

Page 1
AN4061
Application note
EEPROM emulation in STM32F0xx microcontrollers
Introduction
EEPROMs (Electrically Erasable Programmable Read-Only Memory) are often used in
industrial applications to store updateable data. An EEPROM is a type of permanent (nonvolatile) memory storage system used in complex systems (such as computers) and other
electronic devices to store and retain small amounts of data in the event of power failure.
For low-cost purposes, an external EEPROM can be replaced by an on-chip Flash, with a
specific software algorithm.
This application note describes the software solution for substituting a standalone EEPROM
by emulating the EEPROM mechanism using the on-chip Flash of STM32F0xx devices.
The emulation is achieved by employing at least two pages in the Flash. The EEPROM
emulation code swaps data between the pages as they become filled, in a manner that is
transparent to the user.
The EEPROM emulation driver supplied with this application note meets the following
requirements:
● Lightweight implementations offering a simple API that consists of three functions for
initialization, read data and write data, and reduced footprint.
● Simple and easily updateable code model
● Clean-up and internal data management transparent to the user
● Background page erase
● At least two Flash memory pages to be used, more if possible for wear leveling
May 2012 Doc ID 022893 Rev 1 1/19
www.st.com
Page 2
Contents AN4061
Contents
1 Main differences between external and emulated EEPROM . . . . . . . . . 5
1.1 Difference in write access time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Difference in erase time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Similarity in writing method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Implementing EEPROM emulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Case of use: application example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 EEPROM emulation software description . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 EEPROM emulation memory footprint . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 EEPROM emulation timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Embedded application aspects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Data granularity management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Wear-leveling: Flash memory endurance improvement . . . . . . . . . . . . . . 14
3.2.1 Wear-leveling implementation example . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 Page header recovery in case of power loss . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Cycling capability and page allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4.1 Cycling capability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4.2 Flash page allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 Real-time consideration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2/19 Doc ID 022893 Rev 1
Page 3

AN4061 List of tables
List of tables
Table 1. Differences between external and emulated EEPROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Table 2. API definition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Table 3. Memory footprint for EEPROM emulation mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 4. EEPROM emulation timings with a 48 MHz system clock . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 5. Flash program functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Table 6. Application design. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Table 7. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Doc ID 022893 Rev 1 3/19
Page 4

List of figures AN4061
List of figures
Figure 1. Header status switching between page0 and page1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 2. EEPROM variable format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 3. Data update flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figure 4. WriteVariable flowchart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 5. Page swap scheme with four pages (wear-leveling). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4/19 Doc ID 022893 Rev 1
Page 5
AN4061 Main differences between external and emulated EEPROM
1 Main differences between external and emulated
EEPROM
The EEPROM is a key component of many embedded applications that require non-volatile
storage of data updated with byte or word granularity during run time.
Microcontrollers used in these systems are more often based on embedded Flash memory.
To eliminate components, save PCB space and reduce system cost, the STM32F0xx Flash
memory may be used instead of an external EEPROM for simultaneous code and data
storage.
Unlike Flash memory, however, the external EEPROM does not require an erase operation
to free up space before data can be rewritten. Special software management is required to
store data in an embedded Flash memory.
The emulation software scheme depends on many factors, including the EEPROM reliability,
the architecture of the Flash memory used, and the product requirements.
The main differences between an embedded Flash memory and an external serial
EEPROM are the same for any microcontroller that uses the same Flash memory
technology (it is not specific to the STM32F0xx family products). The major differences are
summarized in Ta bl e 1 .
Table 1. Differences between external and emulated EEPROM
External EEPROM
Feature
Write time
Erase time N/A Page Erase time: from 20 ms to 40 ms
Write method
Read access
Write/Erase cycles 1 million Write cycles
(for example, M24C64:
I²C serial access EEPROM)
– Random byte Write within 5 ms.
Word program time = 20 ms
– Page (32 bytes) Write within 5
ms. Word program time = 625 µs
– Once started, is not CPU-
dependent
– Only needs proper supply
– Serial: a hundred µs
– Random word: 92 µs
– Page: 22.5 µs per byte
Half-word program time: from 124 µs to 26 ms
Once started, is CPU-dependent.
If a Write operation is interrupted by software reset,
the EEPROM Emulation algorithm is stopped, but
current Flash write operation is not interrupted by a
software reset.
Can be accessed as half words (16 bits) or full
words (32 bits).
Parallel: (at 48 MHz) the access time by half-word is
from 3.8 µs to 110 µs
10 kilocycles by page. Using multiple on-chip Flash
memory pages is equivalent to increasing the
number of write cycles. See Section 3.4: Cycling
capability and page allocation.
Emulated EEPROM using
on-chip Flash memory
(2)
(1)
(2
1. For further detail, refer to Chapter 2.5: EEPROM emulation timing.
2. For further detail, refer to “Memory characteristics” in STM32F051xx Datasheet.
Doc ID 022893 Rev 1 5/19
Page 6

