

LEY Series
(Rod type)
Doc. no. LEY-OM00407
LEYG Series
(Guide Rod type)
LECSA
(
Positioning)
LECSS
(
Ⅲ)
(SSCNETⅢ/H)
AC Servo Motor
LECS Series
LECSB
(
)
LECSC
(
)
PRODUCT NAME
Electric Actuator / Rod Type
《 AC Servo Motor 》
MODEL / Series
LEY Series
Applicable models: LEY□ , LEYG□
Pulse input /
CC-Link
Driver
Pulse input
SSCNET

Contents
Safety Instructions ....................................................................2
1. Procedure before ope ra t ion ............................................4
2. Rod type / LEY Series .........................................................13
3. Guide rod type / LEYG Series ........................................17
1.1 Preparation ................................................................... 4
1.2 Startup .......................................................................... 6
1.3 Gain tuning ................................................................... 7
1.3.1 Procedure .................................................................. 7
1.3.2 The recommended the parameter for each driver . 8
2.1 Specification .............................................................. 13
2.2 How to Order .............................................................. 15
2.3 Construction .............................................................. 16
3.1 Specification .............................................................. 17
3.2 How to Order .............................................................. 18
3.3 Construction .............................................................. 19
4. Product Outline ......................................................................20
4.1 System construction ................................................. 20
4.2 Function/Configuration ............................................. 23
5. Wiring of cables / Common precautions .................24
6. Electric actuator s / Comm on pre caut ions ..............25
6.1 Design and selection ................................................. 25
6.2 Mounting .................................................................... 26
6.3 Handling ..................................................................... 27
6.4 Operating environment ............................................. 28
6.5 Maintenance ............................................................... 29
6.6 Precautions for actuator with lock ........................... 29
7. Electric actuator s / Rod Type Common precautions ........30
7.1 Design ........................................................................ 30
7.2 Selection..................................................................... 30
7.3 Handling ..................................................................... 30
7.4 Mounting .................................................................... 32
7.5 Precaution on maintenance ...................................... 35
8. Troubleshooting ....................................................................36
8.1 Alarms and Warning ................................................ 36
-1-
indicates a hazard with a low level of risk which, if not avoided, could result in minor
indicates a hazard with a high level of risk which, if not avoided, will result in death or
Warning
Do not service or attempt to remove product and machinery /equipment until safety is
4. Contact SMC beforehand and take special consideration of safety measures if the product is to
LEY Series / Electric Rod type
Safety Instructions
These safety instructions are intended to prevent hazardous situations and /or equipment damage.
These instructions indicat e the lev el of potentia l hazard w ith the labels o f “Caut ion,” “Warning” or “Dange r.”
They are all important notes for safety and must be followed in addition to International Standards (ISO
/IEC), Japan Industrial St andards (JIS)*1) and other saf ety regulations*2).
*1) ISO 4414: Pneumatic fluid power -- General rules relating to systems
ISO 4413: Hydraulic fluid power -- General rules relating to systems
IEC 60204-1: Safety of machinery -- Electrical equipment of machines (Part 1: General requirements)
ISO 10218-1992: Manipulating industrial robots -- Safety
JIS B 8370: General rules for pneumatic equipment.
JIS B 8361: General rules for hydraulic equipment.
JIS B 9960-1: Safety of machinery – Electrical equipment for machines. (Part 1: General requirements)
JIS B 8433-1993: Manipulating industrial robots - Safety. etc.
*2) Labor Safety and Sanitation Law, etc.
Caution
Warning
Danger
Caution
or moderate injury.
Warning indicates a hazard with a medium level of risk which, if not avoided, could res ult in
death or serious injury.
Danger
serious injury.
1. The compatibility of the product is the responsibility of the person who designs the equipment
or decides its specifications.
Since the product spec ified here is used under var ious operating conditions, its compatibility with specific
equipment must be decided by the person who designs the equipment or decides its specifications based on
necessary analysis and test results.
The expected perform ance and safety assurance of the equipment will be the r esponsibility of the perso n
who has determined its compatibility with the product.
This person should also c ontinuously review all specificatio ns of the product referring to its latest catalog
information, with a v iew to giving d ue considerat ion to any possi bility of equi pment failure when configurin g
the equipment.
2. Only personne l with appropriate training should operate mac hi nery and equipm ent.
The product specified here may become unsafe if handled incorrectly.
The assembly, operation and maintenance of machines or equipment including our products must be
performed by an operator who is appropriately trained and experienced.
3.
confirmed.
The inspection and maintenance of machinery /equipment should only be performed after measures to
prevent falling or runaway of the driven objects have been confirmed.
When the product is to be removed, confirm that the safety measures as mentioned above are implemented
and the power from any appropriate source is cut, and read and understand the specific product precautions
of all relevant products carefully.
Before machinery /equipment is restarted, take measures to prevent unexpected operation and malfunction.
be used in any of t he f oll owing conditions.
1) Conditions and environments outside of the given specifications, or use outdoors or in a place exposed to
direct sunlight.
2) Installation on equipment in conjunction with atomic energy, railways, air navigation, space, shipping,
vehicles, military, medical treatment, combustion and recreation, or equipment in contact with food and
beverages, emergency stop circuits, clutch and brake circuits in press applications, safety equipment or
other applications unsuitable for the standard specifications described in the product catalog.
3) An application which co uld have negat ive effects on people, propert y, or animals requiring special safety
analysis.
4) Use in an inter lock circ uit, which requ ires the prov ision of do uble interloc k for pos sible failure by using a
mechanical protective function, and periodical checks to confirm proper operation.
-2-
Caution
the product in other industries, consult SMC beforehand and exchange specifications
If anything is unclear, contact your nearest sales branch.
Also, the product may have specified durability, running distance or replacement parts. Please
For any failure or damage reported within the warranty period which is clearly our responsibility, a
This limited warranty applies only to our product independently, and not to any other damage
erms and disclaimers
due to the deterioration of rubber material are not covered by the limited warranty.
by the Ministry of Economy, Trade and
LEY Series / Electric Rod type
Safety Instructions
The product is pr ovided for use in manufacturing industries.
The product herein described is basically provided f or peaceful use in manufacturing industries.
If considering using
or a contract if necessary.
Limited warranty and Disclaimer /Compliance Requirements
The product used is subject to the following “Limited warranty and Disclaimer” and “Compliance
Requirements”.
Read and accept them before using the product.
Limited warran ty and Disclaimer
The warranty period of the pr od uct is 1 year in service or 1.5 years after the product i s delivered.*3)
consult your nearest sal es branch.
replacement product or necessary parts will be provide d.
incurred due to the failure of the product.
Prior to using SMC products, please read and understand the warranty t
noted in the specified cat a log for the p a r t icular products.
*3) Vacuum pads are excluded from this 1 year warranty.
A vacuum pad is a consumable part, so it is warranted for a year after it is delivered.
Also, even within the warranty period, the wear of a product due to the use of the vacuum pad or failure
Compliance Requirem e nts
When the product is exported, strictly follow the laws required
Industry (Foreign Exchan ge and Foreign Trade Control Law).
-3-
No.
Part name
Qty
(1)
Electric Actuator /LEY Series
1
(2)
Driver / LECS Series
1(in case with driver)
(3)
Motor cable
(4)
Encoder cable
(5)
Lock cable
(6)
I/O Connector
1(in case with I/O connector )
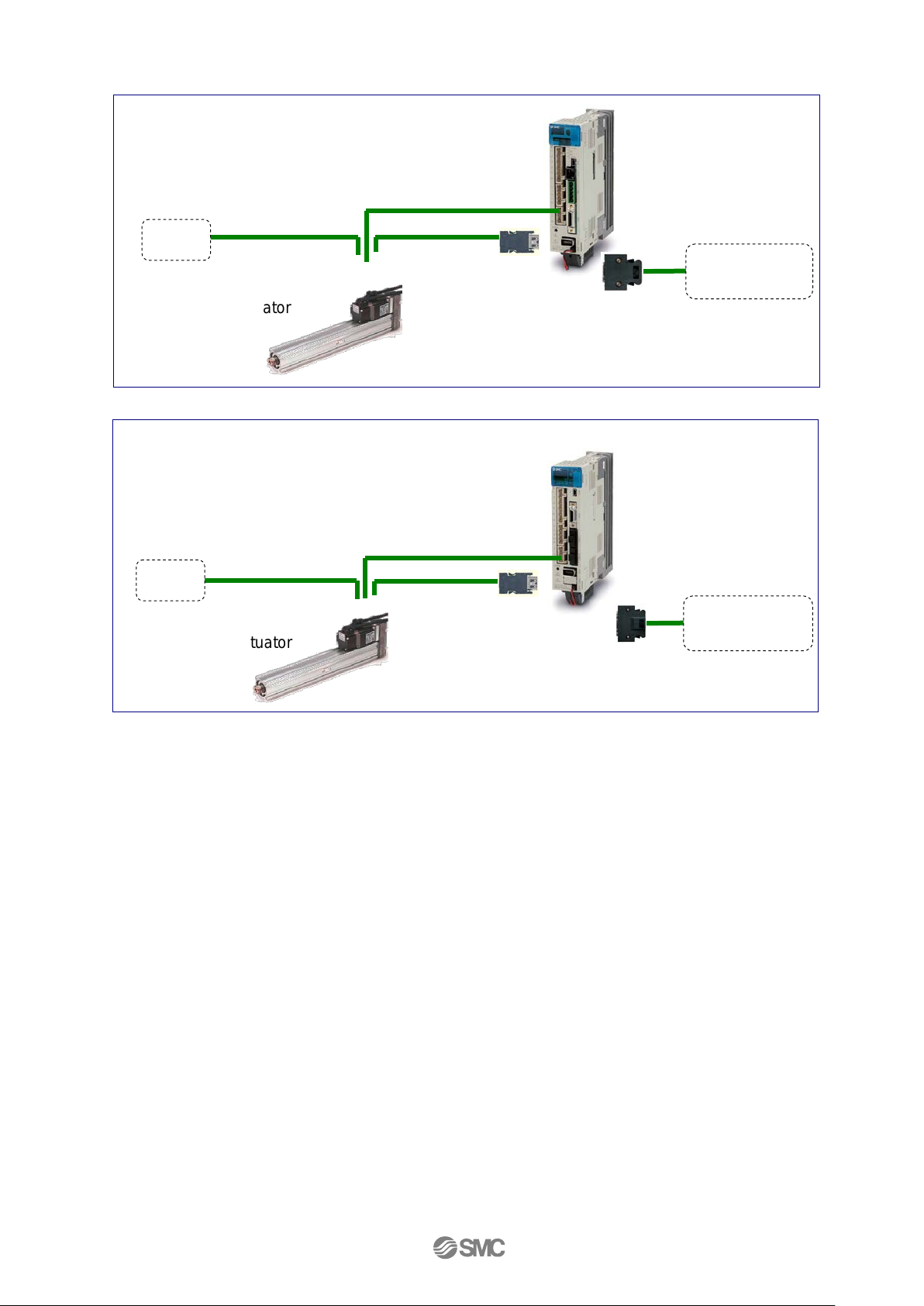
LECSA(Pulse input / Positioning)
(2) Driver
(3) Motor cable
(4) Encoder cable
(1) Electric Actuator
(5) Lock cable
(2) Driver
(3) Motor cable
(4) Encoder cable
(1) Electric Actuator
(5) Lock cable
LECSB(Pulse input)
(6) I/O Connector
(6) I/O Connector
1. Procedure before opera t ion
1.1 Preparation
(1) Items to be prepared
Please check on the label, and the quantity of accessories, to confirm that it is the product that was
ordered.
Table 1. Componets
Pre-installed (1)
(in case with cable)
DC24V
PC, PLC, etc
DC24V
PC, PLC, etc
-4-
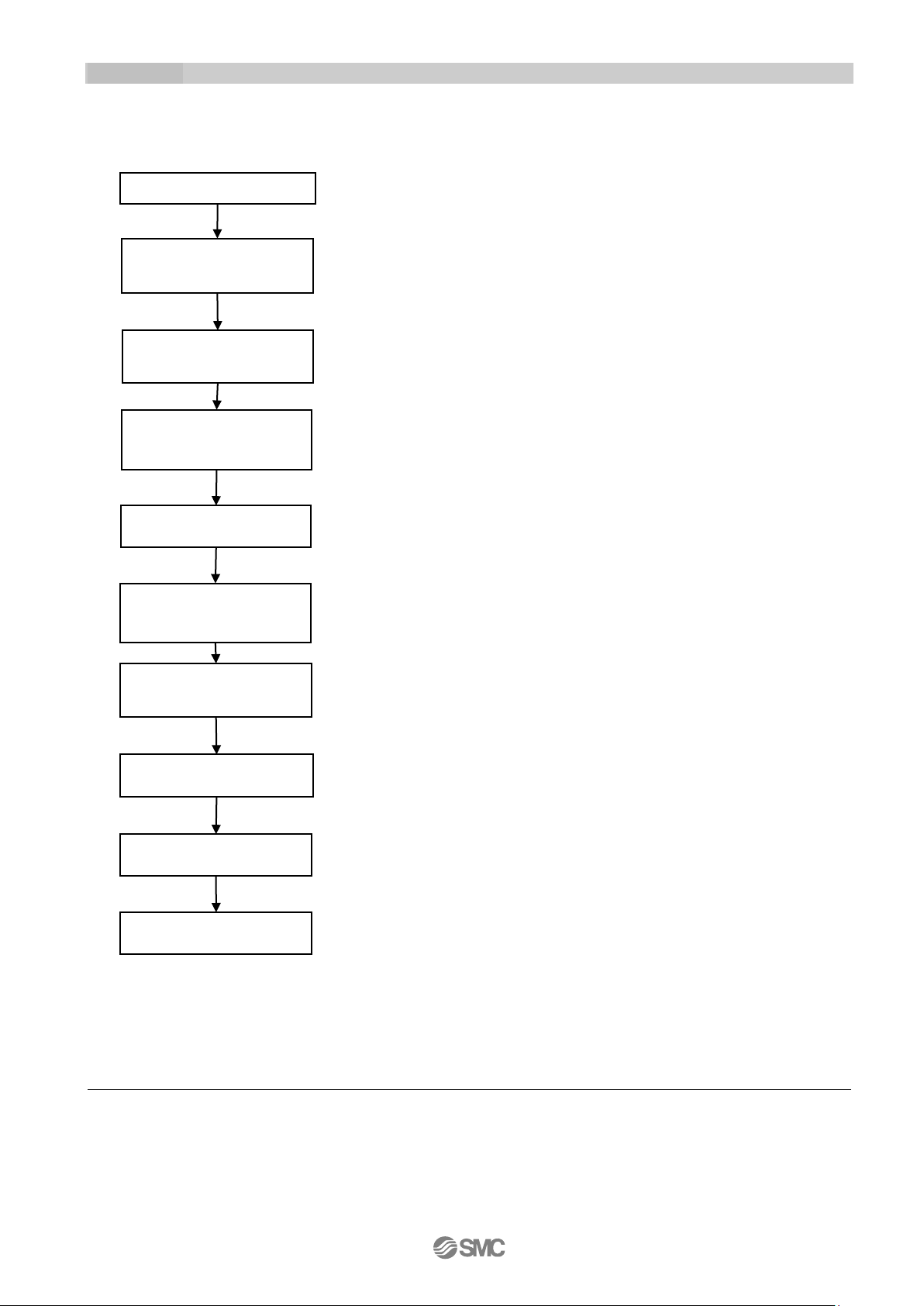
LECSC(CC-Link)
(2) Driver
(3) Motor cable
(4) Encoder cable
(1) Electric actuator
(5) Lock cable
(2) Driver
(3) Motor cable
(4) Encoder cable
(1) Electric actuator
(5) Lock cable
LECSS(SSCNET III) /LECSS-T ( SSCNET III / H )
(6) I/O connector
(
I/O connector
DC24V
Host controller,
etc
DC24V
Host controller,
etc
6)
Refer to the “ Electric actuator / Common precautions 6.2 Mounting No.11” for details and for cable
connection methods.
-5-
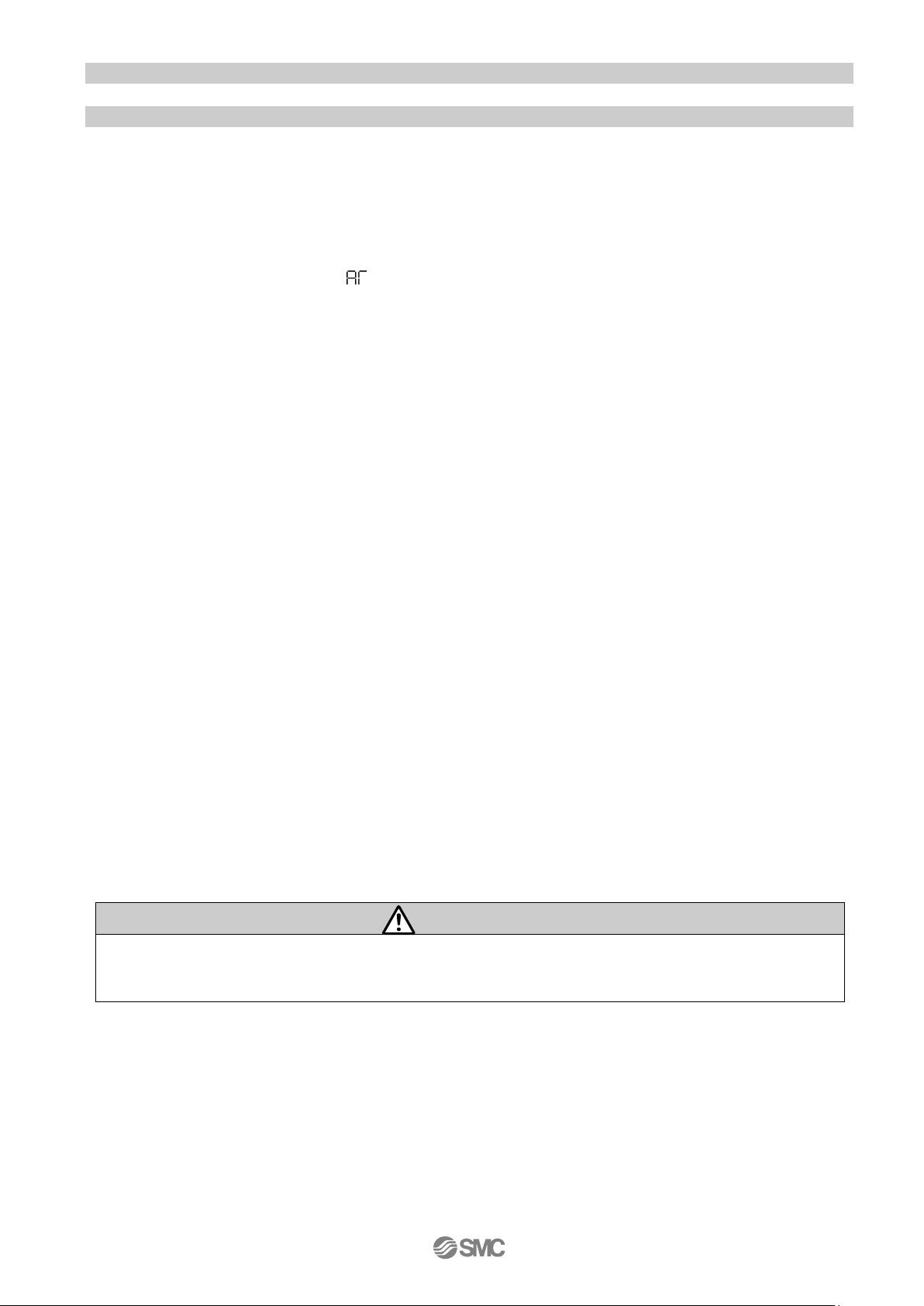
Wiring check
circuit power supply
I/O signal wiring and
during power-on
Confirm that the cables to the driver and actuator are
Check the surrounding environment (cable routing and
Follow the procedure shown in the "Driver Operation
Check the wiring of the input and output signals and
according to the procedure shown in the "Driver
control mode and each control value.
Follow the procedure shown in the "Driver Operation
Use the test operation mode (JOG operation) at the
slowest speed and check whether the servo motor
rotates.
Operation with a vibration might be done according to the
In that case, adjust gain. (Refer to section 1.3)
Check if the cables to the driver and actuator are
Stops command to stop the operation.
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
- - -
1)CC-Link cable (LECSC), SSCNETIII cable (LECSS)
1.2 Startup
When switching the power on for the first time, follow the startup procedure below.
Refer to the “Driver operation manual” for wiring method and deta iled pr ocedure.
connected correctly.
Surrounding
environment check
Power-on of the contrd
cables check
Parameter setting
Power-on of the main
circuit power supply
Test oper ation
(JOG operation)
impurity such as wire offcuts or metallic dust) of the driver
and the servo motor.
Manual" to supply power to t he pr oduct.
cables1)
Operation Manual".
Set the parameters as necessary, such as selecting the
Manual" to supply power to t he pr oduct.
2)
Gain tuning
Actual operation
Stop
2)When using test operation mode (JOG operation), the LECSC and LECSS need the
MR-Configurator, the LECSS-T needs the MR-Configurator2.
condition.
connected correctly.
-6-
Warning
Refer to "The recommend ed t he parameter for each dri ver" for the parameter.
1.3 Gain tuning
1.3.1 Procedure
Here are the steps for basic gain tuning.
Refer to the “Driver operation manual” for details and for tuning methods other than shown below.
●For LECSA (Pulse input / Positio ni ng)
A. One-touch tuning
During motor driving, push “AUTO” button on the front of the driv er for three seconds.
When display panel becomes “ ”, push “AUTO” button again.
⇒The gain (including filter, etc) is adjuste d automatically.
When the error occurs, refer to the “Driver operation manual”.
B. Auto tuning (Mode1) 1)
Do this operation, if you ar e not satisfied with the result of “One-touch tuning”.
Set parameter N o. PA08 “001”. Afterwards, do 1 and 2 alternately.
1. Reduce value of parameter No.PA09 to be less than present value.
2. Operate and ascer tain the situation.
⇒The gain is adjusted automatically.
●For LECSB (Pulse input), LECSC (CC-Link), LECSS(SSCNETIII)
A. Adaptive filter II
Set parameter N o. PB01 “0001” and drive t he m otor.
⇒The filter is adjuste d aut omatically.
B. Auto tuning (Mode1)
Do this operation, if you ar e not satisfied with the result of “Adaptive f ilter II”.
Set parameter N o. PA08 “0001”. Afterwards, do 1 and 2 a lter nat ely.
1. Reduce value of parameter No.PA09 to be less than present value.
2. Operate and ascer tain the situation.
⇒The gain is adjusted automatically.
●For LECSS-T(SSCNET III/H)
A. Auto tuning (Mode1)
Set parameter N o. PA08 “0001”. Afterwards, do 1 and 2 a lter nat ely.
1. Reduce value of parameter No.PA09 to be less than present value.
2. Operate and ascer tain the situation.
⇒The gain is adjusted automatically.
B. Robust filter
Do this operation, if you ar e not sat isfied with the result of “Auto tuning”.
Set parameter N o. PE41 “0001” and drive t he m otor.
⇒The filter is adjuste d aut omatically.
A mechanical resonance may occ ur depending on the configurat ion or t he mounting orientati on of the
transferred object. Plea se change the appropriate parameter in the initial setting.
1) The auto tuning mode 1 may not be perfor m ed pr operly if the following conditions are not satisfied.
・Time to reac h 2,000rpm is the acceleration/deceleration time constant of 5[s] or less.
・Speed is 150rpm or higher.
・Load to motor inertia is 100 times or less.
・The acceleration/dece leration is 10% or more of the rated torque.
-7-
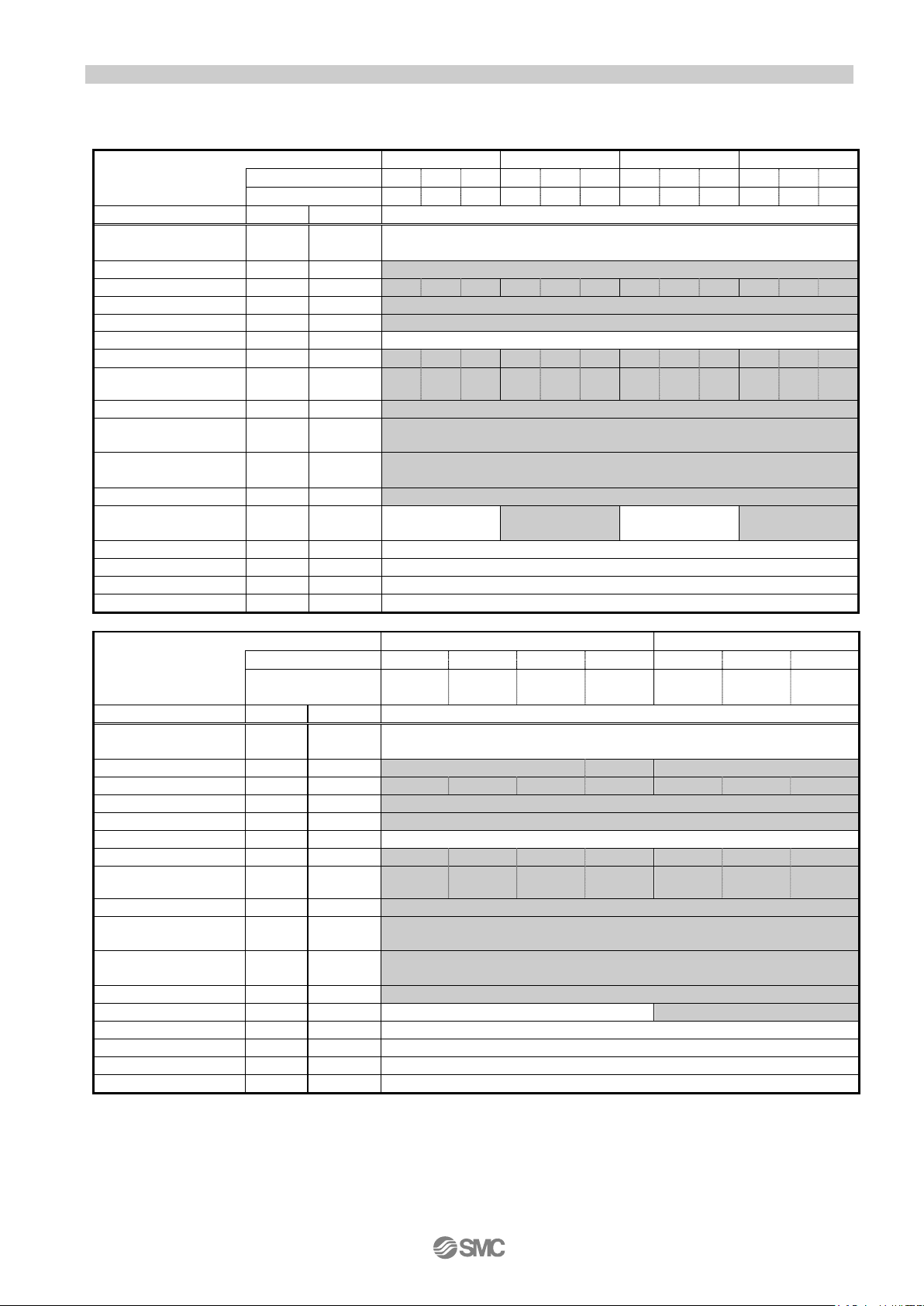
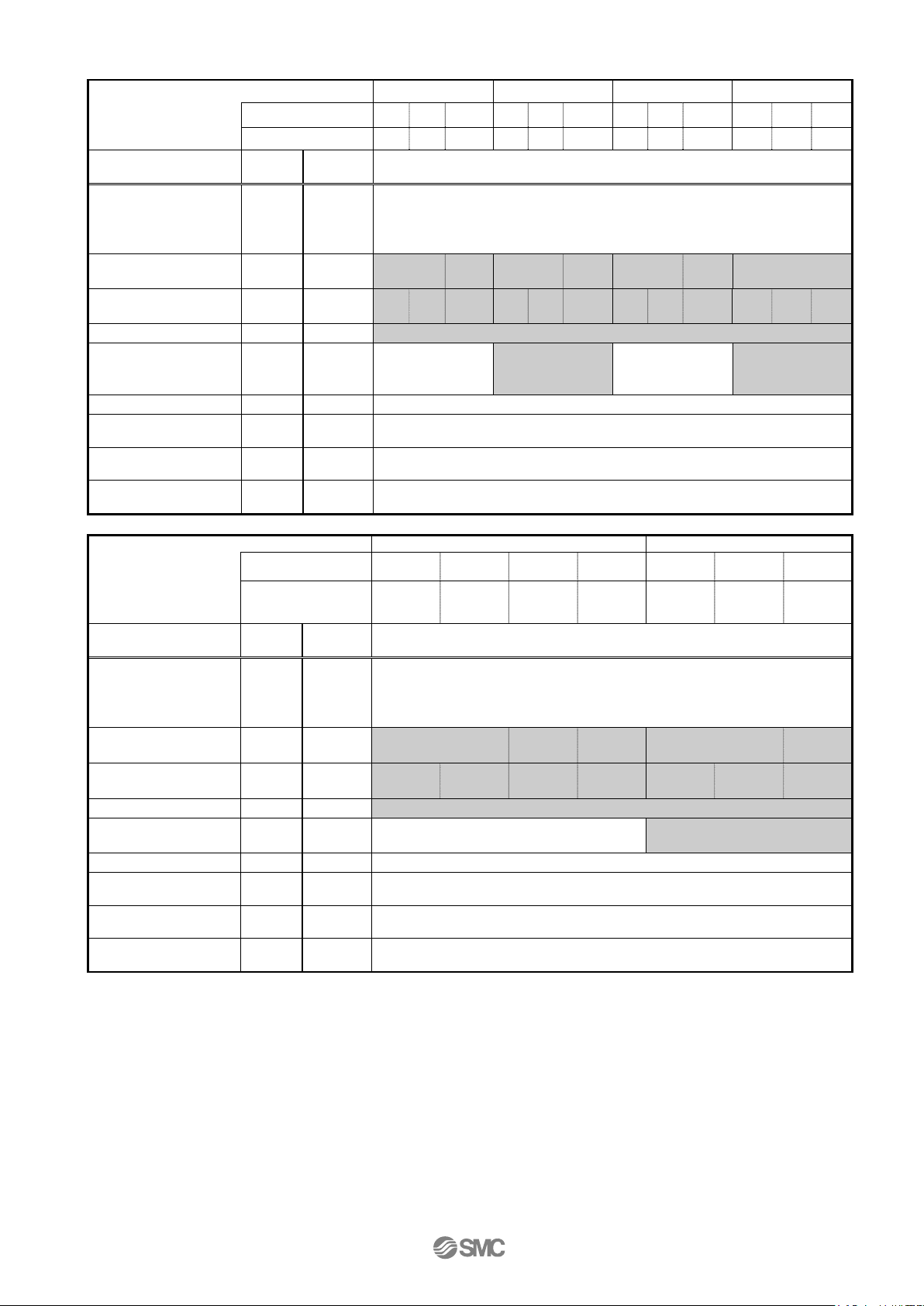
LEY25/LEYG25
LEY25D/LEYG25D
LEY32/LEYG32
LEY32D/LEYG32D
Lead symbol
A B C A B C A B C A B C Lead
12 6 3
12 6 3
20
10 5 16 8 4
Parameter
Para. No
Initial value
Recommended value
Number of command input pulses per
revolution *3
Electronic gear numerator *3
PA06
1
100 (Positioning mode: 10)
Electronic gear denominator *3
PA07
1
12 6 3
12 6 3
20
10 5 16 8 4
Feel length multiplication (STM) (Multiplier)
PE02
0000
0000 (Less than stroke 1000) / 0001 (Stroke 1000 or more)
Home position return type
PE03
0010
□□□3 (Stopper type)
Home position return direction
PE03
0010
□□1□(Motor side)
Home position return Speed (rpm)
PE04
500
150
300
600
150
300
600
90
180
360
112
225
450
Home position return/JOG operation
acceleration/deceleration time constants (msec)
Home position return position data (μm)
PE08 0 -2000(Less than stroke 1000) / -200 (Stroke 1000 or more)
Stopper type home position return
stopper time (msec)
Stopper type home position return torque limit
value (%)
Regenerative option
PA02
