

Page 1
STM8S001J3
SO8N
4.9x6 mm or 150 mils width
16 MHz STM8S 8-bit MCU, 8-Kbyte Flash memory, 128-byte data
EEPROM, 10-bit ADC, 3 timers, UART, SPI, I2C
Datasheet - production data
Features
Core
• 16 MHz advanced STM8 core with Harvard
architecture and 3-stage pipeline
• Extended instruction set
Memories
• Program memory: 8 Kbytes Flash memory;
data retention 20 years at 55 °C after 100
cycles
• RAM: 1 Kbyte
• Data memory: 128-byte true data EEPROM;
endurance up to 100 k write/erase cycles
Clock, reset and supply management
Timers
• Advanced control timer: 16-bit, 2 CAPCOM
channels, 2 outputs, dead-time insertion and
flexible synchronization
• 16-bit general purpose timer, with 3 CAPCOM
channels (IC, OC or PWM)
• 8-bit basic timer with 8-bit prescaler
• Auto wakeup timer
• Window and independent watchdog timers
• 2.95 V to 5.5 V operating voltage
• Flexible clock control, 3 master clock sources
– External clock input
– Internal, user-trimmable 16 MHz RC
– Internal low-power 128 kHz RC
• Clock security system with clock monitor
• Power management
– Low-power modes (wait, active-halt, halt)
– Switch-off peripheral clocks individually
– Permanently active, low-consumption
power-on and power-down reset
Interrupt management
• Nested interrupt controller with 32 interrupts
• Up to 5 external interrupts
Communications interfaces
• UART, SmartCard, IrDA, LIN master mode
• SPI unidirectional interface up to 8 Mbit/s
(master simplex mode, slave receiver only)
• I2C interface up to 400 Kbit/s
Analog to digital converter (ADC)
• 10-bit ADC, ± 1 LSB ADC with up to 3
multiplexed channels, scan mode and analog
watchdog
• Internal reference voltage measurement
I/Os
• Up to 5 I/Os including 4 high-sink outputs
• Highly robust I/O design, immune against
current injection
Development support
• Embedded single-wire interface module
(SWIM) or fast on-chip programming and nonintrusive debugging
June 2018 DS12129 Rev 3 1/85
This is information on a product in full production.
www.st.com
Page 2

Contents STM8S001J3
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Functional overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1 Central processing unit STM8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
4.2 Single wire interface module (SWIM) and debug module (DM) . . . . . . . . 12
4.3 Interrupt controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4 Flash program memory and data EEPROM . . . . . . . . . . . . . . . . . . . . . . . 12
4.5 Clock controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.6 Power management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.7 Watchdog timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.8 Auto wakeup counter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.9 TIM1 - 16-bit advanced control timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.10 TIM2 - 16-bit general purpose timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.11 TIM4 - 8-bit basic timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.12 Analog-to-digital converter (ADC1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.13 Communication interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.13.1 UART1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.13.2 SPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.13.3 I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Pinouts and pin descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1 STM8S001J3 SO8N pinout and pin description . . . . . . . . . . . . . . . . . . . . 21
5.2 Alternate function remapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
6 Memory and register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.1 Memory map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.2 Register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.2.1 I/O port hardware register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6.2.2 General hardware register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2/85 DS12129 Rev 3
Page 3

STM8S001J3 Contents
6.2.3 CPU/SWIM/debug module/interrupt controller registers . . . . . . . . . . . . 34
7 Interrupt vector mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
8 Option bytes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.1 Alternate function remapping bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
9 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1 Parameter conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1.1 Minimum and maximum values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1.2 Typical values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1.3 Typical curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1.4 Loading capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.1.5 Pin input voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.2 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
9.3 Operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
9.3.1 VCAP external capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.3.2 Supply current characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
9.3.3 External clock sources and timing characteristics . . . . . . . . . . . . . . . . . 54
9.3.4 Internal clock sources and timing characteristics . . . . . . . . . . . . . . . . . 54
9.3.5 Memory characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
9.3.6 I/O port pin characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
9.3.7 SPI serial peripheral interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.3.8 I2C interface characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9.3.9 10-bit ADC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.3.10 EMC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
10 Package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
10.1 SO8N package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
10.2 Thermal characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
10.2.1 Reference document . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
10.2.2 Selecting the product temperature range . . . . . . . . . . . . . . . . . . . . . . . 80
11 Ordering information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
12 STM8 development tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
12.1 Emulation and in-circuit debugging tools . . . . . . . . . . . . . . . . . . . . . . . . . 82
DS12129 Rev 3 3/85
4
Page 4

Contents STM8S001J3
12.2 Software tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
12.2.1 STM8 toolset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
12.2.2 C and assembly toolchains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
12.3 Programming tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
13 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4/85 DS12129 Rev 3
Page 5

STM8S001J3 List of tables
List of tables
Table 1. STM8S001J3 features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 2. Peripheral clock gating bit assignments in CLK_PCKENR1/2 registers . . . . . . . . . . . . . . . 15
Table 3. TIM timer features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Table 4. Legend/abbreviations for STM8S001J3 pin description tables. . . . . . . . . . . . . . . . . . . . . . 21
Table 5. STM8S001J3 pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Table 6. Flash, Data EEPROM and RAM boundary addresses . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 7. I/O port hardware register map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 8. General hardware register map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 9. CPU/SWIM/debug module/interrupt controller registers. . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 10. Interrupt mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Table 11. Option bytes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Table 12. Option byte description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Table 13. STM8S001J3 alternate function remapping bits for 8-pin devices . . . . . . . . . . . . . . . . . . . 39
Table 14. Voltage characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 15. Current characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 16. Thermal characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 17. General operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 18. Operating conditions at power-up/power-down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 19. Total current consumption with code execution in run mode at V
Table 20. Total current consumption with code execution in run mode at V
Table 21. Total current consumption in wait mode at V
Table 22. Total current consumption in wait mode at V
Table 23. Total current consumption in active halt mode at V
Table 24. Total current consumption in active halt mode at V
Table 25. Total current consumption in halt mode at V
Table 26. Total current consumption in halt mode at V
= 5 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
DD
= 3.3 V . . . . . . . . . . . . . . . . . . . . . . . . . . 47
DD
DD
DD
= 5 V . . . . . . . . . . . . . . . . . . . . . . . 48
DD
= 3.3 V . . . . . . . . . . . . . . . . . . . . . 48
DD
= 5 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
= 3.3 V . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 27. Wakeup times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 28. Total current consumption and timing in forced reset state . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 29. Peripheral current consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 30. HSE user external clock characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 31. HSI oscillator characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 32. LSI oscillator characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 33. RAM and hardware registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 34. Flash program memory and data EEPROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 35. I/O static characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 36. Output driving current (standard ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 37. Output driving current (true open drain ports). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 38. Output driving current (high sink ports). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Table 39. SPI characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Table 40. I2C characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Table 41. ADC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Table 42. ADC accuracy with R
Table 43. ADC accuracy with R
< 10 kΩ , VDD = 5 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
AIN
< 10 kΩ R
AIN
AIN
, V
= 3.3 V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
DD
Table 44. EMS data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Table 45. EMI data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Table 46. ESD absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Table 47. Electrical sensitivities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Table 48. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
= 5 V . . . . . . . . . . . . 45
DD
= 3.3 V . . . . . . . . . . . 46
DD
DS12129 Rev 3 5/85
6
Page 6

List of tables STM8S001J3
package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Table 49. Thermal characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Table 50. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6/85 DS12129 Rev 3
Page 7

STM8S001J3 List of figures
List of figures
Figure 1. STM8S001J3 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 2. Flash memory organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 3. STM8S001J3 SO8N pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 4. Memory map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 5. Pin loading conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 6. Pin input voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 7. f
CPUmax
Figure 8. External capacitor C
Figure 9. Typ. I
Figure 10. Typ. I
Figure 11. Typ. I
Figure 12. Typ. I
Figure 13. Typ. I
Figure 14. Typ. I
Figure 15. HSE external clock source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Figure 16. Typical HSI frequency variation vs V
Figure 17. Typical LSI frequency variation vs V
Figure 18. Typical V
Figure 19. Typical pull-up resistance vs V
Figure 20. Typical pull-up current vs V
Figure 21. Typ. V
Figure 22. Typ. V
Figure 23. Typ. V
Figure 24. Typ. V
Figure 25. Typ. V
Figure 26. Typ. V
Figure 27. Typ. V
Figure 28. Typ. V
Figure 29. Typ. V
Figure 30. Typ. V
Figure 31. SPI timing diagram - slave mode and CPHA = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Figure 32. SPI timing diagram - slave mode and CPHA = 1
Figure 33. SPI timing diagram - master mode
Figure 34. Typical application with I2C bus and timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figure 35. ADC accuracy characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figure 36. Typical application with ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Figure 37. SO8N – 8-lead, 4.9 x 6 mm, plastic small outline, 150 mils body width, package outline . 77
Figure 38. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
package recommended footprint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Figure 39. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Figure 40. STM8S001J3 ordering information scheme
versus VDD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
DD(RUN)
DD(RUN)
DD(RUN)
DD(WFI)
DD(WFI)
DD(WFI)
OL
OL
OL
OL
OL
OL
DD
DD
DD
DD
vs VDD, HSE user external clock, f
vs f
vs VDD, HSI RC osc, f
vs. VDD HSE user external clock, f
vs. f
vs VDD, HSI RC osc, f
and VIH vs VDD @ 4 temperatures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
IL
@ VDD = 5 V (standard ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
@ VDD = 3.3 V (standard ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
@ VDD = 5 V (true open drain ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
@ VDD = 3.3 V (true open drain ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
@ VDD = 5 V (high sink ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
@ VDD = 3.3 V (high sink ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
- V
OH
- V
OH
- V
OH
- V
OH
EXT
, HSE user external clock, VDD = 5 V . . . . . . . . . . . . . . . . . . . . . . . . 51
CPU
, HSE user external clock, VDD = 5 V . . . . . . . . . . . . . . . . . . . . . . . . 53
CPU
DD
@ 4 temperatures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
DD
= 16 MHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
CPU
= 16 MHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
CPU
at 4 temperatures. . . . . . . . . . . . . . . . . . . . . . . . . 55
DD
@ 4 temperatures . . . . . . . . . . . . . . . . . . . . . . . . 56
DD
@ 4 temperatures . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
= 16 MHz . . . . . . . . . . . . . . . . . . . . 51
CPU
= 16 MHz . . . . . . . . . . . . . . . . . . . . . 52
CPU
@ VDD = 5 V (standard ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
@ VDD = 3.3 V (standard ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
@ VDD = 5 V (high sink ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
@ VDD = 3.3 V (high sink ports) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
(1)
(1)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
(1)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
DS12129 Rev 3 7/85
7
Page 8

Introduction STM8S001J3
1 Introduction
This datasheet contains the description of the STM8S001J3 features, pinout, electrical
characteristics, mechanical data and ordering information.
• For complete information on the STM8S microcontroller memory, registers and
peripherals, please refer to the STM8S and STM8A microcontroller families reference
manual (RM0016).
• For information on programming, erasing and protection of the internal Flash memory
please refer to the PM0051 (How to program STM8S and STM8A Flash program
memory and data EEPROM).
• For information on the debug and SWIM (single wire interface module) refer to the
STM8 SWIM communication protocol and debug module user manual (UM0470).
• For information on the STM8 core, please refer to the STM8 CPU programming manual
(PM0044).
8/85 DS12129 Rev 3
Page 9
STM8S001J3 Description
2 Description
The STM8S001J3 8-bit microcontrollers offer 8 Kbytes of Flash program memory, plus
integrated true data EEPROM. It is referred to as low-density device in the STM8S
microcontroller family reference manual (RM0016).
The STM8S001J3 device provides the following benefits: performance, robustness and
reduced system cost.
Device performance and robustness are ensured by true data EEPROM supporting up to
100000 write/erase cycles, advanced core and peripherals made in a state-of-the-art
technology at 16
clock source, and a clock security system.
The system cost is reduced thanks to a high system integration level with internal clock
oscillators, watchdog, and brown-out reset.
Full documentation is offered as well as a wide choice of development tools.
Pin count 8
MHz clock frequency, robust I/Os, independent watchdogs with separate
Table 1. STM8S001J3 features
Features STM8S001J3
Max. number of GPIOs (I/O) 5
External interrupt pins 5
Timer CAPCOM channels 3
Timer complementary outputs 1
A/D converter channels 3
High-sink I/Os 4
Low-density Flash program memory
(byte)
RAM (byte) 1 K
True data EEPROM (byte) 128
Multi purpose timer (TIM1), SPI unidirectional, I2C, UART,
Peripheral set
1. Without read-while-write capability.
independent WDG, ADC, PWM timer (TIM2), 8-bit timer
Window WDG,
(TIM4)
8 K
(1)
DS12129 Rev 3 9/85
24
Page 10
Block diagram STM8S001J3
MSv44651V1
Reset block
Reset
POR BOR
Clock controller
Detector
RC int. 16 MHz
RC int. 128 kHz
Ext. Clock input
1 – 16 MHz
STM8 core
Debug / SWIM
I2C
Unidirectional SPI
UART1
ADC1
Window WDG
Independent WDG
8 Kbyte
program Flash
128 byte
data EEPROM
1 Kbyte RAM
16-bit advanced
control timer (TM1)
16-bit general
purpose timer
(TIM2)
8-bit basic timer
(TIM4)
AWU timer
Address and data bus
Clock to peripherals and core
Up to 3
channels
LIN master
8 Mbit/s
400 Kbit/s
Single wire
debug
interface
Up to 3
CAPCPOM
channels
Up to 2
CAPCPOM
channels
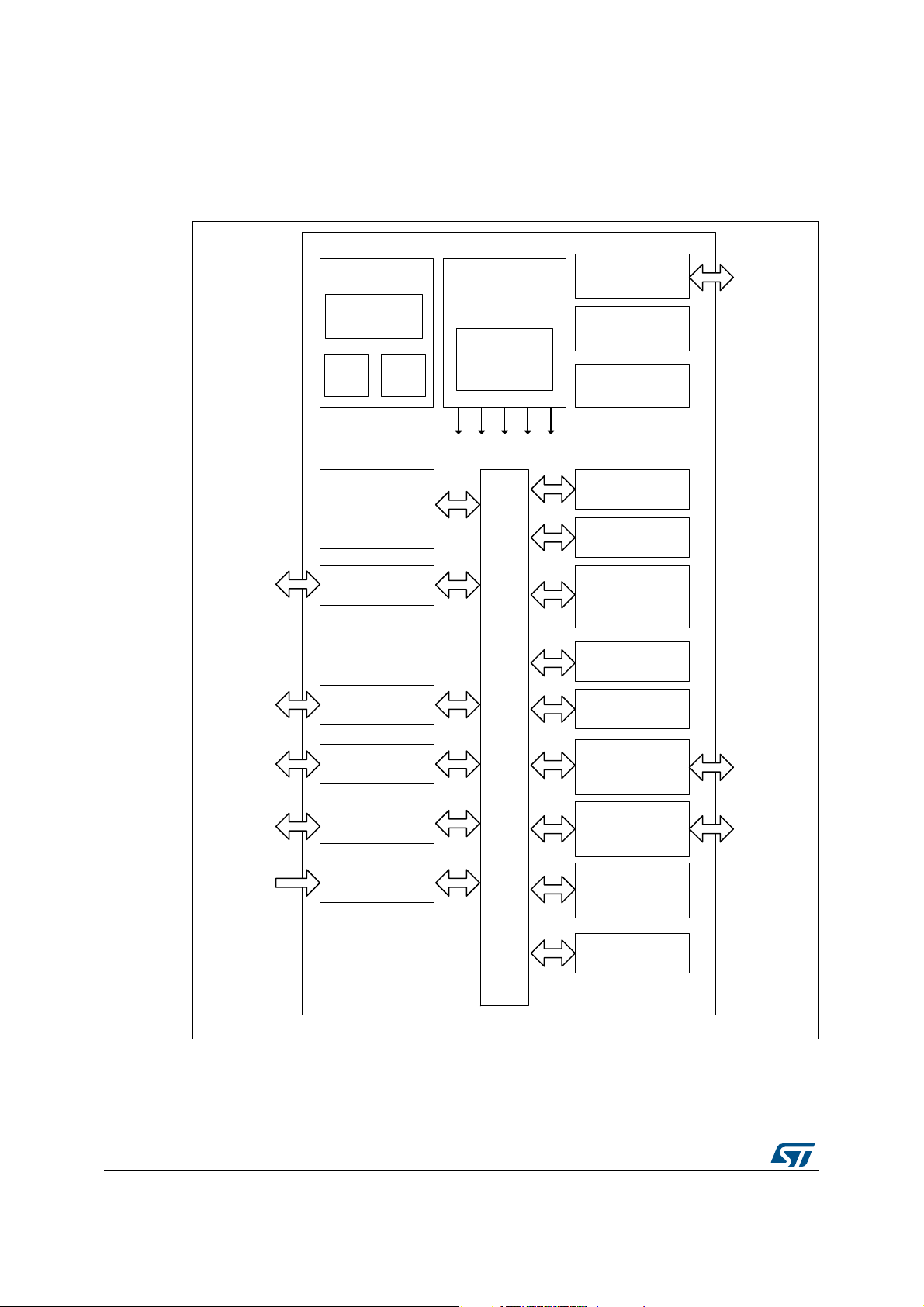
3 Block diagram
Figure 1. STM8S001J3 block diagram
10/85 DS12129 Rev 3
Page 11

