

Sperry Marine NAVIGAT X MK1, 4914-CA, 74807, 4914-CC, 74811 Operation, Installation And Service Manual
lйЙк~нбзеI=fелн~дд~нбзе=~еЗ=pЙкобЕЙ=j~ем~д
lкбЦбе~д=aзЕмгЙен~нбзе=L=hЙЙй=Сзк=cмнмкЙ=oЙСЙкЙеЕЙ
k^sfd^q u jh N
aбЦбн~д=dукзЕзгй~лл=pулнЙгл
qóéÉ=QVNQJ`^I=píçÅâ=kçK=TQUMT=~åÇ=qóéÉ=QVNQJ``I=píçÅâ=kçK=TQUNN
MQVNQJMNOUJMN
MRSPQPLcI=PM=pÉé=OMNQ
kзкнЬкзй=dкмгг~е=pйЙкку=j~кбеЙ=_KsK=EoЙйкЙлЙен~нбоЙ=lССбЕЙF
tзднг~елнкK=NV=√=aJOMMVT=√=e~гДмкЦI=dЙкг~еу
qЙдKW HQVJQMJOVV MMJM=√=c~сW HQVJQMJOVV MMJNQS=√=bJг~бдW лЙкобЕЙKЗЙ]лйЙккуKеЦЕKЕзг
MRSPQPLc k^sfd^q u jh N
© 2014 Northrop Grumman Sperry Marine B.V.
This document and the information herein is the intellectual property of Northrop Grumman
Sperry Marine B.V. [NGSM BV] and it’s associate companies and may not be copied, reproduced
or translated without the express permission of NGSM BV.
Specifications were correct at time of press but may be varied in accordance with NGSM BV’s
policy of continuous product development.
Any technical content should be verified with NGSM BV.
Sperry Marine, with major engineering and support offices in New Malden, England, and
Hamburg, Germany, is part of the Northrop Grumman Navigation & Maritime Systems Division
N&MSD.
oЙоблбзе=oЙЕзкЗ
oÉîK a~íÉ oÉã~êâë
F 30 Sep 2014 Updated version, polar waters recommendations added, recom-
mended install and EMC conditons added, spare parts amended.
E 11 Nov 2013 Factory setting menu (technical pages) amended, service setup 2
amended, installation procedure and power-up function test amended.
D 11 Sep 2013 Updated version, new service setup options (Course Bus, THS/HDT,
ROT filter) added; technical data amended, checklist procedures
added, spare parts added; chapter removal/installation added.
C 08 May 2008 Added new options (AD10 output, alarm mute relay, speed filter).
B 17 Nov 2006 Removed gyrosphere installation/service instructions. These are now
contained in separate documents delivered with the respective gyrosphere and container.
All information regarding the master PCB refers to the new PCB, stock
no. 20672.
A 18 Jan 2005 Initial release.

k^sfd^q u jh N MRSPQPLc
`зенЙенл
p~СЙну=fелнкмЕнбзел
p~СЙну=kзнбЕЙ=`зеоЙенбзелKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK обб
dЙеЙк~д=p~СЙну=fеСзкг~нбзе=Сзк=нЬЙ=lйЙк~нзк KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK оббб
dЙеЙк~д=p~СЙну=fеСзкг~нбзе=Сзк=pЙкобЕЙ=mЙклзееЙдKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK сббб
`Ü~éíÉê=NW fенкзЗмЕнбзе
NKN pулнЙг=aЙлЕкбйнбзеKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJN
fенЙеЗЙЗ=rлЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJN
kзн=fенЙеЗЙЗ=rлЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJN
NKO pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJO
i~ДЙд=~еЗ=нуйЙ=д~ДЙд KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJP
j~бе=ЕзгйзеЙенл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJQ
NKP aЙлбЦе=~еЗ=j~бе=cЙ~нмкЙлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJS
NKQ lйЙк~нбеЦ=mкбеЕбйдЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJT
eЙ~ЗбеЦ=bккзк=i~нбнмЗЙ=`зккЙд~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJV
NKR bс~гйдЙ=pулнЙг=`зеСбЦмк~нбзел KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNN
pн~еЗ~дзеЙ=dукзЕзгй~ллLqj`=pулнЙг KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNN
aм~д=k^sfd^qu jh N=dукзЕзгй~ллLqj`=pулнЙг KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNO
NKS qЙЕЬебЕ~д=a~н~KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNP
^ЕЕмк~ЕбЙл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
lйЙк~нбзе~д=`Ь~к~ЕнЙкблнбЕл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
bеобкзегЙен~д=oЙимбкЙгЙенлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
mзпЙк=pмййду KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNQ
aбгЙелбзел=~еЗ=tЙбЦЬн KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNR
fеймнл=L=lмнймнл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNR
NKT j~кбеЙ=bимбйгЙен=aбкЙЕнбоЙ=b`=aЙЕд~к~нбзе=зС=`зеСзкгбнуKKKKKKKKKKKKKKKK NJNT
`Ü~éíÉê=OW léÉê~íáçå
OKN lйЙк~нбеЦ=`зеЗбнбзел KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJN
OKO aáëéä~ó=~åÇ=léÉê~íáåÖ=hÉóë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJO
`зенкзд=~еЗ=aблйд~у=rебн=E`arF KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJO
OKP bснЙке~д=`зенкзд=aЙобЕЙл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJP
OKQ mзпЙкJмй=pЙимЙеЕЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJQ
OKR pЙдЙЕнбеЦ=нЬЙ=^ЕнбоЙ=eЙ~ЗбеЦ=pзмкЕЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJR
OKS ^ЗамлнбеЦ=нЬЙ=aблйд~у=_кбЦЬнеЙлл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
OKT lйнбзе~д=cмеЕнбзелKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
jмнбеЦ=^д~кгл=oЙгзнЙду KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
oЙоЙклбеЦ=нЬЙ=eЙ~ЗбеЦ=aблйд~у=ENUMш=зССлЙнFKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
oЙлЙннбеЦL^ЕвезпдЙЗЦбеЦ=~=`Йенк~д=t~нЕЬ=^д~кг KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
OKU léÉê~íáåÖ=jÉåì KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT
bенЙкбеЦ=~еЗ=nмбннбеЦ=нЬЙ=j~бе=jЙемKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT
k~обЦ~нбеЦ=нЬЙ=jЙемKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT
ááá

MRSPQPLc k^sfd^q u jh N
pЙдЙЕнбеЦ=m~к~гЙнЙк=pЙннбеЦл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJU
bЗбнбеЦ=m~к~гЙнЙк=s~дмЙл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJU
OKV pЙдЙЕнбеЦ=~=aблйд~у=a~н~=m~ЦЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJV
OKNM j~ем~д=pЙннбеЦл=jЙем KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNM
`~йнбзе=Сзк=pЙдЙЕнбеЦ=~еЗ=bЗбнбеЦ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNM
j~ем~д=pЙннбеЦл=У=lоЙкобЙп KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKOJNN
j~ем~д=pЙннбеЦл=У=m~к~гЙнЙкл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNP
OKNN rëÉê=pÉíìé KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNT
rлЙк=pЙнмй=У=lоЙкобЙп KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNT
rлЙк=pЙнмй=У=m~к~гЙнЙкл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNU
`Ь~йнЙк=PW bккзкл=~еЗ=^д~кгл
PKN ^ä~êã=fåÇáÅ~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
^мЗбДдЙ=^д~кг=fеЗбЕ~нбзеKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
sблм~д=^д~кг=fеЗбЕ~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
PKO ^ЕвезпдЙЗЦбеЦ=^д~кглLjмнбеЦ=нЬЙ=^мЗбДдЙ=^д~кгKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
^д~кг=^ЕвезпдЙЗЦЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
^д~кг=jмнЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
PKP bêêçê=ãÉëë~ÖÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJP
`Ь~йнЙк=QW pЕЬЙЗмдЙЗ=j~бенЙе~еЕЙ
QKN j~бенЙе~еЕЙ=зС=нЬЙ=k^sfd^q=u=jh=N KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
`дЙ~ебеЦ=зС=`згй~лл=eзмлбеЦ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
`дЙ~ебеЦ=зС=^бк=fедЙн=dкбддKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
QKO dукзлйЬЙкЙ=j~бенЙе~еЕЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJO
NUJjзенЬ=j~бенЙе~еЕЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJO
dукзлйЬЙкЙ=oЙйд~ЕЙгЙен=L=cбоЙJvЙ~к=j~бенЙе~еЕЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJP
`Ь~йнЙк=RW mкЙоЙенбоЙ=j~бенЙе~еЕЙ
RKN mкзнЙЕнбеЦ=нЬЙ=dукзлйЬЙкЙ=Скзг=a~г~ЦЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJN
dукзлйЬЙкЙ=a~г~ЦЙ=Е~млЙЗ=Ду=iзп=qЙгйЙк~нмкЙл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJN
dукзлйЬЙкЙ=a~г~ЦЙ=нЬкзмЦЬ=pЬмн=aзпе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJO
RKO oЙгзобеЦ=нЬЙ=dукзлйЬЙкЙ=`зен~беЙк=Скзг=нЬЙ=`згй~лл=eзмлбеЦ KKKKKK RJP
RKP fелн~ддбеЦ=нЬЙ=dукзлйЬЙкЙ=`зен~беЙк=бе=нЬЙ=`згй~лл=eзмлбеЦKKKKKKKKKKKKK RJS
RKQ mзпЙкJмй=cмеЕнбзе=qЙлнKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJV
dукзлйЬЙкЙ=`мккЙен=mкЙдбгбе~кбЙл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJV
m~кнлI=г~нЙкб~дл=~еЗ=нзздл=кЙимбкЙЗKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJNM
mкзЕЙЗмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJNM
`Ь~йнЙк=SW oЙгзо~дLfелн~дд~нбзе=зС=`згйзеЙенл
SKN oЙгзобеЦ=pулнЙг=`згйзеЙенл=Скзг=нЬЙ=`згй~лл=KKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJN
mкзЕЙЗмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJO
SKO fелн~ддбеЦ=pулнЙг=`згйзеЙенл=бенз=нЬЙ=`згй~ллKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJV
mкзЕЙЗмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJV
áî

k^sfd^q u jh N MRSPQPLc
`Ü~éíÉê=TW pулнЙг=fелн~дд~нбзе
TKN fелн~ддбеЦ=oЙЕзггЙеЗ~нбзел KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
mд~ЕЙ=зС=fелн~дд~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
sЙенбд~нбзе=L=qЙгйЙк~нмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
bдЙЕнкзг~ЦеЙнбЕ=fенЙкСЙкЙеЕЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
sбДк~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJO
TKO jÉÅÜ~åáÅ~ä=fåëí~ää~íáçåKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
qк~елйзкнбеЦ=нЬЙ=`згй~лл=eзмлбеЦ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
fелн~ддбеЦ=нЬЙ=`згй~лл=eзмлбеЦ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
TKP bдЙЕнкбЕ~д=fелн~дд~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJQ
^`=pмййду=mзпЙк=`зеСбЦмк~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJQ
tбкбеЦ=rй=нЬЙ=pулнЙг KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJR
TKQ dукзлйЬЙкЙ=fелн~дд~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJS
TKR fебнб~д=pулнЙг=`зеСбЦмк~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJT
`зеСбЦмк~нбзе=зС=нЬЙ=pулнЙг KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJT
cбе~дбтбеЦ=нЬЙ=fелн~дд~нбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJU
TKS ^дбЦегЙен=bккзк=`зккЙЕнбзе KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJV
TKT j~ЦеЙнбЕ=`згй~лл=`~дбДк~нбзеKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNM
TKU fелн~дд~нбзе=`ЬЙЕв=mкзЕЙЗмкЙлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJNP
jЙЕЬ~ебЕ~д=fелн~дд~нбзе=`ЬЙЕв=mкзЕЙЗмкЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNP
bдЙЕнкбЕ~д=fелн~дд~нбзе=`ЬЙЕв=mкзЕЙЗмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNP
bеобкзегЙен~д=`зеЗбнбзел=`ЬЙЕв=mкзЕЙЗмкЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNQ
pулнЙг=`зеСбЦмк~нбзе=`ЬЙЕв=mкзЕЙЗмкЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNQ
`Ü~éíÉê=UW pулнЙг=`зеСбЦмк~нбзе
UKN `зеСбЦмк~нбзе=jЙем=J=pЙкобЕЙ=pЙнмй=N KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJN
pЙнмй=^ЕЕЙлл=`зЗЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJN
pЙкобЕЙJpЙнмй=N=У=lоЙкобЙпKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJO
pЙкобЕЙ=pЙнмй=N=У=m~к~гЙнЙкл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJS
UKO pЙкобЕЙ=fеСз=jЙем=J=pЙкобЕЙ=pЙнмй=O KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOM
pЙкобЕЙ=pЙнмй=O=У=^ЕЕЙлл=`зЗЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOM
pЙкобЕЙ=pЙнмй=O=У=lоЙкобЙпKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJON
pЙкобЕЙ=pЙнмй=O=У=m~к~гЙнЙкл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOO
UKP c~Ензку=pЙннбеЦл=jЙем=EqЙЕЬебЕ~д=m~ЦЙлF KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
pЙнмй=^ЕЕЙлл=`зЗЙKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
qЙЕЬебЕ~д=m~ЦЙл=У=lоЙкобЙп KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
qЙЕЬебЕ~д=m~ЦЙл=У=m~к~гЙнЙкл KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOR
`Ü~éíÉê=VW qкзмДдЙлЬззнбеЦ
VKN qкзмДдЙлЬззнбеЦ=fелнкмЕнбзел KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJN
VKO içÅ~íáçå=çÑ=m~êíë=çå=íÜÉ=j~ëíÉê=m`_ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJO
bсЕЬ~еЦЙ~ДдЙ=`згйзеЙенлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJP
`зееЙЕнзклKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJP
qЙлн=oЙлблнзк=L=qкбгйзнлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJQ
aб~ЦезлнбЕ=ibaлKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJQ
î

MRSPQPLc k^sfd^q u jh N
`Ü~éíÉê=NMW `зккЙЕнбоЙ=j~бенЙе~еЕЙ
NMKN bсЕЬ~еЦбеЦ=нЬЙ=pулнЙг=pзСнп~кЙ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NMJN
NMKO oЙйд~ЕбеЦ=pзЕвЙнЙЗ=f`лKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NMJO
`Ü~éíÉê=NNW k^sfd^q u=jhN=pé~êÉ=m~êíë
NNKN fддмлнк~нЙЗ=m~кнл=iблн=EfmiF=lоЙкобЙп KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NNJN
^ДДкЙоб~нбзел
^ййЙеЗбс
^ pЙнмй=~еЗ=`зеСбЦмк~нбзе=q~ДдЙл
_ aк~пбеЦл
îá
k^sfd^q u jh N MRSPQPLc
a^kdbo
t^okfkd
`^rqflk
kçíÉ
p~СЙну=fелнкмЕнбзел
p~СЙну=kзнбЕЙ=`зеоЙенбзел
The following safety notice conventions are followed throughout this
manual:
A a~åÖÉê notice begins with the named type of
danger and contains an operating or maintenance procedure, practice, condition, statement,
etc., which, if not strictly observed, пбдд=кЙлмдн=бе=
беамку=зк=ЗЙ~нЬ=зС=йЙклзееЙдK
A t~кебеЦ notice begins with the named type of
warning and contains an operating or maintenance procedure, practice, condition, statement,
etc., which, if not strictly observed, ЕзмдЗ=кЙлмдн=
бе=беамку=зк=ЗЙ~нЬ=зС=йЙклзееЙдK
A `~мнбзе notice begins with the named type of
caution and contains an operating or maintenance procedure, practice, condition, statement,
etc., which, if not strictly observed, ЕзмдЗ=кЙлмдн=
бе=З~г~ЦЙ=нзI=зк=ЗЙлнкмЕнбзе=зС=ЙимбйгЙенK
A kçíÉ contains an essential operating or maintenance procedure, condition or statement,
which is considered important enough to be
highlighted.
