

Page 1
SIMOTION
D410
Manual
Preface
Description
Operation (hardware)
Interfaces
Assembling
Connecting
Technical data
1
2
3
4
5
6
Spare parts/Accessories
Standards and approvals
ESD directives
Appendix
7
A
B
C
Valid for SIMOTION D410 DP and D410 PN
03/2007 Edition
Page 2
Safety Guidelines
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
Danger
indicates that death or severe personal injury will result if proper precautions are not taken.
Warning
indicates that death or severe personal injury may result if proper precautions are not taken.
Caution
with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
Caution
without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
Notice
indicates that an unintended result or situation can occur if the corresponding information is not taken into
account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
Qualified Personnel
The device/system may only be set up and used in conjunction with this documentation. Commissioning and
operation of a device/system may only be performed by qualified personnel. Within the context of the safety notes
in this documentation qualified persons are defined as persons who are authorized to commission, ground and
label devices, systems and circuits in accordance with established safety practices and standards.
Prescribed Usage
Note the following:
Warning
This device may only be used for the applications described in the catalog or the technical description and only in
connection with devices or components from other manufacturers which have been approved or recommended by
Siemens. Correct, reliable operation of the product requires proper transport, storage, positioning and assembly
as well as careful operation and maintenance.
Trademarks
All names identified by ® are registered trademarks of the Siemens AG. The remaining trademarks in this
publication may be trademarks whose use by third parties for their own purposes could violate the rights of the
owner.
Disclaimer of Liability
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
Siemens AG
Automation and Drives
Postfach 48 48
90437 NÜRNBERG
GERMANY
Order No.:
Ⓟ 03/2007
Copyright © Siemens AG 2007.
Technical data subject to change
Page 3

Preface
Equipment Manual contents
This document is part of the SIMOTION D4xx Programming documentation package,
Version 03/2007.
The Manual describes the SIMOTION devices D410 DP and D410 PN.
Information in this Manual
The following is a description of the purpose and use of the equipment Manual:
• Description
This chapter provides information on the SIMOTION System and how it integrates into
the information landscape.
• Operator Control (hardware)
This chapter describes the operating elements and how to operate them.
• Dimensional diagrams
This chapter contains the SIMOTION D410 dimensional diagrams.
• Interfaces
This section provides information on the interfaces, pin assignments and application
options.
• Installation
This section explains how you configure a mechanical layout and install the
SIMOTION D410 in a control cabinet.
• Connecting
This chapter describes how to connect and network the SIMOTION D410.
• Technical data
This chapter describes the properties and features of the SIMOTION D410.
• Spare Parts/Accessories
This chapter provides information on accessories and spare parts for the
SIMOTION D410.
• Appendix
D410
Manual, 03/2007 Edition
This section provides information on the various standards and specifications that the
device complies with.
• Index to locate information
3
Page 4

Preface
SIMOTION Documentation
An overview of the SIMOTION documentation can be found in a separate list of references.
This documentation is included as electronic documentation with the supplied
SIMOTION SCOUT.
The SIMOTION documentation consists of 9 documentation packages containing
approximately 60 SIMOTION documents and documents on other products (e.g.
SINAMICS).
The following documentation packages are available for SIMOTION V4.1:
• SIMOTION Engineering System
• SIMOTION System and Function Descriptions
• SIMOTION Diagnostics
• SIMOTION Programming
• SIMOTION Programming - References
• SIMOTION C2xx
• SIMOTION P350
• SIMOTION D4xx
• SIMOTION Supplementary Documentation
Hotline and Internet addresses
If you have any technical questions, please contact our hotline (worldwide):
A&D Technical Support:
• Phone: +49 (180) 50 50 222
• Fax: +49 (180) 50 50 223
• E–mail: adsupport@siemens.com
• Internet: http://www.siemens.de/automation/support-request
If you have any questions, suggestions, or corrections regarding the documentation, please
fax or e-mail them to:
• Fax: +49 (9131) 98 63315
• E–mail: docu.motioncontrol@siemens.com
Siemens Internet address
The latest information about SIMOTION products, product support, and FAQs can be found
on the Internet at:
• General information:
– http://www.siemens.de/simotion (German)
– http://www.siemens.com/simotion (international)
• Product support:
– http://support.automation.siemens.com/WW/view/en/10805436
D410
4 Manual, 03/2007 Edition
Page 5

Preface
Additional support
We also offer introductory courses to help you familiarize yourself with SIMOTION.
Please contact your regional training center or our main training center at D-90027
Nuremberg, phone +49 (911) 895 3202.
Disposal and recycling
SIMOTION D410 is an environmentally friendly product! It includes the following features:
• In spite of its excellent resistance to fire, the flame-resistant agent in the plastic used for
the housing does not contain halogens.
