

Page 1
AN4104
Application note
Using the STM32F0xx DMA controller
Introduction
This application note describes how to use the STM32F0xx direct memory access (DMA)
controller. The STM32F0xx DMA controller, the Cortex™-M0 core, the advanced
microcontroller bus architecture (AMBA) bus and the memory system contribute to provide a
high data bandwidth and to develop very-low latency response time software.
This application note also describes how to take full advantage of these features and ensure
correct response times for different peripherals and subsystems.
Note: To ensure a quick start, application cases presented in this document are implemented in C
language and are available in Project\STM32F0xx_StdPeriph_Examples within the
STM32F0xx_StdPeriph_Lib package.
May 2012 Doc ID 023131 Rev 1 1/13
www.st.com
Page 2
Contents AN4104
Contents
1 DMA controller description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1 DMA Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 DMA Data managing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Round robin priority scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.2 Peripheral to Memory, Memory to Peripheral and Peripheral to Peripheral
DMA transactions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3 Memory to Memory DMA transactions . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.4 Choosing channel priority . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 DMA Interrupt management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 DMA firmware driver API . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 How to use DMA Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 DMA programming examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1 ADC DMA transfer to TIM example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 DMA Flash to RAM example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3 DMA RAM to DAC example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.4 SPI DMA example: communication between two SPIs using DMA . . . . . 11
3.5 USART communication boards data exchange using DMA example . . . 11
4 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2/13 Doc ID 023131 Rev 1
Page 3