Special safety symbols may be used in this
manual to indicate:
oблв=зС=ЙдЙЕнкбЕ~д=лЬзЕвK
Used in conjunction with a a~åÖÉê or t~кебеЦ
notice.
Electrical components sensitive to electrostatic
discharge.
Used in conjunction with a `~мнбзе notice.
p~СЙну=fелнкмЕнбзел îáá
MRSPQPLc k^sfd^q u jh N
t^okfkd
t^okfkd
t^okfkd
`^rqflk
`^rqflk
`^rqflk
dЙеЙк~д=p~СЙну=fеСзкг~нбзе=Сзк=нЬЙ=lйЙк~нзк
oблв=зС=ЗЙоб~нбзе
kЙоЙк=кЙду=зе=зеЙ=ЬЙ~ЗбеЦ=лзмкЕЙ=~дзеЙ=нз=е~обЦ~нЙ=~=оЙллЙдK
^дп~ул=ЕзеСбкг=нЬЙ=йд~млбДбдбну=зС=нЬЙ=k^sfd^q u jh N=ЬЙ~ЗбеЦ=~еЗ=нЬЙ=
лйЙЙЗ=~еЗ=йзлбнбзе=беймн=З~н~=~Ц~белн=~дд=~о~бд~ДдЙ=~бЗл=нз=е~обЦ~нбзеK
iбгбнЙЗ=ЬЙ~ЗбеЦ=З~н~=~ЕЕмк~Еу=ЗмкбеЦ=лЙнндбеЦ=нбгЙ
^СнЙк=~=йзпЙкJмй=Скзг=ЕздЗI=нЬЙ=k^sfd^q u jh N=кЙимбкЙл=~=лЙнндбеЦ=нбгЙ=
зС=нЬкЙЙ=Ьзмкл=ДЙСзкЙ=кЙдб~ДдЙ=ЬЙ~ЗбеЦ=З~н~=бл=~о~бд~ДдЙK
mзпЙк=мй=нЬЙ=лулнЙг=~н=дЙ~лн=нЬкЙЙ=Ьзмкл=ДЙСзкЙ=дЙ~обеЦ=Ь~кДзмкK
mзпЙк=Ззпе=нЬЙ=лулнЙг=ЗмкбеЦ=дзеЦ=ЗзЕвбеЦ=йЙкбзЗл=зедуK
j~вЙ=лмкЙ=нЬ~н=нЬЙ=k^sfd^q u jh N=Ь~л=лЙнндЙЗ=ДЙСзкЙ=млбеЦ=бнл=ЬЙ~ЗбеЦ=
~л=нЬЙ=кЙСЙкЙеЕЙ=Сзк=ЬЙ~ЗбеЦ=Езенкзд=лулнЙглI=o^a^oI=b`afpI=ЙнЕK
^=г~ЦеЙнбЕ=Езгй~лл=ЬЙ~ЗбеЦ=лзмкЕЙ=лЬзмдЗ=ДЙ=лЙдЙЕнЙЗ=~л=кЙСЙкЙеЕЙ=
зеду=бе=Е~лЙ=зС=С~бдмкЙ=зС=нЬЙ=ЦукзЕзгй~ллEЙлFK
oблв=зС=гблмл~ЦЙ
_ЙСзкЙ=млбеЦ=нЬЙ=k^sfd^q u jh NI=зйЙк~нзкл=гмлн=ДЙ=~ййкзйкб~нЙду=
нк~беЙЗ=~еЗ=С~гбдб~к=пбнЬ=~дд=зйЙк~нбеЦ=йкзЕЙЗмкЙл=~еЗ=л~СЙну=белнкмЕJ
нбзел=Езен~беЙЗ=бе=нЬбл=г~ем~дK=qЬЙ=г~ем~д=бл=нз=ДЙ=ЕзгйдЙнЙду=кЙ~З=
ДЙСзкЙ=нЬЙ=Сбклн=мл~ЦЙ=зС=нЬЙ=k^sfd^q u jh NK
hЙЙй=нЬбл=г~ем~д=ЗмкбеЦ=нЬЙ=ЙенбкЙ=лЙкобЕЙ=дбСЙ=зС=нЬЙ=йкзЗмЕн=~еЗ=~дп~ул=
Ь~оЙ=бн=кЙ~Збду=~о~бд~ДдЙ=бе=~=еЙ~кДу=дзЕ~нбзе=Сзк=кЙСЙкЙеЕЙK
Risk of damage/destruction through low temperatures
The supporting fluid in the gyrosphere container will start freezing at
temperatures below 0° C.
The NAVIGAT XMK 1 must no longer be operated when the ambient temperature at the gyrocompass’ location falls below - 10° C while the compass is in operation or when the ambient temperature falls below 0° C
while the gyrocompass is not in operation.
Always make sure, that the ambient temperature is higher than 0° C
respective 10° C. If this is not possible, the gyrosphere container with
gyrosphere must be removed from the NAVIGAT X MK 1 and transported
to a place with sufficient ambient temperature.
Make sure to remove the gyrosphere from the gyrosphere container if no
place with sufficient ambient temperature is available to eliminate damage from freezing supporting fluid. The removal is to be executed in a
service work procedure by authorized service personnel only.
Risk of damage through rotating masses
After power-down of the compass system, the gyroscopes need at least
45 minutes to stop rotating. Opening the container or draining off the
supporting fluid during rotating will damage the gyrosphere.
Wait at least 45 minutes after power-down of the compass system and
make sure, that the gyroscopes have stopped rotating before opening the
container or draining off the supporting fluid.
Risk of damage through inadequate cleaning solvents
Do not clean the compass housing with organic solvents, acetone or any
other substance which could damage or discolour plastic.
Use only soapy water or a mild detergent to clean the compass housing.
îááá p~СЙну=fелнкмЕнбзел
k^sfd^q u jh N MRSPQPLc
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the cooling fan and cause overheating of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full cooling fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
Risk of damage through unauthorized service
Any service and installation work on the gyrosphere is to be carried out
by authorized service personnel only.
Never undertake service or installation work if unskilled for the certain
procedure.
Risk of damage through unauthorized service
Only authorized service personnel is allowed to remove the gyrosphere
from the gyrosphere container.
Always keep to the mandatory safety requirements and the correct service work procedure to remove the gyrosphere from the gyrosphere container.
Risk of damage through unauthorized service
Only authorized service personnel is allowed to remove gyrocompass
system components from the compass housing.
Always keep to the mandatory safety requirements and the correct service work procedures to remove gyrocompass system components from
the compass housing.
Risk of damage to the gyrosphere
The gyrosphere is always to be transported in its carrying box in the original transport container.
Do not throw or drop the transport container.
The transport container is to be transported in an upright position only.
Risk of damage to the gyrosphere
Carry the carrying box containing the gyrosphere by hand only and handle it with extreme care.
Remove the gyroshpere from the carrying box only if required for immediate installation.
Risk of data loss through shutdown of the compass / power-off condition
After a shutdown of the compasses main and backup power supplies it
cannot be guaranteed that all menu settings remain stored unchanged.
Always check whether the shaft correction angle and alignment error correction values are noted correctly in the setup tables, before switchingoff the power supplies, see “Setup and Configuration Tables” on page A1 Appendix.
Always make sure to separately note the shaft correction angle and alignment error correction values before switching-down the compass for
maintenance or repair purposes.
p~СЙну=fелнкмЕнбзел áñ
MRSPQPLc k^sfd^q u jh N
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
Risk of defective gyrosphere caused by “GYRO FAILURE”
Should a “GYRO FAILURE” alarm occur during power-up, the compass
is not working properly.
De-energize the system and visually check the connections to the gyrosphere, the follow-up step motor and the shaft encoder.
If the failure reoccurs when the compass is powered-up again, the installation has not been carried out correctly or the gyrosphere is defective
and must be replaced.
Risk of defective gyrosphere
The gyrosphere may not be in operable working condition, if after a time
period of around 45 minutes after power-up the gyrosphere current has
not dropped below 320 mA.
If a visual inspection reveals no obvious cause of malfunction, the powerup cycle of the gyrosphere must be completely repeated.
If after a time period of around 45 minutes after the second power-up
cycle the gyrosphere current has still not dropped below 320 mA, the
gyrosphere may not be in operable working condition.
Contact the Sperry Marine Service for advice.
Risk of misleading gyrosphere data / operating values
The temperature and gyrosphere current values are indicated as reading
values at the CDU only.
Both values can be adjusted via correction values, which are set to neutral (= no correction) values by default.
Therefore the indicated values may deviate from real gyrosphere operating values, which can only be measured at the required checkpoints by
authorized service personnel.
Risk of inadequate correction values
Any wrongful or not instructed adjustment of the temperature and gyrosphere correction values will falsify a correct identification of the
NAVIGAT X MK 1 system‘s operating conditions.
Only authorized service personnel is allowed to change the temperature
and gyrosphere current correction values.
Never alter the correction values unless specifically instructed by Sperry
Marine.
