

Superior Electric SLO-SYN Micro Series, SLO-SYN 3180-PI10, SLO-SYN 3180-PI, SLO-SYN 3180 Series, SLO-SYN 3180-PI125 Instructions Manual

The Only Factory Authorized Repair Center for Superior Electric
Motor Systems Inc.
460 Milford Parkway
Milford, OH . 45150
www.motorsystems.com
513-576-1725
Stepper Drive & Motor Repair
PRICE:
$25.00
ecticut
060110-7488
1987
The Superlor Eleclr~c
Company
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
The following are the minimum steps necessary for the Packaged
become operational.
Y
RESULT IN DAMAGE TO THE UNIT.
I.
DRIVE
Connect 120 volts ac, 50160 hertz to the AC input terminal strip.
The terminal labeled "H" is hot, "C" is common and
Check to see that the motor used is compatible with the drive. A
list of compatible motors is given in Section 3.3 of this manual.
Set the correct current level for the motor being used per the
instructions in Section 3.8 of this manual.
Wire the motor per Section 2.2, "Motor Connections" in this
manual.
Caution:
necting or disconnecting the motor connector or leads.
always disconnect the ac power to the unit when con-
FAILURE TO PERFORM THESE
"G"
is ground,
Be certain
the "PWR ON" LED is OFF before unplugging the motorconnector, or the drive will be damaged.
2. CONNECTIONS
designated as follows:
-
The serial port (9-pin "D" connector) is
Pin ssignment
Signal Common
RS232 Chain Out
RS232 Receive Data
Signal Common
Signal Common
6232 Echo
RS232 Chain In
t5 Vdc
t5 Vdc
Connect the host computer or terminal as shown in Figure 2.4 of this
manual for single indexer interfacing oras in Figure 2.5fordaisy-chain
operation,
device as
operation with the SSP-500 hand-held pendant. This connection is
already made in the cable.
Use caution when connecting the indexer to the host
+5
Vdc is present on the connector.
3. COMMUNICATIONS
parameters to correspond to the protocol of the host device.
The indexer utilizes the XonKoff handshaking technique which
should be followed to ensure proper serial communications.
The indexer must
character(e.g., "<")and the device identification number (e,g.,
indexer#Ol) that is contained in parameter L21 to initiate communications.
-
Configure the RS232 communication
be
addressed with the proper attention
Only use the t5 Vdc for
Caution:
operation. Be sure to twist the wires for each motor phase. Six
twists per foot is a good guideline.
Connect parallel interface data to J5 and serial datato J4. The SSP100 lndexer Programmer is a parallel interface device and the
SSP-500 lndexer Programmer is aserial interface device. Referto
Sections 4 and 5 of the manual for information and operating instructions.
The motor and drive must always be
grounded
during
This instruction manual MUST BE READ IN ITS ENTIRETY to
correctly operate the indexer. This Express Start-Up Procedure
only highlights the important items necessary to ensure correct
operation of the Indexer.
S
-
Be certain that your signals which communicate with the lndexer meet the following specifications (more details
are found in Section 3.6 of this manual).
.
SERIAL (RS232) OPERATIO
S
-
Be certain that the following signal speci
fications are met:
RS232 s~gnal characterrstics:
6
Output voltage swing:
lnput voltage range: -30 Vdc mlnimum: t30 Vdc maximum
Vdc minimum:
ltlO
Vdc maximum
4.
PROGRAMMING
parameter, first, followed by the remainder of the parameters.
Carefully read Section 4 to implement the powerful and varied
instruction set. Factory defaults have been set for your unit to
aid in first-time operation. These are listed in Section 4.3 of the
manual.
5.
EXECUTION
present settings of the various modes. If program or manual
operations are not correct, verify the mode and parameter settings. The Trace mode is a valuable aid in observing program
operation.
If the motor operates erratically, the motion parameters may
need adjusting.
-
Always program L70, the step resolution
-
The indexer executes its program based on the
PARALLEL OPERATION
1.
SPECIFICATIONS-
nicate with the indexer meetthe following specifications (more
details are found in Section 3.6 of the manual).
Be certain that yoursignals which commu-
lnput Characteristics:
High Level (inactive) Voltage: 4.5 Vdc minimum, t15.0 Vdc
maximum
1
High Level Current:
Low Level (Active) Voltage: tO.O Vdc minimum, t6.5 Vdc
Low Level Current: 3.5 milliamperes maximum
milliampere maximum leakage
maximum
Output Characteristics:
High Level (inactive) Voltage: t24.0 Vdc maximum, open
collector
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

High Level Leakage Current: 250 microamperes maximum
leakage
Low Level Output: t0.4 Vdc at 16 milliamperes sink current
+0.7 Vdc at 40 milliam~eres sink current
2.
CONNECTIONS
pin "D" type connector. The pin assignments are as follows:
-The parallel signals are obtained via the 25-
I
General Comments
Pin Assignment
-
Signal Common 14
D7 Input* 15
D5 Input* 16
03 Input* 17
Dl Input* 18
Motion
Busy*? 19
Strobe 7* 20
5* 21
Strobe
Strobe 3" 22
Strobe 1
Output 2*t 24
All Windings Off Output't 25
Direction
*
Signals are active when low, inactive when high
t
Open collector output.
An example of a switch panel interface is displayed in Figure 5.2. The
diodes must be included
3.
COMMUNICATIONS
the timing requirements as shown in Figure 5.3. The LO7
parameter determines the timing of the strobes during the load
sequence.
4.
PROGRAMMING
be programmed first, after which the rest of the parameters
may be programmed. Carefully read Sections 4 and 5 of the
manual to learn how to implement the powerful and varied
instruction set. Factory default values have been set for your
unit to aid in first-time operation. These default values are
listed in Section 4.3 of the manual.
settings of the various modes.
tions are not correct, verify the mode and parameter settings.
If the motor operates erratically, adjust the motion parameters.
*
Outputet
for the indexer to operate successfully.
-
Proper parallel operation must observe
-
170. the step resolution parameter, must
-The indexer executes based on the present
Pin Assignment
-
Signal Common
05 Input*
D4 Input"
D2 lnput*
DO Input*
Not Used
Strobe
6*
Strobe 4*
Strobe 2*
23
If program or manual opera-
Strobe O*
I
Output
Pulse Output*t
*t
SLO-SYN Micro Serles drives use modern solld-state electronics such
as microprocessors to provide the features needed for- advanced
motion control applications. In some cases, these applications produce electromagnetic interference (EMI, or electrical "noise") that
may cause inappropriate operation of the microprocessor logic used
in the Micro Series product, or in any other computer-type equipment
in the user's system.
This guide is aimed toward helping users avoid such problems by
applying "good engineering practices" when designing their systems.
Following these guidelines will usually prevent
fering l~ith drive operation.
li
Noise Sources
What causes electrical norse? In general, any equrpment that causes
arcs or sparks or that switches voltage or current at high frequencies
can cause interference. In addition, ac utility lines are often "polluted"
with electrical noise from sources outside a user's control (such as
equipment in the factory next door).
The following are some of the more common causes of electrical
interference:
*
power from the utility ac line
*
relays. contactors and solenoids
*
hght dimmers
*
arc welders
*
motors and motor starters
*
induction heaters
*
radio controls or transmitters
sw~tch-mode power supplies
*
computer-based equipment
EM1 noise from inter-
FUSE AND MOTOR CONNECTOR PART NUMBERS
FOR
3180
SERIES UNITS
FUSE:
Littelfuse part number 225005
2AG. 5 amperes. 125 volts, fast acting
MOTOR CONNECTOR
Male connector body: AMP part number 206434-1
(5
required): AMP part number 66506-8
Pins
Cable clamp: AMP part number 206062-1
(mates with female motor connector on
drive)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
*
high frequency llghting equipment
*
dc servo and stepper motors and drives
Ill
Mounting Location
When selecting a mounting location ~t is preferable to keep the drive
away from obvious noise sources
possible locate the drive in rts own metal enclosure to shield it and its
wrmg from noise sources If this cannot be done keep the dr~ve at
least three feet from any nolse sources
such as those listed above If
WHEN
MOUNTING
EXER,
BE
SURE TO
PROVIDE
SOLID,
AN CONNECTION
E
AND
ENCLOSU
P THESE WIRES
C
INPUT
I
I
J5
SINGLE POINT
I
GROUND
S
TWI
SEE
NOTE
1
SEE NOTE
2
-
BE SURE TO KEEP
OM
AND
AC POWER WIRING
Ud
CONNECTOR
TYPE
15(FEMALE)
OOPER INDUSTRIES,
USSMAN CORP.
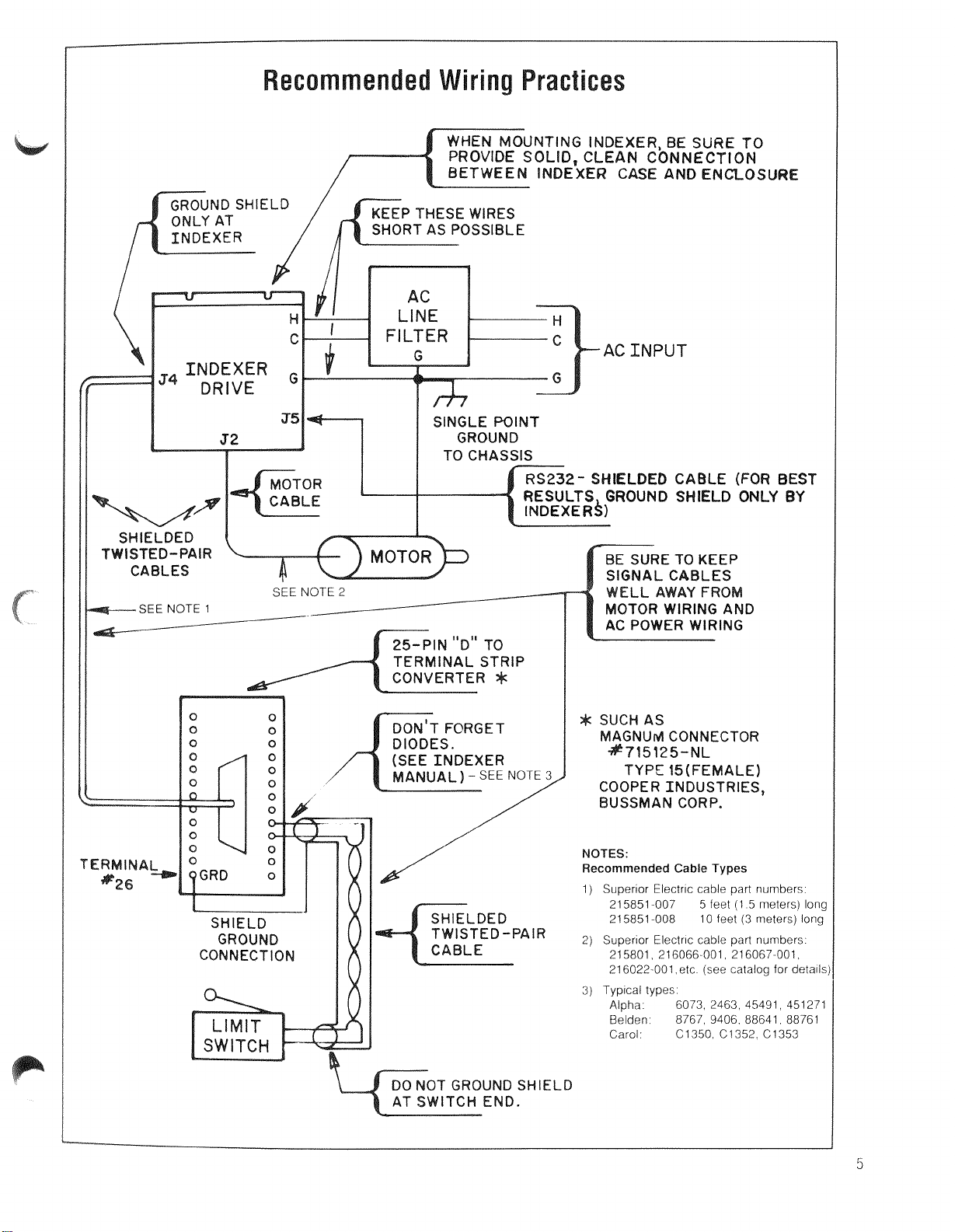
NOTES:
Recommended Cable Types
1)
Superior Electr~c cable part numbers
215851 007
5
feet
(1 5
meters) Ions
21 5851 008
10
feet
(3
meters) long
2)
Superior Electric cable part numbers
215801 216066 001 216067 001
216022 001
etc
(see catalog for details
3)
Typ~cal types
Alpha
6073 2463 45491 451271
Belden
8767 9406 88641 88761
Carol
C1350 C1352 C1353
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
IV
Wiring Practices - "Dos and Don'ts"
Do
the folloviing when installing or wiring your drive or indexer
*
Do
keep the drive and its wiring as far away from noise sources
as possible
4
Do
provide a good solid ground connection to the ac system
earth ground conductor Bond thedrive case to the system enclosure
Do
use a srngle-point grounding scheme for ail related cornponents of a system (this looks like a hub and spokes arrangement)
Do
keep the ground connection short and direct
*
Do
use a line filter on the ac input (Corcorn type
or
lOK1
or eqwalent) for noisy ac lines Particularly bad ac
lines inay need to be conditioned with a ferroresonant type
isolation transformer to provide clean power to the drive or
indexer
Do
keep signal and drive wiring well separated If the wires
inust cross they should do so at right angles to minimize cou-
pling Power wiring includes ac wiring motor wiring etc and
srgnal wiring includes inputs and outputs (110) serial coinrnunicatrons
(RS232
lines) etc
10B1 10S1
*
Do
use separate conduits or ducts for signal and I10 wiring
Keep all power wiring out of these signal line conduits
*
Do
use shielded twisted-pair cables for indexer
*
Do
ground shields only at
*
Do
use twisted-pair shielded cable for the motor wiring
*
Do
use solid-state relays instead of electromechanical contact
types wherever possible to minimize noise generat~on
*
Do
suppress all relays to prevent noise generation Typical
suppressors are capacitors or MOVs See manufacturers
lrterature for complete
Do not
do the following when installing your drive or indexer:
Do not
install sensitive computer-based equipment (such as
an indexer1drive) near a source of
*
Do not
bundle power and signal lines together.
*
Do not
bundle motor cables and signal lines together.
*
Do not
fail to use shielded. twisted-pair cables for signals.
Do not
fail to properly connect the system grounds.
*
Do not
use "daisy-chained" grounds.
*
Do not
fail to ground signal cable shields at only one end.
*
Do not
assume that power from the ac line is adequately
"clean".
one end
information
the indexeridri~e end
electromagnetic
110
lmes
noise.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