Main differences between external and emulated EEPROM AN4061
1.1 Difference in write access time
Because Flash memories have a shorter write access time, critical parameters can be
stored faster in the emulated EEPROM than in an external serial EEPROM, thereby
improving data storage.
1.2 Difference in erase time
The difference in erase time is the other major difference between a standalone EEPROM
and an emulated EEPROM using embedded Flash memory. Unlike Flash memories,
EEPROMs do not require an erase operation to free up space before writing to them. This
means that some form of software management is required to store data in a Flash memory.
Moreover, as the erase process of a block in the Flash memory does not take long, power
shutdown and other spurious events that might interrupt the erase process (a reset, for
example) should be considered when designing the Flash memory management software.
To design robust Flash memory management software, a thorough understanding of the
Flash memory erase process is necessary.
Note: In case of a software reset, ongoing page erase or mass erase operations on the
STM32F0xx embedded Flash are not interrupted.
1.3 Similarity in writing method
One of the similarities between external EEPROM and emulated EEPROM with the
STM32F0xx embedded Flash is the writing method.
● Standalone external EEPROM: once started by the CPU, the writing of a word cannot
be interrupted by a software reset. Only a supply failure will interrupt the write process,
so properly sizing the decoupling capacitors can secure the complete writing process
inside a standalone EEPROM.
● Emulated EEPROM using embedded Flash memory: once started by the CPU, the
write process can be interrupted by a power failure. In case of a software reset,
ongoing word write operation on the STM32F0xx embedded Flash is not interrupted.
The EEPROM algorithm is stopped, but the current Flash word write operation is not
interrupted by a software reset.
6/19 Doc ID 022893 Rev 1
Page 7

AN4061 Implementing EEPROM emulation
2 Implementing EEPROM emulation
2.1 Principle
EEPROM emulation is performed in various ways, taking into consideration the Flash
memory limitations and product requirements. The approach detailed below requires at
least two Flash memory pages of an identical size allocated to non-volatile data: one that is
initially erased, the other that is ready to take over when the former page needs to be
garbage-collected. A header field that occupies the first half word (16-bit) of each page
indicates t.he page status. Each of these pages is called Page0 and Page1 in the rest of this
document
Each page has three possible states:
● ERASED: the page is empty.
● RECEIVE_DATA: the page is receiving data from the other full page.
● VALID_PAGE: the page contains valid data and this state does not change until all
valid data is completely transferred to the erased page.
Figure 1 shows how the page status changes.
Figure 1. Header status switching between page0 and page1
Doc ID 022893 Rev 1 7/19
Page 8

