

Preface
SunFounder
About SunFounder
SunFounder is a technology company focused on Raspberry Pi and Arduino open source
community development. Committed to the promotion of open source culture, we strive to
bring the fun of electronics making to people all around the world and enable everyone to
be a maker. Our products include learning kits, development boards, robots, sensor modules
and development tools. In addition to high quality products, SunFounder also offers video
tutorials to help your own project. If you have interest in open source or making something
cool, welcome to join us! Visit www.sunfounder.com for more!
About This User Manual
This small and ultralight indoor multicopter kit applies F3_EVO_Brush as the flight controller, thus
it gives you all the features you need for the heart of your aircraft. Whether you’re into FPV
racing, acrobatic flying or aerial photography, it’s perfect. The flight controller has been
configured and firmware burnt, so you can fly it as soon as the receiver, propellers, and battery
are assembled. It is equipped with a 5.8G transmitter for real-time image transmission, bringing
you an extraordinary visual experience.
Follow the instructions to assemble the aircraft before flying the aircraft. The software
debugging has been configured on the flight controller originally, which is mentioned in
Chapter 3 and Chapter 4. If you want to redo it, you can follow those instructions.
Notes: This guide fits both the BEE-100 kit and the BEE-100S kit. Most of the steps are the same
for the two aircrafts; for some different practice, just take BEE-100S for example.
Free Support
If you have any TECHNICAL questions, add a topic under FORUM section on our website
and we'll reply as soon as possible.
For NON-TECH questions like order and shipment issues, please send an email to
service@sunfounder.com. You're also welcomed to share your projects on FORUM.

Contents
SunFounder
1. Introduction ....................................................................................................................... 1
1.1 Get to Know the Aircraft .......................................................................................... 1
1.2 Hardware ................................................................................................................. 2
1.3 Software ................................................................................................................... 3
2. Preparation Before Flying ................................................................................................... 4
2.1 Mounting the Receiver ............................................................................................. 4
2.2 Installing the Betaflight ............................................................................................. 6
2.3 Connecting the Aircraft ......................................................................................... 10
2.4 Auxiliary Channels for Self-stabilization and ARM (AUX1 & AUX2) ........................... 13
2.5 Mounting the Propellers ......................................................................................... 14
2.6 Mounting the Battery ............................................................................................. 15
2.7 Unlocking the Aircraft ............................................................................................. 16
2.8 Control During the Flight ......................................................................................... 16
2.9 Ending up the Flight ............................................................................................... 19
2.10 Charging the Battery .......................................................................................... 19
3. Betaflight ......................................................................................................................... 20
3.1 Flashing the F3_EVO_Brush Firmware ...................................................................... 20
3.2 Configuring the Wizard of F3_EVO_Brush ................................................................ 28
3.2.1 Setting the Motor’s Rotation Rate and Throttle Value ................................... 28
3.2.2 Calibrating the Accelerometer ..................................................................... 29
3.2.3 Configuration................................................................................................ 29
3.2.4 Configuring parameter of PID ....................................................................... 34
3.2.5 Configuring the Flight Mode ......................................................................... 35
4. Cleanflight ....................................................................................................................... 37

4.1 Installing Cleanflight ............................................................................................... 37
SunFounder
4.2 Flashing F3_EVO_Brush Firmware ............................................................................ 39
4.3 Configuring the Wizard of F3_EVO_Brush ................................................................ 48
4.3.1 Setting the Motor’s Rotation Rate and Throttle Value ................................... 48
4.3.2 Calibrating the Accelerometer ..................................................................... 49
4.3.3 Configuration................................................................................................ 49
4.3.4 Receiver ....................................................................................................... 50
4.3.5 Configuring Parameter of PID ....................................................................... 55
4.3.6 Configuring Flight Mode ............................................................................... 55

1. Introduction
SunFounder
1.1 Get to Know the Aircraft
1. This is an assembled kit - you can just connect the receiver, install the propellers and batteries,
and complete the configurations, and then you are ready to fly!
2. The F3_EVO_Brush flight controller has the firmware flashed and configured.
3. If you want to reflash the firmware, please follow the instructions in Chapter 3 Betaflight or
Chapter 4 Cleanflight.
4. Its frame is made of carbon fiber, which endows it with high tenacity and anti-collision ability.
5. It is equipped with a 5.8G transmitter for real-time image transmission, bringing you an
extraordinary visual experience.
6. The aircraft provides wonderful stunt flying movements such as left-right flip, crossing, etc.
1
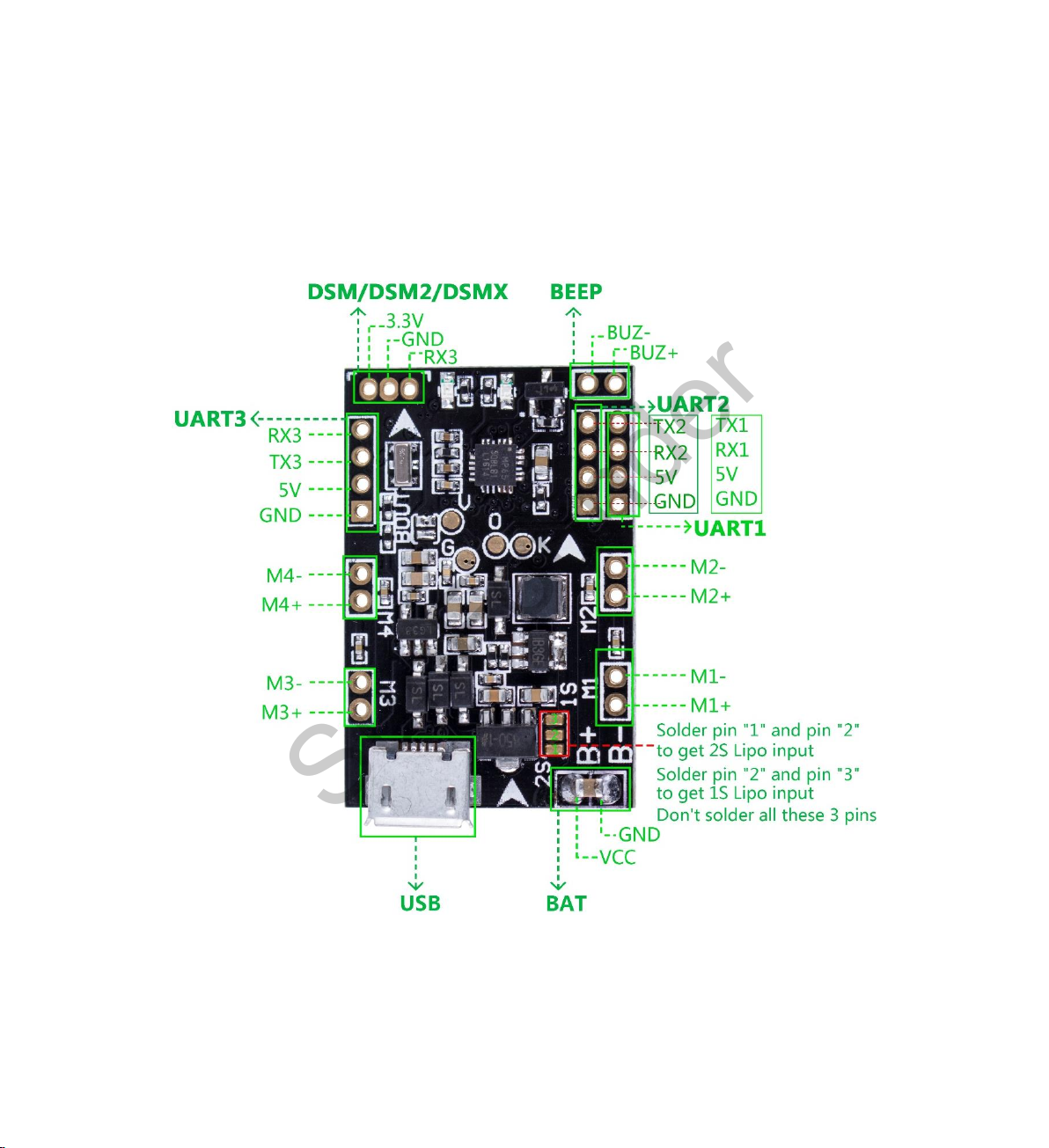
1.2 Hardware
SunFounder
The F3_EVO_Brush flight controller is designed to give awesome flight performance based on tried
and tested sensors while providing unparalleled I/O capabilities in a small and extremely
lightweight form-factor by a next-generation CPU. With all the features needed for the heart of
your aircraft, whether you’re into FPV racing, acrobatic flying or aerial photography, it’s perfect.
Front view
1) DSM receiver is soldered to 3.3V, GND, and RX3 of the DSM port; configure UART3 in
Cleanflight/Betaflight.
2) PPM and SBUS receivers are soldered to GND, 5V, and RX2 of the UART2 port; for SBUS signal,
configure UART2 in Cleanflight/Betaflight.
2

