


Preface
SunFounder
About SunFounder
SunFounder is a technology company focused on Raspberry Pi and Arduino open source
community development. Committed to the promotion of open source culture, we strive to
bring the fun of electronics making to people all around the world and enable everyone to
be a maker. Our products include learning kits, development boards, robots, sensor modules
and development tools. In addition to high quality products, SunFounder also offers video
tutorials to help you make your own project. If you have interest in open source or making
something cool, welcome to join us!
About This Kit
The kit is suitable for the Raspberry Pi model B+, 2 model B and 3 model B.
In this book, we will show you how to build the smart car via description, illustrations of physical
components, and schematic diagrams of circuits, in both hardware and software respects.
You may visit our website www.sunfounder.com to download the related code and view the
user manual on LEARN -> Get Tutorials and watch related videos under VIDEO, or clone the
code on our page of github.com at
https://github.com/sunfounder/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi
Free Support
If you have any TECHNICAL questions, add a topic under FORUM section on our website
and we'll reply as soon as possible.
For NON-TECH questions like order and shipment issues, please send an email to
service@sunfounder.com. You're also welcomed to share your projects on FORUM.
Reprint 4.0

Contents
SunFounder
Introduction .............................................................................................................................................. 1
Components ............................................................................................................................................. 2
A. Acrylic Plates .............................................................................................................................. 2
B. Mechanical Fasteners .............................................................................................................. 3
C. Drive Parts ................................................................................................................................... 4
D. Electrical Components ............................................................................................................ 5
E. Self-provided Parts .................................................................................................................... 8
Electrical Components Basics ............................................................................................................... 9
A. Raspberry Pi ................................................................................................................................ 9
B. Step-down DC-DC Converter Module ............................................................................... 10
C. Servo .......................................................................................................................................... 10
D. DC Motor Driver ....................................................................................................................... 11
E. USB Wi-Fi Adaptor .................................................................................................................... 11
F. Servo Controller ....................................................................................................................... 12
G. 18650*2 Battery Holder ........................................................................................................... 12
Assembly .................................................................................................................................................. 13
A. Back Half Chassis + Rear Wheels ......................................................................................... 13
B. Back Half Chassis + Copper Standoffs ............................................................................... 15
C. Upper Plate + Copper Standoffs ......................................................................................... 15
D. Battery Holder .......................................................................................................................... 17
E. Back Chassis + Upper Plate................................................................................................... 18
F. Electrical Module Assembly .................................................................................................. 19
Circuit Connecting ................................................................................................................................ 20
Servo Calibration(Operation on Raspberry Pi) ........................................................................... 29
A. Burn the image ........................................................................................................................ 29
B. Car Power Supply.................................................................................................................... 30
C. Log into Raspberry Pi .............................................................................................................. 30
For Linux or Mac OS X Users................................................................................................... 30
For Windows Users ................................................................................................................... 32
D. Get Source Code.................................................................................................................... 33
E. Install python-dev, python-smbus........................................................................................ 33
F. Setup I2C Port .......................................................................................................................... 33
G. Start calibration ....................................................................................................................... 33
Continue to Assemble .......................................................................................................................... 35
A. Front Wheels ............................................................................................................................. 35
B. Steering Linkage + Servo Rocker Arm ................................................................................. 37
C. Steering Servo + Upper Plate ................................................................................................ 38

D. Steering Servo + Steering Linkage ....................................................................................... 39
SunFounder
E. Front Chassis + Upper Plate ................................................................................................... 40
F. Plates + Servo Rocker Arms ................................................................................................... 41
G. Pan/Tilt Servo + Plate .............................................................................................................. 42
H. Pan Servo Plate + Tilt Servo Plate ......................................................................................... 43
I. Servos + Rocker Arm Plates ................................................................................................... 44
J. Mount + Car ............................................................................................................................. 45
Car Calibration (Operation on PC) ................................................................................................... 47
A. Get the source code ............................................................................................................. 47
B. Install Python software ........................................................................................................... 47
C. Run cali_client .......................................................................................................................... 48
D. Start Calibration ...................................................................................................................... 50
Motor Adjustment ................................................................................................................... 50
Turning Adjustment ................................................................................................................. 51
Mount Adjustment .................................................................................................................. 51
MJPG-streamer (Operation on Raspberry Pi) .................................................................................. 52
A. MJPG-streamer Installation ................................................................................................... 52
B. Testing ........................................................................................................................................ 53
Get on the Road! .................................................................................................................................. 55
A. Run TCP server (Operation on Raspberry Pi) ..................................................................... 55
B. Run the Client (operation on PC) ........................................................................................ 55
Program Analysis and Explanation .................................................................................................... 58
Abstract ............................................................................................................................................ 58
Introduction of Socket ........................................................................................................... 58
1. Server .................................................................................................................................. 59
Process Diagram of Server Program ................................................................................... 60
2. Client .................................................................................................................................. 60
Introduction of Tkinter ............................................................................................................ 60
Process Diagram of Client Program .................................................................................... 62
Summary .................................................................................................................................................. 63

Introduction
SunFounder
The SunFounder Smart Video Car Kit for Raspberry Pi is composed of Raspberry Pi, step-down
DC-DC converter module, USB camera, DC motor driver, and PCA9685-based servo
controller. From the perspective of software, the smart car is of client/server (C/S) structure.
The TCP server program is run on Raspberry Pi for direct control of the car. And the video
data are acquired and delivered via the open source software MJPG-streamer in a real-time
manner. The TCP client program is run on PC to send the control command. Both the client
and server programs are developed in Python.
The smart car is developed based on the open source hardware Raspberry Pi and integrates
the knowledge of mechanics, electronics and computer, thus having profound educational
significance.
1

Components
SunFounder
A. Acrylic Plates
2

B. Mechanical Fasteners
Parts
Name
Qty.
M1.2*4 self-tapping screw
8 M2*8 screw
6
M2.5*6 screw
16
M3*10 countersunk screw
2 M3*8 screw
8 M3*10 screw
6
M3*30 screw
4
M4*25 screw
2
M2.5*8 copper pillar
16
M3*24 copper pillar
8
M2 nut
6 M2.5 nut
16
M3 nut
20
M4 self-locking nut
2
F694ZZ flange bearing
2
SunFounder
3

C. Drive Parts
Parts
Name
Qty.
Tower Pro
Micro Servo
SG90
3
Gear reducer
2
Driven wheel
2
Active wheel
2
SunFounder
4

D. Electrical Components
Parts
Name
Qty.
Raspberry Pi
Model B+
1
16-Channel 12-bit
PWM driver
(servo controller)
1
L298N DC motor
driver
1
Step-down DC-
DC
converter
module
1
SunFounder
5

USB Wi-Fi
adapter
1
USB camera
1
18650*2
Battery holder
1
Ribbon
1
USB cable
1
SunFounder
6

Cross socket
wrench
1
Cross
screwdriver
1
Cable Spiral
Wrap
1
20cm jumper wire
(F to F)
4
10cm jumper wire
(F to F)
5
10cm jumper wire
(M to F)
2
20cm jumper wire
(M to M)
2
SunFounder
7

