

Page 1
AN2334
Application Note
Complete car door module
Introduction
A car door module typically consists of a rubber-sealed carrier, onto which a variety of door
components such as the window lift mechanism, the wing mirror electric motor, the wiring
harness, the loud speaker, the door latch inner release cable, locks and various switches
are fitted, forming a “cassette”.
The trend in both Europe and the U.S. is to increase the complexity of the door module by
adding more electronic features needed to drive all door loads and functions, with the
possibility to connect the module to other car subsystems via standard automotive
communication protocols (LIN, CAN).
Among many of these automotive subsystems, the connectivity via a single wire,
decentralizing electronic modules, reduces the number of wires required and in turn reduces
wiring harness weight, contributes significantly to overall vehicle weight reduction. This is of
concern to auto manufacturers, who are constantly striving to reduce vehicle weight and to
improve fuel efficiency.
In this document, an electronic module is presented that controls all the car door functions,
including the window lift, all latching/locking operations, wing mirror movement, mirror turn
indicator light, defroster and some lamps. To reduce the risk of bodily injury, especially to
children, this module also includes an advanced trapping detection feature for the window lift
motor, which stops the window if a body member such as a finger, a hand or an arm is
introduced into the window climbing area during the window climbing process. A low-cost,
high performance, antipinch algorithm based on monitoring the window motor driver current,
has been developed.
April 2006 Rev 1 1/22
www.st.com
Page 2

Contents AN2334
Contents
1 Car door module description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Local Interconnect Network (LIN) messages . . . . . . . . . . . . . . . . . . . . 10
4 PC Keypad software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 Hardware implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Appendix A Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2/22
Page 3

AN2334 List of tables
List of tables
Table 1. Door module actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Table 2. Application Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 3. FR RL RR data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 4. Front Right Door . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 5. PC-VNH2 Diag. data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 6. Dashboard data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 7. PC - L9950 Diag. data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 8. Window and door lock coding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Table 9. Mirror and door lock coding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Table 10. L9950 Loads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 11. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3/22
Page 4

