

SOMFY Animeo KNX/EIB WM Series,Animeo KNX/EIB DRM Series Installation Manual
somfy.com
animeo
®
KNX/EIB 4 AC Motor Controller
WM/DRM 220-240V AC
Installation manual
Ref. 1860114
Ref. 1860116
© 2007, SOMFY SAS. ALL RIGHTS RESERVERD. REF. 5050779 - 30/04/2007
Table of contents
Introduction ..................................................................................................... 3
Definitions ....................................................................................................... 4
0
Assembly ......................................................................................................... 5
1
2
Wiring Diagram .................................................................................................. 5
2.1 Checking the running direction of the blinds ................................................................. 6
3
Settings on delivery status ....................................................................................... 7
3.1 Function of the Reset/Prog button ........................................................................... 7
3.2 Selection of different user ergonomics ....................................................................... 7
3.3 Manual setting of running and tilting times .................................................................. 8
3.4 Manual setting of intermediate position 1.................................................................... 8
3.5 Reset to delivery status ..................................................................................... 8
Communication objects
4
5
Parameters
Di
6
6.1
agnosis
..................................................................................................... 13
....................................................................................................... 29
LEDs at the animeo KNX/EIB Motor Controller
.......................................................................................... 9
................................................................ 29
6.2 Information during operation .............................................................................. 29
6.3 St
7
Technichal Data
atus of configurations
................................................................................................. 30
.................................................................................... 30
m
stallation, please read the safety instructions carefully. Failure to respect these instructions automatically
n
e i
or
Bef
invalidates warranty and all liability claims against SOMFY (e.g. wrong installation, maloperation etc.). The product
must be installed by a qualified electrician! All connections has to be disconnected from mains before mounting! Make
precautions against switching on by accident!
The installation of Somfy products has to be made at easily accessible places only. For maintenance and repairs which
are difficult to perform because of bad accessibility (e.g. clotted or extensive clotted floors, installation behind lamps or
behind façades) additional costs cannot be claimed against the seller.
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
/31
2
Introduction
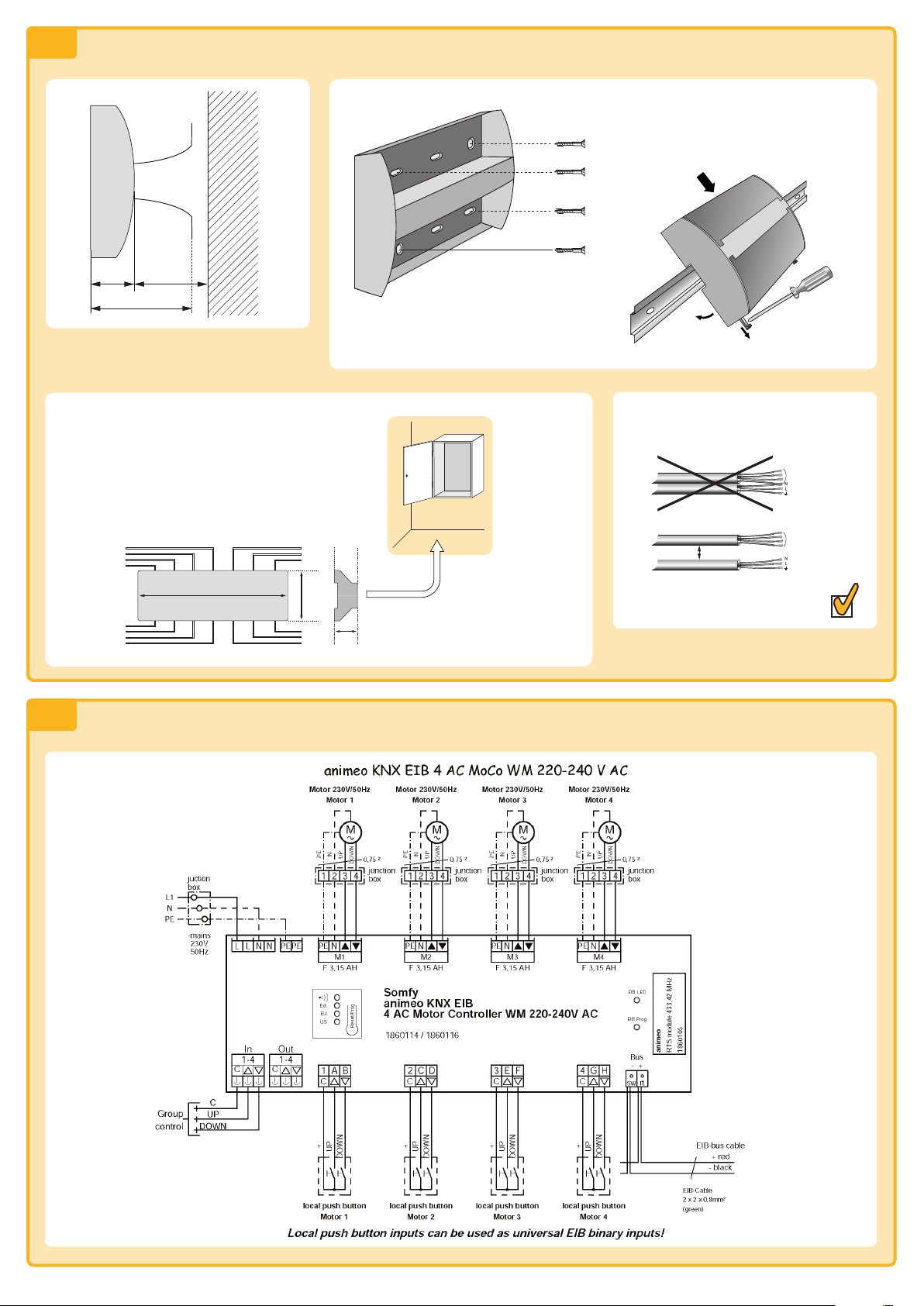
The animeo EIB/KNX 4 AC Motor Controller WM/DRM 220-240 V AC is designed to control four individual configurable motor outputs for venetian
blinds, roller shutters, awnings or windows. Local push button inputs can be used for conventional push buttons or as universal binary EIB inputs.