000
000 (Non)/ 002 (LEC-MR-RB032)
0
(+:Counter motors side)
1
(+:Counter motors side )
0
(+:Counter motors side)
1
(+:Counter motors side )
Adaptive tuning mode
PB01
000
000
Load to motor inertia moment ratio
PB06
7
7
Machine resonance suppression filter 1
PB13
4500
4500
Notch shape selection 1
PB14
000
000
LEY63
LEY63D
Lead symbol
A B C L A B C
5(2.86)
Parameter
Para. No
Initial value
Recommended value
Number of command input pulses per
revolution *3
Electronic gear numerator *3
PA06 1 100 (10)
35 (7)
100 (10)
Electronic gear denominator *3
PA07 1 20
10 5 1(2)
20
10
5
Feel length multiplication (STM) (Multiplier)
PE02
0000
0000 (Less than stroke 1000) / 0001 (Stroke 1000 or more)
Home position return type
PE03
0010
□□□3 (Stopper type)
Home position return direction
PE03
0010
□□1□(Motor side)
Home position return Speed (rpm)
PE04
500
90
180
360
629
90
180
360
Home position return/JOG operation
acceleration/decel eration time constants (msec)
Home position return position data (μm)
PE08 0 -4000(Less than stroke 1000) / -400 (Stroke 1000 or more)
Stopper type home position return
stopper time (msec)
Stopper type home position return torque limit
value (%)
Regenerative option
PA02
000
000 (Non)/ 002 (LEC-MR-RB032)/ 003 (LEC-MR-RB12)
Rotation di rection sel ection
PA14 0 0 (+:Counter motors side)
1 (+:Counter motors side )
Adaptive t uning mode
PB01
000
000
Load to motor inertia moment ratio
PB06
7
7
Machine resonance suppression filter 1
PB13
4500
4500
Notch shape selection 1
PB14
000
000
1.3.2 The recomme nde d the parameter for each driver
The recommended the parameter for each driver. Please change the parameter values by use of the
customer.Please refer to the manual of the driver for more details.
[LECSA]
Series
PA05 100 100
Rotation di rection sel ection
Series
PE07 100 600 300 150 600 300 150
PE10 100 200
PE11 15 30
PA14 0
Lead 20 10 5
PA05 100 100
(Pulley raito 4/7)
1000
500 250 800 400 200
20 10 5
PE07 100 1000 500 250 143 1000 500 250
PE10 100 200
PE11 15 30
*1 Parameter is the recommended value. Please change the parameter to make appropriate value for your
operating method.
*2 A mechanical resonance may occur depending on the configuration or the mounting orientation of the
transferred object. Please change the parameter in the initial setting.
*3 When the positioning mode is not set: The travel distance of the actuator per 1 pulse should be 10 [μm/pulse].
When the positioning mode is set: The minimum unit of the travel distance of the actuator should be 1 [μm].
-8-
Initial
value
Number of
revolution
*3
Electronic gear
numerator *3
Electronic gear
denominator *3
15
0
15
0
250 12
5
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)
0
motors side)
1
motors side )
0
motors side)
1
motors side )
Adaptive tuning mode
PB01
0000
0000
Load to motor inertia
moment ratio
Machine resonance
suppression filter 1
Notch shape selection
1
LEY63
LEY63D
5(2.86)
raito 4/7)
Initial
value
Number of
revolution
*3
Electronic gear
numerator *3
Electronic gear
denominator *3
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)/ 0003 (LEC-MR-RB12)
Rotation direction
selection
0
(
+:Counter motors side)
1
(+:Counter motors side )
Adaptive tuning mode
PB01
0000
0000
Load to motor inertia
moment ratio
Machine resonance
suppression filter 1
Notch shape selection
1
[LECSB]
Series
Lead symbol A B C A B C A B C A B C
Lead
LEY25/LEYG25 LEY25D/LEYG25D LEY32/LEYG32 LEY32D/LEYG32D
12 6 3 12 6 3 20 10 5 16 8 4
Parameter
command input
pulses per
Rotation direction
selection
Series
Para. No
PA05 0 0
PA06 1 32768
PA07 1
(
PA14
PB06 7 7
PB13 4500 4500
PB14 0000 0000
Lead symbol A B C L A B C
0
Lead 20 10 5
+:Counter
75
65536
75
Recommended value
32768
(+:Counter
75
65536
75
(Pulley
32768
(
+:Counter
65536
125 200 100 50
20 10 5
(+:Counter
32768
Parameter
command input
pulses per
Para. No
PA05 0
PA06 1 32768 65536 114688 32768 65536
PA07 1
PA14 0
PB06 7 7
PB13 4500 4500
PB14 0000 0000
250 125 125 125 250 125 125
Recommended value
0
*1 Parameter is the reco mmende d v alue. P lease c h ange the p ara meter to ma ke appr opri ate v alue for y our
operating method.
*2 A mechanical resonance may occur depend ing on the configuration or the mo unt ing orientation of the
transferred object. Plea se change the parameter i n the initial setting.
*3 The travel distance of the actuator per 1 pul s e should be 10 [μm/pulse].
-9-
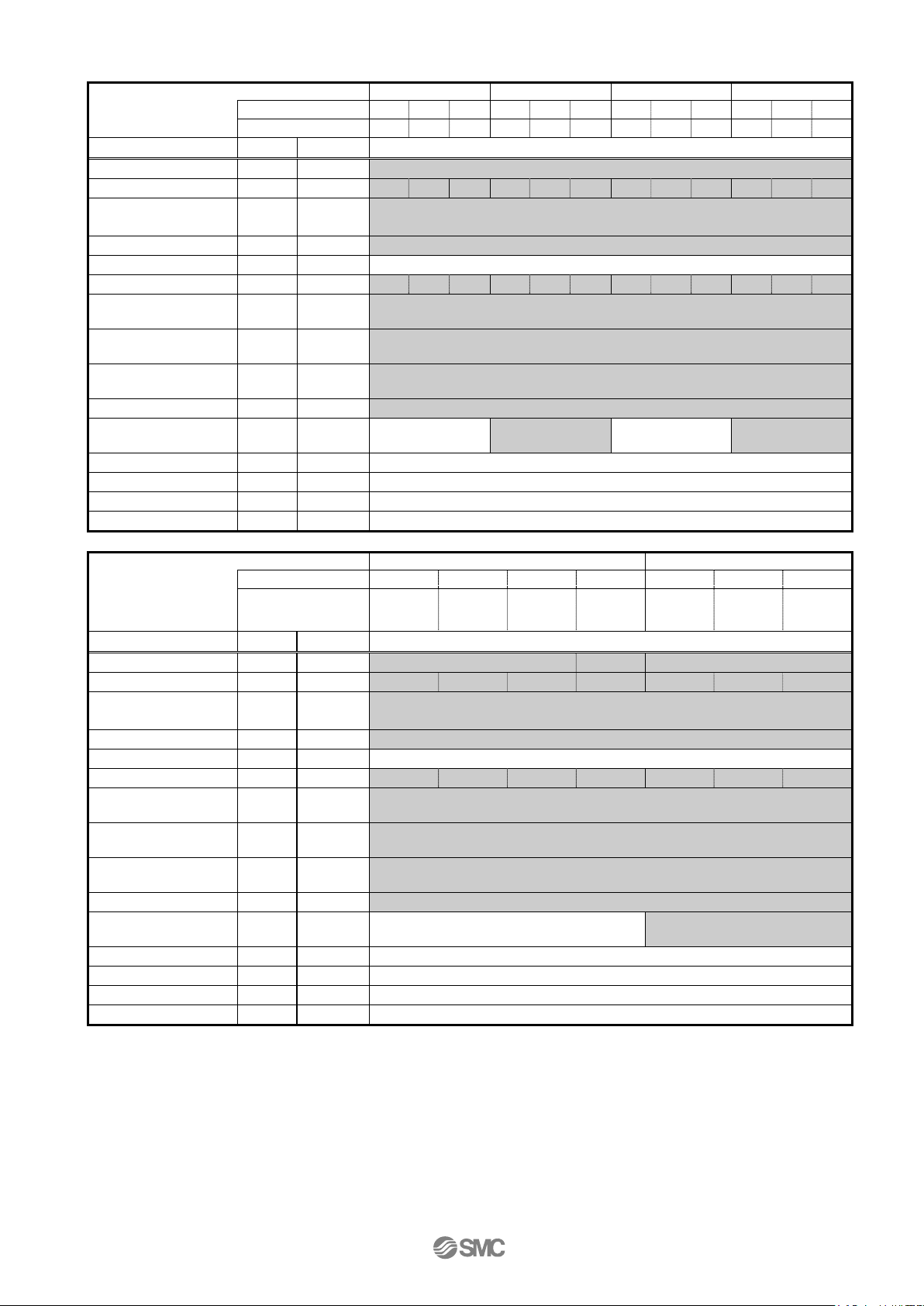
[LECSC]
LEY25/LEYG25
LEY25D/ EYG25D
LEY32/LEYG32
LEY32D/ EYG32D
Lead symbol
A B C A B C A B C A B
C
Lead
12 6 3
12 6 3
20
10 5 16 8 4
Parameter
Para. No
Initial value
Recommended value
Electronic gear numerator *3
PA06
1
32768
Electronic gear enominator *3
PA07
1
1500
750
375
1500
750
375
2500
1250
625
2000
1000
500
Feel length multiplication
(STM) (Multiplier)
Home position return type
PC02
0000
□□□3 (Stopper type)
Home position return direction
PC03
0001
□□□1 (Motor side)
Home position return Speed (rpm)
PC04
500
150
300
600
150
300
600
90
180
360
112
225
450
Home position return p osition
data (μm)
Stopper type home posi tion
return stop per time (ms ec)
Stopper type home posi tion
return tor qu e limit value (%)
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)
0
(+:Counter motors side)
1
(+:Counter motors side )
0
(+:Counter motors side)
1
(+:Counter motors side )
Adaptive t uning mode
PB01
0000
0000
Load to motor inertia moment ratio
PB06
7
7
Machine resonance suppression filter 1
PB13
4500
4500
Notch shape selecti on 1
PB14
0000
0000
LEY63
LEY63D
Lead symbol
A B C L A B C
5(2.86)
raito 4/7)
Parameter
Para. No
Initial value
Recommended value
Electronic gear numerator *3
PA06
1
32768
57344
32768
Electronic gear enominator *3
PA07
1
2500
1250
625
625
2500
1250
625
(STM) (Multiplier)
Home position return type
PC02
0000
□□□3 (Stopper type)
Home position return direction
PC03
0001
□□□1 (Motor side)
Home position return speed (rpm)
PC04
500
90
180
360
629
90
180
360
Home position return p osition
data (μm)
Stopper type home posi tion
return stop per time (ms ec)
Stopper type home posi tion
return tor qu e limit value (%)
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)/ 0003 (LEC-MR-RB12)
0
(
+:Counter motors side)
1
(+:Counter motors side )
Adaptive t uning mode
PB01
0000
0000
Load to motor inertia moment ratio
PB06
7
7
Machine resonance suppression filter 1
PB13
4500
4500
Notch shape selecti on 1
PB14
0000
0000
Series
PA05 0000 0000 (Less than stroke 1000) / 0001 (Stroke 1000 or more)
PC07 0 -2000(Less than stroke 1000) / -200 (Stroke 1000 or more)
PC09 100 200
PC10 15 30
Rotation di rection sel ection
Series
Feel length multiplication
PA14 0
Lead
PA05 0000 0000 (Less than stroke 1000) / 0001 (Stroke 1000 or more)
PC07 0 -4000(Less than stroke 1000) / -400 (Stroke 1000 or more)
PC09 100 200
PC10 15 30
20 10 5
(Pulley
20 10 5
Rotation di rection sel ection
*1 Parameter is the reco mmende d v alue. P lease c h ange the par am eter t o ma ke appr opri ate v alue for y our
operating method.
*2 A mechanical resonance may occur depend ing on the configuration or the mo unt ing orientation of the
transferred object. Plea se change the parameter i n the initial setting.
*3 The minimum unit o f t he travel distance of the actuator should be 1 [μm].
PA14 0
-10-
Lead symbol
A B C A B C A B C A B
C
Lead
12 6 3
12 6 3
20
10 5 16 8 4
Para.
No
Initial
value
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)
0
motors side)
1
motors side )
0
motors side)
1
motors side )
Adaptive tuning mode
PB01
0000
0000
Machine resonance
suppression filter 1
Notch shape selection 1
PB14
0000
0000
LEY63
LEY63D
Lead symbol
A B C L A B C
5(2.86)
raito 4/7)
Para.
No
Initial
value
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB032)/ 0003 (LEC-MR-RB12)
Rotation direction
selection
0
(
+:Counter motors side)
1
(+:Counter motors side )
Adaptive tuning mode
PB01
0000
0000
Load to motor inertia
moment ratio
Machine resonance
suppression filter 1
Notch shape selection 1
PB14
0000
0000
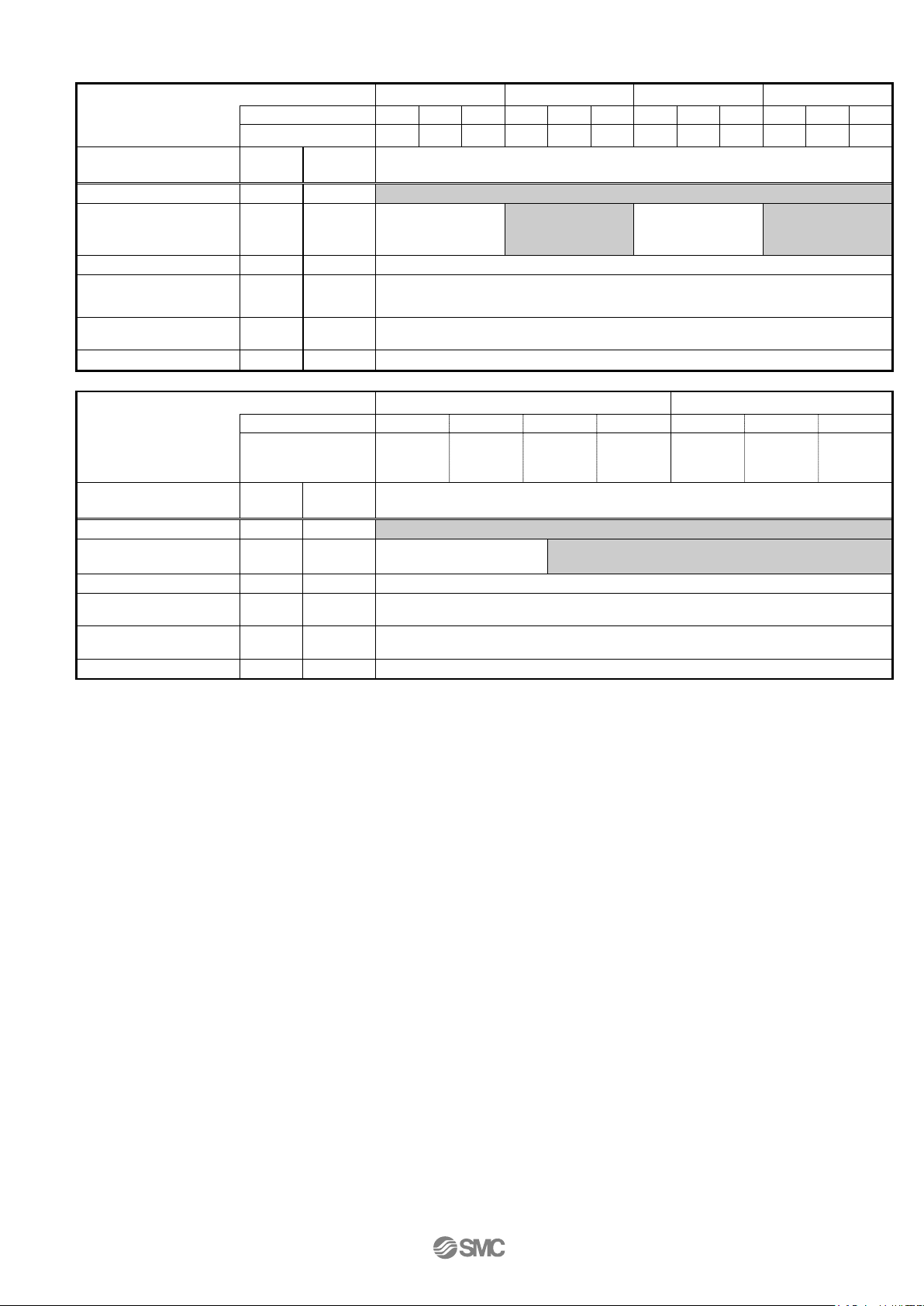
[LECSS]
Series
LEY25/LEYG25 LEY25D/LEYG25D LEY32/LEYG32 LEY32D/LEYG32D
Parameter
Rotation direction
selection
Load to motor inertia
moment ratio
Series
Parameter
Recommended value
(
PA14
PB06
PB13 4500 4500
PA14 0
PB06 7 7
0
7 7
Lead 20 10 5
+:Counter
(+:Counter
(Pulley
Recommended value
(
+:Counter
20 10 5
(+:Counter
PB13 4500 4500
*1 Parameter is the reco mme nded value. P leas e ch ange t he p ara met er to m ake appr opriat e value for y our
operating method.
*2 A mechanical resonance may occur depend ing o n t he c onfiguration or the mounting or ientation of the
transferred object. Plea se change the parameter i n the initial setting.
* For LECSS, please set the el ect r onic gear with PC, PLC etc. in y our application.
-11-
LEY25T6
/ LEYG25T6
LEY25DT6
/ LEYG25DT6
LEY32T7
/ LEYG32T7
LEY32DT7
/ LEYG32DT7
Lead symbol
A B C A B C A B C A B
C
Lead
12 6 3
12 6 3
20
10 5 16 8 4
Para.
No
Initial
value
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB-032)
0
motors side)
1
motors side )
0
motors side)
1
motors side )
Function selection E-3
PE41
0000
0000
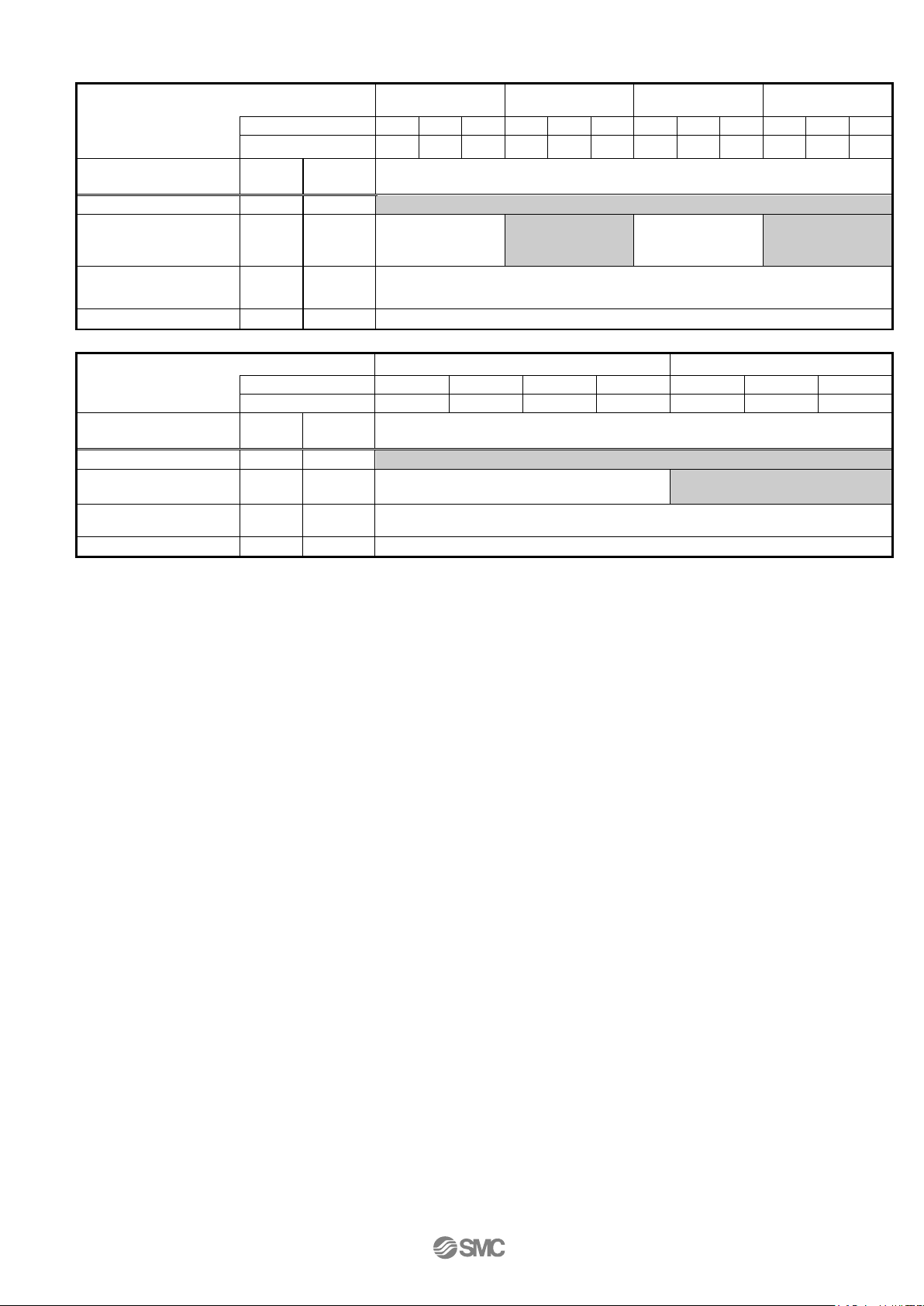
LEY63T8
LEY63DT8
Lead symbol
A B C L A B C
Lead
20
10 5 2.86
20
10
5
Para.
No
Initial
value
Regenerative option
PA02
0000
0000 (Non)/ 0002 (LEC-MR-RB-032)/ 0003 (LEC-MR-RB-12)
Rotation direction
selection
0
(
+:Counter motors side)
1
(+:Counter motors side )
Load to motor inertia
moment ratio
Function selection E-3
PE41
0000
0000
[LECSS-T]
Series
Parameter
Rotation direction
selection
Load to motor inertia
moment ratio
PA14
PB06
(
0
7 7
+:Counter
Recommended value
(+:Counter
(
+:Counter
(+:Counter
Series
Parameter
PA14 0
PB06 7 7
Recommended value
*1 Parameter is the reco mme nded value. P leas e ch ange t he p ara met er to m ake appr opriat e value for y our
operating method.
*2 A mechanical resonanc e may oc cur depending on the configuration or the mounting orientation of the
transferred object. Plea se change the parameter i n the initial setting.
* For LECSS2-T□, please set the electronic gear with PC, PLC etc. in your appl ication.
-12-
LEY63*
(Parallel type)
LEY63D*
(In-line type)
30, 50, 100, 150, 200,
250,300, 350, 400
30, 50, 100, 150, 200,
250,300, 350, 400, 500
30, 50, 100, 150, 200,
250,300, 350, 400, 500
100, 200, 300, 400, 500, 600,
700, 800
Work load
[kg]
Horizontal
Note 2)
18
50
50
30
60
60
30
60
60
40
70
80
200
Vertical
8
16
30 9 19
37
12
24
46
19
38
72
115
Thrust [N]
Note3)
12 to 24%)
(Set value LEY63T :12 to 40%)
Maximum
Speed
Note4)
[mm/s]
Range
to 300
900
450
225
305 to 400
600
300
150
405 to 500
- - -
800
400
200
640
320
160
505 to 600
- - - - - - - - -
800
400
200
605 to 700
- - - - - - - - -
600
300
150
705 to 800
- - - - - - - - -
500
250
125
Pushing speed [mm/s]
Note5)
35 or less
30 or less
30 or less
acceleration/de cel erati on [m m/s2]
5,000
5,000
5,000
3,000
Positioning re peatability [mm]
±0.02[Basic type] / ±0.01[High precision type]
Lost motion[mm]
0.1 or less[Basic type] / 0.05 or less[High precision type]
Lead[mm] (
Including pulley ratio
)
12 6 3
20
10 5 16 8 4
20
10 5 2.86
Impact resistance/vibration
Resistance [m/s2]
Ball screw
and Belt [4:7]
Guide type
Sliding bush (Piston rod part)
Sliding bush (Piston rod part)
Sliding bush (Piston rod part)
Operating temperature range
[℃]
Operating humidity range [%RH]
90 or less(No condensation)
90 or less (No condensation)
90 or less (No conden sation)
Motor output/size
100W/☐40
200W/☐60
400W/☐60
Type of Motor
AC servo motor (100/200VAC
)
AC servo motor (100/200VAC)
AC servo mot or ( 20 0V A C)
[Type of Motor: S2,S3,S4]: Incremental 17bit encoder (Resolution: 131072 p/rev)
[Type of Moto: T6,T7,T8]: Absolute 22bit encoder (Resolution: 4194304 p/rev)
Type
Note7)
No excitation operating type
No excitation operating type
No excitation operating type
Power consumption [W] at 20
℃ Note8)
6.3
7.9
7.9
7.9
Rated voltage [V]
24VDC
0
-10%
24VDC
0
-10%
DC24
0
-10%
DC24
0
-10%
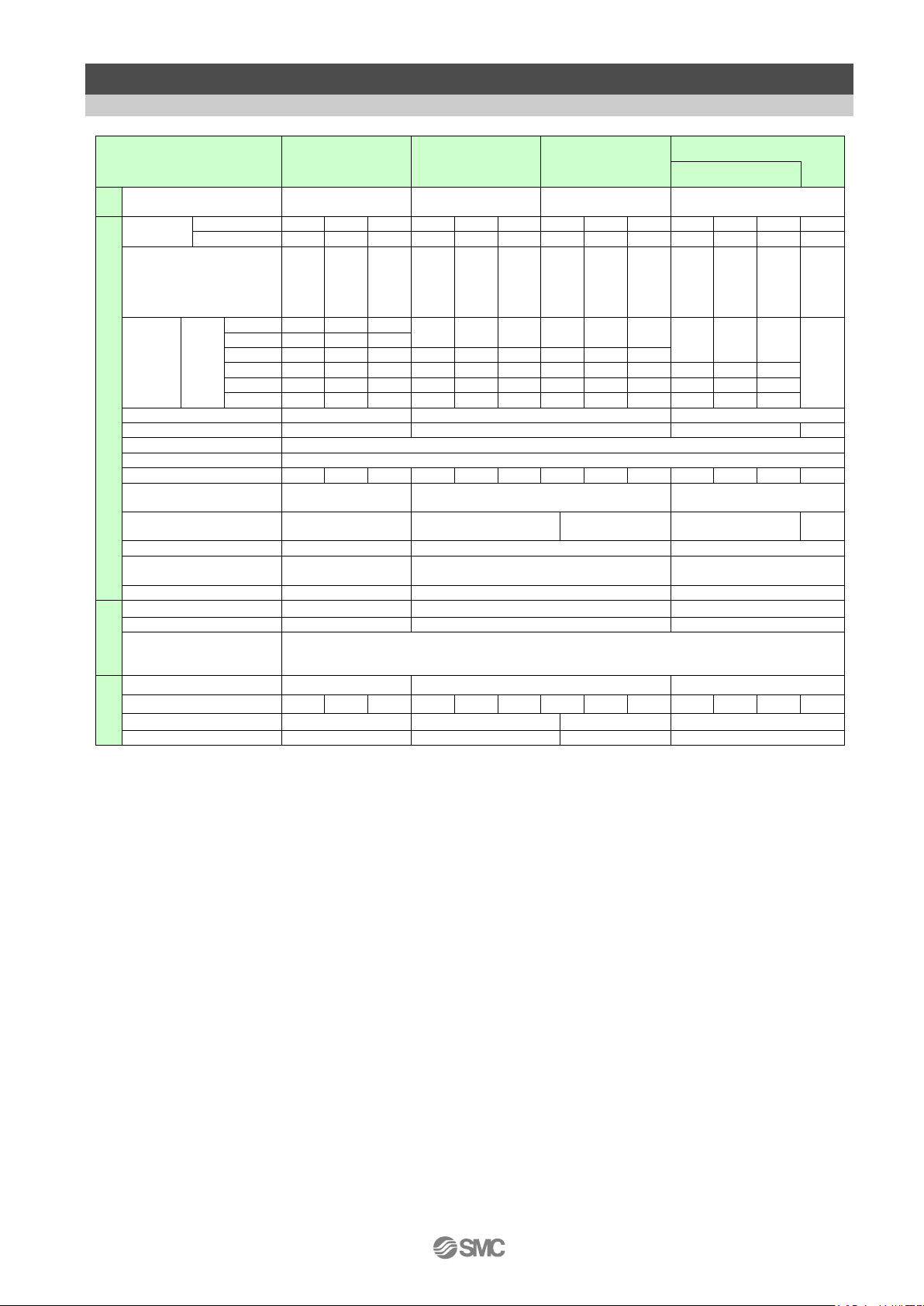
2. Rod type / LEY Series
2.1 Specification
Model
Stroke [mm]
Note1)
(Set value LEY25/32:15 to 30%)
(Set value LEY63
(Set value LEY25T32T
of
stroke
:
15 to 50%)
:
Actuator specification
Note6)
Drive method
LEY25* / LEY25D*
(Parallel / In-line)
65
131
~
127
255
~
~
242
485
LEY32*
(Parallel type)
79
157
~
154
308
~
~
294
588
LEY32D*
(In-line type)
98
192
~
197
~
385
368
~
736
1200 600 300 1000 500 250
156
~
521
1000 500 250
50 / 20 50 / 20 50 / 20
Ball screw and Belt [1:1] / Ball screw
Ball screw and Belt [1.25:1]
Ball screw Ball screw
5 to 40 5 to 40 5 to 40
~
304
1012
~
573
1910
1003
~
3343
70
Encoder
[Type of Moto: S6,S7,S8]: Absolute 18bit encoder (Resolution: 262144 p/rev)
Holding force [N] 131 255 607 607 607 588 197 385 736 313 607 1146 2006
Lock specification
Note 1) The middle stroke other than the above are produced upon receipt of order.
Note 2) The maximum value of the horizontal workload. (An external guide is necessary[Coefficient of friction: 0.1 or less]).
The actual workload will depend on the type of external guide.
Note 3) Thrust setting range when "thrust control" in torque control mode, etc. Set it referring to the thrust conversion graph shown in the
catalog as a guide.
Note 4) The allowable speed changes by the stroke.
Note 5) Allowable impact speed when "impact work" in torque control mode, etc.
Note 6) Impact resistance:
Vibration resistance:
No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and perpendicular direction
to the lead screw. (The test was performed with the actuator in the initial state.)
No malfunction occurred in a test ranging between 45 to 2000 Hz, when the actuator was tested in both an axial direction
and a perpend icular direction to the lead screw. (The test was per f ormed with th e a ctuator in the i ni tial state.)
Note 7) Only when the motor option, "with lock", is selected.
Note 8) For an actuator with lock, add the power consumption for the lock.
-13-
Model
LEY25* (Parallel type)
LEY25D* (In-line mounting type)
Stroke [mm]
30
50
100
150
200
250
300
350
400
30
50
100
150
200
250
300
350
400
Type of Motor
Incremental Enco der
1.31
1.38
1.55
1.81
1.99
2.16
2.34
2.51
2.69
1.34
1.41
1.58
1.84
2.02
2.19
2.37
2.54
2.72
Absolute Enco de r
1.37
1.44
1.61
1.87
2.05
2.22
2.40
2.57
2.75
1.40
1.47
1.64
1.90
2.08
2.25
2.43
2.60
2.78
Model
LEY32* (Parallel type)
LEY32D* (In-line mounting type)
Stroke [mm]
30
50
100
150
200
250
300
350
400
450
500
30
50
100
150
200
250
300
350
400
450
500
Incremental Enco der
2.42
2.53
2.82
3.29
3.57
3.85
4.14
4.42
4.70
4.98
5.26
2.44
2.55
2.84
3.31
3.59
3.87
4.16
4.44
4.72
5.00
5.28
Absolute Enco de r
2.36
2.47
2.76
3.23
3.51
3.79
4.08
4.36
4.64
4.92
5.20
2.38
2.49
2.78
3.25
3.53
3.81
4.10
4.38
4.66
4.94
5.22
Model
LEY63* (Parallel type)
LEY63D* (In-line mounting type)
Stroke [mm]
100
200
300
400
500
600
700
800 100
200
300
400
500
600
700
800
Incremental Enco der
5.4
6.6
8.3
9.4
10.5
12.2
13.4
14.5 5.6
6.7
8.4
9.6
10.7
12.4
13.5
14.7
Absolute Enco de r
5.5
6.7
8.4
9.5
10.6
12.3
13.5
14.6 5.7
6.8
8.5
9.7
10.8
12.5
13.6
14.8
Size
25
32
63
Size
25
32
63
Incremental Encod er
0.20
0.40
0.4
Foot style (Body mounting bolt is included、2sets)
0.08
0.14
0.26
Absolute Encoder
0.30
0.66
0.6
Rod side flange style (Body mounting bolt is included)
0.20
0.51
Rod end male thread
Part of male thread
0.03
0.03
0.12
Motor side fl a nge style (Body mounting bolt isincluded)
-
-
Double clevis style (Clevis pin, Type C retaining ring for axis,
Body mounting bolt is include d)
[kg]
[kg]
[Product Weight]
Type of Motor
Type of Motor
[Additional weight for lock]
Lock
0.17
Nut 0.02 0.02 0.04
0.16 0.22 0.58
-14-

