

AN1711
APPLICATION NOTE
SOFTWARE TECHNIQUES
FOR COMPENSATING ST7 ADC ERRORS
INTRODUCTION
The purpose of this document is to explain in detail some software techniques which you can
apply to compensate and minimise ADC errors. The document also gives some general tips
on writing software for the ADC. For a list of related application notes that contain other useful
information about ADCs see section 6 on page 39.
This document provides some methods of calibrating the ADC. Some ADC errors like Offset
and Gain errors can be cancelled using these simple software techniques. Other errors like
Differential Linearity Error and Integral Linearity Error are associated with the ADC design and
cannot be compensated easily.
The example software provided with this application note is explained in brief in section 5 on
page 35.
Rev. 1.0
AN1711/0804 1/40
1

Table of Contents
1 GENERAL SOFTWARE CONSIDERATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1 CHECKING FOR FADC (MAX) SUPPORTED BY THE DEVICE . . . . . . . . . . . . 4
1.2 SELECTING CONVERSION CHANNEL (AND STARTING CONVERSION) . . . 5
1.3 POLLING FOR END OF CONVERSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 ADC CONVERSION RESULT FORMAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 READING THE ADC CONVERSION RESULTS . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 ENTERING HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.7 USING A TIMER TO MAKE PERIODIC CONVERSIONS . . . . . . . . . . . . . . . . . . 6
1.8 USING A 10-BIT ADC AS AN 8-BIT ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.9 COMBINED REGISTER FOR CONTROL BITS AND LSB OF CONVERSION RESULT 7
1.10ZOOMING TO LOW VOLTAGE SIGNALS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 SOFTWARE TECHNIQUES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 AVERAGING TECHNIQUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2 AVERAGING BY QUEUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 HISTOGRAM TECHNIQUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 NOISE FILTERING ALGORITHM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 REDUCING SYSTEM NOISE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1 INSERT “NOP” WHILE CHECKING FOR EOC . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 USING SLOW MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 USING WAIT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4 EXECUTING CODE FROM RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 CALIBRATING THE ADC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1 CALIBRATION ISSUES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 CALIBRATION METHODS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.1 Use accurate voltage reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2/40
1
40

Table of Contents
4.2.2 Use of external DAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2.3 Maintaining a Lookup table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2.4 Linear compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.5 Zone compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2.6 Autocalibration for Offset and Gain errors . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.7 Calibration for Errors using 2 different zones . . . . . . . . . . . . . . . . . . . . . . 33
5 SOFTWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.1 FILE PACKAGE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.1.1 ADC_tech.h . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1.2 ADC_tech.c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1.3 Main.c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2 DEPENDENCIES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.3 GLOBAL VARIABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.4 INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.5 CODE SIZE AND EXECUTION TIME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 RELATED DOCUMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
1 GENERAL SOFTWARE CONSIDERATIONS
This section gives some basic guidelines for programming the ADC.
General Procedure
■ Check for f
■ Select the conversion channel (and start conversion)
■ Poll for End of Conversion
■ Read the ADC conversion results
Special Procedures
■ Entering HALT mode
■ Using a timer with the ADC to perform periodic conversions
Other Special Features
Not all ST7 ADCs have the same features, refer to the datasheet of the ST7 product you are
using for specific information. Depending on the device, you may need to apply these tips in
your ADC software:
(max) supported by the device
ADC
■ Using 10-bit ADC as 8-bit ADC
■ Handling Control Bits located in same register as Data LSBs
■ Zooming to low voltage signals with embedded amplifier
1.1 CHECKING FOR F
Before configuring the ADC and starting any conversions, you need to check the f
(MAX) SUPPORTED BY THE DEVICE
ADC
ADC
maximum supported by the device. This value is documented in the ST7 datasheets, you should
refer to the ADC electrical characteristics section.
For example:- Some devices have a SPEED bit for working at f
MHz. For ST7 devices, f
because it will boost f
can be up to 8 MHz. In this case you cannot utilize the SPEED bit,
CPU
to 4 MHz, which is greater than the allowed maximum (f
ADC
/2 but the f
CPU
(max) is 2
ADC
ADC
(max)
=2 MHz).
If f
at f
Some devices support f
is 4 MHz or lower (in Run or Slow mode), you can use the SPEED bit to run the ADC
CPU
/2, and still respect the 2MHz. f
CPU
(max) = 4MHz. It is thus necessary to check the electrical charac-
ADC
ADC
(max).
teristics before configuring the ADC.
4/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
1.2 SELECTING CONVERSION CHANNEL (AND STARTING CONVERSION)
The ADC control register provides control bits for selecting the conversion channel. Whenever
you change the channel or write in the control register, the ADC conversion starts again (if the
ADC is already enabled). The voltage is sampled from the selected channel.
There is no stabilization time required by the ADC after changing the conversion channel and
starting conversion. Please refer to the datasheets.
1.3 POLLING FOR END OF CONVERSION
The ADC status register has an EOC bit which is for notifying the end of conversion. In some
ST7 devices this bit is named COCO for “conversion complete”.
Once the ADC is enabled, the conversion is started in continuous mode (except in ADCs with
single-conversion feature). When you check and find that the EOC bit is set, the data is available in the data registers (see next section).
1.4 ADC CONVERSION RESULT FORMAT
The conversion result of the ADC is available in the ADC data registers. In devices with an 8bit ADC, an 8-bit register generally called ADCDR, is available for reading the conversion result.
In a 10-bit ADC, 2 registers are available for reading the 10-bit result. The most significant 8
bits are available in a register called ADCDRH and the 2 least significant bits are available in
the other register generally named ADCDRL.
This requires reading the ADCDRL and then ADCDRH. The 10-bit result is obtained by leftshifting ADCDRH by 2 bits and then ‘OR’ing the value of the 2 bits ADCDRL, read previously
into a variable. All ST7 10-bit ADCs use the same format, which makes it easy to port software
from one device to another. Please take care that the 2-bits of ADCDRH are not lost when leftshifting the register by 2 bits. Please refer to the datasheet for the conversion result format.
5/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
1.5 READING THE ADC CONVERSION RESULTS
It is recommended to read the ADCDRL first and then the ADCDRH. When the ADC is in continuous mode, the EOC is set at the end of conversion and a new conversion is started again
(unless the ADC supports one-shot conversion).
The ADC conversion results are not latched on ADCDRL and ADCDRH. This means that if,
between reading ADCDRL and ADCDRH, there is an interrupt which takes a lot of time (more
than the ADC conversion time), then the software will read the ADCDRL from one conversion
and the ADCDRH from another conversion. It is thus recommended to disable interrupts before reading the conversion results from ADCDRL and ADCDRH and then enable interrupts
again.
However, if you are reading the ADC registers (ADCDRL and ADCDRH) in a peripheral interrupt subroutine, for example, if you are reading the registers in a timer interrupt or external interrupt sub-routine then, do not disable and enable the interrupts.
The “Enable Interrupt” instruction in an interrupt subroutine (in concurrent interrupt mode) will
enable interrupts and cause a nested mode interrupt.
1.6 ENTERING HALT MODE
It is always recommended to shut down the ADC before entering the HALT mode. When exiting from HALT mode, put the ADC ON again. The stabilization time for the ADC, after exiting
from HALT is specified in the datasheet.
1.7 USING A TIMER TO MAKE PERIODIC CONVERSIONS
Some applications may have special requirements for ADC conversion. For example, in an
audio application, you may need to sample an audio signal of maximum 3 kHz. You can
choose to sample 6K samples per second or higher (12K samples/s or 24K samples/s). The
ST7 ADCs do not have a feature for doing this.
In this case it is recommended to use the timer and configure it to generate 6K interrupts (or
12K/ 24K depending on the design) per second. In your timer interrupt routine, the ADC conversion results can be read and stored.
This kind of configuration is easy to use because of the very fast conversion time of ST7 ADCs
and the built-in continuous conversion feature.
6/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
1.8 USING A 10-BIT ADC AS AN 8-BIT ADC
The EOC bit is cleared only when you read the ADCDRH. You can use the ADC in 8-bit mode
if you do not need 10-bit ADC resolution. Thus there is no need to read the ADCDRL register.
Here is the software flow:
1. Check for EOC
2. If EOC is set, read the ADCDRH. This clears the EOC bit.
3. Do not read the ADCDRL. It is not mandatory to read this register.
1.9 COMBINED REGISTER FOR CONTROL BITS AND LSB OF CONVERSION RESULT
Some ST7 devices have a single register containing both the 2 least significant bits of the conversion result and by some control bits in the rest of the register. In this case you need to mask
the control bits to filter the 2 bits of the ADC conversion result.