STM8S001J3 Functional overview
4 Functional overview
The following section intends to give an overview of the basic features of the STM8S001J3
functional modules and peripherals.
For more detailed information please refer to the corresponding family reference manual
(RM0016).
4.1 Central processing unit STM8
The 8-bit STM8 core is designed for code efficiency and performance.
It contains six internal registers which are directly addressable in each execution context, 20
addressing modes including indexed indirect and relative addressing and 80 instructions.
Architecture and registers
• Harvard architecture
• 3-stage pipeline
• 32-bit wide program memory bus - single cycle fetching for most instructions
• X and Y 16-bit index registers - enabling indexed addressing modes with or without
offset and read-modify-write type data manipulations
• 8-bit accumulator
• 24-bit program counter - 16-Mbyte linear memory space
• 16-bit stack pointer - access to a 64 K-level stack
• 8-bit condition code register - 7 condition flags for the result of the last instruction
Addressing
• 20 addressing modes
• Indexed indirect addressing mode for look-up tables located anywhere in the address
space
• Stack pointer relative addressing mode for local variables and parameter passing
Instruction set
• 80 instructions with 2-byte average instruction size
• Standard data movement and logic/arithmetic functions
• 8-bit by 8-bit multiplication
• 16-bit by 8-bit and 16-bit by 16-bit division
• Bit manipulation
• Data transfer between stack and accumulator (push/pop) with direct stack access
• Data transfer using the X and Y registers or direct memory-to-memory transfers
DS12129 Rev 3 11/85
24
Page 12

Functional overview STM8S001J3
4.2 Single wire interface module (SWIM) and debug module (DM)
The single wire interface module and debug module permits non-intrusive, real-time incircuit debugging and fast memory programming.
SWIM
Single wire interface module for direct access to the debug module and memory
programming. The interface can be activated in all device operation modes. The maximum
data transmission speed is 145 byte/ms.
Debug module
The non-intrusive debugging module features a performance close to a full-featured
emulator. Beside memory and peripherals, also CPU operation can be monitored in realtime by means of shadow registers.
• R/W to RAM and peripheral registers in real-time
• R/W access to all resources by stalling the CPU
• Breakpoints on all program-memory instructions (software breakpoints)
• Two advanced breakpoints, 23 predefined configurations
Recommendation for SWIM pin (pin #8) sharing
As the NRST pin is not available on this device, if the SWIM pin should be used with the I/O
pin functionality, it is recommended to add a ~5 seconds delay in the firmware before
changing the functionality on the pin with SWIM functions. This action allows the user to set
the device into SWIM mode after the device power on and to be able to reprogram the
device. If the pin with SWIM functionality is set to I/O mode immediately after the device
reset, the device is unable to connect through the SWIM interface and it gets locked forever.
This initial delay can be removed in the final (locked) code.
If the initial delay is not acceptable for the application there is the option that the firmware
reenables the SWIM pin functionality under specific conditions such as during firmware
startup or during application run. Once that this procedure is done, the SWIM interface can
be used for device debug/programming.
4.3 Interrupt controller
• Nested interrupts with three software priority levels
• 32 interrupt vectors with hardware priority
• Up to 5 external interrupts including TLI
• Trap and reset interrupts
4.4 Flash program memory and data EEPROM
• 8 Kbytes of Flash program single voltage Flash memory
• 128 byte true data EEPROM
• User option byte area
12/85 DS12129 Rev 3
Page 13
STM8S001J3 Functional overview
Write protection (WP)
Write protection of Flash program memory and data EEPROM is provided to avoid
unintentional overwriting of memory that could result from a user software malfunction.
There are two levels of write protection. The first level is known as MASS (memory access
security system). MASS is always enabled and protects the main Flash program memory,
data EEPROM and option bytes.
To perform in-application programming (IAP), this write protection can be removed by
writing a MASS key sequence in a control register. This allows the application to modify the
content of main program memory and data EEPROM, or to reprogram the device option
bytes.
A second level of write protection, can be enabled to further protect a specific area of
memory known as UBC (user boot code). Refer to
The size of the UBC is programmable through the UBC option byte (Ta b le 12), in increments
of 1 page (64-byte block) by programming the UBC option byte in ICP mode.
This divides the program memory into two areas:
• Main program memory: 8 Kbyte minus UBC
• User-specific boot code (UBC): Configurable up to 8 Kbyte
The UBC area remains write-protected during in-application programming. This means that
the MASS keys do not unlock the UBC area. It protects the memory used to store the boot
program, specific code libraries, reset and interrupt vectors, the reset routine and usually
the IAP and communication routines.
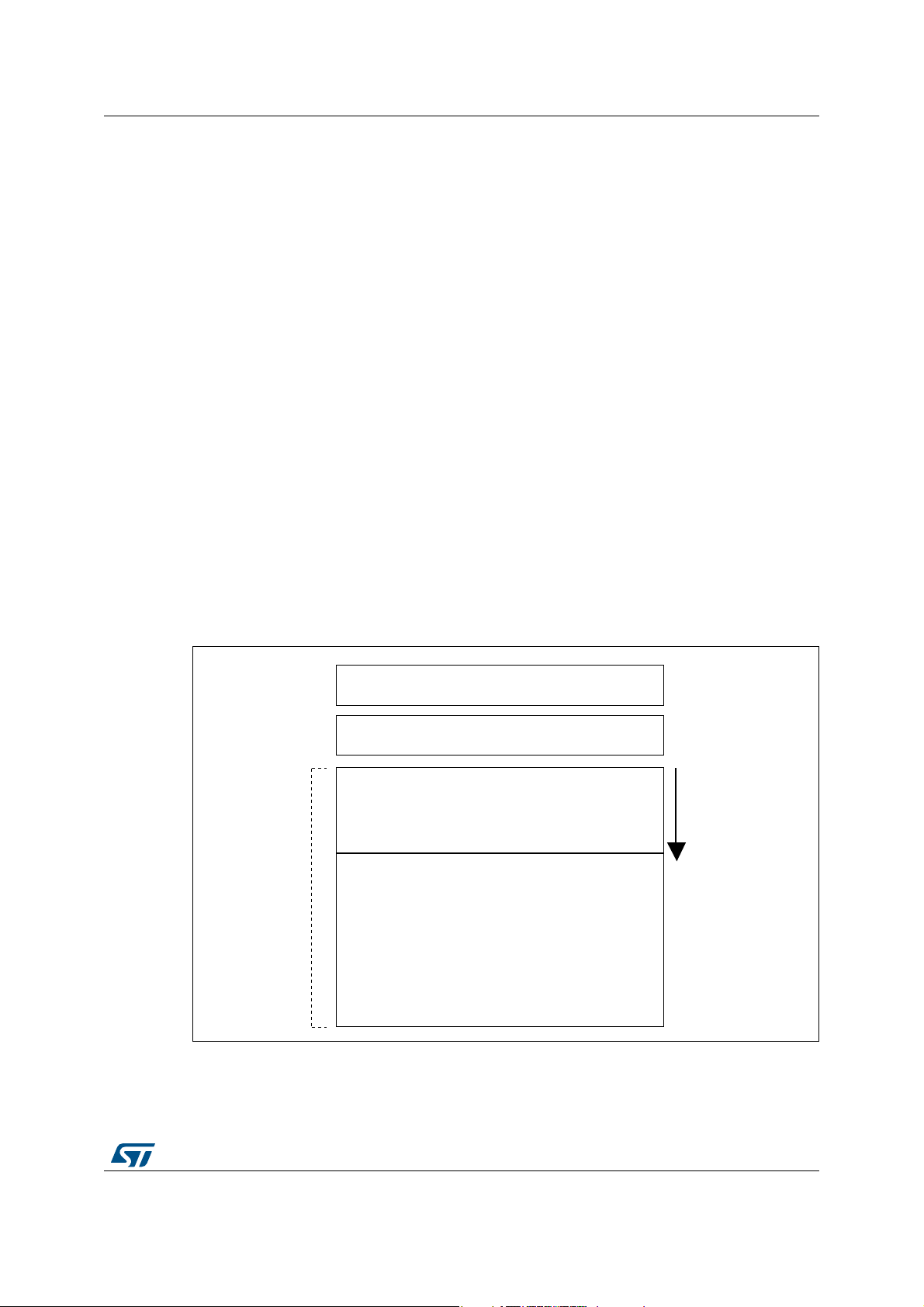
Figure 2.
Low density
Flash program
memory
(8 Kbytes)
Figure 2. Flash memory organization
Option bytes
Data EEPROM (128 bytes)
UBC area
Remains write protected during IAP
Program memory area
Write access possible for IAP
Programmable
area from 64 bytes
(1 page) up to
8 Kbytes
(in 1 page steps)
MS36408V1
DS12129 Rev 3 13/85
24
Page 14

Functional overview STM8S001J3
Read-out protection (ROP)
The read-out protection blocks reading and writing the Flash program memory and data
EEPROM memory in ICP mode (and debug mode). Once the read-out protection is
activated, any attempt to toggle its status triggers a global erase of the program memory.
Even if no protection can be considered as totally unbreakable, the feature provides a very
high level of protection for a general purpose microcontroller.
Recommendation for the device's programming:
The device's 8 Kbytes program memory is not empty on virgin devices; there is code loop
implemented on the reset vector. It is recommended to keep valid code loop in the device to
avoid the program execution from an invalid memory address (which would be any memory
address out of 8 Kbytes program memory space).
If the device's program memory is empty (0x00 content), it displays the behavior described
below:
• After the power on, the “empty” code is executed (0x0000 opcodes = instructions: NEG
(0x00, SP)) until the device reaches the end of the 8 Kbytes program memory (the end
address = 0x9FFF).
It takes around 4 milliseconds to reach the end of the 8 Kbytes memory space @2 MHz
HSI clock.
• Once the device reaches the end of the 8 Kbytes program memory, the program
continues and code from a non-existing memory is fetched and executed.
The reading of non-existing memory is a random content which can lead to the
execution of invalid instructions.
The execution of invalid instructions generates a software reset and the program starts
again. A reset can be generated every 4 milliseconds or more.
Only the “connect on-the-fly” method can be used to program the device through the SWIM
interface. The “connect under-reset” method cannot be used because the NRST pin is not
available on this device.
The “connect on-the-fly” mode can be used while the device is executing code, but if there is
a device reset (by software reset) during the SWIM connection, this connection is aborted
and it must be performed again from the debug tool. Note that the software reset occurrence
can be of every 4 milliseconds, making it difficult to successfully connect to the device's
debug tool (there is practically only one successful connection trial for every 10 attempts).
Once that a successful connection is reached, the device can be programmed with a valid
firmware without problems; therefore it is recommended that device is never erased and
that is contains always a valid code loop.
14/85 DS12129 Rev 3
Page 15
STM8S001J3 Functional overview
4.5 Clock controller
The clock controller distributes the system clock (f
MASTER)
coming from different oscillators
to the core and the peripherals. It also manages clock gating for low power modes and
ensures clock robustness.
Features
• Clock prescaler: To get the best compromise between speed and current
consumption the clock frequency to the CPU and peripherals can be adjusted by a
programmable prescaler.
• Safe clock switching: Clock sources can be changed safely on the fly in run mode
through a configuration register. The clock signal is not switched until the new clock
source is ready. The design guarantees glitch-free switching.
• Clock management: To reduce power consumption, the clock controller can stop the
clock to the core, individual peripherals or memory.
• Master clock sources: Three different clock sources can be used to drive the master
clock:
– Up to 16 MHz high-speed user-external clock (HSE user-ext)
– 16 MHz high-speed internal RC oscillator (HSI)
– 128 kHz low-speed internal RC (LSI)
• Startup clock: After reset, the microcontroller restarts by default with an internal
2 MHz clock (HSI/8). The prescaler ratio and clock source can be changed by the
application program as soon as the code execution starts.
• Clock security system (CSS): This feature can be enabled by software. If an HSE
clock failure occurs, the internal RC (16 MHz/8) is automatically selected by the CSS
and an interrupt can optionally be generated.
• Configurable main clock output (CCO): This outputs an external clock for use by the
application.
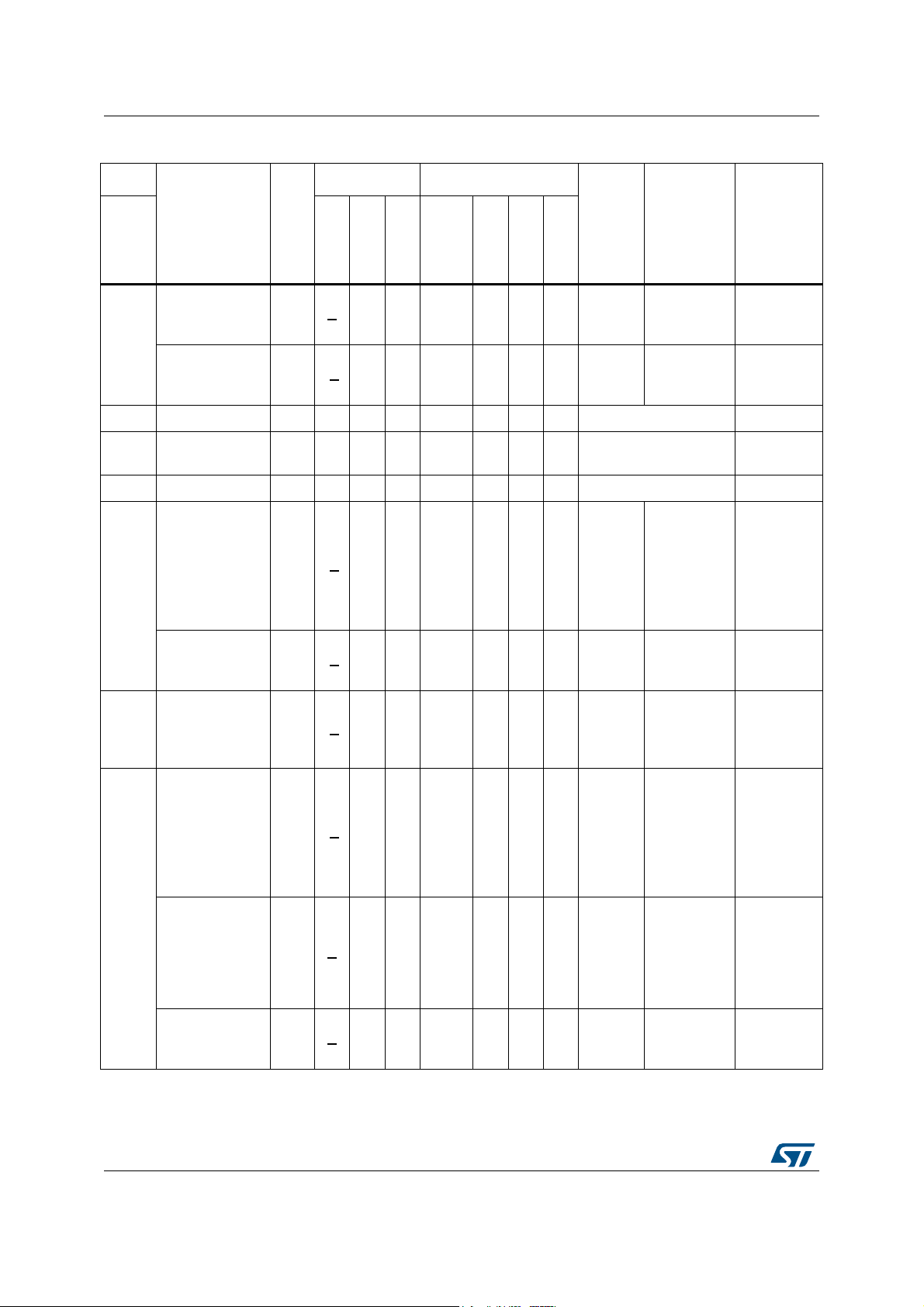
Table 2. Peripheral clock gating bit assignments in CLK_PCKENR1/2 registers
Bit
PCKEN17 TIM1 PCKEN13 UART1 PCKEN27 Reserved PCKEN23 ADC
PCKEN16 Reserved PCKEN12 Reserved PCKEN26 Reserved PCKEN22 AWU
PCKEN15 TIM2 PCKEN11 SPI PCKEN25 Reserved PCKEN21 Reserved
PCKEN14 TIM4 PCKEN10 I2C PCKEN24 Reserved PCKEN20 Reserved
Peripheral
clock
Bit
Peripheral
clock
DS12129 Rev 3 15/85
Bit
Peripheral
clock
Bit
Peripheral
clock
24
Page 16

Functional overview STM8S001J3
4.6 Power management
For efficient power management, the application can be put in one of four different lowpower modes. You can configure each mode to obtain the best compromise between the
lowest power consumption, the fastest start-up time and available wakeup sources.
• Wait mode: In this mode, the CPU is stopped, but peripherals are kept running. The
wakeup is performed by an internal or external interrupt or reset.
• Active halt mode with regulator on: In this mode, the CPU and peripheral clocks are
stopped. An internal wakeup is generated at programmable intervals by the auto wake
up unit (AWU). The main voltage regulator is kept powered on, so current consumption
is higher than in active halt mode with regulator off, but the wakeup time is faster.
Wakeup is triggered by the internal AWU interrupt, external interrupt or reset.
• Active halt mode with regulator off: This mode is the same as active halt with
regulator on, except that the main voltage regulator is powered off, so the wake up time
is slower.
• Halt mode: In this mode the microcontroller uses the least power. The CPU and
peripheral clocks are stopped, the main voltage regulator is powered off. Wakeup is
triggered by external event or reset.
4.7 Watchdog timers
The watchdog system is based on two independent timers providing maximum security to
the applications.
Activation of the watchdog timers is controlled by option bytes or by software. Once
activated, the watchdogs cannot be disabled by the user program without performing a
reset.
Window watchdog timer
The window watchdog is used to detect the occurrence of a software fault, usually
generated by external interferences or by unexpected logical conditions, which cause the
application program to abandon its normal sequence.
The window function can be used to trim the watchdog behavior to match the application
perfectly.
The application software must refresh the counter before time-out and during a limited time
window.
A reset is generated in two situations:
1. Timeout: at 16 MHz CPU clock the time-out period can be adjusted between 75 µs up
to 64
ms.
2. Refresh out of window: the down-counter is refreshed before its value is lower than the
one stored in the window register.
16/85 DS12129 Rev 3
Page 17