Implementing EEPROM emulation AN4061
Variable data
(16 bits)
ai14608d
Variable virtual
address (16 bits)
EEPROM variable element = 32-bit word
256 elements
(1- Kbyte page)
page0 page1
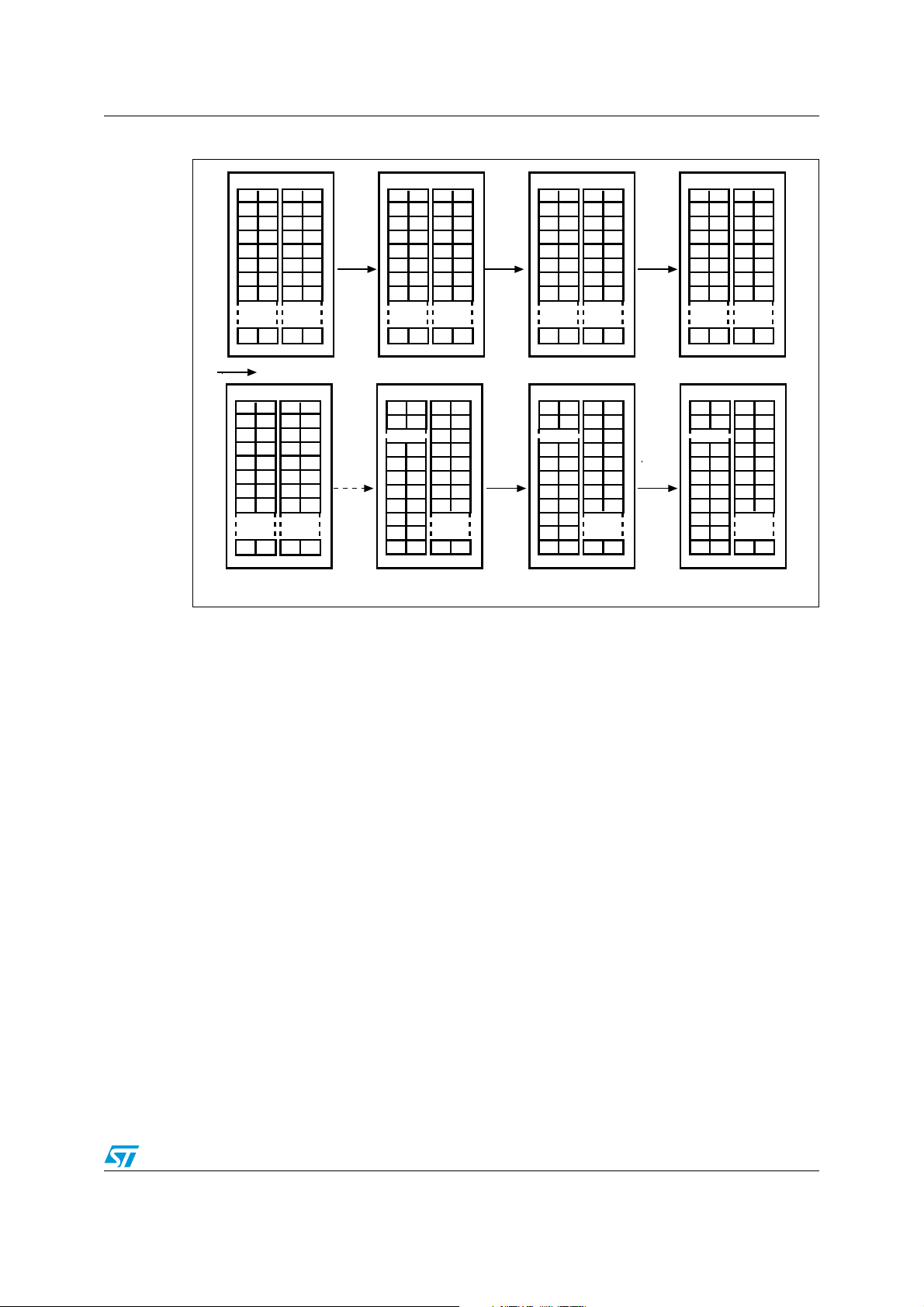
Each variable element is defined by a virtual address and a value to be stored in the Flash
memory for subsequent retrieval or update (in the implemented software, both virtual
address and data are 16 bits long). When data is modified, the modified data associated
with the earlier virtual address is stored into a new Flash memory location. Data retrieval
returns the up-to-date data value.
Figure 2. EEPROM variable format
2.2 Case of use: application example
The following example shows the software management of three EEPROM variables (Var1,
Var2 and Var3) with the following virtual addresses:
Var1 virtual address 5555h
Var2 virtual address 6666h
Var3 virtual address 7777h
8/19 Doc ID 022893 Rev 1
Page 9
AN4061 Implementing EEPROM emulation
Figure 3. Data update flow
Page0 Page1
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
Active Page = Page0
FF FF
Active Page = Page0
FF FF
Add var2
Page0 Page1
12 32
FF FF
77 77
FF FF
12 45
FF FF
77 77
FF FF
BC BC
FF FF
55 55
FF FF
34
FF FF
34
66 66
FF FF
FF FF
=3434h
Add Var3
=1232h
Active Page = Page0
Active Page = Page0
Page0 Page1
12 32
FF FF
77 77
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
Page0 Page1
12 32
77 77
32 32
77 77
22 45
66 66
BD BD
55 55
54 54
77 77
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
Add Var3
=1245h
Add Var2
=6464h
Page0 Page1
12 32
77 77
12 45
FF FF
FF FF
FF FF
FF FF
Active Page = Page0
77 77
77 77
66 66
BD BD
55 55
Active Page = Page1
FF FF
FF FF
FF FF
FF FF
77 77
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
Page0 Page1
12 32
32 32
22 45
54 54
77 77
64 64
66 66
54 54
77 77
BD BD
55 55
FF FF
FF FF
FF FF
Add Var1
=BCBCh
Erase
Page0
Page0 Page1
12 32
FF FF
77 77
FF FF
12 45
FF FF
77 77
FF FF
BC BC
FF FF
FF FF
55 55
FF FF
FF FF
FF FF
FF FF
FF FF
Active Page = Page0
Active Page = Page1
FF FF
Page0 Page1
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
64 64
66 66
54 54
77 77
BD BD
55 55
FF FF
FF FF
FF FF
ai14609
2.3 EEPROM emulation software description
This section describes the driver implemented for the EEPROM emulation using the
STM32F0xx Flash memory driver provided by STMicroelectronics.
A sample demonstration program is also supplied to demonstrate and test the EEPROM
emulation driver using the three variables (Var1, Var2 and Var3) defined in the
VirtAddVarTab[] table declared in the software main.c file.
The project contains three source files in addition to the Flash memory library source files:
● eeprom.c: contains the EEPROM emulation firmware functions:
EE_Init()
EE_Format()
EE_FindValidPage()
EE_VerifyPageFullWriteVariable()
EE_ReadVariable()
EE_PageTransfer()
EE_WriteVariable()
● eeprom.h: contains the function prototypes and some declarations. You can use this
file to adapt the following parameters to your application requirements:
– Number of data variables to be used (default: 3)
● main.c: this application program is an example using the described routines in order to
write to and read from the EEPROM.
Doc ID 022893 Rev 1 9/19
Page 10

