

Page 1

STM32G0B1xB/C/xE
LQFP64
UFQFPN48
UFQFPN32
LQFP48
LQFP32
WLCSP52
3.09 × 3.15 mm
UFBGA64
5
×
5mm
10
×
10 mm
7
×
7mm
7
×
7mm
7×7mm
5×5mm
LQFP100
14
×
14 mm
UFBGA100
7
×
7mm
LQFP80
12
×
12 mm
Arm® Cortex®-M0+ 32-bit MCU, up to 512KB Flash, 144KB RAM,
6x USART, timers, ADC, DAC, comm. I/Fs, 1.7-3.6V
Datasheet - production data
Features
• Core: Arm® 32-bit Cortex®-M0+ CPU,
frequency up to 64 MHz
• -40°C to 85°C/105°C/125°C operating
temperature
• Memories
– Up to 512 Kbytes of Flash memory with
protection and securable area, two banks,
read-while-write support
– 144 Kbytes of SRAM (128 Kbytes with HW
parity check)
• CRC calculation unit
• Reset and power management
– Voltage range: 1.7 V to 3.6 V
– Separate I/O supply pin (1.6 V to 3.6 V)
– Power-on/Power-down reset (POR/PDR)
– Programmable Brownout reset (BOR)
– Programmable voltage detector (PVD)
– Low-power modes:
Sleep, Stop, Standby, Shutdown
–V
supply for RTC and backup registers
BAT
• Clock management
– 4 to 48 MHz crystal oscillator
– 32 kHz crystal oscillator with calibration
– Internal 16 MHz RC with PLL option (±1 %)
– Internal 32 kHz RC oscillator (±5 %)
• Up to 94 fast I/Os
– All mappable on external interrupt vectors
– Multiple 5 V-tolerant I/Os
• 12-channel DMA controller with flexible
mapping
• 12-bit, 0.4 µs ADC (up to 16 ext. channels)
– Up to 16-bit with hardware oversampling
– Conversion range: 0 to 3.6V
• Two 12-bit DACs, low-power sample-and-hold
• Three fast low-power analog comparators, with
programmable input and output, rail-to-rail
• 15 timers (two 128 MHz capable): 16-bit for
advanced motor control, one 32-bit and six 16bit general-purpose, two basic 16-bit, two lowpower 16-bit, two watchdogs, SysTick timer
• Calendar RTC with alarm and periodic wakeup
from Stop/Standby/Shutdown
• Communication interfaces
– Three I
2
C-bus interfaces supporting Fastmode Plus (1 Mbit/s) with extra current
sink, two supporting SMBus/PMBus and
wakeup from Stop mode
– Six USARTs with master/slave
synchronous SPI; three supporting
ISO7816 interface, LIN, IrDA capability,
auto baud rate detection and wakeup
feature
– Two low-power UARTs
– Three SPIs (32 Mbit/s) with 4- to 16-bit
programmable bitframe, two multiplexed
2
with I
S interface
– HDMI CEC interface, wakeup on header
• USB 2.0 FS device (crystal-less) and host
controller
• USB Type-C™ Power Delivery controller
• Two FDCAN controllers
• Development support: serial wire debug (SWD)
• 96-bit unique ID
• All packages ECOPACK
Reference Part number
STM32G0B1xC
STM32G0B1xE
STM32G0B1xB
Table 1. Device summary
STM32G0B1CC, STM32G0B1KC,
STM32G0B1MC, STM32G0B1RC,
STM32G0B1CE, STM32G0B1KE,
STM32G0B1ME, STM32G0B1NE,
STM32G0B1RE, STM32G0B1VE
STM32G0B1CB, STM32G0B1KB,
STM32G0B1MB, STM32G0B1RB,
2 compliant
STM32G0B1VC
STM32G0B1VB
November 2020 DS13560 Rev 1 1/159
This is information on a product in full production.
www.st.com
Page 2

Contents STM32G0B1xB/C/xE
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Functional overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Arm® Cortex®-M0+ core with MPU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Memory protection unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 Embedded Flash memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3.1 Securable area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Embedded SRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 Boot modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.6 Cyclic redundancy check calculation unit (CRC) . . . . . . . . . . . . . . . . . . . 16
3.7 Power supply management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.7.1 Power supply schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.7.2 Power supply supervisor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.7.3 Voltage regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.7.4 Low-power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.7.5 Reset mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.7.6 VBAT operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.8 Interconnect of peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.9 Clocks and startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.10 General-purpose inputs/outputs (GPIOs) . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.11 Direct memory access controller (DMA) . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.12 DMA request multiplexer (DMAMUX) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.13 Interrupts and events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.13.1 Nested vectored interrupt controller (NVIC) . . . . . . . . . . . . . . . . . . . . . . 24
3.13.2 Extended interrupt/event controller (EXTI) . . . . . . . . . . . . . . . . . . . . . . 24
3.14 Analog-to-digital converter (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.14.1 Temperature sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.14.2 Internal voltage reference (V
3.14.3 V
battery voltage monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
BAT
) . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
REFINT
3.15 Digital-to-analog converter (DAC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.16 Voltage reference buffer (VREFBUF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2/159 DS13560 Rev 1
Page 3

STM32G0B1xB/C/xE Contents
3.17 Comparators (COMP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.18 Timers and watchdogs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.18.1 Advanced-control timer (TIM1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.18.2 General-purpose timers (TIM2, 3, 4, 14, 15, 16, 17) . . . . . . . . . . . . . . . 29
3.18.3 Basic timers (TIM6 and TIM7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.18.4 Low-power timers (LPTIM1 and LPTIM2) . . . . . . . . . . . . . . . . . . . . . . . 29
3.18.5 Independent watchdog (IWDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.18.6 System window watchdog (WWDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.18.7 SysTick timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.19 Real-time clock (RTC), tamper (TAMP) and backup registers . . . . . . . . . 30
2
3.20 Inter-integrated circuit interface (I
C) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.21 Universal synchronous/asynchronous receiver transmitter (USART) . . . 32
3.22 Low-power universal asynchronous receiver transmitter (LPUART) . . . . 33
3.23 Serial peripheral interface (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.24 Universal serial bus device (USB) and host (USBH) . . . . . . . . . . . . . . . . 34
3.25 USB Type-C™ Power Delivery controller . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.26 Controller area network (FDCAN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.27 Development support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.27.1 Serial wire debug port (SW-DP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Pinouts, pin description and alternate functions . . . . . . . . . . . . . . . . . 36
5 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1 Parameter conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.1 Minimum and maximum values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.2 Typical values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.3 Typical curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.4 Loading capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.5 Pin input voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1.6 Power supply scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.1.7 Current consumption measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.3 Operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.3.1 General operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.3.2 Operating conditions at power-up / power-down . . . . . . . . . . . . . . . . . . 68
5.3.3 Embedded reset and power control block characteristics . . . . . . . . . . . 68
DS13560 Rev 1 3/159
5
Page 4

Contents STM32G0B1xB/C/xE
5.3.4 Embedded voltage reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.3.5 Supply current characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.3.6 Wakeup time from low-power modes and voltage scaling
transition times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.3.7 External clock source characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.8 Internal clock source characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.3.9 PLL characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.3.10 Flash memory characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.3.11 EMC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.3.12 Electrical sensitivity characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.3.13 I/O current injection characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.3.14 I/O port characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.3.15 NRST input characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.3.16 Analog switch booster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.3.17 Analog-to-digital converter characteristics . . . . . . . . . . . . . . . . . . . . . . 100
5.3.18 Digital-to-analog converter characteristics . . . . . . . . . . . . . . . . . . . . . . 107
5.3.19 Voltage reference buffer characteristics . . . . . . . . . . . . . . . . . . . . . . . 111
5.3.20 Comparator characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.3.21 Temperature sensor characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5.3.22 V
5.3.23 Timer characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.3.24 Characteristics of communication interfaces . . . . . . . . . . . . . . . . . . . . 115
5.3.25 UCPD characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
monitoring characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
BAT
6 Package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.1 UFQFPN32 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.2 LQFP32 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.3 UFQFPN48 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.4 LQFP48 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6.5 WLCSP52 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
6.6 UFBGA64 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6.7 LQFP64 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
6.8 LQFP80 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.9 UFBGA100 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.10 LQFP100 package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
6.11 Thermal characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
4/159 DS13560 Rev 1
Page 5

STM32G0B1xB/C/xE Contents
6.11.1 Reference document . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
6.11.2 Selecting the product temperature range . . . . . . . . . . . . . . . . . . . . . . 155
7 Ordering information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
8 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
DS13560 Rev 1 5/159
5
Page 6

List of tables STM32G0B1xB/C/xE
List of tables
Table 1. Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. Features and peripheral counts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Table 3. Access status versus readout protection level and execution modes. . . . . . . . . . . . . . . . . 15
Table 4. Interconnect of peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Table 5. Temperature sensor calibration values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Table 6. Internal voltage reference calibration values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 7. Timer feature comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Table 8. I
Table 9. USART implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 10. SPI/I2S implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 11. Terms and symbols used in Table 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 12. Pin assignment and description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Table 13. Port A alternate function mapping (AF0 to AF7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 14. Port A alternate function mapping (AF8 to AF15) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 15. Port B alternate function mapping (AF0 to AF7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 16. Port B alternate function mapping (AF8 to AF15) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 17. Port C alternate function mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 18. Port D alternate function mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Table 19. Port E alternate function mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Table 20. Port F alternate function mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Table 21. Voltage characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Table 22. Current characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Table 23. Thermal characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Table 24. General operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Table 25. Operating conditions at power-up / power-down . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Table 26. Embedded reset and power control block characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . 68
Table 27. Embedded internal voltage reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Table 28. Current consumption in Run and Low-power run modes
Table 29. Typical current consumption in Run and Low-power run modes,
Table 30. Current consumption in Sleep and Low-power sleep modes . . . . . . . . . . . . . . . . . . . . . . . 74
Table 31. Current consumption in Stop 0 mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Table 32. Current consumption in Stop 1 mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Table 33. Current consumption in Standby mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Table 34. Current consumption in Shutdown mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Table 35. Current consumption in VBAT mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Table 36. Current consumption of peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Table 37. Low-power mode wakeup times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Table 38. Regulator mode transition times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Table 39. Wakeup time using LPUART . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Table 40. High-speed external user clock characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Table 41. Low-speed external user clock characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Table 42. HSE oscillator characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Table 43. LSE oscillator characteristics (f
Table 44. HSI16 oscillator characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Table 45. HSI48 oscillator characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Table 46. LSI oscillator characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
2
C implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
at different die temperatures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
depending on code executed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
= 32.768 kHz) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
LSE
6/159 DS13560 Rev 1
Page 7

STM32G0B1xB/C/xE List of tables
Table 47. PLL characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Table 48. Flash memory characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Table 49. Flash memory endurance and data retention . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Table 50. EMS characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Table 51. EMI characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Table 52. ESD absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Table 53. Electrical sensitivity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Table 54. I/O current injection susceptibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Table 55. I/O static characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Table 56. Input characteristics of FT_e I/Os . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Table 57. Output voltage characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Table 58. I/O AC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Table 59. NRST pin characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Table 60. Analog switch booster characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Table 61. ADC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Table 62. Maximum ADC R
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
AIN
Table 63. ADC accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Table 64. DAC characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Table 65. DAC accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Table 66. VREFBUF characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Table 67. COMP characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Table 68. TS characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Table 69. V
Table 70. V
monitoring characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
BAT
charging characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
BAT
Table 71. TIMx characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Table 72. IWDG min/max timeout period at 32 kHz LSI clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Table 73. Minimum I2CCLK frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Table 74. I2C analog filter characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Table 75. SPI characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Table 76. I
2
S characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Table 77. USART characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Table 78. USB OTG DC electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Table 79. USB OTG electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Table 80. USB BCD DC electrical characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Table 81. UCPD operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Table 82. UFQFPN32 package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Table 83. LQFP32 mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Table 84. UFQFPN48 package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Table 85. LQFP48 mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Table 86. WLCSP52 mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Table 87. Recommended PCB pad design rules for WLCSP52 package . . . . . . . . . . . . . . . . . . . . 139
Table 88. UFBGA64 package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Table 89. Recommended PCB design rules for UFBGA64 package . . . . . . . . . . . . . . . . . . . . . . . . 141
Table 90. LQFP64 package mechanical data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Table 91. LQFP80 package mechanical data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Table 92. UFBGA100 package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Table 93. UFBGA100 recommended PCB design rules. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Table 94. LQFP100 package mechanical data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Table 95. Package thermal characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Table 96. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
DS13560 Rev 1 7/159
7
Page 8

List of figures STM32G0B1xB/C/xE
List of figures
Figure 1. Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 2. Power supply overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 3. STM32G0B1VxT LQFP100 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 4. STM32G0B1VxI UFBGA100 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 5. STM32G0B1MxT LQFP80 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 6. STM32G0B1RxT LQFP64 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 7. STM32G0B1RxI UFBGA64 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Figure 8. STM32G0B1NxY WLCSP52 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Figure 9. STM32G0B1CxT LQFP48 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Figure 10. STM32G0B1CxU UFQFPN48 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Figure 11. STM32G0B1KxT LQFP32 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Figure 12. STM32G0B1KxU UFQFPN32 pinout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Figure 13. Pin loading conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 14. Pin input voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 15. Power supply scheme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Figure 16. Current consumption measurement scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Figure 17. V
Figure 18. High-speed external clock source AC timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Figure 19. Low-speed external clock source AC timing diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figure 20. Typical application with an 8 MHz crystal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Figure 21. Typical application with a 32.768 kHz crystal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figure 22. HSI16 frequency vs. temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Figure 23. HSI48 frequency versus temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Figure 24. I/O input characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Figure 25. Current injection into FT_e input with diode active . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Figure 26. I/O AC characteristics definition
Figure 27. Recommended NRST pin protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Figure 28. ADC accuracy characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Figure 29. Typical connection diagram using the ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Figure 30. 12-bit buffered / non-buffered DAC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Figure 31. SPI timing diagram - slave mode and CPHA = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Figure 32. SPI timing diagram - slave mode and CPHA = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Figure 33. SPI timing diagram - master mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Figure 34. I
Figure 35. I
2
2
Figure 36. USB OTG timings – definition of data signal rise and fall time . . . . . . . . . . . . . . . . . . . . . 123
Figure 37. UFQFPN32 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Figure 38. Recommended footprint for UFQFPN32 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Figure 39. UFQFPN32 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Figure 40. LQFP32 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Figure 41. Recommended footprint for LQFP32 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Figure 42. LQFP32 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Figure 43. UFQFPN48 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Figure 44. Recommended footprint for UFQFPN48 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Figure 45. UFQFPN48 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Figure 46. LQFP48 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Figure 47. Recommended footprint for LQFP48 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Figure 48. LQFP48 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
vs. temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
REFINT
(1)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
S slave timing diagram (Philips protocol) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
S master timing diagram (Philips protocol). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
8/159 DS13560 Rev 1
Page 9

STM32G0B1xB/C/xE List of figures
Figure 49. WLCSP52 package outline. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Figure 50. Recommended PCB pad design for WLCSP52 package. . . . . . . . . . . . . . . . . . . . . . . . . 138
Figure 51. WLCSP52 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Figure 52. UFBGA64 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Figure 53. Recommended footprint for UFBGA64 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Figure 54. UFBGA64 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Figure 55. LQFP64 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Figure 56. Recommended footprint for LQFP64 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
Figure 57. LQFP64 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Figure 58. LQFP80 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Figure 59. Recommended footprint for LQFP80 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Figure 60. LQFP80 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Figure 61. UFBGA100 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Figure 62. Recommended footprint for UFBGA100 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Figure 63. UFBGA100 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Figure 64. LQFP100 package outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Figure 65. Recommended footprint for LQFP100 package . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Figure 66. LQFP100 package marking example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
DS13560 Rev 1 9/159
9
Page 10

Introduction STM32G0B1xB/C/xE
1 Introduction
This document provides information on STM32G0B1xB/C/xE microcontrollers, such as
description, functional overview, pin assignment and definition, electrical characteristics,
packaging, and ordering codes.
Information on memory mapping and control registers is object of reference manual.
Information on Arm
®(a)
Cortex®-M0+ core is available from the www.arm.com website.
a. Arm is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere.
10/159 DS13560 Rev 1
Page 11

STM32G0B1xB/C/xE Description
2 Description
The STM32G0B1xB/C/xE mainstream microcontrollers are based on high-performance
®
Arm
Cortex®-M0+ 32-bit RISC core operating at up to 64 MHz frequency. Offering a high
level of integration, they are suitable for a wide range of applications in consumer, industrial
and appliance domains and ready for the Internet of Things (IoT) solutions.
The devices incorporate a memory protection unit (MPU), high-speed embedded memories
(144 Kbytes of SRAM and up to 512 Kbytes of Flash program memory with read protection,
write protection, proprietary code protection, and securable area), DMA, an extensive range
of system functions, enhanced I/Os, and peripherals. The devices offer standard
communication interfaces (three I
USB, two FD CANs, and six USARTs), one 12-bit ADC (2.5 MSps) with up to 19 channels,
one 12-bit DAC with two channels, three fast comparators, an internal voltage reference
buffer, a low-power RTC, an advanced control PWM timer running at up to double the CPU
frequency, six general-purpose 16-bit timers with one running at up to double the CPU
frequency, a 32-bit general-purpose timer, two basic timers, two low-power 16-bit timers,
two watchdog timers, and a SysTick timer. The devices provide a fully integrated USB TypeC Power Delivery controller.
The devices operate within ambient temperatures from -40 to 125°C and with supply
voltages from 1.7 V to 3.6 V. Optimized dynamic consumption combined with a
comprehensive set of power-saving modes, low-power timers and low-power UART, allows
the design of low-power applications.
2
Cs, three SPIs / two I2S, one HDMI CEC, one full-speed
VBAT direct battery input allows keeping RTC and backup registers powered.
The devices come in packages with 32 to 100 pins.
Peripheral
Flash memory (Kbyte)
SRAM (Kbyte) 128 (parity-protected) or 144 (not parity-protected)
Advanced control 1 (16-bit) high frequency
General-purpose 6 (16-bit) + 1 (16-bit) high frequency + 1 (32-bit)
Basic 2 (16-bit)
Timers
Low-power 2 (16-bit)
SysTick 1
Watchdog 2
Table 2. Features and peripheral counts
STM32G0B1_
_KB/
_KC/
_KE
128/256/
512
_KBxxN/
_KCxxN/
_KExxN
128/256
/512
_CB/
_CC/
_CE
128/256
/512
_CBxxN/
_CCxxN/
_CExxN
128/256
/512
_NE
512
_RB/
_RC/
_RE
128/256
/512
_RBxxN/
_RCxxN/
_RExxN
128/256
/512
_MB/
_MC/
_ME
128/256
/512
_VB/
_VC/
_VE
128/256
/512
DS13560 Rev 1 11/159
35
Page 12

Description STM32G0B1xB/C/xE
Table 2. Features and peripheral counts (continued)
STM32G0B1_
Peripheral
SPI [I2S]
2
C3
I
_KB/
_KC/
_KE
(1)
_KBxxN/
_KCxxN/
_KExxN
_CB/
_CC/
_CE
_CBxxN/
_CCxxN/
_CExxN
_NE
3 [2]
_RB/
_RC/
_RE
_RBxxN/
_RCxxN/
_RExxN
_MB/
_MC/
_ME
USART 6
LPUART 2
USB 1
Comm. interfaces
UCPD 1
(2)
21 2 1 2
FDCAN 2
CEC 1
RTC Yes
Tamper pins 3
VDDIO2 pin / VSS pin No/No Yes/No No/No Yes/Yes Yes/Yes No/No Yes/Yes Yes/Yes Yes/Yes
Random number generator No
AES No
GPIOs 30 2944424660587494
Wakeup pins 4 3 4 5 7 8
ADC channels (ext. + int.) 11 + 2 10 + 2 14 + 3 12 + 3 14 + 3 16 + 3 14 + 3 16 + 3 16 + 3
DAC channels 2
Internal voltage reference
buffer
No Yes
Analog comparators 3
Max. CPU frequency 64 MHz
Operating voltage 1.7 to 3.6 V
Operating temperature
(3)
Ambient: -40 to 85 °C / -40 to 105 °C / -40 to 125 °C
Junction: -40 to 105 °C / -40 to 125 °C / -40 to 130 °C
Number of pins 32 48 52 64 80 100
1. The numbers in brackets denote the count of SPI interfaces configurable as I
2
S interface.
2. One port with only one CC line available (supporting limited number of use cases).
3. Depends on order code. Refer to Section 7: Ordering information for details.
_VB/
_VC/
_VE
12/159 DS13560 Rev 1
Page 13

MSv63193V1
Parity
FDCAN1 & 2
I2C2
SPI1/I2S
LPUART& & 2
UCPD
USART3/4
LPTIMER 1/2
TIMER 16/17
Power domain of analog blocks :
V
BAT
4 channels
BKIN, BKIN2, ETR
System and
peripheral
clocks
MOSI/SD
MISO/MCK
SCK/CK
NSS/WS
SWCLK
SWDIO
16x IN
OSC_IN
OSC_OUT
VBAT
OSC32_IN
OSC32_OUT
RTC_OUT
RTC_REFIN
RTC_TS
MOSI, MISO
SCK, NSS
HSI16
LSI
PLLPCLK
V
DD
IR_OUT
1 channel
BKIN
ETR, IN, OUT
1 channel
4 channels
ETR
4 channels
ETR
CPU
CORTEX-M0+
f
max
= 64 MHz
SWD
NVIC
EXTI
SPI/I2S 1 & 2
SPI3
AHB-to-APB
RCC
Reset & clock control
I/F
XTAL OSC
4-48 MHz
IWDG
I/F
ADC
RTC, TAMP
Backup regs
I/F
RC 16 MHz
RC 32 kHz
PLL
decoder
XTAL32 kHz
Bus matrix
I/F
V
DD
2 channels
BKIN
RX, TX
CTS, RTS
CEC
TIM6
TIM7
COMP1
COMP2
IN+, IN-,
OUT
V
DDA
SUPPLY
SUPERVISION
POWER
V
CORE
POR
Reset
Int
VDD/VDDA
VSS/VSSA
NRST
PVD
POR/BOR
Voltage
regulator
USART1 to 6
LPTIM1 & 2
TIM16 & 17
TIM15
TIM14
TIM3 & 4
TIM2 (32-bit)
TIM1
GPIOs
IOPORT
HSE
PLLQCLK
PLLRCLK
LSE
LSE
T sensor
RX, TX,
CTS, RTS
LPUART1 & 2
TAMP_IN
APB
APB
AHB
CC, DBCC
FRSTX
UCPD1 & 2
HDMI-CEC
VREFBUF
DAC
I/F
DAC_OUT1
DAC_OUT2
CRC
VREF+
SCL, SDA
SCL, SDA
SMBA, SMBUS
I2C1 & 2
I2C3
DBGMCU
WWDG
PWRCTRL
SYSCFG
DMA
DMAMUX
V
DDA
V
DDIO1
Low-voltage
detector
V
DD
Flash memory
up to 512 KB
V
DDIO1
/V
DDIO2
IRTIM
from peripherals
PFx
Port F
Port D
PDx
PCx
Port C
PBx
Port B
PAx
Port A
Port E
PEx
NOE, DM,
DP
USB FS
RX, TX
FDCAN1 & 2
VDDIO2
V
DDIO2
COMP3
SRAM
144 KB
STM32G0B1xB/C/xE Description
Figure 1. Block diagram
DS13560 Rev 1 13/159
35
Page 14

Functional overview STM32G0B1xB/C/xE
3 Functional overview
3.1 Arm® Cortex®-M0+ core with MPU
The Cortex-M0+ is an entry-level 32-bit Arm Cortex processor designed for a broad range of
embedded applications. It offers significant benefits to developers, including:
• a simple architecture, easy to learn and program
• ultra-low power, energy-efficient operation
• excellent code density
• deterministic, high-performance interrupt handling
• upward compatibility with Cortex-M processor family
• platform security robustness, with integrated Memory Protection Unit (MPU).
The Cortex-M0+ processor is built on a highly area- and power-optimized 32-bit core, with a
2-stage pipeline Von Neumann architecture. The processor delivers exceptional energy
efficiency through a small but powerful instruction set and extensively optimized design,
providing high-end processing hardware including a single-cycle multiplier.
The Cortex-M0+ processor provides the exceptional performance expected of a modern
32-bit architecture, with a higher code density than other 8-bit and 16-bit microcontrollers.
Owing to embedded Arm core, the STM32G0B1xB/C/xE devices are compatible with Arm
tools and software.
The Cortex-M0+ is tightly coupled with a nested vectored interrupt controller (NVIC)
described in Section 3.13.1.
3.2 Memory protection unit
The memory protection unit (MPU) is used to manage the CPU accesses to memory to
prevent one task to accidentally corrupt the memory or resources used by any other active
task.
The MPU is especially helpful for applications where some critical or certified code has to be
protected against the misbehavior of other tasks. It is usually managed by an RTOS (realtime operating system). If a program accesses a memory location that is prohibited by the
MPU, the RTOS can detect it and take action. In an RTOS environment, the kernel can
dynamically update the MPU area setting, based on the process to be executed.
The MPU is optional and can be bypassed for applications that do not need it.
3.3 Embedded Flash memory
STM32G0B1xB/C/xE devices feature up to 512 Kbytes of embedded Flash memory
available for storing code and data.
14/159 DS13560 Rev 1
Page 15

