


1
Technical Manual Board
Computer Model MAG-100R
2
Sumário
1. Mechanic Characteristic.................................................................................. 4
1.1. Technical Characteristic .................................................................................. 4
1.2. GPRS, 3G Communication ............................................................................. 4
1.3. Characteristics ................................................................................................ 5
1.4. Data Transmission: ......................................................................................... 5
1.5. Communication XBEE .................................................................................... 6
1.6. Characteristics: ............................................................................................... 7
1.7. Characteristics of the XBee 900-HPS3B for Peru ........................................... 7
1.8. Data Transmission .......................................................................................... 8
1.9. Transmission Power: ...................................................................................... 8
1.10. GPS MODULE MADE BY UBLOX .............................................................. 9
2. MAG-100 Transshipment Configuration. ....................................................... 11
2.1 APK sCBConfigMag100R ............................................................................. 11
Open sCBConfig app. ............................................................................ 11
Configuring type of equipment ............................................................... 12
Transshipment Parameters Configuration .............................................. 14
Standard Setting: ................................................................................... 15
Configuration Step-by-Step: ................................................................... 15
RPM Factor Settings .............................................................................. 20
Signal test screen .................................................................................. 21
CAN BUS screen ................................................................................... 23
Download Contingency Option .............................................................. 25
3. APK sCB Transshipment .............................................................................. 26
1.11. sCBTransshipment App ............................................................................. 26
1.12. Importing Registers ................................................................................... 28
1.13. Configuring the Operational Parameters of the Transshipment. ................ 29
1.14. Configuration of the Work shifts................................................................. 30
1.15. Zigbee Communication Test ...................................................................... 31
1.16. Import Records.......................................................................................... 31
1.17. Load Map .................................................................................................. 32
1.18. Request release code ............................................................................... 33
1.19. Enable go-return ....................................................................................... 34
1.20. Save commands in log ................................ .............................................. 34
1.21. CDT Planting ............................................................................................. 35
1.22. Active FLOW ............................................................................................. 35
1.23. CDT active ................................................................................................ 36

3
1.24. Basket type ............................................................................................... 37
1.25. Enter Implements ...................................................................................... 37
1.26. Allow access to Tire Screen ...................................................................... 38
1.27. Maximum number of digits on a trailer. ...................................................... 38
1.28. Max. Trailers GR ....................................................................................... 38
1.29. Exit the application .................................................................................... 39
4. Transshipment Firmware Configuration ........................................................ 40
4.1 Parameters of the Transshipment Firmware Configuration ........................... 40
5. Transshipment records registration ............................................................... 44
4.1 Formatting the records on the transshipment memory card CF. ......................... 44
5.2 File Register to the Transshipment APK ........................................................ 47
5.3 Update of the files registered on the tablet using a flash drive. ..................... 50
6. Commands used on the Transshipment remote update ................................ 52
6.1 Parameters that can be updated remotely on the transshipment .................. 52

4
1. Mechanic Characteristic
1.1. Technical Characteristic
a) Feeding of 12 – 35 volts
b) Four digital input 0-30 volts
c) Two digital output 0-30 volts
d) Three analogue input 0-10 volts,4-20 mA
e) Two pulse input (RPM and pulse)
f) One serial port (RS 232)
g) GRPS,3G Communication
h) Communication Zigbee (mesh net) 7 km/ 35 km (optional)
i) Communication Bluetooth (optional)
j) Optional – Canbus parameters reading (it depends on the vehicle model)
k) Global Positioning System (GPS)
l) Removable storage system (Intern Compact flash, up to 2gb)
m) IP66
The Mag100R has an internal battery (optional), that works as a backup, with a minimum
autonomy of 2 working hours, if it were unplugged from the main battery. It is important
to highlight that; this machine is out of the operator’s range and all the antennas are
external.
Storage Temperature
0 - 50°
Relative Humidity
5 – 85%
1.2. GPRS, 3G Communication
Figure 1 - Module HE910 - D
Module HE910-D Made by TELIT.
Address: Via Stazione di Prosecco, 5/B, I-34010 Sgonico(Trieste), Italy,
Zip Code: 34010
Width (mm) x height (mm) x comprimento (mm)
73 mm x 33 mm x 165 mm
Box material
ABS (plastic)

5
Telephone: +39 040 4192, Fax: +39 040 4192 333
Information Contact and technical assistance.
TS-EMEA@telit.com
TS-AMERICAS@telit.com
TS-APAC@telit.com
TS-SRD@telit.com
Alternative Use: http://www.telit.com/support
Official Page: http//www.telit.com
1.3. Characteristics
• 4 range GSM/GPRS/EDGE: 850/900/1800/1900MHz
• 3 range UTMS/HSPA: 850/900/2100MHz
• WCDMA Multi-band (I, II, IV, V, VI, VIII and XIX)
• HSDPA up to 21.0Mbps (high range; up to 7.2 Mbps for other)
• HSUPA up to 5.76Mbps
• WCDMA 384kbps downlink/uplink
• DTM (double transfer module)
• Reception Diversity, tipo3i Interference Canceling Receptor
• CPC (DRX/DTX) (Continuous package connection)
• Control using AT according with 3GPP TS27.005, 27.007 and other Telit
modules.
• Multiplexed serial port 3GPP TS27.010
• SIM card interface 1.8/3V (Automatic detection 3GPP TS 51.014)
Power Consumption (Conventional Values)
• Quiescent current -by 2G, DRX5, 1.1 mA
• Stand-by current- 3G, DRX7, 1.2 mA
Transmission Power:
• Class 4 (2W) @ 850 / 900 MHz, GSM
• Class 1 (1W) @ 1800 / 1900 MHz, GSM
• Class E2 (0.5W) @ 850/900 MHz, EDGE
• Class E2 (0.4W) @ 1800/1900 MHz, EDGE
• Class 3 (0.25W) @ 850/900/1700/1900/2100 MHz
Sensitivity Reception:
• GSM 850/900MHz - 109 dBm
• GSM 1800/1900MHz - 110 dBm
• WCDMA 850/900/1700/1900MHz - 111 dBm
1.4. Data Transmission:
• HSPA: category 14 in downlink and category 6 in uplink
• DL to 21.0Mbps
• UL to 5.76Mbps
• WCDMA: to 384kbps downlink/uplink
• EDGE: DL to 296kbps, UL to 236.8kbps
• GPRS: DL to 107kbps, UL to 85.6kbps
• GPRS class 10 to Global and variables NAx; class 33 for variables EUx
• EDGE class 10 for Global and variables NAx; class 33 for variables EUx
6
• Not transparent asynchronous CSD up to 9.6kbps
• Code outline from 1 to 4 (GPRS) and codification outline module from 1 to 9
(EDGE)
Antenna Perform
Frequency
880 – 1600 mhz
Efficiency
82%
Impedance
50 ohm
Irradiation
Omnidirectional
Polarization
Lineal
Temperature of the Operation
0 - 85°
FCC ID: RI7 HE910
FCC REGISTER NUMBER (FRN): 0020384608
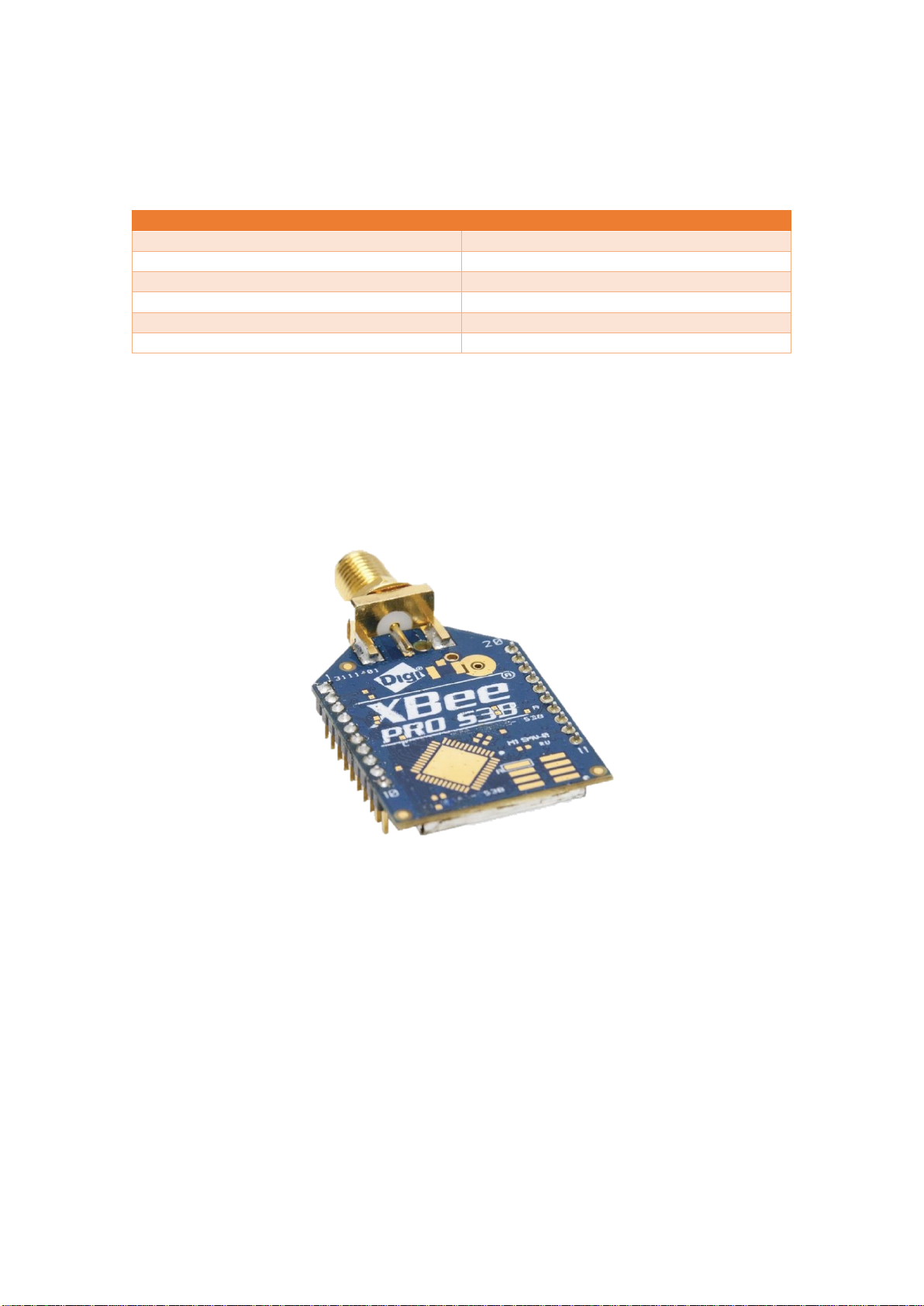
1.5. Communication XBEE
Figure 2 - Module XBEE-PRO S3B
Module XBEE-PRO 900HP S3B Made by Digi International.
Address: 11001 Bren Road East
Minnetonka, MN 55343
Telephone: 1-877-912-3444
Telephone :952-912-3444
Fax: 952-912-4952
Technical Support.
Telephones: (866) 765-9885 toll-free U.S.A and Canada
(801) 765-9885 Worldwide
Online Support: www.digi.com/support
Email: tech.support@digi.com
7
The RF Xbee-pro 900HP is ideal for smaller power consumption, from point to
multipoint on low latency net application. It is used on peer to peer and net from point
to multiple point. The XBee-900 module has a higher selectable transmission power
of 250 mW. This higher Tx power allows a line-of-sight range up to 28 miles with
antenna right. This one is ideal for situations in which the RF penetration and absolute
transmission distance are of extreme importance for the implementation.
As part of the RF XBee line, this module is easy to use, includes drop-in gateways
nets, and uses Digi and Adapters. The RF does not need any out-of-the-box
configuration and any necessary advance configuration can be replaced with simple
commands.
1.6. Characteristics:
Processor: transceiver ADF7023, Cortex-M3 EFM32G230 @ 28 MHz
Includes Programmable: Freescale MC9S08QE32
Frequency range: 902 to 928 MHz, selectable software for the interference resistance.
Frequency Intervals, Power and Type of Modulation
Frequency
Interval Tx
(MHz)
Output
Maximum
Power
(W)
Emission
Designation
Technology
Type of
Modulation
920.0 a
928.0
0.23878
290KF7D
LEAP IN
FREQUENCY
FSK
902.0 a
907.5
0.20701
255KF7D
LEAP IN
FREQUENCY
FSK
902.0 a
907.5
0.24266
360KF7D
LEAP IN
FREQUENCY
FSK
915.0 a
928.0
0.20701
255KF7D
LEAP IN
FREQUENCY
FSK
915.0 a
928.0
0.24266
360KF7D
LEAP IN
FREQUENCY
FSK
In the specific case of Peru, the modules were configurated to work on a 915,5 a 927,7
MHz frequency, setting the cm register (Channel Mask) with a value of
FFFFFFFE00000000, that same value is defined during the production of mag-100R and
it is storage on the inter flash of the XBee 900-HP.
The starting process of the Mag-100R is configured following the next steps. If the XBee
900-HP radio module is changed, then the correct configuration is ensured.
1.7. Characteristics of the XBee 900-HPS3B for Peru
• Working Frequency: 915.5 MHz to 927.7 MHz
• Channels: 31
• Main Frequency of the main channel: 915.600 MHz
• Channel division: 400 kHz