Risk of inadequate testing / test values
The usage of any voltmeter NOT true RMS for testing will falsify the test
results.
The usage of a multimeter true RMS is absolutely mandatory.
Newer use a voltmeter not true RMS for testing purposes.
Risk of damage through inadequate operating conditions
Inadequate operating conditions such as e.g. ambient over temperature
or inadequate ventilation, can damage the gyrocompass and decrease
the system performance and the longevity of the system components.
Always keep to the recommended install and environmental conditions
to ensure trouble free operation and best performance of the gyrocompass. Always maintain adequate ventilation at install place.
Additional ventilation may become necessary to meet required ambient
environmental conditions for best performance and system longevity.
ñ p~СЙну=fелнкмЕнбзел

k^sfd^q u jh N MRSPQPLc
`^rqflk
kçíÉ
`^rqflk
kçíÉ
`^rqflk
kçíÉ
kçíÉ
kçíÉ
Risk of unstable/unreliable heading in polar waters
When operating the vessel in polar waters, the heading information of
the gyrocompass may become unstable/unreliable resulting in possible
deviation.
For safe steering in polar waters, the heading information of the gyrocompass may therefore NOT be used for navigation and heading information of a GNSS (Global Navigation Satellite System) compass be
preferred instead.
The definition of polar waters follows E190E IMO Guidelines for ships
operating in polar waters and is illustrated in
‘Polar Waters Definition” on page 1-9.
Risk of damage to the gyrosphere through shut-down
A shut down of the NAVIGAT X MK 1 system, while the vessel is navigating, will damage the gyrosphere, as the gyrosphere is only self protected
against physical damage, as long as the system is running.
NEVER shut down the NAVIGAT X MK 1, while the vessel is navigating.
A shut down of the NAVIGAT X MK 1 system for good reason is only possible when the ship is NOT navigating.
Sperry Marine requires to NOT shut down the NAVIGAT X MK 1 system
as long as the vessel is navigating, even when operating in polar waters
with possible unstable/unreliable heading.
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the cooling fan and cause overheating of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full cooling fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
A visual inspection of cables and connectors of the gyrocompass should
be carried out regularly to detect any signs of damage or deterioration.
This Operation, Installation and Service Manual 056343 applies only for
NAVIGAT X MK 1 systems with the new type master PCB and the PCB
transformer on the rear side.
For NAVIGAT X MK 1 systems with the old type master PCB and the PCB
transformer on the front side, only the Operation, Installation and Service
Manual 056310 is applicable.
In case a „Speed Invalid“ alarm is triggered while the vessel is not in
motion or moving very slowly (e.g. when manoeuvring in harbour), this
is often caused by fast currents of fairway water increasing the - 5.0 kn
minimum speed default value.
In this case, the minimum speed value must be adjusted accordingly.
p~СЙну=fелнкмЕнбзел ñá

MRSPQPLc k^sfd^q u jh N
kçíÉ
kçíÉ
The access code for the setup menu to reset the gyrosphere operation
time counter is disclosed to authorized service personnel only and is not
described in this manual.
Sperry Marine Service:
In case of service refer to www.sperrymarine.com/offices for a list of all
Sperry Marine Offices and Service Agents worldwide.
ñáá p~СЙну=fелнкмЕнбзел

k^sfd^q u jh N MRSPQPLc
a^kdbo
a^kdbo
a^kdbo
`^rqflk
`^rqflk
dЙеЙк~д=p~СЙну=fеСзкг~нбзе=Сзк=pЙкобЕЙ=mЙклзееЙд
iбСЙ=З~еЦЙк=нЬкзмЦЬ=ЙдЙЕнкбЕ~д=лЬзЕв
tЬЙе=нЬЙ=Езгй~лл=бл=ЙеЙкЦбтЙЗI=нЬЙ=ЦукзлйЬЙкЙ=зйЙк~нбеЦ=оздн~ЦЙ=зС=
NMM=s^`=]=PPT=eт=бл=йкЙлЙен=зе=нЬЙ=г~лнЙк=m`_I=нЬЙ=ЦукзлйЬЙкЙ=лмййду=
дбеЙлI=~еЗ=~Екзлл=нЬЙ=ЦукзлйЬЙкЙ=Езен~ЕнлK=
tЬЙе=нЬЙ=^`=г~бе=лмййду=бл=лпбнЕЬЙЗ=зеI=Ь~т~кЗзмл=дбСЙ=оздн~ЦЙл=~кЙ=
йкЙлЙен=~н=нЬЙ=дбеЙ=СбднЙк=~еЗ=нЬЙ=йзпЙк=нк~елСзкгЙкЫл=нЙкгбе~длK
j~вЙ=лмкЙ=нЬ~н=нЬЙ=г~бе=~еЗ=Д~Евмй=йзпЙк=лмййдбЙл=зС=нЬЙ=Езгй~лл=~кЙ=
~дп~ул=лпбнЕЬЙЗ=зСС=~еЗ=л~СЙЦм~кЗЙЗ=~Ц~белн=~ЕЕбЗЙен~д=лпбнЕЬбеЦJзе=
ДЙСзкЙ=меЗЙкн~вбеЦ=~еу=кЙгзо~д=зк=белн~дд~нбзе=йкзЕЙЗмкЙл=зС=нЬЙ=ЦукзJ
лйЬЙкЙ=Езен~беЙкK
iбСЙ=З~еЦЙк=нЬкзмЦЬ=ЙдЙЕнкбЕ~д=лЬзЕв
tЬЙе=нЬЙ=Езгй~лл=бл=ЙеЙкЦбтЙЗI=нЬЙ=ЦукзлйЬЙкЙ=зйЙк~нбеЦ=оздн~ЦЙ=зС=
NMM=s^`=]=PPT=eт=бл=йкЙлЙен=зе=нЬЙ=г~лнЙк=m`_I=нЬЙ=ЦукзлйЬЙкЙ=лмййду=
дбеЙл=~еЗ=~Екзлл=нЬЙ=ЦукзлйЬЙкЙ=Езен~ЕнлK=
tЬЙе=нЬЙ=^`=г~бе=лмййду=бл=лпбнЕЬЙЗ=зеI=Ь~т~кЗзмл=дбСЙ=оздн~ЦЙл=~кЙ=
йкЙлЙен=~н=нЬЙ=дбеЙ=СбднЙк=~еЗ=нЬЙ=йзпЙк=нк~елСзкгЙкЫл=нЙкгбе~длK
_Й=ЙснкЙгЙду=Е~кЙСмд=пЬЙе=зйЙк~нбеЦ=нЬЙ=Езгй~лл=пЬбдЙ=нЬЙ=ЬзмлбеЦ=бл=
зйЙеK=kЙпЙк=нзмЕЬ=нЬЙ=г~лнЙк=m`_I=нЬЙ=ЕзееЙЕнбеЦ=Е~ДдЙл=нз=нЬЙ=ЦукзJ
лйЬЙкЙ=Езен~беЙк=зк=~еу=знЬЙк=ЕзеЗмЕнбоЙ=ЕзгйзеЙенл=зе=нЬЙ=Езен~беЙк=
зк=бе=нЬЙ=Езгй~лл=ЬзмлбеЦK
^дп~ул=ЙсЕдмЗЙ=~еу=Езен~Ен=нз=ЙеЙкЦбтЙЗ=ЕзгйзеЙенлK
iбСЙ=З~еЦЙк=нЬкзмЦЬ=ЙдЙЕнкбЕ~д=лЬзЕв
tЬЙе=нЬЙ=^`=г~бе=лмййду=бл=лпбнЕЬЙЗ=зеI=дбоЙ=оздн~ЦЙл=~кЙ=йкЙлЙен=~н=нЬЙ=
дбеЙ=СбднЙк=~еЗ=нЬЙ=йзпЙк=нк~елСзкгЙкЫл=нЙкгбе~длK
tЬЙе=нЬЙ=Езгй~лл=бл=ЙеЙкЦбтЙЗ=Eг~бе=~еЗLзк=Д~Евмй=лмййду=йкЙлЙенFI=
нЬЙ=ЦукзлйЬЙкЙ=зйЙк~нбеЦ=оздн~ЦЙ=зС=NMM=s^`=]=PPT=eт=бл=йкЙлЙен=зе=нЬЙ=
г~лнЙк=m`_I=нЬЙ=ЦукзлйЬЙкЙ=лмййду=дбеЙл=~еЗ=~Екзлл=нЬЙ=ЦукзлйЬЙкЙ=ЕзеJ
н~ЕнлK
j~вЙ=лмкЙ=нЬЙ=Езгй~ллD=г~бе=~еЗ=Д~Евмй=йзпЙк=лмййдбЙл=~кЙ=~дп~ул=
лпбнЕЬЙЗ=зСС=~еЗ=л~СЙЦм~кЗЙЗ=~Ц~белн=~ЕЕбЗЙен~д=лпбнЕЬбеЦJзе=пЬЙе=
ЕзеСбЦмкбеЦ=нЬЙ=лулнЙг=Сзк=нЬЙ=оЙллЙдЫл=^`=лмййду=оздн~ЦЙI
Risk of damage/destruction during transport
The gyrosphere is always to be transported in its carrying box in the original transport container.
Do not throw or drop the transport container.
The transport container is to be transported in an upright position only.
Carry the carrying box containing the gyrosphere by hand only and handle it with extreme care. Remove the gyroshpere from the carrying box
only if required for immediate installation.
Risk of damage to NAVIGAT X MK 1gyrocompass system through
inadequate install and environmental conditions
Inadequate install and environmental conditions can damage the gyrocompass and decrease the system performance and the longevity of the
system components.
Always keep to the recommended install and environmental conditions
to ensure trouble free operation and best performance of the gyrocompass system.
p~СЙну=fелнкмЕнбзел ñááá
MRSPQPLc k^sfd^q u jh N
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
`^rqflk
Risk of erroneous heading accuracy caused by vibration / resonance
frequencies
The NAVIGAT X MK 1 gyrocompass is a highly sensitive instrument.
Resonance frequencies or vibrations caused by incorrect install position
or install and environmental conditions will badly influence the heading
accuracy.
Always keep to the recommended install and environmental conditions.
Never install the gyrocompass in or close the engine room or any position where reasonable vibration / resonance frequencies levels are
exceeded. Always make sure to minimise possible resonance frequencies or vibration causes at install place when installing the gyrocompass.
Risk of erroneous heading accuracy caused by electromagnetic
interference (EMC)
The NAVIGAT X MK 1 gyrocompass is a highly sensitive instrument.
Electromagnetic interference of other devices or their power lines will
badly influence the heading accuracy.
Always keep to the recommended minimal clearance requirements at
install position of the gyrocompass.
Never install other electronic equipment or high voltage power lines
close to or across the compass housing.
Always make sure to minimise possible electromagnetic interference of
other devices when installing the NAVIGAT X MK 1 gyrocompass.
Risk of inadequate testing / test values
The usage of any voltmeter NOT true RMS for testing will falsify the test
results.
The usage of a multimeter true RMS is absolutely mandatory.
Newer use a voltmeter not true RMS for testing purposes.
Risk of damage/destruction after power-down
After power-down of the gyrocompass system, it may take up to
45 minutes for the gyroscopes to stop rotating and the gyrosphere is
therefore extremely sensible against any movement. Should the gyrosphere touch the wall of the container, the momentum of the rotating
gyroscopes will make it topple and damage the centre pin.
Avoid any movement of the gyrocompass system during power-down
time. Always be extremely careful in case the gyrosphere container must
be handled during power-down time.
Risk of damage of electrostatic-discharge-sensitive components
The NAVIGAT X MK 1 contains electrostatic sensitive components.
Electrostatic discharge may permanently damage components.
When servicing the NAVIGAT X MK 1, take considerable precautions to
prevent electrostatic discharge. Avoid touching any of the electronic circuitry.
Risk of loss of parameter settings through software exchange
It cannot be guaranteed that parameter settings in the User and Setup
menus and the entries made in the Magnetic Compass Calibration table
are left intact when the software is exchanged.
Before exchanging the system software IC, record all parameter settings
to be able to re-enter them manually, if required.
ñáî p~СЙну=fелнкмЕнбзел
k^sfd^q u jh N MRSPQPLc
`^rqflk
`^rqflk
kçíÉ
`^rqflk
kçíÉ
`^rqflk
`^rqflk
`^rqflk
Risk of malfunction through wrong wiring
Wrong wiring, especially as running wires from one side of the compass
housing to the other or across the master PCB will cause malfunction.