STM32G0B1xB/C/xE Functional overview
Flexible protections can be configured thanks to option bytes:
• Readout protection (RDP) to protect the whole memory. Three levels are available:
– Level 0: no readout protection
– Level 1: memory readout protection: the Flash memory cannot be read from or
written to if either debug features are connected, boot in RAM or bootloader is
selected
– Level 2: chip readout protection: debug features (Cortex-M0+ serial wire), boot in
RAM and bootloader selection are disabled. This selection is irreversible.
Table 3. Access status versus readout protection level and execution modes
Area
User
memory
System
memory
Option
bytes
Backup
registers
1. Erased upon RDP change from Level 1 to Level 0.
Protection
level
1 Yes Yes Yes No No No
2 Yes Yes Yes N/A N/A N/A
1 Yes No No Yes No No
2 Yes No No N/A N/A N/A
1 Yes Yes Yes Yes Yes Yes
2 Yes No No N/A N/A N/A
1YesYesN/A
2 Yes Yes N/A N/A N/A N/A
User execution
Read Write Erase Read Write Erase
(1)
Debug, boot from RAM or boot
from system memory (loader)
No No N/A
• Write protection (WRP): the protected area is protected against erasing and
programming. Two areas per bank can be selected, with 2-Kbyte granularity.
• Proprietary code readout protection (PCROP): a part of the Flash memory can be
protected against read and write from third parties. The protected area is execute-only:
it can only be reached by the STM32 CPU as instruction code, while all other accesses
(DMA, debug and CPU data read, write and erase) are strictly prohibited. An additional
option bit (PCROP_RDP) determines whether the PCROP area is erased or not when
the RDP protection is changed from Level 1 to Level 0.
(1)
The whole non-volatile memory embeds the error correction code (ECC) feature supporting:
• single error detection and correction
• double error detection
• readout of the ECC fail address from the ECC register
3.3.1 Securable area
A part of the Flash memory can be hidden from the application once the code it contains is
executed. As soon as the write-once SEC_PROT bit is set, the securable memory cannot be
accessed until the system resets. The securable area generally contains the secure boot
code to execute only once at boot. This helps to isolate secret code from untrusted
application code.
DS13560 Rev 1 15/159
35
Page 16

Functional overview STM32G0B1xB/C/xE
3.4 Embedded SRAM
STM32G0B1xB/C/xE devices have 128 Kbytes of embedded SRAM with parity. Hardware
parity check allows memory data errors to be detected, which contributes to increasing
functional safety of applications.
When the parity protection is not required because the application is not safety-critical, the
parity memory bits can be used as additional SRAM, to increase its total size to 144 Kbytes.
The memory can be read/write-accessed at CPU clock speed, with 0 wait states.
3.5 Boot modes
At startup, the boot pin and boot selector option bit are used to select one of the three boot
options:
• boot from User Flash memory
• boot from System memory
• boot from embedded SRAM
The boot pin is shared with a standard GPIO and can be enabled through the boot selector
option bit. The boot loader is located in System memory. It manages the Flash memory
reprogramming through one of the following interfaces:
• USART on pins PA9/PA10, PC10/PC11, or PA2/PA3
2
• I
C-bus on pins PB6/PB7 or PB10/PB11
• SPI on pins PA4/PA5/PA6/PA7 or PB12/PB13/PB14/PB15
• USB on pins PA11/PA12
• FDCAN on pins PD0/PD1
3.6 Cyclic redundancy check calculation unit (CRC)
The CRC (cyclic redundancy check) calculation unit is used to get a CRC code using a
configurable generator polynomial value and size.
Among other applications, CRC-based techniques are used to verify data transmission or
storage integrity. In the scope of the EN/IEC 60335-1 standard, they offer a means of
verifying the Flash memory integrity. The CRC calculation unit helps compute a signature of
the software during runtime, to be compared with a reference signature generated at link
time and stored at a given memory location.
16/159 DS13560 Rev 1
Page 17

STM32G0B1xB/C/xE Functional overview
3.7 Power supply management
3.7.1 Power supply schemes
The STM32G0B1xB/C/xE devices require a 1.7 V to 3.6 V operating supply voltage (VDD).
Several different power supplies are provided to specific peripherals:
• V
• V
• V
• V
• V
• V
• V
= 1.7 (1.6) to 3.6 V
DD
V
is the external power supply for the internal regulator and the system analog such
DD
as reset, power management and internal clocks. It is provided externally through
VDD/VDDA pin.
The minimum voltage of 1.7 V corresponds to power-on reset release threshold
V
(max). Once this threshold is crossed and power-on reset is released, the
POR
functionality is guaranteed down to power-down reset threshold V
= 1.62 V (ADC and COMP) / 1.8 V (DAC) / 2.4 V (VREFBUF) to 3.6 V
DDA
V
is the analog power supply for the A/D converter, D/A converter, voltage
DDA
reference buffer and comparators. V
voltage level is identical to VDD voltage as it is
DDA
PDR
(min).
provided externally through VDD/VDDA pin.
= V
DDIO1
V
DDIO1
DD
is the power supply for the I/Os. V
voltage level is identical to VDD voltage
DDIO1
as it is provided externally through VDD/VDDA pin.
= 1.6 to 3.6 V
DDIO2
V
independent of V
TAMP, low-speed external 32.768 kHz oscillator and backup registers when V
present. V
is the power supply from VDDIO2 pin for selected I/Os. Although V
DDIO2
= 1.55 V to 3.6 V. V
BAT
BAT
DD
or V
, it must not be applied without valid VDD.
DDA
is the power supply (through a power switch) for RTC,
BAT
is provided externally through VBAT pin. When this pin is not available
DDIO2
DD
is
is not
on the package, VBAT bonding pad is internally bonded to the VDD/VDDA pin.
is the analog peripheral input reference voltage, or the output of the internal
REF+
voltage reference buffer (when enabled). When V
V
. When V
DDA
when the analog peripherals using V
DDA
2 V, V
must be between 2 V and V
REF+
are not active.
REF+
DDA
< 2 V, V
must be equal to
REF+
. It can be grounded
DDA
The internal voltage reference buffer supports two output voltages, which is configured
with VRS bit of the VREFBUF_CSR register:
–V
–V
V
REF+
internally connected with V
around 2.048 V (requiring V
REF+
around 2.5 V (requiring V
REF+
equal to or higher than 2.4 V)
DDA
equal to or higher than 2.8 V)
DDA
is delivered through VREF+ pin. On packages without VREF+ pin, V
, and the internal voltage reference buffer must be kept
DD
REF+
is
disabled (refer to datasheets for package pinout description).
CORE
An embedded linear voltage regulator is used to supply the V
power. V
The Flash memory is also supplied with V
is the power supply for digital peripherals, SRAM and Flash memory.
CORE
DD
.
internal digital
CORE
DS13560 Rev 1 17/159
35
Page 18

Functional overview STM32G0B1xB/C/xE
MSv63104V1
V
DDA
domain
RTC domain
D/A converter
A/D converter
Standby circuitry
(Wakeup, IWDG)
Voltage
regulator
Core
SRAM
Digital
peripherals
Low-voltage
detector
LSE crystal 32.768 kHz osc
BKP registers
RCC BDCR register
RTC and TAMP
Comparators
Voltage reference buffer
I/O ring
V
CORE
domain
Temp. sensor
Reset block
PLL, HSI
Flash memory
V
DDIO1
VREF+
V
DD
domain
V
CORE
VSS/VSSA
VDD/VDDA
VBAT
V
DDA
V
REF+
V
SSA
V
SS
V
DD
V
DDIO1
domain
I/O ring
V
DDIO2
domain
VDDIO2
V
DDIO2
Figure 2. Power supply overview
3.7.2 Power supply supervisor
The device has an integrated power-on/power-down (POR/PDR) reset active in all power
modes except Shutdown and ensuring proper operation upon power-on and power-down. It
maintains the device in reset when the supply voltage is below V
the need for an external reset circuit. Brownout reset (BOR) function allows extra flexibility. It
can be enabled and configured through option bytes, by selecting one of four thresholds for
rising V
The device also features an embedded programmable voltage detector (PVD) that monitors
the V
when V
falling and rising. The interrupt service routine can then generate a warning message and/or
put the MCU into a safe state. The PVD is enabled by software.
3.7.3 Voltage regulator
Two embedded linear voltage regulators, main regulator (MR) and low-power regulator
(LPR), supply most of digital circuitry in the device.
18/159 DS13560 Rev 1
The MR is used in Run and Sleep modes. The LPR is used in Low-power run, Low-power
sleep and Stop modes.
In Standby and Shutdown modes, both regulators are powered down and their outputs set in
high-impedance state, such as to bring their current consumption close to zero. However,
SRAM data retention is possible in Standby mode, in which case the LPR remains active
and it only supplies the SRAM.
and other four for falling VDD.
DD
power supply and compares it to V
DD
level crosses the V
DD
PVD
threshold, selectively while falling, while rising, or while
PVD
POR/PDR
threshold, without
threshold. It allows generating an interrupt
Page 19

STM32G0B1xB/C/xE Functional overview
3.7.4 Low-power modes
By default, the microcontroller is in Run mode after system or power reset. It is up to the
user to select one of the low-power modes described below:
• Sleep mode
In Sleep mode, only the CPU is stopped. All peripherals continue to operate and can
wake up the CPU when an interrupt/event occurs.
• Low-power run mode
This mode is achieved with V
regulator's operating current. The code can be executed from SRAM or from Flash,
and the CPU frequency is limited to 2 MHz. The peripherals with independent clock can
be clocked by HSI16.
• Low-power sleep mode
This mode is entered from the low-power run mode. Only the CPU clock is stopped.
When wakeup is triggered by an event or an interrupt, the system reverts to the Lowpower run mode.
• Stop 0 and Stop 1 modes
In Stop 0 and Stop 1 modes, the device achieves the lowest power consumption while
retaining the SRAM and register contents. All clocks in the V
The PLL, as well as the HSI16 RC oscillator and the HSE crystal oscillator are
disabled. The LSE or LSI keep running. The RTC can remain active (Stop mode with
RTC, Stop mode without RTC).
Some peripherals with wakeup capability can enable the HSI16 RC during Stop mode,
so as to get clock for processing the wakeup event. The main regulator remains active
in Stop 0 mode while it is turned off in Stop 1 mode.
• Standby mode
The Standby mode is used to achieve the lowest power consumption, with POR/PDR
always active in this mode. The main regulator is switched off to power down V
domain. The low-power regulator is either switched off or kept active. In the latter case,
it only supplies SRAM to ensure data retention. The PLL, as well as the HSI16 RC
oscillator and the HSE crystal oscillator are also powered down. The RTC can remain
active (Standby mode with RTC, Standby mode without RTC).
For each I/O, the software can determine whether a pull-up, a pull-down or no resistor
shall be applied to that I/O during Standby mode.
Upon entering Standby mode, register contents are lost except for registers in the RTC
domain and standby circuitry. The SRAM contents can be retained through register
setting.
The device exits Standby mode upon external reset event (NRST pin), IWDG reset
event, wakeup event (WKUP pin, configurable rising or falling edge) or RTC event
(alarm, periodic wakeup, timestamp, tamper), or when a failure is detected on LSE
(CSS on LSE).
• Shutdown mode
The Shutdown mode allows to achieve the lowest power consumption. The internal
regulator is switched off to power down the V
supplied by the low-power regulator to minimize the
CORE
domain are stopped.
CORE
domain. The PLL, as well as the
CORE
CORE
DS13560 Rev 1 19/159
35
Page 20

Functional overview STM32G0B1xB/C/xE
HSI16 and LSI RC-oscillators and HSE crystal oscillator are also powered down. The
RTC can remain active (Shutdown mode with RTC, Shutdown mode without RTC).
The BOR is not available in Shutdown mode. No power voltage monitoring is possible
in this mode. Therefore, switching to RTC domain is not supported.
SRAM and register contents are lost except for registers in the RTC domain.
The device exits Shutdown mode upon external reset event (NRST pin), IWDG reset
event, wakeup event (WKUP pin, configurable rising or falling edge) or RTC event
(alarm, periodic wakeup, timestamp, tamper).
3.7.5 Reset mode
During and upon exiting reset, the schmitt triggers of I/Os are disabled so as to reduce
power consumption. In addition, when the reset source is internal, the built-in pull-up
resistor on NRST pin is deactivated.
3.7.6 VBAT operation
The V
power domain, consuming very little energy, includes RTC, and LSE oscillator and
BAT
backup registers.
In VBAT mode, the RTC domain is supplied from VBAT pin. The power source can be, for
example, an external battery or an external supercapacitor. Two anti-tamper detection pins
are available.
The RTC domain can also be supplied from VDD/VDDA pin.
By means of a built-in switch, an internal voltage supervisor allows automatic switching of
RTC domain powering between V
voltage of the RTC domain (V
BAT
and voltage from VBAT pin to ensure that the supply
DD
) remains within valid operating conditions. If both voltages
are valid, the RTC domain is supplied from VDD/VDDA pin.
An internal circuit for charging the battery on VBAT pin can be activated if the V
voltage is
DD
within a valid range.
Note: External interrupts and RTC alarm/events cannot cause the microcontroller to exit the VBAT
mode, as in that mode the V
is not within a valid range.
DD
3.8 Interconnect of peripherals
Several peripherals have direct connections between them. This allows autonomous
communication between peripherals, saving CPU resources thus power supply
consumption. In addition, these hardware connections allow fast and predictable latency.
Depending on peripherals, these interconnections can operate in Run, Sleep and Stop
modes.
20/159 DS13560 Rev 1
Page 21

STM32G0B1xB/C/xE Functional overview
Interconnect source
TIMx
COMPx
ADCx TIM1 Timer triggered by analog watchdog Y Y -
RTC
All clock sources (internal and
external)
Table 4. Interconnect of peripherals
Interconnect
destination
TIMx Timer synchronization or chaining Y Y -
ADCx
DACx
Conversion triggers Y Y -
DMA Memory-to-memory transfer trigger Y Y -
COMPx Comparator output blanking Y Y -
TIM1,2,3,4
LPTIMERx
Timer input channel, trigger, break
from analog signals comparison
Low-power timer triggered by analog
signals comparison
TIM16 Timer input channel from RTC events Y Y -
LPTIMERx
TIM14,16,17
Low-power timer triggered by RTC
alarms or tampers
Clock source used as input channel for
RC measurement and trimming
Interconnect action
Run
Sleep
Low-power run
YY -
YYY
YYY
YY -
Stop
Low-power sleep
CSS
RAM (parity error)
Flash memory (ECC error)
TIM1,15,16,17 Timer break Y Y -
COMPx
PVD
CPU (hard fault) TIM1,15,16,17 Timer break Y - -
TIMx External trigger Y Y -
GPIO
LPTIMERx External trigger Y Y Y
ADC
DACx
Conversion external trigger Y Y -
DS13560 Rev 1 21/159
35
Page 22

Functional overview STM32G0B1xB/C/xE
3.9 Clocks and startup
The clock controller distributes the clocks coming from different oscillators to the core and
the peripherals. It also manages clock gating for low-power modes and ensures clock
robustness. It features:
• Clock prescaler: to get the best trade-off between speed and current consumption,
the clock frequency to the CPU and peripherals can be adjusted by a programmable
prescaler
• Safe clock switching: clock sources can be changed safely on the fly in run mode
through a configuration register.
• Clock management: to reduce power consumption, the clock controller can stop the
clock to the core, individual peripherals or memory.
• System clock source: three different sources can deliver SYSCLK system clock:
– 4-48 MHz high-speed oscillator with external crystal or ceramic resonator (HSE). It
can supply clock to system PLL. The HSE can also be configured in bypass mode
for an external clock.
– 16 MHz high-speed internal RC oscillator (HSI16), trimmable by software. It can
supply clock to system PLL.
– System PLL with maximum output frequency of 64 MHz. It can be fed with HSE or
HSI16 clocks.
• Auxiliary clock source: two ultra-low-power clock sources for the real-time clock
(RTC):
– 32.768 kHz low-speed oscillator with external crystal (LSE), supporting four drive
capability modes. The LSE can also be configured in bypass mode for using an
external clock.
– 32 kHz low-speed internal RC oscillator (LSI) with ±5% accuracy, also used to
clock an independent watchdog.
• Peripheral clock sources: several peripherals ( I2S, USARTs, I2Cs, LPTIMs, ADC,
USB FS) have their own clock independent of the system clock.
• Clock security system (CSS): in the event of HSE clock failure, the system clock is
automatically switched to HSI16 and, if enabled, a software interrupt is generated. LSE
clock failure can also be detected and generate an interrupt. The CCS feature can be
enabled by software.
• Clock output:
– MCO (microcontroller clock output) provides one of the internal clocks for
external use by the application
– LSCO (low speed clock output) provides LSI or LSE in all low-power modes
(except in VBAT operation).
Several prescalers allow the application to configure AHB and APB domain clock
frequencies, 64 MHz at maximum.
3.10 General-purpose inputs/outputs (GPIOs)
Each of the GPIO pins can be configured by software as output (push-pull or open-drain), as
input (with or without pull-up or pull-down) or as peripheral alternate function (AF). Most of
the GPIO pins are shared with special digital or analog functions.
22/159 DS13560 Rev 1
Page 23

STM32G0B1xB/C/xE Functional overview
Through a specific sequence, this special function configuration of I/Os can be locked, such
as to avoid spurious writing to I/O control registers.
3.11 Direct memory access controller (DMA)
The direct memory access (DMA) controller is a bus master and system peripheral with
single-AHB architecture.
With 12 channels, it performs data transfers between memory-mapped peripherals and/or
memories, to offload the CPU.
Each channel is dedicated to managing memory access requests from one or more
peripherals. The unit includes an arbiter for handling the priority between DMA requests.
Main features of the DMA controller:
• Single-AHB master
• Peripheral-to-memory, memory-to-peripheral, memory-to-memory and peripheral-to-
peripheral data transfers
• Access, as source and destination, to on-chip memory-mapped devices such as Flash
memory, SRAM, and AHB and APB peripherals
• All DMA channels independently configurable:
– Each channel is associated either with a DMA request signal coming from a
peripheral, or with a software trigger in memory-to-memory transfers. This
configuration is done by software.
– Priority between the requests is programmable by software (four levels per
channel: very high, high, medium, low) and by hardware in case of equality (such
as request to channel 1 has priority over request to channel 2).
– Transfer size of source and destination are independent (byte, half-word, word),
emulating packing and unpacking. Source and destination addresses must be
aligned on the data size.
– Support of transfers from/to peripherals to/from memory with circular buffer
management
– Programmable number of data to be transferred: 0 to 2
• Generation of an interrupt request per channel. Each interrupt request originates from
any of the three DMA events: transfer complete, half transfer, or transfer error.
16
- 1
3.12 DMA request multiplexer (DMAMUX)
The DMAMUX request multiplexer enables routing a DMA request line between the
peripherals and the DMA controller. Each channel selects a unique DMA request line,
unconditionally or synchronously with events from its DMAMUX synchronization inputs.
DMAMUX may also be used as a DMA request generator from programmable events on its
input trigger signals.
3.13 Interrupts and events
The device flexibly manages events causing interrupts of linear program execution, called
exceptions. The Cortex-M0+ processor core, a nested vectored interrupt controller (NVIC)
DS13560 Rev 1 23/159
35
Page 24

Functional overview STM32G0B1xB/C/xE
and an extended interrupt/event controller (EXTI) are the assets contributing to handling the
exceptions. Exceptions include core-internal events such as, for example, a division by zero
and, core-external events such as logical level changes on physical lines. Exceptions result
in interrupting the program flow, executing an interrupt service routine (ISR) then resuming
the original program flow.
The processor context (contents of program pointer and status registers) is stacked upon
program interrupt and unstacked upon program resume, by hardware. This avoids context
stacking and unstacking in the interrupt service routines (ISRs) by software, thus saving
time, code and power. The ability to abandon and restart load-multiple and store-multiple
operations significantly increases the device’s responsiveness in processing exceptions.
3.13.1 Nested vectored interrupt controller (NVIC)
The configurable nested vectored interrupt controller is tightly coupled with the core. It
handles physical line events associated with a non-maskable interrupt (NMI) and maskable
interrupts, and Cortex-M0+ exceptions. It provides flexible priority management.
The tight coupling of the processor core with NVIC significantly reduces the latency between
interrupt events and start of corresponding interrupt service routines (ISRs). The ISR
vectors are listed in a vector table, stored in the NVIC at a base address. The vector
address of an ISR to execute is hardware-built from the vector table base address and the
ISR order number used as offset.
If a higher-priority interrupt event happens while a lower-priority interrupt event occurring
just before is waiting for being served, the later-arriving higher-priority interrupt event is
served first. Another optimization is called tail-chaining. Upon a return from a higher-priority
ISR then start of a pending lower-priority ISR, the unnecessary processor context
unstacking and stacking is skipped. This reduces latency and contributes to power
efficiency.
Features of the NVIC:
• Low-latency interrupt processing
• 4 priority levels
• Handling of a non-maskable interrupt (NMI)
• Handling of 32 maskable interrupt lines
• Handling of 10 Cortex-M0+ exceptions
• Later-arriving higher-priority interrupt processed first
• Tail-chaining
• Interrupt vector retrieval by hardware
3.13.2 Extended interrupt/event controller (EXTI)
The extended interrupt/event controller adds flexibility in handling physical line events and
allows identifying wake-up events at processor wakeup from Stop mode.
The EXTI controller has a number of channels, of which some with rising, falling or rising,
and falling edge detector capability. Any GPIO and a few peripheral signals can be
connected to these channels.
The channels can be independently masked.
The EXTI controller can capture pulses shorter than the internal clock period.
24/159 DS13560 Rev 1
Page 25

STM32G0B1xB/C/xE Functional overview
A register in the EXTI controller latches every event even in Stop mode, which allows the
software to identify the origin of the processor's wake-up from Stop mode or, to identify the
GPIO and the edge event having caused an interrupt.
3.14 Analog-to-digital converter (ADC)
A native 12-bit analog-to-digital converter is embedded into STM32G0B1xB/C/xE devices. It
can be extended to 16-bit resolution through hardware oversampling. The ADC has up to 16
external channels and 3 internal channels (temperature sensor, voltage reference, V
monitoring). It performs conversions in single-shot or scan mode. In scan mode, automatic
conversion is performed on a selected group of analog inputs.
The ADC frequency is independent from the CPU frequency, allowing maximum sampling
rate of ~2 MSps even with a low CPU speed. An auto-shutdown function guarantees that
the ADC is powered off except during the active conversion phase.
BAT
The ADC can be served by the DMA controller. It can operate in the whole V
range.
The ADC features a hardware oversampler up to 256 samples, improving the resolution to
16 bits (refer to AN2668).
An analog watchdog feature allows very precise monitoring of the converted voltage of one,
some or all scanned channels. An interrupt is generated when the converted voltage is
outside the programmed thresholds.
The events generated by the general-purpose timers (TIMx) can be internally connected to
the ADC start triggers, to allow the application to synchronize A/D conversions with timers.
3.14.1 Temperature sensor
The temperature sensor (TS) generates a voltage VTS that varies linearly with temperature.
The temperature sensor is internally connected to an ADC input to convert the sensor
output voltage into a digital value.
The sensor provides good linearity but it has to be calibrated to obtain good overall
accuracy of the temperature measurement. As the offset of the temperature sensor may
vary from part to part due to process variation, the uncalibrated internal temperature sensor
is suitable only for relative temperature measurements.
To improve the accuracy of the temperature sensor, each part is individually factorycalibrated by ST. The resulting calibration data are stored in the part’s engineering bytes,
accessible in read-only mode.
Table 5. Temperature sensor calibration values
supply
DD
Calibration value name Description Memory address
TS ADC raw data acquired at a
TS_CAL1
TS_CAL2
temperature of 30 °C (± 5 °C),
V
= V
DDA
TS ADC raw data acquired at a
temperature of 130 °C (± 5 °C),
V
= V
DDA
DS13560 Rev 1 25/159
= 3.0 V (± 10 mV)
REF+
= 3.0 V (± 10 mV)
REF+
0x1FFF 75A8 - 0x1FFF 75A9
0x1FFF 75CA - 0x1FFF 75CB
35
Page 26