• Identification of plastic materials in accordance with DIN 54840
• Less material used because the unit is smaller and with fewer components thanks to
integration in ASICs
SIMOTION D410 can be recycled because it is made with low-polluting materials.
For state-of-the art environmentally friendly recycling and disposal of your old modules,
contact your Siemens representative. To locate your representative, visit us online at:
http://www.ad.siemens.com/partner
D410
Manual, 03/2007 Edition
5
Page 6

Page 7

Table of contents
Preface ...................................................................................................................................................... 3
1 Description............................................................................................................................................... 11
1.1 System overview ..........................................................................................................................11
1.2 System components ....................................................................................................................13
1.3 SIMOTION D410 DP display .......................................................................................................17
1.4 SIMOTION D410 PN display .......................................................................................................20
1.5 Safety information ........................................................................................................................22
2 Operation (hardware)............................................................................................................................... 23
2.1 Overview of operator controls and indicators ..............................................................................23
2.2 Operator controls .........................................................................................................................24
2.2.1 Mode selector switch ...................................................................................................................24
2.2.2 SIMOTION CompactFlash card...................................................................................................25
2.3 Error and status indicators ...........................................................................................................26
3 Interfaces................................................................................................................................................. 27
3.1 Overview of interfaces .................................................................................................................27
3.2 Digital inputs/outputs....................................................................................................................28
3.3 DRIVE-CLiQ interface..................................................................................................................32
3.4 PROFIBUS DP interface (SIMOTION D410 DP only) .................................................................35
3.5 PROFINET interface (SIMOTION D410 PN only) .......................................................................37
3.6 HTL/TTL encoder interface ..........................................................................................................38
3.7 EP terminals/temperature sensor connection..............................................................................39
3.8 Power supply................................................................................................................................40
3.9 Measuring sockets .......................................................................................................................42
3.10 Power Module Interface ...............................................................................................................42
4 Assembling.............................................................................................................................................. 43
4.1 General requirements ..................................................................................................................43
4.2 SIMOTION D410 mounted on the power module..................
......................................................43
4.3 Mounting SIMOTION D410 on the mounting plate......................................................................46
5 Connecting .............................................................................................................................................. 47
5.1 Overview ......................................................................................................................................47
5.2 General rules for operating the SIMOTION D410........................................................................48
5.3 Overview of SIMOTION D410 connections .................................................................................50
D410
Manual, 03/2007 Edition
7
Page 8

Table of contents
5.4 Connecting the protective ground ............................................................................................... 50
5.5 Connecting the power supply...................................................................................................... 51
5.6 Connecting DRIVE-CLiQ components........................................................................................ 52
5.7 Connecting the digital inputs/outputs .......................................................................................... 53
5.8 Connecting the PROFINET interface (410 PN only)................................................................... 54
5.9 Connecting the PROFIBUS DP interface (410 DP only) ............................................................ 55
5.9.1 Connection components in PROFIBUS...................................................................................... 55
5.9.2 PROFIBUS cables and connectors............................................................................................. 55
5.9.3 PROFIBUS cable lengths............................................................................................................ 56
5.9.4 Rules for routing PROFIBUS cables........................................................................................... 56
5.9.5 Connecting PROFIBUS DP (interface X21)................................................................................ 57
5.9.6 Connection rules in the PROFIBUS subnet................................................................................ 58
5.10 Connecting an external encoder ................................................................................................. 60
6 Technical data ......................................................................................................................................... 61
6.1 SIMOTION D410 dimensional diagram ...................................................................................... 61
6.2 System data, connection values, dimensions and weight .......................................................... 62
6.3 Digital inputs/outputs................................................................................................................... 63
6.4 Shipping and storage conditions................................................................................................. 64
6.5 Mechanical and climatic ambient conditions............................................................................... 64
6.6 Specifications for dielectric tests, safety class and degree of protection.................................... 66
7 Spare parts/Accessories.......................................................................................................................... 67
7.1 Terminal module TM31 ............................................................................................................... 67
7.2 Terminal module TM41 ............................................................................................................... 68
7.3 Terminal modules TM15 and TM17 High Feature ...................................................................... 69
7.4 CUA31 control unit adapter......................................................................................................... 70
7.5 DMC20 DRIVE-CLiQ hub............................................................................................................ 71
7.6 List of spare parts and accessories ............................................................................................ 72
A Standards and approvals......................................