8
• Transmission range length: 200 kHz
• Modulation: GFSK
• Channel Leap: Yes (pseudo-random)
• Maximum Power Transmission: 24 dBm (250 mW)
• Baudrate on the air: 200 kbps
• Sensitivity: -101 dBm
1.8. Data Transmission
• Data Speed: RF: 10 Kbps o 200 Kbps
• Interior/Urban range: 10 Kbps: to 2000 feet (610 m); 200 Kbps: to 1000 feet (305
m), outdoor/Line-Of-Sight Range: 10 Kbps: to 9 miles (14 km); 200 Kbps: to 4
miles (6.5 km) (w/2.1 dipole antenna dB)
1.9. Transmission Power:
• to 24 dBm (250 mW) selectable by software
Receptor Sensitivity:
• -101 dBm a 200 Kbps,
• -110 dBm a 10 Kbps
Interface
• Data Interface: UART (3 V), SPI
• GPIO: to 15 E/S Digital, 4 adc input of $ number bits, 2 PWM outputs
• Network Topology: DigiMesh, repeater, point to point, peer to Multipoint, Peer-to-
Peer
• Spread Spectrum: FHSS (Selectable Channel Software)
Program Capacity
• memory: N/A 32 KB
• CPU/Clock Speed: N/A
Feeding Tension
Feeding Tension 2.1 a 3.6 V CC C
Current in transmission 215 mA typical (290 mA max)
Current in reception 29 mA typical a 3.3V (35 mA max)
Current Sleep 2.5 uA typical
Temperature on the Operation -40 ºC to 85 º C (industrial)
Physical Property
Weight: de 5 a 8 g depending on the antenna option
Size: 3.3 cm x 2.5 cm (4.5x2.5 cm with connector)
Antenna Performance
VSWR
<= 2,0 : 1
Maximum Power
20 Watts
Impedance
50 ohm
Irradiation
Omnidirectional
Earnings
6 dBi

9
Homologated by countries:
Country
Approved
United States (FCC Part 15.247)
MCQ-XB900HP
Industry Canada (IC)
1846A-XB900HP
Australia
RCM
Brazil
ANATEL 3727-12-1209
Singapore
License No. DA105737 (XB900HP
only)
Mexico
IFETEL (XB900HP only)
RoHS2
Compliant
FCC ID: MCQ-XBPS3B
FCC REGISTER NUMBER(FRN): 0010283307
1.10. GPS MODULE MADE BY UBLOX
Figure 3 - LEA-6S Module
Model LEA-6S
Contacts
HQ Switzerland: +41 44 722 7444 info@u-blox.com
America +1 703 483 3180 info_us@u-blox.com
APAC – Singapore +65 6734 3811 info_ap@u-blox.com
China +86 10 68 133 545 info_cn@u-blox.com
Taiwan +886 2 2657 1090 info_tw@u-blox.com
• U-blox 6 position engine:
o Navigate up to-162 dBm and-148 dBm coldstart
o Faster Acquisition with AssistNow Autonomous