The four outputs can also be controlled individually using the animeo RTS radio module.
Benefits and product features
• Practical installation benefits which reduce the installation time, e.g. spring connectors, cable tension release, sufficient space for connections,…
• A group input can be used to control all four outputs independent of the ETS programming.
• Single fuse (3.15 AH) protection per motor output.
• Checking of running direction of the end products possible without the ETS.
• The device can be used basically without the need to be programmed by the ETS software.
• The 4 local push button inputs can be used as maximal 8 universal EIB binary inputs to connect for example window contacts, temperature
sensors or presence detectors. A conventional push button can also be used to realize dimming functions in combination with lighting actuators.
• User-friendly and intuitive configuration inside the ETS parameter settings.
• Intelligent switching between manual and automatic functions to provide excellent user comfort and powerful energy saving functions.
• Position feedback of each motor output during move and when reaching the UP and DOWN end limits.
• Two free configurable security levels per motor output.
• Free configurable action at mains return and feedback of status via object.
• Automatic cascading of the motor outputs to limit the peak current in case of mains power return and bus safety functions.
• Plug and play! Upgrade with the animeo RTS radio module possible at any time. The four outputs can then easily be controlled via radio remote
without additional wiring.
• In cases where radio technology is not permitted, e.g. in hospitals, the motor outputs can also be upgraded and controlled with the animeo
infrared module.
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
/31
3
0
Definitions
ll indications in the manual marked with * refers to the following terms:
A
Manual order A manual order is a command generated by a local conventional switch or by a Somfy RTS radio hand transmitter.
A telegram received on the objects 0-7 is also understood as manual command.
Automatic order A telegram received on the objects 8-15 is understood as an automatic order.
S switch ergonomics
U
ith this parameter it is specified that the venetian blind is headed in US ergonomics over the local switch inputs or
W
ver Somfy RTS radio hand transmitter.
o
Short manipulation of the switch (< 0.5 s): A move command is executed.
Long manipulation of the switch (> 0.5 s): A tilting command is executed as long as the switch is pressed. When releasing the switch the tilting command is stopped. If the current position of the venetian blind is outside the tilting
time,a driving command is implemented with pressed button.
EU switch ergonomics With this parameter it is specified that the venetian blind is headed in European Union ergonomics over the local switch
nputs or over Somfy RTS radio hand transmitter.
i
Short manipulation of the switch (< 0.5 s): A tilting step is implemented.
Long manipulation of the switch (> 0.5 s): A tilting command is implemented as long as the switch is pressed. If the
current position of the venetian blind is outside the tilting time, a driving command is executed.
Screen switch ergonomics With this parameter it is specified that the end product is headed for screen ergonomics over the local switch inputs or
over Somfy RTS radio hand transmitter.
Short manipulation of the switch when the end product is in full swing: A stop command is executed.
Long manipulation when the end product is not in full swing: A driving command is executed.
m This ergonomic is used to control screens, roller blinds, awnings and windows.
Slat position
INSIDE
OUTSIDE
NX/EIB 4 AC MoCo · REF. 5050779 -
meo K
ani
/31
4
1
Assembly
min.:
20 mm
40 mm
1
1
6
3 mm
Choose the optimal location:
flat and large surface
Mount the Motor Controller 4 AC WM
1.
2.
2
Wiring diagram
DIN Rail mounted version
4 AC DRM
90 mm
2
10 mm : 12 Te
Electrical cabinet
Connect power supply and wiring
to the Motor Controller
90 mm
DIN rail
90 mm
9
0 mm
m Check
distance when
using the
animeo RTS
radio module!
> 10 cm
B
Bus
us
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
/31
5
s soon as 230 V and the EIB bus voltage supply are attached the „US“ LED will blink regularly.
m A
The device is operational when the „US“ LED is blinking continuously.
