

Page 1

SYSMAC CJ 系列
CJ1W-CIF21
简单通信单元
操作手册
2003年3
月修订
Page 2

Page 3

注意
! 指示如果不按这些要求做,会有生命危险或引起严重的人身伤害。
! 指示如果不按这些要求做,可能危及生命或引起严重的人身伤害。
! 指示如果不按这些要求做,可能造成伤害或产品损坏。
:
OMRON 制造的产品只用于本手册所述的用途,并由具有一定资格的人员按适当的步骤使用。
下列约定用于指明本手册中此类注意事项。必须按照这些要求做,否则可能引起严重的人身伤害或产品
损坏。
危险
警告
注意
OMRON
在本手册中所有 OMRON 产品都用大写字母。“Unit”(单元)这个字在表示 OMRON 产品时也用大写。
不管它是否是产品的正式的名称。
缩写 “CH”(通道)出现在某些显示中和某些 OMRON产品中,经常表示 “字”的意思。在文件中也
经常缩写成 “Wd”。
缩写 “PC”只表示可编程序控制器的意思,并且不表示其他任何缩写。
产品参考符号
辅助信息
手册中左列的下列首标用于帮助显示不同类型的信息。
注 实际有用的指示信息。使产品的操作更有效、方便。
指示相关题目的可能对用户有用的辅助信息。
1,2,3... 1. 指示一个步骤表,检查表等。
OMRON, 2001
版权所有,没有得到 OMRON 的书面许可。不允许将本刊物的任何部分以任何形式或任何手段 (机械、电子、照
相复制、记录等)进行翻版、存储或传播。
对使用本手册包含的信息没有特许的责任,并且由于 OMRON 一直致力于改进它的高质量的产品,本手册中所包含
的信息在进行修改时不作预告。虽然本手册已经作了各种预防措施,但不会对由于使用本刊物所含的信息可能造成
的损坏承担任何责任。
v
Page 4

Page 5

目录
注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
1 预期的读者. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
2 一般注意事项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
3 安全注意事项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
4 应用注意事项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
5 操作环境要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
6 符合 EC 规定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
第 1 章
特点和系统构成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1-1 概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-2 处理部件数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
第 2 章
单元部件和技术规范 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2-1 技术规范. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2-2 部件名称和功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
第 3 章
准备操作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3-1 步骤概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3-2 安装和电源接线. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3-3 简单通信单元的连接. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3-4 简单通信单元的设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3-5 PC 设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
3-6 所连接部件的设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3-7 DM 设定和部件通信 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3-8 部件通信的注意事项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3-9 故障诊断. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
第 4 章
DM 区分配. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4-1 数据存储器 (DM) 分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4-2 共享区. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4-3 个别单元区. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
附录
A 数据刷新周期 (参考数据) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
B 应用例子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
CDM区设定分配表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
vii
Page 6
Page 7

关于本手册
本手册说明 CJ1W-CIF21 简单通信单元的安装和操作,并包括下述章节。
在动手安装和操作 CJ1W-CIF21 简单通信单元前,请仔细阅读本手册和所有相关手册,并确保您已理解
了这些手册所提供的信息。
第1章
说明 CJ1W-CIF21 简单通信单元的特点和系统构成。
:
第2章
第3章
第4章
附录
提供 CJ1W-CIF21 简单通信单元的技术规范并说明每个部件的功能。
说明从 CJ1W-CIF21 简单通信单元的安装到单元操作的准备步骤。
说明在 CPU 单元的 DM 区内提供的与部件的接口。
提供关于数据刷新周期的信息,一个应用实例和 DM 区设置分配表。
关于 CPU 单元,串行通信板和串行通信单元详细操作,可在下列手册得到。
手册 样本编号
SYSMAC CJ 系列
CJ1G-CPU@@/CJ1G/H-CPU@@H
可编程控制器操作手册
SYSMAC CS 系列
CS1G/H-CPU@@-EV1, CS1G/H-CPU@@H
可编程控制器操作手册
SYSMAC CS/CJ 系列
CS1W-SCB21/41, CS1W-SCU21, CJ1W-SCU41
串行通信板 / 单元操作手册
SYSMAC CQM1H 系列
CQM1H-CPU@@ 可编程控制器
CQM1H-@@@@@ 内板
操作手册
SYSMAC CQM1H 系列
CQM1H-SCB41 串行通信板
操作手册
SYSMAC CPM2A
可编程控制器
操作手册
W393
W339
W336
W363
W365
W352
ix
Page 8
Page 9

注意事项
这部分提供使用 CJ1W-CIF21 简单通信单元的一般注意事项。
本章包含的信息对可编程控制器的安全和可靠应用是重要的。在着手设置和操作 PC 系统前您必须阅读本章
并理解所包含的信息。
1 预期的读者 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
2 一般注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
3 安全注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
4 应用注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
5 工作环境注意事项 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
6 符合 EC 规范. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
6-1 适用规范 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
6-2 概念 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
xi
Page 10

预期的读者
1 预期的读者
2 一般注意事项
1
本手册适用于具备必要电气系统知识的下列人员 ( 电气工程师或相当人员 )。
•FA 系统的安装人员
•FA系统的设计人员
•FA 系统和设备的管理人员
用户必须按照操作手册说明的性能和技术规格去操作产品。
当本产品的使用条件超出手册所述范围或用于核控制系统,铁路系统,航空系
统,汽车,燃料系统,医疗设备,娱乐机器,安全装置和其他一些如果使用不
当就会对生命财产造成严重影响的系统,机器和设备,在使用前请先与
OMRON 代理商联系。
确保产品的额定值,特性参数对于应用的系统,机器和设备是充足的,并且保
证对他们提供双重的安全机理。
本手册提供了编程和操作此单元的信息。在使用此单元前必须阅读本手册并在
操作期间把手册放在手边随时参考。
! PC和所有单元必须用于规定用途和规定条件下,特别是在可能直接或间接影响
警告
3 安全注意事项
! 在上电时不要试图拆卸任何单元部件,否则可能遭受电击。
警告
! 在上电时不要触摸任何接线端子或端子板,否则可能遭受电击。
警告
! 以本手册规定的力矩拧紧通信电缆螺丝上的端子螺丝。
注意
! 按本手册正确地对简单通信单元进行设置。不正确的设置可能会造成未预料的
注意
人的生命的应用中这点特别重要。在将系统用于上述应用前,你必须和
OMRON 代理商联系。
操作,可能造成损坏或人身伤害。
xii
Page 11

应用注意事项
4 应用注意事项
! 不遵守下列注意事项可能造成PC或系统运行失常或可能损坏PC或PC单元。因
注意
4
此必须留意这些事项。
• 运送单元时要使用专门的包装箱。在运输时当心不要使振动和冲击超过允
许的限度,并不要使产品跌落。
• 在下列温度和湿度范围内存储此单元:
存储温度: -20 至 75°C
存储湿度:10% 至 90% ( 无结霜或凝露 )
• 正确安装此单元,不使它掉下。
• 必须使用操作手册上规定的电源电压,不正确的电源电压可能造成功能不
正常或烧坏。
• 安装的通信距离必须在操作手册规定的范围内。
• 不要使通信电缆靠近或平行高压线或电力线。
• 在接线时为了防止灰尘或线头进入单元,必须保持随单元提供的标签。
• 在完成接线后移去标签,以保证正常散热,不移去标签可能会造成单元工
作失常。
• 接线端或连接器必须有正确的极性和方向。
• 在接通电源前必须重复检查所有接线和设置开关,错误的接线可能导致单
元损坏。
• 在接触单元前,必须先接触接地的金属件,使内部的静电放电。不这样做
可能造成单元失效或损坏。
• 使用指定的连接器和导线。
RS-422/485 端子块:AWG 28 至 AW G 16, 剥线长度:7 mm
• 在接触下列物件前必须切断PC的电源,不切断电源可能造成工作失常或电
击。
• 组装单元
• 连接电缆或连线
• 连接或分断连接器
• 使用操作手册中指定的通信电缆。
• 在连接 RS-422/485 时要反复检查极性,某些设备的 SDA/SDB 和 RDA/
RDB 的极性 (+/–) 可能相反。
• 在使用 RS-422/485 时,必须确认终端电阻已正确设置后再投入运行。
• 不要超过自然限度拉伸或弯曲电缆,以免损坏电缆。
• 不要将物件放在电缆上,以免压断电缆。
• 确保端子块连接器和其他带锁扣的设备锁定在正确位置。未锁定可能引起
故障。
• 使用带正确安装盖板的单元。
• 按操作手册规定正确接线。
• 用适当的措施保证提供符合额定要求的电压和频率的电源,在电源不稳定
的场合要特别小心。电源不合格很可能引起故障。
xiii
Page 12

工作环境注意事项
5 工作环境注意事项
! 按本手册说明正确安装单元。
注意
! 不要在下列场合操作控制系统:
注意
• 阳光直接照射的位置。
• 超出本手册规定温度或湿度范围的场合。
• 由于温度突变造成凝露的地方。
• 有腐蚀性或易燃气体的地方。
• 有粉尘 ( 特别是铁粉 ) 或盐的地方。
• 暴露于水、油或化学物质的地方。
• 有剧烈振动或冲击的地方。
! 在下列地方安装系统时应采取适当和足够的措施:
注意
• 有静电或其他形式干扰的地方。
• 有强烈电磁场处。
• 可能暴露在射线幅照下。
• 靠近动力线处。
5
xiv
Page 13
符合 EC 规范
6 符合 EC 规范
6-1 适用规范
6-2 概念
注 下面是适用的 EMC ( 电磁兼容 ) 标准:
6
•EMC 规范
• 低压规范
EMC 规范
OMRON 的设备符合 EC 规范和相关的 EMC 标准。这样能更容易内置在其他
设备和机器中。实际产品都必须通过符合 EMC 标准的检查 ( 见下面的注释 )。
然而产品是否符合用户所使用的系统的标准还必须由用户来检查。
符合 EC 规范的 OMRON 设备的 EMC 相关的性能会随配置、接线和设备或安
装 OMRON 设备的控制盘的其他条件而变。所以用户必须执行最后检查以确定
装置和机器全部符合 EMC 标准。
EMS ( 电磁敏感性 ):EN61131-2
EMI ( 电磁干扰 ): EN50081-2
( 电磁辐射: 10-m 规定 )
低压规范
必须保证设备在交流 50 至 1,000 伏电压或直流 75 至 1,500 伏电压下操作能
满足 PC 的安全标准 (EN61131-2) 的要求。
CJ系列 PC符合 EC 规范。 为了保证使用 CJ系列 PC 的机器或设备符合 EC 规
范,必须按下列要求安装 PC :
• 必须将 PC 安装在控制盘内。
• 直流电源必须使用加强绝缘或双重绝缘。
• 由于 PC 符合 EC 规范所以能符合一般辐射标准 (EN50081-2)。 然而当 PC
内置在一台机器内时,控制盘的结构,其他设备,接线的影响和其他因素
都能影响性能,特别是辐射 (10m 规定 )。即使使用 CJ 系列 PC 已经符合
EC 规范,用户也必须执行最终检查。确定设备和整个机器是否符合 EMC
标准。
xv
Page 14

