

Page 1
SYQWEST INCORPORATED
High Resolution Echo Sounders and Acoustic Systems
For Precision Seafloor Exploration
StrataBox™ Marine
Geophysical Instrument
• Installation
• Operation
• Maintenance
ver 08.25.06a
222 Metro Center Blvd. * Warwick, Rhode Island 02886
Tel: (401) 921-5170 * FAX: (401) 921-5159
Website http://www.syqwestinc.com/ Email: mailto:tech-support@syqwestinc.com
Page 2

Page 3
List of new features included in Versions 3.0.4.1 or greater
Stratabox Data Aquisition New Features:
1) Bottom Detection Threshhold Adjustment. Select from Edit pull-down menu. The
Detection Threshold value is provided to allow the user to vary the echo reply level that
is recognized by the Bottom digitizing function as a valid bottom echo. The scale for
Detection Threshold is 0 through 9. 0 (minimum detection) will only allow the digitizer
to lock onto the strongest returns (i.e. dark colors such as red in the OCEAN pallet). 9
(maximum detection) will allow it to lock onto the weaker returns ( i.e. lighter colors such
as green in the OCEAN pallet). In shallow water and soft sediment survey conditions a
higher value is required to consistently digitize on the bottom without saturating the first
few meters of strata penetration. Recommended user default setting for Detection
Threshold is 0, which should work under most conditions. Increase incrementally to 9
only as required.
2) User selectable Gate Limits. Select from Edit pull-down menu. Bottom Gate Limits
are provided to help the user ensure that the data captured reflects the correct digitized
bottom depth when conditions are difficult. The Stratabox is intended for use in shallow
water. Unfortunately, using low frequency sonar is best for strata penetration but it also
makes for significant surface reverberation and multiple echo issues. By using the
Bottom Gate Limits the user can ensure that the digitizer does not lock on a transmit
reverberation or a 2nd echo return. The Bottom Gate Limit values for Shallow and Deep
limits are entered in the selected units (Feet or Meters) and the "Enable Gate Limits"
check box allows the Gate Limits to be Enabled or Disabled. Please note they only work
in manual range and gain mode (not for use in auto mode). When Manual Gate Limits are
enabled their selected values will show up in the lower right corner of the screen as GLS
(Gate Limit Shallow) and GLD (Gate Limit Deep). Also, once enabled if the actual
bottom moves out of the selected window you will no longer be able to digitize (you will
get -.- for depth). When the Gate Limits are disabled a message is displayed to alert the
user that they have been disabled and should be re-checked.
3) User selectable Sound Velocity control. Select from Edit pull-down menu under "User
Preferences". Select 1400-1600m/s in 1m/s increments or 4590-5250ft/s in 1 ft/s
increments.
4) User selectable Transducer Draft offset. Select from Edit pull-down menu under
"Configure Sonar Port".
5) Direct SEG-Y (.seg) and classic (.odc) data storage. Select via the Start Recording
button. Creates a new file or files on the specified hard disk for capturing acquisition
data. If the Record Format in the User Preferences menu is set to "Classic (*.odc)" then
the data recording will start immediately if the sensor is pinging or as soon as the start
ping command is sent to the sensor if it is in idle mode. If the Record Format in the User
Preferences menu is set to "Classic and SEGY (*.odc & *.seg)" then a dialog box is
presented to the user. The user can enter the desired SEGY Header information as
Page 4
described in the box. There is also a selection for a single file or multiple files. In most
cases multiple files should be selected to ensure that the files are not very large in size.
This helps when transferring the files to another media and also mitigates the risk of file
corruption. The user can select the appropriate file size for the "new" file break to occur.
6) Direct SEG-Y Zoom data storage. Selected when SEGY header information is entered,
the "Save a SEGY Zoom file" check box allows for the independent storage of Zoom
data when a Zoom mode is enabled. If this box is NOT checked, only Normal data is
stored when recording is enabled. The SEGY storage of Zoom data provides higher
resolution (in proportion to the Zoom and Normal window Depth Ranges) data in the area
of interest. Recording commences when the OK button is depressed in the "Record
SEGY Header Information" window.
7) Long and Lat and depth window "mouse over display".
Stratabox Playback New Features:
1) Playback now supports SEG-Y formats.
2) Playback slider bar.
3) Long and Lat and Depth window cursor "mouse over display".
4) .odc to SEG-Y (.seg) file converter. Select from Tools pull-down menu.
5) .odc to SEG-Y (.seg) multi-file batch converter. Select from Tools pull-down menu.
Useful for Stratabox customers who have many .odc files to convert.
Page 5

Important Notes regarding Stratabox operation – Please Read!
Please be advised that the serial connection to the computer is critical for correct Stratabox
operation. The best serial connection is a 9-pin connector found standard on older
computers/laptops. Next best is what we recommend for users who have a modern laptop
running Windows XP and no 9-pin serial connector (only USB) is to use a PCMCIA adapter
to serial such as those made by Quatech. We use the Quatech Model QSP-100. It has been
proven to work very well for this application.
USB to serial adapters generally aren’t good for seamless bidirectional serial communication
and we try to discourage their use. Some customers have had some success using better
quality USB to serial adapters but overall most customers have had bad (or no) luck with
them.
Also, please be advised that the Stratabox data cable with built in RS422 (Stratabox end) to
RS232 (computer end) converter needs to be a direct connection to a COM port to insure
consistent two-way communication. Do not split this connection. For users who require a
longer than the supplied 10 foot length for the data cable please contact us for additional
information.
Page 6

Stratabox Firmware Flash update instructions
It is recommended you print these for reference while completing your firmware update.
1. Uninstall the old versions of Stratabox software.
2. Install the new version of Stratabox software provided to your PC.
3. Connect the Stratabox power and data cable to the Stratabox. Do not power it on.
4. Using Windows Explorer go to the C:\Program Files\SyQwest\StrataBox\Firmware\10kHz
directory and copy the StrataFW.hex file and place it into the “Stratabox” directory.
5. Then power on your Stratabox, the software will then prompt you. New firmware detected do
you wish to proceed with the update? Click the yes button and it will update the flash memory
device on the DSP.
6. When the update is completed cycle power on the Stratabox and you should see a flashing green
light.
7. Turn on the Stratabox software and click Help, About and it should show the following:
Software 3.0.8.1
Firmware 48
Page 7
Stratabox 3510 Firmware Flash update instructions
It is recommended you print these for reference while completing your firmware update.
1. Uninstall the old versions of Stratabox software.
2. Install the new version of Stratabox software provided.
3. Connect the Stratabox 3510 with power applied to the Stratabox with data cable to the com port
you assigned and connect the data cable to the 10kHz data cable connector.
4. Using Windows Explorer go to the C:\Program Files\SyQwest\StrataBox\Firmware\10kHz
directory and copy the StrataFW.hex file and place it in the Stratabox directory.
5. Then Turn on your Stratabox 3510 power switch to the 10kHz position the software will then
prompt you. New firmware detected do you wish to proceed with the update? Click the yes button
and it will update the flash memory device on the DSP.
6. When the update is completed cycle power on the Stratabox 3510 and you should see a flashing
green light.
7. Turn on the Stratabox software and click Help About and it should say Firmware 48 Software
3.0.8.0.
8. Connect the Stratabox 3510 with power applied to the Stratabox with data cable to the com port
you assigned and connect the data cable to the 3.5kHz data cable connector.
9. Using Windows Explorer go to the C:\Program Files\SyQwest\StrataBox\Firmware\3.5kHz
directory and copy the StrataFW.hex file and place it in the Stratabox directory.
10. Then Turn on your Stratabox 3510 power switch to the 3.5kHz position the software will then
prompt you. New firmware detected do you wish to proceed with the update? Click the yes button
and it will update the flash memory device on the DSP.
11. When the update is completed cycle power on the Stratabox 3510 and you should see a flashing
green light.
12. Turn on the Stratabox software and click Help About and it should say Firmware 48 Software
3.0.8.0.
Page 8

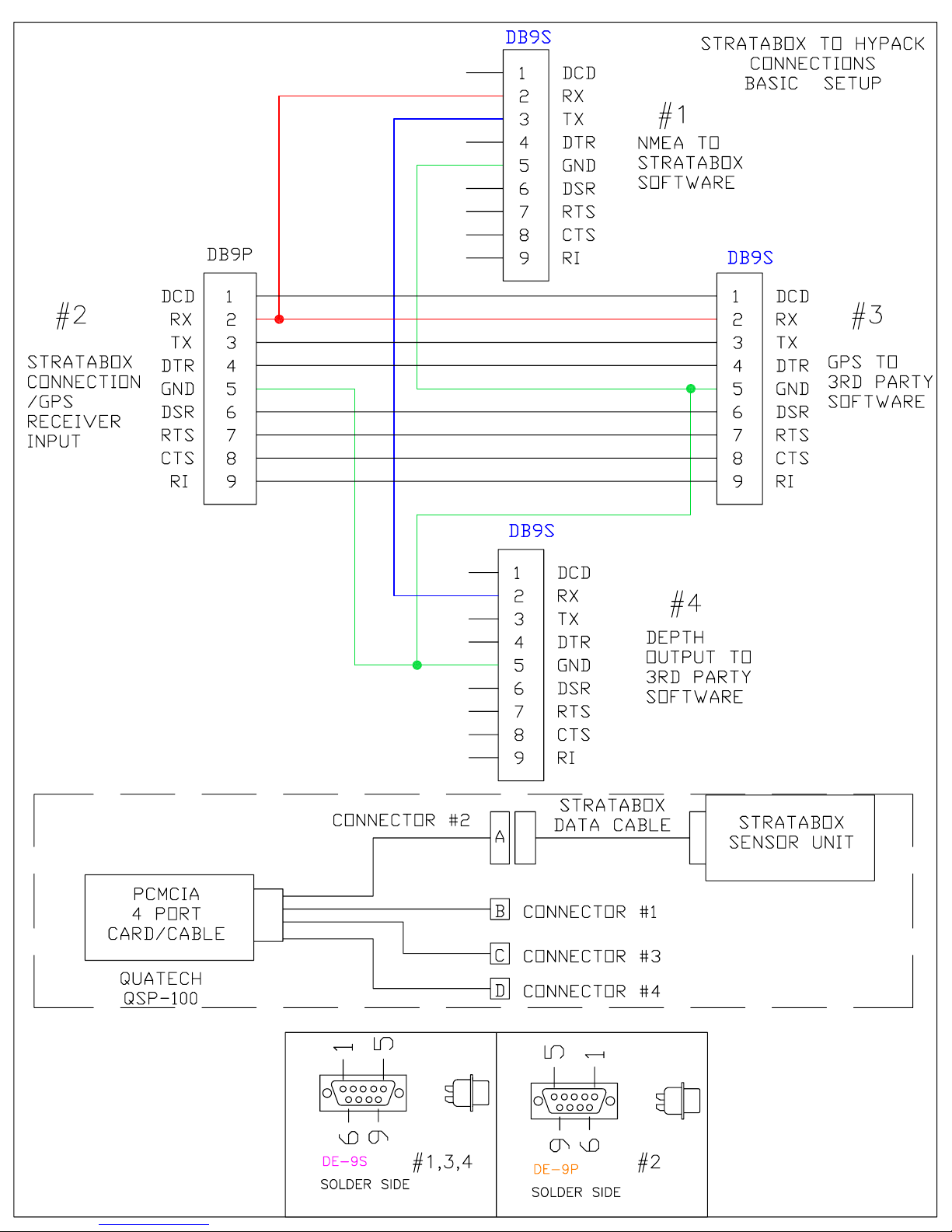
Basic SrataBox – Hypack
Instructions for configuring Stratabox to use with survey software and laptop PC
1. Install PCMCIA 4 port serial card. Recommend Quatech QSP-100. Windows will
assign COM ports for connectors A through D. Typically it will be COM 5 through
8 where COM 5 is A, COM 6 is B etc.
2. Connect Interface cable to 4 port cable and equipment as shown in Figure 4-1.
3. In Stratabox software, select EDIT from taskbar then “Configure Sonar Port”. Select
COM port Windows assigned for connector A.
4. In Stratabox software, select EDIT from taskbar then “Configure NMEA I/O”.
Select COM port Windows assigned for connector B. Select Baud rate, Data bits,
Stop bits and parity to match your GPS. Select NMEA DBT output string for
Stratabox.
5. Connect your GPS receiver to Interface Connector # 2.
6. In survey software (Hypack, Hydropro etc), select COM port Windows assigned for
connector C as GPS input.
7. In survey software, select COM port Windows assigned for connector D as your
echosounder input.
NOTES: For Hypack use syqwest.dll driver. For Hydropro, use generic echosounder
driver and configure to accept NMEA DBT strings.
Page 9
Page 10
Page 11

