

AN1882
Application note
Designing with the L6926, high efficiency monolithic
synchronous step-down regulator
Introduction
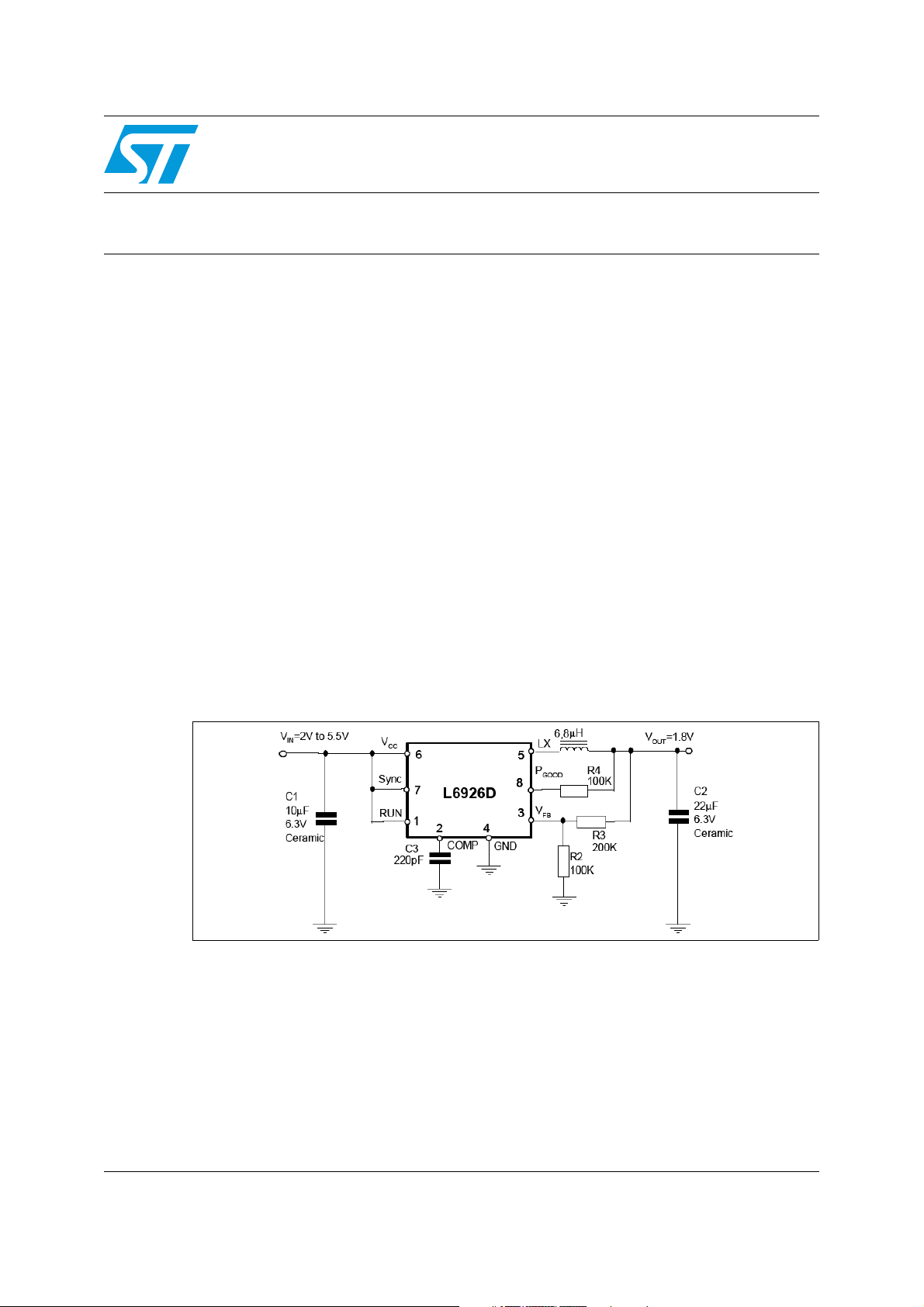
This application note details the main features and application advantages of this new
synchronous step-down regulator. After describing how the device works and the main
features, a step-by-step design section is provided in order to aid in the selection of the
external components and in the evaluation of the losses. The device performances are
shown in terms of efficiency and thermal results. At the end, some application ideas are
proposed. This new product, designed using BCDV technology, is a high efficiency
monolithic synchronous step-down regulator capable of delivering up to 800 mA of
continuous output current and to regulate the output voltage from 0.6 V up to V
the 100% duty cycle operation capability. The input voltage ranges from 2 V to 5.5 V. The
control loop architecture is based on a constant frequency peak current mode, while high
efficiency at light loads is achieved by a low consumption functionality. The very low
quiescent current (25 µA) and shutdown current (0.2 µA) make the device very suitable to
supply battery-powered equipment like PDAs and hand-held terminals, DSCs (digital still
cameras) and cellular phones. The switching frequency is internally set at 600 kHz, but the
device can be externally synchronized up to 1.4 MHz. An internal reference voltage of 0.6 V
(typ) allows the device to regulate a minimum output voltage of the same low value. The low
MOSFETs R
features are: hysteretic UVLO, OVP, constant current short-circuit protection, Power Good
and thermal shutdown. The MSOP8 package allows significant space savings on the board.
ensures high efficiency at high output current. Additional beneficial
DS(on)
thanks to
IN
Figure 1. Application test circuit
April 2012 Doc ID 10209 Rev 4 1/30
www.st.com

Contents AN1882
Contents
1 Pins function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Functional description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 Modes of operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1.1 Low consumption mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1.2 Low noise mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2 System stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2.1 Current loop compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2.2 Voltage loop compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4 Short-circuit protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.1 Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2 DROPOUT operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.3 PGOOD (Power Good output) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.4 Adjustable output voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.5 OVP (over-voltage protection) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.6 Hysteretic thermal shutdown . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 Application information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1 External components selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.1 Input capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.2 Output capacitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1.3 Inductor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1.4 Compensation network (R1C3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2 Losses and efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2.1 Conduction losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.2.2 Switching losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.2.3 Gate charge losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6 Thermal considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
7 Application board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2/30 Doc ID 10209 Rev 4

AN1882 Contents
8 Efficiency results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
9 Application ideas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
9.1 Buck boost topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
9.2 White LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
9.2.1 Driving white LEDs: buck topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
9.2.2 Driving white LEDs: boost topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
9.2.3 Driving white LEDs: buck/boost topology . . . . . . . . . . . . . . . . . . . . . . . . 26
10 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Doc ID 10209 Rev 4 3/30

