

Page 1
UG235.06: Bootloading and OTA with
Silicon Labs Connect v2.x
This chapter of the Connect v2.x User’s Guide explains the bootloader options (standalone, application, and Over the Air (OTA))
available for use within Connect-based applications. The Connect
v2.x User’s Guide assumes that you have already installed the
Simplicity Studio development environment and the Flex SDK,
and that you are familiar with the basics of configuring, compiling,
and flashing Connect-based applications. Refer to UG235.01: De-
veloping Code with Silicon Labs Connect v2.x for an overview of
the chapters in the Connect v2.x User’s Guide.
The Connect v2.x User’s Guide is a series of documents that provides in-depth information for developers who are using the Silicon Labs Connect Stack for their application
development. If you are new to Connect and the Proprietary Flex SDK, see QSG138:
Proprietary Flex SDK v2.x Quick Start Guide.
Proprietary is supported on all EFR32FG devices. For others, check the device's data
sheet under Ordering Information > Protocol Stack to see if Proprietary is supported. In
Proprietary SDK version 2.7.n, Connect is not supported on EFR32xG22.
KEY POINTS
• Introduces different bootloaders.
• Describes using the Gecko Bootloader.
• Describes how to set up a Silicon Labs
Connect application for bootloading.
• Describes how to use the standalone
bootloader with an SOC or NCP Host
application.
• Describes how to use the application
bootloader for OTA.
silabs.com | Building a more connected world. Rev. 0.4
Page 2

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Introduction
1. Introduction
It is often required to update firmware on devices when it is not feasible to connect a J-Link debugger. In these cases, a standalone
bootloader is ideal because it makes it possible to update the firmware through a Universal Asynchronous Receiver/Transmitter (UART)
or Serial Peripheral Interface (SPI) connection.
In some cases, even connecting a device to a computer is problematic. In these instances, an OTA (Over the Air) bootloading process
can work. This requires an application bootloader which can update the firmware from an onboard storage (like an SPI flash memory or
part of the MCU flash memory). However, the OTA image transfer is still the responsibility of the main application.
For more details on bootloading basics, see UG103.06: Bootloading Fundamentals.
silabs.com | Building a more connected world. Rev. 0.4 | 2
Page 3

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
The Gecko Bootloader
2. The Gecko Bootloader
Silicon Labs Connect only supports the Gecko Bootloader which is available for the Wireless Gecko (EFR32™) portfolio. For the standalone bootloader, the UART XMODEM Bootloader example is recommended. For the application bootloader, either the SPI Flash Stor-
age Bootloader (if SPI flash is attached the EFR32) or the Internal Storage Bootloader applications are recommended. Note that the
OTA protocol available for Silicon Labs Connect only supports single image bootloaders.
Once you have compiled the bootloader, make sure to flash it (the <projectname\>-combined.s37 file) on your device before flashing
the main firmware.
For more details on using the Gecko Bootloader examples, see AN1085: Using the Gecko Bootloader with Silicon Labs Connect. For
more information on the Gecko Bootloader, see UG266: Silicon Labs Gecko Bootloader User’s Guide.
silabs.com | Building a more connected world. Rev. 0.4 | 3
Page 4

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Setting Up a Silicon Labs Connect Application for Bootloading
3. Setting Up a Silicon Labs Connect Application for Bootloading
To make an application ready for bootloader usage, select either the Standalone or the Application bootloader on the HAL tab of Application Builder. This will:
• Modify the linker script on EFR32xG1 (where the first 16kB of the flash memory is used by the bootloader).
• Modify the linker script to reserve the first 4B of RAM for communication between the bootloader and the main firmware.
• Add GBL file (binary image for bootloading) generation to the build process.
• Add a compile time define that can be used by bootloader-related code.
• Add c functions that can be used to communicate with the bootloader from the main firmware (for example, to switch to bootloader
mode).
• Add the application properties data that can be read by the bootloader from a GBL image.