Page 15

本章说明 CJ1W-CIF21 简单通信单元的特点和系统构成。
1-1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-1-1 特点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-1-2 系统构成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1-1-3 兼容的 PC 和部件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1-2 处理部件数据 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
第 1 章
特点和系统构成
1
Page 16
概述 第 1-1 章
1-1 概述
1-1-1 特点
简化 PC 和 OMRON 部件之
间的数据传送
可连接各种部件 可连接具有 CompoWay/F 和 SYSWAY 通信功能的 OMRON 部件,包括温度
可以从 PC 监控所有部件 能在 PC 的 DM 区监控温度控制器,数字定时器 / 计数器和数字面板表的 (当
方便修改部件的设定值 SV 只要修改 PC 的 DM 区中对应的值就可修改所连接部件的设定值。
可连接多个单元 简单通信单元可连接到 CPU 上的端口或接到串行通信板 / 单元上的 RS-232C
每个单元可连接多至 32 个
部件
由于简单通信单元能在 PC 的 DM 区和 OMRON 部件之间交换数据,所以在
PC(CPU 单元 ) 和支持的 OMRON 部件之间传递数据时不需要梯形图编程。
控制器,数字定时器和数字面板表。
前值)值和状态,所以连接的所有部件可以一起监视。
端口,可以串行连接多个部件。
每个简单通信单元可以连接单元号为 0 至 31 的 32 个部件。
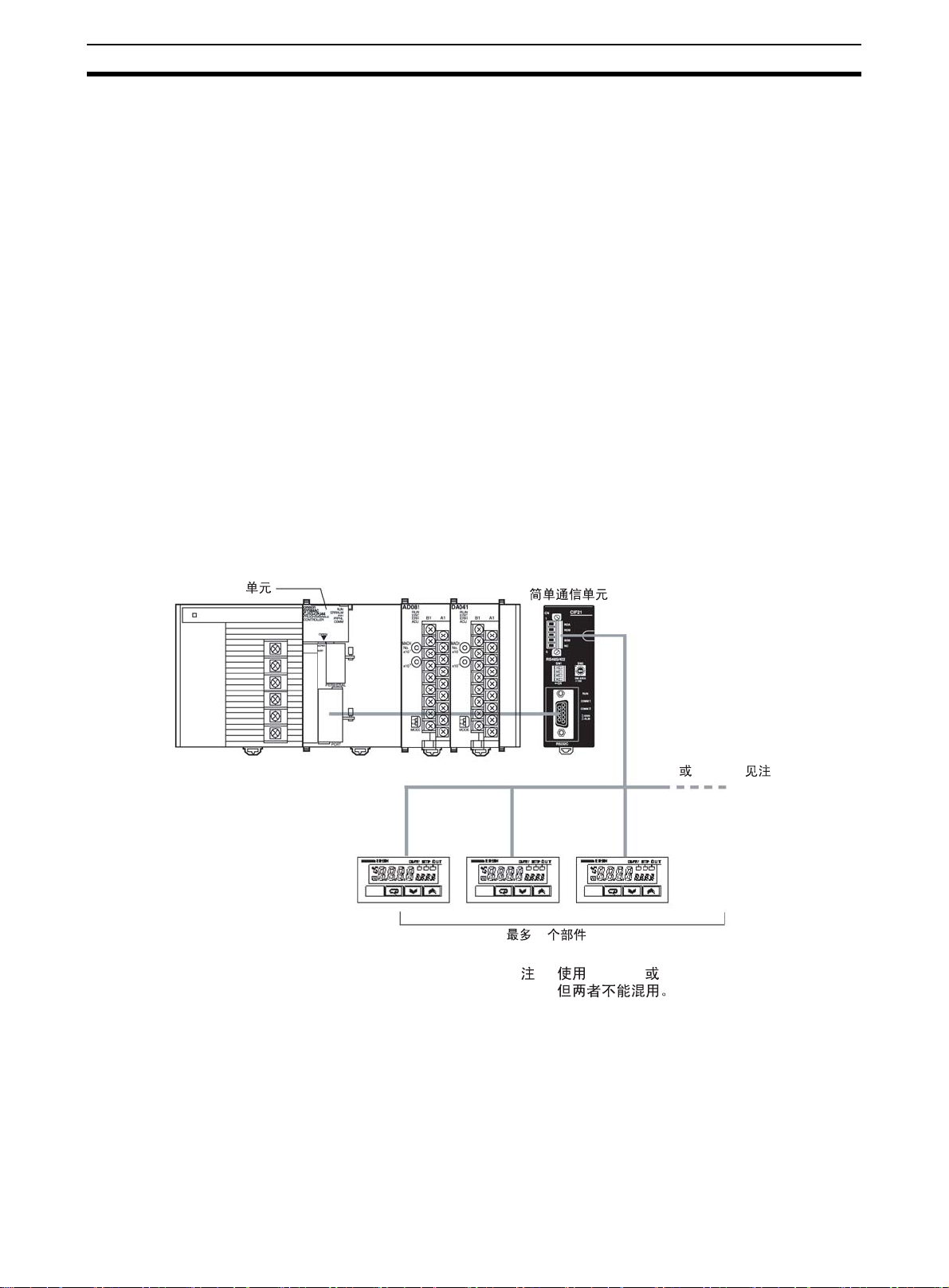
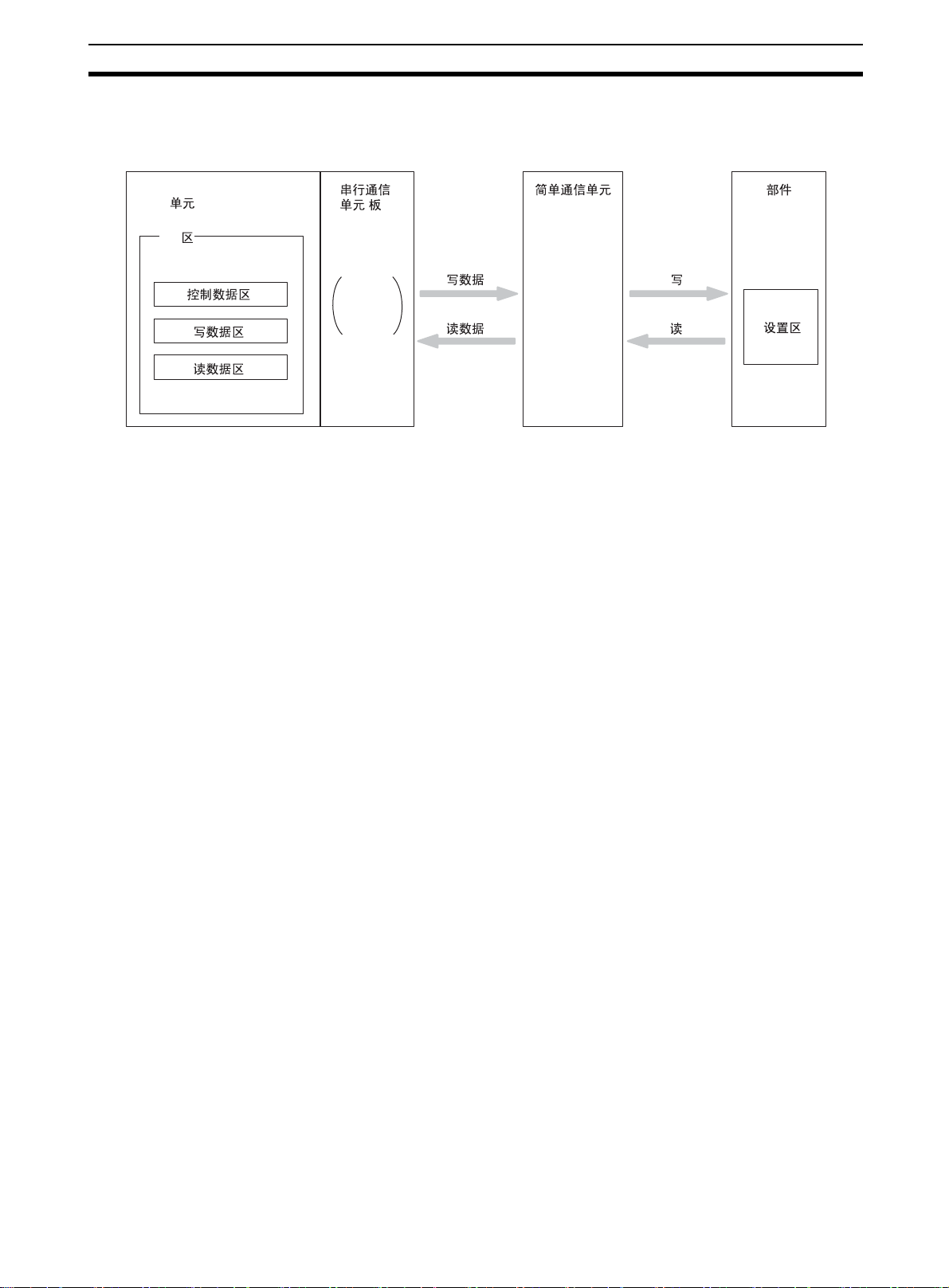
1-1-2 系统构成
如下图所示, PC (CPU 单元 ) 通过 CJ1W-CIF21 简单通信单元连接 OMRON
的部件。
CPU
RS-422 RS-485 ( )
32
RS-422 RS-485,
2
Page 17
概述 第 1-1 章
1-1-3 兼容的 PC 和部件
主机 (PC)
CJ1W-CIF21可以连接到一个 CJ系列, CS系列,CQM1H 或 CPM2A CPU 或
一个 CJ 系列, CS 系列或 CQM1H 系列通信板 / 单元。
PC
CJ 系列
CS
系列
CQM1H CQM1H-CPU@@
CPM2A CPM2A-@@C@@
CJ1G-CPU@@
CJ1G/H-CPU@@H
CJ1W-SCU41
CS1G/H-CPU@@(-EV1)
CJ1G/H-CPU@@H
CS1W-SCB21
CS1W-SCU21/41
CQM1H-SCB41
部件
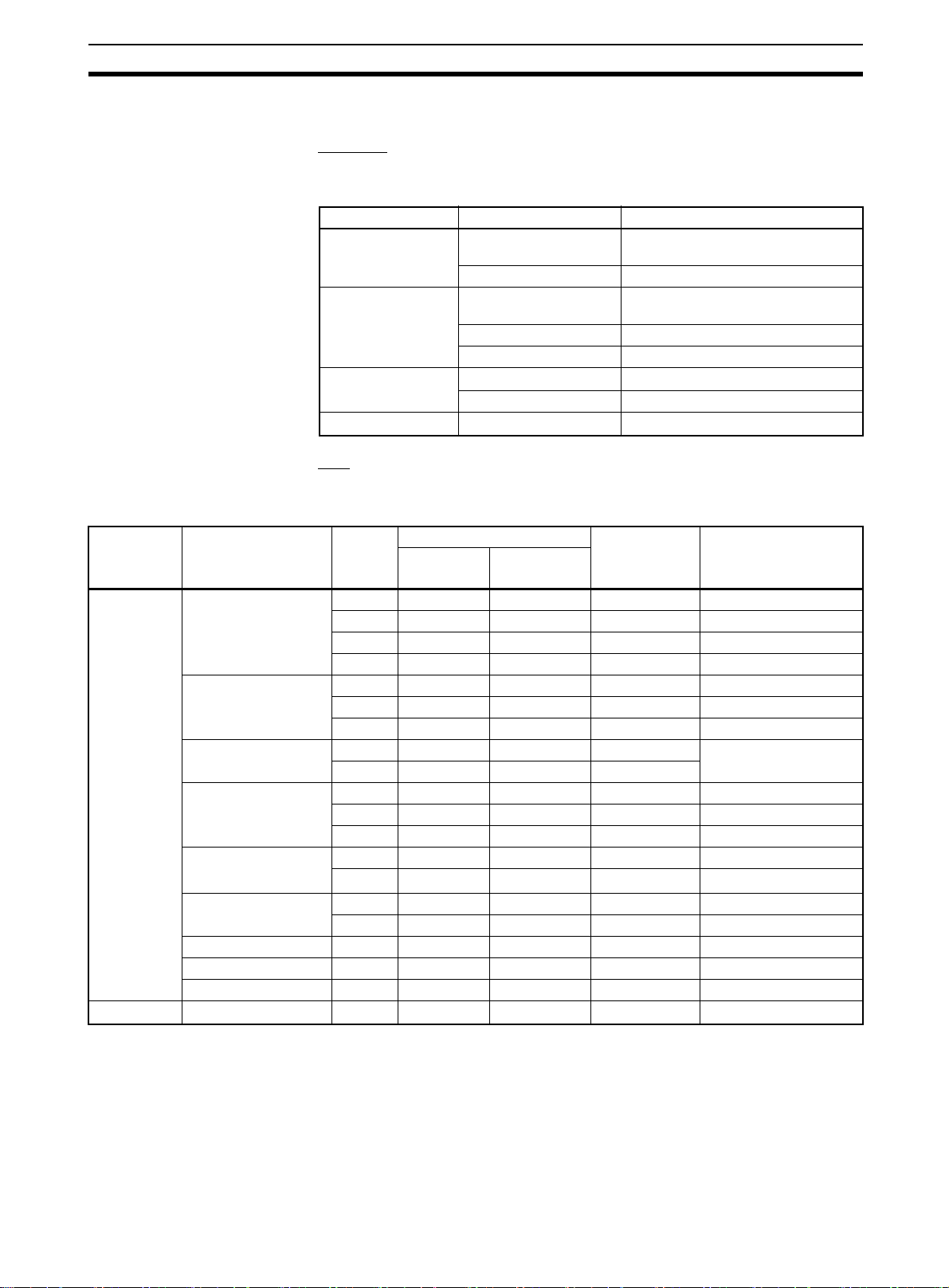
下列表格显示可以连接哪些具有 SYSWAY 或 CompoWay/F 通信的 OMRON
部件。
型号 名称
CPU 单元
串行通信单元
CPU 单元
串行通信板
串行通信单元
CPU 单元
串行通信板
CPU 单元
名称 系列 型号
温度控制器 温度控制器
标准型数字控制器
数字控制器 ( 阀控 )
数字控制器 ( 可编程 )
数字调节器
( 可编程阀控 )
温度调节器
模糊温度控制器
组件化的温度控制器
数字控制器板
定时器 数字定时器 / 计数器
SYSWAY
连接 段信息
( 见注 5)
E5GN OK 1 OK --E5CN OK 1 OK --E5EN OK 1 OK --E5AN OK 1 OK --E5CK OK 1 No --E5EK OK 1 No --E5AK OK 1 No --E5EK OK 1 No
E5AK OK 1 No
E5CK-T No --- No --E5EK-T No --- No --E5AK-T No --- No --E5EK-T No --- No --E5AK-T No --- No ---
E5EJ OK 1 No --E5AJ OK 1 No --E5AF OK 1 No --E5ZN No --- OK --E5ZM No --- OK --H8GN No --- OK ---
CompoWay/F
连接
不支持限定值控制通信
备注
3
Page 18
概述 第 1-1 章
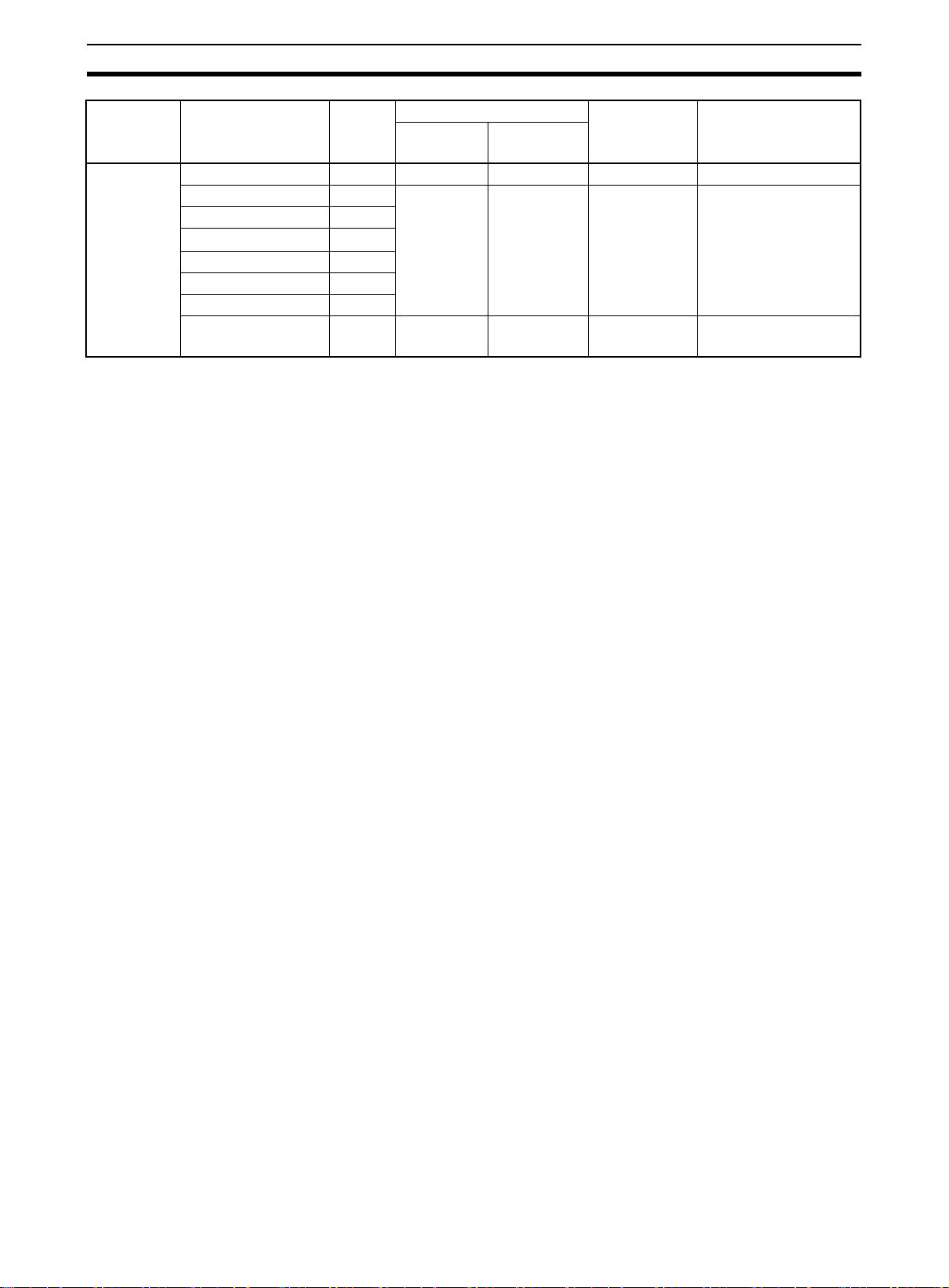
名称 系列 型号
数字面板表 数字面板表
过程表
重量表
频率 / 速率表
周期表
可逆计数表
温度表
智能信号处理器
注 1. 只支持 SYSWAY 或 CompoWay/F 通信的部件,必须连接那一种通信规
SYSWAY
连接 段信息
( 见注 5)
K3GN No --- OK --K3NX
K3NV
K3NR
K3NP
K3NC
K3NH
K3TS
有限功能
有限功能
2
2No
CompoWay/F
连接
有限功能 不能使用某些命令。
只能读 CompoWay/F 变
量区 ( 见注 3)。
仅 SYSWAY 连接
( 见注 2)。
备注
约。
2. 在连接一台 K3TS 时,还可通过 SYSWAY 连接其它部件。 K3TS 不能与通
过 CompoWay/F 通信的部件混用。
3. CompoWay/F 通信用于某些数字面板表时,当前值和设定值以 BCD 格式
存储,不象温控器和定时器这些值以二进制格式存储。
4. 有些 SYSWAY 命令 OMRON 部件是不支持的。在使用 SYSWAY 通信前,
请先参考部件的手册并确认 CJ1W-CIF21 命令组的内容。
5. 正在使用 SYSWAY 通信时,必须设置“段信息”表示所连接的表是温度控
制器或数字面板表。 关于段信息的设定的详情参见 P38
移量:
+7,+10,+13
,…,
+97,+100
)。
单元通信类型(偏
4
Page 19
处理部件数据 第 1-2 章
1-2 处理部件数据
数据处理基础 在读和写命令位为 ON 时周期执行读和写。
CPU
DM
简单通信单元和 PC 之间的
接口
简单通信单元和部件之间的
接口
SYSWAY 和 CompoWay/F
的区别
/
CJ
CS
CQM1H
简单通信单元通过 CPU 单元的 DM 区,使用 CPU 单元上的 RS-232C 或外设
端口或串行通信板或串行通信单元上的 RS-232C端口与 CPU 单元接口。
简单通信单元通过使用 SYSWAY 或 CompoWay/F 通信传送数据与 OMRON 部
件接口。
使用 SYSWAY 或 CompoWay/F 通信可以在简单通信单元和 OMRON 部件之
间写入数据,但这两种通信规约中读写数据的方法是不同的。(某些部件部限
制只用一种规约)。
SYSWAY 通信
在使用 SYSWAY 通信时,有 5 种可用的命令组。可以选择其中一个命令组传
送指定的数据。
在使用 SYSWAY 通信时,必须设置所要连接的部件的类型 (温度控制器单元
或数字面板表)。温度控制器单元和数字面板表传送的变量不同。
CompoWay/F 通信
在使用 CompoWay/F 通信时,要传送的变量必须预先逐个登记。一共可以登记
12 变量类型。将你要读 / 写的变量登记在写变量类型区和读变量类型区。
在使用 CompoWay/F 通信时,只有登记过的变量才能读和写。
5
Page 20
处理部件数据 第 1-2 章
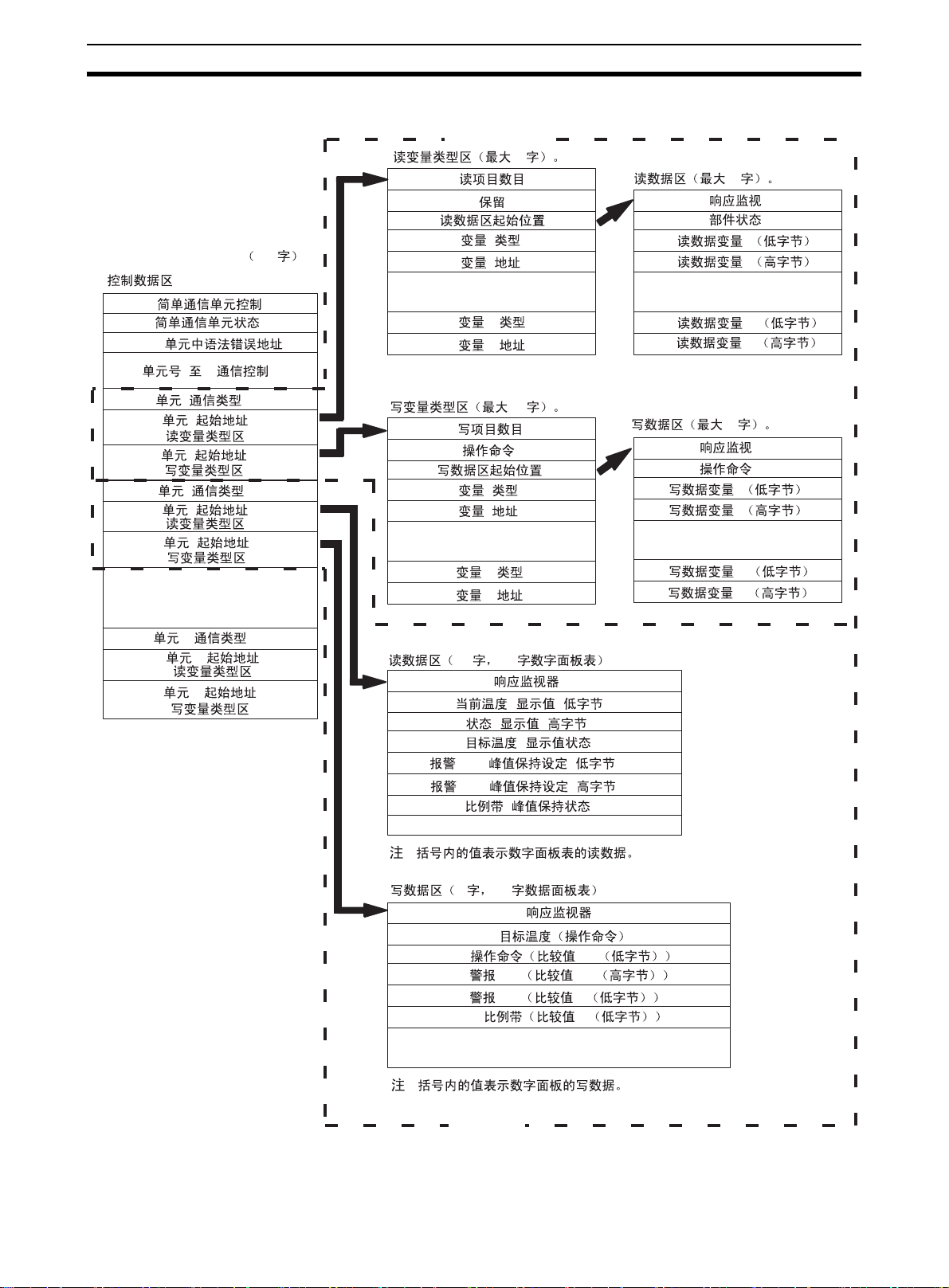
DM 区结构 下图表示用于与简单通信单元通信的 DM 区的结构。
CompoWay/F
27
26
DM
0 31
0
0
0
1
1
1
31
31
31
103
:
:
:
1
1
:
:
12
12
27
1
1
:
:
12
12
11 18
( ( ))
( ( ))
( )
1SV ( ( ))
2SV ( ( ))
( )
:
26
1
1
12
12
1
1
:
:
12
12
:
:
9 10
HH
1SV HH
2SV H
H
:
:
SYSWAY
6
Page 21
处理部件数据 第 1-2 章
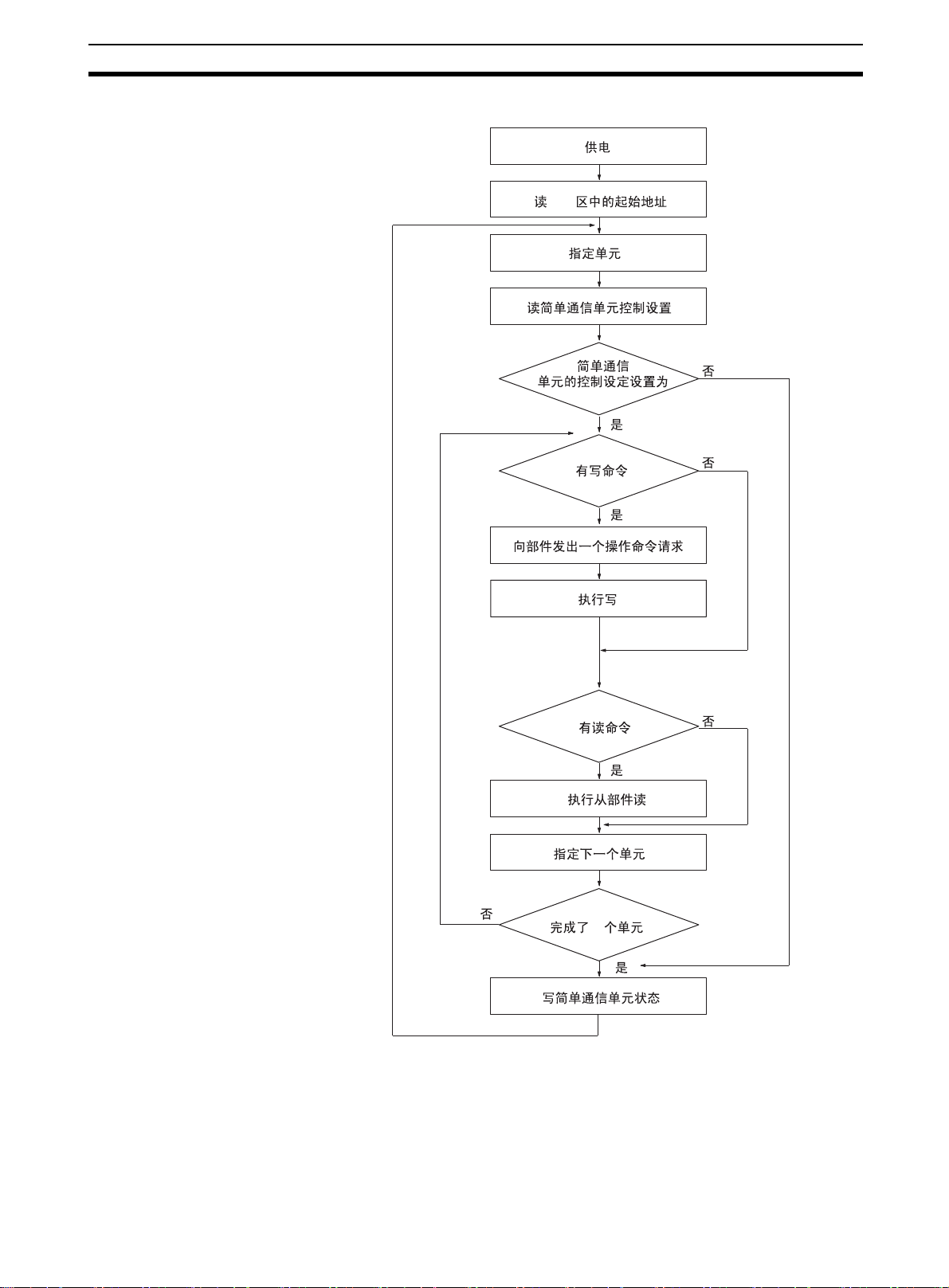
数据处理流程 下面流程图表示数据处理的过程。
DM
0
RUN?
?
?
32 ?
7
Page 22

