



x
PSM3000, PSM4000, and PSM5000 Series
RF and Microwave Power Sensors/Meters
ZZZ
Programmer Manual
*P077065100*
077-0651-00

xx
PSM3000, PSM4000, and PSM5000 Series
RF and Microwave Power Sensors/Meters
ZZZ
Programmer Manual
www.tektronix.com
077-0651-00

Copyright © Tektronix. All rights reserved. Licensed software products are owned by Tektronix or its subsidiaries or suppliers, and are
protected by na
tional copyright laws and international treaty provisions.
Tektronix pro
previously published material. Specifications and price change privileges reserved.
TEKTRONIX and TEK are registered trademarks of Tektronix, Inc.
ducts are covered by U.S. and foreign patents, issued and pending. Information in this publication supersedes that in all
Contacting Tektronix
Tektronix, Inc.
14150 SW Karl Braun Drive
P.O. Box 500
Beaverton, OR 97077
USA
For product information, sales, service, and technical support:
In North America, call 1-800-833-9200.
Worldwide, visit www.tektronix.com to find contacts in your area.

Table of Contents
Preface ................................................................................................................................ vii
Getting Started......................................................................................................................... 1
Commands Common to all Models. .... . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . .... . . ... . . . ... 2
Pulse Measurements ............................................................................................................ 2
Pulse Profiling.................................................................................................................... 2
Addressing and Communicating with Sensors.. . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . . 3
Identify the Instrument. . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... . . .... . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . .. 3
Set the Instrument Address .. . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .. 4
Make a CW Measurement....................................................................................................... 5
VB 6.0 Code ................................................................................................................ 6
VB.NET Code (Visual Studio 2005)........................................................................................ 7
C# Code (Visual Studio 2005) . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . .. 8
Command Groups . . . .... . . .... . . .... . . .... . . .... . . .... . . .... . . .... . . .... . . .... . ..... . ..... . ..... . ..... . ..... . ..... . ..... . ..... . ... . .. 10
CW Measurement Command Group........................................................................................... 10
Initialization and Identification Command Group .............................................................................. 10
Pulse Measurement Command Group......................................................................................... 12
Pulse Setup Command Group.................................................................................................. 12
Pulse Profiling Gate Command Group......................................................................................... 12
Pulse Profiling Marker Command Group....................................................................................... 14
Pulse Profiling Setup Command Group........................................................................................ 15
Pulse Profiling Status Command Group ....................................................................................... 16
Pulse Profiling Trace Command Group........................................................................................ 16
Pulse Profiling Trigger Command Group.... . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... 18
Save/Recall Command Group.................................................................................................. 18
Service Command Group....................................................................................................... 19
Setup Command Group......................................................................................................... 19
Trigger Command Group ... . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . .. 21
Commands Listed in Alphabetical Order ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ... 22
LB_AddressConflictExists ...................................................................................................... 23
LB_BlinkLED_Addr (and related commands)
linkLED_Idx .......................................................................................................... 24
LB_B
LB_BlinkLED_SN ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... 24
LB_ChangeAddress. . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . 26
LB_DriverVersion. . . . ..... . . ... . . . ..... . . ... . . . ..... . . ..... . . ... . . . ..... . . .... . . ..... . . ..... . . ... . . . ..... . . .... . . ..... . . ..... . . ..27
LB_GetFirmwareVersion. . ... . . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . ... . . . ... . . . 28
LB_GetIndex_Addr (and related commands) ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . 29
LB_GetIndex_SN . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . . 29
LB_GetModelNumber_Addr (and related commands) . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 31
LB_GetModelNumber_Idx. .... . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . 31
LB_GetModelNumber_SN .... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . 31
LB_GetSerNo_Addr (and related commands) . .... . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . 35
LB_GetSerNo_Idx ... . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . 35
Table of Content
.................................................................................. 24
s
PSM3000, PSM4000, and PSM5000 Series i

Table of Content
s
LB_InitializeSensor_Addr (and related commands) . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . .. 37
LB_InitializeSensor_Idx . . ... . . . ... . . . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . . 37
LB_InitializeSensor_SN .... . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... 37
LB_IsDeviceInUse_Addr (and related commands) ..... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . 40
LB_IsDeviceInUse_Idx .................................................................................................... 40
LB_IsDeviceInUse_SN . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ..... . . ... 40
LB_IsSensorConnected_Addr (and related commands) . . . .... . ..... . ..... . ... . . . .... . . .... . ..... . ... . . . .... . . .... . ... . . . .... 42
LB_IsSensorConnected_SN ... . . . ..... . . .... . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . ..... 42
LB_MeasureBurst_DBM . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . 44
LB_MeasureCW. . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . 46
LB_MeasureCW_PF .. . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . . 48
LB_MeasurePulse. .... . . ..... . ..... . . .... . . ..... . . .... . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . .. 51
LB_MeasurePulse_PF . . .... . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . 53
LB_ResetRegStates (and related commands).... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . . 55
LB_ResetCurrentState .................................................................................................... 55
LB_ReadStateFromINI (and related commands).. . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . 56
LB_WriteStateToINI........................................................................................................ 56
LB_SensorCnt. . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . 57
LB_SensorList. . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ....58
LB_Set75OhmsEnabled (and related commands) . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . .. 60
LB_Get75OhmsEnabled . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . . 60
LB_SetAddress_Idx (and related commands) . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ..... 61
LB_GetAddress_Idx ....................................................................................................... 61
LB_SetAddress_SN (and related commands) . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .. 63
LB_GetAddress_SN....................................................................................................... 63
LB_SetAntiAliasingEnabled (and related commands). . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . 65
LB_GetAntiAliasingEnabled... . . ..... . . ... . . . ..... . . .... . . ..... . . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . . ..... . ..... 65
LB_SetAutoPulseEnabled (and related commands) . . ..... . . .... . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... 67
LB_GetAutoPulseEnabled ... . . . ..... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . .... . . ..... . 67
LB_SetAverages (and related commands) . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... 69
LB_GetAverages .... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... 69
LB_SetCalDueDate (and related commands) . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . 71
LB_GetCalDueDate ....................................................................................................... 71
LB_SetCWReference (and related commands) ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . . 74
LB_GetCWReference ..................................................................................................... 74
LB_SetDutyCycleEnabled (and related commands) . . ..... . . .... . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... 76
LB_GetDutyCycleEnabled .. . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . 76
LB_SetDutyCyclePerCent. . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... 76
LB_GetDutyCyclePerCent .. . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . .... 76
LB_SetExtendedAveraging (and related commands) . . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . 79
LB_GetExtendedAveraging .... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . 79
LB_SetExtendedAveragingEnabled . .... . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . ... 79
LB_GetExtendedAveragingEnabled . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . .. 79
LB_ResetExtendedAveraging. . ..... . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . .... 79
LB_SetFrequency (and related commands) . . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . .... 82
ii PSM3000, PSM4000, and PSM5000 Series

