

Page 1
Si5347, Si5346 Revision D Reference
Manual
Quad/Dual DSPLL Any-frequency, Any-output Jitter Attenuators
Si5347, Si5346 Family Reference Manual
RELATED DOCUMENTS
This Family Reference Manual is intended to provide system, PCB design, signal integrity, and software engineers the necessary technical information to successfully use the
Si5347/46
in the Si5347/46 data sheets.
devices in end applications. The official device specifications can be found
• Si5347/46 Rev D Data Sheet: https://
www.silabs.com/documents/public/datasheets/Si5347-46-D-DataSheet.pdf
•
Si5347/46 Rev D Device Errata: https://
www.silabs.com/documents/public/errata/
Si5347-46-RevD-Errata.pdf
• Si5347 Rev D -EVB User Guide: https://
www.silabs.com/documents/public/userguides/Si5347-D-EVB.pdf
• Si5346 Rev D -EVB User Guide: https://
www.silabs.com/documents/public/userguides/Si5346-D-EVB.pdf
• Si534x/8x Jitter Attenuators
Recommended Crystals, TCXO and
OCXOs Reference Manual: https://
www.silabs.com/documents/public/
reference-manuals/si534x-8xrecommended-crystals-rm.pdf
silabs.com | Building a more connected world. Rev. 1.3
Page 2

Table of Contents
Overview .................................5
1.
1.1 Work Flow Using ClockBuilder Pro and the Register Map ...............5
1.2 Family Product Comparison .........................5
2. Functional Description............................6
2.1 DSPLL.................................6
2.2 DSPLL Loop Bandwidth ...........................7
2.2.1 Fastlock ...............................7
2.3 Dividers Overview .............................8
3. Modes of Operation .............................9
3.1 Reset and Initialization ...........................10
3.1.1 Updating Registers during Device Operation ..................10
3.1.2 NVM Programming ...........................12
3.2 Free Run Mode ..............................13
3.3 Lock Acquisition Mode ...........................13
3.4 Locked Mode ..............................13
3.5 Holdover Mode ..............................14
4. Clock Inputs............................... 17
4.1 Input Source Selection ...........................18
4.2 Types of Inputs ..............................20
4.2.1 Hitless Input Switching with Phase Buildout ...................21
4.2.2 Ramped Input Switching .........................22
4.2.3 Hitless Switching, LOL (loss of lock) and Fastlock .................22
4.2.4 External Clock Switching .........................22
4.2.5 Synchronizing to Gapped Input Clocks ....................23
4.2.6 Rise Time Considerations .........................24
4.3 Fault Monitoring .............................25
4.3.1 Input Loss of Signal (LOS) Detection .....................25
4.3.2 XA/XB LOS Detection ..........................26
4.3.3 OOF Detection ............................26
4.3.4 LOL Detection.............................29
4.3.5 Interrupt Pin (INTR) ...........................31
5. Output Clocks ..............................32
5.1 Outputs ................................32
5.1.1 Output Crosspoint ...........................32
5.1.2 Output Divider (R) Synchronization......................32
5.2 Performance Guidelines for Outputs .......................33
5.2.1 Output Crosspoint and Signal Format Selection .................34
5.2.2 Output Terminations...........................35
5.3 Differential Outputs ............................35
silabs.com | Building a more connected world. Rev. 1.3 | 2
Page 3

5.3.1 Differential Output Amplitude Controls.....................35
5.3.2 Differential Output Common Mode Voltage Selection................36
5.3.3 Recommended Settings for Differential LVPECL, LVDS, HCSL, and CML ........37
5.4
LVCMOS Outputs .............................38
5.4.1 LVCMOS Output Terminations .......................38
5.4.2 LVCMOS Output Impedance And Drive Strength Selection .............39
5.4.3 LVCMOS Output Signal Swing .......................39
5.4.4 LVCMOS Output Polarity .........................40
5.5 Output Enable/Disable ...........................41
5.5.1 Output Disable State Selection .......................41
5.5.2 Output Disable During LOL ........................41
5.5.3 Output Disable During XAXB_LOS ......................41
5.5.4 Output Driver State When Disabled .....................42
5.5.5 Synchronous/Asynchronous Output Selection ..................43
5.5.6 Output Driver Disable Source Summary ....................44
6. Digitally Controlled Oscillator (DCO) Mode ...................45
6.1 Frequency Increment/Decrement Using Pin Controls .................46
6.2 Frequency Increment/Decrement Using the Serial Interface ...............48
6.2.1 DCO with Direct Register Writes ......................50
7. Serial Interface .............................. 51
7.1 I2C Interface ...............................53
7.2 SPI Interface...............................55
8. Field Programming ............................59
9. XAXB External References .........................60
9.1 Performance of External References ......................60
9.2 Recommend Crystals and Oscillators ......................60
9.3 Register Settings to Configure for External XTAL Reference ..............61
9.3.1 XAXB_EXTCLK_EN Reference Clock Selection Register ..............61
9.3.2 PXAXB Pre-scale Divide Ratio for Reference Clock Register .............61
10. Crystal and Device Circuit Layout Recommendations ..............62
10.1 64-Pin QFN Si5347 Layout Recommendations...................62
10.1.1 Si5347 Applications without a Crystal ....................62
10.1.2 Si5347 Crystal Guidelines ........................63
10.1.3 Si5347 Output Clocks ..........................66
10.2 44-Pin QFN Si5346 Layout Recommendations...................67
10.2.1 Si5346 Applications without a Crystal ....................68
10.2.2 Si5346 Crystal Guidelines ........................69
11. Power Management ...........................72
11.1 Power Management Features ........................72
11.2 Power Supply Recommendations .......................72
11.3 Power Supply Sequencing .........................72
silabs.com | Building a more connected world. Rev. 1.3 | 3
Page 4

11.4 Grounding Vias .............................73
12. Base vs. Factory Preprogrammed Devices ...................74
12.1 "Base" Devices (Also Known as "Blank" Devices) ..................74
12.2 “Factory Preprogrammed” (Custom OPN) Devices .................74
13. Register Map ..............................75
13.1 Register Map Overview and Default Settings Values .................75
13.2 Si5347A/B Register Map ..........................76
13.2.1 Page 0 Registers Si5347A/B .......................76
13.2.2 Page 1 Registers Si5347A/B .......................96
13.2.3 Page 2 Registers Si5347A/B ......................102
13.2.4 Page 3 Registers Si5347A/B ......................112
13.2.5 Page 4 Registers Si5347A/B ......................114
13.2.6 Page 5 Registers Si5347A/B ......................123
13.2.7 Page 6 Registers Si5347A/B ......................132
13.2.8
Page 7 Registers Si5347A/B ......................141
13.2.9 Page 9 Registers Si5347A/B ......................150
13.2.10 Page A Registers Si5347A/B ......................151
13.2.11 Page B Registers Si5347A/B ......................152
13.3 Si5347C/D Register Map .........................155
13.3.1 Page 0 Registers Si5347C/D ......................155
13.3.2 Page 1 Registers Si5347C/D ......................175
13.3.3 Page 2 Registers Si5347C/D ......................179
13.3.4 Page 3 Registers Si5347C/D ......................189
13.3.5 Page 4 Registers Si5347C/D ......................191
13.3.6 Page 5 Registers Si5347C/D ......................200
13.3.7 Page 6 Registers Si5347C/D ......................209
13.3.8 Page 7 Registers Si5347C/D ......................218
13.3.9 Page 9 Registers Si5347C/D ......................228
13.3.10 Page A Registers Si5347C/D ......................229
13.3.11 Page B Registers Si5347C/D ......................230
13.4 Si5346 Register Map ..........................233
13.4.1 Page 0 Registers Si5346........................233
13.4.2 Page 1 Registers Si5346........................249
13.4.3 Page 2 Registers Si5346........................253
13.4.4 Page 3 Registers Si5346........................261
13.4.5 Page 4 Registers Si5346........................263
13.4.6 Page 5 Registers Si5346........................272
13.4.7 Page 9 Registers Si5346........................281
13.4.8 Page A Registers Si5346 .......................282
13.4.9 Page B Registers Si5346 .......................283
14. Revision History.............................285
silabs.com | Building a more connected world. Rev. 1.3 | 4
Page 5

Si5347, Si5346 Revision D Reference Manual
Overview
1. Overview
The Si5347 is a high performance jitter attenuating clock multiplier that integrates four any-frequency DSPLLs for applications that require maximum integration and independent timing paths. The Si5346 is a dual DSPLL version in a smaller package. Each DSPLL has
access to any of the four inputs and can provide low jitter clocks on any of the device outputs. Based on 4th generation DSPLL technology, these devices provide any-frequency conversion with typical jitter performance of <100 fs in integer mode or <150 fs in fractional
frequency synthesis mode. Each DSPLL supports independent free-run, holdover modes of operation, and offers automatic and hitless
input clock switching. The Si5347/46 is programmable via a serial interface with in-circuit programmable non-volatile memory so that it
always powers up with a known configuration. Programming the Si5347/46 is made easy with Silicon Labs’ ClockBuilder Pro software.
Factory preprogrammed devices are available.
1.1 Work Flow Using ClockBuilder Pro and the Register Map
This reference manual is to be used to describe all the functions and features of the parts in the product family with register map details
on how to implement them. It is important to understand that the intent is for customers to use the ClockBuilder Pro software to provide
the initial configuration for the device. Although the register map is documented, all the details of the algorithms to implement a valid
frequency plan are fairly complex and are beyond the scope of this document. Real-time changes to the frequency plan and other operating settings are supported by the devices. However, describing all the possible changes is not a primary purpose of this document.
Refer to the applications notes and Knowledge Base articles within the ClockBuilder Pro GUI for information on how to implement the
most common, real-time frequency plan changes.
The primary purpose of the software is to enable use of the device without an in-depth understanding of its complexities. The software
abstracts the details from the user to allow focus on the high level input and output configuration, making it intuitive to understand and
configure for the end application. The software walks the user through each step, with explanations about each configuration step in the
process to explain the different options available. The software will restrict the user from entering an invalid combination of selections.
The final configuration settings can be saved, written to an EVB and a custom part number can be created for customers who prefer to
order a factory preprogrammed device. The final register maps can be exported to text files, and comparisons can be done by viewing
the settings in the register map described in this document.
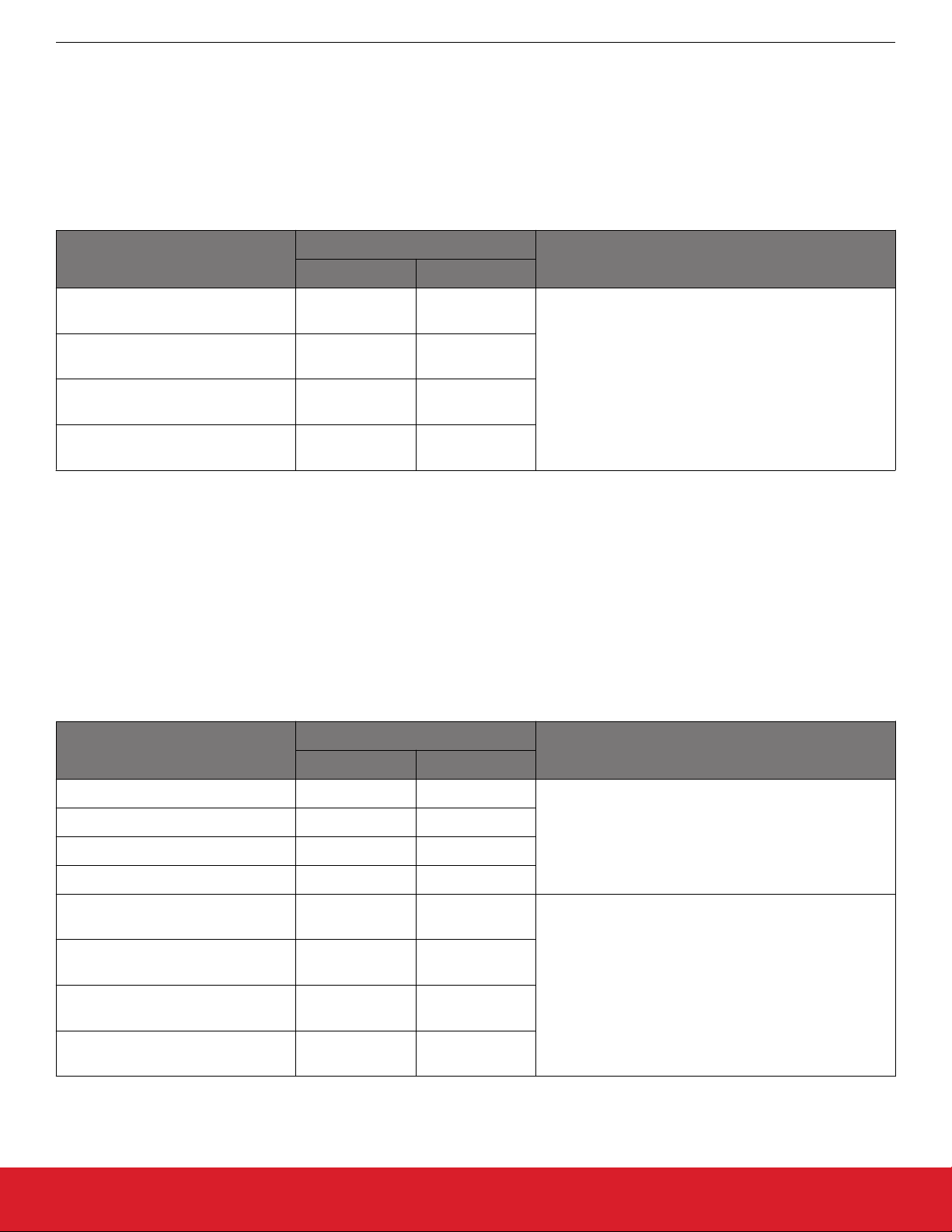
1.2 Family Product Comparison
The Table 1.1 Device Selector Guide on page 5 lists the differences between the devices in this family.
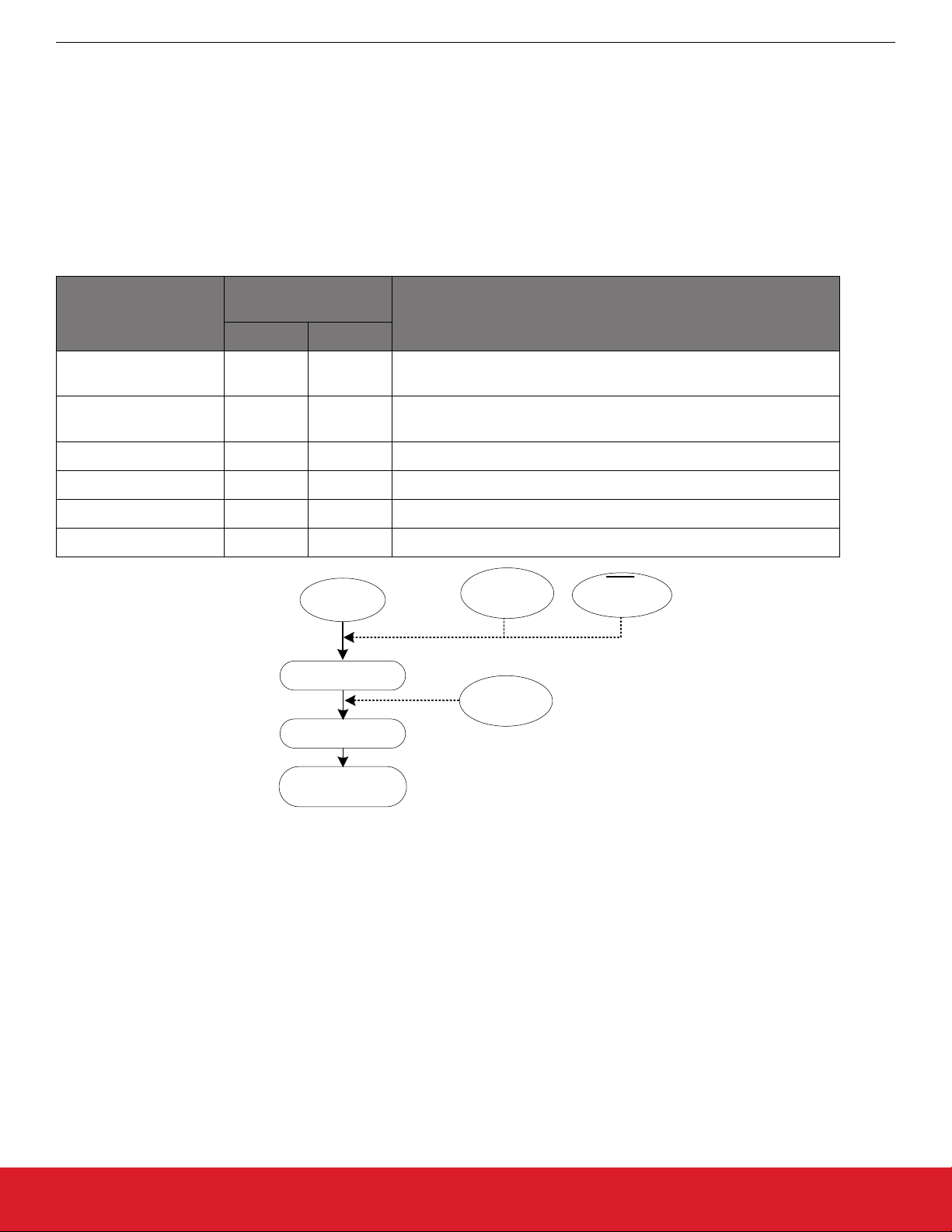
Table 1.1. Device Selector Guide
Grade PLLs/OUTs Max Output Freq Frequency Synthesis Modes
Si5347A 4/8 712.5 MHz Integer + Fractional
Si5347C 4/4 712.5 MHz Integer + Fractional
Si5346A 2/4 712.5 MHz Integer + Fractional
Si5347B 4/8 350 MHz Integer + Fractional
Si5347D 4/4 350 MHz Integer + Fractional
Si5346B 2/4 350 MHz Integer + Fractional
silabs.com | Building a more connected world. Rev. 1.3 | 5
Page 6
Si5347, Si5346 Revision D Reference Manual
Functional Description
2. Functional Description
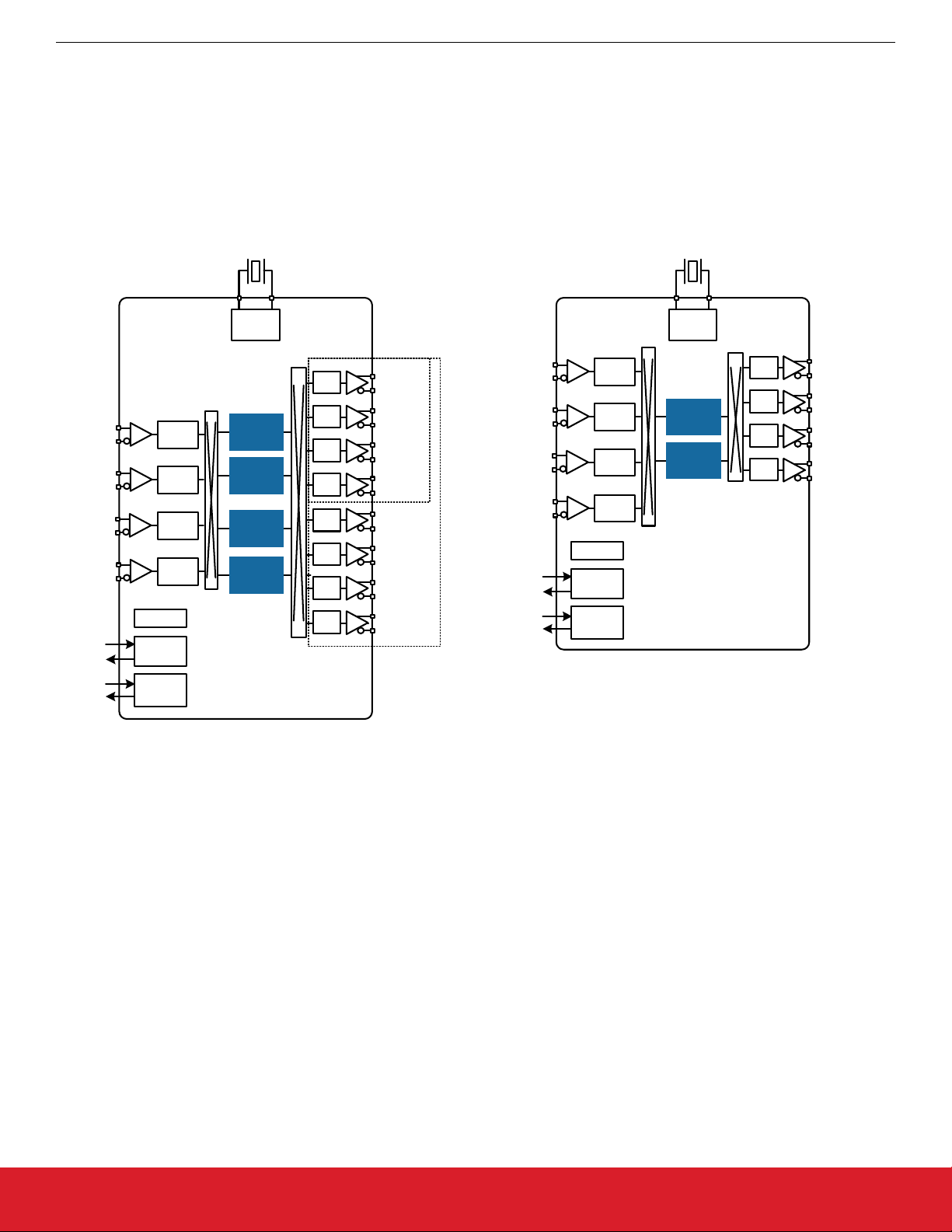
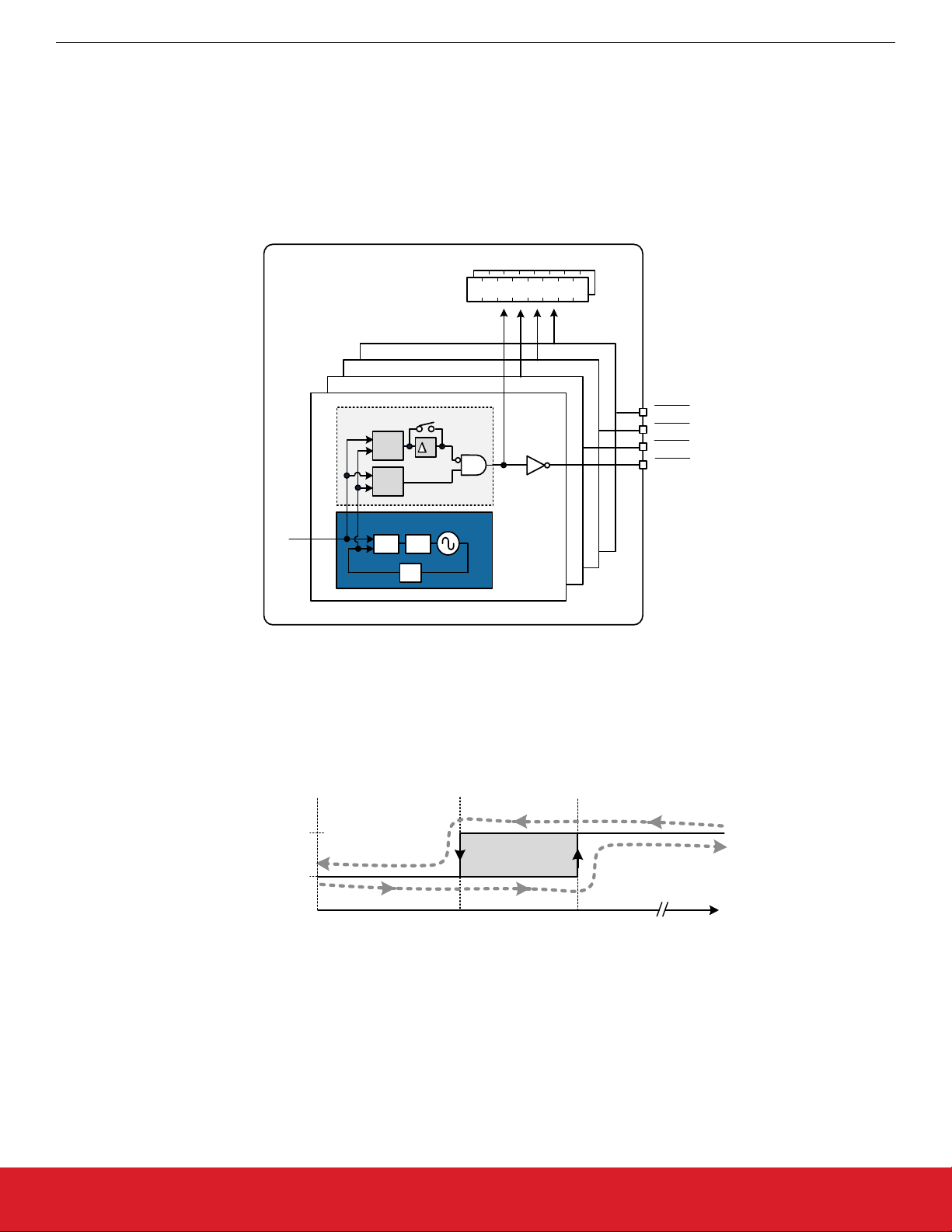
The Si5347 takes advantage of Silicon Labs fourth-generation DSPLL technology to offer the industry’s most integrated and flexible
jitter attenuating clock generator solution. Each of the DSPLLs operate independently from each other and are controlled through a
common serial interface. Each DSPLL has access to any of the four inputs (IN0 to IN3) after having been divided down by the P dividers, which are either fractional or integer. Clock selection can be either manual or automatic. Any of the output clocks can be configured
to any of the DSPLLs using a flexible crosspoint connection. The Si5346 is a smaller form factor dual DSPLL version with four inputs
and four outputs.
IN0
IN1
IN2
IN3
Si5347
÷FRAC
÷FRAC
÷FRAC
÷FRAC
NVM
2
I
C/SPI
Control/
Status
XTAL/
REFCLK
OSC
DSPLL
A
DSPLL
B
DSPLL
C
DSPLL
D
XTAL/
REFCLK
XBXA
÷INT
÷INT
÷INT
÷INT
÷INT
÷INT
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
Si5347C/D
Si5347A/B
÷INT
÷INT
OUT6
OUT7
IN0
IN1
IN2
IN3
Si5346
÷FRAC
÷FRAC
÷FRAC
÷FRAC
NVM
2
I
C/SPI
Control/
Status
OSC
DSPLL
A
DSPLL
B
XBXA
÷INT
÷INT
÷INT
÷INT
OUT0
OUT1
OUT2
OUT3
Figure 2.1. Block Diagrams
2.1 DSPLL
DSPLL is responsible for input frequency translation, jitter attenuation and wander filtering. Fractional input dividers (Pxn/Pdc) al-
The
low the DSPLL to perform hitless switching between input clocks (INx). Input switching is controlled manually or automatically using an
internal state machine. The oscillator circuit (OSC) provides a frequency reference that determines output frequency stability and accuracy while the device is in free-run or holdover mode. A crosspoint switch connects any of the DSPLLs to any of the outputs. An additional integer divisor (R) determines the final output frequency.
The frequency configuration of the DSPLL is programmable through the SPI or I2C serial interface and can also be stored in non-volatile memory or RAM. The combination of fractional input dividers (Pn/Pd), fractional frequency multiplication (Mn/Md) and integer output
division (Rn) allows the generation of virtually any output frequency on any of the outputs. All divider values for a specific frequency
plan are easily determined by using the ClockBuilder Pro software.
Because a jitter reference is required for all applications, either a crystal or an external clock source needs to be connected to the
XAXB pins. See 9. XAXB External References and 10. Crystal and Device Circuit Layout Recommendations for more information.
silabs.com | Building a more connected world. Rev. 1.3 | 6
Page 7
Si5347, Si5346 Revision D Reference Manual
Functional Description
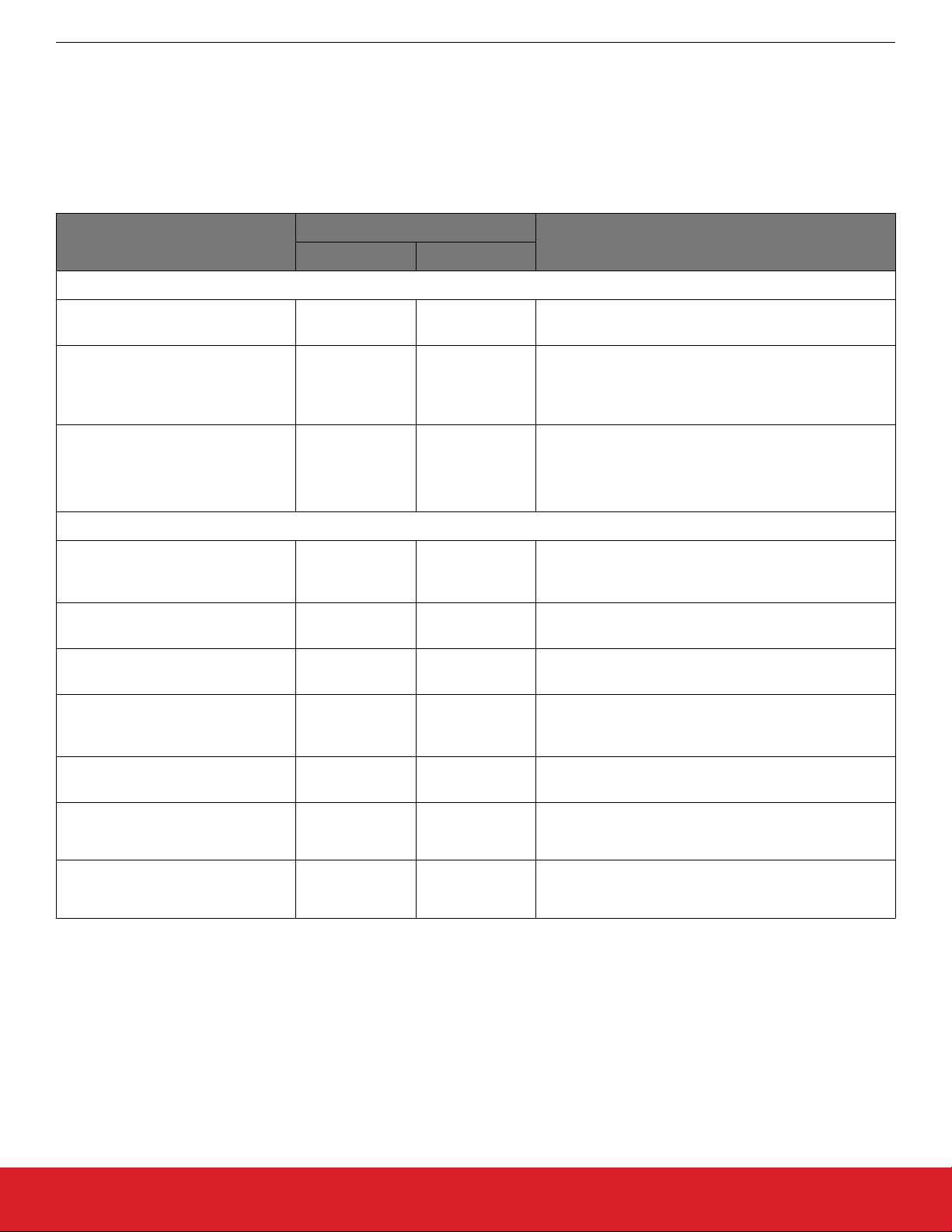
2.2 DSPLL Loop Bandwidth
DSPLL loop bandwidth determines the amount of input clock jitter attenuation. Register configurable DSPLL loop bandwidth set-
The
tings of from 0.1 Hz up to 4 kHz are available for selection for each of the DSPLLs. Since the loop bandwidth is controlled digitally, each
of the DSPLLs will always remain stable with less than 0.1 dB of peaking regardless of the loop bandwidth selection. Note that after
changing the bandwidth parameters, the appropriate BW_UPDATE_PLLx bit (0x0414, 0x0514, 0x0614, 0x0715) must be set high to
latch the new values into operation. Note that each of these update bits will latch both nominal and fastlock bandwidths.
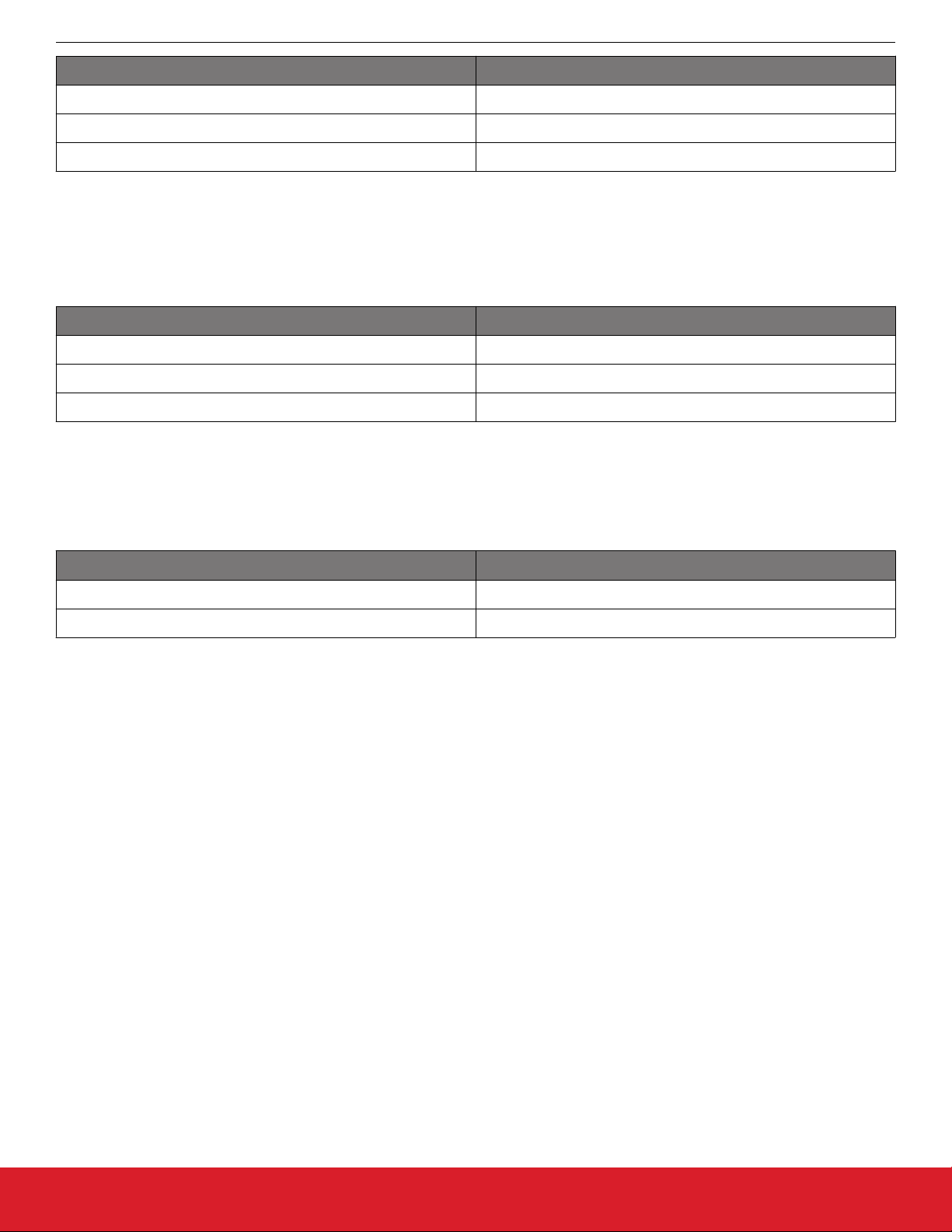
Table 2.1. DSPLL Loop Bandwidth Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
BW_PLLA 0408[7:0] -
040D[7:0]
BW_PLLB 0508[7:0] -
050D[7:0]
BW_PLLC 0608[7:0] -
0408[7:0] -
040D[7:0]
0508[7:0] -
050D[7:0]
—
This group of registers determine the loop bandwidth for
DSPLL A, B, C, D. They are all independently selectable
in the range from 0.1 Hz up to 4 kHz. Register values
determined by ClockBuilderPro.
060D[7:0]
BW_PLLD 0709[7:0] -
—
070E[7:0]
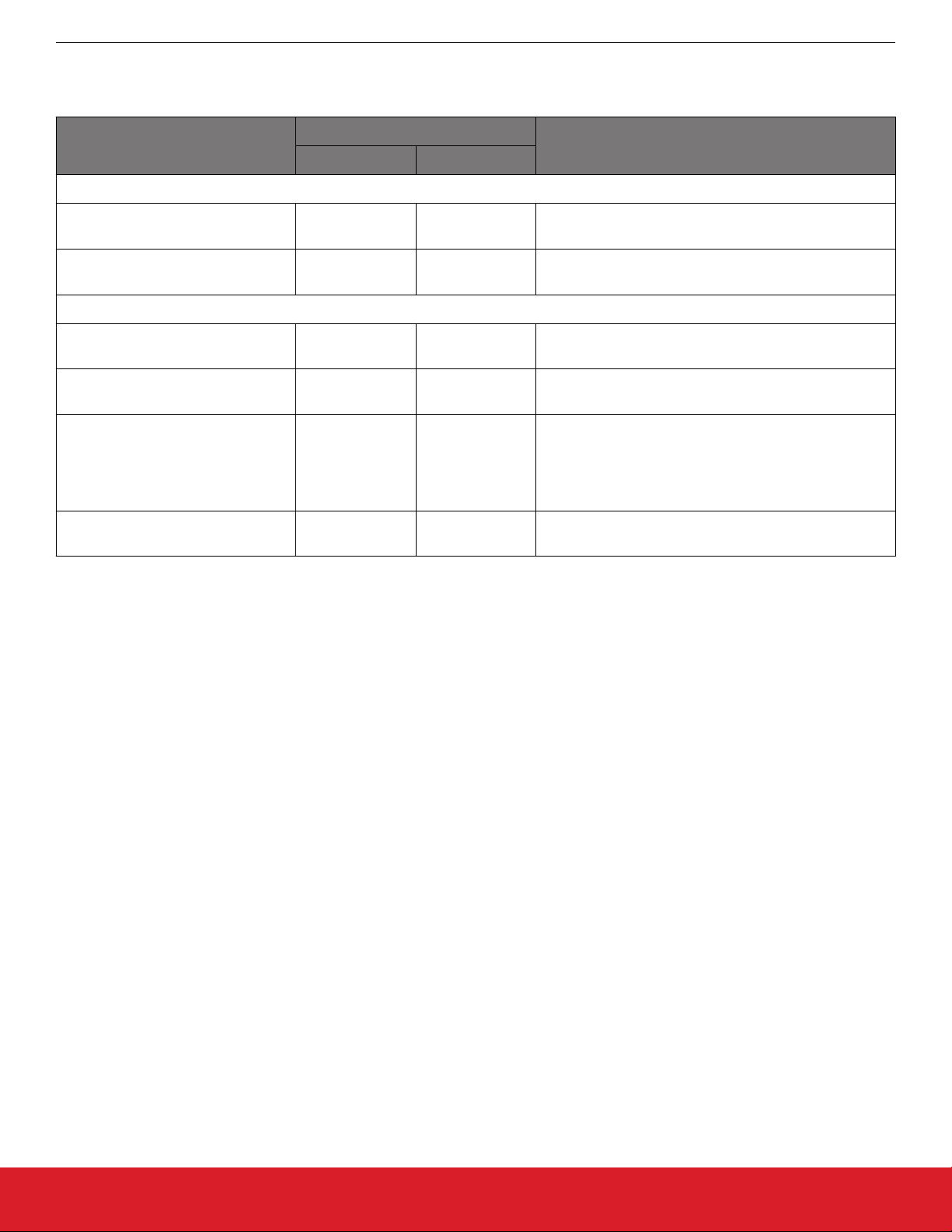
2.2.1 Fastlock
Selecting
a low DSPLL loop bandwidth (e.g. 0.1 Hz) will generally lengthen the lock acquisition time. The fastlock feature allows setting
a temporary Fastlock Loop Bandwidth that is used during the lock acquisition process. Higher fastlock loop bandwidth settings will enable the DSPLLs to lock faster. Fastlock Loop Bandwidth settings in the range from 100 Hz up to 4 kHz are available for selection. Once
lock acquisition has completed, the DSPLL’s loop bandwidth will automatically revert to the DSPLL Loop Bandwidth setting. The fastlock feature can be enabled or disabled independently for each of the DSPLLs. If enabled, when LOL is asserted, Fastlock is enabled.
When LOL is not asserted, Fastlock is disabled. Note that after changing the bandwidth parameters, the appropriate BW_UPDATE_PLLx bit (0x0414, 0x0514, 0x0614, 0x0715) must be set high to latch the new values into operation. Note that each of these
update bits will latch all Loop, Fastlock and Holdover bandwidths.
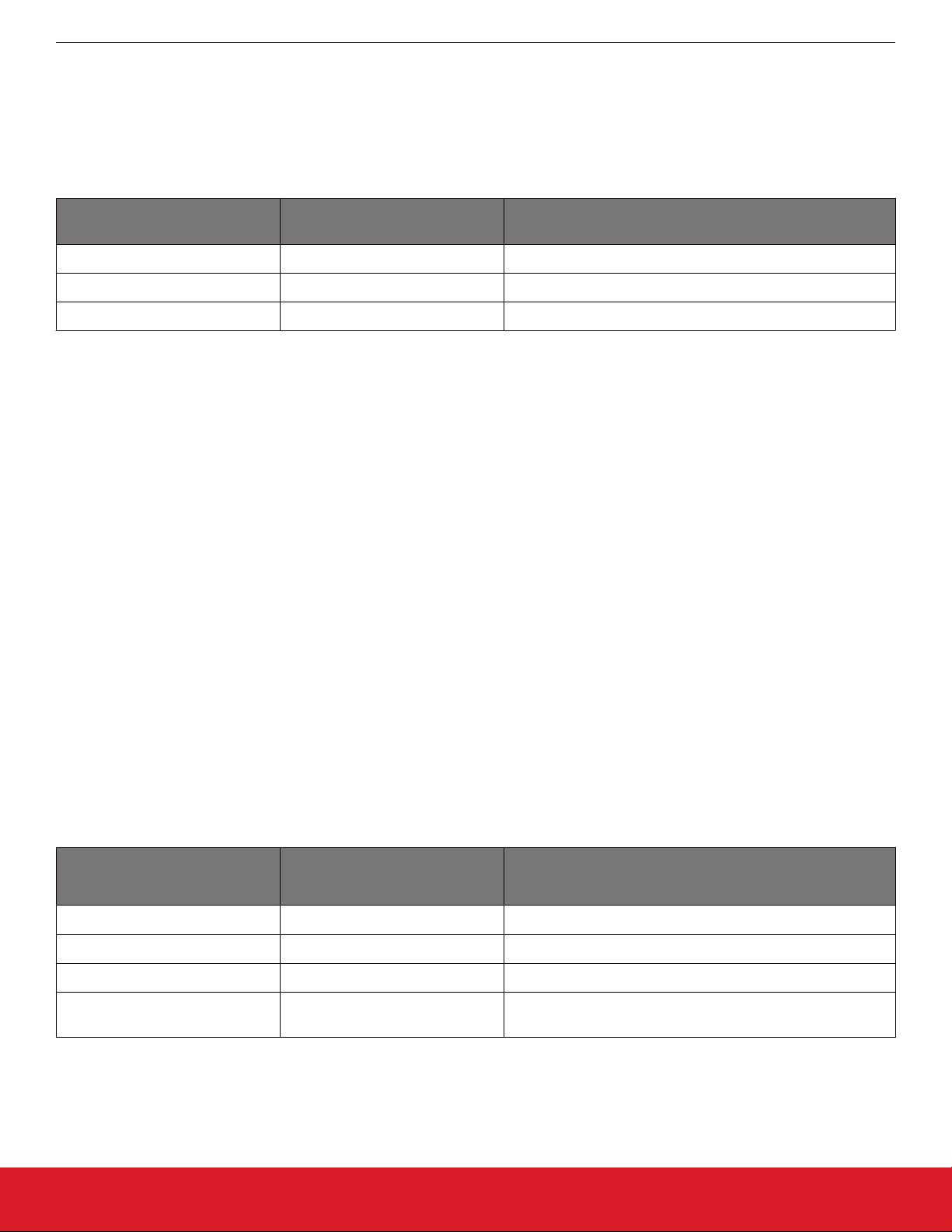
Table 2.2. Fastlock Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
FASTLOCK_AUTO_EN_PLLA 042B[0] 042B[0] Fastlock enable/disable. Fastlock is enabled by default
FASTLOCK_AUTO_EN_PLLB 052B[0] 052B[0]
with a bandwidth of 4 kHz.
FASTLOCK_AUTO_EN_PLLC 062B[0] —
FASTLOCK_AUTO_EN_PLLD 072C[0] —
FAST_BW_PLLA 040E[7:0] -
0413[7:0]
FAST_BW_PLLB 050E[7:0] -
0513[7:0]
FAST_BW_PLLC 060E[7:0] -
040E[7:0] -
0413[7:0]
050E[7:0] -
0513[7:0]
—
Fastlock bandwidth is selectable in the range of 100 Hz
up to 4 kHz. Register values determined using ClockBuilderPro.
0613[7:0]
FAST_BW_PLLD 070F[7:0] -
—
0714[7:0]
silabs.com | Building a more connected world. Rev. 1.3 | 7
Page 8

