

Page 1
AN3129
Application note
Real-time performance using FIQ interrupt handling
in SPEAr MPUs
Introduction
This application note provides information for software developers on how to use the (FIQ)
(fast interrupt request) mechanism with Linux in the SPEAr embedded MPU family.
It is divided into four sections:
Section 1 describes the interrupt logic on SPEAr platform.
Section 2 provides a detailed introduction to the FIQ interrupt handling hardware
mechanism and interrupt latency in the Linux kernel.
Section 3 describes the FIQ interrupt handler software.
Section 4 gives the results of interrupt latency measurements performed with Linux running
on a SPEAr evaluation board.
January 2010 Doc ID 16927 Rev 1 1/12
www.st.com
Page 2
SPEAr interrupt logic AN3129
Interrupt logic
Interrupt sources
Vectored
interrupt
controller
ARM
FIQ
IRQ
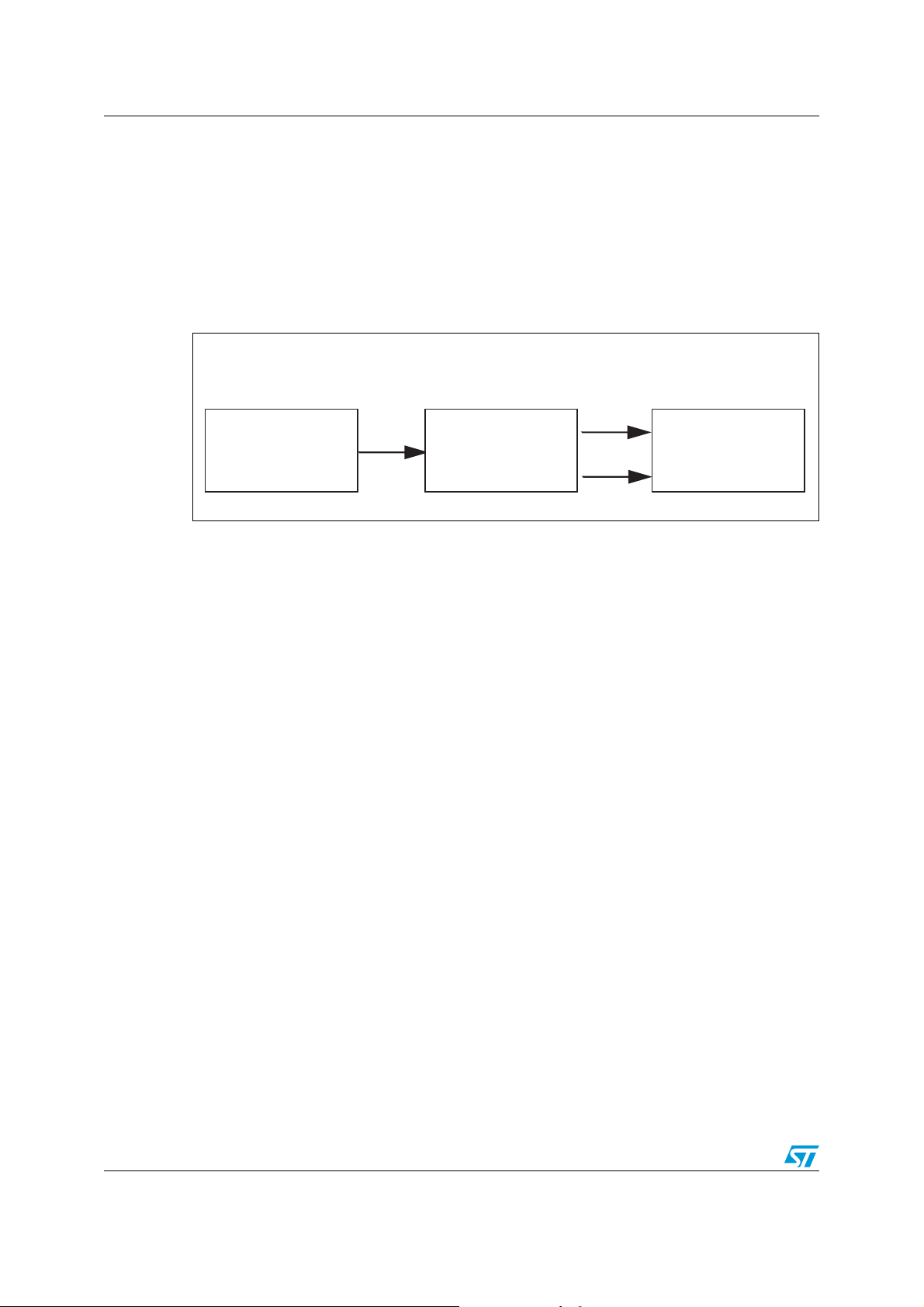
1 SPEAr interrupt logic
SPEAr is a family of embedded MPUs based on the ARM core. The embedded MPU uses
the PL190 vectored interrupt controller (VIC) IP. Together they provide facilities to use fast
interrupts as highest priority interrupts. Fast interrupt features are supported by both the
ARM core and the VIC. This VIC IP can be configured to select any hardware source to
interrupt ARM core as either IRQ or FIQ.
Figure 1. SPEAr platform interrupt logic
The order of priority for hardware interrupts (from higher to lower) is as follows:
1. Fast interrupt request (FIQ) interrupts
2. Vectored IRQ interrupts
3. Non-vectored IRQ interrupts.
FIQs are intended for fast, low-latency interrupt handling. In FIQ mode, the ARM core uses
seven 32-bit banked registers, which enable the VIC to process interrupts as quickly as
possible.
Multiple interrupts can be handled as FIQs, but in this case the IRQ vector needs to be
loaded in the program counter (PC). In order to reduce interrupt latency, it is advised to use
a single FIQ source, because the ISR can be directly executed without determining the
source of the interrupt.
As the Linux kernel never disables FIQs they have ultimate priority over anything else in the
system. When using an FIQ, the FIQ latency will be the time it takes the CPU to enter your
