

Page 1

MP-285
Micromanipulator System
ROE
Basic Operations
Rev. 3.08 ( 20140809)
One Digital Drive
Novato, CA 94949
Voice: 415-883-0128 Web: www.sutter.com
Fax: 415-883-0572 Email: info@sutter.com
Page 2
ii
Copyright © 2014 Sutter Instrument Company. All Rights Reserved.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 3
iii
Mains Voltage
DIS CLAI M ER
The
MP-285
-system consists of one controller (MP-285), a user control device (ROE or
Joystick), and one electromechanical micromanipulator device (MP-285/M). The purpose of
the system is for the manipulation at the micro level of micropipettes and probes used in
conjunction with a microscope. No other use is recommended.
This instrument is designed for use in a laboratory environment. It is not intended, nor
should it be used in human experimentation or applied to humans in any way. This is not a
medical device.
Do not open or attempt to repair the instrument. High voltages are present and inadvertent
movement of the micromanipulator electromechanical could cause injury.
Do not allow unauthorized and/or untrained operative to use this device.
Any misuse will be the sole responsibility of the user/owner and Sutter Instrument Company
assumes no implied or inferred liability for direct or consequential damages from this
instrument if it is operated or used in any way other than for which it is designed.
SAF E TY W ARN ING S AND PRE CAU T ION S
Electrical
Operate the MP-285 using 110-- 240 V AC., 50-60 Hz line voltage. This instrument is
designed for use in a laboratory environment that has low electrical noise and mechanical
vibration. Surge suppression is recommended at all times.
Fuse Replacement: Replace only with the same type and rating:
Mains fuse type and rating.
Fuse
Setting
“110”
(100 – 120
VAC)
“220”
(200 – 240
VAC)
Rating Manufacturer Examples
2A, 250V
(Time Delay)
T1.0A, 250V Bussmann: GDC-1A or S506-1A (RoHS)
(Type: Time Delay, 5mm x 20mm, glass tube)
Bussmann: GMC-2A, GMC-2-R (RoHS), GDC-2A, or
S506-2A (RoHS)
Littelfuse: 239 002 or 239.002.P (RoHS)
Littelfuse: 218 001 or 218 001.P (RoHS)
A spare fuse is located in the power input module. Please refer to the fuse-replacement
appendix for more details on fuse ratings and for instructions on how to change the fuse.
Avoiding Electrical Shock and Fire-related Injury
Always use the grounded power supply cord set provided to connect the system to a
grounded outlet (3-prong). This is required to protect you from injury in the event that
an electrical hazard occurs.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 4
iv
Do not disassemble the system. Refer servicing to qualified personnel.
To prevent fire or shock hazard do not expose the unit to rain or moisture.
Electromagnetic Interference
To comply with FDA and CE electromagnetic immunity and interference standards; and to
reduce the electromagnetic coupling between this and other equipment in your lab always
use the type and length of interconnect cables provided with the unit for the interconnection
of the ROE, MP-285/M electromechanical device, and host computer via serial RS-232
interface, (see the Technical Specifications appendix for more details).
Operational
Failure to comply with any of the following precautions may damage this device.
This instrument is designed for operation in a laboratory environment (Pollution Degree
I) that is free from mechanical vibrations, electrical noise and transients.
This unit is not designed for operation at altitudes above 2000 meters nor was it tested
for safety above 2000 meters.
DO NOT CONNECT OR DISCONNECT THE CABLES BETWEEN THE
CONTROLLER AND THE MECHANICAL UNITS WHILE POWER IS ON.
Please allow at least 20 seconds after turning the unit off before disconnecting the
mechanical units. Failure to do this may result in damage to the electronics.
Operate this instrument only according to the instructions included in this manual.
Do not operate if there is any obvious damage to any part of the instrument.
Operate only in a location where there is a free flow of fresh air on all sides.
NEVER ALLOW THE FREE FLOW OF AIR TO BE RESTRICTED.
Do not operate this instrument near flammable materials. The use of any hazardous
materials with this instrument is not recommended and if undertaken is done so at the
users’ own risk.
Do not attempt to operate the instrument with the manipulator shipping screws in
place - severe motor damage may result.
Do not operate if there is any obvious damage to any part of the instrument. Do not
attempt to operate the instrument with the manipulator shipping screws in place - severe
motor damage may result. When transporting the mechanical manipulator, be sure to
install the shipping screws supplied in their correct locations. Failure to do this may
result in damage to the motors.
Never touch any part of the micromanipulator electromechanical device while it is in
operation and moving. Doing so can result in physical injury (e.g., fingers can be caught
and pinched between the moving parts of the micromanipulator).
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 5

v
As with all microinjection devices, sharp micropipettes can fly out of their holder
unexpectedly. Always take precautions to prevent this from happening. Never loosen the
micropipette holder chuck when the tubing is pressurized, and never point micropipette
holders at yourself or others. Always wear safety glasses when using sharp glass
micropipettes with pressure microinjectors.
Do not handle the manipulator mechanical while the power is on, and take care to
ensure no cables pass close to the mechanical manipulator.
Other
Use this instrument only for microinjection purposes in conjunction with the procedures
and guidelines in this manual.
Retain the original packaging for future transport of the instrument.
Some applications, such as piezo-impact microinjection call for the use of mercury in the
micropipette tip. The use of any hazardous materials with any Sutter Instrument’s
instrument is not recommended and if undertaken is done so at the users’ own risk.
When transporting the mechanical manipulator, be sure to install the shipping screws
supplied in their correct locations. Failure to do this may result in damage to the motors.
This instrument contains no user-serviceable components — do not open the instrument
casing. This instrument should be serviced and repaired only by Sutter Instrument or an
authorized Sutter Instrument servicing agent.
Sutter Instrument reserves the right to change specifications without prior notice.
This device is intended only for research purposes.
Handling Micropipettes
Failure to comply with any of the following precautions may result in injury to the users
of this device as well as those working in the general area near the device.
The micropipettes used with this instrument are very sharp and relatively fragile.
Contact with the pulled micropipette tips, therefore, should be avoided to prevent
accidentally impaling yourself.
Always dispose of micropipettes by placing them into a well-marked, spill-proof “sharps”
container.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 6