List of figures AN1882
List of figures
Figure 1. Application test circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
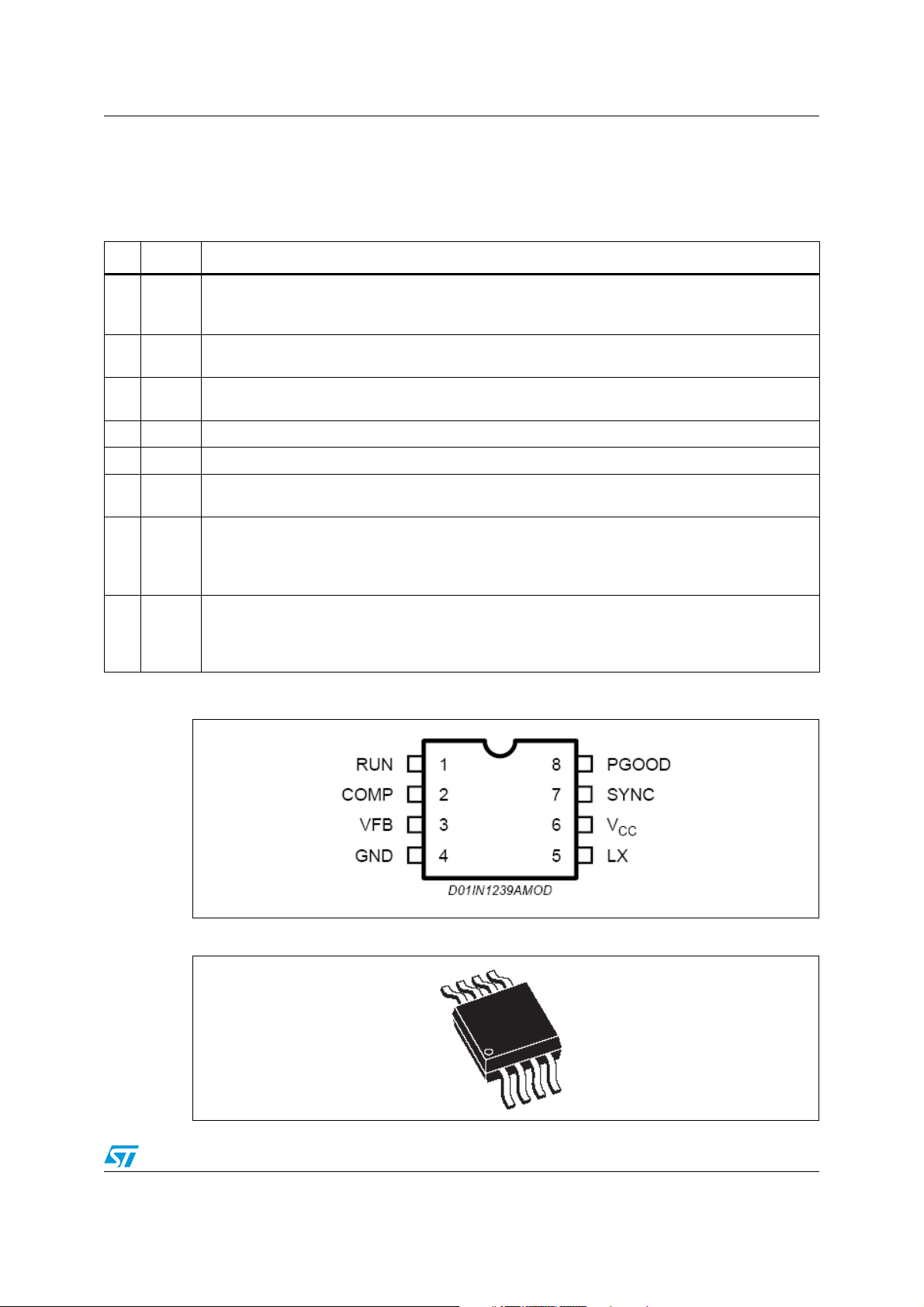
Figure 2. Pins connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 3. MSOP8 package. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 4. Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 5. Low consumption mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 6. Low noise mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 7. Slope compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Figure 8. Equivalent circuit for the voltage loop analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 9. Equivalent circuits during the ON time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figure 10. Equivalent circuit during the OFF time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 11. Valley current limit protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 12. Thermal performance results: V
Figure 13. RDS(on) vs. temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 14. Application board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 15. Component placement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 16. Top side view . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 17. Bottom side view. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 18. Schematic demonstration board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 19. Low noises vs. low consumption efficiencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 20. Efficiency vs. output current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 21. Efficiency vs. output current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 22. Efficiency vs. output current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 23. Positive buck boost application. 1 Li-Ion cell to 3.3 V@0.25 A . . . . . . . . . . . . . . . . . . . . . . 25
Figure 24. Buck topology schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figure 25. Boost topology schematic. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figure 26. Buck boost topology schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 27. PWM brightness control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 28. Analog brightness control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
= 3.7 V V
IN
OUT
= 1.8 V I
= 800 mA . . . . . . . . . . . . . . 20
OUT
4/30 Doc ID 10209 Rev 4
AN1882 Pins function
1 Pins function
Table 1. Pin description
N. Name Description
Shutdown input. When connected to a lower voltage than 0.5 V (down to GND) the device stops
1 RUN
2 COMP
working. When connected to a higher voltage than 1.3 V (up to VCC) the device is enabled. The pin
must not be left floating
Error amplifier output. A compensation network has to be connected from this pin to GND. Usually a
220 pF capacitor is enough to guarantee the loop stability (see related section)
3 VFB
4 GND Ground
5 LX Switch output node. Common point between high side and low side MOSFETs
6
VCC
7 SYNC
8 PGOOD
Error amplifier inverting input, used to adjust the output voltage (from 0.6 V to VIN) by an external
divider.
Input voltage. The operating input voltage range is from 2 V to 5.5 V. An internal UVLO circuit
realizes a 200 mV (typ) hysteresis
Operating mode selector input. Low consumption mode, when connected to a higher voltage than
1.3 V (up to VCC). Low noise mode when connected to a lower than 0.5 V (down to GND).
Synchronization mode when connected to an external appropriate clock generator. This pin must
not be left floating
Power Good comparator output. It is an open drain output. A pull-up resistor should be connected
between Power Good and V
the regulated output voltage and goes high when the output voltage is greater than 90% of the
regulated output voltage. If not used, the pin can be left floating.
. The pin is forced low when the output voltage is lower than 90% of
O
Figure 2. Pins connection
Figure 3. MSOP8 package
Doc ID 10209 Rev 4 5/30
Block diagram AN1882
2 Block diagram
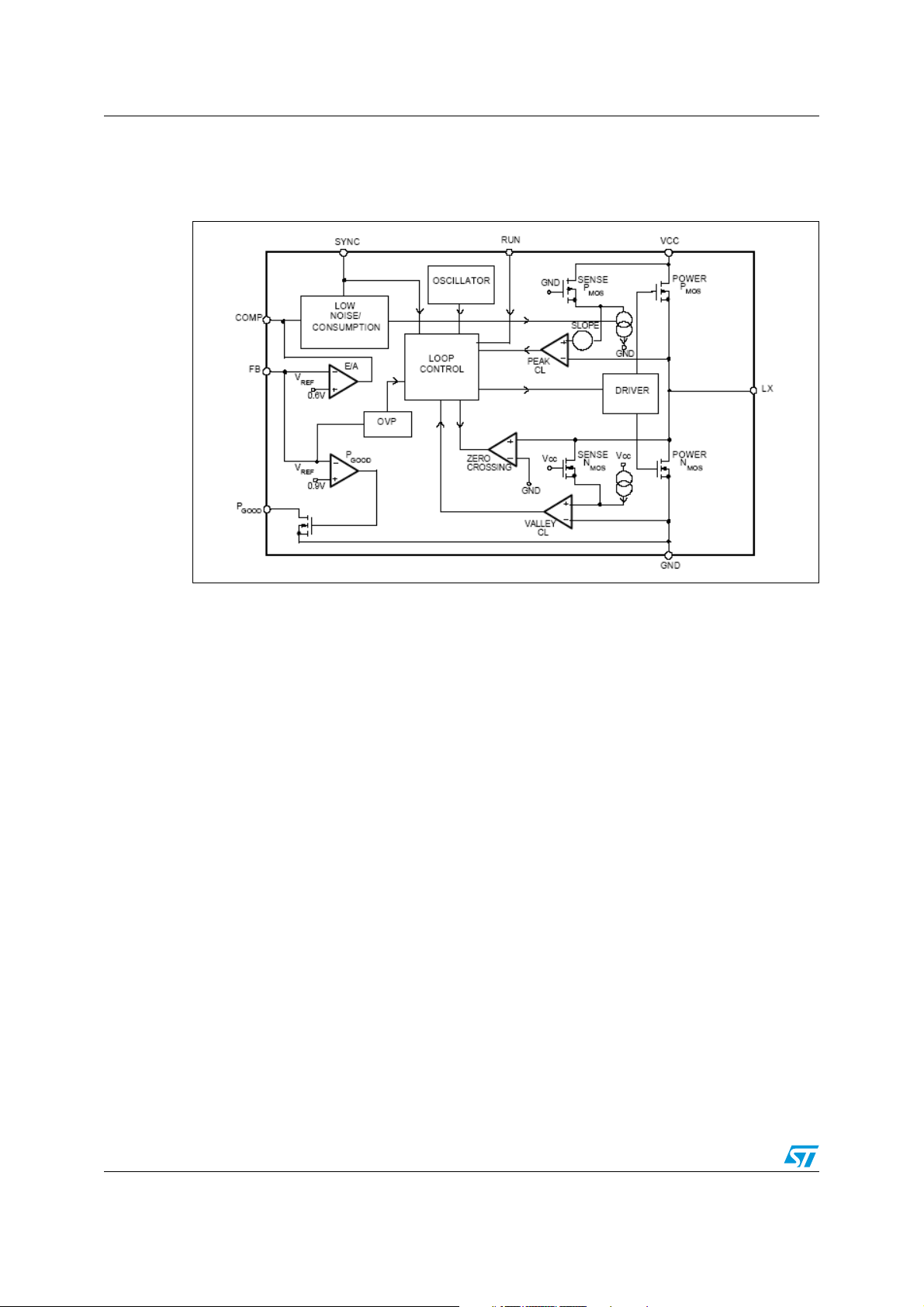
Figure 4. Block diagram
6/30 Doc ID 10209 Rev 4