Page 23

单元部件和技术规范
本章提供 CJ1W-CIF21 简单通信单元的技术规范和每个部件的功能。
2-1 技术规范 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2-1-1 技术规范 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2-1-2 尺寸 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2-2 部件名称和功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
第 2 章
9
Page 24
技术规范 第 2-1 章
2-1 技术规范
2-1-1 技术规范
项目 规范
电源电压 24 VDC (见注)
允许电压范围 20.4 至 26.4 VDC
电源消耗
运行环境温度 0 至 55°C
运行环境湿度 10% 至 90% (无凝露)
储存环境温度 -20 至 75°C
重量
1.5 W
150 g
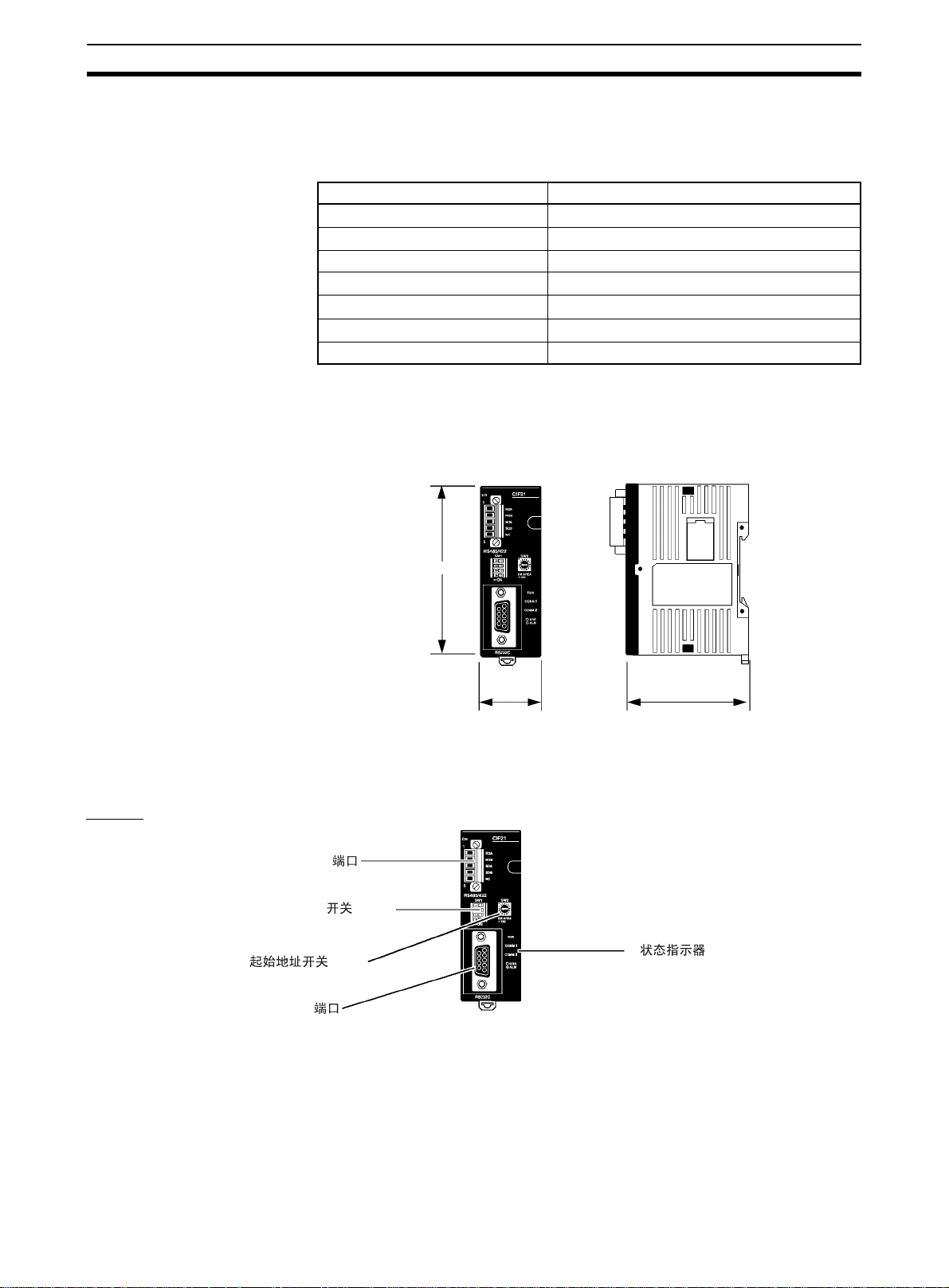
2-1-2 尺寸
下图表示 CJ1W-CIF21 简单通信单元的外部尺寸。所有尺寸以毫米为单位。
2-2 部件名称和功能
前视图
注 向电源连接器提供了一个 24V DC 电源。 详见第 3-2-2
90
33
65
电源接线
。
10
1. RS-422/RS-485
2.RS-422/RS-485 (SW1)
3.DM (SW2)
4.RS-232C
5.
Page 25
部件名称和功能 第 2-2 章
侧视图
SW3
ON
1
2
3
4
5
6
7
8
9
10
6.
DM
(SW3)
顶视图
(
)
7.
(SW4)
底视图
8.
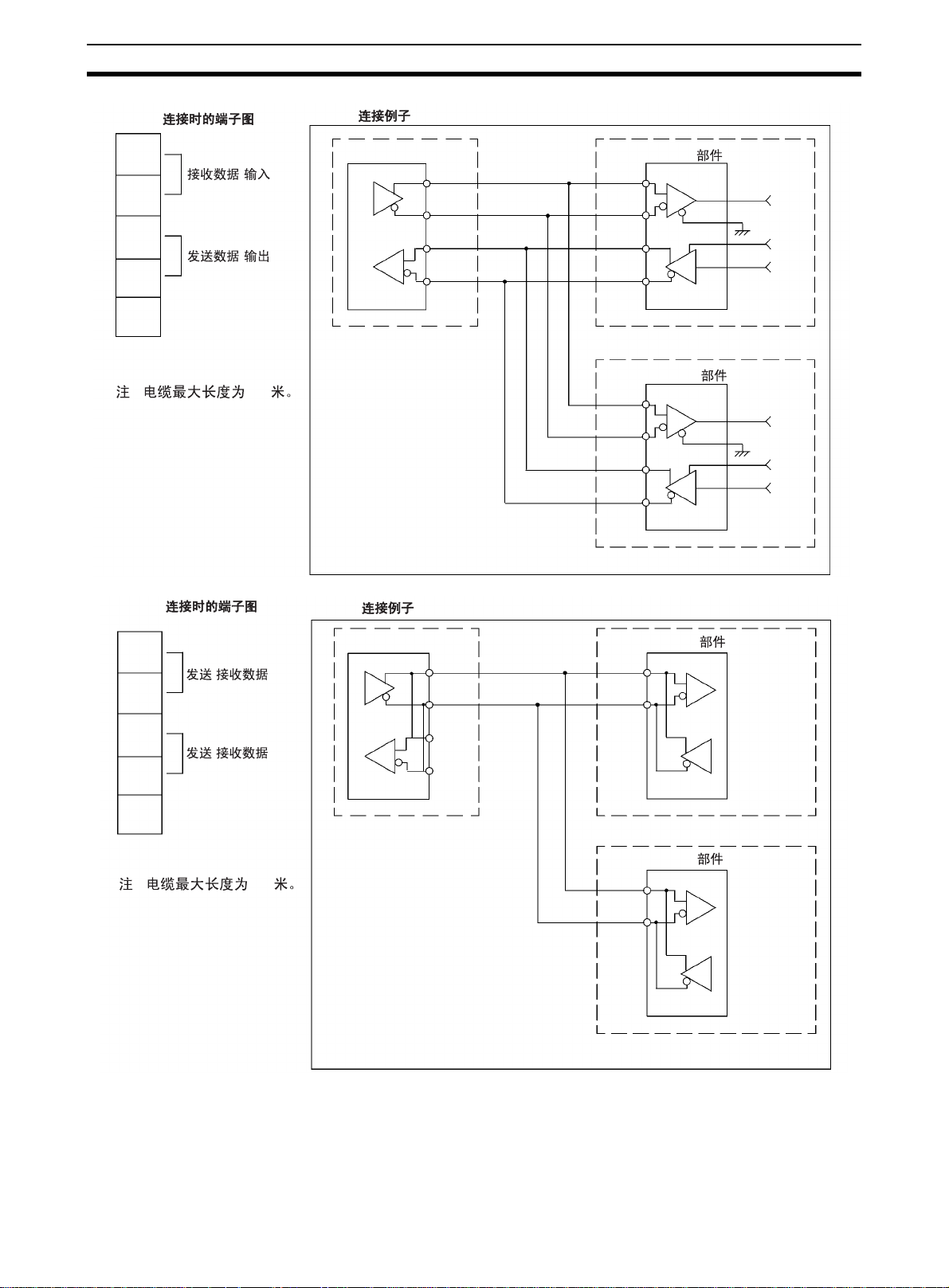
1.RS-422/RS-485 端口 接到温度控制器,数字定时器 / 计数器和数字面板表。使用 RS-422 或 RS-485
连接器,在同一个 CJ1W-CIF21 上不能混合使用两种端口。
11
Page 26
部件名称和功能 第 2-2 章
RS-422
RDA-
RDB+
SDA-
SDB+
NC
500
( )
( )
RS-422
CJ1W-CIF21
SDB (+)
SDA (-)
RDB (+)
RDA (-)
RDB (+)
RDA (-)
SDB (+)
SDA (-)
RDB (+)
RDA (-)
SDB (+)
SDA (-)
OMRON
OMRON
RXD
XD
T
R
XD
T
XD
RS-485
RDA-
RDB+
SDA-
SDB+
NC
500
/ (I/O)
/ (I/O)
RS-485
CJ1W-CIF21
SDB (+)
SDA (-)
OMRON
RDB (+)
RDA (-)
OMRON
RDB (+)
RDA (-)
12
注 不能同时使用 RS-422 和 RS-485 。
Page 27
部件名称和功能 第 2-2 章
RS-422/485
TXD
SE
R
XD
2.RS-422/RS-485 开关
(SW1)
0 V
5 V
5V
5V
0V C0V
C5V
选择 RS-422 或 RS-485 通信。
RS-422 RS-485
SW1
ON
1 2 3 4
SW1
ON
1 2 3 4
C5V
C5V
C5V
SDB
SDA
RDB
RDA
C0V
SW1
SW4
1
2
SW1
C5V
4
3
C0V
SW4
SW1 RS-422 RS-485
1OFFON
2OFFON
3ONOFF
4OFFON
注 出厂设置为 RS-485 的二线制通信。不要将 SW1-3 和 SW1-4 同时设
置为 ON。这样做可能会损坏内部电路。
3.DM 启动地址开关 (SW2) 设定简单通信单元在 DM 区内的操作设置的起始地址。这个设置与单元侧面的
DIP开关 (SW3)的 9 脚和 10 脚 的 DM起始地址区设定组合使用。(参见第 16页
. 通信设定和
6
DM
起始地址区
(SW3))。 下面的表格表示 DM 起始地址开关
(SW2) 和 DIP 开关 9 脚和 10 脚 (SW3) 可能的设定。
注 1. 连接到 CPM2A PC 时 9 脚和 10 脚必须转为 OFF。
2. 在连接 1个以上简单通信单元时,在 DM区中设置得起始地址必须相隔 200
个字以上,以防止各个单元的设置不会互相重叠。
0 F
13
Page 28

部件名称和功能 第 2-2 章
DM D0000 D1500
SW3 9 OFF 10 OFF
SW2
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
DM
D0000
D0100
D0200
D0300
D0400
D0500
D0600
D0700
D0800
D0900
D1000
D1100
D1200
D1300
D1400
D1500
DM D5000 D6500
SW3 9 OFF 10 ON
SW2
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
DM
D5000
D5100
D5200
D5300
D5400
D5500
D5600
D5700
D5800
D5900
D6000
D6100
D6200
D6300
D6400
D6500
DM D2500 D4000
SW3 9 ON 10 OFF
SW2
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
DM
D2500
D2600
D2700
D2800
D2900
D3000
D3100
D3200
D3300
D3400
D3500
D3600
D3700
D3800
D3900
D4000
DM D7500 D9000
SW3 9 ON 10 ON
SW2
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
DM
D7500
D7600
D7700
D7800
D7900
D8000
D8100
D8200
D8300
D8400
D8500
D8600
D8700
D8800
D8900
D9000
14
Page 29

部件名称和功能 第 2-2 章
4.RS-232C 端口 将简单通信单元连接到 CPU 单元的 RS-232C 端口或外设端口或接到串行通信
板或单元的 RS-232C 端口。
9 SG
8 NC
7 NC
6 NC
5 CTS
4 RTS
3 R
2 T
1 NC
( )
RS-232C
电缆的接线
下图表示 CJ 系列, CS 系列,或 CQM1H PC 的电缆的接线。
CJ/CS/CQM1H
D
X
D
X
FG 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
下图表示连接 CPM2A PC 的电缆接线。
CPM2A
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
15
Page 30

部件名称和功能 第 2-2 章
5. 状态指示器 指示简单通信单元的操作状态。
标记 状态 含义
RUN
ERR/ALM
COMM1
COMM2
注 1. 在出现致命错误时,简单通信单元停止操作,清除出错原因并重新接通电
源。
2. 在出现非致命错误时,简单通信单元继续操作。只要排除出错原因或清除
错误并操作停止 / 启动以恢复运行。
亮 简单通信单元和 CPU 单元之间的通信已经建立。简单通信单
元正在运行。
不亮 简单通信单元没有随 CPU 单元一起运行。
闪烁 简单通信单元和 CPU 单元之间的通信未建立或已经中断。
亮 出现一个致命错误 (见注 1)。
闪烁 出现一个非致命错误 (见注 2)。
不亮 单元运行正常。
闪烁 简单通信单元和 CPU 单元之间正在传送数据。
不亮 不传送数据。
闪烁 简单通信单元和连接的部件之间正在传送数据。
不亮 不传送数据。
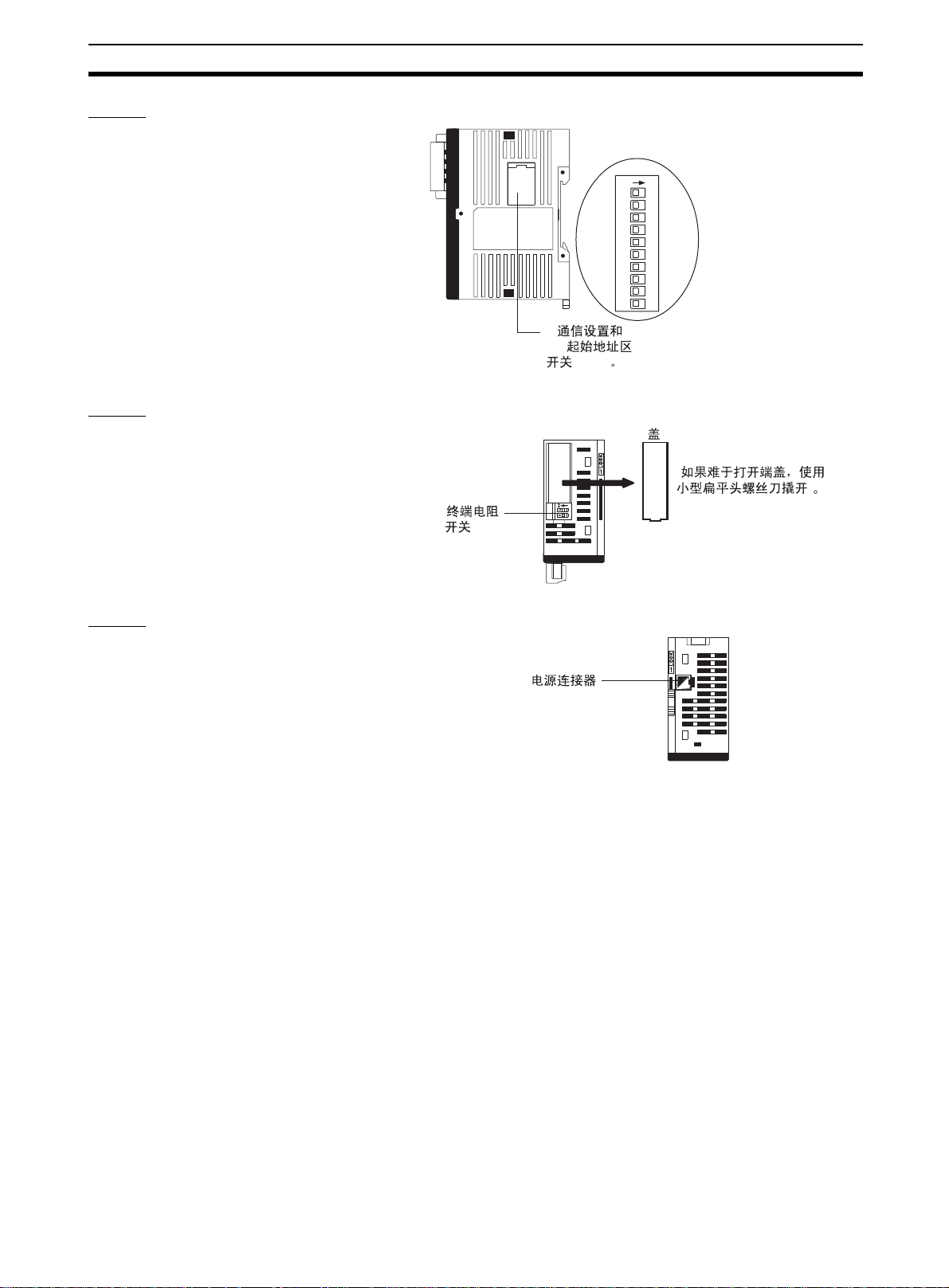
6. 通信设定和 DM 起始地址
区 (SW3)
SW3
ON
1
2
3
4
5
6
7
8
9
10
设置与所连接部件和 CPU 单元所使用的通信的通信条件。拆开单元侧面的盖
板就可以操作 DIP 开关 (SW3)。
脚功能
1
与 CPU 单元通信的波特率
(见注 3)
2
与连接的部件通信的波特率 正常
3
数据长度 (见注 2 和注 3)。
4
奇偶校验允许位 (见注 2 和注 3)。
5
奇偶 (见注 2 和注 3)。
6
停止位 (见注 2 和注 3)。
7
与 CPU 单元的通信
8
与连接的部件的通信
9
DM 起始地址区
(见注 4 和注 5)。
10
---
脚 9 OFF
脚 9 ON D2500 至 D4000 D7500至 D9000
正常
高速
高速
脚 10 OFF 脚 10 ON
D0000 至 D1500 D5000 至 D6500
OFF ON
9,600 bps 19,200 bps
38,400 bps 57,600 bps
9,600 bps 19,200 bps
38,400 bps 57,600 bps
7 位 8 位
有奇偶 无奇偶
偶 奇
2 位 1 位
正常 高速
正常 高速
注 1. 出厂时所有脚置为 OFF, 出厂设置如上图阴影线所示。
2. 脚 3, 4, 5, 和 6 至设置简单通信单元和所连接的部件之间的通信条件。
3. 与 CPU 的通信条件是固定的如下所示 :7位数据位,偶校验, 2 位停止位。
4. 在连接到 CPM2A CPU 单元时,脚 9 和脚 10 转为 OFF。
5. 为连接一台以上简单通信单元时,在 DM 区中设置的起始地址,至少相隔
200 个字,以免各个单元的设定互相重叠。
16
Page 31