vi
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 7

vii
TABLE OF CONTENTS
DISCLAIMER ......................................................................................................................................iii
SAFETY WARNINGS AND PRECAUTIONS...................................................................................iii
Electrical .................................................................................................................................................iii
Avoiding Electrical Shock and Fire-related Injury.............................................................................iii
Electromagnetic Interference...............................................................................................................iv
Operational.............................................................................................................................................iv
Other.........................................................................................................................................................v
Handling Micropipettes..........................................................................................................................v
1. GENERAL INFORMATION...........................................................................................................1
1.1 Structure of the MP-285 Documentation Package ...............................................................................1
1.2 Technical Support.............................................................................................................................1
2. SETUP...............................................................................................................................................3
2.1 Unpacking..........................................................................................................................................3
2.2 Initial Setup and Gross Movement.................................................................................................4
2.3 Installation of the MP-285 Micromanipulator on your Microscope............................................6
2.3.1 General Considerations.............................................................................................................6
2.3.2 Specifics.......................................................................................................................................6
2.4 Mounting Headstages.......................................................................................................................7
2.5 Adjusting the Rotating Dovetail Base.............................................................................................8
2.6 Minimizing Electrical Noise ............................................................................................................9
3. MICROSCOPIC MANIPULATION ..............................................................................................11
3.1 Some Basic Information.................................................................................................................11
3.2 SETUP Selection ............................................................................................................................11
3.3 Changing Minimal Resolution.......................................................................................................12
4. PULSE MOVEMENT.....................................................................................................................15
5. HOME FUNCTION........................................................................................................................17
5.1 How to Define a New Home ..........................................................................................................17
5.2 Moving to the New Home:.............................................................................................................17
5.3 Practical Use of the Home Function.............................................................................................17
6. GENERALIZED ROBOTIC MOVEMENTS.................................................................................19
6.1 Setting Absolute Zero.....................................................................................................................19
6.2 Redefining Home ............................................................................................................................19
6.3 Clearing Program Location #1 for Recording a New Robotic Series .......................................19
6.4 Teaching the MP-285 Controller a New Robotic Series.............................................................20
6.5 Executing the Newly Entered Program!......................................................................................21
6.6 Loading a Saved Program..............................................................................................................22
7. DIAGONAL OR 4TH AXIS MOVEMENTS .................................................................................23
8. ROE RESPONSE CHARACTERISTICS ......................................................................................25
8.1 Controlling ROE Knob to Manipulator Stepper Motor Axis Assignment................................25
8.2 Controlling Movement Amount per ROE Turn..........................................................................25
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 8
viii
APPENDIX A. LIMITED WARRANTY............................................................................................27
INDEX.................................................................................................................................................29
TABLE OF FIGURES
Figure 2-1. MP-285 Controller (front panel)...........................................................................................3
Figure 2-2. Manipulator. Figure 2-3. Rotary Optical Encoder (ROE)...............................................3
Figure 2-4. MP-285 controller rear connections. ....................................................................................4
Figure 2-5. Manipulator base dimensions................................................................................................6
Figure 2-6. Headstage mounting plate.....................................................................................................7
Figure 2-7. Mounting the headstage on the manipulator's Z-axis.........................................................8
Figure 2-8. Adjusting the headstage angle...............................................................................................8
TABLE OF TABLES
Table 3-1. Microsteps per ROE turn settings........................................................................................12
Table 3-2. Microns per ROE turn settings.............................................................................................13
Table 4-1. Microsteps and microns per Pulse settings. ........................................................................16
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 9
1
1. GEN E RAL INFO RMA TION
1.1 Structure of the MP-285 Documentation Package
The MP-285 is a highly versatile stepper motor driven micromanipulator. Because of this
versatility, the documentation necessary to cover various functions has rapidly grown to a
size best described as unwieldy and thus has generally not been useful to most operators.
In order to produce a more useful set of instructions, we have split the manual into two
parts. The first part, “Basic Operations”, has been kept short and covers major functions
with the aim of quickly guiding the first time user through the setup and use of the MP-285
for micromanipulation with emphasis on using the ROE (Rotary Optical Encoder) for user
control. These steps are, in many ways, identical to the steps performed any time one sets up
an MP-285 for use at a microscope. Many users will find that no other manual is necessary.
The second part, “Reference Manual”, provides in-depth coverage of the MP-285. It
documents the precise keystrokes (menu navigation) necessary to access each MP-285
function. The Reference Manual also describes, in detail, how to alter MP-285 performance
via add-on accessories, perform microcontroller robotic programming, and how to use the
serial computer interface.
1.2 Technical Support
Unlimited technical support is provided by Sutter Instrument Company at no charge to our
customers. Our technical support staff is available between the hours of 8:00 AM and 5:00
PM (Pacific Time) at
(415) 883-0128
. You may also E-mail your queries to
info@sutter.com
.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 10