Functional overview STM32G0B1xB/C/xE
3.14.2 Internal voltage reference (V
The internal voltage reference (V
ADC and comparators. V
REFINT
REFINT
is internally connected to an ADC input. The V
REFINT
)
) provides a stable (bandgap) voltage output for the
voltage is individually precisely measured for each part by ST during production test and
stored in the part’s engineering bytes. It is accessible in read-only mode.
3.14.3 V
Calibration value name Description Memory address
battery voltage monitoring
BAT
Table 6. Internal voltage reference calibration values
Raw data acquired at a
V
REFINT
temperature of 30 °C (± 5 °C),
V
DDA
= V
= 3.0 V (± 10 mV)
REF+
This embedded hardware feature allows the application to measure the V
using an internal ADC input. As the V
voltage may be higher than V
BAT
the ADC input range, the VBAT pin is internally connected to a bridge divider by three. As a
consequence, the converted digital value is one third the V
3.15 Digital-to-analog converter (DAC)
REFINT
0x1FFF 75AA - 0x1FFF 75AB
battery voltage
BAT
and thus outside
DDA
voltage.
BAT
The 2-channel 12-bit buffered DAC converts a digital value into an analog voltage available
on the channel output. The architecture of either channel is based on integrated resistor
string and an inverting amplifier. The digital circuitry is common for both channels.
Features of the DAC:
• Two DAC output channels
• 8-bit or 12-bit output mode
• Buffer offset calibration (factory and user trimming)
• Left or right data alignment in 12-bit mode
• Synchronized update capability
• Noise-wave generation
• Triangular-wave generation
• Independent or simultaneous conversion for DAC channels
• DMA capability for either DAC channel
• Triggering with timer events, synchronized with DMA
• Triggering with external events
• Sample-and-hold low-power mode, with internal or external capacitor
26/159 DS13560 Rev 1
Page 27

STM32G0B1xB/C/xE Functional overview
3.16 Voltage reference buffer (VREFBUF)
When enabled, an embedded buffer provides the internal reference voltage to analog
blocks (for example ADC) and to VREF+ pin for external components.
The internal voltage reference buffer supports two voltages:
• 2.048 V
• 2.5 V
An external voltage reference can be provided through the VREF+ pin when the internal
voltage reference buffer is disabled.
On some packages, the VREF+ pad of the silicon die is double-bonded with supply pad to
common VDD/VDDA pin and so the internal voltage reference buffer cannot be used.
3.17 Comparators (COMP)
Three embedded rail-to-rail analog comparators have programmable reference voltage
(internal or external), hysteresis, speed (low for low-power) and output polarity.
The reference voltage can be one of the following:
• external, from an I/O
• internal, from DAC
• internal reference voltage (V
The comparators can wake up the device from Stop mode, generate interrupts, breaks or
triggers for the timers and can be also combined into a window comparator.
) or its submultiple (1/4, 1/2, 3/4)
REFINT
3.18 Timers and watchdogs
The device includes an advanced-control timer, seven general-purpose timers, two basic
timers, two low-power timers, two watchdog timers and a SysTick timer. Table 7 compares
features of the advanced-control, general-purpose and basic timers.
Timer type Timer
Advanced-
control
TIM1 16-bit
Counter
resolution
Table 7. Timer feature comparison
Counter
type
Up, down,
up/down
Maximum
operating
frequency
128 MHz
Prescaler
factor
Integer from
1 to 2
16
DMA
request
generation
Yes 4 3
Capture/
compare
channels
Complementary
outputs
DS13560 Rev 1 27/159
35
Page 28

Functional overview STM32G0B1xB/C/xE
Table 7. Timer feature comparison (continued)
Maximum
operating
frequency
64 MHz
64 MHz
64 MHz
Timer type Timer
TIM2 32-bit
TIM3 16-bit
General-
purpose
Basic
Low-power
TIM4 16-bit
TIM14 16-bit Up 64 MHz
TIM15 16-bit Up 128 MHz
TIM16
TIM17
TIM6
TIM7
LPTIM1
LPTIM2
Counter
resolution
16-bit Up 64 MHz
16-bit Up 64 MHz
16-bit Up 64 MHz
Counter
type
Up, down,
up/down
Up, down,
up/down
Up, down,
up/down
3.18.1 Advanced-control timer (TIM1)
Prescaler
factor
Integer from
Integer from
Integer from
Integer from
Integer from
Integer from
Integer from
16
1 to 2
16
1 to 2
16
1 to 2
16
1 to 2
16
1 to 2
16
1 to 2
16
1 to 2
2n where
n=0 to 7
DMA
request
generation
Yes 4 -
Yes 4 -
Yes 4 -
No 1 -
Yes 2 1
Yes 1 1
Yes - -
No N/A -
Capture/
compare
channels
Complementary
outputs
The advanced-control timer can be seen as a three-phase PWM unit multiplexed on 6
channels. It has complementary PWM outputs with programmable inserted dead-times. It
can also be seen as a complete general-purpose timer. The four independent channels can
be used for:
• input capture
• output compare
• PWM output (edge or center-aligned modes) with full modulation capability (0-100%)
• one-pulse mode output
In debug mode, the advanced-control timer counter can be frozen and the PWM outputs
disabled, so as to turn off any power switches driven by these outputs.
Many features are shared with those of the general-purpose TIMx timers (described in
Section 3.18.2) using the same architecture, so the advanced-control timers can work
together with the TIMx timers via the Timer Link feature for synchronization or event
chaining.
28/159 DS13560 Rev 1
Page 29

STM32G0B1xB/C/xE Functional overview
3.18.2 General-purpose timers (TIM2, 3, 4, 14, 15, 16, 17)
There are seven synchronizable general-purpose timers embedded in the device (refer to
Tab l e 7 for comparison). Each general-purpose timer can be used to generate PWM outputs
or act as a simple timebase.
• TIM2, TIM3, and TIM4
These are full-featured general-purpose timers:
– TIM2 with 32-bit auto-reload up/downcounter and 16-bit prescaler
– TIM3 and TIM4 with 16-bit auto-reload up/downcounter and 16-bit prescaler
They have four independent channels for input capture/output compare, PWM or onepulse mode output. They can operate in combination with other general-purpose timers
via the Timer Link feature for synchronization or event chaining. They can generate
independent DMA request and support quadrature encoders. Their counter can be
frozen in debug mode.
• TIM14
This timer is based on a 16-bit auto-reload upcounter and a 16-bit prescaler. It has one
channel for input capture/output compare, PWM output or one-pulse mode output. Its
counter can be frozen in debug mode.
• TIM15, TIM16, TIM17
These are general-purpose timers featuring:
– 16-bit auto-reload upcounter and 16-bit prescaler
– 2 channels and 1 complementary channel for TIM15
– 1 channel and 1 complementary channel for TIM16 and TIM17
All channels can be used for input capture/output compare, PWM or one-pulse mode
output. The timers can operate together via the Timer Link feature for synchronization
or event chaining. They can generate independent DMA request. Their counters can
be frozen in debug mode.
3.18.3 Basic timers (TIM6 and TIM7)
These timers are mainly used for triggering DAC conversions. They can also be used as
generic 16-bit timebases.
3.18.4 Low-power timers (LPTIM1 and LPTIM2)
These timers have an independent clock. When fed with LSE, LSI or external clock, they
keep running in Stop mode and they can wake up the system from it.
DS13560 Rev 1 29/159
35
Page 30

Functional overview STM32G0B1xB/C/xE
Features of LPTIM1 and LPTIM2:
• 16-bit up counter with 16-bit autoreload register
• 16-bit compare register
• Configurable output (pulse, PWM)
• Continuous/one-shot mode
• Selectable software/hardware input trigger
• Selectable clock source:
– Internal: LSE, LSI, HSI16 or APB clocks
– External: over LPTIM input (working even with no internal clock source running,
used by pulse counter application)
• Programmable digital glitch filter
• Encoder mode
3.18.5 Independent watchdog (IWDG)
The independent watchdog is based on an 8-bit prescaler and 12-bit downcounter with
user-defined refresh window. It is clocked from an independent 32 kHz internal RC (LSI).
Independent of the main clock, it can operate in Stop and Standby modes. It can be used
either as a watchdog to reset the device when a problem occurs, or as a free-running timer
for application timeout management. It is hardware- or software-configurable through the
option bytes. Its counter can be frozen in debug mode.
3.18.6 System window watchdog (WWDG)
The window watchdog is based on a 7-bit downcounter that can be set as free-running. It
can be used as a watchdog to reset the device when a problem occurs. It is clocked by the
system clock. It has an early-warning interrupt capability. Its counter can be frozen in debug
mode.
3.18.7 SysTick timer
This timer is dedicated to real-time operating systems, but it can also be used as a standard
down counter.
Features of SysTick timer:
• 24-bit down counter
• Autoreload capability
• Maskable system interrupt generation when the counter reaches 0
• Programmable clock source
3.19 Real-time clock (RTC), tamper (TAMP) and backup registers
The device embeds an RTC and five 32-bit backup registers, located in the RTC domain of
the silicon die.
The ways of powering the RTC domain are described in Section 3.7.6.
The RTC is an independent BCD timer/counter.
30/159 DS13560 Rev 1
Page 31

STM32G0B1xB/C/xE Functional overview
Features of the RTC:
• Calendar with subsecond, seconds, minutes, hours (12 or 24 format), week day, date,
month, year, in BCD (binary-coded decimal) format
• Automatic correction for 28, 29 (leap year), 30, and 31 days of the month
• Programmable alarm
• On-the-fly correction from 1 to 32767 RTC clock pulses, usable for synchronization with
a master clock
• Reference clock detection - a more precise second-source clock (50 or 60 Hz) can be
used to improve the calendar precision
• Digital calibration circuit with 0.95 ppm resolution, to compensate for quartz crystal
inaccuracy
• Two anti-tamper detection pins with programmable filter
• Timestamp feature to save a calendar snapshot, triggered by an event on the
timestamp pin or a tamper event, or by switching to VBAT mode
• 17-bit auto-reload wakeup timer (WUT) for periodic events, with programmable
resolution and period
• Multiple clock sources and references:
– A 32.768 kHz external crystal (LSE)
– An external resonator or oscillator (LSE)
– The internal low-power RC oscillator (LSI, with typical frequency of 32 kHz)
– The high-speed external clock (HSE) divided by 32
When clocked by LSE, the RTC operates in VBAT mode and in all low-power modes. When
clocked by LSI, the RTC does not operate in VBAT mode, but it does in low-power modes
except for the Shutdown mode.
All RTC events (Alarm, WakeUp Timer, Timestamp or Tamper) can generate an interrupt
and wake the device up from the low-power modes.
The backup registers allow keeping 20 bytes of user application data in the event of V
failure, if a valid backup supply voltage is provided on VBAT pin. They are not affected by
the system reset, power reset, and upon the device’s wakeup from Standby or Shutdown
modes.
3.20 Inter-integrated circuit interface (I2C)
The device embeds three I2C peripherals. Refer to Tab le 8 for the features.
2
The I
C-bus interface handles communication between the microcontroller and the serial
2
I
C-bus. It controls all I2C-bus-specific sequencing, protocol, arbitration and timing.
DD
DS13560 Rev 1 31/159
35
Page 32

Functional overview STM32G0B1xB/C/xE
Features of the I2C peripheral:
2
• I
C-bus specification and user manual rev. 5 compatibility:
– Slave and master modes, multimaster capability
– Standard-mode (Sm), with a bitrate up to 100 kbit/s
– Fast-mode (Fm), with a bitrate up to 400 kbit/s
– Fast-mode Plus (Fm+), with a bitrate up to 1 Mbit/s and extra output drive I/Os
– 7-bit and 10-bit addressing mode, multiple 7-bit slave addresses
– Programmable setup and hold times
– Clock stretching
• SMBus specification rev 3.0 compatibility:
– Hardware PEC (packet error checking) generation and verification with ACK
control
– Command and data acknowledge control
– Address resolution protocol (ARP) support
– Host and Device support
– SMBus alert
– Timeouts and idle condition detection
• PMBus rev 1.3 standard compatibility
• Independent clock: a choice of independent clock sources allowing the I2C
communication speed to be independent of the PCLK reprogramming
• Wakeup from Stop mode on address match
• Programmable analog and digital noise filters
• 1-byte buffer with DMA capability
Table 8. I
2
C implementation
I2C features
Standard mode (up to 100 kbit/s) X X
Fast mode (up to 400 kbit/s) X X
Fast Mode Plus (up to 1 Mbit/s) with extra output drive I/Os X X
Programmable analog and digital noise filters X X
SMBus/PMBus hardware support X -
Independent clock X -
Wakeup from Stop mode on address match X -
1. X: supported
(1)
I2C1
I2C2
I2C3
3.21 Universal synchronous/asynchronous receiver transmitter (USART)
The device embeds universal synchronous/asynchronous receivers/transmitters that
communicate at speeds of up to 8 Mbit/s.
32/159 DS13560 Rev 1
Page 33

STM32G0B1xB/C/xE Functional overview
They provide hardware management of the CTS, RTS and RS485 DE signals,
multiprocessor communication mode, master synchronous communication and single-wire
half-duplex communication mode. Some can also support SmartCard communication (ISO
7816), IrDA SIR ENDEC, LIN Master/Slave capability and auto baud rate feature, and have
a clock domain independent of the CPU clock, which allows them to wake up the MCU from
Stop mode. The wakeup events from Stop mode are programmable and can be:
• start bit detection
• any received data frame
• a specific programmed data frame
All USART interfaces can be served by the DMA controller.
Table 9. USART implementation
USART modes/features
Hardware flow control for modem X X
Continuous communication using DMA X X
Multiprocessor communication X X
Synchronous mode X X
Smartcard mode X -
Single-wire half-duplex communication X X
IrDA SIR ENDEC block X -
LIN mode X -
Dual clock domain and wakeup from Stop mode X -
Receiver timeout interrupt X -
Modbus communication X -
Auto baud rate detection X -
Driver Enable X X
1. X: supported
(1)
USART1
USART2
USART3
USART4
USART5
USART6
3.22 Low-power universal asynchronous receiver transmitter (LPUART)
The device embeds two LPUARTs. The peripheral supports asynchronous serial
communication with minimum power consumption. It supports half duplex single wire
communication and modem operations (CTS/RTS). It allows multiprocessor
communication.
The LPUART has a clock domain independent of the CPU clock, and can wakeup the
system from Stop mode. The Stop mode wakeup events are programmable and can be:
• start bit detection
• any received data frame
• a specific programmed data frame
DS13560 Rev 1 33/159
35
Page 34

Functional overview STM32G0B1xB/C/xE
Only a 32.768 kHz clock (LSE) is needed to allow LPUART communication up to 9600
baud. Therefore, even in Stop mode, the LPUART can wait for an incoming frame while
having an extremely low energy consumption. Higher speed clock can be used to reach
higher baudrates.
The LPUART interface can be served by the DMA controller.
3.23 Serial peripheral interface (SPI)
The device contains three SPIs running at up to 32 Mbits/s in master and slave modes. It
supports half-duplex, full-duplex and simplex communications. A 3-bit prescaler gives eight
master mode frequencies. The frame size is configurable from 4 bits to 16 bits. The SPI
peripherals support NSS pulse mode, TI mode and hardware CRC calculation.
The SPI peripherals can be served by the DMA controller.
2
The I
S interface mode of the SPI peripheral (if supported, see the following table) supports
four different audio standards can operate as master or slave, in half-duplex communication
mode. It can be configured to transfer 16 and 24 or 32 bits with 16-bit or 32-bit data
resolution and synchronized by a specific signal. Audio sampling frequency from 8 kHz up to
192 kHz can be set by an 8-bit programmable linear prescaler. When operating in master
mode, it can output a clock for an external audio component at 256 times the sampling
frequency.
Table 10. SPI/I2S implementation
SPI features
Hardware CRC calculation X X
Rx/Tx FIFO X X
NSS pulse mode X X
2
S mode X -
I
TI mode X X
1. X = supported.
(1)
SPI1
SPI2
3.24 Universal serial bus device (USB) and host (USBH)
The devices embed a USB controller with full-speed USB device and host functionality
compliant with the USB specification version 2.0. The internal USB PHY supports USB FS
signaling, embedded DP pull-up and also battery charging detection according to Battery
Charging Specification Revision 1.2. The USB interface implements a full-speed (12 Mbit/s)
function interface with added support for USB 2.0 Link Power Management. It has softwareconfigurable endpoint setting with packet memory up to 1 KB and suspend/resume support.
It requires a precise 48 MHz clock that is generated from the internal main PLL (the clock
source must use a HSE crystal oscillator) or by the internal 48 MHz oscillator in automatic
trimming mode. The synchronization for this oscillator can be taken from the USB data
stream itself (SOF signalization) which allows crystal less operation.
SPI3
34/159 DS13560 Rev 1
Page 35

STM32G0B1xB/C/xE Functional overview
3.25 USB Type-C™ Power Delivery controller
The device embeds two controllers (UCPD1 and UCPD2) compliant with USB Type-C Rev.
1.2 and USB Power Delivery Rev. 3.0 specifications.
The controllers use specific I/Os supporting the USB Type-C and USB Power Delivery
requirements, featuring:
• USB Type-C pull-up (Rp, all values) and pull-down (Rd) resistors
• “Dead battery” support
• USB Power Delivery message transmission and reception
• FRS (fast role swap) support
The digital controller handles notably:
• USB Type-C level detection with de-bounce, generating interrupts
• FRS detection, generating an interrupt
• byte-level interface for USB Power Delivery payload, generating interrupts (DMA
compatible)
• USB Power Delivery timing dividers (including a clock pre-scaler)
• CRC generation/checking
• 4b5b encode/decode
• ordered sets (with a programmable ordered set mask at receive)
• frequency recovery in receiver during preamble
The interface offers low-power operation compatible with Stop mode, maintaining the
capacity to detect incoming USB Power Delivery messages and FRS signaling.
3.26 Controller area network (FDCAN)
The controller area network (CAN) subsystem consists of two CAN modules and a message
RAM.
The CAN modules are compliant with ISO 11898-1 (CAN protocol specification version 2.0
part A, B) and CAN FD protocol specification version 1.0.
The 1-Kbyte message RAM per CAN module implements filters, receive FIFOs, receive
buffers, transmit event FIFOs, and transmit buffers.
3.27 Development support
3.27.1 Serial wire debug port (SW-DP)
An Arm SW-DP interface is provided to allow a serial wire debugging tool to be connected to
the MCU.
DS13560 Rev 1 35/159
35
Page 36

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Top view
LQFP100
1
2
3
4
5
6
7
8
9
10
11
12
54
53
52
51
62
61
60
59
58
57
56
55
787679
77
84
82
80
878685
83
81
384037
39
28
34
36
41
26
27
33
35
13
14
15
16
32
293031
66
65
64
63
88
919089
17
18
19
20
21
22
23
24
25
464845
47
42
444943
50
71
70
69
68
67
75
74
73
72
93
969594
92
97
100
99
98
VDDIO2
VSS
PF8
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PA15
PD9
PD8
PC7
PC6
PD15
PD14
PD13
PD12
PB15
PB14
PB13
PB12
PA3
PA4
PA5
PA6
PA7
PC4
PC5
PB0
PB1
PE7
PE8
PE9
PE10
PE11
PE12
PE13
PE14
PE15
PB10
PB11
PB9
PC10
PC11
PE4
PE5
VBAT
PC14-OSC32_IN
PC15-OSC32_OUT
PA8
PF9
PF0-OSC_IN
PF2-NRST
PF3
PF4
PF5
PC0
PC2
VSS/VSSA
PC1
VDD/VDDA
PA0
PA1
PA2
PC13
PF1-OSC_OUT
PB8
PB7
PE3
PE2
PE1
PE0
PB5
PB4
PB3
PD7
PD6
PD5
PD4
PD3
PD2
PD0
PC12
PE6
PC8
VREF+
PC3
PB2
PF6
PF7
PA9
PD11
PD10
PA14-BOOT0
PC9
PD1
PF10
PF11
PB6
PF12
PF13
4 Pinouts, pin description and alternate functions
The devices housed in 32-pin, 48-pin, and 64-pin packages come in two variants - “GP” and
“N” (the latter with ordering code having N behind the temperature range digit). Refer to
Table 2: Features and peripheral counts for differences.
Figure 3. STM32G0B1VxT LQFP100 pinout
36/159 DS13560 Rev 1
1. The I/O pins supplied by V
are shown in gray.
DDIO2
Page 37

STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
A
B
C
D
E
PC14-
OSC32
_IN
PC12
PE5
PC15-
OSC32
_OUT
VBAT
PC13
VDD VREF+
VSS
PF2-
NRST
PF0-
OSC_I
N
PF4 PF3
PB8 PE3 PE2 PE0 PB3
PC11 PC10
PB7
PE1 PB4
PE6 PE4
PB9
PB6 PB5
PF13 PF11 PF9
PF12
PF10 PD7
PD3
12345678
F
G
H
PF1-
OSC_
OUT
PF5 PC1
PF8
PA10
PA9
PD6 PD5
PD4 PD0
PD1 PC8
PB15
910
J
PC0 PC2 PA0 PA3
PA1 PA4 PC4
PA7
PB0 PB2
PE9
PF7 PE10
PE14 PB12
PE12 PE15
K
L
PC3
PA2 PA5 PA 6 PC5
PB1 PF6 PE7 PE8 PE11 PE13
M
PD15
PD14
PD12
PD11
PD9
PD2
PA15
PA13
PC6
PA11
[PA9]
PD13
VDDIO
2
VSS
PD10
PC9
PA14-
BOOT0
PA12
[PA10]
PD8
PB14
PB11
PC7
PA8
PB10 PB13
11 12
Top view
Figure 4. STM32G0B1VxI UFBGA100 pinout
1. The I/O pads supplied by V
are shown in gray.
DDIO2
DS13560 Rev 1 37/159
55
Page 38

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Top view
LQFP80
1
2
3
4
5
6
7
8
9
10
11
12
54
53
52
51
42
41
60
59
58
57
56
55
787679
77
64
62
80
676665
63
61
384037
39
28
34
36
21
26
27
33
35
13
14
15
16
32
293031
46
45
44
43
68
717069
17
18
19
20
252224
23
50
49
48
47
737574
72
VDDIO2
VSS
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PD9
PD8
PC7
PC6
PD15
PD14
PD13
PD12
PB15
PA3
PA4
PA5
PA6
PA7
PC4
PC5
PB0
PB1
PE7
PE8
PE9
PE10
PB10
PB11
PB9
PC10
PC11
VBAT
PC14-OSC32_IN
PA8
PF0-OSC_IN
PF2-NRST
PC0
PC2
VSS
PC1
VDD
PA0
PA2
PC13
PF1-OSC_OUT
PB8
PB7
PE3
PE1
PE0
PB5
PB4
PB3
PD7
PD6
PD5
PD4
PD3
PD2
PD0
PC12
PC8
VREF+
PC3
PB2
PA9
PD11
PD10
PA14-BOOT0
PC9
PD1
PB6
PC15-OSC32_OUT
PA1
PB12
PB13
PB14
PA15
Figure 5. STM32G0B1MxT LQFP80 pinout
1. The I/O pins supplied by V
38/159 DS13560 Rev 1
are shown in gray.
DDIO2
Page 39

STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
PC4
PC5
PB0
PB1
PB2
PB10
PB11
PB12
PC11
PC12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PC0
PC1
PC2
PC3
PC8
PA15
PA14-BOOT0
PA1 3
PA12 [PA10]
PA11 [PA9]
PA10
VDDIO2
VSS
PC7
PC6
PA9
PA8
PB15
PB14
PB13
PC9
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PB3
PB4
PB5
PB6
PB7
PB8
PB9
PC10
Top view
LQFP64
1
3
4
5
6
7
8
9
10
11
12
13
14
15
16
2
48
46
45
44
43
42
41
40
39
38
37
36
35
34
33
47
55
5352515049
56
54
61
59
57
646362
60
58
26
2829303132
25
27
20
22
24
171819
21
23
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
PC4
PC5
PB0
PB1
PB2
PB10
PB11
PB12
PC11
PC12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PC0
PC1
PC2
PC3
PC8
PA15
PA14-BOOT0
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PD9
PD8
PC7
PC6
PA9
PA8
PB15
PB14
PB13
PC9
PD0
PD1
PD2
PD3
PD4
PD5
PD6
PB3
PB4
PB5
PB6
PB7
PB8
PB9
PC10
Top view
LQFP64
1
3
4
5
6
7
8
9
10
11
12
13
14
15
16
2
48
46
45
44
43
42
41
40
39
38
37
36
35
34
33
47
55
5352515049
56
54
61
59
57
646362
60
58
26
2829303132
25
27
20
22
24
171819
21
23
GP version
N version
(_RxTxN)
(_RxT)
Figure 6. STM32G0B1RxT LQFP64 pinout
1. The I/O pins supplied by V
DDIO2
are shown in gray.
DS13560 Rev 1 39/159
55
Page 40