1.10 ZOOMING TO LOW VOLTAGE SIGNALS
Some the ST7 devices (for example ST7LITE) have a built-in amplifier to amplify the input
signal. A control bit is available to switch the amplifier ON.
It is thus possible to zoom for lower voltages by switching the ADC amplifier ON and then
switching it OFF for higher voltages.
This is very useful for interfacing sensors directly connected to the ADC inputs.
7/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
2 SOFTWARE TECHNIQUES
2.1 AVERAGING TECHNIQUE
Averaging is a simple technique where you sample an analog input several times and take the
average of the results. This technique is helpful in eliminating the effect of noise on the analog
input or wrong conversion.
As we take the average of several readings, these readings must correspond to the same analog input voltage. You should take care that the analog input remains at the same voltage
during the time period when the conversions are done. Otherwise you will add digital values
corresponding to different analog inputs and introduce errors.
In other words the analog input should not change in-between the different readings considered for the averaging.
It is better to collect the samples in multiples of 2. This makes it more efficient to compute the
average because you can do the division by right-shifting the sum of the converted values.
This saves CPU time and code memory needed to execute a division algorithm.
For example take 8,16, 32 samples etc., and then take the average.
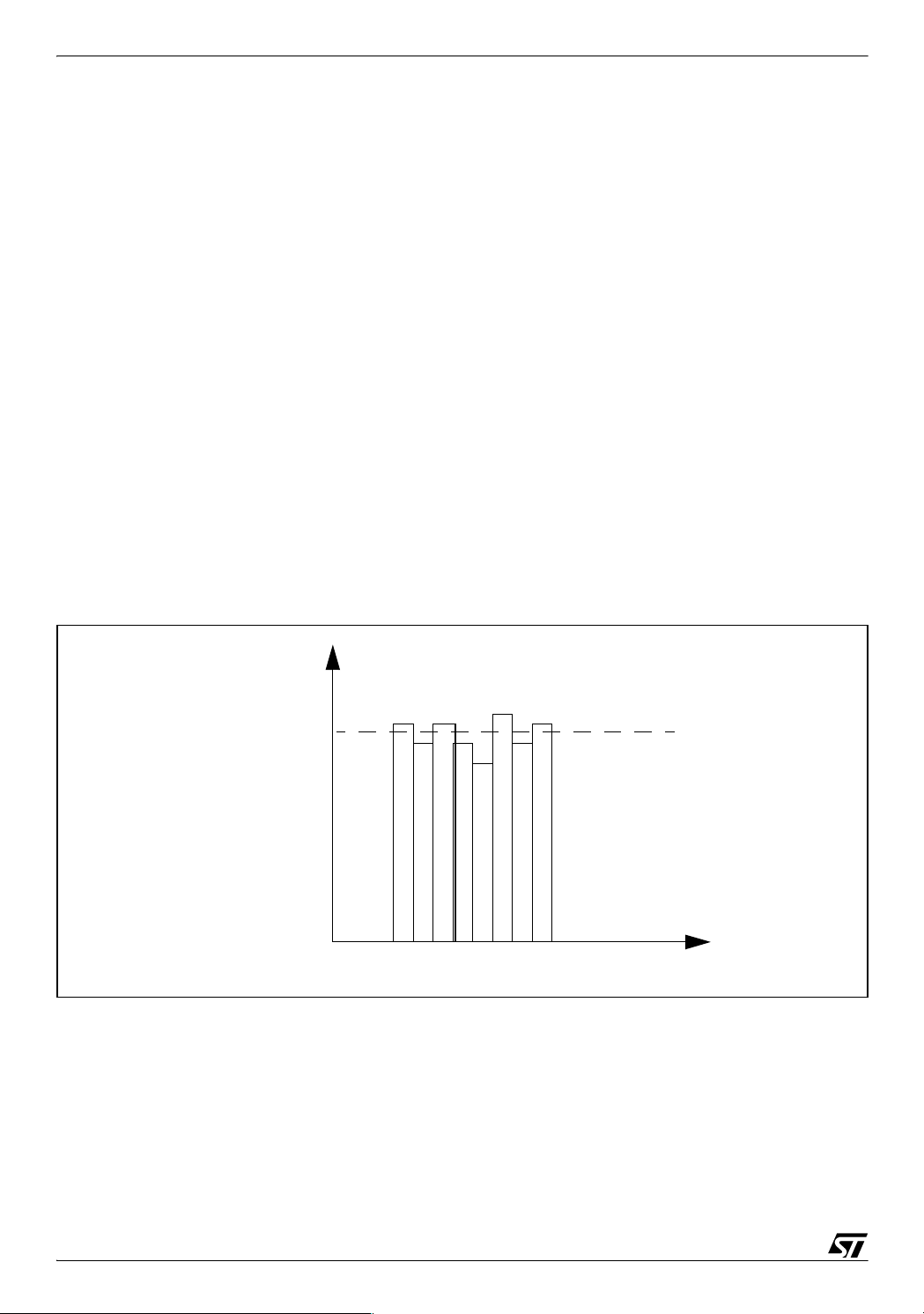
Figure 1. Graphical representation of Averaging technique
Digital
Output
Average
Value
Number of Conversions
Practical measurement
To obtain the results, this averaging technique is used to measure the voltage on one of the
microcontroller’s analog input pins. A total of 16 conversions is taken and the average is calculated. This is done in a loop in the firmware.