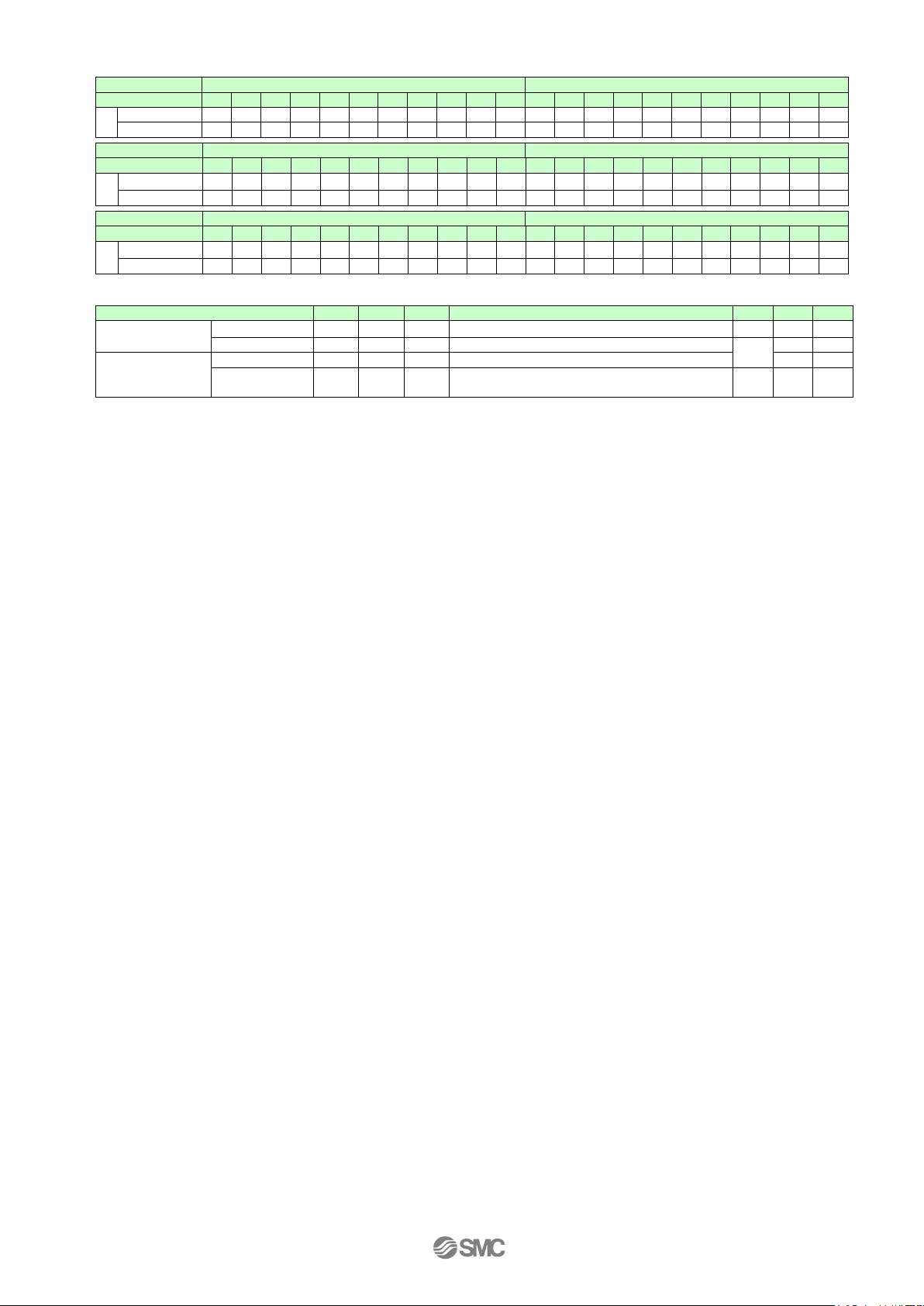
30 50 100 150 200 250 300 350 400 450 500 600 700 800
LEY25
● ● ● ● ● ● ● ● ●
- - - - -
LEY32
● ● ● ● ● ● ● ● ● ● ●
- - -
LEY63 - -
●
-
●
-
●
-
●
-
● ● ● ●
Model
Storoke
[㎜]
*Consult with SMC for the manufacture of intermediate strokes.
*Applicable stroke table
② Size
25
32
63
③ Motor mounti ng positi on
Nil T op mounting type
R Right side parallel type
L Left side parallel type
D In-line type
④ Motor ty pe
Symbol
Type
Output
[W]
Size Compatible driver
S2
AC servo motor
(Incremental encoder)
100 25 LECSA□-S1
S3
200 32 LECSA□-S3
S4
400 63 LECSA2-S4
S6
AC servo motor
(Absolute encoder)
100 25 LECS[B/C/S]□-S5
S7 200 32 LECS[B/C/S]□-S7
S8 400 63 LECS[B/C/S]2-S8
T6 100 25 LECSS2-T5
T7 200 32 LECSS2-T7
T8 400 63 LECSS2-T8
⑤ Lead[mm]
symbol
LEY25 LEY32 LEY63
A 12 16(20) 20
B 6 8(10) 10
C 3 4(5) 5
L - - -(2.86)
⑥ Stroke [mm]
30
30
to
to
800
800
⑧ Motor opti on
Nil Without option
B With lock
⑨ Rod end thr ead
Nil
Rod end female
thread
M
Rod end male
thread
(1 rod end nut included)
⑩ Mounting
Symbol
Type
Motor mounting
Parallel In-line
Nil
Ends tapped
/Body bottom tapped
● ●
L Foot ● -
F Rod flange ● ●
G Head flange ● -
D Double clevis ● -
⑪ Actuat or cable t ype
Nil Without cable
B Standard cable
R
Robot cable(Flexible cable)
⑫ Cable lengt h [m]
Nil Without cable
2 2
5 5
A 10
⑬ Driver type
Com patible driv e r
Pow er supply
voltage [V]
Nil Without driver
A1 LECSA1-S□ 100 to 120
A2 LECSA2-S□ 200 to 230
B1 LECSB1-S□ 100 to 120
B2 LECSB2-S□ 200 to 230
C1 LECSC1-S□ 100 to 120
C2 LECSC2-S□ 200 to 230
S1 LECSS1-S□ 100 to 120
S2
LECSS2-S□ 200 to 230
LECSS2-T□ 200 to 240
⑭ I/O cable length [m]
Nil Without cable
H Without cable
(Connector only)
1 1.5
* Motor cable and encoder cable are included.
(Lock cable is al so i nclude d i f mot or opt i on
“W i th lock” i s se lected.)
* Comm on to enc ode r / motor / l ock cable
* Mounting bracket is shipped together, (but not assembled).
* When mounting styles are [Rod/Head flange] or [Ends tapped] with horizontal cantilever,
use it within the Following stroke.
・LEY25:200 or less ・LE Y32:100 or l ess ・LEY63:400 or less
* In case of [Double clevis], use the actuator within the following stroke limit.
・LEY25:200 or less ・LEY32:200 o r l ess ・LEY63:300 or less
* “G” Head flange is not available for LEY32
LEY B A1200 2-
S332
-
S
② ③ ④ ⑤ ⑦ ⑧ ⑨ ⑪ ⑫ ⑭⑬
⑥
⑩
①
⑦ Dust and dr ip proof opt ion
《Only available for LEY63 》
記号
LEY25/32 L EY63
Nil
Without
option
Equivalent to
IP5x(Dust proof)
P
-
Equivalent to I P65
(Dust and drip proof)
/with Port for breath
*The val ues shown in ( ) are t he l ead for
top mounting, right/left side parallel types.
(Eq ui valent lead which inc l udes the pul l ey ratio)
① Accuracy
Nil Basic type
H High precision type
•∗ When the driver type is selected, the cable is
•included. Select cable type and cable length.
•Example)
•S2S2: Standard cable (2 m) + Driver (LECSS2)
•S2 : Standard cable (2 m)
•Nil : Without cable and driver
2.2 How to Order
-15-