TABLE OF CONTENTS
1.0 INTRODUCTION..............................................................................................................................1-1
1.1 GENERAL INFORMATION............................................................................................................1-1
1.2 ABOUT THIS MANUAL ...............................................................................................................1-1
1.3 ECHO SOUNDING PRINCIPLES ....................................................................................................1-2
1.3.1 Underwater Acoustics........................................................................................................1-2
1.3.1.1 Decibels..........................................................................................................................1-2
1.3.1.2 Sound Propagation.........................................................................................................1-2
1.4 SPECIFICATIONS .........................................................................................................................1-7
1.4.1 StrataBox Sensor Specifications ........................................................................................1-7
2.0 INSTALLATION...............................................................................................................................2-1
2.1 - STRATABOX SYSTEM INSTALLATION OVERVIEW ...................................................................2-1
2.1.1 - Getting Started................................................................................................................2-2
2.1.2 - Installing the StrataBox Electronics................................................................................2-3
2.1.3 - Installing the StrataBox Transducer................................................................................2-5
2.1.4 - Electrical Connections...................................................................................................2-11
2.2 - STRATABOX PC SOFTWARE INSTALLATION .........................................................................2-14
3.0 OPERATION .....................................................................................................................................3-1
3.1 STRATABOX PC SOFTWARE ......................................................................................................3-1
3.1.1 - The Main Window............................................................................................................3-1
3.1.2 – The Menu Bar .................................................................................................................3-5
3.1.2.1 – The File Menu.............................................................................................................3-5
3.1.2.2 – The Edit Menu ..........................................................................................................3-11
3.1.2.3 – The View Menu ........................................................................................................3-11
3.1.2.4 – The Help Menu .........................................................................................................3-13
4.0 MAINTENANCE...............................................................................................................................4-1
4.1 – POST (POWER ON SELF TEST) ...............................................................................................4-1
4.2 – LED INDICATOR......................................................................................................................4-1
4.3 – FIRMWARE UPDATE ................................................................................................................4-1
4.3.1 – Connection......................................................................................................................4-2
4.3.2 – Firmware Update File ....................................................................................................4-2
4.3.3 – StrataBox PC Software Firmware Update......................................................................4-2
4.4 – TROUBLESHOOTING ................................................................................................................4-3
4.4.1 – StrataBox Sensor Troubleshooting .................................................................................4-3
4.4.2 – StrataBox PC Software Troubleshooting........................................................................4-3
TABLE OF CONTENTS I
Page 12

TABLE OF FIGURES
Figure 1-1 Absorption Coefficient Versus Frequency..........................................................................1-3
Figure 1-2 Acoustic Beam Pattern.........................................................................................................1-6
Figure 2-1 System Interconnect Diagram..............................................................................................2-2
Figure 2-2 Bulkhead Mounting the Sensor Unit...................................................................................2-5
Figure 2-3 Transducer Mounting Ring..................................................................................................2-7
Figure 2-4 Over The Side Transducer Mounting..................................................................................2-8
Figure 2-5 StrataBox Sensor Unit Connections...................................................................................2-11
Figure 2-6 StrataBox Sensor Power Connector..................................................................................2-12
Figure 2-7 StrataBox Sensor Data Connector.....................................................................................2-13
Figure 2-8 StrataBox Sensor Transducer Connector.........................................................................2-13
Figure 2-9 Printer Port.........................................................................................................................2-14
TABLE OF TABLES
Table 2-1 Basic Equipment.....................................................................................................................2-2
Table 2-2 Accessories and Options......................................................................................................... 2-3
Table 2-3 Portable Transducer Installation Parts ................................................................................2-7
Table 2-4 StrataBox System Cables .....................................................................................................2-11
TABLE OF CONTENTS II
Page 13
STRATABOX ™
Operations and Maintenance Manual
1.0 INTRODUCTION
1.1 General Information
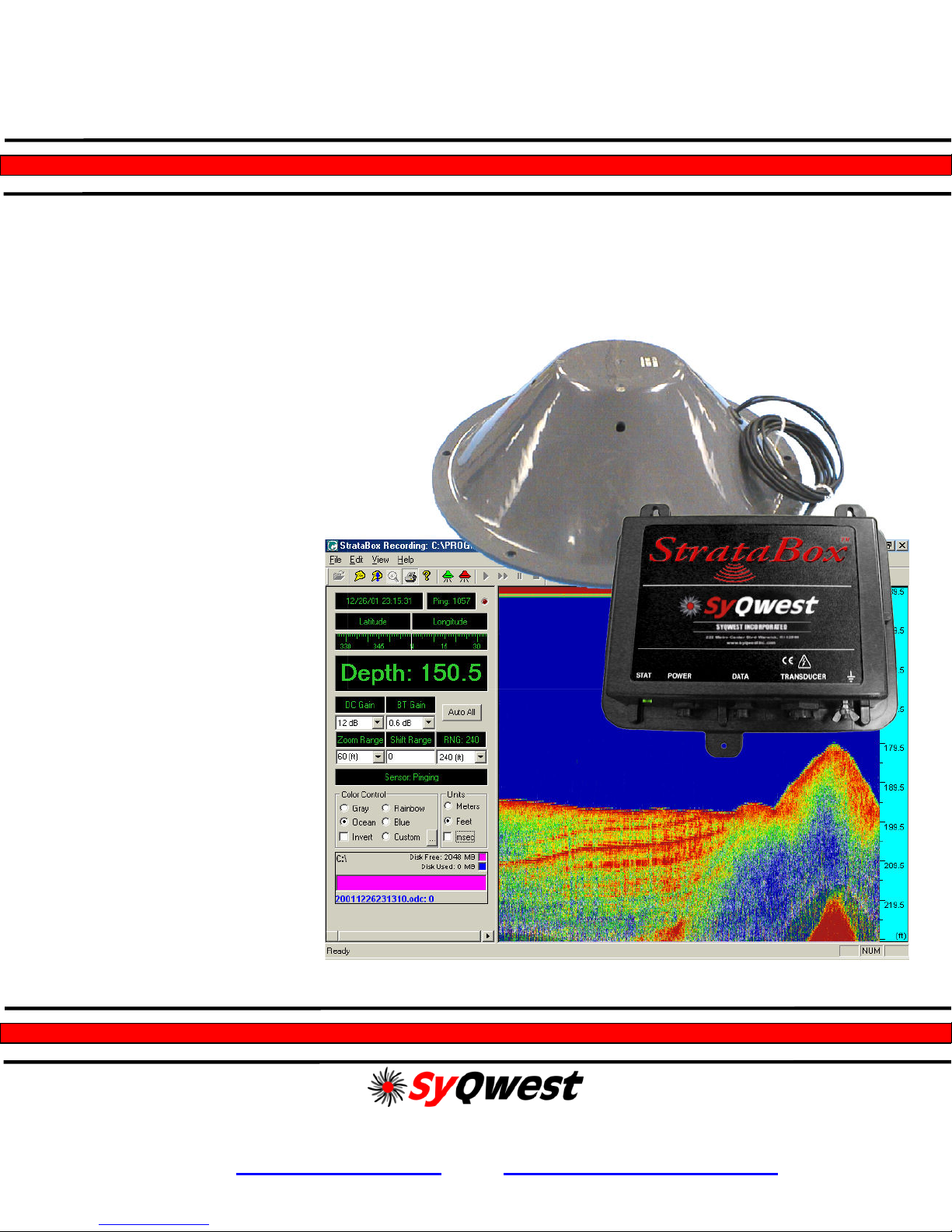
The StrataBox™ is a portable, low power, high-resolution, and water-resistant marine sediment imaging
instrument capable of delivering 6 cm of marine sediment strata resolution with bottom penetration of up
to 40 meters. It is designed exclusively for inshore and coastal geophysical marine survey up to 150
meters of water depth and operates at 10 kHz. Included with the StrataBox™ product is the following:
•
StrataBox™ Sensor Unit
•
StrataBox™ Transducer Assembly
•
StrataBox™ Installation CD
•
StrataBox™ Manual
StrataBox™ Sensor Unit provides all of the transmit/receive electronics, and all of the signal processing
functions. It is powered from a 10-30VDC source and consumes 8 watts of power. It interfaces to the
Host PC via a single COM port. The mechanical case for the Electronics Unit is Water Resistant to the
EN60529 IP65 Specification and is also UV Stable and Chemical Resistant.
The StrataBox™ Transducer Assembly is a Line-in-Cone type transducer with an anodized aluminum
ring attached. The ring provides a means to affix the transducer to the appropriate mounting hardware.
The transducer itself provides 300 Watts of Low Frequency energy for bottom penetration of up to 40
meters (sediment dependent). It is lightweight and well suited for portable applications.
The StrataBox™ Installation CD will install the PC software used to configure, control, and acquire data
from the StrataBox Sensor device. It will also include this manual in PDF format and any Release Notes
that have been generated.
A hardcopy of the StrataBox™ Manual is also included so that the user may learn to install, operate, and
maintain the StrataBox™ Equipment and Accessories. The manual also includes a section on acoustic
theory.
The StrataBox PC software was designed for use with the Windows 98 operating system, but should
operate under Windows 95/ME/NT/2000/XP also. We recommend the software be used on a PC with a
processor speed of at least 266 MHz. The software requires at least 1 available Serial Port for connection
to the StrataBox instrument, and optionally, additional Serial Ports for NMEA Navigation/GPS Input,
NMEA Depth Out, and External Annotation. The software features Navigation Input, External
Annotation, Data Storage, Zoom Modes, Thermal Printer output, Automatic/Manual Eventing, and more.
The StrataBox software interface is divided into two fields. The Controls field is located on the left and
contains navigation/depth information, configuration buttons, and system status. The Data field is
located on the right and contains the actual acoustic echo data.
1.2 About This Manual
This manual contains important information regarding acoustic theory, installation, operation and
maintenance of your new equipment. The user should take sufficient time to read the entire manual and
to understand the full functionality of the StrataBox Sensor and PC Software.
The manual is organized into four chapters:
1) An introduction (this section), which provides a system overview and basic outline of echosounding
acoustics.
©2006 SyQwest Incorporated
INTRODUCTION 1-1
Page 14
STRATABOX ™
Operations And Maintenance Manual
2) Installation, which provides details on how to properly mount all of the StrataBox System
components. Details on installing the StrataBox PC Software package are included also.
3) Operational instructions describing how to operate the StrataBox Sensor unit and the StrataBox PC
Software.
4) Maintenance, which provides information on replaceable parts and troubleshooting guidelines.
The user should pay attention to notes that are displayed in a gray box. These notes contain important
information regarding installation and use of the StrataBox System. An example is given below:
NOTE: Important operation and installation information is provided in gray boxes
throughout the manual.
1.3 Echo Sounding Principles
Basic echo sounding principles that should be understood by all operators of hydrographic equipment are
provided in this section.
1.3.1 Underwater Acoustics
1.3.1.1 Decibels
The scale most often used to describe a measurement unit of sound is the decibel (abbreviated “dB”). The
decibel system was selected for a number of reasons. First, it is a logarithmic system, which is useful for
dealing with large changes in measured quantities. Decibel units make multiplication and division simple
because they are reduced to an addition and a subtraction operation respectively. Secondly, for
underwater acoustics, the primary concern is ratios of power levels and signal levels rather than absolute
numeric values.
Transducer calibration values are typically provided in units of decibels, including source level, receive
sensitivity and directivity index. These transducer calibration values are outlined later in this section.
These quantities are used to predict performance levels of a given transducer used with a sonar system.
1.3.1.2 Sound Propagation
The sea, together with its boundaries, forms a remarkably complex medium for the propagation of sound.
Figure 1-2 shows the interaction of a transmitted sound source and the water. Both signal loss and
interference result from interactions with boundaries and components within the water column, causing
the source to be delayed, distorted and weakened. The main components affecting sound propagation are
spreading loss and attenuation loss.
Spreading Loss
As a transmitted pulse of sound leaves the transducer, it spreads out in all directions. At the transmission
point, the sonar puts a fixed amount of energy into the water. As the pulse travels away from the
transducer, it occupies a greater and greater volume. This effect is called spherical spreading. The
general rule is that the intensity of the sound falls off as the square of the distance traveled. In respect to
typical acoustic measurements, this mathematically becomes a loss of 6 decibels for each doubling of the
distance.
INTRODUCTION 1-2
©2006 SyQwest Incorporated
Page 15

