


TecnoBody S.r.l – PRO-KIN Systems
PROKIN 3.0软件
TecnoBody S.r.l.
Published: Luglio 2006
Code-Version: PK-MANOP-03-EN-01
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
软件——
软件软件
——操作手册
————
操作手册
操作手册操作手册
1

TecnoBody S.r.l – PRO-KIN Systems
目录
目录
目录目录
第一节
第一节.............................................................................................................. 7
第一节第一节
介绍................................................................................................................. 7
手册中使用的安全标志和符号...................................................................... 8
概述............................................................................................................ 10
安全规则..................................................................................................... 11
PROKIN系统安装........................................................................................... 11
系统组成..................................................................................................... 13
系统安装位置.............................................................................................. 14
连接............................................................................................................ 15
PROKIN系统连接.................................................................................... 17
技术特征..........................................................................................................17
角度测量范围.............................................................................................. 17
尺寸............................................................................................................ 18
电子学......................................................................................................... 18
工作环境..................................................................................................... 18
相关规范和标准.......................................................................................... 19
角度的清除.................................................................................................. 21
移动斜板相关配件....................................................................................... 23
说明................................................................................................................ 23
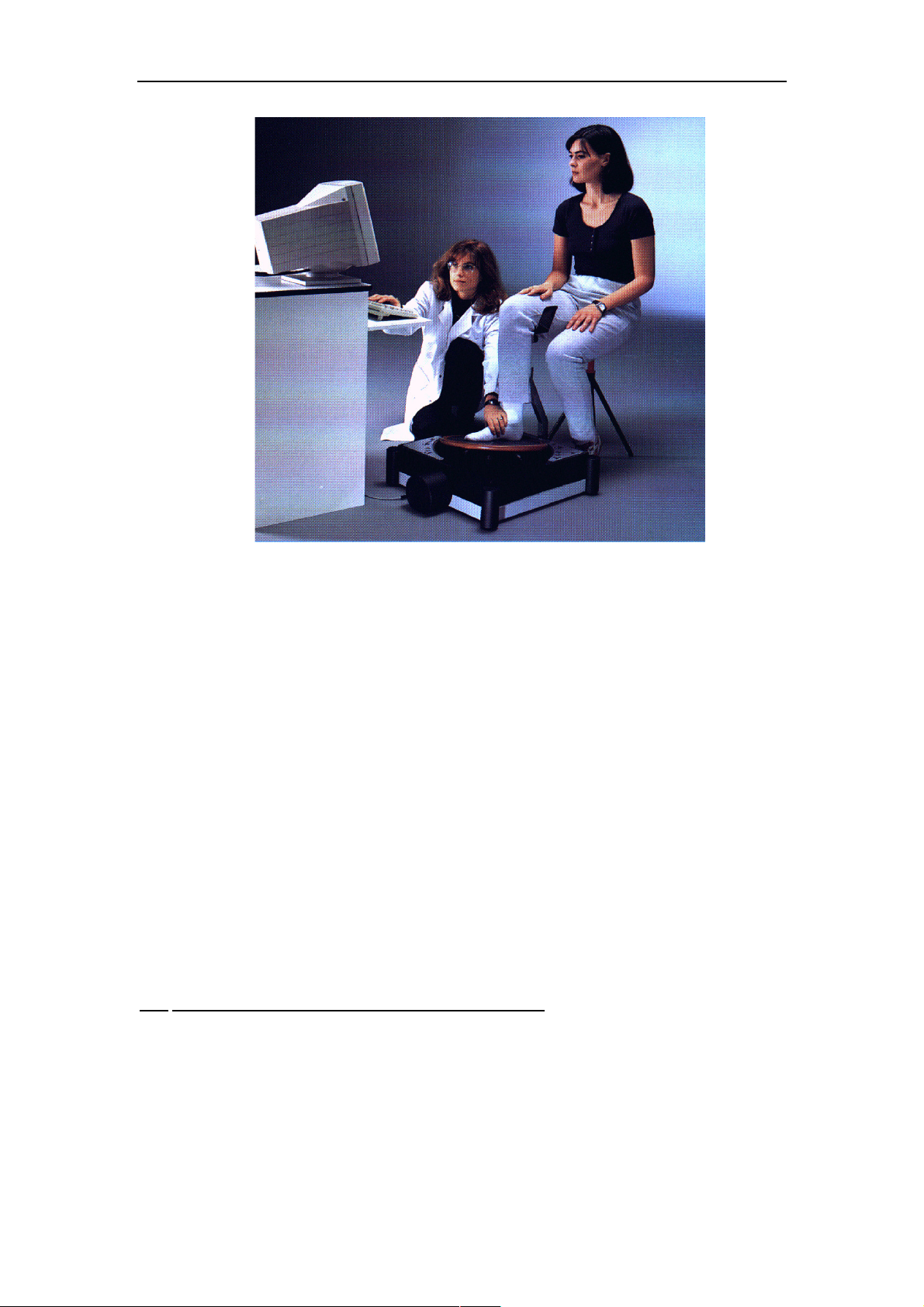
坐位下单足的使用....................................................................................... 23
无支持面条件下足的运动............................................................................ 24
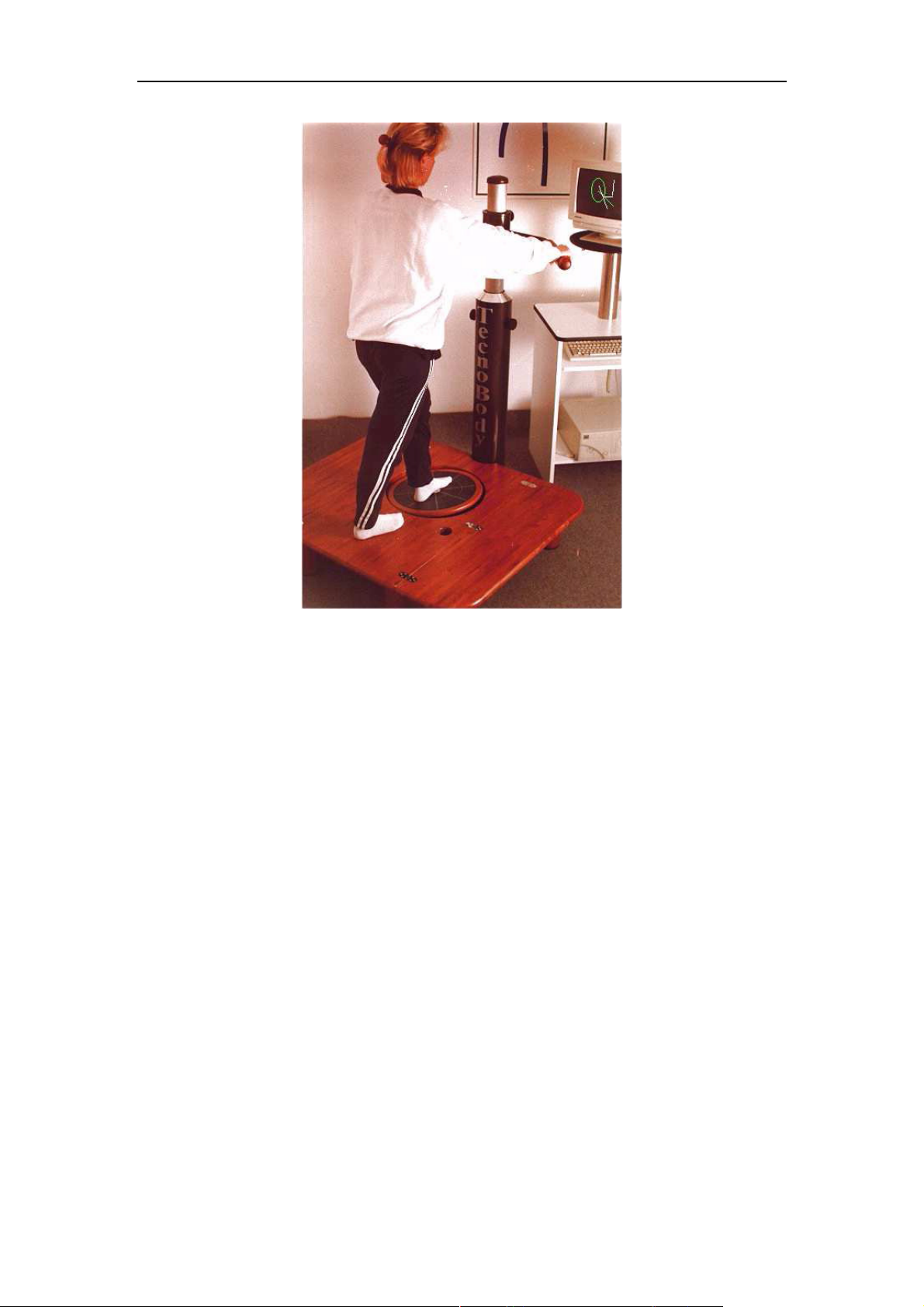
有支持面条件下的运动(向后姿势backward position)................................. 25
有支持面条件下的运动(向前姿势advanced position)................................ 26
睁/闭眼时无上肢辅助的运动...........................................................................