V
AC
Line Filter
Use of an AC lhne filter on
Proper installation of the
31
80
and
61
80
Ser~es drlves
AC
Line Filter is essential
is recommended.
Asuitable filter is included with each unit supplied for sale in North America.
WARNING: Improper installation of the ac line filter may cause electrical shock, which could result in death, serious bodily
injury or property damage. To avoid electrical shock:
*The ac line filter must be installed by qualified personnel. Typical methods of locating and installing the line filter are
shown in Figures
1
and
2.
*The ac line filter must be firmly fastened near the Indexer. Failure to do so may result in damage to the filter and system.
*The installer must properly insulate and protect the ac connections to assure that the wires are not exposed. Exposed
wires could cause electrical shock, resutting in death, bodily injury or property damage.
If you have any questions regarding installation of the line filter, contact an electrician before installing the device.
For best performance:
*
The wlre between the Filter and the Drive should be less than two feet
(0.61
meter) long
Proper AC Line Filter Connections
VI
Troubleshooting Guide
Electrical interference problems are common with today's computer-based controls, and such problems are often difficult to diagnose and cure.
If such a problem occurs with your system. it is recommended that the following checks be made to locate the cause of the problem.
1.
Check the quality of the ac line voltage using an oscilloscope and a line monitor. such as the Superior Electric
age problems exist, use appropriate line conditioning, such as line filters or isolation transformers.
2.
Be certaln all of the previous Do's and Don'ts are followed for location, grounding, wring and relay suppression
3.
Double check the grounding connections to be sure they are good electrical connections and are as short and direct as possible.
4
Try
operating the drive wlth all suspected noise sources switched off If the drlve functions properly switch the noise sources on again
one at a time and try to Isolate whlch ones are causing the Interference problems When a noise source is located try rerouting wirlng
suppressing
relays or other measures to eliminate the problem
VMS
series. If linevolt-
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
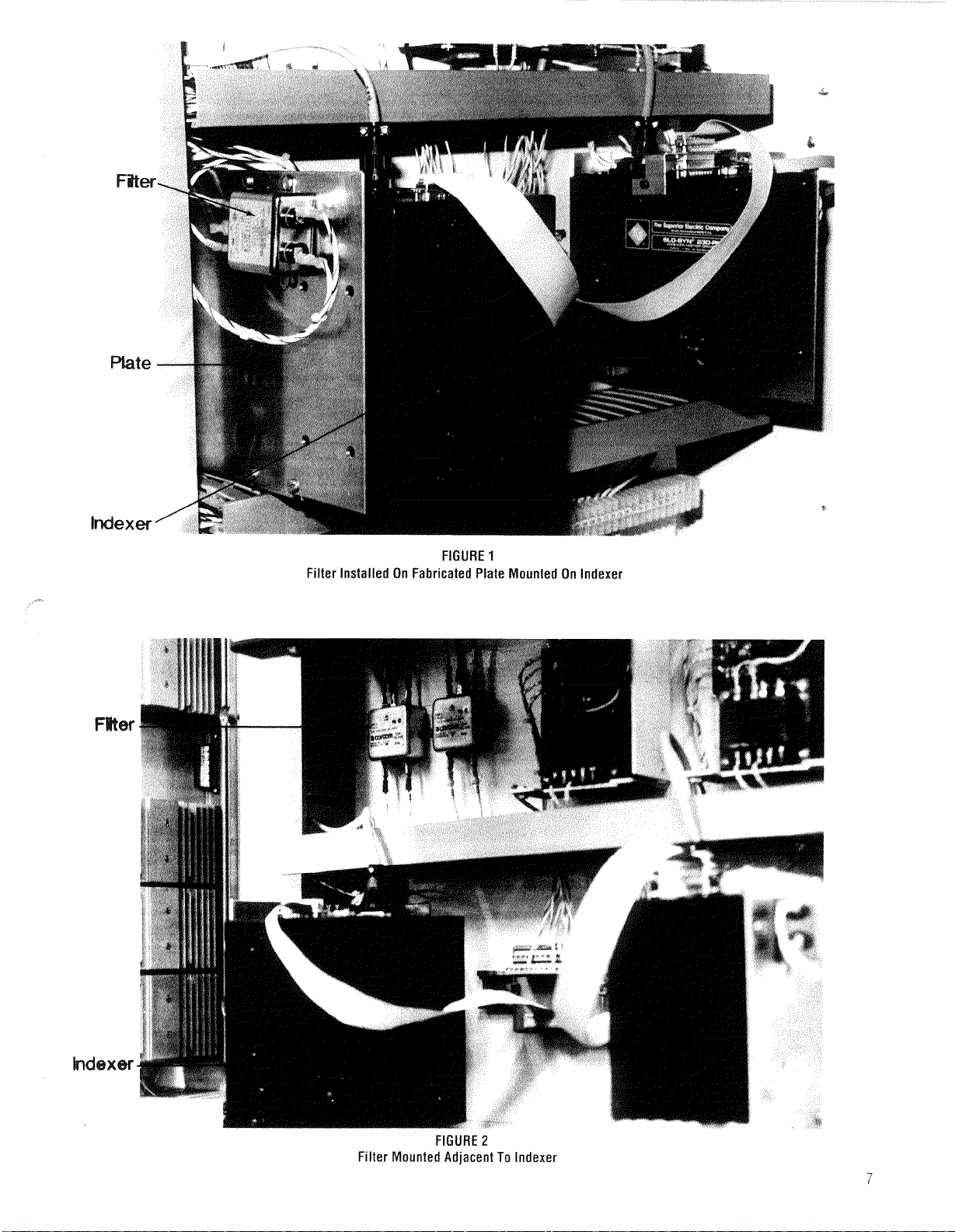
FIGURE
1
Filter installed On Fabricated Plate Mounted On Indexer
FIGURE
2
Filter Mounted Adjacent To Indexer
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PAGE
PRECAUTIONS
WARNINGS CAUTIONS. LIMITS OF USE. ETC 9
SECTION
1:
INTRODUCTION
1.1 Features Overview 10
1.2 Inspection parts list 10
1.3 Using this manual 10
1.3.1 Organization
9
10
4.1.3 Programming Chart
~
--
--
-.-
4.2 Immediate Commands
-
Clear 19
Freehold 19
Device Attention Character 19
Cycle Stop 19
Backspace and Delete 19
PAGE
1.3.2 Logic voltage and programming conventions 10 Delete Line 19
1.3.3 Indicator lights and AC fuse 10
SECTION
2:
MOUNTING, CONNECTIONS & PIN ASSIGNMENTS
11
4.3 L Codes: Indexer Parameters 19
L06, Program Execution Format
2.1 Mounting 11 107, Strobe Delay Time 20
2.2 Motor connections 11 L08, Mechanical Home Direction 20
2.3 Connection Diagrams 13 L09, Jog Speed 20
17
19
2.3.2 J2: Motor 13
2.3.3 J3: Power lnuut
2.3.4 34: Parallel
2.3.5 J5: Serial
2 4 Serial Communication Connection Diagrams
Single lndexer System
2 4
1
Multiple lndexer System
2 4 2
-
110
110
.
..
--
-
-.
--
-
--
-
-
2 5 Memory Protect Switch
SECTION
3:
SPECIFICATIONS
3 1 Drive Description
3 2 Drive Performance
--
-
3 3 Motor Compatibility
--
-
-
--
-
--
---
--
-
3 4 Drive Mechanical Specifications 15
3.5 Electrical Specifications 15
AC
35 1
3 5 2
-
3 6 Micro-Series-Indexer 110 Signal Interfaces
--
lnput
-
Output to Motor
-
--
--
3 6 1 Parallel I10
3 6 1 1 Parallel Output Characteristics 16
3 6 1 2
-
Parallel lnput Characteristics
--
--
3 6 2 Serial I10 16
3.7 Environmental Specifications 16
3
8 Current Settings
4
1 2 General Programming Comments 17
-
GUIDE
-
--
-
-
-
-
-
--
--
13
13
13
15
15
15
15
16
16
17
17
L1 2. Low Speed
L14, Home Speed 2
117, Offset Direction and Distance from
Mechanical Home 21
L18, Clockwise Software Travel Limit
119. Counterclockwise Software Travel Limit
L21. Assign Device Identification Number
L22, Baud Rate 22
L23, Character Length 22
L25, Parity 2 2
126, Indexer Ready Acknowledge 22
141, Auto Start Line Number
L44 Program Line Delay
--
L45 Limit Switch Enable 23
L48. Program Line Transfer Count
L49, Parameter Transfer Designation
-.
170, Translator Resolution 23
4 4 Codes Commands for Modes of Operation
--
-
-
-
- - - - -
-
HI Cycle Start
H2 Step Mode
H3 Jog Mode
H4. High Speed Mode 24
H5. Low Speed Mode 24
H6. Turn in CW Direction
Hi. turn in CCW Direction
H8 Return to Electrical Home 24
2 1
1
2 1
3
2
2 3
2 3
2 3
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
H9, Set Electr~cal Home
-
--
--
HI0 Return to Mechanical Home 24
HI 1, Clear Present Program Line
HI 2. Clear Program 25
H13. Transmit Contents of Present Program L~ne
HI4 Transm~t Program
-.
--
-
H15, Transmit The Current Program Line Number
H16, Transmit Parameters 25
H17, Transmit Absolute Position 26
HI 8, Transmit Motion Status 2 6
HI 9, Transmit Mode Status 2 7
H20, Transmit I/O Status 28
H23, Transmit Software Revision Date 2 8
H24, Enable Trace Mode 28
H25, Disable Trace Mode 28
4 5 Programming Codes
--
N Codes Line Number 28
X
Codes, Move Direction and Distance
F
Codes, Feedrate
G Codes Programmable Commands
--
GO4 Dwell Time 29
-
GI 1 Call a Subrout~ne
--
G20 Conditional Branch
-
-
--
G22 Wait for Input 30
G30, Return from Subroutine ProgramLine 31
G31. Program Stop 3 1
PAGE
---
24
G36 Strobe X Code Data
31
G37 Strobe N Code Data 31
25
2 5
25
.-
25
G47 Set Output 3 2
G64 Enable Reduced Current
-
---
-
32
-
G65 Cancel Reduced Current 3 2
G66 Enable Boost Currerlt 32
G67 Cancel Boost Current 32
G68 Enable All Wmdings Off
--
-
32
G69 Cancel All Windings Off 32
G76 Return to Electrical Home
-
-
--
--
-
-
3 2
G77 Set Electrical Home 32
G78 Return to Mechanical Home
--
-
-
3 2
-
--
G90 Absolute Mode 32
G91, Incremental Mode 32
4.6 Sample Program 33
2 8
-
28
4.7 Code Assignment Tables 34
5:
SECTION
5
1 Overview
OPERATING INSTRUCTIONS 36
-
-
-
5 2 Operation from a Sw~tch Panel
28
--
5.3 Operation from a Remote Terminal 4 1
5.4 Operation from a Host Computer
6:
29
29
--
SECTION
6.1 Motor Performance 49
SECTION
Summary of Codes
-
SPEEORORQUE CURVES
7:
TROUBLESHOOTING
--
-
-
50
53
-
-
Program Worksheet 54
WARNINGS
*
Voltagespresent in this unit can causeserious or fatal injury. Only
qualified personnel should install or perform servicing procedures on this equipment.
*
Voltage is present on unprotected pins when unit is operational.
a
No short circuit protection for motor outputs is provided in this
unit. The AC input is internally fused.
*
Before making changes to the motor or control wiring, turn off all
power to the unit, and disconnect its AC power source.
*
Allow at least ten minutes for capacitors to discharge as they will
remain at high voltages for several minutes after power is removed.
*Assure motor compatibility before using the unit.
*Observe all cooling and temperature limitations. Heat sink
temperature must be maintained between Oand 80 degrees C. (32
and
176
degrees F). Unit must not be operated in ambient tern
perature below 0 degrees C (32 degrees F) or above 50 degrees
C
(122 degrees F).
*
All Windings Off should be used with caution, asall holding torque
is lost.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
*Do not connect or disconnect motor or signal cables while AC
power is applied.
*
00 not use J1 connector (15-pin "0" connector).
*
Do not exceed specified input voltage.
*Do not operate unit without the enclosures in place, as high
voltages are present.
LIMITS OF USE:
*
Reconfiguration of the circuit in any fashion not shown in this
manual will void the warranty.
NOTES:
1.
Clockwise and counterclockwise directions are properly oriented when viewing the motor from the label end.
2. When connecting the unit to a terminal or host computer, be sure
to make note of the
RS232 configuration and Micro-Series
Indexer device address.
3.
Care must be taken when connecting this unit to a host computer
or remote terminal as a +5VDC voltage source is present on the
RS232 connector. Follow instructions carefully.
4.
The
J1
connector (15 pin "D" connector) is not to be used for any
purpose.
9
1.1
FEATURES OVERVIEW
Complete specifications listed in Section 3 will provide easily referenced information concerning all aspects of installation power and
interface requirements as well a performance specifications
The 3180-PI provides the following output capability:
MOTOR
CURRENT
VA
PER PHASE PER PHASE
3180-PI 3 Amps peak 500 VA nominal
The 3180-PI motor drivelindexer package is a line-operated, energy
efficient motor drive module, that is coupled to a programmable
m~crocontrolier indexer. An integral power supply provides the
necessary DC voltages required to operate the indexer and drive. This
indexeridriver module
Electric SLO-SYN stepping motors, and allows for a wide range of
functions, The indexer has several features, including:
Programming is done in a s~mple easy to use format
Up to 400 lines of program instructions can be stored
Program storage
Easy programming allows for motion and input/output control
99
Up to
tions
Program entry and execution may be done
Switch panel including the Superior Electric SSP-100 SLO-SYN
lndexer Programmer
Remote terminal including the Superlor Electric SSP-500 SLOSYN Indexer Programmer
Host computer
The drive features include.
Full/half 1/10 or 11125 step resolution depending on model
Motor current adjustable from 0
*
Speeds up to I0 000 full steps per second
*
Reduce-current and boost-current functions that are indexercontrolled
*
Power-on and fault LED indicators
*
Over-temperature protection
1.2
INSPECTION PARTS LIST
The drive and indexer come fully assembled as a single unit that is
inarked with the part number either 3180-PI (fullihalf step) 3180PI10 (1110 microstep) or 3180-PI125 (11125 microstep)
1.3
USING THIS MANUAL
This manual is an installation and operating guide to the 3180-PI
motor drive and indexer All the necessary information is provided for
using the 3180-Pi successfully
indexers may be daisy chained via RS232 communica-
is capable of driving a wide range of Superior
is in nonvolatile memory
in a variety of ways
5
to 3 0 amperes per phase
Section 4
and commands used by the indexer and gives examples of how these
commands are used
Section 5 entitled Operating Instructions provides information on
how to operate the indexer from a switch panel remote terminal or
host computer Detailed information on switch and strobesettings will
be provided there
The remaining sections contain additional drawings and information
useful for setting up and operating the indexer modules.
1.3.2
is a Programmrng Guide' that explains all the parameters
LOGIC VOLTAGE AND PROGRAMMING CONVENTIONS
All logic is LOW TRUE. This means that a logic function is
when low
designated by a bar. In the case of step/Eg,
If a logiccontrol function connectorpin is left
be clamped in a
When a sign is to be used in conjunction with a move distance or an
offset direction.
motor's LABEL END.
Certain commands are designated as MODE commands. Examples: ABSOLUTE MODE. INCREMENTAL MODE, STEP MODE.
JOG MODE, etc. Care should be taken to assure that the correct
MODE is operational for each command. Once a mode is set.
remains active until a canceling or alternate mode is chosen.
Motion performance and the ranges listed for motion parameters
are dependent on the translator resolution chosen with the L70
parameter.
and inactive when high. The low true condition is
jog
is active when low.
open,
the function will
high or inactive
+
will cause
condition.
clockwise
motion as viewed from the
L70 must be programmed priorto any motionparame-
active
it
ter entry. If the L70 parameter is modified, then the motion
parameters must be re-entered.
3.3
INDICATOR LIGHTS AND AC FUSE
A red "PWR ON" LED indicator shows the presence of the t 5Vdc
drive logic power supply. thereby indicating that the 3180-PI
is energized.
A red "TEMP" LEO indicator shows a drive over-temperature condition. During this condition. the power is removed from the motor
v~indings so that no holding torque is being applied. Recovery from
tlirs condition necessitates removing and then re-applying the
power source.
The unit s AC input is internally fused A blown AC input fuse
prevent the power supply from energizing any of its outputs hencs
the unit will not operate Usually theonly reason thlsfuse will ope?
(
blow ) is if an internal failure occurs If an open fuse occurs
return the unit to the factory for service
DO NOT REPLACE THE
AC
w
I
FUSE OR THE UNIT MAY BE FURTHER DAMAGED.
We strongly recommend that this manual be read thoroughly and
completely before attempting to install and operate the equipment.
1.3.1
ORGANIZATION
This inianuai is organized for the convenience of the operator Section
2
mounting Connections and Pin Assignments provides diagraiiis and reminders that are necessary even for the experienced
user and iiistaller
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
The 31 80-PI is mounted by afflxing ~ts enclosure to aflat surface in one
of two possible
locations
configurations
and
diameters
Figure 2 1 shows the mounting hole
It is important to leave at least two inches
(51 rnm) of space between the drive stop bottom and sides to allow
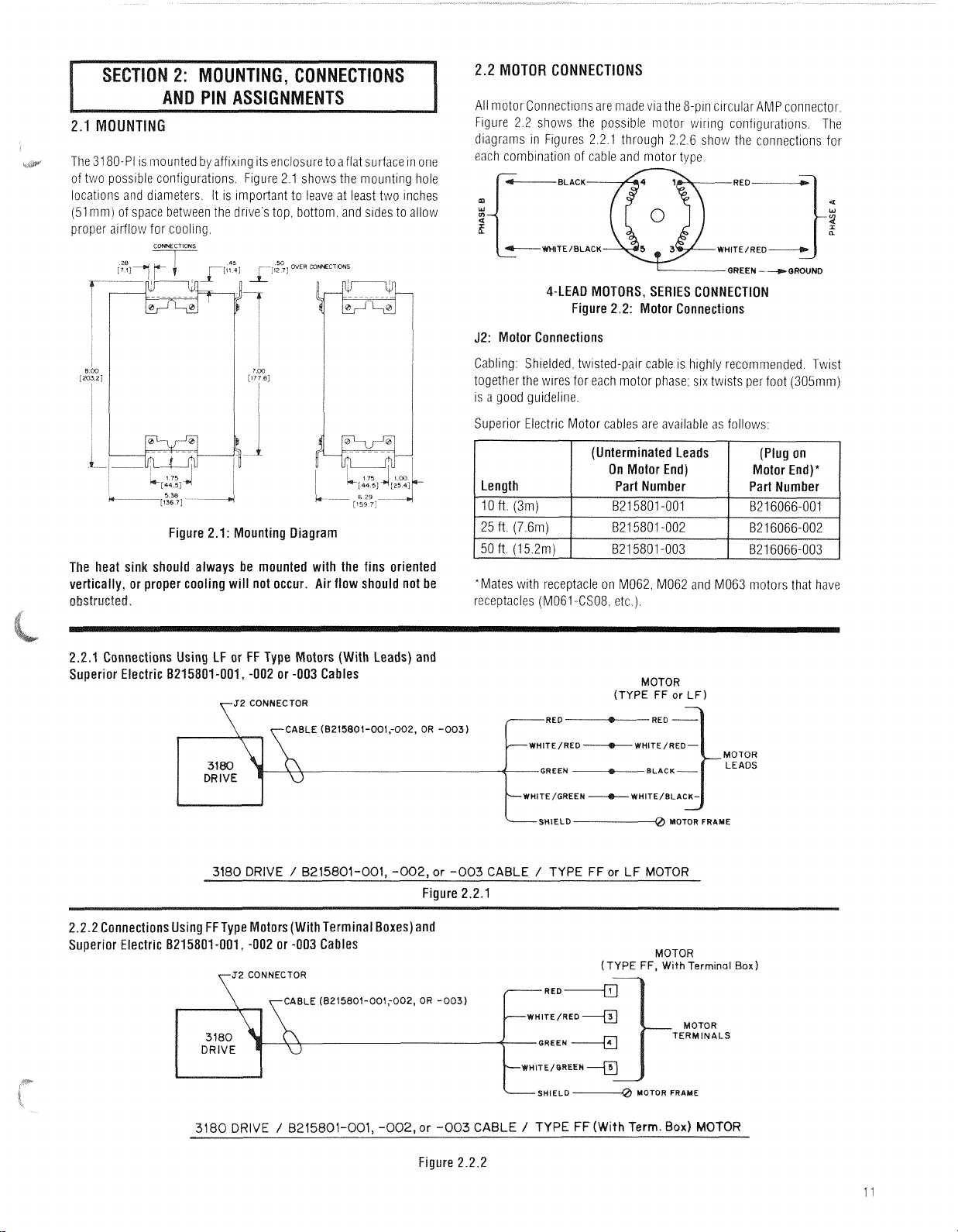
2.2
MOTOR CONNECTIONS
All motor Connectioris are made vla the 8-pin circular AMP connector.
Figure 2.2 shows the possible rnotor wiring configurations. The
diagrarns in Figures 2.2.1 through 2.2.6 show the connections for
each comblnatiori of cable and motor type
BLACK
m
w
WHlTElBLACK
-QUEEN
-+
a
QRWND
4-LEA0 MOTORS, SERIES CONNECTION
Figure 2.2: Motor Connections
J2: Motor Connections
Figure 2.1: Mounting Diagram
The heat sink should always be mounted with the fins oriented
vertically, or proper cooling will not occur. Air flow should not be
2.2.1 Connections Using LF or FF Type Motors (With Leads) and
Superior Electric 8215801-001, -002 or -003 Cables
ZCONNECTOR
CABLE
(8215801-001;002,
OR
-003)
Cabling: Shielded. twisted-par cable
IS
highly recommended. Tw~st
together the wlres for each motor phase; six twists per foot (305mm)
IS
a good guideline.
Superior Electric Motor cables are available as follows.
Length
loft (3m)
(Unterminated Leads
On Motor End)
Part Number
821 5801 -001
(Plug on
Motor End)*
I
Part Number
1
B216066-001
*Mates wlth receptacle on M062, M062 and M063 motors that have
receptacles (M061 -CS08. etc
RED -RED
TE/RED bWHITE/RED-
GREEN -BLAC
WHITE/GREEN
SHIELD-@ MOTOR
--+---
)
MOTOR
(TYPE
WHITE/BLA
FF
or
LF)
FRAME
3180 DRIVE / 8215801-001,
-002,
Figure 2.2.1
2.2.2 Connections Using FFType Motors (With Terminal Boxes) and
Superior Electric B215801-001, -002 or -003 Cables
2
CONNECTOR
CABLE
3180
DRIVE
(8215801-001;002,
/
8215001-001, -002,or -003 CABLE / TYPE FF
OR
Figure 2.2.2
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
or -003 CABLE / TYPE
-003)
WHITE/QREEN
SHIELD
~-0
FF
or LF MOTOR
(TYPE
(With
MOTOR
FF,
MOTOR
Term. Box) MOTOR
With
Terminal
MOTOR
TERMINALS
FRAME
Box)
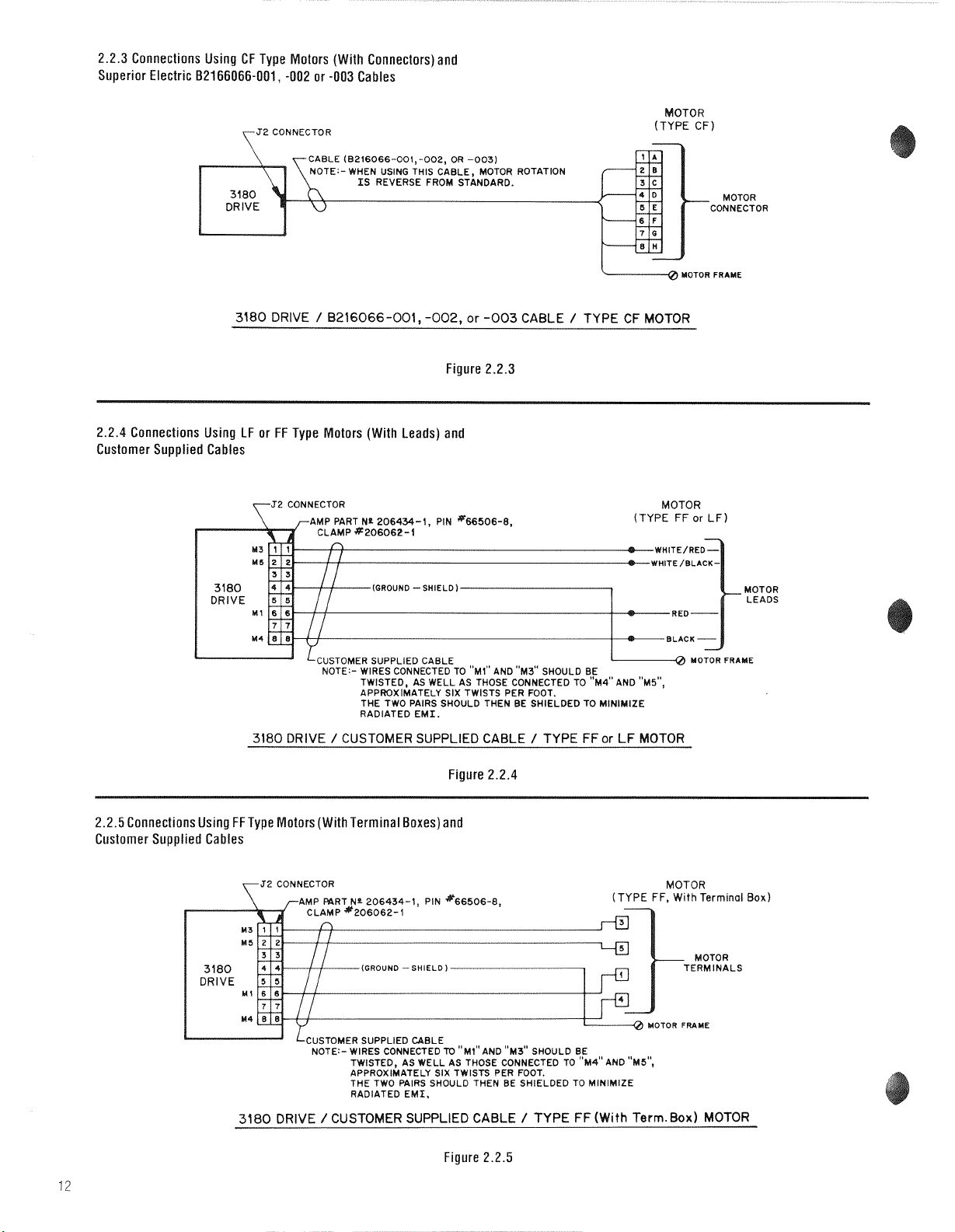
2.2.3 Connections Using CF Type Motors (With Connectors) and
Superior Electric 82166066-001, -002 or -003 Cables
CABLE (8216066-001,-002, OR -003)
OTOR
(TYPE CF)
-
MOTOR
CONNECTOR
3180 DRIVE / B216066-001, -002,
Figure 2.2.3
2.2.4 Connections Using LF or FF Type Motors (With Leads) and
Customer Supplied Cables
2 CONNECTOR
AMP PART Nr 206434-1, PIN "66506-8,
CLAMP *206062-1
(GROUND -SHIELD
L----------d
LCUSTOMER
NOTE:- WIRES CONNECTED TO "~1" AND "~3" SHOULD BE
SUPPLIED
TWISTED,
APPROXIMATELY SIX TWISTS PER FOOT.
THE TWO PAIRS SHOULD THEN BE SHIELDED TO MINIMIZE
RADIATED EMI.
CABLE
AS
WELL AS THOSE CONNECTEO TO "~4'' AND "M5",
3180 DRIVE / CUSTOMER SUPPLIED CABLE / TYPE FF
or
-003
CABLE / TYPE CF MOTOR
or
MOTOR
(TYPE FF
I-0
LF MOTOR
or
LF)
MOTOR
MOTOR
LEADS
FRAME
Figure 2.2.4
2.2.5 Connections Using FFType Motors (With Terminal Boxes) and
Customer Supplied Cables
NOTE:- WIRES CONNECTEO
TWISTED, AS WELL AS THOSE CONNECTED TO "M4"AND "M5",
APPROXIMATELY SIX TWISTS PER FOOT.
THE TWO PAIRS SHOULD THEN BE SHIELDED TO
RADIATED EMI.
3180
DRIVE / CUSTOMER SUPPLIED CABLE / TYPE FF(With Term.Box) MOTOR
TO
"Ml" AND "~3" SHOULD BE
Figure 2.2.5
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
MINIMIZE
F,
With
Terminal
MOTOR FRAME
Box)