AN4104 DMA controller description
1 DMA controller description
Direct memory access (DMA) is used in order to provide high-speed data transfer
betweenperipherals and memory as well as memory to memory. Data can be quickly moved
by DMA without any CPU actions. This keeps CPU resources free for other operations.
The DMA allows data transfers to take place in the background, without the intervention of
the Cortex-M0 processor. During this operation, the main processor can execute other tasks
and it is only interrupted when a whole data block is available for processing. Large amounts
of data can be transferred with no major impact on the system performance.
The DMA is mainly used to implement central data buffer storage (usually in system SRAM)
for different peripheral modules. This solution is less expensive in terms of silicon and power
consumption compared to a distributed solution where each peripheral needs to implement
its own local data storage.
Depending on the sales type used, one or two DMA controllers are implemented
The STM32F0xx DMA controller has 5 channels for DMA1 in total, each dedicated to
manage memory access requests from one or more peripherals. It has an arbiter for
handling the priority between DMA requests.
1.1 DMA Overview
The DMA(s) offer(s):
● independently configurable channels (requests)
● Each channels are connected to dedicated hardware DMA requests, software trigger is
also supported on each channel
● Priorities between requests from channels of one DMA are software programmable (4
levels: very high, high, medium, low) or hardware in case of equality (request 1 has
priority over request 2, etc.)
● Independent source and destination transfer size (byte, half word, word), emulating
packing and unpacking. The source and the address must have the same data size (to
be aligned on the data size).
● Support for circular buffer management
● 3 event flags (DMA Half Transfer, DMA Transfer complete and DMA Transfer Error)
logically ORed together in a single interrupt request for each channel
● Memory-to-memory transfer
● Peripheral-to-memory and memory-to-peripheral as well as peripheral-to-peripheral
transfers
● Access to Flash, SRAM, APB and AHB peripherals as source and destination
● Programmable number of data to be transferred: up to 65536
.
The DMA aims to offer a relatively large data buffer to all peripherals. This buffer is usually
located in system SRAM.
Each channel is assigned to a unique peripheral (data channel) at a given time. Peripherals
connected to the same DMA channel (CH1 to CH5 in Ta bl e 1 for STM32F0xx devices)
cannot be used simultaneously with active DMA (DMA function active in the peripheral
register).
Doc ID 023131 Rev 1 3/13
Page 4
DMA controller description AN4104
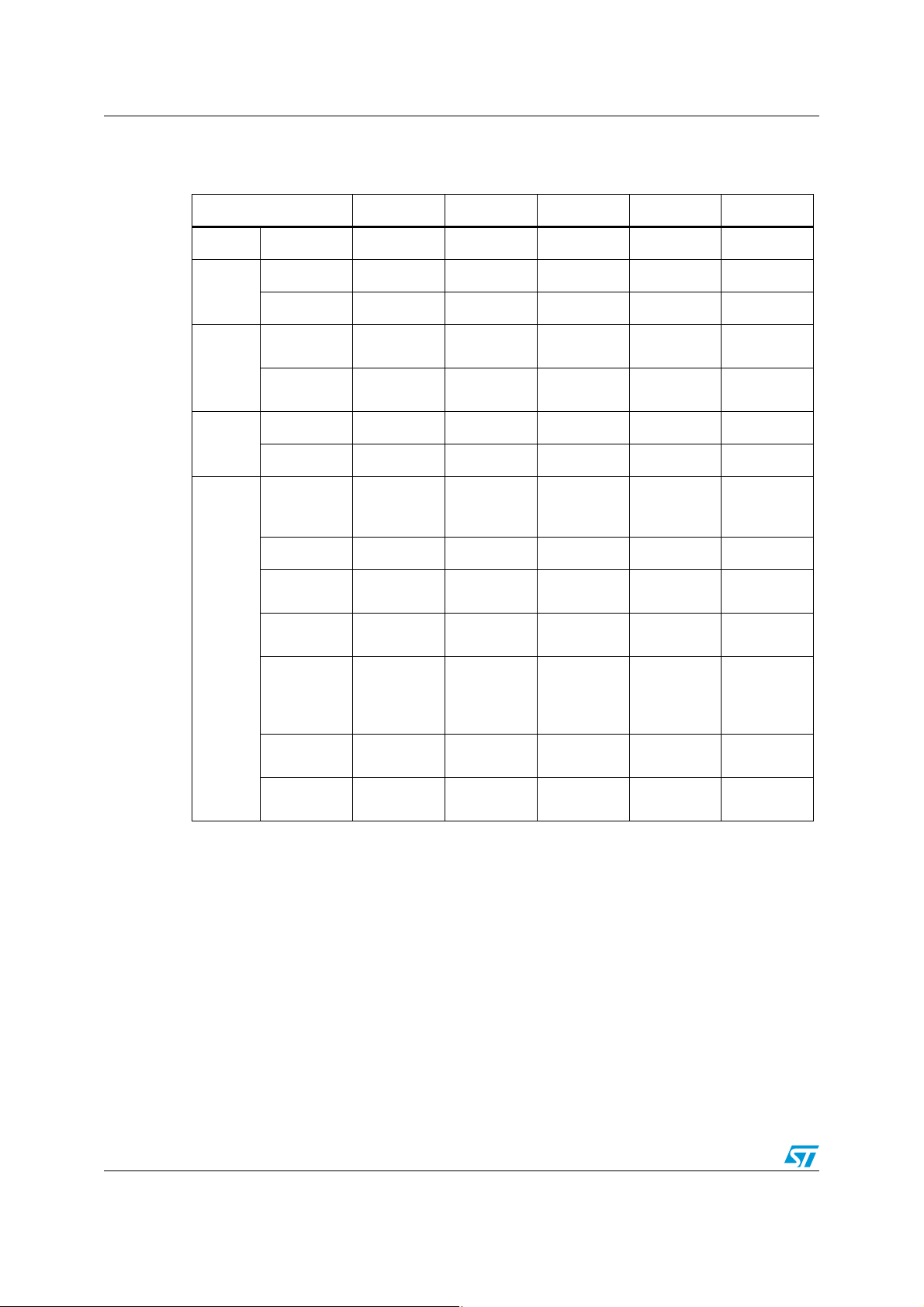
The different peripherals supporting DMA transfers in STM32F0xx devices are shown in
Ta bl e 1 .
Table 1. Peripherals served by DMA1 and channel allocation
Peripherals CH1 CH2 CH3 CH4 CH5
ADC ADC1 ADC1 ADC1
SPI1 SPI1_RX SPI1_TX
SPI
SPI2 SPI2_RX SPI2_TX
USART
2
I
C
TIM
USART1
USART2
2
I
C1 I2C1_TX I2C1_RX
2
I
C2 I2C2_TX I2C2_RX
TIM1 TIM1_CH1 TIM1_CH2
TIM2 TIM2_CH3 TIM2_UP TIM2_CH2 TIM2_CH4 TIM2_CH1
TIM3 TIM3_CH3
TIM6/DAC
TIM15
TIM16
TIM17
TIM17_CH1
TIM17_UP
USART1_
TX
TIM17_CH1
TIM17_UP
USART1_RX
TIM3_CH4
TIM3_UP
TIM6_UP
DAC
TIM16_CH1
TIM16_UP
USART1_
TX
USART2_
TX
TIM1_CH4
TIM1_TRIG
TIM1_COM
TIM3_CH1
TIM3_TRIG
TIM16_CH1
TIM16_UP
USART1_RX
USART2_RX
TIM1_UP
TIM1_CH3
TIM15_CH1
TIM15_UP
TIM15_TRIG
TIM15_COM
Note: For more details,refer to RM0091 DMA section for STM32F0xx devices.
1.2 DMA Data managing
The DMA controller performs direct memory transfer by sharing the system bus with the
Cortex-M0 core. When the CPU and DMA are targeting the same destination (memory or
peripheral) the DMA request may stop the CPU access to the system bus for several bus
cycles. The bus matrix implements round-robin scheduling, thus ensuring at least half of the
system bus bandwidth (both to memory and peripheral) for the CPU.
4/13 Doc ID 023131 Rev 1
Page 5

