

Page 1

SN8P2711A
8-Bit Micro-Controller
SN8P2711A
用户参考手册
Version 1.0
S
O
S
O
SONiX 公司保留对以下所有产品在可靠性,功能和设计方面的改进作进一步说明的权利。SONiX 不承担由本手册所
涉及的产品或电路的运用和使用所引起的任何责任,SONiX 的产品不是专门设计来应用于外科植入、生命维持和任何
SONiX 产品的故障会对个体造成伤害甚至死亡的领域。如果将 SONiX 的产品应用于上述领域,即使这些是由 SONiX 在
产品设计和制造上的疏忽引起的,用户应赔偿所有费用、损失、合理的人身伤害或死亡所直接或间接产生的律师费用,并
且用户保证 SONiX 及其雇员、子公司、分支机构和销售商与上述事宜无关。
Nii
N
X 88
X
位
位
单
单
片
片
机
机
SONiX TECHNOLOGY CO., LTD Page 1 Version 1.0
Page 2
SN8P2711A
8-Bit Micro-Controller
修正记录
版本号 日期 内容
VER 1.0
2008 年 3 月 初版。
2008 年 5 月 1. 修改烧录信息内容。
SONiX TECHNOLOGY CO., LTD Page 2 Version 1.0
Page 3

SN8P2711A
8-Bit Micro-Controller
目 录
修正记录................................................................................................................................................................................................ 2
目 录................................................................................................................................................................................................ 3
1
1
产品简介 ......................................................................................................................................................................................
1
1.1 功能特性............................................................................................................................................................................. 6
1.2 系统结构框图...................................................................................................................................................................... 7
1.3 引脚配置............................................................................................................................................................................. 8
1.4 引脚说明............................................................................................................................................................................. 8
1.5 引脚电路结构图 ..................................................................................................................................................................9
2
2
中央处理器(CPU) ..................................................................................................................................................................
2
2.1 存储器 .............................................................................................................................................................................. 10
2.1.1 程序存储器(ROM)...................................................................................................................................................10
2.1.1.1 复位向量(0000H)........................................................................................................................................... 10
2.1.1.2 中断向量(0008H)........................................................................................................................................... 11
2.1.1.3 查表.................................................................................................................................................................... 12
2.1.1.4 跳转表 ................................................................................................................................................................ 14
2.1.1.5 CHECKSUM计算 ............................................................................................................................................... 15
2.1.2 编译选项表(CODE OPTION) .................................................................................................................................. 16
2.1.3 数据存储器(RAM) ...................................................................................................................................................16
2.1.4 系统寄存器 .................................................................................................................................................................. 17
2.1.4.1 系统寄存器列表.................................................................................................................................................. 17
2.1.4.2 系统寄存器说明.................................................................................................................................................. 17
2.1.4.3 系统寄存器的位定义........................................................................................................................................... 18
2.1.4.4 累加器 ................................................................................................................................................................ 19
2.1.4.5 程序状态寄存器PFLAG ...................................................................................................................................... 20
2.1.4.6 程序计数器.........................................................................................................................................................21
2.1.4.7 Y,Z寄存器........................................................................................................................................................23
2.1.4.8 R寄存器 ............................................................................................................................................................. 23
2.2 寻址模式........................................................................................................................................................................... 24
2.2.1 立即寻址......................................................................................................................................................................24
2.2.2 直接寻址......................................................................................................................................................................24
2.2.3 间接寻址......................................................................................................................................................................24
2.3 堆栈..................................................................................................................................................................................25
2.3.1 概述 ............................................................................................................................................................................. 25
2.3.2 堆栈寄存器 .................................................................................................................................................................. 25
2.3.3 堆栈操作举例............................................................................................................................................................... 26
3
3
复位 ...........................................................................................................................................................................................
3
3.1 概述..................................................................................................................................................................................27
3.2 上电复位........................................................................................................................................................................... 28
3.3 看门狗复位 ....................................................................................................................................................................... 28
3.4 掉电复位........................................................................................................................................................................... 29
3.4.1 概述 ............................................................................................................................................................................. 29
3.4.2 系统工作电压............................................................................................................................................................... 29
3.4.3 掉电复位性能改进........................................................................................................................................................ 30
3.5 外部复位........................................................................................................................................................................... 32
3.6 外部复位电路.................................................................................................................................................................... 33
3.6.1 RC复位电路................................................................................................................................................................. 33
3.6.2 二极管及RC复位电路 .................................................................................................................................................. 33
3.6.3 稳压二极管复位电路 .................................................................................................................................................... 34
3.6.4 电压偏置复位电路........................................................................................................................................................ 34
3.6.5 外部IC复位 .................................................................................................................................................................. 35
4
4
系统时钟 ....................................................................................................................................................................................
4
4.1 概述..................................................................................................................................................................................36
4.2 时钟框图........................................................................................................................................................................... 36
4.3 OSCM寄存器.................................................................................................................................................................... 36
4.4 系统高速时钟.................................................................................................................................................................... 37
4.4.1 内部高速RC振荡器 ...................................................................................................................................................... 37
4.4.2 外部高速时钟............................................................................................................................................................... 38
4.4.2.1 石英/陶瓷振荡器................................................................................................................................................. 38
4.4.2.2 RC振荡器...........................................................................................................................................................39
4.4.2.3 外部时钟源.........................................................................................................................................................39
10
27
36
6
SONiX TECHNOLOGY CO., LTD Page 3 Version 1.0
Page 4

SN8P2711A
8-Bit Micro-Controller
4.5 系统低速时钟.................................................................................................................................................................... 40
4.5.1 系统时钟测试............................................................................................................................................................... 40
5
5
系统工作模式 .............................................................................................................................................................................
5
5.1 概述..................................................................................................................................................................................41
5.2 系统模式切换.................................................................................................................................................................... 42
5.3 唤醒时间........................................................................................................................................................................... 43
5.3.1 概述 ............................................................................................................................................................................. 43
5.3.2 唤醒时间......................................................................................................................................................................43
6
6
中断 ...........................................................................................................................................................................................
6
6.1 概述..................................................................................................................................................................................44
6.2 中断请求使能寄存器INTEN .............................................................................................................................................. 44
6.3 中断请求寄存器INTRQ.....................................................................................................................................................45
6.4 GIE全局中断..................................................................................................................................................................... 45
6.5 PUSH, POP处理............................................................................................................................................................... 46
6.6 INT0(P0.0)中断............................................................................................................................................................ 47
6.7 INT1(P0.1)中断............................................................................................................................................................ 48
6.8 TC0 中断 .......................................................................................................................................................................... 49
6.9 TC1 中断 .......................................................................................................................................................................... 50
6.10 ADC中断 ..........................................................................................................................................................................51
6.11 多中断操作举例................................................................................................................................................................ 52
7
7
I/O口 ..........................................................................................................................................................................................
7
7.1 I/O口模式 ......................................................................................................................................................................... 53
7.2 I/O上拉电阻寄存器 ........................................................................................................................................................... 54
7.3 I/O口数据寄存器............................................................................................................................................................... 54
7.4 P4 口ADC共用引脚 .......................................................................................................................................................... 55
8
8
定时器........................................................................................................................................................................................
8
8.1 看门狗定时器.................................................................................................................................................................... 57
8.2 定时/计数器TC0 ...............................................................................................................................................................58
8.2.1 概述 ............................................................................................................................................................................. 58
8.2.2 TC0M模式寄存器......................................................................................................................................................... 59
8.2.3 TC1X8, TC0X8, TC0GN标志....................................................................................................................................... 59
8.2.4 TC0C计数寄存器 ......................................................................................................................................................... 60
8.2.5 TC0R自动装载寄存器..................................................................................................................................................61
8.2.6 TC0 时钟频率输出(蜂鸣器输出) .............................................................................................................................. 62
8.2.7 TC0 操作流程 .............................................................................................................................................................. 63
8.3 定时/计数器TC1 ...............................................................................................................................................................64
8.3.1 概述 ............................................................................................................................................................................. 64
8.3.2 TC1M模式寄存器......................................................................................................................................................... 65
8.3.3 TC1X8 标志 ................................................................................................................................................................. 65
8.3.4 TC1C计数寄存器 ......................................................................................................................................................... 66
8.3.5 TC1R自动装载寄存器..................................................................................................................................................67
8.3.6 TC1 时钟频率输出(蜂鸣器输出) .............................................................................................................................. 68
8.3.7 TC1 操作流程 .............................................................................................................................................................. 69
8.4 PWM功能说明 .................................................................................................................................................................. 70
8.4.1 概述 ............................................................................................................................................................................. 70
8.4.2 TCnIRQ和PWM输出占空比 ......................................................................................................................................... 71
8.4.3 PWM输出占空比和TCnR的变化..................................................................................................................................72
8.4.4 PWM编程举例 ............................................................................................................................................................. 73
9
9
5+1 通道ADC.............................................................................................................................................................................
9
9.1 概述..................................................................................................................................................................................74
9.2 ADM寄存器 ...................................................................................................................................................................... 74
9.3 ADR寄存器....................................................................................................................................................................... 75
9.4 ADB寄存器.......................................................................................................................................................................75
9.5 P4CON寄存器 .................................................................................................................................................................. 76
9.6 VREFH寄存器 .................................................................................................................................................................. 76
9.7 AD转换时间...................................................................................................................................................................... 77
9.8 ADC操作实例 ................................................................................................................................................................... 78
9.9 ADC电路 ..........................................................................................................................................................................80
0
1
0
1
指令集 ...................................................................................................................................................................................
0
1
1
1
1
1
电气特性 ...............................................................................................................................................................................
1
1
11.1 极限参数........................................................................................................................................................................... 82
11.2 电气特性........................................................................................................................................................................... 82
2
1
2
1
开发工具 ...............................................................................................................................................................................
2
1
12.1 在线仿真器(ICE)..........................................................................................................................................................84
41
44
53
57
74
81
82
84
SONiX TECHNOLOGY CO., LTD Page 4 Version 1.0
Page 5

SN8P2711A
8-Bit Micro-Controller
12.2 OTP烧录器 ....................................................................................................................................................................... 84
12.3 SN8IDE ............................................................................................................................................................................ 84
12.4 SN8P2711 EV KIT............................................................................................................................................................85
12.4.1 PCB说明 ................................................................................................................................................................. 85
12.4.2 SN8P2711 EV KIT与SN8ICE 2K的连接 ................................................................................................................. 87
12.5 OTP烧录信息 ................................................................................................................................................................... 88
12.5.1 烧录转接板信息 ...................................................................................................................................................... 88
12.5.2 烧录引脚信息.......................................................................................................................................................... 90
3
1
3
1
封装信息 ...............................................................................................................................................................................
3
1
13.1 P-DIP 14 PIN .................................................................................................................................................................... 91
13.2 SOP 14 PIN ......................................................................................................................................................................92
13.3 SSOP 16 PIN.................................................................................................................................................................... 93
4
1
4
1
芯片正印命名规则 .................................................................................................................................................................
4
1
14.1 概述.................................................................................................................................................................................. 94
14.2 芯片型号说明....................................................................................................................................................................94
14.3 命名举例........................................................................................................................................................................... 95
14.4 日期码规则.......................................................................................................................................................................95
91
94
SONiX TECHNOLOGY CO., LTD Page 5 Version 1.0
Page 6

SN8P2711A
8-Bit Micro-Controller
1
1
1
SN8P2711A 是 SN8P2711 的升级版本,IHRC 提高到 16MHz±2%。产品优秀的高抗干扰性能为家电产品提供
最佳的解决方案。
z SN8P2711A 兼容 SN8P2711;
z IHRC 性能由 16MHz±5%提高到 16MHz±2%;
z 掉电复位性能更加准确;
z SN8P2711 的代码可直接用于 SN8P2711A。可以将 SN8P2711 的原始 SN8 档直接编程为 SN8P2711A,无 需
在 SN8P2711A 源代码中宣告和重新编译。
产品简介
1.1 功能特性
存储器配置 ♦ 5+1 通道 12 位 ADC.
♦
OTP ROM 空间:1K * 16 位。 5个外部 ADC 输入。
RAM 空间:64 字节。 一个内部电池检测。
4 层堆栈缓存器
♦
I/O 引脚配置
♦
输入输出双向端口:P0、P4、P5。 TC1:自动装载定时器/计数器/PWM1/ Buzzer 输出。
单向输入引脚:P0.4,与复位引脚共用。
具有唤醒功能的端口:P0 电平触发。
内置上拉电阻端口:P0、P4、P5。
外部中断引脚:
P0.0:由寄存器 PEDGE 控制;
P0.1:下降沿触发。
3 级低电压检测系统(LVD) 内部高速时钟:RC 模式,高达 16MHz。
♦
系统复位,监控系统电源。
5 个中断源
♦
3 个内部中断:TC0、TC1、ADC。 普通模式:高、低速时钟同时工作。
2 个外部中断:INT0、INT1。 低速模式:只有低速时钟工作。
强大的指令系统
♦
单时钟系统(1T)。
大部分指令只需要一个时钟周期。
跳转指令 JMP 可在整个 ROM 区执行。 P-DIP 14 pins。
调用指令 CALL 可在整个 ROM 区执行。
查表指令 MOVC 可寻址整个 ROM 区。
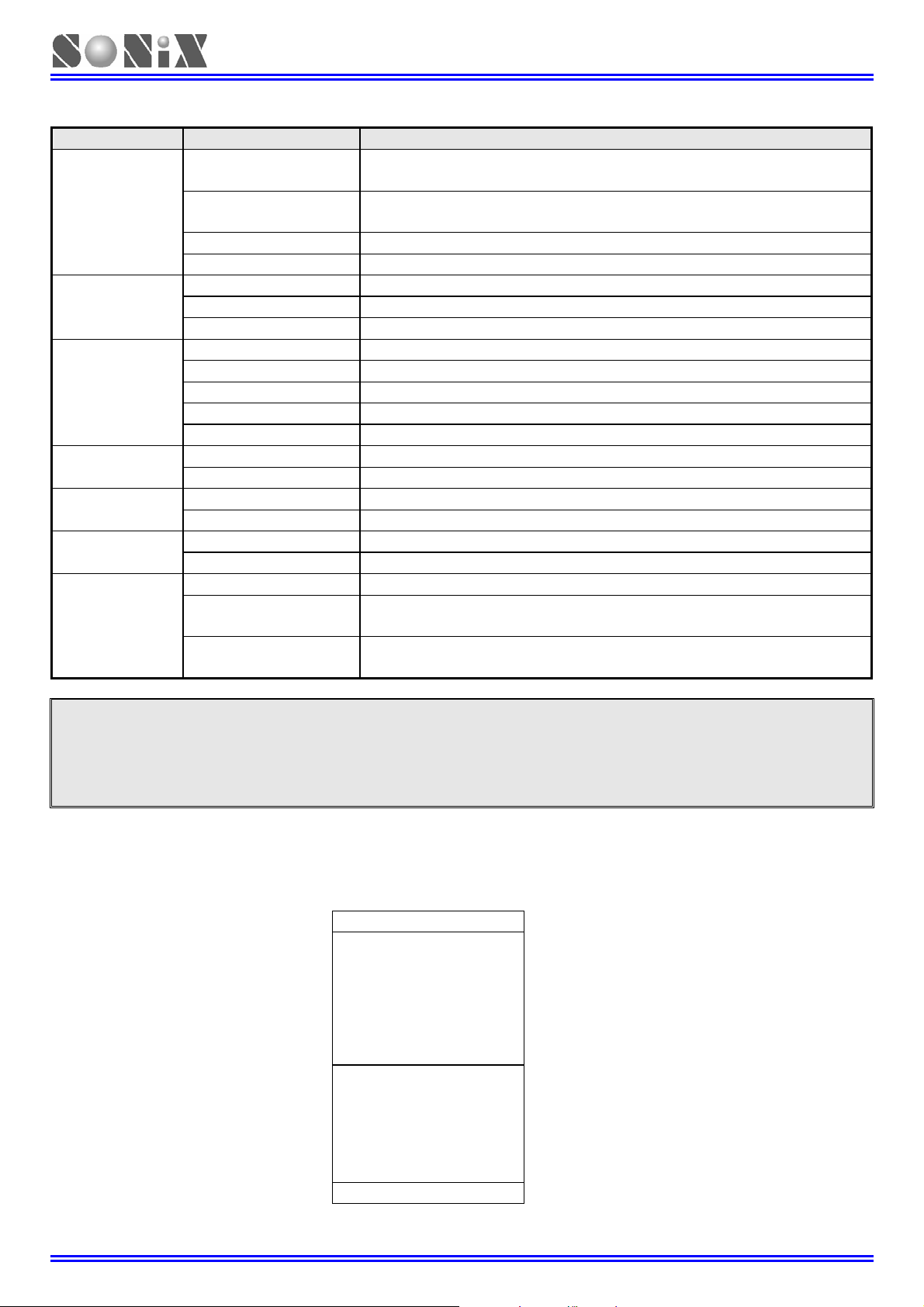
) 特性列表
单片机型号 ROM RAM 堆栈
SN8P2711 1K*16 64 4 V V 12 5+1 ch V 2 5 P-DIP 14/SOP 14/SSOP 16
SN8P2711A 1K*16 64 4 V V 12 5+1 ch V 2 5 P-DIP 14/SOP 14/SSOP 16
) SN8P2711 升级为 SN8P2711A 注意事项
项目
PCL
32KHz 振荡器模式 不支持 支持
韧件差别
PCL 不能保存在地址 0xxFEH 和 0xxFFH 处 没有限制
SN8P2711 的 SN8 档可直接通过
烧录 SN8P2711A
定时器
TC0 TC1
SN8P2711 SN8P2711A
I/O ADC 绿色模式
内部 AD 参考电压(VDD、4V、3V、2V)。
两个 8 位定时/计数器
♦
TC0:自动装载定时器/计数器/PWM0/ Buzzer 输出。
内置看门狗定时器,其时钟源由内部低速 RC 振荡器提供
♦
(16KHz @3V,32KHz @5V)
双时钟系统
♦
外部高速时钟:RC 模式,高达 10 MHz。
外部高速时钟:晶体模式,高达 16 MHz。
内部低速时钟:RC 模式,16KHz(3V),32KHz(5V)。
工作模式
♦
睡眠模式:高、低速时钟都停止工作。
绿色模式:由 TC0 周期性的唤醒。
封装形式
♦
SOP 14 pins。
SSOP 16 pins。
MPIII Writer
PWM
Buzzer
SN8P2711A 的 SN8 档(如重新编译的 SN8P2711 的
源代码而没有宣告秤 SN8P2711A,SN8P2711 的新
代码……) 不能直接通过 MPIII Writer 烧录
SN8P2711 的芯片。
唤醒功能
引脚数目
封装形式
SONiX TECHNOLOGY CO., LTD Page 6 Version 1.0
Page 7
SN8P2711A
8-Bit Micro-Controller
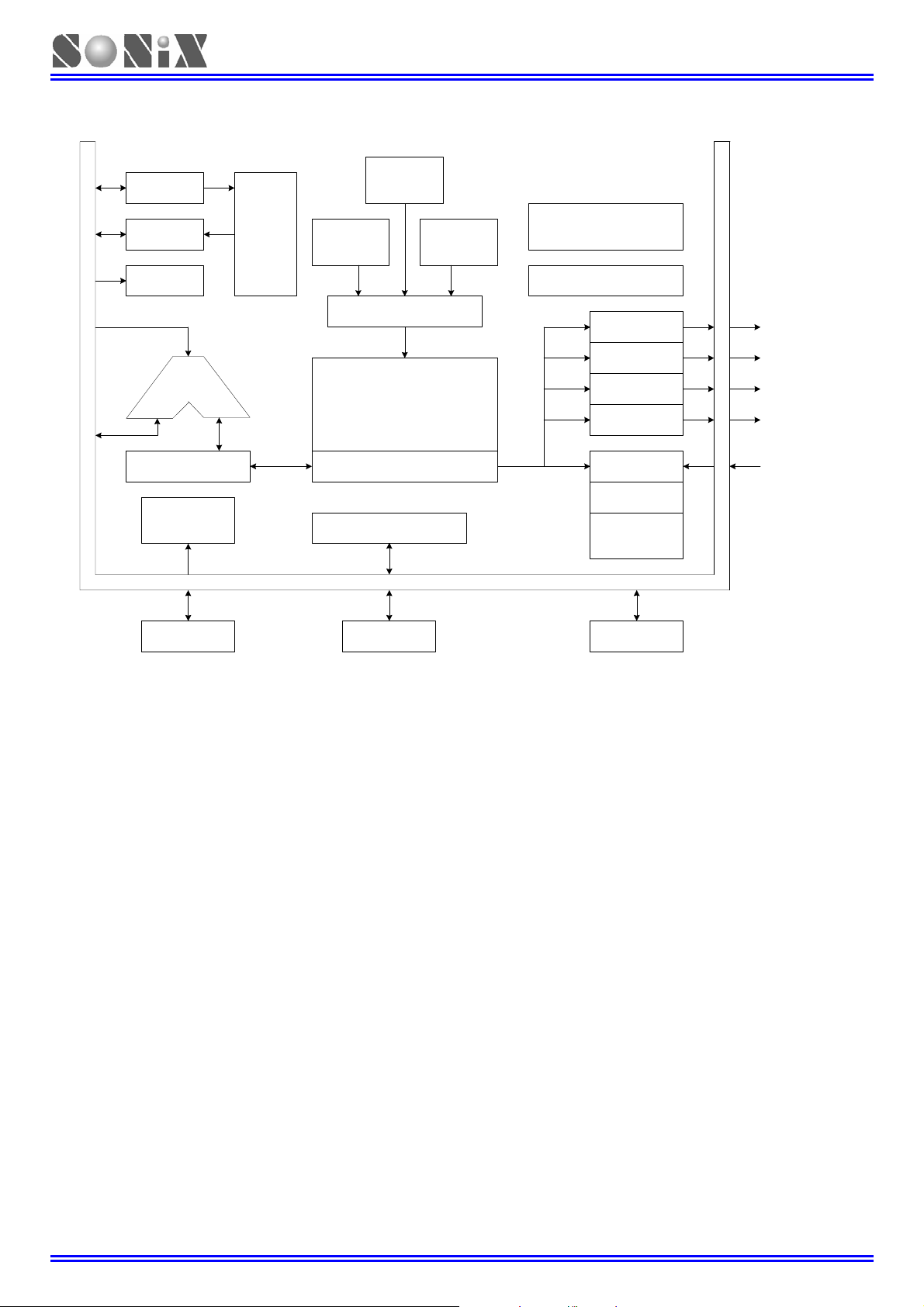
1.2 系统结构框图
内部高速RC
PC
振荡时钟
OTP
IR
ROM
FLAGS
ALU
ACC
中断控制
P0 P5 P4
外部高速振
荡时钟
定时器&计数器
内部低速RC
振荡时钟
时序产生器
RAM
系统寄存器
低电压检测
(LVD)
看门狗定时器
PWM 0
BUZZER 0
PWM 1
BUZZER 1
12-BIT ADC
内部参考源
检测电池的内
部ADC
PWM0
BUZZER0
PWM1
BUZZER1
AIN0~AIN4
SONiX TECHNOLOGY CO., LTD Page 7 Version 1.0
Page 8
SN8P2711A
8-Bit Micro-Controller
1.3 引脚配置
SN8P2711AP(P-DIP 14 pins)
SN8P2711AS(SOP 14 pins)
VDD 1 U 14 VSS
P0.3/XIN 2 13 P4.4/AIN4
P0.2/XOUT 3 12 P4.3/AIN3
P0.4/RST/VPP 4 11 P4.2/AIN2
P5.3/BZ1/PWM1 5 10 P4.1/AIN1
P5.4/BZ0/PWM0 6 9 P4.0/AIN0/VREFH
P0.1/INT1 7 8 P0.0/INT0
SN8P2711AX(SSOP 16 pins)
VDD 1 U 16 VSS
P0.3/XIN 2 15 P4.4/AIN4
P0.2/XOUT 3 14 P4.3/AIN3
P0.4/RST/VPP 4 13 P4.2/AIN2
P5.3/BZ1/PWM1 5 12 P4.1/AIN1
P5.4/BZ0/PWM0 6 11 P4.0/AIN0/VREFH
P0.1/INT1 7 10 P0.0/INT0
NC 8 9 NC
SN8P2711AP
SN8P2711AS
SN8P2711AX
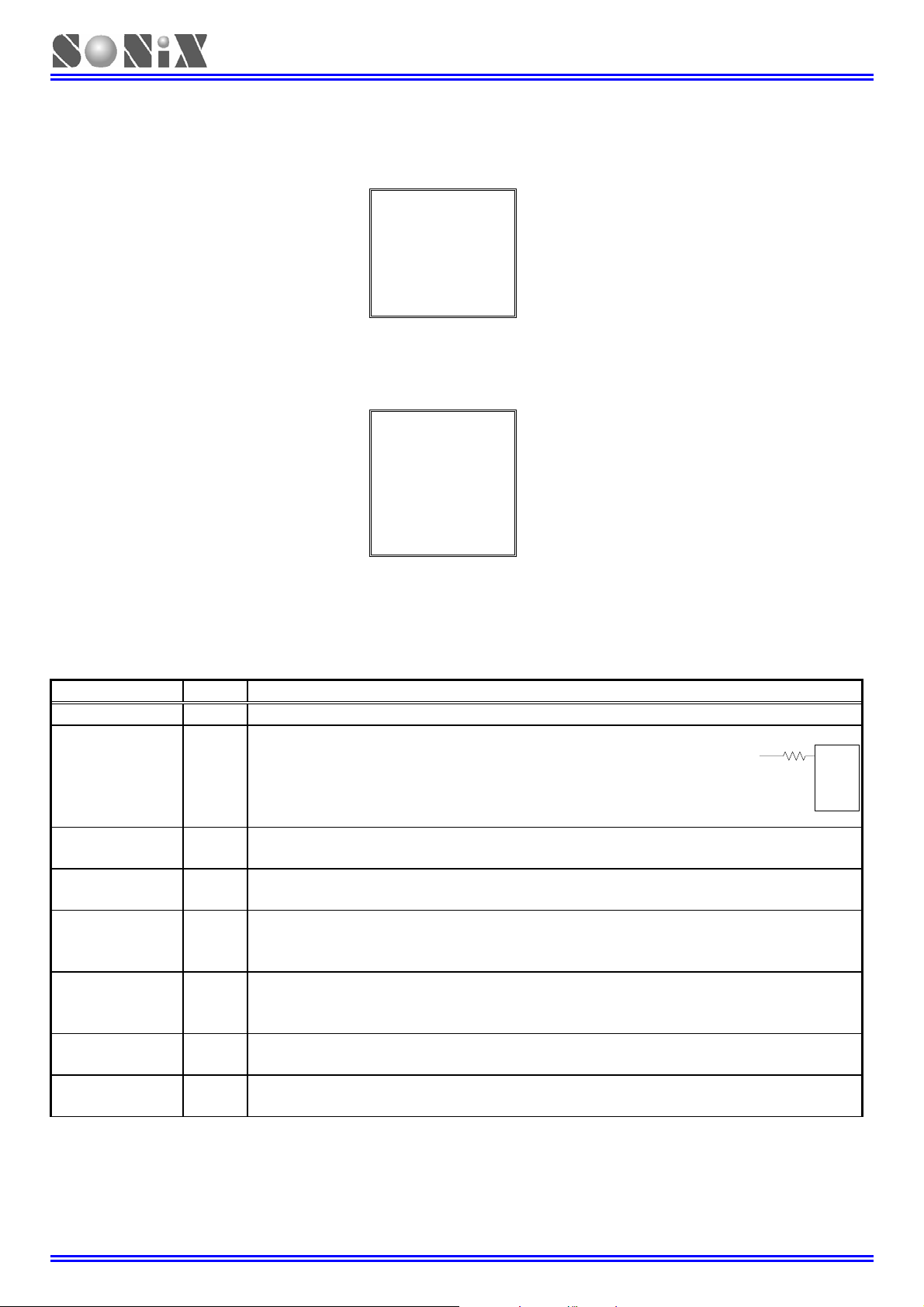
1.4 引脚说明
引脚名称 类型 功能说明
VDD, VSS P
P0.4/RST/VPP I, P
P0.3/XIN I/O
P0.2/XOUT I/O
P0[1:0]/INT[1:0] I/O
P4.0/AIN0/VREFH I/O
P4.[4:1]/AIN[4:1] I/O
P5[4:3]/BZ[1:0]/
PWM[1:0]
电源输入端。
P0.4:禁止外部复位时为单向输入引脚,施密特触发,无内置上拉电阻,
作普通输入引脚使用时,用户需在单片机的 P0.4 外面串接一个 100 欧姆
的电阻(如右图所示,电阻要尽可能的靠近单片机),具有唤醒功能。
RST:系统复位输入引脚,施密特结构,低电平触发,通常保持高电平。
VPP:OTP 烧录引脚。
P0.3:双向输入/输出引脚,输入模式时为施密特触发,内置上拉电阻,具有唤醒功能。
XIN:使能外部振荡电路(晶体/RC 振荡电路)时为振荡信号输入引脚。
P0.2:双向输入/输出引脚,输入模式时为施密特触发,内置上拉电阻,具有唤醒功能。
XOUT:使能外部晶体振荡器时为振荡器输出引脚。
双向输入/输出引脚,输入模式时为施密特触发,内置上拉电阻,具有唤醒功能。
外部中断触发引脚(施密特触发)。
TC1/TC0 事件计数器的信号输入引脚。
P4.0:双向输入/输出引脚,非施密特触发,内置上拉电阻。
AIN0:ADC 输入通道。
VERFH:ADC 参考电压的高电平输入引脚。
P4 [4:1]:双向输入/输出引脚,非施密特触发,内置上拉电阻。
AIN[4:1]:ADC 输入通道。
双向输入/输出引脚,输入模式时为施密特触发,内置上拉电阻。
I/O
Buzzer 输出引脚/PWM 输出引脚。
100R
P0.4
MCU
SONiX TECHNOLOGY CO., LTD Page 8 Version 1.0
Page 9