27
躯干姿势控制的运动................................................................................... 28
第二节
第二节............................................................................................................ 29
第二节第二节
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
2

TecnoBody S.r.l – PRO-KIN Systems
软件使用手册.................................................................................................. 29
硬件和软件的要求.......................................................................................... 29
软件安装程序................................................................................................. 30
USB驱动的安装.......................................................................................... 30
安装时CD-ROM的功能............................................................................... 34
PROKIN软件安装....................................................................................... 36
主菜单............................................................................................................ 38
系统设置......................................................................................................... 39
本体感觉评估.................................................................................................. 41
评估的内容和方式....................................................................................... 41
A.T.E........................................................................................................... 43
与康复描迹(tracing)的联系........................................................................ 46
参数构架..................................................................................................... 50
阈值......................................................................................................... 51
时序......................................................................................................... 51
位置......................................................................................................... 51
旋转......................................................................................................... 51
记录......................................................................................................... 51
测试......................................................................................................... 52
外观......................................................................................................... 52
A.T.E....................................................................................................... 52
斜板......................................................................................................... 52
患者数据文件夹选择................................................................................... 53
对比测试..................................................................................................... 54
平面图和图表程序单元................................................................................... 58
参数............................................................................................................ 60
时间......................................................................................................... 60
位置......................................................................................................... 60
外观......................................................................................................... 61
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
3

TecnoBody S.r.l – PRO-KIN Systems
斜板......................................................................................................... 61
记录......................................................................................................... 61
目标............................................................................................................ 66
负荷目标..................................................................................................... 68
瞬时分析..................................................................................................... 69
解剖学分析.................................................................................................. 70
参数构架..................................................................................................... 73
力的吸收器(force absorbers)................................................................. 74
轴点......................................................................................................... 74
测试时长.................................................................................................. 74
记录......................................................................................................... 74
患者数据文件夹选择................................................................................... 75
形式......................................................................................................... 75
康复描迹......................................................................................................... 77
稳定性测量所得的康复描迹............................................................................ 79
外观............................................................................................................ 80
位置............................................................................................................ 80
时间............................................................................................................ 80
如何进行测试........................................................................................... 80