E. Self-provided Parts
Parts
Name
Qty. Needed
18650 3.7V
rechargeable
Li-ion battery
2
TF Card
1
SunFounder
The following parts are not included in the set.
8

Electrical Components Basics
SunFounder
A. Raspberry Pi
The Raspberry Pi is a low cost, credit-card sized computer that plugs into a computer monitor
or TV, and uses a standard keyboard and mouse. It is a capable little device that enables
people of all ages to explore computing, and to learn how to program in languages like
Scratch and Python. It's capable of doing everything you'd expect a desktop computer to
do, from browsing the internet and playing high-definition video, to making spreadsheets,
doing word-processing, and playing games.
What's more, the Raspberry Pi has the ability to interact with the outside world, and has been
used in a wide array of digital maker projects, from music machines and parent detectors to
weather stations and tweeting birdhouses with infra-red cameras.
In this kit, we use Raspberry Pi as the core controller of driving equipment like DC motor and
servo. With the device and a camera collaborated, video data can be acquired in a real-
time manner and delivered by Wi-Fi network.
9

B. Step-down DC-DC Converter Module
SunFounder
Built based on the chip XL1509, the module converts the battery output of 7.4V to 5V, so as
to supply power to Raspberry Pi and the servo. As a DC to DC converter IC, the chip has an
input voltage ranging from 4.5V to 40V and generates an output voltage of 5V with a current
of as high as 2A. Please note: only when the input voltage is up to 6.5V, a 5V output can be
supported.
C. Servo
In this smart car, one servo controls the direction of the car, and the other two, the movement
of the camera between X axis and Y axis, thus defining the coverage of the camera. A servo
is an automatic control system composed of DC motor, reduction gear set, sensor, and
control circuit. It defines the rotation angle of the output shaft via delivering specific PWM
signals.
Generally, a servo supports a maximum rotation angle of the shaft (like 180 degrees). It differs
from a common DC motor in the rotation mode: a DC motor rotates by circle when a servo
10

rotates in a certain degree and does not rotate in a round circle. Also, the former is used for
SunFounder
power supply by its whole-circle rotation, while the latter is applied to controlling the rotation
angle of an object (like joints of a robot).
D. DC Motor Driver
As the name suggests, the module is used to drive DC motors. The driver is built based on
L298N. As a high-voltage and large-current chip for motor driving, encapsulated with 15 pins,
the chip has a maximum operating voltage of 46V and an instant peak current of as high as
3A, with an operating current of 2A and rated power of 25W. Thus, it is completely capable
of driving two low-power DC motors.
E. USB Wi-Fi Adaptor
The adapter helps Raspberry Pi connect to a Wi-Fi hot spot.
11

F. Servo Controller
SunFounder
The Servo Controller is built based on PCA9685. PCA9685 is a 16-channel LED controller with
I2C bus interface. The resolution ratio of each channel is 12 bits (212=4096 levels). The
controller works in a frequency between 40Hz and 1000Hz and its duty cycle can be adjusted
in a range of 0 to 100%. It provides PWM signals for the servo and controls the rotation angle
of the servo. Meanwhile, the module controls the duty cycle of the square waves output
from channel 14 and 15 to regulate the rotational speed of the DC motor, so as to control
the speed of the car.
G. 18650*2 Battery Holder
The battery is to use two 18650 batteries to power the modules and servos on the car.
Note: Please pay attention to the cathode (-) and anode (+) marks inside the holder (near
each pole). Install the 18650 batteries accordingly: battery cathode to holder -, and battery
anode to holder +.
12

Assembly
a) Assemble the following two acrylic
plates
b) When completed, the assembly should
look like the figure below.
c) Assemble the gear reducer, the active wheel and following acrylic plates with two
M3*30 screws and M3 nuts.
d) When completed, the assembly should look like the figure below.
SunFounder
A. Back Half Chassis + Rear Wheels
13

e) Assemble the following two acrylic
plates
f) When completed, the assembly should
look like the figure below.
g) Assemble the gear reducer, the active wheel and the previously assembled part
with two M3*30 screws and M3 nuts.
h) When completed, the assembly should look like the figure below.
SunFounder
14

B. Back Half Chassis + Copper Standoffs
a) Assemble 4 M3*24 copper standoffs
and 4 M3 nuts into the acrylic plate part
as shown below.
b) When completed, the assembly should
look like the figure below.
a) Assemble 16 M2.5*8 copper standoffs and 16 M2.5 nuts into the acrylic plate as shown
below.
Pay attention to the face of the plate. Refer to the small hole in the plate as pointed by the
arrow in the following figure.
SunFounder
C. Upper Plate + Copper Standoffs
15

b) When completed, the assembly should look like the figure below.
c) The view from the back of the plate:
SunFounder
16

D. Battery Holder
a) Assemble the battery holder to the plate below with 2 M3*10 countersunk screws and
2 M3 nuts.
You can thread a ribbon through the plate below, so it will be easy to remove the
battery, which is up to you.
b) When completed, the assembly should look like the figure below.
c) The view from the top is as follows.
SunFounder
17

E. Back Chassis + Upper Plate
a) Connect the two assembled parts with 4 M3*8 screws.
b) When completed, the assembly should look like the figure below.
SunFounder
18

c) The view from the back of the plate:
F. Electrical Module Assembly
Assemble the electrical components to the car with M2.5*6 screws.
See the figure below.
SunFounder
19

Circuit Connecting
SunFounder
Preview:
Looks complicated but don't worry! The detailed procedures will be given below, step by
step.
20

Step 1: Connect the two DC motors with the motor driver.
SunFounder
You may remove the L-shaped PCB connector and plug it back after wiring.
Note: It doesn't matter how to wire the motors. After all the assembly is done, if the car moves
in an opposite direction of what you control, just swap the wiring of the two motors and it will
work normally.
After wiring, it should be like this:
21

Step 2: Connect the motor driver with the Raspberry Pi GPIO port based on the following
Raspberry Pi GPIO Port
DC Motor Driver
Pin11
IN1
Pin12
IN2
Pin13
IN3
Pin15
IN4
SunFounder
table.
22

Step 3: Connect the servo controller with the Raspberry Pi GPIO port as follows:
Raspberry Pi GPIO Port
Servo Controller
Pin 2 (5V)
VCC
Pin 3 (SDA)
SDA
Pin 5 (SCL)
SCL
GND
GND
SunFounder
23