Si5347, Si5346 Revision D Reference Manual
Functional Description
2.3 Dividers Overview
are five main divider classes within the Si5347/46. See Figure 2.1 Block Diagrams on page 6 for a block diagram that shows
There
them. Additionally, FSTEPW can be used to adjust the nominal output frequency in DCO mode. See 6. Digitally Controlled Oscillator
(DCO) Mode for more information and block diagrams on DCO mode.
• 1. PXAXB: Reference input divider (0x0206)
• Divide reference clock by 1, 2, 4, or 8 to obtain an internal reference < 125 MHz
• 2. P0-P3: Input clock wide range dividers (0x0208-0x022F)
• Integer or Fractional divide values
•
Min. value is 1, Max. value is 224 (Fractional-P divisors must be > 5)
• 48-bit numerator, 32-bit denominator
• Practical P divider range of (Fin / 2 MHz) < P < (Fin / 8 kHz)
• Each P divider has a separate update bit for the new divider value to take effect
• 3. MA-MD: DSPLL feedback dividers (0x0415-0x041F, 0x0515-0x051F, 0x0615-0x061F, 0x0716-0x0720)
• Integer or Fractional divide values
•
Min. value is 1, Max. value is 224 (Fractional-M divisors must be > 10)
• 56-bit numerator, 32-bit denominator
• Practical M divider range of (Fdco / 2 MHz) < M < (Fdco / 8 kHz)
• Each M divider has a separate update bit for the new divider value to take effect
• Soft reset will also update M divider values
• 4. Output N dividers N0-N3(0x0302-0x032D)
• MultiSynth divider
• Integer or fractional divide values
• 44 bit numerator, 32 bit denominator
• Each divider has an update bit that must be written to cause a newly written divider value to take effect.
• 5. R0-R7: Output dividers (0x024A-0x026A)
• 24-bit field
•
Min. value is 2, Max. value is 225-2
• Only even integer divide values: 2, 4, 6, etc.
• R Divisor = 2 x (Field + 1). For example, Field = 3 gives an R divisor of 8
• FSTEPW: DSPLL DCO step words (0x0423-0x0429, 0x0523-0x0529, 0x0623-0x0629, 0x0724-0x072A)
• Positive Integers, where FINC/FDEC select direction
•
Min. value is 0, Max. value is 2
• 56-bit step size, relative to 32-bit M denominator
24
silabs.com | Building a more connected world. Rev. 1.3 | 8
Page 9
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
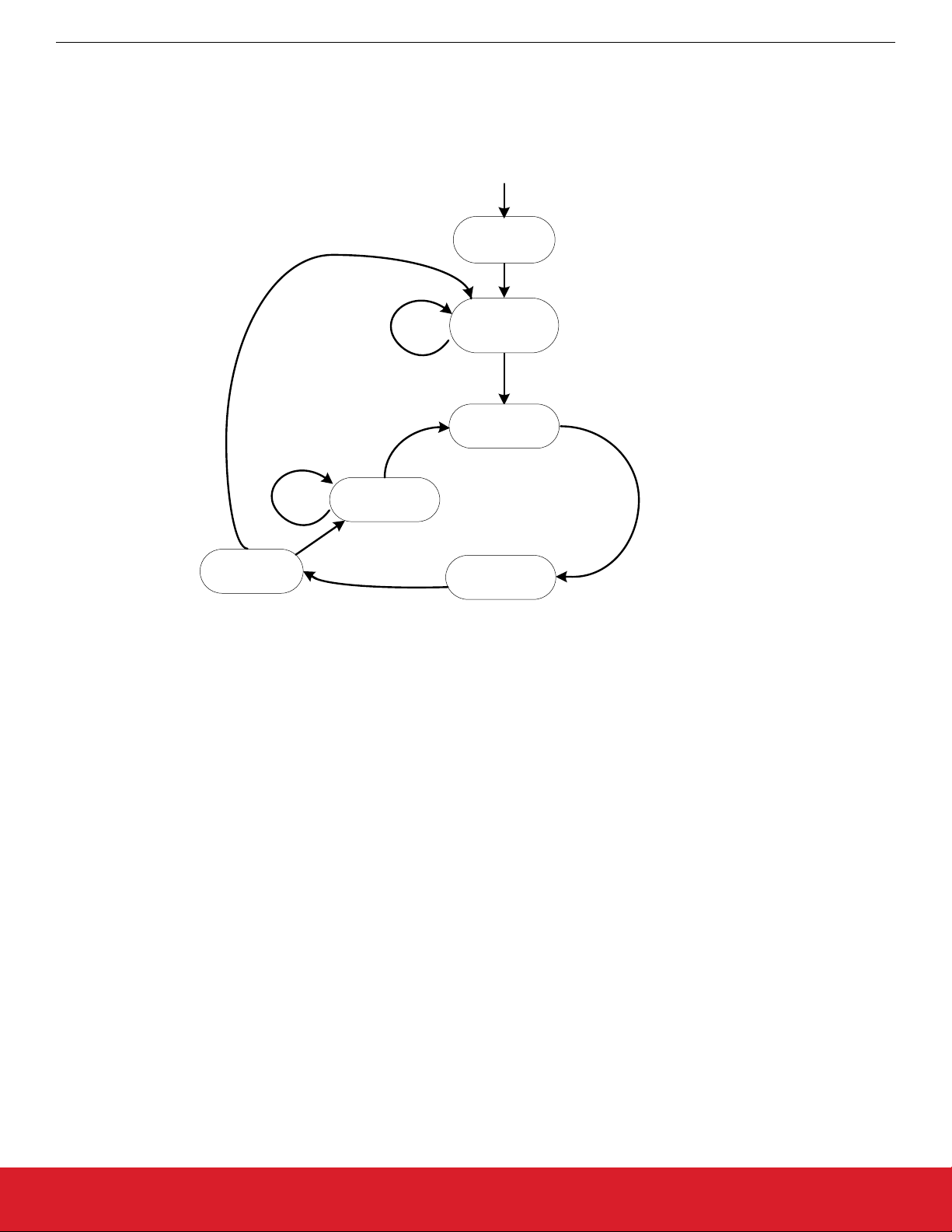
3. Modes of Operation
Once initialization is complete, each of the DSPLLs operates independently in one of four modes: Free-run Mode, Lock Acquisition
Mode, Locked Mode, or Holdover Mode. A state diagram showing the modes of operation is shown in Figure 3.1 Modes of Operation
on page 9. The following sections describe each of these modes in greater detail.
Power-Up
Reset and
Initialization
No
Is holdover
history valid?
No valid
input clocks
selected
An input is qualified
and available
selection
Holdover
Mode
Yes
Selected input
clock fails
Figure 3.1. Modes of Operation
for
Free-run
Valid input clock
Lock Acquisition
(Fast Lock)
Locked
Mode
selected
Phase lock on
selected input
clock is achieved
silabs.com | Building a more connected world. Rev. 1.3 | 9
Page 10
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
3.1 Reset and Initialization
power is applied, the device begins an initialization period where it downloads default register values and configuration data from
Once
NVM and performs other initialization tasks. Communicating with the device through the serial interface is possible once this initialization period is complete. No clocks will be generated until the initialization is complete.
There are two types of resets available. A hard reset is functionally similar to a device power-up. All registers will be restored to the
values stored in NVM, and all circuits will be restored to their initial state including the serial interface. A hard reset is initiated using the
RST pin or by asserting the hard reset bit. A soft reset bypasses the NVM download. It is simply used to initiate register configuration
changes. A hard reset affects all DSPLLs, while a soft reset can affect all or each DSPLL individually.
Table 3.1. Reset Control Registers
Setting Name Hex Address
Function
[Bit Field]
Si5347 Si5346
HARD_RST 001E[1] 001E[1] Performs the same function as power cycling the device. All registers
will be restored to their default values.
SOFT_RST_ALL 001C[0] 001C[0] Resets the device without re-downloading the register configuration
from NVM.
SOFT_RST_PLLA 001C[1] 001C[1] Performs a soft reset on DSPLL A only.
SOFT_RST_PLLB 001C[2] 001C[2] Performs a soft reset on DSPLL B only.
SOFT_RST_PLLC 001C[3] — Performs a soft reset on DSPLL C only.
SOFT_RST_PLLD 001C[4] — Performs a soft reset on DSPLL D only.
Power-Up
NVM download
Initialization
Hard Reset
bit asserted
Soft Reset
bit asserted
RST
pin asserted
Serial interface
ready
Figure 3.2. Initialization from Hard Reset and Soft Reset
The Si547/46 is fully configurable using the serial interface (I2C
or SPI). At power up the device downloads its default register values
from internal non-volatile memory (NVM). Application specific default configurations can be written into NVM allowing the device to generate specific clock frequencies at power-up. Writing default values to NVM is in-circuit programmable with normal operating power supply voltages applied to its VDD (1.8 V) and VDDA (3.3 V) pins. Neither VDDOx or VDDS supplies are required to write the NVM.
3.1.1 Updating Registers during Device Operation
ClockBuilder Pro generates all necessary control register writes to update settings for the entire device, including the ones described
below. This is the case for both “Export” generated files as well as when using the GUI. This is sufficient to cover most applications.
However, in some applications it is desirable to modify only certain sections of the device while maintaining unaffected clocks on the
remaining outputs. If this is the case CBPro provides some frequency changes on the fly examples.
If certain registers are changed while the device is in operation, it is possible for the PLL to become unresponsive (i.e. lose lock indefinitely). Additionally, making single frequency step changes greater than ±350 ppm, either by using the DCO or by directly updating the
M dividers, may also cause the PLL to become unresponsive. Changes to the following registers require this special sequence of
writes:
silabs.com | Building a more connected world. Rev. 1.3 | 10
Page 11
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
Control Register(s)
PXAXB 0x0206[1:0]
MXAXB_NUM 0x0235 – 0x023A
MXAXB_DEN 0x023B – 0x023E
PLL lockup can easily be avoided by using the following the preamble and postamble write sequence below when one of these regis-
is modified or large frequency steps are made. Clockbuilder Pro software adds these writes to the output file by default when Ex-
ters
porting Register Files.
3.1.1.1 Dynamic PLL Changes
To start, write the preamble by updating the following control bits using Read/Modify/Write sequences:
Address Value
0x0B24 0xC0
0x0B25 0x00
0x0B4E 0x1A
Wait 300 ms for the device state to stabilize.
Then, modify all desired control registers.
Write 0x01 to Register 0x001C (SOFT_RST_ALL) to perform a Soft Reset once modifications are complete.
Write the postamble by updating the following control bits using Read/Modify/Write sequences:
Address Value
0x0B24 0xC3
0x0B25 0x02
Note, however, that this procedure affects all DSPLLs and outputs on the device.
Note: This
programming sequence applies only to Rev D and later revisions. The preamble and postamble values for updating certain
registers during device operation are different for earlier revisions. Either the new or old values below may be written to revision D or
later devices without issue. No system software changes are necessary for legacy systems. When writing old values, note that reading
back these registers will not give the written old values, but will reflect the new values. Silicon Labs recommends using the new values
for all revision D (described above) and later designs, since the write and read values will match. Please contact Silicon Labs if you
need information about an earlier revision. Please always ensure to use the correct sequence for the correct revision of the device. Also
check for the latest information online. This information is updated from time to time. The latest information is always posted online.
silabs.com | Building a more connected world. Rev. 1.3 | 11
Page 12
3.1.2 NVM Programming
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
Devices
have two categories of non-volatile memory: user NVM and Factory (Silabs) NVM. Each type is segmented into NVM banks.
There are three user NVM banks, one of which is used for factory programming (whether a base part or an Orderable Part Number).
User NVM can be therefore be burned in the field up to two times. Factory NVM cannot be modified, and contains fixed configuration
information for the device.
The ACTIVE_NVM_BANK device setting can be used to determine which user NVM bank is currently being used and therefore how
many banks, if any, are available to burn. The following table describes possible values:
Active NVM BANK Value (Deci-
Number of User Banks Burned Number of User Banks Available to Burn
mal)
3 (factory state) 1 2
15 2 1
63 3 0
Note: While polling DEVICE_READY during the procedure below, the following conditions must be met in order to ensure that the correct values are written into the NVM:
VDD and VDDA power must both be stable throughout the process.
•
• No additional registers may be written or read during DEVICE_READY polling. This includes the PAGE register at address 0x01.
DEVICE_READY is available on every register page, so no page change is needed to read it.
• Only the DEVICE_READY register (0xFE) should be read during this time.
The procedure for writing registers into NVM is as follows:
1. Write all registers as needed. Verify device operation before writing registers to NVM.
2. You may write to the user scratch space (Registers 0x026B to 0x0272 DESIGN_ID0-DESIGN_ID7) to identify the contents of the
NVM bank.
3. Write 0xC7 to NVM_WRITE register.
4. Poll DEVICE_READY until DEVICE_READY=0x0F.
5. Set NVM_READ_BANK 0x00E4[0]=1. This will load the NVM contents into non-volatile memory.
6. Poll DEVICE_READY until DEVICE_READY=0x0F.
7. Read ACTIVE_NVM_BANK and verify that the value is the next highest value in the table above. For example, from the factory it
will be a 3. After NVM_WRITE, the value will be 15.
Alternatively, steps 5 and 6 can be replaced with a Hard Reset, either by RSTb pin, HARD_RST register bit, or power cycling the device
to generate a POR. All of these actions will load the new NVM contents back into the device registers.
The ClockBuilder Pro Field Programmer kit is a USB attached device to program supported devices either in-system (wired to your
PCB) or in-socket (by purchasing the appropriate field programmer socket). ClockBuilder Pro software is then used to burn a device
configuration (project file). Learn more at https://www.silabs.com/products/development-tools/timing/cbprogrammer.
Table 3.2. NVM Programming Registers
Register Name Hex Address
Function
[Bit Field]
ACTIVE_NVM_BANK 0x00E2[7:0] Identifies the active NVM bank.
NVM_WRITE 0x00E3[7:0] Initiates an NVM write when written with value 0xC7.
NVM_READ_BANK 0x00E4[0] Download register values with content stored in NVM.
DEVICE_READY 0x00FE[7:0] Indicates that the device is ready to accept commands when
value = 0x0F.
Warning:
Any attempt to read or write any register other than DEVICE_READY before DEVICE_READY reads as 0x0F may corrupt
the NVM programming and may corrupt the register contents, as they are read from NVM. Note that this includes accesses to the
PAGE register.
silabs.com | Building a more connected world. Rev. 1.3 | 12
Page 13