List of figures AN2334
List of figures
Figure 1. Door module block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 2. VNH2 PWM signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 3. Simplified algorithm flowcharts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figure 4. Master/slave diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 5. LIN bus message frame format diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 6. PC keypad screenshot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 7. Adjust thresholds screenshot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 8. Board connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 9. Board Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Figure 10. Board Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4/22
Page 5
AN2334 Car door module description
1 Car door module description
This note describes a complete electronic module used to drive all loads in a car door,
connected via a LIN bus to the dashboard and to other doors, and via a parallel port to a PC
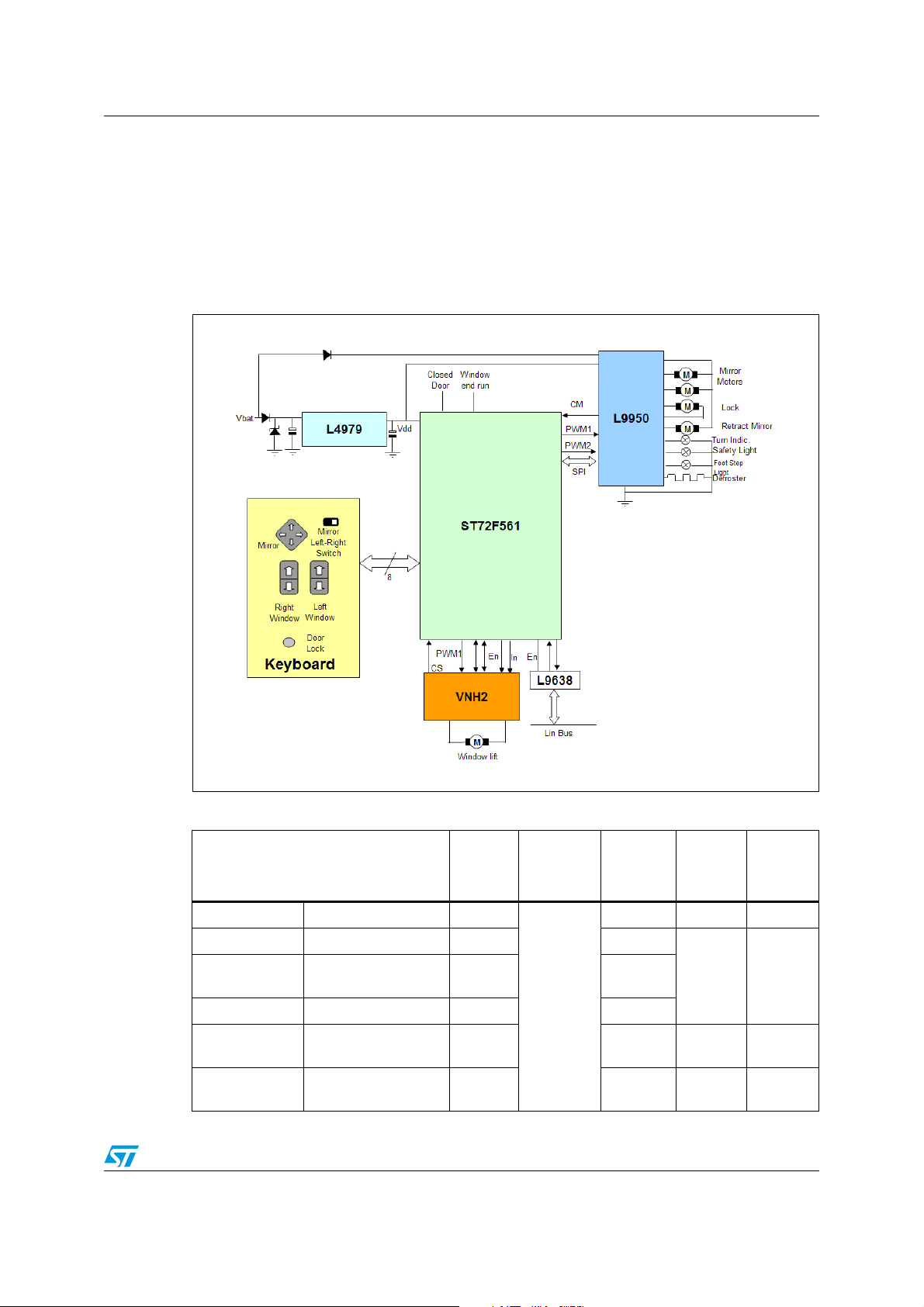
(for demonstration purposes). The block diagram in Figure 1 shows the system
configuration.
Figure 1. Door module block diagram
Table 1. Door module actuators
Actuators P
Window Lift 1 DC motor
Door lock 1 DC motor
Mirror axis
control
Mirror fold 1 DC motor
Mirror defroster
Light bulbs
2 DC motors
1 grounded resistive
load
4 grounded resistive
loads
nom
100W
5W
5/22
Wor ki ng
voltage
12 V
Load
speed
(Typ)
>78 rpm <2.5A <20A
Load
current
(Typ)
<2A <10A
current
Stall
Page 6

Car door module description AN2334
The microcontroller is the ST72F561, a member of the ST7 microcontroller family, designed
for mid-range applications with CAN (Controller Area Network) and LIN (Local Interconnect
Network) interfaces. It is based on an industry standard 8-bit core, featuring an enhanced
instruction set. The enhanced instruction set and addressing modes of the ST7 offer both
power and flexibility to software developers, enabling the design of highly efficient and
compact application codes. In addition to standard 8-bit data management, all ST7
microcontrollers feature true bit manipulation, 8x8 unsigned multiplication and indirect
addressing modes.
The voltage regulator is the L4979 which offers high precision output voltage and a
programmable watchdog timer with an external capacitor. The programmable watchdog
timer allows microcontroller auto-recovery from software runaway failures.
The L9638 performs LIN-bus interface functions between the protocol handler in the
microcontroller and the physical bus in automotive applications. It has a Sleep mode that
allows the lowest current consumption of the transceiver. It is possible to wake up the
transceiver through LIN-bus, Enable input or Wake-up input.
The new VNH2SP30 window power bridge driver provides a smooth and fully-protected
motor drive via 20 kHz PWM. A current sense (CS) output is used to monitor motor torque
that provides an antitrap function via the ADC inputs of the microcontroller.
Finally, the L9950 actuator driver controls mirror adjustment and fold-in/-out, as well as an
advanced locking system, driving the door latch and the dead bolt motor. Five intrinsic highside drivers are available to control various lamps or LEDs, including the mirror defroster,
and sophisticated diagnostic algorithms allow digital and analog load status to be monitored
by reading fold, lock motors and defroster currents.
6/22
Page 7