Back View:
SunFounder
1.3 Software
The F3_EVO_Brush runs the Cleanflight and Betaflight flight control software which has a
community with a growing number of friendly developers and users. Being open-source means
that you can also contribute to the system.
Note: Here we use firmware Betaflight, and the software debugging operation above is based
on Betaflight. If you prefer Cleanflight, please refer to the operation in Chapter 4. Cleanflight.
3
2. Preparation Before Flying
SunFounder
Notice:
The Flight Controller in the kit has firmware flashed and been configured. You can fly it after
finishing the preparation in this chapter (2). The procedures in Chapter 3. Betaflight and Chapter
4. Cleanflight are about firmware flashing and configuration. If you want to redo those operations,
please refer to the instructions in those two chapters.
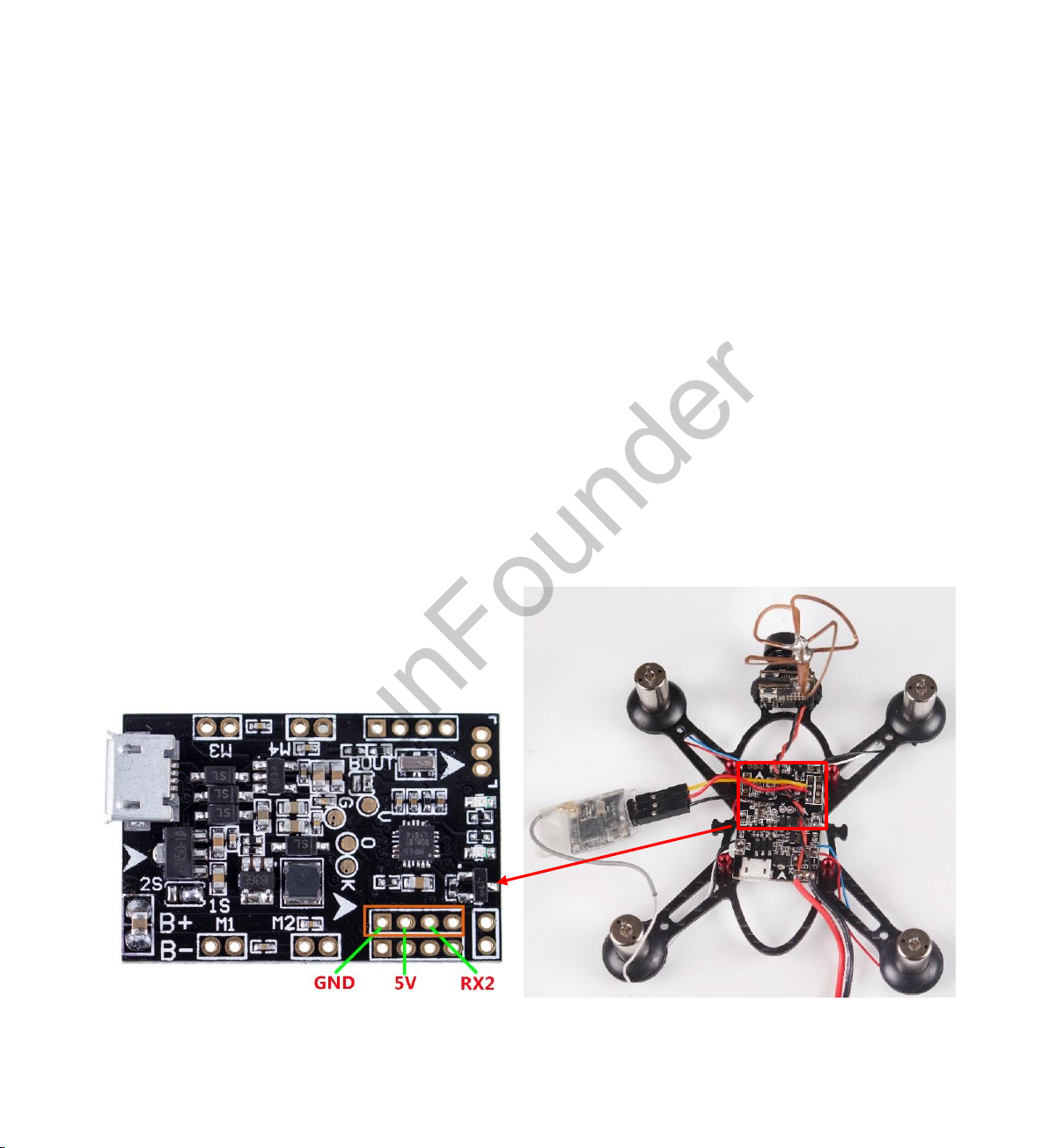
2.1 Mounting the Receiver
Procedures
1) Check the signal mode of the receiver: PPM, SBUS, or DSM/DSMX.
2) Solder the receiver to the right position.
For PPM or SBUS Mode
Remove the upper plate of the frame first. Solder three jumper wires to the UART2 port,
connecting to GND, 5V, and RX2 respectively.
4
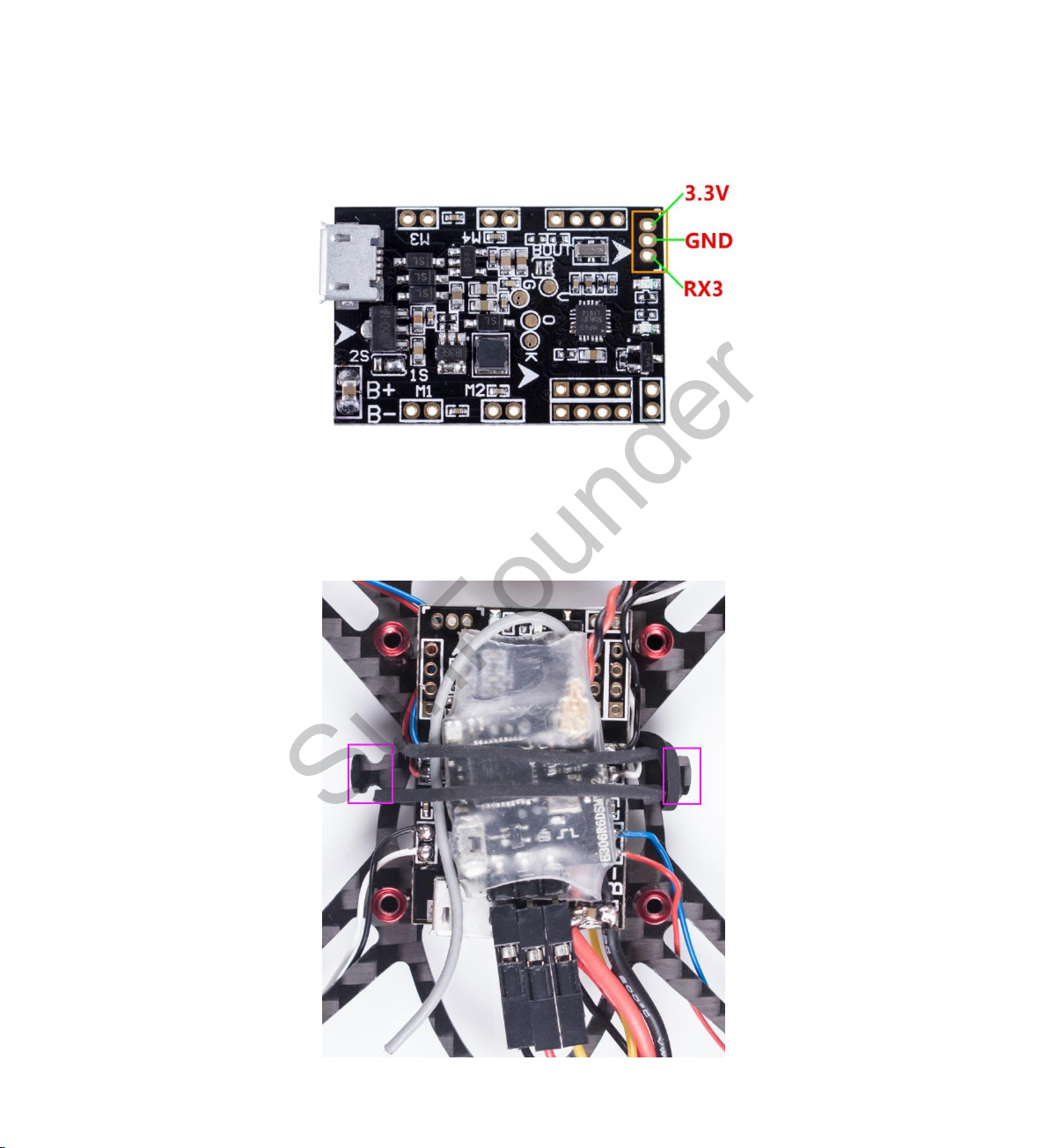
For DSM/DSMX Mode
SunFounder
Remove the upper plate of the frame first. Solder three jumper wires to the UART3, connecting to
GND, 3.3V, and RX3 respectively.
3) Then connect the jumper wires to the receiver. Pay attention NOT to connect wires inversely.
If you have an ultra-small receiver with a protective case, you can just fasten it on the flight
controller and fix it with a rubber band. The two bulges on the frame can be used to fix the
rubber band.
5