STM8S001J3 Functional overview
Independent watchdog timer
The independent watchdog peripheral can be used to resolve processor malfunctions due to
hardware or software failures.
It is clocked by the 128 kHz LSI internal RC clock source, and thus stays active even in case
of a CPU clock failure
The IWDG time base spans from 60 µs to 1 s.
4.8 Auto wakeup counter
• Used for auto wakeup from active halt mode
• Clock source: internal 128 kHz internal low frequency RC oscillator or external clock
• LSI clock can be internally connected to TIM1 input capture channel 1 for calibration
4.9 TIM1 - 16-bit advanced control timer
This is a high-end timer designed for a wide range of control applications. With its
complementary outputs, dead-time control and center-aligned PWM capability, the field of
applications is extended to lighting and half-bridge driver.
• 16-bit up, down and up/down autoreload counter with 16-bit prescaler
• Four independent capture/compare channels (CAPCOM) configurable as input
capture, output compare, PWM generation (edge and center aligned mode) and single
pulse mode output
• Synchronization module to control the timer with external signals
• Break input to force the timer outputs into a defined state
• One complementary output (CH1 with CH1N option) with adjustable dead time
• Interrupt sources: 3 x input capture/output compare, 1 x overflow/update, 1 x break
4.10 TIM2 - 16-bit general purpose timer
• 16-bit autoreload (AR) up-counter
• 15-bit prescaler adjustable to fixed power of 2 ratios 1…32768
• 3 individually configurable capture/compare channels
• PWM mode
• Interrupt sources: 3 x input capture/output compare, 1 x overflow/update
4.11 TIM4 - 8-bit basic timer
• 8-bit autoreload, adjustable prescaler ratio to any power of 2 from 1 to 128
• Clock source: CPU clock
• Interrupt source: 1 x overflow/update
DS12129 Rev 3 17/85
24
Page 18
Functional overview STM8S001J3
Counter
Timer
TIM1 16 Any integer from 1 to 65536 Up/down 2 1
TIM2 16 Any power of 2 from 1 to 32768 Up 3 0 No
TIM4 8 Any power of 2 from 1 to 128 Up 0 0 No
1. TIM1_CH2N with TIM1_CH1
size
(bits)
Prescaler
Table 3. TIM timer features
Counting
mode
CAPCOM
channels
Complem.
outputs
(1)
4.12 Analog-to-digital converter (ADC1)
STM8S001J3 contains a 10-bit successive approximation A/D converter (ADC1) with up to
three external and one internal multiplexed input channels and the following main features:
• Input voltage range: 0 to V
• Conversion time: 14 clock cycles
• Single and continuous, buffered continuous conversion modes
• Buffer size (10 x 10 bits)
• Scan mode for single and continuous conversion of a sequence of channels
• Analog watchdog capability with programmable upper and lower thresholds
• Analog watchdog interrupt
• Internal reference voltage on channel AIN7
• External trigger input
• Trigger from TIM1 TRGO
• End of conversion (EOC) interrupt
DDA
Ext.
trigger
No
Timer
synchr-
onization/
chaining
No
next paragraph :
Internal bandgap reference voltage
Channel AIN7 is internally connected to the internal bandgap reference voltage. The internal
bandgap reference is constant and can be used, for example, to monitor V
determine the absolute voltage on external input channels. It is independent of variations in
V
and ambient temperature TA.
DD
4.13 Communication interfaces
The following communication interfaces are implemented:
• UART1: full feature UART, synchronous mode, SmartCard mode, IrDA mode, LIN2.1
master capability
• SPI: master mode transmit/receive only, slave mode receive only, 8 Mbit/s
• I²C: up to 400 Kbit/s
18/85 DS12129 Rev 3
DD
or to
Page 19

STM8S001J3 Functional overview
4.13.1 UART1
Main features
• 1 Mbit/s full duplex SCI
• High precision baud rate generator
• Smartcard reader emulation
• IrDA SIR encoder decoder
• LIN master mode
• Single wire half duplex mode
Asynchronous communication (UART mode)
• Full duplex communication - NRZ standard format (mark/space)
• Programmable transmit and receive baud rates up to 1 Mbit/s (f
following any standard baud rate regardless of the input frequency
• Separate enable bits for transmitter and receiver
• Two receiver wakeup modes:
– Address bit (MSB)
– Idle line (interrupt)
• Transmission error detection with interrupt generation
• Parity control
/16) and capable of
CPU
LIN master mode
• Emission: generates 13-bit synch. break frame
• Reception: detects 11-bit break frame
4.13.2 SPI
• Maximum speed: 8 Mbit/s (f
• Unidirectional transfer: SPI master mode transmit/receive only, SPI slave mode receive
• Simplex master synchronous transfers on two lines with a possible bidirectional data
• Master or slave operation - selectable by software
• CRC calculation
• 1 byte Tx and Rx buffer
only
line
MASTER
/2) both for master and slave
DS12129 Rev 3 19/85
24
Page 20

Functional overview STM8S001J3
4.13.3 I2C
• I2C master features
– Clock generation
– Start and stop generation
• I2C slave features
– Programmable I2C address detection
– Stop bit detection
• Generation and detection of 7-bit/10-bit addressing and general call
• Supports different communication speeds
– Standard speed (up to 100 kHz)
– Fast speed (up to 400 kHz)
20/85 DS12129 Rev 3
Page 21
STM8S001J3 Pinouts and pin descriptions
MSv44652V2
STM8S
1
2
3
4
8
7
6
5
PD5/AIN5/UART1_TX/
PD3/AIN4/TIM2_CH2/ADC_ETR/
PD1/SWIM/
PC6/SPI_MOSI/[TIM1_CH1]
PC5/SPI_SCK/[TIM2_CH1]/
PC4/CLK_CCO/TIM1_CH4/[AIN2]/[TIM1_CH2N]
PC3/TIM1_CH3/[TLI]/[TIM1_CH1N]
PB4/I2C_SCL/[ADC_ETR]
PB5/I2C_SDA/[TIM1_BKIN]/
PA3/TIM2_CH3/[SPI_NSS]/[UART1_TX]
PD6/AIN6/UART1_RX/
PA1/OSCIN
VSS/VSSA
VCAP
VDD/VDDA
5 Pinouts and pin descriptions
This section presents the pinouts and pin descriptions for STM8S001J3. Tab le 4 introduces
the legends and abbreviations that are used in the upcoming subsections.
Type I = input, O = output, S = power supply
Level
Output speed
Port and control
configuration
Reset state
Table 4. Legend/abbreviations for STM8S001J3 pin description tables
Input CM = CMOS
Output HS = high sink
O1 = slow (up to 2 MHz)
O2 = fast (up to 10 MHz)
O3 = fast/slow programmability with slow as default state after reset
O4 = fast/slow programmability with fast as default state after reset
Input float = floating, wpu = weak pull-up
Output T = true open drain, OD = open drain, PP = push pull
Bold x
(pin state after internal reset release)
Unless otherwise specified, the pin state is the same during the reset phase
and after the internal reset release.
5.1 STM8S001J3 SO8N pinout and pin description
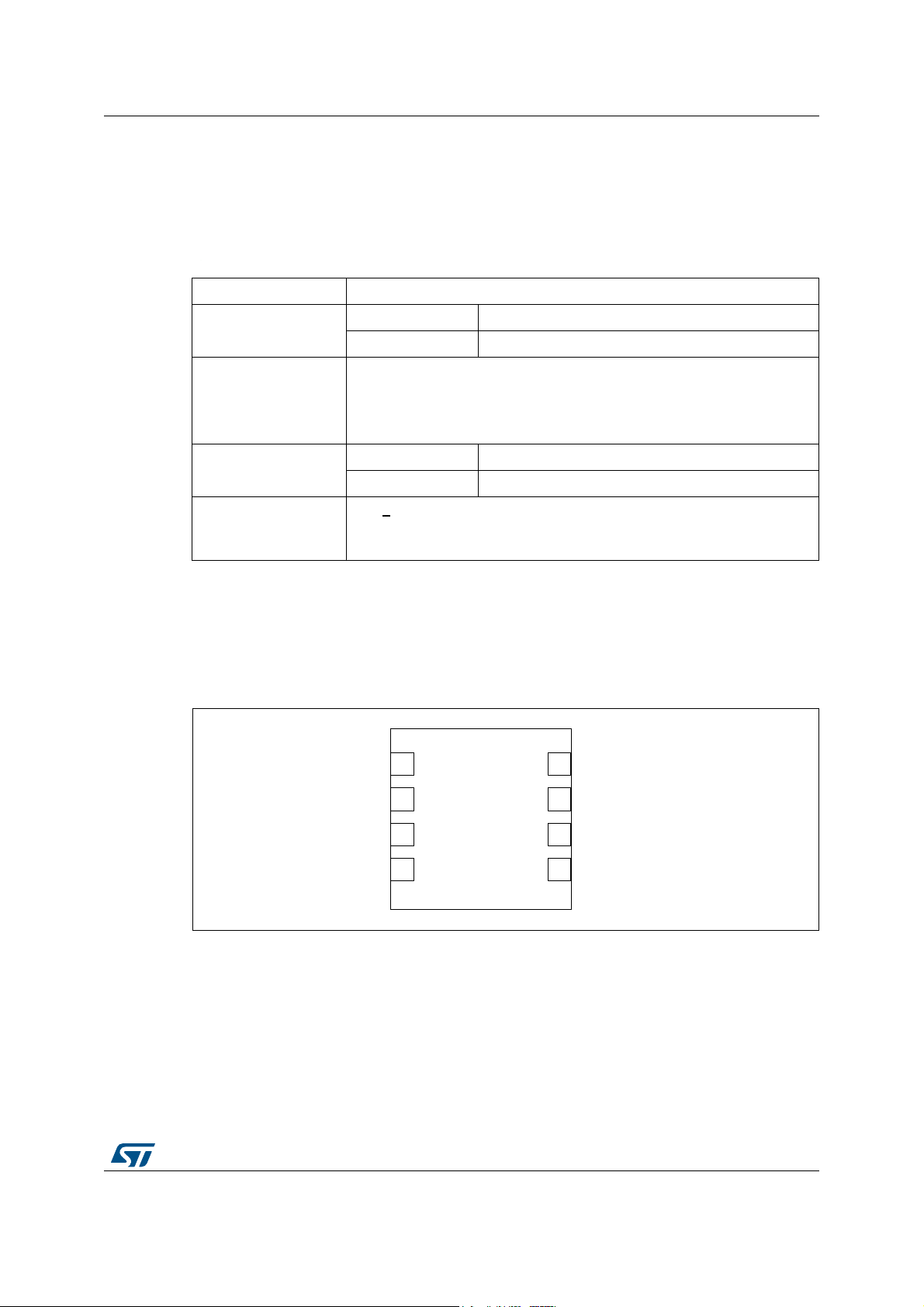
Figure 3 presents the STM8S001J3 pinout image and Tab le 5 below presents the device’s
pins description.
Figure 3. STM8S001J3 SO8N pinout
1. [ ] Alternative function option (if the same alternate function is shown twice, it indicated an exclusive choice
and not a duplication of the function).
DS12129 Rev 3 21/85
24
Page 22
Pinouts and pin descriptions STM8S001J3
Pin no.
SO8N
Pin name Type
PD6/ AIN6/
UART1 _RX
(2)
Table 5. STM8S001J3 pin description
Input Output
High
(1)
sink
Speed
Ext. interr.
I/O X
wpu
floating
XX HS O3 XX Port D6
OD PP
Main
function
(after
reset)
Default
alternate
function
Analog input
6/ UART1
data receive
1
External
clock input
PA1/ OSCIN
(3)
I/O X X X - O1 X X Port A1
(HSE clock)
2 VSS/VSSA S - - - - - - - Ground -
3VCAP S - -- - ---
1.8 V regulator
capacitor
4 VDD/VDDA S - - - - - - - Power supply -
PA3/ TIM2_ CH3
[SPI_ NSS]\
[UART1_TX]
(2)
I/O X X X HS O3 X X Port A3
Timer 2
channel 3
5
PB5/ I2C_ SDA
[TIM1_ BKIN]
PB4/ I2C_ SCL
6
/[ADC_ETR]
PC3/ TIM1_CH3
[TLI]
[TIM1_ CH1N]
7
PC4/ CLK_CCO/
TIM1_
CH4/[AIN2]/
[TIM1_ CH2N]
PC5/ SPI_SCK
[TIM2_ CH1]
I/O X
- X - O1 T
I/O X - X - O1 T
I/O X
I/O X
I/O X
X X HS O3 X X Port C3
X X HS O3 X X Port C4
X X HS O3 X X Port C5 SPI clock
(4)
- Port B5 I2C data
(4)
- Port B4 I2C clock
Timer 1 channel 3
Configurable
clock
output/Timer
1 - channel 4
Alternate
function
after remap
[option bit]
-
-
-
SPI master/
slave select
[AFR1]
UART1 data
transmit
[AFR1 and
AFR0]
Timer 1 break input
[AFR4]
ADC
external
trigger
[AFR4]
To p le v e l
interrupt
[AFR3]
Timer 1 inverted
channel 1
[AFR7]
Analog input
2 [AFR2],
Timer 1 inverted
channel 2
[AFR7]
Timer 2 channel 1
[AFR0]
22/85 DS12129 Rev 3
Page 23
STM8S001J3 Pinouts and pin descriptions
Table 5. STM8S001J3 pin description (continued)
Pin no.
SO8N
Pin name Type
PC6/ SPI_MOSI
[TIM1_ CH1]
PD1/ SWIM
(5)
I/O X
I/O X X
Input Output
High
(1)
wpu
floating
(5)
X X HS O3 X X Port C6
(5)
sink
Ext. interr.
X HS O4 X X Port D1
OD PP
Speed
Main
function
(after
reset)
Default
alternate
function
SPI master
out/slave in
SWIM data
interface
Alternate
function
after remap
[option bit]
Timer 1 channel 1
[AFR0]
-
Analog input
8
PD3/ AIN4/
TIM2_ CH2/
ADC_ ETR
I/O X
(5)
X X HS O3 X X Port D3
4/ Timer 2 channel
2/ADC
external
-
trigger
PD5/ AIN5/
UART1 _TX
1. I/O pins used simultaneously for high current source/sink must be uniformly spaced around the package. In addition, the total
driven current must respect the absolute maximum ratings.
2. By remapping UART1_TX (AFR0=1 and AFR1=1) to PA3 the UART1_RX alternate function on PD6 becomes unavailable.
UART1 can be then used only in Single wire half-duplex mode or in Smartcard-reader emulation mode.
3. When the MCU is in halt/active-halt mode, PA1 is automatically configured in input weak pull-up and cannot be used for
waking up the device. In this mode, the output state of PA1 is not driven. It is recommended d to use PA1 only in input mode
if halt/active-halt is used in the application.
4. In the open-drain output column, “T” defines a true open-drain I/O (P-buffer, weak pull-up, and protection diode to VDD are
not implemented). Although PB5 itself is a true open drain GPIO with its respective internal circuitry and characteristics, V
maximum of the pin number 5 is limited by the standard GPIO PA3 which is also bonded to pin number 5.
5. The PD1 pin is in input pull-up during the reset phase and after internal reset release. This PD1 default state influences all
GPIOs connected in parallel on pin# 8 (PC6, PD3, PD5).
I/O X
(5)
XX HS O3 XX Port D5
Analog input
5/ UART1
data transmit
-
IN
Note: The PA2, PB0, PB1, PB2, PB3, PB6, PB7, PC1, PC2, PC7, PD0, PD2, PD4, PD7, PE5 and
PF4 GPIOs should be configured after device reset in output push-pull mode with output
low-state to reduce the device’s consumption and to improve its EMC immunity. The GPIOs
mentioned above are not connected to pins, and they are in input-floating mode after a
device reset.
Note: As several pins provide a connection to multiple GPIOs, the mode selection for any of those
GPIOs impacts all the other GPIOs connected to the same pin. The user is responsible for
the proper setting of the GPIO modes in order to avoid conflicts between GPIOs bonded to
the same pin (including their alternate functions). For example, pull-up enabled on PD1 is
also seen on PC6, PD3 and PD5. Push-pull configuration of PC3 is also seen on PC4 and
PC5, etc.
DS12129 Rev 3 23/85
24
Page 24

Pinouts and pin descriptions STM8S001J3
5.2 Alternate function remapping
As shown in the rightmost column of the pin description table, some alternate functions can
be remapped at different I/O ports by programming one of eight AFR (alternate function
remap) option bits. Refer to
the default alternate function is no longer available.
To use an alternate function, the corresponding peripheral must be enabled in the peripheral
registers.
Alternate function remapping does not effect GPIO capabilities of the I/O ports (see the
GPIO section of the family reference manual, RM0016).
Section 8: Option bytes. When the remapping option is active,
24/85 DS12129 Rev 3
Page 25
STM8S001J3 Memory and register map
6 Memory and register map
6.1 Memory map
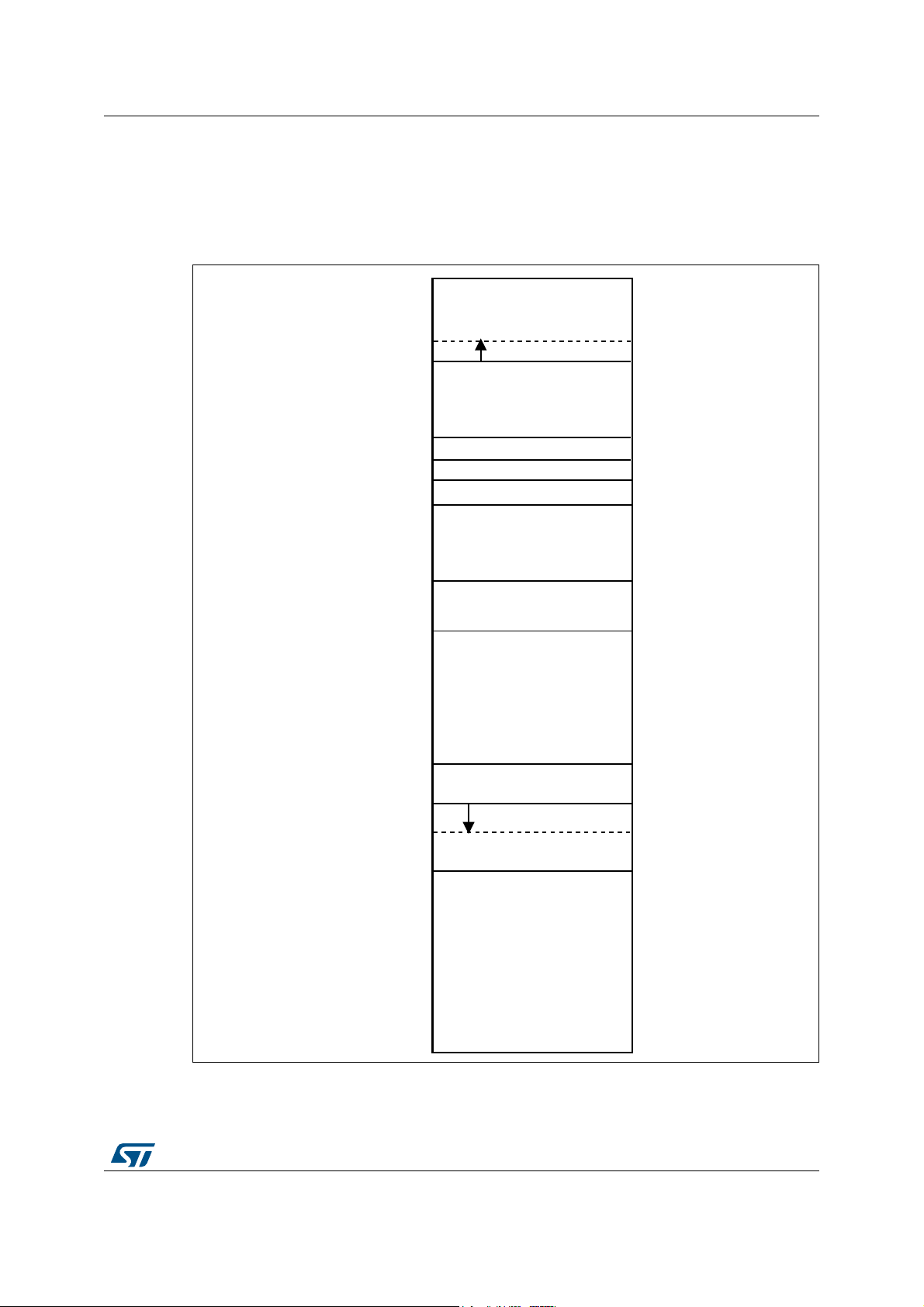
Figure 4. Memory map
0x00 0000
0x00 03FF
0x00 0800
0x00 4000
0x00 407F
0x00 47FF
0x00 4800
0x00 480A
0x00 480B
0x00 4FFF
0x00 5000
0x00 57FF
0x00 5800
RAM
(1 Kbyte)
513 byte stack
Reserved
Data EEPROM
Reserved
Option bytes
Reserved
GPIO and periph. reg.
Reserved
0x00 7EFF
0x00 7F00
0x00 7FFF
0x00 8000
0x00 807F
0x00 8080
0x00 9FFF
0x00 A000
CPU/SWIM/debug/ITC
registers
32 interrupt vectors
Flash program memory
(8 Kbyte)
Reserved
0x02 7FFF
DS12129 Rev 3 25/85
MS36410V1
36
Page 26