AN1882 Functional description
3 Functional description
The main loop uses constant frequency peak current mode architecture. Each cycle, the
high side MOSFET is turned on, triggered by the oscillator, so that the current flowing
through it increases with a slope fixed by the operating conditions. When the sensed current
(a part of the high side current) reaches the output value of the error amplifier E/A, COMP
pin, the internal logic turns off the high side MOSFET and turns on the low side one until the
next clock cycle begins or the current flowing through it goes down to zero (ZERO
CROSSING comparator). During the load transients, the voltage control loop keeps the
output voltage in regulation changing the COMP pin value, fixing a new turn off threshold.
Moreover, during these dynamic conditions the choke must not saturate and the inductor
peak current must never exceed the maximum value. This value is function of the internal
slope compensation (see related section).
3.1 Modes of operation
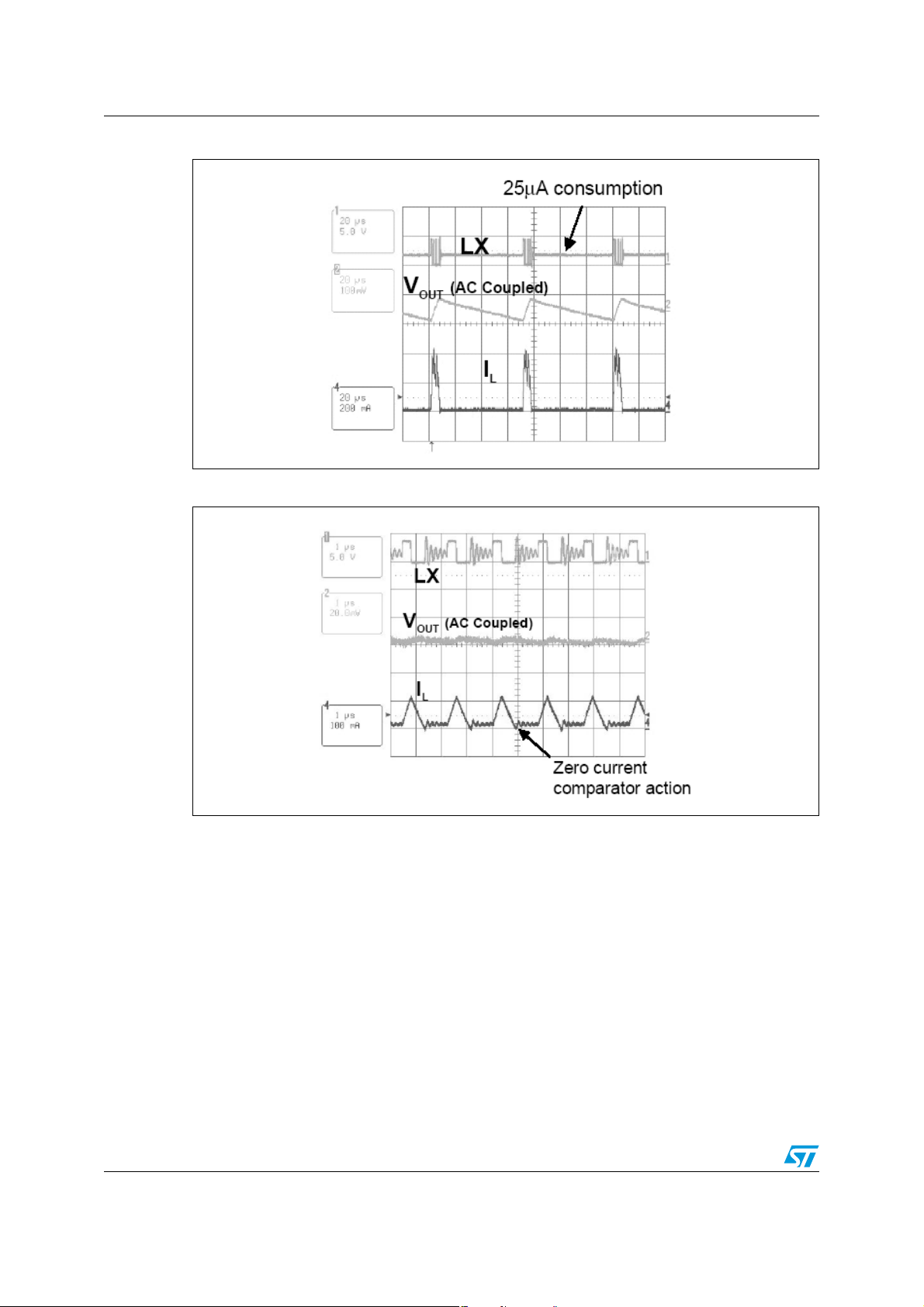
3.1.1 Low consumption mode
At light load, the device operates in burst mode in order to keep the efficiency very high also
in these conditions.
While the device is not switching the load discharges the output capacitor and the output
voltage goes down. The COMP pin, due to the feedback loop, increases and when a fixed
internal threshold is reached, the device starts to switch again. In this condition the peak
current limit is set approximately in the range of 200 mA-400 mA, depending on the slope
compensation (see related section). Once the device starts to switch the output capacitor is
recharged. The repetition time of the bursts depend on parameters like input and output
voltages, load, inductor and output capacitors.
Between two bursts, most of the internal circuitries are off, so reducing the device
consumption down to a typical value of 25 µA. During the burst, the frequency of the pulses
is equal to the internal frequency.
3.1.2 Low noise mode
In case the very low frequencies generated by the low consumption mode are undesirable,
the low noise mode can be selected. The efficiency is a little bit lower compared with the low
consumption mode conditions when working close to zero loads, while the trend is to reach
the efficiency of low consumption mode for intermediate light loads.
The device could skip some cycles in order to keep the output voltage in regulation. In the
Figure 5
and 6 the LCM and LNM typical waveforms are shown.
Doc ID 10209 Rev 4 7/30
Functional description AN1882
Figure 5. Low consumption mode
Figure 6. Low noise mode
Measurement conditions: V
C
= 22 µF; RC = 40 kΩ; CC = 330 pF
OUT
In
Figure 19
is shown a comparison between the efficiency in low noise mode and the
IN
= 4.2 V; V
= 1.5 V; I
OUT
efficiency in low consumption mode.
3.2 System stability
Since the device operates with constant frequency peak current mode architecture, the
voltage loop stability is usually not a big issue. For most of the applications a 220 pF
connected between the COMP pin and ground is enough to guarantee the stability. In case
very low ESR capacitors are used for the output filter, such as multilayer ceramic capacitors,
the zero introduced by the capacitor itself can be shifted at a frequency well above the
resonance frequency of the L-C filter and the loop stability could be affected.
Adding a series resistor to the 220 pF capacitor can solve this problem. The right value for
the resistor can be determined by checking the load transient response voltage waveforms.
8/30 Doc ID 10209 Rev 4
= 30 mA; L = 6.8 µH; CIN = 10 µF;
OUT
AN1882 Functional description
The current mode stability can be studied in two consecutive steps; first the inner loop is
closed (current loop) and then the second loop stability is considered (voltage loop).
3.2.1 Current loop compensation
The selected control architecture brings many advantages: easy compensation with ceramic
capacitors, fast transient response and intrinsic peak current measurement that simplify the
current limit protection. A known drawback, however, is that the current loop becomes
unstable, when the duty cycle exceeds 50%.
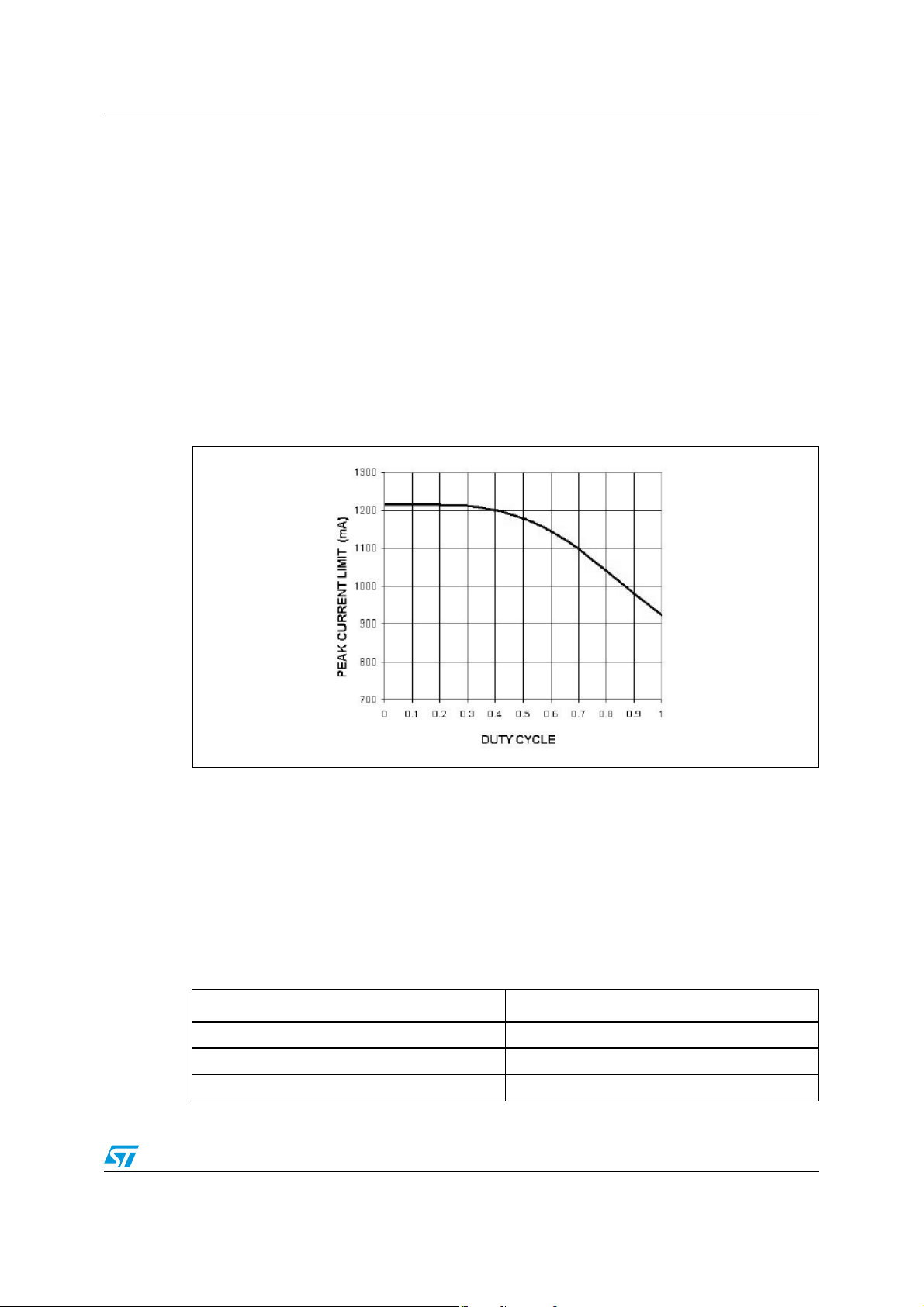
This phenomenon is known as "sub-harmonic oscillation" and can be avoided by adding a
slope compensation signal. Due to this fact, the current limit of the device decreases when
the slope compensation signal is applied. The slope compensation is internally implemented
from a duty around 30% and
current limit.
Figure 7. Slope compensation
Figure 7
shows how the slope compensation affects the device
The amount of slope compensation depends on the inductor current slope during the OFF
time. This slope, for a given duty cycle, is inversely proportional to the inductor value. Since
the device can be synchronized at higher frequency, it is reasonable to calculate the inductor
value in terms of it. Finally, the input voltage affects the OFF time slope as well. This is
obvious because, for a given duty cycle, the output voltage (and so the OFF time inductor
current slope) is directly proportional to the input one. In order to better manage these
issues, the amount of slope compensation does not depend only on the duty cycle but also
on the switching frequency and the input voltage.
Table 2. Suggested inductor values for different switching frequencies, at
V
= 3.6 V and V
IN
FSW [kHz] Minimum inductor value [µH]
600 6.8
1000 3.6
1400 2.7
=1.8 V
OUT
Doc ID 10209 Rev 4 9/30