10
o Configurable energy Management
o Hybrid gps/sbas (waas, egnos, msas)
o Anti-jamming Technology
• Simple Integration with unwired u-blox modules
• A-gps: AssistNow ON-LINE and off-line AssistNow services, OMA SUPL
compliant
• Compatible (hardware and firmware); easy migration to LEA-5 or LEA-4 family
• LCC package for trustable manufacture and effective cost
• Compatible with u-blox GPS for Android
• Based on the GNSS chips qualified according to the aec-q100
• Made on iso/ts 16949 production facility
• Qualified according to ISO 16750
Hot starting and initial auxiliary position for the first time in less than a second.
Tracking capture and sensitivity of 160dBm
Kickstart function, the model can attain an acceleration when the signal level is low at
the beginning.
GPS, Galileo, SBAS (WAAS and EGNOS and MSAS, and GAGAN) hybrid motor
4 Hz update range of the position.
Receptor with 50 channels, frequency L1 code C/A (1575 MHz).
Search sensitivity during navigation -162 dBm
Reacquisition sensitivity -160 dBm
Sensitivity on the cold starting without help -148 dBm.
Maximum Updating interval during navigation 5 Hz
Horizontal Position of without help precision 2,5 m e SBAS 2 m
Configurable interval frequency of leap-time 0,25 Hz a 1 kHz
Speed Precision 0,1 m/s
Orientation Precision 0,5 degrees
Operational Limits: Dynamic ≤ 4 g, Altitude 50,000 m , speed 500 m/s
Source tension 2.7 V – 3.6 V
Consumption of continuous potency 121 mW.
Consumption of potency on Save mode 36 mW.
Support of Antenna active and passive.
Serial Interface: 1 UART, 1 USB V2.0 full speed 12 Mbit/s, 1 DDC (I2 C compliant)
Antenna Performance
Impendence
50 ohm
Central Frequency
1575.42 mhz
Range length
10 mhz
Earnings
27 db
Mitigation for output filter
range (db)
Dielectric fo = 1575.42 mhz
7 typ. Fo +/- 20 mhz
20 typ. Fo +/- 50 mhz
30 typ. Fo +/- 100 mhz
Power Consumption
10 mA (max)
11
2. MAG-100 Transshipment Configuration.
2.1 APK sCBConfigMag100R
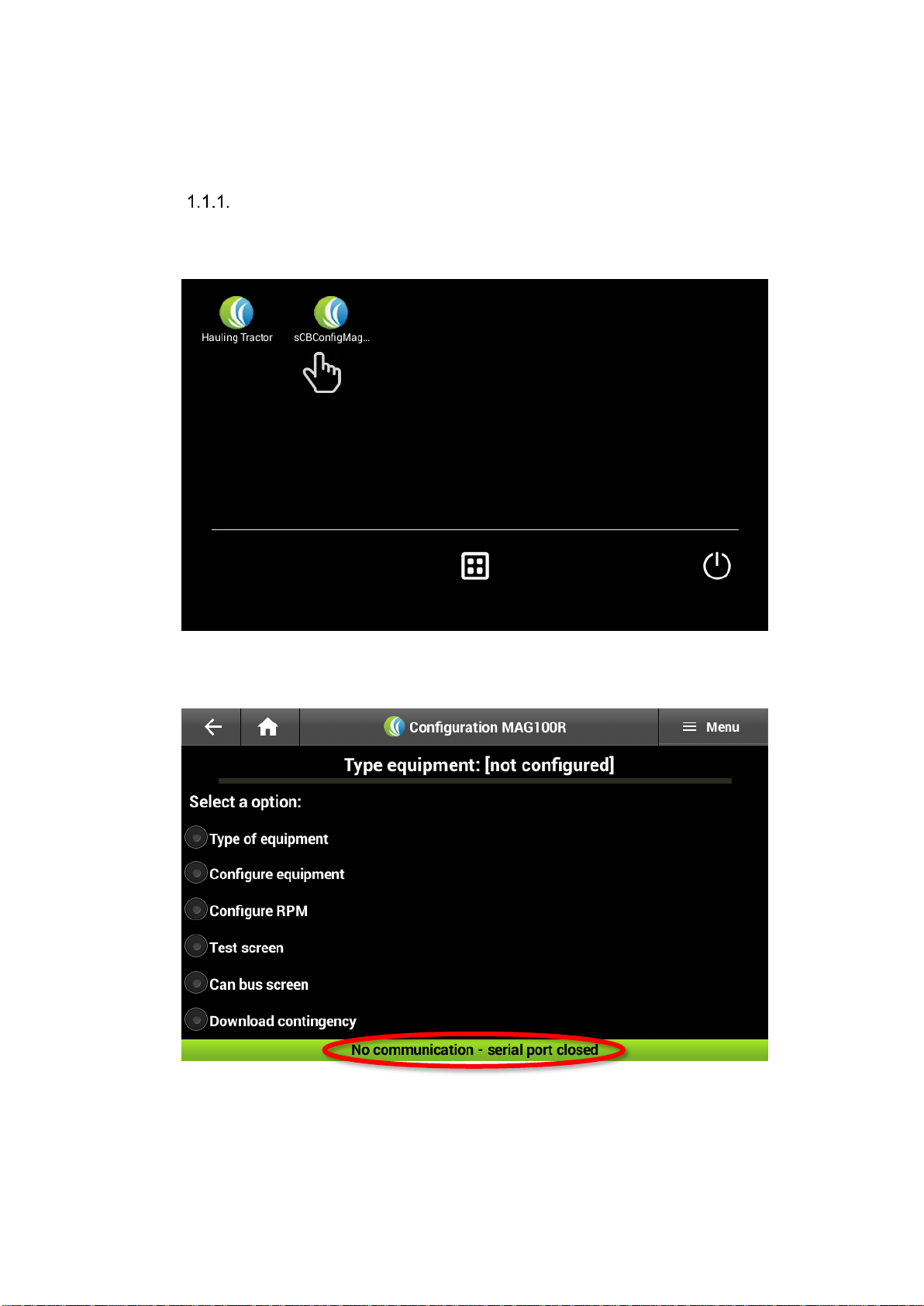
Open sCBConfig app.