4) If your receiver does not have a protective case, just fix it on the upper plate of the frame in
SunFounder
case of short circuit.
2.2 Installing the Betaflight
Step 1: Run the Google Chrome
You will see the interface as shown below:
6
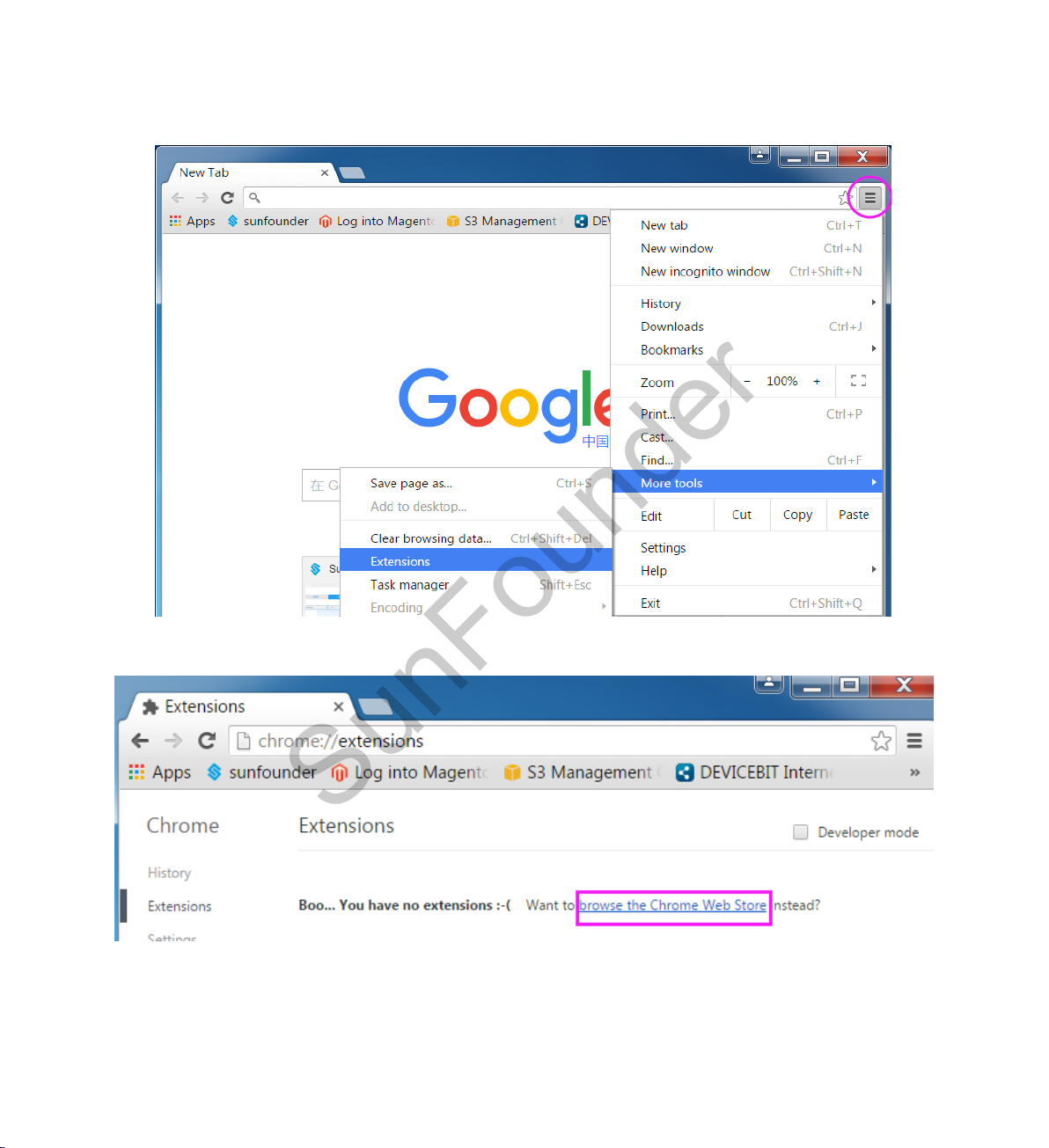
Step 2: Click on the Customize and Control Google Chrome button at the top right of the window,
SunFounder
then on the drop-down list select More Tools -> Extensions:
Step 3: On the window, click browse the Chrome Web Store.
7

And you'll see the shop page as below:
SunFounder
Step 4: Type in Betaflight in the search bar, select Apps and press Enter. You will see the Betaflight
app.
8

Step 5: Click + ADD TO CHROME, and a prompt Add "Betaflight - Configurator" will pop up asking
SunFounder
you whether to add the extension or not. Just click Add app.
Step 6: The software installation may take a little time. When it is done, you will see the Betaflight
app in Chrome Extensions.
9