Step 4: Hook up the servo that controls the car's direction to CH0 of the servo controller, and
SunFounder
the two servos that control the view of the camera to CH14 and CH15 respectively, as shown
below:
Step 5: Connect the motor driver with the servo controller.
24
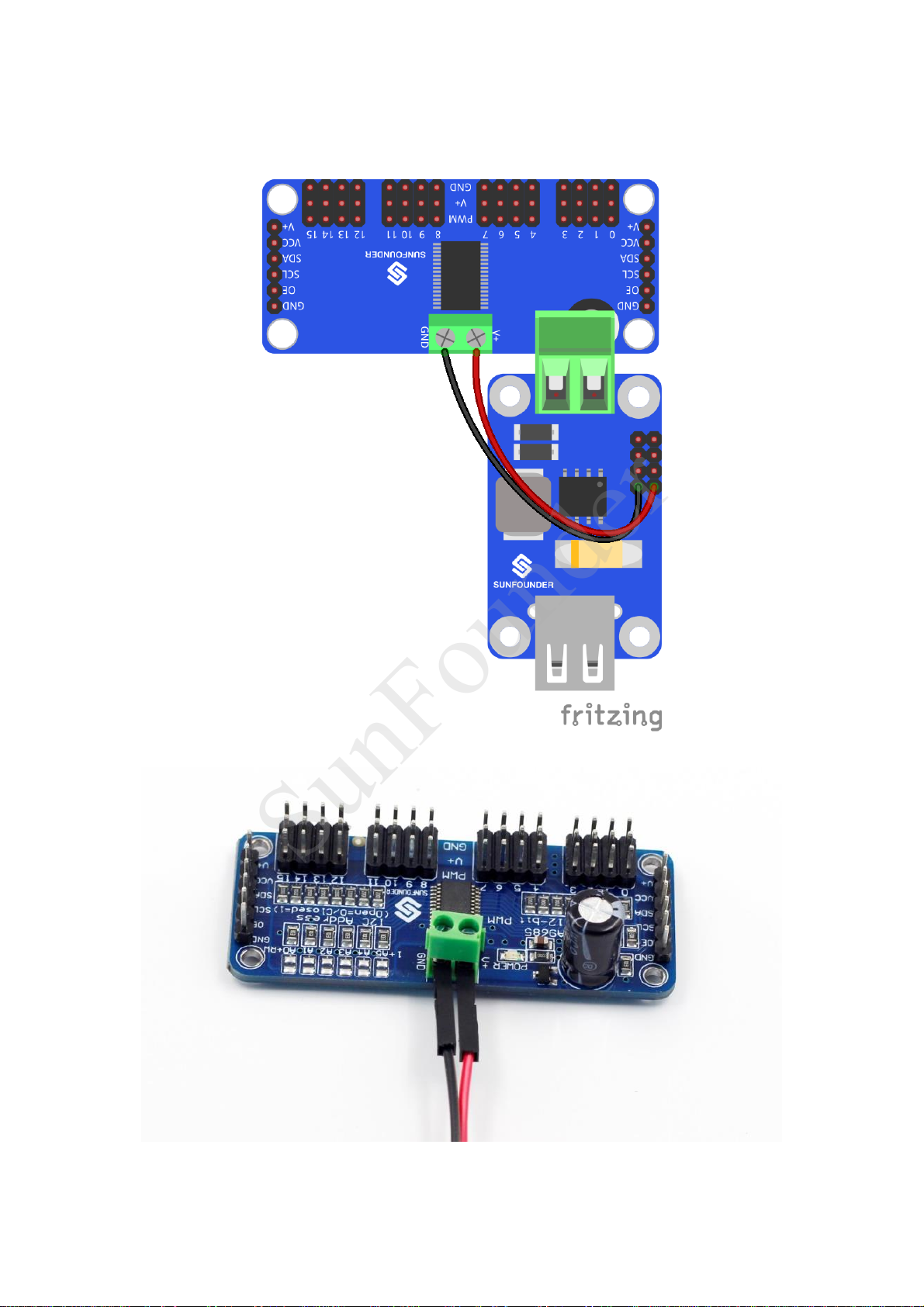
Step 6: Connect the servo controller with the step-down DC-DC converter module. For the
SunFounder
connector, loosen the screws, insert the wire, and then tighten the screws with a screwdriver.
The connection should be like:
25
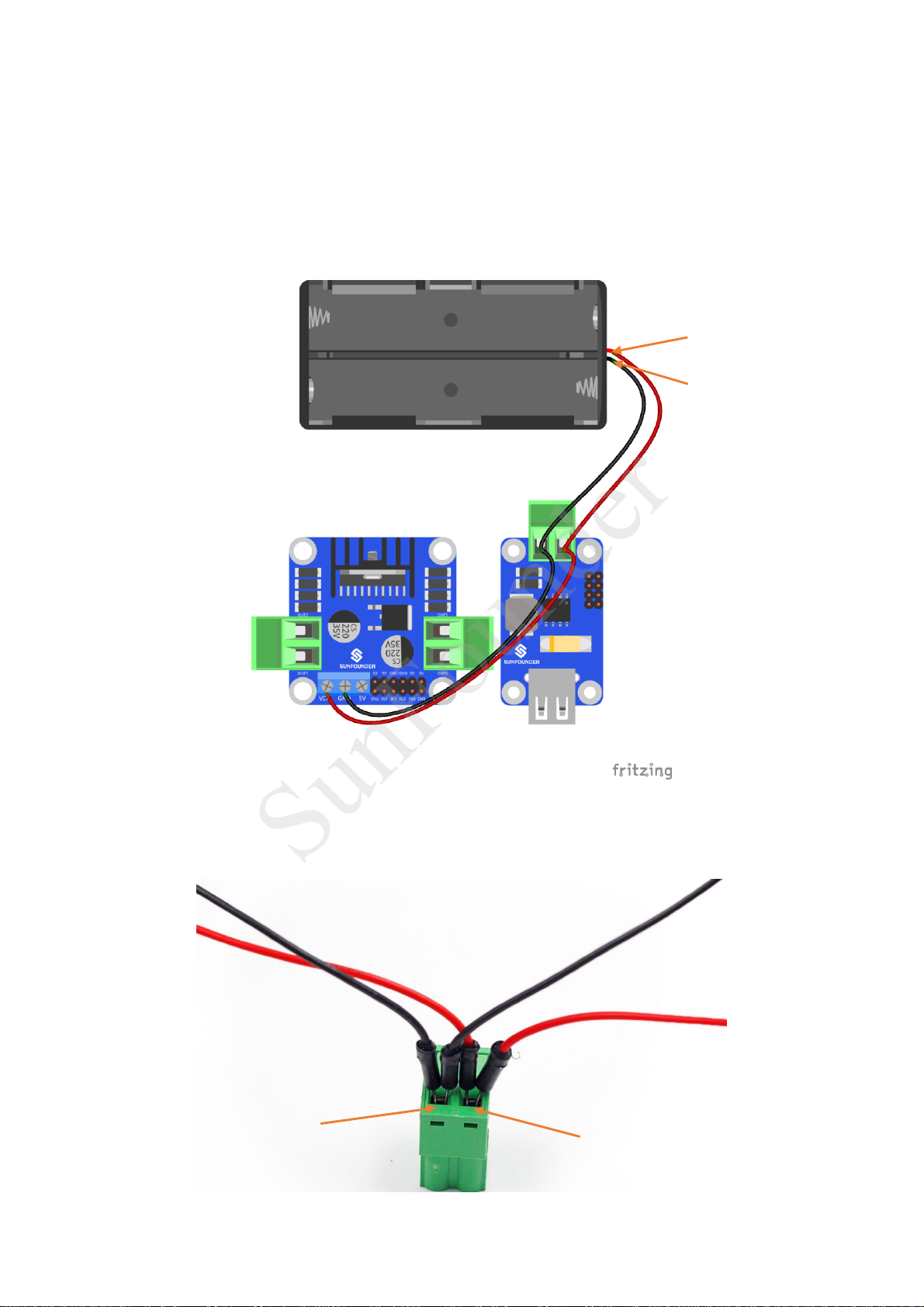
Step 7: Connect the battery holder with the step-down DC-DC converter module and the
SunFounder
DC motor driver.
Note: Please DO NOT install the batteries at this step! Do it later when you've completed all
the wiring. And take care that the red wire is the power and should be connected to the
anode of the holder, when the black wire, i.e. the ground, to cathode.
Insert the four wires into two jacks of the connector, two in each. Pay attention: the red wires
to the anode of the step-down module, when the black ones to the cathode. Also DO NOT
plug a red wire with a black one into the same jack, or it'll cause a short circuit!
26

