

Page 1
SN8P2604
8-Bit Micro-Controller
SN8P2604
用户手册
S
O
Nii
S
O
SONIX 公司保留对以下所有产品在可靠性、功能和设计方面的改进做进一步说明的权利。SONIX 不承担由本手
册所涉及的产品或电路的运用和使用所引起的任何责任。SONIX 的产品不是专门设计应用于外科植入、生命维持和
任何 SONIX 产品的故障会对个体造成伤害甚至死亡的领域。如果将 SONIX 的产品应用于上述领域,即使这些是由
SONIX 在产品设计和制造上的疏忽引起的,用户也应赔偿所有费用、损失、合理的人身伤害或死亡所直接或间接产
生的律师费用,并且用户保证 SONIX 及其雇员、子公司、分支机构和销售商与上述事宜无关。
N
X 88
X
位
位
单
单
片
片
机
机
SONiX TECHNOLOGY CO., LTD Preliminary Version 0.2
Page 2
SN8P2604
8-Bit Micro-Controller
修改记录
版本 日期 说明
VER 0.1
VER 0.2
VER 0.3
VER0.4
VER0.5
2004 年 1 月 第一版
2004 年 4 月 1. 增加应用注意事项章节。
2. 调整了特性的说明。
3. 调整了“SN8P1604A 移植到 SN8P2604”表。
4. 在指令表中调整了 PUSH/POP 的说明。
5. 在 SSOP28 封装型号中调整了外围尺寸。
6. 更改了唤醒时间的公式。
2004 年 7 月 1. ORG 8 处的第一条指令必须是“JMP”或“NOP”。
2. 把寄存器 Y,Z,H,L,R 的复位值由 00H 改为未知。
3. 操作环境温度中封装型号的后面插入“D”表示温度范围为-40℃~+80℃。
4. 调整了部分电气特性:ViL,ViH,Ilekg,Rup,IoH。
5. 在“应用注意事项”中增加“开发工具版本”。
6. 把“转接座”的名字改为“OTP 烧录引脚”并调整了部分内容。
7. 删除了“编程模板”。
2004 年 7 月 更改了指令周期中参数“S”的有关说明。
2004 年 7 月 1. 删除了 TC0 定时/计数器的说明并更改了烧录信息。
2. 更改了绿色模式的说明。
SONiX TECHNOLOGY CO., LTD Page 2 Preliminary Version 0.3
Page 3

SN8P2604
8-Bit Micro-Controller
目 录
修改记录 .................................................................................................................................................................2
1
1
1
产品简介 ........................................................................................................................................................6
1.1 特性 ...........................................................................................................................................................6
1.2 系统时钟框图.............................................................................................................................................8
1.3 引脚配置 ....................................................................................................................................................8
1.4 引脚说明 ....................................................................................................................................................9
1.5 引脚电路图 ................................................................................................................................................9
2
2
2
中央处理器(CPU).........................................................................................................................................10
2.1 内存 .........................................................................................................................................................10
2.1.1 程序存储器(ROM) .................................................................................................................................. 10
2.1.1.1 复位向量地址(000H) ........................................................................................................................... 10
2.1.1.2 中断向量地址(0008H) ......................................................................................................................... 11
2.1.1.3 查表功能 ..................................................................................................................................................12
2.1.1.4 跳转表...................................................................................................................................................... 14
2.1.1.5 CHECKSUM 计算 ................................................................................................................................... 15
2.1.2 编译选项表(Code Option) ................................................................................................................. 16
2.1.3 数据存储器(RAM) ..................................................................................................................................16
2.1.4 系统寄存器 ............................................................................................................................................. 17
2.1.4.1 系统寄存器列表 ....................................................................................................................................... 17
2.1.4.2 系统寄存器的位地址配置表...................................................................................................................... 18
2.1.4.3 累加器(ACC) ....................................................................................................................................... 19
2.1.4.4 程序状态寄存器(PFLAG)..................................................................................................................... 20
2.1.4.5 程序计数器(PC)................................................................................................................................... 21
2.1.4.6 H, L 寄存器 ..............................................................................................................................................23
2.1.4.7 Y, Z 寄存器 ..............................................................................................................................................24
2.1.4.8 R 寄存器 ..................................................................................................................................................24
2.2 寻址模式 ..................................................................................................................................................25
2.2.1 立即寻址模式 ......................................................................................................................................... 25
2.2.2 直接寻址模式 ......................................................................................................................................... 25
2.2.3 间接寻址模式 ......................................................................................................................................... 25
2.3 堆栈操作 ..................................................................................................................................................26
2.3.1 概述........................................................................................................................................................26
2.3.2 堆栈指针寄存器......................................................................................................................................27
2.3.3 堆栈操作举例 ......................................................................................................................................... 28
3
3
3
复位…… ......................................................................................................................................................29
3.1 概述 .........................................................................................................................................................29
3.2 上电复位 ..................................................................................................................................................29
3.3 外部复位 ..................................................................................................................................................30
3.3.1 外部复位电路 ......................................................................................................................................... 30
3.4 看门狗复位 ..............................................................................................................................................31
3.5 低电压侦测(LVD) ................................................................................................................................31
4
4
4
系统时钟 ......................................................................................................................................................32
4.1 概述 .........................................................................................................................................................32
4.2 时钟框图 ..................................................................................................................................................32
4.3 OSCM 寄存器..........................................................................................................................................33
4.4 系统高速时钟...........................................................................................................................................34
4.4.1 外部高速时钟 ......................................................................................................................................... 34
4.4.1.1 晶体振荡器............................................................................................................................................... 34
4.4.1.2 RC 振荡器................................................................................................................................................ 34
4.4.1.3 外部时钟输入 ........................................................................................................................................... 34
4.4.2 系统低速时钟 ......................................................................................................................................... 35
4.4.3 振荡器频率测试......................................................................................................................................35
5
5
5
系统操作模式 ...............................................................................................................................................36
5.1 概述 .........................................................................................................................................................36
5.2 系统模式转换...........................................................................................................................................37
5.2.1 系统模式转换 ......................................................................................................................................... 38
5.3 唤醒时间 ..................................................................................................................................................39
5.3.1 概述........................................................................................................................................................39
SONiX TECHNOLOGY CO., LTD Page 3 Preliminary Version 0.3
Page 4

SN8P2604
8-Bit Micro-Controller
5.3.2 唤醒时间 ................................................................................................................................................39
5.3.3 P1W 唤醒控制寄存器 .............................................................................................................................39
6
6
6
中断…… ......................................................................................................................................................40
6.1 概述 .........................................................................................................................................................40
6.2 INTEN 中断使能寄存器 ...........................................................................................................................41
6.3 INTRQ 中断请求寄存器...........................................................................................................................41
6.4 中断操作举例...........................................................................................................................................42
6.4.1 总中断操作 ............................................................................................................................................. 42
6.4.2 PUSH, POP 程序 ................................................................................................................................... 42
6.4.3 INT0(P0.0)中断 ......................................................................................................................................43
6.4.4 INT1(P0.1)中断操作...............................................................................................................................44
6.4.5 T0 中断操作 ........................................................................................................................................... 45
6.4.6 TC1 中断操作.........................................................................................................................................46
6.4.7 多个中断操作 ......................................................................................................................................... 47
7
7
7
I/O 端口........................................................................................................................................................48
7.1 I/O 端口模式 ............................................................................................................................................48
7.2 I/O 上拉电阻寄存器 .................................................................................................................................49
7.3 I/O 漏极开路寄存器 .................................................................................................................................50
7.4 I/O 口数据寄存器 .....................................................................................................................................51
8
8
8
定时器… ......................................................................................................................................................52
8.1 看门狗定时器...........................................................................................................................................52
8.2 定时器 T0.................................................................................................................................................53
8.2.1 概述........................................................................................................................................................53
8.2.2 T0M 模式寄存器.....................................................................................................................................53
8.2.3 T0C 计数寄存器 .....................................................................................................................................54
8.2.4 T0 操作流程 ........................................................................................................................................... 55
8.3 定时/计数器 TC1......................................................................................................................................56
8.3.1 概述........................................................................................................................................................56
8.3.2 TC1M 模式寄存器 ..................................................................................................................................56
8.3.3 TC1C 计数寄存器 ..................................................................................................................................57
8.3.4 TC1C 溢出时间 ......................................................................................................................................58
8.3.5 TC1R 自动装载寄存器 ........................................................................................................................... 58
8.3.6 TC1 操作流程.........................................................................................................................................59
9
9
9
指令表…. .....................................................................................................................................................65
1
0
1
0
1
0
电气特性 ......................................................................................................................................................66
10.1 极限参数 ..................................................................................................................................................66
10.2 电气特性 ..................................................................................................................................................66
1
1
1
1
1
1
应用注意事项 ...............................................................................................................................................67
11.1 开发工具版本...........................................................................................................................................67
11.1.1 ICE(在线仿真器) ....................................................................................................................................67
11.1.2 OTP 烧录器............................................................................................................................................ 67
11.1.3 SN8IDE..................................................................................................................................................67
11.2 编译选项(CODE OPTION).......................................................................................................................68
11.2.1 FCPU 编译选项......................................................................................................................................68
11.2.2 NOISE FILTER 编译选项.......................................................................................................................68
11.2.3 WATCHDOG .........................................................................................................................................68
11.3 中断向量(ORG 8).....................................................................................................................................69
11.4 指令 .........................................................................................................................................................70
11.4.1 B0MOV M, I ...........................................................................................................................................70
11.4.2 B0XCH A, M ..........................................................................................................................................70
11.5 S8KD-2 ICE 仿真.....................................................................................................................................71
11.5.1 ICE_MODE ............................................................................................................................................ 71
11.5.2 指令周期 ................................................................................................................................................ 72
11.5.3 系统时钟 ................................................................................................................................................ 74
11.5.4 看门狗定时器 .........................................................................................................................................75
11.5.5 P0 仿真 ..................................................................................................................................................76
11.5.5.1 @P00_MODE, @P01_MODE .................................................................................................................76
11.5.5.2 @P00_OUT, @P01_OUT ....................................................................................................................... 76
11.5.5.3 PEDGE .................................................................................................................................................... 77
SONiX TECHNOLOGY CO., LTD Page 4 Preliminary Version 0.3
Page 5

SN8P2604
8-Bit Micro-Controller
11.5.6 PWM 占空比 ..........................................................................................................................................78
11.5.7 其它宏指令.............................................................................................................................................79
1
2
1
2
1
2
OTP 烧录引脚..............................................................................................................................................80
12.1 EASY WRITER 转接板的引脚配置..............................................................................................................80
12.2 WRITER V3.0 和 WRITER V2.5 转接板的引脚配置 ....................................................................................80
12.3 SN8P2604 烧录引脚分配表.....................................................................................................................81
1
3
1
3
1
3
封装…… ......................................................................................................................................................82
13.1 SK-DIP 28 PIN.........................................................................................................................................82
13.2 SOP 28 PIN .............................................................................................................................................83
13.3 SSOP 20 PIN...........................................................................................................................................84
SONiX TECHNOLOGY CO., LTD Page 5 Preliminary Version 0.3
Page 6

SN8P2604
8-Bit Micro-Controller
1
1
1
产品简介
1.1 特性
存储器配置
OTP ROM:4K * 16 bits.
RAM:128 * 8 bits.
8 层堆栈缓存器
I/O 引脚配置
双向输入输出:P0, P1, P2, P5
漏极开路引脚:P1.0, P1.1
具有唤醒功能的引脚:P0, P1 的电平变换
内部上拉电阻:P0, P1, P2, P5
外部中断输入:P0.0,P0.1
外部中断:P0.0 由 PEDGE 控制,P0.1 由下降沿触发。 外部高速时钟:晶体,最大 16 MHz
功能强大的指令集
每个指令周期为一个时钟周期(1T)
大多数指令的执行时间均为一个指令周期
JMP 指令可直接寻址整个 ROM 区
CALL 指令可直接寻址整个 ROM 区
查表功能(MOVC)可直接寻址整个 ROM 区
SK-DIP 28
SOP 28
SSOP 28
) 特性比较表
芯片型号
SN8P1604A 4K*16 128 8 V 22 - V 10 SK-DIP28/SOP28
SN8P2604 4K*16 128 8 V V 24 V V 11 SK-DIP28/SOP28/SSOP28
ROM RAM
定时器 PWM
堆栈
T0 TC1
绿色模式
I/O
4 个中断源
2 个内部中断源:T0, TC1.
2 个外部中断源:INT0, INT1.
2 个 8 位定时/计数器
T0:基本定时器
TC1:自动装载定时器/PWM1/Buzzer 输出
内置看门狗定时器
系统时钟和操作模式
外部高速时钟:RC,最大 10 MHz
内部低速时钟:RC,16KHz(3V),32KHz(5V)
普通模式:高低速时钟同时运行
低速模式:仅低速时钟运行
睡眠模式:高低速时钟均停止
绿色模式:由定时器 T0 周期性唤醒
封装(支持的芯片格式)
Buzzer
唤醒功能引脚 封装
SONiX TECHNOLOGY CO., LTD Page 6 Preliminary Version 0.3
Page 7

