

2.1-channel high-efficiency digital audio system
Features
■ Wide supply voltage range (10 V - 36 V)
■ Three power output configurations
–2x40W + 1x80W
–2x80W
–1x160W
■ PowerSO-36 package (exposed pad up (EPU))
■ 2.1 channels of 24-bit DDX
100-dB SNR and dynamic range
■
■ 32 kHz to 192 kHz input sample rates
■ Digital gain/attenuation +48 dB to -80 dB in
0.5-dB steps
■ Four 28-bit user-programmable biquads (EQ)
per channel
2
■ I
C control
■ 2-channel I
■ Individual channel and master gain/attenuation
■ Individual channel and master soft/hard mute
■ Individual channel volume and EQ bypass
■ Bass/treble tone control
■ Dual independent programmable
2
S input data interface
limiters/compressors
■ Automodes
– 32 preset EQ curves
– 15 preset crossover settings
– Auto volume-controlled loudness
– 3 preset volume curves
– 2 preset anti-clipping modes
– Preset nighttime listening mode
– Preset TV AGC
Table 1. Device summary
®
STA326
PowerSO-36
with exposed pad up
■ Input and output channel mapping
■ AM noise-reduction and PWM
frequency-shifting modes
■ Software volume update and muting
■ Auto zero detect and invalid input detect
muting
■ Selectable DDX
output + variable PWM speeds
■ Selectable de-emphasis
■ Post-EQ user-programmable mix with default
2.1 bass-management settings
■ Variable max power correction for lower full-
power THD
■ Four output routing configurations
■ Selectable clock input ratio
■ 96 kHz internal processing sample rate, 24 to
28-bit precision
■ Video application supports 576 * fs input mode
®
ternary or binary PWM
Order code Package Packaging
STA326 PowerSO-36 EPU Tube
STA32613TR PowerSO-36 EPU Tape and reel
January 2012 Doc ID 11531 Rev 5 1/58
www.st.com
58

Contents STA326
Contents
1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1 EQ processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Output configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Pin out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Package pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Pin list . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1 General interface specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 DC electrical specifications (3.3 V buffers) . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Power electrical specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Power supply and control sequencing . . . . . . . . . . . . . . . . . . . . . . . . . 13
5 Characterization curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
6I
2
C bus specification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6.1 Communication protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6.2 Device addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6.3 Write operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6.4 Read operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
7 Register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
7.1 Configuration register A (addr 0x00) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.2 Configuration register B (addr 0x01) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.3 Configuration register C (addr 0x02) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.3.1 DDX® power output mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.3.2 DDX
®
variable compensating pulse size . . . . . . . . . . . . . . . . . . . . . . . . 26
7.4 Configuration register D (addr 0x03) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.5 Configuration register E (addr 0x04) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
7.6 Configuration register F (addr 0x05) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2/58 Doc ID 11531 Rev 5

STA326 Contents
7.7 Volume control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.7.1 Master controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.7.2 Channel controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.7.3 Volume description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.8 Automode registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.8.1 Automodes EQ, volume, GC (addr 0x0B) . . . . . . . . . . . . . . . . . . . . . . . 35
7.8.2 Automode AM/prescale/bass management scale (addr 0x0C) . . . . . . . 36
7.8.3 Preset EQ settings (addr 0x0D) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7.9 Channel configuration registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.9.1 Channel 1 configuration (addr 0x0E) . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.9.2 Channel 2 configuration (addr 0x0F) . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.9.3 Channel 3 configuration (addr 0x10) . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
7.10 Tone control (addr 0x11) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
7.11 Dynamics control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.11.1 Limiter 1 attack/release threshold (addr 0x12) . . . . . . . . . . . . . . . . . . . . 41
7.11.2 Limiter 1 attack/release threshold (addr 0x13) . . . . . . . . . . . . . . . . . . . . 41
7.11.3 Limiter 2 attack/release rate (addr 0x14) . . . . . . . . . . . . . . . . . . . . . . . . 41
7.11.4 Limiter 2 attack/release threshold (addr 0x15) . . . . . . . . . . . . . . . . . . . . 41
7.11.5 Dynamics control description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.11.6 Anti-clipping mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.11.7 Dynamic range compression mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8 User programmable processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.1 EQ - biquad equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.2 Prescale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.3 Postscale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.4 Mix/bass management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.5 Calculating 24-bit signed fractional numbers from a dB value . . . . . . . . . 47
8.6 User defined coefficient RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.6.1 Coefficient address register 1 (addr 0x16) . . . . . . . . . . . . . . . . . . . . . . . 47
8.6.2 Coefficient b1data register bits 23:16 (addr 0x17) . . . . . . . . . . . . . . . . . 47
8.6.3 Coefficient b1data register bits 15:8 (addr 0x18) . . . . . . . . . . . . . . . . . . 47
8.6.4 Coefficient b1data register bits 7:0 (addr 0x19) . . . . . . . . . . . . . . . . . . . 47
8.6.5 Coefficient b2 data register bits 23:16 (addr 0x1A) . . . . . . . . . . . . . . . . 47
8.6.6 Coefficient b2 data register bits 15:8 (addr 0x1B) . . . . . . . . . . . . . . . . . 48
8.6.7 Coefficient b2 data register bits 7:0 (addr 0x1C) . . . . . . . . . . . . . . . . . . 48
Doc ID 11531 Rev 5 3/58

Contents STA326
8.6.8 Coefficient a1 data register bits 23:16 (addr 0x1D) . . . . . . . . . . . . . . . . 48
8.6.9 Coefficient a1 data register bits 15:8 (addr 0x1E) . . . . . . . . . . . . . . . . . 48
8.6.10 Coefficient a1 data register bits 7:0 (addr 0x1F) . . . . . . . . . . . . . . . . . . 48
8.6.11 Coefficient a2 data register bits 23:16 (addr 0x20) . . . . . . . . . . . . . . . . 48
8.6.12 Coefficient a2 data register bits 15:8 (addr 0x21) . . . . . . . . . . . . . . . . . 48
8.6.13 Coefficient a2 data register bits 7:0 (addr 0x22) . . . . . . . . . . . . . . . . . . 48
8.6.14 Coefficient b0 data register bits 23:16 (addr 0x23) . . . . . . . . . . . . . . . . 49
8.6.15 Coefficient b0 data register bits 15:8 (addr 0x24) . . . . . . . . . . . . . . . . . 49
8.6.16 Coefficient b0 data register bits 7:0 (addr 0x25) . . . . . . . . . . . . . . . . . . 49
8.6.17 Coefficient write control register (addr 0x26) . . . . . . . . . . . . . . . . . . . . . 49
8.7 Reading a coefficient from RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.8 Reading a set of coefficients from RAM . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.9 Writing a single coefficient to RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.10 Writing a set of coefficients to RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
8.11 Variable max power correction (addr 0x27, 0x28) . . . . . . . . . . . . . . . . . . 53
8.12 Fault detect recovery (addr 0x2B, 0x2C) . . . . . . . . . . . . . . . . . . . . . . . . . 53
9 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
10 Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
11 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4/58 Doc ID 11531 Rev 5

