

Page 1
AN2869
Application note
Guidelines for designing touch sensing applications
Introduction
This application note describes the layout and mechanical design guidelines used for touch
sensing applications.
Capacitive sensing interfaces provide many advantages compared to mechanical user
interfaces. They:
● offer a modern look and feel
● are easy to clean
● are waterproof
● are robust
Capacitive sensing interfaces are more and more used in a wide range of applications.
The main difficulty designing such interfaces is to ensure that none of the items interfere
with each other.
This document provides simple guidelines covering three main aspects:
1. Printed circuit board (PCB)
2. Overlay and panel materials
3. All other items in the capacitive sensor environment
Depending on which application you are designing, you may not need to refer to all of the
contents of this document. You can go to the appropriate section after reading the common
part which contains the main capacitive sensing guidelines. For example, if you are
developing an application with only projected electrode, you should first read the main
capacitive sensing guidelines and then go through the sections giving specific
recommendations for projected electrode designs.
Ta bl e 1 lists the microcontrollers concerned by this application note.
Table 1. Applicable products
Type Applicable products
Proximity and touchkey microcontrollers
STM8A automotive microcontrollers
STM8L ultra-low-power microcontrollers
Product family
STM8S mainstream microcontrollers
STM8T touch-sensing microcontrollers
STM32 F0 entry-level Cortex™-M0 microcontrollers
STM32 L1 ultra-low-power ARM Cortex™-M3 based microcontrollers
May 2012 Doc ID 15298 Rev 6 1/43
www.st.com
Page 2

Contents AN2869
Contents
1 Capacitive sensing technology in ST . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1 RC acquisition principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Charge transfer
1.3 Surface ProxSense
1.4 Projected ProxSense
1.5 Surface capacitance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Projected capacitance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Main capacitive sensing guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 Construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.1 Substrates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
acquisition principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
TM
acquisition principle . . . . . . . . . . . . . . . . . . . . . . . . 5
TM
acquisition principle . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.2 Electrode and interconnection materials . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.3 Panel materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.4 Mechanical construction and PCB to panel bonding . . . . . . . . . . . . . . . 13
2.2.5 Metal chassis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.6 Air gap . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.7 Transfer of an electrode from PCB to the front panel . . . . . . . . . . . . . . . 14
2.3 Placing of LEDs close to sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Power supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Surface electrode design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Touchkey sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Touchkey matrix sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Linear sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 Normal patterned linear sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.2 Interlaced linear sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 Rotary sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4.1 Normal patterned rotary sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4.2 Interlaced patterned rotary sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4.3 Rotary sensor with central touchkey . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.5 Specific recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5.1 LEDs and sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2/43 Doc ID 15298 Rev 6
Page 3
AN2869 Contents
3.5.2 Driven shield . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5.3 Using electrodes separated from the PCB . . . . . . . . . . . . . . . . . . . . . . 28
3.5.4 PCB and layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5.5 Component placement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5.6 Ground considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5.7 Rotary and linear sensor recommendations . . . . . . . . . . . . . . . . . . . . . 32
4 Projected sensor design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1 Touchkey sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.1 Diamond type sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1.2 H sensor single layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1.3 H type sensor two layers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Linear sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3 Rotary sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4 Specific recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4.1 PCB and layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Doc ID 15298 Rev 6 3/43
Page 4

List of figures AN2869
List of figures
Figure 1. Equivalent touch sensing capacitances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 2. Example of capacitive sensor construction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 3. Clear ITO on PET with silver connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figure 4. Silver printing on PET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 5. Flexible PCB (FPC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 6. FR4 (2-sided epoxy-fiberglass). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 7. Typical panel stack-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 8. Examples of cases where a LED bypass capacitor is required . . . . . . . . . . . . . . . . . . . . . 15
Figure 9. Typical power supply schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 10. Sensor size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 11. Recommended electrode size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 12. Simple matrix implementation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 13. Normal patterned linear sensor with five electrodes (20-50 mm long) . . . . . . . . . . . . . . . . 20
Figure 14. Interlaced linear touch sensor with three elements (up to 60 mm long) . . . . . . . . . . . . . . . 21
Figure 15. Normal patterned rotary sensor (three electrodes) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 16. Interlaced patterned rotary sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 17. Back-lighting touchkey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 18. STM8T141 driven shield solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 19. Simple driven shield using RC acquisition principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 20. STM8L1xx driven shield example using the charge-transfer acquisition principle . . . . . . . 26
Figure 21. STM32L driven shield example using the charge-transfer acquisition principle . . . . . . . . . 27
Figure 22. Printed electrode method showing several connection methods . . . . . . . . . . . . . . . . . . . . 28
Figure 23. Spring and foam picture (both are not compressed) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 24. Track routing recommendation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 25. Ground plane example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 26. Hatched ground and signal tracks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figure 27. Electric field between 2 surface electrodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figure 28. Diamond implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Figure 29. H sensor (single layer) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figure 30. Two-layer implementation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 31. Normal linear sensor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 32. Small linear sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 33. Rotary sensor made of 5 parcels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 34. Ground floods around Tx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 35. Potential false key detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4/43 Doc ID 15298 Rev 6
Page 5

AN2869 Capacitive sensing technology in ST
1 Capacitive sensing technology in ST
STMicroelectronics offers different capacitive sensing technologies for STM8 and STM32
family products. These technologies are based on:
● The RC acquisition principle for STM8A, STM8S and STM8L microcontrollers.
● The charge transfer acquisition principle for STM8L, STM32 F0 and STM32 L1
microcontrollers.
● The surface ProxSense
● The projected ProxSense
Note: ProxSense™ is a trademark of Azoteq.
1.1 RC acquisition principle
The RC acquisition principle is based on the charging/discharging time measurement of an
electrode capacitance through a resistor. When the electrode is touched, the
charging/discharging time increases and the variation is used to detect the finger proximity.
The RC acquisition principle is detailed in AN2927.
TM
acquisition principle for STM8T14x microcontrollers.
TM
acquisition principle for STM8TL5x microcontrollers.
1.2 Charge transfer acquisition principle
The charge transfer acquisition principle uses the electrical properties of the capacitor
charge (Q). The electrode capacitance is repeatedly charged and then discharged in a
sampling capacitor until the voltage on the sampling capacitor reaches a given threshold.
The number of transfers required to reach the threshold is a representation of the size of the
electrode’s capacitance. When the electrode is “touched”, the charge stored on the
electrode is higher and the number of cycles needed to charge the sampling capacitor
decreases.
1.3 Surface ProxSense
The surface ProxSenseTM acquisition principle is similar to the charge transfer one, except
that the acquisition is fully managed by a dedicated hardware IP providing improved
performance. For more information, please refer to the application note AN2970.
1.4 Projected ProxSense
The projected ProxSenseTM acquisition principle is a measurement of a charge transferred
by a driven electrode to another one. Like the charge transfer, there is also a sampling
capacitor which stores the charges coming from the electrodes which form a coupling
capacitor with less capacitance than the sample one. When a finger approaches, the
dielectric (between the two electrodes) is modified and so the capacitance decreases. As a
consequence, the time taken to load the sample capacitor will increase and this difference is
used to detect if a finger is present or not.
TM
acquisition principle
TM
acquisition principle
Doc ID 15298 Rev 6 5/43
Page 6
Capacitive sensing technology in ST AN2869
Application
Electrode
C
X
C
T
C
F
Earth
Application ground
ai15083
V
SS
CH
1.5 Surface capacitance
A capacitance is modified when a finger gets close to a sensing electrode.
The return path goes either through:
● a capacitor to ground through the user’s feet
● a capacitor between the user’s hand and the device
● a capacitor between the user’s body and the application board through the air (like an
antenna)
Background
Figure 1. Equivalent touch sensing capacitances
C
is the parasitic capacitance of the electrode.
X
C
is composed of two capacitances: the first one refers to earth, which is not significant
X
and can be ignored, and the second one refers to the application ground, which is
dependent on the PCB or the board layout. This latter parasitic capacitance includes the
GPIO pad capacitance and the coupling between the electrode tracks and the application
ground.
The PCB and board layout must be designed to minimize this parasitic capacitance.
C
is the feedback capacitance between earth and the application. Its influence is important
F
in surface capacitance touch sensing applications, especially for applications which do not
feature a direct connection to earth.
6/43 Doc ID 15298 Rev 6
C
is the capacitance created by a finger touch and it is the source of the useful signal. Its
T
reference is earth and not the application ground.
The total capacitance measured is a combination of C
meaningful for the application. So we measure C
by the formula: C
+ 1 / ((1 / CT) + (1 / CF)).
X
, CF and CT where only CT is
X
plus CT in parallel with CF, which is given
X
Page 7