Si5347, Si5346 Revision D Reference Manual
Modes of Operation
3.2 Free Run Mode
power is applied to the Si5347 and initialization is complete, all DSPLLs will automatically enter freerun mode, generating the
Once
frequencies determined by the NVM. The frequency accuracy of the generated output clocks in freerun mode is entirely dependent on
the frequency accuracy of the external crystal or reference clock on the XA/XB pins. For example, if the crystal frequency is ±100 ppm,
then all the output clocks will be generated at their configured frequency ±100 ppm in freerun mode. Any drift of the crystal frequency
will be tracked at the output clock frequencies. A TCXO or OCXO is recommended for applications that need better frequency accuracy
and stability while in freerun or holdover modes.
3.3 Lock Acquisition Mode
Each of the DSPLLs independently monitors its configured inputs for a valid clock. If at least one valid clock is available for synchronization, a DSPLL will automatically start the lock acquisition process. If the fast lock feature is enabled, a DSPLL will acquire lock using
the Fastlock Loop Bandwidth setting and then transition to the DSPLL Loop Bandwidth setting when lock acquisition is complete. During lock acquisition the outputs will generate a clock that follows the VCO frequency change as it pulls-in to the input clock frequency.
3.4 Locked Mode
Once locked, a DSPLL will generate output clocks that are both frequency and phase locked to their selected input clocks. At this point
any XTAL frequency drift will not affect the output frequency. Each DSPLL has its own LOL pin and status bit to indicate when lock is
achieved. See 4.3.4 LOL Detection for more details on the operation of the loss of lock circuit.
silabs.com | Building a more connected world. Rev. 1.3 | 13
Page 14
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
3.5 Holdover Mode
of the DSPLLs programmed for holdover mode automatically enter holdover when the selected input clock becomes invalid (i.e.
Any
when either OOF or LOS are asserted) and no other valid input clocks are available for selection. Each DSPLL calculates a historical
average of the input frequency while in locked mode to minimize the initial frequency offset when entering the holdover mode.
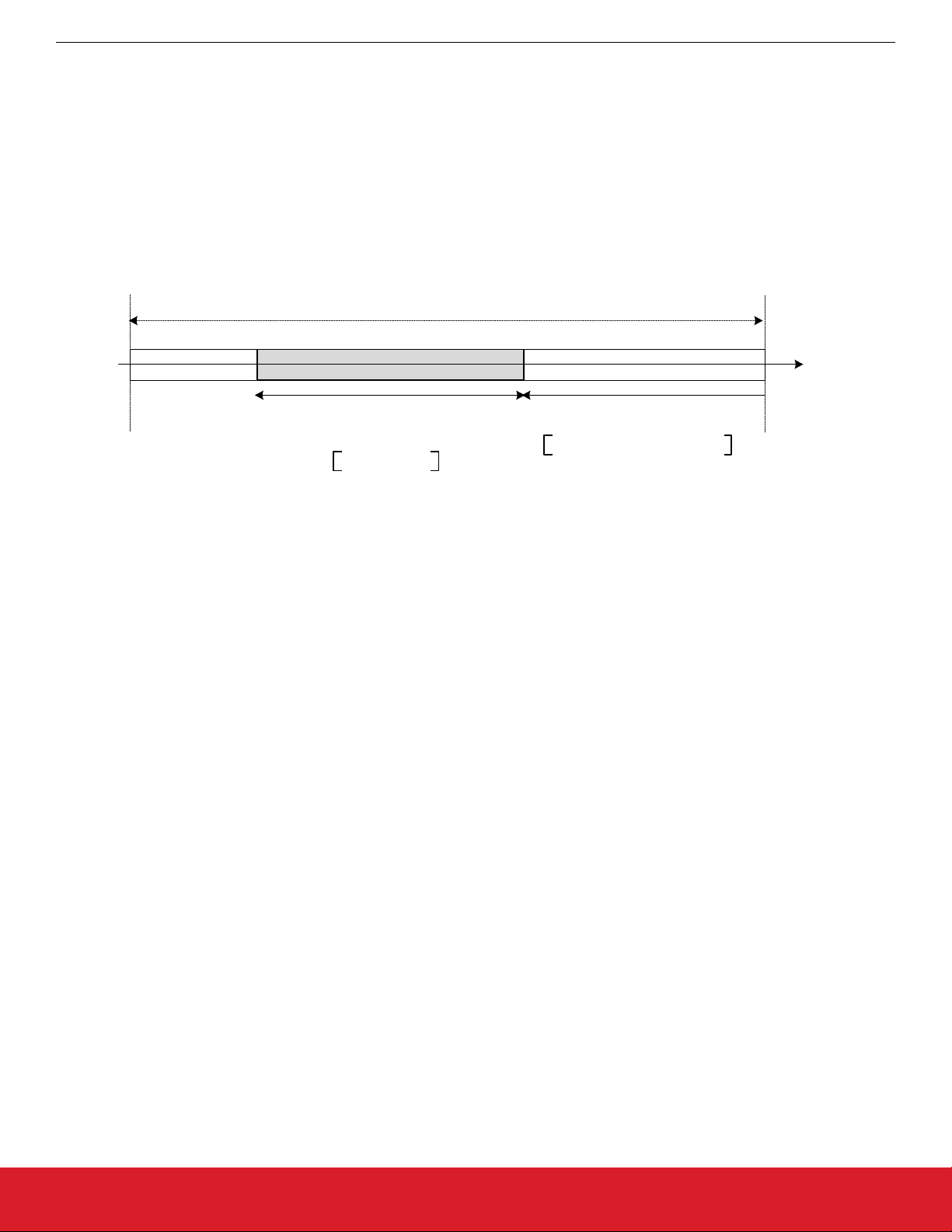
The averaging circuit for each DSPLL stores up to 120 seconds of historical frequency data while locked to a valid clock input. The final
averaged holdover frequency value is calculated from a programmable window with the stored historical frequency data. The window
size determines the amount of holdover frequency averaging. The delay value is used to ignore frequency data that may be corrupt just
before the input clock failure. Both the window size and the delay are programmable as shown in the figure below. Each DSPLL computes its own holdover frequency average to maintain complete holdover independence between the DSPLLs.
Clock Failure
and Entry into
Holdover
Historical Frequency Data Collected
Time
120s
Programmable historical data window
to determine the final holdover value
used
1s,10s, 30s, 60s
Programmable delay
30ms, 60ms, 1s,10s, 30s, 60s
0s
Figure 3.3. Programmable Holdover Window
When entering holdover, a DSPLL will pull its output clock frequency to the calculated average holdover frequency. While in holdover,
output frequency drift is entirely dependent on the external crystal or external reference clock connected to the XA/XB pins. If a
the
clock input becomes valid, a DSPLL will automatically exit holdover mode and re-acquire lock to the new input clock. This process involves adjusting the output clock to achieve frequency and phase lock with the new input clock.
The recommended holdover exit mode is a frequency ramp. Just before the exit begins, the difference between the current holdover
output frequency and the desired, new output frequency is measured. It is likely that the new output clock frequency and the holdover
output frequency will not be the same - the new input clock frequency might have changed and/or the holdover history circuit may have
changed the holdover output frequency.
Using the calculated frequency difference (holdover v. new frequency) and the user-selectable ramp rate a ramp time is calculated. The
output ramp rate is then applied for this ramp time ensuring a smooth and linear transition between the holdover and the final desired
frequency. The ramp rate can be very slow (0.2 ppm/s), very fast (40,000 ppm/s) or any of about 40 values in between. The loop BW
values do not limit or affect the ramp rate selections (and vice versa). CBPro defaults to ramped exit from holdover.
Note that the same ramp rate settings are used for both exit from holdover and clock switching. For more information on ramped clock
switching, see 4.2.2 Ramped Input Switching.
silabs.com | Building a more connected world. Rev. 1.3 | 14
Page 15
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
Table 3.3. DSPLL Holdover Control and Status Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
Holdover Status
HOLD_PLL(D,C,B,A) 000E[7:4] 000E[5:4] Holdover status indicator. Indicates when a DSPLL is in
holdover or free-run mode and is not synchronized to
the input reference. The DSPLL goes into holdover only
when the historical frequency data is valid, otherwise the
DSPLL will be in free-run mode.
HOLD_FLG_PLL(D,C,B,A) 0013[7:4] 0013[5:4] Holdover status monitor sticky bits. Sticky bits will re-
main asserted when an holdover event occurs until
cleared. Writing a zero to a sticky bit will clear it.
HOLD_HIST_VALID_PLLA 043F[1] 043F[1] Holdover historical frequency data valid. Indicates if
HOLD_HIST_VALID_PLLB 053F[1] 053F[1]
HOLD_HIST_VALID_PLLC 063F[1] —
there is enough historical frequency data collected for
valid holdover value.
HOLD_HIST_VALID_PLLD 0740[1] —
Holdover Control and Settings
HOLD_HIST_LEN_PLLA 042E[4:0] 042E[4:0] Window Length time for historical average frequency
HOLD_HIST_LEN_PLLB 052E[4:0] 052E[4:0]
used in Holdover mode. Window Length in seconds (s):
Window Length = ((2
LEN
) – 1)*268nsec
HOLD_HIST_LEN_PLLC 062E[4:0] —
HOLD_HIST_LEN_PLLD 072F[4:0] —
HOLD_HIST_DELAY_PLLA 042F[4:0] 042F[4:0] Delay Time to ignore data for historical average frequen-
HOLD_HIST_DELAY_PLLB 052F[4:0] 052F[4:0]
cy in Holdover mode. Delay Time in seconds (s): Delay
Time = (2
DELAY
) x268nsec
HOLD_HIST_DELAY_PLLC 062F[4:0] —
HOLD_HIST_DELAY_PLLD 0730[4:0] —
FORCE_HOLD_PLLA 0435[0] 0435[0] These bits allow forcing any of the DSPLLs into hold-
FORCE_HOLD_PLLB 0535[0] 0535[0]
over
FORCE_HOLD_PLLC 0635[0] —
FORCE_HOLD_PLLD 0736[0] —
HOLD_EXIT_BW_SEL1_PLLA 042C[4] 042C[4] Selects the exit from holdover bandwidth. Options are:
HOLD_EXIT_BW_SEL1_PLLB 052C[4] 052C[4]
0: Exit of holdover using the fastlock bandwidth
HOLD_EXIT_BW_SEL1_PLLC 062C[4] —
1: Exit of holdover using the DSPLL loop bandwidth
HOLD_EXIT_BW_SEL1_PLLD 072D[4] —
HOLD_EXIT_BW_SEL0_PLLA 049B[6] 049B[6]
HOLD_EXIT_BW_SEL0_PLLB 059B[6] 059B[6]
HOLD_EXIT_BW_SEL0_PLLC 069B[6] —
HOLD_EXIT_BW_SEL0_PLLD 079B[6] —
silabs.com | Building a more connected world. Rev. 1.3 | 15
Page 16
Si5347, Si5346 Revision D Reference Manual
Modes of Operation
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
HOLD_RAMP_EN_PLLA 042C[3] 042C[3] Must be set to 1 for normal operation.
HOLD_RAMP_EN_PLLB 052C[3] 052C[3]
HOLD_RAMP_EN_PLLC 062C[3] —
HOLD_RAMP_EN_PLLD 072D[3] —
silabs.com | Building a more connected world. Rev. 1.3 | 16
Page 17
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4. Clock Inputs
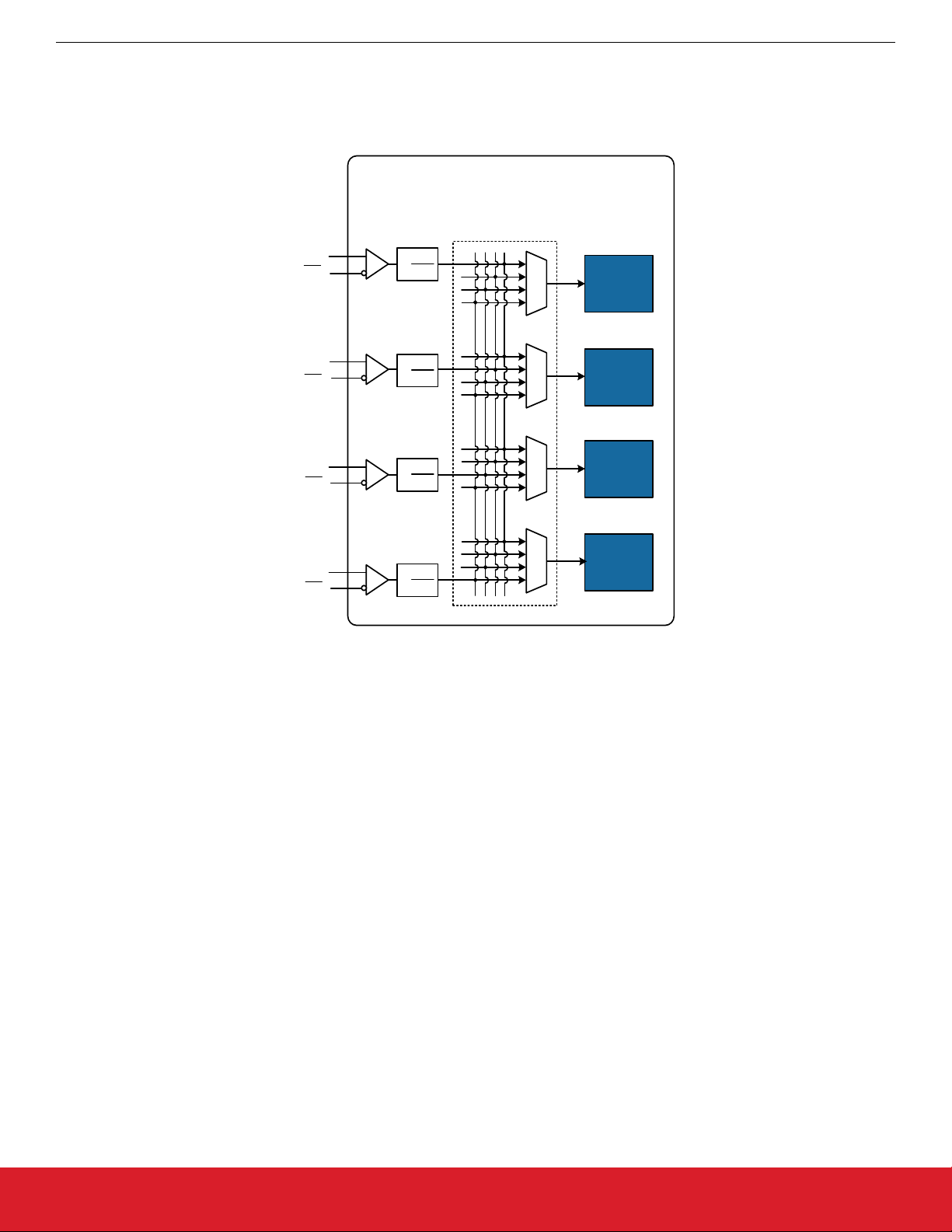
There are four inputs that can be used to synchronize any of the DSPLLs. The inputs accept both standard format inputs and low duty
cycle pulsed CMOS clocks. The input P dividers can be either fractional or integer. A crosspoint between the inputs and the DSPLLs
allows any of the inputs to connect to any of the DSPLLs as shown in Figure 4.1 DSPLL Input Selection Crosspoint on page 17.
Si5347
Input
Crosspoint
IN0
IN0
IN1
IN1
IN2
IN2
IN3
IN3
P
0n
÷
P
0d
P
1n
÷
P
1d
P
2n
÷
P
2d
P
3n
÷
P
3d
0
1
2
3
0
1
2
3
0
1
2
3
0
1
2
3
Figure 4.1. DSPLL Input Selection Crosspoint
DSPLL
A
DSPLL
B
DSPLL
C
DSPLL
D
silabs.com | Building a more connected world. Rev. 1.3 | 17
Page 18
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4.1 Input Source Selection
source selection for each of the DSPLLs can be made manually through register control or automatically using an internal state
Input
machine.
Table 4.1. Manual or Automatic Input Clock Selection Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
CLK_SWITCH_MODE_PLLA 0436[1:0] 0436[1:0] Selects manual or automatic switching mode for DSPLL
CLK_SWITCH_MODE_PLLB 0536[1:0] 0536[1:0]
CLK_SWITCH_MODE_PLLC 0636[1:0] —
CLK_SWITCH_MODE_PLLD 0737[1:0] —
In manual mode the input selection is made by writing to a register. If there is no clock signal on the selected input, the DSPLL will
automatically enter holdover mode if the holdover history is valid or Freerun if it is not.
A, B, C, D.
0: For manual
1: For automatic, non-revertive
2: For automatic, revertive
3: Reserved
Table 4.2. Manual Input Select Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
IN_SEL_PLLA 042A[2:0] 042A[2:0] Selects the clock input used to synchronize DSPLL A, B,
IN_SEL_PLLB 052A[3:1] 052A[3:1]
IN_SEL_PLLC 062A[2:0] —
C, or D. Selections are: IN0, IN1, IN2, IN3, corresponding to the values 0, 1, 2, and 3. Selections 4–7 are reserved.
IN_SEL_PLLD 072B[2:0] —
Automatic input switching is available in addition to the manual selection described previously. In automatic mode, the switching criteria
is
based on input clock qualification, input priority and the revertive option. The IN_SEL_PLLx register bits are not used in automatic
input switching. Also, only input clocks that are valid (i.e., with no active fault indicators) can be selected by the automatic clock switching. If there are no valid input clocks available, the DSPLL will enter Holdover or Freerun mode. With Revertive switching enabled, the
highest priority input with a valid input clock is always selected. If an input with a higher priority becomes valid then an automatic switchover to that input will be initiated. With Non-revertive switching, the active input will always remain selected while it is valid. If it becomes
invalid, an automatic switchover to the highest priority valid input will be initiated.
Table 4.3. Automatic Input Select Control Registers
Setting Name Hex Address Function
Si5347 Si5346
IN(3,2,1,0)_PRIORITY_PLLA 0x0438–0x0439 0x0438–0x0439 Selects the automatic selection priority for [IN3, IN2,
IN(3,2,1,0)_PRIORITY_PLLB 0x0538–0x0539 0x0538–0x0539
IN(3,2,1,0)_PRIORITY_PLLC 0x0638–0x0639 —
IN1, IN0] for each DSPLL A, B, C, D. Selections are:
1st, 2nd, 3rd, 4th, or never select. Default is IN0=1st,
IN1=2nd, IN2=3rd, IN3=4th.
IN(3,2,1,0)_PRIORITY_PLLD 0x0739–0x073A —
IN(3,2,1,0)_LOS_MSK_PLLA 0x0437 0x0437 Determines if the LOS status for [IN3, IN2, IN1, IN0] is
IN(3,2,1,0)_LOS_MSK_PLLB 0x0537 0x0537
IN(3,2,1,0)_LOS_MSK_PLLC 0x0637 —
used in determining a valid clock for the automatic input
selection state machine for DSPLL A, B, C, D. Default is
LOS is enabled (un-masked).
IN(3,2,1,0)_LOS_MSK_PLLD 0x0738 —
silabs.com | Building a more connected world. Rev. 1.3 | 18
Page 19