The sCBConfig app is used for the initial configurations of the MAG100 in any
machine. On this document, it is explained the configuration process of the
Transshipment.
First, it must be selected the sCBConfigMag app.
Opening of the configuration serial port
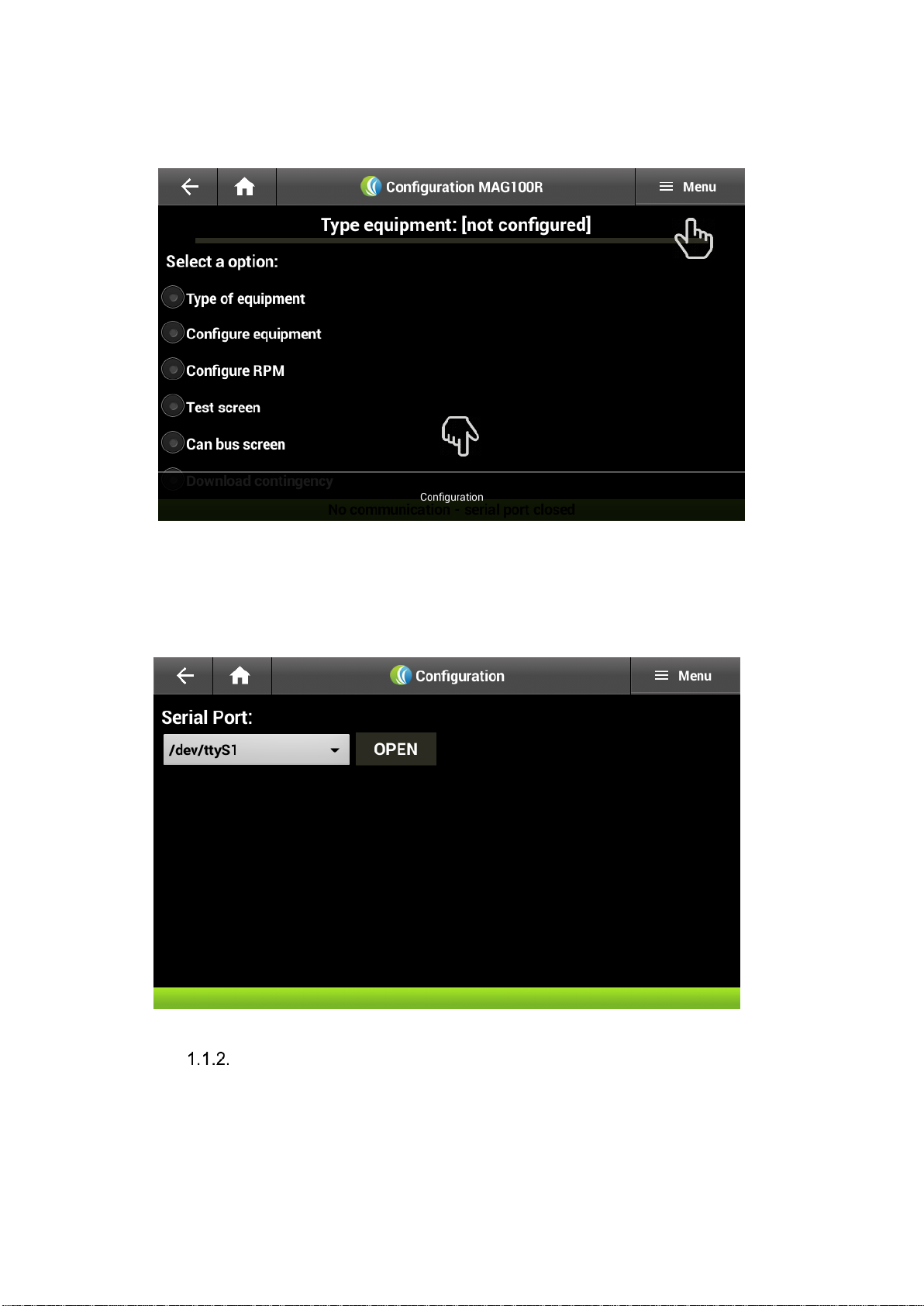
Each item on the screen will be explained one by one with all its functionalities. The
configuration main screen by default has no machine configurated and has the serial
port closed:
12
To enable the serial port, it is necessary to click on the “MENU”.
After, that a tab will appear on the lower part of the screen with the option of
“Configuration”.
Once the Configuration option is selected, a portal serial tab will appear on the screen.
Then, it is important to enter the valid address which is (/dev/ttyS1) and select the
option “OPEN”. To return to the main screen click the “BACK” or “HOME bottom
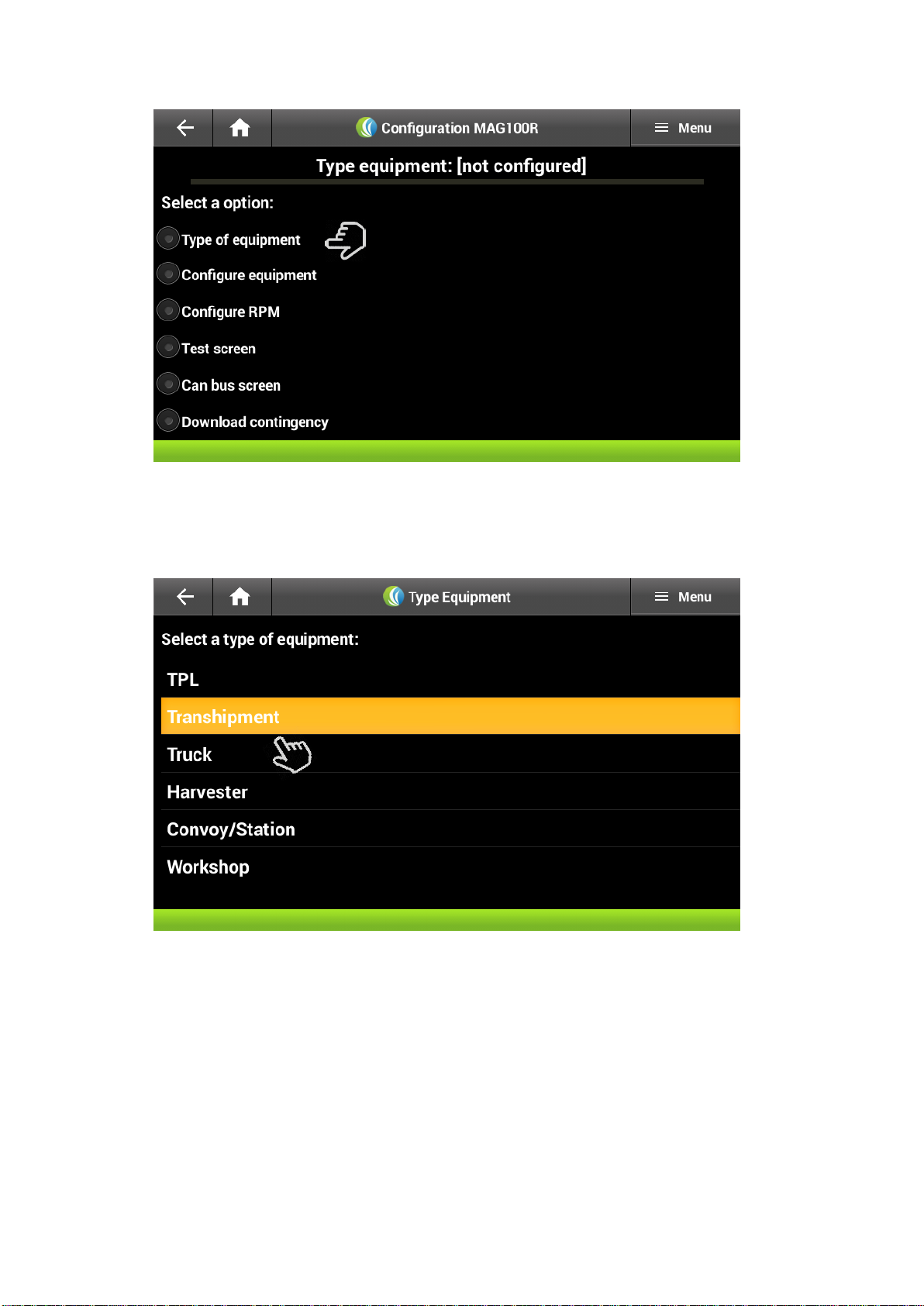
Configuring type of equipment
The first step on the configuration of the computer on board, it is to specify the type
of equipment used on the option “Type of Equipment”.
13
In this case, the equipment will be “Transshipment”
14
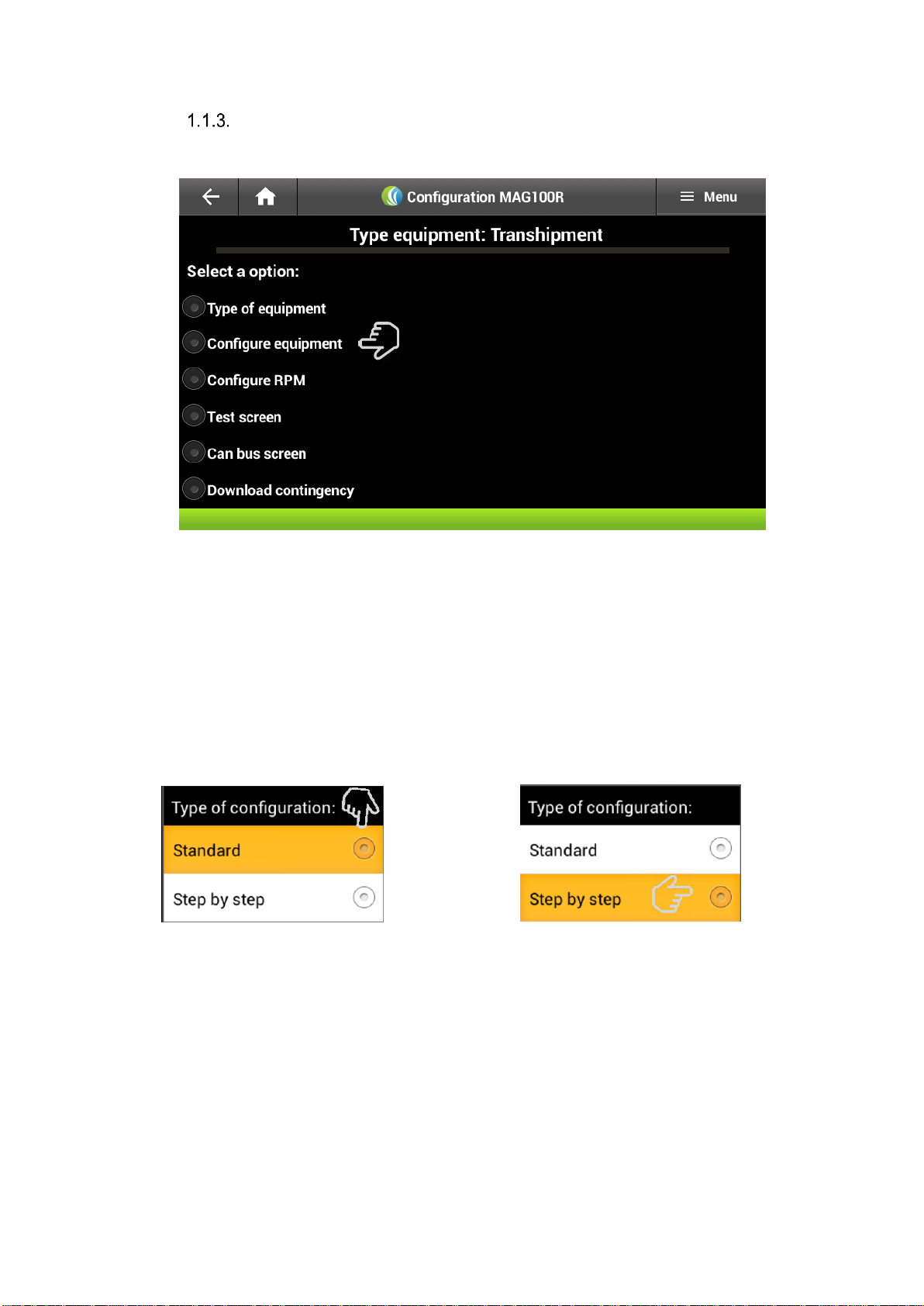
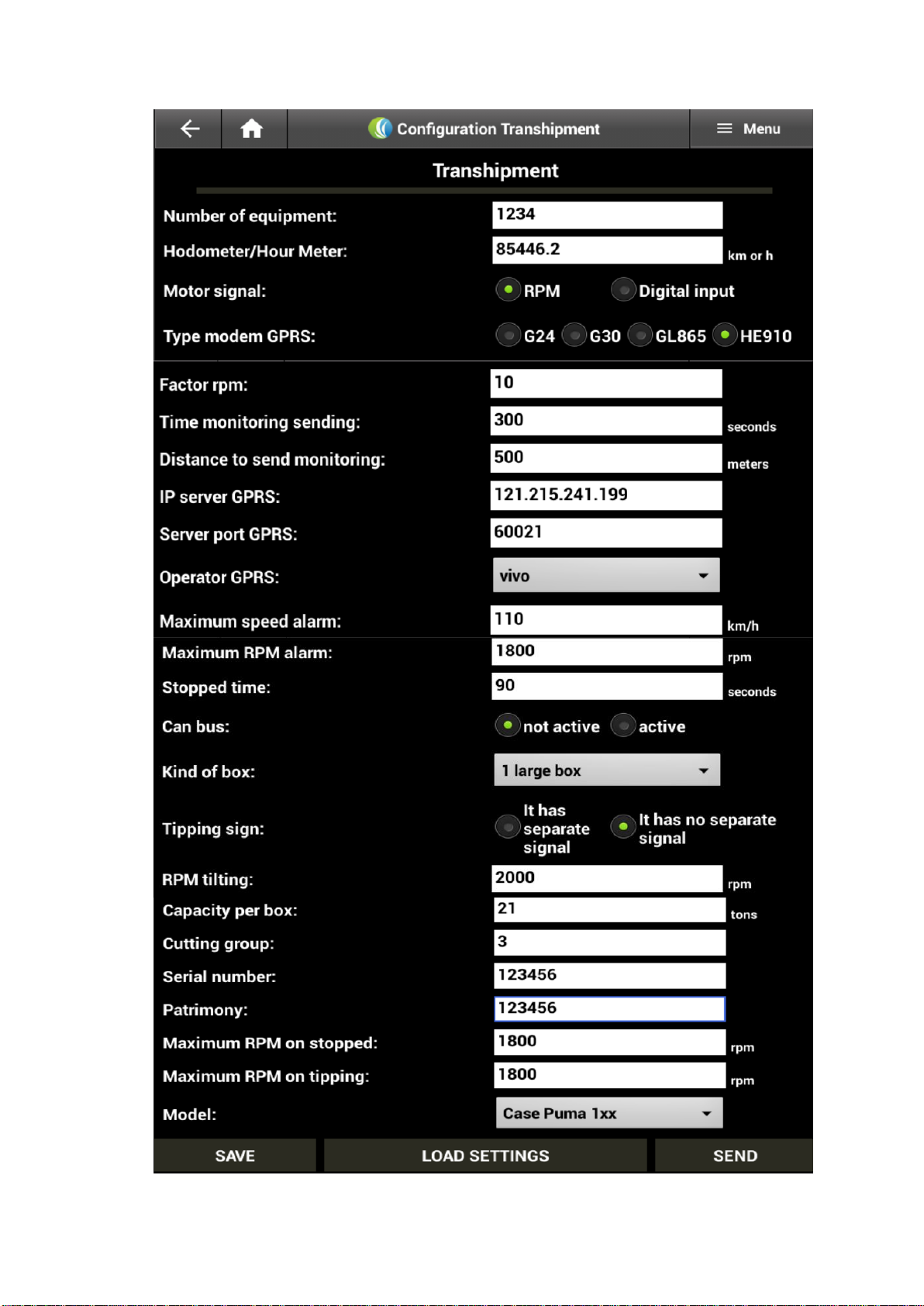
Transshipment Parameters Configuration
After that, the app will return immediately to the main screen. Then, the equipment
can be configured
The desired setting can be selected:
Standard: There is complete freedom to change the parameters.
Step-by-Step: It will be changed a field at a time, on the following order.
15
Standard Setting:
This option gives more liberty on the field selection. The desired option can be
selected at any time and the virtual keyboard will appear to enter the data. To move
around on the screen, it is just a matter of sliding the finger.
Configuration Step-by-Step:
In this case, it must be configured field by field following the order on the screen and
changing them using the arrow highlighted on the image:
After that, it is necessary to make some changes which are explained in detail:
16