AN2334 Algorithms
2 Algorithms
After turn on or resetting, the microcontroller initializes all used peripherals (I/Os, Timers,
ADC and LIN-SCI) and variables, drives the L9950 to open the left wing-mirror and sends a
LIN message to do the same for the right wing-mirror. Afterward, it starts an infinite loop that
can be stopped only by resetting or turning off the board.
The microcontroller starts polling on both key pins (for driving window lift) and the keypad.
As soon as a load is turned on, the L9950 Enable Bit is set to switch the device into active
mode, turning on the Charge Pump Output. This output drives the gate of an external nchannel power MOS used for reverse polarity protection. This action, guaranteeing the
reverse battery protection, needs about 300µs, which is the activation delay for every load.
When no load is driven, the Enable Bit is cleared and the device goes into standby mode for
power saving.
It is possible to drive the window lift by using both the PC keypad and board keys (#4 / #5 -
Figure 9). The "Up key" and "Down key" pins are configured in the input pull-up mode, so
they are normally at a high value (5V); if the UP or DOWN buttons are pressed, two different
behaviors are shown, depending on the duration of the pressing time. If the button is
pressed for less than 100 ms, the glass moves up or down (depending on the key pressed)
until the top or bottom part of the window is reached; if the pressed time exceeds 100 ms,
the window moves up or down following the touch temporization. The same behavior occurs
when a PC software keypad is used.
The "Window Up switch" pin (#9 - Figure 9), also configured in input pull-up mode, must be
connected using a mechanical switch that senses the window end run, indicating that the
door upper limit has been reached.
The PWM 8-bit Autoreload Timer is used to perform a task temporized at 1 ms.
This task is in charge of all temporized events:
– It counts 250 ms before sending a LIN request message to the dashboard
– In case of window lift activation, it manages current sampling
– It also controls the mirror folding, locking and turn indicator light on and off
switching timings
When either the Down or Up key (both in the board or on the PC keypad) are pressed, the
Window_Lift routine is called:
– VNH2 InA and InB pins are, then, set or reset, depending on the key pressed, to
lift the window up or down and,
– the 16-bit Timer is used to provide to the VNH2 a PWM signal with 20 kHz
frequency and 30% duty cycle
– during a 1 ms task, the current sense voltage is acquired via ST7 ADC; the
acquisition is averaged over a 10 ms period to eliminate noise. Motor power is
calculated by multiplying the current sense by the estimated angular velocity. This
value is averaged over 100 ms, providing a delayed signal compared to the
original. The difference between power and averaged power must be compared
with a threshold to determine whether a pinch event occurs. This threshold
depends on the motor status (soft start up or steady state conditions).
Unless a Down/Up key is pressed or a pinch occurs, the duty cycle increases linearly until
100% is reached and the PWM becomes a constant (steady state phase, see Figure 2.)
7/22
Page 8

Algorithms AN2334
Figure 2. VNH2 PWM signal
PWM
5V
At this point the system waits for any event: A pressed key or a pinch.
If a key is pressed, the motor is stops, resetting VNH2 PWM and setting InA and InB for
braking to Vbatt the motor and stopping the glass.
In case of a pinch event, the Window Up switch is first checked. If this switch is closed
(upper limit reached), the glass is locked driving the motor up for 800 ms.
Otherwise, if the glass moves up, it is driven down for 800 ms to release the pinched object;
if it goes down the motor is stopped immediately.
When an abnormal condition is detected (Open Load, Short circuit or thermal shutdown), a
LIN message is sent to the PC VNH2 diagnostic node. Open Load is detected by current
sense voltage monitoring (value) while a short circuit and thermal shutdown are detected
using the VNH2 DIAGx pin. When DIAGx pin is reset, while INx is set, the status pin
indicates a thermal shutdown; otherwise, if INx is reset the status pin detects a short circuit.
For further information about antipinch algorithms, please refer to “AN2095 - VNH2 for
window lift with antipinch routine”.
Duty
Cycle
30%
Duty
Cycle
50%
Soft Start
Duty
Cycle
70%
Duty
Cycle
100%
t
When a command for L9950 loads is detected through keypad input pins, the
microcontroller drives such loads through the L9950 SPI bus. Serial data for controlling
outputs and for receiving status registers is sent via this bus.
For example, if one of the over-current bits is set, the corresponding driver is disabled. If the
over-current recovery bit of the output is not set, the microcontroller must clear the overcurrent bit to enable the driver again.
If the thermal shutdown bit is set, all drivers go to high impedance state. Again, the
microcontroller must clear the bit to enable the drivers.
When the Fold Mirror motor is activated, the relevant motor is driven for 4 seconds with a
fully charged battery and for 6 seconds in other cases. Since the OUT1 is common to all
mirror motors, it is impossible to drive two or more mirror motors at the same time.
The turn indicator and the defroster are driven using PWM2 and PWM1 respectively.
For all lights, the over-current Recovery Enable bit is set by the microcontroller; this
automatically reactivates the output after a delay time, resulting in a PWM modulated
current with a programmable duty cycle.
The over-current recovery feature is intended for loads which have an initial current higher
than the over-current limit of the output (for example, cold light bulbs).
The described algorithm, including LIN message managing, is stored in less than 10 kB on
the microcontroller Flash memory.
8/22
Page 9