SN8P2711A
8-Bit Micro-Controller
1.5 引脚电路结构图
P0.2、P0.3:
Pull-Up
P0.4
、5:
P0
:
Oscillator
Code Option
Pin
PnM
PnM, PnUR
Output
Latch
Input Bus
Output Bus
Int. Osc.
Ext. Reset
Code Option
Pin
Int. Bus
Int. Rst
Pull-Up
PnM
Pin
PnM, PnUR
Input Bus
P4.0
:
P4
:
Output
Latch
Output Bus
Pull-Up
PnM
PnM
GCHS
Pull-Up
PnM, PnUR
PnM, PnUR
Output
Latch
Input Bus
Output Bus
Int. ADC
Int. VERFH
Input Bus
P4CON
EVHENB
Pin
P4CON
Pin
GCHS
Output
Latch
Output Bus
Int. ADC
SONiX TECHNOLOGY CO., LTD Page 9 Version 1.0
Page 10

SN8P2711A
8-Bit Micro-Controller
2
2
2
中央处理器(CPU)
2.1 存储器
2.1.1 程序存储器(ROM)
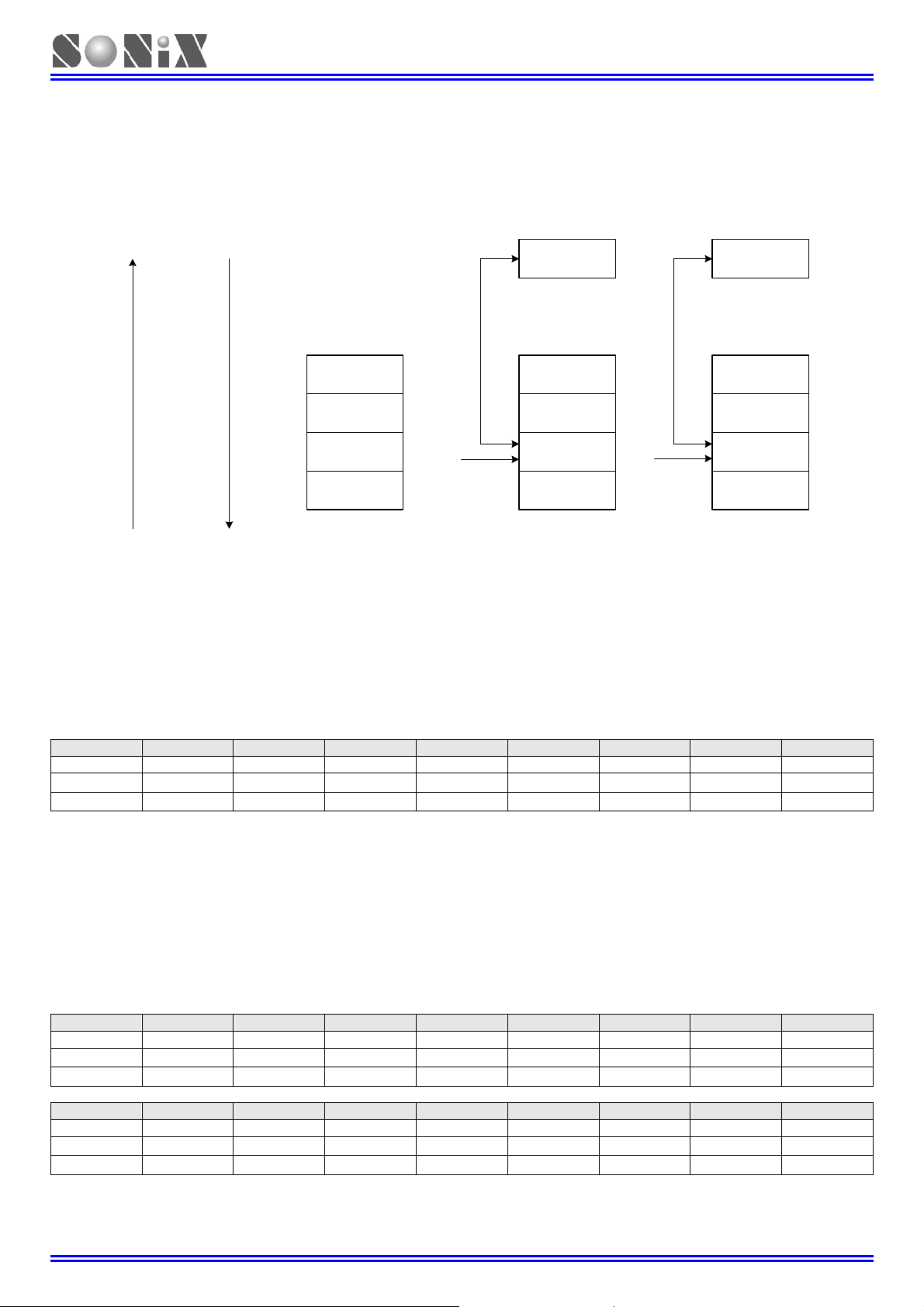
) ROM
2.1.1.1 复位向量(0000H)
) 上电复位(NT0=1,NPD=0);
) 看门狗复位(NT0=0,NPD=0);
) 外部复位(NT0=1,NPD=1)。
的 NT0 和 NPD 标志位的内容可以判断系统复位方式。下面一段程序演示了如何定义 ROM 中的复位向量。
¾ 例:定义复位向量。
ORG 0 ;
JMP START
…
ORG 10H
START:
…
…
ENDP
:
1K
0000H
0001H
.
.
0007H
0008H
0009H
.
.
000FH
0010H
0011H
.
.
.
.
.
03FCH
03FDH
03FEH
03FFH
具有一个字长的系统复位向量(0000H)。
发生上述任一种复位后,程序将从 0000H 处重新开始执行,系统寄存器也都将恢复为默认值。根据 PFLAG 寄存器中
ROM
复位向量
通用存储区
中断向量 用户中断向量
通用存储区
系统保留
; 跳至用户程序。
; 用户程序起始地址。
; 用户程序。
; 程序结束。
用户复位向量
用户程序开始
用户程序结束
用户程序
SONiX TECHNOLOGY CO., LTD Page 10 Version 1.0
Page 11
SN8P2711A
8-Bit Micro-Controller
2.1.1.2 中断向量(0008H)
中断向量地址为 0008H。一旦有中断响应,程序计数器 PC 的当前值就会存入堆栈缓存器并跳转到 0008H 开始执行
中断服务程序。0008H 处的第一条指令必须是“JMP”或“NOP”。下面的示例程序说明了如何编写中断服务程序。
注:“PUSH”,“POP”指令用于存储和恢复 ACC/PFLAG,NT0、NTD 不受影响。PUSH/POP 缓存器是唯一的,且仅有一层。
¾ 例:定义中断向量,中断服务程序紧随 ORG 8H 之后。
.CODE
…
…
…
START:
… ;
JMP START
…
ENDP
¾ 例:定义中断向量,中断程序在用户程序之后。
.CODE
ORG 0
JMP START
…
JMP MY_IRQ
START:
…
JMP START
…
MY_IRQ:
…
…
ENDP
注:从上面的程序中容易得出 SONiX 的编程规则,有以下几点:
1. 地址 0000H 的“JMP”指令使程序从头开始执行;
2. 地址 0008H 是中断向量;
3. 用户的程序应该是一个循环。
ORG 0
JMP START
ORG 8H
PUSH
POP
RETI
ORG 8H
ORG 10H
PUSH
POP
RETI
; 跳至用户程序。
; 中断向量。
; 保存 ACC 和 PFLAG。
; 恢复 ACC 和 PFLAG。
; 中断结束。
; 用户程序开始。
; 用户程序结束。
; 程序结束。
; 跳至用户程序。
; 中断向量。
; 跳至中断程序。
; 用户程序开始。
; 用户程序结束。
; 中断程序开始。
; 保存 ACC 和 PFLAG。
; 恢复 ACC 和 PFLAG。
; 中断程序结束。
; 程序结束。
SONiX TECHNOLOGY CO., LTD Page 11 Version 1.0
Page 12
SN8P2711A
8-Bit Micro-Controller
2.1.1.3 查表
在 SONiX 单片机中,对 ROM 区中的数据进行查找,寄存器 Y 指向所找数据地址的中间字节(bit8~bit15),寄存
器 Z 指向所找数据地址的低字节(bit0~bit7)。执行完 MOVC 指令后,所查找数据低字节内容被存入 ACC 中,而数据高
字节内容被存入 R 寄存器。
¾ 例:查找 ROM 地址为“TABLE1”的值。
B0MOV Y, #TABLE1$M
B0MOV Z, #TABLE1$L
MOVC
NOP ;
@@:
… ;
TABLE1: DW 0035H
DW 5105H
DW 2012H
…
INCMS Z
JMP @F
INCMS Y
;
MOVC
注:当寄存器 Z 溢出(从 0FFH 变为 00H)时 ,寄 存 器 Y 并不会自动加 1。因此, Z溢出时,Y 必须由程序加 1,下面的宏 INC_YZ
能够对 Y 和 Z 寄存器自动处理。
¾ 例:宏 INC_YZ。
INC_YZ MACRO
INCMS Z
JMP @F
INCMS Y
NOP
@@:
ENDM
¾ 例:通过“INC_YZ”对上例进行优化。
B0MOV Y, #TABLE1$M
B0MOV Z, #TABLE1$L
MOVC
INC_YZ
@@:
… ;
TABLE1: DW 0035H
DW 5105H
DW 2012H
…
;
MOVC
; 设置 TABLE1 地址高字节。
; 设置 TABLE1 地址低字节。
; 查表,R = 00H,ACC = 35H。
; 查找下一地址。
; Z 没有溢出。
; Z 溢出(FFH Æ 00),Æ Y=Y+1
; 查表,R = 51H,ACC = 05H。
; 定义数据表(16 位)数据。
; 没有溢出。
; 没有溢出。
; 设置 TABLE1 地址中间字节。
; 设置 TABLE1 地址低字节。
; 查表,R = 00H,ACC = 35H。
; 查找下一地址数据。
; 查表,R = 51H,ACC = 05H。
; 定义数据表(16 位)数据。
SONiX TECHNOLOGY CO., LTD Page 12 Version 1.0
Page 13

SN8P2711A
下面的程序通过累加器对 Y,Z 寄存器进行处理来实现查表功能,但需要特别注意进位时的处理。
¾ 例:由指令 B0ADD/ADD 对 Y 和 Z 寄存器加 1。
B0MOV Y, #TABLE1$M
B0MOV Z, #TABLE1$L
GETDATA: ;
MOVC
…
TABLE1: DW 0035H
DW 5105H
DW 2012H
…
B0MOV A, BUF
B0ADD Z, A
B0BTS1 FC
JMP GETDATA
INCMS Y
NOP
; 设置 TABLE1 地址中间字节。
; 设置 TABLE1 地址低字节。
; Z = Z + BUF。
; 检查进位标志。
; FC = 0。
; FC = 1。
; 存储数据,如果 BUF = 0,数据为 0035H。
; 如果 BUF = 1,数据=5105H。
; 如果 BUF = 2,数据=2012H。
; 定义数据表(16 位)数据。
8-Bit Micro-Controller
SONiX TECHNOLOGY CO., LTD Page 13 Version 1.0
Page 14
SN8P2711A
8-Bit Micro-Controller
2.1.1.4 跳转表
跳转表能够实现多地址跳转功能。由于 PCL 和 ACC 的值相加即可得到新的 PCL,因此,可以通过对 PCL 加上不同
的 ACC 值来实现多地址跳转。ACC 值若为 n,PCL+ACC 即表示当前地址加 n,执行完当前指令后 PCL 值还会自加 1,
可参考以下范例。如果 PCL+ACC 后发生溢出,PCH 则自动加 1。由此得到的新的 PC 值再指向跳转指令列表中新的地
址。这样,用户就可以通过修改 ACC 的值轻松实现多地址的跳转。
注:PCH 只支持 PC 增量运算,而不支持 PC 减量运算。当 PCL+ACC 后如有进位,PCH 的值会自动加 1。PCL-ACC 后若有借
位,PCH 的值将保持不变,用户在设计应用时要加以注意。
¾ 例:跳转表。
ORG 0100H ; 跳转表从 ROM 前端开始。
B0ADD PCL, A ; PCL = PCL + ACC,PCL 溢出时 PCH 加 1。
JMP A0POINT ; ACC = 0,跳至 A0POINT。
JMP A1POINT ; ACC = 1,跳至 A1POINT。
JMP A2POINT ; ACC = 2,跳至 A2POINT。
JMP A3POINT ; ACC = 3,跳至 A3POINT。
SONiX 单片机提供一个宏以保证可靠执行跳转表功能,它会自动检测 ROM 边界并将跳转表移至适当的位置。但采用
该宏程序会占用部分 ROM 空间。
¾ 例:宏“MACRO3.H”中,“@JMP_A”的应用。
B0MOV A, BUF0 ; “BUF0”从 0 至 4。
@JMP_A 5 ; 列表个数为 5。
JMP A0POINT ; ACC = 0,跳至 A0POINT。
JMP A1POINT ; ACC = 1,跳至 A1POINT。
JMP A2POINT ; ACC = 2,跳至 A2POINT。
JMP A3POINT ; ACC = 3,跳至 A3POINT。
JMP A4POINT ; ACC = 4,跳至 A4POINT。
如果跳转表恰好位于 ROM BANK 边界处(00FFH~0100H),宏指令“@JMP_A”将调整跳转表到适当的位置(0100H)。
¾ 例:如果跳转表跨越 ROM 边界,将引起程序错误。
@JMP_A MACRO VAL
IF (($+1) !& 0XFF00) !!= (($+(VAL)) !& 0XFF00)
JMP ($ | 0XFF)
ORG ($ | 0XFF)
ENDIF
ADD PCL, A
ENDM
注:“VAL”为跳转表列表中列表个数。
¾ 例:“@JMP_A”运用举例
; 编译前
ROM 地址
B0MOV A, BUF0 ; “BUF0”从 0 到 4。
@JMP_A 5 ; 列表个数为 5。
00FDH JMP A0POINT ; ACC = 0,跳至 A0POINT。
00FEH JMP A1POINT ; ACC = 1,跳至 A1POINT。
00FFH JMP A2POINT ; ACC = 2,跳至 A2POINT。
0100H JMP A3POINT ; ACC = 3,跳至 A3POINT。
0101H JMP A4POINT ; ACC = 4,跳至 A4POINT。
; 编译后
ROM 地址
B0MOV A, BUF0 ; “BUF0”从 0 到 4。
@JMP_A 5 ; 列表个数为 5。
0100H JMP A0POINT ; ACC = 0,跳至 A0POINT。
0101H JMP A1POINT ; ACC = 1,跳至 A1POINT。
0102H JMP A2POINT ; ACC = 2,跳至 A2POINT。
0103H JMP A3POINT ; ACC = 3,跳至 A3POINT。
0104H JMP A4POINT ; ACC = 4,跳至 A4POINT。
SONiX TECHNOLOGY CO., LTD Page 14 Version 1.0
Page 15
SN8P2711A
2.1.1.5 CHECKSUM 计算
ROM 的最后一个地址是系统保留区,用户应该在计算 Checksum 时跳过该区域。
¾ 例:下面的程序说明如何从 00H 至用户代码结束的区域内进行 Checksum 计算。
MOV A,#END_USER_CODE$L
B0MOV END_ADDR1, A
MOV A,#END_USER_CODE$M
B0MOV END_ADDR2, A
CLR Y
CLR Z
@@:
MOVC
B0BCLR FC
ADD DATA1, A ;
MOV A, R
ADC DATA2, A ;
JMP END_CHECK
AAA:
INCMS Z
JMP @B
JMP Y_ADD_1
END_CHECK:
MOV A, END_ADDR1
CMPRS A, Z
JMP AAA
MOV A, END_ADDR2
CMPRS A, Y
JMP AAA
JMP CHECKSUM_END
Y_ADD_1:
INCMS Y ;
NOP
JMP @B
CHECKSUM_END:
…
…
END_USER_CODE:
; 用户程序结束地址低位地址存入end_addr1。
; 用户程序结束地址中间地址存入end_addr2。
; 清 Y。
; 清 Z。
; 清标志位 C。
; 检查 YZ 地址是否为代码的结束地址。
; 若 Z != 00H,进行下一个计算。
; 若 Z = 00H,Y+1。
; 检查 Z 地址是否为用户程序结束地址低位地址。
; 否,则进行 Checksum 计算。
; 是则检查 Y 的地址是否为用户程序结束地址中间地址。
; 否,则进行 Checksum 计算。
; 是则 Checksum 计算结束。
; 跳转到 Checksum 计算。
; 程序结束。
8-Bit Micro-Controller
SONiX TECHNOLOGY CO., LTD Page 15 Version 1.0
Page 16
SN8P2711A
8-Bit Micro-Controller
2.1.2 编译选项表(CODE OPTION)
编译选项 内容 功能说明
IHRC_16M
High_Clk
Watch_Dog
Fcpu
Reset_Pin
Security
Noise_Filter
LVD
注:
1. 在干扰较大的情况下,建议开启杂讯滤波功能,此时 Fcpu = Fosc/4 ~ Fosc/128,并将 Watch_Dog 设置为“Always_On”;
2. 如果用户定义看门狗为“Always_On”,编译器会自动开启看门狗定时器;
3. 编译选项 Fcpu 仅针对外部高速时钟,在低速模式下 Fcpu =Fosc/4。
RC
12M X’tal
4M X’tal
Always_On
Enable
Disable
Fhosc/1
Fhosc/2
Fhosc/4
Fhosc/8
Fhosc/16
Reset
P04
Enable
Disable
Enable
Disable
LVD_L
LVD_M
LVD_H
高速时钟采用内部 16MHz RC 振荡电路,XIN/XOUT(P0.3/P0.2)为普通
的 I/O 引脚。
外部高速时钟振荡器采用廉价的 RC 振荡电路,XOUT(P0.2)为普通的 I/O
引脚。
外部高速时钟振荡器采用高频晶体/陶瓷振荡器(如 12MHz)。
外部高速时钟振荡器采用标准晶体/陶瓷振荡器(如 4MHz)。
始终开启看门狗定时器,即使在睡眠模式和绿色模式下也处于开启状态。
开启看门狗定时器,但在睡眠模式和绿色模式下关闭。
关闭看门狗定时器。
指令周期 = 1 个时钟周期,必须关闭杂讯滤波功能。
指令周期 = 2 个时钟周期,必须关闭杂讯滤波功能。
指令周期 = 4 个时钟周期。
指令周期 = 8 个时钟周期。
指令周期 = 16 个时钟周期。
使能外部复位引脚。
P0.4 为单向输入引脚,无上拉电阻。
ROM 程序加密。
ROM 程序不加密。
使能杂讯滤除功能,Fcpu = Fosc/4~Fosc/16。
禁止杂讯滤除功能,Fcpu = Fosc/1~Fosc/16。
VDD 低于 2.0V 时,系统复位。
VDD 低于 2.0V 时,系统复位;
PFLAG 寄存器的 LVD24 位作为 2.4V 低电压监测器。
VDD 低于 2.4V 时,系统复位;
PFLAG 寄存器的 LVD36 位作为 3.6V 低电压监测器。
2.1.3 数据存储器(RAM)
) RAM
:64字节
BANK 0
地址
000H
“
“
“
“
“
03FH
080H
“
“
“
“
“
0FFH
RAM
通用存储区
系统寄存器
Bank 0 的结束区
Bank0 的 080H~0FFH 是系统寄存器
区(128 字节)。
SONiX TECHNOLOGY CO., LTD Page 16 Version 1.0
Page 17
SN8P2711A
8-Bit Micro-Controller
2.1.4 系统寄存器
2.1.4.1 系统寄存器列表
0 1 2 3 4 5 6 7 8 9 A B C D E F
- - R Z Y - PFLAG - - - - - - - - -
8
- - - - - - - - - - - - - - - -
9
- - - - - - - - - - - - - - P4CON VREFH
A
- ADM ADB ADR - - - - P0M - - - - -
B
- - - - P4M P5M - - INTRQ INTEN OSCM - WDTR TC0R PCL PCH
C
P0 - - - P4 P5 - - T0M - TC0M TC0C TC1M TC1C TC1R STKP
D
P0UR - - - P4UR P5UR - @YZ - - - - - - - -
E
- - - - - - - - STK3L STK3H STK2L STK2H STK1L STK1H STK0L STK0H
F
2.1.4.2 系统寄存器说明
R
PFLAG
VERFH
ADB
PnM
INTRQ
OSCM
TC0R =
Pn
TC0M
TC1M
TC1R =
PnUR
STK0~STK3
= 工作寄存器和 ROM 查表数据缓存器
= ROM 页和特殊标志寄存器
= ADC 参考电压寄存器
= ADC 数据缓存器
= Pn 模式控制寄存器
= 中断请求寄存器
= 振荡模式寄存器
TC0 自动装载数据缓存器
= Pn 数据缓存器
= TC0 模式寄存器
= TC1 模式寄存器
TC1 自动装载实际缓存器
= Pn 上拉电阻控制寄存器
= 堆栈寄存器
Y, Z
P4CON
ADM
ADR
PEDGE
INTEN
WDTR
PCH, PCL
T0M
TC0C
TC1C
STKP
@YZ
= 专用寄存器,@YZ 间接寻址寄存器,ROM 寻址寄存器
=P4配置控制寄存器
=ADC模式寄存器
=ADC精度选择寄存器
=P0.0模式控制寄存器
= 中断使能寄存器
= 看门狗清零寄存器
= 程序计数器
= TC0/TC1 加速和 TC0 唤醒功能寄存器
=TC0计数寄存器
=TC1计数寄存器
=
堆栈指针
= 间接寻址寄存器
- PEDGE
SONiX TECHNOLOGY CO., LTD Page 17 Version 1.0
Page 18
SN8P2711A
8-Bit Micro-Controller
2.1.4.3 系统寄存器的位定义
地址
082H RBIT7 RBIT6 RBIT5 RBIT4 RBIT3 RBIT2 RBIT1 RBIT0 R/W R
083H ZBIT7 ZBIT6 ZBIT5 ZBIT4 ZBIT3 ZBIT2 ZBIT1 ZBIT0 R/W Z
084H YBIT7 YBIT6 YBIT5 YBIT4 YBIT3 YBIT2 YBIT1 YBIT0 R/W Y
086H NT0 NPD LVD36 LVD24 C DC Z R/W PFLAG
0AEH P4CON4 P4CON3 P4CON2 P4CON1 P4CON0 R/W P4CON
0AFH EVHENB VHS1 VHS2 R/W VREFH
0B1H ADENB ADS EOC GCHS CHS2 CHS1 CHS0 R/W ADM
0B2H ADB11 ADB10 ADB9 ADB8 ADB7 ADB6 ADB5 ADB4 R ADB
0B3H ADCKS1 ADCKS0 ADB3 ADB2 ADB1 ADB0 R/W ADR
0B8H P03M P02M P01M P00M R/W P0M
0BFH P00G1 P00G0 R/W PEDGE
0C4H P44M P43M P42M P41M P40M R/W P4M
0C5H P54M P53M R/W P5M
0C8H ADCIRQ TC1IRQ TC0IRQ P01IRQ P00IRQ R/W INTRQ
0C9H ADCIEN TC1IEN TC0IEN P01IEN P00IEN R/W INTEN
0CAH CPUM1 CPUM0 CLKMD STPHX R/W OSCM
0CCH WDTR7 WDTR6 WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0 W WDTR
0CDH TC0R7 TC0R6 TC0R5 TC0R4 TC0R3 TC0R2 TC0R1 TC0R0 W TC0R
0CEH PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0 R/W PCL
0CFH PC9 PC8 R/W PCH
0D0H P04 P03 P02 P01 P00 R/W P0
0D4H P44 P43 P42 P41 P40 R/W P4
0D5H P54 P53 R/W P5
0D8H TC1X8 TC0X8 TC0GN R/W T0M
0DAH TC0ENB TC0rate2 TC0rate1 TC0rate0 TC0CKS ALOAD0 TC0OUT PWM0OUT R/W TC0M
0DBH TC0C7 TC0C6 TC0C5 TC0C4 TC0C3 TC0C2 TC0C1 TC0C0 R/W TC0C
0DCH TC1ENB TC1rate2 TC1rate1 TC1rate0 TC1CKS ALOAD1 TC1OUT PWM1OUT R/W TC1M
0DDH TC1C7 TC1C6 TC1C5 TC1C4 TC1C3 TC1C2 TC1C1 TC1C0 R/W TC1C
0DEH TC1R7 TC1R6 TC1R5 TC1R4 TC1R3 TC1R2 TC1R1 TC1R0 W TC1R
0DFH GIE STKPB2 STKPB1 STKPB0 R/W STKP
0E0H P03R P02R P01R P00R W P0UR
0E4H P44R P43R P42R P41R P40R W P4UR
0E5H P54R P53R W P5UR
0E7H @YZ7 @YZ6 @YZ5 @YZ4 @YZ3 @YZ2 @YZ1 @YZ0 R/W @YZ
0F8H S3PC7 S3PC6 S3PC5 S3PC4 S3PC3 S3PC2 S3PC1 S3PC0 R/W STK3L
0F9H S3PC9 S3PC8 R/W STK3H
0FAH S2PC7 S2PC6 S2PC5 S2PC4 S2PC3 S2PC2 S2PC1 S2PC0 R/W STK2L
0FBH S2PC9 S2PC8 R/W STK2H
0FCH S1PC7 S1PC6 S1PC5 S1PC4 S1PC3 S1PC2 S1PC1 S1PC0 R/W STK1L
0FDH S1PC9 S1PC8 R/W STK1H
0FEH S0PC7 S0PC6 S0PC5 S0PC4 S0PC3 S0PC2 S0PC1 S0PC0 R/W STK0L
0FFH S0PC9 S0PC8 R/W STK0H
注:
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
1. 所有寄存器的名称在 SN8ASM 编译器中做了宣告;
2. 寄存器中各位的名称已在 SN8ASM 编译器中以“F”为前缀定义过;
3. 指令“B0BSET”、“B0BCLR”、“BSET”、“BCLR”只能用于“R/W”寄存器。
注释
SONiX TECHNOLOGY CO., LTD Page 18 Version 1.0
Page 19