The whole picture of wiring should be like this:
SunFounder
27

Step 8: Connect the Raspberry Pi with the step-down DC-DC converter module, the USB Wi-
SunFounder
Fi adapter and the USB camera.
28

Servo Calibration (Operation on Raspberry Pi)
SunFounder
In the subsequent part of Operation on Raspberry Pi, you need to log into the Raspberry Pi
REMOTELY instead of direct operation on a screen connected to the RPi – which is also
impossible because the HDMI port on the smart car is blocked and cannot connect to one
such display.
So the back part of the car is completed. Next we'll move on to the front part. But before
assembly, since servos are used in this part, they need some configuration for protection. We
need to make the servo rotate to the 90 degrees when it's mounted, so the rotating range
can match with the application in the car. Otherwise, damages may be caused to servos.
PLEASE DO FOLLOW THIS STEP BEFORE MOVING ON!
And since the servos used in this kit are adjusted by software and there's no such physical
sticking point as other servos, here we need to configure the servo via software. First you
need to finish some software installation before the configuration.
A. Burn the image
Take the following steps before inserting the TF card into the Raspberry Pi:
1) Prepare the tool of image burning. Such as win32DiskImager
2) Download the complete image on the official website at this link:
https://www.raspberrypi.org/downloads/raspbian/. Both the RASPBIAN STRETCH WITH
DESKTOP and RASPBIAN STRETCH LITE are available, but RASPBIAN STRETCH WITH DESKTOP
would be a better choice if you have no special requirements.
3) Unzip the downloaded package and you will see the xxxx-xx-xx-raspbian- stretch.img file
inside. Note: This file is NOT extractable.
4) Open the win32DiskImager and insert the SD card into the computer with a card reader.
Select the image file and the drive (the card) in the tool. Click Write to write the system
to the SD card. Wait for a while until the system is written to the card.
5) When the progress bar comes to the end and a prompt "write successful" appears, click
OK.
29

6) Create a blank file ssh under the /boot directory to enable remote login and delete the
SunFounder
suffix in the file name.
7) Create a WiFi configuration file wpa_supplicant.conf under /boot and add the following
to the file:
ssid= "(name of the Wi-Fi)"
psk= "(your Wi-Fi password)"
B. Car Power Supply
Now you can unplug the TF card from the PC and insert it into the Raspberry Pi. For power
supply of the smart car, please note:
1) Supply the Raspberry Pi independently with a 5V/2A power – the software installation
and calibration needs a long time and the battery won't be able to support.
2) Also keep the power on by battery – the servos and motors are powered by the battery,
so ensure the power is on for them when the RPi is supplied separately.
Plug in the USB Wi-Fi adapter (skip this if you use a Raspberry Pi 3 with built-in WiFi device) and
complete the setting in the way you're comfortable with.
After the blinking indicator LED on the RPi turns into steady light on, you can check the IP
address for the router. Now log into the RPi.
C. Log into Raspberry Pi
For Linux or Mac OS X Users
For Linux and Mac OS X users, you can only open the Bash shell via ssh.
Go to Applications->Utilities, find the Terminal, and open it.
30

SunFounder
Type in ssh pi@ip_address – ssh is the tool for remote login, pi, the user name, and
ip_address, as the name suggests, your Pi's IP address. For example:
ssh pi@192.168.0.101
Press Enter to confirm. If you get a prompt that no ssh is found, you need to install an ssh tool
like Ubuntu and Debian by yourself:
sudo apt-get install ssh
For other Linux platforms, please contact your supplier.
31

For Windows Users
SunFounder
If your computer runs on Windows, you need to pen the Bash shell with the help of some
software. Here we recommend a tool PuTTY.
1. Download PuTTY
2. Open PuTTY and click Session on the left tree-alike structure (generally it's collapsed
upon PuTTY startup).Enter the IP address of the RPi you just got in the textbox under Host
Name (or IP address) and 22 under Port (by default it is 22)
3. Click Open. Note that when you first log in to the Raspberry Pi with the IP address, you'll
be prompted with a security reminder. Just click Yes. When the PuTTY window prompts
login as: type in the user name of the RPi: pi, and password: raspberry (the default one,
if you haven't changed it).
Note: When you're typing the password in, the window shows nothing just null, but you're
in fact is typing things in. So just focus on typing it right and press Enter. After you log in the
RPi successfully, the window will display as follows.
32