AN2334 Algorithms
Figure 3. Simplified algorithm flowcharts
Reset
Reset
Init
Ext. WDG reload
Ext. WDG reload
Paral. Port and keys read
Paral. Port and keys read
Key or keypad
Key or keypad
Load turn ON/OFF
Load turn ON/OFF
NO
NO
Send LIN Msg to PC
Send LIN Msg to PC
Init
Pushed
Pushed
Diagnostic
Diagnostic
NO
NO
Window Lift Routine
Window Lift Routine
Load Turn ON/OFF
Load Turn ON/OFF
Turn On Charge Pump
Turn On Charge Pump
VNH2 or
VNH2 or
L9950
L9950
LOAD ?
VNH2 L9950
VNH2 L9950
LOAD ?
SPI send MSG
SPI send MSG
250 ms Task
250 ms Task
LIN Msg Request to Dashboard
LIN Msg Request to Dashboard
Receive Data
Receive Data
Defroster
Defroster
ON
NO
NO
NO
NO
ON
Turn Light ON
Turn Light ON
YES
YES
PWM1 On
PWM1 On
SPI send Msg
SPI send Msg
YES
YES
PWM2 On
PWM2 On
SPI send Msg
SPI send Msg
9/22
Page 10

Local Interconnect Network (LIN) messages AN2334
3 Local Interconnect Network (LIN) messages
Created by the LIN Consortium (a collection of automotive, software and semiconductor
manufacturers), LIN is a low speed bus with a maximum speed of 20kbaud. The most
significant advantage offered by LIN bus is the low cost of implementation. Implementing a
LIN node costs approximately half of an equivalent CAN bus node.
The LIN bus protocol is based on the common UART byte interface. Any microcontroller with
a UART interface can be used as a node on the LIN bus since the basic transmission uses
the UART format. The LIN bus protocol specification 1.2 defines three standard baud rates:
2400 baud, 9600 baud and 19200 baud. Communication is based on a master/slave
mechanism.
The bus is composed of one master node (Driver door) and five slave nodes (All Doors,
Front Right Door, Dashboard, PC VNH2 Diagnostic and PC UH22/L9950 Diagnostic). All
arbitration and collision management takes place in the master node to further simplify and
lower the cost of the slave nodes.
Figure 4. Master/slave diagram
CAN Bus
SLAVE
All Doors
MASTER
Driver Door
SLAVE
Front Right Door
SLAVE
Dashboard
SLAVE
PC-VNH2 Diag
LIN Bus
SLAVE
PC-UH22/L9950 Diag
– All Doors is used for locking/unlocking all doors
– Front Right Door is the slave node in the front right door that receives all
messages for mirror positioning (X-Y and fold) and for front right window lift
– Dashboard is questioned from the master node each 250 ms in order to give
information for turning on/off turn indicator and defroster
– PC-VNH2 is used for demonstration purposes to send VNH2 diagnostic
information to PC
– PC-UH22/L9950 is also used for demonstration purposes to send L9950
diagnostic information to PC
All communications on the bus take the form of messages, which have a defined format
known as the message frame. A diagram showing the format of the message is shown in
Figure 5. The message frame is composed of a header and a response. The header is
further broken down into three fields:
– The synchronization break field, composed of 13 dominant bits (0) and at least
one recessive bit (1), which indicates the beginning of a frame.
– The synchronization field, which allows a slave to be synchronized on the current
master baud rate.
– The identifier field, which identifies the requested message and the length of the
response field.
10/22
Page 11