2
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 11
3
HOM
NOR
COAR
CON
DIA
FIN
PULS
2. SETU P
2.1 Unpacking
Carefully remove all components from the shipping container. One of each of the following
should be included:
MP-285 controller
MP-285 micromanipulator and D25 cable for connection to controller
Rotary Optical Encoder (ROE) and D15 cable for connection to controller
Controller power cord
Serial port cable (DB9 connectors)
Metal dovetail headstage mounting plate with plastic isolation plate
Metal dovetail rod clamp
2.5mm hex wrench for removing the shipping screws
7/64 hex wrench for adjusting the rotating dovetail base
MP-285 documentation
RESET
POWER
MP-285
SUTTER INSTRUMENT CO.
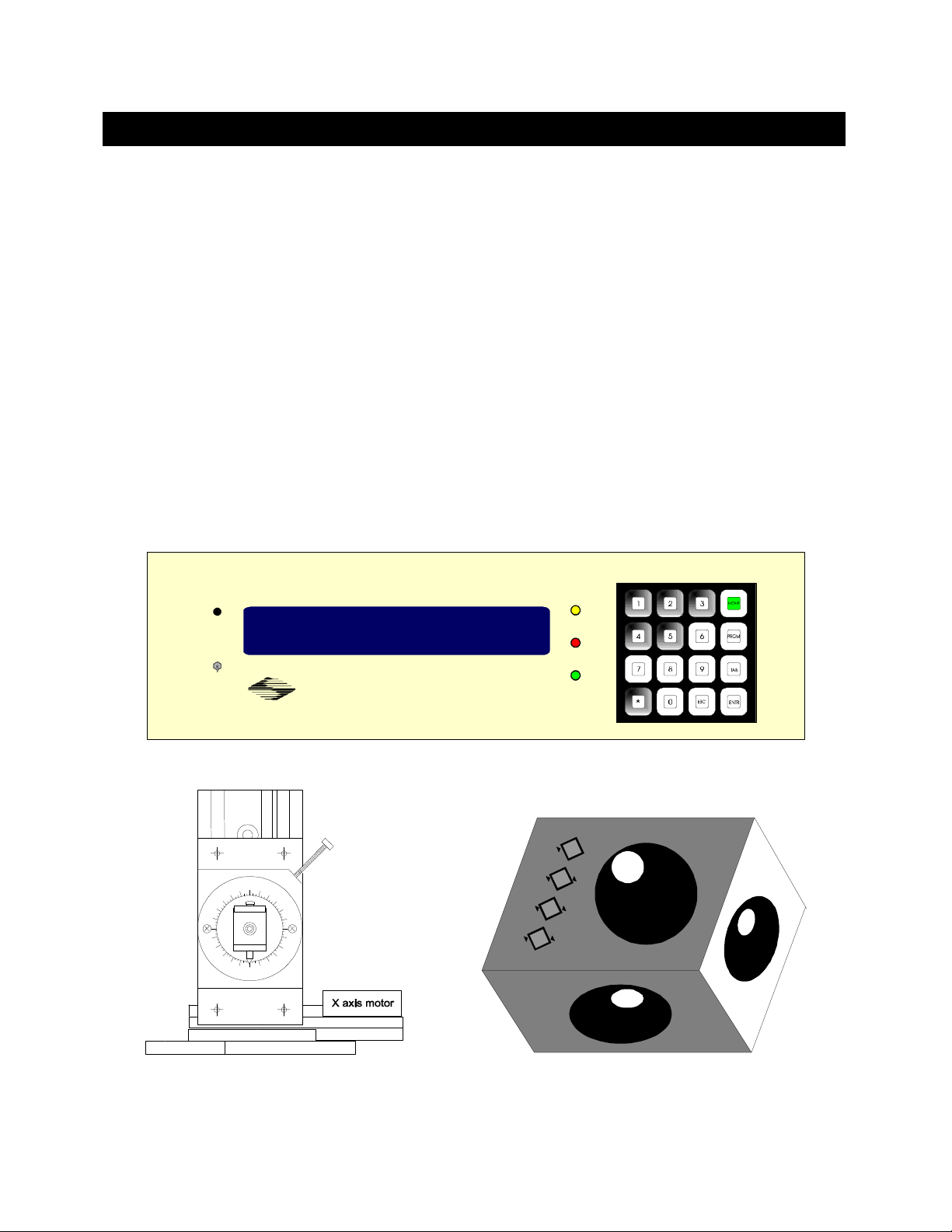
Figure 2-1. MP-285 Controller (front panel).
MADE IN U.S.A.
Figure 2-2. Manipulator. Figure 2-3. Rotary Optical Encoder (ROE).
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 12
4
1 2 3 4 5 6 7 8 9 10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
1 2 3 4 5 6 7 8
9 10 11 12 13 14 15
110
220
FUSE
L
SUTTER
INSTRUMENT
51 Digital Drive
NOVATO, CA 94949 USA
(415) 883 - 0128
DISCONNECT POWER
BEFORE OPENING
UNIT!
MODEL
Hz
FUSE
VOLTS
DANGER
SERIAL PORT
MANIPULATOR
COMMAND INP
UT
You may have also received one or more accessories for mounting your MP-285 and/or
modifying the headstage mount to the manipulator (i.e., rotating base, microscope stage
mount, gantry stand, dovetail extension). Setup of these accessories is covered either in
documentation accompanying the accessory or in the
MP-285 Reference Manual
.
Remove all six shipping screws from the MP-285. Save the screws, warning tags, and hex
wrench in the event you need to transport your manipulator in the future. Once these screws
have been removed, handle the micromanipulator with care. The drive cables can be
damaged
2.2 Initial Setup and Gross Movement
Initially, you may want to simply connect your manipulator, controller, and ROE together and
try some gross movements in order to get a feel for the controls and how to make simple
movements. It is perfectly acceptable to set the manipulator in the middle of a bench top,
make all electrical connections and then observe the unit’s movement by eye. Even if you
wish to directly install your manipulator in your rig, it is useful to follow the initial setup
procedure in order to learn how to move the unit and allow easy access to the mounting
screws if subjected to unnecessary strain.
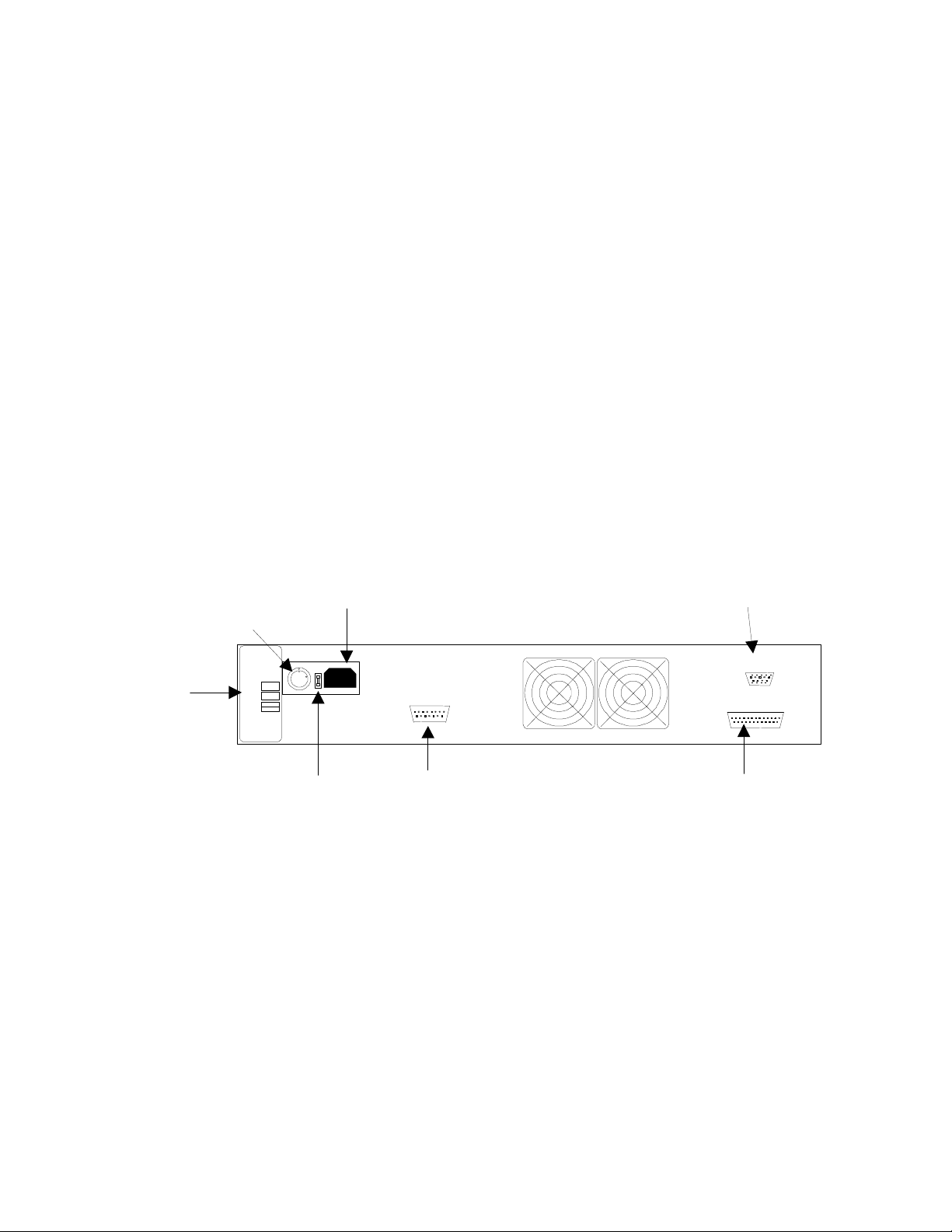
1. Connect the power cord to the MP-285 controller. Make certain that the voltage selector
next to the power cord socket on the back of the MP-285 controller has been set to the
appropriate voltage (110 or 220).
ABEL
VOLTAGE
SELECTOR
HIGH VOLTAGE
LINE POWER
FUSE
Figure 2-4. MP-285 controller rear connections.
INPUT DEVICE
CABLE (15 pin)
SERIAL PORT
CABLE (9 pin)
MANIPULATOR
CABLE (25 pin)
2. With the power OFF (front panel switch in the down position), use the D15 cable and
connect the ROE to the connection labeled “COMMAND INPUT” on the back of the MP285 controller.
CAUTION: Never connect or disconnect the ROE while the power is on!
3. With the power OFF, use the D25 cable and connect the MP-285 micromanipulator to the
DB 25 connector labeled “MANIPULATOR” on the back of the controller.
CAUTION: Never connect or disconnect the micromanipulator while the power is on!
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 13