This window is just like the Command Line window in Linux.
SunFounder
D. Get Source Code
Download the source code directly from Github to your Raspberry Pi.
cd ~
git clone https://github.com/sunfounder/Sunfounder_Smart_Video_Car_Kit_for_Raspb
erryPi.git
E. Install python-dev, python-smbus
Install python-dev and python-smbus:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python-dev
sudo apt-get install python-smbus
F. Setup I2C Port
Run the command to open Raspberry Pi Software Configuration Tool (raspi-config)
sudo raspi-config
Enable I2C:
Select Advanced Options => I2C => <Yes> => <Ok> => <Yes>
Select <Finish>. Close the window.
If a message of rebooting appears, click <No>. Before reboot, we still need to complete
some configurations.
G. Start calibration
Run the calibration server on the Raspberry Pi, and wait for client to connect.
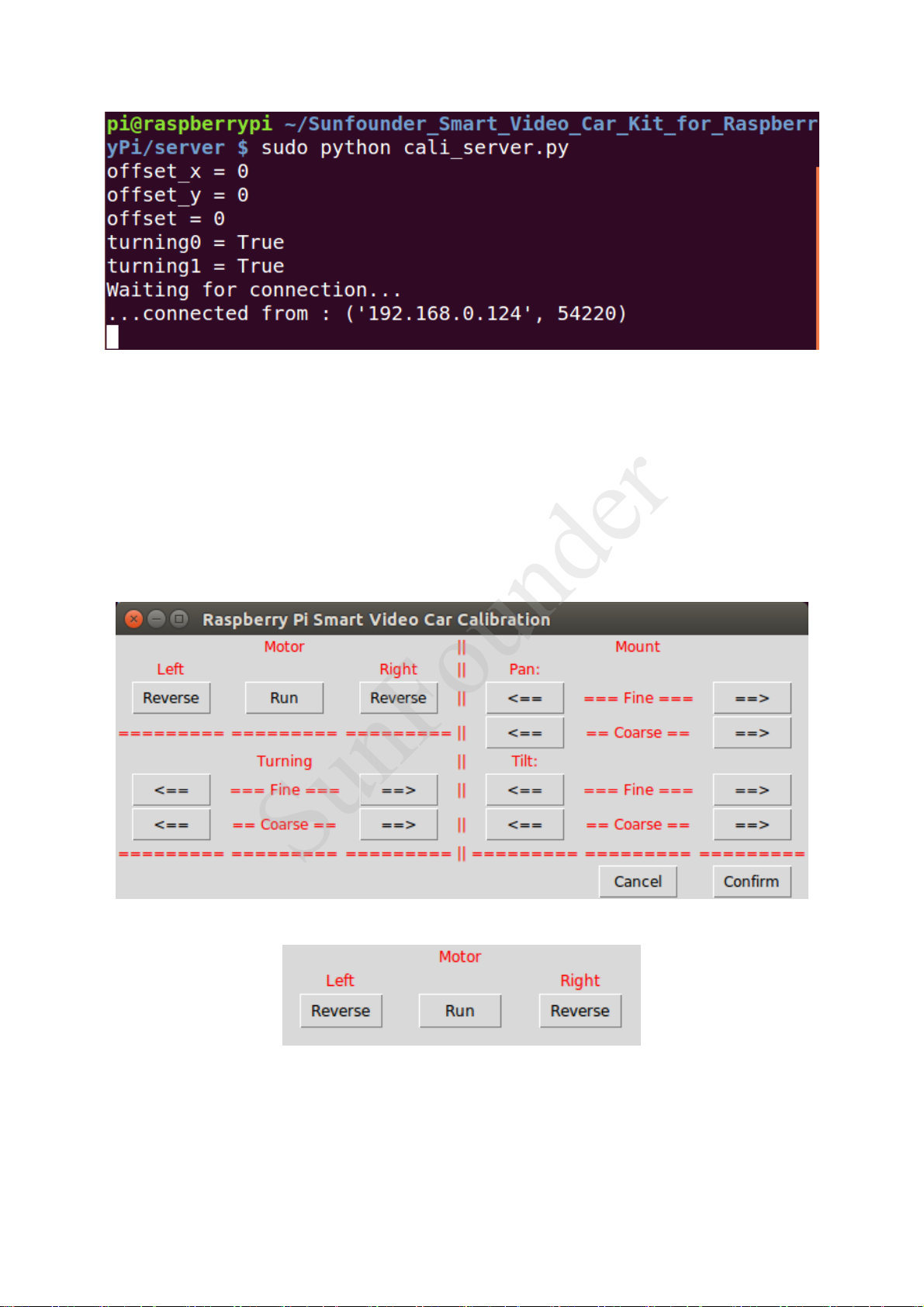
Make sure that the circuit is connected properly. Power the smart car, open a terminal in
Linux. Connect with your Raspberry Pi via the ssh. Go to the directory
Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi/server, run the server cali_server.py: if the
servo gets stuck with an abnormal sound, unplug the wires at once, and redo servo
adjustment for calibration in case of further damages.
33

cd ~/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi/server
SunFounder
sudo python cali_server.py
Then the contents of config are printed and the last line: Waiting for connection…
At this time, the servo might move a bit (this is the original position set).
Note: During the subsequent assembly, cali_server.py should keep running.
34

Continue to Assemble
a) Fasten the F694ZZ flange bearing, driven wheel and following acrylic plates with an
M4*25 screw and an M4 self-locking nut in the way as shown below. Use the cross socket
wrench to fasten the M4 self-locking nut.
b) When completed, the assembly
should look like the figure below.
c) Bear in mind that DO NOT over-tighten the nut
or else the wheel cannot turn flexibly. Neither too
loose, in case the gap between the parts is too
large.
Pay attention to
the direction of
this plate
SunFounder
Note: Please keep cali_server.py running in the whole process of assembly.
A. Front Wheels
35

d) Fasten the F694ZZ flange bearing, driven wheel and following acrylic plates with an
M4*25 screw and an M4 self-locking nut in the way shown as below.
e) When completed, the assembly
should look like the figure below.
f) Bear in mind that DO NOT over tighten the nut
or else the wheel cannot turn flexibly. Neither too
loose, in case the gap between the parts is too
large.
Pay attention to
the direction of
this plate
SunFounder
36

B. Steering Linkage + Servo Rocker Arm
a) Connect the following acrylic plate to the second hole of the rocker arm (see the figure
below) with an M2*8 self-tapping screw.
The M2*8 self-tapping screw is contained in the package of the servo; it is one of the
two longest screws.
Also the rocker arm is packaged together with the servo. Note: Be careful with the
screw of pricking your fingers.
b) Tighten the screw first, then loosen it a little to ensure the Steering Linkage’s movement,
the assembly should look like the figure below.
SunFounder
37
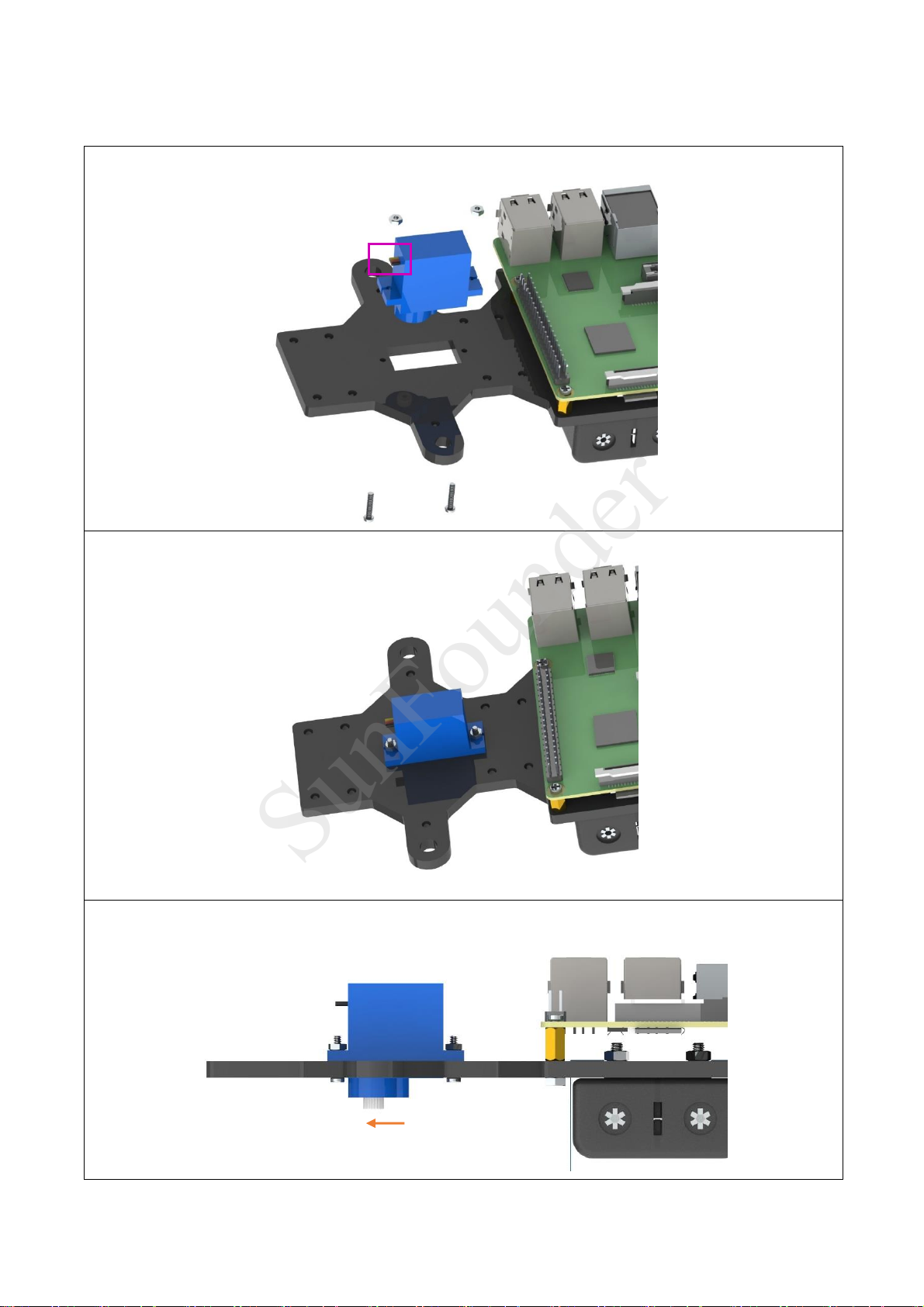
C. Steering Servo + Upper Plate
a) Connect the servo to the acrylic plate below with two M2*8 screws and M2 nuts.
b) When completed, the assembly should look like the figure below.
Note: The servo should be placed with its output shaft toward the front of the plate (see
the following figure).
SunFounder
38

