

Datasheet uPSD3312D-40T6, uPSD3312DV-40T6, uPSD3333D-40T6, uPSD3333DV-40T6, uPSD3333D-40U6 Datasheet (ST)
...
查询UPSD3312D-40T6T供应商
Fast 8032 MCU with Programmable Logic
FEAT URES SUM MARY
■ FAST 8-BIT TURBO 8032 MCU, 40MHz
– Advanced core, 4-clocks per instruction
– 10 MIPs peak performance at 40MHz (5V)
– JTAG Debug and In-System
Programming
– Branch Cache & 6 instruction Prefetch
Queue
– Dual XDATA pointers with auto incr & decr
– Compatible with 3rd party 8051 tools
■ DUAL FLASH MEMORIES WITH MEMORY
MANAGEMENT
– Place either memory into 8032 program
address space or data address space
– READ-while-WRITE operation for In-
Application Programming and EEPR OM
emulation
– Single voltage program and erase
– 100K guarante ed eras e cycle s, 15-year
retention
■ CLOCK, RESET, AND SUPPLY
MANAGEMENT
– SRAM is Battery Backup capable
– Flexible 8-level CPU clock divider register
– Normal, Idle, and Power Down Modes
– Power-on and Low Voltage reset
supervisor
– Programmable Watchdog Timer
■ PROGRAMMABLE LOGIC, GENERAL
PURPOSE
– 16 macrocells
– Create shifters, sta te machines, chip-
selects, glue-logic to keypads, panels,
LCDs, others
■ COMMUNICATION INTERFACES
2
C Master/Slave controller, 833KHz
–I
– SPI Master controller, 10MHz
– Two UARTs with independent baud rate
– IrDA protocol support up to 115K baud
– Up to 46 I/O, 5V tolerant on 3.3V
uPSD33xxV
uPSD33xx
Turbo Series
PRELIMINARY DATA
Figure 1. Packages
TQFP52 (T)
52-lead, Thin,
Quad, Flat
TQFP80 (U)
80-lead, Thin,
Quad, Flat
■ A/D CONVERTER
– Eight Channels, 10-bit resolution, 6µs
■ TIMERS AND INTERRUPTS
– Three 8032 standard 16-bit timers
– Programmable Counter Array (PCA), six
16-bit modules for PWM, CAPCOM, and
timers
– 8/10/16-bit PWM operation
– 11 Interrupt sources with two external
interrupt pins
■ OPERATING VOLTAGE SOURCE (±10%)
– 5V devices use both 5.0V and 3.3V
sources
– 3.3V devices use only 3.3V source
January 2005
This is preliminary information on a new product now in development or undergoing evaluation. Details are subject to change without notice.
1/231
uPSD33xx
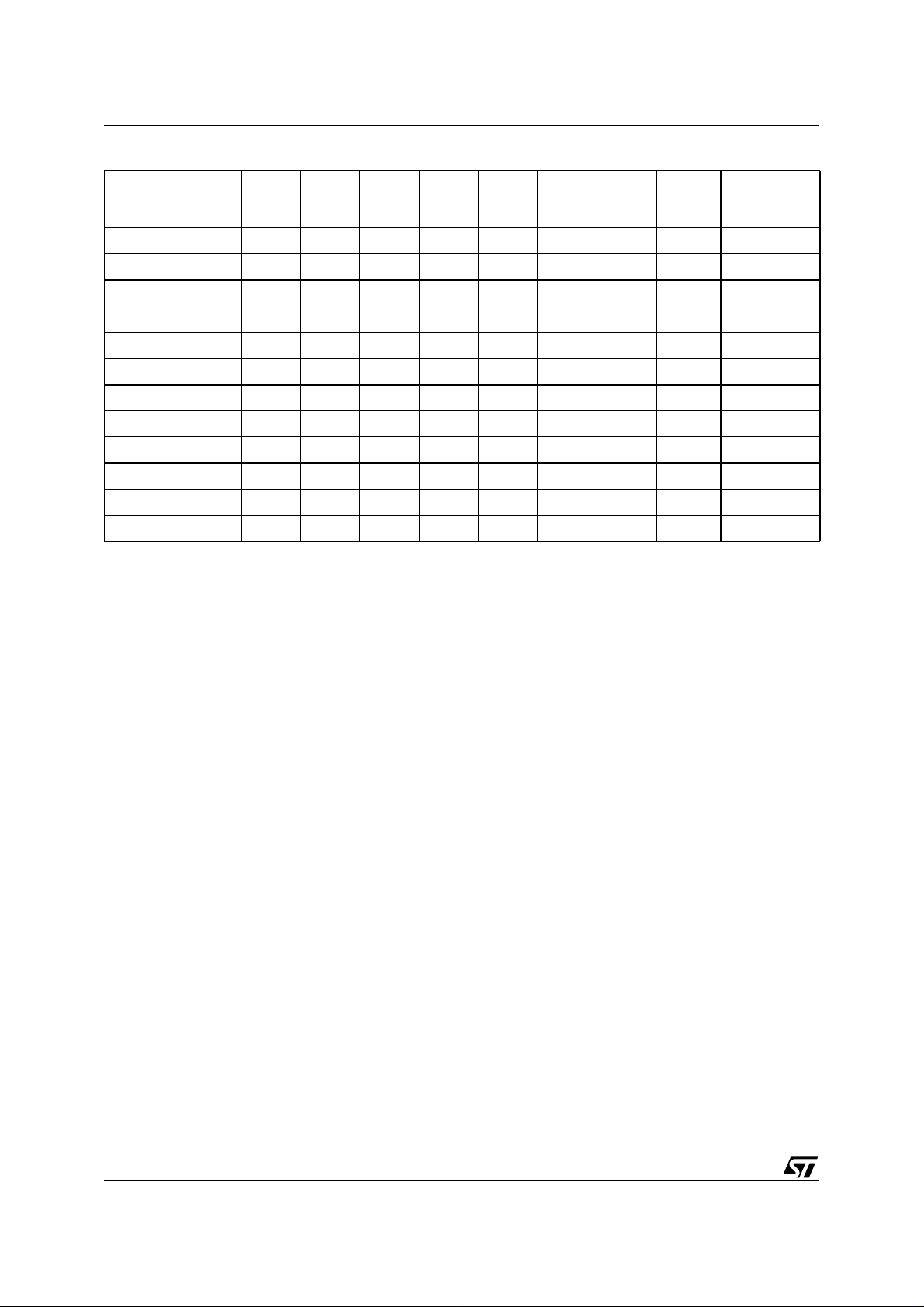
Table 1. Device Summary
1st
Part Number
uPSD3312D-40T6 64K 16K 2K 37 No 3.3V 5.0V TQFP52 –40°C to 85°C
uPSD3312DV-40T6 64K 16K 2K 37 No 3.3V 3.3V TQFP52 –40°C to 85°C
uPSD3333D-40T6 128K 32K 8K 37 No 3.3V 5.0V TQFP52 –40°C to 85°C
uPSD3333DV-40T6 128K 32K 8K 37 No 3.3V 3.3V TQFP52 –40°C to 85°C
uPSD3333D-40U6 128K 32K 8K 46 Yes 3.3V 5.0V TQFP80 –40°C to 85°C
uPSD3333DV-40U6 128K 32K 8K 46 Yes 3.3V 3.3V TQFP80 –40°C to 85°C
uPSD3334D-40U6 256K 32K 8K 46 Yes 3.3V 5.0V TQFP80 –40°C to 85°C
uPSD3334DV-40U6 256K 32K 8K 46 Yes 3.3V 3.3V TQFP80 –40°C to 85°C
uPSD3354D-40T6 256K 32K 32K 37 No 3.3V 5.0V TQFP52 –40°C to 85°C
uPSD3354DV-40T6 256K 32K 32K 37 No 3.3V 3.3V TQFP52 –40°C to 85°C
uPSD3354D-40U6 256K 32K 32K 46 Yes 3.3V 5.0V TQFP80 –40°C to 85°C
uPSD3354DV-40U6 256K 32K 32K 46 Yes 3.3V 3.3V TQFP80 –40°C to 85°C
Flash
(bytes)
2nd
Flash
(bytes)
SRAM
(bytes)
GPIO
8032
Bus
V
CC
V
DD
Pkg. Temp.
2/231

uPSD33xx
TABLE OF CONTENTS
FEATURES SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
SUMMARY DESCRIPTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
PIN DESCRIPTIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
uPSD33xx HARDWARE DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
MEMORY ORGANIZATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Internal Memory (MCU Module, Standard 8032 Memory: DATA, IDATA, SFR) . . . . . . . . . . . . 16
External Memory (PSD Module: Program memory, Data memory). . . . . . . . . . . . . . . . . . . . . . 16
8032 MCU CORE PERFORMANCE ENHANCEMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Pre-Fetch Queue (PFQ) and Branch Cache (BC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
PFQ Example, Multi-cycle Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Aggregate Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
MCU MODULE DISCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
8032 MCU REGISTERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Stack Pointer (SP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Data Pointer (DPTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Program Counter (PC). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Accumulator (ACC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
B Register (B). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
General Purpose Registers (R0 - R7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Program Status Word (PSW) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
SPECIAL FUNCTION REGISTERS (SFR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
8032 ADDRESSING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Register Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Direct Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Register Indirect Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Immediate Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 0
External Direct Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
External Indirect Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Indexed Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Relative Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Absolute Addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Long Addressing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Bit Addressing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
uPSD33xx INSTRUCTION SET SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3/231

uPSD33xx
DUAL DATA POINTERS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Data Pointer Control Register, DPTC (85h). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Data Pointer Mode Register, DPTM (86h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
DEBUG UNIT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
INTERRUPT SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Individual Interrupt Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
MCU CLOCK GENERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
MCU_CLK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
PERIPH_CLK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
POWER SAVING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Idle Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Power-down Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 8
Reduced Frequency Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
OSCILLATOR AND EXTERNAL COMPONENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
I/O PORTS of MCU MODULE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3
MCU Port Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
MCU BUS INTERFACE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2
Bus Read Cycles (PSEN or RD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
Bus Write Cycles (WR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 2
Controlling the PFQ and BC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
SUPERVISORY FUNCTIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
External Reset Input Pin, RESET_IN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Low V
Voltage Detect, LVD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
CC
Power-up Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
JTAG Debug Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Watchdog Timer, WDT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
STANDARD 8032 TIMER/COUNTERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Standard Timer SFRs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Clock Sources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
SFR, TCON. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1
SFR, TMOD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Timer 0 and Timer 1 Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Timer 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
SERIAL UART INTERFACES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
UART Operation Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4/231

uPSD33xx
Serial Port Control Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
UART Baud Rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 4
More About UART Mode 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
More About UART Mode 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
More About UART Modes 2 and 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
IrDA INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Pulse Width Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
2
I
C INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
I2C Interface Main Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Communication Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Bus Arbitration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Clock Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
General Call Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Serial I/O Engine (SIOE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
2
I
C Interface Control Register (S1CON) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
2
I
C Interface Status Register (S1STA). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
I2C Data Shift Register (S1DAT). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
2
I
C Address Register (S1ADR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
2
I
C START Sample Setting (S1SETUP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
2
I
C Operating Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
SPI (SYNCHRONOUS PERIPHERAL INTERFACE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
SPI Bus Features and Communication Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Full-Duplex Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Bus-Level Activity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
SPI SFR Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
SPI Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1 6
Dynamic Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
ANALOG-TO-DIGITAL CONVERTOR (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Port 1 ADC Channel Selects. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
PROGRAMMABLE COUNTER ARRAY (PCA) WITH PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
PCA Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
PCA Clock Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Operation of TCM Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Capture Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Timer Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Toggle Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
PWM Mode - (X8), Fixed Frequency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
PWM Mode - (X8), Programmable Frequency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
PWM Mode - Fixed Frequency, 16-bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5/231

uPSD33xx
PWM Mode - Fixed Frequency, 10-bit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Writing to Capture/Compare Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Control Register Bit Definition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
TCM Interrupts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
PSD MODULE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
PSD Module Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Memory Mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Runtime Control Register Definitions (csiop). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
PSD Module Detailed Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
PSD Module Reset Conditions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
AC/DC PARAMETERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
MAXIMUM RATING. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
DC AND AC PARAMETERS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
PACKAGE MECHANICAL INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
PART NUMBERING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
REVISION HISTORY. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
6/231

SUMMARY DESCRIPTIO N
The Turbo uPSD33xx Series combines a powerful
8051-based microcontroller with a flexible memory
structure, programmable logic, and a rich peripheral mix to form an ideal embedded controller. At
its core is a fast 4-cycle 8032 MCU with a 6-byte
instruction prefetch queue (PFQ) and a 4-entry fully associative branching cache (BC) to maximize
MCU performance, enabling loops of code in
smaller localities to execute extremely fast.
Code development is easily managed without a
hardware In-Circuit Emulator by using the serial
JTAG debug interface. JTAG i s also used for InSystem Programming (ISP ) in as little as 10 seconds, perfect for manufacturing and lab development. The 8032 core is coupled to Programmable
System Device (PSD) architectu re to optimi ze the
8032 memory structure, offering two independent
Figure 2. Block Diagram
uPSD33xx
(3) 16-bit
Timer/
Counters
(2)
External
Interrupts
P3.0:7
P1.0:7
Optional IrDA
Encoder/Decoder
Turbo
8032
Core
I2C
UART0
(8) GPIO, Port 3
(8) GPIO, Port 1
(8) 10-bit ADC
PFQ
&
BC
SYSTEM BUS
UART1
uPSD33xx
banks of Flash mem ory that can be pl aced at virtually any address within 8032 program or data address space, and easily paged beyond 64K bytes
using on-chip programmable decode logic. Dual
Flash memory banks provide a robus t s olution for
remote product updates in the field through In-Application Programming (IAP). Dual Flash banks
also support EEPROM emulation, eliminating the
need for external EEPROM chips. General purpose programmable logic (PLD) is included to
build an endless variety of glue-logic, saving external logic devices. The PLD is configured using the
software development tool, PSDsoft Express,
available from the web at www.st.com/psm, at no
charge. The uPSD33xx also includes supervisor
functions such as a programmable watchdog timer
and low-voltage reset.
1st Flash Memory:
64K, 128K,
Programmable
Decode and
Page Logic
General
Purpose
Programmable
Logic,
16 Macrocells
JTAG ICE and ISP
or 256K Bytes
2nd Flash Memory:
16K or 32K Bytes
SRAM:
2K, 8K, or 32K Bytes
(8) GPIO, Port A
(80-pin only)
(8) GPIO, Port B
(2) GPIO, Port D
(4) GPIO, Port C
PA0:7
PB0:7
PD1:2
PC0:7
P4.0:7
SPI
16-bit PCA
(6) PWM, CAPCOM, TIMER
(8) GPIO, Port 4
8032 Address/Data/Control Bus
(80-pin device only)
Supervisor:
Watchdog and Low-Voltage Reset
VCC, VDD, GND, Reset, Crystal In
MCU
Bus
Dedicated
Pins
AI08875
7/231

uPSD33xx
PIN DES CRIPTIONS
Figure 3. TQ FP 52 Connection s
/ADC6
/ADC7
(2)
PB0
PB1
PB2
PB3
PB4
(3)
REF
/V
CC
PB5
GND
AV
RESET_IN
PB6
(2)
PB7
P1.7/SPISEL
P1.6/SPITXD
52515049484746454443424140
(2)
(2)
(2)
(2)
/ADC1
/ADC0
/ADC5
/ADC4
(2)
/ADC3
(2)
/ADC2
PD1/CLKIN
PC7
JTAG TDO
JTAG TDI
DEBUG
3.3V V
CC
PC4/TERR
V
DD
GND
PC3/TSTAT
PC2/V
STBY
JTAG TCK
JTAG TMS
1
2
3
4
5
6
7
(1)
8
9
10
11
12
13
39 P1.5/SPIRXD
38 P1.4/SPICLK
37 P1.3/TXD1(IrDA)
36 P1.2/RXD1(IrDA)
35 P1.1/T2X
34 P1.0/T2
(1)
33 V
DD
32 XTAL2
31 XTAL1
30 P3.7/SCL
29 P3.6/SDA
28 P3.5/C1
27 P3.4/C0
14151617181920212223242526
GND
TXD0/P3.1
RXD0/P3.0
/TCM4/P4.5
/TCM5/P4.6
/TCM3/P4.4
(2)
(2)
SPITXD
SPIRXD
(2)
SPICLK
/PCACLK1/P4.7
(2)
SPISEL
/PCACLK0/P4.3
(2)
TXD1(IrDA)
/TCM0/P4.0
/TCM1/P4.1
/TCM2/P4.2
(2)
(2)
(2)
T2
T2X
RXD1(IrDA)
EXTINT0/TG0/P3.2
EXTINT1/TG1/P3.3
AI07822
Note: 1. For 5V applications, VDD must be connected to a 5.0V source. Fo r 3.3V applications, VDD must be connected to a 3.3V source.
2. These signals can be used on one of two different ports (Port 1 or Port 4) for flexibility. Default is Port1.
3. V
and 3.3V AVCC are shared i n the 52-pin package only . A DC channels mu st use AVCC as V
REF
for the 52-pin package.
REF
8/231

Figure 4. TQ FP 80 Connection s
uPSD33xx
SPISEL
SPITXD
PD2/CSI
P3.3/TG1/EXINT1
PD1/CLKIN
ALE
PC7
JTAG TDO
JTAG TDI
DEBUG
PC4/TERR
3.3V V
NC
V
DD
GND
PC3/TSTAT
PC2/V
STBY
JTAG TCK
NC
(2)
/PCACLK1/P4.7
(2)
/TCM5/P4.6
JTAG TMS
/ADC7
(2)
CC
PB0
P3.2/EXINT0/TG0
PB1
P3.1/TXD0
PB2
P3.0/RXD0
PB3
PB4
AV
PB5
V
REF
GND
RESET_IN
PB6
PB7RDP1.7/SPISEL
80797877767574737271706968676665646362
1
2
3
4
5
6
7
8
9
10
CC
11
(1)
12
13
14
15
16
17
18
19
20
/ADC6
(2)
PSENWRP1.6/SPITXD
61
60 P1.5/SPIRXD
59 P1.4/SPICLK
58 P1.3/TXD1(IrDA)
57 MCU A11
56 P1.2/RXD1(IrDA)
55 MCU A10
54 P1.1/T2X
53 MCU A9
52 P1.0/T2
51 MCU A8
50 V
49 XTAL2
48 XTAL1
47 MCU AD7
46 P3.7/SCL
45 MCU AD6
44 P3.6/SDA
43 MCU AD5
42 P3.5/C1
41 MCU AD4
(2)
/ADC5
(2)
/ADC4
(2)
/ADC3
(2)
/ADC2
(2)
/ADC1
(2)
/ADC0
(1)
DD
21222324252627282930313233343536373839
PA7
PA6
/TCM4/P4.5
(2)
SPIRXD
PA5
/TCM3/P4.4
(2)
SPICLK
PA4
PA3
/PCACLK0/P4.3
(2)
GND
PA2
/TCM2/P4.2
/TCM1/P4.1
(2)
(2)
T2X
PA1
PA0
/TCM0/P4.0
(2)
T2
MCU AD0
MCU AD1
MCU AD2
RXD1(IrDA)
TXD1(IrDA)
Note: NC = Not Connected
Note: 1. For 5V applications, V
2. These signals can be used on one of two different ports (Port 1 or Port 4) for flexibility. Default is Port1.
must be connected to a 5.0V source. Fo r 3.3V applications, VDD must be connected to a 3.3V source.
DD
40
P3.4/C0
MCU AD3
AI07823
9/231
uPSD33xx
Table 2. Pin D ef in iti ons
Port Pin
MCUAD0 AD0 36 N/A I/O
MCUAD1 AD1 37 N/A I/O
MCUAD2 AD2 38 N/A I/O
MCUAD3 AD3 39 N/A I/O
MCUAD4 AD4 41 N/A I/O
MCUAD5 AD5 43 N/A I/O
MCUAD6 AD6 45 N/A I/O
MCUAD7 AD7 47 N/A I/O
MCUA8 A8 51 N/A O
MCUA9 A9 53 N/A O
MCUA10 A10 55 N/A O
MCUA11 A11 57 N/A O
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P3.0 RxD0 75 23 I/O General I/O port pin
P3.1 TXD0 77 24 I/O General I/O port pin
P3.2
P3.3 INT1 2 26 I/O General I/O port pin
P3.4 C0 40 27 I/O General I/O port pin Counter 0 input (C0)
Signal
Name
T2
ADC0
T2X
ADC1
RxD1
ADC2
TXD1
ADC3
SPICLK
ADC4
SPIRxD
ADC6
SPITXD
ADC6
SPISE
ADC7
EXINT0
TGO
80-Pin
L
52-Pin
No.
No.
52 34 I/O General I/O port pin
54 35 I/O General I/O port pin
56 36 I/O General I/O port pin
58 37 I/O General I/O port pin
59 38 I/O General I/O port pin
60 39 I/O General I/O port pin
61 40 I/O General I/O port pin
64 41 I/O General I/O port pin
79 25 I/O General I/O port pin
(1)
In/Out
Basic Alternate 1 Alternate 2
External Bus
Multiplexed Address/
Data bus A0/D0
Multiplexed Address/
Data bus A1/D1
Multiplexed Address/
Data bus A2/D2
Multiplexed Address/
Data bus A3/D3
Multiplexed Address/
Data bus A4/D4
Multiplexed Address/
Data bus A5/D5
Multiplexed Address/
Data bus A6/D6
Multiplexed Address/
Data bus A7/D7
External Bus, Addr
A8
External Bus, Addr
A9
External Bus, Addr
A10
External Bus, Addr
A11
Function
Timer 2 Count input
(T2)
Timer 2 T rigger input
(T2X)
UART1 or IrDA
Receive (RxD1)
UART or IrDA
Transmit (TxD1)
SPI Clock Out
(SPICLK)
SPI Receive
(SPIRxD)
SPI Transmit
(SPITxD)
SPI Slave Select
(SPISEL
UART0 Receive
(RxD0)
UART0 Transmit
(TxD0)
Interrupt 0 input
(EXTINT0)/Timer 0
gate control (TG0)
Interrupt 1 input
(EXTINT1)/Timer 1
gate control (TG1)
)
ADC Channel 0
input (ADC0)
ADC Channel 1
input (ADC1)
ADC Channel 2
input (ADC2)
ADC Channel 3
input (ADC3)
ADC Channel 4
input (ADC4)
ADC Channel 5
input (ADC5)
ADC Channel 6
input (ADC6)
ADC Channel 7
input (ADC7)
10/231

uPSD33xx
Port Pin
Signal
Name
80-Pin
No.
52-Pin
(1)
No.
In/Out
Basic Alternate 1 Alternate 2
Function
P3.5 C1 42 28 I/O General I/O port pin Counter 1 input (C1)
P3.6 SDA 44 29 I/O General I/O port pin
P3.7 SCL 46 30 I/O General I/O port pin
P4.0
P4.1
P4.2
P4.3
P4.4
P4.5
T2
TCM0
T2X
TCM1
RXD1
TCM2
TXD1
PCACLK0
SPICLK
TCM3
SPIRXD
TCM4
33 22 I/O General I/O port pin
31 21 I/O General I/O port pin PCA0-TCM1
30 20 I/O General I/O port pin PCA0-TCM2
27 18 I/O General I/O port pin PCACLK0
25 17 I/O General I/O port pin
23 16 I/O General I/O port pin PCA1-TCM4
I2C Bus serial data
2
CSDA)
(I
I2C Bus clock
2
CSCL)
(I
Program Counter
Array0 PCA0-TCM0
Program Counter
Array1 PCA1-TCM3
P4.6 SPITXD 19 15 I/O General I/O port pin PCA1-TCM5
P4.7
V
REF
SPISEL
PCACLK1
RD
WR
PSEN
ALE 4 N/A O
RESET_IN
XTAL1 48 31 I
XTAL2 49 32 O
DEBUG 8 5 I/O
18 14 I/O General I/O port pin PCACLK1
70 N/A I
65 N/A O
62 N/A O
63 N/A O
Reference Voltage
input for ADC
READ Signal,
external bus
WRITE Signal,
external bus
PSEN Signal,
external bus
Address Latch
signal, external bus
68 44 I
Active low reset
input
Oscillator input pin
for system clock
Oscillator output pin
for system clock
I/O to the MCU
Debug Unit
PA0 35 N/A I/O General I/O port pin
PA1 34 N/A I/O General I/O port pin
PA2 32 N/A I/O General I/O port pin
PA3 28 N/A I/O General I/O port pin
PA4 26 N/A I/O General I/O port pin
PA5 24 N/A I/O General I/O port pin
PA6 22 N/A I/O General I/O port pin
PA7 21 N/A I/O General I/O port pin
Timer 2 Count input
(T2)
Timer 2 T rigger input
(T2X)
UART1 or IrDA
Receive (RxD1)
UART1 or IrDA
Transmit (TxD1)
SPI Clock Out
(SPICLK)
SPI Receive
(SPIRxD)
SPI Transmit
(SPITxD)
SPI Slave Select
(SPISEL
)
All Port A pins
support:
1. PLD Macro-cell
outputs, or
2. PLD inputs, or
3. Latched
Address Out
(A0-A7), or
4. Peripheral I/O
Mode
11/231