AN2869 Capacitive sensing technology in ST
1.6 Projected capacitance
A capacitor is modified when the finger gets close to a sensing electrode. The finger
changes the dielectric properties.
The sensor consists of two electrodes:
● Tx driven by a port in Output mode,
● Rx in the return path to a dedicated port in Read mode.
Doc ID 15298 Rev 6 7/43
Page 8
Main capacitive sensing guidelines AN2869
MS18973V1
Glass/plexiglass panel
Silkscreen printing
Copper pad (Cu)
electrode
Fiberglass PCB
2 Main capacitive sensing guidelines
2.1 Overview
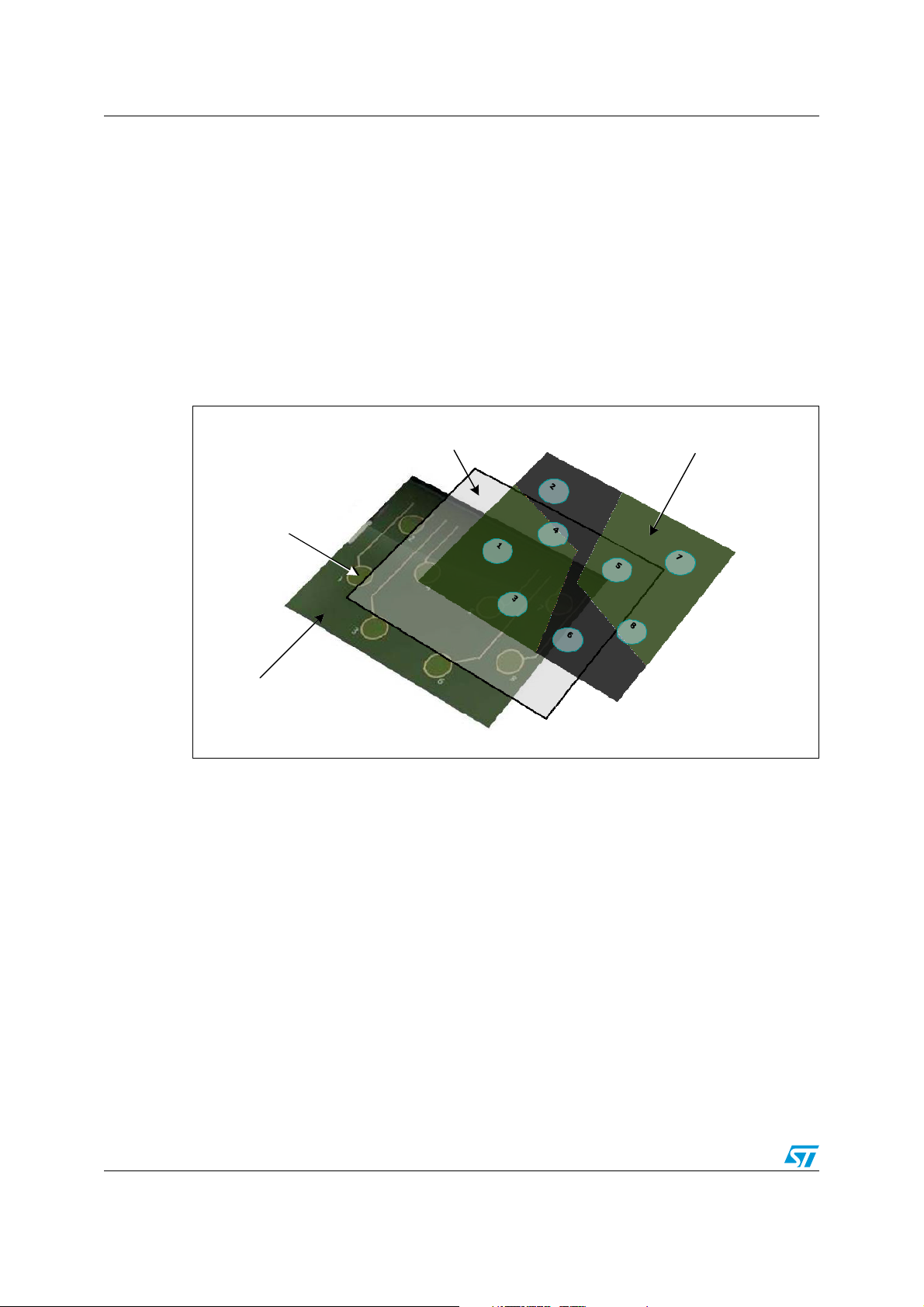
A surface or projected capacitive sensor is generally made up of the following different
layers:
● A fiberglass PCB
● A set of electrodes made of a copper pad
● A panel made of glass, Plexiglas, or any non-conductive material
● A silk screen printing
Figure 2. Example of capacitive sensor construction
2.2 Construction
2.2.1 Substrates
The substrate is the base material carrying the electrodes.
A substrate can be chosen among any non-conductive material, in practice, PCB materials
(e.g. FR4, CEM-1), acrylics like Polyethylene Terephthalate (PET), or Polycarbonate can be
used. Glass is also an excellent material for this purpose.
Note: For the projected materials (technologies) listed above, it is not recommended to use a
8/43 Doc ID 15298 Rev 6
relative permittivity (
ε
) that is too high.
R
In many cases, the substrate which is used in electronic application will also work well for
capacitive sensing. Special care is required to avoid materials which can retain water
contained in the atmosphere (e.g. hygroscopic material such as paper based).
Unfortunately, this would modify
ε
(relative permittivity) with environmental conditions.
R
Page 9
AN2869 Main capacitive sensing guidelines
It is not recommended to directly set the substrate against the front panel without gluing it by
pressure or by bonding. Some moisture or air bubbles can appear between them and cause
a change on the sensitivity. Indeed, if the substrate and the panel are closely linked together
this will avoid a varying sensitivity loss which is hard to predict (when the air bubbles are
greater than 2 mm diameter). Hence, the way used is to strongly glue them all mechanically
or with a suitable bonding material.
It is possible to construct sensors that do not rely on a substrate. These are described in this
document under separate sections (Section 2.2.7, Section 3.5.3 and Chapter 4.4.1).
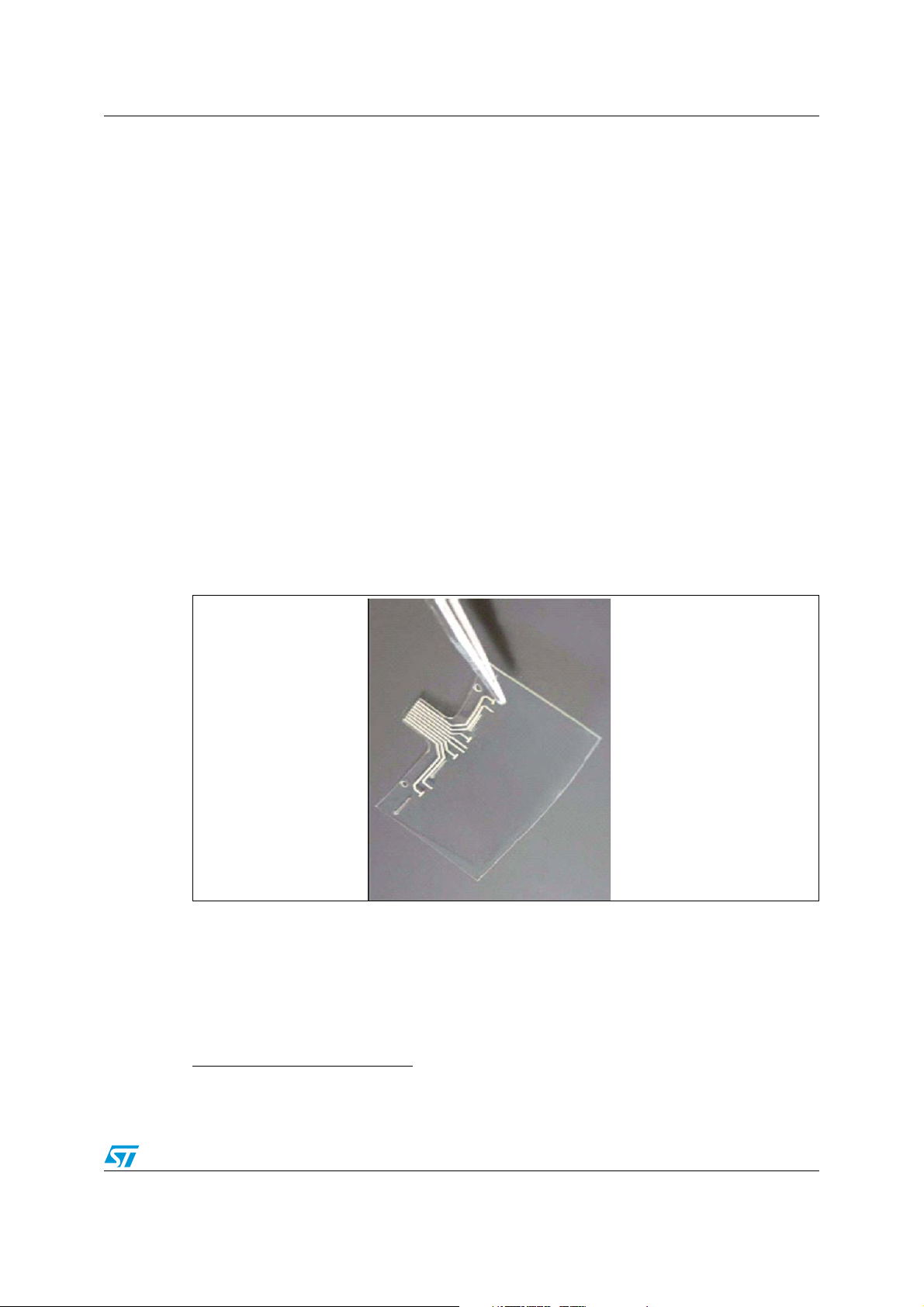
2.2.2 Electrode and interconnection materials
Generally, an electrode is made with the following materials: copper, carbon, silver ink,
Orgacon
TM
or Indium Tin Oxyde (ITO).
The resistance to electric current of a material is measured in ohm-meters (Ωm). The lower
this degree of resistivity the better, as well as a good RC time constant. That is why
interconnections will be made with low Ωm material. e.g. a printed silver track at 15.9 nΩm
that is 100 mm long, 0.5 mm wide and 0.1 mm thick (so the area is 0.05 mm²) will have a
resistance of 32 µΩ.
About metal deposition, another well-known approach is to consider the Ω/❑
(a)
of a
material. For instance, you can compare silver and ITO (which is about 10 times greater)
and deduce which material is well suited for the connections.
Figure 3. Clear ITO on PET with silver connections
a. Pronounced “Ohms per square” and also called sheet resistance; if you know this constant (given by the
manufacturer) and how many squares are put in series, you can deduce the overall resistance of the line.
Doc ID 15298 Rev 6 9/43
Page 10
Main capacitive sensing guidelines AN2869
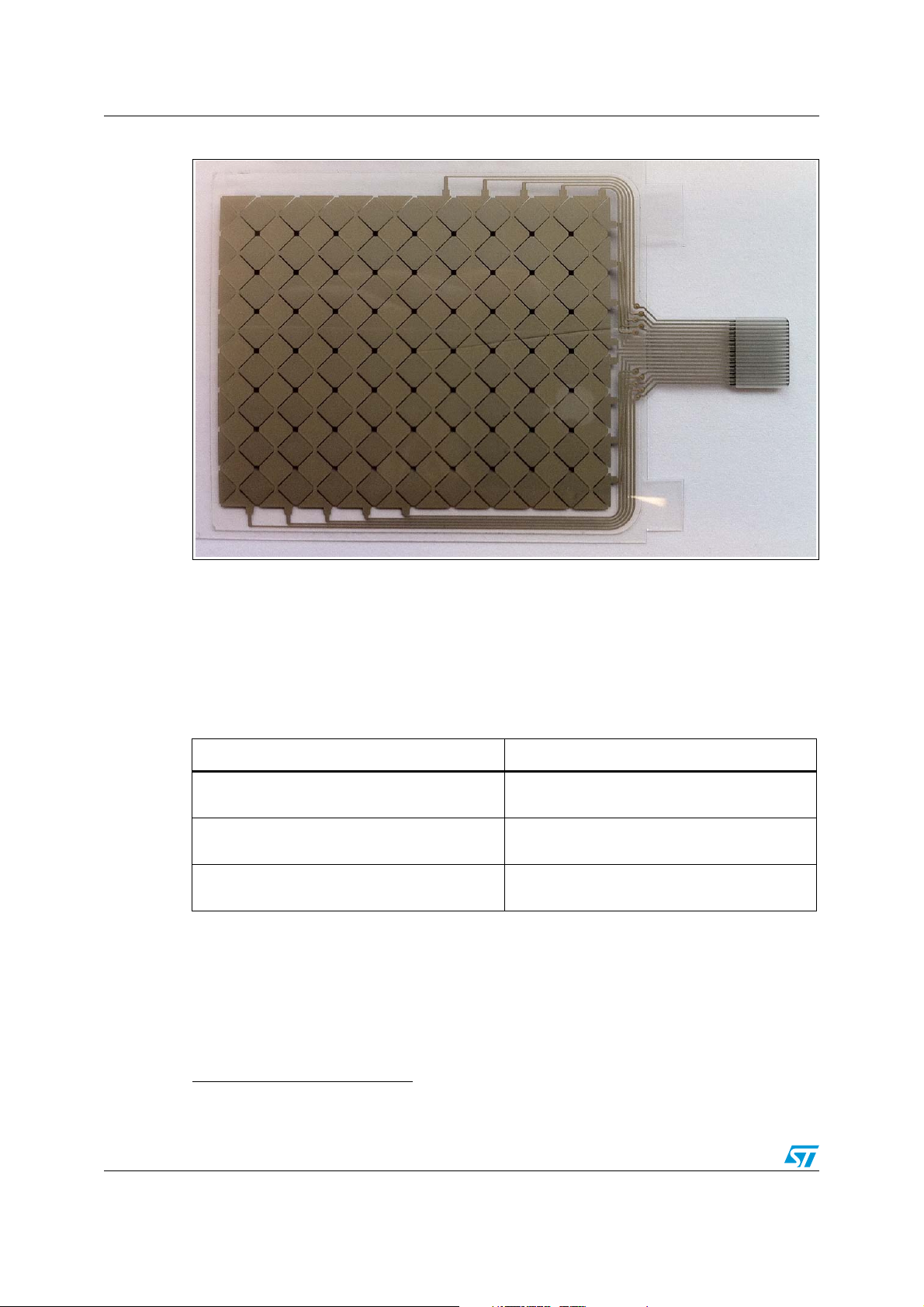
Figure 4. Silver printing on PET
More and more applications need a flex PCB or FFC/FPC
(b)
to interconnect circuitry; it is
suitable, provided that the overall application is mechanically stable. Furthermore, the FPC
tracks will be part of the touch sensor. So if the flex moves a little bit, even a few
micrometers, the capacitance to its surroundings will definitely change and might be
significant, causing false touch detections or drops in sensitivity. Putting the flex in close
proximity to a metal chassis or other signals, or on top of noisy circuitry, can cause problems
as well (loss of sensitivity or spurious detection).
Table 2. Potential application problems with flex PCB placement
When the flex PCB is in close proximity to... ...the following can occur.
...the ground or to a metal chassis
connected to the ground.
