

Page 1

AN1953
Application note
PFC for ST7MC starter kit
Introduction
The aim of this Application Note is to give an example of how to use the ST7MC microcontroller to
implement the Power Factor Correction (PFC) inside a motor control application. The ST7MC
microcontroller is provided with a Motor Control Peripheral which has been developed to implement motor
control function for Induction motors and Permanent Magnet Synchronous motors. The motor control
peripheral leaves the microcontroller resources free to perform the power factor correction.
The power factor correction technique utilized is called “transition mode”. The hardware used to realize
the system is the ST7MC Starter Kit plus an additional external power board called “Add On”.
In this application note, theoretical information about the PFC control method is given, in addition to an
explanation of the software routine able to manage the PFC stage and the calculation of the Add On
components.
The reader can find extra information about the motor control related routines the application note
AN1904.
AN1953 Rev 2 1/20
http://www.st.com
20
Page 2

PFC for ST7MC Starter Kit
Contents
1 Theory about the PFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Starter kit approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Firmware description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1 Flowchart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 PFC software description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Hardware description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.1 Power stage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.1.1 Power section design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6 Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
7 References and related materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
8 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2/20
Page 3

PFC for ST7MC Starter Kit 1 Theory about the PFC
1 Theory about the PFC
This application note focuses on the management by a microcontroller of the boost stage to
obtain a power factor corrector (PFC) working in transition mode.
Of course to do this job the microcontroller should have a timer with a special feature.
A block diagram of the application is shown in Figure 1.
Figure 1. Block diagram
1.1 Description
With this method, the boost inductor works on the boundary between continuous and
discontinuous mode. In this operation mode there is a high peak current which means that this
kind of approach could be used for power below 600W.
Here, the system works with fixed ON-time and variable frequency and functions as follows:
The main supply is rectified by the bridge and the energy is stored in the transformer during the
turn-on period of the mosfet. This time interval is called Ton and must be calculated by the
Micro according to the Vout value, the input voltage and the load.
To simplify the algorithm, just the output voltage is measured and the difference (error) between
the desired values (400V) and the actual value is calculated. This error is multiplied by a
constant to obtain the right correction value.
BOOST
Stage
DRIVER
uC Supply
LOAD
ST7MC
Volt
Measure
The measured voltage value is the average of eight ADC conversions.
The turn-off time of the mosfet is called Toff and is fixed by the circuit. This means the inductor
discharges all its own energy to the output stage until its current goes to zero.
In this condition, the drain Voltage will go to the Vin voltage and an oscillation due to the MOS
capacitance is added to this voltage.
In order to reduce the commutation losses, the MOS must be turned ON when the Drain
voltage reaches the minimum.
To detect this condition the secondary winding of the transformer is used. In fact, in this
secondary winding is a square wave with zero mean value which is made up of a negative
signal during the Ton and a positive signal during the Toff. To adapt this signal to the digital
world of a microcontroller a resistor to limit the current plus the internal clamping diodes have
been used to obtain a square TTL waveform.
3/20
Page 4

1 Theory about the PFC PFC for ST7MC Starter Kit
So, finally, a TTL square wave is obtained on the microcontroller pin which is used by the timer
peripheral to restart the counter cycle and fix the counter period.
For the timer, it's important to note that if there isn't a load variation and/or a variation of the
input voltage, it could work as a standalone circuit without any computational time required to
the micro. In fact, if the zero current condition (ZCD) is missed the timer will restart at the
minimum frequency through a software routine.
Of course the availability of the micro makes a lot of features possible simply by modifying
some parameters and it also allows a particular software routine to be used to improve the
control method.
The output of the PWM timer is connected to the TD220 driver that drives the MOS of the boost
stage.
4/20
Page 5