2.3 Construction
No.
Part
Material
Remarks
No.
Part
Material
Remarks
1
Body
Aluminum alloy
Anodized
19
Pulley (For mo t or)
Aluminum alloy
2
Ball screw shaft
Alloy steel
20
Belt
-
3
Ball screw nut
Resin alloy steel
21
Parallel pin
Stainless steel
4 Piston
Aluminum alloy
22
Rod seal
NBR 5
Piston rod
Stainless steel
Hard chrome anodized
23
Retaining ring
Steel for spring
Phosphate coated
6
Rod cover
Aluminum alloy
24
Motor adapter
Aluminum alloy
Coating
7
Bearing hplder
Aluminum alloy
25
Motor
-
8 Rotation stopper
POM
26
Motor block
Aluminum alloy
Coating
9
Socket
Free cutting carbon steels
Nickel plated
27
Hub
Aluminum alloy
10
Connected shaft
Free cutting carbon steels
Nickel plated
28
Spider
Urethane
Spider
11
Bushing
Bearing alloy
29
Socket (male thread)
Free cutting carbon steels
Nickel plated
12
Bearing
-
30
Nut
Alloy steel
Zinc chormaed
13
Return box
Aluminum die-cast
Coating
31
Lock-nut
Alloy steel
Black dyed
14
Return plate
Aluminum die-cast
Coating
32
Speacer-A
Stainless steel
15
Magnet
-
Only stroke 101mm or more
(LEY63:All strokes)
Only stroke 101mm or mo re
(LEY63:All strokes)
Pulley
(For Screw shaft)
Size
Foot
Flange
Double clevis
Size
Part number
25
LEY-L025
LEY-F025
LEY-D025
25
LE-D-2-2
32
LEY-L032
LEY-F032
LEY-D032
32
LE-D-2-4
63
LEY-L063
LEY-F063
LEY-D063
[Lead:A/B/C]
LE-D-2-5
[Lead:L]
LE-D-2-6
1 2 3 4 5 6 8 9 11
12
13
14
15
16
17
18
19
20
21
22
23
24
25 32
27
28
27
29
30
7 7 10
26
7
26
24
31
27
28
27
25
Rod end
In-line mounting type [LEY25/32]
In-line mounting type [LEY63]
Top mounting type [LEY25/32/63]
(Right / Left side p arallel type)
male thread
Parts list
16
Wear ring holder
17
Wear ring
18
Mounting bracket part number Maintenanc e parts / belt
/ When ordering foot bracket, order 2 pieces per actuator.
/ Parts belonging to each bracket are as follows.
Foot, Flange: Body mounting bolt.
Double clevis: Clevis pin, Type C retaining ring for axis, Body mounting bolt.
Stainless steel
POM
Aluminum alloy
63
63
-16-