部件名称和功能 第 2-2 章
7. 终端开关 (SW4) 如果简单通信单元位于 RS-422/RS-485 传送线路的终点,应当接通针脚1和针
脚 2 。卸去单元顶上的盖板可以操作 SW4。如果不能卸去盖板,用小型扁平螺
丝刀撬开。
SW4
1 2
注 1. 出厂时两个针脚均置于 OFF 位置。
2. RS-422通信的终端电阻是235Ω 。总的组合终端电阻应保持为110 Ω以上。
3. RS-485通信的终端电阻是 118Ω 。请保持总的组合终端电阻在 54 Ω 以上。
8. 电源连接器 连接到 24V DC 电源。 将+24V 接到随单元供货的电源线的红线上, 0V 接到黑
线上。
ON ON
OFF OFF
17
Page 32

Page 33

本章说明从 CJ1W-CIF21 简单通信单元的安装到单元的操作的准备步骤。
3-1 简要步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3-2 安装和电源接线 . . . . . . . . . . . . . . . . . . . . . . . 20
3-2-1 安装 . . . . . . . . . . . . . . . . . . . . . . . . 20
3-2-2 电源接线 . . . . . . . . . . . . . . . . . . . . . . 22
3-3 连接简单通信单元 . . . . . . . . . . . . . . . . . . . . . . 23
3-4 简单通信单元的设置 . . . . . . . . . . . . . . . . . . . . . 25
3-5 PC 设定 . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3-6 连接部件的设定 . . . . . . . . . . . . . . . . . . . . . . . 27
3-7 DM 设定和部件通信 . . . . . . . . . . . . . . . . . . . . . 27
3-7-1 DM 设定 . . . . . . . . . . . . . . . . . . . . . . 28
3-7-2 启动与部件的通信 . . . . . . . . . . . . . . . . . . 28
3-8 部件通信的注意事项 . . . . . . . . . . . . . . . . . . . . . 29
3-9 故障诊断 . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3-9-1 致命错误 (ERR 指示灯常亮 ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3-9-2 非致命错误 (ERR 指示灯闪烁) . . . . . . . . . . . . 32
第 3 章
操作准备
19
Page 34

简要步骤 第 3-1 章
3-1 简要步骤
下图简要说明准备与连接的 OMRON 部件通信所需要做的步骤。
PC
3-2 安装和电源接线
3-2-1 安装
将 CJ1W-CIF21 简单通信单元安装在 35mm 宽的 DIN 导轨上。此单元不能直
接装在盘上或其他表面上。
PFP-M
DM
DIN
PFP-100N (1 m)
PFP-50N (50 cm)
PFP-100N2 (1 m)
20
Page 35

安装和电源接线 第 3-2 章
将单元装上 DIN 导轨
将单元的安装卡座上部钩在 DIN 导轨上沿,向下转动单元使它锁在 DIN 导轨
下沿。
2.
DIN
3.
1.
4.
注 DIN 导轨必须水平安装。如果导轨垂直安装,空气不能正常从单元中流通,单
元会过热。
DIN 导轨上拆下单元
从
用标准的扁平头螺丝刀松开单元下部的锁扣。将锁扣往下拉使单元脱开 DIN 导
轨。
21
Page 36

安装和电源接线 第 3-2 章
3-2-2 电源接线
使用容量足够和低纹波的直流电源。我们推荐使用 OMRON CPM2C-PA201 交
流电源单元。
! 不要在单元的直流供电端子做电压耐受试验。这种测试可能损坏单元的内部元
注意
件。
使用通用的直流供电单元 用随单元提供的电源线将 CJ1W-CIF21 简单通信单元与 24V 直流电源相连。
1,2,3... 1. 将电源线上的连接器对准单元下部的连接器,并将它接入单元。
: +24 V
: 0 V
: 100 cm
2. 拆开电源线时,拿住电源线的连接器,按下锁定扣,释放连接器的锁扣拔
出连接器。不要拉导线。
22
Page 37

连接简单通信单元 第 3-3 章
使用 CPM2C-PA201 交流供
电单元
如果使用 CPM2C-PA201 供电单元,用随 CPM2C-PA201 供货的电源线连接
CJ1W-CIF21 简单通信单元。
注 1. 使用容量充裕和低纹波的直流电源,推荐使用 CPM2C-PA201。
2. 要满足 EC 规程的低压导则时,需要使用双重或加强绝缘的电源。
3-3 连接简单通信单元
将 CJ1W-CIF21 简单通信单元连接到 PC,并通过单元的 RS-422/RS-485 接口
连接多达 32 个 OMRON 部件。
CPM2C-PA201
: 23 cm
CPU
RS-422 RS-485
32
注 使用 RS-422 或 RS-485,二种方法不能混用。
23
Page 38

连接简单通信单元 第 3-3 章
PC 侧 9 针 D 型插头 RS-232C 的接线
下图表示简单通信单元和 PC (CPU 单元,串行通信板或串行通信单元)之间
的电缆接线。
CJ , CS , CQM1H PC
CJ/CS/CQM1H
FG 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
CPM2A PC
CPM2A
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
可用下列连接器将 PC 连接到简单通信单元。
•CJ系列、 CS 系列或 CQM1H PC
单元 单元上的端口 型号 长度
CPU 单元 内置 RS-232C 端口
XW2Z-200T/500T
(D 型, 9 针插座)
外设端口
CS1W-CN118 +
XW2Z-200T/500T
串行通信板 / 单元 RS-232C 端口
XW2Z-200T/500T
(D 型, 9 针插座 )
• CPM2A PC
单元 单元上的端口 型号 长度
CPU 单元 内置 RS-232C 端口
(D 型, 9 针插座)
外设端口
XW2Z-200T/500T
CPM1-CIF01 +
XW2Z-200T/500T
--- 1
SD 2
RD 3
RS 4
CS 5
--- 6
--- 7
--- 8
SG 9
2 或 5 m
0.1 m + 2 或 5 m
2 或 5 m
2 或 5 m
0.15 m + 2 或 5 m
24
Page 39

简单通信单元的设置 第 3-4 章
3-4 简单通信单元的设置
在改变单元的开关设置前先看下列二个注意事项。
• 改变简单通信单元的设置前必须先断开电源。
• 为防止由于静电放电造成故障,在上电时不能触摸设置开关。
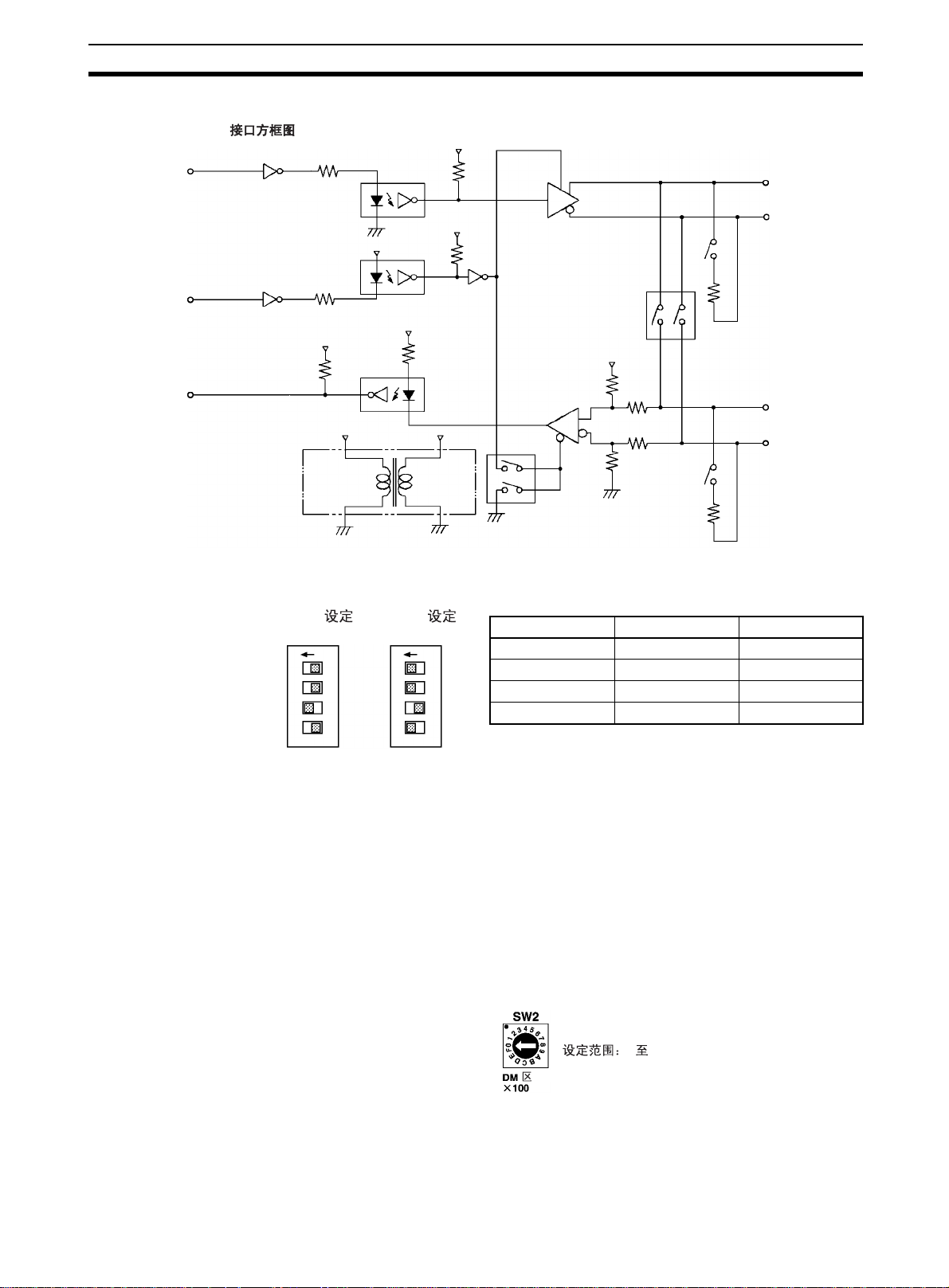
RS-422/RS-485
开关 (SW1)
选择使用 RS-422 还是 RS-485 与所连接的 OMRON 部件通信。
RS-422 RS-485
SW1
ON
1 2 3 4
SW1
ON
1 2 3 4
下表表示工厂设置 (RS-485 通信 )。
SW1 针脚 工厂设置 功能
1ON
2ON
3OFF
4ON
选择 RS-485 通信
(二线制通信)。
注 关于 SW1 的详细功能参见 13 页 2.RS-422/RS-485 开关 (SW1) 。
区起始地址设定 (SW2)
DM
设定简单通信单元在 DM 区中的操作设定的起始地址。这个设定与位于单元侧
面的 DIP 开关 (SW3) 的 9 脚和 10 脚的 DM 起始地址区的设定组合使用。
SW2
DM 100
下表表示 SW2 和 SW3 的 9 脚和 10 脚的出厂设置。
SW2
0 OFF OFF D0000
SW3 9 脚 SW3 10 脚在 DM 区的起始地址
注 1. 参见13页 3.DM启动地址开关 (SW2) ,表格表示 SW2 和SW3 9 脚和 10脚
所有可能的设置。
2. 在连接到 CPM2A CPU 单元时, 9 脚和 10 脚必须为 OFF。
3. 连接一台以上简单通信单元时,在 DM 区中设置的起始地址互相至少相隔
200 个字,以使各单元的各种设置不会重叠。
25
Page 40

简单通信单元的设置 第 3-4 章
通信设置和 DM 起始地址区 (SW3)
设置与 CPU 单元的波特率,与所连接的部件的波特率和通信条件,以及由简单
通信单元使用的在 DM 区中的区域,它的第一个字是可以设置的。在 PC 和通
信部件中应设置相同的波特率和通信设定。(设定 PC 的通信条件如下: 7 位数
据,偶校验,和 2 位停止位)。
SW3
ON
1
2
3
4
5
6
7
8
9
10
针脚 工厂设置 功能 通信
1OFF
2OFF
3OFF
4OFF
5OFF
6OFF
7OFF
8OFF
9OFF
10 OFF
波特率 = 9,600 bps CPU 单元
波特率 = 9,600 bps 连接的部件
数据长度 = 7 位
校验 = 允许
校验 = 偶校验
停止位 = 2 位
通信方式 = 正常 (非高速) CPU 单元
通信方式 = 正常 (非高速) 连接的部件
DM 起始地址区: D0000 至 D1500
---
注 1. 连接到 CPM2A CPU 单元时,脚 9 和脚 10 始终为 OFF。
2. 在连接一台以上简单通信单元时,在 DM 区中设定的起始地址,各单元至
少相隔 200 字,以免互相重叠。
3. 关于 SW3 针脚设定详见 16 页 6. 通信设定和 DM 起始地址区 (SW3) 。
终端器开关 (
SW4)
如果简单通信单元位于 RS-422/RS-485 传送线路的端点,将脚 1 和脚 2 转为
ON。 SW4 的工厂设定是二脚均为 OFF (无终端电阻)。
SW4
( ON)
( OFF)
注 1. RS-422通信的终端电阻是 235Ω。请保持总的组合终端电阻在110Ω 以上。
2. RS-485 通信的终端电阻是 118Ω。请保持总的组合终端电阻在 54Ω 以上。
26
Page 41

PC 设定 第 3-5 章
3-5 PC 设定
对 PC 做下列设定 (CPU 单元,串行通信板或串行通信单元)。
设置名称 设定 备注
串行通信模式
波特率
数据长度 7 位
允许 / 禁止校验 使用校验
奇 / 偶校验 偶校验
停止位 2 位
Host Link 编号
(见注 1)
注 1. Host Link 编号设置为 00。任何其他编号均不能运行。
2. 可以使用的 DM 区地址范围取决于所连接的 PC 。检查在 CPU 单元中可用
的 DM 区地址范围并且不要超过可用范围。
3. 虽然 CS/CJ 系列 CPU 单元支持的 DM 区的地址为 D00000 至 D32767 。简
单通信单元只能分配在 D00000 至 D09999。
Host Link --9,600/19,200/38,400/57,600 bps
00 ---
与简单通信单元的设
定匹配
---
---
---
---
3-6 连接部件的设定
在简单通信单元所连接的部件中做下列设定。关于设定的详情参见部件的手
册。
单元编号 设定部件的单元编号为 0 至 31。每个部件设定一个唯一的编号。
通信设定 通信设定与 25 页
允许远程通信写入 指定 “设定模式为允许通信写入 (远程)”。如果规定为 “禁止通信写入 (本
地方式)”,就不能改变部件的 SV 值。
终端电阻 在 RS-422/RS-485通信电缆端点的部件上必须设置终端电阻。将最后一个部件
上的终端电阻开关转为 ON。
简单通信单元设定
中对简单通信单元所做的设定相同。
3-7 DM 设定和部件通信
本节说明与所连接部件通信所需要做的基本步骤。关于 DM 设定和设置步骤参
第4章
见
在用户程序中写入下列程序部分,以建立起与所连接部件的通信。
DM
区的分配 。
27
Page 42

DM 设定和部件通信 第 3-7 章
3-7-1 DM 设定
先查验 CJ1W-CIF21 是否支持你要连接的部件,并决定使用 SYSWAY 或
CompoWay/F 与此部件通信。
在用户程序的开始写入下列程序部分,使 PC 电源接通时能执行 DM 设置。
在连接一台以上简单通信单元时,要设置好系统以保证控制数据区和各单元区
不会重叠。
1,2,3... 1. 在控制数据区内设定参数
• 设定连接部件的数目 (最多 32 个)。
• 使用 SYSWAY 时,设定每个部件的段信息。
• 使用 SYSWAY 时,选择和设置包含你要读和写的值的命令组。
• 设定通信规约。
• 使用 SYSWAY 时,设定每个部件的读 / 写数据区的起始地址。
• 使用 CompoWay/F时,设定每个部件的读 /写变量类型区的起始地址。
2. 在使用 CompoWay/F 时,设置你要读或写的每个变量的变量类型和变量地
址 (在读 / 写变量类型区设置这些信息)。
3. 在写入数据时,设定你希望写入数据区的数据。
3-7-2 启动与部件的通信
用下列步骤启动与部件的通信。
1,2,3... 1. 将在控制数据区中“简单通信单元控制”字(运行 / 停止数字)的最右边一
2. 将要求部件的读命令位或写命令位转为 ON。(这些位在控制数据区中用字
在简单通信单元控制字的运行 / 停止数位,从停止切换为运行时才能识别下列
值的变化。当这些值中某一个值改变时,要将简单通信单元从运行切换到停
止,再从停止切换到运行。
注 关于 运行 / 停止数位详见第 36 页
个数字设置为 1 (运行)。
偏移 +3, +4, +5, 和 +6。参 见
• 段信息
• 命令组
• 通信规约
• 读 / 写数据区的起始地址
• 读 / 写变量类型区的起始地址
通信控制位(偏移:+3,+4,+5和+6)
简单通信单元控制 (偏移:+0)
。
第 37页。
28
Page 43

