

Page 1
www .s la m t e c .c o m
Shangh ai Slam te c .Co.,L td
RPLIDAR
Low Cost 360 Degree Laser Range Scanner
Introduction to Standard SDK
2017-05-15 rev.1.0
Page 2

CONTENTS ................................................................................................................................................... 1
INTRODUCTION ......................................................................................................................................... 3
SDK ORGANIZATION ......................................................................................................................................... 3
BUILD SDK AND DEMO APPLICATIONS ............................................................................................................. 4
CROSS COMPILE ................................................................................................................................................. 6
DEMO APPLICATION ................................................................................................................................ 6
ULTRA_SIMPLE .................................................................................................................................................... 6
SIMPLE_GRABBER ................................................................................................................................................ 8
FRAME_GRABBER ................................................................................................................................................ 9
SDK USAGE AND DEVELOPMENT GUIDE .......................................................................................... 11
ASSUMPTION .................................................................................................................................................... 11
SDK USAGE ...................................................................................................................................................... 11
RUNTIME CONSISTENCY ................................................................................................................................... 11
SDK HEADERS .................................................................................................................................................. 11
SDK INITIALIZATION AND TERMINATION ........................................................................................................ 12
CONNECTING TO AN RPLIDAR ....................................................................................................................... 12
MOTOR START AND STOP CONTROL ............................................................................................................... 13
MEASUREMENT SCAN AND DATA ACQUIRING ................................................................................................ 13
RETRIEVING OTHER INFORMATION OF AN RPLIDAR...................................................................................... 14
THE OPERATIONS RELATED TO THE ACCESSORY BOARD ................................................................................. 15
REVISION HISTORY ................................................................................................................................. 16
APPENDIX .................................................................................................................................................. 17
IMAGE AND TABLE INDEX ................................................................................................................................. 17