AN4104 DMA controller description
1.2.1 Round robin priority scheme
The NVIC and Cortex-M0 processor implement a high-performance very low latency
interrupt scheme. All Cortex-M0 instructions are either executed in a single cycle or are
interruptible at cycle level. In order to preserve this advantage at system level, the DMA and
bus matrix ensure that the DMA does not block the bus for a long time. The round-robin
priority scheme ensures that the CPU can access any slave buses during every second
cycle, if needed.
1.2.2 Peripheral to Memory, Memory to Peripheral and Peripheral to Peripheral DMA transactions
After an event, the peripheral sends a request signal to the DMA Controller. The DMA
controller serves the request depending on the channel priorities. As soon as the DMA
Controller accesses the peripheral, an Acknowledge is sent to the peripheral by the DMA
Controller. The peripheral releases its request as soon as it gets the Acknowledge from the
DMA Controller. Once the request is deasserted by the peripheral, the DMA Controller
releases the Acknowledge. If there are more requests, the peripheral can initiate the next
transaction.
Each DMA transfer consists of three operations:
● The loading of data from the peripheral data register or a location in memory
addressed through an internal current peripheral/memory address register. The start
address used for the first transfer is the base peripheral/memory address.
● The storage of the data loaded to the peripheral data register or a location in memory
addressed through an internal current peripheral/memory address register. The start
address used for the first transfer is the base peripheral/memory address.
● The post-decrementing of the DMA counter, which contains the number of transactions
that still have to be performed.
1.2.3 Memory to Memory DMA transactions
The DMA channels can also work without being triggered by a request from a peripheral.
This mode is called Memory to Memory mode. If the MEM2MEM bit is set, then the channel
initiates transfers as soon as it is enabled by software by setting the Enable bit.
The transfer stops once the DMA counter reaches zero. Memory to Memory mode may not
be used at the same time as Circular mode.
1.2.4 Choosing channel priority
In order to achieve continuous data transfers to/from a peripheral, the corresponding DMA
channel must be able to sustain the peripheral data rate and ensure that the service latency
is shorter than the period of time between two consecutive data.
The high speed/high bandwidth peripherals must have the highest DMA priorities. This
ensures that the maximum data latency will be respected for these peripherals and
over/under-run conditions will be avoided.
In case of equal bandwidth requirements, it is recommended to assign a higher priority to
the peripherals working in slave mode (which have no control on the data transfer speed)
compared with the ones working in master mode (which may control the data flow).
Doc ID 023131 Rev 1 5/13
Page 6

DMA controller description AN4104
By default, the channel allocation and hardware priority (from 1 to 5 for STM32F0xx devices)
are set in order to assign the fastest peripherals to the highest priority channels. However,
this may not be true for some applications. In this case, the user can configure a software
priority for each channel (4 levels – from Very High to Low), which takes precedence over
the hardware priority.
1.3 DMA Interrupt management
An interrupt can be produced on a Half-transfer, Transfer complete or Transfer error for each
DMA channel. Separate interrupt enable bits are available for flexibility.
Table 2. DMA Interrupt requests
Interrupt events Event Flags Control bit enable
Half Transfer HTIF HTIF
Transfer Complete TCIF TCIF
Transfer Error TEIF TEIF
When a DMA transfer error occurs during a DMA read or a write access, the faulty channel
is automatically disabled through a hardware clear of its enable bit in the corresponding
Channel configuration register (DMA_CCRx). The channel's transfer error interrupt flag
(TEIF) in the DMA_IFR register is set and an interrupt is generated if the transfer error
interrupt enable bit (TEIE) in the DMA_CCRx register is set.
6/13 Doc ID 023131 Rev 1
Page 7