2.2.6 Connections Using CF Type Motors (With Connectors) and
Customer Supplied Cable
2
CONNECTOR
GROUND
-SHIELD)
LcusToMER SUPPLIED CABLE
NOTE:- WIRES CONNECTED TO "~1" AND "~3" SHOULD
TWISTED, AS WELL AS THOSE CONNECTED TO
APPROXIMATELY SIX TWISTS PER
THE TWO WlRS SHOULD THEN BE SHIELDED TO MINIMIZE
RADIATED EMI.
3180 DRIVE / CUSTOMER SUPPLIED CABLE / TYPE CF MOTOR
Figure 2.2.6
2.3
CONNECTION DIAGRAMS
2.3.1 J1: DO NOT USE (15-pin "0" type)
otor (see 3.5.2.1 for pin assignments)
53: Power Input (see 3.5.1.2 for terminal assignments)
2.3.3
2.3.4 J4: Parallel I10 Connections (25 pin. "0" type) (see 3.6.1 for
pin assignments)
2.3.5 55: Serial IlO(9-pin, "0"
type)(see3.6.2forpinassignments)
'7LoIoR
BE
"~4"
FOOT.
2.4
SERIAL COMMUNICATION CONNECTION DIAGRAMS
AND "M5",
rmw
2.4.1 Single lndexer System
In
a
slngie
~ndexer
systeln
~t
IS
init~ally transrnlttlng
Ing devlce
Flgure
HOST
RS
PORT
232
address
2
4
for
wlrlng Instructtons
3WlRE CONNtCIlON NO ECHO
ax
TI
VO
the
dev~ce
A
new
necessary
attentton
indexer
to actlvate
character
has
a
devlce
the
and
~ts
correspond-
address
INDEXER
9
lridexer
of
PIN CONNECTOR
1
by
See
/
I
Figure 2.3 3180-PI Connections
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
SERIAL
CONNECTOR
110
J5
MEMORY PROTECT
SWITCH
PARALLEL
CONNECTOR
I10
J4
PWR. ON LED
TEMP. LED
AC INPUT
TERMINAL STRIP
J3
MOTOR CONNECTOR
J2
3
WlR€ CONNECTION WITH ECIi0
I
Figure 2.4 Single Indexer Connections
INDEXER
9
PIN CONNCCTOR
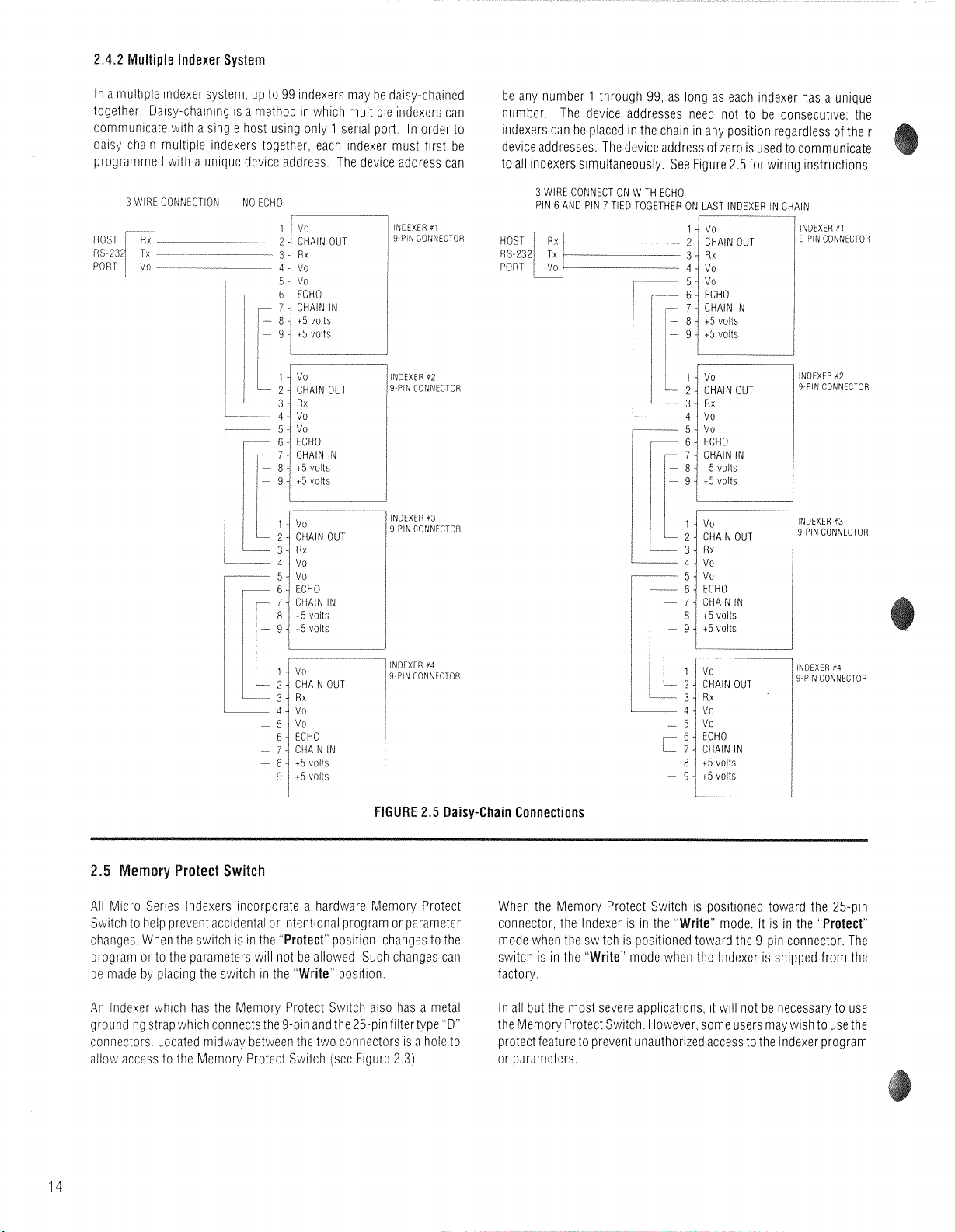
2.4.2
Multiple lndexer System
In a multiple indexer system. up to
99
indexers may be day-chained
together Dalsy-chaining
IS
a method in which muhple indexers can
communicate
with
a singie host uslng only 1 sera port. In order to
dalsy chaln multiple Indexers together, each indexer must first be
progran~med with a unlque device address. The device address can
3
WIRE
CONhECTlON
NO
ECHO
7-1
IPdEXER
#I
2.
CHAIN
OUT
I
9
PI4
CONNECTOR
3-
'Ivo
Rx
--
4
-I
vo
i
...
5:
vo
1
r---
6-1
ECHO
7
-
CHAIN
IN
1
1
cB!
15
volts
I
)
-
9
-1
15
volts
Ill
I
I
/
INDEXER
42
/
9
PIN
CONNECTOR
Ill
-
INDEXER
#3
9-PIN
CONNECTOR
1
INDEXER
#4
/
9-PIN
CONNECTOR
l
I
I
i
:
I
r--
--
3-
Rr
4-
vo
be any number
1
through 99, as long as each indexer has a unique
number. The device addresses need not to be consecutive; the
Indexers can be placed ~n the cnain in any position regardless of their
device addresses. The device address of zero is used to communicate
to all indexers simultaneously. See Figure
2.5
for wiring instructions.
-
5-
--
6
-
3
WIRE
CONNECTION
WITH
ECHO
PIN
6
AND
PIN
7
TIED TOGETHER
ON
LAST
INDEXER
IN
CHAIN
vo
ECHO
1
4
vo
INDEXER pl
HOST
I%--.-
---
2
'
CHAIN
OUT
9-PIN
CONNECTOR
RS-232,
Tx
t
3
1
Rx
--
7
4
CHAIN
IN
-
8
-/
15
volts
-
9
-i
45
volts
1
INDEXER
#3
9-PIN
CONNECTOR
FIGURE
2.5
Daisy-Chain Connections
t5
volts
15
volts
INDEXER
#4
9-PIN
CONNECTOR
emory Protect Switch
Ali Micro Series Indexers Incorporate a hardware Memory Protect When the Memory Protect Switch is positioned toward the 25-pin
Switch to help prevent accidental or intentional program or parameter connector, the lndexer is in the
"Write"
mode. It is in the
"Protect"
changes. When the swltch
IS
in the
"Protect"
position. changes to the mode when the switch
IS
positioned toward the 9-pin connector. The
program or to the parameters will not be allowed. Such changes can switch is in the
"Write"
mode when the lndexer is shipped from the
be made by
placing
the swltch in the
"Write"
position. factory.
An Indexer whlch has the Memory Protect Swltch also has a metal
in all but the most severe
applications
~t will not be necessary to use
grounding strap whch connects the 9-pin and the 25-pin filtertype D
'
the Memory Protect S~vitch However some users may wlsh to use the
connectors Located midway between the two connectors 1s a hole to
protect feature to prevent unauthorized access to the lndexer program
allov! access to the Memory Protect Switch (see Figure 2
3)
or parameters
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
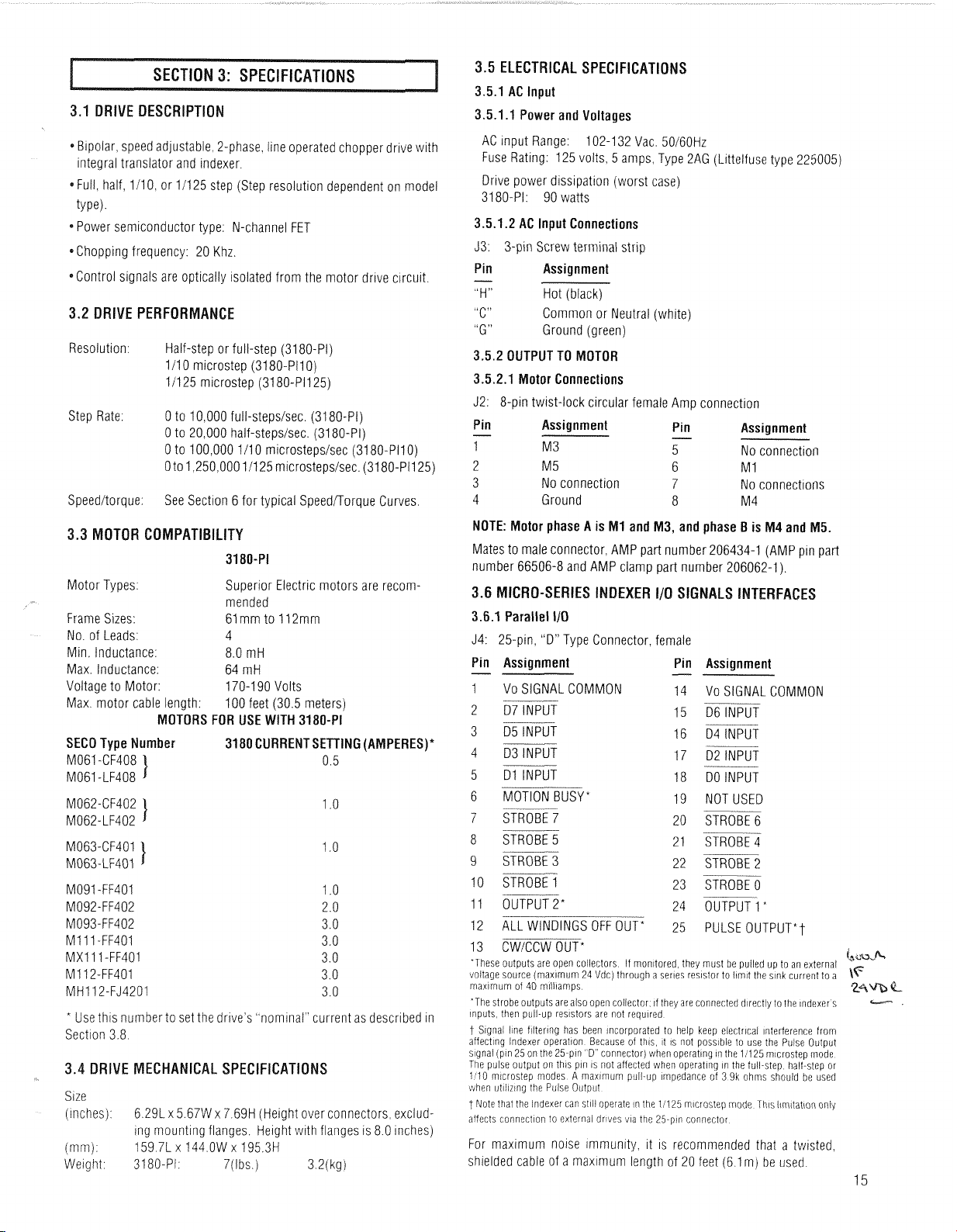
3.5
ELECTRICAL SPECIFICATIONS
3.5.1 AC lnput
3.1
DRIVE DESCRlPTlO
3.5.1.1 Power and Voltages
AC lnput Range:
102-1 32 Vac. 50160Hz
Fuse Rating: 125 volts, 5 amps, Type 2AG (Littelfuse type 225005)
*
Blpolar, speed adjustable, 2-phase. line operated chopper drive with
integral translator and indexer.
*Full, half, 111 0, or 111 25 step (Step resolution dependent on model
type).
Drive power dissipation (worst case)
3180-PI: 90 watts
3.5.1.2 AC lnput Connections
Power semiconductor type: N-channel FET
J3: 3-pin Screw terminal strip
*Chopping frequency: 20 Khz.
Pin
-
Assignment
"H" Hot (black)
"C"
Common or Neutral
"G" Ground (green)
*Control signals are optically isolated from the motor drive circuit.
3.2
DRIVE PERFORMANCE
(white)
Resolution: Half-step or full-step (3180-Pi)
1/10 microstep (3180-PI1 0)
11125 microstep (3180-P1125)
3.5.2 OUTPUT TO MOTOR
3.5.2.1 Motor Connections
J2: 8-pin twist-lock circular female Amp connection
Step Rate:
0 to 10,000 full-stepsisec. (3180-PI)
0 to 20,000 half-stepsisec. (3180-PI)
0 to 100,000 111 0 microstepsisec (3180-P110)
Oto 1,250,000 11125 microsteps1sec. (3180-PI1 25)
Pin
-
Assignment
-
Pin Assignment
1 M3 5
No connection
2 M 5
6 M 1
3 No connection 7 No
connectioils
4 Ground 8 M4 Speeditorque:
See Section 6 for typical SpeedDorque Curves
NOTE: Motor phase A is MI and M3, and phase B is M4 and M5.
Mates to male connector, AMP part number 206434-1 (AMP pin part
number 66506-8 and AMP clamp part number 206062-1).
Motor Types:
Superior Electric motors are recommended
Frame Sizes:
61 mm to 112mm
No. of Leads: 4
Min. Inductance: 8.0 mH
Max. Inductance: 64 mH
Voltage to Motor:
170-1 90 Volts
Max. motor cable length:
100 feet (30.5 meters)
MOTORS FOR USE WITH 3180-PI
SECO Type Number
3180 CURRENTSETTING (AMPERES)*
M061 -CF408
1
0.5
M061 -LF408
DEXER I10 SIGNALS
I
3.6.1 Parallel 110
J4: 25-pin, "D" Type Connector, female
Pin Assignment
-
1 Vo SIGNAL COMMON
2 07 INPUT
--
3 D5 INPUT
4 03 INPUT
Pin
Assignment
VO SIGNAL COMMON
--
D6 INPUT
-
--
D4 INPUT
--
D2 INPUT
--
-
DO INPUT
NOT USED
--
STROBE 6
STROBE 4
STROBE
2
--
STROBE 0
5 Dl INPUT
--
6 MOTION BUSY
*
--
7 STROBE
7
8 STROBE 5
9 STROBE 3
10 STROBE 1
M091 -FF401
M092-FF402
M093-FF402
MI 11 -FF401
MXl 1 1 -FF401
M1 12-FF401
MHI 12-FJ4201
--
11 OUTPUT2* 24 OUTPUT 1"
12 ALL
WINDINGS
OFF
OUT*
25
PULSE
OUTPUT*^
13 CWiCCW OUT*
in
m.,f+-
'These
outputs
are
open collectors
If
monitored
they
must
be
pulled
up
to
an
external
mltage
source
(maximum
24 Vdc)
through
a
series
resistor
to
limit
the
sink
current
to
a
\F
maximum
of
40
milliamps
'The
strobe
outputs
are
also
open
coliector,
if
they
are
conrlected
directly
to
lhe
indexers
----
inputs
then
pull-up
resistors
are
not
required
t
Signal
line
filtering
has
been
incorporated
to
help
keep
electrical
interference
from
affecting
Indexer
operation
Because
of
this,
it
is
not possibie
to
use
the
Pulse
Output
signai
(pin
25
on
the
25-pin ' D"
connector)
when
operating
in
the
1:125
microstep
mode
The
puise
output
on
this
pin
is
not
affected
when
operatinq
in
the
full-step
half-step
or
1/10
microstep
modes
A
maximum
piiil-up
impedance
of
3 9k
ohriis
should
be
used
vihen
utilizing
the
Puise
Outpu!
t
Note
that
the
Indexer
can
still
operate
in
the
11125
microstep
mode
This
lirnitation
only
affects
connection
to
external
dri'des
via
the
25-pin
connector
*
Use
this
number to set the drlve's
"nominal"
current as described in
Section 3 8
Size
(inches)
immi
Weight
MECHANICAL SPECIFICATIONS
6.291 x 5.67W x 7.69H (Height over connectors, excluding mounting flanges. Helght with flanges is 8.0 inches)
159.71 x 144.OW
x
195.3H
3180-PI: 7(lbs.) 3.2(kg)
For maximum noise
immunity,
it
IS
recommended that a twisted,
shielded cable of a maximum length of 20 feet (6.1 m) be used.
15
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
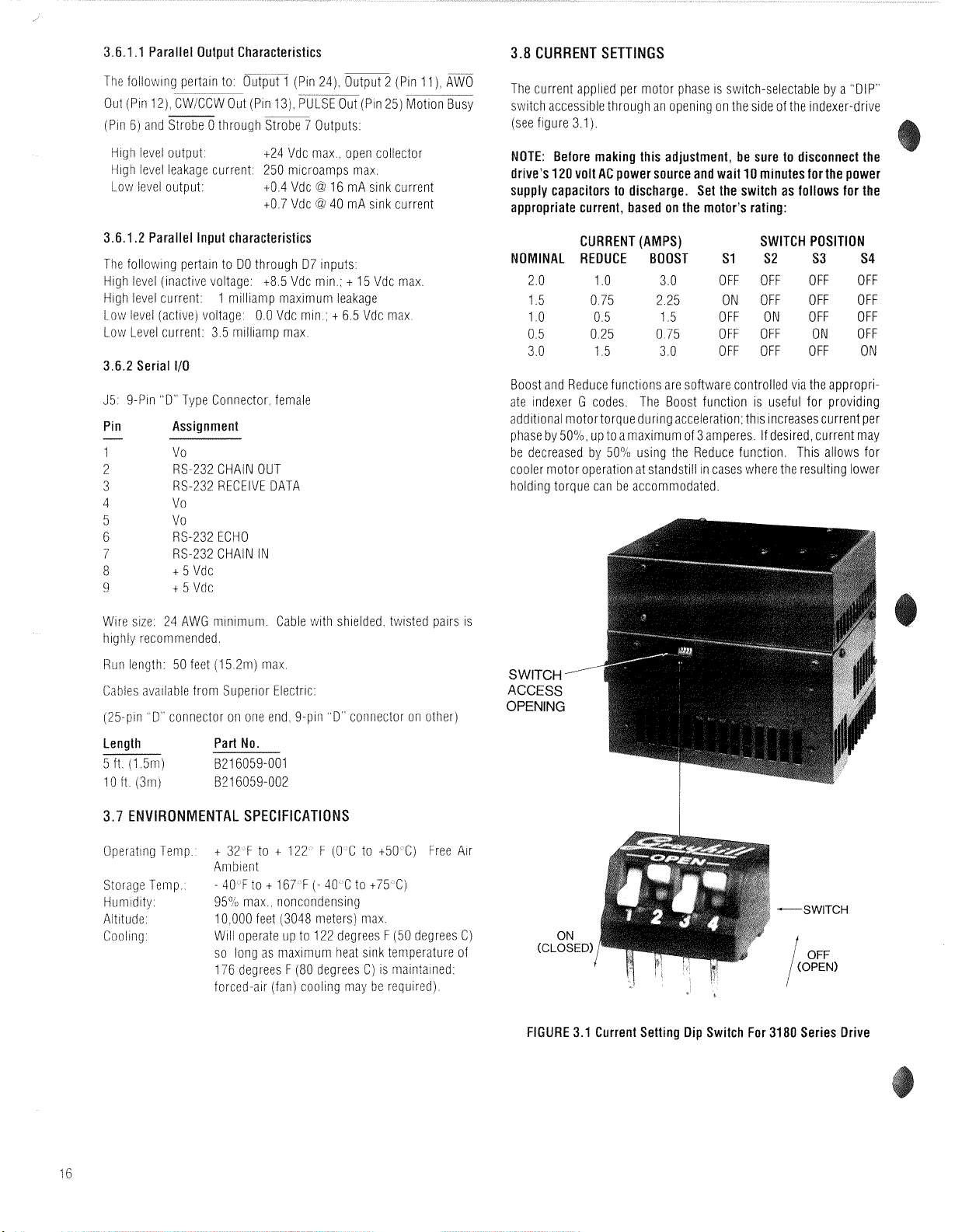
3.6.1.1 Parallel Output Characteristics
3.8
CURRENT SETTINGS
The follov~~ng pertain to Output 1 (Pin 24) Output 2 (Pin 11)
Out (Pin 12) CW CCW Out (Pin 13) %L~(PI~ 25) ~:tionX&
(Pin 6) and Strobe 0 through Strobe 7 Outputs
High level output.
124 Vdc max.. open collector
High level leakage current: 250 microamps max.
@
Low level output:
1-0.4 Vdc
t0.7 Vdc
16 mA sink current
@
40 mA sink current
3.6.1.2 Parallel Input characteristics
The following pertain to DO through 07 inputs:
t
High level (inact~ve voltage: t8.5 Vdc min.;
High level current:
1 milliamp maximum leakage
Low level (active) voltage: 0.0 Vdc mln.:
15 Vdc max
t
6.5 Vdc max.
[.ow Level current: 3.5 milliam~ max
3.6.2 Serial
110
35 9-Pin "D" Type Coriiiector female
Pin
1
2
3
4
5
6
7
8
9
Assignment
Vo
RS-232 CHAIN OUT
RS-232 RECEIVE DATA
Vo
Vo
RS-232 ECHO
RS-232 CHAIN IN
t
5 Vdc
t
5 Vdc
The current applied per motor phase is switch-selectable by a "DIP"
switch accessible through an opening on the s~de of the indexer-drive
(see figure 3.1).
NOTE: Before making this adjustment, be sure to disconnect the
drive's
120
volt AC power source and wait
10
minutes for the power
supply capacitors to discharge. Set the switch as follows for the
appropriate current, based on the motor's rating:
CURRENT (AMPS) SWITCH POSITION
NOMINAL REDUCE BOOST
2.0
1 .O
3.0 OFF OFF OFF OFF
1.5 0.75 2.25 ON OFF
1
.O
0.5 1.5 OFF ON OFF OFF
S1 S2 S3 S4
OFF OFF
0.5 0.25 0.75 OFF OFF ON OFF
3.0 1.5 3.0 OFF OFF OFF ON
Boost and Reduce functions are software controlled
G
ate Indexer
codes The Boost funct~on
via the appropri-
IS
useful for prov~d~ng
additional motortorque during acceleration this increases current per
phase by 50% up to a maximum of 3 amperes If desrred current may
be decreased by 50% using the Reduce functlon Thls allows for
cooler motor operation at standstill in cases where the
resulting
lower
holding torque can be accommodated
Wire size. 24 AWG minimum. Cable with shielded. tw~sted pairs is
higtily recommended.
Ruii length: 50 feet (15.2m) max
Cables available from Superlor Electric:
pin
(25
D
connector on one end 9-pin D connector on other)
Length Part No.
5 ft (1 51n) B216059-001
loft (3x1) 821 6059-002
VIRONMENTAL SPECIFICATIONS
t
Operating Temp
32 F to t 122
Anibient
-
Storage Temp
40 F to t 167 F
Humidity 95% max noncondensing
Altitude
Cooling
10 000 feet (3048 meters) max
Will operate up to 122 degrees
so long as maximuni heat sink temperature of
176 degrees
forced-air (fan) cooling may be required)
F (0 C to t50 C) Free Air
(-
40 C to t75 C)
F (50 degrees C)
F (80 degrees C) is maintained
SWITCH
-
ACCESS
OPENING
FIGURE 3.1 Current Setting Dip Switch For
3180
Series Drive
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
This section contains the information necessary to set up,
enter, and edit programs and also to execute programs with the
Micro Series Indexer.
By carefully reading this section through in its entirety, the user
will fully understand the wide range of applications possible
with the Micro Series Indexer.
.1
OVERVIEW AN0 SET-U
EIA (Electronic Industries Association) Standard RS274-D is
the programming guide for numerically controlled machines.
Superior Electric has utilized this standard to form the basis for
the Micro Series Indexer's command structure. It was not
technically desirable to conform to the standard in complete
detail, but it proved beneficial in the program structure to
perform complex and varied operations with a simple format.
Using straightforward programming formats, the Micro Series
lndexer enables the user to program and execute in either
parallel (switch panel) or serial (remote terminal or host
computer) communication modes.
In general, all parameters and commands can be broadly
grouped into four categories, which correspond to these code
groupings:
1.
L
Codes
3.
N,
G,
X and F Codes
2.
H
Codes
4. Immediate Codes
1.
"L Codes" (discussed in Section 4.3) are used to set
parameters for each indexer. These commands are not considered part of an indexer program, that is, they are made prior to
any motion programming and do not have program line
num bers.
It is important to remember that the L codes are used exclu-
sively to set the initial parameters of a particular indexer and
should not be thought of as part of the program option for the
indexer.
Codes" (Section 4.4) are used to set indexer modes,
control manual and program execution and to transmit parameters and indexer status via the serial communications port.
H codes are not part of the programming commands for the
indexer. There are no program line numbers associated with
the
"H"
codes and they are not considered to be part of the
programming function.
and F
Codes" (Section 4.5) are the programming
commands for the indexer. Up to 400 lines of program instruc-
tions can be stored as a unique motion control program.
Each program is in a fixed format, and is composed of a line
number, a "G" code, an
"Xu
code and an
"F"
field.
A line of program has this format:
N[nnn) G[nn] X[snnnnnnnn] F[nnnnnnn]
A space is used to separate the codes.
Not all codes need be programmed for each program line.
The G,
X
and F codes may be programmed in any order.
:
The brackets,
[I,
are used in this manual for clarity
h,
and are not to be used when entering data
or
variables
4. lmmediate Codes (Section 4.2) are executed immediately
upon receipt and are not stored as part of the program. All
commands are highlighted in bold face for easy reference.
4.1.2 General Programming Comments
T PROGRAMMING NOTES**
1.
The indexer contains a 40 character serial buffer
to
accept all data and programming entries.
If
a COMMAND
TERMINATOR (CARRIAGE RETURN and/or LINE FEED) is
not received by the 40th character, the buffer contents art:
dumped and that 40 character strina is lost.
Upon receipt of a CR and/or LF, an XOFF (ASCII Code 19)
character is transmitted to the host; no further data trans-
mission from the host should occur. However, any characters transmitted subsequent to XOFF will be stored in
the buffer until the buffer capacity is reached. if the
capacity is exceeded, the buffer contents are dumped.
The receipt of a COMMAND TERMINATOR character will
cause the commands in the buffer to be executed sequentially. That is, the first command that was entered will be
the first command executed. The COMMAND DELIMITER
for a series of commands is a space. Once all the com-
mands in the buffer have been executed, the indexer will
send an XON (ASCII Code 17) character and will be ready
to receive further data.
2. Whether the indexer is being operated from a switch
panel, remote terminal or host computer, the first task that
faces an operator, after all circuit connections have been
made, is that of setting
"L:
codes", the parameters of each
indexer.
3.
In the following descriptions, it is important to note the
factory default values for each parameter as entry steps
can be eliminated. Upon receipt of a new indexer, the default
ilalues will have been entered for the parameters.
I.
Motor speeds and acceleration will depend on theTRANSLATOR RESOLUTION setting (L70 nnn). Set this parameter
first and then work in ascending numerical order starting
@ith the LO6 parameter.
NOTE: If the L70value is changed, the valuesfor L09, L11,
L12, L14 and the "F" field values must be reentered.
5.
Entry of invalid data for a parameter or program field will
-esult in the previous data being left intact.
3.
If the number of characters entered exceeds the number
~f required characters, the data is truncated to the maxinum field length for the entry.
XoniXoff Protocol:
The Xoff character is transrnitted to the host when a CR or LF is
received The lndexer will process the information it has received and
v!iII transmit an Xon character when it is ready to accept more
information
from the host The lndexer should be polled to determine
when it is ready to accept more information If
L26
3
is selected the
lndexer will transmit an
=
if it is ready to accept more ~nformation
If an Xoff chardcter has been transmitted to the host and the command
received by the lndexer calls for motion or progrdm execution the
lndexer will send an Xon to the host This allo?.!s the host to send any
of the immediate commands such as
*
[Clear) S (Feed Hold) or
#
(Cycle Stop) The host shoiild not send normal commands until
the lndexer is ready to accept more information The lndexer will be
ready to accept more information when motion is stopped program
is stopped and all
previoiis commands have been executed
17
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