Contents
Page 3
3 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
This document introduces the open source RPLIDAR standard SDK. The SDK can
be used in Windows, MacOS (10.x) and Linux environment by using Microsoft
Visual C++ 2010 and Makefile.
SDK Organization
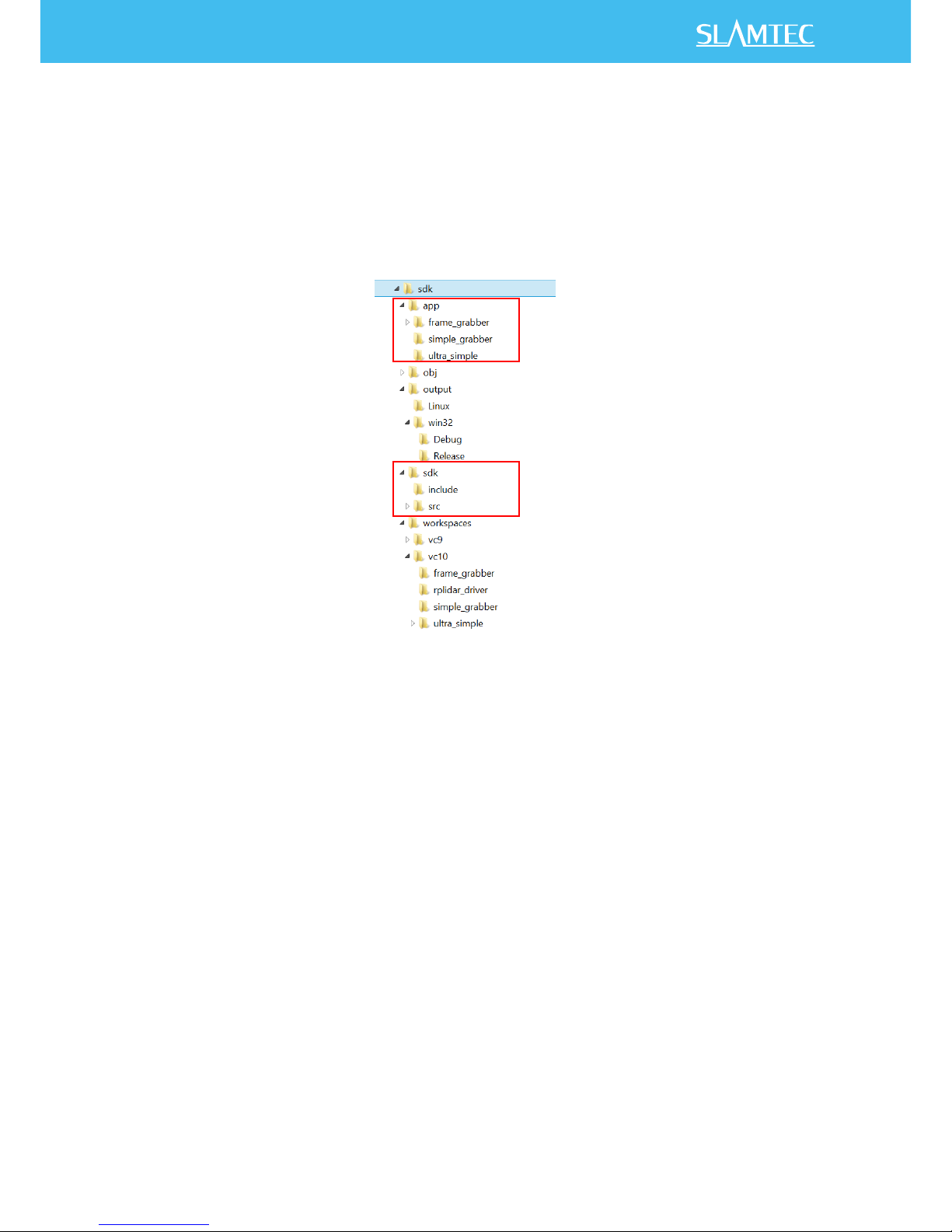
The RPLIDAR standard SDK organized as bellow:
Figure 1-1 The RPLIDAR standard SDK organization
The workspaces directory contains VS project files for SDK and related demo
applications.
The sdk directory contains the external header files(the include folder) of RPLIDAR
driver application and the internal implementation code of SDK itself(the src
folder).
The app directory contains the related sample code. And SLAMTEC provides the
following demo applications in the app directory:
ultra_simple
An ultra-simple command line application demonstrates the simplest way to
connect to an RPLIDAR device and continuously fetching the scan data and
outputting the data to the console. Users can quickly integrate RPLIDAR to their
existing system based on this demo application.
simple_grabber
Introduction
Page 4
4 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
A command line grab application. Each execution will grab two round of laser data
and show as histogram.
frame_grabber
A win32 GUI grab application. When pressing start scan button, it will start scan
continuously and show the data in the UI.
For SDK after compilation, there will be two more subfolders in the SDK: obj and
output. The output folder contains generated SDK static library (.lib or .a) and
demo application executable files (exe or elf). obj folder contains intermediate files
generated during compilation.
Build SDK and Demo Applications
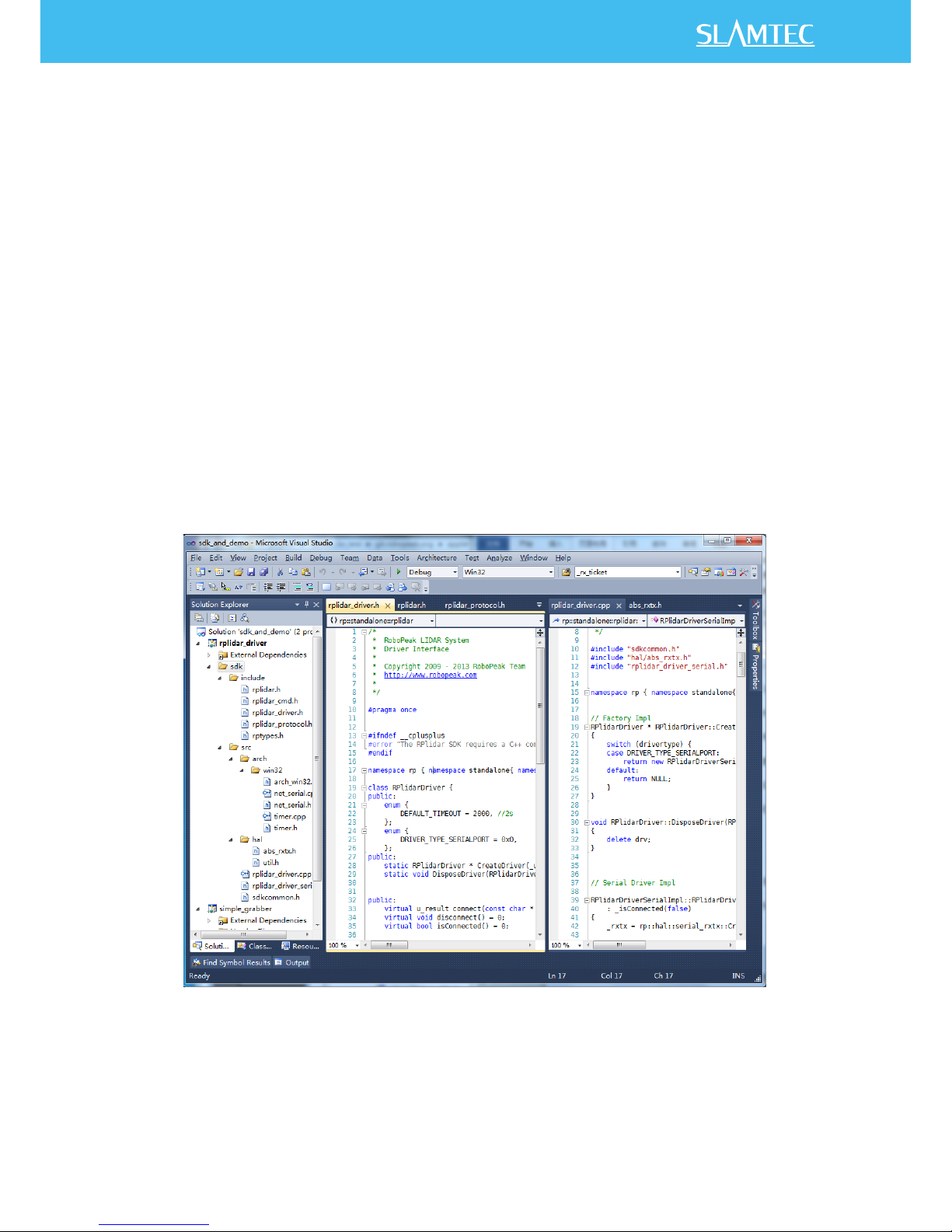