Implementing EEPROM emulation AN4061
User API definition
The set of functions contained in the eeprom.c file, that are used for the EEPROM
emulation, are described in the table below:
Table 2. API definition
EE_Init()
EE_Format()
EE_FindValidPage()
EE_VerifyPageFullWrite
Variable()
EE_ReadVariable()
EE_PageTransfer()
EE_WriteVariable()
Function name Description
Page header corruption is possible in the event of power loss during data update or
page erase/transfer. In this case, the EE_Init() function will attempt to restore
the emulated EEPROM to a known good state. This function should be called prior
to accessing the emulated EEPROM after each power-down. It accepts no
parameters.
This function erases page0 and page1 and writes a VALID_PAGE header to
page0.
This function reads both page headers and returns the valid page number. The
passed parameter indicates if the valid page is sought for a write or read operation
(READ_FROM_VALID_PAGE or WRITE_IN_VALID_PAGE).
It implements the write process that must either update or create the first instance
of a variable. It consists in finding the first empty location on the active page,
starting from the end, and filling it with the passed virtual address and data of the
variable. In case the active page is full, the PAGE_FULL value is returned. This
routine uses the parameters below:
Virtual address: may be any of the three declared variables’ virtual addresses
(Var1, Var2 or Var3)
Data: the value of the variable to be stored
This function returns FLASH_COMPLETE on success, PAGE_FULL if there is not
enough memory for a variable update, or a Flash memory error code to indicate an
operation failure (erase or program).
This function returns the data corresponding to the virtual address passed as a
parameter. Only the last update is read. The function enters in a loop in which it
reads the variable entries until the last one. If no occurrence of the variable is
found, the ReadStatus variable is returned with the value “1”, otherwise it is reset
to indicate that the variable has been found and the variable value is returned on
the Read_data variable.
It transfers the latest value of all variables (data with associated virtual address)
from the current page to the new active page. At the beginning, it determines the
active page, which is the page the data is to be transferred from. The new page
header field is defined and written (new page status is RECEIVE_DATA given that
it is in the process of receiving data). When the data transfer is complete, the new
page header is VALID_PAGE, the old page is erased and its header becomes
ERASED.
This function is called by the user application to update a variable. It uses the
EE_VerifyPageFullWriteVariable(), and EE_PageTransfer() routines
that have already been described.
10/19 Doc ID 022893 Rev 1
Page 11