STRATABOX ™
Operations and Maintenance Manual
For echo sounders, the distance actually traveled is two times the distance to the seafloor from the source
transducer (from the transmission source, to the bottom and back again). This results in a significant
source of signal loss for the system receiving the sound pulse, which must be compensated for at the
receiver. Typically a Time Varied Gain (TVG) amplifier is used to correct for spherical spreading loss in
an acoustic receiver. A TVG amplifier works by applying an increasing amount of gain to the return
signal as time of travel increases.
Attenuation Loss
Attenuation of sound energy in the oceans comes from three factors: absorption, scattering (or
reverberation) and bottom loss. Sound absorption takes place at two levels; one, absorption in the actual
seawater medium, and two, absorption into the seafloor. Primary causes of absorption are viscosity and
thermal conductivity in the molecules of water as the sound travels. At the molecular level, absorption is
primarily related to frequency. At high frequencies- 500 kHz, for example, a loss of 0.14 dB/meter
occurs in seawater, while at 50 kHz the loss is only 0.014 dB/meter. This is a major concern when
selecting a transducer required to meet specified depth criteria. A graph showing the attenuation loss
versus frequency is shown in
Figure 1-1.
Figure 1-1 Absorption Coefficient Versus Frequency
©2006 SyQwest Incorporated
INTRODUCTION 1-3
Page 16

STRATABOX ™
Operations And Maintenance Manual
Sound reflected off the seafloor usually suffers a significant loss in intensity. Part of this loss is due to
scattering (reflection) but most of it results from the portion of sound entering the new medium and
traveling into the seafloor until it is completely absorbed. The amount of energy lost by this effect varies
greatly and depends on bottom type, sound frequency, and the angle at which the sound intersects the
seafloor. Total losses can vary from 10 dB to 40 dB, with hard bottoms (packed sand, rock outcrops)
causing little loss, and soft bottoms causing a significant amount of energy loss (muddy, silt-like
sediments). Therefore, it is necessary when designing an echo sounder to compensate for this wide range
in signal variation.
Another form of attenuation is scattering, also called reverberation, which results when sound reflects off
components in the water column. Some of these reflectors include boundaries (sea surface and bottom),
bubbles, biological material, suspended particulate and water type boundaries such as thermoclines. As
the sound pulse travels from the transducer, it will reflect off these objects in many different directions.
The larger the area of the reflector compared to the wavelength of the transmitted sound, the more
effective it is as a scatterer. During the scattering process, part of the sound is reflected back to the
surface, and the rest is scattered in all directions. This will cause a reduction in the acoustic energy that
can travel to the seafloor and back to the transducer. For echosounding, this causes a reduced signal
strength, which complicates location of the bottom. In the extreme case, scatterers will cause such a good
reflection it looks like the bottom to the echo sounder and corrections must be made by the user to
properly determine the digitized bottom value.
Bottom reverberation occurs whenever a sound pulse strikes the ocean bottom. In deep water this
condition normally does not cause serious problem, but in shallow water reverberation can happen
multiple times, causing high background signal levels (i.e. the sound travels from the surface to the
bottom and back again many times).
Noise Sources
Background noise can cause interference with the reception of the desired acoustic echo return from the
seafloor. Unlike reverberation, however, noise does not result from the transmitted pulse but from active
producers of noise located at the ship or in the water. Noise can be classified as self produced or ambient
noise.
Self-noise
Self-noise is produced by noisy ship components, electrical circuitry, and water turbulence around the
transducer, including noise caused by water flow and cavitation.
Machinery noise and other sonar systems are the main components of ship produced self-noise. The
dominant source of machinery noise is the ship power plant, including the main engine, generators, and
propellers. The only way to reduce the effect of these noise makers is in proper selection of the
transducer frequency for the echo sounder, and to locate the transducer as far away as possible from the
noise sources. Typically, these sources are of lower frequencies than the echo sounder, but some
mechanical and electrical equipment will produce sound in the ultrasonic region (above 15 kHz) which
can detrimentally affect the performance of a system.
In general echosounding, flow noise, cavitation, and sonar circuitry are more important than other noise
sources. Flow noise results when there is a difference in the relative motion between the transducer and
water surrounding it. As flow increases, friction between an object and water increases, resulting in
increased turbulence and, thus, increasing noise due to varying static pressure in the water. Flow noise is
directly related to the speed of the ship and, on an improperly mounted transducer, there is usually a
certain speed threshold that will cause the echo sounder to start picking up unwanted noise. Increased
flow noise over time can usually be attributed to growth of marine animals and plants on the bottom of
the ship.
INTRODUCTION 1-4
©2006 SyQwest Incorporated
Page 17
STRATABOX ™
Operations and Maintenance Manual
Cavitation is a result of the pressure on the face of the transducer reducing to a level that permits the
water to boil (i.e. turn from a liquid to a gas). This is directly related to the flow around the transducer as
described above. Cavitation is also related to the depth, source level, and frequency of the transducer
being used. As the depth of the transducer increases, static pressure increases to levels that will prevent
cavitation from occurring. If the transducer is mounted properly, with flow noise and cavitation levels
considered, this phenomenon should never affect an echo sounder.
Cavitation may also occur on a ship’s propeller. As the speed of the water increases over the surface of
the propeller, turbulence causes changes in the static pressure of the water. At this point, if the pressure is
low enough, boiling will occur. This process releases a large quantity of bubbles into the water, causing
noise that can affect the performance of an echo sounder. Care should be taken to mount a transducer as
far as possible from this noise source.
Ambient Noise
Ambient noise is always present in the ocean. This noise is caused by both natural or human-made
events. For echosounding principles, ambient noise sources that are significant include hydrodynamic
boundaries, ocean traffic and biological transmitters.
Hydrodynamic noise results from natural phenomenon such as wind, waves, rain or currents. The levels
produced vary greatly, but are largely related to the sea state level. In severe storms, hydrodynamic noise
can reach levels that make reception of a transmitted signal very difficult, if not impossible.
Ocean traffic noise is dependent on the number of ships, the distance from noise sources, and the current
propagation conditions due to thermoclines and sea state. Ocean traffic generally produces acoustic noise
that is not within the frequency bandwidth of most navigational echo sounders, except when ships pass
very near to the receiving transducer.
Biological noise producers include marine life such as shrimp, fish, and mammals. Mechanical
movements of crustaceans, with their hard shells, may produce significant noise when in large schools.
Likewise, certain fish species produce noise by reflecting noise off their swim bladder.
Transducer Properties
Properties of a chosen transducer affect sonar performance which directly relates to depth measurements.
The source level, directivity index, and beam width of a transducer have a relationship with how the sonar
system performs under different conditions.
Source Level
Sound is created by a transducer from a mechanical vibration of the ceramic material of which underwater
transducers are made. The movement of the transducer face creates alternating regions of high and low
pressure, resulting in an acoustic wave. The amount of energy transmitted into the water column is
defined as the acoustic source level. A source level is expressed in units of decibels that describe the
intensity of sound relative to a reference intensity at one unit distance from the sound source. For the
user, a source level is useful for selecting a transducer for a particular use.
The amount of movement on the face of the transducer is linearly related to the voltage difference created
across the ceramics of the transducer. Normally it would seem desirable to put as much power into the
water as possible to achieve maximum depth performance. Cavitation, however, which results from high
source levels and small transducer depths below the sea surface, is generally the limiting factor when
driving a transducer. The electrical and mechanical design of the transducer, which has a maximum
recommended input power level, must also be considered.
©2006 SyQwest Incorporated
INTRODUCTION 1-5
Page 18

STRATABOX ™
Operations And Maintenance Manual
Beam Width
The beam width of a transducer is described as the width of the main lobe of a transmit pattern. The
width is usually measured between the -3 dB points on either side of the beam pattern. Shown in
1-2
is a transmit beam pattern for a 125 kHz transducer. The shape of the transducer beam pattern is a
Figure
result of the transducer design. An array of ceramic elements, or a single ceramic element, emits sound at
given frequency. The spacing of the elements and the frequency being used can control the shape of the
beam pattern. At the center of the beam pattern is the main lobe of the transducer, with a width of 7
degrees (centered at zero degrees). The -3 dB point is shown as a dashed line on the graph. The side
lobes of this transducer are the smaller lobes, approximately 18 dB below the level of the main lobe.
Figure 1-2 Acoustic Beam Pattern
The width of a beam is important for calculating how small an object the system can detect. If two
objects fall within the main beam the object will appear as one object when it is received by the system.
Thus, a narrow beam width is required for navigational echo sounders so it is capable of discriminating
small objects.
The size of the transducer sidelobes (smaller beams off to the side of the main lobe) is important in
determining how the system will behave on steep slopes. On steep slopes, transmitted acoustic energy
from the side lobes will be received first and reveal a signal that looks like the actual bottom. In reality,
the bottom is directly below the ship, and as seen by the main lobe, is much deeper. For this reason, it is
important to select a transducer which has reduced sidelobes.
INTRODUCTION 1-6
©2006 SyQwest Incorporated
Page 19