If you’re developing under Windows, please open VS solution file
sdk_and_demo.sln under workspaces\vc10 or workspaces\vc9. It contains the
SDK project and all demo application projects.
Figure 1-2 The RPLIDAR Standard SDK Solution File
Page 5
5 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Now, you can develop SDK and all the demo applications in VS environment easily.
There are two ways of compiling: Debug and Release. And you can choose
according to your requirement. Depends on your build configure, the generated
binary can be found under output\win32\Release or output\win32\Debug.
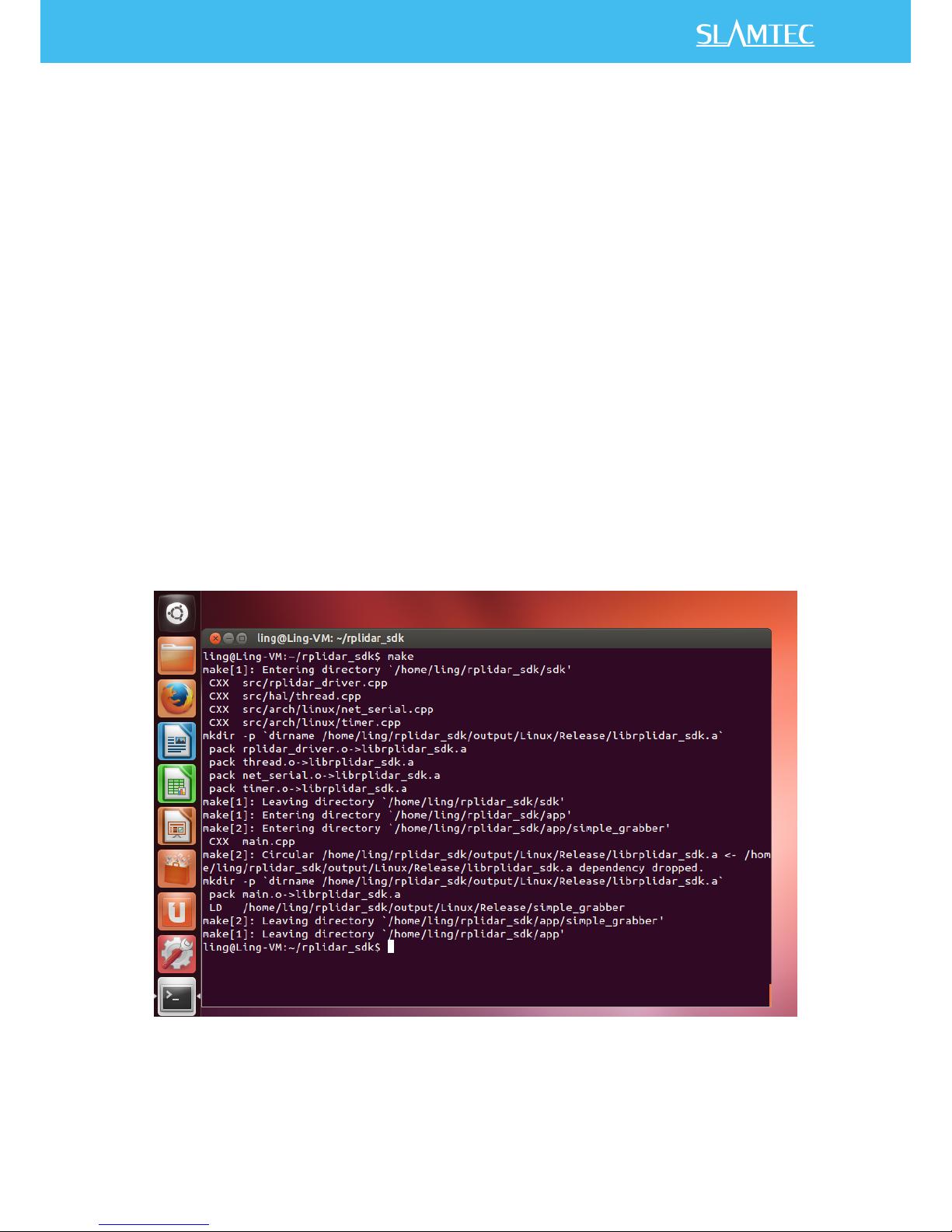
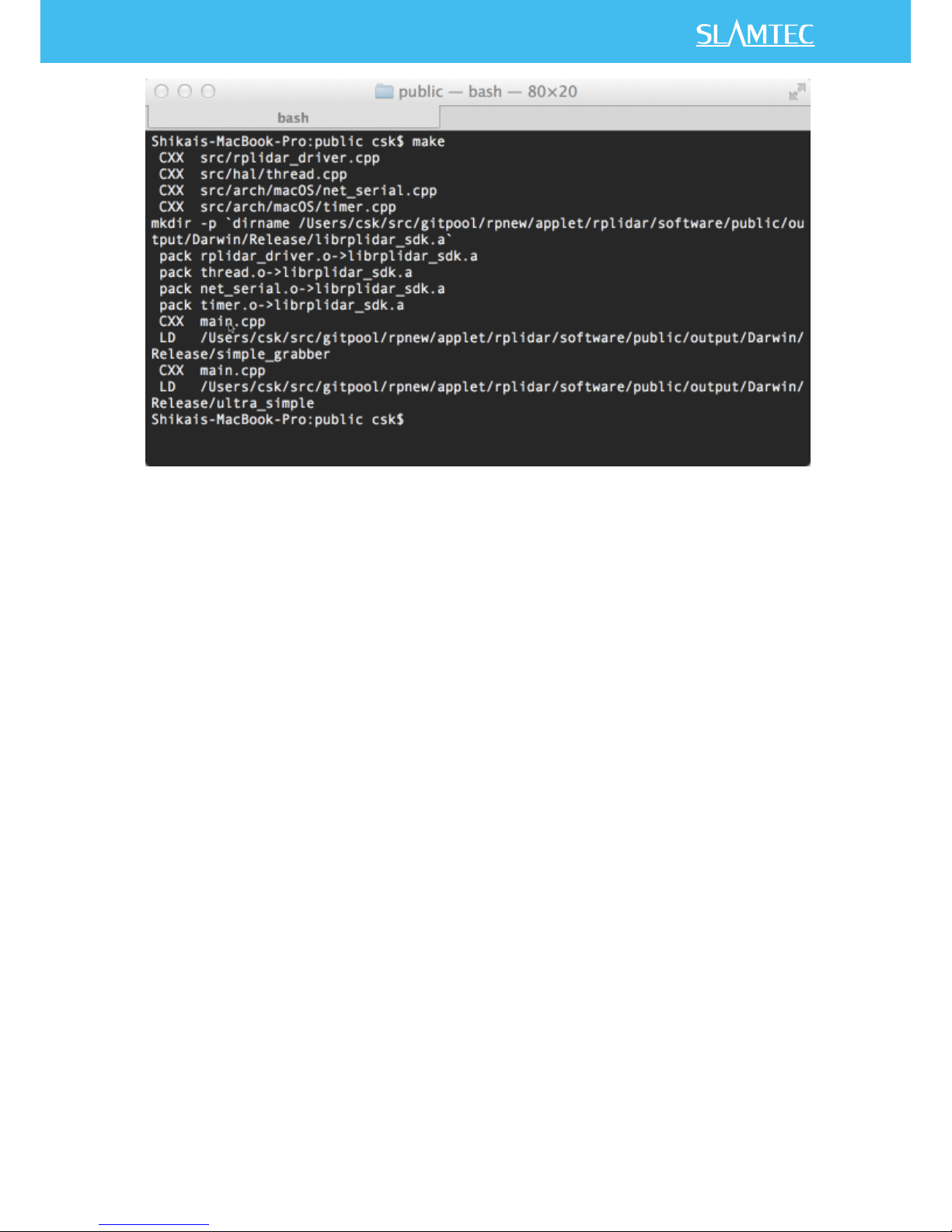
If you’re developing under Linux or MacOS, just type “make” under the root
of SDK directory to start compiling. It will do Release build by default, and you
can also type “make DEBUG=1” to do Debug build. The generated binary can
be found under the following folders:
o Linux
o output\Linux\Release
o output\Linux\Debug.
o MacOS
o output\Darwin\Release
o output\Darwin\Debug.
Figure 1-3 Develop RPLIDAR Standard SDK in Linux
Page 6
6 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Figure 1-4 Develop RPLIDAR Standard SDK in MacOS
Cross Compile
The SDK build system allows you to generate binaries which run on another
platform/system using the cross-compiling feature.
NOTE: this feature only works with Make build system.
The cross compile process can be triggered by invoking the cross_compile.sh
script under the SDK root folder. The common usage is:
CROSS_COMPILE_PREFIX=<COMPILE_PREFIX> ./cross_compile.sh
e.g. CROSS_COMPILE_PREFIX=arm-linux-gnueabihf ./cross_compile.sh
ultra_simple
The demo application simply connects to an RPLIDAR device and outputs the scan
data to the console:
Demo Application
Page 7

