

Page 1
AN4088
Application note
Migrating from STM32F1 to STM32F0
Introduction
For designers of STM32 microcontroller applications, it is important to be able to easily
replace one microcontroller type by another one in the same product family. Migrating an
application to a different microcontroller is often needed, when product requirements grow,
putting extra demands on memory size, or increasing the number of I/Os. On the other
hand, cost reduction objectives may force you to switch to smaller components and shrink
the PCB area.
This application note is written to help you and analyze the steps you need to migrate from
an existing STM32F1 device to an STM32F0 device. It gathers the most important
information and lists the vital aspects that you need to address.
To migrate your application from STM32F1 series to STM32F0 series, you have to analyze
the hardware migration, the peripheral migration and the firmware migration.
To benefit fully from the information in this application note, the user should be familiar with
the STM32 microcontroller family. You can refer to the following documents that are available
from www.st.com.
● The STM32F1 family reference manuals (RM0008 and RM0041), the STM32F1
datasheets, and the STM32F1 Flash programming manuals (PM0075, PM0063 and
PM0068).
● The STM32F0 family reference manual (RM0091) and the STM32F0 datasheets.
For an overview of the whole STM32 series and a comparison of the different features of
each STM32 product series, please refer to AN3364 Migration and compatibility guidelines
for STM32 microcontroller applications.
Ta bl e 1 lists the microcontrollers and development tools concerned by this application note.
Table 1. Applicable products
Type Product sub-class
Microcontroller
July 2012 Doc ID 023072 Rev 1 1/60
STM32 F0 Entry-level
STM32 F1 Mainstream
www.st.com
Page 2

Contents AN4088
Contents
1 Hardware migration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Boot mode compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Peripheral migration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1 STM32 product cross-compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 System architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 Memory mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.4 Reset and clock controller (RCC) interface . . . . . . . . . . . . . . . . . . . . . . . 13
3.5 DMA interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.6 Interrupt vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.7 GPIO interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.8 EXTI source selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.9 FLASH interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.10 ADC interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.11 PWR interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.12 Real-time clock (RTC) interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.13 SPI interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.14 I2C interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.15 USART interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.16 CEC interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Firmware migration using the library . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1 Migration steps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2 RCC driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3 FLASH driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4 CRC driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.5 GPIO configuration update . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5.1 Output mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5.2 Input mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5.3 Analog mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.5.4 Alternate function mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2/60 Doc ID 023072 Rev 1
Page 3

AN4088 Contents
4.6 EXTI Line0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.7 NVIC interrupt configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.8 ADC configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.9 DAC driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.10 PWR driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.11 Backup data registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.12 CEC application code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.13 I2C driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.14 SPI driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.15 USART driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.16 IWDG driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Doc ID 023072 Rev 1 3/60
Page 4

List of tables AN4088
List of tables
Table 1. Applicable products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. STM32F1 series and STM32F0 series pinout differences . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Table 3. Boot modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Table 4. STM32 peripheral compatibility analysis F1 versus F0 series . . . . . . . . . . . . . . . . . . . . . . . 8
Table 5. IP bus mapping differences between STM32F0 and STM32F1 series. . . . . . . . . . . . . . . . 10
Table 6. RCC differences between STM32F1 and STM32F0 series . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 7. Example of migrating system clock configuration code from F1 to F0 . . . . . . . . . . . . . . . . 15
Table 8. RCC registers used for peripheral access configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Table 9. DMA request differences between STM32F1 series and STM32F0 series . . . . . . . . . . . . 17
Table 10. Interrupt vector differences between STM32F1 series and STM32F0 series. . . . . . . . . . . 19
Table 11. GPIO differences between STM32F1 series and STM32F0 series . . . . . . . . . . . . . . . . . . 21
Table 12. FLASH differences between STM32F1 series and STM32F0 series . . . . . . . . . . . . . . . . . 23
Table 13. ADC differences between STM32F1 series and STM32F0 series . . . . . . . . . . . . . . . . . . . 24
Table 14. PWR differences between STM32F1 series and STM32F0 series. . . . . . . . . . . . . . . . . . . 26
Table 15. STM32F10x and STM32F0xx source clock API correspondence . . . . . . . . . . . . . . . . . . . 32
Table 16. STM32F10x and STM32F0xx FLASH driver API correspondence. . . . . . . . . . . . . . . . . . . 33
Table 17. STM32F10xx and STM32F0xx CRC driver API correspondence . . . . . . . . . . . . . . . . . . . . 35
Table 18. STM32F10x and STM32F0xx MISC driver API correspondence . . . . . . . . . . . . . . . . . . . . 40
Table 19. STM32F10x and STM32F0xx DAC driver API correspondence . . . . . . . . . . . . . . . . . . . . . 42
Table 20. STM32F10x and STM32F0xx PWR driver API correspondence . . . . . . . . . . . . . . . . . . . . 43
Table 21. STM32F10xx and STM32F0xx CEC driver API correspondence . . . . . . . . . . . . . . . . . . . . 45
Table 22. STM32F10xx and STM32F0xx I2C driver API correspondence . . . . . . . . . . . . . . . . . . . . . 47
Table 23. STM32F10xx and STM32F0xx SPI driver API correspondence . . . . . . . . . . . . . . . . . . . . . 51
Table 24. STM32F10x and STM32F0xx USART driver API correspondence . . . . . . . . . . . . . . . . . . 54
Table 25. STM32F10xx and STM32Fxx IWDG driver API correspondence . . . . . . . . . . . . . . . . . . . . 58
Table 26. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4/60 Doc ID 023072 Rev 1
Page 5
AN4088 Hardware migration
1 Hardware migration
The entry-level STM32F0 and general-purpose STM32F1xxx families are pin-to-pin
compatible. All peripherals shares the same pins in the two families, but there are some
minor differences between packages. The transition from the STM32F1 series to the
STM32F0 series is simple as only a few pins are impacted (impacted pins are in bold in
Ta bl e 2 ).
Table 2. STM32F1 series and STM32F0 series pinout differences
STM32F1 series STM32F0 series
QFP48 QFP64 Pinout QFP48 QFP64 Pinout
55PD0 - OSC_IN 5 5 PH0 - OSC_IN
66PD1 - OSC_OUT 6 6 PH1 - OSC_OUT
-18VSS_4 -18PF4
-19VDD_4 -19PF5
35 47 VSS_2 35 47 PF6
36 48 VDD_2 36 48 PF7
20 28 Boot1/PB2 20 28 PB2
The migration from F1 to F0 has no impact on the pinout, except that the user wins 2 or 4
GPIOs for his/her application at VSS/VDD 2 and 4 locations, depending on the package
used.
Doc ID 023072 Rev 1 5/60
Page 6
Boot mode compatibility AN4088
2 Boot mode compatibility
The way to select the boot mode on the F0 family differs from F1 devices. Instead of using
two pins for this setting, F0 gets the nBOOT1 value from an option bit located in the User
option bytes at 0x1FFFF800 memory address. Together with the BOOT0 pin, it selects the
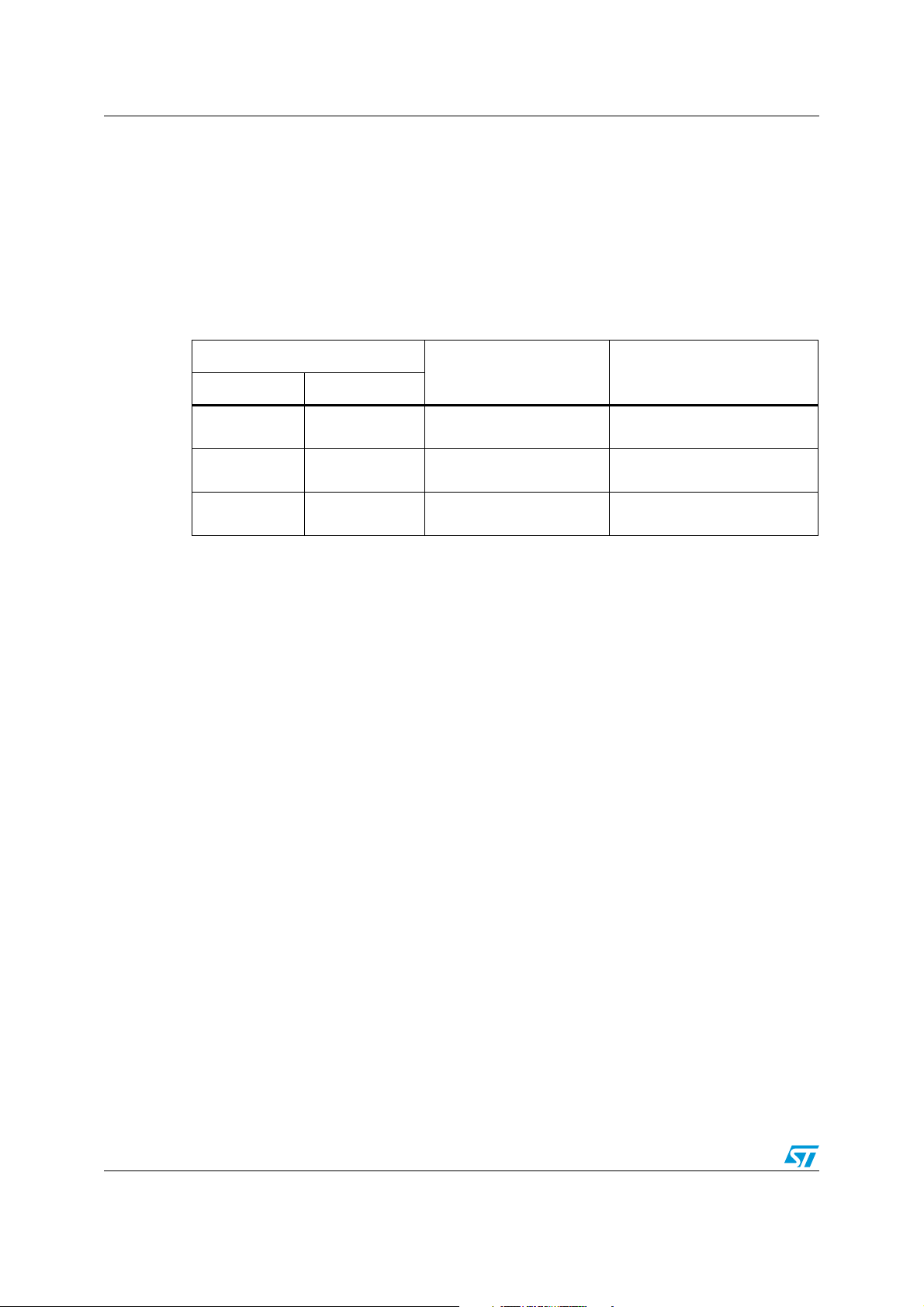
boot mode to the main Flash memory, the SRAM or to the System memory. Tab le 3
summarizes the different configurations available for selecting the Boot mode.
Table 3. Boot modes
F0/F1 Boot mode selection
Boot mode Aliasing
BOOT1 BOOT0
x 0 Main Flash memory
0 1 System memory
1 1 Embedded SRAM
Note: The BOOT1 value is the opposite of the nBOOT1 option bit.
Main Flash memory is selected
as boot space
System memory is selected as
boot space
Embedded SRAM is selected as
boot space
6/60 Doc ID 023072 Rev 1
Page 7