CABLE
Connections to ... Cables Twisted pairs Max. distance
Motors
Min.: 4 x 0.75 mm2/16 AWG
- 150 m
Max.: 4 x 2.5 mm2/13 AWG
Switches
Min.: 3 x 0.6 mm2/19 AWG
Recommended 150 m
Max.: 3 x 2.5 mm2/13 AWG
roup control
G
EIB bus
Min.: 3 x 0.6 mm2/19 AWG
Max.: 3 x 1.5 mm
2 x 2 x 0.8 mm
2
2
/13 AWG
ecommended
R
Required, following KNX/EIB
1000 m
topology guidelines
2.1
230 V AC
Checking the running direction of the blinds
Min.: 3 x 0.75 mm2/16 AWG
Max.: 3 x 2.5 mm
2
/13 AWG
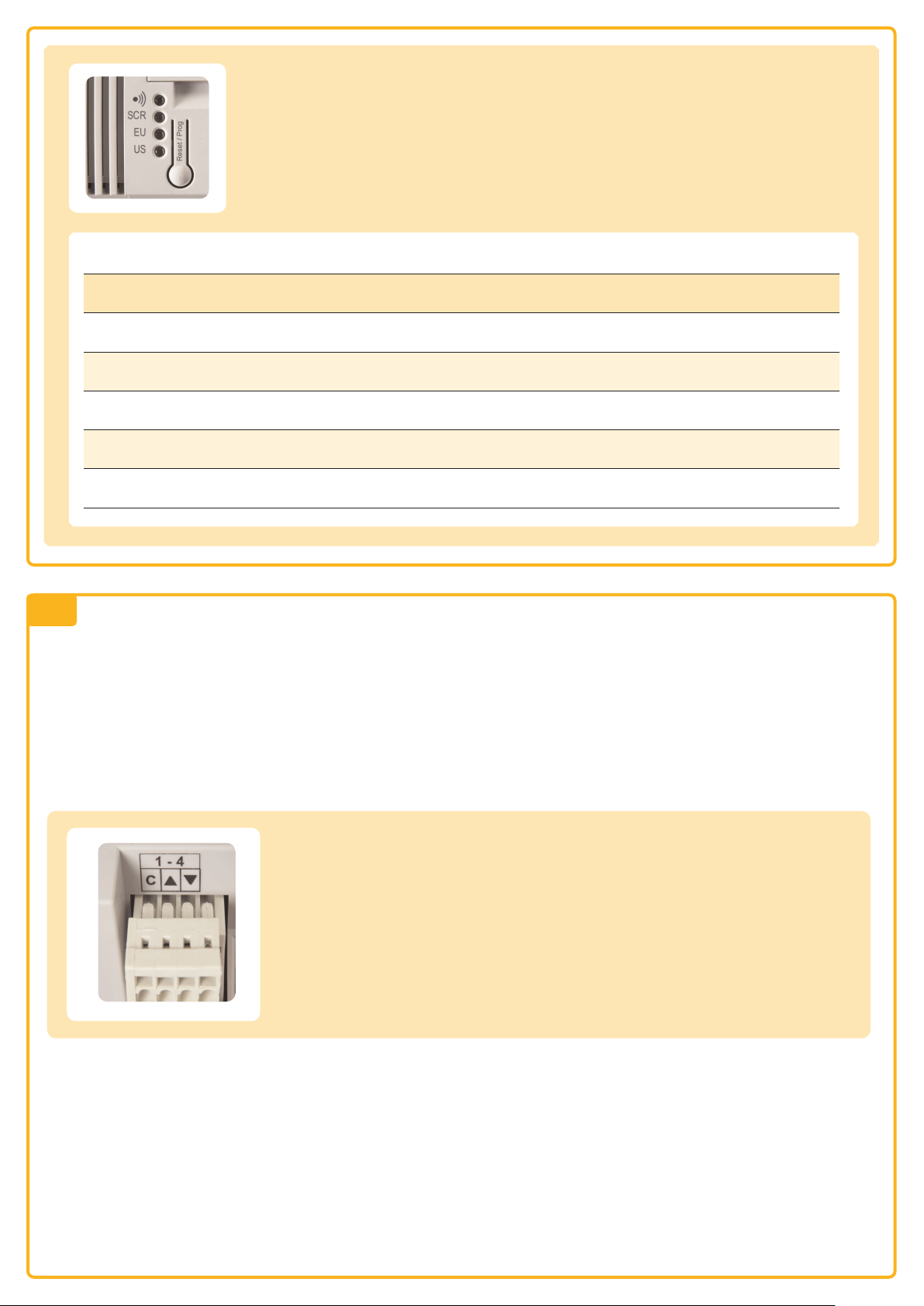
Group control of the motors 1 - 4 over the group control input
Over the group control input the running directions of the connected motors can be tested. All four motor outputs are switched together. This input
can become disabled in the ETS parameters. In the case of a bus voltage failure it is always enabled in order to make an emergency operation
possible.
m Absolute guarantee with start-up that the motors run into the correct direction. By cable links at the group control input this test can be
complished.