LEYG25
M
L
* / LEYG25
M
L
D*
LEYG32
M
L
*
(Parallel type)
LEYG32
M
L
D*
(In-line mounting type)
Stroke [mm]
Note1)
30, 50, 100, 150, 200, 250,300
30, 50, 100, 150, 200, 250,300
30, 50, 100, 150, 200, 250,300
Work load
Horizontal
Note 2)
18
50
50
30
60
60
30
60
60
Vertica
Thrust [N]
Note3)
(Set value:15 to 30%)
Pushing speed [mm/s]
Note5)
35 or less
30 or less
30 or less
acceleration/deceleration [mm/s2]
5,000
5,000
Positioning repeatability [mm]
±0.02[Basic type] / ±0.01[High precision type]
Lost motion[mm]
0.1 or less[Basic type] / 0.05 or less[High precision type]
Lead[mm]
(
Including pulley ratio
)
12 6 3
20
10 5 16 8 4
Impact resistance/vibration
Resistance [m/s2]
Drive method
Ball screw and Belt [1:1]/ Ball screw
Ball screw and Belt [1.25:1]
Ball screw
Guide type
Slide bearing (LEYG□M), Ball bushing bearing (LEYG□L)
Operating temperature range [℃]
5 to 40
5 to 40
Operating humidity range [%RH]
90 or less(No condensation)
90 or less (No condensation)
Electric
specification
Motor output/size
100W/☐40
200W/☐60
Type of Motor
AC servo motor (100/200VAC)
AC servo motor (100/200VAC)
[Type of Motor: S2,S3]: Incremental 17bit encoder (Resolution: 131072 p/rev)
[Type of Moto: S6,S7]: Absolute 18bit encoder (Resolution: 262144 p/rev)
Type
Note7)
No excitation operating type
Holding force [N]
131
255
485
157
308
588
197
385
736
Power consumption [W] at 20
℃ Note8)
6.3
7.9
7.9
Rated voltage [V]
24VDC
0
-10%
Model
type
LEYG25*(Parallel type)
LEYG32*(Parallel type)
Stroke [mm]
Absolute
Size
25
32
Incremental Encoder
0.20
0.40
Absolute Encoder
0.30
0.66
LEYG25D*
(In-line mounting type)
LEYG32D*
(In-line mounting type)
Stroke [mm]
Encoder
[kg]
[kg]
3. Guide rod type / LEYG Series
3.1 Specification
Model
[kg]
7 15 29 7 17 35 10 22 44
65~131 127~255 242~485 79~157 154~308 294~588 98~197 192~385 368~736
Maximum Speed
[mm/s]
Note4)
to 300
stroke
900 450 225 1200 600 300 1000 500 250
Actuator specification
Note6)
50 / 20 50 / 20
Encoder
Lock specification
Note 1) The middle stroke other than the above are produced upon receipt of order.
Note 2) The maximum value of the horizontal workload. (An external guide is necessary[Coefficient of friction:0.1 or less]).
The actual workload will depend on the type of external guide.
Note 3) Thrust setting range when "thrust control" in torque control mode, etc. Set it referring to the thrust conversion graph shown in the
catalog as a guide.
Note 4) The allowable speed changes by the stroke.
Note 5) Allowable impact speed when "impact work" in torque control mode, etc.
Note 6) Impact resistance:
No malfunction occurred when the actuator was tested with a drop tester in both an axial direction and perpendicular direction
to the lead screw. (The test was performed with the actuator in the initial state.)
Vibration resistance:
No malfunction occurred in a test ranging between 45 to 2000 Hz, when the actuator was tested in both an axial
direction and a perpendicular direction to the lead screw. (The test was performed with the actuator in the initial state.)
Note 7) Only when the motor option, "with lock", is selected.
Note 8) For an actuator with lock, add the power consumption for the lock.
[Product Weight]
Guide
30 50 100 150 200 250 300 30 50 100 150 200 250 300
Model
Type of Motor
Incremental
Encoder
Encoder
M 1.80
L 1.81 2.02 2.26 2.69 2.95 3.27 3.51 3.24 3.51 3.90 4.64 5.06 5.56 5.96
M 1.86
L 1.87 2.08 2.32 2.75 3.01 3.33 3.57 3.18 3.45 3.84 4.58 5.00 5.50 5.90
1.99 2.31 2.73 3.07 3.41 3.67 3.24 3.50 4.05 4.80 5.35 5.83 6.28
2.05 2.37 2.79 3.13 3.47 3.73 3.18 3.44 3.99 4.74 5.29 5.77 6.22
Model
Type of Motor
Model
Incremental
Encoder
Absolute
Guide
type
30 50 100 150 200 250 300 30 50 100 150 200 250 300
M 1.83
2.02 2.34 2.76 3.10 3.44 3.70 3.26 3.52 4.07 4.82 5.37 5.85 6.30
L 1.84 2.05 2.29 2.72 2.98 3.30 3.54 3.26 3.53 3.92 4.66 5.08 5.58 5.98
M 1.89 2.08 2.40 2.82 3.16 3.50 3.76 3.20 3.46 4.01 4.76 5.31 5.79 6.24
L 1.90 2.11 2.35 2.78 3.04 3.36 3.60 3.20 3.47 3.86 4.60 5.02 5.52 5.92
[Additional weight for lock]
Lock
-17-

② Size
LEY G
B
A1
200
2-
S332
-
S
② ④
⑤ ⑥ ⑧ ⑨ ⑩ ⑪ ⑬⑫
⑦
*Applicable stroke table
30 50 100 150 200 250 300
LEYG25 ● ● ● ● ● ● ●
LEYG32 ● ● ● ● ● ● ●
Model
Stroke
[㎜]
M
③
⑨ Guide opt ion
Nil Without option
F
With grease
holding function
* Only available for slide
bearings
③ Beari ng type
M Sliding bearing
L Ball bushing bearing
⑩ Actuat or cable t ype
Nil Without cable
B Standard cable
R
Robot cable(Flexible cable)
⑪ Cable lengt h [m]
Nil Without cable
2 2
5 5
A 10
⑫ Driver type
Com patible dr ive r
Pow er supply
voltage [V]
Nil Without controller
A1 LECSA1-S□ 100 to 120
A2 LECSA2-S□ 200 to 230
B1 LECSB1-S□ 100 to 120
B2 LECSB2-S□ 200 to 230
C1 LECSC1-S□ 100 to 120
C2 LECSC2-S□ 200 to 230
S1 LECSS1-S□ 100 to 120
S2
LECSS2-S□ 200 to 230
LECSS2-T□ 200 to 240
⑬ I/O cable length [m]
Nil Without cable
H Without cable
(Connector only)
1 1.5
* Motor cable and encoder cable are included.
(Lock cable is al so i nclude d i f mot or opt i on
“W i th lock” i s se lected.)
* Comm on to enc ode r / motor / l oc k cable
⑧ Motor opti on
Nil Without option
B With lock
25
32
⑤ Motor ty pe
Symbol
Type
Output
[W]
Size Compatible driver
S2
AC servo motor
(Incremental encoder)
100 25 LECSA□-S1
S3 200 32 LECSA□-S3
S6
AC servo motor
(Absolute encoder)
100 25 LECS[B/C/S]□-S5
S7 200 32 LECS[B/C/S]□-S7
T6 100 25 LECSS□-T5
T7 200 32 LECSS□-T7
④ Motor mounti ng positi on
Nil T op mounting type
D In-line type
⑦ Stroke [mm]
30
30
to
to
300
300
⑥ Lead[mm]
symbol
LEY25 LEY32
A 12 16(20)
B 6 8(10)
C 3 4(5)
*Consult with SMC for the manufacture of intermediate strokes.
①
① Accuracy
Nil Basic type
H High precision type
•∗ When the driver type is selected, the cable is
•included. Select cable type and cable length.
•Example)
•S2S2: Standard cable (2 m) + Driver (LECSS2)
•S2 : Standard cable (2 m)
•Nil : Without cable and driver
3.2 How to Orde r
-18-

No.
Part
Material
Remarks
No
Part
Material
Remarks
1
Body
Aluminum alloy
Anodized
21
Parallel pin
Stainless steel
2
Ballscrew shaft
Alloy steel
22
Rod seal
NBR
3
Ball screw nut
Resin alloy steel
23
Retaining ring
Spring steel
Phosphate coated
4
Piston
Aluminum alloy
24
Motor adapter
Aluminum alloy
Coating
5
Piston rod
Stainless steel
Hard chrome anodized
25
Motor
-
Coating
7
Bearing holder
Aluminum alloy
27
Hub
Aluminum alloy
8
Rotation Stopper
POM
28
Spider
Urethane
Spider
9
Socket
Free cutting carbon stee ls
Nickel plated
29
Guide attachment
Aluminium alloy
Anodized
10
Connected shaft
Free cutting carbon stee ls
Nickel plated
30
Guide rod
Carbon steel
-
11
Bushing
Bearing alloy
31
Plate
Aluminium alloy
Anodized
12
Bearing
-
32
Plate mounting bolt
Carbon tool steel
Nickel plateing
13
Return box
Aluminum die-cast
Coating
33
Guide bolt
Carbon tool steel
Nickel plateing
14
Return plate
Aluminum die-cast
Coating
34
Slide Bearing
Bearing alloy
15
Magnet
-
35
Felt
Felt 16
Wear ring holder
Stainless steel
Only stroke 101mm or more
36
Holder
Resin
17
Wear ring
POM
Only stroke 101mm or more
37
Retaining ring
Steel for spring
Phosphate coated
18
Pulley (For Screw shaft)
Aluminum alloy
38
Ball bushing
- 19
Pulley (For motor)
Aluminum alloy
39
Spacer
Aluminium alloy
Chormated
20
Belt
-
Size
Part number
Size
Part number
25
LEYG-S025
25
LE-D-2-2
27
26
28
27
Motor mounting position:
Top mountng type
Motor mounting position:
In-line mounting type
When “Grease maintenance mechanism”
50 stroke or less
Over 50 stroke
100 stroke or less
Over 100 stroke
17
18
19
20
21
22
23
24
25
29
30
31
33
34
37
38
13
12
11
16
15
8 9 3
4 5 2 1 6
14 7 10
32
36
35
39
50 stroke or less
Over 50 stroke
3.3 Construction
is selected
Rod cover
6
Motor block
Aluminum alloy
26
Aluminum alloy
Support block Maintenance par ts / belt
32 LEYG-S032 32 LE-D-2-4
*Mounting bolt (2 pieces) is
included in Support block.
-19-

Incremental Encoder
Absolute Encoder
Prepared by user
Prepared by user
Prepared by user
Prepared by user
Prepared by user
Power supply
Control circuit power
Regenerative option
Setup software
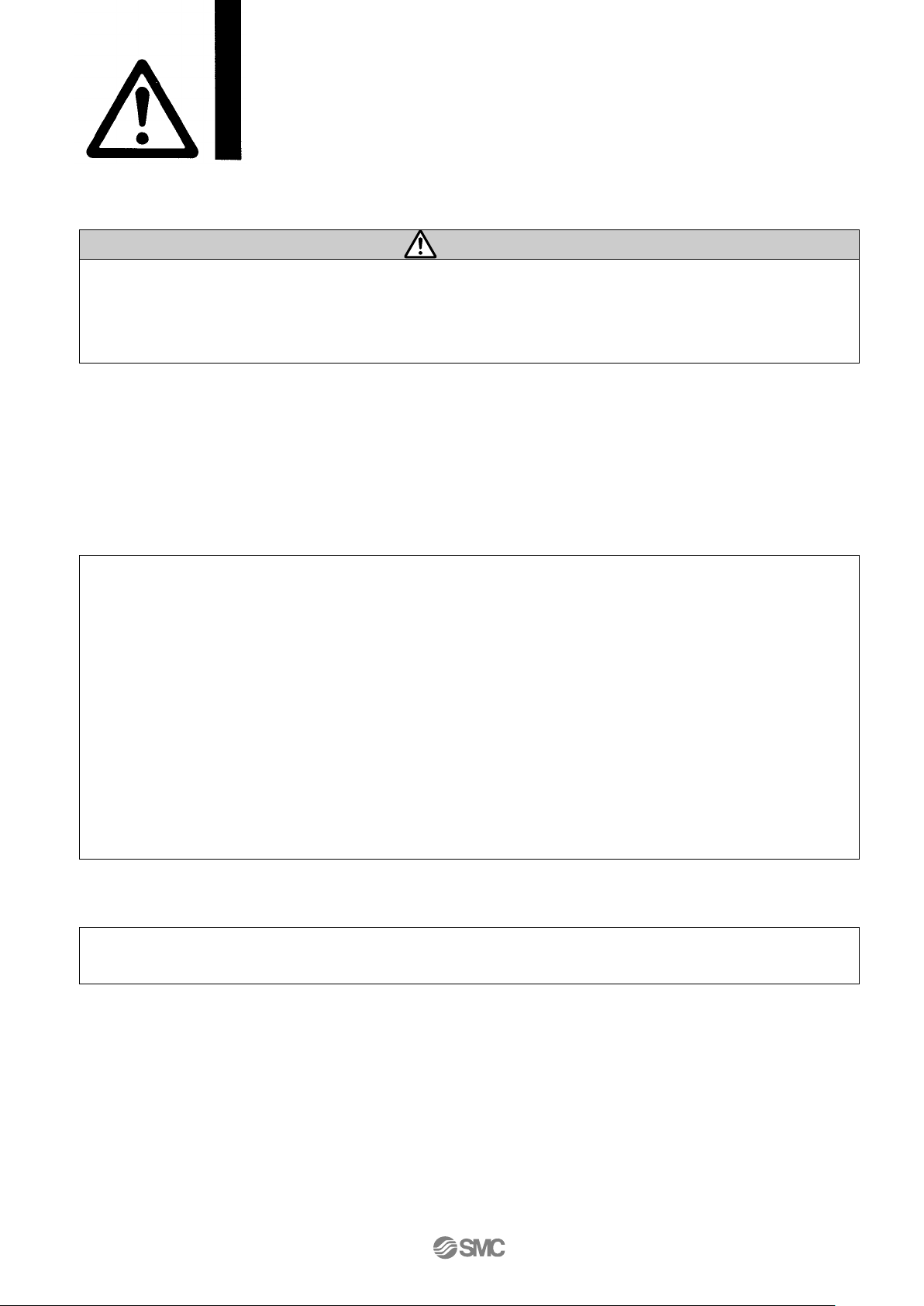
Electric actuator
PLC (Positioning unit)
LEC-MR-SETUP221
USB cable
Motor cable
Lock cable
1-phase 100 to 120VAC (50/60Hz)
200 to 230VAC (50/60Hz)
LEC-MR-RB-□
Power supply
PC
Driver
Standard
Standard
Robot
Robot
Encoder cable
Standard
Robot
I/O connector
Control circuit
Main circuit
Power supply
Regenerative option
Setup software
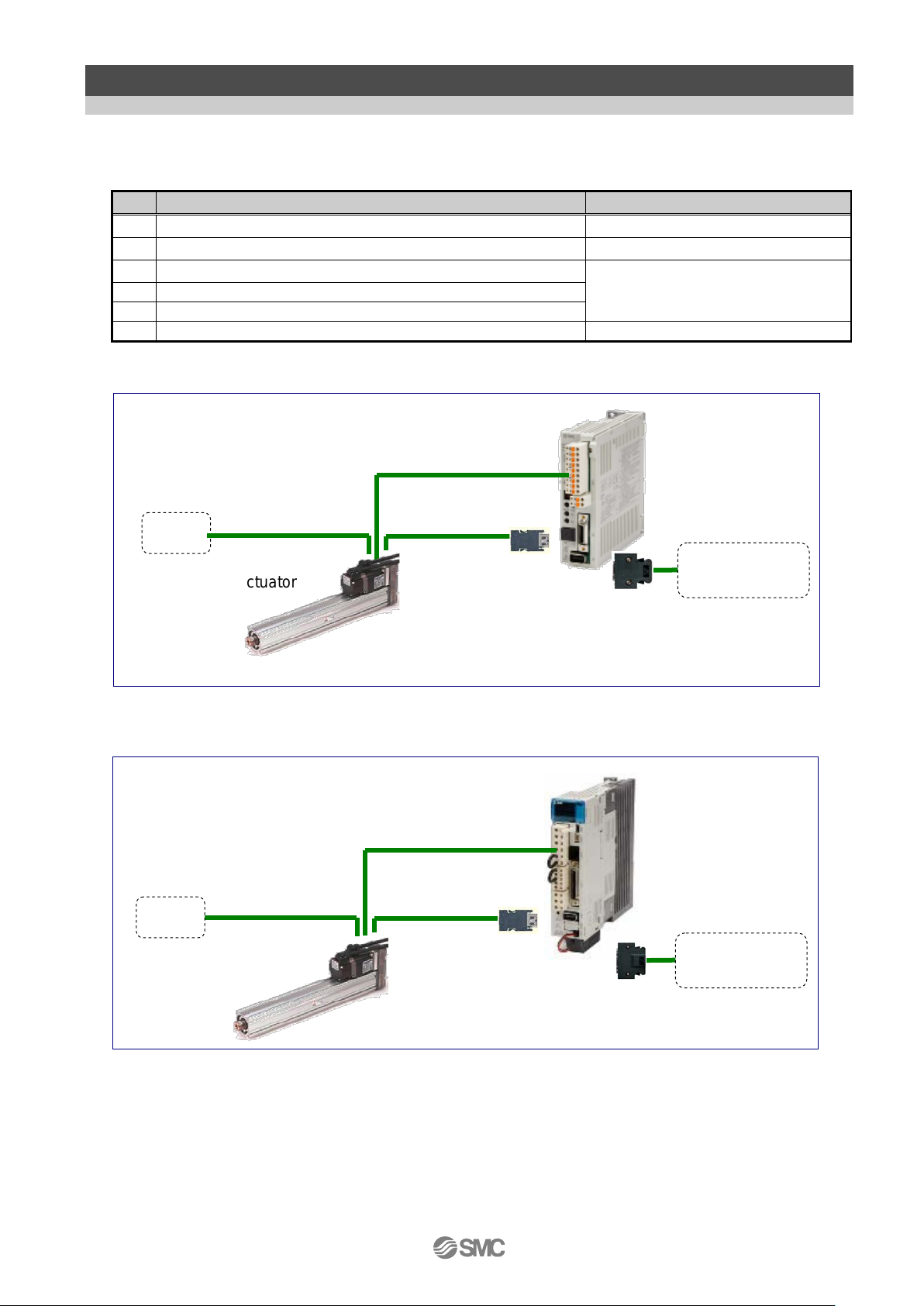
Electric actuator
PLC (Positioning unit)
Power supply
DC24V
I/O connector
LEC-MR-SETUP221
PC
USB cable
◎option
option
1-phase 100 to 120VAC (50/60Hz)
LEC-MR-RB-□
Motor cable
Lock cable
Encoder cable
Main circuit
Driver
Standard
Standard
Robot
Robot
Standard
Robot
Control
Motor
◎option
◎option
◎option
option
Analog
output
RS-422
interface
Battery (accessrory)
When using this software,
When using this software,
Rod type
LEY series
Rod type
LEY series
(MR Configurator2TM)
(MR Configurator2TM)
4. Product Outline
4.1 System construction
(Pulse input / Positioning)
(Pulse input)
200 to 230VAC (50/60Hz)
3-phase 200 to 230VAC (50/60Hz)
◎
power connector
(accessory)
power connector
(accessory)
circuit power
connector
(accessory)
connector
(accessory)
LE-MR-J3BAT
supply
LEC-MRC2□
power connector
(accessory)
order USB cable separately.
LEC-MR-J3USB
LE-CSNA
DC24V
◎
LEC-MR-J3USB
LEC-MRC2□
monitor
order USB cable separately.
LE-CSNB
-20-