uPSD33xx
Port Pin
Signal
Name
80-Pin
No.
52-Pin
(1)
No.
In/Out
Basic Alternate 1 Alternate 2
PB0 80 52 I/O General I/O port pin
PB1 78 51 I/O General I/O port pin
PB2 76 50 I/O General I/O port pin
PB3 74 49 I/O General I/O port pin
PB4 73 48 I/O General I/O port pin
PB5 71 46 I/O General I/O port pin
PB6 67 43 I/O General I/O port pin
PB7 66 42 I/O General I/O port pin
JTAGTMS TMS 20 13 I JTAG pin (TMS)
JTAGTCK TCK 16 12 I JTAG pin (TCK)
PC2
V
STBY
15 11 I/O General I/O port pin
PC3 TSTAT 14 10 I/O General I/O port pin
PC4 TERR
9 7 I/O General I/O port pin
JTAGTDI TDI 7 4 I JTAG pin (TDI)
JTAGTDO TDO 6 3 O JTAG pin (TDO)
PC7 5 2 I/O General I/O port pin
PD1 CLKIN 3 1 I/O General I/O port pin
PD2 CSI 1 N/A I/O General I/O port pin
V
3.3V-V
CC
AV
CC
V
DD
3.3V or 5V
V
DD
3.3V or 5V
10 6
72 47
12 8
50 33
- MCU Module
CC
Analog V
V
DD
V
DD
CC
- PSD Module
- 3.3V for 3V
VDD - 5V for 5V
V
- PSD Module
DD
V
- 3.3V for 3V
DD
VDD - 5V for 5V
GND 13 9
GND 29 19
GND 69 45
NC 11 N/A
NC 17 N/A
Note: 1. N/A = Signal Not Available on 52-pin package.
Input
Function
SRAM Standby
voltage input
(V
)
STBY
Optional JTAG
Status (TSTAT)
Optional JTAG
Status (TERR
All Port B pins
support:
1. PLD Macro-cell
outputs, or
2. PLD inputs, or
3. Latched
Address Out
(A0-A7)
PLD Macrocell
output, or PLD input
PLD, Macrocell
output, or PLD input
PLD, Macrocell
)
output, or PLD input
PLD, Macrocell
output, or PLD input
1. PLD I/O
2. Clock input to
PLD and APD
1. PLD I/O
2. Chip select ot
PSD Module
12/231
uPSD33xx HARDWARE DESCRIPTION
The uPSD33xx has a modular architecture built
from a stacked die process. There are two die, one
is designated “MCU Module” in this document, and
the other is designated “PSD Module” (see Figure
5., page 14). In all cases, the MCU Module die op-
erates at 3.3V with 5V tolerant I/O. The PSD Module is either a 3.3V die or a 5V die, depending on
the uPSD33xx device as described below.
The MCU Module consists of a fast 8032 core, that
operates with 4 clocks per instruction cycle, and
has many peripheral and system supervisor functions. The PSD Module provides the 8032 with
multiple memories (two Flash and one SRAM) for
program and data, programmable logic for address decoding and for general-purpose logic, and
additional I/O. The MCU Module communicates
with the PSD Module through internal address and
data busses (A8 – A15, AD0 – AD7) and control
signals (RD
There are slightly different I/O characteristics for
each module. I/Os for the MCU module are designated as Ports 1, 3, and 4. I/Os for the PS D M odule are designated as Ports A, B, C, and D.
For all 5V uPSD33xx devices, a 3.3V MCU Module
is stacked with a 5V PSD Module. In this case, a
5V uPSD33xx device must be supplied with
3.3V
CC
PSD Module. Ports 3 and 4 of the MCU Module
are 3.3V ports with tolerance to 5V devices (they
can be directly driven by external 5V devices and
they can directly drive external 5V devices whi le
, WR, PSEN, ALE, RESET).
for the MCU Module and 5.0VDD for th e
uPSD33xx
producing a V
A, B, C, and D of the PSD Module are true 5V
ports.
For all 3.3V uPSD33xxV devices, a 3.3V MCU
Modu l e i s s t ac k ed wi t h a 3. 3 V PS D M o du l e . I n th i s
case, a 3.3V uPSD 33xx device needs t o be supplied with a single 3.3V voltage source at both V
and VDD. I/O pins on Ports 3 and 4 are 5V tolerant
and can be connec ted to external 5V peri pherals
devices if desired. Ports A, B, C, and D of the PSD
Module are 3.3V ports, which are not tolerant to
external 5V devices.
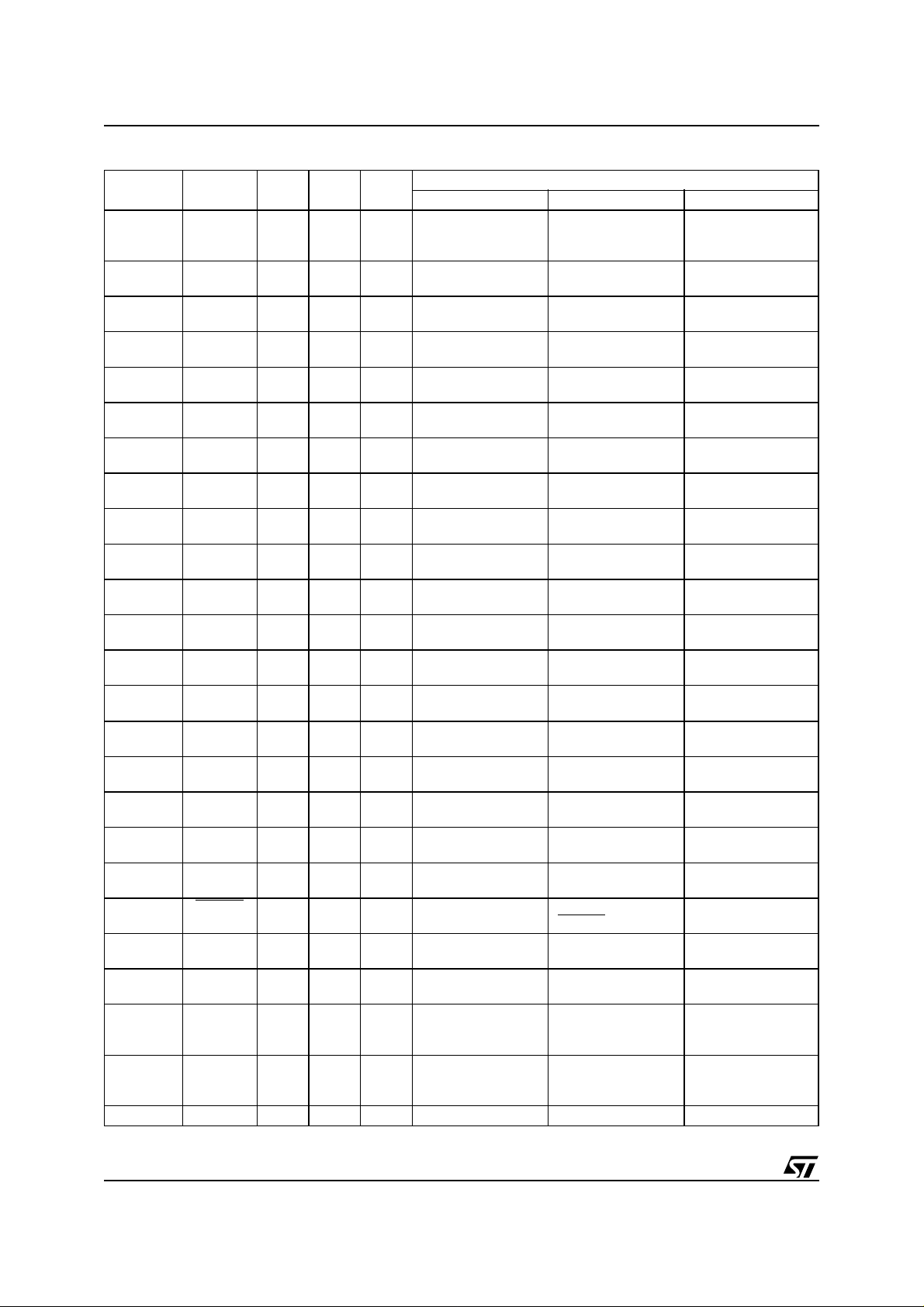
Refer to Table 3 for port type and voltage source
requirements.
80-pin uPSD33xx devices provide access to 8032
address, data, and control signals on external pins
to connect external peripheral and memory devices. 52-pin uPSD33xx devices do not provide access to the 8032 system bus.
All non-volatile memory and configuration portions
of the uPSD33xx device are programmed through
the JTAG interface and no special program ming
voltage is needed. This same JTAG port is also
used for debugging of the 8032 core at runtime
providing breakpoint, single-step, display, and
trace features. A non-volatile securi ty bit may be
programmed to block all access via JTAG interface for security. The security bit is defeated only
by erasing the entire device, leaving the device
blank and ready to use again.
of 2.4V min and VCC max). Po r ts
OH
CC
Table 3. Port Type and Voltage Source Combinations
Device Type
5V:
uPSD33xx
3.3V:
uPSD33xxV
for MCU
V
CC
Module
3.3V 5.0V 3.3V but 5V tolerant 5V
3.3V 3.3V 3.3V but 5V tolerant 3.3V. NOT 5V tolerant
VDD for PSD
Module
Ports 3 and 4 on
MCU Module
Ports A, B, C, and D on
PSD Module
13/231

uPSD33xx
Figure 5. uPSD33xx Functional Modules
XTAL
Clock Unit
8-Bit Die-to-Die Bus
Port 3 - UART0,
Intr, Timers
Turbo 8032 Core
Dual
UARTs
Interrupt
256 Byte SRAM
Dedicated Memory
Interface Prefetch,
Branch Cache
Enhanced MCU Interface
PSD Page Register
Decode PLD
JTAG ISP
Port 1 - Timer, ADC, SPI
Port 1Port 3
3 Timer /
Counters
JTAG
DEBUG
Main Fl ash
10-b it
ADC
8032 Intern al Bus
SPI
Secondary
Flash
PSD Internal Bus
CPLD - 16 MACROCELLS
Port 4 - PCA,
PWM, UART1
PCA
PWM
Counters
Internal
Reset
SRAM
LVD
Reset Logic
Port 3
2
I
C
I2C
Unit
WDT
PSD
Reset
MCU M odule
Reset Input
P SD Module
VCC Pins
3.3V
Ext.
Bus
Reset
Pin
VDD Pins
3.3V or 5V
uPSD33XX
Port C
JTAG and
GPIO
Port A,B,C PLD
I/O and GPIO
Port D
GPIO
AI07842
14/231
MEMOR Y ORGANIZAT ION
The 8032 MCU core views m emory on the MCU
module as “internal” memory and it views memory
on the PSD module as “external” memory, see
Figure 6.
Internal memory on the MCU Modul e consists of
DATA, IDATA, and SFRs. Thes e standard 8032
memories reside in 384 bytes of SRAM located at
a fixed address space starting at address 0x0000.
External memory on the PSD Module consists of
four types: main Flash (64K, 128K, or 256K bytes),
a smaller secondary Flash (16 K, or 32K), SRAM
(2K, 8K, or 32K bytes), and a block of PSD Module
control registers called CSIOP (256 bytes). These
external memories reside at programmable address ranges, specified using the software tool
PSDsoft Express. See the PSD Module section of
this document for more details on these memories.
External memory is accessed by the 8032 in two
separate 64K byte address spaces. One address
space is for program memory and the other ad-
Figure 6. uPSD33xx Memories
uPSD33xx
dress space is for data memory. Program memory
is accessed using the 8032 signal, PSEN
memory is accessed usin g the 8032 signals, RD
and WR. If the 8032 ne eds to access more than
64K bytes of external program or data memory, it
must use paging (or banking) techniques provided
by the Page Register in the PSD Module.
Note: When referencing program a nd da ta memory spaces, it has nothing to do with 8032 internal
SRAM areas of DATA, IDATA, and SFR on the
MCU Module. Program an d data mem ory spaces
only relate to the external memo ries on the PSD
Module.
External memory on the PSD Module can overlap
the internal SRAM memory on the MCU Module in
the same physical address range (starting at
0x0000) without interference because the 8032
core does not assert the RD
or WR signals when
accessing internal SRAM.
. Data
Fixed
Addresses
FF
80
7F
0
Internal SRAM on
MCU Module
384 Bytes SRAM
Indirect
Addressing
IDATA
128 Bytes
128 Bytes
DATA
Direct or Indirect Addressing
SFR
128 Bytes
Direct
Addressing
Main
Flash
64KB,
128KB,
or
256KB
External Memory on
PSD Module
• External memories may be placed at virtually
any address using software tool PSDsoft Express.
• The SRAM and Flash memories may be placed
in 8032 Program Space or Data Space using
PSDsoft Express.
• Any memory in 8032 Data Space is XDATA.
Secondary
Flash
16KB
or
32KB
SRAM
2KB,
8KB,
or
32KB
CSIOP
256 Bytes
AI07843
15/231

uPSD33xx
Internal Memory (MCU Module, Standard 8032
Memory: DATA, IDATA, SFR)
DATA Memory. The first 128 bytes of internal
SRAM ranging from address 0x0000 to 0x007F
are called DATA, which can be accessed using
8032 direct or indirect addressing schemes and
are typically used to store variables and stack.
Four register banks, each with 8 registers (R0 –
R7), occupy addresses 0x0000 to 0x001F. Only
one of these four banks may be enabled at a time.
The next 16 locations at 0x0020 to 0x002F contain
128 directly addressable bit locations that can be
used as software flags. SRAM locations 0x0030
and above may be used for variables and stack.
IDATA Memory. The next 128 bytes of internal
SRAM are named IDATA and range from address
0x0080 to 0x00FF. IDATA can be accessed only
through 8032 indirect addressing and is typically
used to hold the MCU stack as well as data variables. The stack can reside in both DATA and
IDATA memories and rea ch a s ize limited only by
the available space i n the com bined 2 56 bytes of
these two memories (since stack accesses are always done using indirect addres sing, the boundary between DATA and IDATA does not exist with
regard to the stack).
SFR Mem ory. Special Function Registers (Table
5., page 24) occupy a separate physical mem ory,
but they logically overlap the s ame 128 bytes as
IDATA, ranging from a ddress 0x0080 t o 0x00FF.
SFRs are accessed only using direct addressing.
There 86 active registers used for many functions:
changing the operating mode of the 8032 MCU
core, controlling 8 032 pe ripherals, c ontrollin g I/O,
and managing interrupt functions. The remaining
unused SFRs are reserved and s ho uld n ot be accessed.
16 of the SFRs are both byte- and bit-addressable.
Bit-addressable SFRs are those whose address
ends in “0” or “8” hex.
External Memo ry (PS D Module: Program
memory, Data memory)
The PSD Module has f our m emo ries: main Flash,
secondary Flash, SRAM, and CSIOP. See the
PSD MODULE section for more detailed informati on on these memori es.
Memory mapping in the PSD Module is implemented with the Decode PLD (DPLD) and opt ionally the Page Register. The user specifies decode
equations for individual seg ments of each of the
memories using the software tool PSDsoft Express. This is a very easy point-and-click process
allowing total flexibility in mapping memories. Additionally, each of the memories may be pla ced in
various combinations of 8032 program address
space or 8032 data address space by using the
software to o l PSDsoft Ex p r e ss.
Program Memory. External program memory is
addressed by the 8032 using its 16-bit Program
Counter (PC) and is accessed w ith the 8032 signal, PSEN
. Program memory can be present at
any address in program space between 0x0000
and 0xFFFF.
After a power-up or reset, the 8032 begins program execution from location 0x0000 where the
reset vector is stored, causing a jump to an initialization routine in firmware. At address 0x0003, just
following the reset vector are the interrupt serv ice
locations. Each interrupt is assigned a fixed interrupt service location in program memory. An interrupt causes the 8032 to jump to that service
location, where it commences execution of the
service routine. External Interrupt 0 (EXINT 0), for
example, is assigned to service location 0x0003. If
EXINT0 is going to be used, its service routine
must begin at location 0x0003. Interrupt service locations are spaced at 8-byte intervals: 0x0003 for
EXINT0, 0x000B for Timer 0, 0x00 13 f or EXINT1,
and so forth. If an interrupt service routine is short
enough, it can reside entirely within the 8-byte interval. Longer service routines can u se a ju mp instruction to somewhere else in program memory.
Data Memory. External data is referred to as
XDATA and is a ddressed by the 8032 using I ndirect Addressing via its 16-bit Data Pointer Register
(DPTR) and is accessed by the 8032 signals, RD
and WR. XDATA can be present at any address in
data space between 0x0000 and 0xFFFF.
Note: the uPSD33xx has dual data pointers
(source and destination) making XDATA transfers
much more efficient.
Memory Placement. PSD Module architecture
allows the placement of its external memories into
different combinations of program memory and
data memory spaces. This means the main Flash,
the secondary Flash, and the SRAM can be
viewed by the 8032 MCU in various comb inations
of program memory or data memory as defined by
PSDsoft Express.
As an example of this flexibility, for applications
that require a great deal of Flash memory i n data
space (large lookup tables or extended data recording), the larger main Flash memory can be
placed in data space an d the smaller secondary
Flash memory can be placed in program space.
The opposite can be realized for a different application if more Flash memory is nee ded for code
and less Flash memory for data.
16/231

uPSD33xx
By default, the SRAM and CSIOP memories on
the PSD Module must always reside in data memory space and they are treated by the 8032 as
XDATA. However, the SRAM may optionally reside in program space in addition to data space if
it is desired to execute code from SRAM. The main
Flash and secondary Flash memories may reside
in program space, data space, or both.
These memory placement choices specified by
PSDsoft Express are programmed into n on-volatile sections of the uPSD33xx, and are active at
power-up and after reset. It is possible to override
these initial settings during runtime for In-Application Programming (IAP).
Standard 8032 MCU architecture cannot write to
its own program memory space to prev ent accidental corruption of firmware. However, this becomes an obstacle in typical 8032 systems when
a remote update to firmware in Flash memory is
required using IAP. The PSD module provides a
solution for remote updates by allowing 8032 firmware to temporarily “reclassify” Flash memory to
reside in data space during a remote update, then
returning Flash memory back to program space
when finished. See the VM Register (Table
78., page 143) in the PSD Module section of this
document for more details.
8032 MCU CORE PERFORMANCE ENHANCEMENTS
Before describing performance features of the
uPSD33xx, let us first look at standard 8032 architecture. The clock source for the 8032 MCU creates a basic unit of timing called a machine-cycle,
which is a period of 12 clocks for standard 8032
MCUs. The instruction set for traditional 8032
MCUs consists of 1, 2, and 3 byte instructions that
execute in different combinations of 1, 2, or 4 machine-cycles. For example, there are one-byte instructions that execute in one machine-cycle (12
clocks), one-byte instructions that ex ecute in f our
machine-cycles (48 clocks), two-byte, two-cycle
instructions (24 clocks), and so on. In addition,
standard 8032 architecture will fetch two bytes
from program memory on almost every machinecycle, regardless if it needs them o r not (dummy
fetch). This means for one-byte, one-cycle instructions, the second byte is ignored. These one-byte,
one-cycle instructions account for half of the
8032's instructions (126 out of 255 opcodes).
There are inefficiencies due to wasted bus cycles
and idle bus times that can be eliminated.
The uPSD33xx 8032 MCU core offers increased
performance in a number of ways, while keeping
the exact same instruction set as the standard
8032 (all opcodes, the number of bytes per instruction, and the nat ive number a machine-cycle s
per instruction are identical t o the original 8032).
The first way performance is boost ed i s by reducing the mac hin e -cycle period to j u st 4 MCU clocks
as compared to 12 MCU clocks in a standard
8032. This shortened machine-cycle improves the
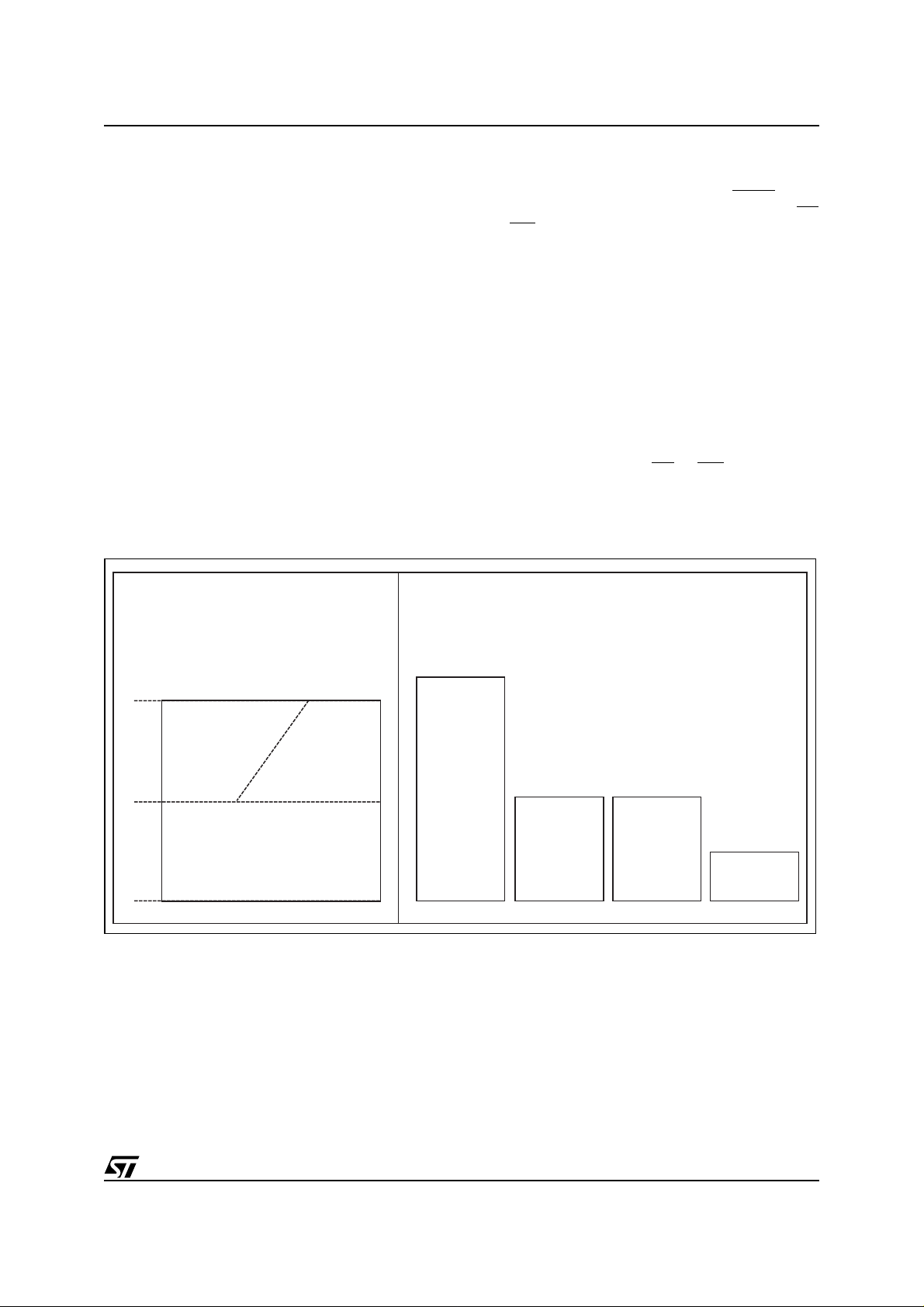
instruction rate for one-byte, one-cycle instructions by a factor of three (Figure 7., page 18) compared to standard 8051 architectures, and
significantly improves performan ce of m ultipl e-cycle instruction types.
The example in Figure 7 shows a continuous execution stream of one-byte, one-cycle instructions.
The 5V uPSD33xx will yield 10 MIPS peak performance in this case while operating at 40MHz clock
rate. In a typical application however, the effective
performance will be lower since programs do not
use only one-cycle instructions, but special techniques are implemented in the uPSD33xx to keep
the effective MIPS rate as close as possible to the
peak MIPS rate at all times. This is accomplished
with an instruction Pre-Fetch Queue (PFQ) a nd a
Branch Cache (BC) as shown in Figure
8., page 18.
17/231

uPSD33xx
Figure 7. Comparison of uPSD33xx with Standard 8032 Performance
1-byte, 1-Cycle Instructions
Instruction A Instruction B Instruction C
Turbo uPSD33XX
Execute Instruction and
Pre-Fetch Next Instruction
Execute Instruction and
Pre-Fetch Next Instruction
Execute Instruction and
Pre-Fetch Next Instruction
4 clocks (one machine cycle)
one machine cycle one machine cycle
MCU Clock
12 clocks (one machine cycle)
Instruction A
Standard 8032
Fetch Byte for Instruction A
Dummy Byte is Ignored (wasted bus access)
Turbo uPSD33XX executes instructions A, B, and C in the same
amount of time that a standard 8032 executes only instruction A.
Figure 8. Instruction Pre-Fetch Queue and Branch Cache
Branch 4
Code
Branch
Cache
(BC)
Branch 3
Code
Branch 2
Code
Branch 4
Code
Branch 3
Code
Branch 1
Code
Branch 4
Code
Branch 2
Code
Branch 1
Code
Branch 3
Code
Branch 2
Code
Branch 4
Code
Branch 3
Code
Branch 1
Code
Branch 4
Code
Branch 2
Code
Branch 1
Code
Branch 3
Code
Branch 2
Branch 4
Code
Code
Branch 1
Code
Execute Instruction A
and Fetch a Second Dummy Byte
Previous
Branch 4
Branch 3
Code
Branch 2
Code
Branch 1
Code
Previous
Branch 3
Previous
Branch 2
AI08808
Compare
Previous
Branch 1
Address
Program
Memory on
PSD Module
18/231
Instruction
Byte
8
Address
16
Wait
Load on Branch Address Match
6 Bytes of Instruction
Instruction Pre-Fetch Queue (PFQ)
Instruction
Byte
8
Address
16
Stall
Current
Branch
Address
8032
MCU
AI08809

uPSD33xx
Pre-Fetch Queue (PFQ) and Branch Cache
(BC)
The PFQ is always working to minimize the idle
bus time inherent to 8032 MCU architecture, to
eliminate wasted memory fetches, and to maximize memory bandwidth to the MCU. The PFQ
does this by running asynchronously in relation to
the MCU, looking ahead to pre-fetch code from
program memory during any idle bus periods. Only
necessary bytes will be fetched (no dumm y fe tches like standard 8032) . The PFQ w ill queue up t o
six code bytes in advance of execution, which significantly optimizes sequential program performance. However, when program execution
becomes non-sequential (program branch), a typical pre-fetch queue will empty itself and reload
new code, causing the MCU to stall. The Turbo
uPSD33xx diminishes this problem by using a
Branch Cache with the PFQ. The BC is a four-way,
fully associative cache, mea ning tha t when a program branch occurs, it's branch destination address is compared simultaneously with four recent
previous branch destinations stored in the BC.
Each of the four cache entries contain up to six
bytes of code related to a branch. If there is a hit
(a match), then all six code bytes of the matching
program branch are transferred immediate ly and
simultaneously from the BC to the PFQ, and execution on that branch continues with mini mal delay. This greatly reduces the chance that the MCU
will stall from an empty PFQ, and improves performance in embedded contro l systems where it is
quite common to branch and loop in relatively
small code localities.
By default, the PFQ and BC are enabled after
power-up or reset. The 8032 can disable the PFQ
and BC at runtime if desired by writing to a specific
SFR (BUSCON).
The memory in the PSD module operates with
variable wait states depending on the value spec ified in the SFR named BUSCON. For example, a
5V uPSD33xx device operating at a 40MHz crystal
frequency requires four memory wait states (equal
to four MCU clocks). In this example, once the
PFQ has one or more bytes of code, the wait
states become transparent and a full 10 MIPS is
achieved when the program stream consists of sequential one-byte, one machine-cycle instructions
as shown in Figure 7., page 18 (transparent because a machine-cycle is four MCU clocks which
equals the memory pre-fetch wait time that is also
four MCU clocks). But it is als o important to understand PFQ operation on multi -cycle instructions.
PFQ Example, Multi-cycle Instructions
Let us look at a string of two-byte, two-cycle instructions in Figure 9., page 20. There are three
instructions executed sequentially in this example,
instructions A, B, and C. Each of the time divisions
in the figure is one machine-c ycle of four clocks,
and there are six phases to reference in this discussion. Each instruction is pre-fetched into the
PFQ in advance of execution by the MCU. Prior to
Phase 1, the PFQ has pre-fetched the two instruction bytes (A1 and A2) of instruction A. During
Phase one, both byte s are loaded into the MCU
execution unit. Also in Phase 1 , the PFQ is prefetching the first byte (B1) of instruction B from
program memory. In Phase 2, the MCU is processing Instruction A internally while the PF Q is
pre-fetching the second byte (B2) of Instruction B.
In Phase 3, both bytes of instru ction B are loa ded
into the MCU execution uni t and the PFQ b egins
to pre-fetch bytes for the third instruction C. In
Phase 4 Instruction B is processed and the prefetching con ti n u es , eliminating i dle bu s cycles and
feeding a continuous flow of operands and opcodes to t he MCU execution un it.
The uPSD33xx MCU instructions are an exact 1/3
scale of all standard 8032 instructions with regard
to number of cycles per instruction. Figure
10., page 20 shows the e quivalent instruction se-
quence from the example above on a standard
8032 for comparison.
Aggregate Perform ance
The stream of two-byte, two-cycle instructions in
Figure 9., page 20, running on a 40MHz, 5V,
uPSD33xx will yield 5 MIPs. And we saw the
stream of one-byte, one-cycle instructions in Fig-
ure 7., page 18, on the sam e M CU yield 10 MIP s.
Effective performance will depend on a number of
things: the MCU clock frequency; the mixture of instructions types (bytes and cycles) in the application; the amount of time an empty PFQ stalls the
MCU (mix of instruction types and misses on
Branch Cache); and the operating vol tage. A 5V
uPSD33xx device operates with four memory wait
states, but a 3.3V de vice operat es wi th five mem ory wait states yielding 8 MIPS peak com pared t o
10 MIPs peak for 5V device. The same number of
wait states will apply to both program f etches and
to data READ/WRITEs unless otherwise specified
in the SFR named BUSCON.
In general, a 3X aggregate performance increase
is expected over any standard 8032 application
running at the same clock frequency.
19/231

uPSD33xx
Figure 9. PFQ Operation on Multi-cycl e Instruction s
Three 2-byte, 2-cycle Instructions on uPSD33XX
Pre-Fetch Inst A Pre-Fetch Inst B Pre-Fetch Inst C
PFQ
Inst A, Byte 1
4-clock
Macine Cycle
Inst A, Byte 2 Inst B, Byte 1 Inst B, Byte 2 Inst C, Byte 1 Inst C, Byte 2
Continue to Pre-Fetch
Phase 1 Phase 2 Phase 3 Phase 4 Phase 6Phase 5
MCU
Previous Instruction A1 A2 Process A B1 B2 Process B C1 C2
Execution
Instruction A Instruction B Instruction C
Figure 10. uPSD33xx Multi-cycle Instructions Compared to Standard 8032
Three 2-byte, 2-cycle Instructions, uPSD33XX vs. Standard 8032
24 Clocks Total (4 clocks per cycle)
uPSD33XX
Std 8032
A1
Byte 1
A2
Inst A
Byte 2
B1
1 Cycle
Process Inst A
B2
1 Cycle
Inst B
C1
C2
Inst C
72 Clocks (12 clocks per cycle)
Byte 1
Byte 2
Process Inst B
Byte 1
Byte 2
Process C
Process Inst C
Next Inst
AI08810
AI08811
20/231