ac
the correct direction of the end product
k
ec
h
C
DOWN: The end product heads in the down direction (cable link between C +
STOP: The end product stops (Cable link between C + ▼ + ▲ )
UP: The end product heads in the up direction (cable link between C + ▲ )
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
▼ )
/31
6
3
Reset / Prog
Reset / Prog
Reset / Prog
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Settings on delivery status
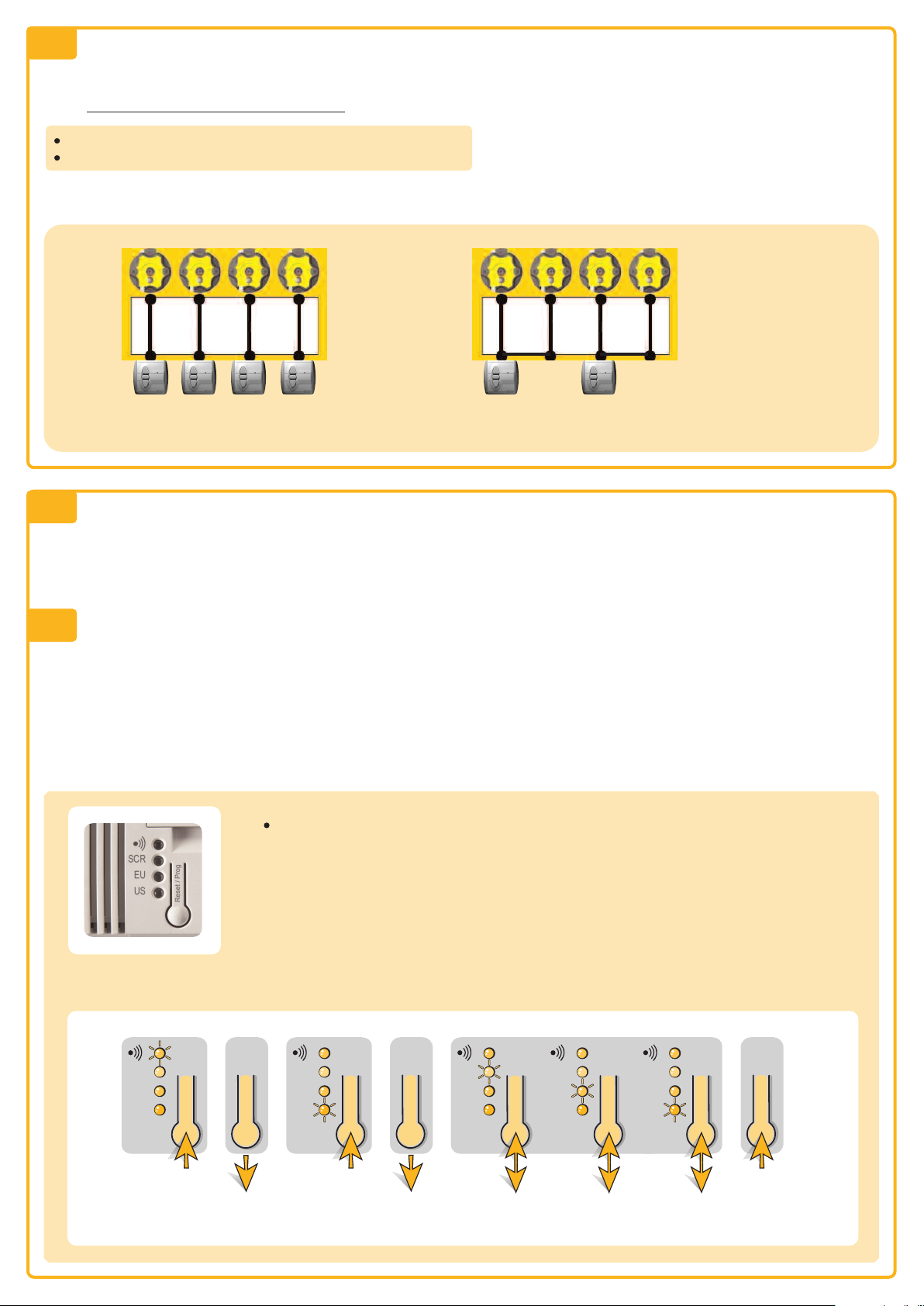
The Moco KNX/EIB can be used on delivery without being programmed by the ETS software. Meaningful default values are implemented in the
device. Th
ese settings apply to all four motor outputs.
unning times UP/DOWN, CLOSE/OPEN = 5 minutes
R
Connection of local conventional switch possible
The local switch inputs are linked 1 to 1 to the motor outputs (fig. 1): switch input 1 controls motor output 1. The motor outputs can be controlled
by cable links at the switch inputs as required (fig. 2).
3.1
Fig. 1
Function of the Reset/Prog button
Fig. 2
m Over this switch base settings at the Moco KNX/EIB can be made. These base settings are only possible in delivery status before the device is
programmed with the ETS or after the device is unloaded by the ETS. The base settings are overwritten by the ETS settings.
3.2
Selection of different user ergonomics
Over the Reset/Prog button different switch user ergonomics can be defined for the local switch inputs and/or Somfy RTS radio hand transmitters.
These settings are only possible in delivery status before the device was programmed with the ETS or after the device became to unload by the ETS.
As soon as the device was programmed with the ETS the user ergonomics can no more be made over the Reset/Prog button. If the device became to
unload by the ETS, setting of the user ergonomics is again possible over the Reset/Prog button.
m The selection of the user ergonomics should be consistent with the appropriate end product.
onfiguration of the animeo RTS radio module
C
=
)
)
)
Screen ergonomics*
=
CR
S
EU = Venetian blind, EU ergonomics*
US = Venetian blind, US ergonomics*
* see Chapter 0 Definitions
Change the ergonomics
2 s
The delivery status is venetian blind with EU ergonomics.