................................................................................... 73
A.1 General rules............................................................................................................................... 73
A.2 Safety of electronic controllers.................................................................................................... 74
A.3 Electromagnetic Compatibility..................................................................................................... 75
B ESD directives......................................................................................................................................... 77
B.1 ESD definition ............................................................................................................................. 77
B.2 Electrostatic charging of individuals............................................................................................ 78
B.3 Basic measures for protection against discharge of static electricity ......................................... 78
C Appendix.................................................................................................................................................. 79
C.1 References.................................................................................................................................. 79
C.2 List of abbreviations .................................................................................................................... 81
D410
8 Manual, 03/2007 Edition
Page 9

Table of contents
Index........................................................................................................................................................ 83
Tables
Table 1-1
System components ....................................................................................................................13
Table 1-2 Components on PROFIBUS DP ..................................................................................................14
Table 1-3 Components on PROFINET ........................................................................................................15
Table 1-4 Components on DRIVE-CLiQ ......................................................................................................16
Table 1-5 SIMOTION D410 interfaces.........................................................................................................18
Table 1-6 SIMOTION D410 interfaces.........................................................................................................21
Table 2-1 Mode selector switch settings......................................................................................................24
Table 3-1 Overview of available SIMOTION D410 interfaces......................................................................27
Table 3-2 Overview of non-usable SIMOTION D410 interfaces..................................................................27
Table 3-3 Interface X121..............................................................................................................................28
Table 3-4 Interface assignment X121 ..........................................................................................................29
Table 3-5 Interface X100..............................................................................................................................32
Table 3-6 Interface assignment X100 ..........................................................................................................32
Table 3-7 DRIVE-CLiQ connection topology................................................................................................33
Table 3-8 Interface X21................................................................................................................................35
Table 3-9 Interface assignment X21 ............................................................................................................35
Table 3-10 Ports X200 and X201...................................................................................................................37
Table 3-11 Assignment of ports X200 - X201 ................................................................................................37
Table 3-12 Interface X23................................................................................................................................38
Table 3-13 Interface assignment X23 ............................................................................................................38
Table 3-14 Interface X120..............................................................................................................................39
Table 3-15 Interface assignment X120 ..........................................................................................................39
Table 3-16 Interface X124..............................................................................................................................41
Table 3-17 Interface assignments T0, T1 and T2 ..........................................................................................42
Table 5-1 System startup .............................................................................................................................48
Table 5-2 Supply voltage .............................................................................................................................48
Table 5-3 24 V DC supply voltage ...............................................................................................................48
Table 5-4 Protection against external electrical interference .......................................................................49
Table 5-5 Electrical parameters of the required load power supply.............................................................51
Table 5-6 Features of PROFIBUS cables....................................................................................................55
Table 5-7 Permitted cable length of a subnet segment for specific baud rates ...........................................56
Table 5-8 Boundary conditions for routing of PROFIBUS cables ................................................................57
Table 6-1 Memory for system data and its memory size .............................................................................62
D410
Manual, 03/2007 Edition
9
Page 10

Table of contents
Table 6-2 SIMOTION D410 electrical connection values............................................................................ 62
Table 6-3 SIMOTION D410 dimensions and weight ................................................................................... 62
Table 6-4 CF card........................................................................................................................................ 62
Table 6-5 Digital input technical data .......................................................................................................... 63
Table 6-6 Digital output technical data........................................................................................................ 63
Table 6-7 Shipping and storage conditions................................................................................................. 64
Table 6-8 Mechanical ambient conditions................................................................................................... 65
Table 6-9 Climatic ambient conditions ........................................................................................................ 65
Table 6-10 Test voltages............................................................................................................................... 66
Table 7-1 Interface overview of the TM31................................................................................................... 67
Table 7-2 TM41 interface overview ............................................................................................................. 68
Table 7-3 Overview of CUA31 interfaces.................................................................................................... 70
Table 7-4 Spare parts and accessories ...................................................................................................... 72
Table A-1 EMC Directive ............................................................................................................................. 73
Table A-2 EMC standards ........................................................................................................................... 75
Table C-1 Abbreviations .............................................................................................................................. 81
D410
10 Manual, 03/2007 Edition
Page 11

Description
1.1 System overview
Overview
In SIMOTION D, the SIMOTION functionality is integrated directly in the closed-loop control
module of the SINAMICS S120 drive system.
SIMOTION D410 is a module drive system for single axes, which solves demanding drive
tasks for a very wide range of industrial applications. SIMOTION D410 supplements D425,
D435 and D445, the three power levels for multi-axis connections.
SIMOTION D is an integral part of the Totally Integrated Automation (TIA) concept. TIA
features standardized data management, configuration and communication over all products
and systems. Thus, an extensive toolbox of automation modules is also available for
SIMOTION D410.
Application
Combining a power module with SIMOTION D410 forms a compact single drive for machine
and plant engineering.