SN8P2604
8-Bit Micro-Controller
) SN8P1604A 升级到 SN8P2604
项目 SN8P2604 SN8P1604A
DAA
PUSH/POP
B0MOV M, I
B0XCH A, M
R0M 的 ORG8 处的有效指令 JMP 或 NOP 无限制
AC 抗干扰能力 很好(添加了 1 个 47uF 的旁路电容) 一般
运算能力(16Mhz Crystal) 最大 16 MIPS 最大 4 MIPS
M 的地址不能是 80h~FFh
PWM 分辨率:8/6/5/4 位
高速 PWM
High Clock = 16MHz
8 位分辨率时高达 31.25K
4 位分辨率时高达 500K
定时器
I/O 引脚的数目
可编程漏极开路输出
内置上拉电阻 引脚配置(利用寄存器 PnUR) 端口配置(利用寄存器 PUR)
绿色模式 有(T0 定时器)
由寄存器 PEDGE 控制:
P0.0 中断触发沿
P00G[1:0]:(位 4 和位 3)
00=保留,01=上升沿,
10=下降沿,11=改变电平
P0.1 中断触发边沿
P0.0 唤醒功能
P0.1 唤醒功能
P1 唤醒功能 改变电平
唤醒时间 1/Fosc * 4096 (sec) + X’tal 稳定时间 1/Fosc * 2048 (sec) + X’tal 稳定时间
施密特触发输入 所有输入引脚 P0.0,P0.1,RST,XIN
看门狗定时器时钟源 仅内部低速 RC 时钟 内部低速 RC 时钟和外部高速时钟
看门狗清零
待机电流
LVD
1.8V,一直处于使能状态 1.8V,一直处于使能状态
注:电平变化触发指上升沿和下降沿触发。
I 不能是 0E6h 和 0E7h
不可用 可用
可用 不可用
-
-
PWM 分辨率:只 8 位
在 16MHz 等于 7.8125K
T0/TC1 TC1
24 (P0.2) 22
P1.0/P1.1 -
-
由寄存器 PEDGE 控制:
PEDGEN(位 7):
0=下降沿,1=由 P00G[1:0]定义
P00G[1:0]:(位 4 和位 3)
00=保留,01=下降沿
10=上升沿,11=改变电平
下降沿 P0.1 无中断功能
由寄存器 PEDGE 控制:
PEDGEN(位 7):
电平变化
0=下降沿,1=由 P00G[1:0]定义
P00G[1:0]:(位 4 和位 3)
00=保留,01=下降沿
10=上升沿,11=改变电平
由寄存器 PEDGE 控制:
电平变化
PEDGEN(位 7):
0=低电平唤醒,1=改变电平
由寄存器 PEDGE 控制:
PEDGEN(位 7):
0=低电平唤醒,1=改变电平
MOV A, #0x5A
B0MOV WDTR, A
1uA/5V 10uA/5V
B0BSET FWDRST
SONiX TECHNOLOGY CO., LTD Page 7 Preliminary Version 0.3
Page 8
SN8P2604
8-Bit Micro-Controller
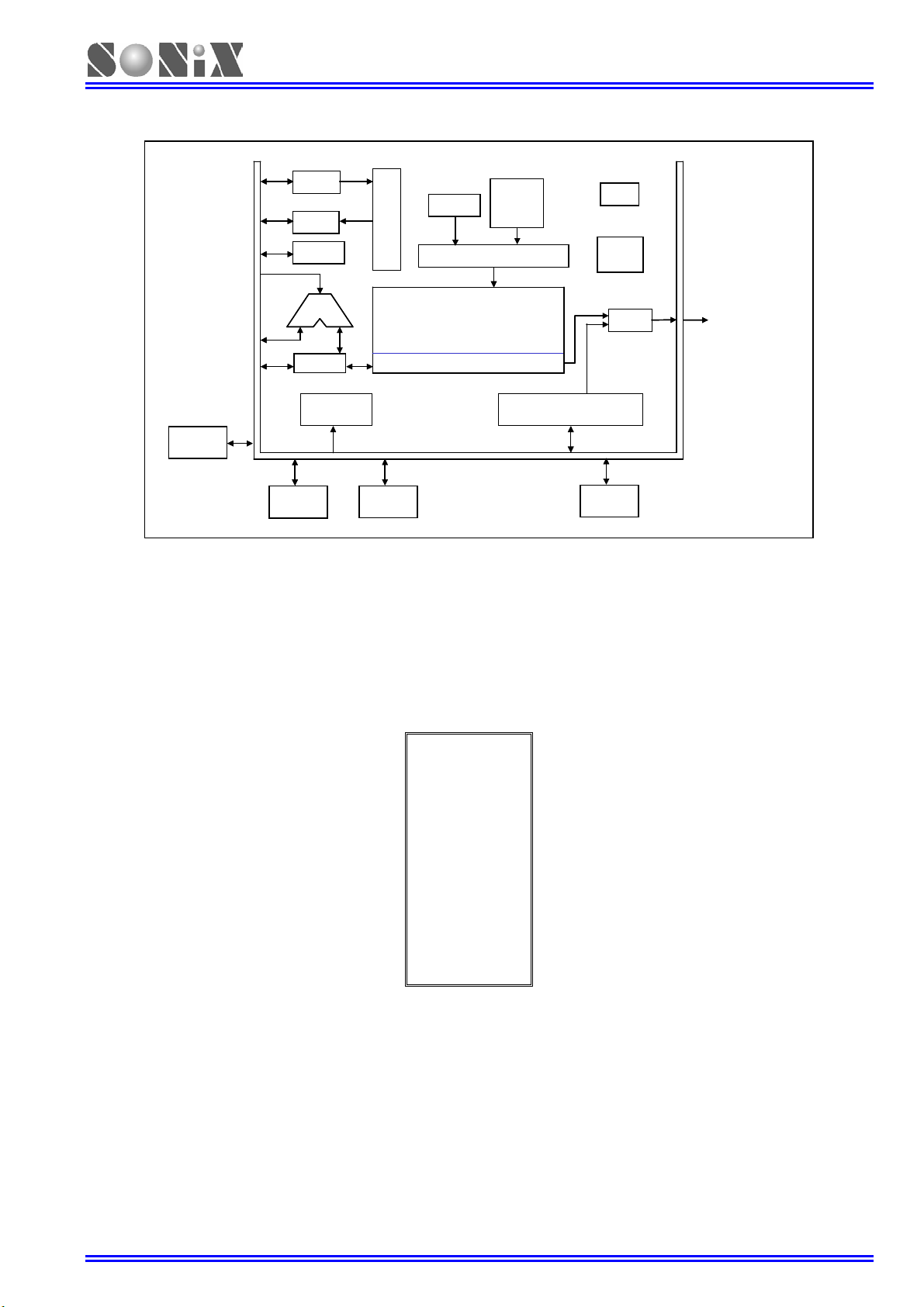
1.2 系统时钟框图
SN8P2604
SN8P2604
PC
PORT 0
PORT 0
FLAGS
FLAGS
PORT 1
PORT 1
PC
IR
IR
ALU
ALU
ACC
ACC
INTERRUPT
INTERRUPT
CONTROL
CONTROL
R
R
O
O
M
M
SYSTEM REGISTER
SYSTEM REGISTER
PORT 2
PORT 2
H-OSC
H-OSC
TIMING GENERATOR
TIMING GENERATOR
RAM
RAM
Internal
Internal
Low
Low
RC
RC
TIMER & COUNTER
TIMER & COUNTER
POR
POR
Watch
Watch
Dog
Dog
PORT 5
PORT 5
PWM
PWM
PWM & BUZZER
PWM & BUZZER
1.3 引脚配置
SN8P2604K (SK-DIP 28 pins)
SN8P2604S (SOP 28 pins)
SN8P2604X (SSOP 28 pins)
P5.3/BZ1/PWM1 9 20 P2.2
P0.1/INT1 1 U 28 RST/VPP/P0.2
VDD 2 27 XIN
P5.4 3 26 XOUT/Fcpu
VSS 4 25 P2.7
P0.0/INT0 5 24 P2.6
P5.0 6 23 P2.5
P5.1 7 22 P2.4
P5.2 8 21 P2.3
P1.0 10 19 P2.1
P1.1 11 18 P2.0
P1.2 12 17 P1.7
P1.3 13 16 P1.6
P1.4 14 15 P1.5
SN8P2604K
SN8P2604S
SN8P2604X
SONiX TECHNOLOGY CO., LTD Page 8 Preliminary Version 0.3
Page 9
SN8P2604
8-Bit Micro-Controller
1.4 引脚说明
引脚名称 类型 说明
VDD, VSS P
P0.2/RST/VPP I, P
XIN I
XOUT/Fcpu I/O
P0.0/INT0 I/O
P0.1/INT1 I/O
P1.0~P1.1 I/O
P1.2~P1.7 I/O
P2.0~P2.7 I/O
P5.0~P5.2, P5.4 I/O
P5.3/BZ1/PWM1 I/O
数字电路的电源输入引脚
P0.2:禁止外部复位功能时为单向输入引脚(施密特结构)/无内置上拉电阻。
RST:系统复位输入引脚,施密特结构,低电平触发,通常保持高电平。
VPP:OTP ROM 编程引脚。
选择外部振荡器(晶体或 RC)时为振荡器输入引脚。
XOUT:选择外部晶体振荡器时为振荡器输出引脚
Fcpu:使能外部 RC 模式时为信号输出引脚。
P0.0:双向输入输出引脚,施密特结构(输入模式下)。内置上拉电阻。
INT0 触发引脚(施密特结构)
P0.1:双向输入输出引脚,施密特结构(输入模式下)。内置上拉电阻。
INT1 触发引脚(施密特结构)
TC1 事件计数器时钟输入引脚。
P1.0, P1.1:双向输入输出引脚/漏极开路引脚/施密特结构(输入模式下)/内置
上拉电阻。
P1.2~P1.7:双向输入输出引脚/施密特结构(输入模式下)/内置上拉电阻。
双向输入输出引脚/施密特结构(输入模式下)/内置上拉电阻。
P5:双向输入输出引脚/施密特结构(输入模式下)/内置上拉电阻。
P5.3:双向输入输出引脚/施密特结构(输入模式下)/内置上拉电阻。
TC1 /2 :Buzzer 或 PWM 信号输出引脚。
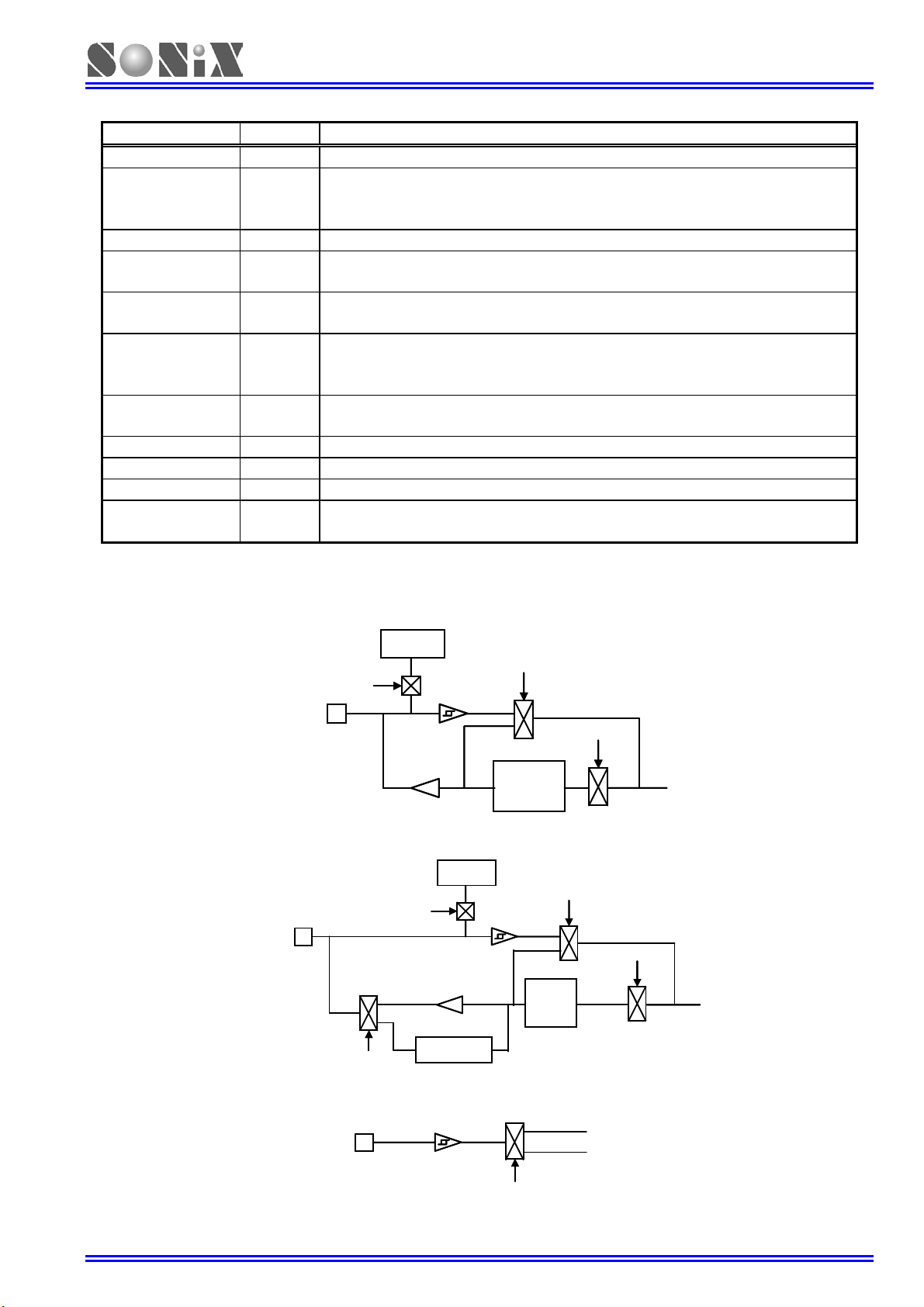
1.5 引脚电路图
Port 0, 1, 2, 5 structure:
Port 1.0, P1.1 structure:
Pin
PinPin
PnM, PnUR
PnM, PnUR
Pin
Pin
Pull-Up
Pull-Up
PnM, PnUR
PnM, PnUR
Pull-Up
Pull-Up
PnM
PnMPnM
Output
Output
Latch
Latch
Output
Output
Latch
Latch
PnM
PnMPnM
PnM
PnMPnM
PnM
PnMPnM
Int. bus
Int. bus
Int. bus
Int. bus
Open-Drain
P1OC
P1OCP1OC
Open-Drain
Port 0.2 structure:
Int. bus
Pin
PinPin
Ext. Rst Code Option
Ext. Rst Code Option
Int. bus
Int. Rst
Int. Rst
SONiX TECHNOLOGY CO., LTD Page 9 Preliminary Version 0.3
Page 10
SN8P2604
8-Bit Micro-Controller
2
2
2
中央处理器(CPU)
2.1 内存
2.1.1 程序存储器(ROM)
) 4K words ROM
0000H
0001H 跳转到用户程序
0002H 跳转到用户程序
0003H
0004H
0005H
0006H
0007H
0008H
0009H 用户程序区
.
.
000FH
0010H
0011H
.
.
.
.
.
0FFBH
0FFCH
0FFDH
0FFEH
0FFFH
ROM
复位向量 程序开始
通用存储区
跳转到用户程序
保留区
中断向量 中断入口地址
通用存储区
保留区
程序结束
2.1.1.1 复位向量地址(000H)
one-word 的复位向量地址用来执行系统复位。
) 上电复位(NT0=1, NPD=0)
) 看门狗复位(NT0=0, NPD=0)
) 外部复位(NT0=1, NPD=1)
上电复位或看门狗计数器溢出复位后,系统从地址 0000H 开始重新执行程序,所有的系统寄存器恢复为默认值。
下面的例子给出了如何在程序存储器里定义复位向量。
 例: 定义复位向量
ORG 0 ; 0000H
JMP START ; 跳转到用户程序区
. ; 0004H ~ 0007H 保留
ORG 10H
START: ; 0010H,
. ; 用户程序
.
ENDP ; 程序结束
SONiX TECHNOLOGY CO., LTD Page 10 Preliminary Version 0.3
用户程序的起始位置
Page 11
SN8P2604
G
H
G
8
H
F
H
H
F
T
8-Bit Micro-Controller
2.1.1.2 中断向量地址(0008H)
一旦有中断响应,程序计数器(PC)的值就会存入堆栈缓冲器中并跳转至 0008H 处执行中断服务程序。用户使
用时必须自行定义中断向量,在 ROM 的地址 8(ORG 8)处的指令必须为 JMP 或 NOP。下面的例子给出了如何在
程序中定义中断向量。
注:“PUSH”,“POP”指令保存和恢复 ACC 和 PFLAG,除了 PFLAG 的复位标志(NT0,NPD)
注:ROM 地址 8 处的指令必须为“JMP”或“NOP”。
 例 1:定义中断向量,主程序位于中断服务程序后面。
OR
JMP START ;
. ; 0004H ~ 0007H 保留
OR
NOP
B0XC
PUS
.
POP ; 恢复工作寄存器
B0XC
RETI ; 中断返回
START: ;
. ; 用户程序
.
JMP STAR
ENDP ; 程序结束
 例 2:定义中断向量,中断服务程序位于主程序后面。
ORG 0 ; 0000H
JMP START ;
. ; 0004H ~ 0007H 保留
ORG 08
JMP MY_IRQ ; 0008H,
ORG 10H
START: ; 0010H,
. ; 用户程序
.
JMP START ; 用户程序结束
MY_IRQ: ;
B0XCH A, ACCBUF ; B0XCH 指令不会影响标志位 C,Z
PUSH ; 保存工作寄存器
.
POP ; 恢复工作寄存器
B0XCH A, ACCBUF
RETI ; 中断返回
ENDP ; 程序结束
注:从上面的程序中很容易得出 SONIX 的主要编程规则,有以下几点:
1.地址 0000H 处的“JMP”指令使程序从头开始执行。
2.0004H~0007H 区域由系统保留,用户必须跳过 0004H~0007H。我们强烈建议用户在对 ROM 区作 CHECKSUM
时要跳过该区域,详见下面的 Checksum 计算章节。
0 ; 0000
A, ACCBU
A, ACCBU
; 中断服务程序
; 保存工作寄存器
; 用户程序结束
跳转到用户程序
; B0XCH 不会影响到 C, Z
用户程序起始地址
跳转到用户程序
.
跳转到中断服务程序
用户程序起始地址
中断服务程序的起始地址
SONiX TECHNOLOGY CO., LTD Page 11 Preliminary Version 0.3
Page 12
SN8P2604
@
Y
@@
_
@
@@
A
_
@@
8-Bit Micro-Controller
2.1.1.3 查表功能
在 ROM 的查表功能程序中, Y寄存器指向数据 ROM 地址的高 8 位,Z 寄存器指向低 8 位地址,执行 MOVC
后,数据的低字节存入累加器 ACC 中,而数据的高字节存入 R 寄存器中。
 例:查找位于 “table1”的 ROM 数据.
B0MOV Y, #TABLE1$M ; 取得表格地址高字节
B0MOV Z, #TABLE1$L ; 取得表格地址低字节
MOVC ; 查表, R = 00H, ACC = 35H
; 索引地址加 1
INCMS Z ; Z+1
JMP
INCMS
NOP ;
;
: MOVC ; 查表, R = 51H, ACC = 05H.
. . ;
TABLE1: DW 0035H ; 定义表格数据
DW 5105H ; “
DW 2012H ; “
注意:当 Z 寄存器从 0XFFH 增至 0X00H 跨越边界时,Y 寄存器不会自动增加。所以,用户必须非常小心
处理这种情况,避免查表错误。如果 Z 寄存器发生溢出,Y 寄存器必须增 1。下面给出的宏指令 INC_YZ
提供了解决此问题的方法。
 例:宏指令 INC_YZ
INC
YZ MACRO
INCMS Z ; Z+1
JMP
INCMS Y ; Y+1
NOP ; Y 无溢出
:
ENDM
 例:通过宏指令“INC_YZ”调整上例。
B0MOV Y, #TABLE1$M ; 取得表格地址高字节
B0MOV Z, #TABLE1$L ; 取得表格地址低字节
MOVC ; 查表,R=00H,
INC
: MOVC ; 查表,R=51H,ACC=05H
…
TABLE1: DW 0035H ; 定义一个字(16 位)的数据
DW 5105H
DW 2012H
…
YZ ; 索引地址加 1
F ; 无进位
; Z 溢出(FFH Æ 00)则, Æ Y=Y+1
F ; Z 无溢出
CC=35H
SONiX TECHNOLOGY CO., LTD Page 12 Preliminary Version 0.3
Page 13
SN8P2604
Y
8-Bit Micro-Controller
另一种方式的查表是通过累加器来增加间接寄存器 Y 和 Z,但要注意是否有进位发生。
 例: 执行指令 B0ADD/ADD 增加 Y、Z
B0MOV Y, #TABLE1$M ; 取得表格地址高字节
B0MOV Z, #TABLE1$L ; 取得表格地址低字节
B0MOV A, BUF ; Z = Z + BUF.
B0ADD Z, A
B0BTS1 FC ; 检查进位表示 C
JMP GETDATA ; FC = 0
INCMS
NOP
GETDATA: ;
MOVC ; 查表,若 BUF = 0,结果是 0x0035
; 若 BUF = 1,结果是 0x5105
; 若 BUF = 2, 结果是 0x2012
TABLE1: DW 0035H ; 定义一个 WORD 的表格数据
DW 5105H ; “
DW 2012H ; “
; FC = 1. Y+1.
注:“B0MOV M, I”指令不支持“I=0xE6”和“I=0xE7”,在查表功能中,用户必须检查 Y,Z 的值,不能是“0xE6”
和“0xE7”。在表格的开始设置 ROM 的地址,避开“0xE6”和“0xE7”。
 例:通过 ORG 指令设置 TABLE1 的开始地址以避开“0xE6”和“0xE7”。
B0MOV Y, #TABLE1$M
B0MOV Z, #TABLE1$L
GETDATA: ;
MOVC
…
TABLE1: DW 0035H
DW 5105H ; “
DW 2012H ; “
…
B0MOV A, BUF ; Z = Z + BUF.
B0ADD Z, A
B0BTS1 FC
JMP GETDATA ; FC = 0
INCMS Y ; FC = 1. Y+1.
NOP
ORG 0x0100
; 取得表格的高字节
; 取得表格的低字节
; 检查进位标志
; 查表,若 BUF = 0,数据为 0x0035
; 若 BUF = 1,数据为 0x5105
; 若 BUF = 2,数据为 0x2012
; 设置 TABLE1 的开始地址是 0x0100.
; 定义一个 word(16 位)的表格数据
SONiX TECHNOLOGY CO., LTD Page 13 Preliminary Version 0.3
Page 14
SN8P2604
A
A
A
A
A
@
((
)
($ |
)
($ |
)
A
A
A
@
A
A
A
A
A
A
@
A
A
A
A
A
8-Bit Micro-Controller
2.1.1.4 跳转表
跳转表操作可以完成多个地址跳转功能,将程序计数器的低字节 PCL 与累加器 ACC 相加从而得到一个指向新的
跳转地址的程序计数器值,这种方法可以方便多个任务的处理。
 例:跳转表
ORG 0X0100 ; 跳转表最好放在 ROM 的边界位置
B0ADD PCL,
JMP
JMP
JMP
JMP
SONIX 提供了一条宏指令以保证安全的跳转表操作,这条宏指令会检查 ROM 的边界,并自动将跳转表移动到
正确的位置。但宏指令会占用 ROM 的存储空间。
JMP_A MACRO VAL
IF
JMP
ORG
ENDIF
ENDM
DD PCL,
; PCL = PCL + ACC,但 PCH 不会改变
0POINT ; ACC = 0, 跳转到 A0POINT
1POINT ; ACC = 1, 跳转到A1POINT
2POINT ; ACC = 2, 跳转到A2POINT
3POINT ; ACC = 3, 跳转到A3POINT
$+1) !& 0XFF00) !!= (($+(VAL)) !& 0XFF00
0XFF
0XFF
注:“VAL”为跳转列表的个数
 例:“@JMP_A” 在 SONIX 的宏文件中称为“MACRO3.H”.
B0MOV
JMP
JMP
JMP
JMP
JMP
如果跳转表格的位置是从 00FFH 到 0100H,那么宏指令“@JMP_A”将使跳转表格从 0100h 开始。
 例:“@JMP_A”操作。
; 程序编译前
ROM address
B0MOV
0X00FD JMP
0X00FE JMP
0X00FF JMP
0X0100 JMP
0X0101 JMP
; 程序编译后
ROM address
B0MOV A, BUF0 ; “BUF0” 的值为 0-4
@JMP_A 5 ; 要跳转的总的地址数是 5.
0X0100 JMP A0POINT ; ACC = 0, 跳转到 A0POINT
0X0101 JMP A1POINT ; ACC = 1, 跳转到 A1POINT
0X0102 JMP A2POINT ; ACC = 2, 跳转到 A2POINT
0X0103 JMP A3POINT ; ACC = 3, 跳转到 A3POINT
0X0104 JMP A4POINT ; ACC = 4, 跳转到 A4POINT
JMP_A 5 ; 要跳转的总的地址数是 5.
JMP_A 5 ; 要跳转的总的地址数是 5.
, BUF0 ; “BUF0” 的值为 0~4
0POINT ; ACC = 0, 跳转到A0POINT
1POINT ; ACC = 1, 跳转到A1POINT
2POINT ; ACC = 2, 跳转到A2POINT
3POINT ; ACC = 3, 跳转到A3POINT
4POINT ; ACC = 4, 跳转到A4POINT
, BUF0 ; “BUF0” 的值为 0-4
0POINT ; ACC = 0, 跳转到A0POINT
1POINT ; ACC = 1, 跳转到A1POINT
2POINT ; ACC = 2, 跳转到A2POINT
3POINT ; ACC = 3, 跳转到A3POINT
4POINT ; ACC = 4, 跳转到A4POINT
SONiX TECHNOLOGY CO., LTD Page 14 Preliminary Version 0.3
Page 15

SN8P2604
8-Bit Micro-Controller
2.1.1.5 CHECKSUM 计算
ROM 中的 0004H~0007H 和最后的一个地址是系统保留区,用户应该在计算 Checksum 时跳过这一区域。
 例:下面的程序给出了在计算 Checksum 时如何跳过保留区。
MOV A,#END_USER_CODE$L
B0MOV END_ADDR1,A
MOV A,#END_USER_CODE$M
B0MOV END_ADDR2,A
CLR Y
CLR Z
@@:
CALL YZ_CHECK
MOVC ;
B0BSET FC ;
ADD DATA1,A ;
MOV A,R
ADC DATA2,A ;
JMP END_CHECK
AAA:
INCMS Z ; Z=Z+1
JMP @B ;
JMP Y_ADD_1 ;
END_CHECK:
MOV A,END_ADDR1
CMPRS A,Z
JMP AAA ;
MOV A,END_ADDR2
CMPRS A,Y ;
JMP AAA
JMP CHECKSUM_END
YZ_CHECK:
MOV A,#04H
CMPRS A,Z ;
RET
MOV A,#00H
CMPRS A,Y ;
RET ;
INCMS Z ;
INCMS Z
INCMS Z
INCMS Z
RET ;
Y_ADD_1:
INCMS Y
NOP
JMP @B ;
CHECKSUM_END:
……….
……….
END_USER_CODE: ;
; 保存地址的低字节
; 保存地址的高字节
; 清 Y 寄存器
; 清 Z 寄存器
; 调用函数,判断是否到 0004H 保留区
; 跳转到判断代码结束的函数
; 判断是否计算到代码结束位置
; 不是则继续计算
; 是则结束计算
; 检查是否到 0004H 位置
; 不是 0004H 则返回继续计算
; 递增 Y,继续计算
SONiX TECHNOLOGY CO., LTD Page 15 Preliminary Version 0.3
Page 16

SN8P2604
8-Bit Micro-Controller
2.1.2 编译选项表(Code Option)
编译选项 内容 功能说明
High_Clk
Watch_Dog
Fcpu
Reset_Pin
Security
Noise_Filter
注:
RC
32K X’tal
12M X’tal
4M X’tal
Always_On
Enable
Disable
Fosc/1
Fosc/2
Fosc/4
Fosc/8
Reset
P02
Enable
Disable
Enable
Disable
1. 在高干扰环境下,强烈建议使能“Noise Filter”选项,并使看门狗选择“Always_On”选项。使能
“Noise_Filter”后就会限制 Fcpu = Fosc/4 ~ Fosc/8.
2. 如果用户选择看门狗为“Always_On”,编译器会自动使能看门狗功能。
3. Fcpu 编译选项仅对高速时钟有效。在 slow 模式下,Fcpu=Fosc/4(Fosc 为内部低速时钟)。
外部振荡器采用廉价 RC 振荡电路,XOUT 为 Fcpu 输出引脚。(P1.2)
外部振荡器采用低功耗振荡器(如 32.768KHz)
外部振荡器采用高频晶体振荡器(如 12MHz)
外部振荡器采用一般晶体振荡器(如 4MHz)
看门狗定时器在省电模式和绿色模式下仍然处于使能状态。
使能看门狗定时器功能,看门狗定时器在省电模式和绿色模式下被禁止。
禁止看门狗定时器功能
指令周期为 1 个振荡器时钟。
指令周期为 2 个振荡器时钟。
指令周期为 4 个振荡器时钟。
指令周期为 8 个振荡器时钟。
使能外部复位引脚功能
P0.2 作为单向输入端,没有上拉电阻
允许 ROM 程序代码加密
禁止 ROM 程序代码加密
使能噪音滤除功能,Fcpu=Fosc/4~Fosc/8.
禁止噪音滤除功能,Fcpu=Fosc/1~Fosc/8.
2.1.3 数据存储器(RAM)
) 128 X 8-bit RAM
Address RAM
000h
“
“
“
“
“
BANK 0
07Fh
080h
“
“
“
“
“
0FFh
通用寄存器区
系统寄存器区
BANK 0 结束区
Bank 0 的 80h~FFh 是系统寄存器区
共 128 bytes.
SONiX TECHNOLOGY CO., LTD Page 16 Preliminary Version 0.3
Page 17

