

Page 1
AN0918.2: Wireless Gecko Series 1 to
Series 2 Compatibility and Migration
Guide
This porting guide is targeted at migrating an existing design from
Wireless Gecko Series 1 to Wireless Gecko Series 2. Both hardware and software migration needs to be considered.
The core and peripherals of Wireless Gecko Series 2 devices are based on the existing
MCU and Wireless Series 1 devices with better performance and lower current consumption.
This document will describe which aspects are enhanced in the peripherals common
between Series 1 and Series 2. Details for all of the new peripherals of Series 2 can be
found in the reference manual, and it is recommended to review the available example
code for assistance and recommendations.
All peripherals in the Series 1 and Series 2 devices are described in general terms. Not
all modules are present in all devices, and the feature set for each device might vary.
Such differences, including pinout, are covered in the device-specific data sheets.
KEY POINTS
• Series 2 have commonalities and
enhancements from Series 0 and Series 1
peripherals.
• Software and hardware migration must
both be considered when porting from a
Series 1 device to Wireless Gecko Series
2 device.
• Series 2 devices are software compatible
with the existing Series 1 devices, so only
minor changes are required for common
peripherals.
• Refer to the example code for specific
recommendations and assistance.
silabs.com | Building a more connected world. Rev. 0.2
Page 2

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
1. Device Compatibility
This application note supports multiple device families, and some functionality is different depending on the device.
MCU Series 0 consists of:
• EFM32G
• EFM32GG
• EFM32WG
• EFM32LG
• EFM32TG
• EFM32ZG
• EFM32HG
Wireless MCU Series 0 consists of:
• EZR32WG
• EZR32LG
• EZR32HG
MCU Series 1 consists of:
• EFM32JG1/EFM32JG12
• EFM32PG1/EFM32PG12
• EFM32GG11/EFM32GG12
• EFM32TG11
Device Compatibility
Wireless Gecko Series 1 consists of:
• EFR32BG1/EFR32BG12/EFR32BG13/EFR32BG14
• EFR32FG1/EFR32FG12/EFR32FG13/EFR32FG14
• EFR32MG1/EFR32MG12/EFR32MG13/EFR32MG14
Wireless Gecko Series 2 consists of:
• EFR32BG21/EFR32BG22
• EFR32FG22
• EFR32MG21/EFR32MG22
silabs.com | Building a more connected world. Rev. 0.2 | 2
Page 3
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Compatibility Overview
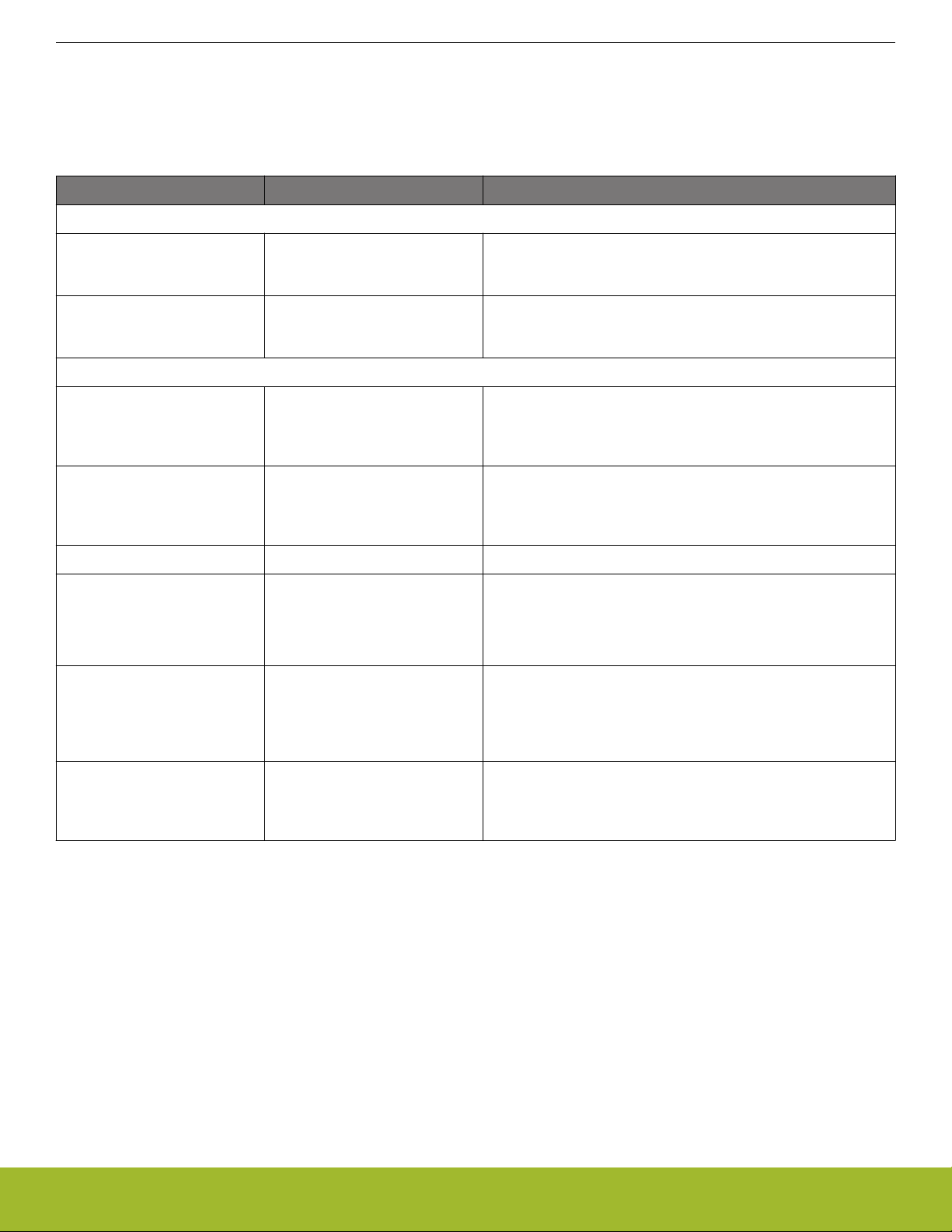
2. Compatibility Overview
Four factors must be considered when porting a design from Series 1 to Series 2: pin compatibility, hardware compatibility, software
compatibility, and peripheral compatibility.
2.1 Pins and Hardware
Wireless Gecko Series 2 devices are not footprint compatible with Series 1 or Series 0.
More information on footprint and hardware compatibility between Series 1 and Series 2 can be found in 4. Hardware Migration.
2.2 Software and Peripherals
Software compatibility between Series 1 and Series 2 is maintained using emlib and emdrv, which are software abstraction layers built
upon the CMSIS (Cortex Microcontroller Software Interface Standard) layer defined by Arm. These devices are not binary compatible,
meaning code compiled for Series 1 will not work after being downloaded to Series 2. However, if the software is written using the emlib
or emdrv modules, then the application code should not need to change in most cases when recompiling for the new Series 2 target.
Note: There are some small exceptions to full software compatibility across Series 1 and Series 2. For example, wake-up pins and
GPIO drive strength are implemented slightly differently on these parts, so the emlib functions have changed slightly to accommodate
these differences. Wherever possible, these details have been abstracted by emlib and emdrv. See 5.1 Peripheral Support Library (em-
lib) and Drivers (emdrv) for more information on compatibility between Series 1 and Series 2. Consult the [SDK Documentation] under
the [Getting Started] tab in Simplicity Studio for more information on the emlib and emdrv modules.