8/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
A switch connected to a port pin can be used to inform the software to send the data to a host
PC for display via the SCI communications interface. The port pin used for the switch must be
configured as input. The firmware checks if the switch is pressed (0 is read if switch is pressed
and 1 if open), the ADC readings are then sent to the PC using RS232 communication. You
can use the HyperTerminal application to display the results.
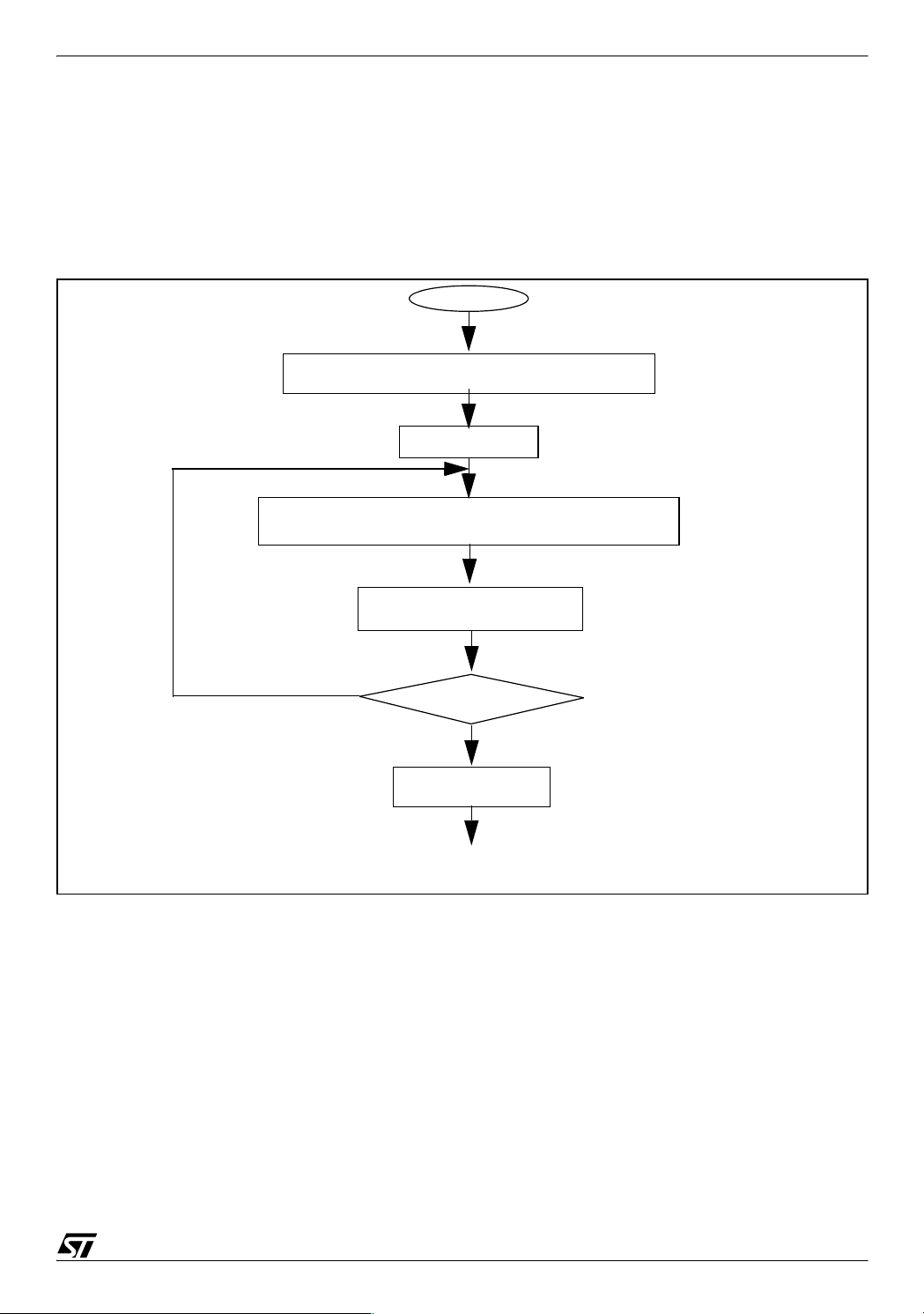
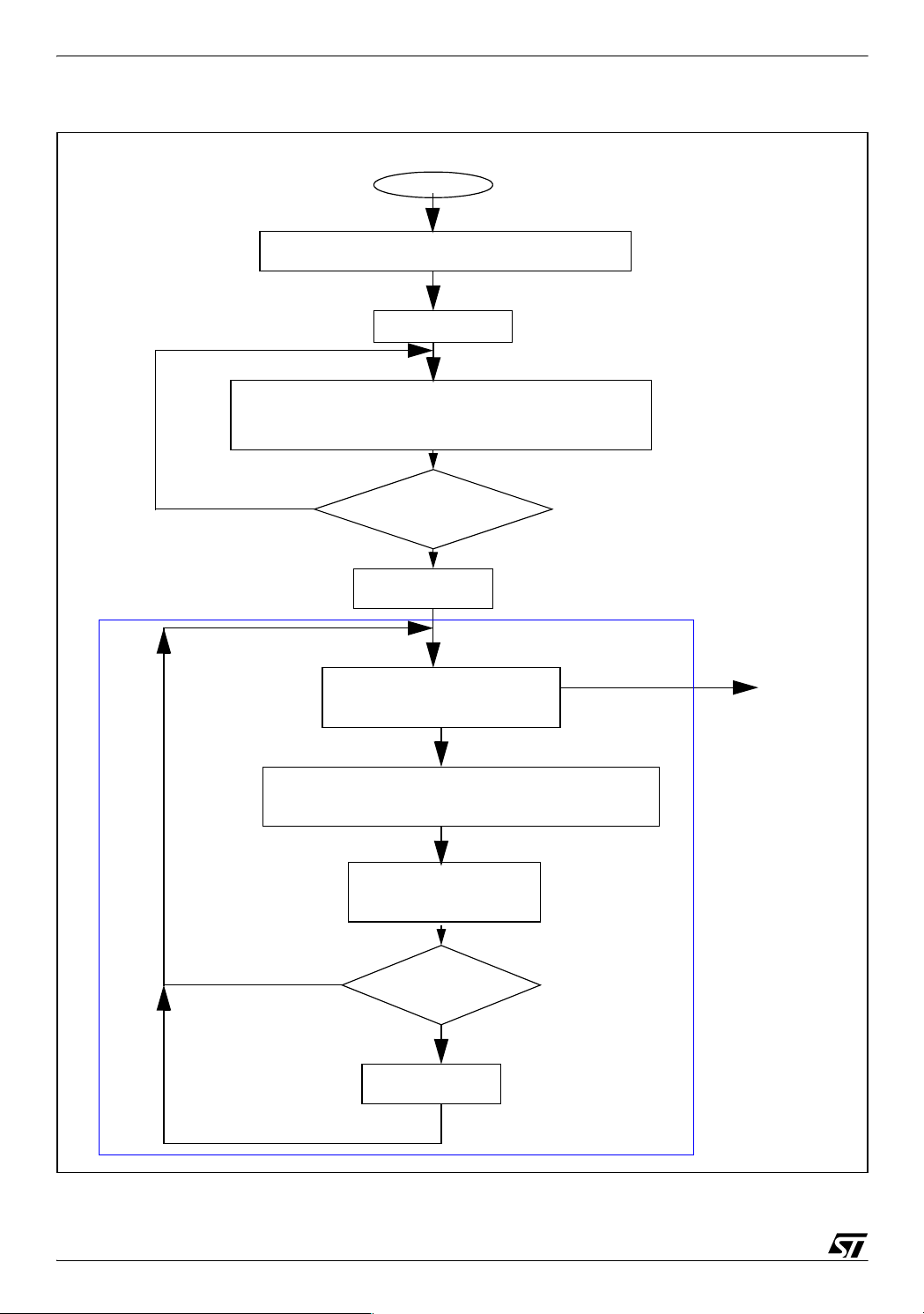
Figure 2. Averaging Algorithm
START
Initialise ADC, variables, and select analog
channel, Total=0
Start ADC
Read the ADC output registers after End of Conversion
Add read value to Total
no
Num. of Conv.
= 16?
yes
Average = total/16
Use the Result
Total conversion time = (number of samples*ADC conversion time)+ computation time.
Computation time = time taken to read the results, add them together and calculate the average by dividing the total by the number of samples.
There is a tradeoff between the total conversion time and number of samples used for averaging, depending on the analog signal variations and time available for computation.
9/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
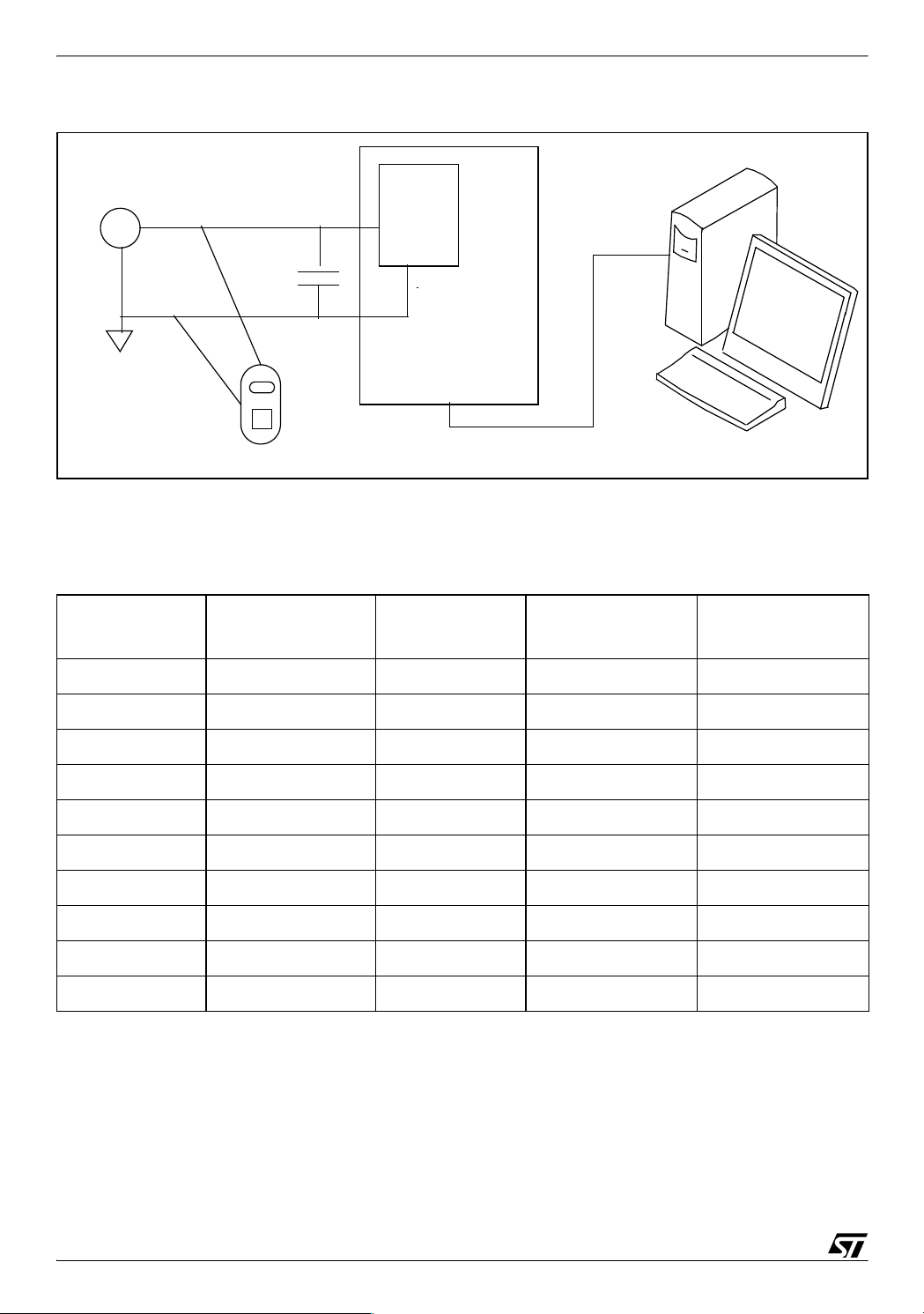
Figure 3. Hardware Setup
Vain
ADC
10nf
Application Board
MultiMeter
The following results are obtained:
V
, VDD= 4.950 V
AREF
Table 1. Averaging Results
Vin
0.5 V 103 103 101 102
1.0 V 206 206 205 205
1.5 V 310 310 309 309
2 V 413 415 414 414
2.5 V 516 516 516 516
3 V 620 621 620 620
3.5 V 723 725 724 724
4 V 826 831 829 830
Ideal
results
RS232 communication
Maximum value
obtained
Minimum value
obtained
Average
4.5 V 930 935 934 934
4.95 1023 1023 1023 1023
Tips:
1. It is always better to take the average of 16 samples rather than to take only one conversion
result. If you take a single conversion it can be erroneous because of noise.