康复描迹的处理.............................................................................................. 83
描迹的创造.................................................................................................. 83
描迹的储存.............................................................................................. 87
描迹的删除.............................................................................................. 89
打印......................................................................................................... 89
描迹的升级.............................................................................................. 89
序列的创造................................................................................................. 90
序列的储存.............................................................................................. 93
序列的删除.............................................................................................. 94
序列的升级.............................................................................................. 94
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
4

TecnoBody S.r.l – PRO-KIN Systems
打印......................................................................................................... 96
患者文件夹..................................................................................................... 97
患者数据的生成.......................................................................................... 97
测试图表的生成.......................................................................................... 98
测试的删除.............................................................................................. 99
对比试验................................................................................................... 100
躯干传感器................................................................................................... 102
打印.............................................................................................................. 104
平面观和图表打印面板.............................................................................. 104
康复描迹打印面板..................................................................................... 104
稳定性测量打印面板................................................................................. 105
评估测试打印面板..................................................................................... 105
康复描迹的稳定性测量打印面板............................................................... 106
描迹处理打印面板(描迹)...................................................................... 106
描迹处理打印面板(序列)...................................................................... 107
患者文件夹打印面板................................................................................. 107
反馈监控....................................................................................................... 109
附录 A........................................................................................................... 113
附录 B........................................................................................................... 115
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
5

第一节
第一节
第一节第一节
介绍
介绍
介绍介绍
TecnoBody S.r.l – PRO-KIN Systems
手册中使用的安全标志和符号
手册中使用的安全标志和符号
手册中使用的安全标志和符号手册中使用的安全标志和符号
危险
危险
危险危险
被标记为此符号的文本提示为避免对操作者和患者造成伤害或损伤
被标记为此符号的文本提示为避免对操作者和患者造成伤害或损伤,,,,必需小心
被标记为此符号的文本提示为避免对操作者和患者造成伤害或损伤被标记为此符号的文本提示为避免对操作者和患者造成伤害或损伤
依照说明操作
依照说明操作
依照说明操作依照说明操作
必需小心
必需小心必需小心
警告
警告
警告警告
被标记为此符号的说明必需小心查看以免对系统或硬件造成破坏
被标记为此符号的说明必需小心查看以免对系统或硬件造成破坏
被标记为此符号的说明必需小心查看以免对系统或硬件造成破坏被标记为此符号的说明必需小心查看以免对系统或硬件造成破坏
注释
注释
注释注释
注释提示了对系统功能有益的重要信息和推荐意见
注释提示了对系统功能有益的重要信息和推荐意见
注释提示了对系统功能有益的重要信息和推荐意见注释提示了对系统功能有益的重要信息和推荐意见
概述
概述
概述概述
现在我们来简述Pro-Kin系统的运行并精确测试其主要特点。
这个系统的基本构成是由传感器网对一个复杂的斜板上多角度的运动和施
加的负荷进行测量。
当患者与斜板进行相互运动的时候,平板上获得的数据是根据每个单一运动
转化为电脉冲而得到,并且把所得数据直接传输到电脑。
软件将对这些电脉冲进行详细分析,之后便在电脑控制端将显示出一个描
迹,这与斜板上的成角运动或在其上施加的力是一致的。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
6
TecnoBody S.r.l – PRO-KIN Systems
这些所获得的结果对操作者和患者都非常重要。
患者可以除去连续的视觉反馈,以便建立其在运动水平上真实产生的对于本
体感觉水平和肌肉运动觉水平的感觉对比。
实践中,患者能够逐步重新建立起对本体感觉和肌肉运动觉的正确描绘。
对于专业的操作者,以下有 3 条信息来评估这个系统对于康复坐位的创新贡
献:
1、 评估准确和康复干预措施个体化设置的可能性
由于描迹的发展可以在电脑控制端显示出患者与系统的相互作用,当有关节
阻断情况发生时,能够很容易被医生发现,如在肌张力或神经感觉层面发生的损
害。做完评估后,治疗师可以很容易就可以在显示器上画出一系列“康复描迹”。
基于这些,患者按照治疗师画出的康复途径,做准确且恒定获得的运动,这样就
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
7
TecnoBody S.r.l – PRO-KIN Systems
避免了由于表达的转述错误而带来的问题。
此外,为了使治疗师能够制定出与患者功能障碍相应的康复描迹,软件还包
含了一些默认的康复途径。
2、 康复描迹的比较和保存
Pro-Kin 系统能够保存从患者处获得的康复描迹并且能够自动把所获信息
嵌入个人电子文件。使用患者文件的治疗师能够轻易回忆起患者的信息,并且对
康复干预的评估进行周期性核对。
电子文档对于治疗师是非常有用的,因为它们为治疗师提供了客观评估的机
会,并且为可能被目前设备限制造成妨碍的康复干预提供准确效力。
3、 对主动阻力和斜板不稳定性的改良
斜板的主动阻力可以通过使用四个减速活塞得到改良,治疗师可能可以通过
这种方式在获得的工作负荷基础上使肌肉活动改良。
除了斜板的主动阻力可以扇形的改良并使其作为可能的肌肉干预措施,与特
殊的营养缺乏相关性多样化,可以有治疗师来隔离。
此系统另外一个特点是可以改良斜板的稳定性。这个特点使操作者改良了患
者与所处环境或计划的康复途径相关所需的关节和神经肌肉的参与。
安全规则
安全规则
安全规则安全规则
在安装
在安装 Pro-Kin 系统前
在安装在安装
系统前阅读以下说明
系统前系统前
阅读以下说明::::
阅读以下说明阅读以下说明
手册中所示说明必需严格遵守;
此系统应远离水源使用。在斜板上不能沾任何液体;
勿把斜板置于手推车、桌面或任何其它不稳定平面,因为这样可能使斜板掉
落;
不要把斜板靠近加热器或其它任何热源;
必需对斜板进行设置以便连接电线工作;
勿把任何物体掉落于斜板上,因为这样会对整台仪器造成损害;
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
8
TecnoBody S.r.l – PRO-KIN Systems
完整的 Pro-Kin 系统(斜板+个人电脑)必需只能接入电源,并且遵守所有
有效的规范和准则,特别是涉及到电力保护系统和恰当的接地(IEC64-8 规
范,法律 no.46/90 自 1990 年 3 月 5 日起,第 447 号总统令自的 1991 年
12 月 6 号)。忽略这些情况将会导致取消 Pro-Kin 系统的保证。关于电力
连接的更多问题请联系房子的电工或我们的技术辅助实验室;
在清洗任何设备以前应切断所有电源,清洗时请使用干净的湿布,请勿使用
液体清洁剂或外用酒精;
任何对斜板直接的个人干预都应该严格避免,应以此手册中的操作步骤为
准。
若出现以下问题,请联系我们的技术辅助服务:
电线和(或)相关的插头损坏;
有液体渗入斜板或斜板被置于雨中;
在完全依照用户说明的情况下 Pro-Kin 系统仍无法正常运行,此时只应按照
手册中步骤执行,任何不当的干预和行为可能造成更严重的损害,可能需要
专业的工程师排除问题;
斜板受到撞击或由于暴露而表面损坏;
斜板有明确的磨损和破裂,需要修理。
Pro-Kin 系统安装
系统组成
系统组成
系统组成系统组成
系统安装
系统安装系统安装
Pro-Kin 系统包装中含以下组件:
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
9
1、 Pro-Kin 系统
TecnoBody S.r.l – PRO-KIN Systems
2、 No.1 CD
3、 Alimentatore 110/200-12V 输出
4、 为串口连接的 Serial-ProKin 系统连接器或为 USB 连接的 USB-ProKin 系
统连接器
系系系系统安装位置
统安装位置
统安装位置统安装位置
为正确安装系统
为正确安装系统,,,,应阅读以下规则
为正确安装系统为正确安装系统
应阅读以下规则::::
应阅读以下规则应阅读以下规则
ProKin 系统必需放置在平坦、质地硬、坚固和稳定的平面上;
放置平面的选择应避免潮湿和灰尘;
系统必需放置无任何电磁干扰源的地方,如扬声器和手机;
考虑到系统的基本不稳定性,应当确保斜板的周围没有会产生使患者失去平
衡危险的家具、设备、墙体或任何其它物体。
连接
连接
连接连接
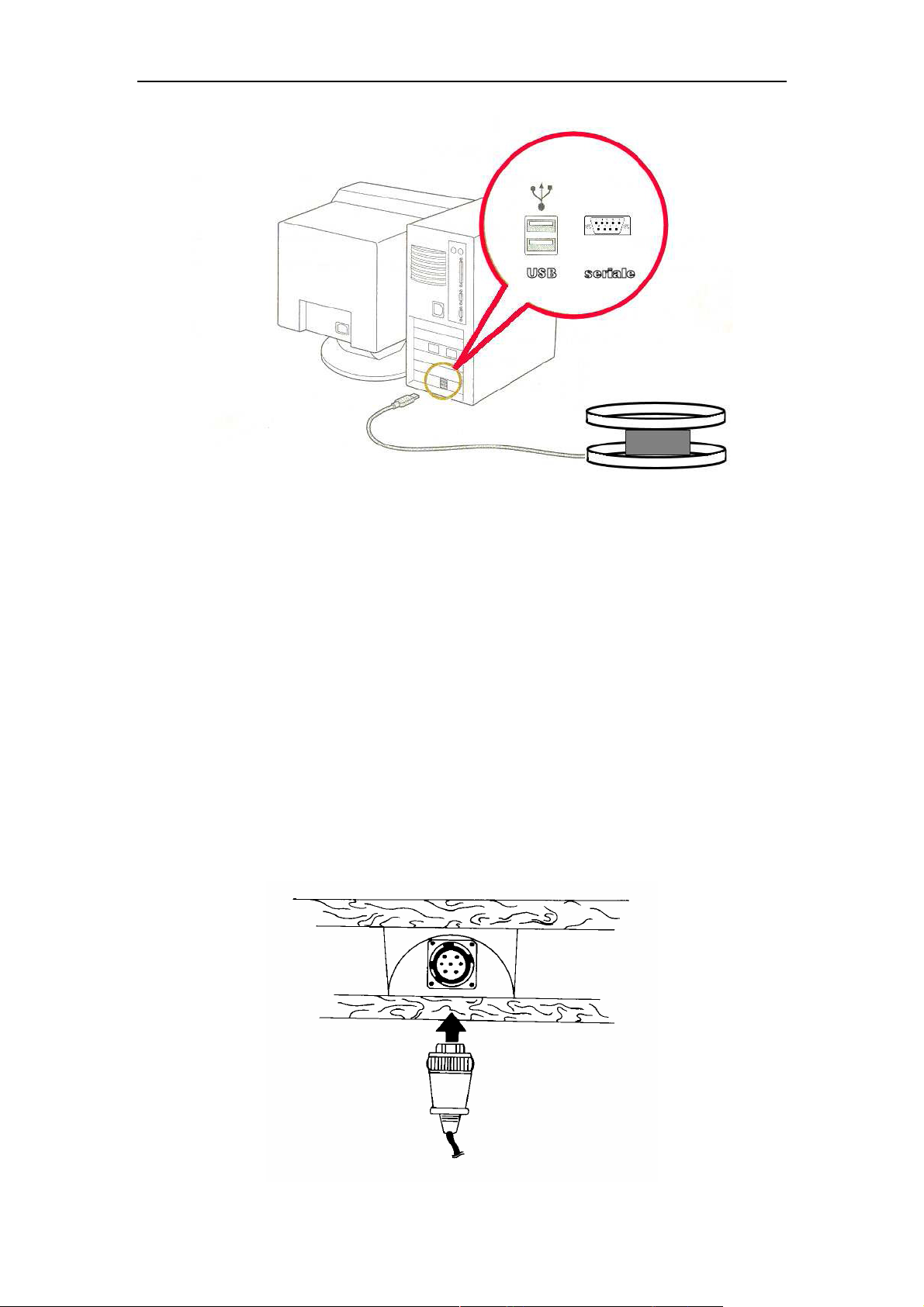
ProKin 系统由两个不同的单元构成:电子移动斜板和个人电脑。
为了保证操作功能,ProKin 系统必需连接在个人电脑上一个可用的串口或
一个可用的 USB 接口,这两个不同类型由 ProKin 的不同类型决定。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
10
TecnoBody S.r.l – PRO-KIN Systems
当把 USB 连接器插入电脑的一个空闲 USB 接口时,Move 系统将会给予一
个声音反馈提示,此时则表示连接正确。
几秒钟后电脑将会发现一个新硬件(被连接的斜板),它将引导你为这个
USB 设备安装必要的驱动程序。在 USB 连接前,我们建议将 ProKin 安装软件
CD 光盘插入,然后按照 27 页所述安装程序进行操作。
ProKin 系统的连接
系统的连接
系统的连接系统的连接
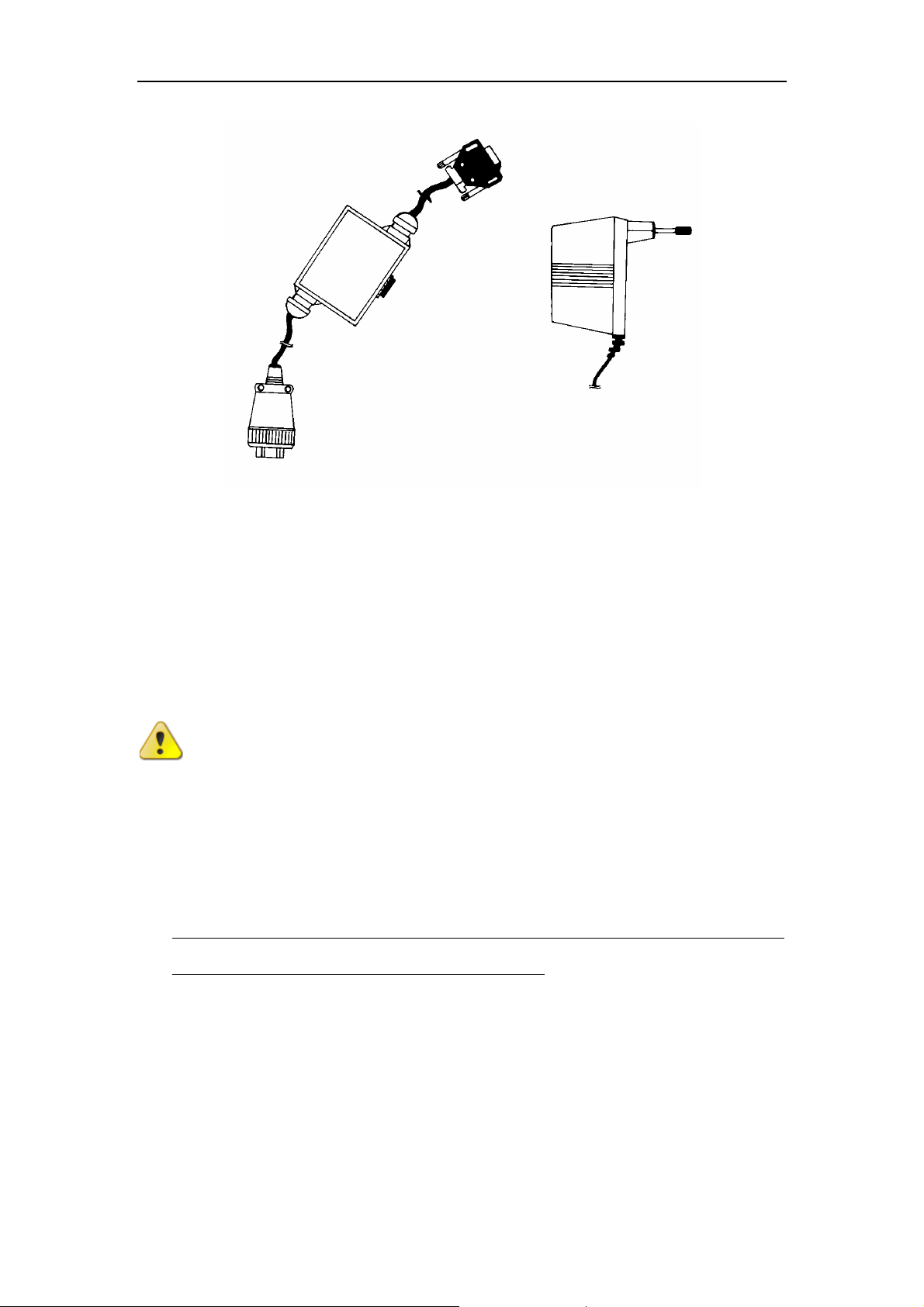
如图所示,ProKin 系统与系统电线连接时通过一个圆形 10 极的连接口插
入系统。
为了保障连接的牢固,当电线插入后应当把螺丝扭紧。这样的操作同时还可
以避免连接由于意外情况而发生损坏。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
11
TecnoBody S.r.l – PRO-KIN Systems
传输连接
传输连接((((feeding connection))))和和和和交流电压
传输连接传输连接
交流电压((((net tension))))连接
交流电压交流电压
连接
连接连接
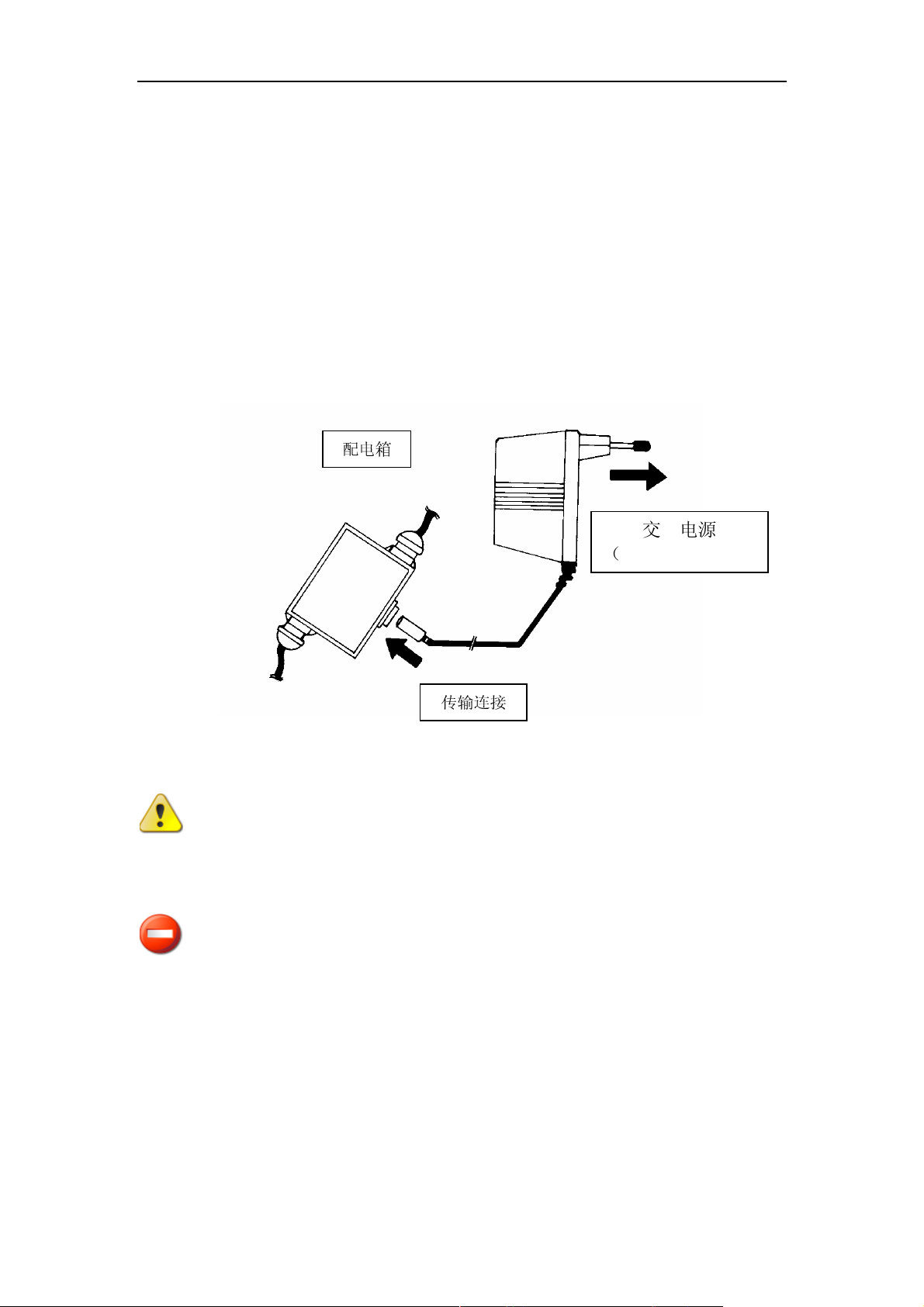
系统的传输是通过一个稳定的传输器直接连接到交流电源(220V
AC-50Hz)。传输器上出口插座必需通过配套的连接器连接到配电箱(distribution
box)。
配电箱有一个按钮和一个发光二极管。
当把这个稳定的传输器连接到配电系统中时,按下按钮,发光二极管将变成
红色,这表示传输电压出现,此时 ProKin 系统将以三种声音信号方式确认此连
接。
配电箱
传输连接
系统使用完毕后
系统使用完毕后,,,,应当把配电箱上的按钮还原到
系统使用完毕后系统使用完毕后
且把传输器从电源拔出
且把传输器从电源拔出。。。。
且把传输器从电源拔出且把传输器从电源拔出
应当把配电箱上的按钮还原到““““OFF””””位位位位((((无红灯亮
应当把配电箱上的按钮还原到应当把配电箱上的按钮还原到
交流电源
(220V AC-50Hz)
无红灯亮),
无红灯亮无红灯亮
),并并并并
),),
为了确 保系统
为了确 保系统 ((((ProKin 系统
为了确 保系统为了确 保系统
((((European Norm EN 60601-1))))一致
技术特点
技术特点
技术特点技术特点
系统 ----个 人电脑
系统系统
个人电 脑))))和 电子医 疗设 备安 全总体 规范
个人电 脑个人电 脑
一致,,,,请认真阅读手册中的
一致一致
请认真阅读手册中的 A 栏栏栏栏。。。。
请认真阅读手册中的请认真阅读手册中的
和电子 医疗设 备安 全总体规 范
和电子 医疗设 备安 全总体规 范和电子 医疗设 备安 全总体规 范
正如再简介中提到的,电子移动斜板是整个 ProKin 系统的核心部分。整个
结构都是与传感器复杂的功能相适应的,以便探测每一位患者与移动斜板运动的
相互作用。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
12
TecnoBody S.r.l – PRO-KIN Systems
ProKin 系统主要的技术特点是:
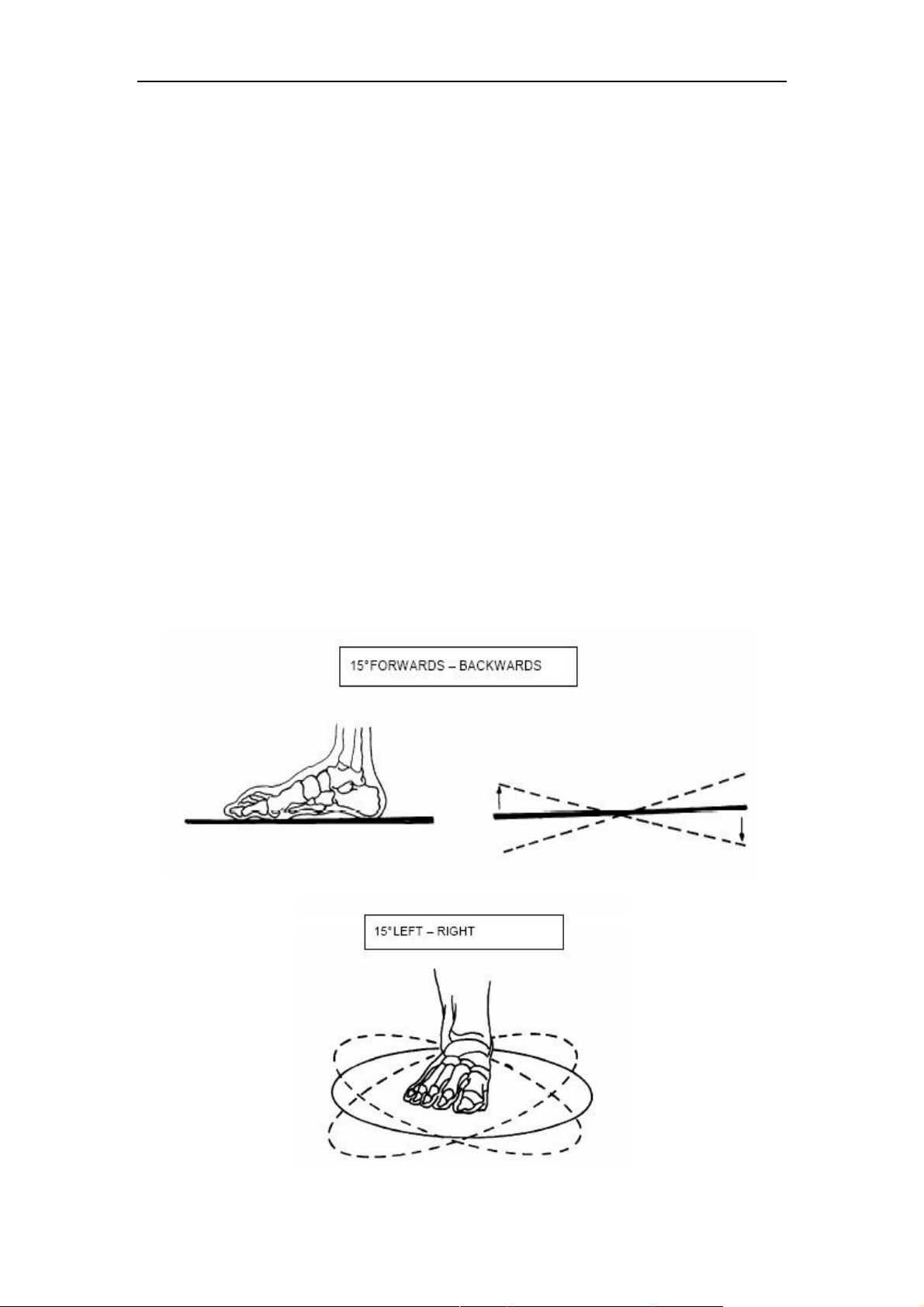
角度测量范围
角度测量范围
角度测量范围角度测量范围
前-后向倾斜 +15°-15°
左-右向倾斜 +15°-15°
角度精确度 0.1°
尺寸
尺寸
尺寸尺寸
宽度 92 cm
长度 98 cm
高度 15 cm
重量 20 kg
电子学
电子学
电子学电子学
ProKin系统设计团队中有电子微处理器技术参与
系统的主要电子特点如下:
微处理器板必需由USB连接直接供能
信号记录的样本频率为20 Hz
输入信号滤波器使用模拟滤波和数字滤波相结合的方法
额定电源电压:5V
吸收电流:120mA
工作环境
工作环境
工作环境工作环境
室温 正常工作温度范围 系统内部温度-0°——+60°
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
13
相关规范和标准
相关规范和标准
相关规范和标准相关规范和标准
TecnoBody S.r.l – PRO-KIN Systems
设备应符合EC指示:
93 / 42 / EEC “医疗设备一般安全规范”,Ⅰ类
同时还应符合以下标准:
EN 60601-1(IEC 62-5) “医疗电子设备安全规范——一般要求”
Ⅱ类 B型设备
EN 60601-1-2 “电磁兼容性相关指示”
角度的清除
角度的清除
角度的清除角度的清除
ProKin系统倾斜角的记录感谢能够感知任何形式在前-后向、左-右向角
度变化的硅式角度传感器(silicon angular transducer)。
如上文中技术特点部分所述,这个系统的倾斜角度在各个平面上被限制在15