The abstraction provided by emlib and emdrv simplifies peripheral initialization and usage. Version 5.9 and later (provided by Gecko
SDK v2.7 and later) of emlib and emdrv support the following peripherals across Series 1 and Series 2:
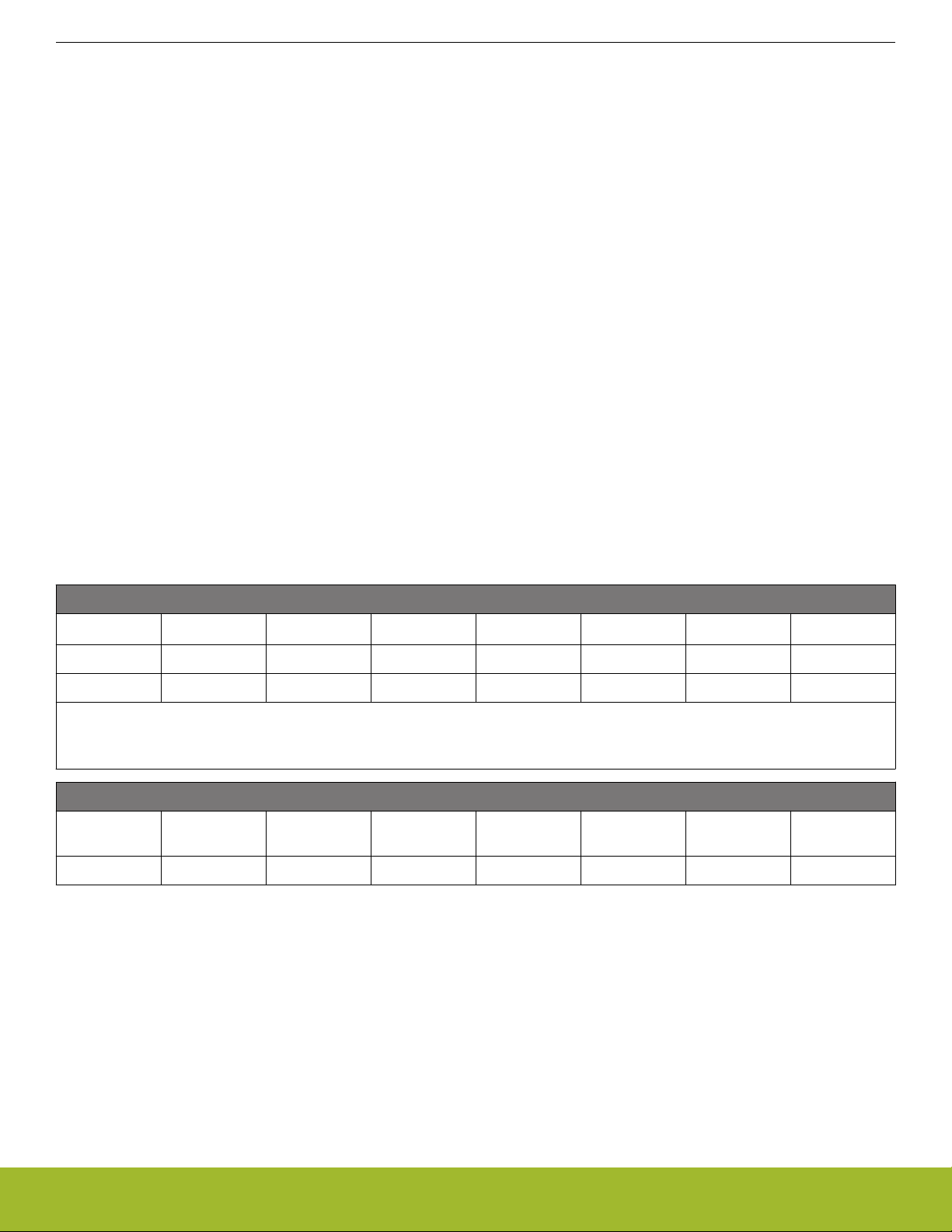
Table 2.1. Support in emlib and emdrv for Series 1 and Series 2
emlib Peripheral Support
ACMP BURTC CMU CORE
CRYPTO
1
DBG EMU EUART
GPCRC GPIO I2C IADC LDMA LETIMER MSC PDM
PRS RTCC SYSTEM TIMER USART WDOG — —
Note:
1. For CRYPTO, use the mbedTLS library.
emdrv Driver Support
DMADRV GPIOINTERR-
NVM3 RTCDRV SLEEP SPIDRV TEMPDRV UARTDRV
PUT
USTIMER — — — — — — —
Because emlib and emdrv modules are common across Series 1 and Series 2, the look and feel of the software development experience is familiar. In other words, developers experienced with Series 1 devices will already know how to construct software and use
peripherals on Series 2 devices. In addition, existing Series 1 designs can be quickly ported to new devices to take advantage of new
capabilities available on Series 2 by utilizing the common code base between families.
More information on software migration can be found in 5. Software Migration, and more information on peripheral commonalities and
differences can be found in 6. Peripherals Common Between Series 1 and Series 2.
silabs.com | Building a more connected world. Rev. 0.2 | 3
Page 4
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
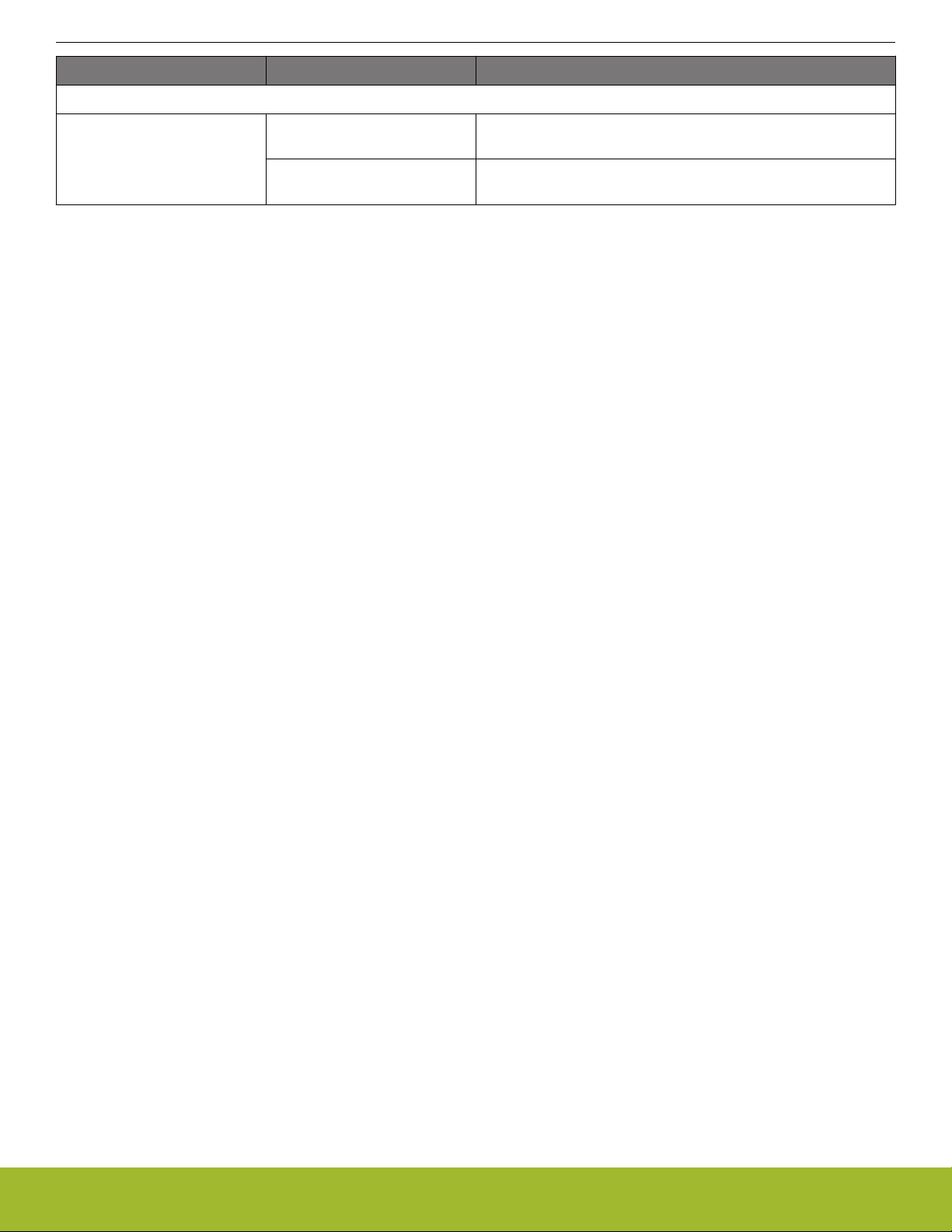
3. System Overview
3.1 Core and Memory
This section compares the core and memory of Series 1 with Series 2.