2. It is recommended to always keep the analog path as short as possible between the source
of the analog voltage and the ADC inputs.
10/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
3. Even when you connect a multimeter to the analog input signal, it may introduce noise if the
probes of the multimeter are not shielded. Hence, they act like antennae. The results vary
by several (6 to 7) LSBs. The average value is always near to the center of the variations.
Figure 4. Illustration of Averaging technique
Maximum
Converted
Value
Average
Value
Minimum
Converted
Value
Difference
(Max - Min)
Comments
1. Averaging is the most popular technique because it requires only a little extra RAM space.
2. The disadvantage is, values affected by noise and the least occurring values (outliers) af-
fect the average.
2.2 AVERAGING BY QUEUE
This technique is Averaging of a LIFO queue (Last-in, first-out). The queue is maintained by
using an array to fill the ADC results. To do this:
– Maintain a variable which contains an index for array.
– After every new conversion, overwrite the converted value at the index and then take the
average and increment the index.
– Once the index reaches the end of array, reset the index to the start of array.
Thus, for every conversion you fill the queue and overwrite the old values with the new values.
This technique is useful when the application cannot wait for the required number of conversions because the conversion time is too long. The time required to calculate the average
should be less than the time required to make the total number of conversions.
This technique can be used for slowly varying ADC signals. for example, battery monitoring.
11/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 5. LIFO implementation of averaging
START
Initialise ADC, variables, and select analog
channel, initialise index for array.
Read the ADC output registers after End of Conversion
Store the result in an Array pointed by index.
No
Read the ADC output registers after End of Conversion
Store the result in an Array pointed by index. Overwrite
the original value pointed at index.
Start ADC
Is Array
full
Yes
Index = 0
Take average of all the values
in the array.
Use
the value
12/40
No
Increment the
Index
Index >
Size of Array
index = 0
yes
Queue
implementation

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
2.3 HISTOGRAM TECHNIQUE
A histogram arranges several conversion results in increasing order and calculates the
number of occurrences of each value. The technique is to discard the least occurring values.
We assume that the least occurring values are the effect of a momentary disturbance in the
application.
Figure 6. Overview of Histogram technique
12
11
Number of
Conversions
5
Rejected values
3
1
409 410 411 412408
Digital Output
Histogram representation for 10-bit ADC for V
=2V, V
IN
REF
=5V.
Example
Figure 6 shows an example histogram. It gives the number of occurrences of a conversion
value for V
=2V, V
IN
=5V. The histogram shows 5 different values received after 32 con-
AREF
versions. Each output value is arranged in a bar chart showing the number of occurrences.
(for example value=409 received 12 times out of 32 conversions).
The principle is to reject the values with the smallest number of occurrences, assuming them
to be result of noise etc.
This technique has limitations in practical usage. The disadvantage is more RAM requirement
because all the results are stored in an array. It also requires lot of time for post processing the
data. The processing of data involves finding the total number of occurrences of any value and
then discarding the data which occurred less than a specified number of time.
13/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 7. Histogram technique Flowchart
START
Initialise ADC, variables, and select analog
channel
Read the ADC output registers after End of Conversion
Store the result in an Array
no
Find the number of occurrences of each digital result
Reject the values occurring less than expected number Take average
Start ADC
Is
Array filled
?
yes
of other valuesof times
Practical measurement
You can test this technique using a hardware setup similar to the one shown in Figure 8. The
eliminated value was also captured on HyperTerminal. Only last eliminated value was displayed on HyperTerminal.
A Switch connected at a port pin was used to inform the software to send the data on SCI communication. The port pin was configured as input and when, the switch was pressed ‘0’ is read
on this pin, the ADC readings were then sent to the PC using RS232 communication. These
readings were read on the HyperTerminal and noted.
A function generator is used in lab to introduce noise in the neighbouring pin of analog signal
being converted so as to generate the noisy conversions. This neighbouring pin is also configured as floating input.
14/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 8. Hardware setup
Function
generator
Vain
10nf
AIN1
AIN0
ADC
Application Board
MultiMeter
RS232 communication
Figure 9 shows how the data is displayed. A noisy conversion is shown and it can be noted
that the result of the histogram technique is better than the averaging technique.
Figure 9. Illustration of histogram technique
Maximum
converted
value
Rejected
value
(last)
Noisy
Conversion
Minimum
converted
value
Average
Histogram
Value
technique result
15/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Comments
1. The Histogram technique requires lot of RAM for storing the data.
2. It takes a lot of time to process the data to find the outlier conversion results caused by
noise.
3. This technique is mostly used to analyze ADC performance and not in the final application
because of the above disadvantages.
4. If the outlier results caused by noise are symmetrically placed around the expected result
then the averaging technique can be as good as the histogram technique.
5. If the results received do not vary much, then it is better to use averaging.
Algorithm improvement
The histogram technique algorithm can be further improved by not storing the converted
values. Instead, an array can hold the number of occurrences of each result as an offset from
the first digital value. If the first conversion is disturbed by noise, then the array size limitation
will be a problem.
16/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
2.4 NOISE FILTERING ALGORITHM
During ADC conversions it is possible that a small number of results are received which are totally different from the majority of values. These are called outliers. These may be the result of
induced noise in the system. Outliers should be filtered so that the average result is not affected by them. The flowchart shows how this algorithm works.
Figure 10. Flow chart for noise filtering
START
Initialise ADC, variables, and select analog channel
Ignore the value
Reset the counter
and take fresh
readings
Take ADC converted value after
End of conversion
If first sample then use this value as reference for noise
filtering
no
Check
sample = (+/-)expected
range
?
yes
Is
16 samples
over
?
yes
no
Average
Use the value
17/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Practical measurements
You can test how this works in practice using a hardware setup like that shown in Figure 8.
The objective is to eliminate the errors resulting from noise in the analog input pin of the microcontroller. The loop takes 16 conversions and finds if the values received are within the
range. If the values are out of range, a new conversion cycle starts, ignoring the results received and resetting all the variables.
A switch connected to port pin can be used to trigger the software to send the conversion results to the PC using RS232 communication. The results can be displayed on the PC screen
using the HyperTerminal as shown in Figure 11.
You can use a function generator to introduce noise in the pin next to the analog signal being
converted and to generate conversion errors.