1
Product variants
D410
Manual, 03/2007 Edition
Applications include:
• Machine concepts with central drive (e.g., pressing, printing, packaging)
• Modular machine concepts where the machine modules broken down to single axes
• Single drives with high accuracy, stability and concentricity requirements (compared with
standard drives) in machine and industrial plant engineering
• Single drives for transport tasks (conveying, raising, lowering)
• Single drives with integrated PLC functionality and expanded motion control functionality
such as output cam or cams
• Drives without power recovery (wire drawing, extruding)
• Drive connections with high availability requirements (incoming supply failure may not
cause all axes to fail)
SIMOTION D410 comes in two variants:
• SIMOTION D410 DP with PROFIBUS DP interface.
• SIMOTION D410 PN with PROFINET interface.
11
Page 12
Description
1.1 System overview
System integration
SIMOTION provides an optimized system platform for automation and drive solutions where
the main focus is on motion control applications and technology tasks.
The SIMOTION system is made up of three components:
• SIMOTION SCOUT Engineering System
• Runtime Software
• Hardware platforms
The innovative SIMOTION concept involves integrating pure automation and motion
functions, which have been traditionally isolated in the past.
3/&IXQFWLRQDOLW\
,(&
7KHV\VWHPDSSURDFKRI
0RWLRQ&RQWURO
HJSRVLWLRQLQJ
V\QFKURQRXV
RSHUDWLRQHWF
7HFKQRORJ\
IXQFWLRQV
HJK\GUDXOLFV
WHPSHUDWXUHFRQWUROHWF
Figure 1-1 System solution
6,027,21
7KHIXVLRQRI0RWLRQ
&RQWURO3/&DQG
WHFKQRORJ\IXQFWLRQV
SIMOTION can be used with all machines with motion control tasks. The focus is on a
simple and flexible solution to a wide variety of motion control tasks. In order to achieve this
in the best way possible, a new system approach has been introduced:
the fusion of motion control with two other control functions, which are found in most
machines: PLC and technology functions.
This approach enables motion control of axes and machines with only one system. The
same applies to technology functions, such as pressure control of a hydraulic axis. A
seamless switch can be made from position-controlled positioning mode to pressure control.
The fusion the three control functions motion control, PLC and technology has the following
advantages:
• Lower engineering expenditure and higher machine performance.
• Interfaces between individual components requiring rapid response are no longer
needed.
• Simple, standardized and transparent programming and diagnostics for the complete
machine.
D410
12 Manual, 03/2007 Edition
Page 13
Description
1.2 System components
1.2 System components
Overview
SIMOTION D410 communicates with the components of the automation landscape via the
following interfaces:
• PROFIBUS DP (SIMOTION D410 DP only)
• PROFINET (SIMOTION D410 PN only)
• DRIVE-CLiQ (DRIVE Component Link with IQ)
• Power Module Interface (PM-IF)
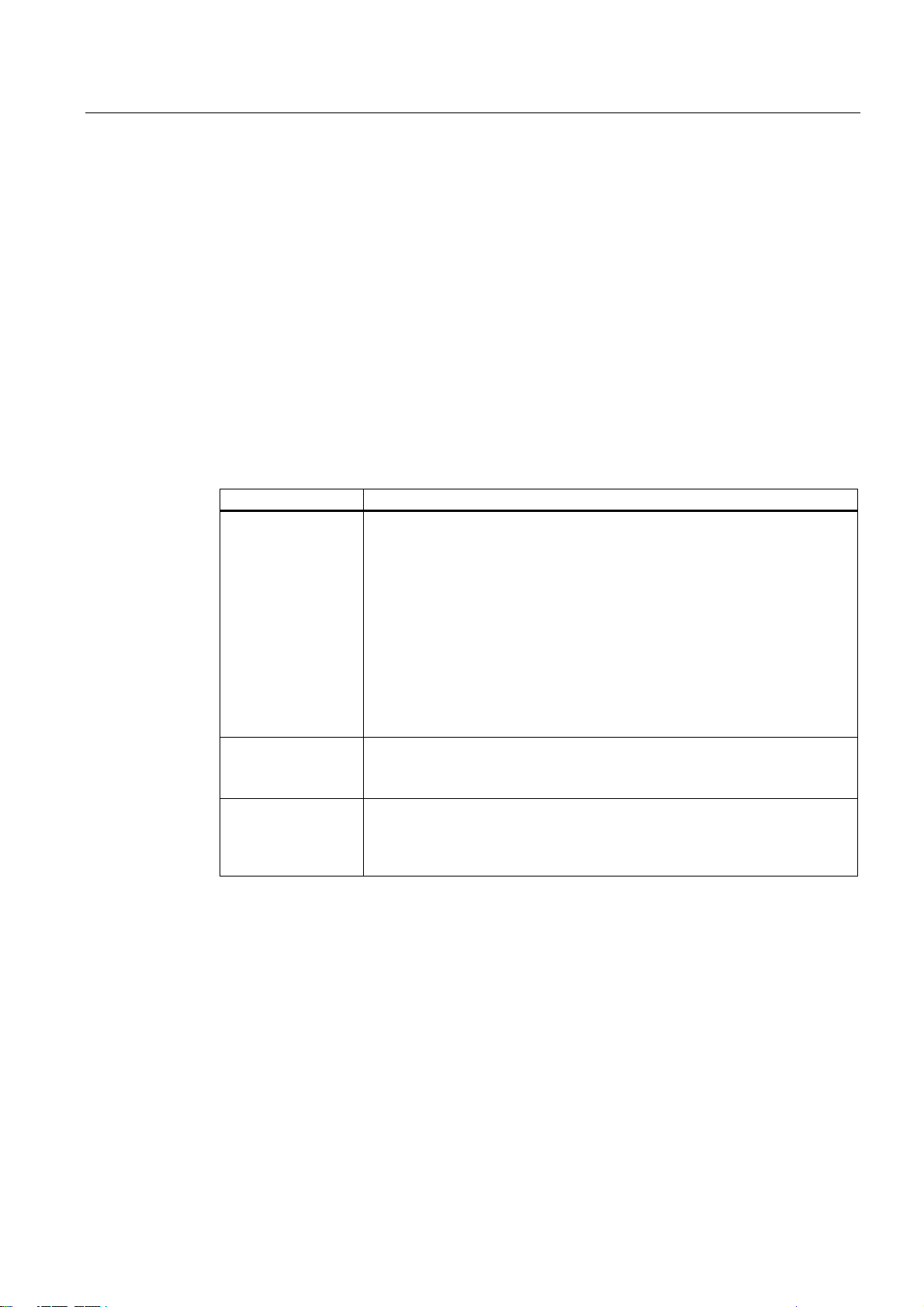
The most important system components and their functions are listed in the following table.