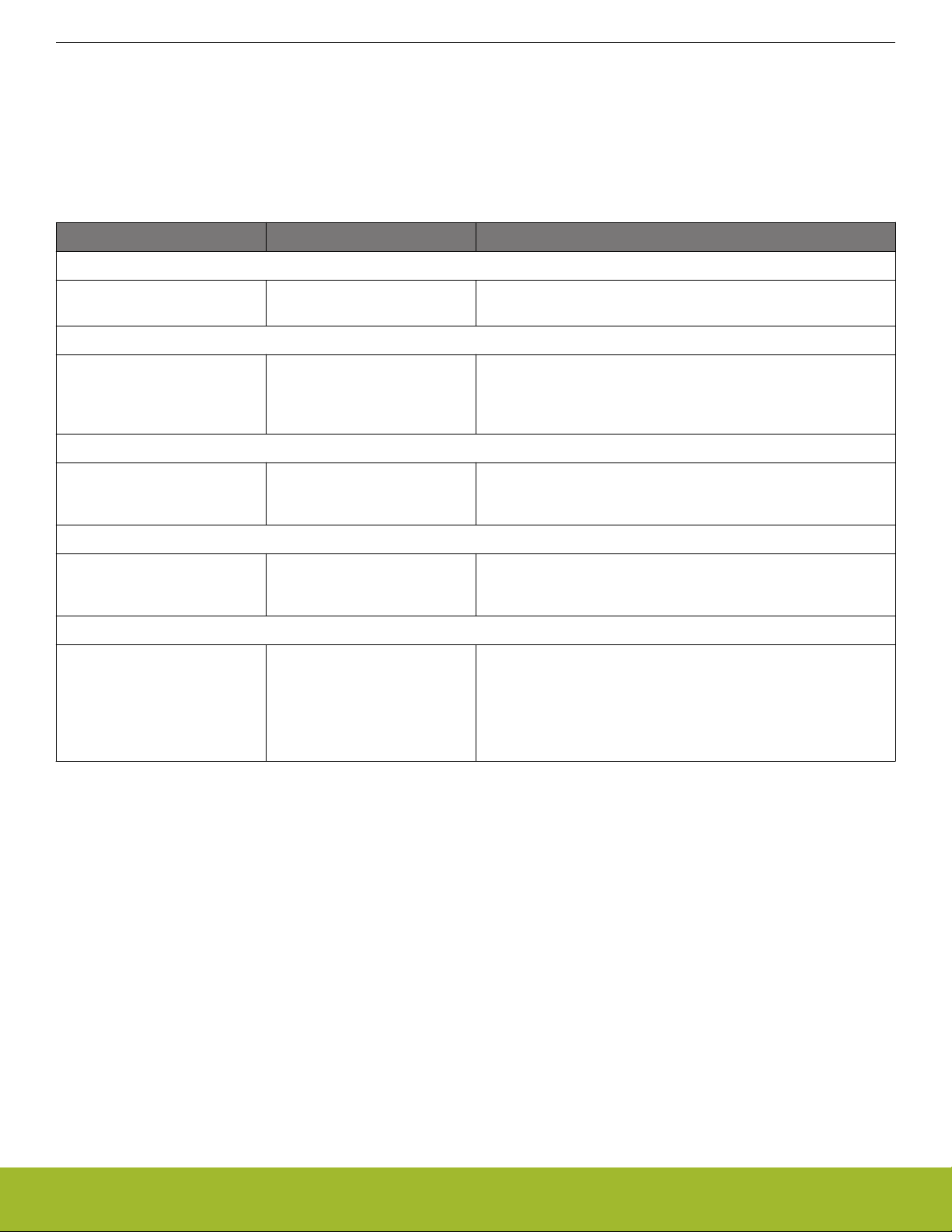
Table 3.1. Core and Memory
Series 1 Series 2 Notes
Core
System Overview
Arm Cortex M3 and M4 with
FPU
Debug Interface
The 2-pin serial-wire debug
(SWD) interface or a 4-pin Joint
Test Action Group (JTAG) interface.
DMA Controller (DMA)
Linked DMA Controller (LDMA) Linked DMA Controller (LDMA) The number of channels on each device can vary; differences are
Flash Program Memory
128 - 2048 kB Up to 1024 kB Series 2 flash words are 64 bits wide vs. 32 bits on Series 1 devi-
RAM Memory
MCU Series 1:
32 - 512 kB
Wireless Gecko Series 1:
Arm Cortex M33 —
The 2-pin serial-wire debug
(SWD) interface or a 4-pin Joint
Test Action Group (JTAG) interface.
Up to 96 kB Series 2 RAM supports ECC and may require wait states at high-
Details of the debug interface (SWD, JTAG, and ETM) on each
device might vary; differences are covered in the device-specific
data sheets.
covered in the device-specific data sheets. DMADRV can assist
with family differences.
ces. Available flash memory among device family members can
vary; differences are covered in the device-specific data sheets.
er operating frequencies. RAM features and capability can vary
among devices; differences are covered in the device-specific data sheets and family reference manuals.
16 - 256 kB
silabs.com | Building a more connected world. Rev. 0.2 | 4
Page 5

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
4. Hardware Migration
4.1 Pin Compatibility
Series 2 Wireless SoC devices are not pin compatible with any Series 0 or Series 1 SoC or MCU.
Hardware Migration
silabs.com | Building a more connected world. Rev. 0.2 | 5
Page 6
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Hardware Migration
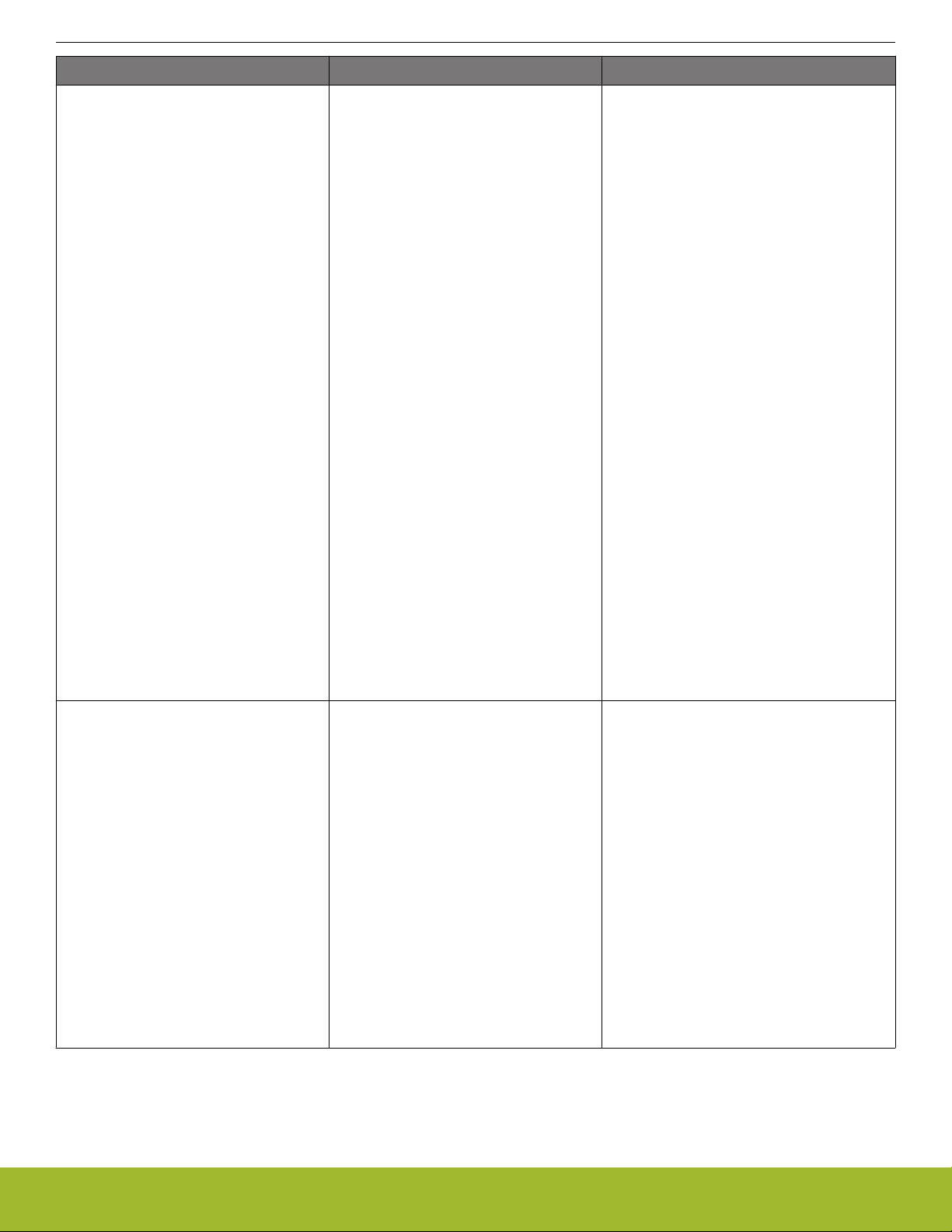
4.2 Series 1 Peripheral Migration
The following table lists Series 1 peripherals and, if they exist, their equivalents on Series 2 devices. The RF portions of Series 2 devices are not included in this comparison.