Absolute Encoder
Absolute Encoder
Prepared by user
Prepared by user
Prepared by user
Prepared
by user
Power supply
Regenerative option
Setup software
Electric actuator
PLC (CC-Link master unit)
Power supply
DC24V
I/O connector
LEC-MR-SETUP221
PC
USB cable
◎option
1-phase 100 to 120VAC (50/60Hz)
LEC-MR-RB-□
Motor cable
Lock cable
Main circuit
(accessory)
Driver
Standard
Standard
Robot
Robot
Control circuit
Motor
◎option
◎option
RS-422 interface
Power supply
Regenerative option
Setup software
Electric actuator
PLC (Positioning unit /
Power supply
DC24V
I/O connector
LEC-MR-SETUP221
PC
USB cable
option
1-phase 100 to 120VAC (50/60Hz)
3-phase 200 to 230VAC (50/60Hz)
LEC-MR-RB-□
Motor cable
Lock cable
Main circuit
Driver
Standard
Standard
Robot
Robot
Control circuit
Motor
◎option
option
Encoder cable
Standard
Robot
Encoder cable
Standard
Robot
CC-Link connector
SSCNET III
LE-CSS-□
◎option
Battery (accessrory)
Battery (accessrory)
Rod type
LEY series
Rod type
LEY series
(MR Configurator2TM)
(MR Configurator2TM)
(CC-Link)
200 to 230VAC (50/60Hz)
3-phase 200 to 230VAC (50/60Hz)
(SSCNET III)
200 to 230VAC (50/60Hz)
◎
power
connector
Power connector
(accessory)
connector
(accessory)
LE-MR-J3BAT
power connector
(accessory)
power connector
(accessory)
connector
(accessory)
LE-MR-J3BAT
LEC-MR-J3USB
LEC-MRC2□
(accessory)
LE-CSNB
◎
LEC-MR-J3USB
LEC-MRC2□
LE-CSNS
optical cable
motion controller)
-21-

Absolute Encoder Series LECSS-T
Provided by customer
Provided by customer
Power supply
Regenerative option
Setup software
PLC ( Positioning unit / motion controller )
Power supply
I/O connector
LEC-MRC2□
PC
USB cable
◎option
1-phase 200 to 240VAC (50/60Hz)
LEC-MR-RB-□
Motor cable
Lock cable
Main circuit
Driver
Standard
Standard
Robot
Robot
Control circuit
Motor
option
◎option
Encoder cable
Standard
Robot
SSCNET III
LE-CSS-□
option
Battery (accessory)
Electric actuator
Rod type
LEY series
3-phase 200 to 240VAC (50/60Hz)
power connector
(accessory)
connector
(accessory)
power connector
(accessory)
LEC-MR-J3USB
◎
LE-CSNS
◎
optical cable
LE-MR-J3BAT
DC24V
-22-

Control mode
Note1)
Positioning
Parameter
Position
control
Speed
control
Torque
control
Point table
method
Program
method
LECSA
positioning)
LECSS
(SSCNET III)
LECSS
(SSCNET III/H)
Operation
method
4.2 Function/Configuration
The following control mode can be selected for applicable actuators.
Please refer to the “Driver Operation Manual” ab out wiring and parameter setting.
T able. Applicable control mode.
Driver
(Pulse input /
LECSB
(Pulse input)
LECSC
(CC-Link)
Pulse train
Pulse train
CC-Link
(When 2 stations
are occupied)
Positioning
operation
ON/OFF signal
(Internal speed)
Analog
command
- - Absolute
Note4)
Note4)
Speed command
operation
ON/OFF signal
(Internal torque)
Analog
command
Torque command
operation
Encoder
Incremental
Absolute - - PA01
Absolute - -
Absolute - -
-
ON/OFF signal
3 points
(max. 7 points)
31 points
255 points
CC-Link
(When 1 station is occupied)
(When 2 stat io n s ar e occupie d)
Positioning operati on by
point table No. setting
Note2)
ON/OFF signal
4 programs
(max. 8 Programs)
Positioning operati on by
program No. setting
Note 1
Make the moving range limitation by extern al sensor etc to avoid actuator hitt ing to the work
piece or stroke end.
When using the thrust control, the following parameter should be set.
If not, it will cause malfunc t ion.
- LECSA: The value of the parameter value [PC12] “Internal torque command” should be 30% or
less. (LEY63 : 50% or less)
- LECSB: The value of the parameter value [PC13] “Analog torque maximum output command”
should be 30% or less. (LEY 63 : 50% or le s s)
(30% = Maximum pushing force of the product.)
- LECSS-T: The value of the parameter value [PC13] “Analog torque maximum output command”
should be 24% or less. (LEY63 : 40% or less)
When the control equivalent to the pushing operation of the controller LECP series is performed,
select the LECSS driver and combine it with the Motion or Simple Motion (manufactured by
Mitsubishi Electric Corporation) which has a pus hi ng operation function.
Note2) To set the maximum value for the each method, it is necessary to change the settin g.
Please refer “Driver Operation Manual”.
Note3) The MR Configurator is necessary to control by the program method.
Order separately.
-MR Configurator2TM (Setup software Japanese version) / LEC- MRC2
TM
-MR Configurator2
-MR Configurator2
(Setup software English version) / LEC-MRC2E
TM
(Setup software Chinese version) / LEC-MRC2C
-USB cable for Setup software (3m) / LEC-MR-J3USB
Note4) The LECSS/LECSS-T is set by upper positioning unit or motion contr oller.
Note2)
select
PA01
Note4)
Note4)
-
Note3)
- PC30
-23-

5. Wiring of cables / Common precautions
Warning
1. Adjusting, mounting or wiring change should never be done before shutting off the power
supply to the pr oduct.
Electrical shock, malfunction and damaged can result.
2. Never disassemble t he cable. Use only specif ied cables.
3. Never connect or dis connect the cable or conn ector with power on.
Caution
1. Wire the connector securely. Do not apply any voltage to the terminals other than those
specified in the product manual.
2. Wire the connector securely.
Check for correct connector wiring and polarity.
3. Take appropriate m easures against noise.
Noise in a signal line may cause malfunction. As a countermeasure, separate high voltage and low
voltage cables, and sh or t en wiring lengths, etc.
4. Do not route wires and cables together with po w e r or high volta ge cables.
The product can malfunction due to interference of noise and surge voltage from power and high
voltage cables to the signal line. Route the wires of the product separately from power or high voltage
cables.
5. Take care that actuator movement does not catch cables.
6. Operate with cables secured. Avoid bending cables at sharp angles where they enter the product.
7. Avoid twisting, folding, rotati ng or applyi ng an external force to the cabl e.
Risk of electric shock, wire break, contact failure and loss of control for t he product can happen.
8. Select “Robotic ty pe cabl es” in case of inflecting cable (encoder/motor/lock) repeatedly.
Refer to the “Driver operation manual” for t he bending life of the bending radius of the cable.
9. Confirm proper wiring of the product.
Poor insulation (interference with other circuits, poor insulation between terminals and etc.) can apply
excessive voltage or cur r ent to the product causing damage.
[Transportation]
Caution
1. Do not carry or swing the product by the cable
-24-

6. Electric actuat ors / Common precautions
6.1 Design and selection
Warning
1. Be sure to read the Operation Manual (this manual and the one for the driver: LEC series).
Handling or usage/operation other than that specified in the Operation Manual may lead to breakage
and operation failure of th e pr oduc t .
Any damage attributed to the use beyond the specifications is not guaranteed.
2. There is a possibility of dangerous sudden action by the product if sliding parts of machinery
are twisted due to exter nal f orces etc.
In such cases, human injury may occur, such as by catching hands or feet in the machinery, or
damage to the machinery itself may occur.
Design the machinery should be designed to avoid such dangers.
3. A protective cover i s r ecom mended to minimize t he r i sk of personal injury.
If a driven object and moving parts of the product are in close proximity, personal injury may occur.
Design the system to avoid contact with the hu man body.
4. Securely tighten all statio nar y part s and connected p ar ts so that they will not become loose.
When the product operates with high frequency or is installed where there is a lot of vibration, ensure
that all parts re ma in secure.
5. Consider a possible loss of power source.
Take measures to prevent injury and equipme nt damage even in the case of a power sour ce failure.
6. Consider behavior of emergency stop of whole system.
Design the system so that human injury and/or damage to machinery and equipment will not be
caused, when it is stopped by a safety device for abnormal conditions such as a power outage or a
manual emergency st op of whole system.
7. Consider the action when operation is restarted after an emergency stop or abnormal stop of
whole system.
Design the system so that human injury or equipment damage will not occur upon restart of operation
of whole system.
8. Never disassemble or modify (including additional machining) the produc t .
An injury ro failure can result.
It will cause the loss of the pr oduct performance.
9. When using it for vert ical application, it is neces sar y to build in a safety device.
The rod may fall due to the weight of work. The safety device should not interfere with normal
operation of the machine.
Caution
1. Operate within the limits of the maximu m usable stoke.
The product will be damaged if it is used with the stroke which is over the maximum stroke. Refer to
the specifications of the product.
2. When the product repeatedly cycles with partial strokes, operate it at a full stroke at l east once
every 10 strokes.
Otherwise, lubrication can run out.
3. Do not use the product in applications where excessive external force or impact force is
applied to it. The pr oduct can be dam aged.
Each component that incl udes motor is made with accurat e t ol er ance.
So even slightly deformed or miss-alignment of component may lead operation failur e of the
product.
4. R e fe r to a c o mmon auto sw itch /matte r (B e st Pneuma tics No 2 ) whe n an auto switch is built in
and used.
5. Do not exceed prod uct specification, even if work load is supported by external linear guides.
The moment to actuator is reduced by external guide, but required ability for transport (relationship
between speed and work load) is not redeuced.
-25-

For brake connector
Screw size: M2
Tightening torque: 0.2 N m
For power supply connector
Screw size: M2
Tightening torque: 0.2 N m
For encoder connector
Screw size: M2
Tightening torque: 0.1 N m
6.2 Mounting
Warning
1. Install and operate the product only after reading the Operation Manual carefully and under
standing its content s. Keep the manual in a safe pl ace f ut ure reference.
2. Observe the tightening torque for screws.
Tighten the s cr ew s to the recommended tor que for mounting the product.
3. Do not make any alterations to thi s pr oduct.
Alterations made to this product m ay lead to a loss of durabilit y and dam age to the pr oduct, w hich can
lead to human injury and damag e t o other equipment and mach in er y.
4. When using extern al guide, the guide axis should be parallel to the actuator axis.
There will be damage/exc ess iv e wear on the lead screw if the external guide is not para llel.
5. When an external guide is used, connect the moving parts of the product and the load in such
a way that there is no interf erence at any point within the str oke.
Do not scratch or dent the sliding parts of the product tube or piston rod etc., by striking or grasping
them with other objects. Components are manufactured to precise tolerances, so that even a slight
deformation may cause faulty operation.
6. Prevent the seizure of rotating parts.
Prevent the seizure of rotating parts ( pi ns , et c. ) by applying grease.
7. Do not use the product until y ou verify that the equipment can ope r ate properly.
After mounting or repair, connect the power supply to the product and perform appropriate functional
inspections to check it is mount ed properly.
8. Cantilever
When the actuator is operated at high speed while it is fixed at one end and free at the other end
(flange type, foot type, double clevis type, direct mount type), a bending moment may act on the
actuator due to vibration generated at the stro ke end, which can damage the actuator. In such a case,
install a support bracket to suppress the vi br at ion of the actuator body or reduce the speed s o t hat t he
actuator does not vibrate. Use a support bracket also when moving the actuator body or when a long
stroke actuator is mounted horizontally and fi xed at one end.
9. When attaching work pi e ce , do not apply st r ong impact or large moment.
If an external force ov er the allowable moment is applied, it may cause loos eness in the guide unit, an
increase in sliding resistance or other problems.
10. Maintenance space
Allow sufficient space for maintenan ce and inspection.
11. Mounting connectors
Tighten the s cr ew s evenly. Tightening torques are as ind icat ed below.
-26-

6.3 Handling
Warning
1. If abnormal heating, smoking or fire, etc., occurs in the product, immediately shut off the
power supply.
2. Immediately stop operation i f abnormal operat i on noise or vibra t ion occurs.
If abnormal operation noise or vibration occurs, the product may have been mounted incorrectly.
Unless operation of the produc t is st opped for inspection, the pr oduct can be seriously damaged.
3. Never touch the rotating par t of the motor or moving part of the actuator while in operat ion.
Alterations made to this product m ay lead to a loss of durabilit y and dam age to the pr oduct, w hich can
lead to human injury and damag e t o other equipment and mach in ery.
4. W hen installing, adjusting, inspecting or performing maintenance on the product, driver and
related equipment, be sure to shut off the power supply to them.
Then, lock it s o t hat no o ne ot her than the per so n worki n g ca n t urn t he po wer on, or impl e men t
measures such as a safety plug.
Caution
1. Keep the driver and product combined as delivered for use.
The product is set in parameters for shipment. If it is combined with a different p ar ameter, failure can result.
2. Check the product for the following points before operation.
a) Damage to power supply line and signal line.
b) Looseness of the connector to each power line and signal line.
c) Looseness of the actuator /cylinder and Driver /driver mounting
d) Abnormal operation
e) Emergency stop of the tot al system
3. When more than one person is performing work, decide on the procedures, signals, measures
and resolution f or abn or ma l condi ti ons bef ore b egi nni ng the wor k. Also, designate a per so n to
supervise work other than those performing work.
4. Actual speed of the product wi ll be changed by the workload.
Before selecting a product, check the catalog for the instructions regarding selection and
specifications.
5. Do not apply a load, impact or resistance in addition to a transferred load during return to
origin.
In the case of the return to origin by pushing force, additional force will cause displacement of the
origin position since it is based on detected motor torque.
6. Do not remove the nameplate.
7. Operation test should be done by low speed. Start operation by predefined speed after
confirming there is no trouble .
8. Do not apply i m pact/collision/resistance for mover of actuator in operation.
It will cause decrease of product’s life, damage to product, and so on
[Ground]
Warning
1. Do the earth construction surely.
2. Refer to the driver manual for the grounding procedure and notes.
[Unpackaging]
Caution
1. Check the received product is as ordered
If the different produ ct is installed from the one or dered, injury or damage can result.
-27-

6.4 Operating environment
Warning
Av oid use in the followi ng environments.
a. Locations where a large amount of dusts and cutting ch ips are airborne.
b. Locations where the ambient temperature is outside the range of the temperature specification
(refer to specifications).
c. Locations where the ambient humidity is outside the range of the humidity specification (refer to
specifications).
d. Locations where corros ive gas, flammable gas, sea w at er, water and steam are present.
e. Locations where strong mag netic or electric fields are generat ed.
f. Locations where direct vibrat i on or impact is applied t o t he pr oduct .
g. Areas t hat are dusty, or are exposed to splashes of water and oil drop s .
h. Areas exposed to direct sunlight (ultraviolet ray).
2. Do not use in an environment where the product is directly exposed to liquid, such as cutting oils.
If cutting oils, coolant or oil mist contaminates the product, failure or increased sliding resistance can result.
3. Install a protective cover when the product is used in an environment directly exposed to
foreign matters such as dust, cut ting chip s a nd spatter.
Play or increased sliding res istance can result.
4. Shade the sunlight in the place wh er e t he product is applied with dir ect sunshine.
5. Shield the product if the r e i s a heat source nearby.
When there is a heat source surrounding the product, the radiated heat from the heat source can increase
the temperature of the product beyond the operating temperature range. Protect it with a cover, etc.
6. Grease oil can be decreased due to external environment and operating conditions, and it
deteriorates lubrication performance to shorten the life of the product.
[Storage]
Warning
1. Do not store the product in a place in direct contact with rain or water drops or is exposed to
harmful gas or li quid.
2. Store in an area that is shaded from direct sunlight and has a temperature and humidity within
the specified range (-10°C to 60°C and 90%RH or less No condensati on or freezing).
3. Do not apply vibration and impact to the product during stor age.
-28-