Some specific application features like OTA needs some plugins as well. These requirements will be discussed in the following chapters.
silabs.com | Building a more connected world. Rev. 0.4 | 4
Page 5

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Using the Standalone Bootloader with a System on Chip Application
4. Using the Standalone Bootloader with a System on Chip Application
The standalone bootloader can be used without further modification in the application code. If you enable the GPIO activation feature in
the Gecko Bootloader (enabled by default), you can enter bootloader mode by resetting the MCU while pushing the activation button.
Then, you can communicate with the bootloader as described in AN1085: Using the Gecko Bootloader with Silicon Labs Connect.
Alternatively, you can enter bootloader mode by using the following function in your application:
halLaunchStandaloneBootloader(STANDALONE_BOOTLOADER_NORMAL_MODE)
For further details on the communication API with the bootloader, see the file
platform/base/hal/micro/bootloader-interface-standalone.h
silabs.com | Building a more connected world. Rev. 0.4 | 5
Page 6

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Using the Standalone Bootloader with an NCP-Host Application
5. Using the Standalone Bootloader with an NCP-Host Application
The standalone bootloader can be used in NCP-host mode to update the firmware on the NCP device from the host device. To use this,
make sure standalone bootloader on your NCP device and the Bootloader NCP CLI plugin in your host application are enabled (both
are enabled by default). This will add a three CLI commands to the NCP-host:
• bootloader info – Returns information of the bootloader.
• bootloader launch – Starts the bootloader.
• bootloader load-image – Loads a firmware image using an external tool.
To use the third command:
1. Compile the host application on the host (currently only POSIX operating systems like Linux are supported). Go to the folder
named protocol/flex/ and call make -f connect/plugins/serial-bootloader/bootload-ncp-uart-app.mak
This will generate the binary bootloader-ncp-uart-app under
protocol/flex/connect/build/bootloader-ncp-uart-app/
2. Once you have this binary and the firmware image on your host machine, you can load it using the following commands (note the
use of double quotes around the string parameters):
bootloader launch
then
bootloader load-image "<path to loader>" "<path to the firmware> <offset> <size>" [other bootloader
options]
• <path to loader> is the path to bootloader-ncp-uart-app compiled in step 1.
• <path to the image> is the path to the firmware image to load.
• <offset> is the offset inside the image where loading should start (typically 0).
• <size> is the size of the image or 0xFFFFFFFF to use the whole file.
• [other bootloader options] is where further options can be passed to the bootloader-ncp-uart-app.
Note: option "-p <serial port>" is mandatory. See bootloader-ncp-uart-app -h for further details.
silabs.com | Building a more connected world. Rev. 0.4 | 6
Page 7

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Using the Application Bootloader for OTA
6. Using the Application Bootloader for OTA
6.1 Broadcast or Unicast
Silicon Labs Connect provides two OTA methods:
• Broadcast: Image is sent to all devices (although a device could ignore it, so in that sense, it is actually multicast). Only single-hop
range is supported—that is, the coordinator cannot bootload endpoints behind range extender.
• Unicast: Image is sent to a single device. If the server and client are in the same Connect network, it will work. Packets are ACKed
(both per-hop and end-to-end). The drawback is that it can only target a single device. Therefore, bootloading multiple targets is
slow and puts a serious load on the network.
Both broadcast and unicast use a single source to distribute the image. This is called the OTA server. The devices that download the
image are called OTA clients. Both broadcast and unicast supports secure messages.
Neither OTA method is available currently for MAC mode. Sleepy end devices cannot be bootloaded using the broadcast method. Although unicast bootloading of a sleepy end device is theoretically possible, it would take an extremely long time and Silicon Labs does
not recommend it.
6.2 OTA Plugins
The following plugins are required to test OTA in an SoC application.
For both broadcast and unicast OTA:
• Bootloader interface: enables the application to communicate with the bootloader (for example, the flash memory is written using
bootloader APIs).
• OTA Bootloader test common: implements generic bootloader CLI commands such as erase.
For broadcast OTA:
• OTA Broadcast Bootloader client: implements OTA image reception.
• OTA Broadcast Bootloader server: implements OTA image transmission.