FIQ function. Moreover an FIQ can preempt Linux kernel code and IRQ handlers and it can
also be used for faster response to interrupts.
Note: The use of an FIQ in place of an IRQ does not require any hardware (wiring) modifications
on the SPEAr board. The VIC has a 32-bit register (VICINTSELECT) which can toggle an
IRQ source to raise an FIQ instead of the default mechanism of IRQ.
2/12 Doc ID 16927 Rev 1
Page 3
AN3129 Linux kernel IRQ handling latency
Interrupt IRQ handler
Interrupt
latency
Interrupt disabling in Kernel
OR
other interrupt handler
Interrupt
handler
duration
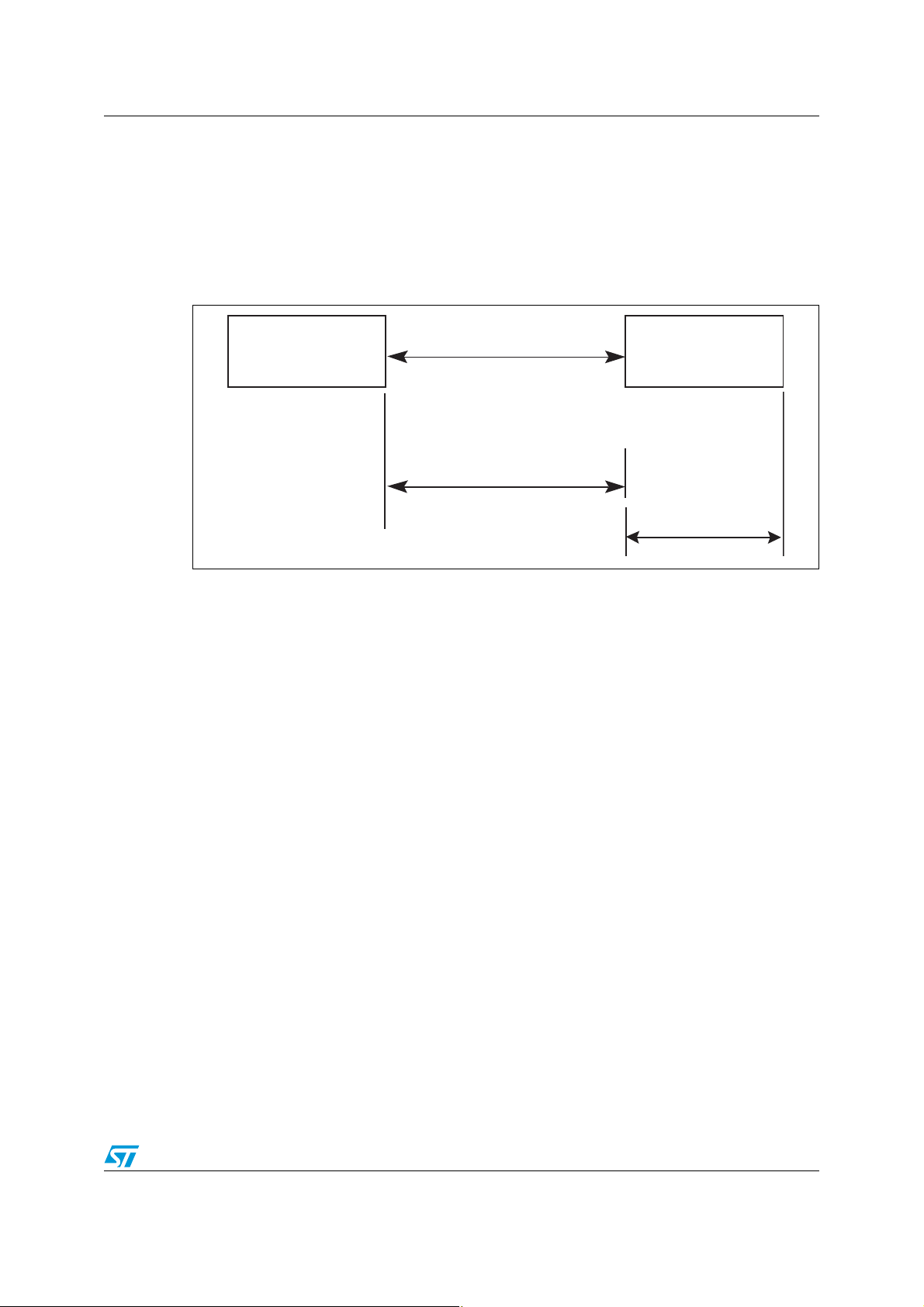
2 Linux kernel IRQ handling latency
In a Linux kernel based system, interrupt latency may occur in the following cases:
● Interrupt latency for top half,
● Various sections where IRQs are disabled
Figure 2. IRQ handling latency in Linux Kernel
An FIQ is a highest priority interrupt and preempts both of these sources of latency. It can
preempt IRQ top half handlers as well as Linux kernel code sections where IRQs are
disabled. Further to this, the FIQ handler can not be preempted by other IRQs. This ensures
that the platform has predictable worst case timings for FIQ handler latency making FIQ
suitable for real-time systems.
The FIQ handler can not permit tasks that require other IRQs to be active, including the
timer. This also makes it suitable for real-time systems but imposes the following limitations:
● Kernel mode APIs and device driver framework can not be used inside the FIQ handler.
These APIs available for Linux driver development may internally rely upon timers,
schedulers, spinlocks, etc. for functioning. Linux code also needs to guard against
multiple access to objects by spinlocks or other relevant mechanisms. FIQ ISRs can
come in the middle of anything and have to get out quickly again too. So unless it is a
simple macro, you can not use any Linux APIs in the FIQ ISR.
● Page faults have to be avoided inside the handler (the memory used in the handler
should be already allocated and initialized). In case that a page fault occurs inside the
FIQ handler, it can not be recovered by the kernel and it would lead to a kernel crash.
Doc ID 16927 Rev 1 3/12
Page 4