5
CAUTION: Important! Check to make sure that you have removed all six shipping screws.
The unit can be severely damaged if you try to move one of the axes with the shipping screws
in place.
To observe movement of the manipulator do the following:
1. Turn the power ON (front panel switch up). Observe the startup screen:
S1 * * * M P - 2 8 5 C o n t r o l l e r * * * P1
P r e s s M O V E , P R G M o r s e l e c t m a g . w i t h *
2. Press the <MOVE> key on the MP-285 controller keypad. Observe the movement screen:
- 1 0 7 8 9 . 2 0 u m X - 1 0 7 7 8 . 2 4 u m Y
- 1 0 7 5 0 . 4 0 u m Z 0 . 2 0 u m R e s .
Assuming this was the initial power on from the unit after unpacking, you should have
coordinates similar to those above (-10,000µm to -12,000µm). These coordinates correspond
to the locations of the shipping screws.
Turn a knob on the ROE. You should see one of the axes on the manipulator move and the
coordinates on the screen of the controller change. The coordinates indicate how far you have
moved in micrometers along each of the three axes.
Before the unit was shipped from Sutter, its absolute origin (location 0,0,0) was set at the
center of travel of each axis. This same location was also defined as “Home”. This means that
you can make the manipulator move to the center of travel by a simple move to “Home”, as
follows:
1. Make sure you are still in the movement screen (coordinates displayed).
2. Press the button on the ROE marked <HOME>.
Observe the “rapid” movement of the manipulator to the center of travel of each axis. The
controller display will read, “Going home” during the move, and will display coordinates
close to 0,0,0 after the move is complete.
The MP-285 controller front panel is configured with three colored LEDs. When lit, these
LEDs indicate that a signal is being received from the input device. Each LED (yellow, red,
and green) indicates input originating from one of the three knobs on the ROE (top, left, and
right, respectively).
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 14

6
2.75”
2.75”
2.5”
2.5”
2.25”
2.3 Installation of the MP-285 Micromanipulator on your Microscope
2.3.1 General Considerations
In most applications, it is best to try to mount the MP-285 in a location that allows for the
widest range of movement. Usually, this means mounting so that the device is in the center
of travel when it is in its normal operating position. To facilitate this procedure, move the
manipulator to its center of travel before determining where it should be mounted.
The base of the MP 285 manipulator is also the mounting surface for the bearing ways of the
X-axis. When the base plate is pressed firmly against most mounting surfaces, torsional
stress can be transmitted to the base and thus misaligns the bearing ways. A supply of four
precision-thickness washers is included with your MP-285 manipulator. To limit
misalignment, you should use one on each of the four mounting screws between the MP-285
manipulator base and your mounting surface.
When mounting the MP-285 there should be no physical impediments to the full excursion of
the three axes. Pay particular attention to the screws or clamps used to secure the base of the
micromanipulator to make certain that the X-axis slide can move to the end of its travel
without obstruction.
Additional mounting considerations, as well as instructions pertaining to specific mounting
accessories can be found in the Reference Manual.
2.3.2 Specifics
The base of the MP-285 manipulator has four mounting holes on 2.5” centers. A template,
drawn to scale and based on the footprint shown below, can be used to drill holes in a suitable
mounting surface.
3.8125”
Figure 2-5. Manipulator base dimensions.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 15