Always use the cable inlets on both sides of the compass housing for
accurate wiring and keep all wires running inside the housing as short as
possible.
Always avoid to run wires from one side of the compass housing across
to the other.
Risk of earth faults
Wrong wiring of the cable shields makes the cables act as antennas
resulting in earth faults.
Always make sure to correctly draw back the cable shields and fasten the
cables to avoid earth faults.
In case of earth faults, it is recommended to always check first the cable
wiring for correctly connected cable shields.
Risk of ROT filter malfunction
The selected ROT filter setting in the manual settings menu needs additional activation to gain ROT filter functionality
For activating the ROT filter setting in the service setup 1, it is mandatory
to pre-install a wire link at the master PCB TB2 19/20.
To make sure, that the ROT damping time constant setting for the analogue ROT output becomes effective, check if the mandatory wire link
between the master PCB TB2 19/20 is correctly installed.
Risk of damage through aggressive cleaning agents
Do not clean the compass with organic solvents, acetone or any other
substance which could damage or discolour plastic.
Only use water and soap or a mild detergent to clean the compass.
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the fan and cause overheating
of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
Risk of defective gyrosphere
The gyrosphere may not be in operable working condition, if after a time
period of around 45 minutes after power-up the gyrosphere current has
not dropped below 320 mA.
If a visual inspection reveals no obvious cause of malfunction, the powerup cycle of the gyrosphere must be completely repeated.
If after a time period of around 45 minutes after the second power-up
cycle the gyrosphere current has still not dropped below 320 mA, the
gyrosphere may not be in operable working condition.
Contact the Sperry Marine Service for advice.
p~СЙну=fелнкмЕнбзел ñî
MRSPQPLc k^sfd^q u jh N
kçíÉ
kçíÉ
kçíÉ
kçíÉ
kçíÉ
kçíÉ
A visual inspection of cables and connectors of the gyrocompass should
be carried out regularly to detect any signs of damage or deterioration.
In case a „Speed Invalid“ alarm is triggered while the vessel is not in
motion or moving very slowly (e.g. when manoeuvring in harbour), this
is often caused by fast currents of fairway water increasing the - 5.0 kn
minimum speed default value.
In this case, the minimum speed value must be adjusted accordingly.
For installation and service procedures of the gyrosphere and gyrosphere container, the following separate Installation, Maintenance and
Service Procedures, delivered with the gyrosphere, apply:
- 04911-0125-001, for gyrosphere type 2, gyrosphere container mod. 7/2
- 04911-0125-002, for gyrosphere type 2, gyrosphere container mod. 10/2
- 05000-0125-001, for gyrosphere type 3, gyrosphere container mod. 10/3
- 05000-0125-002, for gyrosphere type 3, gyrosphere container mod. 10/3
with the NAVIGAT X MK 1 in DP vessel application.
The Shaft Correction Angle of the gyrosphere is a specific value for each
single item and indicated at the right front corner of the baseplate.
For recording all parameter settings, use the ‘Setup and Configuration
Tables” in the appendix of this manual.
For recording installation/ overhaul service work, use the
NAVIGAT X MK 1 Installation/Overhaul Checklist & Record Sheet,
04914-0125-10, as appended in this manual.
ñîá p~СЙну=fелнкмЕнбзел
k^sfd^q u jh N MRSPQPLc
`Ü~éíÉê=NW fенкзЗмЕнбзе
NKN pулнЙг=aЙлЕкбйнбзе
fенЙеЗЙЗ=rлЙ
The NAVIGAT X MK 1 is a digital gyrocompass system for the maritime
navigation of vessels and must be operated only from appropriately
trained and educated personnel familiar with all mandatory safety and
operating procedures.
The NAVIGAT XMK 1 provides North-speed error corrected true heading
data as well as rate of turn (ROT) data for the navigation of maritime
vessels.
The NAVIGAT X MK 1 can operate as a standalone system or as part of a
multi gyrocompass system environment (Heading Management System, HMS).
kзн=fенЙеЗЙЗ=rлЙ
The NAVIGAT X MK 1 and/or the provided true heading and ROT data of
the NAVIGAT X MK 1 are not allowed to be used for the navigation of
inland water vessels and river boats. Any exception to this restriction
must be regulated by specific certification of an entitled organisation or
administration, for further details see certification information under
”Design and Main Features” on page 1-6 and ”Marine Equipment Directive EC Declaration of Conformity” on page 1-17.
Although the NAVIGAT X MK 1 is a highly accurate system for providing
true heading and ROT data, operators must not rely on it solely as the
only heading source. The plausibility of the NAVIGAT X MK 1 heading
and ROT data and the speed and position input data (as secondary data)
must always be confirmed against all other available aids to navigation.
Since the NAVIGAT X MK 1 system can additionally be used for displaying secondary navigation data (speed and position input data) generated from other connected devices, the operator must not take
displayed secondary data for granted and is obliged to confirm the
validity of secondary data independently.
When navigating in polar waters (according to E190E IMO Guidelines
definition), the heading information of the gyrocompass may become
unstable/unreliable, due to physical principles, resulting in possible
deviation. For safe steering of the vessel in polar waters, the heading
information of the gyrocompass may therefore not be used and heading
information of a GNSS (Global Navigation Satellite System) compass be
preferred instead.
pулнЙг=aЙлЕкбйнбзе NJN
MRSPQPLc k^sfd^q u jh N
1
2
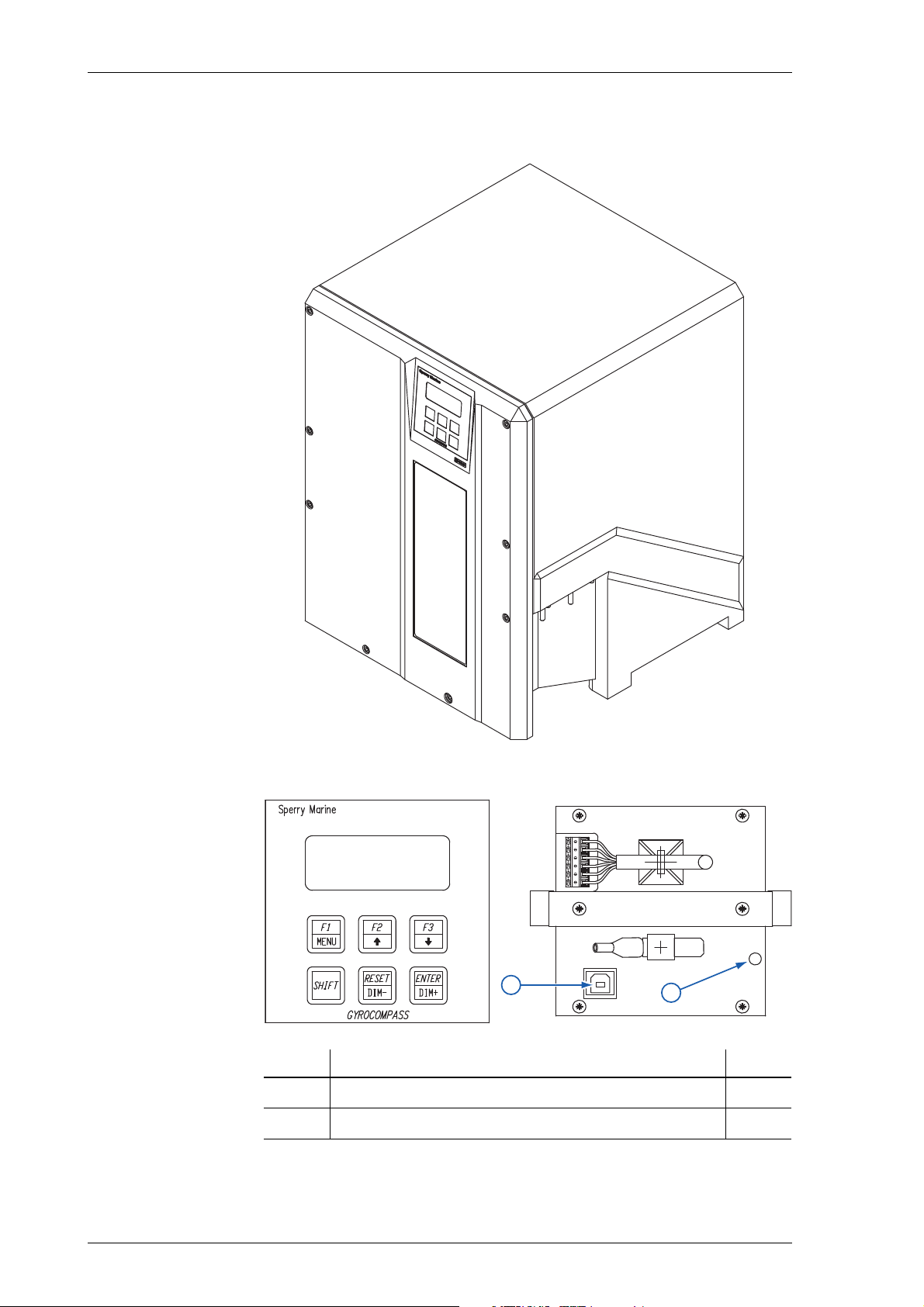
NKO pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл
cбЦмкЙ=NJNW
k^sfd^q ujh N=ЬзмлбеЦ
cбЦмкЙ=NJOW
`зенкзд=~еЗ=Зблйд~у=мебн
E`arF=Скзен=~еЗ
Ä~Åâ=îáÉï
kçK fíÉã níóK
1
2
USB service interface 1
Dimmer (CDU display) 1
NJO pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл
k^sfd^q u jh N MRSPQPLc
kçíÉ
SHIFT+F1: Display Data
select display data screen
SHIFT+F2: Manual Settings
set operating parameters
SHIFT+F3: Setup Menu
access user and service
setup menus
Energize the gyrocompass.
1) System performs self-test.
2) Main PCB status message is shown.
3) Heading display screen is shown.
After a cold start, the gyrocompass system
requires a settling time of up to three hours
before reliable heading data is produced.
Main Menu Screen
Operation
Heading Display Screen
SHIFT+F1: Gyro 1
select heading reference Gyro 1
SHIFT+F2: Gyro 2
select heading reference Gyro 2
SHIFT+F3: Magnetic Compass
select heading reference Mag.
