

SOMFY Animeo Series,Animeo DRM,Animeo WM Instructions Manual
somfy.com
animeo®
KNX 4 AC Motor Controller
WM/DRM 220-240 V AC
Instructions
Ref. 1860114
Ref. 1860116
© 2007 - 2011, SOMFY SAS. ALL RIGHTS RESERVERD. REF. 5071074 - 2011/07/31
Table of Contents
Introduction ..................................................................................................... 3
1
Definitions ...................................................................................................... 4
2
Installation ...................................................................................................... 5
3
Wiring diagram .................................................................................................. 5
3.1 Checking the move direction of the end products ............................................................ 6
4
Settings in the delivery state .................................................................................... 7
4.1 Function of the Reset/Prog button .......................................................................... 7
4.2 Selection of different user ergonomics ...................................................................... 7
4.3 Manual learning-in of move and turn times ................................................................ 8
4.4 Manual learning-in of the intermediate position 1 ......................................................... 8
4.5 Resetting to the delivery state .............................................................................. 9
5
Communication objects ........................................................................................ 10
6
Parameters .................................................................................................... 17
6.1 Menu index card "General" ............................................................................... 17
6.2 Menu index card "Motor 1 ... 4" .......................................................................... 20
6.3 Menu index card "Functions Motor 1 ... 4" ................................................................. 23
6.4 Menu index card "Push button binary input 1 ... 4" ........................................................ 25
6.5 Menu index card "General: Push button binary input 1-4" ................................................ 32
6.6 Menu index card "Electronic Motors" ...................................................................... 33
6.7 Menu index card "Bus safety" ............................................................................. 34
6.8 Menu index card "Feedback motor positions" .............................................................. 35
6.9 Menu index card "General: Radio binary input" ........................................................... 37
6.10 Menu index card "General: Radio binary input 1 ... 5" ..................................................... 38
7
Diagnosis ...................................................................................................... 44
7.1 LEDs on the animeo KNX Motor Controller .................................................................. 44
7.2 Information during operation ............................................................................. 44
7.3 Status of the configuration ................................................................................ 44
8
Push button configuration of the radio transmitters .......................................................... 45
9
Technical data ................................................................................................. 46
These instructions apply to KNX 4 AC Motor Controller WM/DRM 220 - 240 V AC from version B onwards!!!
Before starting up it is necessary to follow the safety instructions in this instruction. SOMFY cannot be held liable for defects and damages when these have been caused as a result of not following instructions (wrong installation, incorrect
service etc.). Establishing, testing and starting up of the equipment is permitted only by a qualified person (in accordance with VDE 0100). Switch on all connections without voltage. Take precautions against unintentional turning on.
The installation of the Somfy products may occur only at easily accessible places. If maintenance and repair become
hindered by accessibility substantially (e.g. stuck or extensively stuck flooring, installation behind lamps or behind
façades), any originating supplementary costs therein cannot be charged to the seller.
animeo KNX 4 AC MoCo · REF. 5071074 - 2/47
Introduction
The animeo KNX Motor Controller WM/DRM 220 - 240 V AC is suited for selecting from up to four individually parameterable motors for Venetian
blinds, roller shutters, awnings and windows. The local push button inputs can be used as conventional push buttons or as universal KNX binary
inputs.
Functions and advantages
• Time savings through easy installation, for example, using spring connectors, strain relief cable binders, sufficient enough clamping space …
• A group input can be used to control all four motors independent of ETS programming.
• Every motor is safe with an individual fuse (3.15, A).
• Moving direction of the motors is possible without ETS.
• The device can be used in the delivery state without programming with the ETS software.
• 4 local push button inputs can be used as maximum 8 universal KNX binary inputs to connect, for example, window contacts, temperature
sensors or presence detectors. Using conventional push buttons, lighting can also be controlled and dimmed.
• User-friendly and intuitive parameter settings in the ETS software.
• Intelligent change-over between manual operation and automatic operation to guarantee excellent user friendliness and energy savings.
• Position messaging of the motors during the movement and when reaching the upper or lower end position.
• Two different safety positions, freely determinable for every individual motor output.
• Safety position with mains voltage return freely determinable and messaging over building.
• Automatic cascading of the outputs with mains voltage return and bus-safety functions to minimise power peaks.
• Plug and Play! Any time extendable with animeo RTS radio module (Ref. 1860105). Without additional wiring the four motors can be controlled
individually per radio using Somfy RTS technology.
• Alternatively the animeo KNX RTS Receiver (Ref. 1860191) can be used. Here, without additional wiring, up to 5 universal KNX radio binary
inputs can be gained (e.g., light ON/OFF with DIM).
A complete parametering and programming is only possible when there is a power supply and KNX bus voltage on the KNX Motor Control-
ler. When only KNX bus voltage is present, only the physical address can be programmed.
animeo KNX 4 AC MoCo · REF. 5071074 - 3/47
1
Definitions
Manual Command A manual command is a command which is generated by local conventional push buttons or by a Somfy RTS
radio hand transmitter. A telegram which is sent on the objects 0-7 (bit commands) is also understood as a
manual command.
Automatic Command A telegram which is sent on the objects 8-15 (byte commands) is understood as an automatic command.
US push button ergonomics With this parameter it is ensured that the Venetian blind is controlled in the US ergonomics over the local push
button inputs or over the Somfy RTS radio hand transmitter.
Short pressing of the push button (< 0.5 s): A move command is carried out.
Long pressing of the push button (> 0.5 s): A turn command is carried out, as long as the push button is pressed.
When released, the turn command is stopped. If the current position of the Venetian blind is beyond the turn,
a move command is carried out with pressed push button.
EU push button ergonomics With this parameter it is ensured that the Venetian blind is controlled in the EU ergonomics over the local push
button inputs or over the Somfy RTS radio hand transmitter.
Short pressing of the push button (< 0.5 s): A turn step is carried out.
Long pressing of the push button (> 0.5 s): A turn command is carried out, as long as the push button is pressed.
If the current position of the Venetian blind is beyond the turn, a move command is carried out.
Screen push button ergonomics With this parameter it is ensured that the end product is controlled in Screen ergonomics over the local push
button inputs or over the Somfy RTS radio hand transmitter.
Short pressing of the push button when the end product is moving: A stop command is carried out.
Long pressing of the push button when the end product is not moving: A drive command is carried out.
These ergonomics are selected to control vertical awnings, roller shutters, awnings and windows.
