

Page 1
Dual synchronous step-down controller with adjustable LDO
Features
■ 6 V to 36 V input voltage range
■ Adjustable output voltages
■ 0.9 - 3.3 V LDO adjustable delivers 100 mA
peak current
■ 5 V LDO delivers 100 mA peak current
■ 1.237 V ±1 % reference voltage available
■ No R
MOSFETs' R
■ Negative current limit
■ Soft-start internally fixed at 2 ms
■ Soft output discharge
■ Latched UVP
■ Not-latched OVP
■ Selectable pulse skipping at light loads
■ Selectable minimum frequency (33 kHz) in
pulse skip mode
■ 5 mW maximum quiescent power
■ Independent Power Good signals
■ Output voltage ripple compensation
Applications
■ Embedded computer system
■ FPGA system power
■ Industrial applications on 24 V
■ High performance and high density DC-DC
modules
■ Notebook computer
current sensing using low side
SENSE
DS(on)
PM6681A
VFQFPN-32 (5 mm x 5 mm)
Description
PM6681A is a dual step-down controller
specifically designed to provide extremely high
efficiency conversion, with lossless current
sensing technique. The constant on-time
architecture assures fast load transient response
and the embedded voltage feed-forward provides
nearly constant switching frequency operation. An
embedded integrator control loop compensates
the DC voltage error due to the output ripple.
Pulse skipping technique increases efficiency at
very light load. Moreover a minimum switching
frequency of 33 kHz is selectable to avoid audio
noise issues. The PM6681A provides a selectable
switching frequency, allowing three different
values of switching frequencies for the two
switching sections. The output voltages OUT1
and OUT2 can be adjusted from 0.9 V to 5 V and
from 0.9 V to 3.3 V respectively. The device
provides also 2 LDOs, 5 V fixed and 0.9 V - 3.3 V
adjustable.
Table 1. Order codes
Order codes Package Packaging
PM6681A
PM6681ATR Tape and reel
June 2008 Rev 3 1/47
VFQFPN-32 (5 mm x 5 mm)
exposed pad
Tr ay
www.st.com
47
Page 2

Contents PM6681A
Contents
1 Simplified application schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Pin settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Functional block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6 Typical operating characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7 Device description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7.1 Constant on time PWM control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7.2 Constant on time architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.3 Output ripple compensation and loop stability . . . . . . . . . . . . . . . . . . . . . 20
7.4 Pulse skip mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
7.5 No-audible skip mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.6 Current limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.7 soft-start and soft-end . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.8 Gate drivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
7.9 Internal linear regulators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.10 Power up sequencing and operative modes . . . . . . . . . . . . . . . . . . . . . . . 28
8 Monitoring and protections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.1 Power good signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.2 Thermal protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.3 Overvoltage protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8.4 Undervoltage protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2/47
Page 3

PM6681A Contents
9 Design guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
9.1 Switching frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
9.2 Inductor selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
9.3 Output capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
9.4 Input capacitors selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
9.5 Power MOSFETs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
9.6 Closing the integrator loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
9.7 Other parts design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
9.8 Design example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
9.8.1 Inductor selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
9.8.2 Output capacitor selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.8.3 Power MOSFETs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.8.4 Current limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.8.5 Input capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
9.8.6 Synchronous rectifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
9.8.7 Integrator loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
9.8.8 Output feedback divider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
10 Layout guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
11 Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
12 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3/47
Page 4
Simplified application schematic PM6681A
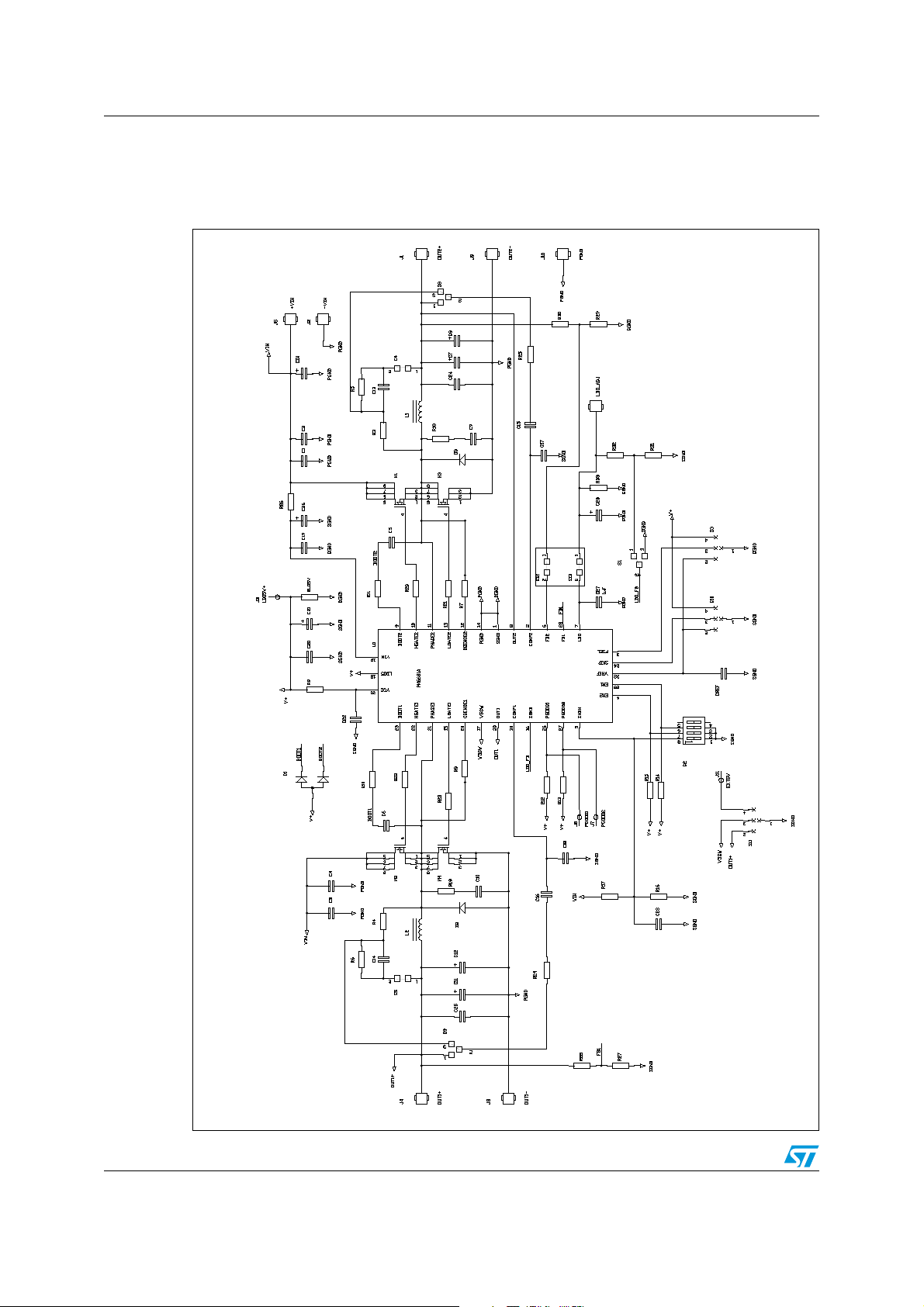
1 Simplified application schematic
Figure 1. Application schematic
4/47
Page 5