SN8P2604
8-Bit Micro-Controller
2.1.4 系统寄存器
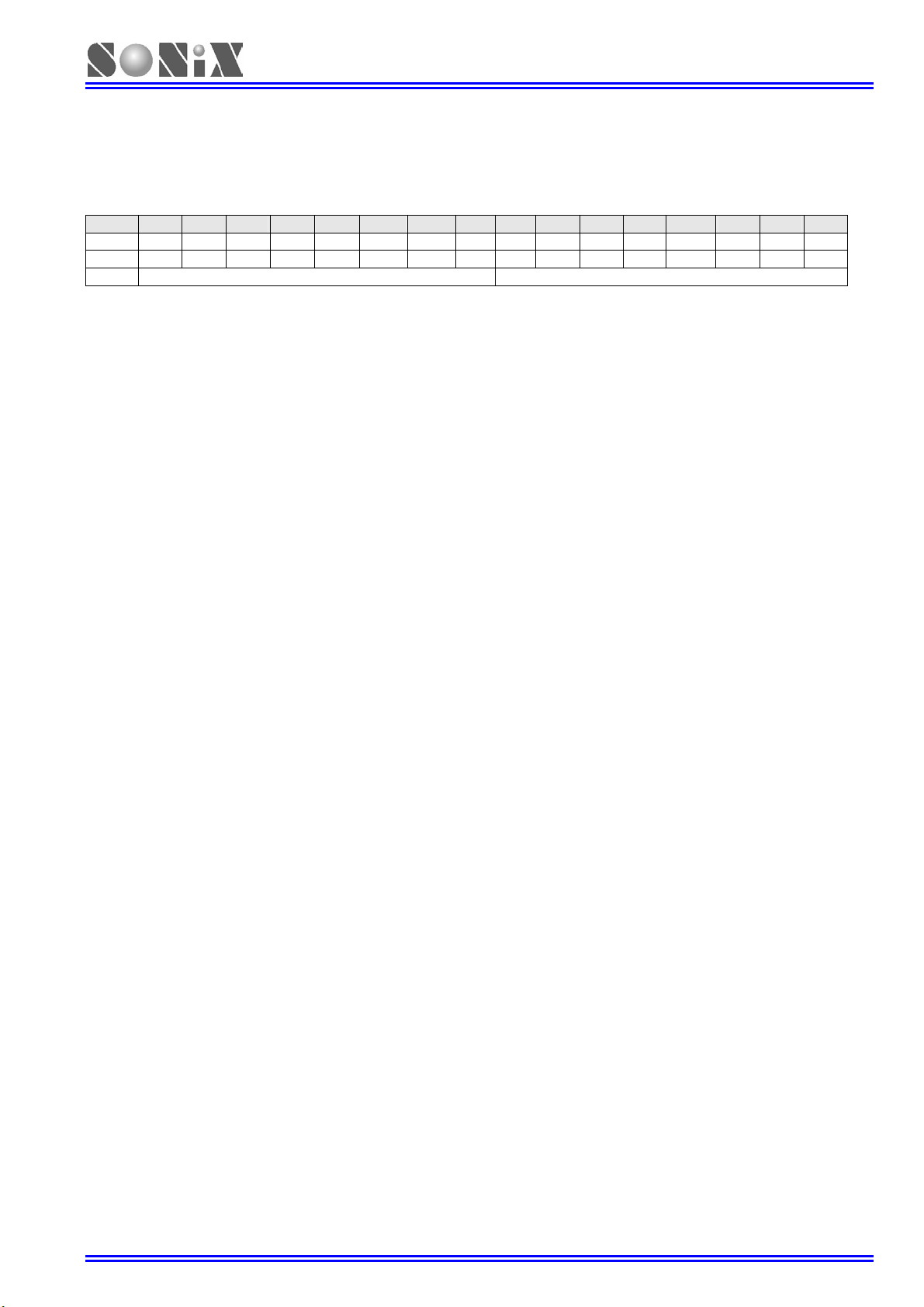
2.1.4.1 系统寄存器列表
0 1 2 3 4 5 6 7 8 9 A B C D E F
L H R Z Y - PFLAG - - - - - - - - -
8
- - - - - - - - - - - - - - - -
9
- - - - - - - - - - - - - - - -
A
- - - - - - - - P0M - - - - -
B
P1W P1M P2M - - P5M - - INTRQ INTEN OSCM - WDTR TC1R PCL PCH
C
P0 P1 P2 - - P5 - - T0M T0C - - TC1M TC1C TC1R STKP
D
P0UR P1UR P2UR - - P5UR @HL @YZ - P1OC - - - - - -
E
STK7L STK7H STK6L STK6H STK5L STK5H STK4L STK4H STK3L STK3H STK2L STK2H STK1L STK1H STK0L STK0H
F
说明:
PFLAG = ROM 页和特殊标志寄存器 R = 工作寄存器和 ROM 查表数据缓存器
H, L = 工作寄存器,@HL 和 ROM 寻址寄存器 Y, Z = 工作寄存器,@YZ 和 ROM 寻址寄存器
P1W = P1 口唤醒功能寄存器 PEDGE = P0.0 模式控制寄存器
PnM = Pn 口输入/输出模式控制寄存器 Pn = Pn 口数据缓存器
P1OC = P1 口开漏控制寄存器 PnUR = Pn 口上拉电阻控制寄存器
INTRQ = 中断请求寄存器 INTEN = 中断使能寄存器
OSCM = 振荡模式寄存器 PCH, PCL = 程序计数器
T0M = T0 模式寄存器 T0C = T0 计数寄存器
TC1M = TC1 模式寄存器 TC1C = TC1 计数寄存器
TC1R =
STKP = 堆栈指针 STK0~STK7 = 堆栈
@YZ = 间接寻址寄存器 @HL = 间接寻址寄存器
TC1 自动装载数据缓存器 WDTR = 看门狗清零寄存器
- PEDGE
SONiX TECHNOLOGY CO., LTD Page 17 Preliminary Version 0.3
Page 18

SN8P2604
8-Bit Micro-Controller
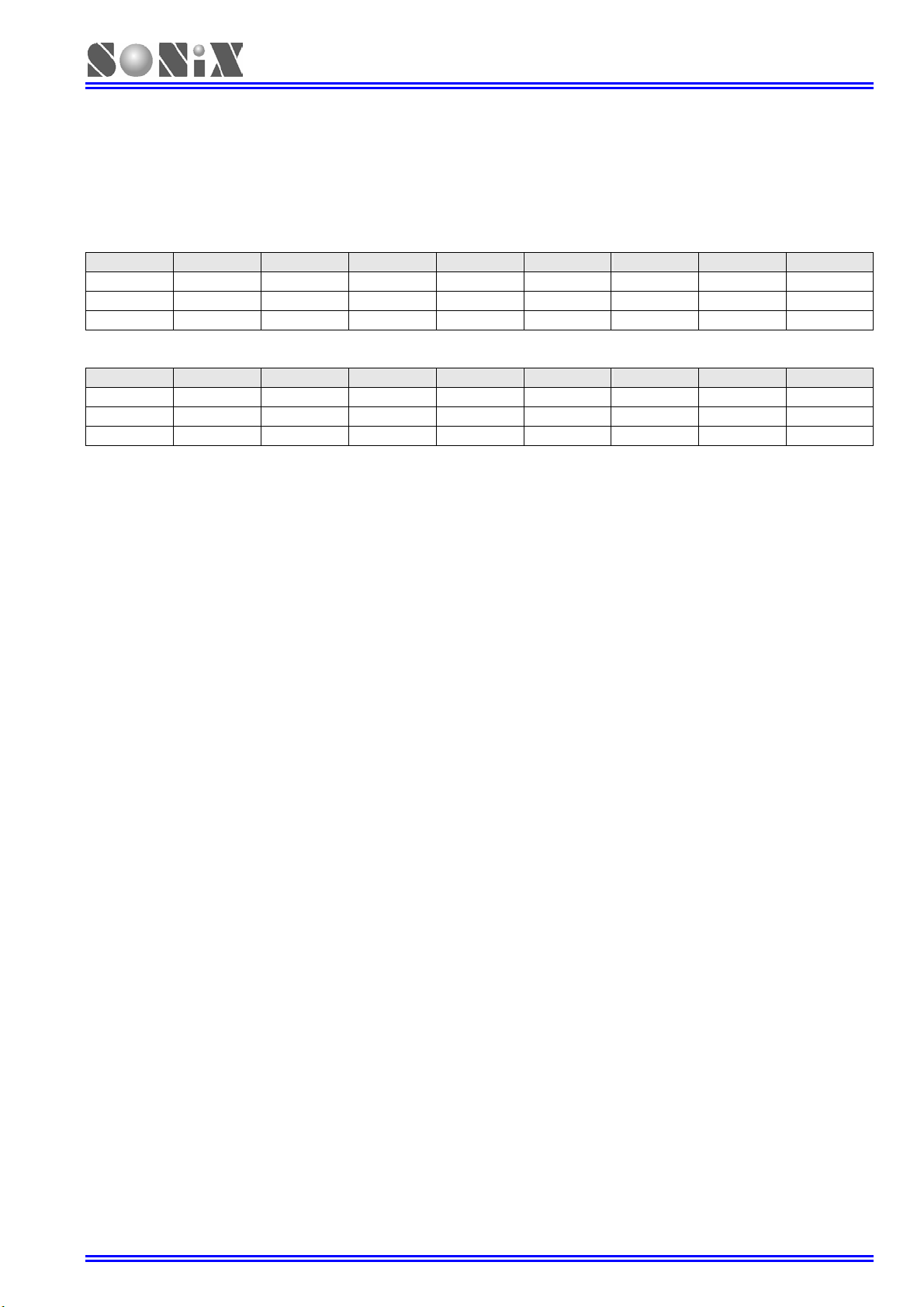
2.1.4.2 系统寄存器的位地址配置表
地址 Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W 备注
080H LBIT7 LBIT6 LBIT5 LBIT4 LBIT3 LBIT2 LBIT1 LBIT0 R/W L
081H HBIT7 HBIT6 HBIT5 HBIT4 HBIT3 HBIT2 HBIT1 HBIT0 R/W H
082H RBIT7 RBIT6 RBIT5 RBIT4 RBIT3 RBIT2 RBIT1 RBIT0 R/W R
083H ZBIT7 ZBIT6 ZBIT5 ZBIT4 ZBIT3 ZBIT2 ZBIT1 ZBIT0 R/W Z
084H YBIT7 YBIT6 YBIT5 YBIT4 YBIT3 YBIT2 YBIT1 YBIT0 R/W Y
086H NT0 NPD C DC Z R/W PFLAG
0B8H P01M P00M R/W P0M
0BFH P00G1 P00G0 R/W PEDGE
0C0H P17W P16W P15W P14W P13W P12W P11W P10W W P1W
0C1H P17M P16M P15M P14M P13M P12M P11M P10M R/W P1M
0C2H P27M P26M P25M P24M P23M P22M P21M P20M R/W P2M
0C5H P54M P53M P52M P51M P50M R/W P5M
0C8H TC1IRQ T0IRQ P01IRQ P00IRQ R/W INTRQ
0C9H TC1IEN T0IEN P01IEN P00IEN R/W INTEN
0CAH CPUM1 CPUM0 CLKMD STPHX R/W OSCM
0CCH WDTR7 WDTR6 WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0 W WDTR
0CEH PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0 R/W PCL
0CFH PC11 PC10 PC9 PC8 R/W PCH
0D0H P02 P01 P00 R/W P0
0D1H P17 P16 P15 P14 P13 P12 P11 P10 R/W P1
0D2H P27 P26 P25 P24 P23 P22 P21 P20 R/W P2
0D5H P54 P53 P52 P51 P50 R/W P5
0D8H T0ENB T0rate2 T0rate1 T0rate0 R/W T0M
0D9H T0C7 T0C6 T0C5 T0C4 T0C3 T0C2 T0C1 T0C0 R/W T0C
0DCH TC1ENB TC1rate2 TC1rate1 TC1rate0 TC1CKS ALOAD1 TC1OUT PWM1OUT R/W TC1M
0DDH TC1C7 TC1C6 TC1C5 TC1C4 TC1C3 TC1C2 TC1C1 TC1C0 R/W TC1C
0DEH TC1R7 TC1R6 TC1R5 TC1R4 TC1R3 TC1R2 TC1R1 TC1R0 W TC1R
0DFH GIE STKPB2 STKPB1 STKPB0 R/W STKP
0E0H P01R P00R W P0UR
0E1H P17R P16R P15R P14R P13R P12R P11R P10R W P1UR
0E2H P27R P26R P25R P24R P23R P22R P21R P20R W P2UR
0E5H P54R P53R P52R P51R P50R W P5UR
0E6H @HL7 @ HL 6 @ HL5 @ HL4 @ HL3 @ HL2 @ HL1 @ HL0 R/W @ HL
0E7H @YZ7 @YZ6 @YZ5 @YZ4 @YZ3 @YZ2 @YZ1 @YZ0 R/W @YZ
0E9H P11OC P10OC W P1OC
0F0H S7PC7 S7PC6 S7PC5 S7PC4 S7PC3 S7PC2 S7PC1 S7PC0 R/W STK7L
0F1H - - - - S7PC11 S7PC10 S7PC9 S7PC8 R/W STK7H
0F2H S6PC7 S6PC6 S6PC5 S6PC4 S6PC3 S6PC2 S6PC1 S6PC0 R/W STK6L
0F3H - - - - S6PC11 S6PC10 S6PC9 S6PC8 R/W STK6H
0F4H S5PC7 S5PC6 S5PC5 S5PC4 S5PC3 S5PC2 S5PC1 S5PC0 R/W STK5L
0F5H - - - - S5PC11 S5PC10 S5PC9 S5PC8 R/W STK5H
0F6H S4PC7 S4PC6 S4PC5 S4PC4 S4PC3 S4PC2 S4PC1 S4PC0 R/W STK4L
0F7H - - - - S4PC11 S4PC10 S4PC9 S4PC8 R/W STK4H
0F8H S3PC7 S3PC6 S3PC5 S3PC4 S3PC3 S3PC2 S3PC1 S3PC0 R/W STK3L
0F9H - S3PC11 S3PC10 S3PC9 S3PC8 R/W STK3H
0FAH S2PC7 S2PC6 S2PC5 S2PC4 S2PC3 S2PC2 S2PC1 S2PC0 R/W STK2L
0FBH - S2PC11 S2PC10 S2PC9 S2PC8 R/W STK2H
0FCH S1PC7 S1PC6 S1PC5 S1PC4 S1PC3 S1PC2 S1PC1 S1PC0 R/W STK1L
0FDH - S1PC11 S1PC10 S1PC9 S1PC8 R/W STK1H
0FEH S0PC7 S0PC6 S0PC5 S0PC4 S0PC3 S0PC2 S0PC1 S0PC0 R/W STK0L
0FFH - S0PC11 S0PC10 S0PC9 S0PC8 R/W STK0H
注:
1. 有些位元要固定放入“0”或“1 ”(如上表中所示),以免系统出错。
2. 所有寄存器的名称在 SN8ASM 编译器是默认的。
3. 寄存器中各位的名称已在 SN8ASM 编译器中以“F”为前缀定义过。
4. 指令“B0BSET”, “B0BCLR”, “BSET”, “BCLR” 仅对 “R/W” 寄存器有效。
5. 详细细节请查阅“系统寄存器参照表”。
SONiX TECHNOLOGY CO., LTD Page 18 Preliminary Version 0.3
Page 19

SN8P2604
A
A
A
A
A
A
_
A
A
8-Bit Micro-Controller
2.1.4.3 累加器(ACC)
累加器 ACC 是一个 8 位专用数据寄存器,用来进行算术逻辑运算或数据存储器之间数据的传送和处理。如果对
ACC 的操作结果为零(Z)或者有进位产生(C 或 DC),那么这些标志将会影响 PFLAG 寄存器。
由于 ACC 不在数据存储器(RAM)中,所以在立即寻找模式下不能通过执行“B0MOV”指令访问 ACC。
 例:读/写 ACC 中的数据
; 把
CC 中的数据送到 BUF 中
MOV BUF,
; 给
CC 送立即数
MOV
; 把 BUF 的数据送给
MOV
中断响应时,系统不会自动保存 ACC 和 PFLAG,所以如果中断发生,必须将 ACC 和 PFLAG 寄存器值存储在
其它的存储器中,“PUSH”和“POP”指令在缓存器中保存和恢复 ACC 和 PFLAG 的值。
 例:保护 ACC 和工作寄存器
INT
SERVICE:
PUSH ; 保存
.
.
POP ; 恢复
RETI ; 中断返回
CC
, #0FH
, BUF
CC 和 PFLAG
CC 和 PFLAG
SONiX TECHNOLOGY CO., LTD Page 19 Preliminary Version 0.3
Page 20
SN8P2604
8-Bit Micro-Controller
2.1.4.4 程序状态寄存器(PFLAG)
PFLAG 包括复位标志,进位标志(C),辅助进位标志(DC)和零标志(Z),如果操作结果为 0 或是有进位、
借位发生,就存入 PFLAG 寄存器中。
086H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PFLAG NT0 NPD - - - C DC Z
读/写 R/W R/W - - - R/W R/W R/W
复位后 - - - - - 0 0 0
) 复位标志
NT0 NPD 复位状态
0 0 看门狗超时复位
0 1 保留
1 0 由 LVD 复位
1 1 由外部复位引脚复位
) 进位标志
C = 1:执行算术加法后有进位发生,执行算术减法后没有借位或移位指令后移出逻辑“1”
C = 0:执行算术加法后没有进位发生,执行算术减法后有借位或移位指令后移出逻辑“0”
) 辅助进位标志
DC = 1:执行算术加法操作产生由低字节向高字节的进位或执行算术减法操作没有从高字节借位
DC = 0:执行算术加法操作没有产生由低字节向高字节的进位或执行算术减法操作从高字节借位
) 零标志
Z=1:指令执行后,运算结果为零
Z=0:指令执行后,运算结果非零
SONiX TECHNOLOGY CO., LTD Page 20 Preliminary Version 0.3
Page 21
SN8P2604
A
A
A
A
8-Bit Micro-Controller
2.1.4.5 程序计数器(PC)
程序计数器 PC 是一个 12 位专用二进制计数器,分为 4 位的高字节和 8 位的低字节,PC 指向下一条将要执行
的指令的地址 ,一般的,在程序执行过程中,PC 会随着指令的执行自动加 1。
此外,执行程序调用(CALL)和跳转(JMP)指令时,下一条将要执行的指令地址会被装入 PC 的 0~11 位。
Bit15 Bit14 Bit13 Bit12 Bit11 Bit10 Bit9 Bit8 Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
PC - - - - PC11 PC10 PC9 PC8 PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0
复位后 - - - - 0 0 0 0 0 0 0 0 0 0 0 0
PCH PCL
) 单地址跳转
单地址跳转功能共有 9 条指令: CMPRS、INCS、INCMS、DECS、DECMS、BTS0、BTS1、B0BTS0 和 B0BTS1 ,
如果运算的结果符合跳转条件,则程序计数器加 2,会跳过当前指令的下一条指令。
如果位测试结果符合跳转条件,那么 PC 将加 2,跳过当前指令的下一条指令:
B0BTS1 FC ; 如果 C=1 则跳过下一条指令
JMP C0STEP ; 否则跳转到 C0STEP.
.
C0STEP: NOP
B0MOV
B0BTS0 FZ ; 如果 Z=0,则跳过下一条指令
JMP C1STEP ; 否则跳到 C1STEP.
.
C1STEP: NOP
如果 ACC 与立即数或存储器中的内容相等,那么 PC 将加 2,跳过下一条指令
CMPRS
JMP C0STEP ; 否则跳到 C0STEP.
.
C0STEP: NOP
, BUF0 ; 把 BUF0 的值赋给ACC.
, #12H ; 如果ACC = 12H. 则跳过下一条指令
如果增加 1 后的结果是从 0xffh 到 0x00h, 那么 PC 将加 2,跳过下一条指令
INCS:
INCS BUF0
JMP C0STEP ; 如果
…
C0STEP: NOP
INCMS:
INCMS BUF0
JMP C0STEP ; 如果 BUF0 不为 0 则跳到 C0STEP
…
C0STEP: NOP
如果减小 1 后的结果是从 0x01h 到 0x00h, 那么 PC 将加 2,跳过下一条指令
DECS:
DECS BUF0
JMP C0STEP ; 如果
…
C0STEP: NOP
DECMS:
DECMS BUF0
JMP C0STEP ; 如果 BUF0 不为 0 则跳到 C0STEP
…
C0STEP: NOP
CC 不为 0 则跳到 C0STEP
CC 不为 0 则跳到 C0STEP
SONiX TECHNOLOGY CO., LTD Page 21 Preliminary Version 0.3
Page 22

SN8P2604
8-Bit Micro-Controller
) 多地址跳转
用户可以通过 JMP 和“ ADD PCL,A ”指令实现多地址跳转。 “ADD PCL, A”执行后若有进位发生,进位标志
并不会影响 PCH 寄存器。
 例: 如果 PC = 0323H (PCH = 03H、PCL = 23H)
; PC = 0323H
MOV A, #28H
B0MOV PCL, A ; 跳转到 0328H
. .
. .
; PC = 0328H . .
MOV A, #00H
B0MOV PCL, A ; 跳转到 0300H
 例: 如果 PC = 0323H (PCH = 03H、PCL = 23H)
; PC = 0323H
B0ADD PCL, A ; PCL = PCL + ACC, PCH 的值不会改变.
JMP A0POINT ; ACC = 0, 跳转到 A0POINT
JMP A1POINT ; ACC = 1, 跳转到 A1POINT
JMP A2POINT ; ACC = 2, 跳转到 A2POINT
JMP A3POINT ; ACC = 3, 跳转到 A3POINT
. . ;
只有“ADD M, A”,“ADC M, A”和“B0ADD M, A”支持 PCL 溢出和 PCH=PCH+1,其它的指令均不支持。
SONiX TECHNOLOGY CO., LTD Page 22 Preliminary Version 0.3
Page 23
SN8P2604
8-Bit Micro-Controller
2.1.4.6 H, L 寄存器
8 位系统专用寄存器 H 和 L 主要用作工作寄存器和间接寻址 RAM 数据。数据寄存器@HL 位于 RAM bank_0 的
E6H 单元,H 和 L 寄存器的内容决定了被访问的 RAM 单元的地址,可通过累加器 ACC 对此单元进行读/写。 H寄
存器的低 4 位决定了单元所在的 RAM 页,L 寄存器给出该单元在某 RAM 页中的具体地址。H 寄存器的高 4 位在间
接寻址中无意义。
H 初始值=0000 0000
081H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
H HBIT7 HBIT6 HBIT5 HBIT4 HBIT3 HBIT2 HBIT1 HBIT0
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
L 初始值=0000 0000
080H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
L LBIT7 LBIT6 LBIT5 LBIT4 LBIT3 LBIT2 LBIT1 LBIT0
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
 例:间接寻址读取 RAM bank_0 的 20H 单元数据。
B0MOV H, #00H ; 把 BANK0 的 RAM 高 8 位地址送到 H 寄存器
B0MOV L, #20H ; 把 BANK0 的 RAM 低 8 位地址送到 L 寄存器
B0MOV A, @HL ; 读上面地址对应储存器的值到 ACC
 例:用@HL 对 RAM bank 0 进行清零
CLR H ; 清零(Bank0)
MOV A, #07FH
B0MOV L, A ; L = 7FH,数据存储器的低地址
CLR_HL_BUF:
CLR @HL ; 清零
DECMS L ; L 递减 1,L = 0 子程序结束
JMP CLR_HL_BUF ; 不为零继续清零
CLR @HL
END_CLR: ; 结束通用区所有存储器的清零程序
. .
SONiX TECHNOLOGY CO., LTD Page 23 Preliminary Version 0.3
Page 24