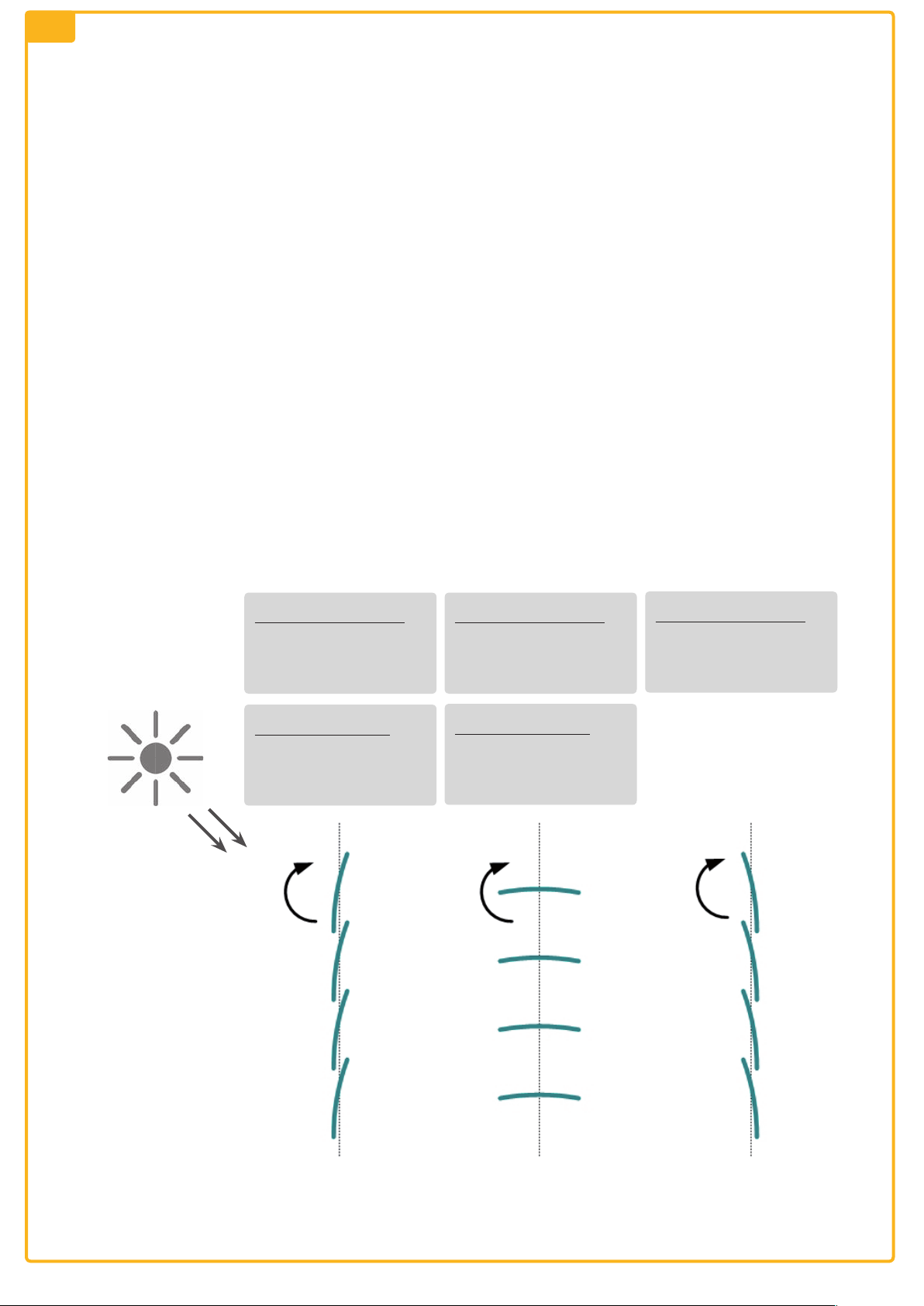
Position of the slats
Venetian blind 90 ° / -90 °
Angle: 90 °
Turn: 0 %
KNX byte value: 225 or 0
Venetian blind 90 ° / 0 °
Angle: 90 °
Turn: 0 %
KNX byte value: 255 or 0
Turning direction
Venetian blind 90 ° / -90 °
Angle: 0 °
Turn: 50 %
KNX byte value: 127
Venetian blind 90 ° / 0 °
Angle: 0 °
Turn: 100 %
KNX byte value: 0 or 255
Turning direction Turning direction
Venetian blind 90 ° / -90 °
Angle: -90 °
Turn: 100 %
KNX byte value: 0 or 255
Max. closed
Venetian blind 90° / 0°
Max. closed
Venetian blind 90° / -90°
Max. turned
Venetian blind 90° / 0°
50 % turned
Venetian blind 90° / -90°
Max. turned
Venetian blind 90° / -90°
animeo KNX 4 AC MoCo · REF. 5071074 - 4/47
2
Reset / Prog
Ext.
EU
US
Alternative:
animeo KNX RTS Receiver
1860191
PE
L
C
1-4
LNN
PE PE
Input Output
-Mains
230 V
50 Hz
L1
N
PE
1860114 / 1860116
Somfy
animeo KNX
4 AC Motor Controller WM 220-240 V AC
M4
F 3.15 AH
KNX LED
animeo
RTS Modul 433.42 MHz
1860105
KNX Prog
Bus
-+
0.75
2
2 x 2 x 0.8° (green)
N
1234
Junction
Box
M
˜
C
1-4
C
1AB
C
2CD
C
3EF
C
4G
bl
rd
H
Group
Control
-A2-S1
Local push button
Motor 1
-A2-S2
Local push button
Motor 2
-A2-S3
Local push button
Motor 3
-A2-S4
Local push button
Motor 4
Motor 230
V/50 Hz
Motor 4
KNX bus cable
+UPDOWN
+UPDOWN
+UPDOWN
+UPDOWN
PE N UP
DOWN
C
UP
DOWN
+ red
- black
PE
M3
F 3.15 AH
0.75
2
N
1234
Junction
Box
M
˜
Motor 230 V/50 Hz
Motor 3
PE N UP
DOWN
PE
M2
F 3.15 AH
0.75
2
N
1234
Junction
Box
M
˜
Motor 230 V/50 Hz
Motor 2
PE N UP
DOWN
PE
M1
F 3.15 AH
0.75
2
N
1234
Junction
Box
M
˜
Motor 230 V/50 Hz
Motor 1
PE N UP
DOWN
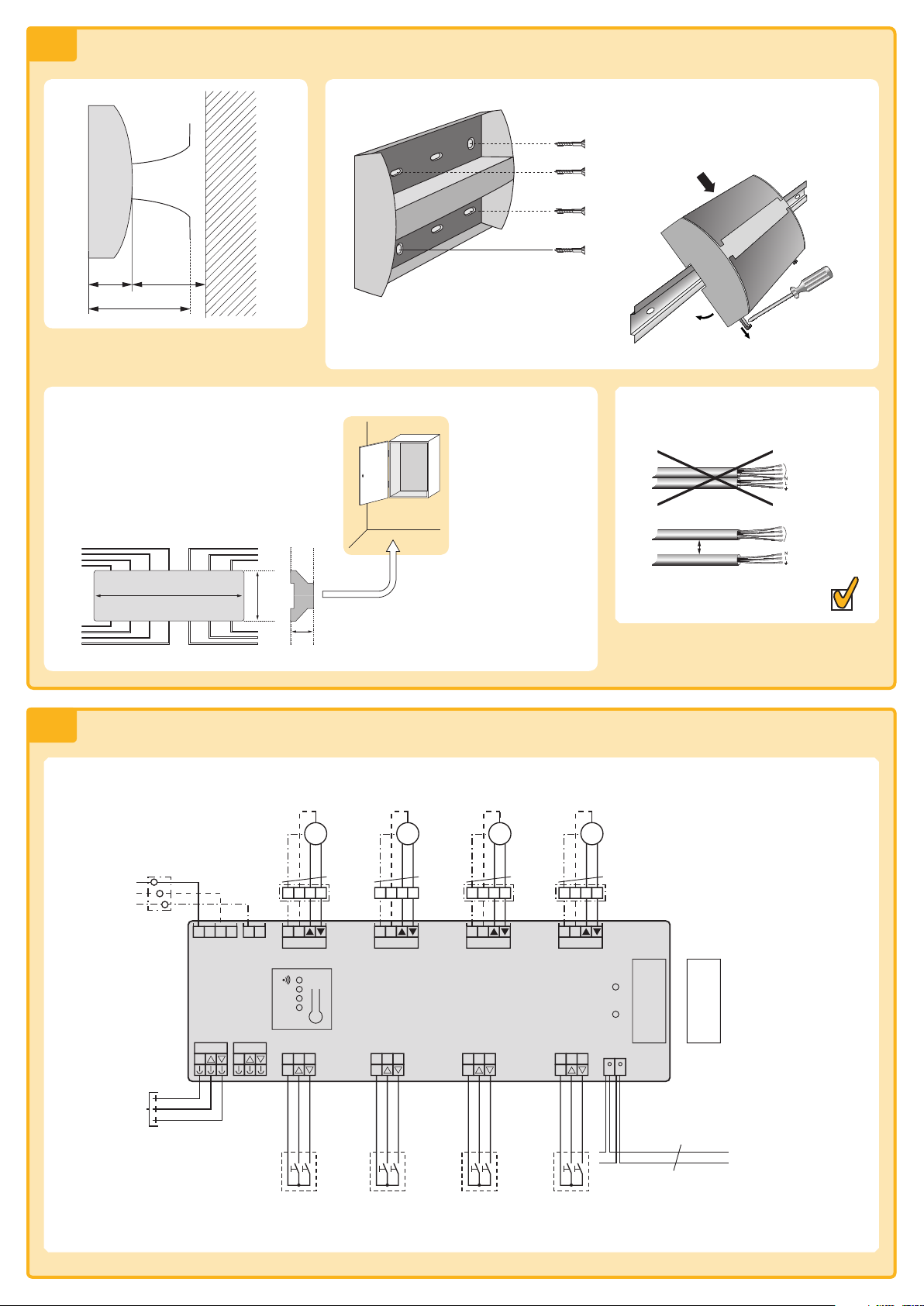
Installation
min.:
63 mm
120 mm
140 mm
Choose the right place for installation:
level surface with sufficient space
Installation of the
Motor Controller 4 AC WM
1.