°范围内,这个限制的制定基于临床参考文献,有记载的一些不稳定的特例显示,
20°的倾斜角将会导致关节变形(joint-distortions)。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
14
TecnoBody S.r.l – PRO-KIN Systems
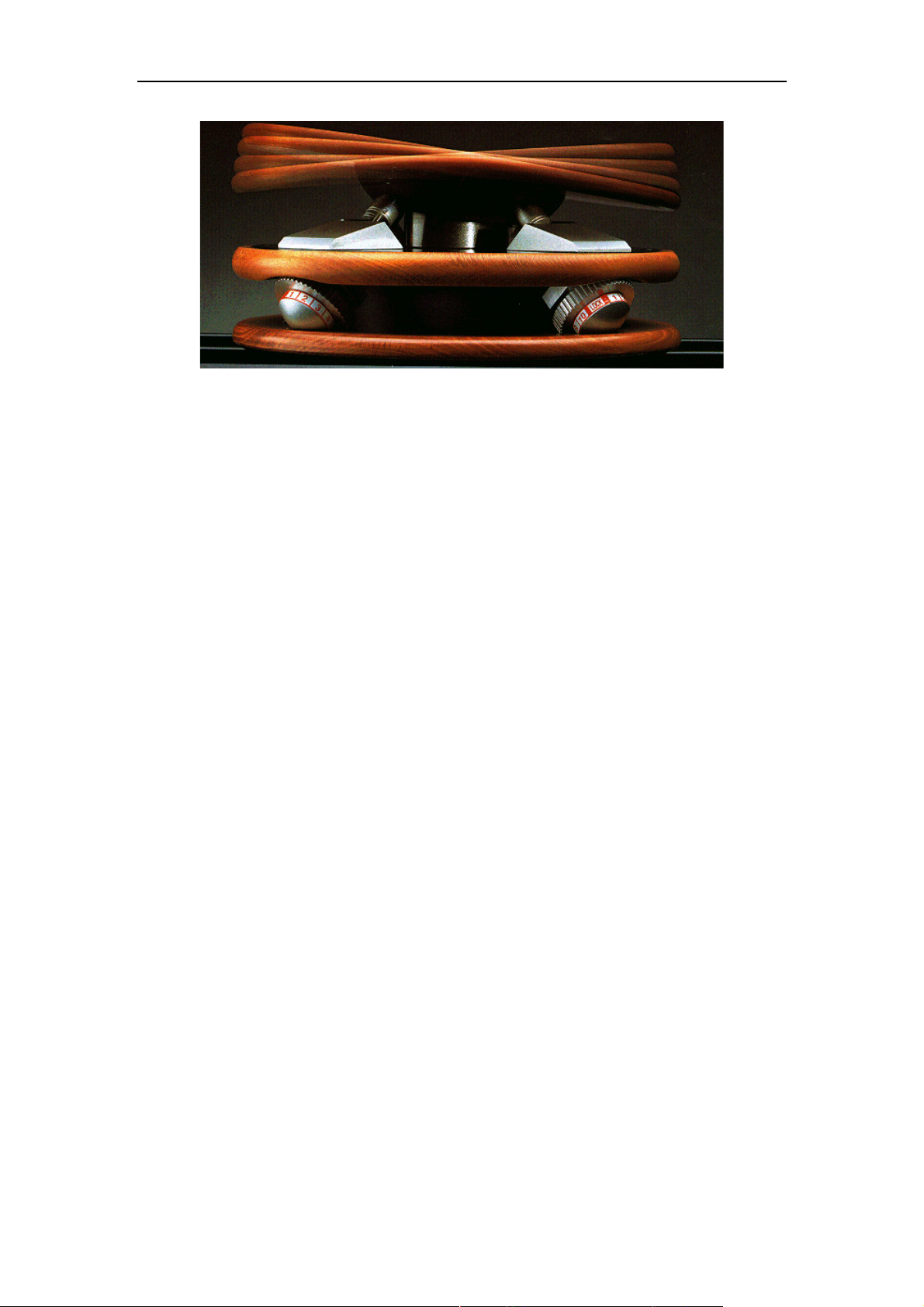
你可以通过改变其稳定性和斜板提供的主动阻力。
这些是由四个在斜板边缘的oleodinamic活塞调节。
这些活塞的顺序提供了连续的间断10个位置,从一个最小阻力开始(位置1)
直到最大阻力(位置10),之后减震器能够维持在“锁住”,能够提供活塞干
几乎全部的阻滞。
需记住的重要一点是,在康复通道,操作者通过改变4个减震器的阻力来调
整系统的运动类型和患者特异的障碍。
移动
移动斜板
斜板相关配件
斜板斜板
相关配件
相关配件相关配件
移动移动
为了对大量不同患者个体实验得的结果数据进行对比,与每个试验相关的情
况都需要尽最大可能进行推想。
细节输入越详细,实验越可信,尤其是实验结果将与以后的数据相比较时。
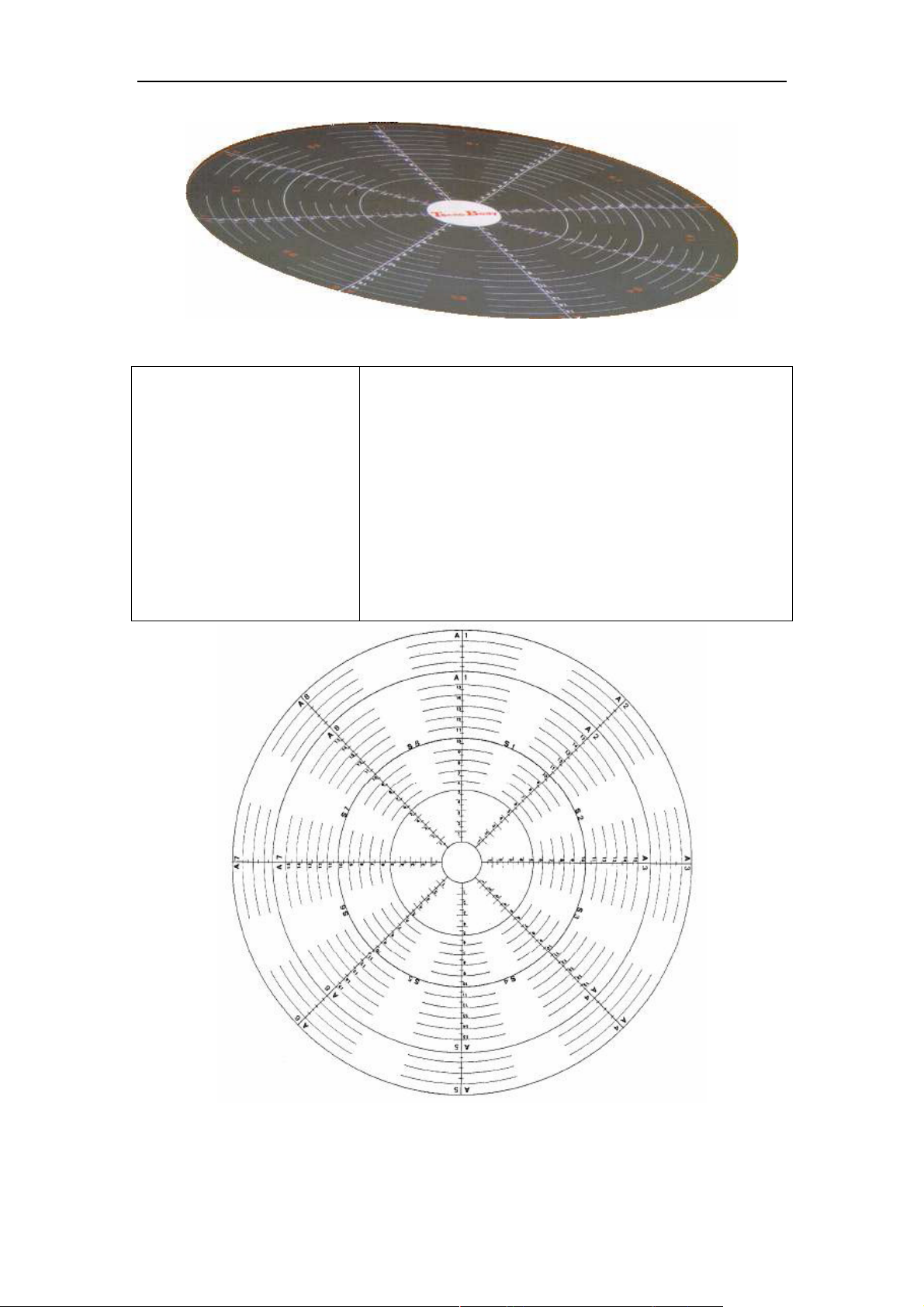
为了帮助操作者在移动平板上摆放被测肢体,系统中心的旋转率基线已经印
在斜板的表面上。
在杆的末端的字母(A1-A2-A3-A4…./ S1-S2-S3-S4...)把斜板表面分成 8
个不同的轴和 8 个不同象限。从顺时针方向开始,你将会得到:
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
15
TecnoBody S.r.l – PRO-KIN Systems
-轴 1
-轴 2
-轴 3
-轴 4
-轴 5
-轴 6
-轴 7
-正截面(front section)
-正-右截面(Front-right section)
-右截面(Right section)
-右-后截面(Right-back section)
-后截面(Back section)
-左-后截面(Left-back section)
-左截面(Left section)
这些面的划分对于在移动斜板面上精确决定特定面是非常必要的,并且这些
都是与许多软件程序单元相适应的。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
16
TecnoBody S.r.l – PRO-KIN Systems
在移动斜板上旋转脚部的同时,正在被测试的个体描述出一个可以被切分为
8 个基本象限的圆形运动,并且可以被本体感觉评估程序单元以图表的形式显示
出来。
此外,“平面”显示程序模式能够帮助正在被测试或训练的个体有一个对斜
板的上面观。
这个模式能够使个体在移动斜板的空间基线(轴和象限)上建立一个非常接
近的个体运动相关性。
说明
说明
说明说明
以下是 ProKin 系统的主要说明:
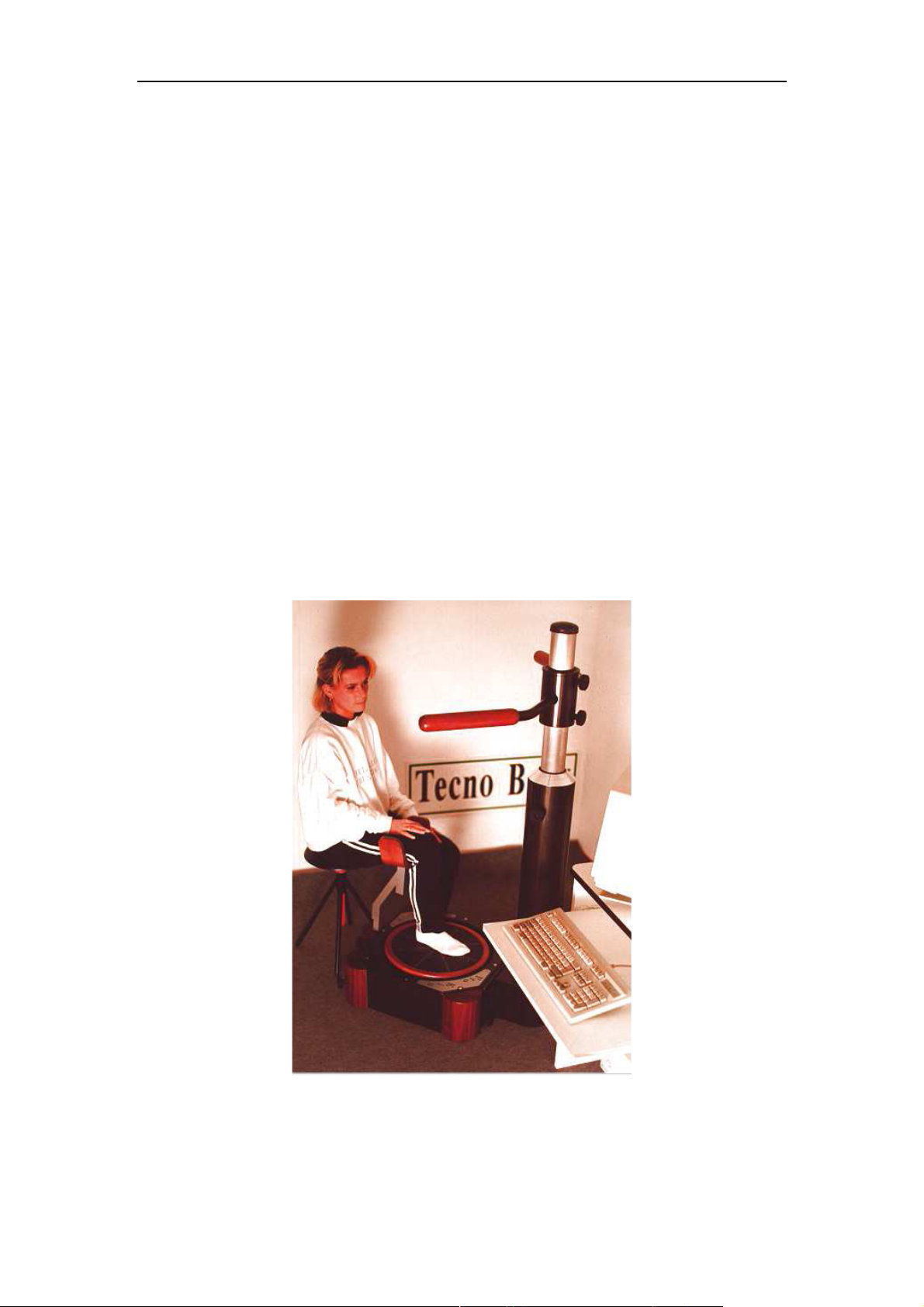
坐位下单足的使用
坐位下单足的使用
坐位下单足的使用坐位下单足的使用
坐位情况下,患者把一足置于斜板上。这个方法适用于康复第一阶段的患者
或不能够靠足稳定的患者。这个康复阶段的目标是在无关节负重的条件下给患者
以感知的数据。
无支持面条件下足的运动
无支持面条件下足的运动
无支持面条件下足的运动无支持面条件下足的运动
站立位下的患者把一足置于移动斜板,另一足置于稳定的支持面。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
17
TecnoBody S.r.l – PRO-KIN Systems
在康复阶段的这个运动,使患者可以用受伤的足在移动斜板上探索,其间需
保持稳定的支撑。
在这种环境下,患者将可以在移动斜板上部分负重(最大30%-40%),
这是因为双足分别被置于不同的支持面上。
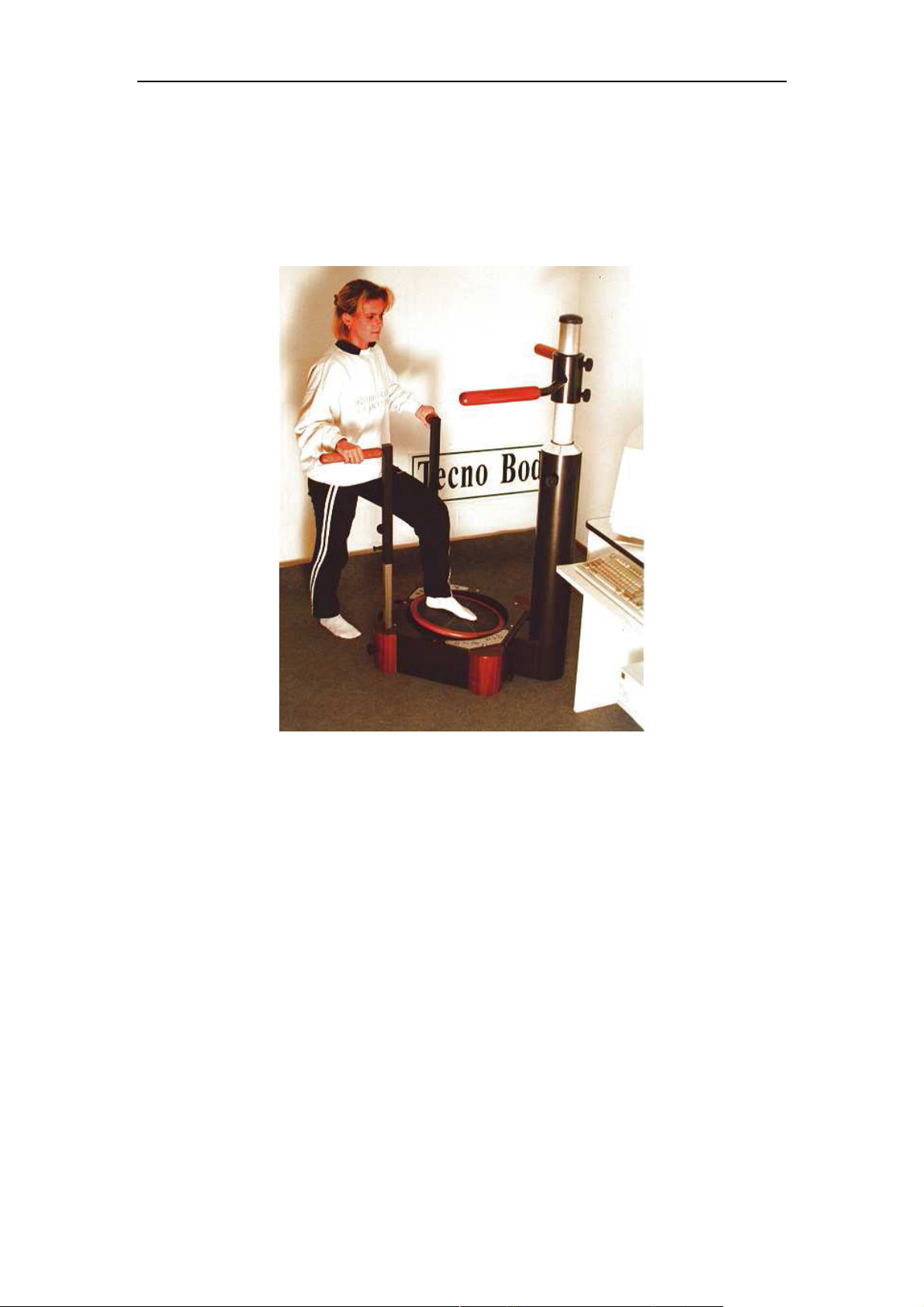
有支持面条件下的运动
有支持面条件下的运动((((向后姿势
有支持面条件下的运动有支持面条件下的运动
向后姿势))))
向后姿势向后姿势
我们为患者设定的支持面上的运动和上一个类似,但是加大了其负重量(最
大为体重的50-60%)。
有支持面条件下的运动
有支持面条件下的运动((((向前姿势
有支持面条件下的运动有支持面条件下的运动
向前姿势))))
向前姿势向前姿势
在这个姿势下,患者可以通过一个相当大的关节负荷(70-80%)来获得
本体感觉,期间仍需要上肢的辅助。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
18
TecnoBody S.r.l – PRO-KIN Systems
睁睁睁睁/闭眼时无上肢辅助的运动
闭眼时无上肢辅助的运动
闭眼时无上肢辅助的运动闭眼时无上肢辅助的运动
在这个条件下,患者在无上肢辅助的情况下执行当前预设的康复描迹。
患者可以探索预定的足部关节位置,并且在逐渐增加负重时维持良好的姿势
控制(20%-30%-40%-80%)。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
19

TecnoBody S.r.l – PRO-KIN Systems
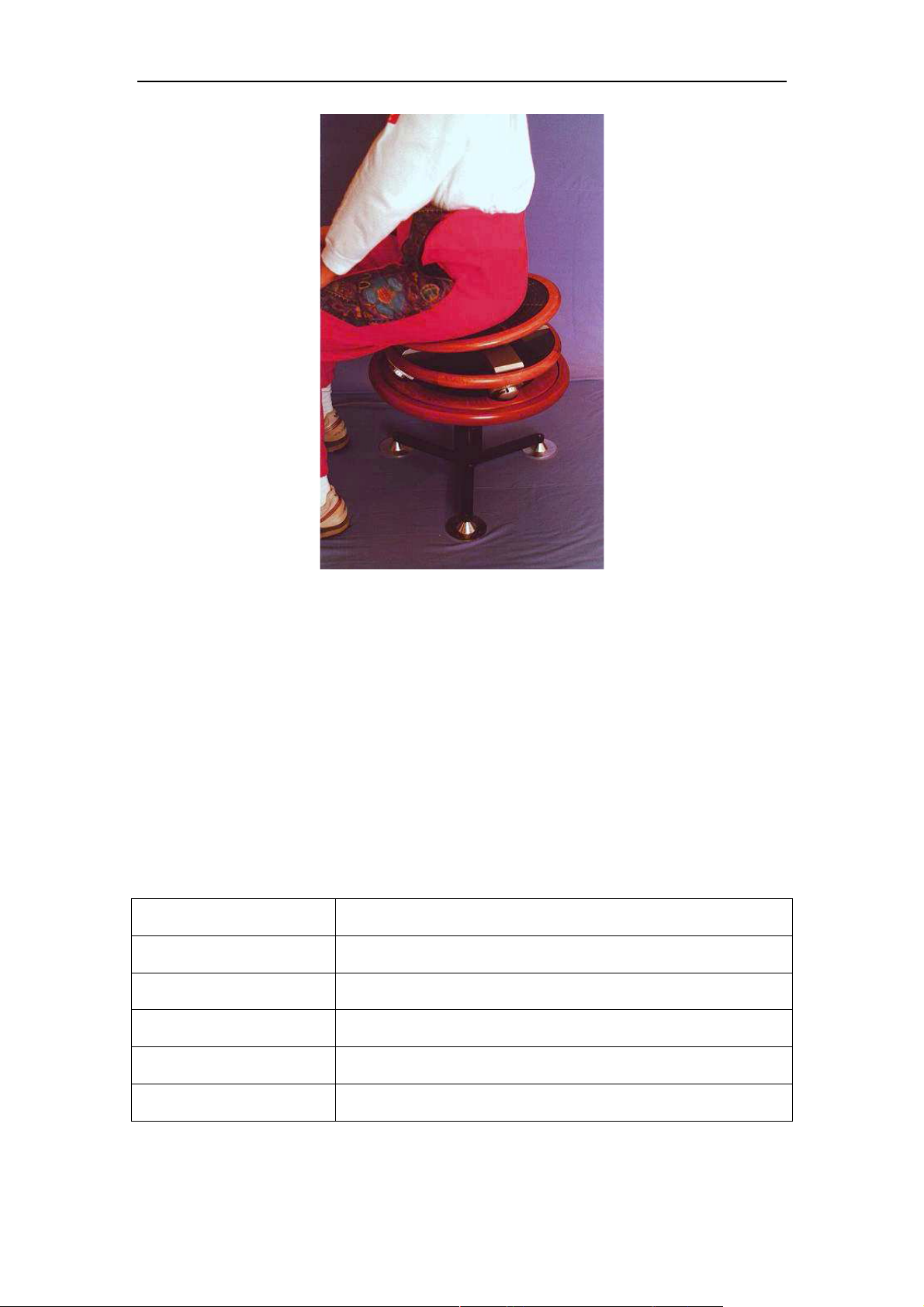
躯干姿势控制的运动
躯干姿势控制的运动
躯干姿势控制的运动躯干姿势控制的运动
患者坐于此系统上。
依据日常观察而得到的关于躯干如何在有需要情况下作出即刻反应的证据,
发现其与上肢和头部是相关联的。根据这个观点,躯干在身体各节段之间的作用
类似于“运动通路”。
对于每一个“功能性”结构,躯干在执行一个有意义的姿势时担任重要角色,
对于最终的行为姿势起类似于支持的作用。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
20
TecnoBody S.r.l – PRO-KIN Systems
第二节
第二节
第二节第二节
软件使用手册
软件使用手册
软件使用手册软件使用手册
PROKIN 软件包的设计是以创造一个万能但是非常易于使用的软件,对操作
者的技能要求甚少。
为了使操作者掌握窗口运行环境,PROKIN 程序必需很简单。功能性的可靠
性和图示界面连接保障了简单操作互动的数据辨认。
硬件和软