AN4104 DMA firmware driver API
2 DMA firmware driver API
This driver provides a set of firmware functions to manage the following functionalities of the
DMA peripheral:
– Initialization and Configuration functions
– Data Counter functions
– Interrupts and flags management functions
For the STM32F0xx family, the DMA driver stm32f0xx_dma.c/.h can be found in the
directory: STM32F0xx_StdPeriph_Lib_vX.Y.Z\Libraries\STM32F0xx_StdPeriph_Driver.
This driver provides a fully compatible API making it easy to move from one product to
another.
Table 3. DMA Functions description
Groups Function name Description
Initialization and
Configuration
functions
Data Counter
functions
Interrupts and flags
management
functions
DMA_DeInit
DMA_Init
DMA_StructInit
DMA_Cmd
DMA_SetCurrDataCounter
DMA_GetCurrDataCounter
DMA_ITConfig
DMA_GetFlagStatus
DMA_ClearFlag Clears the DMAy Channelx's pending flags.
DMA_GetITStatus
DMA_ClearITPendingBit
Deinitializes the DMAy Channelx registers to
their default reset values.
Initializes the DMAy Channelx according to
the specified parameters in the
DMA_InitStruct.
Fills each DMA_InitStruct member with its
default value.
Enables or disables the specified DMAy
Channelx.
Sets the number of data units in the current
DMAy Channelx transfer.
Returns the number of remaining data units
in the current DMAy Channelx transfer.
Enables or disables the specified DMAy
Channelx interrupts.
Checks whether the specified DMAy
Channelx flag is set or not..
Checks whether the specified DMAy
Channelx interrupt has occurred or not.
Clears the DMAy Channelx's interrupt
pending bit..
Several parameters such as source/destination address (Location where data is to be read
or transferred) and transfer length must be specified in order for a DMA transaction to take
place.
Doc ID 023131 Rev 1 7/13
Page 8

DMA firmware driver API AN4104
The DMA field configuration is stored in a structure as described below:
– DMA_PeripheralBaseAddr: Specifies the peripheral base address for DMAy
Channelx.
– DMA_MemoryBaseAddr: Specifies the memory base address for DMAy
Channelx.
– DMA_DIR: Specifies if the peripheral is the source or destination.
– DMA_BufferSize: Specifies the buffer size, in data unit, of the specified Channel.
The data unit is equal to the configuration set in DMA_PeripheralDataSize or
DMA_MemoryDataSize members depending in the transfer direction.
– DMA_PeripheralInc: Specifies whether the Peripheral address register is
incremented or not after transferring each unit.
– DMA_MemoryInc: Specifies whether the memory address register is incremented
or not after transferring each unit.
– DMA_PeripheralDataSize: Specifies the Peripheral data width. The size of the
transfer unit can be byte, Half-Word or Word.
– DMA_MemoryDataSize: Specifies the Memory data width. The size of the
transfer unit can be byte, Half-Word or Word.
– DMA_Mode: Specifies the operation mode of the DMAy Channelx (Normal or
circular mode).
– DMA_Priority: Specifies the software priority for the DMAy Channelx.
– DMA_M2M: Specifies if the DMAy Channelx will be used in memory-to-memory
transfer.
Note: For further details, please refer to the DMA section in the reference manual RM0091 for
STM32F0x devices.
8/13 Doc ID 023131 Rev 1
Page 9

AN4104 DMA firmware driver API
2.1 How to use DMA Driver
1. Before using the DMa driver, enable The DMA controller clock using
RCC_AHBPeriphClockCmd (RCC_AHBPeriph_DMAX, ENABLE) function.
2. Enable and configure the peripheral to be connected to the DMA channel (except for
internal SRAM / Flash memories: no initialization is necessary).
3. For a given channel, program the Source and Destination addresses, the transfer
Direction, the Buffer Size, the Peripheral and Memory Incrementation mode and Data
Size, the Circular or Normal mode, the channel transfer Priority and the Memory-toMemory transfer mode (if needed) using the DMA_Init() function.
4. Enable the NVIC and the corresponding interrupt(s) using the function DMA_ITConfig()
if you need to use DMA interrupts.
5. Enable the DMA channel using the DMA_Cmd() function.
6. Activate the needed channel request using PPP_DMACmd() function for the adequate
PPP peripheral except internal SRAM and Flash (ie. SPI, USART...) The function
allowing this operation is provided in each PPP peripheral driver (ie. SPI_DMACmd for
SPI peripheral).
7. Optionally, configure the number of data to be transferred when the channel is disabled
(ie. after each Transfer Complete event or when a Transfer Error occurs) using the
function DMA_SetCurrDataCounter(). And you can get the number of remaining data to
be transferred using the function DMA_GetCurrDataCounter() at run time (when the
DMA channel is enabled and running).
8. To control DMA events you can use one of the following two methods:
– Check on DMA channel flags using the function DMA_GetFlagStatus().
– Use DMA interrupts through the function DMA_ITConfig() at initialization phase
and DMA_GetITStatus() function into interrupt routines in communication phase.
After checking on a flag, clear it using DMA_ClearFlag() function. And after
checking on an interrupt event, clear it using DMA_ClearITPendingBit() function.
Doc ID 023131 Rev 1 9/13
Page 10