D. Steering Servo + Steering Linkage
a) Connect the following parts with an M2*4 screw.
The M2*4 screw is contained in the package of the servo; it is the shortest of the screws
in the package.
Keep the Steering Linkage perpendicular with the middle of the car; otherwise,
remove it and mount again. DO NOT directly turn it in case of damaging the servo.
Minor errors are allowed, which can corrected later by programming.
b) When completed, the assembly should look like the figure below.
SunFounder
39

E. Front Chassis + Upper Plate
a) Connect the following parts and wheels with M3*8 screws, M3*24 copper standoffs and
M3 nuts, 4 for each.
b) When completed, the assembly should look like the figure below.
SunFounder
40
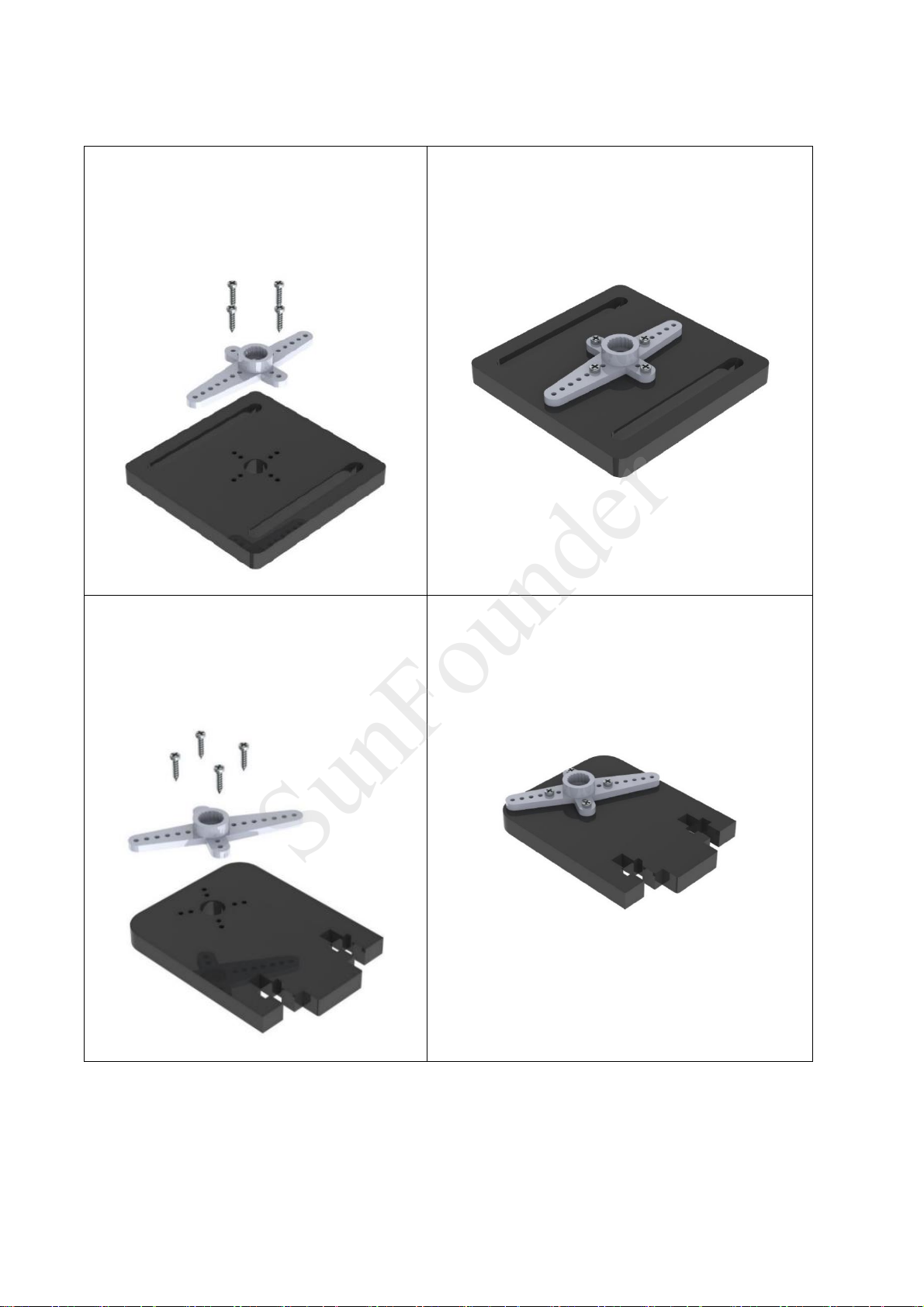
F. Plates + Servo Rocker Arms
a) Connect the rocker arm of the
servo to the acrylic plate below with 4
M1.2*4 screws.
The rocker arm is packaged
together with the servo.
b) When completed, the assembly should
be like the figure below.
c) Connect the rocker arm of the
servo to the acrylic plate below with
four M1.2*4 screws.
The rocker arm is packaged
together with the servo.
d) When completed, the assembly should
be like the figure below.
SunFounder
41

G. Pan/Tilt Servo + Plate
a) Connect the servo to the acrylic plate
below with two M2*8 screws and M2 nuts,
and we name it "pan servo".
b) When completed, the assembly should
look like the figure below.
c) Connect the servo to the acrylic plate
below with two M2*8 screws and M2 nuts
and we name it "tilt servo".
d) When completed, the assembly should
look like the figure below.
SunFounder
42

H. Pan Servo Plate + Tilt Servo Plate
a) Connect the two plate parts
together with two M3*10 screws and
M3 nuts. The two plates should be
perpendicular to each other.
b) When completed, the assembly should
look like the figure below.
c) Connect the two parts at a right
angle with two M3*10 screws and M3
nuts.
d) When completed, the assembly should
look like the figure below.
SunFounder
43