硬件和软件要求
硬件和软硬件和软
件要求
件要求件要求
操作系统
操作系统 Windows 2000/windows XP
操作系统操作系统
CPU
内存
内存 128M
内存内存
Pentium III
硬盘空间需求
硬盘空间需求 硬盘空间不得低于 100M
硬盘空间需求硬盘空间需求
显卡
显卡 Super VGA 处理(1024*768)
显卡显卡
连接
连接 USB/串口
连接连接
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
21

软件安装程序
软件安装程序
软件安装程序软件安装程序
TecnoBody S.r.l – PRO-KIN Systems
PROKIN 软件的安装程序是根据 PROKIN 的类型不同而异的,串口连接只
能安装 Type IIIPROKIN 软件。
若 PROKIN 系统有 USB 连接,安装过程将分为以下两个阶段:
—USB 驱动安装
—PROKIN 软件安装
USB 驱动安装
驱动安装
驱动安装驱动安装
第一步是将 PROKIN 系统软件安装 CD 插入光驱。
只要把系统连接器与个人电脑的 USB 接口连接,你将听到 4 个声音信号代
表系统已连接。
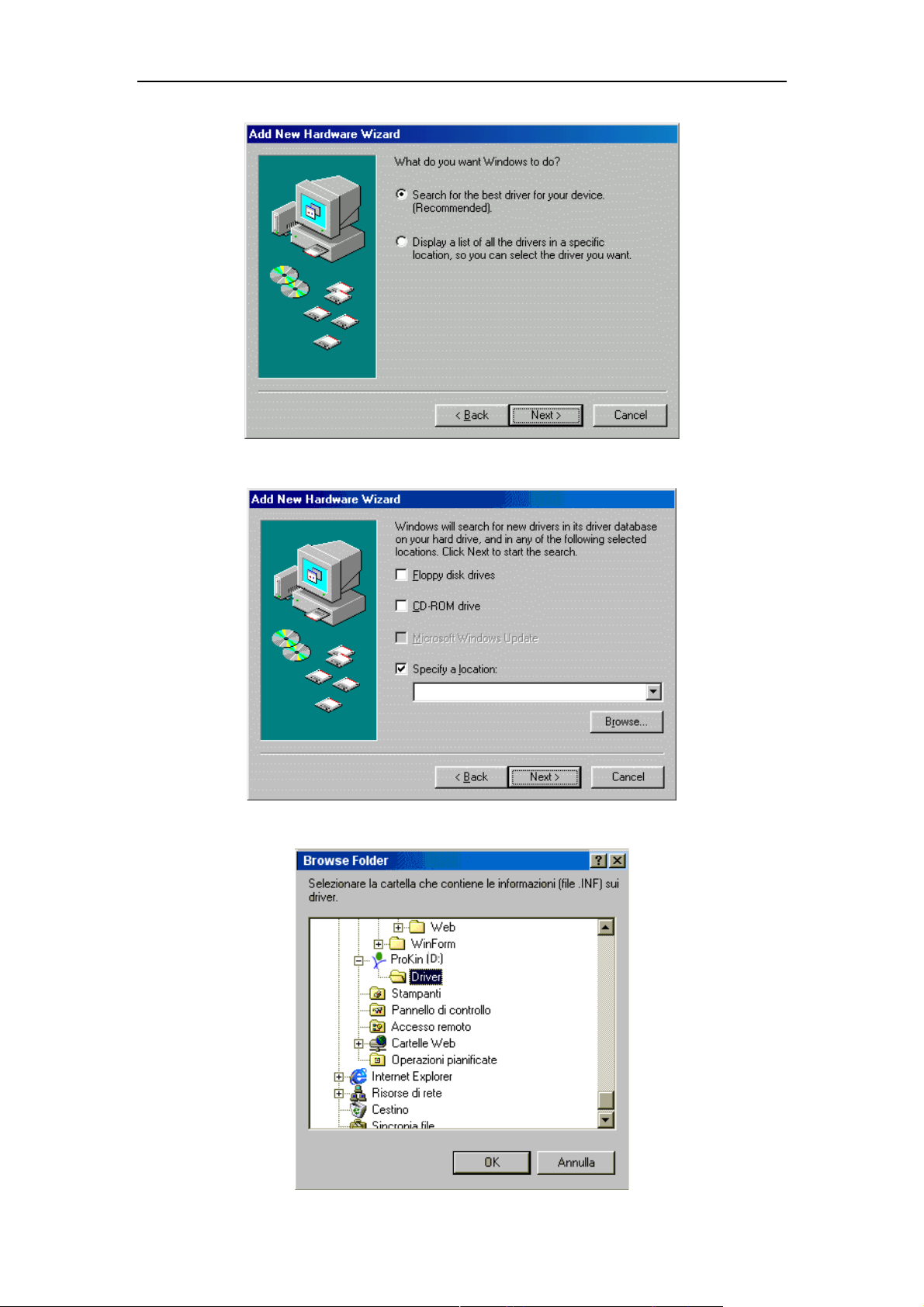
Windows 操作系统此时将找到新硬件并且显示“安装新硬件指导”。
点击“Next” 继续。
继续点击“Next”。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
22
TecnoBody S.r.l – PRO-KIN Systems
现在, PROKIN 系统正确的安装位置将被选择。点击“Browse”来获得。
选择光盘上 TecnoBody 项,之后获取“Driver”文件夹。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
23
TecnoBody S.r.l – PRO-KIN Systems
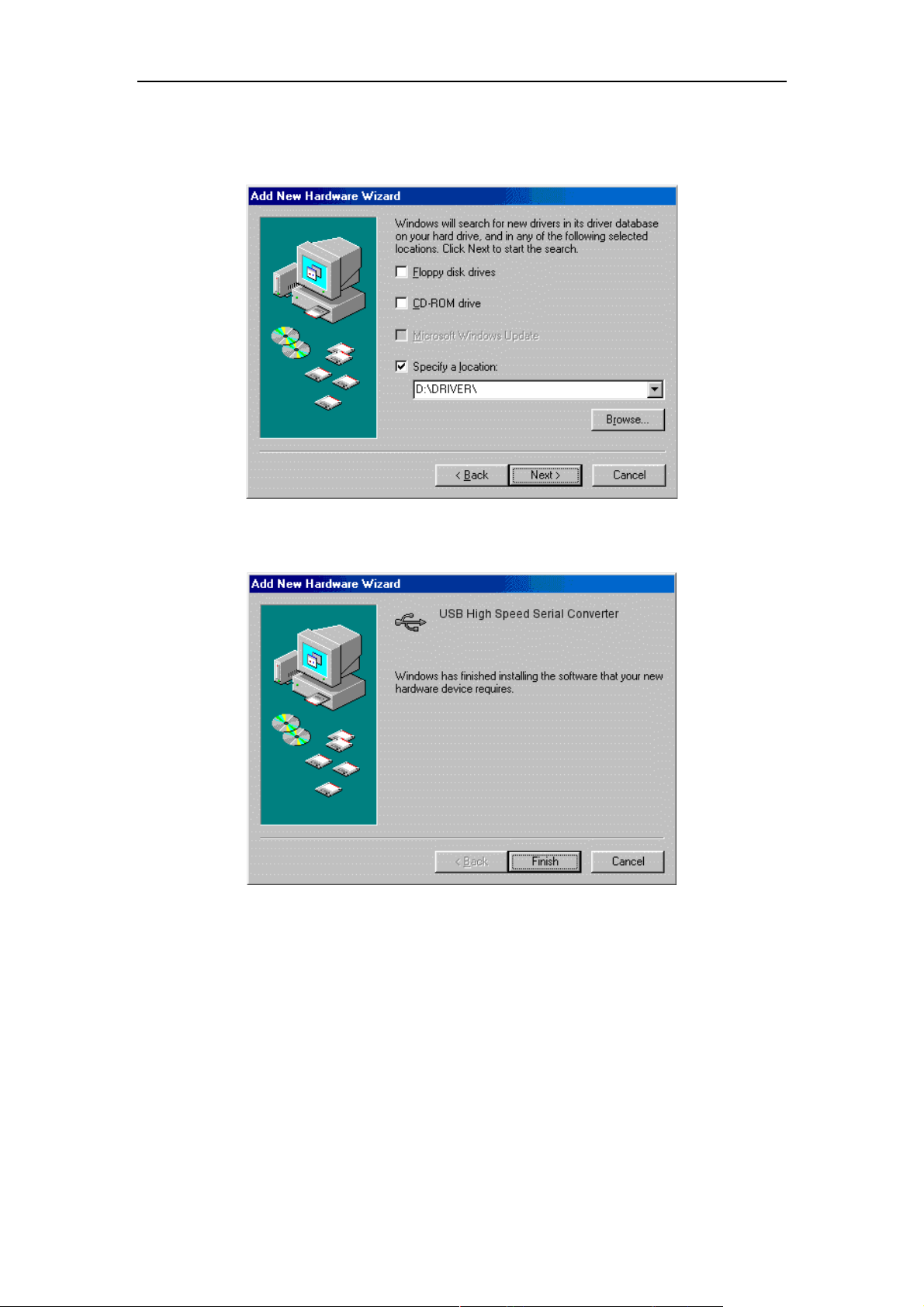
只要 Driver 文件夹被选择,将会回到以下窗口,点击“Next”。
之后 PROKIN 系统需要的软件将开始安装。
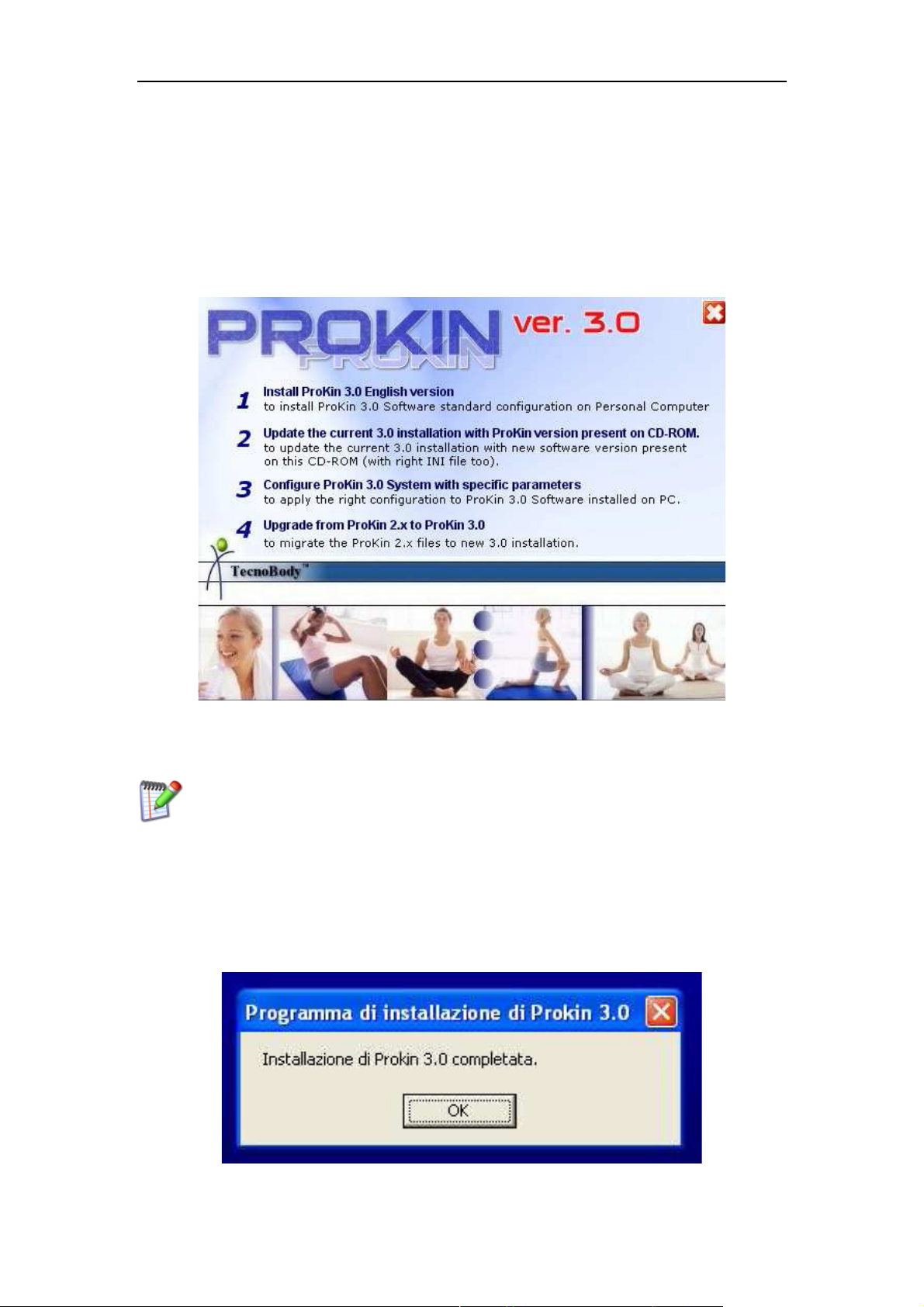
如果安装过程正确完成,几秒钟后系统将提示以窗口提示安装已完成。
安装时
安装时 CD-ROM 的功能
安装时安装时
的功能
的功能的功能
安装 关盘 除了 可以 安装 相关的 PROKIN 软件 ,还可 以升 级并 且保 持
PROKIN 软件已经安装到个人电脑中。
为了开始安装供能,请把 PROKIN 光盘插入电脑的光驱中。
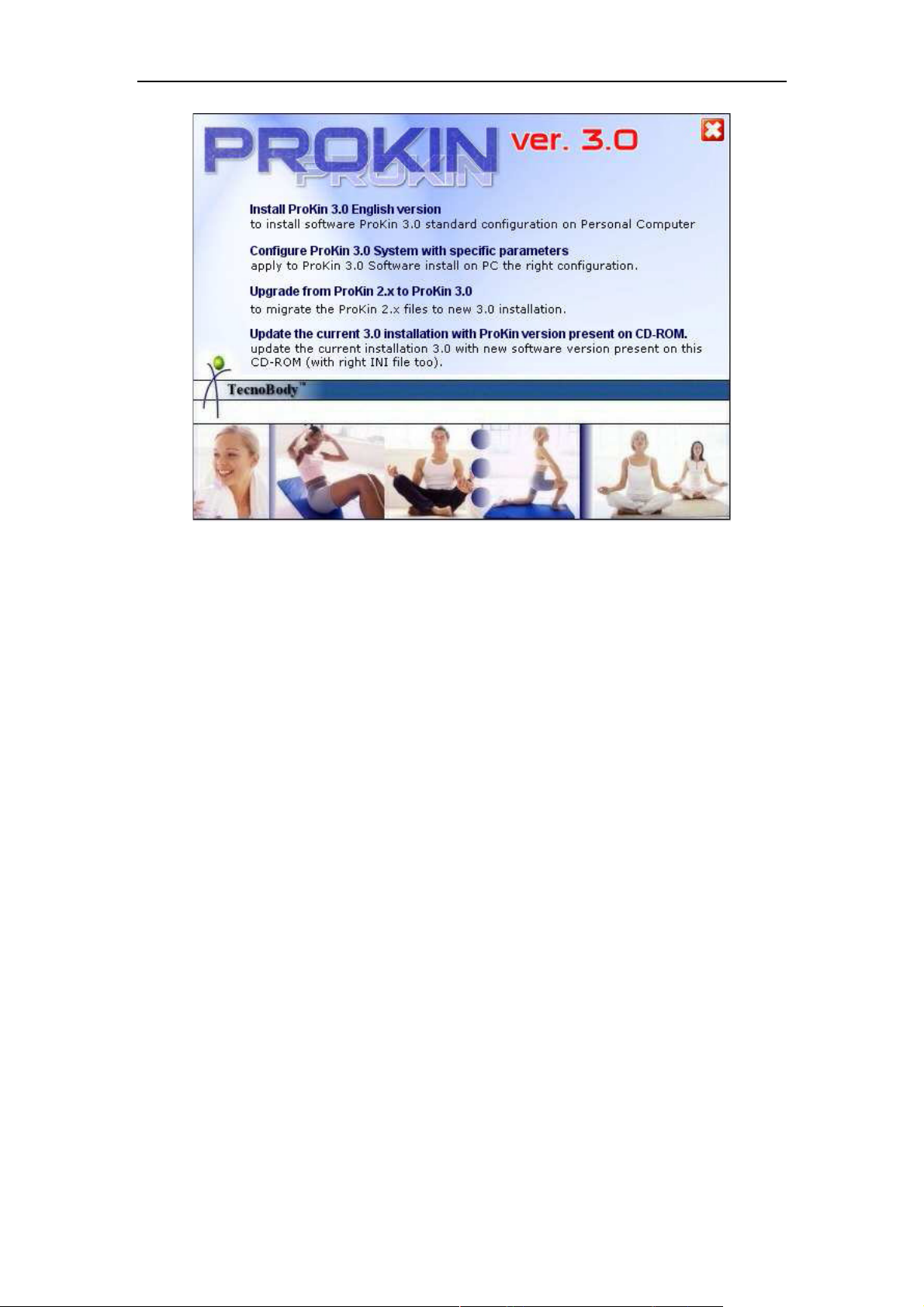
几秒钟之后将在屏幕中央出现 PROKIN 软件安装菜单。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
24
TecnoBody S.r.l – PRO-KIN Systems
在这个菜单中,可以选择安装功能或升级功能。
安装
安装 PROKIN3.0 英文版
安装安装
英文版
英文版英文版
在电脑上选择安装功能来安装一个新的 PROKIN3.0 软件(参见本手册相关
章节)。
配置
配置 PROKIN3.0 系统特定参数
配置配置
系统特定参数
系统特定参数系统特定参数
选择此项功能,此时在电脑上显示的 PROKIN3.0 将以正确的方式嵌入工厂
刻度文件(factory calibration file)。
*电脑必需已经安装了 PROKIN 软件 3.0 版本(参见先前功能)
PROKIN2.x 升级到
升级到 3.0
升级到升级到
这项功能可以使光盘中的 3.0 版本覆盖先前安装的版本。这项操作通常将会
在软件升级后生效,并且可以保存先前的程序文档(患者和实验)。
用光盘中的版本升级当前安装的
用光盘中的版本升级当前安装的 3.0 版本
用光盘中的版本升级当前安装的用光盘中的版本升级当前安装的
版本
版本版本
这项功能可以使光盘中的版本取代已经安装的 PROKIN 软件 3.0 版本。这
项操作通常会在从 TECNOBODY 释放出的更新版本确实安装后生效。
这项操作可以保存先前的程序文档(患者和实验)。
*电脑必需已经安装了 PROKIN 软件 3.0 版本(参见先前功能)
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
25
TecnoBody S.r.l – PRO-KIN Systems
PROKIN 软件的安装
软件的安装
软件的安装软件的安装
把 PROKIN 光盘插入光驱(由于先前安装 USB 驱动时已插入光盘,此时光
盘可以仍在光驱中)。
几秒钟后,屏幕中央将会显示一个菜单。
点击“PROKIN Prokin Software 2.0”
按照软件的自动安装程序指南进行操作。
如果你被问及离开未改变的操作系统文件夹
如果你被问及离开未改变的操作系统文件夹,,,,例如没有用更新的版本覆盖它
如果你被问及离开未改变的操作系统文件夹如果你被问及离开未改变的操作系统文件夹
则点击
则点击““““Yes””””。。。。
则点击则点击
例如没有用更新的版本覆盖它,,,,
例如没有用更新的版本覆盖它例如没有用更新的版本覆盖它
当安装全部完成时,程序将会告知软件已经正确的安装到你的个人电脑中。
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
26
TecnoBody S.r.l – PRO-KIN Systems
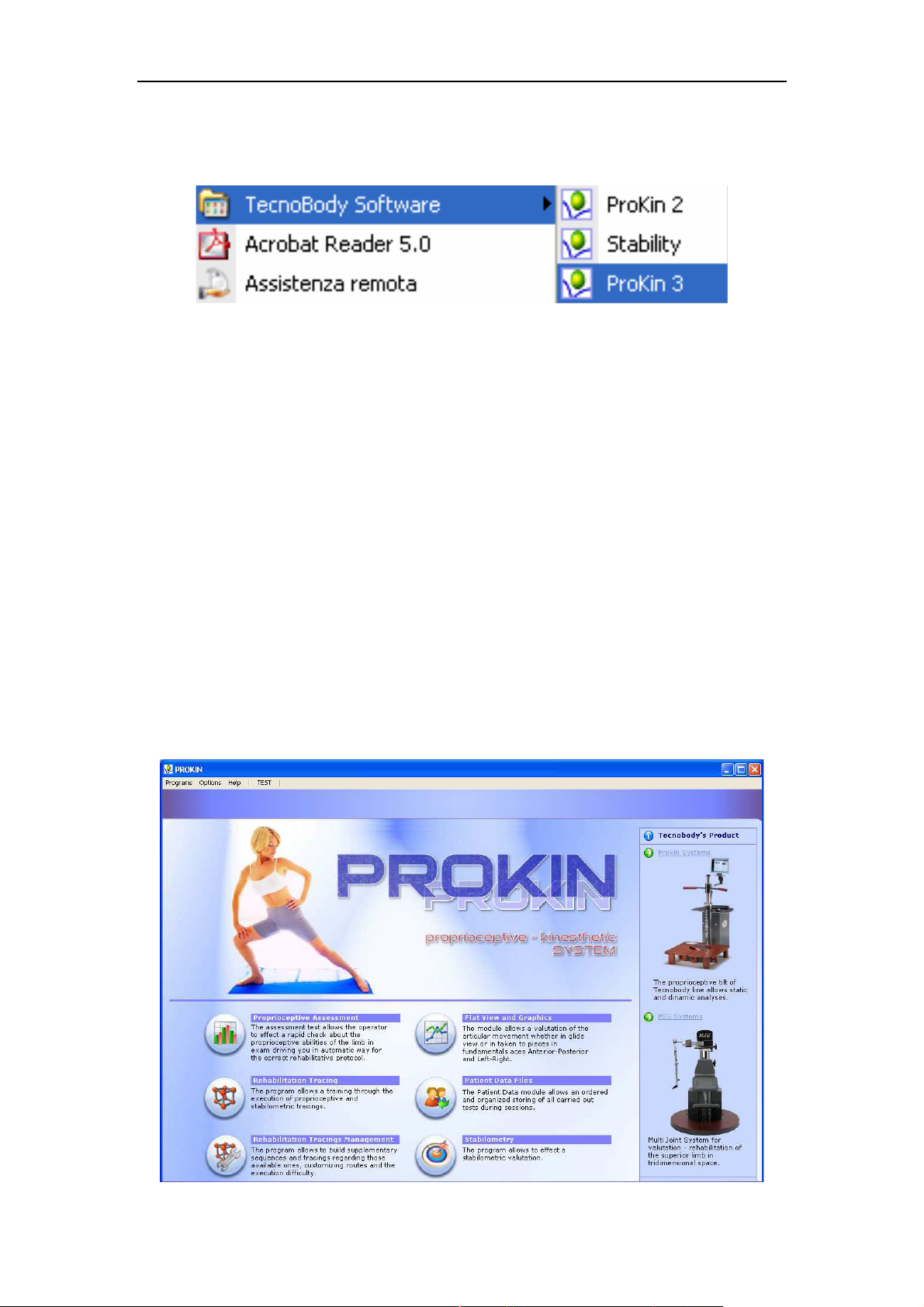
为了直接获得 PROKIN Software III,直接在“程序”主菜单中点击 PROKIN
图标。
主菜单
主菜单
主菜单主菜单
PROKIN 系统管理程序是由一些列子程序构成,也称为程序单元,每一个
都有其特定功能。程序的主菜单以直接的命令行和工具栏选项两种方式,能够使
操作者获取移动斜板管理的不同单元。
系统管理程序中的可用程序单元是以下这些:
本体感觉评估
平面观和图表
康复描迹
康复描迹的管理
患者数据文件夹
稳定性测量
PK-MANOP-03-EN-01
Software PROKIN 3.0 –OPERATOR’S MANUAL
27
 Loading...
Loading...