2.
Switch box
Complete wiring and connect
power supply
Check range
when using
animeo RTS radio
module!
Bus
Bus
> 10 cm
DIN rail
DIN rail version
90 mm
4 AC DRM
90 mm
210 mm : 12 HP
3
Wiring diagram
90 mm
90 mm
animeo KNX 4 AC MoCo · REF. 5071074 - 5/47
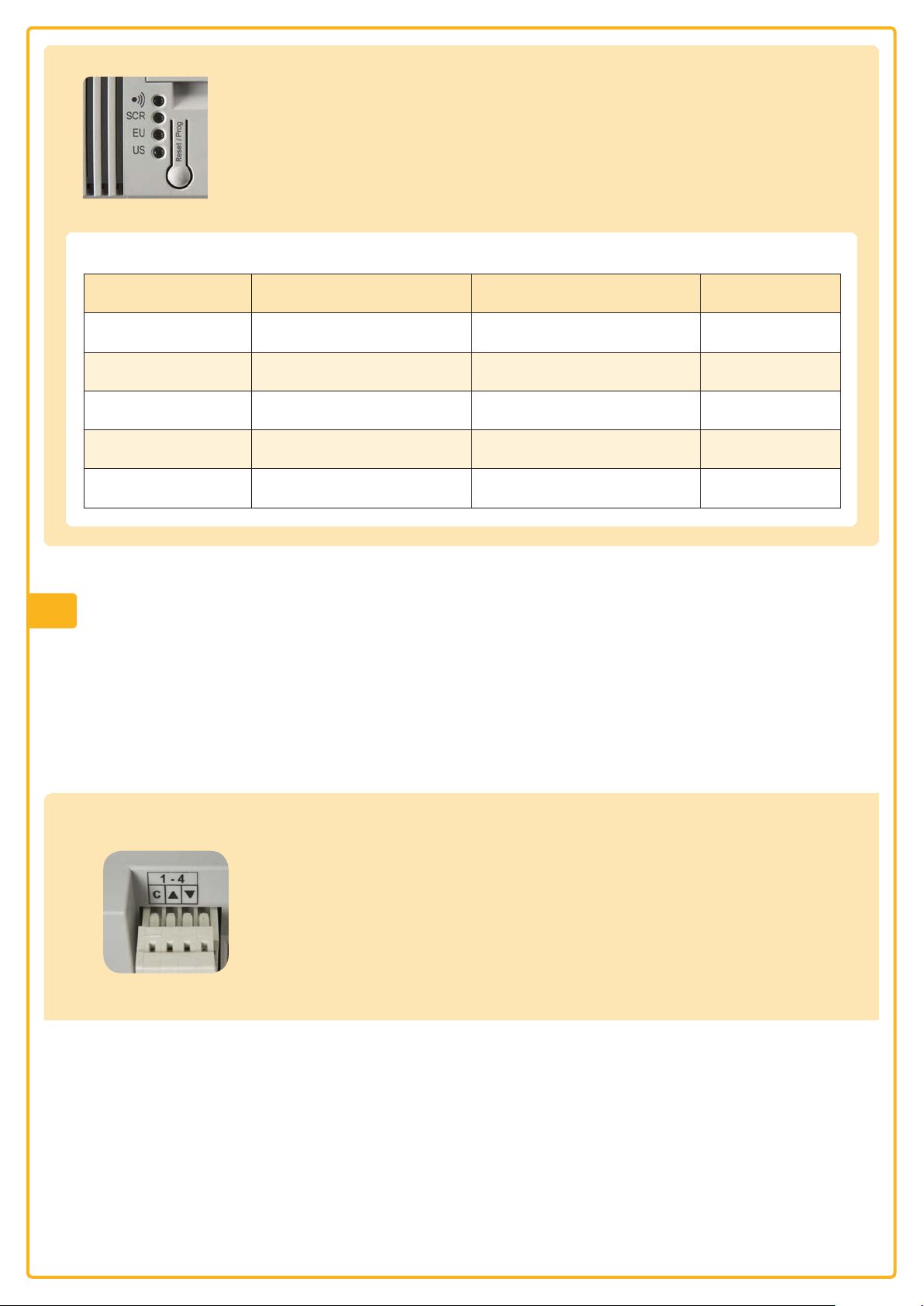
The "US"-LED blinks regularly when the mains (230 V) and the KNX bus voltage are connected actively on
the device. The device is ready for operation when the "US" LED blinks.
WIRING
Connected to ... Cabling Twisted pair Max. length
Motors
Min.: 4 x 0.75 mm
2
/19 AWG
- 150 m
Max.: 4 x 2.5 mm2/14 AWG
Push button
Group control
KNX Bus
Min.: 3 x 0.6 mm/22 AWG
Max.: 3 x 2.5 mm
Min.: 3 x 0.6 mm/22 AWG
Max.: 3 x 1.5 mm
2
/14 AWG
2
/16 AWG
2 x 0.8 mm/20 AWG Compulsory, corresponding to
Recommended 150 m
Recommended 50 m
KNX topology guidelines
230 V AC
Min.: 3 x 1.5 mm
2
/16 AWG
Max.: 3 x 2.5 mm2/14 AWG
3.1
Checking the move direction of the end products
Group control of the motor outputs 1 - 4 over the group input
The move directions of the motors can be checked via the group inputs. All four motor outputs are switched simultaneously. This input can be
blocked in the ETS parameters. In the event of bus power failure, it is always freed to allow emergency operation.
When starting up, make absolutely sure that the motors move in the right direction. This check can be carried out by making a wiring bridge at
the group input.
Check the correct move direction of the end products
DOWN: The end product moves down (bridge between: C + q)
STOP: The end product stops (bridge between: C + q+ p)
UP: The end product moves upwards ( C + q)
animeo KNX 4 AC MoCo · REF. 5071074 - 6/47
Reset / Prog
Reset / Prog
Reset / Prog
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
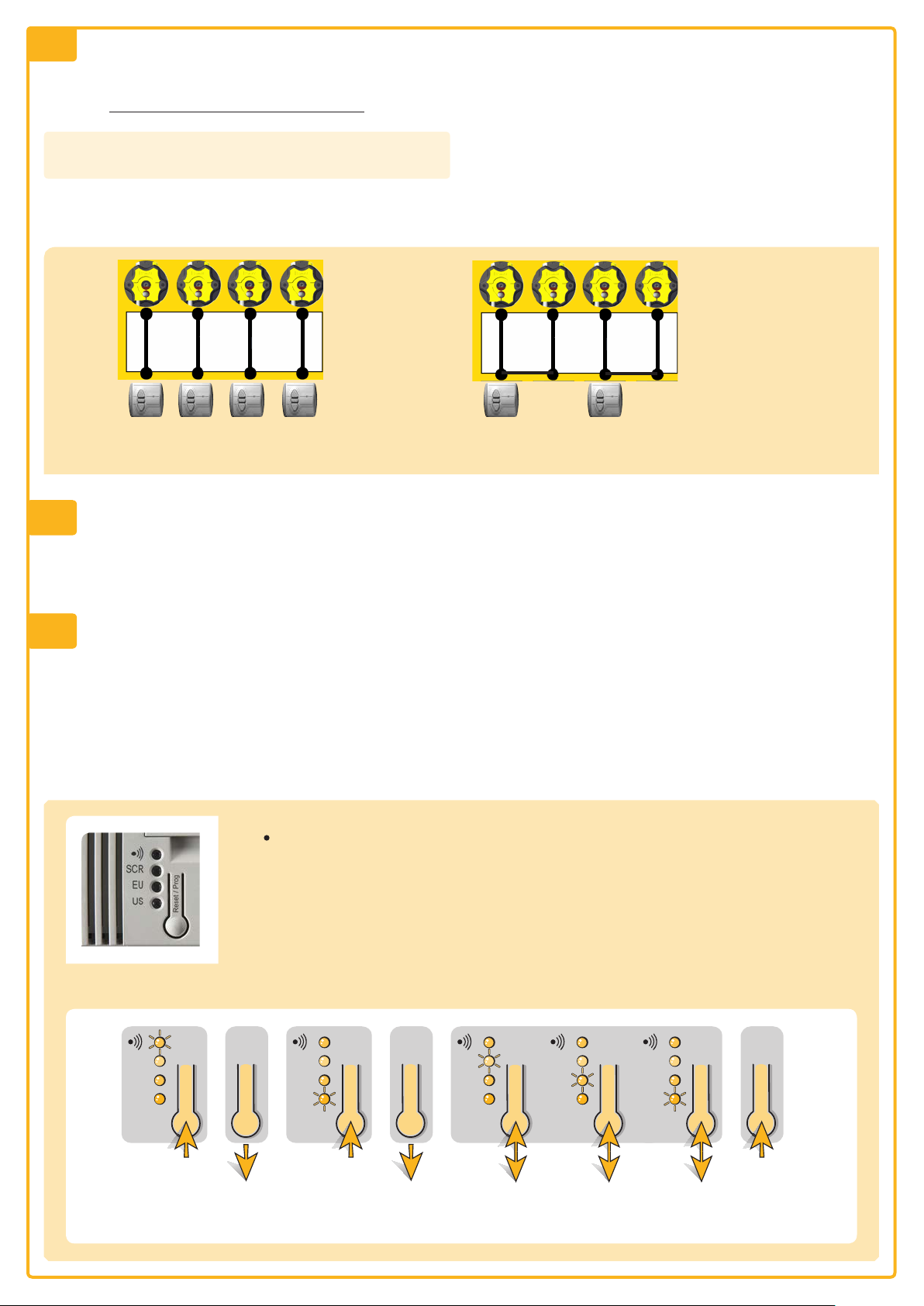
4
Settings in the delivery state
The Motor Controller KNX can be used in the delivery state also without prior programming by the ETS software. Practical presets are implemented in
the device. These settings apply to all four motor outputs.