Table of Content
LB_GetFrequency ... . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . 82
LB_SetLimitEnabled (and related commands). ..... . . . ..... . . . ...... . . ...... . . . ..... . . . ..... . . . ...... . . ...... . . . ..... . . . .... . . 84
LB_GetLimitEnabled..... . . ... . . . ... . . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . . 84
LB_SetSingleSidedLimit . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . 84
LB_GetSingleSidedLimit . . ..... . . ... . . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . 84
LB_SetDoubleSidedLimit. . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . . 84
LB_GetDoubleSidedLimit . . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . 84
LB_SetMaxHoldEnabled (and related commands) ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . . 9
LB_GetMaxHoldEnabled . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . .. 93
LB_ResetMaxHold. . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . . 93
LB_SetMeasurementPowerUnits (and related commands) ..... . . .... . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ... 95
LB_GetMeasurementPowerUnits . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . .. 95
LB_SetOffset (and related commands) ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . 97
LB_GetOffset . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . 97
LB_SetOffsetEnabled .... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . 97
LB_GetOffsetEnabled ... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . . 97
LB_SetPulseCriteria (and related commands) .... . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . ... . . . .. 100
LB_GetPulseCriteria. . . ..... . . .... . . ..... . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ..... . ..... . . ... . . . ..... . . ..... . . .... . . 100
LB_SetPulseReference (and related commands) ... . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... 103
LB_GetPulseReference .... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . 103
LB_SetResponseEnabled (and related commands).... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . 106
LB_GetResponseEnabled. .... . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 106
LB_SetResponse . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . 106
LB_GetResponse . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . 106
LB_SetTTLTriggerInEnabled (and related commands). ..... . ..... . . .... . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . 110
LB_GetTTLTriggerInEnabled. . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... . 110
LB_SetTTLTriggerInInverted . . . ..... . . ... . . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ... . . 110
LB_GetTTLTriggerInInverted... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... . ..... . . ..... . . .... . . ..... . . ... 110
LB_SetTTLTriggerInTimeOut.... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . .... 110
LB_GetTTLTriggerInTimeOut ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ... 110
LB_SetTTLTriggerOutEnabled (and related commands). . . .... . . ..... . . .... . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . . 114
LB_GetTTLTriggerOutEnabled.. . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . . ... . . . ... 114
LB_SetTTLTriggerOutInverted ... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . . ..... . ..... . . ... . . . ..... . . ..... . . 114
LB_GetTTLTriggerOutInverted .... . . ..... . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . . 114
LB_StoreReg (and related commands) ... . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . 118
LB_RecallReg ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . 118
LB_WillAddressConflict....................................................................................................... 120
PP_AnalysisTraceIsValid . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . . 121
PP_CheckTrigger ..... . . .... . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . .. 122
PP_CnvtTrace.. . . ..... . . ... . . . ..... . ..... . . ..... . . .... . . ..... . . ..... . ..... . . ... . . . ..... . . ..... . . .... . . ..... . . .... . . ..... . . ... . 123
PP_CurrTrace2AnalysisTrace . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . 125
PP_GatePositionIsValid .... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .. 126
PP_GetAnalysisTraceLength ... . . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . . 127
PP_GetGateCrestFactor.. . . ..... . . .... . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . . 128
PP_GetGateDroop . . ..... . . .... . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . 129
s
3
PSM3000, PSM4000, and PSM5000 Series iii

Table of Content
s
PP_GetGateDutyCycle .... . . ... . . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . .... . . . 130
PP_GetGateEndPosition ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... 132
PP_GetGateFallTime ... . . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . . 133
PP_GetGateOverShoot .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . .. 135
PP_GetGatePeakPower . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . . 136
PP_GetGatePRF... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... 137
PP_GetGatePRT.. . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... 139
PP_GetGatePulsePower ... . . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . 141
PP_GetGatePulseWidth ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . 143
PP_GetGateRiseTime ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . 145
PP_GetMarkerAmp . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . .... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . .... . . ... . . . .... 146
PP_GetMarkerDeltaAmp .... . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . 147
PP_GetPeaks_Val (and related commands) . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . 148
PP_GetPeaks_Idx .. . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... 148
PP_GetPeaksFromTr_Val.... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . .. 148
PP_GetPeaksFromTr_Idx ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . . 148
PP_GetPeaks_VEE_Idx. . . .... . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... 148
PP_GetPeaks_VEE_Val.. . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . 148
PP_GetPulseEdgesTime (and related commands).... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . . 152
PP_GetPulseEdgesPosition . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . ..... . . .... . . ..... . . 152
PP_GetTrace.... . . ... . . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . 155
PP_GetTraceAvgPower (and related commands) . . ..... . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . 158
PP_GetTraceCrestFactor . ... . . . ... . . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . 158
PP_GetTraceDC . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . . 158
PP_GetTracePkPwr ... . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . ... 158
PP_GetTracePulsePower . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... 158
PP_GetTraceLength .... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... 160
PP_MarkerPosIsValid. . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . . 162
PP_MarkerToPk (and related commands) . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . 163
PP_MarkerToLowestPk ..... . . .... . . ... . . . ..... . ..... . . ... . . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .. 163
PP_MarkerToFirstPk..... . . .... . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... 163
PP_MarkerToLastPk. . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ... 163
PP_MarkerPrevPk . ... . . . ..... . . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . . ..... . ..... . . ..... . . ... . . . ..... . . ... . . . ... 163
PP_MarkerNextPk . .... . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . .. 163
PP_MarkerPkHigher. . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . .. 163
PP_MarkerPkLower ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . . 163
PP_SetAnalysisTrace (and related commands) . . .... . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . 167
PP_SetAvgMode (and related commands) . . . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . 169
PP_GetTraceAvgs... . . .... . . ... . . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ... 169
PP_GetAvgMode ... . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . ... 169
PP_ResetTraceAveraging. .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 169
PP_SetAvgResetSens (and related commands) ... . ..... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . 172
PP_GetAvgResetSens .... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . . 172
PP_SetClosestSweepTimeUSEC . . ..... . . .... . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . 173
PP_SetFilter (and related commands) .. . . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... 174
iv PSM3000, PSM4000, and P SM5000 Series