2.3 Connecting the Aircraft
SunFounder
Step 1: Click Betaflight to run the ground control software (GCS).
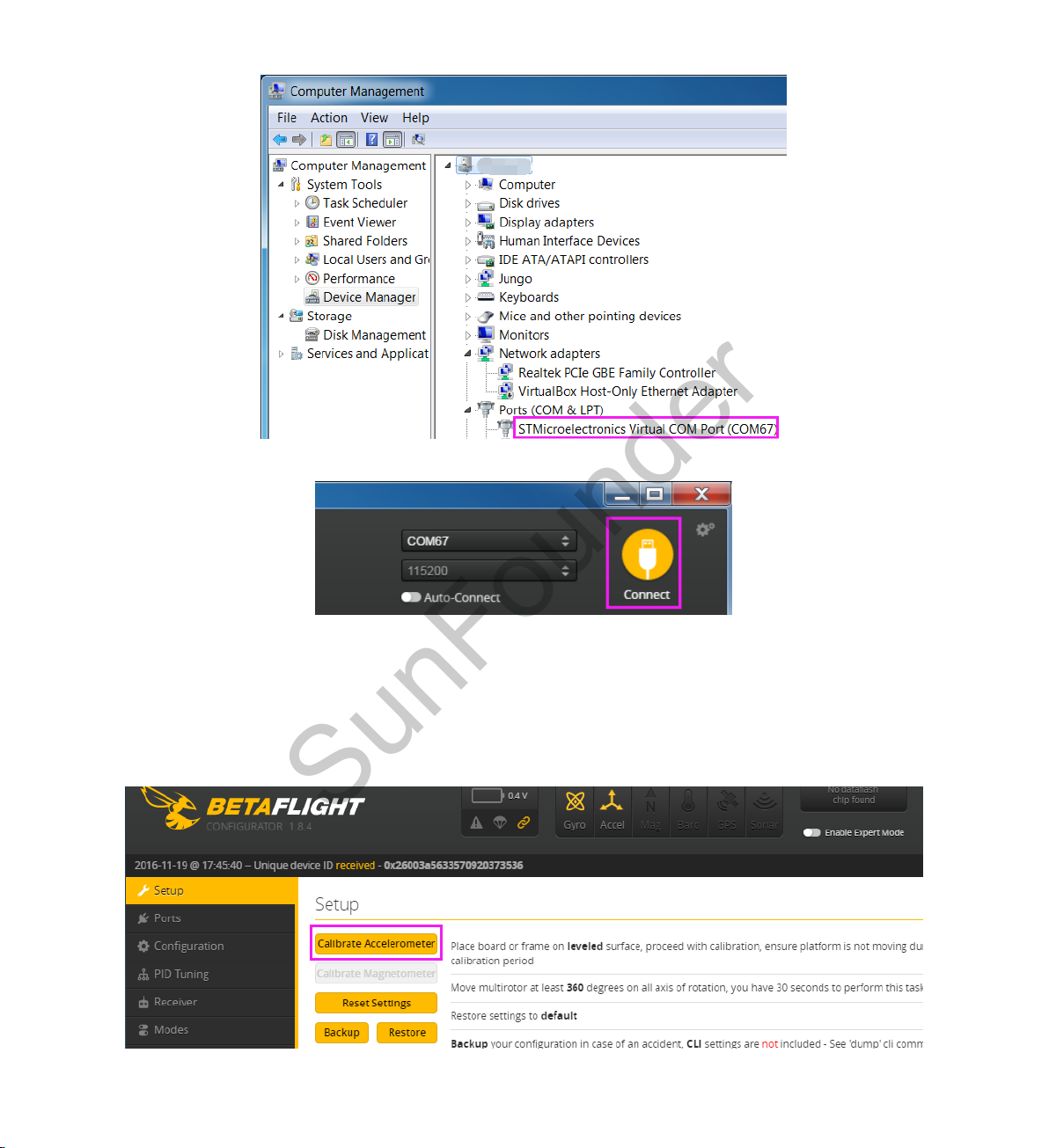
Step 2: Connect the F3_EVO_Brush to the computer with a USB cable. Go to Computer
Management -> Device Manager -> Ports (COM & LPT) to check whether the F3_EVO_Brush is
recognized by the computer or not.
10

Step 3: If YES, choose the corresponding COM port at the top right corner on the software.
SunFounder
Do not connect now.
Step 4: If there is NO driver software on your computer, please install the driver first.
Note: If the flight controller is recognized by the computer, please skip this step.
1) The F3_EVO_Brush flight controller applies STM32 Virtual COM Port (VCP). You can download
this driver in Betaflight.
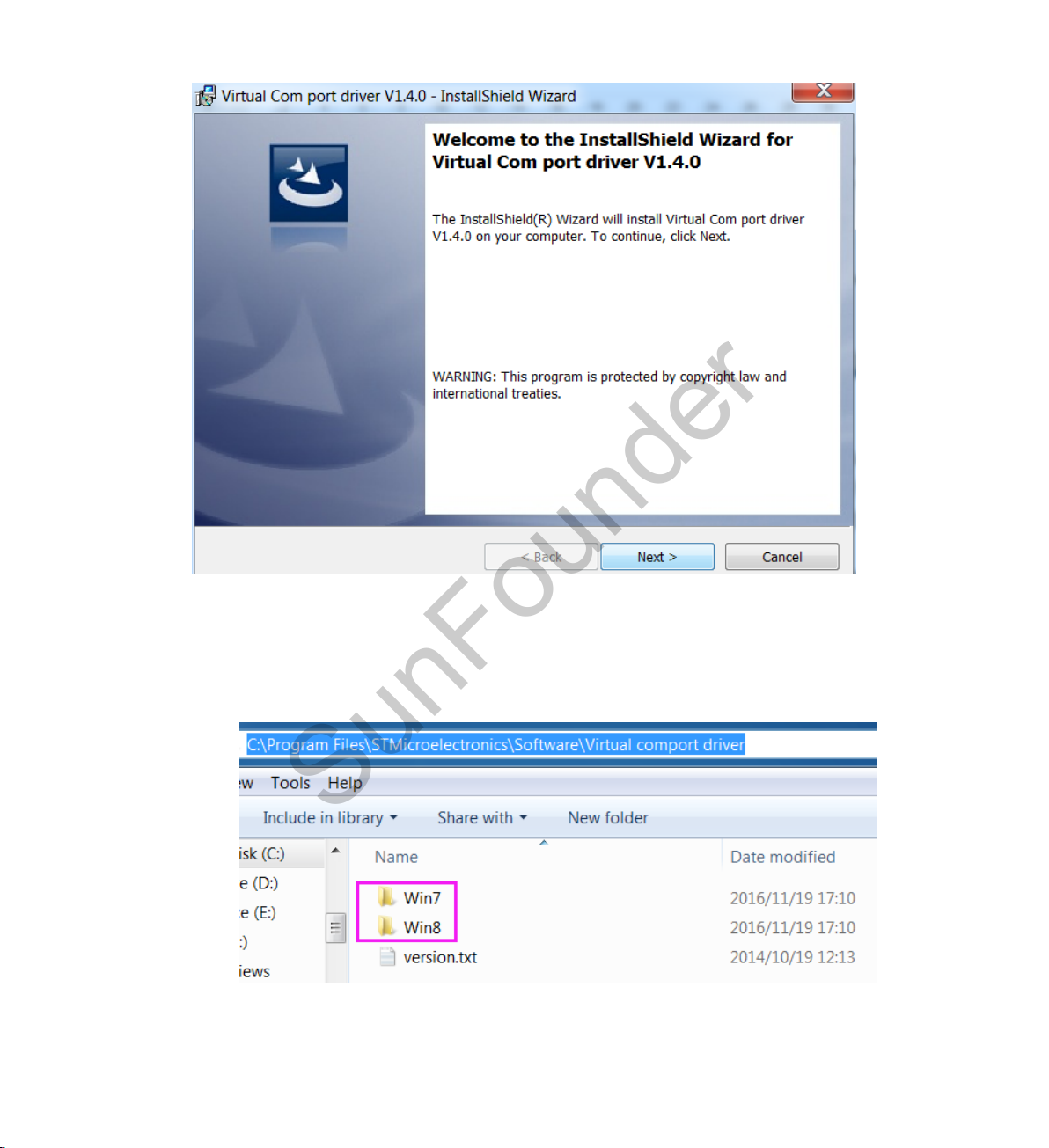
2) After download the driver, double-click VCP_V1.4.0_Setup.exe to install it. After it's
completed (click Close), please CONTINUE the installation below.
11
SunFounder
3) Get into C:\Program Files (x86)\STMicroelectronics\Software\Virtual comport
driver\Win8\ - Here type in Win7 or Win8 for your computer’s operating system. You can see
there are two files. If your system is 64-bit, please click dpinst_amd64 to install; if it is 32-bit,
click dpinst_x86. Wait until the installation is completed.
4) Replug in the USB cable, and then you can see the flight controller is recognized by the
computer in the Device Manager.
12
SunFounder
Click Connect at the top right of the software.
2.4 Auxiliary Channels for Self-stabilization and ARM (AUX1 &
AUX2)
1) Place the F3_EVO_Brush on a level surface, click Calibrate Accelerometer to proceed
calibrate horizontally. There is no need to calibrate the compass.
13