PM6681A Pin settings
V
2 Pin settings
2.1 Connections
Figure 2. Pin connection (top view)
VREF
VCC
32 31 30 29 28 27 26 25
SGND
COMP2
FSEL
EN2
SHDN
FB2
LDO
OUT2
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16
HGATE2
BOOT2
PHASE2
COMP1
OUT
FB1
PPMM66668811AA
LGATE2
CSENSE2
PGOOD2
PGOOD
EN1
24
SKIP
23
BOOT1
22
HGATE1
21
PGND
LDO FB
LGATE1
20
19
18
17
PHASE1
CSENSE1
VIN
LDO5
5SW
2.2 Functions
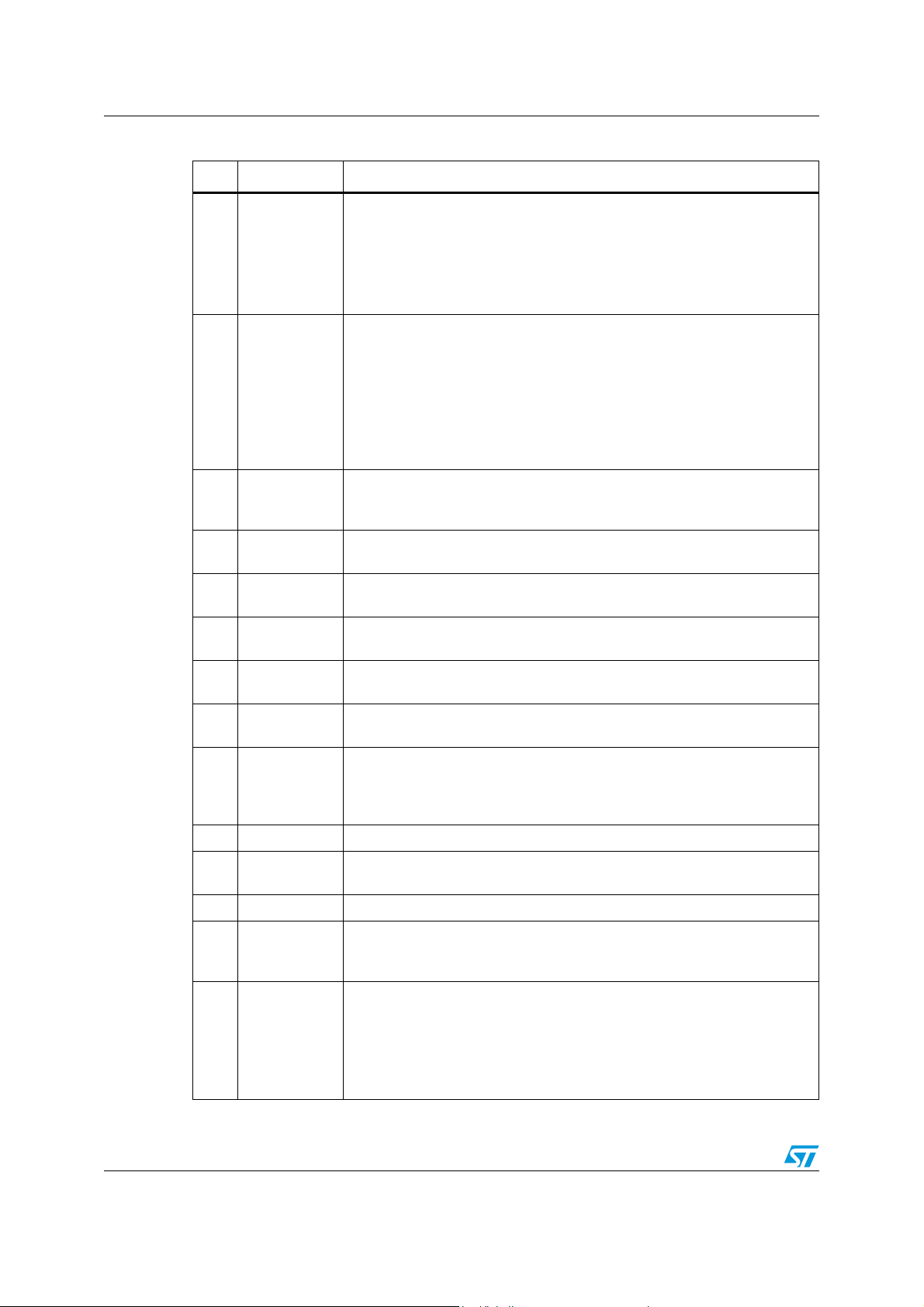
Table 2. Pin functions
N° Pin Function
1SGND
2 COMP2 DC voltage error compensation pin for the switching section 2
3 FSEL
Signal ground. Reference for internal logic circuitry. It must be connected to
the signal ground plan of the power supply. The signal ground plan and the
power ground plan must be connected together in one point near the PGND
pin.
Frequency selection pin. It provides a selectable switching frequency,
allowing three different values of switching frequencies for the switching
sections.
5/47
Page 6
Pin settings PM6681A
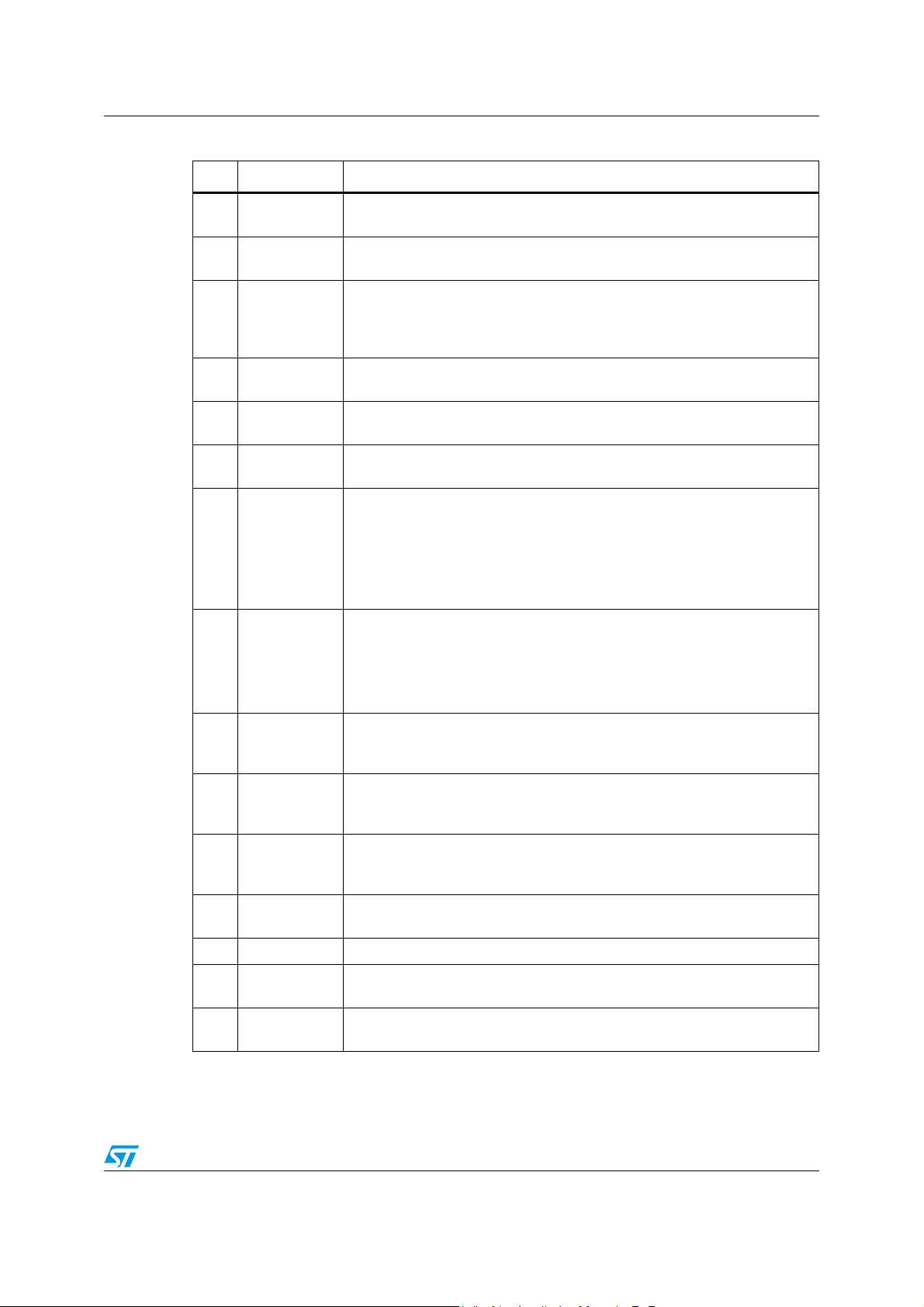
Table 2. Pin functions (continued)
N° Pin Function
Enable input for the switching section 2.
– The section 2 is enabled applying a voltage greater than 2.4 V to this pin.
4EN2
5 SHDN
6FB2
7LDO
8OUT2
– The section 2 is disabled applying a voltage lower than 0.8 V.
When the section is disabled the high side gate driver goes low and Low
Side gate driver goes high. If both EN1 and EN2 pins are low and SHDN pin
is high the device enters in standby mode.
Shutdown control input.
– The device switch off if the SHDN voltage is lower than the device off
threshold (shutdown mode)
– The device switch on if the SHDN voltage is greater than the device on
threshold.
The SHDN pin can be connected to the battery through a voltage divider to
program an undervoltage lockout. In shutdown mode, the gate drivers of the
two switching sections are in high impedance (high-Z).
Feedback input for the switching section 2 This pin is connected to a
resistive voltage-divider from OUT2 to PGND to adjust the output voltage
from 0.9 V to 3.3 V.
Adjustable internal regulator output. It can be set from 0.9 V to 3.3 V.
LDO pin can provide a 100 mA peak current.
Output voltage sense for the switching section 2. This pin must be directly
connected to the output voltage of the switching section.
9BOOT2
10 HGATE2
11 PHASE2
12 CSENSE2
13 LGATE2 Low-side gate driver output for the section 2.
14 PGND
15 LGATE1 Low-side gate driver output for the section 1.
16 LDO FB
17 V5SW
Bootstrap capacitor connection for the switching section 2. It supplies the
high-side gate driver.
High-side gate driver output for section 2. This is the floating gate driver
output.
Switch node connection and return path for the high side driver for the
section 2. It is also used as negative current sense input.
Positive current sense input for the switching section 2. This pin must be
connected through a resistor to the drain of the synchronous rectifier
(R
supply controller.
Power ground. This pin must be connected to the power ground plan of the
power supply.
Feedback input for the adjustable internal linear regulator. This pin is
connected to a resistive voltage-divider from LDO to SGND to adjust the
output voltage from 0.9 V to 3.3 V.
Internal 5 V regulator bypass connection.
– If V5SW is connected to OUT5 (or to an external 5 V supply) and V5SW is
If V5SW is connected to GND, the LDO5 linear regulator is always on if the
device is not in shutdown mode.
sensing) to obtain a positive current limit threshold for the power
DS(on)
greater than 4.9 V, the LDO5 regulator shuts down and the LDO5 pin is
directly connected to OUT5 through a 3 W (max) switch.
6/47
Page 7
PM6681A Pin settings
Table 2. Pin functions (continued)
N° Pin Function
18 LDO5
19 VIN
20 CSENSE1
21 PHASE1
22 HGATE1
23 BOOT1
24 SKIP
25 EN1
26 PGOOD1
27 PGOOD2
28 FB1
29 OUT1
5 V internal regulator output. It can provide up to 100 mA peak current.
LDO5 pin supplies embedded low side gate drivers and an external load.
Device supply voltage input and battery voltage sense. A bypass filter
(4 W and 4.7 µF) between the battery and this pin is recommended.
Positive current sense input for the switching section 1. This pin must be
connected through a resistor to the drain of the synchronous rectifier
(R
supply controller.
Switch node connection and return path for the high side driver for the
section 1. It is also used as negative current sense input.
High-side gate driver output for section 1. This is the floating gate driver