MCU MODU LE DISCRIPTION
This section provides a detail description of the
MCU Module system functions and peripherals, including:
■ 8032 MCU Registers
■ Special Function Registers
■ 8032 Addressing Modes
■ uPSD33xx Instruction Set Summary
■ Dua l Data Po i nters
■ Debug Unit
■ Interrupt System
■ MCU Clock Generation
■ Power Saving Modes
■ Oscillator and Ext ernal C om ponents
8032 MCU REGISTERS
The uPSD33xx has the following 8 032 MCU core
registers, also shown in Figure 11.
Figure 11. 8032 MCU Registers
A
B
SP
PCH
DPTR(DPH)
AI06636
PCL
PSW
R0-R7
DPTR(DPL)
Stack Pointer (SP)
The SP is an 8-bit register which holds the current
location of the top of th e stack. It is incremented
before a value is pushed ont o t he st ack , and dec remented after a value is popped off the stack. The
SP is initialized to 07h after reset. This causes the
stack to begin at locat ion 08h (top o f stack). To
avoid overlapping conflicts, the user must initialize
the top of the stack to 20h if all four banks of registers R0 - R7 are used, and the user must initialize
the top of stack to 30h if all of the 8032 bit memory
locations are used.
Data Pointer (DPTR)
DPTR is a 16-bit register consisting of two 8-bit
registers, DPL and DPH. The DPTR Register is
used as a base register to create an address for indirect jumps, table look-up operations, and for external data transfers (XDATA). When not used for
addressing, the DPTR Register can be used as a
general purpose 16-bit data register.
Accumulator
B Register
Stack Pointer
Program Counter
Program Status Word
General Purpose
Register (Bank0-3)
Data Pointer Register
uPSD33xx
■ I/O Ports
■ MCU Bus Interface
■ Supervisory Functions
■ Standard 8032 Timer/Counters
■ Serial UART Interf ac e s
■ IrDA Interface
2
■ I
C Interface
■ SPI Interface
■ Analog to Digital Converter
■ Programmable Counter Array (PCA)
Note: A full description of the 8032 instruction set
may be found in the uPSD33xx Programmers
Guide.
Very frequently, the DPTR Register is used to access XDATA using the External Direct addressing
mode. The uPSD33 xx has a specia l set of SFR
registers (DPTC, DPTM) to control a secondary
DPTR Register to speed memory-to-memory
XDATA transfers. Having dual DPTR Registers allows rapid switching between source and destination addresses (see details in DUAL DATA
POINTERS, page 37).
Program Counter (PC)
The PC is a 16-bit register consisting of two 8-bit
registers, PCL and PCH. This counter indicates
the address of the next instruction in program
memory to be fetched and executed. A reset forces the PC to location 0000h, which is where the reset jump vector is stored.
Accumulator (ACC)
This is an 8-bit general purpose register which
holds a source operand and rece ives the result of
arithmetic operations. The ACC Register can also
be the source or destination of logic and data
movement operations. For MUL and DIV instructions, ACC is combined with the B Register to hold
16-bit operands. The ACC is referred to as “A” in
the MCU instruction set.
B Register (B)
The B Register is a gene ra l purpo se 8-bit regi ster
for temporary data storage and also used as a 16bit register when concatenated with the ACC Register for use with MUL and DIV instructions.
21/231

uPSD33xx
General Purpose Registers (R0 - R7)
There are four banks of eight general purpose 8bit registers (R0 - R7), but only o ne bank of eight
registers is active at any given time dependin g on
the setting in the PSW word (described next). R0 R7 are generally used to assist in manipulating
values and moving data from one memory location
to another. These register banks physically reside
in the first 32 locations of 8032 internal DATA
SRAM, starting at address 00h. At reset, only the
first bank of eight registers is active (addresses
00h to 07h), and the stack begins at address 08h.
Program Stat us Wor d (PSW )
The PSW is an 8-bit regi ster wh ich st ores s everal
important bits, or flags, that are set and cleared by
many 8032 instructions, reflecting the current
state of the MCU core. Figure 12., page 22 shows
the individual flags.
Carry Flag (CY). This flag is set when the last
arithmetic operation that was executed results in a
carry (addition) or borrow (subtraction). It is
cleared by all other arithmetic operations. The CY
flag is also affected by Shift and Rotate Instructions.
Auxiliary Carry Flag (AC). This flag i s set when
the last arithmetic operation that was executed results in a carry into (addition) or borrow from (subtraction) the high-order nibble. It is cleared by all
other arithmetic operations.
General Purpose Flag (F0). This is a bit-addressable, general-purpose flag for use under software
control.
Register Bank Select Flags (RS1, RS0). These
bits select which ba nk of eight regist ers is used
during R0 - R7 register accesses (see Table 4)
Overflow Flag (OV). The OV flag is set when: an
ADD, ADDC, or SUBB instruction causes a sign
change; a MUL instruction results in an overflow
(result greater than 255); a DIV instruction causes
a divide-by-zero condition. The OV f lag is cl eared
by the ADD, ADDC, SUBB, MUL, and DIV instructions in all other cases. The CLRV instruction will
clear the OV flag at any time.
Parity Flag (P). The P flag is set if the sum of the
eight bits in the Accumulator is odd, and P is
cleared if the sum is even.
Table 4. .Register Bank Select Addresses
RS1 RS0
0 0 0 00h - 07h
0 1 1 08h - 0Fh
1 0 2 10h - 17h
1 1 3 18h - 1Fh
Register
Bank
8032 Internal
DATA Address
Figure 12. Program Statu s W or d (PS W ) Re gi st er
MSB
CY
PSW
Carry Flag
Auxillary Carry Flag
General Purpose Flag
AC FO RS1 RS0 OV P
Register Bank Select Flags
(to select Bank0-3)
LSB
Reset Value 00h
Parity Flag
Bit not assigned
Overflow Flag
AI06639
22/231

SPECIA L FUNCTION REGISTER S (SFR)
A group of registers designated as Special Function Register (SFR) is shown in Table 5., page 24.
SFRs control the operating modes of the MCU
core and also control the peripheral interfaces and
I/O pins on the MCU Module. The SFRs can be accessed only by using the Direct Addressing method within the address range from 80h t o FFh of
internal 8032 SRAM. Sixteen addresses in SFR
address space are both byte- and bit-addressable.
The bit-addressable SFRs are noted in Table 5.
86 of a possible 128 SFR addresses are occupied.
The remaining unoccupied SFR addresses (designated as “RESERVED” in Table 5) should not be
written. Reading unoccupied lo cations will return
an undefined value.
Note: There is a separate set of control registers
for the PSD Module, designated as csiop, and they
are described in the PSD MODULE, page 133.
The I/O pins, PLD, and other functions on the PSD
Module are NOT controlled by SFRs.
SFRs are categorized as follows:
■ MCU core registers:
IP, A, B, PSW, SP, DPTL, DPTH, DPTC,
DPTM
■ MCU Module I/O Port registers:
P1, P3, P4, P1SFS0, P1SFS1, P3SFS,
P4SFS0, P4SFS 1
■ Standard 8032 Timer reg isters
TCON, TMOD, T2CON, TH0, TH1, TH2, TL0,
TL1, TL2, RCAP2L, RCAP2H
■ Standard Serial Interfaces (UART)
uPSD33xx
SCON0, SBUF0, SCON1, SBUF1
■ Power, clock, and bus timi ng regis ters
PCO N, CCON0, B U SCON
■ Hardware wat ch do g t imer re gist ers
WDKEY, WDRST
■ Interrupt system registers
IP, I PA, IE, IEA
■ Prog. Coun te r Array ( P CA ) cont ro l
registers
PCACL0, PCACH0, PCACON0, PCASTA,
PCACL1, PCACH1, PCACON1, CCON2,
CCON3
■ PCA capture/compare and PWM regist ers
CAPCOML0, CAPCOMH0, TCMMODE0,
CAPCOML1, CAPCOMH1, TCMMODE2,
CAPCOML2, CAPCOMH2, TCMMODE2,
CAPCOML3, CAPCOMH3, TCMMODE3,
CAPCOML4, CAPCOMH4, TCMMODE4,
CAPCOML5, CAPCOMH5, TCMMODE5,
PWMF0, PMWF1
■ SPI interface registers
SPICLKD, SPISTAT, SPITDR, SPIRDR,
SPICON0, SPICON1
2
■ I
C interface registers
S1SETUP, S1CON, S1STA, S1 D AT , S1ADR
■ Analog to Digital Converter registers
ACON, ADCPS, ADAT0, ADAT1
■ IrDA interface register
IRDACON
23/231
uPSD33xx
Table 5. SFR Memory Map with Direct Address and Reset Value
SFR
Addr
(hex)
80 RESERVED
81 SP SP[7:0] 07
82 DPL DPL[7:0] 00 Data
83 DPH DPH[7:0] 00
84 RESERVED
85 DPTC – AT – – – DPSEL[2:0] 00
86 DPTM – – – – MD1[1:0] MD0[1:0] 00
87 PCON SMOD0 SMOD1 – POR RCLK1 TCLK1 PD IDLE 00
88
89 TMOD GATE C/T
8A TL0 TL0[7:0] 00
8B TL1 TL1[7:0] 00
8C TH0 TH0[7:0] 00
8D TH1 TH1[7:0] 00
8E P1SFS0 P1SFS0[7:0] 00
8F P1SFS1 P1SFS1[7:0] 00
90
91 P3SFS P3SFS[7:0] 00
92 P4SFS0 P4SFS0[7:0] 00
93 P4SFS1 P4SFS1[7:0] 00
(1)
(1)
SFR
Name
TCON
P1
76 5 43210
TF1
<8Fh>
P1.7
<97h>
TR1
<8Eh>
P1.6
<96h>
Bit Name and <Bit Address> Reset
Value
(hex)
TF0
<8Dh>
M1 M0 GATE C/T M1 M0 00
P1.5
<95h>
TR0
<8Ch>
P1.4
<94h>
IE1
<8Bh>
P1.3
<93h>
IT1
<8Ah>
P1.2
<92h>
IE0
<89h>
P1.1
<91h>
IT0
<88h>
P1.0
<90h>
00
FF
with Link
Pointer
(SP), page
Pointer
(DPTR), p
age 21
13., page
14., page
24., page
39., page
40., page
Standard
SFRs, pag
29., page
30., page
25., page
28., page
32., page
33., page
Reg.
Descr.
Stack
21
Table
37
Table
38
Table
50
Table
70
Table
72
Timer
e69
Table
60
Table
60
Table
57
Table
60
Table
61
Table
61
24/231

uPSD33xx
SFR
Addr
(hex)
94 ADCPS – – – – ADCCE ADCPS[2:0] 00
95 ADAT0 ADATA[7:0] 00
96 ADAT1 – – – – – – ADATA[9:8] 00
97 ACON AINTF AINTEN ADEN ADS[2:0] ADST ADSF 00
98
99 SBUF0 SBUF0[7:0] 00
9A RESERVED
9B RESERVED
9C RESERVED
9D BUSCON EPFQ EBC WRW1 WRW0 RDW1 RDW0 CW1 CW0 EB
9E RESERVED
9F RESERVED
A0 RESERVED
A1 RESERVED
A2 PCACL0 PCACL0[7:0] 00
A3 PCACH0 PCACH0[7:0] 00
A4 PCACON0 EN_ALL EN_PCA EOVF1 PCA_IDL – – CLK_SEL[1:0] 00
A5 PCASTA OVF1 INTF5 INTF4 INTF3 OVF0 INTF2 INTF1 INTF0 00
A6 WDTRST WDTRST[7:0] 00
A7 IEA EADC ESPI EPCA ES1 – – EI2C – 00
(1)
SFR
Name
SCON0
76 5 43210
SM0
<9Fh>
SM1
<9Eh>
Bit Name and <Bit Address> Reset
SM2
<9Dh>
REN
<9Ch>
TB8
<9Bh>
RB8
<9Ah>TI<99h>RI<9h8>
Value
(hex)
00
Reg.
Descr.
with Link
Table
64., page
122
Table
65., page
122
Table
66., page
122
Table
63., page
121
Table
45., page
82
Figure
25., page
79
Table
35., page
63
Table
67., page
124
Table
67., page
124
Table
70., page
129
Table
72., page
131
Table
38., page
68
Table
18., page
44
25/231

uPSD33xx
SFR
Addr
(hex)
(1)
A8
A9
AA
AB
AC
AD
SFR
Name
IE
TCMMODE
0
TCMMODE
1
TCMMODE
2
CAPCOML
0
CAPCOMH
0
76 5 43210
EA
<AFh>
–
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
Bit Name and <Bit Address> Reset
Value
(hex)
ET2
<ADh>
ES0
<ACh>
ET1
<ABh>
EX1
<AAh>
ET0
<A9h>
EX0
<A8h>
CAPCOML0[7:0] 00
CAPCOMH0[7:0] 00
00
Reg.
Descr.
with Link
Table
17., page
43
Table
73., page
132
Table
67., page
124
Table
AE WDTKEY WDTKEY[7:0] 55
37., page
68
AF
B0
(1)
B1
B2
B3
CAPCOML
1
P3
CAPCOMH
1
CAPCOML
2
CAPCOMH
2
P3.7
<B7h>
P3.6
<B6h>
P3.5
<B5h>
CAPCOML1[7:0] 00
P3.4
<B4h>
P3.3
<B3h>
P3.2
<B2h>
P3.1
<B1h>
P3.0
<B0h>
FF
CAPCOMH1[7:0] 00
CAPCOML2[7:0] 00
CAPCOMH2[7:0] 00
Table
67., page
124
Table
26., page
58
Table
67., page
124
B4 PWMF0 PWMF0[7:0] 00
B5 RESERVED
B6 RESERVED
Table
B7 IPA PADC PSPI PPCA PS1 – – PI2C – 00
20., page
45
Table
19., page
44
B8
(1)
IP – –
PT2
<BDh>
PS0
<BCh>
PT1
<BBh>
PX1
<BAh>
PT0
<B9h>
PX0
<B8h>
00
B9 RESERVED
BA PCACL1 PCACL1[7:0] 00 Table
BB PCACH1 PCACH1[7:0] 00
67., page
124
Table
BC PCACON1 – EN_PCA EOVF1 PCA_IDL – – CLK_SEL[1:0] 00
71., page
130
26/231

uPSD33xx
SFR
Addr
(hex)
BD
BE
BF
(1)
C0
C1
C2
C3
C4
C5
C6
SFR
Name
TCMMODE
3
TCMMODE
4
TCMMODE
5
P4
CAPCOML
3
CAPCOMH
3
CAPCOML
4
CAPCOMH
4
CAPCOML
5
CAPCOMH
5
76 5 43210
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
EINTF E_COMP CAP_PE CAP_NE MATCH TOGGLE PWM[1:0] 00
P4.7
<C7h>
P4.6
<C6h>
Bit Name and <Bit Address> Reset
P4.5
<C5h>
P4.4
<C4h>
P4.3
<C3h>
P4.2
<C2h>
P4.1
<C1h>
P4.0
<C0h>
CAPCOML3[7:0] 00
CAPCOMH3[7:0] 00
CAPCOML4[7:0] 00
CAPCOMH4[7:0] 00
CAPCOML5[7:0] 00
CAPCOMH5[7:0] 00
C7 PWMF1 PWMF1[7:0] 00
CP/
RL2
<C8h>
C8
(1)
T2CON
TF2
<CFh>
EXF2
<CEh>
RCLK
<CDh>
TCLK
<CCh>
EXEN2
<CBh>
TR2
<CAh>
C/T2
<C9h>
C9 RESERVED
CA RCAP2L RCAP2L[7:0] 00
CB RCAP2H RCAP2H[7:0] 00
CC TL2 TL2[7:0] 00
CD TH2 TH2[7:0] 00
CE IRDACON – IRDA_EN BIT_PULS CDIV4 CDIV3 CDIV2 CDIV1 CDIV0 0F
D0
(1)
PSW
CY
<D7h>AC<D6h>F0<D5h>
RS[1:0]
<D4h, D3h>
OV
<D2h>
–
P
<D0>
D1 RESERVED
D2 SPICLKD SPICLKD[5:0] – – 04
D3 SPISTAT – – – BUSY TEISF RORISF TISF RISF 02
Value
(hex)
FF
00
00
Reg.
Descr.
with Link
Table
73., page
132
Table
27., page
58
Table
67., page
124
Table
41., page
75
Standard
Timer
SFRs, pag
e69
Table
48., page
93
Program
Status
Word
(PSW), pa
ge 22
Table
61., page
118
Table
62., page
119
27/231
uPSD33xx
SFR
Addr
(hex)
SFR
Name
76 5 43210
Bit Name and <Bit Address> Reset
Value
(hex)
Reg.
Descr.
with Link
D4 SPITDR SPITDR[7:0] 00 Table
62., page
D5 SPIRDR SPIRDR[7:0] 00
119
Table
D6 SPICON0 – TE RE SPIEN SSEL FLSB SPO – 00
59., page
117
Table
D7 SPICON1 – – – – TEIE RORIE TIE RIE 00
60., page
118
Table
46., page
D8
(1)
SCON1
SM0
<DF
SM1
<DE>
SM2
<DD>
REN
<DC>
TB8
<DB>
RB8
<DA>TI<D9>RI<D8>
00
Figure
D9 SBUF1 SBUF1[7:0] 00
25., page
DA RESERVED
Table
DB S1SETUP SS_EN SMPL_SET[6:0] 00
55., page
105
Table
DC S1CON CR2 EN1 STA STO ADDR AA CR1 CR0 00
50., page
100
Table
DD S1STA GC STOP INTR TX_MD B_BUSY B_LOST ACK_R
SLV 00
52., page
103
Table
DE S1DAT S1DAT[7:0] 00
53., page
104
Table
DF S1ADR S1ADR[7:0] 00
54., page
104
Accumulat
E0
(1)
A
<bit addresses: E7h, E6h, E5h, E4h, E3h, E2h, E1h, E0h>
A[7:0]
00
(ACC), pa
ge 21
E1
to
RESERVED
EF
F0
(1)
B
<bit addresses: F7h, F6h, F5h, F4h, F3h, F2h, F1h, F0h>
B[7:0]
00
B Register
(B), page
F1 RESERVED
F2 RESERVED
F3 RESERVED
F4 RESERVED
F5 RESERVED
F6 RESERVED
83
79
or
21
28/231
uPSD33xx
SFR
Addr
(hex)
F7 RESERVED
F8 RESERVED
F9 CCON0 – – – DBGCE CPU_AR CPUPS[2:0] 10
FA RESERVED
FB CCON2 – – – PCA0CE PCA0PS[3:0] 10
FC CCON3 – – – PCA1CE PCA1PS[3:0] 10
FD RESERVED
FE RESERVED
FF RESERVED
Note: 1. This SFR can be addressed by i ndividual bits (Bit Addr ess mode) or addressed by the entire by te (Direct Address mode) .
SFR
Name
76 5 43210
Bit Name and <Bit Address> Reset
Value
(hex)
with Link
21., page
68., page
69., page
Reg.
Descr.
Table
47
Table
125
Table
125
29/231

uPSD33xx
8032 ADDRESSING MODES
The 8032 MCU uses 11 different addressing
modes listed below:
■ Register
■ Direct
■ Register Indirect
■ Immediate
■ External Direct
■ External Indirect
■ Indexed
■ Relative
■ Absolute
■ Long
■ Bit
Register Addressing
This mode uses the con tents of one of the registers R0 - R7 (selected by the last three bits in the
instruction opcode) as the operand source or destination. This mode is very efficient since an additional instruction byte is not needed to ident ify the
operand. For example:
MOV A, R7 ; Move contents of R7 to accumulator
Direct Addressing
This mode uses an 8-bit address, which is contained in the second byte of the instruction, to directly address an operand which reside s in either
8032 DATA SRAM (internal address range 00h07Fh) or resides in 8032 SFR (internal address
range 80h-FFh). This m ode is quite fast sin ce the
range limit is 256 bytes of internal 8032 SRAM.
For example:
MOV A, 40h ; Move contents of DATA SRAM
; at location 40h into the accumulator
Register Indirect Addressing
This mode uses an 8-bit address contained in either Register R0 or R1 to indirectly address an operand which resides in 8032 IDATA SRAM
(internal address range 80h-FFh). Although 8 032
SFR registers also occupy the same physical address range as IDATA, SFRs will not be accessed
by Register Indirect mode. S F Rs m ay on ly be accesses using Direct address mode. For example:
MOV A, @R0 ; Move into the accumulator the
; contents of IDATA SRAM that is
; pointed to by the address
; contained in R0.
Imm ediate Addressing
This mode uses 8-bits of dat a (a constant) contained in the second byte of the instruction, and
stores it into the memory location or register indicated by the first byte of the in struction. Thu s, the
data is immediately available within the instruction.
This mode is commonly used to initialize registers
and SFRs or to perform mask operations.
There is also a 16-bit version of this mode for loading the DPTR Register. In this case, the two bytes
following the instruction byte contain the 16-bit value. For example:
MOV A, 40# ; Move the constant, 40h, into
; the accumulator
MOV DPTR, 1234# ; Move the constant, 1234h, into
; DPTR
External Direct Addressing
This mode will access external me mory (XDATA)
by using the 1 6-bit address stored in the DPTR
Register. There are only two instructions using this
mode and both use the accumulator to either receive a byte from external memory addressed by
DPTR or to send a byte from the accumul ator to
the address in DPTR. The uPSD 33xx has a special feature to alternate the contents (source and
destination) of DPTR rapidly to implement very efficient memory-to-memory transfers. For example:
MOVX A, @DPTR ; Move contents of accumulator to
; XDATA at address contained in
; DPTR
MOVX @DPTR, A ; Move XDATA to accumulator
Note: See details in DUAL DATA
POINTERS, page 37.
External Indirect Addressing
This mode will access external me mory (XDATA)
by using the 8-bit address stored in either Register
R0 or R1. This is the fastest way to access XDATA
(least bus cycles), but because only 8-bits are
available for address, this mode limits XDATA to a
size of only 256 bytes (the traditional Port 2 of the
8032 MCU is not available in the uPSD33xx, so it
is not possible to write the upper address byte).
This mode is not supported by uPSD33xx.
For example:
MOVX @R0,A ; Move into the accumulator the
; XDATA that is pointed to by
; the address contained in R0.
30/231

uPSD33xx
Indexed Addressing
This mode is used for the MOVC instruction which
allows the 8032 to read a constant from program
memory (not data memory). MOVC is of ten used
to read look-up tables that are embedded in program memory. The final address produced by this
mode is the result of adding either the 16-bit PC or
DPTR value to the contents of the accumulator.
The value in the accumulator is referred to as an
index. The data fetched from the final location in
program memory is stored into the accumulator,
overwriting the index value that was previously
stored there. For example:
MOVC A, @A+DPTR; Move code byte relative to
; DPTR into accumulator
MOVC A, @A+PC ; Move code byte relative to PC
; into accumulator
Relative Addressing
This mode will add the two’s- compliment number
stored in the second byte of the instruction to the
program counter for short jumps within +128 or –
127 addresses relative to the program counter.
This is commonly used for looping and is very efficient since no additional bus cycle is needed to
fetch the jump destination address. For example:
SJMP 34h ; Jump 34h bytes ahead (in program
; memory) of the address at which
; the SJMP instruction is stored. If
; SJMP is at 1000h, program
; execution jumps to 1034h.
Absolute Addressing
This mode will append the 5 high-order bits of the
address of the next instruction to the 11 low-order
bits of an ACALL or AJUMP instruction to produce
a 16-bit jump address. The jump will be within the
same 2K byte page of program memory as the first
byte of the following instruction. For example:
AJMP 0500h ; If next instruction is located at
; address 4000h, the resulting jump
; will be made to 4500h.
Long Addres sing
This mode will use the 16-bits contained in the two
bytes following the instruction byte as a jump destination address for LCALL and LJMP instructions.
For example:
LJMP 0500h ; Unconditionally jump to address
; 0500h in program memory
Bit Addressing
This mode allows setting or clearing an i ndividual
bit without disturbing the ot her bits within an 8-bit
value of internal SRAM. Bit Addressing is only
available for certain locations in 803 2 DATA and
SFR memory. Valid locations are DATA add resses 20h - 2Fh and for SFR addresses whose base
address ends with 0h or 8h. (Examp le: The SFR,
IE, has a base address of A8h, so each of the eight
bits in IE can be addressed individually at address
A8h, A9h, ...up to AFh.) For example:
SETB AFh ; Set the individual EA bit (Enable All
; Interrupts) inside the SFR Register,
; IE.
31/231

uPSD33xx
uPSD33xx INSTRUCTION SET SUMMARY
Tables 6 through 11 list all of the instructions supported by the uPSD33xx, including the number of
bytes and number of machine cycles required to
implement each instruction. This is the standard
8051 instruction set.
The meaning of “machine cycles” is how many
8032 MCU core machine cycles are required to
execute the instruction. The “native” duration of all
machine cycles is set by the memory wait state
settings in the SFR, BUSCON, and the MCU clock
divider selections in the SFR, CCON0 (i.e. a machine cycle is typically set to 4 MCU clocks for a 5V
uPSD33xx). However, an individual machine cycle
may grow in duration when either of two things
happen:
Table 6 . Arithm etic Instructio n Set
Mnemonic
and Use
ADD A, Rn Add register to ACC 1 byte/1 cycle
ADD A, Direct Add direct byte to ACC 2 byte/1 cycle
ADD A, @Ri Add indirect SRAM to ACC 1 byte/1 cycle
ADD A, #data Add immediate data to ACC 2 byte/1 cycle
ADDC A, Rn Add register to ACC with carry 1 byte/1 cycle
ADDC A, direct Add direct byte to ACC with carry 2 byte/1 cycle
ADDC A, @Ri Add indirect SRAM to ACC with carry 1 byte/1 cycle
ADDC A, #data Add immediate data to ACC with carry 2 byte/1 cycle
SUBB A, Rn Subtract register from ACC with borrow 1 byte/1 cycle
SUBB A, direct Subtract direct byte from ACC with borrow 2 byte/1 cycle
SUBB A, @Ri Subtract indirect SRAM from ACC with borrow 1 byte/1 cycle
SUBB A, #data Subtract immediate data from ACC with borrow 2 byte/1 cycle
INC A Increment A 1 byte/1 cycle
INC Rn Increment register 1 byte/1 cycle
INC direct Increment direct byte 2 byte/1 cycle
INC @Ri Increment indirect SRAM 1 byte/1 cycle
DEC A Decrement ACC 1 byte/1 cycle
DEC Rn Decrement register 1 byte/1 cycle
DEC direct Decrement direct byte 2 byte/1 cycle
DEC @Ri Decrement indirect SRAM 1 byte/1 cycle
INC DPTR Increment Data Pointer 1 byte/2 cycle
MUL AB Multiply ACC and B 1 byte/4 cycle
DIV AB Divide ACC by B 1 byte/4 cycle
DA A Decimal adjust ACC 1 byte/1 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
(1)
1. a stall is imposed while loading the 8032 PreFetch Queue (PFQ); or
2. the occurrence of a cache miss in the Branch
Cache (BC) during a branch in program
execution flo w.
See 8032 MCU CORE PERFORMANCE
ENHANCEMENTS, page 17 or more details.
But generally speaking, during typical program execution, the PFQ is not empty and the BC has no
misses, producing very good performance without
extending the durat ion of any machine cycles.
The uPSD33xx Programmers Guide describes
each instruction operation in detail.
Description Length/Cycles
32/231

uPSD33xx
Table 7. Logical Instruction Set
Mnemonic
and Use
ANL A, Rn AND register to ACC 1 byte/1 cycle
ANL A, direct AND direct byte to ACC 2 byte/1 cycle
ANL A, @Ri AND indirect SRAM to ACC 1 byte/1 cycle
ANL A, #data AND immediate data to ACC 2 byte/1 cycle
ANL direct, A AND ACC to direct byte 2 byte/1 cycle
ANL direct, #data AND immediate data to direct byte 3 byte/2 cycle
ORL A, Rn OR register to ACC 1 byte/1 cycle
ORL A, direct OR direct byte to ACC 2 byte/1 cycle
ORL A, @Ri OR indirect SRAM to ACC 1 byte/1 cycle
ORL A, #data OR immediate data to ACC 2 byte/1 cycle
ORL direct, A OR ACC to direct byte 2 byte/1 cycle
ORL direct, #data OR immediate data to direct byte 3 byte/2 cycle
SWAP A Swap nibbles within the ACC 1 byte/1 cycle
XRL A, Rn Exclusive-OR register to ACC 1 byte/1 cycle
(1)
Description Length/Cycles
XRL A, direct Exclusive-OR direct byte to ACC 2 byte/1 cycle
XRL A, @Ri Exclusive-OR indirect SRAM to ACC 1 byte/1 cycle
XRL A, #data Exclusive-OR immediate data to ACC 2 byte/1 cycle
XRL direct, A Exclusive-OR ACC to direct byte 2 byte/1 cycle
XRL direct, #data Exclusive-OR immediate data to direct byte 3 byte/2 cycle
CLR A Clear ACC 1 byte/1 cycle
CPL A Compliment ACC 1 byte/1 cycle
RL A Rotate ACC left 1 byte/1 cycle
RLC A Rotate ACC left through the carry 1 byte/1 cycle
RR A Rotate ACC right 1 byte/1 cycle
RRC A Rotate ACC right through the carry 1 byte/1 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
33/231