Memory and register map STM8S001J3
Tabl e 6 lists the boundary addresses for each memory size. The top of the stack is at the
RAM end address in each case.
Flash program memory 8 K 0x00 8000 0x00 9FFF
Data EEPROM 128 0x00 4000 0x00 407F
Table 6. Flash, Data EEPROM and RAM boundary addresses
Memory area Size (byte) Start address End address
RAM 1 K 0x00 0000 0x00 03FF
6.2 Register map
6.2.1 I/O port hardware register map
Address Block Register label Register name
0x00 5000
Table 7. I/O port hardware register map
Reset
status
PA_ODR Port A data output latch register 0x00
0x00 5001 PA_IDR Port A input pin value register 0xXX
0x00 5002 PA_DDR Port A data direction register 0x00
Port A
0x00 5003 PA_CR1 Port A control register 1 0x00
0x00 5004 PA_CR2 Port A control register 2 0x00
0x00 5005
PB_ODR Port B data output latch register 0x00
0x00 5006 PB_IDR Port B input pin value register 0xXX
0x00 5007 PB_DDR Port B data direction register 0x00
Port B
0x00 5008 PB_CR1 Port B control register 1 0x00
0x00 5009 PB_CR2 Port B control register 2 0x00
0x00 500A
PC_ODR Port C data output latch register 0x00
0x00 500B PB_IDR Port C input pin value register 0xXX
0x00 500C PC_DDR Port C data direction register 0x00
Port C
0x00 500D PC_CR1 Port C control register 1 0x00
0x00 500E PC_CR2 Port C control register 2 0x00
0x00 500F
PD_ODR Port D data output latch register 0x00
0x00 5010 PD_IDR Port D input pin value register 0xXX
0x00 5011 PD_DDR Port D data direction register 0x00
Port D
0x00 5012 PD_CR1 Port D control register 1 0x02
(1)
(1)
(1)
(1)
0x00 5013 PD_CR2 Port D control register 2 0x00
26/85 DS12129 Rev 3
Page 27

STM8S001J3 Memory and register map
Table 7. I/O port hardware register map (continued)
Address Block Register label Register name
0x00 5014
PE_ODR Port E data output latch register 0x00
0x00 5015 PE_IDR Port E input pin value register 0xXX
0x00 5016 PE_DDR Port E data direction register 0x00
Port E
0x00 5017 PE_CR1 Port E control register 1 0x00
0x00 5018 PE_CR2 Port E control register 2 0x00
0x00 5019
PF_ODR Port F data output latch register 0x00
0x00 501A PF_IDR Port F input pin value register 0xXX
0x00 501B PF_DDR Port F data direction register 0x00
Port F
0x00 501C PF_CR1 Port F control register 1 0x00
0x00 501D PF_CR2 Port F control register 2 0x00
1. Depends on the external circuitry.
6.2.2 General hardware register map
Reset
status
(1)
(1)
DS12129 Rev 3 27/85
36
Page 28

Memory and register map STM8S001J3
Address Block Register label Register name
0x00 501E to
0x00 5059
0x00 505A
Table 8. General hardware register map
Reset
status
Reserved area (60 byte)
FLASH_CR1 Flash control register 1 0x00
0x00 505B FLASH_CR2 Flash control register 2 0x00
0x00 505C FLASH_NCR2 Flash complementary control register 2 0xFF
0x00 505D FLASH _FPR Flash protection register 0x00
Flash
0x00 505E FLASH _NFPR Flash complementary protection register 0xFF
0x00 505F FLASH _IAPSR
0x00 5060 to
0x00 5061
0x00 5062 Flash FLASH _PUKR
Flash in-application programming status
register
Reserved area (2 byte)
Flash Program memory unprotection
register
0x00
0x00
0x00 5063 Reserved area (1 byte)
0x00 5064 Flash FLASH _DUKR Data EEPROM unprotection register 0x00
0x00 5065 to
0x00 509F
0x00 50A0
EXTI_CR1 External interrupt control register 1 0x00
Reserved area (59 byte)
ITC
0x00 50A1 EXTI_CR2 External interrupt control register 2 0x00
0x00 50A2 to
0x00 50B2
Reserved area (17 byte)
0x00 50B3 RST RST_SR Reset status register 0xXX
0x00 50B4 to
0x00 50BF
0x00 50C0
CLK_ICKR Internal clock control register 0x01
Reserved area (12 byte)
CLK
0x00 50C1 CLK_ECKR External clock control register 0x00
0x00 50C2 Reserved area (1 byte)
0x00 50C3
CLK_CMSR Clock master status register 0xE1
0x00 50C4 CLK_SWR Clock master switch register 0xE1
0x00 50C5 CLK_SWCR Clock switch control register 0xXX
0x00 50C6 CLK_CKDIVR Clock divider register 0x18
CLK
0x00 50C7 CLK_PCKENR1 Peripheral clock gating register 1 0xFF
0x00 50C8 CLK_CSSR Clock security system register 0x00
0x00 50C9 CLK_CCOR Configurable clock control register 0x00
0x00 50CA CLK_PCKENR2 Peripheral clock gating register 2 0xFF
0x00 50CB Reserved area (1 byte)
(1)
28/85 DS12129 Rev 3
Page 29

STM8S001J3 Memory and register map
Table 8. General hardware register map (continued)
Address Block Register label Register name
0x00 50CC
CLK_HSITRIMR HSI clock calibration trimming register 0x00
CLK
0x00 50CD CLK_SWIMCCR SWIM clock control register
0x00 50CE to
0x00 50D0
0x00 50D1
WWDG_CR WWDG control register 0x7F
Reserved area (3 byte)
Reset
status
0bXXXX
XXX0
WWDG
0x00 50D2 WWDG_WR WWDR window register 0x7F
0x00 50D3 to
0x00 50DF
0x00 50E0
0x00 50E1 IWDG_PR IWDG prescaler register 0x00
IWDG
IWDG_KR IWDG key register 0xXX
Reserved area (13 byte)
0x00 50E2 IWDG_RLR IWDG reload register 0xFF
0x00 50E3 to
0x00 50EF
0x00 50F0
0x00 50F1 AWU_APR AWU asynchronous prescaler buffer register 0x3F
AWU
AWU_CSR1 AWU control/status register 1 0x00
Reserved area (13 byte)
0x00 50F2 AWU_TBR AWU timebase selection register 0x00
(2)
0x00 50F3 to
0x00 50FF
0x00 5200
SPI_CR1 SPI control register 1 0x00
Reserved area (13 byte)
0x00 5201 SPI_CR2 SPI control register 2 0x00
0x00 5202 SPI_ICR SPI interrupt control register 0x00
0x00 5203 SPI_SR SPI status register 0x02
SPI
0x00 5204 SPI_DR SPI data register 0x00
0x00 5205 SPI_CRCPR SPI CRC polynomial register 0x07
0x00 5206 SPI_RXCRCR SPI Rx CRC register 0x00
0x00 5207 SPI_TXCRCR SPI Tx CRC register 0x00
0x00 5208 to
0x00 520F
0x00 5210
I2C_CR1 I2C control register 1 0x00
Reserved area (8 byte)
0x00 5211 I2C_CR2 I2C control register 2 0x00
0x00 5212 I2C_FREQR I2C frequency register 0x00
I2C
0x00 5213 I2C_OARL I2C own address register low 0x00
0x00 5214 I2C_OARH I2C own address register high 0x00
0x00 5215 Reserved
DS12129 Rev 3 29/85
36
Page 30

Memory and register map STM8S001J3
Table 8. General hardware register map (continued)
Address Block Register label Register name
0x00 5216
0x00 5217 I2C_SR1 I2C status register 1 0x00
0x00 5218 I2C_SR2 I2C status register 2 0x00
0x00 5219 I2C_SR3 I2C status register 3 0x00
0x00 521A I2C_ITR I2C interrupt control register 0x00
0x00 521B I2C_CCRL I2C clock control register low 0x00
0x00 521C I2C_CCRH I2C clock control register high 0x00
0x00 521D I2C_TRISER I2C TRISE register 0x02
0x00 521E I2C_PECR I2C packet error checking register 0x00
0x00 521F to
0x00 522F
0x00 5230
0x00 5231 UART1_DR UART1 data register 0xXX
0x00 5232 UART1_BRR1 UART1 baud rate register 1 0x00
0x00 5233 UART1_BRR2 UART1 baud rate register 2 0x00
0x00 5234 UART1_CR1 UART1 control register 1 0x00
0x00 5235 UART1_CR2 UART1 control register 2 0x00
I2C
UART1
I2C_DR I2C data register 0x00
Reserved area (17 byte)
UART1_SR UART1 status register 0xC0
Reset
status
0x00 5236 UART1_CR3 UART1 control register 3 0x00
0x00 5237 UART1_CR4 UART1 control register 4 0x00
0x00 5238 UART1_CR5 UART1 control register 5 0x00
0x00 5239 UART1_GTR UART1 guard time register 0x00
0x00 523A UART1_PSCR UART1 prescaler register 0x00
0x00 523B to
0x00 523F
0x00 523B to
0x00523F
Reserved area (5 bytes)
Reserved area (21 byte)
30/85 DS12129 Rev 3
Page 31

STM8S001J3 Memory and register map
Table 8. General hardware register map (continued)
Address Block Register label Register name
0x00 5250
TIM1_CR1 TIM1 control register 1 0x00
Reset
status
0x00 5251 TIM1_CR2 TIM1 control register 2 0x00
0x00 5252 TIM1_SMCR TIM1 slave mode control register 0x00
0x00 5253 TIM1_ETR TIM1 external trigger register 0x00
0x00 5254 TIM1_IER TIM1 Interrupt enable register 0x00
0x00 5255 TIM1_SR1 TIM1 status register 1 0x00
0x00 5256 TIM1_SR2 TIM1 status register 2 0x00
0x00 5257 TIM1_EGR TIM1 event generation register 0x00
0x00 5258 TIM1_CCMR1 TIM1 capture/compare mode register 1 0x00
0x00 5259 TIM1_CCMR2 TIM1 capture/compare mode register 2 0x00
0x00 525A TIM1_CCMR3 TIM1 capture/compare mode register 3 0x00
0x00 525B TIM1_CCMR4 TIM1 capture/compare mode register 4 0x00
0x00 525C TIM1_CCER1 TIM1 capture/compare enable register 1 0x00
0x00 525D TIM1_CCER2 TIM1 capture/compare enable register 2 0x00
0x00 525E TIM1_CNTRH TIM1 counter high 0x00
0x00 525F TIM1_CNTRL TIM1 counter low 0x00
TIM1
0x00 5260 TIM1_PSCRH TIM1 prescaler register high 0x00
0x00 5261 TIM1_PSCRL TIM1 prescaler register low 0x00
0x00 5262 TIM1_ARRH TIM1 auto-reload register high 0xFF
0x00 5263 TIM1_ARRL TIM1 auto-reload register low 0xFF
0x00 5264 TIM1_RCR TIM1 repetition counter register 0x00
0x00 5265 TIM1_CCR1H TIM1 capture/compare register 1 high 0x00
0x00 5266 TIM1_CCR1L TIM1 capture/compare register 1 low 0x00
0x00 5267 TIM1_CCR2H TIM1 capture/compare register 2 high 0x00
0x00 5268 TIM1_CCR2L TIM1 capture/compare register 2 low 0x00
0x00 5269 TIM1_CCR3H TIM1 capture/compare register 3 high 0x00
0x00 526A TIM1_CCR3L TIM1 capture/compare register 3 low 0x00
0x00 526B TIM1_CCR4H TIM1 capture/compare register 4 high 0x00
0x00 526C TIM1_CCR4L TIM1 capture/compare register 4 low 0x00
0x00 526D TIM1_BKR TIM1 break register 0x00
0x00 526E TIM1_DTR TIM1 dead-time register 0x00
0x00 526F TIM1_OISR TIM1 output idle state register 0x00
0x00 5270 to
0x00 52FF
Reserved area (147 byte)
DS12129 Rev 3 31/85
36
Page 32

Memory and register map STM8S001J3
Table 8. General hardware register map (continued)
Address Block Register label Register name
0x00 5300
0x00 5301 Reserved
0x00 5302 Reserved
0x00 5303 TIM2_IER TIM2 interrupt enable register 0x00
0x00 5304 TIM2_SR1 TIM2 status register 1 0x00
0x00 5305 TIM2_SR2 TIM2 status register 2 0x00
0x00 5306 TIM2_EGR TIM2 event generation register 0x00
0x00 5307 TIM2_CCMR1 TIM2 capture/compare mode register 1 0x00
0x00 5308 TIM2_CCMR2 TIM2 capture/compare mode register 2 0x00
0x00 5309 TIM2_CCMR3 TIM2 capture/compare mode register 3 0x00
0x00 530A TIM2_CCER1 TIM2 capture/compare enable register 1 0x00
0x00 530B TIM2_CCER2 TIM2 capture/compare enable register 2 0x00
0x00 530C TIM2_CNTRH TIM2 counter high 0x00
0x00 530D TIM2_CNTRL TIM2 counter low 0x00
0x00 530E TIM2_PSCR TIM2 prescaler register 0x00
0x00 530F TIM2_ARRH TIM2 auto-reload register high 0xFF
0x00 5310 TIM2_ARRL TIM2 auto-reload register low 0xFF
TIM2
TIM2_CR1 TIM2 control register 1 0x00
Reset
status
0x00 5311 TIM2_CCR1H TIM2 capture/compare register 1 high 0x00
0x00 5312 TIM2_CCR1L TIM2 capture/compare register 1 low 0x00
0x00 5313 TIM2_CCR2H TIM2 capture/compare reg. 2 high 0x00
0x00 5314 TIM2_CCR2L TIM2 capture/compare register 2 low 0x00
0x00 5315 TIM2_CCR3H TIM2 capture/compare register 3 high 0x00
0x00 5316 TIM2_CCR3L TIM2 capture/compare register 3 low 0x00
0x00 5317 to
0x00 533F
0x00 5340
0x00 5341 Reserved
0x00 5342 Reserved
0x00 5343 TIM4_IER TIM4 interrupt enable register 0x00
0x00 5344 TIM4_SR TIM4 status register 0x00
0x00 5345 TIM4_EGR TIM4 event generation register 0x00
0x00 5346 TIM4_CNTR TIM4 counter 0x00
0x00 5347 TIM4_PSCR TIM4 prescaler register 0x00
0x00 5348 TIM4_ARR TIM4 auto-reload register 0xFF
TIM4
TIM4_CR1 TIM4 control register 1 0x00
Reserved area (43 byte)
32/85 DS12129 Rev 3
Page 33

STM8S001J3 Memory and register map
Table 8. General hardware register map (continued)
Address Block Register label Register name
0x00 5349 to
0x00 53DF
0x00 53E0 to
0x00 53F3
0x00 53F4 to
0x00 53FF
0x00 5400
ADC1 ADC_DBxR ADC data buffer registers 0x00
ADC _CSR ADC control/status register 0x00
Reserved area (153 byte)
Reserved area (12 byte)
Reset
status
0x00 5401 ADC_CR1 ADC configuration register 1 0x00
0x00 5402 ADC_CR2 ADC configuration register 2 0x00
0x00 5403 ADC_CR3 ADC configuration register 3 0x00
0x00 5404 ADC_DRH ADC data register high 0xXX
0x00 5405 ADC_DRL ADC data register low 0xXX
0x00 5406 ADC_TDRH ADC Schmitt trigger disable register high 0x00
0x00 5407 ADC_TDRL ADC Schmitt trigger disable register low 0x00
ADC1
0x00 5408 ADC_HTRH ADC high threshold register high 0x03
0x00 5409 ADC_HTRL ADC high threshold register low 0xFF
0x00 540A ADC_LTRH ADC low threshold register high 0x00
0x00 540B ADC_LTRL ADC low threshold register low 0x00
0x00 540C ADC_AWSRH ADC analog watchdog status register high 0x00
0x00 540D ADC_AWSRL ADC analog watchdog status register low 0x00
0x00 540E ADC_AWCRH ADC analog watchdog control register high 0x00
0x00 540F ADC_AWCRL ADC analog watchdog control register low 0x00
0x00 5410 to
0x00 57FF
1. Depends on the previous reset source.
2. Write only register.
Reserved area (1008 byte)
DS12129 Rev 3 33/85
36
Page 34