Move times UP/DOWN, CLOSED/OPEN = 5 minutes
Connection of local conventional push buttons is possible
The local push button inputs are assigned directly to the motor outputs: Push button input 1 controls motor output 1 (fig. 1). The motor outputs
can be controlled through bridging the wire at the push button inputs when required (fig. 2).
Fig. 1 Fig. 2
4.1
Function of the Reset/Prog button
The basic settings in the KNX Motor Controller can be made using this push button. These basis settings are possible only in the delivery state,
before the device with the ETS was programmed, or after the device was unassigned by the ETS.
The basis settings are overwritten by the settings in the ETS.
4.2
Selection of different user ergonomics
Using the Reset/Prog button the press button user ergonomics for the local push button inputs or Somfy RTS radio hand transmitter can be determined. These settings are possible only in the delivery state, before the device is programmed with ETS software or after the device is unassigned
with the ETS.
As soon as the device with the ETS is programmed, no further settings of the user ergonomics can be made via the Reset/Prog button. When the
device is unassigned by the ETS, the adjusting of the user ergonomics is possible again via the Reset/Prog button.
The selection of the user ergonomics must match with a corresponding end product.
= Learning-in of animeo RTS radio module
)
)
)
SCR = Screen ergonomics*
EU = Venetian blind, EU ergonomics*
US = Venetian blind, US ergonomics*
* see chapter 1 "Definitions"
Changing the ergonomics:
The delivery state is Venetian blind with EU ergonomics
2 s
2 s
To change to different ergonomics press briefly the Reset/Prog
button. Repeat till such time as the desired LED shines.
animeo KNX 4 AC MoCo · REF. 5071074 - 7/47
2 s
Save and exit the
setting mode
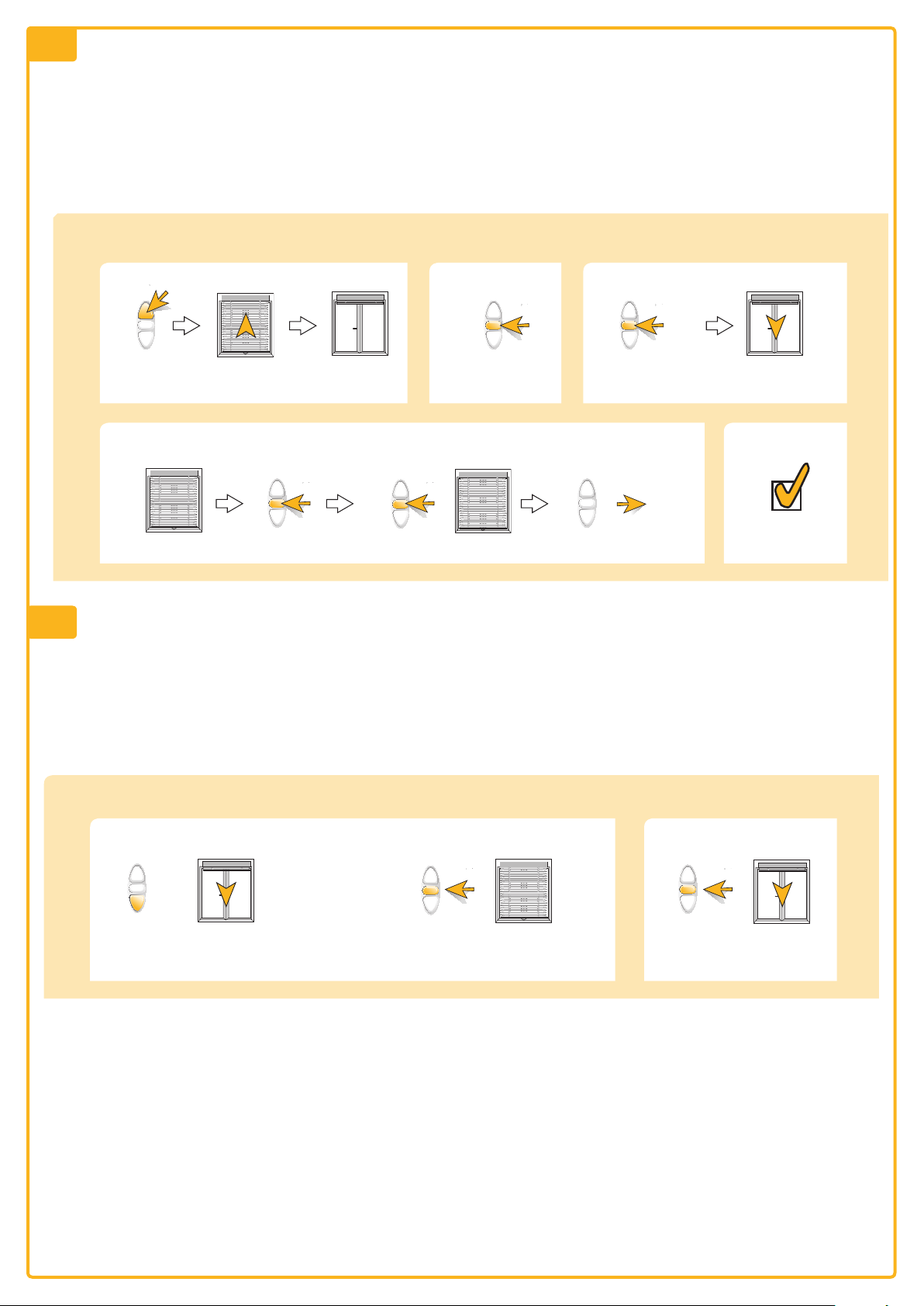
4.3
Manual learning-in of move and turn times
The move and turn times per motor output can be set via local conventional push buttons. These settings are possible only in the delivery state
before the device has been programmed with the ETS. As soon as the device with the ETS is programmed, the move times and turn times can no
longer be set via local conventional push buttons. When the device is unassigned by the ETS, the adjusting of the move times and turn times via
local conventional push buttons can be done again.
Alternatively to the conventional push buttons, the settings can also be done using the Somfy RTS Transmitter and animeo RTS Radio Module
(Ref. 1860105). A setting using animeo KNX RTS Receiver (Ref. 1860191) and Somfy RTS Transmitter is not possible!
Learning-in length of move and turn times
0.5 s
0.5 s > 6 s
4.4
Press immediately when the
lower end position is reached
Manual learning-in of the intermediate position 1
Hold Stop during the complete turn
Intermediate position 1 can be learned-in individually per motor output via conventional local push buttons. At the same time, it is possible to
carry out the intermediate position 1 via settings in the ETS parameters. Prior to this, the move and turn times must be learned-in!