Si5347, Si5346 Revision D Reference Manual
Clock Inputs
Setting Name Hex Address Function
Si5347 Si5346
IN(3,2,1,0)_OOF_MSK_PLLA 0x0437 0x0437 Determines if the OOF status for [IN3, IN2, IN1, IN0] is
IN(3,2,1,0)_OOF_MSK_PLLB 0x0537 0x0537
IN(3,2,1,0)_OOF_MSK_PLLC 0x0637 —
IN(3,2,1,0)_OOF_MSK_PLLD 0x0738 —
used in determining a valid clock for the automatic input
selection state machine for DSPLL A, B, C, D. Default is
OOF enabled (un-masked).
silabs.com | Building a more connected world. Rev. 1.3 | 19
Page 20
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
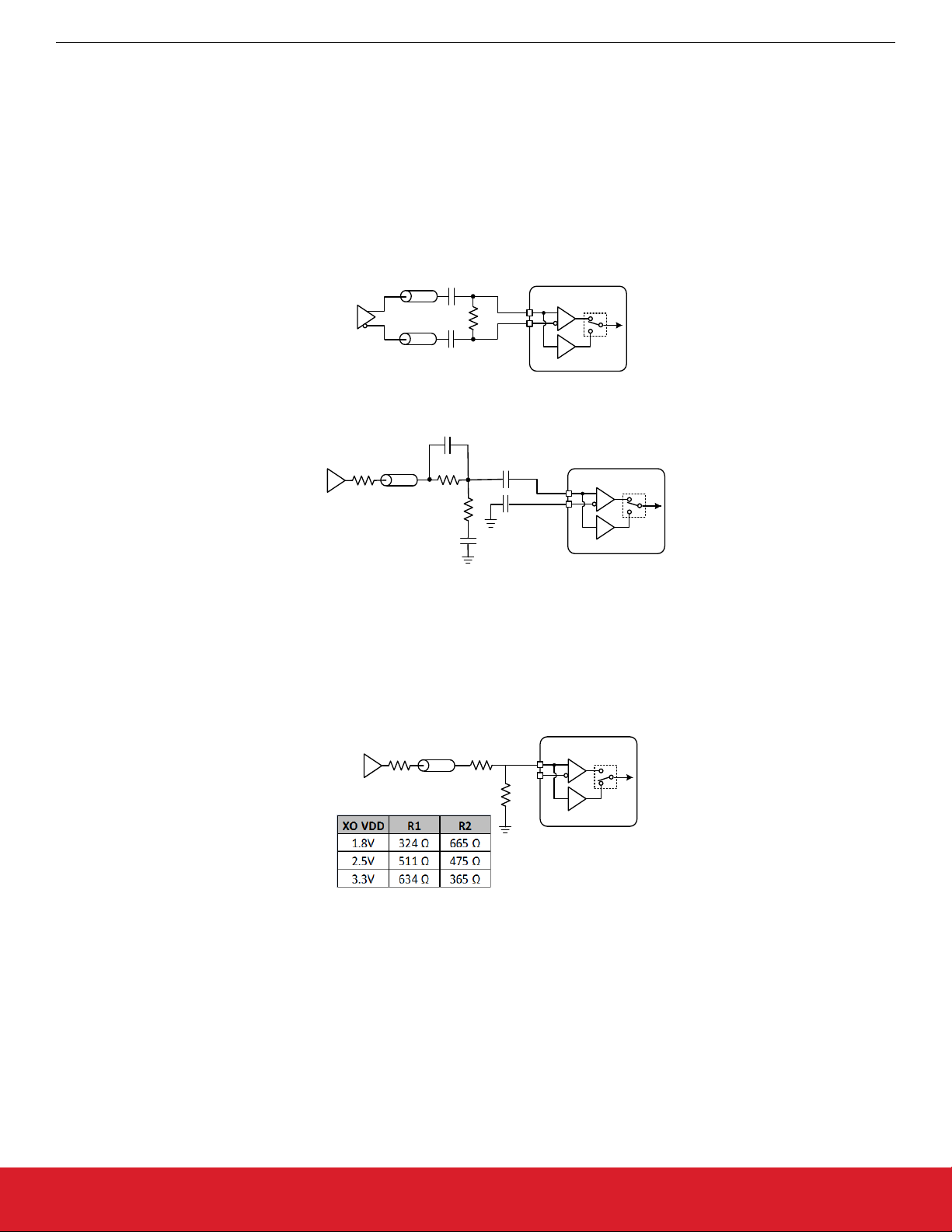
4.2 Types of Inputs
of the four different inputs IN0-IN3 can be configured as standard LVDS, LVPECL, HCL, CML, and single-ended LVCMOS for-
Each
mats, or as a low duty cycle pulsed CMOS format. The standard format inputs have a nominal 50% duty cycle, must be ac-coupled and
use the “Standard” Input Buffer selection as these pins are internally dc-biased to approximately 0.83 V. The pulsed CMOS input format
allows pulse-based inputs, such as frame-sync and other synchronization signals having a duty cycle much less than 50%. These
pulsed CMOS signals are dc-coupled and use the “Pulsed CMOS” Input Buffer selection. In all cases, the inputs should be terminated
near the device input pins as shown below in Figure 4.2 Input Termination for Standard and Pulsed CMOS Inputs on page 20. The
resistor divider values given below will work with up to 1 MHz pulsed inputs. In general, following the “Standard AC Coupled Single
Ended” arrangement shown below will give superior jitter performance.
Standard AC-Coupled Differential (IN0-IN3)
0.1uF *
50
100
LVDS, LVPECL, CML
* These caps should have < ~5 ohms capacitive reactance at the
50
0.1uF *
c
lock input frequency.
Standard AC-Coupled Single-Ended (IN0-IN3)
INx
INxb
Standard
Pulsed CMOS
RS
50
3.3/2.5/1.8V LVCMOS
RS matches the CMOS driver to a 50 ohm
transmission line (if
used)
0.1uF *
C1
R1
R
2
0.1uF
0.1uF
INx
INxb
Only when 3.3V LVCMOS driver is present, use R2 = 845 ohm and R1 = 267
ohm if needed to keep the signal at INx < 3.6 Vpp_se. Including C1 = 6 pf
may improve the output jitter due to faster input slew rate at INx. If
attenuation is not needed for Inx<3.6Vppse, make R1 = 0 ohm and omit C1,
R2 and the capacitor below R2. C1, R1, and R2 should be physically placed
as close as practicle to the device input pins. *This cap should have less than
~20 ohms of capacitive reactance at the clock input frequency
DC-Coupled Pulsed CMOS only for Frequencies
< 1MHz (IN0-IN3)
RS matches the CMOS driver to a 50 ohm
3.3V, 2.5V, 1.8V
transmission
LVCMOS
line (if used)
RS
R1
50
R
2
INx
INxb
Standard
Pulsed CMOS
Standard
Pulsed CMOS
Note: See Datasheet for input clock specifications
Figure 4.2. Input Termination for Standard and Pulsed CMOS Inputs
Floating clock inputs are noise sensitive. Add a cap to ground for all non-CMOS unused clock inputs. Input clock buffers are enabled by
setting
the IN_EN 0x0949[3:0] bits appropriately for IN3 through IN0. Unused clock inputs may be powered down and left unconnected
at the system level. For standard mode inputs, both input pins must be properly connected as shown in Figure 4.2 Input Termination for
Standard and Pulsed CMOS Inputs on page 20, including the “Standard AC Coupled Single Ended” case. In Pulsed CMOS mode, it is
not necessary to connect the inverting INx input pin. To place the input buffer into Pulsed CMOS mode, the corresponding bit must be
set in IN_PULSED_CMOS_EN 0x0949[7:4] for IN3 through IN0.
silabs.com | Building a more connected world. Rev. 1.3 | 20
Page 21
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
Table 4.4. Input Clock Control and Configuration Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
IN_EN 0x0949[3:0] 0x0949[3:0] Enable each of the input clock buffers for IN3 through
IN0.
IN_PULSED_CMOS_EN 0x0949[7:4] 0x0949[7:4] Enable Pulsed CMOS mode for each input IN3 through
IN0.
4.2.1 Hitless Input Switching with Phase Buildout
buildout, also referred to as hitless switching, prevents a phase change from propagating to the output when switching between
Phase
two clock inputs with the exact same frequency and a fixed phase relationship (i.e., they are phase/frequency locked, but with a nonzero phase difference). When phase buildout is enabled, the DSPLL absorbs the phase difference between the two input clocks during
a clock switch. When phase buildout is disabled, the phase difference between the two inputs is propagated to the output at a rate
determined by the DSPLL loop bandwidth. The phase buildout feature can be enabled on a per DPSLL basis. It supports a minimum
input frequency of 8 kHz, but if a fractional P input divider is used, the input frequency must be 300 MHz or higher in order to ensure
proper operation.
Table 4.5. DSPLL Phase Buildout Switching Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
HSW_EN_PLLA 0436[2] 0436[2] Phase Buildout Switching Enable/Disable for DSPLL A,
HSW_EN_PLLB 0536[2] 0536[2]
B, C, D. Phase Buildout Switching is enabled by default.
HSW_EN_PLLC 0636[2] —
HSW_EN_PLLD 0737[2] —
silabs.com | Building a more connected world. Rev. 1.3 | 21
Page 22
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4.2.2 Ramped Input Switching
switching between input clocks that are not exactly the same frequency (i.e. are plesiochronous), ramped switching should be ena-
If
bled to ensure a smooth transition between the two inputs. In this situation, it is also advisable to enable phase buildout to minimize the
input-to-output clock skew after the clock switch ramp has completed.
When ramped clock switching is enabled, the Si5347/46 will very briefly go into holdover and then immediately exit from holdover. This
means that ramped switching will behave the same as an exit from holdover. This is particularly important when switching between two
input clocks that are not the same frequency because the transition between the two frequencies will be smooth and linear. Ramped
switching should be turned off when switching between input clocks that are always frequency locked (i.e. are the same exact frequency). Because ramped switching avoids frequency transients and overshoot when switching between clocks that are not the same frequency, CBPro defaults to ramped clock switching. The same ramp rate settings are used for both exit from holdover and clock switching. For more information on ramped exit from holdover including the ramp rate, see section 3.5 Holdover Mode.
Table 4.6. Ramped Input Switching Control Registers
Setting Name Hex Address [Bit Field] Function
RAMP_SWITCH_EN_PLLA 0x04A6[3] Enable frequency ramping on an input switch
RAMP_SWITCH_EN_PLLB 0x05A6[3]
RAMP_SWITCH_EN_PLLC 0x06A6[3]
RAMP_SWITCH_EN_PLLD 0x07A6[3]
HSW_MODE_PLLA 0x043A[1:0] Input switching mode select
HSW_MODE_PLLB 0x053A[1:0]
HSW_MODE_PLLC 0x063A[1:0]
HSW_MODE_PLLD 0x073A[1:0]
4.2.3 Hitless Switching, LOL (loss of lock) and Fastlock
When
doing a clock switch between clock inputs that are frequency locked, LOL might momentarily be asserted. If so programmed, the
assertion of LOL will invoke Fastlock. Because Fastlock temporarily increases the loop BW by asynchronously inserting new filter parameters into the DSPLL’s closed loop, there may be transients at the clock outputs when Fastlock is either entered or exited. For this
reason, it is suggested that automatic entry into Fastlock be disabled by writing a zero to FASTLOCK_AUTO_EN at 0x52B[0] whenever
a clock switch might occur. For more details on hitless switching please refer to AN1057: Hitless Switching using Si534x/8x Devices.
4.2.4 External Clock Switching
External clock switches should be avoided because the Si5347/6 has no way of knowing when a clock switch will or has occurred. Because of this, neither the phase buildout engine or the ramp logic can be used. If expansion beyond the four clock inputs is an important
issue, please see AN1111: Si534x/8x Input Clock Expander which describes how an external FPGA can be used for this purpose.
silabs.com | Building a more connected world. Rev. 1.3 | 22
Page 23
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
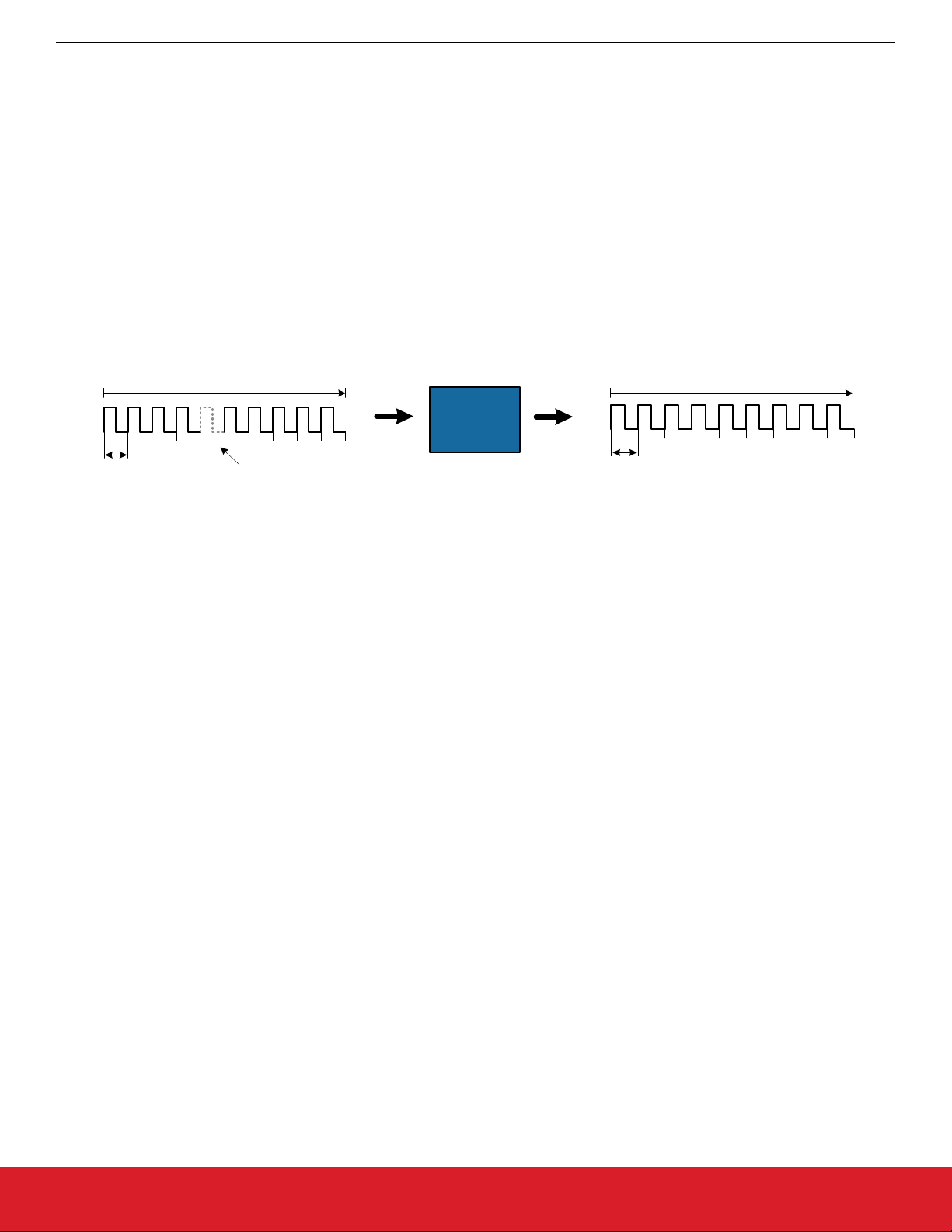
4.2.5 Synchronizing to Gapped Input Clocks
DSPLL supports locking to a gapped input clock with missing clock edges. The purpose of gapped clocking is to modulate the
The
frequency of a periodic clock by selectively removing some of its edges. Gapping a clock significantly increases its jitter so a phaselocked loop with high jitter tolerance and low loop bandwidth is required to produce a low-jitter, periodic clock. The resulting output will
be a periodic non-gapped clock with an average frequency of the input with its missing cycles. For example, an input clock of 100 MHz
with one cycle removed every 10 cycles will result in a 90 MHz periodic non-gapped output clock. A valid gapped clock input must have
a minimum frequency of 10 MHz with a maximum of 2 missing cycles out of every 8.
When properly configured, locking to a gapped clock will not trigger the LOS, OOF, and LOL fault monitors. Clock switching between
gapped clocks may violate the hitless switching specification for a maximum phase transient, when the switch occurs during a gap in
either input clocks. Figure 4.3 Gapped Input Clock Use on page 23 shows a 100 MHz clock with one cycle removed every 10 cycles
that results in a 90 MHz periodic non-gapped output clock.
Gapped Input Clock Periodic Output Clock
100 MHz clock
1 missing period
every 10
100 ns 100 ns
90 MHz non-gapped clock
DSPLL
1 2 3 4 5 6 7 8 9 10
10 ns
Period Removed
1 2 3 4 5 6 7 8 9
11.11111... ns
Figure 4.3. Gapped Input Clock Use
silabs.com | Building a more connected world. Rev. 1.3 | 23
Page 24
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
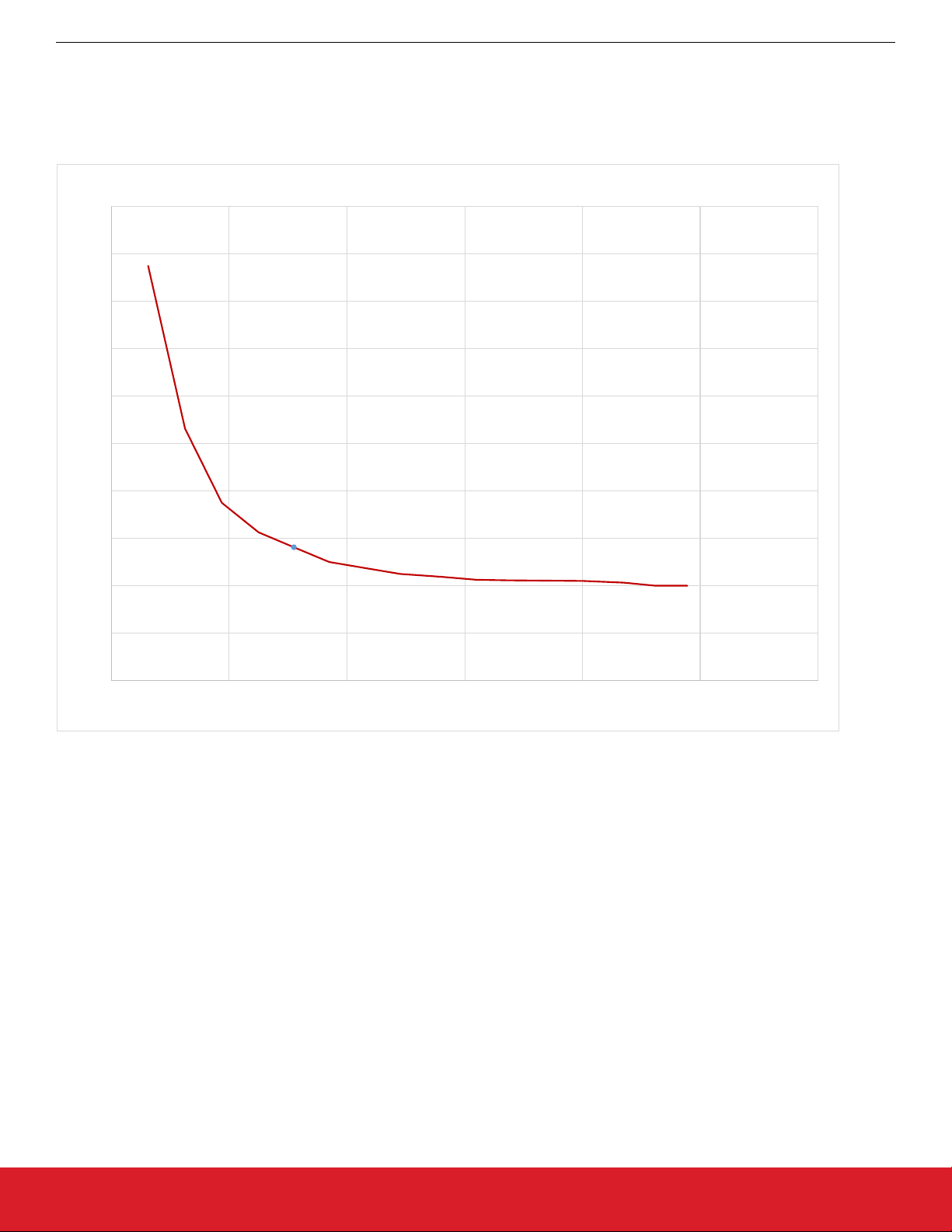
4.2.6 Rise Time Considerations
is well known that slow rise time signals with low slew rates are a cause of increased jitter. In spite of the fact that the low loop BW of
It
the Si5347/46 will attenuate a good portion of the jitter that is associated with a slow rise time clock input, if the slew rate is low enough,
the output jitter will increase. The following figure shows the effect of a low slew rate on RMS jitter for a differential clock input. The
figure shows the relative increase in the amount of RMS jitter due to slow rise time and is not intended to show absolute jitter values.
IN_X Slew Rate in Differential Mode
5
4.5
4
3.5
3
2.5
Relateive Jitter
2
1.5
J
TYP
1
0.5
0
0 100 200 300 400 500 600
Input Slew (V/us)
Figure 4.4. Effect of Low Slew Rate on RMS Jitter
silabs.com | Building a more connected world. Rev. 1.3 | 24
Page 25
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
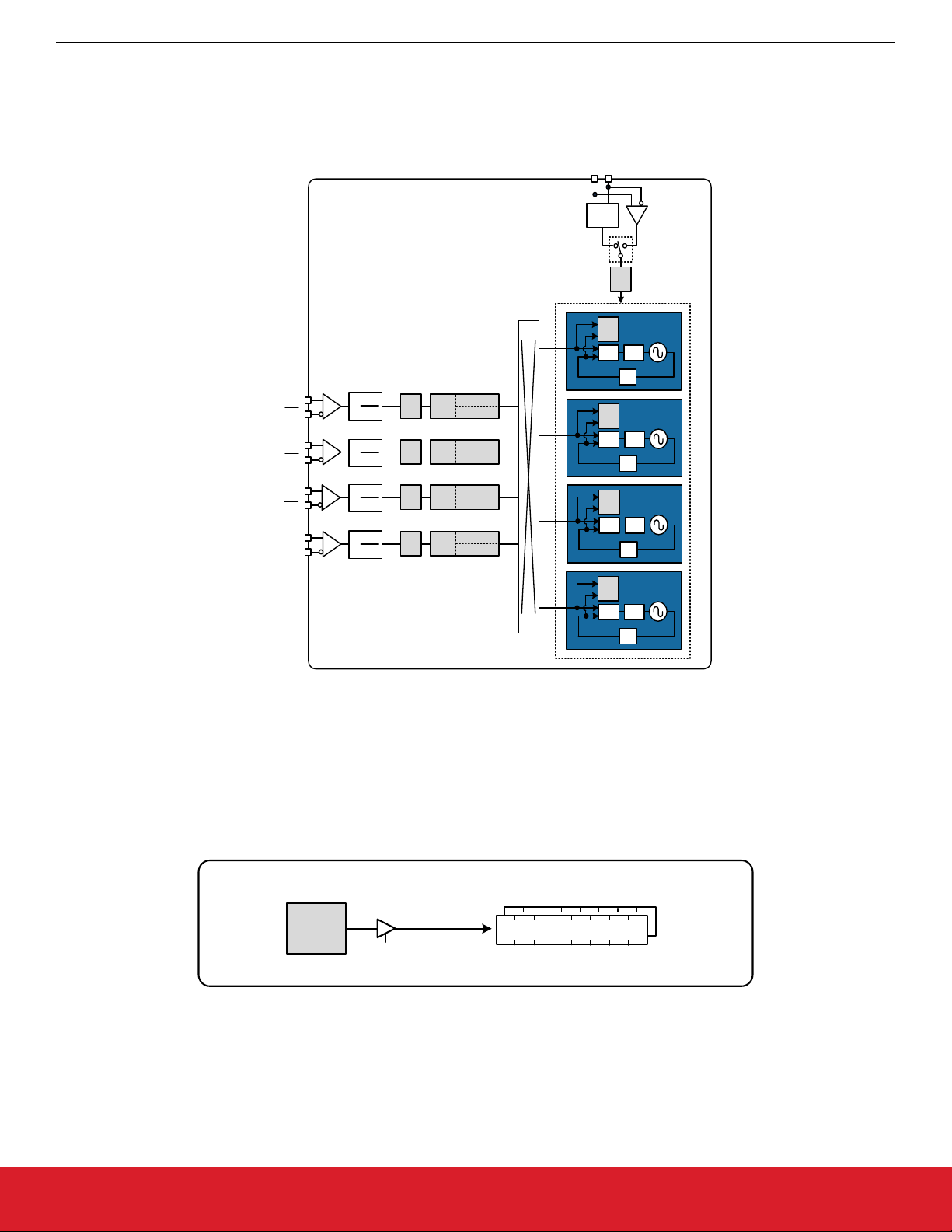
4.3 Fault Monitoring
four input clocks (IN0, IN1, IN2, IN3) are monitored for loss of signal (LOS) and out-of-frequency (OOF) as shown in Figure 4.5 Fault
All
Monitors on page 25. The reference at the XA/XB pins is also monitored for LOS since it provides a critical reference clock for the
DSPLLs. Each of the DSPLLs also has a Loss Of Lock (LOL) indicator which is asserted when synchronization is lost with their selected input clock.
XA
XB
Si5347
OSC
LOS
DSPLL A
LOL
PD
LPF
÷M
IN0
IN0
IN1
IN1
P
0n
÷
÷
LOS
P
0d
P
1n
LOS
P
1d
OOF
OOF
Precision
Fast
Precision
Fast
LOL
PD
DSPLL B
LPF
÷M
IN2
IN2
IN3
IN3
P
2n
÷
÷
LOS
P
2d
P
3n
LOS
P
3d
OOF
OOF
Precision
Fast
Precision
Fast
LOL
PD
LOL
PD
DSPLL C
LPF
÷M
DSPLL D
LPF
÷M
Figure 4.5. Fault Monitors
4.3.1 Input Loss of Signal (LOS) Detection
The
loss of signal monitor measures the period of each input clock cycle to detect phase irregularities or missing clock edges. Each of
the input LOS circuits has its own programmable sensitivity which allows ignoring missing edges or intermittent errors. Loss of signal
sensitivity is configurable using the ClockBuilder Pro utility. The LOS status for each of the monitors is accessible by reading a status
register. The live LOS register always displays the current LOS state and a sticky register, when set, always stays asserted until
cleared.
Monitor
LOS
en
Live
LOS
LOS
Sticky
Figure 4.6. LOS Status Indicator
silabs.com | Building a more connected world. Rev. 1.3 | 25
Page 26
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4.3.2 XA/XB LOS Detection
LOS monitor is available to ensure that the external crystal or reference clock is valid. By default the output clocks are disabled when
A
XAXB_LOS is detected. This feature can be disabled such that the device will continue to produce output clocks when XAXB_LOS is
detected.
Table 4.7. LOS Status Monitor Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
LOS Status Indicators
LOS(3,2,1,0) 000D[3:0] 000D[3:0] LOS status monitor for IN3, IN2, IN1, IN0. Indicates if a
valid clock is detected or if a LOS condition is present.
LOSXAXB 000C[1] 000C[1] LOS status monitor for the XTAL or REFCLK at the
XA/XB pins.
LOS(3,2,1,0)_FLG 0012[3:0] 0012[3:0] LOS status monitor sticky bits for IN3, IN2, IN1, IN0.
Sticky bits will remain asserted when an LOS event occurs until they are cleared. Writing a zero to a sticky bit
will clear it.
LOSXAXB_FLG 0011[1] 0011[1] LOS status monitor sticky bits for XAXB. Sticky bits will
remain asserted when an LOS event occurs until
cleared. Writing a zero to a sticky bit will clear it.
LOS Fault Monitor Controls and Settings
LOS(3,2,1,0)_EN 002C[3:0] 002C[3:0] LOS monitor enable for IN3, IN2, IN1, IN0. Allows disa-
bling the monitor if unused.
LOS(3,2,1,0)_TRIG_THR 002E[7:0] -
0035[7:0]
LOS(3,2,1,0)_CLR_THR 0036[7:0] -
003D[7:0]
002E[7:0] -
0035[7:0]
0036[7:0] -
003D[7:0]
Sets the LOS trigger threshold and clear sensitivity for
IN3, IN2, IN1, IN0. These 16-bit values are determined
with the ClockBuilder Pro utility.
LOS(3,2,1,0)_VAL_TIME 002D[7:0] 002D[7:0] LOS clear validation time for IN3, IN2, IN1, IN0. This
sets the time that an input must have a valid clock before the LOS condition is cleared. Settings of 2 ms, 100
ms, 200 ms, and 1 s are available.
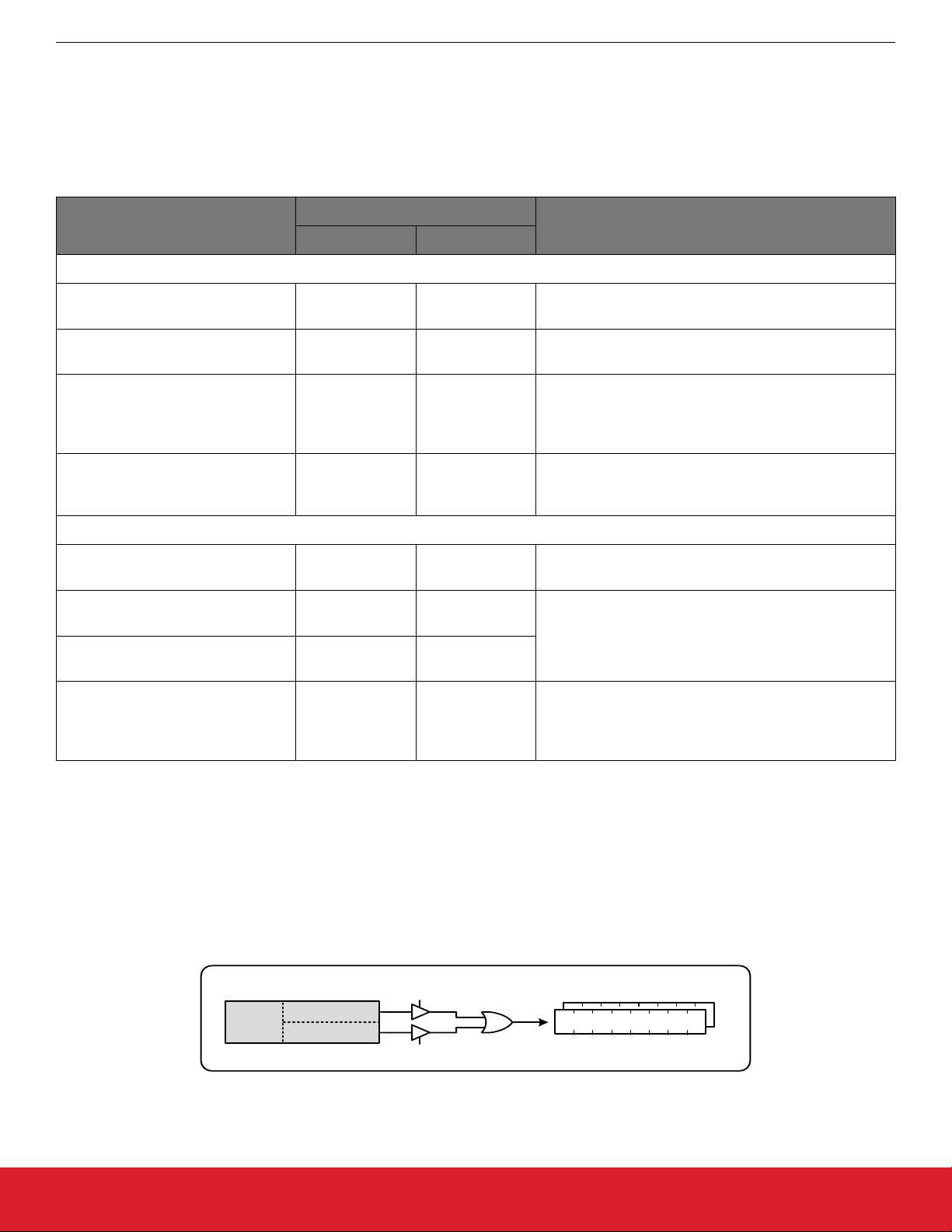
4.3.3 OOF Detection
Each
input clock is monitored for frequency accuracy with respect to a OOF reference which it considers as its “0 ppm” reference. This
OOF reference can be selected as either:
• XA/XB pins
• Any input clock (IN0, IN1, IN2, IN3)
The final OOF status is determined by the combination of both a precise OOF monitor and a fast OOF monitor as shown in Figure
4.7 OOF Status Indicator on page 26. An option to disable either monitor is also available. The live OOF register always displays the
current OOF state and its sticky register bit stays asserted until cleared.
Sticky
OOF
Monitor
Precision
Fast
en
en
Live
LOS
OOF
Figure 4.7. OOF Status Indicator
silabs.com | Building a more connected world. Rev. 1.3 | 26
Page 27
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
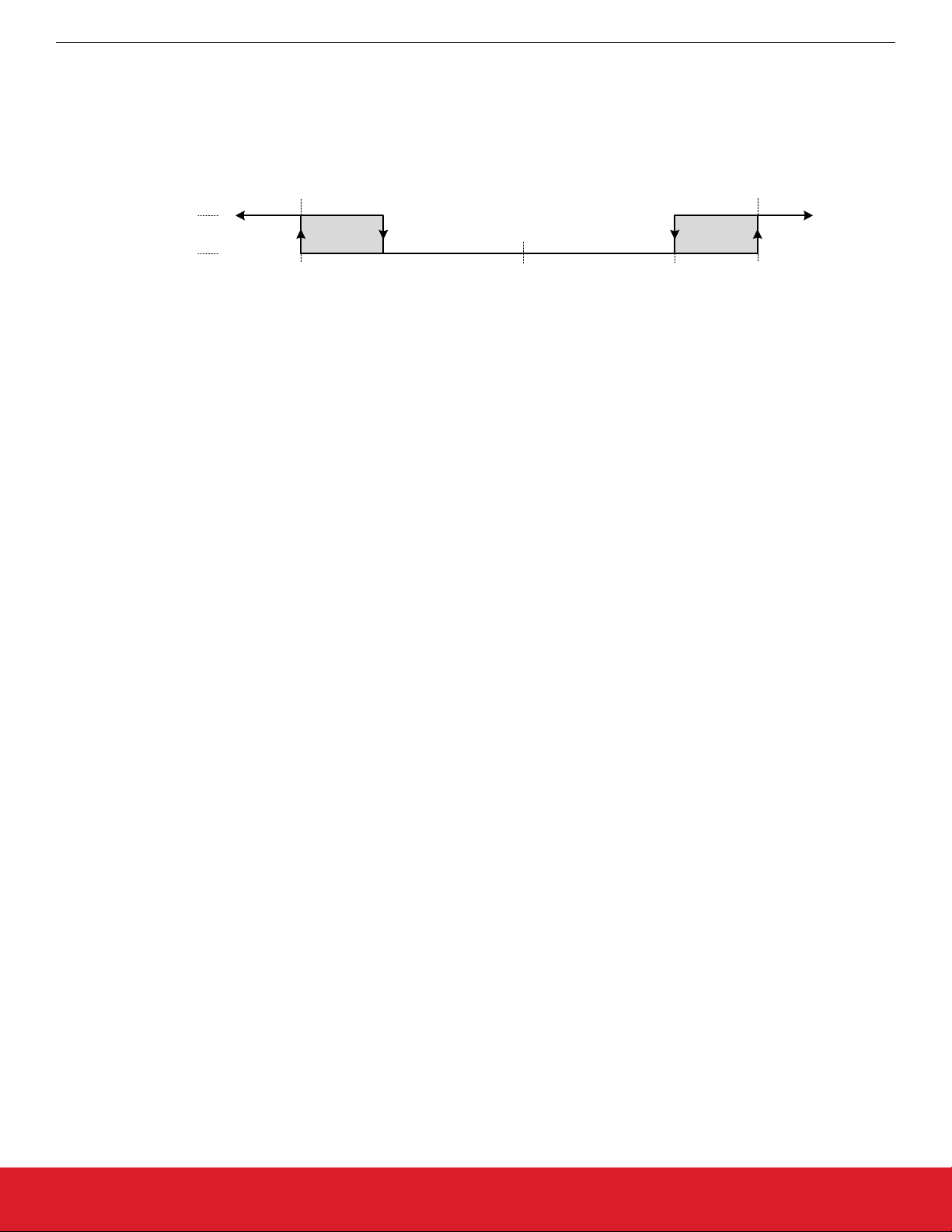
4.3.3.1 Precision OOF Monitor
precision OOF monitor circuit measures the frequency of all input clocks to within ±0.0625 ppm accuracy with respect to the selec-
The
ted OOF frequency reference. A valid input clock frequency is one that remains within the register-programmable OOF frequency range
of from ±0.0625 ppm to ±512 ppm in steps of 1/16 ppm. A configurable amount of hysteresis is also available to prevent the OOF status
from toggling at the failure boundary. An example is shown in the figure below. In this case, the OOF monitor is configured with a valid
frequency range of ±6 ppm and with 2 ppm of hysteresis. An option to use one of the input pins (IN0-IN3) as the 0 ppm OOF reference
instead of the XAXB pins is available. These options are all register configurable.
OOF Declared
OOF Cleared
Hysteresis Hysteresis
-6 ppm
(Set)
-4 ppm
(Clear
)
OOF
0 ppm
+4 ppm
(Clear)
+6 ppm
Reference
Figure 4.8. Example of Precise OOF Monitor Assertion and Deassertion Triggers
(Set)
f
IN
silabs.com | Building a more connected world. Rev. 1.3 | 27
Page 28
4.3.3.2 Fast OOF Monitor
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
Because
the precision OOF monitor needs to provide 1/16 ppm of frequency measurement accuracy, it must measure the monitored
input clock frequencies over a relatively long period of time. This may be too slow to detect an input clock that is quickly ramping in
frequency. An additional level of OOF monitoring called the Fast OOF monitor runs in parallel with the precision OOF monitors to quickly detect a ramping input frequency. The Fast OOF responds more quickly and has larger thresholds.
Table 4.8. OOF Status Monitor Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
OOF Status Indicators
OOF(3,2,1,0) 000D[7:4] 000D[7:4] OOF status monitor for IN3, IN2, IN1, IN0. Indicates if a
valid clock is detected or if a OOF condition is detected.
OOF(3,2,1,0)_FLG 0012[7:4] 0012[7:4] OOF status monitor sticky bits for IN3, IN2, IN1, IN0.
Sticky bits will remain asserted when an OOF event occurs until cleared. Writing a zero to a sticky bit will clear
it.
OOF(3,2,1,0)_INTR_MSK 0x0018[7:4] 0x0018[7:4] Marks OOF from generating INTRb interrupt for IN3-IN0.
0: Allow OOF interrupt (default)
1: Mask (ignore) OOF for interrupt
OOF Monitor Control and Settings
OOF_REF_SEL 0040[2:0] 0040[2:0] This selects the clock that the OOF monitors use as
their “0 ppm” reference. Selections are: XA/XB, IN0,
IN1, IN2, IN3.
OOF(3,2,1,0)_EN 003F[3:0] 003F[3:0] This allows to enable/disable the precision OOF monitor
for IN3, IN2, IN1, IN0.
FAST_OOF(3,2,1,0)_EN 003F[7:4] 003F[7:4] To enable/disable the fast OOF monitor for IN3, IN2,
IN1, IN0.
OOF(3,2,1,0)_SET_THR 0046[7:0] -
0049[7:0]
0046[7:0] -
0049[7:0]
Determines the OOF alarm set threshold for IN3, IN2,
IN1, IN0. Range is from ±2 ppm to ±500 ppm in steps of
2 ppm.
OOF(3,2,1,0)_CLR_THR 004A[7:0] -
004D[7:0]
FAST_OOF(3,2,1,0)_SET_THR 0x0051[7:0] -
0x0054[7:0]
FAST_OOF(3,2,1,0)_
CLR_THR
0x0055 [7:0] -
0x0058[7:0]
004A[7:0] -
004D[7:0]
0x0051[7:0] -
0x0054[7:0]
0x0055 [7:0] -
0x0058[7:0]
Determines the OOF alarm clear threshold for INx.
Range is from ±2 ppm to ±500 ppm in steps of 2 ppm.
Determines the fast OOF alarm set threshold for IN3,
IN2, IN1, IN0.
Determines the fast OOF alarm clear threshold for IN3,
IN2, IN1, IN0.
silabs.com | Building a more connected world. Rev. 1.3 | 28
Page 29
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4.3.4 LOL Detection
is a loss of lock (LOL) monitor for each of the DSPLLs. The LOL monitor asserts a LOL register bit when a DSPLL has lost
There
synchronization with its selected input clock. There is also a dedicated loss of lock pin that reflects the loss of lock condition for each of
the DSPLLs (LOL_A, LOL_B, LOL_C, LOL_D). The LOL monitor functions by measuring the frequency difference between the input
and feedback clocks at the phase detector. There are two LOL frequency monitors, one that sets the LOL indicator (LOL Set) and another that clears the indicator (LOL Clear).
A block diagram of the LOL monitor is shown in Figure 4.9 LOL Status Indicators on page 29. The live LOL register always displays
the current LOL state and a sticky register always stays asserted until cleared. The LOL pin reflects the current state of the LOL monitor.
Si5347
f
IN
LOL Monitor
LOL
Clear
LOL
Set
PD
LPF
÷M
t
DSPLL A
LOS
LOL Status Registers
Live
DSPLL A
Sticky
DSPLL D
DSPLL C
DSPLL B
LOL_D
LOL_C
LOL_B
LOL_A
Figure 4.9. LOL Status Indicators
Each of the LOL frequency monitors has adjustable sensitivity which is register configurable from 0.1 ppm to 10000 ppm. Having two
separate
frequency monitors allows for hysteresis to help prevent chattering of LOL status. An example configuration of the LOL set
and clear thresholds is shown in Figure 4.10 LOL Set and Clear Thresholds on page 29.
Clear LOL
Threshold
Set LOL
Threshold
Lock Acquisition
LOL
Hysteresis
LOCKED
0
Lost Lock
10,0000.1 1
Phase Detector Frequency Difference (ppm)
Figure 4.10. LOL Set and Clear Thresholds
An optional timer is available to delay clearing of the LOL indicator to allow additional time for the DSPLL to completely lock to the input
The timer is also useful to prevent the LOL indicator from toggling or chattering as the DSPLL completes lock acquisition. The
clock.
configurable delay value depends on frequency configuration and loop bandwidth of the DSPLL and is automatically calculated using
the ClockBuilder Pro utility.
It is important to know that, in addition to being status bits, LOL optionally enables Fastlock.
silabs.com | Building a more connected world. Rev. 1.3 | 29
Page 30
Si5347, Si5346 Revision D Reference Manual
Clock Inputs
Table 4.9. LOL Status Monitor Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
LOL Status Indicators
LOL_PLL(D,C,B,A) 000E[3:0] 000E[1:0] Status bit that indicates if DSPLL A, B, C, or D is locked
to an input clock.
LOL_FLG_PLL(D,C,B,A) 0013[3:0] 0013[1:0] Sticky bits for LOL_[D,C,B,A]_STATUS register. Writing
a zero to a sticky bit will clear it.
LOL Fault Monitor Controls and Settings
LOL_SET_THR_PLL(D,C,B,A) 009E[7:0] -
009F[7:0]
LOL_CLR_THR_PLL(D,C,B,A) 00A0[7:0] -
00A1[7:0]
LOL_CLR_DELAY_DIV256_PLL(D,C,B,A)
00A4[7:0] -
00B6[7:0]
009E[7:0] Configures the loss of lock set thresholds for DSPLL A,
B, C, D.
00A0[7:0] Configures the loss of lock clear thresholds for DSPLL
A, B, C, D.
00A4[7:0] -
00AC[7:0]
This is a 29-bit register that configures the delay value
for the LOL Clear delay. Selectable from 4 ns to over
500 seconds. This value depends on the DSPLL frequency configuration and loop bandwidth. It is calculated using the ClockBuilder Pro utility
LOL_TIMER_EN_PLL(D,C,B,A) 00A2[3:0] 00A2[1:0] Allows bypassing the LOL Clear timer for DSPLL A, B,
C, D. 0- bypassed, 1-enabled
The settings in Table
4.9 LOL Status Monitor Registers on page 30 are handled by ClockBuilder Pro. Manual settings should be avoi-
ded.
silabs.com | Building a more connected world. Rev. 1.3 | 30
Page 31

Si5347, Si5346 Revision D Reference Manual
Clock Inputs
4.3.5 Interrupt Pin (INTR)
interrupt pin (INTR) indicates a change in state with any of the status indicators for any of the DSPLLs. All status indicators are
An
maskable to prevent assertion of the interrupt pin. The state of the INTR pin is reset by clearing the sticky status registers.
Table 4.10. Interrupt Mask Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
LOS(3, 2, 1, 0)_INTR_MSK 0018[3:0] 0018[1:0] Prevents IN3, IN2, IN1, IN0 LOS from asserting the
INTR pin
OOF(3, 2, 1, 0)_INTR_MSK 0018[7:4] 0018[5:4] Prevents IN3, IN2, IN1, IN0 OOF from asserting the
INTR pin
LOSXAXB_INTR_MSK 0017[1] 0017[1] Prevents XAXB LOS from asserting the INTR pin
LOL_INTR_MSK_PLL(D,C,B,A) 0019[3:0] 0019[1:0] Prevents DSPLL D, C, B, A LOL from asserting the
INTR pin
HOLD_INTR_MSK_PLL(D,C,B,A) 0019[7:4] 0019[5:4] Prevents DSPLL D, C, B, A HOLD from asserting the
INTR pin
LOS_FLG[3-0]
OOF_FLG[3-0]
LOL_FLG_PLL[D:A]
HOLD_FLG_PLL[D:A]
CAL_FLG_PLL[D:A]
SYSINCAL_FLG
LOSXAXB_FLG
LOSREF_FLG
XAXB_ERR_FLG
SMBUS_TIMEOUT_FLG
LOS[3-0]_INTR_MSK
OOF[3-0]_INTR_MSK
LOL_INTR_MSK_PLL[D:A]
HOLD_INTR_MSK_PLL[D:A]
CAL_INTR_MSK_PLL[D:A]
SYSINCAL_INTR_MSK
LOSXAXB_INTR_MSK
LOSREF_INTR_MSK
XAXB_ERR_INTR_MSK
SMB_TMOUT_INTR_MSK
INTR
Figure 4.11. Interrupt Triggers and Masks
The _FLG bits are “sticky” versions of the alarm bits and will stay high until cleared. A _FLG bit can be cleared by writing a zero to the
_FLG bit. When a _FLG bit is high and its corresponding alarm bit is low, the _FLG bit can be cleared.
run time, the source of an interrupt can be determined by reading the _FLG register values and logically ANDing them with the
During
corresponding _MSK register bits (after inverting the _MSK bit values). If the result is a logic one, then the _FLG bit will cause an interrupt.
For example, if LOS_FLG[0] is high and LOS_INTR_MSK[0] is low, then the INTR pin will be active (low) and cause an interrupt. If
LOS[0] is zero and LOS_MSK[0] is one, writing a zero to LOS_MSK[0] will clear the interrupt (assuming that there are no other interrupt
sources). If LOS[0] is high, then LOS_FLG[0] and the interrupt cannot be cleared.
silabs.com | Building a more connected world. Rev. 1.3 | 31
Page 32

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5. Output Clocks
5.1 Outputs
The Si5347 supports up to eight differential output drivers and the Si5346 supports four. Each driver has a configurable voltage amplitude and common mode voltage covering a wide variety of differential signal formats including LVPECL, LVDS, HCSL, with CML-compatible amplitudes. In addition to supporting differential signals, any of the outputs can be configured as dual single-ended LVCMOS
(3.3 V, 2.5 V, or 1.8 V) providing up to 16 single-ended outputs, or any combination of differential and single-ended outputs.
5.1.1 Output Crosspoint
A crosspoint allows any of the output drivers to connect with any of the DSPLLs as shown in Figure 5.1 DSPLL to Output Driver Cross-
point on page 32. The crosspoint configuration is programmable and can be stored in NVM so that the desired output configuration is
ready at power up.
Si5347
DSPLL
A
DSPLL
B
DSPLL
C
DSPLL
D
Output
Crosspoint
A
B
÷R
÷R
÷R
÷R
÷R
÷R
÷R
÷R
0
1
2
3
4
5
6
7
C
D
A
B
C
D
A
B
C
D
A
B
C
D
A
B
C
D
A
B
C
D
A
B
C
D
A
B
C
D
VDDO0
OUT0
OUT0
VDDO1
OUT1
OUT1
VDDO2
OUT2
OUT2
VDDO3
OUT3
OUT3
VDDO4
OUT4
OUT4
VDDO5
OUT5
OUT5
VDDO6
OUT6
OUT6
VDDO7
OUT7
OUT7
Figure 5.1. DSPLL to Output Driver Crosspoint
5.1.2 Output Divider (R) Synchronization
the output R dividers are reset to a known state during the power-up initialization period. This ensures consistent and repeatable
All
phase alignment. Resetting the device using the RST pin or asserting the hard reset bit 0x001E[1] will give the same result. Soft reset
does not affect output alignment.
silabs.com | Building a more connected world. Rev. 1.3 | 32
Page 33

5.2 Performance Guidelines for Outputs
Si5347, Si5346 Revision D Reference Manual
Output Clocks
Whenever
a number of high frequency, fast rise time, large amplitude signals are all close to one another, there will be some amount of
crosstalk. The jitter generation of the Si5347/46 is so low that crosstalk can become a significant portion of the final measured output
jitter. Some of the crosstalk will come from the Si5347/46, and some will be introduced by the PCB. It is difficult (and possibly irrelevant)
to allocate the jitter portions between these two sources since the Si5347/46 must be attached to a board in order to measure jitter.
For extra fine tuning and optimization in addition to following the usual PCB layout guidelines, crosstalk can be minimized by modifying
the arrangements of different output clocks. For example, consider the following lineup of output clocks in Table 5.1 Example of Output
Clock Placement on page 33.
Table 5.1. Example of Output Clock Placement
Output Not Recommended (Frequency MHz) Recommended (Frequency MHz)
0 155.52 155.52
1 156.25 155.52
2 155.52 622.08
3 156.25 Not used
4 622.08 Not used
5 625 156.25
6 Not used 156.25
7 Not used 625
Using this example, a few guidelines are illustrated:
1. Avoid
adjacent frequency values that are close. For example, a 155.52 MHz clock should not be placed next to a 156.25 MHz
clock. If the jitter integration bandwidth goes up to 20 MHz then keep adjacent frequencies at least 20 MHz apart.
2. Adjacent frequency values that are integer multiples of one another are allowed, and these outputs should be grouped together
when possible. Noting that because 155.52 MHz x 4 = 622.08 MHz and 156.25 MHz x 4 = 625 MHz, it is okay to place each pair of
these frequency values close to one another.
3. Unused outputs can be used to separate clock outputs that might otherwise interfere with one another. In this case, see OUT3 and
OUT4.
If some outputs have tight jitter requirements while others are relatively loose, rearrange the clock outputs so that the critical outputs are
the least susceptible to crosstalk. These guidelines need to be followed by those applications that wish to achieve the highest possible
levels of jitter performance. Because CMOS outputs have large pk-pk swings, are single ended, and do not present a balanced load to
the VDDO supplies, CMOS outputs generate much more crosstalk than differential outputs. For this reason, CMOS outputs should be
avoided in jitter-sensitive applications. When CMOS clocks are unavoidable, even greater care must be taken with respect to the above
guidelines. For more information on these issues, see application note, "AN862: Optimizing Si534x Jitter Performance in Next Generation Internet Infrastructure Systems.”
The ClockBuilder Pro Clock Placement Wizard is an easy way to reduce crosstalk for a given frequency plan. This feature can be accessed on the “Define Output Frequencies” page of ClockBuilder Pro in the lower left hand corner of the GUI. It is recommended to use
this tool after each project frequency plan change.
silabs.com | Building a more connected world. Rev. 1.3 | 33
Page 34