Memory and register map STM8S001J3
6.2.3 CPU/SWIM/debug module/interrupt controller registers
Table 9. CPU/SWIM/debug module/interrupt controller registers
Address Block Register Label Register Name
0x00 7F00
A Accumulator 0x00
Reset
Status
0x00 7F01 PCE Program counter extended 0x00
0x00 7F02 PCH Program counter high 0x00
0x00 7F03 PCL Program counter low 0x00
0x00 7F04 XH X index register high 0x00
(1)
0x00 7F05 XL X index register low 0x00
CPU
0x00 7F06 YH Y index register high 0x00
0x00 7F07 YL Y index register low 0x00
0x00 7F08 SPH Stack pointer high 0x
0x00 7F09 SPL Stack pointer low 0xFF
0x00 7F0A CCR Condition code register 0x28
0x00 7F0B to
0x00 7F5F
Reserved area (85 byte)
0x00 7F60 CPU CFG_GCR Global configuration register 0x00
0x00 7F70
ITC_SPR1 Interrupt software priority register 1 0xFF
0x00 7F71 ITC_SPR2 Interrupt software priority register 2 0xFF
0x00 7F72 ITC_SPR3 Interrupt software priority register 3 0xFF
0x00 7F73 ITC_SPR4 Interrupt software priority register 4 0xFF
ITC
0x00 7F74 ITC_SPR5 Interrupt software priority register 5 0xFF
0x00 7F75 ITC_SPR6 Interrupt software priority register 6 0xFF
0x00 7F76 ITC_SPR7 Interrupt software priority register 7 0xFF
0x00 7F77 ITC_SPR8 Interrupt software priority register 8 0xFF
0x00 7F78 to
0x00 7F79
Reserved area (2 byte)
0x00 7F80 SWIM SWIM_CSR SWIM control status register 0x00
0x00 7F81 to
0x00 7F8F
Reserved area (15 byte)
34/85 DS12129 Rev 3
Page 35

STM8S001J3 Memory and register map
Table 9. CPU/SWIM/debug module/interrupt controller registers (continued)
Address Block Register Label Register Name
0x00 7F90
DM_BK1RE DM breakpoint 1 register extended byte 0xFF
0x00 7F91 DM_BK1RH DM breakpoint 1 register high byte 0xFF
0x00 7F92 DM_BK1RL DM breakpoint 1 register low byte 0xFF
0x00 7F93 DM_BK2RE DM breakpoint 2 register extended byte 0xFF
0x00 7F94 DM_BK2RH DM breakpoint 2 register high byte 0xFF
0x00 7F95 DM_BK2RL DM breakpoint 2 register low byte 0xFF
DM
0x00 7F96 DM_CR1 DM debug module control register 1 0x00
0x00 7F97 DM_CR2 DM debug module control register 2 0x00
0x00 7F98 DM_CSR1 DM debug module control/status register 1 0x10
0x00 7F99 DM_CSR2 DM debug module control/status register 2 0x00
0x00 7F9A DM_ENFCTR DM enable function register 0xFF
0x00 7F9B to
0x00 7F9F
1. Accessible by debug module only
Reserved area (5 byte)
Reset
Status
DS12129 Rev 3 35/85
36
Page 36

Interrupt vector mapping STM8S001J3
7 Interrupt vector mapping
IRQ
no.
Source
block
Description
Table 10. Interrupt mapping
Wakeup from
Halt mode
Wakeup from
Active-halt mode
Vector address
- RESET Reset Yes Yes 0x00 8000
- TRAP Software interrupt - - 0x00 8004
0 TLI External top level interrupt - - 0x00 8008
1 AWU Auto wake up from halt - Yes 0x00 800C
2 CLK Clock controller - - 0x00 8010
3 EXTI0 Port A external interrupts Yes
(1)
Yes
(1)
0x00 8014
4 EXTI1 Port B external interrupts Yes Yes 0x00 8018
5 EXTI2 Port C external interrupts Yes Yes 0x00 801C
6 EXTI3 Port D external interrupts Yes Yes 0x00 8020
7 EXTI4 Port E external interrupts Yes Yes 0x00 8024
8 - Reserved 0x00 8028
9 - Reserved 0x00 802C
10 SPI End of transfer Yes Yes 0x00 8030
11 TI M1
TIM1 update/overflow/underflow/
trigger/break
- - 0x00 8034
12 TIM1 TIM1 capture/compare - - 0x00 8038
13 TIM2 TIM2 update /overflow - - 0x00 803C
14 TIM2 TIM2 capture/compare - - 0x00 8040
15 - Reserved 0x00 8044
16 - Reserved 0x00 8048
17 UART1 Tx complete - - 0x00 804C
18 UART1 Receive register DATA FULL - - 0x00 8050
19 I2C I2C interrupt Yes Yes 0x00 8054
20 - Reserved 0x00 8058
21 - Reserved 0x00 805C
22 ADC1
ADC1 end of conversion/analog
watchdog interrupt
- - 0x00 8060
23 TIM4 TIM4 update/overflow - - 0x00 8064
24 Flash EOP/WR_PG_DIS - - 0x00 8068
Reserved
1. Except PA1
0x00 806C to
0x00 807C
36/85 DS12129 Rev 3
Page 37

STM8S001J3 Option bytes
8 Option bytes
Option bytes contain configurations for device hardware features as well as the memory
protection of the device. They are stored in a dedicated block of the memory. Except for the
ROP (read-out protection) byte, each option byte has to be stored twice, in a regular form
(OPTx) and a complemented one (NOPTx) for redundancy.
Option bytes can be modified in ICP mode (via SWIM) by accessing the EEPROM address
shown in
application in IAP mode, except the ROP option that can only be modified in ICP mode (via
SWIM).
Refer to the STM8S Flash programming manual (PM0051) and STM8 SWIM
communication protocol and debug module user manual (UM0470) for information on SWIM
programming procedures.
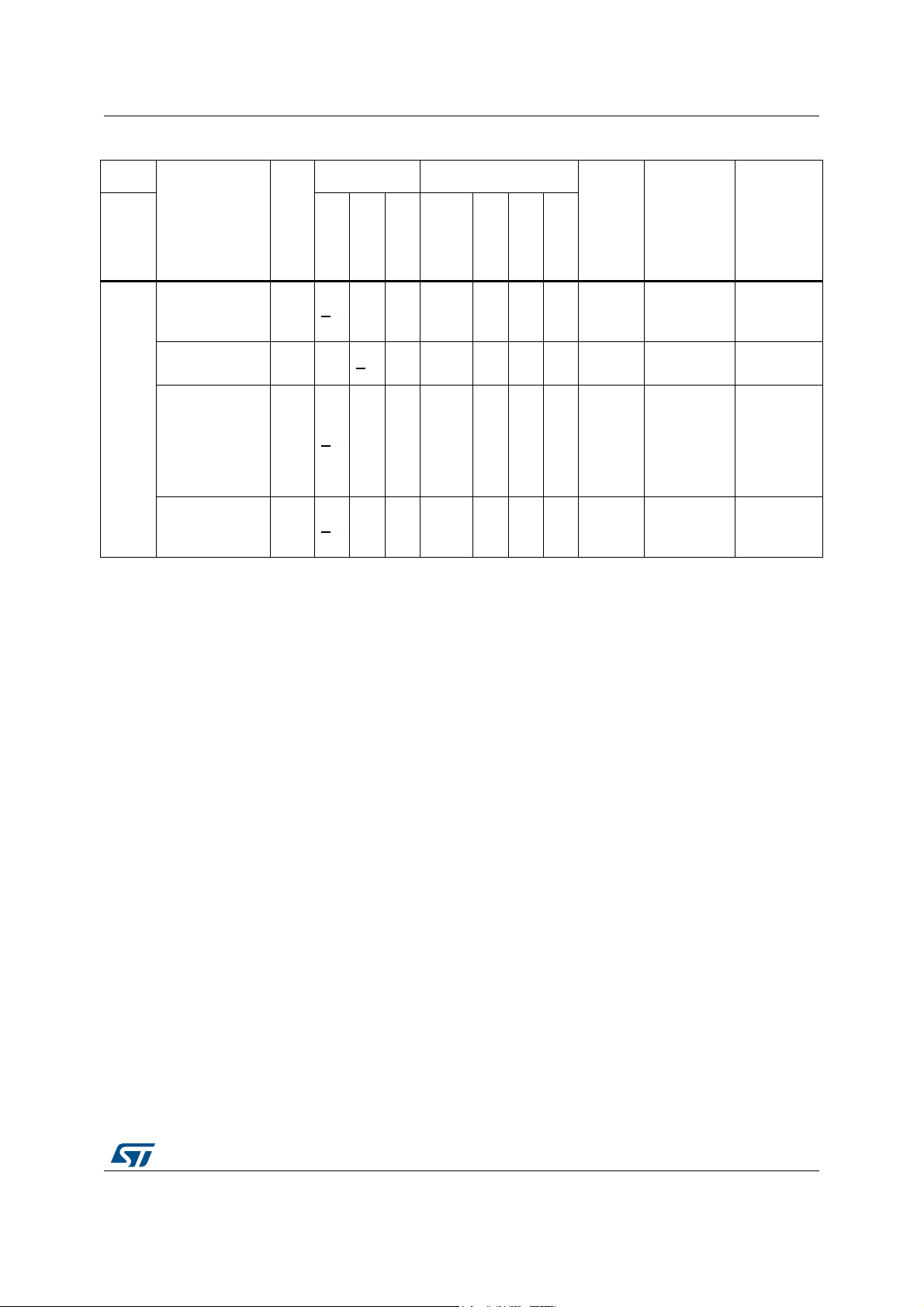
Table 11: Option bytes below. Option bytes can also be modified ‘on the fly’ by the
Table 11. Option bytes
Addr.
0x4800
0x4801
0x4802 NOPT1 NUBC[7:0] 0xFF
0x4803 Alternate
0x4804 NOPT2 NAFR7 NAFR6 NAFR5 NAFR4 NAFR3 NAFR2 NAFR1 NAFR0 0xFF
0x4805
0x4806 NOPT3 Reserved
0x4807
0x4808 NOPT4 Reserved
0x4809
0x480A NOPT5 NHSECNT[7:0] 0xFF
Option
name
Read-out
protection
(ROP)
User boot code
(UBC)
function
remapping
(AFR)
Misc. option
Clock option
HSE clock
startup
Option
byte no.
OPT0 ROP[7:0] 0x00
OPT1 UBC[7:0] 0x00
OPT2 AFR7 AFR6 AFR5 AFR4 AFR3 AFR2 AFR1 AFR0 0x00
OPT3 Reserved HSITRIM
OPT4 Reserved
OPT5 HSECNT[7:0] 0x00
76543210
Table 12. Option byte description
Option bits Factory
default
setting
NHSI
TRIM
LSI
_EN
NLSI
_EN
EXT
CLK
NEXT
CLK
IWDG
_HW
NIWDG
_HW
CKAWU
SEL
NCKAW
USEL
WWDG
_HW
NWWDG
_HW
PRS
C1
NPR
SC1
WWDG
_HALT
NWWDG
_HALT
PRS
C0
NPR
SC0
0x00
0xFF
0x00
0xFF
Option byte no. Description
ROP[7:0] Memory readout protection (ROP)
OPT0
0xAA: Enable readout protection (write access via SWIM protocol)
Note: Refer to the family reference manual (RM0016) section on
Flash/EEPROM memory readout protection for details.
DS12129 Rev 3 37/85
39
Page 38

Option bytes STM8S001J3
Table 12. Option byte description (continued)
Option byte no. Description
UBC[7:0] User boot code area
0x00: no UBC, no write-protection
0x01: Pages 0 defined as UBC, memory write-protected
0x02: Pages 0 to 1 defined as UBC, memory write-protected
OPT1
OPT2
OPT3
Page 0 and page 1 contain the interrupt vectors.
...
0x7F: Pages 0 to 126 defined as UBC, memory write-protected
Other values: Pages 0 to 127 defined as UBC, memory-write protected.
Note: Refer to the family reference manual (RM0016) section on
Flash/EEPROM write protection for more details.
AFR[7:0]
Refer to the following section for alternate function remapping descriptions
of bits [7:2] and [1:0] respectively.
HSITRIM: high-speed internal clock trimming register size
0: 3-bit trimming supported in CLK_HSITRIMR register
1: 4-bit trimming supported in CLK_HSITRIMR register
LSI_EN: Low speed internal clock enable
0: LSI clock is not available as CPU clock source
1: LSI clock is available as CPU clock source
IWDG_HW: Independent watchdog
0: IWDG Independent watchdog activated by software
1: IWDG Independent watchdog activated by hardware
OPT4
OPT5
WWDG_HW: Window watchdog activation
0: WWDG window watchdog activated by software
1: WWDG window watchdog activated by hardware
WWDG_HALT: Window watchdog reset on halt
0: No reset generated on halt if WWDG active
1: Reset generated on halt if WWDG active
EXTCLK: External clock selection
0: External crystal connected to OSCIN/OSCOUT
1: External clock signal on OSCIN
CKAWUSEL: Auto wakeup unit/clock
0: LSI clock source selected for AWU
1: HSE clock with prescaler selected as clock source for for AWU
PRSC[1:0] AWU clock prescaler
0x: 16 MHz to 128 kHz prescaler
10: 8 MHz to 128 kHz prescaler
11: 4 MHz to 128 kHz prescaler
HSECNT[7:0]: HSE crystal oscillator stabilization time
This configures the stabilization time.
0x00: 2048 HSE cycles
0xB4: 128 HSE cycles
0xD2: 8 HSE cycles
0xE1: 0.5 HSE cycles
38/85 DS12129 Rev 3
Page 39

STM8S001J3 Option bytes
8.1 Alternate function remapping bits
Table 13. STM8S001J3 alternate function remapping bits for 8-pin devices
Option byte number Description
AFR7Alternate function remapping option 7
0: AFR7 remapping option inactive: default alternate function
1: Port C3 alternate function = TIM1_CH1N; port C4 alternate function =
TIM1_CH2N.
AFR6 Alternate function remapping option 6
Reserved.
AFR5 Alternate function remapping option 5
Reserved.
AFR4 Alternate function remapping option 4
0: AFR4 remapping option inactive: default alternate function
1: Port B4 alternate function = ADC_ETR; port B5 alternate function =
TIM1_BKIN.
AFR3 Alternate function remapping option 3
OPT2
0: AFR3 remapping option inactive: default alternate function
1: Port C3 alternate function = TLI.
AFR2 Alternate function remapping option 2
0: AFR2 remapping option inactive: default alternate function
1: Port C4 alternate function = AIN2.
AFR1 Alternate function remapping option 1
0: AFR1 remapping option inactive: default alternate function
1: If AFR0=0: Port A3 alternate function = SPI_NSS.
If AFR0=1: Port A3 alternate function = UART_TX; port D6 alternate
function UART_RX unavailable.
AFR0 Alternate function remapping option 0
0: AFR0 remapping option inactive: Default alternate functions
1: Port C5 alternate function = TIM2_CH1; port C6 alternate function =
TIM1_CH1.
1. Refer to the pinout description.
2. Do not use more than one remapping option in the same port.
(2)
(2)
(1)
(1)
(1)
(1)
(1)
(1)
.
DS12129 Rev 3 39/85
39
Page 40

Electrical characteristics STM8S001J3
50 pF
STM8 pin
9 Electrical characteristics
9.1 Parameter conditions
Unless otherwise specified, all voltages are referred to VSS.
9.1.1 Minimum and maximum values
Unless otherwise specified the minimum and maximum values are guaranteed in the worst
conditions of ambient temperature, supply voltage and frequencies by tests in production on
100% of the devices with an ambient temperature at T
the selected temperature range).
Data based on characterization results, design simulation and/or technology characteristics
are indicated in the table footnotes and are not tested in production. Based on
characterization, the minimum and maximum values refer to sample tests and represent the
mean value plus or minus three times the standard deviation (mean ± 3
9.1.2 Typical values
= 25 °C and TA = T
A
Σ).
Amax
(given by
Unless otherwise specified, typical data are based on TA = 25 °C, V
only as design guidelines and are not tested.
Typical ADC accuracy values are determined by characterization of a batch of samples from
a standard diffusion lot over the full temperature range, where 95% of the devices have an
error less than or equal to the value indicated
9.1.3 Typical curves
Unless otherwise specified, all typical curves are given only as design guidelines and are
not tested.
9.1.4 Loading capacitor
The loading conditions used for pin parameter measurement are shown in Figure 5.
(mean ± 2 Σ).
Figure 5. Pin loading conditions
= 5 V. They are given
DD
9.1.5 Pin input voltage
The input voltage measurement on a pin of the device is described in Figure 6.
40/85 DS12129 Rev 3
Page 41

STM8S001J3 Electrical characteristics
V
IN
STM8 pin
Figure 6. Pin input voltage
9.2 Absolute maximum ratings
Stresses above the absolute maximum ratings listed in Tab le 14: Voltage characteristics,
Tabl e 15: Current characteristics, and Tab le 16: Thermal characteristics may cause
permanent damage to the device. These are stress ratings only and functional operation of
the device at these conditions is not implied. Exposure to maximum rating conditions for
extended periods may affect device reliability.
Device mission profile (application conditions) is compliant with JEDEC JESD47
Qualification Standard, extended mission profiles are available on demand.
Table 14. Voltage characteristics
Symbol Ratings Min Max Unit
V
- VSSSupply voltage
DDx
Input voltage on true open drain pins
V
IN
Input voltage on any other pin
(1)
(2)
(2)
-0.3 6.5
V
- 0.3 6.5
SS
V
- 0.3 V
SS
DD
+ 0.3
see Absolute maximum
V
ESD
Electrostatic discharge voltage
ratings (electrical
sensitivity) on page 75
1. All power (VDD) and ground (VSS) pins must always be connected to the external power supply
2. I
must never be exceeded. This is implicitly insured if VIN maximum is respected. If VIN maximum
INJ(PIN)
cannot be respected, the injection current must be limited externally to the I
injection is induced by V
there is no positive injection current, and the corresponding V
while a negative injection is induced by VIN<VSS. For true open-drain pads,
IN>VDD
maximum must always be respected
IN
value. A positive
INJ(PIN)
V
-
DS12129 Rev 3 41/85
76
Page 42

