

Silicon Labs Si72xx-WD User Manual

UG288: Si72xx-WD-Kit User's Guide
The Si72xx-WD-Kit allows for the evaluation of the Si72xx Hall Sensors through eight
demos on
in the kit on small, postage-stamp-sized (PS) boards with an evaluation demo for each.
This user guide describes a quick-start procedure to start the evaluation easily as well
as a full description of each demo and a list of compatible PS boards.
The Si72xx-WD Rev 2 Kit includes the following:
• (1) Si72XX-EXP Rev2 Board
• (1) Si7201-B01V-EB Switch PS Board
• (1) Si7202-B01V-EB Latch PS Board
• (1) Si7210-B00V-EB I2C PS Board
• (1) Si7211-B00V-EB Analog PS Board
• (1) Si7212-B00V-EB PWM PS Board
• (1) Si7213-B00V-EB SENT PS Board
• (1) 6-pin, 8-inch ribbon cable
• (2) Loose magnets for PS demos
• (1) CR2032 Coin Cell battery
• (1) Micro USB cable
the EFM32 Happy Gecko STK. Each of the six base part types are included
KEY POINTS
• 8 demos
• Wheel demo showing wheel angular
position
•
Wheel demo showing revolution counting
• Si7210 postage-stamp-sized board demos
including magnetic field data on two
scales and temperature
• Switch, analog, PWM, and SENT postagestamp-sized board demos including
tamper indication with an Si7210
silabs.com | Building a more connected world. Rev. 0.2
UG288: Si72xx-WD-Kit User's Guide
Demos
1. Demos
1.1 Demo 1—Wheel Angular Position (Si72xx-EXP)
Section 9 of "AN1018: Using the Si72xx Hall-Effect Magnetic Position Sensors" covers how the hall sensor can be used for a positional