2) Set the Receiver Mode in Betaflight
SunFounder
Please refer to the operations in 3.2.3 Configuration to set the Receiver Mode in Configuration.
For Cleanflight, please refer to the operations in 4.3.4 Receiver.
3) Check the corresponding channel of ARM, AIR, ANGLE, and HORIZON
ARM: Run the ARM/DISARM mode AIR: Run the manual mode
ANGLE: Run the self-stability mode HORIZON: Run the horizontal mode
Click Modes, and we can see ANGLE, HORIZON and AIR are on AUX1, while ARM is on AUX2. Pull
the rocker on the remote controller for the auxiliary channels one by one. If the mode turns yellow,
it means the channel is for this mode. Locate the AUX1 and AUX2, and remember their position
on the remote controller and the corresponding modes.
For security, do not forget to DISABLE the ARM (DISARM modes) after checking.
2.5 Mounting the Propellers
Eight propellers are provided in this kit, including four CW and four CCW ones.
14

Mount the propellers to the aircraft as shown below.
SunFounder
2.6 Mounting the Battery
Fix the battery under the aircraft, and ensure the direction of the wire is opposite to the head.
Make sure the propellers are mounted correctly, and connect the aircraft to the battery.
15

2.7 Unlocking the Aircraft
Remote Controller (right hand throttle)
Remote Controller (left hand throttle)
SunFounder
Place the aircraft on a level surface, or the blue LED will keep flickering - after it's done, the LED
will go out. Then pull the rocker of the throttle to the lowest, and toggle the AUX1 to self-
stabilization (recommended for beginners). Pull the AUX2 to the unlocked mode (ARM). The
aircraft is unlocked successfully if the blue LED on the flight controller lights up and keep on
constantly. Then you can pull the throttle gently to start flying the aircraft!
2.8 Control During the Flight
Before applying the remote control, you need to know there are two different types of remote
control. They are different in the position of throttle – left (what we provided in this kit) and right.
The throttle controls the motor speed. The higher you push it, the motor rotates faster, and the
quadcopter flies higher, and vice versa. It is quite easy to tell the throttle. Try to pull the two rocker
arms. The one that will not restore to the middle is the throttle rocker.
16
Basic Flight Modes and Corresponding Channels of Remote Controller
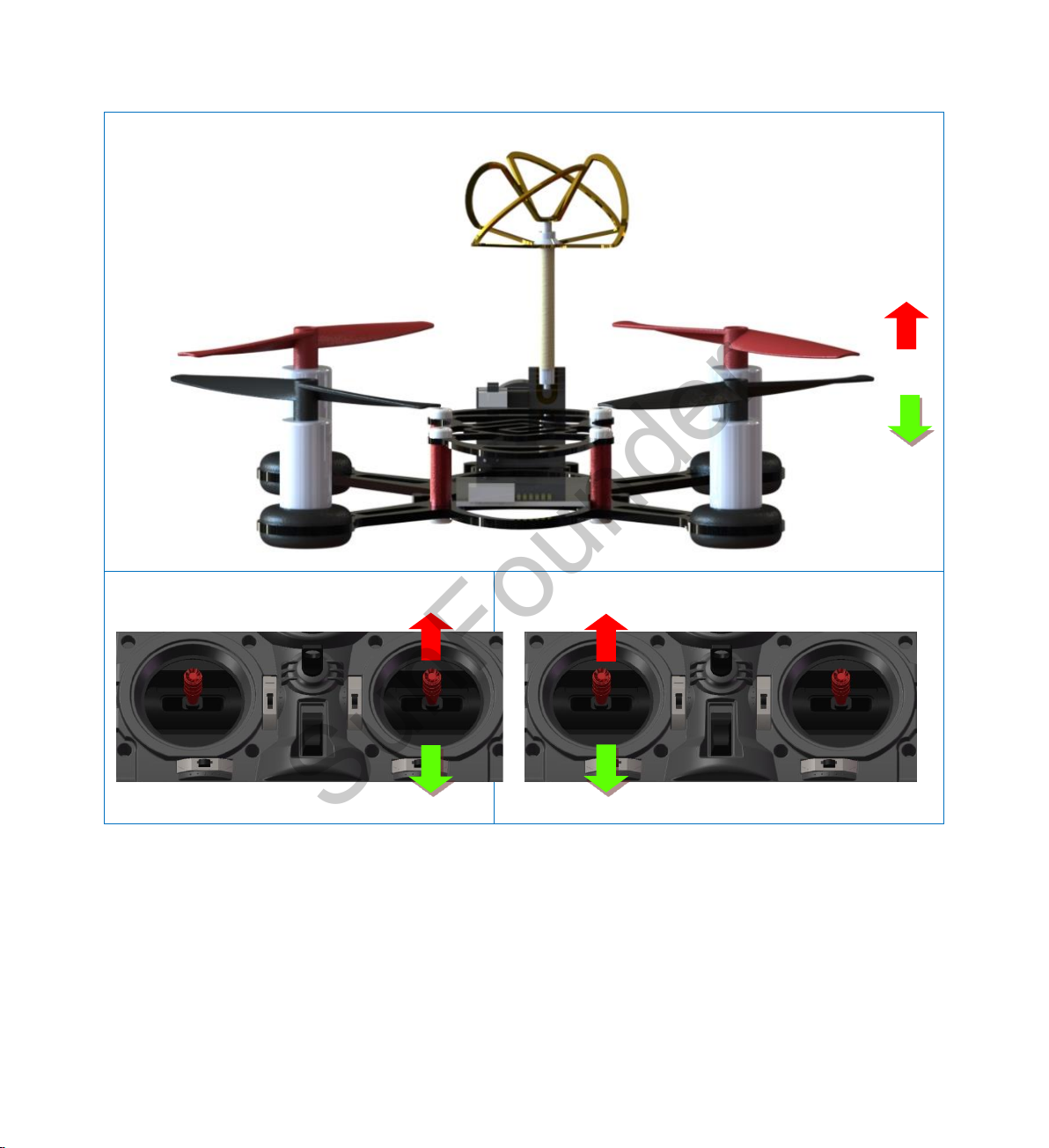
Aircraft (Climb -Sink)
Remote Controller (right hand throttle)
Remote Controller (left hand throttle)
SunFounder
17

Aircraft (Forward and backward)
Remote Controller (right hand throttle)
Remote Controller (left hand throttle)
Aircraft (Roll to the right and left)
Remote Controller
SunFounder
18

Aircraft (turn on its own axis)
Remote Controller
2.9 Ending up the Flight
SunFounder
1) Control the aircraft to land on the ground.
2) Switch the AUX2 to DISARM.
3) Take out the battery from the aircraft.
2.10 Charging the Battery
1) Connect the battery to the USB cable.
2) Connect the USB cable to the charging adapter or a USB port of other devices.
3) The red LED on the USB cable would not light up until the battery is fully charged.
19

3. Betaflight
SunFounder
3.1 Flashing the F3_EVO_Brush Firmware
Step 1: Click Betaflight to run the ground control software (GCS).
Step 2: Connect the F3_EVO_Brush to the computer with a USB cable. Go to Computer
Management -> Device Manager -> Ports (COM & LPT) to check whether the F3_EVO_Brush is
recognized by the computer or not.
20

Step 3: If YES, choose the corresponding COM port at the top right corner on the software.
SunFounder
Do not connect now.
Step 4: If there is NO driver software on your computer, please install the driver first.
Note: If the flight controller is recognized by the computer, please skip this step.
1) The F3_EVO_Brush flight controller applies STM32 Virtual COM Port (VCP). You can download
this driver in Betaflight.
2) After download the driver, double-click VCP_V1.4.0_Setup.exe to install it. After it's completed
(click Close), please CONTINUE the installation below.
21