... a floating metal object or to a floating
metal chassis
... a source of noise
...the sensitivity is reduced.
... the object or the chassis conducts the
touch to the electrode
... the acquisition will be strongly perturbed
and so the touchkey will become non-usable
b. FFC = Flat Flexible Conductor, FPC = Flexible Printed Circuit
10/43 Doc ID 15298 Rev 6
Page 11
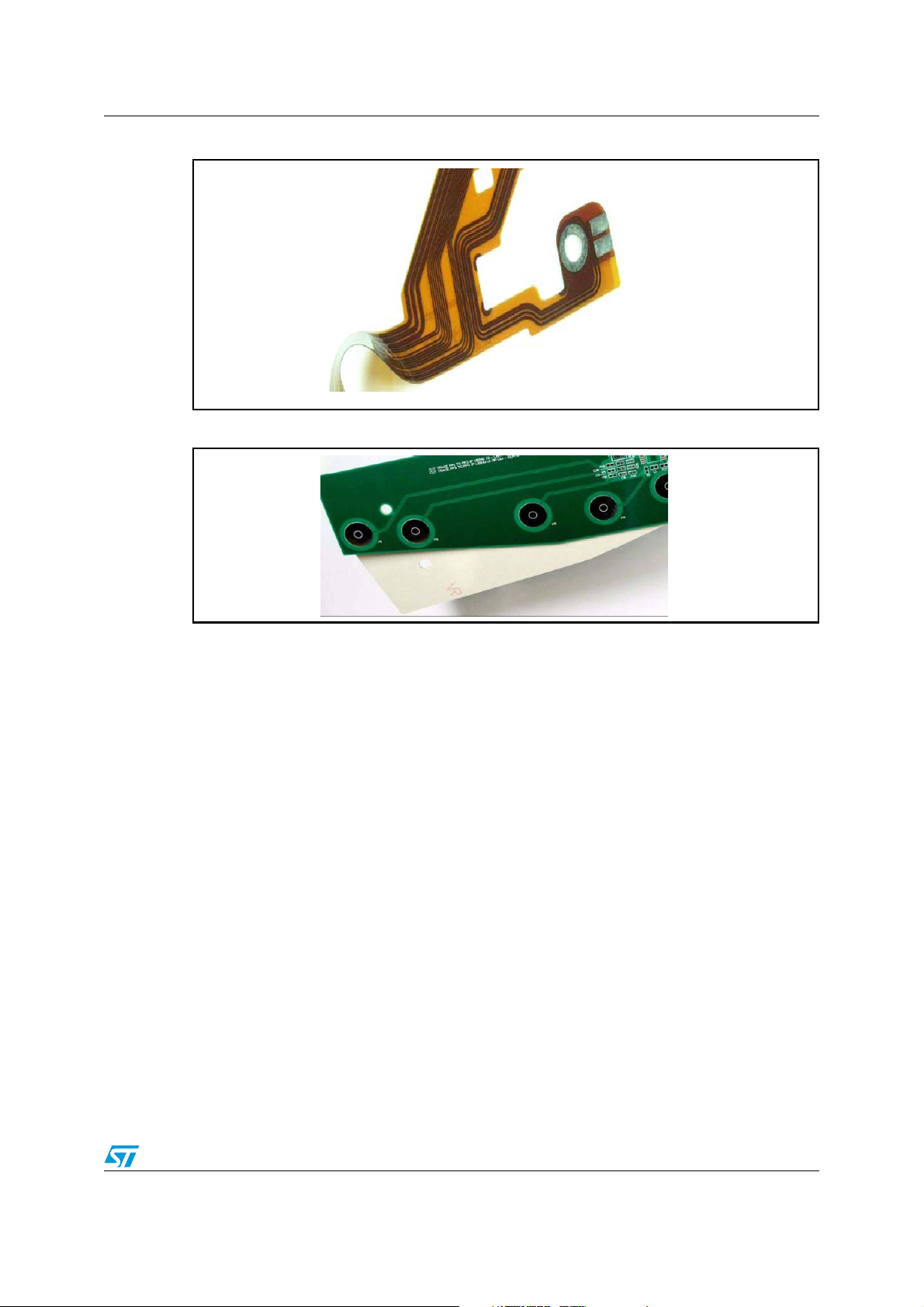
AN2869 Main capacitive sensing guidelines
Figure 5. Flexible PCB (FPC)
Figure 6. FR4 (2-sided epoxy-fiberglass)
2.2.3 Panel materials
You can choose the panel material which best suits your application. This panel material
MUST NOT be conductive. The material characteristics impact the sensor performance,
particularly the sensitivity.
Dielectric constant
The panel is the main item of the capacitor dielectric between the finger and the electrode.
Its dielectric constant (
propagation of the electric field inside the material is given by this parameter. The higher the
dielectric constant, the better the propagation.
Glass has a higher
materials used in a panel construction). Higher numbers mean that the fields will propagate
through more effectively. Thus a 5 mm panel with an
sensitivity to a 2.5 mm panel with a relative epsilon of 4, all other factors being equal.
A plastic panel up to 10 mm thick is quite usable, depending on key spacing and size. The
circuit sensitivity needs to be adjusted during development to compensate for panel
thickness, dielectric constant and electrode size.
The thicker a given material is, the worse the SNR. For this reason, it is always better to try
and reduce the thickness of the front panel material. Materials with high relative dielectric
constants are also preferable for front panels as they help to increase SNR.
ε
) differentiates a material when it is placed in an electric field. The
R
ε
than most plastics (see Table 3: Dielectric constants of common
R
ε
of 8 will perform similarly in
R
Doc ID 15298 Rev 6 11/43
Page 12
Main capacitive sensing guidelines AN2869
T
V
t
ε
R
----- -=
T
VSTACK()TV layers()
∑
=
Table 3. Dielectric constants of common materials used in a panel construction
Material
Air 1.00059
Glass 4 to 10
Sapphire glass 9 to 11
Mica 4 to 8
Nylon 3
Plexiglass 3.4
Polyethylene 2.2
Polystyrene 2.56
Polyethylene terephthalate (PET) 3.7
FR4 (fiberglass + epoxy) 4.2
PMMA (Poly methyl methacrylate) 2.6 to 4
Typical PSA 2.0 - 3.0 (approx.)
ε
R
Sensitivity
A useful parameter to consider with panel material and thickness (T) is the electric field
equivalent vacuum thickness T
Equation 1
where t is the thickness of the dielectric.
T
is the thickness of vacuum with an electric field conduction equivalent to that of the
V
material. The smaller it is, the easier the field can reach through. Panels with the same T
make keys with identical sensitivity. This works for both directions of course and may be
used to evaluate the touch sensitivity from the back side of the application.
For a panel built from a stack of different materials, it is possible to add the vacuum
equivalent thickness of each layer:
Equation 2
Each material has an influence on the sensitivity. So the equation can be used when, for
example, the electrodes are on the bottom surface of the PCB substrate, then the thickness
and
ε
of the substrate will be also factors of the global sensitivity.
R
.
V
V
12/43 Doc ID 15298 Rev 6
Page 13
AN2869 Main capacitive sensing guidelines
MS18974V1
Non-conductive panel
PCB
OR
Pressure-sensitive adhesive (PSA)
e.g. 3M467
Copper electrode
2.2.4 Mechanical construction and PCB to panel bonding
In order to ensure stable touch detection, the PCB must always be at the same place on the
panel. The slightest variation, even as small as 100 microns, may lead to differences in the
signal which can be detected. This must be avoided to ensure the integrity of the touch
detection. The panel and other elements of the device must not be moved, or only as little as
possible, by the user’s finger. To avoid this kind of problem, glue, compression, co-convex
surfaces can be used to mechanically stabilize the PCB and the panel very close together.
In the list of the different ways to achieve this, we can put: heat staking plastic posts, screws,
ultrasonic welding, spring clips, non-conductive foam rubber pressing from behind, etc.
Figure 7. Typical panel stack-up
Normal construction is to glue a sensor to a front panel with Pressure Sensitive Adhesive
(PSA). 3M467 or 468 PSAs work very well.
Doc ID 15298 Rev 6 13/43
Page 14