output.
Bootstrap capacitor connection for the switching section 1. It supplies the
high-side gate driver.
Pulse skipping mode control input.
– If the pin is connected to LDO5 the PWM mode is enabled.
– If the pin is connected to GND, the pulse skip mode is enabled.
– If the pin is connected to VREF the pulse skip mode is enabled but the
Enable input for the switching section 1.
– The section 1 is enabled applying a voltage greater than 2.4 V to this pin.
– The section 1 is disabled applying a voltage lower than 0.8 V.
when the section is disabled the high side gate driver goes low and low side
gate driver goes high.
Power Good output signal for the section 1. This pin is an open drain output
and when the output of the switching section 1 is out of +/- 10 % of its
nominal value.It is pulled down.
Power Good output signal for the section 2. This pin is an open drain output
and when the output of the switching section 2 is out of +/- 10 % of its
nominal value.It is pulled down.
Feedback input for the switching section 1. This pin is connected to a
resistive voltage-divider from OUT1 to PGND to adjust the output voltage
from 0.9 V to 5.5 V.
Output voltage sense for the switching section 1.This pin must be directly
connected to the output voltage of the switching section.
sensing) to obtain a positive current limit threshold for the power
DS(on)
switching frequency is kept higher than 33 kHz
(No-audible pulse skip mode).
30 COMP1 DC voltage error compensation pin for the switching section 1.
31 VCC
32 VREF
Device supply voltage pin. It supplies all the internal analog circuitry except
the gate drivers (see LDO5). Connect this pin to LDO5.
Internal 1.237 V high accuracy voltage reference. It can deliver 50 µA.
Bypass to SGND with a 100 nF capacitor to reduce noise.
7/47
Page 8
Functional block diagram PM6681A
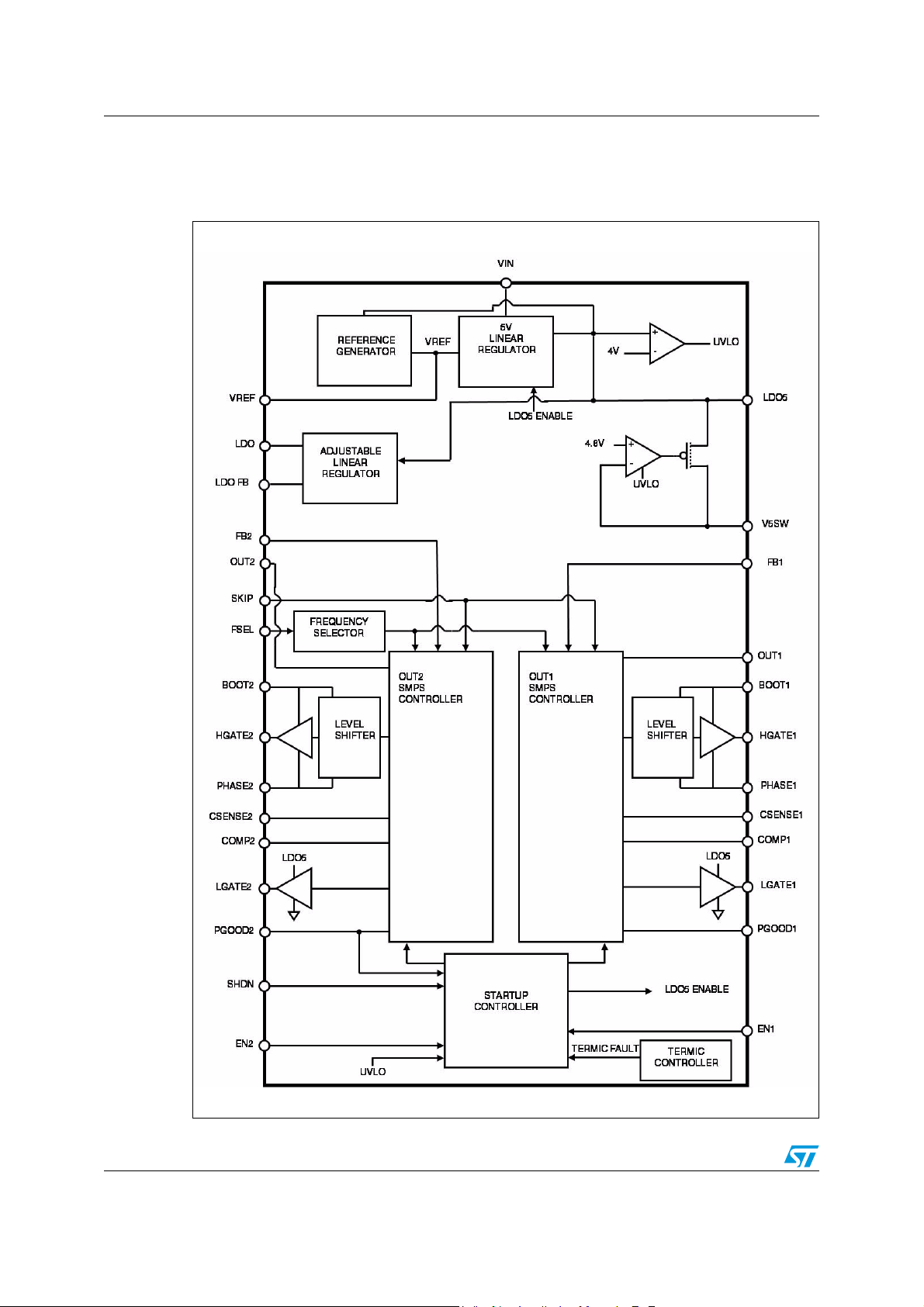
3 Functional block diagram
Figure 3. Functional block diagram
8/47
Page 9
PM6681A Maximum ratings
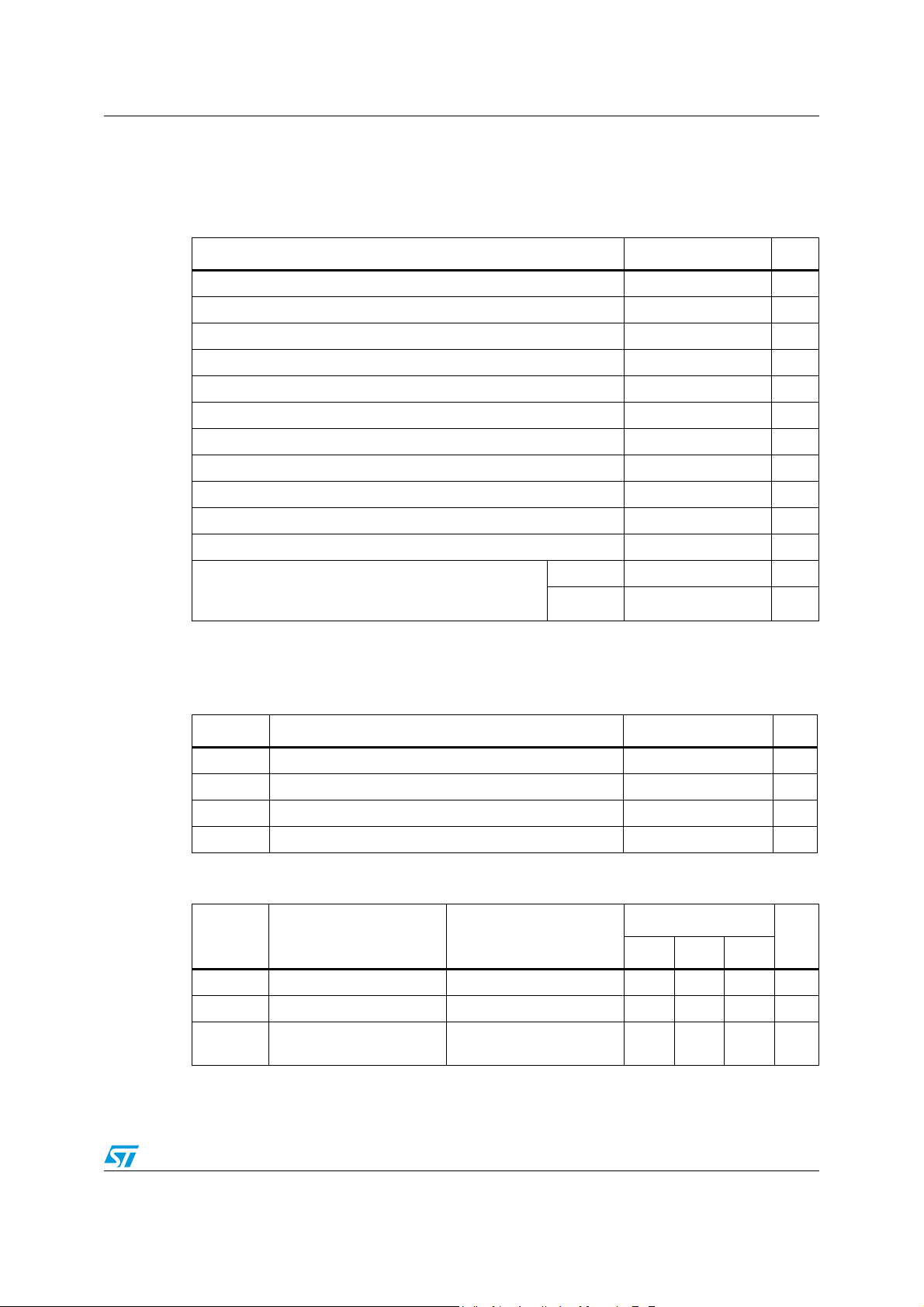
4 Maximum ratings
Table 3. Absolute maximum ratings
Parameter Value Unit
V5SW, LDO5 to PGND -0.3 to 6 V
VIN to PGND -0.3 to 36 V
HGATEx and BOOTx, to PHASEx -0.3 to 6 V
PHASEx to PGND -0.6
CSENSEx, to PGND -0.6 to 42 V
CSENSEx to BOOTx -6 to 0.3 V
LGATEx to PGND -0.3
FBx, COMPx, SKIP, FSEL,VREF to SGND, LDO FB -0.3 to Vcc+0.3 V
PGND to SGND -0.3 to 0.3 V
SHDN, PGOODx, OUTx, VCC, ENx to SGND -0.3 to 6 V
Power dissipation at T
Maximum withstanding voltage range test condition:
= 25 °C 2.8 W
A
VIN ±1000 V
CDF-AEC-Q100-002- “human body model” acceptance
criteria: “normal performance”
Other pins ±2000
(1)
to36
(2)
to LDO5 +0.3
V
V
1. PHASE to PGND up to -2.5 V for t < 10 ns
2. LGATEx to PGND up to -1 V for t < 40 ns
Table 4. Thermal data
Symbol Parameter Value Unit
T
R
STG
thJA
T
T
Storage temperature range -50 to 150 °C
Thermal resistance junction to ambient 35 °C/W
Junction operating temperature range -40 to 125 °C
J
Operating ambient temperature range -40 to 85 °C
A
Table 5. Recommended operating conditions
Val ue
Symbol Parameter Test condition
Min Typ Max
VIN Input voltage range LDO5 in regulation 5.5 36 V
VCC IC supply voltage 4.5 5.5 V
V
maximum operating
V
V5SW
V5SW
range
5.5 V
Unit
9/47
Page 10
Electrical characteristics PM6681A
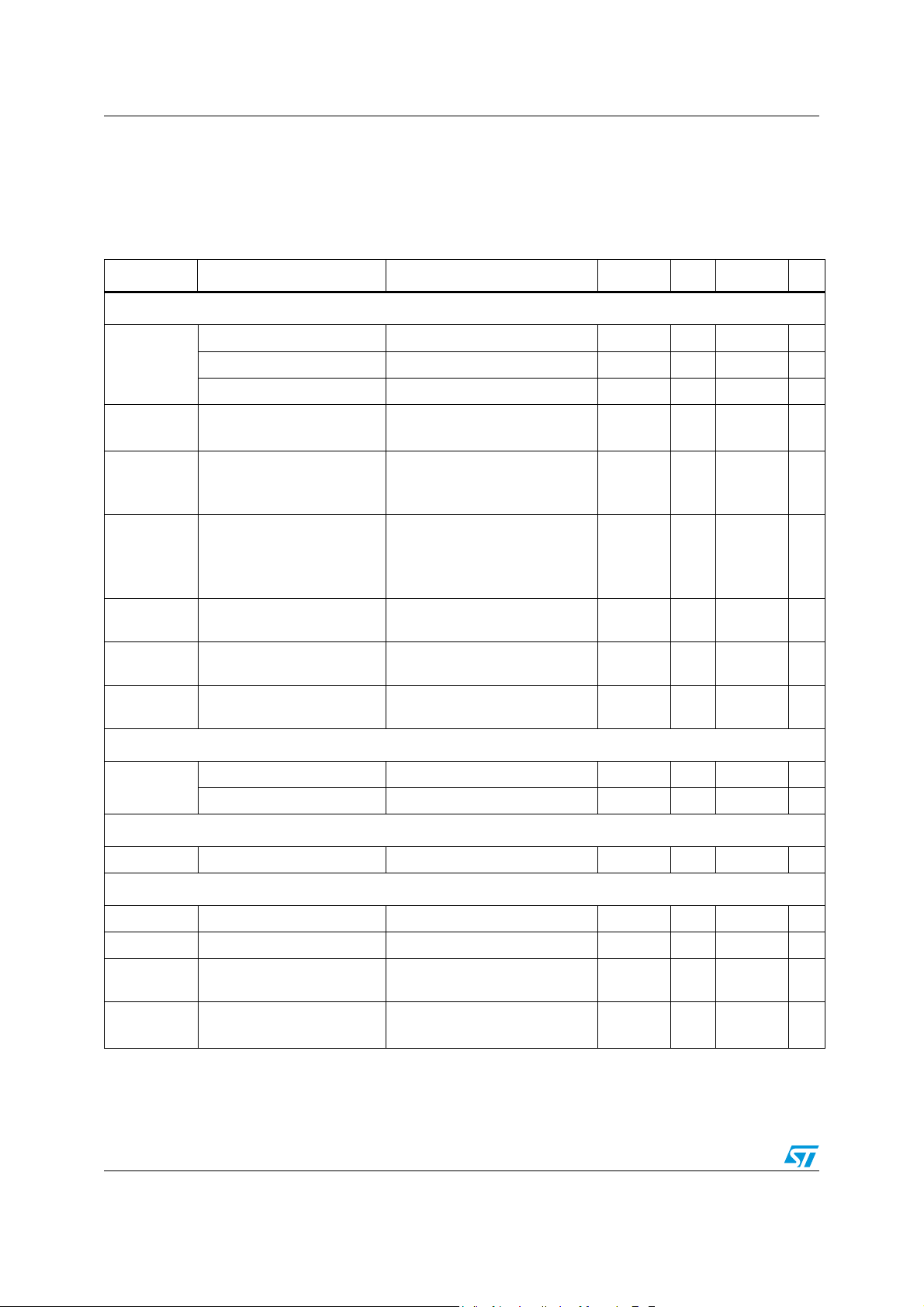
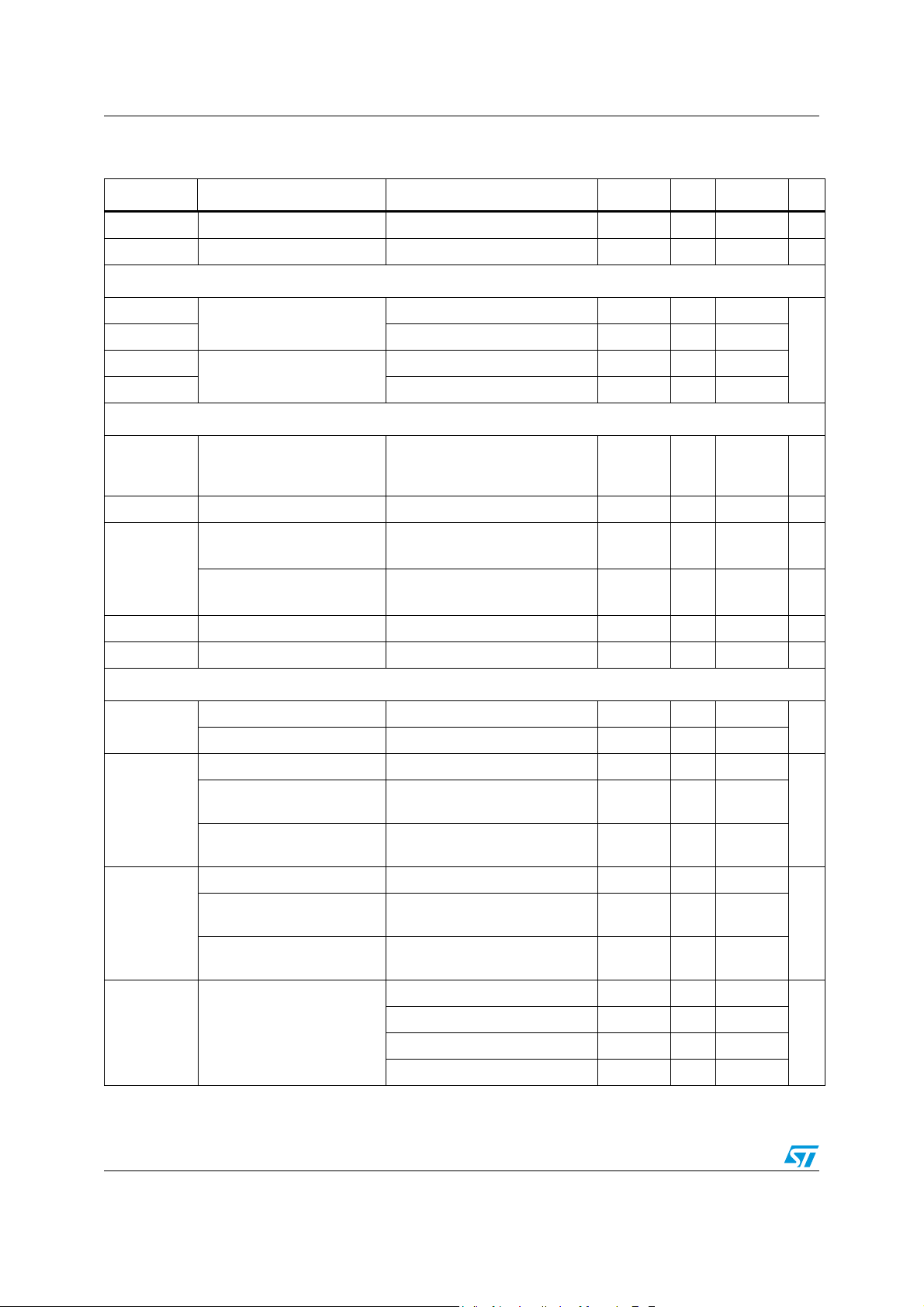
5 Electrical characteristics
Table 6. Electrical characteristics
(V
= 24 V; TJ = 25 °C, unless otherwise specified)
IN
Symbol Parameter Test condition Min Typ Max Unit
Supply section
Turn-on voltage threshold 4.8 4.9 V
V
V5SW
R
DS(on)
Turn-off voltage threshold 4.6 4.75 V
Hysteresis 20 50 mV
LDO5 internal bootstrap
switch resistance
V5SW > 4.9 V 1.8 3 Ω
OUTx, OUTx
discharge-mode
18 25 Ω
On-resistance
OUTx, OUTx
discharge-mode
Synchronous rectifier
0.20.350.6 V
turn-on level
Pin
Ish
Isb
Operating power
consumption
Operating current sunk by
V
IN
Operating current sunk by
V
IN
Shutdown section
Device on threshold 1.2 1.5 1.7 V
V
SHDN
Device off threshold 0.8 0.85 0.9 V
soft-start section
soft-start ramp time 2 3.5 ms
Current limit and zero crossing comparator
I
CSENSE
Input bias current limit
(1)
Comparator offset V
Zero crossing comparator
offset
Fixed negative current limit
threshold
FBx > VREF, Vref in regulation,
V5WS to 5 V
4mW
SHDN connected to GND 20 30 µA
ENx to GND, V5SW to GND 250 380 µA
90 100 110 µA
CSENSE
V
PGND
V
PGND
- V
- V
- V
PHASE
PHASE
PGND
-6 6 mV
-1 11 mV
-120 mV
10/47
Page 11