Table 1-1 System components
Components Function
SIMOTION D410 ... is the central motion control module.
The module contains the programmable SIMOTION Runtime in
SIMOTION D410 and the SINAMICS S120 drive software.
You can use the integrated rapid digital I/Os as:
• Homing inputs
• Inputs for measuring inputs
• User-addressable process inputs/outputs
• Outputs for fast output cams
The measuring sockets can output any analog signals.
The DRIVE-CLiQ interfaces permit a fast connection to the SINAMICS drive
components.
System software The system software is delivered separately on a CompactFlash card (not
included in the scope of delivery).
Note: An additional license is not required for the real axis technology.
Power supply (PS) ... provides the electronic power supply for SIMOTION D410, e.g., SITOP.
Note: If SIMOTION D410 is to be mounted on the power module, the power is
supplied via the power module (e.g., PM340). The digital outputs of
SIMOTION D410 are not supplied by the power supply.
D410
Manual, 03/2007 Edition
13
Page 14
Description
1.2 System components
PROFIBUS DP
SIMOTION D410 DP can communicate via PROFIBUS DP interface to the following
components:
Table 1-2 Components on PROFIBUS DP
Components Function
PG/PC programming device ... configures, sets parameters, programs and tests using the
SIMOTION SCOUT Engineering System (ES).
Drive units with
PROFIBUS DP interface
(e.g., SINAMICS,
SIMODRIVE 611 universal)
SIMATIC ET 200M Modular I/O system for control cabinet installation and high channel
SIMATIC ET 200S Precision modular I/O system for control cabinet installation, including
SIMATIC ET 200pro Modular I/O system with IP65/66/67 rating for near-machine
SIMATIC ET 200eco I/O system with IP 67 rating for near-machine applications with no
Gateways
Teleservice adapter Remote diagnosis
Other controls (e.g.,
SIMOTION or SIMATIC)
... convert speed setpoints into signals for controlling the motor and
supply the power required to operate the motors.
Can also be operated as an isochronous, equidistant Slave on the
PROFIBUS DP.
densities.
motor starters, safety technology and connecting load groups to
common potential.
applications with no control cabinet; with new features like more
compact designs, integrated PROFIsafe safety technology,
PROFINET connection and live module replacement.
control cabinet, including flexible and fast connection system in
ECOFAST or M12.
• DP/AS Interface Link 20E and DP/AS Interface Link Advanced for
the PROFIBUS DP gateway to AS Interface
• DP/DP coupler to connect two PROFIBUS DP networks
Note
Note that only a real axis can be used on a SIMOTION D410!
D410
14 Manual, 03/2007 Edition
Note
Please note that not all modules for the I/O systems listed above are enabled for SIMOTION.
Moreover, system-related functional differences can come into play when these I/O or I/O
systems are used on SIMOTION vs. on SIMATIC. For example, SIMOTION does not support
special process control functions (e.g., live plugging and unplugging, etc.) in the ET 200M
distributed I/O system.