Main capacitive sensing guidelines AN2869
2.2.5 Metal chassis
A metal chassis behind a touch sensor is a good path to the ground and tends to reduce the
sensitivity of the touch response in case there is a significant area of overlap. Such a
metallic surface must never be electrically floating as it makes the whole product unstable in
terms of touch detection. This is also applicable for any conductive decorative feature close
to the sensor.
Metal chassis and decorative items must be grounded or connected to the driven shield (see
Section 3.5.2: Driven shield) if it is implemented.
Metallic paints can be an issue if they contain conductive particles. Low particle density
paint is recommended.
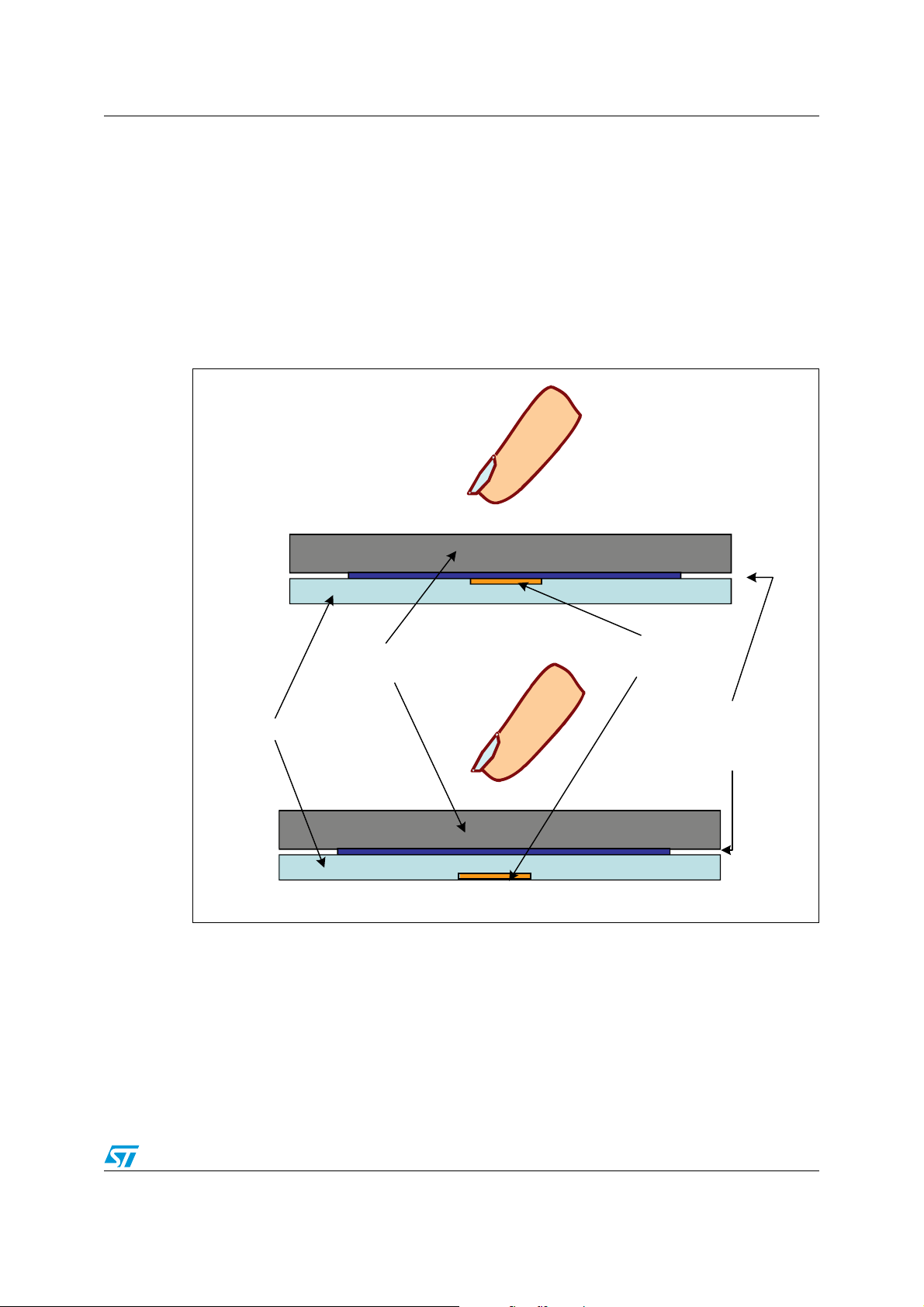
2.2.6 Air gap
Due to its dielectric constant, air can be used as an isolator. An air gap reduces the touch
sensitivity when it is in the touch side stack. However, in some conditions, air can be useful
to reduce the ground loading in the non-touch side stack. Such ground loading can be due
to the metal chassis or an LCD. For instance, when designing a touch-screen solution, an air
gap of 0.5 mm to 1 mm between the LCD and the touch sensor is recommended. Air gaps
also help to reduce the sensitivity of the back side of a portable device.
2.2.7 Transfer of an electrode from PCB to the front panel
It is possible to use a conducting cylinder or a compressed spring to achieve a transfer of an
electrode from a PCB to the front panel. Please refer to Section 3.5.3 or Section 4.4.1 for
further information.
14/43 Doc ID 15298 Rev 6
Page 15
AN2869 Main capacitive sensing guidelines
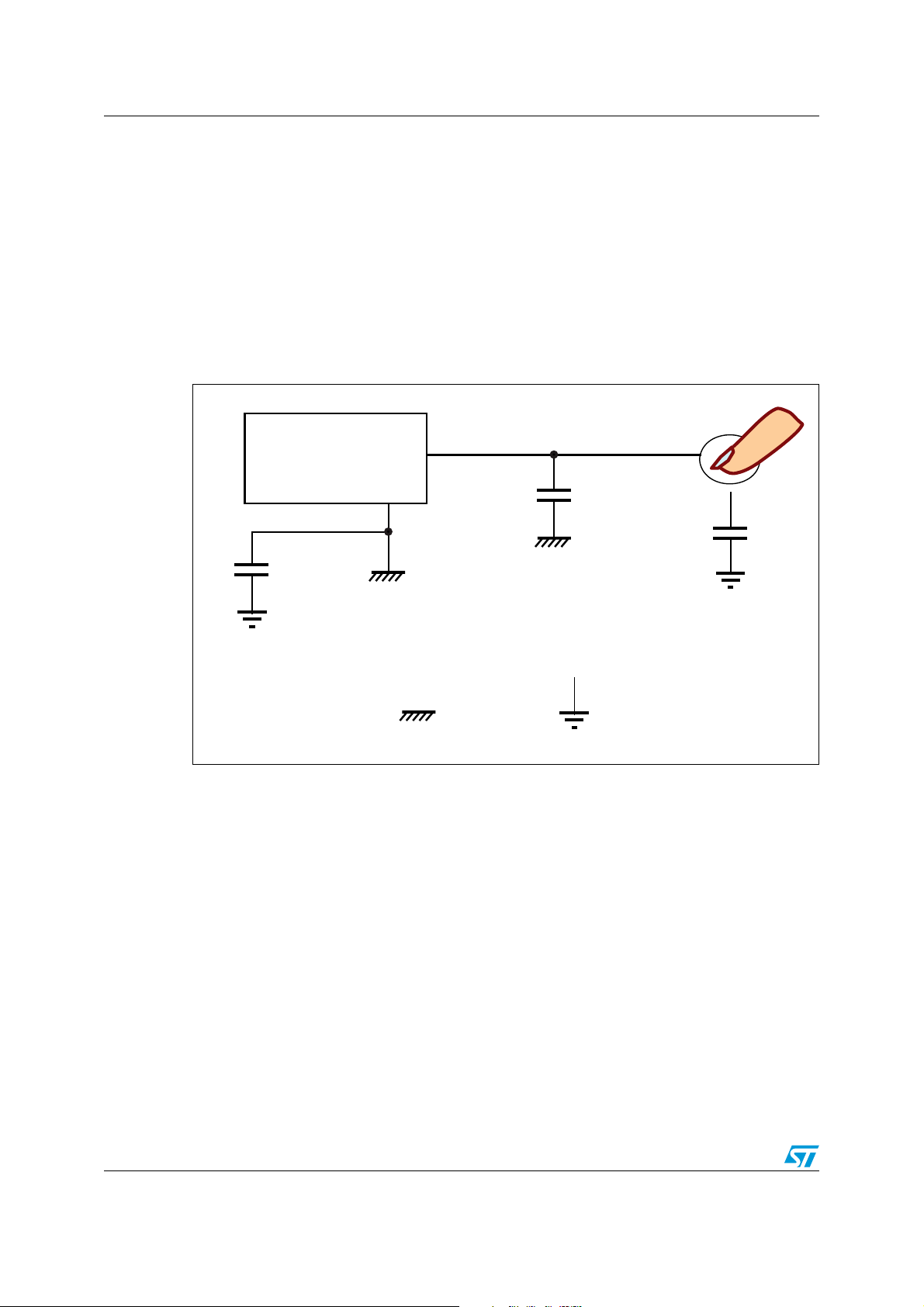
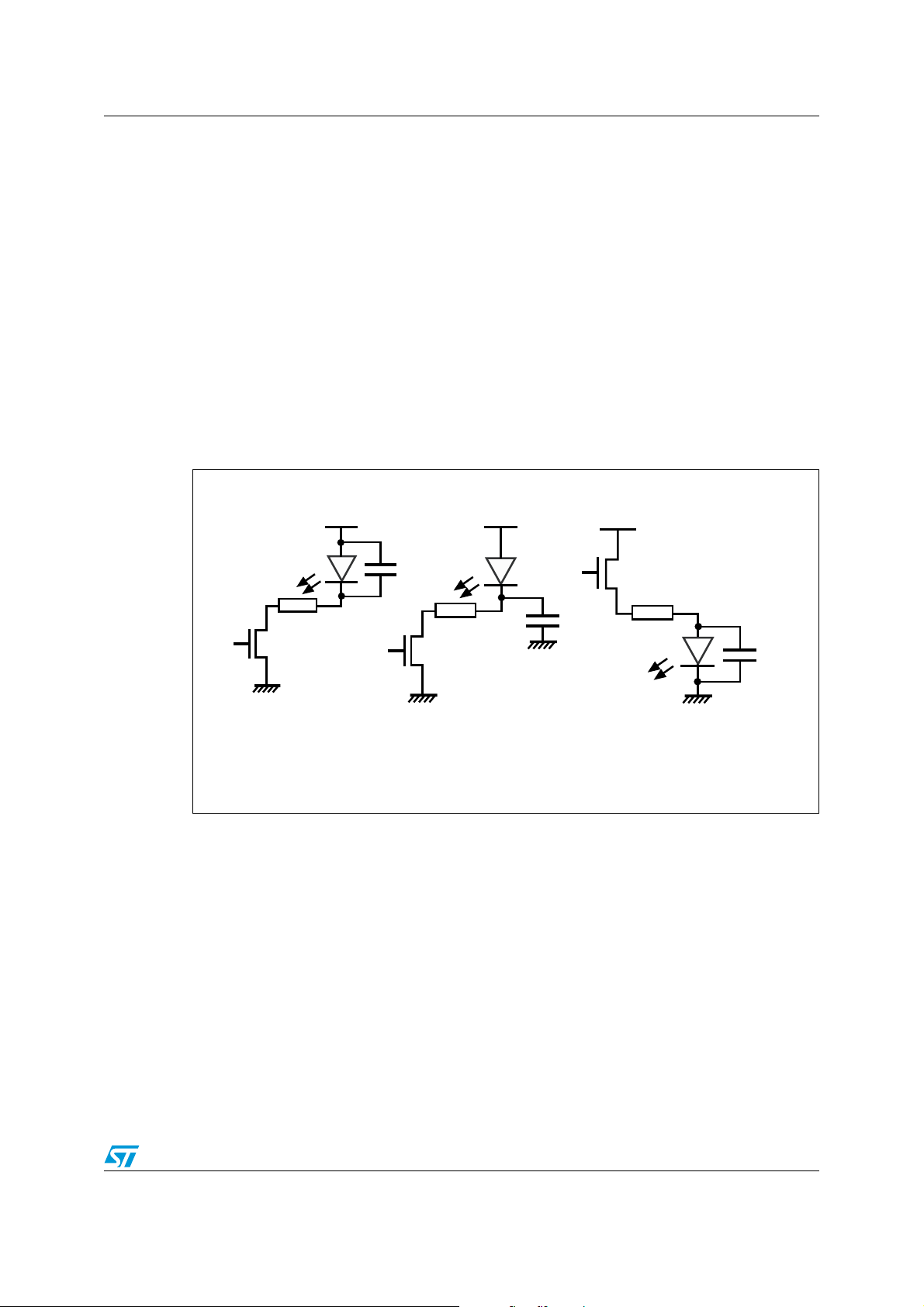
2.3 Placing of LEDs close to sensors
Light-emitting diodes (LEDs) are very often implemented near capacitive sensor buttons on
application boards. The LEDs are very useful for showing that the button has been correctly
touched. When designing application boards with LEDs, the following considerations must
be taken into account:
● LEDs change capacitance when switched on and off
● LED driver tracks can change impedance when switched on and off
● LED load current can affect the power rail
Both sides of the LEDs must always follow the low impedance path to ground (or power).
Otherwise, the LEDs should be bypassed by a capacitor to suppress the high impedance
(typically 10 nF).
The examples of bypass capacitors for the LEDs using a driver (Figure 8) can also be
applied to transistors.
Figure 8. Examples of cases where a LED bypass capacitor is required
V
DD
V
DD
V
DD
ai15080
Doc ID 15298 Rev 6 15/43
Page 16