PM6681A Electrical characteristics
Table 6. Electrical characteristics
(V
= 24 V; TJ = 25 °C, unless otherwise specified) (continued)
IN
Symbol Parameter Test condition Min Typ Max Unit
On time pulse width
FSEL to GND
575 680 785
OUT1 = 3.3 V
195 230 265
390 460 530
145 175 205
285 340 395
To n
On time duration_
@VIN = 24 V
OUT2 = 1.8 V
FSEL to VREF
OUT1 = 3.3 V
OUT2 = 1.8 V
FSEL to LDO5
OUT1 = 3.3 V
OUT2 =1.8 V
110 135 160
OFF time
T
OFFMIN
Minimum off time
@VIN = 24 V
350 500 ns
Voltag e refe r e n c e
V
REF
Voltage accuracy 4 V < V
Load regulation -100 µA< I
Undervoltage lockout fault
threshold
Falling edge of REF 0.95 mV
< 5.5 V 1.224 1.236 1.249 V
LDO5
< 100 µA-4 4mV
REF
Integrator
FB Voltage accuracy +891 +909 mV
FB Input bias current
(1)
0.1 µA
COMP Over voltage clamp Normal mode 250
COMP Under voltage clamp -150
ns
mV
Line regulation
LDO5 linear regulator
V
LDO5
LDO5 linear output voltage
LDO5 line regulation 6 V < VIN < 36 V, I
I
LDO5
U L V O
LDO5 current limit V
Under voltage lockout of
LDO5
LDO linear regulator
V
LDO
LDO linear output voltage
= 20 mA
(1)
4.9 5.0 5.1 V
,
Both SMPS, 6 V < Vin < 36 V
6 V < VIN < 36 V,
0 < I
LDO5
< 50 mA
LDO5
LDO5
> UVLO 270 330 400 mA
3.94 4 4.13 V
4.5 V< V5SW < 5.5 V
0.5 mA < I
LDO
< 50 mA
0.887 0.905 0.923 V
LDO FB connected to LDO
11/47
1%
0.004 %/V
Page 12
Electrical characteristics PM6681A
Table 6. Electrical characteristics
(V
= 24 V; TJ = 25 °C, unless otherwise specified) (continued)
IN
Symbol Parameter Test condition Min Typ Max Unit
I
LDO
I
LDO FB
LDO current limit 170 220 270 mA
Input bias current
(1)
0.1 µA
High and low gate drivers
HGATEx high state (pull-up) 2.0 3
HGATE driver on-resistance
HGATEx low state (pull-down) 1.6 2.7
LGATEx high state (pull-up) 1.4 2.1
LGATE driver on-resistance
LGATEx low state (pull-down) 0.8 1.2
PGOOD pins UVP/OVP protections
Both SMPS sections with
OVP Over voltage threshold
respect to VREF, OUT1 = 5 V,
112 116 120 %
OUT2 = 3.3 V
UVP Under voltage threshold 65 68 71 %
Upper threshold
(VFB-VREF)
107 110 113 %
PGOOD1,2
I
PGOOD1,2
V
PGOOD1,2
Lower threshold
(VFB-VREF)
PGOOD leakage current V
output low voltage I
PGOOD1,2
Sink
forced to 5.5 V 1 uA
= 4 mA 150 250 mV
88 91 94 %
Power management pins
EN1,2
SMPS disabled level
SMPS enabled level
Frequency selection range Low level
(1)
(1)
(1)
0.8
2.4
0.5
Ω
V
V
FSEL
SKIP
1. by design
Pulse skip mode
Ultrasonic mode
PWM mode
Input leakage current
(1)
(1)
V
LDO5
V
LDO5
1.0
-
0.8
1.0
-
Middle level
High level
(1)
(1)
(1)
0.8
= 0 to 5 V 1
V
EN1,2
V
= 0 to 5 V 1
SKIP
= 0 to 5 V 1
V
SHDN
V
= 0 to 5 V 1
FSEL
LDO5
V
LDO5
-
1.5
0.5
-
1.5
12/47
V
V
µA
Page 13
PM6681A Typical operating characteristics
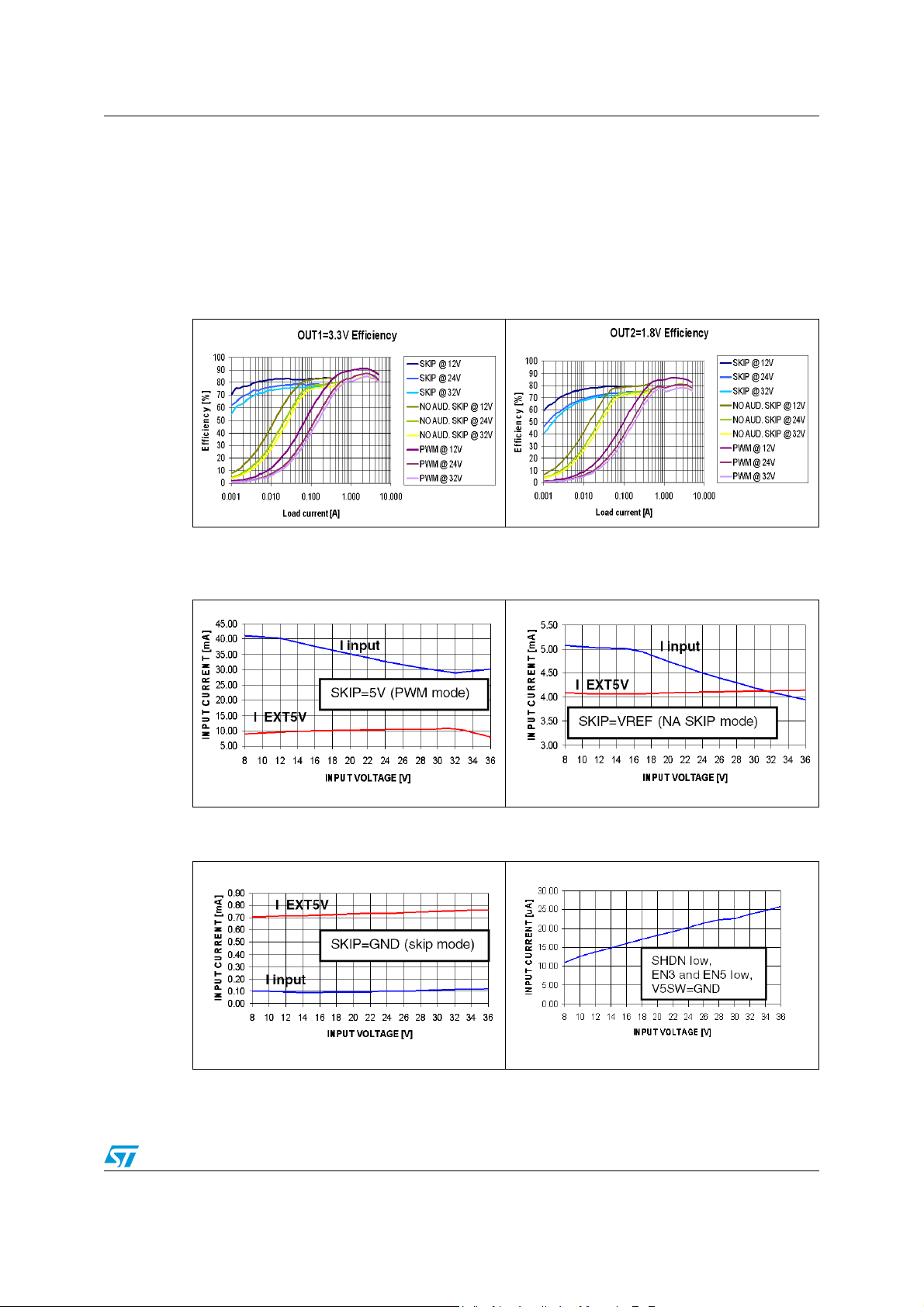
6 Typical operating characteristics
(FSEL = GND (200/300 kHz), SKIP = GND (skip mode), V5SW = EXT5 V (external 5 V
power supply connected), input voltage VIN = 24 V, SHDN, EN1 and EN2 high,
OUT1 = 3.3 V, OUT2 = 1.8 V, no load, LDO = 3.3 V, (LDO_FB divider = 5.6 k and 15 k)
unless specified)
Figure 4. Efficiency vs current load Figure 5. Efficiency vs current load
\
Figure 6. PWM no load battery current
vs input voltage
\
Figure 7. No-audible skip no load
battery current vs input
voltage
Figure 8. Skip no load battery current
\
vs input voltage
13/47
Figure 9. Shutdown mode input battery
current vs input voltage
Page 14
Typical operating characteristics PM6681A
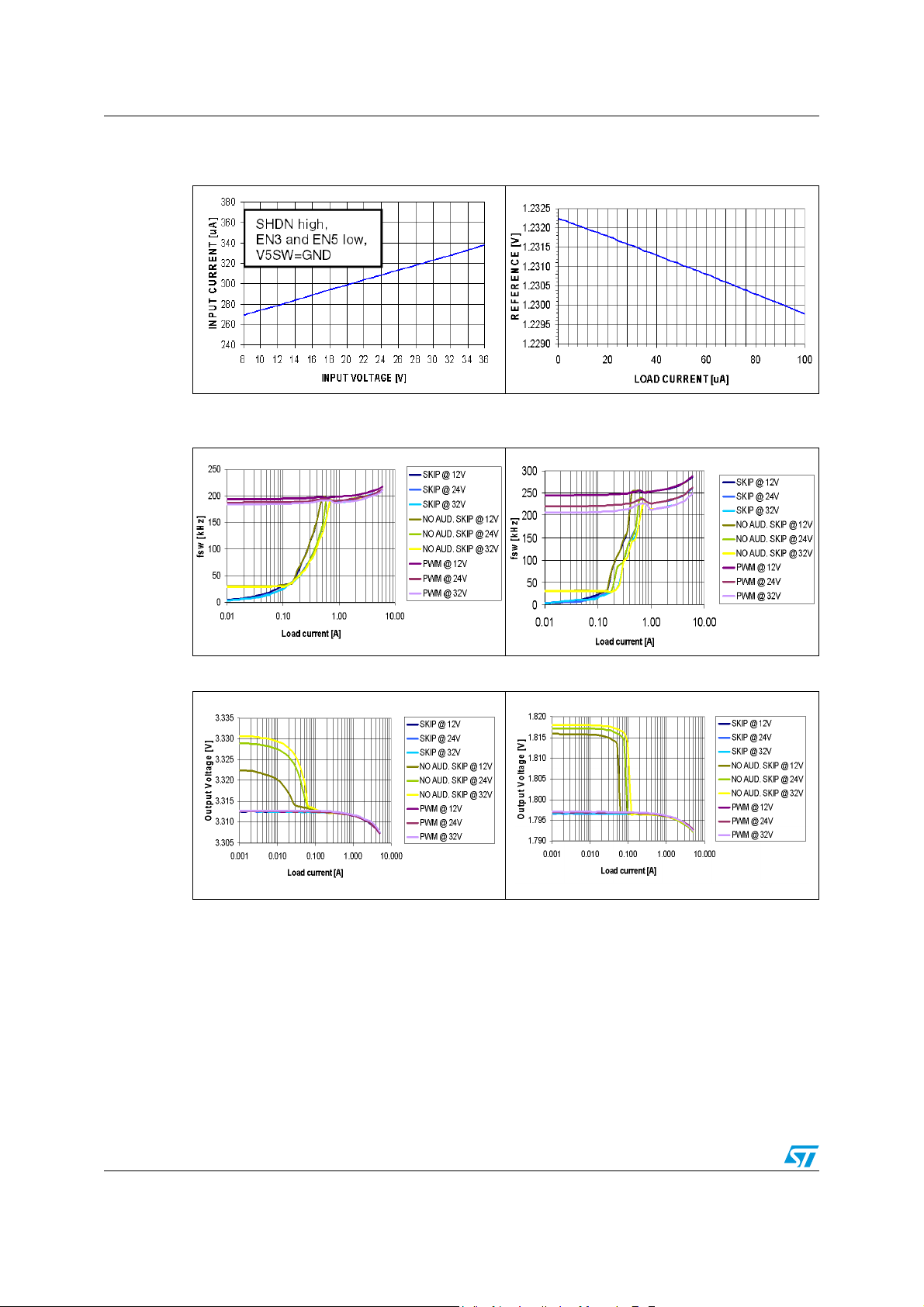
Figure 10. Standby mode input battery
\
current vs input voltage
Figure 12. OUT1 = 3.3 V switching
\
frequency
Figure 11. Voltage reference vs load
current
Figure 13. OUT2 = 1.8 V switching
frequency
Figure 14. OUT1 = 3.3 V load regulation Figure 15. OUT2 = 1.8 V load regulation
\
14/47
Page 15
PM6681A Typical operating characteristics
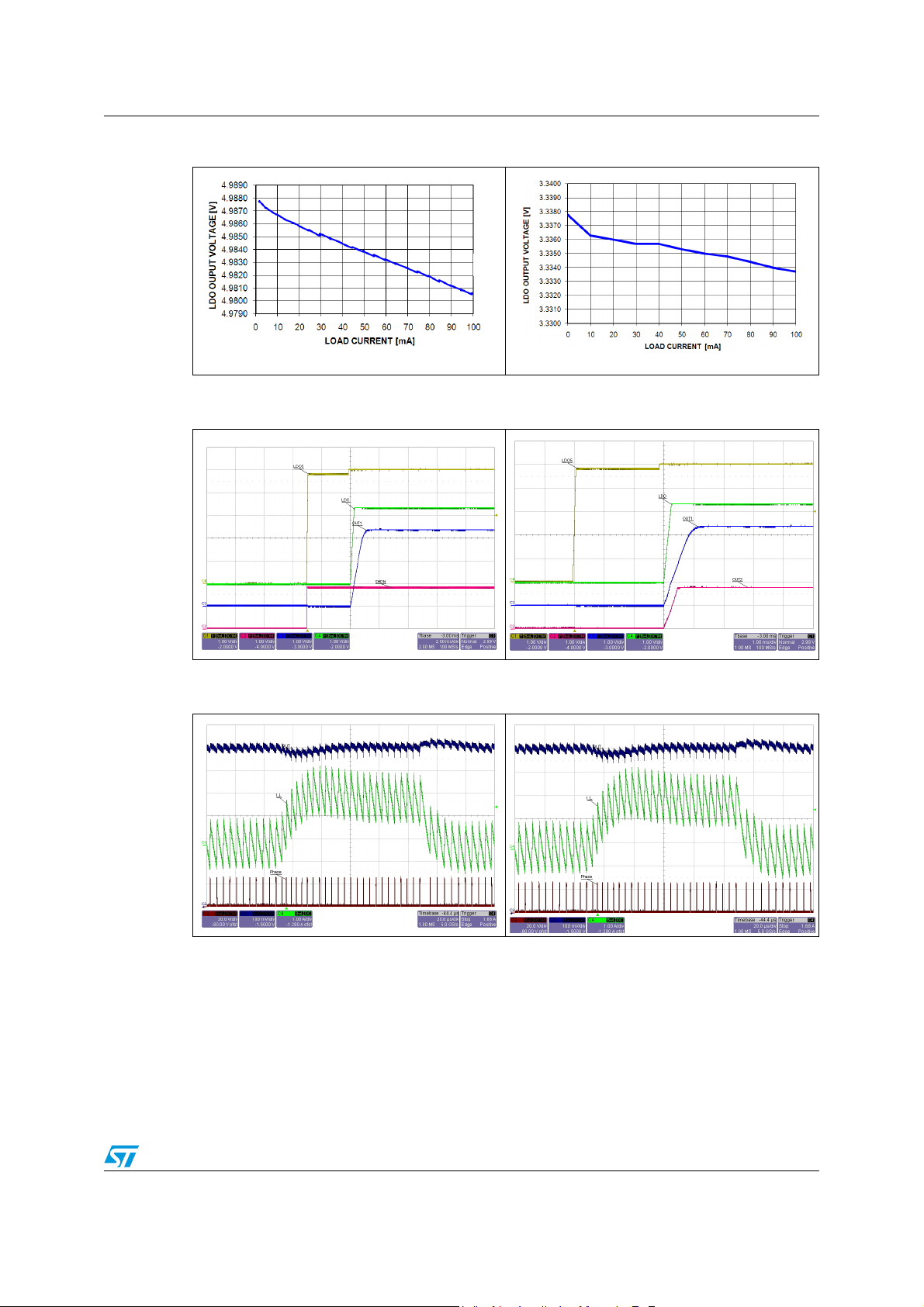
Figure 16. LDO5 vs output current Figure 17. LDO vs output current
\
Figure 18. SHDN, OUT1, LDO and LDO5
\
power-up
Figure 19. OUT1, OUT2, LDO and LDO5
power-up
Figure 20. OUT1 = 3.3 V load transient
\
0 to 2 A
Figure 21. OUT2 = 1.8 V load transient
0 to 2 A
15/47
Page 16