• OTA Broadcast Bootloader test: Implements CLI over the bootloader client/server and connects the OTA plugins with the bootloader
interface.
For unicast OTA:
• OTA Unicast Bootloader client: implements OTA image reception.
• OTA Unicast Bootloader server: implements OTA image transmission.
• OTA Unicast Bootloader test: Implements CLI over the bootloader client/server and connects the OTA plugins with the bootloader
interface.
All plugins are open source.
6.3 Theory of Operation: Broadcast OTA
The broadcast OTA completes these steps:
1. Clients who want to download the same image set up the same tag.
2. The server starts broadcasting tagged image segments (a chunk of the firmware that fits into a connect data frame with memory
address).
3. The clients store the broadcasted image segments. Based on the addresses, they also recognize missing segments.
4. The server stops the broadcast after 512 segments and asks each client (with unicast message) what segments are missing.
5. The clients report the missing segments and the server collects this information.
6. The server re-broadcasts the missing segments.
7. The server asks again for missing segments and this loop continues until all the clients have the first 512 segments.
8. The server broadcasts the next 512 segments and this loop continues until all the clients have the full image.
The tags can be used in a network where not all devices run the same firmware, or it can be used for versioning to make sure a device
will not participate in the OTA process if it already has the same image.
silabs.com | Building a more connected world. Rev. 0.4 | 7
Page 8

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Using the Application Bootloader for OTA
6.4 Theory of Operation: Unicast OTA
Unicast OTA is much simpler. It completes these steps:
1. The clients set up a tag.
2. The server sends a handshake, telling the client the image size and the tag.
3. The client responds to the handshake.
4. The server sends a tagged image segment (a chunk of the firmware that fits into a connect data frame with memory address).
5. The client responds with a segment response.
6. If the server did not receive a response, it sends the segment again.
7. If the server did receive the response, it sends the next segment, and continues this loop until the client has the whole image.
The tag is still available. It can be used for versioning. The server retries to transmit the unacknowledged segment multiple times before
it stops the transmission. The client has a five second timeout before it drops the current firmware download. A resume function has
been implemented in Flex 2.6. The client counts how many segments were received. If the connection was lost between the server and
the client, once the server re-initiates the download, the client informs the server to send only the remaining portion during the handshake. The segment counter on the client side is cleared if the tag changed or a flash erase command has been executed by the client.
If the communication was interrupted, the re-initiation of the download is the responsibility of the customer’s application on the server
side.
6.5 Remote Bootload Request
Both broadcast and unicast OTA plugins implement command messages which makes remote bootload requests possible—that is, the
OTA server can request bootload from clients, and in response, the clients will load the downloaded image into the main memory and
boot into that.
silabs.com | Building a more connected world. Rev. 0.4 | 8
Page 9

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
7. Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
The following example walks through using OTA in a sensor-sink demo using CLI commands. The sink will be the OTA server and the
sensor(s) will be the OTA client(s). The example will use sensor/sink if the context is the Connect network and OTA client/server if the
context is the OTA process.
The example should work with any Software Development Kit that is supported by Silicon Labs Connect, but the internal flash bootloader example is only available for 1MB (EFR32xG12) and 512kB (EFR32xG13) devices.
7.1 Create Projects
1. Create either of the single image bootloader examples that are available for your devices. There is no need to modify it.
2. Create a connect sink application. Enable Application Bootloader on the HAL tab of AppBuilder and enable the following plugins:
• Bootloader interface
• OTA Bootloader test common
• OTA Broadcast or Unicast Bootloader server
• OTA Broadcast or Unicast Bootloader test
These will be the OTA client projects.
3. Create two sensor applications. The example will flash one with regular J-Link and use OTA to bootload the other. Make sure you
make some difference between the two applications—for example, change the heartbeat period to 12 (3 seconds) or change the
name on the General tab. On both projects, enable Application Bootloader on the HAL tab and enable the following plugins:
• Bootloader interface
• OTA Bootloader test common
• OTA Broadcast or Unicast Bootloader client
• OTA Broadcast or Unicast Bootloader test
These will be the OTA client projects.