AN4088 Peripheral migration
3 Peripheral migration
As shown in Ta bl e 3 , there are three categories of peripherals. The common peripherals are
supported with the dedicated firmware library without any modification, except if the
peripheral instance is no longer present. You can change the instance and, of course, all the
related features (clock configuration, pin configuration, interrupt/DMA request).
The modified peripherals such as: ADC, RCC and RTC are different from the F1 series ones
and should be updated to take advantage of the enhancements and the new features in F0
series.
All these modified peripherals in the F0 series are enhanced to obtain smaller silicon print
with features designed to offer advanced high-end capabilities in economical end products
and to fix some limitations present in the F1 series.
3.1 STM32 product cross-compatibility
The STM32 series embeds a set of peripherals which can be classed in three categories:
● The first category is for the peripherals which are, by definition, common to all products.
Those peripherals are identical, so they have the same structure, registers and control
bits. There is no need to perform any firmware change to keep the same functionality,
at the application level, after migration. All the features and behavior remain the same.
● The second category is for the peripherals which are shared by all products but have
only minor differences (in general to support new features). The migration from one
product to another is very easy and does not need any significant new development
effort.
● The third category is for peripherals which have been considerably changed from one
product to another (new architecture, new features...). For this category of peripherals,
the migration will require new development, at the application level.
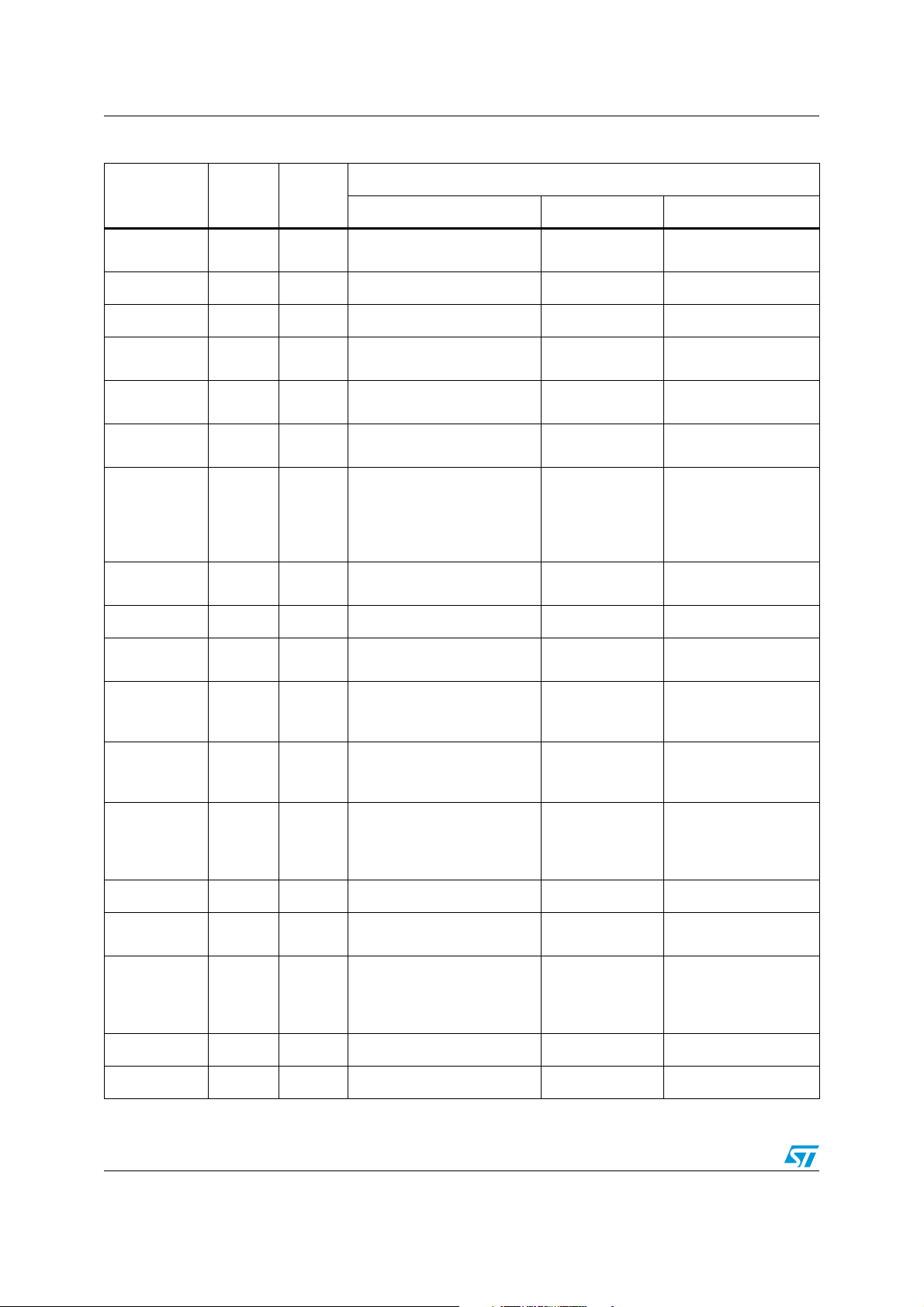
Ta bl e 4 gives a general overview of this classification.
Doc ID 023072 Rev 1 7/60
Page 8
Peripheral migration AN4088
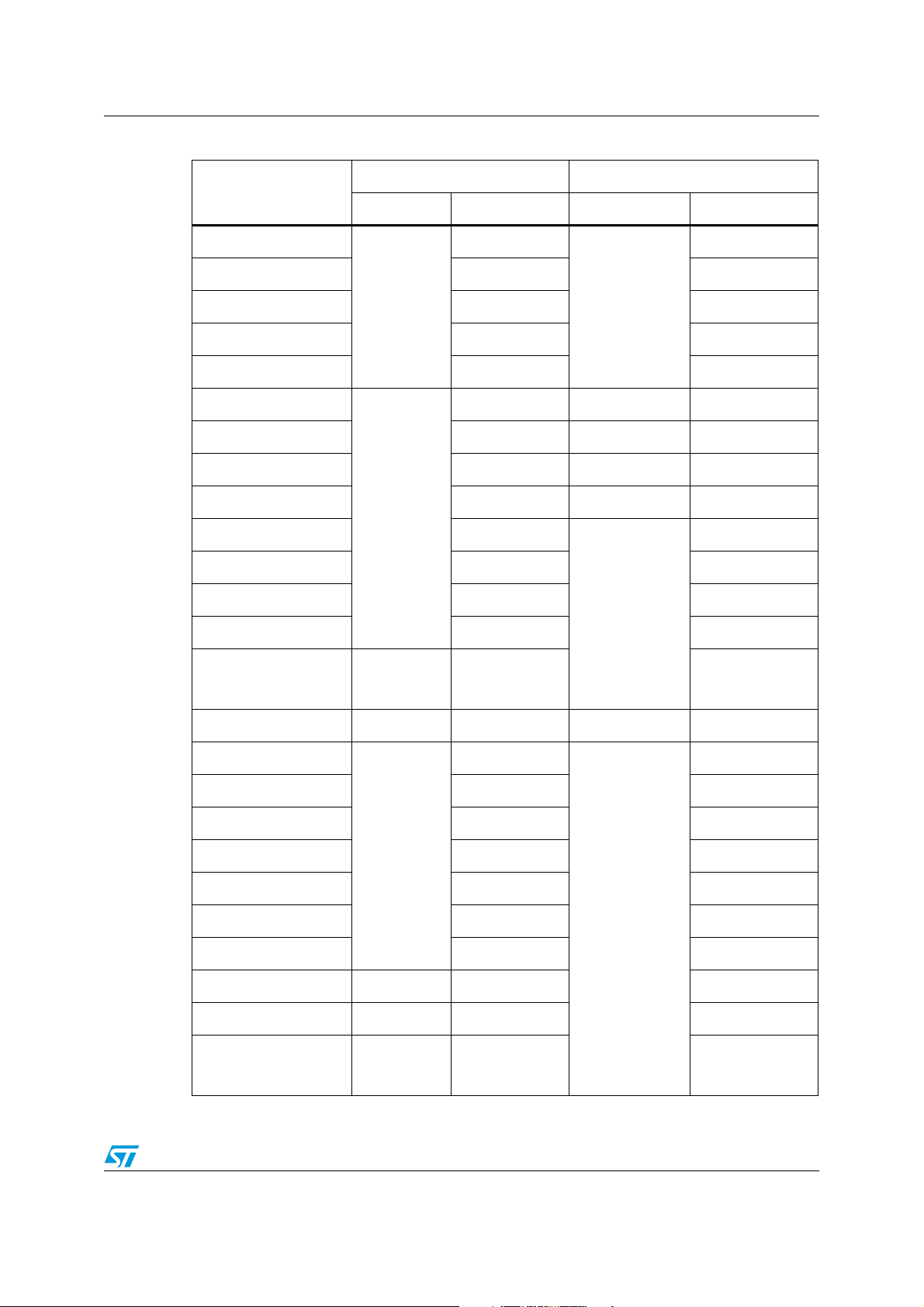
Table 4. STM32 peripheral compatibility analysis F1 versus F0 series
Peripheral F1 series
SPI Ye s
WWDG
IWDG
DBGMCU Ye s Yes No JTAG, No Trace
CRC
EXTI
F0
series
Yes++
Feature Pinout FW driver
Two FIFO available, 4-bit to
16-bit data size selection
Compatibility
Identical Partial compatibility
Ye s Yes Same features NA Full compatibility
Ye s Yes+ Added a Window mode NA Full compatibility
Identical for the
SWD
Ye s Yes++
Ye s Ye s +
Added reverse capability and
initial CRC value
Some peripherals are able to
generate event in stop mode
NA Partial compatibility
Identical Full compatibility
Kernel clock, arbitration lost
flag and automatic
CEC
Ye s Yes++
transmission retry, multi-
Identical Partial compatibility
address config, wakeup from
stop mode
DMA
Ye s Ye s
1 DMA controller with 5
channels
NA Full compatibility
Partial compatibility
TIM
PWR
Ye s Yes+ Enhancement Identical Full compatibility
Ye s Ye s +
No Vref, Vdda can be greater
than Vdd, 1.8 mode for core.
Identical for the
same feature
Partial compatibility
PD0 & PD1 =>
RCC Yes Yes+ New HSI14 dedicated to ADC
PF0 & PF1 for the
Partial compatibility
osc
Choice for independent clock
USART
Ye s Ye s +
sources, timeout feature,
Identical Full compatibility
wakeup from stop mode
Communication events
I2C
Ye s Ye s + +
managed by HW, FM+,
wakeup from stop mode,
Identical New driver
digital filter
DAC
ADC
Yes Yes+ DMA underrun interrupt Identical Full compatibility
Ye s Ye s + +
Same analogic part, but new
digital interface
Identical Partial compatibility
Subsecond precision, digital
RTC
Ye s Ye s + +
calibration circuit, time-stamp
function for event saving,
Identical for the
same feature
New driver
programmable alarm
FLASH Yes Yes+ Option byte modified NA Partial compatibility
GPIO
Yes Yes++ New peripheral 4 new GPIOs Partial compatibility
8/60 Doc ID 023072 Rev 1
Page 9
AN4088 Peripheral migration
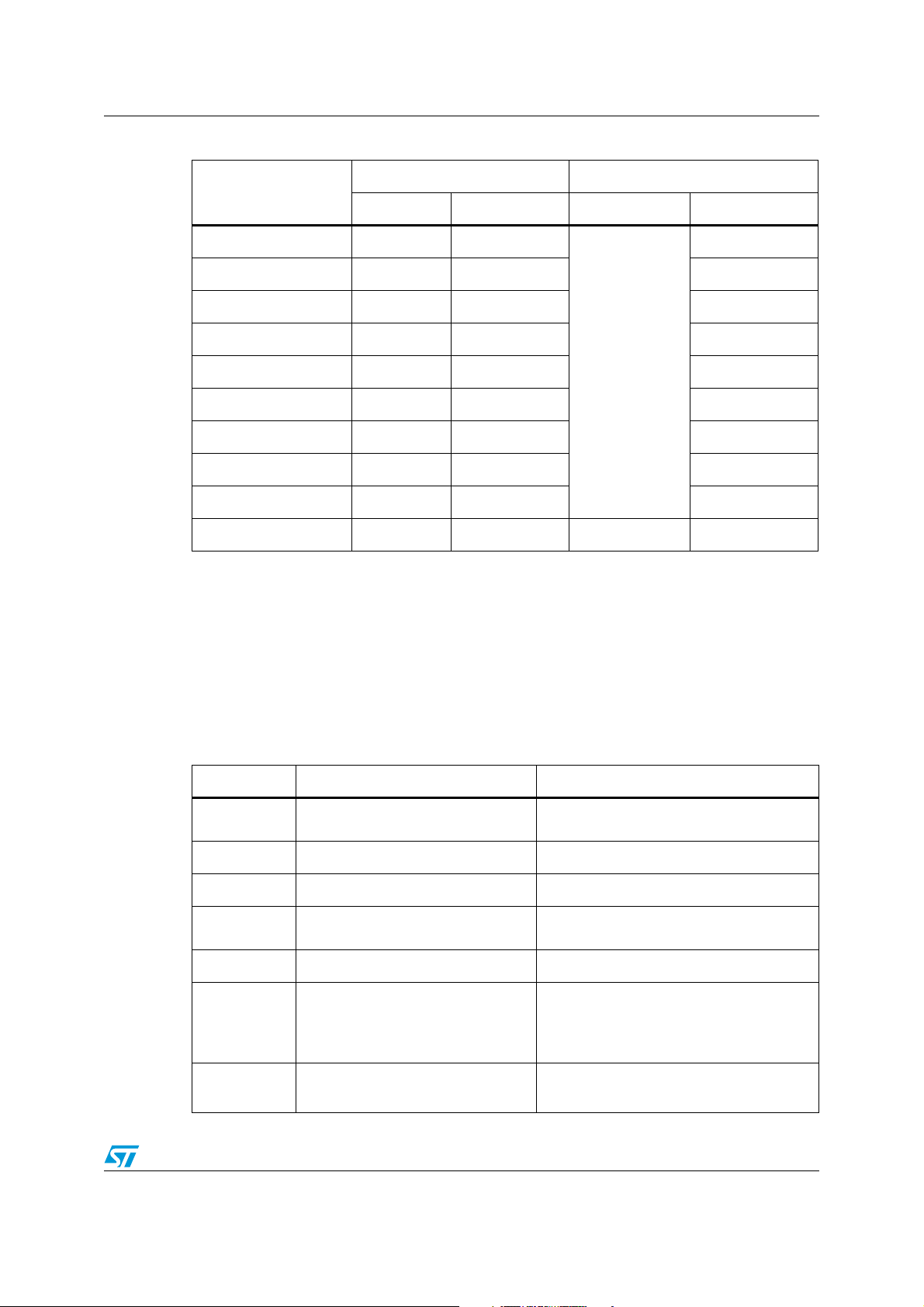
Table 4. STM32 peripheral compatibility analysis F1 versus F0 series (continued)
Peripheral F1 series
CAN Ye s N A N A N A N A
USB FS
Device
Ethernet Ye s N A N A N A N A
SDIO Ye s N A N A N A N A
FSMC Ye s N A N A N A N A
Touch
Sensing
COMP NA Yes NA NA NA
SYSCFG NA Yes NA NA NA
Ye s N A N A N A N A
NA Yes NA NA NA
F0
series
Feature Pinout FW driver
Compatibility
Note: Yes++ = New feature or new architecture
Yes+ = Same feature, but specification change or enhancement
Yes = Feature available
NA = Feature not available
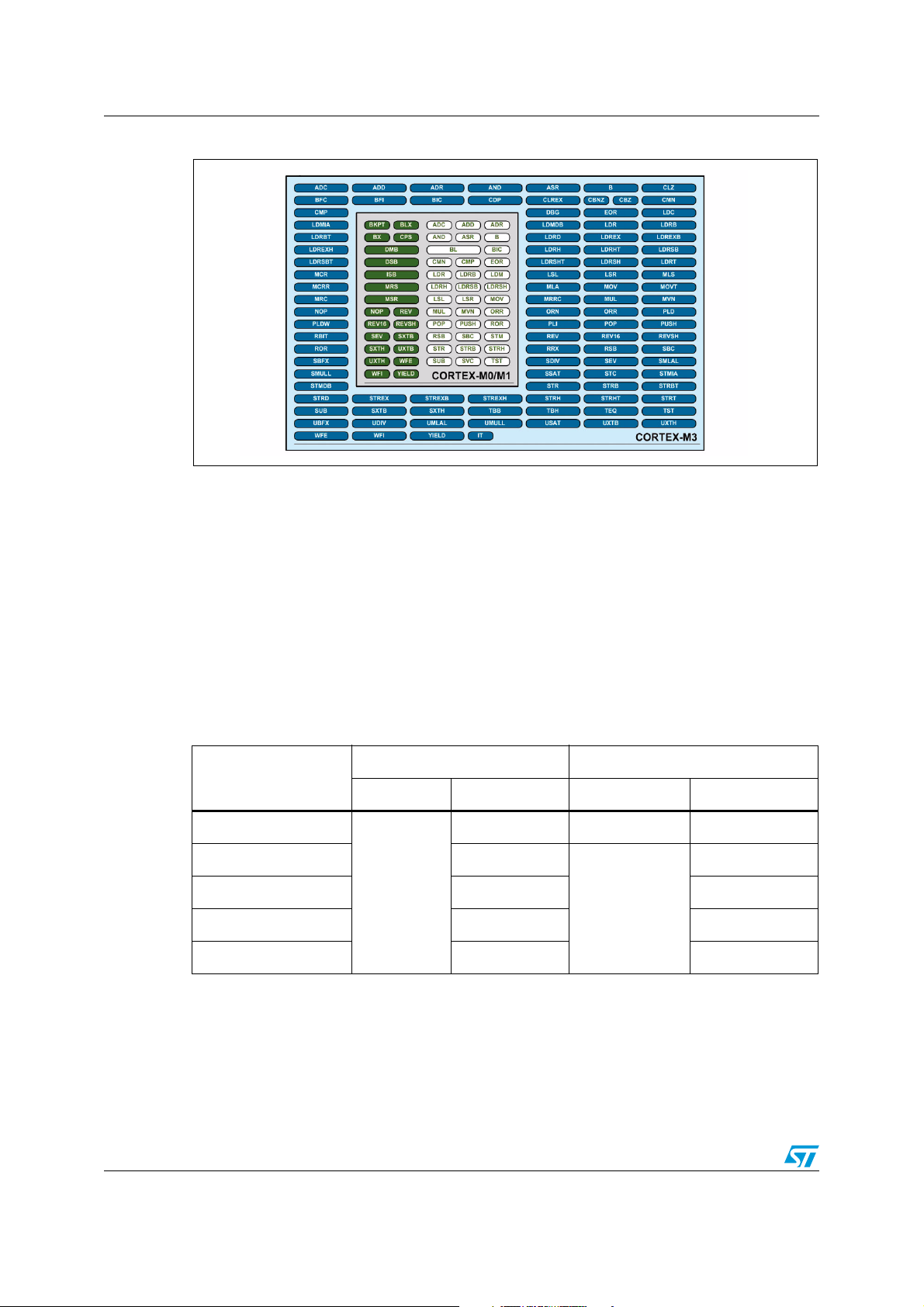
3.2 System architecture
The STM32F0 MCU family has been designed to target an entry-level market, with lowpower capabilities and easy handling. In order to fulfill this aim while keeping the advanced
high-end features proper to the STM32, the core has been changed for a Cortex-M0. Its
small silicon area, coupled to a minimal code footprint, allows for low-cost applications with
32 bits performance. Figure 1 shows the correspondence between the M3 and M0 sets of
instructions. Moving from F1 to F0 requires a recompilation of the code to avoid the use of
unavailable features.
Doc ID 023072 Rev 1 9/60
Page 10
Peripheral migration AN4088
Figure 1. System architecture
Important modifications have been performed on the MCU organization too, starting by
switching from a Harvard to Von Neumann architecture, decreasing the system complexity,
or focusing on SW Debug in order to simplify this precise feature.
3.3 Memory mapping
The peripheral address mapping has been changed in the F0 series versus F1 series. The
main change concerns the GPIOs which have been moved from the APB bus to the AHB
bus to allow them to operate at the maximum speed.
Ta bl e 5 provides the peripheral address mapping correspondence between F0 and F1
series.
Table 5. IP bus mapping differences between STM32F0 and STM32F1 series
Peripheral
TSC
CRC 0x40023000
FLITF 0x40022000 0x40022000
RCC 0x40021000 0x40021000
DMA1/DMA 0x40020000 0x40020000
STM32 F0 series STM32 F1 series
Bus Base address Bus Base address
0x40024000 NA NA
0x40023000
AHB1
AHB
10/60 Doc ID 023072 Rev 1
Page 11
AN4088 Peripheral migration
Table 5. IP bus mapping differences between STM32F0 and STM32F1 series
STM32 F0 series STM32 F1 series
Peripheral
Bus Base address Bus Base address
GPIOF
GPIOD 0x48000C00 0x40011400
GPIOC 0x48000800 0x40011000
GPIOB 0x48000400 0x40010C00
GPIOA 0x48000000 0x40010800
DBGMCU
TIM17 0x40014800 NA NA
TIM16 0x40014400 NA NA
TIM15 0x40014000 NA NA
USART1 0x40013800
SPI1 / I2S1 0x40013000 0x40013000
TIM1 0x40012C00 0x40012C00
ADC / ADC1 0x40012400 0x40012400
EXTI
AHB2
APB2
APB2
(through
SYSCFG)
0x48001400
APB2
0x40015800 NA NA
APB2
0x40010400 0x40010400
0x40011800
0x40013800
SYSCFG + COMP APB2 0x40010000 NA NA
CEC
DAC 0x40007400 0x40007400
PWR 0x40007000 0x40007000
I2C2 0x40005800 0x40005800
I2C1 0x40005400 0x40005400
USART2 0x40004400 0x40004400
SPI2 0x40003800 0x40003800
IWWDG / IWDG Own Clock 0x40003000 0x40003000
WWDG APB1 0x40002C00 0x40002C00
RTC
APB1
APB1
(through
PWR)
Doc ID 023072 Rev 1 11/60
0x40007800
0x40002800 (inc.
BKP registers)
0x40007800
APB1
0x40002800
Page 12