7
dovetail mounting plate:
EPC: 1
-
1/16" x 2
-
7/32"
A
B
C
C
C
D D
This four-hole pattern is also compatible with the MP-285 rotary base, part #285RBI and the
mounting adapter plate, # 285210 (see the Reference Manual for further instructions).
While it is possible to insert and tighten all four mounting screws with the MP-285 in one
position, you may find it convenient to connect and power up the manipulator and position
the X-axis for the best access to the screw holes.
2.4 Mounting Headstages
The most stable way to mount a headstage is to fasten it directly to the Z-axis slide. The
mounting hardware included with the MP-285 is designed to eliminate the need for custom
machining of headstage and pipette holders. For example, Axon Instruments’ new 203B
headstage mounts directly to the rotating dovetail on the MP-285 Z-axis. Other headstages
require use of the dovetail mounting plate:
2 middle (D) holes
(2 holes, A & B)
CV-4: 1-1/8" x 1-15/16"
(4 holes, B & C)
Figure 2-6. Headstage mounting plate.
The plastic portion of the plate provides electrical isolation while allowing for a direct mount
of Axon Instruments’ CV-4 headstage or Heka Electronics’ EPC-7, 8, or 9 headstages. The
user can drill additional holes to allow the plate-mount installation of other headstages.
Headstage mounting instructions can be found in the Reference Manual.
Whether using the Axon 203B Headstage or another headstage mounted on the dovetail
mounting plate, the respective male dovetail is inserted into the female dovetail on the MP285 Z-axis. Slide the dovetail mounting plate/headstage assembly into the rotating-dovetail
base and secure it by tightening the dovetail clamp set screw with a Phillips-head
screwdriver.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 16

8
Rotating dovetail
Headstag
Dovetail mounting
Dovetail clamp set
Plastic isolation
0 15
15
0
45
30
30
15
45
15
30
30 15
45
15
30
30
15
45
15
30
30
Loosen then
retighten
Rotate
Figure 2-7. Mounting the headstage on the manipulator's Z-axis.
2.5 Adjusting the Rotating Dovetail Base
The rotating dovetail base allows the pipette holder or headstage to be rotated and firmly
fixed at any angle desired by the experimenter as required for access to a particular
microscope.
Headstage
Figure 2-8. Adjusting the headstage angle.
To adjust the rotary dovetail to your desired angle:
1. Loosen the brake set screw to rotate the headstage or pipette holder. Failure to loosen the
screw may lead to rapid deterioration of the brake and rotating disk thereby reducing the
ability to firmly secure the rotating dovetail.
2. Once you have determined the proper angle, firmly tighten the brake set screw to assure
stable positioning of the rotating dovetail.
It is not recommended that you use this rotational joint as a means of pipette replacement.
Repeated repositioning of the rotary disk and brake will lead to rapid deterioration of the
joint which may then not tighten properly to allow stable positioning of a pipette.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 17

9
2.6 Minimizing Electrical Noise
We are aware of two potential noise sources for users coupling their MP-285 with high-gain,
high input impedance, electrophysiological recording amplifiers. The first is associated with
the manipulator and its connecting cable from the controller. Under certain circumstances
these may act as an antenna concentrating electric field noise that originates from nearby
electrical equipment (computer monitors and fluorescent lights are the most notorious
offenders) and bringing it into close proximity with recording apparatus. Grounding the
manipulator will largely eliminate this noise source. Ground tabs are located on each motor
housing for this purpose. It should be noted that the manipulator produces negligible
electrical noise when it is not moving because it is powered by a linear power supply with no
AC current present.
The second potential source of noise is associated with the magnetic field radiated from the
power supply transformer in the controller. Certain electrophysiological amplifiers are more
susceptible to generating noise when exposed to this magnetic field. This noise can be
minimized or eliminated by allowing a maximal distance between your MP-285 controller and
your amplifier. It may be possible to decrease this noise source further by placing a soft steel
plate or a piece of high permeability metal between the controller and the amplifier.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 18

10
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 19

11
3. MIC R OSCO PIC MAN I PU L ATIO N
3.1 Some Basic Information
Assuming you have already tried gross movement of the MP-285 as outlined above (Initial
Setup and Gross Movement) then you have an understanding of most of the features
necessary for microscopic manipulation using your MP-285. The controller makes two
changes to implement fine movement:
The number of microsteps commanded per revolution of the ROE is reduced.
The size of the microsteps produced by the stepping motor (minimal resolution) is
reduced from 0.2mm to 0.04mm.
These two changes give you a wide range of control over the amount of movement
commanded by a single turn of an ROE knob. In the gross movement mode, you are
commanding slightly over 700mm/turn. In the precise movement mode, you can command as
few as 20mm/turn.
As with the other portions of this User’s Manual, it is hoped that enough information has
been provided to get the average user “micromanipulating” with a minimum of time spent
covering unnecessary detail. If you find yourself needing additional detail on any of the items
covered, please consult the appropriate topic in the Reference Manual.
3.2 SETUP Selection
In order for the MP-285 to make precise movements and have a greater amount of control
over the movement, you instruct the controller to produce fewer microsteps (the minimal
increment of manipulator movement) per rotation of the ROE knobs. Using simple
commands, you choose one of four different “Setups” that vary the number of microsteps per
turn of the ROE knob over a range of 512 to 5120 per turn.
The following steps outline how to use your MP-285 to manipulate a pipette into position in
the field of view of your microscope. In doing so, you will learn how to switch from one setup
to another. The same procedure can also be used as the final steps of manipulator setup and
installation assuming the MP-285 is mounted on or near your microscope.
1. Turn on the manipulator power; while still in the main menu press <1>. This selects
Setup 1 and allows for rapid positioning of the pipette in your microscopic field of view.
The upper left-hand corner of the display should now read “S⇒1”.
2. Press <MOVE> to allow movement; remember that you cannot make movements unless
you see the movement screen displayed
3. Focus the microscope to a height slightly above your preparation.
4. Using the X and Y-axes, move the pipette tip to a position above the middle of your field
of view. In most cases, the first indication that the pipette is in the correct approximate
location is an out-of-focus shadow. You may need to work at a lower microscopic power to
visualize the tip.
5. Once you can see the shadow of the tip above your preparation, use the Z-axis control (top
ROE knob) to move the pipette down into focus. If you focused above your preparation,
you should not crash the pipette into your dish and/or preparation.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 20