4. Generate and build all four projects (bootloader, sink, two sensors).
7.2 Flashing Applications
For the applications to work, you first need to flash the bootloader itself. The simplest way to flash it is to use Simplicity Commander.
Make sure you use the <bootloader app name>-combined.s37 file because this is the only image with the full bootloader: Gecko
Bootloader is a two-stage bootloader, which means there is a very small first stage which can update the bootloader itself (this is not
demonstrated in this example). Only the -combined.s37 file includes this first stage. All other binaries are just the second stage so they
will not work by themselves.
Next, flash the sink and one of the sensor applications. You can use almost any method, just make sure you don't use the "bin file
because it does not include address information and might overwrite the bootloader. Also, make sure you do not erase the flash memory before flashing the application.
If both the bootloader and the application are present, it should start as a usual Connect project (heartbeat LED blinks, CLI available).
silabs.com | Building a more connected world. Rev. 0.4 | 9
Page 10

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
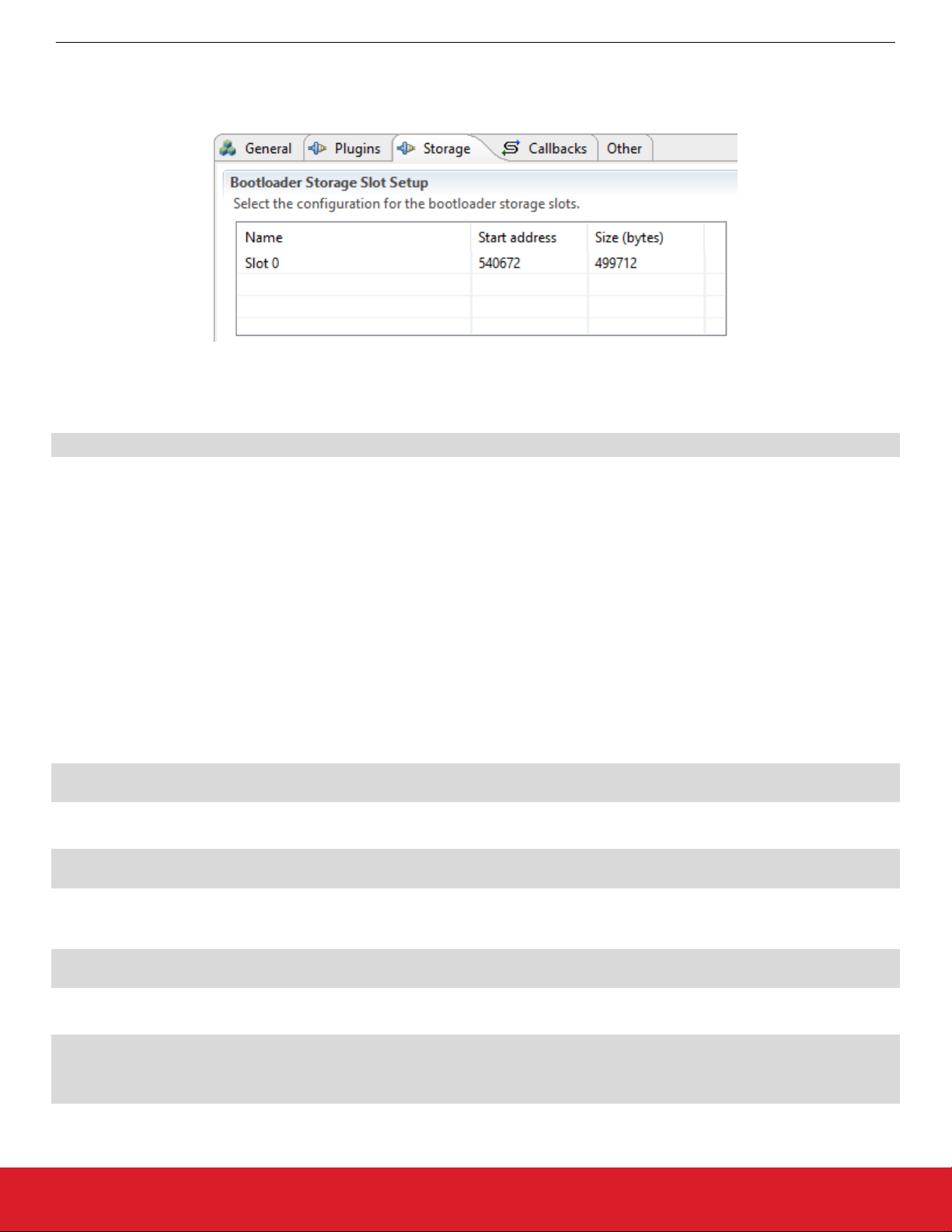
7.3 Loading the Image to the OTA Server
Next, you need to flash the GBL file of the other sensor to the bootloader's storage slot on the sink/OTA server as shown in the following figure.