6.5 Maintenance
Warning
1. Do not disassemble or repair the product.
Fire or electric shock can result . Contact SMC, in case of disassembly for the ma intenance.
2. Before modifying or checking the wiring, the voltage should be checked with a tester 5
minutes after the power supply is turned off.
Electrical shock can result.
Caution
1. Maintenance should be performed according to the procedure indicated in the Operating
Manual.
Incorrect handling can caus e an injury, damage or malfun ction of equipment and machinery.
2. Removal of product
When equipment is serviced, first confirm that measures are in place to prevent dropping of work
pieces and run-away of equipment, etc, and then cut the power supply to the system. When
machinery is restarted, check that operation is norm al w ith actuators in the proper positions.
[Lubrication]
Caution
1. The product has been lubricated for life at manufacturer, and does not require lubrication in
service.
Contact SMC if lubric at io n will be applied.
6.6 Precautions for actuator with lock
Warning
1. Do not use the lock as a safety lock or a control t hat r eq ui r es a l ocking force.
The lock used for the product w it h a loc k is de s ig ned to prevent dropping of wor k piec e.
2. For vertical mounting, use the product with a lock.
If the product is not equ ipped with a loc k, the pr odu ct will mov e and drop t he w ork piece wh en the
power is removed.
3. "Measures against drops” means preventing a work pie ce from dropping due to its weight
when the product operation is st opped and the p ower supply i s t urned off.
4. Do not apply an impact load or strong vibration whil e t he lock is activated.
If an external impact load or strong vibration is appli ed t o the product, the lock will lose it’s
holding force and damage to the sliding part of the lock or reduced lifetime ca n r esult. The same
situations will happen when the lock slips due to a forc e hig ht than its holding force, as this will
accelerate the wear to the loc k.
5. Do not apply liquid or oil and grease to the lock or its surrounding.
When liquid or oil and grease is a pplied to the sliding part of the lock, its holding force will be
reduce significantly. Or, lock sl iding part performance and condition changes may be cause of
lock release malfunction.
6. Take measures against drops and check that safety is assured before mounting,
adjustment and i nspection of the product.
If the lock is released with the prod uct mount ed v erti cally, a work piece can drop du e t o it s w eight .
-29-

7. Electric actuators / Rod Type Common precautions
7.1 Design
Warning
1. Do not apply a load in excess of the actuator specification.
A product should be selected based on the maximum work load and allowable moment.
If the product is used outside of the operating specification, eccentric load applied to the guide
will become excessive and have adverse effects such as creating play in the guide, reduced
accuracy and reduced product life.
2. Do not use the product in applications where excessive external force or impact force is
applied to it.
The product can be damaged.
The components inc lud ing the motor are manufactured to precise tolerances.
So that even a slight deformat ion may cause faulty operation or s eiz ur e.
7.2 Selection
Warning
1. Do not exceed the speed lim i t of t he act uator specification.
Select a suitable actuator by the relationship of al lowable work load and speed.
Noise or reduction of accura c y may occur i f the actuat or is operated in excess of its specification
and could lead to reduced ac cur acy and reduced product file.
2. When the product repeat edl y cycles with part i al st r okes (100mm), lubri cation can run out .
Operate it at a full stroke at least once a day or every 1000 strokes.
7.3 Handling
Caution
1. For thrust control, make sure to set it to "torque control mode", and operate within the
"pushing speed" range of eac h m odel.
Do not hit the workpiece or the stroke end with the piston in the "position control mode", "speed
control mode" or "positioning mode". The lead screw, bearing and internal stopper may be
damaged, causing malfunction.
2. When using the thrust control, the f ollowing parameter should be set.
- LECSA: T he value of the parameter value [PC12] “Internal torque command” should be 30% or
less. (LEY63 : 50% or less)
- LECSB: The value of the parameter value [PC13] “Analog torque maximum output command”
should be 30% or less. (LEY 63 : 50% or le s s)
- LECSS-T: The value of the parameter value [PC13] “Analog torque maximum output command”
should be 24% or less. (LEY 63 : 40% or le s s)
It may lead to breakage and m al function.
3. Normal/reverse torque limit value is set to 100 % as a default.
It is the maximum torque (the limit value) in the "position control mode", "speed control mode" or
"positioning mode". When the product is operated with a smaller value than the default,
acceleration when driv ing c an decr ease. Set it upo n c onfir mation w ith t he a ctu al equi pme nt used.
4. The maxim um speed of this actuator vari es depending on the stroke of the product.
When selecting a product, check the catalog for the model selection.
5. Do not apply a load, impact or resistance in addition to a transferred load during return to
origin.
Otherwise, the origin can be dis placed since it is based on det ect ed motor torque.
6. Do not scratch or gouge the sliding parts of the piston rod, by striking or grasping them
with other objects.
Piston rod is manufactured to precise tolerances, so that even a slight deformation may cause
malfunction.
7. Please connect it so that the impact and load may not be added to the rod from the side
when external guide is u sed.
-30-

Allowable
(Nm or less)
LEY25**
LEY32**
LEY63**
Stroke [mm]
30
50
100
200
300
ational Torque of
LEYG32M
2.55
2.09
5.39
3.26
1.88
LEYG25L
1.52
3.57
2.47
2.05
1.44
LEYG32L
2.80
5.76
4.05
3.23
2.32
8. Please do not operate body itself by the piston rod fixin g.
An excessive load joins the piston rod, and it causes defective operation and the longevity
decrease.
9. When the actuator is operated at high speed while it is fixed at one end and free at the other
end (flange type, foot type, double clevis type, direct mount type), a bending moment may act
on the actuator d ue t o vi brat ion ge nera te d at t he str oke e nd, whic h ca n d am age the a ct uat or. In
such a case, install a support bracket to suppress the vibration of the actuator body or reduce
the speed so that the actuator does not vibrate.
Use a support bracket als o w hen moving the actuator body or w hen a long stroke actuator is mounted
horizontally and fixed at one end.
10. Avoid using the electric actuator in such a way that rotational torque would be applied to
the piston rod.
If rotational torque is applied, the non-rotating guide will become deformed, thus affecting the
non-rotating accuracy.
Refer to the table below f or the approximate values of the allowable range of rot at io nal t or que.
rotational torque
1.1 1.4 2.8
To screw a bracket or a nut onto the threaded portion at the tip of the piston rod, make sure to
retract the piston rod entir ely, and place a wrench over the flat portion of the rod that protrudes.
Tighten it by giving consideration to prevent the tightening torque from being applied to the
non-rotating guide.
11. When rotational torque is applied to the plate end, use within the allowable range. [LEYG series]
Excessive torque could cause the guide rod and bushing to be deformed, causing looseness of the guide or
increase in sliding resistance.
The applied rotational torque should be l ess than the "Allowable Rotational Torque of Plate" in the table below.
Allowable
Rot
Plate[Nm]
LEYG25M 1.56 1.29 3.50 2.18 1.36
12.
When the fluctuation of load is caused during operation, malfunction/noise/alarm may
occur.
The tuning of gain may not suit for fluctuation load. Adjust the gain properly by following the manual of
driver.
-31-

Max.
torque [Nm]
Scket width
[mm]
LEY25
M8x1.25
12.5
13
17
LEY32
M8x1.25
12.5
13
22
LEY63
M16x2
106
21
36
Max.
torque [Nm]
Scket width
[mm]
LEY25
M14x1.5
50
20.5
17
LEY32
M14x1.5
50
20.5
22
LEY63
M18x1.5
97
26
36
Rod end nut
Width
across flats
[mm]
LEY25
22 8 14
LEY32
22 8 14
LEY63
27
11
18
Max.
torque [Nm]
LEY25
M5x0.8
3.0
6.5
LEY32
M6x1.0
5.2
8.5
LEY63
M8x1.25
12.5
10
Max.
torque [Nm]
LEY25
M5x0.8
3.0
8
LEY32
M6x1.0
5.2
10
LEY63
M8x1.25
12.5
16
Soket
Rod end nut
Soket
Rod side
Head side
Thread depth
of bracket
LEY*D is
7.4 Mounting
Caution
1. Fix 'Socket' square widt h across fl at s in t he piston r od poi nt with the sp ann er etc. , pr event
the piston rod from rotating, and tighten the screw tightening when work piece or jig, etc.
are installed properly by the torque val ue within the range of the limi tation.
It causes the abnormal reaction of an auto sw itch, the spac e of an internal guide, and an increase
of the sliding resistance, etc..
2. When mounting the workpiece or other d evice to the actuator tighten the fixing screws
with adequate t orque within the s pe cified torque range.
Tightening the screws with a higher torque than the maximum may cause malfunction, whilst
tightening with a lower torque can cause the displacement of the mounting position or in extr em e
conditions detach ing o f the work piece.
LEY series>
<
Work fixed / Rod end female thread
Model Bolt
tightening
Work fixed / Rod end male thread
Model
Thread
size
tightening
Model
Length [mm]
Mounting / Body bottom tapped style (When “Body bottom tappde” is selected)
Model Bolt
Max.thread
depth [mm]
Max.thread
length [mm]
thread
depth of
bracket[mm]
tightening
across flats
across flats
Max.thread
depth [mm]
Mounting / Rod side・Head side tapped style
Model Bolt
tightening
Max.thread
depth [mm]
excluded
-32-

<
Actuator body
Actuator body
Work piece
Max.
torque [N•m]
Max. thread
LEYG25
M
L
M6 x 1.0
5.2
11
LEYG32
M
L
M6 x 1.0
5.2
12
torque [N•m]
LEYG25
M
L
M5 x 0.8
3.0
40.3
LEYG32
M
L
M5 x 0.8
3.0
50.3
Max.
torque [N•m]
Max. thread
LEYG25
M
L
M6 x 1.0
5.2
12
LEYG32
M
L
M6 x 1.0
5.2
12
torque [N•m]
LEYG32
M
L
M8 x 1.0
5.2
10
L
LEYG series>
Work fixed/ Plate tapped style
Mounting / Upper mounting tapped style
Mounting / Lower mountin g tapped style
Mounting / Head side tapped style
Model Bolt
tightening
depth [mm]
Max.
Model Bolt
Model Bolt
tightening
tightening
Length
L [mm]
depth [mm]
Max.
Model Bolt
LEYG25
M
M8 x 0.8 3.0 8
L
tightening
Max. thread
depth [mm]
3. Keep the flatness of the mounting surface within the following ranges when mounting the
actuator body and work piece.
Insufficient flatness of the work piece or the surface onto which the actuator body is to be mounted
can cause increased sliding r esistance.
Model Mounting part Flatness
LEY*
/Body bottom tapped style
/ Upper mounting tapped style
/
Lowe
r mounting tapped style
0.1mm or less
0.02mm or less
LEYG*
/Plate tapped sty le
0.02mm or less
-33-

0
Non-protected
1
Protected against solid forei gn objects of 50 mm and grat er
2
Protected against solid forei gn objects of 12 mm and grat er
3
Protected against solid forei gn objects of 2.5 mm and grater
4
Protected against solid forei gn objects of 1.0 mm and grater
5
Dust-protected
6
Dust-tight
0
Non-protected
-
1
Protected against vertically falli ng water dr ops
Dripproof type 1
Protected against ver t i cal ly falling water drop s when
enclosure tilted up to 15°
Dripproof type 2
3
Protected against rainfall when enclosure tilted up to 60°
Rainroof type
4
Protected against spla s hi ng water
Splashpr of type
Protected against water jet s
Water-jet-proof
type
Protected against powerful water jet s
Powerful
water-jet-proof type
7
Protected against the effects of temporary immersion in water
Immersible type
8
Protected against the effects of conti nuous imm ersion in water
Submersible type
IP
First characteristic numeral
Second characteristic numeral
.Encloure
4
・First Characteristics: D egrees of protection aga i nst sol i d for eign objects
・Second Characteristics: Degrees of protecti on against water
2
5
6
Example)IP65:Dust-tight, Water-jet-proof type ‘‘Water-jet-proof type’’ means that no water
intrudes inside an equipment that could hinder from operating normally by means of applying
water for 3 minutes in the prescribed manner. Take appropriate protection measures, since a
device is not usable in an environment where a droplet of water is splashed constantly.Keep
the flatness of the mounting surface within the following rang es when mounting t he a
-34-

Appearance check
Check belt
Inspection before daily operation
○
Inspection every six months *
○
○
Inspection every 250k m *
○
○
Inspection are every five mil li on t i me s *
○
○
Teeth become fuzzy
7.5 Precaution on maintenance
Caution
1. Cut the power supply during maint enance and re placement of the pr oduct.
[Maintenance frequency]
Preform maintenance according to the table be low.
*Either of inspection early t ime is selected.
[Items for visual appearance check]
1. Loose set screws, abnorma l dirt .
2. Check of flaw and cable joint
3. Vibration, noise.
[Items for belt check]
Stop oper at ion immediately and r eplace the belt when belt appear to be li ke photos below.
a . Tooth shape canvas is worn out
Canvas fiber becomes fuz zy. Rubber is removed and the fiber becomes whitish. Lines of fib ers
become unclear.
b . Peeling off or wearing of the side of t he belt
Belt corner becomes roun d and frayed thread sticks out.
c . Belt partially cut
Belt is partially cut. For eig n matt er caught in teeth other than cut p ar t c auses flaw.
d . Vertical line of belt teeth
Flaw which is made when t he belt r uns on the flange.
e . Rubber back of the belt i s softened and sticky
f . Crack on the back of the belt
-35-

Alarm deactivation
Press "SET" on
screen.
(RES)
Undervoltage
Clock error
Memory error 2 (EEP-ROM)
Encoder initial communication error1
A.19
Memory error 3 (Fl ash-ROM)
Motor combination error
Software combination error
Encoder initial communication error 3
Encoder normal communication error 1
Encoder normal communication error 2
Regenerative error
Overspeed
Overcurrent
A.35
Command frequency error
Parameter error
Main circuit device overheat
Overload 1
Overload 2
Error excessive
Watchdog
8. Troubleshooting
8.1 Alarms and Warning
When a fault occurs during the operation, t he cor r esponding alarm or warnin g is displayed.
If any alarm or warning has occurr ed, r efer to 「Driver Oper at io n M anual」and take the appropriate action.
After removing the cause of the alarm, the alarm ca n be deactivated in any of t he m et hods marked ○ in
the alarm deactivation co l um n.
・LECSA(Pulse input / Positioni ng)
No.
A.10
A.12
A.13
A.15
A.16
A.17
A.1A
A.1C
A.1E
A.1F
A.20
A.21
A.24
Alarm
A.30
A.31
A.32
A.33
LED
display
Name
Memory error 1 (RAM)
Board error
Encoder initial communication error 2
Main circuit error
Overvoltage
Power
OFF
(Note 1) (Note 1) (Note 1)
ON
current alarm
Alarm
reset
A.37
A.45
A.46
A.50
A.51
A.52
A.8E
888
Servo motor overheat
USB communication error
(Note 1) (Note 1) (Note 1)
(Note 1)
(Note 1) (Note 1) (Note 1)
(Note 1) (Note 1) (Note 1)
(Note 1) (Note 1)
-36-

Home positioning incomplete warning
Stops
Driver overheat warning
Does not stop
Stops
A.97
Program operation disabled
Does not stop
Software limit warning
Stops (Note 2)
Stroke limit warning
Stops (Note 2)
Excessive regeneration warning
Does not stop
A.E1
Overload warning 1
Does not stop
Servo forced stop warning
Stops
Main circuit off warning
Stops
Does not stop
Does not stop
Tough drive warning
Does not stop
Note 1. Deactivate the alarm about
2. Operation to the direction which cancels the warning can be performed.
No.
A.90
A.91
A.96
3-digit,
7-segment
LED
display
Home position setting error
Name
The servo motor stops
/does not stop.
A.98
A.99
A.E0
Warning
A.E6
A.E9
A.EC
A.ED
A.F0
Overload warning 2
Output watt excess warning
30 minutes of cooling time after removing the cause of occurrence.
-37-

(Note 2)
Display
Name
Alarm code
Battery cable
OFF ON
Press
disconnection warning
Display
CN1
CN1
CN1
Name
"SET" on
Alarm
Home position setting
22
23
24 current
reset
error (bit2)
(bit1)
(bit0) alarm
(RES)
AL.99
Stroke limit warning
screen.
AL.9F
Battery warning
AL.10 0 1 0 Undervoltage
Excessive regeneration
AL.12 0 0 0 Memory error 1 (RAM)
warning
AL.13 0 0 0 Clock error
AL.E1
Overload warning 1
AL.15 0 0 0 Memory error 2 (EEP-ROM)
Absolute position counter
Encoder error 1
warning
(At power on)
AL.E5
ABS time-out warning
AL.17 0 0 0 Board error
Servo emergency stop
Memory error 3
warning
(Flash-ROM)
Cooling fan speed
AL.1A 1 1 0 Motor combination error
reduction warning
Encoder error 2
AL.E9
Main circuit off warning
(during runtime)
AL.EA
ABS servo on warning
Encoder error 3
AL.EC
Overload warning 2
(during runtime)
Output watt excess
AL.24 1 0 0 Main circuit error
warning
AL.25 1 1 0 Absolute position erase
(Note 1)
(Note 1)
(Note 1)
AL.31 1 0 1 Overspeed
AL.32 1 0 0 Overcurrent
AL.33 0 0 1 Overvoltage
Command pulse frequency
alarm
AL.37 0 0 0 Parameter error
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
AL.47 0 1 1 Cooling fan alarm
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
AL.52 1 0 1 Error excessive
Serial communication
time-out
AL.8E 0 0 0 Serial communication error
88888 Watchdog
・LECSB(Pulse input)
Alarm deactivation
Power
AL.92
AL.96
AL.E0
AL.16 1 1 0
AL.19 0 0 0
AL.20 1 1 0
AL.21 1 1 0
AL.30 0 0 1 Regenerative error
Alarm
AL.35 1 0 1
AL.45 0 1 1 Main circuit device overheat
AL.46 0 1 1 Servo motor overheat
AL.50 0 1 1 Overload 1
AL.51 0 1 1 Overload 2
AL.E3
Warning
AL.E6
AL.E8
AL.ED
AL.8A 0 0 0
Note 1. Deactivate the alarm about 30 minutes of cooling time after removing the cause of occurrence.
2. 0: off
1: on
-38-

