

SOMFY Animeo KNX RS485 Operating Manual
Table of content
1
First operation ................................................................................................................................ 3
2
Wiring diagram ............................................................................................................................... 3
3
Communication objects ................................................................................................................ 5
3.1 Object overview...................................................................................................................... 5
3.1.1 List of Objects ........................................................................................................................ 5
4
Parameter ...................................................................................................................................... 19
4.1 Motor Controller settings ...................................................................................................... 19
4.1.1 Menu index card “Motor Controller” ..................................................................................... 19
4.1.2 Menu index card “Motor 1” ................................................................................................... 20
4.2 Group Assignment ............................................................................................................... 24
4.2.1 Menu index card “Group Assignment” ................................................................................. 24
4.2.2 Menu index card “Command Group 1” ................................................................................ 25
5
Technical data .............................................................................................................................. 28
6
General information ..................................................................................................................... 29
7
Appendix ....................................................................................................................................... 30
Different types of motors could be used and connected on the animeo KNX RS485 Motor Con-
troller.
Before connecting motor and Motor Controller make sure that the end limits of the motors have
been set correctly.
Before starting up it is necessary to follow the safety instructions in this manual. SOMFY cannot
be held liable for defects and damages when these have been caused as a result of not following
instructions (wrong installation, incorrect service etc.). Establishing, testing and commissioning of
the equipment is permitted only by a qualified person (in accordance with VDE 0100). Plug in all
connections without voltage. Take precautions against unintentional turning on.
The installation of the Somfy products may occur only at easily accessible places. If maintenance
and repair become hindered by accessibility substantially (e.g. stuck or extensively stuck flooring,
installation behind lamps or behind façades), any originating supplementary costs therein cannot
be charged to the seller.
Subject to technical changes.
animeo KNX RS485 Motor Controller WM 2017-06-30
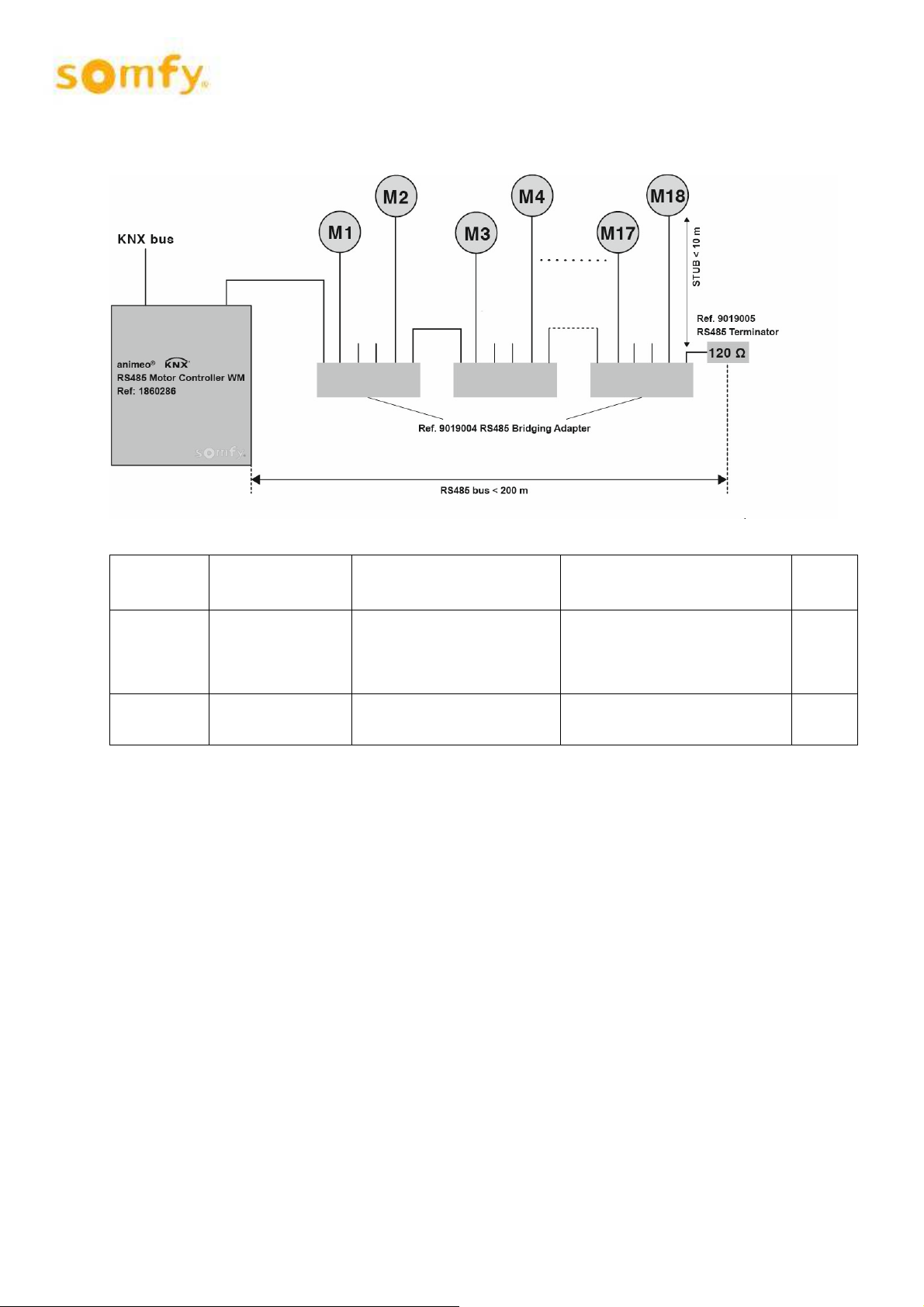
The KNX RS485 is a wall-mounted Motor Controller which enables the
controlling of up to 18 motors. The motors can be controlled either individually or by groups.