7 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Figure 2-1 ultra_simple Demo Application Data Output
Steps:
1) Connect RPLIDAR to PC by using the provided USB cable. (The chip
transforming the USB to serial port is embedded in the RPLIDAR
development kit)
2) Start application by using the following command:
o Windows
ultra_simple <com_port>
Note: if the com number is larger than 9, e.g. com11, then you should
start application use command like this: ultra_grabber \\.\com11
o Linux
ultra_simple <tty device>
e.g. ultra_simple /dev/ttyUSB0.
o Linux
Page 8

8 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
ultra_simple <usb tty device>
e.g. ultra_simple /dev/tty.SLAB_USBtoUART.
simple_grabber
This application demonstrates the process of getting RPLIDAR’s serial number,
firmware version and healthy status after connecting the PC and RPLIDAR. Then
the demo application grabs two round of scan data and shows the range data as
histogram in the command line mode. User can print all scan data if needed.
Figure 2-2 simple_grabber Demo Application Data Output
Steps:
1) Connect RPLIDAR to pc using provided USB cable. (USB to serial chip
embedded in RPLIDAR development kit)
2) Start application use command: simple_grabber <com number>
o Windows
simple_grabber <com_port>
Page 9

9 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Note: if the com number is larger than 9, e.g. com11, then you should
start application use command like this: ultra_grabber \\.\com11
o Linux
simple_grabber <tty device>
e.g. ultra_simple /dev/ttyUSB0.
o Linux
simple_grabber <usb tty device>
e.g. ultra_simple /dev/tty.SLAB_USBtoUART.
frame_grabber
This demo application can show real-time laser scan data in the GUI with 0-360
degree environment range data. Note, this demo application only has win32
version.
Figure 2-3 frame_grabber Demo Application Data Output
Page 10

10 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Steps:
1) Connect RPLIDAR to pc using provided USB cable. (USB to serial chip
embedded in RPLIDAR development kit)
2) Choose correct com port number through com port selection dialog.
3) Press start scan button (marked in red in the figure above) to start.
Page 11