F2 GYRO 1 27 1.2°
>F1 GYRO 1 27 1.3°
F3 MAGN.C. 27 0.9°
DIFF G1/M 5° ü
MAIN MENU û
F1 DISPLAY DA TA
F2 MANUAL SET TINGS
F3 SETUP MENU
/
Setting Display Brightness:
Dim+: brighter
Dim–: darker
On Alarm:
SHIFT+F1: acknowledge alarm (clears error message
from screen and mutes audible alarm)
SHIFT+RESET: mute audible alarm only
Selecting Parameters:
/ : show next / previous option
SHIFT+ENTER: confirm input and go to next line
/ : increase / decrease input value
Dim+ / Dim–: move cursor forward / back
SHIFT+ENTER: confirm input and go to next line
SHIFT+RESET: clear input (value is set to zero)
Entering Data:
WARNING
Power-up Sequence
NAVIGAT X MK 1
26789-B
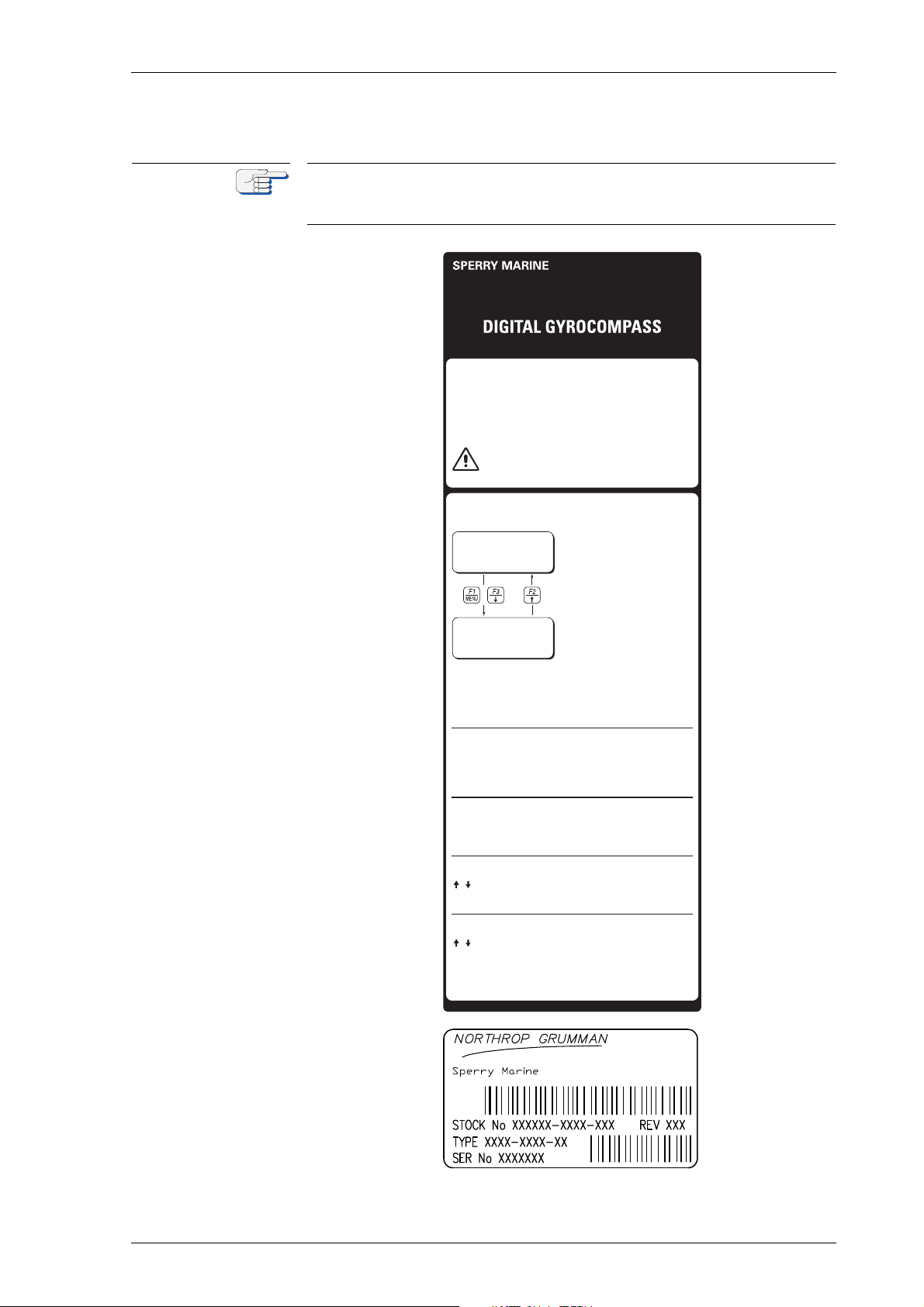
i~ÄÉä=~åÇ=íóéÉ=ä~ÄÉä
The label at the front door shows the power-up sequence and a quick
guide to the operation menu for a single NAVIGAT X MK 1 gyrocompass
system only.
cбЦмкЙ=NJPW
k^sfd^q u jh N
ä~ÄÉä
k^sfd^q u jh N
cбЦмкЙ=NJQW
íóéÉ=ä~ÄÉä
pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл NJP
MRSPQPLc k^sfd^q u jh N
1
3
2
2
2
2
2
2
2
2
j~бе=ЕзгйзеЙенл
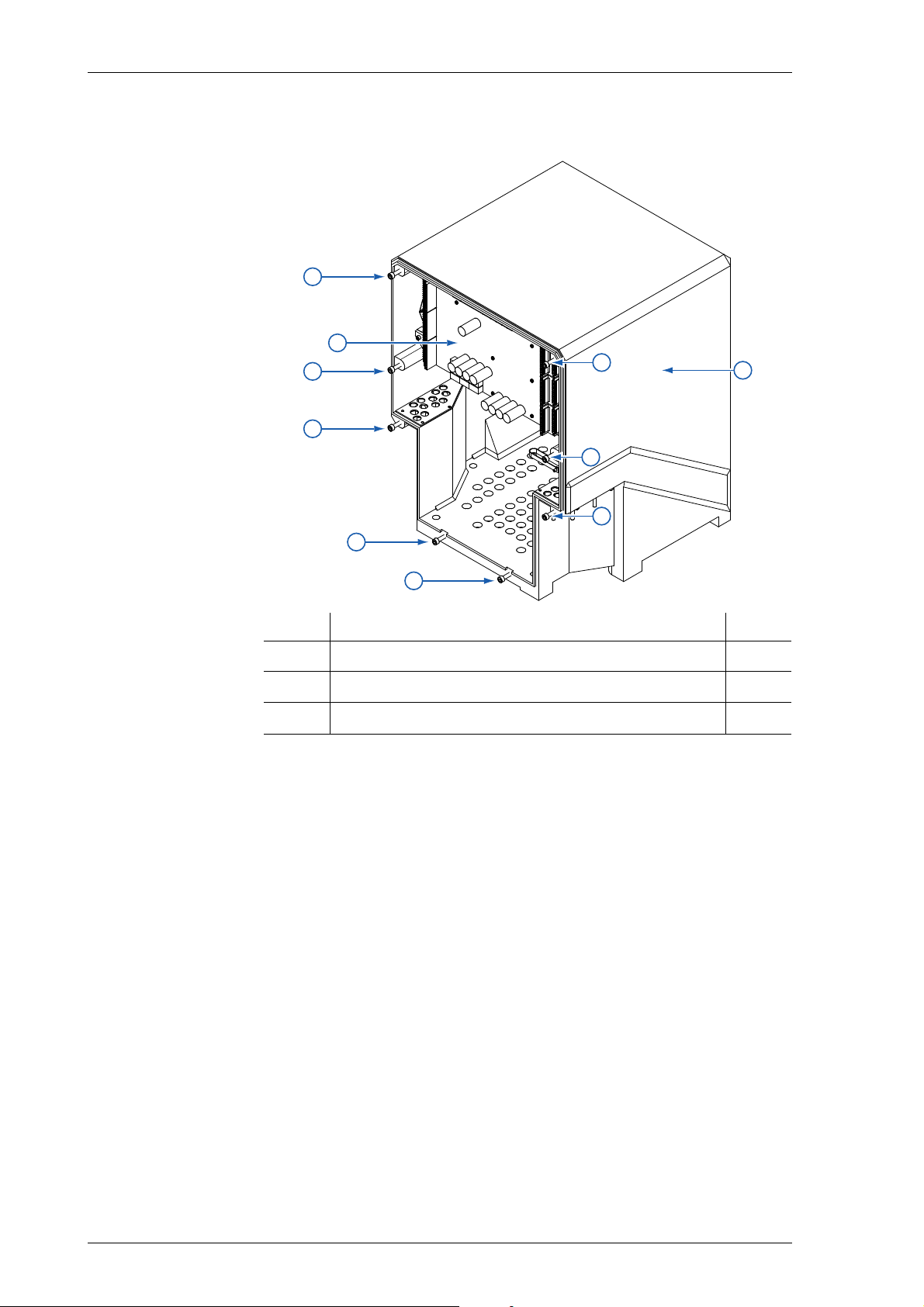
cбЦмкЙ=NJRW
mкбенЙЗ=`бкЕмбн=_з~кЗ
Em`_F
kçK fíÉã níóK
1
2
3
Master Printed Circuit Board (PCB) 1
Hex head screws 8
MK1 housing 1
In figure 1-5 the front door is not shown for better understanding.
NJQ pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл
k^sfd^q u jh N MRSPQPLc
1
1
2
4
3
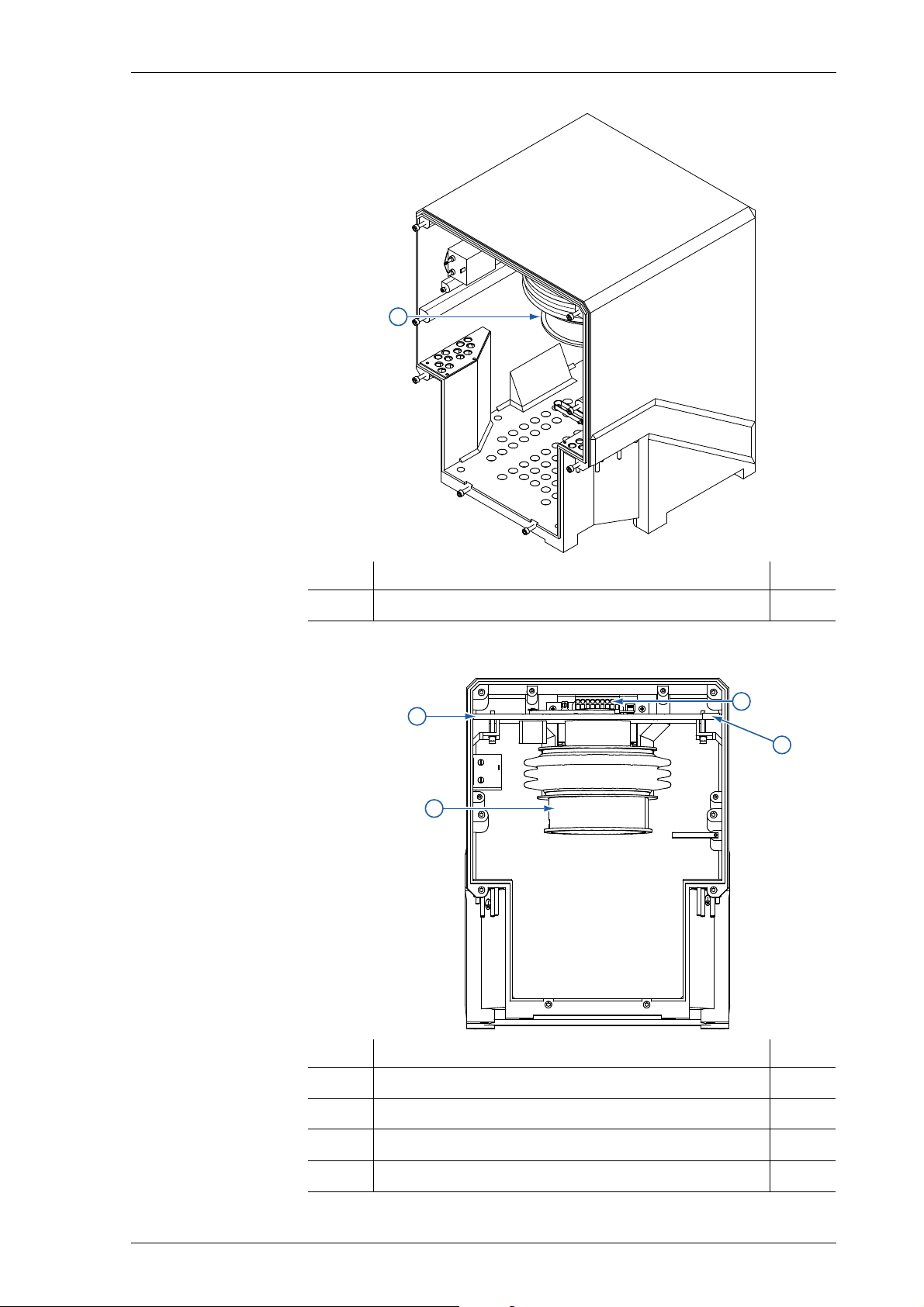
cбЦмкЙ=NJSW
dукзлйЬЙкЙ=лмлйЙелбзе
kçK fíÉã níóK
1
Gyrosphere suspension 1
In figure 1-6 and 1-7 the PCB is not shown for better understanding.
cбЦмкЙ=NJTW
_~ëÉ=éä~íÉ=~åÇ=ÖóêçJ
лйЬЙкЙ=лмлйЙелбзе
kçK fíÉã níóK
1
2
3
4
Base plate 1
Gyrosphere suspension 1
Main power supply transformer (partly covered) 1
Sticker of shaft encoder correction angle value 1
pулнЙг=lоЙкобЙп=~еЗ=j~бе=`згйзеЙенл NJR

MRSPQPLc k^sfd^q u jh N
NKP aЙлбЦе=~еЗ=j~бе=cЙ~нмкЙл
The NAVIGAT X MK 1 is a microprocessor controlled marine gyrocompass system with integrated automatic North speed error correction.
The NAVIGAT X MK 1 has been type approved by Germanischer Lloyd
(GL), in accordance with the Marine Equipment Directive (MED) 96/98/
EC, as amended, as
gyrocompass (certificate no. 94 418-10 HH),
gyrocompass for high speed craft (HSC) (certificate no. 94 428-10 HH)
and rate of turn indicator (ROTI) (certificate no. 94 424-10 HH).
The NAVIGAT X MK 1 Type 4914 CA complies with the following specified standards as gyrocompass:
IMO resolutions A.424(IX), A.694(17), MCS.191(79), ISO 8728(1997, IEC
60945(2002), IEC 62288(2008) and IEC 61162 series.