SN8P2711A
8-Bit Micro-Controller
2.1.4.4 累加器
8 位数据寄存器 ACC 用来执行 ALU 与数据存储器之间数据的传送操作。如果操作结果为零(Z)或有进位产生(C
或 DC),程序状态寄存器 PFLAG 中相应位会发生变化。
ACC 并不在 RAM 中,因此在立即寻址模式中不能用“B0MOV”指令对其进行读写。
¾ 例:读/写 ACC。
; 数据写入 ACC。
MOV A, #0FH
; 读取 ACC 中的数据并存入 BUF。
MOV BUF, A
B0MOV BUF, A
; BUF 中的数据写入 ACC。
MOV A, BUF
B0MOV A, BUF
系统执行中断操作时,ACC 和 PFLAG 中的数据不会自动存储,用户需通过程序将中断入口处的 ACC 和 PFLAG 中
的数据送入存储器进行保存。可通过“PUSH”和“POP”指令对 ACC 和 PFLAG 等系统寄存器进行存储及恢复。
¾ 例:ACC 和工作寄存器中断保护操作。
INT_SERVICE:
PUSH
… .
…
POP
RETI
; 保存 PFLAG 和 ACC。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 19 Version 1.0
Page 20
SN8P2711A
8-Bit Micro-Controller
2.1.4.5 程序状态寄存器 PFLAG
寄存器 PFLAG 中包含 ALU 运算状态信息、系统复位状态信息和 LVD 检测信息,其中,位 NT0 和 NPD 显示系统复
位状态信息,包括上电复位、LVD 复位、外部复位和看门狗复位;位 C、DC 和 Z 显示 ALU 的运算信息。位 LVD24 和
LVD36 显示了单片机供电电压状况。
086H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PFLAG
读/写 R/W R/W R R - R/W R/W R/W
复位后 X X 0 0 - 0 0 0
Bit [7:6] NT0, NPD:复位状态标志。
Bit 5 LVD36:3.6V LVD 工作电压标志, LVD 编译选项为 LVD_H 时有效。
Bit 4 LVD24:2.4V LVD 工作电压标志,LVD 编译选项为 LVD_M 时有效。
Bit 2 C:进位标志。
1 = 加法运算后有进位、减法运算没有借位发生或移位后移出逻辑“1”或比较运算的结果 ≥ 0;
0 = 加法运算后没有进位、减法运算有借位发生或移位后移出逻辑“0”或比较运算的结果 < 0。
Bit 1 DC:辅助进位标志。
Bit 0 Z:零标志。
注:关于标志位 C、DC 和 Z 的更多信息请参阅指令集相关内容。
NT0 NPD LVD36 LVD24 - C DC Z
NT0 NPD
0 0
0 1
1 0
1 1
复位状态
看门狗复位
保留
LVD 复位
外部复位
0 =系统工作电压 VDD 超过 3.6V,低电压检测器没有工作;
1 =系统工作电压 VDD 低于 3.6V,说明此时低电压检测器已处于监控状态。
0 =系统工作电压 VDD 超过 2.4V,低电压检测器没有工作;
1 =系统工作电压 VDD 低于 2.4V,说明此时低电压检测器已处于监控状态。
1 = 加法运算时低四位有进位,或减法运算后没有向高四位借位;
0 = 加法运算时低四位没有进位,或减法运算后有向高四位借位。
1 = 算术/逻辑/分支运算的结果为零;
0 = 算术/逻辑
/分支运算的结果非零。
SONiX TECHNOLOGY CO., LTD Page 20 Version 1.0
Page 21

SN8P2711A
8-Bit Micro-Controller
2.1.4.6 程序计数器
程序计数器 PC 是一个 10 位二进制程序地址寄存器,分高 2 位和低 8 位。专门用来存放下一条需要执行指令的内存
地址。通常,程序计数器会随程序中指令的执行自动增加。
若程序执行 CALL 和 JMP 指令时,PC 指向特定的地址。
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PC
复位后
PCH PCL
) 单地址跳转
可完成单地址跳转功能。如果这些指令执行结果为真,那么 PC 值加 2 以跳过下一条指令。
如果位测试为真,PC 加 2。
B0BTS1 FC
JMP C0STEP
…
C0STEP: NOP
B0MOV A, BUF0
JMP C1STEP
…
…
C1STEP: NOP
如果 ACC 等于指定的立即数则 PC 值加 2,跳过下一条指令。
JMP C0STEP
…
…
C0STEP: NOP
执行加 1 指令后,结果为零时,PC 的值加 2,跳过下一条指令。
INCS:
INCS BUF0
JMP C0STEP
…
C0STEP: NOP
INCMS:
INCMS BUF0
JMP C0STEP
…
C0STEP: NOP
执行减 1 指令后,结果为零时,PC 的值加 2,跳过下一条指令。
DECS:
DECS BUF0
JMP C0STEP
…
C0STEP: NOP
DECMS:
DECMS BUF0
JMP C0STEP
…
C0STEP: NOP
- - - - - - PC9 PC8 PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0
- - - - - - 0 0 0 0 0 0 0 0 0 0
在 SONiX 单片机里面,有 9 条指令(CMPRS、INCS、INCMS、DECS、DECMS、BTS0、BTS1、B0BTS0 和 B0BTS1)
; 若 Carry_flag = 1 则跳过下一条指令。
; 否则执行 C0STEP。
; BUF0 送入 ACC。
B0BTS0
CMPRS
FZ
A, #12H
; Zero flag = 0 则跳过下一条指令。
; 否则执行 C1STEP。
; 如果 ACC = 12H,则跳过下一条指令。
; 否则跳至 C0STEP。
SONiX TECHNOLOGY CO., LTD Page 21 Version 1.0
Page 22

SN8P2711A
8-Bit Micro-Controller
) 多地址跳转
执行 JMP 或 ADD M,A(M=PCL)指令可实现多地址跳转。执行 ADD M, A、ADC M, A 或 B0ADD M, A 后,若 PCL
溢出,PCH 会自动进位。对于跳转表及其它应用,用户可以通过上述 3 条指令计算 PC 的值而不需要担心 PCL 溢出的问
题。
注:PCH 仅支持 PC 的递增运算而不支持递减运算。当 PCL+ACC 执行完 PCL 有进位时,PCH 会自动加 1;但执行 PCL-ACC
有借位发生,PCH 的值会保持不变。
¾ 例:PC = 0323H(PCH = 03H,PCL = 23H)。
; PC = 0323H
MOV A, #28H
B0MOV PCL, A
…
; PC = 0328H
MOV A, #00H
B0MOV PCL, A
…
; 跳到地址 0328H。
; 跳到地址 0300H。
¾ 例:PC = 0323H(PCH = 03H,PCL = 23H)。
; PC = 0323H
B0ADD PCL, A
JMP A0POINT
JMP A1POINT
JMP A2POINT
JMP A3POINT
…
…
; PCL = PCL + ACC,PCH 的值不变。
; ACC = 0,跳到 A0POINT。
; ACC = 1,跳到 A1POINT。
; ACC = 2,跳到 A2POINT。
; ACC = 3,跳到 A3POINT。
SONiX TECHNOLOGY CO., LTD Page 22 Version 1.0
Page 23
SN8P2711A
8-Bit Micro-Controller
2.1.4.7 Y,Z 寄存器
寄存器 Y 和 Z 都是 8 位缓存器,主要用途如下:
z 普通工作寄存器;
z RAM 数据寻址指针@YZ;
z 配合指令 MOVC 对 ROM 数据进行查表。
084H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Y
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
083H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Z
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
YBIT7 YBIT6 YBIT5 YBIT4 YBIT3 YBIT2 YBIT1 YBIT0
ZBIT7 ZBIT6 ZBIT5 ZBIT4 ZBIT3 ZBIT2 ZBIT1 ZBIT0
¾ 例:用 Y、Z 作为数据指针,访问 bank0 中 025H 处的内容。
B0MOV Y, #00H
B0MOV Z, #25H
B0MOV A, @YZ
; Y 指向 RAM bank 0。
; Z 指向 25H。
; 数据送入 ACC。
¾ 例:利用数据指针@YZ 对 RAM 数据清零。
B0MOV Y, #0
B0MOV Z, #7FH
CLR_YZ_BUF:
CLR @YZ
DECMS Z ;
JMP CLR_YZ_BUF
CLR @YZ
END_CLR: ;
…
; Y = 0,指向 bank 0。
; Z = 7FH,RAM 区的最后单元。
; @YZ 清零。
; 不为零。
2.1.4.8 R 寄存器
8 位缓存器 R 主要有以下两个功能:
z 作为工作寄存器使用;
z 存储执行查表指令后的高字节数据。(执行 MOVC 指令,指定 ROM 单元的高字节数据会被存入 R 寄存器而低
字节数据则存入 ACC。)
082H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
R
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
RBIT7 RBIT6 RBIT5 RBIT4 RBIT3 RBIT2 RBIT1 RBIT0
SONiX TECHNOLOGY CO., LTD Page 23 Version 1.0
Page 24
2.2 寻址模式
2.2.1 立即寻址
将立即数送入 ACC 或指定的 RAM 单元。
¾ 例:立即数 12H 送入 ACC。
MOV A, #12H
¾ 例:立即数 12H 送入寄存器 R。
B0MOV R, #12H
注:立即数寻址中,指定的 RAM 单元必须是 80H~87H 的工作寄存器。
SN8P2711A
8-Bit Micro-Controller
2.2.2 直接寻址
通过 ACC 对 RAM 单元数据进行操作。
¾ 例:地址 12H 处的内容送入 ACC。
B0MOV A, 12H
¾ 例:ACC 中数据写入 RAM 的 12H 单元。
B0MOV 12H, A
2.2.3 间接寻址
通过指针寄存器(Y/Z)访问 RAM 数据。
¾ 例:用 @YZ 实现间接寻址。
B0MOV Y, #0
B0MOV Z, #12H
B0MOV A, @YZ
; Y 清零以寻址 RAM bank 0。
; 设定寄存器地址。
SONiX TECHNOLOGY CO., LTD Page 24 Version 1.0
Page 25
SN8P2711A
8-Bit Micro-Controller
2.3 堆栈
2.3.1 概述
SN8P2711A 的堆栈缓存器共 4 层,程序进入中断或执行 CALL 指令时,用来存储程序计数器 PC 的值。寄存器 STKP
为堆栈指针,STKnH 和 STKnL 分别是各堆栈缓存器的高、低字节。
RET /
RETI
CALL /
中断
PCH
PCL
堆栈层数
STKP - 1STKP + 1
STKP = 3
STKP = 2
STKP = 1
STKP
STKP = 0
堆栈缓存器高
字节
STK3H
STK2H
STK1H
STKP
STK0H
堆栈缓存器低
字节
STK3L
STK2L
STK1L
STK0L
2.3.2 堆栈寄存器
堆栈指针 STKP 是一个 3 位寄存器,存放被访问的堆栈单元地址,10 位数据存储器 STKnH 和 STKnL 用于暂存堆栈
数据。以上寄存器都位于 bank 0。
使用入栈指令 PUSH 和出栈指令 POP 可对堆栈缓存器进行操作。堆栈操作遵循后进先出(LIFO)的原则,入栈时堆
栈指针 STKP 的值减 1,出栈时 STKP 的值加 1,这样,STKP 总是指向堆栈缓存器顶层单元。
系统进入中断或执行 CALL 指令之前,程序计数器 PC 的值被存入堆栈缓存器中进行入栈保护。
0DFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKP
读/写 R/W - - - - R/W R/W R/W
复位后 0 - - - - 1 1 1
Bit[2:0] STKPBn:堆栈指针(n = 0 ~ 2)。
Bit 7 GIE:全局中断控制位。
0 = 禁止;
1 = 使能。
¾ 例:系统复位时,堆栈指针寄存器内容为默认值,但强烈建议在程序初始部分重新设定,如下面所示:
MOV A, #00000111B
B0MOV STKP, A
0F0H~0FFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKnH
读/写 - - - - - - R/W R/W
复位后 - - - - - - 0 0
0F0H~0FFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKnL
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 0 0 0 0 0 0 0 0
STKn = STKnH,STKnL(n = 3 ~ 0
GIE - - - - STKPB2 STKPB1 STKPB0
- - - - - - SnPC9 SnPC8
SnPC7 SnPC6 SnPC5 SnPC4 SnPC3 SnPC2 SnPC1 SnPC0
)。
SONiX TECHNOLOGY CO., LTD Page 25 Version 1.0
Page 26
SN8P2711A
8-Bit Micro-Controller
2.3.3 堆栈操作举例
执行程序调用指令 CALL 和响应中断服务时,堆栈指针 STKP 的值减 1,指针指向下一个堆栈缓存器。同时,对程序
计数器 PC 的内容进行入栈保护。入栈操作如下表所示:
堆栈层数
0
1
2
3
4
> 4
STKPB2 STKPB1 STKPB0
1 1 1 保留 保留 -
1 1 0 STK0H STK0L 1 0 1 STK1H STK1L 1 0 0 STK2H STK2L 0 1 1 STK3H STK3L 0 1 0 - - 缓存器已满,错误
STKP
对应每个入栈操作,都有一个出栈操作来恢复程序计数器 PC 的值。RETI 指令用于中断服务程序中,RET 用于子程
序调用。出栈时,STKP 加 1 并指向下一个空闲堆栈缓存器。堆栈恢复操作如下表所示:
堆栈层数
4
3
2
1
0
STKPB2 STKPB1 STKPB0
0 1 1 STK3H STK3L 1 0 0 STK2H STK2L 1 0 1 STK1H STK1L 1 1 0 STK0H STK0L 1 1 1 保留 保留 -
STKP
缓存器
高字节 低字节
缓存器
高字节 低字节
备注
备注
SONiX TECHNOLOGY CO., LTD Page 26 Version 1.0
Page 27
SN8P2711A
8-Bit Micro-Controller
3
3
3
复位
3.1 概述
SN8P2711A 有以下几种复位方式:
z 上电复位;
z 看门狗复位;
z 掉电复位;
z 外部复位(仅在外部复位引脚处于使能状态)。
上述任一种复位发生时,所有的系统寄存器恢复默认状态,程序停止运行,同时程序计数器 PC 清零。复位结束后,
系统从向量 0000H 处重新开始运行。PFLAG 寄存器的 NT0 和 NPD 两个标志位能够给出系统复位状态的信息。用户可以
编程控制 NT0 和 NPD,从而控制系统的运行路径。
086H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PFLAG
读/写 R/W R/W R R - R/W R/W R/W
复位后 X X 0 0 - 0 0 0
Bit [7:6] NT0, NPD:复位状态标志。
NT0 NPD
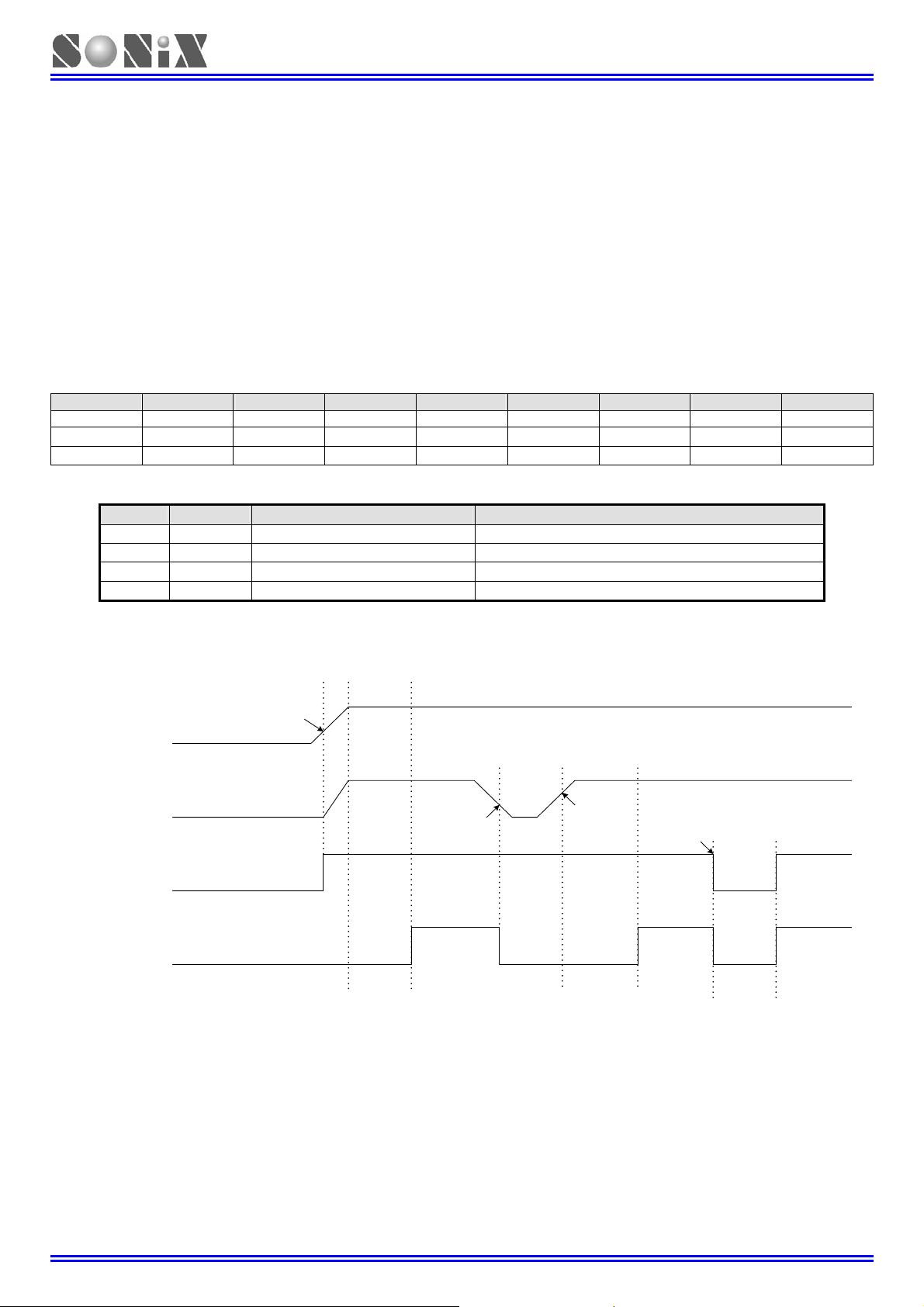
任何一种复位情况都需要一定的响应时间,系统提供完善的复位流程以保证复位动作的顺利进行。对于不同类型的振
荡器,完成复位所需要的时间也不同。因此,VDD 的上升速度和不同晶振的起振时间都不固定。RC 振荡器的起振时间最
短,晶体振荡器的起振时间则较长。在用户终端使用的过程中,应注意考虑主机对上电复位时间的要求。
NT0 NPD LVD36 LVD24 - C DC Z
复位情况 说明
0 0
0 1
1 0
1 1
看门狗复位 看门狗溢出
保留
上电及 LVD 复位 电源电压低于 LVD 检测值
外部复位 外部复位引脚检测到低电平
-
上电
外部复位
看门狗复位
系统状态
VDD
VSS
VDD
VSS
看门狗定时器正常工作
看门狗定时器停止计时
系统正常运行
系统停止工作
低电压检测
上电延时
外部复位低电压检测
外部复位高电压检测
看门狗溢出
看门狗复位延迟时间外部复位延迟时间
SONiX TECHNOLOGY CO., LTD Page 27 Version 1.0
Page 28
SN8P2711A
8-Bit Micro-Controller
3.2 上电复位
上电复位与 LVD 操作密切相关。系统上电的过程呈逐渐上升的曲线形式,需要一定时间才能达到正常电平值。下面
给出上电复位的正常时序:
z
上电:系统检测到电源电压上升并等待其稳定;
z
外部复位(仅限于外部复位引脚使能状态):系统检测外部复位引脚状态。如果不为高电平,系统保持复位状态直
到外部复位引脚释放;
z
系统初始化:所有的系统寄存器被置为初始值;
z
振荡器开始工作:振荡器开始提供系统时钟;
z
执行程序:上电结束,程序开始运行。
3.3 看门狗复位
看门狗复位是系统的一种保护设置。在正常状态下,由程序将看门狗定时器清零。若出错,系统处于未知状态,看门
狗定时器溢出,此时系统复位。看门狗复位后,系统重启进入正常状态。看门狗复位的时序如下:
z
看门狗定时器状态:系统检测看门狗定时器是否溢出,若溢出,则系统复位;
z
系统初始化:所有的系统寄存器被置为默认状态;
z
振荡器开始工作:振荡器开始提供系统时钟;
z
执行程序:上电结束,程序开始运行。
看门狗定时器应用注意事项:
z
对看门狗清零之前,检查 I/O 口的状态和 RAM 的内容可增强程序的可靠性;
z
不能在中断中对看门狗清零,否则无法侦测到主程序跑飞的状况;
z
程序中应该只在主程序中有一次清看门狗的动作,这种架构能够最大限度的发挥看门狗的保护功能。
注:关于看门狗定时器的详细内容,请参阅“看门狗定时器”有关章节。
SONiX TECHNOLOGY CO., LTD Page 28 Version 1.0
Page 29
SN8P2711A
8-Bit Micro-Controller
3.4 掉电复位
3.4.1 概述
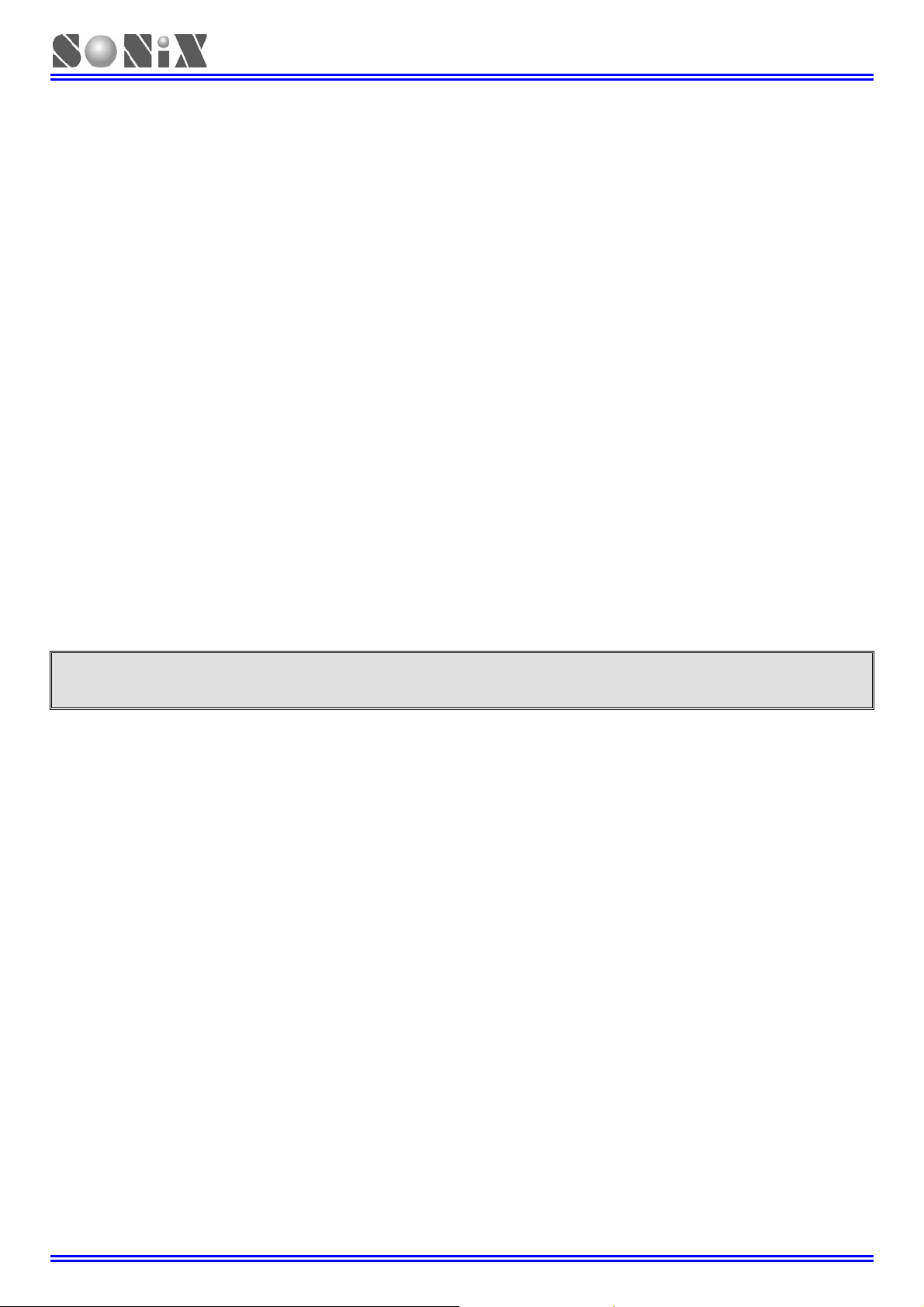
掉电复位针对外部因素引起的系统电压跌落情形(例如,干扰或外部负载的变化),掉电复位可能会引起系统工作状
态不正常或程序执行错误。
VDD
系统正常工作区域
V1
LVD检测电压
V2
V3
系统工作出错区域
掉电复位示意图
电压跌落可能会进入系统死区。系统死区意味着电源不能满足系统的最小工作电压要求。上图是一个典型的掉电复位
示意图。图中,
入未知的工作状态,这个区域称作死区。当
入死区,则容易导致出错。以下情况系统可能进入死区:
VDD 受到严重的干扰,电压值降的非常低。虚线以上区域系统正常工作,在虚线以下的区域内,系统进
VDD 跌至 V1 时,系统仍处于正常状态;当 VDD 跌至 V2 和 V3 时,系统进
DC
运用中:
DC
运用中一般都采用电池供电,当电池电压过低或单片机驱动负载时,系统电压可能跌落并进入死区。这时,电源
不会进一步下降到
LVD 检测电压,因此系统维持在死区。
AC
运用中:
系统采用 AC 供电时,DC 电压值受 AC 电源中的噪声影响。当外部负载过高,如驱动马达时,负载动作产生的干扰
也影响到
DC 电源。VDD 若由于受到干扰而跌落至最低工作电压以下时,则系统将有可能进入不稳定工作状态。
在 AC 运用中,系统上、下电时间都较长。其中,上电时序保护使得系统正常上电,但下电过程却和 DC 运用中情形
类似,
AC 电源关断后,VDD 电压在缓慢下降的过程中易进入死区。
3.4.2 系统工作电压
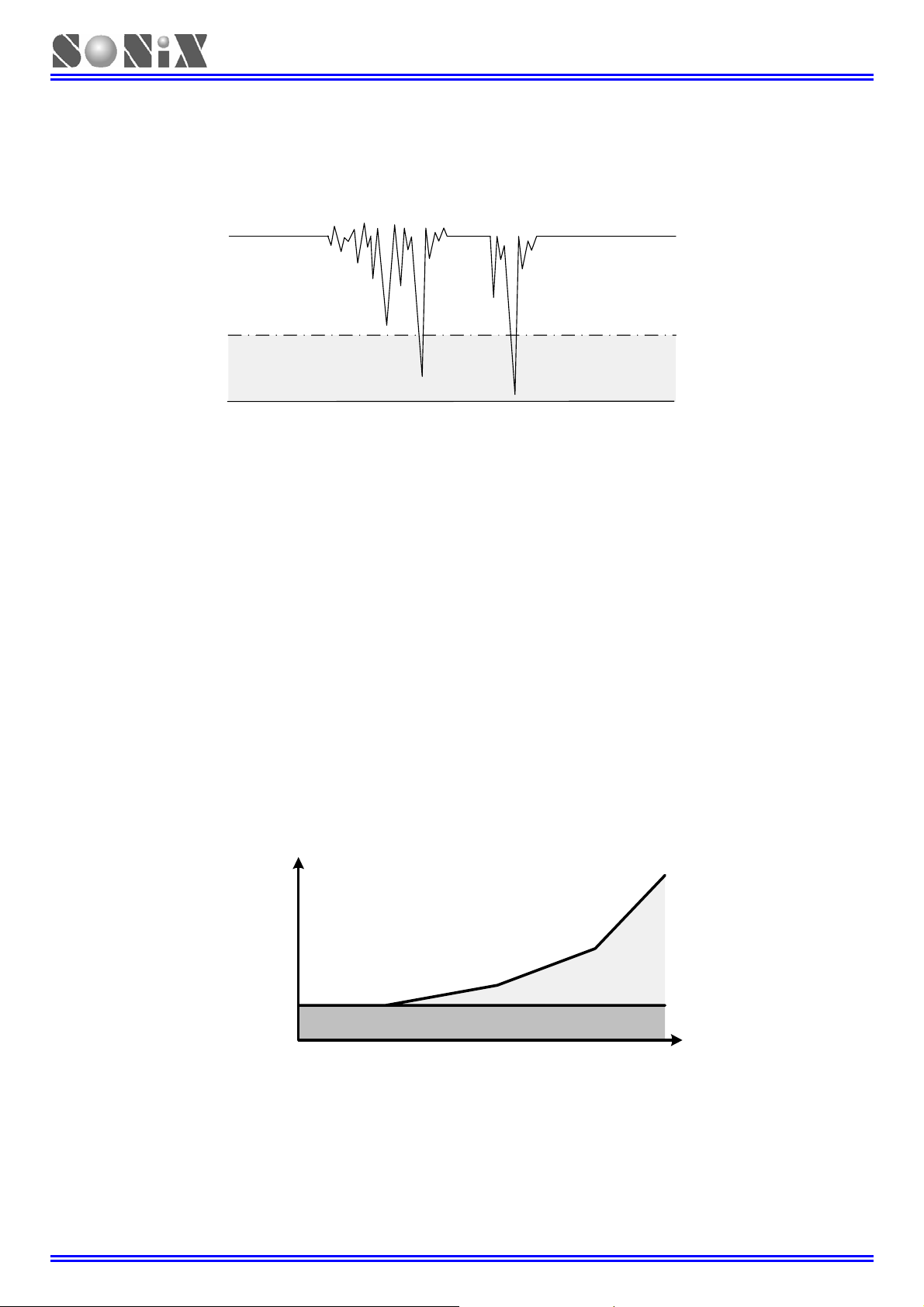
为了改善系统掉电复位的性能,首先必须明确系统具有的最低工作电压值。系统最低工作电压与系统执行速度有关,
不同的执行速度下最低工作电压值也不同。
工作电压
(Vdd) (V)
系统最低
工作电压值
系统正常工作
电压区域
死区
系统复位电压
复位区域
系统执行速度 (Fcpu)
系统工作电压与执行速度关系图
如上图所示,系统正常工作电压区域一般高于系统复位电压,同时复位电压由低电压检测(LVD)电平决定。当系统
执行速度提高时,系统最低工作电压也相应提高,但由于系统复位电压是固定的,因此在系统最低工作电压与系统复位电
压之间就会出现一个电压区域,系统不能正常工作,也不会复位,这个区域即为死区。
SONiX TECHNOLOGY CO., LTD Page 29 Version 1.0
Page 30