17
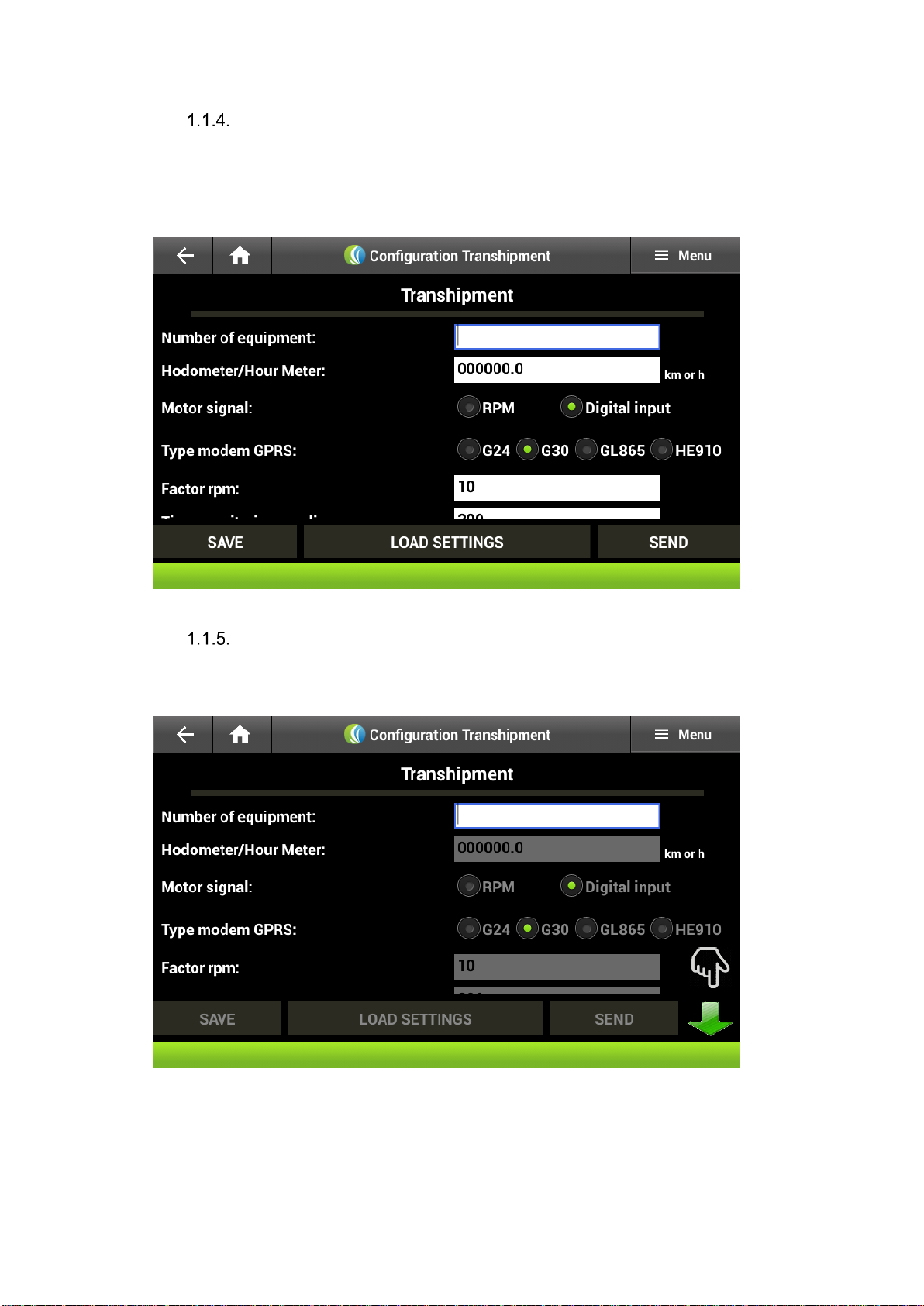
Description of Fields
Fields configuration detail
Machine Number
Machine number registered by the farm.
Odometer/Hour Meter
Odometer and Hour Meter (depends on the machine)
usually on the transshipment panel analyzed by the CAN
BUS network.
Engine Signal
RPM: Engine signal is measured by the alternator or the
CAN BUS network.
Digital Input: The engine signal is measured by the ignition
point or (fixed RPM).
Type of Modem
Specify the type of hardware used (modem GPRS).
RPM Factor
It will be configured afterwards
Monitoring Sending Time
Time measured in seconds for the register of the
monitoring.
Monitoring Sending Distance
Distance in meters for the register of the monitoring
IP server GPRS
IP of the server that will receive the CB info.
Server Port GPRS
The server port will receive the CB info.
GPRS Operator
Operator of the SIM card used on the transmission of the
CB info.
Maximum Speed Alarm
If the Maximum speed is exceeded an alarm is generated
and registered.
RPM maximum alarm
If the maximum RPM speed is exceeded an alarm is
generated and registered.
Stop Time
If the Maximum time is exceeded, it will ask for a code with
the reason of the stop.
Can bus
It enables or disables de Can Bus network.
Type of truck *
No configurated
1 small truck box
2 small truck boxes
3 small truck boxes
1 big truck box
2 big truck boxes
3 big truck boxes
Small together
Big together
2 middle truck boxes
2 extra big truck box
Overturning Signal
There is or not case selection (overturning signal)
Truck bed Capacity
Case capacity in ton.
Harvesting Code
Harvesting team machine code.
Serial number
Serial number fixed on the computer on board by Solinftec
Assets
Identity number of the computer on board fixed by the client
Maximum RPM Stop
Maximum RPM allowed to the machine when there is no
speed
Maximum overturning RPM
Maximum RPM allowed to machine during overturning
Case Type*
Distance between
the GPS antenna
and the center of
the 1st truck crate
Distance between
the GPS antenna
and the center of
the 2
nd
truck crate
Distance between
the GPS antenna
and the center of
the 3
rd
truck crate