STRATABOX ™
Operations and Maintenance Manual
Directivity Index
The directivity index measures the ability of a transducer to reject noise from extraneous sources. In the
ocean, noise may be coming from all directions, but a narrow beam transducer will only “hear” noise
within the beam width pattern. A sonar systems signal to noise ratio (SNR) will be affected by the ability
of a transducer to reject unwanted noise, and thus is related to the directivity index. The higher the
directivity index of a transducer, the better the ability to reject unwanted noise.
1.4 Specifications
1.4.1 StrataBox Sensor Specifications
Units
Depth Ranges
Shift Range
Zoom Range
Zoom Modes
Display
Strata Resolution
Depth Resolution
Depth Accuracy
Speed of Sound
Geographic Position
Data Interface
Printer Output
Shallow Water
Operation
Transmit Rate
Event Marks
Data File Output
Data File Playback
Frequency Output
Transmit Output
Power
Input Power
Dimensions
Weight
Environmental
Feet or Meters
0-15, 0-30, 0-60, 0-120, 0-240, 0-450 Feet
0-5, 0-10, 0-20, 0-40, 0-80, 0-150 Meters
0-450 Feet in 1 Foot increments
0-150 Meters in 1 Meter increments
15, 30, 60, 120, 240 Feet
5, 10, 20, 40, 80 Meters
Bottom Zoom, Bottom Lock Zoom, Marker Zoom, GUI Zoom (Playback Only)
Normal Data, Zoom Data, Navigation, Depth, Command/Status, Color Control
for Data: 4 Selections or Custom (User Input), Data Color Invert possible
6 cm with 40 Meters of bottom penetration
0.1 Feet, 0.1 Meters
± 0.5%
1500 Meters/Second, 4800 Feet/Second
NMEA 0183, GLL, GGA, RMC, VTG, VHW, HDT
Selectable Baud Rates (RS-232): 4800, 9600, 19200, 38400
SYQWEST StrataBox Interface, 57600 Baud (RS-422)
Centronics (Parallel Port) interface to TDU Series Thermal Printers
< 2.5 Meters; bottom type dependant
Up to 10 Hz, depth and operator mode dependant
Periodic, External, and/or Manual (Periodic selectable in 1 minute intervals)
Stores Depth, Navigation, and Graphic Data in ODC format (Proprietary)
Normal and Zoom Data stored is Pixel data and can be played back and/or printed
Files can be played back and/or printed at Normal or Fast-Forward speed, with
Pause and GUI Zoom available
10 KHz
300 Watts (Pulsed), 1000 Watts capable
10-30 Volts DC, Nominal power 8 Watts, Reverse Polarity and Over Voltage
Protected
25.4 cm (10”) Length, 15.876 cm (6.25”) Width, and 6.25 cm (2.5”) Height
0.9 kg (2.0 lbs)
-25°C to +60°C Operating Temperature (-55°C to +90°C Storage)
Water Resistant to EN60529 IP65
EMC meets EN60945 Emissions; CE Compliant
©2006 SyQwest Incorporated
INTRODUCTION 1-7
Page 20

Operations And Maintenance Manual
THIS PAGE INTENTIONALLY LEFT BLANK
STRATABOX ™
INTRODUCTION 1-8
©2006 SyQwest Incorporated
Page 21

STRATABOX ™
Operations and Maintenance Manual
2.0 INSTALLATION
2.1 - StrataBox System Installation Overview
This section presents instructions for initial setup and installation of the StrataBox Sensor. Physical and
electrical installation details are provided for connecting, mounting, and getting started with the
StrataBox. A summary is given of the software installation and setup procedure as well.
Although the StrataBox Sensor is designed to deliver the highest levels of quality and performance, it can
best attain those standards when the equipment has been properly installed. Because of the great variety
of vessels that will employ the StrataBox Sensor, it is not feasible to provide complete and detailed
instructions that will fit all installation possibilities. Therefore, this section will provide practical
guidelines to assist the user in planning a typical installation of the StrataBox System aboard the vessel.
Shown in
minimum operational system configuration requires:
The GPS, NMEA Depth Out, and External Eventing connections are optional but, if used, will require the
PC to have additional COM ports. For many portable PC’s additional COM ports may be installed via
one of the PCMCIA expansion slots.
The TDU Printer, if used, is attached via the PC’s Printer Port.
Figure 2-1 is a system-interconnecting diagram. Optional items are shown with dashed lines. A
1. PC running Windows 98 (Windows 95/ME/NT/2000/XP should work as well, Pentium II @
266MHz or greater)
2. StrataBox Sensor Unit
3. StrataBox Transducer Assembly
4. StrataBox Cables (Power, Data, Transducer)
5. 10-30 Volt DC Power Source (8 Watts)
6. Transducer Mounting Hardware
©2006 SyQwest Incorporated
INSTALLATION 2-1
Page 22

Operations And Maintenance Manual
STRATABOX ™
Figure 2-1 System Interconnect Diagram
2.1.1 - Getting Started
Unpacking and Inspection
Use care when unpacking the unit from it’s shipping carton to prevent damage to the contents. It is also
recommended that the carton and the interior packing material be saved even after the unit has been
installed on the vessel. In the unlikely event that it is necessary to return the unit to the factory, the
original carton and packing material should be used. Verify that all parts described in the next section
have been shipped with the unit.
Basic Equipment
The following (
Instrument (P04400):
Table 2-1) is a list of the basic equipment supplied with the StrataBox Geophysical
Part
Number
Item Quantity
P04403 StrataBox Sensor Unit 1
P04462 StrataBox Transducer Assembly 1
P04412 Power Cable (10 feet) 1
P04413 Data Cable (10 feet) 1
P04415 Transducer Cable (30 feet) 1
P04421 StrataBox Software CD 1
P04425 StrataBox Manual 1
INSTALLATION 2-2
Table 2-1 Basic Equipment
©2006 SyQwest Incorporated
Page 23

STRATABOX ™
Operations and Maintenance Manual
Accessories and Options
The following items are available to complement and enhance the operation of the StrataBox Profiler.
Please contact your authorized SYQWEST distributor or visit our web site for information and assistance
in obtaining any of these items.
Product
Code
Item Quantity
P02553 TDU-850 Thermal Printer 1
P03100 TDU-1200 Thermal Printer 1
P03120 TDU-2000F Thermal Printer 1
P03050 12 Channel DGPS System w/ Combo Antenna 1
P04465 Over-the-Side Mounting Kit 1
Table 2-2 Accessories and Options
2.1.2 - Installing the StrataBox Electronics
Instructions are provided in this section regarding the physical installation of the StrataBox Sensor Unit
and the PC that is used for the User Interface. Guidelines are provided for locating and/or mounting the
StrataBox Sensor unit and the PC. The installer should refer to Section
2.1.4 for information on electrical
hookup.
Selecting a Location for the Electronics
The StrataBox Sensor Unit is designed for portable, marine applications but maybe used in permanent
installations as well. The user must determine if the StrataBox Sensor Unit is to be mounted on the vessel
or just placed in a convenient place on-board the vessel. Either way the appropriate location for the unit
needs to be determined. The following considerations should be investigated before deciding upon a
location:
1. User Supplied Personal Computer
The first step in the equipment location process is to determine the optimum place for viewing the data.
The unit should be positioned to provide the optimum viewing angle and within easy reach of the operator
whenever possible. This will vary depending on the size of the vessel and type of Personal Computer
(Desktop or Laptop) but is most important to insure the comfort and success of the user. The location
selection should consider that standard PC displays are not easily readable in direct sunlight. Adequate
space for the computer and any peripherals that need to be connected should be considered as well.
Finally, provisions need to be made to properly secure the equipment for the worst sea conditions that
may be encountered.
2. Cable Lengths.
Both the Data Interface Cable and the DC Power Cable supplied with the product are 10 feet long. Thus,
the Sensor Unit must be installed within 10 feet of both the user supplied Personal Computer and a 1030VDC Power Source. The unit must also provide adequate access for cabling termination without
binding, and allow suitable space for servicing the equipment. (If necessary, the data cable may be
extended beyond 10 feet. See Section
©2006 SyQwest Incorporated
2.1.4 for more information)
INSTALLATION 2-3
Page 24

STRATABOX ™
Operations And Maintenance Manual
3. Water Resistance.
The Sensor Unit has passed the EN60529 IP65 Water Resistance Standard which insures that the unit is
completely sealed and is Splash Proof. The unit should NOT however be installed in an area where the
unit may be submerged in water.
4. Environmental.
The operating temperature of the StrataBox Sensor is –25C to +60C thus the operating temperature range
of the PC is likely the limiting factor for temperature. The unit has also passed all of the EN60945
emission tests (radiation and immunity). For optimum system performance it is still recommended that
the installer mount or place the Sensor unit in an area that is at least several feet away from any other
electronic equipment or machinery on the vessel. The unit should also be mounted or placed in an area
that won’t be exposed to water if practical.
Mounting the Sensor Unit
This section outlines the steps for mounting the Sensor Unit. Refer to
Figure 2-2 while installing. The
unit may be mounted either horizontally or vertically. The keyhole slots make installation in hard to
reach areas easier, but be sure to tighten all mounting hardware securely. Insure that adequate room is left
for installing and removing the cable connections. Also, verify that the status indicator (labeled STAT) is
visible.
Step 1) Confirm that the area behind the intended-mounting surface on the bulkhead is clear of
equipment, panels, electrical cables, conduits, hydraulic, air, water lines or pipes.
Step 2) Using the Sensor Unit as a template mark a drill point for each of the mounting holes. Insure that
the marks for the keyholes are placed in the smaller, slotted areas.
Step 3) Drill four (4) holes that will work with the mounting hardware that has been selected (not
supplied). The 4 holes on the Electronic unit are .195 inches in size (#8 size Screw recommended
for installation).
INSTALLATION 2-4
©2006 SyQwest Incorporated
Page 25

STRATABOX ™
Operations and Maintenance Manual
Figure 2-2 Bulkhead Mounting the Sensor Unit
2.1.3 - Installing the StrataBox Transducer
General Transducer
The StrataBox is equipped with a single lightweight, Line-in-Cone transducer that is designed for
portable, over-the-side mount applications. It may also be used in permanent installations but will need to
be mounted in a water filled seachest in those installations. Before installing the transducer, the installer
should read and understand the appropriate section below to insure that all of the installation issues are
considered.
Selecting a Location for the Transducer
The location of the transducer is very important for maintaining reliable bottom tracking and optimum
subbottom performance of the equipment. Avoid installing transducers in locations where the transducer
will be subjected to turbulent water, air bubbles, or vibration. The best clear water location on most
vessels meeting these criteria is approximately 1/3 the length of the vessel, aft from the bow.
For many portable applications and some permanent applications it is not practical to mount the
transducer in the forward section of the vessel. For these applications the transducer can be located in the
aft third of the vessel; away from and forward of shafts and propellers, clear of hull openings, sea chests,
outlets or protuberances. It is preferable to mount the transducer on the side of the hull where the
propeller blades are normally moving downwards. The upward motion of the propeller can generate
pressure waves, which push air bubbles up against the hull. By mounting the transducer on the downward
side, the hull will tend to protect the transducer from this effect.
©2006 SyQwest Incorporated
INSTALLATION 2-5
Page 26