measurement by moving the magnetic field. Furthermore, it explains how an MCU can perform an angular position measurement by
arranging two hall sensors to sense magnetic field variations from two magnets arranged about the shaft underneath.
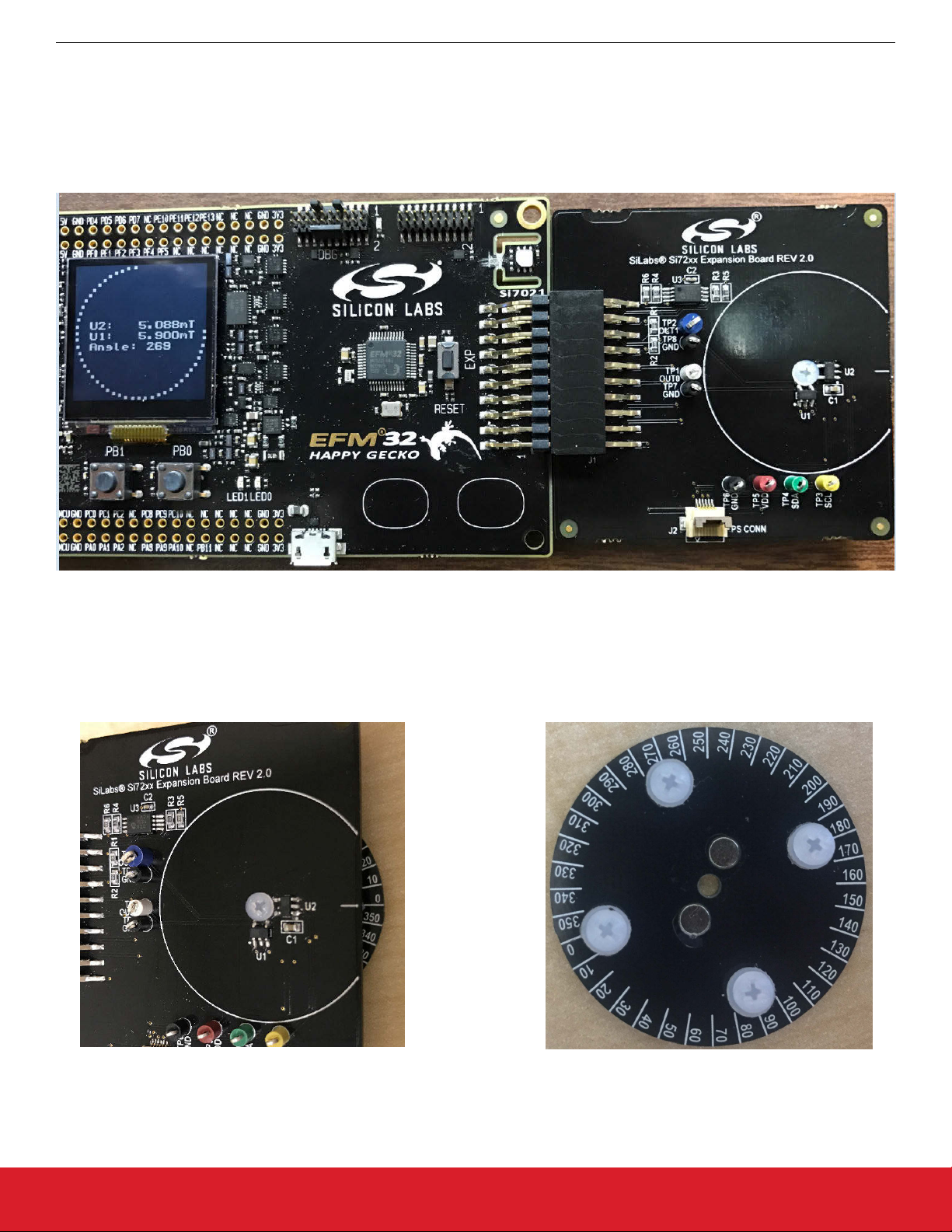
Figure 1.1. Wheel Angular Position Demo
The Wheel Angle Calculation demo determines the angular position of the wheel using two magnetic sensors mounted 90° apart on top
EXP. Underneath the sensors, a wheel board is connected by a nylon screw which houses two magnets positioned at 45° and
of the
225°. The figures below show the magnets orientated 180° apart, in opposite polarity on the wheel board and how the wheel aligns with
the EXP positioning. Using the wheel board as an angle reference, the sensors are positioned so that when U2 is at 0°, U1 is positioned
at 270°.
Figure 1.2. SI72xx-EXP Wheel Alignment
silabs.com | Building a more connected world. Rev. 0.2 | 2
Figure 1.3. Wheel Magnet Orientation
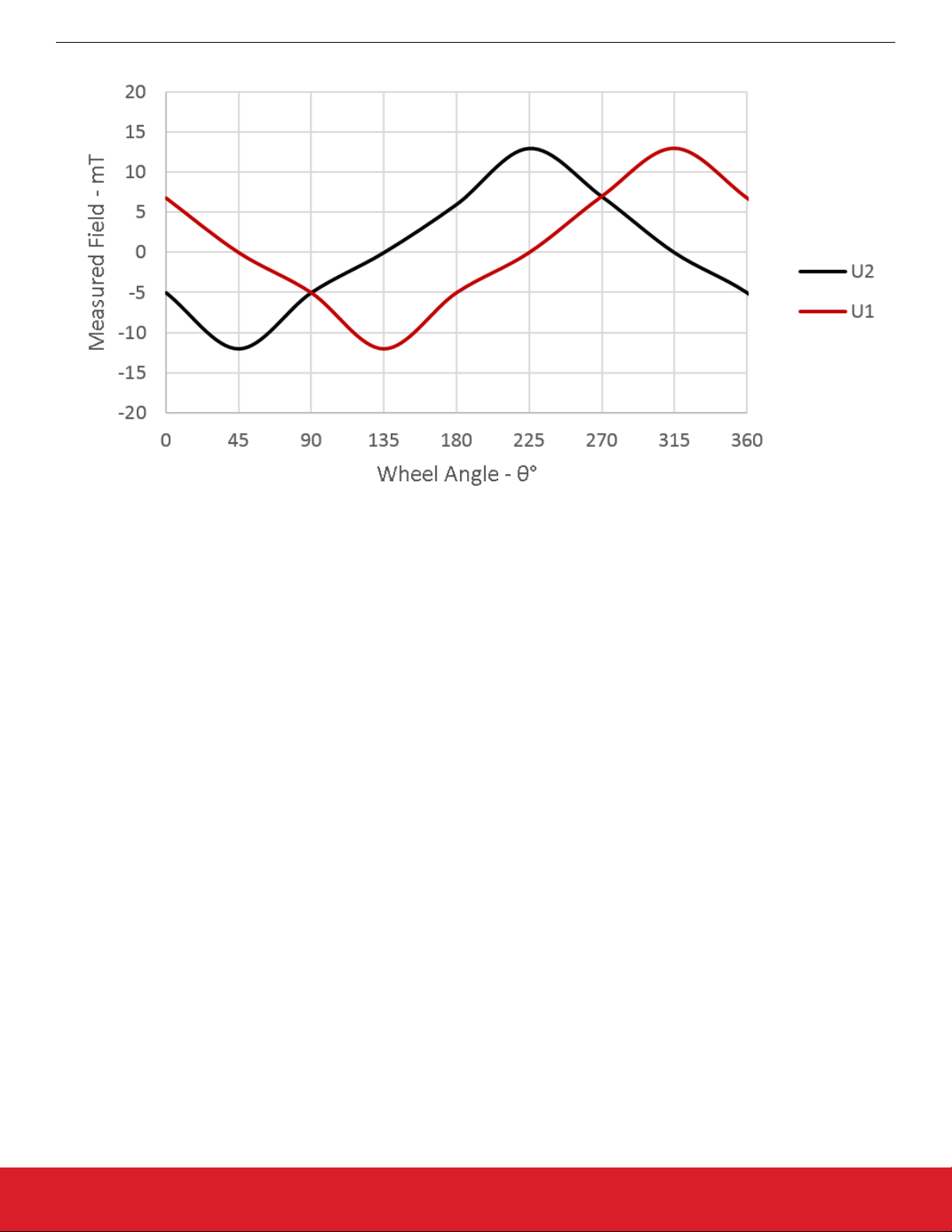
As the angular position varies, the measured magnetic field from each sensor varies as shown below.
UG288: Si72xx-WD-Kit User's Guide
Demos
Figure 1.4. Magnetic Field Strength vs. Angle Position
To calculate the angular position, interpolation is applied using the ratio of magnetic field strengths from each sensor against a lookup
table. Without calibration, the angle accuracy is within ±5° due to variations in the magnets, mechanical alignment and variations in the