For a detailed and routinely updated list of I/O modules enabled with SIMOTION as well as
application information, visit us online at:
http://support.automation.siemens.com/WW/view/de/11886029
Page 15
Description
1.2 System components
In addition to the I/O modules enabled for SIMOTION, all certified standard slaves can, in
principle, be connected to SIMOTION if they support the following:
• Cyclic data traffic (DP-V0) and, possibly
• Acyclic data traffic (DP-V1) or
• Isochronous data traffic (DP-V2)
These modules are integrated via the GSD file from the device manufacturer.
PROFINET
Note
Please note that in individual cases further boundary conditions must be fulfilled in order to
integrate a standard slave into SIMOTION. For example, "driver modules" in the form of
function blocks are required for some modules, which enable integration or make it
especially easy.
For modules enabled for SIMOTION (e.g., S7-300 module FM 350-1, etc.), these driver
modules are part of the SIMOTION SCOUT Engineering System command library.
SIMOTION D410 PN can communicate via PROFINET interface to the following
components:
Table 1-3 Components on PROFINET
Components Function
PG/PC programming device ... communicates with the SIMOTION SCOUT Engineering
Systems (ES), STEP 7 and HMI (Human Machine Interface).
Host computer ... communicates to other devices via TCP/IP.
SIMATIC HMI device ... is used for operator control and monitoring functions. It is not
absolutely required to run SIMOTION D410.
SIMATIC ET 200S Precision modular I/O system for control cabinet installation,
including motor starters, safety technology and connecting load
groups to common potential.
SIMATIC ET 200pro Modular I/O system with IP65/66/67 rating for near-machine
applications with no control cabinet; with new features like more
compact designs, integrated PROFIsafe safety technology,
PROFINET connection and live module replacement.
Drive units with PROFINET
interface (e.g., SINAMICS S120
with CBE20)
Other controls (e.g., SIMOTION
or SIMATIC)
Gateways
... convert speed setpoints into signals for controlling the motor
and supply the power required to operate the motors.
• IE/AS Interface Link PN IO for the PROFINET IO gateway to
AS Interface
• PN/PN coupler to connect two PROFINET IO networks
• IE/PB Link PN IO for the PROFINET IO gateway to PROFIBUS
DP
D410
Manual, 03/2007 Edition
15
Page 16
Description
1.2 System components
DRIVE-CLiQ
SIMOTION D410 can communicate via DRIVE-CLiQ interface to the following components:
Table 1-4 Components on DRIVE-CLiQ
Components Function
Drive units
SINAMICS S120 AC DRIVE
(with CUA31)
TM15 and TM17 High Feature
terminal modules
TM31 terminal module ... enables terminal expansion via DRIVE-CLiQ (additional
TM41 terminal module ... enables terminal expansion (analog and digital inputs/outputs)
Sensor Module Integrated (SMI) The integrated sensor module delivers the encoder signals
Sensor Module Cabinets (SMC) ... converts the encoder signals into DRIVE-CLiQ signals.
DMC20 ... expands the number of DRIVE-CLiQ nodes
... convert speed setpoints into signals for controlling the motor
and supply the power required to operate the motors. The
AC DRIVE component PM340 is connected via CUA31. No more
than one PM340 can be connected. Chassis power module is
connected via DRIVE-CLiQ.
Note: Booksize components are not supported!
The TM15 and TM17 High Feature terminal modules can be
used to set up inputs of measuring inputs and outputs of output
cams. In addition, these terminal modules provide drive-related
digital inputs and outputs with short signal delay times.
analog and digital inputs/outputs).
and encoder simulation via DRIVE-CLiQ.
directly as DRIVE-CLiQ signals.
Note
Note that SIMOTION D410 does not support the CX32 expansion!