Table of Content
PP_GetFilter .... . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .. 174
PP_SetGateMode (and related commands) . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . 177
PP_GetGateMode . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 177
PP_SetGateStartEndPosition (and related commands). . ... . . . ..... . . .... . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . ... 179
PP_GetGateStartEndPosition ..... . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... 179
PP_SetGateStartEndTime . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... 179
PP_GetGateStartEndTime . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . .... . . ..... . . .... . . ..... . . .... . . ..... . . ... . . . ..... . 179
PP_SetGateStartPosition .... . . .... . . ..... . . ... . . . ..... . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ..... . ..... . . ... . . . ..... 179
PP_GetGateStartPosition .. . . . ..... . ..... . . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . . .... . 179
PP_SetGateEndPosition ..... . . .... . . ... . . . ..... . . .... . . ..... . . .... . . ..... . ..... . . ... . . . ... . . . ..... . . .... . . ..... . . .... . . 179
PP_GetGateEndPosition . . .... . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . ..... . . ... . . . ... . . . ..... . . ... . . . ... . 179
PP_SetGateStartTime. . . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . .... 179
PP_GetGateStartTime ..... . . ..... . . ... . . . ..... . ..... . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . ... . . . ..... . . ... . . . 179
PP_SetGateEndTime. .... . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... 179
PP_GetGateEndTime . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... 179
PP_SetMarkerDeltaTime (and related commands) . ... . . . ..... . ..... . . .... . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .. 184
PP_GetMarkerDeltaTime..... . ..... . . .... . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 184
PP_SetMarkerMode (and related commands) . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . . 186
PP_GetMarkerMode. . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . .. 186
PP_SetMarkerPosition (and related commands) . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . 188
PP_GetMarkerPosition . . . .... . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . . 188
PP_SetMarkerPositionTime... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ... . . . ..... . 188
PP_GetMarkerPositionTime.. . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... 188
PP_SetMeasurementThreshold (and related commands) ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . 190
PP_GetMeasurementThreshold . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .. 190
PP_SetPoles (and related commands) . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . . .... 192
PP_GetPoles ..... . ..... . . ... . . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . 192
PP_SetSweepDelay (and related commands). ..... . . .... . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . 194
PP_GetSweepDelay ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ..... . ..... . . .... . . .. 194
PP_SetSweepDelayMode (and related commands) . . . .... . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... 196
PP_GetSweetDelayMode ... . . .... . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . .... 196
PP_SetSweepHoldOff (and related commands)..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 197
PP_GetSweepHoldOff . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . 197
PP_SetSweepTime (and related commands).. . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... 198
PP_GetSweepTime..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . . . ... . . . ..... . ... 198
PP_SetTimeOut (and related commands) . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . .. 200
PP_GetTimeOut . . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . . ... . . . ... . . . ... . . . .... . . ... . . 200
PP_SetTriggerEdge (and related commands) ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . ... . . . 201
PP_GetTriggerEdge . . .... . . ..... . . ... . . . ... . . . ..... . . ... . . . ... . . . ..... . ..... . . ... . . . ..... . . .... . . ..... . . ... . . . ..... . ... 201
PP_SetTriggerLevel (and related commands) . . .... . . ... . . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ... . . . ..... . . .... . . ... . . . . 203
PP_GetTriggerLevel.. . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . ... . . . ..... . ..... . . .... . . ..... . . .... . . ..... . . .... . . 203
PP_SetTriggerOut (and related commands) . . . ... . . . ... . . . ..... . ..... . . .... . . ... . . . ... . . . ... . . . ... . . . ..... . . .... . . ... . . . ... . 205
PP_GetTriggerOut . . ..... . . ... . . . ..... . ..... . . ... . . . ..... . . ... . . . ..... . . ... . . . ..... . ..... . . ..... . . .... . . ..... . . ... . . . ... 205
PP_SetTriggerSource (and related commands).... . ..... . . ... . . . ... . . . ..... . . .... . . ... . . . ..... . . .... . . ..... . ..... . . .... . . .. 207
PP_GetTriggerSource . ... . . . ..... . . ..... . ..... . . ..... . . ... . . . ..... . . ..... . ..... . . ..... . . ... . . . ..... . . ..... . . .... . . ..... 207
s
PSM3000, PSM4000, and PSM5000 Series v

Table of Content
Index
s
vi PSM3000, PSM4000, and P SM5000 Series
Preface
This manual provides programming information for remotely controlling the following Tektronix products:
Product Description
PSM3110 10MHz-8GHz (3.5mm-male)
PSM3120 10MHz-8GHz (N-Type male)
PSM3310 10MHz-18GHz (3.5mm-male)
PSM3320 10MHz-18GHz (N-Type male)
PSM3510 10MHz-26.5GHz (3.5mm-male)
PSM4110 10MHz-8GHz (3.5mm-male)
PSM4120 10MHz-8GHz (N-Type male)
PSM4320 50MHz-18GHz (N-Type male)
PSM4410 50MHz-20GHz (3.5mm-male)
PSM5110 100MHz-8GHz (3.5mm-male)
PSM5120 100MHz-8GHz (N-Type male)
PSM5320 50MHz-18GHz (N-Type male)
PSM5410 50MHz-20GHz (3.5mm-male)
Preface
This manual consists of the following sections:
Getting Started describes how to make simple measurements using commands, provides command naming conventions,
and describes how to communicate with the instrument. (See page 1, Getting Started.)
Command Groups provides lists of commands by function and includes command descriptions. (See page 10,
Command Groups.)
Commands Listed in Alphabetical Order provides a list of commands that includes arguments, related commands, and
programming examples. (See page 22, Commands Listed in Alphabetical Order .)
Index provides an indexed list of the contents of this manual.
PSM3000, PSM4000, and PSM5000 Series vii

Preface
viii PSM3000, PSM4000, and PSM5000 Series
Getting Started
Getting Start
Most of the commands documented in this manual correspond directly to setup and measurement functions in the Power
Meter and Pulse Profiling applications. Explanations of setup and measurement techniques are provided in the PSM3000,
PSM4000, and PSM5000 Series RF and Microwave Power Sensors/Meters User Manual. Commands that correspond to
the Power Meter application begin with the prefix "LB". Commands that correspond to the Pulse Profiling application
begin with the prefix "PP".
The programmatic interface for these instruments consists of a dynamic link library (DLL). The name of the DLL is
LB_API2.DLL. This library uses the WinAPI or "_stdcall" calling convention. The DLL is located in the Tektronix application
directory. The name of the default application directory is "C:\Program Files\Tektronix\Tektronix Power Sensor Applications".
Included in the installation are the following files, which will help you become familiar with the available function calls. These
files can be found in "C:\Program Files\Tektronix\Tektronix Power Sensor Applications\Sample C ode":
C# Pulse Profiling sample code
C# Power Meter sample code
VB Power Meter sample code
C# High Speed Logger sample code
Driver Installation Files
Three test harness programs are also included in the sample code installation. These executable programs are designed
to exercise instrument functions and generate code that demonstrates correct syntax for commands. They can be found
in subdirectories within the Sample Code directory. The different versions support different programming languages and
instrument applications:
ed
C# Power Meter Applications
C# Pulse Profiling Applications
VB Power Meter Applications
NOTE. See the README.txt file and test harness documentation in the Sample Code directory for more information
about test harnesses.
PSM3000, PSM4000, and PSM5000 Series 1