Alternatively to the conventional push buttons, the settings can also be done using the Somfy RTS Transmitter and animeo RTS Radio Module
(Ref. 1860105). A setting using animeo KNX RTS Receiver (Ref. 1860191) and Somfy RTS Transmitter is not possible!
Save Call up
1
Move blinds to desired position
2
Save position
With conventional unlocked push buttons, a Stop
command is generated by pressing the UP and DOWN
button at the same time.
> 2 s
Whilst saving, the blinds move briefly
UP and DOWN.
0.5 s
The saved position is moved to.
animeo KNX 4 AC MoCo · REF. 5071074 - 8/47
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
4.5
Resetting to the delivery state
1. When the device has not been programmed with the ETS software.
2. When the device has been programmed with the ETS software.
Full RESET:
The settings made via the Reset/Prog push button can be
set back to the delivery state by pressing the Reset/Prog
button for 10 seconds.
When the device has been programmed with the ETS software, a reset in
the delivery state is no longer possible via the Rest/Prog button. Over the
function "Unload" in the ETS, all settings of the device can be set back in
the delivery state. The Reset/Prog button is then freed again.
animeo KNX 4 AC MoCo · REF. 5071074 - 9/47
5
Communication objects
At the most, 150 communication objects are available for use, but not all at once. A maximum of 250 group addresses can be connected.
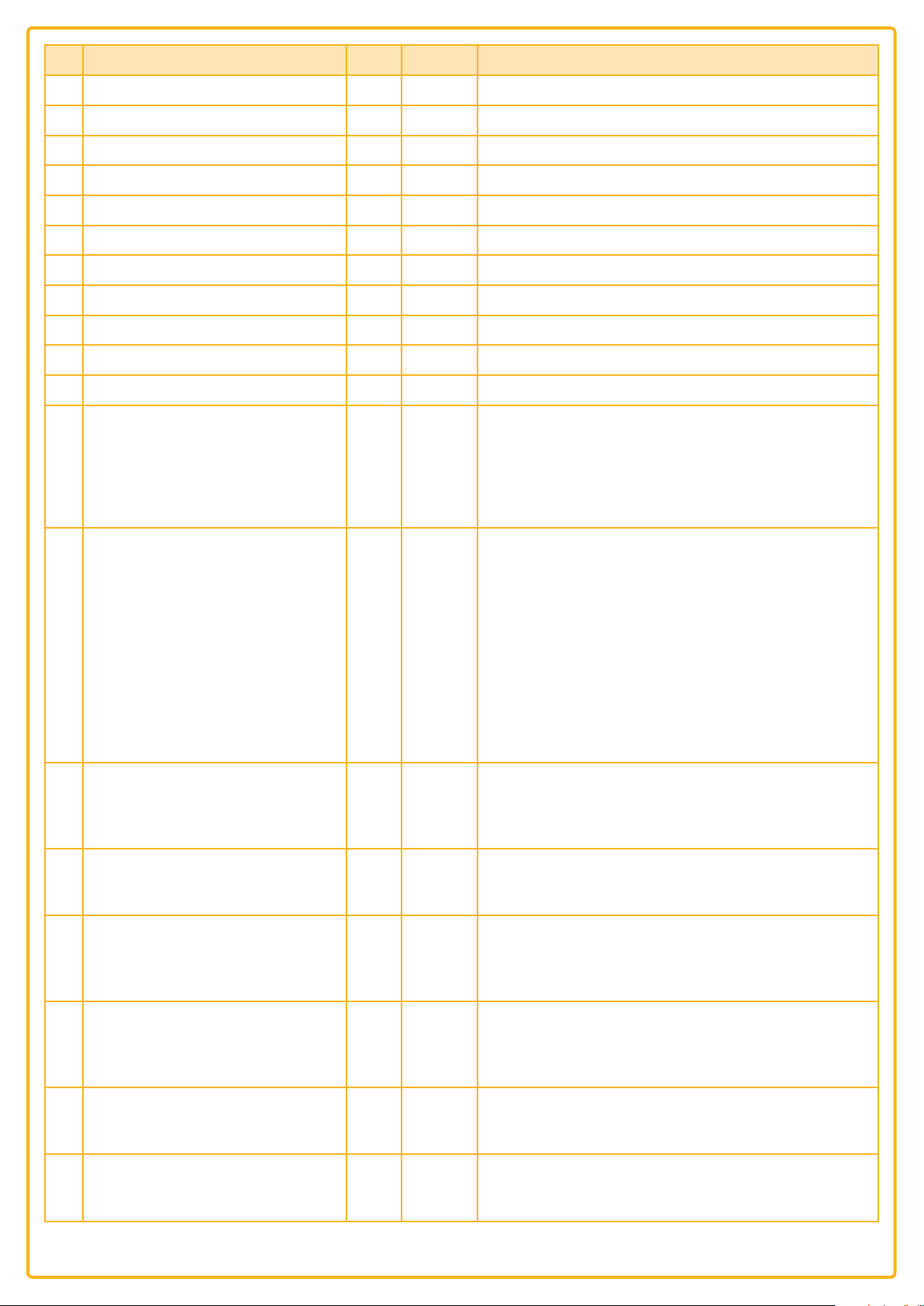
No. Object name Model DPT_ID Description
1 Motor 1 UP / DOWN, CLOSED / OPEN 1 Bit 1.001 If a telegram with the value "0" is received by this communication
object, the corresponding blind is moved upwards or a window
2 Motor 2 UP / DOWN, CLOSED / OPEN 1 Bit 1.001
3 Motor 3 UP / DOWN, CLOSED / OPEN 1 Bit 1.001
4 Motor 4 UP / DOWN, CLOSED / OPEN 1 Bit 1.001
is closed. If a telegram with the value "1" is received, the corresponding blind is moved down or a window is opened. At the end
of the set move time for UP or DOWN direction or the move time for
opening or closing of the window, the relays of the outputs are
freed.
5 Motor 1 STEP / STOP 1 Bit 1.001 With Venetian blinds: If the Venetian blind is moving, the move is
stopped with the receiving of a telegram on one of these commu-
6 Motor 2 STEP / STOP 1 Bit 1.001
7 Motor 3 STEP / STOP 1 Bit 1.001
8 Motor 4 STEP / STOP 1 Bit 1.001
nication objects, no matter whether "0" or "1" is received. If the
Venetian blind is stationary, a turn is carried out. In addition, the
slats turn CLOSED with the receiving of a telegram with the value
"1" and UP with the receiving of a telegram with the value "0". The
duration of the turning step is defined in the parameter settings.
With vertical awnings, roller shutters, awnings and windows:
When one of the end products is moving, the move is stopped with
the receiving of a telegram on one of these communication objects,
no matter whether "0" or "1" is received. If one of these end
products is not moving and a telegram is received on one of these
communication objects, then no operation is carried out.
9 Motor 1 Position UP / DOWN 1 Byte 5.004 If a telegram is received on one of these communication objects, the
corresponding blind will move to the position which is defined by
10 Motor 2 Position UP / DOWN 1 Byte 5.004
11 Motor 3 Position UP / DOWN 1 Byte 5.004
12 Motor 4 Position UP / DOWN 1 Byte 5.004
the received value "0" = upper / "255" = lower.
With Venetian blinds: When the position is reached, the same
slats angle is moved to at which the Venetian blind was before.
Between the receiving of a telegram on the objects 9-12 and the receiving of a telegram on
the objects 13-16, a temporary time lapse of 2 seconds must be taken into consideration.
13 Motor 1 Slat position 1 Byte 5.004 With Venetian blinds: If a telegram is received on one of these
communication objects, the corresponding slats will move to the
14 Motor 2 Slat position 1 Byte 5.004
15 Motor 3 Slat position 1 Byte 5.004
16 Motor 4 Slat position 1 Byte 5.004
position which is defined by the received value. If a Venetian blind
is moving and receives a value on the corresponding object, the
position of the slats is moved to only when the move has been
completed. Depending on the parameter settings on the card index
"General" the position is defined as follows:
"255" = slats max. closed /
"0" = slats max. turned
value (0/255)
or
"0" = slats max. closed /
"255" = slats max. turned
value (255/0)
17 Motor 1 Move to IP 1 1 Bit 1.001 If a telegram with the value "1" is received on one of these com-
munication objects, the corresponding blind moves to the ETS
18 Motor 2 Move to IP 1 1 Bit 1.001
19 Motor 3 Move to IP 1 1 Bit 1.001
20 Motor 4 Move to IP 1 1 Bit 1.001
parametered per local switch, or to the radio hand-transmitted,
learned-in intermediate position 1. In addition, the learned-in
position is valid. With the receiving of a telegram with the value "0"
on one of these communication objects, the blinds 1-4 move to the
upper end position.