SN8P2604
8-Bit Micro-Controller
2.1.4.7 Y, Z 寄存器
z 通用工作寄存器
z 通过寄存器@YZ 用作访问 RAM 的数据指针
z 通过 MOVC 查表指令,可访问 ROM 中的数据
084H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Y YBIT7 YBIT6 YBIT5 YBIT4 YBIT3 YBIT2 YBIT1 YBIT0
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
083H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Z ZBIT7 ZBIT6 ZBIT5 ZBIT4 ZBIT3 ZBIT2 ZBIT1 ZBIT0
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
 例:间接寻址模式访问 RAM bank 0 中 025H 单元。
B0MOV Y, #00H ; 用 Y 确定 BANK0
B0MOV Z, #25H ; 用 Z 确定 RAM 中的位置
B0MOV A, @YZ ; 25H 的数据放到 ACC 中
 例:用寄存器@YZ 将数据存储器中 bank 0 的通用数据存储器清零
B0MOV Y, #0 ; Y = 0, bank 0
B0MOV Z, #07FH ; Y = 7FH, 数据存储区的最大地址
CLR_YZ_BUF:
CLR @YZ ; @YZ =0
DECMS Z ;
JMP CLR_YZ_BUF ;
CLR @YZ
END_CLR: ; 完成对 BANK0 中的数据的清零
.
2.1.4.8 R 寄存器
R 寄存器是一个 8 位缓存器,有两个主要功能:
z 工作寄存器
z 存放 ROM 查表的高字节数据
(MOVC 指令执行完后,指定的 ROM 地址中数据的高 8 位将存放在 R 寄存器中,低 8 位存放在 ACC 中)
082H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
R RBIT7 RBIT6 RBIT5 RBIT4 RBIT3 RBIT2 RBIT1 RBIT0
读/写 R/W R/W R/W R/W R/W R/W R/W R/W
复位后 X X X X X X X X
注:请参考使用 R 寄存器的查表功能“查表说明”。
SONiX TECHNOLOGY CO., LTD Page 24 Preliminary Version 0.3
Page 25
SN8P2604
8-Bit Micro-Controller
2.2 寻址模式
2.2.1 立即寻址模式
将一个立即数送入累加器或指定的 RAM 单元。
 例:把立即数 12H 送入 ACC。
MOV A, #12H ;立即数 12H 存入 ACC
 例:把立即数 12H 送入 R 寄存器。
B0MOV R, #12H ; 立即数 12H 存入 R 寄存器
注:在立即数寻找模式下,特殊的 RAM 必须是 0x80~0x87 工作寄存器。
2.2.2 直接寻址模式
通过单元地址访问存储器就是直接寻找。
 例:把 RAM 中的 0x12 送入 ACC。
B0MOV A, 12H ; bank 0 中 12H 的数据送入 ACC
 例:从 ACC 中把 0x12 移入 RAM 中。
B0MOV 12H, A ; 把 bank0 中的 12H 从 ACC 中取出并保存在 RAM 中
2.2.3 间接寻址模式
通过数据指针寄存器(H/L,Y/Z)访问存储器。
 例:利用@HL 寄存器间接寻址。
B0MOV H, #0 ; 清 H,指向 bank 0.
B0MOV L, #12H ; 送入一个立即数 12H 到 L 寄存器。
B0MOV A, @YZ ; 用数据指针@HL 取得相应存储器中的数据 012H 中的数据送给 ACC
 例:利用@YZ 寄存器间接寻址。
B0MOV Y, #0 ; 清 Y,指向 bank 0.
B0MOV Z, #12H ; 送入一个立即数 12H 到 Z 寄存器。
B0MOV A, @YZ ; 用数据指针@YZ 取得相应存储器中的数据 012H 中的数据送给 ACC
SONiX TECHNOLOGY CO., LTD Page 25 Preliminary Version 0.3
Page 26

SN8P2604
8-Bit Micro-Controller
2.3 堆栈操作
2.3.1 概述
SN8P2604 共有 8 层堆栈。堆栈缓存器 STKnH 和 STKnL 在中断现场保护和恢复时用来存放程序计数器 PC 的
数据。堆栈指针 STKP 指示当前栈顶位置以便保护和恢复数据。
PCL
PCH
PCHPCH
PCLPCL
STKP + 1
STKP + 1
RET /
RETI
STKP - 1
STKP - 1STKP - 1
CALL /
interrupt
Stack Level
STKP = 7
STKP = 6
STKP = 5
STKP = 4
STKP = 3
STKP = 2
STKP = 1
STKP = 0
Stack Buffer High Byte
STKPSTKP
STK7H
STK6H
STK5H
STK4H
STK3H
STK2H
STK1H
STK0H
Stack Buffer Low Byte
STK7L
STK6L
STK5L
STKPSTKP
STK4L
STK3L
STK2L
STK1L
STK0L
SONiX TECHNOLOGY CO., LTD Page 26 Preliminary Version 0.3
Page 27

SN8P2604
8-Bit Micro-Controller
2.3.2 堆栈指针寄存器
堆栈指针 STKP 是一个 3 位的寄存器,用来指示堆栈栈顶位置,12 位的数据存储器(STKnH 和 STKnL)用来
存储程序计数器(PC)的值。
堆栈操作有两种,入栈(PUSH)和出栈(POP)。执行入栈(PUSH)操 作, STKP 就会减一,执行出栈(POP)
操作,STKP 就会加一。这样,STKP 总是指向栈顶位置。
执行 CALL 指令和响应中断时,程序计数器(PC)的值会被保存在堆栈中,堆栈操作遵循后进先出的原则。堆
栈指针寄存器(STKP)和缓冲器 STKnH、STKnL 位于 BANK0。
0DFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKP
读/写
复位后
STKPBn:堆栈指针 (n = 0 ~ 2)
GIE:全局中断控制位, 0 = 禁止,1 = 使能。详见中断章节。
 例:栈指针 (STKP)复位,我们强烈建议在程序的开始将堆栈指针清零。
MOV A, #00000111B
B0MOV STKP, A
0F0H~0FFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKnH
读/写
复位后
0F0H~0FFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKnL
读/写
复位后
STKn= <STKnH , STKnL> (n = 7 ~ 0)
GIE - - - - STKPB2 STKPB1 STKPB0
R/W - - - - R/W R/W R/W
0 - - - - 1 1 1
- - - - SnPC11 SnPC10 SnPC9 SnPC8
- - - - R/W R/W R/W R/W
- - - - 0 0 0 0
SnPC7 SnPC6 SnPC5 SnPC4 SnPC3 SnPC2 SnPC1 SnPC0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
SONiX TECHNOLOGY CO., LTD Page 27 Preliminary Version 0.3
Page 28

SN8P2604
8-Bit Micro-Controller
2.3.3 堆栈操作举例
程序调用指令(CALL)和中断都涉及到对堆栈指针 STKP 的操作和将程序计数器 PC 保存在堆栈缓冲区。在两
种操作中,堆栈指针 STKP 都会减 1 并指向下一个可用的堆栈区域,堆栈缓存器中则保存了程序指针。入栈保护操
作如下表所示:
堆栈层数
0
1
2
3
4
5
6
7
8
> 8
STKPB2 STKPB1 STKPB0
1 1 1 Free Free
1 1 0 STK0H STK0L
1 0 1 STK1H STK1L
1 0 0 STK2H STK2L
0 1 1 STK3H STK3L
0 1 0 STK4H STK4L
0 0 1 STK5H STK5L
0 0 0 STK6H STK6L
1 1 1 STK7H STK7L
1 1 0 - -
STKP
对应每个入栈操作,都有一个出栈操作来恢复程序计数器 PC 的值。RETI 指令用于中断服务程序中,RET 用于
子程序调用。出栈时,STKP 加 1 并指向下一个空闲堆栈缓存器。堆栈恢复操作如下表所示:
堆栈层数
8
7
6
5
4
3
2
1
0
STKPB2 STKPB1 STKPB0
1 1 1 STK7H STK7L
0 0 0 STK6H STK6L
0 0 1 STK5H STK5L
0 1 0 STK4H STK4L
0 1 1 STK3H STK3L
1 0 0 STK2H STK2L
1 0 1 STK1H STK1L
1 1 0 STK0H STK0L
1 1 1 Free Free
STKP
堆栈缓存器
高字节 低字节
堆栈缓存器
高字节 低字节
堆栈溢出,出错
说明
-
-
-
-
-
-
-
-
-
说明
-
-
-
-
-
-
-
-
-
SONiX TECHNOLOGY CO., LTD Page 28 Preliminary Version 0.3
Page 29

SN8P2604
8-Bit Micro-Controller
3
3
3
复位
3.1 概述
MCU 的复位方式有上电复位,外部复位和看门狗复位。当任何一种复位发生,系统复位并初始化系统寄存器。
复位后,系统进入普通模式。复位时序图如下:
VDD
Power
VSS
LVD 1.8V Detect
External Reset
Watchdog Reset
System Status
VDD
VSS
Watchdog Normal Run
Watchdog Stop
System Normal Run
System Stop
Power On
Delay Time
External Reset
Low Detect
External Reset High
Detect
External
Reset Delay
Time
Watchdog Overflow
Watchdog
Reset Delay
Time
3.2 上电复位
接通电源当电源从 VSS 上升到 VDD 时,系统就会复位,进入普通模式。上电到系统正常运行之间的这段时间
叫做“上电延迟时间”,系统会在系统延迟时间后正常运行。
VDD
3V 4MHz
5V 4MHz
3V 32768Hz
5V 32768Hz
晶振 上电延迟时间
大约 131ms
大约 66ms
大约 239ms
大约 174ms
SONiX TECHNOLOGY CO., LTD Page 29 Preliminary Version 0.3
Page 30

SN8P2604
8-Bit Micro-Controller
3.3 外部复位
外部复位引脚为施密特触发结构,当它设置为复位引脚时,就使能了外部复位功能。外部复位为低电平有效,
当复位引脚侦测到低电压(低于 0.3VDD)时,系统开始复位,直到侦测到的电压达到高电平(高于 0.7VDD)。用
户可以使用外部复位电路控制系统。
VDD
3V 4MHz
5V 4MHz
3V 32768Hz
5V 32768Hz
3.3.1 外部复位电路
外部复位电路就是一个简单的 RC 回路,如下所示:
晶振 外部复位延迟时间
大约 131ms
大约 66ms
大约 193ms
大约 127ms
20K ohm
0.1uF
R
C
R2 110
VDD
RST
VSS
DIODE
MCU
0.1uF
C
R
20K ohm
R2 110
VCC
GND
简单 RC 复位电路 添加二极管后的节电复位电路
VDD
RST
VSS
MCU
R2 110
VCC
GND
SONiX TECHNOLOGY CO., LTD Page 30 Preliminary Version 0.3
Page 31

SN8P2604
8-Bit Micro-Controller
3.4 看门狗复位
看门狗复位是对系统的一种保护。在正常情况下,系统可以可以通过程序对看门狗清零保证正常运行,但在错
误状态下,系统位于未知状态,在看门狗定时器溢出前无法由程序对看门狗清零。看门狗定时器溢出后,系统复位,
系统重启并进入普通模式。
VDD
3V 4MHz
5V 4MHz
3V 32768Hz
5V 32768Hz
晶振 看门狗复位延迟时间
大约 145ms
大约 73ms
大约 207ms
大约 127ms
3.5 低电压侦测(LVD)
LVD 为低电压侦测,当侦测到 VDD 低于设定值时,系统就会复位。低电压侦测的电压值为 1.8V,如果 VDD 低
于 1.8V,系统就会复位。如果 VDD 返回到 1.8V 以上,系统开始执行上电程序,在上电延迟时间结束后,系统开始
正常运行,这叫做 BROWN OUT 复位。在高干扰环境下,上电会有些不稳定,LVD 可以防止噪音影响系统工作。当
VDD 保持 1.8V 以上的电压时,系统就会保持稳定的工作状态;当 VDD 低于 1.8V 时,LVD 使系统复位并等待 VDD
返回到正常电压。LVD 复位延迟就是上电复位延迟时间。
Power
System Status
VDD
VSS
System Normal Run
System Stop
LVD 1.8V Detect
Power drops to < 1.8V
and system reset.
Power On
Delay
Time
SONiX TECHNOLOGY CO., LTD Page 31 Preliminary Version 0.3
Page 32

SN8P2604
8-Bit Micro-Controller
4
4
4
系统时钟
4.1 概述
SN8P2604 是具有高速时钟和低速时钟的双时钟微控制器。高速时钟是由外部振荡电路提供,而低速时钟则是
由内置低速 RC 振荡电路(ILRC 16KHz @3V, 32KHz @5V)提供。
高低速时钟均可作为系统时钟(Fosc)。
) 普通模式(高速时钟): Fcpu = Fosc/N,N = 1~8,N 由 Fcpu 编译选项选择。
) 低速模式(低速时钟): Fcpu = Fosc/4
4.2 时钟框图
Fcpu Code Option
Fcpu Code Option
÷1~ ÷8 Noise Filter Disable
÷1~ ÷8 Noise Filter Disable
÷4~ ÷8 Noise Filter Enable
÷4~ ÷8 Noise Filter Enable
Fosc
Fosc
Fosc
Fosc
CLKMD
CLKMD
Fcpu
Fcpu
XIN
XIN
XOUT
XOUT
STPHX
STPHX
STPHX
Fhosc.
Fhosc.
CPUM0[1:0]
CPUM0[1:0]
HOSC
HOSC
HOSC
Flosc.
Flosc.
z HOSC:High_Clk 编译选项
z Fhosc:外部高速时钟
z Flosc:内部低速 RC 时钟
÷4
÷4
SONiX TECHNOLOGY CO., LTD Page 32 Preliminary Version 0.3
Page 33

SN8P2604
8-Bit Micro-Controller
4.3 OSCM 寄存器
OSCM 寄存器是一个振荡器控制寄存器,它控制着振荡器的状态和系统模式。
0CAH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
OSCM
读/写
复位后
Bit1 STPHX:外部高速振荡器控制位
0 = 运行
1 = 停止,内部低速振荡器仍处于运行状态。
Bit2 CLKMD:系统高/低速模式控制位
0 = 普通模式(双重时钟),系统时钟为高速时钟。
1 = 低速模式,系统时钟为内部低速时钟
Bit[4:3] CPUM1, CPUM0:CPU 运行模式控制位。
00 = 普通模式
01 = 睡眠(省电)模式
10 = 绿色模式
11 = 保留
 例:停止高速振荡器
B0BSET FSTPHX ; 仅停止高速振荡器
 例:在省电模式下,高速振荡器和内部低速振荡器都停止。
B0BSET FCPUM0 ; 停止外部高速和内部低速振荡器进入省电(睡眠)模式
0 0 0 CPUM1 CPUM0 CLKMD STPHX 0
- - - R/W R/W R/W R/W -
- - - 0 0 0 0 -
SONiX TECHNOLOGY CO., LTD Page 33 Preliminary Version 0.3
Page 34

SN8P2604
8-Bit Micro-Controller
4.4 系统高速时钟
4.4.1 外部高速时钟
外部高速时钟有三种(晶体,RC和外部时钟信号)。高速振荡电路由编译选项的HIGH_CLK选项控制。
4.4.1.1 晶体振荡器
晶体振荡由 XIN,XOUT 引脚驱动。当使用高/一般/低的频率时,驱动电流是不一样的。HIGH_CLK 的编译选项
支持不同的频率。 高速:12M-option.(如:12M); 一般:4M-option (如:4M);低速:32k_option(如:32.768K)
20PF
CRYSTAL
20PF
晶体振荡器
VDD
XIN
XOUT
VSS
MCU
4.4.1.2 RC 振荡器
可以由 HIGH_CLK 选项中的 RC 选项来选择 RC 振荡器。RC 振荡器的频率可以达到 16M。建议改变“R”的值来
改变频率。“C”的大小一般为 50P~100P。P1.4 是 XOUT,为无上拉电阻的单向输入引脚。
R
C
VDD
XIN
XOUT
VSS
RC 振荡器
MCU
注:R 要尽可能地靠近 MCU 的 VDD.
注:C 要尽可能地靠近 MCU 的 VSS。
4.4.1.3 外部时钟输入
外部时钟输入做为系统时钟信号,由 HIGH_CLK 选项中的 RC 选项来选择。外部时钟输入信号由 XIN 引脚输入。
P1.4 为 XOUT,是无上拉电阻的单向输入引脚。
External Clock Input
外部时钟输入
注:外部振荡器电路的地线必须和微控制器的 Vss 引脚直接相连接。
VDD
XIN
XOUT
VSS
MCU
SONiX TECHNOLOGY CO., LTD Page 34 Preliminary Version 0.3
Page 35

SN8P2604
;
;
@@
;
;
@
8-Bit Micro-Controller
4.4.2 系统低速时钟
SN8P2604 内置内部低速振荡器,其时钟源由 RC 振荡电路提供。
) 系统低速时钟(Fcpu)= 内部低速时钟(16KHz @3V,32KHz @5V)/ 4
例:停止内部低速时钟。
B0BSET FCPUM0
; 停止外部高速和内部低速振荡器进入省电(睡眠)模式
注:内部低速时钟不能被单独停止,由 OSCM 寄存器的 CPUM0 位控制。
低速振荡器采用 RC 振荡电路,频率受系统电压和温度的影响。通常情况下,RC 振荡器的频率约为 16KHZ
(3V)、32KHZ(5V)。RC 频率和电压之间的关系如下图所示:
Internal RC vs. VDD
40
35
30
25
20
15
10
Fintrc (KHz)
5
0
1.80 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50
7.329
11.998
8.663
18.668
15.333
25.338
22.003
32.008
28.673
38.678
35.343
VDD (Volts)
 例:由 Fcpu 测试内部 RC 频率。 内部 RC 频率等于 4 倍的 Fcpu。我们可以从 Fcpu 得到内部 RC 的频率.
B0BSET P1M.0
设置 P1.0 为输出模式
B0BSET FCLKMD
进入内部低速模式
:
B0BSET P1.0
B0BCLR P1.0
JMP
B
在低速模式下输出频率信号
通过测量指令周期来测试频率
4.4.3 振荡器频率测试
在 RC 模式,用户可以由指令周期(Fcpu)来测试 Fosc 的周期。
 例:由测量指令周期来测量外部振荡器的周期
B0BSET P1M.0
@@:
B0BSET P1.0
B0BCLR P1.0
JMP @B
; 设置 P1.0 为输出模式
; 输出方波信号
; 通过测量指令周期来测试频率
注:不能直接由 XIN 测试 RC 频率;探针会影响 RC 的频率值。
SONiX TECHNOLOGY CO., LTD Page 35 Preliminary Version 0.3
Page 36

SN8P2604
8-Bit Micro-Controller
5
5
5
系统操作模式
5.1 概述
SN8P2604 具有低功耗的特性,能在 4 种不同的操作模式下相互转换。
z 普通模式
z 低速模式
z 省电模式(睡眠模式)
z 绿色模式
普通模式
普通模式下,系统时钟源是外部高速时钟。上电复位后,系统就在普通模式下运行。指令周期为 Fosc/4,当外
部高速振荡器的频率为 3.58MHz 时,指令周期就是 3.58MHz/4=895KHz。系统可以在普通模式下转入省电模式,低
速模式和绿色模式。
)
低速模式
低速模式时,系统时钟源为内部低速 RC 时钟。设置 CLKMD=1,系统就进入内部低速模式。低速模式下的运行
与普通模式一样(除了内部 RC 时钟),仅是时钟频率有所降低。系统可在低速模式下转入普通模式及低功耗的绿色
模式和省电模式。
) 绿色模式
绿色模式提供一个定时唤醒功能。用户可通过设置定时器 T0 来确定系统的唤醒时间。系统可以从普通模式和低
速模式进入绿色模式。普通模式下,T0 定时器的溢出时间非常短,而在低速模式下,其溢出时间则较长。用户可根
据具体的应用选择合适的模式。系统可以由 T0 定时器或由 P0、P1 的触发信号来唤醒。
) 省电模式
省电模式也称睡眠模式,系统进入睡眠状态后 MCU 停止工作。设 CPUM0=1,系统进入省电模式,外部高速和
内部低速振荡器均停止工作,P0、P1 的触发信号可将系统唤醒。
SONiX TECHNOLOGY CO., LTD Page 36 Preliminary Version 0.3
Page 37

SN8P2604
眠模式
8-Bit Micro-Controller
5.2 系统模式转换
省电模式
(
睡眠模式
P1,P0 口唤醒功能激活
外部复位激活
CPUM1, CPUM0 = 01
)
P1,P0 口唤醒功能激活
T0
外部复位激活
-
溢出激活
操作模式说明
模式 普通模式 低速模式 绿色模式
HX osc
LX osc
CPU
T0
TC1
看门狗定时器
内部中断 全部有效 全部有效
外部中断 全部有效 全部有效 全部有效 全部无效
系统唤醒
普通模式
CLKMD = 1
CLKMD = 0
CPUM1, CPUM0 = 10
低速模式
P1,P0 口唤醒功能激活
T0
溢出激活
-
-
绿色模式
. 外部复位激活
系统模式转换简图
省电模式
(睡
运行 由 STPHX 位决定 由 STPHX 位决定 停止
运行 运行 运行 停止
执行 执行 停止 停止
*有效 *有效 *有效 无效 *程序激活
*有效 *有效 无效 无效 *程序激活
Watch_Dog
Watch_Dog
- -
P0,P1,T0 复位 P0,P1 复位
Watch_Dog
T0
Watch_Dog
全部无效
)
Enable
Disable
Always_on
备注
SONiX TECHNOLOGY CO., LTD Page 37 Preliminary Version 03
Page 38

SN8P2604
;
;
;
;
;
;
@@
;
@
;
;
;
;
A
A
;
A
A
;
)
;
;
;
;
;
8-Bit Micro-Controller
5.2.1 系统模式转换
 例:普通/低速模式进入省电(睡眠)模式
B0BSET FCPUM0
注:系统在睡眠模式中,只有具有唤醒功能的引脚和复位引脚能够将系统唤醒。
 例:普通模式转换为低速模式
B0BSET FCLKMD
B0BSET FSTPHX
 例:低速模式转换为普通模式(外部高速振荡器仍然运行)
B0BCLR FCLKMD
 例:低速模式转换为普通模式(外部高速振荡器停止)
如果外部高速时钟停止时程序欲重新回到普通模式,就必须延迟至 10mS 以等待外部时钟稳定下来。
B0BCLR FSTPHX
B0MOV Z, #27
: DECMS Z
JMP
;
B0BCLR FCLKMD
 例:进入绿色模式并使能 T0 的唤醒功能
设置定时器 T0 的唤醒功能.
B0BCLR FT0IEN
B0BCLR FT0ENB
MOV
B0MOV T0M,
MOV
B0MOV T0C,
B0BCLR FT0IEN
B0BCLR FT0IRQ
进入绿色模式
B0BCLR FCPUM0
B0BSET FCPUM1
B0BSET FT0ENB
B
,#20H ;
,#74H
设置 CPUMx = 10
设置 CPUM0 = 1.
设置 CLKMD = 1, 进入低速模式
停止高速振荡器以省电
设置 CLKMD = 0
启动外部高速振荡器
若 VDD = 5V, 则内部 RC 的频率为 32KHz (典型值)
高速振荡器稳定时间 0.125ms X 81 = 10.125ms
进入普通模式
禁止 T0 中断
禁止 T0 计数
设置 T0 时钟源 = Fcpu / 64
设置 T0C 初始值=74H (设置 T0 定时间隔 = 10 ms
禁止 T0 中断
清 T0 中断请求标志
使能 T0 计数
注:若 T0ENB=0,T0 不能将系统从绿色模式唤醒进入普通/低速模式。
SONiX TECHNOLOGY CO., LTD Page 38 Preliminary Version 03
Page 39