AN4061 Implementing EEPROM emulation
Note: The following functions can be used to access the emulated EEPROM:
- EE_Init()
- EE_ReadVariable()
- EE_WriteVariable()
These functions are used in the application code delivered with this application note.
Figure 4 shows the procedure for updating a variable entry in the EEPROM.
Figure 4. WriteVariable flowchart
Function call
EE_VerifyPageFullWriteVariable()
EE_FindValidPage()
EE_PageTransfer()
EE_ReadVariable()
Copy all current elements by
reading the active page
from the bottom, taking
into account the new
updated element
Erase previous active page
Change the active page
.
End
Add element request
Find Valid page
Yes No
current
active page
full
Key features
● User-configured emulated EEPROM size
● Increased Flash memory endurance: page erased only when it is full
● Non-volatile data variables can be updated infrequently
● Interrupt servicing during program/erase is possible
Add new element at
the 1st empty element
place in the current
active page
End
ai14610b
Doc ID 022893 Rev 1 11/19
Page 12

Implementing EEPROM emulation AN4061
2.4 EEPROM emulation memory footprint
Ta bl e 3 details the footprint of the EEPROM emulation driver in terms of Flash size and RAM
size.
The table and figure below have been determined using the IAR EWARM v6.30.7 tool with
High Size optimization level.
Table 3. Memory footprint for EEPROM emulation mechanism
Minimum
Mechanism
EEPROM emulation software mechanism 1824 1046
1. Based on three 32-bit variables (16-bit for address and 16-bit for data). The SRAM memory used increases
depending on the number of variables used.
(1)
required code size (bytes)
Flash SRAM
2.5 EEPROM emulation timing
This section describes the timing parameters associated with the EEPROM emulation driver
based on two 16-Kbyte EEPROM page sizes.
All timing measurements are performed:
● STM32F051RBT6
● System clock at 48 MHz, Flash prefetch and cache features enabled
● With execution from Flash
● At room temperature
Ta bl e 4 lists the timing values for EEPROM.
Table 4. EEPROM emulation timings with a 48 MHz system clock
EEPROM emulation timings
Operation
(1)
Ty p ic a l
variable
Variable Write operation with page swap
Variable Read Operation from EEPROM
EEPROM Initialization for the 1st time
Typical EEPROM Initialization
1. Write with no page swap. The minimum value refers to a write operation of a variable in the beginning of
the Flash page and the maximum value refers to a write operation in the end of the Flash page. The
difference between the minimum and maximum values is due to the time taken to find a free Flash address
to store the new data.
2. The variable size used is 32-bit (16-bit for the virtual address and 16-bit for the data).
3. Page swapping is done when the valid page is full. It consists of transferring the last stored data for each
variable to the other free page and erasing the full page.
4. The minimum value refers to a read operation of the 1st variable stored in the Flash page and the
maximum value refers to a read operation of the last variable -1. The difference between the minimum and
maximum values is due to the time taken to find the last variable data stored.
(2)
Write operation in EEPROM
(3)
(4)
(5)
(6)
in EEPROM
Minimum
(µs)
Typical (ms)
Maximum
(µs)
124 - 219
-26-
3.8 - 110
- 52.11 -
-26-
12/19 Doc ID 022893 Rev 1
Page 13