Typical operating characteristics PM6681A
Figure 22. 3.3 V soft-start (1 Ω load) Figure 23. 1.8 V soft-start (0.6 Ω load)
\
Figure 24. OUT1 = 3.3 V
\
soft-end (no load)
Figure 25. OUT2 = 1.8 V
soft-end (no load)
Figure 26. OUT1 = 3.3 V soft-end
\
(0.8 Ω load)
Figure 27. OUT2 = 1.8 V soft-end
(0.6 Ω load)
16/47
Page 17

PM6681A Typical operating characteristics
Figure 28. 3.3 V no-audible skip mode Figure 29. 1.8 V no-audible skip mode
\
17/47
Page 18

Device description PM6681A
7 Device description
The PM6681A is a dual step-down controller dedicated to provide logic voltages for
industrial automation application and notebook computer.
It is based on a constant on time control architecture. This type of control offers a very fast
load transient response with a minimum external component count. A typical application
circuit is shown in Figure 1. The PM6681A regulates two adjustable output voltages: OUT1
and OUT2. The switching frequency of the two sections can be adjusted to three different
values. In order to maximize the efficiency at light load condition, a pulse skipping mode can
be selected. The PM6681A includes also a 5 V linear regulator (LDO5) that can power the
switching drivers. If the output OUT1 regulates 5 V, in order to maximize the efficiency in
higher consumption status, the linear regulator can be turned off and their outputs can be
supplied directly from the switching outputs. Moreover, the PM6681A includes also a linear
regulator with an output voltage adjustable from 0.9 V to 3.3 V. It can provide 100 mA of
peak current. The PM6681A provides protection versus overvoltage, undervoltage and
overtemperature as well as
An external 1.237 V reference is available.
Power Good signals for monitoring purposes.
7.1 Constant on time PWM control
If the SKIP pin is tied to 5 V, the device works in PWM mode. Each power section has an
independent on time control.The PM6681A employees a pseudo-fixed switching frequency,
constant on time (COT) controller as core of the switched mode section. Each power section
has an independent COT control.
The COT controller is based on a relatively simple algorithm and uses the ripple voltage due
to the output capacitor's ESR to trigger the fixed on-time one-shot generator. In this way, the
output capacitor's ESR acts as a current sense resistor providing the appropriate ramp
signal to the PWM comparator. On-time one-shot duration is directly proportional to the
output voltage, sensed at the OUT1/OUT2 pins, and inversely proportional to the input
voltage, sensed at the VIN pin, as follows:
Equation 1
KT
on
This leads to a nearly constant switching frequency, regardless of input and output voltages.
When the output voltage goes lower than the regulated voltage Vreg, the on-time one shot
generator directly drives the high side MOSFET for a fixed on time allowing the inductor
current to increase; after the on time, an off time phase, in which the low side MOSFET is
turned on, follows. Figure 30 shows the inductor current and the output voltage waveforms
in PWM mode.
×=
Vout
Vin
18/47
Page 19

PM6681A Device description
T
Figure 30. Constant on time PWM control
".W
)NDUCTOR
CURRENT
/UTPUT
VOLTAGE
6REG
$#ERR OR
4
4
F
The duty cycle of the buck converter in steady state is:
Equation 2
Vout
D =
Vin
The PWM control works at a nearly fixed frequency fSW:
Equation 3
Vout
D
f =
sw
T
on
Vin
==
Vout
K
×
on
Vin
1
K
on
As mentioned the steady state switching frequency is theoretically independent from battery
voltage and from output voltage.
Actually the frequency depends on parasitic voltage drops that are present during the
charging path (high side switch resistance, inductor resistance (DCR) and discharging path
(low side switch resistance, DCR).
As a result the switching frequency increases as a function of the load current.
Standard switching frequency values can be selected for both sections by connecting pin
FSEL to SGND, VREF or LDO5 pin. The following table shows the typical switching
frequencies that can be obtained as a function of the programmed output voltage. The
measures are referred to switching sections with 2 A load, 12 V input voltage and working in
continuous conduction mode.
Table 7. FSEL pin selection: typical switching frequency
Fsw @ OUT1 = 1.5 V (kHz) Fsw @ OUT2 = 1.05 V (kHz)
FSEL = GND 200 325
FSEL = VREF 290 425
FSEL = LDO5 390 590
19/47
Page 20

Device description PM6681A
7.2 Constant on time architecture
Figure 31 shows the simplified block diagram of a constant on time controller. A minimum
off-time constrain (350 ns typ.) is introduced to allow inductor valley current sensing on
synchronous switch. A minimum on-time (130 ns) is also introduced to assure the start-up
switching sequence.
PM6681A has a one-shot generator for each power section that turns on the high side
MOSFET when the following conditions are satisfied simultaneously: the PWM comparator
is high, the synchronous rectifier current is below the current limit threshold, and the
minimum off-time has timed out.
Once the on-time has timed out, the high side switch is turned off, while the synchronous
switch is turned on according to the anti-cross conduction circuitry management.
When the negative input voltage at the PWM comparator (
down replica of the output voltage (see the external R1/R2 divider in
Figure 31), which is a scaled-
Figure 32), reaches the
valley limit (determined by internal reference Vr = 0.9 V), the low-side MOSFET is turned off
according to the anti-cross conduction logic once again, and a new cycle begins.
Figure 31. Constant on-time block diagram
4OF F M I N
"//4
"//4
"//4
#3%.3%
#3%.3%
#3%.3%
#3%.3%
#/-0
#/-0
#/-0
#/-0
/54
/54
/54
/54
3+)0
3+)0
3+)0
3+)0
&"
&"
&"
&"
6).
6).
6).
6).
0OSITIVE
#URRENT
,IMIT
6R
07-
GM
GM
GM
GM
6R
#OMPARATOR
6
6
3
3
2
2
4ON
:ERO CROSS
#O
MP
1
1
1
1
123
123
,$/
,$/
,$/
,$/
6
6
6
,EVEL
SHIFTER
BANDGAP
6
6R
(3
DRIVER
6
66
,$/
,3
,3
,3
,3
DRIVER
DRIVER
DRIVER
DRIVER
"//4
('!4%
('!4%
('!4%
('!4%
0(!3%
0(!3%
0(!3%
0(!3%
,'!4%
0'.$
0'.$
0'.$
0'.$
62%&
62%&
62%&
62%&
!-V
7.3 Output ripple compensation and loop stability
In a classic constant on time control, the system regulates the valley value of the output
voltage and not the average value, as shown in
voltage ripple is source of a DC static error.
To compensate this error, an integrator network can be introduced in the control loop, by
connecting the output voltage to the COMP1/COMP2 (for the OUT1 and OUT2 sections
respectively) pin through a capacitor CINT as in
20/47
Figure 30. In this condition, the output
Figure 32.
Page 21