11 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Assumption
We strongly recommend developers learn RPLIDAR’s communication protocol
and working mode before starting development by using the RPLIDAR SDK.
This document assumes developer has related knowledge about C++
development.
SDK usage
The RPLIDAR standard SDK provides static library for developers to integrated the
SDK feature into their existing project. If the dynamic library is required, the
developers can also set it by easily modifying the project configurations.
When developing via RPLIDAR SDK, developers only need to include SDK’s
external header files (under sdk\include) into their own source code and link the
application with SDK’s static library (rplidar_driver.lib or rplidar_driver.a).
For VS developers, they can also include the SDK’s VC project into their own
project and set the related project dependence. For Linux developers, please refer
to the simple_grabber’s Makefile for detailed settings.
Runtime consistency
For windows developers: the SDK static library c uses VC10 MD C runtime library.
If your project used different C runtime library may lead to compilation failure or
unpredictable behavior. Then please change SDK settings accordingly.
SDK Headers
o rplidar.h
Usually, you only need to include this file to get all functions of RPLIDAR SDK.
o rplidar_driver.h
This header defines the SDK core drive interface: the RPLidarDriver class. Please
refer to demo applications ultra_simple or simple_grabber to understand how to
use it.
o rplidar_protocol.h
SDK Usage and Development
Page 12

12 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
This header defines low-level data structures and constants for RPLIDAR protocol.
o rplidar_cmd.h
This header defines request/answer data structures and constants for RPLIDAR
protocol.
o rptypes.h
This header defines platform-independent data structures and constants.
SDK Initialization and Termination
User programs are required to create an RPlidarDriver instance via SDK before
communicating with an RPLIDAR device. It can be implemented by using the
following static function is used:
RPlidarDriver *RPlidarDriver::CreateDriver (_u32 drivertype)
Each RPlidarDriver instance is bound to only one RPLIDAR device at the same time.
But user programs can freely allocate arbitrary number of RPlidarDriver instances
and make them communicates with multiple RPLIAR devices concurrently.
Once user programs finish operations, all previously created RPlidarDriver
instances should be released explicitly using the following static function in order
to free system memory.
RPlidarDriver::DisposeDriver(RPlidarDriver * drv)
Connecting to an RPLIDAR
After creating an RPlidarDriver instance, the user program should invoke the
connect() function firstly to open the serial port and connect with the RPLIDAR
device. All RPLIDAR operations require invoking the connect() function first.
u_result RPlidarDriver::connect(const char * port_path, _u32 baudrate, _u32 flag =
0)
The function returns RESULT_OK for success operation.
When invoking this interface, by default, the SDK will call stopMotor to stop the
rotating of motor. And the SDK will call startMotor to start the rotating of motor
before taking measurement.
Page 13

13 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Once the user program finishes operation, it can call the disconnect() function
to close the connection and release the serial port device.
Motor Start and Stop Control
The following functions are related to the motor control:
Figure 3-1 RPLIDAR Functions Related to Motor Control
Note: as described in the previous section, the RPLIDAR SDK will call stopMotor
to stop the rotating of motor by default when invoking the interface connect.
And before the RPLIDAR start taking distance measurement, the startMotor is
required to be called to start the motor rotating.
Measurement Scan and Data Acquiring
The following functions are related to the measurement scan operation and help
user programs to acquire the measurement data:
Figure 3-2 RPLIDAR Functions related to Measurement Scan Operation
Function Name
Brief Introduction
startMotor()
Request RPLIDAR to start the motor rotating.
For RPLIDAR A1, this interface will enable DTR to set the motor
start rotating by default.
For RPLIDAR A2, this interface will start the motor by using the
default duty cycle and configure the rotating speed.
stopMotor()
Request RPLIDAR to stop the motor rotating.
Function Name
Brief description
startScan()
Request the RPLIDAR core to start measurement scan operation
and send out result data continuously
If the Express Scan mode is supported, and the program invokes
the startScan() by using the default parameters
startScanNormal()
Force the RPLIDAR core to start measurement scan operation in
Scan mode
startScanExpress()
Force the RPLIDAR core to start measurement scan operation in
Express Scan mode. It the RPLIDAR firmware not supports Express
Scan mode, the function will fail the execution.
stop()
Request the RPLIDAR core to stop the me as asurement scan
operation.
grabScanData()
Grab a complete 360-degrees’ scan data sequence.
ascendScanData()
Rank the scan data from grabScanData() as the angle inscreases.
Page 14