PFC for ST7MC Starter Kit 2 Starter kit approach
2 Starter kit approach
To implement the PFC with the ST7MC starter kit we developed a power board “Add On” that
realizes the control of the Bus voltage with a boost topology.
The Power Add On is connected to the mains and provides the Bus voltage for the starter kit.
The Power Add On requires two connections with the starter kit. One is the PWM generated by
the microcontroller coming from the starter kit and the second sends the zero crossing signals
to the starter kit. The Add On power board needs a supplementary 15 Volts to supply the driver,
which can be provided by the starter kit (J16). The starter kit is then connected to the motor by
the wire for the phases and with the tachometer signal if required.
The Add On power board provides the rectified and controlled voltage bus for the starter kit.
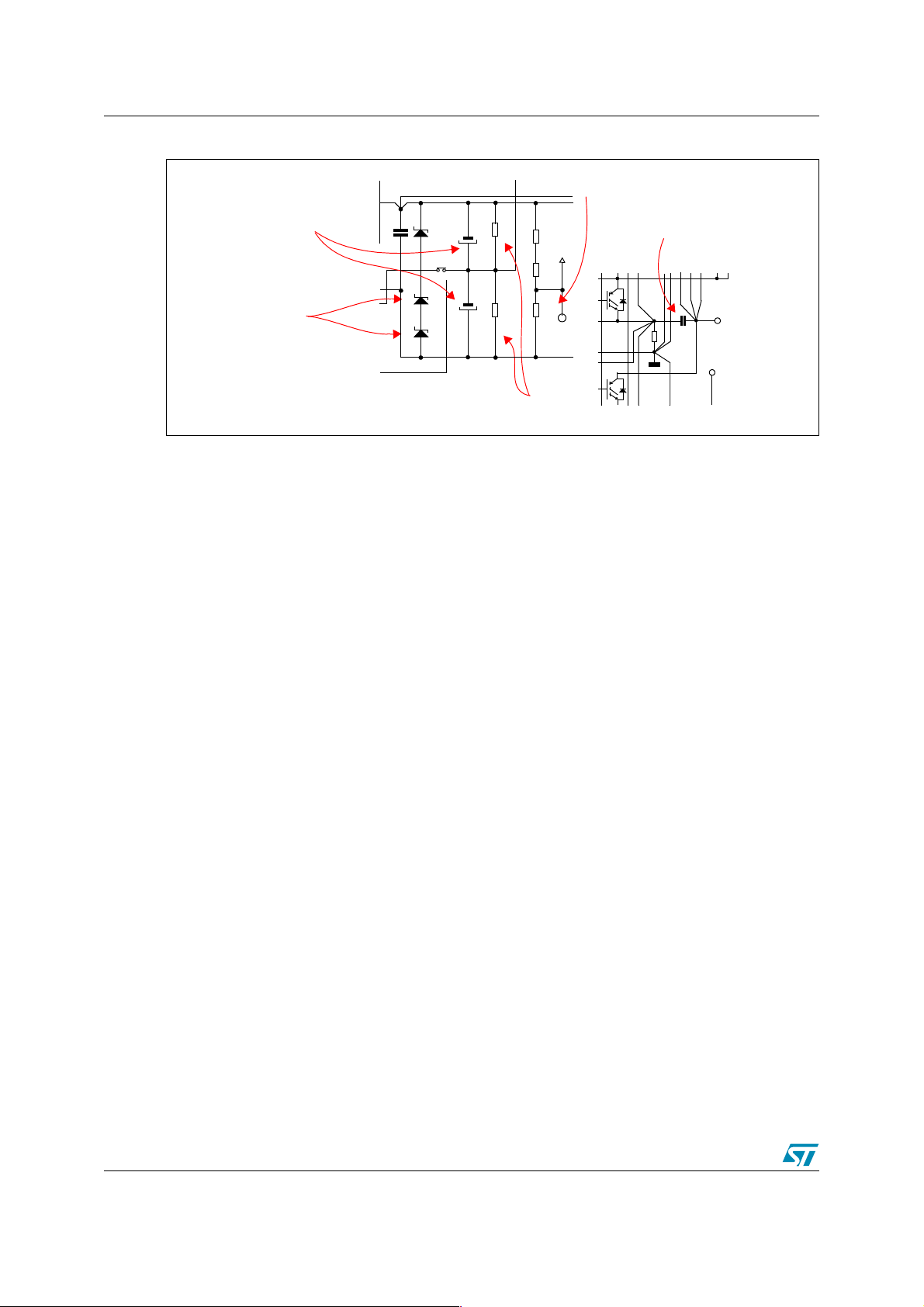
The starter kit board has been modified as in Figure 2
● the bridge D4 has been removed and correctly short-circuited (pin 1-2; pin 3-4)
● the capacitances C1 and C2 have been removed
● the NTC1 has been removed and short-circuited
● the fusible F1 has been removed and short-circuited
Figure 2. Modifications to be performed in the Starter Kit
J12
MOTOR
1
A
2
B
3
4
5
MSTBA2,54/5-G-5,08
J3
1
2
3
GMKDS 3/3-7,62
90/140VAC
OR
180/260VAC
TP13
Phase C
Phase B
STTA106U
STTA106U
NTC1
SG170(4R)
TP6
5X20(type KELSTONE)
F1
10A
R43
5.6K 1/4W
R49
5.6K 1/4W
R53
1K2 1/4W
1K2 1/4W
D16
D17
R44
OR 1/4W
R45
R50
OR 1/4W
R51
R54
Mounted on 17°C/W
AAVID Thermalloy
heatsink
STBR608
C
B
A
C11
D4
4
2
1
J11
MOTOR
1
PHASES
2
3
4
5
6
7
C1
4.7nF
Y
3
C2
4.7nF
Y
SOLDER FOR 110VAC
100nF
400V
Z2
BZW50-120
BZW50-120
Z4
BZW50-100
W2
12
TO SOLDER
Z3
The modification has been performed also on the value of some component in order to work in
safe with a bus voltage of 400-500 Volt. So the following components have been substituted:
(see Figure 3)
● C12 and C13 bulk capacitors have been replaced with one of 470uF 450Volt
● The transil Z2 and Z3 has been replaced with BZW50 -180