I. Servos + Rocker Arm Plates
a) Connect the following parts without any
screws.
b) When completed, the assembly should
look like the figure below.
The two plates as indicated with arrows
below should be assembled in parallel;
otherwise, remove and mount again. DO
NOT directly rotate them in case of damages
to the servo.
Top view:
Front view:
c) Then fasten them with an M2*4 screw.
The M2*4 screw is contained in the package
of the servo and is the shortest of the screws.
SunFounder
44

J. Mount + Car
Assemble the mount part and the car with two M3*10 screws and M3 nuts.
When completed, the assembly should look like the figure below.
SunFounder
45

------------------------ Now the car is completed. Congratulations! -----------------------------
SunFounder
The car should be assembled successfully as shown below:
To organize the wires, you can use the cable spiral wrap.
Bottom view:
46

Car Calibration (Operation on PC)
SunFounder
A. Get the source code
Download the source code directly from Github to your PC at:
https://github.com/sunfounder/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi,
Or search for Sunfounder in Github and find the repository:
Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi.
Click Download ZIP on the sidebar of the page, as shown below.
After download, unzip the file. Find the file whose name containing "–master" and delete its
suffix.
The file name then should be: Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi.
B. Install Python software
For Linux users:
Install python-tk for a remote interface, open a Terminal, and type in the command:
sudo install apt-get install python-tk
For Windows users:
Go to the Python website www.python.org, find the latest Python 2 and install. After
installation, RESTART the computer.
47

C. Run cali_client
SunFounder
Run the calibration client on PC to connect the server on Raspberry Pi.
For Windows users:
Click the Start button on your computer, and type in python in the search bar, and you can
find the IDLE (Python GUI). Click it and then a window will pop up.
Click File -> Open -> Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi-master -> client ->
cali_client.py to open this file, modify the value of HOST for the IP address of the Raspberry
Pi.
After modification, save the file and click the Run menu, and select Run Module.
For Linux users:
Open another terminal in Linux (not via ssh on your Pi). Find the sketch downloaded and edit
client/cali_client.py:
cd client/
sudo nano cali_client.py
48

Find the variable of HOST:
SunFounder
Enter your own address of the Raspberry Pi there. Press Ctrl+O to save and Ctrl+X exit.
Run cali_client.py:
sudo python cali_client.py
No matter what system your computer is running on, Linux or Windows, when you run
cali_client.py, a window Raspberry Pi Smart Video Car Calibration will pop up:
In the terminal remotely connected with the Raspberry Pi, the IP address of the PC will be
printed.
49
SunFounder
Then you can start calibrating. Before that, take out your package box and place it vertically
with the side face to the table. Put the car onside the box and keep it balanced. The purpose
is to keep the wheels of the car off the table.
By default, the front wheels should be directly pointed towards the front; the camera on the
tilt servo should be face up no matter what directions the pan servo is pointed at.
D. Start Calibration
On the calibration UI there are three sections: Motor, Turning, and Mount.
Motor Adjustment
Click Run. The car will walk forward. Check whether both the back wheels move forward
together. If either fails to do so, your wiring may be wrong. But don't worry! You don't need
to rewire; just click the corresponding Reverse in Motor section of the Calibration window
shown above. After clicking, observe whether the wheel you just adjusted is turning forward.
50

If the reversing works normally, click Run again to stop the wheels from spinning.
SunFounder
Turning Adjustment
Currently the front wheels should be pointed at the exact front direction. But if it is not, you
need to make some adjustments. In the Turning section in the Calibration window, click the
left ( ) and right ( ) arrow buttons in the upper line to make fine adjustments, and
those in the lower to coarsely adjust the turning direction. Keep adjusting until the wheels is
oriented to the front exactly. Then you may place the car on the table and click Run to verify
whether it runs in a straight line. If not, perform the adjustment again till it does.
Mount Adjustment
Now the pan servo on the car should be pointed at the exact front direction and the camera
face up. But if not, you may need to adjust them similarly. In the Mount section, there are the
adjustments for the pan servo and tilt one. Also you have two kinds of adjustments, fine and
coarse. Keep adjusting until they are pointed at the right direction.
After all the adjustments are done, click Confirm.
And the program will exit.
Then the Raspberry Pi returns to the status: Waiting for connection...
Press Ctrl + C to exit.
51

MJPG-streamer (Operation on Raspberry Pi)
SunFounder
A. MJPG-streamer Installation
Introduction
The acquisition and transmission of video data by the SunFounder Smart Video Car is fulfilled
based on MJPG-streamer.
MJPG-streamer is a command line application that copies JPG-frame from a single input
plugin to multiple output plugins. It can be used to stream JPEG files over an IP-based network
from the webcam to a viewer like Firefox, Cambozola and Videolanclient or even to a
Windows mobile device running the TCPMP-Player.
It was written for embedded devices with very limited resources in terms of RAM and CPU. Its
origin, the "uvc_streamer" was written, because Linux-UVC compatible cameras directly
produce JPEG-data, allowing fast and performant M-JPEG streams even from an embedded
device running OpenWRT. The input module "input_uvc.so" captures such JPG frames from a
connected webcam.
Installation
Plug the USB camera into Raspberry Pi, and run the command lsusb. The GEMBIRD represents
the USB camera; since it is printed on the screen, it indicates the system has recognized the
camera.
lsusb
You'll see:
pi@raspberrypi:~ $ lsusb
Bus 001 Device 004: ID 1908:2310 GEMBIRD
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast
Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Check whether the driver for the camera works normally:
ls /dev/vid*
You'll see:
pi@raspberrypi:~ $ ls /dev/vid*
/dev/video0
If /dev/video0 is printed, the driver is in the normal state.
Then, install the following software needed:
sudo apt-get install subversion
sudo apt-get install libv4l-dev
52

sudo apt-get install libjpeg8-dev
SunFounder
sudo apt-get install imagemagick
Compile the source code of MJPG-streamer:
cd /home/pi/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi/mjpg-streamer/mjpg-
streamer
sudo make USE_LIBV4L2=true clean all
Install:
sudo make DESTDIR=/usr install
B. Testing
Operation on Raspberry Pi
Run the program:
sudo sh start.sh
Then the video data acquisition will start, like this:
Type in the following address (replace 192.168.0.126 with your Raspberry Pi IP address) at the
address bar of your browser (Firefox is recommended): (operation on PC)
http://192.168.0.126:8080/stream.html
Press Enter and you will see the view captured by the camera displayed on the screen in a
real-time manner.
53

SunFounder
54

Get on the Road!
SunFounder
A. Run TCP server (Operation on Raspberry Pi)
Now a terminal's already open for remote login to the Raspberry Pi and run the mjpgstreamer, and you need to keep it RUNNING. Open one more to log into the Raspberry Pi to
run tcp_server.
Go to the directory with cd.
cd ~/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi/server
Then run tcp_server.py:
sudo python tcp_server.py
The server program on the Raspberry Pi will be running and waiting for the client to connect
to the Raspberry Pi.
B. Run the Client (operation on PC)
Run the client on PC to connect the server on the Raspberry Pi.
For Windows users:
Open the IDLE:
Click File -> Open -> Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi -> client -> client
App.py to open this file, modify the value of the HOST for the IP address of the Raspberry Pi.
55