18
After clicking on the option Save, the following confirmation message will appear:
Indicating that it is necessary to fill all the fields before saving the settings
If settings were previously saved on the S7 tablet, those can be loaded on the option
“Loading Settings”
1 small crate
3.7 meter
2 small crates
3.7 meter
7 meters
3 small crates
3.7 meter
7meters
12.5 meter
1 large crate
7 meters
2 large crates
5.5 meter
12 meters
3 large crates
5.5 meter
12 meters
22.5 meter
Small Attached
3.7 meter
7 meters
Large Attached
5.5 meter
12 meters
2 medium truck
4.2 meter
10.8 meter
2 extra-large truck
crates
6.3 meter
13.3 meter

19
Then, it is necessary to send such data to the MAG100 computer on board using the
option Send.
After that, the user must return to the main screen using the bottoms return or home

20
RPM Factor Settings
The option RPM Configuration allows to calibrate the RPM measurements by means
of the RPM Factor:
Only equipment without Can Bus net reading need de RPM calibration. Once selected
the field rpm factor, a virtual keyboard will appear to make the necessary value
changes:

21
Once the info is saved, the next screen will appear confirming the previous action.
Signal test screen
The option test screen allows to see the state of the equipment, as well as the value
of all the measurements made by the computer on board and the status of it
peripherals
Adjust de RPM
factor until a
number similar to
the one on the
harvester panel.
Saves the RPM values
RPM measured by the computer on board
RPM value
validation

22
Test Screen Description
Computer on Board
Machine Number:
Number of the machine configured.
Odometer/Hours
meter:
The odometer and hours meter configured on the CAN BUS.
Speed:
Equipment speed.
RPM:
Actual RPM of the equipment measured by the computer on board, by the
CAN BUS net.
Status:
Actual status of the machine:
F: Stopped
C: Harvest
M: Maneuver
D: Moving
CF card:
Actual state of memory card Compact Flash: Error or OK.
ENTRYS
Digital Input:
Digital Input activated by the computer on board (0000 → ED1, ED2, ED3,
ED4).
Pulse Input:
Pulse input values (00 → EP1, EP2).
External Input:
Feed.
Analogue 1:
Value measured by the computer on board on the EA1.
Analogue 2:
Value measured by the computer on board on the EA2.
Analogue 3:
Value measured by the computer on board on the EA3.
GPS
GSP valid:
Actual GPS – Valid or not valid
Latitude:
Equipment Actual Latitude.
Longitude:
Actual Longitude of the equipment.
MODEM GPRS
Status:
It shows the status of the connectivity process of the modem GPRS (0 –
11).

23
Message:
7 (MAG200, RECOK, ALOHA): Modem connected on the monitoring
system.
6 (ERROR) IP and/or wrong Input or communication problem with the
server.
5 (ERROR) Problem with the signal connection with the operator.
1 (ERROR) Problem with the SIM card.
Monitoring time:
Time spent since the last monitoring register.
Monitoring Distance:
Distance travelled since the last monitoring register.
Aloha Time:
Time spent since the last communication with the server.
Alarms:
Alarms actives on the computer on board.
CAN BUS screen
Option “can bus screen” allows to access the screens with all the info of the Can Bus
net, as long as that option is active on the equipment settings.

24
To return to the main screen, you can select the home bottom and the back option.

25
Download Contingency Option
On this option the appointment and monitoring info is downloaded from the CF
memory card into a flash drive on the tablet.
If there is no flash drive the system will display the following warning:
If the flash drive is on the tablet after the info is downloaded the following text will
appear:
Closing of the Setting Serial Port
After the configuration process is finished, it is necessary to close the APK sCBConfig
communication port. This process can be done on the main screen
Menu/Configuration.

26
To exit the app used the back bottom.
3. APK sCB Transshipment
1.11. sCBTransshipment App
The sCBTransshipment app is used on to register and monitor using the MAG 100.
In this part of the document, it will be explained in detail the transshipment
configuration process.
The first step is to open the app:

27
Opening the MAG100 comunication serial port
The first time the app is opened there will appear a warning, of the serial port being
closed, on the main screen. In order to open it, you must click on the “MENU” ,
“Configuration” option.
For security reasons, the configuration process has a password only known by those
authorized to configure the computer on board:

28
After introducing the password select the open bottom and the correct serial port will
appear as a pre-stablished (/dev/ttyS1):
1.12. Importing Registers
Once the serial port is opened, the files registered and saved on the tablet on the file
“data/Trabalho/Cadastros” will be imported automatically

29
If there is any change on the register files saved on the tablet, it will be necessary to
select the option import records without any need of opening the serial port again. If
there is any file missing during this process the following message will appear.
In this case, follow the steps on the option “Updating the register files on the tablet”
1.13. Configuring the Operational Parameters of the Transshipment.
Some of the configurations done on the app sCBConfig can be seen and modified
on this app on the option “General”

30
The General option will show the machine code, the GPRS operator, the monitoring
time among other info that cannot be changed. Other modifiable parameters such as,
minimum and maximum speed and RPM stop time will appear on this option.
Whenever a modifiable field is activated the virtual keyboard will appear. All
modification must be saved using the corresponding option: “Save”
1.14. Configuration of the Work shifts
The transshipment option will allow to alter the configuration of item such as TAG’s
type of crate, lifting signal, crates and cutting capacity as well as configurating the
crates with or without password.

31
1.15. Zigbee Communication Test
The option “Zigbee Communication” allows to test the Zigbee on the computer on
board. Once it is selected, a communication internal test is done. If the test is
successful, the message “Zigbee Communication Ok” will appear. If the message
to appear were “Zigbee Communication Fail” the CB must be sent to maintenance.
1.16. Import Records
This option imports the registers saved on the tablet on the file
“data/Trabalho/Cadastros”. If there is any change on these files saved on the tablet,
it is necessary to select this option to enable the changes. After that, the message
“Records imported successfully” will appear.

32
If there is any record missing on the import process the following message will appear
“Records not found on file /data/Trabalho/Cadastros”: If this were the case, the
steps on section “Update the records registered on the tablet” must be followed.
1.17. Load Map
This option loads on the APK transshipment main screen the harvesting area maps
supplied by the farm and saved on the file “data/Trabalho/Mapas”.
Once this option is selected, on the Menu /Option Map on the main screen of the
Transshipment will appear the harvesting area map of the farm

33
When this option is not selected, then it will return to the main screen of the
Transshipment APK and will show the Solinftec logo:
1.18. Request release code
This option is active on any contingency measure. For example, if a transshipment
doesn’t detect the harvester the computer on board will request the cut order of the
harvest.

34
1.19. Enable go-return
This option is used to the transshipment to send information to the coordinator. If the
firmware or the “Transshipment coordinator” item0 is active, then this option will also
activate the transshipment to act as a coordinator, in case of the CDC:
1.20. Save commands in log
In this case, all the commands given will be saved for further analysis using USB
cable.

35
1.21. CDT Planting
Using this option, the planting features will be activated, if the firmware allows it to
1.22. Active FLOW
A confirmation check box will appear whenever this option is activated.

36
1.23. CDT active
A confirmation check box will appear whenever this option is activated.

37
1.24. Basket type
This option allows to enter the Crate Code if necessary:
1.25. Enter Implements
This option enables to select any implement.

38
1.26. Allow access to Tire Screen
This option is currently on development, therefore, has not been activated on the
transshipment:
1.27. Maximum number of digits on a trailer.
This option shows a range between 10 to 12 digits, depending on the farms
configuration and the maximum number of trailers allowed.
1.28. Max. Trailers GR
This option shows the maximum number of trailers to be storage on the go- return
option.

39
1.29. Exit the application
Through this option the Transshipment APK can be exit and access other apps
installed on android.
Once this option is selected, you can return to the main screen of the transshipment
App and exit the app using the bottom Return.

40
4. Transshipment Firmware Configuration
4.1 Parameters of the Transshipment Firmware Configuration
Every MAG 100 Transshipment firmware will be accompanied by the “Config.txt” file
which has all the current settings of the firmware. In this section will be explained
every parameter and its use on the computer on board.
TRANSSHIPMENT
APP DESCRIPTION
MODOTESTE
Defines the Firmware test mode.
0: Test Mode disable.
1: Test Mode activated (with the ED4
active, a fixed speed of (5Km/h) and RPM
of 640 (Engine on).
FUT
Defines the activation of the FLOW app on
Firmware.
0: FLOW app disables.
1: FLOW app active.
ATIVACCT
Defines the activation of the CDT app on
the Firmware.
0: Applicative CDT disable (identifies the
harvester and changes the status. It
doesn’t send lifting register ZIG22).
1: App CDT active
ATIVACCTPLANTIO
Defines the activation of the CCT
PLANTING app on the Firmware.
0: CCT PLANTING APP disable.
1: CCT PLANTING APP active.
SEMCOORD
Defines the activation of the Transshipment
Coordinator Function.
0: Disables the Transshipment Coordinator
Function.