sensors. The lookup table consists of 36 reference points for each sensor 10° apart. To activate the calibration procedure, follow these
steps:
1. Press and hold-down push-button PB1 on the MCU STK.
2. While holding-down PB1, press push-button PB0 on the MCU STK.
Carefully and accurately position the wheel at each angular position to calibrate the lookup table properly. The calibration requires 36
points of calibration that are 10° apart, from 0° to 350°. With calibration, accuracy is better than ±1°. Due to higher voltage required for
flash programming, only perform the calibration with a fresh battery or when USB powered.
silabs.com | Building a more connected world. Rev. 0.2 | 3
1.2 Demo 2—Revolution Counter Using the MCU Pulse Counter (Si72xx-EXP)
UG288: Si72xx-WD-Kit User's Guide
Demos
Section 10
of "AN1018: Using the Si72xx Hall-Effect Magnetic Position Sensors" explains how the same rotary shaft configuration of
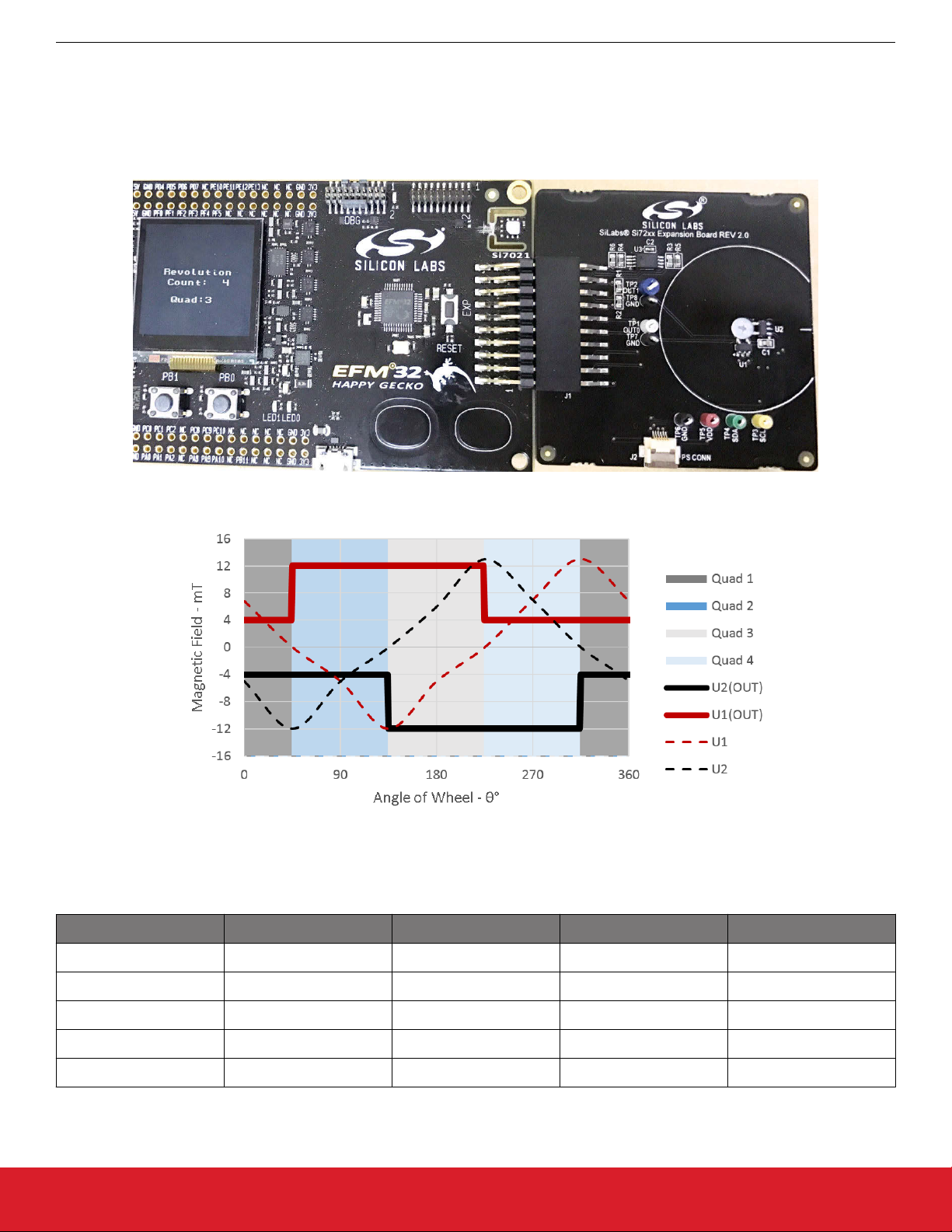
the angular position demo can be used for detecting direction and quadrature positioning. Placing the Si7210 sensors on the Si72xxEXP into a latch mode, the demo counts the total number of wheel revolutions in either direction, with a maximum number of 15 revolutions. To activate the quadrature decoder, press push-button PB1 on the MCU STK. The STK screen will display the quadrature positioning and update the screen once the quadrature position has changed.
Figure 1.5. Revolution Counter Demo
Figure 1.6. Quadrant vs. Wheel Position