部件通信的注意事项 第 3-8 章
3-8 部件通信的注意事项
在与部件通信时要注意下列事项。
刷新读 / 写数据所需的时间 刷新读或写数据所需的时间随 PC 的周期时间变化。另外,刷新的间隔时间也
是不固定的。
与 PC 建立通信 同时接通简单通信单元和 PC, 或先启动 PC 后接通简单通信单元。单元的 RUN
指示灯将闪烁,直到与 PC 的通信建立为止。在通信建立后,RUN 指示灯将常
亮或不亮,由简单通信单元控制的状态决定。
建立连接后得不到 PC 的响
应
与所连接的部件的通信 当简单通信单元和所连接的一个部件之间的通信出现差错时,在单元中会出现
CPU 单元的运行模式 如果 CPU 单元在运行模式,简单通信单元不能将数据写入 CPU 单元。在写入
简单通信单元从 “停止”切
换到 “运行”
句法错误 在简单通信单元中出现句法错误时,将单元从运行切换到停止,编辑引起句法
如果已经建立与 PC 的通信,但后来得不到 PC 的响应,单元将持续 2 分钟与
PC 重试通信。如果 2 分钟后仍无响应,将出现致命差错并点亮 ERR 指示灯。
一个非致命错误,单元将停止与那个部件的通信。单元将响应的出错代码写入
响应监视区,并且使 ERR 灯闪烁,但是单元将继续运行并处理与下一个部件的
通信。如果此单元与下一个部件的通信成功, ERR 指示灯将停止闪烁。
数据前,将用上位机链接命令 STATUS READ 检查 CPU 单元的运行模式,如
果 CPU 是在运行模式,可用上位机链接命令 STATUS WRITE 将它改为监控模
式,这时就能写入数据。
当由于 CPU 单元被编程设备改回到运行状态而出现写入错误时,简单通信单
元将尝试改变单元的操作模式并写入数据二次。如果尝试失败,将出现致命错
误并且点亮 ERR 指示灯。
为了使在控制数据区字 +7 至 +102 中任何修改有效,必须将简单通信单元从
“停止”切换到 “运行” 。在编辑完这些字后必须将单元从运行切换到停止,
并再从停止切换到运行。关于运行 / 停止数位的详细,参见第 36 页
元控制 (偏移:+
注 通信控制区 (读和写命令)和 CompoWay/F 读和写变量类型区是每个扫描周
期都读的,所以这个区编辑过后不需要将单元从停止到运行来回切换。
错误的地方然后再切换到运行。
句法错误是非致命错误,不需要将单元从 STOP 切换到 RUN 来清除,但非致
命错误也不是仅用消除错误原因就能清除的。
0)。
简单通信单
DM 区分配错误 在产生 DM 区分配错误时,可能是分配的 DM 区字超过了PC的 DM 区的范围。
在修正 DM 区分配后,复位简单通信单元的电源。
DM 区分配错误是一种致命错误,要通过关闭电源再重新接通来清除,仅仅排
除出错原因还不能清除错误。
29
Page 44

部件通信的注意事项 第 3-8 章
与所连接部件的通信响应延
迟
选择 RAM 写入模式或后备
模式
多个简单通信单元的 DM 区
设定
如果你使用的系统配置会造成简单通信单元和部件之间通信的明显的延时,例
如单元和部件之间使用无线通信就必须扩大通信超时的设定,通信超时设定可
设置为 500 ms 的倍数,最大监视时间为 5.0 s。设置的监视时间要与你的系统
相匹配。
注 正常情况下,不需要修改通信超时设定,一般使用设置值为 0。它对应的响应
监视时间为 500 ms。 关于通信超时设定详情参见第 36 页
(偏移:+
在选择 RAM 写入模式或后备模式时,由程序选择操作的命令,所以它只在一
次扫描内发送,但某些部件在接受到命令时,也将它写入非挥发内存中,如果
每个周期都接收命令也将降低非挥发内存的服务寿命。
当连接一个以上简单通信单元时,系统的设定要保证控制数据区和每个单元区
不会互相重叠。
0) 。
简单通信单元控制
30
Page 45

故障诊断 第 3-9 章
3-9 故障诊断
简单通信单元能够检测二种类型错误:致命错误造成 ERR 指示灯常亮和非致
命错误造成 ERR 指示灯闪烁。下表表示造成出错的可能的原因和清除故障的
方法。
3-9-1 致命错误 (ERR 指示灯常亮)
错误 可能的原因和纠正错误
不能与 CPU 单元建立通信。 检查 CPU 单元和简单通信单元中通信波特率和其它通信设定。改正设定
并将简单通信单元再次转 ON 。
与 CPU 单元之间出现通信错误。 噪声可能造成通信出错,如果怀疑噪声,使用可降低通信线上噪声的电缆
CPU 单元在运行模式下不能写入
数据。
出现监视定时器错误 ( 见注 )。 在简单通信单元状态字中指示监视定时器错误 (参见第 36 页
DM 分配错误 ( 见注 )。可能 DM 的分配超出 CPM2C的 DM 区的边界。
和接线方法,并重新接通简单通信单元。
检查一下 CPU 单元是否处于运行状态。如果是的,将 CPU 单元切换到监
控或编程模式,并重新接通电源。
简单通信单
元状态 (位移:+1)
这可能是干扰影响了简单通信单元的处理,如果怀疑是干扰,采取步骤减
少单元周围的干扰或屏蔽此单元。
关断电源再重新接通可以清除监视定时器错误。
在检测到 DM 分配错误时,在简单通信单元状态字中写入出错代码 “15”
(参见第 36 页
为恢复正常操作,要改正 DM 区分配并将单元从运行切换到停止,再从停
止重新切换到运行。关于运行 / 停止数位详见第 36 页
0
(偏移:+
)
)
。
简单通信单元状态 (位移:+1))。
简单通信单元控制
注 在简单通信单元状态字中指示监视定时器错误和 DM 分配错误。(详见第 36 页
简单通信单元状态 (位移:+1)
)。
31
Page 46

故障诊断 第 3-9 章
3-9-2 非致命错误 (ERR 指示灯闪烁)
错误 可能的原因和纠正措施
与部件的通信出错。 ( 见注 1)。 检查在部件内的通信设置是否与在简单通信单元内的设置一致,如果需
句法错误 ( 见注 2)。在 DM 设定中有错误时,将出现句法错误。
注 1. 关于通信错误的详情,可在响应监视区找到。在读数据时出现的错误详情
2. 句法错误表示在简单通信单元状态字中。(详见36页
要,修改设定。在造成通信出错的原因清除后,就将恢复正常操作。
噪声可能引起通信出错。如果怀疑噪声,在通信线上使用能减少噪声的电
缆和接线方法,在通信错误解决后就能恢复正常运行。
在检测到句法错误时,在 36 页
误代码 “02”,并且 DM 字地址被写入到句法错误 DM 地址字 ( 参见 37 页
句法错误
改正指出的 DM 字中的设定,并将单元从运行切换停止,然后在切换回
来,就能恢复正常运行。 关于运行 / 停止数位的详情参见 36 页
元控制 (偏移:+0)
参见 46 页
响应监视区 (偏移:+0)
页
DM
地址 (偏移:+2)
。
响应监视区 (偏移:+0)
。
简单通信单元状态 (偏移:+1)
)。
。在写数据时出现的错误详情参见 44
简单通信单元状态(偏
移:+1)
)。
中写入错
简单通信单
32
Page 47

本章说明 CPU 单元在 DM 区提供的与部件的接口。
4-1 数据内存 (DM) 分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4-2 共享区. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4-3 单独单元区. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
第4章
DM 区的分配
33
Page 48

数据内存 (DM) 分配 第 4-1 章
4-1 数据内存 (DM) 分配
下图表示单元的分配 DM 字的使用。
݅ѿ
(103 字)
ࠊ᭄
通用通信部件的自用区
CompoWay/F
䇏ব䞣㉏ൟ
ݭব䞣㉏ൟ
䇏᭄
ݭ᭄
( 最大 27 字 )
䇏᭄
( 最大 26 字 )
( 最大 27 字 )
ݭ᭄
( 最大 26 字 )
SYSWAY
( 温度控制器 : 11 字
数字面板表 : 18 字 )
( 温度控制区 : 9 字
数字面板表 : 10 字 )
34
Page 49

共享区 第 4-2 章
4-2 共享区
共享区用于设置和监视所有单元 (部件)可以共享的值。
控制数据区的结构 控制数据区包含 103 字,它用于控制简单通信单元的操作和监视单元的操作状
态。 不管所连接的单元有多少,都要确保有 103 字可供用于控制数据区。用
DM 起始地址开关 (SW2) 设置起始 DM 地址。详见 13
(SW2)。
注 用 DM 起始地址开关 (SW2) 和 DM 起始地址区设置 (SW3 针脚 9 和针脚 10) 这
个区中的第一个字。在使用一台以上简单通信单元时,控制数据所使用的 DM
区字不能与控制数据区重叠。
偏移 功能
+0
+1
+2
+3
+4
+5
+6
+7
+8
+9
+10
+11
+12
+100
+101
+102
简单通信单元控制
简单通信单元状态 *
句法错误 DM 地址 *
单元 0 至 7 的通信控制
单元 8 至 15 的通信控制
单元 16 至 23 的通信控制
单元 24 至 31 的通信控制
单元 0 通信类型
单元 0 读数据区起始地址
(单元 0 读变量类型区起始地址 *
单元 0 写数据区起始地址
(单元 0 写变量类型区起始地址 *
单元 1 通信类型
单元 1 读数据区起始地址
(单元 1 读变量类型区起始地址 *
单元 1 写数据区起始地址
(单元 1 写变量类型区起始地址 *
:
:
单元 31 通信类型
单元 31 读数据区起始地址
(单元 31 读变量类型区起始地址 *
单元 31 读数据区起始地址
(单元 31 读变量类型区起始地址 *
1
1
2
)
2
)
2
)
2
)
:
:
2
)
2
)
页
3.DM
起始地址开关
注 1. 这些字用来向 CPU 单元通报简单通信单元的状态。
2. 圆括号内是 CompoWay/F 通信的功能。
35
Page 50

共享区 第4-2章
简单通信单元控制
(偏移:+0)
位设定范围 功能
0 至 3
(数位
4 至 7
(数位
8 至 15
(数位 16
和 16
简单通信单元状态
( 位移 : +1)
出错情况 位 设定 范围 功能
出现错误
(位 15 为 ON)
运行 / 停止 1: 运行
0
16
)
通信超时 0 至 9
1
16
)
连接部件的数目 00 至 32
2
3
)
0 至 7
( 数位 16
和 16
0
1
)
8 至 11
16
2
)
(数位
12 至 15
16
3
)
(数位
错误代码
停止标记
出错标记
0: 停止
(BCD)
(BCD)
如果这个数位设置为 1 ,接通电源后,简单通信单元将起动与部件和 CPU
单元的通信。(如果出现致命错误,即使此数位为 1,此单元也不起动与部
件的通信)。
如果这个数位设置为 0,简单通信单元不与部件通信。
设置从简单通信单元到所连接部件的访问响应监视时间。超过时间设置为
500 ms 的倍数 (( 设定值 + 1) × 500 ms)。这个设定通常置为 0,即设定响应
监视时间为 500 ms。
指定简单通信单元连接的部件的数目,如果连接的部件数设置为 0,简单通
信单元将不与部件通信。
01, 02,
或 15
最右边二个数位是一个错误代码。
01: 监视定时器错误 (致命错误)
出现这种错误时,简单通信单元将停止所有通信,在写入
“简单通信单元状态”字后,点亮 ERR 指示灯。
02: 句法错误 (非致命错误)
出现这个错误时,简单通信单元停止与部件的通信。在 “句
法错误 DM 地址”字写入出现错误的 DM 地址后,闪烁 ERR
指示灯。
15: DM 分配错误 (致命错误)
在单元企图读或写在 CPU 不存在的一个 DM 地址时,出现这
种错误。出现错误后,简单通信单元将停止与部件的通信,
并点亮 ERR 指示灯。检查 PC 的 DM 区范围,并使 DM 区的
分配在此范围内。
0
8
如果出现错误将停止操作,并且此标记将转为 OFF。
值 8 (位 15 为 ON)表示在简单通信单元出现一个致命错误。
36
Page 51

共享区 第 4-2 章
出错情况 位 设定 范围 功能
无出错
15为OFF
(位
句法错误 DM 地址
(偏移 : +2)
范围 功能
0000 至 9999
(BCD)
0 至 7
)
(数位 16
和 16
8 至 11
(数位
12 至 15
(数位
简单通信单元指示出现句法错误的 DM 地址。
当检测出二个或多个句法错误时,此单元指示检测到的第一个 DM 地址。
单元编号 00 至 31
0
1
)
运行 / 停止标志0 或 1 简单通信单元在运行时,此标志为 ON ,在停止时此标志为
2
16
)
出错标志
3
16
)
(BCD)
0
指示完成通信的最后一个部件的单元编号,单元从这个部件读出
数据并将数据传送给 CPU 单元。在刚接通电源还未完成与任一部
件的通信时,这些数位的内容是 00。
在下列条件下,这些数位的内容为 00:
1) 在简单通信单元控制字 (偏移:+0)“连接的部件数目”设置
为 00 时。
2) 在简单通信单元控制字 (偏移:+0)“运行 / 停止” 设置,设
定为 00 时。
3) 在单元的通信类型字内设置为 “无连接单元”时。
OFF。
值 0 ( 位 15 为 OFF) 表示在简单通信单元没有出现过致命错误。
在下列情况,单元无能力通知 CPU 单元已经出现了致命错误:
1) CPU 单元在运行模式并且不能写入。
2) 在与 CPU 单元的通信出现错误。
3) 在 PC 设定 (DM 6602) 中设置程序内存写保护。
在出现上述三种错误之一时,简单通信单元将停止所有通信,并
点亮 ERR 指示灯。
通信控制位
(偏移 : +3, +4, +5, 和 +6)
位偏移 +3
(单元 0 至 7)
0
单元 7 读命令位 单元 15读命令位 单元 23 读命令位 单元 31 读命令位
1
单元 7 写命令位 单元 15 写命令位 单元 23 写命令位 单元 31 写命令位
2
单元 6 读命令位 单元 14 读命令位 单元 22 读命令位 单元 30 读命令位
3
单元 6 写命令位 单元 14 写命令位 单元 22 写命令位 单元 30 写命令位
4
单元 5 读命令位 单元 13 读命令位 单元 21 读命令位 单元 29 读命令位
5
单元 5 写命令位 单元 13 写命令位 单元 21 写命令位 单元 29 写命令位
6
单元 4 读命令位 单元 12 读命令位 单元 20 读命令位 单元 28 读命令位
7
单元 4 写命令位 单元 12 写命令位 单元 20 写命令位 单元 28 写命令位
8
单元 3 读命令位 单元 11 读命令位 单元 19 读命令位 单元 27 读命令位
9
单元 3 写命令位 单元 11 写命令位 单元 19 写命令位 单元 27 写命令位
10
单元 2 读命令位 单元 10 读命令位 单元 18 读命令位 单元 26 读命令位
11
单元 2 写命令位 单元 10 写命令位 单元 18 写命令位 单元 26 写命令位
12
单元 1 读命令位 单元 9 读命令位 单元 17 读命令位 单元 25 读命令位
13
单元 1 写命令位 单元 9 写命令位 单元 17 写命令位 单元 25 写命令位
14
单元 0 读命令位 单元 8 读命令位 单元 16 读命令位 单元 24 读命令位
15
单元 0 写命令位 单元 8 写命令位 单元 16 写命令位 单元 24 写命令位
偏移 +4
(单元 8 至 15)
偏移 +5
(单元 16 至 23)
偏移 +6
(单元 24 至 31)
37
Page 52

共享区 第4-2章
位范围 功能
写命令位 0: 写禁止
1: 允许写
读命令位 0: 读禁止
1: 允许读
注 数据写入温度控制器的非挥发存储器的次数是有限制的。在频繁向温度控制器
将这个位设置为 1 以允许操作命令,可将数据写入对应单元编号的部件。当这个
位被置为 0 时,不允许写入数据。
在写入数据出现错误时,在写入数据区的响应监视区写入响应的错误代码。(详
见 46 页
将这个位设置为 1, 以允许从响应的单元编号部件读出数据,这个位被置为 0 时,
不允许读。
在读数据出现错误时,在读数据区的响应监视区写入响应的错误代码。(详见 44
页
“响应监视区”
“响应监视区”
)。
)。
发送数据时,或者在完成写入后将写命令位置为 0, 或者将对温度控制器的写
模式设置为对 RAM 写入模式。虽然执行仅一个扫描周期的命令去选择 RAM 写
入模式和后备模式。某些设备还会每次都将选择的模式写入非挥发存储器。如
果每周期都做选择也会很快耗尽非挥发存储器的寿命。
单元通信类型
(偏移 : +7, +10, +13, ... ,
对给定的单元号使用下列方程式计算偏移量:
偏移 = 7 + (3 × 单元编号)
+97, 和 +100)
位设置范围 功能
0 至 7
(数位 16
1
和 16
)
8 至 11
(数位
16
12 至 15
(数位
16
通信规约
0
命令组
(仅对 SYSWAY
2
)
有效)
段信息
(仅对 SYSWAY
3
)
有效)
00, 01,
或 02
1 至 5
(BCD)
0, 1, 或 2 这个设定仅在指定通信规约为 SYSWAY (01) 时有效。段信息指定用 SYSWAY
如果连接了一个部件,要指定连接部件的通信规约 (SYSWAY 或 CompoWay/
F) 。
00: 无连接单元
01: SYSWAY
02: CompoWay/F
如果指定的值非 00 ,01 ,或 02 , 将出现句法错误并且这个字的设定无效。
这个设定仅在指定通信规约为 SYSWAY (01) 时有效。指定 SYSWAY 时,命
令组决定读或写数据时读 / 写哪些值。
在下列情况命令组设定无效:
1) 通信规约设置为 02 (CompoWay/F)。
2) 通信规约设置为 00 (无连接的单元)。
3) 通信规约设置为 01 (SYSWAY),但命令组设定不在允许范围内 (1 至 5)。
规约连接的时温度控制器或数字面板表:
1) 通信规约设置为 02 (CompoWay/F)。
2) 通信规约设置为 00 (无连接的单元)。
3) 通信规约设置为 01 (SYSWAY),但段信息设定不是 1 或 2。
注 命令组和段信息设定仅在通信规约设置为 SYSWAY 是有效。当通信规约设置
为 CompoWay/F 时,这些设定都无效。
38
Page 53

共享区 第 4-2 章
下表展示对应每个命令组和段信息设定的组合所要读和写的数据。
段信息 存取 数据 命令组
12345
1: 温度控制器 读 当前温度 有有有有有
状态 有有有有有
目标温度 有有有有有
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热器电流
加热器当前状态
写 目标温度 有有有有有
操作命令
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热器烧断检测值
2: 数字面板表 读 显示值 有有有有有
显示值状态 有有有有有
峰值保持
峰值保持状态
最低值保持
最低值保持状态
比较值 (HH)
比较值 (H)
比较值 (L)
比较值 (LL)
写 操作命令
比较值 (HH)
比较值 (H)
比较值 (L)
比较值 (LL)
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
--- --- --- ---
---
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
---
---
---
---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
有有有有
有有
有有
有有
有有
有有有
有有有
有有
有有
有有
有有有
有有有
有有
有有
有有
---
---
---
---
有有
有有
有有
有有
有
---
有有
有有
有有
有有
有
有
有
有
有
有
有
有
39
Page 54

共享区 第4-2章
读数据区或读变量类型区的
起始地址
(偏移 : +8, +11, ... , +98, 和
+101)
设定 范围 功能
读数据区的起始地
址
(SYSWAY 规约)
读变量类型区的起
始地址
(CompoWay/F 规
约)
0000 至 9999 BCD
(DM 地址)
0000 至 9999 BCD
(DM 地址)
注 1. 不能指定控制数据区内的字。
写数据区或写入变量类型区
的起始地址
(偏移 : +9, +12, ... , +99, 和
+102)
设定 范围 功能
写数据区的起始地
址
(SYSWAY 规约)
写变量类型区的起
始地址
(CompoWay/F 规
约)
0000 至 9999 BCD
(DM 地址)
0000 至 9999 BCD
(DM 地址)
对给定的单元编号用下列公式计算偏移:
偏移 = 8 + (3 × 单元编号)
指定存储从部件读出数据的在 CPU 单元的 DM 区中 DM 起始地址。
如果在这个字中指定的起始地址不是 BCD 码,将出现句法错误。
指定表示要从部件读出的变量的字的起始 DM 地址。
要从部件中读出的数据由变量类型和写入在变量类型区的地址决定。
如果在这个字内指定的起始地址不是 BCD 码,将出现句法错误。
2. 在使用一个以上简单通信单元时,为每个单元指定不同的 DM 区。
对给定的单元编号使用下列公式计算偏移:
偏移 = 9 + (3 × 单元编号)
指定 CPU 单元的 DM 区中包含要写入部件的数据的起始 DM 地址。
如果在这个字中指定的起始地址不是 BCD 码,将出现句法错误。
指定表示要向部件写入哪个部件变量的字的起始 DM 地址。
要写入部件的数据由变量类型和写入在变量类型区的地址决定。
如果在这个字内指定的起始地址不是 BCD 码,将出现句法错误。
注 1. 不能指定控制数据区内的字。
2. 在使用一个以上简单通信单元时,为每个单元指定不同的 DM 区。
40
Page 55