Main capacitive sensing guidelines AN2869
10 nF
GPIO
VDD LEDs
Supply input
LDO regulator
(note 1)
V
DD
Touch sensing
device (MCU)
LED
ai15082
V
SS
V
DD
V
in
V
out
V
SS
1 μF
1 μF
100 nF
100 nF
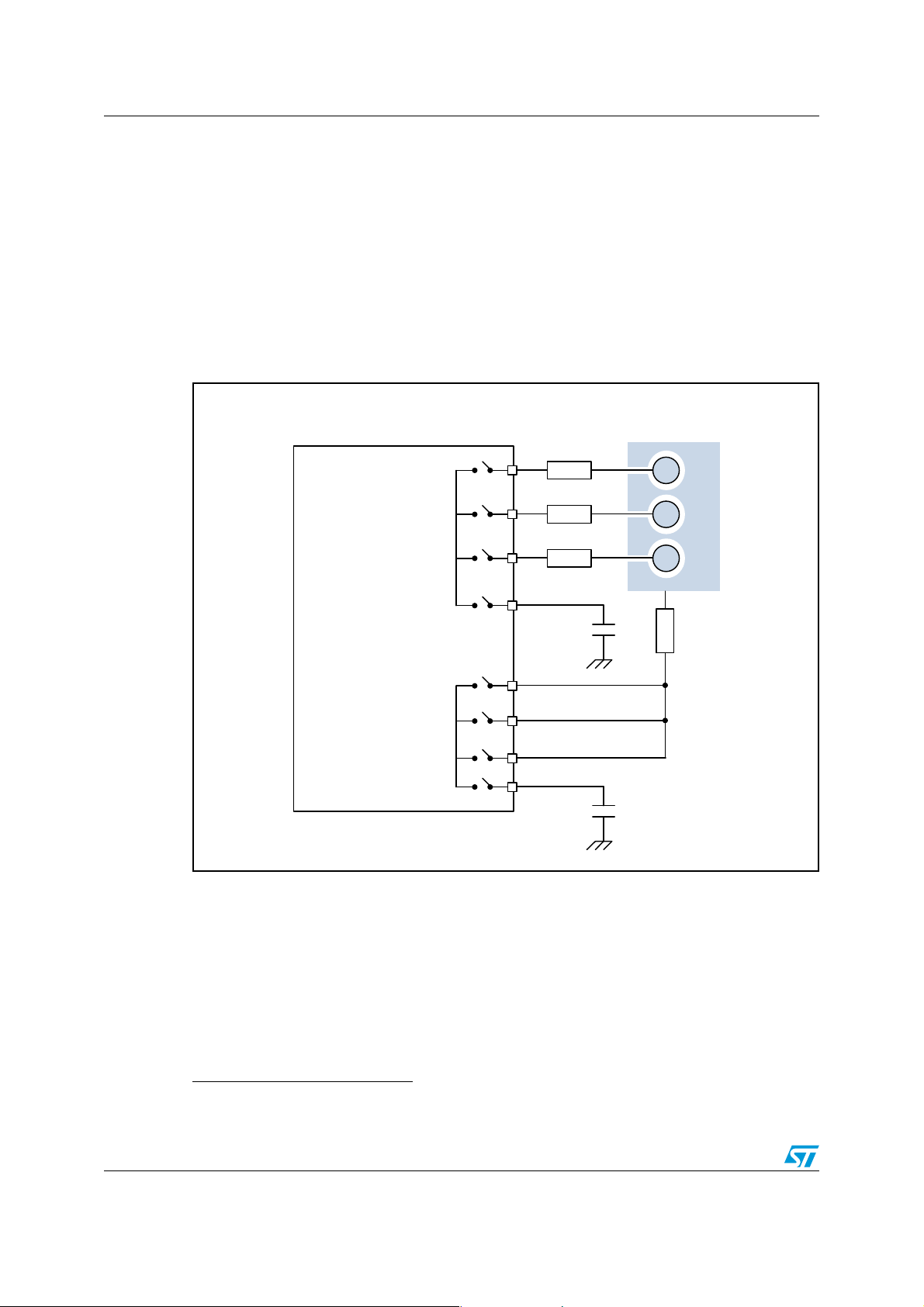
2.4 Power supply
In order to reduce system costs, a regulator, which is fully dedicated to touch sensing, is
already embedded in the devices of the STM8T family. For other devices without a touch
sensing dedicated regulator, it is strongly recommended to use an external voltage regulator
to power the device only.
The voltage regulator must be chosen to provide a stable voltage without any ripple. The
actual precision of the voltage is not important, but the noise rejection feature is critical. This
voltage is used to drive C
capacitor (C
). Any variation of this voltage may induce measurement variations which
S
could generate a false touch or a missed touch. For instance, a ±10 mV peak to peak
variation on V
limits the resolution of linear sensor or rotary sensor to 4 or 5 bits.
DD
The voltage regulator should be placed as far as possible from the sensors and their tracks.
The voltage regulator also acts as a filter against noise coming from the power supply. So, it
is recommended to power any switching components, such as LEDs, directly from V
not from the regulated voltage (see Figure 9).
Figure 9. Typical power supply schematic
and is also used as a reference when measuring the sampling
X
DD
and
1. Typical voltage regulator LD2980 can be used.
16/43 Doc ID 15298 Rev 6
Page 17