D410
16 Manual, 03/2007 Edition
Page 17

Description
1.3 SIMOTION D410 DP display
1.3 SIMOTION D410 DP display
View
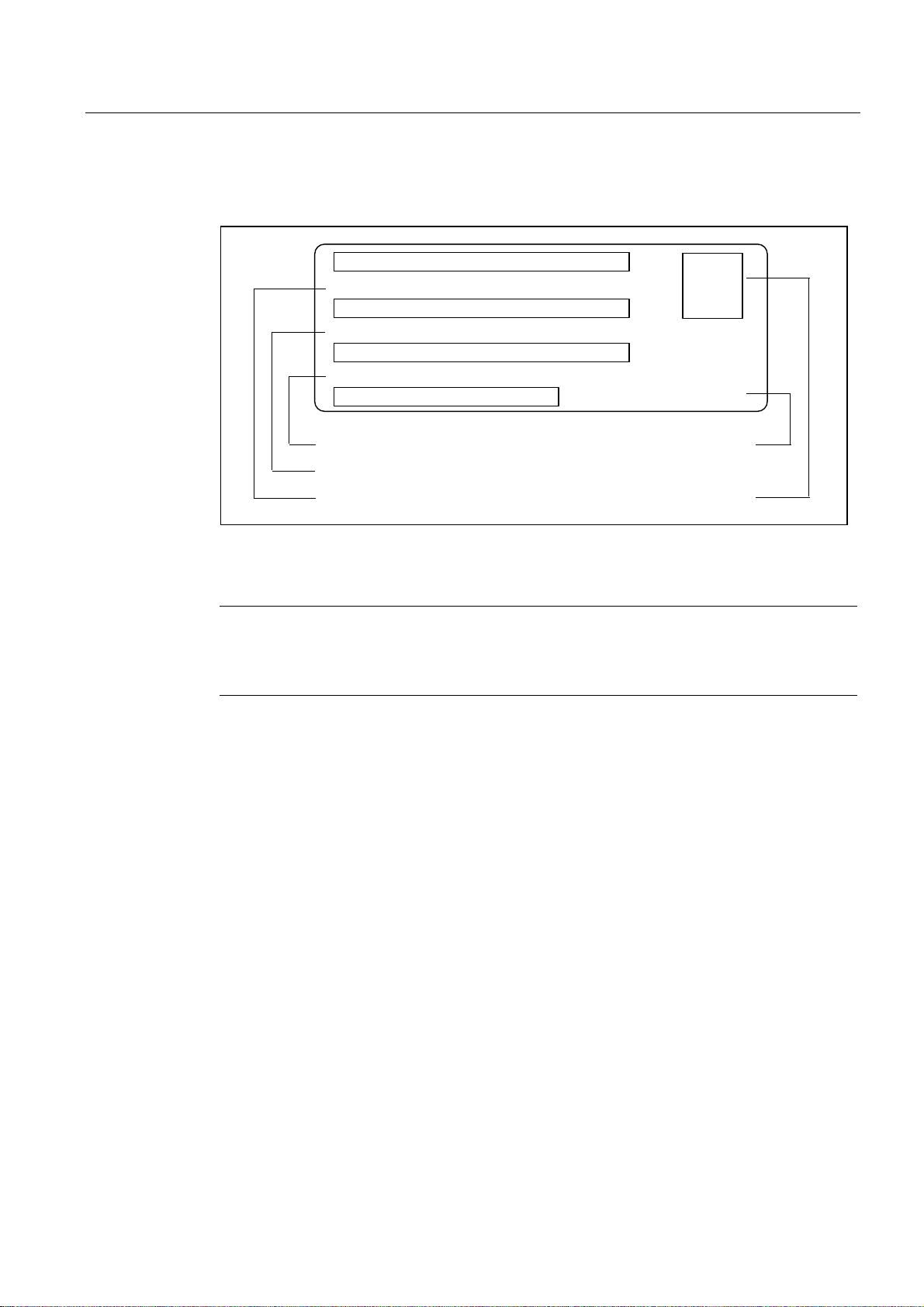
The following figure shows SIMOTION D410 DP with the interfaces and front elements.
3RZHUPRGXOHLQWHUIDFH30,)
6HULDOLQWHUIDFHQR
IXQFWLRQ
;
352),%86
0VFUHZRQVKLHOG
FRQQHFWLRQ
;
(QFRGHULQWHUIDFH+7/77/
;
'5,9(&/L4LQWHUIDFH
;
(OHFWURQLFVSRZHUVXSSO\
&RPSDFW)ODVKb&DUG
;
(3WHUPLQDOVWHPSHUDWXUH
VHQVRUFRQQHFWLRQ
;
'LJLWDOLQSXWVRXWSXWV
Figure 1-2 Location of interfaces and front elements in SIMOTION D410 DP
6LGHQDPHSODWH
7770
0HDVXULQJVRFNHWV
/('GLVSOD\V
1DPHSODWH
5(6(7EXWWRQ
0RGHVHOHFWRUVZLWFK
',/VZLWFK
D410
Manual, 03/2007 Edition
Note
The lettering "DP ADDRESS" below the DIL switch is of no interest.