STA326 Description
1 Description
The STA326 comprises digital audio processing, digital amplifier control and DDX® power
output stage to create a high-power single-chip DDX
®
solution for high-quality,
high-efficiency, all-digital amplification.
The STA326 power section consists of four independent half-bridges. These can be
configured via digital control to operate in different modes. 2.1 channels can be provided by
two half-bridges and a single full-bridge to give up to 2 x 40 W plus 1 x 80 W of power
output. Two channels can be provided by two full-bridges to give up to 2 x 80 W of power.
The IC can also be configured as a single parallel full-bridge capable of high-current
operation and 1 x 160 W output.
Also provided in the STA326 is a full assortment of digital processing features. This includes
up to four programmable 28-bit biquads (EQ) per channel and bass/treble tone control.
Automodes enable a time-to-market advantage by substantially reducing the amount of
software development needed for certain functions. This includes auto volume loudness,
preset volume curves, preset EQ settings and new advanced AM radio-interference
reduction modes.
The serial audio data input interface accepts all possible formats, including the popular I
2
S
format.
Three channels of DDX
audio to patented DDX
®
processing are provided. This high-quality conversion from PCM
®
3-state PWM switching provides over 100 dB of SNR and dynamic
range.
Figure 1. Block diagram
SDA SCL
SDA SCL
DDX-SPIRIT
DDX-SPIRIT
Processing
Processing
Power-Down
Power-Down
DDX
DDX
FAULTTWARN
FAULTTWARN
®
®
Half-Bridge
Half-Bridge
Power Stage
Power Stage
LRCKI
LRCKI
BICKI
BICKI
SDI_12
SDI_12
I2C
I2C
Serial Data
Serial Data
Mapping &
Mapping &
Resampling
Resampling
Input,
Input,
Channel
Channel
PLL
PLL
CLK
CLK
System Contro
System Contro
System Timing
System Timing
l
l
Audio EQ, Mix,
Audio EQ, Mix,
Crossver,
Crossver,
Volume, Limiter
Volume, Limiter
Processing
Processing
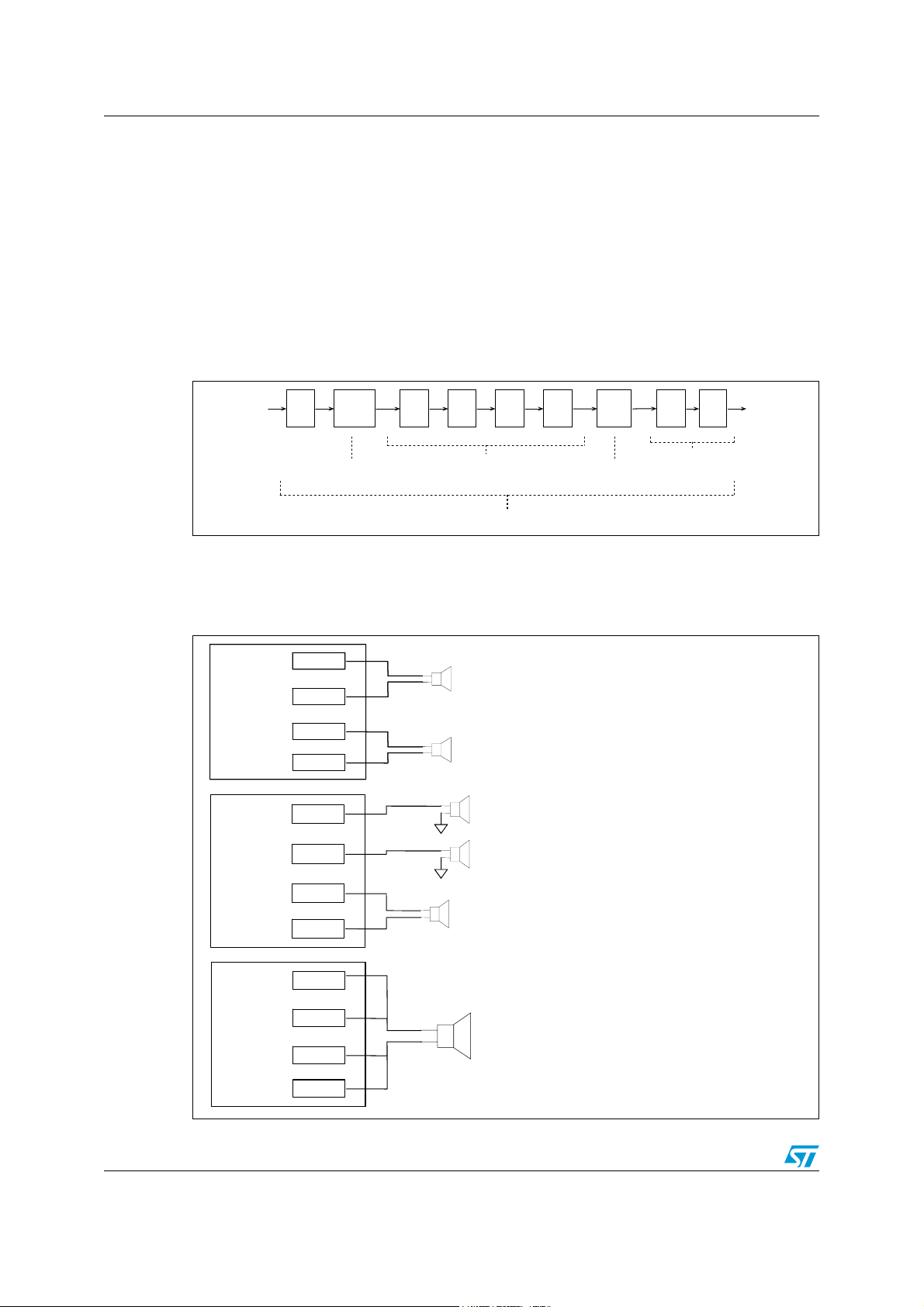
Figure 2. Channel signal flow diagram through the digital core
I2S
Input
Channel
Mapping
Re-sampling
EQ
Processing
Mix
Crossover
Filter
Volu me
Limiter
4X
Interp
Quad
Quad
EAPD
EAPD
DDX
OUT1A
OUT1A
OUT1B
OUT1B
OUT2A
OUT2A
OUT2B
OUT2B
®
DDX
Output
Doc ID 11531 Rev 5 5/58
Description STA326
1.1 EQ processing
Two channels of input data (re-sampled if necessary) at 96 kHz are provided to the EQ
processing block. In this block, up to four user-defined biquads can be applied to each of the
two channels.
Prescaling, DC-blocking, high-pass, de-emphasis, bass, and tone control filters can also be
applied based on various configuration parameter settings.
The entire EQ block can be bypassed for all channels simultaneously by setting the DSPB
bit to 1. And the CxEQBP bits can be used to bypass the EQ function on a per channel
basis. Figure 3 shows the internal signal flow through the EQ block.
Figure 3. Channel signal flow through the EQ block
Re-s amp led
Input
Pre
Scale
High-Pass
Filter
BQ#1 BQ#2
BQ#4BQ#3
De-
Emphasis
Bass
Filter
Treble
Filter
To
Mix
If HPB = 0
1.2 Output configurations
Figure 4. Output power-stage configurations
OUT1A
Half
Half
Bridge
Bridge
Half
Half
Bridge
Bridge
Half
Half
Bridge
Bridge
Half
Half
Bridge
Bridge
Half
Bridge
Half
Bridge
Half
Bridge
Half
Bridge
OUT1A
OUT1B
OUT1B
OUT2A
OUT2A
OUT2B
OUT2B
OUT1A
OUT1B
OUT2A
OUT2B
4 Biquads
User defined if AMEQ = 00
Preset EQ if AMEQ = 01
Auto Lo udness if AMEQ = 10
If DSPB = 0 & CxEQB = 0
Channel 1
Channel 1
Channel 2
Channel 2
Channel 1
Channel 2
Channel 3
If Cx TCB = 0
If DEMP = 1
BT C: Bass Boo st/Cut
TT C: Treble Boost/Cut
2-channel (full-bridge) configuration,
register bits OCFG[1:0] = 00
2.1-channel configuration,
register bits OCFG[1:0] = 01
Half
Bridge
Half
Bridge
Half
Bridge
Half
Bridge
OUT1A
OUT1B
Channel 3
OUT2A
OUT2B
6/58 Doc ID 11531 Rev 5
1-channel mono-parallel configuration,
register bits OCFG[1:0] = 11
The setup register is Configuration register
F (addr 0x05) on page 31
STA326 Pin out
2 Pin out
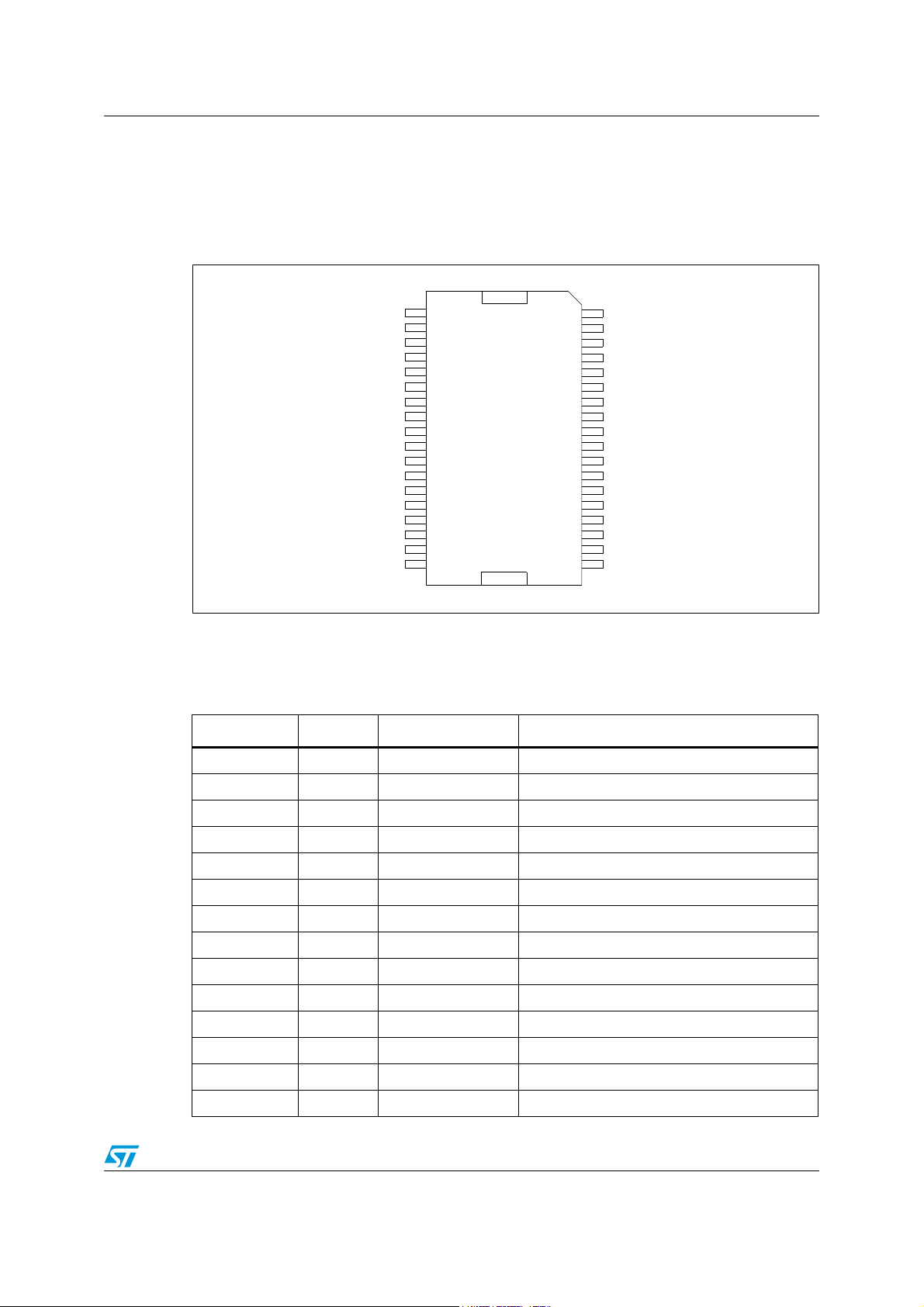
2.1 Package pins
Figure 5. Pin connections
2.2 Pin list
Table 2. Pin list
Number Type Name Description
1 I/O SUB_GND Ground
2 N.C. N.C. Not connected
VCC_SIGN
VSS
VDD
GND
BICKI
LRCKI
SDI
VDDA
GNDA
XTI
PLL_FILTER
RESERVED
SDA
SCL
RESET
CONFIG
VL
VDD_REG
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
20
19
10
11
12
13
14
15
16
17
18
1
2
3
4
5
6
7
8
9
SUB_GND
N.C.
OUT2B
2B
N.C.
GND2B
GND2A
2A
OUT2A
OUT1B
1B
GND1B
GND1A
N.C.
1A
OUT1A
GND_CLEAN
GND_REG
3 O OUT2B Output half bridge 2B
4 I/O 2B Positive supply
5 N.C. N.C. Not connected
6 I/O GND2B Negative supply
7 I/O GND2A Negative supply
8 I/O 2A Positive supply
9 O OUT2A Output half bridge 2A
10 O OUT1B Output half bridge 1B
11 I/O 1B Positive supply
12 I/O GND1B Negative supply
13 I/O. GND1A Negative supply
14 N.C. N.C. Not connected
Doc ID 11531 Rev 5 7/58
Pin out STA326
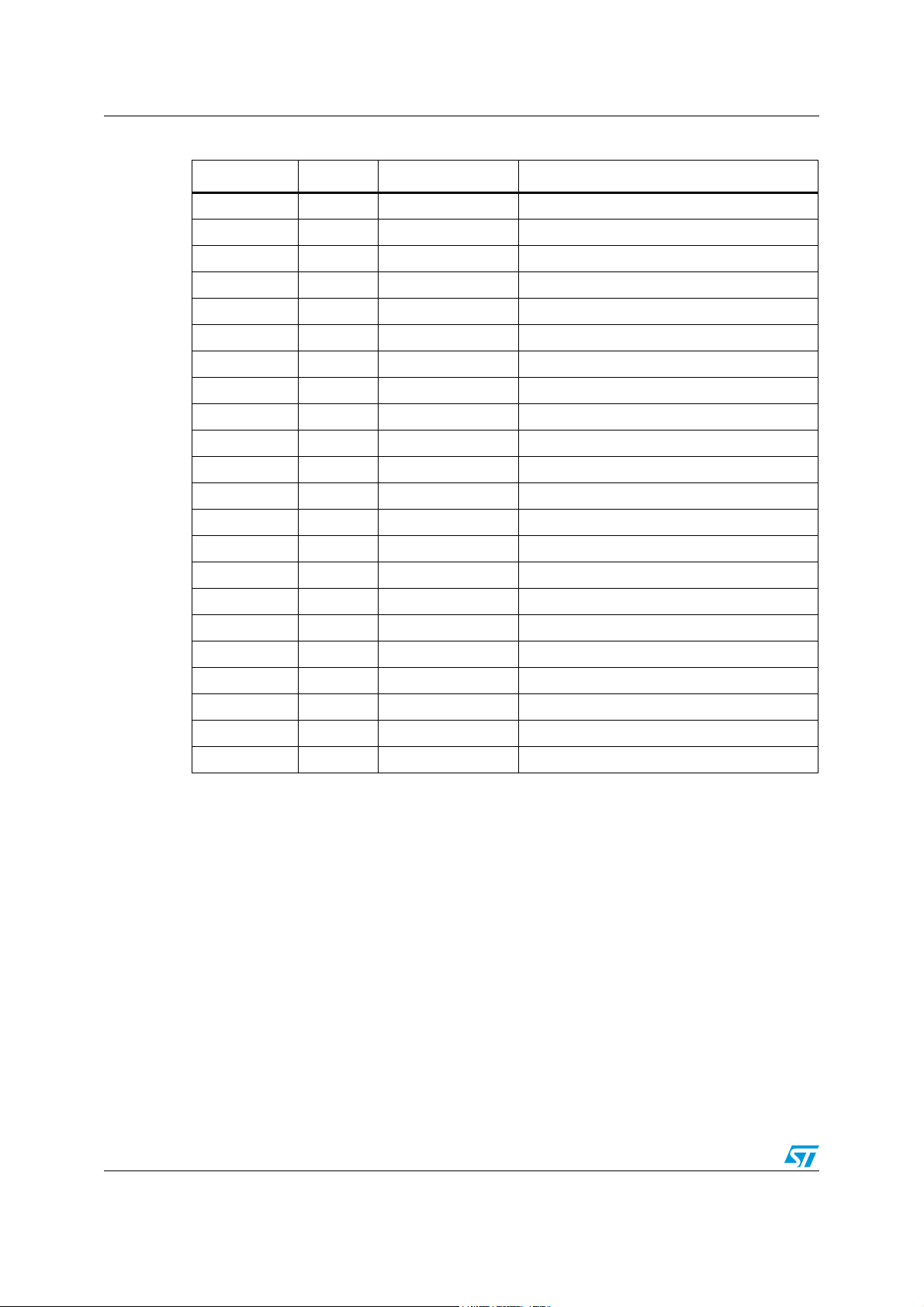
Table 2. Pin list
Number Type Name Description
15 I/O 1A Positive supply
16 O OUT1A Output half bridge 1A
17 I/O GND_CLEAN Logical ground
18 I/O GND_REG Substrate ground
19 I/O VDD_REG Logic supply
20 I/O VL Logic supply
21 I CONFIG Logic levels
22 I RESET Reset
2
23 I SCL I
24 I/O SDA I
25 - RESERVED This pin must be connected to GND
26 I PLL_FILTER Connection to PLL filter
27 I XTI PLL input clock
28 I/O GNDA Analog ground
29 I/O VDDA Analog supply, nominally 3.3 V
C serial clock
2
C serial data
30 I SDI I2S serial data channels 1 & 2
2
31 I/O LRCKI I
32 I BICKI I
S left/right clock,
2
S serial clock
33 I/O GND Digital ground
34 I/O VDD Digital supply, nominally 3.3 V
35 I/O VSS 5 V regulator referred to +
36 I/O _SIGN 5 V regulator referred to ground
8/58 Doc ID 11531 Rev 5