PM6681A Device description
Figure 32. Circuitry for output ripple compensation
#/-00).
6/,4 !'%
6R
/54054
6/,4 !'%
ǻ 6
T
$
ǻ 6
T
#
&),4
#
2
,
2
/54
/54
#
#/-0
).4
6
#
).4
).4
/54
2
2
)GM6 6R
6R
&"
6R
GM
6
07-
#OMPARATOR
!-V
The integrator amplifier generates a current, proportional to the DC errors between the FB
voltage and Vr, which decreases the output voltage in order to compensate the total static
error, including the voltage drop on PCB traces. In addition, CINT provides an AC path for
the output ripple. In steady state, the voltage on COMP1/COMP2 pin is the sum of the
reference voltage Vr and the output ripple (see
Figure 32). In fact when the voltage on the
COMP pin reaches Vr, a fixed Ton begins and the output increases.
For example, we consider Vout = 5 V with an output ripple of ∆V = 50 mV. Considering C
>> C
C
, the C
FILT
assures an AC path for the output voltage ripple. Then the COMP pin ripple is a replica
INT
DC voltage drop V
INT
of the output ripple, with a DC value of Vr + 25 mV = 925 mV.
For more details about the output ripple compensation network, see the paragraph “Closing
the integrator loop” in the design guidelines.
In steady state the FB pin voltage is about Vr and the regulated output voltage depends on
the external divider:
Equation 4
7.4 Pulse skip mode
If the SKIP pin is tied to ground, the device works in skip mode.
At light loads a zero-crossing comparator truncates the low-side switch on-time when the
inductor current becomes negative. In this condition the section works in discontinuous
conduction mode. The threshold between continuous and discontinuous conduction mode
is:
is about 5 V - Vr + 25 mV = 4.125 V.
CINT
⎛
⎜
⎜
⎝
⎞
R
2
⎟
+×=
1VrOUT
⎟
R
1
⎠
INT
21/47
Page 22

Device description PM6681A
×
∼
Equation 5
−
VV
=
)SKIP(ILOAD ×
OUTIN
T
L2
ON
For higher loads the inductor current doesn't cross the zero and the device works in the
same way as in PWM mode and the frequency is fixed to the nominal value.
Figure 33. PWM and pulse skip mode inductor current
07-MODE 0ULSESKIPMODE
)NDUCTORCURRENT
4O
N4OFF
Figure 33
shows inductor current waveforms in PWM and SKIP mode. In order to keep
average inductor current equal to load current, in SKIP mode some switching cycles are
skipped. When the output ripple reaches the regulated voltage Vreg, a new cycle begins.
The off cycle duration and the switching frequency depend on the load condition.
As a result of the control technique, losses are reduced at light loads, improving the system
efficiency.
7.5 No-audible skip mode
If SKIP pin is tied to VREF, a no-audible skip mode with a minimum switching frequency of
33 kHz is enabled. At light load condition, If there is not a new switching cycle within a 30 µs
(typ.) period, a no-audible skip mode cycle begins.
,OADC URRENT
4ON4ON
,OZSIDEON
4ON
4OFF
,OZSIDEOFF
4IME
!-V
Figure 34. No audible skip mode
Inductor current
No audible skip mode
30us
0
Tim e
Low side
22/47
Page 23

PM6681A Device description
The low side switch is turned on until the output voltage crosses about Vreg+1 %. Then the
high side MOSFET is turned on for a fixed on time period. Afterwards the low side switch is
enabled until the inductor current reaches the zero-crossing threshold. This keeps the
switching frequency higher than 33 kHz. As a consequence of the control, the regulated
voltage can be slightly higher than Vreg (up to 1 %).
If, due to the load, the frequency is higher than 33 kHz, the device works like in skip mode.
No-audible skip mode reduces audio frequency noise that may occur in pulse skip mode at
very light loads, keeping the efficiency higher than in PWM mode.
7.6 Current limit
The current-limit circuit employs a “valley” current-sensing algorithm. During the conduction
time of the low side MOSFET the current flowing through it is sensed. The current-sensing
element is the low side MOSFET on-resistance (
Figure 35).
Figure 35. R
sensing technique
DS(on)
(3
,3
2#3%.3%
2
$3
!-V
('!4%
0(!3%
#3%.3%
,'!4%
ON
An internal 100 µA current source is connected to CSENSE pin and determines a voltage
drop on R
CSENSE
. If the voltage across the sensing element is greater than this voltage
drop, the controller doesn't initiate a new cycle. A new cycle starts only when the sensed
current goes below the current limit.
Since the current limit circuit is a valley current limit, the actual peak current limit is greater
than the current limit threshold by an amount equal to the inductor ripple current. Moreover
the maximum output current is equal to the valley current limit plus half of the inductor ripple
current:
Equation 6
LvalleyLOAD
2
∆
I
L
+=
I(max)I
The output current limit depends on the current ripple, as shown in Figure 36:
23/47
Page 24

Device description PM6681A
×
Figure 36. Current waveforms in current limit conditions
Curre nt
DC current limit = maximum load
Inductor cur rent
Val ley c urrent th re sho ld
Maximum load curre nt is
influenced by the inductor
current ripple
Time
Being fixed the valley threshold, the greater the current ripple is, greater the DC output
current is:
The valley current limit can be set with resistor R
Equation 7 (R
Where I
CSENSE
= 100 µA, R
DS(on)
R
sensing technique)
DS(on)
CSENSE
is the drain-source on resistance of the low side switch.
CSENSE
=
I
CSENSE
Consider the temperature effect and the worst case value in R
:
IR
LvalleyDSon
calculation.
DS(on)
The accuracy of the valley current threshold detection depends on the offset of the internal
comparator (∆V
) and on the accuracy of the current generator(∆I
OFF
CSENSE
):
Equation 8
I
Where R
∆
Lvalley
I
Lvalley
is the sensing element (R
SNS
=
I
∆
CSENSE
I
CSENSE
⎡
+
⎢
⎣
V
∆
OFF
×
DS(on)
IR
CSENSECSENSE
).
×
100
⎤
R
∆
CSENSE
+
⎥
R
CSENSE
⎦
R
∆
SNS
+
R
SNS
PM6681A provides also a fixed negative peak current limit to prevent an excessive reverse
inductor current when the switching section sinks current from the load in PWM mode. This
negative current limit threshold is measured between PHASE and SGND pins, comparing
the magnitude drop on the PHASE node during the conduction time of the low side
MOSFET with an internal fixed voltage of 120 mV.
The negative valley-current limit INEG (if the device works in PWM mode) is given by:
Equation 9
I =
NEG
24/47
R
mV120
DSon
Page 25

PM6681A Device description
7.7 soft-start and soft-end
Each switching section is enabled separately by asserting high EN1/EN2 pins respectively.
In order to realize the soft-start, at the startup the overcurrent threshold is set 25 % of the
nominal value and the undervoltage protection (see related sections) is disabled. The
controller starts charging the output capacitor working in current limit. The overcurrent
threshold is increased from 25 % to 100 % of the nominal value with steps of 25 % every
700 µs (typ.). After 2.8 ms (typ.) the undervoltage protection is enabled. The s oft start time
is not programmable. A minimum capacitor C
any overshoot on the output:
Equation 10
is required to ensure a soft-start without
INT
C ×
≥
INT
I
Lvalley
4
uA6
+
C
out
I
∆
L
2
Figure 37. Soft-start waveforms
Switching
Current limit thres hold
Time
EN1 /EN2
When a switching section is turned off (EN1/EN2 pins low), the controller enters in soft-end
mode. The output capacitor is discharged through an internal 18 Ω P-MOSFET switch;
when the output voltage reaches 0.3 V, the low-side MOSFET turns on, keeping the output
to ground. The soft-end time also depends on load condition.
7.8 Gate drivers
The integrated high-current drivers allow to use different power MOSFETs. The high side
driver MOSFET uses a bootstrap circuit which is indirectly supplied by LDO5 output. The
BOOT and PHASE pins work respectively as supply and return rails for the HS driver.
The low side driver uses the internal LDO5 output for the supply rail and PGND pin as return
rail.
An important feature of the gate drivers is the adaptive anti-cross conduction protection,
which prevents high side and low side MOSFETs from being on at the same time. When the
25/47
Page 26

Device description PM6681A
high side MOSFET is turned off the voltage at the phase node begins to fall. The low side
MOSFET is turned on when the voltage at the phase node reaches an internal threshold.
When the low side MOSFET is turned off, the high side remains off until the LGATE pin
voltage goes approximately under 1 V.
The power dissipation of the drivers is a function of the total gate charge of the external
power MOSFETs and the switching frequency, as shown in the following equation:
Equation 11
fQVP ××=
swgdriverdriver
Where V
is the 5 V driver supply.
driver
Reference voltage and bandgap
The 1.237 V (typ.) internal bandgap voltage is accurate to 1 % over the temperature range.
It is externally available (VREF pin) and can supply up to 100 µA and can be used as a
voltage threshold for the multifunction pins FSEL and SKIP to select the appropriate working
mode. Bypass VREF to ground with a 100 nF minimum capacitor.
If VREF goes below 0.87 V (typ.), the system detects a fault condition and all the circuitry is
turned off. A toggle on the input voltage (power on reset) or a toggle on SHDN pin is
necessary to restart the device.
An internal divider of the bandgap provides a voltage reference Vr of 0.9 V. This voltage is
used as reference for the linear and the switching regulators outputs. The overvoltage
protection, the undervoltage protection and the
7.9 Internal linear regulators
The PM6681A has two linear regulators providing respectively 5 V (LDO5) and an
adjustable voltage (LDO) at ± 2 % accuracy. High side drivers, low side drivers and
MOSFETs of internal circuitry are supplied by LDO5 output through VCC pin (an external
RC filter may be applied between LDO5 and VCC). The linear regulator can provide an
average output current of 50 mA and a peak output current of 100mA. Bypass LDO5 output
with a minimum 1 µF ceramic capacitor and a 4,7 µF tantalum capacitor (ESR
5 V output goes below 4 V, the system detects a fault condition and all the circuitry is turned
off. A power on reset or a toggle on SHDN pin is necessary to restart the device.
Power Good signals are referred to Vr.
≥ 2 Ω). If the
V5SW pin allows to keep the 5 V linear regulator always active or to enable the internal
bootstrap-switch over function: if the 5 V switching output is connected to V5SW, when the
voltage on V5SW pin is above 4.8 V, an internal 3.0 Ω max P-channel MOSFET switch
connects V5SW pin to LDO5 pin and simultaneously LDO5 shuts down. This configuration
allows to achieve higher efficiency. V5SW can be connected also to an external 5 V supply.
LDO5 regulator turns off and LDO5 is supplied externally. If V5SW is connected to ground,
the internal 5 V regulator is always on and supplies LDO5 output.
26/47
Page 27

PM6681A Device description
Table 8. V5SW multifunction pin
V5SW Description
GND The 5 V linear regulator is always turned on and supplies LDO5 output.
Switching 5 V
output
External 5 V
supply
The 5 V linear regulator is turned off when the voltage on V5SW is above 4.8 V and
LDO5 output is supplied by the switching 5 V output.
The 5 V linear regulator is turned off when the voltage on V5SW is above 4.8 V and
LDO5 output is supplied by the external 5 V.
The adjustable linear regulator is supplied by LDO5 output. It turns on after LDO5 power up
sequence.
It can provide up to 100 mA peak current. Set up the feedback resistor divider according to
the following formula, to regulate a voltage from 0.9 V to 3.3 V.
Equation 12
R
⎛
⎜
+×=
1VLDO
r
⎜
⎝
R
up
down
⎞
⎟
⎟
⎠
where LDO is the desired output voltage, Vr = 0.9 V is the internal reference voltage and Rup
and R
are the resistors of the feedback divider, as shown in Figure 38:
down
Figure 38. LDO linear regulator
Bypass LDO5 and LDO output with 1-10 µF ceramic capacitor and a 4,7 µF tantalum
capacitor (ESR ≥ 2
Ω).
27/47
Page 28

Device description PM6681A
7.10 Power up sequencing and operative modes
Let’s consider SHDN, EN1 and EN2 low at the beginning. The battery voltage is applied as
input voltage. The device is in shutdown mode.
When the SHDN pin voltage is above the shutdown device on threshold (1.5 V typ.), the
controller begins the power-up sequence. All the latched faults are cleared. LDO5
undervoltage control is blanked for 4 ms and the internal regulator LDO5 turns on. If the
LDO5 output is above the UVLO threshold after this time, the device enters in standby mode
and the adjustable internal linear regulator LDO is turned on.
The switching outputs are kept to ground by turning on the low side MOSFETs. When EN1
and EN2 pins are forced high the switching sections begin their soft-start sequence.
Table 9. Operative modes
Mode Conditions Description
Run
Standby
Shutdown SHDN is low All circuits off.
SHDN is high,
EN1/EN2 pins are high
Both EN1/EN2 pins are low
and SHDN pin is high
Switching regulators are enabled; internal linear
regulators outputs are enabled.
Internal linear regulators active (LDO5 is always on). In
Standby mode LGATE1/LGATE2 pins are forced high
while HGATE1/HGATE2 pins are forced low.
28/47
Page 29