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.2.1 Output Crosspoint and Signal Format Selection
differential output swing and common mode voltage are both fully programmable and compatible with a wide variety of signal for-
The
mats, including LVDS, LVPECL, HCSL, and CML. The differential formats can be either normal- or low-power mode. Low-power format
uses less power for the same amplitude but has the drawback of slower rise/fall times. See for register settings to implement variable
amplitude differential outputs. In addition to supporting differential signals, any of the outputs can be configured as LVCMOS (3.3, 2.5,
or 1.8 V) drivers providing up to 20 single-ended outputs or any combination of differential and single-ended outputs. Note also that
CMOS can create much more crosstalk than differential outputs, so extra care must be taken in their pin placement so that other clocks
that need the lowest jitter are not on nearby pins. With all outputs, see “AN862: Optimizing Si534x Jitter Performance in Next Generation Internet Infrastructure Systems” for additional information on frequency planning considerations.
Table 5.2. Output Crosspoint Selection Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_MUX_SEL
010B[2:0]
010B[2:0]
0115[2:0]
Selects the DSPLL that each of the outputs are
connected to. Options are DSPLL_A, DSPLL_B,
OUT1_MUX_SEL
OUT2_MUX_SEL
OUT3_MUX_SEL
OUT4_MUX_SEL
OUT5_MUX_SEL
OUT6_MUX_SEL
OUT7_MUX_SEL
0115[2:0]
011A[2:0]
011F[2:0]
0129[2:0]
012E[2:0]
0133[2:0]
013D[2:0]
011F[2:0]
0129[2:0]
012E[2:0]
—
—
—
—
011A[2:0]
0129[2:0]
012E[2:0]
—
—
—
—
DSPLL_C, or DSPLL_D.
Table 5.3. Output Signal Format Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_FORMAT
0109[2:0]
0109[2:0]
0113[2:0]
Selects the output signal format as differential or
LVCMOS.
OUT1_FORMAT
OUT2_FORMAT
OUT3_FORMAT
0113[2:0]
0118[2:0]
011D[2:0]
011D[2:0]
0127[2:0]
012C[2:0]
0118[2:0]
0127[2:0]
012C[2:0]
OUT4_FORMAT
OUT5_FORMAT
OUT6_FORMAT
OUT7_FORMAT
silabs.com | Building a more connected world. Rev. 1.3 | 34
0127[2:0]
012C[2:0]
0131[2:0]
013B[2:0]
—
—
—
—
—
—
—
—
Page 35

Si5347, Si5346 Revision D Reference Manual
5.2.2 Output Terminations
The differential output drivers support both ac coupled and dc coupled terminations as shown below.
Output Clocks
= 3.3V, 2.5V, 1.8V
LVDS: V
DDO
OUTx
OUTxb
50
100
50
AC Coupled LVDS/LVPECL
= 3.3V
DDO
, 2.5V, 1.8V
= 3.3V, 2.5V
DDO
OUTx
OUTxb
0.1uF*
50
100
50
0.1uF*
Internally
self-biased
LVDS: V
LVPECL: V
*All caps should have < 5 ohms capacitive reactance at the clock output frequency
= 3.3V
V
DDO
= 3.3V, 2.5V. 1.8V
V
DDO
For V
VDD
RX
3.3 V
2.5 V
1.8 V
AC Coupled CMLDC Coupled LVDS
, 2.5V
OUTx
OUTxb
AC Coupled HCSL
0.1uF*
OUTx
OUTxb
0.1uF*
= 0.35 V
CM
R1 Ω R2 Ω
442
332
243
56.2
59.0
63.4
VDD – 1.3V
0.1uF*
50
50
0.1uF*
R1
50
50
R2
5050
VDD
RX
R1
Standard
HCSL
R2
Receiver
Figure 5.2. Output Terminations for Differential Outputs
5.3 Differential Outputs
5.3.1 Differential Output Amplitude Controls
differential amplitude of each output can be controlled with the following registers. See for register settings for non-standard ampli-
The
tudes.
Table 5.4. Differential Output Voltage Amplitude (Swing) Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_AMPL
010A[6:4]
010A[6:4]
0114[6:4]
Sets the differential voltage swing (amplitude) for
the output drivers in both normal and low-power
OUT1_AMPL
OUT2_AMPL
OUT3_AMPL
OUT4_AMPL
OUT5_AMPL
0114[6:4]
0119[6:4]
011E[6:4]
0128[6:4]
012D[6:4]
011E[6:4]
0128[6:4]
012D[6:4]
—
—
0119[6:4]
0128[6:4]
012D[6:4]
—
—
modes. See Table 5.6
Recommended Settings
for Differential LVDS, LVPECL, HCSL, and CML
on page 37 for more information.
OUT6_AMPL
OUT7_AMPL
0132[6:4]
013C[6:4]
—
—
—
—
silabs.com | Building a more connected world. Rev. 1.3 | 35
Page 36

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.3.2 Differential Output Common Mode Voltage Selection
common mode voltage (VCM) for differential output normal and low-power modes is selectable depending on the supply voltage
The
provided at the output’s VDDO pin. See Table 5.6 Recommended Settings for Differential LVDS, LVPECL, HCSL, and CML on page
37. for recommended OUTx_CM settings for common signal formats. See for recommended OUTx_CM settings when using custom
output amplitude.
Table 5.5. Differential Output Common Mode Voltage Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_CM
OUT1_CM
OUT2_CM
OUT3_CM
OUT4_CM
OUT5_CM
OUT6_CM
OUT7_CM
010A[3:0]
0114[3:0]
0119[3:0]
011E[3:0]
0128[3:0]
012D[3:0]
0132[3:0]
013C[3:0]
010A[3:0]
011E[3:0]
0128[3:0]
012D[3:0]
—
—
—
—
0114[3:0]
0119[3:0]
0128[3:0]
012D[3:0]
—
—
—
—
Sets the common mode voltage for the differential output driver. See Table 5.6 Recommended
Settings for Differential LVDS, LVPECL, HCSL,
and CML
on page 37 for more information.
silabs.com | Building a more connected world. Rev. 1.3 | 36
Page 37

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.3.3 Recommended Settings for Differential LVPECL, LVDS, HCSL, and CML
Each differential output has four settings for control:
Normal or Low Power Format
1.
2. Amplitude (sometimes called Swing)
3. Common Mode Voltage
4. Stop High or Stop Low
The Normal mode setting includes an internal 100 Ω resistor between the OUTx pins. In Low Power mode, this resistor is removed,
resulting in a higher output impedance. The increased impedance creates larger amplitudes for the same power while reducing edge
rates that may increase jitter or phase noise. In either mode, the differential receiver must be properly terminated to the PCB trace impedance for good system signal integrity. Note that ClockBuilder Pro does not provide low-power mode settings. Contact Silicon Labs
Technical Support for assistance with low-power mode use.
Amplitude controls are as described in the previous section and also in more detail in . Common mode voltage selection is also described in more detail in Appendix A. The Stop High or Stop Low choice is described above.
Table 5.6. Recommended Settings for Differential LVDS, LVPECL, HCSL, and CML
Standard VDDOx Mode OUTx_FORMAT OUTx_CM OUTx_AMPL
(V) (dec) (dec) (dec)
LVPECL 3.3 Normal 1 11 6
LVPECL 2.5 Normal 1 11 6
LVPECL 3.3 Low-Power 2 11 3
LVPECL 2.5 Low-Power 2 11 3
LVDS 3.3 Normal 1 3 3
LVDS 2.5 Normal 1 11 3
Sub-LVDS1 1.8 Normal 1 13 3
LVDS 3.3 Low-Power 2 3 1
LVDS 2.5 Low-Power 2 11 1
Sub-LVDS1 1.8 Low-Power 2 13 1
HCSL2 3.3 Low-Power 2 11 3
HCSL2 2.5 Low-Power 2 11 3
HCSL2 1.8 Low-Power 2 13 3
1. The Sub-LVDS common mode voltage is not compliant with LVDS standards. Therefore, AC coupling the driver to an
LVDS receiver is highly recommended.
2.
Creates HCSL compatible signals, see HCSL receiver biasing network in Figure 16.
The output differential driver can also produce a wide range of CML compatible output amplitudes. See for additional information.
silabs.com | Building a more connected world. Rev. 1.3 | 37
Page 38

5.4 LVCMOS Outputs
5.4.1 LVCMOS Output Terminations
Si5347, Si5346 Revision D Reference Manual
Output Clocks
LVCMOS
outputs may be ac- or dc-coupled, as shown in Figure 5.2 Output Terminations for Differential Outputs on page 35. AC coupling is recommended for best jitter and phase noise performance. For dc-coupled LVCMOS, as shown again in Figure 5.3 LVCMOS
Output Terminations on page 38 below, series termination resistors are required in order to increase the total source resistance to
match the trace impedance of the circuit board.
DC Coupled LVCMOS
3.3V, 2.5V, 1.8V
= 3.3V
V
DDO
, 2.5V, 1.8V
OUTx
OUTx
Rs
50
50
Rs
Figure 5.3. LVCMOS Output Terminations
LVCMOS
silabs.com | Building a more connected world. Rev. 1.3 | 38
Page 39

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.4.2 LVCMOS Output Impedance And Drive Strength Selection
LVCMOS driver has a configurable output impedance to accommodate different trace impedances and drive strengths. A series
Each
source termination resistor (Rs) is recommended close to the output to match the selected output impedance to the trace impedance
(i.e., Rs = Trace Impedance – Zs). There are multiple programmable output impedance selections for each VDDO option as shown in
Table 5.7 LVCMOS Output Impedance and Drive Strength Selections on page 39. Generally, the lowest impedance for a given supply
voltage is preferable, since it will give the fastest edge rates.
Table 5.7. LVCMOS Output Impedance and Drive Strength Selections
VDDO OUTx_CMOS_DRV Source Impedance (Zs) Drive Strength (Iol/Ioh)
3.3 V 0x01 38 Ω 10 mA
0x02 30 Ω 12 mA
0x03* 22 Ω 17 mA
2.5 V 0x01 43 Ω 6 mA
0x02 35 Ω 8 mA
0x03* 24 Ω 11 mA
1.8 V 0x03* 31 Ω 5 mA
Note: Use of the lowest impedance setting is recommended for all supply voltages for best edge rates.
Table 5.8. LVCMOS Drive Strength Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_CMOS_DRV
0109[7:6]
0109[7:6]
0118[7:6]
LVCMOS output impedance. See Table
5.7 LVCMOS Output Impedance and Drive
OUT1_CMOS_DRV
OUT2_CMOS_DRV
OUT3_CMOS_DRV
OUT4_CMOS_DRV
OUT5_CMOS_DRV
OUT6_CMOS_DRV
OUT7_CMOS_DRV
0113[7:6]
0118[7:6]
011D[7:6]
0127[7:6]
012C[7:6]
0131[7:6]
013B[7:6]
011D[7:6]
0127[7:6]
012C[7:6]
—
—
—
—
011D[7:6]
0127[7:6]
012C[7:6]
—
—
—
—
Strength Selections
on page 39.
5.4.3 LVCMOS Output Signal Swing
The signal swing (VOL/VOH) of the LVCMOS output drivers is set by the voltage on the VDDO pins. Each output driver has its own
VDDO pin allowing a unique output voltage swing for each of the LVCMOS drivers.
silabs.com | Building a more connected world. Rev. 1.3 | 39
Page 40

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.4.4 LVCMOS Output Polarity
a driver is configured as an LVCMOS output it generates a clock signal on both pins (OUTx and OUTx). By default the clock on
When
the OUTx pin is generated with the same polarity (in phase) with the clock on the OUTx pin. The polarity of these clocks is configurable
enabling complimentary clock generation and/or inverted polarity with respect to other output drivers.
Table 5.9. LVCMOS Output Polarity Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_INV
OUT1_INV
OUT2_INV
OUT3_INV
OUT4_INV
OUT5_INV
OUT6_INV
OUT7_INV
010B[7:6]
0115[7:6]
011A[7:6]
011F[7:6]
0129[7:6]
012E[7:6]
0133[7:6]
013D[7:6]
010B[7:6]
011F[7:6]
0129[7:6]
012E[7:6]
—
—
—
—
0115[7:6]
011A[7:6]
0129[7:6]
012E[7:6]
—
—
—
—
Controls output polarity of the OUTx and OUTx pins when in
LVCMOS mode. Selections are:
OUTx_IN
OUTx OUTx Comment
V
Register
Settings
0 0 CLK CLK Both in phase (de-
fault)
0 1 CLK CLK OUTx inverted
1 0 CLK CLK OUTx and OUTx in-
verted
1 1 CLK CLK Both out of phase
silabs.com | Building a more connected world. Rev. 1.3 | 40
Page 41

Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.5 Output Enable/Disable
Si5347/46 allows enabling/disabling outputs by either pin, register control, or a combination of both. Two output enable pins are
The
available (OE0, OE1). The output enable pins can be mapped to any of the outputs (OUTx) through register configuration. By default
OE0 controls all of the outputs while OE1 remains unmapped and has no affect until configured. Figure 5.4 Example of Configuring
Output Enable Pins on page 41 shows an example of a output enable mapping scheme that is register configurable and can be stor-
ed in NVM as the default at power-up.
DSPLL
A
DSPLL
B
Output
Crosspoint
A
B
A
B
A
B
A
B
÷R
÷R
÷R
÷R
Si5346
0
1
2
3
In its default state the OE0 pin enables/
disables
all outputs. The OE1 pin is not
mapped and has no effect on outputs.
Figure 5.4. Example of Configuring Output Enable Pins
OUT0
OUT0
OUT1
OUT1
OUT2
OUT2
OUT3
OUT3
OE0
OE1
DSPLL
A
DSPLL
B
Output
Crosspoint
A
B
A
B
A
B
A
B
÷R
÷R
÷R
÷R
Si5346
0
1
2
3
OUT0
OUT0
OUT1
OUT1
OE0
OUT2
OUT2
OUT3
OUT3
OE1
An example of an configurable output enable
scheme. In this case OE0 controls the outputs
associated with DSPLL A, while OE1 controls
the outputs of DSPLL B.
Enabling and disabling outputs can also be controlled by register control. This allows disabling one or more output when the OE pin(s)
has them enabled. By default the output enable register settings are configured to allow the OE pins to have full control.
5.5.1 Output Disable State Selection
the output driver is disabled, the outputs will drive either logic high or logic low, selectable by the user. The output common mode
When
voltage is maintained while the driver is disabled, reducing enable/disable transients.
By contrast, powering down the driver rather than disabling it increases output impedance and shuts off the output common mode voltage. For all output drivers connected in the system, it is recommended to use Disable rather than Powerdown to reduce enable/disable
common mode transients. Unused outputs may be left unconnected, powered down to reduce current draw, and, with the corresponding VDDOx, left unconnected.
5.5.2 Output Disable During LOL
By default a DSPLL that is out of lock will generate an output clock. There is an option to disable the outputs when a DSPLL is out of
lock (LOL). This option can be useful to force a downstream PLL into holdover.
5.5.3 Output Disable During XAXB_LOS
The internal oscillator circuit, in combination with the external crystal, provides a critical function for the operation of the DSPLLs. In the
event of a crystal failure the device will assert an XAXB_LOS alarm. By default all outputs will be disabled during assertion of the
XAXB_LOS alarm.
silabs.com | Building a more connected world. Rev. 1.3 | 41
Page 42

5.5.4 Output Driver State When Disabled
The disabled state of an output driver is register-configurable as disable low or disable high.
Table 5.10. Output Enable/Disable Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
Si5347, Si5346 Revision D Reference Manual
Output Clocks
OUTALL_DISABLE_
LOW
OUT0_OE
OUT1_OE
OUT2_OE
OUT3_OE
OUT4_OE
OUT5_OE
OUT6_OE
OUT7_OE
OUT_DIS_MSK_LOL_
PLL(D,C,B,A)
OUT_DIS_MSK_
LOSXAXB
0102[0] 0102[0] 0102[0] Allows disabling all output drivers: 0 - all outputs
disabled, 1 - all outputs controlled by the
OUTx_OE bits. Note that if the OE pin is held
high (disabled), then all assigned outputs will be
disabled regardless of the state of this register
bit.
0108[1]
0108[1]
0012[1]
Allows enabling/disabling individual output drivers. Note that the OE pin must be held low in or-
0112[1]
0117[1]
011C[1]
0126[1]
012B[1]
0130[1]
013A[1]
011C[1]
0126[1]
012B[1]
—
—
—
—
0117[1]
0126[1]
012B[1]
—
—
—
—
der to enable an output with these register bits.
0142[3:0] 0142[3:0] 0142[1:0] Determines if the outputs are disabled during an
LOL condition. 0 = outputs disable on LOL, 1 =
outputs remain enabled during LOL (default).
This option is independently configured for each
DSPLL. See DRVx_DIS_SRC registers.
0141[6] 0141[6] 0141[6] Determines if outputs are disabled during an
LOSXAXB condition. 0 = all outputs disabled on
LOSXAXB (default), 1 = outputs remain enabled
during LOSXAXB condition.
OUT0_DIS_STATE
0109[5:4]
0109[5:4]
0113[5:4]
Sets the state for the outputs when they are disabled.
OUT1_DIS_STATE
OUT2_DIS_STATE
OUT3_DIS_STATE
OUT4_DIS_STATE
OUT5_DIS_STATE
OUT6_DIS_STATE
OUT7_DIS_STATE
silabs.com | Building a more connected world. Rev. 1.3 | 42
0113[5:4]
0118[5:4]
011D[5:4]
0127[5:4]
012C[5:4]
0131[5:4]
013B[5:4]
011D[5:4]
0127[5:4]
012C[5:4]
—
—
—
—
0118[5:4]
0127[5:4]
012C[5:4]
—
—
—
—
Page 43

5.5.5 Synchronous/Asynchronous Output Selection
Si5347, Si5346 Revision D Reference Manual
Output Clocks
Outputs
can be configured to enable and disable either synchronously or asynchronously. In synchronous disable mode the output will
wait until a clock period has completed before the driver is disabled. This prevents unwanted runt pulses from occurring when disabling
an output. In asynchronous disable mode, the output clock will disable immediately without waiting for the period to complete.
Table 5.11. Synchronous/Asynchronous Disable Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
OUT0_SYNC_EN
0109[3]
0109[3]
0113[3]
Selects Synchronous or Asynchronous output
disable. 1= synchronous, 0 = asynchronous. De-
OUT1_SYNC_EN
OUT2_SYNC_EN
OUT3_SYNC_EN
OUT4_SYNC_EN
OUT5_SYNC_EN
OUT6_SYNC_EN
OUT7_SYNC_EN
0113[3]
0118[3]
011D[3]
0127[3]
012C[3]
0131[3]
013B[3]
011D[3]
0127[3]
012C[3]
—
—
—
—
0118[3]
0127[3]
012C[3]
—
—
—
—
fault is asynchronous mode.
silabs.com | Building a more connected world. Rev. 1.3 | 43
Page 44
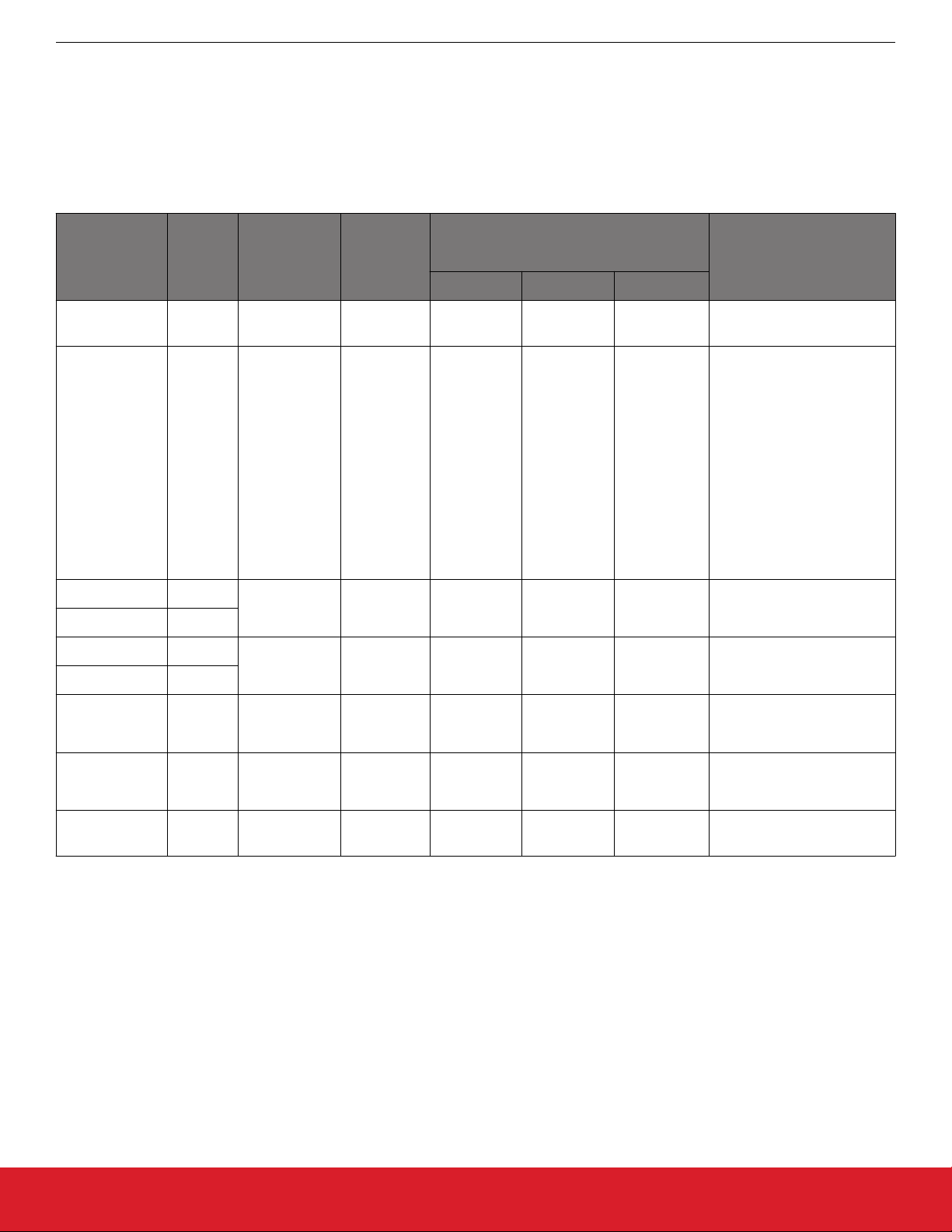
Si5347, Si5346 Revision D Reference Manual
Output Clocks
5.5.6 Output Driver Disable Source Summary
are a number of conditions that may cause the outputs to be automatically disabled. The user may mask out unnecessary disa-
There
ble sources to match the system requirements. Any one of the unmasked sources may cause the outputs to be disabled; this is more
powerful but similar in concept to open source “wired-OR” configurations. Table 5.12 Output Driver Disable Sources Summary on page
44 summarizes the output disable sources with additional information for each source.
Table 5.12. Output Driver Disable Sources Summary
Output Driver
Disable Source
OUTALL_DISA-
Disable
Outputs
when
Source
Individually
Assignable?
Maskable? Related Registers[Bits]
(Hex)
Si5347A/B Si5347C/D Si5346
Low N N 0102[0] 0102[0] 0102[0] User Controllable
BLE_LOW
OUT0_OE
OUT1_OE
OUT2_OE
OUT3_OE
OUT4_OE
OUT5_OE
OUT6_OE
OUT7_OE
Low Y N 0108[1]
0112[1]
0117[1]
011C[1]
0126[1]
012B[1]
0130[1]
013A[1]
OE0 (pin) High Y N 0022[1:0],
OE0 (register) Low
0023-0024
OE1 (pin) High Y N 0022[2,0],
OE1 (register) Low
0025, 0026
0108[1]
011C[1]
0126[1]
012B[1]
—
—
—
—
0022[1:0],
0023-0024
0022[2,0],
0025, 0026
0112[1]
0117[1]
0126[1]
012B[1]
—
—
—
—
0022[1:0],
0023-0024
0022[2,0],
0025, 0026
Comments
User Controllable
User Controllable
User Controllable
LOL_PLL[D:A] High Y Y 000D[3:0],
0142[3:0]
LOS_XAXB High N Y 000C[1],
0141[6]
000D[3:0],
0142[3:0]
000C[1],
0141[6]
000D[1:0],
0142[1:0]
000C[1],
0141[6]
Maskable separately for
each DSPLL
Maskable
SYSINCAL High N N 000C[0] 000C[0] 000C[0] Automatic, not user-control-
lable
silabs.com | Building a more connected world. Rev. 1.3 | 44
Page 45

Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
6. Digitally Controlled Oscillator (DCO) Mode
The DSPLLs support a DCO mode where their output frequencies are adjustable in pre-defined steps given by frequency step words
(FSTEPW). The frequency adjustments are controlled through the serial interface or by pin control using frequency increments (FINC)
or decrements (FDEC). A FINC will add the frequency step word to the DSPLL output frequency, while a FDEC will decrement it. The
DCO mode is available when the DSPLL is operating in locked mode. Note that the maximum FINC/FDEC update rate, by either hardware or software, is 1 MHz. Each DSPLL being used in DCO mode should have fractional M division enabled by setting the appropriate
M_FRAC_EN_PLLx = 0x3B for proper operation.
Note: DCO mode is not available when in free run or when in holdover. A large freq step can assert LOL on the relevant DSPLL. The
step sizes and frequency of operation need to be considered with the LOL settings and BW.
Table 6.1. Fractional M Divider Enable Controls
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
M_FRAC_EN_PLLA 0x0421[5:0] 0x0421[5:0] DSPLL feedback M divider fractional enable.
M_FRAC_EN_PLLB 0x0521[5:0] 0x0521[5:0]
M_FRAC_EN_PLLC 0x0621[5:0] —
M_FRAC_EN_PLLD 0x0721[5:0] —
0x2B: Integer-only division
0x3B Fractional (or Integer) division
Required for DCO operation.
silabs.com | Building a more connected world. Rev. 1.3 | 45
Page 46

6.1 Frequency Increment/Decrement Using Pin Controls
Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
Controlling
the output frequency with pin controls is available on the Si5347. This feature involves asserting the FINC or FDEC pins to
increment or decrement the DSPLL frequency. The DSPLL_SEL pins select which DSPLL output frequency is affected by the frequency change. The frequency step words (FSTEPW) define the amount of frequency change for each FINC or FDEC. The FSTEPW may
be written once or may be changed after every FINC/FDEC assertion. Note that the DSPLL_SEL pins are not available on the Si5346.
Both the FINC and FDEC inputs are rising-edge-triggered and must meet the data sheet minimum pulse width (PW) specifications.
Note: When the FINC/FDEC pins on the Si5347 are unused, the FDEC pin must be pulled down with an external pull-down resistor or
jumper. The FINC pin has an internal pull-down and may be left unconnected when not in use.
Table 6.2. 0x0020 DSPLL_SEL[1:0] Control of FINC/FDEC for DCO
Reg Address Bit Field Type Name Description
0x0020 0 R/W FSTEP_PLL_SIN-
GLE
0: DSPLL_SEL[1:0] pins and bits are disabled.
1: DSPLL_SEL[1:0] pins or FSTEP_PLL bits are enabled. See FSTEP_PLL_REGCTRL
0x0020 1 R/W FSTEP_PLL_REGC
TRL
Only functions when FSTEP_PLL_SINGLE = 1.
0: DSPLL_SELx pins are enabled, and the corresponding register bits are disabled.
1: DSPLL_SELx_REG register bits are enabled, and
the corresponding pins are disabled.
0x0020 3:2 R/W FSTEP_PLL[1:0] Register version of the DSPLL_SEL[1:0] pins. Used to
select which PLL (M divider) is affected by FINC/FDEC.
0: DSPLL A M-divider
1: DSPLL B M-divider
2: DSPLL C M-divider
3: DSPLL D M-divider
silabs.com | Building a more connected world. Rev. 1.3 | 46
Page 47

Si5347
PD
Frequency
+
Step Word
-
0x0423 – 0x0429
PD
Frequency
+
Step Word
-
0x0523 – 0x0529
PD
Frequency
+
Step Word
-
0x0623 – 0x0629
PD
Frequency
+
Step Word
-
0x0724 – 0x072A
Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
LPF
M
n_A
÷
M
_A
d
DSPLL A
LPF
M
n_B
÷
M
_B
d
DSPLL B
LPF
M
n_C
÷
M
_C
d
DSPLL C
LPF
M
n_D
÷
M
_D
d
DSPLL D
FINC
FDEC
DSPLL_SEL0
DSPLL_SEL1
Figure 6.1. Controlling the DCO Mode By Pin Control
silabs.com | Building a more connected world. Rev. 1.3 | 47
Page 48

6.2 Frequency Increment/Decrement Using the Serial Interface
Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
Controlling
the DSPLL frequency through the serial interface is available on both the Si5347 and Si5346. This can be performed by
asserting the FINC or FDEC bits to activate the frequency change defined by the frequency step word. A set of mask bits selects the
DSPLL(s) that is affect by the frequency change. The FINC and FDEC pins can also be used to trigger a frequency change. Note that
both the FINC and FDEC register bits are rising-edge-triggered and self-clearing.
Each DSPLL being used in DCO mode should have fractional M division enabled by setting the appropriate M_FRAC_EN_PLLx=0x3B
for proper operation. See AN909: DCO Application with the Si5347/46 for related information.
Si5347
PD
PD
LPF
M
n_A
÷
M
d
_A
DSPLL A
LPF
M
n_B
÷
M
_B
d
DSPLL B
FINC
FDEC
0x001D
FSW_MASK_A
0x0422
FSW_MASK_B
0x0522
Frequency
+
Step Word
-
0x0423 – 0x0429
Frequency
+
Step Word
-
0x0523 – 0x0529
I2C_SEL
SDA/SDIO
A1/SDO
SCLK
A0/CS
SPI/
2
I
C
FSW_MASK_C
0x0622
Frequency
+
Step Word
-
0x0623 – 0x0629
FSW_MASK_D
0x0723
Frequency
+
Step Word
-
0x0724 – 0x072A
FINC
FDEC
Figure 6.2. Controlling the DCO Mode Using the Serial Interface
PD
PD
LPF
M
n_C
÷
M
d
_C
DSPLL C
LPF
M
n_D
÷
M
d
_D
DSPLL D
silabs.com | Building a more connected world. Rev. 1.3 | 48
Page 49

Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
Table 6.3. Frequency Increment/Decrement Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
FINC 001D[0] 001D[0] Asserting this bit will increase the DSPLL output fre-
quency by the frequency step word.
FDEC 001D[1] 001D[1] Asserting this bit will decrease the DSPLL output fre-
quency by the frequency step word.
M_FSTEPW_PLLA 0423[7:0] -
0429[7:0]
M_FSTEPW_PLLB 0523[7:0] -
0529[7:0]
M_FSTEPW_PLLC 0623[7:0] -
0423[7:0] -
0429[7:0]
0523[7:0] -
0529[7:0]
—
This is a 56-bit frequency step word for DSPLL A, B, C,
D. The FSTEPW will be added or subtracted to the
DSPLL output frequency during assertion of the FINC/
FDEC bits or pins. The FSTEPW is calculated based on
the frequency configuration and is easily calculated using ClockBuilder Pro utility.
0629[7:0]
M_FSTEPW_PLLD 0724[7:0] -
—
072A[7:0]
M_FSTEP_MSK_PLLA 0422[0] 0422[0] This mask bit determines if a FINC or FDEC affects
M_FSTEP_MSK_PLLB 0522[0] 0522[0]
M_FSTEP_MSK_PLLC 0622[0] —
DSPLL A, B, C, D. 0 = FINC/FDEC will increment/decrement the FSTEPW to the DSPLL. 1 = Ignores FINC/
FDEC.
M_FSTEP_MSK_PLLD 0723[0] —
M_FRAC_EN_PLLA 0x0421[5:0] 0x0421[5:0] DSPLL feedback M divider fractional enable.
M_FRAC_EN_PLLB 0x0521[5:0] 0x0521[5:0] 0x2B: Integer-only division
M_FRAC_EN_PLLC 0x0621[5:0] — 0x3B: Fractional (or Integer) division
M_FRAC_EN_PLLD 0x0721[5:0] — Required for DCO operation.
silabs.com | Building a more connected world. Rev. 1.3 | 49
Page 50

Si5347, Si5346 Revision D Reference Manual
Digitally Controlled Oscillator (DCO) Mode
6.2.1 DCO with Direct Register Writes
In addition to the register-based FINC/FDEC described above, updated values for the DSPLL feedback M divider value may be updated
directly
merator value will take effect and the output frequency will change without any glitches. The M divider numerator and denominator
terms (Mx_NUM and Mx_DEN) can be left and right-shifted so that the least significant bit of the numerator word represents the exact
step resolution that is needed for your application. Each individual M divider has its own update bit (Mx_UPDATE) that must be written
to cause the new numerator value to take effect. All M dividers can be updated at the same time by issuing a Soft Reset.
Changing the DSPLL feedback M divider value while the device is operating will not generate any glitches on affected outputs. The
frequency settling to the new value will be determined by the Loop BW of the DSPLL. All other outputs generated by other DSPLLs will
be unaffected by this update. It is generally recommended to avoid dynamically changing the M divider denominator (Mx_DEN) as, in
some cases, a small output phase shift may be observed when the update becomes active. However, by using the proper combination
of settings for the particular frequency plan, it is possible to avoid this entirely. If your application requires dynamic changes to an M
divider denominator, contact Silicon Labs at https://www.silabs.com/support/pages/contacttechnicalsupport.aspx.
by the user. When the M divider numerator (Mx_NUM) and its corresponding update bit (Mx_UPDATE) is written, the new nu-
Table 6.4. Direct DCO Control Registers
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
M_NUM_PLLA 0x0415–0x041B 0x0415–0x041B 56-bit DSPLL feedback M divider Numerator.
M_NUM_PLLB 0x0515–0x051B 0x0515–0x051B
M_NUM_PLLC 0x0615–0x061B —
M_NUM_PLLD 0x0716–0x071C —
M_DEN_PLLA 0x041C–0x041F 0x041C–0x041F 32-bit DSPLL feedback M divider Denominator.
M_DEN_PLLB 0x051C–0x051F 0x051C–0x051F
M_DEN_PLLC 0x061C–0x061F —
M_DEN_PLLD 0x071D–0x0720 —
M_UPDATE_PLLA 0x0420[0] 0x0420[0] Must write a 1 to this bit to cause the individual M divider
M_UPDATE_PLLB 0x0520[0] 0x0520[0]
M_UPDATE_PLLC 0x0620[0] —
changes to take effect. Note that a corresponding
SOFT_RST_PLLx or device SOFT_RST will also update
the M divider values.
M_UPDATE_PLLD 0x0721[0] —
silabs.com | Building a more connected world. Rev. 1.3 | 50
Page 51