STA326 Pin out
2.3 Pin description
OUT1A, 1B, 2A and 2B (pins 16, 10, 9 and 3)
Output half bridge PWM outputs 1A, 1B, 2A and 2B provide the input signals to the
speakers.
CONFIG (pin 21)
The configuration input pin is normally connected to ground. Using the mono high power
BTL configuration requires the CONFIG input pin to be shorted to VREG1
RESET (pin 22)
Driving RESET low sets all outputs low and returns all register settings to their default
(reset) values. The reset is asynchronous to the internal clock.
2
I
C signals (pins 23 and 24)
The SDA (I2C Data) and SCL (I2C Clock) pins operate according to the I2C specification
(Chapter 6 on page 16 gives more information). Fast-mode (400 kB/s) I
supported.
2
C communication is
GNDA and VDDA (pins 28 and 29)
This is the 3.3 V analog supply for the phase locked loop. It must be well decoupled and
filtered for good noise immunity since the audio performance of the device depends upon
the PLL circuit.
CLK (pin 27)
This is the master clock in used by the digital core. The master clock must be an integer
multiple of the LR clock frequency. Typically, the master clock frequency is 12.288 MHz
(256 * fs) for a 48 kHz sample rate; it is the default setting at power-up. Care must be taken
to provide the device with the nominal system clock frequency; over-clocking the device may
result in anomalous operation, such as inability to communicate.
FILTER_PLL (pin 26)
This is the connection for external filter components for the PLL loop compensation. The
schematic diagram in Figure 20 on page 54 shows the recommended circuit.
BICKI (pin 32)
The serial or bit clock input is for framing each data bit. The bit clock frequency is typically
64 * fs using I
2
S serial format.
SDI_12 (pin 30)
This is the serial data input where PCM audio information enters the device. Six format
choices are available including I
of 16, 18, 20 and 24 bits.
2
S, left or right justified, LSB or MSB first, with word widths
LRCKI (pin 31)
The left/right clock input is for data word framing. The clock frequency is at the input sample
rate, fs.
Doc ID 11531 Rev 5 9/58

Electrical specifications STA326
3 Electrical specifications
Table 3. Absolute maximum ratings
Symbol Parameter Value Unit
V
V
V
T
T
amb
DD33
i
o
stg
3.3 V I/O power supply (pins VDDA, VDD) -0.5 to 4 V
Voltage on input pins -0.5 to (V
Voltage on output pins -0.5 to (V
DD33
DD33
+0.5) V
+0.5) V
Storage temperature -40 to +150 °C
Ambient operating temperature -20 to +85 °C
DC supply voltage (pins nA, nB) 40 V
V
MAX
Table 4. Thermal data
Maximum voltage on VL (pin 20) 5.5 V
Symbol Parameter Min Typ Max Unit
R
thj-case
T
j-SD
T
WARN
T
h-SD
Table 5. Recommended operating conditions
Thermal resistance junction to case (thermal pad) - - 2.5 °C/W
Thermal shut-down junction temperature - 150 - °C
Thermal warning temperature - 130 - °C
Thermal shut-down hysteresis - 25 - °C
Symbol Parameter Value Unit
V
T
DD33
j
I/O power supply 3.0 to 3.6 V
Operating junction temperature -20 to +125 °C
3.1 General interface specifications
Operating conditions V
Table 6. General interface electrical characteristics
Symbol Parameter Test Condition Min. Typ. Max. Unit
I
il
I
ih
I
OZ
V
esd
1. The leakage currents are generally very small (< 1 nA). The values given here are the maximum values
after an electrostatic stress on the pin.
10/58 Doc ID 11531 Rev 5
Low level input no pull-up Vi = 0 V
High level input no pull-down Vi = V
3-state output leakage without
pull-up/down
Electrostatic protection
(human-body model)
= 3.3 V ±0.3 V, T
DD33
amb
DD33
= V
V
i
DD33
Leakage current < 1 μA2000 - - V
= 25° C unless otherwise specified
(1)
(1)
(1)
--1μA
--2μA
--2μA
STA326 Electrical specifications
3.2 DC electrical specifications (3.3 V buffers)
Operating conditions V
Table 7. DC electrical specifications
= 3.3 V ±0.3 V, T
DD33
Symbol Parameter Test condition Min. Typ. Max. Unit
V
IL
V
IH
V
hyst
V
ol
V
oh
Low level input voltage - - - 0.8 V
High level input voltage - 2.0 - - V
Schmitt trigger hysteresis - 0.4 - - V
Low level output IoI = 2 mA - - 0.15 V
High level output Ioh = -2 mA
3.3 Power electrical specifications
Operating conditions V
otherwise specified.
Table 8. Power electrical characteristics
Symbol Parameter Test conditions Min. Typ. Max. Unit
R
dsON
Power Pchannel/Nchannel
MOSFET RdsON
= 3.3 V ±0.3 V, VL= 3.3 V, = 30 V, T
DD33
Id = 1A - 200 270 mΩ
= 25° C unless otherwise specified
amb
V
DD33
- 0.15
--V
= 25° C unless
amb
I
dss
g
N
g
P
Power Pchannel/Nchannel
leakage Idss
Power Pchannel RdsON
matching
Power Nchannel RdsON
matching
Dt_s Low current dead time (static)
t
d ON
t
d OFF
t
r
t
f
Turn-on delay time Resistive load - - 100 ns
Turn-off delay time Resistive load - - 100 ns
Rise time
Fall time
Supply voltage - 10 - 36 V
V
L
V
H
I
-PWRDN
I
-hiz
Low logical state voltage VL VL = 3.3 V 0.8 - - V
High logical state voltage VH VL = 3.3V --1.7V
Supply current from in
PWRDN
Supply current from in
3-state
= 35V --50μA
Id = 1 A 95 - - %
Id = 1 A 95 - - %
See test circuits,
Figure 6 and Figure 7
Resistive load, Figure 6
and Figure 7
Resistive load, Figure 6
and Figure 7
-1020ns
--25ns
--25ns
Pin PWRDN = 0 V - - 3 mA
= 30 V, 3-state - 22 - mA
Doc ID 11531 Rev 5 11/58
Electrical specifications STA326
Table 8. Power electrical characteristics (continued)
Symbol Parameter Test conditions Min. Typ. Max. Unit
Input pulse width = 50%
duty,
switching
-80-mA
frequency = 384 kHz,
no LC filters
-4.56-A
I
I
out-sh
Supply current from in
operation
(both channel switching)
Overcurrent protection
threshold (short circuit current
limit)
V
UV
t
pw-min
P
o
P
o
Undervoltage protection
threshold
Output minimum pulse width No load 70 150 ns
Output power (refer to test
circuit
Output power (refer to test
circuit
Figure 6. Test circuit 1
Low current dead time = MAX(DTr, DTf)
Duty cycle = 50%
INxY
M58
M57
--7-V
THD = 10%
RL = 4Ω, = 21 V
= 8Ω, = 36 V
R
L
-
-
50
80
-
-
W
THD = 1%
RL = 4Ω, = 21 V
RL = 8Ω, = 36 V
+
OUTxY
gnd
OUTxY
DTr DTf
R 8 W
-
-
+
-
V67
vdc = /2
(3/4)
(1/2)
(1/4)
t
40
62
-
-
W
Figure 7. Test circuit 2
High Current Dead time for Bridge application = ABS(DTout(A)-DTin(A))+ABS(DTOUT(B)-DTin(B))
+V
CC
Duty cycle=A Duty cycle=B
M58
DTin(A)
INA
M57
Duty cycle A and B: Fixed to have DC output current of 4A in the direction shown in figure
12/58 Doc ID 11531 Rev 5
Q1
Q3
DTout(A)
OUTA
Iout=1.5A
C69
470nF
Rload=4Ω
C71 470nF
M64
OUTB
Q2
M63
Q4
DTout(B) DTin(B)
L68 10μL67 10μ
Iout=1.5A
C70
470nF
INB
D06AU1651

STA326 Power supply and control sequencing
4 Power supply and control sequencing
To guarantee correct operation and reliability, the recommended power-on/off sequence as
shown in Figure 8 should be followed.
Figure 8. Recommended power-on/off sequence
V
Vcc > V
L
PWRDN
IN
V
should be turned on before VL. This prevents uncontrolled current flowing through the
CC
internal protection diode connected between V
V
cc
V
L
(logic supply) and VCC (high power supply)
L
which could result in damage to the device.
PWRDN must be released after V
is switched on. An input signal can then be sent to the
L
power stage.
t
t
t
Doc ID 11531 Rev 5 13/58

Characterization curves STA326
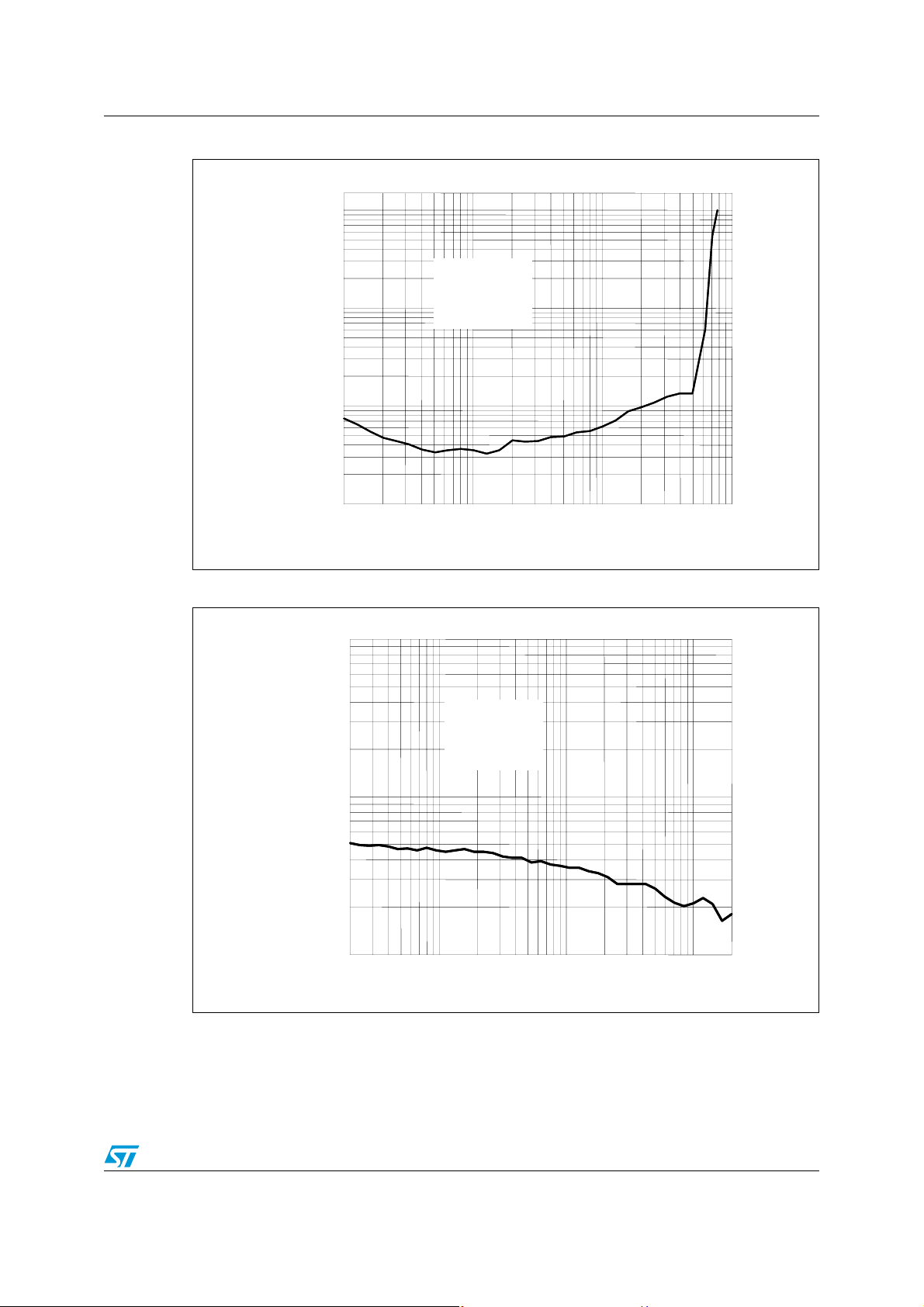
5 Characterization curves
Figure 9. Channel separation vs. frequency
+10
+10
+0
+0
dBr A
dBr A
-10
-10
-20
-20
-30
-30
-40
-40
-50
-50
-60
-60
-70
-70
-80
-80
-90
-90
20 20k50 100 200 500 1k 2k 5k 10k
20 20k50 100 200 500 1k 2k 5k 10k
Hz
Hz
Figure 10. THD vs. output power - single ended
10
10
5
THD (%)
THD (%)
5
Vcc = 36 V
2
2
1
1
0.5
0.5
0.2
0.2
0.1
0.1
0.05
0.05
0.02
0.02
0.01
0.01
100m 60200m 500m 1 2 5 10 20 50
100m 60200m 500m 1 2 5 10 20 50
Vcc = 36 V
R
R
= 4 Ω
= 4 Ω
L
L
f= 1 kHz
f= 1 kHz
Po (W)
Po (W)
14/58 Doc ID 11531 Rev 5
STA326 Characterization curves
Figure 11. THD vs. output power - BTL
10
10
5
5
THD (%)
THD (%)
Vcc = 36 V
2
2
1
1
0.5
0.5
0.2
0.2
0.1
0.1
0.05
0.05
0.02
0.02
0.01
0.01
100m 100200m 500m 1 2 5 10 20 50
100m 100200m 500m 1 2 5 10 20 50
Vcc = 36 V
Rl = 8 Ω
Rl = 8 Ω
f= 1 kHz
f= 1 kHz
Po (W)
Po (W)
Figure 12. THD vs. frequency - BTL
1
1
0.5
0.5
THD (%)
THD (%)
0.2
0.2
0.1
0.1
0.05
0.05
0.02
0.02
0.01
0.01
20 20k50 100 200 500 1k 2k 5k 10k
20 20k50 100 200 500 1k 2k 5k 10k
Vcc = 36 V
Vcc = 36 V
RL = 8 Ω
RL = 8 Ω
f= 1 kHz
f= 1 kHz
Hz
Hz
Doc ID 11531 Rev 5 15/58