2 s
To switch between the different ergonomics press shortly the
eset/P
R
lighting.
rog button. Continue to do so until the desired LED is
meo K
ani
2 s
of
it
x
and e
e
v
a
S
configuration to
e.
mod
NX/EIB 4 AC MoCo • REF. 5050779 -
/31
7
3.3
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
Reset / Prog
SCR
EU
US
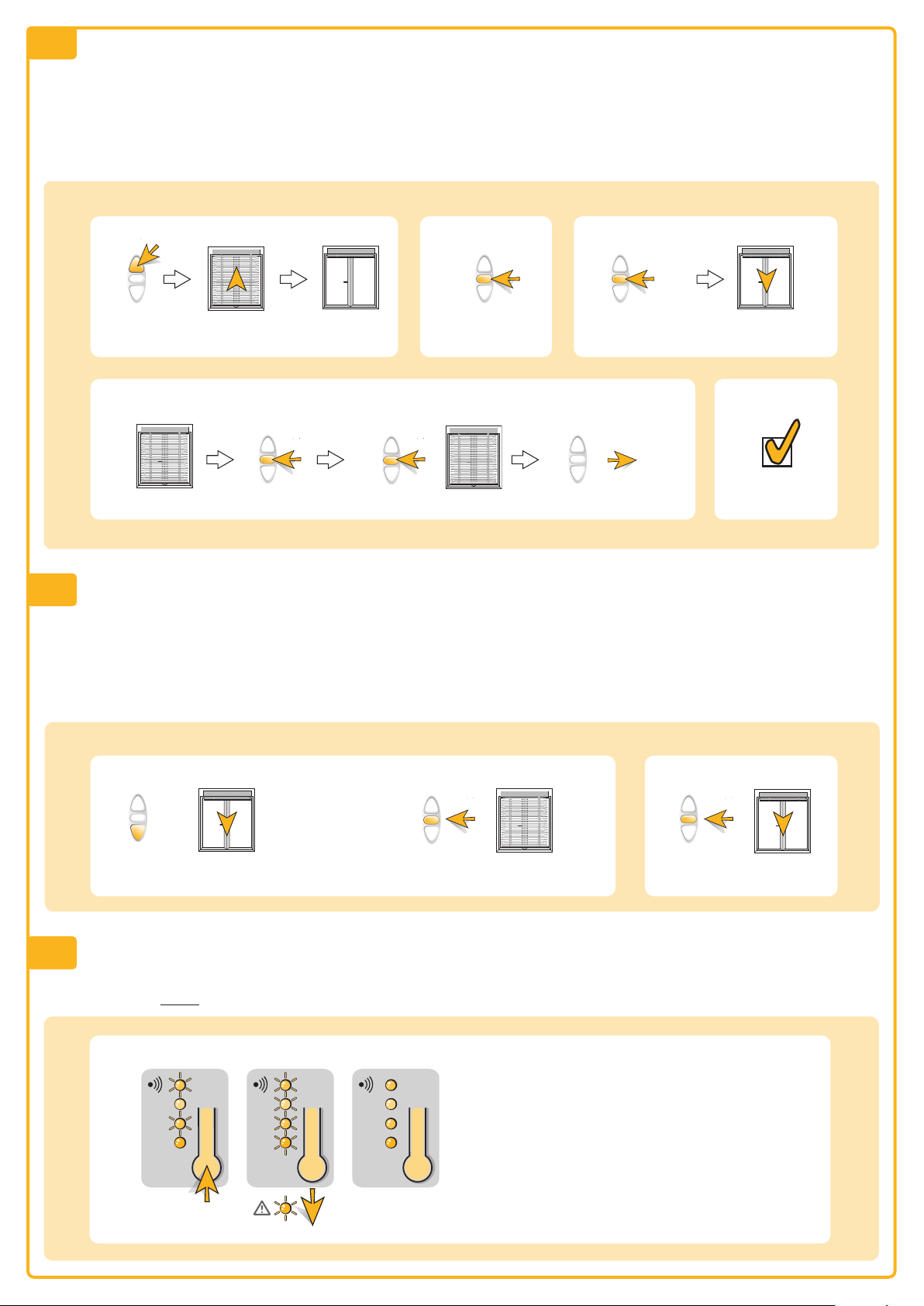
Manual setting of the running and tilting times
Over the local conventional switch and by radio hand transmitters the running and tilting times per motor output can be adjusted. These settings are
only possible on delivery status before the device is programmed with the ETS. As soon as the device is programmed with the ETS, the running and
tilting times cannot be programmed over the local conventional switches or by radio hand transmitters. If the device is unloaded by the ETS, it is
gain possible to program the running and tilting times over the local conventional switches or by radio hand transmitters.
a
Teach running and tilting time/-length
0.5 s
3.4
Press immediately when lower
m
end limit is reached.
Keep stop pressed during
m
entire tilting.
Manual setting of the intermediate position 1
0.5 s
> 6 s
Intermediate position 1 can also be programmed over a conventional local switch or by radio hand transmitters individually per motor output. At the
same time it is possible to define the intermediate position 1 over settings in the ETS parameters. Before the intermediate position 1 is programmed it
is obligatory to set the running and tilting times.
n The last learned position is valid.
Saving
Call in
3.5
1.
1
Drive screen in desired position
h conventional unlocked push buttons the stop
m Wit
order can be generated by pressing the up and down
button simultaneously
Reset to delivery status
vice has not
e
If t
e d
h
yet been programmed with the ETS software.