SN8P2711A
3.4.3 掉电复位性能改进
如何改善系统掉电复位性能,有以下几点建议:
z LVD
z
z
z
注:“稳压二极管复位电路”、“电压偏移复位电路”和“外部 IC 复位”能够完全避免掉电复位出错。
LVD
复位:
复位;
看门狗复位;
降低系统工作速度;
采用外部复位电路(稳压二极管复位电路,电压偏移复位电路,外部 IC 复位)。
8-Bit Micro-Controller
上电
系统状态
VDD
VSS
系统正常运行
系统停止工作
低电压检测
电压低于低电压检测点
系统复位
上电延迟
低电压检测(LVD)是 SONiX 8 位单片机内置的掉电复位保护装置,当 VDD 跌落并低于 LVD 检测电压值时,LVD
被触发,系统复位。不同的单片机有不同的 LVD 检测电平,LVD 检测电平值仅为一个电压点,并不能覆盖所有死区范围。
因此采用
作仍出错,则
能状态;
状态。
只需查看
LVD 依赖于系统要求和环境状况。电源变化较大时,LVD 能够起到保护作用,如果电源变化触发 LVD,系统工
LVD 就不能起到保护作用,就需要采用其它复位方法。
LVD
设计为三层结构(2.0V/2.4V/3.6V),由 LVD 编译选项控制。对于上电复位和掉电复位,2.0V LVD 始终处于使
2.4V LVD 具有 LVD 复位功能,并能通过标志位显示 VDD 状态;3.6V LVD 具有标记功能,可显示 VDD 的工作
LVD 标志功能只是一个低电压检测装置,标志位 LVD24 和 LVD36 给出 VDD 的电压情况。对于低电压检测应用,
LVD24 和 LVD36 的状态即可检测电池状况。
086H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PFLAG
读/写 R/W R/W R R - R/W R/W R/W
复位后 X X 0 0 - 0 0 0
NT0 NPD LVD36 LVD24 - C DC Z
Bit 5 LVD36
:3.6V LVD 工作电压标志, LVD 编译选项为 LVD_H 时有效。
0 =
系统工作电压 VDD 超过 3.6V,低电压检测器没有工作;
1 =
系统工作电压 VDD 低于 3.6V,说明此时低电压检测器已处于监控状态。
Bit 4 LVD24
:2.4V LVD 工作电压标志,LVD 编译选项为 LVD_M 时有效。
0 =
系统工作电压 VDD 超过 2.4V,低电压检测器没有工作;
1 =
系统工作电压 VDD 低于 2.4V,说明此时低电压检测器已处于监控状态。
SONiX TECHNOLOGY CO., LTD Page 30 Version 1.0
Page 31

SN8P2711A
8-Bit Micro-Controller
LVD
2.0V 复位 有效 有效 有效
2.4V 标志 - 有效 -
2.4V 复位 - - 有效
3.6V 标志 - - 有效
LVD_L LVD_M LVD_H
LVD 编译选项
LVD_L
如果 VDD < 2.0V,系统复位;
LVD24
和 LVD36 标志位无意义。
LVD_M
如果 VDD < 2.0V,系统复位;
LVD24
LVD36
:如果 VDD > 2.4V,LVD24 =0;如果 VDD <= 2.4V,LVD24=1;
标志位无意义。
LVD_H
如果 VDD < 2.4V,系统复位;
LVD36
LVD24
:如果 VDD > 3.6V,LVD36=0;如果 VDD <= 3.6V,LVD36=1;
标志位无意义。
注:
a)LVD 复位结束后,LVD24 和 LVD36 都将被清零;
b)LVD 2.4V 和 LVD3.6V 检测电平值仅作为设计参考,不能用作芯片工作电压值的精确检测。
看门狗复位:
看门狗定时器用于保证系统正常工作。通常,会在主程序中将看门狗定时器清零,但不要在多个分支程序中清看门狗。
若程序正常运行,看门狗不会复位。当系统进入死区或程序运行出错的时候,看门狗定时器继续计数直至溢出,系统复位。
如果看门狗复位后电源仍处于死区,则系统复位失败,保持复位状态,直到系统工作状态恢复到正常值。
降低系统工作速度:
系统工作速度越快最低工作电压值越高,从而加大工作死区的范围,因此降低系统工作速度不失为降低系统进入死区
几率的有效措施。所以,可选择合适的工作速度以避免系统进入死区,这个方法需要调整整个程序使其满足系统要求。
附加外部复位电路:
外部复位也能够完全改善掉电复位性能。有三种外部复位方式可改善掉电复位性能:稳压二极管复位电路,电压偏移
复位电路和外部
IC 复位。它们都采用外部复位信号控制单片机可靠复位。
SONiX TECHNOLOGY CO., LTD Page 31 Version 1.0
Page 32

SN8P2711A
8-Bit Micro-Controller
3.5 外部复位
外部复位功能由编译选项“Reset_Pin”控制。将该编译选项置为“Reset”,可使能外部复位功能。外部复位引脚为
施密特触发结构,低电平有效。复位引脚处于高电平时,系统正常运行。当复位引脚输入低电平信号时,系统复位。外部
复位操作在上电和正常工作模式时有效。需要注意的是,在系统上电完成后,外部复位引脚必须输入高电平,否则系统将
一直保持在复位状态。外部复位的时序如下:
z
外部复位(当且仅当外部复位引脚为使能状态):系统检测复位引脚的状态,如果复位引脚不为高电平,则系统会
一直保持在复位状态,直到外部复位结束;
z
系统初始化:初始化所有的系统寄存器;
z
振荡器开始工作:振荡器开始提供系统时钟;
z
执行程序:上电结束,程序开始运行。
外部复位可以在上电过程中使系统复位。良好的外部复位电路可以保护系统以免进入未知的工作状态,如 AC 应用中的
掉电复位等。
SONiX TECHNOLOGY CO., LTD Page 32 Version 1.0
Page 33

SN8P2711A
8-Bit Micro-Controller
3.6 外部复位电路
3.6.1 RC 复位电路
VDD
R1
47K ohm
R2
S
T
R
100 ohm
C1
0.1uF
上图为一个由电阻 R1 和电容 C1 组成的基本 RC 复位电路,它在系统上电的过程中能够为复位引脚提供一个缓慢上
升的复位信号。这个复位信号的上升速度低于
时,系统复位结束,进入正常工作状态。
VDD 的上电速度,为系统提供合理的复位时序,当复位引脚检测到高电平
注:此 RC 复位电路不能解决非正常上电和掉电复位问题。
3.6.2 二极管及 RC 复位电路
MCU
VSS
VCC
GND
VDD
0.1uF
R1
47K ohm
R2
R
T
S
100 ohm
C1
MCU
VSS
VCC
GND
DIODE
上图中,R1 和 C1 同样是为复位引脚提供输入信号。对于电源异常情况,二极管正向导通使 C1 快速放电并与 VDD
保持一致,避免复位引脚持续高电平、系统无法正常复位。
注:“基本 RC 复位电路”和“二极管及 RC 复位电路”中的电阻 R2 都是必不可少的限流电阻,以避免复位引脚 ESD(Electrostatic
Discharge)或 EOS(Electrical Over-stress)击穿 。
SONiX TECHNOLOGY CO., LTD Page 33 Version 1.0
Page 34

SN8P2711A
8-Bit Micro-Controller
3.6.3 稳压二极管复位电路
VDD
33K ohm
Vz
R1
10K ohm
R2
40K ohm
E
B
Q1
R
S
T
C
R3
MCU
VSS
VCC
GND
稳压二极管复位电路是一种简单的 LVD 电路,基本上可以完全解决掉电复位问题。如上图电路中,利用稳压管的击
穿电压作为电路复位检测值,当
“
Vz + 0.7V”时,三极管集电极输出低电平,单片机复位。稳压管规格不同则电路复位检测值不同,根据电路的要求选
择合适的二极管。
VDD 高于“Vz + 0.7V”时,三极管集电极输出高电平,单片机正常工作;当 VDD 低于
3.6.4 电压偏置复位电路
VDD
E
B
Q1
T
S
R
C
R3
MCU
VSS
47K ohm
10K ohm
R1
R2
2K ohm
VCC
GND
电压偏置复位电路是一种简单的 LVD 电路,基本上可以完全解决掉电复位问题。与稳压二极管复位电路相比,这种
复位电路的检测电压值的精确度有所降低。电路中,
/ R1
”时,三极管集电极 C 输出高电平,单片机正常工作;VDD 低于“0.7V x (R1 + R2) / R1”时 ,集 电 极 C 输出低电平,
单片机复位。
R1 和 R2 构成分压电路,当 VDD 高于和等于分压值“0.7V x (R1 + R2)
对于不同应用需求,选择适当的分压电阻。单片机复位引脚上电压的变化与 VDD 电压变化之间的差值为 0.7V。如果
VDD 跌落并低于复位引脚复位检测值,那么系统将被复位。如果希望提升电路复位电平,可将分压电阻设置为 R2>R1,
并选择
耗中。
VDD 与集电极之间的结电压高于 0.7V。分压电阻 R1 和 R2 在电路中要耗电,此处的功耗必须计入整个系统的功
注:在电源不稳定或掉电复位的情况下,“稳压二极管复位电路”和“偏压复位电路”能够保护电路在电压跌落时避免系统出错。当
电压跌落至低于复位检测值时,系统将被复位。从而保证系统正常工作。
SONiX TECHNOLOGY CO., LTD Page 34 Version 1.0
Page 35

3.6.5 外部 IC 复位
VDD
Reset
Capacitor
IC
Bypass
0.1uF
RST
VDD
R
S
T
SN8P2711A
8-Bit Micro-Controller
MCU
VSS
VSS
VCC
GND
外部复位也可以选用 IC 进行外部复位,但是这样一来系统成本将会增加。针对不用的应用要求选择适当的复位 IC,
如上图所示外部
IC 复位电路,能够有效的降低电源变化对系统的影响。
SONiX TECHNOLOGY CO., LTD Page 35 Version 1.0
Page 36

SN8P2711A
8-Bit Micro-Controller
4
4
4
系统时钟
4.1 概述
SN8P2711A内带双时钟系统:高速时钟和低速时钟。高速时钟由外部晶振和内置的16MHz RC振荡电路(IHRC
16KHz
钟源
)
)
)提供,低速时钟由内置的低速RC振荡电路(ILRC 16KHz @3V,32KHz @5V)提供。两种时钟都可作为系统时
Fosc,系统工作在低速模式时,Fosc 4分频后作为一个指令周期。
普通模式 (高速时钟):Fcpu = Fhosc / N,N = 1 ~ 16,Fcpu 的编译选项决定 N 的值。
低速模式 (低速时钟):Fcpu = Flosc/4。
在干扰较严重的运用条件下,SONiX 提供的杂讯滤波器能够对外部干扰进行隔离以保护系统的正常工作。
4.2 时钟框图
CLKMD
Fosc
Fosc
XIN
XOUT
z HOSC
z Fhosc
z Flosc
z Fosc
z Fcpu
STPHX HOSC Fcpu Code Option
Fhosc. Fcpu = Fhosc/1 ~ Fhosc/16
CPUM[1:0]
Flosc. Fcpu = Flosc/4
:High_Clk 编译选项。
:外部高速/内部 RC 振荡器时钟频率。
:内部低速 RC 时钟频率(16KHz@3V,32KHz@5V)。
:系统时钟频率。
:指令执行频率。
4.3 OSCM 寄存器
寄存器 OSCM 控制振荡器的状态和系统的工作模式。
0CAH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
OSCM
读/写
复位后
Bit 1 STPHX:外部高速振荡器控制位。
0 =
1 =
Bit 2 CLKMD
0 =
1 =
Bit[4:3] CPUM[1:0]
00 =
¾
例:停止高速振荡器。
B0BSET FSTPHX
- - - CPUM1 CPUM0 CLKMD STPHX -
- - - R/W R/W R/W R/W -
- - - 0 0 0 0 -
运行;
停止,内部低速 RC 振荡器仍然运行。
:系统时钟模式控制位。
普通(双时钟)模式,高速时钟作为系统时钟;
低速模式,低速时钟作为系统时钟。
:CPU 工作模式控制位。
普通模式;01 = 睡眠模式;10 = 绿色模式;11 = 系统保留。
; 停止外部高速振荡器。
Fcpu
SONiX TECHNOLOGY CO., LTD Page 36 Version 1.0
Page 37

SN8P2711A
8-Bit Micro-Controller
4.4 系统高速时钟
内部 16MHZ RC 振荡器和外部振荡器都可作为系统高速时钟源,由编译选项“High_Clk”控制。
High_Clk
IHRC
RC
32K
12M
4M
内部 16MHz RC 振荡器作为系统时钟源,XIN 和 XOUT 引脚为通用 I/O 口。
外部 RC 振荡器为系统高速时钟, XOUT 引脚为通用 I/O 口。
外部 32768Hz 低速振荡器作为系统高速时钟。
外部高速振荡器作为系统高速时钟,典型频率为 12MHz。
外部振荡器作为系统高速时钟,典型频率为 4MHz。
4.4.1 内部高速 RC 振荡器
编译选项“IHRC_16M”和“IHRC_RTC”控制单片机的内置 RC 高速时钟(16MHz)。若选择“IHRC_16M”,则
内置
16MHz RC 振荡器作为系统时钟源,XIN 和 XOUT 引脚作为通用 I/O 口。
z IHRC
:系统高速时钟来自内置 16MHz RC 振荡器,XIN/XOUT 引脚作为普通的 I/O 引脚。
说明
SONiX TECHNOLOGY CO., LTD Page 37 Version 1.0
Page 38

SN8P2711A
8-Bit Micro-Controller
4.4.2 外部高速时钟
外部高速时钟共三种模式:石英/陶瓷振荡器,RC 及外部时钟源,由编译选项 High_Clk 控制具体模式的选择。石英/
陶瓷振荡器和 RC 振荡器的上升时间各不相同。RC 振荡器的上升时间相对较短。振荡器上升时间与复位时间的长短密切
相关。
4MHz Crystal
RC
32768Hz Crystal
4MHz Ceramic
4.4.2.1 石英/陶瓷振荡器
石英/陶瓷振荡器由 XIN/XOUT 口驱动,对于高速、普通和低速三种不同工作模式,振荡器的驱动电流也不同。不同
的工作模式下,编译选项
High_Clk 支持不同的频率条件:12MHz、4MHz 以及 32KHz 工作频率。
XIN
CRYSTAL
C
20pF
X
C
20pF
T
U
O
MCU
VDD
VSS
VCC
GND
注:上图中, XIN/XOUT/VSS 引脚与石英/陶瓷振荡器以及电容 C 之间的距离越近越好。
SONiX TECHNOLOGY CO., LTD Page 38 Version 1.0
Page 39

SN8P2711A
8-Bit Micro-Controller
4.4.2.2 RC 振荡器
通过编译选项 High_Clk 的设置可控制 RC 振荡器的选择,RC 振荡器输出频率最高可达 10MHZ。改 变 R 可改变输出
频率的大小,电容
C 的最佳容量为 50P~100P,引脚 XOUT 为通用 I/O 口,如下图所示:
T
U
O
X
XIN
MCU
C
R
V
VSS
D
D
VCC
GND
注:电容 C 和电阻 R 应尽可能的接近单片机的 VDD。
4.4.2.3 外部时钟源
单片机可选择外部时钟信号作为系统时钟,由编译选项 High_Clk 控制,从 XIN 脚送入。
External Clock Input
XIN
XOUT
MCU
VSS
VDD
VCC
GND
注:外部振荡电路中的 GND 必须尽可能的接近单片机的 VSS 端口。
SONiX TECHNOLOGY CO., LTD Page 39 Version 1.0
Page 40

SN8P2711A
8-Bit Micro-Controller
4.5 系统低速时钟
系统低速时钟源即内置的低速振荡器,采用 RC 振荡电路。低速时钟的输出频率受系统电压和环境温度的影响,通常
为
5V 时输出 32KHZ,3V 时输出 16KHZ。输出频率与工作电压之间的关系如下图所示。
内部低速
45.00
40.00
35.00
30.00
25.00
20.00
15.00
10.00
Freq. (KHz)
5.00
0.00
2.1 2.5 3 3.1 3.3 3.5 4 4.5 5 5.5 6 6.5 7
7.52
10.64
振荡器输出频率
RC
22.24
18.88
17.24
16.00
14.72
25.96
29.20
32.52
35.40
38.08
40.80
ILRC
VDD (V)
低速时钟可作为看门狗定时器的时钟源。由 CLKMD 控制系统低速工作模式。
) Flosc =
)
低速模式 Fcpu = Flosc / 4。
内部低速 RC 振荡器(16KHz @3V、32KHz @5V)。
系统工作在睡眠模式下,可以停止低速 RC 振荡器。
¾
例:停止内部低速振荡器。
B0BSET FCPUM0
注:不可以单独停止内部低速时钟;由寄存器 OSCM 的位 CPUM0 和 CPUM1 的设置决定内部低速时钟的状态。
4.5.1 系统时钟测试
在设计过程中,用户可通过软件指令周期 Fcpu 对系统时钟速度进行测试。
¾
例:外部振荡器的 Fcpu 指令周期测试。
B0BSET P0M.0
@@:
B0BSET P0.0
B0BCLR P0.0
JMP @B
注:不能直接从 XIN 引脚测试 RC 振荡频率,因为探针的连接会影响测试的准确性。
; P0.0 置为输出模式以输出 Fcpu 的触发信号。
SONiX TECHNOLOGY CO., LTD Page 40 Version 1.0
Page 41

5
5
5
系统工作模式
5.1 概述
SN8P2711A
z
普通模式 (高速模式);
z
低速模式;
z
睡眠模式;
z
绿色模式。
可在如下四种工作模式之间进行切换:
P0唤醒功能有效
外部复位电路有效
普通模式
CPUM1, CPUM0 = 01.
睡眠模式
CLKMD = 1
CLKMD = 0
SN8P2711A
8-Bit Micro-Controller
低速模式
TC0GN = 1时,TC0定时器溢出
工作模式说明
工作模式 普通模式 低速模式 绿色模式 睡眠模式 备注
EHOSC 运行 STPHX 控制 STPHX 控制 停止
CPU 指令 执行 执行 停止 停止
看门狗定时器
内部中断 全部有效 全部有效 TC1 全部无效
外部中断 全部有效 全部有效 全部有效 全部有效
唤醒功能 - - P0,TC0,复位 P0,复位
EHOSC:外部高速时钟。
IHRC
ILRC
:内部高速时钟(16M RC 振荡器)。
:内部低速时钟(3V 时 16K RC 振荡器,5V 时 32K 振荡器)。
P0唤醒功能有效
外部复位电路有效
IHRC 运行 STPHX 控制 STPHX 控制 停止
ILRC 运行 运行 运行 停止
TC0 *有效 *有效 *有效 无效 *TC0ENB = 1 时有效
TC1 *有效 *有效 *有效 无效 *TC1ENB = 1 时有效
Watch_Dog 编译
选项控制
CPUM1, CPUM0 = 10.
系统模式转换结构图
Watch_Dog 编译
选项控制
绿色模式
Watch_Dog 编译
选项控制
Watch_Dog 编译选
项控制
P0唤醒功能有效
TC0GN = 1时,TC0定时器溢出
外部复位电路有效
参考 CODE OPTION 说明
SONiX TECHNOLOGY CO., LTD Page 41 Version 1.0
Page 42

SN8P2711A
8-Bit Micro-Controller
5.2 系统模式切换
¾ 例:系统由普通/低速模式切换进入睡眠模式。
B0BSET FCPUM0 ;
注:睡眠模式下,仅具有唤醒功能的引脚和复位引脚能够将系统唤醒回到普通模式。
¾
例:系统由普通模式切换进入低速模式。
B0BSET FCLKMD
B0BSET FSTPHX
例:系统由低速模式切换进入普通模式(外部高速振荡器仍然运行)。
¾
B0BCLR FCLKMD ;
例:系统由低速模式切换进入普通模式(外部高速振荡器停止运行)。
¾
在外部高速振荡器停止工作的情况下,系统至少需要延迟 20ms 才能回到普通运行模式。
B0BCLR FSTPHX
MOV A, #54
B0MOV Z, A
@@: DECMS Z ;
JMP @B
B0BCLR FCLKMD
例:系统由普通/低速模式切换进入绿色模式。
¾
B0BSET FCPUM1 ;
注:绿色模式下如果禁止 TC0 的唤醒功能,则只有具有唤醒功能的引脚和复位引脚可以将系统唤醒(具有唤醒功能的引脚将系统
返回到上一个工作模式,复位引脚将系统返回到普通模式)。
¾
例:系统由普通/低速模式切换进入绿色模式,开启 TC0 的唤醒功能。
; 使能 TC0 的唤醒功能。
B0BCLR FTC0IEN
B0BCLR FTC0ENB
MOV A,#20H ;
B0MOV TC0M,A
MOV A,#64H
B0MOV TC0C,A
B0BCLR FTC0IEN
B0BCLR FTC0IRQ
; 进入绿色模式。
B0BCLR FCPUM0 ;
B0BSET FCPUM1
注:TC0 和具有唤醒功能的引脚都可以将系统从绿色模式唤醒返回到上一个工作模式,TC0 的唤醒功能由程序控制,TC0GN
必须置 1。
B0BSET FTC0GN
B0BSET FTC0ENB
0D8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
T0M
读/写
复位后
- - - - TC1X8 TC0X8 TC0GN -
- - - - R/W R/W R/W -
- - - - 0 0 0 -
Bit 1 TC0GN
0 =
1 =
:TC0 绿色模式下唤醒功能控制位。
禁止;
使能。
; CLKMD = 1,系统进入低速模式。
; 停止外部高速振荡器。
; 启动外部高速振荡器。
; 若 VDD = 5V,内部 RC=32KHz 将延迟 0.125ms×162= 20.25ms
; 等待外部时钟稳定。
; 进入普通模式。
; 禁止 TC0 中断。
; 禁止 TC0 定时器。
; 设置 TC0 时钟 = Fcpu / 64。
; 设置 TC0C = 64H(TC0 间隔时间 = 10 ms)。
; 禁止 TC0 中断。
; 清 TC0 中断请求标志。
; 开启 TC0 的唤醒功能。
; 开启 TC0 定时器。
SONiX TECHNOLOGY CO., LTD Page 42 Version 1.0
Page 43