12
If these operations are part of your initial installation, your manipulator may not be mounted
in a position to allow you to center the pipette tip in the microscope field of view. If this is
true, you will have to stop and adjust the mounting location of the manipulator and/or the
angle of approach of the pipette and/or the mounting of the headstage in the rotary dovetail.
After repositioning, you will be able to bring the pipette to the correct working location. See
the MP-285 Reference Manual for additional information on pipette positioning and Sutter
accessories to aid in pipette access to different microscopes.
NOTE: Once you can see the pipette in your field of view, you are ready for
micromanipulation.
1. Press <ESC> to get to the main menu
2. Press <4> to select Setup 4; the upper left hand corner of the display should now read
S⇒4.
3. Press <MOVE> to return to the movement screen.
4. Rotate the knobs on the ROE and observe the precise control you have over the
movement of the pipette. If you wish to have even better control, press the
<COARSE/FINE> button on the ROE (see below)
Four factory-installed Setups are selected from the main menu by pressing the corresponding
number (1 through 4) from the MP-285 keypad. Assuming you are in the movement screen
and you want to change the current Setup, the key sequence is as follows:
1. From the movement screen press <ESC> to access the main menu
2. Press the number key <1> through <4> corresponding to the Setup you wish to use.
The actual values for number of microsteps per ROE turn are as follows:
Table 3-1. Microsteps per ROE turn settings.
Setup
Number
Microsteps per
ROE turn
1 3694
2 5120
3 2560
4 512
3. Press <MOVE> to return to the movement screen and begin moving at the precision
specified by the selected Setup.
The selected setup is maintained when the MP-285 controller is turned off; you only need to
select a different setup when you wish to change precision of movement.
3.3 Changing Minimal Resolution
In addition to controlling the number of microsteps per ROE turn, you can also set the
microstep size to one of two values (coarse=0.2µm or fine=0.04µm). You then have two
different amounts of movement (ultimately two different precisions for each selected Setup).
To change resolution from one value to the other, simply press the <COARSE/FINE> button
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 21

13
on the top of the ROE (coarse is up, fine is down). The movement screen also displays the
resolution in the lower right corner “0.2 (or 0.04) µm Res”. Given a resolution in microns, we
can now re-specify the amount of movement per ROE turn in microns for Setups 1 through
4:
Table 3-2. Microns per ROE turn settings.
Setup
Number
1
2
3
4
Microns per ROE turn at
0.2µm 0.04µm
716.8 143.36
1024 204.8
512 102.4
102.4 20.48
Thus, you have a relatively wide range of precision of movement. In practice, many users end
up only using a very non-precise, fast moving setup (#1 or 2, coarse) for quickly positioning
the pipette and then a precise setup (#4, fine) for micromanipulation under the microscope.
You may find that none of these SETUPS delivers the type of responsiveness that you desire
from the MP-285. The MP-285 Reference Manual provides complete instructions for defining
and saving your own Setup.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 22

14
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 23

15
4. PUL S E M O VEM ENT
So far, all the movements you have made, whether gross movement that can be easily seen by
eye or precise micro moves which can only be observed with the aid of a microscope, have
been in Continuous movement mode. The MP-285 controller is also capable of commanding
the micromanipulator to move in pulses, where both the length and speed of the individual
pulse is controlled. You might wish to use pulse movement mode in order to move a pipette
towards a target in quantized steps. Pulse mode has also been used as a means of final
approach to a cell membrane during “giga-seal” formation. Intracellular electrophysiologists
may find that a pulse approach at maximal speed (about 2.9mm/sec) may provide sufficient
impulse to impale some types of cells.
To change from continuous to pulse movement mode when using an ROE is quite simple.
Just locate and press the <CONT/PULSE> button on the ROE. The controller is in Pulse
mode when the button is depressed. The movement screen will also indicate Pulse mode
movement by display of the word “Pulses” in the upper right corner. If no word is displayed,
the unit is in continuous mode.
Pulse movement can be most easily observed under a microscope. If you have already
configured your microscope for micromanipulation as detailed in section “Microscopic
Manipulation” then simply follow these steps:
1. From the main menu press <3> to access a Setup with medium size pulses. Note that
each Setup defines a Pulse size. The size of the pulses is given in the table below.
2. Press <MOVE> to enter the movement screen
3. Depress the < CONT/PULSE > button on the ROE so that it is in the down position
4. Make sure the controller is set for coarse resolution microsteps (0.2 mm, ROE
<COARSE/FINE> button up)
5. Now turn the ROE knob while observing pipette movement under the microscope.
You should see movement in pulses of 10mm. The ROE produces eight pulses per turn when
in pulse mode. Thus, each full turn will produce a total movement of 80mm in eight 10mm
pulses. The speed of the movement is 1mm/second.
While only four factory installed Setups were described above, there are actually six: five and
six are identical to four with respect to the number of microsteps per ROE turn in
continuous mode movement (described above). They do differ in the size of pulses used in
Pulse movement mode. The following table lists the sizes of pulses for the six factoryinstalled setups in microsteps and micrometers as calculated for the two different microstep
resolutions:
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 24

16
Table 4-1. Microsteps and microns per Pulse settings.
Setup
Number
1
2
3
4
5
6
Microsteps
per Pulse
20 4 0.8
10 2 0.4
5 1 0.2
2 0.4 0.08
1 0.2 0.04
25 5 1
Microns per Pulse at
0.2µm 0.04µm
The speed of pulse movement is 5000 microsteps/second for all Setups. As there are two
different resolutions, this translates to the same two different speeds for each setup: 1
mm/second at coarse resolution and 200 mm/second at fine resolution.
You may find that no SETUP delivers the size and or speed pulses that you desire. The
reference manual gives complete instructions for defining pulse size and speed and saving
defined values to a new setup.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 25

17
5. HOME FU N CTI O N
“Go home” is the simplest of the programmable robotic functions available on the MP-285.
Using the home function, you can establish a point in space to which you can command the
micromanipulator to return. You may have used the home function to quickly move the
manipulator to the center of travel during the “Initial Setup” procedure. At the factory, the
center of travel for all three axes is established as both the absolute zero and the location of
“Home” but any location can be designated as “Home”. Once a new location is defined as
“Home”, the MP-285 controller will automatically move back to that location by a simple
press of the <HOME> button on the ROE.
5.1 How to Define a New Home
1. Press <MOVE> to access the movement screen
2. Move the manipulator to the desired home location
3. Press <*>. The Robotics Menu will appear:
H o m e ▓ N e w H o m e E x e c u t e L e a r n
S h o w h o m e S e l e c t P r o g r a m
4. Press <TAB> to move the cursor (indicated by the arrow) to “New Home”. Press
<ENTR>, the New Home menu will appear:
▓ A c c e p t n e w h o m e s p d = 2 0 0 0 u m / s
( T A B t o e d i t ) r e s = . 2 0 u m / S t e p
5. Press <ENTR> to accept the default speed and resolution. You will be back in the
movement screen.
5.2 Moving to the New Home:
The location you just selected is now the new home.
1. Use the ROE knobs to move away from the new home
2. Press the <HOME> button on the ROE
3. The controller will move back to the new home.
5.3 Practical Use of the Home Function
Many users find the ability to move to a specified location useful for bringing a pipette back
into the general area of the microscope’s field of view after installing a new pipette. Note that
the accuracy of repositioning is very dependent on exactness of pipette length and
installation into a holder. If you use the home function to reposition after pipette exchange,
you may want to follow these guidelines:
Define your home position as a location above the plane of focus of your preparation.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 26