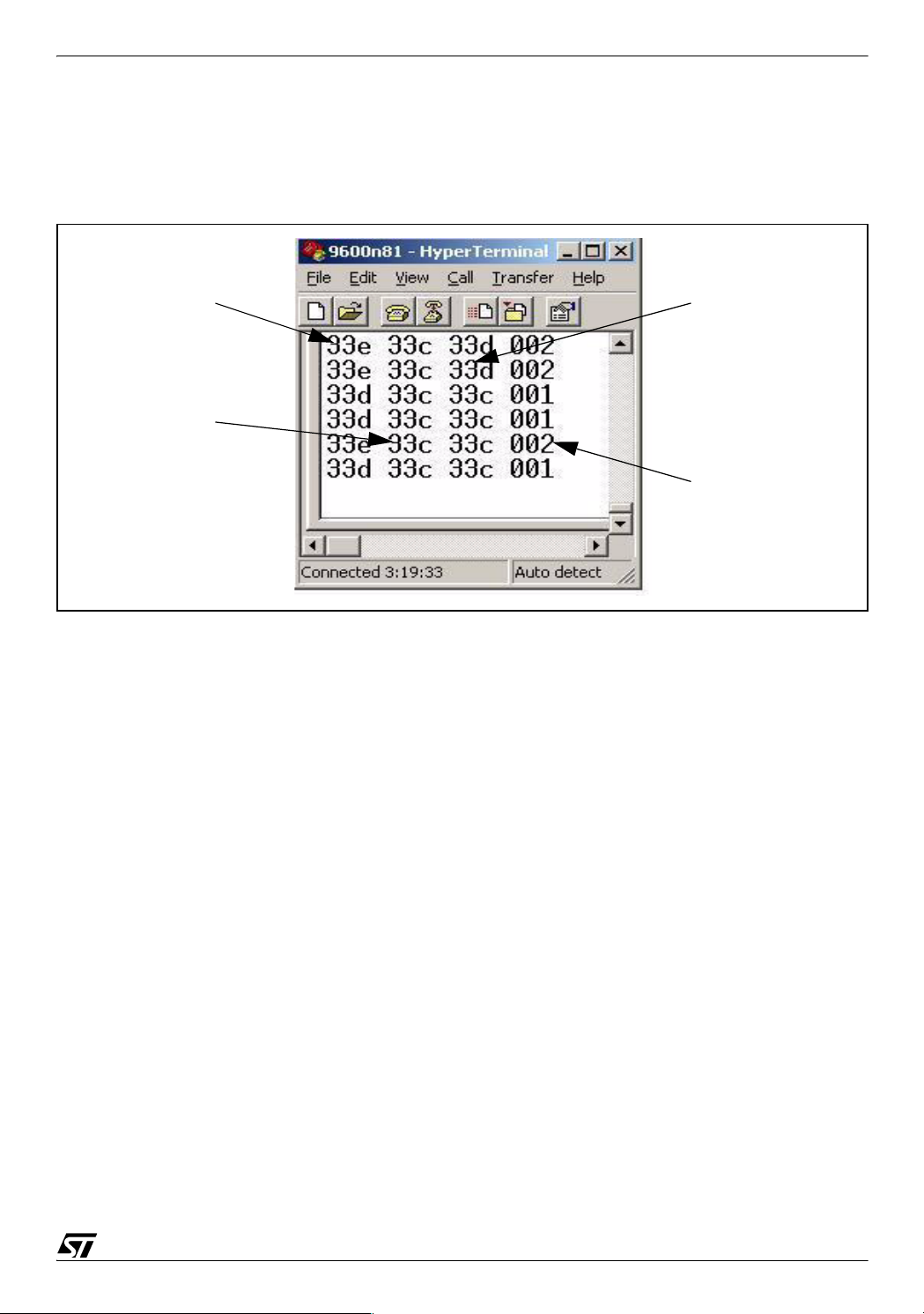
Figure 11. Illustration of noise filtering
Maximum
converted
value
Rejected
value of
previous
loop
Noisy conversion
Minimum
Average
converted
value
Comments
1. The code eliminates the outlier values even if the first conversion in the loop is noisy.
2. Note that the conversion loop is restarted when a noisy value is received, so if the environment is very noisy then it is very important to define the proper range for filtering the results.
3. In noisy environments, the conversion loop could take too much time, making endless conversions and rejecting values. You can avoid this by putting a timeout variable in your program.
4. This technique filters the same way as the histogram technique but it is more efficient in
terms of RAM usage and execution.
5. This technique is more accurate than averaging because it takes care of outlier results,
however it uses more RAM and takes more execution time for the same number of conversions.
18/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
3 REDUCING SYSTEM NOISE
ADC conversion results are the ratio of the input voltage to the reference voltage. If there is
noise in the reference voltage, then the results may be not be accurate. Both hardware and
software design are responsible for reducing the noise.
The execution of code generates some non-negligible noise on the internal power supply network of the microcontroller. To filter this noise, the V
DDA
(or V
pins are available on the microcontroller package so you can connect a capacitor filter to these
power supply pins to filter high frequency noise. Sometimes these power supply pins may not
be available on the package with low pin count.
In any case, you can reduce the generation of internal noise by applying some software techniques and making use of the microcontroller’s power saving modes.
Here are some general software design tips for reducing system noise:
– Do not start transmission on any communication peripheral just before starting the ADC con-
version. The toggling of I/Os may create some noise in the supply voltage.
– Do not toggle high-sink I/Os connected to relay coils etc., which cause noise ripples in the
power supply.
AREF
) and V
analog supply
SSA
– Use power saving modes like “Slow” mode and “Wait for Interrupt” mode.
3.1 INSERT “NOP” WHILE CHECKING FOR EOC
Do not execute a lot of instructions while ADC conversion is in progress. Execution of instructions may generate some noise in the power supply. Try to insert the NOP instruction when
polling the EOC bit. This reduces the number of “jump” instructions required but it uses up
some extra program memory to store the NOP op-codes.
In the software example, we used 4 NOP instructions before checking the EOC. It can be calculated from the execution time (NOP=2 cycles, BTJF = 5 Cycles) that once the ADC is put
ON and EOC is set, the execution of the code takes a minimum of 4 cycles to execute the
BTJF instruction with 4 NOP instructions.
Code in “C” Corresponding assembled code in assembly
ADC_SET_START;
do {
asm Nop;
asm Nop;
asm Nop;
}while (!(isADC_EOC_SET));
BSET ADCCSR,#5
NOP ; 2 cyc
NOP ; 2 cyc
NOP ; 2 cyc
BTJF ADCCSR,#7,*-3 ; 5 cyc
Similarly if 1 NOP is used, it will take 9 executions of the loop before the routine exits.
19/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
If 2 NOP instructions are used, it will take 7 executions of the loop
If 3 NOP instructions are used it will take 5 executions of the loop
If 4 NOP instructions are used it will take 4 executions of the loop
See: ADC_do_conversion()
3.2 USING SLOW MODE
You can use “Slow mode” to reduce the internal noise generated by the CPU. SLOW mode reduces the CPU frequency f
. This reduces the internal noise because the CPU runs slower
CPU
and executes the code at a lower frequency.
For devices with f
(max)=8 MHz and f
CPU
(max) =2 MHz, you can utilise the SPEED bit
ADC
available in some ADCs. Refer to section 1.1 on page 4. If you set the SPEED bit, you can use
= f
f
ADC
mode and you can set the SPEED bit to make f
/2. So in this configuration you can reduce the f
CPU
ADC
to 4 MHz by setting the SLOW
CPU
(max) =2 MHz.
In the software example: the following sequence is used
1. MCCSR register, keep CP[1:0] = 00. f
CPU
= f
OSC2
/2
2. MCCSR register, Set SMS (Slow mode select) = 1
This configures f
= 4 MHz and f
CPU
ADC
= 1 MHz
3. Set the SPEED bit in the ADCCSR register
This configures f
ADC
= 2 MHz
Use #define ADC_SLOW_MODE_SELECT in adc_tech.h to enable the ADC conversions in
SLOW mode.
3.3 USING WAIT MODE
You can also use WAIT mode to reduce the internal noise generated by the CPU. In WAIT
mode the CPU is OFF and the peripherals are working. Note that some ADCs do not have interrupt capability, but anyhow you can wake up the CPU from WAIT mode by means of a timer
interrupt or an external interrupt.
In the software example, we use the Timer-A output compare interrupt to wake up the CPU
from WAIT mode.
The value to be compared is chosen in order to take enough time to allow one ADC conversion to be completed. We can also use a time period which is equivalent to 2 conversions. This
would guarantee that at least the second conversion is done while the CPU is in WAIT mode.
20/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Programming Tips
1. If you use the timer interrupt to exit from WAIT mode, take care that the time period should
not be defined in such a way that half the conversion is done in WAIT mode and rest when
the CPU is running. Otherwise you will not get the benefit of a conversion done in WAIT
mode.
2. You need to consider the execution done prior to entering WAIT mode. For example, the
ADC conversion is restarted and the WFI instruction is executed. This takes 7 cycles which
is approximately 1µs when f
CPU
=8 MHz.
So, the time programmed in output compare register must be equal to 1us+ADC conversion
time for one ADC conversion.
For 2 ADC conversions, the time will be 1µs+2*ADC conversion time.
3. Please note that the timer reset value is 0xFFFC. This means that it will take 4 timer cycles
to overflow and reset to 0000.