uPSD33xx
Table 8. Data Transfer Instruction Set
Mnemonic
and Use
MOV A, Rn Move register to ACC 1 byte/1 cycle
MOV A, direct Move direct byte to ACC 2 byte/1 cycle
MOV A, @Ri Move indirect SRAM to ACC 1 byte/1 cycle
MOV A, #data Move immediate data to ACC 2 byte/1 cycle
MOV Rn, A Move ACC to register 1 byte/1 cycle
MOV Rn, direct Move direct byte to register 2 byte/2 cycle
MOV Rn, #data Move immediate data to register 2 byte/1 cycle
MOV direct, A Move ACC to direct byte 2 byte/1 cycle
MOV direct, Rn Move register to direct byte 2 byte/2 cycle
MOV direct, direct Move direct byte to direct 3 byte/2 cycle
MOV direct, @Ri Move indirect SRAM to direct byte 2 byte/2 cycle
MOV direct, #data Move immediate data to direct byte 3 byte/2 cycle
MOV @Ri, A Move ACC to indirect SRAM 1 byte/1 cycle
MOV @Ri, direct Move direct byte to indirect SRAM 2 byte/2 cycle
(1)
Description Length/Cycles
MOV @Ri, #data Move immediate data to indirect SRAM 2 byte/1 cycle
MOV DPTR, #data16 Load Data Pointer with 16-bit constant 3 byte/2 cycle
MOVC A, @A+DPTR Move code byte relative to DPTR to ACC 1 byte/2 cycle
MOVC A, @A+PC Move code byte relative to PC to ACC 1 byte/2 cycle
MOVX A, @Ri Move XDATA (8-bit addr) to ACC 1 byte/2 cycle
MOVX A, @DPTR Move XDATA (16-bit addr) to ACC 1 byte/2 cycle
MOVX @Ri, A Move ACC to XDATA (8-bit addr) 1 byte/2 cycle
MOVX @DPTR, A Move ACC to XDATA (16-bit addr) 1 byte/2 cycle
PUSH direct Push direct byte onto stack 2 byte/2 cycle
POP direct Pop direct byte from stack 2 byte/2 cycle
XCH A, Rn Exchange register with ACC 1 byte/1 cycle
XCH A, direct Exchange direct byte with ACC 2 byte/1 cycle
XCH A, @Ri Exchange indirect SRAM with ACC 1 byte/1 cycle
XCHD A, @Ri Exchange low-order digit indirect SRAM with ACC 1 byte/1 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
34/231

uPSD33xx
Table 9. Boolean Variable Manipulation Instruction Set
Mnemonic
and Use
CLR C Clear carry 1 byte/1 cycle
CLR bit Clear direct bit 2 byte/1 cycle
SETB C Set carry 1 byte/1 cycle
SETB bit Set direct bit 2 byte/1 cycle
CPL C Compliment carry 1 byte/1 cycle
CPL bit Compliment direct bit 2 byte/1 cycle
ANL C, bit AND direct bit to carry 2 byte/2 cycle
ANL C, /bit AND compliment of direct bit to carry 2 byte/2 cycle
ORL C, bit OR direct bit to carry 2 byte/2 cycle
ORL C, /bit OR compliment of direct bit to carry 2 byte/2 cycle
MOV C, bit Move direct bit to carry 2 byte/1 cycle
MOV bit, C Move carry to direct bit 2 byte/2 cycle
JC rel Jump if carry is set 2 byte/2 cycle
JNC rel Jump if carry is not set 2 byte/2 cycle
(1)
Description Length/Cycles
JB rel Jump if direct bit is set 3 byte/2 cycle
JNB rel Jump if direct bit is not set 3 byte/2 cycle
JBC bit, rel Jump if direct bit is set and clear bit 3 byte/2 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
35/231

uPSD33xx
Table 10. Program Branching Instru ction Set
Mnemonic
and Use
ACALL addr11 Absolute subroutine call 2 byte/2 cycle
LCALL addr16 Long subroutine call 3 byte/2 cycle
RET Return from subroutine 1 byte/2 cycle
RETI Return from interrupt 1 byte/2 cycle
AJMP addr11 Absolute jump 2 byte/2 cycle
LJMP addr16 Long jump 3 byte/2 cycle
SJMP rel Short jump (relative addr) 2 byte/2 cycle
JMP @A+DPTR Jump indirect relative to the DPTR 1 byte/2 cycle
JZ rel Jump if ACC is zero 2 byte/2 cycle
JNZ rel Jump if ACC is not zero 2 byte/2 cycle
CJNE A, direct, rel Compare direct byte to ACC, jump if not equal 3 byte/2 cycle
CJNE A, #data, rel Compare immediate to ACC, jump if not equal 3 byte/2 cycle
CJNE Rn, #data, rel Compare immediate to register, jump if not equal 3 byte/2 cycle
CJNE @Ri, #data, rel Compare immediate to indirect, jump if not equal 3 byte/2 cycle
(1)
Description Length/Cycles
DJNZ Rn, rel Decrement register and jump if not zero 2 byte/2 cycle
DJNZ direct, rel Decrement direct byte and jump if not zero 3 byte/2 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
Table 11. Miscellaneous Instruction Set
Mnemonic
and Use
NOP No Operation 1 byte/1 cycle
Note: 1. All mnemonics copyri ght ed ©Intel Corporation 1980.
(1)
Description Length/Cycles
Table 12. Notes on Instruction Set and Addressing Modes
Rn Register R0 - R7 of the currently selected register bank.
direct 8-bit address for internal 8032 DATA SRAM (locations 00h - 7Fh) or SFR registers (locations 80h - FFh).
@Ri 8-bit internal 8032 SRAM (locations 00h - FFh) addressed indirectly through contents of R0 or R1.
#data 8-bit constant included within the instruction.
#data16 16-bit constant included within the instruction.
addr16 16-bit destination address used by LCALL and LJMP.
addr11 11-bit destination address used by ACALL and AJMP.
rel Signed (two-s compliment) 8-bit offset byte.
bit
Direct addressed bit in internal 8032 DATA SRAM (locations 20h to 2Fh) or in SFR registers (88h, 90h,
98h, A8h, B0, B8h, C0h, C8h, D0h, D8h, E0h, F0h).
36/231

DUAL DA T A POINTE RS
XDATA is accessed by the External Direct addressing mode, which uses a 16-bit address
stored in the DPTR Register. Traditional 8032 architecture has only one DPTR Register. This is a
burden when transferring data between two XDATA locations because it requires heavy use of the
working registers to manipulate the source and
destination pointers.
However, the uPSD33xx has two data pointers,
one for storing a source address and the other for
storing a destination address. These pointers can
be configured to automatically increment or decrement after each data transfer, further reducing the
burden on the 8032 and making this kind of data
movement very efficient.
Data Pointer Control Register, DPTC (85h)
By default, the DPTR Register of the uPSD33xx
will behave no different than in a standard 8032
MCU. The DPSEL0 Bit of SFR register DPTC
shown in Table 13, selects which one of the two
“background” data pointer registers (DPTR0 or
DPTR1) will function as the traditional DPTR Reg-
uPSD33xx
ister at any given time. After reset, the DPSEL0 Bit
is cleared, enabling DPTR0 to function as the DPTR, and firmware may access DPTR0 by reading
or writing the traditional DPTR Register at SFR addresses 82h and 83h. When the DPSEL0 bit is set,
then the DPTR1 Register functions as DPTR, and
firmware may now access DPTR1 through SFR
registers at 82h and 83h. The pointer which is not
selected by the DPSEL0 bit remains in the ba ckground and is not acc essible by the 8032. If the
DPSEL0 bit is never set, then the uPSD33xx will
behave like a traditional 8032 having only one
DPTR Register.
To further speed XDATA to XDATA transfers, the
SFR bit, AT, m ay be set to aut omatically toggle the
two data pointers, DPTR0 and DPTR1, each t ime
the standard DPTR Register is accessed by a
MOVX instruction. This eliminates the need for
firmware to manually manipulate the DPSEL0 bit
between each data transfer.
Detailed description for the SFR register DPTC is
shown in Table 13.
Table 13. DPTC: Data Pointer Control Register (SFR 85h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
–AT–––––DPSEL0
Details
Bit Symbol R/W Definition
7––Reserved
6ATR,W
5-1 – – Reserved
0 DPSE0 R,W
0 = Manually Select Data Pointer
1 = Auto Toggle between DPTR0 and DPTR1
0 = DPTR0 Selected for use as DPTR
1 = DPTR1 Selected for use as DPTR
37/231

uPSD33xx
Data Pointer Mode Register, DPTM (86h)
The two “background” data pointers, DPTR0 and
DPTR1, can be configured to automatic ally increment, decrement, or stay the same after a MOVX
instruction accesses the DPTR Register. Only the
currently selected pointer will be affected by the increment or decrement. This feature is controlled
by the DPTM Register defined in Table 14.
The automatic increment or decrement function is
effective only for the MOVX instruction, and not
MOVC or any other instruction that uses the DTPR
Register.
Table 14. DPTM: Data Pointer Mode Register (SFR 86h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
––––MD11MD10MD01MD00
Details
Bit Symbol R/W Definition
7-4 – – Reserved
DPTR1 Mode Bits
Firmware Example. The 8051 a ssembl y code illustrated in Table 15 shows how to transfer a block
of data bytes from one XDATA address region to
another XDATA address reg ion. Auto-address incrementing and auto-pointer toggling will be used.
3-2 MD[11:10] R,W
1-0 MD[01:00] R,W
00: DPTR1 No Change
01: Reserved
10: Auto Increment
11: Auto Decrement
DPTR0 Mode Bits
00: DPTR0 No Change
01: Reserved
10: Auto Increment
11: Auto Decrement
Table 15. 8051 Assembly Code Example
MOV R7, #COUNT ; initialize size of data block to transfer
MOV DPTR, #SOURCE_ADDR ; load XDATA source address base into DPTR0
MOV 85h, #01h ; load DPTC to access DPTR1 pointer
MOV DPTR, #DEST_ADDR ; load XDATA destination address base into DPTR1
MOV 85h, #40h ; load DPTC to access DPTR0 pointer and auto toggle
MOV 86h, #0Ah ; load DPTM to auto-increment both pointers
LOOP:
Note: 1. The code loop where the data transfer t akes place is only 3 lines of code.
(1)
MOVX
(1)
MOVX
(1)
DJNZ
MOV 86h, #00 ; disable auto-increment
MOV 85h, #00 ; disable auto-toggle, now back to single DPTR mode
A, @DPTR ; load XDATA byte from source into ACC.
; after load completes, DPTR0 increments and DPTR
; switches DPTR1
@DPTR, A ; store XDATA byte from ACC to destination.
; after store completes, DPTR1 increments and DPTR
; switches to DPTR0
R7, LOOP ; continue until done
38/231

DEBUG UNIT
The 8032 MCU Module supports run-time d ebugging through the JTAG interface. This same JTAG
interface is also used for In-System Program mi ng
(ISP) and the physical connections are described
in the PSD Module section, JTAG ISP and JTAG
Debug, page 195.
Debugging with a serial interface such as JTAG is
a non-intrusive way to gain acces s to the i nternal
state of the 8032 MCU core and various memories. A traditional external hardware emulator cannot be completely effective on the uPSD33xx
because of the Pre-Fetch Queue and Branch
Cache. The nature of the PFQ and BC hide the
visibility of actual program flow through traditional
external bus connections, thus requiring on-chip
serial debugging instead.
Debugging is supported by Windows PC based
software tools used for 8051 code development
from 3rd party vendors listed at www.st.com/psm.
Debug capabilities include:
■ Halt or Start MCU execution
■ Res e t the MC U
■ Single Step
■ 3 Match Breakpoints
■ 1 Range Breakpoint (inside or outside range)
■ Program Tracing
■ Read or Modify MCU core registers, DATA,
IDATA, SFR, XDATA, and Code
■ External Debug Event Pin, Input or Output
Some key points regarding us e of the JTAG Debugger.
– The JTAG Debugger can access MCU
registers, data memory, and code memory
while the MCU is executing at full speed by
cycle-stealing. This means “watch windows”
may be displayed and periodically updated on
the PC during full speed operation. Registers
and data content may also be modified during
full speed operation.
uPSD33xx
– There is no on-chip storage for Program Trace
data, but instead this data is scanned from the
uPSD33xx through the JTAG channel at runtime to the PC host for proccessing. As such,
full speed program tracing is possible only
when the 8032 MCU is operating below
approximately one MIPS of performance.
Above one MIPS, the program will not run
real-time while tracing. One MIPS
performance is determined by the
combination of choice for MCU clock
frequency, and the bit settings in SFR
registers BUSCON and CCON0.
– Breakpoints can optionally halt the MCU, and/
or assert the external Debug Event pin.
– Breakpoint definitions may be qualified with
read or write operations, and may also be
qualified with an address of code, SFR, DATA,
IDATA, or XDATA memo r ies.
– Three breakpoints w ill co m pare an addr ess ,
but the fourth breakpoint can compare an
address and also data content. Additionally,
the fouth breakpoint can be logically combined
(AND/OR) with any of the other three
breakpoints.
– The Debug Event pin can be configured by the
PC host to generate an output pulse for
external triggering when a break condition is
met. The pin can also be configured as an
event input to the breakpoint logic, causing a
break on the falling-edge of an external event
signal. If not used, the Debug Event pin should
be pulled up to V
section, Debugging the 8032 MCU
Module., page 201 .
– The duration of a pulse, generated when the
Event pin configured as an output, is one MCU
clock cycle. This is an active-low signal, so the
first edge when an event occurs is high-to-low.
– The clock to the Watchdog Timer, ADC, and
2
C interface are not stopped by a breakpoint
I
halt.
– The Watchdog Timer should be disabled while
debugging with JTAG, else a reset w ill be
generated upon a watchdog time-out.
as described in the
CC
39/231

uPSD33xx
INTERRUPT SYSTEM
The uPSD33xx has an 11-source, two priority level
interrupt structure summarized in Table 16.
Firmware may assign each interrupt source either
high or low priority by writing to bits in the SFRs
named, IP and IPA, shown in Table 16. An interrupt will be serviced as long as an interrupt of
equal or higher priority is not already be ing serviced. If an interrupt of equal or higher priority is
being serviced, the new interrupt will wait until it is
finished before being serviced. I f a lower priority
interrupt is being serviced, it will be stopped and
the new inte r r u pt is servi ced. Wh en the n ew in te r rupt is finished, the lower priority interrupt that was
stopped will be completed. If new interrupt requests are of the same priority level and are received simultaneously, an internal polling
sequence determines which request is selected
for service. Thus, within each of t he two priority
levels, there is a second priority structure determined by the polling sequence.
Firmware may individually enable or disable interrupt sources by writing to bits in the SFRs named,
IE and IEA, shown in Table 16., page 41. The SFR
named IE contains a global disable bit (EA), which
can be cleared to disable all 11 interrupts at once,
as shown in Table 17., page 43. Figure
13., page 42 illu strates th e interrupt p riority, po ll-
ing, and enabling process.
Each interrupt source has at least one interrupt
flag that indicates whether or not an interrupt is
pending. These flags reside in bits of various
SFRs shown in T able 16., page 41.
All of the interrupt flags are latched in to the in terrupt control system at the beginning of each MCU
machine cycle, and they are polled at the beginning of the follo wing m achine cycl e. If po lling de termines one of the flags was set, the interrupt
control system automatically generates an LCALL
to the user’s Interrupt Service Ro utine (ISR) firmware stored in program memory at the appropriate
vector address.
The specific vector addres s for each o f the interrupt sources ar e listed in Table 16., page 41. However, this LCALL jump may be block ed by any of
the following conditions:
– An interrupt of equal or higher priority is
already in progress
– The current machine cy cle is not the fi nal cycle
in the execution of the instruction in progress
– The current instruction involves a write to any
of th e SF Rs: IE , IEA, IP, or IP A
– The current instruction is an RETI
Note: Interrupt flags are polled based on a sample
taken in the pre vious MCU machine cycle. If an interrupt flag is active in one cycle but is denied serviced due to the conditions above, and then later it
is not active when the conditions above are finally
satisfied, the previously denied interrupt will not be
serviced. This means that active interrupts are not
remembered. Every poling cycle is new.
Assuming all of the listed conditions are satisfied,
the MCU executes the hardware generated
LCALL to the appropriate ISR. This LCALL pushes
the contents of the PC onto th e stack (but it does
not save the PSW) and loads the PC with the appropriate interrupt vector address. Program execution then jumps to the ISR at the vector address.
Execution precedes in the ISR. It may be necessary for the ISR firmware to clear the pending interrupt flag for some interrupt sources, because
not all interrupt flags are automatically cleared by
hardware when the ISR is called, as shown in Ta-
ble 16., page 41. If an interrupt flag is not cleared
after servicing the interrupt, an unwanted interrupt
will occur upon exiting the ISR.
After the interrupt is serviced, the last i nstruction
executed by the ISR is RETI. The RETI informs
the MCU that the ISR is no longer in progress and
the MCU pops the top two byte s from the stack
and loads them into the PC. Execution of the interrupted program continues where it left off.
Note: An ISR must end with a RETI instruction,
not a RET. An RET w ill not inform the interrupt
control system that the ISR is complete, leav ing
the MC U to think the ISR is s till in p r og r es s , ma k ing future interrupts impossible.
40/231

Table 16. Interrupt Summary
Flag Bit Name
Interrupt
Source
Reserved 0 (high) 0063h – – – –
Polling
Priority
Vector
Addr
(SFR.bit position)
1 = Intr Pending
0 = No Interrupt
Flag Bit Auto-
Cleared
by Hardware?
Enable Bit Name
(SFR.bit position)
1 = Intr Enabled
0 = Intr Disabled
Priority Bit Name
(SFR.bit position)
1= High Priority
0 = Low Priority
uPSD33xx
External
Interrupt INT0
Timer 0
Overflow
External
Interrupt INT1
Timer 1
Overflow
UART0 5 0023h
Timer 2
Overflow
or TX2 Pin
SPI 7 0053h
Reserved 8 0033h – – – –
2
C
I
ADC 10 003Bh AINTF (ACON.7) No EADC (IEA.7) PADC (IPA.7)
PCA 11 005Bh
UART1 12 (low) 004Bh
1 0003h IE0 (TCON.1)
2 000Bh TF0 (TCON.5) Yes ET0 (IE.1) PT0 (IP.1)
3 0013h IE1 (TCON.3
4 001Bh TF1 (TCON.7) Yes ET1 (IE.3) PT1 (IP.3)
RI (SCON0.0)
TI (SCON0.1)
6002Bh
9 0043h INTR (S1STA.5) Yes
TF2 (T2CON.7)
EXF2 (T2CON.6)
TEISF, RORISF,
TISF, RISF
(SPISTAT[3:0])
OFVx, INTFx
(PCASTA[0:7])
RI (SCON1.0)
TI (SCON1.1)
Edge - Yes
Level - No
Edge - Yes
Level - No
No ES0 (IE.4) PS0 (IP.4)
No ET2 (IE.5) PT2 (IP.5)
Yes ESPI (IEA.6) PSPI (IPA.6)
No EPCA (IEA.5) PPCA (IPA.5)
No ES1 (IEA.4) PS1 (IPA.4)
EX0 (IE.0) PX0 (IP.0)
EX1 (IE.2) PX1 (IP.2)
EI2C (IEA.1) PI2C (IPA.1)
41/231

uPSD33xx
Figure 13. Enabling and Polling Interrupts
Interrupt
Sources
Reserved
Ext
INT0
Timer 0
Ext
INT1
Timer 1
UART0
Timer 2
SPI
USB
IE/IEA
Priority
IP/IPA
High
Low
Interrupt Polling
Sequence
2
I
C
ADC
PCA
UART1
Global
Enable
AI07844
42/231

Individual In t errupt Source s
External Interrupts Int0 and Int1. External in-
terrupt inputs on pins EXTINT0 and EXTINT1
(pins 3.2 and 3.3) are either edge-triggered or level-triggered, depending on bits IT0 and IT1 in t he
SFR named TCON.
When an external interrupt is generated from an
edge-triggered (falling-edge) source, the appropriate flag bit (IE0 or IE1) is automatically cleared by
hardware upon entering the ISR.
When an external interrupt is generated from a
level-triggered (low-level) source, the appropriate
flag bit (IE0 or IE1) is NOT automatically cleared
by hardware.
Timer 0 and 1 Overflow Interrup t. Timer 0 and
Timer 1 interrupts are generat ed by the flag bits
TF0 and TF1 when there i s an overflow con dition
in the respective Timer/Counter register (except
for Timer 0 in Mode 3).
Timer 2 Overflow Interrupt. This interrupt is
generated to the MCU by a logical OR of flag bits,
TF2 and EXE2. The ISR must read the flag bits to
determine the cause of the interrupt.
– TF2 is set by an overflow of Timer 2.
– EXE2 is generated b y the fa l ling edge of a
signal on the external pin, T2X (pin P1.1).
UART0 and UART1 Interrupt. Each of the
UARTs have identical interrupt structure. For each
UART, a single i nterrupt is ge nerat ed to the MCU
by the logical OR of the flag bits, RI (byte received)
and TI (byte transmitted).
uPSD33xx
The ISR must read flag bits in the SFR named
SCON0 for UART0, or SCON 1 for UART1 to determine the cause of the interrupt.
SPI Interru pt. The SPI interrupt has four interrupt
sources, which are logically ORed together when
interrupting the MCU. The ISR must read the flag
bits to determine the cause of the interrupt.
A flag bit is set for: end of data transmit (TEISF);
data receive overrun (RORISF); transmit buffer
empty (TISF); or rece ive buffer full (RISF).
2
C Interrupt. The flag bit INTR is set by a variety
I
of conditions occurring on the I
ceived own slave address (ADD R flag); received
general call address (GC flag); received STOP
condition (STOP flag); or successful transmission
or reception of a data byte.The ISR must read the
flag bits to determine the cause of the interrupt.
ADC Interrupt. The flag bit AINTF is set when an
A-to-D conversion has completed.
PCA Interrupt. The PCA has eight interrupt
sources, which are logically ORed together when
interrupting the MCU.The I SR must read the flag
bits to determine the cause of the interrupt.
– Each of the six TCMs can generate a "match
or capture" interrupt on flag bits OFV5..0
respectively.
– Each of the two 16-bit counters can generate
an overflow interrupt on flag bits INTF1 and
INTF0 respectively.
Tables 17 through Table 20., page 45 have de-
tailed bit definitions of the interrupt system SFRs.
2
C interface: re-
Table 17. IE: Interrupt Enable Register (SFR A8h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
EA – ET2 ES0 ET1 EX1 ET0 EX0
Details
Bit Symbol R/W Function
Global disable bit. 0 = All interrupts are disabled. 1 = Each interrupt
7EAR,W
6–R,W
(1)
5
(1)
4
(1)
3
(1)
2
(1)
1
(1)
0
Note: 1. 1 = Enable Inte rrupt, 0 = Disa bl e Interrupt
ET2 R,W Enable Timer 2 Interrupt
ES0 R,W Enable UART0 Interrupt
ET1 R,W Enable Timer 1 Interrupt
EX1 R,W Enable External Interrupt INT1
ET0 R,W Enable Timer 0 Interrupt
EX0 R,W Enable External Interrupt INT0
source can be individually enabled or disabled by setting or clearing its
enable bit.
Do not modify this bit. It is used by the JTAG debugger for instruction
tracing. Always read the bit and write back the same bit value when
writing this SFR.
43/231

uPSD33xx
Table 18. IEA: Interrupt Enable Addition Register (SFR A7h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
EADC ESPI EPCA ES1 – –
Details
Bit Symbol R/W Function
(1)
7
(1)
6
(1)
5
(1)
4
EADC R,W Enable ADC Interrupt
ESPI R,W Enable SPI Interrupt
EPCA R,W Enable Programmable Counter Array Interrupt
ES1 R,W Enable UART1 Interrupt
3 – – Reserved, do not set to logic '1.'
2 – – Reserved, do not set to logic '1.'
(1)
1
EI2C
R,W
Enable I2C Interrupt
0 – – Reserved, do not set to logic '1.'
Note: 1. 1 = Enable Inte rrupt, 0 = Disa bl e Interrupt
Table 19. IP: Interrupt Priority Register (SFR B8h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
– – PT2 PS0 PT1 PX1 PT0 PX0
Details
EI
2
C
–
Bit Symbol R/W Function
7––Reserved
6––Reserved
(1)
5
(1)
4
(1)
3
(1)
2
(1)
1
(1)
0
Note: 1. 1 = Assi gn s hig h pri o rity level, 0 = Assigns low priority level
PT2 R,W Timer 2 Interrupt priority level
PS0 R,W UART0 Interrupt priority level
PT1 R,W Timer 1 Interrupt priority level
PX1 R,W External Interrupt INT1 priority level
PT0 R,W Timer 0 Interrupt priority level
PX0 R,W External Interrupt INT0 priority level
44/231

Table 20. IPA: Interrupt Priority Addition register (SFR B7h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PADC PSPI PPCA PS1 – –
Details
Bit Symbol R/W Function
(1)
7
(1)
6
(1)
5
(1)
4
PADC R,W ADC Interrupt priority level
PSPI R,W SPI Interrupt priority level
PPCA R,W PCA Interrupt level
PS1 R,W UART1 Interrupt priority level
3––Reserved
2––Reserved
(1)
1
PI2C
R,W
I2C Interrupt priority level
0––Reserved
Note: 1. 1 = Assi gn s hig h pri o rity level, 0 = Assigns low priority level
PI
2
C
uPSD33xx
–
45/231

uPSD33xx
MCU CLOCK GENERA T ION
Internal system clocks generated by the clock generation unit are derived from the signal, XTAL1,
shown in Figure 14. XTAL1 has a frequency f
which comes directly from the external crystal or
oscillator device. The SFR named CCO N0 (Table
21., page 47) controls the clock generation unit.
There are two clock signals produced by the clock
generation unit:
■ MCU_CLK
■ PERIPH_CLK
MCU_CLK
This clock drives the 8032 MCU core and the
Watchdog Timer (WDT). The frequency of
MCU_CLK is equal to f
by default, but it can be
OSC
divided by as much as 2048, sho wn in Figure 14.
The bits CPUPS[2:0] select one of eight different
divisors, ranging from 2 to 2048. The new frequency is available immediately af ter the CPUPS[2:0]
bits are written. The final frequency of MCU_CLK
MCU
.
is f
MCU_CLK is blocked by either bit, PD or IDL, in
the SFR named PCON during MCU Power-down
Mode or Idle Mode respectively.
MCU_CLK clock can be further divided as required for use in the WDT. See details of the WDT
in SUPERVISORY FUNCTIONS, page 65.
PERIPH_CLK
This clock drives all the uPSD33xx peripherals except the WDT. The Frequency of PERIPH_CLK is
always f
. Each of the peripherals can indepen-
OSC
OSC
dently divide PERIPH_CLK to scale it appropriately for use.
,
PERIPH_CLK runs at all times except when
blocked by the PD bi t in the SFR named PCON
during MCU Power-down Mode.
JTAG Interface Clock. The JTAG interface for
ISP and for Debugging uses the externally supplied JTAG clock, coming in on pin TCK. This
means the JTAG ISP interface is always available,
and the JTAG Debug interface is avai lable when
enabled, even during MCU Idle mode and Powerdown Mode.
However, since the MCU participates in the JTAG
debug process, and MCU_CLK is halted during
Idle and Power-down Modes, the m ajority of debug functions are not available during these low
power modes. But the JTAG debug interface is capable of executing a reset command while in these
low power mo des, which will e xit back to norma l
operating mode where all deb ug commands are
available again.
The CCON0 SFR contains a bit, DBGCE, which
enables the breakpoint comparators inside the
JTAG Debug Unit when set. DBGCE is set by default after reset, and firmware may clear this bit at
run-time. Disabling these comparator s will reduc e
current consumption on the MCU Module, and it’s
recommended to do s o if the Debug Unit will not
be used (such as in the production version of an
end-product).
Figure 14. Cloc k Generation Log ic
PCON[1]: PD,
Power-Down Mode
XTAL1
(f
)
OSC
Clock Divider
AI09197
46/231
PCON[2:0]: CPUPS[2:0],
Clock Pre-Scaler Select
XTAL1 (default)
XTAL1 /2
Q
XTAL1 /4
Q
XTAL1 /8
Q
XTAL1 /16
Q
XTAL1 /32
Q
XTAL1 /1024
Q
XTAL1 /2048
Q
0
1
2
3
4
5
6
7
(to: TIMER0/1/2, UART0/1, PCA0/1, SPI, I2C, ADC)
PCON[0]: IDL,
3
M
U
X
Idle Mode
MCU_CLK (f
(to: 8032, WDT)
PERIPH_CLK (f
MCU
OSC
)
)