After modification, save the file and select Run -> Run Module.
SunFounder
For Linux users:
Open another terminal again. But DO NOT log into the Raspberry Pi remotely in this terminal.
Go to the client with cd and edit the file client.py:
Similar to changes in calibration, change the IP address in client program in your PC:
After the alteration, press Ctrl + O and save and Ctrl + X to exit.
Then run the client program:
sudo python client_App.py
No matter what system your computer is running on, Linux or Windows, when you run the
client_App.py, the following window will appear on your screen:
56

SunFounder
You can click buttons such as Forward and Backward to control the car moving remotely.
Or click X+, X-, Y+, and Y- to control the coverage of the camera.
Note:
The server program must be run before you run the client program. Some settings must be
completed for the server before the service is done. A communication endpoint needs to
be created for the server to "listen" to requests from the client. Take the server as a
receptionist or an operator of the bus phone in a company. Once the phone and device
installation is completed and the receptionist or operator is in place, the service begins.
57

Program Analysis and Explanation
SunFounder
Abstract
From the perspective of software, the smart car is of C/S structure. The TCP server program is
run on Raspberry Pi to listen to the command from the client and control the car accordingly.
The client program is run on the PC and connected with the server through the TCP, which
provides the user with a graphical user interface (GUI) to conveniently control the Raspberry
Pi remotely. Both the client and server programs are written in Python.
Make sure that the circuit is connected properly. Power the smart car, log in the Raspberry
Pi remotely, go to the directory Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi and check
the files under it.
cd ~/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi
ls
pi@raspberrypi ~/Sunfounder_Smart_Video_Car_Kit_for_RaspberryPi $ ls
client datasheet html_server i2cHelper.py mjpg-streamer README.md server
You can see seven files under the directory: client, datasheet, html_server, i2cHelper.py,
mjpg-streamer, a file README.md, and server.
Wherein,
client, the client run on your PC,
datasheet contains some PDF files about the chip (you need to view them on PC),
html_server, the web server run on the Raspberry Pi for Android app client,
i2cHelper, a simple script to help you set up i2c on the Raspberry Pi,
mjpg-streamer, the camera driver to acquire and upload images,
README.md, an introduction file with update information,
server, the server run on the Raspberry Pi for the client on your PC.
Introduction of Socket
The C/S-structure program of the SunFounder Raspberry Pi-based Smart Car is written based
on the socket module of the Python language. Socket wraps and applies the TCP/IP and is
used to describe IP address and port. Also it is a network data structure for computer. The
socket module should be created before the communication of network applications. If the
socket can be said to be the plug of a telephone, which is the lowest layer of communication,
then the combination of IP address and ports can be said to be that of area code and
phone numbers. Only having the hardware for a phone call making is not enough. You still
need to know whom and where to call. An Internet address is composed of the essential IP
address and port for network communication.
58
1. Server
SunFounder
Here we provide a pseudocode which creates a universal TCP server for explanation. Note
that this is just one of the methods for server design. After you have a good knowledge about
it, you can alter the pseudocode as you want:
s = socket( ) # Create a socket for the server.
s.bind( ) # Bind the address to the socket.
s.listen( ) # Listen to the connection.
inf_loop: # Indefinite loop of the server.
c = s.accept( ) # Accept the connection from the client.
comm_loop: # Communication loop.
c.recv( )/c.send( ) # Dialog (receiving or sending data)
c.close( ) # Close the socket of the client.
s.close( ) # Close the socket of the server (optional).
All kinds of socket can be created via the function socket.socket( ) and then bound with IP
address and port by the function bind( ). Since TCP is a connection-oriented communication
system, some settings need to be completed before the TCP server starts operation. The TCP
server must "listen" to connections from the client.
After the settings are done, the server will enter an indefinite loop. A simple, like single-thread,
server will call the function accept( ) to wait for the coming connection. By default, the
function accept( ) is a blocking one, which means it is suspended before the connection
comes. Once a connection is received, the function accept( ) returns a separate client
socket for the subsequent communication. After the temporary socket is created,
communication begins. Both the server and client use the new socket for data sending and
receiving. The communication does not end until either end closes the connection or sends
a null character string.
59

Process Diagram of Server Program
SunFounder
2. Client
It is easier to create a TCP client than to do a server. Take the following pseudocode:
c = socket( ) # Create a client socket.
c.connect( ) # Try to connect a server.
comm_loop: # Communication loop.
c.send( )/c.recv( ) # Dialog (sending out and receiving data)
c.close( ) # Close the client socket.
As mentioned above, all sockets are created via the function socket.socket( ). Then, the
function connect( ) can be called to connect the server. After the connection is built, the
dialog between the client and the server is enabled. When the dialog ends, the client can
close the socket and the connection.
Introduction of Tkinter
Developed based on Tkinter, our client program carries graphical interfaces. Tkinter is a GUI
widget set for Python. We can develop application programs with graphical interfaces fast
by Python language based on it. It is quite easy to use Tkinter. All you have to do is to import
the module into Python.
To create and run a GUI program, take the following steps:
a) Import the Tkinter module (by import Tkinter or from Tkinter import *).
b) Create a top window object to contain the whole GUI program.
60

c) Create the GUI module needed on the object and enable the functions.
SunFounder
d) Connect the GUI modules with the code at the system back-end.
e) Enter the main event loop.
Take a simple GUI program:
Create a file Tk_test.py under the path /home:
touch Tk_test.py
Add executable privilege to the file:
chmod +x Tk_test.py
Open the file:
vim Tk_test.py
Type in the following code:
#!/usr/bin/env python
from Tkinter import *
top = Tk() # Create a top window
top.title('Sunfounder.com')
label = Label(top, text='Hello Geeks !', fg='blue') # Create a label and set
its foreground color as blue
label.pack() # layout
top.mainloop() # main loop
Save the code and exit.
Run
./Tk_test.py
Then the following picture will appear on your screen:
Click to close the program.
61

Process Diagram of Client Program
SunFounder
62

Summary
SunFounder
In this manual, having learned the related components for building the car kit, you've gone
through the assembly of the mechanical parts and electrical modules with the knowledge
of Raspberry Pi as well as a brief introduction of the key parts like servo, Wi-Fi adapter, etc.
Also you've got a lot of software and coding, which lays a solid foundation for your future
journey of exploring open-source field.
The SunFounder Smart Video Car for Raspberry Pi is not only a toy, but more a meaningful
development kit for Raspberry Pi. After all the study and hands-on practice of the kit, you
should have a better understanding of Raspberry Pi. Now, get started to make better work!
63

Copyright Notice
SunFounder
All contents including but not limited to texts, images, and code in this manual are owned
by the SunFounder Company. You should only use it for personal study, investigation,
enjoyment, or other non-commercial or nonprofit purposes, under the related regulations
and copyrights laws, without infringing the legal rights of the author and relevant right
holders. For any individual or organization that uses these for commercial profit without
permission, the Company reserves the right to take legal action.
64
 Loading...
Loading...