4. On some ST7 devices, the ADC has an End of Conversion interrupt capability, in this case
you can use the ADC interrupt directly to wake up from WAIT mode.
Figure 12. Illustration of Wait mode
First column
is Maximum
value recorded
Second column
is minimum
value recorded
**Rows starting with ‘W’ are results from WAIT mode execution
**Rows starting with ‘A’ are results from execution from flash.
Average
Result
Difference
(Max - Min)
In the software example, we take the time to do two ADC conversions while the CPU is in
WAIT mode. For ST72F324, this is around 16µs. (= 1µs+ 2*7.5µs). So, the timer compare
21/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
value is taken equivalent to 18µs which is 2µs greater than the required time. This is chosen
precisely so that the 3rd conversion is not finished before we read the ADC data registers.
With a timer frequency programmed as 1MHz, the time for comparison is taken as 14. (4
values for 0xFFFC to 0x0000)
Comment
The results obtained from executing the ADC conversion in WAIT mode are more accurate.
This can be seen from the difference between the maximum value and minimum value recorded for an analog input (see Figure 12). However these results can still be affected by external noise.
3.4 EXECUTING CODE FROM RAM
The technique of executing the code from RAM can also be used to reduce noise. This is because the CPU does not access the Flash memory to fetch the op-codes but accesses RAM
instead.
The disadvantage of this technique is that you need spare RAM to act as program memory.
You have to load the ADC conversion function into RAM from the Flash or ROM program
memory at some known free RAM locations and then use the in-line assembly code to execute this function.
In the software example provided, we have used the STACK top memory to execute the ADC
conversion. The ADC conversion function is loaded in the STACK area at address 100h. The
size of the function is 8Bytes. We used these locations because stack-pointer never reaches
these locations in the application. Take care not to use lot of RAM, otherwise the STACK area
will be corrupted by the function and there could be un-predictable results.
22/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 13. Illustration of execution from RAM
First column is
Maximum value
recorded
Second column
is for minimum
value recorded
**Rows starting with ‘R’ are results from RAM execution
**Rows starting with ‘A’ are results from execution from flash.
Average
Result
Difference
(Max-Min)
Comments
1. The results obtained from executing the ADC conversion from RAM are better. This can be
seen in Figure 13 from the difference between the maximum and minimum values. However
the results can still be affected by external noise.
2. There can be cases where execution from RAM and execution from flash give the same re-
sults.
23/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
4 CALIBRATING THE ADC
4.1 CALIBRATION ISSUES
1. If calibration is done on a single channel of the device, the calibration constant is applicable
to all the channels.
2. The ADC conversion errors cannot vary from one channel to another unless the source re-
sistance of any of the analog inputs is different, causing a different voltage drop across the
source resistance. The R
section of the datasheet.
3. Because of positive offset errors and negative gain errors, the actual range of analog input
voltage range will be reduced. The ADC cannot be calibrated outside this range.
Figure 14. 10-bit ADC Calibration Overview
(max) value is provided in the ADC electrical characteristics
AIN
Gain error (negative)
Uncalibrated range
1023
Digital
output
(Decimal
steps)
Ideal range
Actual
transfer curve
Ideal
transfer curve
Uncalibrated
range
V
SSA
Vin
Reduced
Offset
Range
Error (positive)
4.2 CALIBRATION METHODS
The ADC can be calibrated using a known source so as to get accurate results.
4.2.1 Use accurate voltage reference
This is a simple way to calibrate the ADC. A known reference voltage is connected to a free
analog input channel and converted. The digital output received after the conversion can be
compared to the already known correct value. The correction factor is then used to correct all
other the digital values.
Correction factor = known expected value/Actual value
24/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 15. Hardware setup for calibration
V
AIN
AIN0
ADC
Reference
voltage
AIN1
for calibration
Microcontroller
Example
Suppose that the application provides a voltage from a 7805 fixed voltage linear regulator. Because of the tolerance of the linear regulator, the voltage does not stabilise at exactly 5V but
remains at 4.900V.
If the full scale reference voltage V
is 5V, then the result you would expect from converting
DDA
a 2.5V input with a 10-bit ADC is:
(2.5/5)*1023 = 511.5.
So we would expect 512 as converted digital value by ADC.
If the reference voltage is 4.9V the conversion result for 2.5 will be:
(2.5/4.9)*1023 = 521.9
So we will get 522 as converted result.
This means that with a lower voltage reference (4.9V) than the ideal voltage reference (5V),
the ADC will report higher results. So each result should be adjusted by multiplying it with the
calibration constant.
So the calibration constant will be (expected value)/actual value = 512/522 = 0.98
Calibrated ADC result = (calibration constant)*(actual digital result).
Disadvantages
1. The disadvantage of this technique is that the use of very precise voltage references is
costly.
2. The error correction made to the reference voltage is applied to all inputs. If there is an error
in this input voltage then the same error is applied to all analog inputs.
25/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
3. This correction method is an open loop correction method, therefore we cannot guarantee
if the actual correction is done.
4. The ‘calibration constant’ is a fraction, calling for floating point arithmetic which requires a
lot of RAM. To avoid using the floating point library, you can multiply each result by 100 and
divide the final result by 100. This will handle fractions with a precision of up to 2 decimal
places. For more precision, you can use higher values like 1000 or 10000.
5. Some errors may be introduced because of calculations (fractions for example).
Figure 16. ADC Calibration
1023
Digital
output
(Decimal
steps)
Gain error (positive)
Actual
transfer curve
Ideal
transfer curve
Correction
V
SSA
Vcal=2.5V
Vin
Offset error
(positive)
*This diagram is not a representation of the example.
Comments
1. The technique can be useful if the actual transfer curve and ideal transfer curve do not cross
each other. This will be the case when both offset and gain errors are positive.
Also as illustrated in the example, any difference in the reference voltage can be nullified by
this technique.
2. You can use Zener diodes and a potential divider formed by resistors to implement a the low
cost voltage reference. These discrete components have their own tolerances and drift with
temperature etc. so you are advised to verify that the voltage received across the discrete
components is same as the expected voltage.
3. If you use a potential divider as a voltage reference, use it only from a precise voltage
source, and not from a voltage for which calibration is required i.e V
26/40
DDA
of ADC.

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
4.2.2 Use of external DAC
A precise external DAC (Digital to Analog Converter) can be used to provide a software controlled voltage reference. The output received can then be used by the ADC to get the digital
value.
The comparison between the expected and actual value will provide the calibration constant.
Using the DAC creates a closed loop system and hence this technique is very effective.
Disadvantages
1. The disadvantage of this method is the cost of the extra device which is generally high.
2. The DAC will have its own errors which will effect the calibration, therefore a DAC with very
good accuracy is required.
Figure 17. Hardware setup for ADC calibration using DAC
DAC
ADC
Control
Microcontroller
4.2.3 Maintaining a Lookup table
You can maintain a lookup table to correlate the ADC conversion results with the correct result. This requires converting each voltage step with ADC and storing the digital results for
each digital code in non volatile (program) memory. This will use lot of program memory.
For example to maintain the lookup table for all 1024 digital codes would require program
memory equal to 1024 words. This is equivalent to 2KB memory.
For an 8-bit ADC, the program memory required for the lookup table would be 256 bytes.
Comments:
1. This is the fastest method of getting the correct values for any analog input voltage.
2. It is a very time consuming process to take the readings for all 1023 steps and then maintain
the table in the software.
27/40
SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
3. The process can be automated using external calibration. A precise analog source can be
used for this purpose. The software must make the communication between the source and
the device under test.
4. Store the lookup table in EEPROM
The lookup table for different values can be stored in the connected E2PROM. This will make
it easy to update the lookup table by calibrating from time to time.
This technique can be used in production. A known and precise analog input voltage source of
is used in the test setup and the different voltages are produced. The communication between
test setup and microcontroller provides the digital code that can be expected. The actual digital code and expected digital code is then used for making the lookup table.
4.2.4 Linear compensation
Linear compensation can be done using the datasheet values for Offset and Gain errors. The
ideal transfer curve is a straight line from code 0 to 1023 for a 10-bit ADC.
The actual ADC transfer curve is assumed to follow a straight line from first transition (digital
code =1) to last transition (digital code = 1023).
The first transition and last transition error values are known from the datasheet. If the Offset
error is positive and the Gain error is negative then the available range is reduced. In this case
the actual transfer curve will cross the ideal transfer curve.