AN2334 Local Interconnect Network (LIN) messages
Figure 5. LIN bus message frame format diagram
Only the master node can initiate a message by sending a header field that is received by all
nodes. Each slave node analyses the header and must be ready to send or receive data
during the response field of the frame. The identifier field within the header informs all slave
nodes in the network of the appropriate action to take. Such actions include:
– Receiving bytes transmitted in the response field
– Transmitting bytes in the response field
– Doing nothing
ST72F561 has a flexible microcontroller architecture that makes the implementation of LIN
bus communication much easier than on other devices.
The LIN bus transmission of a master node, as this demoboard, has three distinct phases:
– Synchronization break field transmission: The length of this field is 13 dominant
bits and 1 recessive bit
– Data byte transmission: The synchronization field, the identifier field, the data
fields and the checksum field are each one byte fields.
– Data byte reception: The data fields and the checksum field are also transmitted in
a byte wise manner.
The LIN bus protocol uses a standard baud rate: 19200 baud. In case of microcontroller
debugging, when CPU frequency is divided by two, a 9600 baud protocol is also possible.
The software PC allows users to change the baud rate.
It is necessary to define a specific ID (6 bits long) for each message, which is used for
reception or transmission. The message ID is written in a hexadecimal format with the parity
bits included. According to the LIN specification, the data field can be 1 to 8 bytes long (for
LIN 1.2 and newer).
The parity bits P0 and P1 are calculated as follows:
P0=ID0 ⊕ ID1 ⊕ ID2 ⊕ ID4
P0=ID1 ⊕ ID3 ⊕ ID4 ⊕ ID5
Because the application is for demonstration purposes, it uses two LIN messages for
transmission with PC (2 bytes long for VNH2 diagnostic and 8 bytes long for L9950
diagnostic).
11/22
Page 12

Local Interconnect Network (LIN) messages AN2334
Table 2. Application Messages
Message ID
LinMsg1
(0xc1)
LinMsg2
(0x42)
LinMsg4
(0x73)
LinMsg3
(0xC4)
LinMsg5
(0x11)
Table 3. FR RL RR data
Slave
response
source
Driver Door (M)
Driver Door (M)
Driver Door (M)
Driver Door (M)
Slave response
destination
FR RL RR
Doors (S)
Front Right
Door (S)
PC-L9950
Diag (S)
PC-VNH2
Diag (S)
Dashboard (S) Driver Door (M) 2 See Ta ble 6 Master data request
Description Data Value
Unlock Doors 0x01
Lock Doors 0x02
Table 4. Front Right Door
N.transmit
[bytes]
2See Ta bl e 3
2See Ta bl e 4
Message
Data
Description
Master transmit doors lock / unlock
command
Master transmit FR Door
commands
8See Ta bl e 7 Master transmit diagnostic signals
2See Ta bl e 5
Master transmit RL Door
commands
Description Data Value
Front Right Mirror Dx 0x01
Front Right Mirror Sx 0x02
Front Right Mirror Up 0x03
Front Right Mirror Down 0x04
Front Right Mirror Close 0x05
Front Right Mirror open 0x06
Front Right Window Up 0x07
Front Right Window Down 0x08
Table 5. PC-VNH2 Diag. data
Description Data Value
No diag err 0x01
Therm. Shutdown Leg A 0x27
Therm. Shutdown Leg B 0x28
Short Circ. Leg A 0x29
Short Circ. Leg B 0x2A
Open Load 0x2B
12/22
Page 13

AN2334 Local Interconnect Network (LIN) messages
Table 6. Dashboard data
Description
Data Value
No action 0x01
Defroster turn on 0x02
Turn light turn on 0x03
Defroster and Turn light turn on 0x04
Table 7. PC - L9950 Diag. data
Data0 Data1 Data2 Data3 Data4
Bit Description Bit Description Bit Description Bit Description Bit Description
VS Over
0
Voltage
VS Under
1
Voltage
Thermal
2
Shutdown
Temperature
3
Warning
Out 2 HS
0
Over Current
Out 3 LS
1
Over Current
Out 3 HS
2
Over Current
Out 4 LS
3
Over Current
Out 6 HS
0
Over Current
Out 7 HS
1
Over Current
Out 8 HS
2
Over Current
Out 9 HS
3
Over Current
Out 2 LS
0
Open Load
Out 2 HS
1
Open Load
Out 3 LS
2
Open Load
Out 3 HS
3
Open Load
Out 6 LS
0
Open Load
Out 6 HS
1
Open Load
Out 7 HS
2
Open Load
Out 8 HS
3
Open Load
4N.U. 4
Out 1 LS
5
Over Current
Out 1 HS
6
Over Current
Out 2 LS
7
Over Current
5
6
7
Out 4 HS
Over Current
Out 5 LS
Over Current
Out 5 HS
Over Current
Out 6 LS
Over Current
Out 10 HS
4
Over Current
Out 11 HS
5
Over Current
Out 1 LS Open
6
Load
Out 1 HS Open
7
Load
Out 4 LS
4
Open Load
Out 4 HS
5
Open Load
Out 5 LS
6
Open Load
Out 5 HS
7
Open Load
Out 9 HS
4
Open Load
Out 10 HS
5
Open Load
Out 11 HS
6
Open Load
N.U.
7
13/22
Page 14