Alarm deactivation
Display
Name
A92
Open battery cable warning
A96
Home position setting error
A98
Software limit warning
A10
Undervoltage
A99
Stroke limit warning
A12
Memory error 1 (RAM)
A9D
CC-Link warning 1
A13
Clock error
A9E
CC-Link warning 2
Memory error 2
A9F
Battery warning
(EEP-ROM)
AE0
Excessive regeneration warning
Encoder error 1
AE1
Overload warning 1
(At power on)
AE3
Absolute position counter warning
A17
Board error
AE6
Servo emergency stop warning
Memory error 3
(Flash-ROM)
A1A
Motor combination error
AE9
Main circuit off warning
A20
Encoder error 2 (during runtime)
AEC
Overload warning 2
A21
Encoder error 3 (during runtime)
AED
Output watt excess warning
A24
Main circuit error
(Note 1)
(Note 1)
(Note 1)
A31
Overspeed
A32
Overcurrent
A33
Overvoltage
A35
Command pulse frequency alarm
A37
Parameter error
(Note 1)
(Note 1)
(Note 1)
A47
Cooling fan alarm
(Note 1)
(Note 1)
(Note 1)
A52
Error excessive
A61
Operation alarm
A8A
Serial communication time-out
A8D
CC-Link alarm
A8E
Serial communication error
888
Watchdog
・LECSC(CC-Link)
(Note3)
Display
A15
A16
A19
Name
Power
OFF
ON
MR
Configurator2
parameter
unit
A25 Absolute position erase
A30 Regenerative error
Alarms
A45 Main circuit device overheat
(Note 1)
(Note 1) (Note 1)
Home positioning incomplete
(Note2)
Alarm
A90
warning
reset
(RES)
Warning
Cooling fan speed reduction
AE8
warning
A46 Servo motor overheat
A50 Overload 1
(Note 1)
(Note 1) (Note 1)
A51 Overload 2
Note 1. Deactivate the alarm about 30 minutes of cooling time after removing the cause of occurrence.
2. Turns on RY(n+1)A or RY(n+3)A.
3. Clicking the "Alarm reset" button on the "Alarm display" screen of set up software (MR Configurator2) allows an alarm to be
deactivated. Pressing the "STOP RESET" key of the parameter unit allows an alarm to be deactivated.
-39-

Alarm deactivation
Display
Name
Display
Name
Power
Error
CPU
92
Battery cable disconnection warning
OFF ON
reset
reset
96
Home position setting warning
10
Undervoltage
9F
Battery warning
12
Memory error 1 (RAM)
E0
Excessive regeneration warning
13
Clock error
E1
Overload warning 1
15
Memory error 2 (EEP-ROM)
E3
Absolute position counter warning
16
Encoder error 1 (At power on)
E4
Parameter warning
17
Board error
E6
Servo forced stop warning
Servo system controller forced
stop warning
1A
Motor combination error
E8
Cooling fan speed reduction warning
20
Encoder error 2
E9
Main circuit off warning
24
Main circuit error
EC
Overload warning 2
25
Absolute position erase
ED
Output watt excess warning
31
Overspeed
32
Overcurrent
33
Overvoltage
35
Command frequency error
36
Receive error 2
37
Parameter error
47
Cooling fan error
(Note 1)
(Note 1)
(Note 1)
52
Error excessive
8A
USB communication time-out error
8E
USB communication error
888
Watchdog
Note
2. In some servo system controller comm unication status, the alarm factor may not be removed.
・LECSS(SSCNET III)
19 Memory error 3 (Flash-ROM)
Warning
E7
30 Regenerative error
34 Receive error 1
Alarms
45 Main circuit device overheat
46 Servo motor overheat
50 Overload 1
51 Overload 2
1. Deactivate the alarm about 30 minutes of cooling time after removing the cause of occurrence.
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1) (Note 1)
(Note 2)
(Note 1) (Note 1)
(Note 1) (Note 1)
(Note 1) (Note 1)
-40-

・LECSS-T(SSCNET III / H)
Alarm reset
10.2
Voltage drop in the main circuit power
SD
12.1
RAM error 1
DB 12.2
RAM error 2
DB 12.3
RAM error 3
DB 12.4
RAM error 4
DB
12.5
RAM error 5
DB
13.1
Clock error 1
DB
13.2
Clock error 2
DB
14.1
Control process error 1
DB 14.2
Control process error 2
DB
14.4
Control process error 4
DB
14.5
Control process error 5
DB
14.6
Control process error 6
DB 14.7
Control process error 7
DB 14.8
Control process error 8
DB 14.9
Control process error 9
DB
14.A
Control process error 10
DB
15.1
EEP-ROM error at power on
DB
15.2
EEP-ROM error during operation
DB
Encoder initial communication - Receive data
error 1
Encoder initial communication - Receive data
data error 1
Encoder initial communication - Transmission
data error 2
Encoder initial communication - Transmission
16.A
Encoder initial communication - Process error 1
DB 16.B
Encoder initial communication - Process error 2
DB 16.C
Encoder initial communication - Process error 3
DB
16.D
Encoder initial communication - Process error 4
DB
16.E
Encoder initial communication - Process error 5
DB
16.F
Encoder initial communication - Process error 6
DB
No. Name
Detail
display
Detail name
Stop
Method
(Note3,
4)
Power
off → on
CPU reset
Error reset
10 Undervoltage
12 Memory error 1 (RAM)
13 Clock error
14 Control process error
Alarm
15
Memory error 2
(EEP-ROM)
10.1 Voltage drop in the control circuit power EDB
14.3 Control pr ocess error 3 DB
16.1
16.2
error 2
Encoder initial communication - Receive data
16.3
error 3
Encoder initial communication - Transmission
16.5
DB
DB
DB
DB
16
communication error 1
Encoder initial
16.6
16.7
data error 3
DB
DB
-41-

Alarm reset
Error reset
17.1
Board error 1
DB
17.3
Board error 2
DB
17.4
Board error 3
DB
17.5
Board error 4
DB
17.6
Board error 5
DB
17.8
Board error 6 (Note 5)
EDB
19.1
Flash-ROM error 1
DB
19.2
Flash-ROM error 2
DB
1A.1
Servo motor combination error
DB
1A.2
Servo motor control mode combination error
DB
1E.1
Encoder malfunction
DB
1E.2
Load-side encoder malfunction
DB
1F.1
Incompatible encoder
DB
1F.2
Incompatible load-side encoder
DB
Encoder normal communication - Receive data
error 2
error 3
Encoder normal communication - Transmission
data error 1
Encoder normal communication - Transmission
Encoder normal communication - Transmission
data error 3
error 4
Encoder normal communication - Receive data
error 5
21.1
Encoder data error 1
EDB
21.2
Encoder data update err or
EDB
21.3
Encoder data waveform error
EDB
21.4
Encoder non-signal error
EDB
21.5
Encoder hardware err or 1
EDB
21.6
Encoder hardware error 2
EDB
21.9
Encoder data error 2
EDB
Ground fault detected b y hard wa re det ecti o n
function
25
Absolute position erased
25.1
Servo motor encoder - Absolute position erased
DB
27.1
Magnetic pole detection - Abnormal termination
DB
27.2
Magnetic pole detection - Time out error
DB
27.3
Magnetic pole detection - Limit switch error
DB
27.4
Magnetic pole detection - Estimated error
DB
27.5
Magnetic pole detection - Position deviation error
DB
27.6
Magnetic pole detection - Speed deviation error
DB
27.7
Magnetic pole detection - Current error
DB
28
Linear encoder error 2
28.1
Linear encoder - Environment error
EDB
2A.1
Linear encoder error 1-1
EDB
2A.2
Linear encoder error 1-2
EDB
2A.3
Linear encoder error 1-3
EDB
2A.4
Linear encoder error 1-4
EDB
2A.5
Linear encoder error 1-5
EDB
2A.6
Linear encoder error 1-6
EDB
2A.8
Linear encoder error 1-8
EDB
2B.1
Encoder counter error 1
EDB
2B.2
Encoder counter error 2
EDB
No. Name
17 Board error
19
1A
1E
1F
20
Memory error 3
(FLASH-ROM)
Servo motor combination
Encoder initial
communication error 2
Encoder initial
communication error 3
Encoder normal
communication error 1
error
Detail
display
20.1
error 1
Encoder normal communication - Receive data
20.2
Encoder normal communication - Receive data
20.3
20.5
20.6
data error 2
20.7
Encoder normal communication - Receive data
20.9
Detail name
Stop
Method
(Note3,
4)
EDB
EDB
EDB
EDB
EDB
EDB
EDB
Power
off → on
CPU reset
Alarm
21
24 Main circuit error
27
2A Line ar enc od er er ro r 1
2B Encoder counter er ror
Encoder normal
communication error 2
Initial magnetic pole
detection error
20.A
24.1
circuit
Ground fault detected by software detection
24.2
2A.7 Linear encoder error 1-7 EDB
EDB
DB
DB
-42-

Alarm reset
Error reset
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
31
Overspeed
31.1
Abnormal motor speed
SD
circuit (during operation)
Overcurrent detected at software detection
function (during operation)
Overcurrent detect ed at har d wa re de te cti on
function (during a stop)
33
Overvoltage
33.1
Main circuit voltage error
EDB
(Note 2)
34.2
SSCNET connector connection error
SD
34.3
SSCNET communicati on data error
SD
34.4
Hardware error signal det ec tio n
SD
35
Command frequency error
35.1
Command frequency error
SD
36
SSCNET receive error 2
36.1
Continuous communication data error
SD
37.1
Parameter setting range error
DB
37.2
Parameter combination error
DB
Inrush current suppression
circuit error
3E
Operation mode error
3E.1
Operation mode error
DB
(Note 3)
(Note 3)
(Note 3)
(Note 3)
error (during fully closed loop
Fully closed loop control error by position
(Note 3)
(Note 3)
deviation during command stop
(Note 3)
(Note 3)
Main circuit device
overheat (Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
47.1
Cooling fan stop error
SD
47.2
Cooling fan speed reduction error
SD
No. Name
30
Regenerative error
(Note 1)
32 Overcurrent
34 SSCNET receiv e err or 1
37 Parameter error
Detail
display
Detail name
Method
(Note3,
30.1 Regenerat i on he at er ror DB
30.2 Regenerat i on si g nal err or DB
30.3 Regenerat i on fe edb ac k sign al err or DB
Overcurrent detect ed at har d wa re de te cti on
32.1
32.2
32.3
circuit (during a stop)
Overcurrent detected at software detection
32.4
34.1 SSCNET receive data error SD
Stop
4)
DB
DB
DB
DB
Power
off → on
CPU reset
(Note 1)
(Note 1)
3A
3A.1 Inrush current suppression circuit error EDB
Alarm
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 3)
(Note 3)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
Servo control error
(for linear servo motor and
direct drive motor)
42
Fully closed loop control
control)
45
Servo motor overheat
46
(Note 1)
42.1 Servo contr ol err or b y positi on deviation EDB
42.2 Servo control error by speed deviation EDB
42.3 Servo control error by torque/thrust deviation EDB
42.8
deviation
EDB
42.9 Fully closed loop control error by speed deviation EDB
Fully closed loop control error by position
42.A
EDB
45.1 Main circuit device overheat error SD
46.1 Abnormal temperature of servo motor 1 SD
46.2 Abnormal temperature of servo motor 2 SD
46.3 Thermistor disconnected SD
46.5 Abnormal temperature of servo motor 3 DB
46.6 Abnormal temperature of servo motor 4 DB
(Note 3)
(Note 3)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
47 Cooling fan error
-43-

Alarm reset
Error reset
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
52.1
Excess droop pulse 1
SD
52.3
Excess droop pulse 2
SD
52.4
Error excessive during 0 torque limit
SD
52.5
Excess droop pulse 3
EDB
54
Oscillation detecti on
54.1
Oscillation detecti on er ror
EDB
56.2
Over speed during forced stop
EDB
56.3
Estimated distance over during forced stop
EDB
63.1
STO1 off
DB
63.2
STO2 off
DB
Load-side encoder initial communication Receive data error 1
Receive data error 2
70.3
Load-side encoder initial communication Receive data error 3
Transmission data err or 1
70.6
Load-side encoder initial communication Transmission data err or 2
Transmission data err or 3
70.A
Load-side encoder initial communication Process error 1
Process error 2
70.C
Load-side encoder initial communication Process error 3
Process error 4
70.E
Load-side encoder initial communication Process error 5
Process error 6
No. Name
50 Overload 1 (Note 1)
51 Overload 2 (Note 1)
52 Error excessive
56 Forced stop error
63 STO timing error
Alarm
Detail
display
Detail name
Method
(Note3,
50.1 Thermal overload error 1 during operation SD
50.2 Thermal overload error 2 during operation SD
50.3 Thermal overload error 4 during operation SD
50.4 Thermal overload error 1 during a stop SD
50.5 Thermal overload error 2 during a stop SD
50.6 Thermal overload error 4 during a stop SD
51.1 Thermal overload error 3 during operation DB
51.2 Thermal overload error 3 during a stop DB
70.1
70.2 Load-side encoder initial communication -
Stop
4)
DB
DB
(Note 1)
(Note 1)
(Note 1)
(Note 1)
Power
off → on
CPU reset
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
Load-side encoder initial
70
communication error 1
70.5 Load-side encoder initial communication -
70.7 Load-side encoder initial communication -
70.B Load-side encoder initial communication -
70.D Load-side encoder initial communication -
70.F Load-side encoder initial communication -
DB
DB
DB
DB
DB
DB
DB
DB
DB
DB
-44-

Alarm reset
Error reset
data error 1
71.2
Load-side encoder comm uni c ati o n - Receive
data error 2
71.3
Load-side encoder comm uni c ati o n - Receive
Transmission data err or 1
Transmission data err or 2
71.7
Load-side encoder comm uni c ati o n Transmission data err or 3
71.9
Load-side encoder comm uni c ati o n Transmission data err or 5
72.1
Load-side encoder data er ror 1
EDB
72.2
Load-side encoder data up date error
EDB
72.3
Load-side encoder data w ave form er ror
EDB
72.4
Load-side encoder non-signal error
EDB
72.5
Load-side encoder hard w ar e err or 1
EDB
72.6
Load-side encoder hard w ar e err or 2
EDB
72.9
Load-side encoder data er ror 2
EDB
time-out error
8E.1
USB communication receive error
SD
8E.2
USB communication checksum error
SD
8E.3
USB communication character error
SD
8E.4
USB communication command error
SD
8E.5
USB communication data number error
SD
888
Watchdog
88._
Watchdog
DB
Note 1.
Leave for about 30 minutes of cooling time after removing the cause of occurrence.
2.
In some controller communication status, the alarm factor may not be removed.
Stop method indicates as follows:
SD: Forced stop deceleration
4.
This is applicable when [Pr. PA04] is set to the initial value. The stop system of SD can be changed to DB using [Pr. PA04].
5.
This alarm will occur only in the J3 compatibility mode.
No. Name
Load-side encoder norm al
71
communication error 1
Alarm
Load-side encoder norm al
72
communication error 2
USB communication
8A
Detail
display
71.1 Load-side encoder communicatio n - Receive
data error 3
71.5 Load-side encoder communicatio n -
71.6 Load-side encoder communicatio n -
Transmission data err or 4
71.A Load-side encoder comm uni c ati o n -
8A.1 USB communication time-out error SD
Detail name
Method
(Note3,
Stop
4)
EDB
EDB
EDB
EDB
EDB
EDB
EDB
EDB
Power
off → on
CPU reset
8E USB communication error
3.
DB: Stops with dynamic brake. (Coasts for the driver without dynamic brake.)
EDB: Stops with electronic dynamic brake for 400 W or less drivers
Stops with dynamic brake for 750 W drivers
-45-

warning (Note 1)
92.1
Encoder battery cable disconnection warning
92.3
Battery degradation
95.1
STO1 off detection
DB
95.2
STO2 off detection
DB
96.1
In-position warning at home positioning
96.2
Command input warning at home positioning
9F.2
Battery degradation warning
E1.1
Thermal overload war ning 1 duri ng ope ratio n
E1.3
Thermal overload war ning 3 duri ng ope ratio n
E1
Overload warning 1 (Not e 1)
E1.4
Thermal overload war ning 4 duri ng ope ratio n
E1.5
Thermal overload error 1 during a stop
E1.6
Thermal overload error 2 during a stop
E1.7
Thermal overload error 3 during a stop
E1.8
Thermal overload error 4 during a stop
warning
E3.2
Absolute position counter warning
E3.5
Encoder absolute positi oning counter warning
E4
Parameter warning
E4.1
Parameter setting range error warning
E6
Servo forced stop warning
E6.1
Forced stop warning
SD
E7
Controller forced sto p warni ng
E7.1
Controller forced sto p wa rni ng
SD
Cooling fan speed reduction
E8.2
Cooling fan stop
E9.1
Servo-on signal on during main circuit off
DB
E9
Main circuit off warning
E9.2
Bus voltage drop during low speed op e ratio n
DB
E9.3
Ready-on signal on during main circuit off
DB
EC
Overload warning 2 (Not e 1)
EC.1
Overload warning 2
ED
Output watt excess warnin g
ED.1
Output watt excess warnin g
Instantaneous power failure tough drive
warning F0.3
Vibration tough drive war ni n g
warning
F2.2
Drive recorder - Data miswriting warning
Oscillation detecti on
warning
Note 1.
Leave for about 30 minutes of cooling time after removing the cause of occurrence.
Stop method indicates as follows:
SD: Decelerates to a stop
3.
This is applicable when [Pr. PA04] is set to the initial value. The stop system of SD can be changed to DB using [Pr. PA04].
No. Name
91
92
95 STO warning
96
9F Battery warning
E0
E1.2 Therm al overload warning 2 during ope rati o n
Warning
E2
E3
Servo amplifier overheat
Battery cable disconnection
warning
Home position setting
warning
Excessive regeneration
warning (Note 1)
Servo motor overheat
Absolute position counter
warning
Detail
display
91.1 Main circuit device overheat warning
9F.1 Low battery
E0.1 Excessive regeneration warning
E2.1 Servo motor temperature warning
Detail name Stop method (Note 2, 3)
E8
F0 Tough drive warning F0.1
F2
F3
warning
Drive recorder - Miswriting
E8.1 Decreased cooling fan speed warning
F2.1 Drive recorder - Area writing time-out w arni ng
F3.1 Oscillation detection warning
2.
DB: Stops with dynamic brake. (Coasts for the driver without dynamic brake.)
-46-

Revision history
Change of How to order
No.LEY-OM00401
Jun / 2011 1st printing
No.LEY-OM00402
July / 2012 Revision
・Addition / LEYG Series (Guide rod type)
・Addition / LECSC Series (CC-Link)
・Addition / LECSS Series (SSCNETⅢ)
No.LEY-OM00403
Nov / 2013 Revision
・Addition / The recommended the parameter for each driver
・Addition / LEY63 Parallel mounting type
No.LEY-OM00404
July / 2014 Revision
・Change of recommended the parameter
No.LEY-OM00405
Mar/ 2016 Revision
・Addition / LECSS-T Series (SSCNETⅢ/H)
No.LEY-OM00406
Jan / 2017 Revision
・Change and Addition / Common precautions
No.LEY-OM00407
Jan / 2017 Revision
・
4-14-1, Sotokanda, Chiyoda-k u, Tokyo 101-0021 JAPAN
Tel: + 81 3 5207 8249 Fax: +81 3 5298 5362
URL http: / /www.smcworld.com
Note: Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.
© 2017 SMC Corporation All Rights Reserved
-47-
 Loading...
Loading...