SunFounder
3) Get into C:\Program Files (x86)\STMicroelectronics\Software\Virtual comport driver\Win8\ -
Here type in Win7 or Win8 for your computer’s operating system. You can see there are two
files. If your system is 64-bit, please click dpinst_amd64 to install; if it is 32-bit, click dpinst_x86.
Wait until the installation is completed.
4) Replug the USB cable, then you can see the flight controller is recognized by the computer in
the device manager.
22

SunFounder
Step 5: Click Firmware Flasher (you can see the icon’s name on the left by amplifying the
Betaflight) to upgrade and flash the firmware. Choose a board: SPRACINGF3EVO; Choose a
latest firmware version: XXXXX; Enable the “Manual baud rate” and select the baud rate 256000.
Step 6: There are two Load Firmware options: Load Firmware[Online] and Load Firmware[Local] -
you are recommended to select Load Firmware[Online].
23

SunFounder
Step 7: After loading, click Flash Firmware to start flashing. Then you will see a prompt -Failed to
open serial port after flashing is done.
Note:
1) Do not pull out the USB cable during the firmware flashing, or you will get an error “USB Device
Not Recognized” when you replug in the USB cable.
2) Thus, you need to pull out the USB cable, and use the tip of a tweezer or a screw driver to
connect the two BOOT pads (as shown below) for a while.
24

SunFounder
3) Then insert the USB cable, and reopen the Betaflight. You will see DFU at the top right of the
software. Just repeat the Step 4 – Step 6 above.
Step 8: Now, you need to find the corresponding “STM32 BOOTLOADER” driver via a USB driver
installation software Zadig. You can download it in Betaflight.
25

Please choose the version to download according to your computer’s operating system. Here
SunFounder
we will use version Zadig for Windows Vista or later as an example; only an .exe file is in the
package:
Note: Do not exit Betaflight or pull out the USB cable during Zadig download. If the cable is pulled
out carelessly, repeat the operations in Step 4 – Step 7.
Step 9: Double-click zadig_2.2.exe to run.
Step 10: Select Options, and tick the checkbox List All Devices.
26

SunFounder
Step 11: Select STM32 BOOTLOADER, and click Replace Driver.
Step 12: Exit Zadig and replug the USB cable connected to F3_EVO_Brush when the driver is
installed. Click Flash Firmware again, and it should be flashed successfully after a while.
27

3.2 Configuring the Wizard of F3_EVO_Brush
SunFounder
3.2.1 Setting the Motor’s Rotation Rate and Throttle Value
Click Connect at the top right of the software.
Click CLI and type in these in the window of command line:
set motor_pwm_rate=1000
set max_throttle =2000
Here is to set the max throttle as 2000, which optimizes the flying time. Type in save command to
save; it will disconnect itself after saving, and recover to connection after a while.
28

3.2.2 Calibrating the Accelerometer
SunFounder
Place the F3_EVO_Brush on a level surface, click Calibrate Accelerometer for calibrating
horizontally. There is no need to calibrate the compass. If the arrow in the software does not face
the front of the aircraft, just replug the USB cable to try.
3.2.3 Configuration
1) Click Configuration on the left to set Quad-X as default mode in Mixer, and select BRUSHED
and click to activate MOTOR_STOP in ESC/Motor Features; Activate VBAT in Battery Voltage
part, then remember to click Save and Reboot after setting.
29

2) Set the arrow pointing direction of the F3_EVO_Brush in Board and Sensor Alignment. The
SunFounder
arrow of F3_EVO_Brush we use should point at the plane head. Set 0 at the Yaw Degrees.
When the arrow direction and the head direction are perpendicular with a rotation of 90
degrees counterclockwise, set 0 at the Yaw Degrees.
3) You can set the Receiver Mode in Configuration.
The F3_EVO_Brush supports PPM, SBUS, and DSM/DSMX; thus you can set your receiver to these
modes.
PPM Signal Mode
The receiver is set under the PPM signal mode originally. Under this mode, the least serial ports are
occupied and the LED indicator can be set. Here PPM is set as the default RX signal input in
Betaflight. So if your receiver is in the PPM signal mode, there is no need to change the setting of
Receiver Mode and Serial Receiver Provider in Betaflight.
30

SunFounder
SBUS Signal Mode
If your receiver is in the SBUS signal mode, click Ports on the left and activate Serial RX in UART2,
and then click Save and Reboot.
Next, click Configuration on the left, select RX_SERIAL as Receiver Mode, and select SBUS in Serial
Receiver Provider.
31

SunFounder
After setting, click Save and Reboot to save it.
DSM Signal Mode:
1) If your receiver is in the DSM/DSMX signal mode, click Ports and enable Serial RX in UART3,
then click Save and Reboot.
32

2) Click Configuration, select RX_SERIAL as Receiver Mode, and select SPEKTRUM1024 in Serial
SunFounder
Receiver Provider.
After setting, click save and Reboot to save it.
3) Click Receiver on the left, select Futaba/Hitec for Channel Map. Click Save.
Now, click Receiver on the left, pick up the radio transmitter and pull the rocker of throttle or yaw,
and you will see the change of channels related as shown below.
33
SunFounder
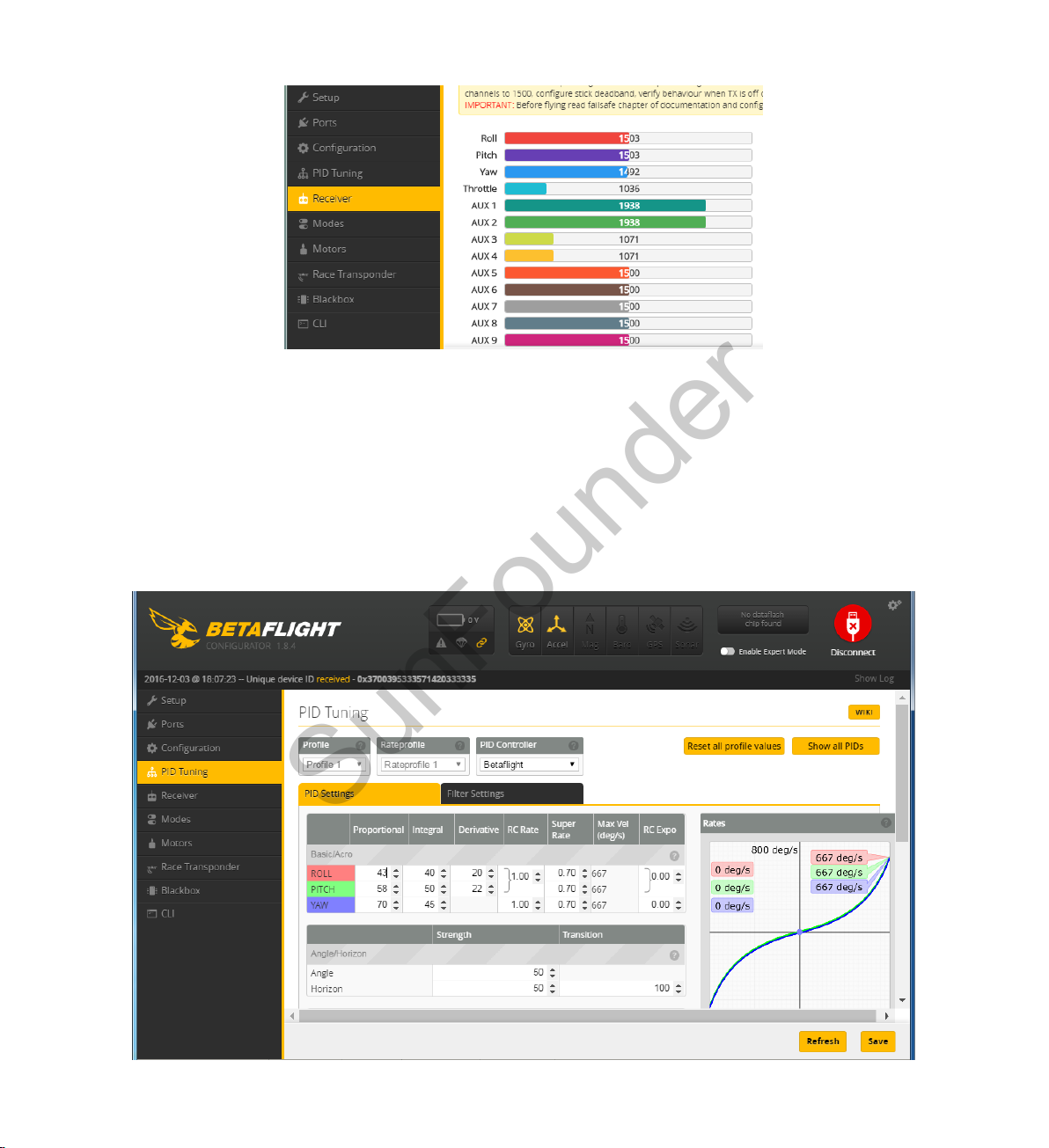
3.2.4 Configuring parameter of PID
Click PID Tuning, and you will see the PID value and RC rate of different channels. You do not
need to modify them. PID (Proportional Integral Derivative) is used to adjust the flight
performance. By default, the plane flies mildly, which will respond to the control a little slower.
You can adjust the PID parameters to get a more agile flight. If you are a beginner, you are not
recommended to do so.
34