.1
.3
Programming Chart For lndexer Communications - "On The Fly" Commands
"On The Fly" commands can be sent to the indexer when it is "BUSY" (When motion or program execution is active or when
previously transmitted commands are being processed)."On The Fly" commands allow the indexer to send status or position
information to the host. The sequence for sending "On The Fly" commands is shown below. The host must send an "On The Fly"
command, followed immediately by a carriage return (CR) and/or Line Feed (LF). If the command is not sent in this manner, it will
not be treated as an "On The Fly" command. Instead, it
1
HOST DEVICE SENDS
I
HOST DEVICE WAITS FOR INDEXER TO SEND REQUESTED DATA
The following commands can be sent the lndexer while it is "BUSY":
HI Scrlf Transmit Present Program Line Number
HI 7crlf Transmit Present Absolute Position
HI 8crlf Transmit Mode Status
HI 9crlf Transmit Motion Status
H2Ocrlf Transmit I10 Status
will be placed in the buffer and executed when the indexer is no longer "BUSY".
ON
THE FLY" COMMAND"
I
I
I
Any other commands sent to the lndexer will be executed when the lndexer is no longer "BUSY"
.l,
Program Flow Chart For lndexer Communications
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

.2 IMMEDIATE COMMANDS
The
"X
command is executed immediately upon entry and is
not stored as part of the program.
I
*
CLEAR (ASCII Code 42)
/
(s.
This command IMMEDIATELY halts all motor motion and
program execution and will cause a loss of home position. The
program line pointer
is
reset to the line number specified with
the
L41
parameter.
The RS232 input buffer is also cleared and the indexer transmits an XOFF and then an XON when a CLEAR command is
used.
(ASCII CODE 36)
1
This command will immediately bring current motor motion to
a controlled stop with deceleration determined by the
L11
parameter
(ACCELERATION/DECELERATION).
Motion can be continued without loss of position by using a
NO1
CYCLE START command if the feedhold was applied
during program execution. If a feedhold was applied during
a
H08
(return to electrical home) command, a subsequent
H08
will continue the motion. A feedhold during a
HI0
(return to
mechanical home) command requires a
HI0
to continue the
motion. The line number cannot bealtered during afeedhold as
the remaining move distance needs to be completed. A CLEAR
(*)
can be issued if it is not desired to complete the motion.
TTENTION CHARACTE
If
<[nn] = 00, all indexers will be addressed; otherwise, the
indexer with the value set by the
L21
parameter that matches
the <[nn] value will become the active indexer. The indexer will
respond with
"
=
XON" when the <[nn] value matches the value
set with the
L21
parameter and the indexer is ready for
commands. If the indexer is not ready, the indexer responds
with
":".
If <00 is used, there is no indexer response.
This command halts program execution after the current
program line is completed.
This command is used to stop programs executing with
LO6
[2]
[31
EXECUTION FORMAT settings.
H) BACKSPACE AND DELETE
The CONTROL
H (&H)
command will cause a backspace and
delete one character on the current program line. The
AH
command is executed immediately upon entry and is not stored
as part of the program.
The CONTROL
X
(A
)
command will delete the program line
that has been entered in the line buffer,
This command must be used prior to a COMMAND TERMINA-
TOR.
.3 L Codes: INDEXER PARAMETERS
L codes are used to set parameters for each indexer. These
parameters affect the entire operation of the indexer and cannot
be changed during program execution; therefore, they should
be programmed first. The Lcodes can be categorized into three
areas of interest: motion, execution and serial communication
parameters.
Motion parameters: L08,
L09, L11, L12, L14, L17, L18,
L19, L70
Execution parameters: L06, L07, L41, L44, L45, L48,
L49
Communication parameters: L21, L22, L23, L25, L26
The L codes have been preset at the factory to default values;
these are listed as "Factory Default" settings.
INDEXER PARAMETER FACTORY DEFAULT VALUES
Full Step
1/10 Step 11125 Step
Translator
Translator Translator
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

I
LO8
[sl
MECHANICAL HOME DIRECTION
/
This command determines the fashion in which a program will
(H01)
be executed after a CYCLE START
command is issued.
The options are:
Single-line program execution format
=
1
[n]
When a CYCLE STARTcommand is given, the current program
line is executed. The line pointer is then incremented to the next
program line and the cycle stops. The program line pointer may
be moved to another line by using the N [nnn] command.
(H01)
Another CYCLE START
command will repeat the proc-
ess.
Automatic program execution format
=
2
[n]
In this mode, a CYCLE START command will cause the program to execute from the present program line to line number
G30
400 or to a line command that contains a
of
a
GI1
(subroutine call) command. The program will then halt
that is not a part
execution and the program line pointer will be set to the line
L41
number specified with the
parameter. A second CYCLE
START command will cause the program to start execution
from this line number.
Continuous program execution format
=
3
[n]
In this mode, a CYCLE START command will cause the pro-
gram to execute from the present program line to line number
630
400 or to a line command that contains a
that is not part
(subroutine call) command. The program line pointer
is then set to the line number specified with the
and program execution continues until a
mand or a
Example:
mat. [CRLF
NOTES:
format is ignored as line
CYCLE START
*
CLEAR command is issued.
LO6
2 CRLF sets automatic program execution for-
=
carriage return, line feed].
Factory default:
When line
and the line pointer remains at line
LO6
1
00 (MDI
line) is executed, the execution
00
executes one time for each
L41
parameter
#
CYCLE STOP com-
00.
HI0
or
Sets the direction that the motor will turn when a
678
RETURN TO MECHANICAL HOME command is issued.
A
"t"
will cause the motor to turn clockwise.
"-"
will cause the motor to turn counterclockwise.
A
LO$:
s
=
Factory default
Example:
LO8
t
CRLF sets a clockwise mechanical home
t.
direction.
LO9
[nnnnnnnl
JOG SPEED
Sets the desired speed, in pulseslsecond, to be used when the
motor is run in the JOG mode and the HIGH SPEED mode.
Allowable values for this parameter are:
full step (L70
half step (L70
115 step (L70
111 0 step
111 25 step (L70
=
1) 0 to 115,000 pulses/sec.
=
2) 0 to 115,000 pulses/sec.
=
5) 0 to 115,000 pulses/sec.
=
10) 0 to 11 5,000 pulses/sec.
(L70
=
125) 0 to 1,875,000 pulses/sec.
Factory default:
=
full step (L70
half step
115 step
1/10 step
111 25 step (L70
LO9
Example:
PLEASE NOTE:
L09, L11, L12
1200 CRLF sets a jog speed of 1200 pulseslsec.
The range of values that will be accepted by the
and
1)
=
2) 2,000 pulses/sec.
(L70
=
5) 5,000 pulses/sec.
(L70
=
10) 10,000 pulses/sec.
(L70
=
125)
L14
parameters
1,000 pulseslsec.
125,000 pulses/sec.
IS
set by the
L70
TRANS-
LATOR RESOLUTION value.
L70
is set or changed after setting the
If
parameters, the range may not be valid and
may
occur.
ALWAYS SET THE
L70
PARAMETER FIRST.
L09, L11, L12
incorrect motion
or
L14
This command is transparent when using the SSP-500.The
mode is changed when using specific displays. Refer to the
SSP-500 manual for details.
This sets the length of time, in milliseconds, that the output
strobe line will be ACTIVE (low) before the connected data line
is read.
9999
The delay range is 0 milliseconds to
milliseconds.
See Section 5 for an explanation of the STROBE and DATA
functions.
=
Factory default L07: [nnnn]
100 milliseconds
Strobe delay accuracy is i2.5•‹/0 of the selected value.
Example:
LO7 1000 CRLF sets a 1000 millisecond strobe
delay.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

L14
[nnnnnnn]
HOME SPEED
Sets the value, in pulses/sec/sec, for acceleration and deceleration. The same rate applies to both.
Whenever the indexer initiates motion, it is always at the speed
set with the
L12
LOW SPEED parameter. This is the instanta-
neous starting speed of a motor; it will then ramp up to the JOG
or HOME SPEED value orthe FEED RATE using the acceleration
rate set with the
ACCELERATIONIDECELERATION
pa-
L11
rameter.
When the motor is running at JOG SPEED and a feedhold is
asked for, the motor will decelerate from JOG SPEED using the
L11
deceleration rate set with the
parameter and will then stop.
When a move distance and feed rate have been programmed,
the motor will decelerate to a stop at the end of the move using
L11
the deceleration rate set with the
The ranges for
[nnnnnnn]
ACCELERATIONIDECELERATION
=
25 to
9,999,999
parameter.
are:
pulses/sec/sec.
Factory defaults:
full step (L70
half step (L70
115 step (L70
1110 step (L70
111 25 step (L70
=
1)
=
2) 5,000 pulses/sec/sec
=
5)
=
10)
=
125)
Example: L11 5000 CRLFsets an
2,500 pulses/sec/sec
12,500 pulseslseclsec
25,000 pulses/sec/sec
31 2,500 pulses/sec/sec
accelerationldeceleration
rate
of 5000 pulses/second/second.
This command sets the speed, in pulseslsecond, with which
HI0
or
678
the motor will return home when a
H08
or
MECHANICAL HOME, or a
CAL HOME command
is
executed.
676
RETURN TO ELECTRI-
RETURN TO
The ranges for the HOME SPEED are:
full step (L70
half step (L70
115 step (L70
111 0 step (70
=
111 25 step (L70
1)
=
2) 0 to 115,000 pulseslsec.
=
5) 0 to 115,000 pulseslsec.
10) 0 to 11 5,000 pulseslsec.
=
125) 0 to 1,875,000 pulseslsec.
0 to 11 5,000 pulseslsec.
=
Factory default:
=
full step (L70
half step (L70
115 step
111 0 step (L70
11125 step (L70
1)
=
2) 2,000 pulseslsec.
=
5) 5,000 pulseslsec.
(L70
=
10)
=
125)
Exampie: L14 2000 CRLF sets
1,000 pulseslsec.
10,000 pulseslsec.
125,000 pulseslsec
a
home speed of 2000 pulses1
second.
L17
[snnnnnnnnl
OFFSET DIRECTION AND
DISTANCE FROM ELECTRICAL HOME
This command sets the direction and distance, in pulses, that
HI0
or
678
the motor will automatically move after a
RETURN
TO MECHANICAL HOME command has been issued and the
motor has returned to the HOME LIMIT switch.
This command sets the speed at which the motor will run if the
H05
LOW SPEED MODE command is used, or the speed at
which the motor will start before accelerating to the HIGH
SPEED value.
The ranges for LOW SPEED are:
(L70
=
full step
half step
115 step
1/10 step
11125 step
1) 0 to 115,000 pulseslsec.
(L70
=
2) 0 to 115,000 pulseslsec.
(L70
=
5) 0 to 11 5,000 pulseslsec.
(L70
=
10) 0 to 115,000 pulseslsec.
(L70
=
125) 0 to 1,875,000 pulseslsec
Factory defaults:
full step (L70
half step
115 step
1/10 step
(L70
(L70
(L70
11125 step (L70
=
1)
=
2) 500 pulseslsec.
=
5) 1,250 pulseslsec.
=
10) 2,500 pulseslsec.
=
125)
250 pulseslsec.
31,250 pulseslsec.
Example: L12 300 CRLF sets a low speed of 300 pulseslsec.
See Section 5.2.3 on hardware inputs for a description of the
HOME
LIMIT switch function.
[s] =tor
[nnnnnnnnj = 0 to
Factory default
Example:
-
99,999,999
L17:
[s]
L17
-
1000 CRLF sets an offset of 1000 pulses in the
pulses.
=
t:
[nnnnnnn] pulses = 0.
negative direction.
L18
[snnnnnnnnl
CLOCKWISE SOFTWARE
TRAVEL LIMIT
s
=
t
to enable the feature
s
=
-
to disable the feature
[nnnnnnnn]
=
0 to
99,999,999
pulses
When enabled, motion in the clockwise direction that causes
the absolute position to exceed the
L18
value will result in a
feedhold being activated. Only motion in the opposite direction
is permitted.
L18:
Factory default
[s] = -[nnnnnnnn] = 0 pulses
Example: L18 t5000 CRLF will enact a feedhold should the
absolute position exceed t5000 and no further clockwise
motion is permitted.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

s
=
-
to enable the feature
s
=
t
to disable the feature
[nnnnnnnn]
=
0 to 99,999,999 pulses
When enabled, motion in the counterclockwise direction that
L19
causes the absolute position to exceed the
value will result
in a feedhold being activated. Only motion in the opposite
direction is permitted.
:
[s]
=
t
[nnnnnnnn] = 0 pulses
Example:
L19
-7500 CRLF will enact a feedhold should the
absolute position exceed -7500 and no further counterclockwise motion is permitted.
This will assign a unique device number to each indexer in
situations where multiple indexers (up to 99 are permitted)
have been daisy-chained.
4nnl
This number will be used with the
DEVICE ATTENTION
command to activate a particular indexer.
The range for
Factory default
Example:
L21
L21
is 01 to 99
L21:
inn] = 01
05 CRLF sets an identification number of 5.
This command sets the serial port data transfer rate in bits1
second (baud).
The acceptable values for [nnnn] are:
=
[nnnn]
Factory default
300, 1200,2400 and 9600
L22:
[nnnn] = 9600
ost of the recently manufactured terminals and
9600
baud.
If
desktop computers are set at
9600
terminal used is not
b d, it will not be able to commu-
the computer or
nicate with a new indexer. nondefault rate will have to be
set
either with a compatible switch or with a switch panel as
described in Section
I
L23
[nl
CHARACTER LE
5.
This sets the number of data bits in a character sent via serial
communications.
=
7
or
The acceptable values for [n] are: [n]
Factory default
L23:
[n]
=
8
8
This setting determines whether parity applies to serial communication commands and, if parity is selected, whether odd
or even parity is applied. The acceptable values for [nn] are:
=
1
Parity disabled
[n]
=
2Parity enabled, odd parity
[n]
[n]
=
3parity enabled, even parity
L25:
[n]
=
1,
Factory default
OTE:
When parity is disabled, two stop bits will be sent,
Parity disabled.
regardless of the character length. When odd or even parity
is set, one stop bit will be sent if
is set to [nl = 8.
=
7.
Two stop bits will be sent if
L23 CHARACTER LENGTH
L23
is set to [nl
This parameter selects the transmission protocol which the
lndexer will use when responding to input commands. If the
L26
command
n is issued while the lndexer is busy, the
command will be processed when the lndexer is no longer
busy.
Range:
0 to 7
Factory Default
n Transmission Mode Selected
0 Normal Transmission Mode (No "EOT" or
L26:
[n] = 0
XonRoff Protocol Enabled
"="
characters)
1 "EOT" follows each complete data transmission to the host
2
"="
is transmitted when Indexer is ready for more commands
3
"EOT" follows each complete data transmission to the host
and
"="
is transmitted when thelndexer is ready for more in-
formation
n Transmission Mode Selected
4 Normal Transmission Mode (No "EOT" or
XonRoff Protocol Disabled
"="
characters)
5 "EOT" follows each complete data transmission to the host
6
"="
is transmitted when lndexer is ready for more commands
7 "EOT" follows each complete data transmission to the host
"="
and
is transmitted when thelndexer is ready for more in-
formation
Xon character is ASCll code 17
Xoff character is ASCll code
19
EOT character is ASCll code 04
XonRoff Protocol:
The Xoff character is transmitted to the host when a CR or LF
is received. The lndexer will process the information it has
received and will transmit an Xon character when it is ready to
accept more information from the host. The lndexer should be
polled to determine when it is ready to accept more informa-
L26
tion. If
3 is selected, the lndexer will transmit an
"="
if it is
ready to accept more information. If an Xoff character has been
transmitted to the host and the command received by the
lndexer calls for motion or program execution, the lndexer will
send an Xon to the host. This allows the host to send any of the
"*"
immediate commands such as
"f"
(Cycle Stop). The host should not send "normal" com-
(Clear),
"$"
(Feed Hold) or
mands until the lndexer is ready to accept more information.
The lndexer will be ready to accept more information when
is
motion is stopped, program
stopped and all previous com-
mands have been executed.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