Getting Started
Commands Common to all Models
Some commands only apply to certain instrument models and their corresponding measurement capabilities. Other
commands, called common commands, apply to all instrument models. These commands all begin with the prefix “LB”.
This common command group includes commands to:
Detect, identify, and address an instrument
Initialize an instrument
Manage communications and exceptions with an instru
Set the center frequency
Perform average power measurements
Configure and perform pass/fail limit testing on continuous wave (CW) power
Set averaging parameters
Set trigger conditions
Configure offsets and relative measurements
Save and recall setups
Pulse Measurements
The PSM4000 and PSM5000 Series instruments can measure power contained within pulses. These measurements include
average pulse power, peak pulse power, crest factor, duty cycle, and average continuous wave (CW) power. Commands
related to these measurement types begin with the prefix “LB”.
These instrument models support additional commands to:
Set the criteria for distinguishing pulses
Perform average pulse power, pulse power, crest factor, and duty cycle
ment
Configure and perform pass/fail limit testing on pulse power
Pulse Profiling
The PSM5000 Series instruments can perform pulse profiling measurements. Commands related to these measurement
types begin with the prefix “PP”, and are used to:
Configure and manage pulse profile triggers
Perform gated measurements of pulse characteristics
Manipulate markers and read back measurements
Set filters
Transfer the trace to the computer
Perform power measurements on the trace
Perform pulse measurements like rise/fall time, overshoot and droop
2 PSM3000, PSM4000, and PSM5000 Series
Addressing and Communicating with Sensors
You can use an instrument identifier and a series of function commands to establish a connection with the correct instrument.
Function commands are provided for the following tasks:
Collect all instrument identification information, including index, serial number, and address
Obtain the address via serial number or index
Set/change the address using the index, serial number, or current address
Retrieve the serial number using the index or address
Retrieve the index using the serial number or address
Blink the LED on a specific instrument
Determine if an address conflict exists
Determine if changing an address will cause an address conflict
Identify the Instrument
Getting Started
You must fi
rst identify the instrument before you can use the function commands. You can do this in one of the following ways:
Address. A user-set identifier stored in the instrument's memory. The user has complete control over the address, and
can assign any legitimate address (1-255) to any instrument.
Using the address is the recommended way to identify an instrument, because this eliminates the need to change the
programming code if the original instrument is being replaced. More importantly, almost all commands require the
instrument’s address, including getting, setting measurement attributes and making measurements (over 80 of them). The
address is stored in non-volatile memory, so it is not lost when the instrument is disconnected or the system is powered
down. Note that address conflicts may arise during the process of reassigning instrument addresses.
Serial Number. This number is permanent and determined by the factory. It is stamped into the back of the instrument.
The address or index can be retrieved using the serial number. You can also use the serial number to change the address
use the LED to blink.
and ca
Index. A temporary logical descriptor determined by the system driver when the instrument is connected.
This is an arbitrary number that is assigned by order of identification. The index of the first instrument detected by the system
is 1. The index of the second instrument is 2 and so on. Typically, the index is less useful than the address and serial number.
The index is most useful when coupled with the function call LB_SensorCnt. For instance, when LB_SensorCnt is called, if
the instrument count is three, the first instrument discovered will have an index of 1; the second instrument will have an
index of 2; and the third instrument will have an index of 3.
PSM3000, PSM4000, and PSM5000 Series 3
Getting Started
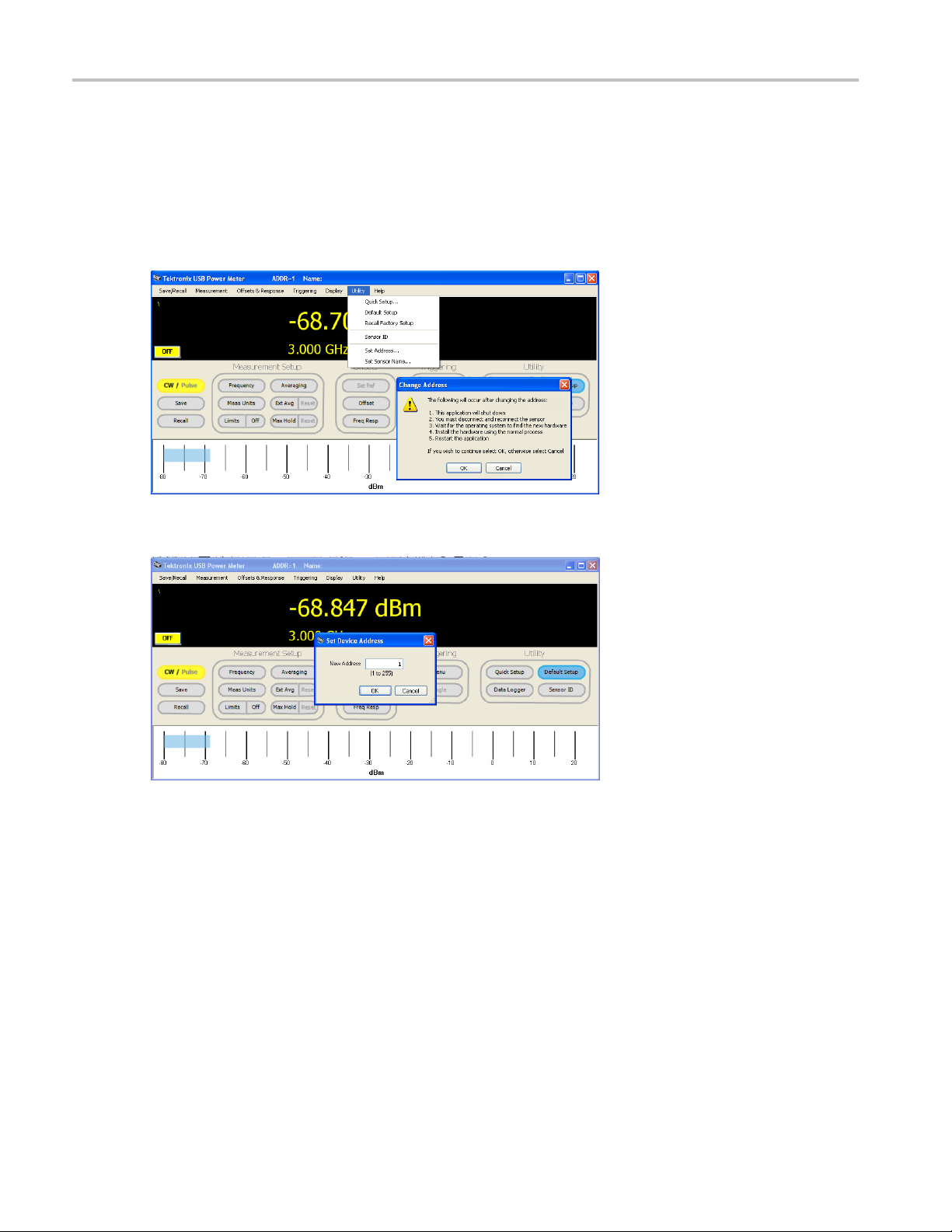
Set the Instrument Address
Next, you’ll need to set the instrument address:
1. Open the Power Meter application, which should be visible in the Tektronix menu (Start > Tektronix > Power Meter
2. After the Power Meter application opens, select the "Set Address" command found under the Utility menu tab. A window
3. After pressing "Ok", set the new address of the device and press "Ok", as shown below. Then allow the application to