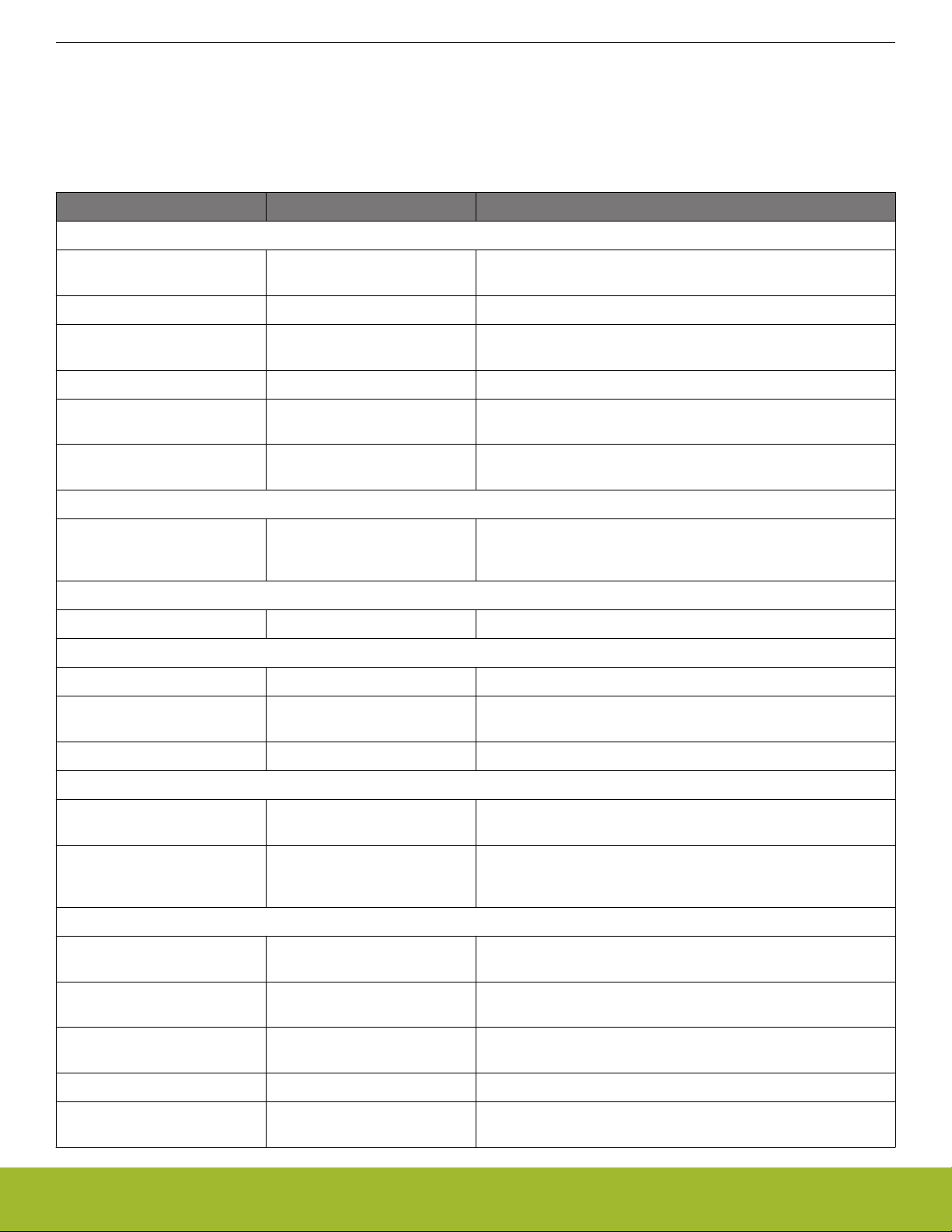
Table 4.1. Series 1 Peripheral Functionality
Series 1 Series 2 Notes
Analog Interfaces
Analog to Digital Converter
(ADC)
Incremental Analog to Digital
Converter (IADC)
No change to system hardware is required.
Analog Port (APORT) Analog Bus (ABUS) No change to system hardware is required.
Capacitive Sense Module
— This functionality is not available on Series 2.
(CSEN)
Operational Amplifier (OPAMP) — This functionality is not available on Series 2.
Voltage Digital to Analog Con-
— This functionality is not available on Series 2.
verter (VDAC)
Current Digital to Analog Con-
— This functionality is not available on Series 2.
verter (IDAC)
Digital Pin Routing
I/O ROUTE Registers Digital Bus (DBUS) DBUS is a switch matrix between peripheral resources and GPIO
pins used for signal enabling and routing on Series 2 devices. No
change to system hardware is required.
Energy Management
RTCC Retention RAM Backup RAM (BURAM) No change to system hardware is required.
External Storage
External Bus Interface (EBI) — This functionality is not available on Series 2.
Quad/Octal SPI Flash Interface
— This functionality is not available on Series 2.
(QSPI)
SDIO Host Controller (SDIO) — This functionality is not available on Series 2.
Serial Interfaces
Universal Serial Bus Controller
— This functionality is not available on Series 2.
(USB)
Low Energy Universal Asynchronous Receiver/Transmitter
(LEUART)
Enhanced Universal Asynchronous Receiver/Transmitter (EUART)
No change to system hardware is required.
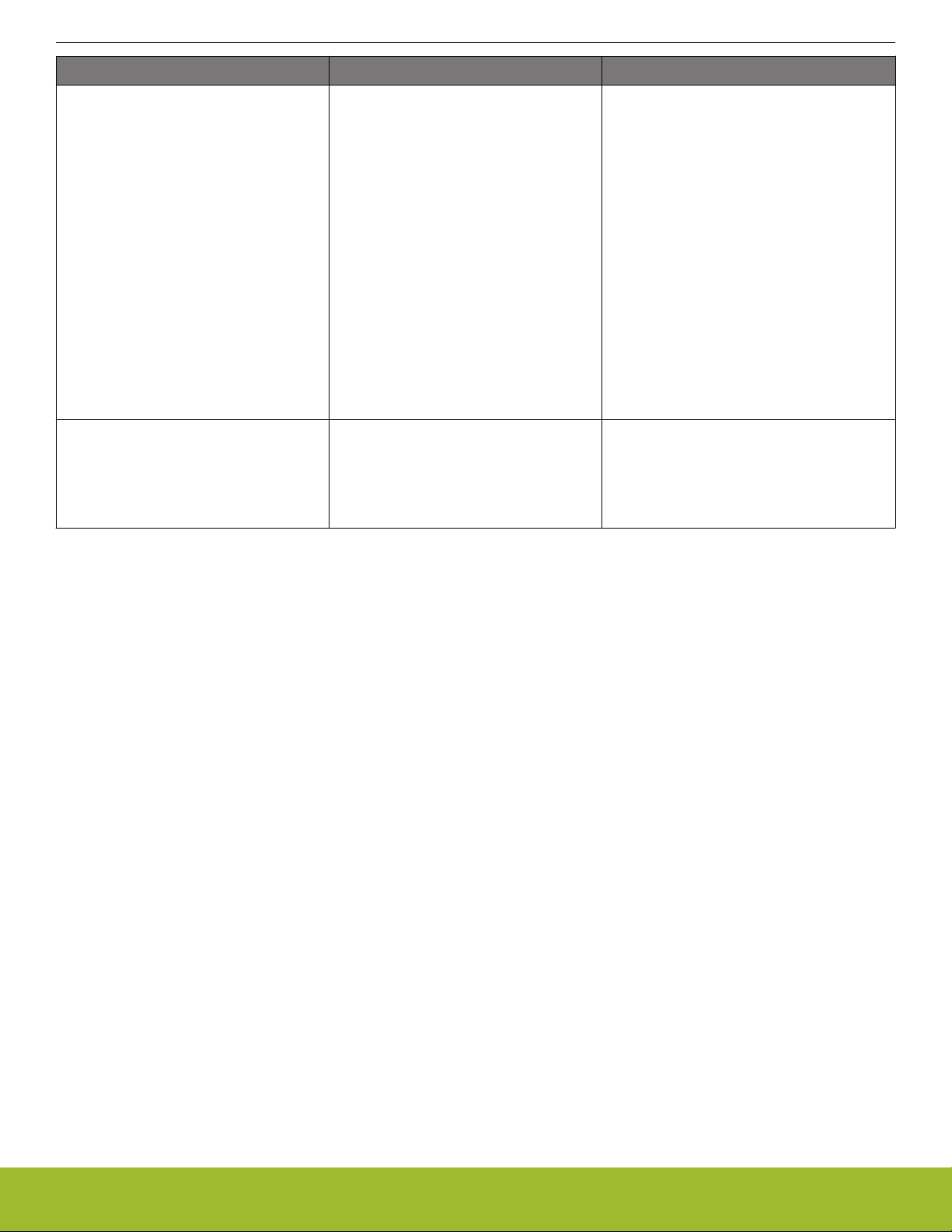
Timers and Triggers
Real Time Counter and Calendar (RTCC)
Ultra Low Energy Timer/Counter
(CRYOTIMER)
32-bit General Purpose Timer
Real Time Clock with Capture
No change to system hardware is required.