Peripheral migration AN4088
Table 5. IP bus mapping differences between STM32F0 and STM32F1 series
STM32 F0 series STM32 F1 series
Peripheral
Bus Base address Bus Base address
TIM14
TIM6 0x40001000
APB1
TIM3 0x40000400 0x40000400
TIM2 0x40000000 0x40000000
USB device FS SRAM NA NA
USB device FS NA NA 0x40005C00
USART3 NA NA 0x40004800
TIM7 NA NA 0x40001400
TIM4 NA NA 0x40000800
FSMC Registers NA NA
USB OTG FS NA NA 0x50000000
ETHERNET MAC NA NA 0x40028000
DMA2 NA NA 0x40020400
GPIOG NA NA APB2 0x40012000
0x40002000 NA NA
0x40001000
APB1
0x40006000
APB1
0xA0000000
AHB
SDIO NA NA AHB 0x40018000
TIM11 NA NA
TIM10 NA NA 0x40015000
TIM9 NA NA 0x40014C00
APB2
ADC2 NA NA 0x40012800
ADC3 NA NA 0x40013C00
TIM8 NA NA 0x40013400
0x40015400
12/60 Doc ID 023072 Rev 1
Page 13
AN4088 Peripheral migration
Table 5. IP bus mapping differences between STM32F0 and STM32F1 series
STM32 F0 series STM32 F1 series
Peripheral
Bus Base address Bus Base address
CAN2 NA NA
CAN1 NA NA 0x40006400
UART5 NA NA 0x40005000
UART4 NA NA 0x40004C00
SPI3/I2S3 NA NA 0x40003C00
TIM13 NA NA 0x40001C00
TIM12 NA NA 0x40001800
TIM5 NA NA 0x40000C00
BKP registers NA NA 0x40006C00
AFIO NA NA APB2 0x40010000
APB1
Note: NA = feature not available.
3.4 Reset and clock controller (RCC) interface
0x40006800
The main differences related to the RCC (Reset and clock controller) in the STM32F0 series
versus STM32F1 series are presented in Tab l e 6.
Table 6. RCC differences between STM32F1 and STM32F0 series
RCC STM32 F1 series STM32 F0 series
HSI 14 NA
HSI 8 MHz RC factory-trimmed Similar
LSI 40 KHz RC Similar
HSE
LSE 32.768 KHz Similar
PLL
System clock
source
3 - 25 MHz depending on the product
line used
- Connectivity line: main PLL +
2 PLLs for I2S, Ethernet and OTG FS
clock
- Other product lines: main PLL
HSI, HSE or PLL Similar
High speed internal oscillator dedicated to
ADC
4 - 32 MHz
Main PLL
Doc ID 023072 Rev 1 13/60
Page 14
Peripheral migration AN4088
Table 6. RCC differences between STM32F1 and STM32F0 series (continued)
RCC STM32 F1 series STM32 F0 series
System clock
frequency
APB1/APB
frequency
RTC clock
source
MCO clock
source
Internal
oscillator
measurement /
calibration
- Up to 72 MHz depending on the
product line used
- 8 MHz after reset using HSI
Up to 36 MHz Up to 48 MHz
LSI, LSE or HSE/128 LSI, LSE or HSE clock divided by 32
- MCO pin (PA8)
- Connectivity line: HSI, HSE, PLL/2,
SYSCLK, PLL2, PLL3 or XT1
- Other product lines: HSI, HSE,
PLL/2 or SYSCLK
LSI connected to TIM5 CH4 IC: can
measure LSI with respect to HSI/HSE
clock
Up to 48 MHz
MCO(PA8): SYSCLK, HSI, HSE, HSI14,
PLLCLK/2, LSE, LSI
- LSE & LSI clocks are indirectly measured
through MCO by the timer TIM14 with
respect to HSI/HSE clock
- HSI14/HSE are indirectly measured
through MCO by means of the TIM14
channel 1 input capture with respect to HSI
clock.
In addition to the differences described in the table above, the following additional
adaptation steps may be needed for the migration.
1. S
ystem clock configuration: when moving from F1 series to F0 series, only a few
settings need to be updated in the system clock configuration code; mainly the Flash
settings (configure the right wait states for the system frequency, prefetch
enable/disable) or/and the PLL parameters configuration:
a) In case HSE or HSI is used directly as the system clock source, only the Flash
parameters should be modified.
b) In case PLL (clocked by HSE or HSI) is used as the system clock source, the
Flash parameters and PLL configuration need to be updated.
Ta bl e 7 below provides an example of porting a system clock configuration from F1 to F0
series:
– STM32F100x value line running at maximum performance: system clock at
24 MHz (PLL, clocked by the HSE (8 MHz), used as the system clock source),
Flash with 0 wait states and Flash prefetch queue enabled.
– F0 series running at maximum performance: system clock at 48 MHz (PLL,
clocked by the HSE (8 MHz), used as the system clock source), Flash with 1 wait
state and Flash prefetch enabled.
As shown in Ta bl e 7 , only the Flash settings and PLL parameters (code in Bold Italic) need
to be rewritten to run on F0 series. However, HSE, AHB prescaler and the system clock
source configuration are left unchanged, and APB prescalers are adapted to the maximum
APB frequency in the F0 series.
14/60 Doc ID 023072 Rev 1
Page 15
AN4088 Peripheral migration
Note: 1 The source code presented in Tab le 7 is intentionally simplified (timeout in wait loop
removed) and is based on the assumption that the RCC and Flash registers are at their
reset values.
2 For STM32F0xx, you can use the clock configuration tool,
STM32F0xx_Clock_Configuration.xls, to generate a customized system_stm32f0xx.c file
containing a system clock configuration routine, depending on your application
requirements.
Table 7. Example of migrating system clock configuration code from F1 to F0
STM32F100x Value Line running at 24 MHz (PLL as
clock source) with 0 wait states
/* Enable HSE ----------------------------*/
RCC->CR |= ((uint32_t)RCC_CR_HSEON);
/* Wait till HSE is ready */
while((RCC->CR & RCC_CR_HSERDY) == 0)
{
}
/* Flash configuration -------------------*/
/* Prefetch ON, Flash 0 wait state */
FLASH->ACR |= FLASH_ACR_PRFTBE | FLASH_ACR_LATENCY_0;
/* AHB and APB prescaler configuration --*/
/* HCLK = SYSCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1;
/* PCLK2 = HCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE2_DIV1;
/* PCLK1 = HCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE1_DIV1;
/* PLL configuration = (HSE / 2) * 6 = 24 MHz */
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_PREDIV1 |
RCC_CFGR_PLLXTPRE_PREDIV1_Div2 | RCC_CFGR_PLLMULL6);
/* Enable PLL */
RCC->CR |= RCC_CR_PLLON;
/* Wait till PLL is ready */
while((RCC->CR & RCC_CR_PLLRDY) == 0)
{
}
/* Select PLL as system clock source ----*/
RCC->CFGR &= (uint32_t)((uint32_t)~(RCC_CFGR_SW));
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
/* Wait till PLL is used as system clock source */
while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) !=
(uint32_t)0x08)
{
}
STM32F0xx running at 48 MHz (PLL as clock source)
with 1 wait state
/* Enable HSE ----------------------------*/
RCC->CR |= ((uint32_t)RCC_CR_HSEON);
/* Wait till HSE is ready */
while((RCC->CR & RCC_CR_HSERDY) == 0)
{
}
/* Flash configuration -------------------*/
/* Prefetch ON, Flash 1 wait state */
FLASH->ACR |= FLASH_ACR_PRFTBE | FLASH_ACR_LATENCY;
/* AHB and APB prescaler configuration --*/
/* HCLK = SYSCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_HPRE_DIV1;
/* PCLK = HCLK */
RCC->CFGR |= (uint32_t)RCC_CFGR_PPRE_DIV1;
/* PLL configuration = HSE * 6 = 48 MHz -*/
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_PREDIV1 |
RCC_CFGR_PLLXTPRE_PREDIV1 | RCC_CFGR_PLLMULL6);
/* Enable PLL */
RCC->CR |= RCC_CR_PLLON;
/* Wait till PLL is ready */
while((RCC->CR & RCC_CR_PLLRDY) == 0)
{
}
/* Select PLL as system clock source ----*/
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
/* Wait till PLL is used as system clock source */
while ((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) !=
(uint32_t)RCC_CFGR_SWS_PLL)
{
}
2. Peripheral access configuration: since the address mapping of some peripherals has
been changed in F0 series versus F1 series, you need to use different registers to
[enable/disable] or [enter/exit] the peripheral [clock] or [from reset mode].
Doc ID 023072 Rev 1 15/60
Page 16
Peripheral migration AN4088
Table 8. RCC registers used for peripheral access configuration
Bus Register Comments
AHB
APB1
APB2
RCC_AHBRSTR Used to [enter/exit] the AHB peripheral from reset
RCC_AHBENR Used to [enable/disable] the AHB peripheral clock
RCC_APB1RSTR Used to [enter/exit] the APB1 peripheral from reset
RCC_APB1ENR Used to [enable/disable] the APB1 peripheral clock
RCC_APB2RSTR Used to [enter/exit] the APB2 peripheral from reset
RCC_APB2ENR Used to [enable/disable] the APB2 peripheral clock
To configure the access to a given peripheral, you have first to know to which bus this
peripheral is connected; refer to Ta bl e 5 then, depending on the action needed, program
the right register as described in Ta bl e 8 above. For example, if USART1 is connected to the
APB2 bus, to enable the USART1 clock you have to configure APB2ENR register as follows:
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
3. Peripheral clock configuration: some peripherals have a dedicated clock source
independent from the system clock, and used to generate the clock required for their
operation:
a) A
DC: in STM32F0 series, the ADC features two possible clock sources:
– The first one is based on the PCLK; a prescaler allows you to reduce the ADC
input frequency by a factor 2 or 4 before getting to the ADC.
– The other one is a completely new feature on stingray; a dedicated 14 MHz
oscillator (HSI14) is integrated on the chip and can be used for the ADC input
frequency.
b) RTC:
in STM32F0 series, the RTC features three possible clock sources:
– The first one is based on the HSE Clock; a prescaler divides its frequency by 32
before going to the RTC.
– The second one is the LSE oscillator.
– The third clock source is the LSI RC with a value of 40 KHz.
3.5 DMA interface
STM32F1 and STM32F0 series use the same fully compatible DMA controller.
The STM32F0 series uses one 5-channel DMA controller when STM32F1 uses two. Each
channel is dedicated to managing memory access requests from one or more peripherals.
The table below presents the correspondence between the DMA requests of the peripherals
in STM32F1 series and STM32F0 series.
16/60 Doc ID 023072 Rev 1
Page 17
AN4088 Peripheral migration
Table 9. DMA request differences between STM32F1 series and STM32F0 series
Peripheral DMA request STM32F1 series STM32F0 series
ADC1/ADC ADC1/ADC DMA1_Channel1
DMA_Channel1
DMA_Channel2
ADC3 ADC3 DMA2_Channel5 NA
DAC
SPI1
SPI2
SPI3
USART1
USART2
USART3
UART4
UART5
I2C1
I2C2
DAC_Channel1/
DAC
DAC_Channel2
SPI1_Rx
SPI1_Tx
SPI2_Rx
SPI2_Tx
SPI3_Rx
SPI3_Tx
USART1_Rx
USART1_Tx
USART2_Rx
USART2_Tx
USART3_Rx
USART3_Tx
UART4_Rx
UART4_Tx
UART5_Rx
UART5_Tx
I2C1_Rx
I2C1_Tx
I2C2_Rx
I2C2_Tx
DMA2_Channel3 / DMA1_Channel3
DMA2_Channel4 / DMA1_Channel4
DMA1_Channel2
DMA1_Channel3
DMA1_Channel4
DMA1_Channel5
DMA2_Channel1
DMA2_Channel2
DMA1_Channel5
DMA1_Channel4
DMA1_Channel6
DMA1_Channel7
DMA1_Channel3
DMA1_Channel2
DMA2_Channel3
DMA2_Channel5
DMA2_Channel4
DMA2_Channel1
DMA1_Channel7
DMA1_Channel6
DMA1_Channel5
DMA1_Channel4
(1)
DMA_Channel3
(1)
DMA_Channel2
DMA_Channel3
DMA_Channel4
DMA_Channel5
NA
DMA_Channel3/DMA_Channel5
DMA_Channel2/DMA_Channel4
DMA_Channel6
DMA_Channel7
NA
NA
NA
DMA_Channel7
DMA_Channel6
DMA_Channel5
DMA_Channel4
SDIO SDIO DMA2_Channel4 NA
TIM1
TIM1_UP
TIM1_CH1
TIM1_CH2
TIM1_CH3
TIM1_CH4
TIM1_TRIG
TIM1_COM
DMA1_Channel5
DMA1_Channel2
DMA1_Channel3
DMA1_Channel6
DMA1_Channel4
DMA1_Channel4
DMA1_Channel4
DMA_Channel5
DMA_Channel2
DMA_Channel3
DMA_Channel6
DMA_Channel4
DMA_Channel4
DMA_Channel4
Doc ID 023072 Rev 1 17/60
Page 18
Peripheral migration AN4088
Table 9. DMA request differences between STM32F1 series and STM32F0 series (continued)
Peripheral DMA request STM32F1 series STM32F0 series
TIM8
TIM2
TIM3
TIM4
TIM5
TIM8_UP
TIM8_CH1
TIM8_CH2
TIM8_CH3
TIM8_CH4
TIM8_TRIG
TIM8_COM
TIM2_UP
TIM2_CH1
TIM2_CH2
TIM2_CH3
TIM2_CH4
TIM3_UP
TIM3_CH1
TIM3_TRIG
TIM3_CH3
TIM3_CH4
TIM4_UP
TIM4_CH1
TIM4_CH2
TIM4_CH3
TIM5_UP
TIM5_CH1
TIM5_CH2
TIM5_CH3
TIM5_CH4
TIM5_TRIG
DMA2_Channel1
DMA2_Channel3
DMA2_Channel5
DMA2_Channel1
DMA2_Channel2
DMA2_Channel2
DMA2_Channel2
DMA1_Channel2
DMA1_Channel5
DMA1_Channel7
DMA1_Channel1
DMA1_Channel7
DMA1_Channel3
DMA1_Channel6
DMA1_Channel6
DMA1_Channel2
DMA1_Channel3
DMA1_Channel7
DMA1_Channel1
DMA1_Channel4
DMA1_Channel5
DMA2_Channel2
DMA2_Channel5
DMA2_Channel4
DMA2_Channel2
DMA2_Channel1
DMA2_Channel1
TIM6 TIM6_UP DMA2_Channel3 / DMA1_Channel3
NA
DMA_Channel2
DMA_Channel5
DMA_Channel3
DMA_Channel1
DMA_Channel4
DMA_Channel3
DMA_Channel4
DMA_Channel4
DMA_Channel2
DMA_Channel3
NA
NA
(1)
DMA_Channel3
TIM7 TIM7_UP DMA2_Channe4 / DMA1_Channel4
TIM15_UP
TIM15
TIM15_CH1
TIM15_TRIG
TIM15_COM
TIM16
TIM17
1. For high-density value line devices, the DAC DMA requests are mapped respectively on DMA1 Channel 3 and DMA1
Channel 4.
TIM16_UP
TIM16_CH1
TIM17_UP
TIM17_CH1
DMA1_Channel5
DMA1_Channel5
DMA1_Channel5
DMA1_Channel5
DMA1_Channel6
DMA1_Channel6
DMA1_Channel7
DMA1_Channel7
(1)
NA
DMA_Channel5
DMA_Channel5
DMA_Channel5
DMA_Channel5
DMA_Channel3/DMA_Channel4
DMA_Channel3/DMA_Channel4
DMA_Channel1/DMA_Channel2
DMA_Channel1/DMA_Channel2
18/60 Doc ID 023072 Rev 1
Page 19