The easiest way to do that is to use Simplicity Commander's command line options.
7.3.1 Loading to SPI Flash
To load <application image>.gbl to the SPI flash, use the following command:
commander extflash write <application image>.gbl
This method is only available on Silicon Labs Development Kits. It will lock the MCU so reset the device when it is finished.
silabs.com | Building a more connected world. Rev. 0.4 | 10
Page 11
UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
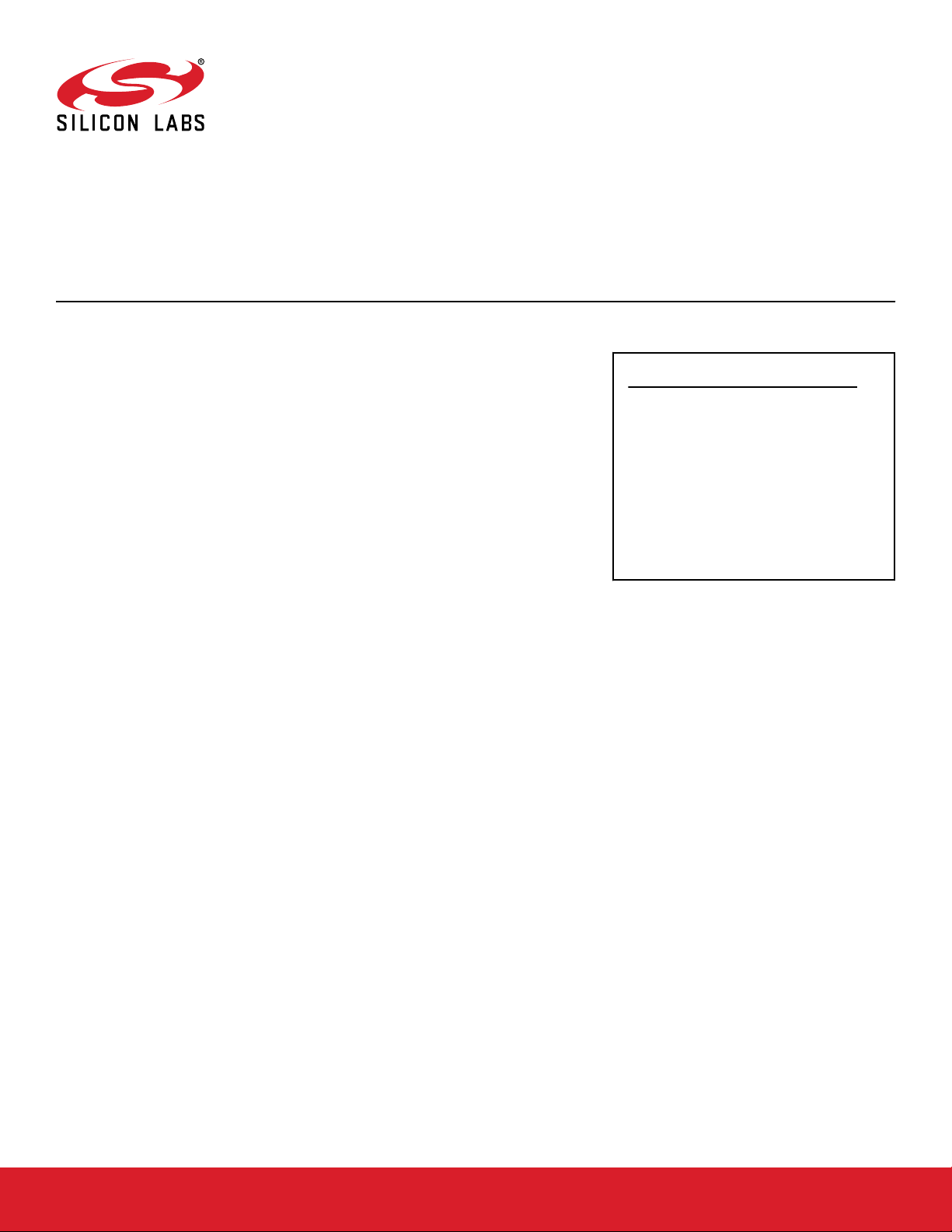
7.3.2 Loading Internal Flash
To flash to internal storage, first figure out the starting address of the slot. You can read that from the storage tab in the AppBuilder of
the bootloader project. For example, for 1MB devices, it is 540672 by default as shown in the following figure.