I2C bus specification STA326
6 I2C bus specification
The STA326 supports the I2C protocol. This protocol defines any device that sends data on
to the I
that controls the data transfer is known as the master and the other as the slave. The master
always starts the transfer and provides the serial clock for synchronization. The STA326 is
always a slave device in all of its communications.
2
C bus as a transmitter and any device that reads the data as a receiver. The device
6.1 Communication protocol
Data transition or change
Data changes on the SDA line must only occur when the SCL clock is low. SDA transition
while the clock is high is used to identify a START or STOP condition.
Start condition
START is identified by a high to low transition of the data bus SDA signal while the clock
signal SCL is stable in the high state. A START condition must precede any command for
data transfer.
Stop condition
STOP is identified by a low to high transition of the data bus SDA signal while the clock
signal SCL is stable in the high state. A STOP condition terminates communication between
STA326 and the bus master.
Data input
During the data input the STA326 samples the SDA signal on the rising edge of clock SCL.
For correct device operation the SDA signal must be stable during the rising edge of the
clock and the data can change only when the SCL line is low.
6.2 Device addressing
To start communication between the master and the STA326, the master must initiate with a
start condition. Following this, the master sends 8 bits (MSB first) onto the SDA line
corresponding to the device select address and read or write mode.
The 7 MSBs are the device address identifiers, corresponding to the I
STA326 device address is 0x34.
The 8th bit (LSB) identifies read or write operation, RW. This bit is set to 1 in read mode and
0 for write mode. After a START condition the STA326 identifies the device address on the
bus. If a match is found, it acknowledges the identification on the SDA bus during the 9th bit
time. The byte following the device identification byte is the internal space address.
2
C bus definition. The
16/58 Doc ID 11531 Rev 5

STA326 I2C bus specification
A
A
A
A
A
6.3 Write operation
Following the START condition the master sends a device select code with the RW bit set
to 0. The STA326 acknowledges this and then the master writes the internal address byte.
After receiving the internal byte address the STA326 again responds with an
acknowledgement.
Figure 13. I
2
C write procedure
BYTE
WRITE
MULTIBYTE
WRITE
DEV-ADDR
START
DEV-ADDR
START
Byte write
In the byte write mode the master sends one data byte. This is acknowledged by the
STA326. The master then terminates the transfer by generating a STOP condition.
Multi-byte write
The multi-byte write modes can start from any internal address. Sequential data byte writes
will be written to sequential addresses within the STA326.
The master generating a STOP condition terminates the transfer.
6.4 Read operation
ACK
SUB-ADDR
RW
ACK
SUB-ADDR
RW
ACK
ACK
DATA IN
DATA IN
CK
STOP
CK
DATA IN
CK
STOP
Figure 14. I2C read procedure
CURRENT
ADDRESS
READ
RANDOM
ADDRESS
READ
SEQUENTIAL
CURRENT
READ
SEQUENTIAL
RANDOM
READ
START
START
START
START
DEV-ADDR
DEV-ADDR
DEV-ADDR
DEV-ADDR
ACK
RW
ACK
RW
RW=
ACK
HIGH
ACK
RW
DATA
SUB-ADDR
DATA
SUB-ADDR
NO ACK
STOP
ACK
DEV-ADDR
START RW
ACK
DATA
ACK
DEV-ADDR
START RW
ACK
ACK
ACK
NO ACK
DATA
STOP
NO ACK
DATA
STOP
CK
DATA
DATA
CK NO ACK
DATA
STOP
Current address byte read
Following the START condition the master sends a device select code with the RW bit set to
1. The STA326 acknowledges this and then responds by sending one byte of data. The
master then terminates the transfer by generating a STOP condition.
Doc ID 11531 Rev 5 17/58

I2C bus specification STA326
Current address multi-byte read
The multi-byte read modes can start from any internal address. Sequential data bytes will be
read from sequential addresses within the STA326. The master acknowledges each data
byte read and then generates a STOP condition terminating the transfer.
Random address byte read
Following the START condition the master sends a device select code with the RW bit set
to 0. The STA326 acknowledges this and then the master writes the internal address byte.
After receiving, the internal byte address the STA326 again responds with an
acknowledgement. The master then initiates another START condition and sends the device
select code with the RW bit set to 1. The STA326 acknowledges this and then responds by
sending one byte of data. The master then terminates the transfer by generating a STOP
condition.
Random address multi-byte read
The multi-byte read modes could start from any internal address. Sequential data bytes will
be read from sequential addresses within the STA326. The master acknowledges each data
byte read and then generates a STOP condition terminating the transfer.
18/58 Doc ID 11531 Rev 5

STA326 Register description
7 Register description
You must not reprogram the register bits marked “Reserved”. It is important that these bits
keep their default reset values.
Table 9. Register summary
Address Name D7 D6 D5 D4 D3 D2 D1 D0
0x00 CONFA FDRB TWAB TWRB IR1 IR0 MCS2 MCS1 MCS0
0x01 CONFB C2IM C1IM DSCKE SAIFB SAI3 SAI2 SAI1 SAI0
0x02 CONFC Reserved CSZ4 CSZ3 CSZ2 CSZ1 CSZ0 OM1 OM0
0x03 CONFD MME ZDE DRC BQL PSL DSPB DEMP HPB
0x04 CONFE SVE ZCE Reserved PWMS AME Reserved MPC MPCV
0x05 CONFF EAPD PWDN ECLE Reserved BCLE IDE OCFG1 OCFG0
0x06 MMUTE Reserved Reserved Reserved Reserved Reserved Reserved Reserved MMUTE
0x07 MVOL MV7 MV6 MV5 MV4 MV3 MV2 MV1 MV0
0x08 C1VOL C1V7 C1V6 C1V5 C1V4 C1V3 C1V2 C1V1 C1V0
0x09 C2VOL C2V7 C2V6 C2V5 C2V4 C2V3 C2V2 C2V1 C2V0
0x0A C3VOL C3V7 C3V6 C3V5 C3V4 C3V3 C3V2 C3V1 C3V0
0x0B AUTO1 AMPS Reserved AMGC1 AMGC0 AMV1 AMV0 AMEQ1 AMEQ0
0x0C AUTO2 XO3 XO2 XO1 XO1 AMAM2 AMAM1 AMAM0 AMAME
0x0D AUTO3 Reserved Reserved Reserved PEQ4 PEQ3 PEQ2 PEQ1 PEQ0
0x0E C1CFG C1OM1 C1OM0 C1LS1 C1LS0 C1BO C1VBP C1EQBP C1TCB
0x1F C2CFG C2OM1 C2OM0 C2LS1 C2LS0 C2BO C2VBP C2EQBP C2TCB
0x10 C3CFG C3OM1 C3OM0 C3LS1 C3LS0 C3BO C3VBP Reserved Reserved
0x11 TONE TTC3 TTC2 TTC1 TTC0 BTC3 BTC2 BTC1 BTC0
0x12 L1AR L1A3 L1A2 L1A1 L1A0 L1R3 L1R2 L1R1 L1R0
0x13 L1ATRT L1AT3 L1AT2 L1AT1 L1AT0 L1RT3 L1RT2 L1RT1 L1RT0
0x14 L2AR L2A3 L2A2 L2A1 L2A0 L2R3 L2R2 L2R1 L2R0
0x15 L2ATRT L2AT3 L2AT2 L2AT1 L2AT0 L2RT3 L2RT2 L2RT1 L2RT0
0x16 CFADD R2 CFA7 C FA6 CFA 5 CFA 4 CFA 3 CFA2 C FA1 C FA0
0x17 B1CF1 C1B23 C1B22 C1B21 C1B20 C1B19 C1B18 C1B17 C1B16
0x18 B1CF2 C1B15 C1B14 C1B13 C1B12 C1B11 C1B10 C1B9 C1B8
0x19 B1CF3 C1B7 C1B6 C1B5 C1B4 C1B3 C1B2 C1B1 C1B0
0x1A B2CF1 C2B23 C2B22 C2B21 C2B20 C2B19 C2B18 C2B17 C2B16
0x1B B2CF2 C2B15 C2B14 C2B13 C2B12 C2B11 C2B10 C2B9 C2B8
0x1C B2CF3 C2B7 C2B6 C2B5 C2B4 C2B3 C2B2 C2B1 C2B0
0x1D A1CF1 C3B23 C3B22 C3B21 C3B20 C3B19 C3B18 C3B17 C3B16
Doc ID 11531 Rev 5 19/58

Register description STA326
Table 9. Register summary
Address Name D7 D6 D5 D4 D3 D2 D1 D0
0x1E A1CF2 C3B15 C3B14 C3B13 C3B12 C3B11 C3B10 C3B9 C3B8
0x1F A1CF3 C3B7 C3B6 C3B5 C3B4 C3B3 C3B2 C3B1 C3B0
0x20 A2CF1 C4B23 C4B22 C4B21 C4B20 C4B19 C4B18 C4B17 C4B16
0x21 A2CF2 C4B15 C4B14 C4B13 C4B12 C4B11 C4B10 C4B9 C4B8
0x22 A2CF3 C4B7 C4B6 C4B5 C4B4 C4B3 C4B2 C4B1 C4B0
0x23 B0CF1 C5B23 C5B22 C5B21 C5B20 C5B19 C5B18 C5B17 C5B16
0x24 B0CF2 C5B15 C5B14 C5B13 C5B12 C5B11 C5B10 C5B9 C5B8
0x25 B0CF3 C5B7 C5B6 C5B5 C5B4 C5B3 C5B2 C5B1 C5B0
0x26 CFUD Reserved Reserved Reserved Reserved RA R1 WA W1
0x27 MPCC1 MPCC15 MPCC14 MPCC13 MPCC12 MPCC11 MPCC10 MPCC9 MPCC8
0x28 MPCC2 MPCC7 MPCC6 MPCC5 MPCC4 MPCC3 MPCC2 MPCC1 MPCC0
0x29 Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved
0x2A Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved
0x2B FDRC1 FDRC15 FDRC14 FDRC13 FDRC12 FDRC11 FDRC10 FDRC9 FDRC8
0x2C FDRC2 FDRC7 FDRC6 FDRC5 FDRC4 FDRC3 FDRC2 FDRC1 FDRC0
0x2D Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved Reserved
7.1 Configuration register A (addr 0x00)
D7 D6 D5 D4 D3 D2 D1 D0
FDRB TWAB TWRB IR1 IR0 MCS2 MCS1 MCS0
01100011
Table 10. Master clock select
Bit R/W RST Name Description
0RW1MCS0
1RW1MCS1-
2RW0MCS2-
The STA326 will support sample rates of 32 kHz, 44.1 kHz, 48 kHz, 88.2 kHz, and 96 kHz.
Therefore the internal clock will be:
● 32.768 MHz for 32 kHz
● 45.1584 MHz for 44.1 kHz, 88.2 kHz, and 176.4 kHz
● 49.152 MHz for 48 kHz, 96 kHz, and 192 kHz
The external clock frequency provided to the XTI pin must be a multiple of the input sample
frequency (fs). The correlation between the input clock and the input sample rate is
determined by the status of the MCSx bits and the IR (input rate) register bits. The MCSx
Master clock select: Selects the ratio between the input
I2S sample frequency and the input clock.
20/58 Doc ID 11531 Rev 5

STA326 Register description
bits determine the PLL factor generating the internal clock and the IR bit determines the
oversampling ratio used internally.
Table 11. IR and MCS settings for input sample rate and clock rate
Input sample rate
fs (kHz)
IR
000 001 010 011 100 101
MCS[2:0]
32, 44.1, 48 00 768 fs 512 fs 384 fs 256 fs 128 fs 576 fs
88.2, 96 01 384 fs 256 fs 192 fs 128 fs 64 fs -
176.4, 192 1X 384 fs 256 fs 192 fs 128 fs 64 fs -
Table 12. Interpolation ratio select
Bit R/W RST Name Description
4:3 RW 00 IR[1:0]
Interpolation ratio select: selects internal interpolation ratio
based on input
I2S sample frequency
The STA326 has variable interpolation (re-sampling) settings such that internal processing
and DDX
®
output rates remain consistent. The first processing block interpolates by either 2
times or 1 time (pass-through) or provides a down-sample by a factor of 2.
The IR bits determine the re-sampling ratio of this interpolation.
Table 13. IR bit settings as a function of input sample rate
Input sample rate fs (kHz) IR[1,0] 1st stage interpolation ratio
32 00 2 times over-sampling
44.1 00 2 times over-sampling
48 00 2 times over-sampling
88.2 01 Pass-through
96 01 Pass-through
176.4 10 Down-sampling by 2
192 10 Down-sampling by 2
Table 14. Thermal warning recovery bypass
Bit R/W RST Name Description
Thermal warning recovery bypass:
5RW1TWRB
0: thermal warning recovery enabled
1: thermal warning recovery disabled
If the thermal warning adjustment is enabled (TWAB = 0), then the thermal warning
recovery will determine if the adjustment is removed when thermal warning is negative. If
TWRB = 0 and TWAB = 0, then when a thermal warning disappears the gain adjustment
determined by the thermal warning postscale (default = -3 dB) will be removed and the gain
will be added back to the system. If TWRB = 1 and TWAB = 0, then when a thermal warning
disappears the thermal warning postscale gain adjustment will remain until TWRB is
changed to zero or the device is reset.
Doc ID 11531 Rev 5 21/58