SN8P2711A
8-Bit Micro-Controller
5.3 唤醒时间
5.3.1 概述
在绿色模式和睡眠模式下,系统并不执行程序指令,唤醒触发信号能够将处于睡眠状态的系统唤醒到普通模式或低速
模式。这里的唤醒触发信号包括外部触发信号(
z
从睡眠模式唤醒后只能进入普通模式,且将其唤醒的触发只能是外部触发信号;
z
由绿色模式唤醒回到系统前一工作模式(普通模式或低速模式)可以用外部触发或者内部触发。
5.3.2 唤醒时间
系统进入睡眠模式后,高速时钟是处于停止状态的。把系统从睡眠模式下唤醒时,单片机需要等待 2048 个外部高速
振荡器时钟周期以使振荡电路进入稳定工作状态,等待的这一段时间就称为唤醒时间。唤醒时间结束后,系统才进入到普
通模式。
注:将系统从绿色模式中唤醒是不需要唤醒时间的,因为在绿色模式下高速时钟仍然正常工作。
注:高速时钟的启动时间与 VDD 和振荡器类型有关。
¾
唤醒时间的计算如下:
唤醒时间 = 1/Fosc * 2048(sec)+ 高速时钟启动时间
例:将系统从睡眠模式中唤醒,并设置系统进入普通模式。唤醒时间计算如下。
唤醒时间= 1/Fosc * 2048 = 0.512 ms(Fosc = 4MHz)
总的唤醒时间 = 0.512 ms + 振荡器启动时间
P0 引脚的电平变化)和内部触发信号(TC0 溢出信号)。
SONiX TECHNOLOGY CO., LTD Page 43 Version 1.0
Page 44

SN8P2711A
8-Bit Micro-Controller
6
6
6
中断
6.1 概述
SN8P2711A 提供 5 个中断源:3 个内部中断(TC0/TC1/ADC)和 2 个外部中断(INT0/INT1)。外部中断可以将系
统从睡眠模式中唤醒进入高速模式,在返回到高速模式前,中断请求被锁定。一旦程序进入中断,寄存器
被硬件自动清零以避免响应其它中断。系统退出中断后,硬件自动将 GIE 置“1”,以响应下一个中断。中断请求存放在
寄存器
INTRQ 中。
中断使能寄存器
STKP 的位 GIE
INT0触发
INT1触发
TC0超时溢出
TC1超时溢出
AD转换结束
注:程序响应中断时,必须开启全局中断控制位 GIE。
中断请求
锁定(5
位)
P00IRQ
P01IRQ
TC0IRQ
TC1IRQ
ADCIRQ
中断向量地址(0008H)
中断使能门
全局中断请求信号
6.2 中断请求使能寄存器 INTEN
中断请求控制寄存器 INTEN 包括所有中断的使能控制位。INTEN 的有效位被置为“1”则系统进入该中断服务程序,
程序计数器入栈,程序转至
0C9H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTEN
读/写
复位后
Bit 0 P00IEN
Bit 1 P01IEN
Bit 5 TC0IEN
Bit 6 TC1IEN
Bit 7 ADCIEN
ADCIEN TC1IEN TC0IEN - - - P01IEN P00IEN
R/W R/W R/W - - - R/W R/W
0 0 0 - - - 0 0
:P0.0 外部中断(INT0)控制位。
0 =
无效;
1 =
有效。
:P0.1 外部中断(INT1)控制位。
0 =
无效;
1 =
有效。
:TC0 中断控制位。
0 =
无效;
1 =
有效。
:TC1 中断控制位。
0 =
无效;
1 =
有效。
:ADC 中断控制位。
0 =
无效;
1 =
有效。
0008H 即中断程序。程序运行到指令 RETI 时,中断结束,系统退出中断服务。
SONiX TECHNOLOGY CO., LTD Page 44 Version 1.0
Page 45

SN8P2711A
8-Bit Micro-Controller
6.3 中断请求寄存器 INTRQ
中断请求寄存器 INTRQ 中存放各中断请求标志。一旦有中断请求发生,则 INTRQ 中对应位将被置“1”,该请求被
响应后,程序应将该标志位清零。根据
0C8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTRQ
读/写
复位后
ADCIRQ TC1IRQ TC0IRQ - - - P01IRQ P00IRQ
R/W R/W R/W - - - R/W R/W
0 0 0 - - - 0 0
Bit 0 P00IRQ
0 = INT0
1 = INT0
:P0.0 中断(INT0)请求标志。
无中断请求;
有中断请求。
Bit 1 P01IRQ
0 = INT1
1 = INT1
:P0.1 中断(INT1)请求标志。
无中断请求;
有中断请求。
Bit 5 TC0IRQ
0 = TC0
1 = TC0
:TC0 中断请求标志。
无中断请求;
有中断请求。
Bit 6 TC1IRQ
0 = TC1
1 = TC1
:TC1 中断请求标志。
无中断请求;
有中断请求。
Bit 7 TC0IRQ
0 = ADC
1 = ADC
:ADC 中断请求标志。
无中断请求;
有中断请求。
INTRQ 的状态,程序判断是否有中断发生,并执行相应的中断服务。
6.4 GIE 全局中断
只有当全局中断控制位 GIE 置“1”的时候程序才能响应中断请求。 一旦有中断发生,程序计数器(PC)指向中断
向量地址(
0DFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKP
读/写 R/W - - - - R/W R/W R/W
复位后 0 - - - - 1 1 1
Bit 7 GIE
¾
B0BSET FGIE
注:在所有中断中,GIE 都必须处于使能状态。
ORG8),堆栈层数加 1。
GIE - - - - STKPB2 STKPB1 STKPB0
:全局中断控制位。
0 =
禁止全局中断;
1 =
使能全局中断。
例:设置全局中断控制位(GIE)。
; 使能 GIE。
SONiX TECHNOLOGY CO., LTD Page 45 Version 1.0
Page 46

SN8P2711A
8-Bit Micro-Controller
6.5 PUSH, POP 处理
有中断请求发生并被响应后,程序转至 0008H 执行中断子程序。响应中断之前,必须保存 ACC、PFLAG 的内容。
芯片提供
注:“PUSH”、“POP”指令仅对 ACC 和 PFLAG 作中断保护,而不包括 NT0 和 NPD。PUSH/POP 缓存器是唯一的且仅有一层。
¾
ORG 0
JMP START
ORG 8H
JMP INT_SERVICE
ORG 10H
START:
…
INT_SERVICE:
PUSH
…
…
POP
RETI
…
ENDP
PUSH 和 POP 指令进行入栈保存和出栈恢复,从而避免中断结束后可能的程序运行错误。
例:对 ACC 和 PAFLG 进行入栈保护。
; 保存 ACC 和 PFLAG。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 46 Version 1.0
Page 47

SN8P2711A
8-Bit Micro-Controller
6.6 INT0(P0.0)中断
INT0 被触发,则无论 P00IEN 处于何种状态,P00IRQ 都会被置“1”。如果 P00IRQ=1 且 P00IEN=1,系统响应该
中断;如果
如果中断的触发方向和唤醒功能的触发方向是一样的,则在系统由 P0.0 从睡眠模式和绿色模式唤醒时,INT0 的中断
请求(
注:INT0 的中断请求被 P0.0 的唤醒触发功能锁定。
注:P0.0 的中断触发边沿由 PEDGE 控制。
0BFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PEDGE
读/写 - - - R/W R/W - - -
复位后 - - - 1 0 - - -
Bit[4:3] P00G[1:0]
¾
MOV A, #18H
B0MOV PEDGE, A
B0BCLR FP00IRQ
B0BSET FP00IEN
B0BSET FGIE
例:INT0 中断。
¾
ORG 8H ;
JMP INT_SERVICE
INT_SERVICE:
…
…
EXIT_INT:
…
RETI
P00IRQ=1 而 P00IEN=0,系统并不会执行中断服务。在处理多中断时尤其需要注意。
INT0IRQ)就会被锁定。系统会在唤醒后马上进入中断向量地址执行中断服务程序。
- - - P00G1 P00G0 - - -
:P0.0 中断触发控制位。
00 =
保留;
01 =
上升沿触发;
10 =
下降沿触发;
11 =
上升/下降沿触发(电平触发)。
例:INT0 中断请求设置,电平触发。
; 设置 INT0 为电平触发。
; 清 INT0 中断请求标志。
; 使能 INT0 中断。
; 使能 GIE。
; 保存 ACC 和 PFLAG。
B0BTS1 FP00IRQ
JMP EXIT_INT
B0BCLR FP00IRQ
…
; 检查是否有 P00 中断请求标志。
; P00IRQ = 0,退出中断。
; 清 P00IRQ。
; INT0 中断服务程序。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 47 Version 1.0
Page 48

SN8P2711A
8-Bit Micro-Controller
6.7 INT1(P0.1)中断
INT1 被触发,则无论 P01IEN 处于何种状态,P01IRQ 都会被置“1”。如果 P01IRQ = 1 且 P01IEN = 1,系统响应
该中断;如果
如果中断的触发方向和唤醒功能的触发方向是一样的,则在系统由 P0.1 从睡眠模式和绿色模式唤醒时,INT1 的中断
请求(
INT1IRQ)就会被锁定。系统会在唤醒后马上进入中断向量地址执行中断服务程序。
注:INT1 的中断请求被 P0.1 的唤醒触发功能锁定。
注:P0.1 中断由下降沿触发
¾
例:INT1 中断请求设置。
B0BCLR FP01IRQ
B0BSET FP01IEN
B0BSET FGIE
¾
例:INT1 中断。
ORG 8H ;
JMP INT_SERVICE
INT_SERVICE:
…
…
EXIT_INT:
…
RETI
P01IRQ = 1 而 P01IEN = 0,系统并不会执行中断服务。在处理多中断时尤其需要注意。
; 清 INT1 中断请求标志。
; 使能 INT1 中断。
; 使能 GIE。
; 保存 ACC 和 PFLAG。
B0BTS1 FP01IRQ
JMP EXIT_INT
B0BCLR FP01IRQ
…
; 检查是否有 P01 中断请求标志。
; P01IRQ = 0,退出中断。
; 清 P01IRQ。
; INT1 中断服务程序。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 48 Version 1.0
Page 49

SN8P2711A
8-Bit Micro-Controller
6.8 TC0 中断
TC0C 溢出时,无论 TC0IEN 处于何种状态,TC0IRQ 都会置“1”。若 TC0IEN 和 TC0IRQ 都置“1”,系统就会
响应
TC0 的中断;若 TC0IEN = 0,则无论 TC0IRQ 是否置“1”,系统都不会响应 TC0 中断。尤其需要注意多种中断下
的情形。
¾
B0BCLR FTC0IEN
B0BCLR FTC0ENB ;
MOV A, #20H ;
B0MOV TC0M, A
MOV A, # 64H
B0MOV TC0C, A
B0BCLR FTC0IRQ
B0BSET FTC0IEN
B0BSET FTC0ENB ;
B0BSET FGIE
¾
ORG 8H ;
JMP INT_SERVICE
INT_SERVICE:
…
B0BTS1 FTC0IRQ
JMP EXIT_INT
B0BCLR FTC0IRQ
MOV A, #64H
B0MOV TC0C, A
…
…
EXIT_INT:
…
RETI
例:TC0 中断请求设置。
例:TC0 中断服务程序。
; 禁止 TC0 中断。
; TC0 时钟=Fcpu / 64。
; TC0C 初始值=64H。
; TC0 间隔= 10 ms。
; 清 TC0 中断请求标志。
; 使能 TC0 中断。
; 使能 GIE。
; 保存 ACC 和 PFLAG。
; 检查是否有 TC0 中断请求标志。
; TC0IRQ = 0,退出中断。
; 清 TC0IRQ。
; 清 TC0C。
; TC0 中断程序。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 49 Version 1.0
Page 50

SN8P2711A
8-Bit Micro-Controller
6.9 TC1 中断
TC1C 溢出时,无论 TC1IEN 处于何种状态,TC1IRQ 都会置“1”。若 TC1IEN 和 TC1IRQ 都置“1”,系统就会
响应
TC1 的中断;若 TC1IEN = 0,则无论 TC1IRQ 是否置“1”,系统都不会响应 TC1 中断。尤其需要注意多种中断下
的情形。
¾
B0BCLR FTC1IEN
B0BCLR FTC1ENB
MOV A, # 20H ;
B0MOV TC1M, A
MOV A, # 64H
B0MOV TC1C, A
B0BCLR FTC1IRQ
B0BSET FTC1IEN
B0BSET FTC1ENB
B0BSET FGIE
¾
ORG 8H ;
JMP INT_SERVICE
INT_SERVICE:
…
B0BTS1 FTC1IRQ
JMP EXIT_INT
B0BCLR FTC1IRQ
MOV A, #64H
B0MOV TC1C, A
…
…
EXIT_INT:
…
RETI
例:设置 TC1 中断请求。
例:TC1 中断服务程序。
; 禁止 TC1 中断。
; 关闭 TC1 定时器。
; 设置 TC1 时钟=Fcpu / 64。
; 设置 TC1C 初始值=64H。
; 设置 TC1 间隔时间=10 ms。
; 清 TC1 中断请求标志。
; 使能 TC1 中断。
; 开启 TC1 定时器。
; 使能 GIE。
; 保存 ACC 和 PFLAG。
; 检查是否有 TC1 中断请求标志。
; TC1IRQ = 0,退出中断。
; 清 TC1IRQ。
; 清 TC1C。
; TC1 中断服务程序。
; 恢复 ACC 和 PFLAG。
; 退出中断。
SONiX TECHNOLOGY CO., LTD Page 50 Version 1.0
Page 51

SN8P2711A
8-Bit Micro-Controller
6.10 ADC 中断
当 ADC 转换完成后,无论 ADCIEN 是否使能,ADCIQR 都会置“1”。若 ADCIEN 和 ADCIQR 都置“1”,那么系
统就会响应
下的处理。
¾
例: ADC 中断设置。
B0BCLR FADCIEN ; 禁止 ADC 中断。
MOV A, #10110000B ;
B0MOV ADM, A ; 允许 P4.0 ADC 输入,使能 ADC 功能。
MOV A, #00000000B ; 设置 AD 转换速率 = Fcpu/16。
B0MOV ADR, A
B0BCLR FADCIRQ ; 清除 ADC 中断请求标志。
B0BSET FADCIEN ; 使能 ADC 中断。
B0BSET FGIE ; 使能 GIE。
B0BSET FADS ; 开始 AD 转换。
¾
例:ADC 中断服务程序。
ORG 8H ; 中断向量地址。
JMP INT_SERVICE
INT_SERVICE:
… ; 保存 ACC 和 PFLAG。
B0BTS1 FADCIRQ ; 检查是否有 ADC 中断。
JMP EXIT_INT ; ADCIRQ = 0,退出中断。
B0BCLR FADCIRQ ; 清 ADCIRQ。
… ; ADC 中断服务程序。
…
EXIT_INT:
… ; 恢复 ACC 和 PFLAG。
RETI ; 退出中断。
ADC 中断。若 ADCIEN = 0,不管 ADCIRQ 是否置“1”,系统都不会进入 ADC 中断。用户应注意多种中断
SONiX TECHNOLOGY CO., LTD Page 51 Version 1.0
Page 52

SN8P2711A
8-Bit Micro-Controller
6.11 多中断操作举例
在同一时刻,系统中可能出现多个中断请求。此时,用户必须根据系统的要求对各中断进行优先权的设置。中断请求
标志
IRQ 由中断事件触发,当 IRQ 处于有效值“1”时,系统并不一定会响应该中断。各中断触发事件如下表所示:
中断 有效触发
P00IRQ
P01IRQ
TC0IRQ
TC1IRQ
ADCIRQ
多个中断同时发生时,需要注意的是:首先,必须预先设定好各中断的优先级。其次,利用 IEN 和 IRQ 控制系统是
否响应该中断。在程序中,必须对中断控制位和中断请求标志进行检测。
¾
例:多中断条件下检测中断请求。
ORG 8H ;
JMP INT_SERVICE
INT_SERVICE:
…
INTP00CHK:
B0BTS1 FP00IEN
JMP INTP01CHK
B0BTS0 FP00IRQ
JMP INTP00
INTP01CHK:
B0BTS1 FP01IEN
JMP INTTC0CHK
B0BTS0 FP01IRQ
JMP INTP01
INTTC0CHK:
B0BTS1 FTC0IEN
JMP INTTC1CHK
B0BTS0 FTC0IRQ
JMP INTTC0
INTTC1CHK:
B0BTS1 FTC1IEN
JMP INTADCHK
B0BTS0 FTC1IRQ
JMP INTTC1
INTADCHK:
B0BTS1 FADCIEN
JMP INT_EXIT ;
B0BTS0 FADCIRQ
JMP INTADC
INT_EXIT:
…
RETI
由 PEDGE 控制
下降沿触发
TC0C 溢出
TC1C 溢出
AD 转换完成
; 保存 ACC 和 PFLAG。
; 检查是否有 P00 中断请求。
; 检查是否使能 P00 中断。
; 跳到下一个中断。
; 检查是否有 P00 中断请求。
; 进入 INT0 中断。
; 检查是否有 P01 中断请求。
; 检查是否使能 P01 中断。
; 跳到下一个中断。
; 检查是否有 P01 中断请求。
; 进入 INT1 中断。
; 检查是否有 TC0 中断请求。
; 检查是否使能 TC0 中断。
; 跳到下一个中断。
; 检查是否有 TC0 中断请求。
; 进入 TC0 中断。
; 检查是否有 TC1
; 检查是否使能 TC1 中断。
; 跳到下一个中断。
; 检查是否有 TC1 中断请求。
; 进入 TC1 中断。
; 检查是否有 ADC 中断请求。
; 检查是否使能 ADC 中断。
; 检查是否有 ADC 中断请求。
; 进入 ADC 中断。
; 恢复 ACC 和 PFLAG。
; 退出中断。
中断请求。
SONiX TECHNOLOGY CO., LTD Page 52 Version 1.0
Page 53

SN8P2711A
8-Bit Micro-Controller
7
7
7
I/O 口
7.1 I/O 口模式
寄存器 PnM 控制 I/O 口的工作模式。
0B8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0M
读/写
复位后
0C4H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4M
读/写
复位后
0C5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5M
读/写
复位后
Bit[7:0] PnM[7:0]
0 =
1 =
注:
1. 用户可以用位操作指令(B0BSET,B0BCLR)对 I/O 口进行操作;
2. P0.4 是单向输入引脚, P0.4M = 1。
例:I/O 模式选择。
¾
CLR P0M
CLR P4M
CLR P5M
MOV A, #0FFH
B0MOV P0M, A
B0MOV P4M,A
B0MOV P5M, A
B0BCLR P4M.0
B0BSET P4M.0
- - - - P03M P02M P01M P00M
- - - - R/W R/W R/W R/W
- - - - 0 0 0 0
- - - P44M P43M P42M P42M P40M
- - - R/W R/W R/W R/W R/W
- - - 0 0 0 0 0
- - - P54M P53M - - -
- - - R/W R/W - - -
- - - 0 0 - - -
:Pn 模式控制位(n = 0~5)。
输入模式;
输出模式。
; 所有端口置为输入模式。
; 所有端口置为输出模式。
; P4.0 置为输入模式。
; P4.0 置为输出模式。
SONiX TECHNOLOGY CO., LTD Page 53 Version 1.0
Page 54

SN8P2711A
8-Bit Micro-Controller
7.2 I/O 上拉电阻寄存器
0E0H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0UR - - - - P03R P02R P01R P00R
读/写 - - - - W W W W
复位后 - - - - 0 0 0 0
0E4H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4UR - - - P44R P43R P42R P41R P40R
读/写 - - - W W W W W
复位后 - - - 0 0 0 0 0
0E5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5UR - - - P54R P53R - - -
读/写 - - - W W - - -
复位后 - - - 0 0 - - -
注:P0.4 是单向输入引脚,无上拉电阻,因此 P0UR.4 始终为“1”。
¾ 例:I/O 上拉电阻。
MOV A, #0FFH
B0MOV P0UR, A ;
B0MOV P4UR,A
B0MOV P5UR, A
; 使能 P0、4、5 上拉电阻。
7.3 I/O 口数据寄存器
0D0H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0 - - - P04 P03 P02 P01 P00
读/写 - - - R R/W R/W R/W R/W
复位后 - - - 0 0 0 0 0
0D4H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4 - - - P44 P43 P42 P41 P40
读/写 - - - R/W R/W R/W R/W R/W
复位后 - - - 0 0 0 0 0
0D5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5 - - - P54 P53 - - -
读/写 - - - R/W R/W - - -
复位后 - - - 0 0 - - -
注:使能外部复位时,P04 的值保持为“1”。
¾ 例:从输入端口读取数据。
B0MOV A, P0 ; 读 P0 口的数据。
B0MOV A, P4 ; 读 P4 口的数据。
B0MOV A, P5 ; 读 P5 口的数据。
¾ 例:写数据到输出端口。
MOV A, #0FFH ; 写 0FFH 到所有的端口。
B0MOV P0, A
B0MOV P4, A
B0MOV P5, A
¾ 例:写 1 位数据到输出端口。
B0BSET P4.0 ; P4.0 和 P5.3 设为“1”。
B0BSET P5.3
B0BCLR P4.0 ; P4.0 和 P5.3 为设“0”。
B0BCLR P5.3
SONiX TECHNOLOGY CO., LTD Page 54 Version 1.0
Page 55

SN8P2711A
8-Bit Micro-Controller
7.4 P4 口 ADC 共用引脚
P4 口和 ADC 的输入口共用,非施密特触发。同一时间只能设置 P4 口的一个引脚作为 ADC 的测量信号输入口(通
过
ADM 寄存器来设置),其它引脚则作为普通 I/O 使用。具体应用中,当输入一个模拟信号到 CMOS 结构端口,尤其当
模拟信号为
眠模式下,上述漏电流会严重影响到系统的整体功耗。
的
P4 口将被设置为纯模拟信号输入口,从而避免上述漏电流的情况。
0AEH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4CON
读/写
复位后
Bit[4:0] P4CON[4:0]
0 = P4.n
1 = P4.n
注:当 P4.n 作为普通 I/O 口而不是 ADC 输入引脚时,P4CON.n 必须置为 0,否则 P4.n 的普通 I/O 信号会被隔离开来。
P4
1
,CHSn 所对应的 P4.n 用作 ADC 模拟信号输入引脚。
0B1H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ADM
读/写
复位后
Bit 4 GCHS
0 =
1 =
Bit[2:0] CHS[2:0]:ADC 输入通道选择位。
000 = AIN0
注:在设置 P4.n 为普通的 I/O 引脚时,必须保证 P4.n 的 ADC 功能已经被禁止。否则当 GCHS = 1 时,CHS[2:0]所指向的 P4.n
¾
; 检查 GCHS 和 CHS[2:0]的状态。
B0BCLR FGCHS
; 清 P4CON。
B0BCLR P4CON.1
; P4.1 设为输入模式。
B0BCLR P4M.1
¾
例:设置 P4.1 为普通的输出模式,P4CON.1 必须置为 0。
; 检查 GCHS 和 CHS[2:0]的状态。
B0BCLR FGCHS
; 清 P4CON。
B0BCLR P4CON.1
; 设置 P4.1 为输出模式以避免误操作。
B0BSET P4.1
或
B0BCLR P4.1
; P4.1 设为输出模式。
B0BSET P4M.1
1/2 VDD 时,将可能产生额外的漏电流。同样,当 P4 口外接多个模拟信号时,也会产生额外的漏电流。在睡
P4CON 为 P4 口的配置寄存器。将 P4CON[7:0]置“1”,其对应
- - - P4CON4 P4CON3 P4CON2 P4CON1 P4CON0
- - - R/W R/W R/W R/W R/W
- - - 0 0 0 0 0
:P4.n 控制位。
作为模拟信号输入或普通 I/O 引脚;
作为仅作模拟信号输入引脚。
的 ADC 模拟输入由寄存器 ADM 的 GCHS 和 CHSn 位控制,若 GCHS = 0,P4.n 为普通的 I/O 引脚,若 GCHS =
ADENB ADS EOC GCHS - CHS2 CHS1 CHS0
R/W R/W R/W R/W - R/W R/W R/W
0 0 0 0 - 0 0 0
:ADC 输入通道控制位。
禁止 AIN 通道;
开启 AIN 通道。
;001 = AIN1;010 = AIN2;011 = AIN3;100 = AIN4;101 = AIN5。
会被自动设为 ADC 输入引脚。
例:设置 P4.1 为普通的输入引脚,P4CON.1 必须置为 0。
; CHS[2:0]指向 P4.1(CHS[2:0] = 001B),则 GCHS=0。
; CHS[2:0]没指向 P4.1(CHS[2:0] ≠ 001B),则忽略 GCHS 的状态。
; 使能 P4.1 的普通 I/O 功能。
; 设置 P4.1 为输入模式。
; CHS[2:0]指向 P4.1(CHS[2:0]=001B),则 GCHS=0。
; CHS[2:0]不指向 P4.1(CHS[2:0]≠001B),则忽略 GCHS 的状态。
; 使能 P4.1 的普通 I/O 功能。
; 设置 P4.1 为 1。
; 设置 P4.1 为 0。
; P4.1 设为输入模式。
SONiX TECHNOLOGY CO., LTD Page 55 Version 1.0
Page 56

SN8P2711A
8-Bit Micro-Controller
P4.0
可作为普通的 I/O 引脚,ADC 输入(AIN0)和 ADC 外部参考电压的高电平输入端 。VERFH 寄存器的 EVHENB
位是 ADC 的外部参考电压的高电平输入控制位。若使能 EVHENB,P4.0 的普通 I/O 功能和 ADC 输入(AIN0)功能被禁
止。
P4.0 和 ADC 的参考电压输入端直接相连。
注:若想使能 P4.0 的普通 I/O 功能和 AIN0 功能,必须将 EVHENB 设置为“0”。
0AFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
VREFH
读/写
复位后
EVHENB - - - - - VHS1 VHS0
R/W - - - - - R/W R/W
0 - - - - - 0 0
Bit 7 EVHENB
0 =
1 =
: ADC 外部参考电压的高电平输入控制位。
禁止 ADC 参考电压的高电平输入;
允许 ADC 参考电压的高电平输入。
¾
例:设置 P4.0 为普通输入模式, EVHENB 和 P4CON.0 必须置 0。
; 检查 EVHENB 状态。
B0BTS0 FEVHENB ;
; 检查 GCHS 和 CHS[2:0]的状态。
B0BCLR FGCHS
; 清 P4CON。
B0BCLR P4CON.0
; 设置 P4.0 为输入模式。
B0BCLR P4M.0
B0BCLR FEVHENB
; EVHENB = 1, 禁止 ADC 外部参考电压的高电平输入。
; EVHENB = 0,执行下一段程序。
; CHS[2:0]指向 P4.0(CHS[2:0] = 000B),则 GCHS=0。
; CHS[2:0]不指向 P4.0(CHS[2:0]≠000B),则忽略 GCHS 的状态。
; 使能 P4.0 的普通 I/O 功能。
; P4.0 置为输入模式。
¾
例:设置 P4.0 为普通输出模式,EVHENB 和 P4CON.0 位必须置 0。
; 检查 EVHENB 的状态。
B0BTS0 FEVHENB ;
; 检查 GCHS 和 CHS[2:0]的状态。
B0BCLR FGCHS
; 清 P4CON。
B0BCLR P4CON.0
; 设置 P4.0 为输出模式。
B0BSET P4.0
; 或
B0BCLR P4.0
; 设置 P4.0 为输出模式。
B0BSET P4M.0 ;
B0BCLR FEVHENB
; EVHENB=1,清 EVHENB 并禁止 ADC 外部参考电压的高电平输入。
; EVHENB = 0,执行下一段程序。
; CHS[2:0]指向 P4.0(CHS[2:0] = 000B),设置 GCHS=0。
; CHS[2:0]不指向 P4.0(CHS[2:0]≠000B),则忽略 GCHS 的状态。
; 使能 P4.0 的普通 I/O 功能。
; 设置 P4.0 为 1。
; 设置 P4.0 为 0。
SONiX TECHNOLOGY CO., LTD Page 56 Version 1.0
Page 57