Simplicity Commander will recognize the GBL file and you do not want to decode the address information from there (as it would flash it
to address 0): Basically, you want it to handle as a binary blob. If you rename the GBL file to .bin, you get exactly that. After that, you
can flash it either from the GUI (with start address) or from the command line by executing the following command:
commander flash --address 84000 <application image>.bin
Where 84000 is 540642 in hexadecimal and <application image>.bin is the renamed GBL file.
For more information, see UG162: Simplicity Commander Reference Guide.
7.3.3 Preparing the Devices for Bootloading
The next steps are CLI commands on the devices.
7.3.3.1 Preparing the Storage
Use these commands to prepare the storage on the device.
• 7.3.3.1.1 Sink/OTA Server
• 7.3.3.1.1 Sink/OTA Server
7.3.3.1.1 Sink/OTA Server
bootloader init
bootloader validate-image
The second command will check the image, which should look like this (with many more dots):
image....done!
Image is valid!
7.3.3.1.2 Sensor/OTA Client
bootloader init
bootloader flash-erase
The second command will erase the flash, which is required before writing it. Its output should look like this (with many more dots):
flash erase started
flash erasing slot 0 started
....................................
flash erase successful!
silabs.com | Building a more connected world. Rev. 0.4 | 11
Page 12

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
7.3.3.2 Preparing the Network
These commands are the usual ones to create and join to a network.
• 7.3.3.2.1 Sink/OTAServer
• 7.3.3.2.2 Sensor/OTA Client
7.3.3.2.1 Sink/OTAServer
form 0
pjoin 120
7.3.3.2.2 Sensor/OTA Client
join 0
It is a good idea to set a slower report rate to make the CLI more usable:
set-report-period 10000
If everything went well, you should see the communication between the sink and the sensor every 10 seconds.
You also need to set a bootloader tag on the sensor:
bootloader set-tag 0xaa
You will need the node ID of the sensor for the next steps. You can get it using the info command:
node id: 0x0001
The next steps are different for unicast and broadcast OTA.
silabs.com | Building a more connected world. Rev. 0.4 | 12
Page 13
UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
7.3.4 Unicast OTA
Use the following commands on the OTA server.
bootloader unicast-set-target 0x0001
This will set the destination of the OTA packets to the 0x0001 which is the node ID from the previous step.
With the next command you start the OTA distribution itself as shown in the following figure.
bootloader unicast-distribute <size> 0xaa
Where <size> is the size of the GBL image in bytes and 0xaa is the tag you set up previously on the OTA client.
This starts the OTA process. You should see get segment lines on the OTA server (that is, reading segments from flash memory) and
incoming segment lines on the OTA client. It should end with image distribution completed, 0x00 on the server side and Image
download COMPLETED tag=0xAA size=\<size\> on the client side.
At this point, bootloader validate-image should return with valid on the client as well.