RS485 motors can be connected to the RS485 Bridging Adapter, ref.
9019004. Different motor types can be used.
RS485 motors are compatible with
Sonesse50 RS485
LT50 RS485
Sonesse30 RS485
Sonesse50 Ultra DC RS485
Product features:
• Flexible installation: suspended ceiling/raised floor, under window or wall-mounted wiring channels.
• Quick installation and connection of the Motor Controller by plug and play, cable tension relief point
to tighten cables to the housing of the product and daisy chaining of several RS485 motors.
• With the SDN configuration software the motor settings have to be done before configuring via ETS.
• Perfect alignment of the blinds thanks to the increment encoder technology of the RS485 motors.
• The exact position of the blind during movement and when reaching the upper and lower end limits
can be monitored.
• Using a one Byte telegram over the KNX, the blind can be moved to numerous intermediate positions.
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 2/31
animeo KNX RS485 Motor Controller WM 2017-06-30
1 First operation
1. Blinds must be mounted and the upper and lower end limit must be adjusted (s. wiring diagram).
The settings of the motor limits can be done via the use of the SDN configuration software.
2. Link all motors via the RS485 bus and connect them to the Motor Controller.
3. Turn on power supply of the motors.
4. Connect power supply to the Motor Controllers (KNX bus).
5. After a waiting time of ca. 30 seconds all motors can be operated by means of the push buttons
on the Motor Controller.
6. Check end limits and running direction. Can be adjusted later via ETS, if necessary.
7. Create ETS project and download it.
8. After a waiting time of approx. 1 minute after downloading the Motor Controller is ready for opera-
tion.
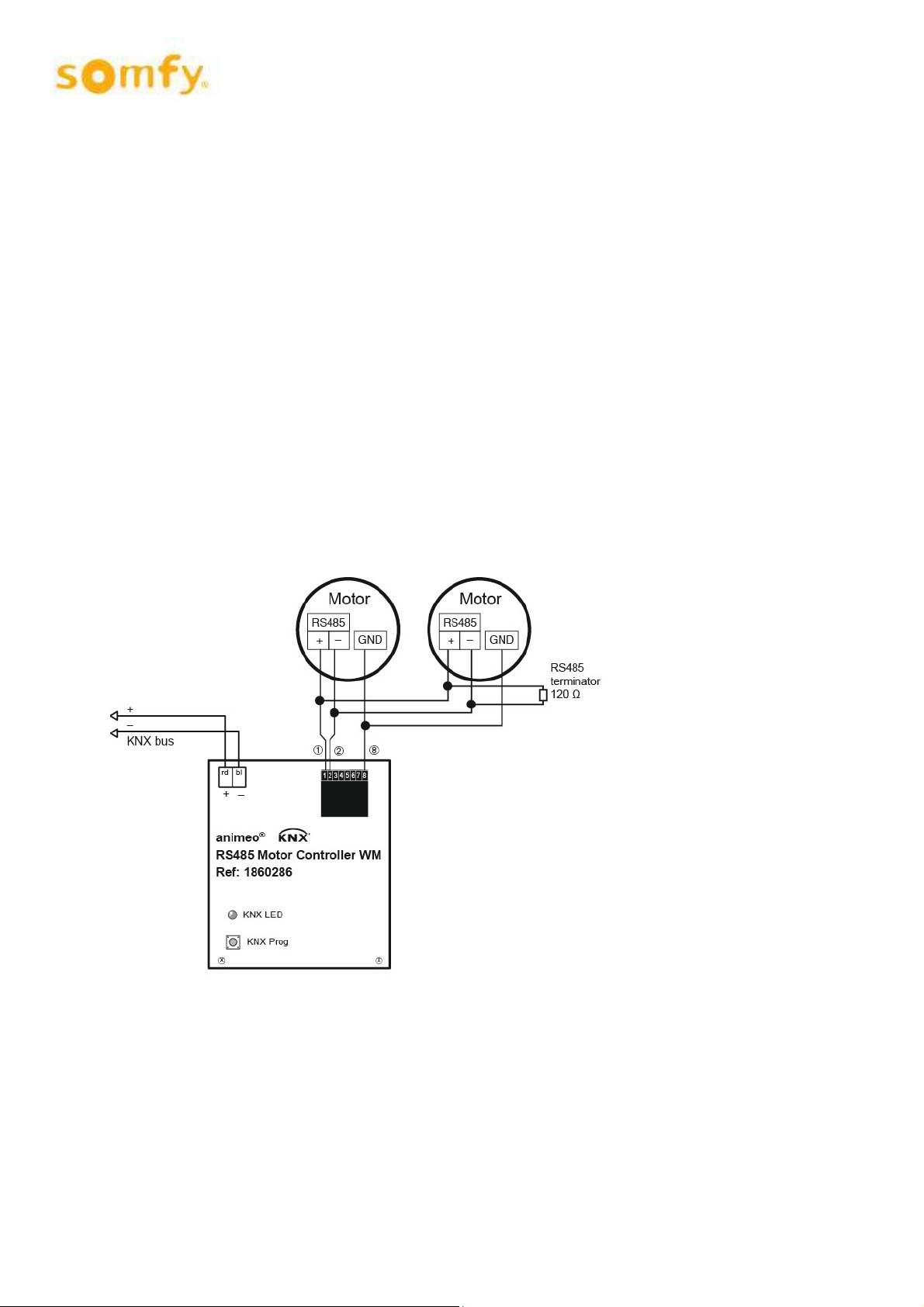
2 Wiring diagram
, ref. 9019005
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 3/31
animeo KNX RS485 Motor Controller WM 2017-06-30
Connection
to
RS485 bus Modular Jack 8P4C