This parameter determines the line number to which the
-
program line pointer will automatically be set upon powerup,
during invalid program execution, upon encountering a G30
command that is not part of a GI1 subroutine call or after a
clear command
(*)
has been executed.
The acceptable values for [nnn]
=
0
to
400.
Factory default L41: [nnn] = 0
1
200
CRLF sets the autostart line number to
200.
During program execution, a delay of L44 parameter length in
milliseconds will occur after each line completes executing.
This delay should be set to allow sufficient motor settling time.
The delay is also invoked after G76
or
67
sfor [nnnn]
=
0
to
9999
milliseconds.
[nnnn]
=
50
milliseconds.
ets a delay of
250
milliseconds after
execution of each line.
IT SWITCH ENABLE
I
The user can utilize the inputs labeled CW LIMIT- and CCW
LIMIT- either as limit switches (L45
0)
or as additional pro-
grammable inputs (L45
1).
[n] = 0
to enable limit switch operation
[n]
=
1
to disable limit switch operation for utilization as
additional programmable inputs.
Factory default L45: [n]
=
0
Example: L45 1 CRLFdisables limit switch operation as the two
limit switch inputs are used as additional programmable
inputs.
ote: When [n]
=
1,
the CW LIMIT- input becomes input 3 and
IT- input become input
I
L48
[nnn] PROGRA LINE TRANSFER COUNT
/
Used in conjunction with the
H12
and HI4 commands, L48
contains the number of lines the command is to act upon. If L48
contains
0,
lines 1 through
400
will be cleared
(H12)
or trans-
).
Otherwise, the command is effective for the
number of lines indicated by the L48 value starting from the
present line number.
Factory default L48:
[nnn]
=
000
Example: L48
10
CRLF sets a
10
line execution block for
H12
UST BE SET WlTH 0 TO OPER
500.
Used in conjunction with the HI6 command, L49 contains the
designated parameter to transfer. If L49contains
0,
all parameters are transferred. Otherwise, only the parameter designated
by L49 is transferred. If L49 contains an invalid parameter, HI6
transmits only a Carriage ReturnILine Feed. This parameter IS
NOT stored in nonvolatile memory.
Factory default L49: [nn]
=
00
Example: L49
06
CRLF causes HI6 to transfer the contents of
the LO6 parameter.
UST BE SET WlTH 0 TO OPERATE WlTH AN SSP-
500.
L70
[nnnl TRANSLATOR RESOLUTION
This sets the step resolution of the motor drive translator
The acceptable values for [nnn] are:
full step
1
half step
2
*
115
step
5
*
1/10
step
10
*
11125step
125
*
These settings are only valid for the
440, 3180
and
6180
Series drives.
Factory default:
full step
1
115
step
5
1/10
step
10
111 25
step
125
Example: L70 2 CRLF sets a half step tsanslator resolution.
OTE: For all
230
and
430
Series indexers, the
L70
parame-
ter must be set to
1
or 2 for the drive
to
work properly.
OTE: Since the ranges of
L09, Lll, L12
and
L14
depend on
the setting of
L70,
it is important to set the
L70
parameter
first so that range confusion will be avoided.
.4 H
CODES: COMMANDS FOR MODES OF OPERATION
H
codes perform four different functions in indexer operations:
1.
They control manual and program execution. H codes,
however, cannot be used as programmable instructions.
2.
They are used to set MODES OF OPERATION,
3.
They are used in PROGRAM EDITING to clear program
data.
4.
They issue transmission instructions, that is, they allow
stored parameters and status data to be TRANSFERRED
via the serial communications port.
The
H
code are categorized into the following four areas of
interest.
Mode Commands:
H2, H3, H4, H5, H24, H25
Execution Commands:
HI, H6, H7, H8, H9, HI0
Transfer Commands:
H13, H14, H15, H16, H17,
H18, H19, H20, H23
Edit Commands:
H1 1, HI2
For ease of reference, the H codes are presented here in
numerical order.
23
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

I
HQ1 CYCLE START
I
H05 LOW SPEED MODE
This is a "GO" command. It will start program execution from
the present line number based on the execution format set with
This command will also restart motion during program execution after a
This command sets the indexer in the single-step mode for
manual motion operation.
OTE:
they only set the mode in which motion will occur when it is
called for.
otion is started by issuing a
COUNTERCLOCKWISE
or
H03 JOG
followed by a
made by the motor.
Upon power up of the system, the indexer is set in the
I
H03
This command sets the indexer in the continuous motion mode
for manual motion operation.
$
FEEDHOLD command.
The
HQ2
and
H03
command after setting the
mode. When the
H06
or
H07
JOG
MODE
I
commands do not cause motion,
H06 CLOCKWISE
H02 STEP
command, a single step will be
mode command is
or a
HQ7
H02 STEP
STEP
This command allows the motor to run at the speed, in pulses
L12
per second, that was set with the
o acceleration or deceleration is allowed.
A
H05
command followed by a
will cause the motor to JOG at the speed set with the
parameter. If the LOW SPEED mode is enabled when a
CYCLE START command is issued, all motion will be at the
value set with the
ignored.
H06 TURN
This command will cause the motor to move in the CLOCKWISE direction.
The type of motion will depend on whether the indexer is in the
STEP or JOG mode, the HlGH SPEED or LOW SPEED mode and
the parameters set with the
I
H07 TURN IN CCW DIRECTION
This command will cause the motor to turn in the COUNTERCLOCKWISE direction. The type of motion will depend on
whether the indexer is in the STEP or JOG mode, the HlGH
SPEED or LOW SPEED mode and the parameters set with the
LQ9, L11
and
L12
parameter. Any F field values will be
IN
CW DIRECTION
L09, L11
L12.
LOW SPEED parameter.
H03
and a
H06
or
H07
and
L12.
I
command
L12
H01
H06
or
H07
When a
the motor will turn continuously until a$ FEEDHOLD command
is issued.
The speed at which the motor will turn is dependent on whether
the HlGH SPEED or the LOW SPEED mode has been selected.
If the HlGH SPEED mode is enabled, the motor will run at the
value set with the
enabled. the motor will run at the value set with the
parameter.
This command allows the motor to run at the speed, in pulses
per second, that was set with the
during program execution, or at the value set with the
parameter when the JOG mode is selected.
mand, the motor will accelerate according to the value set with
L11
the
JOGGING is terminated with a
motor decelerates to a stop according to the value set with the
L11
When the indexer is powered up, it is set in the HlGH SPEED
MODE.
parameter to the jog speed set with the
parameter.
command is issued after a
LO9
parameter. If the LOW SPEED mode is
or a
HQ7
command is issued after a
$
FEEDHOLD command and the
F[x] FEEDRATE command
H03
command,
HQ4
LO9
value.
L12
L
com-
Electrical home is established when the indexer is powered up
H09
or when a
will cause the motor to return to the absolute position of
(electrical home).
In executing this motion, the motor will move in the
direction
position counter reaches
H09 SET ELECTRICAL HOME
This command will set the absolute position counter to zero.
This, in effect, sets the
home position.
HlO RETURN TO MECHANICAL HOME
This command will cause the indexer to return the motor to the
MECHANICAL HOME LIMIT SWITCH.
When this command is being executed, the motor will turn in
the
direction
motor from the home limit switch the direction and distance set
with the
ter. When motion is completed, the motor position becomes
electrical home as the absolute position counter is set to zero.
SET HOME command is issued. This command
opposite
of the absolute position sign until the absolute
0.
current motor position as the electrical
set with the
L17
parameter, at the speed set with the
LO8
parameter and will
offset
L14
parame-
0
the
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

This command will
designated by the line pointer.
This command, with
is stored in the indexer EEROM.
Lines
1
NOTE: After a CLEAR PROGRAM command, with
line pointer will be returned to the value set by
If all 400 lines are programmed, this command may take as
long as 15 seconds to complete execution.
12
Example:
contents of lines 10, 11, 12, 13 and 14.
An additional
16,17,18 and 19.
L48
delete
the contents of the program line
rmation contained in that program line is
lete the contents of line 20.
L48
=
0, will clear the entire program that
through
is not allowed while in a FEEDHOLD condition
400 will
5
NO10
H12
H12
command deletes the contents of lines 15,
be
IRRETRIEVABLY ERASED.
L48
L41.
CRLF results in the deletion of the
=
0, the
L48
=
With
number is reset to the value set by
After
to the line number that was active during the feed hold.
Example:
contents of lines 20 and 21.
NO20
NO21
An additional
23.
NO22
NO23
H15 TRANSMIT THE CURRENT
PROGRAM LINE NUMBER
This command will transmit the current program line number.
This H code can be executed while the indexer is in motion,
executing a program or in parallel mode.
Example: If the line number is equal to 100,
in NIOOCRLF being transmitted by the indexer.
/
HI6 TRANSIT PARAMETERS
This command, with
parameters to be transmitted through the RS232 serial port in
the order shown below:
0, after the
H14
execution during afeed hold. the line number is reset
L48
2 NO20
G90
Xt00001000 F0002000CRLF
G91
Xt00002000 F0002500CRLF
H14
G64
Xt00001234 CRLF
630
H14
command is executed, the line
L41.
H14
CRLF results in the transfer of the
CRLF transfers the contents of line 22 and
CRLF
H15
CRLF results
I
L49=0,
will cause the contents of the L
This command causes the indexer to transmit the contents of
the program line at the program line pointerthrough the RS232
serial interface port.
H13
transfers are always in a fixed format as follows:
Nnnn Gnn Xtnnnnnnnn FnnnnnnnCRLF
N is in column 1
G
is in column 6 (if programmed, otherwise a space)
X is in column 10 (if programmed, otherwise
F is in column 21 (if programmed, otherwise a space)
a
program line does not contain all the fields, spaces fill
If
in the unprogrammed fields.
Example: If program line number 100 contains
F5678,". then
100 H13
Nl 00
This command, with
program lines 1 through 400 through the RS232 serial port.
Each program line is transmitted in the same format as
NO01 Gnn Xtsnnnnnnnn FnnnnnnnCRLF
NO02 Gnn Xtsnnnnnnnn FnnnnnnnCRLF
&t !t
CRLF would result in the following transmis-
sion:
G90
Xt00001234 F0005678CRLF
L48
=
0, causes the indexer to transmit
a
space)
"G90
Xt1234
H13.
Examples
149 70 H16 CRLF results In the transfer of the contents of
parameter L70: L70 nnn CRLF is transmitted
N399 Gnn Xtsnnnnnnnn FnnnnnnnCRLF
N400 Gnn Xtsnnnnnnnn FnnnnnnnCRLF
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
149 99 H16 CRLF results In no parameter transfer as 199
is nonexistent: CRLF is transm~tted.

This command causes the indexer to transmit the current
contents of the absolute position counter through the RS232
serial interface port. This H Code can be executed while the
indexer is in motion, executing a program or in the parallel
mode. The data transmission format is:
snnnnnnnnnn CRLF
EXAMPLE: If
HI7
CRLF results in t0000001000CRLF being
transmitted, the absolute position is t1000 pulses.
:
If
motion is called for that exceeds the maximum
absolute position (9,999,999,999 pulses), the absolute position counter will roll over (reset to
0
and continue counting). In this case, the absolute position counter would
contain erroneous information.
TRANSMIT MOTlO
The "TRANSMIT" command will output the requested data via
the RS232C serial port.
This command causes the current status of tLIMIT, -LIMIT,
HOME LIMIT, CLEAR, FEED HOLD, and STOP EXECUTION data
inputs. This H Code can be executed while indexer is
in
motion,
executing a program or in parallel mode.
The data is transmitted in the following format:
OOOOOOOOCRLF
n
.......
STOP EXEC O=inactive
1
=active
.n
......
CCW DIR O=inactive
1
=active
.n.....CW DIR O=inactive 1 =active
.n,.HOME LIMIT O=inactive
1
=active
......
n.CCW LIMIT O=inactive
1
=active
.nCW LIMIT O=inactive
1
=active
EXAMPLE: If
HI8
CRLF results in OOOO1OOICRLF being
transmitted. CW limit and clear are active, the others are
inactive
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

IT
MODE
STATUS
I
This command will transmit through the RS232 serial port the
the indexer is in motion, executing
a
program or in parallel
status of the indexer modes. This H Code can be executed while
mode.
The format for the data transfer is as follows:
OOOOOOOOCRLF
n
.......
O=PROG EXECUTION INACTIVE
.n
......
O=MOTION INACTIVE
..n
.....
O=INCREMENTAL MODE SELECTED
... n ....
O=ALL WINDINGS OFF CANCELLED
....
n... O=BOOST CURRENT CANCELLED
.....
n.. O=REDUCE CURRENT CANCELLED
......
n.
O=LOW SPEED MODE SELECTED
.......
n
O=STEP MODE SELECTED
1 =PROGRAM EXECUTION ACTIVE
1 =MOTION ACTIVE
1 =ABSOLUTE MODE SELECTED
1=ALL WINDINGS OFF ENABLED
1=BOOST CURRENT ENABLED
1=REDUCE CURRENT ENABLED
1
=HIGH SPEED MODE SELECTED
1
=JOG
MODE SELECTED
EXAMPLE: If
HI9
CRLF results in 00100011CRLF being
transmitted, jog made, high speed mode and absolute mode
are enabled.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

This command causes the indexer to transmit the status of the
H
two inputs and the two outputs. This
while the indexer is in motion, executing a program or in
parallel mode.
The format for the data transfer is as follows:
OOOOOOOOCRLF
...
0000n
OOOO.n.. INPUT
0000..n. OUTPUT 2 O=inactive
0000
...
n OUTPUT
EXAMPLE: If
transmitted, then output
and input
1
H23 TRANSMIT SOFTWARE REVISION DATE
This command causes the indexer to transmit the software
revision date via the RS232 serial interface port.
The date is transmitted in the following format:
INDH mmiyylxCRLF
Where INDH=indexer. mrn=month, yy=year or the software
revision and x=software level
EXAMPLE:
mitted, which indicates that indexer software level
leased in April
INPUT 2 O=inactive
1
1
H20
CRLF results in 00001001CRLF being
1
and input 2 are active, and output 2
1
are inactive.
H23
CRJLF results in INDH 04/87/C being trans-
of
1987.
code can be executed
O=inactive
O=inactive
1
=active
1
=active
1
=active
1
=active
1
C
was re-
.5 N, 6, X, F Codes: PROGRAMMING CODES
This command will set the program line pointer to the line
specified by [nnn].
[nnn] can have a value from 0 to 400.
N:
Powerup default
parameter.
If a line number greater than 400 is entered, the program line
pointer will reset to the line number specified with the
parameter.
rogram line 00 (NOO) is used at any time, the
NUAL DATA INTERFACE mode (MDI) will be ened.
rogram line 00 is stored in a volatile memory
only and its contents will be lost when power is
removed from the indexer.
NO0 is used to store a single program line for manual operation
and will not change the contents of the stored program. Upon
power up, the MDI line's
the
LO9
parameter.
I
X [snnnnnnnnl MOVE DIRECTION AND DISTANCE
If in incremental mode, the motor will move in either the
+(clockwise) or -(counterclockwise) direction for the distance
specified, in pulses. If in absolute mode, the motor will move
to the absolute position specified in the
The X field range is from 0 pulse to
eld
IS
also used wlth the
nds to spec~fy add~t~onal
604, 611, 620, 622
the
mformatlon
OTE: No motion can be programmed on a line that contains
a 604, 611, 620, 622, 630, 631,637 or 647 command.
[nnn] = The line number in the
F
code is loaded with the contents of
X
field.
and
99,999,999
647
commands for add~tlonal
pulses.
L
L41
I
This command causes the indexer to transmit the contents of
each line being executed during program execution.
HI3
The data is transmitted in the same format as an
ODE MUST BE OFF TO OPER
SSP-500 INDEXER PROGRAMMER
This command causes the indexer to disable the trace mode
during program execution. Upon power up. the indexer is set
in the trace disabled mode.
:
The following H codes are able to be executed while
er is in motion, executing a program, or in parallel
15, H17, H18,
the user to monitor the indexerson the fly1'. Each command
must be immediately followed with a carriage return and/or
line feed during "on the fly" operations.
H19, and H20. These codes enable
transfer.
/
F [nnnnnnnl FEEDRATE
This command is used to specify the motor speed, in pulses1
second, at which a move will occur.
F
The range of
0
to
11
5,000 pulses/second if the
10
0 to 1,875.000 pulsesisec if the
F
field is also used with
The
additional data.
FEEDRATE SHOULD BE SPECIFIED IN THE FIRST
LINE OF THE PROGRAM.
If no FEEDRATE is specified as part of the program line, the last
FEEDRATE that was programmed will be used.
G Codes PROGRAMMABLE COMMANDS
G
codes are preparatory commands that are stored and exe-
cuted within a program. Several
which are those functions that retain their state until canceled
or superseded by a subsequent command.
execute a
program execution
the
G
L41
parameter.
[nnnnnnn] is:
code without required additional data causes
to
halt and the line number is loaded
I
L70
parameter is 1,2.5.
L70
parameter is 125
GI1
and
G20
commands to specify
G
codesare modal commands
Attempting to
with
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

1
620
CONDITIONAL BRANCH
(L45 = 0)
1
This command allows a delay to be entered in the program.
must be followed by an X field value that is
the desired delay in milliseconds. The
9999 msec and any sign is ignored. The correct format for
entering a delay is:
NO01 GO4 X1000 CRLF
calls for a delay and XI000 sets the delay at 1000
milliseconds.
E:
The F field value is ignored during the execution of a
X
value range is 0 to
command.
If any value is entered that is greaterthan 9999, it will automati-
cally be truncated to the four least significant digits. Therefore,
GO4
entering N120
milliseconds.
Dwell time accuracy is
This command calls a subroutine.
A
GI1
command must be followed by an X value that gives the
starting line number of the subroutine and an Fvalue that is the
number of times the subroutine is to be repeated.
The range for the
ignored); the range for the VALUE IS 0 to 9999. The correct
format for a subroutine call is:
"NO01
GI1
This will set the program line pointer to line 15 and execute the
subroutine twice.
X612000 CRLF will cause a delay of 2000
Q.5% of the selected value.
value is 1 to 400 (with the sign being
X15 F1 CRLF"
command for terminating a subroutine
NOTE: Using an F value for 0 will cause the subroutine to be
executed
an F value
of
1
will cause the subroutine to
once;
be executed twice, etc. The number of executions is the F
The Ffield cannot be left blankas this may cause the program
broutines can
mand while a
be nested.
Gll
subroutine call
T
not
cause program execution to cease and fhe program line
will
pointer
The X field value is truncated to the four least significant digits.
The only values that are valid are numbers from 1 to 400.
or a number greater than 400 will cause program execution to
cease and the program line pointer will reset to the
The F field value is also truncated to the four least significant
digits.
automatically reset to the
L41
value.
L41
A
0
value.
This command consists of a
The
620
command will cause the program line pointer to jump
to the program line number given by the Ffield if the state of the
two inputs correspoond to the values of the X field.
The acceptable values for the X field are:
x In21 [n11
Any value for nl or n2 from 2 to 9 will signify a "don't care"
condition and that input will be ignored.
If the states of input
n2, the program will jump to the line number indicated by the
F field value (1 TO 400 ONLY).
If
the states of input 1 and input 2
grammed values of nl and n2, the program line pointer is
incrernented to the next program line.
20
OPTIONS:
G20 XOO: Go to line number (F field) if input 2 off and input
G20 XO1: Go to line number (F field) if input 2 off and input
G20 X10: Go to line number (F field) if input 2 on and input
1:
G20 XI
G20 XOd: Go to line number (F field) if input 2 off, ignore
G20 Xld: Go to line number (F field) if input 2 on, ignore
620 XdO: Go to line number (F field) if input 1 off, ignore
G20 Xdd: Go to line number (F field) ignore input 2, ignore
=
2 through 9: don't care condition
d
EXAMPLE: N100
Will always cause a jump to line 120 when executed because
both nl and n2 signify a "don't care" condition.
Nl00
When executed, will cause a jump to line 120 if input 1 is active
and input 2 is inactive. Otherwise, the program will increment
to line 101.
F field value is truncated to the least four significant digits,
The
and if the F field value is 0 or greater than 400, program
execution will cease and the program line pointer will be set to
L41
the
parameter.
nl
nl
n2
n2
1
1 off
1 on
1 off
Go to line number (F field) if input 2 on and input
1 on
input 1
input 1
2
input
input 1
G20
X01 F120 CRLF
620,
and X value and an F value.
= 0 =
input 1 inactive
=
1 = input 1 active
=
0 = input 2 inactive
=
1 = input 2 active
and input 2
match
do not match
620
X22 F120 CRLF
the values of nl and
the pro-
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