21 Motor 1-4 Move to IP 1 1 Bit 1.001 If a telegram with the value "1" is received on this communication
object, the blinds 1-4 move to the ETS parametered per local switch,
or to the radio hand-transmitted, learned-in intermediate position
1. In addition, the learned-in position is valid. With the receiving
of a telegram with the value "0" on this communication object, the
blinds 1-4 move to the upper end position.
22 Motor 1 Move to IP 2 1 Bit
1.001
If a telegram with the value "1" is received on one of these communication objects, the corresponding blind moves to the intermediate
23 Motor 3 Move to IP 2 1 Bit 1.001
24 Motor 3 Move to IP 2 1 Bit 1.001
position 2 parametered in the ETS parameters. With the receiving
of a telegram with the value "0" on one of these communication
objects, the corresponding blind moves to the upper end position.
25 Motor 4 Move to IP 2 1 Bit 1.001
animeo KNX 4 AC MoCo · REF. 5071074 - 10/47

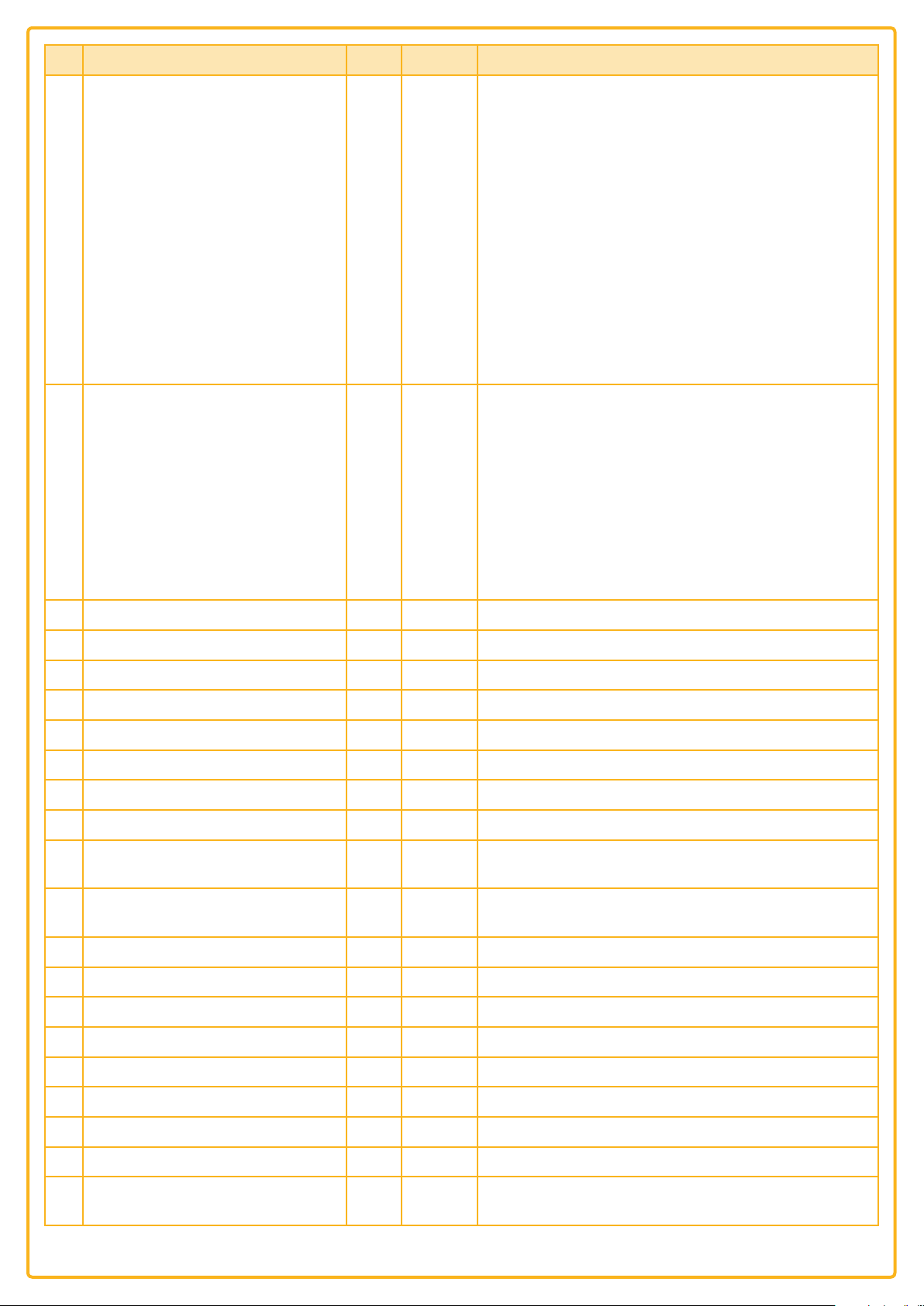
No. Object name Model DPT_ID Description
26 Motor 1-4 Move to IP 2 1 Bit 1.001 If a telegram with the value "1" is received on this communication
object, the blinds move to the Intermediate Positition (IP) 2 parametered in the ETS parameters. With the receiving of a telegram with
the value "0" on this communication object the blinds 1-4 move to
the upper end position.
27 Motor 1 Security, low prio 1 Bit 1.001 If a telegram with the value "1" is received on one of these com-
munication objects, the corresponding blind moves to the position
28 Motor 2 Security, low prio 1 Bit 1.001
29 Motor 3 Security, low prio 1 Bit 1.001
30 Motor 4 Security, low prio 1 Bit 1.001
parametered in the ETS parameters. With the receiving of a telegram
with the value "0" on one of these communication objects, no operation is carried out. Only when "Repeat last telegram after security
(Yes)" has been selected in the ETS parameters, can the operation
for the corresponding blind be carried out. If one of these communication objects is activated by a telegram with the value "1" and
on one of the communication objects 32-34 (Security, high prio)
a telegram is received with the value "1", the corresponding blind
move to the position parametered in the ETS (Security, high prio).
31 Motor 1 - 4 Security, low prio 1 Bit 1.001 If a telegram with the value "1" is received on this communication
object, the blinds 1-4 move to the position parametered in the ETS
parameters. With the receiving of a telegram with the value "0" on
this communication object no operation is carried out. Only when
"Repeat last telegram after security (Yes)" has been selected in the
ETS parameters can the operation for the corresponding blinds 1-4
be carried out. If one of these communication objects is activated by
a telegram with the value "1" and on the communication object 36
(Security, high prio) a telegram is received with the value "1", the
blinds 1-4 move to the position parametered in the ETS (Security,
high prio).
32 Motor 1 Security, high prio 1 Bit 1.001 If a telegram with the value "1" is received on one of these com-
munication objects, the corresponding blind moves to the position
33 Motor 2 Security, high prio 1 Bit 1.001
34 Motor 3 Security, high prio 1 Bit 1.001
35 Motor 4 Security, high prio 1 Bit 1.001
parametered in the ETS parameters. With the receiving of a telegram
with the value "0" on this communication object no operation is
carried out. Only when "Repeat last telegram after security (Yes)"
has been selected in the ETS parameters can the operation for the
corresponding blind be carried out. In this case, when an object for
"Security, low prio" is activated ("1"), the corresponding parametered position will be moved to.
36 Motor 1 - 4 Security, high prio 1 Bit 1.001 If a telegram with the value "1" is received on this communica-
tion object, the blinds 1-4 move to the IP 2 parametered in the ETS
parameters. With the receiving of telegram with the value "0" on
this communication object no operation is carried out. Only when
"Repeat last telegram after security (Yes)" has been selected in the
ETS parameters can the operation for the blinds 1-4 be carried out.
In this case, when an object for "Security, low prio" is activated
("1"), the corresponding parametered position will be moved to.
37 Mains power failure (230 V) 1 Bit 1.002 A mains power failure is signaled with this communication object.
As soon as the mains voltage cuts out, a telegram with the value "1"
is sent to the bus. With return of mains voltage this communication
object sends the telegram with the value "0".