Register description STA326
Table 15. Thermal warning adjustment bypass
Bit R/W RST Name Description
Thermal warning adjustment bypass:
6RW1TWAB
0: thermal warning adjustment enabled
1: thermal warning adjustment disabled
The on-chip STA326 power output block provides feedback to the digital controller using
inputs to the power control block. The TWARN input is used to indicate a thermal warning
condition. When TWARN is asserted (set to 0) for a period greater than 400 ms, the power
control block will force an adjustment to the modulation limit in an attempt to eliminate the
thermal warning condition. Once the thermal warning volume adjustment is applied,
whether the gain is reapplied when TWARN is de-asserted is dependent on the TWRB bit.
Table 16. Fault detect recovery bypass
Bit R/W RST Name Description
Fault detector recovery bypass:
7RW0FDRB
0: fault detector recovery enabled
1: fault detector recovery disabled
The DDX® power block can provide feedback to the digital controller using inputs to the
power control block. The FAULT input is used to indicate a fault condition (either over-current
or thermal). When FAULT is asserted (set to 0), the power control block will attempt a
recovery from the fault by asserting the 3-state output (setting it to 0 which directs the power
output block to begin recovery). It holds it at 0 for period of time in the range of 0.1 ms to 1 s
as defined by the fault-detect recovery constant register (FDRC registers 0x29 to 0x2A),
then toggle it back to 1. This sequence is repeated as log as the fault indication exists. This
feature is enabled by default but can be bypassed by setting the FDRB control bit to 1.
22/58 Doc ID 11531 Rev 5

STA326 Register description
7.2 Configuration register B (addr 0x01)
D7 D6 D5 D4 D3 D2 D1 D0
C2IM C1IM DSCKE SAIFB SAI3 SAI2 SAI1 SAI0
1 0 0 0 0000
This register configures the serial data interface
Table 17. Serial audio input interface format
Bit R/W RST Name Description
3:0 RW 0000 SAI[3:0]
4 RW 0 SAIFB
Serial audio input interface format: determines the interface
format of the input serial digital audio interface (see below).
Data format:
0: MSB first 1: LSB first
The STA326 serial audio input was designed to interface with standard digital audio
components and to accept a number of serial data formats. The STA326 always acts as a
slave when receiving audio input from standard digital audio components. Serial data for two
channels is provided using 3 input pins: left/right clock LRCKI (pin 31), serial clock BICKI
(pin 32), and serial data SDI (pin 30).
SAI[3:0] and SAIFB are used to specify the serial data format. The default format is I
2
S,
MSB-first. Available formats are shown below in Figure 15 and the tables that follow.
Figure 15. General serial input and output formats
I2S
LRCLK
SCLK
SDATA
Left Justified
LRCLK
SCLK
Left Right
LSBMSB
Left Right
LSBMSB MSB
SDATA
Right Justified
LRCLK
SCLK
SDATA
LSBMSB
Left Right
LSBMSB LSBMSB MSB
LSBMSB MSB
Ta bl e 1 8 lists the serial audio input formats supported by STA326 when
BICKI = 32 * fs, 48 * fs and 64 * fs, where the sampling rate fs = 32, 44.1, 48, 88.2, 96,
176.4 or 192 kHz.
Doc ID 11531 Rev 5 23/58

Register description STA326
Table 18. Supported serial audio input formats
BICKI SAI [3:0] SAIFB Interface format
32 * fs 1100 X I
1110 X Left/right justified 16-bit data
48 * fs 0100 X I
0100 X I
1000 X I
0100 0 MSB first I
1100 1 LSB first I
0001 X Left-justified 24-bit data
0101 X Left-justified 20-bit data
1001 X Left-justified 18-bit data
1101 X Left-justified 16-bit data
0010 X Right-justified 24-bit data
0110 X Right-justified 20-bit data
1010 X Right-justified 18-bit Data
2
S 15-bit data
2
S 23-bit data
2
S 20-bit data
2
S 18-bit data
2
2
S 16-bit data
S 16-bit data
1110 X Right-justified 16-bit Data
2
64 * fs 0000 X I
0100 X I
1000 X I
0000 0 MSB first I
1100 1 LSB first I
S 24-bit data
2
S 20-bit data
2
S 18-bit data
2
2
S 16-bit data
S 16-bit data
0001 X Left-justified 24-bit data
0101 X Left-justified 20-bit data
1001 X Left-justified 18-bit data
1101 X Left-justified 16-bit data
0010 X Right-justified 24-bit data
0110 X Right-justified 20-bit data
1010 X Right-justified 18-bit data
1110 X Right-justified 16-bit data
For example, SAI = 1110 and SAIFB = 1 would specify right-justified 16-bit data, LSB-first.
24/58 Doc ID 11531 Rev 5

STA326 Register description
0
4
Table 19. Serial input data timing characteristics (fs = 32 to 192 kHz)
Parameter in Figure 16 Val u e
BICKI frequency (slave mode) 12.5 MHz max.
BICKI pulse width low (T0) (slave mode) 40 ns min.
BICKI pulse width high (T1) (slave mode) 40 ns min.
BICKI active to LRCKI edge delay (T2) 20 ns min.
BICKI active to LRCKI edge delay (T3) 20 ns min.
SDI valid to BICKI active setup (T4) 20 ns min.
BICKI active to SDI hold time (T5) 20 ns min.
Figure 16. Serial input data timing
LRCKI
BICKI
T
SDI
T
Table 20. Delay serial clock enable
Bit R/W RST Name Description
Delay serial clock enable:
5 RW 0 DSCKE
Table 21. Channel input mapping
0: no serial clock delay
1: serial clock delay by 1 core clock cycle to tolerate
anomalies in some I
2
S master devices
Bit R/W RST Name Description
2
S input
2
S input
2
S input
6RW0C1IM
7RW1C2IM
0: processing channel 1 receives left I
1: processing channel 1 receives right I
0: processing channel 2 receives left I
1: processing channel 2 receives right I2S input
Each channel received via I2S can be mapped to any internal processing channel via the
channel input mapping registers. This allows for flexibility in processing. The default settings
of these registers map each I
2
S input channel to its corresponding processing channel.
Doc ID 11531 Rev 5 25/58

Register description STA326
7.3 Configuration register C (addr 0x02)
D7 D6 D5 D4 D3 D2 D1 D0
Reserved CSZ4 CSZ3 CSZ2 CSZ1 CSZ0 OM1 OM0
0 1000010
7.3.1 DDX® power output mode
Table 22. DDX® power output mode
Bit R/W RST Name Description
®
DDX
1:0 RW 10 OM[1:0]
The DDX® power output mode selects how the DDX® output timing is configured. Different
power devices can use different output modes. The recommended use is OM = 10. When
OM = 11 the CSZ bits determine the size of the DDX
Table 23. DDX® output modes
OM[1,0] Output stage - mode
power output mode:
Selects configuration of DDX
®
compensating pulse.
®
output
00 Not used
01 Not used
10 Recommended
11 Variable compensation
7.3.2 DDX® variable compensating pulse size
The DDX® variable compensating pulse size is intended to adapt to different power stage
ICs. Contact Apogee applications for support when deciding this function.
Table 24. DDX® compensating pulse
CSZ[4:0] Compensating pulse size
00000 0 clock period compensating pulse size
00001 1 clock period compensating pulse size
……
10000 16 clock period compensating pulse size
……
11111 31 clock period compensating pulse size
26/58 Doc ID 11531 Rev 5

STA326 Register description
7.4 Configuration register D (addr 0x03)
D7 D6 D5 D4 D3 D2 D1 D0
MME ZDE DRC BQL PSL DSPB DEMP HPB
01000 0 0 0
Table 25. High-pass filter bypass
Bit R/W RST Name Description
High-pass filter bypass bit.
0RW0HPB
0: AC coupling high pass filter enabled
1: AC coupling high pass filter disabled
The STA326 features an internal digital high-pass filter for the purpose of DC Blocking. The
purpose of this filter is to prevent DC signals from passing through a DDX
®
amplifier. DC
signals can cause speaker damage.
Table 26. De-emphasis
Bit R/W RST Name Description
De-emphasis:
1RW0DEMP
0: no de-emphasis
1: de-emphasis
By setting this bit to 1, the de-emphasis will be implemented on all channels. DSPB (DSP
Bypass, Bit D2, CFA) bit must be set to 0 for de-emphasis to function.
Table 27. DSP bypass
Bit R/W RST Name Description
DSP bypass bit:
2 RW 0 DSPB
0: normal Operation
1: bypass of EQ and mixing functionality
Setting the DSPB bit bypasses all the EQ and mixing functionality of the STA326 core.
Table 28. Postscale link
Bit R/W RST Name Description
Postscale link:
3 RW 0 PSL
0: each channel uses individual postscale value
1: each channel uses channel 1 postscale value
Postscale functionality is an attenuation placed after the volume control and directly before
the conversion to PWM. Postscale can also be used to limit the maximum modulation index
and therefore the peak current. A setting of 1 in the PSL register will result in the use of the
value stored in channel 1 postscale for all three internal channels.
Doc ID 11531 Rev 5 27/58

Register description STA326
Table 29. Biquad coefficient link
Bit R/W RST Name Description
Biquad link:
4RW0BQL
0: each channel uses coefficient values
1: each channel uses channel 1 coefficient values
For ease of use, all channels can use the biquad coefficients loaded into the channel 1
coefficient RAM space by setting the BQL bit to 1. Therefore, any EQ updates only have to
be performed once.
Table 30. Dynamic range compression/anti-clipping bit
Bit R/W RST Name Description
Dynamic range compression/anti-clipping
5 RW 0 DRC
0: limiters act in anti-clipping mode
1: limiters act in dynamic range compression mode
Both limiters can be used in one of two ways, anti-clipping or dynamic range compression.
When used in anti-clipping mode the limiter threshold values are constant and dependent on
the limiter settings. In dynamic range compression mode the limiter threshold values vary
with the volume settings allowing a nighttime listening mode that provides a reduction in the
dynamic range regardless of the volume level.
Table 31. Zero detect mute enable
Bit R/W RST Name Description
6RW1ZDE
Zero detect mute enable: setting of 1 enables the
automatic zero-detect mute
Setting the ZDE bit enables the zero-detect automatic mute. When ZDE = 1, the zero detect
circuit looks at the input data to each processing channel after the channel-mapping block. If
any channel receives 2048 consecutive zero value samples (regardless of fs) then that
individual channel is muted if this function is enabled.
Table 32. Miami mode enable
Bit R/W RST Name Description
Miami mode enable:
7RW0MME
0: sub mix into left/right disabled
1: sub mix into left/right enabled
28/58 Doc ID 11531 Rev 5

STA326 Register description
7.5 Configuration register E (addr 0x04)
D7 D6 D5 D4 D3 D2 D1 D0
SVE ZCE Reserved PWMS AME Reserved MPC MPCV
110 0 001 0
Table 33. Max power correction variable
Bit R/W RST Name Description
Max power correction variable:
0RW0MPCV
By enabling MPC and setting MPCV = 1, the max power correction becomes variable. By
adjusting the MPCC registers (address 0x27, 0x28) it becomes possible to adjust the THD
at maximum unclipped power to a lower value for a particular application.
Table 34. Max power correction
Bit R/W RST Name Description
1RW1MPC
0: use standard MPC coefficient
1: use MPCC bits for MPC coefficient
Max power correction:
0: MPC disabled
1: MPC enabled
Setting the MPC bit corrects the DDX® power device at high power. This mode lowers the
THD+N of a full DDX
Table 35. AM mode enable
®
system at maximum power output and slightly below.
Bit R/W RST Name Description
AM mode enable:
3RW0AME
0: normal DDX
1: AM reduction mode DDX
The STA326 features a DDX® processing mode that minimizes the amount of noise
generated in the frequency range of AM radio. This mode is intended for use when DDX
operating in a device with an active AM tuner. The SNR of the DDX
®
operation.
®
operation.
®
processing is reduced
®
to approximately 83 dB in this mode, which is still greater than the SNR of AM radio.
Table 36. PWM speed mode
Bit R/W RST Name Description
PWM output speed selection:
4RW0PWMS
0: normal speed (384 kHz) all channels
1: odd speed (341.3 kHz) all channels
is
Doc ID 11531 Rev 5 29/58

Register description STA326
Table 37. Zero-crossing volume enable
Bit R/W RST Name Description
Zero-crossing volume enable:
6RW1ZCE
1: volume adjustments will only occur at digital zerocrossings
0: volume adjustments will occur immediately
The ZCE bit enables zero-crossing volume adjustments. When volume is adjusted on digital
zero-crossings no clicks will be audible.
Table 38. Soft volume update enable
Bit R/W RST Name Description
Soft volume enable:
7 RW 1 SVE
1: volume adjustments will use soft volume
0: volume adjustments will occur immediately
The STA326 includes a soft volume algorithm that will step through the intermediate volume
values at a predetermined rate when a volume change occurs. By setting SVE = 0 this can
be bypassed and volume changes will jump from old to new value directly. This feature is
only available if individual channel volume bypass bit is set to 0.
30/58 Doc ID 11531 Rev 5