STRATABOX ™
Operations And Maintenance Manual
The transducer should be mounted adjacent to the ship’s centerline. The radiating face should be flush
with the hull and, wherever practical, the face should be parallel to the waterline. A maximum deadrise
angle of 3 degrees is allowable.
The transducer must be mounted such that it will always remain submerged during operation. Thus, the
depth of the transducer should take into account the location on the vessel and the worst case sea state
conditions. Turbulent flow across the radiating face of the transducer and/or the presence of air bubbles
will degrade system performance significantly as well and must be considered.
The area selected for mounting must provide sufficient space for access to the transducer and cable, and
for routing cable and conduit. In addition, there should be sufficient room to permit use of the necessary
tools to facilitate the installation-mounting requirements. Ideally, the location would provide a relatively
direct cable run to the site of the StrataBox Sensor Unit.
The cable path from the Electronics to the transducer should be routed as far as possible from other
electrical cables. Although the cable is shielded, the acoustic reply from the transducer can be on the
order of microvolts, thus any cable crosstalk emissions can cause a decrease in acoustic sensitivity.
Handling Transducers
The transducer is the heart of the StrataBox system and, in spite of its appearance and size, is a delicate
instrument. Although it is designed to be in contact with and survive tough marine environments, it
should not be dropped or mishandled during the installation. Caution is advised when handling the
transducer to prevent any damage to the transducer face or radiating surface.
The Line-in-Cone transducer is comprised of a large ceramic, cylindrical ring element affixed to a plastic
cone with baffling. The Transducer Mounting Ring is provided to make it easy to secure the StrataBox
Transducer to a mounting surface. This assembly also provides protection for the Transducer and should
be affixed to the transducer at all times. The transducer and mounting assembly should be as clean and
smooth as possible so the path of the sounding energy is uninterrupted. The transducer face must not be
painted with lead based bottom paint. In portable applications the transducer and mounting assembly
should be cleaned with fresh water after use.
WARNING: Do not expose the transducer to any solvents when cleaning any excess
sealants. Strong solvents may damage the face of the transducer.
INSTALLATION 2-6
©2006 SyQwest Incorporated
Page 27

STRATABOX ™
Ø16.38 (416mm) Dia.
Operations and Maintenance Manual
Ø0.50 (12.7mm) Dia. (2 PLcs.)
MOUNTING RING
SPIDER MOUNT
PIPE FLANGE 1" DIA PIPE
(REFERENCE)
MOUNTING HOLES
Ø0.404 (10.26mm) THRU, 6 PLACES
EQ. SPACED ON A Ø15.13
(384.3mm)B.C.
Ø5.5" (139.7mm) Dia.
5.75"
(146mm)
ASSEMBLY
Figure 2-3 Transducer Mounting Ring
Also, when handling the transducer, avoid lifting or pulling on the transducer cable. Although the cable
appears thick and substantial, the internal cable wiring could be damaged by stress from the sheer weight
of the transducer and cause a malfunction at the most inopportune time.
Portable Transducer Installation
Portable installations of the StrataBox transducer for most survey vessels will be of the over-the-side pipe
mount type. This type of installation is achieved with the following list of materials:
Part Number Item Quantity
P02590 StrataBox Transducer 1
P04462 StrataBox Transducer Mounting Assembly 1
User Supplied Silicone grease or petroleum jelly (Vaseline®) 1
User Supplied Pipe coupling 1
User Supplied
Pipe with threads to match the pipe coupling and length to give
proper transducer depth
1
User Supplied Pipe coupling adapter 1
User Supplied Support Lines or cables 2
User Supplied Pipe Clamps to affix the Pipe to the 4x4 1 (or 2)
User Supplied Pressure Treated 4x4x (Ship’s Beam Width + 2 feet) 1
User Supplied Large “C” Clamps to affix the 4x4 across the beam of the vessel 2
User Supplied Protective Pads or Carpet Remnants 2
User Supplied Mild Household Detergent (i.e.,dishwashing liquid) 1
Table 2-3 Portable Transducer Installation Parts
©2006 SyQwest Incorporated
INSTALLATION 2-7
Page 28

Operations And Maintenance Manual
Refer to
Figure 2-4 below while reading and implementing the Installation procedure listed below.
STRATABOX ™
Figure 2-4 Over The Side Transducer Mounting
INSTALLATION 2-8
©2006 SyQwest Incorporated
Page 29

STRATABOX ™
Operations and Maintenance Manual
CAUTION: Never pull, carry or hold the transducer by the cable as this may sever
internal connections.
Installation Procedure:
1. Apply silicone grease or petroleum jelly to the threads of the pipe to facilitate later disassembly.
2. Twist the pipe coupling onto the pipe.
3. Push the transducer cable through the pipe. Alternately after the transducer is attached, clamp the
cable to the outside of the pipe using cable clamps.
4. Apply silicone grease or petroleum jelly to the transducer stem. Insure that the grease does not smear
the face of the transducer.
5. Attach 2 lines or cables to the Transducer Mounting Assembly. These lines or cables will support the
pipe from the force of the water when the boat is underway.
6. Attach the Pipe Clamp(s) near the end of the 4x4 insuring that there is enough clearance for the
transducer to hang over the side of the vessel.
7. Place the 4x4 across the beam of the vessel near the stern and fasten it to the gunnels with the C
Clamps. Use the Protective Pads or Carpet Remnants to protect the gunnels of the vessel. Insure that
the 2 foot extra length of the 4x4 extends beyond the beam of the vessel on the appropriate side and
that the Pipe Clamp(s) attached to the 4x4 are on the extra length as well.
8. Attach the Transducer/Pipe Assembly to the 4x4 using the Pipe Clamps. Insure that the transducer is
deep enough into the water that sea conditions will not cause the transducer to get to the surface.
9. Fasten the line(s) or cable(s) fore and aft with sufficient tension to support the pipe when the boat is
underway.
10. Route the cable to the instrument being careful not to tear the cable jacket. To reduce electrical
interference, separate the transducer cable from other electrical wiring. Coil any excess cable and
secure it in a place with zip-ties to prevent damage.
Portable Transducer Maintenance
Aquatic growth can accumulate rapidly on the transducer's surface reducing its performance in weeks.
Clean the surface, keeping it free of marine growth and petroleum residue, with a soft cloth and mild
household detergent. Inspect the cable periodically for kinks, abrasions and cuts. Repair any damage
using an approved waterproofing cable repair system. Inspect connections for indications of corrosion.
WARNING: NEVER USE SOLVENTS!
Certain cleaners, gasoline, paint, sealants and other products may contain strong
solvents, such as acetone, which can attack many plastics dramatically reducing
their strength. Clean surface of transducer with a mild detergent only.
Permanent Transducer Installation
For some applications it may be necessary and/or convenient to mount the StrataBox Transducer
permanently in the hull of the vessel. Due to the construction of the StrataBox Transducer it may NOT be
directly affixed to the hull of the vessel. A Seachest Installation is required. Guidelines for performing a
Seachest installation are described in the following sections.
INSTALLATION 2-9
©2006 SyQwest Incorporated
Page 30

STRATABOX ™
Operations And Maintenance Manual
Seachest Transducer Installation
Interior Seachest installations are best suited for solid fiberglass hulls to permit a minimum attenuation of
acoustic reply signals. Hulls of other type material types may be considered but most other hull types will
require that a Seachest design be built into the hull with an acoustic window across the face of the
enclosure (i.e. a significant hole must be cut out of the hull).
Inside mounting to the hull does minimize drag to allow faster survey speeds, however, significant loss of
subbottom performance may result due to the attenuation loss in the hull.
Locate the transducer where the hull is solid fiberglass resin to maximize sound transmission. Do not
locate over balsa wood core material. Consult the hull manufacturer if you are unsure of the core material
or the best location. Never bond large resin housings directly to the hull; always use a liquid-filled box.
In any permanent installation the intended final configuration should be tested before it is implemented, if
possible.
For more information regarding the installation of a Seachest or other permanent transducer mount, refer
to our website at
http://www.syqwestinc.com/support/install/xducer.htm, or contact us directly.
INSTALLATION 2-10
©2006 SyQwest Incorporated
Page 31

STRATABOX ™
Operations and Maintenance Manual
2.1.4 - Electrical Connections
WARNING: Be sure to turn the vessel power off at the main switchboard before
proceeding with the installation. If power is left on or turned on during the
installation, then fire, electrical shock or other serious injury may occur.
There are 3 connections that need to be made to the StrataBox Sensor Unit and the PC for the system
function properly. The user also has the option of connecting a GPS input and/or a Thermal Printer. The
sections below describe the connection details for each.
All electrical connections to the StrataBox Sensor unit are to the side of the unit. Refer to the sections on
each individual connector for information on connector type, recommended cable and wiring specifics.
Figure 2-1 at the beginning of the chapter shows the overall systems interconnect for the system.
Figure 2-5 StrataBox Sensor Unit Connections
Figure 2-5 shows the basic connections to the unit. In all installations, all of the connections must be
made for the unit to function. As shown above, there is a status indicator (STAT) and there are 3
connectors from left to right: DC Power (3 pins), Data Interface (8 Pins), and the Transducer (10 Pins). A
grounding screw, located to the right of the Transducer connector, is provided to connect the StrataBox to
the vessel’s earth ground system. The cables supplied with the StrataBox are ready to plug into the
StrataBox Sensor Unit. No user wiring is necessary. The cables associated with the StrataBox Sensor
Unit are listed below (
firmly attached to the unit via the twist-lock mechanism.
Table 2-4). The user should make sure that, after wiring is complete, each plug is
Part Number Item Quantity
P04412 DC Power Cable (10 feet) 1
P04413 Data Interface Cable (10 feet) 1
P04415 Transducer Cable (30 feet) 1
Table 2-4 StrataBox System Cables
©2006 SyQwest Incorporated
INSTALLATION 2-11
Page 32