● R1 and R2 resistors have been replaced with 68K - 1W
● C20 capacitor has been replaced with 33nF - 600V
5/20
Page 6
2 Starter kit approach PFC for ST7MC Starter Kit
Figure 3. Modifications to be performed in the Starter Kit
R20 6.2K
C13, C12:
470uF 450V
Z2, Z3: BZW50180 transil
C11
100nF
400V
Z2
BZW50-120
BZW50-120
FOR 110VAC
Z4
BZW50-100
W2
12
TO SOLD ER
Z3
C13
1000uF
200V
C12
1000uF
200V
R2
47K
R16
1W
470K
HV Bus
R17
470K
R20
R1
12K
47K
1W
TP11
C20:33nF 600V
Phase B
B60HDFP
T4
7NB60HDFP
T5
R21
0.047R
TP17
C20
33nF
400V
4W
TP14
R1, R2: 68K - 1Watt
To get the Bus voltage value a voltage divider with R16-R17 and R20 is used. To get 5 Volts as
a maximum voltage for the AD converter with the new Bus voltage max value, R20 must be
replaced with a 6.2K resistance.
To connect the Power Add On board with the starter kit, use two control cables, one to
communicate the PWM for the Add on coming from starter kit and one to get the zero crossing
from the Add on to the starter kit. The connection of the zero crossing cable is critical. The
shunt resistor has been connected near the pin of the starter kit to avoid a capacitive parasite
effect of the cable acting as a filter for the zero crossing signal and a capacitor of 12pF has
been added to filter the noise.
To generate the PWM for the PFC, the Timer B of the micro is used. The PWM signal of the
PFC Power Add On is connected to the OCMP1_B pin of the micro (J10 Pin 3) and the Zero
Crossing signal of the Add On reaches the ICAP1_B pin of the micro (J10 Pin 7).
The PE2 pin it is connected with ICAP1_B, because it is used to force the reset of PWM when
the ZCD signal is missed.
This could happen for example when the instantaneous input voltage is too low to energize the
inductor.
The Vout of the Add On is the Mains for the Starter Kit board so must be connected to the Pin 2
and Pin 3 of J3.
The ground signal is connected directly from the ground of the micro to the ground of the driver
in the Add On.
The connections are depicted in Figure 4.
6/20
Page 7