Application > P ower Meter Application.
will open that lists the steps to follow in order to change the instrument address as shown below.
shut down.
4. Disconnect and reconnect the instrument.
5. Wait for the operating system to find the new hardware.
6. Restart the Power Meter application.
7. Confirm that the instrument address shown at the top of the Power Meter window is the correct address.
8. Close the Power Meter application.
4 PSM3000, PSM4000, and PSM5000 Series
Make a CW Measurement
When creating an application for making a simple continuous wave (CW) measurement, a similar approach is taken whether
you are using VB 6.0, VB .Net, or C#. The VB .NET and C# examples in this section were created using Microsoft Visual
Studio 2005. Thfor taking a measurementis code assumes that a single instrument has been connected to the computer and
has proven functional. If an earlier version of Visual Studio.NET is being used, the VB.NET and C# code may need minor
modification, as a direct copy and paste may not work.
NOTE. Before performing the following procedures, make sure you have installed the Sample Code application on
your PC and that the instrument and PC are communicating properly. For installation and functional check procedures,
see the Installation and Safety Instructions that shipped with your instrument. You can also download the manual from
www.tektronix.com.manuals.
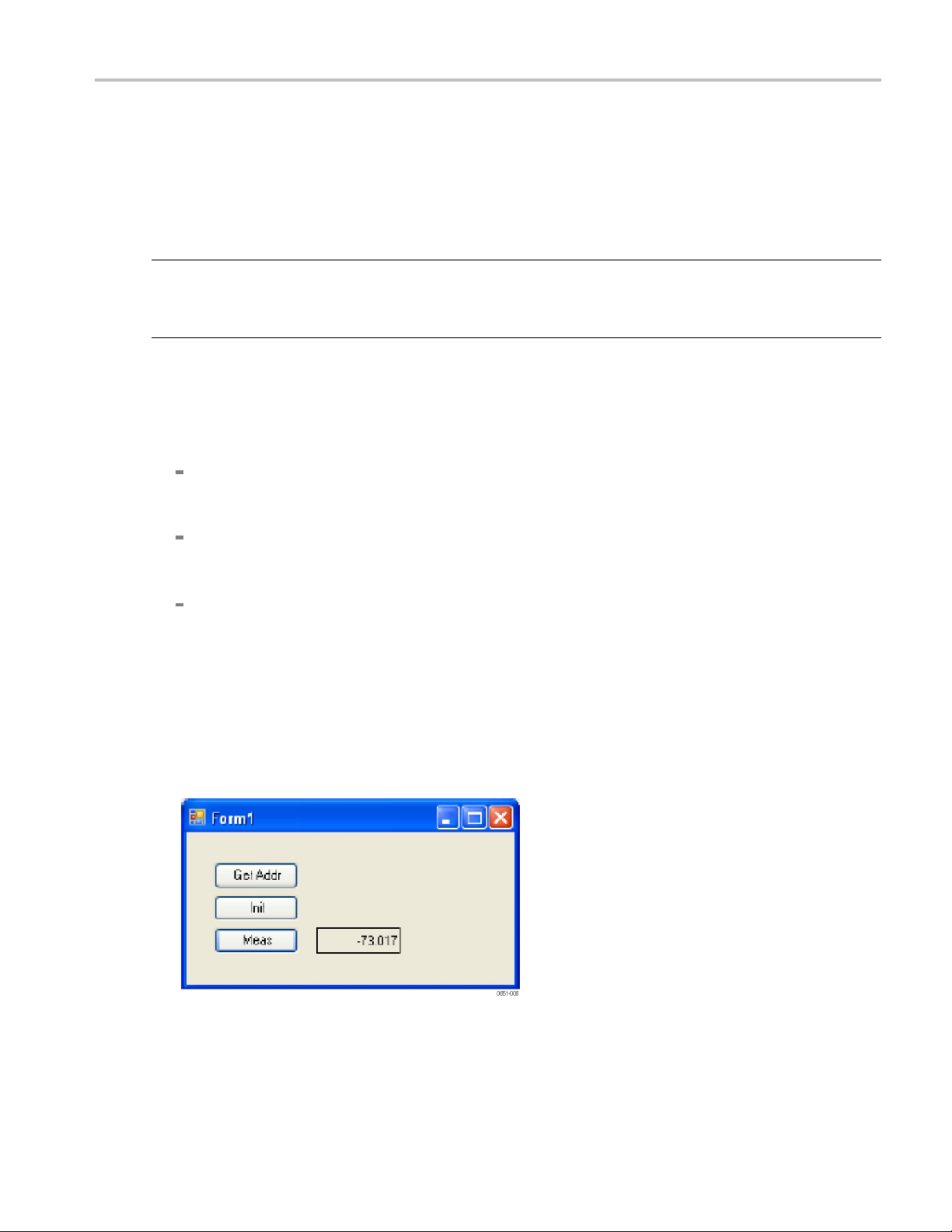
1. Start the code by creating a default Windows application.
2. Place three buttons and one label on the window or form.
3. Name the buttons as follows:
cmdGetAddress: Clicking this button uses the "LB_GetAddress_Idx" command. The name of this command can
be interpreted as "get the address using the index." In this case, the first instrument is used, or the instrument
with an index of 1.
Getting Started
cmdInitialize: Clicking this button uses the "LB_InitializeSensor_Addr" command. The name of this command can
be interpreted as "initialize the instrument using the address". Initialization causes the calibration constants and other
information for the instrument to be transferred to the PC.
cmdMeasure: Clicking this button uses the "LB_CWMeasure" command. The name of this command can be
interpreted as “make a measurement”. The result of the m easurement is converted to text and placed in the label.
This command requires the address acquired in the first button click. It also requires that the instrument be initialized,
as done in the second button click. In this API, most commands are designed for use with the address.
4. Name the label lblCW. The result of the measurement taken when the cmdMeasure command is used is converted to
text and placed in this label.
5. Copy the appropriate portions of code from the following pages.
6. Compile the application you have just coded. The window may look similar to the one shown here.
PSM3000, PSM4000, and PSM5000 Series 5
Getting Started
7. Run the application as follows:
a. Click the “Get Addr” or cmdGetAddress button.
b. Click the “Init” or cmdInitialize button. Wait for the message indicating initialization is complete. This typically
takes about 5 s
econds.
c. Click the “Mea
been initialized, this button can be clicked repeatedly for as many measurements as you would like.
s” or cmdMeasure button and a measurement should appear in the label. Now that the instrument has
Tips
A few items that may be of interest to some programmers are:
“Long” in VB 6.0 is equivalent to an “Integer” in VB.NET and “int” in C#.
The default ByRef/ByVal are switched when going from VB 6.0 to VB.NET and C#. We have taken the approach of
explicitly including the ByRef/ByVal declarations in all code. We highly recommend this practice.
Structures in VB 6.0 allowed the embedding of fixed arrays. This is/was commonly used for transferring complex
data types. The exact capability has not been duplicated in VB.NET and C#. VB.NET does have the following type
of declaration, which can be used inside a structure. However, it seems able to be passed via a_stdcall for simple
structures only.
<VBFixedArray(6)>Dim SerialNumber() As Byte
NOTE. If you are using an earlier version of Visual Studio.NET, the code may need some modification.
VB 6.0 Code
Option Explicit
e Declare Function LB_SensorCnt Lib _
Privat
"LB_API2.dll" () _
As Long
Private Declare Function LB_GetAddress_Idx _
Lib "LB_API2.dll" ( _
l addr As Long) _
ByVa
As Long
ate Declare Function LB_InitializeSensor_Addr _
Priv
Lib "LB_API2.dll" ( _
ByVal addr As Long) _
ong
As L
Private Declare Function LB_MeasureCW _
"LB_API2.dll" ( _
Lib
ByVal addr As Long, _
ByRef CW As Double) As Long
Dim m_Addr As Long
ivate Sub cmdG etAddress_Click()
Pr
6 PSM3000, PSM4000, and PSM5000 Series