STRATABOX ™
Operations And Maintenance Manual
DC Power Connection
Before installing the power connection to the unit, the installer must first insure that the DC power source
is in the range of 10-30VDC and is capable of providing 8 watts of power to the unit. Although the
StrataBox Sensor unit is reverse polarity and over-voltage protected, it is always required that the power
mains be turned off during system wiring for both personal and equipment safety.
The Power Cable supplied with the system is 10 feet long, and includes 3 conductors. The wires in the
power cable must be connected as follows:
RED – Positive DC Voltage (Fused Lead), DC IN+
BLACK – DC Return, DC INWHITE – Earth Ground, SHLD
The Positive DC Voltage lead includes a 3 Amp in-line Fuse. In the unlikely event that the fuse is blown
it should be replaced with a fuse of the same amperage. Installing an incorrect fuse can result in damage
or fire to the unit if it is not operating properly.
The Power Connector on the Sensor Unit is shown below in
Figure 2-6 StrataBox Sensor Power Connector
Electrical wiring standards require that the StrataBox Sensor Unit be properly attached to a solid chassis
ground via the ground stud on the bottom of the unit, or the Earth Ground wire (WHITE) in the power
cable. When connecting to the ground stud, a tinned copper braided wire (0.190 gauge or greater) is
recommended.
Figure 2-6.
NOTE: Connecting the Earth Ground is required for optimum system performance and
safe operation. The white wire in the power cable OR (BUT NOT BOTH) a ground
wire to the unit ground stud is needed. Connecting both the white wire and the
ground stud to earth ground may degrade performance due to induced ground
loops.
INSTALLATION 2-12
©2006 SyQwest Incorporated
Page 33

STRATABOX ™
Operations and Maintenance Manual
Data Interface Connection
The Data Interface cable supplied with the StrataBox is 10 feet long. It includes 8 conductors and an RS422 to RS-232 conversion block. This block connects directly to the COM port of the PC and derives its
input power from the DTR and/or RTS signal lines from the PC. For nearly all applications, the Data
Interface can be connected as supplied.
If the 10 foot length of cable is not enough, the Data Interface Cable may be extended by using a
standard, 1 to 1, 9 pin D to 9 pin D extension cable. This cable must be connected between the RS-422
side of the conversion block and the 9 pin D connector attached to the Data Interface cable. The
extension cable must be shielded to guard against interference. The Data Interface Connector on the
Sensor Unit is shown below in
Figure 2-7
Figure 2-7 StrataBox Sensor Data Connector
Transducer Connection
The StrataBox transducer wiring is comprised of 2 cable sections.
The first cable section is 6 feet long and is directly connected to the ceramic inside the transducer. There
is a waterproof inline connector at the end of this cable section suitable for connection in a flooded
seachest or in seawater.
The second cable section is 30 feet in length and has the waterproof mate to the first cable section on one
end and a 10 pin connector on the other end that mates to the Transducer connector on the StrataBox
Sensor Unit. Only 3 of the pins on the 10 pin connector are wired to the unit. They are defined as:
WHITE - Transducer +
BLACK - Transducer –
GREEN - Transducer Shield
The Transducer Connector on the Sensor Unit is shown below in
Figure 2-8.
Figure 2-8 StrataBox Sensor Transducer Connector
©2006 SyQwest Incorporated
INSTALLATION 2-13
Page 34

STRATABOX ™
Operations And Maintenance Manual
GPS Connection
Connecting a GPS or other Navigation input to the PC running the StrataBox™ software allows the user
to store and annotate Date, Time, Position, and Heading information to the Acoustic data returns.
The StrataBox PC Software supports the NMEA 0183 protocol on a 2
nd
COM port that is software
selectable by the user. When selecting a PC to use with the StrataBox system the user should insure that
PC hardware supports 2 COM Ports if a Navigation input is desired (the StrataBox Sensor/PC interface
requires 1 COM port). For Portable PC’s, a PCMCIA COM port card can often be used to provide a 2
nd
COM port.
The user should refer to the GPS NMEA 0183 output connection information in their GPS Manual as well
as the PC COM port wiring information in their PC Manual to insure that the Navigation input is wired
correctly.
Printer Connection
The StrataBox PC Software allows the user to interface to the all of the SYQWEST TDU Thermal
Printers. The connection is established through the PC’s Parallel Printer Port (25-pin D-Type) as shown
below in
Figure 2-9. Once the software has been started, all displayed acoustic data can be printed to the
TDU in either Acquisition or Playback mode.
Figure 2-9 Printer Port
The standard TDU Printer cable is provided with the printer and is 12 feet long and does not require any
user wiring. Installers must locate the printer accordingly.
2.2 - StrataBox PC Software Installation
This section describes how to install the StrataBox PC software package. It is assumed that the reader has
a working knowledge of installing Windows 95/98/2000/NT® software. The installation software is
located on the CD-ROM disc included with your StrataBox.
NOTE: It is recommended that you exit all running applications before inserting the CD
and beginning the installation.
To install the PC software, insert the StrataBox CD into an available drive. If Auto Insert Notification is
enabled on the CD-ROM drive, then the StrataBox PC installer will begin automatically. If the CD does
not auto-start, simply execute the
Once the installer is running, it will verify that your operating system is compatible with the StrataBox
software, and then it will check which version of the Windows Installer program is installed in your
system. If the Windows Installer program is not found or out of date, it will update it and prompt you to
restart your computer. Once restarted, the StrataBox installation will continue automatically.
SETUP.EXE file in the root directory of the CD.
INSTALLATION 2-14
©2006 SyQwest Incorporated
Page 35

STRATABOX ™
Operations and Maintenance Manual
The InstallShield Wizard will guide you through the next step where you have the option of choosing an
install directory. By default, the StrataBox PC software is installed in the Program Files folder under the
sub-directory ODEC.
In the next step, you may choose a Typical, Minimal, or Custom installation. Selecting Typical will
perform a complete install of both the StrataBox application and Sample Data for playback. A Minimal
installation will only install the StrataBox application. Additionally, you can choose Custom to manually
select what you would like installed. Click the next button to continue to the next step.
The rest of the installation process consists of verifying your settings and clicking the install button.
Also, once the installation is complete, you can check the Launch the program box to execute the
StrataBox software as soon as you close the installer. If not, you can run the StrataBox PC software by
using the Windows Start button to find the StrataBox menu under Programs, or simply double-click on
the StrataBox icon located on your Desktop.
©2006 SyQwest Incorporated
INSTALLATION 2-15
Page 36

Operations And Maintenance Manual
THIS PAGE INTENTIONALLY LEFT BLANK
STRATABOX ™
INSTALLATION 2-16
©2006 SyQwest Incorporated
Page 37

STRATABOX ™
Operations and Maintenance Manual
3.0 OPERATION
3.1 StrataBox PC Software
This section describes how to operate the StrataBox Sensor using the PC Software package included with
your StrataBox.
3.1.1 - The Main Window
The StrataBox Main interface is divided into two fields, the Controls and Status field, and the Data
field. The vertical window boundary between the fields may be positioned by the user as desired.
The Controls and Status field is located in the left portion of the window. It provides access to all of the
user controlled parameters. Specifically, the Controls and Status field includes digital depth, an
animated compass with heading marks in degrees, GPS Position, Time/Date, Ping Count, available disk
space (for data storage), and StrataBox Sensor status.
The Data field is located in the right portion of the window. It displays the actual echo data. The Data
field can be viewed in either Normal or Zoom mode. In Normal Mode, the entire Data field is used for
displaying non-zoomed bottom data. In Zoom Mode, the Data field is divided in half to show zoomed
data on the left and normal bottom data on the right. While echo data is being shown in either mode, the
user may use the mouse to obtain a digital depth value anywhere in the water column by pointing and
clicking. See the below picture and table for more info. (The picture reflects the software in Zoom mode)
NOTE: The current on-screen bottom image in both Zoom and Data windows will be lost
upon resizing the window
©2006 SyQwest Incorporated
OPERATION 3-1
Page 38

Operations And Maintenance Manual
1. The Toolbar
Quick access to common StrataBox functions. From left to right they include:
Open A Playback File
Insert Text Annotation
Insert Manual Event Mark
Toggle Playback Zoom
Toggle TDU Printer On or Off
Get StrataBox Software And Version Info
Starts the StrataBox Sensor Pinging
Stops the StrataBox Sensor Pinging
Playback a Previously Recorded File
STRATABOX ™
Toggle Fast Forward/Normal Playback
Pause Playback
Stop Playback
NOTE: Playback buttons are available in Playback mode only and will be disabled
otherwise.
2. Navigation/Depth Display
These indicators provide navigation and digital depth info to the user in real-time. Navigation/Depth
information includes the digital depth, current Date/Time, global position, and ping count.
The digital depth is shown to 1 decimal place in both Feet and Meters and is displayed in a large font to
make viewing easier from a distance. The depth value is updated once per ping and will show
depth is not found or invalid.
The Date/Time shown is based on the user’s PC clock by default and can be displayed in Local time or
GMT (See User Preferences in Section
valid navigation data, the Date and Time on the user’s PC can be synchronized to the UTC Date/Time
transmitted from the GPS (See “Configure NMEA I/O” in Section
Position info is also provided when a GPS receiver is connected to the PC and the StrataBox Software is
configured and receiving valid GPS data. When GPS Position data is not available, the display will show
“Latitude N/A” and “Longitude N/A”. If the StrataBox PC Software is receiving position data, it will be
provided in Decimal Minutes format. (i.e. 41° 22.74402’ N, 71° 36.25902’ W)
3.1.2.1). If the PC is connected to a GPS receiver that is receiving
3.1.2.1 for more information).
-.- if the
OPERATION 3-2
©2006 SyQwest Incorporated
Page 39

STRATABOX ™
Operations and Maintenance Manual
The ping count is included to provide the user with a means of estimating how fast the StrataBox Sensor
is pinging, and also for how long. The ping count is reset to zero when any of the following events occur:
- The StrataBox PC Software is restarted.
- A Recording or Playback file has begun.
- The StrataBox Sensor has temporarily lost power and reset.
In addition, the StrataBox software features an animated compass which displays the current heading.
The compass is located underneath the GPS position information.
3. Gain and Auto Controls
The Gain controls consist of 2 pull-down menus which control the StrataBox Sensor’s gain settings. The
StrataBox Hardware gain is controlled by the DC Gain control and can be set either from 0-75 dB, or to
Auto Mode. The BT Gain controls the Bottom Triggered gain which allows the user to amplify acoustic
returns in the sub-bottom sediments. The BT Gain is first applied at the bottom depth value and
increases over time at the selected dB/unit increment. It can be set from 0.1 - 2.0 dB/unit (Either Feet or
Meters, depending on which is currently enabled) in 0.1 increments. For example, consider the
following:
Bottom Depth is 40.0 meters
Range is set to 0 - 80 meters
BT Gain is set to 0.5 dB/m
DC Gain is set to 30 dB
From 0 – 40 meters, the total gain will remain 30 dB as set by the DC Gain control. After 40 meters,
however, the total gain will increase by 0.5 dB every meter, giving you 35 dB of total gain at 50 meters,
40 dB at 60 meters, etc. The BT Gain can only apply up to 30 dB of additional gain.
Depressing the Auto All button sets the StrataBox Sensor to automatically choose the best Range (Refer
to next section for more information on Range) and hardware Gain settings, making bottom tracking
easier for the user. Clicking the Auto All button again will toggle the StrataBox back to manual mode.
The BT Gain is not auto-controlled in Auto All mode. This allows the user to select the BT Gain best
suited to the bottom features present for their application.
NOTE: When in Auto All mode, the DC Gain control is not available and will be controlled
by the StrataBox automatically. While the control is disabled, it will indicate which
hardware gain setting that the Sensor has chosen.
4. Range, Zoom Range, and Shift Controls
The Range control allows you to choose a manual range for the StrataBox Sensor. It includes 6 range
settings presented in either Feet or Meters.
The Zoom Range control has 5 settings which are used to set the range of the Zoom window. These
values will be in either Feet or Meters depending on which units are currently selected.
©2006 SyQwest Incorporated
OPERATION 3-3
Page 40