18
Mark your pipette puller in such a way as to make pipettes of approximately the same
length.
Try to fabricate concentric pipettes.
Try to install your pipettes in the holder such that they always extend the same amount.
If you use a rotating device to position the manipulator, try to install it such that rotation
is up against a hard stop when the manipulator is in the operating location.
Note that you accepted the factory set speed and resolution for the move back to home. If you
wish, you can define both; for example, you can make the move to home even faster. Details
on how to specify speed and resolution are given in the MP-285 Reference Manual.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 27

19
6. GEN E RAL I ZED ROB OTIC MOV EMEN TS
In addition to a simple movement like “Go Home”, the MP-285 is also capable of learning and
remembering a complex series of Robotic movements. A series of recorded movements can be
executed once or many times in a loop. The series of moves can also be executed in the
reverse order in which they were recorded.
The following section teaches you how to record and execute a series of robotic movements by
demonstration. You will find it easy to use robotic movements to remove your pipette from
the field of view to a location where you can easily switch in a new pipette. Such a function
provides a complement to “Go Home”, used in the proceeding section, to robotically move a
pipette from a distant location to the field of view.
It is assumed that you have installed your micromanipulator at your microscope and are
capable of bringing your pipette into focus in your field of view. If you have not yet done so,
you may wish to proceed through the previous sections of this manual.
6.1 Setting Absolute Zero
With your pipette centered at a location in the middle of the field of view of your microscope,
you may find it advantageous to define this location as the absolute zero (0,0,0) for the MP285 controller. Once this is done, it is straightforward to know where you are when you are
looking at the coordinate display on the controller. It is probably a good idea to define the
zero as a location slightly above the surface of your preparation and/or specimen dish. This
way you will be less likely to smash pipettes into your work. To set the absolute zero, do the
following (from the movement screen):
1. <ESC> to main menu and press <PRGM>
2. <TAB> 2X to “SETUP” and press <ENTR>
3. <ENTR> to access “AXES” menu
4. <ENTR> to access “New Origin”
5. <ENTR> 2X more to complete the reset
6. <ESC> 3X back to main menu and press <MOVE>
You should be back in the movement screen and the coordinates on the display should read
0.00mm.
6.2 Redefining Home
If you also wish to set this location as your home location, you must redefine it as such:
1. Press <*> then <TAB> to “New Home”
2. Press <ENTR> to access “New Home”
3. Press <ENTR> to accept the default speed and resolution.
4. You will be back in the movement screen.
6.3 Clearing Program Location #1 for Recording a New Robotic Series
Robotic movements are initially stored in program location #1. If there is another series
already stored in this location that you wish to retain you must move it to another location
first. When shipped, program location #1 is occupied by a test routine. While you probably
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 28

20
have no reason to save this routine, you may wish to save it to another location simply to
learn the procedure for later reference. To move program #1 to a new location and free up
location #1, follow these steps (from the movement screen):
1. Press <*> to enter the Robotics menu
2. <TAB> 5X to “Select program” and press <ENTR>
3. Press <ENTR> to accept “Save/Clear”
4. <TAB> to a free location (for e.g. #7) and press <ENTR>
5. <ESC> back to the movement screen
Note that the original copy of program #1 is still in location 1 and will be overwritten when
new robotic moves are entered.
6.4 Teaching the MP-285 Controller a New Robotic Series
You are ready to teach the controller a series of movements to robotically move the
manipulator to a location where pipette exchange is possible:
1. Press <ESC> to reach the main menu and press <1> to put the manipulator in Setup
#1 for coarse movement, press <MOVE> to return to the movement screen
2. Press <*> to enter the Robotics menu. <TAB> 3X to “Learn” and press <ENTR> to
gain access to Learn functions. You will be issued the following warning:
W A R N I N G : P r o g r a m 1 c o n t a i n s v e c t o r s .
P r e s s E S C t o q u i t o r a n o t h e r t o c o n t i n u e .
3. If you have already saved Program 1, or if you do not need to, then press any key other
than <ESC> to continue to the following screen:
P r o g r a m 1 : A d d v e c t o r s a f t e r 6 - o r - .
S t a r t n e w p r o g r a m 1 w i t h v e c t o r n o . 1
4. <TAB> to “Start new …” and press <ENTR> to access the main Learn mode menu:
▓ A d d v e c t o r a f t e r 0 E n d p r o g r a m
I n s e r t p a u s e G o h o m e D e l e t e
5. Press <ENTR> to add the first vector (actually the end point of the first move). You will
enter a screen that <**>asks for the desired speed for the move.
▓ A c c e p t n e w h o m e s p d = 2 0 0 0 u m / s
( T A B t o e d i t ) r e s = . 2 0 u m / S t e p
6. <TAB> to “spd”, press <ENTR>, and press <6550> to put in a speed of 6550mm/sec.
This will make the manipulator move as fast as possible during robotic movement.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 29