SN8P2604
8-Bit Micro-Controller
5.3 唤醒时间
5.3.1 概述
外部高速振荡器从停止到运行需要一段时间的延迟,这段延迟时间对振荡器的稳定工作是必需的。在有些应用
中,高速时钟可能需要经常的开停。外部高速振荡器重新启动需要的这一延迟时间称为唤醒时间。
下面两种情况需要唤醒时间:一种是从省电模式转换到正常模式,另一种是从低速模式转换到普通模式。对前
一种情况,SN8P2604 提供了 4096 个振荡时钟作为唤醒时间,后一种情况需要用户自行计算唤醒时间。
5.3.2 唤醒时间
当系统处于省电(睡眠)模式时,外部高速振荡器停止运行。从睡眠模式唤醒时,SN8P2604 提供 4096 个外部
高速振荡周期作为唤醒时间,以使振荡电路达到稳定状态。唤醒时间结束后,系统进入正常模式,唤醒时间的计算
方法如下:
唤醒时间 = 1/Fosc×4096 (sec)+X’tal 稳定时间
X’tal 稳定时间决定于 X’tal 的类型,一般的,约为 2~4ms(4MHz 晶体振荡器)
 例:省电(睡眠)模式下,系统由 P0、P1 的触发信号唤醒。唤醒时间后,系统进入普通模式,P0、P1 唤醒功
能的唤醒时间如下:
唤醒时间=1/Fosc*4.96=1.14ms (Fosc=3.58MHz)
总的唤醒时间=1.14ms+X’tal 稳定时间
5.3.3 P1W 唤醒控制寄存器
省电(睡眠)模式下,具有唤醒功能的 P0 和 P1 都能将系统唤醒,P0 永远具有唤醒功能,而 P1 的唤醒功能受
寄存器 P1W 控制。当 P0 或 P1 口的电平发生变化就可产生唤醒信号。
0C0H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1W
读/写
复位后
Bit[5:0] P10W~P17W:P1 唤醒功能控制位
0=禁止 P1n 唤醒功能
1=使能 P1n 唤醒功能
P17W P16W P15W P14W P13W P12W P11W P10W
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
SONiX TECHNOLOGY CO., LTD Page 39 Preliminary Version 03
Page 40

SN8P2604
8-Bit Micro-Controller
6
6
6
中断
6.1 概述
SN8P2604 有 4 个中断源:两个内部中断源(T0/TC1),一个外部中断源(INT0/INT1)。外部中断能够唤醒
睡眠模式进入高速模式。当系统进入到中断服务程序时,全局中断控制位 GIE 清零,系统退出中断服务后,GIE 被
置为“1”以准备响应下一个中断请求。所有的中断请求存放于 INTRQ 中,用户可通过程序设置中断优先级。
INTEN Interrupt enable register
INTEN Interrupt enable register
T0IRQ
T0 time out
T0 time out
TC1 time out
TC1 time out
INT0 trigger
INT0 trigger
INT1 trigger
INT1 trigger
INTRQ
INTRQ
4-bit
4-bit
Latchs
Latchs
T0IRQ
TC1IRQ
TC1IRQ
P00IRQ
P00IRQ
P01IRQ
P01IRQ
INTEN Interrupt enable register
INTEN Interrupt enable register
Interrupt
Interrupt
enable
enable
gating
gating
Interrupt vector address (0008H)
Interrupt vector address (0008H)
Global interrupt request signal
Global interrupt request signal
T0 time out
T0 time out
TC0 time out
TC0 time out
INT0 trigger
INT0 trigger
注:GIE 使能后,才能响应各中断。
INTRQ
INTRQ
3-bit
3-bit
Latchs
Latchs
T0IRQ
T0IRQ
TC0IRQ
TC0IRQ
P00IRQ
P00IRQ
Interrupt
Interrupt
enable
enable
gating
gating
Interrupt vector address (0008H)
Interrupt vector address (0008H)
Global interrupt request signal
Global interrupt request signal
SONiX TECHNOLOGY CO., LTD Page 40 Preliminary Version 03
Page 41

SN8P2604
8-Bit Micro-Controller
6.2 INTEN 中断使能寄存器
INTEN 为中断使能控制寄存器,包括内部中断和外部中断的控制位。INTEN 的某位被置“1”, 则相对应的中断
请求便能够被响应。一旦有中断发生,程序将跳至 ORG 8 处执行中断服务程序。当执行到中断服务返回指令(RETI)
时,将退出中断程序。
0C9H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTEN
读/写
复位后
Bit0
Bit1
Bit4
Bit6
- TC1IEN - T0IEN - - P01IEN P00IEN
- R/W - R/W - - R/W R/W
- 0 - 0 - - 0 0
P00IEN:外部 P0.0 中断(INT0)控制位
0=禁止 INT0 中断功能
1=使能 INT0 中断功能
P01IEN:外部 P0.1 中断(INT1)控制位
0=禁止 INT1 中断功能
1=使能 INT1 中断功能
T0IEN:定时器 T0 中断控制位
0=禁止 T0 中断功能
1=使能 T0 中断功能
TC1IEN:定时器 TC1 中断控制位
0=禁止 TC1 中断功能
1=使能 TC1 中断功能
6.3 INTRQ 中断请求寄存器
INTRQ 为中断请求寄存器,包含了所有的中断请求标志,当有中断发生时,INTRQ 寄存器中的相应位会置为“1”。
中断请求标志需要用软件清零。用户通过检查中断请求寄存器可以知道中断的种类,从而执行相应的中断服务程序。
0C8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTRQ
读/写
复位后
Bit0
Bit1
Bit4
Bit6
- TC1IRQ - T0IRQ - - P01IRQ P00IRQ
- R/W - R/W - - R/W R/W
- 0 - 0 - - 0 0
P00IRQ:外部 P0.0 中断(INT0)请求位
0=无 INT0 中断请求
1=请求 INT0 中断
P01IRQ:外部 P0.1 中断(INT1)请求位
0=无 INT1 中断请求
1=请求 INT1 中断
T0IRQ:定时器 T0 中断控制位
0=无 T0 中断请求
1=请求 T0 中断
TC1IRQ:定时器 TC1 中断控制位
0=无 TC1 中断请求
1=请求 TC1 中断
SONiX TECHNOLOGY CO., LTD Page 41 Preliminary Version 03
Page 42

SN8P2604
8-Bit Micro-Controller
6.4 中断操作举例
6.4.1 总中断操作
GIE 是总中断控制位。所有的中断在 GIE 使能的前提下才能够得到响应。一旦有中断请求发生,程序计数器 PC
指向中断向量地址(ORG 8),堆栈层数加 1。
GIE 是总中断控制位。所有的中断在 GIE 使能的前提下才能够得到响应。一旦有中断请求发生,程序计数器 PC
指向中断向量地址(ORG 8),堆栈层数加 1。
0DFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
STKP
读/写
复位后
Bit7 GIE:全局中断控制位。
B0BSET FGIE
GIE - - - - STKPB2 STKPB1 STKPB0
R/W - - - - R/W R/W R/W
0 - - - - 1 1 1
0=禁止
1=使能
 例:设置全局中断控制位(GIE)
总中断使能
注:GIE 必须使能,所有中断才能被响应。
6.4.2 PUSH, POP 程序
中断发生时,系统跳到 ORG 8 处执行中断服务程序,此时必须保存 ACC、PFLAG 的值,用 PUSH,POP 指令
进入/退出中断服务程序。在中断服务程序完成后,用 PUSH,POP 指令保存/恢复 ACC,PFLAG 以避免主程序出错。
 例:在中断服务程序发生时由指令 PUSH,POP 保存 ACC 和 PFLAG 的值。
ORG 0
JMP START
ORG 8
JMP INT_SERVICE
ORG 10H
START:
…
INT_SERVICE:
RETI
…
ENDP
PUSH
.
.
POP
; 保存 ACC 和 PFLAG
; 恢复 ACC 和 PFLAG
; 中断返回
SONiX TECHNOLOGY CO., LTD Page 42 Preliminary Version 03
Page 43

SN8P2604
A
A
;
;
;
;
;
_
_
;
;
_
;
;
;
_
;
;
8-Bit Micro-Controller
6.4.3 INT0(P0.0)中断
当 INT0 中断发生时,不管 P00IEN 是否使能,P00IRQ 都会置“1”。若 P00IEN=1,且 P00IRQ=1,那么系统就
进入中断向量地址(ORG 8)执行中断服务程序。但若 P00IEN=0,不管 P00IRQ 是否等于 1,系统都不进入中断。
用户应注意多种中断下的处理。
注:P0.0 的中断触发的方式由 PEDGE 寄存器控制。
0BFH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PEDGE
读/写
复位后
Bit[4:3] P00G[1:0]: P0.0 中断触发边沿控制位:
 例:INT0 中断请求,双边沿触发。
MOV
B0MOV PEDGE,
B0BSET FP00IEN
B0BCLR FP00IRQ
B0BSET FGIE
 例:INT0 中断服务程序
ORG 8
JMP INT
INT
SERVICE:
PUSH
B0BTS1 FP00IRQ
JMP EXIT
B0BCLR FP00IRQ
. .
INT:
EXIT
POP
RETI
- - - P00G1 P00G0 - - -
- - - R/W R/W - - -
- - - 1 0 - - -
00=保留
01=上升沿
10=下降沿
11=上升/下降沿双向(改变电平)
, #18H
设置 INT0 中断触发为双向触发
INT0 中断使能
清 INT0 中断请求标志
总中断使能
中断向量地址
SERVICE
保存ACC 和 PFLAG
判断是否有外部中断请求
INT
P00IRQ=1,退出中断
清中断标志
中断服务程序
恢复ACC 和 PFLAG
中断返回
SONiX TECHNOLOGY CO., LTD Page 43 Preliminary Version 03
Page 44

SN8P2604
8-Bit Micro-Controller
6.4.4 INT1(P0.1)中断操作
当 INT1 中断发生时,不管 P01IEN 是否使能,P01IRQ 都会置“1”。若 P01IEN=1,且 P01IRQ=1,那么系统就
进入中断向量地址(ORG 8)执行中断服务程序。但若 P01IEN=0,不管 P01IRQ 是否等于 1,系统都不进入中断。
用户应注意多种中断下的处理。
注:P0.1 由下降沿触发中断。
 例:初始化 INT1
B0BSET FP01IEN
B0BCLR FP01IRQ
B0BSET FGIE
 例:INT1 中断服务。
ORG 8
JMP INT_SERVICE
INT_SERVICE:
PUSH
B0BTS1 FP01IRQ
JMP EXIT_INT ;
B0BCLR FP01IRQ
. .
. .
EXIT_INT:
POP
RETI
; INT1 中断使能
; 清 INT1 中断请求
; 总中断使能
; 中断向量地址
; 保存 ACC 和 PFLAG 的值
; 判断是否有外部中断请求
; 清中断标志
; INT1 中断服务程序
; 恢复 ACC 和 PFLAG
; 中断返回
SONiX TECHNOLOGY CO., LTD Page 44 Preliminary Version 03
Page 45

SN8P2604
8-Bit Micro-Controller
6.4.5 T0 中断操作
当 T0C 计数器溢出,无论 T0IEN 是否使能,T0IRQ 都会置“1”。若 T0IEN=1,且 T0IRQ =1,那么系统就进入
中断向量地址(ORG 8)执行中断服务程序。若 T0IEN =0,不管 T0IRQ 是否等于 1,系统都不进入中断。用户应注
意多种中断下的处理。
 例:初始化 T0
B0BCLR FT0IEN
B0BCLR FT0ENB
MOV A, #20H ;
B0MOV T0M, A
MOV A, #74H
B0MOV T0C, A
B0BCLR FT0IRQ
B0BSET FT0IEN
B0BSET FT0ENB
B0BSET FGIE
¾ 注:避免错误的响应中断,在设置定时/计数器中断时必须先清除定时/计数器的中断请求标志位 T0IRQ,再开
放中断和定时/计数器,如上例。
 例:T0 中断服务程序
ORG 8
JMP INT_SERVICE
INT_SERVICE:
PUSH
B0BTS1 FT0IRQ
JMP EXIT_INT ;
B0BCLR FT0IRQ
MOV A, #74H
B0MOV T0C, A
. .
. .
EXIT_INT:
POP
RETI
; 禁止 T0 中断
; 停止 T0 计数
; 设置定时模式 Fcpu / 64
; 设置时间常数
; 定时中断为 10 ms
; 清 T0 中断请求标志
; 使能 T0 中断
; 开始 T0 计数
; 使能总中断
; 中断向量地址
; 保存 ACC 和 PFLAG
; 检查是否是 T0 中断请求
; 清 T0 中断标志
; 重新装载时间常数
; T0 中断服务程序
; 恢复 ACC 和 PFLAG
; 中断返回
SONiX TECHNOLOGY CO., LTD Page 45 Preliminary Version 03
Page 46

SN8P2604
8-Bit Micro-Controller
6.4.6 TC1 中断操作
当计数器 TC1C 溢出时,无论 TC1IEN 是否使能,TC1IRQ 都会置“1”。若 TC1IEN =1,且 TC1IRQ =1,那么 系
统就进入中断向量地址(ORG 8)执行中断服务程序。若 TC1IEN =0,不管 TC1IRQ 是否等于 1,系统都不进入中
断。用户应注意多种中断下的处理。
 例:初始化 TC1
B0BCLR FTC1IEN
B0BCLR FTC1ENB
MOV A, #20H ;
B0MOV TC1M, A
MOV A, #74H
B0MOV TC1C, A
B0BCLR FTC1IRQ
B0BSET FTC1IEN
B0BSET FTC1ENB
B0BSET FGIE
¾ 注:避免错误的响应中断,在设置定时/计数器中断时必须先清除定时/计数器的中断请求标志位 TC1IRQ,再开
放中断和定时/计数器,如上例。
 例:TC1 中断服务
ORG 8
JMP INT_SERVICE
INT_SERVICE:
PUSH
B0BTS1 FTC1IRQ
JMP EXIT_INT ;
B0BCLR FTC1IRQ
MOV A, #74H
B0MOV TC1C, A
. .
EXIT_INT:
POP
RETI
; 禁止 TC1 中断
; 停止 TC1 计数
; 设置 TC1 定时模式 Fcpu / 64
; 设置 TC1 的初始值 = 74H
; 定时中断为 10 ms
; 清 TC1 中断请求标志
; 使能 TC1 中断
; 开始 TC1 计数
; 使能总中断
; 中断向量地址
; 保存 ACC 和 PFLAG
; 检查是否是 TC1 中断请求
; 清 TC1 中断标志
; 重新装载时间常数
; TC1 中断服务程序
; 恢复 ACC 和 PFLAG
; 中断返回
SONiX TECHNOLOGY CO., LTD Page 46 Preliminary Version 03
Page 47

SN8P2604
8-Bit Micro-Controller
6.4.7 多个中断操作
大部分情况下,用户需要同时处理多个中断。处理多个中断就需要设置中断的优先权。中断请求由不同的事件
控制,但是,有中断请求并不意味着系统就会去执行中断服务程序。不管中断是否使能,都可触发中断请求,一旦
有中断发生,相应的中断请求标志就会被置为“1”。各中断与对应的触发事件关系如下表所示:
中 断 触 发 信 号
P00IRQ
P01IRQ
T0IRQ
TC1IRQ
在处理多中断请求下,用户必须对各中断进行优先权的设置,并根据 IEN 和 IRQ 的状态决定系统是否响应中断
请求。用户必须在中断向量里检查中断控制位和中断请求标志位。
 例: 在多中断情况下,检查是否响应各中断请求
ORG 8
NOP
PUSH
INTP00CHK:
B0BTS1 FP00IEN
JMP INTTC0CHK
B0BTS0 FP00IRQ
JMP INTP00
INTP01CHK:
B0BTS1 FP01IEN
JMP INTT0CHK
B0BTS0 FP01IRQ
JMP INTP01
INTT0CHK:
B0BTS1 FT0IEN
JMP INTTC0CHK
B0BTS0 FT0IRQ
JMP INTT0
INTTC0CHK:
B0BTS1 FTC1IEN
JMP INT_EXIT
B0BTS0 FTC1IRQ
JMP INTTC1
INT_EXIT:
POP
RETI
由 PEDGE 寄存器控制 P0.0 触发
P0.1 下降沿触发
T0C 溢出
TC1C 溢出
; 中断向量地址
; ORG 8 处的第一条指令
; 保存 ACC 和 PFLAG
; 检查是否有 INT0 中断
; 检查是否允外部中断 0
; 跳转到下一个中断
; 检测是否有外部中断 0 的请求
; 跳转到 INT0 的中断服务程序
; 检查是否有 INT1 中断
; 检查是否允许外部 INT1 中断
; 跳转到下一个中断
; 检测是否有外部中断 INT1 的请求
; 跳转到 INT1 的中断服务程序
; 检查是否有 T0 中断
; 检查是否允 T0 中断
; 跳转到下一个中断
; 检测是否有 T0 中断请求
; 跳转到 T0 中断服务程序
; 检查是否有 TC1 中断
; 检查是否允 TC1 中断
; 中断返回
; 检测是否有 TC1 中断请求
; 跳转到 TC1 中断服务程序
; 恢复 ACC 和 PFLAG
; 中断返回
SONiX TECHNOLOGY CO., LTD Page 47 Preliminary Version 03
Page 48

SN8P2604
8-Bit Micro-Controller
7
7
7
I/O 端口
7.1 I/O 端口模式
寄存器 PnM 控制端口的输入输出方向,大部分端口均为双向(输入输出)模式。
0B8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0M
读/写
复位后
0C1H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1M
读/写
复位后
0C2H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P2M
读/写
复位后
0C5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5M
读/写
复位后
Bit[7:0] PnM[7:0]: Pn 模式控制位 (n = 0~5).
0 = Pn为输入模式.
1 = Pn 为输出模式
注:
 例:输入/输出模式选择
CLR P0M
CLR P2M
CLR P1M
CLR P5M
MOV A, #0FFH
B0MOV P0M, A
B0MOV P1M, A
B0MOV P2M,A
B0MOV P5M, A
B0BCLR P1M.2
B0BSET P1M.2
- - - - - - P01M P00M
- - - - - - R/W R/W
- - - - - - 0 0
P17M P16M P15M P14M P13M P12M P12M P10M
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
P27M P26M P25M P24M P23M P22M P22M P20M
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
- - - P54M P53M P52M P51M P50M
- - - R/W R/W R/W R/W R/W
- - - 0 0 0 0 0
1. 用户可用位操作指令(B0BSET, B0BCLR)对它们进行操作。
2. P0.2 是单向输入引脚,故 P0M.2 = 1。
; 设置为输入模式
; 设置为输出模式
; 设置 P1.2 为输入模式
; 设置 P1.2 为输出模式
SONiX TECHNOLOGY CO., LTD Page 48 Preliminary Version 0.2
Page 49

SN8P2604
8-Bit Micro-Controller
7.2 I/O 上拉电阻寄存器
0E0H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0UR
读/写
复位后
0E1H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1UR
读/写
复位后
0E2H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P2UR
读/写
复位后
0E5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5UR
读/写
复位后
- - - - - - P01R P00R
- - - - - - W W
- - - - - - 0 0
P17R P16R P15R P14R P13R P12R P11R P10R
W W W W W W W W
0 0 0 0 0 0 0 0
P27R P26R P25R P24R P23R P22R P21R P20R
W W W W W W W W
0 0 0 0 0 0 0 0
- - - P54R P53R P52R P51R P50R
- - - W W W W W
- - - 0 0 0 0 0
注:P0.2 是单向输入引脚,无上拉电阻。故 P0UR.2 = 1。
 例:I/O 上拉电阻寄存器
MOV A, #0FFH
B0MOV P0UR, A ;
B0MOV P1UR, A
B0MOV P2UR,A
B0MOV P5UR, A
; 使能 P0、P1、P2、P5 口的上拉电阻
SONiX TECHNOLOGY CO., LTD Page 49 Preliminary Version 0.2
Page 50

SN8P2604
8-Bit Micro-Controller
7.3 I/O 漏极开路寄存器
SN8P2604 的 P1.0、P1.1 具有内置开漏功能,当使能开漏功能时,P1.0、P1.1 必须设置为输出模式。开漏外
部电路如下所示:
MCU1
U
Pull-up Resistor
Open-drain pin Open-drain pin
上拉电阻驱动开漏电路输出高电平,MCU 的引脚则使其输出低电平。
0E9H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1OC
读/写
复位后
Bit 0 P10OC: P10 开漏控制位
0=禁止漏极开路模式
1=使能漏极开路模式
Bit 1 P11OC: P11 开漏控制位
0=禁止漏极开路模式
1=使能漏极开路模式
 例:使能 P1.0 为开漏模式并输出高电平。
B0BSET P1.0 ;
B0BSET P10M
MOV A, #01H
B0MOV P1OC, A
- - - - - - P11OC P10OC
- - - - - - W W
- - - - - - 0 0
VCC
; 使能 P1.0 的输出模式
; 使能 P1.0 的开漏功能
MCU2
U
注:P1OC 是只写寄存器,必须用“MOV”指令设置 P10OC。
 例:禁止 P1.0 的开漏功能,输出低电平。
MOV A, #0
B0MOV P1OC, A
注:禁止 P1.0 的开漏功能后,P1.0 返回到上一个 I/O 模式。
; 禁止 P1.0 的开漏功能
SONiX TECHNOLOGY CO., LTD Page 50 Preliminary Version 0.2
Page 51

SN8P2604
8-Bit Micro-Controller
7.4 I/O 口数据寄存器
0D0H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P0
读/写
复位后
0D1H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P1
读/写
复位后
0D2H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P2
读/写
复位后
0D5H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
P5
读/写
复位后
- - - - - P02 P01 P00
- - - - - R R/W R/W
- - - - - 0 0 0
P17 P16 P15 P14 P13 P12 P11 P10
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
P27 P26 P25 P24 P23 P22 P21 P20
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
P57 P56 P55 P54 P53 P52 P51 P50
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
当选择外部复位功能时,P02 保持为“1”
 例:从输入端读取数据
B0MOV A, P0
B0MOV A, P1
B0MOV A, P2
B0MOV A, P5
 例:写数据到输出端
MOV A, #0FFH
B0MOV P0, A
B0MOV P1, A
B0MOV P2, A
B0MOV P5, A
 例:写 1-bit 的数据到输出端口
B0BSET P1.3
B0BSET P5.5
B0BCLR P1.3
B0BCLR P5.5
; 读 P0 口的数据
; 读 P1 口的数据
; 读 P2 口的数据
; 读 P5 口的数据
; 所有端口写 FFH
; 置 P1.3 和 P5.5 为“1”
; 置 P1.3 和 P5.5 为“0”
SONiX TECHNOLOGY CO., LTD Page 51 Preliminary Version 0.2
Page 52