AN4061 Implementing EEPROM emulation
5. When the EEPROM mechanism is run for the 1st time or for an invalid status (see Table 1: Header status
switching between page0 and page1 for more details), the two pages are erased and the page used for
storage is marked as VALID_PAGE.
6. A typical EEPROM initialization is performed when a valid page exists (the EEPROM has been initialized at
least once). During a typical EEPROM initialization, one of the two pages is erased (see Table 1: Header
status switching between page0 and page1 for more details).
Doc ID 022893 Rev 1 13/19
Page 14

Embedded application aspects AN4061
3 Embedded application aspects
This section provides advice on how to overcome software limitations in embedded
applications and how to fulfill the needs of different applications.
3.1 Data granularity management
An Emulated EEPROM can be used in embedded applications where non-volatile storage of
data updated with a half-word or word granularity is required. It generally depends on the
user requirements and Flash memory architecture (for example, stored data length, write
access).
The STM32F0xx on-chip Flash memory allows 16-bit or word programming:
Table 5. Flash program functions
Data granularity Function name
by Word(32-bit) FLASH_ProgramWord
by half word(16-bit) FLASH_ProgramHalfWord
3.2 Wear-leveling: Flash memory endurance improvement
In the STM32F0xx on-chip Flash memory, each page can be programmed or erased reliably
around 10 000 times.
For write-intensive applications that use more than two pages for the emulated EEPROM, it
is recommended to implement a wear-leveling algorithm to monitor and distribute the
number of write cycles among the pages.
When no wear-leveling algorithm is used, the pages are not used at the same rate. Pages
with long-lived data do not endure as many write cycles as pages that contain frequently
updated data. The wear-leveling algorithm ensures that equal use is made of all the
available write cycles for each page.
Note: The main memory block in the STM32F0xx Flash memory is divided as described in