SN8P2711A
8-Bit Micro-Controller
8
8
8
定时器
8.1 看门狗定时器
看门狗定时器 WDT 是一个 4 位二进制计数器,用于监控程序的正常执行。如果由于干扰,程序进入了未知状态,看
门狗定时器溢出,系统复位。看门狗的工作模式由编译选项控制,其时钟源由内部低速
@5V
)提供。
看门狗溢出时间 = 8192 /内部低速振荡器周期(sec)
VDD
3V 16KHz 512ms
5V 32KHz 256ms
注:如果看门狗被置为“Always_On”模式,那么看门狗在睡眠模式和绿色模式下仍然运行。
看门狗清零的方法是对看门狗计数器清零寄存器 WDTR 写入清零控制字 5AH。
0CCH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
WDTR
读/写
复位后
¾
例:如下是对看门狗定时器的操作,在主程序开头对看门狗清零。
…
CALL SUB1
CALL SUB2
…
…
JMP MAIN
看门狗定时器应用注意事项如下:
z
对看门狗清零之前,检查 I/O 口的状态和 RAM 的内容可增强程序的可靠性;
z
不能在中断中对看门狗清零,否则无法侦测到主程序跑飞的状况;
z
程序中应该只在主程序中有一次清看门狗的动作,这种架构能够最大限度的发挥看门狗的保护功能。
¾
例:如下是对看门狗定时器的操作,在主程序开头对看门狗清零。
main:
…
…
Err: JMP $
Correct:
;
MOV A, 5AH
B0MOV WDTR, A
…
CALL SUB1
CALL SUB2
…
…
JMP MAIN
WDTR7 WDTR6 WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0
W W W W W W W W
0 0 0 0 0 0 0 0
MOV A,#5AH
B0MOV WDTR,A
内部低速 RC Freq. 看门狗溢出时间
; 看门狗定时器清零。
; 检测 I/O 口的状态。
; 检测 RAM 的内容。
; I/O 或 RAM 出错,不清看门狗等看门狗计时溢出。
; I/O 和 RAM 正常,看门狗清零 。
; 在整个程序中只有一处地方清看门狗。
RC 振荡器(16KHz @3V,32KHz
SONiX TECHNOLOGY CO., LTD Page 57 Version 1.0
Page 58

SN8P2711A
8-Bit Micro-Controller
8.2 定时/计数器 TC0
8.2.1 概述
定时/计数器 TC0 具有双时钟源,可根据实际需要选择内部时钟或外部时钟作为计时标准。其中,内部时钟源来自 Fcpu
或 Fosc(Fosc 由 TC0X8 标志控制)。外部时钟源 INT0 从 P0.0 端输入(下降沿触发)。寄存器 TC0M 控制 TC0 时钟
源的选择。当
式,
TC0 的溢出时间由寄存器 ALOAD0 和 TC0OUT 位控制。
TC0
的主要功能如下:
) 8
)
外部事件计数器:对外部事件计数;
)
绿色模式唤醒功能:TC0 可以将系统从绿色模式下唤醒;
) Buzzer
) PWM
TC0 从 0FFH 溢出到 00H 时,TC0 在继续计数的同时产生一个溢出信号,触发 TC0 中断请求。在 PWM 模
位可编程定时器:根据选择的时钟频率信号,产生周期中断;
输出;
输出。
TC0OUT
内部P5.4 I/O电路
记录重装值
TC0 溢出
ALOAD0
自动重装
Buzzer
TC0 / 2
P5.4
TC0 Rate
(Fcpu/2~Fcpu/256)
Fcpu
Fosc
TC0 Rate
(Fosc/1~Fosc/128)
INT0
(施密特触发)
TC0X8
TC0CKS TC0ENB
CPUM0,1
TC0R重装数据缓
存器
Load
TC0C
8位二进制计数器
比较器
ALOAD0, TC0OUT
R
PWM
S
PWM0OUT
TC0溢出
SONiX TECHNOLOGY CO., LTD Page 58 Version 1.0
Page 59

SN8P2711A
8-Bit Micro-Controller
8.2.2 TC0M 模式寄存器
0DAH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC0M
读/写
复位后
TC0ENB TC0rate2 TC0rate1 TC0rate0 TC0CKS ALOAD0 TC0OUT PWM0OUT
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
Bit 0 PWM0OUT:PWM 输出控制。
0 =
禁止 PWM 输出;
1 =
使能 PWM 输出,PWM 输出占空比由 T0OUT 和 ALOAD0 控制。
Bit 1 TC0OUT:TC0 溢出信号输出控制位。仅当 PWM0OUT = 0 时有效。
0 =
1 =
禁止,P5.4 作为输入/输出口;
允许,P5.4 输出 TC0OUT 信号。
Bit 2 ALOAD0:自动装载控制位。仅当 PWM0OUT = 0 时有效。
0 =
禁止 TC0 自动重装;
1 =
允许 TC0 自动重装。
Bit 3 TC0CKS:TC0 时钟信号控制位。
0 =
内部时钟(Fcpu 或 Fosc);
1 =
外部时钟,由 P0.0/INT0 输入。
Bit [6:4] TC0RATE[2:0]:TC0 分频选择位。
TC0RATE [2:0] TC0X8 = 0 TC0X8 = 1
000 Fcpu / 256 Fosc / 128
001 Fcpu / 128 Fosc / 64
010 Fcpu / 64 Fosc / 32
011 Fcpu / 32 Fosc / 16
100 Fcpu / 16 Fosc / 8
101 Fcpu / 8 Fosc / 4
110 Fcpu / 4 Fosc / 2
111 Fcpu / 2 Fosc / 1
Bit 7 TC0ENB:TC0 启动控制位。
0 =
关闭;
1 =
开启。
注:若 TC0CKS=1, 则 TC0 用作外部事件计数器,此时不需要考虑 TC0RATE 的设置,P0.0 口无中断信号(P00IRQ=0)。
8.2.3 TC1X8, TC0X8, TC0GN 标志
0D8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
T0M
读/写
复位后
Bit 1 TC0GN:TC0 绿色模式唤醒功能控制位。
0 =
1 =
Bit 2 TC0X8:TC0 内部时钟选择控制位。
0 = TC0
1 = TC0
Bit 3 TC1X8:TC1 内部时钟选择控制位。
0 = TC1
1 = TC1
注:TC0CKS = 1 时,TC0X8 和 TC0RATE 可以忽略不计。
- - - - TC1X8 TC0X8 TC0GN -
- - - - R/W R/W R/W -
- - - - 0 0 0 -
禁止 TC0 的唤醒功能;
允许 TC0 的唤醒功能。
内部时钟来自 Fcpu,TC0RATE = Fcpu/2~Fcpu/256;
内部时钟来自 Fosc,TC0RATE = Fosc/1~Fosc/128。
内部时钟来自 Fcpu,TC0RATE = Fcpu/2~Fcpu/256;
内部时钟来自 Fosc,TC0RATE = Fosc/1~Fosc/128。
SONiX TECHNOLOGY CO., LTD Page 59 Version 1.0
Page 60

SN8P2711A
8-Bit Micro-Controller
8.2.4 TC0C 计数寄存器
TC0C
0DBH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC0C
读/写
复位后
TC0C
N
TC0CKS TC0X8 PWM0 ALOAD0 TC0OUT
0
1 - - - - 256 00H~0FFH 00000000b~11111111b
¾
TC0 中断时间对应表(TC0X8 = 0)
TC0RATE TC0CLOCK
000 Fcpu/256 65.536 ms 256 us 8000 ms 31250 us
001 Fcpu/128 32.768 ms 128 us 4000 ms 15625 us
010 Fcpu/64 16.384 ms 64 us 2000 ms 7812.5 us
011 Fcpu/32 8.192 ms 32 us 1000 ms 3906.25 us
100 Fcpu/16 4.096 ms 16 us 500 ms 1953.125 us
101 Fcpu/8 2.048 ms 8 us 250 ms 976.563 us
110 Fcpu/4 1.024 ms 4 us 125 ms 488.281 us
111 Fcpu/2 0.512 ms 2 us 62.5 ms 244.141 us
TC0X8 = 1
TC0RATE TC0CLOCK
000 Fosc/128 8.192 ms 32 us 1000 ms 7812.5 us
001 Fosc/64 4.096 ms 16 us 500 ms 3906.25 us
010 Fosc/32 2.048 ms 8 us 250 ms 1953.125 us
011 Fosc/16 1.024 ms 4 us 125 ms 976.563 us
100 Fosc/8 0.512 ms 2 us 62.5 ms 488.281 us
101 Fosc/4 0.256 ms 1 us 31.25 ms 244.141 us
110 Fosc/2 0.128 ms 0.5 us 15.625 ms 122.07 us
111 Fosc/1 0.064 ms 0.25 us 7.813 ms 61.035 us
控制 TC0 的时间间隔。
TC0C7 TC0C6 TC0C5 TC0C4 TC0C3 TC0C2 TC0C1 TC0C0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
初始值计算公式如下:
TC0C
初始值 = N -(TC0 中断间隔时间 * 输入时钟)
为 TC0 二进制计数范围。各模式下参数的设定如下表所示:
TC0C 有效值 TC0C 二进制计数范围 备注
N
0
(Fcpu/2~
Fcpu/256)
1
(Fosc/1~
Fosc/128)
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
每计数 256 次溢出
每计数 256 次溢出
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
每计数 256 次溢出
每计数 256 次溢出
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
每计数 256 次溢出
例:TC0 的间隔时间为 10ms,时钟源来自 Fcpu(TC0CKS = 0,TC0X8 = 0),无 PWM 输出(PWM0 = 0),高
速时钟
= 4MHz,Fcpu=Fosc/4,TC0RATE=010 (Fcpu/64)。
TC0C
初始值 = N -(TC0 中断间隔时间 * 输入时钟)
= 256 = 256 -
(
10ms * 4MHz / 4 / 64)
(
10-2 * 4 * 106 / 4 / 64)
= 100
= 64H
高速模式(fcpu = 4MHz / 4) 低速模式(fcpu = 32768Hz / 4)
最大溢出间隔时间 单步间隔时间 = max/256 最大溢出间隔时间 单步间隔时间 = max/256
高速模式(fcpu = 4MHz / 4) 低速模式(fcpu = 32768Hz / 4)
最大溢出间隔时间 单步间隔时间 = max/256 最大溢出间隔时间 单步间隔时间 = max/256
SONiX TECHNOLOGY CO., LTD Page 60 Version 1.0
Page 61

SN8P2711A
8-Bit Micro-Controller
8.2.5 TC0R 自动装载寄存器
TC0
的自动重装功能由 TC0M 的 ALOAD0 位控制。当 TC0C 溢出时,TC0R 的值自动装入 TC0C 中。这样,用户在
使用的过程中就不需要在中断中复位
TC0
为双重缓存器结构。若程序对 TC0R 进行了修改,那么修改后的 TC0R 值首先被暂存在 TC0R 的第一个缓存器
中,
TC0 溢出后,TC0R 的新值就会被存入 TC0R 缓存器中,从而避免 TC0 中断时间出错以及 PWM 和蜂鸣器误动作。
注:在 PWM 模式下,系统自动开启重装功能,ALOAD0 用于控制溢出范围。
0CDH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC0R
读/写
复位后
TC0R7 TC0R6 TC0R5 TC0R4 TC0R3 TC0R2 TC0R1 TC0R0
W W W W W W W W
0 0 0 0 0 0 0 0
初始值计算公式如下:
TC0R
N
是 TC0 最大溢出值。TC0 的溢出时间和有效值见下表:
TC0CKS TC0X8 PWM0 ALOAD0 TC0OUT
0
(Fcpu/2~
Fcpu/256)
0
1
(Fosc/1~
Fosc/128)
1 - - - - 256 00H~0FFH 00000000b~11111111b
¾
例:TC0 中断间隔时间设置为 10ms,时钟源选 Fcpu(TC0KS=0,TC0X8 = 0),无 PWM 输出(PWM0=0),
高速时钟为外部
4MHz,Fcpu=Fosc/4,TC0RATE=010(Fcpu/64)。
TC0C。
TC0R
TC0R = N -
初始值 = N -(TC0 中断间隔时间 * 输入时钟)
TC0R 有效值 TC0R 二进制有效范围
N
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
(TC0 中断间隔时间 * 输入时钟)
= 256 = 256 -
(
10ms * 4MHz / 4 / 64)
(
10-2 * 4 * 106 / 4 / 64)
= 100
= 64H
SONiX TECHNOLOGY CO., LTD Page 61 Version 1.0
Page 62

SN8P2711A
8-Bit Micro-Controller
8.2.6 TC0 时钟频率输出(蜂鸣器输出)
对 TC0 时钟频率进行适当设置可得到特定频率的蜂鸣器输出(TC0OUT),并通过引脚 P5.4 输出。单片机内部设置
TC0 的溢出频率经过 2 分频后作为 TC0OUT 的频率,即 TC0 每溢出 2 次 TC0OUT 输出一个完整的脉冲,此时,P5.4 的
I/O 功能自动被禁止。TC0OUT 输出波形如下:
1 2 3 4
TC0溢出时钟
1 2 3 4
TC0OUT(Buzzer)输出时钟
若外部高速时钟选择 4MHz,系统时钟源采用外部时钟 Fosc/4,程序中设置 TC0RATE2~TC0RATE1 = 110, TC0C
= TC0R = 131
,则 TC0 的溢出频率为 2KHz,TC0OUT 的输出频率为 1KHz。下面给出范例程序。
¾
例:设置 TC0OUT(P5.4)。
MOV A,#01100000B
B0MOV TC0M,A
MOV A,#131
B0MOV TC0C,A
B0MOV TC0R,A
B0BSET FTC0OUT
B0BSET FALOAD0
B0BSET FTC0ENB
; TC0 速率 = Fcpu/4。
; 自动装载参考值设置。
; TC0 的输出信号由 P5.4 输出,禁止 P5.4 的普通 I/O 功能。
; 使能 TC0 自动重装功能。
; 开启 TC0 定时器。
注:蜂鸣器的输出有效时,“PWM0OUT”必须被置为“0”。
SONiX TECHNOLOGY CO., LTD Page 62 Version 1.0
Page 63

8.2.7 TC0 操作流程
TC0
定时器可用于定时器中断、事件计数、TC0OUT 和 PWM。下面分别举例说明。
停止 TC0 计数,禁止 TC0 中断,并清 TC0 中断请求标志。
)
设置 TC0 的速率 (不包含事件计数模式)。
)
设置 TC0 的时钟源。
)
; 选择 TC0 内部/外部时钟源。
或
;选择 TC0 Fcpu/Fosc 内部时钟源。
或
B0BCLR FTC0ENB
B0BCLR FTC0IEN
B0BCLR FTC0IRQ
MOV A, #0xxx0000b ; TC0M 的 bit4~bit6 控制 TC0 的速率为 x000xxxxb~x111xxxxb。
B0MOV TC0M,A ; 禁止 TC0 中断。
B0BCLR FTC0CKS
B0BSET FTC0CKS
B0BCLR FTC0X8
B0BSET FTC0X8
SN8P2711A
8-Bit Micro-Controller
; 停止 TC0 计数、TC0OUT 和 PWM。
; 禁止 TC0 中断。
; 清 TC0 中断请求标志。
; 内部时钟。
; 外部时钟。
; Fcpu 内部时钟。
; Fosc 内部时钟。
注:在 TC0 外部时钟模式下,TC0X8 可以忽略不计。
)
设置 TC0 的自动装载模式。
或
B0BCLR FALOAD0 ; 禁止 TC0 自动装载功能。
B0BSET FALOAD0 ; 使能 TC0 自动装载功能。
)
设置 TC0 中断间隔时间,TC0OUT(Buzzer)频率或 PWM 占空比。
; 设置 TC0 中断间隔时间,TC0OUT(Buzzer)频率或 PWM 占空比。
MOV A,#7FH
B0MOV TC0C,A
B0MOV TC0R,A
; PWM 模式下设置 PWM 的周期。
或
或
或
B0BCLR FALOAD0
B0BCLR FTC0OUT
B0BCLR FALOAD0
B0BSET FTC0OUT
B0BSET FALOAD0
B0BCLR FTC0OUT
B0BSET FALOAD0
B0BSET FTC0OUT
; TC0 的模式决定 TC0C 和 TC0R 的值。
; 设置 TC0C 的值。
; 在自动装载模式或 PWM 模式下设置 TC0R 的值。
; ALOAD0,TC0OUT = 00,PWM 周期 = 0~255。
; ALOAD0,TC0OUT = 01,PWM 周期 = 0~63。
; ALOAD0,TC0OUT = 10,PWM 周期 = 0~31。
; ALOAD0,TC0OUT = 11,PWM 周期 = 0~15。
)
设置 TC0 的模式。
或
或
或
开启 TC0 定时器。
)
B0BSET FTC0IEN
B0BSET FTC0OUT
B0BSET FPWM0OUT
B0BSET FTC0GN
B0BSET FTC0ENB ;
; 使能 TC0 中断。
; 使能 TC0OUT(Buzzer)功能。
; 使能 PWM。
; 使能 TC0 的绿色模式下的唤醒功能。
SONiX TECHNOLOGY CO., LTD Page 63 Version 1.0
Page 64

SN8P2711A
8-Bit Micro-Controller
8.3 定时/计数器 TC1
8.3.1 概述
定时/计数器 TC1 具有双时钟源,可根据实际的需要选择内部时钟或外部时钟作为计时标准。其中,内部时钟源来自
Fcpu 或 Fosc(Fosc 由 TC1X8 标志控制)。外部时钟源 INT1 从 P0.1 端输入(下降沿触发)。寄存器 TC1M 控制 TC1
时钟源的选择。当 TC1 从 0FFH 溢出到 00H 时,TC1 在继续计数的同时产生一个超时信号,触发 TC1 中断请求。在 PWM
模式,TC1 的溢出由寄存器 ALOAD1 的位 TC1OUT 控制。
TC1
的主要功能如下:
) 8
)
) Buzzer
) PWM
位可编程定时器:根据选择的时钟信号,产生周期中断;
外部事件计数器:对外部事件计数;
输出;
输出。
记录重装值
TC1 Time Out
ALOAD1
内部P5.3 I/O电路
自动重装
Buzzer
TC1 / 2
TC1OUT
P5.3
(Fcpu/2~Fcpu/256)
Fcpu
Fosc
(Fosc/1~Fosc/128)
INT1
(施密特触发)
TC1 Rate
TC1 Rate
TC1X8
TC1CKS TC1ENB
CPUM0,1
TC1R重装数据缓
存器
Load
TC1C
8位二进制计数器
比较器
ALOAD1, TC1OUT
R
PWM
S
PWM1OUT
TC1超时溢出
SONiX TECHNOLOGY CO., LTD Page 64 Version 1.0
Page 65

SN8P2711A
8-Bit Micro-Controller
8.3.2 TC1M 模式寄存器
0DCH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1M
读/写
复位后
TC1ENB TC1rate2 TC1rate1 TC1rate0 TC1CKS ALOAD1 TC1OUT PWM1OUT
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
Bit 0 PWM1OUT
0 =
1 =
:PWM 输出控制位。
禁止 PWM 输出;
使能 PWM 输出,PWM 输出占空比由 TC1OUT 和 ALOAD1 控制。
Bit 1 TC1OUT
:TC1 超时输出信号控制。仅当 PWM1OUT = 0 时有效。
0 =
1 =
禁止,P5.3 作为输入/输出口;
使能,P5.3 输出 TC1OUT 信号。
Bit 2 ALOAD1
0 =
1 =
:自动装载控制位。仅当 PWM1OUT = 0 时有效。
禁止 TC1 自动装载;
使能 TC1 自动装载。
Bit 3 TC1CKS
:TC1 时钟源控制位。
0 =
内部时钟(Fcpu 或 Fosc);
1 =
外部时钟,由 P0.1/INT1 输入。
Bit [6:4] TC1RATE[2:0]
TC1RATE [2:0] TC1X8 = 0 TC1X8 = 1
:TC1 分频选择位。
000 Fcpu / 256 Fosc / 128
001 Fcpu / 128 Fosc / 64
010 Fcpu / 64 Fosc / 32
011 Fcpu / 32 Fosc / 16
100 Fcpu / 16 Fosc / 8
101 Fcpu / 8 Fosc / 4
110 Fcpu / 4 Fosc / 2
111 Fcpu / 2 Fosc / 1
Bit 7 TC1ENB
:TC1 启动控制位。
0 =
禁止 TC1 定时器;
1 =
开启 TC1 定时器。
注:若 TC1CKS=1, 则 TC1 用作外部事件计数器,此时不需要考虑 TC1RATE 的设置,P0.1 口无中断信号 (P0.1IRQ=0)。
8.3.3 TC1X8 标志
0D8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
T0M
读/写
复位后
Bit 3 TC1X8
注:TC1CKS = 1 时,TC1X8 和 TC1RATE 可以忽略不计。
- - - - TC1X8 - - -
- - - - R/W - - -
- - - - 0 - - -
:TC1 内部时钟选择控制位。
0 = TC1
1 = TC1
内部时钟来自 Fcpu,TC1RATE = Fcpu/2~Fcpu/256;
内部时钟来自 Fosc,TC1RATE = Fosc/1~Fosc/128。
SONiX TECHNOLOGY CO., LTD Page 65 Version 1.0
Page 66

SN8P2711A
8-Bit Micro-Controller
8.3.4 TC1C 计数寄存器
TC1C
控制 TC1 的时间间隔。
0DDH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1C
读/写
复位后
TC1C
初始值的计算公式如下:
N
为 TC1 二进制计数范围。各模式下参数的设定如下表所示:
TC1CKS TC1X8 PWM1 ALOAD1 TC1OUT
0
1 - - - - 256 00H~0FFH 00000000b~11111111b
¾
例:TC1 的间隔时间为 10ms,时钟源来自 Fcpu(TC1CKS = 0,TC1X8 = 0),无 PWM 输出(PWM1 = 0),高
速时钟
TC1 中断时间对应表,TC1X8 = 0
TC1RATE TC1CLOCK
000 Fcpu/256 65.536 ms 256 us 8000 ms 31250 us
001 Fcpu/128
010 Fcpu/64
011 Fcpu/32
100 Fcpu/16
101 Fcpu/8
110 Fcpu/4
111 Fcpu/2
TC1 中断时间对应表,TC1X8 = 1
TC1RATE TC1CLOCK
000 Fosc/128 8.192 ms 32 us 1000 ms 7812.5 us
001 Fosc/64
010 Fosc/32
011 Fosc/16
100 Fosc/8
101 Fosc/4
110 Fosc/2
111 Fosc/1
TC1C7 TC1C6 TC1C5 TC1C4 TC1C3 TC1C2 TC1C1 TC1C0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
0
(Fcpu/2~
Fcpu/256)
1
(Fosc/1~
Fosc/128)
TC1C
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
初始值 = N -(TC1 中断间隔时间 * 输入时钟)
TC1C 有效值 TC1C 二进制计数范围 备注
N
每计数 256 次溢出
每计数 256 次溢出
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
每计数 256 次溢出
每计数 256 次溢出
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
每计数 256 次溢出
= 4MHz,Fcpu=Fosc/4,TC1RATE=010(Fcpu/64)。
TC1C
初始值 = N -(TC1 中断间隔时间 * 输入时钟)
= 256 = 256 -
(
10ms * 4MHz / 4 / 64)
(
10-2 * 4 * 106 / 4 / 64)
= 100
= 64H
高速模式(fcpu = 4MHz / 4) 低速模式(fcpu = 32768Hz / 4)
最大溢出间隔时间 单步间隔时间 = max/256 最大溢出间隔时间 单步间隔时间 = max/256
32.768 ms 128 us 4000 ms 15625 us
16.384 ms 64 us 2000 ms 7812.5 us
8.192 ms 32 us 1000 ms 3906.25 us
4.096 ms 16 us 500 ms 1953.125 us
2.048 ms 8 us 250 ms 976.563 us
1.024 ms 4 us 125 ms 488.281 us
0.512 ms 2 us 62.5 ms 244.141 us
高速模式(fcpu = 4MHz / 4) 低速模式(fcpu = 32768Hz / 4)
最大溢出间隔时间 单步间隔时间 = max/256 最大溢出间隔时间 单步间隔时间 = max/256
4.096 ms 16 us 500 ms 3906.25 us
2.048 ms 8 us 250 ms 1953.125 us
1.024 ms 4 us 125 ms 976.563 us
0.512 ms 2 us 62.5 ms 488.281 us
0.256 ms 1 us 31.25 ms 244.141 us
0.128 ms 0.5 us 15.625 ms 122.07 us
0.064 ms 0.25 us 7.813 ms 61.035 us
SONiX TECHNOLOGY CO., LTD Page 66 Version 1.0
Page 67

SN8P2711A
8-Bit Micro-Controller
8.3.5 TC1R 自动装载寄存器
TC1
的自动装载功能由 TC1M 的 ALOAD1 位控制。当 TC1C 溢出时,TC1R 的值自动装入 TC1C 中。这样,用户在
使用的过程中就不需要在中断中复位
TC1
为双重缓存器结构。若程序对 TC1R 进行了修改,那么修改后的 TC1R 值首先被暂存在 TC1R 的第一个缓存器
中,
TC1 溢出后,TC1R 的新值就会被存入 TC1R 缓存器中,从而避免 TC1 中断时间出错以及 PWM 和蜂鸣器误动作。
注:在 PWM 模式下,系统自动开启自动重装功能,ALOAD1 用于控制溢出范围。
0DEH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1R
读/写
复位后
TC1R7 TC1R6 TC1R5 TC1R4 TC1R3 TC1R2 TC1R1 TC1R0
W W W W W W W W
0 0 0 0 0 0 0 0
初始值计算公式如下:
TC1R
N
是 TC1 最大溢出值。TC1 的溢出时间和有效值见下表:
TC1CKS TC1X8 PWM1 ALOAD1 TC1OUT N
0
(Fcpu/2~
Fcpu/256)
0
1
(Fosc/1~
Fosc/128)
1 - - - - 256 00H~0FFH 00000000b~11111111b
¾
例:TC1 中断间隔时间设置为 10ms,时钟源选 Fcpu(TC1CKS=0,TC1X8 = 0),无 PWM 输出(PWM1=0),
高速时钟为外部
4MHz,Fcpu=Fosc/4,TC1RATE=010(Fcpu/64)。
TC1C。
TC1R
TC1R
初始值 = N -(TC1 中断间隔时间 * 输入时钟)
TC1R 有效值 TC1R 二进制有效范围
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
0 x x 256 00H~0FFH 00000000b~11111111b
1 0 0 256 00H~0FFH 00000000b~11111111b
1 0 1 64 00H~3FH xx000000b~xx111111b
1 1 0 32 00H~1FH xxx00000b~xxx11111b
1 1 1 16 00H~0FH xxxx0000b~xxxx1111b
有效值 = N -(TC1 中断间隔时间 * 输入时钟)
= 256 = 256 -
(
10ms * 4MHz / 4 / 64)
(
10-2 * 4 * 106 / 4 / 64)
= 100
= 64H
SONiX TECHNOLOGY CO., LTD Page 67 Version 1.0
Page 68