AN4088 Peripheral migration
3.6 Interrupt vectors
Ta bl e 1 0 presents the interrupt vectors in STM32F0 series versus STM32F1 series.
The switch from Cortex-M3 to Cortex-M0 has introduced a reduction of the vector table. This
leads to many differences between the two devices.
Table 10. Interrupt vector differences between STM32F1 series and STM32F0 series
Position STM32F1 series STM32F0 series
0 WWDG WWDG
1 PVD PVD
2 TAMPER RTC
3 RTC FLASH
4 FLASH RCC
5 RCC EXTI0_1
6 EXTI0 EXTI2_3
7 EXTI1 EXTI4_15
8 EXTI2 TSC
9 EXTI3 DMA_CH1
10 EXTI4 DMA_CH2_CH3
11 DMA1_Channel1 DMA_CH4_CH5
12 DMA1_Channel2 ADD_COMP
13 DMA1_Channel3 TIM1_BRK_UP_TRG_COM
14 DMA1_Channel4 TIM1_CC
15 DMA1_Channel5 TIM2
16 DMA1_Channel6 TIM3
17 DMA1_Channel7 TIM6_DAC
18 ADC1_2 Reserved
19
20
21 CAN1_RX1 TIM16
22 CAN1_SCE TIM17
23 EXTI9_5 I2C1
24 TIM1_BRK / TIM1_BRK _TIM9 I2C2
25 TIM1_UP / TIM1_UP_TIM10 SPI1
26
27 TIM1_CC USART1
CAN1_TX / USB_HP_CAN_TX TIM14
CAN1_RX0 / USB_LP_CAN_RX0 TIM15
TIM1_TRG_COM /
TIM1_TRG_COM_TIM11
SPI2
28 TIM2 USART2
29 TIM3 Reserved
Doc ID 023072 Rev 1 19/60
Page 20

Peripheral migration AN4088
Table 10. Interrupt vector differences between STM32F1 series and STM32F0 series
Position STM32F1 series STM32F0 series
30 TIM4 CEC
31 I2C1_EV Reserved
32 I2C1_ER NA
33 I2C2_EV NA
34 I2C2_ER NA
35 SPI1 NA
36 SPI2 NA
37 USART1 NA
38 USART2 NA
39 USART3 NA
40 EXTI15_10 NA
41 RTC_Alarm NA
42 OTG_FS_WKUP / USBWakeUp NA
43 TIM8_BRK / TIM8_BRK_TIM12
44 TIM8_UP / TIM8_UP_TIM13
(1)
(1)
NA
NA
45
TIM8_TRG_COM /
TIM8_TRG_COM_TIM14
(1)
NA
46 TIM8_CC NA
47 ADC3 NA
48 FSMC NA
49 SDIO NA
50 TIM5 NA
51 SPI3 NA
52 UART4 NA
53 UART5 NA
54 TIM6 NA
55 TIM7 NA
56 DMA2_Channel1 NA
57 DMA2_Channel2 NA
58 DMA2_Channel3 NA
59 DMA2_Channel4/DMA2_Channel4_5
(1)
NA
60 DMA2_Channel5 NA
61 ETH NA
62 ETH_WKUP NA
63 CAN2_TX NA
20/60 Doc ID 023072 Rev 1
Page 21

AN4088 Peripheral migration
Table 10. Interrupt vector differences between STM32F1 series and STM32F0 series
Position STM32F1 series STM32F0 series
64 CAN2_RX01 NA
65 CAN2_RX1 NA
66 CAN2_SCE NA
67 OTG_FS NA
1. Depending on the product line used.
The cortex M0 core uses 2 bits to set the interrupt priority without a sub-priority. The user can define 4
levels of priorities in the Nested Vector Interrupt Controller. F1 and Cortex M3 core use 4 bits, thus it can
reach 16 priority levels.
3.7 GPIO interface
The STM32F0 GPIO peripheral embeds new features compared to F1 series, below the
main features:
● GPIO mapped on AHB bus for better performance
● I/O pin multiplexer and mapping: pins are connected to on-chip peripherals/modules
through a multiplexer that allows only one peripheral alternate function (AF) connected
to an I/O pin at a time. In this way, there can be no conflict between peripherals sharing
the same I/O pin.
● More possibilities and features for I/O configuration
The F0 GPIO peripheral is a new design and thus the architecture, features and registers
are different from the GPIO peripheral in the F1 series. Any code written for the F1 series
using the GPIO needs to be rewritten to run on F0 series.
For more information about STM32F0’s GPIO programming and usage, please refer to the
"I/O pin multiplexer and mapping" section in the GPIO chapter of the STM32F0xx Reference
Manual (RM0091).
The table below presents the differences between GPIOs in the STM32F1 series and
STM32F0 series.
Table 11. GPIO differences between STM32F1 series and STM32F0 series
Input mode
General purpose output
GPIO STM32F1 series STM32F0 series
Floating
PU
PD
PP
OD
Floating
PU
PD
PP
PP + PU
PP + PD
OD
OD + PU
OD + PD
Doc ID 023072 Rev 1 21/60
Page 22

Peripheral migration AN4088
Table 11. GPIO differences between STM32F1 series and STM32F0 series (continued)
GPIO STM32F1 series STM32F0 series
PP
PP + PU
Alternate function
output
Input / Output Analog Analog
PP
OD
PP + PD
OD
OD + PU
OD + PD
2 MHz
Output speed
Alternate function
selection
Max IO toggle frequency 18 MHz 12 MHz
10 MHz
50 MHz
To optimize the number of peripheral I/O
functions for different device packages, it
is possible to remap some alternate
functions to some other pins (software
remap).
2 MHz
10 MHz
48 MHz
Highly flexible pin multiplexing allows no
conflict between peripherals sharing the
same I/O pin.
Alternate function mode
In STM32F1 series
1. The configuration to use an I/O as an alternate function depends on the peripheral
mode used. For example, the USART Tx pin should be configured as an alternate
function push-pull, while the USART Rx pin should be configured as input floating or
input pull-up.
2. To optimize the number of peripheral I/O functions for different device packages
(especially those with a low pin count), it is possible to remap some alternate functions
to other pins by software. For example, the USART2_RX pin can be mapped on PA3
(default remap) or PD6 (by software remap).
In STM32F0 series
1. Whatever the peripheral mode used, the I/O must be configured as an alternate
function, then the system can use the I/O in the proper way (input or output).
2. The I/O pins are connected to on-chip peripherals/modules through a multiplexer that
allows only one peripheral’s alternate function to be connected to an I/O pin at a time.
In this way, there can be no conflict between peripherals sharing the same I/O pin.
Each I/O pin has a multiplexer with eight alternate function inputs (AF0 to AF7) that can
be configured through the GPIOx_AFRL and GPIOx_AFRH registers:
– The peripheral alternate functions are mapped by configuring AF0 to AF7.
3. In addition to this flexible I/O multiplexing architecture, each peripheral has alternate
functions mapped on different I/O pins to optimize the number of peripheral I/O
functions for different device packages. For example, the USART2_RX pin can be
mapped on PA3 or PA15 pin.
22/60 Doc ID 023072 Rev 1
Page 23

AN4088 Peripheral migration
Note: Please refer to the “Alternate function mapping” table in the STM32F0x datasheet for the
detailed mapping of the system and the peripheral alternate function I/O pins.
4. Configuration procedure
– Configure the desired I/O as an alternate function in the GPIOx_MODER register
– Select the type, pull-up/pull-down and output speed via the GPIOx_OTYPER,
GPIOx_PUPDR and GPIOx_OSPEEDER registers, respectively
– Connect the I/O to the desired AFx in the GPIOx_AFRL or GPIOx_AFRH register
3.8 EXTI source selection
In STM32F1, the selection of the EXTI line source is performed through EXTIx bits in
AFIO_EXTICRx registers, while in F0 series this selection is done through EXTIx bits in
SYSCFG_EXTICRx registers.
Only the mapping of the EXTICRx registers has been changed, without any changes to the
meaning of the EXTIx bits. However, the maximum range of EXTIx bit values is 0b0101 as
the last PORT is F (in F1 series, the maximum value is 0b0110).
3.9 FLASH interface
The table below presents the difference between the FLASH interface of STM32F1 series
and STM32F0 series, which can be grouped as follows:
● New interface, new technology
● New architecture
● New read protection mechanism, 3 read protection levels
Consequently, the F0 Flash programming procedures and registers are different from the F1
series, and any code written for the Flash interface in the F1 series needs to be rewritten to
run on F0 series.
Table 12. FLASH differences between STM32F1 series and STM32F0 series
Main/Program memory
EEPROM memory
Feature STM32F1 series STM32F0 series
Start Address 0x0800 0000 0x0800 0000
End Address up to 0x080F FFFF Up to 0x0805 FFFF
Page size = 2 Kbytes
Granularity
Start Address
End Address
except for Low and Medium
density page size = 1 Kbyte
Available through SW emulation Available through SW emulation
64 pages of 1 Kbyte
System memory
Start Address 0x1FFF F000 0x1FFF EC00
End Address 0x1FFF F7FF 0x1FFF F7FF
Doc ID 023072 Rev 1 23/60
Page 24

Peripheral migration AN4088
Table 12. FLASH differences between STM32F1 series and STM32F0 series (continued)
Feature STM32F1 series STM32F0 series
Start Address 0x1FFF F800 0x1FFF F800
Option Bytes
End Address 0x1FFF F80F 0x1FFF F80B
Start address 0x4002 2000 0x4002 2000
Flash interface
Read Protection
Write protection Protection by 4-Kbyte block Protection by 4-Kbyte block
User Option bytes
Erase granularity Page (1 or 2 Kbytes) Page (1 Kbyte)
Program mode Half word (16 bits) Half word (16 bits)
Programming
procedure
Unprotection
Protection
Same for all product lines
Read protection disable
RDP = 0xA55A
Read protection enable
RDP != 0xA55A
STOP STOP
STANDBY STANDBY
WDG WDG
NA RAM_PARITY_CHECK
NA VDDA_MONITOR
NA nBOOT1
Same as F1 series for Flash
program and erase operations.
Different from F1 series for
Option byte programming
Level 0 no protection
RDP = 0xAA
Level 1 memory protection
RDP != (Level 2 & Level 0)
Level 2: Lvl 1 + Debug disabled
3.10 ADC interface
The table below presents the differences between the ADC interface of STM32F1 series
and STM32F0 series; these differences are the following:
● New digital interface
● New architecture and new features
Table 13. ADC differences between STM32F1 series and STM32F0 series
ADC STM32F1 series STM32F0 series
ADC Type SAR structure SAR structure
Instances ADC1 / ADC2 / ADC3 ADC
24/60 Doc ID 023072 Rev 1
Page 25

AN4088 Peripheral migration
Table 13. ADC differences between STM32F1 series and STM32F0 series
ADC STM32F1 series STM32F0 series
Maximum sampling
frequency
Number of
channels
1 MSPS
Up to 21 channels Up to 16 channels + 3 internal
1 MSPS
Resolution 12-bit 12-bit
Single / continuous / scan /
discontinuous / dual mode /
triple mode
Conversion modes
Single / continuous / scan / discontinuous /
dual mode
DMA Ye s Ye s
Ye s Ye s
External Trigger
External event for
regular group
For ADC1 and ADC2:
TIM1 CC1
TIM1 CC2
TIM1 CC3
TIM2 CC2
TIM3 TRGO
TIM4 CC4
EXTI line 11 /
TIM8_TRGO
For ADC3:
TIM3 CC1
TIM2 CC3
TIM1 CC3
TIM8 CC1
TIM8 TRGO
TIM5 CC1
External event for
injected group
For ADC1 and ADC2:
TIM1 TRGO
TIM1 CC4
TIM2 TRGO
TIM2 CC1
TIM3 CC4
TIM4 TRGO
EXTI line15 /
TIM8_CC4
For ADC3:
TIM1 TRGO
TIM1 CC4
TIM4 CC3
TIM8 CC2
TIM8 CC4
TIM5 TRGO
External even
TIM1_TRGO
TIM1_CC4
TIM2_TRGO
TIM3_TRGO
TIM15_TRGO
t
Supply requirement 2.4 V to 3.6 V 2.4 V to 3.6 V
Input range V
<= VIN <= V
REF-
REF+
Vdd and 2.4 <= Vdda <= 3.6
Doc ID 023072 Rev 1 25/60
Page 26