KNX Bus 2 x 0.8 mm/20 AWG Required, following KNX
Cable Twisted pair Max.
Min.: 4 x 2 x 0.5 mm/24 AWG Required twisted pair shielded,
(RJ45)
impedance 100 Ω (-10 Ω/+30 Ω),
recommended CAT5-FTP,
following Somfy RS485 guidelines
topology guidelines
length
200 m
–
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 4/31
animeo KNX RS485 Motor Controller WM 2017-06-30
3 Communication objects
3.1 Object overview
A maximum of 306 communication objects are available, which however cannot be used at one time.
H Maximum 480 group addresses can be linked.
3.1.1 List of Objects
No. Object name Model DPT_ID Description
1 Motor 1 Position Request 1 Bit 1.017
2 Motor 1 Position Feedback 1 Byte 5.001
3 Not used
4 Motor 1 Feedback Upper End 1 Bit 1.001
5 Motor 1 Feedback Lower End 1 Bit 1.001
6 Motor 1 Error Feedback 1 Bit 1.001
7 Motor 1 Identification 4 Bytes 12.*
8 Motor 1 Cycles 4 Bytes 12.001 Read out the number of movement cycles
If a telegram with the value “1” or “0” is received on this communication object, the
current status position is sent on the bus
(object 2).
On this communication object the current
position (UP/DOWN direction) of the blind
is sent to the bus based on the programmed running time. The type of feedback (on demand, status change, cyclic) is
defined in the ETS parameters.
"0" = UP / "100" = DOWN
Over this communication object a telegram
with the value "1" is sent if the upper end
position is reached. When leaving the upper end position of the blind a telegram
with the value "0" is sent. The upper and
the lower end position result from the parameterized running times.
Over this communication object a telegram
with the value "1" is sent after the lower
end position is reached. When leaving the
lower end position of the blind a telegram
with the value "0" is sent. The upper and
the lower end position result from the parameterized running times.
Over this communication object a telegram
is sent if a motor error occurs. An error is
when a move command was sent to the
motor, but the motor does not move.