STRATABOX ™
Operations And Maintenance Manual
The Shift Range control allows you to choose a manual offset to the start depth on the graphic display.
The user enters an integer value, in either Feet or Meters depending on which is currently selected, to set
the top of the water column. The water column viewed will reflect the shift depth at the upper limit of the
display and will extend the entire range amount.
For example, if a range of 0 – 80 meters is selected, and a Shift value of 10 is selected, the water column
range will become 10 – 90 meters. The Shift value cannot exceed 450 feet, or 150 meters. It will also
NOT be available nor have any effect while in Auto All mode.
NOTE: When in Auto All mode, the Range control is not available and will be controlled
by the StrataBox automatically. While the Range control is disabled, it will
indicate the current Range setting that the Sensor has chosen. Shift Range will also
not be available nor have any effect in Auto All mode.
5. Sensor State
This indicator shows the current state of the StrataBox Sensor. There are a total of 6 different states:
Unknown - No communication is present between the Sensor and PC Software.
Power On - Power has been applied to the StrataBox and the Sensor has begun
communicating.
Initializing - The StrataBox software is handshaking with the Sensor to establish a reliable
connection.
Idle - A connection between the PC and the StrataBox Sensor has been established,
but no commands have been received yet.
Pinging - The StrataBox Sensor is transmitting and receiving real-time bottom data.
Playback - The PC Software is displaying previously recorded data from a playback file.
Post Failure - The StrataBox Sensor did not pass the initial Power On Self Test. This error
will always include an error code.
6. Color Palette and Unit Controls
The StrataBox PC Software allows you to choose from 4 standard color palettes by clicking on one of the
radio buttons located in the Color Control section. If you wish to create your own palette, you can do so
by selecting Custom and clicking on the button to right of it. You can also reverse the current palette by
using the Invert box.
Along side the Color Control is the Units control. You can choose to display depth and range information
in Feet or Meters. You can also check the Milliseconds box to display range and zoom range scale bars in
Milliseconds rather than Feet or Meters.
7. File Capture Status
This unique feature allows the user to view the Recording status when capturing data to a hard disk. The
status shows the drive letter of the destination drive as well as a graph depicting how much free/used
space is present on that drive. During recording, the current file size will be shown also.
OPERATION 3-4
©2006 SyQwest Incorporated
Page 41

STRATABOX ™
Operations and Maintenance Manual
8. Range Markers
These scalebars show the full range of the data windows and are based in the current unit selected. Also,
if GUI Zoom is activated, two slider bars will be visible on the right scalebar. They are used to specify
the GUI zoom window boundaries. In addition, when Marker Zoom is enabled, a single slider bar will
appear and is used to specify where the water column will begin in the marker zoom window.
9. Mouse Depth Fields
These fields are where the actual echo return data appears in the StrataBox PC Software. By using the
mouse, the user may obtain a digital depth value anywhere in the water column by pointing the mouse
cursor and clicking the left mouse button. A window will appear containing the digital depth value in feet
or meters, depending on which has been selected. This window may be conveniently moved anywhere on
the screen and will remain open until it is closed. Each time the user points and clicks in a Mouse Depth
Field, this window will re-open unless it is already open.
NOTE: To fine-tune in on a depth value, the user may point, click the left mouse button,
and HOLD it down while slowly moving the mouse pointer. The digital depth
shown in the Mouse Depth display will be continuously updated until the mouse
button is released.
3.1.2 – The Menu Bar
The StrataBox PC Software has 4 menus on the menubar including File, Edit, View, and Help. Most of
the StrataBox Software Preferences and Navigation configuration are accomplished through these menus.
3.1.2.1 – The File Menu
©2006 SyQwest Incorporated
OPERATION 3-5
Page 42

STRATABOX ™
Operations And Maintenance Manual
Start Recording
Creates a new file on the specified hard disk for capturing acquisition data. If the StrataBox Sensor is
already pinging, then the software will start the data recording immediately. The filename is based on the
date/time in the following format:
<path>YYYYMMDDhhmmss.odc
<path> - This represents the path to a directory where the recorded files should be stored. Refer
to User Preferences in this section for information on manually setting the path.
YYYY - 4-digit Year
MM - 2-digit Month
DD - 2-digits Days
hh - 2-digits for Hours
mm - 2-digits for Minutes
ss - 2-digits for Seconds
.odc - ODEC’s Proprietary File Extension
NOTE: Once recording is started, this option will become “Stop Recording”.
Open for Playback
Opens a previously recorded file for reviewing. All other Playback functions are controlled by the
coinciding buttons in the toolbar. Playback filenames are created based on the date/time. (Refer to the
above section for more information)
Configure Sonar Port
This menu allows you to choose which PC COM port the StrataBox Sensor is connected to. In
addition, you can enable/disable communication to the sensor by toggling the “Enable Serial IO”
check box.
OPERATION 3-6
©2006 SyQwest Incorporated
Page 43

STRATABOX ™
Operations and Maintenance Manual
Configure NMEA I/O
This menu allows the user to configure the StrataBox software to receive NMEA 0183 navigational
information from a GPS receiver, or equivalent. The user may also use this menu to select an output
format for digital depth. Both the GPS NMEA 0183 and NMEA Depth Out functions operate on the one
COM port chosen by the user. An adapter from SYQWEST may be required to use both functions
simultaneously. Using the “Enable Serial IO” checkbox, you can enable/disable NMEA Input/Output.
When enabled, you can choose the appropriate PC COM port and communication parameters.
Most GPS units are setup to use 8 Data bits, No Parity, 1 Stop bit, and either 4800 or 9600 Baud. In
addition, you must choose which NMEA format the software will use to collect navigational data. Make
sure you choose a format compatible with your GPS receiver. Check your GPS manual for more
information.
The “Synchronize System Time to GPS Time” option is provided as a means to synchronize the internal
PC clock to the UTC Date/Time from the GPS. The RMC Sentence is the only one which includes GPS
Date and Time and so this option is only available when the RMC Sentence is selected for “NMEA
Position”. It will be disabled otherwise.
The user may also choose to enable digital depth output by selecting one of the 3 output formats,
including NMEA DPT, NMEA DBT, or SYQWEST’s PMC. The PMC format is fully compatible with
the Bathy-500MF output format and can be interfaced to any third party software, such as HyPack, which
supports the Bathy-500MF. To disable digital depth output, simply select OFF under “NMEA Depth
Out”.
NOTE: Since Navigation Data Input and Digital Depth Output both use the same COM
Port, both devices must use the same communication parameters, such as Baud
Rate, Data Bits, Parity, and Stop Bits.
©2006 SyQwest Incorporated
OPERATION 3-7
Page 44

Operations And Maintenance Manual
Configure Events
STRATABOX ™
This menu is used to configure eventing and annotation. Events may be generated by using the toolbar
button, or the corresponding menu option “Insert Event Mark” under the Edit menu. An event is a
vertical marker which appears on both the screen and printer. A number of real-time parameters may be
included with the events as derived by the user. These parameters are shown in the previous picture
under “Annotate Event Mark With...”. In addition, the user may choose between 3 Eventing trigger
methods including, Manual, Periodic, or External. When in “Manual Eventing”, event marks are inserted
only when one is requested by the user using one of the methods described above. “Periodic Eventing”
allows the StrataBox software to insert events at a specific interval, depending on the number of minutes
entered by the user. While in periodic mode, the user may still insert manual event marks in addition to
the periodic ones. “External Eventing” has been implemented as means of allowing third party software,
such as HyPack, to remotely generate Event marks and annotation in the StrataBox software. It can be
configured by enabling the “External Eventing” option and setting the communication parameters such as
COM Port, Baud Rate, Start Bits, Stop Bits, and Parity to match the configuration of the third party
software. The StrataBox software accepts external annotation/eventing with the same format that the
Bathy-500MF uses. That format is as follows:
(CTRL F) (CTRL A) (Annotation String) (CTRL D) - Generates an event mark containing
the text in the Annotation String
(CTRL F) - Generates an empty event/fix mark
OPERATION 3-8
©2006 SyQwest Incorporated
Page 45

STRATABOX ™
Operations and Maintenance Manual
NOTE: External Eventing requires an additional free COM Port. If there are no more
available COM Ports on your PC, contact SYQWEST for an expansion card.
NOTE: Periodic Eventing is not available when External Eventing has been enabled.
NOTE: All event marks and text annotation shown on the screen are inserted BETWEEN
the acquired bottom data so that there is no loss of information.
Configure Thermal Printer
This menu allows you to configure a thermal printer for use with the StrataBox software. It supports 3
different models from the Raytheon/SYQWEST TDU series, including the TDU-850, TDU-1200, and the
TDU-2000.
In addition to Enabling or Disabling the printer, there are a number of other options available to the user.
These settings only affect the thermal printout, not the on-screen display. They include:
•
Display Negative Image
- Enabling this option will invert the gray scale colors on the thermal printout.
Flip Rasters Left to Right or Top to Bottom
•
- Enabling this option will print a mirror image of the event/annotation marks. This
option is to be used in conjunction with the L/R dip switch located on the back of the
TDU Printer (Refer to your TDU Manual for more information). By default, the switch
is set to the L position and so this option should not be enabled. However, if the dip
switch is set to R, enable this option to print the event/annotation marks correctly.
OPERATION 3-9
©2006 SyQwest Incorporated
Page 46

Operations And Maintenance Manual
• Print Grid Lines and Range Markers
- Enabling this option will print the data along with 4 grid lines and periodic range
markers.
• Print Annotation Text Transparently
- By default, this option is not enabled and annotation is printed with a solid background
so that the text is always readable. This will cause some bottom data not to be shown
on the printout, but will still be present on the display and recording file (if recording is
on). Enabling this option will print annotation text without a solid background. This
may make annotation text hard to read when printed over bottom data.
• Repeat Raster Count
- A Repeat Raster Count can be entered between 1 and 10. The default count is 1 Raster.
Increasing this value will cause the printout to be stretched horizontally. This option is
useful when using a TDU-1200 or TDU-2000 printer which has a finer vertical
resolution. (i.e. Pixels are small)
User Preferences
STRATABOX ™
This menu allows you to configure recording and playback options. By selecting “Playback files
continuously”, the current playback file will repeat from the beginning when it reaches the end. The
StrataBox software stores recorded data files in the same directory as the application by default, however,
you can select an alternate location by clicking the “Browse” button and specifying another directory.
Additionally, you can limit the maximum recorded file size by enabling the “Automatic File Size” option.
If the recording file reaches the specified size, it will create additional files to save the remaining data.
This option is useful if your data will be transferred to removable media where space is limited.
The “Time Display” control allows the user to specify which Time Zone the Date/Time should be
based on. The Date/Time shown on the display will also be the value recorded to a file if recording is
active. Choosing “Local Time” will enable whichever Time Zone is currently selected in the Windows
operating system. (Refer to your Windows User Guide for more information regarding Time Zones).
Selecting “UTC Time” will display Date/Time information based on the GMT Time Zone.
OPERATION 3-10
©2006 SyQwest Incorporated
Page 47