Table 1.1. Quadrant Assignments vs. Wheel Position
Quadrant 1 2 3 4
U2 OUT HIGH HIGH LOW LOW
U1 OUT LOW HIGH HIGH LOW
U2 Field Polarity Negative Negative Positive Positive
U1 Field Polarity Positive Negative Negative Positive
Angle Interval 315° to 45° 45° to 135° 135° to 225° 225° to 315°
silabs.com | Building a more connected world. Rev. 0.2 | 4

1.3 Demo 3—PS Magnetic Field Strength over I2C (SI7210-B00V-EB)
UG288: Si72xx-WD-Kit User's Guide
Demos
With the
Si7210-B00V-EB PS board connected by ribbon cable, the magnetic field readings from the hall sensor on the PS board are
displayed on the MCU LCD screen. A magnetic field can be applied to the hall sensor by placing one of the provided loose magnets
within near range of the sensor. As detailed in Section 2 of "AN1018: Using the Si72xx Hall-Effect Magnetic Position Sensors", the hall
sensor detects the magnetic field going into the bottom of the package. Therefore, it is best to use the magnet positioning shown in the
following figures to measure the magnetic field strength for a given distance. The sensor’s magnetic field readings are displayed on the
STK screen once every second. By default, the sensor uses a ±20 mT full-scale range for performing magnetic field conversions. This
can be converted to a ±200 mT full-scale range by pressing the push-button PB1 on the STK.
Figure 1.7. 20 mT Data Screen with Negative Field
silabs.com | Building a more connected world. Rev. 0.2 | 5
 Loading...
Loading...