Functional description AN1882
Table 3. Suggested inductor values for different switching frequencies, at
V
= 5 V and V
IN
FSW [kHz] Minimum inductor value [µH]
600 8.2
1000 5.6
1400 3.6
OUT
=3.3 V
In the above tables are indicated the minimum inductor values that ensure the current loop
stability with an input voltage of 3.6 V and 5 V. Also there is a maximum inductor value
above which the loop can become unstable. For example, if the inductor is too high the LC
double pole returns in bandwidth.
3.2.2 Voltage loop compensation
Ideally in a current mode control, after closing the current loop, the pole splitting effect
separates the complex double pole due to the inductor and the output capacitor in 2 different
poles; the pole due to the inductor shifts out of system bandwidth (i.e. the inductor ideally
acts like a current source), while the pole due to the output capacitor remains inside the
bandwidth. In
compensation:
Figure 8
is shown the equivalent circuit used to study the voltage loop
Figure 8. Equivalent circuit for the voltage loop analysis
In the
Equation 1
the power stage transfer function is shown:
Equation 1
Hs()
VOs()
------------ --- -
I
L
sC
O
------------- ------------ ------------- ------------- -- -==
s()
sCOESR RO+()1+
ESR 1+()R
O
where R
is the output equivalent resistor load (VO/IO) and ESR is the series resistance of
O
the output capacitors. It can be seen that the pole due to the output capacitor shifts in
frequency based on the load value.
10/30 Doc ID 10209 Rev 4