STA326 Register description
7.6 Configuration register F (addr 0x05)
D7 D6 D5 D4 D3 D2 D1 D0
EAPD PWDN ECLE Reserved BCLE IDE OCFG1 OCFG0
0101110 0
Table 39. Output configuration selection
Bit R/W RST Name Description
Output configuration selection
1:0 RW 00 OCFG[1:0]
00: 2-channel (full-bridge) power, 1-channel
default
Table 40. Output configuration selection
OCFG[1:0] Output power configuration
DDX
®
:
00
2 channel (full-bridge) power, 1 channel
1A/1B ◊ 1A/1B
2A/2B ◊ 2A/2B
2 (half-bridge) and 1 (full-bridge) on-board power:
01
1A ◊ 1A binary
2A ◊ 1B binary
3A/3B ◊ 2A/2B binary
10 Reserved
1 channel mono-parallel:
11
3A ◊ 1A/1B
3B ◊ 2A/2B
Table 41. Invalid input detect mute enable
Bit R/W RST Name Description
Invalid input detect auto-mute enable:
2RW1IDE
0: disabled
1: enabled
DDX
®
is
Setting the IDE bit enables this function, which looks at the input I2S data and clocking and
will automatically mute all outputs if the signals are perceived as invalid.
Table 42. Binary clock loss detection enable
Bit R/W RST Name Description
Binary output mode clock loss detection enable
3RW1BCLE
0: disabled
1: enabled
Detects loss of input MCLK in binary mode and will output 50% duty cycle to prevent audible
artifacts when input clocking is lost.
Doc ID 11531 Rev 5 31/58

Register description STA326
Table 43. Auto-EAPD on clock loss enable
Bit R/W RST Name Description
Auto EAPD on clock loss
5RW0ECLE
0: disabled
1: enabled
When ECLE is active, it issues a power device power down signal (EAPD) on clock loss
detection.
Table 44. Software power down
Bit R/W RST Name Description
Software power down:
0: power down mode: initiates a power-down sequence
6RW1PWDN
Table 45. External amplifier power down
Bit R/W RST Name Description
which results in a soft mute of all channels and finally
asserts EAPD circa 260 ms later
1: normal operation
External amplifier power down:
7 RW 0 EAPD
0: external power stage power down active
1: normal operation
EAPD is used to actively power down a connected DDX® power device. This register has to
be written to 1 at start-up to enable the DDX
®
power device for normal operation.
32/58 Doc ID 11531 Rev 5

STA326 Register description
7.7 Volume control
7.7.1 Master controls
Master mute register (addr 0x06)
D7 D6 D5 D4 D3 D2 D1 D0
Reserved Reserved Reserved Reserved Reserved Reserved Reserved MMUTE
00000000
Master volume register (addr 0x07)
D7 D6 D5 D4 D3 D2 D1 D0
MV7 MV6 MV5 MV4 MV3 MV2 MV1 MV0
11111 1 1 1
Note: Value of volume derived from MVOL is dependent on AMV Automode volume settings.
7.7.2 Channel controls
Channel 1 volume (addr 0x08)
D7 D6 D5 D4 D3 D2 D1 D0
C1V7 C1V6 C1V5 C1V4 C1V3 C1V2 C1V1 C1V0
01100000
Channel 2 volume (addr 0x09)
D7 D6 D5 D4 D3 D2 D1 D0
C2V7 C2V6 C2V5 C2V4 C2V3 C2V2 C2V1 C2V0
01100000
Channel 3 volume (addr 0x0A)
D7 D6 D5 D4 D3 D2 D1 D0
C3V7 C3V6 C3V5 C3V4 C3V3 C3V2 C3V1 C3V0
01100000
7.7.3 Volume description
The volume structure of the STA326 consists of individual volume registers for each of the
three channels and a master volume register, and individual channel volume trim registers.
The channel volume settings are normally used to set the maximum allowable digital gain
and to hard-set gain differences between certain channels. These values are normally set at
the initialization of the IC and not changed. The individual channel volumes are adjustable in
0.5-dB steps from +48 dB to -80 dB. The master volume control is normally mapped to the
master volume of the system. The values of these two settings are summed to find the
actual gain/volume value for any given channel.
When set to 1, the master mute will mute all channels, whereas the individual channel
mutes (CxM) will mute only that channel. Both the master mute and the channel mutes
provide a “soft mute” with the volume ramping down to mute in 4096 samples from the
maximum volume setting at the internal processing rate (approximately 96 kHz). A “hard
Doc ID 11531 Rev 5 33/58

Register description STA326
mute” can be obtained by programming the value 0xFF to any channel volume register or
the master volume register. When volume offsets are provided via the master volume
register any channel whose total volume is less than -100 dB will be muted.
All changes in volume take place at zero-crossings when ZCE = 1 (configuration register E)
on a per channel basis as this creates the smoothest possible volume transitions. When
ZCE = 0, volume updates will occur immediately.
The STA326 also features a soft-volume update function that will ramp the volume between
intermediate values when the value is updated, when SVE = 1 (configuration register E).
This feature can be disabled by setting SVE = 0.
Each channel also contains an individual channel volume bypass. If a particular channel has
volume bypassed via the CxVBP = 1 register then only the channel volume setting for that
particular channel affects the volume setting, the master volume setting will not affect that
channel. Also, master soft-mute will not affect the channel if CxVBP = 1.
Each channel also contains a channel mute. If CxM = 1 a soft mute is performed on that
channel
Table 46. Master volume offset as a function of MV[7:0]
MV[7:0] Volume offset from channel value
00000000 (0x00) 0 dB
00000001 (0x01) -0.5 dB
00000010 (0x02) -1 dB
……
01001100 (0x4C) -38 dB
……
11111110 (0xFE) -127 dB
11111111 (0xFF) Hard master mute
Table 47. Channel volume as a function of CxV[7:0]
CxV[7:0] Volume
00000000 (0x00) +48 dB
00000001 (0x01) +47.5 dB
00000010 (0x02) +47dB
……
01100001 (0x5F) +0.5 dB
01100000 (0x60) 0 dB
01011111 (0x61) -0.5 dB
……
11111110 (0xFE) -79.5 dB
11111111 (0xFF) Hard channel mute
34/58 Doc ID 11531 Rev 5

STA326 Register description
7.8 Automode registers
7.8.1 Automodes EQ, volume, GC (addr 0x0B)
D7 D6 D5 D4 D3 D2 D1 D0
AMPS Reserved AMGC1 AMGC0 AMV1 AMV0 AMEQ1 AMEQ0
1 0 0 0 0 0 0 0
Table 48. Automode EQ
AMEQ[1,0] Mode (biquad 1-4)
00 User programmable
01 Preset EQ - PEQ bits
10 Auto volume controlled loudness curve
11 Not used
By setting AMEQ to any setting other than 00 enables Automode EQ where biquads 1-4 are
not user programmable. Any coefficient settings for these biquads are ignored. Also when
Automode EQ is used the prescale value for channels 1-2 becomes hard-set to -18 dB.
Table 49. Automode volume
AMV[1,0] Mode (MVOL)
00 MVOL 0.5 dB 256 steps (standard)
01 MVOL auto curve 30 steps
10 MVOL auto curve 40 steps
11 MVOL auto curve 50 steps
Table 50. Automode gain compression/limiters
AMGC[1:0] Mode
00 User programmable GC
01 AC no clipping
10 AC limited clipping (10%)
11 DRC nighttime listening mode
Table 51. AMPS - Automode auto prescale
Bit R/W RST Name Description
Automode prescale
7 RW 1 AMPS
0: -18 dB used for prescale when AMEQ neq 00
1: user defined prescale when AMEQ neq 00
Doc ID 11531 Rev 5 35/58

Register description STA326
7.8.2 Automode AM/prescale/bass management scale (addr 0x0C)
D7 D6 D5 D4 D3 D2 D1 D0
XO3 XO2 XO1 XO0 AMAM2 AMAM1 AMAM0 AMAME
00000000
Table 52. Automode AM switching enable
Bit R/W RST Name Description
Automode AM enable
0 RW 0 AMAME
0: switching frequency determined by PWMS setting
1: switching frequency determined by AMAM settings
3:1 RW 000 AMAM[2:0]
n
Table 53. Automode AM switching frequency selection
AM switching frequency setting
000: default
AMAM[2:0] 48 kHz/96 kHz input fs 44.1 kHz/88.2 kHz input fs
000 0.535 MHz -0.720 MHz 0.535 MHz -0.670 MHz
001 0.721 MHz -0.900 MHz 0.671 MHz -0.800 MHz
010 0.901 MHz -1.100 MHz 0.801 MHz -1.000 MHz
011 1.101 MHz -1.300 MHz 1.001 MHz -1.180 MHz
100 1.301 MHz -1.480 MHz 1.181 MHz -1.340 MHz
101 1.481 MHz -1.600 MHz 1.341 MHz -1.500 MHz
110 1.601 MHz -1.700 MHz 1.501 MHz - 1.700 MHz
When DDX® is used concurrently with an AM radio tuner, it is advisable to use the AMAM
bits to automatically adjust the output PWM switching rate dependent upon the specific
radio frequency that the tuner is receiving. The values used in AMAM are also dependent
upon the sample rate determined by the ADC used.
Table 54. Automode crossover setting
Bit R/W RST Name Description
Automode crossover frequency selection
7:4 RW 0 XO[3:0]
000: user defined crossover coefficients are used
Otherwise: preset coefficients for the crossover setting
desired
Table 55. Crossover frequency selection
XO[2:0] Bass management - Crossover frequency
0000 User
0001 80 Hz
0010 100 Hz
0011 120 Hz
0100 140 Hz
36/58 Doc ID 11531 Rev 5

STA326 Register description
Table 55. Crossover frequency selection (continued)
XO[2:0] Bass management - Crossover frequency
0101 160 Hz
0110 180 Hz
0111 200 Hz
1000 220 Hz
1001 240 Hz
1010 260 Hz
1011 280 Hz
1100 300 Hz
1101 320 Hz
1110 340 Hz
1111 360 Hz
7.8.3 Preset EQ settings (addr 0x0D)
D7 D6 D5 D4 D3 D2 D1 D0
Reserved Reserved Reserved PEQ4 PEQ3 PEQ2 PEQ1 PEQ0
00000000
Table 56. Preset EQ selection
PEQ[3:0] Setting
00000 Flat
00001 Rock
00010 Soft rock
00011 Jazz
00100 Classical
00101 Dance
00110 Pop
00111 Soft
01000 Hard
01001 Party
01010 Vocal
01011 Hip-hop
01100 Dialog
01101 Bass-boost #1
01110 Bass-boost #2
01111 Bass-boost #3
10000 Loudness 1 (least boost)
Doc ID 11531 Rev 5 37/58

Register description STA326
Table 56. Preset EQ selection (continued)
PEQ[3:0] Setting
10001 Loudness 2
10010 Loudness 3
10011 Loudness 4
10100 Loudness 5
10101 Loudness 6
10110 Loudness 7
10111 Loudness 8
11000 Loudness 9
11001 Loudness 10
11010 Loudness 11
11011 Loudness 12
11100 Loudness 13
11101 Loudness 14
11110 Loudness 15
11111 Loudness 16 (most boost)
7.9 Channel configuration registers
7.9.1 Channel 1 configuration (addr 0x0E)
D7 D6 D5 D4 D3 D2 D1 D0
C1OM1 C1OM0 C1LS1 C1LS0 C1BO C1VBP C1EQBP C1TCB
000000 00
7.9.2 Channel 2 configuration (addr 0x0F)
D7 D6 D5 D4 D3 D2 D1 D0
C2OM1 C2OM0 C2LS1 C2LS0 C2BO C2VBP C2EQBP C2TCB
00000000
7.9.3 Channel 3 configuration (addr 0x10)
D7 D6 D5 D4 D3 D2 D1 D0
C3OM1 C3OM0 C3LS1 C3LS0 C3BO C3VBP Reserved Reserved
00000000
EQ control can be bypassed on a per channel basis. If EQ control is bypassed on a given
channel the prescale and all 9 filters (high-pass, biquads, de-emphasis, bass management
cross-over, bass, treble in any combination) are bypassed for that channel.
38/58 Doc ID 11531 Rev 5

STA326 Register description
CxEQBP
● 0: perform EQ on channel X - normal operation
● 1: bypass EQ on channel X
Tone control (bass/treble) can be bypassed on a per channel basis. If tone control is
bypassed on a given channel the two filters that tone control utilizes are bypassed.
CxTCB
● 0: perform tone control on channel X - (default operation)
● 1: bypass tone control on channel X
Each channel can be configured to output either the patented DDX
binary PWM encoded data. By setting the CxBO bit to 1, each channel can be individually
controlled to be in binary operation mode.
Also, there is the capability to map each channel independently onto any of the two limiters
available within the STA326 or even not map it to any limiter at all (default mode).
Table 57. Channel limiter mapping selection
CxLS[1,0] Channel limiter mapping
00 Channel has limiting disabled
01 Channel is mapped to limiter #1
®
PWM data or standard
10 Channel is mapped to limiter #2
Each PWM output channel can receive data from any channel output of the volume block.
Which channel a particular PWM output receives is dependent upon that channel’s CxOM
register bits.
Table 58. Channel PWM output mapping
CxOM[1:0] PWM output from
00 Channel 1
01 Channel 2
10 Channel 3
11 Not used
Doc ID 11531 Rev 5 39/58