PC Keypad software AN2334
4 PC Keypad software
Before switching on the board, the PC “Keypad” software must be run, defining the parallel
port base address (see Windows Device Manager) and the COM serial port to be used.
PC software has four different functions: Keyboard, dashboard, LIN analyzer, VNH2 and
L9950 diagnostic view.
– Keyboard is connected to the microcontroller via a parallel port and provides to
the microcontroller an 8-bit word that encodes all possible user actions as
described in the following Table 8 and Tabl e 9 :
Table 8. Window and door lock coding
Window Door
Parallel Port
Up Left Down Left Up Right Down Right Lock / Unlock
00 0 0 0 192
00 0 1 0 194
01 0 1 0 202
01 0 0 0 200
00 1 0 0 196
10 1 0 0 212
10 0 0 0 208
00 0 0 1 193
00 0 1 1 195
01 0 1 1 203
01 0 0 1 201
00 1 0 1 197
10 1 0 1 213
10 0 0 1 209
14/22
Page 15

AN2334 PC Keypad software
Table 9. Mirror and door lock coding
Mirror Door
Open Close
00 0 0 0 0 0 0 0
10 0 0 0 0 0 0 128
01 0 0 0 0 0 0 64
10 1 0 0 0 0 0 160
01 1 0 0 0 0 0 96
00 0 1 0 0 0 0 16
00 0 0 1 0 0 0 8
00 0 0 0 1 0 0 4
00 0 0 0 0 1 0 2
00 1 1 0 0 0 0 48
00 1 0 1 0 0 0 40
00 1 0 0 1 0 0 36
00 1 0 0 0 1 0 34
Left /
Right
Up Down Left Right
Lock /
Unlock
Parallel Port
00 0 0 0 0 0 1 1
10 0 0 0 0 0 1 129
01 0 0 0 0 0 1 65
10 1 0 0 0 0 1 161
01 1 0 0 0 0 1 97
00 0 1 0 0 0 1 17
00 0 0 1 0 0 1 9
00 0 0 0 1 0 1 5
00 0 0 0 0 1 1 3
00 1 1 0 0 0 1 49
00 1 0 1 0 0 1 41
00 1 0 0 1 0 1 37
00 1 0 0 0 1 1 35
– Dashboard is a LIN slave node and is used to switch on or off the turn indicator
light and the defroster.
– LIN Analyzer “sniffs” all LIN messages that flow through bus.
– VNH2 and L9950 diagnostic graphically shows the LIN messages addressing
VNH2 and L9950 diagnostic nodes.
Figure 6 displays the program main window snapshot.
15/22
Page 16

PC Keypad software AN2334
Figure 6. PC keypad screenshot
Keyboard
Keyboard
Dashboard
Dashboard
LIN analyzer
LIN analyzer
VNH2 and L9950
VNH2 and L9950
diagnostics
diagnostics
16/22
Page 17

AN2334 PC Keypad software
PC software can also change the thresholds for the window lift routine. Any threshold
change modifies the motor torque in a pinch state. For further details, please refer to
“AN2095 - VNH2 for window lift with antipinch routine”.
Figure 7. Adjust thresholds screenshot
17/22
Page 18

Hardware implementation AN2334
5 Hardware implementation
The voltage regulator, which provides the required 5V during normal mode, is enabled by
the LIN transceiver through Inhibit Output pin INH. To reset the microcontroller with the
watchdog timer in case of a missing pulse, a jumper must be installed in the Voltage
Regulator Reset connector (#1 - Figure 8).
The jumper must be removed in case of microcontroller reprogramming; in fact, in this
phase, the microcontroller cannot provide pulses to the voltage regulator that should provide
a low level reset. Moreover, during the programming phase, to enable the Voltage regulator
a jumper must be installed in the Voltage Regulator Enable connector (#2 - Figure 8)
because in this case the LIN bus interface L9638 cannot provide the enabling voltage.
In summary, the microcontroller can be reprogrammed using the ICP connector (#10 -
Figure 8) by removing the Reset jumper (#1 - Figure 8) and settling the Enable jumper (#2 -
Figure 8). See the ST72F561 datasheet for more details.
A jumper on CB4 connector (#8 - Figure 8) allows using the board without using the LIN
Interface as detailed in Section 3: Local Interconnect Network (LIN) messages.
The board connector locations are given in Figure 8.
Figure 8. Board connectors
1 Reset
1 Reset
2 Enable
2 Enable
12 Power
12 Power
Supply
Supply
13 L9950
13 L9950
Outputs
Outputs
3 L9950 Outputs
3 L9950 Outputs
1
1
2
2
4 Down Key
4 Down Key
3
3
4
4
5
5
6
6
7
7
8
8
5 Up Key
5 Up Key
11
9
9
10
10
11
12 14
12 14
6 - CB5 / 7 – CB3 / 8 - CB4
6 - CB5 / 7 – CB3 / 8 - CB4
9 - Window Up Switch
9 - Window Up Switch
15
13
13
15
16
16
10 ICP Conn
10 ICP Conn
11 Window
11 Window
Motor
Motor
16 LIN Conn.
16 LIN Conn.
15 Wake Up
15 Wake Up
14 Parallel
14 Parallel
Port
Port
18/22
Page 19