The sent value of this communication object depends on what has been selected in
the ETS parameters.
• 1/0 (1 = error, 0 = no error) or
• 0/1 (0 = error, 1 = no error)
Write:
0 Motor is winking
1-255 Move to position
Read:
Read out the Motor ID of the connected
RS485 motor
of the motor.
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 5/31
animeo KNX RS485 Motor Controller WM 2017-06-30
No. Object name Model DPT_ID Description
Motor 2 Position Request
9
1 Bit 1.017 See object description no. 1 for motor 1
10 Motor 2 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
11 Not used
12 Motor 2 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
13 Motor 2 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
14 Motor 2 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
15 Motor 2 Identification 4 Bytes 12.* See object description no. 7 for motor 1
16 Motor 2 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 3 Position Request
17
1 Bit 1.017 See object description no. 1 for motor 1
18 Motor 3 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
19 Not used
20 Motor 3 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
21 Motor 3 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
22 Motor 3 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
23 Motor 3 Identification 4 Bytes 12.* See object description no. 7 for motor 1
24 Motor 3 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 4 Position Request
25
1 Bit 1.017 See object description no. 1 for motor 1
26 Motor 4 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
27 Not used
28 Motor 4 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
29 Motor 4 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
30 Motor 4 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
31 Motor 4 Identification 4 Bytes 12.* See object description no. 7 for motor 1
32 Motor 4 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 5 Position Request
33
1 Bit 1.017 See object description no. 1 for motor 1
34 Motor 5 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
35 Not used
36 Motor 5 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
37 Motor 5 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
38 Motor 5 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
39 Motor 5 Identification 4 Bytes 12.* See object description no. 7 for motor 1
40 Motor 5 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 6 Position Request
41
1 Bit 1.017 See object description no. 1 for motor 1
42 Motor 6 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
43 Not used
44 Motor 6 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 6/31
animeo KNX RS485 Motor Controller WM 2017-06-30
No. Object name Model DPT_ID Description
45 Motor 6 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
46 Motor 6 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
47 Motor 6 Identification 4 Bytes 12.* See object description no. 7 for motor 1
48 Motor 6 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 7 Position Request
49
1 Bit 1.017 See object description no. 1 for motor 1
50 Motor 7 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
51 Not used
52 Motor 7 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
53 Motor 7 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
54 Motor 7 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
55 Motor 7 Identification 4 Bytes 12.* See object description no. 7 for motor 1
56 Motor 7 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 8 Position Request
57
1 Bit 1.017 See object description no. 1 for motor 1
58 Motor 8 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
59 Not used
60 Motor 8 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
61 Motor 8 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
62 Motor 8 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
63 Motor 8 Identification 4 Bytes 12.* See object description no. 7 for motor 1
64 Motor 8 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 9 Position Request
65
1 Bit 1.017 See object description no. 1 for motor 1
66 Motor 9 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
67 Not used
68 Motor 9 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
69 Motor 9 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
70 Motor 9 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
71 Motor 9 Identification 4 Bytes 12.* See object description no. 7 for motor 1
72 Motor 9 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 10 Position Request
73
1 Bit 1.017 See object description no. 1 for motor 1
74 Motor 10 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
75 Not used
76 Motor 10 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
77 Motor 10 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
78 Motor 10 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
79 Motor 10 Identification 4 Bytes 12.* See object description no. 7 for motor 1
80 Motor 10 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 11 Position Request
81
1 Bit 1.017 See object description no. 1 for motor 1
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 7/31
animeo KNX RS485 Motor Controller WM 2017-06-30
No. Object name Model DPT_ID Description
82 Motor 11 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
83 Not used
84 Motor 11 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
85 Motor 11 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
86 Motor 11 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
87 Motor 11 Identification 4 Bytes 12.* See object description no. 7 for motor 1
88 Motor 11 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 12 Position Request
89
1 Bit 1.017 See object description no. 1 for motor 1
90 Motor 12 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
91 Not used
92 Motor 12 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
93 Motor 12 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
94 Motor 12 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
95 Motor 12 Identification 4 Bytes 12.* See object description no. 7 for motor 1
96 Motor 12 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 13 Position Request
97
1 Bit 1.017 See object description no. 1 for motor 1