Register description STA326
7.10 Tone control (addr 0x11)
D7 D6 D5 D4 D3 D2 D1 D0
TTC3 TTC2 TTC1 TTC0 BTC3 BTC2 BTC1 BTC0
01110111
Table 59. Tone control boost/cut selection
BTC[3:0]/TTC[3:0] Boost/Cut
0000 -12 dB
0001 -12 dB
……
0111 -4 dB
0110 -2 dB
0111 0 dB
1000 +2 dB
1001 +4 dB
……
1101 +12 dB
1110 +12 dB
1111 +12 dB
40/58 Doc ID 11531 Rev 5

STA326 Register description
7.11 Dynamics control
7.11.1 Limiter 1 attack/release threshold (addr 0x12)
D7 D6 D5 D4 D3 D2 D1 D0
L1A3 L1A2 L1A1 L1A0 L1R3 L1R2 L1R1 L1R0
01101010
7.11.2 Limiter 1 attack/release threshold (addr 0x13)
D7 D6 D5 D4 D3 D2 D1 D0
L1AT3 L1AT2 L1AT1 L1AT0 L1RT3 L1RT2 L1RT1 L1RT0
01101 0 0 1
7.11.3 Limiter 2 attack/release rate (addr 0x14)
D7 D6 D5 D4 D3 D2 D1 D0
L2A3 L2A2 L2A1 L2A0 L2R3 L2R2 L2R1 L2R0
01101010
7.11.4 Limiter 2 attack/release threshold (addr 0x15)
D7 D6 D5 D4 D3 D2 D1 D0
L2AT3 L2AT2 L2AT1 L2AT0 L2RT3 L2RT2 L2RT1 L2RT0
01101 0 0 1
7.11.5 Dynamics control description
The STA326 includes 2 independent limiter blocks. The purpose of the limiters is to
automatically reduce the dynamic range of a recording to prevent the outputs from clipping
in anti-clipping mode, or to actively reduce the dynamic range for a better listening
environment (such as a night-time listening mode, which is often needed for DVDs.) The two
modes are selected via the DRC bit in configuration register D (bit 5, address 0x03). Each
channel can be mapped to Limiter1, Limiter2, or not mapped.
If a channel is not mapped, that channel will clip normally when 0 dBFS is exceeded. Each
limiter will look at the present value of each channel that is mapped to it, select the
maximum absolute value of all these channels, perform the limiting algorithm on that value,
and then if needed adjust the gain of the mapped channels in unison.
The limiter attack thresholds are determined by the LxAT registers. When the attack
threshold has been exceeded, the limiter, when active, will automatically start reducing the
gain. The rate at which the gain is reduced when the attack threshold is exceeded is
dependent upon the attack rate register setting for that limiter. The gain reduction occurs on
a peak-detect algorithm.
The release of limiter, when the gain is again increased, is dependent on a RMS-detect
algorithm. The output of the volume/limiter block is passed through an RMS filter. The output
of this filter is compared to the release threshold, determined by the Release Threshold
register.
When the RMS filter output falls below the release threshold, the gain is increased at a rate
dependent upon the release rate register. The gain can never be increased past its set value
Doc ID 11531 Rev 5 41/58

Register description STA326
and therefore the release will only occur if the limiter has already reduced the gain. The
release threshold value can be used to set what is effectively a minimum dynamic range.
This is helpful as over-limiting can reduce the dynamic range to virtually zero and cause
program material to sound “lifeless”.
In AC mode the attack and release thresholds are set relative to full-scale. In DRC mode the
attack threshold is set relative to the maximum volume setting of the channels mapped to
that limiter and the release threshold is set relative to the maximum volume setting plus the
attack threshold.
Figure 17. Basic limiter and volume flow diagram
RMSLimiter
Gain/Volume
Input Output
Gain Att en uat io n Saturation
Table 60. Limiter attack/release rate selection
LxA[3:0]
Attack rate
dB/ms
LxR[3:0]
0000 3.1584 Fast 0000 0.5116
0001 2.7072 0001 0.1370
0010 2.2560 0010 0.0744
0011 1.8048 0011 0.0499
0100 1.3536 0100 0.0360
0101 0.9024 0101 0.0299
0110 0.4512 0110 0.0264
0111 0.2256 0111 0.0208
1000 0.1504 1000 0.0198
1001 0.1123 1001 0.0172
1010 0.0902 1010 0.0147
1011 0.0752 1011 0.0137
1100 0.0645 1100 0.0134
1101 0.0564 1101 0.0117
Release rate
dB/ms
1110 0.0501 1110 0.0110
1111 0.0451 Slow 1111 0.0104
42/58 Doc ID 11531 Rev 5

STA326 Register description
7.11.6 Anti-clipping mode
Table 61. Limiter attack/release threshold selection (AC mode)
LxAT[3:0]
Attack threshold (AC)
dB relative to FS
LxRT[3:0]
Release threshold (AC)
0000 -12 0000 -∞
0001 -10 0001 -29 dB
0010 -8 0010 -20 dB
0011 -6 0011 -16 dB
0100 -4 0100 -14 dB
0101 -2 0101 -12 dB
0110 0 0110 -10 dB
0111 +2 0111 -8 dB
1000 +3 1000 -7 dB
1001 +4 1001 -6 dB
1010 +5 1010 -5 dB
1011 +6 1011 -4 dB
1100 +7 1100 -3 dB
1101 +8 1101 -2 dB
1110 +9 1110 -1 dB
1111 +10 1111 -0 dB
dB relative to FS
Doc ID 11531 Rev 5 43/58

Register description STA326
7.11.7 Dynamic range compression mode
Table 62. Limiter attack/release threshold selection (DRC mode)
LxAT[3:0]
Attack threshold (DRC)
dB relative to volume
LxRT[3:0]
Release threshold (DRC)
db relative to volume + LxAT
0000 -31 0000 -∞
0001 -29 0001 -38 dB
0010 -27 0010 -36 dB
0011 -25 0011 -33 dB
0100 -23 0100 -31 dB
0101 -21 0101 -30 dB
0110 -19 0110 -28 dB
0111 -17 0111 -26 dB
1000 -16 1000 -24 dB
1001 -15 1001 -22 dB
1010 -14 1010 -20 dB
1011 -13 1011 -18 dB
1100 -12 1100 -15 dB
1101 -10 1101 -12 dB
1110 -7 1110 -9 dB
1111 -4 1111 -6 dB
44/58 Doc ID 11531 Rev 5

STA326 User programmable processing
b
8 User programmable processing
8.1 EQ - biquad equation
The biquads use the equation that follows. This is diagrammed in Figure 18 below.
Y[n] = 2(b0/2)X[n] + 2(b1/2)X[n - 1] + b2X[n - 2] - 2(a1/2)Y[n - 1] - a2Y[n - 2]
= b0X[n] + b1X[n - 1] + b2X[n - 2] - a1Y[n - 1] - a2Y[n - 2]
where Y[n] represents the output and X[n] represents the input. Multipliers are 28-bit signed
fractional multipliers, with coefficient values in the range of 0x800000 (-1) to 0x7FFFFF
(0.9999998808).
Coefficients stored in the user defined coefficient RAM are referenced in the following
manner:
● CxHy0 = b1/2
● CxHy1 = b2
● CxHy2 = -a1/2
● CxHy3 = -a2
● CxHy4 = b0/2
The x represents the channel and the y the biquad number. For example C3H41 is the b0/2
coefficient in the fourth biquad for channel 3
Figure 18. Biquad filter
8.2 Prescale
The prescale block which precedes the first biquad is used for attenuation when filters are
designed that boost frequencies above 0 dBFS. This is a single 28-bit signed multiplier, with
0x800000 = -1 and 0x7FFFFF = 0.9999998808. By default, all prescale factors are set to
0x7FFFFF.
8.3 Postscale
The STA326 provides one additional multiplication after the last interpolation stage and
before the distortion compensation on each channel. This is a 24-bit signed fractional
multiplier. The scale factor for this multiplier is loaded into RAM using the same I
as the biquad coefficients and the mix. All channels can use the same settings as channel 1
by setting the postscale link bit.
Z -1
Z -1
b0 /2
b1 /2
2
2
2
+
Z -1
-a
+
+
2
/2
1
Z -1
-a
2
2
C registers
Doc ID 11531 Rev 5 45/58

User programmable processing STA326
8.4 Mix/bass management
The STA326 provides a post EQ mixing block per channel. Each channel has 2 mixing
coefficients, which are each 24-bit signed fractional multipliers, that correspond to the 2
channels of input to the mixing block. These coefficients are accessible via the user
controlled coefficient RAM described below. The mix coefficients are expressed as 24-bit
signed; fractional numbers in the range +1.0 (8388607) to -1.0 (-8388608) are used to
provide three channels of output from two channels of filtered input.
Figure 19. Mix/bass management block diagram
Channel #1
from EQ
Channel # 2
from EQ
C1MX1
+
C1MX2
C2MX1
+
C2MX2
High -P as s
XO
Filter
High -P as s
XO
Filter
Channel#1
to GC/Vol
Channel#2
to GC/Vol
C3MX1
+
C3MX2
User-defined Mix Coefficients Crossover Frequenc y determined
Low -Pas s
XO
Filter
by XO setting.
User-defined w hen XO = 000
Channel#3
to GC/Vol
After a mix is achieved, STA326 also provides the capability to implement crossover filters
on all channels corresponding to 2.1 bass management solution. Channels 1 and 2 use a
first-order high-pass filter and channel 3 uses a second-order low-pass filter corresponding
to the setting of the XO bits of I
2
C register 0x0C. If XO = 000, user specified crossover filters
are used.
By default these coefficients correspond to pass-through. However, the user can write these
coefficients in a similar way as the EQ biquads. When user-defined setting is selected, the
user can only write 2nd order crossover filters. This output is then passed on to the
volume/limiter block.
46/58 Doc ID 11531 Rev 5

STA326 User programmable processing
8.5 Calculating 24-bit signed fractional numbers from a dB value
The prescale, mixing, and postscale functions of the STA326 use 24-bit signed fractional
multipliers to attenuate signals. These attenuations can also invert the phase and therefore
range in value from -1 to +1. It is possible to calculate the coefficient to utilize for a given
negative dB value (attenuation) via the equations below.
● Non-inverting phase numbers 0 to +1:
● Coefficient = round(8388607 * 10
● Inverting phase numbers 0 to -1:
● Coefficient = 16777216 - round(8388607 * 10
(dB / 20)
)
(dB / 20)
)
As can be seen by the preceding equations, the value for positive phase 0 dB is 0x7FFFFF
and the value for negative phase 0 dB is 0x800000.
8.6 User defined coefficient RAM
8.6.1 Coefficient address register 1 (addr 0x16)
D7 D6 D5 D4 D3 D2 D1 D0
CFA7 CFA6 CFA5 CFA4 CFA3 CFA2 CFA1 CFA0
00000000
8.6.2 Coefficient b1data register bits 23:16 (addr 0x17)
D7 D6 D5 D4 D3 D2 D1 D0
C1B23 C1B22 C1B21 C1B20 C1B19 C1B18 C1B17 C1B16
00000000
8.6.3 Coefficient b1data register bits 15:8 (addr 0x18)
D7 D6 D5 D4 D3 D2 D1 D0
C1B15 C1B14 C1B13 C1B12 C1B11 C1B10 C1B9 C1B8
00000000
8.6.4 Coefficient b1data register bits 7:0 (addr 0x19)
D7 D6 D5 D4 D3 D2 D1 D0
C1B7 C1B6 C1B5 C1B4 C1B3 C1B2 C1B1 C1B0
00000000
8.6.5 Coefficient b2 data register bits 23:16 (addr 0x1A)
D7 D6 D5 D4 D3 D2 D1 D0
C2B23 C2B22 C2B21 C2B20 C2B19 C2B18 C2B17 C2B16
00000000
Doc ID 11531 Rev 5 47/58