AN1882 Functional description
In order to have zero DC error in the voltage regulation, the feedback voltage loop is
implemented with an integrator stage; the transfer function of the signal stage is shown in
the
Equation 2
.
Equation 2
Gs()
gmα
-----------
A
⋅=
V
sC
C
-------------------- -
sC
C
1+
Where g
is the integrator transconductance (250 µS). The total gain loop is:
m
Equation 3
α 1sESRC
+()sCCRC1+()
A
1sCOESR RO+()+()
VsCC
O
where A
(R
/(R2+R3).
2
R
Ogm
s()
G
LOOP
is the current loop factor (1Ω typ.) and α is the feedback resistor divider ratio
V
------------ ------------- ------------- ------------- ------------ ------------- ------------- -----=
Once the gain loop is known the system will be stabilized with the compensation network as
shown in the
Section 5.1.4
.
Doc ID 10209 Rev 4 11/30

Short-circuit protection AN1882
4 Short-circuit protection
The device is provided by two limiting current circuitries, one on the high side and a second
on the low side MOSFET.
Due to the peak current mode architecture, the peak current flowing through the high side
switch is accurately sensed. When this current reaches the peak current limit threshold, the
internal high side MOSFET is turned off. In this way, the ON time, T
output voltage decreases. The minimum T
can be around 200 ns (T
ON
circuit, the peak current could further increase because the intervention of the high side
limiting current is not fast enough. In this case, the valley current limits eliminate the risks of
device failure. To better understand this concept, it's useful to read the below considerations
on the current variation through the inductor during the ON and OFF time.
Equation 4
VINV
–()
ΔI
ON
------------- ------------- --------
OUT
⋅=
L
T
ON
(ON time slope)
Equation 5
V
OUT
ΔI
OFF
------------ --
L
⋅=
T
OFF
(OFF time slope)
, is reduced and the
ON
). In case of short-
MIN
When V
= 0 V, it can be seen that the inductor current doesn't decrease during the OFF
OUT
time. Therefore the current will increase step by step during each cycle In order to
understand when this phenomenon will end, some real parameter must be considered.
Figure 9. Equivalent circuits during the ON time
12/30 Doc ID 10209 Rev 4

AN1882 Short-circuit protection
Figure 10. Equivalent circuit during the OFF time
Considering the figures above, in particular during the OFF time, in despite of the output
voltage is zero, the output current generates, on the parasitic resistances, the voltage drop
necessary to produce a negative slope. So, the higher will be the output current, the higher
will be the negative slope during the OFF time; in this way, the inductor current will find a
stable value. This value is given by:
Equation 6
VINT
⋅–()RPRL+()T
MINFSW
where T
I
------------- ------------ ------------- ------------- ------------- ------------ ------------- ------------- ------------- ------------ ------------- ----------=
LIM
is the minimum ON time, FSW is the switching frequency, RN and RP are the ON
MIN
R
+()1T
NRL
resistance of the low side and high side MOSFETs respectively, R
resistance and R
is the equivalent output resistance. As it can be seen, in these extreme
O
⋅()⋅
MINFSW
⋅()⋅+⋅[]
MINFSW
is the inductor series
L
conditions, the maximum current value depends both on the application conditions (like VIN
and F
), the inductor parasitic resistor RL, and the MOSFETS R
SW
DS(on) RN
and RP. It does
not depend on the peak current limit at all. In order to limit the output current to a safe value
even in extreme short-circuit conditions, a current limit has also been introduced on the low
side MOSFET: this operates as a valley current limit, as shown in
Figure 11
. The high side
MOSFET does not turn-on until the inductor current exceeds the valley current limit. This
implies that, depending on the over current conditions, the device skips some cycles, so
reducing the equivalent switching frequency in order to limit the output current. With this
approach, the maximum peak current is definitively limited to:
Equation 7
VINT
I
LIMIVALLEY
MIN
------------ ----------+=
L
Doc ID 10209 Rev 4 13/30
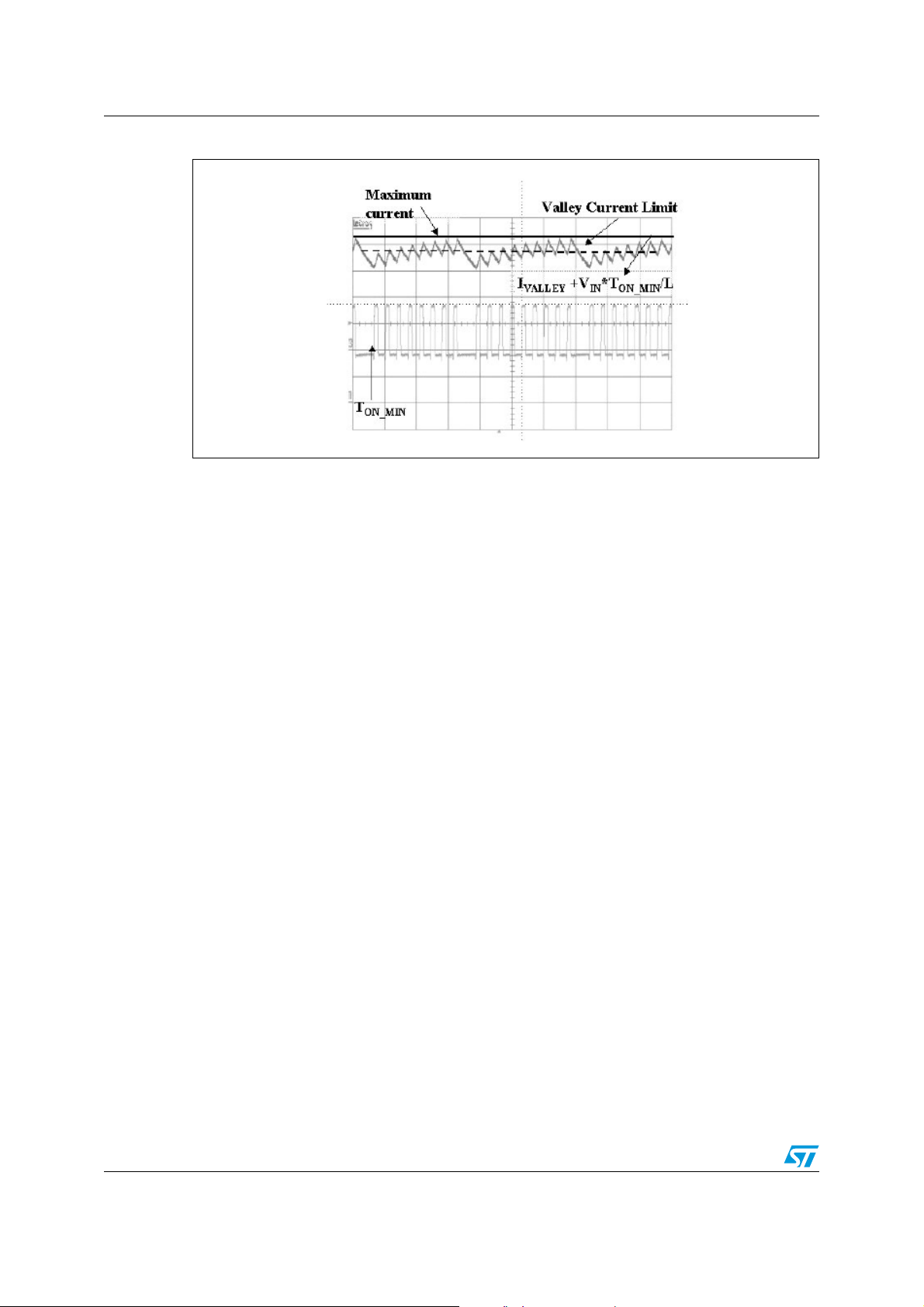
Short-circuit protection AN1882
Figure 11. Valley current limit protection
4.1 Synchronization
The device can be synchronized with an external signal from 500 kHz up to 1.4 MHz through
the internal PLL. When the device is locked, the external signal and the high side turn on
rising edges are aligned. In this case the low noise mode is automatically selected. The
device will eventually skip some cycles in very light load conditions depending also on the
input/output conditions. The internal synchronization circuit is inhibited in short-circuit and
over-voltage conditions in order to keep the involved protections effective. The
synchronization signal amplitude can range typically from 1 V to VCC and the duty factor
can range typically from 20% to 80%. Sometimes, if the synchronization signal duty cycle is
very similar to the application duty factor, noise can be detected on the L
some practical solutions are:
1. Change the synchronization signal duty factor
2. Decrease the synchronization signal amplitude
3. Add 20 pF capacitor between the comp pin and ground.
pin. In this case
X
The device switches at 600 kHz (typ.) if no synchronization signal is applied.
4.2 DROPOUT operation
When the input voltage is a Li-Ion battery, the voltage ranges from a minimum of 3 V or less
to 4.1 V - 4.2 V (depending on the anode material). In case the regulated output voltage is
from 2.5 V and 3.3 V, the device can work in linear mode or dropout operation. The minimum
input voltage necessary to ensure output regulation can be calculated as:
Equation 8
V
INMIN
---
where RDSON_HS_MAX is the maximum high side resistance and R
resistance.
14/30 Doc ID 10209 Rev 4
VOIOR
DS on()HSMAXRL
+()⋅+=
is the series inductor
L