AN2334 Hardware implementation
The L9950 loads are shown in the following table:
Table 10. L9950 Loads
L9950 Outputs Load
OUT1 Common Mirror Motors
OUT2 X Mirror Motor
OUT3 Y Mirror Motor
OUT4 Lock Motor
OUT5 Lock Motor
OUT6 Mirror Fold Motor
OUT7 Exterior Light
OUT8 Footstep Light
OUT9 Safety Light
OUT10 Turn Indicator
OUT11 Defroster
The input signals INA and INB are directly interfaced with the microcontroller to select the
motor direction and the brake condition. The DIAGA/ENA or DIAGB/ENB, connected to the
I/O microcontroller and configured as input pull-up, enable the legs of the bridge. They also
provide a digital diagnostic signal. The CS pin allows monitoring the motor current by
delivering a current proportional to its value. The PWM, up to 20 KHz, allows control of the
motor speed in all possible conditions.
The reverse polarity protection MOSFET needs a zener diode and a resistor between gate
and source to protect against ISO pulses and for proper turn off in static reverse polarity.
In master node application, a LOW ohmic resistor must be connected externally between
LIN and battery to allow the maximum transmission rate.
Finally, all outputs need a 10nF capacitor to protect the module against 8 kV ESD events.
Figure 9. Board Layout
ICP
Reset
Reset
Enable
Enable
+12
+12
Down
Out4
Out6
Out6
Gnd
Gnd
Out4
Out5
Out3
Out5
Out7
Out7
Out3
Out3
Out3
Out2
Out2
Out10
Out10
Out8
Out9
Out8
Out9
Down
Out1
Out1
Out1
Out1
Up
Up
Gnd
Gnd
Parallel Port
Out11
Out11
Parallel Port
Connector
Connector
ICP
Connector
Connector
Wake Up
Wake Up
Window
Window
A
A
Window
Window
B
B
Gnd
Gnd
+12
+12
Lin
Lin
19/22
Page 20