PM6681A Monitoring and protections
8 Monitoring and protections
8.1 Power Good signals
The PM6681A provides three independent Power Good signals: one for each switching
section (PGOOD1/PGOOD2).
PGOOD1/PGOOD2 signals are low if the output voltage is out of ± 10 % of the designed set
point or during the soft-start, standby and shutdown mode.
8.2 Thermal protection
The PM6681A has a thermal protection to preserve the device from overheating. The
thermal shutdown occurs when the die temperature goes above +150 °C. In this case all
internal circuitry is turned off and the power sections are turned off after the discharge
mode.
A power on reset or a toggle on the SHDN pin is necessary to restart the device.
8.3 Overvoltage protection
When the switching output voltage goes over the OVP threshold (about 116 % of its nominal
value), the low side MOSFET turns on. The LS MOSFET is kept on until the output voltage
returns under the OVP threshold.
8.4 Undervoltage protection
When the switching output voltage is below 70 % of its nominal value, a latched
undervoltage protection occurs. In this case the switching section is immediately disabled
and both switches are open. The controller enters in soft-end mode and the output is
eventually kept to ground, turning low side MOSFET on. The undervoltage circuit protection
is enabled only at the end of the soft-start. Once an overvoltage protection has been
detected, a toggle on SHDN, EN1/EN2 pin or a power on reset is necessary to clear the
undervoltage fault and starts with a new soft-start phase.
Table 10. Protections and operatives modes
Mode Conditions Description
Overvoltage
protection
Undervoltage
protection
Thermal
shutdown
OUT1/OUT2 > 115 % of
the nominal value
OUT1/OUT2 < 70 % of the
nominal value
> +150 °C
T
J
LGATE1/LGATE2 pin is forced high until the output
voltage is over the OVP threshold, LDO5 remains
active.
LGATE1/LGATE2 is forced high after the soft-end
mode, LDO5 remains active. Exit by a power on reset
or toggling SHDN or EN1/EN2
All circuitry off. Exit by a POR on VIN or toggling
SHDN.
29/47
Page 30

Design guidelines PM6681A
9 Design guidelines
The design of a switching section starts from two parameters:
● Input voltage range: in notebook applications it varies from the minimum battery
voltage, V
● Maximum load current: it is the maximum required output current, I
9.1 Switching frequency
It's possible to set 3 different working frequency ranges for the two sections with FSEL pin
(table 1).
Switching frequency mainly influences two parameters:
● Inductor size: for a given saturation current and RMS current, greater frequency allows
to use lower inductor values, which means smaller size.
● Efficiency: switching losses are proportional to frequency. High frequency generally
involves low efficiency.
to the AC adapter voltage, V
INmin
INmax
.
LOAD(max)
.
9.2 Inductor selection
Once that switching frequency is defined, inductor selection depends on the desired
inductor ripple current and load transient performance.
Low inductance means great ripple current and could generate great output noise. On the
other hand, low inductor values involve fast load transient response.
A good compromise between the transient response time, the efficiency, the cost and the
size is to choose the inductor value in order to maintain the inductor ripple current ∆I
between 20 % and 50 % of the maximum output current I
occurs at the maximum input voltage. With this considerations, the inductor value can be
calculated with the following relationship:
Equation 13
where fsw is the switching frequency, VIN is the input voltage, V
∆IL is the selected inductor ripple current.
In order to prevent overtemperature working conditions, inductor must be able to provide an
RMS current greater than the maximum RMS inductor current I
Equation 14
VV
−
L ×
=
OUTIN
If
∆×
Lsw
V
OUT
V
LOAD(max)
IN
. The maximum ∆IL
is the output voltage and
OUT
:
LRMS
L
(max))I(I
LOADLRMS
Where ∆I
30/47
is the maximum ripple current:
L(max)
L
+=
12
2
(max))I(
∆
2
Page 31

PM6681A Design guidelines
∆×=
Equation 15
I
L
(max)
VV
−
sw
OUTmaxIN
Lf
×
=∆
V
OUT
×
V
`
maxIN
If hard saturation inductors are used, the inductor saturation current should be much greater
than the maximum inductor peak current I
peak
:
Equation 16
(max)I
∆
(max)II
LOADpeak
L
+=
2
Using soft saturation inductors it's possible to choose inductors with saturation current limit
nearly to I
. Below there is a list of some inductor manufacturers.
peak
Table 11. Inductor manufacturer
Manufacturer Series
Coilcraft SER1360 1 to 8 6 to 9.5 7 to 31
Coilcraft MLC 0.7 to 4.5 13.6 to 17.3 11.5 to 26
TDK RLF12560 1 to 10 7.5 to 14.4 7.5 to 18.5
Inductor value
(uH)
RMS current
(A)
Saturation current
(A)
9.3 Output capacitor
The selection of the output capacitor is based on the ESR value Rout and the voltage rating
rather than on the capacitor value Cout.
The output capacitor has to satisfy the output voltage ripple requirements. Lower inductor
value can reduce the size of the choke but increases the inductor current ripple ∆I
Since the voltage ripple V
Equation 17
A low ESR capacitor is required to reduce the output voltage ripple. Switching sections can
work correctly even with 20 mV output ripple.
However, to reduce jitter noise between the two switching sections it's preferable to work
with an output voltage ripple greater than 30 mV. If lower output ripple is required, a further
compensation network is needed (see Closing the integrator loop paragraph).
Finally the output capacitor choice deeply impacts on the load transient response (see Load
transient response paragraph). Below there is a list of some capacitor manufacturers.
RIPPLEout
is given by:
.
L
IRV
LoutRIPPLEout
31/47
Page 32

Design guidelines PM6681A
Table 12. Output capacitor manufacturer
Manufacturer Series
SANYO
Panasonic SPCAP UD, UE 100 to 470 2 to 6.3 7 to 18
POSCAP TPB,TPD,
TPE
9.4 Input capacitors selection
In a buck topology converter the current that flows into the input capacitor is a pulsed current
with zero average value. The input RMS current of the two switching sections can be roughly
estimated as follows:
Equation 18
Where D1, D2 are the duty cycles and I1, I2 are the maximum load currents of the two
sections.
Input capacitor should be chosen with an RMS rated current higher than the maximum RMS
current given by both sections.
Tantalum capacitors are good in term of low ESR and small size, but they occasionally can
burn out if subjected to very high current during the charge. Ceramic capacitors have
usually a higher RMS current rating with smaller size and they remain the best choice.
Capacitor value
(uF)
100 to 470 2.5 to 6.3 12 to 65
2
11CinRMS
Rated voltage (V) ESR max (mΩ)
2
221
)D1(ID)D1(IDI
−××+−××=
2
Below there is a list of some ceramic capacitor manufacturers.
Table 13. Input capacitor manufacturer
Manufacturer Series Capacitor value (uF) Rated voltage (V)
Tayio yuden UMK432 X5506MM-T 10 50
TDK C3225X5R1E106M 10 25
9.5 Power MOSFETs
Logic-level MOSFETs are recommended, since low side and high side gate drivers are
powered by LDO5. Their breakdown voltage VBR
In notebook applications, power management efficiency is a high level requirement. The
power dissipation on the power switches becomes an important factor in switching
selections. Losses of high-side and low-side MOSFETs depend on their working conditions.
The power dissipation of the high-side MOSFET is given by:
Equation 19
must be higher than V
DSS
PPP +=
switchingconductionDHighSide
INmax
.
32/47
Page 33

PM6681A Design guidelines
∆
=
Maximum conduction losses are approximately:
Equation 20
where R
V
RP ××=
DSonconduction
is the drain-source on resistance of the high side MOSFET. Switching losses
DS(on)
OUT
V
LOAD
minIN
2
(max)I
are approximately:
Equation 21
∆
I
L
+×
2
××
ft)
swoff
2
P
switching
I
=
LOADIN
2
2
L
−×
(max)I(V
××
ft)
(max)I(V
LOADINswon
+
where ton and toff are the switching times of the turn off and turn off phases of the MOSFET.
As general rule, high side MOSFETs with low gate charge are recommended, in order to
minimize driver losses.
Below there is a list of possible choices for the high side MOSFET.
Table 14. High side MOSFET manufacturer
Manufacturer Type Gate charge (nC) Rated reverse voltage (V)
ST STS12NH3LL 10 30
ST STS17NH3LL 18 30
The power dissipation of the low side MOSFET is given by:
Equation 22
PP
conductionDLowSide
Maximum conduction losses occur at the maximum input voltage:
Equation 23
DSonconduction
Choose a synchronous rectifier with low R
⎛
⎜
−×=
1RP ×
⎜
⎝
DS(on)
⎞
V
OUT
⎟
LOAD
⎟
V
maxIN
⎠
2
(max)I
. When high side MOSFET turns on, the fast
variation of the phase node voltage can bring up even the low side gate through its gate
drain capacitance CRSS, causing cross-conduction problems. Choose a low side MOSFET
that minimizes the ratio C
RSS/CGS
(CGS = C
ISS
- C
RSS
).
Below there is a list of some possible low side MOSFETs.
33/47
Page 34
Design guidelines PM6681A
Table 15. Low side MOSFET manufacturer
C
Manufacturer Type R
ST STS17NF3LL 5.5 0.047 30
ST STS25NH3LL 3.5 0.011 30
(mΩ) Rated reverse voltage (V)
DS(on)
RSS
C
GS
Dual N-channel MOSFETs can be used in applications with a maximum output current of
about 3 A. Below there is a list of some MOSFET manufacturers.
Table 16. Dual MOSFET manufacturer
Manufacturer Type R
ST STS8DNH3LL 25 10 30
ST STS4DNF60L 65 32 60
DS(on)
A rectifier across the low side MOSFET is recommended. The rectifier works as a voltage
clamp across the synchronous rectifier and reduces the negative inductor swing during the
dead time between turning the high-side MOSFET off and the synchronous rectifier on. It
can increase the efficiency of the switching section, since it reduces the low side switch
losses. A Schottky diode is suitable for its low forward voltage drop (0.3 V). The diode
reverse voltage must be greater than the maximum input voltage V
recovery reverse charge is preferable. Below there is a list of some Schottky diode
manufacturers.
Table 17. Schottky diode manufacturer
Manufacturer Series
ST STPS1L30M 0.34 30 0.00039
ST STPS1L20M 0.37 20 0.000075
Forward voltage
(V)
9.6 Closing the integrator loop
(mΩ) Gate charge (nC) Rated reverse voltage (V)
. A minimum
INmax
Rated reverse voltage
(V)
Reverse current
(uA)
The design of external feedback network depends on the output voltage ripple. If the ripple
is higher than approximately 30 mV, the feedback network (
Figure 39) is usually enough to
keep the loop stable.
34/47
Page 35

PM6681A Design guidelines
Figure 39. Circuitry for output ripple compensation
#/-00).
6/,4 !'%
6R
/54054
6/,4 !'%
ǻ 6
T
$
ǻ 6
T
#
&),4
#
2
,
2
/54
/54
#
#/-0
).4
6
#
).4
).4
/54
2
2
)GM6 6R
6R
&"
6R
07-
GM
6
!-V
The stability of the system depends firstly on the output capacitor zero frequency. The
following condition should be satisfied:
Equation 24
fkf
=×>
Zoutsw
where k is a design parameter greater than 3 and R
determinates the minimum integrator capacitor value C
k
××π
RC2
outout
is the ESR of the output capacitor. It
out
:
INT
Equation 25
g
C ×
>
INT
2
m
f
⎛
sw
f
−×π
⎜
⎝
Zout
k
Vr
V
⎞
OUT
⎟
⎠
where gm = 50 µs is the integrator trans conductance.
In order to ensure stability it must be also verified that:
Equation 26
g
C ×
INT
m
>
f2
×π
Vr
V
OUTZout
In order to reduce ground noise due to load transient on the other section, it is
recommended to add a resistor R
low pass filter (see
Figure 39). The cutoff frequency f
and a capacitor C
INT
that, together with C
filt
must be much greater (10 or more
CUT
times) than the switching frequency of the section:
, realize a
INT
35/47
Page 36