3.2.5 Configuring the Flight Mode
SunFounder
Click Modes on the left to configure the flight mode.
1) Set the self-stabilization mode, horizontal mode and manual mode
You need to choose a 2-channel or 3-channel AUX x, set the self-stabilization mode, horizontal
mode, and manual mode to be controlled all by AUX x, and then set the volume for three modes
in Betaflight. For example, here we choose the 3-channel AUX1 to control these three modes.
Click Add Range in AIR MODE to run the manual mode. Select AUX1 and the value ranging from
1700 to 2100.
Click Add Range in ANGLE to run the self-stabilization mode. Select AUX1 and the value ranging
from 900 to 1300.
Click Add Range in HORIZON to run the horizontal mode. Select AUX1 and the value will be 1300
to 1700.
You can set the ranges for different modes yourself. Try to slide the switch for each mode and
check whether the range changes or not.
35

SunFounder
Remember to click Save after modifying. If you don’t have a 3-channel AUXx, you can choose
two modes from three.
2) Set the ARM/DISARM mode
Choose an AUX x to control the ARM/DISARM Mode of the aircraft. For example, here we choose
AUX2.
Click Add Range in ARM to set ARM/DISARM modes, and select AUX2 and the value ranging from
1700 to 2100.
Click Save to save the settings.
After all the settings, click Disconnect at the top right of the software to break the connection
with the F3_EVO_Brush.
36

4. Cleanflight
SunFounder
4.1 Installing Cleanflight
Step 1: Run the Google Chrome
And you will see the interface as shown below:
Step 2: Click on the Customize and Control Google Chrome button at the top right of the window,
and then on the drop-down list select More Tools -> Extensions.
37

Step 3: Click browse the Chrome Web Store.
SunFounder
And you'll see the shop page as below:
Step 4: Type in Cleanflight in the search bar and select Apps, and you will see the Cleanflight
App.
38

Step 5: Click + ADD TO CHROME. A prompt Add "Cleanflight - Configurator" will pop up, and then
SunFounder
click Add app to install.
Step 6: The software installation may take a little time. When it is done, you will see the Cleanflight
app in Chrome Apps.
4.2 Flashing F3_EVO_Brush Firmware
Step 1: Click Cleanflight to run this ground control software.
39

SunFounder
Step 2: Connect the F3_EVO_Brush to the computer with a USB cable. Open the Device Manager
to check whether the F3_EVO_Brush is recognized by the computer or not.
40

Step 3: If yes, choose the corresponding COM port at the top right of the software. Do not click
SunFounder
connect now.
Step 4: If there is no driver software on your computer, you need to install the driver first.
Note: If the flight controller is recognized by the computer, please ignore this step.
1) The F3_EVO_Brush flight controller applies STM32 Virtual COM Port (VCP). You can download
this driver in Cleanflight.
2) After downloading the driver, double-click VCP_V1.4.0_Setup.exe to install it. After it's
completed (click Close), please CONTINUE the installation below.
41

SunFounder
3) Get into C:\Program Files (x86)\STMicroelectronics\Software\Virtual comport driver\Win7 or
Win8 (here type in Win7 or Win8 according to your computer’s operating system). You can
see there are two files. If your system is 64-bit, please click dpinst_amd64 to install; if it is 32-bit,
please choose dpinst_x86. Wait until the installation is completed.
4) Replug the USB cable, and then you can see the fight controller is recognized by the
computer in the Device Manager.
42

SunFounder
Step 5: Click Firmware Flasher (you can see the icons’ name on the left by amplifying the
Cleanflight logo) to upgrade and flash the firmware. Choose a board: SPRACINGF3EVO; Choose
a latest firmware version: XXXXX (based on the actual situation); Enable “Manual baud rate” and
select the baud rate 256000.
Step 6: There are two Load Firmware options: Load Firmware[Online] or Load Firmware[Local], you
are recommended to select Load Firmware[Online].
43

SunFounder
Step 7: After loading, click Flash Firmware to start flashing. Then you will see a prompt -Failed to
open serial port after the flashing.
Note: Do not pull out the USB cable during firmware flash, or you will get an error “USB Device Not
Recognized” if you reinsert the USB cable.
44

Thus, you need to pull out the USB cable, and use the tip of a tweezer or a screw driver to connect
SunFounder
the two BOOT pads as shown below.
Then insert the USB cable again, and reopen the Cleanflight. You will see DFU at the top right of
the software. Just repeat the operations in Step 4 – Step 6 above.
Step 8: Now, you need to find the corresponding “STM32 BOOTLOADER” driver via a USB driver
installation software “Zadig”. You can also download Zadig in Cleanflight.
45

Note: Do not exit Cleanflight or pull out the USB cable during Zadig download. If the cable is
SunFounder
pulled out carelessly, repeat the operations in Step 4 – Step 7.
Step 9: Double-click zadig_2.2.exe to run it.
Step 10: Select Options, and tick the checkbox List All Devices.
46

SunFounder
Step 11: Then select STM32 BOOTLOADER, and then Replace Driver.
Step 12: Exit Zadig and replug the USB cable connected to F3_EVO_Brush when the driver is
installed, and click Flash Firmware again. It will be flashed successfully after a while.
47

4.3 Configuring the Wizard of F3_EVO_Brush
SunFounder
4.3.1 Setting the Motor’s Rotation Rate and Throttle Value
Click Connect at the top right of the software.
Click CLI and type in these in the Command Line:
set motor_pwm_rate=1000
set max_throttle = 2000
Here is to set the max throttle as 2000, which optimizes the flying time. Type in the save command
to save; it will disconnect itself after saving, and recover to connection after a while.
48

4.3.2 Calibrating the Accelerometer
SunFounder
Place the F3_EVO_Brush on a level surface, click Calibrate Accelerometer to proceed calibrate
horizontally. There is no need to calibrate the compass. If the arrow in the software does not face
the front of the aircraft, just replug the USB cable to try.
4.3.3 Configuration
Click Configuration on the left to configure Quad-X as default mode in Mixer, enable
MOTOR_STOP in ESC/Motor Features and VBAT in Battery Voltage part, and then remember to
click Save and Reboot after setting.
49