Next, you are going to request bootloading as shown in the following figure.
To do that, execute the following command on the OTA server:
bootloader unicast-request-bootload 1000 0xaa
Where 1000 is a timeout in ms and 0xaa is the tag again.
silabs.com | Building a more connected world. Rev. 0.4 | 13
Page 14

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
7.3.4.1 Unicast Download Resume Feature
The OTA download feature in Flex 2.6 supports resuming the download from the segment at which the transmission was interrupted.
To test this feature, reset the server during download (by hardware reset pin or issuing the reset command in the CLI. When the reset
cycle has completed, issue the same commands on the server as were issued on the first attempt:
bootloader init
bootloader unicast-set-target 0x0001
bootloader unicast-distribute <size> 0xaa
The download should start from the point where it was interrupted. There is no limit to the number of times the interrupt and resume can
be repeated. If the tag has been changed or the flash has been erased on the client, the download will start from the beginning (that is,
the whole image will be downloaded).
silabs.com | Building a more connected world. Rev. 0.4 | 14
Page 15

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
7.3.5 Broadcast OTA
First, you set up the target list on the server. This is the list of the client's node IDs. This is used for missing segment request and
bootload request messages. The maximum number of clients is limited in the broadcast plugin to 50.
The following command on the OTA server sets the node ID of the client at index 0 to 0x0001:
bootloader set-target 0 0x0001
You can set up multiple targets with the same command by incrementing the index.
With the next command, you are starting the OTA distribution itself as shown in the following figure.
bootloader distribute <size> 0xaa 1
Where <size> is the size of the GBL image in bytes and 0xaa is the tag you set up previously on the OTA client and 1 is number of
clients you set up using set-target.
This starts the OTA process. You should see get segment lines on the OTA server (that is, reading segments from flash memory) and
incoming segment lines on the OTA client. It should end with image distribution completed, 0x00 on the server side and Image
download COMPLETED tag=0xAA size=<size> on the client side.
At this point, bootloader validate-image should return with valid on the client(s) as well.
Next, you are going to request bootloading as shown in the following figure.
To do that, execute the following command on the OTA server:
bootloader request-bootload 1000 0xaa 1
Where 1000 is a timeout in ms and the last two parameters are the same as above for distribute.
silabs.com | Building a more connected world. Rev. 0.4 | 15
Page 16