Table 3: Memory footprint for EEPROM emulation mechanism
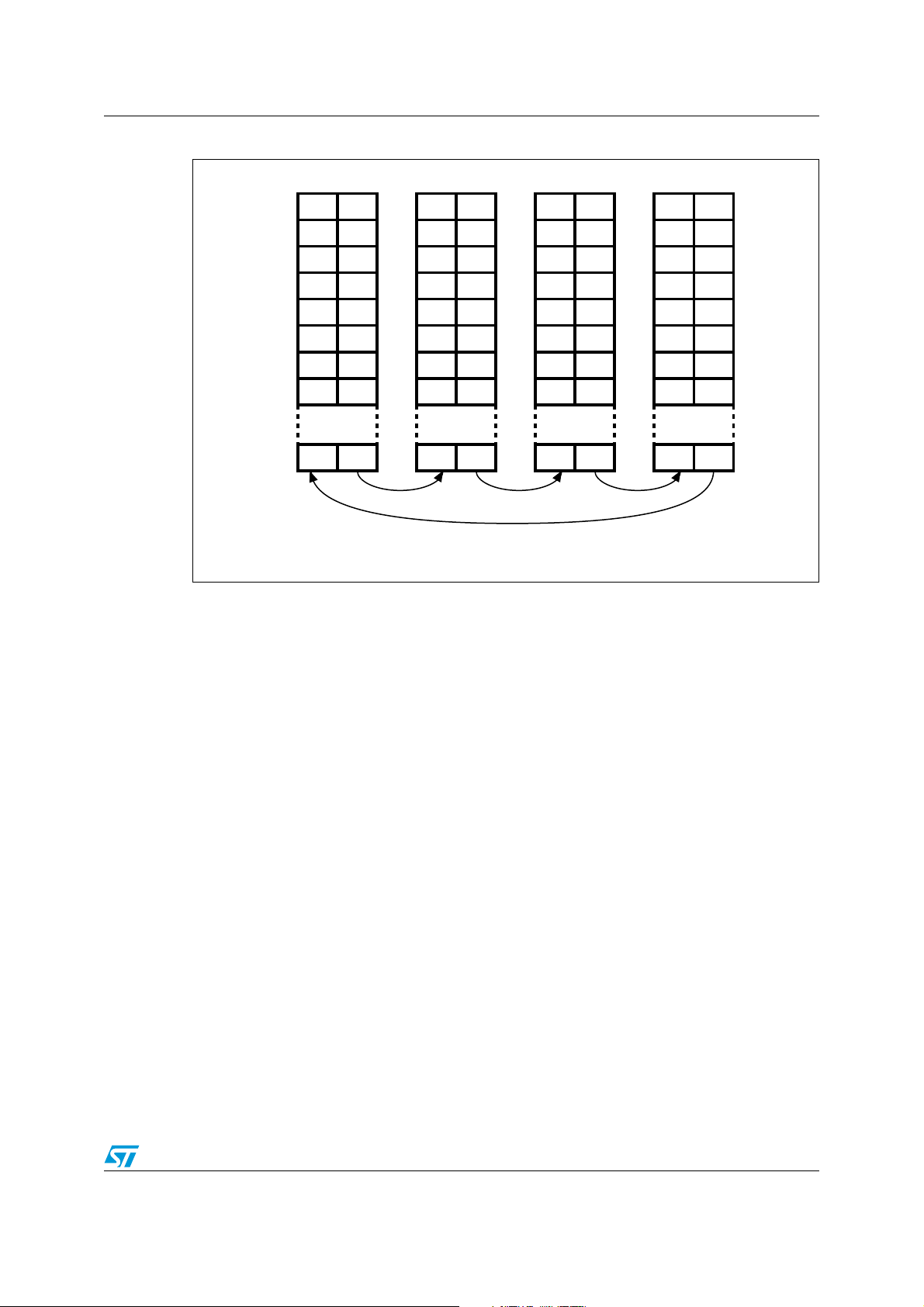
3.2.1 Wear-leveling implementation example
In this example, in order to enhance the emulated EEPROM capacity, four pages will be
used (Page0, Page1, Page2 and Page3).
The wear-leveling algorithm is implemented as follows: when page n is full, the device
switches to page n+1. Page n is garbage-collected and then erased. When it is the turn of
Page3 to be full, the device goes back to Page0, Page3 is garbage-collected then erased
and so on (refer to Figure 5).
.
14/19 Doc ID 022893 Rev 1
Page 15
AN4061 Embedded application aspects
12 32
55 55
FF FF
FF FF
FF FF
FF FF
FF FF
Active Page
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
FF FF
Erased Erased Erased
Page0
Page1 Page2 Page3
ai14611
Figure 5. Page swap scheme with four pages (wear-leveling)
In the software, the wear-leveling algorithm can be implemented using the
EE_FindValidPage() function (refer to Ta bl e 2 ).
3.3 Page header recovery in case of power loss
Data or page header corruption is possible in case of a power loss during a variable update,
page erase or transfer.
To detect this corruption and recover from it, the EE_Init() routine is implemented. It
should be called immediately after power-up. The principle of the routine is described in this
application note. The routine uses the page status to check for integrity and perform repair if
necessary.
After power loss, the EE_Init() routine is used to check the page header status. There
are 9 possible status combinations, three of which are invalid. Figure 1: Header status
switching between page0 and page1shows the actions that should be taken based on the
page statuses upon power-up.
3.4 Cycling capability and page allocation
3.4.1 Cycling capability
A program/erase cycle consists of one or more write accesses and one page erase
operation.
When the EEPROM technology is used, each byte can be programmed and erased a finite
number of times, typically in the range of 10 000 to 100 000.
Doc ID 022893 Rev 1 15/19
Page 16