Si5347, Si5346 Revision D Reference Manual
Serial Interface
7. Serial Interface
Configuration and operation of the Si5347/46 is controlled by reading and writing registers using the I2C or SPI serial interface. The
I2C_SEL pin selects between I2C or SPI operation. The Si5347/46 supports communication with either a 3.3 V or 1.8 V host by setting
the IO_VDD_SEL (0x0943[0]) configuration bit. The SPI mode supports 4-wire or 3-wire by setting the SPI_3WIRE configuration bit.
See Figure 7.1 I2C/SPI Device Connectivity Configurations on page 51 for supported modes of operation and settings. The I2C pins
are open drain and are ESD clamped to 3.3 V, regardless of the host supply level. The I2C pins are clamped to 3.3 V so that they may
be externally pulled up to 3.3 V regardless of IO_VDD_SEL (in register 0x0943).
Host = 1.8V
Host = 3.3V
I2C_SEL pin = High
1.8V
2
I
C
SDA
HOST
SCLK
IO_VDD_SEL = 1
3.3V
2
I
C
SDA
HOST
SCLK
2
I
C
SPI 4-Wire SPI 3-Wire
I2C_SEL pin = Low
SPI_3WIRE = 0
IO_VDD_SEL = 0
IO_VDD_SEL = 0
(Default) (Default)
1.8V
VDDA
SDA
SCLK
1.8V3.3V
VDD
Si5347/46
SPI
HOST
CS
SDO
SDI
SCLK
1.8V
IO_VDD_SEL = 1 IO_VDD_SEL = 1
3.3V
VDDA
1.8V3.3V
VDD
Si5347/46
SPI
HOST
CS
SDO
SDI
SCLK
3.3V
SDA
SCLK
Figure 7.1. I2C/SPI Device Connectivity Configurations
I2C_SEL pin = Low
SPI_3WIRE
IO_VDD_SEL = 0
(Default)
1.8V3.3V
VDD
VDDA
CS
SDI
SDO
SCLK
Si5347/46 Si5347/46
1.8V3.3V
VDD
VDDA
CS
SDI
SDO
SCLK
Si5347/46
SPI
HOST
SPI
HOST
1.8V
3.3V
CS
SDIO
SCLK
CS
SDIO
SCLK
SDIO
SCLK
SDIO
SCLK
= 1
VDDA
CS
VDDA
CS
1.8V3.3V
VDD
1.8V3.3V
VDD
Si5347/46
Table 7.1 I2C/SPI Register Settings
on page 52 lists register settings of interest for the I2C/SPI.
If neither serial interface is used, leave I2C_SEL unconnected. Pull pins SDA/SDIO, SCLK, A1/SDO, and A0/CS all low.
Note that the Si5347/46 is not I2C fail-safe upon loss of power. Applications that require fail-safe operation should isolate the device
from a shared I2C bus.
silabs.com | Building a more connected world. Rev. 1.3 | 51
Page 52

Si5347, Si5346 Revision D Reference Manual
Serial Interface
Table 7.1. I2C/SPI Register Settings
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
IO_VDD_SEL 0x0943[0] 0x0943[0] The IO_VDD_SEL configuration bit optimizes the VIL, VIH, VOL,
and VOH thresholds to match the VDDS voltage. By default the
IO_VDD_SEL bit is set to the VDD option. The serial interface
pins are always 3.3 V tolerant even when the device's VDD pin is
supplied from a 1.8 V source. When the I2C or SPI host is operat-
ing at 3.3 V and the Si5347/46 at VDD = 1.8 V, the host must
write the IO_VDD_SEL configuration bit to the VDDA option. This
will ensure that both the host and the serial interface are operating
at the optimum voltage thresholds.
SPI_3WIRE 0x002B[3] 0x002B[3] The SPI_3WIRE configuration bit selects the option of 4-wire or 3-
wire SPI communication. By default, this configuration bit is set to
the 4-wire option. In this mode the Si5347/46 will accept write
commands from a 4-wire or 3- wire SPI host allowing configuration of device registers. For full bidirectional communication in 3wire mode, the host must write the SPI_3WIRE configuration bit to
“1”.
silabs.com | Building a more connected world. Rev. 1.3 | 52
Page 53

Si5347, Si5346 Revision D Reference Manual
Serial Interface
7.1 I2C Interface
When
in I2C mode, the serial interface operates in slave mode with 7-bit addressing and can operate in Standard-Mode (100 kbps) or
Fast-Mode (400 kbps) and supports burst data transfer with auto address increments. The I2C bus consists of a bidirectional serial data
line (SDA) and a serial clock input (SCL) as shown in the figure below. Both the SDA and SCL pins must be connected to a supply via
an external pull-up (4.7 kΩ) as recommended by the I2C specification as shown in Figure 7.2 I2C Configuration on page 53. Two
address select bits (A0, A1) are provided allowing up to four Si5347/46 devices to communicate on the same bus. This also allows four
choices in the I2C address for systems that may have other overlapping addresses for other I2C devices.
2
I
VDDI2C
VDD
C
I2C_SEL
2
To I
C Bus
or Host
LSBs of I
Address
Figure 7.2. I2C Configuration
The 7-bit slave device address of the Si5347/46 consists of a 5-bit fixed address plus 2 pins which are selectable for the last two bits,
as shown in Figure 7.3 7-bit I2C Slave Address Bit-Configuration
Slave Address
Figure 7.3. 7-bit I2C Slave Address Bit-Configuration
Data is transferred MSB first in 8-bit words as specified by the I2C
address + a write bit, an 8-bit register address, and 8 bits of data as shown in Figure 7.6 SPI Interface Connections on page 55. A
write burst operation is also shown where subsequent data words are written using to an auto-incremented address.
Write Operation – Single Byte
S 0 A Reg Addr [7:0]Slv Addr [6:0] A Data [7:0] PA
on page 53.
1 1 0 1 1 A0
SDA
SCLK
2
C
A0
A1
Si5347/46
0123456
A1
specification. A write command consists of a 7-bit device (slave)
Write Operation - Burst (Auto Address Increment)
S 0 A Reg Addr [7:0]Slv Addr [6:0] A Data [7:0] A Data [7:0] PA
1 – Read
Host
Host
A read operation is performed in two stages. A data write is used to set the register address, then a data read is performed to retrieve
the data from the set address. A read burst operation is also supported. This is shown in Figure 7.5 I2C Read Operation
silabs.com | Building a more connected world. Rev. 1.3 | 53
Si5347/46
Si5347/46
Figure 7.4. I2C Write Operation
0 – Write
A – Acknowledge (SDA LOW)
N – Not Acknowledge (SDA HIGH)
S – START condition
P – STOP condition
Reg Addr +1
on page 54.
Page 54

Read Operation – Single Byte
S 0 A Reg Addr [7:0]Slv Addr [6:0] A P
S 1 ASlv Addr [6:0] Data [7:0] PN
Read Operation - Burst (Auto Address Increment)
S 0 A Reg Addr [7:0]Slv Addr [6:0] A P
S 1 ASlv Addr [6:0] Data [7:0] A PNData [7:0]
Reg Addr +1
Si5347, Si5346 Revision D Reference Manual
Serial Interface
Host
Host
Si5347/46
Si5347/46
1 – Read
0 – Write
A – Acknowledge (SDA LOW)
N – Not Acknowledge (SDA HIGH)
S – START condition
P – STOP condition
Figure 7.5. I2C Read Operation
silabs.com | Building a more connected world. Rev. 1.3 | 54
Page 55

Si5347, Si5346 Revision D Reference Manual
Serial Interface
7.2 SPI Interface
in SPI mode, the serial interface operates in 4-wire or 3-wire depending on the state of the SPI_3WIRE configuration bit. The 4-
When
wire interface consists of a clock input (SCLK), a chip select input (CS), serial data input (SDI), and serial data output (SDO). The 3wire interface combines the SDI and SDO signals into a single bidirectional data pin (SDIO). Both 4-wire and 3-wire interface connections are shown in Figure 7.6 SPI Interface Connections on page 55.
SPI 3-Wire
SPI_3WIRE = 1
Si5347/46
To SPI
Host
CS
SDI
SDO
SCLK
I2C_SEL
SPI 4-Wire
SPI_3WIRE = 0
Si5347/46
To SPI
To SPI
Host
Host
I2C_SEL
CS
SDIO
SCLK
Figure 7.6. SPI Interface Connections
Table 7.2. SPI Command Format
Instruction
Ist Byte
1
2nd Byte 3rd Byte Nth Byte
Set Address 000x xxxx 8-bit Address — —
Write Data 010x xxxx 8-bit Data — —
Read Data 100x xxxx 8-bit Data — —
Write Data + Address Increment 011x xxxx 8-bit Data — —
2,3
Read Data + Address Increment 101x xxxx 8-bit Data — —
Burst Write Data 1110 0000 8-bit Address 8-bit Data 8-bit Data
1. X = don’t care (1 or 0).
2.
The Burst Write Command is terminated by de-asserting /CS (/CS = high).
3. There is no limit to the number of data bytes that follow the Burst Write Command, but the address will wrap around to zero in the
byte after address 255 is written.
Writing or reading data consist of sending a “Set Address” command followed by a “Write Data” or “Read Data” command. The 'Write
+ Address Increment' or “Read Data + Address Increment” commands are available for cases where multiple byte operations in
Data
sequential address locations is necessary. The “Burst Write Data” instruction provides a compact command format for writing data
since it uses a single instruction to define starting address and subsequent data bytes. Figure 7.7 Example Writing Three Data Bytes
using the SPI Write Commands on page 56 shows an example of writing three bytes of data using the write commands. As can be
seen, the “Write Burst Data” command is the most efficient method for writing data to sequential address locations. Figure 7.8 Example
of Reading Three Data Bytes Using the SPI Read Commands on page 56 provides a similar comparison for reading data with the
read commands. Note that there is no equivalent burst read; the read increment function is used in this case.
silabs.com | Building a more connected world. Rev. 1.3 | 55
Page 56

Si5347, Si5346 Revision D Reference Manual
‘Set Address’ and ‘Write Data’
‘Set Addr’ Addr [7:0] ‘Write Data’ Data [7:0]
‘Set Addr’ Addr [7:0] ‘Write Data’ Data [7:0]
‘Set Addr’ Addr [7:0] ‘Write Data’ Data [7:0]
‘Set Address’ and ‘Write Data + Address Increment’
‘Set Addr’ Addr [7:0] ‘Write Data + Addr Inc’ Data [7:0]
‘Write Data + Addr Inc’ Data [7:0]
‘Write Data + Addr Inc’ Data [7:0]
‘Burst Write Data’
‘Burst Write Data’ Addr [7:0] Data [7:0] Data [7:0] Data [7:0]
Serial Interface
Si5347/46Host
Si5347/46Host
Figure 7.7. Example Writing Three Data Bytes using the SPI Write Commands
‘Set Address’ and ‘Read Data’
‘Set Addr’ Addr [7:0] ‘Read Data’ Data [7:0]
‘Set Addr’ Addr [7:0] ‘Read Data’ Data [7:0]
‘Set Addr’ Addr [7:0] ‘Read Data’ Data [7:0]
‘Set Address’ and ‘Read Data + Address Increment’
‘Set Addr’ Addr [7:0] ‘Read Data + Addr Inc’ Data [7:0]
‘Read Data + Addr Inc’ Data [7:0]
‘Read Data + Addr Inc’ Data [7:0]
Si5347/46Host
Si5347/46Host
Figure 7.8. Example of Reading Three Data Bytes Using the SPI Read Commands
The timing diagrams for the SPI commands are shown in Figures Figure
7.9 SPI “Set Address” Command Timing on page 57, Figure
7.10 SPI “Write Data” and “Write Data+ Address Increment” Instruction Timing on page 57, Figure 7.11 SPI “Read Data” and “Read
Data + Address Increment” Instruction Timing on page 58, and Figure 7.12 SPI “Burst Data Write” Instruction Timing on page 58.
silabs.com | Building a more connected world. Rev. 1.3 | 56
Page 57

Si5347, Si5346 Revision D Reference Manual
Serial Interface
Previous
Command
CS
SCLK
4-Wire
SDI
SDO
3-Wire
SDIO
‘Set Address’ Command
2 Cycle
Wait
Set Address Instruction Base Address
1
0
1
0
Si5347/46Host
01234567
7
01234567
7
Si5347/46Host
Don’t Care
>1.9
SCLK
periods
0123456
0123456
High Impedance
Next
Command
7
6
7
6
Figure 7.9. SPI “Set Address” Command Timing
Previous
Command
CS
2 Cycle
Wait
Write Data instruction
‘Write Data’
Data byte @ base address + 1
Data byte @ base address
or
>1.9
SCLK
periods
Next
Command
SCLK
4-Wire
SDI
1
0
01234567
01234567
7
6
SDO
3-Wire
SDIO
1
0
Si5347/46Host
01234567
Si5347/46Host
Don’t Care
01234567
7
High Impedance
6
Figure 7.10. SPI “Write Data” and “Write Data+ Address Increment” Instruction Timing
silabs.com | Building a more connected world. Rev. 1.3 | 57
Page 58

Si5347, Si5346 Revision D Reference Manual
Serial Interface
Previous
Command
2 Cycle
Wait
Read Data instruction
‘Read Data’
Read byte @ base address
Read byte @ base
or
address + 1
>1.9
SCLK
periods
Next
Command
CS
SCLK
4-Wire
SDI
SDO
1
0
1
0
01234567
01234567
7
6
7
6
3-Wire
SDIO
1
0
Si5347/46Host
01234567
Si5347/46Host
Don’t Care
01234567
High Impedance
7
6
Figure 7.11. SPI “Read Data” and “Read Data + Address Increment” Instruction Timing
Previous
Command
CS
‘Burst Data Write’ Command
2 Cycle
Wait
Burst Write Instruction Base address
st
1
data byte @ base address
th
n
data byte @ base address +n
>1.9
SCLK
periods
Next
Command
SCLK
4-Wire
SDI
1
0
01234567
7
0123456 0123456 01234567
7
7
6
SDO
3-Wire
SDIO
1
0
Si5347/46Host
01234567
7 7 7
Si5347/46Host
Don’t Care
0123456 0123456 0123456
High Impedance
7
6
Figure 7.12. SPI “Burst Data Write” Instruction Timing
Note that for all SPI communication the chip select (CS) must be high for the minimum time period between commands. When chip
select
goes high it indicates the termination of the command. The SCLK can be turned off between commands, particularly if there are
very long delays between commands.
silabs.com | Building a more connected world. Rev. 1.3 | 58
Page 59

Si5347, Si5346 Revision D Reference Manual
Field Programming
8. Field Programming
To simplify design and software development of systems using the Si5347/46, a field programmer is available in addition to the evaluation board. The ClockBuilder Pro Field Programmer supports both “in-system” programming (for devices already mounted on a PCB),
as well as “in-socket” programming of Si5347/46 sample devices. Refer to www.silabs.com/CBProgrammer for information about this
kit.
silabs.com | Building a more connected world. Rev. 1.3 | 59
Page 60

Si5347, Si5346 Revision D Reference Manual
XAXB External References
9. XAXB External References
9.1 Performance of External References
An external standard non-pullable crystal (XTAL) is recommended in combination with the internal oscillator (OSC) to produce an ultra
low phase noise reference clock for the DSPLL, as well as providing a stable reference for the Freerun and Holdover modes. Simplified
connection diagrams are shown below. The device includes internal 8 pF crystal loading capacitors which eliminates the need for external capacitors and also has the benefit of reduced noise coupling from external sources. In most applications, using the internal OSC
with an external crystal provides the best phase noise performance. See AN905: Si534x External References; Optimizing Performance
for more information on the performance of various XO's with these devices. The recommended crystal suppliers are listed in the
Si534x/8x Jitter Attenuators Recommended Crystal, TCXO and OCXOs Reference Manual.
Figure 9.1. XAXB Crystal Resonator and External Reference Clock Connection Options
25-54 MHz
XO/Clock
LVCMOS
R1
0.1 uf
R2
0.1 uf
XB XA
2xC
L
OSC
LVCMOS XO/Clock
Connection
C1
0.1 uf
2xC
C1 is recommended to
the slew rate at
increase
Xa
nc nc
X1
X2
L
÷ P
REF
3.3V* These settings should be done if there CMOS level is
up to 4 V pp to limit the input at Xa to less than 2V ppse
25-54 MHz
XTAL
XB XA
X2
2xC
L
OSC
Crystal Resonator
Connection
Note: See Pin
Descriptions for
X1/X2 connections
X1
2xC
L
÷ P
REF
25-54 MHz
XO/Clock
0.1 uf
2xC
Note: See Datasheet for input clock specifications
0.1 uf
0.1 uf
50
50
XB XA
L
2xC
OSC
Differential XO/Clock
Connection
nc nc
X1
L
÷ P
REF
X2
In addition to crystal operations, the Si5347/46 accepts a clipped sine wave, CMOS, or differential reference clock on the XA/XB inter-
Most clipped sine wave and CMOS TCXOs have insufficient drive strength to drive a 100 Ω or 50 Ω load. For this reason, place
face.
the TCXO as close to the Si5347/46 as possible to minimize PCB trace length. In addition, ensure that both the Si5347/46 and the
TCXO are both connected directly to the ground plane. Figure 9.1 XAXB Crystal Resonator and External Reference Clock Connection
Options on page 60 shows the recommended method of connecting a clipped sine wave TCXO to the Si5347/46. Because the
Si5347/46 provides dc bias at the XA and XB pins, the ~800 mV peak-peak swing can be input directly into the XA interface of the
Si5347/46 once it has been ac-coupled. Because the signal is single-ended, the XB input is ac-coupled to ground. Figure 9.1 XAXB
Crystal Resonator and External Reference Clock Connection Options on page 60 illustrates the recommended method of connecting a
CMOS rail-to-rail output to the XA/XB inputs of the Si5347/46. The resistor network attenuates the rail-to-rail output swing to ensure that
the maximum input voltage swing at the XA pin is less than the data sheet specification. The signal is ac-coupled before connecting it to
the Si5347/46 XA input. Again, since the signal is single-ended, the XB input should be ac-coupled to ground. For applications with loop
BW values less than 10 Hz that require low wander output clocks, using a TCXO as the XAXB reference source should be considered
to avoid the wander of a crystal.
If an external oscillator is used as the XAXB reference, it is important to use a low jitter source because there is effectively no jitter
attenuation from the XAXB pins to the outputs. To minimize jitter at the XA/XB pins, the rise time of the XA/XB signals should be as fast
as possible.
For best jitter performance, use a XAXB frequency above 40 MHz. Also, for XAXB frequencies higher than 125 MHz, the PXAXB control must be used to divide the input frequency down below 125 MHz.
9.2 Recommend Crystals and Oscillators
Refer to the Si534x/8x Jitter Attenuators Recommended Crystal, TCXO and OCXOs Reference Manual for more information.
silabs.com | Building a more connected world. Rev. 1.3 | 60
Page 61

Si5347, Si5346 Revision D Reference Manual
XAXB External References
9.3 Register Settings to Configure for External XTAL Reference
The following registers can be used to control and make adjustments for the external reference source used.
9.3.1 XAXB_EXTCLK_EN Reference Clock Selection Register
Table 9.1. XAXB External Clock Selection Register
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
XAXB_EXTCLK_EN 090E[0] 090E[0] Selects between the XTAL or external reference clock on the
XA/XB pins. Default is 0, XTAL. Set to 1 to use an external reference oscillator.
The internal crystal loading capacitors (CL) are disabled when an external clock source is selected.
9.3.2 PXAXB Pre-scale Divide Ratio for Reference Clock Register
Table 9.2. XAXB Pre-Scale Divide Ratio Register
Setting Name Hex Address [Bit Field] Function
Si5347 Si5346
PXAXB 0206[1:0] 0206[1:0] Sets the XAXB input divider value according to the table below.
The following table lists the values, along with the corresponding divider ratio.
Table 9.3. XAXB Pre-Scale Divide Values
Value (Decimal) PXAXB Divider Value
0 1
1 2
2 4
3 8
silabs.com | Building a more connected world. Rev. 1.3 | 61
Page 62

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10. Crystal and Device Circuit Layout Recommendations
The main layout issues that should be carefully considered include the following:
Number and size of the ground vias for the Epad (see 11.4 Grounding Vias).
•
Output clock trace routing
• Input clock trace routing
• Control and Status signals to input or output clock trace coupling
• Xtal signal coupling
• Xtal layout
If the application uses a crystal for the XAXB inputs a shield should be placed underneath the crystal connected to the X1 and X2 pins
to provide the best possible performance. The shield should not be connected to the ground plane(s), and the layers underneath should
have as little area under the shield as possible. It may be difficult to do this for all the layers, but it is important to do this for the layers
that are closest to the shield.
Go to www.silabs.com/Si538x-4x-EVB to obtain Si5347-EVB and Si5346-EVB schematics, layouts, and component BOM files.
10.1 64-Pin QFN Si5347 Layout Recommendations
This section details the recommended guidelines for the crystal layout of the 64-pin Si5347 device using an example 8-layer PCB. The
following are the descriptions of each of the eight layers.
• Layer 1: device layer, with low speed CMOS control/status signals
• Layer 2: crystal shield
• Layer 3: ground plane
• Layer 4: power distribution
• Layer 5: power routing layer
• Layer 6: input clocks
• Layer 7: output clocks layer
• Layer 8: ground layer
Figure 10.1 64-pin Si5347 Crystal Layout Recommendations Top Layer (Layer 1) on page 63 shows the top layer layout of the Si5347
device mounted on the top PCB layer. This particular layout was designed to implement either a crystal or an external oscillator as the
XAXB reference. The crystal/ oscillator area is outlined with the white box around it. In this case, the top layer is flooded with ground.
Note that this layout has a resistor in series with each pin of the crystal. In typical applications, these resistors should be removed.
10.1.1 Si5347 Applications without a Crystal
For applications that do not use a crystal, leave X1 and X2 pins as "no connect". Do not tie to ground. In this case, there is no need for
a crystal shield or the voids underneath the shield. The XAXB connection should be treated as a high speed critical path that is ac
coupled and terminated at the end of the etch run. The layout should minimize the stray capacitance from the XA pin to the XB pin.
Jitter is very critical at the XAXB pins and therefore split termination and differential signaling should be used whenever possible.
silabs.com | Building a more connected world. Rev. 1.3 | 62
Page 63

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10.1.2 Si5347 Crystal Guidelines
The following are five recommended crystal guidelines:
Place the crystal as close as possible to the XA/XB pins.
1.
2. Do not connect the crystal's X1 or X2 pins to PCB ground.
3. Connect the crystal's GND pins to the DUT's X1 and X2 pins via a local crystal shield placed around and under the crystal. See
Figure 10.1 64-pin Si5347 Crystal Layout Recommendations Top Layer (Layer 1) on page 63 at the bottom left for an illustration
of how to create a crystal shield by placing vias connecting the top layer traces to the shield layer underneath. Note the zoom view
of the crystal shield layer on the next layer down is shown in Figure 10.2 Zoom View Crystal Shield Layer, Below the Top Layer
(Layer 2) on page 63.
4. Minimize traces adjacent to the crystal/oscillator area especially if they are clocks or frequently toggling digital signals.
5. In general do not route GND, power planes/traces, or locate components on the other side, below the crystal GND shield. As an
exception if it is absolutely necessary to use the area on the other side of the board for layout or routing, then place the next reference plane in the stack-up at least two layers away or at least 0.05 inches away. The Si5347 should have all layers underneath the
ground shield removed.
Figure 10.1. 64-pin Si5347 Crystal Layout Recommendations Top Layer (Layer 1)
Figure 10.2. Zoom View Crystal Shield Layer, Below the Top Layer (Layer 2)
Figure 10.2 Zoom View Crystal Shield Layer, Below the Top Layer (Layer 2) on page 63
shows the layer that implements the shield
underneath the crystal. The shield extends underneath the entire crystal and the X1 and X2 pins. This layer also has the clock input
pins. The clock input pins go to layer 2 using vias to avoid crosstalk. As soon as the clock inputs are on layer 2 they have a ground
shield above below and on the sides for protection.
Figure 10.3 Crystal Ground Plane (Layer 3) on page 64 is the ground plane and shows a void underneath the crystal shield. Figure
10.4 Power Plane (Layer 4) on page 64 is a power plane and shows the clock output power supply traces. The void underneath the
crystal shield is continued.
silabs.com | Building a more connected world. Rev. 1.3 | 63
Page 64

Crystal and Device Circuit Layout Recommendations
Figure 10.3. Crystal Ground Plane (Layer 3)
Si5347, Si5346 Revision D Reference Manual
Figure 10.4. Power Plane (Layer 4)
Figure 10.5 Layer 5 Power Routing on Power Plane (Layer 5) on page 65
shows layer 5, which is the power plane with the power
routed to the clock output power pins.
silabs.com | Building a more connected world. Rev. 1.3 | 64
Page 65

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
Figure 10.5. Layer 5 Power Routing on Power Plane (Layer 5)
Figure 10.6 Ground Plane (Layer 6)
on page 65 is another ground plane similar to layer 3.
Figure 10.6. Ground Plane (Layer 6)
silabs.com | Building a more connected world. Rev. 1.3 | 65
Page 66

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10.1.3 Si5347 Output Clocks
10.7 Output Clock Layer (Layer 7) on page 66 shows the output clocks. Similar to the input clocks the output clocks have vias
Figure
that immediately go to a buried layer with a ground plane above them and a ground flooded bottom layer. There is a ground flooding
between the clock output pairs to avoid crosstalk. There should be a line of vias through the ground flood on either side of the output
clocks to ensure that the ground flood immediately next to the differential pairs has a low inductance path to the ground plane on layers
3 and 6.
Figure 10.7. Output Clock Layer (Layer 7)
Figure 10.8. Bottom Layer Ground Flooded (Layer 8)
silabs.com | Building a more connected world. Rev. 1.3 | 66
Page 67

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10.2 44-Pin QFN Si5346 Layout Recommendations
This section details the layout recommendations for the 44-pin Si5346 device using an example 6-layer PCB.
The following guidelines details images of a six layer board with the following stack:
Layer 1: device layer, with low speed CMOS control/status signals, ground flooded
•
• Layer 2: crystal shield, output clocks, ground flooded
• Layer 3: ground plane
• Layer 4: power distribution, ground flooded
• Layer 5: input clocks, ground flooded
• Layer 6: low-speed CMOS control/status signals, ground flooded
This layout was designed to implement either a crystal or an external oscillator as the XAXB reference. The top layer is flooded with
ground. The clock output pins go to layer 2 using vias to avoid crosstalk during transit. When the clock output signals are on layer 2
there is a ground shield above, below and on all sides for protection. Output clocks should always be routed on an internal layer with
ground reference planes directly above and below. The plane that has the routing for the output clocks should have ground flooded
near the clock traces to further isolate the clocks from noise and other signals.
silabs.com | Building a more connected world. Rev. 1.3 | 67
Page 68

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10.2.1 Si5346 Applications without a Crystal
the application does not use a crystal, then the X1 and X2 pins should be left as “no connect” and should not be tied to ground. In
If
addition, there is no need for a crystal shield or the voids underneath the shield. If there is a differential external clock input on XAXB
there should be a termination circuit near the XA and XB pins. This termination circuit should be two 50 Ω resistors and one 0.1 μF cap
connected in the same manner as on the other clock inputs (IN0, IN1 and IN2). The clock input on XAXB must be ac-coupled. Care
should be taken to keep all clock inputs well isolated from each other as well as any other dynamic signal.
Figure 10.9. 44-Pin Si5346 Device Layer (Layer 1)
silabs.com | Building a more connected world. Rev. 1.3 | 68
Page 69

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
10.2.2 Si5346 Crystal Guidelines
10.10 Crystal Shield Layer 2 on page 69 is the second layer. The second layer implements the shield underneath the crystal.
Figure
The shield extends underneath the entire crystal and the X1 and X2 pins. There should be no less than 12 vias to connect the X1 and
X2 planes on layers 1 and 2. These vias are not shown in any other figures. All traces with signals that are not static must be kept well
away from the crystal and the X1 and X2 plane.
Figure 10.10. Crystal Shield Layer 2
Figure 10.11 Ground Plane (Layer 3) on page 69 is the ground plane and shows a void underneath the crystal shield.
Figure 10.11. Ground Plane (Layer 3)
Figure 10.12 Power Plane and Clock Output Power Supply Traces (Layer 4) on
page 70 is a power plane showing the clock output
power supply traces. The void underneath the crystal shield is continued.
silabs.com | Building a more connected world. Rev. 1.3 | 69
Page 70

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
Figure 10.12. Power Plane and Clock Output Power Supply Traces (Layer 4)
Figure 10.13 Clock Input Traces (Layer 5) on page 70 shows layer 5 and the clock input traces. Similar to the clock output traces,
they are routed to an inner layer and surrounded by ground to avoid crosstalk.
Figure 10.13. Clock Input Traces (Layer 5)
Figure 10.14 Low-Speed CMOS Control and Status Signal Layer 6 (Bottom Layer) on page 71 shows
the bottom layer, which continues the void underneath the shield. Layer 6 and layer 1 are mainly used for low speed CMOS control and status signals for which
crosstalk is not a significant issue. PCB ground can be placed under the X1 and X2 shield as long as the PCB ground is at least 0.05
inches below it.
silabs.com | Building a more connected world. Rev. 1.3 | 70
Page 71

Si5347, Si5346 Revision D Reference Manual
Crystal and Device Circuit Layout Recommendations
Figure 10.14. Low-Speed CMOS Control and Status Signal Layer 6 (Bottom Layer)
For any high-speed, low-jitter application, the clock signal runs should be impedance-controlled to 100 Ω differential or 50 Ω singleended. Differential signaling is preferred because of its increased immunity to common-mode noise. All clock I/O runs should be properly terminated.
silabs.com | Building a more connected world. Rev. 1.3 | 71
Page 72

Si5347, Si5346 Revision D Reference Manual
Power Management
11. Power Management
11.1 Power Management Features
Several unused functions can be powered down to minimize power consumption. The registers listed in Table 11.1 Power Management
Registers on page 72 are used for powering down different features.
Table 11.1. Power Management Registers
Setting Name Hex Address [Bit Field] Function
Si5347A/B Si5347C/D Si5346
PDN 0x001E[0] This bit allows powering down the device. The
serial interface remains powered during power
down mode and the registers are available to be
read and written.
OUT0_PDN
OUT1_PDN
OUT2_PDN
OUT3_PDN
OUT4_PDN
OUT5_PDN
OUT6_PDN
OUT7_PDN
OUT_PDN_ALL 0x0145[0] Power down all output drivers
11.2 Power Supply Recommendations
power supply filtering generally is important for optimal timing performance. The Si5347/46 devices have multiple stages of on-chip
The
regulation to minimize the impact of board level noise on clock jitter. Following conventional power supply filtering and layout techniques will further minimize signal degradation from the power supply.
It is recommended to use a 1 μF 0402 ceramic capacitor on each VDD for optimal performance. It is also suggested to include an optional, single 0603 (resistor/ferrite) bead in series with each supply to enable additional filtering if needed.
11.3 Power Supply Sequencing
0x0108[0]
0x0112[0]
0x0117[0]
0x011C[0]
0x0126[0]
0x012B[0]
0x0130[0]
0x013A[0]
0x0108[0]
0x011C[0]
0x0126[0]
0x012B[0]
—
—
—
—
0x0112[0]
0x0117[0]
0x0126[0]
0x012B[0]
—
—
—
—
Powers down unused clock outputs. When powered down, output pins will be high-impedance
with a light pull-down effect.
Four classes of supply voltages exist on the Si5347/46:
1. VDD = 1.8 V ± 5% (Core digital supply)
2. VDDA = 3.3 V ± 5% (Analog supply)
3. VDDOx = 1.8/2.5/3.3 V ± 5% (Clock output supply)
4. VDDS = 1.8/3.3V ± 5% (Digital I/O supply)
There is no requirement for power supply sequencing unless the output clocks are required to be phase aligned with each other. In this
case, the VDDO of each clock which needs to be aligned must be powered up before VDD and VDDA. VDDS has no effect on output
clock alignment.
If output-to-output alignment is required for applications where it is not possible to properly sequence the power supplies, then the output clocks can be aligned by asserting the SOFT_RST 0x001C[0] or Hard Reset 0x001E[1] register bits or driving the RSTB pin. Note
that using a hard reset will reload the register with the contents of the NVM and any unsaved changes will be lost.
One may observe that when powering up the VDD = 1.8 V rail first, that the VDDA = 3.3 V rail will initially follow the 1.8 V rail. Likewise,
if the VDDA rail is powered down first then it will not drop far below VDD until VDD itself is powered down. This is due to the pad I/O
circuits which have large MOSFET switches to select the local supply from either the VDD or VDDA rails. These devices are relatively
large and yield a parasitic diode between VDD and VDDA. Please allow for both VDD and VDDA to power-up and power-down before
measuring their respective voltages.
silabs.com | Building a more connected world. Rev. 1.3 | 72
Page 73