UG235.06: Bootloading and OTA with Silicon Labs Connect v2.x
Example: OTA Bootloading Sensor(s) in a Sensor-sink Demo
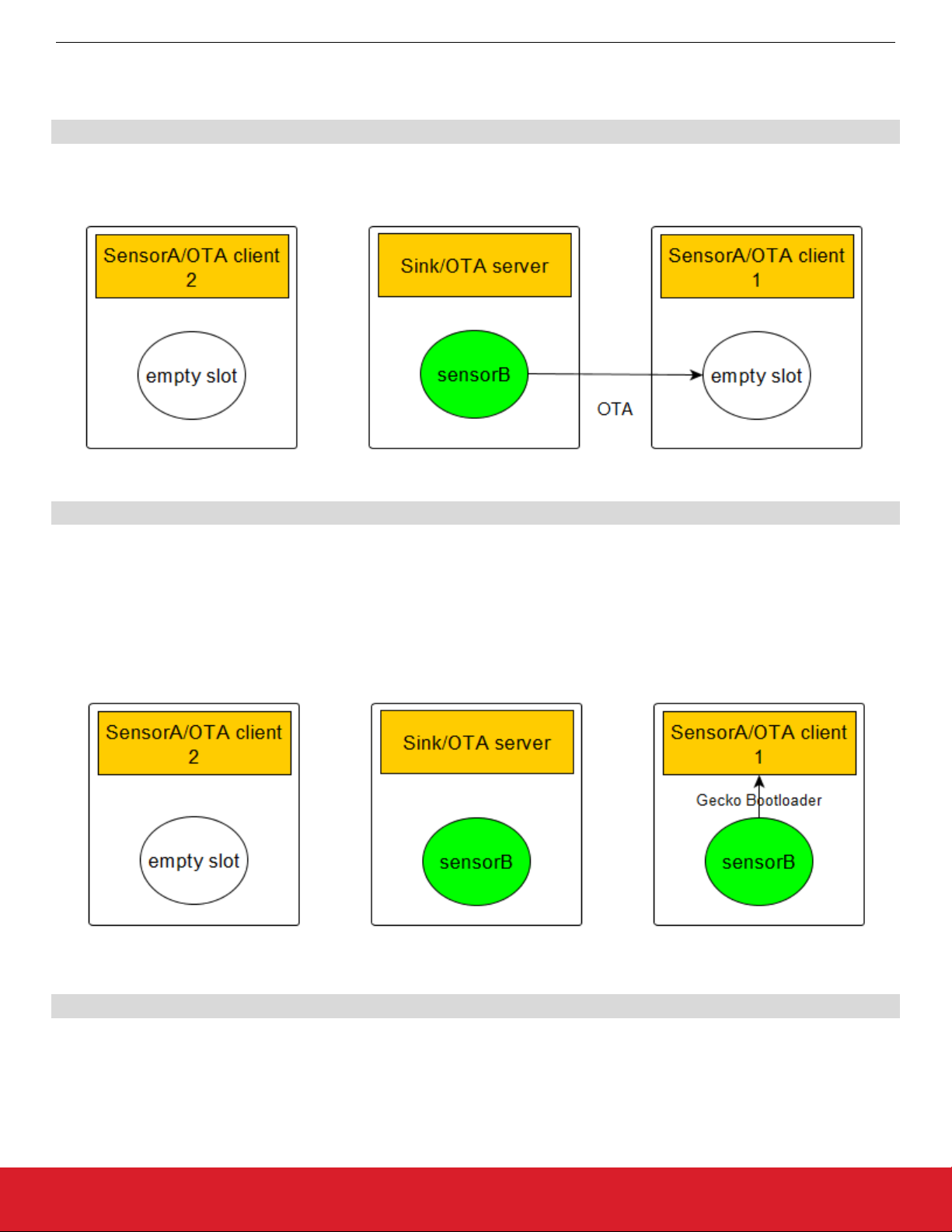
7.4 Bootloading Finished
Both unicast and broadcast bootload request should immediately return with bootload request completed. After the timeout, you
should see the bootloading of the OTA client. After bootloading, the sensor should join again because the network information is stored
in NVM, but this time you should see the differences you set up for the OTA image.
silabs.com | Building a more connected world. Rev. 0.4 | 16
Page 17
Smart.
Connected.
Energy-Friendly.
Products
www.silabs.com/products
Disclaimer
Silicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or
intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical"
parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only . Silicon Labs reserves the right to make changes without
further notice to the product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Without prior
notification, Silicon Labs may update product firmware during the manufacturing process for security or reliability reasons. Such changes will not alter the specifications or the performance
of the product. Silicon Labs shall have no liability for the consequences of use of the information supplied in this document. This document does not imply or expressly grant any license
to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any FDA Class III devices, applications for which FDA premarket approval is
required, or Life Support Systems without the specific written consent of Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health,
which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs
products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering
such weapons. Silicon Labs disclaims all express and implied warranties and shall not be responsible or liable for any injuries or damages related to use of a Silicon Labs product in such
unauthorized applications.
Trademark Information
Silicon Laboratories Inc.®, Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, ClockBuilder®, CMEMS®, DSPLL®, EFM®, EFM32®,
EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®,
Gecko OS, Gecko OS Studio, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® , Zentri, the Zentri logo and Zentri DMS, ZWave®, and others are trademarks or registered trademarks of Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a
registered trademark of ARM Limited. Wi-Fi is a registered trademark of the Wi-Fi Alliance. All other products or brand names mentioned herein are trademarks of their respective holders.
Silicon Laboratories Inc.
400 West Cesar Chavez
Austin, TX 78701
USA
Quality
www.silabs.com/quality
Support and Community
community.silabs.com
http://www.silabs.com
 Loading...
Loading...