STRATABOX ™
Operations and Maintenance Manual
In addition, both the Local Time and UTC Time zones can be synchronized to GPS Time
provided that a GPS Receiver is connected to the StrataBox PC Software and configured correctly.
(Refer to Configure NMEA I/O in Section
3.1.2.1 for more information)
Recent Files
The StrataBox software keeps a list of the 4 most recently opened playback filenames for easy
access. These filenames are found between the “User Preferences” and “Exit” menu options.
Clicking one will immediately begin playback of the file.
Exit
You can exit the StrataBox PC Software by either using the “Exit” on this file menu, or by simply
clicking on the windows default close button.
3.1.2.2 – The Edit Menu
Insert Event Mark
Selecting this option will generate and insert a formatted event mark on the display, in the
recorded file (if recording is on), and if enabled, the thermal printout. The event mark contents
can be configured by selecting “Configure Events…” under the File menu. In addition, an event
mark can also be inserted by clicking the corresponding toolbar button. (See Section
3.1.1)
Insert Annotation
Selecting this option will allow you to enter a custom text message to be inserted on the display,
the recorded file (if recording is on), and if enabled, the thermal printout. In addition, annotation
text can also be inserted by clicking the corresponding toolbar button. (See Section
3.1.1)
3.1.2.3 – The View Menu
©2006 SyQwest Incorporated
OPERATION 3-11
Page 48

STRATABOX ™
Operations And Maintenance Manual
Toolbar
Selecting this will toggle the toolbar on and off. (Refer to Section
3.1.1 for more information on
toolbar).
Status Bar
Selecting this will toggle the Status Bar on and off. The Status bar is located at the bottom of the
StrataBox application and displays extended information about a particular button or function.
Raster View / Wiggle Trace
The StrataBox software allows the user to display bottom information in two formats, Raster
view or Wiggle Trace. In Raster view, bottom information is depicted graphically with bottom intensity
being represented by the different colors in a specified color palette. In Wiggle Trace view, the bottom
information is shown ping by ping with acoustic energy being represented horizontally.
NOTE: Wiggle Trace mode is only available in the Normal display. All zoom data will
appear in Raster mode.
Enable GUI Zoom
This option allows the user to digitally scale bottom data from a playback file and can function as
a manual zoom. This feature was included in order to provide a method to zoom in on bottom data
previously recorded without one of the StrataBox Sensor’s enhanced zoom modes enabled. When
enabled, two zoom bars will appear on the scalebar of the Normal Data window. These bars can be
dragged up or down in order to set the GUI zoom range. Data displayed in GUI Zoom is derived from
recorded Normal data.
Display Modes
The StrataBox Sensor features an enhanced multi-mode zoom. It provides a smooth, magnified highresolution window of the bottom. The enhanced zoom modes are acquired in real-time and are
displayed/recorded at higher sample rates than the Normal data (assuming the zoom range is smaller than
the normal range).
There are 4 display modes available with StrataBox software, including 3 Zoom modes, and 1 without
any zoom. They include:
Normal
This mode displays the normal bottom data by itself without any zoom information. When selected, this
mode will use the entire viewing area.
Bottom Zoom
When selected, this mode will split the viewing area in half. The left side will be used to show zoom
information, and the right side for normal bottom data. Bottom Zoom mode centers the zoom display
around the current depth allowing you to follow it up and down the water column at a high resolution. In
addition, the user can use the Zoom Range Control to zoom in or out. The Zoom Range value represents
the zoom range in whichever units are currently selected. When the zoom window moves up or down to
track the bottom, it does so in Zoom Range / 2 increments.
OPERATION 3-12
©2006 SyQwest Incorporated
Page 49

STRATABOX ™
Operations and Maintenance Manual
Bottom Lock Zoom
This mode functions the same way as Bottom Zoom, however it does not show the bottom moving
through the water column. Instead, it will lock the bottom to the upper portion of the zoom view so that
the user may continuously monitor sub-bottom information.
Marker Zoom
Like in the other modes, Marker Zoom provides a high-resolution zoomed view of the water
column, however in this mode, the user can specify where in the water column the zoom range will begin.
This is accomplished by dragging the marker zoom bar up or down the normal view scalebar to the point
you want the zoom range to begin. The start of the zoom range can be observed at the top of the zoom
window while you drag the marker zoom bar, but the marker zoom isn’t set until the mouse button is
released.
3.1.2.4 – The Help Menu
This menu includes a software Help guide along with an About StrataBox option. Clicking it
will display a window with information such as the StrataBox software version and SYQWEST company
information. In addition, the software will request and display Hardware/Firmware version information
from the StrataBox Sensor providing the Sensor is connected and communicating properly.
©2006 SyQwest Incorporated
OPERATION 3-13
Page 50

Page 51

STRATABOX ™
Operations and Maintenance Manual
4.0 MAINTENANCE
4.1 – POST (Power On Self Test)
Each time power is applied to the StrataBox Sensor, it performs a series of self-tests to ensure that it is
working optimally. The tests occur as follows:
Test 1 – Initialization Test
Checks overall functionality of the sensor hardware to verify it is operational.
Test 2 – RAM Test
Verifies that the system RAM is operational.
Test 3 – Serial EPROM Test
Verifies that the Serial EPROM is operational and it’s checksum is valid.
Test 4 – Flash Memory Test
Verifies that the Flash Memory is working and it’s checksum is valid.
If Test 1, 2, or 3 fail, the Sensor’s green LED will blink rapidly at 4 Hz indicating an error. The
StrataBox Sensor will not be operational and the user should contact SYQWEST’s Support Dept. for
assistance. If the Sensor fails Test 4, the green LED will blink normally at 1 Hz, but will not function
until it is reprogrammed. The StrataBox PC Software will detect this problem and notify the user. (Refer
to Troubleshooting Section
If the Sensor passes these tests, the green LED will blink at 1 Hz indicating that it’s working and waiting
for communication with the PC and StrataBox PC Software.
4.4)
4.2 – LED Indicator
The StrataBox Sensor is equipped with a green LED which was designed to give the user immediate
information regarding the Sensor’s status. When power is supplied to the Sensor and it is working
properly, the LED will blink at 1 Hz indicating that the unit has powered up correctly and is waiting for
communication with the PC and StrataBox software. Once communication is established, the LED will
stay on continuously. However, if the unit is powered up and the green LED blinks at 4 Hz, then the unit
is problematic and will not be able to communicate with the PC until the problem is rectified. (See
Troubleshooting Section
4.4)
4.3 – Firmware Update
The StrataBox Sensor is a self-contained unit and has it’s own set of Firmware. Periodically, SYQWEST
may offer Sensor Firmware upgrades which add new features and functionality. This section describes
the process involved in updating that firmware.
©2006 SyQwest Incorporated
MAINTENANCE 4-1
Page 52

STRATABOX ™
Operations And Maintenance Manual
4.3.1 – Connection
The StrataBox Sensor Firmware does not need any special connection cables or connectors to perform an
update. The Sensor is connected to an available COM port (Usually COM 1) on a Portable PC as if it
were being used to acquire data. (See Data Interface Connector in Section
2.1.4).
4.3.2 – Firmware Update File
If a Firmware Update file is available, SYQWEST can send the user a disk containing the file, or it may
be downloaded from our website (http://www.syqwestinc.com). The file will always be called
StrataFW.hex. This file should NOT be renamed because the StrataBox PC Software is configured
to only detect it’s specific filename.
This file should always be COPIED from the disk to the PC rather than being moved. This allows the
user to retain a copy of the file on disk for backup purposes. Before copying the file, the StrataBox PC
Software should NOT be running. The file should be copied to the same directory as the StrataBox
executable file. (Usually
C:\Program Files\ODEC\StrataBox, unless otherwise specified).
4.3.3 – StrataBox PC Software Firmware Update
The StrataBox PC Software is designed to automatically detect the presence of a firmware update file
upon startup. If the file is detected, the user will be notified and asked whether the firmware update
should take place. If the user chooses “No”, then the StrataBox PC Software continues to run normally.
NOTE: If the user chooses “No”, the firmware file will REMAIN in the StrataBox
directory. The file must be manually removed to avoid being detected each time
the software is run.
Before the user chooses “Yes”, the StrataBox Sensor must be reset back to the Power-up state. This can
be done by removing power from the Sensor (Either at the connector, or power supply) and then
reapplying it. The green LED on the Sensor should be blinking at 1 Hz indicating that it’s in the Powerup state. For more information regarding the LED indicator, see Section
When the user clicks “Yes”, then the PC Software will attempt to communicate with the StrataBox Sensor
while giving the user status message updates. If there are no problems, the firmware upload will begin
and a progress indicator will be shown to the user. Refer to Section
4.2.
4.4 for troubleshooting information.
NOTE: If the firmware update is successful, the firmware file WILL be removed from the
StrataBox directory to prevent it from being detected again. Make sure you have a
backup copy of this file.
MAINTENANCE 4-2
©2006 SyQwest Incorporated
Page 53

STRATABOX ™
4.4 – Troubleshooting
4.4.1 – StrataBox Sensor Troubleshooting
Symptom Possible Cause Solution
Green LED on Sensor does not
turn on
Green LED on Sensor blinks
rapidly at 4 Hz
Green LED on Sensor blinks at 1
Hz but cannot establish
communication with PC software
Sensor is not receiving power
Power on Self Test 1, 2 or 3 has
failed
1) Connection problem between
PC and Sensor
2) PC Software not setup to use
correct COM port
3) Flash Memory is corrupt
4.4.2 – StrataBox PC Software Troubleshooting
Symptom Possible Cause Solution
Sensor State always shows
Unknown
Sensor State stuck in Power-up
PC Software not receiving GPS
information
PC Software is non-responsive or
lagged
PC Software not receiving
communication from Sensor
PC Software was executed after
Sensor has already been
initialized
1) PC Software is not setup
correctly
2) There is a connection
problem between the PC and
GPS Receiver
Thermal Printing is enabled but
no TDU is connected
Operations and Maintenance Manual
Check the power supply, inline
fuse, and connections to the
Sensor with a voltmeter
Contact SYQWEST Support
Dept for assistance
1) Check connections between
PC and Sensor
2) Select the correct COM port
in the “Sonar Port” menu
3) Contact SYQWEST Support
Dept for assistance
1) Check connections between
PC and Sensor
2) Make sure the Sensor’s LED
is blinking at 1 Hz indicating
that is ready for
communicating
3) Verify the software is setup
to use the correct COM port
for communicating with
Sensor
Cycle (remove then reapply)
power to the StrataBox Sensor
1) Correctly configure PC
Software in the “NMEA I/O”
menu to the correct COM
port and to a compatible
NMEA string with your GPS
Receiver
2) Check connections between
PC and GPS Receiver
Check connection between PC
and TDU or disable Thermal
Printing in software
©2006 SyQwest Incorporated
MAINTENANCE 4-3
Page 54

Operations And Maintenance Manual
OPTIONAL EXTERNAL INTERFACE CONNECTIONS
STRATABOX ™
Figure 4-1 Optional Interface Connections
MAINTENANCE 4-4
END OF MANUAL
©2006 SyQwest Incorporated
 Loading...
Loading...