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
A
B
C
D
E
VDD/
VDDA
VREF+
VBAT
PB5 PD3
VSS/
VSSA
PF2-
NRST
PC0
PA7 PC7
PF0-
OSC_I
N
PC1
PA3
PA6 PB0
PF1-
OSC_
OUT
PC2
PA2
PA5 PB1
PC3 PA 0 PA1 PA 4 PC4
PC11 PC10 PB7 PB6 PD6
PC15-
OSC32
_OUT
PC12
PB8
PB3 PD5
PC14-
OSC32
_IN
PC13
PB9
PB4 PD4
PA10
PA13
VDDIO
2
PA9
PC6 VSS
PB14
PB15 PA 8
PB10
PB12 PB13
PC5 PB2 PB11
PD2 PD0 PC8
PD1
PC9
PA12
[PA10]
PA15
PA14-
BOOT0
PA11
[PA9]
12345678
F
G
H
Top view
N version
(_RxIxN)
Figure 7. STM32G0B1RxI UFBGA64 pinout
1. The I/O pads supplied by V
are shown in gray.
DDIO2
40/159 DS13560 Rev 1
Page 41

STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Top view
A
B
C
D
E
12345678
F
G
H
910111213
VDDIO
2
PC7 PC6
VSS PA9
PA8 PB15 PB11
PB14 PB2
PB13 PB10 PB1
PA15 PD0
PA12
[PA10]
PA13
PA14-
BOOT0
PA11
[PA9]
PA10
PB7
PB12 PA 2
PA6
PC5 PC4
PB0
PD3 PB3
PD2
PD1 PB6
PB9
PA1
PA5
PA4
PA7
PB5
PB4
VBAT
VREF+
PF2-
NRST
PA3
PC13
VDD/
VDDA
VSS/
VSSA
PF0-
OSC_IN
PF1-
OSC_
OUT
PA0
PB8
PC14-
OSC32
_IN
PC15-
OSC32
_OUT
Figure 8. STM32G0B1NxY WLCSP52 pinout
1. The I/O pads supplied by V
are shown in gray.
DDIO2
DS13560 Rev 1 41/159
55
Page 42

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB2
PB10
PB11
PB12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PA0
PA1
PA14-BOOT0
PA13
PA12 [PA10]
PA11 [ PA9]
PA10
VDDIO2
VSS
PA9
PA8
PB15
PB14
PB13
PA15
PD0
PD1
PD2
PD3
PB3
PB4
PB5
PB6
PB7
PB8
PB9
Top view
LQFP48
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
393740
38
45
43
41
484746
44
42
222421
23
16
18
20
131415
17
19
N version
(_RxTxN)
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB2
PB10
PB11
PB12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PA0
PA1
PA14-BOOT0
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PC7
PC6
PA9
PA8
PB15
PB14
PB13
PA15
PD0
PD1
PD2
PD3
PB3
PB4
PB5
PB6
PB7
PB8
PB9
Top view
LQFP48
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
393740
38
45
43
41
484746
44
42
222421
23
16
18
20
131415
17
19
GP version
(_RxT)
Figure 9. STM32G0B1CxT LQFP48 pinout
1. The I/O pins supplied by V
42/159 DS13560 Rev 1
are shown in gray.
DDIO2
Page 43

STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Exposed pad
Top view
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
393740
38
45
43
41
484746
44
42
222421
23
16
18
20
131415
17
19
VSS
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB2
PB10
PB11
PB12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PA0
PA1
PA14-BOOT0
PA13
PA12 [PA10]
PA11 [ PA9]
PA10
VDDIO2
VSS
PA9
PA8
PB15
PB14
PB13
PA15
PD0
PD1
PD2
PD3
PB3
PB4
PB5
PB6
PB7
PB8
PB9
Exp
d
2
3
5
6
7
891
1
363534
33
32
31
3029282726
25
UFQFPN48
N version
(_CxTxN)
Exposed pad
Top view
Exp
d
UFQFPN48
1
2
3
4
5
6
7
8
9
10
11
12
36
35
34
33
32
31
30
29
28
27
26
25
393740
38
45
43
41
484746
44
42
222421
23
16
18
20
131415
17
19
VSS
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB2
PB10
PB11
PB12
PC13
PC14-OSC32_IN
PC15-OSC32_OUT
VBAT
VREF+
VDD/VDDA
VSS/VSSA
PF2-NRST
PF0-OSC_IN
PF1-OSC_OUT
PA0
PA1
PA14-BOOT0
PA13
PA12 [PA10]
PA11 [ PA9]
PA10
PC7
PC6
PA9
PA8
PB15
PB14
PB13
PA15
PD0
PD1
PD2
PD3
PB3
PB4
PB5
PB6
PB7
PB8
PB9
GP version
(_CxT)
Figure 10. STM32G0B1CxU UFQFPN48 pinout
osed pa
1. The I/O leads supplied by V
4
osed pa
are shown in dark gray.
DDIO2
DS13560 Rev 1 43/159
55
Page 44

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB9
PC14-OSC32_IN
PC15-OSC32_OUT
VDD/VDDA
VSS/VSSA
PF2-NRST
PA0
PA1
PA13
PA12 [PA10]
PA11 [PA9]
PA10
VDDIO2
PA9
PA8
PB15
PA14-BOOT0
PD0
PD1
PD2
PD3
PB6
PB7
PB8
Top view
LQFP32
1
2
3
4
5
6
7
8
24
23
22
21
20
19
18
17
29
27
25
323130
28
26
12
14
16
9
10
11
13
15
MSv39712V3
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB9
PC14-OSC32_IN
PC15-OSC32_OUT
VDD/VDDA
VSS/VSSA
PF2-NRST
PA0
PA1
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PC6
PA9
PA8
PB2
PA14-BOOT0
PA15
PB3
PB4
PB5
PB6
PB7
PB8
Top view
LQFP32
1
2
3
4
5
6
7
8
24
23
22
21
20
19
18
17
29
27
25
323130
28
26
12
14
16
9
10
11
13
15
GP version
N version
(_KxTxN)
(_KxT)
Figure 11. STM32G0B1KxT LQFP32 pinout
1. The I/O pins supplied by V
are shown in dark gray.
DDIO2
44/159 DS13560 Rev 1
Page 45

STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Exposed pad
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB9
PC14-OSC32_IN
PC15-OSC32_OUT
VDD/VDDA
VSS/VSSA
PF2-NRST
PA0
PA1
PA13
PA12 [PA10]
PA11 [PA9]
PA10
VDDIO2
PA9
PA8
PB15
PA14-BOOT0
PD0
PD1
PD2
PD3
PB6
PB7
PB8
Top view
Exp
d
UFQFPN32
1
2
3
4
5
6
7
8
24
23
22
21
20
19
18
17
29
27
25
323130
28
26
12
14
16
9
10
11
13
15
VSS
MSv39715V3
PA2
PA3
PA4
PA5
PA6
PA7
PB0
PB1
PB9
PC14-OSC32_IN
PC15-OSC32_OUT
VDD/VDDA
VSS/VSSA
PF2-NRST
PA0
PA1
PA13
PA12 [PA10]
PA11 [PA9]
PA10
PC6
PA9
PA8
PB2
PA14-BOOT0
PA15
PB3
PB4
PB5
PB6
PB7
PB8
Top view
UFQFPN32
1
2
3
4
5
6
7
8
24
23
22
21
20
19
18
17
29
27
25
323130
28
26
12
14
16
9
10
11
13
15
VSS
GP version
(_KxU)
N version
(_KxUxN)
Figure 12. STM32G0B1KxU UFQFPN32 pinout
1. The I/O leads supplied by V
are shown in dark gray.
DDIO2
DS13560 Rev 1 45/159
osed pa
55
Page 46

Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Table 11. Terms and symbols used in Table 12
Column Symbol Definition
Pin name
Terminal name corresponds to its by-default function at reset, unless otherwise specified in
parenthesis under the pin name.
S Supply pin
Pin type
I Input only pin
I/O Input / output pin
FT 5 V tolerant I/O
TT 3.6 V tolerant I/O
RST Bidirectional reset pin with embedded weak pull-up resistor
I/O structure
Options for TT or FT I/Os
_f I/O, Fm+ capable
_a I/O, with analog switch function
_c I/O, USB Type-C PD capable
_e I/O, with switchable diode to V
DD
_d I/O, USB Type-C PD Dead Battery function
Note Upon reset, all I/Os are set as analog inputs, unless otherwise specified.
Pin
functions
Alternate
functions
Additional
functions
Functions selected through GPIOx_AFR registers
Functions directly selected/enabled through peripheral registers
46/159 DS13560 Rev 1
Page 47

47/159 DS13560 Rev 1
Pin number
WLCSP52
LQFP64 - GP
Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Table 12. Pin assignment and description
Pin name
Alternate
(function
upon reset)
LQFP100
LQFP64 - N
UFBGA80
UFBGA64 - N
UFBGA100
Pin type
Note
I/O structure
functions
Additional
functions
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
- - - - - 64 64 A2 2 2 B2 PC10 I/O FT - USART3_TX, USART4_TX, TIM1_CH3, SPI3_SCK -
- - - - - 1 1 A1 3 3 B1 PC11 I/O FT - USART3_RX, USART4_RX, TIM1_CH4, SPI3_MISO -
---- - --- - 4C2 PE4 I/OFT - TIM3_CH2 -
---- - --- - 5D3 PE5 I/OFT - TIM3_CH3 -
- - - - - - - - - 6 C1 PE6 I/O FT - TIM3_CH4 TAMP_IN3, WKUP3
---- - 22B247D2 PC12 I/OFT -
- - 1 1 B11 3 3 C2 5 8 E3 PC13 I/O FT
--22B1344C16 9D1
22------- - -
3333C1255B1710E1
- - 4 4 C10 6 6 D3 8 11 E2 VBAT S - - - -
- - 5 5 D11 7 7 D2 9 12 F2 VREF+ S - - - VREFBUF_OUT
4 4 6 6 D13 8 8 D1 10 13 F1 VDD/VDDA S - - -
5 5 7 7 E12 9 9 E1 11 14 G1 VSS/VSSA S - - -
LQFP48 / UFQFPN48 - N
LQFP48 / UFQFPN48 - GP
PC14-
OSC32_IN
(PC14)
PC14-
OSC32_IN
(PC14)
PC15-
OSC32_OUT
(PC15)
I/O FT
I/O FT
I/O FT
(1)(2)
(1)(2)
(1)(2)
(1)(2)
LPTIM1_IN1, UCPD1_FRSTX, TIM14_CH1,
USART5_TX, SPI3_MOSI
TIM1_BKIN
TIM1_BKIN2 OSC32_IN
TIM1_BKIN2 OSC32_IN, OSC_IN
OSC32_EN, OSC_EN, TIM15_BKIN OSC32_OUT
TAMP_IN1, RTC_TS,
RTC_OUT1, WKUP2
-
Page 48

Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Additional
functions
DS13560 Rev 1 48/159
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
--88F131010F11215H1
--99G121111G11316J1
6 6 10 10 F11 12 12 E2 14 17 G2 PF2-NRST I/O - MCO, LPUART2_TX, LPUART2_RTS_DE NRST
- - - - - - - - - 18 H3 PF3 I/O FT - LPUART2_RX, USART6_RTS_DE_CK -
---- - --- -19H2 PF4 I/OFT - LPUART1_TX -
---- - --- -20J2 PF5 I/OFT - LPUART1_RX -
---- -1313E31521K1 PC0 I/OFT -
---- -1414F21622J3 PC1 I/OFT -
---- -1515G21723K2 PC2 I/OFT -
---- -1616H11824L1 PC3 I/OFT -
7 7 11 11 H1 3 1 7 17 H 2 1 9 25 K 3 PA0 I/ O FT_a -
8 81212E101818H32026L2 PA1 I/OFT_a -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
PF0-OSC_IN
(PF0)
PF1-
OSC_OUT
(PF1)
I/O FT - CRS1_SYNC, EVENTOUT, TIM14_CH1 OSC_IN
I/O FT - OSC_EN, EVENTOUT, TIM15_CH1N OSC_OUT
LPTIM1_IN1, LPUART1_RX, LPTIM2_IN1,
LPUART2_TX, USART6_TX, I2C3_SCL,
COMP3_OUT
LPTIM1_OUT, LPUART1_TX, TIM15_CH1,
LPUART2_RX, USART6_RX, I2C3_SDA
LPTIM1_IN2, SPI2_MISO/I2S2_MCK, TIM15_CH2,
FDCAN2_RX, COMP3_OUT
LPTIM1_ETR, SPI2_MOSI/I2S2_SD, LPTIM2_ETR,
FDCAN2_TX
SPI2_SCK/I2S2_CK, USART2_CTS,
TIM2_CH1_ETR, USART4_TX, LPTIM1_OUT,
UCPD2_FRSTX, COMP1_OUT
SPI1_SCK/I2S1_CK, USART2_RTS_DE_CK,
TIM2_CH2, USART4_RX, TIM15_CH1N,
I2C1_SMBA, EVENTOUT
COMP3_INM7
COMP3_INP1
-
-
COMP1_INM8, ADC_IN0,
TAMP_IN2, WKUP1
COMP1_INP2, ADC_IN1
Page 49

49/159 DS13560 Rev 1
Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Additional
functions
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
9 9 13 13 E8 19 19 G3 21 27 M1 PA2 I/O FT_a -
10 10 14 14 H11 20 20 F3 22 28 K4 PA3 I/O FT_a -
- -1515G102121H42329L3 PA4 I/OTT_a -
1111-------- - PA4 I/OTT_a-
12 12 16 16 F9 22 22 G4 24 30 M2 PA5 I/O TT_a -
13 13 17 17 F7 23 23 F4 25 31 M3 PA6 I/O FT_a -
14 14 18 18 H9 24 24 E4 26 32 K5 PA7 I/O FT_a -
- - - - G8 25 25 H5 27 33 L4 PC4 I/O FT_a -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
SPI1_MOSI/I2S1_SD, USART2_TX, TIM2_CH3,
UCPD1_FRSTX, TIM15_CH1, LPUART1_TX,
COMP2_OUT
SPI2_MISO/I2S2_MCK, USART2_RX, TIM2_CH4,
UCPD2_FRSTX, TIM15_CH2, LPUART1_RX,
EVENTOUT
SPI1_NSS/I2S1_WS, SPI2_MOSI/I2S2_SD,
USB_NOE, USART6_TX, TIM14_CH1,
LPTIM2_OUT, UCPD2_FRSTX, EVENTOUT,
SPI3_NSS
SPI1_NSS/I2S1_WS, SPI2_MOSI/I2S2_SD,
USB_NOE, USART6_TX, TIM14_CH1,
LPTIM2_OUT, UCPD2_FRSTX, EVENTOUT,
SPI3_NSS
SPI1_SCK/I2S1_CK, CEC, TIM2_CH1_ETR,
USART6_RX, USART3_TX, LPTIM2_ETR,
UCPD1_FRSTX, EVENTOUT
SPI1_MISO/I2S1_MCK, TIM3_CH1, TIM1_BKIN,
USART6_CTS, USART3_CTS, TIM16_CH1,
LPUART1_CTS, COMP1_OUT, I2C2_SDA,
I2C3_SDA
SPI1_MOSI/I2S1_SD, TIM3_CH2, TIM1_CH1N,
USART6_RTS_DE_CK, TIM14_CH1, TIM17_CH1,
UCPD1_FRSTX, COMP2_OUT, I2C2_SCL,
I2C3_SCL
USART3_TX, USART1_TX, TIM2_CH1_ETR,
FDCAN1_RX
COMP2_INM8, ADC_IN2,
WKUP4, LSCO
COMP2_INP2, ADC_IN3
ADC_IN4, DAC1_OUT1,
RTC_OUT2
ADC_IN4, DAC1_OUT1,
TAMP_IN1, RTC_TS,
RTC_OUT1, WKUP2
ADC_IN5, DAC1_OUT2
ADC_IN6
ADC_IN7
COMP1_INM7, ADC_IN17
Page 50

Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Additional
functions
DS13560 Rev 1 50/159
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
- - - - G6 26 26 H6 28 34 M4 PC5 I/O FT_a -
15 15 19 19 H7 27 27 F5 29 35 L5 PB0 I/O FT_a -
16 16 20 20 H5 28 28 G5 30 36 M5 PB1 I/O FT_a -
17 - 2121G42929H731 37 L6 PB2 I/OFT_a -
---- - --- -38M6 PF6 I/OFT - LPUART1_RTS_DE -
---- - --- -39L7 PF7 I/OFT - LPUART1_CTS, USART5_CTS -
- - - - - - - - 32 40 M7 PE7 I/O FT - TIM1_ETR, USART5_RTS_DE_CK COMP3_INP2
- - - - - - - - 33 41 M8 PE8 I/O FT - USART4_TX, TIM1_CH1N COMP3_INM8
- - - - - - - - 34 42 K8 PE9 I/O FT - USART4_RX, TIM1_CH1 -
- - - - - - - - 35 43 L8 PE10 I/O FT - TIM1_CH2N, USART5_TX -
- - - - - - - - - 44 M9 PE11 I/O FT - TIM1_CH2, USART5_RX -
- - - - - - - - - 45 L9 PE12 I/O FT - SPI1_NSS/I2S1_WS, TIM1_CH3N -
- - - - - - - - - 46 M10 PE13 I/O FT - SPI1_SCK/I2S1_CK, TIM1_CH3 -
- - - - - - - - - 47 K9 PE14 I/O FT - SPI1_MISO/I2S1_MCK, TIM1_CH4, TIM1_BKIN2 -
- - - - - - - - - 48 L10 PE15 I/O FT - SPI1_MOSI/I2S1_SD, TIM1_BKIN -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
USART3_RX, USART1_RX, TIM2_CH2,
FDCAN1_TX
SPI1_NSS/I2S1_WS, TIM3_CH3, TIM1_CH2N,
FDCAN2_RX, USART3_RX, LPTIM1_OUT,
UCPD1_FRSTX, COMP1_OUT, USART5_TX,
LPUART2_CTS
TIM14_CH1, TIM3_CH4, TIM1_CH3N, FDCAN2_TX,
USART3_RTS_DE_CK, LPTIM2_IN1,
LPUART1_RTS_DE, COMP3_OUT, USART5_RX,
LPUART2_RTS_DE
SPI2_MISO/I2S2_MCK, MCO2, USART3_TX,
LPTIM1_OUT, EVENTOUT
COMP1_INP0, ADC_IN18,
WKUP5
COMP3_INP0, ADC_IN8
COMP1_INM6, ADC_IN9
COMP1_INP1,
COMP3_INM6, ADC_IN10
Page 51

51/159 DS13560 Rev 1
Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Additional
functions
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
- - 22 22 H3 30 30 G6 36 49 M11 PB10 I/O FT_fa -
- - 23 23 F5 31 31 H8 37 50 L11 PB11 I/O FT_fa -
- - 24 24 E6 32 32 G7 38 51 K10 PB12 I/O FT_fa -
- - 25 25 H1 33 33 G8 39 52 M12 PB13 I/O FT_f -
- - 26 26 G2 34 34 F6 40 53 K11 PB14 I/O FT_f -
- 172727 F3 3535F7 41 54J10 PB15 I/OFT_f -
18 18 28 28 F1 36 36 F8 42 55 L12 PA8 I/O FT_f -
19 19 29 29 E4 37 37 E6 43 56 H10 PA9 I/O FT_fd -
20 - 30 - D5 38 38 E7 44 57 J11 PC6 I/O FT -
- - 31 - D3 39 39 E5 45 58 K12 PC7 I/O FT -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
CEC, LPUART1_RX, TIM2_CH3, USART3_TX,
SPI2_SCK/I2S2_CK, I2C2_SCL, COMP1_OUT
SPI2_MOSI/I2S2_SD, LPUART1_TX, TIM2_CH4,
USART3_RX, I2C2_SDA, COMP2_OUT
SPI2_NSS/I2S2_WS, LPUART1_RTS_DE,
TIM1_BKIN, FDCAN2_RX, TIM15_BKIN,
UCPD2_FRSTX, EVENTOUT, I2C2_SMBA
SPI2_SCK/I2S2_CK, LPUART1_CTS, TIM1_CH1N,
FDCAN2_TX, USART3_CTS, TIM15_CH1N,
I2C2_SCL, EVENTOUT
SPI2_MISO/I2S2_MCK, UCPD1_FRSTX,
TIM1_CH2N, USART3_RTS_DE_CK, TIM15_CH1,
I2C2_SDA, EVENTOUT, USART6_RTS_DE_CK
SPI2_MOSI/I2S2_SD, TIM1_CH3N, TIM15_CH1N,
TIM15_CH2, EVENTOUT, USART6_CTS
MCO, SPI2_NSS/I2S2_WS, TIM1_CH1,
CRS1_SYNC, LPTIM2_OUT, EVENTOUT,
I2C2_SMBA
MCO, USART1_TX, TIM1_CH2,
SPI2_MISO/I2S2_MCK, TIM15_BKIN, I2C1_SCL,
EVENTOUT, I2C2_SCL
UCPD1_FRSTX, TIM3_CH1, TIM2_CH3,
LPUART2_TX
UCPD2_FRSTX, TIM3_CH2, TIM2_CH4,
LPUART2_RX
ADC_IN11
ADC_IN15
ADC_IN16
-
-
UCPD1_CC2, RTC_REFIN
UCPD1_CC1
UCPD1_DBCC1
-
-
Page 52

Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Additional
functions
DS13560 Rev 1 52/159
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
- - - - - 40 - - 46 59 J12 PD8 I/O FT - USART3_TX, SPI1_SCK/I2S1_CK, LPTIM1_OUT -
- - - - - 41 - - 47 60 H11 PD9 I/O FT - USART3_RX, SPI1_NSS/I2S1_WS, TIM1_BKIN2 -
- - - - - - - - 48 61 H12 PD10 I/O FT - MCO -
- - - - - - - - 49 62 G11 PD11 I/O FT - USART3_CTS, LPTIM2_ETR -
- - - 30 E2 - 40 E8 50 63 G12 VSS S - - -
-20-31D1-41D85164F12 VDDIO2 S - - -
---- - ---5265F11 PD12 I/OFT -
- - - - - - - - 53 66 E12 PD13 I/O FT - LPTIM2_OUT, TIM4_CH2, FDCAN1_TX -
- - - - - - - - 54 67 E11 PD14 I/O FT - LPUART2_CTS, TIM4_CH3, FDCAN2_RX -
---- - ---5568D11 PD15 I/OFT -
21 21 32 32 C4 42 42 D6 56 69 E10 PA10 I/O FT_fd -
22 22 33 33 C2 43 43 C8 57 70 D12 PA11 [PA9]
23 23 34 34 B1 44 44 B8 58 71 C12 PA12 [PA10]
---- - --- -72D10 PF8 I/OFT - - -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
(3)
I/O FT_f -
(3)
I/O FT_f -
USART3_RTS_DE_CK, LPTIM2_IN1, TIM4_CH1,
FDCAN1_RX
CRS1_SYNC, LPUART2_RTS_DE, TIM4_CH4,
FDCAN2_TX
SPI2_MOSI/I2S2_SD, USART1_RX, TIM1_CH3,
MCO2, TIM17_BKIN, I2C1_SDA, EVENTOUT,
I2C2_SDA
SPI1_MISO/I2S1_MCK, USART1_CTS, TIM1_CH4,
FDCAN1_RX, TIM1_BKIN2, I2C2_SCL,
COMP1_OUT
SPI1_MOSI/I2S1_SD, USART1_RTS_DE_CK,
TIM1_ETR, FDCAN1_TX, I2S_CKIN, I2C2_SDA,
COMP2_OUT
-
-
UCPD1_DBCC2
USB_DM
USB_DP
Page 53
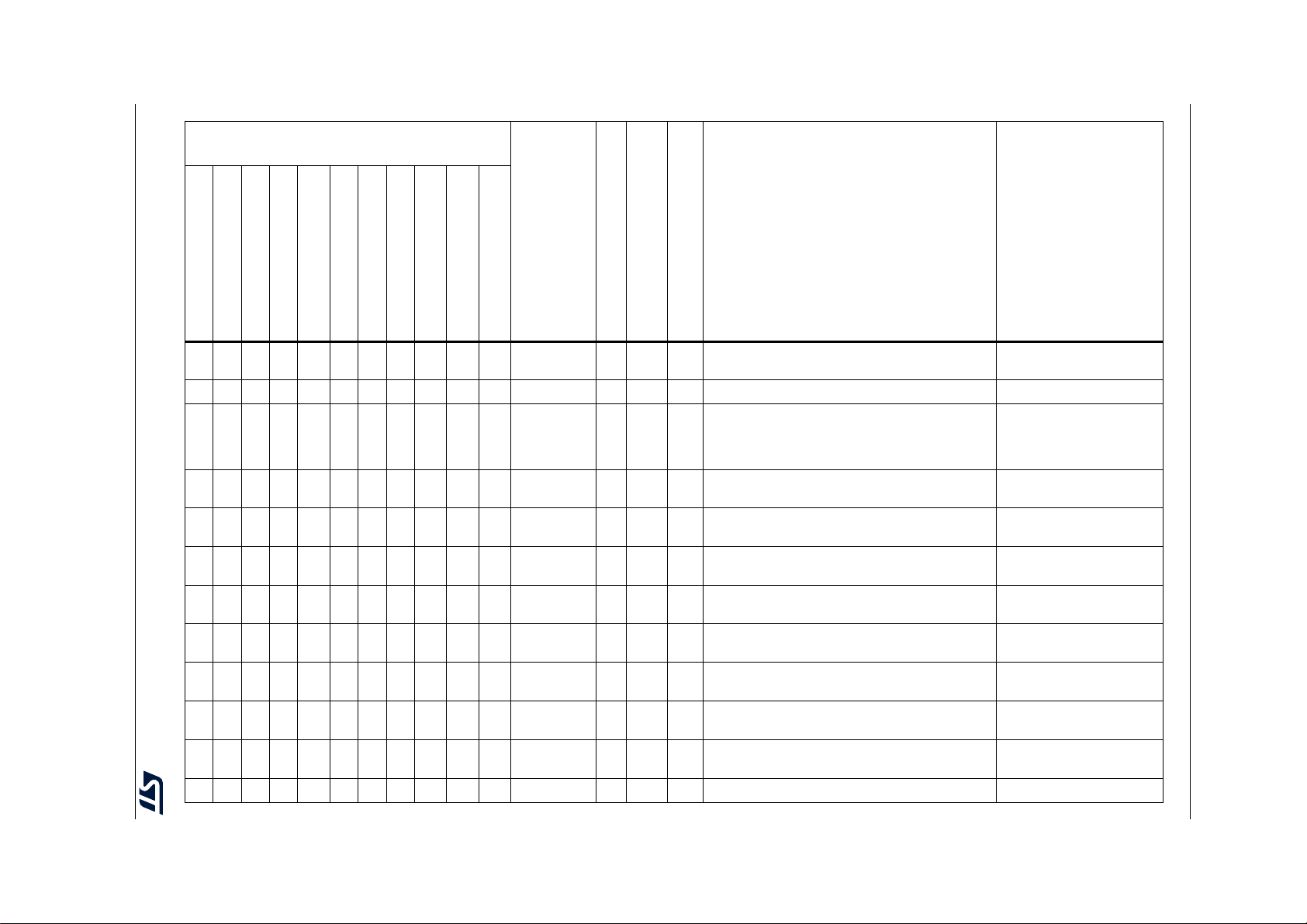
53/159 DS13560 Rev 1
Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Additional
functions
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
24 24 35 35 B3 45 45 D7 59 73 C11 PA13 I/O FT
25 25 36 36 B5 46 46 C7 60 74 B12 PA14-BOOT0 I/O FT
26 - 3737 A2 4747C6 61 75B11 PA15 I/O FT -
---- -4848A86276C10 PC8 I/OFT -
---- -4949B76377A12 PC9 I/OFT -
- 263838 A4 5050A7 64 78B10 PD0 I/OFT_c -
- 273939C6 5151B6 65 79 C9 PD1 I/OFT_d -
- 284040 B7 5252A6 66 80A11 PD2 I/OFT_c -
- 294141 A6 5353D567 81 C8 PD3 I/OFT_d -
---- -5454C56882B9 PD4 I/OFT -
---- -5555B56983A10 PD5 I/OFT -
- - - - - 56 56 A5 70 84 A9 PD6 I/O FT - USART2_RX, SPI1_MOSI/I2S1_SD, LPTIM2_OUT -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
(4)
(4)
SWDIO, IR_OUT, USB_NOE, EVENTOUT,
SWCLK, USART2_TX, EVENTOUT, LPUART2_TX BOOT0
SPI1_NSS/I2S1_WS, USART2_RX,
TIM2_CH1_ETR, MCO2, USART4_RTS_DE_CK,
USART3_RTS_DE_CK, USB_NOE, EVENTOUT,
UCPD2_FRSTX, TIM3_CH3, TIM1_CH1,
I2S_CKIN, TIM3_CH4, TIM1_CH2,
LPUART2_RTS_DE, USB_NOE
EVENTOUT, SPI2_NSS/I2S2_WS, TIM16_CH1,
EVENTOUT, SPI2_SCK/I2S2_CK, TIM17_CH1,
USART3_RTS_DE_CK, TIM3_ETR, TIM1_CH1N,
USART2_CTS, SPI2_MISO/I2S2_MCK,
USART2_RTS_DE_CK, SPI2_MOSI/I2S2_SD,
TIM1_CH3N, USART5_RTS_DE_CK
USART2_TX, SPI1_MISO/I2S1_MCK, TIM1_BKIN,
LPUART2_RX
I2C2_SMBA, SPI3_NSS
LPUART2_CTS
FDCAN1_RX
FDCAN1_TX
USART5_RX
TIM1_CH2N, USART5_TX
USART5_CTS
UCPD2_CC1
UCPD2_DBCC1
UCPD2_CC2
UCPD2_DBCC2
-
-
-
-
-
-
Page 54

Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
STM32G0B1xB/C/xE Pinouts, pin description and alternate functions
Additional
functions
DS13560 Rev 1 54/159
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
---- - ---7185B8 PD7 I/OFT - MCO2 -
---- - --- -86A8 PF9 I/OFT - USART6_TX -
---- - --- -87B7 PF10 I/OFT - USART6_RX -
---- - --- -88A7 PF11 I/OFT - USART6_RTS_DE_CK -
- - - - - - - - - 89 B6 PF12 I/O FT - TIM15_CH1, USART6_CTS -
---- - --- -90A6 PF13 I/OFT - TIM15_CH2 -
27 - 4242 A8 5757B472 91 A5 PB3 I/OFT_a -
28 - 4343 B9 5858C4 73 92 B5 PB4 I/OFT_a -
29 - 44 44 A10 59 59 D4 74 93 C5 PB5 I/O FT -
- - - - - - - - 75 94 A4 PE0 I/O FT - TIM16_CH1, EVENTOUT, TIM4_ETR -
- - - - - - - - 76 95 B4 PE1 I/O FT - TIM17_CH1, EVENTOUT -
---- - --- -96A3 PE2 I/OFT - TIM3_ETR -
---- - ---7797A2 PE3 I/OFT - TIM3_CH1 -
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
SPI1_SCK/I2S1_CK, TIM1_CH2, TIM2_CH2,
USART5_TX, USART1_RTS_DE_CK, I2C3_SCL,
EVENTOUT, I2C2_SCL, SPI3_SCK
SPI1_MISO/I2S1_MCK, TIM3_CH1, USART5_RX,
USART1_CTS, TIM17_BKIN, I2C3_SDA,
EVENTOUT, I2C2_SDA, SPI3_MISO
SPI1_MOSI/I2S1_SD, TIM3_CH2, TIM16_BKIN,
FDCAN2_RX, LPTIM1_IN1, I2C1_SMBA,
COMP2_OUT, USART5_RTS_DE_CK, SPI3_MOSI
COMP2_INM6
COMP2_INP0
WKUP6
Page 55

55/159 DS13560 Rev 1
Pin number
WLCSP52
LQFP64 - GP
LQFP64 - N
UFBGA64 - N
Table 12. Pin assignment and description (continued)
Pin name
LQFP100
UFBGA80
(function
upon reset)
UFBGA100
Pin type
Note
I/O structure
Alternate
functions
Pinouts, pin description and alternate functions STM32G0B1xB/C/xE
Additional
functions
LQFP32 / UFQFPN32 - N
LQFP32 / UFQFPN32 - GP
30 30 45 45 C8 60 60 A4 78 98 C4 PB6 I/O FT_fa -
31 31 46 46 D7 61 61 A3 79 99 B3 PB7 I/O FT_fa -
32 32 47 47 A12 62 62 B3 80 100 A1 PB8 I/O FT_f -
1 1 48 48 D9 63 63 C3 1 1 C3 PB9 I/O FT_f -
1. PC13, PC14 and PC15 are supplied through the power switch. Since the switch only sinks a limited amount of current (3 mA), the use of GPIOs PC13 to PC15 in output
mode is limited:
- The speed should not exceed 2 MHz with a maximum load of 30 pF
- These GPIOs must not be used as current sources (for example to drive a LED).
2. After an RTC domain power-up, PC13, PC14 and PC15 operate as GPIOs. Their function then depends on the content of the RTC registers. The RTC registers are not
reset upon system reset. For details on how to manage these GPIOs, refer to the RTC domain and RTC register descriptions in the RM0444 reference manual.
3. Pins PA9/PA10 can be remapped in place of pins PA11/PA12 (default mapping), using SYSCFG_CFGR1 register.
4. Upon reset, these pins are configured as SW debug alternate functions, and the internal pull-up on PA13 pin and the internal pull-down on PA14 pin are activated.
LQFP48 / UFQFPN48 - GP
LQFP48 / UFQFPN48 - N
USART1_TX, TIM1_CH3, TIM16_CH1N,
FDCAN2_TX, SPI2_MISO/I2S2_MCK, LPTIM1_ETR,
I2C1_SCL, EVENTOUT, USART5_CTS, TIM4_CH1,
LPUART2_TX
USART1_RX, SPI2_MOSI/I2S2_SD, TIM17_CH1N,
USART4_CTS, LPTIM1_IN2, I2C1_SDA,
EVENTOUT, TIM4_CH2, LPUART2_RX
CEC, SPI2_SCK/I2S2_CK, TIM16_CH1,
FDCAN1_RX, USART3_TX, TIM15_BKIN,
I2C1_SCL, EVENTOUT, USART6_TX, TIM4_CH3
IR_OUT, UCPD2_FRSTX, TIM17_CH1,
FDCAN1_TX, USART3_RX, SPI2_NSS/I2S2_WS,
I2C1_SDA, EVENTOUT, USART6_RX, TIM4_CH4
COMP2_INP1
COMP2_INM7, PVD_IN
-
-
Page 56

Table 13. Port A alternate function mapping (AF0 to AF7)
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
STM32G0B1xB/C/xE
DS13560 Rev 1 56/159
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
PA8 MCO
PA9 MCO USART1_TX TIM1_CH2 -
PA1 0
PA11
PA1 2
SPI2_SCK/
I2S2_CK
SPI1_SCK/
I2S1_CK
SPI1_MOSI/
I2S1_SD
SPI2_MISO/
I2S2_MCK
SPI1_NSS/
I2S1_WS
SPI1_SCK/
I2S1_CK
SPI1_MISO/
I2S1_MCK
SPI1_MOSI/
I2S1_SD
SPI2_MOSI/
I2S2_SD
SPI1_MISO/
I2S1_MCK
SPI1_MOSI/
I2S1_SD
USART2_CTS TIM2_CH1_ETR - USART4_TX LPTIM1_OUT UCPD2_FRSTX COMP1_OUT
USART2_RTS
_DE_CK
TIM2_CH2 - USART4_RX TIM15_CH1N I2C1_SMBA EVENTOUT
USART2_TX TIM2_CH3 - UCPD1_FRSTX TIM15_CH1 LPUART1_TX COMP2_OUT
USART2_RX TIM2_CH4 - UCPD2_FRSTX TIM15_CH2 LPUART1_RX EVENTOUT
SPI2_MOSI/
I2S2_SD
USB_NOE USART6_TX TIM14_CH1 LPTIM2_OUT UCPD2_FRSTX EVENTOUT
CEC TIM2_CH1_ETR USART6_RX USART3_TX LPTIM2_ETR UCPD1_FRSTX EVENTOUT
TIM3_CH1 TIM1_BKIN USART6_CTS USART3_CTS TIM16_CH1 LPUART1_CTS COMP1_OUT
TIM3_CH2 TIM1_CH1N
SPI2_NSS/
I2S2_WS
TIM1_CH1 - CRS1_SYNC LPTIM2_OUT - EVENTOUT
USART6_RTS
_DE_CK
TIM14_CH1 TIM17_CH1 UCPD1_FRSTX COMP2_OUT
SPI2_MISO/
I2S2_MCK
TIM15_BKIN I2C1_SCL EVENTOUT
USART1_RX TIM1_CH3 MCO2 - TIM17_BKIN I2C1_SDA EVENTOUT
USART1_CTS TIM1_CH4 FDCAN1_RX - TIM1_BKIN2 I2C2_SCL COMP1_OUT
USART1_RTS
_DE_CK
TIM1_ETR FDCAN1_TX - I2S_CKIN I2C2_SDA COMP2_OUT
PA13 SWDIO IR_OUT USB_NOE - - - - EVENTOUT
PA14SWCLKUSART2_TX-----EVENTOUT
PA1 5
SPI1_NSS/
I2S1_WS
USART2_RX TIM2_CH1_ETR MCO2
USART4_RTS
_DE_CK
USART3_RTS
_DE_CK
USB_NOE EVENTOUT
Page 57

57/159 DS13560 Rev 1
Table 14. Port A alternate function mapping (AF8 to AF15)
Port AF8 AF9 AF10 AF11 AF12 AF13 AF14 AF15
PA0--------
PA1--------
PA2--------
PA3--------
PA4-SPI3_NSS------
PA5--------
PA6 I2C2_SDA I2C3_SDA - - - - - -
PA7I2C2_SCLI2C3_SCL------
PA8I2C2_SMBA-------
PA9I2C2_SCL-------
PA10 I2C2_SDA - - - - - - -
PA11--------
PA12--------
PA13 - - LPUART1_RX - - - - -
PA14 - - LPUART1_TX - - - - -
PA15I2C2_SMBASPI3_NSS------
STM32G0B1xB/C/xE
Page 58

Table 15. Port B alternate function mapping (AF0 to AF7)
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
STM32G0B1xB/C/xE
DS13560 Rev 1 58/159
PB0
PB1 TIM14_CH1 TIM3_CH4 TIM1_CH3N FDCAN2_TX
PB2 -
PB3
PB4
PB5
PB6 USART1_TX TIM1_CH3 TIM16_CH1N FDCAN2_TX
PB7 USART1_RX
PB8 CEC
SPI1_NSS/
I2S1_WS
SPI1_SCK/
I2S1_CK
SPI1_MISO/
I2S1_MCK
SPI1_MOSI/
I2S1_SD
TIM3_CH3 TIM1_CH2N FDCAN2_RX USART3_RX LPTIM1_OUT UCPD1_FRSTX COMP1_OUT
USART3_RTS
_DE_CK
SPI2_MISO/
I2S2_MCK
TIM1_CH2 TIM2_CH2 USART5_TX
- MCO2 USART3_TX LPTIM1_OUT - EVENTOUT
USART1_RTS
_DE_CK
TIM3_CH1 - USART5_RX USART1_CTS TIM17_BKIN I2C3_SDA EVENTOUT
TIM3_CH2 TIM16_BKIN FDCAN2_RX - LPTIM1_IN1 I2C1_SMBA COMP2_OUT
SPI2_MISO/
I2S2_MCK
SPI2_MOSI/
I2S2_SD
SPI2_SCK/
I2S2_CK
TIM17_CH1N - USART4_CTS LPTIM1_IN2 I2C1_SDA EVENTOUT
TIM16_CH1 FDCAN1_RX USART3_TX TIM15_BKIN I2C1_SCL EVENTOUT
PB9 IR_OUT UCPD2_FRSTX TIM17_CH1 FDCAN1_TX USART3_RX
PB10 CEC LPUART1_RX TIM2_CH3 - USART3_TX
PB11
PB12
PB13
SPI2_MOSI/
I2S2_SD
SPI2_NSS/
I2S2_WS
SPI2_SCK/
I2S2_CK
LPUART1_TX TIM2_CH4 - USART3_RX - I2C2_SDA COMP2_OUT
LPUART1_RTS
_DE
TIM1_BKIN FDCAN2_RX - TIM15_BKIN UCPD2_FRSTX EVENTOUT
LPUART1_CTS TIM1_CH1N FDCAN2_TX USART3_CTS TIM15_CH1N I2C2_SCL EVENTOUT
LPTIM2_IN1
LPUART1_RTS
_DE
COMP3_OUT
- I2C3_SCL EVENTOUT
LPTIM1_ETR I2C1_SCL EVENTOUT
SPI2_NSS/
I2S2_WS
SPI2_SCK/
I2S2_CK
I2C1_SDA EVENTOUT
I2C2_SCL COMP1_OUT
Page 59

59/159 DS13560 Rev 1
Table 15. Port B alternate function mapping (AF0 to AF7) (continued)
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
PB14
PB15
SPI2_MISO/
I2S2_MCK
SPI2_MOSI/
I2S2_SD
UCPD1_FRSTX TIM1_CH2N -
- TIM1_CH3N - TIM15_CH1N TIM15_CH2 - EVENTOUT
Table 16. Port B alternate function mapping (AF8 to AF15)
USART3_RTS
_DE_CK
TIM15_CH1 I2C2_SDA EVENTOUT
Port AF8 AF9 AF10 AF11 AF12 AF13 AF14 AF15
PB0USART5_TX-LPUART2_CTS-----
PB1 USART5_RX -
LPUART2_RTS
_DE
-----
PB2--------
PB3I2C2_SCLSPI3_SCK------
PB4I2C2_SDASPI3_MISO------
PB5
USART5_RTS
_DE_CK
SPI3_MOSI------
PB6USART5_CTSTIM4_CH1LPUART2_TX-----
PB7-TIM4_CH2LPUART2_RX-----
PB8USART6_TXTIM4_CH3------
PB9USART6_RXTIM4_CH4------
PB10--------
PB11--------
PB12I2C2_SMBA-------
STM32G0B1xB/C/xE
PB13--------
PB14
USART6_RTS
_DE_CK
-------
PB15USART6_CTS-------
Page 60

DS13560 Rev 1 60/159
Table 17. Port C alternate function mapping
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
PC0 LPTIM1_IN1 LPUART1_RX LPTIM2_IN1 LPUART2_TX USART6_TX - I2C3_SCL COMP3_OUT
PC1 LPTIM1_OUT LPUART1_TX TIM15_CH1 LPUART2_RX USART6_RX - I2C3_SDA -
PC2 LPTIM1_IN2
PC3 LPTIM1_ETR
SPI2_MISO/
I2S2_MCK
SPI2_MOSI/
I2S2_SD
TIM15_CH2 - - - - COMP3_OUT
LPTIM2_ETR - - - - -
PC4 USART3_TX USART1_TXTIM2_CH1_ETR-----
PC5 USART3_RX USART1_RX TIM2_CH2 - - - - -
PC6 UCPD1_FRSTX TIM3_CH1 TIM2_CH3 LPUART2_TX - - - -
PC7 UCPD2_FRSTX TIM3_CH2 TIM2_CH4 LPUART2_RX - - - -
PC8 UCPD2_FRSTX TIM3_CH3 TIM1_CH1 LPUART2_CTS - - - -
PC9 I2S_CKIN TIM3_CH4 TIM1_CH2
LPUART2_RTS_
DE
- - USB_NOE -
PC10 USART3_TX USART4_TX TIM1_CH3 - SPI3_SCK - - -
PC11 USART3_RX USART4_RX TIM1_CH4 - SPI3_MISO - - -
PC12 LPTIM1_IN1 UCPD1_FRSTX TIM14_CH1 USART5_TX SPI3_MOSI - - -
PC13 - - TIM1_BKIN - - - - -
PC14 - - TIM1_BKIN2 - - - - -
PC15 OSC32_EN OSC_EN TIM15_BKIN - - - - -
STM32G0B1xB/C/xE
Page 61

61/159 DS13560 Rev 1
*
Table 18. Port D alternate function mapping
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
PD0 EVENTOUT
PD1 EVENTOUT
PD2
USART3_RTS
_DE_CK
PD3 USART2_CTS
PD4
USART2_RTS
_DE_CK
PD5 USART2_TX
PD6 USART2_RX
SPI2_NSS/
I2S2_WS
SPI2_SCK/
I2S2_CK
TIM16_CH1 FDCAN1_RX - - - -
TIM17_CH1 FDCAN1_TX - - - -
TIM3_ETR TIM1_CH1N USART5_RX - - - -
SPI2_MISO/
I2S2_MCK
SPI2_MOSI/
I2S2_SD
SPI1_MISO/
I2S1_MCK
SPI1_MOSI/
I2S1_SD
TIM1_CH2N USART5_TX - - - -
TIM1_CH3N
USART5_RTS
_DE_CK
----
TIM1_BKIN USART5_CTS - - - -
LPTIM2_OUT - - - - -
PD7---MCO2----
PD8 USART3_TX
PD9 USART3_RX
PD10
MCO - -
SPI1_SCK/
I2S1_CK
SPI1_NSS/
I2S1_WS
LPTIM1_OUT - - - - -
TIM1_BKIN2-----
-----
PD11 USART3_CTS LPTIM2_ETR - - - - - -
PD12
USART3_RTS
_DE_CK
LPTIM2_IN1 TIM4_CH1 - - - - -
PD13 - LPTIM2_OUT TIM4_CH2 - - - - -
PD14 - LPUART2_CTS TIM4_CH3 - - - - -
PD15 CRS1_SYNC
LPUART2_RTS
_DE
TIM4_CH4-----
STM32G0B1xB/C/xE
Page 62

DS13560 Rev 1 62/159
Table 19. Port E alternate function mapping
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
PE0 TIM16_CH1 EVENTOUT TIM4_ETR FDCAN[1_RXFD] - - - -
PE1 TIM17_CH1 EVENTOUT - FDCAN[1_TXFD] - - - -
PE2-TIM3_ETR------
PE3-TIM3_CH1------
PE4-TIM3_CH2------
PE5-TIM3_CH3------
PE6-TIM3_CH4------
PE7 - TIM1_ETR -
USART5_RTS_D
E_CK
----
PE8USART4_TXTIM1_CH1N------
PE9USART4_RXTIM1_CH1------
PE10 - TIM1_CH2N - USART5_TX - - - -
PE11 - TIM1_CH2 - USART5_RX - - - -
PE12
PE13
SPI1_NSS/
I2S1_WS
SPI1_SCK/
I2S1_CK
TIM1_CH3N------
TIM1_CH3------
STM32G0B1xB/C/xE
Page 63

63/159 DS13560 Rev 1
Table 20. Port F alternate function mapping
Port AF0 AF1 AF2 AF3 AF4 AF5 AF6 AF7
PF0 CRS1_SYNC EVENTOUT TIM14_CH1 - - - - -
PF1 OSC_EN EVENTOUT TIM15_CH1N - - - - -
PF2 MCO LPUART2_TX -
PF3 - LPUART2_RX -
LPUART2_RTS
_DE
USART6_RTS
_DE_CK
----
----
PF4-LPUART1_TX------
PF5-LPUART1_RX------
PF6 -
LPUART1_RTS
_DE
------
PF7 - LPUART1_CTS - USART5_CTS - - - -
PF8--------
PF9 - - - USART6_TX - - - -
PF10 - - - USART6_RX - - - -
PF11---
USART6_RTS
_DE_CK
----
PF12 TIM15_CH1 - - USART6_CTS - - - -
PF13 TIM15_CH2 - - - - - - -
STM32G0B1xB/C/xE
Page 64

Electrical characteristics STM32G0B1xB/C/xE
MCU pin
C = 50 pF
MCU pin
V
IN
5 Electrical characteristics
5.1 Parameter conditions
Unless otherwise specified, all voltages are referenced to VSS.
Parameter values defined at temperatures or in temperature ranges out of the ordering
information scope are to be ignored.
Packages used for characterizing certain electrical parameters may differ from the
commercial packages as per the ordering information.
5.1.1 Minimum and maximum values
Unless otherwise specified, the minimum and maximum values are guaranteed in the worst
conditions of ambient temperature, supply voltage and frequencies by tests in production on
100% of the devices with an ambient temperature at T
the selected temperature range).
Data based on characterization results, design simulation and/or technology characteristics
are indicated in the table footnotes and are not tested in production. Based on
characterization, the minimum and maximum values refer to sample tests and represent the
mean value plus or minus three times the standard deviation (mean ±3).
= 25 °C and TA = TA(max) (given by
A
5.1.2 Typical values
Unless otherwise specified, typical data are based on TA = 25 °C, VDD = V
V. They are given only as design guidelines and are not tested.
Typical ADC accuracy values are determined by characterization of a batch of samples from
a standard diffusion lot over the full temperature range, where 95% of the devices have an
error less than or equal to the value indicated
5.1.3 Typical curves
Unless otherwise specified, all typical curves are given only as design guidelines and are
not tested.
5.1.4 Loading capacitor
The loading conditions used for pin parameter measurement are shown in Figure 13.
5.1.5 Pin input voltage
The input voltage measurement on a pin of the device is described in Figure 14.
Figure 13. Pin loading conditions Figure 14. Pin input voltage
(mean ±2).
DDA
= V
DDIO2
= 3
64/159 DS13560 Rev 1
Page 65