2
Store position
> 2 s
m Whilst saving the screen tilts shortly
up and down m The stored position will be driven
1
0,5 s
Complete reset:
The configurations realized over the Reset/Prog button, local
onventional push buttons or radio transmitters can be reset
c
og button by pressing 10 s.
r
eset/P
e R
h
t
er
v
o
10 s
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
/31
8
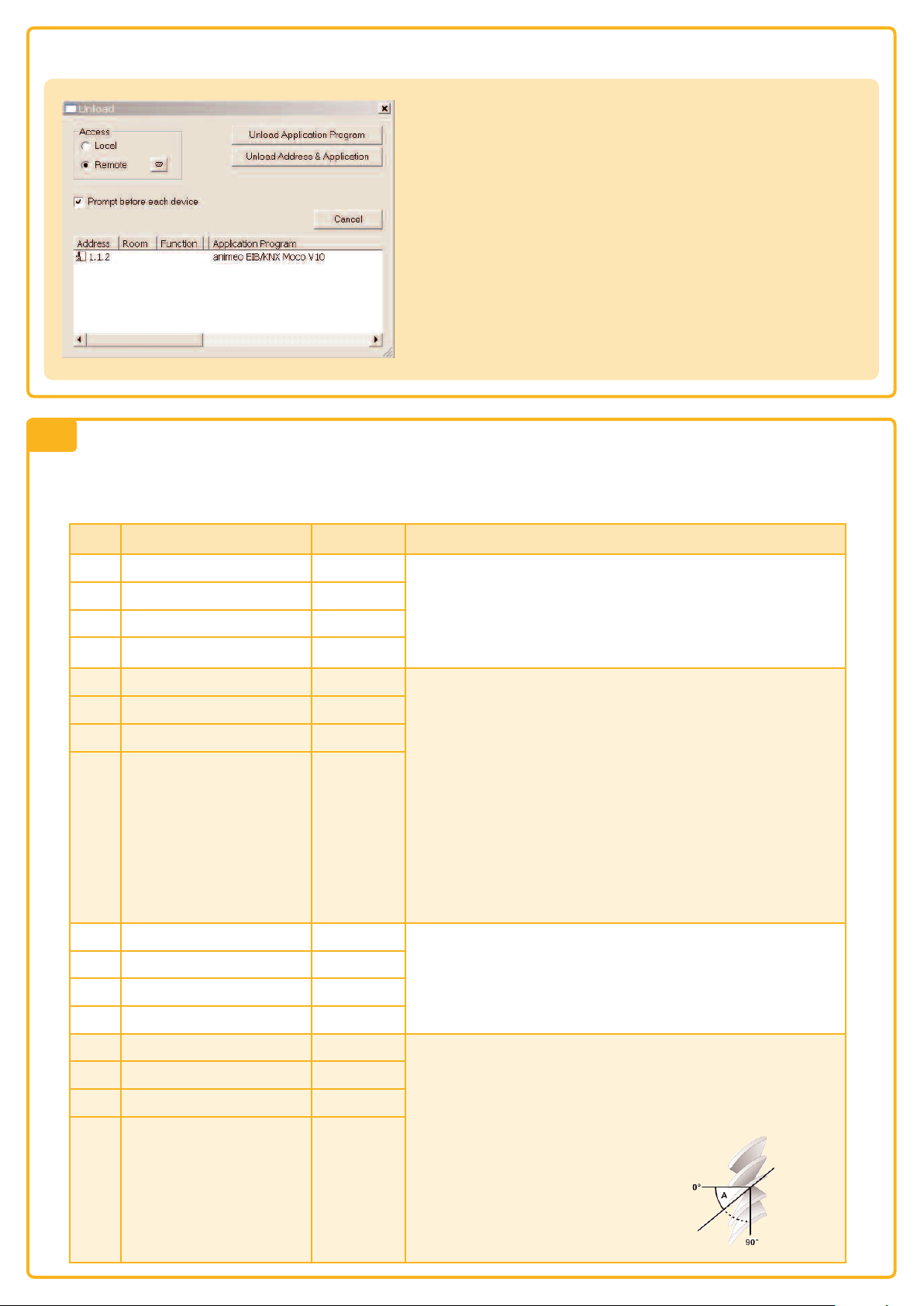
2. If the device with the ETS has already been programmed.
If the device with the ETS has already been programmed, a reset to delivery
status is not possible over the Reset/Prog button. Over the function “Unload”
in the ETS all settings of the device can be reset to delivery status. The Reset/
Prog button can then be used again.
4
Communication objects
A maximum of 100 communication objects are available, which however cannot be used at one time.
Maximally 95 group addresses can be linked.
No. Objekt name Type Description
0 Motor 1 UP/DOWN, CLOSE/OPEN 1 Bit (EIS 7) If a telegram with the value “0” is received on this communication object,
1 Motor 2 UP/DOWN, CLOSE/OPEN 1 Bit (EIS 7)
2 Motor 3 UP/DOWN, CLOSE/OPEN 1 Bit (EIS 7)
the appropriate blind goes up or the window closes. If a telegram with the
value “1” is received, the appropriate blind goes down or the window
opens. At expiration of the adjusted running time for the UP and DOWN
direction the relays of the outputs are activated.