(RTCC)
Backup Real Time Clock
No change to system hardware is required.
(BURTC)
TIMER Only TIMER0 supports 32-bit operation.
(WTIMER)
Pulse Counter (PCNT) — This functionality is not available on Series 2.
Low Energy Sensor Interface
— This functionality is not available on Series 2.
(LESENSE)
silabs.com | Building a more connected world. Rev. 0.2 | 6
Page 7
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Series 1 Series 2 Notes
Security
Hardware Migration
True Random Number Generator (TRNG) & CRYPTO
Secure Element (SE) The SE implements CRYPTO and TRNG functionality on
EFR32xG21. No hardware changes are required.
Cryptographic Accelerator
(CRYPTOACC)
The CRYPTOACC implements CRYPTO and TRNG functionality
on EFR32xG22. No hardware changes are required.
silabs.com | Building a more connected world. Rev. 0.2 | 7
Page 8

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Software Migration
5. Software Migration
Series 2 devices are software compatible with Series 1 devices, so only minor changes are required for peripherals that are common to
Series 1 and Series 2 (especially when enhancements and new features are not used).
silabs.com | Building a more connected world. Rev. 0.2 | 8
Page 9

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Software Migration
5.1 Peripheral Support Library (emlib) and Drivers (emdrv)
Initialization and basic peripheral functionality are handled using the emlib low-level peripheral support library, the API for which abstracts the register-level differences between Series 1 and Series 2 devices. Use of emlib simplifies the porting of firmware among devices in the same family and between Series 1 and Series 2.
The emlib modules are found under the Simplicity Studio installation path. The default location on Windows is:
C:\SiliconLabs\SimplicityStudio\v4\developer\sdks\gecko_sdk_suite\vX.Y\platform\emlib
While emlib handles initialization of and low-level data movement to and from peripherals, emdrv provides driver-level functionality,
such as sending or receiving strings of serial data or instantiating one-shot or periodic timer events. Each emdrv component has an API
that is identical across all EFM32 and EFR32 devices and is optimized for speed and power by using DMA and running in the lowest
allowable energy mode. Because it maintains API consistency, emdrv does not take advantage of enhancements that are made to
common peripherals on new devices. Although they are unavailable through emdrv, these features are generally accessible through
emlib's initialization functions and can often simplify software development or reduce energy use.
The emdrv modules are found under the Simplicity Studio installation path. The default location on Windows is:
C:\SiliconLabs\SimplicityStudio\v4\developer\sdks\gecko_sdk_suite\vX.Y\platform\emdrv
Developing software with the emlib and emdrv libraries is highly recommended because they provide software compatibility across devices. API availability on and differences between Series 1 and Series 2 are discussed below.
Table 5.1. Software Migration Checklist
Series 1 Series 2 Notes
API for DCDC power configurations in
em_emu.c.
API for DCDC power configuration remains in em_emu.c for EFR32xG22. It is
—
unused on EFR32xG21, which does not
have a DCDC converter.
API for HFXO startup in em_cmu.c.
API for HFXO startup in em_cmu.c.
Configure the HFXO for safe crystal startup
with:
emlib:
Common API for HFXO startup initialization.
API for LFXO startup in em_cmu.c.
emlib:
Common API for HFXO startup initialization.
API for LFXO startup in em_cmu.c.
void CMU_HFXOInit(const
CMU_HFXOInit_TypeDef *hfxoInit)
Configure the LFXO for safe crystal startup
with:
emlib:
Common API for LFXO startup initialization.
API for HFRCO band selection in
em_cmu.c on Series 1 devices.
emlib:
void CMU_HFRCOBandSet(CMU_HFRCOFreq_TypeDef setFreq)
emlib:
Common API for LFXO startup initialization.
API for HFRCODPLL band selection in
em_cmu.c on Series 2 devices.
emlib:
void CMU_HFRCODPLLBandSet(CMU_HFRCODPLLFreq_TypeDef
freq)
void CMU_LFXOInit(const
CMU_LFXOInit_TypeDef *lfxoInit)
The HFRCO on Series 1 devices is replaced
with the HFRCODPLL on Series 2 devices.
The HFRCODPLL API in em_cmu.c implements an enumerated type to specify one of
several predefined frequency bands that are
a superset of those supported on Series 1 devices. For example, CMU_HFRCOBand-
Set(cmuHFRCOFreq_38M0Hz) is be replaced
with CMUHFRCODPLLBandSet(cmuHFRCODPLL-
Freq_38M0Hz) on a Series 2 device.
Although the register interface is similar, code
that tunes the HFRCO to operate at a frequency other than one of the factory-calibrated presets must be rewritten for use with the
HFRCODPLL. Alternatively, the DPLL API in
em_cmu.c can be used to run at a customer-
designated frequency on Series 2 devices
without the need calibrate for iterative tuning,
as is the case Series 1 devices.
silabs.com | Building a more connected world. Rev. 0.2 | 9
Page 10
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Series 1 Series 2 Notes
Software Migration
Peripheral-specific ROUTEPEN/ROUTELOCn registers are used to enable signals
and route them to physical pins on Series
1 devices.
emlib:
There is no emlib API to enable and route
peripheral signals to physical pins.
The ROUTEPEN and ROUTELOC definitions of digital peripherals can be found in
corresponding device header files.
For example, to enable SCL and SDA for
I2C0 and route them to the location 15
pins:
I2C0->ROUTEPEN =
I2C_ROUTEPEN_SDAPEN |
I2C_ROUTEPEN_SCLPEN;I2C0>ROUTELOC0 = (I2C0->ROUTELOC0 &
(~_I2C_ROUTELOC0_SDALOC_MASK)) |
I2C_ROUTELOC0_SDALOC_LOC4;I2C0>ROUTELOC0 = (I2C0->ROUTELOC0 &
(~_I2C_ROUTELOC0_SCLLOC_MASK)) |
I2C_ROUTELOC0_SCLLOC_LOC4;
GPIO registers are used to enable the
DBUS signals for digital peripherals and
route them to specific pins on Series 2 devices.
emlib:
There is no emlib API to enable and route
peripheral signals to physical pins.
To pin enable and route digital peripheral,
first set the required port/pin bits of
GPIO_x_yROUTE register, where x is the
peripheral name and y is the resource
name. Then set GPIO_x_ROUTEEN register, where x is the peripheral name.