AN2869 Surface electrode design
OK
3 Surface electrode design
3.1 Touchkey sensor
A touchkey can be either touched or untouched by the user. So the information that is
managed by the microcontroller is a binary one (e.g. ‘0’ for untouched and ‘1’ for touched).
The sensor can be any shape, however it is recommended to use round or oval as these
shapes are the simplest. The libraries and hardware cells automatically compensate for
capacitance differences, but the acquisition time and processing parameters can be
optimized if the electrodes have similar capacitance. For this reason, it is recommended to
use the same shape for all electrodes. The touchkeys can be customized by the drawing on
the panel.
When designing touchkey sensors, two parameters must be taken into account:
1. The object size to be detected
2. The panel thickness
Regarding object size (see Figure 10), it is recommended to design a sensor in the same
range as the object to be detected. In most cases, it is a finger.
Figure 10. Sensor size
Doc ID 15298 Rev 6 17/43
Page 18

Surface electrode design AN2869
6 mm (min.) 6 mm (min.)
C
T
εRε0A
d
---------------- -=
Regarding panel thickness, the touchkey must be at least four times as wide as the panel is
thick. For example, a panel which is 1.5 mm thick and has no immediately adjacent ground
layer, must have a touchkey which is at least 6 mm in diameter if the key is round, or have a
6 mm side if the key is square (see Figure 11). There are sensitivity issues if dimensions
lower than these values are used.
Figure 11. Recommended electrode size
As shown in Equation 3, a capacitor is used to detect the finger touch. The capacitor is
proportional to the size of the electrode. Increasing the electrode area allows the capacitor
to be maximized, but increasing the electrode size above the size of a finger touch only
increases the parasitic capacitance and not the finger touch capacitance, resulting in lower
relative sensitivity. Refer to Section 3.5.4: PCB and layout. There is also a problem of
relative sensitivity: when the electrode size is increased, C
stops increasing while CX keeps
T
growing. This is because the parasitic capacitance is directly proportional to the electrode
area.
Equation 3
where:
C
is the touchkey capacitance
T
A is the area with regard to the electrode and the conductive object
d is the distance between the electrode and the conductive object (usually the
panel thickness)
ε
is the dielectric relative permittivity
R
ε
is the vacuum permittivity
0
18/43 Doc ID 15298 Rev 6
Page 19

AN2869 Surface electrode design
MS18975V1
CH1 CH2 CH3
K1 K2 K3
CH4
K4 K5 K6
CH5
K7 K8 K9
CH6
K10 K11 K12
CH7
= keys pressed
3.2 Touchkey matrix sensor
To extend the number of touchkeys, it is possible to implement the touchkey using a matrix
arrangement.
For further information, please refer to AN3236.
Figure 12. Simple matrix implementation
Hardware recommendations:
● Touching one key may induce sufficient capacitance change on other channels
● Special care must be taken to avoid
– Imbalanced electrodes
– Columns and lines electrodes tracks too close in the user touchable area
Doc ID 15298 Rev 6 19/43
Page 20

Surface electrode design AN2869
ai15087
112345
1 mmchc15 mm
ec0.5 mm
ec8 mm
3.3 Linear sensor
A linear sensor is a set of contiguous capacitive electrodes connected to the device and
placed in a single line. Touch sensors are typically linear, running only along a single axis.
They can be made up of a set of electrodes, depending on the required size and resolution.
Linear sensors use differential capacitance changes between adjacent capacitive
electrodes to determine the finger or conductive object position with greater resolution.
The size and targeted application tend to dictate the linear touch sensor layout. However,
some general rules apply to any kind of layout:
● To ensure that the conductive object couples to more than one element, each element
must be small enough for the finger to overlap its outside edge. However, it must also
be large enough to have correct sensitivity even through the application overlay.
● The extremities must be a half electrode and both should be connected so that the
linear touch sensor is well balanced (see Figure 13).
There are 2 kinds of linear sensors:
● Normal patterned linear sensors
● Interlaced patterned linear sensors
3.3.1 Normal patterned linear sensor
With a normal patterned linear sensor (see Figure 13), the linearity is limited due to the ratio
square width versus finger touch area. To improve the linearity, to get a smoother transition
between items and to increase the resolution, it is recommended to use an interlaced
electrode with crisscross teeth as shown in Figure 14.
Figure 13. Normal patterned linear sensor with five electrodes (20-50 mm long)
1. Legend: e is the gap between two sensor electrodes, h is the height of the sensor electrode, and w is the
width of the sensor electrode.
The size of the square electrode and gap between electrodes are valid irrespective of the
number of electrodes.
To get larger linear sensors, the number of electrodes can be increased to eight.
This solution is mainly used by RC acquisition principle.
20/43 Doc ID 15298 Rev 6
Page 21

AN2869 Surface electrode design
ai15091
Full band width 3.6 mm
Squared end
0.2 - 0.3 mm
Electrode gap 0.2 - 0.3 mm
LEGEND:
Via between layers
10 % meshed ground plane
Copper electrode
gap
2 mm
Electrode/ground
Tooth pitch
2.4 mm
3.3.2 Interlaced linear sensor
When using the charge transfer acquisition principle, it is possible to use only three
elements thanks to the higher resolution achieved. This sensor type is not compatible with
the RC acquisition principle due to the lower sensitivity supported.
Figure 14. Interlaced linear touch sensor with three elements (up to 60 mm long)
1. The teeth of the interlaced linear touch sensor must be perfectly regular.
Doc ID 15298 Rev 6 21/43
Page 22

Surface electrode design AN2869
e <= 0.5 mm
L = 10-12 mm
d >= 5 mm
w = 8-10 mm
ai15089
3.4 Rotary sensor
A rotary sensor is a set of contiguous capacitive electrodes (placed in a circle) connected to
the controller pins. It consists of a set of three, five or eight electrodes that can be interlaced,
like the linear touch sensor.
There are three kinds of rotary sensors:
● Normal patterned rotary sensors
● Interlaced patterned rotary sensors
● Rotary sensor with central touchkey
3.4.1 Normal patterned rotary sensor
Figure 15. Normal patterned rotary sensor (three electrodes)
3.4.2 Interlaced patterned rotary sensors
22/43 Doc ID 15298 Rev 6
1. Legend: d is the diameter of the center, e is the gap between two sensor electrodes, w is the width of the
sensor electrode, L is the length of the external perimeter of the sensor electrode.
The dimensions d, e, w, and L of the three-electrode scheme above can also be applied for
five and eight electrodes, thus giving a bigger rotor.
The three-electrode rotary touch sensor can be used for bigger rotary sensors with an
interlaced pattern.
This allows a smoother transition and a higher sensitivity. To cover a large range of sizes,
more teeth are added inside the rotary touch sensor rather than increasing the size of an
individual tooth.
Page 23

AN2869 Surface electrode design
ai15093
0.2 - 0.3 mm
0.2 - 0.3 mm
0.2 - 0.3 mm
Full band width 2.0 - 4.0 mm
Tooth pitch
2.0 - 4.0 mm
2 mm
LEGEND:
Via between layers
10 % meshed ground plane
Copper electrode
Figure 16. Interlaced patterned rotary sensor
3.4.3 Rotary sensor with central touchkey
It is possible to locate a touchkey in the centre of a rotary sensor. This touchkey has a lower
sensitivity compared to other single keys. To reduce the loss of sensitivity induced by the
center key on the rotary sensor, it is recommended to place the center key and rotary sensor
electrodes on the same acquisition bank. The pattern of the central key must be as
symmetrical as possible so that the loading effect on the rotary sensor is also symmetrical.
Doc ID 15298 Rev 6 23/43
Page 24