14 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
The startScan() function will start a background worker thread to receive the
measurement scan data sequence sent from RPLIDAR asynchronously. The
received data sequence is stored in the driver’s internal cache for the
grabScanData() function to fetch.
User programs can use the grabScanData() function to retrieve the scan data
sequence previously received and cached by the driver. This function always
returns a latest and complete 360-degrees’ measurement scan data sequence.
After each grabScanData() call, the internal data cache will be cleared to ensure
the grabScanData() won’t get duplicated data.
In case a complete 360-degrees’ scan sequence hasn’t been available at the
time when grabScanData() is called, the function will wait until a complete scan
data is received by the driver or the given timeout duration is expired. User
programs can tune this timeout value to meet different application requirements.
Note: the startScan() and stop() functions don’t control the scanning motor
of the RPLIDAR directly. The host system should control the scanning motor to
rotate or stop via the PWM pin.
Please refer to the comments in the header files and the implementation of SDK
demo applications for details.
Retrieving Other Information of an RPLIDAR
The user program can retrieve other information of an RPLIDAR via the following
functions. Please refer to the comments in the header files and the implementation
of SDK demo applications for details.
Figure 3-3 RPLIDAR Functions related to Retrieving Other Information Operation
Function Name
Brief description
getHealth()
Get the healthy status of an RPLIDAR
getDeviceInfo()
Retrieve the device information, e.g. serial number,
firmware version etc, from and RPLIDAR
getFrequency()
Calculate an RPLIDAR’s scanning speed from a
complete scan sequence.
checkExpressScanSupported()
Check whether the RPLIDAR supports Express Scan
mode
getSampleDuration_uS()
Get the the single measurement duration in standard
scan mode and express scan mode respectively. The
unit is micro second.
Page 15

15 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
The Operations Related to the Accessory Board
For the accessory board included in some RPLIDAR development kits, since the
board supports speed control via PWM, this feature can be implemented by
invoking the following functions:
Figure 3-4 RPLIDAR Functions related to the Accessory Board
Function Name
Brief description
checkMotorCtrlSupport ()
Check whether the accessory board supports the PWM
control.
Please refer to the SDK header files notes for details about
the usage.
setMotorPWM ()
Send specific PWM duty cycle to the accessory board to
control the motor rotating speed of the RPLIDAR.
Please refer to the SDK header files notes for details about
the usage.
Page 16

16 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Revision History
Date
Description
2013-3-5
Initial version
2014-1-25
Added Linux content and updated related information
2014-3-8
Added description for the ultra_simple demo application
2014-7-25
Added description about developing under MacOS environment
Added description about the cross compiling
2016-4-12
Added description about the newly added firmware interface of 1.5.1
2016-05-03
Added description about the newly added interface of 1.5.2
Added new interface startMotor/stopMotor
Updated connect interface and set stopMotor called by default
2017-05-15
Release 1.0 Version
Page 17

17 / 17
Copyright (c) 2009-2013 RoboPeak Team
Copyright (c) 2013-2017 Shanghai Slamtec Co., Ltd.
Image and Table Index
FIGURE 1-1 THE RPLIDAR STANDARD SDK ORGANIZATION ............................................................................................ 3
FIGURE 1-2 THE RPLIDAR STANDARD SDK SOLUTION FILE ............................................................................................ 4
FIGURE 1-3 DEVELOP RPLIDAR STANDARD SDK IN LINUX .............................................................................................. 5
FIGURE 1-4 DEVELOP RPLIDAR STANDARD SDK IN MACOS ......................................................................................... 6
FIGURE 2-1 ULTRA_SIMPLE DEMO APPLICATION DATA OUTPUT ....................................................................................... 7
FIGURE 2-2 SIMPLE_GRABBER DEMO APPLICATION DATA OUTPUT .................................................................................. 8
FIGURE 2-3 FRAME_GRABBER DEMO APPLICATION DATA OUTPUT .................................................................................. 9
FIGURE 3-1 RPLIDAR FUNCTIONS RELATED TO MOTOR CONTROL .............................................................................. 13
FIGURE 3-2 RPLIDAR FUNCTIONS RELATED TO MEASUREMENT SCAN OPERATION ................................................ 13
FIGURE 3-3 RPLIDAR FUNCTIONS RELATED TO RETRIEVING OTHER INFORMATION OPERATION ......................... 14
FIGURE 3-4 RPLIDAR FUNCTIONS RELATED TO THE ACCESSORY BOARD .................................................................... 15
Appendix
 Loading...
Loading...