Table 21. CCON0: Clock Control Register (SFR F9h, reset value 10h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
– – – DBGCE CPUAR CPUPS[2:0]
Details
Bit Symbol R/W Definition
7––Reserved
6––Reserved
5––Reserved
Debug Unit Breakpoint Comparator Enable
uPSD33xx
4DBGCER,W
3 CPUAR R,W
2:0 CPUPS R,W
0 = JTAG Debug Unit comparators are disabled
1 = JTAG Debug Unit comparators are enabled (Default condition after
reset)
Automatic MCU Clock Recovery
0 = There is no change of CPUPS[2:0] when an interrupt occurs.
1 = Contents of CPUPS[2:0] automatically become 000b whenever any
interrupt occur s.
MCUCLK Pre-Scaler
000b: f
001b: f
010b: f
011b: f
100b: f
101b: f
110b: f
111b: f
MCU
MCU
MCU
MCU
MCU
MCU
MCU
MCU
= f
(Default after reset)
OSC
= f
/2
OSC
= f
/4
OSC
= f
/8
OSC
= f
/16
OSC
= f
/32
OSC
= f
/1024
OSC
= f
/2048
OSC
47/231

uPSD33xx
POWER SAVING MODES
The uPSD33xx is a combination of two die, or
modules, each module having it’s own current
consumption characteristics. This section describes reduced power modes for the MCU M odule. See the section, Power
Management, page 137 for reduced power modes
of the PSD Module. Total current consumption for
the combined modules is determined in the DC
specifications at the end of this document.
The MCU Module has three software-selectable
modes of reduced power operation.
■ Idle Mode
■ Power-down Mode
■ Reduced Frequency Mode
Idle M o de
Idle Mode will halt the 8032 MCU core while leaving the MCU peripherals active (Idle Mode blocks
MCU_CLK only). For lowest current consumption
in this mode, it is recommended to dis able all unused peripherals, before entering Idle mode (such
as the ADC and the De bug Unit breakpoint comparators). The following functions remain fully active during Idle Mode (ex cept if disabled by SFR
settings).
■ External Interrupts INT0 and INT1
■ Timer 0, Timer 1 and Timer 2
■ Supervisor reset from: LVD, JTAG Debug,
External RESET_IN_, but not the WTD
■ ADC
2
■ I
C Interface
■ UART0 and UART1 Interfaces
■ SPI Interface
■ Programmable Counter Array
An interrupt generated by any of these peripherals, or a reset generated from the s upervisor, will
cause Idle Mode to exit and the 8032 MCU will resume normal operation.
The output state on I/O pins of MCU ports 1, 3, and
4 remain unchanged during Idle Mode.
To enter Idle Mode, the 8032 MCU executes an instruction to set the IDL bit in the SFR named
PCON, shown in Table 24., page 5 0. This is the
last instruction executed in normal operating mode
before Idle Mode is activated. Once in Idle Mode,
the MCU status is entirely preserved, and there
are no changes to: SP, PSW, PC, ACC, SFRs,
DATA, IDATA, or XDATA.
The following are factors related to Idle Mode exit:
– Activation of any enable d interrupt will cause
the IDL bit to be cleared by hardware,
terminating Idle Mode. The interrupt is
serviced, and following the Return from
Interrupt instruction (RETI), the next
instruc t io n to be execut ed w ill be th e on e
which follows the instruction that set the IDL
bit in the PCON SFR.
– After a reset from the supervisor, the IDL bit is
cleared, Idle Mode is terminated, and the MCU
restarts after three MCU machine cycles.
Power-dow n M ode
Power-down Mode will halt the 8032 core and a ll
MCU peripherals (Power-down Mode blocks
MCU_CLK and PERIPH_CLK). This is the lowest
power state for the MCU Module. When the PSD
Module is also placed in Power-down mode , the
lowest total current consumption for the combined
die is achieved for the uPSD33xx. See Power
Management, page 137 in the PSD Module sec-
tion for details on how to also place the PSD Module in Power-down mode. The sequence of 8032
instructions is important when placing both modules into Power-down Mode.
The instruction that sets the PD Bit in the SFR
named PCON (Table 2 4., page 50) is th e last instruction executed prior to the MCU Module going
into Power-down Mode. Once in Power-down
Mode, the on-chip oscillator circuitry and all clocks
are stopped. The SFRs, DATA, IDATA,
and XDATA are preserved.
Power-down Mode is terminated only by a reset
from the supervisor, originating from the
RESET_IN_ pin, the Low-Voltage Detect circuit
(LVD), or a JTAG Debu g reset command. Since
the clock to the WTD is not active during Powerdown mode, it is not possible for the supervisor to
generate a WDT reset.
Table 22., page 49 sum marizes the status of I/O
pins and peripherals during Idle and Power-down
Modes on the MCU Module. Table 23., page 49
shows the state of 8032 M CU address, data, and
control signals during these modes.
Reduced Frequency Mode
The 8032 MCU consumes less current when operating at a lower clock frequency. The MCU can reduce it’s own clock frequency at run-time by
writing to three bits, CPUPS[2:0], in the SFR
named CCON0 described in Table 21., page 47 .
These bits effectively divide the clock frequency
) coming in from the external crystal or oscil-
(f
OSC
lator device. The clock division range is from 1/2 to
1/2048, and the resulting frequency is f
MCU
.
This MCU clock division does not affect any of the
peripherals, except for the WTD. The clock driving
the WTD is the same clo ck d riving the 8 032 M C U
core as shown in Figure 14., page 46.
48/231

uPSD33xx
MCU firmware may reduce the MCU clock frequency at run-time to consume less current when
performing tasks that are not time critical, and then
restore full clock frequency as required to perform
urgent tasks.
Returning to full clock frequency is done automatically upon an MCU interrupt, if the CPUAR Bit in
the SFR named CCO N0 is set (the interrupt will
force CPUPS[2:0] = 000). This is an excellent way
til an event occurs that requires full performance.
See T able 21., page 47 for details on CPUAR.
See the DC Specifications at the end of this document to estimate current consumption based on
the MCU clock frequency.
Note: Some of the bits in the PCON SFR shown in
Table 24., page 50 are not related to power con-
trol.
to conserve power using a low frequency clock un-
Table 22. MCU Module Port and Peripheral Status during Red uced Power M od es
Mode Ports 1, 3, 4 PCA SPI
Idle Maintain Data Active Active Active Active
Power-down Maintain Data Disabled Disabled Disabled Disabled Disabled Disabled Disabled Disabled
Note: 1. The Watchdog Timer is not active during Idle Mode. Other supervisor functions are active: LVD, external reset, JTAG Debug reset
2
C
I
ADC
SUPER-
VISOR
Active
UART0,
UART1
(1)
Active Active Active
TIMER
0,1,2
EXT
INT0, 1
Table 23. State of 8032 MCU Bus Signals during Power-down and Idle Modes
Mode ALE PSEN_ RD_ WR_ AD0-7 A8-15
Idle0111FFhFFh
Power-down 0 1 1 1 FFh FFh
49/231

uPSD33xx
Table 24. PCON: Power Control Register (SFR 87h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
SMOD0 SMOD1 – POR RCLK1 TCLK1 PD IDL
Details
Bit Symbol R/W Function
Baud Rate Double Bit (UART0)
7 SMOD0 R,W
6 SMOD1 R,W
5––Reserved
4PORR,W
3 RCLK1 R,W
2 TCLK1 R,W
1PDR,W
0 IDL R,W
0 = No Doubling
1 = Doubling
(See UART Baud Rates, page 84 for details.)
Baud Rate Double Bit for 2nd UART (UART1)
0 = No Doubling
1 = Doubling
(See UART Baud Rates, page 84 for details.)
Only a power-on reset sets this bit (cold reset). Warm reset will not set
this bit.
'0,' Cleared to zero with firmware
'1,' Is set only by a power-on reset generated by Supervisory circuit (see
Power-up Reset, page 66 for details).
Received Clock Flag (UART1)
(See Table 41., page 75 for flag description.)
Transmit Clock Flag (UART1)
(See Table 41., page 75 for flag description)
Activate Power-down Mode
0 = Not in Power-down Mode
1 = Enter Power-down Mode
Activate Idle Mode
0 = Not in Idle Mode
1 = Enter Idle Mode
50/231

OSCILLATOR AND EXTERNAL COMPONENTS
The oscillator circuit of uPSD33xx devices is a single stage, inverting am plifier in a P ierce oscillat or
configuration. The internal circuitry between pins
XTAL1 and XTAL2 is basically a n inverter b iased
to the transfer point. Either an external quartz crystal or ceramic resonator can be used as the feedback element to complete the oscillator circuit.
Both are operated in parallel resonance. Ceramic
resonators are lower cost, but typically have a wider frequency tolerance than quartz crystals. Alternatively, an external clock source from an
oscillator or other active device may drive the
uPSD33 xx oscillator cir cuit input direct ly, instead
of using a crystal or resonator.
The minimum frequenc y of the quartz crystal, ceramic resonator, or external clock source is 1MHz
if the I
8MHz if I
cases. This frequency is f
2
C interface is not used. The minimum is
2
C is used. The maximum is 40MHz in all
, which can be divid-
OSC
ed internally as described in MCU CLOCK
GENERATION, page 46.
The pin XTAL1 is the high gain amplifier input, and
XTAL2 is the output. To drive the uPSD33xx device externally from an oscillator or other active
device, XTAL1 is d riven and XTAL2 is left opencircuit. This external source shou ld drive a logic
low at the voltage level of 0.3 V
logic high at 0.7V V
The XTAL1 input is 5V tolerant.
Most of the quartz crystals in the range of 25MHz
to 40MHz operate in the third overtone f requency
mode. An external LC tank circuit at the XTAL2
output of the oscillator circuit is needed to achieve
the third overtone frequency, as shown in Figure
15., page 52. Without this LC circuit, the crystal
will oscillate at a fundamental frequency mode that
is about 1/3 of the desired overtone frequency.
Note: In Figure 15., page 52 crystals which are
specified to operate in fundamental mode (not
overtone mode) do not need the LC circuit components. Since quartz crystals and ceram ic resonators have their own characteristics based on t heir
manufacturer, it is wise to also consult t he manufacturer’s recommended values for external components.
uPSD33xx
or below, and
or above, up to 5.5V VCC.
CC
CC
51/231

uPSD33xx
Figure 15. Oscillator and Clock Connections
XTAL1
(in)
C1 C2
XTAL (f
XTAL
(f
OSC
OSC
)
)
Ceramic Resonator
XTAL2
(out)
40 - 50pF
Crystal, fundamental mode (3-40MHz)
Crystal, overtone mode (25-40MHz)
Direct Drive
XTAL1
(in)
Crystal or Resonator
Usage
L1
C1 = C2
C3 L1
None
15-33pF
20pF
None
10nF
XTAL2
(out)
C3
None
None
2.2µH
External Ocsillator or
Active Clock Source
No Connect
AI09198
52/231

I/O PORTS OF MCU MODULE
The MCU Module has three 8-bit I/O ports: Port 1,
Port 3, and Port 4. The PSD Module has four other
I/O ports: Port A, B, C, and D. This section describes only the I/O ports on the MCU Module.
I/O ports will function as bi-directional General
Purpose I/O (GPIO), but the port pins can have alternate functions assigned at run-time by writing to
specific SFRs. The default operating mode (during
and after reset) for all three ports is GPIO input
mode. Port pins that have no external connection
will not float because each pin has an internal
weak pull-up (~150K ohms) to V
I/O ports 3 and 4 are 5V tolerant, meaning they
can be driven/pulled ex ternall y up to 5.5V without
damage. The pins on Port 4 have a higher current
capability than the pins on Ports 1 and 3.
Three additional MCU ports (only on 80-pin
uPSD33xx devices) are dedicated to bring out the
8032 MCU address, data, and control signals to
external pins. One port, named MCUA[11:8], contains four MCU address signal outputs. Another
port, named MCUAD[7:0], has eight multiplexed
address/data bidirectional signals. The third port
has MCU bus control outputs: read, write, program
fetch, and address latch. These ports are typically
used to connect ex ternal parallel peripherals and
memory devices, but they may NO T be used as
GPIO. Notice that only four of the eight upper address signals come out to pins on the port MCUA[11:8]. If additional high-order address signals
are required on external pins (MCU addresses
A[15:12]), then these address signals can be
brought out as needed to PLD output pins or to the
Address Out mode pins on PSD Module ports.
See PSD Module section, “Latche d Address Ou t-
put Mode, page 177 for details.
Figure 16., page 55 re pr esents the f l ex i b il i ty of pi n
function routing controlled by the SFRs. Each of
the 24 pins on three ports, P1, P3, and P4, may be
individually routed on a pin-by-pin basis to a desired function.
CC
.
uPSD33xx
MCU Port Operating Modes
MCU port pins can operate as GPIO or as alternate functions (see Figure 17., page 56 through
Figure 19., page 57).
Depending on the selected pin function, a particular pin operating mode will automati ca lly be use d:
■ GPIO - Quasi-bidirectional mode
■ UART0, UART1 - Quasi-bidirectional mode
■ SPI - Quasi-bidirectional mode
■ I2C - Open drain mode
■ ADC - Analog input mode
■ PCA output - Push-Pull mode
■ PCA input - Input only (Quasi-bidirectional)
■ Timer 0,1,2 - Input only (Quasi-bidirectional)
GPIO Function. Ports in GPIO m ode op erate as
quasi-bidirectional pins, consistent with standard
8051 architecture. GPIO pins are individually controlled by three SFRs:
■ SFR, P1 (Table 25., page 57 )
■ SFR, P3 (Table 26., page 58 )
■ SFR, P4 (Table 27., page 58 )
These SFRs can be accessed using t he Bit Addressing mode, an eff icient way to control individual port pins.
GPIO Output. Simply stated, when a logic '0' is
written to a bit in any of these port SFRs while in
GPIO mode, the corresponding port pin will enable
a low-side driver, which pulls the pin to ground,
and at the same time releases the high-side driver
and pull-ups, resulting in a logic'0' output. When a
logic '1' is written to the SFR, the low-side driver is
released, the high-side driver i s enabled for just
one MCU_CLK period to rapidly make the 0-t o1
transition on the pin, while weak active pull-ups
(total ~150K ohms) to V
ture is consistent with standard 8051 architecture.
The high side driver is momentarily enabled only
for 0-to-1 transitions, which is implemented with
the delay function at the latch output as pictured in
Figure 17., page 56 through Figure 19. , page 57.
After the high-side driver is disabled, the two weak
pull-ups remain enabled resulting in a logic '1' output at the pin, sourcing I
vice. Optionally, an external pull-up resistor can be
added if additional source current is needed while
outputting a logic '1.'
are enabled. This struc-
CC
uA to an external de-
OH
53/231

uPSD33xx
GPIO Input. To use a GPIO port pin as an input,
the low-side driver to ground must be disabled, or
else the true logic level being driven on the pin by
an external device will be masked (alw ays reads
logic '0'). So to make a port pin “input ready”, the
corresponding bit in the SFR m ust have been s et
to a logic '1' prior to reading that SFR bit as an input. A reset condition forces SFRs P1, P3, and P4
to FFh, thus all three ports are input ready after reset.
When a pin is used as an input, the stronger pullup “A” maintains a solid logic '1 ' until an exte rnal
device drives the input pin low. At this time, pull-up
“A” is automatically disabled , and only pul l-up “B”
will source the externa l device I
uA, consistent
IH
with standard 8051 architecture.
GPIO Bi-Direc tional . It is possible to operate indi-
vidual port pins in bi-directional mode. For an output, firmware would simply write the
corresponding SFR bit to logic '1' or '0' as needed.
But before using the pin as an input, firmware must
first ensure that a logic '1' was the last value written to the correspondi ng SFR bit prior to reading
that SFR bit as an input.
GPIO Current Capability. A GPIO pin on Port 4
can sink twice as much current than a pin on either
Port 1 or Port 3 when the low-si de dri ver is outputting a logic '0' (I
). See the DC specifications at
OL
the end of this document for full details.
Reading Port Pin vs. Reading Port Latch. When
firmware reads the GPIO ports, sometimes the actual port pin is sampled i n hardware, and sometimes the port SFR latch is read and not the actual
pin, depending on the type of MCU instruction
used. These two data paths are sho wn in Figure
17., page 56 through Figure 19., page 57. SFR
latches are read (and not the pins) only when the
read is part of a
read-modify-write
instructio n a nd
the write destination is a bit or bits in a port SFR.
These instructions are: ANL, ORL, XRL, JBC,
CPL, INC, DEC, DJNZ, MOV, CLR, and SE TB. All
other types of reads to port SFRs will read the actual pin logic level and not the port latch. This is
consistent with 8051 architecture.
54/231

Figure 16. M CU Mod ul e Po rt Pi n Function Ro ut i ng
uPSD33xx
Available on PSD
Module Pins
ADC (8)
TIMER2 (2)
UART1 (2)
SPI (4)
PCA (8)
4
SFR
GPIO (8)
UART0 (2)
TIMER0/1 (4)
I2C (2)
GPIO (8)
SFR
SFR
GPIO (8)
8032 MCU
CORE
MCU Module
SFR
SFR
SFR
Low Addr & Data[7:0]
Hi Address [11:8] 4Hi Address [15:12]
Ports
8
8
8
P3
P1
P4
M
8
C
U
A
D
M
C
U
On 80-pin
Devices
Only
A
RD, WR, PSEN, ALE
4
N
T
L
AI09199
55/231
C

uPSD33xx
Figure 17. MCU I/O Cell Block Diagram for Port 1
Select_Alternate_Func
DELAY,
1 MCU_CLK
Digital_Alt_Func_Data_Out
P1.X SFR Read Latch
(for R-M-W instructions)
SEL
Q
Q
IN 1
MUX
IN 0
DELAY,
1 MCU_CLK
Y
MCU_Reset
8032 Data Bus Bit
GPIO P1.X SFR
Write Latch
D
PRE
SFR
P1.X
Latch
P1.X SFR Read Pin
Analog_Alt_Func_En
Digital_Pin_Data_In
Analog_Pin_In
Figure 18. MCU I/O Cell Block Diagram for Port 3
Enable_I2C
Select_Alternate_Func
Digital_Alt_Func_Data_Out
P3.X SFR Read Latch
(for R-M-W instructions)
MCU_Reset
8032 Data Bus Bit
GPIO P3.X SFR
Write Latch
Disables High-Side Driver
DELAY,
1 MCU_CLK
PRE
D
SFR
Q
P3.X
Latch
Q
1 MCU_CLK
IN 1
MUX
IN 0
DELAY,
SEL
Y
V
CC
HIGH
SIDE
LOW
SIDE
V
CC
HIGH
SIDE
LOW
SIDE
WEAK
PULL-UP, B
WEAK
PULL-UP, B
V
CC
V
CC
STONGER
PULL-UP, A
P1.X Pin
AI09600
V
CC
V
CC
STONGER
PULL-UP, A
P3.X Pin
P3.X SFR Read Pin
Digital_Pin_Data_In
56/231
AI09601

Figure 19. MCU I/O Cell Block Diagram for Port 4
uPSD33xx
Enable_Push_Pull
Select_Alternate_Func
Digital_Alt_Func_Data_Out
P4.X SFR Read Latch
(for R-M-W instructions)
MCU_Reset
8032 Data Bus Bit
GPIO P4.X SFR
Write Latch
P4.X SFR Read Pin
Digital_Pin_Data_In
For PCA Alternate Function
DELAY,
1 MCU_CLK
PRE
D
SFR
P4.X
Latch
Q
Q
1 MCU_CLK
IN 1
MUX
IN 0
DELAY,
SEL
V
WEAK
PULL-UP, B
V
CC
V
CC
HIGH
SIDE
Y
LOW
SIDE
Table 25. P1: I/O Port 1 Register (SFR 90h, reset value FFh)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0
Details
Bit Symbol R/W
7 P1.7 R,W Port pin 1.7
6 P1.6 R,W Port pin 1.6
Function
(1)
CC
STONGER
PULL-UP, A
P4.X Pin
AI09602
5 P1.5 R,W Port pin 1.5
4 P1.4 R,W Port pin 1.4
3 P1.3 R,W Port pin 1.3
2 P1.2 R,W Port pin 1.2
1 P1.1 R,W Port pin 1.1
0 P1.0 R,W Port pin 1.0
Note: 1. Write ' 1' or '0 ' fo r p in o utp u t. Re ad fo r pin i n put, but prior t o READ, this bit mus t h av e be en set to '1' by fir m ware o r by a reset event.
57/231

uPSD33xx
Table 26. P3: I/O Port 3 Register (SFR B0h, reset value FFh)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P3.7 P3.6 P3.5 P3.4 P3.3 P3.2 P3.1 P3.0
Details
Bit Symbol R/W
Function
7 P3.7 R,W Port pin 3.7
6 P3.6 R,W Port pin 3.6
5 P3.5 R,W Port pin 3.5
4 P3.4 R,W Port pin 3.4
3 P3.3 R,W Port pin 3.3
2 P3.2 R,W Port pin 3.2
1 P3.1 R,W Port pin 3.1
0 P3.0 R,W Port pin 3.0
Note: 1. Write ' 1' or '0 ' fo r p in o utp u t. Re ad fo r pin i n put, but prior t o READ, this bit mus t h av e be en set to '1' by fir m ware o r by a reset event.
Table 27. P4: I/O Port 4 Register (SFR C0h, reset value FFh)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4.7 P4.6 P4.5 P4.4 P4.3 P4.2 P4.1 P4.0
(1)
Details
Bit Symbol R/W
Function
(1)
7 P4.7 R,W Port pin 4.7
6 P4.6 R,W Port pin 4.6
5 P4.5 R,W Port pin 4.5
4 P4.4 R,W Port pin 4.4
3 P4.3 R,W Port pin 4.3
2 P4.2 R,W Port pin 4.2
1 P4.1 R,W Port pin 4.1
0 P4.0 R,W Port pin 4.0
Note: 1. Write ' 1' or '0 ' fo r p in o utp u t. Re ad fo r pin i n put, but prior t o READ, this bit mus t h av e be en set to '1' by fir m ware o r by a reset event.
58/231

uPSD33xx
Alternate Function s. There are five SFRs used
to control the mapping o f alternate f unctions onto
MCU port pins, and these SFRs are depicted as
switches in Figure 16., page 55.
■ Port 3 uses the SFR, P3SFS (Table
28., page 60).
■ Port 1 uses SFRs, P1SFS0 (Table
29., page 60) and P1SFS1 (Table
30., page 60).
■ Port 4 uses SFRs, P4SFS0 (Table
32., page 61) and P4SFS1 (Table
33., page 61).
Since these SFRs are cleared by a reset, then by
default all port pins function as GPIO (not the alternate function) until firmware initializes these SFRs.
Each pin on each of the three ports can be independently assigned a different function on a pinby-pin basis.
The peripheral functions Timer 2, UART1, and I
2
may be split independently between Port 1 and
Port 4 for additional flexibility by giving a wider
choice of peripheral usage on a limited num ber of
device pins.
When the selected alternate function is UART0,
UART1, or SPI, then the related pins are in quasibidirectional mode, including the use of the highside driver for rapid 0-to-1 output transitions. The
high-side driver is enabled for just one MCU_CLK
period on 0-to-1 transitions by the delay function at
the “digital_alt_func_data_out” signal pictured in
Figure 17., page 56 through Figure 19., page 57.
If the alternate function is Timer 0, Timer 1, Timer
2, or PCA input, then the related pins are in quasibidirectional mode, but input only.
If the alternate function is ADC, then for each p in
the pull-ups, the high-side driver, and the low-side
driver are disabled. The analog input is routed directly to the ADC unit. Only Port 1 supports analog
functions (Figure 17., page 56 ). Port 1 is not 5V
tolerant.
2
If the alternate function is I
C, the related pins will
be in open dra in mode, which is just l ike q uas i-bidirectional mode but the high-side driver is not enabled for one cycle when outputting a 0-to-1
transition. Only the low-side driver and the internal
weak pull-ups are used. Only Port 3 supports
open-drain mode (Figure 18., page 56). I
quires the use of an external pull-up resistor on
each bus signal, typically 4.7KΩ to V
If the alternate function is PCA output, then the related pins are in push-pull mode, meaning the pins
are actively driven and held to logic '1' by the highside driver, or actively driven and held to logic '0'
by the low-side driver. Only Port 4 suppo rts pushpull mode (Figure 19., page 57 ). Port 4 push-pull
pins can source I
C
and sink I
current when driving logic '0.' This
OL
current when driving logic '1,'
OH
current is significantly more than the capability of
pins on Port 1 or Port 3 (see Table
129., page 207).
For example, to assign these port functions:
■ Port 1: UART1, ADC[1:0], P1[7 :4 ] a re GPIO
■ Port 3: UART0, I
■ Port 4: TCM0, SPI, P4[3 :1 ] a r e GPIO
2
C, P3[5:2] are GPIO
The following values need to be written to the
SFRs:
P1SFS0 = 00001111b, or 0Fh
P1SFS1 = 00000011b , or 03h
P3SFS = 11000011b, or C3h
P4SFS0 = 11110001b, or F1h
P4SFS1 = 11110000b, or F0h
CC
2
C re-
.
59/231

uPSD33xx
Table 28. P3SFS: Port 3 Special Function Select Register (SFR 91h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P3SFS7 P3SFS6 P3SFS5 P3SFS4 P3SFS3 P3SFS2 P3SFS1 P3SFS0
Details
Port 3 Pin R/W
0 R,W GPIO UART0 Receive, RXD0
1 R,W GPIO UART0 Transmit, TXD0
2 R,W GPIO Ext Intr 0/Timer 0 Gate, EXT0INT/TG0
3 R,W GPIO Ext Intr 1/Timer 1 Gate, EXT1INT/TG1
4 R,W GPIO Counter 0 Input, C0
5 R,W GPIO Counter 0 Input, C1
6 R,W GPIO
7 R,W GPIO
Table 29. P1SFS0: Port 1 Special Function Select 0 Register (SFR 8Eh, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1SF07 P1SF06 P1SF05 P1SF04 P1SF03 P1SF02 P1SF01 P1SF00
Default Port Function Alternate Port Function
P3SFS[i] - 0; Port 3 Pin, i = 0..7 P3SFS[i] - 1; Port 3 Pin, i = 0..7
2
I
C Data, I2CSDA
2
I
C Clock, I2CCL
Details
Table 30. P1SFS1: Port 1 Special Function Select 1 Register (SFR 8Fh, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1SF17 P1SF16 P1SF15 P1SF14 P1SF13 P1SF12 P1SF11 P1SF10
Table 31. P1SFS0 and P1SFS1 Details
Default Port Function Alternate 1 Port Function Alternate 2 Port Function
Port 1 Pin R/W
0 R,W GPIO Timer 2 Count Input, T2 ADC Chn 0 Input, ADC0
1 R,W GPIO Timer 2 Trigger Input, TX2 ADC Chn 1 Input, ADC1
2 R,W GPIO U ART1 Receive, RXD1 ADC Chn 2 Input, ADC2
3 R,W GPIO UART1 Transmit, TXD1 ADC Chn 3 Input, ADC3
4 R,W GPIO SPI Clock, SPICLK ADC Chn 4 Input, ADC4
5 R,W GPIO SPI Receive, SPIRXD ADC Chn 5 Input, ADC5
6 R,W GPIO SPI Transmit, SPITXD ADC Chn 6 Input, ADC6
7 R,W GPIO SPI Select, SPISEL_ ADC Chn 7 Input, ADC7
P1SFS0[i] = 0
P1SFS1[i] = x
Port 1 Pin, i = 0.. 7 Port 1 Pin, i = 0.. 7 Port 1 Pin, i = 0.. 7
P1SFS0[i] = 1
P1SFS1[i] = 0
P1SFS0[i] = 1
P1SFS1[i] = 1
60/231