Surface electrode design AN2869
MS18976V1
Field lines cover the hole
3.5 Specific recommendations
3.5.1 LEDs and sensors
In some cases, a hole needs to be inserted in the sensor electrode to create a back-lighting
touchkey (see Figure 17). This is a very common solution which does not involve a
sensitivity dip in the middle of the sensor electrode as the electric field tends to close over
above the hole. As the sensor area decreases, there is a corresponding decrease in
sensitivity.
Figure 17. Back-lighting touchkey
3.5.2 Driven shield
The principle of a driven shield is to drive the shield plane with the same signal as the
electrode.
There are several advantages to using a driven shield instead of a grounded shield:
● The parasitic capacitance between the electrode and the shield no longer needs to be
charged. This cancels the effect on the sensitivity.
● A driven shield is useful for certain applications where shielding may be required to:
– Protect the touch electrodes from a noise source
– Remove touch sensitivity from the cable or track between the electrode and the
sensing MCU.
– Increase system stability and performance when a moving metal part is close to
the electrode.
24/43 Doc ID 15298 Rev 6
Page 25

AN2869 Surface electrode design
ai15086
V
DD
Shield out
Shield in
Shield
Key
Key electrode
Figure 18. STM8T141 driven shield solution
For more details on the STM8T141 shield implementation, please refer to AN2967.
Figure 19. Simple driven shield using RC acquisition principle
Load
Shield
Shield pin
Key
Key electrode
On the same
I/O port
MS18977V1
Doc ID 15298 Rev 6 25/43
Page 26
Surface electrode design AN2869
MS18978V1
CH4
CH1
CH2
CH3
CH4
CH3
CH2
CH1
Group 1
Shield
group
STM8L101
Rs
key
Cs
key
Rs
shield
Cs
shield
If the design is done by using the charge transfer acquisition principle to have an efficient
shield, its waveform must be similar to that of the touchkey. Here are some guidelines for
achieving this (refer to Figure 20 and Figure 21):
● The Cs/Cx of the shield should be in the same range as the Cs/Cx of the touchkeys.
● Using Cs
● The Cs of the shield does not need to be a high grade capacitor. Any type should work.
● The noise/ESD protection resistor may be mandatory on the shield because it may be
shield
= k.Cs
exposed to ESD. In order not to modify the pulse timings, the Rs
range of Rs
key
/k.
(c)
usually gives good results.
key
should be in the
shield
Figure 20. STM8L1xx driven shield example using the charge-transfer acquisition
principle
c. k = (shield area)/(electrode area)
26/43 Doc ID 15298 Rev 6
Page 27

AN2869 Surface electrode design
MS18998V1
Shield
group
STM32L15x
Group 7
Group
10
Group 1
Group 4
Group 5
Group 8
Group 6
Group 9
Group 3
Group 2
Shield
Cs
shield
Cs
key
Cs
key
Rs
key
Rs
shield
Figure 21. STM32L driven shield example using the charge-transfer acquisition
principle
Doc ID 15298 Rev 6 27/43
Page 28

Surface electrode design AN2869
MS18979V1
Front panel
(plexiglass or
other suitable
material)
Controller
PCB
Spring
Printed
electrode
PCB pad
Flex PCB
Flex
connector
ACF/ACP
connection
Spacer (cylinder
of hard foam or
other suitable
material)
Printed
electrode
(optional)
3.5.3 Using electrodes separated from the PCB
It is possible to use surface electrodes which create a sensitive area on the bottom surface
of the panel and are not close to the PCB.
One option is to print an electrode array on the inner surface of the front panel. In this case,
the electrode shape rules are as described in Chapter 3.1, and the materials are as
described in Chapter 2.2.2. The sensors can be connected using spring contacts,
conductive foam or rubber, or a flex tail attached using ACF/ACP
Remember that, with this technique, the area where the interconnection is made is touchsensitive too.
Figure 22. Printed electrode method showing several connection methods
(d)
(see Figure 22).
d. ACF/ACP = Anisotropic Conductive Film/Anisotropic Conductive Paste.
28/43 Doc ID 15298 Rev 6
Page 29

AN2869 Surface electrode design
Figure 23. Spring and foam picture (both are not compressed)
3.5.4 PCB and layout
Sensor track length and width
The parasitic capacitance of a track depends on its length and its width. Besides that, a long
track can create an antenna effect which may couple noise. So, the main rule to keep in
mind is that the shorter and thinner the track is, the smaller the parasitic capacitance.
It is recommended to route the tracks as thin as the PCB technology allows and shorter than
10 cm for standard or flexible PCBs.
Sensor track routing
The main goal, when laying out the PCB, should be to minimize the interactions between
elements or, if they cannot be minimized, to make them uniform for all capacitive elements.
Although the touch sensing controller algorithms, used to acquire touchkey, linear sensor
and rotary sensor signals, take into account that the capacitance of each array is different, it
is good practice to keep things as balanced as possible.
Doc ID 15298 Rev 6 29/43
Page 30

Surface electrode design AN2869
MS18980V1
Ground plane or
ground track
Key bank 1
Key bank 2
Any application track
(LED, power, Com.)
At least twice the
panel thickness
As thin as
PCB
technology
allows
At least
twice the
track width
At least 2 mm (4 - 5 mm is recommended)
Figure 24. Track routing recommendation
Electrode banks
A set of electrodes that are driven simultaneously during the acquisition is called an
acquisition bank.
This set of electrodes and tracks interact less with each other and can be routed closer.
Typically, a spacing of twice the track width is sufficient.
For electrodes not belonging to the same bank, coupling must be avoided, a spacing of at
least 2 mm is required and 4 to 5 mm is recommended (see Figure 24).
Electrode spacing
To avoid cross detection on adjacent electrodes, it is recommended to keep a gap of at least
twice the panel thickness between electrodes (see Figure 24).
Interaction with other tracks
To avoid creating coupling with lines driving high frequency signals, it is recommended to
cross the sensor tracks perpendicularly with the other tracks. This is especially true for
communication lines, where it is forbidden to route them in parallel with the sensor tracks. To
avoid such a configuration, the pins of the microcontroller must be selected and grouped by
function. When it is possible, all the sensor pins are consecutively distributed on one or
several sides of the microcontroller package (the pins are then used as GPIOs like the LED
drivers and communication lines).
It is strongly recommended to dedicate the pins to be used as sensors and not to share
them with other features. Sharing tracks produces parasitic capacitance due to re-routing of
the sensor tracks, and impacts the sensitivity.
30/43 Doc ID 15298 Rev 6
Page 31

AN2869 Surface electrode design
3.5.5 Component placement
To reduce the sensor track lengths, it is recommended to place the microcontroller very
close to the sensor electrodes. It is also recommended to center the microcontroller among
the sensors to balance the parasitic capacitance and to put a ground layer above it.
The ESD protection resistors must also be placed as close as possible to the microcontroller
to reduce the track length which could drive ESD disturbance directly to the microcontroller
without protection. These ESD resistors must be selected according to the acquisition
method recommendations.
3.5.6 Ground considerations
Ground plane
It is recommended to route the sensors and the ground on the same layer while the
components and other tracks are routed on the other(s) layer(s).
When a multilayer PCB is used, both sides of the PCB are commonly grounded to improve
the immunity to noise. Nevertheless, the ground has an effect on the sensitivity of the
sensor. The ground effect is to increase C
decreases. So, to balance between noise immunity and sensitivity, it is recommended to use
partial grounding on both sides of the PCB through a 15% mesh on the sensor layer and a
10% copper mesh for the opposite side with the electrodes and tracks.
, which reduces the sensitivity as the ratio CT/CX
X
Ground around sensor
When the ground plane is on the same layer as the sensor, it surrounds the sensors. To
avoid increasing C
, it is recommended to keep a gap between the sensor and the ground.
X
This gap size must be at least 2 mm (4-5 mm recommended) and must also be respected
with any noisy application track or power supply voltage.
There are two different cases:
● distance to GND and power supply voltage, shorter distance is possible, but impacts
significantly the key sensitivity
● distance to noisy signal, the detection may completely stop working in case the
distance is not respected
Special care must be taken to balance the ground around the sensors. This is particularly
true for a rotary or linear sensor (see Section 3.5.2: Driven shield).
Caution: Floating planes must never be placed close to the sensors.
Ground plane example
A full ground plane is mandatory below the MCU up to serial resistors (see Figure 25).
● It must cover the tracks between the MCU and the serial resistors
● In RC, it must also cover the load resistors
● In CT, it must cover the sampling capacitors
Doc ID 15298 Rev 6 31/43
Page 32

Surface electrode design AN2869
MS18981V1
GPIO1Key1
Key2
Key4
Key3
Rx
Rx
Rx
Rx
GPIO2
GPIO3
GPIO4
C
S
Hatched ground plane (optional)
Flood ground plane (mandatory)
MS18982V1
Must be avoided
Track is OK
Figure 25. Ground plane example
Hatched ground plane
Here are some guidelines for satisfactorily designing an application with a hatched ground
plane (see Figure 26):
● The signal track should cross the ground lines as little as possible
● The signal track should never follow the ground lines
Figure 26. Hatched ground and signal tracks
3.5.7 Rotary and linear sensor recommendations
Given that the sensitivity must be very high in order to be able to detect the position most
accurately, neither the power plane nor any application signal should run under a rotary or
linear sensor.
32/43 Doc ID 15298 Rev 6
Page 33