Figure 18. Offset and Gain error compensation
Ideal range
Gain error (negative)
1023
Digital
output
Actual
transfer curve
(Decimal
steps)
Ideal
transfer curve
Offset error positive
Gain error negative
V
SSA
Vin
Reduced
Offset
Range
Error (positive)
To do linear compensation, the offset and gain errors can be spread over the full range. It can
be noted from the transfer curve that positive offset errors cause the actual result to be re-
28/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
ported as less than the expected result and negative offset error causes the reported result to
be more than the expected result.
For example: Offset error = 3 LSBs
Gain error = -1 LSB
So total error = 4 LSBs for 1023 steps.
To avoid using floating point arithmetic, we can take 1 LSB per 255 steps (approximately) to
be compensated.
Therefore, add 3 to digital results in the range 1-255.
256-510 add 2
511 - 765 add 1
765 - 1023 subtract 1
Caution: This technique is provided for theoretical understanding. The error distribution may
not be linear. Please refer to the Zone compensation as below.
4.2.5 Zone compensation
As explained in the linear compensation technique, the ADC errors may not be equally distributed over the entire analog input range.
There are analog ranges in which there are positive errors and other ranges with negative errors. Figure 19 shows the approximate error distribution curve. The actual values on the Y axis
depend on the device.
Figure 19. Error distribution
LSB
+2.5
0
-2.5
0V Full Scale
Full Scale/2
Thus, we can divide the ADC converted values into zones which have positive and negative
errors. To simplify the calculations we can use following zones for error correction.
29/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
00-0x7F and 0x200 to 0x27F: +2
0x80-0xFF and 0x280 to 0x2FF: +1
0x100-0x17F and 0x300 to 0x37F: -1
0x180-0x200 and 0x380-0x3FF: 2
4.2.6 Autocalibration for Offset and Gain errors
Approximate Offset and Gain errors can be calculated by software and external hardware and
these parameters can be used for calibrating the ADC. Use a spare analog channel for calculating the offset and gain error. Use an external resistor network to get the known voltages
near to ground and V
Do the ADC conversion on this spare ADC channel and calculate
DDA.
the Offset and Gain error.
Figure 20. Hardware setup for calculating offset and gain errors
V
AIN
AIN0
V
DDA
\/\/\/\/\/\/
R1
\/\/\/\/\/\/ \/\/\/\/\/\/
R2
AIN1
AIN2
ADC
R3
V
SSA
Microcontroller
Example:
Get the low voltage on AIN2 equivalent to 10LSB and get the voltage on AIN1 as (1023-
10)LSB for a 10-bit ADC. After doing the ADC conversion on AIN2, the digital code received
can be compared to 10LSB and offset error can be calculated. This will be an approximate
value and assumes a straight line transfer curve from the first transition to the 10LSB. Similarly
gain error can be calculated and compensated.
The resistor should be precise with less than 1% tolerance.
Resistance values chosen were R1=R3=100 Ohm, R2=9.8K Ohm.
DDA
= 5V,
For V
Expected digital output on AIN2 = (100/10K)*1023 = 10 (approx.)
Expected digital output on AIN1 = ((100+9.8K)/10K)* 1023 = 1012.7 = 1013 (approx.)
30/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Offset error (approx.) = Ideal digital value - Actual digital value
Eo approx. = 10-(DIgital code AIN2)
Gain error (approx.) = Actual digital value - Ideal digital value
Eg approx. = (Digital code AIN1)-1013
Please note that the offset error is the difference between first actual transition and first ideal
transition. When the actual digital code for same input voltage is received less than the expected (ideal) analog input, this means that a higher input voltage will be required to produce
the same digital code. This results in a positive offset error. So we have reversed the polarity
and used the ideal digital value - actual digital value, instead of actual analog value- ideal analog value. This calculation is approximate. The results received thus can be used for calibrating the ADC.
Similarly we can calculate the Gain errors.
Mathematic calculations
Assuming the ADC transfer curve is a straight line, we obtain the linear function:
Y= ax+b .........[1]
where Y is the converter output i.e digital code
a is the slope of the transfer curve
x is the input/ actual reading
b is the offset
For the 1st conversion result of an input voltage equivalent to 10LSB:
Y1 = a * x1 + b .... [2]
For the 2nd conversion result of an input voltage equivalent to 1013LSB:
Y2 = a * x2 + b ..... [3]
Subtracting [3] - [2]
Y2-Y1 = a (x2-x1) ......[4]
slope a = (Y2-Y1)/(x2-x1) ....[5]
Putting this value of ‘a’ in the equation [2]
b = Y1- ((Y2-Y1)/(x2-x1)) * x1 .....[6]
as, Y = ax + b
x = (Y-b)/a
31/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Therefore after getting the ADC converted values (Y) we can calculate the actual or ideal analog input signal (x) after knowing the slope of transfer curve (a) and offset constant (b).
Practical measurement
To test the calibration technique, we can use the test setup shown in Figure 20. Analog
Channel 1 is used for gain error calculation and Channel 2 was used for offset calculation. The
test results shown in Table 2. were obtained.
To avoid using floating point variables and the floating point library, all the calibration constants were multiplied by a constant N (= 1000000) and ‘long’ type variables are used.
= 4.9814 V
V
REF
Table 2. Calibration Results
Vin
0.509 V 104 102 103
1.005 V 206 205 206
1.502 V 308 309 309
2.005 V 412 413 412
2.503 V 514 514 513
3.001 V 616 616 617
3.504 V 719 720 718
4 V 821 824 821
4.5 V 924 927 924
4.97 1020 1023 1018
Ideal
results
Recorded
value
Calibrated
Comments
1. It can be noted that calibration helps eliminate the errors.
2. In most cases the calibrated value was close to the ideal or expected value.
value
3. Calibration results are much better in the higher voltage range (>3.5V).
4. For some analog input ranges (approx. 2V to 3V) the recorded values are the same as ex-
pected, and the calibration introduced some errors. This is because of non linearity of the
ADC. We have assumed the actual transfer curve was a straight line, whereas in practice
the ADC transfer curve may exhibit non-linearity.
32/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
Figure 21. Illustration of calibration
Calibrated
Recorded
value
value
4.2.7 Calibration for Errors using 2 different zones
We can extend the technique mentioned above to do 2-zone calibration. This is required because of the linear distribution of errors from offset error to mid-voltage and then from midvoltage to gain error as shown in Figure 22.
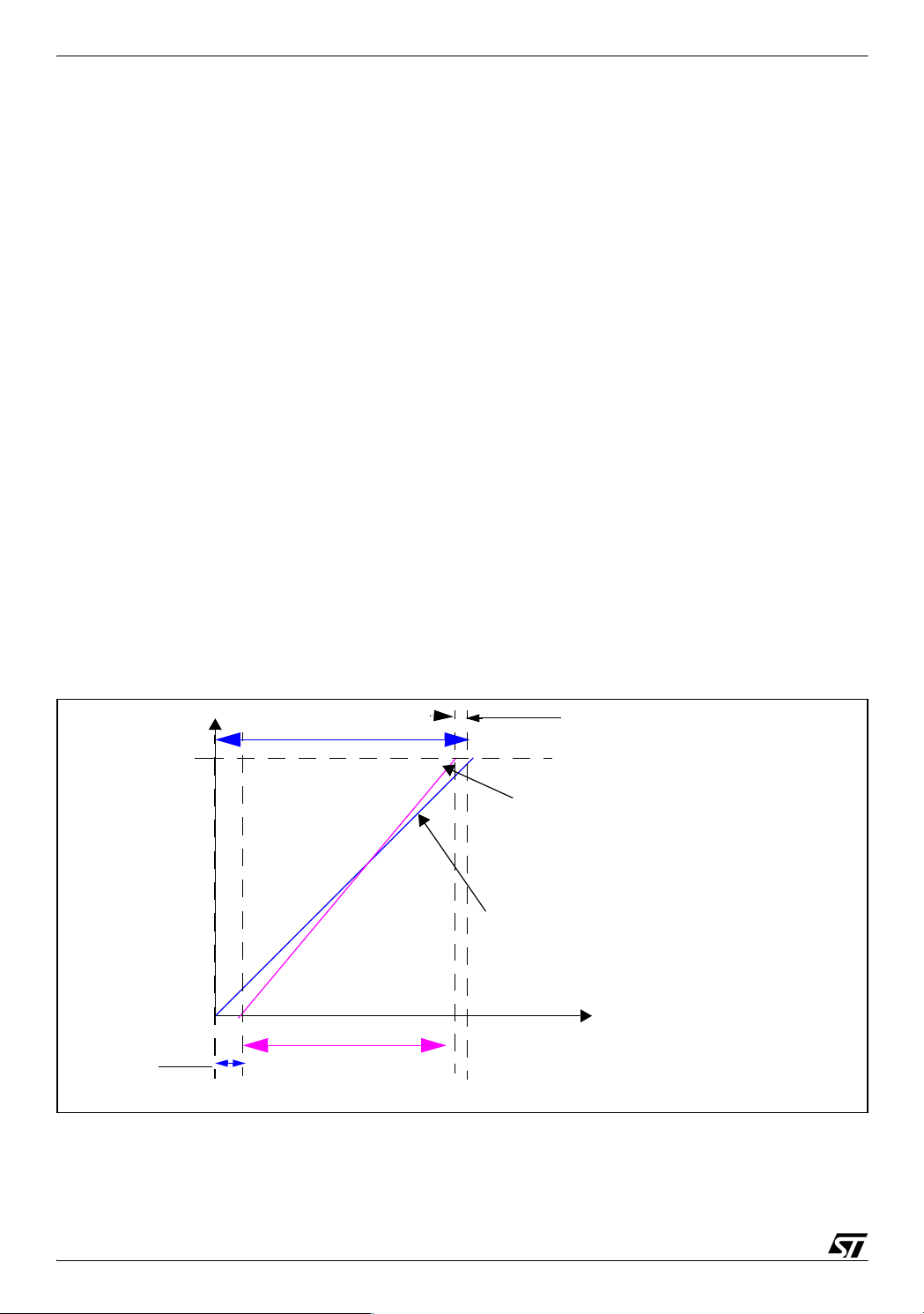
Figure 22. Calibration for 2 zones
Ideal range
Gain error (negative)
1023
Digital
output
(Decimal
steps)
V
SSA
509
Ideal
transfer curve
517
Actual
transfer curve
Vin
Offset
Error (positive)
uncalibrated
range
**Graph not to scale
In addition to approximate Offset and Gain errors we need to calculate the error around the
center of the analog voltage range. A small voltage range around mid-voltage is to be ignored
33/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
for calibration and this range will not be calibrated. Thus, we need 4 external voltage references for calibration.