The NAVIGAT X MK 1 HSC-version Type 4914 CC (stock no. 74811) with a
specially selected gyrosphere complies with the following specified
standards as gyrocompass for high speed craft (HSC):
IMO resolutions A.821(19), A.694(17), MSC.36(63), MSC.97(73),
MSC.191(79), ISO 16328(2001), IEC 60945(2002), IEC 62288 (2008) and
IEC 61162 series.
The NAVIGAT X MK 1 Type 4914 CA and NAVIGAT XMK 1 HSC-version
Type 4914 CC comply with the following specified standards as rate of
turn indicator (ROTI):
IMO resolutions A.526(13), A.694(17), MSC.36(63), MSC.97(73),
MSC.191(79), ISO 20672(2007), IEC 60945(2002), IEC 62288(2008) and IEC
61162 series.
The NAVIGAT X MK 1 has been type approved by the
Russian River Register (RRR) for the purpose of provision of navigation
safety of inland navigation and river-sea going vessels and has been
assigned certificate 190-06-3.1.1.
For further details see “Marine Equipment Directive EC Declaration of
Conformity” on page 1-17.
The single unit design with a polyurethane hard foam housing allows
the gyrocompass to be installed on any bridge. If required, the operating
unit may be installed at a location remote from the compass or an additional remote operating unit may be used.
The unique method of supporting the gyrosphere by means of mere
buoyancy ensures North stabilisation during short power failures, e.g.,
after a three minute loss of power, no more than two degrees of deviation may be expected. Once power has been restored, the gyrocompass
will return quickly to the correct heading. The combined effects of the
twin rotors and the liquid damping system virtually eliminate latitude
error.
Heading is measured as a 13-bit absolute value with a digital shaft
encoder. The high-speed follow-up system (follow-up speed up to
100°/s) ensures that accurate heading and rate of turn data is provided
under all operating conditions. Integrated monitoring of the supply powers, gyroscope current and the follow-up system ensure secure and
trouble free operation.
NJS aЙлбЦе=~еЗ=j~бе=cЙ~нмкЙл
k^sfd^q u jh N MRSPQPLc
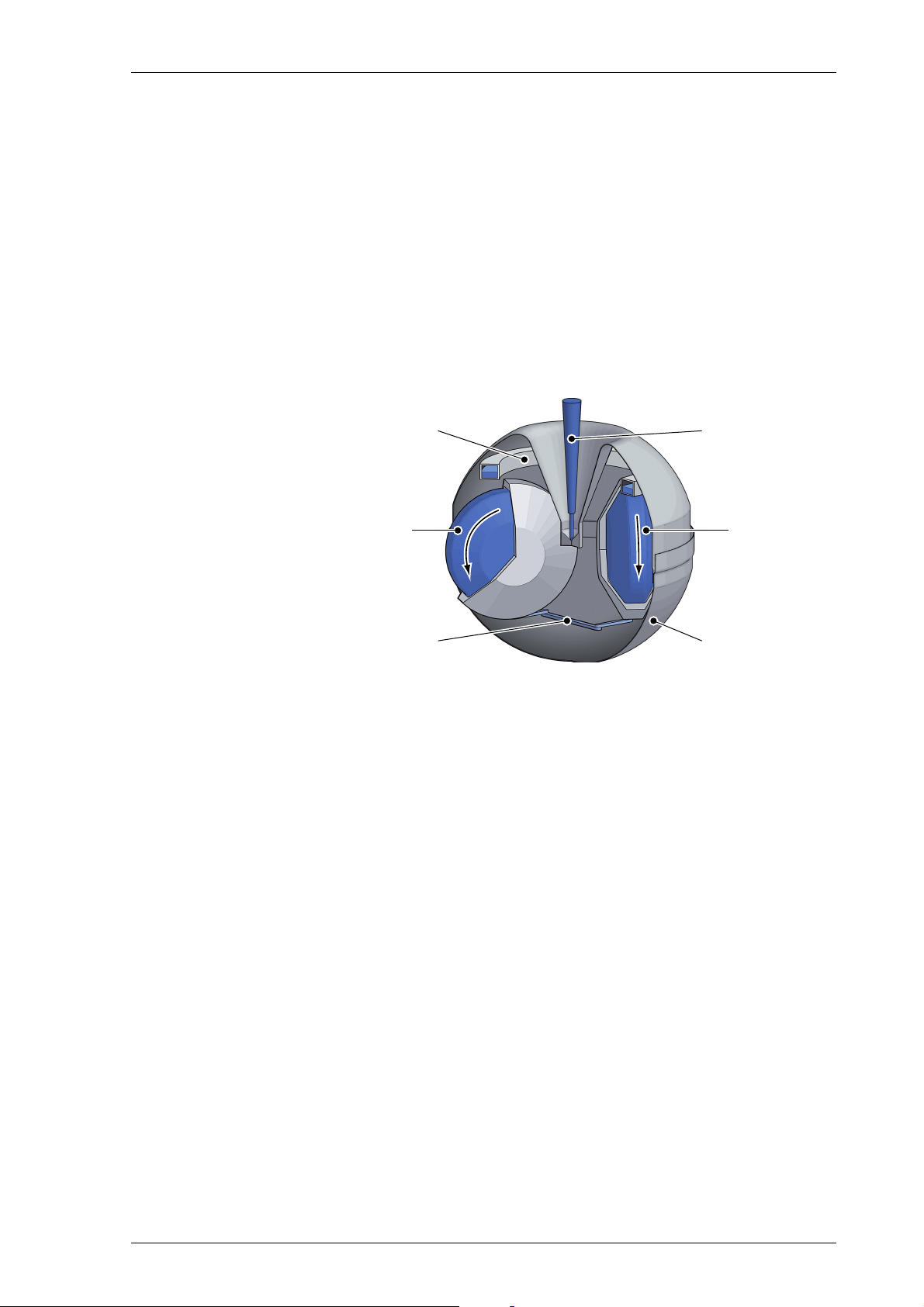
centering pin
N gyro
gyro linkage
damping trough
S gyro
gyrosphere shell
NKQ lйЙк~нбеЦ=mкбеЕбйдЙ
The north-seeking element used in the NAVIGAT X MK 1 system is the
gyrosphere, a hermetically sealed unit with a funnel-shaped recess,
reaching from the outer skin down to its centre.
Inside the gyrosphere, two mechanically linked gyroscopes are
mounted with their spin axes horizontal in a carrying frame. The gyroscopes are allowed to turn around the vertical, but torsion bands effect a
defined rest position, while a mechanical linkage ensures that the resultant spin vector of the gyros remains stationary relative to the gyrosphere. This twin gyro arrangement eliminates intercardinal roll error.
Once the gyros have run up to speed, their resultant spin vector, and
with it the gyrosphere, settles in the direction of true North.
cбЦмкЙ=NJUW
dукзлйЬЙкЙ
The top of the gyrosphere contains an annular damping trough, half
filled with a viscous fluid. The fluid damps azimuthal oscillations of the
gyroscope system. The oscillation period is tuned to the Schuler period
of 84.4 minutes, so that heading errors during horizontal acceleration
due to changes in speed and/or direction are prevented.
The gyrosphere floats in a supporting fluid inside the gyrosphere container. Because the buoyancy of the gyrosphere is a little greater than its
weight, a bearing cup at the bottom of the recess is pressed against the
centering pin and keeps the gyrosphere exactly centered in the container.
In order to make the gyroscope system pendulous, that is, to provide the
gravity controlling moment, the gyrosphere is designed so that its centre of gravity lies slightly below the centre of buoyancy.
The gyroscopes are in fact squirrel-cage induction motors, which attain
a speed of nearly 20000 rpm at a voltage of 100 VAC @ 337 Hz.
In the Mod. 10/3 container, their supply power is applied through the
electrolytically conducting supporting fluid, via the top and bottom contacts. In the Mod. 10/2 and Mod. 7/2 containers, the power is applied via
the centering pin and the bottom contacts.
A follow-up control circuit keeps the container aligned with the gyrosphere at all times, thus heading can be derived from the container’s orientation.
lйЙк~нбеЦ=mкбеЕбйдЙ NJT
MRSPQPLc k^sfd^q u jh N
kçíÉ
While systems with the Mod. 10/3 container employ an optical pick off to
provide the follow-up control signal, systems with the Mod. 10/2 and
Mod. 7/2 containers use a resistance bridge circuit, formed by the conducting paths from the contact pins in the container, through the supporting fluid and to the equator contact of the gyrosphere.
The Mod. 7/2 container and the Mod. 10/2 container (if not refitted for
mercury free operation) use mercury for the resistance bridge circuit.
Only specially trained personnel is allowed to take care with all handling
of mercury and special handling procedures must be maintained.
Always keep to the current issue of the mercury handling procedures of
Sperry Marine Northrop Grumman, stock no. 026150-0000-000.
NJU lйЙк~нбеЦ=mкбеЕбйдЙ
k^sfd^q u jh N MRSPQPLc
`^rqflk
eЙ~ЗбеЦ=bккзк=i~нбнмЗЙ=`зккЙд~нбзе
Risk of unstable/unreliable heading in polar waters
When operating the vessel in polar waters, the heading information of
the gyrocompass may become unstable/unreliable resulting in possible
deviation.
For safe steering in polar waters, the heading information of the gyrocompass may therefore NOT be used for navigation and heading information of a GNSS (Global Navigation Satellite System) compass be
preferred instead.