For example, to enable SCL and SDA for
I2C0 and route them to pins PA5 and
PA6:
GPIO->I2CROUTE[0].SCLROUTE =
(GPIO->I2CROUTE[0].SCLROUTE &
~_GPIO_I2C_SCLROUTE_MASK) |
(gpioPortA <<
_GPIO_I2C_SCLROUTE_PORT_SHIFT | (5
<<
_GPIO_I2C_SCLROUTE_PIN_SHIFT));
GPIO->I2CROUTE[0].SDAROUTE =
(GPIO->I2CROUTE[0].SDAROUTE &
~_GPIO_I2C_SDAROUTE_MASK) |
(gpioPortA <<
_GPIO_I2C_SDAROUTE_PORT_SHIFT | (6
<<
_GPIO_I2C_SDAROUTE_PIN_SHIFT));
GPIO->I2CROUTE[0].ROUTEEN =
GPIO_I2C_ROUTEEN_SDAPEN |
GPIO_I2C_ROUTEEN_SCLPEN;
Peripheral route enable, port select, and pin
select registers can be found in the GPIO
section of the reference manual.
The APORT is used to specify analog peripheral inputs and output on Series 1 devices.
emlib:
An analog input or output, when selectable, is specifed by the appropriate initializer function for a given peripheral.
APORT definitions for selectable analog
inputs and outputs can be found in the
corresponding peripheral's emlib header
file.
For example, to use APORT BUS1X
channel 6 as an ADC input:
ADC_InitSingle_TypeDef singleInit
= ADC_INITSINGLE_DEFAULT;
singleInit.posSel =
adcPosSelAPORT1XCH6;
The ABUS is used to specify analog peripheral inputs and output on Series 2 devices.
emlib:
Bus allocation to analog peripherals is
managed by fields in the GPIO_ABUSxALLOC registers. Selection of a specific
port and pin is managed by the peripheral
because it is possible for more than one
bus to be assigned to a single peripheral.
For example, to allow ACMP0 to use PD3
as its positive input:
GPIO->CDBUSALLOC =
GPIO_CDBUSALLOC_CDODD0_ACMP0;ACMP_
ChannelSet(ACMP0,
acmpInputVREFDIV1V25,
acmpInputPD3);
There are three analog buses on the
EFR32xG21 and EFR32xG22: one dedicated
to Port A (ABUSA), one dedicated to port B
(ABUSB), and one that serves both ports C
and D (ABUSCD). Up to two analog peripherals may be given access to an ABUS at any
one time and the even/odd pins of each bus
are configured independently. This means
that a single bus may have up to four different
analog peripherals connected to it and using
(different) pins simultaneously.
Bus allocation registers are found in the
GPIO section of the reference manual.
silabs.com | Building a more connected world. Rev. 0.2 | 10
Page 11

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Series 1 Series 2 Notes
Software Migration
APIs for GPIO in em_gpio.c (emlib) and
GPIONT (emdrv).
emlib and emdrv:
Common APIs for GPIO pin and external
interrupt configuration and selection.
On Series 1 devices, Gecko bootloader
contains two stages (first stage bootloader
and main bootloader). To enable bootloader functionality, Gecko Bootloader
must be configured and programmed into
the dedicated bootloader region of flash, if
applicable. The main bootloader (second
stage) is upgradable through the first
stage bootloader.
APIs for IDAC and VDAC in em_idac.c
and em_vdac.c, respectively (both in emlib).
APIs for GPIO in em_gpio.c (emlib) and
GPIONT (emdrv).
The emlib code to configure PC6 (interrupt
source 6) as a falling edge interrupt is the
same on both Series 1 and Series 2:
emlib and emdrv:
Common APIs for GPIO pin and external
interrupt configuration and selection.
GPIO_PinModeSet(gpioPortC, 6,
gpioModeInputPull, 1);
GPIO_ExtIntConfig(gpioPortC, 6, 6,
false, true, true);
GPIOINT (emdrv) is a callback dispatcher and,
apart from clearing interrupt flags, is not dependent on the underlying hardware for configuration.
Gecko Bootloader is also used on Series
2 devices. To enable bootloader functionality, the second stage (main bootloader)
must be configured and programmed into
See application note, AN1218: Series 2 Se-
cure Boot with RTSL and UG266: Gecko
Bootloader User’s Guide for more informa-
tion.
the first 16 KB of flash. The main bootloader is upgradable through the Secure
Loader, firmware maintained by Silicon
Labs and pre-programmed into flash at
the factory.
— Neither the IDAC nor the VDAC is currently
present on Series 2 devices.
API for VMON in em_emu.c (emlib). — VMON is not present on Series 2 devices.
On EFR32xG21, the VSENSE feature of the
ACMP can be used to monitor the AVDD and
DVDD supplies.
For more customized monitoring (or, in the
case of EFR32xG22, which does not have
the ACMP module), the IADC's window com-
parison unit can generate interrupts in re-
sponse to sample results that are less than or
greater than specific threshold values.
Cryptographic operations on Series 1 are
implemented using the mbedTLS library
and accelerated in hardware by the
CRYPTO and TRNG modules.
Cryptographic operations on Series 2 are
implemented using the mbedTLS library
and accelerated in hardware by the SE
(EFR32xG21) or CRYPTOACC
(EFR32xG22) modules.
The mbedTLS library is found under the Sim-
plicity Studio installation path. The default lo-
cation on Windows is:
C:\SiliconLabs\SimplicityStudio\v4\de
veloper\sdks\gecko_sdk_suite\vX.Y\uti
l\third_party\mbedtls
silabs.com | Building a more connected world. Rev. 0.2 | 11
Page 12
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Series 1 Series 2 Notes
Software Migration
APIs for RTCC in em_rtcc.c (emlib),
RTCDRV (emdrv), and SLEEPTIMER (plat-
form services).
API for LDMA in em_ldma.c (emlib) and
DMADRV (emdrv).
emlib and emdrv:
Common APIs for configuring and managing the LDMA and transfers.
APIs for RTCC in em_rtcc.c (emlib),
RTCDRV (emdrv), and SLEEPTIMER (plat-
form services).
API for LDMA in em_ldma.c (emlib) and
DMADRV (emdrv).
emlib and emdrv:
Common APIs for configuring and managing the LDMA and transfers.
Low-level management of the RTCC can be
implemented with the API in em_rtcc.c.
RTCDRV provides low-frequency (millisecond-
level) one-shot and periodic timers by ab-
stracting the RTCC hardware but is now dep-
recated in favor of the SLEEPTIMER platform
service.
SLEEPTIMERimplements the same functionali-
ty as RTCDRV. It maintains a continuous 64-bit
tick counter upon driver initialization and can
return a UNIX-style time stamp (seconds
elapsed since January 1, 1970, 00:00:00).
Functions are provided for conversion be-
tween the UNIX time stamp and ZigBee and
NTP time formats.
All three APIs are available on Series 1 and
Series 2 devices.
The em_ldma.c and DMADRV APIs are com-
mon across Series 1 and Series 2 devices.
silabs.com | Building a more connected world. Rev. 0.2 | 12
Page 13

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6. Peripherals Common Between Series 1 and Series 2
6.1 Core, Memory, and Bus System
The major changes are the switch to the Cortex-M33 core and, on some devices, the addition of the Secure Element (SE).
Table 6.1. Core, Memory, and Bus System
Series 1 Series 2 Notes
New Features
— Secure Memory Secure memory prevents secure addresses from being ac-
cessed by unauthorized code or peripherals.
— Backup RAM Backup RAM provides 128 bytes of low power RAM that is re-
tained in EM4.
— Flash Lock
— Secure Debug Unlock The Secure Element provides a secure debug unlock function
Enhancements
Cortex-M3 or Cortex-M4
(ARMv7-M)
Cortex-M33 (ARMv8-M) Inclusion of the single-precision Floating Point (FPU) and Memo-
Unlike Series 0 and 1, Series 2 devices do not have a lock bits
page in flash. Instead, Series 2 devices have a register-based
flash locking mechanism where, as on earlier devices, each bit
corresponds to a single flash page.
The MSC_PAGELOCKn registers are cleared after reset. Writing
a given bit to 1 can be done one time after reset by the CPU or
the Secure Element and prevents the designated flash page
from being programmed or erased.
Like other flash pages, the user data page can be locked via a
one time write that sets the UDLOCK bit in the MSC_MISCLOCKWORD register.
When the Secure Element is present on a device, only it is allowed to write to the user data page, which, by consequence, is
locked upon reset.
that allows users to grant debug access to locked devices on a
device by device basis. See the application note, AN1190:
EFR32xG21-22, for more information.
ry Protection (MPU) Units effectively makes the Cortex-M33 a
superset of the Cortex-M4. ARM's TrustZone security provides
dedicated hardware resources to permit the execution of secure
and non-secure code. Refer to Arm's architecture, core, and security documentation for more details.
silabs.com | Building a more connected world. Rev. 0.2 | 13
Page 14
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.2 Clock Management Unit (CMU)
The major changes are the on demand oscillators, synchronous registers, and new oscillator names.