3 Motor 4 UP/DOWN, CLOSE/OPEN 1 Bit (EIS 7)
4 Motor 1 STEP / STOP 1 Bit (EIS 7) For venetian blinds: If the venetian blind is in a fully moving process, the
5 Motor 2 STEP / STOP 1 Bit (EIS 7)
6 Motor 3 STEP / STOP 1 Bit (EIS 7)
venetian blind stops with the receipt of a telegram on the appropriate
object, independently whether a telegram with the value “0“ or “1“ is
received. If the venetian blind is in passive state, a step will be executed
whereas with the receipt of a telegram with the value “1” the slat will
7 Motor 4 STEP / STOP 1 Bit (EIS 7)
close and with the receipt of a telegram with the value “0” the slat will
open. The step length is de-fined in the parameter settings for the
appropriate motor.
For screens, roller blinds, awnings and windows:
If one of these end products is in a fully moving process, the end product
stops with the receipt of a telegram on the appropriate object, independently of whether a telegram with the value “0“ or “1“ is received. If one
of these end products is in passive state, then with the receipt of a
telegram on one of these communication objects no action is executed.
8 Motor 1 Position UP / DOWN 1 Byte (EIS 6) If one of these communication objects receives a telegram, the appropriate
9 Motor 2 Position UP / DOWN 1 Byte (EIS 6)
10 Motor 3 Position UP / DOWN 1 Byte (EIS 6)
blind will go into the position which is defined by the received value.
“0“ = UP “255“ = DOWN
For venetian blinds: If the position is reached, the same slat angle starts
up in which the venetian blind was previously.
11 Motor 4 Position UP / DOWN 1 Byte (EIS 6)
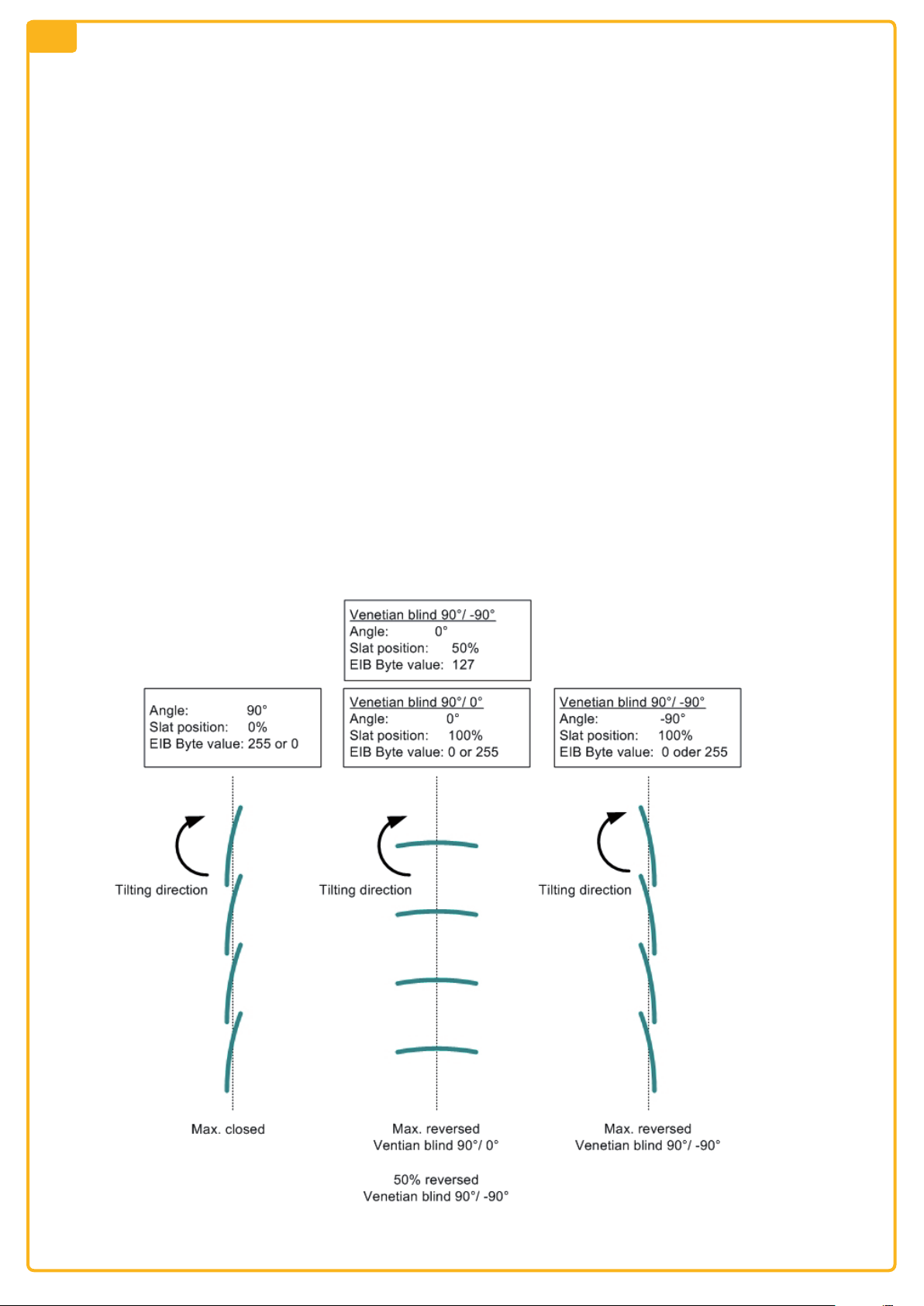
12 Motor 1 Slat position 1 Byte (EIS 6) For venetian blinds: If one of these communication objects receives a
13 Motor 2 Slat position 1 Byte (EIS 6)
14 Motor 3 Slat position 1 Byte (EIS 6)
telegram, the appropriate slat will go to that position which is defined by
the received value. If the venetian blind is in full moving process while
receiving a telegram on the appropriate object, the position of the slat will
be started up when the drive is finished. Depending on the parameter set-
15 Motor 4 Slat position 1 Byte (EIS 6)
ting on parameter card „General“ the position is defined
as follows:
“255“ = slat maximal closed /
value
(0/255)
“0“ = slat maximal reversed
or
“0“ = slat maximal closed /
“255“ = slat maximal reversed
animeo KNX/EIB 4 AC MoCo • REF. 5050779 - 9/31
value
(255/0)
No.