38 Motor 1 Feedback UP / DOWN 1 Byte 5.004 Through these communication objects, the actual position, based on
the learned-in move time (UP / DOWN direction) of the correspond-
39 Motor 2 Feedback UP / DOWN 1 Byte 5.004
40 Motor 3 Feedback UP / DOWN 1 Byte 5.004
ing blind, is sent to the bus. This kind of sending (on demand,
status change, cyclic) is set in the ETS parameters.
"0" = upper / "255" = lower.
41 Motor 4 Feedback UP / DOWN 1 Byte 5.004
42 Motor 1 Feedback slat 1 Byte 5.004 Through this communication objects, the actual slats position, based
on the learned-in turn time, is sent to the bus. This kind of sending
43 Motor 2 Feedback slat 1 Byte 5.004
44 Motor 3 Feedback slat 1 Byte 5.004
45 Motor 4 Feedback slat 1 Byte 5.004
(on demand, status change, cyclic) is set in the ETS parameters. The
position, dependent of parameter settings on the menu list "General" is defined as follows:
"255" = slats max. closed / "0" = slats max. turned
or
"0" = slats max. closed / "255" = slats max. turned
animeo KNX 4 AC MoCo · REF. 5071074 - 11/47
No. Object name Model DPT_ID Description
46 Motor 1-4 Status positions 1 Bit 1.001 If a telegram with the value "1" or "0" is received on this com-
munication object, the current status positions of the corresponding
blinds are sent to the bus (objects 38-45).
47 Motor 1 Upper end position 1 Bit 1.001 Through these communication objects a telegram with the value "1"
for the corresponding blind is sent when the upper end position is
48 Motor 2 Upper end position 1 Bit 1.001
49 Motor 3 Upper end position 1 Bit 1.001
reached. When leaving the upper end position of the corresponding
blind, a telegram with the value "0" is sent. The upper and lower
end position is determined by the parametered move times.
50 Motor 4 Upper end position 1 Bit 1.001
51 Motor 1-4 Upper end position 1 Bit 1.001 Through this communication object a telegram with the value "1"
for the blinds 1-4 is sent when all four blinds have reached the
upper end position. When all 4 blinds leave the upper end position,
a telegram with the value "0" is sent. The upper and lower end
position is determined by the parametered move times.
52 Motor 1 Lower end position 1 Bit 1.001 Through this communication objects a telegram with the value
"1" for the corresponding blind is sent when all four blinds have
53 Motor 2 Lower end position 1 Bit 1.001
54 Motor 3 Lower end position 1 Bit 1.001
55 Motor 4 Lower end position 1 Bit 1.001
reached the lower end position. When leaving the lower end position of the corresponding motor, a telegram with the value "0"
is sent. The upper and lower end position is determined by the
parametered move times.
56 Motor 1-4 Lower end position 1 Bit 1.001 Through this communication object a telegram with the value "1" is
sent for the blinds 1-4 when all four blinds have reached the lower
end position. When the corresponding blinds leave the lower end
position, a telegram with the value "0" is sent. The upper and lower
end position is determined by the parametered move times.
57 Motor 1 Block functions 1 Bit 1.001 If a telegram with the value "1" is received on one of these com-
munication objects, the functions parametered in the ETS for the
58 Motor 2 Block functions 1 Bit 1.001
59 Motor 3 Block functions 1 Bit 1.001
60 Motor 4 Block functions 1 Bit 1.001
corresponding blind is blocked. If a telegram with the value "0"
is received on one of these communication objects, the functions
parametered in the ETS for the corresponding blind is no longer
blocked and freed again.
61 Motor 1-4 Block functions 1 Bit 1.001 If a telegram with the value "1" is received on this communica-
tion object, the functions parametered in the ETS for the blinds 1-4
are blocked. If a telegram with the value "0" is received on this
communication object, the functions parametered in the ETS for the
blinds 1-4 are no longer blocked and freed again.
62 Motor 1 Prio automatic/manual 1 Bit 1.001 Over these communication objects the priority automatic function
and priority manual function can be switched. If a telegram with
63 Motor 2 Prio automatic/manual 1 Bit 1.001
64 Motor 3 Prio automatic/manual 1 Bit 1.001
65 Motor 4 Prio automatic/manual 1 Bit 1.001
the value "1" is received on one of these communication objects,
the automatic functions for the corresponding blind is priority activated. If a telegram with the value "0" is received on one of these
communication objects, the manual functions for the corresponding
blind is active.
66 Motor 1 Reset priority 1 Bit 1.001 If a telegram with the value "1" or "0" is received on one of these
communication objects the priority switching for the correspond-
67 Motor 2 Reset priority 1 Bit 1.001
68 Motor 3 Reset priority 1 Bit 1.001
69 Motor 4 Reset priority 1 Bit 1.001
ing blind is reset. Automatic functions or manual functions are
then switched to priority active again. Whichever priority is active
depends on the status of the communication objects 62-65 or
whichever priority has been parametered in the ETS.
70 Switch input 1: UP / DOWN 1 Bit 1.001 A long pressing of the button on input A generates a telegram on
this communication object with the value "0". The Venetian blind
moves UP.
A long pressing of the button on input B generates a telegram on
this communication object with the value "1". The Venetian blind
moves DOWN.
animeo KNX 4 AC MoCo · REF. 5071074 - 12/47
No. Object name Model DPT_ID Description
71 Switch input 1: STEP/STOP 1 Bit 1.001 A short pressing of the button on input A generates a telegram on
this communication object with the value "0". The slat turns UP.
When the Venetian blinds are making a move then a short pressing
of the button generates a stop command on input A. A short pressing of the switch on input B generates a telegram with the value
"1". The slats turn CLOSE. When the Venetian blind is making a
move then a short pressing of the button generates a stop command
on input B.
72 Switch input 1: A, Switch 1 Bit 1.001 According to the parameter settings and the state at input 1 contact
A a switching telegram is sent over this communication object with
the value "1" or "0".
73 Switch input 1: B, Switch 1 Bit 1.001 According to the parameter settings and the state at input 1 contact
B, a switching telegram is sent over this communication object with
the value "1" or "0".
74 Switch input 1: A, 8-Bit value 1 Byte 5.004 According to the parameter settings, with a rising edge on input 1
contact A, the parametered value (0-255) is sent.
75 Switch input 1: B, 8-Bit value 1 Byte 5.004 According to the parameter settings, with a rising edge on input 1
contact B, the parametered value (0-255) is sent.
76 Switch input 1: A/B, Dimming 1 Bit 1.001
On/Off:
According to the parameter settings, with a short pressing at the
input 1 contact A/B, a telegram is generated with the value "1" or
"0".
Toggle/Toggle:
According to the parameter settings, with a short pressing at the
input 1 contact A/B, a telegram is generated with the value "1" or
"0".
77 Switch input 1:
A/B, Dimming, Value
4 Bit 3.007
Brighter/darker dimming:
According to the parameter settings, brighter dimming is done with
a long pressing at the input 1 contact A. According to the parameter
settings, darker dimming is done with a long pressing at the input 1
contact B.
Brighter/Darker toggle:
According to the parameter settings, over input 1 contact A, 100 %
is dimmed with longer pressing of the switch. When releasing the
corresponding switch at the input A, a stop command is generated.
The last activated dimming step becomes inverted. According to
the parameter settings, over input 1 contact A, 100 % is dimmed
with longer pressing of the switch. When releasing the corresponding switch at the input B, a stop command is generated. The last
activated dimming step becomes inverted.