Si5347, Si5346 Revision D Reference Manual
Power Management
11.4 Grounding Vias
pad on the bottom of the device functions as both the sole electrical ground and primary heat transfer path. Hence it is important to
The
minimize the inductance and maximize the heat transfer from this pad to the internal ground plane of the PCB. Use no fewer than 25
vias from the center pad to a ground plane under the device. In general, more vias will perform better. Having the ground plane near the
top layer will also help to minimize the via inductance from the device to ground and maximize the heat transfer away from the device.
silabs.com | Building a more connected world. Rev. 1.3 | 73
Page 74

Si5347, Si5346 Revision D Reference Manual
Base vs. Factory Preprogrammed Devices
12. Base vs. Factory Preprogrammed Devices
The Si5347/46 devices can be ordered as “base” or “factory-preprogrammed” (also known as “custom OPN”) versions.
12.1 "Base" Devices (Also Known as "Blank" Devices)
Example “base” orderable part numbers (OPNs) are of the form “Si5341A-A-GM” or “Si5340B-A-GM”.
Base devices are available for applications where volatile reads and writes are used to program and configure the device for a particular application.
• Base devices do not power up in a usable state (all output clocks are disabled).
• Base devices are, however, configured by default to use a 48 MHz crystal on the XAXB reference and a 1.8 V compatible I/O voltage setting for the host I2C/SPI interface.
• Additional programming of a base device is mandatory to achieve a usable configuration.
• See the on-line lookup utility at:
www.silabs.com/products/clocksoscillators/pages/clockbuilderlookup.aspx to access the default configuration plan and register set-
tings for any base OPN.
12.2 “Factory Preprogrammed” (Custom OPN) Devices
Factory preprogammed devices use a “custom OPN”, such as Si5341A-A-xxxxx-GM, where “xxxxx” is a sequence of characters assigned by Silicon Labs for each customer-specific configuration. These characters are referred to as the “OPN ID”. Customers must
initiate custom OPN creation using the ClockBuilder Pro software.
• Many customers prefer to order devices which are factory preprogrammed for a particular application that includes specifying the
XAXB reference frequency/type, the clock input frequencies, the clock output frequencies, as well as the other options, such as automatic clock selection, loop BW, etc. The ClockBuilder software is required to select among all of these options and to produce a
project file that Silicon Labs uses to preprogram all devices with custom orderable part number (“custom OPN”).
• Custom OPN devices contain all of the initialization information in their non-volatile memory (NVM) so that it powers up fully configured and ready to go.
• Because preprogrammed device applications are inherently quite different from one another, the default power up values of the register settings can be determined using the custom OPN utility at:
www.silabs.com/products/clocksoscillators/pages/clockbuilderlookup.aspx.
• Custom OPN devices include a device top mark that includes the unique OPN ID. Refer to the device data sheet’s Ordering Guide
and Top Mark sections for more details.
Both “base” and “factory preprogrammed” devices can have their operating configurations changed at any time using volatile reads and
writes to the registers. Both types of devices can also have their current register configuration written to the NVM by executing an NVM
bank burn sequence (see 3.1.2 NVM Programming).
silabs.com | Building a more connected world. Rev. 1.3 | 74
Page 75

Si5347, Si5346 Revision D Reference Manual
Register Map
13. Register Map
13.1 Register Map Overview and Default Settings Values
The Si5347/46 family parts have large register maps that are divided into separate “Pages” of register banks. This allows more register
addresses than either the I2C or SPI serial interface standards 8-bit addressing provide. Each page has a maximum of 256 addresses,
however not all addresses are used on every page. Every register has a maximum data size of 8-bits, or 1 byte. Writing the page number to the 8-bit serial interface address of 0x01 on any page (0x0001, 0x0101, 0x0201, etc.) updates the page selection for subsequent
register reads and writes. For example, to access the value in register 0x040E, it is first necessary to write the page value 0x04 to serial
interface register address 0x01. At this point, the value of serial interface address 0x0E (0x040E) may be read or written. Note that is it
not necessary to write the page select register again when accessing other registers on the same page. Similarly, the read-only DEVICE_READY status is available from every page at serial interface address 0xFE (0x00FE, 0x01FE, 0x02FE, etc.).
It is recommended to use dynamic Read-Modify-Write methods when writing to registers which contain multiple settings, such as register 0x0011. To do this, first read the current contents of the register. Next, update only the select bit or bits that are being modified. This
may involve using both logical AND and logical OR operations. Finally, write the updated contents back to the register. Writing to pages, registers, or bits not documented below may cause undesired behavior in the device.
Details of the register and settings information are organized hierarchically below. To find the relevant information for your application,
first choose the section corresponding to the base part number, Si5347 or Si5346, for your design. Then, choose the section under that
for the page containing the desired register(s). For example, to find information on Page 2 register 0x02030 for the Si5346, see
13.4.3 Page 2 Registers Si5346.
Default register contents and settings differ for each device part number, or OPN. This information may be found by searching for the
Custom OPN for your device using the link below. Both Base/Blank and Custom OPNs are available there. See the previous section on
“Base vs. Factory Preprogrammed Devices" for more information on part numbers. The Private Addendum to the datasheet lists the
default settings and frequency plan information. You must be logged into the Silicon Labs website to access this information. The Public
addendum gives only the general frequency plan information (www.silabs.com/products/clocksoscillators/pages/clockbuilderlook-
up.aspx).
Table 13.1. Register Map Page Descriptions
Page Start Address (Hex) Start Address (Decimal) Contents
Page 0 0000h 0 Alarms, interrupts, reset, and other configuration
Page 1 0100h 256 Output clock configuration
Page 2 0200h 512 P and R dividers, user scratch area
Page 3 0300h 768 Internal divider value updates
Page 4 0400h 1024 DSPLLA
Page 5 0500h 1280 DSPLLB
Page 6 0600h 1536 DSPLLC, Si5347 only
Page 7 0700h 1792 DSPLLD, Si5347 only
Page 9 0900h 2304 Control IO configuration
Page A 0A00h 2560 Internal divider enables
Page B 0B00h 2816 Internal clock disables and control
R = Read Only
R/W = Read Write
S = Self Clearing
A
self-clearing bit will be cleared by the device once the operation initiated by this bit is complete. Registers with “sticky” flag bits, such
as LOS0_FLG, are cleared by writing “0” to the bit that has been automatically set high by the device.
silabs.com | Building a more connected world. Rev. 1.3 | 75
Page 76

Si5347, Si5346 Revision D Reference Manual
Register Map
13.2 Si5347A/B Register Map
13.2.1 Page 0 Registers Si5347A/B
Table 13.2. 0x0001 Page
Reg Address Bit Field Type Setting Name Description
0x0001 7:0 R/W PAGE Selects one of 256 possible pages.
The “Page Select” register is located at address 0x01 on every page. When read, it indicates the current page. When written, it will
change the page to the value entered. There is a page register at address 0x0001, 0x0101, 0x0201, 0x0301, … etc.
Table 13.3. 0x0002–0x0003 Base Part Number
Reg Address Bit Field Type Setting Name Value Description
0x0002 7:0 R PN_BASE 0x47 Four-digit “base” part number, one nibble per
0x0003 15:8 R PN_BASE 0x53
digit
Example: Si5347A-A-GM. The base part number (OPN) is 5347, which is stored in this register
Table 13.4. 0x0004 Device Grade
Reg Address Bit Field Type Setting Name Description
0x0004 7:0 R GRADE One ASCII character indicating the device speed/
synthesis mode.
0 = A
1 = B
2 = C
3 = D
Refer to the device data sheet Ordering Guide section for more information about device grades.
Table 13.5. 0x0005 Device Revision
Reg Address Bit Field Type Setting Name Description
0x0005 7:0 R DEVICE_REV One ASCII character indicating the device revision lev-
el.
0 = A; 1 = B, etc.
Example Si5347C-A12345-GM, the device revision is
“A” and stored as 0
Table 13.6. 0x0006–0x0008 TOOL_VERSION
Reg Address Bit Field Type Name Description
0x0006 3:0 R/W TOOL_VERSION[3:0] Special
0x0006 7:4 R/W TOOL_VERSION[7:4] Revision
silabs.com | Building a more connected world. Rev. 1.3 | 76
Page 77

Si5347, Si5346 Revision D Reference Manual
Reg Address Bit Field Type Name Description
0x0007 7:0 R/W TOOL_VERSION[15:8] Minor[7:0]
0x0008 0 R/W TOOL_VERSION[15:8] Minor[8]
0x0008 4:1 R/W TOOL_VERSION[16] Major
0x0008 7:5 R/W TOOL_VERSION[13:17] Tool. 0 for ClockBuilder Pro
Table 13.7. 0x0009–0x000A NVM Identifier, Pkg ID
Reg Address Bit Field Type Setting Name Description
0x0009 7:0 R TEMP_GRADE Device temperature grading
0 = Industrial (–40 °C to 85 °C) ambient conditions
0x000A 7:0 R PKG_ID Package ID
0 = 9x9 mm 64 QFN
Part numbers are of the form:
Si<Part Num Base><Grade>-<Device Revision><OPN ID>-<Temp Grade><Package ID>
Register Map
Examples:
Si5347C-A12345-GM.
Applies to a “base” or “blank” OPN (Ordering Part Number) device. These devices are factory pre-programmed with the frequency plan
and all other operating characteristics defined by the user’s ClockBuilder Pro project file.
Si5347C-A-GM.
Applies to a “base” or “blank” OPN device. Base devices are factory pre-programmed to a specific base part type (e.g., Si5347 but
exclude any user-defined frequency plan or other user-defined operating characteristics selected in ClockBuilder Pro.
Table 13.8. 0x000B I2C Address
Reg Address Bit Field Type Setting Name Description
0x000B 6:0 R/W I2C_ADDR 7-bit I2C Address. Note: This register is not bank burna-
ble.
Table 13.9. 0x000C Internal Status Bits
Reg Address Bit Field Type Setting Name Description
0x000C 0 R SYSINCAL 1 if the device is calibrating.
0x000C 1 R LOSXAXB 1 if there is no signal at the XAXB pins.
0x000C 2 R LOSREF 1 if there is no signal detected on the XAXB input sig-
nal.
0x000C 3 R XAXB_ERR 1 if there is a problem locking to the XAXB input signal.
0x000C 5 R SMBUS_TIMEOUT 1 if there is an SMBus timeout error.
Bit 1 is the LOS status monitor for the XTAL or REFCLK at the XA/XB pins. Bit 3 is the XAXB problem status monitor and may indicate
the
XAXB input signal has excessive jitter, ringing, or low amplitude. Bit 5 indicates a timeout error when using SMBUS with the I2C
serial port.
silabs.com | Building a more connected world. Rev. 1.3 | 77
Page 78

Si5347, Si5346 Revision D Reference Manual
Table 13.10. 0x000D Loss-of Signal (LOS) Alarms
Reg Address Bit Field Type Setting Name Description
0x000D 3:0 R LOS 1 if the clock input [3 2 1 0] is currently LOS.
0x000D 7:4 R OOF 1 if the clock input [3 2 1 0] is currently OOF.
Note that each bit corresponds to the input. The LOS bits are not sticky.
Input 0 (IN0) corresponds to LOS 0x000D [0], OOF 0x000D[4]
•
• Input 1 (IN1) corresponds to LOS 0x000D [1], OOF 0x000D[5]
• Input 2 (IN2) corresponds to LOS 0x000D [2], OOF 0x000D[6]
• Input 3 (IN3) corresponds to LOS 0x000D [3], OOF 0x000D[7]
Table 13.11. 0x000EHoldover and LOL Status
Reg Address Bit Field Type Setting Name Description
0x000E 3:0 R LOL_PLL[D:A] 1 if the DSPLL is out of lock
0x000E 7:4 R HOLD_PLL[D:A] 1 if the DSPLL is in holdover (or free run)
Register Map
DSPLL_A corresponds to bit 0,4
DSPLL_B corresponds to bit 1,5
DSPLL_C corresponds to bit 2,6
DSPLL_D corresponds to bit 3,7
Table 13.12. 0x000F INCAL Status
Reg Address Bit Field Type Setting Name Description
0x000F 7:4 R CAL_PLL[D:A] 1 if the DSPLL internal calibration is busy.
DSPLL_A corresponds to bit 4
DSPLL_B corresponds to bit 5
DSPLL_C corresponds to bit 6
DSPLL_D corresponds to bit 7
Table 13.13. 0x0011 Internal Error Flags
Reg Address Bit Field Type Setting Name Description
0x0011 0 R/W SYSINCAL_FLG Sticky version of SYSINCAL. Write a 0 to this bit to
clear.
0x0011 1 R/W LOSXAXB_FLG Sticky version of LOSXAXB. Write a 0 to this bit to
clear.
0x0011 2 R/W LOSREF_FLG Sticky version of LOSREF. Write a 0 to clear the flag.
0x0011 3 R/W XAXB_ERR_FLG Sticky version of XAXB_ERR. Write a 0 to this bit to
clear.
0x0011 5 R/W SMBUS_TIME-
OUT_FLG
Sticky version of SMBUS_TIMEOUT. Write a 0 to this
bit to clear.
These are sticky flag versions of 0x000C. They are cleared by writing zero to the bit that has been set.
silabs.com | Building a more connected world. Rev. 1.3 | 78
Page 79

Si5347, Si5346 Revision D Reference Manual
Table 13.14. 0x0012 Sticky OOF and LOS Flags
Reg Address Bit Field Type Setting Name Description
0x0012 3:0 R/W LOS_FLG Sticky version of LOS. Write a 0 to this bit to clear.
0x0012 7:4 R/W OOF_FLG Sticky version of OOF. Write a 0 to this bit to clear.
These are sticky flag versions of 0x000D.
Input 0 (IN0) corresponds to LOS_FLG 0x0012 [0], OOF_FLG 0x0012[4]
•
• Input 1 (IN1) corresponds to LOS_FLG 0x0012 [1], OOF_FLG 0x0012[5]
• Input 2 (IN2) corresponds to LOS_FLG 0x0012 [2], OOF_FLG 0x0012[6]
• Input 3 (IN3) corresponds to LOS_FLG 0x0012 [3], OOF_FLG 0x0012[7]
Table 13.15. 0x0013 Holdover and LOL Flags
Reg Address Bit Field Type Setting Name Description
0x0013 3:0 R/W LOL_FLG_PLL[D:A] 1 if the DSPLL was unlocked
0x0013 7:4 R/W HOLD_FLG_PLL[D:A]1 if the DSPLL was in holdover (or freerun)
Register Map
Sticky flag versions of address 0x000E.
DSPLL_A corresponds to bit 0,4
DSPLL_B corresponds to bit 1,5
DSPLL_C corresponds to bit 2,6
DSPLL_D corresponds to bit 3,7
Table 13.16. 0x0014 INCAL Flags
Reg Address Bit Field Type Setting Name Description
0x0014 7:4 R/W CAL_FLG_PLL[D:A] 1 if the DSPLL internal calibration was busy
These are sticky-flag versions of 0x000F.
DSPLL A corresponds to bit 4
DSPLL B corresponds to bit 5
DSPLL C corresponds to bit 6
DSPLL D corresponds to bit 7
Table 13.17. 0x0016
Reg Address Bit Field Type Setting Name Description
0x0016 3:0 R/W LOL_ON_HOLD_PL
Set by CBPro.
L[D:A]
Table 13.18. 0x0017 Fault Masks
Reg Address Bit Field Type Setting Name Description
0x0017 0 R/W SYSIN-
1 to mask SYSINCAL_FLG from causing an interrupt
CAL_INTR_MSK
silabs.com | Building a more connected world. Rev. 1.3 | 79
Page 80
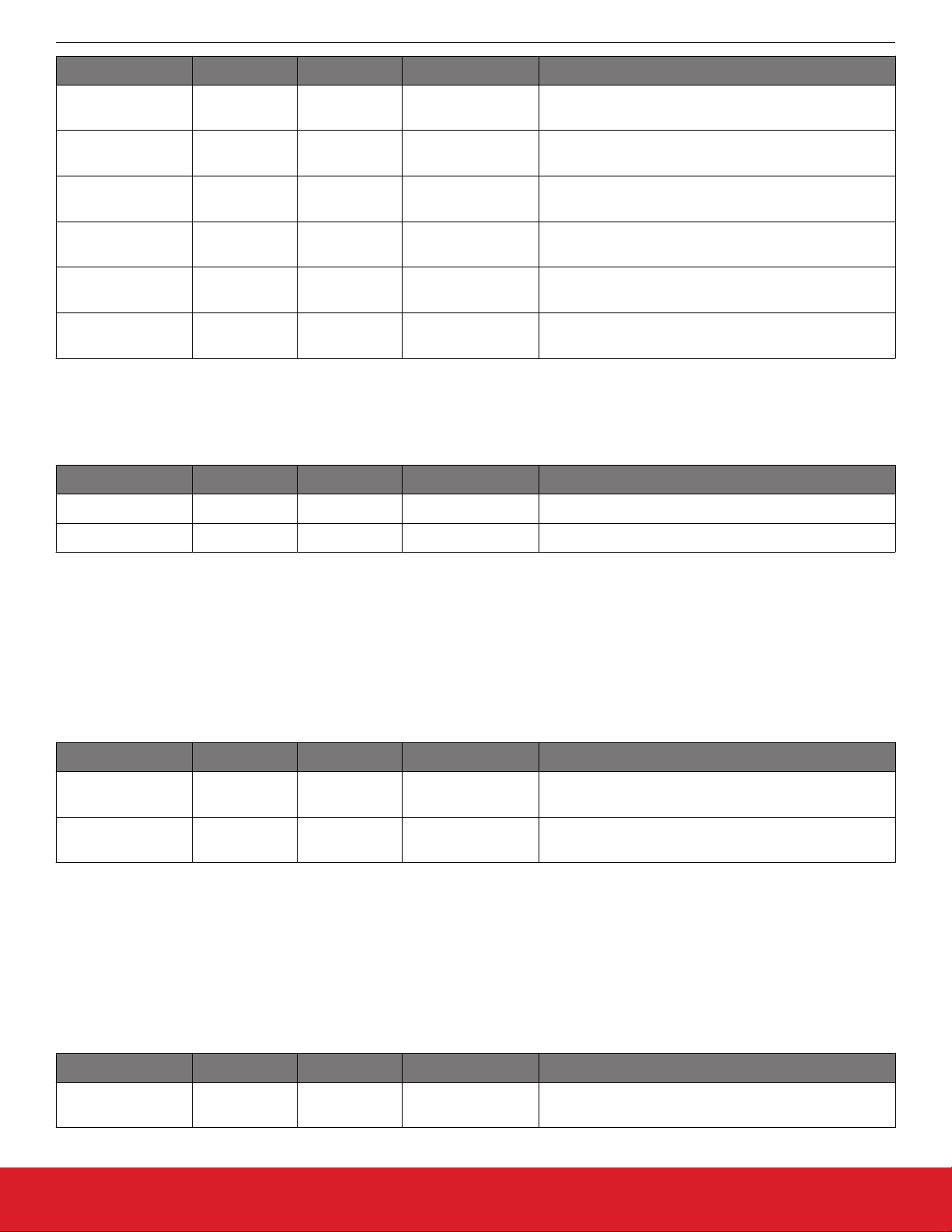
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0017 1 R/W LOS-
1 to mask the LOSXAXB_FLG from causing an interrupt
XAXB_INTR_MSK
0x0017 2 R/W LOS-
1 to mask LOSREF_FLG from causing an interrupt
REF_INTR_MSK
0x0017 3 R/W XAXB_ERR_INTR_
MSK
0x0017 5 R/W SMB_TMOUT_INT
R_MSK
1 to mask SMBUS_TIMEOUT_FLG from causing an interrupt
0x0017 6 R/W Reserved Factory set to 1 to mask reserved bit from causing an
interrupt. Do not clear this bit.
0x0017 7 R/W Reserved Factory set to 1 to mask reserved bit from causing an
interrupt. Do not clear this bit.
The interrupt mask bits for the fault flags in register 0x011. If the mask bit is set, the alarm will be blocked from causing an interrupt.
The default for this register is 0x035.
Table 13.19. 0x0018 OOF and LOS Masks
Reg Address Bit Field Type Setting Name Description
0x0018 3:0 R/W LOS_INTR_MSK 1: To mask the clock input LOS flag
0x0018 7:4 R/W OOF_INTR_MSK 1: To mask the clock input OOF flag
• Input 0 (IN0) corresponds to LOS_IN_INTR_MSK 0x0018 [0], OOF_IN_INTR_MSK 0x0018 [4]
• Input 1 (IN1) corresponds to LOS_IN_INTR_MSK 0x0018 [1], OOF_IN_INTR_MSK 0x0018 [5]
• Input 2 (IN2) corresponds to LOS_IN_INTR_MSK 0x0018 [2], OOF_IN_INTR_MSK 0x0018 [6]
• Input 3 (IN3) corresponds to LOS_IN_INTR_MSK 0x0018 [3], OOF_IN_INTR_MSK 0x0018 [7]
These are the interrupt mask bits for the OOF and LOS flags in register 0x0012. If a mask bit is set, the alarm will be blocked from
causing an interrupt.
Table 13.20. 0x0019 Holdover and LOL Masks
Reg Address Bit Field Type Setting Name Description
0x0019 3:0 R/W LOL_INTR_MSK_P
1: To mask the clock input LOL flag
LL[D:A]
0x0019 7:4 R/W HOLD_INTR_MSK_
1: To mask the holdover flag
PLL[D:A]
• DSPLL A corresponds to LOL_INTR_MSK_PLL 0x0019 [0], HOLD_INTR_MSK_PLL 0x0019 [4]
•
DSPLL B corresponds to LOL_INTR_MSK_PLL 0x0019 [1], HOLD_INTR_MSK_PLL 0x0019 [5]
• DSPLL C corresponds to LOL_INTR_MSK_PLL 0x0019 [2], HOLD_INTR_MSK_PLL 0x0019 [6]
• DSPLL D corresponds to LOL_INTR_MSK_PLL 0x0019 [3], HOLD_INTR_MSK_PLL 0x0019 [7]
These are the interrupt mask bits for the LOS and HOLD flags in register 0x0013. If a mask bit is set, the alarm will be blocked from
causing an interrupt.
Table 13.21. 0x001A INCAL Masks
Reg Address Bit Field Type Setting Name Description
0x001A 7:4 R/W CAL_INTR_MSK_D
1: To mask the DSPLL internal calibration busy flag
SPLL[D:A]
DSPLL A corresponds to bit 0
silabs.com | Building a more connected world. Rev. 1.3 | 80
Page 81

Si5347, Si5346 Revision D Reference Manual
Register Map
DSPLL B corresponds to bit 1
DSPLL C corresponds to bit 2
DSPLL D corresponds to bit 3
Table 13.22. 0x001C Soft Reset and Calibration
Reg Address Bit Field Type Setting Name Description
0x001C 0 S SOFT_RST_ALL 0: No effect
1: Initialize and calibrate the entire device.
0x001C 1 S SOFT_RST_PLLA 1 initialize and calibrate DSPLLA
0x001C 2 S SOFT_RST_PLLB 1 initialize and calibrate DSPLLB
0x001C 3 S SOFT_RST_PLLC 1 initialize and calibrate DSPLLC
0x001C 4 S SOFT_RST_PLLD 1 initialize and calibrate DSPLLD
These bits are of type “S”, which means self-clearing. Unlike SOFT_RST_ALL, the SOFT_RST_PLLx bits do not update the loop BW
values.
and BW_UPDATE_PLLD at addresses 0x0414, 0x514, 0x0614, and 0x0715.
If these have changed, the update can be done by writing to BW_UPDATE_PLLA, BW_UPDATE_PLLB, BW_UPDATE_PLLC,
Table 13.23. 0x001D FINC, FDEC
Reg Address Bit Field Type Setting Name Description
0x001D 0 S FINC 0: No effect
1: A rising edge will cause an frequency increment.
0x001D 1 S FDEC 0: No effect
1: A rising edge will cause an frequency decrement.
Table 13.24. 0x001E Sync, Power Down, and Hard Reset
Reg Address Bit Field Type Setting Name Description
0x001E 0 R/W PDN 1: To put the device into low power mode
0x001E 1 R/W HARD_RST Perform hard Reset with NVM read.
0: Normal Operation
1: Hard Reset the device
0x001E 2 S SYNC 1 to set all the R dividers to the same state.
Table 13.25. 0x0020 DSPLL_SEL[1:0] Control of FINC/FDEC for DCO
Reg Address Bit Field Type Name Description
0x0020 0 R/W FSTEP_PLL_SIN-
GLE
0: DSPLL_SEL[1:0] pins and bits are disabled.
1: DSPLL_SEL[1:0] pins or FSTEP_PLL bits are enabled. See FSTEP_PLL_REGCTRL
silabs.com | Building a more connected world. Rev. 1.3 | 81
Page 82

Reg Address Bit Field Type Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0020 1 R/W FSTEP_PLL_REGC
TRL
Only functions when FSTEP_PLL_SINGLE = 1.
0: DSPLL_SELx pins are enabled, and the corresponding register bits are disabled.
1: DSPLL_SELx_REG register bits are enabled, and
the corresponding pins are disabled.
0x0020 3:2 R/W FSTEP_PLL Register version of the DSPLL_SEL[1:0] pins. Used to
select which PLL (M divider) is affected by FINC/FDEC.
0: DSPLL A M-divider
1: Reserved
2: DSPLL C M-divider
3: DSPLL D M-divider
By default ClockBuilder Pro sets OE0 controlling all outputs. OUTALL_DISABLE_LOW 0x0102[0] must be high (enabled) to observe
the effects of OE0. Note that the OE0 register bits (active high) have inverted logic sense from the pins (active low).
Table 13.26. 0x002B SPI 3 vs 4 Wire
Reg Address Bit Field Type Setting Name Description
0x002B 3 R/W SPI_3WIRE 0: For 4-wire SPI
1: For 3-wire SPI.
Table 13.27. 0x002C LOS Enable
Reg Address Bit Field Type Setting Name Description
0x002C 3:0 R/W LOS_EN 0: For disable.
1: To enable LOS for a clock input.
0x002C 4 R/W LOSXAXB_DIS Enable LOS detection on the XAXB inputs.
0: Enable LOS Detection (default)
1: Disable LOS Detection
• Input 0 (IN0): LOS_EN[0]
•
Input 1 (IN1): LOS_EN[1]
• Input 2 (IN2): LOS_EN[2]
• Input 3 (IN3): LOS_EN[3]
Table 13.28. 0x002D Loss of Signal Re-Qualification Value
Reg Address Bit Field Type Setting Name Description
0x002D 1:0 R/W LOS0_VAL_TIME Clock Input 0
0: For 2 msec
1: For 100 msec
2: For 200 msec
3: For one second
0x002D 3:2 R/W LOS1_VAL_TIME Clock Input 1, same as above
silabs.com | Building a more connected world. Rev. 1.3 | 82
Page 83

Si5347, Si5346 Revision D Reference Manual
Register Map
Reg Address Bit Field Type Setting Name Description
0x002D 5:4 R/W LOS2_VAL_TIME Clock Input 2, same as above
0x002D 7:6 R/W LOS3_VAL_TIME Clock Input 3,same as above
When an input clock is gone (and therefore has an active LOS alarm), if the clock returns, there is a period of time that the clock must
be within the acceptable range before the alarm is removed. This is the LOS_VAL_TIME.
Table 13.29. 0x002E-0x002F LOS0 Trigger Threshold
Reg Address Bit Field Type Setting Name Description
0x002E 7:0 R/W LOS0_TRG_THR 16-bit Threshold Value
0x002F 15:8 R/W LOS0_TRG_THR
ClockBuilder Pro calculates the correct LOS register threshold trigger value for Input 0, given a particular frequency plan.
Table 13.30. 0x0030-0x0031 LOS1 Trigger Threshold
Reg Address Bit Field Type Setting Name Description
0x0030 7:0 R/W LOS1_TRG_THR 16-bit Threshold Value
0x0031 15:8 R/W LOS1_TRG_THR
ClockBuilder Pro calculates the correct LOS register threshold trigger value for Input 1, given a particular frequency plan.
Table 13.31. 0x0032-0x0033 LOS2 Trigger Threshold
Reg Address Bit Field Type Setting Name Description
0x0032 7:0 R/W LOS2_TRG_THR 16-bit Threshold Value
0x0033 15:8 R/W LOS2_TRG_THR
ClockBuilder Pro calculates the correct LOS register threshold trigger value for Input 2, given a particular frequency plan.
Table 13.32. 0x0034-0x0035 LOS3 Trigger Threshold
Reg Address Bit Field Type Setting Name Description
0x0034 7:0 R/W LOS3_TRG_THR 16-bit Threshold Value
0x0035 15:8 R/W LOS3_TRG_THR
ClockBuilder Pro calculates the correct LOS register threshold trigger value for Input 3, given a particular frequency plan.
Table 13.33. 0x0036-0x0037 LOS0 Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x0036 7:0 R/W LOS0_CLR_THR 16-bit Threshold Value
0x0037 15:8 R/W LOS0_CLR_THR
ClockBuilder Pro calculates the correct LOS register clear threshold value for Input 0, given a particular frequency plan.
silabs.com | Building a more connected world. Rev. 1.3 | 83
Page 84

Si5347, Si5346 Revision D Reference Manual
Table 13.34. 0x0038-0x0039 LOS1 Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x0038 7:0 R/W LOS1_CLR_THR 16-bit Threshold Value
0x0039 15:8 R/W LOS1_CLR_THR
ClockBuilder Pro calculates the correct LOS register clear threshold value for Input 1, given a particular frequency plan.
Table 13.35. 0x003A-0x003B LOS2 Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x003A 7:0 R/W LOS2_CLR_THR 16-bit Threshold Value
0x003B 15:8 R/W LOS2_CLR_THR
ClockBuilder Pro calculates the correct LOS register clear threshold value for Input 2, given a particular frequency plan.
Table 13.36. 0x003C-0x003D LOS3 Clear Threshold
Register Map
Reg Address Bit Field Type Setting Name Description
0x003C 7:0 R/W LOS3_CLR_THR 16-bit Threshold Value
0x003D 15:8 R/W LOS3_CLR_THR
ClockBuilder Pro calculates the correct LOS register clear threshold value for Input 3, given a particular frequency plan.
Table 13.37. 0x003F OOF Enable
Reg Address Bit Field Type Setting Name Description
0x003F 3:0 R/W OOF_EN 0: To disable
0x003F 7:4 R/W FAST_OOF_EN
1: To enable
Table 13.38. 0x0040 OOF Reference Select
Reg Address Bit Field Type Setting Name Description
0x0040 2:0 R/W OOF_REF_SEL 0: IN0
1: IN1
2: IN2
3: IN3
4: XAXB
5–7: Reserved
ClockBuilder Pro provides the OOF register values for a particular frequency plan.
silabs.com | Building a more connected world. Rev. 1.3 | 84
Page 85

Table 13.39. 0x0041-0x0045 OOF Divider Select
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0041 4:0 R/W OOF0_DIV_SEL Sets a divider for the OOF circuitry for each input clock
0x0042 4:0 R/W OOF1_DIV_SEL
0,1,2,3. The divider value is 2
these dividers.
OOFx_DIV_SEL
. CBPro sets
0x0043 4:0 R/W OOF2_DIV_SEL
0x0044 4:0 R/W OOF3_DIV_SEL
0x0045 4:0 R/W OOFXO_DIV_SEL
Table 13.40. 0x0046-0x0049 Out of Frequency Set Threshold
Reg Address Bit Field Type Setting Name Description
0x0046 7:0 R/W OOF0_SET_THR OOF Set Threshold. Range is up to ± 500 ppm in steps
of 1/16 ppm.
0x0047 7:0 R/W OOF1_SET_THR OOF Set Threshold. Range is up to ± 500 ppm in steps
of 1/16 ppm.
0x0048 7:0 R/W OOF2_SET_THR OOF Set Threshold. Range is up to ± 500 ppm in steps
of 1/16 ppm.
0x0049 7:0 R/W OOF3_SET_THR OOF Set Threshold. Range is up to ± 500 ppm in steps
of 1/16 ppm.
Table 13.41. 0x004A-0x004D Out of Frequency Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x004A 7:0 R/W OOF0_CLR_THR OOF Clear Threshold. Range is up to ± 500 ppm in
steps of 1/16 ppm.
0x004B 7:0 R/W OOF1_CLR_THR OOF Clear Threshold. Range is up to ± 500 ppm in
steps of 1/16 ppm.
0x004C 7:0 R/W OOF2_CLR_THR OOF Clear Threshold. Range is up to ± 500 ppm in
steps of 1/16 ppm.
0x004D 7:0 R/W OOF3_CLR_THR OOF Clear Threshold. Range is up to ± 500 ppm in
steps of 1/16 ppm.
Table 13.42. 0x004E-0x004F OOF Detection Windows
Reg Address Bit Field Type Setting Name Description
0x004E 2:0 R/W OOF0_DET-
Values calculated by CBPro.
WIN_SEL
0x004E 6:4 R/W OOF1_DET-
WIN_SEL
0x004F 2:0 R/W OOF2_DET-
WIN_SEL
0x004F 6:4 R/W OOF3_DET-
WIN_SEL
silabs.com | Building a more connected world. Rev. 1.3 | 85
Page 86