Object name Type Description
6
1
17 Motor 2 Move to IP 1 1 Bit (EIS 1)
18 Motor 3 Move to IP 1 1 Bit (EIS 1)
19 Motor 4 Move to IP 1 1 Bit (EIS 1)
otor 1 Move to IP 1
M
Bit (EIS 1)
1
f a telegram with the value “1” is received on this communication
I
object, the appropriate blind goes to the intermediate position 1 which
was configured by local switch or by remote control or parameterised in
the ETS parameters. The last position which has been configured is active.
Receiving a telegram with the value “0“ on one of these communication
objects the appropriate blind goes to the upper end position.
20 Motor 1-4 Move to IP 1 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
bject, the blinds 1-4 go to the intermediate position 1 which was
o
configured by local switch or by remote control and parameterised in the
ETS parameters. The position which has been configured at last is active.
Receiving a telegram with the value “0“ on one of these communication
objects the blinds 1-4 go to the upper end position.
21 Motor 1 Move to IP 2 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
object, the appropriate blind goes to the intermediate position 2 which
22 Motor 2 Move to IP 2 1 Bit (EIS 1)
23 Motor 3 Move to IP 2 1 Bit (EIS 1)
was parameterised in the ETS parameters. Receiving a telegram with the
value “0“ on one of these communication objects the blind goes to the
upper end position.
24 Motor 4 Move to IP 2 1 Bit (EIS 1)
25 Motor 1-4 Move to IP 2 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
object, the blinds 1-4 go to the intermediate position 2 which was
parameterised in the ETS parameters. Receiving a telegram with the value
“0“ on one these communication objects the blinds 1-4 go to the upper
end position.
26 Motor 1 Security, low prio 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
object, the appropriate blind goes to the position which was para-
27 Motor 2 Security, low prio 1 Bit (EIS 1)
28 Motor 3 Security, low prio 1 Bit (EIS 1)
29 Motor 4 Security, low prio 1 Bit (EIS 1)
meterised in the ETS parameters. When one of the communication objects
receives a telegram with value “0” no action will be executed. Only with
the selection “Repeat the last telegram after security (Yes)“ in the ETS
parameters this action will be executed on the appropriate blind. If one
of these communication objects is active through a telegram with the
value “1“ and if then on one of the communication objects 31-34
(security position, high priority) a telegram with value “1“ is received, the
appropriate blind will move to the position configured in the ETS parameters (security position, high priority).
30 Motor 1-4 Security, low prio 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
object, the blinds 1-4 go to the position which was parameterised in the
ETS parameters. When the communication object receives a telegram with
value “0” no action will be executed. Only with the selection “Repeat the
last telegram after security (Yes)” in the ETS parameters this action will be
nds 1-4.
e bli
h
ed on t
ecut
x
e
If this communication object is active through a telegram with the value
“1“ and if then, on the communication object 35 (security position, high
priority) a telegram with the value “1“ is received the blinds 1-4 will
move to the position configured in the ETS parameters (security position,
high priority).
31 Motor 1 Security, high prio 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
object, the appropriate blind goes to the position which was para-
32 Mot
or
33 Motor 3 Security, high prio 1 Bit (EIS 1)
34 Motor 4 Security, high prio 1 Bit (EIS 1)
1 Bit
(EIS 1)
meterised in the ETS parameters. When one of the communication objects
receives a telegram with value “0” no action will be executed. Only with
the selection “Repeat the last telegram after security (Yes)” in the ETS
his will be executed in the appropriate blind. If an object for
s t
er
amet
ar
p
secu
rity position, low priority is active (“1“), the appropriate para-
rity, high prio
2 Secu
meterised position will be started up.
35 Motor 1-4 Security, high prio 1 Bit (EIS 1) If a telegram with the value “1” is received on this communication
t, the blinds 1-4 go to the position which was parameterised in the
bjec
o
ETS parameters. When the communication object receives a telegram with
value “0” no action will be executed. Only with the selection “Repeat the
last telegram after security (Yes)” in the ETS parameters this action will be
he blinds 1-4. If an object for security position, low priority
n t
ed i
ecut
x
e
is active (“1”) the appropriate parameterised position will be started up.
NX/EIB 4 AC MoCo • REF. 5050779 -
meo K
ani
10
/31
 Loading...
Loading...