Schematic AN2334
m
Appendix A Schematic
Figure 10. Board Schematic
1234567
10nF
C9
10nF
C7
10nF
C10
26
GNDA28GNDA27GNDA
VCC4VCC12VCC13VCC3VCC
C5
100uF
C4
100nF
RESE T
ICCDATA
ICCCLO CK
12
13
RESE T
ICCCLK / AI N 0/ P B4
ICCDATA/AI N1/P B5
18
21
23
Ext Wdg
41
PE4
8
CON8
10nF
C14
Mirr o r R et ra ct Mot o r
10nF
C13
Lock Mot. B
10nF
Common Mi rror Mo to rs
10nF
Lock Mot. A
MOTOR D C
17
18
25
30
OutA1OutA2OutA
GNDB
GNDB20GNDB19GNDB
PWM
VCC22VCC24IN A5IN B11PWM8DiagA/En A6DiagB/EnB
7
R17
R19
R18
10K
10K
Master in-Slave out
Mast er o ut- Sl ave i n
R61K
R71K
TxD
26
10
19
17
14
11
43
MCO/ PB3
PD6/AI N10
PC6/SPI_MOSI27PC5/SPI_MISO
T8_I CA P1 / P B2
PD5/linSCL2_TDO
T16_ICAP2/( HS)/PC1
T16_OCMP1/AIN2/P B6
PD1/linSCL1_RD1
PWM3/PA35T16_ICAP1/AI N4/PC0
PWM0/PA13PWM1/(HS)P A24ARTIC2/(HS)PA6
PWM3/PA46ARTCLK/(HS)PA57PD2/linSCL1_TDO
8
32
33
R31KR41KR51KR101KR141KR111KR121KR13
1K
123456789
J2
+5V
R1
4.7k
C12
C8
10nF
C26
J5
10nF
C27
14
21
OutB
OutB15OutB16OutB
OutA
CSens
Multi Power SO30
9
10
R22
2.2K
R21
R35
R20
10K
10K
2.7K
2.7K
PWM1
EN
RxD
36
28
9
35
T8_O CMP 1 /P B 1
PD4/linSCL2_RDl
PD3(HS)/ linSCL2_ SCK
T16_OCMP2/AIN3/P B7
PC4/CAN_TX
PD7/AI N11
24
44
CM
10
to PC Parallel Port
10k
R9
Spi Cl ock
PC7/SPI_SCK
PD0/SPI_ss/AIN629PF1/AIN7
1K
R15
CSN
Vpp/ICCSEL
22
38
Vs s _0
ICCSEL /Vpp
PC3/CAN_RX
T1 6 _ E XTCL K / ( H S ) /P C 220PE6/AI N5
PF5
23
30
34
33nF
C28
R16
10 K
15
37
Vs s 2
Vs s a
PF2/AIN8
31
25
J3
10nF
C6
Left - Rig ht Mi rr o r Mot o r
Common Mi rror Moto rs
Up-Down Mi rror Mot or
Common Mi rror Mo to rs
29
GNDA
VNH 2 SP 3 0
VBAT
R8
47K
+5V
Vd d
10nF
C3
+5V
39
16
40
42
Vd d 2
Vd d A
Vdd_0
Osc1
Osc2
ST72F561
1
2
C2
18pF
XT1
16 MHz
C1
Osc1
18pF
VBAT
R2
10k
1234567
J9
Exte ri ou r Li ght
TQFP44
Close d Door
CB5
PF1
CB4
CB3
PE6
M2
M1
CB2
Win dow Up Sw itch
CON7
10nF
C19
Defroster
10nF
C18
Turn Indicator
10nF
C16
Safet y Li gh t
10nF
C17
Footst ep Ligh t
10nF
C11
Common Mi rror Moto rs
Up- Do wn Mir ro r Mot or
Left-Right Mirror Motor
5
Out13Out24Out3
Out416Out4
Vs28Vs
Vs
L9950
25
29
32
VBAT
123
J6
100Ohm
VBAT1
R27
10nF
R25
500 Ohm
VBAT
INH
7
8
6
5
Vs
LIN
INH
GND
RxD1EN2WUP3TxD
L9638D
4
EN
TxD
RxD
R24
1k
VBAT
2
3
J7
123456789
J4
ICCDATA
Lock Mot. B
Safet y Li gh t
Lock Mot. A
Turn Indicator
Footst ep Ligh t
Exteriou r Light
Mirror Retract Motor
2
17
C15
Wake Up
35
22
31
33
Out520Out521Out6
Out730Out8
Out9
Out1034Out11
Vs6Vs
Vs14Vs
Vs23Vs24Vs
CP
Tab
7
15
26
Tab
CP
Master in-Slave out
CON3
SO8
R26
1KOhm
10
ICC P rog ra
Vd d
Osc1
RES ET
ICCCLO CK
Vp p / ICC S EL
C29
CM
33nF
PWM1
R34
R32
2.7k
R36
50k
10k
Defroster
Out11
Di8CSN10DO11Vcc
CSN
Master out-Sl ave in
VBAT
CP
R33
27
PWM1
12
L4979D
R23
INH
10k
13
9
Spi Cl oc k
Clk
CM/P W M2
GND
GND18GND
GND
Power SO36
1
19
36
C25
10nF
+5V
10nF
C24
+5V
RES ET
C23
U5
Ext Wdg
Wi6Vo
Vs8En1Ground
100uF
47nF
7
5
C22
Vcw
Vcr
SO8
2
4
C21
1nF
100uF
C20
R31
100k
D2
BATTERY
J8
D1
R29 10 0K
CB1
3
Res out
J1
1K
R30 10 K
10k
R28
20/22
Page 21

AN2334 Revision history
Revision history
Table 11. Document revision history
Date Revision Changes
07-Apr-2006 1 Initial release.
21/22
Page 22

AN2334
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZE REPRESENTATIVE OF ST, ST PRODUCTS ARE NOT DESIGNED,
AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING APPLICATIONS,
NOR IN PRODUCTS OR SYSTEMS, WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY, DEATH, OR
SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2006 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
22/22
 Loading...
Loading...