单独单元区 第 4-3 章
4-3 单独单元区
单独单元区用于分别监视和设置每个连接的部件,对
单独单元区的结构不相同。
CompoWay/F 通信的区域结构
读变量类型
(最大 27 字)
在指定 CompoWay/F 作为部件的通信规约时,这个 “读变量类型区”包含要
读的变量类型和变量的 SV 和 PV 值的地址设置。
+0
+1
+2
+3
+4
+5
+23
+24
+25
+26
读出项目的数目 (偏移: +0)
偏移 内容
读出项目的数目
保留
读数据区的起始地址
变量 1 类型
变量 1 地址
变量 2 类型
:
:
变量 11 类型
变量 11 地址
变量 12 类型
变量 12 地址
:
:
CompoWay/F 和SYSWAY
范围 功能
0001 至 0012
(BCD)
指定你希望读出的变量的数目。例如,如果 “读出的项目数”设置
为 0002,那么变量类型 1 和变量类型 2 内的变量组将被读出。
如果在这个字中指定的项目数不在 0001 和 0012 BCD 之间,将出
现语法错误。
保留 (偏移:+1)
范围 功能
0000
这个字始终置为 0000。
读数据区的起始地址 (偏移:+2)
范围 功能
0000 至 9999
(BCD)
在 CPU 单元的 DM 区中指定存储从部件中读出数据的起始 DM 地
址。
注 1. 不能指定控制数据区内的字。
2. 在使用一个以上简单通信单元时,为每个单元指定不同的 DM 区。
41
Page 56

单独单元区 第 4-3 章
变量类型 (偏移 : +3, +5, ... , +23, 和 +25)
对给定编号的变量按下列公式计算偏移量:
偏移量 = 1 + (2 × 变量编号)
范围 功能
00C0 至 00CF
(Hex)
注 根据部件不同,除非修改变量类型,有些变量类型不能写入。详请参见部件手
册。
变量地址 (偏移: +4, +6, ... , +24, 和 +26)
对给定编号的变量按下列公式计算偏移量:
偏移 = 2 + (2 × 变量编号)
范围 功能
0000 至 FFFF
(Hex)
设置你要读出的变量类型。
在每种部件内变量类型是预先定好的,所以应按部件手册找出实际
的变量类型。
如果在这个字中所指定的变量类型不在 00C0 和 00CF Hex 之间,
将出现句法错误。
设置你要读出的数据的变量地址。
在每个部件中变量地址是预先安排好的,所以应按部件的手册找出
实际的变量地址。
写变量类型区
( 最大 27 字 )
当指定 CompoWay/F 作为部件的通信规约时,这个 “写入变量类型区”包含
变量类型和要写入 SV 的变量地址设定。
偏移 内容
+0
+1
+2
+3
+4
+5
+23
+24
+25
+26
写入项目数
操作命令
写入数据区得起始地址
变量 1 类型
变量 1 地址
变量 2 类型
:
:
变量 11 类型
变量 11 地址
变量 12 类型
变量 12 地址
:
:
写入项目数目 (偏移: +0)
范围 功能
0000 至 0012
(BCD)
指定你要写入的变量数目。
例如,“写入项目数”被设置为 0002 时,变量类型 1 和变量类型 2
内的变量将被写入。
如果 “写入项目数”设置为 0000 时,不会有变量写入。这时,只
有操作命令是有效的。
如果在这个字中指定的项目数不在 0000 和 0012 BCD 之间,将出
现句法错误。
42
Page 57

单独单元区 第 4-3 章
操作命令 (偏移:+1)
范围 功能
0000 或 0001 指定为 0000 时,写入数据区的操作命令被禁止。
指定为 0001 时,允许写入数据区的操作命令。
如果操作命令不是 0000 或 0001,将出现句法错误。
注 数据写入温度控制器非挥发存储器的次数是有限制的,在频繁向温度控制器发
送数据时,或者在完成写入后将命令位 设置为 0,或者将对温度控制器的写入
模式设置为对 RAM 写入模式。虽然执行仅一个扫描周期的命令去选择 RAM 写
入模式和后备模式,某些设备会每次将选择的模式写入非挥发存储器,如果每
周期都做选择,也会很快耗尽非挥发存储器的寿命。
写数据区的起始地址 (偏移:+2)
范围 功能
0000 至 9999
(BCD)
注 1. 不能指定控制数据区内的字。
2. 在使用一个以上简单通信单元时,为每个单元指定不同的 DM 区。
变量类型 (偏移:+3, +5, ... , +23, 和 +25)
对给定编号的变量按下列公式计算偏移量:
偏移 = 1 + (2 × 变量编号)
在 CPU 单元的 DM 区中指定包含要写入部件的数据的起始 DM 地
址。
范围 功能
00C0 至 00CF
(Hex)
给定你要写入的变量数据类型。
每一个部件的变量类型是预先确定的,所以要按部件的手册找出实
际变量类型。
如果在这个字中指定的变量类型不在 00C0 和 00CF Hex 之间,将
出现句法错误。
注 1. 不能指定控制数据区内的字。
2. 在使用一个以上简单通信单元时,为每个单元指定不同的 DM 区。
3. 根据部件品种,某些变量类型时不能写入的,除非改变类型。详见部件的
手册。
变量地址 (偏移: +4, +6, ... , +24, 和 +26)
对给定编号的变量按下列公式计算偏移量:
偏移 = 2 + (2 × 变量编号)
范围 功能
0000 至 FFFF
(Hex)
设定你要写入的数据的变量地址。
在每种部件内,变量地址是预先确定的,所以要按部件手册找出实
际变量的地址。
43
Page 58

单独单元区 第 4-3 章
读入数据区
( 最大 26 字 )
在 “读变量类型区”指定“读入数据区”的起始地址,这个 “读入数据区”存
储从部件读入的变量数据。
偏移 内容
+0
+1
+2
+3
+4
+5
:
:
+22
+23
+24
+25
响应监视器
部件状态
变量 1 读入数据 (低字节)
变量 1 读入数据 (高字节)
变量 2 读入数据 (低字节)
变量 2 读入数据 (高字节)
: : :
: : :
变量 11 读入数据 (低字节)
变量 11 读入数据 (高字节)
变量 12 读入数据 (低字节)
变量 12 读入数据 (高字节)
响应监视区 (偏移: +0)
该区包括与部件通信读入变量时的通信结果。
1,2,3... 1. 结束代码 = 00
当功能的结束代码为 00 时,“响应监视区”包含响应代码。
响应代码 含义
0000
0401
1001
1002
1101
1103
1104
1003
110B
1100
2203
指示正常完成
不支持的命令
命令过长
命令长度过短
区类型错误
起始地址不在范围内错误
结束地址超出范围错误
元件数与数据量不匹配
响应长度过长
参数错误
操作出错
44
2. 结束代码 ≠ 00
在出现错误并且功能代码不等于 00 的值时,“响应监视区”包含结束代码
(出错代码)。前两位数字 FF 表示在传送 CompoWay/F 命令时出现错误。
出错代码 含义
FF04
FF0D
FF10
FF11
FF12
FF13
FF14
FF15
FF16
FF18
FF97
地址溢出
不能执行命令
校验错
帧错误
溢出错误
BCC 错误
格式错误
数字数据错误
分部地址错误
帧长度错误
响应数据 BCC 错误
Page 59

单独单元区 第 4-3 章
3. 出现超时错误。
超时代码 含义
E999
部件状态 (偏移 : +1)
3
16
部件状态
包含部件的控制器的状态
读入数据 (偏移 : +2, +4, ... , +22, 和 +24)
在偏移 2 × n (n = 变量编号)起始的二个字中包含读入数据。
偏移 范围 功能
2 × n
(n = 变量编号 )
(2 × n) + 1
(n = 变量编号 )
0000 至 FFFF
(Hex)
0000 至 FFFF
(Hex)
这个从部件读入的变量数据其值可从 0000 0000 至 FFFF FFFF。如果出现通
信故障,读入的值为 0000 0000。下列例子表示在读变量 2读入数据时,出现
了通信错误时读入数据区的内容。
• 响应监视区: 包含错误代码。
• 状态: 包含控制器状态。
• 读入数据 1: 包含从部件读入的数据。
• 读入数据 2:包含0000 0000。
• 其余读入项: 包含 0000 0000。
表示没有得到部件的响应。
2
16
包含数据的低位的二个字节 ( 最右边 )。
包含数据的高位的二个字节 ( 最左边 ) 。
16
1
16
0
写数据区
(最大 26 字)
注 1. 由于在 CompoWay/F 通信中没有传送部件的十进制小数点位置,这个十进
制小数点位置要由用户来管理。
2. 数字面板表 (K3N@) 使用 BCD 格式。详见所用组件的手册。
在 “写入变量类型区”中指定 “写入数据区”的起始地址。在这个 “写入数
据区”中存储你想写入部件的变量数据。
偏移 内容
+0
+1
+2
+3
+4
+5
+22
+23
+24
+25
响应监视
操作命令
变量 1 写入数据 (低位 2 字节)
变量 1 写入数据 (高位 2 字节)
变量 2 写入数据 (低位 2 字节)
变量 2 写入数据 (高位 2 字节)
:
:
变量 11 写入数据 (低位 2 字节)
变量 11 写入数据 (高位 2 字节)
变量 12 写入数据 (低位 2 字节)
变量 12 写入数据 (高位 2 字节)
:
:
响应监视区 (偏移:+0)
该区包含与部件通信写入变量时的通信结果。
45
Page 60

单独单元区 第 4-3 章
1,2,3... 1. 结束代码 = 00
在功能的结束代码为 00 时,“响应监视区”包含响应代码。
响应代码 含义
0000
0401
1001
1002
1101
1103
1104
1003
110B
1100
3003
2203
2. 结束代码 ≠ 00
在出现错误并且功能的结束代码是 00 以外的数值时,“响应监视区”包含
结束代码 ( 错误代码 )。前二个数位的值 FF 表示在传送 CompoWay/F 命
令时出现一个错误。
指示正常完成
不支持的命令
命令长度过长
命令长度过短
区类型错误
起始地址超出范围错误
结束地址超出范围错误
元件数与数据量不匹配
响应长度过长
参数错误
只读错误
操作错误
错误代码 含义
FF04
FF0D
FF10
FF11
FF12
FF13
FF14
FF15
FF16
FF18
FF21
FF97
3. 出现的超时错误
超过代码 含义
E999
地址溢出
不能执行命令
奇偶校验错误
帧错误
溢出错误
BCC 错误
格式错误
数字数据错误
子地址错误
帧长度错误
非挥发内存写入错误
响应数据 BCC 错误
指示没有得到部件的响应。
46
Page 61

单独单元区 第 4-3 章
操作命令 (偏移: +1)
关于各种 CompoWay/F 通信功能的命令代码详见部件的操作手册。
位功能
0 至 7
(数位 16
8 至 15
(数位 16
0
和 16
2
和 16
注 1. 在指定 0600 作为操作命令和相关信息的扫描周期内不能写入 SV。
2. 仅在一个扫描周期执行选择 RAM写入模式和后备模式。有些设备每次都将
选择的模式写入非挥发存储器,如果每个周期都做选择,那么很快就会耗
尽非挥发存储器的寿命。
写入数据 ( 偏移: +2, +4, ... , +22, 和 +24)
写入数据包含在偏移为 2 × n (n = 变量编号 ) 起始的二个字内。
偏移 范围 功能
2 × n
(n = 变量编号 )
(2 × n) + 1
(n = 变量编号 )
相关信息
1
设置 CompoWay/F 命令代码要求的相关信息。
)
命令代码
3
按部件手册所述设置 CompoWay/F 命令代码。
)
0000 至 FFFF
(Hex)
0000 至 FFFF
(Hex)
将你希望写入相应部件的 SV 数据的低位 ( 最右
边 ) 二个字节存入。
将你希望写入相应部件的 SV 数据的高位 ( 最左
边) 二个字节存入。
如果出现通信错误,将停止正在进行的写入操作,并将执行通信通信设备的下
一个操作。
下列例子表示在写入变量 2 时,出现通信错误,此时写入操作的结果。
• 响应监视区: 包含错误代码。
• 操作命令: 不能执行操作命令。
• 变量 1 写入数据: SV 将正常写入。
• 变量 2 写入数据: SV 不能写入。
• 其余写入项: SV 不能写入。
注 1. 由于在 CompoWay/F 通信中不能传送十进制小数点的位置,十进制小数点
的位置必须由用户管理。
2. 数字面板表 (K3N@)使用BCD 格式。详见所用模块的手册。
47
Page 62

单独单元区 第 4-3 章
SYSWAY 通信区的结构
读入数据区
温度控制器
(11 字 )
在指定 SYSWAY 为部件的通信规约时,将可以从温度控制器读出下列数据。
在 “控制数据区”指定 “读出数据区”的起始地址。选择 5 个命令组中任一
个,指定要读出的哪一个 PV 和 SV。 不管选哪一个命令组,都将为读入数据区
分配 11 个 DM 字。
偏移 数据 命令组
12345
+0
+1
+2
+3
+4
+5
+6
+7
+8
+9
+10
响应监视器 读 读 读 读 读
当前温度 读 读 读 读 读
状态 读读读读读
目标温度 读 读 读 读 读
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热电流监视
加热电流状态
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
--- --- --- ---
读读读
读读读
读读
读读
读读
读
读
响应监视区 (偏移: +0)
无论使用 SYSWAY 或 CompoWay/F,响应监视区的结构是相同的。关于响应
监视区详情,请参见 44 页
响应监视区
。
读入数据 (偏移: +1, +3, +4, +5, +6, +7, +8, 和 +9)
从温度控制器读入的每个数据字,数值范围都是从 0000 至 FFFF。负值表示为
2 的补数。
如果出现通信错误,数据字的值就为 0000。下列例子表示在以命令组 1 读目标
温度时出现了错误时,读入数据的内容。
• 响应监视区: 包含错误代码。
• 当前温度: 包含从温度控制器读入的数据。
• 状态: 包含从温度控制器读入的状态。
• 目标温度: 包含 0000。
48
注 由于在 SYSWAY (X 格式 ) 通信中不传送温度控制器的十进制小数点的位置,
所以要由用户自己管理十进制小数点的位置。
状态 (偏移 : +2 和 +10)
在读当前温度时,读入数据区 +2 偏移字包含此状态。在读加热器电流时,+10
偏移字包含加热器电流状态。详细的状态参见温度控制器操作手册。
Page 63

单独单元区 第 4-3 章
读入数据区:
数字面板表
(18 字)
当选用 SYSWAY 作为部件的通信规约时,将从数字面板表读出下列数据。
在 “控制数据区”内指定“读入数据区”的起始地址。选择 5 个命令组中任意
一个,指定要读出的 PV 值和 SV 值, 不管选用哪一个命令组,都将为读入数
据区分配 18 个 DM 字。
偏移 数据 命令组
1234*5
+0
+1 and +2
+3
+4 and +5
+6
+7 and +8
+9
+10 and +11
+12 and +13
+14 and +15
+16 and +17
响应监视区 读 读 读 读 读
显示值 读读读读读
显示值状态 读 读 读 读 读
峰值保持
峰值保持状态
底值保持
底值保持状态
比较值 (HH)
比较值 (H)
比较值 (L)
比较值 (LL)
---
---
---
---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
读读
读读
读读
读读
---
---
---
---
读读
读读
读读
读读
注 在选择命令组 4 时, 偏移 +4 至 +9 的字将被清另为 0000。
响应监视区 (偏移:+0)
无论使用 SYSWAY 或 CompoWay/F 通信,响应监视区的结构相同。详见 44
页
响应监视区
。
读入数据
偏移:
+1, 4, 7, 10, 12, 14, 16
偏移:
+2, 5, 8, 11, 13, 15, 17
3
16
读入数据低位字节 (二进制,二进制补码表示负值)
0000 至 FFFF Hex
3
16
读入数据高位字节 (二进制,二进制补码表示负值)
0000 至 FFFF Hex
16
16
2
2
16
16
1
1
16
16
读
读
读
读
0
0
从面板表读出的每个二字长的值都是一个从 0000 0000 至 FFFF FFFF 的带符
号二进制数据,它的二进制补码表示负值。如果出现通信错误,这些字的值将
为 0000 0000。下列例子表示在用命令组 1 读显示值中出现通信错误时,读入
数据区的内容。
• 响应监视区: 包含错误代码。
• 显示值: 为 0000 0000。
• 显示值状态: 为 0000。
注 由于在 SYSWAY (X 格式 ) 通信中不能传送数字面板表的十进制小数点的位
置,所以十进制小数点的位置必须由用户管理。
状态 (偏移: +3, +6, 和 +9)
在分别读入显示值,峰值,保持值或低限保持值时,相应的读入数据区的 +3,
+6 和 +9 偏移字包含状态。关于状态值详情,请参见
第 44 页数字面板表
的操作
手册。
49
Page 64

单独单元区 第 4-3 章
写入数据区:
温度控制器
(9 字)
在指定 SYSWAY 作为部件的通信规约时,将向温度控制器写入下列数据。
在 “控制数据区”内指定“写入数据区”的起始地址,选择 5 个命令组中任一
个指定要写入的 SV 值。无论选择哪个命令组,都分配 9 个 DM 字的写入数据
区。
偏移 数据 命令组
12345
+0
+1
+2
+3
+4
+5
+6
+7
+8
响应监视区 写入 写入 写入 写入 写入
目标温度 写入 写入 写入 写入 写入
操作命令
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热器烧断监测值
---
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
写入 写入 写入 写入
写入 写入 写入
写入 写入 写入
写入 写入
写入 写入
写入 写入
写入
响应监视区 (偏移: +0)
无论使用 SYSWAY 或 CompoWay/F 通信,响应监视区的结构相同。关于响应
监视区详见 46 页
“响应监视区”
。
写入数据 (偏移: +1, +3, +4, +5, +6, +7, 和 +8)
设置要写入温度控制器的数据字,作为二进制数据,用 2 的补码表示负值。
如果在写入数据时出现一个通信错误,剩下的写入数据将不再写入,将接着执
行通用通信设备的下一步处理。错误代码将写到响应监视区。
下面的例子表示在以命令组 2 写入目标温度中出现一个通信错误时,写入操作
的结果。
• 响应监视区: 包含错误代码。
• 目标温度: SV 值尚未写入。
• 操作命令: 操作命令未被写入。
注 由于在 SYSWAY (X 格式)通信中不能传送十进制小数点的位置,所以十进
制小数点的位置必须由用户自己管理。
操作命令 (偏移: +2)
将操作命令代码 (0000 至 0005)存入这个字。在选择包含此操作命令的命令
组时,相应的操作命令将发送到温度控制器。
命令代码 操作
0000
0001
0002
0003
0004
0005
不执行操作命令。(空操作)
停止自调整。
起动自调整。
选择后备模式。
选择 RAM 写入模式。
保存运行 / 调整 SV。
注 1. 不能在指定为 “起动自调整”的扫描周期写入 SV。
2. 只有 E5EK, E5AK 和 E5AF 型号能起动和停止自调整。
3. 对温度控制器的非挥发存储器的数据写入次数是有限制的。在向温度控制
器频繁发送数据时,在写入完成后应立即将写入命令位设置为 0 ,或将对
温度控制器的写入模式设置为 RAM 写入模式。虽然只有一个扫描周期执行
选择RAM写入模式和后备模式。 某些设备每次都将选择的模式写入非挥发
50
Page 65