78 Switch input 2: UP/DOWN 1 Bit 1.001 See object description 70, C/D instead A/B
79 Switch input 2: STEP/STOP 1 Bit 1.001 See object description 71, C/D instead A/B
80 Switch input 2: C, Switch 1 Bit 1.001 See object description 72, C instead A
81 Switch input 2: D, Switch 1 Bit 1.001 See object description 73, D instead B
82 Switch input 2: C, 8-Bit value 1 Bit 5.004 See object description 74, C instead A
83 Switch input 2: D, 8-Bit value 1 Bit 5.004 See object description 75, D instead B
84 Switch input 2: C/D, Dimming 1 Bit 1.001 See object description 76, C/D instead A/B
85 Switch input 2: C/D, Dimming, Value 4 Bit 3.007 See object description 77, C/D instead A/B
86 Switch input 3: UP/DOWN 1 Bit 1.001 See object description 70, E/F instead A/B
87 Switch input 3: STEP/STOP 1 Bit 1.001 See object description 71, E/F instead A/B
88 Switch input 3: E, Switch 1 Bit 1.001 See object description 72, E instead A
89 Switch input 3: F, Switch 1 Bit 1.001 See object description 73, F instead B
90 Switch input 3: E, 8-Bit value 1 Bit 5.004 See object description 74, E instead A
animeo KNX 4 AC MoCo · REF. 5071074 - 13/47
No. Object name Model DPT_ID Description
91 Switch input 3: F, 8-Bit value 1 Bit 5.004 See object description 75, F instead B
92 Switch input 3: E/F, Dimming 1 Bit 1.001 See object description 76, E/F instead A/B
93 Switch input 3: E/F, Dimming, Value 4 Bit 3.007 See object description 77, E/F instead A/B
94 Switch input 4: UP / DOWN 1 Bit 1.001 See object description 70, G/H instead A/B
95 Switch input 4: STEP/STOP 1 Bit 1.001 See object description 71, G/H instead A/B
96 Switch input 4: G, Switch 1 Bit 1.001 See object description 72, G instead A
97 Switch input 4, H, Switch 1 Bit 1.001 See object description 73, H instead B
98 Switch input 4: G, 8-Bit value 1 Bit 5.004 See object description 74, G instead A
99 Switch input 4: H, 8-Bit value 1 Bit 5.004 See object description 75, H instead B
100 Switch input 4: G/H, Dimming 1 Bit 1.001 See object description 76, G/H instead A/B
101 Switch input 4: G/H, Dimming, Value 4 Bit 3.007 See object description 77, G/H instead A/B
110 Radio input 1: UP / DOWN 1 Bit 1.001 A longer pressing of the "UP" switch on channel 1 of the learned-
in handheld sender generates a telegram with the value "0". The
Venetian blind moves UP.
A longer pressing of the "DOWN" switch on channel 1 of the
learned-in handheld sender generates a telegram with the value
"1". The Venetian blind moves DOWN.
111 Radio input 1: STEP/STOP 1 Bit 1.001 According to the parameter settings a short press on the "my"
button on channel 1 of the learned-in handheld radio transmitter generates a telegram with the value "0" on this communication
object. The slats turn OPEN. When the Venetian blind is moving
then a short press of channel 1 on the learned-in handheld radio
transmitter will generate a stop command.
A short pressing of the "DOWN" button on channel 1 of the learnedin handheld radio transmitter generates a telegram with the value
"1" on this communication object. The slats turn DOWN. When the
Venetian blind is moving then a short press of channel 1 on the
learned-in handheld radio transmitter will generate a stop command.
112 Radio input 1: Switch "my" button 1 Bit 1.001 According to the parameter settings a press on the "my" button on
channel 1 of the learned-in handheld radio transmitter generates a
switching telegram with the value "0" or "1" on this communication object.
113 Radio input 1: 8-Bit value "my" button 1 Byte 5.004 According to the parameter settings a press on the "my" button on
channel 1 of the learned-in handheld radio transmitter sends a
switching telegram with the value (0-255).
114 Radio input 1: Switch "UP" button 1 Bit 1.001 According to the parameter settings a press on the "UP" button on
channel 1 of the learned-in handheld radio transmitter generates a
switching telegram with the value "1" or "0" on this communication object.
115 Radio input 1: Switch "DOWN" button 1 Bit 1.001 According to the parameter settings a press on the "DOWN" but-
ton on channel 1 of the learned-in handheld radio transmitter
generates a switching telegram with the value "1" or "0" on this
communication object.
116 Radio input 1: 8-Bit value "UP" button 1 Byte 5.004 According to the parameter settings a press on the "UP" button on
channel 1 of the learned-in handheld radio transmitter sends a
switching telegram with the value (0-255).
117 Radio input 1: 8-Bit value "DOWN" button 1 Byte 5.004 According to the parameter settings a press on the "DOWN" button
on channel 1 of the learned-in handheld radio transmitter sends a
switching telegram with the value (0-255).
animeo KNX 4 AC MoCo · REF. 5071074 - 14/47
No. Object name Model DPT_ID Description
118 Radio input 1: Dimming ON/OFF or
Slow tilting UP/DOWN
119 Radio input 1: Dimming Brighter/Darker or
Slow tilting OPEN/CLOSE
1 Bit 1.001
4 Bit 3.007
ON/UP:
A short pressing of the "UP" button on channel 1 of the learned-in
handheld radio transmitter generates a telegram with the value "0"
on this communication object. The lights switch OFF or the Venetian
blind moves UP.
OFF/DOWN:
A short pressing of the "DOWN" button on channel 1 of the learnedin handheld radio transmitter generates a telegram with the value
"1" on this communication object. The lights switch ON or the
Venetian blind moves DOWN.
Toggle/Toggle:
A short pressing of the "DOWN" or the "UP" button on channel 1
of the learned-in handheld radio transmitter generates a telegram
with the value "1" or with the value "0"on this communication
object. The lights switch ON or OFF or the Venetian blind moves
DOWN or UP.
Brighter/Slow tilting open:
A longer pressing of the "UP" button on channel 1 of the learned-in
handheld radio transmitter generates a telegram with the adjusted
1
value "100 %,
/2, 1/4, 1/8, 1/16, 1/32 or 1/64" on this communication
object. The lights dim darker or the Venetian blind moves UP.
Darker/Slow tilting close:
A short pressing of the "DOWN" button on channel 1 of the
learned-in handheld radio transmitter generates a telegram with
the adjusted value "100 %, 1/2, 1/4, 1/8, 1/16, 1/32 or 1/64" on this
communication object. The light dims brighter or the Venetian blind
turns slowly closed.
120 Radio input 2: UP / DOWN 1 Bit 1.001 See object description 110, channel 2 instead channel 1
121 Radio input 2: STEP/STOP 1 Bit 1.001 See object description 111, channel 2 instead channel 1
122 Radio input 2: Switch "my" button 1 Bit 1.001 See object description 112, channel 2 instead channel 1
123 Radio input 2: 8-Bit value "my" button 1 Byte 5.004 See object description 113, channel 2 instead channel 1
124 Radio input 2: Switch "UP" button 1 Bit 1.001 See object description 114, channel 2 instead channel 1
125 Radio input 2: Switch "DOWN" button 1 Bit 1.001 See object description 115, channel 2 instead channel 1
126 Radio input 2: 8-Bit value "UP" button 1 Byte 5.004 See object description 116, channel 2 instead channel 1
127 Radio input 2: 8-Bit value "DOWN" button 1 Byte 5.004 See object description 117, channel 2 instead channel 1
128 Radio input 2: Dimming ON/OFF or
1 Bit 1.001 See object description 118, channel 2 instead channel 1
Slow tilting UP/DOWN
129 Radio input 2: Dimming Brighter/Darker or
4 Bit 3.007 See object description 119, channel 2 instead channel 1
Slow tilting OPEN/CLOSE
130 Radio input 3: UP / DOWN 1 Bit 1.001 See object description 110, channel 3 instead channel 1
131 Radio input 3: STEP/STOP 1 Bit 1.001 See object description 111, channel 3 instead channel 1
132 Radio input 3: Switch "my" button 1 Bit 1.001 See object description 112, channel 3 instead channel 1
133 Radio input 3: 8-Bit value "my" button 1 Byte 5.004 See object description 113, channel 3 instead channel 1
134 Radio input 3: Switch "UP" button 1 Bit 1.001 See object description 114, channel 3 instead channel 1
135 Radio input 3: Switch "DOWN" button 1 Bit 1.001 See object description 115, channel 3 instead channel 1
136 Radio input 3: 8-Bit value "UP" button 1 Byte 5.004 See object description 116, channel 3 instead channel 1
137 Radio input 3: 8-Bit value "DOWN" button 1 Byte 5.004 See object description 117, channel 3 instead channel 1
138 Radio input 3: Dimming ON/OFF or
1 Bit 1.001 See object description 118, channel 3 instead channel 1
Slow tilting UP/DOWN
animeo KNX 4 AC MoCo · REF. 5071074 - 15/47
 Loading...
Loading...