Electrical characteristics STM8S001J3
Symbol Ratings Max.
I
VDD
I
VSS
Total current into V
Total current out of V
Table 15. Current characteristics
power lines (source)
DD
ground lines (sink)
SS
(2)
(2)
(1)
100
80
Output current sunk by any I/O and control pin 20
I
IO
(3)(4)
I
INJ(PIN)
ΣI
INJ(PIN)
1. Guaranteed by characterization results.
2. All power (VDD) and ground (VSS) pins must always be connected to the external supply.
3. I
4. ADC accuracy vs. negative injection current: Injecting negative current on any of the analog input pins
5. When several inputs are submitted to a current injection, the maximum ΣI
must never be exceeded. This is implicitly insured if VIN maximum is respected. If VIN maximum
INJ(PIN)
cannot be respected, the injection current must be limited externally to the I
injection is induced by V
there is no positive injection current, and the corresponding VIN maximum must always be respected
should be avoided as this significantly reduces the accuracy of the conversion being performed on another
analog input. It is recommended to add a Schottky diode (pin to ground) to standard analog pins which may
potentially inject negative current. Any positive injection current within the limits specified for I
ΣI
INJ(PIN)
positive and negative injected currents (instantaneous values). These results are based on characterization
with
Σ
I
INJ(PIN)
Output current source by any I/Os and control pin -20
Injected current on OSCIN pin ±4
Injected current on any other pin
(3)
Total injected current (sum of all I/O and control pins)
while a negative injection is induced by VIN<VSS. For true open-drain pads,
IN>VDD
in the I/O port pin characteristics section does not affect the ADC accuracy.
maximum current injection on four I/O port pins of the device.
(5)
(5)
INJ(PIN)
is the absolute sum of the
INJ(PIN)
±4
±20
value. A positive
INJ(PIN)
Unit
mA
and
Table 16. Thermal characteristics
Symbol Ratings Value Unit
T
STG
T
J
Storage temperature range -65 to 150
Maximum junction temperature 150
°C
42/85 DS12129 Rev 3
Page 43

STM8S001J3 Electrical characteristics
16
12
8
4
0
2.95
4.0
5.0
5.5
f
CPU (MHz)
Functionality guaranteed
@T
A -40 to 125 °C
Supply voltage
MSv46305V1
Functionality
not guaranteed
in this area
9.3 Operating conditions
The device must be used in operating conditions that respect the parameters in Tab le 17. In
addition, full account must be taken of all physical capacitor characteristics and tolerances.
Symbol Parameter Conditions Min Max Unit
Table 17. General operating conditions
V
f
CPU
V
CAP
DD
Internal CPU clock frequency - 0 16 MHz
Standard operating voltage - 2.95 5.5 V
C
: capacitance of external
EXT
capacitor
(1)
ESR of external capacitor
At 1 MHz
- 470 3300 nF
(2)
-0.3ohm
ESL of external capacitor - 15 nH
Power dissipation at
(3)
P
D
T
T
TA = 125° C
Ambient temperature Maximum power dissipation -40 125
A
Junction temperature range - -40 130
J
1. Care should be taken when selecting the capacitor, due to its tolerance, as well as the parameter
dependency on temperature, DC bias and frequency in addition to other factors. The parameter must be
respected for the full application range.
2. This frequency of 1 MHz as a condition for V
3. To calculate P
characteristics on page 79) with the value for T
Table 49: Thermal characteristics.
), use the formula P
Dmax(TA
Figure 7. f
SO8N - 49 mW
parameters is given by the design of the internal regulator.
CAP
= (T
Dmax
- TA)/Θ
Jmax
given in Table 17 above and the value for Θ
Jmax
CPUmax
versus VDD
(see Section 10.2: Thermal
JA
given in
JA
°C
DS12129 Rev 3 43/85
76
Page 44

Electrical characteristics STM8S001J3
Table 18. Operating conditions at power-up/power-down
Symbol Parameter Conditions Min Typ
VDD rise time rate - 2 - ∞
t
VDD
t
TEMP
V
IT+
V
IT-
V
HYS(BOR)
1. Reset is always generated after a t
minimum operating voltage (V
fall time rate
V
DD
Reset release
delay
Power-on reset
threshold
Brown-out reset
threshold
Brown-out reset
hysteresis
(1)
delay. The application must ensure that VDD is still above the
TEMP
min) when the t
DD
-2-∞
rising - - 1.7 ms
V
DD
-2.62.72.85V
- 2.5 2.65 2.8 V
--70-mV
delay has elapsed.
TEMP
Max Unit
µs/V
44/85 DS12129 Rev 3
Page 45

STM8S001J3 Electrical characteristics
MSv36488V1
ESR
RLeak
ESL
C
9.3.1 VCAP external capacitor
Stabilization for the main regulator is achieved connecting an external capacitor C
V
CAP
pin. C
is specified in Table 17. Care should be taken to limit the series inductance
EXT
to less than 15 nH.
Figure 8. External capacitor C
1. Legend: ESR is the equivalent series resistance and ESL is the equivalent inductance.
9.3.2 Supply current characteristics
The current consumption is measured as described in Section 9.1.5: Pin input voltage.
Total current consumption in run mode
The MCU is placed under the following conditions:
• All I/O pins in input mode with a static value at VDD or VSS (no load)
• All peripherals are disabled (clock stopped by Peripheral Clock Gating registers)
except if explicitly mentioned.
EXT
EXT
to the
Subject to general operating conditions for VDD and TA.
Table 19. Total current consumption with code execution in run mode at VDD = 5 V
Symbol Parameter Conditions Typ Max
= f
f
CPU
MASTER
Supply
current in
run mode,
f
CPU
= f
MASTER
code
I
DD(RUN)
executed
from RAM
= f
f
CPU
MASTER
15.625 kHz
= f
f
CPU
MASTER
= f
f
CPU
MASTER
Supply
current in
run mode,
code
executed
from Flash
1. Guaranteed by characterization results.
f
= f
CPU
MASTER
= f
f
CPU
MASTER
f
= f
CPU
MASTER
15.625 kHz
= f
f
CPU
MASTER
= 16 MHz
/128 = 125 kHz
/128 =
= 128 kHz LSI RC osc. (128 kHz) 0.41 0.55
= 16 MHz
= 2 MHz HSI RC osc. (16 MHz/8)
/128 = 125 kHz HSI RC osc. (16 MHz) 0.72 0.9
/128 =
= 128 kHz LSI RC osc. (128 kHz) 0.42 0.57
HSE user ext. clock (16 MHz) 2 2.35
HSI RC osc. (16 MHz) 1.7 2
HSE user ext. clock (16 MHz) 0.86 -
HSI RC osc. (16 MHz) 0.7 0.87
HSI RC osc. (16 MHz/8) 0.46 0.58
HSE user ext. clock (16 MHz) 4.3 4.75
HSI RC osc.(16 MHz) 3.7 4.5
(2)
0.84 1.05
HSI RC osc. (16 MHz/8) 0.46 0.58
(1)
Unit
mA
DS12129 Rev 3 45/85
76
Page 46

Electrical characteristics STM8S001J3
2. Default clock configuration measured with all peripherals off.
Table 20. Total current consumption with code execution in run mode at VDD = 3.3 V
Symbol Parameter Conditions Typ Max
(1)
Unit
f
CPU
= f
MASTER
= 16 MHz
Supply
current in
run mode,
CPU
= f
MASTER
/128 = 125 kHz
f
code
I
DD(RUN)
executed
from RAM
f
= f
CPU
MASTER
15.625 kHz
f
= f
CPU
MASTER
= f
f
CPU
MASTER
/128 =
= 128 kHz LSI RC osc. (128 kHz) 0.41 0.55
= 16 MHz
Supply
current in
run mode,
code
executed
from Flash
1. Guaranteed by characterization results.
2. Default clock configuration, measured with all peripherals off.
= f
f
CPU
MASTER
= f
f
CPU
MASTER
= f
f
CPU
MASTER
15.625 kHz
= f
f
CPU
MASTER
= 2 MHz HSI RC osc. (16 MHz/8)
/128 = 125 kHz HSI RC osc. (16 MHz) 0.72 0.9
/128 =
= 128 kHz LSI RC osc. (128 kHz) 0.42 0.57
HSE user ext. clock (16 MHz) 2 2.3
HSI RC osc. (16 MHz) 1.5 2
HSE user ext. clock (16 MHz) 0.81 -
HSI RC osc. (16 MHz) 0.7 0.87
HSI RC osc. (16MHz/8) 0.46 0.58
HSE user ext. clock (16 MHz) 3.9 4.7
HSI RC osc. (16 MHz) 3.7 4.5
(2)
0.84 1.05
HSI RC osc. (16 MHz/8) 0.46 0.58
mA
46/85 DS12129 Rev 3
Page 47

STM8S001J3 Electrical characteristics
Total current consumption in wait mode
Table 21. Total current consumption in wait mode at VDD = 5 V
Symbol Parameter Conditions Typ Max
(1)
Unit
f
= f
CPU
MASTER
I
DD(WFI)
Supply
current in
wait mode
f
f
CPU
CPU
= f
= f
MASTER
MASTER
15.625 kHz
f
= f
CPU
MASTER
1. Guaranteed by characterization results.
2. Default clock configuration measured with all peripherals off.
Table 22. Total current consumption in wait mode at VDD = 3.3 V
= 16 MHz
HSI RC osc. (16 MHz) 0.89 1.1
/128 = 125 kHz HSI RC osc. (16 MHz) 0.7 0.88
/128 =
HSI RC osc. (16 MHz/8)
(2)
0.45 0.57
= 128 kHz LSI RC osc. (128 kHz) 0.4 0.54
Symbol Parameter Conditions Typ Max
HSE user ext. clock (16 MHz) 1.1 1.3
HSE user ext. clock (16 MHz) 1.1 1.3
= f
f
CPU
MASTER
I
DD(WFI)
Supply
current in
wait mode
= f
f
CPU
MASTER
f
= f
CPU
MASTER
15.625 kHz
f
= f
CPU
MASTER
15.625 kHz
1. Guaranteed by characterization results.
2. Default clock configuration measured with all peripherals off.
= 16 MHz
HSI RC osc. (16 MHz) 0.89 1.1
/128 = 125 kHz HSI RC osc. (16 MHz) 0.7 0.88
/128 =
/128 =
HSI RC osc. (16 MHz/8)
LSI RC osc. (128 kHz) 0.4 0.54
(2)
0.45 0.57
(1)
mA
Unit
mA
DS12129 Rev 3 47/85
76
Page 48

Electrical characteristics STM8S001J3
Total current consumption in active halt mode
Table 23. Total current consumption in active halt mode at VDD = 5 V
Conditions
Symbol Parameter
Supply current
I
DD(AH)
in active halt
mode
Main
voltage
regulator
(2)
(MVR)
On
Flash mode
(3)
Operating mode
Power-down
mode
Clock source
HSE user
external clock
(16 MHz)
LSI RC oscillator
(128 kHz)
HSE user
external clock
(16 MHz)
LSI RC oscillator
(128 kHz)
Max at
Typ
85°C
1030 - -
200 260 300
970 - -
150 200 230
(1)
Max at
125°C
(1)
Unit
µA
Operating mode
Off
Power-down
mode
1. Guaranteed by characterization results.
2. Configured by the REGAH bit in the CLK_ICKR register.
3. Configured by the AHALT bit in the FLASH_CR1 register.
Table 24. Total current consumption in active halt mode at VDD = 3.3 V
Conditions
Symbol Parameter
Main voltage
regulator
(2)
(MVR)
Flash mode
Operating mode
On
Power-down
mode
I
DD(AH)
Supply
current in
active halt
mode
Operating mode
Off
Power-down
mode
1. Guaranteed by characterization results.
2. Configured by the REGAH bit in the CLK_ICKR register.
3. Configured by the AHALT bit in the FLASH_CR1 register.
LSI RC oscillator
66 85 110
(128 kHz)
(3)
Clock source
HSE user external clock
(16 MHz)
10 20 40
Typ
550 - -
LSI RC osc. (128 kHz) 200 260 290
HSE user external
clock(16 MHz)
970 - -
LSI RC osc. (128 kHz) 150 200 230
66 80 105
LSI RC osc. (128 kHz)
10 18 35
Max
at
85°
(1)
C
Max
at
125°
(1)
C
Unit
µA
48/85 DS12129 Rev 3
Page 49

STM8S001J3 Electrical characteristics
Total current consumption in halt mode
Table 25. Total current consumption in halt mode at VDD = 5 V
Max at
(1)
Max at
125°C
Max at
125°
C
Symbol Parameter Conditions Typ
I
DD(H)
1. Guaranteed by characterization results.
Supply current in halt
mode
Table 26. Total current consumption in halt mode at VDD = 3.3 V
Flash in operating mode,
HSI clock after wakeup
Flash in power-down mode,
HSI clock after wakeup
63 75 105
6.0 20 55
Symbol Parameter Conditions Typ
Flash in operating mode, HSI
clock after wakeup
I
DD(H)
Supply current in halt mode
Flash in power-down mode, HSI
clock after wakeup
1. Guaranteed by characterization results.
Max at
(1)
85°C
85° C
60 75 100
4.5 17 30
Low-power mode wakeup times
Symbol Parameter Conditions Typ Max
t
WU(WFI)
t
WU(AH)
t
WU(H)
1. Guaranteed by design.
2. t
WU(WFI)
3. Measured from interrupt event to interrupt vector fetch.
4. Configured by the REGAH bit in the CLK_ICKR register.
5. Configured by the AHALT bit in the FLASH_CR1 register.
6. Plus 1 LSI clock depending on synchronization.
Wakeup time from wait
mode to run mode
Wakeup time active halt
mode to run mode.
Wakeup time from halt
mode to run mode
= 2 x 1/f
master
+ 7 x 1/f
(3)
(3)
(3)
CPU
Table 27. Wakeup times
0 to 16 MHz - -
f
= f
CPU
MASTER
MVR voltage
regulator on
MVR voltage
regulator off
Flash in operating mode
Flash in power-down mode
= 16 MHz. 0.56 -
Flash in operating
(5)
mode
(4)
Flash in power-down
(5)
mode
Flash in operating
(5)
mode
(4)
Flash in power-down
(5)
mode
(5)
(5)
HSI (after
wakeup)
(6)
1
(6)
3
(6)
48
(6)
50
52 -
54 -
(1)
(1)
2
(1)
(2)
(6)
-
-
-
Unit
µA
Unit
µA
Unit
µs
DS12129 Rev 3 49/85
76
Page 50

Electrical characteristics STM8S001J3
Total current consumption and timing in forced reset state
Table 28. Total current consumption and timing in forced reset state
Symbol Parameter Conditions Typ Max
(1)
Unit
I
DD(R)
t
RESETBL
1. Guaranteed by design.
2. Characterized with all I/Os tied to V
Supply current in reset state
Reset release to vector fetch - - 150 µs
Current consumption of on-chip peripherals
Subject to general operating conditions for VDD and TA.
HSI internal RC/f
Symbol Parameter Typ. Unit
I
DD(TIM1)
I
DD(TIM2)
I
DD(TIM4)
I
DD(UART1)
I
DD(SPI)
I
DD(I2C)
I
DD(ADC1)
1. Data based on a differential IDD measurement between reset configuration and timer counter running at
16 MHz. No IC/OC programmed (no I/O pads toggling). Not tested in production.
TIM1 supply current
TIM2 supply current
TIM4 timer supply current
UART1 supply current
SPI supply current
I2C supply current
ADC1 supply current when converting
VDD = 5 V 400 -
= 3.3 V 300 -
V
DD
= 16 MHz, VDD = 5 V.
SS
CPU
.
= f
(2)
MASTER
Table 29. Peripheral current consumption
(1)
(1)
130
(1)
50
(1)
120
(1)
45
(1)
(1)
µA
210
µA
65
1000
50/85 DS12129 Rev 3
Page 51

STM8S001J3 Electrical characteristics
Current consumption curves
The following figures show the typical current consumption measured with code executing in
RAM.
Figure 9. Typ. I
Figure 10. Typ. I
DD(RUN)
DD(RUN)
vs VDD, HSE user external clock, f
vs f
, HSE user external clock, VDD = 5 V
CPU
= 16 MHz
CPU
DS12129 Rev 3 51/85
76
Page 52

Electrical characteristics STM8S001J3
Figure 11. Typ. I
DD(RUN)
vs VDD, HSI RC osc, f
= 16 MHz
CPU
Figure 12. Typ. I
DD(WFI)
vs. VDD HSE user external clock, f
= 16 MHz
CPU
52/85 DS12129 Rev 3
Page 53

STM8S001J3 Electrical characteristics
Figure 13. Typ. I
Figure 14. Typ. I
DD(WFI)
DD(WFI)
vs. f
, HSE user external clock, VDD = 5 V
CPU
vs VDD, HSI RC osc, f
CPU
= 16 MHz
DS12129 Rev 3 53/85
76
Page 54

Electrical characteristics STM8S001J3
V
HSEH
V
HSEL
External clock
source
OSCIN
f
HSE
STM8
MS36489V2
9.3.3 External clock sources and timing characteristics
HSE user external clock
Subject to general operating conditions for VDD and TA.
Symbol Parameter Conditions Min Typ Max Unit
Table 30. HSE user external clock characteristics
f
HSE_ext
V
HSEH
V
HSEL
I
LEAK_HSE
1. Guaranteed by characterization results.
User external clock source
frequency
OSCIN input pin high level
(1)
voltage
OSCIN input pin low level
(1)
voltage
OSCIN input leakage
current
Figure 15. HSE external clock source
0-16MHz
-
0.7 x V
DD
-V
DD
+ 0.3 V
V
V
SS
< V
V
SS
IN
< V
DD
-1 - +1 µA
- 0.3 x V
DD
9.3.4 Internal clock sources and timing characteristics
Subject to general operating conditions for VDD and TA.
54/85 DS12129 Rev 3
Page 55