SN8P2711A
8-Bit Micro-Controller
8.3.6 TC1 时钟频率输出(蜂鸣器输出)
对 TC1 时钟频率进行适当设置可得到特定频率的蜂鸣器输出(TC1OUT),并通过引脚 P5.3 输出。单片机内部设置
TC1 的溢出频率经过 2 分频后作为 TC1OUT 的频率,即 TC1 每溢出 2 次 TC1OUT 输出一个完整的脉冲,此时,P5.3 的
I/O 功能自动被禁止。TC1OUT 输出波形如下:
1 2 3 4
TC1溢出时钟
1 2 3 4
TC1OUT(Buzzer)输出时钟
若外部高速时钟选择 4MHz,系统时钟源采用外部时钟 Fosc/4,程序中设置 TC1RATE2~TC1RATE1 = 110, TC1C
= TC1R = 131
,则 TC1 的溢出频率为 2KHz,TC1OUT 的输出频率为 1KHz。下面给出范例程序。
¾
例:设置 TC1OUT(P5.3)。
MOV A,#60H
B0MOV TC1M,A
MOV A,#131
B0MOV TC1C,A
B0MOV TC1R,A
B0BSET FTC1OUT
B0BSET FALOAD1
B0BSET FTC1ENB
; TC1 速率= Fcpu/4。
; 自动装载参考值设置。
; TC1 的输出信号由 P5.3 输出,禁止 P5.3 的普通 I/O 功能。
; 使能 TC1 自动重装功能。
; 开启 TC1 定时器。
注:蜂鸣器的输出有效时,“PWM1OUT”必须被置为“0”。
SONiX TECHNOLOGY CO., LTD Page 68 Version 1.0
Page 69

SN8P2711A
8.3.7 TC1 操作流程
TC1 定时器可用于定时器中断、事件计数、TC1OUT 和 PWM。下面分别举例说明。
)
停止 TC1 计数,禁止 TC1 中断并清 TC1 中断请求标志。
)
设置 TC1 的速率 (不包含事件计数模式)。
设置 TC1 的时钟源。
)
; 选择 TC1 内部/外部时钟源。
或
;选择 TC1 Fcpu/Fosc 内部时钟源。
或
B0BCLR FTC1ENB ; 停止 TC1 计数、TC1OUT 和 PWM。
B0BCLR FTC1IEN ; 禁止 TC1 中断。
B0BCLR FTC1IRQ ; 清 TC1 中断请求标志。
MOV A, #0xxx0000b ;TC1M 的 bit4~bit6 控制 TC1 的速率在 x000xxxxb~x111xxxxb。
B0MOV TC1M,A
B0BCLR FTC1CKS
B0BSET FTC1CKS
B0BCLR FTC1X8
B0BSET FTC1X8
; 禁止 TC1 中断。
; 内部时钟。
; 外部时钟。
; Fcpu 内部时钟。
; Fosc 内部时钟。
8-Bit Micro-Controller
注:在 TC1 外部时钟模式下,TC1X8 可以忽略不计。
)
设置 TC1 的自动装载模式。
或
B0BCLR FALOAD1 ; 禁止 TC1 自动装载功能。
B0BSET FALOAD1 ; 使能 TC1 自动装载功能。
设置 TC1 中断间隔时间,TC1OUT(Buzzer)频率或 PWM 占空比。
)
; 设置 TC1 中断间隔时间,TC1OUT(Buzzer)频率或 PWM 占空比。
MOV A,#7FH
B0MOV TC1C,A
B0MOV TC1R,A
; PWM 模式下设置 PWM 周期。
或
或
或
B0BCLR FALOAD1
B0BCLR FTC1OUT
B0BCLR FALOAD1
B0BSET FTC1OUT
B0BSET FALOAD1
B0BCLR FTC1OUT
B0BSET FALOAD1
B0BSET FTC1OUT
; TC1 的模式决定 TC1C 和 TC1R 的值。
; 设置 TC1C 的值。
; 在自动装载模式或 PWM 模式下设置 TC1R 的值。
; ALOAD1,TC1OUT = 00,PWM 周期 = 0~255。
; ALOAD1,TC1OUT = 01,PWM 周期 = 0~63。
; ALOAD1,TC1OUT = 10,PWM 周期 = 0~31。
; ALOAD1,TC1OUT = 11,PWM 周期 = 0~15。
)
设置 TC1 的模式。
或
或
B0BSET FTC1IEN
B0BSET FTC1OUT
B0BSET FPWM1OUT
; 使能 TC1 中断。
; 使能 TC1OUT(Buzzer)功能。
; 使能 PWM。
)
开启 TC1 定时器。
B0BSET FTC1ENB ;
SONiX TECHNOLOGY CO., LTD Page 69 Version 1.0
Page 70

SN8P2711A
8-Bit Micro-Controller
8.4 PWM 功能说明
8.4.1 概述
PWM
信号输出到 PWMnOUT(P5.3/P5.4 引脚),位 TCnOUT 和 ALOADn 控制 PWM 输出的阶数(256、64、32
和 16)。8 位计数器 TCnC 计数过程中不断与 TCnR 相比较,当 TCnC 计数到两者相等时,PWM 输出低电平,当 TCnC
再次从零开始计数时,PWM 被强制输出高电平。PWMn 输出占空比 = TCnR/阶数(阶数= 256、64、32 或 16)。
参考寄存器保持输入 00H 可使 PWM 的输出长时间维持在低电平,通过修改 TCnR 可改变 PWM 输出占空比。
注:TCn、TCnC 的“n”的值只能是 0 或 1。n = 0 时为 TC0 模式,n = 1 时为 TC1 模式。
注:TCn 为双重缓存器结构,调整 TCnR 的值可以改变 PWM 的输出占空比。用户可随时改变 TCnR 的值,但是只有在 TCn
溢出后,这一修改值才真正被写入 TCnR 中。
ALOADn TCnOUT PWM 占空比范围 TCnC 有效值 TCnR 有效范围
0 0 0/256~255/256 00H~0FFH 00H~0FFH 7.8125K 每计数 256 次溢出
0 1 0/64~63/64 00H~3FH 00H~3FH 31.25K 每计数 64 次溢出
1 0 0/32~31/32 00H~1FH 00H~1FH 62.5K 每计数 32 次溢出
1 1 0/16~15/16 00H~0FH 00H~0FH 125K 每计数 16 次溢出
PWM
输出占空比随 TCnR 的变化而变化:0/256~255/256。
0 1 128 254 255
…… ……
MAX. PWM 输出频率
(Fcpu = 4MHz)
0 1 128 254 255
…… ……
备注
TCn Clock
TCnR=00H
TCnR=01H
TCnR=80H
TCnR=FFH
Low
High
Low
High
Low
High
Low
SONiX TECHNOLOGY CO., LTD Page 70 Version 1.0
Page 71

8.4.2 TCnIRQ 和 PWM 输出占空比
在 PWM 模式下,TCnIRQ 的频率与 PWM 的占空比有关,具体情况如下图所示:
0xFF
TCnC Value
0x00
PWMn Output
(Duty Range 0~255)
0xFF
TCnC Value
SN8P2711A
8-Bit Micro-Controller
TCn Overflow,
TCnIRQ = 1
TCn Overflow,
TCnIRQ = 1
0x00
PWMn Output
(Duty Range 0~63)
0xFF
TCnC Value
0x00
PWMn Output
(Duty Range 0~31)
0xFF
TCnC Value
0x00
TCn Overflow,
TCnIRQ = 1
TCn Overflow,
TCnIRQ = 1
PWMn Output
(Duty Range 0~15)
SONiX TECHNOLOGY CO., LTD Page 71 Version 1.0
Page 72

SN8P2711A
8-Bit Micro-Controller
8.4.3 PWM 输出占空比和 TCnR 的变化
在 PWM 模式下,系统随时比较 TCnC 和 TCnR 的异同。若 TCnC<TCnR,PWM 输出高电平,反之则输出低电平。
当
TCnC 发生改变的时候,PWM 将在下一周期改变输出占空比。如果 TCnR 保持恒定,那么 PWM 输出波形也保持稳定
波形。
TCnC = TCnR
TCnC overflow
and TCnIRQ set
0xFF
TCnC Value
0x00
PWMn Output
Period
1 2 3 4 5 6 7
上图所示是 TCnR 恒定时的波形。每当 TCnC 溢出时,PWM 都输出高电平,TCnC TCnR≧ 时,PWM 即输出低电平。
下面所示是
TCnC Value
PWMn Output
TC0R 发生变化时对应的波形图:
Update New TC nR!
Old TCnR < TCnC < New TCnR
0xFF
0x00
Old TCnR Old TCnRNew TCnR New TCnR
Update New TCnR!
New TCnR < TCnC < Old TCnR
TCnC < TCnR
PWM Low > High
TCnC > = TCnR
PWM High > Low
TCnC overflow
and TCnIRQ set
Period
1
1st PWM
2
Update PWM Duty
3
2nd PWM
4
Update PWM Duty
5
3th PWM
在 period 2 和 period 4 中,显示新的占空比(TC0R),但 PWM 在 period 2 和 period 4 的占空比要在下一个 period
才会改变。这样,可以避免 PWM 不随设定改变或在同一个周期内改变两次,从而避免系统发生不可预知的误动作。
SONiX TECHNOLOGY CO., LTD Page 72 Version 1.0
Page 73

SN8P2711A
8-Bit Micro-Controller
8.4.4 PWM 编程举例
¾
例:PWM 输出设置。外部高速振荡器输出频率 = 4MHZ,Fcpu = Fosc/4,PWM 输出占空比 = 30/256,输出频率
1KHZ,PWM 时钟源来自外部时钟,TC0 速率 = Fcpu/4,TC0RATE2~TC0RATE1 = 110,TC0C = TC0R = 30。
MOV A,#01100000B
注:TCnR 为只写寄存器,不能用 INCMS 和 DECMS 指令对其进行操作。
¾
MOV A, #30H ;
B0MOV TC0R, A
INCMS BUF0
NOP
B0MOV A, BUF0
B0MOV TC0R, A
例:改变 TC0R 的内容。
注:PWM 可以在中断下工作。
B0MOV TC0M,A
MOV A,#30
B0MOV TC0C,A
B0MOV TC0R,A
B0BCLR FTC0OUT
B0BCLR FALOAD0
B0BSET FPWM0OUT
B0BSET FTC0ENB
; TC0 速率=Fcpu/4。
; PWM 输出占空比=30/256。
; 占空比变化范围:0/256~255/256。
; PWM0 输出至 P5.4,禁止 P5.4 I/O 功能。
SONiX TECHNOLOGY CO., LTD Page 73 Version 1.0
Page 74

SN8P2711A
8-Bit Micro-Controller
9
9
9
5+1 通道 ADC
9.1 概述
SN8P2711A 模数转换模块共有 5 条外部通道(AIN0~AIN4)和一条内部通道(AIN5:内部 1/4VDD),4096 阶分
辨率的
后把
ADB 和寄存器 ADR 中。
A/D 转换器,可以将模拟信号转换成 12 位数字信号。进行 AD 转换时,首先要选择输入通道(AIN0~AIN5),然
GCHS 和 ADS 位置“1”,启动 AD 转换。转换结束后,系统自动将 EOC 设置为“1”,并将转换结果存入寄存器
AIN0/P4.0
AIN1/P4.1
AIN2/P4.2
AIN3/P4.3
AIN4/P4.4
AIN5
(内部1/4 VDD)
A/D转换
(ADC)
12-Bits
数据总线
9.2 ADM 寄存器
0B1H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ADM ADENB ADS EOC GCHS - CHS2 CHS1 CHS0
读/写 R/W R/W R/W R/W - R/W R/W R/W
复位后 0 0 0 0 - 0 0 0
Bit 7 ADENB
0 =
1 =
Bit 6 ADS
0 =
1 =
Bit 5 EOC
0 =
1 =
Bit 4 GCHS
0 =
1 =
Bit[2:0] CHS[2:0]
000 = AIN0
AIN5
是内部 1/4 VDD 输入通道,外部没有输入引脚。AIN5 可以作为电池系统的电池检测器。为了选择合适的内部
VREFH 电平并进行比较,系统内置了这个高性能、廉价的低电池检测器。
注:若 ADENB = 1,用户应设置 P4.n/AINn 为无上拉电阻的输入模式。系统不会自动设置。若已经设置了 P4CON.n,P4.n/AINn
的数字 I/O 功能(包括上拉电阻)都是隔离开来的。
:ADC 控制位。
禁止;
使能。
:ADC 启动位。
停止;
开始。
:ADC 状态控制位 。
转换过程中;
转换结束,ADS 复位。
:通道选择位。
禁止 AIN 通道;
使能 AIN 通道。
:ADC 输入通道选择位。
;001 = AIN1;010 = AIN2;011 = AIN3;100 = AIN4;101 = AIN5。
SONiX TECHNOLOGY CO., LTD Page 74 Version 1.0
Page 75

SN8P2711A
8-Bit Micro-Controller
9.3 ADR 寄存器
0B3H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ADR
读/写 - R/W - R/W R R R R
复位后
Bit[6,4] ADCKS1
Bit[3:0] ADB[3:0]
注:ADC 缓存器 ADR [3:0]复位后的初始值是未知的。
- ADCKS1 - ADCKS0 ADB3 ADB2 ADB1 ADB0
- 0 - 0 X X X X
,ADCKS0:ADC 时钟源选择位。
ADCKS1 ADCKS0
ADC 时钟源
0 0 Fcpu/16
0 1 Fcpu/8
1 0 Fcpu
1 1 Fcpu/2
:ADC 12 位分辨率的低字节数据缓存器。
9.4 ADB 寄存器
0B2H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ADB
读/写 R R R R R R R R
复位后
Bit[7:0] ADB[7:0]
8
位数据缓存器 ADB 用来保存 AD 转换结果的高 8 位(bit4~bit11),转换结果的低 4 位则保存在 ADR 寄存器中。
ADB 为只读寄存器,在 8 位 ADC 模式下,AD 转换结果保存在寄存器 ADB 中;在 12 位模式下,则分别保存在寄存器 ADB
和 ADR 中。
AIN
的输入电压 v.s. ADB 的输出数据
AIN n ADB11 ADB10 ADB9 ADB8 ADB7 ADB6 ADB5 ADB4 ADB3 ADB2 ADB1 ADB0
0/4096*VREFH 0 0 0 0 0 0 0 0 0 0 0 0
1/4096*VREFH 0 0 0 0 0 0 0 0 0 0 0 1
4094/4096*VREFH 1 1 1 1 1 1 1 1 1 1 1 0
4095/4096*VREFH 1 1 1 1 1 1 1 1 1 1 1 1
针对不同的应用,用户可能需要精度介于 8 位到 12 位之间的 AD 转换器。对于这种情况,可以通过对保存在 ADR 和
ADB 中的转换结果进行处理得到。首先,用户必须选择 12 位分辨率的模式,进行 AD 转换,然后在转换结果中去掉最低
的几位得到需要的结果。如下表所示:
ADC 分辨率
10-bit O O O O O O O O O O x x
11-bit O O O O O O O O O O O x
12-bit O O O O O O O O O O O O
O = 可选位,x = 未使用的位
注:ADC 缓存器 ADB 在复位后的初始值是未知的。
ADB15 ADB14 ADB13 ADB12 ADB11 ADB10 ADB9 ADB8
X X X X X X X X
:ADC 12 位分辨率的高字节数据缓存器。
. . . . . . . . . . . . .
. . . . . . . . . . . . .
. . . . . . . . . . . . .
ADB ADR
ADB11 ADB10 ADB9 ADB8 ADB7 ADB6 ADB5 ADB4 ADB3 ADB2 ADB1 ADB0
8-bit O O O O O O O O x x x x
9-bit O O O O O O O O O x x x
SONiX TECHNOLOGY CO., LTD Page 75 Version 1.0
Page 76

SN8P2711A
8-Bit Micro-Controller
9.5 P4CON 寄存器
P4 口和 ADC 的输入口共享。同一时间只能设置 P4 口的一个引脚作为 ADC 的测量信号输入口(通过 ADM 寄存器来
设置),其它引脚则作为普通
时,将可能产生额外的漏电流。同样,当 P4 口外接多个模拟信号时,也会产生额外的漏电流。在睡眠模式下,上述漏电
流会严重影响到系统的整体功耗。
拟信号输入口,从而避免上述漏电流的情况。
0AEH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P4CON - - -
读/写
复位后
- - -
- - -
Bit[4:0] P4CON[4:0]
0 = P4.n
1 = P4.n
作为模拟输入(ADC 输入)引脚或者数字 I/O 引脚;
只能作为单纯的模拟输入引脚,不能作为数字 I/O 引脚。
注:当 P4.n 为普通 I/O 而不是 ADC 通道时,P4CON.n 必须置“0”,否则 P4.n 的数字 I/O 信号会被隔离。
I/O 使用。具体应用中,当向 CMOS 结构端口输入一个模拟信号,尤其当模拟信号为 1/2 VDD
P4CON 为 P4 口的配置寄存器。将 P4CON[7:0]置"1",其对应的 P4 口将被设置为纯模
P4CON4 P4CON3 P4CON2 P4CON1 P4CON0
R/W R/W R/W R/W R/W
0 0 0 0 0
:P4.n 配置控制位。
9.6 VREFH 寄存器
0AFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
VREFH
读/写
复位后
Bit[1:0] VHS[1:0]
注:若由 VHS[1:0]控制选择的内部 VREFH 电平高于 VDD,内部 VREFH 为 VDD。例:VHS[1:0] = 10(内部 VREFH = 4.0V),
VDD = 3.0V,则实际内部 VREFH = 3.0V。
Bit[7] EVHENB
注:若 EVHENB = 1,P4.0/AIN0 引脚就是外部 VREFH 的输入引脚,P4.0 的 I/O 功能和 AIN0 功能被隔离。 此时,该引脚处
于悬浮状态。
注:当选择单片机内部 4V/3V/2V 参考电压时,ADC 的分辨率为 8 位。
当选择单片机内部 VDD 和外部参考源时,ADC 的分辨率位 12 位。
EVHENB - - - - - VHS1 VHS0
R/W - - - - - R/W R/W
0 - - - - - 0 0
:ADC 内部参考电压选择位。
VHS1 VHS0
1 1 VDD
1 0 4.0V
0 1 3.0V
0 0 2.0V
内部 VREFH 电压
:ADC 内部参考电压控制位。
0 =
允许 ADC 内部 VREFH 功能,VREFH 引脚是 P4.0/AIN0 引脚;
1 =
禁止 ADC 内部 VREFH 功能,P4.0/AIN0/VREFH 引脚来自外部 VREFH 输入引脚。
SONiX TECHNOLOGY CO., LTD Page 76 Version 1.0
Page 77

SN8P2711A
8-Bit Micro-Controller
9.7 AD 转换时间
12位 AD 转换时间 = 1/(ADC clock /4)*16 sec
高速时钟(Fosc)= 4MHz
Fcpu ADCKS1 ADCKS0
0 0 Fcpu/16 1/( ( 4MHz / 1 ) / 16 /4 ) x16= 256 us
Fosc/1
Fosc/2
Fosc/4
Fosc/8
Fosc/16
0 1 Fcpu/8 1/( ( 4MHz / 1 ) / 8 /4 ) x16= 128 us
1 0 Fcpu 1/( ( 4MHz / 1 ) / 1 /4 ) x16= 16 us
1 1 Fcpu/2 1/( ( 4MHz / 1 ) / 2 /4 ) x16= 32 us
0 0 Fcpu/16 1/( ( 4MHz / 2 ) / 16 /4 ) x16= 512 us
0 1 Fcpu/8 1/( ( 4MHz / 2 ) / 8 /4 ) x16= 256 us
1 0 Fcpu 1/( ( 4MHz / 2 ) / 1 /4 ) x16= 32 us
1 1 Fcpu/2 1/( ( 4MHz / 2 ) / 2 /4 ) x16= 64 us
0 0 Fcpu/16 1/( ( 4MHz / 4 ) / 16 /4 ) x16= 1024 us
0 1 Fcpu/8 1/( ( 4MHz / 4 ) / 8 /4 ) x16= 512 us
1 0 Fcpu 1/( ( 4MHz / 4 ) / 1 /4 ) x16= 64 us
1 1 Fcpu/2 1/( ( 4MHz / 4 ) / 2 /4 ) x16= 128 us
0 0 Fcpu/16 1/( ( 4MHz / 8 ) / 16 /4 ) x16= 2048 us
0 1 Fcpu/8 1/( ( 4MHz / 8 ) / 8 /4 ) x16= 1024 us
1 0 Fcpu 1/( ( 4MHz / 8 ) / 1 /4 ) x16= 128 us
1 1 Fcpu/2 1/( ( 4MHz / 8 ) / 2 /4 ) x16= 256 us
0 0 Fcpu/16 1/( ( 4MHz / 16 ) / 16 /4 ) x16= 4096 us
0 1 Fcpu/8 1/( ( 4MHz / 16 ) / 8 /4 ) x16= 2048 us
1 0 Fcpu 1/( ( 4MHz / 16 ) / 1 /4 ) x16= 256 us
1 1 Fcpu/2 1/( ( 4MHz / 16 ) / 2 /4 ) x16= 512 us
ADC 时钟 AD 转换时间
SONiX TECHNOLOGY CO., LTD Page 77 Version 1.0
Page 78

SN8P2711A
9.8 ADC 操作实例
例:设置 AIN0 为 ADC 的输入并执行 12 位 ADC,VREFH 为内部 3.0V,ADC 时钟源为 Fcpu。
¾
; 允许 ADC 功能,延迟 100us 等待转换。
ADC0:
B0BSET FADENB
CALL Delay100uS
; 设置 P4 I/O 模式。
MOV A, #0FEH
B0MOV P4UR, A
B0BCLR FP40M
或
;
MOV A, #01H
B0MOV P4CON, A
; 设置 VREFH 为内部 3.0V。
MOV A, #01H
B0MOV VREFH, A
; 设置 ADC 时钟源为 Fcpu。
MOV A, #40H
B0MOV ADR, A
; 使能 AIN0(P4.0)。
MOV A, #90H
B0MOV ADM, A
; 开始 AD 转换。
B0BSET FADS
WADC0:
B0BTS1 FEOC ;
JMP WADC0 ;
B0MOV A, ADB ;
B0MOV Adc_Buf_Hi, A
B0MOV A, ADR ;
AND A, 0FH
B0MOV Adc_Buf_Low, A
End_ADC: .
B0BCLR FADENB
; 使能 ADC 电路。
; 延迟 100us 等待 ADC 电路开始转换。
; 禁止 P4.0 上拉电阻。
; 设置 P4.0 为输入模式。
; 设置 P4.0 为单纯的模拟输入。
; 设置内部 3.0V VREFH。
; 设置 ADC 时钟源为 Fcpu。
; 允许 ADC 并设置 AIN0 输入。
; 开始转换。
; 禁止 AD 转换。
8-Bit Micro-Controller
SONiX TECHNOLOGY CO., LTD Page 78 Version 1.0
Page 79

SN8P2711A
8-Bit Micro-Controller
¾
例:设置 AIN1 为 ADC 输入并执行 12 位 ADC。VREFH 来自 VREFH 引脚(P4.0/AIN0)的外部输入电源,ADC 的
时钟源为
; 允许 ADC 功能,延迟 100us 等待 AD 转换。
ADC0:
B0BSET FADENB
CALL Delay100uS
; 设置 P4 I/O 模式。
MOV A, #0FDH
B0MOV P4UR, A
B0BCLR FP41M
;
或
MOV A, #02H
B0MOV P4CON, A
; 设置 VREFH 为外部输入电压。
B0BSET FEVHENB
; 设置 ADC 时钟源为 Fcpu。
MOV A, #40H
B0MOV ADR, A
; 允许 AIN0(P4.1)。
MOV A, #91H
B0MOV ADM,A
; 设置 ADC 中断。
B0BCLR FADCIRQ
B0BSET FADCIEN
B0BSET FGIE
; 开始 AD 转换。
B0BSET FADS
…
…
…
ADC_INT_SR:
PUSH
B0BTS1 FADCIRQ
JMP ADC_INT_EXIT
B0BCLR FADCIRQ
B0MOV A, ADB ;
B0MOV Adc_Buf_Hi, A
B0MOV A, ADR ;
AND A, 0FH
B0MOV Adc_Buf_Low, A
B0BCLR FADENB
ADC_INT_EXIT: .
POP
RETI
Fcpu。使用 ADC 中断。
; 使能 ADC 电路。
; 延迟 100us 等待 ADC 电路开始转换。
; 禁止 P4.1 的上拉电阻。
; 设置 P4.1 为输入模式。
; 设置 P4.1 为单纯的模拟输入。
; 允许外部 VREFH 输入。
; 设置 ADC 时钟源为 Fcpu。
; 允许 ADC 和 AIN1 输入。
; 清除 ADC 中断请求标志。
; 使能 ADC 中断功能。
; 使能 GIE 功能。
; 开始转换。
; 检查是否有 ADC 中断标志。
; 清除 ADC 中断请求标志。
; 禁止 ADC 电路。
SONiX TECHNOLOGY CO., LTD Page 79 Version 1.0
Page 80

9.9 ADC 电路
SN8P2711A
8-Bit Micro-Controller
ADC
号的稳定。
0.1uF
0.1uF
47uF
AINn/P4.n
VSS
V
D
D
MCU
VCC
GND
模拟信号输入
参考电压为内部参考电压,VREFH 引脚是 AIN0/P4.0。AINn/P4.n 和 VSS 之间的电容(0.1uF)有助于模拟信
0.1uF
47uF
AINn/P4.n
VSS
V
R
E
D
V
F
H
D
MCU
VCC
模拟信号输入
0.1uF
ADC
参考电压来自 VDD,AIN0/P4.0 为 VREFH 输入引脚。VREFH 应该来自单片机的 VDD,而不是其它 VDD。
参考电压来自外部电压,AIN0/P4.0 是 VREFH 的输入引脚。VREFH 和 VSS 之间的电容(47uF)有助于 VREFH
ADC
电压的稳定。
参考电压的高电平输入
模拟信号输入
47uF
0.1uF
0.1uF
AINn/P4.n
VSS
VREFH
VDD
GND
MCU
VCC
GND
SONiX TECHNOLOGY CO., LTD Page 80 Version 1.0
Page 81