SN8P2604
8-Bit Micro-Controller
8
8
8
定时器
8.1 看门狗定时器
看门狗定时器(WDT)是一个二进制加 1 计数器,用来监控程序的运行状态,如果程序由于干扰进入未知状态,
看门狗定时器将溢出,使微控制器复位。看门狗定时器的时钟由编译选项控制,其时钟源为内部低速振荡器(16K
@3V,32K @5V)。
看门狗溢出时间=8192/内部低速振荡器(sec)
VDD
3V 16KHz 512ms
5V 32KHz 256ms
注:
1. 如果看门狗选择“Always_On”模式,则即使在睡眠模式或绿色模式下,看门狗仍然运行。
2. 在 S8KD ICE 仿真时,必须用宏指令“@RST_WDT”清看门狗定时器,否则 S8KD 看门狗会出错。
看门狗定时器的清零由 WDTR 寄存器控制,写入 0x5A 到 WDTR 使看门狗定时器复位。
0CCH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
WDTR
读/写
复位后
 例:下面是看门狗定时器的操作,在程序的开始将看门狗定时计数器清零。
Main:
. .
CALL SUB1
CALL SUB2
. .
. .
JMP MAIN
 例:用宏指令@RST_WDT 将看门狗定时器清零。
Main:
@RST_WDT
. .
CALL SUB1
CALL SUB2
. .
. .
JMP MAIN
WDTR7 WDTR6 WDTR5 WDTR4 WDTR3 WDTR2 WDTR1 WDTR0
W W W W W W W W
0 0 0 0 0 0 0 0
MOV A,#5AH
B0MOV WDTR,A
内部低速 RC 频率 看门狗溢出时间
; 清看门狗计数器
; 清看门狗计数器
SONiX TECHNOLOGY CO., LTD Page 52 Preliminary Version 0.5
Page 53

SN8P2604
8-Bit Micro-Controller
8.2 定时器 T0
8.2.1 概述
基本定时器 T0 是一个 8 位二进制加一计数器,由寄存器 T0M 选择 T0C 的输入时钟。当 T0 溢出 (从 FFH 至
00H)时,产生一个信号触发 T0 中断。T0 基本定时器的功能如下:
T0 的主要功能如下:
) 8 位可编程定时器:根据所选的时钟频率,定时发出中断请求信号。
) 绿色模式唤醒功能:T0ENB=1,T0 定时器溢出使系统从绿色模式返回到上一个操作模式。
T0rate
T0enb
Internal data bus
pre_load
Fcpu
T0C 8-bit binary counter
T0 Time out
8.2.2 T0M 模式寄存器
0D8H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
T0M
读/写
复位后
Bit[6:4] T0RATE2~T0RATE0:T0 内部时钟选择位。
Bit7 T0ENB:T0 计数器控制位。
T0ENB T0rate2 T0rate1 T0rate0 - - - -
R/W R/W R/W R/W - - - -
0 0 0 0 - - - -
000 = fcpu/256,
001 = fcpu/128
, …,
110 = fcpu/4,
111 = fcpu/2。
0 = 禁止,
1 = 使能。
SONiX TECHNOLOGY CO., LTD Page 53 Preliminary Version 0.5
Page 54

SN8P2604
p
)
)
8-Bit Micro-Controller
8.2.3 T0C 计数寄存器
T0C 是一个 8 位计数寄存器。
0D9H Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
T0C
读/写
复位后
T0 基本时间常数表
T0RATE T0CLOCK
000 fcpu/256 73.2 ms 286us 8000 ms 31.25 ms
001 fcpu/128 36.6 ms 143us 4000 ms 15.63 ms
010 fcpu/64 18.3 ms 71.5us 2000 ms 7.8 ms
011 fcpu/32 9.15 ms 35.8us 1000 ms 3.9 ms
100 fcpu/16 4.57 ms 17.9us 500 ms 1.95 ms
101 fcpu/8 2.28 ms 8.94us 250 ms 0.98 ms
110 fcpu/4 1.14 ms 4.47us 125 ms 0.49 ms
111 fcpu/2 0.57 ms 2.23us 62.5 ms 0.24 ms
T0C 初始值的计算方法如下:
 例:3.58MHZ 高速模式下,设 TC0 的时间间隔为 10ms。 TC0C (74H) = 256 - (10ms×fcpu/64)
T0C7 T0C6 T0C5 T0C4 T0C3 T0C2 T0C1 T0C0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
高速模式 Fc
最大溢出间隔时间 单步间隔时间= max/256 最大溢出间隔时间 单步间隔时间= max/256
T0C 初始值=256 -(T0 中断间隔时间×输入时钟)
初始值 = 256 - (TC0 中断间隔时间×输入时钟)
= 256 - (10ms×3.58×10
= 256 - (10
= 116
= 74H
-2
u = 3.58MHz / 4
6
÷4÷64)
×3.58×106÷4÷64)
低速模式 Fcpu = 32768Hz / 4
SONiX TECHNOLOGY CO., LTD Page 54 Preliminary Version 0.5
Page 55

SN8P2604
8-Bit Micro-Controller
8.2.4 T0 操作流程
T0 定时器就是一个定时器中断,设置 T0 的操作流程如下:
) T0 定时器停止计数,禁止 T0 的中断功能并清 T0 的中断请求标志。
程序 注释
B0BCLR FT0ENB
B0BCLR FT0IEN
B0BCLR FT0IRQ
) 设置 T0 定时器的速率。若使能 T0 的 RTC 功能,就不用设置 T0 的速率。
程序 注释
MOV A, #00H
B0MOV T0M, A
) 设置 T0 定时器的功能模式
程序 注释
B0BSET FT0IEN
) 设置 T0 的间隔时间。若使能 T0 的 RTC 功能,则不设置 T0C。
程序 注释
MOV A, #7FH
B0MOV T0C, A
) 使能 T0 定时器
程序 注释
B0BSET FT0ENB
T0 定时器停止
禁止 T0 中断功能
清 T0 中断请求标志
T0 的速率由 T0M 的第 4~6 位控制,范围为 00h~70h
使能 T0 中断功能
设置 T0 的间隔时间
使能 T0 定时器计数
SONiX TECHNOLOGY CO., LTD Page 55 Preliminary Version 0.5
Page 56

SN8P2604
8-Bit Micro-Controller
8.3 定时/计数器 TC1
8.3.1 概述
TC1 是一个二进制定时器/计数器,利用 TC1M 寄存器从 Fcpu 或者外部 INT1 引脚(下降沿触发)选择 TC1C
的时钟源,以进行精确的计时/计数。如果 TC1 溢出(从 FFH 到 00H),TC1 将继续计数并产生溢出触发信号,请
求 TC1 中断服务。
TC1 定时器的主要功能如下:
¾ 8 位可编程定时器:根据设定的时钟频率,产生定时中断。
¾ 外部事件计数器:在 INT1 输入引脚端,用外部时钟信号的下降沿记录系统“事件”。
¾ BUZZER 输出
¾ PWM 输出
TC1out
TC1out
PWM1OUT
PWM1OUT
P5.3
P5.3
Fcpu
Fcpu
TC1rate
TC1rate
TC1cks
TC1cks
TC1enb
TC1enb
TC1R reload
TC1R reload
data buffer
data buffer
load
load
Aload1
Aload1
Compare
Compare
Internal P5.3 I/O circuit
Internal P5.3 I/O circuit
Auto. reload
Auto. reload
R
R
S
S
Buzzer
Buzzer
÷2
÷2
PWM
PWM
INT1
INT1
(schmitter trigger)
(schmitter trigger)
CPUM0
CPUM0
TC1C
TC1C
8-bit binary counter
8-bit binary counter
TC1 Time out
TC1 Time out
8.3.2 TC1M 模式寄存器
0DCH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1M
读/写
复位后
Bit0 PWM1OUT:PWM 输出控制位。
Bit1 TC1OUT:TC1 溢出信号输出控制位。仅在 PWM1OUT=0 时有效。
0 = 禁止,P5.3 为基本输入/输出端
1 = 使能,P5.3 为 TC1OUT 信号的输出端。
Bit2 ALOAD1:自动加载控制位。仅在 PWM1OUT=0 时有效。
Bit3 TC1CKS:TC1 时钟源选择位。
Bit[6:4] TC1RATE2~TC1RATE0:TC1 内部时钟选择位。
Bit7 TC1ENB:TC1 计数器控制位。
TC1ENB TC1rate2 TC1rate1 TC1rate0 TC1CKS ALOAD1 TC1OUT PWM1OUT
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
0 = 禁止 PWM 输出
1 = 使能 PWM 输出,PWM 占空比由 TC1OUT、ALOAD1 控制。
0 = 禁止
1 = 使能
0 = 内部时钟(Fcpu)
1 = 来自 INT1/P0.1 引脚的外部时钟
000 = fcpu/256
001 = fcpu/128
…
110 = fcpu/4
111 = fcpu/2
0 = 禁止
1 = 使能
注:当 TC1CKS=1,TC1 就是一个外部事件计数器,P01IRQ 始终为 0。
SONiX TECHNOLOGY CO., LTD Page 56 Preliminary Version 0.5
Page 57

SN8P2604
8-Bit Micro-Controller
8.3.3 TC1C 计数寄存器
TC1C 是 8 位计数寄存器,用来控制 TC1 的间隔时间。
0DDH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1C
读/写
复位后 0
定时/计数器 TC1 的间隔时间表
TC1 速率 TC1 时钟
000 fcpu/256 73.2 ms 286us 8000 ms 31.25 ms
001 fcpu/128 36.6 ms 143us 4000 ms 15.63 ms
010 fcpu/64 18.3 ms 71.5us 2000 ms 7.8 ms
011 fcpu/32 9.15 ms 35.8us 1000 ms 3.9 ms
100 fcpu/16 4.57 ms 17.9us 500 ms 1.95 ms
101 fcpu/8 2.28 ms 8.94us 250 ms 0.98 ms
110 fcpu/4 1.14 ms 4.47us 125 ms 0.49 ms
111 fcpu/2 0.57 ms 2.23us 62.5 ms 0.24 ms
TC1C 的初始值计算如下:
 例: 3.58MHZ 高速模式下,设 TC1 的时间间隔为 10ms。TC1C (74H) = 256- (10ms×fcpu÷64)。Fcpu=Fosc/4。
TC1C7 TC1C6 TC1C5 TC1C4 TC1C3 TC1C2 TC1C1 TC1C0
R/W R/W R/W R/W R/W R/W R/W R/W
0 0 0 0 0 0 0 0
高速模式(fcpu = 3.58MHz) 低速模式(fcpu = 32768Hz)
最大溢出间隔时间 单步间隔时间 = max/256 最大溢出间隔时间 单步间隔时间 = max/256
表 8-2 TC1 时间表
TC1C 初始值=256-(TC1 中断间隔时间×输入时钟)
TC1C 初始值 =256- (TC1 中断间隔时间×输入时钟)
=256- (10ms×3.58×10
=256- (10
=116
=74H
-2
×3.58×106÷4÷64)
6
÷4÷64)
SONiX TECHNOLOGY CO., LTD Page 57 Preliminary Version 0.5
Page 58

SN8P2604
A
有效值
的边界类型
备注
每
每
每
每
每
读/写
复位后
8-Bit Micro-Controller
8.3.4 TC1C 溢出时间
TC1 的溢出时间有两种(PWM 模式和无 PWM 模式)。无 PWM 模式,其溢出边界为 0~255;PWM 模式,溢
出边界包括四种(0~16,0~32,0~64,0~255),由 TC1M 寄存器的 TC1OUT,ALOAD1 位控制。
TC1C 溢出时间列表
PWM1
0 x x 0x00~0xFF 00000000b~11111111b
1 0 0 0x00~0xFF 00000000b~11111111b
1 0 1 0x00~0x3F xx000000b~xx111111b
1 1 0 0x00~0x1F xxx00000b~xxx11111b
1 1 1 0x00~0x0F xxxx0000b~xxxx1111b
LOAD1 TC1OUT TC1C
TC1C
计数 256次溢出
计数 256次溢出
计数 64次溢出
计数 32次溢出
计数 16次溢出
8.3.5 TC1R 自动装载寄存器
TC1 的自动装载功能由 TC1M 的 ALOAD1 位控制,当 TC1C 溢出时,TC1R 的值装载到 TC1C 中。易于产生一
个精确时间,在中断发生时用户不需重置复位 TC1C。
注:在 PWM 模式下,自动使能自动装载功能,ALOAD1 位选择溢出的边界。
0DEH Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TC1R
TC1R 初始值的计算如下:
 例:设 Fosc=3.58MHz,时间间隔为 10ms。TC1R(74H) = 256- (10ms*fcpu/64)。Fcpu=Fosc/4
TC1R7 TC1R6 TC1R5 TC1R4 TC1R3 TC1R2 TC1R1 TC1R0
W W W W W W W W
0 0 0000 0 0
TC1R 初始值 = N -(TC1 间隔时间*输入时钟)
TC0R 初始值 = 256 - (TC0 中断间隔时间 * 输入时钟)
= 256 - (10ms * 3.58 * 10
= 256 - (10
= 116
= 74H
-2
* 3.58 * 10
6
/ 4 / 64)
6
/ 4 / 64)
SONiX TECHNOLOGY CO., LTD Page 58 Preliminary Version 0.5
Page 59

SN8P2604
程序
注释
程序
注释
A
8-Bit Micro-Controller
8.3.6 TC1 操作流程
TC1 的操作包括定时器的中断,事件的计数。TC1OUT 和 PWM。TC1 的初始化操作如下:
) TC1 停止计数,禁止 TC1 中断并清 TC1 中断请求标志。
B0BCLR
B0BCLR
B0BCLR
) 设置 TC1 的速率 (事件计数器模式除外)
MOV
B0MOV
) 设置 TC1 定时功能模式
B0BSET
B0BSET
B0BSET
) 设置 TC1 定时时钟源
B0BCLR
B0BSET
) 设置 TC1 的自动装载模式.
B0BCLR
B0BSET
) 设置 TC1 的间隔时间和 PWM 占空比
MOV
B0MOV
B0MOV
B0BCLR
B0BCLR
) 使能 TC1 定时器,TC1OUT 和 PWM 输出
B0BSET
程序 注释
程序 注释
程序 注释
程序 注释
程序 注释
FTC1ENB
FTC1IEN
FTC1IRQ
, #00H
TC1M,A
FTC1IEN
FTC1OUT
FPWM1OUT
FTC1CKS
FTC1CKS
FALOAD1
FALOAD1
A, #7FH
TC1C, A
TC1R, A
FTC1OUT
FALOAD1
FTC1ENB
停止 TC1 定时器,TC1OUT 和 PWM
禁止 TC1 中断功能。
清 TC1 中断请求标志
由 TC1M 的第 4~6 位控制 TC1 的速率,其值处于 00h~70h 之
间
使能 TC1 中断
使能 TC1OUT 功能
使能 PWM 功能
从系统时钟中选择 TC1 的时钟源
从外部事件计数器中选择 TC1 的时钟源
禁止自动装载模式
使能自动装载模式
设置 TC1 的间隔时间,并由 TC1C 设置 PWM 的占空比。TC1R
处于自动装载模式(PWM 模式下)
设置 PWM 的占空比为 0~255
使能 TC1 定时/计数器
SONiX TECHNOLOGY CO., LTD Page 59 Preliminary Version 0.5
Page 60

SN8P2604
8-Bit Micro-Controller
8.4 TC1 时钟频率输出(BUZZER 输出)
TC1 定时器/计数器提供了一个频率输出功能。通过设置 TC1 的时钟频率,可以从 P5.3 输出时钟信号,同时 P5.3
的基本输入/输出功会自动屏蔽。TC1 的输出信号是 2 分频的。由于 TC1 时钟源可以有多种选择,相应就可产生多种
频率输出,这个功能常用作蜂鸣器输出。
TC1 Clock
TC1OUT Pulse
 例:设置 TC1 的 TC1OUT (P5.3)输出,要求外部高速时钟 4MHz,TC1OUT 的频率 0.5KHz。因为 TC1OUT
经过 2 分频 ,因此 TC1 的时钟设为 1KHz。TC1 时钟源来自外部振荡器,T1C 的速率为 Fcpu/4。所以
TC1RATE2~TC1RATE1 = 110。 TC1C = TC1R = 131
MOV A,#01100000B
B0MOV TC1M,A
MOV A,#131
B0MOV TC1C,A
B0MOV TC1R,A
B0BSET FTC1OUT
B0BSET FALOAD1
B0BSET FTC1ENB
注:使能 buzzer 输出,“PWM1OUT”必须为 0。
; 设置 TC1 的分频数为 Fcpu/4
; 设置自动重新装载的时间常数
; 允许 TC1 频率输出(P5.3),同时禁止 P5.3 的 I/O 功能
; 允许自动装载功能
; TC1 开始计数
SONiX TECHNOLOGY CO., LTD Page 60 Preliminary Version 0.5
Page 61

SN8P2604
8-Bit Micro-Controller
8.4.1 TC1OUT 频率表
Fosc = 4MHz, TC1 Rate = Fcpu/8
TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz)
0 0.2441 56 0.3125 112 0.4340 168 0.7102 224 1.9531
1 0.2451 57 0.3141 113 0.4371 169 0.7184 225 2.0161
2 0.2461 58 0.3157 114 0.4401 170 0.7267 226 2.0833
3 0.2470 59 0.3173 115 0.4433 171 0.7353 227 2.1552
4 0.2480 60 0.3189 116 0.4464 172 0.7440 228 2.2321
5 0.2490 61 0.3205 117 0.4496 173 0.7530 229 2.3148
6 0.2500 62 0.3222 118 0.4529 174 0.7622 230 2.4038
7 0.2510 63 0.3238 119 0.4562 175 0.7716 231 2.5000
8 0.2520 64 0.3255 120 0.4596 176 0.7813 232 2.6042
9 0.2530 65 0.3272 121 0.4630 177 0.7911 233 2.7174
10 0.2541 66 0.3289 122 0.4664 178 0.8013 234 2.8409
11 0.2551 67 0.3307 123 0.4699 179 0.8117 235 2.9762
12 0.2561 68 0.3324 124 0.4735 180 0.8224 236 3.1250
13 0.2572 69 0.3342 125 0.4771 181 0.8333 237 3.2895
14 0.2583 70 0.3360 126 0.4808 182 0.8446 238 3.4722
15 0.2593 71 0.3378 127 0.4845 183 0.8562 239 3.6765
16 0.2604 72 0.3397 128 0.4883 184 0.8681 240 3.9063
17 0.2615 73 0.3415 129 0.4921 185 0.8803 241 4.1667
18 0.2626 74 0.3434 130 0.4960 186 0.8929 242 4.4643
19 0.2637 75 0.3453 131 0.5000 187 0.9058 243 4.8077
20 0.2648 76 0.3472 132 0.5040 188 0.9191 244 5.2083
21 0.2660 77 0.3492 133 0.5081 189 0.9328 245 5.6818
22 0.2671 78 0.3511 134 0.5123 190 0.9470 246 6.2500
23 0.2682 79 0.3531 135 0.5165 191 0.9615 247 6.9444
24 0.2694 80 0.3551 136 0.5208 192 0.9766 248 7.8125
25 0.2706 81 0.3571 137 0.5252 193 0.9921 249 8.9286
26 0.2717 82 0.3592 138 0.5297 194 1.0081 250 10.4167
27 0.2729 83 0.3613 139 0.5342 195 1.0246 251 12.5000
28 0.2741 84 0.3634 140 0.5388 196 1.0417 252 15.6250
29 0.2753 85 0.3655 141 0.5435 197 1.0593 253 20.8333
30 0.2765 86 0.3676 142 0.5482 198 1.0776 254 31.2500
31 0.2778 87 0.3698 143 0.5531 199 1.0965 255 62.5000
32 0.2790 88 0.3720 144 0.5580 200 1.1161
33 0.2803 89 0.3743 145 0.5631 201 1.1364
34 0.2815 90 0.3765 146 0.5682 202 1.1574
35 0.2828 91 0.3788 147 0.5734 203 1.1792
36 0.2841 92 0.3811 148 0.5787 204 1.2019
37 0.2854 93 0.3834 149 0.5841 205 1.2255
38 0.2867 94 0.3858 150 0.5896 206 1.2500
39 0.2880 95 0.3882 151 0.5952 207 1.2755
40 0.2894 96 0.3906 152 0.6010 208 1.3021
41 0.2907 97 0.3931 153 0.6068 209 1.3298
42 0.2921 98 0.3956 154 0.6127 210 1.3587
43 0.2934 99 0.3981 155 0.6188 211 1.3889
44 0.2948 100 0.4006 156 0.6250 212 1.4205
45 0.2962 101 0.4032 157 0.6313 213 1.4535
46 0.2976 102 0.4058 158 0.6378 214 1.4881
47 0.2990 103 0.4085 159 0.6443 215 1.5244
48 0.3005 104 0.4112 160 0.6510 216 1.5625
49 0.3019 105 0.4139 161 0.6579 217 1.6026
50 0.3034 106 0.4167 162 0.6649 218 1.6447
51 0.3049 107 0.4195 163 0.6720 219 1.6892
52 0.3064 108 0.4223 164 0.6793 220 1.7361
53 0.3079 109 0.4252 165 0.6868 221 1.7857
54 0.3094 110 0.4281 166 0.6944 222 1.8382
55 0.3109 111 0.4310 167 0.7022 223 1.8939
SONiX TECHNOLOGY CO., LTD Page 61 Preliminary Version 0.5
Page 62