uPSD33xx
Table 32. P4SFS0: Port 4 Special Function Select 0 Register (SFR 92h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4SF07 P4SF06 P4SF05 P4SF04 P4SF03 P4SF02 P4SF01 P4SF00
Details
Table 33. P4SFS1: Port 4 Special Function Select 1 Register (SFR 93h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4SF17 P4SF16 P4SF15 P4SF14 P4SF13 P4SF12 P4SF11 P4SF10
Table 34. P4SFS0 and P4SFS1 Details
Default Port Function Alternate 1 Port Function Alternate 2 Port Function
Port 4 Pin R/W
0 R,W GPIO PCA0 Module 0, TCM0 Timer 2 Count Input, T2
1 R,W GPIO PCA0 Module 1, TCM1 Timer 2 Trigger Input, TX2
2 R,W GPIO PCA0 Module 2, TCM2 UART1 Receive, RXD1
P4SFS0[i] = 0
P4SFS1[i] = x
Port 4 Pin, i = 0.. 7 Port 4 Pin, i = 0.. 7 Port 4 Pin, i = 0.. 7
P4SFS0[i] = 1
P4SFS1[i] = 0
P4SFS0[i] = 1
P4SFS1[i] = 1
3 R,W GPIO PCA0 Ext Clock, PCACLK0 UART1 Transmit, TXD1
4 R,W GPIO PCA1 Module 3, TCM3 SPI Clock, SPICLK
5 R,W GPIO PCA1 Module 4, TCM4 SPI Receive, SPIRXD
6 R,W GPIO PCA1 Module 5, TCM5 SPI Transmit, SPITXD
7 R,W GPIO PCA1 Ext Clock, PCACLK1 SPI Select, SPISEL_
61/231

uPSD33xx
MCU BUS INTERFACE
The MCU Module has a pro grammable bus in terface. It is based on a standard 8032 bus, with eight
data signals multiplexed with eight low-order address signals (AD[7:0]). It also has eight high-order non-multiplexed address signals (A[15:8]).
Time multiplexing is controlled by the address
latch signal, ALE.
This bus connects the MCU Modu le to the PSD
Module, and also connects to external pins only on
80-pin devices. See the AC specifications section
at the end of this document for external bus timing
on 80-pin devices.
Four types of data transfers are supported, each
transfer is to/from a mem ory location external to
the M CU Modu le:
– Code Fetch cycle using the PSEN
a code byte for execution
– Code Read cycle using PSEN
byte using the MOVC (Move Constant)
instruction
– XDATA Read cycle using the RD
a data byte using the MOVX (Move eXternal)
instruction
– XDATA Write cycle usin g th e WR
a data byte using the MOVX instruction
The number of MCU_CLK periods for these transfer types can be specified at runtime by firmware
writing to the SFR register named BUSCO N (Ta-
ble 35., page 63). Here, the number of MCU_CLK
clock pulses per bus cycle are specified to maximize performance.
Important: By default, the BUS CON Register is
loaded with long bus cycle times (6 MCU_CLK periods) after a reset condition. It is important that the
post-reset in itiali zation f ir mware sets the bus cycl e
times appropriately to get the most performance,
according to Table 36., page 64. Keep in mind that
the PSD Module has a faster Turbo Mode (default)
and a slower but less power consuming Non-Turbo Mode. The bus cycle times must be programmed in BUSCON to optimize for each mode
as shown in Table 36., page 64. See PLD Non-
Turbo Mode, page 192 for more details.
Bus Read Cycles (PSEN
When the PSEN
code, the byte is read from the PSD Module or external device and it enters the MCU Pre-Fetch
Queue (PFQ). When PSEN
MOVC instruction, or when the RD
to read a byte of data, the byte is routed directly to
the MCU, bypassing the PFQ.
signal is used to fetch a byte of
or RD)
is used during a
signal: fetch
: read a code
signal: read
signal: write
signal is used
Bits in the BUSCON Register determ ine the number of MCU_CLK periods per bus cycle for each of
these kinds of transfers to all address ranges.
It is not possible to specify in the BUSCON Register a different number of MCU_CLK periods for
various address ranges. For example, the user
cannot specify 4 MCU_CLK periods for RD
cycles to one address range on the PSD M odule,
and 5 MCU_CLK periods for RD
different address range on an external device.
However, the user can specify one number of
clock periods for PSEN
number of clock periods for RD
Note 1: A PSEN
aborted before completion if the PFQ and Branch
Cache (BC) determines the current code fetch cycle is not needed.
Note 2: Whenever the same number of MCU_CLK
periods is specified in BUSCON for both PSEN
and RD cycles, the bus cycle timing is typically
identical for each of these types of bus cycles. In
this case, the only time PSEN
longer than RD
sues a stall while reloading. PFQ stalls do no t affect RD
traditional 8051 architectures, RD
always longer than PSEN
Bus Write Cycles (WR
When the WR
ten directly to the PSD Module or external device,
no PFQ or caching is involved. Bits in the BUSCON Register determine the number of
MCU_CLK periods for bus write cycles to all addresses. It is not possible to specify in BUSCON a
different number of MCU_CLK periods for writes to
various address ranges.
Controlling the PFQ and BC
The BUSCON Register allows firmware to enable
and disable the PFQ an d BC at run-time. Sometimes it may be desired to disable the PFQ and BC
to ensure deterministic execution. The dynamic
action of the PFQ and BC may cause varying program execution times depending on the events
that happen prior to a particular section of code of
interest . For th is reason, it is not recommended to
implement timing loops in firmware, but instead
use one of the many hardware timers in the
uPSD33xx.
By default, the PFQ and BC are enabled after a reset condition.
Important: Disabling the PFQ or BC will seriously
reduce MCU performance.
read cycles. By comparison, in many
read cycles is when the PFQ is-
signal is used, a byte of data is writ-
read cycles and a different
bus cycle in progress may be
bus cycles.
)
read cycles to a
read cycles.
read cycles are
bus cycles are
read
62/231

Table 35. BUSCON: Bus Control Register (SFR 9Dh, reset value EBh)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
EPFQ EBC WRW[1:0] RDW[1:0] CW[1:0]
Details
Bit Symbol R/W Definition
Enable Pre-Fetch Queue
7 EPFQ R,W
6 EBC R,W
0 = PFQ is disabled
1 = PFQ is enabled (default)
Enable Branch Cache
0 = BC is disabled
1 = BC is enabled (default)
Wait, number of MCU_CLK periods for WR write bus cycle during
WR
any MOVX instruction
uPSD33xx
5:4 WRW[1:0] R,W
3:2 RDW[1:0] R,W
1:0 CW[1:0] R,W
00b: 4 clock periods
01b: 5 clock periods
10b: 6 clock periods (default)
11b: 7 clock periods
Wait, number of MCU_CLK periods for RD read bus cycle during any
RD
MOVX instruction
00b: 4 clock periods
01b: 5 clock periods
10b: 6 clock periods (default)
11b: 7 clock periods
Code Wait, number of MCU_CLK periods for PSEN
during any code byte fetch or during any MOVC code byte read
instruction. Periods will increase with PFQ stall
00b: 3 clock periods - exception, for MOVC instructions this setting
results 4 clock periods
01b: 4 clock periods
10b: 5 clock periods
11b: 6 clock periods (default)
read bus cycle
63/231

uPSD33xx
Table 36. Number of MCU_CLK Periods Required to Optimize Bus Transfer Rate
MCU Clock Frequency,
MCU_CLK (f
40MHz, Turbo mode PSD
MCU
(2)
CW[1:0] Clk Periods
)
3.3V
(1)
5V
(1)
545454
RDW[1:0] Clk
Periods
(1)
3.3V
5V
(1)
40MHz, Non-Turbo mode PSD 6 5 6 5 6 5
36MHz, Turbo mode PSD 545454
36MHz, Non-Turbo mode PSD 6 4 6 4 6 4
32MHz, Turbo mode PSD 545454
32MHz, Non-Turbo mode PSD 5 4 5 4 5 4
28MHz, Turbo mode PSD 434444
28MHz, Non-Turbo mode PSD 5 4 5 4 5 4
24MHz, Turbo mode PSD 434444
24MHz, Non-Turbo mode PSD 4 3 4 4 4 4
20MHz and below, Turbo mode PSD 334444
20MHz and below, Non-Turbo mode PSD 3 3 4 4 4 4
Note: 1. VDD of the PSD Module
2. “Turbo mode PSD” means that the PSD Module is in the faster, Turbo mode (default condition). A PSD Module in Non-Turbo mode
is slower, but consumes less current. See PSD Module section, titled “PLD Non-Turbo Mode” for details.
WRW[1:0] Clk
Periods
(1)
3.3V
5V
(1)
64/231

SUPERVISORY FUNCTIONS
Supervisory circuitry on the MCU Module will issue
an internal reset signal to the MCU Module and simultaneously to the PSD Module as a result of any
of the following four events:
– The external RESET_IN
– The Low Voltage Detect (LVD) circuitry has
detected a voltage on V
threshold (power-on or voltage sags)
– The JTAG Debug interface has issued a reset
command
– The Watch Dog Timer (WDT) has timed out
The resulting internal reset signal, MCU_RESET,
will force the 8032 into a known reset state whi le
asserted, and then 8032 program execution will
jump to the reset vector at program address 0000h
just after MCU_RESET is deasserted. The MCU
Module will also assert an active low internal reset
signal, RESET
signal RESET
, to the PSD Module. If needed, the
can be driven out to external system components through any PLD o utput pin on
the PSD Module. When driving this
pin is asserted
below a specific
CC
uPSD33xx
“RESET_OUT” signal from a PLD output, the user
can choose to make it either active-high or activelow logic, depending on the PLD equation.
External Reset Input Pin, RESET_IN
The RESET_IN pin can be connected directly to a
mechanical reset switch or other device which
pulls the signal to ground to invoke a reset.
RESET_IN
Schmitt trigger input buffer with a voltage hysteresis of V
signal rise and fall times, as shown in Figure 20.
RESET_IN
less than a duration of t
signal must be maintained at a logic '0' for at least
a duration of t
ning. The resulting MCU_RESET signal will last
only as long as the R
not stretched). Refer to the Supervisor AC specificatio ns in Tab le 150., page 221 at the end of t his
document for these parameter values.
is pulled up internally and enters a
RST_HYS
for immunity to the effects of slow
is also filtered to reject a voltage spike
. The RESET_IN
RST_LO_IN
RST_FIL
while the oscillator is run-
ESET_IN signal is active (it is
Figure 20. Supervisor Reset Generation
V
CC
PULL-UP
RESET_IN
PIN
WDT
LVD
JTAG Debug
DELAY,
t
RST_ACTV
Noise Filter
S
R
MCU
Clock
Sync
Q
MCU_RESET
to MCU and
Peripherals
RESET
to PSD Module
AI09603
65/231

uPSD33xx
Low VCC Voltage Detect, LVD
An internal reset is generated by the LVD circuit
when V
V
LV_THRESH
old, the MCU_RESET signal will remain asserted
for t
RST_ACTV
is always enabled (c annot be disabled by S FR),
even in Idle Mode and Power-down Mode. The
LVD input has a voltage hysteresis of V
and will reject voltage spikes less than a duration
of t
RST_FIL
Important: The LVD voltage threshold is
V
LV_THRESH
supply on the MCU Module and the 3.3V V
V
CC
supply on the PSD Module for 3.3V uPSD33xxV
devices, since these supplies are one in the same
on the circuit board.
However, for 5V uPSD33xx devices, V
is not suitable for monitoring the 5 V VDD voltage
supply (V
itoring the 3.3V V
uPSD33xx devices, an external means is required
to monitor the separate 5V V
Power-up Reset
At power up, the internal reset generated by the
LVD circuit is latched as a logic '1' in the POR bit
of the SFR named PCON (Table 24., page 50).
Software can read this bit to determine whether
the last MCU reset was the result of a power up
(cold reset) or a reset from some other condition
(warm reset). This bit must be cleared with software.
JTAG Debug Reset
The JTAG Debug Unit can generate a reset for debugging purposes. This reset source is also available when the MCU is in Idle Mode and PowerDown Mode (the JTAG debugge r can be used to
exit these modes).
Watchdog Timer, WDT
When enabled, the WDT will generate a reset
whenever it overflows. Firmware that is behaving
correctly will periodically clear t he WDT before it
overflows. Run-away firmware will not be able to
clear the WDT, and a reset will be generated.
drops below the reset threshold,
CC
. After VCC returns to the reset thresh-
before it is released. The LVD circuit
RST_HYS
.
, suitable for monitoring both the 3.3V
LV_THRESH
LV_THRESH
is too low), but good for mon-
supply. In the case of 5V
CC
supply, if desired.
DD
DD
By default, the WDT is disabled after each reset.
Note: The WDT is not active d uring Idle m ode or
Power-down Mode.
There are two SFRs that control the WDT, they are
WDKEY (Table 37., page 68) and WDRST (Table
38., page 68).
If WDKEY conta ins 55h , th e WDT is disab led . Any
value other than 55h in WDKEY will enable the
WDT. By default, after any reset condition, WDKEY is automatically loaded with 55h, disabling
the WDT. It is the responsibility of initialization
firmware to write some value other than 55h to
WDKEY after each reset if the WDT is to be used.
The WDT consists of a 24-bit up-coun ter (Figure
21), whose initial count is 000000h by default after
every reset. The most significant byte of this
counter is controlled by the SFR, WDRST. After
being enabled by W DKEY, the 24-bit count is increased by 1 for each MCU machine cycle. When
the count overflows beyond FFFFFh (2
24
MCU
machine cycles), a reset is issued and the WDT is
automatically disabled (WDKEY = 55h again).
To prevent the WDT f rom timing out an d generating a reset, firmware must repeatedly write some
value to WDRST before the count reaches
FFFFFh. Whenever WDRST is written, the upper
8 bits of the 24-bit counter are loaded with the written value, and the lower 16 bits of the counter are
cleared to 0000h.
The WDT time-out period can be adjusted by writing a value other that 00h to WDRST. For e xample, if WDRST is written with 04h, then the WDT
will start counting 040000h, 040001h, 040002h,
and so on for each MCU machine cycle. In this example, the WDT time-out period is shorter than if
WDRST was written with 00h, because the W DT
is an up-counter. A value for WDRST should never
be written that results in a WDT time-ou t period
shorter than the time required to complete the
longest code task in the application, else unwanted WDT overflows will occur.
Figure 21. Watchdog Counter
23 15 7 0
8-bits8-bits8-bits
SFR, WDRST
66/231
AI09604

uPSD33xx
The formula to determine WDT time-out period is:
WDT
PERIOD
N
OVERFLOW
= t
MACH_CYC
is the number of WDT up-counts re-
x N
OVERFLOW
quired to reach FFFFFFh. This is det ermined by
the value written to the S FR, WDRST.
t
MACH_CYC
is the average duration of one MCU
machine cycle. By defa ult, an MCU machine cycle
is always 4 MCU_CLK periods for uPSD 33xx, but
the following factors can sometimes add more
MCU_CLK periods per machine cycle:
– The number of MCU_CLK periods assigned to
MCU memory bus cycles as determined in the
SFR, BUSCON. If this setting is greater than
4, then machine cycles have additional
MCU_CLK periods during memory transfers.
– Whether or not the PFQ/BC circuitry issues a
stall during a pa rticular MCU machi ne cycle. A
stall adds more MCU_CLK periods to a
machine cycle until the stall is removed.
t
MACH_CYC
is also affected by the absolute time of
a single MCU_CLK period. This number is fixed by
the following factors:
– Frequency of the external crystal, resonator,
or oscillator: (f
OSC
)
– Bit settings in the SFR CCON0, which can
divide f
and change MCU_CLK
OSC
As an example, assume the following:
1. f
is 40MHz, thus its period is 25ns.
OSC
2. CCON0 is 10h, meaning no clock division, so
the period of MCU_CLK is also 25ns.
3. BUSCON is C1h, meaning the PFQ and BC
are enabled, and each MCU memory bus
cycle is 4 MCU_CLK periods, adding no
additional MCU_CLK periods to MCU
machine cycles during memory transfers.
4. Assume there are no stalls from the PFQ/BC.
In reality, there are occational stalls but their
occurance has minimal impact on WDT
timeout period.
24
5. WDRST contains 00h, meaning a full 2
upcounts are required to reach FFFFFh and
generate a reset.
In this example,
t
MACH_CYC
N
OVERFLOW
WDT
= 100ns (4 MCU_CLK periods x 25ns)
= 224 = 16777216 up-counts
PERIOD
= 100ns X 16777216 = 1.67 seconds
The actual value will be slightly longer due to PFQ/
BC.
Firmware Example: T he following 8051 assembly code illustrates how to operate the WDT. A
simple statement in the reset initialization firmware
enables the WDT, and then a periodic write to
clear the WDT in the main firmware is required to
keep the WDT from overflowing. This firmware is
based on the example above (40MHz f
OSC
CCON0 = 10h, BUSCON = C1h).
For example, in the reset initialization firmware
(the function that executes after a jump to the reset
vector):
MOV AE, #AA ; enable WDT by writing value to
; WDKEY other than 55h
Somewhere in the flow of the main program, this
statement will execute periodically to reset the
WDT before it’s time-out period of 1.67 seconds.
For example:
MOV A6, #00 ; reset WDT, loading 000000h.
; Counting will automatically
; resume as long as 55h in not in
; WDKEY
,
67/231

uPSD33xx
Table 37. WDKEY: Watchdog Timer Key Register (SFR AEh, reset value 55h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
WDKEY[7:0]
Details
Bit Symbol R/W Definition
55h disables the WDT from counting. 55h is automatically loaded in this
SFR after any reset condition, leaving the WDT disabled by default.
[7:0] WDKEY W
Any value other than 55h written to this SFR will enable the WDT, and
counting begins.
Table 38. WDRST: Watchdog Timer Reset Counter Register (SFR A6h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
WDRST[7:0]
Details
Bit Symbol R/W Definition
This SFR is the upper byte of the 24-bit WDT up-counter. Writing this
[7:0] WDRST W
SFR sets the upper byte of the counter to the written value, and clears
the lower two bytes of the counter to 0000h.
Counting begins when WDKEY does not contain 55h.
68/231

STANDARD 8032 TIMER/COUNTERS
There are three 8032-style 16-bit Timer/Counter
registers (Timer 0, Timer 1, Timer 2) that can be
configured to operate as timers or event counters.
There are two additional 16-bit T imer/Counters in
the Programmable Counter Array (PCA), seePCA
Block, page 123 for details.
Standard Ti m er SF R s
Timer 0 and Timer 1 have very similar functions,
and they share two SFRs for control:
■ TCON (Table 39., page 70)
■ TMOD (Table 40., page 72).
Timer 0 has two SFRs that form the 16-bit counter,
or that can hold reload values, or that can s cale
the clock depending on the timer/counter mode:
■ TH0 is the high byte, address 8Ch
■ TL0 is the low byte, address 8Ah
Timer 1 has two similar SFRs:
■ TH1 is the high byte, address 8Dh
■ TL1 is the low byte, address 8Bh
Timer 2 has one control SFR:
■ T2CON (Table 41., page 75 )
Timer 2 has two SFRs that form the 16-bit counter,
and perform other functions:
■ TH2 is the high byte, address CDh
■ TL2 is the low byte, address CCh
Timer 2 has two SFRs for capture and reload:
■ RCAP2H is the high byte, address CBh
■ RCAP2L is the low byte, address CAh
uPSD33xx
Clock Sources
When enabled in the “Timer” function, the Registers THx and TLx are incremented every 1/12 of
the oscillator frequency (f
source is not effected by MCU clock dividers in the
CCON0, stalls from PFQ/BC, or bus transfer cycles. Timers are always clocked at 1/12 of f
When enabled in the “Counter” function, the Registers THx and TLx are incremented in response to
a 1-to-0 transition sampled at their corresponding
external input pin: pin C0 f or Timer 0; pin C1 for
Timer 1; or pin T2 for Timer 2. In this function, the
external clock input pin is s am pled by t he c ounter
at a rate of 1/12 of f
. When a logic '1' is deter-
OSC
mined in one sample, and a logic '0' in the next
sample period, the count is incremented at the
very next sample period (period1: sample=1,
period2: sample=0, period3: increment count
while continuing to sample). This means the maximum count rate is 1/24 of the f
restrictions on the duty cycle of the external input
signal, but to ensure that a given level is sampled
at least once before it changes, it should be active
for at least one full sample period (12 / f
onds). However, if MCU_CLK is divided by the
SFR CCON0, then the sample period must be calculated based on the resultant, longer, MCU_CLK
frequency. In this case, an external clock signal on
pins C0, C1, or T2 should have a duration longer
than one MCU machine cycle, t
section, Watchdog Timer, WDT, page 66 explains
how to e stimate t
MACH_CYC
). This timer clock
OSC
. There are no
OSC
MACH_CYC
.
OSC,
OSC
sec-
. The
.
69/231

uPSD33xx
Table 39. TCON: Timer Control Register (SFR 88h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0
Details
Bit Symbol R/W Definition
7 TF1 R
6 TR1 R,W Timer 1 run control. 1 = Timer/Counter 1 is on, 0 = Timer/Counter 1 is off.
5 TF0 R
4 TR0 R,W Timer 0 run control. 1 = Timer/Counter 0 is on, 0 = Timer/Counter 0 is off.
3IE1R
2IT1R,W
1IE0R
0IT0R,W
Timer 1 overflow interrupt flag. Set by hardware upon overflow.
Automatically cleared by hardware after firmware services the interrupt
for Timer 1.
Timer 0 overflow interrupt flag. Set by hardware upon overflow.
Automatically cleared by hardware after firmware services the interrupt
for Timer 0.
Interrupt flag for external interrupt pin, EXTINT1. Set by hardware when
edge is detected on pin. Automatically cleared by hardware after
firmware services EXTINT1 interrupt.
Trigger type for external interrupt pin EXTINT1. 1 = falling edge, 0 = lowlevel
Interrupt flag for external interrupt pin, EXTINT0. Set by hardware when
edge is detected on pin. Automatically cleared by hardware after
firmware services EXTINT0 interrupt.
Trigger type for external interrupt pin EXTINT0. 1 = falling edge, 0 = lowlevel
70/231

SFR, TCON
Timer 0 and Timer 1 share the S FR, TCON, that
controls these timers and provides information
about them. See Table 39., page 70.
Bits IE0 and IE1 are not re lated to Timer/Counter
functions, but they are set by hardware when a
signal is active on one of the two external interrupt
pins, EXTINT0 and EXTINT1. For system information on all of these interrupts, see Table
16., page 41, Interrupt Summary.
Bits IT0 and IT1 are not related to Timer/Counter
functions, but they control whether or not the two
external interrupt input pins, EXTINT0 and
EXTINT1 are edge or level triggered.
SFR, TMOD
Timer 0 and Timer 1 have four modes of operation
controlled by the SFR named TMOD (Table 40).
Timer 0 and Tim er 1 Operating M od e s
The “Timer” or “Counter” function is selected by
the C /T
control bits in TMOD. The four operating
modes are selected by b it-pairs M[1:0] in TM OD.
Modes 0, 1, and 2 are the sam e for both Timer/
Counters. Mode 3 is different.
Mode 0. Putting either Timer/Counter into Mode 0
makes it an 8-bit Counter with a divid e-by-32 prescaler. Figure 22 shows Mode 0 operation as it applies to Timer 1 (same applies to Timer 0).
In this mode, the Timer Register is configured as a
13-bit register. As the count rolls o ver from al l '1s'
to all '0s,' it sets the Timer Interrupt flag TF1. The
counted input is enabled to the Timer when
TR1 = 1 and either GATE = 0 or EXTINT1 = 1.
(Setting GATE = 1 allows the Timer to be controlled by external input pin, EXTINT1, to facilitate
pulse width measurements). TR1 is a control bit in
the SFR, TCON. GATE is a bit in the SFR, TMOD.
The 13-bit register consists of all 8 bits of TH1 and
the lower 5 bits of TL1. The upper 3 bits of TL1 are
indeterminate and shou ld be ignored. Set ting the
run flag, TR1, does not clear the registers.
uPSD33xx
Mode 0 operation is the same for the Timer 0 as
for Timer 1. Substitute TR0, TF0, C0, TL0, TH0,
and EXTINT0 for the corres ponding Timer 1 signals in Figure 22. There are two different GATE
Bits, one for Timer 1 and one for Timer 0.
Mode 1. Mode 1 is the same as Mode 0, except
that the Timer Register is being run with all 16 bits .
Mode 2. Mode 2 configures the Timer Register as
an 8-bit Counter (TL1) with a utomatic reload, as
shown in Figure 23., page 73. Overflow from TL1
not only sets TF1, but also reloads T L1 with the
contents of TH1, which is preset with firmware.
The reload leaves TH1 unchanged. Mode 2 operation is the same for Timer/Counter 0.
Mode 3. Timer 1 in Mode 3 simply holds its count.
The effect is the same as setting TR1 = 0.
Timer 0 in Mode 3 establishes TL0 and TH0 as two
separate counters. The logic for Mode 3 on Timer
0 is shown in Figure 24 ., p age 73. TL0 uses the
Timer 0 control Bits: C/T
well as the pin EXTINT0. TH0 is locked into a timer
function (counting at a rate of 1/12 f
over the use of TR1 and TF1 from Time r 1. Thus,
TH0 now controls the “Timer 1“ interrupt flag.
Mode 3 is provided for applications requiring an
extra 8-bit timer on the counter (see Figure
24., page 73). With Timer 0 in Mode 3, a
uPSD33xx device can look like it has three Timer/
Counters (not including the PCA). When Timer 0 is
in Mode 3, Timer 1 can be turned on and off by
switching it out of and into its own Mo de 3, or can
still be used by the serial port as a baud rate generator, or in fact, in any application not requiring an
interrupt.
, GATE, TR0, and TF0, as
) and takes
OSC
71/231

uPSD33xx
Table 40. TMOD: Timer Mode Register (SFR 89h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
GATE C/T
Details
Bit Symbol R/W Timer Definition (T/C is abbreviation for Timer/Counter)
7GATER,W
6C/T
[5:4] M[1:0] R,W
3GATER,W
M[1:0] GATE C/T M[1:0]
Gate control.
When GATE = 1, T/C is enabled only while pin EXTINT1
is '1' and the flag TR1 is '1.' When GATE = 0, T/C is
enabled whenever the flag TR1 is '1.'
Counter or Timer function select.
R,W
Timer 1
When C/T = 0, function is timer, clocked by internal clock.
= 1, function is counter, clocked by signal sampled on
C/T
external pin, C1.
Mode Select.
00b = 13-bit T/C. 8 bits in TH1 with TL1 as 5-bit pre-
scaler.
01b = 16-bit T/C. TH1 and TL1 are cascaded. No prescaler.
10b = 8-bit auto-reload T/C. TH1 holds a constant and
loads into TL1 upon overflow.
11b = Timer Counter 1 is stopped.
Gate control.
When GATE = 1, T/C is enabled only while pin EXTINT0
is '1' and the flag TR0 is '1.' When GATE = 0, T/C is
enabled whenever the flag TR0 is '1.'
Counter or Timer function select.
2C/T
[1:0] M[1:0] R,W
72/231
R,W
Timer 0
When C/T = 0, function is timer, clocked by internal clock.
= 1, function is counter, clocked by signal sampled on
C/T
external pin, C0.
Mode Select.
00b = 13-bit T/C. 8 bits in TH0 with TL0 as 5-bit pre-
scaler.
01b = 16-bit T/C. TH0 and TL0 are cascaded. No prescaler.
10b = 8-bit auto-reload T/C. TH0 holds a constant and
loads into TL0 upon overflow.
11b = TL0 is 8-bit T/C controlled by standard Timer 0
control bits. TH0 is a separate 8-bit timer that uses Timer
1 control bits.