41
1: Activates Transshipment Coordinator
Function.
CERCAELETRONICA
Defines the activation of the Transshipment
Electronic Fence.
0: Disables Transshipment Electronic
Fence.
1: Activates Transshipment Electronic
Fence.
(file COORD_CERCAS).
ATIVARRFID
Defines the RFID usage activation.
0: Disables the RFID scanner.
1: Activates the RFID scanner.
PRIORIZASOLINFNET
Defines priority of the data traffic into the
system.
0: Prioritizes the GPRS/3G mode for the
data traffic.
1: Prioritizes the SOLINFNET for the data
traffic.
HARDWARE DESCRIPTION
ENTRADAX7
Defines the interface on the MAG100.
0: Interface by Bluetooth.
1: Interface on the S7 screen.
VALIDAEMX7
Defines the validation of the digital data.
0: Uses the CF register on the validation of
the digital data.
1: Uses the S7 register on the validation of
the digital data.
LIMITAPULOS
Configuration of the jumps on the registers
send by the Zigbee.
0: Doesn’t limit the number of jumps on the
Zigbee net.
1: Limits on 2 the number of jumps of the
Zigbee.
TAGBASCULAMENTO
Defines the activation of the Lifting Tag
use.
0: Activates the lifting status of the crates
on the digital input.
1: Activates the lifting status of the crates
on the Lifting Tag.
RPMPELACAN
Defines the activation of the RPM Reading
on the CAN net
0: Activates the RPM reading signal.
1: Activates the RPM reading signal on the
CAN net
HODOMHORIMCAN
Defines the activation of the
Odometer/Hour meter on the CAN net.
0: The Odometer/Hour meter info will be
calculated by the CB.
1: Activates the Odometer/Hour meter
Info Reading by the CAN net.
RTKPORCX3
Defines the activation of the RTK signal
Reading of the crate 3 (pin 7/ED4).
0: Activates the lifting Reading signal of
crate 3on the digital input 4 (pin 7).

42
1: Activates the RTK Reading signal on the
digital entry 4 (pin 7).
BAUDRATEZB
Defines the communication speed with the
ZIGBEE.
9600: Speed Pattern.
15200: Speed Test.
OPERATION DESCRIPTION
VALIDAIMPL
Defines the validation of the digital
implement codes on the register.
0: Doesn’t validate the implement code on
the file registered C_IMPLEMENTO.
1: Validates the implement code in the file
registered C_IMPLEMENTO.
VALIDAEQUP
Defines the validation of the digital
equipment codes on the register.
0: Doesn’t validate the equipment code on
the register C_EQUIP.
1: Validates the equipment code on the
register C_EQUIP.
PRIORIZAPARADA
Activates the function that prioritizes the
call of Harvesters on the FLOW app.
0: Transshipment doesn’t prioritize the
stopped harvesters on the FLOW calls.
1: Transshipments prioritize the stopped
harvesters on the FLOW calls (identifier 17
on the zig call).
GRUPOSFUT
Activates the Group work function on the
FLOW app.
0: Doesn’t send coordinates to the ZIG 29.
1: Sends coordinates to the ZIG 29 to work
on group only to harvesters with MAG100.
DESLOCAC1T
Activates the function maintain Harvester
assigned with ZOG1T register on the
FLOW app
0: Transshipment maintain Harvester
assigned when receives the ZOG1T
register of that harvester with a different
transshipment.
1: Transshipment release the harvester
assigned when it receives the ZIG1T from
that harvester with a transshipment waiting.
COLHEDORA300
Defines the ZIG29 answer time on the
FLOW app.
0: Harvester MAG100.
1: Changes the (zig29) answer time to the
calling of the harvester, it sends ok to the
zig 17.
CARRETA12DIG
Defines the number of digits of the codes
on the crates.
0: Works with 10 digits crates codes.
1: Works with the 12 digits code crate.
PREGQUANTOSQ
Activates the lifted crates request on the
FLOW app.
0: When the FLOW code is entered, it

43
doesn’t ask: “How many crates were
lifted.?".
1: When the FLOW code is entered, it asks:
“How many crates were lifted.?".
NOFUTDESLOCCARR
Defines the usage of the stop time
“Transshipment Line”.
0: Enters on Transshipment Line on any
condition the stop time code with identifiers
is entered. ador "H".
1: It doesn’t enter on Transshipment Line
when the stop time code identifies with and
H if it was previously on moving for loading
stage.
CORRIGEDATAHFUT
Data and time correction using FLOW.
0: Doesn’t correct date or time using
FLOW.
1: Corrects the date and time using FLOW.
DATALIMITEFUT
Defines the validity activation data on the
FLOW app.
0: The FLOW app will be active indefinitely.
170720 (aammdd): The FLOW app will be
active until July 20, 2017.
TPARADABASC
Defines the stop time of the lifting stage to
ask for the stop time code (in seconds).
180: When the transshipment passes the
180 second on lifting stop time, it asks for a
stop time code.
NOBASCMANOBRA
Defines the possibility to enter on lifting
state on the status of loading cane and
maneuver.
0: It sends records of the lifting process
when loading cane and maneuver.
1: It doesn’t send lifting records on the
status of Loading and Maneuver.
BASCLEVANTACX
It Defines a time filter to start the lifting
status.
0: Applies 5 seconds filter to start the lifting
status when the crate is lifted.
1: it starts the lifting status immediately
when the crate is lifted.
LIMITABASC
Defines the lifting limit event for crate.
0: It doesn’t limit the lifting for crate.
1: It limits the lifting for the selected crate.
NOCOLHEDCARREG
Defines the condition that recognizes the
harvester.
0: Recognizes the harvester without
condition
1: It doesn’t recognize the first 5 minutes
loading.
HODOMETRO
Defines the info to be send on the orometer
and hour meter records.
0: It sends the orometer kijos (standard).
1: It sends hour meters kijos.

44
KIJOSCAN
Defines the info system of the CAN net.
0: It doesn’t send Can records even if it is
active.
1: It sends records of the CAN.
DEFINIÇÕES DE ALAMES
TOCIOSO
Defines the idle engine time (in seconds).
300: The engine must maintain the alarm
condition for 300 consecutive second on
stop state to generate the alarm.
REDE ZIGBEE FIRMWARE
REDEZBH
High address of the e Zigbee (H).
REDEZBL
Low address of the Zigbee (L) net – All
together with the high address form the
Zigbee (HHLL).
VERSÃO FIRMWARE
VERSIONE
Development year of the firmware version.
VERSIOND
Sequence of the firmware.
OUTROS CULTIVOS
MAPASANALITICOS
CAMBIOCONDICAO
RELATORIOPOR33
5. Transshipment records registration
4.1 Formatting the records on the transshipment memory card CF.
The CF memory card installed on the MAG100 needs to be formatted, using the app
“CF Formatting” given by Solinftec, using some files to ensure the functioning of the
computer on board. Below, there is a description of the necessary files for the
transshipment:
On the transshipment CF there will be storage the following files:
• C_CHECKLIST;
• C_CHECKLIST_ITEM;
• C_FUNC;
• operacoes_manutencao;
• operacoes_paradas;
• operacoes_produtivas;
• C_EQUIP;
• C_COORDENADAS;
• C_COORD_CERCAS
• fazendas;
• C_FAZENDAS.
Below there is the description of each of the files.
C_CHECKLIST:
In this case, there is a code register of the groups in which every checklist is framed
Example: 01;S
Field
Description
01
Checklist item code
S
Checklist implement indicator

45
Whenever a checklist is not necessary, that file can be registered on one line.
C_CHECKLIST_ITEM:
Checklist Item ordered by group:
Example: 01;001;CHECK FUEL LEVEL
Field
Description
01
Team code
001
Item code
CHECK FUEL LEVEL
Item description
Whenever a checklist is not necessary, that file can be registered on one empty line:
01;001;VAZIO
C_FUNC:
The employee record order from the small to the biggest registration code
Example: 140292;RENATO RUY;O;140292;1
Field
Description
140292
Employee registration
RENATO RUY
Name of the employee
O
Employee Role (O = Operator; M =
Mechanic)
140292
Employee registration
1
Reserved field
operacoes_manutencao:
The maintenance operations record order from the small to the biggest registration
operation code
Example: 999, MANUT HID, 0
Field
Description
999
Operation code
MANUT HID
Operation description
0
Reserved
Whenever the maintenance operation is not necessary, that file can be registered on
one empty line:
0001;VAZIO;0
operacoes_paradas:
The unproductive operations record ordered from the small to the biggest registration
operation code
Example: 104;Treinamento/Orientação;N;N;S
Field
Description
104
Operation Code
Treinamento/Orientação
Operation Description
N
Maximum operation time
(minutes), if the maximum time
isn’t stated, it must remain in N
N
Special code linked to the
operation*
S
Reserved Field