If LB_SensorCnt() > 0 Then
m_Addr = LB_Get
End If
End Sub
Private Sub cmdInitialize_Click()
If LB_InitializeSensor_Addr(m_Addr) > 0 Then
MsgBox ("Ini
End If
End Sub
Private Sub cmdMeasure_Click()
Dim CW As Double, rslt As Long
rslt = LB_Me
If rslt > 0 Then lblCW.Caption = Format(CW, "###0.0###")
End Sub
asureCW(m_Addr, CW)
Address_Idx(1)
tialization OK")
Getting Started
VB.NET Cod
Public Class Form1
Public Declare Function LB_SensorCnt Lib _
Public Declare Function LB_GetAddress_Idx _
Public Declare Function LB_InitializeSensor_Addr _
Public Declare Function LB_MeasureCW _
Dim m_Addr As Integer
Private Sub cmdGetAddress_Click(ByVal sender As System.Object, _
End Sub
e (Visual Studio 2005)
"LB_API2.dll" () _
As Integer
Lib "LB_API2.dll" ( _
ByVal addr As Integer) _
As Integer
Lib "LB_API2.dll" ( _
ByVal addr As Integer) _
As Integer
Lib "LB_API2.dll" ( _
ByVal addr As Integer, _
ByRef CW As Double) As Integer
ByVal e As System.EventArgs) Handles cmdGetAddress.Click
If LB_SensorCnt() > 0 Then
m_Addr = LB_GetAddress_Idx(1)
End If
Private Sub cmdInitialize_Click(ByVal sender As System.Object, _
ByVal e As System.EventArgs) Handles cmdInitialize.Click
If LB_InitializeSensor_Addr(m_Addr) > 0 Then
PSM3000, PSM4000, and PSM5000 Series 7