Figure 22. Tim er/Counter Mode 0: 13-bit Counter
uPSD33xx
Gate
EXTINT1 pin
f
OSC
C1 pin
TR1
÷ 12
C/T = 0
C/T = 1
Control
Figure 23. Timer/Counter Mode 2: 8-bit Auto-reload
Gate
EXTINT1 pin
f
OSC
C1 pin
TR1
÷ 12
C/T = 0
C/T = 1
Control
TL1
(5 bits)
TL1
(8 bits)
TH1
(8 bits)
TH1
(8 bits)
TF1 Interrupt
AI06622
TF1 Interrupt
AI06623
Figure 24. Timer/Counter Mode 3: Two 8-bit Counters
Gate
EXTINT0 pin
f
OSC
C0 pin
f
OSC
TR0
÷ 12
÷ 12
C/T = 0
C/T = 1
TR1
Control
Control
TL0
(8 bits)
TH0
(8 bits)
TF0 Interrupt
TF1 Interrupt
AI06624
73/231

uPSD33xx
Timer 2
Timer 2 can operate as either an event timer or as
an event counter. This is selected by the bit C/ T2
in the SFR named, T2CON (Table 41., page 75).
Timer 2 has three operating modes selected by
bits in T2CON, according to Table 42., page 76.
The three modes are:
■ Capture mode
■ Auto re-load mode
■ Baud rate generator mode
Capture Mode. In Capture Mode there are two
options which are selected by the bit EXEN2 in
T2CON. Figure 25., page 79 illustrates Capture
mode.
If EXEN2 = 0, then Timer 2 is a 16-bit timer if C/T2
= 0, or it’s a 16-bit counter if C /T2 = 1, either of
which sets the interrupt flag bit TF2 upon overflow.
If EXEN2 = 1, then Tim er 2 still does the above,
but with the added feature that a 1-to-0 transition
at external input pin T2X causes the current value
in the Timer 2 registers, TL2 and TH2, to be captured into Registers RCAP2L and RCAP2H, respectively. In addition, the transition at T2X
causes interrupt flag bit EXF2 in T2CON to be set.
Either flag TF2 or EXF2 will generate an interrupt
and the MCU m ust read both flags to determine
the cause. Flags TF2 and EXF2 are not automatically cleared by hardware, so the firmware servicing the interrupt must clear the flag(s) upon exit of
the interrupt service routine.
Auto-relo a d M ode. In the Auto-reload Mode,
there are again two options, which are selected by
the bit EXEN2 in T2CON. Figure 26., page 79
shows Auto-reload mode.
If EXEN2 = 0, then when Timer 2 counts up and
rolls over from FFFFh it not only sets the interrupt
flag TF2, but also causes the Timer 2 registers to
be reloaded with the 16-bit value contained in
Registers RCAP2L and R CAP2H, which are preset with firmware.
If EXEN2 = 1, then Timer 2 still does the above,
but with the added feature that a 1-to-0 transition
at external input T2X will also trigger the 16-bit reload and set the interrupt flag EXF2. Again, firmware servicing the interrupt must read both TF2
and EXF2 to d etermine the cause, and cl ear the
flag(s) upon exit.
Note: The uPSD33xx does not support selectable
up/down counting in Aut o-reload mode (this feature was an extension to the origin al 8032 architecture).
74/231

Table 41. T2CON: Timer 2 Control Register (SFR C8h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
uPSD33xx
TF2 EXF2 RCLK TCLK EXEN2 TR2 C/T2
Details
Bit Symbol R/W Definition
Timer 2 flag, causes interrupt if enabled.
7 TF2 R,W
TF2 is set by hardware upon overflow. Must be cleared by firmware. TF2
will not be set when either RCLK or TCLK =1.
Timer 2 flag, causes interrupt if enabled.
6 EXF2 R,W
EXF2 is set when a capture or reload is caused by a negative transition
on T2X pin and EXEN2 = 1. EXF2 must be cleared by firmware.
UART0 Receive Clock control.
5
RCLK
(1)
R,W
When RCLK = 1, UART0 uses Timer 2 overflow pulses for its receive
clock in Modes 1 and 3. RCLK=0, Timer 1 overflow is used for its receive
clock
UART0 Transmit Clock control.
4
TCLK
(1)
R,W
When TCLK = 1, UART0 uses Timer 2 overflow pulses for its transmit
clock in Modes 1 and 3. TCLK=0, Timer 1 overflow is used for transmit
clock
Timer 2 External Enable.
3 EXEN2 R,W
When EXEN2 = 1, capture or reload results when negative edge on pin
T2X occurs. EXEN2 = 0 causes Timer 2 to ignore events at pin T2X.
CP/RL2
2 TR2 R,W
Timer 2 run control.
1 = Timer/Counter 2 is on, 0 = Timer Counter 2 is off.
Counter or Timer function select.
1C/T2
R,W
When C/T2
= 0, function is timer, clocked by internal clock. When C/T2 =
1, function is counter, clocked by signal sampled on external pin, T2.
Capture/Reload.
= 1, capture occurs on negative transition at pin T2X if
= 0, auto-reload occurs when Timer 2
0CP/RL2
R,W
When CP/RL2
EXEN2 = 1. When CP/RL2
overflows, or on negative transition at pin T2X when EXEN2=1. When
RCLK = 1 or TCLK = 1, CP/RL2
is ignored, and Timer 2 is forced to auto-
reload upon Timer 2 overflow
Note: 1. The RCLK1 and T CLK1 Bits i n th e SFR named PCON control UA RT1, and have the exact s am e function as RCLK and TCLK.
75/231

uPSD33xx
Table 42. Timer/Counter 2 Operating Mo des
Bits in T2CON SFR
Input Clock
Mode
16-bit
Auto-
reload
RCLK
TCLK
or
CP/
RL2
TR2 EXEN2
001 0 x
001 1 ↓
Pin
T2X
Remarks
reload [RCAP2H, RCAP2L] to [TH2,
TL2] upon overflow (up counting)
reload [RCAP2H, RCAP2L] to [TH2,
TL2] at falling edge on pin T2X
Timer,
Internal
f
OSC
0 1 1 0 x 16-bit Timer/Counter (up counting)
16-bit
Capture
011 1 ↓
Capture [TH2, TL2] and store to
[RCAP2H, RCAP2L] at falling edge on
f
OSC
pin T2X
Baud Rate
Generator
1 x 1 0 x No overflow interrupt request (TF2)
1x1 1↓ Extra Interrupt on pin T2X, sets TF2
f
OSC
Off x x 0 x x Timer 2 stops – –
Note: ↓ = falling ed ge
/12
/12
/2
Counter,
External
(Pin T2,
P1.0)
MAX
/24
f
OSC
MAX
f
/24
OSC
–
76/231

uPSD33xx
Baud Rate Generator Mode. The RCLK and/or
TCLK Bits in the SFR T2CON allow the transmit
and receive baud rates on serial port UART0 to be
derived from either Timer 1 or Timer 2. Figure
27., page 80 illustrates Baud Rate Generator
Mode.
When TCLK = 0, Timer 1 is used as UART0’s
transmit baud generator. When TCLK = 1, Timer 2
will be the transmit baud generator. RCLK has the
same effect for UART0’s receive baud rate. With
these two bits, UART0 c an have diff erent receive
and transmit baud rates - one generated by Timer
1, the other by Timer 2.
Note: Bits RCLK1 and TCLK1 in the SFR nam ed
PCON (see PCON: Power Control Register (SFR
87h, reset value 00h), page 50) have identical
functions as RCLK and TCLK but they apply to
UART1 instead. For simplicity in the following discussions about baud rate generation, no suffix will
be used when referring to SFR registers and bi ts
related to UART0 or UART1, since each UART interface has identical operation. Example, TCLK or
TCLK1 will be referred to as just TCLK.
The Baud Rate Generator Mode is similar to the
Auto-reload Mode, in that a roll over in TH2 causes
the Timer 2 registers, TH2 and TL2, to be reloaded
with the 16-bit value in Registers RCAP2H and
RCAP2L, which are preset with firmware.
The baud rates in UART Modes 1 and 3 are determined by Timer 2’s overflow rate as follows:
UART Mode 1,3 Baud Rate =
Timer 2 Overflow Rate / 16
The timer can be configured for either “timer” or
“counter” operation. In the most typical applications, it is configured for “timer” operation (C/T2
=
0). “Timer” operation is a little different for Timer 2
when it's being used as a baud rate generat or. In
this case, the baud rate is given by the formula:
UART Mode 1,3 Baud Rate =
/(32 x [65536 – [RCAP2H, RCAP2L]))
f
OSC
where [RCAP2H, RCAP2L] is the content of the
SFRs RCAP2H and RCAP2L taken as a 16-bit unsigned integer.
A roll-over in TH2 does not set TF2, and will not
generate an interrupt. Therefo re, the Timer Interrupt does not have to be disabled when Timer 2 is
in the Baud Rate Generator Mode.
If EXEN2 is set, a 1-to-0 transition on pin T2X wi ll
set the Timer 2 interrupt flag EXF2, but will not
cause a reload from RCAP2H and RCAP2L to
TH2 and TL2. Thus when Tim er 2 is in use as a
baud rate generator, the pin T2X can be used as
an extra external interrupt, if desired.
When Timer 2 is running (TR2 = 1) in a “timer”
function in the Baud Rate Generator Mode, firmware should not read or write TH2 or TL2. Under
these conditions the results of a read or write may
not be accurate. However, SFRs RCAP2H and
RCAP2L may be read, but should not be written,
because a write might overlap a reload and cause
write and/or reload errors. Timer 2 should be
turned off (clear TR2) before accessing Timer 2 or
Registers RCAP2H and RCAP2L, in this case.
Table 43., page 78 shows commonly used baud
rates and how they can be obtained from Timer 2,
with T2CON = 34h.
77/231

uPSD33xx
Table 43. Com m on ly Used Baud Rates Genera te d from Ti m e r2 (T2CON = 34h)
f
MHz
OSC
40.0 115200 FF F5 113636 -1.36%
40.0 57600 FF EA 56818 -1.36%
40.0 28800 FF D5 29070 0.94%
40.0 19200 FF BF 19231 0.16%
40.0 9600 FF 7E 9615 0.16%
36.864 115200 FF F6 115200 0
36.864 57600 FF EC 57600 0
36.864 28800 FF D8 28800 0
36.864 19200 FF C4 19200 0
36.864 9600 FF 88 9600 0
36.0 28800 FF D9 28846 0.16%
36.0 19200 FF C5 19067 -0.69%
36.0 9600 FF 8B 9615 0.16%
24.0 57600 FF F3 57692 0.16%
Desired
Baud Rate
RCAP2H (hex) RCAP2L(hex)
Timer 2 SFRs
Resulting
Baud Rate
Baud Rate
Deviation
24.0 28800 FF E6 28846 0.16%
24.0 19200 FF D9 19231 0.16%
24.0 9600 FF B2 9615 0.16%
12.0 28800 FF F3 28846 0.16%
12.0 9600 FF D9 9615 0.16%
11.0592 115200 FF FD 115200 0
11.0592 57600 FF FA 57600 0
11.0592 28800 FF F4 28800 0
11.0592 19200 FF EE 19200 0
11.0592 9600 FF DC 9600 0
3.6864 115200 FF FF 115200 0
3.6864 57600 FF FE 57600 0
3.6864 28800 FF FC 28800 0
3.6864 19200 FF FA 19200 0
3.6864 9600 FF F4 9600 0
1.8432 19200 FF FD 19200 0
1.8432 9600 FF FA 9600 0
78/231

Figure 25. Tim er 2 in Cap t ure Mode
uPSD33xx
f
OSC
T2 pin
T2X pin
÷ 12
Transition
Detector
C/T2 = 0
C/T2 = 1
TR2
EXEN2
Control
Capture
Control
Figure 26. Tim er 2 in Aut o- Re l oad Mode
f
OSC
T2 pin
÷ 12
C/T2 = 0
C/T2 = 1
Control
TL2
(8 bits)
RCAP2L
TL2
(8 bits)
TH2
(8 bits)
RCAP2H
TH2
(8 bits)
TF2
Timer 2
Interrupt
EXP2
AI06625
TF2
T2X pin
Transition
Detector
TR2
EXEN2
Reload
Control
RCAP2L
Timer 2
Interrupt
RCAP2H
EXP2
AI06626
79/231

uPSD33xx
Figure 27. Timer 2 in Baud R at e Gen e rator Mode
Note:
Oscillator frequency is divided by 2,
not 12 like in other timer modes.
f
OSC
T2 pin
÷ 12
C/T2 = 0
C/T2 = 1
TL2
(8 bits)
Control
TR2
TH2
(8 bits)
Reload
Timer 1 Overflow
÷ 2
'0'
'1'
'1'
'1'
SMOD
'0'
RCLK
÷ 16
'0'
TCLK
RX CLK
T2X pin
Transition
Detector
Control
EXEN2
Note:
Availability of additional external interrupt.
RCAP2L
EXF2
RCAP2H
Timer 2 Interrupt
÷ 16
TX CLK
AI09605
80/231

SERIAL UA RT INTERFACES
uPSD33xx devices provide two standard 8032
UART serial ports.
– The first port, UART0, is connected to pins
RxD0 (P3.0) and TxD0 (P3.1)
– The second port, UART1 is connected to pins
RxD1 (P1.2) and TxD1 (P1.3). UART1 can
optionally be routed to pins P4.2 and P4.3 as
described in Alternate Functions, page 59.
The operation of the two serial ports are the same
and are controlled by two SFRs:
■ SCON0 (Table 45., page 82) for UART0
■ SCON1 (Table 46., page 83) for UART1
Each UART has its own data buffer accessed
through an SFR listed below:
■ SBUF0 for UART0, address 99h
■ SBUF1 for UART1, address D9h
When writing SBU0 or SBUF1, the data automatically loads into the associated UART transmit data
register. When reading this SFR, data comes from
a different physical register, which is the receive
register of the associated UART.
Note: For simplicity in the remaining UART discussions, the suffix “0” or “1” will be dropped when
referring to SFR registers and bits related to
UART0 or UART1, since each UART interface has
identical operation. Example, SBUF 0 and SBUF1
will be refe rred to as just SB UF.
Each UART serial port can be full-duplex, meaning
it can transmit and receive simultaneously. Each
UART is also receive-buffered, meaning it can
commence reception of a second byte before a
previously received byte ha s been read from the
SBUF Register. However, if the first byte still has
not been read by the time reception of the second
byte is complete, one of the bytes will be lost .
UART Operation Modes
Each UART can operate in one of four m odes, one
mode is synchronous, and the others are asynchronous as shown in Table 44.
uPSD33xx
Mode 0. Mode 0 provides asynchronous, half-du-
plex operation. Serial data is both transmitted, and
received on the RxD pin. The TxD pin outputs a
shift clock for both transmit and receive directions,
thus the MCU must be the master. Eight bits are
transmitted/received LSB first. The baud rate is
fixed at 1/12 of f
Mode 1. Mode 1 provides standard asynchronous, full-duplex communication using a total of 10
bits per data byte. Data is transmitted through TxD
and received through RxD with: a Start Bit (logic
'0'), eight data bits (LSB first), and a Stop Bit (logic
'1'). Upon receive, the eight data bits go into the
SFR SBUF, and the Stop Bit goes into bit RB8 of
the SFR SCON. The baud rate is variable and derived from overflows of Timer 1 or Timer 2.
Mode 2. Mode 2 provides asynchronous , full-duplex communication using a total of 11 bits per
data byte. Data is transmitted through TxD and received through RxD with: a Start Bit (logic '0');
eight data bits (LSB first); a programmable 9th
data bit; and a Stop Bit (logic '1'). Upon Transmit,
the 9th data bit (from bit TB8 in SCON) can be assigned the value of '0' or '1.' Or, for example , the
Parity Bit (P, in the PSW) could be moved into
TB8. Upon receive, the 9th data bit goes into RB8
in SCON, while the Stop Bit is ignored. The b aud
rate is programmable to either 1/32 or 1/64 of
.
f
OSC
Mode 3. Mode 3 is the same as Mode 2 in all respects except the baud rate is variable like it is in
Mode 1.
In all four modes, transmission is initiated by any
instruction that uses SBUF as a d estin ation register. Reception is initiated in Mode 0 by the co ndition RI = 0 and REN = 1. Reception is initiated in
the other modes by the incoming Start Bit if
REN = 1.
OSC
.
Table 44. UART Operating Modes
Bits of SFR,
Mode Synchronization
0 Synchronous 0 0
1 Asynchronous 0 1 Timer 1 or Timer 2 Overflow 8 1 Start, 1 Stop
2 Asynchronous 1 0
3 Asynchronous 1 1 Timer 1 or Timer 2 Overflow 9 1 Start, 1 Stop
SCON
SM0 SM1
Baud Clock
f
OSC
/32 or f
f
OSC
/12
OSC
/64
Data
Start/Stop Bits See Figure
Bits
8 None
9 1 Start, 1 Stop
Figure
28., page 86
Figure
30., page 88
Figure
32., page 90
Figure
34., page 91
81/231

uPSD33xx
Multiprocessor Communications . Modes 2 and
3 have a special provision for multiprocessor communications. In these modes, 9 dat a bits are received. The 9th one goes into bit RB8, then comes
a stop bit. The port can be programmed su ch that
when the stop bit is received, the UART interrupt
will be activated only if bit RB8 = 1. This feature is
enabled by setting bit SM2 in SCON. A way to use
this feature in multi-processor systems is as follows: When the master proces sor wants to transmit a block of data to one of sev eral sla ves, it first
sends out an address byte which identifies the target slave. An address byte differs from a data byte
in that the 9th bit is 1 in an address byte and 0 in a
data byte. With SM2 = 1, no slave will be interrupted by a data byte. An address byte, however, will
interrupt all slaves, so that e ach slave can e xamine the received byte and see if it is being ad-
dressed. The addressed slave will clear its SM2 bit
and prepare to receive the data bytes that w ill be
coming. The slaves that were not being addressed
leave their SM2 bits set and go on about their business, ignoring the coming data bytes.
SM2 has no effect in Mode 0, and in Mode 1, SM2
can be used to check the validity of the stop bit. In
a Mode 1 reception, if SM2 = 1, the receive in terrupt will not be activated unless a valid stop bit is
received.
Serial Port Control Registers
The SFR SCON0 controls UART0, and SCON1
controls UART1, shown in Table 45 and Table 46.
These registers contain not only the mo de selection bits, but also the 9th data bit for transm it and
receive (bits TB8 and RB8), and the UART In terrupt flags, TI and RI.
Table 45. SCON0: Serial Port UART0 Control Register (SFR 98h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
SM0 SM1 SM2 REN TB8 RB8 TI RI
Details
Bit Symbol R/W Definition
7 SM0 R,W Serial Mode Select, See Table 44., page 81. Important, notice bit order
of SM0 and SM1.
6SM1R,W
5SM2R,W
4RENR,W
3TB8R,W
2RB8R,W
1TIR,W
[SM0:SM1] = 00b, Mode 0
[SM0:SM1] = 01b, Mode 1
[SM0:SM1] = 10b, Mode 2
[SM0:SM1] = 11b, Mode 3
Serial Multiprocessor Communication Enable.
Mode 0: SM2 has no effect but should remain 0.
Mode 1: If SM2 = 0 then stop bit ignored. SM2 =1 then RI active if stop
bit = 1.
Mode 2 and 3: Multiprocessor Comm Enable. If SM2=0, 9th bit is
ignored. If SM2=1, RI active when 9th bit = 1.
Receive Enable.
If REN=0, UART reception disabled. If REN=1, reception is enabled
TB8 is assigned to the 9th transmission bit in Mode 2 and 3. Not used in
Mode 0 and 1.
Mode 0: RB8 is not used.
Mode 1: If SM2 = 0, the RB8 is the level of the received stop bit.
Mode 2 and 3: RB8 is the 9th data bit that was received in Mode 2 and
3.
Transmit Interrupt flag.
Causes interrupt at end of 8th bit time when transmitting in Mode 0, or at
beginning of stop bit transmission in other modes. Must clear flag with
firmware.
Receive Interrupt flag.
0RIR,W
82/231
Causes interrupt at end of 8th bit time when receiving in Mode 0, or
halfway through stop bit reception in other modes (see SM2 for
exception). Must clear this flag with firmware.

Table 46. SCON1: Serial Port UART1 Control Register (SFR D8h, reset value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
SM0 SM1 SM2 REN TB8 RB8 TI RI
Details
Bit Symbol R/W Definition
uPSD33xx
7 SM0 R,W Serial Mode Select, See Table 44., page 81. Important, notice bit order
6SM1R,W
5SM2R,W
4RENR,W
3TB8R,W
2RB8R,W
1TIR,W
of SM0 and SM1.
[SM0:SM1] = 00b, Mode 0
[SM0:SM1] = 01b, Mode 1
[SM0:SM1] = 10b, Mode 2
[SM0:SM1] = 11b, Mode 3
Serial Multiprocessor Communication Enable.
Mode 0: SM2 has no effect but should remain 0.
Mode 1: If SM2 = 0 then stop bit ignored. SM2 =1 then RI active if stop
bit = 1.
Mode 2 and 3: Multiprocessor Comm Enable. If SM2=0, 9th bit is
ignored. If SM2=1, RI active when 9th bit = 1.
Receive Enable.
If REN=0, UART reception disabled. If REN=1, reception is enabled
TB8 is assigned to the 9th transmission bit in Mode 2 and 3. Not used in
Mode 0 and 1.
Mode 0: RB8 is not used.
Mode 1: If SM2 = 0, the RB8 is the level of the received stop bit.
Mode 2 and 3: RB8 is the 9th data bit that was received in Mode 2 and
3.
Transmit Interrupt flag.
Causes interrupt at end of 8th bit time when transmitting in Mode 0, or at
beginning of stop bit transmission in other modes. Must clear flag with
firmware.
Receive Interrupt flag.
0RIR,W
Causes interrupt at end of 8th bit time when receiving in Mode 0, or
halfway through stop bit reception in other modes (see SM2 for
exception). Must clear this flag with firmware.
83/231

uPSD33xx
UART Baud Rates
The baud rate in Mode 0 is fixed:
Mode 0 Baud Rate = f
OSC
/ 12
The baud rate in Mode 2 depends on the value of
the bit SMOD in the SFR named PCON. If SMOD
= 0 (default value), the baud rate is 1/64 the oscillator frequency, f
. If SMOD = 1, the baud rat e
OSC
is 1/32 the oscillator frequency.
SMOD
Mode 2 Baud Rate = (2
/ 64) x f
OSC
Baud rates in Modes 1 and 3 are determined by
the Timer 1 or Timer 2 overflow rate.
Using Timer 1 to Generate Baud Ra te s. When
Timer 1 is used as the baud rate generator (bits
RCLK = 0, TCLK = 0), the baud rates in M odes 1
and 3 are determined by the Timer 1 overflow rate
and the value of SMOD as follows:
Mode 1,3 Baud Rate =
SMOD
(2
/ 32) x (Timer 1 overflow rate)
Table 47. Com m only Used Ba ud Rates Generated from Ti m er 1
f
UART Mode
Mode 0 Max 40.0 3.33MHz 3.33MHz 0 X X X X
Mode 2 Max 40.0 1250 k 1250 k 0 1 X X X
Mode 2 Max 40.0 625 k 625 k 0 0 X X X
Modes 1 or 3 40.0 19200 18939 -1.36% 1 0 2 F5
Modes 1 or 3 40.0 9600 9470 -1.36% 1 0 2 EA
Modes 1 or 3 36.0 19200 18570 -2.34% 1 0 2 F6
Modes 1 or 3 33.333 57600 57870 0.47% 1 0 2 FD
Modes 1 or 3 33.333 28800 28934 0.47% 1 0 2 FA
Modes 1 or 3 33.333 19200 19290 0.47% 1 0 2 F7
Modes 1 or 3 33.333 9600 9645 0.47% 1 0 2 EE
Modes 1 or 3 24.0 9600 9615 0.16% 1 0 2 F3
Modes 1 or 3 12.0 4800 4808 0.16% 1 0 2 F3
Modes 1 or 3 11.0592 57600 57600 0 1 0 2 FF
Modes 1 or 3 11.0592 28800 28800 0 1 0 2 FE
Modes 1 or 3 11.0592 19200 19200 0 1 0 2 FD
Modes 1 or 3 11.0592 9600 9600 0 1 0 2 FA
Modes 1 or 3 3.6864 19200 19200 0 1 0 2 FF
Modes 1 or 3 3.6864 9600 9600 0 1 0 2 FE
Modes 1 or 3 1.8432 9600 9600 0 1 0 2 FF
Modes 1 or 3 1.8432 4800 4800 0 1 0 2 FE
OSC
MHz
Desired
Baud Rate
Resultant
Baud Rate
The Timer 1 Interrupt should be di sabled in this
application. The Timer itself can be conf igured for
either “timer” or “counter” operation, and in any of
its 3 running modes. In the m ost typical applications, it is configured for “timer” operation, in the
Auto-reload Mode (high nibb le of the SFR TM OD
= 0010B). In that case the baud rate is given by the
formula:
Mode 1,3 Baud Rate =
SMOD
(2
/ 32) x (f
/ (12 x [256 – (TH1)]))
OSC
Table 47 lists various comm only used b aud ra tes
and how they can be obtained from Timer 1.
Using Timer/Counter 2 to Generate Baud
Rates. See Baud Rate Generator
Mode, page 77 .
Timer 1
Timer
Mode in
TMOD
value (hex)
Baud Rate
Deviation
SMOD
bit in
PCON
Bit
C/T
in TMOD
TH1
Reload
84/231

More About UART Mode 0
Refer to the block diagram in Figure 28., page 86,
and timing diagram in Figure 29., page 86 .
Transmission is initiated by any instruction which
writes to the SFR named SBUF. At the end of a
write operation to SBUF, a 1 is loaded into the 9th
position of the transmit shift register and tells the
TX Control unit to begin a transmission. Transmission begins on the following MCU machine cycle,
when the “SEND” signal is active in Figure 29.
SEND enables the output of the shift register to the
alternate function on the po rt containing pin RxD,
and also enables the SHIFT CLOCK signal to the
alternate function on the port containing the pin,
TxD. At the end of each SHIFT CLOCK in which
SEND is active, the contents of the transmit shift
register are shifted to the right one position.
As data bits shift out to the right, zeros come in
from the left. When the MS B o f the da ta b yte is at
the output position of the shift register, then the '1'
that was initially loaded into the 9th position, is just
to the left of the MSB, and all positions to the left
of that contain zeros. This condition flags the TX
uPSD33xx
Control unit to do one last shift, then deactivate
SEND, and then set the interrupt flag TI. Both of
these actions occur at S1P1.
Reception is initiated by the condition REN = 1 and
RI = 0. At the end of the next MCU machine cycle,
the RX Control unit writes the bits 11111110 to the
receive shift register, and in the next c lock phas e
activates RECEIVE. RECEIVE enables the SHIFT
CLOCK signal to the alternate function on the port
containing the pin, TxD. Each pulse of SHIFT
CLOCK moves the contents of the receive shift
register one position to the left while RECEIVE is
active. The value that comes in from the right is the
value that was sampled at the RxD pi n. As data
bits come in from the right , 1s shift out to th e left.
When the 0 that was initially loaded into the rightmost position arrives at the left-most position in the
shift register, it flags the RX Control unit to do one
last shift, and then it loads SBUF. After this, RECEIVE is cleared, and the receive interrupt flag RI
is set.
85/231

uPSD33xx
Figure 28. UART Mode 0, Block Diagram
Write
to
SBUF
DS
CL
Q
Zero Detector
Internal Bus
SBUF
RxD
Pin
Start
f
OSC
/12
REN
R1
Serial
Port
Interrupt
Tx Clock
Rx Clock
Start
Load
SBUF
Read
SBUF
Figure 29. UART Mode 0, Timing Diagram
Shift
Tx Control
T
R
Rx Control
7 6 5 4 3 2 1 0
Input Shift Register
SBUF
Internal Bus
Send
Receive
Shift
Shift
Shift
Clock
RxD
P3.0 Alt
Input
Function
TxD
Pin
AI06824
86/231
Write to SBUF
Send
Shift
RxD (Data Out)
TxD (Shift Clock)
Write to SCON
Receive
Shift
RxD (Data In)
TxD (Shift Clock)
D0 D1 D2 D3 D4 D5 D6 D7
TI
RI
Clear RI
D0 D1 D2 D3 D4 D5 D6 D7
Transmit
Receive
AI06825