AN1882 Short-circuit protection
4.3 PGOOD (Power Good output)
The pin is an open drain output and so, a pull up resistor should be connected to it. If the
feature is not required, the pin can be left floating. A Power Good signal, low, is available,
until the output voltage reaches the 90% of the final value. After that, the PGOOD signal
goes high and the internal transistor goes off.
4.4 Adjustable output voltage
The output voltage can be adjusted by an external resistor network from a minimum value of
0.6 V up to the V
Equation 9
. The output voltage value is given by:
IN
R
V
OUT
⎛⎞
0.6 1
⋅=
⎝⎠
------ -+
R
3
2
Thanks to the very low FB leakage current (typ. 25 nA), high R
hundreds of kΩ increasing the system efficiency also at very low load.
4.5 OVP (over-voltage protection)
The device has an internal output over-voltage protection. If the output voltage goes higher
than 10% of its nominal value, the low side MOSFET is turned on until the output voltage
returns inside the nominal value tolerances. During the over-voltage circuit intervention, the
zero crossing comparator is disabled so that the device is also able to sink current.
4.6 Hysteretic thermal shutdown
The device has also a thermal shutdown protection activated when the junction temperature
goes above 150 °C. In this case both the high side MOSFET and the low side one are
turned off. Once the junction temperature goes back to about 95 °C, the device restarts the
normal operation.
, R2 values can be chosen of
3
Doc ID 10209 Rev 4 15/30

Application information AN1882
5 Application information
5.1 External components selection
5.1.1 Input capacitor
The input capacitor must be able to support the maximum input operating voltage and the
maximum RMS input current. Since step-down converters draw current from the input in
pulses, the input current is squared and the height of each pulse is equal to the output
current, neglecting the ripple across the inductor.
The RMS input current (flowing through the input capacitor) is:
Equation 10
2
⋅
2D
I
RMSIO
------------ -- -–
D
η
Where η is the expected system efficiency, D is the duty cycle and Io the output DC current.
Supposing η =1 this function reaches its maximum value at D=0.5 and the equivalent RMS
current is equal to I
/2.
o
The maximum and minimum duty cycles are:
2
D
------ -+⋅=
2
η
Equation 11
Equation 12
Depending on the output voltage value the worst case can be with the maximum or
minimum input battery voltage. Usually the best choice for the input capacitor is the MLCC
(multilayer ceramic capacitor) thanks to its very small size and very low ESR.
provides a list of some MLCC manufacturers.
Table 4. Recommended input capacitors
Manufacturer Series Cap value (µF) Rated voltage (V) ESR@600 kHz (m.)
Panasonic ECJ 10 to 22 6.3 10
TAIYO YUDEN JMK 10 to 22 6.3 10
5.1.2 Output capacitor
The output capacitor is very important to satisfy the output voltage ripple requirement. Very
small inductors values reduce size and cost of the application but increase the current
ripple. This ripple, multiplied by the ESR of the output capacitor, is the output voltage ripple.
Tantalum and ceramic capacitors are usually good for this purpose. Ceramic capacitors
have the lowest ESR for a given size, so for very compact applications they are the best
choice. POSCAP capacitors from Sanyo are also a good choice for the output filter. Below is
a list of some capacitor manufacturers.
D
D
MAX
MIN
------------------=
V
INMIN
V
------------ --------=
V
INMAX
V
O
O
Ta bl e 4
16/30 Doc ID 10209 Rev 4

AN1882 Application information
Table 5. Recommended output capacitors
Manufacturer Series Cap value (µF) Rated voltage (V) ESR (m.)
Panasonic ECJ 10 to 47 6.3 10
Panasonic EEF 22 to 47 6.3 60 to 90
TAIYO YUDEN JMK 10 to 47 6.3 10
Sanyo POSCAP TPA 47 to 100 6.3 80 to 100
5.1.3 Inductor
The inductor value fixes the ripple current flowing through the output capacitor. The ripple
current is usually fixed at 20%-30% of the output current and is approximately obtained by
the following formula:
Equation 13
VINV
–()
IΔ
OUT
TON⋅=
------------ ------------- ---------
L
For example, with V
and I
= 600 mA and ΔI = 200 mA, the inductor value is about 6 µH. The peak current
O
= 3.3 V, VIN = 4.2 V (Li-Ion battery fully charged), FSW = 600 kHz
OUT
through the inductor is given by:
Equation 14
I
PKIO
IΔ
---- -+=
2
It can be seen that if the inductor value decreases, the peak current (which has to be lower
than the current limit of the device) increases. This peak current must be lower than the
saturation current of the choke.
This is particularly important when using ferrite cores because they can hardly saturate (the
inductance value decreases abruptly when the saturation threshold is exceeded, causing an
abrupt increase of the current flowing through it). The inductor should be selected also
considering the system stability, (see the slope compensation paragraph). Moreover the
inductor selection should be made taking in account the inductor parasitic resistance,
because a too high value can decrease the efficiency. In the following table some inductor
manufacturers are listed.
Table 6. Recommended inductors
Manufacturer Series Inductor value (µH) Saturation current (A)
DO1607C 6.8 to 15 0.72 to 0.96
Coilcraft
DT1608C 6.8 to 15 0.6 to 1
LPO1704 6.8 to 10 0.8 to 0.9
DO1606T 6.8 to 10 1 to 1.1
Panasonic
To ko
ELL6RH 6.2 to 22 0.7 to 1.4
ELL6GM 6.8 to 10 0.93 to 1.1
D62CB 10 to 22 0.71 to 1.07
D62C 10 to 22 0.63 to 0.99
Doc ID 10209 Rev 4 17/30