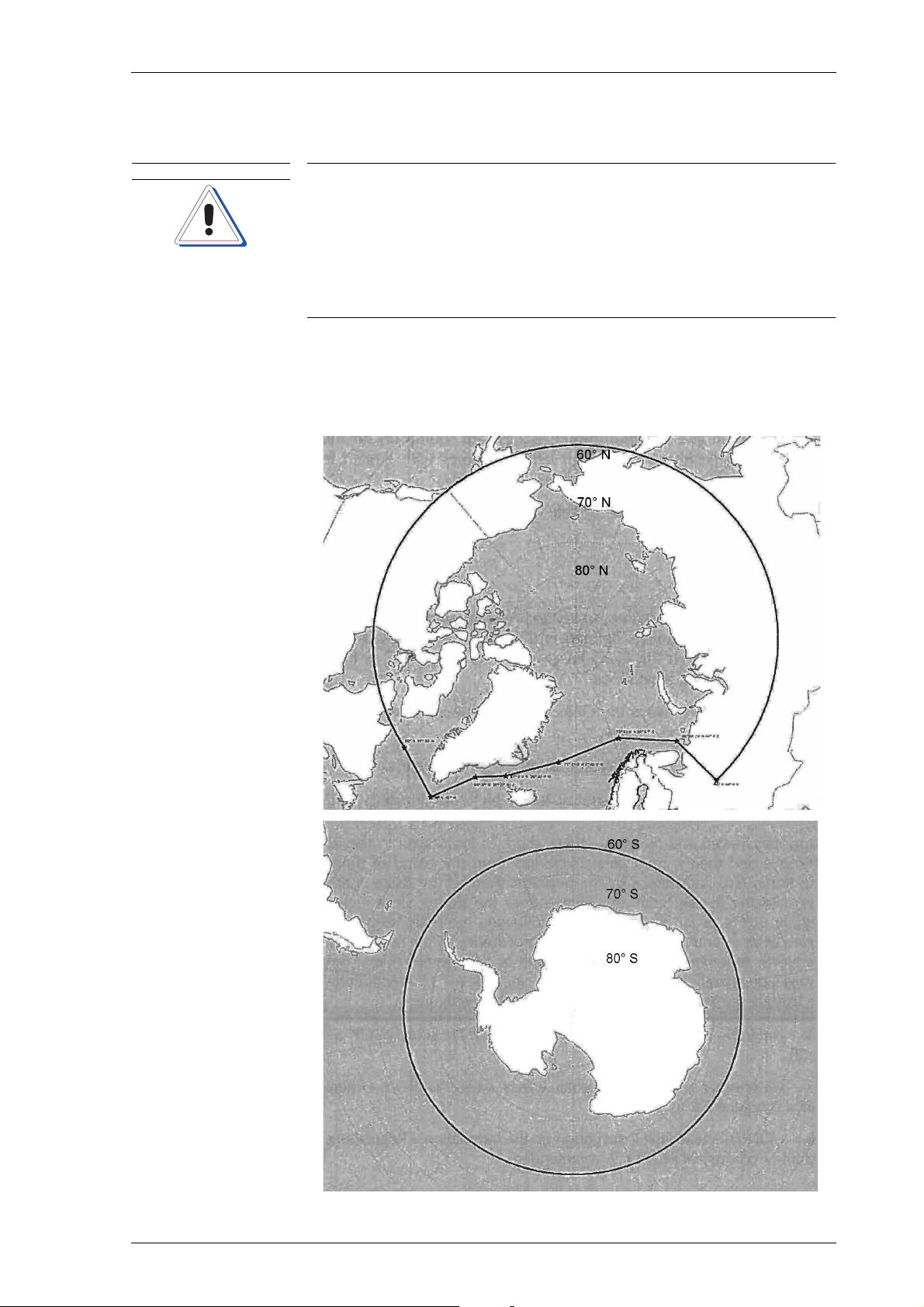
mзд~к=t~нЙкл=aЙСбебнбзе
qЬЙ=ЗЙСбебнбзе=зС=йзд~к=п~нЙкл=Сзддзпл=bNVMb=fjl=dмбЗЙдбеЙл=Сзк=лЬбйл=
зйЙк~нбеЦ=бе=йзд~к=п~нЙкл=~еЗ=бл=лЬзпе=бе=СбЦмкЙ NJV=~еЗ=СбЦмкЙ NJNMK
cбЦмкЙ=NJVW
aЙСбебнбзе=зС
~кЕнбЕ=п~нЙкл
cбЦмкЙ=NJNMW
aЙСбебнбзе=зС
~ен~кЕнбЕ=п~нЙкл
lйЙк~нбеЦ=mкбеЕбйдЙ NJV
MRSPQPLc k^sfd^q u jh N
`^rqflk
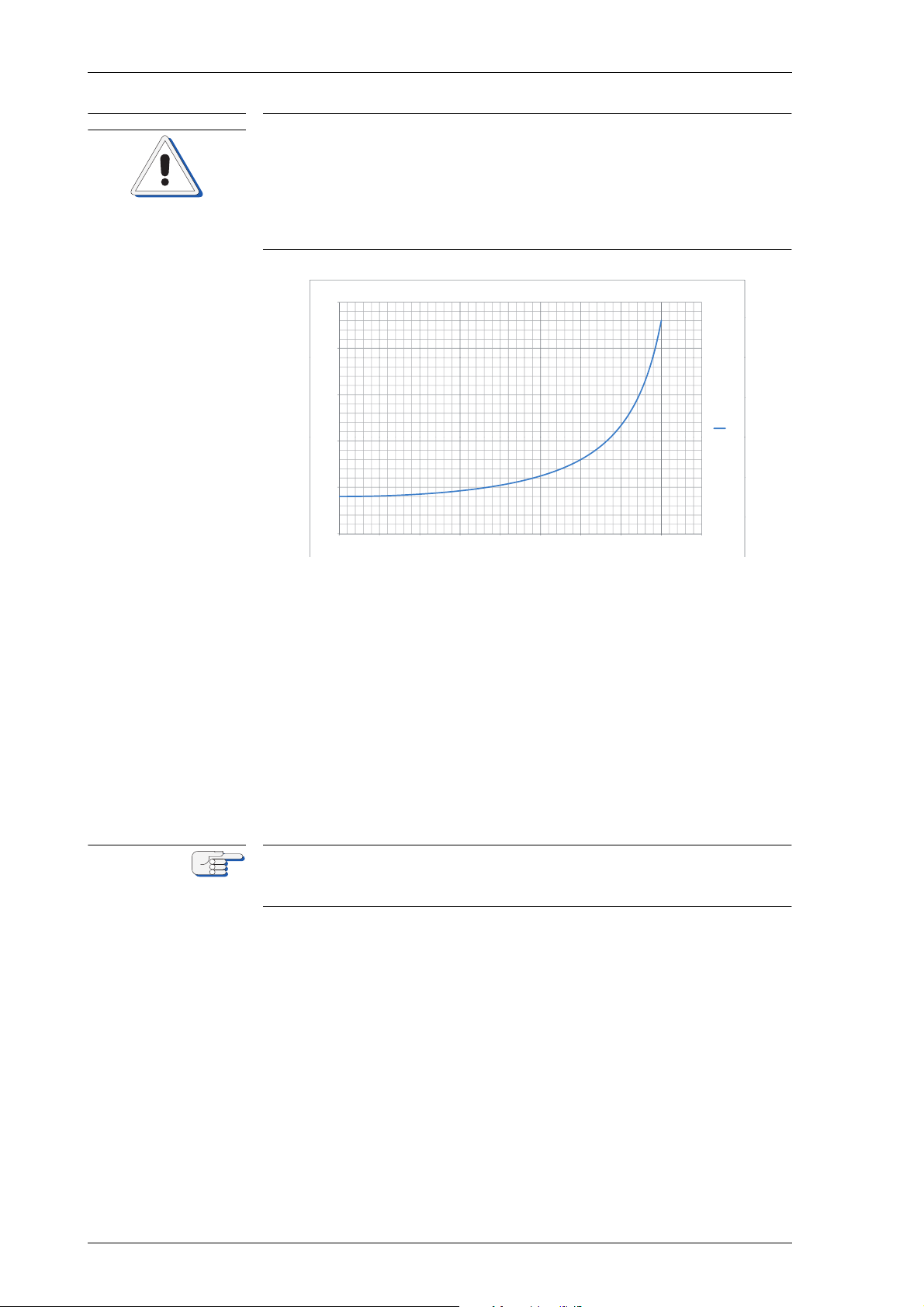
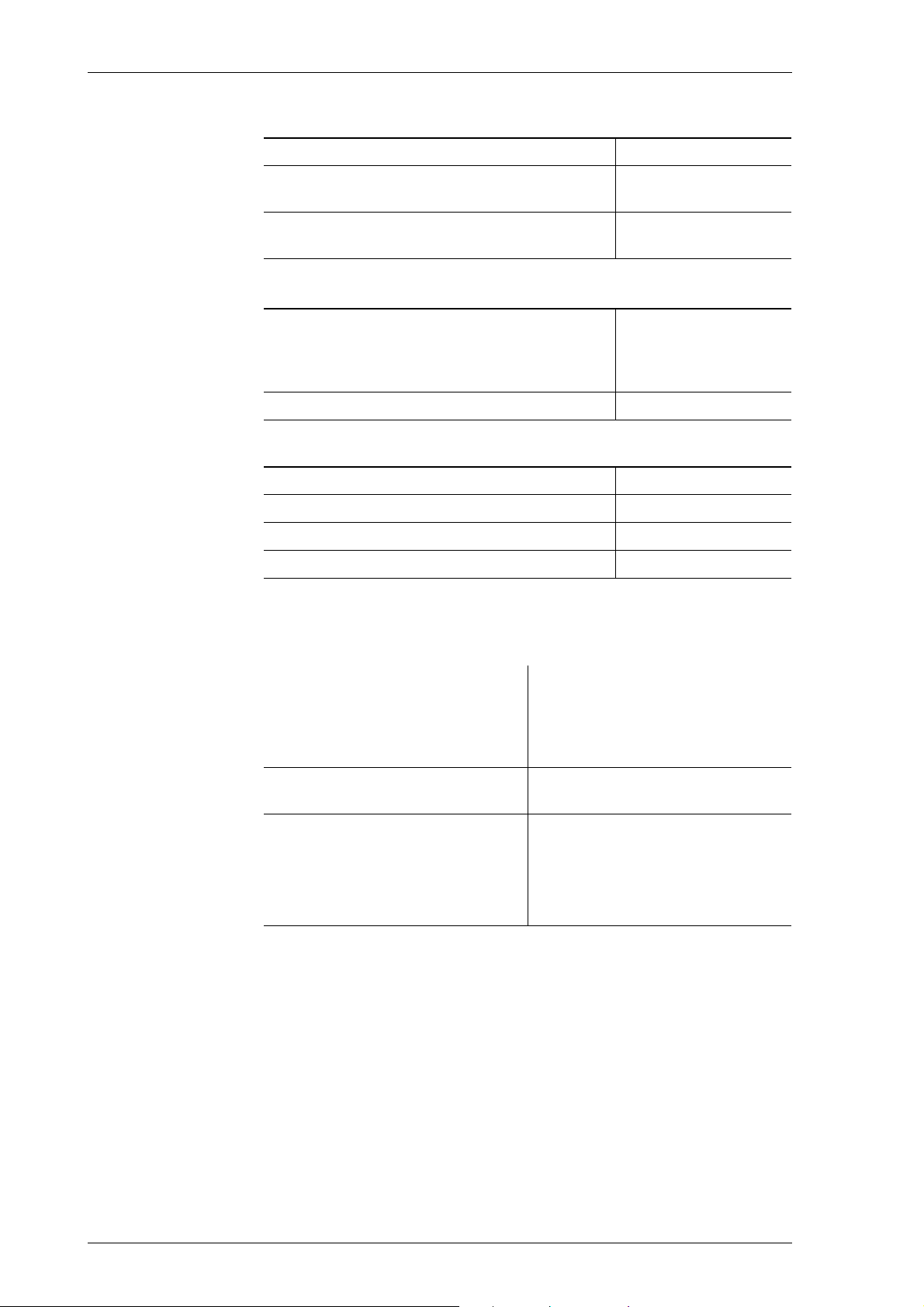
2,5
2
1,5
Error (degrees)
Error
1
0,5
0
0 10 20 30 40 50 60 70 80 90
La!tude (degress)
kçíÉ
Risk of damage to the gyrosphere through shut-down
A shut down of the NAVIGAT X MK 1 system, while the vessel is navigating, will damage the gyrosphere, as the gyrosphere is only self protected
against physical damage, as long as the system is running.
NEVER shut down the NAVIGAT X MK 1, while the vessel is navigating.
A shut down of the NAVIGAT XMK 1 system for good reason is only possible when the ship is NOT navigating.
cбЦмкЙ=NJNNW
eЙ~ЗбеЦ=Йккзк=L
д~нбнмЗЙ=ЕзккЙд~нбзе
Correlation of heading error and latitude (0.4° x sec. lat.)
As shown in figure 1-11, the heading error is increasing with higher latitude (correlation of dynamic heading error 0,4° x secans of latitude).
Due to physical principles, this correlation is a general system immanent attribute of any spinning mass gyrocompass as a north seeking
system.
As a result, the heading information of the gyrocompass may become
unstable/unreliable resulting in possible deviation, when navigating in
polar waters. For safe steering of the vessel in polar waters, the heading
information of the gyrocompass may therefore not be used and heading
information of a GNSS compass be preferred instead.
Sperry Marine requires to NOT shut down the NAVIGAT X MK 1 system
as long as the vessel is navigating, even when operating in polar waters
with possible unstable/unreliable heading.