FIQ handler environment AN3129
3 FIQ handler environment
The FIQ registration, the ISR function and the runtime environment of a FIQ handler are
different from a standard IRQ handler. A working example of an FIQ handler can be found in
latency measurement module in Section 4: IRQ latency measurement.
3.1 FIQ registration
For FIQ registration ‘set_fiq_handler’ API is used.
The two arguments of this API are:
● Function pointer
● Size of handler function in bytes
This handler function is copied to the FIQ vector reserved area. The FIQ vector area is last
in the memory area reserved for interrupt vectors. About five hundred (500) bytes are
available in this area for copying the ISR.
In the SPEAr Linux Support Package (LSP), the following API must be used to select the
configuration of the IRQ source:
● vic_unmask_irq(int number) – enables interrupt source on VIC as IRQ
● vic_select_fiq(int number) – selects interrupt source on VIC as FIQ instead of IRQ
3.2 FIQ mode registers setup
When the FIQ handler runs, it utilizes FIQ mode-specific registers (r8-r14) and general
mode registers (r0-r7). This set of FIQ mode registers is exclusive to FIQ mode and not
available to other handlers.
To pass any information to the FIQ handler, the FIQ mode registers have to be set using the
call: ‘set_fiq_regs’.
3.3 Return from FIQ mode
To return from FIQ mode on completion of the code, use the following assembly instruction:
subs pc, lr, #4;
This command restores the instruction pointer to the original location it was before FIQ
arrived.
3.4 FIQ ISR in C
Writing the FIQ handler function in ARM assembly language can be cumbersome, so it is
highly recommended to use C language instead. This is especially true for large functions
when the handler function is larger than the maximum size available for FIQ vector (500
bytes). In such cases branching to the C function can be possible. This involves saving of
the register context (r0-r12 general mode registers) and initialization of the function frame
pointer.
4/12 Doc ID 16927 Rev 1
Page 5