Table 6.2. CMU
Series 1 Series 2 Notes
New Features
— FSRCO (20 MHz) The Fast Start RC Oscillator is a fixed frequency, low energy os-
cillator with a short start up time. This oscillator is used after reset.
— Digital PLL for the HFRCO ena-
bles arbitrary clock frequency
See the device-specific reference manual for more information
on the DPLL.
generation
Enhancements
1 MHz – 72 MHz HFRCO (1, 2,
4, 7, 13, 16, 19, 26, 32, 38, 48,
56, 64 and 72 MHz), HFRCO is
19 MHz after reset.
1 MHz – 50 MHz AUXHFRCO
(1, 2, 4, 7, 13, 16, 19, 26, 32,
38, 48 and 50 MHz), AUXHFR-
1 MHz – 80 MHz HFRCODPLL The HFRCO on Series 2 devices has selectable tuning bands
that are a superset of those available on Series 1 devices. The
DPLL is available for use in EM0/1 and can be set to arbitrary
frequencies as permitted by the M and N dividers.
1 MHz – 38 MHz HFRCOEM23 Oscillator is enabled on demand in energy modes EM2 and EM3
(EFR32xG21). Not all Series 2 devices include the
HFRCOEM23.
CO is 19 MHz after reset
DBGCLK TRACECLK —
Three clocks (HFPERCLK,
HFPERBCLK, and
HFPERCCLK) drive all high-frequency peripherals.
Peripheral clocks (PCLK) are
asynchronous to the main system
clock (HCLK).
Peripheral clocks are enabled by specific bits in the
CMU_CLKENn registers.
On EFR32xG21, peripheral clocks are requested by setting the
EN bit in the peripheral's EN register.
HFPERCLK PCLK, LSPCLK, EM01GRPA,
EM01GRPB
PCLK is the standard peripheral clock. EM01GRPA and
EM01GRPB are selectable by certain peripherals to permit asynchronous operation relative to the (PCLK). LSPCLK permits operation at lower frequency in order to reduce energy use for peripherals that do not need the highest frequency clock available.
LFA, LFE EM23GRPA, EM4GRPA Seperate clocks selectable by peripherals capable of operation
in EM2/3 or EM4. This allows peripherals that can operate in
EM2/3 to use the LFXO or LFRCO as a clock source, while peripherals capable of operation in EM4 can use the ULFRCO.
silabs.com | Building a more connected world. Rev. 0.2 | 14
Page 15

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
6.3 Energy Management
6.3.1 Energy Management Unit (EMU)
The major change is the new single EM4 energy mode.
Table 6.3. EMU
Series 1 Series 2 Notes
Enhancements
Peripherals Common Between Series 1 and Series 2
EM4 is separated into hibernate
(EM4H) and shutdown (EM4S)
modes with certain peripherals
available in EM4H not available
in EM4S for further reduction in
Single EM4 Mode EM4 with one of the low frequency clocks running has much low-
er current draw on Series 2 devices than does the equivalent peripheral running in EM4H on Series 1 devices. EM4 mode with
clocks shutdown on Series 2 devices is comparable to EM4S on
Series 1 devices.
energy use.
Limitations
— DCDC availability is device-de-
pendent
EFR32xG22 devices have the DCDC converter as a standard
feature.
EFR32xG21 devices do not have a DCDC converter.
6.3.2 Reset Management Unit (RMU)
RMU functionality has been folded into the EMU on Series 2 devices. Many reset sources can now be individually enabled or disabled.
Table 6.4. RMU
Series 1 Series 2 Notes
New Features
Brown-out Detector (BOD) resets cannot be masked.
All BODs can be individually enabled and masked.
—
Enhancement
BODs for analog unregulated
supply (AVDD), digital unregulated supply (DVDD), and regulated digital supply (DECOUPLE).
silabs.com | Building a more connected world. Rev. 0.2 | 15
BODs for AVDD, IOVDD, DECOUPLE (under and over voltage), DVDD in EM0/EM1, and
DVDD in EM2/EM3/EM4.
—
Page 16

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.4 Serial Interfaces
6.4.1 Inter-Integrated Circuit Interface (I2C)
There are no major changes to the I2C module. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers
have been added and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated by the
peripheral register set/clear/toggle address aliases.
Table 6.5. I2C
Series 1 Series 2 Notes
Enhancements
— I2C0 is available in EM0/EM1
—
and can be available EM2/3.
I2C1 in available only EM0/
EM1.
6.4.2 Universal Synchronous Asynchronous Receiver/Transmitter (USART)
There are no major changes to the USART module. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers have been added and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated by
the peripheral register set/clear/toggle address aliases.
6.4.3 Enhanced Universal Asynchronous Receiver/Transmitter (EUART)
The EUART on Series 2 devices replaces the Low-Energy UART (LEUART) on Series 1 devices. It maintains the core functionality of
the LEUART and adds features for high-frequency operation found in the USART. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers have been added and the individual interrupt flag set/clear registers have been removed since their
functionality is duplicated by the peripheral register set/clear/toggle address aliases.
Table 6.6. EUART
Series 1 Series 2 Notes
Enhancements
— Low-frequency EM2 operation
at 9600 baud from 32.768 kHz.
As with the LEUART, low-frequency EUART operation imposes
certain limitations (e.g. no receive oversampling).
High-frequency operation in
EM0/1 at programmable baud
rates derived from PCLK ÷
4/6/8/16.
— FIFOs increased from 2 to 4
—
words (8/9 bits).
— IrDA support —
— Autobaud in EM0/1 upon recep-
—
tion of 0x55 (standard) or 0x00
(IrDA).
— Hardware flow control. —
6.4.4 Pulse Density Modulation (PDM) Interface
Apart from the addition of a second pair of channels for a total of four, PDM functionality is effectively unchanged between Series 1 and
Series 2. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers have been added and the individual
interrupt flag set/clear registers have been removed since their functionality is duplicated by the peripheral register set/clear/toggle address aliases.
silabs.com | Building a more connected world. Rev. 0.2 | 16
Page 17
AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.5 I/O Ports
6.5.1 General Purpose Input/Output (GPIO)
Major changes to GPIO are the additions of DBUS pin routing, the relocation of all pin routing and enabling registers from peripherals to
the GPIO register space, and the removal of 5 V tolerant inputs. Like all Series 2 peripheral modules, dedicated enable and hardware
revision registers have been added and the individual interrupt flag set/clear registers have been removed since their functionality is
duplicated by the peripheral register set/clear/toggle address aliases.
Table 6.7. GPIO
Series 1 Series 2 Notes
New Features
— DBUS DBUS is an any-to-any switch matrix that routes digital peripher-
als to pins.
See the reference manual for the device in question more infor-
mation.
Limitations
— Port C and port D only permit
state retention in EM2/EM3 and
do not support low-frequency
Only port A and port B pins can be used in EM2/3 for low-frequen-
cy peripherals, such as the EUART, or GPIO inputs intended to
serve as wake-up interrupts.
peripheral operation.
5 V tolerant pins. Inputs are not 5 V tolerant. All
—
I/O pins support a maximum input voltage of IOVDD + 0.3 V.
6.6 Timers and Triggers
6.6.1 Timer/Counter (TIMER)
While some Series 1 devices implement both 32- and 16-bit wide timers named WTIMER and TIMER, respectively, Series 2 simply
uses TIMER for all module instances, regardless of width. Like all Series 2 peripheral modules, dedicated enable and hardware revision
registers have been added and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated
by the peripheral register set/clear/toggle address aliases.
Table 6.8. TIMER
Series 1 Series 2 Notes
Enhancements
Separate 32-bit (WTIMER) and
16-bit (TIMER) modules.
Single TIMER module regardless of width.
By current convention, TIMER0 is 32 bits wide and all other in-
stances are 16 bits wide.
Limitation
Timers are synchronized to
HFPERCLK.