Peripheral migration AN4088
3.11 PWR interface
In STM32F0 series the PWR controller presents some differences vs. F1 series, these
differences are summarized in the table below. However, the programming interface is
unchanged.
Table 14. PWR differences between STM32F1 series and STM32F0 series
PWR STM32F1 series STM32F0 series
Power supplies
Battery backup
domain
Power supply
supervisor
Low-power
modes
Wake-up
sources
1- VDD = 2.0 to 3.6 V: external power
supply for I/Os and the internal regulator.
Provided externally through VDD pins.
2- VSSA, VDDA = 2.0 to 3.6 V: external
analog power supplies for ADC, Reset
blocks, RCs and PLL. VDDA and VSSA
must be connected to VDD and VSS,
respectively.
3- VBAT = 1.8 to 3.6 V: power supply for
RTC, external clock 32 kHz oscillator and
backup registers (through power switch)
when VDD is not present.
– Backup registers
–RTC
–LSE
– PC13 to PC15 I/Os
Integrated POR / PDR circuitry
Programmable voltage detector (PVD)
Sleep mode
Stop mode
Standby mode (1.8V domain powered-off)
Sleep mode
– Any peripheral interrupt/wakeup event
Stop mode
– Any EXTI line event/interrupt
Standby mode
– WKUP pin rising edge
–RTC alarm
– External reset in NRST pin
– IWDG reset
1- VDD = 2.0 to 3.6 V: external power supply for
I/Os and the internal regulator. Provided externally
through VDD pins.
2- VSSA, VDDA = 2.0 to 3.6 V: external analog
power supplies for ADC, DAC, Reset blocks, RCs
and PLL. VDDA and VSSA must be connected to
VDD and VSS, respectively.
3- VBAT = 1.8 to 3.6 V: power supply for RTC,
external clock 32 kHz oscillator and backup
registers (through power switch) when VDD is not
present.
– Backup registers
–RTC
–LSE
– RCC Backup Domain Control Register
Integrated POR / PDR circuitry
Programmable voltage detector (PVD)
Sleep mode
Stop mode
Standby mode (1.8V domain powered-off)
and sleep low power modes
Sleep
– Any peripheral interrupt/wakeup event
Stop mode
– Any EXTI line event/interrupt
Standby mode
– WKUP0 or WKUP1 pin rising edge
– RTC alarm
– External reset in NRST pin
– IWDG reset
26/60 Doc ID 023072 Rev 1
Page 27

AN4088 Peripheral migration
3.12 Real-time clock (RTC) interface
The STM32F0 series embeds a new RTC peripheral versus the F1 series. The architecture,
features and programming interface are different.
As a consequence, the F0 RTC programming procedures and registers are different from
those of the F1 series, so any code written for the F1 series using the RTC needs to be
rewritten to run on F0 series.
The F0 RTC provides best-in-class features:
● BCD timer/counter
● Time-of-day clock/calendar featuring subsecond precision with programmable daylight
saving compensation
● A programmable alarm
● Digital calibration circuit
● Time-stamp function for event saving
● Accurate synchronization with an external clock using the subsecond shift feature.
● 5 backup registers (20 bytes) which are reset when a tamper detection event occurs
For more information about STM32F0’s RTC features, please refer to RTC chapter of
STM32F0xx Reference Manual (RM0091).
For advanced information about the RTC programming, please refer to Application Note
AN3371 Using the STM32 HW real-time clock (RTC).
3.13 SPI interface
The STM32F0 series embeds a new SPI peripheral versus the F1 series. The architecture,
features and programming interface are modified to introduce new capabilities.
As a consequence, the F0 SPI programming procedures and registers are similar to those
of the F1 series but with new features. The code written for the F1 series using the SPI
needs little rework to run on F0 series, if it did not use new capabilities.
The F0 SPI provides best-in-class added features:
● Enhanced NSS control - NSS pulse mode (NSSP) and TI mode
● Programmable data frame length from 4-bit to 16-bit
● Two 32-bit Tx/Rx FIFO buffers with DMA capability and data packing access for frames
fitted into one byte (up to 8-bit)
● 8-bit or 16-bit CRC calculation length for 8-bit and 16-bit data.
Furthermore, the SPI peripheral, available in the F0 family, fixes the CRC limitation present
in the F1 family product. For more information about STM32F0 SPI features, please refer to
SPI chapter of STM32F0xx Reference Manual (RM0091).
Doc ID 023072 Rev 1 27/60
Page 28

Peripheral migration AN4088
3.14 I2C interface
The STM32F0 series embeds a new I2C peripheral versus the F1 series. The architecture,
features and programming interface are different.
As a consequence, the F0 I2C programming procedures and registers are different from
those of the F1 series, so any code written for the F1 series using the I2C needs to be
rewritten to run on F0 series.
The F0 I2C provides best-in-class new features:
● Communication events managed by hardware.
● Programmable analog and digital noise filters.
● Independent clock source: HSI or SYSCLK.
● Wake-up from STOP mode.
● Fast mode + (up to 1MHz) with 20mA I/O output current drive.
● 7-bit and 10-bit addressing mode, multiple 7-bit slave address support with
configurable masks.
● Address sequence automatic sending (both 7-bit and 10-bit) in master mode.
● Automatic end of communication management in master mode.
● Programmable Hold and Setup times.
● Command and Data Acknowledge control.
For more information about STM32F0 I2C features, please refer to I2C chapter of
STM32F0xx Reference Manual (RM0091).
28/60 Doc ID 023072 Rev 1
Page 29

AN4088 Peripheral migration
3.15 USART interface
The STM32F0 series embeds a new USART peripheral versus the F1 series. The
architecture, features and programming interface are modified to introduce new capabilities.
As a consequence, the F0 USART programming procedures and registers are modified
from those of the F1 series, so any code written for the F1 series using the USART needs to
be updated to run on F0 series.
The F0 USART provides best-in-class added features:
● A choice of independent clock sources allowing
– UART functionality and wake-up from low power modes,
– convenient baud-rate programming independently of the APB clock
reprogramming.
● Smartcard emulation capability: T=0 with auto retry and T=1
● Swappable Tx/Rx pin configuration
● Binary data inversion
● Tx/Rx pin active level inversion
● Transmit/receive enable acknowledge flags
● New Interrupt sources with flags:
– Address/character match
– Block length detection and timeout detection
● Timeout feature
● Modbus communication
● Overrun flag disable
● DMA disable on reception error
● Wake-up from STOP mode
● Auto baud rate detection capability
● Driver Enable signal (DE) for RS485 mode
For more information about STM32F0 USART features, please refer to USART chapter of
STM32F0xx Reference Manual (RM0091).
Doc ID 023072 Rev 1 29/60
Page 30

Peripheral migration AN4088
3.16 CEC interface
The STM32F0 series embeds a new CEC peripheral versus the F1 series. The architecture,
features and programming interface are modified to introduce new capabilities.
As a consequence, the F0 CEC programming procedures and registers are different from
those of the F1 series, so any code written for the F1 series using the CEC needs to be
rewritten to run on F0 series.
The F0 CEC provides best-in-class added features:
● 32 KHz CEC kernel with dual clock
–LSE
– HSI/244
● Reception in listen mode
● Rx tolerance margin: standard or extended
● Arbitration (signal free time): standard (by H/W) or aggressive (by S/W)
● Arbitration lost detected flag/interrupt
● Automatic transmission retry supported in case of arbitration lost
● Multi-address configuration
● Wake-up from STOP mode
● Receive error detection
– Bit rising error (with stop reception)
– Short bit period error
– Long bit period error
● Configurable error bit generation
– on bit rising error detection
– on long bit period error detection
● Transmission under run detection
● Reception overrun detection
The following features present in the F1 family are now handled by the new F0 CEC features
and thus are no more available.
● Bit timing error mode & bit period error mode, by the new error handler
● Configurable prescaler frequency divider, by the CEC fixed kernel clock
For more information about STM32F0 CEC features, please refer to CEC chapter of
STM32F0xx Reference Manual (RM0091).
30/60 Doc ID 023072 Rev 1
Page 31

AN4088 Firmware migration using the library
4 Firmware migration using the library
This section describes how to migrate an application based on STM32F1xx Standard
Peripherals Library in order to use the STM32F0xx Standard Peripherals Library.
The STM32F1xx and STM32F0xx libraries have the same architecture and are CMSIS
compliant; they use the same driver naming and the same APIs for all compatible
peripherals.
Only a few peripheral drivers need to be updated to migrate the application from an F1
series to an F0 series product.
Note: In the rest of this chapter (unless otherwise specified), the term “STM32F0xx Library” is
used to refer to the STM32F0xx Standard Peripherals Library, and the term “STM32F10x
Library” is used to refer to the STM32F10x Standard Peripherals Library.
4.1 Migration steps
To update your application code to run on STM32F0xx Library, you have to follow the steps
listed below:
1. Update the toolchain startup files
a) Project files: device connections and Flash memory loader. These files are
provided with the latest version of your toolchain that supports STM32F0xxx
devices. For more information, please refer to your toolchain documentation.
b) Linker configuration and vector table location files: these files are developed
following the CMSIS standard and are included in the STM32F0xx Library install
package under the following directory: Libraries\CMSIS\Device\ST\STM32F0xx.
2. Add STM32F0xx Library source files to the application sources
a) Replace the stm32f10x_conf.h file of your application with stm32f0xx_conf.h
provided in STM32F0xx Library.
b) Replace the existing stm32f10x_it.c/stm32f10x_it.h files in your application with
stm32f0xx_it.c/Stm32f0xx_it.h provided in STM32F0xx Library.
3. Update the part of your application code that uses the RCC, PWR, GPIO, FLASH, ADC
and RTC drivers. Further details are provided in the next section.
Note: The STM32F0xx Library comes with a rich set of examples (67 in total) demonstrating how
to use the different peripherals (under Project\STM32F0xx_StdPeriph_Examples\).
4.2 RCC driver
1. System clock configuration: as presented in section 3.4: Reset and clock controller
(RCC) interface, the STM32 F0 and F1 series have the same clock sources and
configuration procedures. However, there are some differences related to the product
voltage range, PLL configuration, maximum frequency and Flash wait state
configuration. Thanks to the CMSIS layer, these differences are hidden from the
application code; you only have to replace the system_stm32f10x.c file by
system_stm32f0xx.c file. This file provides an implementation of SystemInit() function
Doc ID 023072 Rev 1 31/60
Page 32

Firmware migration using the library AN4088
used to configure the microcontroller system at start-up and before branching to the
main() program.
Note: For STM32F0xx, you can use the clock configuration tool,
STM32F0xx_Clock_Configuration.xls, to generate a customized SystemInit() function
depending on your application requirements. For more information, refer to AN4055 “Clock
configuration tool for STM32F0xx microcontrollers”.
2. Peripheral access configuration
: as presented in section 3.4: Reset and clock controller
(RCC) interface, you need to call different functions to [enable/disable] or [enter/exit]
the peripheral [clock] or [from reset mode]. For example, GPIOA is mapped on AHB
bus on F0 series (APB2 bus on F1 series). To enable its clock, you have to use the
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
function instead of:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
in the F1 series.
Refer to Tab le 5 for the peripheral bus mapping changes between F0 and F1 series.
3.
Peripheral clock configuration
Some STM32F0xx peripherals support dual clock features. The table below summarizes the
clock sources for those IPs in comparison with STM32F10xx peripherals.
Table 15. STM32F10x and STM32F0xx source clock API correspondence
Peripherals
ADC APB2 clock with prescaler
CEC APB1 clock with prescaler
I2C APB1 clock
SPI/I2S System clock System clock
USART
Source clock in STM32F10xx
device
1. USART1 can be clocked with:
- PCLK2 (72 MHz Max)
2. Other USARTs can be clocked
with:
- PCLK1 (36 MHz Max)
Source clock in STM32F0xx device
- HSI14: by default
- APB2 clock/2
- APB2 clock/4
- HSI/244: by default
- LSE
- APB clock: Clock for the digital interface
(used for register read/write access). This
clock is equal to the APB2 clock.
1. I2C1can be clocked with:
- System clock
- HSI
2. I2C2 can be only clocked with:
- HSI
1. USART1 can be clocked with:
- system clock
- LSE clock
- HSI clock
- APB clock (PCLK)
2. USART2 can be only clocked with:
- system clock
32/60 Doc ID 023072 Rev 1
Page 33

AN4088 Firmware migration using the library
4.3 FLASH driver
The table below presents the FLASH driver API correspondence between STM32F10x and
STM32F0xx Libraries. You can easily update your application code by replacing
STM32F10x functions by the corresponding function in the STM32F0xx Library.
Table 16. STM32F10x and STM32F0xx FLASH driver API correspondence
STM32F10x Flash driver API STM32F0xx Flash driver API
void FLASH_SetLatency(uint32_t
FLASH_Latency);
void FLASH_PrefetchBufferCmd(uint32_t
FLASH_PrefetchBuffer);
void FLASH_HalfCycleAccessCmd(uint32_t
FLASH_HalfCycleAccess);
void FLASH_ITConfig(uint32_t FLASH_IT,
Interface configuration
FunctionalState NewState);
void FLASH_Unlock(void); void FLASH_Unlock(void);
void FLASH_Lock(void); void FLASH_Lock(void);
FLASH_Status FLASH_ErasePage(uint32_t
Page_Address);
FLASH_Status FLASH_EraseAllPages(void); FLASH_Status FLASH_EraseAllPages(void);
FLASH_STATUS
FLASH_ERASEOPTIONBYTES(void);
FLASH_Status
FLASH_ProgramWord(uint32_t Address,
uint32_t Data);
Memory Programming
FLASH_Status
FLASH_ProgramHalfWord(uint32_t Address,
uint16_t Data);
void FLASH_SetLatency(uint32_t FLASH_Latency);
void FLASH_PrefetchBufferCmd(FunctionalState
NewState);
NA
void FLASH_ITConfig(uint32_t FLASH_IT,
FunctionalState NewState);
FLASH_Status FLASH_ErasePage(uint32_t
Page_Address);
FLASH_STATUS FLASH_OB_ERASE(void);
FLASH_Status FLASH_ProgramWord(uint32_t Address,
uint32_t Data);
FLASH_Status FLASH_ProgramHalfWord(uint32_t
Address, uint16_t Data);
Doc ID 023072 Rev 1 33/60
Page 34

Firmware migration using the library AN4088
Table 16. STM32F10x and STM32F0xx FLASH driver API correspondence (continued)
STM32F10x Flash driver API STM32F0xx Flash driver API
NA void FLASH_OB_Unlock(void);
NA void FLASH_OB_Lock(void);
FLASH_Status
FLASH_ProgramOptionByteData(uint32_t
Address, uint8_t Data);
FLASH_Status
FLASH_EnableWriteProtection(uint32_t
FLASH_Pages);
FLASH_Status
FLASH_ReadOutProtection(FunctionalState
NewState);
FLASH_Status
FLASH_UserOptionByteConfig(uint16_t
OB_IWDG, uint16_t OB_STOP, uint16_t
OB_STDBY);
NA FLASH_Status FLASH_OB_Launch(void);
NA
FLASH_Status FLASH_ProgramOptionByteData(uint32_t
Address, uint8_t Data);
FLASH_Status FLASH_OB_EnableWRP(uint32_t
OB_WRP);
FLASH_Status FLASH_OB_RDPConfig(uint8_t
OB_RDP);
FLASH_Status FLASH_OB_UserConfig(uint8_t
OB_IWDG, uint8_t OB_STOP, uint8_t OB_STDBY);
FLASH_Status FLASH_OB_WriteUser(uint8_t
OB_USER);
Option Byte Programming
NA
NA
NA
uint32_t FLASH_GetUserOptionByte(void);
uint32_t
FLASH_GetWriteProtectionOptionByte(void);
FlagStatus
FLASH_GetReadOutProtectionStatus(void);
FLASH_Status FLASH_OB_BOOTConfig(uint8_t
OB_BOOT1);
FLASH_Status FLASH_OB_VDDAConfig(uint8_t
OB_VDDA_ANALOG);
FLASH_Status FLASH_OB_SRAMParityConfig(uint8_t
OB_SRAM_Parity);
uint8_t FLASH_OB_GetUser(void);
uint16_t FLASH_OB_GetWRP(void);
FlagStatus FLASH_OB_GetRDP(void);
34/60 Doc ID 023072 Rev 1
Page 35