98 Motor 13 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
99 Not used
100 Motor 13 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
101 Motor 13 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
102 Motor 13 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
103 Motor 13 Identification 4 Bytes 12.* See object description no. 7 for motor 1
104 Motor 13 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 14 Position Request
105
1 Bit 1.017 See object description no. 1 for motor 1
106 Motor 14 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
107 Not used
108 Motor 14 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
109 Motor 14 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
110 Motor 14 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
111 Motor 14 Identification 4 Bytes 12.* See object description no. 7 for motor 1
112 Motor 14 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 15 Position Request
113
1 Bit 1.017 See object description no. 1 for motor 1
114 Motor 15 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
115 Not used
116 Motor 15 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
117 Motor 15 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
118 Motor 15 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 8/31
animeo KNX RS485 Motor Controller WM 2017-06-30
No. Object name Model DPT_ID Description
119 Motor 15 Identification 4 Bytes 12.* See object description no. 7 for motor 1
120 Motor 15 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 16 Position Request
121
122 Motor 16 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
123 Not used
124 Motor 16 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
125 Motor 16 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
126 Motor 16 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
127 Motor 16 Identification 4 Bytes 12.* See object description no. 7 for motor 1
128 Motor 16 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 17 Position Request
129
130 Motor 17 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
131 Not used
1 Bit 1.017 See object description no. 1 for motor 1
1 Bit 1.017 See object description no. 1 for motor 1
132 Motor 17 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
133 Motor 17 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
134 Motor 17 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
135 Motor 17 Identification 4 Bytes 12.* See object description no. 7 for motor 1
136 Motor 17 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
Motor 18 Position Request
137
138 Motor 18 Position Feedback 1 Byte 5.001 See object description no. 2 for motor 1
139 Not used
140 Motor 18 Feedback Upper End 1 Bit 1.001 See object description no. 4 for motor 1
141 Motor 18 Feedback Lower End 1 Bit 1.001 See object description no. 5 for motor 1
142 Motor 18 Error Feedback 1 Bit 1.001 See object description no. 6 for motor 1
143 Motor 18 Identification 4 Bytes 12.* See object description no. 7 for motor 1
144 Motor 18 Cycles 4 Bytes 12.001 See object description no. 8 for motor 1
1 Bit 1.017 See object description no. 1 for motor 1
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 9/31
animeo KNX RS485 Motor Controller WM 2017-06-30
No. Object name Model DPT_ID Description
Command Group 1
153
Up/Down
Command Group 1
154
Dedicated Stop
155 Command Group 1
Position
156 Not used
1 Bit 1.008
1 Bit 1.017 If the end product is in a full moving process, it stops
1 Byte 5.001
If a telegram with the value "0" is received on this
communication object, the appropriate blind goes up.
If a telegram with the value "1" is received, the appropriate blind goes down.
with the receipt of a telegram on the object, regardless of whether a telegram with the value "0" or "1" is
received. If the end product is in passive state, then
with the receipt of a telegram on this communication
object no action is executed.
If this communication object receives a telegram, the
appropriate blind will go into the position which is defined by the received value.
"0" = UP "100" = DOWN
157 Command Group 1
Move to IP1
158 Command Group 1
Move to IP2
159 Command Group 1
Security low prio
1 Bit 1.008 If a telegram with the value "1" is received on this
communication object, the blind goes to the intermediate position 1 which was configured by local switch
or parameterized in the ETS parameters. The last position which has been configured is active. Receiving
a telegram with the value "0" on this communication
object the appropriate blind goes to the upper end
position.
1 Bit 1.008 If a telegram with the value "1" is received on one of
these communication objects, the corresponding
blind moves to the intermediate position 2 parameterized in the ETS parameters. Receiving a telegram
with the value "0" on one of these communication objects, the corresponding blind moves to the upper
end position.
1 Bit 1.001 If a telegram with the value "1" is received on this
communication object, the blind goes to the position
which was parameterized in the ETS parameters.
When the communication object receives a telegram
with value "0" no action will be executed. Only with
the selection "Restore previous position after security
(Yes)" in the ETS parameters this action will be executed on the blind. If this communication object is active through a telegram with the value "1" and if then
on the communication object 160 (security position,
high priority) a telegram with value "1" is received, the
blind will move to the position configured in the ETS
parameters (security position, high priority).
160 Command Group 1
Security high prio
animeo KNX RS485 Motor Controller WM . Ref. 5134039A 10/31
1 Bit 1.001 If a telegram with the value "1" is received on this
communication object, the blind goes to the position
which was parameterized in the ETS parameters.
When the communication object receives a telegram
with value "0" no action will be executed. Only with
the selection " Restore previous position after security (Yes)" in the ETS parameters this will be executed in the blind. If an object for security position,
low priority is active ("1"), the blinds will go to the parameterized position for the low priority.
 Loading...
Loading...