620
CONDITIONAL BRANCH (L45 = 0)
This command consists of a 620, an X value and an F value.
The 620 command will cause the program line pointer to jump
to the program line number given by the
Ffield if the state of the
four inputs correspond to the values of the X field.
The acceptable values for the X field are:
x [n41[n31[ n2WI
nl
= 0 =
input 1 inactive
n1
=
l= input 1 active
n2
=
0 = input 2 inactive
n2
= 1 =
input 2 active
n3
= 0 =
CW limit input (input 3) inactive
n3
=
1 = CW limit input (input 3) active
n4
=
0 = CCW limit input (input 4) inactive
n4
= 1 =
CCW limit input (input 4) active
Any value for nl, n2, n3, or n4 from 2 to 9 will signify a
"don't care" condition and that input will be ignored.
If the states of the four inputs
match
the values of nl, n2, n3,
and n4, the program will jump to the line number indicated by
the
F
field value (1 TO 400 ONLY).
If the states of the four inputs
do not match
the programmed
values of nl, n2, n3. and n4, the program line pointer is
incremented to the next program line.
620 OPTIONS:
G20 X0000: Go to line number (F field) if input
4
off, input 3 off,
input 2 off, input 1 off
G20 X0001 :Go to line number (F field) if input 4 off, input 3 off,
input 2 off, input 1 on
G20 XOOIO: Go to line number (Ffield) if input 4 off, input 3 off,
input 2 on, input 1 off
G20 XOO11 :Go to line number (F field) if input 4 off, input 3 off,
input 2 on, input 1 on
G20 X0100: Go to line number (F field) if input 4 off, input 3 on,
input 2 off, input 1 off
G20 X0101 :Go to line number (F field) if input 4 off, input 3 on,
input 2 off, input 1 on
G20
XO110: Go to line number (Ffield) if input
4
off, input 3 on,
input 2 on, input
1
off
G20 X0111: Go to line number (Ffield) if input 4 off, input 3 on,
input 2 on, input 1 on
G20 X1000: Go to line number (Ffield) if input 4 on, input 3 off,
input 2 off, input 1 off
G20 XI 001
:
Go to line number (F field) if input 4 on, input 3 off,
input 2 off, input 1 on
G20 X1010: Go to line number (Ffield) if input 4 on, input 3 off,
input 2 on, input 1 off
G20 XI01 1: Go to line number (Ffield) if input 4 on, input 3 off,
input 2 on, input 1 on
G20 X1 100: Go to line number (Ffield) if input 4 on, input 3 on,
input 2 off, input 1 off
G20 X1 101: Go to line number (Ffield) if input 4 on, input 3 on,
input 2 off, input 1 on
G20 X1 11 0: Go to line number (Ffield) if input 4 on, input 3 on,
input 2 on, input 1 off
G20
XI
11
1
:
Go to line number (F field) if input 4 on, input 3 on,
input 2 on, input
1
on
Any 0 or 1 can be replaced by a "don't care" character (2
through 9). A "don't care" condition causes that particular
input to be ignored.
EXAMPLE:
Nl 00
620
X2222 F120
Will always cause a jump to line 120 because all inputs
signify a "don't care" condition.
Nl00 620 XI 01 0 F120 CRLF
When executed, will cause a jump to line 120 if
4
is active,
input 3 is inactive, input 2 is active, and input 1 is inactive.
Otherwise, the program will increment to line 101.
The F field value is truncated to the least four significant digits,
and if the
F field value is 0 or greater than 400, program
execution ceases and the line number is set with the
L41
parameter.
622
WAIT
FOR
INPUT
(L45 = 0)
This command consists of a 622 and X field
The 622command will cause the program to wait until the state
of the two inputs correspond to the values of the X field.
The acceptable values for the
X
field are:
x in21 In1
I
nl = 0 = input 1 inactive
n1
= 1 =
input 1 active
n2
= 0 =
input 2 inactive
n2
=
1
=
input 2 active
Any value for nl or n2 from 2 to 9 will signify a "don't care"
condition and that input will be ignored.
If
the states of input 1 and input 2
match
the values of nl and
n2, the program continues execution.
If the states of input 1 and input 2
do not match
the pro-
grammed values of nl and n2, the program waits until a match
occurs.
N100 622 XI0 CRLF
When executed will cause the program to wait until input
2 is active and input 1 is inactive. Then, the program will
increment to line 101.
The F field is ignored during a 622 command.
22 OPTIONS:
G22 XOO: Wait until input 2 off, input 1 off
622 XOl: Wait until input 2 off, input
1
on
G22 X10: Wait until input 2 on, input 1 off
G22 XI 1: Wait until input
2
on, input 1 on
G22 XOd: Wait until input 2 off, ignore input 1
G22 Xld: Wait until input 2 on, ignore input 1
G22 XdO: Wait until input
1
off, ignore input 2
G22 Xdl: Wait until input 1 on, ignore input
2
G22 Xdd: Don't wait
d
=
2 through 9: don't care condition
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

-
-
622 WAIT FOR INPUT (L45 = 1)
This command consists of a 622 and X field.
&
The 622 comand will cause the program to wait until the state
of the four inputs correspond to the values of the X field.
The acceptable values for the X field are:
x in41 in31 in21 [nl
I
nl = 0 = input 1 inactive
=
1 = input 1 active
nl
= 0 =
n2
n2
n3
n3
n4
n4
Any value for nl, n2, n3, or n4 from 2 to
input 2 inactive
=
1 = input 2 active
=
0 = CW limit input (input 3) inactive
=
1 = CW limit input (input 3) active
=
0 = CCW limit input (input 4) inactive
=
1 = CCW limit input (input 4) active
9
will signify a "don't
care" condition and that input will be ignored.
match
If the state of the four inputs
the values of n1, n2, n3 and
n4, the program continues execution.
If the states of the four inputs
do not match
the programmed
values of nl, n2, n3 and n4, the program waits until a match
occurs.
622 OPTIONS:
G22 X0000: Wait until input 4 off, input 3 off, input 2 off, input
1 off
G22 X0001: Wait until input 4 off, input 3 off, input 2 off, input
1 on
G22 X007O: Wait until input 4 off, input 3 off, input 2 on, input
1 off
G22 XOO11: Wait until input 4 off, input 3 off, input 2 on, input
1 on
G22 XO100: Wait until input 4 off, input 3 on, input
1 off
G22 X0101: Wait until input 4 off, input 3 on, input 2 off, input
1 on
G22 X0110: Wait until input 4 off, input 3 on, input 2 on, input
1 off
X0111: Wait until input 4 off, input 3 on, input 2 on, input
G22
1 on
G22 X1000: Wait until input 4 on, input 3 off, input 2 off, input
1 off
G22 X1001: Wait until input 4 on, input 3 off, input
1 on
G22 X1010: Wait until input 4 on, input 3 off, input 2 on, input
1 off
2
off, input
2
off, input
Any
0 or 1 can be replaced by a "don't care" character (2
through
9).
A "don't care" condition causes that particular
input to be ignored.
EXAMPLE:
Nl 00 622 Xl 01 0 CRLF
When executed will cause the program to wait until input
4 is active, input 3 is inactive, input 2 is active, and input
1
is inactive. Then the program will increment to line 101.
1
630 RETURN FROM SUBROUTlNElPROGRAM END
I
This command has two uses.
1. 630, used in conjunction with a Gll, indicates end of
a subroutine. A 630 command that is issued after a
611 command will cause the program line pointer to be
after
set to the next program line
the line containing the
Gll command.
2. 630, used by itself, that is not following a GI1 com-
mand, indicates the
end of the program.
The program line pointer will reset to the program line indicated
by the L41 parameter.
In the
automatic execution format,
(LO6 n = 2), 630 will stop
program execution.
In the
continuous execution format
(LO6 n
=
3),
program
execution will continue from the line number indicated by the
L41 parameter.
If no 630 command is used, program line number 400 is
of
automatically set as the end
the program.
During program execution, the 631 causes the program to
cease executing and the line pointer increments to the next line.
A CYCLE START (Hl) will continue execution from that point.
636 STROBE
X
CODE DATA
During program execution, the G36 command causes the
indexer to load the parallel data inputs. The Field Data entry
becomes the X field for the program line. The Select and Code
Data entries are ignored. The program line's F Code, if
programmed, will be utilized as the active feed rate. Any
previously programmed X field on a line with a 636 command
is ignored.
G22 XI01 1: Wait until input 4 on, input 3 off, input 2 on, input
1 on
G22 XI 100: Wait until input 4 on, input 3 on, input 2 off, input
I
off
:
G22 XI 101
Wait until input 4 on, input 3 on, input 2 off, input
1 on
G22 Xf 110: Wait until input
1
off
G22
XI
11 1: Wait until input 4 on, input 3 on, input 2 on, input
4
on, input 3 on, input 2 on, input
1 on
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
During program execution, the 637 command causes the
indexer to load the parallel data inputs. The Code Data entry
becomes the active program line as the program branches to
that line. The Select and Field Data entries are ignored. Any
previously programmed X or F fields on a line with a 637
command are ignored. Attempting to load a line number of 0
or greater than 400 will cause program execution to cease, and
the program line pointer will reset to the L41 value.

668 ENABLE ALL WINDINGS OFF
This command will set the states of the two programmable
outputs according to the value of the last 2 digits of the X field
in the following fashion:
nl
=
0 = output 1 off (inactive)
=
1 = output 1 on (active)
nl
=
0 = output 2 off (inactive)
n2
=
1
=
n2
If a value of 2 through
the state of the output.
G47
G47
G47
G47
G47
G47
G47
G47
G47
=
2
through
d
The F field is ignored on a line containing a
*
The following four commands apply to 3180 and 6180
series drives only. They are not functional with 230 and 430
series units.
This command will reduce the motor current at standstill to a
value set on the drive. If a command for motion is issed after
command, the motor will run at normal current, and
return to a reduced current when motion ceases.
CEL REDUCED CURRENT
This command cancels the
is powered up, it is in the CANCEL REDUCED CURRENT mode.
output 2 on (active)
9
is used for nl or n2, it will not
XOO = Output 2 off, output 1 off
X01 = Output 2 off, output 1 on
XI0 = Output 2 on, output 1 off
Xl
1
=
Output 2 on, output 1 on
XOd = Output 2 off, output 1 no change
XI d = Output 2 on, output 1 no change
XdO = Output 2 no change, output 1 off
Xdl = Output 2 no change, output 1 on
Xdd = Output 2 no change, output 1 no change
9,
don't care condition
647
command.
LE REDUCED CURRE
*
/
664
command. When the indexer
This command sets the average motor current to zero when the
motor is at a standstill. Voltage is still present at the motor
terminals.
668
If a command for motor motion is issued aftera
the motor will turn at normal current and return to a zero
condition when motion ceases.
G68
This command cancels a
When the indexer is powered up, it is in the CANCEL ALL
WINDINGS OFF mode.
This command causes the motor to turn until an absolute
position of
Electrical home is established when the indexer is powered up
or when a
The motor will move in the
position sign
position counter.
677 SET ELECTRICAL HOME
This command sets the absolute position counter to zero. The
current motor position is established as electrical home.
This command causes the motor to turn in the direction set
with the
home limit switch is activated. The motorthen offsets from the
switch the direction and distance set with the
the speed set with
position becomes electrical home as the absolute position
counter is set to zero.
0 is reached.
H09
SET HOME command
and will index the value contained in the absolute
LO8
parameter, at the speed set with
L14.
command.
is
used.
opposite direction of the absolute
At motion completion, the motor
command,
L14
L17
parameter at
until the
q
This command will increase the motor current during acceleration and deceleration to a value set on the drive. The boost will
5
turn off
heating during long
This command cancels the
is powered up, it is in the CANCEL BOOST CURRENT mode.
seconds after application to prevent excessive motor
acceleration/deceleration
CEL BOOST CURRENT*
G66
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
I
command. When the indexer
ramps.
This command sets the indexer to operate in the absolute
mode. All moves made by the motor are counted either plus
or minus from the
command.
CREMENTAL MODE
This command sets the indexer to operate in the incremental
mode.
All moves of the motor are counted either plus or minus from
the present motor position.
When the indexer is powered up, it is automatically set in the
INCREMENTAL MODE.
OTE: Even when the indexer is operating in the incremental
mode, the ABSOLUTE POSITION counter is operational and
RETURN TO ELECTRICAL HOME command may be used.
zero position
set with the
I
NO9
or
677

.6
SAMPLE PROGRA DESCRIPTION
The following is a sample program which demonstrates some of the capabilities of the Micro Series indexer. With
5
at 0, lines 1 through 3 will execute continuously until an input condition matches the branch condition and jumps to
the branch line number.
1
Selecting program segment 1 through input
results in the following lines being executed:
20, 21, 22, 23, 24, 25, 26, 27, 28, 29, and back to 1.
Selecting program segment 2 through input 2 results in the following lines being executed:
10, 11, 12,13,14,15,
NO01 G20
X
t
0000001 0 FOOOOOlO
16,30,31,32,33,34,30,31,32,33,34,30,31,32,33,34,17,18,
Line
1
is a CONDITIONAL BRANCH. If input 2 is active and input 1 is inactive, the line pointer
19,andbacktol
jumps to linelo.
NO02 G20
X
t
0000001 F0000020
Line 2 is a CONDITIONAL BRANCH. If input 2 is inactive and input 1 is active, the line pointer
jumps to line 20.
Line 3 is a PROGRAM END. The L41 Value (1) is loaded in the line pointer and since
LO6 is set in the continuous mode (3), the program continues to execute.
NO04
NO05
NO06
NO07
Line 4 contains no programming
Line 5 contains no programming.
Line 6 contains no programming
Line
7
contains no programming
LO6
set to 3,
L41
Line 8 contains no programming.
Line 9 contains no programming.
Line 10 sets ABSOLUTE MODE with G90 and the motor moves to position t1000 at a
FEEEDRATE of 2400 pulseslsec.
2
Line 11 is a DWELL time of
seconds
Line 12 moves to position -2000 by moving -3000 pulses at a FEEDRATE of 2400 pulses1
sec. (Since no feedrate was programmed, it moved at the last programmed feedrate.)
Line 13 ENABLES BOOST CURRENT with G66 and the motor moves to position t10000 by
moving
t12000 pulses at a FEEDRATE of 1200 pulses/sec.
Line 14 is a DWELL of 3 seconds
Line 15 CANCELS BOOST CURRENT
moving -13000 pulses at
FEEDRATE of 2000 pulseslsec.
WITH G67 and the motor moves to position -3000 by
Line 16 is a SUBROUTINE CALL to line 30. The subroutine will be executed 3 times
17
RETURNS HOME (position 0) by moving the necessary pulses at the HOME SPEED
Line
(L14).
2
Line 18 turns off output
and turns output 1 on
Line 19 is an UNCONDITIONAL BRANCH to Line 1
Line 20 sets INCREMENTAL MODE with G91 and the motor moves -2500 pulses at a
FEEDRATE OF 2400 pulseslsec.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

NO21 G64
NO22 GO4
X
t
00000500
X
t
00004000
Line 13 ENABLES REDUCE CURRENT with G64 and the motor moves t500 pulses at a
FEEDRATE of 2400 pulseslsec. (Since no feedrate was programmed, it moved at the last
programmed feedrate.)
Lme 22 is a DWELL of 4 seconds.
N23 G65
N24 G68
X
X
NO25 GO4
N26 G69
NO28 G47
NO29 G20
NO30
X
-
000001 00 F0000800
NO31 GO4
X
NO32
t
+ 00005500
-
00009120 F0002000
X
t00009000
X
t00000010
X
t
00000022 F0000001
X
t
00005000
00000500 F0001500
Line 23 CANCELS REDUCE CURRENT with G65 and moves the motor t5500 pulses at
a
FEEDRATE of 2400 pulseslsec. (Since no feedrate was programmed, it moved at the last
programmed feedrate.)
Line 24 ENABLES ALL WINDINGS OFF with G68 and the motor moves -9120 pulses at a
FEEDRATE of 2000 pulseslsec.
Line 25 is a DWELL of 9 seconds.
Line 26 CANCELS ALL WINDINGS OFF with G69
Line 27 RETURNS HOME (position
0) by moving the necessary pulses at the HOME SPEED
(L14).
Line 28 turns off output %and turns output 2 on.
Line 29
is
an UNCONDITIONAL BRANCH to Line
1,
effectively ending the second program
segment.
a
Line 30 moves the motor to position -100 at
FEEDRATE of 800 pulseslsec.
Line 31 is a DWELL of 5 seconds
Line 32 moves the motor to position t500 at a FEEDRATE of 1500 pulseslsec.
NO33 GO4
X
t
00003500 Line 33 is a DWELL of 3.5 seconds.
NO34 G30 Line 34 is a SUBROUTINE END.
.7
CODE ASSIGNMENT TABLES
PARAMETERS
cod
field
data
n
nnnn
S
nnnnnnn
nnnnnnn
nnnnnnn
nnnnnnn
snnnnnnnn
snnnnnnnn
snnnnnnnn
n n
nnnn
n
n
n
nnn
nnnn
n
nnn
nn
nnn
function
Execute Format
Strobe delay Time (milliseconds)
Mechanical Home Direction (t,
Jog Speed (pulselsec)
Acceleration/Deceleration
Low Speed (pulseslsec)
Home Speed (pulseslsec)
Offset Distance and Direction from Home (pulses)
CW software Travel Limit (pulses)
CCW software Travel Limit (pulses)
RS232 Device ID (01 thru 99)
RS232 Baud Rate (300, 1200, 2400,9600)
RS232 Word Length (7, 8)
RS232 Parity (1, 2, 3)
Indexer Ready Acknowledge (0,
Line Number for Auto Start (00 through 400)
Program Line Delay (milliseconds)
Limit Switch Enable (0,
Program Line Count
Parameter Transfer Designation
Translator Resolution (1. 2. 5. 10.
(1,
2, 3)
(pulses/sec/sec)
1)
-)
1,
2,3)
125)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

COMMANDS
code type function
H06 motion
H06 motion
H07 motion
H08 motion
H09 motion
Cycle Start
CW Direction for STEP or JOG mode
CCW Direction for STEP or JOG mode
Return to Electrical Home
Set Home
HI0 motion Return to Mechanical Home
motion Clear (uncontrolled stop)
$
#
H02 mode
motion
Feed hold (controlled stop)
motion Stop Program Execution Cycle
set Step Mode
H03 mode set Jog Mode
H 04 mode
set High Speed Mode operation
H05 mode set Low Speed Mode of operation
1
HI
HI 2 edit
edit
Clear present Program Line
Clear Program
<nn edit Device Attention Character
Cntl H edit
Cntl
X
edit
Back Space
Cancel Line
HI3 transfer transfer Present Program Line
HI 4 transfer transfer Program
Hi5 transfer transfer Present Line Number (see note)
HI 6 transfer transfer Parameters
HI7 transfer
HI
8
transfer
transfer Absolute Position (see note)
transfer Motion Status (see note)
HI9 transfer transfer Mode Status (see note)
H20 transfer transfer I/O Status (see note)
H23 transfer transfer Software Revision Date
H24 mode
H25 mode
enable Trace Mode
disable Trace Mode
code field data function
N
X
F
cod function
Program Dwell Time
Subroutine call
Conditional Branch
Wait for Input
Return from Subroutine1
Program End
Program Stop
Strobe
X
Strobe N Code Data
SettReset Output Condition
Enable Reduce Current Mode
Cancel Reduce Current Mode
Enable Boost Current Mode
Cancel Boost Current Mode
Enable All Windings Off Mode
Cancel All Windings Off Mode
Return To Electrical Home
Set Electrical Home
Return to Mechanical Home
Set Absolute Motion Mode
Set Incremental Motion Mode
nnn Line Number (000 thru 400)
snnnnnnnn
nnnnnnn Feed Rate or Data field for GI
Code Data
can be executed during motion or program execution, and also while in parallel mode,
PROGRAM DATA
Move Distance or Data field for G04, GI 1, G20, G22, G47 codes
1,
G20 codes
X
field data F field data
nnnn Dwell in milliseconds
nnn Line Number of Subroutine nnnn Subroutine Repeat count
(nn)nn Input condition for Branch nnn Branch Line Number
(nn)nn Input Wait Condition
nn Output condition
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

4. If feed rate is not programmed for a given line, the last
programmed feed rate is used.
5. Selection of invalid data will result in the previous data
The Micro-Indexer allows for program entry and execution
being left intact.
from a variety of sources. The options are:
Operation from a user-made switch panel.
Operation from Superior Electric switch panel SSP-1 00.
These options are discussed in Section 5.2.
Operation from a Superior Electric SSP-500 hand-held
intelligent terminal.
Operation from a user supplied remote terminal. These
options are covered in Section 5.3.
Operation from a host computer. This option is covered
in Section 5.4.
5.1.1
Instructions for Entering Data
5.1.1
.I
General Instructions
1.
Lines may be programmed in any order but are executed
in numerical sequence.
2. Variables may be programmed or reprogrammed in any
order.
3. Program area should be cleared prior to new program
entry to avoid execution of previously programmed lines.
5.2
OPERATION FROM A SWITCH PANEL
5.2.1
Overview
Because of the nature of the parallel interface, all indexer
functions can be controlled by the connection of one of 8
STROBE pins to one of 8 DATA pins. A matrix diagram of the
STROBEIDATA functions is given in Figure 5.1.
Referring to this figure, it can be seen that if the STROBE 0 line
is connected to the DATA 2 line, a Home Limit condition will be
indicated.
All STROBEIDATA functions are controlled by either STROBE
0 or STROBE
1.
These two STROBE lines are polled by the
indexer every several milliseconds, so that any contact closure
between STROBE
0 or STROBE
1
and any of the DATA lines will
be detected by the indexer within a maximum of 12 milliseconds. Figure 5.3 shows a strobe signal timing diagram.
The other STROBES listed in Figure 5.1 are used to enter
programs and parameters. After switches are set, the LOAD
input must be activated for data entry
to
be executed (LOAD is
a connection between STROBE
1
and DATA
2).
CW LIMIT CW DIR CODE 1 CODE1 00 DATA 1 M DATA 1 OK DATA 100 DATA
1
-
--
1
CCW LIMIT CCW DIR CODE 2 CODE 200 DATA2M DATA 20K DATA 200 DATA
2
HOME LIMIT LOAD CODE 4 CODE 400 DATA 4M DATA 40K DATA 400 DATA 4
-
CLEAR CYCLE AWO CODE 8 CODE 800 DATA
8M
DATA 80K DATA 800 DATA 8
FEED HOLD LOWIHIGH CODE 10 SIGN DATA 10M DATA 1OOK DATA 1K DATA 10
IN
1
STEP/JOG CODE 20
SEL
1
DATA 20M DATA 200K DATA 2K DATA 20
IN 2 CYCLE START CODE 40
SEL 2 DATA 40M DATA 400K DATA 4K DATA 40
7
STOP CYCLE SERiPAR CODE 80 SEL 4 DATA 80M DATA 800K DATA 8K DATA 80
li
signals are low true logic except LOW, STEP and SER.
Figure
5.1,
Strobe and Data Functions
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PARALLEL INPUT EVALUATION
Due to necessary timing restrictions, not all inputs are monitored at all times. Below is a description of which inputs are active and
when.
a
Inputs must be active for
minimum of
12
milliseconds to be considered valid.
I
INPUT
I
CCW LIMIT
I
HOME LIMIT
I
CLEAR
I
FEEDHOLD
1
CW DIRECTION
CCW DIRECTION
CYCLE STOP
I
INPUT
1
/
INPUT
2
LOAD
1
AWO
CYCLE START
SERIAUPARALLEL
I
CODE
SIGN
SEL
-CODE 800
DATA 1 -DATA 80M
1,
SEL
2,
SEL
4
SERIAL MODE
READY
MODE
PROGRAM
EXECUTION
PARALLEL MODE
ANUAL
MOTION
PARALLEL READY
DATA LOAD MODE
I*Ie
]@Ie
I*\@
IeIe
I
e
I
1.1
1.1
e
1
I
The schematic diagram shown in Figure 5.2 gives the wiring details for the construction of a Parallel Data Entry Interface
:
Implementation of steering diodes is essential to insure proper operation.
The SSP-100, A fully functional parallel interface data entry switch panel, can be ordered from Superior Electric
The following table gives
FUNCTIONAL SELECT CODE DATA THUMBWHEEL
=
Line No.
Code
Code
F Code
L Code
W
Code
a
summary of the data entry format
FIELD DATA THUMBWHEEL
ot
Line Number
G
Code Selection
Not Used
Not Used
L Code Selection
W
Code Selection
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Used
ot Used
X
Field Data
F
Field Data
L Field Data
ot Used

Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

5.2.3
Description Of Hardware Inputs
CODE DATA THUMBWHEEL lnput for entty of line number,
L, H or G code
FIELD DATA THUMBWHEEL lnput for entry of data assoc-
ated with the X field, F field or
L field data
CW
LIMIT-
Input to cause motion to come
to an uncontrolled immediate
stop if moving in the CW direction. Motion is only allowed in
the CCW direction until the CW
Limit- is inactive. Line pointer
resetto L41 value, serial buffer
is
is cleared and XOFF and then
XON are sent.
CCW LIMIT-
lnput to cause motion to come
to an uncontrolled immediate
stop of moving in the CCW di-
rection. Motion is only allowed
in the CW direction until the
CCW Limit- is inactive. Line
pointer is reset to L41 value,
serial buffer is cleared and XOFF
and then XON are sent.
STOP-
CYCLE
LOAD-
AWO-
STEPIJOG-
CYCLE
START-
Program execution is stopped
after the present line is executed.
lnput to enter data selected on
CODE DATA thumbwheel and
corresponding data on FIELD
DATA thumbwheel.
lnput to turn windings off when
the motor is at a standstill.
Input to determine speed range
limit. If HIGH- is selected, motor will be allowed to ramp to
selected speed. If LOW is selected, motor will not be allowed to ramp and will run at
selected low speed.
Input to determine if motor will
single-step or jog (continuous
motion) when manual motion
is called for.
Input to start execution of pro-
gram or to continue motion if a
FEED HOLD has been executed.
CLEAR-
FEEDHOLD-
HOME LIMIT-
CW DIR-
CCW DIR-
lnput to cause motion to come
to an uncontrolled immediate
stop. Position is lost, no mo-
tion is allowed while CLEAR- is
active. Resets line pointer to
L41 value, clears the serial
buffer and XOFF and then XON
are sent.
lnput to cause motion to come
toacontrolled stop (pause) with
no loss of position.
lnput to indicate mechanical
home position.
Input to cause motor motion in
the CW direction. If STEP was
selected, motor will single-step
each time this input is activated.
If JOG- is selected, motor will
turn continuously while input is
active.
lnput to cause motor motion in
the CCW
direction.lf STEP was
selected, motor will single-step
each time this input isactivated.
If JOG- is selected, motor will
turn continuously while input is
active.
SERIALIPARALLEL-
SEL 4-, SEL 2-, SEL
NOTE: O=high input
l=low input
inus sign
(-)
1
-
indicates signal is active when low.
Input to determine if operation
is via SERIAL (RS232) or PARALLEL inputs. If SERIAL mode
is selected, the following parallel inputs are ignored.
CW DIR-, CCW DIR-, LOW/
HIGH-, AWO-, STEPJJOG-,
LOAD-
Changing this input automatically invokes a CLEAR
mand.
com-
FUNCTION SELECT inputs SEL
1
-
4-, SEL 2- and SEL
are used
in combination to select the
variable to be programmed on
a selected line.
Function Selected
N Line Number
G Code
X Code
F Code
L Code
H Code
Not Used
Not Used
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PARALLEL DATA LOADING
1)
Parallel mode must be selected
2) Program execution and manual modes must be stopped
3) The proper data must be selected via the function select
switches, code data thumbwheels and field data
thurnbwheels.
4) The load input must be activated.
OF HOW INDEXER LOADS PARALLEL DATA
Strobe 0 and Strobe 1 are disabled.
Strobe 2 is activated for the delay time indicated by
the LO7 parameter.
At the end of the delay period the data is read and
the strobe deactivated.
Strobe 3 is activated for the delay time indicated by the
LO7 parameter.
At the end of the delay period the data is read and
the strobe deactivated.
Strobe
4
is activated for the delay time indicated by
the LO7 parameter.
At the end of the delay period the data is read and
the strobe deactivated.
Strobe
5
is activated for the delay time indicated by
the LO7 parameter.
At the end of the delay period the date is read and
the strobe deactivated.
10)
Strobe 6 is activated for the delay time indicated by
the LO7 parameter.
11) At the end of the delay period the data is read and
the strobe deactivated.
12) Strobe 7 is activated for the delay time indicated by
the LO7 parameter.
13) At the end of the delay period the data is read and
the strobe deactivated.
14) An additional time delay indicated by the LO7 parameter
is executed to allow sufficient time to remove the data
prior to Strobe 0 and Strobe 1 actuation.
15)
The command is then executed.
STROBE
0
STROBE
1
STROBE
2
STROBE
3
STROBE
4
STROBE
5
STROBE
6
STROBE
7
5.2.4.1
Data Entry
By
Letter Code
inus sign
(-)
indicates signal is active when low.
Data Entry
N:
Select N code via SEL
4-,
SEL 2- and SEL 1- ~nputs.
Select desired line number on code data thumbwheel.
Bring LOAD- input low and release.
Code data thumbwheel value is then strobed in.
This becomes the active program line until new line
number is selected.
Field data thumbwheel value is ignored.
Data Entry
G:
1.
Select G code via SEL 4-, SEL 2- and SEL
1-
inputs
2. Select desired
G
code on code data thumbwheel.
3.
Bring LOAD- input low and release.
4.
Code data thumbwheel value are the strobed in.
5.
G
code is placed in active program line.
6.
Field data thumbwheel value is ignored.
Data Entry
X:
1. Select X code via SEL
4-,
SEL 2- and SEL
1
-
inputs.
2. Select desired
X
value on field data thumbwheel.
3.
Bring LOAD- input low and release.
4. Field data thumbwheel value is then strobed in.
5.
Value is placed in active program line X field.
6.
Code data thumbwheel value is ignored.
Data Entry F:
1. Select F code via SEL 4-, SEL 2- and SEL
1
-
inputs.
2. Select desired value on the field data thumbwheel.
3. Bring LOAD- input low and release.
4. Field data thumbwheel value is then strobed in.
5.
Value is placed in active program line F field.
6.
Code data thumbwheel is ignored.
FIGURE
5.3,
STROBE TIMING DIAGRAM
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

code via SEL 4-, SEL 2- and SEL
1-
inputs.
2. Select desired L code data on code data thumbwheel.
3.
Select associated value on field data thumbwheel.
4. Bring LOAD- input low and release.
5.
Code data thurnbwheel value is then strobed in.
6.
Field data thumbwheel value is then strobed in.
7.
L code is entered.
1.
Select H code via SEL 4-, SEL 2- and SEL
1
-
inputs
2.
Select desired H code on code data thumbwheel.
3.
Bring LOAD- input low and release.
4. Code data thumbwheel value is then strobed in.
5.
H
code is executed.
6.
Field data thumbwheel is ignored.
:
The following H codes cannot b
el mode:
H2, H3,
H4, H5, H6 and
Manual motion is possible whenever a program is not being
executed. The STEPIJOG- input and the LOWIHIGH- input will
determine the response to the CW DIR- and CCW DIR- inputs
becoming active. The absolute position counter is maintained.
Program Execution is accomplished by activating the CYCLE
START- input and releasing. The program then executes based
on the L parameters.
uts Accessed Through The External Parallel
I10
These outputs are open collectors. They must be pulled up to
an external voltage source (maximum t24Vdc) through a
series resistor to limit the sink current to a maximum of 40
milliamperes.
OUTPUT
1
-,
OUTPUT 2-
Programmable outputs con-
trolled through use of G47 code.
ALL WINDINGS OFF OUT- Output indicating the status of
the ALL WINDINGS OFF- mode.
CWICCW- OUT
Output indicating the direction of
motor motion.
MOTION BUSY OUT-
Output indicating when any type
of motion is occurring.
PULSE OUT-
Output of the pulses being ap
plied to the drive.
FROM A REMOTE TER
This section contains information pertaining to operating the
indexer from a remote terminal via the RS232 serial port.
.2 Connections and Intedace
9-prn ser~al rnterface connector can be used to connect a
remote termrnal to the Indexer for
programming
and program
t
execution
When any other type of remote terminal is used with the
indexer, the baud rate must be set correctly so that the indexer
will match the terminal. This parameter is set with the
L22, L23
and L25
commands. See the Command Description section
for the applicable values and defaults.
NOTE: The baud rate, word length and parity default settings are correct for operation with the Superior Electric
hand-held remote terminal SSP-500.
If
another type of remote terminal is used which has a baud
rate other than 9600 baud, the terminal will not be able to
communicate with the indexer.
A
compatible terminal will
have to be used to set the baud rate or, alternatively, a switch
panel (such as an
SSP-1OO)can be used to set the indexer's
baud rate, etc. (See Section 5.2.1 for a description of the
switch panel operation).
5.4 OPERATION FROM
A
HOST COMPUTER
The hardware connections fora host computer are the same as
those for a remote terminal. The connection is made through
the 9-pin serial interface connector.
An IBM compatible program (on a
5.25"
floppy disk) that has
editing, manual motion and program execution modes of
operation to facilitate Micro Series indexer functions is available from Superior Electric. Local and remote modes allow
programs to be developed off-line in the IBM PC and later
loaded into the indexer.
Alternatively, a commercially available communications program (such as "Crosstalk", from Digital Communications Associates. Inc.) may be run on the PC to configure it as a remote
terminal.
To interface with an IBM PC, the connections must be config-
ured as follows:
IBM
(25-pin
"D"
Connector)
Positioner (9-pin
"D"
Connector)
-
- -
-- - -
-
--
-
Pin Number
--
Pin Number
-
2
>
3
Rece~ve
3
>
2
Cham
Out
7
-
--
>
4
S~gnal
Common
Following are three sample IBM PC compatible programs to
display the ease of indexer/host computer software interfacing.
Program
1
uploads an indexer program to the PC disk. Program 2 downloads a program from the PC disk to the indexer:
and program
3
sets up interactive communications between
the PC and the indexer. Enter BASIC with the following:
The SSP-500, a hand-held intelligent terminal available from
Superior Electric, can be used for debugging, loading and
executing indexer programs.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

10 REM THIS PROGRAM TAKES THE APPLICATION PRO- 450 REM CLOSE THE OPEN FILES
GRAM THAT IS IN 460 CLOSE
20 REM THE INDEXER AND STORES IT ON A DISK 470 REM PROGRAM END
25 REM PROGRAM DOES NOT SUPPORT DAISY CHAINING 480 END
30 REM CONFIGURE SERIAL PORT 1 FOR INDEXER COM-
MUNICATIONS
40 REM INDEXER SET AT9600 BAUD,
8
DATA BITS, 1 STOP
BIT, AND
50 REM NO PARITY
60 OPEN
"COMI 9600, N,8,2,CS,DS,CDH AS# 1
70 INPUT "ENTER DEVICE NUMBERn,D
80
REM OUTPUT DEVICE CHARACTER AND DEVICE NUMBER
90
IF
D>99 OR D<1 GO TO 70
100 REM
110 IF D<10 THEN PRlNT #1 USING "<#",D
120 IF D>9 THEN PRlNT
#l
USING "<##",D
130 REM RECEIVE EQUAL SIGN AND XON
140 G$=INPUT$(2,#1)
150 REM SET L26 PARAMETER TO 0
160 PRlNT #1, "L26 0"
170 REM RECEIVE XOFF AND XON
180
G$=INPUT$(2,#
1)
190 REM INPUT FILENAME TO WHICH THE INDEXER PRO-
GRAM WILL BE STORED
200 INPUT "ENTER FILENAME TO STORE INDEXER
PROGRAMn,F$
210 REM OPEN THE DlSK FILE TO RECEIVE THE INDEXER
PROGRAM
220 OPEN
"OH, #2, F$
230 REM INITIALIZE LlNE COUNT
240 C=O
250 REM SEND PROGRAM TRANSFER COMMAND TO IN-
DEXER
260 PRlNT #1,"L48 0 HI4
270 REM INPUT XOFF
280
G$=INPUT$(l ,#1)
290 REM RECEIVE PROGRAM LlNE
300 INPUT
#l
,
L$
310 REM SEND XOFF TO ALLOW TIME TO STORE DATA ON
DISK
320 PRlNT #I, CHR$(I 9),
330 REM STORE DATA ON DlSK
340 PRINT #2,L$
350 REM DISPLAY PROGRAM LlNE ON SCREEN
360 PRlNT L$
370 REM INCREMENT LlNE COUNT
380
C=C+1
390 REM SEND XON TO ALLOW TRANSMISSION TO CON-
TINUE
400 PRlNT #1, CHR$(17),
410 REM GET NEXT LINE IF 400 LINES HAVE NOT BEEN
RECEIVED
420 IF
C<400 THEN GO TO 300
430 REM DATA TRANSFER AND STORAGE COMPLETE
440 PRlNT "INDEXER PROGRAM STORED IN FILE'' F$
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PROGRAM LISTING
3
REM THIS PROGRAM LOADS THE INDEXER WlTH AN
APPLICATION PROGRAM
REM THAT HAS BEEN STORED ON A DISK
REM PROGRAM DOES NOT SUPPORT DAISY CHAINING
REM CONFIGURE SERIAL PORT 1 FOR INDEXER COMMUNICATIONS
REM INDEXER SET AT9600 BAUD, 8 DATA BITS, 2 STOP
BITS AND
REM NO PARITY
"COM1:9600,N,8,2,CS,DS,CDU
OPEN
AS#l
INPUT "ENTER DEVICE NUMBERn;D
REM OUTPUT XON
PRlNT #I ,CHR$(17);
REM OUTPUT DEVICE CHARACTER AND DEVICE NUMBER
IF D>99 OR D<1 THEN GO TO 70
REM
IF
D<lO THEN PRlNT #1, USING "<#;D
IF D>9 THEN PRlNT #1, USING "<##";D
REM RECEIVE EQUAL SIGN, AND XON
G$=INPUT$(2,#1)
REM SET L26 PARAMETER TO 0
PRlNT #1 ,"L26 0"
REM RECEIVE XOFF AND XON
G$=INPUT$(2,#1)
REM FILENAME FROM WHICH THE INDEXER WILL BE
LOADED
INPUT "ENTER FILENAME TO LOAD INDEXER" ;F$
REM OPEN THE DISK FILE TO LOAD INDEXER
"I",
OPEN
#2, F$
REM INITIALIZE LlNE COUNT
C=O
REM READ PROGRAM LlNE FROM DISK
INPUT #2, L$
REM SEND PROGRAM LlNE TO INDEXER
PRlNT #1 ,L$
REM INPUT XOFF AND XON
G$=INPUT$(2,# 1
)
REM DISPLAY PROGRAM LlNE ON SCREEN
PRlNT L$
REM INCREMENT LlNE COUNT
C=Ctl
REM GET NEXT LINE IF 400 LINES HAVE NOT BEEN
TRANSFERRED
IF (2400 THEN GO TO 280
REM DATA TRANSFER AND STORAGE COMPLETE
PRlNT "INDEXER LOADED WlTH FILEn$$
REM CLOSE THE OPEN FILES
CLOSE
REM PROGRAM END
END
REM THlS PROGRAM ALLOWS INTERACTIVE COMMU-
NICATIONS BETWEEN THE
REM HOST AND THE INDEXER
1
REM CONFIGURE SERIAL PORT
FOR INDEXER COMMUNICATIONS
REM INDEXER SET AT 9600 BAUD, 8 DATA BITS, 2 STOP
BITS,AND
REM NO PARITY
OPEN TOM1 :9600,N,8,2,CS,DS,CD" AS#1
PRlNT #I, CHR$(17);
REM SET L26 PARAMETER IN ALL INDEXERS
PRlNT #1,"<00 L26 0"
REM ENTER INDEXER COMMAND STRING
REM IF END IS ENTERED THEN PROGRAM IS TERMI-
NATED
INPUT "ENTER INDEXER COMMANDn;L$
IF L$="ENDn THEN GO TO 350
PRlNT #I, CHR$(17);
REM OUTPUT INDEXER COMMAND STRING
PRINT #1 ,L$
REM TIME DELAY
FOR I=1 TO 25
l
NEXT
REM READ INPUT BUFFER FOR DATA
IF EOF(1)= -1 THEN GO TO 140
REM DO NOT PRlNT CHARACTER IF XOFF OR XON
PRlNT
#I, CHR$(17);
B$=INPUT$(l,#l
)
IF B$=CHR$(17) THEN GO TO 230
IF B$=CHR$(19) THEN GO TO 230
REM
IF B$=CHR$(10) THEN PRINT B$;: GOSUB 360: GO TO
230
REM PRlNT INPUT CHARACTER ON DISPLAY
PRlNT B$;
GO TO 200
REM PROGRAM END
END
REM THlS SUBROUTINE IS CALLED IF A MULTI-LINE
TRANSFER HAS BEEN
REM COMMANDED. IT UTILIZES XON AND XOFF
IF
EOF(l)= -1 THEN RETURN
REM OUTPUT XOFF
#1
PRlNT
,CHR$(19);
REM INPUT CHARACTER
B$=INPUT$(1,#1)
REM DO NOT PRINT IF XOFF OR XON
IF B$=CHR$(l 7) THEN GO TO 380
IF
B$=CHR$(l 9) THEN GO TO 380
REM
REM PRlNT INPUT CHARACTER ON DISPLAY
PRlNT B$;
IF EOF(I)=O THEN GO TO 420
REM OUTPUT XON
PRlNT #I ,CHR$(17),
RETURN
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

TYPICAL PERFORMANCE CHARACTERISTICS
-
(FULL STEP)-0
1000 2000
3000
4000
5000
6000
7000
8000
9000
XXXX)
(HALF
STEP)
-0
XXX)
4000 6000
8000 10000 12000 14000
16000 18000
20000
SPEED (STEPS PER SECOND)
FULLIHALF STEP
M061-CF408 AND M061-LF408 MOTORS
3
TYPICAL PERFORMANCE CHARACTERISTICS
(FULL
STEP)-0
1000 2000
3000
4000
5000
6000 7000 8000
9000
10000
(HALF STEP)-0
2000
4000
6000
8000
10000 12000 14000 16000 18000 20000
SPEED (STEPSPER SECOND)
FULLIHALF-STEP
M062-CF402 AND M062-LF402 MOTORS
TYPICAL PERFOR ANCE CHARACTERISTICS
(FULL STEP) - 0
1000
2000 3000
4000
5000
6000 7000
8000 9000 10000
(HALF STEP)-0
'2000
4000
6000
8000 10000
12000 14000 16000 18000 20000
SPEED (STEPS PER SECOND)
FULLtHALF STEP
M063-CF401 AND M063-LF401 MOTORS
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

=,,
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED
(1.8"
STEPS PER SECOND)
MICROSTEP
M061-CF408
AND
M061-LF408 MOTORS
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED
(1.8O
STEPS PER
SECOND)
MICROSTEP
M062-CF402
AND
M062-LF402 MOTORS
.,.,.
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED
(1.8"
STEPS PER SECOND)
MICROSTEP
M063-CF401
AND
M063-LF401 MOTORS
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

7
nn
TYPICAL PERFORMANCE CHARACTERISTICS
50
40
30
20
10
0
(FULL
STEP)
-
0
1000 2000
3000
4000 5000
6000
7000 8000
9000
10000
(hALF
STEP
-
0
2000 4000
6000
8000 10000 12000 14000 16000 18000 20000
SPEED (STEPS PER SECOND)
FULLIHALF STEP
M091-FF401 MOTOR
TYPICAL PERFORMANCE CHARACTERISTICS
150
120
-
cn
I-
90
&
3
-
60
E
3
30
B
n
(FULL
STEP)
-
0
1000 2000 3000 4000
5000
6000
7000 8000 9000
1OW
(HALF
STEP)
-
0 2000
4000
6000 8000 10000
12000
14000 16000
1sOOO
20000
(FUL
(HAL
SPEED (STEPSPERSECOND)
FULLIHALF-STEP
M092-FF401 MOTOR
fino
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED (STEPSPER SECOND)
FULLIHALF STEP
M093-FF402 MOTOR
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

4
5n
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED (1.8" STEPS PER SECOND)
MICROSTEP
M091-FF401 MOTOR
TYPICAL PERFORMANCE CHARACTERISTICS
400
(282.4)
125
320
(226.0) 100
-
cn
k-
240
(169.4)
75
+
4
-.
160
(113.0)
50
&
3
0
80
a
(56 5)
25
0
0
0
1000
2000
3000
4000
5000
6000
7000
800Ci
9000
1m
SPEED
(1.8"
STEPS PER
SECOND)
MICROSTEP
M092-FF402 MOTOR
cnn
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED (1.8" STEPS PER SECOND)
MICROSTEP
M093-FF402 MOTOR
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

750
TYPICAL PERFORMANCE CHARACTERISTICS
(529.6) 250
-
600
E
(423.6) 200
2
-
450
z
(317.8)
I.
N
0
300
(211.8) 100
"
3
150
,o
0
(105.9) 50
k-
150
(FULL STEP)-0 1000 2000
(HALF STEP) - 0
0
2000
4000
M111-FF401 AND MX111-FF401 MOTORS
TYPICAL PERFORMANCE CHARACTERISTICS
XXX)
4000
(FULL
(HALF
-7-
/
3u
(529.6) 300
600
E
(423.6) 240
,U
-
450
z
(317.8) 180
I.
N
0
300
(211.8) 120
13
150
(105.9)
0
STEP)
-0 1000 2000
STEP)
-0
3000
4000
5000
6000
7000
8000
9000
6000 8000 10000 12000
SPEED (STEPS
PER
SECOND)
14000
16000
10000
18000 20000
FULLNHALF STEP
3000
4000 5000 6000 7000 8000 9000 10000
6000 8000 10000 12000 14000 16000 18000 20000
SPEED (STEPS PER SECOND)
FULLIHALF-STEP
M112-FF401 MOTOR
0
60
0
1500
(FULL STEP)
(HALF STEP)- 0 2000 4000 6000 8000 10000 12000 14000 16000 18000 20000
-
TYPICAL PERFORMANCE CHARACTERISTICS
0 1000
2000 3000 4000 5000 6000 7000
8000 9000 10000
300
240
180
120
60
0
SPEED (STEPS PER SECOND)
FULLIHALF STEP
MH112-FJ4201 MOTOR
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