STM32G0B1xB/C/xE Electrical characteristics
MSv66839V2
V
DD
Backup circuitry
(LSE, RTC and
backup registers)
Kernel logic
(CPU, digital and
memories)
Level shifter
IO
logic
IN
OUT
Regulator
GPIOs
1.55 V to 3.6 V
1 x 100 nF
+ 1 x 4.7 μF
VDD/VDDA
VBAT
V
CORE
Power
switch
V
DDIO1
ADC
DAC
COMPs
VREFBUF
VREF+
VREF-
VSS/VSSA
V
REF
100 nF
1 μF
V
SS
V
SSA
V
DDA
V
DD
VREF+
Level shifter
IO
logic
IN
OUT
V
DDIO2
VDDIO2
100 nF
+4.7 μF
V
DDIO2
GPIOs
5.1.6 Power supply scheme
Figure 15. Power supply scheme
Caution: Power supply pin pair (VDD/VDDA/VDDIO2 and VSS/VSSA) must be decoupled with
filtering ceramic capacitors as shown above. These capacitors must be placed as close as
possible to, or below, the appropriate pins on the underside of the PCB to ensure the good
functionality of the device.
DS13560 Rev 1 65/159
124
Page 66

Electrical characteristics STM32G0B1xB/C/xE
MSv66840V1
I
DDVBAT
V
BAT
I
DD
V
DD
(V
DDA
)
VBAT
VDD/VDDA
VDDIO2
5.1.7 Current consumption measurement
Figure 16. Current consumption measurement scheme
5.2 Absolute maximum ratings
Stresses above the absolute maximum ratings listed in Table 21, Table 22 and Table 23
may cause permanent damage to the device. These are stress ratings only and functional
operation of the device at these conditions is not implied. Exposure to maximum rating
conditions for extended periods may affect device reliability.
All voltages are defined with respect to V
Table 21. Voltage characteristics
SS
.
Symbol Ratings Min Max Unit
V
DD
V
DDIO2
V
BAT
V
REF+
V
IN
1. Refer to Table 22 for the maximum allowed injected current values.
2. To sustain a voltage higher than 4 V the internal pull-up/pull-down resistors must be disabled.
External supply voltage - 0.3 4.0
External supply voltage for selected I/Os - 0.3 4.0
External supply voltage on VBAT pin - 0.3 4.0
External voltage on VREF+ pin - 0.3 Min(
Input voltage on FT_xx pins except FT_c
(1)
Input voltage on FT_c pins
Input voltage on any other pin
- 0.3 V
- 0.3
- 0.3
V
DD
+
DD
5.5
4.0
+ 0.4, 4.0)
(2)
4.0
V
66/159 DS13560 Rev 1
Page 67
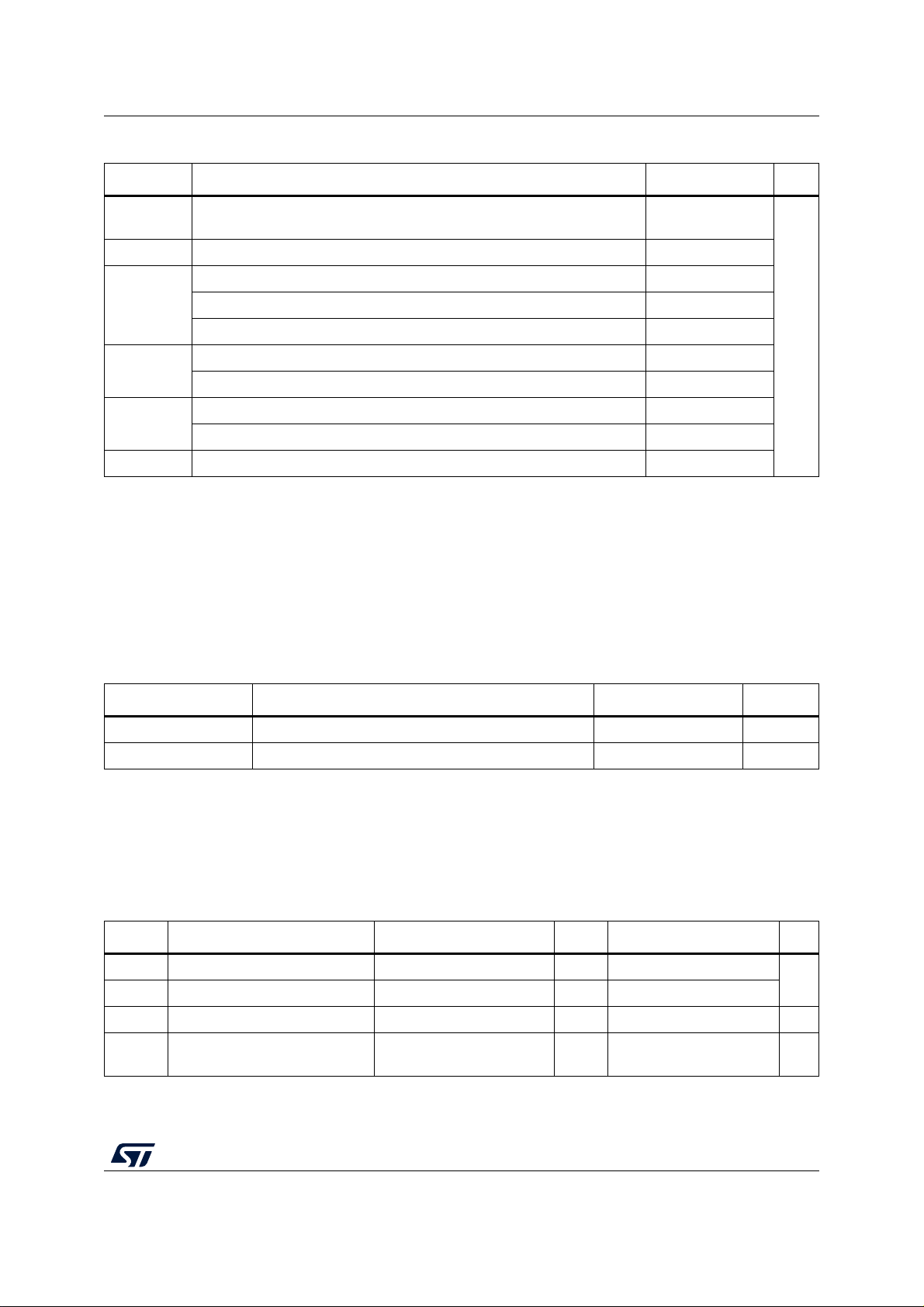
STM32G0B1xB/C/xE Electrical characteristics
Table 22. Current characteristics
Symbol Ratings Max Unit
I
V
DD/VDDA
/VDDIO2
I
V
SS/VSSA
Current into VDD/VDDA/VDDIO2 power pin (source)
Current out of VSS/VSSA ground pin (sink)
(1)
(1)
100
100
Output current sunk by any I/O and control pin except FT_f 15
I
IO(PIN)
Output current sunk by any FT_f pin 20
Output current sourced by any I/O and control pin 15
Total output current sunk by sum of all I/Os and control pins 80
I
IO(PIN)
I
INJ(PIN)
|I
INJ(PIN)
1. All main power (VDD/VDDA/VDDIO2, VBAT) and ground (VSS/VSSA) pins must always be connected to the external
power supplies, in the permitted range.
2. A positive injection is induced by V
exceeded. Refer also to Table 21: Voltage characteristics for the maximum allowed input voltage values.
3. Positive injection is not possible on these I/Os and does not occur for input voltages lower than the specified maximum
value.
4. On these I/Os, any current injection disturbs the analog performances of the device.
5. When several inputs are submitted to a current injection, the maximum |I
injected currents (instantaneous values).
Total output current sourced by sum of all I/Os and control pins 80
Injected current on a FT_xx pin -5 / NA
(2)
Injected current on a TT_a pin
|
Total injected current (sum of all I/Os and control pins)
> V
IN
(4)
(5)
while a negative injection is induced by VIN < VSS. I
DDIOx
|
is the absolute sum of the negative
INJ(PIN)
-5 / 0
INJ(PIN)
(3)
25
must never be
mA
Table 23. Thermal characteristics
Symbol Ratings Value Unit
T
STG
T
J
Storage temperature range –65 to +150 °C
Maximum junction temperature 150 °C
5.3 Operating conditions
5.3.1 General operating conditions
Table 24. General operating conditions
Symbol Parameter Conditions Min Max Unit
f
HCLK
f
PCLK
V
V
DDIO2
Internal AHB clock frequency - 0 64
Internal APB clock frequency - 0 64
Standard operating voltage - 1.7
DD
External supply voltage for
selected I/Os
-1.73.6V
(1)
MHz
3.6 V
DS13560 Rev 1 67/159
124
Page 68

Electrical characteristics STM32G0B1xB/C/xE
Table 24. General operating conditions (continued)
Symbol Parameter Conditions Min Max Unit
V
Analog supply voltage
DDA
For ADC and COMP
operation
For DAC operation 1.8 3.6
1.62 3.6
For VREFBUF operation 2.4 3.6
V
1. When RESET is released functionality is guaranteed down to V
2. The T
3. Temperature range digit in the order code. See Section 7: Ordering information.
Backup operating voltage - 1.55 3.6 V
BAT
Suffix 6
T
Ambient temperature
A
(2)
Suffix 3
Suffix 6
T
Junction temperature
J
Suffix 3
(max) applies to PD(max). At PD < PD(max) the ambient temperature is allowed to go higher than TA(max) provided
A
that the junction temperature TJ does not exceed TJ(max). Refer to Section 6.11: Thermal characteristics.
(3)
(3)
(3)
(3)
(3)
(3)
PDR
-40 85
-40 105
-40 125
-40 105
-40 125
-40 130
min.
5.3.2 Operating conditions at power-up / power-down
The parameters given in Table 25 are derived from tests performed under the ambient
temperature condition summarized in Table 24.
Table 25. Operating conditions at power-up / power-down
V
°CSuffix 7
°CSuffix 7
Symbol Parameter Conditions Min Max Unit
V
rising -
DD
t
VDD slew rate
VDD
falling; ULPEN = 0 10
V
DD
falling; ULPEN = 1 100 ms/V
V
DD
5.3.3 Embedded reset and power control block characteristics
The parameters given in Table 26 are derived from tests performed under the ambient
temperature conditions summarized in Table 24: General operating conditions.
Table 26. Embedded reset and power control block characteristics
Symbol Parameter Conditions
POR
PDR
V
BOR1
(2)
(2)
(2)
POR temporization when VDD crosses V
POR
V
DD
Power-on reset threshold - 1.62 1.66 1.70 V
Power-down reset threshold - 1.60 1.64 1.69 V
V
Brownout reset threshold 1
DD
V
DD
t
RSTTEMPO
V
V
(1)
Min Typ Max Unit
rising - 250 400 s
rising 2.05 2.10 2.18
falling 1.95 2.00 2.08
µs/V
V
68/159 DS13560 Rev 1
Page 69

STM32G0B1xB/C/xE Electrical characteristics
Table 26. Embedded reset and power control block characteristics (continued)
Symbol Parameter Conditions
V
V
BOR2
V
BOR3
V
BOR4
V
V
V
V
V
V
V
PVD0
PVD1
PVD2
PVD3
PVD4
PVD5
PVD6
Brownout reset threshold 2
Brownout reset threshold 3
Brownout reset threshold 4
Programmable voltage detector threshold 0
PVD threshold 1
PVD threshold 2
PVD threshold 3
PVD threshold 4
PVD threshold 5
PVD threshold 6
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
V
DD
Hysteresis in
continuous
V
hyst_POR_PDR
Hysteresis of V
POR
and V
PDR
Hysteresis in
other mode
V
hyst_BOR_PVD
I
DD(BOR_PVD)
1. Continuous mode means Run/Sleep modes, or temperature sensor enable in Low-power run/Low-power sleep modes.
2. Guaranteed by design.
Hysteresis of V
(2)
BOR and PVD consumption - - 1.1 1.6 µA
BORx
and V
PVDx
(1)
Min Typ Max Unit
rising 2.20 2.31 2.38
falling 2.10 2.21 2.28
rising 2.50 2.62 2.68
falling 2.40 2.52 2.58
rising 2.80 2.91 3.00
falling 2.70 2.81 2.90
rising 2.05 2.15 2.22
falling 1.95 2.05 2.12
rising 2.20 2.30 2.37
falling 2.10 2.20 2.27
rising 2.35 2.46 2.54
falling 2.25 2.36 2.44
rising 2.50 2.62 2.70
falling 2.40 2.52 2.60
rising 2.65 2.74 2.87
falling 2.55 2.64 2.77
rising 2.80 2.91 3.03
falling 2.70 2.81 2.93
rising 2.90 3.01 3.14
falling 2.80 2.91 3.04
-20-
mode
-30-
- - 100 - mV
V
V
V
V
V
V
V
V
V
V
mV
DS13560 Rev 1 69/159
124
Page 70

Electrical characteristics STM32G0B1xB/C/xE
MSv40169V1
1.185
1.19
1.195
1.2
1.205
1.21
1.215
1.22
1.225
1.23
1.235
-40 -20 0 20 40 60 80 100 120
V
°C
Mean Min Max
5.3.4 Embedded voltage reference
The parameters given in Table 27 are derived from tests performed under the ambient
temperature and supply voltage conditions summarized in Table 24: General operating
conditions.
Symbol Parameter Conditions Min Typ Max Unit
Table 27. Embedded internal voltage reference
V
REFINT
t
I
DD(VREFINTBUF)
T
V
V
V
1. The shortest sampling time can be determined in the application by multiple iterations.
2. Guaranteed by design.
S_vrefint
t
start_vrefint
V
REFINT
Coeff_vrefint
A
Coeff
V
DDCoeff
REFINT_DIV1
REFINT_DIV2
REFINT_DIV3
Internal reference voltage -40°C < TJ < 130°C 1.182 1.212 1.232 V
ADC sampling time when reading
(1)
the internal reference voltage
Start time of reference voltage
buffer when ADC is enable
V
buffer consumption from
REFINT
VDD when converted by ADC
Internal reference voltage spread
over the temperature range
-4
--812
- - 12.5 20
V
= 3 V - 5 7.5
DD
Temperature coefficient - - 30 50
Long term stability 1000 hours, T = 25 °C - 300 1000
Voltage coefficient 3.0 V < VDD < 3.6 V - 250 1200
1/4 reference voltage
1/2 reference voltage 49 50 51
-
3/4 reference voltage 74 75 76
Figure 17. V
vs. temperature
REFINT
(2)
--µs
24 25 26
(2)
(2)
(2)
(2)
(2)
(2)
µs
µA
mV
ppm/°C
ppm
ppm/V
%
V
REFINT
70/159 DS13560 Rev 1
Page 71

STM32G0B1xB/C/xE Electrical characteristics
5.3.5 Supply current characteristics
The current consumption is a function of several parameters and factors such as the
operating voltage, ambient temperature, I/O pin loading, device software configuration,
operating frequencies, I/O pin switching rate, program location in memory and executed
binary code.
The current consumption is measured as described in Figure 16: Current consumption
measurement scheme.
Typical and maximum current consumption
The MCU is placed under the following conditions:
• All I/O pins are in analog input mode
• All peripherals are disabled except when explicitly mentioned
• The Flash memory access time is adjusted with the minimum wait states number,
depending on the f
to CPU clock (HCLK) frequency” available in the RM0444 reference manual).
• When the peripherals are enabled f
• For Flash memory and shared peripherals f
Unless otherwise stated, values given in Table 29 through Table 36 are derived from tests
performed under ambient temperature and supply voltage conditions summarized in
Table 24: General operating conditions.
frequency (refer to the table “Number of wait states according
HCLK
= f
PCLK
HCLK
PCLK
= f
HCLK
= f
HCLKS
DS13560 Rev 1 71/159
124
Page 72

Electrical characteristics STM32G0B1xB/C/xE
Table 28. Current consumption in Run and Low-power run modes
at different die temperatures
(1)
Unit
C
mA
Symbol Parameter
Supply
current in
I
DD(Run)
Run mode
(from Flash
memory)
General f
Range 1;
PLL enabled;
= f
f
HCLK
HSE_bypass
(16 MHz),
= f
f
HCLK
(>16 MHz);
(3)
PLLRCLK
Range 2;
PLL enabled;
= f
f
HCLK
HSE_bypass
(16 MHz),
= f
f
HCLK
(>16 MHz);
(3)
PLLRCLK
Conditions Typ Max
HCLK
64 MHz
Fetch
from
25°C85°C125°C25°C85°C130°
(2)
8.6 8.8 9.4 9.0 9.1 9.7
56 MHz 7.5 7.8 8.3 7.9 8.0 8.6
48 MHz 6.7 7.0 7.6 7.1 7.2 7.8
32 MHz 4.6 4.8 5.4 4.8 5.0 5.5
Flash
memory
24 MHz 3.6 3.8 4.3 3.8 4.1 4.6
16 MHz 2.3 2.5 3.0 2.4 2.6 3.2
64 MHz
8.8 8.9 9.4 9.3 9.4 9.9
56 MHz 7.7 7.8 8.3 8.2 8.3 8.8
48 MHz 6.9 7.0 7.5 7.3 7.4 7.9
SRAM
32 MHz 4.7 4.8 5.3 5.0 5.1 5.6
24 MHz 3.6 3.8 4.3 4.1 4.2 4.7
16 MHz 2.3 2.4 2.9 2.5 2.6 3.2
16 MHz
8 MHz 1.0 1.1 1.6 1.3 1.4 2.1
2 MHz 0.3 0.4 0.9 0.6 0.9 1.4
16 MHz
8 MHz 1.0 1.1 1.6 1.3 1.5 2.1
Flash
memory
SRAM
1.8 2.0 2.4 2.2 2.3 2.9
1.9 2.0 2.5 2.3 2.4 3.0
2 MHz 0.3 0.4 0.9 0.6 0.9 1.4
2 MHz
280 415 950 585 845 1515
1 MHz 155 285 820 530 835 1315
Flash
memory
250 360 855 575 835 1495
SRAM
I
DD(LPRun)
Supply
current in
Low-power
run mode
PLL disabled;
= f
f
HCLK
HSE
bypass (> 32 kHz),
f
= f
HCLK
bypass (= 32 kHz);
(3)
LSE
500 kHz 90 220 750 475 795 1220
125 kHz 45 170 700 445 745 1190
32 kHz 30 155 695 430 720 1185
2 MHz
1 MHz 140 260 730 530 825 1300
500 kHz 80 205 650 475 780 1230
125 kHz 40 155 635 440 745 1200
32 kHz 30 135 625 415 715 1180
1. Based on characterization results, not tested in production.
2. Prefetch and cache enabled when fetching from Flash memory. Code compiled with high optimization for space in SRAM.
= 3.0 V for values in Typ columns and 3.6 V for values in Max columns, all peripherals disabled, cache enabled,
3. V
DD
prefetch disabled for code and data fetch from Flash and enabled from SRAM
72/159 DS13560 Rev 1
µA
Page 73

STM32G0B1xB/C/xE Electrical characteristics
Table 29. Typical current consumption in Run and Low-power run modes,
depending on code executed
Symbol Parameter
Supply
I
DD(Run)
current in
Run mode
General Code
Range 1;
= f
f
HCLK
64 MHz;
(2)
PLLRCLK
=
Range 2;
f
HCLK
= f
HSI16
=
16 MHz,
PLL disabled,
(2)
Conditions Typ
Unit
Reduced code
(3)
Fetch
from
25 °C 25 °C
(1)
8.70
Coremark 8.15 127
Dhrystone 2.1 8.00 125
Flash
memory
Fibonacci 7.30 114
While(1) loop 5.90 92
Reduced code
(3)
8.85 138
Coremark 9.10 142
Dhrystone 2.1 8.95 140
SRAM
Fibonacci 9.85 154
While(1) loop 8.85 138
Reduced code
(3)
2.45 153
mA
Coremark 1.90 119
Dhrystone 2.1 1.90 119
Flash
memory
Fibonacci 1.70 106
While(1) loop 1.35 84
Reduced code
(3)
2.10 131
Coremark 2.10 131
Typ
Unit
136
A/MHz
Dhrystone 2.1 2.05 128
SRAM
Fibonacci 2.25 141
While(1) loop 2.05 128
Reduced code
(3)
485
243
Coremark 475 238
Dhrystone 2.1 480 240
Flash
memory
Fibonacci 500 250
I
DD(LPRun)
Supply
current in
Low-power
run mode
f
= f
HCLK
HSI16
2 MHz;
PLL disabled,
(2)
/8 =
While(1) loop 515 258
Reduced code
(3)
490 245
A
Coremark 485 243
Dhrystone 2.1 480 240
SRAM
Fibonacci 510 255
While(1) loop 480 240
1. Prefetch and cache enabled when fetching from Flash. Code compiled with high optimization for space in SRAM.
VDD = 3.3 V, all peripherals disabled, cache enabled, prefetch disabled for execution in Flash and enabled in SRAM
2.
DS13560 Rev 1 73/159
A/MHz
124
Page 74

Electrical characteristics STM32G0B1xB/C/xE
3. Reduced code used for characterization results provided in Table 28.
Table 30. Current consumption in Sleep and Low-power sleep modes
Conditions Typ Max
Symbol Parameter
General
Voltage
scaling
Flash memory enabled;
= f
I
DD(Sleep)
Supply
current in
Sleep
mode
f
HCLK
(16 MHz; PLL
disabled),
f
HCLK
(>16 MHz; PLL
= f
bypass
HSE
PLLRCLK
Range 1
enabled);
All peripherals disabled
Range 2
Supply
I
DD(LPSleep)
current in
Low-power
sleep mode
1. Based on characterization results, not tested in production.
Flash memory disabled;
PLL disabled;
= f
f
HCLK
f
HCLK
bypass (> 32 kHz),
HSE
= f
bypass (= 32 kHz);
LSE
All peripherals disabled
f
HCLK
25°C85°C125°C25°C85°C130°
64 MHz 1.9 2.0 2.6 2.5 2.6 3.3
56 MHz 1.7 1.8 2.4 2.2 2.4 3.2
48 MHz 1.5 1.6 2.2 1.9 2.1 2.8
32 MHz 1.1 1.2 1.8 1.4 1.6 2.3
24 MHz 0.9 1.0 1.6 1.2 1.3 2.1
16 MHz 0.5 0.6 1.2 0.7 0.9 1.6
16 MHz 0.4 0.6 1.0 0.6 0.7 1.4
8 MHz 0.3 0.4 0.9 0.4 0.5 1.2
2 MHz 0.2 0.3 0.7 0.2 0.4 1.0
2 MHz 70 200 705 175 500 1325
1 MHz 48 175 685 145 438 1285
500 kHz 37 165 670 130 413 1255
125 kHz 28 155 665 105 388 1250
32 kHz 26 150 660 90 375 1210
(1)
Unit
C
mA
µA
Table 31. Current consumption in Stop 0 mode
Conditions Typ Max
Symbol Parameter
HSI kernel V
DD
1.8 V 290 370 675 370 470 850
2.4 V 295 370 680 370 470 870
Enabled
3 V 295 375 695 375 475 930
I
DD(Stop 0)
Supply
current in
Stop 0
3.6 V 300 380 695 375 475 1050
1.8 V 100 190 505 180 290 680
mode
2.4 V 100 195 510 180 290 685
Disabled
3 V 105 195 525 180 295 695
3.6 V 105 200 530 185 305 830
1. Based on characterization results, not tested in production.
(1)
Unit
25°C 85°C 125°C 25°C 85°C 130°C
µA
74/159 DS13560 Rev 1
Page 75