Application information AN1882
5.1.4 Compensation network (R1C3)
As it is shown in the
function given by the
Section 3.2
the system stability can be studied with the loop transfer
Equation 3Equation 3
. If the output capacitor is a ceramic type the zero
due to the ESR generally will be out of the system bandwidth, so the stability of the system
will be ensured by the cancellation between the pole due to the output capacitor and the
equivalent load and the R
expression, valid around the transition frequency f
zero. In the
1C3
Equation 15Equation 15
is given by:
T
, a simplified gain loop
Equation 15
G
LOOP s()
Supposing C
= 22 µF, the transition frequency at 0 dB equal to 30 kHz (fT is equal to the
2
system bandwidth), and the output voltage equal to 1.8 V the R
gmR1α
------------- ----- -=
sC
2
value can be calculated as:
1
Equation 16
2π fTC
R
1
The nearest standard E12 series value is R
1
2
------------- ------=
gmα
= 47 kΩ.
The higher is the bandwidth, the faster will be the transient response but the bandwidth (and
so the R
poles as mentioned in the
at the least 5 times before the frequency transition, so the C
value) must be lower than fSW/10 to avoid the effect due to the sampling effect
1
Section 3.2
. The zero due to the compensation network must be
value will be:
3
Equation 17
5
------------ -------
C
3
2π f
500pF==
TR1
The nearest standard value is C
ESR zero is in the system bandwidth and it can be used to stabilize the system so the zero
due to the compensation network will be useless (the C
function).
5.2 Losses and efficiency
There are losses affecting the efficiency of the application. Some of these losses are related
to the device and others are related to the external components. The most important losses
are listed below.
5.2.1 Conduction losses
These losses are basically due to the not negligible resistances of the internal switches and
the external inductor. Usually the current ripple across the inductor is negligible and so to
estimate the conduction losses of the inductor, the average output current can be
considered. The conduction losses of the switches depend also on the duty cycle of the
application. The RMS current flowing through the high side MOSFET is (I
RMS current flowing through the low side MOSFET is (I
losses are:
= 470 pF. If the output capacitors are tantalum type the
3
is necessary to the integrator
3
)2 · D while the
)2 · (1-D). So, the total conduction
O
O
18/30 Doc ID 10209 Rev 4

AN1882 Application information
Equation 18
P
MOSIO
2
RPD() RN1D–()RL+⋅+⋅()⋅=
where R
respectively and R
and RN are the series resistance of the high side and low side MOSFETs
P
the series resistance of the inductor. The conduction losses due to the
L
ESR of the input and output capacitors are usually negligible, particularly when using
ceramic caps (very low ESR). Anyway, in case of high ESR values for these caps, their
conduction losses are:
Equation 19
P
CIN COUT,
where ΔI is the current ripple flowing through the choke and D is the duty cycle of the
application. The conduction losses are particularly important at high current cause they
depends on its squared value.
5.2.2 Switching losses
The switching losses are due to the turn on and off of the internal high side MOSFET.
Equation 20
where T
These are approximately in the range of 15 ns to 20 ns.This loss is important at high
frequency.
ON
and T
OFF
2
I
D1D–()⋅()ESR
O
P
SWITCHINGVINIOFSW
⋅⋅ ⋅=
I2Δ
--------
⋅+⋅⋅=
CIN
T
ONTOFF
------------ ------------- -----------
ESR
12
+()
2
COUT
are the turn-on and turn-off times of the internal high side switch.
5.2.3 Gate charge losses
The gate charge losses derive from switching the gate capacitance of the internal
MOSFETs. The gate capacitances (C
MOSFETs) are charged and discharged with the input voltage at the switching frequency.
Equation 21
These losses are also directly proportional to the switching frequency and input voltage but
are usually negligible compared with the conduction and switching losses.
for the high side MOSFETs and CL for the low side
H
P
GATECHARGEVINCHCL
-
⋅⋅=
+()F
SW
Doc ID 10209 Rev 4 19/30

Thermal considerations AN1882
6 Thermal considerations
Depending on the electrical application conditions (input voltage, switching frequency, and
output current) and ambient temperature, the heat produced by device losses could
increases the junction temperature over its absolute maximum rating. The following relation
can estimate the junction temperature of the device:
Equation 22
TJTAR
where T
is the ambient temperature of the application, RTH_JA is the thermal resistance
A
junction to ambient of the package and PTOT is the overall power dissipated by the device.
RTH_JA depends a little bit on the application board but it can approximately considered
equal to 180 °C/W. PTOT is given by:
Equation 23
P
TOTPMOSPSWITCHINGPGATECHARGE
++=
⋅+=
THJAPTOT
-
-
Figure 12. Thermal performance results: V
Figure 13. R
vs. temperature
DS(on)
= 3.7 V V
IN
OUT
= 1.8 V I
= 800 mA
OUT
For a better estimation of the power dissipated it can be useful to consider the MOSFETs
R
20/30 Doc ID 10209 Rev 4
variation with the temperature, shown in the
DS(on)
Figure 13
.

AN1882 Application board
7 Application board
Figure 14. Application board
Demonstration board layout
In the figures below the demonstration board layout is shown.
Figure 15. Component placement
Doc ID 10209 Rev 4 21/30

Application board AN1882
Figure 16. Top side view
Figure 17. Bottom side view
Demonstration board schematic
The very small package and high switching frequency allows a very compact application.
The demonstration board circuit is shown in
22/30 Doc ID 10209 Rev 4
Figure 18
:

AN1882 Application board
Figure 18. Schematic demonstration board
Table 7. Demonstration board part list
Reference Part number Description Manufacturer
C1 ECJ3XBOJ106K 10 µF 6.3 V Panasonic
C2 ECJ4XBOJ226M 22 µF 6.3 V Panasonic
C3 C0406C221J5GAC 220 pF, 5% 50 V Kemet
R1 10 kΩ 1% 0402 Neohm
R2 100 kΩ 1% 0402 Neohm
R3 200 kΩ 1% 0402 Neohm
R4 100 kΩ 1% 0402 Neohm
L1 ELL6GM6R8M 6.8 µH 1.1 A Panasonic
Figure 19. Low noises vs. low consumption efficiencies
Doc ID 10209 Rev 4 23/30

Efficiency results AN1882
8 Efficiency results
Some efficiency results are shown below.
Figure 20. Efficiency vs. output current
Figure 21. Efficiency vs. output current
Figure 22. Efficiency vs. output current
24/30 Doc ID 10209 Rev 4