More About UART Mode 1
Refer to the block diagram in Figure 30., page 88,
and timing diagram in Figure 31., page 88 .
Transmission is initiated by any instruction which
writes to SBUF. At the end of a write operation to
SBUF, a '1' is loaded into the 9th position of the
transmit shift register and flags the TX Control unit
that a transmission is requested. Transmission actually starts at the end of the MCU the machine cycle following the next rollover in the divide-by-16
counter. Thus, the bit times are synchronized t o
the divide-by-16 counter, not to the writing of
SBUF. Transmission begins with activation of
SEND which puts the start bit at pin TxD. One bit
time later, DATA is activated, which enables the
output bit of the trans mit shift register to pin TxD.
The first shift pulse occurs one bit time after t hat.
As data bits shift out to the right, zeros are clocked
in from the left. When the M SB o f the data byte is
at the output position of the shift register, then the
1 that was initially loaded into the 9th position is
just to the left of the MSB, and all positions to the
left of that contain zeros. This condition flags the
TX Control unit to do one last shift and then deactivates SEND, and sets the interrupt flag, TI. This
occurs at the 10th divide-by-16 rollover after a
write to SBUF.
Reception is initiated by a detected 1-to-0 transition at the pin RxD. For this purpose RxD is sampled at a rate of 16 times whatever baud rate has
been established. W hen a transition is detected,
the divide-by-16 counter is immediately reset, and
1FFH is written into the input shift register. Resetting the divide-by-16 counter aligns its rollovers
uPSD33xx
with the boundaries of the incoming bit times. The
16 states of the count er divide each bit time into
16ths. At the 7th, 8th, and 9th count er states of
each bit time, the bit detector samples the value of
RxD. The value accepted is the value that was
seen in at least 2 of the 3 samples. This is done for
noise rejection. If the value accepted during the
first bit time is not '0,' the receive circuits are reset
and the unit goes back to looking for another '1'-to'0' transit ion. This is to pr ovide rejection o f false
start bits. If the start bit proves valid, it is shifted
into the input shift register, and reception of the reset of the rest of the frame will proceed. As data
bits come in from the right, '1s' shift out to the left.
When the start bit arrives at the left-most position
in the shift register (which in mode 1 is a 9-bit register), it flags the RX Control unit to do one last
shift, load SBUF and RB8, and set the receive interrupt flag RI. The signal to load SBUF and RB8,
and to set RI, will be generated if, and only if, the
following conditions are met at the time the final
shift pulse is generated:
1. RI = 0, and
2. Either SM2 = 0, or the received stop bit = 1.
If either of these two conditions are not met, the re-
ceived frame is irretrievably lost. If both conditions
are met, the stop bit goes into RB8, the 8 data bits
go into SBUF, and RI is activated. At this time,
whether the above condi tions are met or not, the
unit goes back to lookin g for a '1'-to-'0' transition
on pin RxD.
87/231

uPSD33xx
Figure 30. UART Mode 1, Block Diagram
Overflow
SMOD
TCLK
RCLK
Timer1
÷2
01
Timer2
Overflow
01
0
1
Write
to
SBUF
RxD
Pin
Sample
1-to-0
Transition
Detector
÷16
Serial
Port
Interrupt
Rx Detector
TB8
DS
CL
Q
Start
Tx Clock
÷16
Rx Clock
Start
Load
SBUF
Read
SBUF
Internal Bus
SBUF
Zero Detector
Tx Control
TI
RI
Rx Control
1FFh
Input Shift Register
SBUF
Shift
Send
Load SBUF
Data
Shift
Shift
TxD
Pin
Figure 31. UART Mode 1, Timing Diagram
Tx Clock
Write to SBUF
Send
Data
88/231
Shift
TxD
Rx Clock
RxD
Bit Detector
Sample Times
Shift
TI
RI
Start Bit
Start Bit
D0 D1 D2 D3 D4 D5 D6 D7
D0 D1 D2 D3 D4 D5 D6 D7
Internal Bus
Stop Bit
Stop Bit
AI06826
Transmit
Receive
AI06843

More About UART Modes 2 and 3
For Mode 2, refer to the blo ck diagram in Figure
32., page 90, and timing diagram in Figure
33., page 90. For Mode 3, refer to the block dia-
gram in Figure 34., page 91, and timing diagram in
Figure 35., page 91.
Keep in mind that the baud rat e is programmab le
to either 1/32 or 1/64 of f
in Mode 2, but Mode
OSC
3 uses a variable baud rate generated from Timer
1 or Timer 2 rollovers.
The receive portion is exactly the same as in Mode
1. The transmit portion differs from Mode 1 only in
the 9th bit of the transmit shift register.
Transmission is initiated by any instruction which
writes to SBUF. At the end of a write operation to
SBUF, the TB8 Bit is loaded into the 9th position of
the transmit shift register and flags the TX Control
unit that a transmission is requested. Transmission actually starts at the end of the MCU the machine cycle fol lowing the next rollover i n the divideby-16 counter. Thus, the bit times are synchronized to the divide-by-16 counter, not to the writing
of SBUF. Transmission begins with ac tivation of
SEND which puts the start bit at pin TxD. One bit
time later, DATA is activated, which enables the
output bit of the trans mit shift register to pin TxD.
The first shift pulse occurs one bit time after t hat.
The first shift clocks a '1' (the stop bit) into the 9th
bit position of the shift register. There-after, only
zeros are clocked in. Thus, as data bits shift out to
the right, zeros are clock ed in from t he left. When
bit TB8 is at the output position of t he shift r egister,
then the stop bit is just to the left of TB8, and all positions to the left of that contain zeros. This condition flags the TX Co ntrol unit to do one last shift
and then deactivate SEND, and set the i nterrupt
flag, TI. This occurs at the 11th divide-by 16 rollover after writing to SBUF.
uPSD33xx
Reception is initiated by a detected 1-to-0 transition at pin RxD. For this purpose RxD is samp led
at a rate of 16 times whatever baud rate has been
established. When a tra nsition i s det ected , the divide-by-16 counter is immediately reset, and 1FFH
is written to the input shift register. At the 7th, 8th,
and 9th counter states of each bit time, the bit detector samples the value of RxD. The value accepted is the value that was seen in at least 2 of
the 3 samples. If the value accepted during the
first bit time is not '0,' the receive circuits are reset
and the unit goes back to looking for another '1'-to'0' transition. If the start bit proves valid, it i s shifted
into the input shift regi ster, and reception of the
rest of the frame will proceed. As data bits come in
from the right, '1s' shift out to the left. W hen the
start bit arrives at the left-most position in the shift
register (which in Modes 2 and 3 is a 9-bit register), it flags the RX Control unit to do one last shift,
load SBUF and RB8, and set the interrupt flag RI.
The signal to load SBUF a nd RB8, a nd to set RI,
will be generated if, and only if, the following conditions are met at th e time the final shift pul se is
generated:
1. RI = 0, and
2. Either SM2 = 0, or the received 9th data bit = 1.
If either of these conditions is not met, the received
frame is irretrievably lost, and RI is not set. If both
conditions are met, the recei ve d 9th dat a bit goes
into RB8, and the first 8 data bits go into SBUF.
One bit time later, whether the above conditions
were met or not, the unit goes bac k to looking for
a '1'-to-'0' transition on pin RxD.
89/231

uPSD33xx
Figure 32. UART Mode 2, Block Diagram
f
OSC
SMOD
÷2
/32
01
Write
to
SBUF
RxD
Pin
Sample
1-to-0
Transition
Detector
÷16
Serial
Port
Interrupt
Rx Detector
TB8
DS
CL
Q
Start
Tx Clock
÷16
Rx Clock
Start
Load
SBUF
Read
SBUF
Internal Bus
SBUF
Zero Detector
Tx Control
TI
RI
Rx Control
1FFh
Input Shift Register
SBUF
Shift
Send
Load SBUF
Data
Shift
Shift
TxD
Pin
Figure 33. UART Mode 2, Timing Diagram
Tx Clock
Write to SBUF
Send
Data
90/231
Shift
TxD
Stop Bit
Generator
Rx Clock
RxD
Bit Detector
Sample Times
Shift
TI
RI
Start Bit
Start Bit
D0 D1 D2 D3 D4 D5 D6 D7
D0 D1 D2 D3 D4 D5 D6 D7
Internal Bus
TB8
RB8
Stop Bit
Stop Bit
AI06844
Transmit
Receive
AI06845

Figure 34. UART Mode 3, Block Diagram
uPSD33xx
Overflow
SMOD
TCLK
RCLK
Timer1
÷2
01
Timer2
Overflow
01
0
1
Write
to
SBUF
RxD
Pin
Sample
1-to-0
Transition
Detector
÷16
Serial
Port
Interrupt
Rx Detector
TB8
DS
CL
Q
Start
Tx Clock
÷16
Rx Clock
Start
Load
SBUF
Read
SBUF
Internal Bus
SBUF
Zero Detector
Tx Control
TI
RI
Rx Control
1FFh
Input Shift Register
SBUF
Shift
Send
Load SBUF
Data
Shift
Shift
TxD
Pin
Figure 35. UART Mode 3, Timing Diagram
Tx Clock
Write to SBUF
Send
Data
Shift
TxD
Stop Bit
Generator
Rx Clock
RxD
Bit Detector
Sample Times
Shift
TI
RI
Start Bit
Start Bit
D0 D1 D2 D3 D4 D5 D6 D7
D0 D1 D2 D3 D4 D5 D6 D7
Internal Bus
TB8
RB8
Stop Bit
Stop Bit
AI06846
Transmit
Receive
AI06847
91/231

uPSD33xx
IrDA INTERFACE
uPSD33xx devices provide an internal IrDA interface that will allow the connection of the UART1
serial interface directly to an external infrared
transceiver device. The IrDA interface does this by
automatically shortening the pulses transmitted on
UART1’s TxD1 pin, and stretching the incoming
pulses received on the RxD1 pin. Reference F igures 36 and 37.
When the IrDA interface is enabled, the output signal from UART1’s transmitter logic on pin TxD1 is
Figure 36. IrDA Interface
compliant with the IrDA Physical Layer Link Specification v1.4 (www.irda.org) operating from 1.2k
bps up to 115.2k bps. The pulses received on the
RxD1 pin are stretched by the IrDA interface to be
recognized by UART1’s receiver logic, also adhering to the IrDA specification up to 115.2k bps.
Note: In Figure 37 a logic '0' in the serial data
stream of a UART Frame corresponds to a logic
high pulse in an IR Frame. A logic '1' in a UART
Frame corresponds to no pulse in an IR Frame.
SIRClk
UART1
TxD
RxD
uPSD33XX
IrDA
Interface
Figure 37. Pulse Shaping by the IrDA Interface
UART Frame
Start
Bit
0101 11 100 0
Data Bits
Tx D1-IrDA
IrDA
Transceiver
RxD1-IrDA
AI07851
Stop
Bit
92/231
UART Frame
IR Frame
Start
Bit
0101 11 100 0
Bit Time
Data Bits
IR Frame
Pulse Width = 3/16 Bit Time
Stop
Bit
AI09624

uPSD33xx
The UART1 serial chan nel can operate in one of
four different modes as shown in Table
44., page 81 in the section, SERIAL UART
INTERFACES, page 81. However, when UART1
is used for IrDA communication, UART1 must operate in Mode 1 only, to be compatible with IrDA
protocol up to 115.2k bps. The IrDA interface will
support baud rates generated from Timer 1 or Timer 2, just like standard UAR T serial communication, but with one restriction. The transmit baud
The IrDA Interface is disabled after a reset and is
enabled by setting the IRDAEN Bit in the SFR
named IRDACON (Table 48., page 93). When
IrDA is disabled, the UART1's RxD and TxD signals will bypass the internal IrDA logic and instead
they are routed directly to the pins RxD1 and TxD1
respectively. When IrDA is enabled, the IrDA pulse
shaping logic is active and resides between
UART1 and the pins RxD1 and TxD1 as shown in
Figure 36., page 92.
rate and receive baud rate must be the same (cannot be different rates as is allowed by standard
UART communications).
Table 48. IRDACON Register Bit Definition (SFR CEh, Reset Value 0Fh)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
– IRDAEN PULSE CDIV4 CDIV3 CDIV2 CDIV1 CDIV0
Details
Bit Symbol R/W Definition
7 – – Reserved
IrDA Enable
6 IRDAEN RW
5PULSERW
4-0 CDIV[4:0] RW Specify Clock Divider (see Table 49., page 94)
0 = IrDA Interface is disabled
1 = IrDA is enabled, UART1 outputs are disconnected from Port 1 (or
Por t 4 )
IrDA Pulse Modulation Select
0 = 1.627µs
1 = 3/16 bit time pulses
93/231

uPSD33xx
Pulse Width Selection
The IrDA interface has two ways to modulate the
standard UART1 serial stream:
1. An IrDA data pulse will have a constant pulse
width for any bit time, regardless of the
selected baud rate.
2. An IrDA data pulse will have a pulse width that
is proportional to the the bit time of the
selected baud rate. In this case, an IrDA data
pulse width is 3/16 of its bit time, as shown in
Figure 37., page 92.
The PULSE bit in the SFR named IRDACON determines which method above will be used.
According to the IrDA physical layer speci fication,
for all baud rates at 115.2k bps and below, the
minimum data pulse width is 1.41µs. For a baud
rate of 115.2k bps, the maximum pulse width
2.23µs. If a constant pulse width is to be used for
all baud rates (PULSE bit = 0), t he ideal general
pulse width is 1.63µs, derived from the bit time of
Table 49. Recommended CDIV[4:0] Values to Generate SIRClk (default CDIV[4:0] = 0Fh, 15 decimal)
f
(MHz)
OSC
40.00 16h, 22 decimal 1.82
Value in CDIV[4:0]
the fastest baud rate (8.68µs bit time for 115.2k
bps rate), multiplied by the proportion, 3/16.
To produce this fixed data pulse width when t he
PULSE bit = 0, a prescaler is needed to generate
an internal reference clock, SIRClk, shown in Fig-
ure 36., page 92. SIRClk is derived by dividing the
oscillator clock frequency, f
using the five bits
OSC,
CDIV[4:0] in the SFR named IRDACON. A divisor
must be chosen to produce a frequency for SIRClk
that lies between 1.34 MHz and 2.13 MHz, but it is
best to choose a divisor value that produces SIR-
Clk frequency as close to 1 .83MHz as possible,
because SIRClk at 1.83MHz wi ll prod uce an f ixed
IrDA data pulse width of 1.63µs. Table 49 provides
recommended values for CDIV[4:0] based on sev-
eral different values of f
OSC
.
For reference, SIRClk of 2.13MHz will generate a
fixed IrDA data pulse width of 1.41µs, and SIRClk
of 1.34MHz will generate a fixed data pulse width
of 2.23µs.
Resulting f
SIRCLK
(MHz)
36.864, or 36.00 14h, 20 decimal 1.84, or 1.80
24.00 0Dh, 13 decimal 1.84
11.059, or 12.00 06h, 6 decimal 1.84, or 2.00
(1)
7.3728
Note: 1. When PULSE bi t = 0 (fixed data pu l se width), thi s is minimum recommend ed f
04h, 4 decimal 1.84
because CDIV[4:0] must be 4 or greater.
OSC
94/231

I2C INTERFAC E
uPSD33xx devices support one serial I2C interface. This is a two-wire communication channel,
having a bi-directional data signal (SDA, pin P3.6)
and a clock signal (SCL, pin P3.7) based on opendrain line drivers, requiring external pull-up resistors, R
Figure 38 ).
2
I
Byte-wide data is transferred, MSB first, between
a Master device and a Slave device on two wire s.
More than one bus Master is allowed, but only one
Master may control the bus at any given time. Data
is not lost when another Master requests the use
of a busy bus because I
tection and arbitration. The bus Master initiates all
data movement and generates the clock that permits the transfer. Once a transfer is initiated by the
Master, any device addressed is considered a
Slave. Automatic clock synchronization allows I
devices with different bit rates to commu nicate on
the same physical bus. A single device can play
Figure 38. Ty pi c al I
, each with a typical value of 4.7kΩ (see
P
C Interface Main Features
2
C supports collision de-
2
C Bus Configuration
VCC or V
DD
2
(1)
the role of Master or Slave, or a single device can
be a Slave only. Each Slave device on the bus has
a unique address, and a general broadcast ad-
dress is also available. A M aster or Slave dev ice
has the ability to suspend da ta transfers if the de-
vice needs more time to transmit or receive data.
2
C interface has the following features:
This I
– Serial I/O Engine (SIOE): serial/parallel
conversion; bus arbitration; clock generation
and synchronization; and handshaking are all
performed in hardware
– Interrupt or Polled operation
– Multi-master capability
– 7-bit Addressing
2
– Supports standard speed I
100kHz), fast mode I
and high-speed mode I
C
833kHz)
C (SCL up to
2
C (101KHz to 400kHz),
2
C (401KHz to
uPSD33xx
Device with I2C
R
P
SDA
I2C BUS
Note: 1. For 3.3V sys t em, connect RP to 3.3V VCC. For 5.0V syst em, connect RP to 5.0V VDD.
SCL
SDA/P3.6 SCL/P3.7
uPSD33XX(V)
R
P
Device with I2C
Interface
Interface
Device with I2C
Interface
AI09623
95/231

uPSD33xx
Communi c at io n Fl ow
2
C data flow control is based on the fact that all
I
2
C compatible devices will drive the bus lines with
I
open-drain (or open-collector) line drivers pulled
up with external resistors, creating a wired-AND
situation. This means that either bus line (SDA or
SCL) will be at a logic '1' level only when no I
vice is actively driving the line to logic '0.' The logic
for handshaking, arbitration, synchronization, and
collision detection is implemented by each I
vice having:
1. The ability to hold a line low against the will of
the other devices who are trying to assert the
line high.
2. The ability of a device to detect that another
device is driving the line low against its will.
Assert high means the driver releases the line and
external pull-ups passively raise the signal to logic
'1.' Holding low means the open-drain driver is
actively pulling the signal to ground for a logic '0.'
For example, if a Slave device cannot tran smit or
receive a byte because it is distracted by and interrupt or it has to wait for some process to complete,
it can hold the SCL clock line low. Even though the
Master device is generating the SCL clock, the
Master will sense that the Slave is holding the SCL
line low against the will of the Master, indicating
that the Master must wait until the Slave releases
SCL before proceeding with the transfer.
Another example is when two Master devices try
to put information on t he bus simultaneously, the
first one to release the SDA data line looses arbitration while the winner continues to hold SDA low.
Two types of data transfers are possibl e with I
depending on the R/W
bit, see Figure
39., page 97.
1. Data transfer from Master Transmitter to
Slave Receiver (R/W
= 0). In this case , the
Master generates a START condition on the
bus and it generates a clock signal on the SCL
line. Then the Master transmits the first byte
on the SDA line containing the 7-bit Slave
address plus the R/W
bit. The Slave who owns
that address will respond with an acknowledge
bit on SDA, and all other Slave devices will not
respond. Next, the Master will transmit a data
byte (or bytes) that the addressed Slave must
receive. The Slave will return an acknowledge
bit after each data byte it successfully
receives. After the final byte is transmitted by
the Master , the Master will generate a STOP
condition on the bus, or it will generate a RE-
2
C de-
2
C de-
2
START conditon and begin the next transfer.
There is no limit to the number of bytes that
can be transmitted during a transfer session.
2. Data transfer from Slave Transmitter to
Master Receiver (R/W
= 1). In this case, the
Master generates a START condition on the
bus and it generates a clock signal on the SCL
line. Then the Master transmits the first byte
on the SDA line containing the 7-bit Slave
address plus the R/W
bit. The Slave who owns
that address will respond with an acknowledge
bit on SDA, and all other Slave devices will not
respond. Next, the addressed Slave will
transmit a data byte (or bytes) to the Master.
The Master will ret ur n an acknow l edge bit
after each data byte it successfully receives,
unless it is the last byte the Master desires. If
so, the Master will not acknowledge the last
byte and from this, the Slave knows to stop
transmitting data bytes to the Master. The
Master will then generate a STOP condition on
the bus, or it will generate a RE-START
conditon and begin the next transfer. There is
no limit to the number of bytes that can be
transmitted during a transfer session.
A few things to know related to these transfers:
– Either the Master or Slave device can hold the
SCL clock line low to indicate it needs more
time to handle a byte transfer. An indefinite
holding period is possible.
– A START condition is generated by a Master
and recognized by a Slave when SDA has a 1-
C
to-0 transition while SCL is high (Figure
39., page 97).
– A STOP condition is generated by a Maste r
and recognized by a Slave when SDA has a 0to1 transition while SCL is high (Figure
39., page 97).
– A RE-START (repeated START) condition
generated by a Master can have the same
function as a STOP condition when starting
another data transfer immediately following
the previous data transfer (Figure
39., page 97).
– When transferring data, the logic level on the
SDA line must remain stable while SCL is
high, and SDA can change only while SCL is
low. However, when not transferring data,
SDA may change state while SCL is high,
which creates the START and STOP bus
conditions.
96/231

uPSD33xx
– An Acknowlegde bit is generated from a
Master or a Slave by driving SDA low during
the “ninth” bit time, just following each 8-bit
byte that is transfered on the bus (Figure
39., page 97). A Non-Acknowledge occurs
when SDA is asserted high during the ninth bit
time. All by te tra n sfers on the I
2
C bus include
a 9th bit time reserved for an Acknowlege
(ACK) or Non-Acknowledge (NACK).
2
Figure 39. Dat a Transfer on an I
7-bit Slave
Address
MSB
12 7893-6 1 2 93-8
Start
Condition
Clock can be held low
C Bus
READ/WRITE
Indicator
R/W
to stall transfer.
ACK
– An additional Master device that desires to
control the bus should wait until the bus is not
busy before generating a START condition so
that a possible Slave operation is not
interrupted.
– If two Master devices both try to generate a
START condition simultaneously, the Master
who looses arbitration will switch immediately
to Slave mode so it can recoginize it’s own
Slave address should it appear on the bus.
Acknowledge
bits from
receiver
NACK
MSB
ACK
Repeated if more
data bytes are
transferred.
Stop
Condition
Repeated
Start
Condition
AI09625
97/231

uPSD33xx
Operating Modes
2
C interface supports four operating modes:
The I
■ Master-Transmitter
■ Master-Receiver
■ Slave-Transmitter
■ Slave-Receiver
The interface may operate as either a Master or a
Slave within a given application, controlled by firmware writing to SFRs.
By default after a reset, the I
ter Receiver mode, and t he SDA/P3.6 and SCL/
P3.7 pins default to GPIO input mode, high impedance, so there is no I
using the I
firmware, and the pins must be configured. This is
discussed in I
2
C interface, it must be initialized by
2
C Operating Sequences, page 108.
Bus Arbitration
A Master device always sam ples the I
ensure a bus line is high whenever that Ma ster is
asserting a logic 1. If the line is low at that time, the
Master recognizes another device is overriding it’s
own transmission.
A Master may start a transfer only if the I
not busy. However, it’s possible that two or more
Masters may generate a START condition simultaneously. In this case, arbitration takes place on the
SDA line each time SCL is high. The Master that
first senses that its bus sample does not correspond to what it is driving (SDA line is low while it’s
asserting a high) will immediately change from
Master-Transmitter to Slave-Receiver mode. The
arbitration process can carry on for many bit times
if both Masters are addressing the same Slave device, and will continue into the data bits if both
Masters are trying to be Master-Transmitter. It is
also possible for arbitration to carry on into the acknowledge bits if both Masters are trying to be
Master-Receiver. Because address and data information on the bus is determined by the winning
Master, no information is lost during the arbitration
process.
Clock Synchronization
Clock synchronization is used to synchronize arbitrating Masters, or used as a handshake by a devices to slow down the data transfer.
Clock Sync D uri ng Arbitratio n. During bus arbitration between competing Masters , Master_X,
2
C in te r f ac e is in M a s-
2
C bus interference. Before
2
C bus to
2
C bus is
with the longest low period on SCL, will force
Master_Y to wait until Master_X finishes its low
period before Master_Y proceeds to assert its high
period on SCL. At this point, both Masters begin
asserting their high period on SCL simultaneously,
and the Master with the shortest high period will be
the first to drive SCL for the next low period. In this
scheme, the Master with the longest low SCL period paces low times, and the Master with the
shortest high SCL period paces the high times,
making synchronized arbitration possible.
Clock Sync D uri ng Handshaking. This allows
receivers in different devices to handle various
transfer rates, either at the byte-level, or bit-level.
At the byte-level, a device may pause the transfer
between bytes by holding SCL low to have time to
store the latest received byte or fetch the next byte
to transmit.
At the bit-level, a Slave device may extend the low
period of SCL by holding it low. Thus the speed of
any Master device will adapt to the internal operati on of th e Slave.
General Call Address
A General Call (GC) occurs when a Master-Transmitter initiates a transfer containing a Slave address of 0000000b, and the R/W
bit is logic 0. All
Slave devices capable of responding to this broadcast message will acknowledge the GC simultaneously and then behave as a Slave-Receiver.
The next byte transmitted by the Master will be accepted and acknowledged by all Slaves capable of
handling the special data bytes. A Sla ve that cannot handle one of the se data bytes must ignore it
by not acknowledging it. The I
2
C specification lists
the possible meanings of the special bytes that follow the first GC address byte, and the actions to
be taken by the Slave device(s) upon receiving
them. A common use of the GC by a Master is to
dynamically assign device addresses to Slave devices on the bus capable of a programmable device address.
The uPSD33xx can generat e a GC as a MasterTransmitter, and it c an receive a GC as a Slave.
When receiving a GC address (00h), an i nterrupt
will be generated so firmware m ay respond to the
special GC data bytes if desired.
98/231

uPSD33xx
Serial I/O Engine (SIOE)
2
At the heart of the I
SIO E, s how n i n F igu re 40. The SIOE automatically
handles low-level I
C interface is the hardware
2
C bus protocol (dat a shifting,
handshaking, arbitration, clock generation and
synchronization) and it is controlled and monitored
by five SFRs.
The five SFRs shown in Figure 40 are:
■ S1CON - Interface Control (Table
50., page 100)
2
Figure 40. I
SCL / P3.7
C Interface SIOE Block Diagram
■ S1STA - Interface Status (Table
52., page 103)
■ S1DAT - Data Shift Register (Table
53., page 104)
■ S1ADR - Device Address (Table
54., page 104)
■ S1SETUP - Samplin g Rate (Table
55., page 105)
INTR to 8032
S1STA - Interface Status
S1CON - Interface Control
S1SETUP - Sample Rate
Control (START Condition)
8
8
8
SDA / P3.6
Open-
Drain
Output
Open-
Drain
Output
Serial DATA OUT
Input
Input
Arbitration
and Sync
Timing and
Control
Clock
Generation
Serial DATA IN
Shift Direction
S1DAT - Shift Register
7
Comparator
7
b7 b0
S1ADR - Device Address
Periph
Clock
(f
)
OSC
8
ACK
Bit
b0b7
8
8032 MCU Bus
AI09626
99/231

uPSD33xx
I2C Interface Control Register (S1CON)
Table 50. Serial Control Register S1CON (SFR DCh, Reset Value 00h)
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
CR2 ENI1 STA STO ADDR AA CR[1:0]
Details
Bit Symbol R/W Function
This bit, along with bits CR1 and CR0, determine the SCL clock
7CR2R,W
frequency (f
divisor for f
2
C Interface Enable
I
6ENI1R,W
0 = SIOE disabled, 1 = SIOE enabled. When disabled, both SDA and
SCL signals are in high impedance state.
START flag.
) when SIOE is in Master mode. These bits create a clock
SCL
. See Table 51.
OSC
When set, Master mode is entered and SIOE generates a START
5STAR,W
condition only if the I
detected on the bus, the STA flag is cleared by hardware. When the STA
bit is set during an interrupt service, the START condition will be
generated after the interrupt service.
STOP flag
4STOR,W
When STO is set in Master mode, the SIOE generates a STOP condition.
When a STOP condition is detected, the STO flag is cleared by
hardware. When the STO bit is set during an interrupt service, the STOP
condition will be generated after the interrupt service.
This bit is set when an address byte received in Slave mode matches the
3ADDRR,W
device address programmed into the S1ADR register. The ADDR bit
must be cleared with firmware.
Assert Acknowledge enable
If AA = 1, an acknowledge signal (low on SDA) is automatically returned
during the acknowledge bit-time on the SCL line when any of the
following three events occur:
1. SIOE in Slave mode receives an address that matches contents of
2AAR,W
2. A data byte has been received while SIOE is in Master Receiver
3. A data byte has been received while SIOE is a selected Slave
When AA = 0, no acknowledge is returned (high on SDA during acknowl-
edge bit-time).
These bits, along with bit CR2, determine the SCL clock frequency (f
1, 0 CR1, CR0 R,W
when SIOE is in Master mode. These bits create a clock divisor for f
See Table 51 for values.
S1ADR register
mode
Receiver
2
C bus is not busy. When a START condition is
SCL
OSC
)
.
100/231
 Loading...
Loading...