AN2869 Projected sensor design
MS19683V1
Dielectric panel
Electric field
Electrodes
Electric field
Electrodes
4 Projected sensor design
Projected sensors are generally used to implement keys, rotary sensors or linear sensors
for use with microcontrollers such as STM8TL5x which embed a ProxSense interface.
4.1 Touchkey sensor
A projected sensor is composed of 2 electrodes, one connected to a transmitter and the
other to a receiver.
The touchkey sensor can be of any shape, however it is recommended to use a square as
this shape is the simplest. The touch sensing library and ProxSense
TM
IP automatically
compensate for capacitance differences, but the acquisition time and processing
parameters can be optimized if the sensors have a similar capacitance. For this reason, it is
recommended to use the same shape for all sensors.
An electric field surrounds the Tx and Rx electrodes (see Figure 27). This field is dependent
on the permittivity
ε
of both the front panel and the PCB. It should not be dependent on air
R
bubbles or moisture which can be trapped between them, because they must be sufficiently
well bonded by the adhesive.
Figure 27. Electric field between 2 surface electrodes
1. The above figure only shows a simplified representation of the sensor; for specification details, refer to
Figure 28 to Figure 30.
Hence, the sensitivity is dependent on known materials and is optimized. This will ensure
that the disturbance caused by the user’s finger is detected and measured with accuracy.
It is recommended to define the sensor size in relation to the panel thickness (d) and viceversa. The following formula helps the designer to define the external size of key sensors
(L), and also for linear touch sensor and rotary touch sensor parcels:
L (mm) = 3 + (1.75 * d)
For example, a typical 10*10 mm touchkey should be used with a 4 mm Plexiglas panel.
Doc ID 15298 Rev 6 33/43
Page 34

Projected sensor design AN2869
L
1/5 L
L
T
R
GndGnd
RxRx
Tx
Tx
0
0
Cl
L
L
Tx (bottom layer)
Rx (Top layer)
GndGnd
RxRx
Tx
Tx
0.2 to 0.5 mm
0.2 to 0.5 mm
Clearance Tx to GND = 1 mm
MS18984V2
4.1.1 Diamond type sensor
In this “diamond type” implementation, the Tx and Rx electrodes form a diamond shape
where the two electrodes are on the same layer, using a bridge (see Figure 28).
Note: This symmetrical implementation allows swapping Rx & Tx.
Figure 28. Diamond implementation
34/43 Doc ID 15298 Rev 6
Page 35

AN2869 Projected sensor design
1/4L 1/4L
Tx
1
0.2 to 0.5 mm
L
1/2 L
1/4 L
1.8 L
L
Rx
1 mm
1/4 L
MS18985V2
4.1.2 H sensor single layer
In this implementation, Tx is on the top layer and forms two rectangles face to face with a
gap between them. The Rx electrode is a wire on the top layer, in the middle of the Tx gap
(see Figure 29).
Figure 29. H sensor (single layer)
Doc ID 15298 Rev 6 35/43
Page 36

Projected sensor design AN2869
/4L/
4.1.3 H type sensor two layers
In this implementation, the Tx electrode forms an H, and the Rx electrode is a wire which
lies on the Tx square. There is an isolating material between them, and Tx square electrode
is hollow under the Rx electrode (see Figure 30). Obviously, this kind of touchkey is made of
two layers.
Figure 30. Two-layer implementation
L
1/2L
panel
PCB
L
1/4L 1/4L
1/4L
4L
1/4L
0.2 to 0.5 mm
1/8L
Rx
H sensor (cross section)
d
Tx
bottom
MS18986V2
4.2 Linear sensor
An example of a linear sensor with five parcels is described in Figure 31. This kind of linear
touch sensor is fine when each parcel is about 6 mm to 10 mm and it could have N parcels.
So, for an overall length L, you can calculate the parcel number: N = L / parcel size (adjust
the parcel size to obtain N as an integer).
36/43 Doc ID 15298 Rev 6
Page 37

AN2869 Projected sensor design
Rx1 Rx1Rx4Rx3Rx2Tx (bottom)
6 mm
5.5 mm 0.5 mm
Global Rx width
0.2 to 0.5 mm
Global clearance
Rx to Tx: 1 mm
3 mm
Rx5
3 mm
40 mm
MS18987V2
Rx1 Rx2 Rx3 Rx4
Tx
Rx5
MS18988V2
Figure 31. Normal linear sensor
For smaller linear touch sensors under 6 mm, you can use an H sensor placed side by side
(with same size rules as H touch key) (see Figure 32).
Figure 32. Small linear sensor
4.3 Rotary sensor
The design of rotary sensor with the projected technology is very similar to a linear sensor
one, so the recommended sizes for a parcel are the same (see Figure 33). You can design
rotary sensors with a diameter of 12 mm to 30 mm having a minimum of 5 parcels.
Doc ID 15298 Rev 6 37/43
Page 38

Projected sensor design AN2869
Figure 33. Rotary sensor made of 5 parcels
Rx1
Rx2
3mm
-
)
-
2
(W/2)
(W/
0.5mm
Tx
(bottom
0.5mm
0.5mm
D
)
W/2
0.5mm
Rx5
To design the rotary sensor:
1. Define the diameter (D) of the rotary sensor (12 mm to 30 mm) and the number of keys
(N minimum = 5)
2. Verify the outer arc (W) of each parcel in the rotary sensor; it should be from 6 to
10 mm
3. If necessary, adjust the parcel number by using the following formula: N = 3.14 * D / W
(with W chosen between 6 and 10 mm to obtain N as an integer)
D
Rx4
Global Rx width
Global width
0.2 to 0.5mm
0.2 to 0.5mm
Rx3
Global clearance
Rx to Tx: 1mm
MS18989V2
4.4 Specific recommendations
4.4.1 PCB and layout
Ground considerations
One of the advantages of a projected sensor compared to a surface sensor is that its Tx and
Rx signals are less sensitive to the external environment than the ones used with the
surface sensor because they are coupled together. Rx is impacted by the ground in any
case (but less than the surface sensor); on the other hand, Tx is shielded by the ground. So
the sensor can be flooded as shown in Figure 34.
38/43 Doc ID 15298 Rev 6
Page 39

AN2869 Projected sensor design
MS18991V2
Rx1 Rx1Rx4Rx3Rx2
Tx (bottom)
GND
Clearance Tx to GND = 1 mm
Figure 34. Ground floods around Tx
Ground plane at the bottom is recommended to:
● prevent false detection from the back side
● shield Rx track from Tx one
● increase the sensitivity
● improve the directivity
For water immunity, avoid ground plane at top layer, and reduce it at the bottom by using
hatched plane.
Tx routing
To route the Tx signal efficiently, the most important thing to respect and almost the only one
is the RC time constant rule. But keep in mind that signals which switch rapidly (more than
tens of kHz) such as high speed communication signals, LCD or LED drive signals must be
routed far away from Tx.
The Tx track is less sensitive than the Rx track so it can be put on any layer of the PCB but
Rx tracks should be considered when routing it to ensure a good design.
Rx routing
On the other hand, the Rx track is very sensitive due to the capacitance of the sensor. A
false detection may occur if some guidelines are not followed. The most obvious is to route it
far from the sensor itself, e.g. on another layer.
Another one is to avoid placing ground near the Rx track which reduces the sensitivity.
Then, when Rx and Tx are very close (about less than 10 mm), an electric field is also
generated and a finger which roams here can generate a false touchkey detection (see
Figure 35).
Doc ID 15298 Rev 6 39/43
Page 40

Projected sensor design AN2869
MS18994V1
Panel
Rx trace
Tx trace
PCB
Figure 35. Potential false key detection
Avoiding false detection
Follow these recommendations to avoid false touchkey detection:
● The Tx and Rx tracks should never cross each other; but if they do, it must be at a right
angle.
● When the Rx and Tx tracks go in the same direction and to places that are close
together, it is better to separate them with a ground which has to be more than twice
the width of each signal track.
● To further reduce the coupling between the Tx and Rx tracks, the Tx signal can run
under the ground, in this case even if Rx is near the ground, coupling should not
happen.
● If the Rx track is behind the Tx track from a user point of view, the user cannot modify
the electrical field. Obviously, if Rx and Tx signals are too far apart, there will be no
interaction.
Furthermore, you can consider these general guidelines:
● The Tx and Rx tracks must be as thin as possible.
● The Rx tracks must be as far as possible from the touchkey.
● When there are several touchkeys, it is better to keep all the Tx tracks together and all
the Rx tracks together, which greatly reduces any false touchkey detection.
40/43 Doc ID 15298 Rev 6
Page 41

AN2869 Conclusion
5 Conclusion
The layout and design of capacitive sensing boards usually present conflicts between all
signals present on the application. This document should be used as a general guideline for
resolving all issues. When the guideline recommendations cannot be followed, tests should
be performed to validate the implementation and verify the sensitivity and robustness of the
impacted channel.
To summarize, the layout of a touch sensing application should reduce the ground coupling
to a minimum and use short clean wires as far as possible from other potential interference
sources.
Doc ID 15298 Rev 6 41/43
Page 42

Revision history AN2869
6 Revision history
Table 4. Document revision history
Date Revision Changes
02-Feb-2009 1 Initial release.
23-Oct-2009 2 Document restructured and content reworked.
01-Apr-2010 3 Added that ProxSense™ is a trademark of Azoteq.
01-Apr-2011 4
17-Oct-2011 5 STM8TL53xx product name update
09-May-2012 6
Document restructured and content of all sections reworked.
Added Section 4: Projected sensor design.
Updated Figure 28 to Figure 33 and Figure 34. and corresponding
texts. “Figure 38. Cross-section of a multi-layer PCB” removed.
STM8TL53xx replaced by STM8TL5x.
42/43 Doc ID 15298 Rev 6
Page 43

AN2869
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
Doc ID 15298 Rev 6 43/43
 Loading...
Loading...