STM32G0B1xB/C/xE Electrical characteristics
Table 32. Current consumption in Stop 1 mode
Conditions Typ Max
Symbol Parameter
Flash
memory
RTC
(2)
1.8 V 2.9 25 105 - - -
2.4 V 3.1 26 110 - - -
Disabled
3.6 V 3.6 26 110 - - -
1.8 V 3.3 25 105 - - -
2.4 V 3.6 26 110 - - -
I
DD(Stop 1)
Supply
current in
Stop 1
Not
powered
Enabled
mode
3.6 V 4.2 27 110 - - -
1.8 V 7.0 30 110 - - -
2.4 V 7.3 30 115 - - -
Powered Disabled
3.6 V 7.8 31 115 - - -
1. Based on characterization results, not tested in production.
2. Clocked by LSI
(1)
V
25°C 85°C 125°C 25°C 85°C 130°C
DD
3 V 3.3 26 110 - - -
3 V 3.7 26 110 - - -
3 V 7.5 30 115 - - -
Unit
µA
Symbol Parameter
Supply current
I
DD(Standby)
in Standby
mode
Table 33. Current consumption in Standby mode
Conditions Typ Max
(2)
General V
RTC disabled
RTC enabled,
clocked by LSI;
IWDG enabled,
clocked by LSI
ULPEN = 0
1.8 V 0.1 2.1 9.4 0.8 14 45
2.4 V 0.1 2.5 11.5 1.2 17 54
3.0 V 0.2 3.0 13.5 1.4 18 64
3.6 V 0.3 3.5 16.0 1.8 21 74
1.8 V 0.4 2.3 9.7 2.0 15 45
2.4 V 0.5 2.8 11.5 2.5 18 55
3.0 V 0.7 3.4 14.0 3.0 20 64
3.6 V 0.9 4.0 16.0 3.3 23 75
1.8 V 0.3 2.3 9.6 2.1 14 45
2.4 V 0.4 2.7 11.5 2.3 17 54
3.0 V 0.5 3.3 13.5 2.6 19 64
3.6 V 0.7 3.8 16.0 3.0 22 74
1.8 V 0.7 2.0 9.4 - - -
2.4 V 0.9 2.4 11.0 - - -
3.0 V 1.1 2.9 13.5 - - -
3.6 V 1.3 3.4 15.5 - - -
25°C 85°C 125°C 25°C 85°C 130°C
DD
(1)
Unit
µA
DS13560 Rev 1 75/159
124
Page 76

Electrical characteristics STM32G0B1xB/C/xE
Table 33. Current consumption in Standby mode (continued)
Symbol Parameter
Conditions Typ Max
General V
Extra supply
I
DD(SRAM)
1. Based on characterization results, not tested in production.
2. Without SRAM retention and with ULPEN bit set
3. To be added to I
current to
retain SRAM
(3)
content
DD(Standby)
SRAM retention
enabled
as appropriate
1.8 V------
2.4 V------
3.0 V------
3.6 V------
25°C 85°C 125°C 25°C 85°C 130°C
DD
(1)
Unit
µA
Table 34. Current consumption in Shutdown mode
(1)
Unit
nA
Symbol Parameter
Supply current
I
DD(Shutdown)
in Shutdown
mode
Conditions Typ Max
RTC V
25 °C 85 °C 125 °C 25 °C 85 °C 130 °C
DD
1.8 V 23 840 7050 240 3210 39200
Disabled
2.4 V 38 965 8050 370 3910 44600
3.0 V 38 1100 9550 370 4700 51500
3.6 V 57 1350 11000 500 5700 59400
1.8 V 235 1050 7400 290 3850 47000
Enabled, clocked
by LSE bypass at
32.768 kHz
2.4 V 320 1250 8400 440 4690 53500
3.0 V 425 1500 9950 450 5640 61800
3.6 V 550 1850 11500 590 6840 71200
1. Based on characterization results, not tested in production.
Table 35. Current consumption in VBAT mode
Conditions Typ
Symbol Parameter
RTC V
Enabled, clocked by
LSE bypass at
32.768 kHz
Enabled, clocked by
LSE crystal at
32.768 kHz
I
DD(VBAT)
Supply current in
VBAT mode
Disabled
DD
25°C 85°C 125°C
1.8 V 195 416 2015
2.4 V 320 530 2366
3.0 V 492 635 2838
3.6 V 627 908 3339
1.8 V 130 325 1550
2.4 V 160 400 1800
3.0 V 210 500 2050
3.6 V 285 605 2400
1.8 V 4 160 1450
2.4 V 4 190 1700
3.0 V 4 220 1950
3.6 V 7 270 2250
Unit
nA
76/159 DS13560 Rev 1
Page 77

STM32G0B1xB/C/xE Electrical characteristics
I
SW
V
DDIOxfSW
C××=
I/O system current consumption
The current consumption of the I/O system has two components: static and dynamic.
I/O static current consumption
All the I/Os used as inputs with pull-up generate current consumption when the pin is
externally held low. The value of this current consumption can be simply computed by using
the pull-up/pull-down resistors values given in Table 55: I/O static characteristics.
For the output pins, any external pull-down or external load must also be considered to
estimate the current consumption.
Additional I/O current consumption is due to I/Os configured as inputs if an intermediate
voltage level is externally applied. This current consumption is caused by the input Schmitt
trigger circuits used to discriminate the input value. Unless this specific configuration is
required by the application, this supply current consumption can be avoided by configuring
these I/Os in analog mode. This is notably the case of ADC input pins which should be
configured as analog inputs.
Caution: Any floating input pin can also settle to an intermediate voltage level or switch inadvertently,
as a result of external electromagnetic noise. To avoid current consumption related to
floating pins, they must either be configured in analog mode, or forced internally to a definite
digital value. This can be done either by using pull-up/down resistors or by configuring the
pins in output mode.
I/O dynamic current consumption
In addition to the internal peripheral current consumption measured previously
(seeTable 36: Current consumption of peripherals , the I/Os used by an application also
contribute to the current consumption. When an I/O pin switches, it uses the current from
the I/O supply voltage to supply the I/O pin circuitry and to charge/discharge the capacitive
load (internal or external) connected to the pin:
where
I
is the current sunk by a switching I/O to charge/discharge the capacitive load
SW
V
f
C is the total capacitance seen by the I/O pin: C = C
is the I/O supply voltage
DDIOx
is the I/O switching frequency
SW
INT
+ C
EXT + CS
CS is the PCB board capacitance including the pad pin.
The test pin is configured in push-pull output mode and is toggled by software at a fixed
frequency.
DS13560 Rev 1 77/159
124
Page 78

Electrical characteristics STM32G0B1xB/C/xE
On-chip peripheral current consumption
The current consumption of the on-chip peripherals is given in the following table. The MCU
is placed under the following conditions:
• All I/O pins are in Analog mode
• The given value is calculated by measuring the difference of the current consumptions:
– when the peripheral is clocked on
– when the peripheral is clocked off
• Ambient operating temperature and supply voltage conditions summarized in Table 21:
Voltage characteristics
• The power consumption of the digital part of the on-chip peripherals is given in the
following table. The power consumption of the analog part of the peripherals (where
applicable) is indicated in each related section of the datasheet.
Peripheral Bus
IOPORT Bus IOPORT 0.5 0.4 0.3
GPIOA IOPORT 3.1 2.4 3.0
GPIOB IOPORT 2.9 2.3 3.0
GPIOC IOPORT 3.0 2.4 2.8
GPIOD IOPORT 2.7 2.2 2.5
GPIOE IOPORT 1.6 1.4 1.6
GPIOF IOPORT 2.8 2.3 2.6
Bus matrix AHB 0.5 0.5 0.5
All AHB Peripherals AHB 31 26 30
DMA1/DMAMUX AHB 5.1 4.3 4.9
CRC AHB 0.4 0.4 0.5
FLASH AHB 22 18 21
All APB peripherals APB 120 110 220
AHB to APB bridge
PWR APB 0.4 0.3 0.4
WWDG APB 0.4 0.4 0.4
DMA2 APB 1.5 1.3 1.5
TIM1 APB 7.6 6.3 7.2
TIM2 APB 5.2 4.3 4.9
TIM3 APB 4.7 3.9 4.3
TIM4 APB 4.4 3.7 4.2
TIM6 APB 1.2 1.0 1.1
TIM7 APB 0.8 0.7 0.8
TIM14 APB 1.4 1.2 1.3
Table 36. Current consumption of peripherals
Consumption in µA/MHz
Range 1 Range 2
(1)
APB 0.2 0.2 0.1
Low-power run
and sleep
78/159 DS13560 Rev 1
Page 79

STM32G0B1xB/C/xE Electrical characteristics
Table 36. Current consumption of peripherals (continued)
Consumption in µA/MHz
Peripheral Bus
Range 1 Range 2
TIM15 APB 4.2 3.5 3.9
TIM16 APB 2.7 2.3 2.5
TIM17 APB 0.8 0.7 0.7
LPTIM1 APB 3.3 2.7 3.1
LPTIM2 APB 3.2 2.7 3.1
I2C1 APB 3.6 3.0 3.3
I2C2 APB 3.4 2.8 3.2
I2C3 APB 0.9 0.7 0.8
SPI1 APB 2.2 1.9 2.1
SPI2 APB 2.1 1.7 2.0
SPI3 APB 1.4 1.2 1.3
USART1 APB 7.4 6.2 6.9
USART2 APB 7.4 6.2 7.0
USART3 APB 7.4 6.2 6.9
USART4 APB 2.1 1.8 2.0
USART5 APB 2.3 1.9 2.1
USART6 APB 2.2 1.8 2.1
LPUART1 APB 4.5 3.7 4.2
LPUART2 APB 4.9 4.1 4.6
ADC APB 2.4 2.0 2.3
DAC1 APB 1.9 1.6 1.8
Low-power run
and sleep
SYSCFG/VREFBUF/COMP APB 0.5 0.4 0.5
CEC APB 0.4 0.3 0.3
CRS APB 0.2 0.2 0.3
USB APB 3.3 2.7 3.0
FDCAN APB 16 13 15
UCPD1 APB 4.0 7.9 59.0
UCPD2 APB 4.0 7.9 59.5
1. The AHB to APB Bridge is automatically active when at least one peripheral is ON on the APB.
2. UCPDx are always clocked by HSI16.
DS13560 Rev 1 79/159
(2)
(2)
124
Page 80

Electrical characteristics STM32G0B1xB/C/xE
5.3.6 Wakeup time from low-power modes and voltage scaling transition times
The wakeup times given in Table 37 are the latency between the event and the execution of
the first user instruction.
Table 37. Low-power mode wakeup times
Symbol Parameter Conditions Typ Max Unit
Wakeup time from
t
WUSLEEP
Sleep to Run
-1111
mode
Transiting to Low-power-run-mode execution in Flash
memory not powered in Low-power sleep mode;
HCLK = HSI16 / 8 = 2 MHz
t
WULPSLEEP
Wakeup time from
Low-power sleep
mode
Transiting to Run-mode execution in Flash memory not
powered in Stop 0 mode;
HCLK = HSI16 = 16 MHz;
t
WUSTOP0
Wakeup time from
Stop 0
Regulator in Range 1 or Range 2
Transiting to Run-mode execution in SRAM or in Flash
memory powered in Stop 0 mode;
HCLK = HSI16 = 16 MHz;
Regulator in Range 1 or Range 2
(1)
CPU
cycles
11 1 4
5.6 6
µs
22.4
t
WUSTOP1
t
WUSTBY
Wakeup time from
Stop 1
Wakeup time from
Standby mode
Transiting to Run-mode execution in Flash memory not
powered in Stop 1 mode;
HCLK = HSI16 = 16 MHz;
Regulator in Range 1 or Range 2
Transiting to Run-mode execution in SRAM or in Flash
memory powered in Stop 1 mode;
HCLK = HSI16 = 16 MHz;
Regulator in Range 1 or Range 2
Transiting to Low-power-run-mode execution in Flash
memory not powered in Stop 1 mode;
HCLK = HSI16/8 = 2 MHz;
Regulator in low-power mode (LPR = 1 in PWR_CR1)
Transiting to Low-power-run-mode execution in SRAM or
in Flash memory powered in Stop 1 mode;
HCLK = HSI16 / 8 = 2 MHz;
Regulator in low-power mode (LPR = 1 in PWR_CR1)
Transiting to Run mode;
HCLK = HSI16 = 16 MHz;
Regulator in Range 1
9.0 11.2
57.5
µs
22 25.3
18 23.5
14.5 30 µs
80/159 DS13560 Rev 1
Page 81

STM32G0B1xB/C/xE Electrical characteristics
Table 37. Low-power mode wakeup times
(1)
(continued)
Symbol Parameter Conditions Typ Max Unit
t
WUSHDN
Wakeup time from
Shutdown mode
Wakeup time from
t
WULPRUN
1. Based on characterization results, not tested in production.
2. Time until REGLPF flag is cleared in PWR_SR2.
Low-power run
(2)
mode
Transiting to Run mode;
HCLK = HSI16 = 16 MHz;
Regulator in Range 1
Transiting to Run mode;
HSISYS = HSI16/8 = 2 MHz
Table 38. Regulator mode transition times
(1)
258 340 µs
57µs
Symbol Parameter Conditions Typ Max Unit
t
VOST
1. Based on characterization results, not tested in production.
2. Time until VOSF flag is cleared in PWR_SR2.
Transition times between regulator
Range 1 and Range 2
(2)
Table 39. Wakeup time using LPUART
HSISYS = HSI16 20 40 µs
(1)
Symbol Parameter Conditions Typ Max Unit
Wakeup time needed to calculate the maximum
t
WULPUART
LPUART baud rate allowing to wakeup up from Stop
mode when LPUART clock source is HSI16
1. Guaranteed by design.
Stop mode 0 - 1.7
Stop mode 1 - 8.5
5.3.7 External clock source characteristics
High-speed external user clock generated from an external source
In bypass mode the HSE oscillator is switched off and the input pin is a standard GPIO.
The external clock signal has to respect the I/O characteristics in Section 5.3.14. See
Figure 18 for recommended clock input waveform.
Table 40. High-speed external user clock characteristics
Symbol Parameter Conditions Min Typ Max Unit
f
HSE_ext
V
HSEH
V
HSEL
Voltage scaling
Range 1
User external clock source frequency
Voltage scaling
Range 2
OSC_IN input pin high level voltage - 0.7 V
OSC_IN input pin low level voltage - V
-848
-826
DDIO1
SS
(1)
-V
-0.3 V
DDIO1
DDIO1
µs
MHz
V
DS13560 Rev 1 81/159
124
Page 82

Electrical characteristics STM32G0B1xB/C/xE
MS19214V2
V
HSEH
t
f(HSE)
90%
10%
T
HSE
t
t
r(HSE)
V
HSEL
t
w(HSEH)
t
w(HSEL)
Table 40. High-speed external user clock characteristics
(1)
(continued)
Symbol Parameter Conditions Min Typ Max Unit
t
w(HSEH)
t
w(HSEL)
1. Guaranteed by design.
OSC_IN high or low time
Voltage scaling
Range 1
Voltage scaling
Range 2
7- -
18 - -
Figure 18. High-speed external clock source AC timing diagram
ns
Low-speed external user clock generated from an external source
In bypass mode the LSE oscillator is switched off and the input pin is a standard GPIO.
The external clock signal has to respect the I/O characteristics in Section 5.3.14. See
Figure 19 for recommended clock input waveform.
Table 41. Low-speed external user clock characteristics
Symbol Parameter Conditions Min Typ Max Unit
f
LSE_ext
V
LSEH
V
t
w(LSEH)
t
w(LSEL)
1. Guaranteed by design.
User external clock source frequency - - 32.768 1000 kHz
OSC32_IN input pin high level voltage - 0.7 V
OSC32_IN input pin low level voltage - V
LSEL
DDIO1
SS
OSC32_IN high or low time - 250 - - ns
(1)
-V
- 0.3 V
DDIO1
DDIO1
V
82/159 DS13560 Rev 1
Page 83

STM32G0B1xB/C/xE Electrical characteristics
MS19215V2
V
LSEH
t
f(LSE)
90%
10%
T
LSE
t
t
r(LSE)
V
LSEL
t
w(LSEH)
t
w(LSEL)
Figure 19. Low-speed external clock source AC timing diagram
High-speed external clock generated from a crystal/ceramic resonator
The high-speed external (HSE) clock can be supplied with a 4 to 48 MHz crystal/ceramic
resonator oscillator. All the information given in this paragraph are based on design
simulation results obtained with typical external components specified in Table 42. In the
application, the resonator and the load capacitors have to be placed as close as possible to
the oscillator pins in order to minimize output distortion and startup stabilization time. Refer
to the crystal resonator manufacturer for more details on the resonator characteristics
(frequency, package, accuracy).
Table 42. HSE oscillator characteristics
Symbol Parameter Conditions
(2)
(1)
Min Typ Max Unit
f
OSC_IN
R
Oscillator frequency - 4 8 48 MHz
Feedback resistor - - 200 - k
F
During startup
V
= 3 V,
DD
Rm = 30 ,
CL = 10 pF@8 MHz
= 3 V,
V
DD
Rm = 45 ,
CL = 10 pF@8 MHz
= 3 V,
V
I
DD(HSE)
HSE current consumption
DD
Rm = 30 ,
CL = 5 pF@48 MHz
= 3 V,
V
DD
Rm = 30 ,
CL = 10 pF@48 MHz
= 3 V,
V
DD
Rm = 30 ,
CL = 20 pF@48 MHz
G
t
SU(HSE)
1. Guaranteed by design.
2. Resonator characteristics given by the crystal/ceramic resonator manufacturer.
Maximum critical crystal
m
transconductance
(4)
Startup time VDD is stabilized - 2 - ms
Startup - - 1.5 mA/V
DS13560 Rev 1 83/159
(3)
--5.5
-0.44-
-0.45-
mA
-0.68-
-0.94-
-1.77-
124
Page 84

Electrical characteristics STM32G0B1xB/C/xE
MS19876V1
(1)
OSC_IN
OSC_OUT
R
F
Bias
controlled
gain
f
HSE
R
EXT
8 MHz
resonator
Resonator with integrated
capacitors
C
L1
C
L2
3. This consumption level occurs during the first 2/3 of the t
4. t
is the startup time measured from the moment it is enabled (by software) to a stabilized 8 MHz oscillation is
SU(HSE)
reached. This value is measured for a standard crystal resonator and it can vary significantly with the crystal manufacturer
SU(HSE)
startup time
For CL1 and CL2, it is recommended to use high-quality external ceramic capacitors in the
5 pF to 20 pF range (typ.), designed for high-frequency applications, and selected to match
the requirements of the crystal or resonator (see Figure 20). C
and C
L1
are usually the
L2
same size. The crystal manufacturer typically specifies a load capacitance which is the
series combination of C
and CL2. PCB and MCU pin capacitance must be included (10 pF
L1
can be used as a rough estimate of the combined pin and board capacitance) when sizing
C
and CL2.
L1
Note: For information on selecting the crystal, refer to the application note AN2867 “Oscillator
design guide for ST microcontrollers” available from the ST website www.st.com.
Figure 20. Typical application with an 8 MHz crystal
84/159 DS13560 Rev 1
1. R
value depends on the crystal characteristics.
EXT
Low-speed external clock generated from a crystal resonator
The low-speed external (LSE) clock can be supplied with a 32.768 kHz crystal resonator
oscillator. All the information given in this paragraph are based on design simulation results
obtained with typical external components specified in Table 43. In the application, the
resonator and the load capacitors have to be placed as close as possible to the oscillator
pins in order to minimize output distortion and startup stabilization time. Refer to the crystal
resonator manufacturer for more details on the resonator characteristics (frequency,
package, accuracy).
Page 85

STM32G0B1xB/C/xE Electrical characteristics
MS30253V2
OSC32_IN
OSC32_OUT
Drive
programmable
amplifier
f
LSE
32.768 kHz
resonator
Resonator with integrated
capacitors
C
L1
C
L2
Symbol Parameter Conditions
Table 43. LSE oscillator characteristics (f
(2)
= 32.768 kHz)
LSE
LSEDRV[1:0] = 00
Low drive capability
LSEDRV[1:0] = 01
Medium low drive capability
I
DD(LSE)
LSE current consumption
LSEDRV[1:0] = 10
Medium high drive capability
LSEDRV[1:0] = 11
High drive capability
LSEDRV[1:0] = 00
Low drive capability
LSEDRV[1:0] = 01
Gm
critmax
Maximum critical crystal
gm
Medium low drive capability
LSEDRV[1:0] = 10
Medium high drive capability
LSEDRV[1:0] = 11
High drive capability
(3)
t
SU(LSE)
1. Guaranteed by design.
2. Refer to the note and caution paragraphs below the table, and to the application note AN2867 “Oscillator design guide for
ST microcontrollers”.
3. t
SU(LSE)
reached. This value is measured for a standard crystal and it can vary significantly with the crystal manufacturer
Startup time VDD is stabilized - 2 - s
is the startup time measured from the moment it is enabled (by software) to a stabilized 32.768 kHz oscillation is
(1)
Min Typ Max Unit
-250-
-315-
-500-
-630-
--0.5
- - 0.75
--1.7
--2.7
nA
µA/V
Note: For information on selecting the crystal, refer to the application note AN2867 “Oscillator
Note: An external resistor is not required between OSC32_IN and OSC32_OUT and it is forbidden
design guide for ST microcontrollers” available from the ST website www.st.com.
Figure 21. Typical application with a 32.768 kHz crystal
to add one.
DS13560 Rev 1 85/159
124
Page 86

Electrical characteristics STM32G0B1xB/C/xE
5.3.8 Internal clock source characteristics
The parameters given in Table 44 are derived from tests performed under ambient
temperature and supply voltage conditions summarized in Table 24: General operating
conditions. The provided curves are characterization results, not tested in production.
High-speed internal (HSI16) RC oscillator
Table 44. HSI16 oscillator characteristics
Symbol Parameter Conditions Min Typ Max Unit
(1)
f
HSI16
Temp(HSI16)
VDD(HSI16)
HSI16 Frequency VDD=3.0 V, TA=30 °C 15.88 - 16.08 MHz
HSI16 oscillator frequency drift over
temperature
HSI16 oscillator frequency drift over
V
DD
TRIM HSI16 frequency user trimming step
(2)
D
HSI16
t
su(HSI16)
t
stab(HSI16)
I
DD(HSI16)
1. Based on characterization results, not tested in production.
2. Guaranteed by design.
Duty Cycle - 45 - 55 %
(2)
HSI16 oscillator start-up time - - 0.8 1.2 s
(2)
HSI16 oscillator stabilization time - - 3 5 s
(2)
HSI16 oscillator power consumption - - 155 190 A
= 0 to 85 °C -1 - 1 %
T
A
= -40 to 125 °C -2 - 1.5
T
A
%
VDD=1.62 V to 3.6 V -0.1 - 0.05 %
From code 127 to 128 -8 -6 -4
From code 63 to 64
From code 191 to 192
For all other code
increments
-5.8 -3.8 -1.8
0.2 0.3 0.4
%
86/159 DS13560 Rev 1
Page 87

STM32G0B1xB/C/xE Electrical characteristics
MSv39299V1
15.6
15.7
15.8
15.9
16
16.1
16.2
16.3
16.4
MHz
min mean max
+1%
-1%
+2%
-2%
+1.5%
-1.5%
-40 -20 0 20 40 60 80 100 120 °C
Figure 22. HSI16 frequency vs. temperature
High-speed internal 48 MHz (HSI48) RC oscillator
Table 45. HSI48 oscillator characteristics
Symbol Parameter Conditions Min Typ Max Unit
f
HSI48
HSI48 Frequency VDD=3.0V, TA=30°C - 48 - MHz
TRIM HSI48 user trimming step - - 0.11
USER TRIM
COVERAGE
HSI48 user trimming coverage ±32 steps ±3
DuCy(HSI48) Duty Cycle - 45
= 3.0 V to 3.6 V,
V
Accuracy of the HSI48 oscillator
ACC
HSI48_REL
over temperature (factory
calibrated)
D
(HSI48)
VDD
tsu(HSI48) HSI48 oscillator start-up time - - 2.5
IDD(HSI48)
jitter
N
T
P
jitter
T
HSI48 oscillator frequency drift
with V
DD
HSI48 oscillator power
consumption
Next transition jitter
Accumulated jitter on 28 cycles
Paired transition jitter
Accumulated jitter on 56 cycles
DD
= –15 to 85 °C
T
A
= 1.65 V to 3.6 V,
V
DD
= –40 to 125 °C
T
A
VDD = 3 V to 3.6 V - 0.025
VDD = 1.65 V to 3.6 V - 0.05
--340
(4)
(4)
--+/-0.15
--+/-0.25
(1)
(2)
(3)
(2)
(3)
±3.5
-55
--±3
--±4.5
(3)
(3)
(2)
(2)
(2)
(2)
(2)
0.18
-%
(2)
(3)
(3)
(3)
0.05
(3)
0.1
(2)
6
(2)
380
-ns
-ns
%
%
%
%
s
A
DS13560 Rev 1 87/159
124
Page 88