Timers use the EM01GRPA
clock and can be synchronous
—
or asynchronous to the HCLK/
PCLK.
silabs.com | Building a more connected world. Rev. 0.2 | 17
Page 18

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.6.2 Low Energy Timer (LETIMER)
LETIMER functionality is enhanced in several aspects. Like all Series 2 peripheral modules, dedicated enable and hardware revision
registers have been added and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated
by the peripheral register set/clear/toggle address aliases.
Table 6.9. TIMER
Series 1 Series 2 Notes
Enhancements
16- bit down counter. 24-bit down counter. By current convention, TIMER0 is 32 bits wide and all other in-
stances are 16 bits wide.
— 8-bit prescaler. —
Limitation
Only one comparator (LETIMER_COMP1) available if LETIMER_COMP0 is used as the
Dedicated LETIMER_TOP register permits use of LETIMER_COMP[1:0] comparators.
—
counter top value.
6.6.3 Real Time Clock with Capture (RTCC)
The Real Time Counter and Calendar (RTCC) on Series 1 has been replaced by the Real Time Clock with Capture (RTCC) on Series
2. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers have been added and the individual interrupt
flag set/clear registers have been removed since their functionality is duplicated by the peripheral register set/clear/toggle address aliases.
Table 6.10. RTCC
Series 1 Series 2 Notes
Limitations
Hardware calendar mode. No calendar mode. —
128 bytes of state retention
RAM
Operates down to EM4H. The RTCC is only available
State retention RAM is no longer part of RTCC.
The BURAM provides 128 bytes of low-power RAM that is re-
tained in EM4.
Use the BURTC for low-power timekeeping in EM4.
down to EM3 on Series 2 devices.
Oscillator failure detection logic
resides in the RTCC.
silabs.com | Building a more connected world. Rev. 0.2 | 18
Oscillator failure detection logic
resides in the LFXO.
Set the LFXO_CTRL_FAILDETEM4WUEN bit to enable wake-up
from EM4 upon LFXO failure.
Page 19

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.6.4 Peripheral Reflex System (PRS)
The major change to the PRS is the addition of four high-speed synchronous channels explicitly for synchronizing IADC and TIMER
events. Like other Series 2 peripheral modules, a hardware revision register has been added along with the peripheral register set/
clear/toggle address aliases.
Table 6.11. PRS
Series 1 Series 2 Notes
New Features
12 synchronous/asynchronous
channels.
12 asynchronous and 4 synchronous channels dedicated to
Synchronous channels support synchronous operation of the
IADC with timer triggers on Series 2.
the IADC and TIMERs.
OR with the previous channel
and AND with the next channel
logic operation.
Expanded set of logic operations that take the previous and
current channels as inputs.
—
6.6.5 Watchdog Timer (WDOG)
WDOG functionality is effectively unchanged between Series 1 and Series 2. Like all Series 2 peripheral modules, dedicated enable
and hardware revision registers have been added and the individual interrupt flag set/clear registers have been removed since their
functionality is duplicated by the peripheral register set/clear/toggle address aliases.
silabs.com | Building a more connected world. Rev. 0.2 | 19
Page 20

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Peripherals Common Between Series 1 and Series 2
6.7 Analog Interfaces
6.7.1 Analog Comparator (ACMP)
ACMP functionality is effectively unchanged between Series 1 and Series 2. Like all Series 2 peripheral modules, dedicated enable and
hardware revision registers have been added and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated by the peripheral register set/clear/toggle address aliases.
6.7.2 Incremental Analog to Digital Converter (IADC)
The ADC has been replaced by the IADC, which has significant functional enhancements and differences. See the application note,
AN1189: Incremental Analog to Digital Converter (IADC), and the device reference manual for more information. Some of the notable
differences are listed below. Like all Series 2 peripheral modules, dedicated enable and hardware revision registers have been added
and the individual interrupt flag set/clear registers have been removed since their functionality is duplicated by the peripheral register
set/clear/toggle address aliases.
Table 6.12. IADC
Series 1 Series 2 Notes
New Features
— Two sets of converter setup,
scaling, and scheduling registers can be independently selected for single conversions or
multi-channel scans.
Enhancements
Traditional SAR ADC. The Incremental ADC combines
SAR and Delta-Sigma techniques.
Uniform input gain. Selectable 0.5x, 1x, 2x, 3x, or
4x input gain.
Limitations
ADC_CLK can range from 32
kHz to 16 MHz.
ADC_CLK can range from 32
kHz to 10 MHz.
Configuration changes require a 5 µs warm-up delay.
Operates with 12-bit resolution and achieves 11 ENOB at 1 Msps
with 2x and 12 ENOB at 555 ksps with 4x oversampling.
—
Maximum ADC_CLK frequency is reduced to 5 MHz, 3.3 MHz and
2.5 MHz for 2x, 3x and 4x input gain, respectively.
silabs.com | Building a more connected world. Rev. 0.2 | 20
Page 21

AN0918.2: Wireless Gecko Series 1 to Series 2 Compatibility and Migration Guide
Revision History
7. Revision History
Revision 0.2
February, 2020
• EFR32xG22 devices added to 1. Device Compatibility.
• 2.2 Software and Peripherals updated to reflect new modules on and versions of emlib and emdrv that add support for EFR32xG22.
• Requirement for RAM wait states made conditional in Table 3.1 Core and Memory on page 4.
• RTCC Retention RAM and EUART added to 4.2 Series 1 Peripheral Migration
• I/O Ports section in Table 4.1 Series 1 Peripheral Functionality on page 6 changed to External Storage and expanded to include
QSPI and SDIO.
• CRYPTOACC added to Security section in Table 4.1 Series 1 Peripheral Functionality on page 6.
• Updates to the Notes throughout 6. Peripherals Common Between Series 1 and Series 2.
• Differences in user data page lock functionality added to 6.1 Core, Memory, and Bus System.
• DCDC support added on EFR32xG22 in 6.3.1 Energy Management Unit (EMU).
• 6.4.3 Enhanced Universal Asynchronous Receiver/Transmitter (EUART) added under 6.4 Serial Interfaces.
• 6.4.4 Pulse Density Modulation (PDM) Interface added under 6.4 Serial Interfaces.
• 6.5.1 General Purpose Input/Output (GPIO) updated to reflect the type of functionality supported by ports A/B vs. ports C/D in
EM2/3.
• 6.6.2 Low Energy Timer (LETIMER) updated with Series 2 enhancements relative to Series 1.
• Oscillator failure detection differences explained in 6.6.3 Real Time Clock with Capture (RTCC).
• Expanded logical operations functionality added to 6.6.4 Peripheral Reflex System (PRS).
• Input gain selection added to 6.7.2 Incremental Analog to Digital Converter (IADC).
Revision 0.1
February, 2019
• Initial revision.
silabs.com | Building a more connected world. Rev. 0.2 | 21
Page 22

Simplicity Studio
One-click access to MCU and
wireless tools, documentation,
software, source code libraries &
more. Available for Windows,
Mac and Linux!
IoT Portfolio
www.silabs.com/IoT
Disclaimer
Silicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or
intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical"
parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only . Silicon Labs reserves the right to make changes without
further notice to the product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Without prior
notification, Silicon Labs may update product firmware during the manufacturing process for security or reliability reasons. Such changes will not alter the specifications or the performance
of the product. Silicon Labs shall have no liability for the consequences of use of the information supplied in this document. This document does not imply or expressly grant any license
to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any FDA Class III devices, applications for which FDA premarket approval is
required, or Life Support Systems without the specific written consent of Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health,
which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs
products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering
such weapons. Silicon Labs disclaims all express and implied warranties and shall not be responsible or liable for any injuries or damages related to use of a Silicon Labs product in such
unauthorized applications.
Trademark Information
Silicon Laboratories Inc.®, Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, ClockBuilder®, CMEMS®, DSPLL®, EFM®, EFM32®,
EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®,
Gecko OS, Gecko OS Studio, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® , Zentri, the Zentri logo and Zentri DMS, ZWave®, and others are trademarks or registered trademarks of Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a
registered trademark of ARM Limited. Wi-Fi is a registered trademark of the Wi-Fi Alliance. All other products or brand names mentioned herein are trademarks of their respective holders.
Silicon Laboratories Inc.
400 West Cesar Chavez
Austin, TX 78701
USA
SW/HW
www.silabs.com/simplicity
Quality
www.silabs.com/quality
Support and Community
community.silabs.com
http://www.silabs.com
 Loading...
Loading...