STM8S001J3 Electrical characteristics
High speed internal RC oscillator (HSI)
Symbol Parameter Conditions Min Typ Max Unit
Table 31. HSI oscillator characteristics
f
Frequency - - 16 - MHz
HSI
Accuracy of HSI oscillator
ACC
HSI
Accuracy of HSI oscillator
(factory calibrated)
t
su(HSI)
I
DD(HSI)
1. See the application note.
2. Guaranteed by design.
3. Guaranteed by characterization results.
HSI oscillator wakeup
time including calibration
HSI oscillator power
consumption
Figure 16. Typical HSI frequency variation vs VDD at 4 temperatures
User-trimmed with the
CLK_HSITRIMR register
for given V
conditions
= 5 V, TA = 25 °C -2.5 - 1.5
V
DD
= 5 V,
V
DD
(1)
DD
and TA
-40 °C ≤ TA ≤ 125 °C
--1.0
-5 - 5
- - - 1.0
- - 170 250
(2)
(2)
(3)
%
µs
µA
Low speed internal RC oscillator (LSI)
Subject to general operating conditions for VDD and TA.
Symbol Parameter Conditions Min Typ Max Unit
Frequency - - 128 - kHz
f
LSI
Table 32. LSI oscillator characteristics
DS12129 Rev 3 55/85
76
Page 56

Electrical characteristics STM8S001J3
Table 32. LSI oscillator characteristics (continued)
Symbol Parameter Conditions Min Typ Max Unit
t
su(LSI)
I
DD(LSI)
1. Guaranteed by design.
LSI oscillator wakeup time - - - 7
LSI oscillator power consumption - - 5 - µA
(1)
µs
Figure 17. Typical LSI frequency variation vs VDD @ 4 temperatures
56/85 DS12129 Rev 3
Page 57

STM8S001J3 Electrical characteristics
9.3.5 Memory characteristics
RAM and hardware registers
Symbol Parameter Conditions Min Unit
V
RM
1. Minimum supply voltage without losing data stored in RAM (in halt mode or under reset) or in hardware
registers (only in halt mode). Guaranteed by design.
2. Refer to Table 18 on page 44 for the value of V
Flash program memory and data EEPROM
General conditions: TA = -40 to 85 °C.
Symbol Parameter Conditions Min
Table 34. Flash program memory and data EEPROM
Table 33. RAM and hardware registers
Data retention mode
(1)
IT-max
Halt mode (or reset) V
.
(2)
IT-max
(1)
Typ Max Unit
V
V
Operating voltage
DD
(all modes, execution/write/erase)
f
≤ 16 MHz 2.95 - 5.5 V
CPU
Standard programming time (including
t
prog
t
erase
N
RW
erase) for byte/word/block
(1 byte/4 bytes/64 bytes)
Fast programming time for 1 block (64
bytes)
Erase time for 1 block (64 bytes) - - 3.0 3.3 ms
Erase/write cycles
(2)
(program memory)
(2)
Erase/write cycles
(data memory)
--6.06.6ms
--3.03.3ms
100 - -
TA = 85 °C
100 k - -
Data retention (program memory)
t
RET
after 100 erase/write cycles at
T
= 85 °C
A
Data retention (data memory) after
10 k erase/write cycles at TA = 85 °C
T
RET
= 55° C
20 - -
20 - -
Data retention (data memory) after
= 85° C 1.0 - -
100 k erase/write cycles at
= 125 °C
T
A
Supply current (Flash programming or
I
DD
erasing for 1 to 128 bytes)
1. Guaranteed by characterization results.
2. The physical granularity of the memory is 4 bytes, so cycling is performed on 4 bytes even when a
write/erase operation addresses a single byte.
T
RET
--2.0-mA
cycles
years
DS12129 Rev 3 57/85
76
Page 58

Electrical characteristics STM8S001J3
9.3.6 I/O port pin characteristics
General characteristics
Subject to general operating conditions for VDD and TA unless otherwise specified. All
unused pins must be kept at a fixed voltage: using the output mode of the I/O for example or
an external pull-up or pull-down resistor.
Symbol Parameter Conditions Min Typ Max Unit
Input low level
V
IL
voltage
Input high level
V
IH
voltage
V
R
tR, t
Hysteresis
hys
Pull-up resistor VDD = 5 V, V
pu
Rise and fall time
F
(10% - 90%)
(1)
Input leakage
I
current,
lkg
analog and digital
I
lkg ana
I
lkg(inj)
Analog input
leakage current
Leakage current in
adjacent I/O
Table 35. I/O static characteristics
-0.3 - 0.3 x V
= 5 V
V
DD
0.7 x V
DD
-700- mV
= V
IN
SS
Fast I/Os
Load = 50 pF
Standard and high sink I/Os
Load = 50 pF
≤ V
≤ V
IN
IN
≤ V
≤ V
DD
DD
V
SS
V
SS
30 55 80 kΩ
--20
- - 125
--±1µA
--±250
Injection current ±4 mA - - ±1
-VDD + 0.3 V V
DD
(2)
(2)
ns
(3)
(3)
V
ns
nA
µA
1. Hysteresis voltage between Schmitt trigger switching levels. Guaranteed by characterization results.
2. Guaranteed by design.
3. Guaranteed by characterization results.
58/85 DS12129 Rev 3
Page 59

STM8S001J3 Electrical characteristics
Figure 18. Typical VIL and VIH vs VDD @ 4 temperatures
Figure 19. Typical pull-up resistance vs V
@ 4 temperatures
DD
DS12129 Rev 3 59/85
76
Page 60

Electrical characteristics STM8S001J3
Figure 20. Typical pull-up current vs VDD @ 4 temperatures
1. The pull-up is a pure resistor (slope goes through 0).
Table 36. Output driving current (standard ports)
Symbol Parameter Conditions Min Max Unit
V
OL
Output low level with 4 pins sunk I
Output high level with 8 pins sourced IIO = 10 mA, V
V
OH
Output high level with 4 pins sourced I
1. Guaranteed by characterization results.
Output low level with 8 pins sunk I
Table 37. Output driving current (true open drain ports)
= 10 mA, V
IO
= 4 mA, V
IO
= 4 mA, V
IO
= 5 V - 2
DD
= 3.3 V - 1
DD
= 5 V 2.8 -
DD
= 3.3 V 2.1
DD
(1)
(1)
-
Symbol Parameter Conditions Max Unit
I
V
1. Guaranteed by characterization results.
Output low level with 2 pins sunk
OL
= 10 mA, V
IO
= 10 mA, V
IO
IIO = 20 mA, V
= 5 V 1
DD
= 3.3 V 1.5
DD
= 5 V 2
DD
(1)
(1)
V
V
VI
60/85 DS12129 Rev 3
Page 61

STM8S001J3 Electrical characteristics
Table 38. Output driving current (high sink ports)
Symbol Parameter Conditions Min Max Unit
Output low level with 8 pins sunk IIO = 10 mA, V
V
Output low level with 4 pins sunk I
OL
Output low level with 4 pins sunk IIO = 20 mA, V
Output high level with 8 pins sourced IIO = 10 mA, V
V
Output high level with 4 pins sourced I
OH
Output high level with 4 pins sourced I
1. Guaranteed by characterization results.
= 10 mA, V
IO
= 10 mA, V
IO
= 20 mA, V
IO
= 5 V - 0.8
DD
= 3.3 V - 1.0
DD
= 5 V - 1.5
DD
= 5 V 4.0 -
DD
= 3.3 V 2.1
DD
= 5 V 3.3
DD
(1)
(1)
(1)
(1)
-
-
Typical output level curves
Figure 22 to Figure 29 show typical output level curves measured with output on a single
pin.
Figure 21. Typ. VOL @ VDD = 5 V (standard ports)
V
DS12129 Rev 3 61/85
76
Page 62

Electrical characteristics STM8S001J3
Figure 22. Typ. VOL @ VDD = 3.3 V (standard ports)
Figure 23. Typ. V
@ VDD = 5 V (true open drain ports)
OL
62/85 DS12129 Rev 3
Page 63

STM8S001J3 Electrical characteristics
Figure 24. Typ. VOL @ VDD = 3.3 V (true open drain ports)
Figure 25. Typ. V
@ VDD = 5 V (high sink ports)
OL
DS12129 Rev 3 63/85
76
Page 64

Electrical characteristics STM8S001J3
Figure 26. Typ. VOL @ VDD = 3.3 V (high sink ports)
Figure 27. Typ. V
DD - VOH
@ VDD = 5 V (standard ports)
64/85 DS12129 Rev 3
Page 65

STM8S001J3 Electrical characteristics
Figure 28. Typ. V
Figure 29. Typ. V
DD - VOH
DD - VOH
@ VDD = 3.3 V (standard ports)
@ VDD = 5 V (high sink ports)
DS12129 Rev 3 65/85
76
Page 66

Electrical characteristics STM8S001J3
9.3.7
Figure 30. Typ. V
DD - VOH
@ VDD = 3.3 V (high sink ports)
SPI serial peripheral interface
Unless otherwise specified, the parameters given in Tab le 39 are derived from tests
performed under ambient temperature, f
conditions. t
MASTER
= 1/f
MASTER
.
MASTER
Refer to I/O port characteristics for more details on the input/output alternate function
characteristics (NSS, SCK, MOSI, MISO).
Table 39. SPI characteristics
frequency and VDD supply voltage
Symbol Parameter Conditions Min Max Unit
Master mode 0 8
MHz
Slave mode 0 7
1/t
f
SCK
c(SCK)
SPI clock frequency
66/85 DS12129 Rev 3
Page 67

STM8S001J3 Electrical characteristics
Table 39. SPI characteristics (continued)
Symbol Parameter Conditions Min Max Unit
t
r(SCK)
t
f(SCK)
t
su(NSS)
t
h(NSS)
t
w(SCKH)
t
w(SCKL)
t
su(MI)
t
su(SI)
t
h(MI)
t
h(SI)
t
a(SO)
t
dis(SO)
t
v(SO)
t
v(MO)
t
h(SO)
t
h(MO)
1. Values based on design simulation and/or characterization results, and not tested in production.
2. Min time is for the minimum time to drive the output and the max time is for the maximum time to validate the data.
3. Min time is for the minimum time to invalidate the output and the max time is for the maximum time to put the data in Hi-Z.
SPI clock rise and fall time Capacitive load: C = 30 pF - 25
(1)
NSS setup time Slave mode 4 x t
(1)
NSS hold time Slave mode 70 -
(1)
SCK high and low time Master mode t
(1)
(1)
Data input setup time
(1)
(1)
Data input hold time
(1)
(1)(2)
Data output access time Slave mode - 3 x t
(1)(3)
Data output disable time Slave mode 25 -
(1)
Data output valid time Slave mode (after enable edge) - 65
(1)
Data output valid time Master mode (after enable edge) - 30
(1)
Data output hold time
(1)
Master mode 5 -
Slave mode 5 -
Master mode 7 -
Slave mode 10 -
Slave mode (after enable edge) 27 -
Master mode (after enable edge) 11 -
MASTER
/2 - 15 t
SCK
SCK
-
/2 + 15
ns
MASTER
Figure 31. SPI timing diagram - slave mode and CPHA = 0
DS12129 Rev 3 67/85
76
Page 68

Electrical characteristics STM8S001J3
Figure 32. SPI timing diagram - slave mode and CPHA = 1
NSS input
SU(NSS)
t
CPHA=1
CPOL=0
CPHA=1
SCK input
CPOL=1
MISO
OUTPUT
MOSI
INPUT
w(SCKH)
t
tw(SCKL)
ta(SO)
t
su(SI)
tv(SO)
MSB OUT
th(SI)
MSB IN
1. Measurement points are done at CMOS levels: 0.3 V
Figure 33. SPI timing diagram - master mode
High
NSS input
t
c(SCK)
CPHA=0
CPOL=0
CPHA=0
CPOL=1
SCK Output
tc(SCK)
and 0.7 V
DD
DD.
BIT6 OUT
BIT 1 IN
th(SO)
(1)
th(NSS)
tr(SCK)
tf(SCK)
LSB IN
(1)
tdis(SO)
LSB OUT
ai14135b
CPHA=1
CPOL=0
CPHA=1
CPOL=1
SCK Output
t
t
MISO
INP UT
MOSI
OUTPUT
su(MI)
1. Measurement points are done at CMOS levels: 0.3 V
w(SCKH)
t
w(SCKL)
MSB IN
MSB OUT
t
v(MO)
t
h(MI)
and 0.7 V
DD
BIT6 IN
B I T1 OUT
DD.
68/85 DS12129 Rev 3
t
h(MO)
t
r(SCK)
t
f(SCK)
LSB IN
LSB OUT
ai14136c
Page 69

STM8S001J3 Electrical characteristics
9.3.8 I2C interface characteristics
Symbol Parameter
t
w(SCLL)
t
w(SCLH)
t
su(SDA)
t
h(SDA)
t
r(SDA)
t
r(SCL)
t
f(SDA)
t
f(SCL)
t
h(STA)
t
su(STA)
t
su(STO)
t
w(STO:STA)
C
1. f
MASTER
Data based on standard I2C protocol requirement, not tested in production
2.
The maximum hold time of the start condition has only to be met if the interface does not stretch the low
3.
time
The device must internally provide a hold time of at least 300 ns for the SDA signal in order to bridge the
4.
undefined region of the falling edge of SCL
SCL clock low time 4.7 - 1.3 -
SCL clock high time 4.0 - 0.6 -
SDA setup time 250 - 100 -
SDA data hold time 0
SDA and SCL rise time - 1000 - 300
SDA and SCL fall time - 300 - 300
START condition hold time 4.0 - 0.6 -
Repeated START condition setup time 4.7 - 0.6 -
STOP condition setup time 4.0 - 0.6 - µs
STOP to START condition time
(bus free)
Capacitive load for each bus line - 400 - 400 pF
b
, must be at least 8 MHz to achieve max fast I2C speed (400 kHz)
Table 40. I2C characteristics
Standard mode I2C
(2)
Min
(3)
4.7 - 1.3 - µs
Fast mode
(2)
Max
-0
Min
(4)
I2C
(2)
(1)
Max
900
Unit
(2)
µs
(3)
ns
µs
DS12129 Rev 3 69/85
76
Page 70

Electrical characteristics STM8S001J3
Figure 34.
Typical application with I2C bus and timing diagram
V
DD
V
DD
4.7 kΩ 4.7 kΩ
100 Ω
SDA
I²C bus
SCL
100 Ω
START
SD A
t
f(SDA)
SCL
t
w(SCLH)
t
h(STA)
t
r(SDA)
t
r(SCL)
t
w(SCLL)
t
su(SDA)
t
h(SDA)
t
f(SCL)
1. Measurement points are made at CMOS levels: 0.3 x VDD and 0.7 x V
t
su(STA)
DD
STM8
S TART REPEATED
STOP
t
su(STO)
START
t
su(STA:STO)
ai17490V2
70/85 DS12129 Rev 3
Page 71

STM8S001J3 Electrical characteristics
9.3.9 10-bit ADC characteristics
Subject to general operating conditions for V
DDA
, f
MASTER
, and TA unless otherwise
specified.
Symbol Parameter Conditions Min Typ Max Unit
f
ADC
V
V
BGREF
C
t
t
STAB
t
CONV
1. During the sample time the input capacitance C
source. The internal resistance of the analog source must allow the capacitance to reach its final voltage
level within t
the conversion result. Values for the sample clock tS depend on programming.
ADC clock frequency
Conversion voltage range
AIN
Internal bandgap reference
voltage
Internal sample and hold
ADC
capacitor
(1)
Sampling time
S
Wakeup time from standby - - 7 - µs
Total conversion time (including
sampling time, 10-bit resolution)
After the end of the sample time tS, changes of the analog input voltage have no effect on
S.
Table 41. ADC characteristics
(1)
V
V
V
DDA=
AIN
3 to 5.5 V 1 - 4
DDA =
4.5 to 5.5 V 1 - 6
DDA =
-V
2.95 to 5.5 V 1.19 1.22 1.25 V
--3-pF
f
= 4 MHz - 0.75 -
ADC
= 6 MHz - 0.5 -
f
ADC
f
= 4 MHz 3.5 µs
ADC
f
= 6 MHz 2.33 µs
ADC
-141/f
(3 pF max) can be charged/discharged by the external
SS
MHz
-VDDV
µs
ADC
DS12129 Rev 3 71/85
76
Page 72

Electrical characteristics STM8S001J3
Symbol Parameter Conditions Typ Max
|ET| Total unadjusted error
|EO| Offset error
|EG| Gain error
|ED| Differential linearity error
|E
| Integral linearity error
L
1. Guaranteed by characterization results.
2. ADC accuracy vs. negative injection current: Injecting negative current on any of the analog input pins
should be avoided as this significantly reduces the accuracy of the conversion being performed on another
analog input. It is recommended to add a Schottky diode (pin to ground) to standard analog pins which may
potentially inject negative current. Any positive injection current within the limits specified for I
ΣI
in Section 9.3.6 does not affect the ADC accuracy.
INJ(PIN)
Table 42. ADC accuracy with R
f
ADC
(2)
(2)
(2)
(2)
(2)
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
< 10 kΩ , V
AIN
DD
= 5 V
= 2 MHz 1.6 3.5
= 4 MHz 2.2 4
= 6 MHz 2.4 4.5
= 2 MHz 1.1 2.5
= 4 MHz 1.5 3
= 6 MHz 1.8 3
= 2 MHz 1.5 3
= 4 MHz 2.1 3
= 6 MHz 2.2 4
= 2 MHz 0.7 1.5
= 4 MHz 0.7 1.5
= 6 MHz 0.7 1.5
= 2 MHz 0.6 1.5
= 4 MHz 0.8 2
= 6 MHz 0.8 2
(1)
INJ(PIN)
and
Unit
LSB
Symbol Parameter Conditions Typ Max
|E
| Total unadjusted error
T
|E
| Offset error
O
|E
| Gain error
G
|E
| Differential linearity error
D
|E
| Integral linearity error
L
1. Guaranteed by characterization results.
2. ADC accuracy vs. negative injection current: Injecting negative current on any of the analog input pins
should be avoided as this significantly reduces the accuracy of the conversion being performed on another
analog input. It is recommended to add a Schottky diode (pin to ground) to standard analog pins which may
potentially inject negative current. Any positive injection current within the limits specified for I
ΣI
INJ(PIN)
Table 43. ADC accuracy with R
(2)
(2)
(2)
(2)
(2)
in Section 9.3.6 does not affect the ADC accuracy.
AIN
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
f
ADC
< 10 kΩ R
AIN
, V
= 3.3 V
DD
= 2 MHz 1.6 3.5
= 4 MHz 1.9 4
= 2 MHz 1 2.5
= 4 MHz 1.5 2.5
= 2 MHz 1.3 3
= 4 MHz 2 3
= 2 MHz 0.7 1.0
= 4 MHz 0.7 1.5
= 2 MHz 0.6 1.5
= 4 MHz 0.8 2
(1)
INJ(PIN)
and
Unit
LSB
72/85 DS12129 Rev 3
Page 73