User programmable processing STA326
8.6.6 Coefficient b2 data register bits 15:8 (addr 0x1B)
D7 D6 D5 D4 D3 D2 D1 D0
C2B15 C2B14 C2B13 C2B12 C2B11 C2B10 C2B9 C2B8
00000000
8.6.7 Coefficient b2 data register bits 7:0 (addr 0x1C)
D7 D6 D5 D4 D3 D2 D1 D0
C2B7 C2B6 C2B5 C2B4 C2B3 C2B2 C2B1 C2B0
00000000
8.6.8 Coefficient a1 data register bits 23:16 (addr 0x1D)
D7 D6 D5 D4 D3 D2 D1 D0
C1B23 C1B22 C1B21 C1B20 C1B19 C1B18 C1B17 C1B16
00000000
8.6.9 Coefficient a1 data register bits 15:8 (addr 0x1E)
D7 D6 D5 D4 D3 D2 D1 D0
C3B15 C3B14 C3B13 C3B12 C3B11 C3B10 C3B9 C3B8
00000000
8.6.10 Coefficient a1 data register bits 7:0 (addr 0x1F)
D7 D6 D5 D4 D3 D2 D1 D0
C3B7 C3B6 C3B5 C3B4 C3B3 C3B2 C3B1 C3B0
00000000
8.6.11 Coefficient a2 data register bits 23:16 (addr 0x20)
D7 D6 D5 D4 D3 D2 D1 D0
C4B23 C4B22 C4B21 C4B20 C4B19 C4B18 C4B17 C4B16
00000000
8.6.12 Coefficient a2 data register bits 15:8 (addr 0x21)
D7 D6 D5 D4 D3 D2 D1 D0
C4B15 C4B14 C4B13 C4B12 C4B11 C4B10 C4B9 C4B8
00000000
8.6.13 Coefficient a2 data register bits 7:0 (addr 0x22)
D7 D6 D5 D4 D3 D2 D1 D0
C4B7 C4B6 C4B5 C4B4 C4B3 C4B2 C4B1 C4B0
00000000
48/58 Doc ID 11531 Rev 5

STA326 User programmable processing
8.6.14 Coefficient b0 data register bits 23:16 (addr 0x23)
D7 D6 D5 D4 D3 D2 D1 D0
C5B23 C5B22 C5B21 C5B20 C5B19 C5B18 C5B17 C5B16
00000000
8.6.15 Coefficient b0 data register bits 15:8 (addr 0x24)
D7 D6 D5 D4 D3 D2 D1 D0
C5B15 C5B14 C5B13 C5B12 C5B11 C5B10 C5B9 C5B8
00000000
8.6.16 Coefficient b0 data register bits 7:0 (addr 0x25)
D7 D6 D5 D4 D3 D2 D1 D0
C5B7 C5B6 C5B5 C5B4 C5B3 C5B2 C5B1 C5B0
00000000
8.6.17 Coefficient write control register (addr 0x26)
D7 D6 D5 D4 D3 D2 D1 D0
Reserved Reserved Reserved Reserved RA R1 WA W1
00000000
Coefficients for EQ, mix and scaling are handled internally in the STA326 via RAM. Access
to this RAM is available to the user via an I
2
C register interface. A collection of I2C registers
are dedicated to this function. First register contains the coefficient base address, five sets
of three registers store the values of the 24-bit coefficients to be written or that were read,
and one contains bits used to control the read or write of the coefficient (s) to RAM. The
following are instructions for reading and writing coefficients.
Doc ID 11531 Rev 5 49/58

User programmable processing STA326
8.7 Reading a coefficient from RAM
● write 8 bits of address to I
● write 1 to bit R1 (D2) of I
● read top 8 bits of coefficient in I
● read middle 8 bits of coefficient in I
● read bottom 8 bits of coefficient in I
2
C register 0x16
2
C register 0x26
2
C address 0x17
2
C address 0x18
2
C address 0x19
8.8 Reading a set of coefficients from RAM
● write 8 bits of address to I
● write 1 to bit RA (D3) of I
● read top 8 bits of coefficient in I
● read middle 8 bits of coefficient in I
● read bottom 8 bits of coefficient in I
● read top 8 bits of coefficient b2 in I
● read middle 8 bits of coefficient b2 in I
● read bottom 8 bits of coefficient b2 in I
● read top 8 bits of coefficient a1 in I
● read middle 8 bits of coefficient a1 in I
● read bottom 8 bits of coefficient a1 in I
● read top 8 bits of coefficient a2 in I
● read middle 8 bits of coefficient a2 in I
● read bottom 8 bits of coefficient a2 in I
● read top 8 bits of coefficient b0 in I
● read middle 8 bits of coefficient b0 in I
● read bottom 8 bits of coefficient b0 in I
2
C register 0x16
2
C register 0x26
2
C address 0x17
2
C address 0x18
2
C address 0x19
2
C address 0x1A
2
C address 0x1D
2
C address 0x20
2
C address 0x23
2
C address 0x1B
2
C address 0x1C
2
C address 0x1E
2
C address 0x1F
2
C address 0x21
2
C address 0x22
2
C address 0x24
2
C address 0x25
8.9 Writing a single coefficient to RAM
● write 8 bits of address to I
● write top 8 bits of coefficient in I
● write middle 8 bits of coefficient in I
● write bottom 8 bits of coefficient in I
● write 1 to W1 bit in I
50/58 Doc ID 11531 Rev 5
2
C register 0x16
2
C address 0x17
2
C address 0x26
2
C address 0x18
2
C address 0x19

STA326 User programmable processing
8.10 Writing a set of coefficients to RAM
● write 8 bits of starting address to I
● write top 8 bits of coefficient b1 in I
● write middle 8 bits of coefficient b1 in I
● write bottom 8 bits of coefficient b1 in I
● write top 8 bits of coefficient b2 in I
● write middle 8 bits of coefficient b2 in I
● write bottom 8 bits of coefficient b2 in I
● write top 8 bits of coefficient a1 in I
● write middle 8 bits of coefficient a1 in I
● write bottom 8 bits of coefficient a1 in I
● write top 8 bits of coefficient a2 in I
● write middle 8 bits of coefficient a2 in I
● write bottom 8 bits of coefficient a2 in I
● write top 8 bits of coefficient b0 in I
● write middle 8 bits of coefficient b0 in I
● write bottom 8 bits of coefficient b0 in I
● write 1 to WA bit in I
2
C address 0x26
2
C register 0x16
2
C address 0x17
2
C address 0x18
2
C address 0x19
2
C address 0x1A
2
C address 0x1B
2
C address 0x1C
2
C address 0x1D
2
C address 0x1E
2
C address 0x1F
2
C address 0x20
2
C address 0x21
2
C address 0x22
2
C address 0x23
2
C address 0x24
2
C address 0x25
The mechanism for writing a set of coefficients to RAM provides a method of updating the
five coefficients corresponding to a given biquad (filter) simultaneously to avoid possible
unpleasant acoustic side-effects. When using this technique, the 8-bit address would
specify the address of the biquad b1 coefficient (for example 0, 5, 10, 15, …, 45 decimal),
and the STA326 will generate the RAM addresses as offsets from this base value to write
the complete set of coefficient data.
Table 63. RAM block for biquads, mixing, and scaling
Index (decimal) Index (Hex) Description Coefficient Default
0 0x00
1 0x01 C1H11 (b2) 0x000000
2 0x02 C1H12 (a1/2) 0x000000
Channel 1 - Biquad 1
3 0x03 C1H13 (a2) 0x000000
4 0x04 C1H14 (b0/2) 0x400000
5 0x05 Channel 1 - Biquad 2 C1H20 0x000000
……… ……
19 0x13 Channel 1 - Biquad 4 C1H44 0x400000
20 0x14
Channel 2 - Biquad 1
21 0x15 C2H11 0x000000
……… ……
C1H10 (b1/2) 0x000000
C2H10 0x000000
39 0x27 Channel 2 - Biquad 4 C2H44 0x400000
Doc ID 11531 Rev 5 51/58

User programmable processing STA326
Table 63. RAM block for biquads, mixing, and scaling (continued)
Index (decimal) Index (Hex) Description Coefficient Default
40 0x28
41 0x29 C12H1 (b2) 0x000000
42 0x2A C12H2 (a1/2) 0x000000
43 0x2B C12H3 (a2) 0x000000
44 0x2C C12H4 (b0/2) 0x400000
45 0x2D
46 0x2E C12L1 (b2) 0x000000
47 0x2F C12L2 (a1/2) 0x000000
48 0x30 C12L3 (a2) 0x000000
49 0x31 C12L4 (b0/2) 0x400000
50 0x32 Channel 1 - Prescale C1PreS 0x7FFFFF
51 0x33 Channel 2 - Prescale C2PreS 0x7FFFFF
52 0x34 Channel 1 - Postscale C1PstS 0x7FFFFF
53 0x35 Channel 2 - Postscale C2PstS 0x7FFFFF
54 0x36 Channel 3 - Postscale C3PstS 0x7FFFFF
55 0x37 Thermal warning - Postscale TWPstS 0x5A9DF7
56 0x38 Channel 1 - Mix 1 C1MX1 0x7FFFFF
57 0x39 Channel 1 - Mix 2 C1MX2 0x000000
High-pass 2nd order filter
for XO = 000
Low-pass 2nd order filter
for XO = 000
C12H0 (b1/2) 0x000000
C12L0 (b1/2) 0x000000
58 0x3A Channel 2 - Mix 1 C2MX1 0x000000
59 0x3B Channel 2 - Mix 2 C2MX2 0x7FFFFF
60 0x3C Channel 3 - Mix 1 C3MX1 0x400000
61 0x3D Channel 3 - Mix 2 C3MX2 0x400000
62 0x3E Unused - -
63 0x3F Unused - -
52/58 Doc ID 11531 Rev 5

STA326 User programmable processing
8.11 Variable max power correction (addr 0x27, 0x28)
D7 D6 D5 D4 D3 D2 D1 D0
MPCC15 MPCC14 MPCC13 MPCC12 MPCC11 MPCC10 MPCC9 MPCC8
00101101
MPCC7 MPCC6 MPCC5 MPCC4 MPCC3 MPCC2 MPCC1 MPCC0
11000000
MPCC bits determine the 16 MSBs of the MPC compensation coefficient. This coefficient is
used in place of the default coefficient when MPCV = 1.
8.12 Fault detect recovery (addr 0x2B, 0x2C)
D7 D6 D5 D4 D3 D2 D1 D0
FRDC15 FDRC14 FDRC13 FDRC12 FDRC11 FDRC10 FDRC9 FDRC8
00000000
FDRC7 FDRC6 FDRC5 FDRC4 FDRC3 FDRC2 FDRC1 FDRC0
00001100
FDRC bits specify the 16-bit fault detect recovery time delay. When FAULT is asserted, the
output TRISTATE will be immediately asserted low and held low for the time period specified
by this constant. A constant value of 0x0001 in this register is approximately 0.083 ms. The
default value of 0x000C specifies approximately 1 ms.
Doc ID 11531 Rev 5 53/58

Applications STA326
9 Applications
Figure 20. Application circuit for 2.1/2.0 configurable solution
54/58 Doc ID 11531 Rev 5

STA326 Package mechanical data
10 Package mechanical data
Figure 21. PowerSO-36 EPU outline drawing
Doc ID 11531 Rev 5 55/58

Package mechanical data STA326
Table 64. PowerSO-36 EPU dimensions
mm inch
Symbol
Min Typ Max Min Typ Max
A 3.25 - 3.43 0.128 - 0.135
A2 3.10 - 3.20 0.122 - 0.126
A4 0.80 - 1.00 0.031 - 0.039
A5 - 0.20 - - 0.008 -
a1 0.03 - -0.04 0.001 - -0.002
b 0.22 - 0.38 0.009 - 0.015
c 0.23 - 0.32 0.009 - 0.013
D 15.80 - 16.00 0.622 - 0.630
D1 9.40 - 9.80 0.370 - 0.386
D2 - 1.00 - - 0.039 -
E 13.90 - 14.50 0.547 - 0.571
E1 10.90 - 11.10 0.429 - 0.437
E2 - - 2.90 - - 0.114
E3 5.80 - 6.20 0.228 - 0.244
E4 2.90 - 3.20 0.114 - 0.126
e - 0.65 - - 0.026 -
e3 - 11.05 - - 0.435 -
G 0 - 0.08 0 - 0.003
H 15.50 - 15.90 0.610 - 0.626
h - - 1.10 - - 0.043
L 0.80 - 1.10 0.031 - 0.043
M 2.25 - 2.60 0.089 - 0.102
N - - 10 degrees - - 10 degrees
R- 0.6 - - 0.024-
s - - 8 degrees - - 8 degrees
In order to meet environmental requirements, ST offers these devices in different grades of
ECOPACK
®
packages, depending on their level of environmental compliance. ECOPACK®
specifications, grade definitions and product status are available at: www.st.com.
ECOPACK
®
is an ST trademark.
56/58 Doc ID 11531 Rev 5

STA326 Revision history
11 Revision history
Table 65. Document revision history
Date Revision Changes
Jul-2005 1 Initial release
May-2006 2 Changed from preliminary data to maturity.
Datasheet remade
Updated Features on cover page
Updated Chapter 1: Description on page 5
Updated Chapter 2: Pin out on page 7
Updated Chapter 3: Electrical specifications on page 10
03-Nov-2010 3
27-Apr-2011 4
19-Jan-2012 5 Updated Section 6.2: Device addressing
Added Chapter 5: Characterization curves on page 14
Updated Table 9: Register summary on page 19 with bit names used in
register description
Updated reset values in register bit map tables in Chapter 7: Register
description on page 19
Updated Chapter 9: Applications on page 54
Updated Chapter 10: Package mechanical data on page 55
Added CONFIG pin description to Section 2.3: Pin description on page 9
Added Section 4: Power supply and control sequencing on page 13
Doc ID 11531 Rev 5 57/58

STA326
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
58/58 Doc ID 11531 Rev 5
 Loading...
Loading...