单独单元区 第 4-3 章
存储器,如果每个扫描周期都做选择的话,也将很快耗尽非挥发存储器的
寿命。
写入数据区:
数字面板表
(10 字)
在指定 SYSWAY 作为部件的通信规约时,下列数据将写入数字面板表。
在 “控制数据区”内指定“写入数据区”的起始地址,可选择 5 个命令组中任
一个来指定要写入的 SV 值。无论选择哪个命令组都将分配 10DM 字作为写入
数据区。
偏移 数据 命令组
12345
+0
+1
+2 和 +3 比较值 (HH)
+4 和 +5 比较值 (H)
+6 和 +7 比较值 (L)
+8 和 +9 比较值 (LL)
响应监视区 写入 写入 写入 写入 写入
操作命令
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
写入
---
写入 写入
写入 写入
写入 写入
写入 写入
写入
响应监视区 ( 偏移:+0)
无论使用 SYSWAY 或 CompoWay/F 通信响应监视区的结构相同。关于响应监
视区详见 46 页
“响应监视区”
。
写入数据
偏移:
+2, 4, 6, 8
偏移:
+3, 5, 7, 9
3
16
写入数据低位字节 (二进制,用 2 的补码表示负值)
0000 至 FFFF Hex
3
16
写入数据高位字节 (二进制,用 2 的补码表示负值)
0000 至 FFFF Hex
16
16
2
2
16
16
1
1
16
16
0
0
将要写入数字面板表的数据字设置为二进制,用
2 的补码表示负值。
51
Page 66

单独单元区 第 4-3 章
如果在写入数据时出现通信错误,余下的写入数据不再写入,将执行通用通信
设备的下一步处理。错误代码将写入响应监视区。
下列例子表示在命令组 4写入比较值 (H) 中发生通信错误时,写入操作的结果。
• 响应监视区: 包含错误代码。
• 比较值 (HH): SV 将正常写入。
• 比较值 (H): 不能写入 SV 。
• 比较值 (L): 不能写入 SV 。
• 比较值 (LL): 不能写入 SV 。
注 由于在 SYSWAY(X 格式)通信中不传送数字面板表的十进制小数点位置,所
以十进制小数点的位置要由用户管理。
操作命令 (偏移:+2)
操作命令代码 (0000 至 0004) 存入这个字。在选择包含操作命令的一个命令
组时,相应的操作命令将发送到数字面板表。
命令代码 操作
0000
0001
0002
0003
0004
不执行操作命令 (空操作)
复位
选择后备模式
选择 RAM 写入模式
保存设定 / 调整值
注 数据写入温度控制器的非挥发存储器的次数是有限制的,在向温度控制器频繁
发送数据时,应在完成写入后立即将写入命令位设置为 0 ,或将对温度控制器
的写入模式设置为 RAM 写入模式。虽然只在一个扫描周期内执行选择 RAM 写
入模式和后备模式。某些设备每次都将选择的模式写入非挥发存储器。如果每
个扫描周期都做选择的话,也将很快耗尽非挥发存储器的寿命。
52
Page 67

附录 A
数据刷新周期 ( 参考数据 )
数据刷新周期
下表表示 CJ 系列 CPU 单元对应各种通信条件时的数据刷新时间。实际的周期时间受系统配置、用户程
序大小的影响,所以这些值仅供参考。
通信规约 部件数目 波特率 (bps)
上位机 / 部件
CompoWay/F 16 9,600/9,600 12 × 16 = 192 12 × 16 = 192 --- 50 s
19,200/19,200 12 × 16 = 192 12 × 16 = 192 --- 33 s
57,600/19,200 12 × 16 = 192 12 × 16 = 192 --- 30 s
8 19,200/38,400 12 × 8 = 96 12 × 8 = 96 --- 14 s
57,600/38,400 12 × 8 = 96 12 × 8 = 96 --- 12 s
4 9,600/9,600 1 × 4 = 4 --- --- 2 s
19,200/19,200 1 × 4 = 4 --- --- 1 s
57,600/38,400 1 × 4 = 4 --- --- 1 s
SYSWAY 16 9,600/9,600
19,200/19,200
57,600/19,200
4 9,600/9,600
19,200/19,200
57,600/19,200
读入数据项 写入数据项 命令组 刷新周期
12 × 16 = 192 --- --- 26 s
--- 1 × 16 = 16 --- 6 s
12 × 16 = 192 --- --- 17 s
1 × 16 = 16 --- --- 4 s
--- 1 × 16 = 16 --- 4 s
12 × 16 = 192 --- --- 15 s
1 × 16 = 16 --- --- 3 s
--- 1 × 16 = 16 --- 3 s
12 × 8 = 96 --- --- 7 s
1 × 8 = 8 --- --- 2 s
12 × 8 = 96 --- --- 6 s
1 × 8 = 8 --- --- 1.5 s
--- 1 × 8 = 8 --- 1.5 s
--- 1 × 4 = 4 --- 1 s
有有
有无
无有
有有
有无
无有
有有
有有
有无
无有
无无
有无
无有
有无
有无
419 s
410 s
13 s
414 s
47 s
12 s
413 s
14 s
12 s
46 s
11 s
11 s
11 s
42 s
11 s
注 1. 由于部件和 CPU单元的通信响应时间不是固定的,所以刷新周期也是不固定的。上述表格中的刷新周
期是平均时间。
2. 在 SYSWAY 通信时,读入数据项目数和写数据项目数由所选择的命令组决定。
53
Page 68

数据刷新周期 ( 参考数据 ) 附录 A
计算数据刷新周期
可用下列公式计算数据刷新周期,实际周期还决定于系统配置和用户程序大小,所以这些公式仅供参考。
CompoWay/F
数据刷新周期 (Td)=
Tps+(Tcr 1
目 ) + 部件的读 / 写时间 [秒 ]
× 读入部件数目)+ 部件的读时间 + (Tcw 1× 写部件的数目 ) + 部件写入时间 + (Tcr w × 读 /写部件数
部件读时间 = Tcr 2
Tcr 2
( 对每个要读的部件 )
部件写入时间 = Tcw 2
Tcw 2
( 对每个要写入的部件 )
部件的读 / 写时间 = Tcr 2
Tcr 2
Tcr 2
( 对每个要读 / 写的部件 )
× ( 读项目数 − 1) + Tcr 2 × ( 读项目数 −1) + ...... +
× ( 读项目数 − 1)
× ( 写入项目数 −1) + Tcw 2 × ( 写入项目数 −1) + ...... +
× ( 写入项目数 −1)
× ( 读项目数 −1) + Tcw 2 × ( 写入项目数 −1) +
× ( 读项目数 −1) + Tcw 2 × ( 写入项目数 −1) +...... +
× ( 读项目数 −1) + Tcw 2 × ( 写入项目数 −1)
CJ 系列 CPU 单元
波特率 (bps)
上位机 / 部件
9600/9600 0.19 0.36 0.11 0.33 0.11 0.69
19200/19200 0.12 0.24 0.07 0.21 0.08 0.45
19200/38400 0.13 0.21 0.06 0.20 0.06 0.41
57600/19200 0.07 0.19 0.07 0.15 0.07 0.34
57600/38400 0.08 0.16 0.05 0.13 0.05 0.30
Tps Tcr1 Tcr2 Tcw1 Tcw2 Tcrw
CS 系列 CPU 单元
波特率 (bps)
上位机 / 部件
9600/9600 0.19 0.35 0.10 0.33 0.10 0.67
19200/19200 0.12 0.23 0.07 0.21 0.07 0.45
19200/38400 0.13 0.21 0.05 0.20 0.05 0.41
57600/19200 0.07 0.19 0.06 0.16 0.06 0.34
57600/38400 0.09 0.17 0.05 0.14 0.05 0.31
Tps Tcr1 Tcr2 Tcw1 Tcw2 Tcrw
CQM1H CPU 单元
波特率 (bps)
上位机 / 部件
9600/9600 0.17 0.35 0.12 0.32 0.12 0.68
19200/19200 0.10 0.23 0.08 0.20 0.08 0.42
19200/38400 0.11 0.20 0.07 0.18 0.06 0.38
Tps Tcr1 Tcr2 Tcw1 Tcw2 Tcrw
54
Page 69

数据刷新周期 ( 参考数据 ) 附录 A
CPM2A CPU 单元
波特率 (bps)
上位机 / 部件
9600/9600 0.15 0.34 0.12 0.30 0.12 0.63
19200/19200 0.08 0.21 0.07 0.17 0.08 0.38
19200/38400 0.08 0.18 0.06 0.16 0.06 0.34
例子: 下面计算是针对 CJ 系列 CPU 单元,在上位机的波特率为 57,600bps ,与部件的波特率为 38,400bps 连
接 8 台 E5ZN 部件。其中 4 个部件一组 ( 组 1),读出 2 个字,其它 4 个 ( 组 2) 读出 2 个字和写入 1 个字。
数据刷新周期 (Td)
= [ 组 1 时间 ] + [ 组 2 时间 ]
= [Tps + (Tcr1
= [0.08 + (0.16
= 2.32
Td = 2.3 s
Tps Tcr1 Tcr2 Tcw1 Tcw2 Tcrw
× 4) + (Tcr2 × (2 − 1)) × 4] + [(Tcrw × 4) + (Tcr2 × (2 − 1)) + (Tcw2 × (1 − 1)) × 4]
× 4) + (0.05 × (2 − 1)) × 4] + [(0.30 × 4) + (0.05 × (2 − 1)) × 4]
SYSWAY
数据刷新周期 (Td) =
Tps + Tsr1 × 命令组 1 读部件数 + Tsw1 × 命令组 1 写入部件数
+ Tsr2
× 命令组 2 读部件数 + Tsw2 × 命令组 2 写入部件数
+ Tsr3
× 命令组 3 读部件数 + Tsw3 × 命令组 3 写入部件数
+ Tsr4
× 命令组 4 读部件数 + Tsw4 × 命令组 4 写入部件数
+ Tsr5
× 命令组 5 读部件数 + Tsw5 × 命令组 5 写入部件数
CJ 系列 CPU 单元
命令组
波特率 (bps)
上位机 / 部件
9600/9600 0.20 0.23 0.19 0.23 0.20 0.37 0.34 0.59 0.57 0.66 0.63
19200/19200 0.13 0.16 0.13 0.16 0.13 0.27 0.25 0.44 0.42 0.49 0.46
57600/19200 0.08 0.14 0.10 0.14 0.10 0.24 0.21 0.41 0.38 0.46 0.43
---12345
Tps Tsr1 Tsw1 Tsr2 Tsw2 Tsr3 Tsw3 Tsr4 Tsw4 Tsr5 Tsw5
CS 系列 CPU 单元
命令组
波特率 (bps)
上位机 / 部件
9600/9600 0.21 0.22 0.19 0.22 0.19 0.35 0.32 0.54 0.52 0.62 0.59
19200/19200 0.14 0.16 0.13 0.16 0.13 0.26 0.24 0.40 0.39 0.45 0.44
57600/19200 0.10 0.11 0.10 0.13 0.10 0.23 0.20 0.37 0.35 0.43 0.41
---12345
Tps Tsr1 Tsw1 Tsr2 Tsw2 Tsr3 Tsw3 Tsr4 Tsw4 Tsr5 Tsw5
CQM1H CPU 单元
命令组
波特率 (bps)
上位机 / 部件
9600/9600 0.20 0.22 0.18 0.23 0.18 0.38 0.34 0.60 0.57 0.69 0.65
19200/19200 0.11 0.15 0.11 0.15 0.12 0.27 0.23 0.44 0.42 0.51 0.48
---12345
Tps Tsr1 Tsw1 Tsr2 Tsw2 Tsr3 Tsw3 Tsr4 Tsw4 Tsr5 Tsw5
55
Page 70

数据刷新周期 ( 参考数据 ) 附录 A
CPM2A CPU 单元
命令组
波特率 (bps)
上位机 / 部件
9600/9600 0.17 0.21 0.17 0.21 0.17 0.36 0.32 0.58 0.55 0.67 0.62
19200/19200 0.10 0.14 0.10 0.14 0.10 0.26 0.22 0.43 0.39 0.49 0.45
例: 下面的计算是针对 CJ 系列 CPU 与上位机的波特率为 57,600bps, 与部件的波特率为 19,200bps,并且连
接 4 台 E5CN 部件和 4 台 E5GN 部件。对 E5CN 部件执行读和写 ( 命令组 1),对 E5GN 是只读 ( 命令组 2)。
数据刷新周期 (Td)
= [ 命令组 1 的时间 ] + [命令组 2 的时间 ]
= [Tps + Tsr1
= [0.08 + 0.14
= 1.60
Td = 1.6 s
---12345
Tps Tsr1 Tsw1 Tsr2 Tsw2 Tsr3 Tsw3 Tsr4 Tsw4 Tsr5 Tsw5
× 4 + Tsw1 × 4] + [Tsr2 × 4]
× 4 + 0.10 × 4] + [0.14 × 4]
56
Page 71

附录 B
应用例子
本章展示示例系统的系统配置和设定,以帮助解释怎样使用简单通信单元。
系统构成
本示例系统有三台 E5CN 温度控制器连接到简单通信单元。
•
CompoWay/F
•
PV
•
CPU
0
0005
100˚C
SYSMAC
CJ1G-CPU44
PROGRAMMABLE
CONTROLLER
RUN
ERR/ALM
INH
PRPHL
COMM
OPEN
MCPWR
BUSY
PERIHERAL
PORT
AD081
MACH
•
•
RUN
ERC
B1 A1
ERH
ADJ
No.
1
x10
0
x10
12
MODE
SYSWAY
DA041
MACH
No.
x10
x10
RUN
ERC
B1 A1
ERH
ADJ
1
0
12
MODE
2
•
1
•
•
•
3
SYSWAY
1
200˚C
(PV)
DM 分配
下表表示 DM 分配。
单元设定 区名称 DM 字
全体 ( 共享 ) 控制数据区 D00000 至 D00102
单元 0 单元 0 读变量类型区 D00150 至 D00154
单元 0 写变量类型区 D00160 至 D00164
单元 0 读数据区 D00170 至 D00173
单元 0 写数据区 D00180 至 D00183
单元 2 单元 2 读数据区 D00200 至 D00210
单元 2 写数据区 D00220 至 D00228
单元 3 单元 3 读数据区 D00240 至 D00250
单元 3 写数据区 D00260 至 D00268
57
Page 72

应用例子 附录 B
与 CPU 单元通信
波特率: 57,600 bps
与部件通信
下列设定用于 RS-485 通信:
项目 设定
波特率
数据位 7 位
奇偶校验 偶校验
停止位 2 位
19,200 bps
系统准备
参见
第 3 章 操作准备
并作下列准备。
1,2,3...
1. 连接简单通信单元。
2. 设定单元上的开关。
3. 在 PC 上做要求的设置。
4. 在部件上做需要的设定。
控制数据区
表中有阴影的 DM 区地址项必须设定,其余 DM 区字用于状态监视。
字位(s) 功能 设定
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
0 至 3 运行 / 停止命令
4 至 7 通信超时设定
8 至 15 连接的部件数
0 至 15 简单通信单元状态
0 至 15 句法错误 DM 地址
0 至 7 单元 4 至 7 的读 / 写命令位
8
9
10
11
12
13
14
15
0 至 15 单元 8 至 15 的读 / 写命令位
0 至 15 单元 16 至 23 的读 / 写命令位
0 至 15 单元 24 至 31 的读 / 写命令位
0 至 7 单元 0 通信规约
8 至 11 单元 0 命令组
12 至 15 单元 0 段信息
0 至 15 单元 0 读变量类型区的起始地址
0 至 15 单元 0 写变量类型区的起始地址
单元 3 读命令位
单元 3 写命令位
单元 2 读命令位
单元 2 写命令位
单元 1 读命令位
单元 1 写命令位
单元 0 读命令位
单元 0 写命令位
0 (→1)
0
03
---
--0
1
1
1
0
0
0
1
0 (→1)
0000
0000
0000
02
0
0
0150
0160
58
Page 73

应用例子 附录 B
字位(s) 功能 设定
D00010
D00011
D00012
D00013
D00014
D00015
D00016
D00017
D00018
D00019
至
D00102
0 至 7 单元 1 通信规约
8 至 11 单元 1 命令组
12 至 15 单元 1 段信息
0 至 15 单元 1 读数据区的起始地址
0 至 15 单元 1 写数据区的起始地址
0 至 7 单元 2 通信规约
8 至 11 单元 2 命令组
12 至 15 单元 2 段信息
0 至 15 单元 2 读数据区的起始地址
0 至 15 单元 2 写数据区的起始地址
0 至 7 单元 3 通信规约
8 至 11 单元 3 命令组
12 至 15 单元 3 段信息
0 至 15 单元 3 读数据区的起始地址
0 至 15 单元 3 写数据区的起始地址
0 至 15 未使用
00
0
0
0000
0000
01
1
1
0200
0220
01
1
1
0240
0260
0000
单元 0 读变量类型区 (CompoWay/F)
字位(s) 功能 设定
D00150
D00151
D00152
D00153
D00154
0 至 7 读出项目数
0 至 15 备用
0 至 15 读数据区起始地址
0 至 7 变量 1 类型
0 至 15 变量 1 地址
注 用变量类型 00C0 和变量地址 0000 指示 PV ( 当前温度 )。
单元 0 写变量类型区 (CompoWay/F)
字位(s) 功能 设定
D00160
D00161
D00162
D00163
D00164
注 用变量类型 00C1 和变量地址 0003 指示目标温度。
0 至 7 写入项目数
0 至 3 操作命令
0 至 15 写入数据区的起始地址
0 至 7 变量 1 类型
0 至 15 变量 1 地址
0001
--0170
00C0
0000
0001
0000
0180
00C1
0003
59
Page 74

应用例子 附录 B
单元 0 读数据区 (CompoWay/F)
字位(s) 功能
D00170
D00171
D00172
D00173
0 至 15 响应监视区
在与部件的通信正常完成时内容是 0000 。
0 至 15 状态
将部件的状态读到这个字中。
0 至 15 变量 1 读数据 (低字节 ) ( PV 的低位二字节 )
0 至 15 变量 1 读数据 (高字节 ) ( PV 的高位二字节 )
注 由于当前温度登录在读变量类型区,所以温度控制器的 PV 值被读到 D00172
和 D00173 。
单元 0 写数据区 (CompoWay/F)
字位(s) 功能 设定
D00180
D00181
D00182
D00183
0 至 15 响应监视区
当与部件的通信正常完成时,内容是 0000 。
0 至 7
8 至 15
0 至 15
0 至 15
操作命令:相关信息
操作命令:命令代码
变量 1 写数据 ( 低位字节 )
变量 1 写数据 ( 高位字节 )
*1
*1
*2
*2
---
---
--0064
0000
注 1. 在单元 0 的写入变量类型区操作命令被设置为 0000 ( 不允许 ) ,因此不允许命令代码和相关的信息。
2. 设置目标温度 (100°C) 的十六进制等效值,这是登录在单元 0 的写变量类型区的变量。
单元 2 读数据区 (SYSWAY)
段信息为 1 并且命令组为 1。
字功能
D00200
D00201
D00202
D00203
D00204
D00205
D00206
D00207
D00208
D00209
D00210
响应监视区
当部件的通信正常完成时为 0000 。
当前温度
包含二进制格式的 PV 值,用 2 的补码表示负值。
状态
在读出 PV 值时,包含状态。
目标温度 ( 见注 )
包含二进制的目标温度,用 2 的补码表示负值。
报警 1 SV 值 ( 见注 )
包含报警 1 的二进制设定值,用 2 的补码表示负值。
报警 2 SV 值 ( 见注 )
包含报警 2 的二进制设定值,用 2 的补码表示负值。
比例带 ( 见注 )
包含二进制的比例带设定。
积分时间 ( 见注 )
包含二进制的积分时间设定。
微分时间 ( 见注 )
包含二进制的微分时间设定。
加热器电流监视 ( 见注 )
包含二进制的加热器电流。
加热器当前状态 ( 见注 )
包含读加热器电流时的状态。
60
Page 75