21
Now you should see a screen similar to the movement screen but with one exception, the
<L> in the lower right corner indicates that you are in “Learn mode”. You cannot leave this
mode properly without formally ending your learned series of movements.
1. Now, move your manipulator to a location where you can most easily exchange your
pipette. This will most likely, but not necessarily, involve moving the Z-axis to its maximal
upward extension and the X-axis to its maximal rightward extension (for a right-side
mount manipulator). You may also want to move the y-axis.
2. Press <*>, then press <ENTR> to add new vector
3. Press <*>, then <TAB> 1X to “End program” and press <ENTR>
You may have a dish that requires a circuitous route for entry and exit. If this is true, you can
easily define a multiple step route out of the dish by multiple cycles of steps one and two
above to make a move and then record it by entering the new vector and then finally using
step three to end the program.
To store your newly entered routine in a location other than program location #1, follow the
steps detailed in the section “Clear Program Location #1 for recording a new Robotic
Series”.
6.5 Executing the Newly Entered Program!
Presumably, you have just entered the Robotic Series described above. It can now be used to
move your pipette effortlessly from your working location to a position where you can
exchange for a new pipette. Note that if you have not just entered the new series in program
location #1, you must first load the program location that contains the series. To do this,
follow the instructions below under “Loading a Saved Program”.
In order to observe the robotic movement, you must first bring the pipette back into the
working location by the following command from the move screen:
Press the <HOME> button on the ROE
The controller screen will display the words “Going home” and the manipulator will
methodically move the pipette back to your field of view. If you did not change the pipette
while you recorded the robotic series, then the pipette tip should come back exactly to the
location you defined as “Home” earlier.
To use the Robotic series to move the pipette out for exchange follow these steps:
1. From the move screen, press <*> to enter the Robotics menu
2. <TAB> 2X to “Execute” and press <ENTR> to access the Execute menu:
▓ D o o n c e L o o p Reverse
A b s / R e l N o w : A b s o l u t e , P r o g r a m 1
3. Press <ENTR> again to accept “Do once”
The screen will display the words “Executing. To stop: press key & hold until end of move”.
As the robotic moves were entered at the fastest possible speed (6550mm/sec) setting the
move should appear significantly faster than the move to home above. If you wish, you can
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 30

22
change your move to home to the speed of 6550mm/sec from the default value of 2000mm/sec
(home speed can be changed whenever you enter a new home).
If you programmed a multiple step withdrawal pattern to move your pipette out through a
circuitous route, you may want to use a similar pattern to move your pipette into the
working area. This can be accomplished simply by executing the above robotic movement in
reverse:
1. From the move screen, press <*> to enter the Robotics menu
2. <TAB> 2X to “Execute” and press <ENTR>
3. <TAB> 2X to “Reverse” and press <ENTR> to accept.
The manipulator will position the pipette in the center of your field of view in the reverse
order of the steps you used to move it out when you taught the controller this routine above.
6.6 Loading a Saved Program
If the program you wish to run has been saved but is not currently loaded, perform the
following steps:
1. Press <*> to enter the Robotics menu
2. <TAB> 5X to “Select program” and press <ENTR>
3. <TAB> to “Load” and press <ENTR> to accept
4. <TAB> to a desired program and press <ENTR>
5. <ESC> back to the movement screen
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 31

23
7. DIAG ONA L OR 4TH AXI S MO VEM E NTS
By simultaneous movement of two axes, the MP-285 is able to produce movement in a
synthetic fourth axis or diagonal. This feature allows for axial micropipette movement along
an axis at an angle with respect to the coordinate system defined by the three axes (x, y, and
z) of the manipulator.
To make diagonal movements while in the movement screen:
1. Press the remote NORM/DIAG button on the encoder (down and lit = diagonal mode).
2. The movement screen should now indicate that the controller is in diagonal mode as
evidenced by the word “Diagonal” in the lower middle of the screen.
3. Diagonal movement is accomplished by turning the Z-axis knob on the ROE.
The controller is factory programmed to produce fourth axis movement in the X-Z plane at a
45-degree angle. Establishment of fourth axis movement at other angles or in other planes is
covered in detail in the
MP-285 Reference Manual
.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 32

24
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 33

25
8. ROE RES P ONS E CH A RA C TERI STIC S
The response characteristics of the ROE are fully adjustable. For purposes of simplicity, this
manual indicates limited adjustment to the values preprogrammed in factory installed
Setups. It is possible to further tailor ROE response to your usage. The following list outlines
the part of the controller menu and the corresponding part of the MP-285 Reference Manual
which deals with each adjustment.
8.1 Controlling ROE Knob to Manipulator Stepper Motor Axis Assignment
The MP-285 software allows full control over which ROE knob is connected to each of the
three physical axes of the manipulator. Furthermore, one can control the direction of
movement commanded by a given input. Axes assignment is covered in the manual under
Controller Configuration and is adjusted using the menu command [PRGM\Setup\Axes].
8.2 Controlling Movement Amount per ROE Turn
How much and how fast the MP-285 manipulator moves in response to a single turn of the
ROE knob is controlled by a single parameter for continuous movement and two parameters
for pulse movement. These parameters are described in detail in the MP-285 Reference
Manual under Controller Configuration and are adjusted using the menu command
[PRGM\Continuous] for continuous movement and the command [PRGM\Pulse Mode] for
pulse movement. A subset of these parameters can also be adjusted during movement using
the menu command [MOVE\1,2,4 or 5] as described in the Movement Screen section of the
MP-285 Reference Manual
.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 34

26
(This page intentionally left blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 35

27
APP E NDI X A. LIM I TED WAR R ANT Y
Sutter Instrument Company, a division of Sutter Instrument Corporation, limits the
warranty on this instrument to repair and replacement of defective components for two
years from date of shipment, provided the instrument has been operated in accordance
with the instructions outlined in this manual.
Abuse, misuse, or unauthorized repairs will void this warranty.
Warranty work will be performed only at the factory.
The cost of shipment both ways is paid for by Sutter Instrument during the first three
months this warranty is in effect, after which the cost is the responsibility of the
customer.
The limited warranty is as stated above and no implied or inferred liability for direct or
consequential damages is intended.
Consumables are exempt from this warranty.
An extended warranty for up to three additional years can be purchased at the time of
ordering, or until the original warranty expires. For pricing and other information, please
contact Sutter Instrument.
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 36

28
(This page intentionally blank.)
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 37

29
IND E X
D
diagonal or 4th axis movements...........................23
disclaimer ............................................................... iii
F
fuses, replacement
mains................................................................... iii
G
general information.................................................1
generalized robotic movements............................19
glassware
precautions...........................................................v
H
home function ........................................................17
M
mains
fuses .................................................................... iii
microscopic manipulation.....................................11
movement
amount per ROE turn.......................................25
control of.............................................................25
N
notes
user............................................................... 29, 30
P
precautions............................................................. iii
electrical.............................................................. iii
pulse movement.....................................................15
R
ROE response characteristics...............................25
S
safety warnings...................................................... iii
electrical.............................................................. iii
mains fuse........................................................... iii
safety warnings & precautions
operational...........................................................iv
safety warnings & precautions........................ iii, iv
setup..........................................................................3
T
technical support .....................................................1
W
warranty.................................................................27
NOTES
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
Page 38
30
NOTES
MP-285 SYSTEM ROE BASIC OPERATIONS – REV. 3.08 (20140809)
 Loading...
Loading...