STM8S001J3 Electrical characteristics
E
O
E
G
1LSB
IDEAL
1LSB
IDEAL
V
DDAVSSA
–
1024
----------------------------- ------------=
1023
1022
1021
5
4
3
2
1
0
7
6
1234567
1021102210231024
(1)
(2)
E
T
E
D
E
L
(3)
V
DDA
V
SSA
AINx
STM8
V
DD
I
L
±1µA
V
T
0.6V
V
T
0.6V
C
ADC
V
AIN
R
AIN
10-bit A/D
conversion
C
AIN
Figure 35. ADC accuracy characteristics
1. Example of an actual transfer curve.
2. The ideal transfer curve
3. End point correlation line
= Total unadjusted error: maximum deviation between the actual and the ideal transfer curves.
E
T
E
= Offset error: deviation between the first actual transition and the first ideal one.
O
EG = Gain error: deviation between the last ideal transition and the last actual one.
ED = Differential linearity error: maximum deviation between actual steps and the ideal one.
E
= Integral linearity error: maximum deviation between any actual transition and the end point correlation
L
line.
Figure 36. Typical application with ADC
DS12129 Rev 3 73/85
76
Page 74

Electrical characteristics STM8S001J3
9.3.10 EMC characteristics
Susceptibility tests are performed on a sample basis during product characterization.
Functional EMS (electromagnetic susceptibility)
While executing a simple application (toggling 2 LEDs through I/O ports), the product is
stressed by two electromagnetic events until a failure occurs (indicated by the LEDs).
• ESD: Electrostatic discharge (positive and negative) is applied on all pins of the device
until a functional disturbance occurs. This test conforms with the IEC 61000-4-2
standard.
• FTB: A burst of fast transient voltage (positive and negative) is applied to V
through a 100 pF capacitor, until a functional disturbance occurs. This test conforms
with the IEC 61000-4-4 standard.
A device reset allows normal operations to be resumed. The test results are given in the
table below based on the EMS levels and classes defined in application note AN1709.
Designing hardened software to avoid noise problems
EMC characterization and optimization are performed at component level with a typical
application environment and simplified MCU software. It should be noted that good EMC
performance is highly dependent on the user application and the software in particular.
and VSS
DD
Therefore it is recommended that the user applies EMC software optimization and
prequalification tests in relation with the EMC level requested for his application.
Software recommendations
The software flowchart must include the management of runaway conditions such as:
• Corrupted program counter
• Unexpected reset
• Critical data corruption (control registers...)
Prequalification trials
To complete these trials, ESD stress can be applied directly on the device, over the range of
specification values. When unexpected behavior is detected, the software can be hardened
to prevent unrecoverable errors occurring (see application note AN1015).
Symbol Parameter Conditions Level/class
V
V
Voltage limits to be applied on any I/O pin to
FESD
induce a functional disturbance
Fast transient voltage burst limits to be
applied through 100pF on VDD and V
EFTB
to induce a functional disturbance
Table 44. EMS data
V
DD
f
MASTER
conforming to IEC 61000-4-2
V
DD
f
MASTER
conforming to IEC 61000-4-4
SS
pins
= 3.3 V, TA = 25 °C,
= 16 MHz,
= 3.3 V, TA = 25 °C,
= 16 MHz,
TBD
TBD
(1)
(1)
1. Data obtained with HSI clock configuration, after applying HW recommendations described in AN2860 EMC guidelines for STM8Smicrocontrollers.
74/85 DS12129 Rev 3
Page 75

STM8S001J3 Electrical characteristics
Electromagnetic interference (EMI)
Based on a simple application running on the product (toggling two LEDs through the I/O
ports), the product is monitored in terms of emission. Emission tests conform to the IEC
61967-2 standard for test software, board layout and pin loading.
Table 45. EMI data
Conditions
Symbol Parameter
General conditions
V
= 5 V
DD
= 25 °C
T
S
Peak level
EMI
A
SO8N package
conforming to IEC
EMI level - TBD TBD -
1. Guaranteed by characterization results.
61967-2
Max f
HSE/fCPU
Monitored
frequency band
16 MHz/
8 MHz
0.1 MHz to 30 MHz TBD TBD
130 MHz to 1 GHz TBD TBD
(1)
Unit
16 MHz/
16 MHz
dBµV30 MHz to 130 MHz TBD TBD
Absolute maximum ratings (electrical sensitivity)
Based on three different tests (ESD, DLU and LU) using specific measurement methods,
the product is stressed in order to determine its performance in terms of electrical sensitivity.
For more details, refer to the application note AN1181.
Electrostatic discharge (ESD)
Electrostatic discharges (one positive then one negative pulse separated by 1 second) are
applied to the pins of each sample according to each pin combination. The sample size
depends on the number of supply pins in the device (3 parts*(n+1) supply pin). One model
can be simulated: the Human Body Model (HBM). This test conforms to the JESD22A114A/A115A standard. For more details, refer to the application note AN1181.
Table 46. ESD absolute maximum ratings
Symbol Ratings Conditions Class
V
ESD(HBM)
V
ESD(CDM)
1. Guaranteed by characterization results.
Electrostatic discharge voltage
(Human body model)
Electrostatic discharge voltage
(Charge device model)
TA = 25°C, conforming to
JESD22-A114
TA= 25°C, conforming to
JESD22-C101
DS12129 Rev 3 75/85
Maximum
value
(1)
Unit
ATBDV
IV TBD V
76
Page 76

Electrical characteristics STM8S001J3
Static latch-up
Two complementary static tests are required on 10 parts to assess the latch-up
performance:
• A supply overvoltage (applied to each power supply pin)
• A current injection (applied to each input, output and configurable I/O pin) is performed
on each sample.
This test conforms to the EIA/JESD 78 IC latch-up standard. For more details, refer to the
application note AN1181.
Symbol Parameter Conditions Class
Table 47. Electrical sensitivities
(1)
LU Static latch-up class
TA = 25 °C TBD
= 85 °C TBD
T
A
1. Class description: A Class is an STMicroelectronics internal specification. All its limits are higher than the
JEDEC specifications, that means when a device belongs to class A it exceeds the JEDEC standard. B
class strictly covers all the JEDEC criteria (international standard).
76/85 DS12129 Rev 3
Page 77

STM8S001J3 Package information
10 Package information
In order to meet environmental requirements, ST offers these devices in different grades of
ECOPACK® packages, depending on their level of environmental compliance. ECOPACK®
specifications, grade definitions and product status are available at: www.st.com.
ECOPACK® is an ST trademark.
Failure analysis and guarantee
The small number of pins available induces limitations on failure analysis depth in case of
isolated symptoms, typically with an impact lower than 0.1%. Please contact your sales
office for additional information for any failure analysis. STMicroelectronics will make a
feasibility study for investigation based on failure rate and symptom description prior to
responsibility endorsement.
10.1 SO8N package information
Figure 37. SO8N – 8-lead, 4.9 x 6 mm, plastic small outline, 150 mils body width,
package outline
1. Drawing not to scale.
Table 48. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
package mechanical data
millimeters inches
Symbol
Min. Typ. Max. Min. Typ. Max.
A - - 1.750 - - 0.0689
A1 0.100 - 0.250 0.0039 - 0.0098
A2 1.250 - - 0.0492 - -
b 0.280 - 0.480 0.0110 - 0.0189
c 0.170 - 0.230 0.0067 - 0.0091
DS12129 Rev 3 77/85
(1)
80
Page 78

Package information STM8S001J3
O7_FP_V1
1.27
0.6 (x8)
3.9
6.7
Table 48. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
package mechanical data
millimeters inches
Symbol
Min. Typ. Max. Min. Typ. Max.
D 4.800 4.900 5.000 0.1890 0.1929 0.1969
E 5.800 6.000 6.200 0.2283 0.2362 0.2441
E1 3.800 3.900 4.000 0.1496 0.1535 0.1575
e - 1.270 - - 0.0500 -
h 0.250 - 0.500 0.0098 - 0.0197
k 0° - 8° 0° - 8°
L 0.400 - 1.270 0.0157 - 0.0500
L1 - 1.040 - - 0.0409 -
ccc - - 0.100 - - 0.0039
1. Values in inches are converted from mm and rounded to four decimal digits.
(1)
Figure 38. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
package recommended footprint
Device marking for SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body
width
The following figure gives an example of topside marking orientation versus pin 1/ball A1
identifier location.
Other optional marking or inset/upset marks, which identify the parts throughout supply
chain operations, are not indicated below.
78/85 DS12129 Rev 3
Page 79

STM8S001J3 Package information
MSv17033v1
8S001J3
R Y WW
Product identification
Additional information
Date code
Unmarkable surface
PIN1 reference
Figure 39. SO8N – 8-lead 4.9 x 6 mm, plastic small outline, 150 mils body width,
marking example
10.2 Thermal characteristics
1. Parts marked as ES or E or accompanied by an Engineering Sample notification letter are not yet qualified
and therefore not approved for use in production. ST is not responsible for any consequences resulting
from such use. In no event will ST be liable for the customer using any of these engineering samples in
production. ST's Quality department must be contacted prior to any decision to use these engineering
samples to run a qualification activity.
The maximum chip junction temperature (T
) must never exceed the values given in
Jmax
Tabl e 17: General operating conditions.
The maximum chip-junction temperature, T
, in degrees Celsius, may be calculated
Jmax
using the following equation:
T
Jmax
= T
Amax
+ (P
Dmax
x ΘJA)
Where:
• T
•Θ
• P
• P
is the maximum ambient temperature in ° C
Amax
is the package junction-to-ambient thermal resistance in ° C/W
JA
is the sum of P
Dmax
is the product of I
INTmax
INTmax
DD
and P
I/Omax (PDmax
= P
INTmax
+ P
and VDD, expressed in Watts. This is the maximum chip
I/Omax
)
internal power.
• P
P
VOH/I
represents the maximum power dissipation on output pins, where:
I/Omax
I/Omax =
Σ (VOL*IOL) + Σ((VDD-V
of the I/Os at low and high level in the application.
OH
OH)*IOH
), and taking account of the actual VOL/I
OL
and
DS12129 Rev 3 79/85
80
Page 80

Package information STM8S001J3
Symbol Parameter Value Unit
Θ
JA
1. Thermal resistances are based on JEDEC JESD51-2 with 4-layer PCB in a natural convection
environment.
Thermal resistance junction-ambient
SO8N
Table 49. Thermal characteristics
10.2.1 Reference document
JESD51-2 integrated circuits thermal test method environment conditions - natural
convection (still air). Available from www.jedec.org.
10.2.2 Selecting the product temperature range
When ordering the microcontroller, the temperature range is specified in the order code (see
Figure 40: STM8S001J3 ordering information scheme(1)).
The following example shows how to calculate the temperature range needed for a given
application.
Assuming the following application conditions:
• Maximum ambient temperature T
• I
= 8 mA, VDD = 5.0 V
DDmax
• Maximum 4 I/Os used at the same time in output at low level with
I
= 8 mA, VOL= 0.4 V
OL
P
INTmax =
P
Dmax
Thus: P
8 mA x 5.0 V = 40 mW
= 40 mW + (8 x 0.4 x 4) mW
= 52.8 mW
Dmax
= 75 °C (measured according to JESD51-2)
Amax
(1)
102 °C/W
Using the values obtained in Section Table 49.: Thermal characteristics T
as follows for SO8N package 102 °C/W :
T
= 75 °C + (102 °C/W x 52.8 mW) = 75 °C + 5.4 °C = 80.4 °C.
Jmax
Above information is within the range (-40 < TJ < 130 °C)
80/85 DS12129 Rev 3
is calculated
Jmax
Page 81

STM8S001J3 Ordering information
STM8 S 001 J 3 M 3 TR
Product class
STM8 microcontroller
Pin count
J = 8 pins
Package type
M =SO8N
Example:
Sub-family type
001 = low density
Family type
S = standard
Temperature range
3 = -40°C to 125°C
Program memory size
3 = 8 Kbyte
Packing
No character = tube
TR = Tape and reel
11 Ordering information
Figure 40. STM8S001J3 ordering information scheme
(1)
1. For a list of available options (e.g. memory size, package) and orderable part numbers or for further
information on any aspect of this device, please go to www.st.com
to you.
or contact the ST Sales Office nearest
DS12129 Rev 3 81/85
81
Page 82

STM8 development tools STM8S001J3
12 STM8 development tools
Development tools for the STM8 microcontrollers include the full-featured STice emulation
system supported by a complete software tool package including C compiler, assembler and
integrated development environment with high-level language debugger. In addition, the
STM8 is to be supported by a complete range of tools including starter kits, evaluation
boards and a low-cost in-circuit debugger/programmer.
12.1 Emulation and in-circuit debugging tools
The STice emulation system offers a complete range of emulation and in-circuit debugging
features on a platform that is designed for versatility and cost-effectiveness. In addition,
STM8 application development is supported by a low-cost in-circuit debugger/programmer.
The STice is the fourth generation of full featured emulators from STMicroelectronics. It
offers new advanced debugging capabilities including profiling and coverage to help detect
and eliminate bottlenecks in application execution and dead code when fine tuning an
application.
In addition, STice offers in-circuit debugging and programming of STM8 microcontrollers via
the STM8 single wire interface module (SWIM), which allows non-intrusive debugging of an
application while it runs on the target microcontroller.
For improved cost effectiveness, STice is based on a modular design that allows users to
order exactly what they need to meet their development requirements and to adapt their
emulation system to support existing and future ST microcontrollers.
STice key features
• Occurrence and time profiling and code coverage (new features)
• Advanced breakpoints with up to 4 levels of conditions
• Data breakpoints
• Program and data trace recording up to 128 KB records
• Read/write on the fly of memory during emulation
• In-circuit debugging/programming via SWIM protocol
• 8-bit probe analyzer
• 1 input and 2 output triggers
• Power supply follower managing application voltages between 1.62 to 5.5 V
• Modularity that allows users to specify the components users need to meet their
development requirements and adapt to future requirements
• Supported by free software tools that include integrated development environment
(IDE), programming software interface and assembler for STM8.
82/85 DS12129 Rev 3
Page 83

STM8S001J3 STM8 development tools
12.2 Software tools
STM8 development tools are supported by a complete, free software package from
STMicroelectronics that includes ST Visual Develop (STVD) IDE and the ST Visual
Programmer (STVP) software interface. STVD provides seamless integration of the Cosmic
and Raisonance C compilers for STM8. A free version that outputs up to
available.
12.2.1 STM8 toolset
STM8 toolset with STVD integrated development environment and STVP programming
software is available for free download at www.st.com. This package includes:
ST Visual Develop – Full-featured integrated development environment from ST, featuring
• Seamless integration of C and ASM toolsets
• Full-featured debugger
• Project management
• Syntax highlighting editor
• Integrated programming interface
• Support of advanced emulation features for STice such as code profiling and coverage
ST Visual Programmer (STVP) – Easy-to-use, unlimited graphical interface allowing read,
write and verify the user STM8 microcontroller Flash program memory, data EEPROM and
option bytes. STVP also offers project mode for saving programming configurations and
automating programming sequences.
Kbytes of code is
12.2.2 C and assembly toolchains
Control of C and assembly toolchains is seamlessly integrated into the STVD integrated
development environment, making it possible to configure and control the building of user
application directly from an easy-to-use graphical interface.
Available toolchains include:
• Cosmic C compiler for STM8 – One free version that outputs up to Kbytes of code is
available. For more information, see www.cosmic-software.com.
• Raisonance C compiler for STM8 – One free version that outputs up to Kbytes of
code. For more information, see www.raisonance.com.
• STM8 assembler linker – Free assembly toolchain included in the STVD toolset,
which allows users to assemble and link the user application source code.
12.3 Programming tools
During the development cycle, STice provides in-circuit programming of the STM8 Flash
microcontroller on user application board via the SWIM protocol. Additional tools are to
include a low-cost in-circuit programmer as well as ST socket boards, which provide
dedicated programming platforms with sockets for programming the user STM8.
For production environments, programmers will include a complete range of gang and
automated programming solutions from third-party tool developers already supplying
programmers for the STM8 family.
DS12129 Rev 3 83/85
83
Page 84

Revision history STM8S001J3
13 Revision history
Date Revision Changes
24-May-2017 1 Initial release.
29-Jun-2017 2
28-Jun-2018 3
Table 50. Document revision history
Updated:
Section 10: Package information
Figure 3: STM8S001J3 SO8N pinout
Table 5: STM8S001J3 pin description
Table 13: STM8S001J3 alternate function remapping
bits for 8-pin devices
Added:
Section : Device marking for SO8N – 8-lead 4.9 x 6 mm,
plastic small outline, 150 mils body width
Updated:
Analog to digital converter (ADC) on cover page
Recommendation for SWIM pin (pin #8) sharing on
Section 4.2
Section 4.12: Analog-to-digital converter (ADC1)
Table 5: STM8S001J3 pin description
Table 13: STM8S001J3 alternate function remapping
bits for 8-pin devices
Table 41: ADC characteristics
84/85 DS12129 Rev 3
Page 85

STM8S001J3
IMPORTANT NOTICE – PLEASE READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and
improvements to ST products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on
ST products before placing orders. ST products are sold pursuant to ST’s terms and conditions of sale in place at the time of order
acknowledgement.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or
the design of Purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2018 STMicroelectronics – All rights reserved
DS12129 Rev 3 85/85
85
 Loading...
Loading...