AN4088 Firmware migration using the library
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 16. STM32F10x and STM32F0xx FLASH driver API correspondence (continued)
STM32F10x Flash driver API STM32F0xx Flash driver API
FlagStatus FLASH_GetFlagStatus(uint32_t
FLASH_FLAG);
void FLASH_ClearFlag(uint32_t
FLASH_FLAG);
FLASH_Status FLASH_GetStatus(void); FLASH_Status FLASH_GetStatus(void);
FLASH_Status
FLASH_WaitForLastOperation(uint32_t
Timeout);
FLAG management
FlagStatus
FLASH_GetPrefetchBufferStatus(void);
4.4 CRC driver
The table below presents the CRC driver API correspondence between STM32F10x and
STM32F0xx Libraries.
FlagStatus FLASH_GetFlagStatus(uint32_t
FLASH_FLAG);
void FLASH_ClearFlag(uint32_t FLASH_FLAG);
FLASH_Status FLASH_WaitForLastOperation(void);
FlagStatus FLASH_GetPrefetchBufferStatus(void);
Table 17. STM32F10xx and STM32F0xx CRC driver API correspondence
STM32F10xx CRC driver API STM32F0xx CRC driver API
NA void CRC_DeInit(void);
void CRC_ResetDR(void); void CRC_ResetDR(void);
NA
NA
Configuration
NA void CRC_SetInitRegister(uint32_t CRC_InitValue);
uint32_t CRC_CalcCRC(uint32_t CRC_Data); uint32_t CRC_CalcCRC(uint32_t CRC_Data);
uint32_t CRC_CalcBlockCRC(uint32_t pBuffer[],
uint32_t BufferLength);
uint32_t CRC_GetCRC(void); uint32_t CRC_GetCRC(void);
Computation
void CRC_ReverseInputDataSelect(uint32_t
CRC_ReverseInputData);
void CRC_ReverseOutputDataCmd(FunctionalState
NewState);
uint32_t CRC_CalcBlockCRC(uint32_t pBuffer[],
uint32_t BufferLength);
Doc ID 023072 Rev 1 35/60
Page 36

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 17. STM32F10xx and STM32F0xx CRC driver API correspondence (continued)
STM32F10xx CRC driver API STM32F0xx CRC driver API
void CRC_SetIDRegister(uint8_t CRC_IDValue); void CRC_SetIDRegister(uint8_t CRC_IDValue);
uint8_t CRC_GetIDRegister(void);
IDR access
4.5 GPIO configuration update
This section explains how to update the configuration of the various GPIO modes when
porting the application code from STM32 F1 series to F0 series.
4.5.1 Output mode
The example below shows how to configure an I/O in output mode (for example to drive a
LED) in STM32 F1 series:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_xxMHz; /* 2, 10 or 50 MHz */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOy, &GPIO_InitStructure);
uint8_t CRC_GetIDRegister(void);
In F0 series, you have to update this code as follows:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; /* Push-pull or open drain */
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; /* None, Pull-up or pull-down */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_xxMHz; /* 10, 2 or 50MHz */
GPIO_Init(GPIOy, &GPIO_InitStructure);
4.5.2 Input mode
The example below shows how to configure an I/O in input mode (for example to be used as
an EXTI line) in STM32 F1 series:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOy, &GPIO_InitStructure);
In F0 series, you have to update this code as follows:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; /* None, Pull-up or pull-down */
GPIO_Init(GPIOy, &GPIO_InitStructure);
36/60 Doc ID 023072 Rev 1
Page 37

AN4088 Firmware migration using the library
4.5.3 Analog mode
The example below shows how to configure an I/O in analog mode (for example, an ADC or
DAC channel) in STM32 F1 series:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOy, &GPIO_InitStructure);
In F0 series, you have to update this code as follows:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIOy, &GPIO_InitStructure);
4.5.4 Alternate function mode
In STM32 F1 series
1. The configuration to use an I/O as an alternate function depends on the peripheral
mode used; for example, the USART Tx pin should be configured as an alternate
function push-pull while the USART Rx pin should be configured as an input floating or
an input pull-up.
2. To optimize the number of peripheral I/O functions for different device packages, it is
possible, by software, to remap some alternate functions to other pins. For example,
the USART2_RX pin can be mapped on PA3 (default remap) or PD6 (by software
remap).
In STM32 F0 series
1. Whatever the peripheral mode used, the I/O must be configured as an alternate
function, then the system can use the I/O in the proper way (input or output).
2. The I/O pins are connected to onboard peripherals/modules through a multiplexer that
allows only one peripheral’s alternate function to be connected to an I/O pin at a time.
In this way, there can be no conflict between peripherals sharing the same I/O pin.
Each I/O pin has a multiplexer with sixteen alternate function inputs (AF0 to AF15) that
can be configured through the GPIO_PinAFConfig () function:
– After reset, all I/Os are connected to the system’s alternate function 0 (AF0)
– The peripherals’ alternate functions are mapped by configuring AF1 to AF7.
3. In addition to this flexible I/O multiplexing architecture, each peripheral has alternate
functions mapped onto different I/O pins to optimize the number of peripheral I/O
functions for different device packages; for example, the USART2_RX pin can be
mapped on PA3 or PA15 pin.
4. Configuration procedure:
– Connect the pin to the desired peripherals' Alternate Function (AF) using
GPIO_PinAFConfig() function
– Use GPIO_Init() function to configure the I/O pin:
- Configure the desired pin in alternate function mode using
GPIO_InitStructure->GPIO_Mode = GPIO_Mode_AF;
- Select the type, pull-up/pull-down and output speed via
GPIO_PuPd, GPIO_OType and GPIO_Speed members
The example below shows how to remap USART2 Tx/Rx I/Os on PD5/PD6 pins in STM32
F1 series:
/* Enable APB2 interface clock for GPIOD and AFIO (AFIO peripheral is used
to configure the I/Os software remapping) */
Doc ID 023072 Rev 1 37/60
Page 38

Firmware migration using the library AN4088
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_AFIO, ENABLE);
/* Enable USART2 I/Os software remapping [(USART2_Tx,USART2_Rx):(PD5,PD6)] */
GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE);
/* Configure USART2_Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
/* Configure USART2_Rx as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, &GPIO_InitStructure);
In F0 series, you have to update this code as follows:
/* Enable GPIOA's AHB interface clock */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
/* Select USART2 I/Os mapping on PA14/15 pins [(USART2_TX,USART2_RX):(PA.14,PA.15)]
*/
/* Connect PA14 to USART2_Tx */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource14, GPIO_AF_2);
/* Connect PA15 to USART2_Rx*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource15, GPIO_AF_2);
/* Configure USART2_Tx and USART2_Rx as alternate function */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
4.6 EXTI Line0
The example below shows how to configure the PA0 pin to be used as EXTI Line0 in STM32
F1 series:
/* Enable APB interface clock for GPIOA and AFIO */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
/* Configure PA0 pin in input mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Connect EXTI Line0 to PA0 pin */
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0);
/* Configure EXTI line0 */
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
38/60 Doc ID 023072 Rev 1
Page 39

AN4088 Firmware migration using the library
In F0 series, the configuration of the EXTI line source pin is performed in the SYSCFG
peripheral (instead of AFIO in F1 series). As a result, the source code should be updated as
follows:
/* Enable GPIOA's AHB interface clock */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
/* Enable SYSCFG's APB interface clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
/* Configure PA0 pin in input mode */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Connect EXTI Line0 to PA0 pin */
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
/* Configure EXTI line0 */
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
4.7 NVIC interrupt configuration
This section describes the configuration of the NVIC interrupts (IRQ).
In F1 series, the NVIC supports:
– up to 81 interrupts
– A programmable priority level of 0-15 for each interrupt (4 bits of interrupt priority
are used). A higher level corresponds to a lower priority; level 0 is the highest
interrupt priority.
– Grouping of priority values into group priority and subpriority fields.
– Dynamic changing of priority levels.
The Cortex-M3 exceptions are managed by CMSIS functions:
● Enable and configure the preemption priority and subpriority of the selected IRQ
channels according to the Priority grouping configuration.
The example below shows how to configure the CEC interrupt in STM32 F1 series:
/* Configure two bits for preemption priority */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* Enable the CEC global Interrupt (with higher priority) */
NVIC_InitStructure.NVIC_IRQChannel = CEC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
In F0 series, the NVIC supports:
– Up to 32 interrupts
– 4 programmable priority levels (2 bits of interrupt priority are used).
– The priority level of an interrupt should not be changed after it is enabled.
Doc ID 023072 Rev 1 39/60
Page 40

Firmware migration using the library AN4088
The Cortex-M0 exceptions are managed by CMSIS functions:
● Enable and configure the priority of the selected IRQ channels. The priority ranges
between 0 and 3. Lower priority values give a higher priority.
In F0 series, the configuration of the CEC Interrupt source code should be updated as
follows:
/* Enable the CEC global Interrupt (with higher priority) */
NVIC_InitStructure.NVIC_IRQChannel = CEC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
The table below presents the MISC driver API correspondence between STM32F10x and
STM32F0xx Libraries.
Table 18. STM32F10x and STM32F0xx MISC driver API correspondence
STM32F10xx MISC Driver API STM32F0xx MISC Driver API
void NVIC_Init(NVIC_InitTypeDef*
NVIC_InitStruct);
void NVIC_SystemLPConfig(uint8_t
LowPowerMode, FunctionalState NewState);
void SysTick_CLKSourceConfig(uint32_t
SysTick_CLKSource);
NVIC_PriorityGroupConfig(uint32_t
NVIC_PriorityGroup);
void NVIC_SetVectorTable(uint32_t
NVIC_VectTab, uint32_t Offset);
4.8 ADC configuration
This section gives an example of how to port existing code from STM32 F1 series to F0
series.
The example below shows how to configure the ADC1 to convert continuously channel 14 in
STM32 F1 series:
/* ADCCLK = PCLK2/4 */
RCC_ADCCLKConfig(RCC_PCLK2_Div4);
/* Enable ADC's APB interface clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
/* Configure ADC1 to convert continously channel14 */
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
/* ADC1 regular channel14 configuration */
ADC_RegularChannelConfig(ADC1, ADC_Channel_14, 1, ADC_SampleTime_55Cycles5);
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
void NVIC_SystemLPConfig(uint8_t
LowPowerMode, FunctionalState NewState);
void SysTick_CLKSourceConfig(uint32_t
SysTick_CLKSource);
NA
NA
40/60 Doc ID 023072 Rev 1
Page 41

AN4088 Firmware migration using the library
/* Enable ADC1's DMA interface */
ADC_DMACmd(ADC1, ENABLE);
/* Enable ADC1 */
ADC_Cmd(ADC1, ENABLE);
/* Enable ADC1 reset calibration register */
ADC_ResetCalibration(ADC1);
/* Check the end of ADC1 reset calibration register */
while(ADC_GetResetCalibrationStatus(ADC1));
/* Start ADC1 calibration */
ADC_StartCalibration(ADC1);
/* Check the end of ADC1 calibration */
while(ADC_GetCalibrationStatus(ADC1));
/* Start ADC1 Software Conversion */
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
...
In F0 series, you have to update this code as follows:
...
/* ADCCLK = PCLK/2 */
RCC_ADCCLKConfig(RCC_ADCCLK_PCLK_Div2);
/* Enable ADC1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
/* ADC1 configuration */
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_TRGO;;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ScanDirection = ADC_ScanDirection_Backward;
ADC_Init(ADC1, &ADC_InitStructure);
/* Convert the ADC1 Channel 1 with 55.5 Cycles as sampling time */
ADC_ChannelConfig(ADC1, ADC_Channel_11 , ADC_SampleTime_55_5Cycles);
/* ADC Calibration */
ADC_GetCalibrationFactor(ADC1);
/* ADC DMA request in circular mode */
ADC_DMARequestModeConfig(ADC1, ADC_DMAMode_Circular);
/* Enable ADC_DMA */
ADC_DMACmd(ADC1, ENABLE);
/* Enable ADC1 */
ADC_Cmd(ADC1, ENABLE);
/* Wait the ADCEN falg */
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_ADEN));
/* ADC1 regular Software Start Conv */
ADC_StartOfConversion(ADC1);
...
Doc ID 023072 Rev 1 41/60
Page 42

Firmware migration using the library AN4088
4.9 DAC driver
The table below describes the difference between STM32F10x functions and the
STM32F0xx Library.
Table 19. STM32F10x and STM32F0xx DAC driver API correspondence
STM32F10x DAC driver API STM32F0xx DAC driver API
void DAC_DeInit(void); void DAC_DeInit(void);
void DAC_Init(uint32_t DAC_Channel,
DAC_InitTypeDef* DAC_InitStruct);
void DAC_Init(uint32_t DAC_Channel,
DAC_InitTypeDef* DAC_InitStruct);
void DAC_StructInit(DAC_InitTypeDef*
DAC_InitStruct);
void DAC_Cmd(uint32_t DAC_Channel,
FunctionalState NewState);
void DAC_SoftwareTriggerCmd(uint32_t
DAC_Channel, FunctionalState NewState);
void DAC_SetChannel1Data(uint32_t DAC_Align,
uint16_t Data);
void DAC_SetChannel2Data(uint32_t DAC_Align,
uint16_t Data);
void DAC_SetDualChannelData(uint32_t
DAC_Align, uint16_t Data2, uint16_t Data1);
uint16_t DAC_GetDataOutputValue(uint32_t
DAC_Channel);
Configuration
void DAC_DMACmd(uint32_t DAC_Channel,
FunctionalState NewState);
DMA management
void DAC_ITConfig(uint32_t DAC_Channel,
uint32_t DAC_IT, FunctionalState NewState);(*)
FlagStatus DAC_GetFlagStatus(uint32_t
DAC_Channel, uint32_t DAC_FLAG);(*)
void DAC_ClearFlag(uint32_t DAC_Channel,
uint32_t DAC_FLAG);(*)
void DAC_StructInit(DAC_InitTypeDef*
DAC_InitStruct);
void DAC_Cmd(uint32_t DAC_Channel,
FunctionalState NewState);
void DAC_SoftwareTriggerCmd(uint32_t
DAC_Channel, FunctionalState NewState);
void DAC_SetChannel1Data(uint32_t DAC_Align,
uint16_t Data);
NA
NA
uint16_t DAC_GetDataOutputValue(uint32_t
DAC_Channel);
void DAC_DMACmd(uint32_t DAC_Channel,
FunctionalState NewState);
void DAC_ITConfig(uint32_t DAC_Channel,
uint32_t DAC_IT, FunctionalState NewState);
FlagStatus DAC_GetFlagStatus(uint32_t
DAC_Channel, uint32_t DAC_FLAG);
void DAC_ClearFlag(uint32_t DAC_Channel,
uint32_t DAC_FLAG);
ITStatus DAC_GetITStatus(uint32_t
DAC_Channel, uint32_t DAC_IT);(*)
void DAC_ClearITPendingBit(uint32_t
DAC_Channel, uint32_t DAC_IT);(*)
Interrupts and flags management
(*) These functions exist only on STM32F10X_LD_VL, STM32F10X_MD_VL, and STM32F10X_HD_VL
devices.
42/60 Doc ID 023072 Rev 1
ITStatus DAC_GetITStatus(uint32_t
DAC_Channel, uint32_t DAC_IT);
void DAC_ClearITPendingBit(uint32_t
DAC_Channel, uint32_t DAC_IT);
Page 43