PFC for ST7MC Starter Kit 2 Starter kit approach
Figure 4. Connection between Starter Kit and Add On power board
J3
1
2
3
2mm Linebar
J10
2
1
1
2
3
7
8
4
5
6
7
Signal GND
ST7MC Starter Kit
OCMP1_B/PE1
ICAP2_B/PE2
ICAP1_B/PE3
Vpp
MCO0
MCO1
Vout
Zero crossing
Signal GND
PFC Power Add On
+
-
PWM
7/20
Page 8

3 Firmware description PFC for ST7MC Starter Kit
3 Firmware description
3.1 Flowchart
Figure 5 shows the flowchart of the ART interrupt service routine that is called every 1ms.
Figure 5. ART Interrupt service routine for PFC
ART Interrupt
every 1ms
Each 20ms
PFC Running
Yes
Vout > OVERVOLTAGE
Yes
PFC Over voltage
Stop PWM
Delay20 = 0
Yes
PFC Ton Adjust
PFC TOTONINCREASE
Yes
PFC Running
Start PWM
Number Of Ton Increase = 0
Counter Ton++
Counter Ton >= MAXRESTART
PFC NoRestartTon
Stop PWM
Counter Ton = 0
PFC Over voltage
Vout < MIN_VOUT
Yes
PFC Running
Restart PWM
8/20
Page 9

PFC for ST7MC Starter Kit 3 Firmware description
Figure 6 shows the main loop.
Figure 6. Main Flowchart
PFC_Init
PFC_Timer_Init
Main Loop
Vout = ADC_GetVout
Each Loop Cycle
PFC_Run
Motor Control Routine
Figure 7 shows the PFC_RUN function.
Figure 7. PFC_RUN Flowchart
Vout>OVERVOLTAGE
Ye s
PFC Over voltage
Stop PWM
9/20
Page 10

3 Firmware description PFC for ST7MC Starter Kit
Figure 8 shows the PFC_TON_ADJUST routine.
Figure 8. PFC_TON_ADJUST
No
PFC Running
PWM Start
Error = Kp * (Vout400 - Vout)
Error > 3
Yes
Error = 3
Ton = Ton + Error
Ton > MAX_TON
Yes
Ton = MAX_TON
Number Of Ton Increase++
Number Of Ton Increase
> MAXTONINCREASE
Yes
PFC TOTONINCREASE
Stop PWM
Vout > Vout400
Ton = MIN_TON
Yes
Error = Kp * (Vout - Vout400)
Error > 3
Yes
Error = 3
Yes
Error > Ton
Ton = Ton - Error
Ton < MIN_TON
Yes
Ton = MIN_TON
3.2 PFC software description
This paragraph contains a description of the part of the software related to the PFC. The
complete explanation of the software is beyond this AN. For a more detailed explanation of the
motor control software library please refer to the application note AN1904.
The modules related to PFC are the following:
● Pfc.c
● Pwmart.c (Partially)
● Timer.c
The file Pfc.h contains some parameters that can be customized by the user according the
application.
At the beginning of the main module (main.c) there is the initialization of the PFC variables and
timer parameters.
PFC_Init();
PFC_TIMER_Init();
SetBit(TBCR2,TBCR2_OC1E);
Then in the main loop the only two tasks performed are the acquisition of the Bus voltage Vout
10/20
Page 11

PFC for ST7MC Starter Kit 3 Firmware description
Vout=ADC_GetVout();
and the check of over-voltage detection condition, performed in the procedure PFC_Run.
In the Pfc.h file are defined different status of the PFC system:
#define PFCOFF 0x00 /* no fault*/
#define TOOTONINCREASE 0x01 /* Too Ton increase*/
#define OVERVOLTAGEFAULT 0x02 /* OverVoltage detect for MAXOVERVOLTAGE time*/
#define PFCRUNNING 0x04
#define LOWVOLTAGEFAULT 0x10 /* Low voltage on DC BUS */
#define NORESTARTTON 0x20 /* No restart after OverVoltage */
#define NORESTARTOV 0x40 /* No restart after OverVoltage */
#define EXTBREAK 0x80 /* External break event */
The other PFC routines are called inside the ART interrupt. This is used as a time base for all
time-related issues of the motor control routine and it is generated every 1 ms.
The PFC Ton Adjust routine it is called each 20 ART interrupts (20 ms) if the status of the
system is PFC Running and this routine is used to calculate and set the new Ton duration.
● If the status of the system is TOOTONINCREASE it means that the PWM is stopped
because there was too much successive increase of the Ton caused for example by an
overload condition. In this case the software tries to restart the PFC clearing the variable
“Number Of Ton Increase” and increasing the variable “Counter Ton”. If “Counter Ton”
reaches the MAXRESTART value the status will be changed in NORESTARTTON and the
PWM will be stopped.
● If the status of the system is OVERVOLTAGE and Vout is below MIN_VOUT, during the
ART interrupt the software restarts the PWM.
PFC Ton adjust
This routine is dedicated to the control of the Bus voltage by means of the Ton duration variable.
It is the only PFC-related routine that requires some CPU load. It is executed every 20ms and
its duration is 15 microseconds, so the CPU load is 0.075%.
The Bus voltage is scaled by a factor 0.0065 through a voltage divider. Then the A/D conversion
introduces another factor of 255/5 so to convert the Voltage bus value expressed in volts into
the value stored inside the software we can use the formula:
Vout Vbus Volt[]0.334×=
rounded down to the nearest integer.
So we have the following parameters:
#define VBUS 140 // = 0.334 * VBus
#define MIN_VOUT 127
#define OVER_VOLTAGEDC 155 //
VBUS: is the target bus voltage.
OVER_VOLTAGEDC: if the bus voltage exceeds this value the firmware determine an over
voltage. In this case it stops the PWM and the PFC_STATUS will be changed in
PFCOVERVOLTAGE.
MIN_VOUT: if the voltage bus drops under this value after an over voltage, the system restarts
the PWM generation and the PFC_STATUS will be changed in PFCRUNNING.
11/20
Page 12