46
Transshipment special codes* and their functionality:
Field
Description
1
Operation Refueling, immediately,
the amount of fuel necessary will be
asked.
2
Shift change, the register of the next
operator will be asked.
4
Transshipment assigned to a
harvester. From the FLOW
0
No special code
N
Stop without special code
S
Maintenance Operation– Enter the
maintenance code
X
Maintenance Operation– Does not
need to enter the maintenance code
L
Indicates the operation to start the
lifting
H
Stop on transshipment line (empty)
– FLOW
C
Waiting for lifting (full) – FLOW
5
Moving on board
6
Increasing the Alarm of Idle engine
A
Cleaning assistance on the
courtyard– available only on ZIG19
calls
D
Enters on Moving for dumping
status
B
Enters on lifting status– for
contingencies if there is no CDC
7
Mandatory, stays on this operation
until a new stop code is entered
operacoes_produtivas:
The productive operations record ordered from the small to the biggest
registration operation code
Example: 1000;COLHENDO CANA;N;N;N
Field
Description
1000
Code operation
COLHendo
Description of the Operation
N;N;N
Reserved Field
C_EQUIP:
This field is used only on the CF card. The equipment records ordered from lowest to
highest operation code.
Example: 1111;COLHEDORA
Field
Description
1111
Code/ equipment number
COLHEDORA
Equipment description
C_COORDENADAS:
This option deals with necessary record of the point that identify a controlled area.

47
Example: PATIO;25.356587;47.547896
Field
Description
PATIO
Coordinates description
25.356587
Latitude
47.547896
Longitude
If it is not needed, that field can be registered with a null line.
C_COORD_CERCAS:
This option deals with necessary record of the coordinates from ambiances that need
to be controlled.
Example: 2152.28788,05026.17930, CERCA_1,1,300, 0
Field
Description
2152.28788
Latitude
05026.17930
Longitude
CERCA_1
Field description
1
Fence code
300
Fence diameter
0
Special code
If it is not needed, that field can be registered with a null line.
It deals with the register of farms, sector, and field. These are registered by the code
of the farm, fallows the zone code and finally the field code.
Example: 0002;FAZENDA TANGARA,0011,0204
Field
Description
0002
Farm Code
FAZENDA TANGARA
Farm Description
0011
Sector Code
0204
Field Code
If it is not needed, that field can be registered with a null line.
C_FAZENDAS
It deals with the register of farms, ordered from the lowest to the highest operation
code.
Example: 0002;FAZENDA TANGARA
Field
Description
0002
Farm Code
FAZENDA TANGARA
Farm Description
5.2 File Register to the Transshipment APK
The Transshipment APK installed on the S7 tablet need some files on the register of
information to avoid typing errors.
The following files must be on the S7 memory.
• C_CHECKLIST_ITEM;
• C_FUNC;
• operacoes_manutencao;
• operacoes_paradas;

48
• operacoes_produtivas;
• C_IMPLEMENTO;
Below there is a more detailed explanation of the previous files.
C_CHECKLIST_ITEM:
It deals with the checklist items organized by the team.
Example: 01;001;VERIFICAR O NIVEL DE ÓLEO
Field
Description
01
Team description
001
Code of the item
VERIFICAR NIVEL DE ÓLEO
Description of the item
If it is not needed, that field can be registered with an empty line as follows:
01;001;VAZIO
C_FUNC:
It deals with the register of the employees organized from the lowest to the highest
registration code.
Example: 140292;RENATO RUY;O;140292;1
Field
Description
140292
Employee register
RENATO RUY
Name of the employee
O
Role of the employee (O =
Operator; M = Mechanic)
140292
Register of the employee
1
Reserved Field
operacoes_manutencao:
it deals with the maintenance operation organized from the lowest to the highest
operation code.
Example: 999, MANUT HID, 0
Field
Description
999
Operation code
MANUT HID
Description of the operation
0
Reserved
If it is not needed, that field can be registered with an empty line as follows:
0001;VAZIO;0
operacoes_paradas:
It deals with the unproductive operation organized from the lowest to the highest
operation code.
Example: 104;Treinamento/Orientação;N;N;S
Field
Description
104
Operation Code
Treinamento/Orientação
Description of the operation
N
Maximum operation time (minutes),
if the maximum time isn’t stated, it
must remain in N
N
Special codes linked to the
operation
S
Reserved fields

49
Transshipment special codes* and their functionality:
Code
Description
1
Operation Refueling, immediately,
the amount of fuel necessary will be
asked.
2
Shift change, the register of the next
operator will be asked.
4
Transshipment assigned to a
harvester. From the FLOW
0
No special code
N
Stop without special code
S
Maintenance Operation– Enter the
maintenance code
X
Maintenance Operation– Does not
need to enter the maintenance code
L
Indicates the operation to start the
lifting
H
Stop on transshipment line (empty)
– FLOW
C
Waiting for lifting (full) – FLOW
5
Moving on board
6
Increasing the Alarm of Idle engine
A
Cleaning assistance on the
courtyard– available only on ZIG19
calls
D
Enters on Moving for dumping
status
B
Enters on lifting status– for
contingencies if there is no CDC
7
Mandatory, stays on this operation
until a new stop code is entered
operacoes_produtivas:
It deals with the register of productive operations organized from lowest to highest
operation code.
Example: 1000;COLHENDO CANA;N;N;N
Field
Description
1000
Operation Code
COLHENDO CANA
Description of the operation
N;N;N
Reserved fields
C_IMPLEMENTO:
It deals with the implement register organized from lowest to highest implement code.
Example: 234;IMPLEMENTO;6
Field
Description
234
Implement code
IMPLEMENTO
Description of the implement
6
Length of the implement

50
5.3 Update of the files registered on the tablet using a flash drive.
This procedure is used to upload the files registered on the S7 using a flash drive
• Firstly, a file with the name “Cadastros” must be created on the flash drive.
All the registers will be updated there.
• Connect the flash drive using the USB-mini on the serial port on the right side
of the S7 tablet.
• Exit the transshipment APK following the steps described on the item ”2.20
Allow to exit the App”.
• Access the S7 menu entering the password to enter the configuration area on
Android.

51
• Opening app “S7Tools”.
Select the option “Import flash drive file”.

52
Select the option “Register” and click on the option “IMPORT”.
• Open the “sCBTransshipment” app again and enter on the
“Menu/Configuration” path option “Import Records” .
6. Commands used on the Transshipment remote update
6.1 Parameters that can be updated remotely on the transshipment
The MAG100 Transshipment firmware are ready to receive remote commands to
update the parameters already registered by the SGPA:
Command
Description
Update Crate
Update crate records
Update Employee
Register a new employee code on the computer on board.
Update Farm, Field
Register FZT on the computer on board
Update Productive
Operation
Register new productive operation code on the computer on
board.
Update
Unproductive
Operation
Register new unproductive operation code on the computer on
board.
Update Productive
Operation
(MAG100)
Register new ´productive operation code on the computer on
board MAG100.
Port Lock
Update the lock used for security matters on the (MAG50R)
Start lock
Update the start lock (MAG50R)
Update
Unproductive
Record
Update the instant stop code of the machine
Text message (64
Characters)
Send text messages to the computer on board up to 64
characters.
Text message
Characters (32)
Send text messages to the computer on boar up to 32 characters.
Machine Code
Change the cut code in which the machine is working.

53
Update Computer
on board
parameters
password
Change the access password to access the computer on board
parameters.
Moving Speed
Change the maximum speed allow.
GPRS transmission
time
Change the monitoring sending time.
Idle engine time
Change the minimum time for the computer on board to show the
idle engine alarm.
Maximum RPM
alarm
Change the maximum RPM for the computer on board to
generate an alarm.
Maximum Speed
Alarm
Change maximum speed for the computer on board to generate
an alarm.
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions:
(1) this device may not cause harmful interference, and
(2) this device must accept any interference received,
including interference that may cause undesired operation.
Warning: Changes or modifications to this unit not expressly approved by the
party responsible for compliance could void the user’s authority to operate the
equipment.
NOTE: This equipment has been tested and found to comply with the limits
for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits
are designed to provide reasonable protection against harmful interference
in a residential installation. This equipment generates, uses and can radiate
radio frequency energy and, if not installed and used in accordance with the
instructions, may cause harmful interference to radio communications.
However, there is no guarantee that interference will not occur in a particular
installation. If this equipment does cause harmful interference to radio or
television reception, which can be determined by turning the equipment off
and on, the user is encouraged to try to correct the interference by one or
more of the following measures:
Reorient or relocate the receiving antenna.
Increase the separation between the equipment and receiver.
Connect the equipment into an outlet on a circuit different from that to
which the receiver is connected.
Consult the dealer or an experienced radio/TV technician for help.
FCC RF Radiation Exposure Statement Caution: To maintain compliance with the
FCC’s RF exposure guidelines, place the product at least 20cm from nearby
persons.
 Loading...
Loading...