AN4088 Firmware migration using the library
The main changes in the source code/procedure in F0 series versus F1 are described
below:
● No Dual mode for DAC channels
● No Noise generator
● No Triangle generator
● In the DAC structure definition, only two fields (external trigger, OutputBuffer) should be
initialized.
The example below shows how to configure the DAC channel 1 STM32 F1 series:
/* DAC channel1 Configuration */
DAC_InitStructure.DAC_Trigger = DAC_Trigger_None;
DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_None;
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Enable;
DAC_Init(DAC_Channel_1, &DAC_InitStructure);
In F0 series, you have to update this code as follows:
/* DAC channel1 Configuration */
DAC_InitStructure.DAC_Trigger = DAC_Trigger_None;
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Enable;
/* DAC Channel1 Init */
DAC_Init(DAC_Channel_1, &DAC_InitStructure);
4.10 PWR driver
The table below presents the PWR driver API correspondence between STM32F10x and
STM32F0xx Libraries. You can easily update your application code by replacing
STM32F10x functions by the corresponding function in the STM32F0xx Library.
Table 20. STM32F10x and STM32F0xx PWR driver API correspondence
Interface
configuration
PVD
Wakeup
STM32F10x PWR driver API STM32F0xx PWR driver API
void PWR_DeInit(void); void PWR_DeInit(void);
void PWR_BackupAccessCmd(FunctionalState
NewState);
void PWR_PVDLevelConfig(uint32_t
PWR_PVDLevel);
void PWR_BackupAccessCmd(FunctionalState
NewState);
void PWR_PVDLevelConfig(uint32_t
PWR_PVDLevel);
void PWR_PVDCmd(FunctionalState NewState); void PWR_PVDCmd(FunctionalState NewState);
void PWR_WakeUpPinCmd(FunctionalState
NewState);
NA
void PWR_EnterSTOPMode(uint32_t
PWR_Regulator, uint8_t PWR_STOPEntry);
void PWR_WakeUpPinCmd(uint32_t
PWR_WakeUpPin, FunctionalState NewState);(*)
void PWR_EnterSleepMode(uint8_t
PWR_SLEEPEntry);
void PWR_EnterSTOPMode(uint32_t
PWR_Regulator, uint8_t PWR_STOPEntry);
void PWR_EnterSTANDBYMode(void); void PWR_EnterSTANDBYMode(void);
Power Management
Doc ID 023072 Rev 1 43/60
Page 44

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 20. STM32F10x and STM32F0xx PWR driver API correspondence (continued)
STM32F10x PWR driver API STM32F0xx PWR driver API
FlagStatus PWR_GetFlagStatus(uint32_t
PWR_FLAG);
void PWR_ClearFlag(uint32_t PWR_FLAG); void PWR_ClearFlag(uint32_t PWR_FLAG);
FLAG
management
(*) More Wake up pins are available on STM32 F0 series.
4.11 Backup data registers
In STM32 F1 series, the Backup data registers are managed through the BKP peripheral,
while in F0 series they are a part of the RTC peripheral (there is no BKP peripheral).
The example below shows how to write to/read from Backup data registers in STM32 F1
series:
uint16_t BKPdata = 0;
FlagStatus PWR_GetFlagStatus(uint32_t
PWR_FLAG);
...
/* Enable APB2 interface clock for PWR and BKP */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
/* Enable write access to Backup domain */
PWR_BackupAccessCmd(ENABLE);
/* Write data to Backup data register 1 */
BKP_WriteBackupRegister(BKP_DR1, 0x3210);
/* Read data from Backup data register 1 */
BKPdata = BKP_ReadBackupRegister(BKP_DR1);
In F0 series, you have to update this code as follows:
uint16_t BKPdata = 0;
...
/* PWR Clock Enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
/* Enable write access to RTC domain */
PWR_RTCAccessCmd(ENABLE);
/* Write data to Backup data register 1 */
RTC_WriteBackupRegister(RTC_BKP_DR1, 0x3220);
/* Read data from Backup data register 1 */
BKPdata = RTC_ReadBackupRegister(RTC_BKP_DR1);
44/60 Doc ID 023072 Rev 1
Page 45

AN4088 Firmware migration using the library
The main changes in the source code in F0 series versus F1 are described below:
1. There is no BKP peripheral
2. Write to/read from Backup data registers are done through RTC driver
3. Backup data registers naming changed from BKP_DRx to RTC_BKP_DRx, and
numbering starts from 0 instead of 1.
4.12 CEC application code
You can easily update your CEC application code by replacing STM32F10x functions by the
corresponding function in the STM32F0xx Library.The table below presents the CEC driver
API correspondence between STM32F10x and STM32F0xx Libraries.
Table 21. STM32F10xx and STM32F0xx CEC driver API correspondence
STM32F10xx CEC driver API STM32F0xx CEC driver API
void CEC_DeInit(void); void CEC_DeInit(void);
void CEC_Init(CEC_InitTypeDef* CEC_InitStruct); void CEC_Init(CEC_InitTypeDef* CEC_InitStruct);
NA void CEC_StructInit(CEC_InitTypeDef* CEC_InitStruct);
void CEC_Cmd(FunctionalState NewState); void CEC_Cmd(FunctionalState NewState);
NA void CEC_ListenModeCmd(FunctionalState NewState);
void CEC_OwnAddressConfig(uint8_t
CEC_OwnAddress);
NA void CEC_OwnAddressClear(void);
void CEC_SetPrescaler(uint16_t CEC_Prescaler);
Interface Configuration
void CEC_SendDataByte(uint8_t Data); void CEC_SendData(uint8_t Data);
uint8_t CEC_ReceiveDataByte(void);
void CEC_StartOfMessage(void); void CEC_StartOfMessage(void);
void CEC_EndOfMessageCmd(FunctionalState
NewState);
DATA Tr an s fe r s
void CEC_OwnAddressConfig(uint8_t
CEC_OwnAddress);
NA
uint8_t CEC_ReceiveData(void);
void CEC_EndOfMessage(void);
Doc ID 023072 Rev 1 45/60
Page 46

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 21. STM32F10xx and STM32F0xx CEC driver API correspondence (continued)
STM32F10xx CEC driver API STM32F0xx CEC driver API
void CEC_ITConfig(FunctionalState NewState)
FlagStatus CEC_GetFlagStatus(uint32_t
CEC_FLAG);
void CEC_ITConfig(uint16_t CEC_IT, FunctionalState
NewState);
FlagStatus CEC_GetFlagStatus(uint16_t CEC_FLAG);
void CEC_ClearFlag(uint32_t CEC_FLAG) void CEC_ClearFlag(uint32_t CEC_FLAG);
ITStatus CEC_GetITStatus(uint8_t CEC_IT) ITStatus CEC_GetITStatus(uint16_t CEC_IT);
void CEC_ClearITPendingBit(uint16_t CEC_IT) void CEC_ClearITPendingBit(uint16_t CEC_IT);
Interrupt and Flag management
The main changes in the source code/procedure in F0 series versus F1 are described
below:
● Dual Clock Source (Refer to RCC section for more details).
● No Prescaler feature configuration.
● It supports more than one address (multiple addressing).
● Each event flag has an associate enable control bit to generate the adequate interrupt.
● In the CEC structure definition, seven fields should be initialized.
The example below shows how to configure the CEC STM32 F1 series:
/* Configure the CEC peripheral */
CEC_InitStructure.CEC_BitTimingMode = CEC_BitTimingStdMode;
CEC_InitStructure.CEC_BitPeriodMode = CEC_BitPeriodStdMode;
CEC_Init(&CEC_InitStructure);
46/60 Doc ID 023072 Rev 1
In F0 series, you have to update this code as follows:
/* Configure CEC */
CEC_InitStructure.CEC_SignalFreeTime = CEC_SignalFreeTime_Standard;
CEC_InitStructure.CEC_RxTolerance = CEC_RxTolerance_Standard;
CEC_InitStructure.CEC_StopReception = CEC_StopReception_Off;
CEC_InitStructure.CEC_BitRisingError = CEC_BitRisingError_Off;
CEC_InitStructure.CEC_LongBitPeriodError = CEC_LongBitPeriodError_Off;
CEC_InitStructure.CEC_BRDNoGen = CEC_BRDNoGen_Off;
CEC_InitStructure.CEC_SFTOption = CEC_SFTOption_Off;
CEC_Init(&CEC_InitStructure);
Page 47

AN4088 Firmware migration using the library
4.13 I2C driver
STM32F0xx devices incorporate new I2C features. The table below presents the I2C driver
API correspondence between STM32F10x and STM32F0xx Libraries. You can update your
application code replacing STM32F10x functions by the corresponding function in the
STM32F0xx Library.
Table 22. STM32F10xx and STM32F0xx I2C driver API correspondence
STM32F10xx I2C Driver API STM32F0xx I2C Driver API
void I2C_DeInit(I2C_TypeDef* I2Cx); void I2C_DeInit(I2C_TypeDef* I2Cx);
void I2C_Init(I2C_TypeDef* I2Cx,
I2C_InitTypeDef* I2C_InitStruct);
void I2C_Init(I2C_TypeDef* I2Cx, I2C_InitTypeDef*
I2C_InitStruct);
void I2C_StructInit(I2C_InitTypeDef*
I2C_InitStruct);
void I2C_Cmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_SoftwareResetCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_ITConfig(I2C_TypeDef* I2Cx, uint16_t
I2C_IT, FunctionalState NewState);
void I2C_StretchClockCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
NA
void I2C_DualAddressCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_OwnAddress2Config(I2C_TypeDef*
I2Cx, uint8_t Address);
void I2C_GeneralCallCmd(I2C_TypeDef* I2Cx,
Initialization and Configuration
FunctionalState NewState);
NA
NA
NA
void I2C_NACKPositionConfig(I2C_TypeDef*
I2Cx, uint16_t I2C_NACKPosition);
void I2C_StructInit(I2C_InitTypeDef* I2C_InitStruct);
void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState
NewState);
void I2C_SoftwareResetCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_ITConfig(I2C_TypeDef* I2Cx, uint16_t I2C_IT,
FunctionalState NewState);
void I2C_StretchClockCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_StopModeCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_DualAddressCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_OwnAddress2Config(I2C_TypeDef* I2Cx,
uint16_t Address, uint8_t Mask);
void I2C_GeneralCallCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_SlaveByteControlCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_SlaveAddressConfig(I2C_TypeDef* I2Cx,
uint16_t Address);
void I2C_10BitAddressingModeCmd(I2C_TypeDef*
I2Cx, FunctionalState NewState);
NA
void I2C_ARPCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
NA
Doc ID 023072 Rev 1 47/60
Page 48

Firmware migration using the library AN4088
Table 22. STM32F10xx and STM32F0xx I2C driver API correspondence (continued)
STM32F10xx I2C Driver API STM32F0xx I2C Driver API
NA
NA
NA
NA
void I2C_GenerateSTART(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_GenerateSTOP(I2C_TypeDef* I2Cx,
FunctionalState NewState);
NA
void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx,
FunctionalState NewState);
Communications handling
NA uint8_t I2C_GetAddressMatched(I2C_TypeDef* I2Cx);
NA
NA
ErrorStatus I2C_CheckEvent(I2C_TypeDef* I2Cx,
uint32_t I2C_EVENT)
void I2C_AutoEndCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_ReloadCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_NumberOfBytesConfig(I2C_TypeDef* I2Cx,
uint8_t Number_Bytes);
void I2C_MasterRequestConfig(I2C_TypeDef* I2Cx,
uint16_t I2C_Direction);
void I2C_GenerateSTART(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_GenerateSTOP(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_10BitAddressHeaderCmd(I2C_TypeDef*
I2Cx, FunctionalState NewState);
void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx,
FunctionalState NewState);
uint16_t I2C_GetTransferDirection(I2C_TypeDef*
I2Cx);
void I2C_TransferHandling(I2C_TypeDef* I2Cx,
uint16_t Address, uint8_t Number_Bytes, uint32_t
ReloadEndMode, uint32_t StartStopMode);
NA
void I2C_Send7bitAddress(I2C_TypeDef* I2Cx,
uint8_t Address, uint8_t I2C_Direction)
48/60 Doc ID 023072 Rev 1
NA
Page 49

AN4088 Firmware migration using the library
Table 22. STM32F10xx and STM32F0xx I2C driver API correspondence (continued)
STM32F10xx I2C Driver API STM32F0xx I2C Driver API
void I2C_SMBusAlertConfig(I2C_TypeDef* I2Cx,
uint16_t I2C_SMBusAlert);
NA
NA
NA
NA
NA
SMBUS management
void I2C_CalculatePEC(I2C_TypeDef* I2Cx,
FunctionalState NewState);
NA
uint8_t I2C_GetPEC(I2C_TypeDef* I2Cx); uint8_t I2C_GetPEC(I2C_TypeDef* I2Cx);
uint32_t I2C_ReadRegister(I2C_TypeDef* I2Cx,
uint8_t I2C_Register);
void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t
Data);
Data transfers
uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx); uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx);
void I2C_DMACmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_SMBusAlertCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_ClockTimeoutCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_ExtendedClockTimeoutCmd(I2C_TypeDef*
I2Cx, FunctionalState NewState);
void I2C_IdleClockTimeoutCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_TimeoutAConfig(I2C_TypeDef* I2Cx, uint16_t
Timeout);
void I2C_TimeoutBConfig(I2C_TypeDef* I2Cx, uint16_t
Timeout);
void I2C_CalculatePEC(I2C_TypeDef* I2Cx,
FunctionalState NewState);
void I2C_PECRequestCmd(I2C_TypeDef* I2Cx,
FunctionalState NewState);
uint32_t I2C_ReadRegister(I2C_TypeDef* I2Cx, uint8_t
I2C_Register);
void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data);
void I2C_DMACmd(I2C_TypeDef* I2Cx, uint32_t
I2C_DMAReq, FunctionalState NewState);
void I2C_DMALastTransferCmd(I2C_TypeDef*
I2Cx, FunctionalState NewState);
DMA management
NA
Doc ID 023072 Rev 1 49/60
Page 50

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 22. STM32F10xx and STM32F0xx I2C driver API correspondence (continued)
STM32F10xx I2C Driver API STM32F0xx I2C Driver API
FlagStatus I2C_GetFlagStatus(I2C_TypeDef*
I2Cx, uint32_t I2C_FLAG);
void I2C_ClearFlag(I2C_TypeDef* I2Cx, uint32_t
I2C_FLAG);
ITStatus I2C_GetITStatus(I2C_TypeDef* I2Cx,
uint32_t I2C_IT);
void I2C_ClearITPendingBit(I2C_TypeDef* I2Cx,
uint32_t I2C_IT);
Interrupts and flags management
Though some API functions are identical in STM32F1 and STM32F0, in most cases the
application code needs to be rewritten when moving from STM32F1 to STM32F0. However,
STMicroelectronics provides an "I2C Communication peripheral application library (CPAL)",
which allows to move seamlessly from STM32F1 to STM32F0: user needs to modify only
few settings without any changes on the application code. For more details about STM32F1
I2C CPAL, please refer to UM1029. For STM32F0, the I2C CPAL is provided within the
Standard Peripherals Library package."
FlagStatus I2C_GetFlagStatus(I2C_TypeDef* I2Cx,
uint32_t I2C_FLAG);
void I2C_ClearFlag(I2C_TypeDef* I2Cx, uint32_t
I2C_FLAG);
ITStatus I2C_GetITStatus(I2C_TypeDef* I2Cx, uint32_t
I2C_IT);
void I2C_ClearITPendingBit(I2C_TypeDef* I2Cx,
uint32_t I2C_IT);
50/60 Doc ID 023072 Rev 1
Page 51