应用例子 附录 B
注 由于在单元 2 的通信类型选择命令组 1 只能从部件来的数据刷新 D00200 至
D00203 的值, D00200 至 D00210 的其他数据都不刷新。
当通过 SYSWAY 与温度控制器通信时,即使选用的命令组限制实际读出的字
数也始终为读数据区分配 11 个字。
单元 2 写数据区 (SYSWAY)
段信息为 1 并且命令组也是 1。
为单元 2 的写入数据分配 D00220 至 D00228。在这个例子中,数据不能写入单元 2 ,所以不需要在单元 2 的写
数据区内设置数据。
单元 3 读数据区 (SYSWAY)
段信息为 1 并且命令组也是 1。
字功能
D00240
D00241
D00242
D00243
D00244
D00245
D00246
D00247
D00248
D00249
D00250
响应监视区
当部件的通信正常完成时为 0000 。
当前温度
包含二进制格式的 PV 值,用 2 的补码表示负值。
状态
在读出 PV 值时,包含状态。
目标温度 ( 见注 )
包含二进制的目标温度,用 2 的补码表示负值。
报警 1 SV 值 ( 见注 )
包含报警 1 的二进制设定值,用 2 的补码表示负值。
报警 2 SV 值 ( 见注 )
包含报警 2 的二进制设定值,用 2 的补码表示负值。
比例带 ( 见注 )
包含二进制的比例带设定。
积分时间 ( 见注 )
包含二进制的积分时间设定。
微分时间 ( 见注 )
包含二进制的微分时间设定。
加热器电流监视 ( 见注 )
包含二进制的加热器电流。
加热器当前状态 ( 见注 )
包含读加热器电流时的状态。
注 由于在单元 3 的通信类型选择命令组 1,只能用部件来的数据刷新 D00240 至
D00242 的值, D00244 至 D00250 的其他值都不刷新。
当通过 SYSWAY 与温度控制器通信时,即使选用的命令组限制实际读出的字
数,也始终为读数据区分配 11 个字。
61
Page 76

应用例子 附录 B
单元 3 写数据区 (SYSWAY)
段信息为 1 并且命令组也是 1。
字功能
D00260
D00261
D00262
D00263
D00264
D00265
D00266
D00267
D00268
响应监视区
当与部件的通信正常结束时包含 0000 。
目标温度
00C8 (200°C)
操作命令 ( 见注 )
0000
报警 1 SV 值 ( 见注 )
以二进制格式设置报警 1 设定值,用 2 的补码表示负值。
报警 2 SV 值 ( 见注 )
以二进制格式设置报警 2 设定值,用 2 的补码表示负值。
比例带 ( 见注 )
以二进制设定比例带。
积分时间 ( 见注 )
以二进制设置积分时间。
微分时间 ( 见注 )
用二进制设置微分时间。
加热器烧坏检测值 (见注)
用二进制设置加热器烧坏检测值。
注 由于在单元 3 的通信类型选择命令组 1。所以只能将目标温度写入部件。当通
过 SYSWAY 与温度控制器通信时,即使选用的命令组限制实际写入的字数也
始终为写入数据区分配 9 个字。
62
Page 77

应用例子 附录 B
用于 DM 设定的梯形图程序
下图展示用于 CJ 系列 CPU 单元设置所要求的 DM 区值的示例程序段。
A20011
(ϔϾᳳᖫ)
H00000
MOV (21)
#0300
D00000
W00000
W10000
MOV (21)
MOV (21)
MOV (21)
MOV (21)
D00003
:
:
:
:
D00261
W00000
H0000
D00000
D00003
#4700
#00C8
#0301
#C500
བ DM 䆒㕂㸼᠔⼎
߱ྟ࣪ DM 䆒ᅮ
߱ྟ࣪ᅠ៤ᖫ
ᇚㅔ䗮ֵܗ䆒㕂Ў
Ā䖤㸠ā
䖭Ͼ䕧ܹᴵӊ
(W10000)
ᇚܗ0ⱘݭҸԡ䕀ЎON
63
Page 78

Page 79

控制数据区
附录 C
DM 区设置分配表
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
D (+18)
D (+19)
D (+20)
D (+21)
D (+22)
D (+23)
D (+24)
D (+25)
D (+26)
D (+27)
D (+28)
D (+29)
D (+30)
D (+31)
D (+32)
D (+33)
D (+34)
D (+35)
D (+36)
D (+37)
D (+38)
D (+39)
D (+40)
D (+41)
D (+42)
D (+43)
D (+44)
简单通信单元控制
简单通信单元状态 *
句法错误 DM 地址 *
单元 0 至 7 的通信控制
单元 8 至 15 的通信控制
单元 16 至 23 的通信控制
单元 24 至 31 的通信控制
单元 0 通信类型
单元 0 读数据区起始地址 ( 单元 0 的读变量类型区的起始地址 )
单元 0 写数据区起始地址 ( 单元 0 的写变量类型区的起始地址 )
单元 1 通信类型
单元 1 读数据区起始地址 ( 单元 1 的读变量类型区的起始地址 )
单元 1 写数据区起始地址 ( 单元 1 的写变量类型区的起始地址 )
单元 2 通信类型
单元 2 读数据区起始地址 ( 单元 2 的读变量类型区的起始地址 )
单元 2 写数据区起始地址 ( 单元 2 的写变量类型区的起始地址 )
单元 3 通信类型
单元 3 读数据区起始地址 ( 单元 3 的读变量类型区的起始地址 )
单元 3 写数据区起始地址 ( 单元 3 的写变量类型区的起始地址 )
单元 4 通信类型
单元 4 读数据区起始地址 ( 单元 4 的读变量类型区的起始地址 )
单元 4 写数据区起始地址 ( 单元 4 的写变量类型区的起始地址 )
单元 5 通信类型
单元 5 读数据区起始地址 ( 单元 5 的读变量类型区的起始地址 )
单元 5 写数据区起始地址 ( 单元 5 的写变量类型区的起始地址 )
单元 6 通信类型
单元 6 读数据区起始地址 ( 单元 6 的读变量类型区的起始地址 )
单元 6 写数据区起始地址 ( 单元 6 的写变量类型区的起始地址 )
单元 7 通信类型
单元 7 读数据区起始地址 ( 单元 7 的读变量类型区的起始地址 )
单元 7 写数据区起始地址 ( 单元 7 的写变量类型区的起始地址 )
单元 8 通信类型
单元 8 读数据区起始地址 ( 单元 8 的读变量类型区的起始地址 )
单元 8 写数据区起始地址 ( 单元 8 的写变量类型区的起始地址 )
单元 9 通信类型
单元 9 读数据区起始地址 ( 单元 9 的读变量类型区的起始地址 )
单元 9 写数据区起始地址 ( 单元 9 的写变量类型区的起始地址 )
单元 10 通信类型
单元 10 读数据区起始地址 ( 单元 10 的读变量类型区的起始地址 )
单元 10 写数据区起始地址 ( 单元 10 的写变量类型区的起始地址 )
单元 11 通信类型
单元 11 读数据区起始地址 ( 单元 11 的读变量类型区的起始地址 )
单元 11 写数据区起始地址 ( 单元 11 的写变量类型区的起始地址 )
单元 12 通信类型
单元 12 读数据区起始地址 ( 单元 12 的读变量类型区的起始地址 )
内容 数据
1
1
65
Page 80

DM 区设置分配表 附录 C
D _____
D (+45)
D (+46)
D (+47)
D (+48)
D (+49)
D (+50)
D (+51)
D (+52)
D (+53)
D (+54)
D (+55)
D (+56)
D (+57)
D (+58)
D (+59)
D (+60)
D (+61)
D (+62)
D (+63)
D (+64)
D (+65)
D (+66)
D (+67)
D (+68)
D (+69)
D (+70)
D (+71)
D (+72)
D (+73)
D (+74)
D (+75)
D (+76)
D (+77)
D (+78)
D (+79)
D (+80)
D (+81)
D (+82)
D (+83)
D (+84)
D (+85)
D (+86)
D (+87)
D (+88)
D (+89)
D (+90)
D (+91)
D (+92)
D (+93)
D (+94)
D (+95)
内容 数据
单元 12 写数据区起始地址 ( 单元 12 的写变量类型区的起始地址 )
单元 13 通信类型
单元 13 读数据区起始地址 ( 单元 13 的读变量类型区的起始地址 )
单元 13 写数据区起始地址 ( 单元 13 的写变量类型区的起始地址 )
单元 14 通信类型
单元 14 读数据区起始地址 ( 单元 14 的读变量类型区的起始地址 )
单元 14 写数据区起始地址 ( 单元 14 的写变量类型区的起始地址 )
单元 15 通信类型
单元 15 读数据区起始地址 ( 单元 15 的读变量类型区的起始地址 )
单元 15 写数据区起始地址 ( 单元 15 的写变量类型区的起始地址 )
单元 16 通信类型
单元 16 读数据区起始地址 ( 单元 16 的读变量类型区的起始地址 )
单元 16 写数据区起始地址 ( 单元 16 的写变量类型区的起始地址 )
单元 17 通信类型
单元 17 读数据区起始地址 ( 单元 17 的读变量类型区的起始地址 )
单元 17 写数据区起始地址 ( 单元 17 的写变量类型区的起始地址 )
单元 18 通信类型
单元 18 读数据区起始地址 ( 单元 18 的读变量类型区的起始地址 )
单元 18 写数据区起始地址 ( 单元 18 的写变量类型区的起始地址 )
单元 19 通信类型
单元 19 读数据区起始地址 ( 单元 19 的读变量类型区的起始地址 )
单元 19 写数据区起始地址 ( 单元 19 的写变量类型区的起始地址 )
单元 20 通信类型
单元 20 读数据区起始地址 ( 单元 20 的读变量类型区的起始地址 )
单元 20 写数据区起始地址 ( 单元 20 的写变量类型区的起始地址 )
单元 21 通信类型
单元 21 读数据区起始地址 ( 单元 21 的读变量类型区的起始地址 )
单元 21 写数据区起始地址 ( 单元 21 的写变量类型区的起始地址 )
单元 22 通信类型
单元 22 读数据区起始地址 ( 单元 22 的读变量类型区的起始地址 )
单元 22 写数据区起始地址 ( 单元 22 的写变量类型区的起始地址 )
单元 23 通信类型
单元 23 读数据区起始地址 ( 单元 23 的读变量类型区的起始地址 )
单元 23 写数据区起始地址 ( 单元 23 的写变量类型区的起始地址 )
单元 24 通信类型
单元 24 读数据区起始地址 ( 单元 24 的读变量类型区的起始地址 )
单元 24 写数据区起始地址 ( 单元 24 的写变量类型区的起始地址 )
单元 25 通信类型
单元 25 读数据区起始地址 ( 单元 25 的读变量类型区的起始地址 )
单元 25 写数据区起始地址 ( 单元 25 的写变量类型区的起始地址 )
单元 26 通信类型
单元 26 读数据区起始地址 ( 单元 26 的读变量类型区的起始地址 )
单元 26 写数据区起始地址 ( 单元 26 的写变量类型区的起始地址 )
单元 27 通信类型
单元 27 读数据区起始地址 ( 单元 27 的读变量类型区的起始地址 )
单元 27 写数据区起始地址 ( 单元 27 的写变量类型区的起始地址 )
单元 28 通信类型
单元 28 读数据区起始地址 ( 单元 28 的读变量类型区的起始地址 )
单元 28 写数据区起始地址 ( 单元 28 的写变量类型区的起始地址 )
单元 29 通信类型
单元 29 读数据区起始地址 ( 单元 29 的读变量类型区的起始地址 )
66
Page 81

DM 区设置分配表 附录 C
D _____
D (+96)
D (+97)
D (+98)
D (+99)
D (+100)
D (+101)
D (+102)
内容 数据
单元 29 写数据区起始地址 ( 单元 29 的写变量类型区的起始地址 )
单元 30 通信类型
单元 30 读数据区起始地址 ( 单元 30 的读变量类型区的起始地址 )
单元 30 写数据区起始地址 ( 单元 30 的写变量类型区的起始地址 )
单元 31 通信类型
单元 31 读数据区起始地址 ( 单元 31 的读变量类型区的起始地址 )
单元 31 写数据区起始地址 ( 单元 31 的写变量类型区的起始地址 )
67
Page 82

DM 区设置分配表 附录 C
读变量类型区 (CompoWay/F)
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
D (+18)
D (+19)
D (+20)
D (+21)
D (+22)
D (+23)
D (+24)
D (+25)
D (+26)
读项目数
保留 始终为 0000
读数据区起始地址
变量 1 类型 变量类型:
变量 1 地址
变量 2 类型
变量 2 地址
变量 3 类型
变量 3 地址
变量 4 类型
变量 4 地址
变量 5 类型
变量 5 地址
变量 6 类型
变量 6 地址
变量 7 类型
变量 7 地址
变量 8 类型
变量 8 地址
变量 9 类型
变量 9 地址
变量 10 类型
变量 10 地址
变量 11 类型
变量 11 地址
变量 12 类型
变量 12 地址
内容 数据 变量名称 设定范围
---
--- ---
---
0001 至 0012 BCD
0000 至 9999 BCD
00C0 至 00CF Hex
变量地址:
0000 至 FFFF Hex
68
Page 83

DM 区设置分配表 附录 C
写变量类型区 (CompoWay/F)
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
D (+18)
D (+19)
D (+20)
D (+21)
D (+22)
D (+23)
D (+24)
D (+25)
D (+26)
写入项目数
操作命令
写数据区起始地址
变量 1 类型 变量类型:
变量 1 地址
变量 2 类型
变量 2 地址
变量 3 类型
变量 3 地址
变量 4 类型
变量 4 地址
变量 5 类型
变量 5 地址
变量 6 类型
变量 6 地址
变量 7 类型
变量 7 地址
变量 8 类型
变量 8 地址
变量 9 类型
变量 9 地址
变量 10 类型
变量 10 地址
变量 11 类型
变量 11 地址
变量 12 类型
变量 12 地址
内容 数据 变量名称 设定范围
---
---
---
0000 至 0012 BCD
0000:禁止
0001:允许
0000 至 9999 BCD
00C0 至 00CF Hex
变量类型:
0000 至 FFFF Hex
69
Page 84

DM 区设置分配表 附录 C
读数据区 (CompoWay/F)
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
D (+18)
D (+19)
D (+20)
D (+21)
D (+22)
D (+23)
D (+24)
D (+25)
响应监视区
部件状态
变量 1 读数据 ( 低字节 )
变量 1 读数据 ( 高字节 )
变量 2 读数据 ( 低字节 )
变量 2 读数据 ( 高字节 )
变量 3 读数据 ( 低字节 )
变量 3 读数据 ( 高字节 )
变量 4 读数据 ( 低字节 )
变量 4 读数据 ( 高字节 )
变量 5 读数据 ( 低字节 )
变量 5 读数据 ( 高字节 )
变量 6 读数据 ( 低字节 )
变量 6 读数据 ( 高字节 )
变量 7 读数据 ( 低字节 )
变量 7 读数据 ( 高字节 )
变量 8 读数据 ( 低字节 )
变量 8 读数据 ( 高字节 )
变量 9 读数据 ( 低字节 )
变量 9 读数据 ( 高字节 )
变量 10 读数据 ( 低字节 )
变量 10 读数据 ( 高字节 )
变量 11 读数据 ( 低字节 )
变量 11 读数据 ( 高字节 )
变量 12 读数据 ( 低字节 )
变量 12 读数据 ( 高字节 )
内容 数据 变量名称
---
---
70
Page 85

DM 区设置分配表 附录 C
写入数据区 (CompoWay/F)
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
D (+18)
D (+19)
D (+20)
D (+21)
D (+22)
D (+23)
D (+24)
D (+25)
响应监视区
操作命令
变量 1 写入数据 ( 低字节 )
变量 1 写入数据 ( 高字节 )
变量 2 写入数据 ( 低字节 )
变量 2 写入数据 ( 高字节 )
变量 3 写入数据 ( 低字节 )
变量 3 写入数据 ( 高字节 )
变量 4 写入数据 ( 低字节 )
变量 4 写入数据 ( 高字节 )
变量 5 写入数据 ( 低字节 )
变量 5 写入数据 ( 高字节 )
变量 6 写入数据 ( 低字节 )
变量 6 写入数据 ( 高字节 )
变量 7 写入数据 ( 低字节 )
变量 7 写入数据 ( 高字节 )
变量 8 写入数据 ( 低字节 )
变量 8 写入数据 ( 高字节 )
变量 9 写入数据 ( 低字节 )
变量 9 写入数据 ( 高字节 )
变量 10 写入数据 ( 低字节 )
变量 10 写入数据 ( 高字节 )
变量 11 写入数据 ( 低字节 )
变量 11 写入数据 ( 高字节 )
变量 12 写入数据 ( 低字节 )
变量 12 写入数据 ( 高字节 )
内容 数据 变量名称
---
---
71
Page 86

DM 区设置分配表 附录 C
读数据区 (SYSWAY: 温度控制器 )
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
响应监视区 读读读读读
当前温度 读读读读读
状态 读读读读读
目标温度 读读读读读
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热器电流监视器
加热器当前状态
内容 数据 命令组
读数据区 (SYSWAY: 数字面板表 )
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
D (+10)
D (+11)
D (+12)
D (+13)
D (+14)
D (+15)
D (+16)
D (+17)
响应监视区 读读读读读
显示值 ( 低字节 ) 读读读读读
显示值 ( 高字节 ) 读读读读读
显示值状态 读读读读读
等值保持 ( 低字节 )
等值保持 ( 高字节 )
等值保持状态
低值保持 ( 低字节 )
低值保持 ( 高字节 )
低值保持状态
比较值 HH ( 低字节 )
比较值 HH ( 高字节 )
比较值 H ( 低字节 )
比较值 H ( 高字节 )
比较值 L ( 低字节 )
比较值 L ( 高字节 )
比较值 LL ( 低字节 )
比较值 LL ( 高字节 )
内容 数据 命令组
12345
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
--- --- --- ---
读读读
读读读
读读
读读
读读
读
读
12345
---
---
---
---
---
---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
读读
读读
读读
读读
读读
读读
---
---
---
---
---
---
读读
读读
读读
读读
读读
读读
读读
读读
读
读
读
读
读
读
72
Page 87

DM 区设置分配表 附录 C
写入数据区 (SYSWAY: 温度控制器 )
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
响应监视区 写写写写写
目标温度 SV 写写写写写
操作命令
报警 1 SV
报警 2 SV
比例带
积分时间
微分时间
加热器烧断检测值
内容 数据 命令组
写数据区 (SYSWAY: 数字面板表 )
D _____
D(+0)
D(+1)
D(+2)
D(+3)
D(+4)
D(+5)
D(+6)
D(+7)
D(+8)
D(+9)
响应监视区 写写写写写
操作命令
比较值 HH ( 低字节 )
比较值 HH ( 高字节 )
比较值 H ( 低字节 )
比较值 H ( 高字节 )
比较值 L ( 低字节 )
比较值 L ( 高字节 )
比较值 LL ( 低字节 )
比较值 LL ( 高字节 )
内容 数据 命令组
12345
---
--- ---
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- --- ---
写写写写
写写写
写写写
写写
写写
写写
写
12345
--- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
--- --- ---
写
---
写写
写写
写写
写写
写
73
Page 88

 Loading...
Loading...