1
1
1
指令 指令格式 描述
MOV A,M
M MOV M,A
O B0MOV A,M
V B0MOV M,A
E MOV A,I
B0MOV M,I
XCH A,M
B0XCH A,M
MOVC
ADC A,M
A ADC M,A
R ADD A,M
I ADD M,A
T B0ADD M,A
H ADD A,I
M SBC A,M
E SBC M,A
T SUB A,M
I SUB M,A
C SUB A,I
AND A,M
L AND M,A
O AND A,I
G OR A,M
I OR M,A
C OR A,I
XOR A,M
XOR M,A
XOR A,I
SWAP M
P SWAPM M
R RRC M
O RRCM M
C RLC M
E RLCM M
S CLR M
S BCLR M.b
BSET M.b
B0BCLR M.b
B0BSET M.b
CMPRS A,I
B CMPRS A,M
R INCS M
A INCMS M
N DECS M
C DECMS M
H BTS0 M.b
BTS1 M.b
B0BTS0 M.b
B0BTS1 M.b
JMP d
CALL d
M RET
I RETI
S
C
NOP
注: 1. “M”是系统寄存器或 RAM,M 为系统寄存器时 N = 0,否则 N = 1。
0
0
指令集
A
← M。
M
← A。
A
← M (bank 0)。
M (bank 0)
← I
A
M
← I。(M 仅适用于系统寄存器 R、Y、Z、RBANK、PFLAG。)
A
←→M。
A
←→M (bank 0)。
R, A
A
← A + M + C,如果产生进位则 C=1,否则 C=0。 √ √ √
M
← A + M + C,如果产生进位则 C=1,否则 C=0。 √ √ √
A
← A + M,如果产生进位则 C=1,否则 C=0。 √ √ √
M
← A + M,如果产生进位则 C=1,否则 C=0。 √ √ √
M (bank 0)
A
← A + I,如果产生进位则 C=1,否则 C=0。 √ √ √
A
← A - M - /C,如果产生借位则 C=0,否则 C=1。 √ √ √
M
← A - M - /C,如果产生借位则 C=0,否则 C=1。 √ √ √
A
← A - M,如果产生借位则 C=0,否则 C=1。 √ √ √
M
← A - M,如果产生借位则 C=0,否则 C=1。 √ √ √
A
← A - I,如果产生借位则 C=0,否则 C=1。 √ √ √
A
← A 与 M。
M
← A 与 M。
A
← A 与 I。
A
← A 或 M。
M
← A 或 M。
A
← A 或 I。
A
← A 异或 M。
M
← A 异或 M。
A
← A 异或 I。
A (b3~b0, b7~b4)
M(b3~b0, b7~b4)
A
← M 带进位右移。 √
M
← M 带进位右移。 √
A
← M 带进位左移。 √
M
← M 带进位左移。 √
M
← 0。
M.b
M.b
M(bank 0).b
M(bank 0).b
比较, 如果相等则跳过下一条指令 C 与 ZF 标志位可能受影响。 √
比较, 如果相等则跳过下一条指令 C 与 ZF 标志位可能受影响。 √
A
← M + 1,如果 A = 0,则跳过下一条指令。
M
← M + 1,如果 M = 0,则跳过下一条指令。
A
← M - 1,如果 A = 0,则跳过下一条指令。
M
← M - 1,如果 M = 0,则跳过下一条指令。
如果 M.b = 0,则跳过下一条指令。
如果 M.b = 1,则跳过下一条指令。
如果 M(bank 0).b = 0,则跳过下一条指令。
如果 M(bank 0).b = 1,则跳过下一条指令。
跳转指令,PC15/14 Å RomPages1/0,PC13~PC0 Å d。
子程序调用指令,Stack Å PC15~PC0,PC15/14 Å RomPages1/0,PC13~PC0 Å d。
子程序跳出指令,PC Å Stack。
中断处理程序跳出指令,PC Å Stack,使能全局中断控制位。
PUSH
POP
2.条件跳转指令的条件为真,则 S = 1,否则 S = 0。
进栈指令,保存 ACC 和工作寄存器。
出栈指令,恢复 ACC 和工作寄存器。
空指令,无特别意义。
← A。
← ROM [Y,Z]。
← M (bank 0) + A,如果产生进位则 C=1,否则 C=0。 √ √ √
←M(b7~b4, b3~b0)。
← M(b7~b4, b3~b0)。
← 0。
← 1
← 0。
← 1。
0
SN8P2711A
8-Bit Micro-Controller
C DC Z
- -
- - - 1
- -
- - - 1
- - - 1
- - - 1
- - - 1+N
- - - 1+N
- - - 2
- -
- -
- -
- -
- -
- -
- -
- -
- -
- - - 1
- - - 1+N
-- 1
-- 1+N
-- 1
-- 1+N
- - - 1
- - - 1+N
- - - 1+N
- - - 1+N
- - - 1+N
-
-
- - - 1+ S
- - - 1+N+S
- - - 1+ S
- - - 1+N+S
- - - 1 + S
- - - 1 + S
- - - 1 + S
- - - 1 + S
- - - 2
- - - 2
- - - 2
- - - 2
- - - 1
√ √ √
- - - 1
周期
1
√
1
√
1
1+N
1
1+N
1+N
1
1
1+N
1
1+N
1
1
√
1+N
√
1
√
1
√
1+N
√
1
√
1
√
1+N
√
1
√
1 + S
√
1 + S
√
1
SONiX TECHNOLOGY CO., LTD Page 81 Version 1.0
Page 82

SN8P2711A
8-Bit Micro-Controller
1
1
1
1
1
1
电气特性
11.1 极限参数
Supply voltage (Vdd)…………………………………………………………………………………………………………………….……………… - 0.3V ~ 6.0V
Input in voltage (Vin)…………………………………………………………………………………………………………………….… Vss – 0.2V ~ Vdd + 0.2V
Operating ambient temperature (Topr)
SN8P2711AP, SN8P2711AS, SN8P2711AX …………………………………………………………………………………………….. 0
SN8P2711APD, SN8P2711ASD, SN8P2711AXD ………………………………………………………………………………………. –40
Storage ambient temperature (Tstor) ………………………………………………………………….………………………………………… –40
°C ~ + 70°C
°C ~ + 85°C
°C ~ + 125°C
11.2 电气特性
(All of voltages refer to Vss, Vdd = 5.0V, fosc = 4MHz,fcpu=1MHZ,ambient temperature is 25°C unless otherwise note.)
PARAMETER SYM. DESCRIPTION MIN. TYP. MAX. UNIT
Operating voltage Vdd
RAM Data Retention voltage Vdr 1.5 - - V
Vdd rise rate Vpor Vdd rise rate to ensure internal power-on reset 0.05 - - V/ms
Input Low Voltage
Input High Voltage
Reset pin leakage current Ilekg Vin = Vdd - - 2 uA
I/O port pull-up resistor Rup
I/O port input leakage current Ilekg Pull-up resistor disable, Vin = Vdd - - 2 uA
I/O output source current IoH Vop = Vdd – 0.5V 8 12 -
sink current IoL Vop = Vss + 0.5V 8 15 -
INTn trigger pulse width Tint0 INT0 interrupt request pulse width 2/fcpu - - cycle
Supply Current
(Disable ADC)
Internal High Oscillator Freq. Fihrc Internal Hihg RC (IHRC)
LVD Voltage
VREFH input voltage
AIN0 ~ AIN5 input voltage Vani Vdd = 5.0V 0 - Vrefh1~5 V
ADC enable time Tast Ready to start convert after set ADENB = “1” 100 - - us
ADC current consumption
ADC Clock Frequency
ADC Conversion Cycle Time F
(Set FADS=1 Frequency)
Differential Nonlinearity DNL VDD=5.0V , AVREFH=3.2V, F
Integral Nonlinearity INL VDD=5.0V , AVREFH=3.2V, F
No Missing Code NMC VDD=5.0V , AVREFH=3.2V, F
*These parameters are for design reference, not tested.
Normal mode, Vpp = Vdd, 25
Normal mode, Vpp = Vdd,
ViL1 All input ports Vss - 0.3Vdd V
ViL2 Reset pin Vss - 0.2Vdd V
ViL3 P4 ADC shared pin. Vss 0.5Vdd - V
ViH1 All input ports 0.7Vdd - Vdd V
ViH2 Reset pin 0.9Vdd - Vdd V
ViH3 P4 ADC shared pin. - 0.5Vdd Vdd V
Vin = Vss , Vdd = 3V 100 200 300
Vin = Vss , Vdd = 5V 50 100 150
Run Mode
Idd1
(No loading, Fcpu = Fosc/4)
Slow Mode
Idd2
(Internal low RC, Stop high clock)
Idd3 Sleep Mode
Green Mode
Idd4
(No loading,Fcpu = Fosc/4 Watchdog Disable)
Vdet0 Low voltage reset level. 1.7 2.0 2.3 V
Low voltage reset level. Fcpu = 1 MHz.
Vdet1
Low voltage indicator level. Fcpu = 1 MHz.
Vdet2 Low voltage indicator level. Fcpu = 1 MHz 2.9 3.4 4.5 V
Vrefh1 External reference voltage, Vdd = 5.0V. 2V - Vdd V
Vrefh2 Internal VDD reference voltage, Vdd = 5V. - Vdd* - V
Vrefh3 Internal 4V reference voltage, Vdd = 5V. - 4* - V
Vrefh4 Internal 3V reference voltage, Vdd = 5V. - 3* - V
Vrefh5 Internal 2V reference voltage, Vdd = 5V. - 2* - V
I
Vdd=5.0V - 0.6 - mA
ADC
Vdd=3.0V - 0.4 - mA
F
VDD=5.0V - 8M Hz
ADCLK
VDD=3.0V - 5M Hz
VDD=2.4V~5.5V 64 1/F
ADCYL
F
VDD=5.0V 125 K/secADC Sampling Rate
ADSMP
VDD=3.0V 80 K/sec
°
C
-40°C~85°C
=7.8K
ADSMP
=7.8K
ADSMP
=7.8K 8 10 12 Bits
ADSMP
Vdd= 5V, 4Mhz - 2.5 5 mA
Vdd= 3V, 4Mhz - 1 2 mA
Vdd= 5V, 32Khz - 20 40 uA
Vdd= 3V, 16Khz - 5 10 uA
Vdd= 5V, 25
Vdd= 3V, 25
Vdd= 5V, -40
Vdd= 3V,
Vdd= 5V, 4Mhz - 0.6 1.2 mA
Vdd= 3V, 4Mhz - 0.25 0.5 mA
Vdd=5V, ILRC 32Khz - 15 30 uA
Vdd=3V, ILRC 16Khz , - 3 6 uA
25°C,
Vdd= 5V,
Fcpu = 1MHz
-40°C~85°C,
Vdd= 2.4V~5.5V,
Fcpu = 1MHz~16 MHz
°
C
°
C
°
C~ 85°C
-40°C~ 85°C
2.4 5.0 5.5 V
2.5 5.0 5.5 V
Ω
K
mA
- 0.8 1.6 uA
- 0.7 1.4 uA
- 10 21 uA
- 10 21 uA
15.68 16 16.32 Mhz
13 16 19 Mhz
2.0 2.3 3 V
ADCLK
±1 ±2 ±16
±2 ±4 ±16
LSB
LSB
SONiX TECHNOLOGY CO., LTD Page 82 Version 1.0
Page 83

¾ Internal 16MHz Oscillator RC Type Temperature Characteristic.
Power Voltage (VDD) = 5V.
Machine Cycle (Fcpu) = Fhosc/4.
Typical Temperature = 25°C.
Typical Internal 16MHz Oscillator RC Type Frequency = 16MHz.
Testing Temperature Range = –40°C ~ + 90°C
17.50
17.00
16.50
16.00
15.50
15.00
14.50
IHRC Freq. (MHz)
14.00
Typ. 25ºC
SN8P2711A
8-Bit Micro-Controller
13.50
13.00
-40-30-20-10 0 102030405060708090
Temperature (ºC)
¾ Internal 16MHz Oscillator RC Type Power Voltage and Machine Cycle Characteristic.
Temperature = 25°C.
Typical Power Voltage (VDD) = 5V.
Typical Machin Cycle (Fcpu) = Fhosc / 4.
Typical Internal 16MHz Oscillator RC Type Frequency = 16MHz.
Testing Power Voltage Range (VDD) = 3V~5.5V.
Testing Machine Cycle Range (Fcpu) = Fhosc/1~Fhosc/16.
16.40
16.30
16.20
16.10
Typ. Fcpu=Fhosc/4
16.00
3V
3.5V
4V
4.5V
15.90
15.80
5V
5.5V
IHRC Freq.(MHz)
15.70
15.60
15.50
Fhosc/16 Fhosc/4 Fhosc/1
Machine Cycle (Fcpu)
SONiX TECHNOLOGY CO., LTD Page 83 Version 1.0
Page 84

2
1
1
1
12.1 在线仿真器(ICE)
z SN8ICE 2K ICE:完全仿真 SN8P2711A 的所有功能。
注:
注:S8KD-2 ICE 不能对 SN8P2711 进行仿真。
2
2
开发工具
1. ICE 工作电压:3.0V ~ 5.0V;
2. 5V 时最高仿真速度:8 MIPS (如,16Mhz 晶振,Fcpu = Fhosc/2);
3. 内部 16M RC 振荡器的精度低于芯片的精度;
4. 建议采用 SN8P2711 EV-KIT 仿真 LVD 和 ADC 参考电压;
SN8P2711A
8-Bit Micro-Controller
12.2 OTP 烧录器
z MP WriterIII:支持 SN8P2711 的联机烧录,也支持大批量的脱机烧录。
12.3 SN8IDE
SONiX 8 位单片机的集成开发环境包括编译器、ICE 调试器和 OTP 的烧录软件。
z SN8ICE 2K:M2IDE_V115 及更新版本。
z MP WriterIII:M2IDE_V115 或更新的版本。
注:SN8IDE(SN8IED_1.99R…)和 SN8WTxxx 不能仿真 SN8P2711。
SONiX TECHNOLOGY CO., LTD Page 84 Version 1.0
Page 85

12.4 SN8P2711 EV KIT
12.4.1 PCB 说明
SONiX
部参考电压和
提供 SN8P2711 的 EV-kit Ver.A,能够对 SN8P2711 的功能进行仿真,对于 ICE 仿真,EV kit 提供 ADC 内
LVD2.4V/3.6V 选择电路。
SN8P2711A
8-Bit Micro-Controller
CON1
:I/O 端口和 ADC 参考输入,与 SN8ICE 2K CON1 相连;
JP6
:LVD 2.4V、3.6V 输入引脚,与 SN8ICE 2K JP6 相连;
S14
:LVD 2.4V/3.6V 控制开关,仿真 LVD 2.4V 标志/复位功能和 LVD3.6V 标志功能;
开关编号
S7
S8
On Off
LVD 2.4V 开 LVD 2.4V 关
LVD 3.6V 开 LVD 3.6V 关
LVD24
LVD36
VDD
VDD
LVD24
LVD36 LVD_3.6V_TP
S14
1
2
SW DIP-2
R29 100K
R30 100K
LVD_2.4V_TP
4
3
LVD24
LVD36
SONiX TECHNOLOGY CO., LTD Page 85 Version 1.0
Page 86

SN8P2711A
8-Bit Micro-Controller
S16
:ADC 参考电压选择开关,此参考电压与 CON1 引脚的 VREFH 相连。最大参考值为 VDD,当 VDD<INT_VREFH_4.0V
的时候,ADC 参考电压就等于 VDD。EXT_VREFH 可选外部参考电压,由 P4.0 口输入,选择内部参考电压时,P4.0 作
为普通
I/O 引脚或 ADC 输入引脚。
开关编号
INT_VREFH_2.0V ON ON OFF OFF OFF OFF
INT_VREFH_3.0V OFF ON OFF OFF ON OFF
INT_VREFH_4.0V OFF OFF ON OFF ON OFF
INT_VREFH_VDD OFF OFF OFF ON OFF OFF
EXT_VREFH OFF OFF OFF OFF OFF ON
S1 S2 S3 S4 S5 S6
:2K 欧姆可变电阻,用来调节 ADC 内部参考电压。若 S16 选为 INT_VREFH_4.0V,那么输入电压 VDD=5V,通过
R26
J3 测量内部参考电压,调节 R26 使得 J3 电压为 4.0V。
VDD
R27 100
R31
R32
INT_VREFH
INT_VREFH
VERFH
INT_VREFH_TP
VREFH_TP
600
U2
LM431
1K
R34
C7
2K
10uF
R36, P37
R26
2K
200
V40
VIN
V30
:R36=300K 欧姆,R37= 100K 欧姆,偏压等于 1/4VDD。通过 ADC 通道 5 仿真低电压检测功能。
C9~C14
:47uF 电容,连接至 ADC 的 0~5 通道旁路电容,即 AIN0~AIN5 输入口。
C15~C20
:0.1uF 电容,连接至 ADC 的 0~5 通道旁路电容,即 AIN0~AIN5 输入口。
VREFH
V20
V20
V30
V40
VDD
INT_VREFH
P4.0
C8 10uFR33
S16
1
2
3
4
5
6
OFF ON
12
11
10
9
8
7
VREFH
VIN
VIN
VREFH
VREFH
VREFH
SONiX TECHNOLOGY CO., LTD Page 86 Version 1.0
Page 87

12.4.2 SN8P2711 EV KIT 与 SN8ICE 2K 的连接
SN8P2711 EV KIT
2K
的 AVREFH/VDD 跳线必须断开。
与 SN8ICE 2K 之间的具体连接如下图所示。ADC 参考电压由 SN8P2711 EV KIT 提供。SN8ICE
SN8P2711A
8-Bit Micro-Controller
SONiX TECHNOLOGY CO., LTD Page 87 Version 1.0
Page 88

12.5 OTP 烧录信息
12.5.1 烧录转接板信息
SN8P2711A
8-Bit Micro-Controller
图 1 MPIII Writer 的内部结构
Writer
注 1:JP1 连接 MP 烧录转接板,JP3 连接 OTP MCU。
注 2:JP2 连接外部烧录转接板。当 OTP MCU 的 PIN 超过 48PIN,或者烧录 Dice MCU 时,请采用外部烧录转接
板,连接到
下面两个图演示了如何焊接烧录转接板。
上板 JP1/JP3 Writer 上板 JP1/JP3 Writer上板 JP2
JP2 进行烧录。
Pin 1 (Down)
Pin 20 (UP)
图 2 图 3
SONiX TECHNOLOGY CO., LTD Page 88 Version 1.0
Page 89

SN8P2711A
8-Bit Micro-Controller
注:
1
、 印有 IC 型号的这一面为转接板的正面。
2
、 180 度的母座必须焊接在 MP 转接板的背面。请参考图 2 和图 3。
Pin 1
48
Pin 48
40
28
18
14
Pin 24
Pin 25
图 4 MP 转接板(连接到 JP1&JP3)
JP3
(连接 48-pin text tool) JP1/JP2
DIP 1 1 48 DIP48 VDD 1 2 VSS
DIP 2 2 47 DIP47 CLK/PGCLK 3 4 CE
DIP 3 3 46 DIP46 PGM/OTPCLK 5 6 OE/ShiftDat
DIP 4 4 45 DIP45 D1 7 8 D0
DIP 5 5 44 DIP44 D3 9 10 D2
DIP 6 6 43 DIP43 D5 11 12 D4
DIP 7 7 42 DIP42 D7 13 14 D6
DIP 8 8 41 DIP41 VDD 15 16 VPP
DIP 9 9 40 DIP40 HLS 17 18 RST
DIP10 10 39 DIP39 - 19 20 ALSB/PDB
DIP11 11 38 DIP38
DIP12 12 37 DIP37 JP1 连接 MP 烧录转接板
DIP13 13 36 DIP36 JP2 连接外部转接板
DIP14 14 35 DIP35
DIP15 15 34 DIP34
DIP16 16 33 DIP33
DIP17 17 32 DIP32
DIP18 18 31 DIP31
DIP19 19 30 DIP30
DIP20 20 29 DIP29
DIP21 21 28 DIP28
DIP22 22 27 DIP27
DIP23 23 26 DIP26
DIP24 24 25 DIP25
SONiX TECHNOLOGY CO., LTD Page 89 Version 1.0
Page 90

r
12.5.2 烧录引脚信息
JP1/JP2 Pin
Number
注:
1. 采用 M2IDE V1.16(和更新版本)仿真;
2. 用 16M Hz 晶振仿真内部 16MHz RC 振荡器;
SN8P2711A
SN8P2711A 系列烧录信息
单片机名称
MPIII Writer
JP1/JP2
Pin Name
1 VDD 1 VDD 18 1 VDD 17
2 GND 14 VSS 31 16 VSS 32
3 CLK 9 P4.0 26 11 P4.0 27
4 CE - - - - - 5 PGM 13 P4.4 30 15 P4.4 31
6 OE 10 P4.1 27 12 P4.1 28
7 D1 - - - - - 8 D0 - - - - - -
9 D3 - - - - - 10 D2 - - - - - 11 D5 - - - - - 12 D4 - - - - - 13 D7 - - - - - 14 D6 - - - - - 15 VDD 1 VDD 18 1 VDD 17
16 VPP 4 RST 21 4 RST 20
17 HLS - - - - - 18 RST - - - - - 19 - - - - - - 20 ALSB/PDB 3 P0.2 20 3 P0.2 19
SN8P2711AP,S SN8P2711AX
OTP IC / JP3 引脚配置
IC Pin
Number
IC Pin
Number
JP3 Pin
Number
IC Pin
Number
IC Pin
Number
JP3 Pin
Numbe
8-Bit Micro-Controller
SONiX TECHNOLOGY CO., LTD Page 90 Version 1.0
Page 91

3
1
1
1
13.1 P-DIP 14 PIN
3
3
封装信息
SN8P2711A
8-Bit Micro-Controller
SYMBOLS
A - - 0.210 - - 5.334
A1 0.015 - - 0.381 - A2 0.125 0.130 0.135 3.175 3.302 3.429
D 0.735 0.075 0.775 18.669 1.905 19.685
E 0.300 7.62
E1 0.245 0.250 0.255 6.223 6.35 6.477
L 0.115 0.130 0.150 2.921 3.302 3.810
eB
θ° 0° 7° 15° 0° 7° 15°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
0.335 0.355 0.375 8.509 9.017 9.525
SONiX TECHNOLOGY CO., LTD Page 91 Version 1.0
Page 92

13.2 SOP 14 PIN
SN8P2711A
8-Bit Micro-Controller
SYMBOLS
A 0.058 0.064 0.068 1.4732 1.6256 1.7272
A1 0.004 - 0.010 0.1016 - 0.254
B 0.013 0.016 0.020 0.3302 0.4064 0.508
C 0.0075 0.008 0.0098 0.1905 0.2032 0.2490
D 0.336 0.341 0.344 8.5344 8.6614 8.7376
E 0.150 0.154 0.157 3.81 3.9116 3.9878
e - 0.050 - - 1.27 -
H 0.228 0.236 0.244 5.7912 5.9944 6.1976
L 0.015 0.025 0.050 0.381 0.635 1.27
θ° 0° - 8° 0° - 8°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
SONiX TECHNOLOGY CO., LTD Page 92 Version 1.0
Page 93

13.3 SSOP 16 PIN
SN8P2711A
8-Bit Micro-Controller
1.7526
0.254
1.4986
0.3048
0.2794
0.254
0.2286
5.0038
3.9878
6.1976
1.27
SYMBOLS
A 0.053 - 0.069
A1 0.004 - 0.010
A2 - - 0.059
b 0.008 - 0.012
b1 0.008 - 0.011
c 0.007 - 0.010
c1 0.007 - 0.009
D 0.189 - 0.197
E1 0.150 - 0.157
E 0.228 - 0.244
L 0.016 - 0.050
e 0.025 BASIC 0.635 BASIC
θ° 0° - 8° 0° - 8°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
1.3462
0.1016
-
0.2032
0.2032
0.1778
0.1778
4.8006
3.81
5.7912
0.4064
-
-
-
-
-
-
-
-
-
-
-
SONiX TECHNOLOGY CO., LTD Page 93 Version 1.0
Page 94

SN8P2711A
r
8-Bit Micro-Controller
4
1
1
1
14.1 概述
SONiX 8 位单片机产品具有多种型号,本章将给出所有 8 位单片机分类命名规则,适用于空片 OTP 型单片机。
14.2 芯片型号说明
SN8 X PART No. X X X
4
4
芯片正印命名规则
Material
Temperature
Range
Shipping
Package
Device
B = PB-Free Package
G = Green Package
℃
- = 0
D = -40
W = Wafe
H = Dice
P = P-DIP
S = SOP
X = SSOP
2711A
~ 70
℃
~
℃
85
℃
ROM
Type
Title
SONiX TECHNOLOGY CO., LTD Page 94 Version 1.0
P=OTP
SONiX 8-bit MCU Production
Page 95

14.3 命名举例
名称 ROM 类型 器件(Device) 封装形式 温度范围 材料
SN8P2711APB
SN8P2711ASB
OTP 2711A P-DIP 0 ~70℃℃ 无铅封装(PB-Free Package)
OTP 2711A SOP 0 ~70℃℃ 无铅封装(PB-Free Package)
14.4 日期码规则
X X X X XXXXX
SN8P2711A
8-Bit Micro-Controller
SONiX Internal Use
Day
1=01
2=02
. . . .
9=09
A=10
B=11
. . . .
Month
1=January
2=February
. . . .
9=September
A=October
B=November
C=December
Year
03= 2003
04= 2004
05= 2005
06= 2006
. . . .
SONiX TECHNOLOGY CO., LTD Page 95 Version 1.0
Page 96

SN8P2711A
8-Bit Micro-Controller
SONiX
公司保留对以下所有产品在可靠性,功能和设计方面的改进作进一步说明的权利。
SONiX 不承担由本手册所涉及的产品或电路的运用和使用所引起的任何责任,SONiX 的产品
不是专门设计来应用于外科植入、生命维持和任何
死亡的领域。如果将
SONiX 的产品应用于上述领域,即使这些是由 SONiX 在产品设计和制造
SONiX 产品的故障会对个体造成伤害甚至
上的疏忽引起的,用户应赔偿所有费用、损失、合理的人身伤害或死亡所直接或间接产生的律
师费用,并且用户保证
SONiX 及其雇员、子公司、分支机构和销售商与上述事宜无关。
总公司:
地址:台湾新竹县竹北市台元街 36 号 10 楼之一
电话:886-3-5600-888
传真:886-3-5600-889
台北办事处:
地址:台北市松德路 171 号 15 楼之 2
电话:886-2-2759 1980
传真:886-2-2759 8180
香港办事处:
地址:香港新界沙田沙田乡宁会路 138#新城市中央广场第一座 7
楼 705 室
电话:852-2723 8086
传真:852-2723 9179
松翰科技(深圳)有限公司
地址:深圳市南山区高新技术产业园南区 T2-B 栋 2 层
电话:86-755-2671 9666
传真:86-755-2671 9786
技术支持:
Sn8fae@SONiX.com.tw
SONiX TECHNOLOGY CO., LTD Page 96 Version 1.0
 Loading...
Loading...