3 Firmware description PFC for ST7MC Starter Kit
The error is the difference between the actual value of the voltage bus (Vout) and the target
voltage (VBUS) multiplied by a factor of Kp. The error is subtracted from the actual value of the
Ton.
The value of Ton is the number of Timer B steps.
Ton is inferiorly limited to MIN_TON value and superiorly to MAX_TON. If Ton is set to the
maximum value the counter “Number Of Ton Increase” is increased by one, if this variable
reaches the value MAXTONINCREASE the system PFC status is changed into
TOOTONINCREASE and the PWM it is stopped.
Timer.c
Timer.c module is used to setup and control the generation of the PWM control signal. To
generate this signal it is used the Timer B peripheral in one pulse mode. The output pin
OCMP1_B is used as PWM control signal.
The Timer B frequency is fixed to 4 MHz so each step is 0.25µs. Ton duration sets the number
of steps in which the OCMP1_B is in high state (see Figure 9).
Figure 9. Ton time duration of the PWM
OCMP1_B pin
Timer B block = 4 MHz
∆T=0.25 µs
Ton=4
∆T=1 µs
t
TimB_init (Ton) is used to set up the Timer B to generate the pulse. Ton sets the number of
steps of the timer in which the timer output is high.
TimB_start() is used to start the timer.
TimB_stop() is used to stop the timer.
Vector.c
TIMB_Interrupt is generated when Timer B reaches the value TBOC2R = 0x0F9B (After 1 ms
the restart of the Timer is forced using PE2) this interrupt happens only in the zero current
event it is not correctly detected for example when the input voltage it's near the 0V.
At each of this interrupt if the Ton < MIN_TON the output of the PWM is switched off this to
avoid the a too short pulse it’s generated on the gate of the mos.
Else if Ton >= MIN_TON the TBOC1R is set to (Ton - 5) to set the pulse of PWM equal to Ton
step of timer frequency (4 Mhz)
12/20
Page 13

PFC for ST7MC Starter Kit 3 Firmware description
Figure 10. Restarting the PWM if maximum value is reached before the ZCD
TBOC2R
TBOC1R
Ton
13/20
Page 14

4 Hardware description PFC for ST7MC Starter Kit
4 Hardware description
4.1 Power stage
The criteria used for the design of the power stage are extracted from the AN966 “L6561,
Enhanced Transition Mode Power Factor Corrector”. The steps followed have been to fix the
operating conditions and then to dimension the single part of the design to these.
● Mains voltage range: Virms(min) Virms(max)
● Output voltage: Vout
● Output power: Pout
● Minimum switching frequency: Fsw
● Maximum output voltage ripple: ∆Vout
4.1.1 Power section design
Input Bridge
The input diodes bridge can use standard slow recovery, low-cost devices. The quantities to
consider will be just the input current (Irms), the maximum peak mains voltage and the thermal
data of the diodes.
Input capacitor
The input high frequency filter capacitor (Cin) has to attenuate the switching noise due to the
high frequency inductor current ripple.
High values of Cin alleviate the burden to the EMI filter but cause the power factor and the
harmonic contents of the mains current to worsen, especially at high line and light load. On the
other hand, low values of Cin improve power factor and reduce mains current distortion but
require heavier EMI filtering and increase power dissipation in the input bridge. It is up to the
designer to find the right trade-off in their application.
Output capacitor
The output bulk capacitor (Co) selection depends on the DC output voltage, the admitted over
voltage, the output power and the desired voltage ripple.
The 100 to 120Hz (twice the mains frequency) voltage ripple (
value) is a function of the capacitor impedance and the peak capacitor current.
Cout
I
----------------------
≥
4πfV
∆
0
out
--------------------------------=
4πfV
P
out
∆
outVout
∆Vout= 1/2 ripple peak-to-peak
Boost inductor
Designing the boost inductor involves several parameters and different approaches can be
used.
14/20
Page 15