SN8P2604
8-Bit Micro-Controller
Fosc = 16MHz, TC1 Rate = Fcpu/8
TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz) TC1R TC1OUT (KHz)
0 0.9766 56 1.2500 112 1.7361 168 2.8409 224 7.8125
1 0.9804 57 1.2563 113 1.7483 169 2.8736 225 8.0645
2 0.9843 58 1.2626 114 1.7606 170 2.9070 226 8.3333
3 0.9881 59 1.2690 115 1.7730 171 2.9412 227 8.6207
4 0.9921 60 1.2755 116 1.7857 172 2.9762 228 8.9286
5 0.9960 61 1.2821 117 1.7986 173 3.0120 229 9.2593
6 1.0000 62 1.2887 118 1.8116 174 3.0488 230 9.6154
7 1.0040 63 1.2953 119 1.8248 175 3.0864 231 10.0000
8 1.0081 64 1.3021 120 1.8382 176 3.1250 232 10.4167
9 1.0121 65 1.3089 121 1.8519 177 3.1646 233 10.8696
10 1.0163 66 1.3158 122 1.8657 178 3.2051 234 11.3636
11 1.0204 67 1.3228 123 1.8797 179 3.2468 235 11.9048
12 1.0246 68 1.3298 124 1.8939 180 3.2895 236 12.5000
13 1.0288 69 1.3369 125 1.9084 181 3.3333 237 13.1579
14 1.0331 70 1.3441 126 1.9231 182 3.3784 238 13.8889
15 1.0373 71 1.3514 127 1.9380 183 3.4247 239 14.7059
16 1.0417 72 1.3587 128 1.9531 184 3.4722 240 15.6250
17 1.0460 73 1.3661 129 1.9685 185 3.5211 241 16.6667
18 1.0504 74 1.3736 130 1.9841 186 3.5714 242 17.8571
19 1.0549 75 1.3812 131 2.0000 187 3.6232 243 19.2308
20 1.0593 76 1.3889 132 2.0161 188 3.6765 244 20.8333
21 1.0638 77 1.3966 133 2.0325 189 3.7313 245 22.7273
22 1.0684 78 1.4045 134 2.0492 190 3.7879 246 25.0000
23 1.0730 79 1.4124 135 2.0661 191 3.8462 247 27.7778
24 1.0776 80 1.4205 136 2.0833 192 3.9063 248 31.2500
25 1.0823 81 1.4286 137 2.1008 193 3.9683 249 35.7143
26 1.0870 82 1.4368 138 2.1186 194 4.0323 250 41.6667
27 1.0917 83 1.4451 139 2.1368 195 4.0984 251 50.0000
28 1.0965 84 1.4535 140 2.1552 196 4.1667 252 62.5000
29 1.1013 85 1.4620 141 2.1739 197 4.2373 253 83.3333
30 1.1062 86 1.4706 142 2.1930 198 4.3103 254 125.0000
31 1.1111 87 1.4793 143 2.2124 199 4.3860 255 250.0000
32 1.1161 88 1.4881 144 2.2321 200 4.4643
33 1.1211 89 1.4970 145 2.2523 201 4.5455
34 1.1261 90 1.5060 146 2.2727 202 4.6296
35 1.1312 91 1.5152 147 2.2936 203 4.7170
36 1.1364 92 1.5244 148 2.3148 204 4.8077
37 1.1416 93 1.5337 149 2.3364 205 4.9020
38 1.1468 94 1.5432 150 2.3585 206 5.0000
39 1.1521 95 1.5528 151 2.3810 207 5.1020
40 1.1574 96 1.5625 152 2.4038 208 5.2083
41 1.1628 97 1.5723 153 2.4272 209 5.3191
42 1.1682 98 1.5823 154 2.4510 210 5.4348
43 1.1737 99 1.5924 155 2.4752 211 5.5556
44 1.1792 100 1.6026 156 2.5000 212 5.6818
45 1.1848 101 1.6129 157 2.5253 213 5.8140
46 1.1905 102 1.6234 158 2.5510 214 5.9524
47 1.1962 103 1.6340 159 2.5773 215 6.0976
48 1.2019 104 1.6447 160 2.6042 216 6.2500
49 1.2077 105 1.6556 161 2.6316 217 6.4103
50 1.2136 106 1.6667 162 2.6596 218 6.5789
51 1.2195 107 1.6779 163 2.6882 219 6.7568
52 1.2255 108 1.6892 164 2.7174 220 6.9444
53 1.2315 109 1.7007 165 2.7473 221 7.1429
54 1.2376 110 1.7123 166 2.7778 222 7.3529
55 1.2438 111 1.7241 167 2.8090 223 7.5758
SONiX TECHNOLOGY CO., LTD Page 62 Preliminary Version 0.5
Page 63

SN8P2604
8-Bit Micro-Controller
8.5 PWM 功能说明
8.5.1 概述
PWM 功能使用的时基为 TC1,产生的 PWM 信号通过 PWM1OUT(P5.3)输出。8 位定时计数器的计数系数
为 256、64、32、16,是由 ALOAD1、TC1OUT 位控制的。8 位计数器的值与 TC1R 的值相比较:当 TC1R 的值和
TC0C 的值相等时,PWM 输出低电平;当计数器的值回到 0 时,PWM 被迫输出高电平。PWM 输出的低高电平的
比例(占空比)为:TC1R/256、64、32、16。
不断地向参考寄存器写入 00H 可以使 PWM 输出保持为低电平。在 PWM 运行时可以改变 PWM 的占空比来调
整 TC1R。
ALOAD1 TC1OUT
PWM 占空比范围 TC1C 有效值 TC1R 有效位
0 0 0/255~255/255 0x00~0xFF 0x00~0xFF 7.8125K
0 1 0/63~63/63 0x00~0x3F 0x00~0x3F 31.25K
1 0 0/31~31/31 0x00~0x1F 0x00~0x1F 62.5K
1 1 0/15~15/15 0x00~0x0F 0x00~0x0F 125K
PWM 的输出占空比和 TC1R 是不同的,占空比的范围是 0/255~255/255。
最大 PWM 频率
(Fcpu = 4MHz)
备注
每计数 256 次溢出
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
01 128 ..... 254 255.....
01 128 ..... 254 255.....
TC1 Clock
TC1 Clock
TC1R = 00H
TC1R = 00H
TC1R = 01H
TC1R = 01H
TC1R = 80H
TC1R = 80H
TC1R = FFH
TC1R = FFH
01 128 ..... 254 255..........
High
High
High
High
High
High
High
Low
Low
Low
Low
Low
Low
Low
Low
Low
01 128 ..... 254 255.....
01 128 ..... 254 255.....
01 128 ..... 254 255..........
SONiX TECHNOLOGY CO., LTD Page 63 Preliminary Version 0.5
Page 64

SN8P2604
8-Bit Micro-Controller
8.5.2 PWM 操作举例
 例:设置 PWM1 的输出 PWM1OUT (P5.3),其外部高速振荡器时钟 4MHz,PWM 输出占空比为 30/256。PWM
的输出频率是 1KHz。PWM 的时钟源来自外部振荡器,TC1 的速率是 Fcpu/4。TC1RATE2~TC1RATE1 =110。
TC0C = TC0R = 30
MOV A,#01100000B
B0MOV TC1M,A
MOV A,#30
B0MOV TC1C, A
B0MOV TC1R, A
B0BCLR FTC1OUT
B0BCLR FALOAD1
B0BSET FPWM1OUT
B0BSET FTC1ENB
注:TC1R 是只写寄存器,不能执行 INCMS,DECMS 指令。
 例:调整 TC1R 的值
MOV A, #30H
B0MOV TC1R, A
INCMS BUF0
B0MOV A, BUF0
B0MOV TC1R, A
注:
1. PWM1 占空比改变时,最好同时改变 TC1C 和 TC1R 的值,以避免 PWM1 信号受到干扰。
2. PWM 功能和中断可同时使用。
; 设置 TC1 的分频数为 Fcpu/4
; 设置 PWM 的占空比为 30/256
; 设置占空比范围为 0/255~255/255
; 使能 PWM1 输出到 P5.3 并禁止 P5.3 的输入输出功能
; TC1 开始计数
; 赋予一个立即数
; 从 BUF0 得到一个新的 TC1R 值
SONiX TECHNOLOGY CO., LTD Page 64 Preliminary Version 0.5
Page 65

SN8P2604
8-Bit Micro-Controller
9
9
9
指令表
Field Mnemonic Description C DC Z Cycle
MOV A,M A ← M - - √ 1
M MOV M,A M ← A - - - 1
O B0MOV A,M A ← M (bank 0) - - √ 1
V B0MOV M,A M (bank 0) ← A - - - 1
E MOV A,I A ← I - - - 1
B0MOV M,I M ← I, (M = only for Working registers R, Y, Z , RBANK & PFLAG) - - - 1
XCH A,M A ←→M - - - 1+N
B0XCH A,M A ← → M (bank 0) - - - 1+N
MOVC R, A ← ROM [Y,Z] - - - 2
ADC A,M A ← A + M + C, if occur carry, then C=1, else C=0 √ √ √ 1
A ADC M,A M ← A + M + C, if occur carry, then C=1, else C=0 √ √ √ 1+N
R ADD A,M A ← A + M, if occur carry, then C=1, else C=0 √ √ √ 1
I ADD M,A M ← A + M, if occur carry, then C=1, else C=0 √ √ √ 1+N
T B0ADD M,A M (bank 0) ← M (bank 0) + A, if occur carry, then C=1, else C=0 √ √ √ 1+N
H ADD A,I A ← A + I, if occur carry, then C=1, else C=0 √ √ √ 1
M SBC A,M A ← A - M - /C, if occur borrow, then C=0, else C=1 √ √ √ 1
E SBC M,A M ← A - M - /C, if occur borrow, then C=0, else C=1 √ √ √ 1+N
T SUB A,M A ← A - M, if occur borrow, then C=0, else C=1 √ √ √ 1
I SUB M,A M ← A - M, if occur borrow, then C=0, else C=1 √ √ √ 1+N
C SUB A,I A ← A - I, if occur borrow, then C=0, else C=1 √ √ √ 1
DAA To adjust ACC’s data format from HEX to DEC. √ - - 1
AND A,M A ← A and M - - √ 1
L AND M,A M ← A and M - - √ 1+N
O AND A,I A ← A and I - - √ 1
G OR A,M A ← A or M - - √ 1
I OR M,A M ← A or M - - √ 1+N
C OR A,I A ← A or I - - √ 1
XOR A,M A ← A xor M - - √ 1
XOR M,A M ← A xor M - - √ 1+N
XOR A,I A ← A xor I - - √ 1
SWAP M A (b3~b0, b7~b4) ← M(b7~b4, b3~b0) - - - 1
P SWAPM M M(b3~b0, b7~b4) ← M(b7~b4, b3~b0) - - - 1+N
R RRC M A ← RRC M √ - - 1
O RRCM M M ← RRC M √ - - 1+N
C RLC M A ← RLC M √ - - 1
E RLCM M M ← RLC M √ - - 1+N
S CLR M M ← 0 - - - 1
S BCLR M.b M.b ← 0 - - - 1+N
BSET M.b M.b ← 1 - - - 1+N
B0BCLR M.b M(bank 0).b ← 0 - - - 1+N
B0BSET M.b M(bank 0).b ← 1 - - - 1+N
CMPRS A,I ZF,C ← A - I, If A = I, then skip next instruction √ - √ 1 + S
B CMPRS A,M ZF,C ← A – M, If A = M, then skip next instruction √ - √ 1 + S
R INCS M A ← M + 1, If A = 0, then skip next instruction - - - 1+ S
A INCMS M M ← M + 1, If M = 0, then skip next instruction - - - 1+N+S
N DECS M A ← M - 1, If A = 0, then skip next instruction - - - 1+ S
C DECMS M M ← M - 1, If M = 0, then skip next instruction - - - 1+N+S
H BTS0 M.b If M.b = 0, then skip next instruction - - - 1 + S
BTS1 M.b If M.b = 1, then skip next instruction - - - 1 + S
B0BTS0 M.b If M(bank 0).b = 0, then skip next instruction - - - 1 + S
B0BTS1 M.b If M(bank 0).b = 1, then skip next instruction - - - 1 + S
JMP d PC15/14 ← RomPages1/0, PC13~PC0 ← d - - - 2
CALL d Stack ← PC15~PC0, PC15/14 ← RomPages1/0, PC13~PC0 ← d - - - 2
M RET PC ← Stack - - - 2
I RETI PC ← Stack, and to enable global interrupt - - - 2
S PUSH To push ACC and PFLAG into buffers. - - - 1
C POP To pop ACC and PFLAG from buffers. √ √ √ 1
NOP No operation - - - 1
注:1.“M”代表寄存器和存储器。若“M”是系统寄存器,则“N”=0,否则“N”=1。
2.若满足跳转指令的条件,则“S = 0”,否则“S = 1”。
3.OSCM 的任何一条读/写指令都不加特别的时钟周期。
4.“B0XCH”指令不支持特殊寄存器(0x80~0xFF)。
5.“B0M0V M, I”中的“I”不能是“0xE6”和“0xE7”。
SONiX TECHNOLOGY CO., LTD Page 65 Preliminary Version 0.5
Page 66

SN8P2604
8-Bit Micro-Controller
1
0
0
0
电气特性
1
1
10.1 极限参数
电源电压(Vdd)…….……………………….……….…………………………………………………………… - 0.3V ~ 6.0V
输入电压(Vin)……..……………….…………………….………………………………………… Vss – 0.2V ~ Vdd + 0.2V
工作温度(Topr)
SN8P2604K,SN8P2604S,SN8P2604X……………………………………………….....….……… -20(C ~ + 70(C
SN8P2604KD,SN8P2604SD,SN8P2604XD…………………………………………………….. -40(C ~ + 85(C
存储温度(Tstor) …………………………………………………………….……………………………… –30°C ~ + 125°C
功耗(Pc)…………………………………………………………...…………………………………………………… 500mW
10.2 电气特性
(所有电压以 Vss, Vdd=5.0V 为参考值, fosc=3.579545MHz,环境温度为 25℃)
参数 符号 说明 最小值 标准值 最大值 单位
普通模式, Vpp = Vdd
工作电压
OTP 编程电压
RAM 数据保持电压
内部 POR
输入低电压
输入高电压
复位引脚漏电流
I/O 口的上拉电阻
I/O 口的输入漏电流
所有端口的源电流
灌电流
INTn 触发脉冲宽度
电源电流
内部振荡器频率
LVD 侦测电平
Vdd
编程模式, Vpp = 12.3V
Vpp
OTP 编程电压
Vdr - 1.5 - V
Vpor
Vdd 的上升速率,以确保内部的上电复位
ViL1
施密特触发的输入端
ViH1
施密特触发的输入端
Ilekg Vin = Vdd - - 2 uA
Rup Vin = Vss , Vdd = 5V - 100 - K(
Ilekg
禁止上拉电阻,Vin = Vdd - - 1 uA
IoH Vop = Vdd – 0.5V - 12 -
IoL Vop = Vss + 0.5V - 15 -
Tintn
INTn 中断请求脉冲宽度
Vdd= 5V 4Mhz - 2.5 - mA
Vdd= 3V 4Mhz - 1 - mA
Vdd= 5V 32768Hz - 70 - uA
Vdd= 3V 32768Hz - 15 - uA
Vdd= 5V 32Khz - 25 - uA
Vdd= 3V 32Khz - 5 - uA
Vdd= 5V - 0.80 - uA
Vdd= 3V - 0.70 - uA
Vdd= 5V 4Mhz - 0.60 - mA
Vdd= 3V 4Mhz - 0.25 - mA
Vdd= 5V 32768Hz - 70 - uA
Vdd= 3V 32768Hz - 10 - uA
Vdd= 5V ILRC 32Khz - 15 - uZ
Vdd= 3V ILRC 16Khz - 3 - uA
Vdd= 3V - 16 - Khz
Idd1
(无负载,Fcpu=Fosc/4
禁止低功耗功能)
Idd2
Idd3
Idd4
Filrc
VLVD
(内部 RC 模式)
(无负载,Fcpu=Fosc/4
禁止低功耗)
内部低速 RC(ILRC)
低电压侦测电平
运行模式
低速模式
睡眠模式
绿色模式
2.4 5.0 5.5
- 5.0 -
- 12.3 - V
- 0.05 - V/ms
Vss - 0.2Vdd V
0.8Vdd - Vdd V
2/fcpu - - cycle
- 1.8 1.8 V
V
mA
SONiX TECHNOLOGY CO., LTD Page 66 Preliminary Version 0.5
Page 67

SN8P2604
8-Bit Micro-Controller
1
1
1
1
应用注意事项
1
1
11.1 开发工具版本
11.1.1 ICE(在线仿真器)
z S8KD-2 ICE:S8KD-2 ICE 是用来进行 SN8P1XXX 系列的仿真,在仿真 SN8P2604 时会有所限制。请参照
下面的 S8KD-2 ICE 仿真注意事项。
z SN8ICE 2K:全功能仿真 SN8P2604。
11.1.2 OTP 烧录器
z Writer3.0:支持 SN8P2604,但是没有脱机模式。
z Easy Writer V1.0:由 ICE 控制 OTP 编程,且没有升级硬件的烦恼。详见 easy writer 的用户手册。
z MP-Easy Writer V1.0:可脱机烧录,支持 SN8P2604 的大规模烧录。
11.1.3 SN8IDE
SONIX 8 位 MCU 完整的开发环境包括编译器,ICE 调试器和 OTP 烧录软件。
z S8KD-2 ICE:SN8IDE V1.99M 或以后的版本。
z S8KE ICE:SN8IDE V2.00 或以后的版本。
z Writer3.0 和 Easy Writer:SN8IDE V1.99M 或以后的版本。
SONiX TECHNOLOGY CO., LTD Page 67 Preliminary Version 0.5
Page 68

SN8P2604
8-Bit Micro-Controller
11.2 编译选项(CODE OPTION)
11.2.1 FCPU 编译选项
SN8P2604 是一个 1T 系统 MCU,一条指令周期(Fcpu)等于系统时钟(Fosc)。对于不同的应用环境,用户
可以由 Fcpu 编译选项选择不同的指令周期,选择范围为 Fosc/1~Fosc/8。针对不同的应用,编译器会自动的限制 Fcpu
的范围,如下所示:
Fcpu
Low_Power
Enable
Disable
Enable Disable
Fosc/4~Fosc/8 Fosc/4~Fosc/8
Fosc/4~Fosc/8 Fosc/1~Fosc/8
11.2.2 NOISE FILTER 编译选项
在 AC 等高干扰环境下应该使能 Noise_Filter,S8ASM 编译器强迫禁止 Low_Power 选项。使能 Noise_Filter 可
以减少外部噪音对操作系统的影响。若使能 Noise_Filter,Fcpu 会限制在 Fosc/4~Fosc/8 之间。
11.2.3 WATCHDOG
SN8P2604 的 Watchdog 有 3 个选项:Enable、Disable 和 Always ON。
¾ Watchdog Enable:在程序执行的过程中,若看门狗溢出,则系统复位。看门狗定时器在绿色模式和省电(睡
眠)模式下停止运行,系统唤醒后,看门狗定时器重新运行。
¾ Watchdog Always On:看门狗定时器在绿色模式和省电(睡眠)模式下仍然运行,若看门狗在这两种模式下
溢出,系统复位。此选项的主要目是为了确保看门狗定时器能够在高干扰环境下保护系统有良好的性能。
Noise_Filter
SONiX TECHNOLOGY CO., LTD Page 68 Preliminary Version 0.5
Page 69

SN8P2604
8-Bit Micro-Controller
11.3 中断向量(ORG 8)
当有中断发生时,系统跳到中断向量执行中断服务程序。中断向量(ORG 8)的第一条指令必须是“JMP”或
“NOP”,如果第一条指令不是“JMP”或“NOP”,SN8ASM199L 和以后版本的编译器会发出报警信号。
 例:中断服务程序位于 ORG 8 后。
.CODE
…
…
…
START:
.
.
JMP START
…
 例:中断服务程序位于用户程序之后。
.CODE
ORG 0 ; 0000H
JMP START
…
ORG 08
JMP MY_IRQ
ORG 10H
START:
.
.
.
JMP START
…
MY_IRQ:
…
…
ORG 0 ; 0000H
JMP START
ORG 8
NOP
RETI
ENDP
RETI
ENDP
; 跳到用户程序
; 0004H ~ 0007H 系统保留
; 中断服务程序
; ORG 8 处的第一条指令
; 中断返回
; 用户程序的首地址
; 用户程序
; 用户程序结束
; 程序结束
; 跳到用户程序
; 0001H ~ 0007H 系统保留
; 0008H, 跳到中断服务程序
; 0010H, 用户程序的首地址
; 用户程序
; 用户程序结束
; 中断服务程序首地址
; 中断返回
; 程序结束
SONiX TECHNOLOGY CO., LTD Page 69 Preliminary Version 0.5
Page 70

SN8P2604
8-Bit Micro-Controller
11.4 指令
11.4.1 B0MOV M, I
“B0MOV M, I”中的”M”指工作寄存器(Y、Z、R、PFLAG)(0x80~0x86),”I”是立即数。
注:“B0MOV M, I”中的“I”不能是“E6H”和“E7H”,若 I 等于 E6H 或 E7H,S8ASM V1.99K 和以后版本的编译
器会报警并将错误信息显示在屏幕上。
用户需要检查”B0MOV M, I”的值,这条指令常用在查表功能中设置表格的地址,在编译后可以很容易地从列表
文件(.LST)中检查表格的地址。用户也可以使用 ORG 设置表格的首地址避开”E6H”和”E7H”。
 例:通过 ORG 设置表格地址。
ORG 0x0100
Table:
DW 0x9876
…
11.4.2 B0XCH A, M
“B0XCH A, M”指令交换 A 和 M 的内容,仅支持用户自定义的 RAM。
; 设置表格的地址从 0x0100 开始
注:“M”不能是系统寄存器的地址(0x80~0xFF)
 例:保存 PFLAG
Error case!
B0XCH A, PFLAG
B0MOV PFLAGBUF, A
Correct case!
B0MOV A, PFLAG
B0MOV PFLAGBUF, A
 例:保存 ACC
ACCBUF
…
; PFLAG 是系统寄存器,“B0XCH A, M”不能访问 PFLAG
; PFLAGBUF 是用户自定义的 RAM
DS 1
ORG 0
…
ORG 10
…
B0XCH A, ACCBUF
; 定义 ACCBUF 保存 ACC
SONiX TECHNOLOGY CO., LTD Page 70 Preliminary Version 0.5
Page 71

SN8P2604
8-Bit Micro-Controller
11.5 S8KD-2 ICE 仿真
S8IDE 是 SONIX 8 位开发软件,包括有编译器/ICE /OTP Writer。S8KD-2 是 SONIX 的 8 位 ICE EV 芯片,
SN8P2604 和 EV 芯片特性并不完全一样。SONIX 提供了宏指令用来解决这些差异,以保证在仿真时特性的一致性。
S8ASM V1.99M 和以后的版本将支持上述的宏指令。
注:请使用 S8ASM V1.99K 或以后的版本来开发新项目。
11.5.1 ICE_MODE
设置 ICE_MODE 是必须的,ICE_MODE=1 支持 S8KD-2 ICE 仿真,ICE_MODE=0 是实际芯片模式。
语法:ICE_MODE Val
Val:0=实际芯片,1=S8KD-2 ICE 仿真
 例:“ICE_MODE EQU 1”用来进行 ICE 仿真。不要使用此时的 SN8 文件来烧录实际的 OTP 芯片。
CHIP SN8P2604
.DATA
ICE_MODE EQU 1
INCLUDESTD SN8P2X_ICE.H
.CODE
User program
…
 例:“ICE_MODE EQU 0”用来生成 OTP 烧录文档,在此模式中,S8KD-2 ICE 不能正确地仿真 SN8P270XA。
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
INCLUDESTD SN8P2X_ICE.H
.CODE
User program
…
注:1. 设置 ICE_MODE = 0,ICE 仿真和校验所有的功能后,在烧录实际 OTP 芯片前要重新编译源代码。
2. 请使用 ICE_MODE = 0 时的 CHECKSUM 值作为实际芯片的 CHECKSUM 值,而不要使用
ICE_MODE = 1 下的 CHECKSUM,这只是仿真时的 CHECKSUM 值。
; 设置 ICE_MODE 为 ICE 仿真模式
; 设置 ICE_MODE 为实际芯片模式
SONiX TECHNOLOGY CO., LTD Page 71 Preliminary Version 0.5
Page 72