Table 13.43. 0x0050
Reg Address Bit Field Type Setting Name Description
0x0050 3:0 R/W OOF_ON_LOS Set by CBPro.
Table 13.44. 0x0051-0x0054 Fast Out of Frequency Set Threshold
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0051 3:0 R/W FAST_OOF0_SET_
(1+ value) x 1000 ppm
THR
0x0052 3:0 R/W FAST_OOF1_SET_
(1+ value) x 1000 ppm
THR
0x0053 3:0 R/W FAST_OOF2_SET_
(1+ value) x 1000 ppm
THR
0x0054 3:0 R/W FAST_OOF3_SET_
(1+ value) x 1000 ppm
THR
These registers determine the OOF alarm set threshold for IN3, IN2, IN1 and IN0 when the fast control is enabled. The value in each of
the register is (1+ value) x 1000 ppm. ClockBuilder Pro is used to determine the values for these registers.
Table 13.45. 0x0055-0x0058 Fast Out of Frequency Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x0055 3:0 R/W FAST_OOF0_CLR_
(1+ value) x 1000 ppm
THR
0x0056 3:0 R/W FAST_OOF1_CLR_
(1+ value) x 1000 ppm
THR
0x0057 3:0 R/W FAST_OOF2_CLR_
(1+ value) x 1000 ppm
THR
0x0058 3:0 R/W FAST_OOF3_CLR_
(1+ value) x 1000 ppm
THR
These registers determine the OOF alarm clear threshold for IN3, IN2, IN1 and IN0 when the fast control is enabled. The value in each
of the register is (1+ value) x 1000 ppm. ClockBuilder Pro is used to determine the values for these registers.
OOF needs a frequency reference. ClockBuilder Pro provides the OOF register values for a particular frequency plan.
Table 13.46. 0x0059 Fast OOF Detection Windows
Reg Address Bit Field Type Setting Name Description
0x0059 1:0 R/W FAST_OOF0_DET-
Values calculated by CBPro.
WIN_SEL
0x0059 3:2 R/W FAST_OOF1_DET-
WIN_SEL
0x0059 5:4 R/W FAST_OOF2_DET-
WIN_SEL
0x0059 7:6 R/W FAST_OOF3_DET-
WIN_SEL
silabs.com | Building a more connected world. Rev. 1.3 | 86
Page 87

Si5347, Si5346 Revision D Reference Manual
Table 13.47. 0x005A-0x005D OOF0 Ratio for Reference
Reg Address Bit Field Type Setting Name Description
0x005A 7:0 R/W OOF0_RATIO_REF Values calculated by CBPro
0x005B 15:8 R/W OOF0_RATIO_REF
0x005C 23:16 R/W OOF0_RATIO_REF
0x005D 25:24 R/W OOF0_RATIO_REF
Table 13.48. 0x005E-0x0061 OOF1 Ratio for Reference
Reg Address Bit Field Type Setting Name Description
0x005E 7:0 R/W OOF1_RATIO_REF Values calculated by CBPro
0x005F 15:8 R/W OOF1_RATIO_REF
0x0060 23:16 R/W OOF1_RATIO_REF
0x0061 25:24 R/W OOF1_RATIO_REF
Register Map
Table 13.49. 0x0062-0x0065 OOF2 Ratio for Reference
Reg Address Bit Field Type Setting Name Description
0x0062 7:0 R/W OOF2_RATIO_REF Values calculated by CBPro
0x0063 15:8 R/W OOF2_RATIO_REF
0x0064 23:16 R/W OOF2_RATIO_REF
0x0065 25:24 R/W OOF2_RATIO_REF
Table 13.50. 0x0066-0x0069 OOF3 Ratio for Reference
Reg Address Bit Field Type Setting Name Description
0x0066 7:0 R/W OOF3_RATIO_REF Values calculated by CBPro
0x0067 15:8 R/W OOF3_RATIO_REF
0x0068 23:16 R/W OOF3_RATIO_REF
0x0069 25:24 R/W OOF3_RATIO_REF
Table 13.51. 0x0092 Fast LOL Enable
Reg Address Bit Field Type Setting Name Description
0x0092 0 R/W LOL_FST_EN_PLLAEnables fast detection of LOL for PLLx. A large input
frequency error will quickly assert LOL when this is ena-
0x0092 1 R/W LOL_FST_EN_PLL
bled.
B
0x0092 2 R/W LOL_FST_EN_PLL
C
0x0092 3 R/W LOL_FST_EN_PLL
D
silabs.com | Building a more connected world. Rev. 1.3 | 87
Page 88
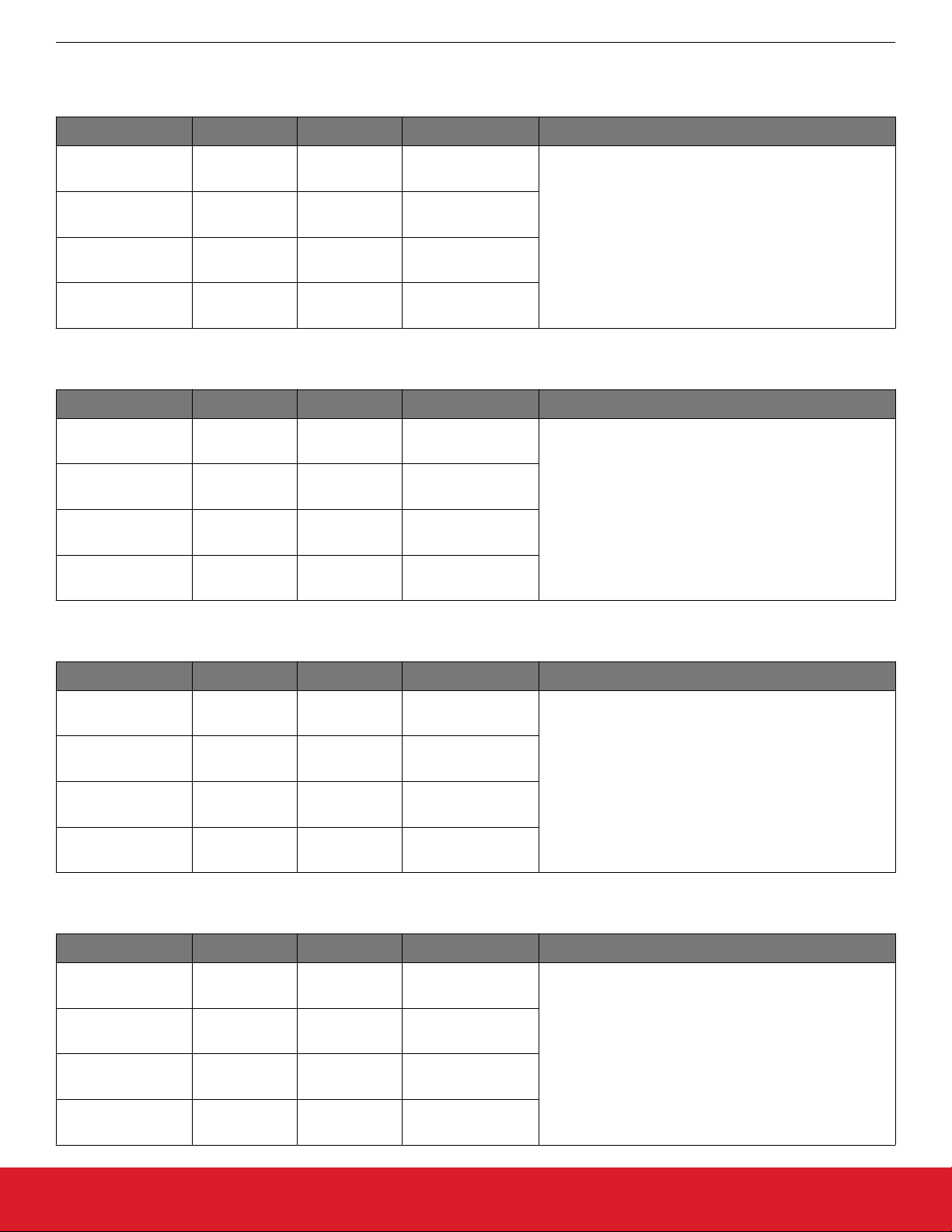
Table 13.52. 0x0093-0x0094 Fast LOL Detection Window
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0093 3:0 R/W LOL_FST_DET-
Values calculated by CBPro
WIN_SEL_PLLA
0x0093 7:4 R/W LOL_FST_DET-
WIN_SEL_PLLB
0x0094 3:0 R/W LOL_FST_DET-
WIN_SEL_PLLC
0x0094 7:4 R/W LOL_FST_DET-
WIN_SEL_PLLD
Table 13.53. 0x0095 Fast LOL Detection Value
Reg Address Bit Field Type Setting Name Description
0x0095 1:0 R/W LOL_FST_VAL-
Values calculated by CBPro
WIN_SEL_PLLA
0X0095 3:2 R/W LOL_FST_VAL-
WIN_SEL_PLLB
0x0095 5:4 R/W LOL_FST_VAL-
WIN_SEL_PLLC
0X0095 7:6 R/W LOL_FST_VAL-
WIN_SEL_PLLD
Table 13.54. 0x0096-0x0097 Fast LOL Set Threshold
Reg Address Bit Field Type Setting Name Description
0x0096 3:0 R/W LOL_FST_SET_TH
Values calculated by CBPro
R_SEL_PLLA
0x0096 7:4 R/W LOL_FST_SET_TH
R_SEL_PLLB
0x0097 3:0 R/W LOL_FST_SET_TH
R_SEL_PLLC
0x0097 7:4 R/W LOL_FST_SET_TH
R_SEL_PLLD
Table 13.55. 0x0098-0x0099 Fast LOL Clear Threshold
Reg Address Bit Field Type Setting Name Description
0x0098 3:0 R/W LOL_FST_CLR_TH
Values calculated by CBPro
R_SEL_PLLA
0x0098 7:4 R/W LOL_FST_CLR_TH
R_SEL_PLLB
0x0099 3:0 R/W LOL_FST_CLR_TH
R_SEL_PLLC
0x0099 7:4 R/W LOL_FST_CLR_TH
R_SEL_PLLD
silabs.com | Building a more connected world. Rev. 1.3 | 88
Page 89

Table 13.56. 0x009A LOL Enable
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x009A 0
R/W LOL_SLOW_EN_P
LLA
1
0: To disable LOL.
1: To enable LOL.
LOL_SLOW_EN_P
2
3
LOL_SLOW_EN_P
LLB
LLC
LOL_SLOW_EN_P
LLD
Table 13.57. 0x009B-0x009C Slow LOL Detection Value
Reg Address Bit Field Type Setting Name Description
0x009B 3:0 R/W LOL_SLW_DET-
Values calculated by CBPro
WIN_SEL_PLLA
0x009B 7:4 R/W LOL_SLW_DET-
WIN_SEL_PLLB
0x009C 3:0 R/W LOL_SLW_DET-
WIN_SEL_PLLC
0x009C 7:4 R/W LOL_SLW_DET-
WIN_SEL_PLLD
Table 13.58. 0x009D Slow LOL Detection Value
Reg Address Bit Field Type Setting Name Description
0x009D 1:0 R/W LOL_SLW_VAL-
Values calculated by CBPro
WIN_SEL_PLLA
0x009D 3:2 R/W LOL_SLW_VAL-
WIN_SEL_PLLB
0x009D 5:4 R/W LOL_SLW_VAL-
WIN_SEL_PLLC
0x009D 7:6 R/W LOL_SLW_VAL-
WIN_SEL_PLLD
Table 13.59. 0x009E LOL Set Thresholds
Reg Address Bit Field Type Setting Name Description
0x009E 3:0 R/W LOL_SLW_SET_TH
R_PLLA
0x009E 7:4 R/W LOL_SLW_SET_TH
R_PLLB
Configures the loss of lock set thresholds. See list below for selectable values.
Configures the loss of lock set thresholds. See list below for selectable values.
silabs.com | Building a more connected world. Rev. 1.3 | 89
Page 90

Table 13.60. 0x009F LOL Set Thresholds
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x009F 3:0 R/W LOL_SLW_SET_TH
R_PLLC
0x009F 7:4 R/W LOL_SLW_SET_TH
R_PLLD
Configures the loss of lock set thresholds. See list below for selectable values.
Configures the loss of lock set thresholds. See list below for selectable values.
The following are the LOL_SLW_SET_THR_PLLx thresholds for the value that is placed in the four bits for DSPLLs.
0 = ±0.1 ppm
•
• 1 = ±0.3 ppm
• 2 = ±1 ppm
• 3 = ±3 ppm
• 4 = ±10 ppm
• 5 = ±30 ppm
• 6 = ±100 ppm
• 7 = ±300 ppm
• 8 = ±1000 ppm
• 9 = ±3000 ppm
• 10 = ±10000 ppm
• 11 - 15 Reserved
Table 13.61. 0x00A0 LOL Clear Thresholds
Reg Address Bit Field Type Setting Name Description
0x00A0 3:0 R/W LOL_SLW_CLR_TH
R_PLLA
0x00A0 7:4 R/W LOL_SLW_CLR_TH
R_PLLB
Configures the loss of lock clear thresholds. See list below for selectable values.
Configures the loss of lock clear thresholds. See list below for selectable values.
Table 13.62. 0x00A1 LOL Clear Thresholds
Reg Address Bit Field Type Setting Name Description
0x00A1 3:0 R/W LOL_SLW_CLR_TH
R_PLLC
0x00A1 7:4 R/W LOL_SLW_CLR_TH
R_PLLD
Configures the loss of lock clear thresholds. See list below for selectable values.
Configures the loss of lock clear thresholds. See list below for selectable values.
The following are the LOL_SLW_CLR_THR_PLLx thresholds for the value that is placed in the four bits of the DSPLLs. ClockBuilder
Pro sets these values.
0 = ±0.1 ppm
•
• 1 = ±0.3 ppm
• 2 = ±1 ppm
• 3 = ±3 ppm
• 4 = ±10 ppm
• 5 = ±30 ppm
• 6 = ±100 ppm
• 7 = ±300 ppm
• 8 = ±1000 ppm
• 9 = ±3000 ppm
• 10 = ±10000 ppm
silabs.com | Building a more connected world. Rev. 1.3 | 90
Page 91

• 11 - 15 Reserved
Table 13.63. 0x00A2 LOL Timer Enable
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x00A2 0
R/W LOL_TIM-
ER_EN_PLLA
1
LOL_TIM-
2
3
ER_EN_PLLB
LOL_TIM-
Enable Delay for LOL Clear.
0: Disable Delay for LOL Clear
1: Enable Delay for LOL Clear
ER_EN_PLLC
LOL_TIM-
ER_EN_PLLD
Table 13.64. 0x00A4-0x00A7 LOL Clear Delay DSPLL A
Reg Address Bit Field Type Setting Name Description
0x00A4 7:0 R/W LOL_CLR_DE-
LAY_DIV256_PLLA
29-bit value. Sets the clear timer 0x00AA 15:8 R/W
LOL_CLR_DLY for LOL. CBPro sets this value.
0x00A5 15:8 R/W LOL_CLR_DE-
LAY_DIV256_PLLA
0x00A6 23:16 R/W LOL_CLR_DE-
LAY_DIV256_PLLA
0x00A7 28:24 R/W LOL_CLR_DE-
LAY_DIV256_PLLA
Table 13.65. 0x00A9-0x00AC LOL Clear Delay DSPLL B
Reg Address Bit Field Type Setting Name Description
0x00A9 7:0 R/W LOL_CLR_DE-
LAY_DIV256_PLLB
29-bit value. Sets the clear timer 0x00AA 15:8 R/W
LOL_CLR_DLY for LOL. CBPro sets this value.
0x00AA 15:8 R/W LOL_CLR_DE-
LAY_DIV256_PLLB
0x00AB 23:16 R/W LOL_CLR_DE-
LAY_DIV256_PLLB
0x00AC 28:24 R/W LOL_CLR_DE-
LAY_DIV256_PLLB
silabs.com | Building a more connected world. Rev. 1.3 | 91
Page 92

Table 13.66. 0x00AE-0x00B1 LOL Clear Delay DSPLL C
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x00AE 7:0 R/W LOL_CLR_DE-
LAY_DIV256_PLLC
29-bit value. Sets the clear timer 0x00AA 15:8 R/W
LOL_CLR_DLY for LOL. CBPro sets this value.
0x00AF 15:8 R/W LOL_CLR_DE-
LAY_DIV256_PLLC
0x00B0 23:16 R/W LOL_CLR_DE-
LAY_DIV256_PLLC
0x00B1 28:24 R/W LOL_CLR_DE-
LAY_DIV256_PLLC
Table 13.67. 0x00B3-0x00B6 LOL Clear Delay DSPLL D
Reg Address Bit Field Type Setting Name Description
0x00B3 7:0 R/W LOL_CLR_DE-
LAY_DIV256_PLLD
29-bit value. Sets the clear timer 0x00AA 15:8 R/W
LOL_CLR_DLY for LOL. CBPro sets this value.
0x00B4 15:8 R/W LOL_CLR_DE-
LAY_DIV256_PLLD
0x00B5 23:16 R/W LOL_CLR_DE-
LAY_DIV256_PLLD
0x00B6 28:24 R/W LOL_CLR_DE-
LAY_DIV256_PLLD
Table 13.68. 0x00E2 Active NVM Bank
Reg Address Bit Field Type Setting Name Description
0x00E2 7:0 R AC-
TIVE_NVM_BANK
0x03 when no NVM has been burned
0x0F when 1 NVM bank has been burned
0x3F when 2 NVM banks have been burned
When ACTIVE_NVM_BANK = 0x3F, the last bank has
already been burned. See 3.1.1 Updating Registers
during Device Operation for a detailed description of
how to program the NVM.
Table 13.69. 0x00E3
Reg Address Bit Field Type Setting Name Description
0x00E3 7:0 R/W NVM_WRITE Write 0xC7 to initiate an NVM bank burn.
Table 13.70. 0x00E4
Reg Address Bit Field Type Setting Name Description
0x00E4 0 S NVM_READ_BANK When set, this bit will read the NVM down into the vola-
tile memory.
silabs.com | Building a more connected world. Rev. 1.3 | 92
Page 93

Table 13.71. 0x00E5
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x00E5 4 R/W FASTLOCK_EX-
TEND_EN_PLLA
Enables
FASTLOCK_EXTEND.
0x00E5 5 R/W FASTLOCK_EX-
TEND_EN_PLLB
0x00E5 6 R/W FASTLOCK_EX-
TEND_EN_PLLC
0x00E5 7 R/W FASTLOCK_EX-
TEND_EN_PLLD
Table 13.72. 0x00E6-0x00E9 FASTLOCK_EXTEND_PLLA
Reg Address Bit Field Type Setting Name Description
0x00E6 7:0 R/W FASTLOCK_EX-
TEND_PLLA
0x00E7 15:8 R/W FASTLOCK_EX-
29-bit value. Set by CBPro to minimize the phase transients when switching the PLL bandwidth. See FASTLOCK_EXTEND_SCL_PLLx.
TEND_PLLA
0x00E8 23:16 R/W FASTLOCK_EX-
TEND_PLLA
0x00E9 28:24 R/W FASTLOCK_EX-
TEND_PLLA
Table 13.73. 0x00EA-0x00ED FASTLOCK_EXTEND_PLLB
Reg Address Bit Field Type Setting Name Description
0x00EA 7:0 R/W FASTLOCK_EX-
TEND_PLLB
0x00EB 15:8 R/W FASTLOCK_EX-
29-bit value. Set by CBPro to minimize the phase transients when switching the PLL bandwidth. See FASTLOCK_EXTEND_SCL_PLLx.
TEND_PLLB
0x00EC 23:16 R/W FASTLOCK_EX-
TEND_PLLB
0x00ED 28:24 R/W FASTLOCK_EX-
TEND_PLLB
Table 13.74. 0x00EE-0x00F1 FASTLOCK_EXTEND_PLLC
Reg Address Bit Field Type Setting Name Description
0x00EE 7:0 R/W FASTLOCK_EX-
TEND_PLLC
0x00EF 15:8 R/W FASTLOCK_EX-
29-bit value. Set by CBPro to minimize the phase transients when switching the PLL bandwidth. See FASTLOCK_EXTEND_SCL_PLLx.
TEND_PLLC
0x00F0 23:16 R/W FASTLOCK_EX-
TEND_PLLC
0x00F1 28:24 R/W FASTLOCK_EX-
TEND_PLLC
silabs.com | Building a more connected world. Rev. 1.3 | 93
Page 94

Table 13.75. 0x00F2-0x00F5 FASTLOCK_EXTEND_PLLD
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x00F2 7:0 R/W FASTLOCK_EX-
TEND_PLLD
0x00F3 15:8 R/W FASTLOCK_EX-
29-bit value. Set by CBPro to minimize the phase transients when switching the PLL bandwidth. See FASTLOCK_EXTEND_SCL_PLLx.
TEND_PLLD
0x00F4 23:16 R/W FASTLOCK_EX-
TEND_PLLD
0x00F5 28:24 R/W FASTLOCK_EX-
TEND_PLLD
Table 13.76. 0x00F6
Reg Address Bit Field Type Name Description
0x00F6 0 R REG_0XF7_INTRSet by CBPro.
0x00F6 1 R REG_0XF8_INTRSet by CBPro.
0x00F6 2 R REG_0XF9_INTRSet by CBPro.
Table 13.77. 0x00F7
Reg Address Bit Field Type Name Description
0x00F7 0 R SYSINCAL_INTR Set by CBPro.
0x00F7 1 R LOSXAXB_INTR Set by CBPro.
0x00F7 2 R LOSREF_INTR Set by CBPro.
0x00F7 4 R LOSVCO_INTR Set by CBPro.
0x00F7 5 R SMBUS_TIME_O
Set by CBPro.
UT_INTR
Table 13.78. 0x00F8
Reg Address Bit Field Type Name Description
0x00F8 3:0 R LOS_INTR Set by CBPro.
0x00F8 7:4 R OOF_INTR Set by CBPro.
Table 13.79. 0x00F9
Reg Address Bit Field Type Name Description
0x00F9 0:3 R LOL_INTR_PLL[
Set by CBPro.
D:A]
0x00F9 7:4 R HOLD_INTR_PL
Set by CBPro.
L[D:A]
silabs.com | Building a more connected world. Rev. 1.3 | 94
Page 95

Si5347, Si5346 Revision D Reference Manual
Register Map
Table 13.80. 0x00FE Device Ready
Reg Address Bit Field Type Setting Name Description
0x00FE 7:0 R DEVICE_READY Ready Only byte to indicate device is ready. When read
data is 0x0F one can safely read/write registers. This
register is repeated on every page so that a page write
is not ever required to read the DEVICE_READY status.
WARNING:
Any attempt to read or write any register other than DEVICE_READY before DEVICE_READY reads as 0x0F may corrupt
the NVM programming. Note this includes writes to the PAGE register.
silabs.com | Building a more connected world. Rev. 1.3 | 95
Page 96

13.2.2 Page 1 Registers Si5347A/B
Table 13.81. 0x0102 Global OE Gating for all Clock Output Drivers
Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0102 0 R/W OUTALL_DISA-
BLE_LOW
0: Disables all output drivers
1: Pass through the output enables.
Table 13.82. 0x0108, 0x0112, 0x0117, 0x011C, 0x0126, 0x012B, 0x0130, 0x013AClock Output Driver and R-Divider Configura-
tion
Reg Address Bit Field Type Setting Name Description
0x0108
0x0112
0x0117
0 R/W OUT0_PDN
OUT1_PDN
OUT2_PDN
0: To power up the regulator,
1: To power down the regulator.
When powered down, output pins will be high-impedance with a light pull-down effect.
0x011C
0x0126
0x012B
0x0130
0x013A
0x0108
0x0112
1 R/W OUT0_OE
OUT3_PDN
OUT4_PDN
OUT5_PDN
OUT6_PDN
OUT7_PDN
OUT1_OE
0: To disable the output
1: To enable the output
0x0117
0x011C
0x0126
0x012B
0x0130
0x013A
OUT2_OE
OUT3_OE
OUT4_OE
OUT5_OE
OUT6_OE
OUT7_OE
silabs.com | Building a more connected world. Rev. 1.3 | 96
Page 97

Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0108
2 R/W OUT0_RDIV_FORC
E
0x0112
OUT1_RDIV_FORC
0x0117
0x011C
0x0126
0x012B
0x0130
0x013A
OUT2_RDIV_FORC
OUT3_RDIV_FORC
OUT4_RDIV_FORC
E
E
E
E
OUT5_RDIV_FORC
E
OUT6_RDIV_FORC
E
OUT7_RDIV_FORC
E
The output drivers are all identical. See 5.2 Performance Guidelines for Outputs.
Table 13.83. 0x0109, 0x0113, 0x0118, 0x011D, 0x0127, 0x012C, 0x0131, 0x013B Output Format
Force Rx output divider divide-by-2.
0: Rx_REG sets divide value (default)
1: Divide value forced to divide-by-2
Reg Address Bit Field Type Setting Name Description
0x0109
0x0113
0x0118
0x011D
0x0127
0x012C
0x0131
0x013B
0x0109
0x0113
0x0118
0x011D
0x0127
0x012C
0x0131
2:0 R/W OUT0_FORMAT
OUT1_FORMAT
OUT2_FORMAT
OUT3_FORMAT
OUT4_FORMAT
OUT5_FORMAT
OUT6_FORMAT
OUT7_FORMAT
3 R/W OUT0_SYNC_EN
OUT1_SYNC_EN
OUT2_SYNC_EN
OUT3_SYNC_EN
OUT4_SYNC_EN
OUT5_SYNC_EN
OUT6_SYNC_EN
0: Reserved
1: Differential Normal mode
2: Differential Low-Power mode
3: Reserved
4: LVCMOS single ended
5: LVCMOS (+pin only)
6: LVCMOS (-pin only)
7: Reserved
0: Disable
1: Enable
0x013B
silabs.com | Building a more connected world. Rev. 1.3 | 97
OUT7_SYNC_EN
Page 98

Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x0109
0x0113
0x0118
0x011D
0x0127
0x012C
0x0131
0x013B
0x0109
0x0113
0x0118
0x011D
0x0127
0x012C
0x0131
0x013B
5:4 R/W OUT0_DIS_STATE
OUT1_DIS_STATE
OUT2_DIS_STATE
OUT3_DIS_STATE
OUT4_DIS_STATE
OUT5_DIS_STATE
OUT6_DIS_STATE
OUT7_DIS_STATE
7:6 R/W OUT0_CMOS_DRV
OUT1_CMOS_DRV
OUT2_CMOS_DRV
OUT3_CMOS_DRV
OUT4_CMOS_DRV
OUT5_CMOS_DRV
OUT6_CMOS_DRV
OUT7_CMOS_DRV
Determines the state of an output driver when disabled,
selectable as
0: Disable low
1: Disable high
2-3: Reserved
LVCMOS output impedance drive strength see Table
5.8 LVCMOS Drive Strength Control Registers
on page
39.
The output drivers are all identical.
Table 13.84. 0x010A, 0x0114, 0x0119, 0x011E, 0x0128, 0x012D, 0x0132, 0x0137 Output Amplitude and Common Mode
Reg Address Bit Field Type Setting Name Description
0x010A
3:0 R/W OUT0_CM
OUTx common-mode voltage selection. This field only
applies when OUTx_FORMAT = 1 or 2.
0x0114
OUT1_CM
See Table 5.6 Recommended Settings for Differential
0x0119
0x011E
0x0128
0x012D
0x0132
0x0137
0x010A
6:4 R/W OUT0_AMPL
OUT2_CM
OUT3_CM
OUT4_CM
OUT5_CM
OUT6_CM
OUT7_CM
LVDS, LVPECL, HCSL, and CML
on page 37.
OUTx common-mode voltage selection. This field only
applies when OUTx_FORMAT = 1 or 2.
0x0114
OUT1_AMPL
See Table 5.6 Recommended Settings for Differential
0x0119
0x011E
OUT2_AMPL
OUT3_AMPL
LVDS, LVPECL, HCSL, and CML
on page 37.
0x0128
0x012D
0x0132
0x0137
silabs.com | Building a more connected world. Rev. 1.3 | 98
OUT4_AMPL
OUT5_AMPL
OUT6_AMPL
OUT7_AMPL
Page 99

Si5347, Si5346 Revision D Reference Manual
ClockBuilder Pro is used to select the correct settings for this register. The output drivers are all identical.
Table 13.85. 0x010B, 0x0115, 0x011A, 0x011F, 0x0129, 0x012E, 0x0133, 0x013D Output Format
Reg Address Bit Field Type Setting Name Description
Register Map
0x010B
0x0115
0x011A
0x011F
0x0129
0x012E
0x0133
0x013D
0x010B
0x0115
0x011A
0x011F
0x0129
0x012E
0x0133
0x013D
2:0 R/W OUT0_MUX_SEL
OUT1_MUX_SEL
OUT2_MUX_SEL
OUT3_MUX_SEL
OUT4_MUX_SEL
OUT5_MUX_SEL
OUT6_MUX_SEL
OUT7_MUX_SEL
3 R/W OUT0_VDD_SEL_E
N
OUT1_VDD_SEL_E
N
OUT2_VDD_SEL_E
N
OUT3_VDD_SEL_E
N
OUT4_VDD_SEL_E
N
OUT5_VDD_SEL_E
N
Output driver input mux select.This selects the source
of the output clock.
0: DSPLL A
1: DSPLL B
2: DSPLL C
3: DSPLL D
5-7: Reserved
0: Reserved
1: Enable manual OUTx_VDD_SEL
0x010B
0x0115
0x011A
0x011F
0x0129
0x012E
0x0133
0x013D
OUT6_VDD_SEL_E
N
OUT7_VDD_SEL_E
N
5:4 R/W OUT0_VDD_SEL
OUT1_VDD_SEL
OUT2_VDD_SEL
OUT3_VDD_SEL
OUT4_VDD_SEL
OUT5_VDD_SEL
OUT6_VDD_SEL
OUT7_VDD_SEL
0: 3.3 V
1: 1.8 V
2: 2.5 V
3: Reserved
silabs.com | Building a more connected world. Rev. 1.3 | 99
Page 100

Reg Address Bit Field Type Setting Name Description
Si5347, Si5346 Revision D Reference Manual
Register Map
0x010B
7:6 R/W OUT0_INV
LVCMOS output inversion. Only applies when
OUT0A_FORMAT = 4. See 5.4.4 LVCMOS Output Po-
0x0115
0x011A
0x011F
0x0129
0x012E
0x0133
0x013D
OUT1_INV
OUT2_INV
OUT3_INV
OUT4_INV
OUT5_INV
OUT6_INV
OUT7_INV
larity for more information.
Each output can be connected to any of the four DSPLLs using the OUTx_MUX_SEL. The output drivers are all identical. The
OUTx_MUX_SEL
settings should match the corresponding OUTx_DIS_SRC selections. Note that the setting codes for
OUTx_DIS_SRC and OUTx_MUX_SEL are different when selecting the same DSPLL. OUTx_DIS_SRC = OUTx_MUX_SEL + 1
Table 13.86. 0x010C, 0x0116, 0x011B, 0x0120, 0x012A, 0x012F, 0x0134, 0x0139 Output Disable Source DSPLL
Reg Address Bit Field Type Setting Name Description
0x010C
2:0 R/W OUT0_DIS_SRC
Output driver 0 input mux select. This selects the
source of the output clock.
0x0116
OUT1_DIS_SRC
0: DSPLL A squelches output
0x011B
OUT2_DIS_SRC
1: DSPLL B squelches output
0x0120
OUT3_DIS_SRC
2: DSPLL C squelches output
0x012A
OUT4_DIS_SRC
3: DSPLL D squelches output
0x012F
OUT5_DIS_SRC
5-7: Reserved
0x0134
OUT6_DIS_SRC
0x013E
OUT7_DIS_SRC
These CLKx_DIS_SRC settings should match the corresponding OUTx_MUX_SEL selections. Note that the setting codes for
OUTx_DIS_SRC and OUTx_MUX_SEL are different when selecting the same DSPLL. OUTx_DIS_SRC = OUTx_MUX_SEL + 1
Table 13.87. 0x013F
Reg Address Bit Field Type Setting Name Description
0x013F 11:0 R/W OUTX_AL-
Set by CBPro
WAYS_ON
silabs.com | Building a more connected world. Rev. 1.3 | 100
 Loading...
Loading...