For example:- We can choose to calculate the offset error at 10LSB and take the 2nd point of
the line at 509LSB.
We can ignore the analog input range from 509LSB to 517LSB.
For second line we take the first point as 517LSB and second as 1013LSB.
Figure 23. Hardware setup for 2-zone calibration
V
AIN
AIN0
ADC
V
DDA
\/\/\/\/\/\/
AIN1
AIN2
AIN3
AIN4
Microcontroller
\/\/\/\/\_/\/\/\/\/\_/\/\/\/\/\_/\/\/\/\
V
SSA
Using the same software technique mentioned in Section 4.2.6 the actual value can be calculated from the converted value.
Comments
1. This technique enables you to able to get close to the ideal result.
2. It requires external resistors and uses four analog channels for calibration and hence, it is
costly.
3. Some current will flow from the external resistor network.
34/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
5 SOFTWARE
The software available with this application note is provided in C language. The software is
provided for guidance and you can use it directly or change it to meet your requirements. For
demonstration and easy usability, some parts of the code are repeated. For example, averaging etc.) is tested on ST72F324 and ST72F521 but it can be used with other ST7 devices
also. The software covers the following techniques.
Table 3. General techniques for improving ADC accuracy
No. Software technique Software available
1 Averaging Yes
2 Averaging using queue implementation Yes
3 Histogram technique Yes
4 Noise filtering technique Yes
Table 4. Noise reduction techniques
No. Noise Reduction technique Software available
1 Using Slow mode Yes
2 Inserting NOPs Yes
3Using WFI mode Yes
4 Executing code from RAM Yes
Table 5. Calibration techniques
No. Calibration technique Software available
1 Use of accurate voltage reference No
2 Use of external DAC No
3 Maintaining lookup table No
4 Using Linear compensation No
5 Zone compensation Yes
6 Autocalibration of offset and gain errors Yes
5.1 FILE PACKAGE
The package provided with this application note contains the workspace, make-files and the
source code.
You can include ADC_tech.c and ADC_tech.h in your workspace to use the ADC software
techniques.
35/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
5.1.1 ADC_tech.h
This file contains the Parameters, Constants (#define), and some macros, which are used in
the ADC_tech.c file
It also contains the prototype declarations for the functions contained in the ADC_tech.c file.
5.1.2 ADC_tech.c
This file contains the software for the ADC techniques described in this application note. It
contains the different functions written in C and inline assembly code is used wherever necessary.
5.1.3 Main.c
This file contains the various test routines for demonstrating the ADC techniques. The data received from the different routines is transmitted to the PC through the RS232.
5.2 DEPENDENCIES
The software uses the ST7 Software Library, which is freely available on http://mcu.st.com
This library path used is c:\ST7_lib. You are requested to modify the path in default.env file to
specify the path of ST7 software library.
The software was tested using the HIWARE toolchain.
Some parts of the source code directly access the hardware registers which is not normally
recommended when using ST7 Library. This is done to reduce the code size and execution
time so as to demonstrate the ADC technique under discussion. Necessary software modifications are done to support this direct access to the registers by including peripheral register
files.
5.3 GLOBAL VARIABLES
The software uses global variables depending on the ADC technique. You can select a technique by enabling the corresponding declaration in adc_tech.h.
Some global variables are used only for demo purposes and they can be enabled by defining
ADC_TEST as 1 in ADC_tech.h
“#define ADC_TEST 1”
All the variables are placed in “default RAM”. Depending on the device, you can place the variables in “short memory” to save code size and execution time.
36/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
5.4 INTERRUPTS
Only one interrupt is used for Timer A. This is used for demonstrating “Wait for interrupt”. You
are advised to make necessary changes in the software when using this technique for example, in PRM file etc.
5.5 CODE SIZE AND EXECUTION TIME
The following table summarises the approximate code size and execution time. Depending on
the compiler and memory placement, these values can change.
The RAM requirements are not provided and you can choose to place the variables as global
or local. For techniques which require arrays, the size of array will define the RAM requirements and it is left up to the user.
Table 6. Code size and execution time
No. Function Name
Averaging technique
1. ADC_get_avgdata 63 311
Averaging using queue implementation
2. ADC_fill_Q 68 178
3. ADC_avg_Q 104 31
Noise filtering technique
4. ADC_getdata_filter_noise 155 717
Histogram technique
5. ADC_getdata_histgrm 669 6550
Execute from RAM
6. ADC_do_Conversion 15 10
7. copy_code_ROM_2_RAM 44 109
8. ADC_get_avg_execRAM 97 541
Code size
(Bytes)
Execution
time
(us)
Zone compensation
9. ADC_zone_compensation 149 24
Wait for Interrupt technique
10. TimerA_Init 19 4
11. ADC_conversion_WFI 14 36**
37/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
No. Function Name
12. TIMERA_IT_Routine 46 11
13. ADC_get_avg_WAIT 129 700
**Time for ADC_conversion_WFI is including 2 ADC conversions done in WFI mode
ADC calibration
14. Get_transfer_line_constant 133 484
15. Get_calibration constant 160 1.2ms
16. Get_corrected_value 113 778
Code size
(Bytes)
Execution
time
(us)
38/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
6 RELATED DOCUMENTS
You can refer to the following application notes for additional useful information:
ADC Application notes
AN1636: Understanding and minimising ADC conversion errors
AN672: Optimizing the ST6 A/D Converter accuracy
AN1548: High resolution single slope conversion with analog comparator of the 52x440
Noise, EMC related documents
AN435: Designing with microcontrollers in noisy environment
AN898: EMC General Information
AN901: EMC Guidelines for microcontroller - based applications
Software techniques
AN1015: Software techniques for improving microcontroller EMC performance
AN985: Executing code in ST7 RAM
39/40

SOFTWARE TECHNIQUES FOR COMPENSATING ST7 ADC ERRORS
“THE PRESENT NOTE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS WITH INFORMATION
REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME. AS A RESULT, STMICROELECTRONICS
SHALL NOT BE HELD LIABLE FOR ANY DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO
ANY CLAIMS ARISING FROM THE CONTENT OF SUCH A NOTE AND/OR THE USE MADE BY CUSTOMERS OF
THE INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.”
Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequences
of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license is granted
by implication or otherwise under any patent or patent rights of STMicroelectronics. Specifications mentioned in this publication are subject
to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics products are not
authorized for use as critical components in life support devices or systems without express written approval of STMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics.
All other names are the property of their respective owners
© 2004 STMicroelectronics - All rights reserved
STMicroelectronics GROUP OF COMPANIES
Australia – Belgium - Brazil - Canada - China – Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
40/40
 Loading...
Loading...