SN8P2604
8-Bit Micro-Controller
11.5.2 指令周期
SN8P2604 和 EV 芯片的某些指令的周期是不同的,这些差异使二者的指令时序不完全一致。SN8IDE 编译器提
供了一些宏指令以解决此问题,用户只需用内置的宏指令取代相应的指令。在仿真模式里,编译器会插入一些额外
的代码使二者指令时序相同,因此,ICE 中可用的 ROM 的最大容量要大于实际芯片,而在实际芯片模式中,它们的
容量是相同的。
Field Mnemonic Cycle Field Mnemonic Cycle
SN8P2604 S8KD-2 EV CHIP
MOV A,M 1 MOV A,M 1 M MOV M,A 1 M MOV M,A 1 O B0MOV A,M 1 O B0MOV A,M 1 -
V B0MOV M,A 1 V B0MOV M,A 1 E MOV A,I 1 E MOV A,I 1 -
B0MOV M,I 1 B0MOV M,I 1 -
XCH A,M 1+N XCH A,M 1 @XCH A,M
B0XCH A,M 1+N B0XCH A,M 1 @B0XCH A,M
MOVC 2 MOVC 2 -
ADC A,M 1 ADC A,M 1 -
A ADC M,A 1+A A ADC M,A 1 @ADC M,A
R ADD A,M 1 R ADD A,M 1 -
I ADD M,A 1+N I ADD M,A 1 @ADD M,A
T B0ADD M,A 1+N T B0ADD M,A 1 @B0ADD M,A
H ADD A,I 1 H ADD A,I 1 M SBC A,M 1 M SBC A,M 1 -
E SBC M,A 1+N E SBC M,A 1 @SBC M,A
T SUB A,M 1 T SUB A,M 1 -
I SUB M,A 1+N I SUB M,A 1 @SUB M,A
C SUB A,I 1 C SUB A,I 1 -
AND A,M 1 AND A,M 1 -
L AND M,A 1+N L AND M,A 1 @AND M,A
O AND A,I 1 O AND A,I 1 G OR A,M 1 G OR A,M 1 -
I OR M,A 1+N I OR M,A 1 @OR M,A
C OR A,I 1 C OR A,I 1 -
XOR A,M 1 XOR A,M 1 XOR M,A 1+N XOR M,A 1 @XOR M,A
XOR A,I 1 XOR A,I 1 SWAP M 1 SWAP M 1 -
P SWAPM M 1+N P SWAPM M 1 @SWAPM M
R RRC M 1 R RRC M 1 O RRCM M 1+N O RRCM M 1 @RRCM M
C RLC M 1 C RLC M 1 -
E RLCM M 1+N E RLCM M 1 @RLCM M
S CLR M 1 S CLR M 1 -
S BCLR M.b 1+N S BCLR M.b 1 @BSET M.b
BSET M.b 1+N BSET M.b 1 @BCLR M.b
B0BCLR M.b 1+N B0BCLR M.b 1 @B0BSET M.b
B0BSET M.b 1+N B0BSET M.b 1 @B0BCLR M.b
CMPRS A,I 1 + S CMPRS A,I 1 + S -
B CMPRS A,M 1 + S B CMPRS A,M 1 + S R INCS M 1 + S R INCS M 1 + S -
A INCMS M 1+N+S A INCMS M 1 + S @INCMS M
N DECS M 1 + S N DECS M 1 + S C DECMS M 1+N+S C DECMS M 1 + S @DECMS M
H BTS0 M.b 1 + S H BTS0 M.b 1 + S -
BTS1 M.b 1 + S BTS1 M.b 1 + S B0BTS0 M.b 1 + S B0BTS0 M.b 1 + S B0BTS1 M.b 1 + S B0BTS1 M.b 1 + S -
M JMP d 2 M JMP d 2 -
I CALL d 2 I CALL d 2 -
S RET 2 S RET 2 C RETI 2 C RETI 2 -
NOP 1 NOP 1 PUSH 1 PUSH 1
POP 1 POP 1
INSTRUCTION
MACRO
DESCRIPTION
1.
M = RAM, N = 0.
M = system
register, N = 1.
2.
S8KD-2 ICE
Read OSCM = 1
cycle
Write OSCM = 2
cycle
SN8P2604
Read OSCM = 1
cycle
Write OSCM = 1
cycle
3.
PUSH,POP
instructions are
different between
SN8P2604 and
S8KD-2 ICE.
:
:
注:S8KD-2 ICE 不能仿真 SN8P2604 的“PUSH”、“POP”指令。
SONiX TECHNOLOGY CO., LTD Page 72 Preliminary Version 0.5
Page 73

SN8P2604
8-Bit Micro-Controller
注:上表中的宏指令内置在“SN8P2X_ICE.H”,此文件必须包含在用户程序中。
 例:在用户程序中包含 SN8P2X_ICE.H
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
INCLUDESTD SN8P2X_ICE.H
.CODE
User program…
…
 例:由宏指令取代指令。
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
.CODE
User program…
; ADD BUF1, A
…
; AND BUF1, A
…
; SN8P2X_ICE.H 是一个标准宏文件,包含在“INCLUDESTD”
INCLUDESTD SN8P2X_ICE.H
@ADD
@AND
BUF1, A
BUF1, A
;由 “@ADD M,A”代替“ADD M,A”
; 由“@AND M,A”代替“AND M,A”
SONiX TECHNOLOGY CO., LTD Page 73 Preliminary Version 0.5
Page 74

SN8P2604
8-Bit Micro-Controller
11.5.3 系统时钟
SONIX 2 系列的 8 位 MCU 具有多种可选择的系统时钟(Fosc/1~Fosc/8,Fosc/64,Fosc/128),但 ICE 固定
于 Fosc/4,在 ICE 仿真模式下,用户必须确认 SN8P2604 和 ICE 的 Fcpu 频率相同,可以通过改变 ICE 的晶振频率
使之和 SN8P2604 的系统时钟相匹配。
 例:SN8P2604 系统时钟和 ICE 的关系表,SN8P2604 的时钟源频率为外部晶振 4MHz。
SN8P2604 Fcpu Option Fcpu Frequency ICE Fcpu ICE Crystal Frequency
Fosc/1
Fosc/2
Fosc/4
Fosc/8
注:对于不同速度的晶振,必须调整 ICE“HIGH CLK”选项。若 ICE 的晶振为 16MHz,则设 置 “HIGH CLK”
选项为“X’TAL 12M”
 例:SN8P2604 系统时钟和 ICE 的关系表。SN8P2604 时钟源为内部 RC 晶振 16MHz。
SN8P2604 Fcpu Option Fcpu Frequency ICE Fcpu ICE Crystal Frequency
Fosc/1
Fosc/2
Fosc/4
Fosc/8
4MHz
2MHz
1MHz
0.5MHz
16MHz
8MHz
4MHz
2MHz
Fosc/4 16MHz
Fosc/4 8MHz
Fosc/4 4MHz
Fosc/4 2MHz
Fosc/4 Fosc/4 Fosc/4 16MHz
Fosc/4 8MHz
注:当 ICE 外部高速晶振等于 16MHz,并且 Fcpu = Fosc/1 和 Fosc/2 时不能仿真,对于这种应用,用户应
该用 SN8P2604 的芯片验证功能。
SONiX TECHNOLOGY CO., LTD Page 74 Preliminary Version 0.5
Page 75

SN8P2604
8-Bit Micro-Controller
11.5.4 看门狗定时器
SN8P2604 的看门狗清零方法是设置 WDTR 寄存器为 0x5A,而 S8KD-2 ICE 则不是。SN8IDE 提供了一条宏指
令”@RET_WDT”以便正确清看门狗。
 例:通过设置 WDTR 为 0x5A 清看门狗。
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
.CODE
User program…
MOV A, #5Ah
B0MOV WDTR, A
…
注:上述方法不能在 S8KD-2 ICE 中仿真,请使用下面的程序替代。
INCLUDESTD SN8P2X_ICE.H
; 看门狗清零
 例:通过“@RST_WDT”对看门狗清零。
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
.CODE
User program…
…
INCLUDESTD SN8P2X_ICE.H
@RST_WDT
; 用宏指令清看门狗
SONiX TECHNOLOGY CO., LTD Page 75 Preliminary Version 0.5
Page 76

SN8P2604
8-Bit Micro-Controller
11.5.5 P0 仿真
SN8P2604 的 P0.0 为双向 I/O 口,但是 ICE 的 P0.0 为单向输入口,PEDGE 的控制也是不同的。SN8IDE 提供
宏指令控制 P0.0 的仿真,这些宏指令内置在编译器软件中。
11.5.5.1 @P00_MODE, @P01_MODE
语法:@P00_MODE Val
Val:0=设置 P0.0 为输入模式,1=设置 P0.0 为输出模式。
语法:@P01_MODE Val
Val:0=设置 P0.1 为输入模式,1=设置 P0.1 为输出模式。
 例:设置 P0.0 为输入模式。
@P00_MODE 0
注:若 P0.0/P0.1 设为输入模式,则 S8KD-2 ICE 的输入引脚为 P0.0/P0.1。
 例:设置 P0.0 为输出模式。
@P00_MODE 1
注:若 P0.0/P0.1 为输出模式,则 S8KD-2 ICE 的输出引脚为 P6.0/P6.1。
11.5.5.2 @P00_OUT, @P01_OUT
语法:@P00_OUT Val
Val:0=设置 P0.0 为低电平输出,1=设置 P0.0 为高电平输出。
语法:@P01_OUT Val
Val:0=设置 P0.1 为低电平输出,1=设置 P0.1 为高电平输出。
 例:设置 P0.0 为高电平输出。
@P00_OUT 1
 例:设置 P0.0 为低电平输出。
@P00_OUT 0
注:在 P0.0/P0.1 输出模式下,S8KD-2 ICE 的信号从 P6.0/P6.1 输出。
SONiX TECHNOLOGY CO., LTD Page 76 Preliminary Version 0.5
Page 77

SN8P2604
8-Bit Micro-Controller
11.5.5.3 PEDGE
PEDGE 寄存器的 P00G[1:0]的定义和 S8KD-2 ICE 不同,ICE 仿真和实际芯片的 PEDGE 功能也是不同的。
PEDGE
P00G1 P00G0
0 0
0 1
1 0
1 1
SONIX 提供宏指令“@P00_EDGE”在 ICE 下仿真实际芯片的 PEDGE 功能,ICE_MODE 必须置 1 以便进行 ICE
仿真。ICE 仿真完毕后,ICE_MODE 置为 0 并重新编译获得 SN8 文件,以便实际芯片工作。
语法:@P00_EDGE Val
Val:1=上升沿,2=下降沿,3=改变电平(双向沿)
 例:设置 P0.0 为上升沿中断触发和 ICE 仿真。
CHIP SN8P2604
.DATA
ICE_MODE EQU 1
.CODE
User program…
B0BSET FP00IEN
…
 例:设置 P0.0 为下降沿触发
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
.CODE
User program…
B0BSET FP00IEN
…
INCLUDESTD SN8P2X_ICE.H
@P00_EDGE 1
INCLUDESTD SN8P2X_ICE.H
@P00_EDGE 2
SN8P2604 S8KD-2 ICE
保留 保留
上升沿 下降沿
下降沿 上升沿
双向 双向
; 设置 ICE 模式
; 设置 P0.0 上升沿触发
; 设置实际芯片模式
; 设置 P0.0 为下降沿触发
SONiX TECHNOLOGY CO., LTD Page 77 Preliminary Version 0.5
Page 78

SN8P2604
8-Bit Micro-Controller
11.5.6 PWM 占空比
SN8P2604 的 PWM 占空比有 ALOAD1、TC1OUT 控制。
PWM1OUT = 1
ALOAD1 TC1OUT
0 0 00h to FFh 0/256 ~ 255/256 7.8125K
0 1 00h to 3Fh 0/64 ~ 63/64 31.25K
1 0 00h to 1Fh 0/32 ~ 31/32 62.5K
1 1 00h to 0Fh 0/16 ~ 15/16 125K
S8KD-2 ICE 不支持 PWM 占空比的设置功能,SONIX 提供 PWM 占空比设置的宏指令,用户可以利用宏指令仿
真 PWM 功能且不会影响起他的功能。宏指令内置在编译软件中,用户必须设置 ICE_MODE 为 ICE 还是实际芯片。
语法:@PWM1_MAX_DUTY Max_Duty
Max_Duty
256 FFh to 00h 0/256 ~ 255/256 8-bit
64 3Fh to 40h 0/64 ~ 63/64 6-bit
32 1Fh to 20h 0/32 ~ 31/32 5-bit
16 0Fh to 10h 0/16 ~ 15/16 4-bit
 例:设置 PWM Max.Duty = 64,Duty = 2:1
CHIP SN8P2604
.DATA
ICE_MODE EQU 0
.CODE
User program…
MOV A,#42 ; 42 = 63 (Max. TC0R) / 3 X 2
B0MOV TC0R,A
B0BSET FPWM0OUT
B0BSET FTC0ENB
…
INCLUDESTD SN8P2X_ICE.H
@PWM1_MAX_DUTY 64
TC1R 边界 PWM 占空比范围
TC1 溢出边界 PWM 占空比范围 PWM 分辨率
PWM 最大频率
(Fcpu = 4M)
每计数 256 次溢出
; 设置为实际芯片模式
; 设置 PWM1 最大占空比为 64
备注
每计数 64 次溢出
每计数 32 次溢出
每计数 16 次溢出
SONiX TECHNOLOGY CO., LTD Page 78 Preliminary Version 0.5
Page 79

SN8P2604
8-Bit Micro-Controller
11.5.7 其它宏指令
一条宏指令包括很多条指令,直接用它跟在带有跳转功能的检测指令后会出错。
BTS0 BUF.0
…
TEST_CODE:
…
BTS0 指令的跳转功能只跳过一条指令,@RST_WDT 是一条宏指令,由多条指令组成。上述程序的跳转功能是
错误的,它不能正确地跳到“JMP TEST_CODE”,使用下面的程序就可以解决这个问题。
BTS0 BUF.0
…
CLR_WDT:
@RST_WDT
…
TEST_CODE:
…
SN8IDE 提供给用户自定义的向前/向后的跳转指令以便更容易地的处理跳转功能,“Macro_Start”和“Macro_End”
就是用户自定义的标签名,使用@@.Macro_Start 和@@.Macro_End,这些标签名就可以在程序中重复使用。
BTS0 BUF.0
…
@@.Macro_Start:
@RST_WDT
@@.Macro_End:
TEST_CODE:
…
@RST_WDT
JMP TEST_CODE
JMP CLR_WDT
JMP TEST_CODE
JMP @F.Macro_Start
JMP @F.Macro_End
; 跳转到最近的用户自定义的@@.Macro_Start:
; 跳转到最近的用户自定义的@@.Macro_End:
注:仅 S8ASM V1.99K 和以后的版本支持用户自定义的向前/向后的跳转指令。
注:宏指令可能影响 ACC 和 PFLAG,用户必须检查宏指令。
SONiX TECHNOLOGY CO., LTD Page 79 Preliminary Version 0.5
Page 80

SN8P2604
8-Bit Micro-Controller
1
2
1
1
12.1 Easy Writer 转接板的引脚配置
Easy Writer JP1/JP2 Easy Writer JP3(Mapping to 48-pin text tool)
JP3 for MP transition board
2
2
OTP 烧录引脚
VSS 2 1 VDD DIP1 1 48 DIP48
CE 4 3 CLK/PGCLK DIP2 2 47 DIP47
OE/ShiftDat 6 5 PGM/OTPCLK DIP3 3 46 DIP46
D0 8 7 D1 DIP4 4 45 DIP45
D2 10 9 D3 DIP5 5 44 DIP44
D4 12 11 D5 DIP6 6 43 DIP43
D6 14 13 D7 DIP7 7 42 DIP42
VPP 16 15 VDD DIP8 8 41 DIP41
RST 18 17 HLS DIP9 9 40 DIP40
ALSB/PDB 20 19 - DIP10 10 39 DIP39
DIP11 11 38 DIP38
JP1 for MP transition board
JP2 for Writer V3.0 transition board
DIP14 14 35 DIP35
DIP15 15 34 DIP34
DIP16 16 33 DIP33
DIP17 17 32 DIP32
DIP18 18 31 DIP31
DIP19 19 30 DIP30
DIP20 20 29 DIP29
DIP21 21 28 DIP28
DIP22 22 27 DIP27
DIP23 23 26 DIP26
DIP24 24 25 DIP25
DIP13 13 36 DIP36
DIP12 12 37 DIP38
12.2 Writer V3.0 和 Writer V2.5 转接板的引脚配置
GND 2 1 VDD
GND 1 2 VDD CE 4 3 CLK
CE 3 4 CLK OE 6 5 PGM
OE 5 6 PGM D0 8 7 D1
D0 7 8 D1 D2 10 9 D3
D2 9 10 D3 D4 12 11 D5
D4 11 12 D5 D6 14 13 D7
D6 13 14 D7 VPP 16 15 VDD
VPP 15 16 VDD RST 18 17 HLS
RST 17 18 HLS 20 19
Writer V2.5 JP1 Pin Assignment Writer V3.0 JP1 Pin Assignment
注:烧录 SN8P2604 时,SONIX Writer2.5 必须升级为 Writer3.0,有关 SONIX Writer2.5 的升级问题请联系
SONIX 的代理商。
SONiX TECHNOLOGY CO., LTD Page 80 Preliminary Version 0.5
Page 81

SN8P2604
8-Bit Micro-Controller
12.3 SN8P2604 烧录引脚分配表
Programming Information of SN8P2600 Series
Chip Name SN8P2604
EZ Writer / Writer V3.0 OTP IC / JP3 Pin Assignment
Number Pin Number Pin
1 VDD 2 VDD
2 GND 4 VSS
3 CLK 6 P5.0
4 CE - 5 PGM 10 P1.0
6 OE 7 P5.1
7 D1 - 8 D0 - -
9 D3 - 10 D2 - 11 D5 - 12 D4 - 13 D7 - 14 D6 - 15 VDD - 16 VPP 28 RST
17 HLS - 18 RST - 19 - - 20 ALSB/PDB 11 P1.1
SONiX TECHNOLOGY CO., LTD Page 81 Preliminary Version 0.5
Page 82

SN8P2604
8-Bit Micro-Controller
1
3
3
3
封装
1
1
13.1 SK-DIP 28 PIN
SYMBOLS
A - - 0.210 - - 5.334
A1 0.015 - - 0.381 - A2 0.114 0.130 0.135 2.896 3.302 3.429
D 1.390 1.390 1.400 35.306 35.306 35.560
E 0.310 7.874
E1 0.283 0.288 0.293 7.188 7.315 7.442
L 0.115 0.130 0.150 2.921 3.302 3.810
e
B 0.330 0.350 0.370 8.382 8.890 9.398
θ° 0° 7° 15° 0° 7° 15°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
SONiX TECHNOLOGY CO., LTD Page 82 Preliminary Version 0.5
Page 83

SN8P2604
8-Bit Micro-Controller
13.2 SOP 28 PIN
SYMBOLS
A 0.093 0.099 0.104 2.362 2.502 2.642
A1 0.004 0.008 0.012 0.102 0.203 0.305
D 0.697 0.705 0.713 17.704 17.907 18.110
E 0.291 0.295 0.299 7.391 7.493 7.595
H 0.394 0.407 0.419 10.008 10.325 10.643
L 0.016 0.033 0.050 0.406 0.838 1.270
θ° 0° 4° 8° 0° 4° 8°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
SONiX TECHNOLOGY CO., LTD Page 83 Preliminary Version 0.5
Page 84

SN8P2604
8-Bit Micro-Controller
13.3 SSOP 20 PIN
SYMBOLS
A
A1
A2
B
C
D
E
E1
[e] 0.002BSC 0.065BSC
L
R
θ°
MIN NOR MAX MIN NOR MAX
(inch) (mm)
- - 0.08
0.00 - 0.01
0.06 0.07 0.07
0.01 - 0.01
0.00 - 0.01
0.39 0.40 0.41
0.29 0.31 0.32
0.20 0.21 0.22
0.02 0.04 0.04
0.00 - -
0° 4° 8°
- - 2.13
0.05 - 0.25
1.63 1.75 1.88
0.22 - 0.38
0.09 - 0.20
9.90 10.20 10.50
7.40 7.80 8.20
5.00 5.30 5.60
0.63 0.90 1.03
0.09 - 0° 4° 8°
SONiX TECHNOLOGY CO., LTD Page 84 Preliminary Version 0.5
Page 85

SN8P2604
8-Bit Micro-Controller
SONIX 公司保留对以下所有产品在可靠性、功能和设计方面的改进做进一步说明的权利。SONIX
不承担由本手册所涉及的产品或电路的运用和使用所引起的任何责任。SONIX 的产品不是专门设计来应
用于外科植入、生命维持和任何 SONIX 产品的故障会对个体造成伤害甚至死亡的领域。如果将 SONIX
的产品应用于上述领域,即使这些是由 SONIX 在产品设计和制造上的疏忽引起的,用户应赔偿所有费用、
损失、合理的人身伤害或死亡所直接或间接产生的律师费用,并且用户保证 SONIX 及其雇员、子公司、
分支机构和销售商与上述事宜无关。
Main Office:
Address: 9F, NO. 8, Hsien Cheng 5th St, Chupei City, Hsinchu, Taiwan R.O.C.
Tel: 886-3-551 0520
Fax: 886-3-551 0523
Taipei Office:
Address: 15F-2, NO. 171, Song Ted Road, Taipei, Taiwan R.O.C.
Tel: 886-2-2759 1980
Fax: 886-2-2759 8180
Hong Kong Office:
Address: Flat 3 9/F Energy Plaza 92 Granville Road, Tsimshatsui East Kowloon.
Tel: 852-2723 8086
Fax: 852-2723 9179
Technical Support by Email:
Sn8fae@sonix.com.tw
深圳技术支持中心:
地址:深圳市科技园南区 T2-B 栋 2 楼
电话:0755-26719666
传真:0755-26719786
SONiX TECHNOLOGY CO., LTD Page 85 Preliminary Version 0.5
 Loading...
Loading...