Design guidelines PM6681A
Equation 27
f2
CUT
1
CC
×
××π
filtINT
CC
+
filtINT
Due to the capacitive divider (C
R
INT
=
INT
, C
), the ripple voltage at the COMP pin is given by:
filt
Equation 28
C
INT
VV
RIPPLEoutRIPPLE
INT
×=
CC
+
filtINT
RIPPLEout
qV
×=
Where VRIPPLEout is the output ripple and q is the attenuation factor of the output ripple.
If the ripple is very small (lower than approximately 30 mV), a further compensation network,
named virtual ESR network, is needed. This additional part generates a triangular ripple
that is added to the ESR output voltage ripple at the input of the integrator network. The
complete control schematic is represented in
Figure 40.
Figure 40. Virtual ESR network
#/-00).
#/-00).
6/,4
!'%
¾ 6
6
R
T
6R
6R
6R
T
#
&),4
2
).4
#/-0
#/-0
#/-0
#/-0
#
).4
6R
6R
07
-
GM
6
#OMPARATOR
¾ 6
/54054
/54054
6/,4!'%
6/,4!'%
¾ 6
4./$%
4./$%
6/, 4!'%
6/, 4!'%
T
T
2
2
2
2
4
4
#2
,
$
$
$
$
2
/54
#
/54
/54
2
&"
2
!-V
The T node voltage is the sum of the output voltage and the triangular waveform generated
by the virtual ESR network. In fact the virtual ESR network behaves like a further equivalent
ESR R
A good trade-off is to design the network in order to achieve an R
ESR
.
given by:
ESR
Equation 29
V
=
RIPPLE
∆
R −
ESR
36/47
R
I
L
out
Page 37

PM6681A Design guidelines
where ∆IL is the inductor current ripple and VRIPPLE is the overall ripple of the T node
voltage. It should be chosen higher than approximately 30 mV.
The new closed loop gain depends on C
that:
Equation 30
C ×
INT
Where:
Equation 31
f
=
Z
where R
given by the virtual ESR network R
Moreover C
is the sum of the ESR of the output capacitor Rout and the equivalent ESR
TOT
ESR
must meet the following condition:
INT
Equation 32
. In order to ensure stability it must be verified
INT
g
m
>
×π
Vr
V
f2
OUTZ
1
××π
RC2
TOTout
.
fkf
=×>
Zsw
k
××π
RC2
TOTout
Where k is a free design parameter greater than 3 and determines the minimum integrator
capacitor value C
INT
:
Equation 33
g
>
C ×
INT
2
m
f
⎛
sw
−×π
⎜
k
⎝
Vr
V
⎞
OUT
f
⎟
Z
⎠
C must be selected as shown:
Equation 34
C5C×>
INT
R must be chosen in order to have enough ripple voltage on integrator input:
Equation 35
R
L
=
ESR
CR
×
R1 can be selected as follows:
37/47
Page 38

Design guidelines PM6681A
Equation 36
Example:
OUT1 = 1.5 V, f
= 12 mΩ. We choose C
R
ESR
= 290 kHz, L = 2.5 µH, Cout = 330 µF with Rout ≈ 12 mΩ. We design
SW
eq.28, 29. C = 5.6 nF by Eq.35. Then R = 36 kΩ (eq.36) and R1 = 3 kΩ (eq.37).
9.7 Other parts design
● VIN filter. A VIN pin low pass filter is suggested to reduce switching noise. The low pass
filter is shown in the next figure:
Figure 41. VIN pin filter
⎛
⎜
×
R
⎜
⎝
=
1R
−
R
= 1 nF by equations 31, 34 and C
INT
⎞
1
⎟
⎟
×π×
fC
Z
⎠
1
×π×
fC
Z
= 47 pF, R
filt
= 1 kΩ by
INT
Typical components values are: R = 3.9 Ω and C = 4.7 µF.
● VCC filter. A VCC low pass filter helps to reject switching commutations noise:
Figure 42. Inductor current waveforms
LLDD OO55
R
R
VVCCCC
C
C
38/47
Page 39

PM6681A Design guidelines
C
Typical components values are: R = 47 Ω and C = 1 µF.
● VREF capacitor. A 10 nF to 100 nF ceramic capacitor on V
pin must be added to
REF
ensure noise rejection.
● LDO5 output capacitors. Bypass the output of each linear regulator with 1 µF ceramic
capacitor closer to the LDO pin and a 4.7 µF tantalum capacitor (ESR = 2 Ω). In most
applicative conditions a 4.7 µF ceramic output capacitor can be enough to ensure
stability.
● Bootstrap circuit. The external bootstrap circuit is represented in the next figure:
Figure 43. Bootstrap circuit
D
D
RR
BBOOOO TT
C
LL
BBOOOOTT
LLDDOO 55
BBOO OOTT
PPHHAASSE
E
The bootstrap circuit capacitor value C
side MOSFET during turn on phase. A typical value is 100 nF.
The bootstrap diode D must charge the capacitor during the off time phases. The maximum
rated voltage must be higher than V
A resistor R
on the BOOT pin could be added in order to reduce noise when the phase
BOOT
node rises up, working like a gate resistor for the turn on phase of the high side MOSFET.
9.8 Design example
The following design example considers an input voltage from 7 V to 16 V. The two switching
outputs are OUT1 = 1.5 V and OUT2 = 1.05 V and must deliver a maximum current of 5 A.
The selected switching frequencies are about 290 kHz for OUT1 section and about 425 kHz
for OUT2 section (see Table 1).
9.8.1 Inductor selection
OUT1: I
We choose standard value L = 8.2 µH.
= 2.5 A, 45 % ripple current.
LOAD
must provide the total gate charge to the high
BOOT
.
INmax
−⋅
=
L µ≈
)V3.3V20(V3.3
⋅⋅⋅
5.245.0V24KHz290
H2.8
∆I
I
LRMS
= 1.16 A @ VIN = 24 V.
L(max)
= 2.53 A
39/47
Page 40

Design guidelines PM6681A
Ipeak = 2.5 A + 0.58 A = 3.08 A
OUT2 : I
= 2.5 A, 35 % ripple current.
LOAD
=
L µ≈
We choose standard value L = 4.7 µH.
∆I
I
LRMS
I
peak
= 0.89 A @ VIN = 24 V.
L(max)
= 2.513 A
= 2.5 A + 0.443 A = 2.943 A
9.8.2 Output capacitor selection
We would like to have an output ripple smaller than 25 mV.
OUT1: POSCAP 4TPE150MI
OUT2: POSCAP 6TPE220M
9.8.3 Power MOSFETs
OUT1:High side: STS5NF60L
Low side: STS7NF60L
−⋅
)V8.1V24(V8.1
⋅⋅⋅
5.235.0V24KHz425
H76.4
OUT2:High side: STS5NF60L
Low side: STS7NF60L
9.8.4 Current limit
OUT1:
(Let's assume the maximum temperature T
OUT2:
R
CSENSE
(max)I(min)I
LOADLvalley
≡ 670m25.16
A12.4
µ
A100
= 75 °C in R
max
(max)I(min)I
LOADLvalley
(min)I
∆
L
−=
2
A12.4
=
Ω≈Ω⋅
calculation)
DS(on)
(min)I
∆
L
−=
2
A2.4
=
40/47
Page 41

PM6681A Design guidelines
(Let's assume T
= 75 °C in R
max
9.8.5 Input capacitor
Maximum input capacitor RMS current is about 1.1 A. Then I
We can put two 10 µF ceramic capacitors with I
9.8.6 Synchronous rectifier
OUT1: Schottky diode STPS1L40M
OUT2: Schottky diode STPS1L40M
9.8.7 Integrator loop
(Refer to Figure 40)
OUT1: The ripple is smaller than 40mV, then the virtual ESR network is required.
= 1 nF; C
C
INT
C = 5.6 nF; R = 36 kΩ; R1 = 3 kΩ
OUT2: The ripple is smaller than 40mV, then the virtual ESR network is required.
= 47 pF; R
filt
R
CSENSE
= 1 kΩ
INT
≡ 680m25.16
calculation)
DS(on)
A2.4
µ
A100
= 1.5 A.
rms
Ω≈Ω⋅
CinRMS
> 1.1 A
C
INT
= 1 nF; C
= 110 pF; R
filt
INT
C = 5.6 nF; R = 22 kΩ; R1 = 3.3 kΩ
9.8.8 Output feedback divider
(Refer to Figure 32)
OUT1: R1 = 10 kΩ; R2 = 6.8 kΩ
OUT2: R1 = 11 kΩ; R2 = 1.8 kΩ
= 1 kΩ
41/47
Page 42

Layout guidelines PM6681A
10 Layout guidelines
The layout is very important in terms of efficiency, stability and noise of the system. It is
possible to refer to the PM6681A demonstration board for a complete layout example.
For good PC board layout follows these guidelines:
● Place on the top side all the power components (inductors, input and output capacitors,
MOSFETs and diodes). Refer them to a power ground plan, PGND. If possible, reserve
a layer to PGND plan. The PGND plan is the same for both the switching sections.
● AC current paths layout is very critical (see Figure 44). The first priority is to minimize
their length. Trace the LS MOSFET connection to PGND plan (with or without current
sense resistor RSENSE) as short as possible. Place the synchronous diode D near the
LS MOSFET. Connect the LS MOSFET drain to the switching node with a short trace.
● Place input capacitors near HS MOSFET drain. It is recommended to use the same
input voltage plan for both the switching sections, in order to put together all input
capacitors.
● Place all the sensitive analog signals (feedbacks, voltage reference and current sense
paths) on the bottom side of the board or in an inner layer. Isolate them from the power
top side with a signal ground layer, SGND. Connect the SGND and PGND plans only in
one point (a multiple via connection is preferable to a 0 ohm resistor connection) near
the PGND device pin. Place the device on the top or on the bottom size and connect
the exposed pad and the SGND pins to the SGND plan (see
Figure 44).
Figure 44. Current paths, ground connection and driver traces layout
42/47
Page 43

PM6681A Layout guidelines
● As general rule, make the high side and low side drivers traces wide and short. The
high side driver is powered by the bootstrap circuit. It's very important to place
capacitor CBOOT and diode DBOOT as near as possible to the HGATE pin (for
example on the layer opposite to the device). Route HGATE and PHASE traces as near
as possible in order to minimize the area between them. The Low side gate driver is
powered by the 5 V linear regulator output. Placing PGND and LGATE pins near the
low side MOSFETs reduces the length of the traces and the crosstalk noise between
the two sections.
● The linear regulator output LDO5 is referred to SGND as long as the reference voltage
Vref. Place their output filtering capacitors as near as possible to the device.
● Place input filtering capacitors near VCC and VIN pins.
● It would be better if the feedback networks connected to COMP, FB and OUT pins are
“referred” to SGND in the same point as reference voltage Vref. To avoid capacitive
coupling place these traces as far as possible from the gate drivers and phase
(switching) paths.
● Place the current sense traces on the bottom side. If low side MOSFET R
DS(on)
sensing
is enabled, use a dedicated connection between the switching node and the current
limit resistor R
CSENSE.
43/47
Page 44

Package mechanical data PM6681A
11 Package mechanical data
In order to meet environmental requirements, ST offers these devices in ECOPACK®
packages. These packages have a lead-free second level interconnect. The category of
second Level Interconnect is marked on the package and on the inner box label, in
compliance with JEDEC Standard JESD97. The maximum ratings related to soldering
conditions are also marked on the inner box label. ECOPACK is an ST trademark.
ECOPACK specifications are available at: www.st.com.
Table 18. VFQFPN32 5 x 5 x 1.0 mm pitch 0.50
Databook (mm)
Dim.
Min Typ Max
A0.80.91
A1 0 0.02 0.05
A3 0.2
b 0.18 0.25 0.3
D4.8555.15
D2 See exposed pad variations
E4.8555.15
E2 See exposed pad variations
(2)
(2)
e0.5
L 0.3 0.4 0.5
ddd 0.05
Table 19. Exposed pad variations
(1)(2)
D2
Min Typ Max Min Typ Max
2.90 3.10 3.20 2.90 3.10 3.20
1. VFQFPN stands for thermally enhanced very thin fine pitch quad flat package no lead. Very thin:
A = 1.00 mm Max.
2. Dimensions D2 and E2 are not in accordance with JEDEC.
E2
44/47
Page 45

PM6681A Package mechanical data
Figure 45. Package dimensions
45/47
Page 46

Revision history PM6681A
12 Revision history
Table 20. Document revision history
Date Revision Changes
02-Nov-2006 1 Initial release
03-Jun-2008 2
26-Jun-2008 3
Document status promoted from Target specification to
Datasheet
Updated: Figure 1 on page 4, Figure 27 on page 16, Figure 16
and Figure 17 on page 15
46/47
Page 47

PM6681A
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2008 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
47/47
 Loading...
Loading...