Electrical characteristics STM32G0B1xB/C/xE
MSv40989V1
-6
-4
-2
0
2
4
6
-50 -30 -10 10 30 50 70 90 110 130
Avg min max
°C
%
1. VDD = 3 V, TA = –40 to 125°C unless otherwise specified.
2. Guaranteed by design.
3. Guaranteed by characterization results.
4. Jitter measurement are performed without clock source activated in parallel.
Figure 23. HSI48 frequency versus temperature
Low-speed internal (LSI) RC oscillator
Table 46. LSI oscillator characteristics
Symbol Parameter Conditions Min Typ Max Unit
= 3.0 V, TA = 30 °C 31.04 - 32.96
V
DD
f
LSI
LSI frequency
V
= 1.62 V to 3.6 V, TA = -40 to
DD
125 °C
(2)
t
SU(LSI)
t
STAB(LSI)
I
DD(LSI)
1. Based on characterization results, not tested in production.
2. Guaranteed by design.
LSI oscillator start-up time - - 80 130 s
(2)
LSI oscillator stabilization time 5% of final frequency - 125 180 s
LSI oscillator power
(2)
consumption
- - 110 180 nA
(1)
kHz
29.5 - 34
88/159 DS13560 Rev 1
Page 89

STM32G0B1xB/C/xE Electrical characteristics
5.3.9 PLL characteristics
The parameters given in Table 47 are derived from tests performed under temperature and
V
supply voltage conditions summarized in Table 24: General operating conditions.
DD
Table 47. PLL characteristics
Symbol Parameter Conditions Min Typ Max Unit
f
PLL_IN
D
PLL_IN
PLL input clock frequency
PLL input clock duty cycle - 45 - 55 %
(2)
-2.66-16MHz
Voltage scaling Range 1 3.09 - 122
f
PLL_P_OUT
PLL multiplier output clock P
Voltage scaling Range 2 3.09 - 40
Voltage scaling Range 1 12 - 128
f
PLL_Q_OUT
PLL multiplier output clock Q
Voltage scaling Range 2 12 - 33
Voltage scaling Range 1 12 - 64
f
PLL_R_OUT
PLL multiplier output clock R
Voltage scaling Range 2 12 - 16
(1)
MHz
MHz
MHz
f
VCO_OUT
t
LOCK
Jitter
PLL VCO output
Voltage scaling Range 2 96 - 128
PLL lock time - - 15 40 s
RMS cycle-to-cycle jitter
-50-
System clock 56 MHz
RMS period jitter - 40 -
VCO freq = 96 MHz - 200 260
Voltage scaling Range 1 96 - 344
I
DD(PLL)
PLL power consumption
(1)
on V
DD
VCO freq = 344 MHz - 520 650
1. Guaranteed by design.
2. Take care of using the appropriate division factor M to obtain the specified PLL input clock values. The M factor is shared
between the two PLLs.
5.3.10 Flash memory characteristics
Table 48. Flash memory characteristics
Symbol Parameter Conditions Typ Max Unit
t
prog
64-bit programming time - 85 125 µs
Normal programming 2.7 4.6
t
prog_row
Row (32 double word) programming time
Fast programming 1.7 2.8
Normal programming 21.8 36.6
t
prog_page
t
ERASE
t
prog_bank
t
ME
Page (2 Kbyte) programming time
Fast programming 13.7 22.4
Page (2 Kbyte) erase time - 22.0 40.0
Bank (512 Kbyte
(2)
) programming time
Normal programming 2.8 4.7
Fast programming 1.8 2.9
Mass erase time - 22.1 40.1 ms
(1)
MHz
±ps
AVCO freq = 192 MHz - 300 380
ms
s
DS13560 Rev 1 89/159
124
Page 90

Electrical characteristics STM32G0B1xB/C/xE
Table 48. Flash memory characteristics
(1)
(continued)
Symbol Parameter Conditions Typ Max Unit
Programming 3 -
I
DD(FlashA)
Average consumption from V
DD
Mass erase 5 -
I
DD(FlashP)
Maximum current (peak)
Programming, 2 µs peak
duration
7-
Erase, 41 µs peak duration 7 -
1. Guaranteed by design.
2. Values provided also apply to devices with less Flash memory than one 512 Kbyte bank
Symbol Parameter Conditions Min
N
t
RET
END
Endurance TA = -40 to +105 °C 10 kcycles
Data retention
Table 49. Flash memory endurance and data retention
1 kcycle
1 kcycle
1 kcycle
10 kcycles
10 kcycles
10 kcycles
(2)
at TA = 85 °C 30
(2)
at TA = 105 °C 15
(2)
at TA = 125 °C 7
(2)
at TA = 55 °C 30
(2)
at TA = 85 °C 15
(2)
at TA = 105 °C 10
(1)
Unit
Years
mAPage erase 3 -
mA
1. Guaranteed by characterization results.
2. Cycling performed over the whole temperature range.
5.3.11 EMC characteristics
Susceptibility tests are performed on a sample basis during device characterization.
Functional EMS (electromagnetic susceptibility)
While a simple application is executed on the device (toggling 2 LEDs through I/O ports).
the device is stressed by two electromagnetic events until a failure occurs. The failure is
indicated by the LEDs:
• Electrostatic discharge (ESD) (positive and negative) is applied to all device pins until
a functional disturbance occurs. This test is compliant with the IEC 61000-4-2 standard.
• FTB: A Burst of Fast Transient voltage (positive and negative) is applied to V
V
through a 100 pF capacitor, until a functional disturbance occurs. This test is
SS
compliant with the IEC 61000-4-4 standard.
A device reset allows normal operations to be resumed.
The test results are given in Table 50. They are based on the EMS levels and classes
defined in application note AN1709.
DD
and
90/159 DS13560 Rev 1
Page 91

STM32G0B1xB/C/xE Electrical characteristics
Symbol Parameter Conditions
V
FESD
V
EFTB
Voltage limits to be applied on any I/O pin to
induce a functional disturbance
Fast transient voltage burst limits to be applied
through 100 pF on VDD and V
functional disturbance
Table 50. EMS characteristics
= 3.3 V, TA = +25 °C,
V
DD
f
= 64 MHz, LQFP100,
HCLK
conforming to IEC 61000-4-2
VDD = 3.3 V, TA = +25 °C,
pins to induce a
SS
f
= 64 MHz, LQFP100,
HCLK
conforming to IEC 61000-4-4
Designing hardened software to avoid noise problems
EMC characterization and optimization are performed at component level with a typical
application environment and simplified MCU software. It should be noted that good EMC
performance is highly dependent on the user application and the software in particular.
Therefore it is recommended that the user applies EMC software optimization and
prequalification tests in relation with the EMC level requested for his application.
Software recommendations
The software flowchart must include the management of runaway conditions such as:
• corrupted program counter
• unexpected reset
• critical data corruption (for example control registers)
Level/
Class
2B
5A
Prequalification trials
Most of the common failures (unexpected reset and program counter corruption) can be
reproduced by manually forcing a low state on the NRST pin or the Oscillator pins for 1
second.
To complete these trials, ESD stress can be applied directly on the device, over the range of
specification values. When unexpected behavior is detected, the software can be hardened
to prevent unrecoverable errors occurring (see application note AN1015).
Electromagnetic Interference (EMI)
The electromagnetic field emitted by the device are monitored while a simple application is
executed (toggling 2 LEDs through the I/O ports). This emission test is compliant with
IEC 61967-2 standard which specifies the test board and the pin loading.
DS13560 Rev 1 91/159
124
Page 92

Electrical characteristics STM32G0B1xB/C/xE
Table 51. EMI characteristics
Symbol Parameter Conditions
0.1 MHz to 30 MHz 9
VDD = 3.6 V, TA = 25 °C,
S
EMI
Peak level
LQFP100 package
compliant with IEC 61967-2
30 MHz to 130 MHz 16
130 MHz to 1 GHz 4
1 GHz to 2 GHz 8
EMI level 2.5 -
5.3.12 Electrical sensitivity characteristics
Based on three different tests (ESD, LU) using specific measurement methods, the device is
stressed in order to determine its performance in terms of electrical sensitivity.
Electrostatic discharge (ESD)
Electrostatic discharges (a positive then a negative pulse separated by 1 second) are
applied to the pins of each sample according to each pin combination. The sample size
depends on the number of supply pins in the device (3 parts × (n+1) supply pins). This test
conforms to the ANSI/JEDEC standard.
Table 52. ESD absolute maximum ratings
Monitored
frequency band
Max vs.
[f
HSE/fHCLK
]
8 MHz / 64 MHz
Unit
dBµV
Symbol Ratings Conditions Class
V
ESD(HBM)
V
ESD(CDM)
1. Based on characterization results, not tested in production.
Electrostatic discharge voltage
(human body model)
Electrostatic discharge voltage
(charge device model)
TA = +25 °C, conforming to
ANSI/ESDA/JEDEC JS-001
TA = +25 °C, conforming to
ANSI/ESDA/JEDEC JS-002
2 2000
C2a 250
Maximum
(1)
value
Static latch-up
Two complementary static tests are required on six parts to assess the latch-up
performance:
• A supply overvoltage is applied to each power supply pin.
• A current is injected to each input, output and configurable I/O pin.
These tests are compliant with EIA/JESD 78A IC latch-up standard.
Symbol Parameter Conditions Class
LU Static latch-up class T
Table 53. Electrical sensitivity
= +125 °C conforming to JESD78 II Level A
A
Unit
V
92/159 DS13560 Rev 1
Page 93

STM32G0B1xB/C/xE Electrical characteristics
5.3.13 I/O current injection characteristics
As a general rule, current injection to the I/O pins, due to external voltage below VSS or
above V
product operation. However, in order to give an indication of the robustness of the
microcontroller in cases when abnormal injection accidentally happens, susceptibility tests
are performed on a sample basis during device characterization.
Functional susceptibility to I/O current injection
While a simple application is executed on the device, the device is stressed by injecting
current into the I/O pins programmed in floating input mode. While current is injected into
the I/O pin, one at a time, the device is checked for functional failures.
The failure is indicated by an out-of-range parameter: ADC error above a certain limit
(higher than 5 LSB TUE), induced leakage current on adjacent pins out of conventional
limits (-5 µA/+0 µA range) or other functional failure (for example reset occurrence or
oscillator frequency deviation).
Negative induced leakage current is caused by negative injection and positive induced
leakage current is caused by positive injection.
(for standard, 3.3 V-capable I/O pins) should be avoided during normal
DDIOx
Table 54. I/O current injection susceptibility
(1)
Symbol Description
All except PA4, PA5, PA6, PB0,
I
INJ
1. Based on characterization results, not tested in production.
Injected current on
pin
PB3, and PC0
PA4 , PA 5 -5 0 mA
PA6, PB0, PB3, and PC0 0 N/A mA
Functional susceptibility
Negative
injection
-5 N/A mA
Positive
injection
Unit
DS13560 Rev 1 93/159
124
Page 94

Electrical characteristics STM32G0B1xB/C/xE
5.3.14 I/O port characteristics
General input/output characteristics
Unless otherwise specified, the parameters given in Table 55 are derived from tests
performed under the conditions summarized in Table 24: General operating conditions. All
I/Os are designed as CMOS- and TTL-compliant.
Symbol Parameter Conditions Min Typ Max Unit
I/O input low level
(1)
V
IL
voltage
I/O input high level
(1)
V
IH
voltage
(3)
V
I/O input hysteresis
hys
Table 55. I/O static characteristics
All
except
1.62 V < V
FT_c
2 V < V
FT_c
DDIOx
1.62 V < V
All
except
1.62 V < V
FT_c
FT_c 1.62 V < V
TT_xx,
FT_xx,
1.62 V < V
NRST
< 3.6 V - -
DDIOx
< 2.7 V - - 0.3 x V
< 2.7 V - - 0.25 x V
DDIOx
< 3.6 V
DDIOx
< 3.6 V 0.7 x V
DDIOx
< 3.6 V - 200 - mV
DDIOx
0.7 x V
+ 0.26
DDIOx
2)
DDIOx
DDIOx
(3)
0.3 x V
0.39 x V
- 0.06
(
--
--
-5
DDIOx
(2)
DDIOx
DDIOx
(3)
DDIOx
V
V0.49 x V
FT_xx
except
FT_c
and
FT_d
I
lkg
Input leakage
(3)
current
FT_c
FT_d
TT_a
Weak pull-up
R
R
1. Refer to Figure 24: I/O input characteristics.
equivalent resistor
PU
(5)
Weak pull-down
PD
equivalent resistor
C
I/O pin capacitance - - 5 - pF
IO
(5)
VIN = V
VIN = V
SS
DDIOx
2. Tested in production.
3. Guaranteed by design.
V
0 < V
IN
DDIOx
V
VIN V
DDIOx
V
+1 V < VIN
DDIOx
(3)
5.5 V
0 < V
V
IN
DDIOx
< VIN 5 V - - 3000
V
DDIOx
0 < VIN V
V
DDIOx
0 < V
V
DDIOx
V
DDIOx
DDIOx
< VIN 5.5 V - - 9000
V
IN
DDIOx
< VIN
+ 0.3 V
+1 V - - 600
DDIOx
--±70
- - 150
- - 2000
- - 4500
--±150
- - 2000
25 40 55 k
25 40 55 k
(4)
(4)
(4)
(4)
(4)
nA
94/159 DS13560 Rev 1
Page 95

STM32G0B1xB/C/xE Electrical characteristics
MSv47925V1
1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 3.2 3.4 3.6
0
0.5
1
1.5
2
2.5
3
Minimum required
logic level 1 zone
Minimum required
logic level 0 zone
V
IHmin
= 0.7 V
DDIO
(CMOS standard requirement)
V
ILmax
= 0.3 V
DDIO
(CMOS standard requirement)
Undefined input range
V
IHmin
= 0.49 V
DDIO
+ 0.26
V
ILmax
= 0.39 V
DDIO
- 0.06
V
IN
(V)
V
DDIO
(V)
TTL standard requirement
TTL standard requirement
Device characteristics
Test thresholds
4. This value represents the pad leakage of the I/O itself. The total product pad leakage is provided by this formula:
I
Total_Ileak_max
= 10 µA + [number of I/Os where VIN is applied on the pad] I
lkg
(Max).
5. Pull-up and pull-down resistors are designed with a true resistance in series with a switchable PMOS/NMOS. This
PMOS/NMOS contribution to the series resistance is minimal (~10% order).
All I/Os are CMOS- and TTL-compliant (no software configuration required). Their
characteristics cover more than the strict CMOS-technology or TTL parameters, as shown
in Figure 24.
Figure 24. I/O input characteristics
Characteristics of FT_e I/Os
The following table and figure specify input characteristics of FT_e I/Os.
Symbol Parameter Conditions Min Typ Max Unit
I
INJ
V
DDIO1-VIN
R
d
Injected current on pin - - - 5 mA
Voltage over V
Diode dynamic serial resistor I
Table 56. Input characteristics of FT_e I/Os
I
DDIO1
= 5 mA - - 2 V
INJ
= 5 mA - - 300
INJ
DS13560 Rev 1 95/159
124
Page 96

Electrical characteristics STM32G0B1xB/C/xE
MSv63112V1
0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2
0
1
2
3
4
5
I
INJ
(mA)
V
IN
– V
DDIO1
(V)
-40°C
25°C 125°C
Figure 25. Current injection into FT_e input with diode active
Output driving current
The GPIOs (general purpose input/outputs) can sink or source up to ±8 mA, and up to
±15 mA with relaxed V
OL/VOH
.
In the user application, the number of I/O pins which can drive current must be limited to
respect the absolute maximum rating specified in Section 5.2:
• The sum of the currents sourced by all the I/Os on V
consumption of the MCU sourced on V
I
(see Table 21: Voltage characteristics).
VDD
• The sum of the currents sunk by all the I/Os on V
the MCU sunk on V
, cannot exceed the absolute maximum rating I
SS
cannot exceed the absolute maximum rating
DD,
SS
, plus the maximum consumption of
plus the maximum
DDIO1,
(see Table 21:
VSS
Voltage characteristics).
Output voltage levels
Unless otherwise specified, the parameters given in the table below are derived from tests
performed under the ambient temperature and supply voltage conditions summarized in
Table 24: General operating conditions. All I/Os are CMOS- and TTL-compliant (FT OR TT
unless otherwise specified).
96/159 DS13560 Rev 1
Page 97

STM32G0B1xB/C/xE Electrical characteristics
Table 57. Output voltage characteristics
(1)
Symbol Parameter Conditions Min Max Unit
V
Output low level voltage for an I/O pin CMOS port
OL
(2)
-0.4
|IIO| = 2 mA for FT_c I/Os
V
V
Output high level voltage for an I/O pin V
OH
(3)
Output low level voltage for an I/O pin TTL port
OL
= 8 mA for other I/Os
2.7 V
V
DDIOx
(2)
- 0.4 -
DDIOx
-0.4
|IIO| = 2 mA for FT_c I/Os
(3)
V
OH
V
V
OH
V
V
OH
V
OLFM+
1. The IIO current sourced or sunk by the device must always respect the absolute maximum rating specified in Table 21:
Voltage characteristics, and the sum of the currents sourced or sunk by all the I/Os (I/O ports and control pins) must always
respect the absolute maximum ratings I
2. TTL and CMOS outputs are compatible with JEDEC standards JESD36 and JESD52.
3. Guaranteed by design.
Output high level voltage for an I/O pin 2.4 -
(3)
Output low level voltage for an I/O pin All I/Os except FT_c
OL
(3)
Output high level voltage for an I/O pin V
(3)
Output low level voltage for an I/O pin |IIO| = 1 mA for FT_c I/Os
OL
(3)
Output high level voltage for an I/O pin V
Output low level voltage for an FT I/O
(3)
pin in FM+ mode (FT I/O with _f option)
.
IO
= 8 mA for other I/Os
2.7 V
V
DDIOx
= 15 mA
|I
IO|
V
2.7 V
DDIOx
= 3 mA for other I/Os
1.62 V
V
DDIOx
= 20 mA
|I
IO|
V
2.7 V
DDIOx
= 9 mA
|I
IO|
1.62 V
V
DDIOx
-1.3
- 1.3 -
DDIOx
-0.4
- 0.45 -
DDIOx
-0.4
-0.4
V
Input/output AC characteristics
The definition and values of input/output AC characteristics are given in Figure 26 and
Table 58, respectively.
Unless otherwise specified, the parameters given are derived from tests performed under
the ambient temperature and supply voltage conditions summarized in Table 24: General
operating conditions.
Table 58. I/O AC characteristics
Speed Symbol Parameter Conditions Min Max Unit
C=50 pF, 2.7 V V
Fmax Maximum frequency
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
00
C=10 pF, 1.6 V V
C=50 pF, 2.7 V V
Tr/Tf Output rise and fall time
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
C=10 pF, 1.6 V V
(1)(2)
3.6 V - 2
DDIOx
2.7 V - 0.35
DDIOx
3.6 V - 3
DDIOx
2.7 V - 0.45
DDIOx
3.6 V - 100
DDIOx
2.7 V - 225
DDIOx
3.6 V - 75
DDIOx
2.7 V - 150
DDIOx
MHz
ns
DS13560 Rev 1 97/159
124
Page 98

Electrical characteristics STM32G0B1xB/C/xE
Table 58. I/O AC characteristics
(1)(2)
(continued)
Speed Symbol Parameter Conditions Min Max Unit
C=50 pF, 2.7 V V
Fmax Maximum frequency
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
01
C=10 pF, 1.6 V V
C=50 pF, 2.7 V V
Tr/Tf Output rise and fall time
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
C=10 pF, 1.6 V V
C=50 pF, 2.7 V V
Fmax Maximum frequency
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
10
C=10 pF, 1.6 V V
C=50 pF, 2.7 V V
Tr/Tf Output rise and fall time
C=50 pF, 1.6 V V
C=10 pF, 2.7 V V
C=10 pF, 1.6 V V
C=30 pF, 2.7 V V
Fmax Maximum frequency
C=30 pF, 1.6 V V
C=10 pF, 2.7 V V
11
C=10 pF, 1.6 V V
C=30 pF, 2.7 V V
Tr/Tf Output rise and fall time
C=30 pF, 1.6 V V
C=10 pF, 2.7 V V
C=10 pF, 1.6 V V
Fm+
1. The I/O speed is configured using the OSPEEDRy[1:0] bits. The Fm+ mode is configured in the SYSCFG_CFGR1 register.
Refer to the RM0444 reference manual for a description of GPIO Port configuration register.
2. Guaranteed by design.
3. This value represents the I/O capability but the maximum system frequency is limited to 64 MHz.
4. The fall time is defined between 70% and 30% of the output waveform, according to I
Fmax Maximum frequency
Tf Output fall time
(4)
C=50 pF, 1.6 V V
3.6 V - 10
DDIOx
2.7 V - 2
DDIOx
3.6 V - 15
DDIOx
2.7 V - 2.5
DDIOx
3.6 V - 30
DDIOx
2.7 V - 60
DDIOx
3.6 V - 15
DDIOx
2.7 V - 30
DDIOx
3.6 V - 30
DDIOx
2.7 V - 15
DDIOx
3.6 V - 60
DDIOx
2.7 V - 30
DDIOx
3.6 V - 11
DDIOx
2.7 V - 22
DDIOx
3.6 V - 4
DDIOx
2.7 V - 8
DDIOx
3.6 V - 60
DDIOx
2.7 V - 30
DDIOx
3.6 V - 80
DDIOx
2.7 V - 40
DDIOx
3.6 V - 5.5
DDIOx
2.7 V - 11
DDIOx
3.6 V - 2.5
DDIOx
2.7 V - 5
DDIOx
3.6 V
DDIOx
2
C specification.
MHz
MHz
MHz
(3)
-1MHz
-5ns
ns
ns
ns
98/159 DS13560 Rev 1
Page 99

STM32G0B1xB/C/xE Electrical characteristics
MS32132V2
T
10%
50%
90%
10%
50%
90%
Maximum frequency is achieved if (t + t (≤ 2/3)T and if the duty cycle is (45-55%)
when loaded by the specified capacitance.
r
f
r(IO)out
t
f(IO)out
t
Figure 26. I/O AC characteristics definition
1. Refer to Table 58: I/O AC characteristics.
5.3.15 NRST input characteristics
The NRST input driver uses CMOS technology. It is connected to a permanent
pull-up resistor, R
Unless otherwise specified, the parameters given in the following table are derived from
tests performed under the ambient temperature and supply voltage conditions summarized
in Table 24: General operating conditions.
.
PU
Table 59. NRST pin characteristics
(1)
(1)
Symbol Parameter Conditions Min Typ Max Unit
V
IL(NRST)
V
IH(NRST)
V
hys(NRST)
R
PU
V
F(NRST)
V
NF(NRST)
1. Guaranteed by design.
2. The pull-up is designed with a true resistance in series with a switchable PMOS. This PMOS contribution to the series
resistance is minimal (~10% order)
NRST input low level
voltage
NRST input high level
voltage
NRST Schmitt trigger
voltage hysteresis
Weak pull-up
equivalent resistor
NRST input filtered
pulse
NRST input not filtered
pulse
(2)
.
VIN = V
1.7 V V
- - - 0.3 x V
- 0.7 x V
DDIO1
--
DDIO1
--200-mV
SS
25 40 55 k
---70ns
3.6 V 350 - - ns
DD
V
DS13560 Rev 1 99/159
124
Page 100

Electrical characteristics STM32G0B1xB/C/xE
MS19878V3
R
PU
V
DD
Internal reset
External
reset circuit
(1)
NRST
(2)
Filter
0.1 μF
Figure 27. Recommended NRST pin protection
1. The reset network protects the device against parasitic resets.
2. The user must ensure that the level on the NRST pin can go below the V
Table 59: NRST pin characteristics. Otherwise the reset will not be taken into account by the device.
3. The external capacitor on NRST must be placed as close as possible to the device.
max level specified in
IL(NRST)
5.3.16 Analog switch booster
Table 60. Analog switch booster characteristics
Symbol Parameter Min Typ Max Unit
V
DD
t
SU(BOOST)
I
DD(BOOST)
1. Guaranteed by design.
Supply voltage 1.62 V - 3.6 V
Booster startup time - - 240 µs
Booster consumption for
1.62 V V
2.0 V
DD
Booster consumption for
2.0 V V
2.7 V
DD
Booster consumption for
2.7 V V
3.6 V
DD
--250
--500
--900
5.3.17 Analog-to-digital converter characteristics
Unless otherwise specified, the parameters given in Table 61 are preliminary values derived
from tests performed under ambient temperature, f
conditions summarized in Table 24: General operating conditions.
Note: It is recommended to perform a calibration after each power-up.
Symbol Parameter Conditions
Table 61. ADC characteristics
(2)
frequency and V
PCLK
(1)
Min Typ Max Unit
(1)
supply voltage
DDA
µA
V
DDA
V
REF+
100/159 DS13560 Rev 1
Analog supply voltage - 1.62 - 3.6 V
Positive reference
voltage
2 V 2 - V
V
DDA
< 2 V V
V
DDA
DDA
DDA
V
 Loading...
Loading...