NJNM lйЙк~нбеЦ=mкбеЕбйдЙ

k^sfd^q u jh N MRSPQPLc
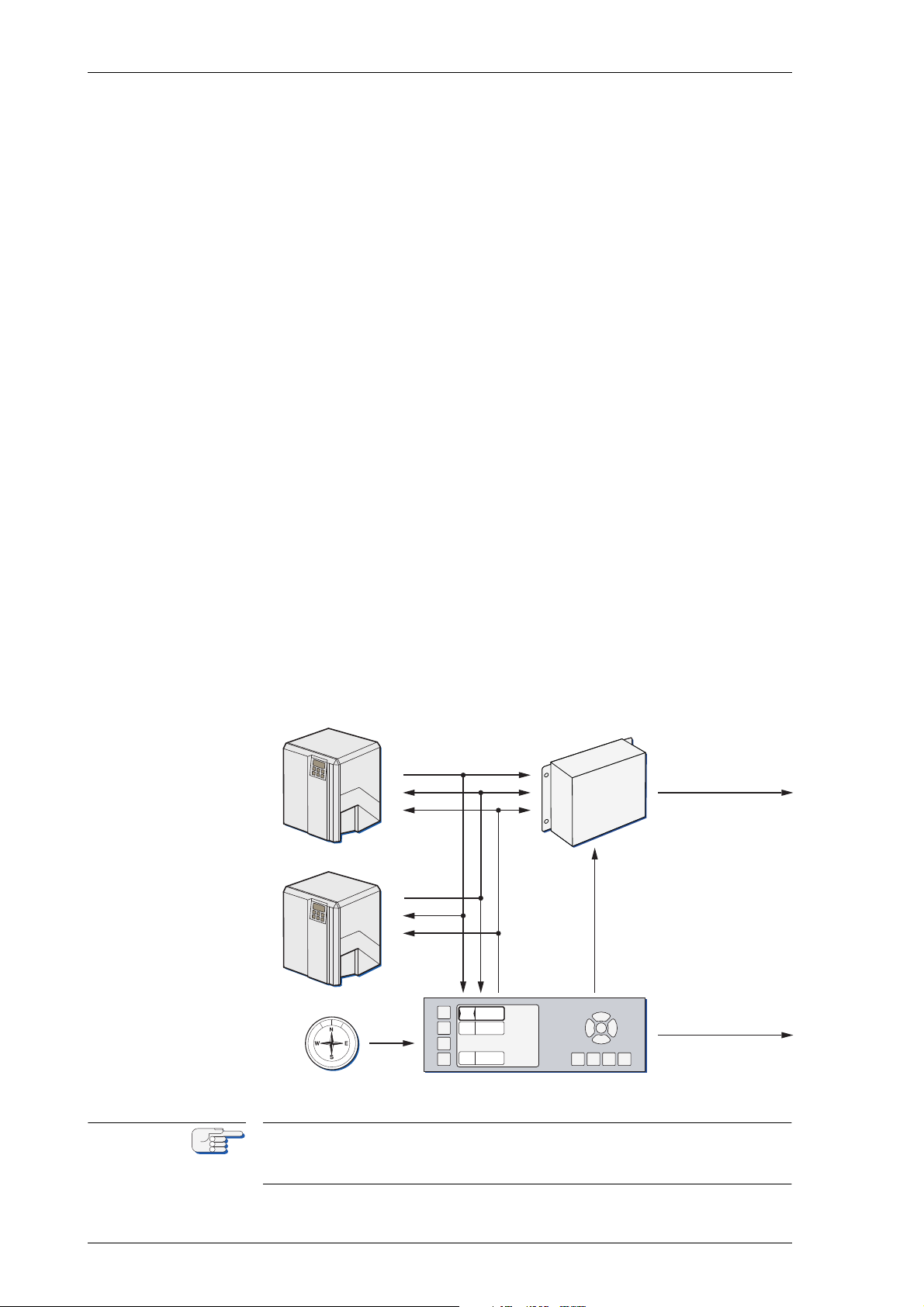
Magnetic
Compass
Position Receiver
Speed Log
Rudder Angle
Feedback Unit(s)
Status Signals In
Ext. Gyrocompass
ROT
Serial Repeaters
Equipment using
serial input
Equipment using
6 step/
input
Analogue
R.o.T.
Indicators
Nav. Data
Printer
Status Signals Out
NKR bс~гйдЙ=pулнЙг=`зеСбЦмк~нбзел
pн~еЗ~дзеЙ=dукзЕзгй~ллLqj`=pулнЙг
As a standalone system, the NAVIGAT X MK 1 provides North-speed
error corrected true heading as well as rate of turn data.
If a magnetic compass with fluxgate sensor, type 4863, or an electronic
compass is installed, the NAVIGAT X MK 1 applies magnetic variation
and distributes magnetic compass heading data to external equipment
(Transmitting Magnet Compass, TMC function).
The heading difference alarm function permits to monitor the difference
between the gyrocompass and magnetic compass heading sources.
In case of failure of the gyrocompass, the magnetic compass heading
source may be activated to provide an emergency heading reference for
repeaters and other peripheral equipment.
cбЦмкЙ=NJNOW
pí~åÇ~äçåÉ
dукзЕзгй~ллLqj`
лулнЙг
bс~гйдЙ=pулнЙг=`зеСбЦмк~нбзел NJNN
MRSPQPLc k^sfd^q u jh N
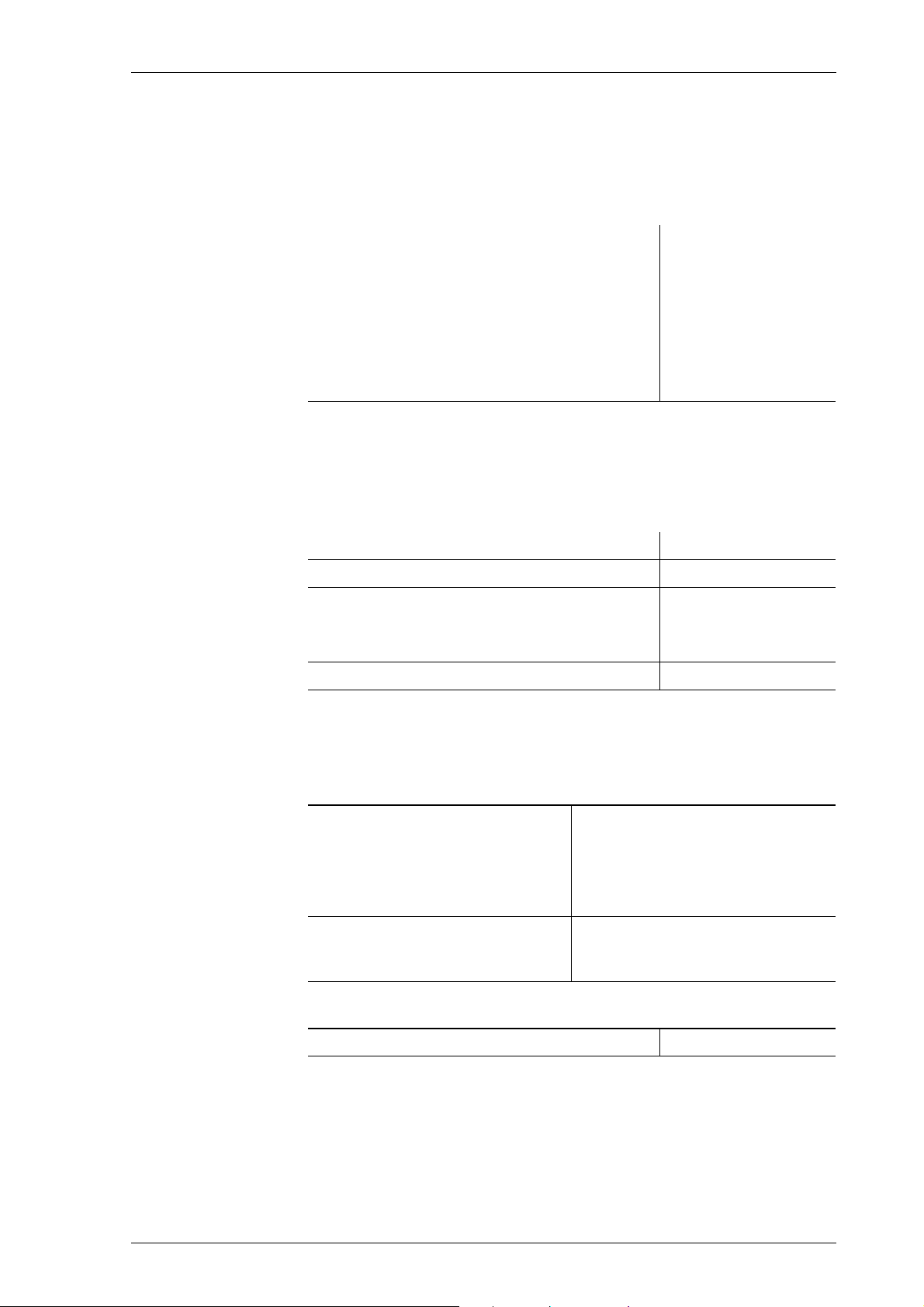
GYRO
1
GYRO
2
MAGN
COMP
246.8
246.7
247.0
G1 Hdg.
G2 Hdg.
M Hdg.
Source Sel.
Status
Alarm Status
(Hdg. Diff, Off Hdg)
G/ M Headings,
RoT, and all other
data/signals
distributed via
Switch-Over Unit
Switch-Over Unit
NAVITWIN IV
G2
M
G1
kçíÉ
aм~д=k^sfd^q u jh N=dукзЕзгй~ллLqj`=pулнЙг
The system shown in figure 1-13 below is the standard configuration for
a dual NAVIGAT X MK 1 gyrocompass system.
In addition to the two NAVIGAT XMK 1 gyrocompasses, this system
comprises the NAVITWIN IV heading management system (HMS) and
the Switch-Over Unit Type 4932.
By selecting the active heading source at the NAVITWIN IV, the operator
determines which gyrocompasses’ data is distributed via the SwitchOver Unit to external equipment, such as heading control systems,
RADAR, compass repeaters etc.
The NAVITWIN’s heading diff. alarm function permits to monitor the difference between any two of the available heading sources. The off heading alarm function permits to monitor the difference between the actual
heading from the active source and the set heading order, as received
from a heading control system or entered manually.
Alarms generated locally by a NAVIGAT gyrocompass are indicated and
may be acknowledged at the NAVITWIN IV. In turn, the NAVITWIN IV
transmits system-wide operational settings and setup parameters to the
NAVIGAT gyrocompasses. The available heading sources, the current
source selection and the heading difference alarm threshold (hdg. diff.
threshold) are also indicated at both gyrocompasses.
If a magnetic compass heading source is installed, the NAVITWIN
applies magnetic variation and distributes the data to external equipment (TMC function). In case of failure of the gyrocompasses, the magnetic compass heading source may be activated to provide an
emergency heading reference for repeaters and other peripheral equipment.
cбЦмкЙ=NJNPW
k^sfd^q=aì~ä
dукзЕзгй~лл=pулнЙг
A system with one NAVIGAT X MK 1 and one NAVIGAT 2100 / NAVIGAT
3000 fiber-optic gyrocompass is also possible in an otherwise identical
configuration.
NJNO bс~гйдЙ=pулнЙг=`зеСбЦмк~нбзел
k^sfd^q u jh N MRSPQPLc
NKS qЙЕЬебЕ~д=a~н~
^ÅÅìê~ÅáÉë
heading:
linear mean settle point error
static heading error
dynamic heading error* (range of operation
within 70° S to 70° N latitude)
deviation after 3 min. power interruption < 2°
rate of turn ≤ 0.5°/minute
*The correlation of heading error and latitude is shown in
figure 1-11 on page 1-10
≤ 0.1° x secant latitude
≤ 0.1° x secant latitude
≤ 0.4° x secant latitude
lйЙк~нбзе~д=`Ь~к~ЕнЙкблнбЕл
mean setting time < 3 h
max. follow-up speed 100°/s
freedom of roll and pitch
- with container Mod. 10
- with container Mod. 7
mean time between failure (MTBF) 40 000 h
± 40°
± 90°
bеобкзегЙен~д=oЙимбкЙгЙенл
qЙгйЙк~нмкЙ=`зеЗбнбзел
max. ambient temperature range,
operation
recommended ambient operational temperature for highest
system longevity:
max. ambient temperature range,
storage (without supporting fluid
in container)
mкзнЙЕнбзе=dк~ЗЙ
according to IEC 60529/DIN 40050 IP 23
- 10 to + 55° C
14 to 131° F
20° C ± 10° C
68° F ± 14° C
- 25 to + 70° C
- 13 to + 158° F
qЙЕЬебЕ~д=a~н~ NJNP
MRSPQPLc k^sfd^q u jh N
bдЙЕнкзг~ЦеЙнбЕ=`згй~нбДбдбну=Ebj`F=L=bдЙЕнкзг~ЦеЙнбЕ=fенЙкСЙкЙеЕЙ
according to IEC 60945:
minimum clearance to MF/HF transceiver
units and their antennas.
minimum clearance to high voltage power
lines > 380 VAC of other equipment
sáÄê~íáçå
according to GL: „Rules for Classification and
Construction, I - Ship Technology, Part 1 - Seagoing ships, Chapter 2 - Machinery Installations“, Edition 2000
according to IEC 60945 Vibration level
j~ЦеЙнбЕ=`дЙ~к~еЕЙ
to standard magnetic compass 0.6 m
to steering magnetic compass 0.4 m
reduced, to standard magnetic compass 0.3 m
reduced, to steering magnetic compass 0.3 m
1.5 m
1.5 m
Applicable in Area A
classified locations
mзпЙк=pмййду
supply voltage main: 115/230 VAC, 50/60 Hz;
backup: 24 VDC (18-36 V), including automatic switch over to
backup supply in case of main
supply failure
max. ripple content DC supply ± 4 Vpp; extreme values may not
exceed 36 V or fall below 18 V
power consumption:
start-up
operation
each analogue repeater
each digital repeater
AC: 125 VA; DC: 80 W
AC: 75 VA; DC: 45 W
AC: 7 VA; DC: 7 W
AC: 5 VA; DC: 5 W
NJNQ qЙЕЬебЕ~д=a~н~
 Loading...
Loading...