PFC for ST7MC Starter Kit 4 Hardware description
First, the inductance value must be defined. The inductance (L) is usually determined so that
the minimum switching frequency is greater than the minimum switching frequency that avoid
audible noise, this value it's fixed by software equal to 10kHz to ensure a correct TM operation.
Assuming unity PF, it is possible to write:
LI
V
----------------------------------------------------=
-------------------=
2
irms
Lpk
2V
Irms
V
out
2FSWPiV
2V
–()
Irms
out
T
on
So it is possible to calculate the value of the inductor as a function of the minimum switching
frequency.
L
T
off
LI
---------------------------------------------------=
V
Lpk
out
2V
Irms
θ()sin
θ()sin–
POWERMOSFET
The choice of the MOSFET concerns mainly its Rds, which depends on the output power, since
the breakdown voltage is fixed just by the output voltage, plus the over voltage admitted and a
safety margin.
Boost diode
The boost freewheeling diode will be of a fast recovery type.
Design parameters used in this AN:
● Input voltage: 176V..264V
● Output regulated voltage: 400V
● Output power: 600W
● Minimum switching frequency: 80kHz
● Full load output ripple: 4%
P
out
I
rms(max)
● Input Bridge: Generic 10A Bridge
● Input Capacitor: 0.22µF
● Output Capacitor 470µF 450V
● Boost Inductor 80µH with 29 turns 0.40 mm x 10 in the primary saturation current 10A and
3 turns in the secondary
● POWERMOSFET P12NK60
● BOOST DIODE STTA12
---------------- -
V
in(min)
3.4A==
To calculate all these values you can follow the formulas used in the AN966.
15/20
Page 16

5 Schematics PFC for ST7MC Starter Kit
5 Schematics
The Add On power stage is depicted in Figure 11.
Figure 11. Schematic of Add On power stage
F1
J1
3
2
1
220VAC
J4
CON2
1
2
FUSE
D4
1 3
1N4001
1
D1
10A Bridge
-+
3
2
VDC+15V
200n 400V
4
R1
470k
C3
1uF 25
zero current detect
R2
470k
Gate Driver
VinWaveform
R8
12
C4
100p
VDC+15V
C2
+
TRANSFORMER
2
6
R3
27K
U1
1
VIN
Vcap
2
VOUT
Vsup
3
NC
GND
4 5
IN GATE
TD221
R9
15k
T1
1
3
1N4001
D3
R4 4.7
R5 47
8
7
6
R7
47
R11
R10
68k
68k
13
123
R64.7
Q1
R12
0.41
J3
1
D
STP12NM50
D5
1N4001
C5
1p
13
123
Q2
STP12NM50
D2
1 3
STTH106
C1
1n
OCP
1 2
NTC1
2.5
VDC-OUT
J2
1
2
3
16/20
Page 17

PFC for ST7MC Starter Kit 6 Measurement
6 Measurement
Figures 12 and 13 show the behavior of the PFC in terms of the Boost Inductor Current, the DC
Bus Voltage and the Drain Voltage. The operating conditions are:
● Vin = 220 V Ac
● Load = 440 W
Figure 12. DC bus drain voltage
Figure 13. Characteristics of drain voltage and inductor current
17/20
Page 18

7 References and related materials PFC for ST7MC Starter Kit
7 References and related materials
1. ST7MC datasheet
2. TD22x datasheet
3. AN966 L6561, Enhanced Transition Mode Power Factor Corrector
4. AN1904 Software library for AC induction motor
5. ST7 Software Library, http://www.st.com/mcu
18/20
Page 19

PFC for ST7MC Starter Kit 8 Revision history
8 Revision history
Table 1. Document revision history
Date Revision Changes
13-May-2005 1 Initial release
16-Jul-2007 2 Removed references to obsolete products
19/20
Page 20

8 Revision history PFC for ST7MC Starter Kit
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2007 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
20/20
 Loading...
Loading...