Getting Started
MsgBox("Initialization OK")
End If
End Sub
Private Sub cm
Dim CW As Doub
rslt = LB_MeasureCW(m_Addr, CW)
If rslt > 0 The
End Sub
End Class
C# Code (Vi
using Microsoft.VisualBasic;
using System;
using System.Collections;
using System.Collections.Generic;
using System.Data;
using System.Drawing;
using System.Diagnostics;
using System.Windows.Forms;
namespace SimpleMeasurement
{
public partial class Form1
{
public Form1()
{
}
dMeasure_Click(ByVal sender As System.Object, _
ByVal e As System.EventArgs) Handles cmdMeasure.Click
le, rslt As Long
n lblCW.Text = Format(CW, "###0.0###")
sual Studio 2005)
InitializeComponent();
cmdGetAddress.Click += new System.EventHandler( cmdGetAddress_Click );
cmdInitialize.Click += new System.EventHandler( cmdInitialize_Click );
cmdMeasure.Click += new System.EventHandler( cmdMeasure_Click );
[System.Runtime.InteropServices.DllImport("LB_API2.dll")]
public static extern int LB_SensorCnt();
[System.Runtime.InteropServices.DllImport("LB_API2.dll")]
public static extern int LB_GetAddress_Idx( int addr );
[System.Runtime.InteropServices.DllImport("LB_API2.dll")]
public static extern int LB_InitializeSensor_Addr( int addr );
[System.Runtime.InteropServices.DllImport("LB_API2.dll")]
public static extern int LB_MeasureCW( int addr, ref double CW );
public int m _Addr;
private void cmdGetAddress_Click( System.Object sender, System.EventArgs e )
{
8 PSM3000, PSM4000, and PSM5000 Series

if ( LB_SensorCnt() > 0 )
{
m_Addr = LB_GetAddress_Idx( 1 );
}
}
private void cmdInitialize_Click( System.Object sender, System.EventArgs e )
{
if ( LB_InitializeSensor_Addr( m_Addr)>0)
{
Interaction
(Microsoft.VisualBasic.MsgBoxStyle)(0), null );
}
}
private void cmdMeasure_Click( System.Object sender, System.EventArgs e )
{
double CW = 0; long rslt = 0;
.MsgBox( "Initialization OK",
Getting Started
rslt = LB_M
if ( rslt > 0 )
{
}
}
}
}
easureCW( m_Addr, ref CW );
lblCW.Te
xt = Strings.Format( CW, "###0.0###" );
PSM3000, PSM4000, and PSM5000 Series 9
Command Groups
Command Group
The following command group tables organize commands together by functionality and link each command to the individual
command, located in the Commands Listed in Alphabetical Order section of this manual. (See page 22, Commands
Listed in Alphabetical Order.)
If a command has related commands, the related commands are indented to the primary command in the table. Primary
commands are listed in the Commands Listed in Alphabetical Order section, and in the table of contents.
NOTE. Unless otherwise noted the following commands are valid for all instrument models.
s
CW Measurement C om mand Group
Command
LB_MeasureCW
(See page 46, LB_MeasureCW.)
LB_MeasureCW_PF
(See page 48, LB_MeasureCW_PF .)
Description
Makes continuous wave (CW) measurements. The value returned is in
the units currently selected.
Makes continuous wave (CW) measurements and evaluates the
measurement relative to the current limit. The value returned is in the
units currently selected.
Initialization and Identification Com mand Group
Command
LB_AddressConflictExists
(See page 23, LB_AddressConflictExists.)
LB_BlinkLED_Addr
LB_BlinkLED_Idx
LB_BlinkLED_SN
(See page 24, LB_BlinkLED_Addr (and
related commands).)
LB_ChangeAddress
(See page 26, LB_ChangeAddress.)
LB_IsDeviceInUse_Addr
LB_IsDeviceInUse_Idx
LB_IsDeviceInUse_SN
(See page 40, LB_IsDeviceInUse_Addr
(and related commands).)
LB_DriverVersion
(See page 27, LB_DriverVersion.)
LB_GetFirmwareVersion
(See page 28, LB_GetFirmwareVersion.)
Description
Checks the address of all instruments that are connected to the system.
If any of the addresses match, a conflict is deemed to exist. If all the
addresses are unique to the system, a conflict is deemed not to exist.
Cause the instrument LED to blink four times.
Changes the address of the device. The address is changed from
“currentAddr” to “newAddr”.
Return a 1 if the device has been initialized and a 0 if the device has not
been initialized by the calling program or any other program.
Returns a 32 bit integer indicating the version of LB_API2.dll.
Returns a null-terminated string of chars indicating the firmware version.
10 PSM3000, PSM4000, and PSM5000 Series
Command Groups
Command
LB_GetIndex_
LB_GetIndex_SN
(See page 29, LB_GetIndex_Addr (and
related comma
LB_GetModel
LB_GetModelNumber_Idx
LB_GetModelNumber_SN
(See page 31, L
(and related commands).)
LB_GetSerNo_Addr
LB_GetSerNo_Idx
(See page 35,
related commands).)
LB_InitializeSensor_Addr
LB_InitializeSensor_Idx
LB_Init
(See page 37, LB_InitializeSensor_Addr
(and related commands) .)
LB_IsSensorConnected_Addr
LB_IsS
(See page 42, LB_IsSensorConnected_Addr (and related commands).)
LB_SensorCnt
(See p
etAddress_Idx
LB_S
LB_GetAddress_Idx
(See page 61, LB_SetAddress_Idx (and
ated commands).)
rel
SetAddress_SN
LB_
LB_GetAddress_SN
(See page 63, LB_S etAddress_SN (and
lated commands).)
re
_WillAddressConflict
LB
(See page 120, LB_WillAddressConflict.)
Addr
nds).)
Number_Addr
B_GetModelNumber_Addr
LB_GetSerNo_Addr (and
ializeSensor_SN
ensorConnected_SN
age 57, LB_SensorCnt.)
Description
Return the index given to the serial number or address.
Return a value equating to a model number enumeration.
Return the
Cause the instrument to be initialized.
Determine if the specified instrument is connected. The query is based
on the s
Returns the number of instruments currently connected to the computer.
Return the address, given the index and vice versa. The index is
assi
Return the address, given the serial number and vice versa.
ecks the address of all instruments connected to the system. If any of
Ch
the addresses match, a conflict is deemed to exist.
serial number given the index or address.
erial number or address.
gned by the OS when the unit is plugged in.
PSM3000, PSM4000, and PSM5000 Series 11
Command Groups
Pulse Measurement Command Group
NOTE. These co
Command
LB_MeasureBurst_DBM
(See page 44, LB_MeasureBurst_DBM.)
LB_MeasurePulse
(See page 51, L
LB_Measur
(See page 53, LB_MeasurePulse_PF.)
mmands are only valid for PSM4000 and PSM5000 Series instruments.
B_MeasurePulse.)
ePulse_PF
Pulse Setup Command Group
NOTE. These commands are only valid for PSM4000 and PSM5000 Series instruments.
Command
LB_SetAutoPulseEnabled
LB_GetAutoPulseEnabled
age 67, LB_SetAutoPulseEnabled
(See p
(and related commands) .)
LB_SetPulseCriteria
LB_GetPulseCriteria
page 100, LB_SetPulseCriteria (and
(See
related commands) .)
LB_SetPulseReference
LB_GetPulseReference
e page 103, LB_SetPulseReference
(Se
(and related commands) .)
Description
Measures the peak power, minimum power and average power over a
specified measurement interval or burst. The measurement is made
relative to
Makes pulse measurements. The measurement returns pulse power
(average po
averge power; and duty cycle.
Makes puls
the pulse power (instead of peak or average) is evaluated against the
selected limit.
Descrip
Enable or disable the default or automatic pulse measurement criteria.
Set or get the pulse measurement criteria.
Configure the instrument for relative measurements during pulse
measurements. (Other commands set a reference for CW
mea
a trigger.
wer in the pulse); peak power (highest sample measured);
e measurements just as LBMeasurePulse does, except that
tion
surements.)
lse Profiling Gate Command Group
Pu
NOTE. These commands are valid only for the PSM5000 Series instrument.
12 PSM3000, PSM4000, and PSM5000 Series