Set the arrow pointing direction of the F3_EVO_Brush in Board and Sensor Alignment. The arrow
SunFounder
of F3_EVO_Brush we use should point at the plane head. Set 0 at the Yaw Degrees. When the
arrow direction of the F3_EVO_Brush and the head direction are perpendicular with a rotation of
90 degrees counterclockwise, set 0 at the Yaw Degrees.
After setting, click Save and Reboot to save it.
4.3.4 Receiver
The F3_EVO_Brush supports PPM, SBUS, and DSM/DSMX; thus you can set your receiver to these
modes.
PPM Signal Mode
The receiver is set under the PPM signal mode originally. Under this mode, the least serial ports are
occupied and the LED indicator can be set.
Here PPM is set as default RX signal input in Cleanflight. If your receiver is in the PPM signal mode,
there is no need to change the setting of Receiver Mode and Serial Receiver Provider.
50

SBUS Signal Mode
SunFounder
1) If your receiver is in the SBUS signal mode, click Ports on the left and enable Serial RX in UART2,
then click Save and Reboot.
2) Next, click Receiver on the left, select RX_SERIAL as Receiver Mode, and select SBUS in Serial
Receiver Provider. Then click Save.
51

SunFounder
DSM/DSMX Signal Mode
If your receiver is in DSM/DSMX signal mode, click Ports on the left and enable Serial RX in UART3,
and then click Save and Reboot.
For DSM Signal Mode: Click Receiver on the left, select Futaba/Hitec for Channel Map. Select
RX_SERIAL as Receiver Mode, and select SPEKTRUM1024 in Serial Receiver Provider. Then click
Save.
52

SunFounder
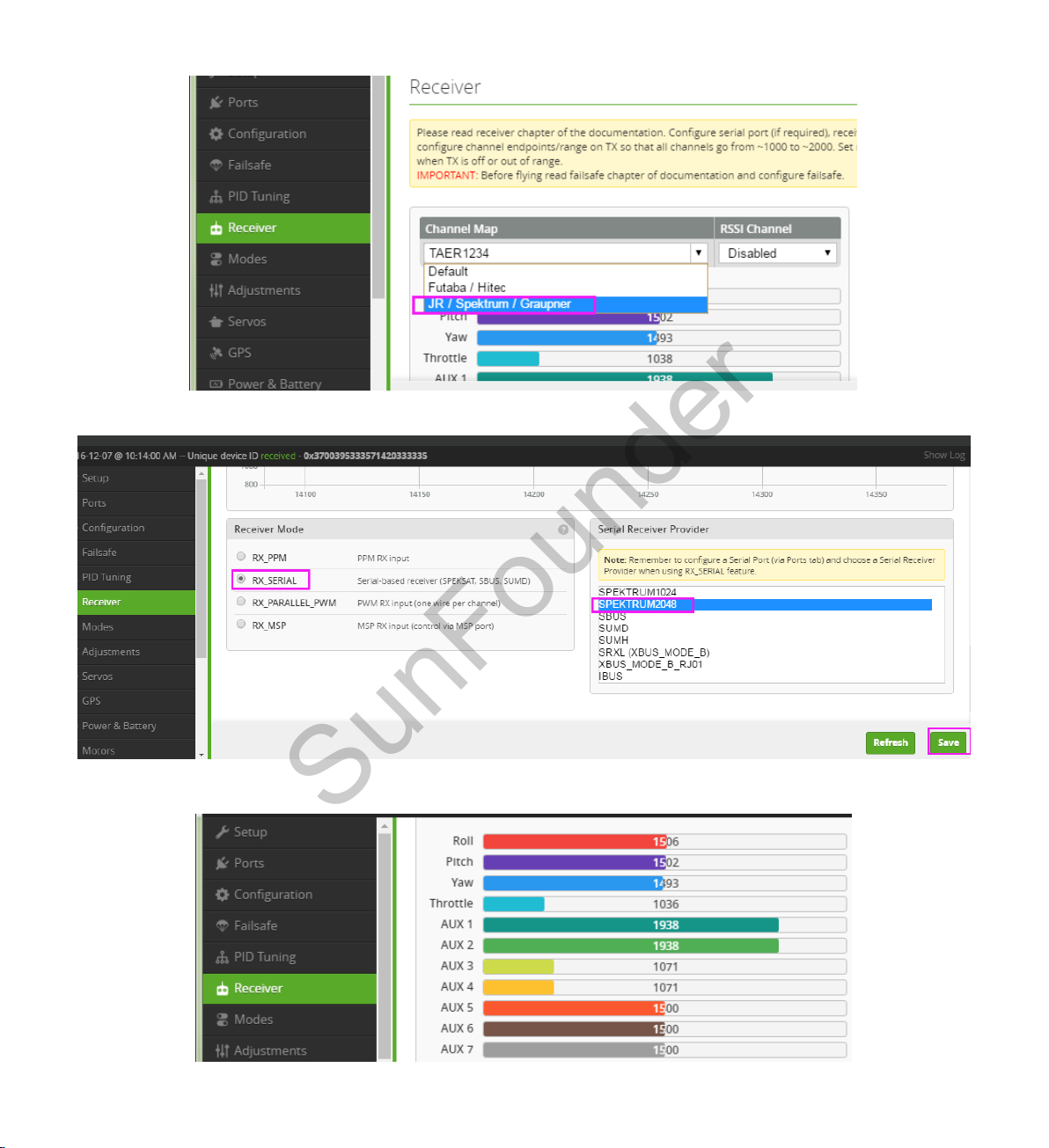
For DSMX Signal Mode: Click Receiver on the left, select JR/ Spektrum / Graupner for Channel
Map, select RX_SERIAL as Receiver Mode, and SPEKTRUM2048 in Serial Receiver Provider. Then
click Save.
53
SunFounder
Now, you will see the corresponding figure changes when you pull the rocker of throttle or yaw.
54

SunFounder
4.3.5 Configuring Parameter of PID
Click PID Tuning, and you will see the PID value and RC rate of different channels. You do not
need to modify them. PID (Proportional Integral Derivative) is used to adjust the flight
performance. By default, the plane flies mildly, which will respond to the control a little slower.
You can adjust the PID parameters to get a more agile flight. If you are a beginner, you are not
recommended to do so.
4.3.6 Configuring Flight Mode
Click Modes on the left to configure the flight mode.
55

1) Set self-stabilization mode, horizontal mode and manual mode.
SunFounder
You need to choose a 2-channel or 3-channel AUX x, set the self-stabilization mode, horizontal
mode, and manual mode to be controlled all by AUX x, and then configure the volume for three
modes in Cleanflight. For example, here we choose the 3-channel AUX1 to control these three
modes.
Click Add Range in ANGLE to run the self-stabilization mode. Select AUX1 and the value ranging
from 900 to 1300.
Click Add Range in HORIZON to run the horizontal mode. Select AUX1 and the value will be 1300
to 1700.
Then the rest is the value range of the manual mode. You can set the ranges for different modes
yourself. ANGLE (in green) indicates AUX1 is in ANGLE mode now. Try to slide the AUX1 switch, and
see whether the range changes or not.
Remember to click Save after any modification. If you don’t have a 3-channel AUX x, you can
choose two modes from the three.
2) Set ARM/DISARM Mode
Choose AUX x to control the ARM/DISARM mode of the aircraft. For example, here we choose
AUX2.
Click Add Range in ARM to set ARM/DISARM modes, and select AUX2 and the value ranging from
1700 to 2100.
56

Click Save to save the settings.
SunFounder
After all the settings, click Disconnect at the top right of the software to break the connection
with the F3_EVO_Brush.
With the instructions above, you should now have completed all the tasks needed and be able
to fly the quadcopter. Enjoy the fun!
Remember if you have any tech questions, please feel free to post forums under FORUM on our
website www.sunfounder.com. We'll respond as soon as possible. Also welcome to share your
experience there.
Copyright Notice
All contents including but not limited to texts, images, and code in this manual are owned by the
SunFounder Company. You should only use it for personal study, investigation, enjoyment, or other
non-commercial or nonprofit purposes, under the related regulations and copyrights laws, without
infringing the legal rights of the author and relevant right holders. For any individual or organization
that uses these for commercial profit without permission, the Company reserves the right to take
legal action.
57
 Loading...
Loading...