AN4088 Firmware migration using the library
4.14 SPI driver
The STM32F0xx SPI includes some new features as compared with STM32F10xx SPI.
Ta bl e 2 3 presents the SPI driver API correspondence between STM32F10x and
STM32F0xx Libraries.
Table 23. STM32F10xx and STM32F0xx SPI driver API correspondence
STM32F10xx SPI driver API STM32F0xx SPI driver API
void SPI_I2S_DeInit(SPI_TypeDef* SPIx); void SPI_I2S_DeInit(SPI_TypeDef* SPIx);
void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef*
SPI_InitStruct);
void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef*
SPI_InitStruct);
void I2S_Init(SPI_TypeDef* SPIx, I2S_InitTypeDef*
I2S_InitStruct);
void SPI_StructInit(SPI_InitTypeDef* SPI_InitStruct); void SPI_StructInit(SPI_InitTypeDef* SPI_InitStruct);
void I2S_StructInit(I2S_InitTypeDef* I2S_InitStruct); void I2S_StructInit(I2S_InitTypeDef* I2S_InitStruct);
NA
NA
void SPI_Cmd(SPI_TypeDef* SPIx, FunctionalState
NewState);
void I2S_Cmd(SPI_TypeDef* SPIx, FunctionalState
NewState);
void SPI_DataSizeConfig(SPI_TypeDef* SPIx,
Initialization and Configuration
uint16_t SPI_DataSize);
NA
NA
void SPI_NSSInternalSoftwareConfig(SPI_TypeDef*
SPIx, uint16_t SPI_NSSInternalSoft);
void SPI_SSOutputCmd(SPI_TypeDef* SPIx,
FunctionalState NewState);
void SPI_I2S_SendData(SPI_TypeDef* SPIx,
uint16_t Data);
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx);
Data Transfers
void I2S_Init(SPI_TypeDef* SPIx, I2S_InitTypeDef*
I2S_InitStruct);
void SPI_TIModeCmd(SPI_TypeDef* SPIx,
FunctionalState NewState);
void SPI_NSSPulseModeCmd(SPI_TypeDef* SPIx,
FunctionalState NewState);
void SPI_Cmd(SPI_TypeDef* SPIx, FunctionalState
NewState);
void I2S_Cmd(SPI_TypeDef* SPIx, FunctionalState
NewState);
void SPI_DataSizeConfig(SPI_TypeDef* SPIx,
uint16_t SPI_DataSize);
void SPI_RxFIFOThresholdConfig(SPI_TypeDef*
SPIx, uint16_t SPI_RxFIFOThreshold);
void SPI_BiDirectionalLineConfig(SPI_TypeDef*
SPIx, uint16_t SPI_Direction);
void SPI_NSSInternalSoftwareConfig(SPI_TypeDef*
SPIx, uint16_t SPI_NSSInternalSoft);
void SPI_SSOutputCmd(SPI_TypeDef* SPIx,
FunctionalState NewState);
void SPI_SendData8(SPI_TypeDef* SPIx, uint8_t
Data);
void SPI_I2S_SendData16(SPI_TypeDef* SPIx,
uint16_t Data);
uint8_t SPI_ReceiveData8(SPI_TypeDef* SPIx);
uint16_t SPI_I2S_ReceiveData16(SPI_TypeDef*
SPIx);
Doc ID 023072 Rev 1 51/60
Page 52

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 23. STM32F10xx and STM32F0xx SPI driver API correspondence (continued)
STM32F10xx SPI driver API STM32F0xx SPI driver API
NA
void SPI_CRCLengthConfig(SPI_TypeDef* SPIx,
uint16_t SPI_CRCLength);
void SPI_TransmitCRC(SPI_TypeDef* SPIx); void SPI_TransmitCRC(SPI_TypeDef* SPIx);
void SPI_CalculateCRC(SPI_TypeDef* SPIx,
FunctionalState NewState);
uint16_t SPI_GetCRC(SPI_TypeDef* SPIx, uint8_t
SPI_CRC);
uint16_t SPI_GetCRCPolynomial(SPI_TypeDef*
SPIx);
void SPI_CalculateCRC(SPI_TypeDef* SPIx,
FunctionalState NewState);
uint16_t SPI_GetCRC(SPI_TypeDef* SPIx, uint8_t
SPI_CRC);
uint16_t SPI_GetCRCPolynomial(SPI_TypeDef*
SPIx);
Hardware CRC Calculation functions
void SPI_I2S_DMACmd(SPI_TypeDef* SPIx, uint16_t
SPI_I2S_DMAReq, FunctionalState NewState);
NA
void SPI_I2S_DMACmd(SPI_TypeDef* SPIx, uint16_t
SPI_I2S_DMAReq, FunctionalState NewState);
void SPI_LastDMATransferCmd(SPI_TypeDef* SPIx,
uint16_t SPI_LastDMATransfer);
DMA transfers
void SPI_I2S_ITConfig(SPI_TypeDef* SPIx, uint8_t
SPI_I2S_IT, FunctionalState NewState);
void SPI_I2S_ITConfig(SPI_TypeDef* SPIx, uint8_t
SPI_I2S_IT, FunctionalState NewState);
uint16_t
NA
SPI_GetTransmissionFIFOStatus(SPI_TypeDef*
SPIx);
NA
FlagStatus SPI_I2S_GetFlagStatus(SPI_TypeDef*
SPIx, uint16_t SPI_I2S_FLAG);
uint16_t
SPI_GetReceptionFIFOStatus(SPI_TypeDef* SPIx);
FlagStatus SPI_I2S_GetFlagStatus(SPI_TypeDef*
SPIx, uint16_t SPI_I2S_FLAG);(*)
void SPI_I2S_ClearFlag(SPI_TypeDef* SPIx,
uint16_t SPI_I2S_FLAG);
void SPI_I2S_ClearITPendingBit(SPI_TypeDef* SPIx,
uint8_t SPI_I2S_IT);
Interrupts and flags management
ITStatus SPI_I2S_GetITStatus(SPI_TypeDef* SPIx,
uint8_t SPI_I2S_IT);
(*) One more flag in STM32F0xx (TI frame format error) can generate an event in comparison with STM32F10xx driver API.
void SPI_I2S_ClearFlag(SPI_TypeDef* SPIx,
uint16_t SPI_I2S_FLAG);(*)
ITStatus SPI_I2S_GetITStatus(SPI_TypeDef* SPIx,
uint8_t SPI_I2S_IT);(*)
52/60 Doc ID 023072 Rev 1
Page 53

AN4088 Firmware migration using the library
4.15 USART driver
The STM32F0xx USART includes enhancements in comparison with STM32F10xx USART.
Table9. presents the USART driver API correspondence between STM32F10x and
STM32F0xx Libraries.
Doc ID 023072 Rev 1 53/60
Page 54

Firmware migration using the library AN4088
Table 24. STM32F10x and STM32F0xx USART driver API correspondence
STM32F10xx USART driver API STM32F0xx USART driver API
void USART_DeInit(USART_TypeDef* USARTx); void USART_DeInit(USART_TypeDef* USARTx);
void USART_Init(USART_TypeDef* USARTx,
USART_InitTypeDef* USART_InitStruct);
void USART_StructInit(USART_InitTypeDef*
USART_InitStruct);
void USART_ClockInit(USART_TypeDef* USARTx,
USART_ClockInitTypeDef* USART_ClockInitStruct);
void
USART_ClockStructInit(USART_ClockInitTypeDef*
USART_ClockInitStruct);
void USART_Cmd(USART_TypeDef* USARTx,
FunctionalState NewState);
NA
void USART_SetPrescaler(USART_TypeDef*
USARTx, uint8_t USART_Prescaler);
void USART_OverSampling8Cmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_OneBitMethodCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
Initialization and Configuration
NA
void USART_Init(USART_TypeDef* USARTx,
USART_InitTypeDef* USART_InitStruct);
void USART_StructInit(USART_InitTypeDef*
USART_InitStruct);
void USART_ClockInit(USART_TypeDef* USARTx,
USART_ClockInitTypeDef*
USART_ClockInitStruct);
void
USART_ClockStructInit(USART_ClockInitTypeDef*
USART_ClockInitStruct);
void USART_Cmd(USART_TypeDef* USARTx,
FunctionalState NewState);
void
USART_DirectionModeCmd(USART_TypeDef*
USARTx, uint32_t USART_DirectionMode,
FunctionalState NewState);
void USART_SetPrescaler(USART_TypeDef*
USARTx, uint8_t USART_Prescaler);
void
USART_OverSampling8Cmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_OneBitMethodCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_MSBFirstCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
NA
NA
NA
NA
NA
54/60 Doc ID 023072 Rev 1
void USART_DataInvCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_InvPinCmd(USART_TypeDef*
USARTx, uint32_t USART_InvPin, FunctionalState
NewState);
void USART_SWAPPinCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_ReceiverTimeOutCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_SetReceiverTimeOut(USART_TypeDef*
USARTx, uint32_t USART_ReceiverTimeOut);
Page 55

AN4088 Firmware migration using the library
Table 24. STM32F10x and STM32F0xx USART driver API correspondence (continued)
STM32F10xx USART driver API STM32F0xx USART driver API
NA
NA
STOP Mode
NA
NA
AutoBaudRate
void USART_SendData(USART_TypeDef* USARTx,
uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef*
USARTx);
Data transfers
void USART_SetAddress(USART_TypeDef*
USARTx, uint8_t USART_Address);
NA
NA
Multi-Processor
Communication
NA
void
USART_LINBreakDetectLengthConfig(USART_Type
Def* USARTx, uint32_t
USART_LINBreakDetectLength);
LIN mode
void USART_LINCmd(USART_TypeDef* USARTx,
FunctionalState NewState);
void USART_STOPModeCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_StopModeWakeUpSourceConfig(USART_
TypeDef* USARTx, uint32_t
USART_WakeUpSource);
void
USART_AutoBaudRateCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_AutoBaudRateConfig(USART_TypeDef*
USARTx, uint32_t USART_AutoBaudRate);
void USART_SendData(USART_TypeDef*
USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef*
USARTx);
void USART_SetAddress(USART_TypeDef*
USARTx, uint8_t USART_Address);
void
USART_MuteModeWakeUpConfig(USART_TypeD
ef* USARTx, uint32_t USART_WakeUp);
void USART_MuteModeCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_AddressDetectionConfig(USART_TypeDef
* USARTx, uint32_t USART_AddressLength);
void
USART_LINBreakDetectLengthConfig(USART_Ty
peDef* USARTx, uint32_t
USART_LINBreakDetectLength);
void USART_LINCmd(USART_TypeDef* USARTx,
FunctionalState NewState);
void USART_HalfDuplexCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
mode
Half-duplex
void USART_HalfDuplexCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
Doc ID 023072 Rev 1 55/60
Page 56

Firmware migration using the library AN4088
Table 24. STM32F10x and STM32F0xx USART driver API correspondence (continued)
STM32F10xx USART driver API STM32F0xx USART driver API
void USART_SmartCardCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_SmartCardNACKCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_SetGuardTime(USART_TypeDef*
USARTx, uint8_t USART_GuardTime);
Smart Card mode
NA
NA
void USART_IrDAConfig(USART_TypeDef* USARTx,
uint32_t USART_IrDAMode);
void USART_IrDACmd(USART_TypeDef* USARTx,
IrDA mode
FunctionalState NewState);
NA
NA
NA
RS485 mode
NA
void USART_DMACmd(USART_TypeDef* USARTx,
uint32_t USART_DMAReq, FunctionalState
NewState);
void
USART_DMAReceptionErrorConfig(USART_TypeDef
DMA transfers
* USARTx, uint32_t USART_DMAOnError);
void USART_SmartCardCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void
USART_SmartCardNACKCmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_SetGuardTime(USART_TypeDef*
USARTx, uint8_t USART_GuardTime);
void
USART_SetAutoRetryCount(USART_TypeDef*
USARTx, uint8_t USART_AutoCount);
void USART_SetBlockLength(USART_TypeDef*
USARTx, uint8_t USART_BlockLength);
void USART_IrDAConfig(USART_TypeDef*
USARTx, uint32_t USART_IrDAMode);
void USART_IrDACmd(USART_TypeDef*
USARTx, FunctionalState NewState);
void USART_DECmd(USART_TypeDef* USARTx,
FunctionalState NewState);
void USART_DEPolarityConfig(USART_TypeDef*
USARTx, uint32_t USART_DEPolarity);
void
USART_SetDEAssertionTime(USART_TypeDef*
USARTx, uint32_t USART_DEAssertionTime);
void
USART_SetDEDeassertionTime(USART_TypeDef
* USARTx, uint32_t USART_DEDeassertionTime);
void USART_DMACmd(USART_TypeDef*
USARTx, uint32_t USART_DMAReq,
FunctionalState NewState);
void
USART_DMAReceptionErrorConfig(USART_Type
Def* USARTx, uint32_t USART_DMAOnError);
56/60 Doc ID 023072 Rev 1
Page 57

AN4088 Firmware migration using the library
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
Table 24. STM32F10x and STM32F0xx USART driver API correspondence (continued)
STM32F10xx USART driver API STM32F0xx USART driver API
void USART_ITConfig(USART_TypeDef* USARTx,
uint16_t USART_IT, FunctionalState NewState);
NA
NA
FlagStatus USART_GetFlagStatus(USART_TypeDef*
USARTx, uint16_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef* USARTx,
uint16_t USART_FLAG);
Interrupts and flags management
ITStatus USART_GetITStatus(USART_TypeDef*
USARTx, uint32_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef*
USARTx, uint32_t USART_IT);
void USART_ITConfig(USART_TypeDef* USARTx,
uint32_t USART_IT, FunctionalState NewState);
void USART_RequestCmd(USART_TypeDef*
USARTx, uint32_t USART_Request,
FunctionalState NewState);
void
USART_OverrunDetectionConfig(USART_TypeDef
* USARTx, uint32_t USART_OVRDetection);
FlagStatus
USART_GetFlagStatus(USART_TypeDef*
USARTx, uint32_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef*
USARTx, uint32_t USART_FLAG);
ITStatus USART_GetITStatus(USART_TypeDef*
USARTx, uint32_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef*
USARTx, uint32_t USART_IT);
Doc ID 023072 Rev 1 57/60
Page 58

Firmware migration using the library AN4088
Color key:
= New function
= Same function, but API was changed
= Function not available (NA)
4.16 IWDG driver
Existing IWDG available on STM32F10xx and STM32F0xx devices have the same
specifications, with window capability additional feature in F0 series which detect over
frequency on external oscillators. The table below lists the IWDG driver APIs.
Table 25. STM32F10xx and STM32Fxx IWDG driver API correspondence
STM32F10xx IWDG driver API STM32F0xx IWDG driver API
void IWDG_WriteAccessCmd(uint16_t
IWDG_WriteAccess);
void IWDG_SetPrescaler(uint8_t IWDG_Prescaler);
void IWDG_SetReload(uint16_t Reload); void IWDG_SetReload(uint16_t Reload);
void IWDG_ReloadCounter(void); void IWDG_ReloadCounter(void);
configuration
Prescaler and Counter
NA
void IWDG_Enable(void); void IWDG_Enable(void);
IWDG
activation
FlagStatus IWDG_GetFlagStatus(uint16_t
IWDG_FLAG);
Flag
management
void IWDG_WriteAccessCmd(uint16_t
IWDG_WriteAccess);
void IWDG_SetPrescaler(uint8_t
IWDG_Prescaler);
void IWDG_SetWindowValue(uint16_t
WindowValue);
FlagStatus IWDG_GetFlagStatus(uint16_t
IWDG_FLAG);
58/60 Doc ID 023072 Rev 1
Page 59

AN4088 Revision history
5 Revision history
Table 26. Document revision history
Date Revision Changes
10-Jul-2012 1 Initial release
Doc ID 023072 Rev 1 59/60
Page 60

AN4088
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
60/60 Doc ID 023072 Rev 1
 Loading...
Loading...