AN1882 Application ideas
9 Application ideas
9.1 Buck boost topology
In portable applications, the input voltage changes significantly due to the battery discharge
profile, which often depends on parameters like temperature, discharge rate, battery ageing,
etc. Moreover, in certain applications, the output voltage requirements can also change.
This could imply that is not possible to provide the desired regulated output voltage by using
the simple buck topology. This problem is often present, for example, in systems using a
single Li-Ion cell, whose voltage profile changes from 4.2 V down to 2.7 V or less. In fact, in
these systems, a 3.3 V output is normally required to power processor I/O, memory and
logic. Adopting the buck topology, the 3.3 V output can be regulated until the battery voltage
is approximately 3.4 V, also depending on the minimum dropout of the regulator. Depending
on the battery type and conditions, this would leave unused some 20%-30% of its capacity.
Another application, even more critical, is the power management of 3G phones, where a
3.7 V or more can be required to power the RF power amplifier (PA). In order to use the full
battery capacity also in these applications, a positive buck/boost topology can be used.
Figure 22
standard buck, depending on the battery discharge profile and the load conditions. In fact,
the efficiency loss of the buck/boost topology can be translated into an equivalent loss in
battery capacity. This can then be compared with the gain in battery capacity due to the fact
that it is used over the full voltage range.
shows how to implement it. This topology can be more suitable, compared to a
Figure 23. Positive buck boost application. 1 Li-Ion cell to 3.3 V@0.25 A
9.2 White LED
White LEDs are now widely used both for LCD backlighting and for illumination. Since their
brightness is proportional to the current flowing through them, a current control loop must be
implemented instead of a voltage one. The device can be used in current control
architecture by simply inserting a sense resistor between the FB and GND pins and
connecting the LED in series with it. The loop will set 0.6 V across the sense resistor, and
so, a constant current flowing through the LED. The current, and by consequence, the
brightness, can be adjusted by changing the resistor value or the voltage across it (by
partitioning the FB pin voltage). The forward voltage across a white LED is approximately
3.6 V and so, depending on the input source, appropriate topologies must be used.
Doc ID 10209 Rev 4 25/30
Application ideas AN1882
9.2.1 Driving white LEDs: buck topology
The simple buck topology can be used when the input voltage source is higher than
approximately 4.5 V that is the case, for example, with the USB bus.
Figure 24. Buck topology schematic
In this case, the maximum device current (800 mA, continuous) can be delivered to the LED.
Moreover, in this topology, the efficiency is maximized.
9.2.2 Driving white LEDs: boost topology
When the input voltage source is always lower than 3 V (that is the case, for example, of 2
cells of a NiMH battery) a boost topology must be implemented, as shown in
Figure 25. Boost topology schematic
Figure 24
.
In this case, according to the boost topology, the maximum current that can be delivered
depends on the duty cycle. The relationship between the output current and the internal
switch current (assuming a negligible current ripple and 100% efficiency) is given in
Equation 24
26/30 Doc ID 10209 Rev 4
:

AN1882 Application ideas
Equation 24
I
OUT
IS
WITCH
1D–()=
This topology is possible because the input source is a battery, and thus must not be
referred to ground.
A drawback of this approach, intrinsic to the boost topology, is that a path between the input
and output is always present. This does not allow effective short-circuit protection and can
generate a battery discharge also when the device is turned off.
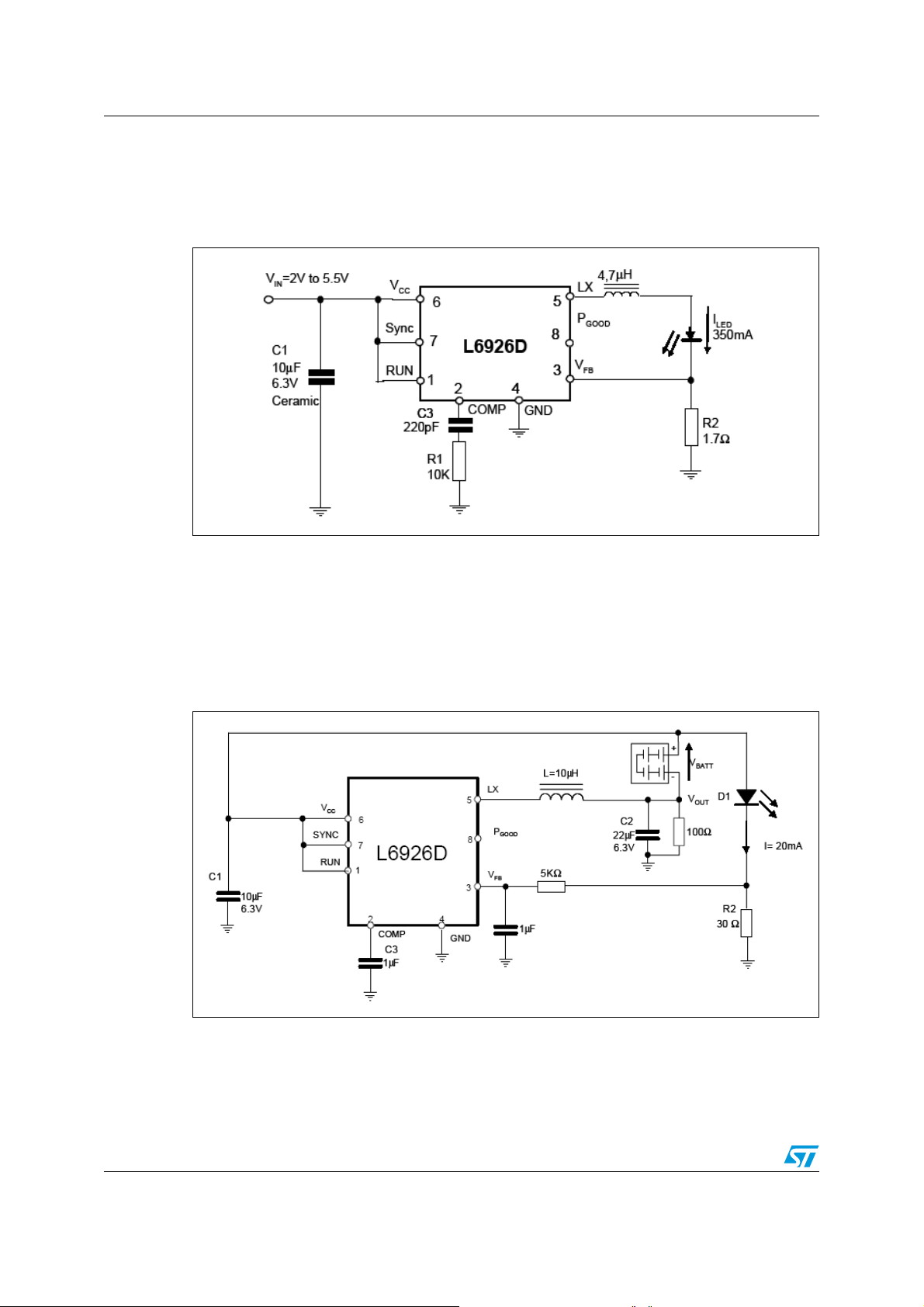
9.2.3 Driving white LEDs: buck/boost topology
In case a single Li-Ion cell is used at the input, a buck/boost topology can be used, as shown
in
Figure 25
Figure 26. Buck boost topology schematic
.
The relationship between the output current and the switch current is the same as the boost
topology. An advantage of this topology compared with the boost, is that when the device is
turned off, there is no current path between the input and the output. This allows an effective
short-circuit protection and minimizes the current drawn from the battery when the device is
turned off.
A dimming control can be developed by turning on and off the device with a frequency of
around 100-200 Hz in order to avoid LED flickering. Another way to implement the led
dimming is to reduce the voltage drop across the resistor in series to the LED to a partition
of the FB voltage. The
Figure 27
and
Figure 28
shows the relative circuits.
Doc ID 10209 Rev 4 27/30

Application ideas AN1882
Figure 27. PWM brightness control
Figure 28. Analog brightness control
Both of solutions change the output current by changing then FB voltage. In the
used a DC voltage; instead in the
Figure 27
is used the average voltage coming from the
PWM signal.
Figure 26
is
28/30 Doc ID 10209 Rev 4

AN1882 Revision history
10 Revision history
Table 8. Document revision history
Date Revision Changes
03-Nov-2007 1 Initial release
08-Oct-2008 2
26-Feb-2009 3 Modified:
13-Apr-2012 4 Modified: L1 part number and description
Document reformatted. No content change
Changed:
Figure 13
Section 5.1.1
Table 7 on page 23
Doc ID 10209 Rev 4 29/30

AN1882
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY TWO AUTHORIZED ST REPRESENTATIVES, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2012 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
30/30 Doc ID 10209 Rev 4
 Loading...
Loading...