0 1000 2000 3000 4000 5000 6000 7000 8000
9000
IOOOO-
SPEED
(1.8''
STEPS PER SECOND)
cnn
TYPICAL PERFORMANCE CHARACTERlSTlCS
MICROSTEP
M111-FF401
AND
MX111-FF401 MOTORS
TYPICAL PERFORMANCE CHARACTERISTICS
250
150
100
50
0
1000 2000
3000
4000
5000
6000 7000
eOOO
9000
loo00
SPEED
(1.8"
STEPS PER SECOND)
MICROSTEP
M112-FF401 MOTOR
TYPICAL PERFORMANCE CHARACTERISTICS
SPEED
(1.8"
STEPS PER SECOND
1
MICROSTEP
MH112-FJ4201 MOTOR
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

6.1
MOTOR PERFORMANCE
All stepping motors exhibit instability at their natural frequency and
harmonics of that frequency Typically this instability will occur at
speeds between 50 and 500 full steps per second and depending on
the dynamic motor load parameters can cause excessive velocity
modulation or improper positioning
There are also other instabilities which may cause a loss of torque at
stepping rates outside the range of natural resonance frequencies.
One such instability is broadly identified as mid-range instability. This
(....I
is identified by the dotted area
Usually the dampening of the system and
through the resonance areas aids in reducing instability to a level that
prov~des smooth shaft velocity and accurate positioning If instability
does cause unacceptable performance under actual operating conditions, the following techniques can be used to reduce velocity modulation
1 Avoid constant speed operation at the motor s unstable frequencies
Select a base speed that
adjust acceleration and deceleration to move the motor through unstable regions quickly
2
The motor winding current can be reduced as discussed in Section
3.8
Lowering the current will reduce torque proportionally. The
reduced energy delivered to the motor can decrease velocity modulation
3.
Use half-step mode of operation (3180-PI only). Note that this
halves the shaft speed for a given input pulse rate. Microstepping
(3180-PI10 and 3180-P1125) inherently provides smoother opera-
tion. and reduces the effects of mid-range instability.
WARNING:
and large amounts of mechanical energy.
Motors connected to this drive can develop high torque
is above the motor's resonant frequencies and
on the speed torque curves.
accelerationideceleration
Keep clear of the motor shaft, and all parts mechanically linked to
the motor shaft.
Turn off the power to the
mechan~cally coupled to the motor.
if installation and operation instructions have been followed carefully
this unit should perform correctly If motor fails to step properly the
following checklist will be helpful
In General:
Check all installation wiring carefully for wiring errors or poor
connections
Check to see that the proper voltage levels are being
unit
Be sure the motor is compatible for use with this unit
*Check to see that baud rates parity and other communications
parameters are properly set
*When connecting thls unit to a terminal or host computer be sure
device addresses are correct
7.1
IF
MOTOR DIRECTION (CW,
Connect~ons to the Motor Connector may be reversed
7.2
IF
THE MOTOR MOTION IS ERRATIC, Check:
Supply voltage out of tolerance.
Motion parameters (low speed,
home speed, and feedrate) may need adjustment.
Operation in dotted area of speed-torque curve.
7.3
IF TORQUE IS LOW, Check:
AWO (All Windings Off) active or REDUCED CURRENT active. Im-
proper supply voltage.
Operation in dotted area of speed-torque curve.
If a malfunction occurs that cannot be corrected by making these
corrections, contact The Superior Electric Company.
drlve before perform~ng work on parts
supplled to the
CGW)
IS REVERSED, Check:
accelerationldeceleration.
jog speed,
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

APPENDIX
MICRO-SERIES SINGLE LINE PRESET INDEXER EMULATION
This Appendix provides two methods of emulating a one-line indexer
function with a Superior Electric Micro-Series Indexer. Method 1
utilizes the MDI (line 000) mode to function as a one-liner indexer.
while Method 2 requires programming of lines 1 and 2. Asassumption
was made that a Superior Electric SSP-100 programmer was interfaced to the Micro-Series Indexer, although any parallel data entry
device (such as a programmable controller) can utilize these methods.
Only the required parameters and program lines are programmed: the
other parameters and program lines retain their factory defaults as
shown below:
Full Step 1110th Step 11125th Step
Translator
---
.
=
1 LO6 = 1 LO6 = 1
LO6
Translator Translator
-
-
One-Line Indexer: Method
1
A. Indexer Set Up - Done only once as all values are retained in
nonvolatile memory.
1.
L70 (Translator Resolution) Data Entry:
A. Select L code with SEL4
- -
=
1,
SEL2 = 0. and%? = 0.
B. Set the CODE DATA THUMBWHEELS to 007.
C. Set the translator resolution (1.2,lO. or 125) in the FIELD
DATA THUMBWHEELS.
D. Activate the LOAD switch and release.
E. The translator resolution has been entered into the
170
parameter.
2. L12 (Low Speed) Data Entry:
=
A Select L code with
SEL~ = 1 SEL2 = 0 and
0
B Set the CODE DATA THUMBWHEELS to 012
C Set the low (base) speed (pulseslsec) in the FIELD DATA
THUMBWHEELS
D Activate the LOAD switch and release
E The low (base) speed has been entered into the 112 parame-
ter
3.
L11
(Acceleration/Deceleration)
-
A. Select L code with SEL4 = 1. SEL2 = 0, and
B.
Set the CODE DATA THUMBWHEELS to 01 1
6. Set the
accelerationldeceleration
Data Entry:
-
SEL~ = 0.
rate (pulses/sec2) in the
FIELD DATA THUMBWHEELS.
D. Activate the LOAD switch and release.
accelerationldeceleration
E. The
rate has been entered into the
L11 parameter.
4.
LO9 (Jog Speed) Data Entry:
A. Select L code with SEL 4 = I,
. . -.
..
.
-
SEL2 = 0, and?~~l = 0.
B. Set the CODE DATA THUMBWHEELS to 009.
C. Set the low (base) speed (pulses/sec) rn the FIELD DATA
One-Line Indexer Emulation Comments
1. Method 1 requires fewer set up steps than Method 2. but Method
2 simplifies the daily operations.
1
2. Method
the power up default of the LO9 parameter is not adequate, while
requires the feed rate to be loaded on power up if
8.
Method 2 retains the feed rate in nonvolatile memory.
3.
The two methods are applicable to any Micro-Series lndexer.
4. The power up default of incremental mode is assumed to remain
unchanged.
5,
The user may find it easierto perform the set up operations via the
RS232 serial port with a computer or terminal. or using the
Superior Electric SSP-500 remote hand-held programmer.
6. The set up is similar to the set up requirements of an IODD008
Modulynx indexer of the analog speed adjustment of a TBM or PIM
module.
7, The methods require Rev. C (4187) or later indexer software
revisions.
8, If the time to load the data. which is 7 times the LO7 value (a total
or 700 milliseconds at factory default
setting).
is too long, then LO7
can be altered as follows:
-
I
A Select L code with SEL 4 = 1
B Set the CODE DATA THUMBWHEELS to 007
-
SEL 2
=
--
0 and SEL
1
=
0
C Set the strobe delay time (m~lliseconds) in the FlELD DATA
THUMBWHEELS
D
Act~vate the LOAD switch and release
E The strobe delay time has been entered into the LO9 parameter
THUMBWHEELS.
D. Activate the LOAD switch and release.
E.
The jog speed has been entered into the LO9 parameter.
F. Upon power up, the jog speed in LO9 will be utilized as the
feed rate.
Daily Operation
1.
X (Move Distance) Data Entry:
A Select X code with SEL4 = 0 SEL2 = 1 and
-
-
SK
=
0
B Set the Distance (pulses) in the FlELD DATATHUMBWHEELS
C Activate the LOAD swrtch and release
X
=
1 and
field
SF
=
1
D The distance has been entered into the
2.
F(Feed Rate) Data Entry: (skip tostep 3 if the power up default
of the LO9 parameter is adequate)
--
A Select F code with SEL4 = 0 K2
B
Set the Feed Rate (pulseslsec) in the FIELD DATA
THUMBWHEELS
C Activate the LOAD switch and release
D The Feed Rate has been entered into the
3.
Index Operation:
F field
A. Activate the CYCLE START switch and release
B. The motor indexes the distance entered.
4.
The X and F values are retained until power is turned off
Repeat steps 1 and 2 as necessary to edit the motron parame-
ters and then repeat step
3
to
initiate motion
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

One-Line lndexer: Method
A. lndexer Set Up
nonvolatile
-
memory.
2
Done only once as all values are retained in
1. L70 (Translator Resolution) Data Entry:
A Select L code with s== 1 s== 0 and
B Set the CODE DATA THUMBWHEELS to 070
C Set the translator resolution (1 2 10 or 125)
in the FIELD
DATA THUMBWHEELS
D Act~vate the LOAD swltch and release
E The translator resolution has been entered into the
parameter
2.
L12 (Low Speed) Data Entry:
---
A. Select L code with SEL4 = 1. SEL2 = 0, andm = 0.
B. Set the CODE DATA THUMBWHEELS to 012.
C. Set the low (base) speed (pulsesisec) in the FIELD DATA
THUMBWHEELS.
D. Activate the LOAD switch and release.
E. The low (base) speed has been entered into the L12 parame-
ter.
3.
L11
(Acceleration/Deceleration)
A.
Select L code with SEL4 = 1. SEL2 = 0, and
Data Entry:
-
SE
B. Set the CODE DATA THUMBWHEELS to 01 1
C. Set the accelerationldeceleration rate (pulseslseci) in the
FIELD DATA THUMBWHEELS.
D. Activate the LOAD swrtch and release.
acceleration/deceleration
E. The
rate has been entered into the
L1 1 parameter.
4.
LO9 (Jog Speed) Data Entry: (skip to step 5 if not utilizing jog
function)
--
-
A. Select L code with SEL4 = 1, SEL2 = 0. and
B. Set the CODE DATA THUMBWHEELS to 009.
C. Set the low (base) speed (pulseslsec) ~n the FIELD DATA
THUMBWHEELS.
D. Activate the LOAD switch and release.
E. The low (base) speed had been entered into the L12 parame-
ter.
5.
LO6 (Program Execution Mode) Data Entry:
=
0
170
=
0.
=
0.
8.
Enter G36
(X
code Strobe) on line number 001:
--
-.
A. Select G code with SEL4 = 0, SEL2 = 0. andm = 1
B. Set the CODE DATA THUMBWHEELS to 036.
C. Activate the LOAD switch and release.
D. G36 has been entered into the program.
9. F (Feed Rate) Data Entry:
-
--
A. Select F code w~th SEL4 = 0. SEL2 = 1, and =l.
B. Set the Feed Rate (pulseslsec) in the FIELD DATA
THUMBWHEELS.
C.
Activate the LOAD switch and release.
D. The Feed Rate has been entered into line number 1's Ffield
10. Select Line Number 002:
A. Select N code w~th SEL4 = 0, SEL2 = 0, and~~i
6.
Set the CODE DATA THUMBWHEELS to 002.
-
=
0
C. Activate the LOAD switch and release.
D. NO02 has been selected.
11.
Enter G30 (Program End) on line number 002:
..
-
A. Select G code with SEL4 = 0, SEL2 = 0, andm = 1
B. Set the CODE DATA THUMBWHEELS to 030.
C.
Activate the LOAD switch and release.
D. G30 has been entered into the program on line number 2
8.
Daily Operation
1.
Index Operation:
A. Setthe Distance (pulses) in the FIELD DATATHUMBWHEELS.
B. Activate the CYCLE START switch and release.
C. The motor indexes the distance entered.
2.
Repeat step 1 as necessary.
A. Select L code w~th SEL4 = 1, SEL2 = 0, and SEL 1 = 0.
B. Set the CODE DATA THUMBWHEELS to 006.
C.
Set FIELD DATA THUMBWHEELS to 2.
D. Activate the LOAD switch and release.
E. The auto execution mode has been entered into the
parameter.
6.
L41 (Autostart Line Number) Data Entry:
A.
Select L code wth SEL4 = 1, SEL2 = 0, and
B.
Set the CODE DATA THUMBWHEELS to 041
C.
Set FIELD DATA THUMBWHEELS to 1
KT
D Activate the LOAD switch and release.
E.
The autostar? line number has been entered ~nto the 141
parameter.
7.
Select line number 001:
--
A Select N code with
B
Set the CODE DATA THUMBWHEELS to 001
C
Activate the LOAD switch and release
~x4
--
=
0 SEL2 = 0 and
~ELI
D NO01 hds been selected
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
=
=
LO6
0.
0

CODE
SUMMARY
COMMAND FORMAT
LO6
n
LO7
nnnn
LO8 s
LO9
nnnnnnn
Lll
nnnnnnnn
L 12
nlmnnnn
L14
nnnnnnn
L 17 snnnnnnnn
118 snnnnnnnn
119 snnnnnnnn
L21
nn
L22
nnnn
L23
n
125
n
126
n
141
nnn
144
nnnn
L45
n
L48
nnn
L49
nn
L70
nnn
PARAMETERS
FUNCTION
EXECUTION FORMAT
STROBE DELAY TIME
MECHANICAL HOME DIRECTION
JOG SPEED
ACC/DCC
LOW SPEED
HOME SPEED
MECHANICAL HOME OFFSET
SOFTWARE CW LIMIT
SOFTWARE CCW LIMIT
DEVICE ID
BAUD RATE
WORD LENGTH
PARITY
RESPONSE FORMAT
AUTO START LINE NUMBER
BETWEEN LINE DELAY
ENABLE/DISABLE
LIMIT
PROGRAM LINE TRANSFER COUNT
PARAMETER TRANSFER DESIGNATOR
RESOLUTION
COMMANDS
-
.-
-
.-
COMMAND FORMAT
NOTE:
TX
is an abbreviation for "Transmit".
COMMANDS
--
FUNCTION
-
PROGRAM CYCLE START
STEP MODE
JOG MODE
SET HIGH SPEED MODE
SET LOW SPEED MODE
CU DIR (Jog or Step cycle)
CCW
RETURN ELECTRICAL HOME
SET ELECTRICAL HOME
RETURN MECHANICAL HOME
CLEAR PRESENT PROGRAM LINE
CLEAR ALL PROGRAM LINES
TX PRESENT PROGRAM LINE
TX ALL PROGRAM LINES
TX PRESENT PROGRAM NUMBER
TX PARAMETER
TX ABSOLUTE POSITION
TX MOTION STATUS
TX MODE STATUS
TX 1/0 STATUS
TX SOFTWARE REV LEVEL
ENABLE TRACE MODE
DISABLE TRACE MODE
--
DIR (Jog
-
-
or
Step cycle)
-
-
COMMAND FORMAT
f
Xof
Xon
'X
ICOMMAND FORMAT 1 FUNCTION
I
I
Nnnn
Xsnnnnnnnn
I
Fnnnnnnn
1
COMMAND FORMAT / FUNCTION
GO4 Xnnnn
IGll Xnnn Fnnnn
G20 Xnnnn Fnnn
G22 Xnnnn
I
G30
lG31
I
G36
G37
G47 Xnn
C64
I
G65
G66
G67
C68
FUNCTION
SUSPEND RS232 TRANSMISSION
RESUME RS232 TRANSMISSION
CANCEL LINE IN RS232 BUFFER
BACKSPACE 1 CHARACTER IN RS232 BUFFER
ATTENTION ALL DEVICES
ATTENTION DEVICE
MOTION CLEAR
FEED HOLD OR JOG STOP
PROGRAM STOP
I
/
LINE NUMBER (000 THRU 4001
/
MOVE DISTANCE OR DATA FIELD FOR GO4,Gll ,G2D,G22,G47 CODES
1
FEED RATE OR DATA FIELD FOR G11 ,G2O
/BRANCH ON INPUT CONDITION
/WAITFOR INPUTCONDITION IlnputCondition
END OF PROGRAM/RTS
PROGRAM STOP
/STROBE x CODE DATA
/STROBE N CODE DATA
/
SET/RESET OUTPUT CONDITION
/ENABLE
ID
IENABLE BOOST CURRENT MODE
WINDINGS OFF
/WINDINGS
IRETURN TO ELECTRICAL HOME
!SET
/RETURN
/ABSOLUTE DIMENSION INPUT
/
REDUCED
ISABLE REDUCED CURRENT MODE
DISABLE BOOST CURRENT MODE
ON
ELECTRICAL
TO MECHANICAL HOME
INCREMENTAL DIMENSION INPUT
nn
WITH RESPONSE
CURRENT
HOME
MODE
(:)
OR (=Xon)
/X
FIELD DATA
Dwell Time
Line Number of Subroutine
/Input
in
milliseconds
Condition for Branch
1
I
I
/output
1
1
I
/
!
1
i
I
1
/
Condition
FIELD DATA
;ubroutine Repeat Count
jranch Line Number
NOTE:
RTS is an abbreviation for "Return From Subroutine".
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PROGRAM WORKSHEET
HARD
L
CODE DATA
L
CODE DATA
ENED INDEXER
ROGRAMMING WORKSHEET
FUNCTION
EXECUTION FORMAT
STROBE DELAY TIME
MECHANICAL HOME DIRECTION
JOG SPEED
ACCELERATION/DECELERATION/
LOW SPEED
HOME SPEED
MECHANICAL HOME OFFSET
SOFTWARE CW LIMIT
SOFTWARE CCW LIMIT
FUNCTION
DEVICE ID
BAUD RATE
WORD LENGTH
PAR
I
TY
RESPONSE FORMAT
AUTO START LINE
BETWEEN LINE DELAY
LIMIT ENABLE/DISABLE
RESOLUTION
I
I
I
1
I
I
I
-
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

PROGRAM DATA
Line Number
G
Code
ove Distance or Data
Feed Rate
or Dat;
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

Superlor Electrlc products are available nationwide
In addition, Superior Electric sales engineers and manu-
through an extensive authorized distributor network.
facturers' representatives are conveniently
located to
These
distributors
offer literature. technlcal assistance
provide prompt attention to customers' needs. Call the
and a wide range of models off the shelf for fastest
nearest office listed for ordering and application informa-
,
possible delivery. tion or for the address of the closest authorized distributor.
383
Middle Street
Br~stol. CT
061 01
Tel:
(203) 582-9561
TWX:
71 0-454-0682
-
FAX:
203-589-21 36
Customer Serivce:
1-800-227-6470
Product Application:
1-800-227-6471
FAX:
1-800-766-6366
Product Literature Request:
1-800-766-71 71
Superior Electric Nederland
B.V.
Koperwerf
33
2544
EM The Hague, Netherlands
Tel:
31 70 3 679590
TELEX:
31 436
Supe nl
FAX:
01 I 31 70 3 296274
WARRANTY AND LIMITATION OF LIABILITY
Superior Electric (the Company ) Bristol Connecticut warrants to the first end user purchaser (the purchaser ) of equipment manufactured by
the Company that such equipment if new unused and in original unopened cartons at the time of purchase will be free from defects in material
and workmanship under normal use and service for a period of one year from date of shipment from the Company s factory or a warehouse of the
Company in the event that the equipment is purchased from the Company or for a period of one year from the date of shipment from the business
establishment of an authorized distributor of the Company in the event that the equipment is purchased from an authorized distributor
THE COMPANY'S
OBLIGATION UNDER THIS WARRANTY SHALL BE STRICTLY AND EXCLUSIVELY LIMITED TO REPAIRING OR
REPLACING, AT THE FACTORY OR A SERVICE CENTER OF THE COMPANY, ANY SUCH EQUIPMENT OR PARTS THEREOF WHICH AN
AUTHORIZED REPRESENTATIVE OF THE COMPANY FINDS TO BE DEFECTIVE IN MATERIAL OR WORKMANSHIP UNDER NORMAL
USE AND SERVICE WITHIN SUCH PERIOD OF ONE YEAR. THE COMPANY RESERVES THE RIGHTTO SATISFY SUCH OBLIGATION IN
FULL BY REFUNDING THE FULL PURCHASE PRICE OF ANY SUCH DEFECTIVE EQUIPMENT.
This warranty does not apply to any equipment
which has been tampered with or altered in any way which has been improperly installed or which has been subject to misuse neglect or accident
THE FOREGOING WARRANTY IS IN LIEU OF ANY OTHER WARRANTIES, EXPRESS OR IMPLIED, INCLUDING, WITHOUT LIMITATION,
ANY IMPLIED WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE,
and of any other obligations or liabilities
1
on the part of the Company and no person is authorized to assume for the Company any other liability with respect to equipment manufactured
by the Company
The Company shall have no liab~lity with respect to equipment not of its manufacture
THE COMPANY SHALL HAVE NO
LIABILITY WHATSOEVER IN ANY EVENT FOR PAYMENTOF ANY INCIDENTAL OR CONSEQUENTIAL DAMAGES, INCLUDING, WITHOUT
LIMITATION, DAMAGES FOR INJURY TO ANY PERSON OR PROPERTY.
Written authorization to return any equipment or parts thereof must be obtained from the Company The Company shall not be responsible tor any
transportation charges
IF FOR ANY REASON ANY OF THE FOREGOING PROVISIONS SHALL BE INEFFECTIVE, THE COMPANY'S LIABILITY FOR DAMAGES
ARISING OUT OF ITS MANUFACTURE OR SALE OF EQUIPMENT, OR USE THEREOF, WHETHER SUCH LIABILITY IS BASED
ON
WARRANTY, CONTRACT, NEGLIGENCE, STRICT LIABILITY IN TORT OR OTHERWISE, SHALL NOT IN ANY EVENT EXCEED THE FULL
PURCHASE PRICE OF SUCH EQUIPMENT.
Any action against the Company based upon any liability or obligation arising hereunder or under any law applicable to the sale of equipment or
the use thereof must be commenced within one year after the cause of such action arises
These products are sold subject to the standard Limitation of Liability
and'or Warranty of The Superior Electric Company The
American Superior Electric Company Lid
or Superior Electric Nederland B
V
The right to make engineering refinements on all products is reserved Dimensions and other details are subject to change
TEL: (203) 582-9561 TELEX: 96-2446
:
7
10-454-0682
Cable Address: SUPELEC
FAX:
(203) 589-2 136
A213710
025.
REV.
D
Printed
in
US
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...