AN3129 IRQ latency measurement
4 IRQ latency measurement
The latency measurement module is a Linux kernel module (LKM) available as part of the
STLinux SPEAr BSP release kernel code. This module can be statically linked with the
kernel at the time of the build.
This module is useful for measuring the IRQ or FIQ latency in a running system. The
statistics collected are:
● Maximum latency (in microseconds)
● Minimum latencies (in microseconds)
● Total number of samples captured
● Frequency distribution of IRQ handling latency in range [0-200] microseconds
Figure 3. Linux Kernel IRQ latency measurement module
To see above modes in the kernel source directory:
1. Run make menuconfig.
2. Then navigate to ‘System Type’->’SPEAr Interrupt Latency Test’]
The source code of the latency measurement module is available in the STLinux SPEAr
BSP Linux kernel source code.
The file location is: arch/arm/plat-spear/latency_test.c
You can use this module as a starting point for writing a new FIQ handler.
4.1 Using the latency measurement module
The latency test module exchanges configurable parameters and measured results through
Linux sysfs filesystem.
Doc ID 16927 Rev 1 5/12
Page 6

IRQ latency measurement AN3129
This module is linked statically to the kernel image and has user mode interface at:
/sys/kernel/irq_latency
To use the module:
1. Run the following command:
#ls /sys/kernel/irq_latency
The command output shows four entries:
– irq_mode – shows if IRQ latency measurement is 1 (on) or 0 (off/no capture)
– fiq-mode – shows if FIQ latency measurement is 1 (on) or 0 (off/no capture)
– stats – shows the running statistics of measurements as summary
– stats_details – shows detailed log of IRQ latency counters
During kernel booting, the statically linked module is loaded automatically. By default the
module lies dormant and does not capture latency statistics.
2. To start the capture, you must activate one of the two IRQ handling modes using the
command:
– #echo 1 > irq_mode
or
– #echo 1 > fiq_mode
irq_mode: in this timer interrupts are handled with an IRQ mechanism.
fiq_mode: in this timer interrupts are handled as FIQ interrupts. FIQ mode is designed
to handle real-time scenarios.
To get the statistics captured by the module, use the command #cat stats repeatedly while
performing other tasks. A typical output is:
Latency
max (usec) : 48
min (usec) : 6
totalsamples : 7798
To get detailed statistics, use the command #cat stats_details repeatedly while performing
other tasks. A typical output is:
Latency: Counter (usec)
0, 0
1, 0
2, 0
3, 0
4, 0
5, 0
6, 12001
7, 70
6/12 Doc ID 16927 Rev 1
Page 7