Embedded application aspects AN4061
However, in an embedded Flash memory, the minimum erase size is the page, and the
number of program/erase cycles applied to a page is the number of possible erase cycles.
The STM32F0xx’s electrical characteristics guarantee 10 000 program/erase cycles per
page. The maximum lifetime of the emulated EEPROM is thereby limited by the update rate
of the most frequently written parameter.
The cycling capability depends on the amount/size of data that the user wants to handle. In
this example, two pages (of 1 Kbyte) are used and programmed with 16-bit data. Each
variable corresponds to a 16-bit virtual address. That is, each variable occupies a word of
storage space. A page can store 1 Kbyte multiplied by the Flash memory endurance of
10 000 cycles, giving a total of 10 000 Kbytes of data storage capacity for the lifetime of one
page in the emulated EEPROM memory. Consequently, 20 000 Kbytes can be stored in the
emulated EEPROM, provided that two pages are used in the emulation process. If more
than two pages are used, this number is multiplied accordingly.
Knowing the data width of a stored variable, it is possible to calculate the total number of
variables that can be stored in the emulated EEPROM area during its lifetime.
3.4.2 Flash page allocation
The page size and the page number needed for an EEPROM emulation application can be
chosen according to the amount of data written during the lifetime of the system.
For example, a 1-Kbyte page with 10-Kbyte erase cycles can be used to write a maximum of
10 megabytes during the lifetime of the system.
Free variable space can be calculated as:
FreeVarSpace = (PageSize) / (VariableTotalSize) - [NbVar+1]
Where:
● Page size: page size in bytes (for example, 1 Kbyte)
● NbVar: number of variables in use (for example, 10 variables)
● VariableTotalSize: number of bytes used to store a variable (address and data)
– VariableTotalSize = 8 for 32-bit variables with (32-bit data + 32-bit virtual address)
– VariableTotalSize = 4 for 16-bit variables with (16-bit data + 16-bit virtual address)
An estimation of the pages needed to guarantee predictable Flash operation during the
application lifetime can be calculated as follows:
Required page number:
NbPages = NbWrites / (PageEraseCycles * FreeVarSpace)
Where:
● NbPages = number of pages needed
● NbWrites = total number of variable writes
● PageEraseCycles = number of erase cycles of a page
Note: If variables are 16-bit, each variable takes 32-bit (16-bit data, with a 16-bit virtual address),
which means that each variable uses 4 bytes of Flash memory each time new data is
written. Each 1-Kbyte page can take 256 variable writes before it is full.
Note: This calculation is a slightly conservative estimation.
16/19 Doc ID 022893 Rev 1
Page 17

AN4061 Embedded application aspects
Case of use example
To design an application that updates 20 different variables, every 2 minutes for 10 years:
– NbVar = 20
–NbWrites = 10 * 365 * 24 * (60/2) * NbVar = ~52 million writes
● If variables are 16-bit data, with a 16-bit virtual address, the number of pages needed
to guarantee non-volatile storage of all this data is:
– Twenty one pages of 1 Kbyte
● If variables are 32-bit data, with 32-bit virtual address, the number of pages needed to
guarantee non-volatile storage of all this data, is:
– Forty one pages of 1 Kbyte
Table 6. Application design
Number of
Variable size
16-bit 52 560 000 210 240 000 1 10000 20.5 21
32-bit 52 560 000 420 480 000 1 10000 41 41
writes
(NbWrites)
Total amount
of data to
write (in
bytes)
Page size
(Kbytes)
Page erase
cycles
Number of
pages needed
Number of
pages used
3.5 Real-time consideration
The provided implementation of the EEPROM emulation firmware runs from the internal
Flash, thus the access to the Flash will be stalled during operations requiring Flash erase or
programming (EEPROM initialization, variable update or page erase). As a consequence,
the application code is not executed and the interrupt cannot be serviced.
This behavior may be acceptable for many applications; however, for applications with realtime constraints, you need to run the critical processes from the internal RAM.
In this case:
1. Relocate the vector table in the internal RAM.
2. Execute all critical code and interrupt service routines from the internal RAM. the
compiler provides a keyword to declare functions as a RAM function; the function is
copied from the Flash to the RAM at system startup just like any initialized variable. It is
important to note that, for a RAM function, all used variable(s) and called function(s)
should be within the RAM.
Doc ID 022893 Rev 1 17/19
Page 18

Revision history AN4061
4 Revision history
Table 7. Document revision history
Date Revision Changes
11-May-2012 1 Initial release.
18/19 Doc ID 022893 Rev 1
Page 19

AN4061
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
Doc ID 022893 Rev 1 19/19
 Loading...
Loading...