Command Groups
Command
PP_GatePosit
ionIsValid
(See page 126, PP_GatePositionIsValid .)
PP_GetGateCrestFactor
(See page 128, PP_GetGateCrestFactor.)
PP_GetGateDroop
(See page 129, P
P_GetGateDroop.)
PP_GetGateDutyCycle
(See page 130, PP_GetGateDutyCycle .)
PP_GetGateEndPosition
(See page
PP_GetGa
132, PP_GetGateEndPosition .)
teFallTime
(See page 133, PP_GetGateFallTime .)
PP_GetGateOverShoot
(See page 135, PP_GetGateOverShoot .)
PP_GetGatePeakPower
ge 136, PP_GetGatePeakPower .)
(See pa
tGatePRF
PP_Ge
(See page 137, PP_GetGatePRF.)
PP_GetGatePRT
page 139, PP_GetGatePRT.)
(See
PP_GetGatePulsePower
(See page 141, PP_GetGatePulsePower .)
PP_GetGatePulseWidth
ee page 143, PP_GetGatePulseWidth .)
(S
_GetGateRiseTime
PP
(See page 145, PP_GetGateRiseTime .)
PP_SetGateStartEndPosition
PP_SetGateStartEndTime
PP_GetGateStartEndTime
PP_SetGateStartPosition
PP_GetGateStartPosition
PP_SetGateEndPosition
PP_GetGateEndPosition
PP_SetGateStartTime
PP_GetGateStartTime
PP_SetGateEndTime
PP_GetGateEndTime
(See page 179, PP_SetGateStartEndPosition (and related commands).)
Description
Determines wh
ether the specified gate is valid. The gate index may
be 0..4.
Returns the create factor (in dB) of the span in the analysis trace
specified by the gate.
Returns the droop of the span in the analysis trace specified by the gate.
The droop wi
ll be the difference in power between the area at beginning
and end of the gate edges.
Returns the duty cycle (as a decimal) of span in the analysis trace
specified by the gate.
Returns the location, as an index in the analysis trace, of the right side
of the spe
Returns t
cified gate.
he fall time in microseconds of the pulse delineated by the
selected gate.
Returns
the overshoot in dB.
Returns the peak power measured of the analysis trace as defined by
e edges.
the gat
ns the pulse repetition frequency (PRF) in Hertz, as defined by the
Retur
inverse of the time between the rising edges of the first two complete
pulses present in the span defined by the gate (gateIdx).
Returns the pulse repetition time (PRT) in microseconds using the same
rithm defined for PRF. The sole difference is that time instead of
algo
frequency is returned.
urns average pulse power.
Ret
Measures the pulse width in microseconds.
Returns rise time in microseconds.
Sets or gets the gate start (left side) and/or end (right side) in terms of
trace index or time.
PSM3000, PSM4000, and PSM5000 Series 13
Command Groups
Pulse Profiling Marker Command Group
NOTE. These co
Command
PP_GetMarkerAmp
(See page 146, P
PP_GetMark
(See page 147, PP_GetMarkerDeltaAmp .)
PP_Marker
(See page 162, PP_MarkerPosIsValid.)
PP_Marke
PP_MarkerToLowestPk
PP_MarkerToFirstPk
PP_Marke
PP_MarkerPrevPk
PP_MarkerNextPk
PP_Mark
PP_MarkerPkLower
(See page 163, PP_MarkerToPk (and
relate
tMarkerDeltaTime
PP_Se
PP_GetMarkerDeltaTime
(See page 184, PP_SetMarkerDeltaTime
(and r
etMarkerMode
PP_S
PP_GetMarkerMode
(See page 186, PP_SetMarkerMode (and
ted commands) .)
rela
SetMarkerPosition
PP_
PP_GetMarkerPosition
PP_SetMarkerPositionTime
_GetMarkerPositionTime
PP
(See page 188, PP_SetMarkerPosition
(and related commands).)
mmands are valid only for the PSM5000 Series instrument.
P_GetMarkerAmp .)
erDeltaAmp
PosIsValid
rToPk
rToLastPk
erPkHigher
d commands) .)
elated commands) .)
Description
Returns the amplitude of the trace at the point indicated by the marker.
Returns the
delta marker in dBm.
Returns the state of the selected marker.
Set one of five markers (0<=mrkIdx<=4) to the position specified in the
command.
Sets o
Sets
s or gets the position of the normal or delta marker depending on
Set
the marker mode.
difference in amplitude between the normal marker and the
r gets the positions the selected marker in microseconds.
or gets the marker mode to on, normal or delta marker.
14 PSM3000, PSM4000, and PSM5000 Series
Pulse ProfilingSetupCommandGroup
Command Groups
NOTE. These co
Command
PP_GetPulseEdgesTime
PP_GetPuls
(See page 152, PP_GetPulseEdgesTime
(and related commands).)
PP_SetAvgMode
PP_GetAvg
PP_GetTraceAvgs
PP_ResetTraceAveraging
(See page
related commands).)
PP_SetAvgResetSens
PP_GetAvgResetSens
(See pag
related commands).)
PP_SetClosestSweepTimeUSEC
(See page 173, PP_SetClosestSweepTimeUSE
tFilter
PP_Se
PP_GetFilter
(See page 174, PP_SetFilter (and related
comm
etGateMode
PP_S
PP_GetGateMode
(See page 177, P P_SetGateMode (and
ated commands) .)
rel
SetMeasurementThreshold
PP_
PP_GetMeasurementThreshold
(See page 190, PP_SetMeasurement-
reshold (and related commands).)
Th
P_SetPoles
P
PP_GetPoles
(See page 192, PP_S etPoles (and related
ommands) .)
c
PP_SetSweepDelay
PP_GetSweepDelay
(See page 194, PP_SetSweepDelay (and
related commands).)
mmands are valid only for the PSM5000 Series instrument.
eEdgesPosition
Mode
169, PP_SetAvgMode (and
e 172, PP_SetAvgResetSens (and
C.)
ands) .)
Description
Return the index of the leading and trailing edges of the pulse
containing
Set, auto-set or manual reset the averaging mode.
Set or get the criteria used to reset the averaging when the
averaging mode is AVG_AUTO_RESET (see PP_SetAvgMode and
PP_GetA
Sets the sweep time to the fixed sweep time closest to the sweep time
sent (in microseconds) to the command.
Sets o
Sets
Set
along with the peak criteria, affects a number of measurement
commands, especially the peak commands.
ets or gets the number of poles in the current filter.
S
Sets or gets the sweep delay in microseconds. Sweep delay is the
time between the trigger and the start of data acquisition.
the peak defined by pkTime or pkIdx.
vgMode).
r gets the enumeration associated with the current filter settings.
or gets the gate mode.
s or gets the measurement threshold. The measurement threshold,
PSM3000, PSM4000, and PSM5000 Series 15
Command Groups
Command
PP_SetSweepD
PP_GetSweetDelayMode
(See page 196, PP_SetSweepDelayMode
(and related c
PP_SetSweep
PP_GetSweepHoldOff
(See page 197, PP_SetSweepHoldOff (and
related com
PP_SetSwe
PP_GetSweepTime
(See page 198, PP_SetSweepTime (and
related co
PP_SetTi
PP_GetTimeOut
(See page 200, PP_SetTimeOut (and related
command
elayMode
ommands).)
HoldOff
mands).)
epTime
mmands).)
meOut
s).)
Description
Turns the swee
unchanged.
Specifies the
trace is taken.
Sets or get
taken. Sweep time is a 1, 2, 5 sequence starting with 10 μsec and
ending with 1 second.
Sets or ge
Pulse Profiling Status Command Group
p delay on or off. The sweep delay parameter remains
length of time (in microseconds) to wait after a sweep or
s the sweep time (in microseconds) for the next sweep
ts the timeout used while taking a trace.
NOTE. T
Command
PP_AnalysisTraceIsValid
PP_CheckTrigger
hese commands are valid only for the PSM5000 Series instrument.
Description
Checks to ensure that the current analysis trace is valid. If the analysis
(See page 121, PP_AnalysisTraceIsValid .)
page 122, PP_CheckTrigger .)
(See
trace
Checks the trigger source for an active trigger. If a trigger is detected, a
valu
Pulse Profiling Trace Command Group
E. These commands are valid only for the PSM5000 Series instrument.
NOT
mmand
Co
PP_CnvtTrace
See page 123, PP_CnvtTrace.)
(
PP_CurrTrace2AnalysisTrace
See page 125, PP_CurrTrace2AnalysisTrace
(
.)
Description
Converts a trace (trIn) from one unit to another, and stores the converted
v
Copies the current trace to the analysis trace and returns a copy of that
race.
t
is valid, a 1 is returned; if it is not valid, a 0 or less is returned.
e > 0 is returned; if a trigger is not detected, a value <= 0 is returned.
alues in a new trace (trOut).
16 PSM3000, PSM4000, and PSM5000 Series
Command Groups
Command
PP_GetAnalys
(See page 127, PP_GetAnalysisTraceLength
.)
PP_GetPeaks_Val
PP_GetPeaks_Idx
PP_GetPeak
PP_GetPeaksFromTr_Idx
PP_GetPeaks_VEE_Idx
PP_GetPeak
(See page 148, PP_GetPeaks_Val (and
related commands) .)
PP_GetPulseEdgesTime
PP_GetPulseEdgesPosition
(See page
(and related commands).)
PP_GetT
(See page 155, PP_GetTrace.)
PP_Get
PP_GetTraceCrestFactor
PP_GetTraceDC
PP_Ge
PP_GetTracePulsePower
(See page 158, PP_GetTraceAvgPower (and
relat
isTraceLength
sFromTr_Val
s_VEE_Val
152, PP_GetPulseEdgesTime
race
TraceAvgPower
tTracePkPwr
ed commands) .)
Description
Returns a 32 bi
Return a set of peaks from either the analysis trace (PP_GetPeaks_Val
and PP_GetPeaks_Idx) or from a trace passed to the command.
Returns the index of the leading and trailing edges of the pulse containing
the peak defined by pkTime or pkIdx.
Causes t
trace is an array of equally spaced (in time) samples, in dBm.
Make a n
commands, but operate on a single trace instead of a set of random
samples.
t integer indicating the length of the analysis trace.
he instrument to take a trace and return the resultant data. The
umber of measurements similar to the power meter measurement
PP_GetTraceLength
page 160, PP_GetTraceLength.)
(See
PP_SetAnalysisTrace
GetAnalysisTrace
PP_
(See page 167, P P_SetAnalysisTrace (and
related commands).)
Returns the number of trace points associated with the current sweep time.
Enable the user to get and set the analysis trace directly. These are
companions to PP_CurrTrace2AnalysisTrace.
PSM3000, PSM4000, and PSM5000 Series 17
Command Groups
Pulse ProfilingTriggerCommandGroup
NOTE. These co
Command
PP_SetTriggerEdge
PP_GetTrig
(See page 201, PP_SetTriggerEdge (and
related commands).)
PP_SetTriggerLevel
PP_GetTri
(See page 203, PP_SetTriggerLevel (and
related commands) .)
PP_SetTriggerOut
PP_GetTr
(See page 205, PP_SetTriggerOut (and
related commands).)
PP_SetTriggerSource
PP_Get
(See page 207, PP_SetTriggerSource (and
related commands).)
mmands are valid only for the PSM5000 Series instrument.
gerEdge
ggerLevel
iggerOut
TriggerSource
Description
Sets or gets the trigger signal edge on which the beginning of the trace
will occur.
Sets or gets the trigger level for internal triggering (manual or automatic),
in dBm.
Sets or gets the trigger out mode. The trigger out can be off (no trigger
out)orit
relative to the input trigger).
Sets or gets the trigger source. Trigger source can be internal or external.
The values are positive edge or negative edge.
can be normal (same polarity as the input trigger or inverted
Save/Recall Command Group
Command
LB_ReadStateFromINI
LB_WriteStateToINI
page 56, LB_ReadStateFromINI (and
(See
related commands).)
LB_ResetRegStates
LB_ResetCurrentState
ee page 55, LB_ResetRegStates (and
(S
related commands).)
LB_StoreReg
LB_RecallReg
See page 118, LB_StoreReg (and related
(
commands).)
iption
Descr
Cause the current state, including all numbered registers to be written
to an INI file.
Enable the user to cause either the current state or the state information
held in the save/recall registers to be reset.
Store/recall register commands. There are 20 registers and each
register holds an entire state.
18 PSM3000, PSM4000, and PSM5000 Series
 Loading...
Loading...