AN3129 IRQ latency measurement
8, 35
9, 29
10, 13
11, 0
……
……
198, 0
199, 0
200, 0
3. To stop statistics capture, use one of the following commands (depending on the
mode):
– #echo 0 > irq_mode
or
– #echo 0 > fiq_mode
Once the mode stopped, the timer is stopped and the IRQ handling is deactivated. Also the
statistics are cleared.
4.2 Module internals
The module uses a general purpose hardware timer to raise an IRQ/FIQ and capture the
ticks elapsed. The timer automatically reloads itself after raising an interrupt. In this way
when the IRQ handler reads the timer value, this value is the exact measurement of the
system latency for handling this IRQ.
Depending upon the choice of IRQ handling mechanism (IRQ or FIQ), the corresponding
selection is made in VIC handling. FIQ registration and de-registration is part of the
standard Linux kernel.
Timer (GPT) interval: 1 millisecond
Timer tick interval: 1/48 microsecond
Interrupt handler latency frequency counter is captured from 0 to 9600 ticks. This
corresponds to a range of 0 to 200 microseconds. This frequency range is sufficient for
determining the interrupt latency performance.
4.3 Performance measurements
The details of setup used for making the measurements are:
● Kernel: Linux kernel version 2.6.27
● Board: SPEAr Plus 600 application board
● CPU: ARM core running @333 MHz
● RAM: 128 MB DDR2 running @333 MHz
● Flash: 8 MB NOR
Doc ID 16927 Rev 1 7/12
Page 8

IRQ latency measurement AN3129
4.3.1 System load using netperf
While the timer is recording values for ISR latency, the system is loaded using high-traffic on
Ethernet. For this, the netperf utility is used. Netperf is an open-source, free software used
for benchmarking of Ethernet performance between two systems.
There are two components to the netperf Ethernet benchmark: server and client. When the
client (netperf) is invoked, it connects to the server (netserver) and starts to send data
through sockets. The total bytes transferred in 10 seconds are measured and used to
calculate the network throughput.
The SPEAr board is connected directly to a Linux PC through Ethernet (cross-cable).
Netperf (client) is run on the SPEAr board and netserver (server) is run on the Linux PC.
The netperf utility sends Ethernet packets at the maximum possible rate to the netserver
which sends them back.
4.4 Results
This experiment was done both for IRQ mode and FIQ mode. The values from the timer
module and the netperf throughput are recorded in the following table.
In all three tests, the overall system throughput was measured as peak network
performance.
Table 1. Timer ISR latency measurements (minimum/maximum)
Interrupt Latency (µs) IRQ FIQ
Under Network load
Maximum (µs)
Minimum (µs)
Throughput (Mbps)
(1)
Test1 Test2 Test3 Test1 Test2 Test3
175 177 173 7 7 8
141000
94 94 94 94 94 94
1. Throughput was calculated using the netperf client data transfer rate.
According to the table, we can infer that:
● The maximum latency for IRQ shoots up to 177 µs
● The maximum latency for FIQ is close to 8 µs
● The overall throughput of system remains the same in both cases.
8/12 Doc ID 16927 Rev 1
Page 9

AN3129 Conclusion
5 Conclusion
The fast interrupt mechanism ensures a bounded performance with the Linux kernel without
any decrease in the overall system throughput. Its worst case is less than ten microseconds
(<10usec). However this deterministic behavior comes at the cost of some limitations in ISR
handler development, which can not utilize Linux kernel API and device driver framework.
The FIQ interrupt handling mechanism used, as described in this application note, is wellsuited for critical real time applications with SPEAr.
Doc ID 16927 Rev 1 9/12
Page 10

References AN3129
6 References
Table 2. References
PrimeCell® Vectored Interrupt Controller (PL190) r1p2 ARM website
Title Revision Path/Location
ARM Architecture Reference Manual 2005 ARM website
SPEAr300 User Manual 1.2 STLinux SPEAr BSP
SPEAr600 User Manual 1.3 STLinux SPEAr BSP
10/12 Doc ID 16927 Rev 1
Page 11

AN3129 Revision history
7 Revision history
Table 3. Document revision history
Date Revision Changes
05-Jan-2010 1 Initial release.
Doc ID 16927 Rev 1 11/12
Page 12

AN3129
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2010 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
12/12 Doc ID 16927 Rev 1
 Loading...
Loading...