DMA programming examples AN4104
3 DMA programming examples
The DMA firmware driver is provided with a set of examples, so you can quickly become
familiar with the DMA peripheral. It demonstrates how to use the DMA in different modes.
Both the package and the application note are available for download from the
STMicroelectronics website: http://www.st.com.
3.1 ADC DMA transfer to TIM example
This example provides a description of how to use a DMA channel to transfer continuously a
data from a peripheral (ADC) to another peripheral (TIM) supporting DMA transfer. The ADC
is configured to operate in Continuous Conversion mode. TIM is configured to generate a
PWM signal on its output.
The dedicated DMA channel is configured to transfer in circular mode the last ADC channel
converted value to the TIMER Capture/Compare register. The DMA channel request is
driven by the TIM update event. The duty cycle of TIMER channel output signal is then
changed each time the input voltage value on ADC channel pin is modified.
The duty cycle variation can be visualized on oscilloscope while changing the analog input
on ADC channel using the potentiometer.
3.2 DMA Flash to RAM example
This example illustrates how to use the DMA to transfer data between two memory
locations.
It provides a description of how to transfer a word data buffer located in Flash memory to
embedded SRAM memory using DMA channel.
DMA Channel is configured to transfer the contents of a 32-word data buffer stored in Flash
memory to the reception buffer declared in RAM.
The start of transfer is triggered by software. DMA Channel memory-to-memory transfer is
enabled. Source and destination addresses incrementing is also enabled.
The transfer is started by setting the Channel enable bit for DMA Channel. At the end of the
transfer, a Transfer Complete interrupt is generated since it is enabled. Once interrupt is
generated, the remaining data to be transferred is read which must be equal to 0 (DMA
Counter reaches 0 if all Data are transferred). The Transfer Complete Interrupt pending bit is
then cleared.
A comparison between the source and destination buffers is done to check that all data have
been correctly transferred.
3.3 DMA RAM to DAC example
This example provides a description of how to use a DMA channel to transfer data buffer
from memory (RAM memory) to the peripheral DAC.
The DMA channel is configured to transfer continuously, word by word, a Half-word buffer
from the RAM memory to the DAC register DAC_DHR12R. The DAC channel conversion is
10/13 Doc ID 023131 Rev 1
Page 11

AN4104 DMA programming examples
configured to be triggered by TIM2 TRGO triggers and without noise/triangle wave
generation. 12bit right data alignment is selected since we choose to access DAC_DHR12R
register.
3.4 SPI DMA example: communication between two SPIs using DMA
This example provides an SPI communications using DMA.
In master board, the SPI peripheral is configured as Master full duplex with DMA and NSS
hardware mode.
The TIM2 is configured to generate 4 KHz PWM signal with 50% duty cycle on TIM2_CH2
pin (PA.01), this signal is used as DMA trigger and as NSS signal input to latch the SPI data
transfers. Whereas in Slave board, the SPI peripheral is configured as Slave Full duplex with
DMA and NSS hardware mode.
● The Master sends the specific command to the Slave using the TIM2_CH2 DMA
request (DMA1_Channel3) (the command contains the transaction code
(CMD_RIGHT, CMD_LEFT, CMD_UP, CMD_DOWN or CMD_SEL) and receives the
ACK command from the Slave using SPI_Rx DMA request (DMA1_Channel2).
● The Slave receives the command using SPI_Rx DMA request (DMA1_Channel2) and
sends the ACK command using the SPI_Tx DMA request (DMA1_Channel3).
3.5 USART communication boards data exchange using DMA example
This example provides a small application of USART communications using DMA.
In both boards, the data transfers is managed using the USART Tx/Rx channels DMA
requests.
Doc ID 023131 Rev 1 11/13
Page 12

Revision history AN4104
4 Revision history
Table 4. Document revision history
Date Revision Changes
02-May-2012 1 Initial release
12/13 Doc ID 023131 Rev 1
Page 13

AN4104
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
Doc ID 023131 Rev 1 13/13
 Loading...
Loading...