17
Page 18
Description
1.3 SIMOTION D410 DP display
Interfaces
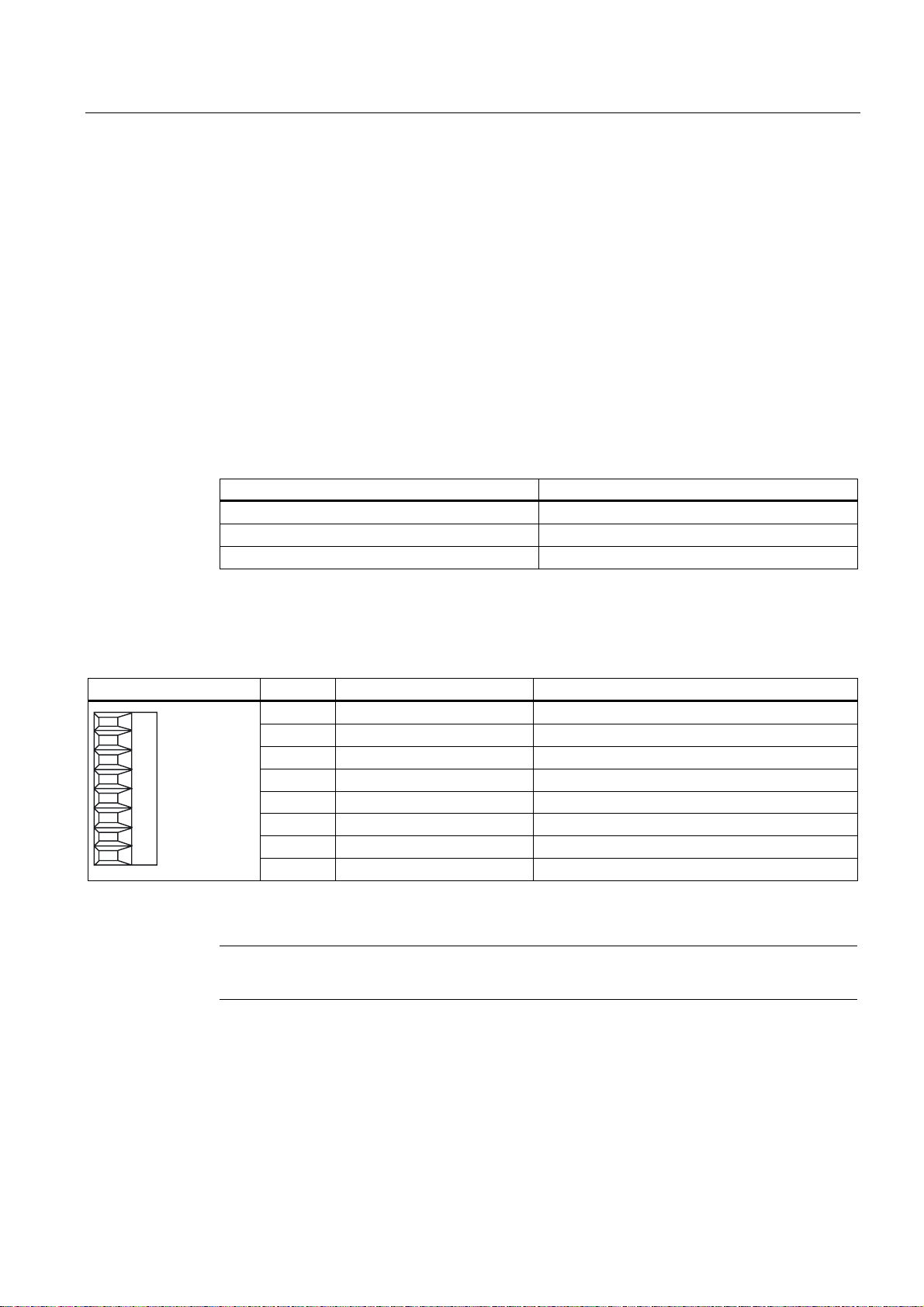
The SIMOTION D410 DP interfaces are described in the following tables.
Table 1-5 SIMOTION D410 interfaces
Interface Description
Digital inputs/outputs
X121
DRIVE-CLiQ interface
X100
PROFIBUS DP interface
X21
Power Module Interface
(PM-IF)
Encoder interface (HTL/TTL)
X23
EP terminals/temperature
sensor connection
X120
Power supply connection
X124
Measuring sockets
T0, T1, T2 and M
• 4 digital inputs: Socket to connect switches or proximity sensors
• 4 digital inputs/outputs: 12-pin socket to connect actuators and
sensors
8-pin RJ45plus socket to connect DRIVE-CLiQ nodes
9-pin SUB-D socket to connect to PROFIBUS DP
8-pin direct connector to connect to a blocksize power module
15-pin SUB-D socket to connect HTL and TTL encoders.
8-pin Mini Combicon to connect input terminals ("safe standstill") or
to connect temperature sensing via KTY or PTC
4-pin screw terminal connection to connect the 24 V DC load power
supply
Sockets to output analog signals
Nameplates
The following figure shows you all the information included on the nameplates located on the
side of the unit.
0RGXOHGHVLJQDWLRQ
2UGHUQXPEHU
6HULDOQXPEHU
+:YHUVLRQ
Figure 1-3 SIMOTION D410 nameplate
D410
18 Manual, 03/2007 Edition
Page 19
Description
$8$$$$
81,.$761U
6DFK1U$(
9HUVLRQ
$$
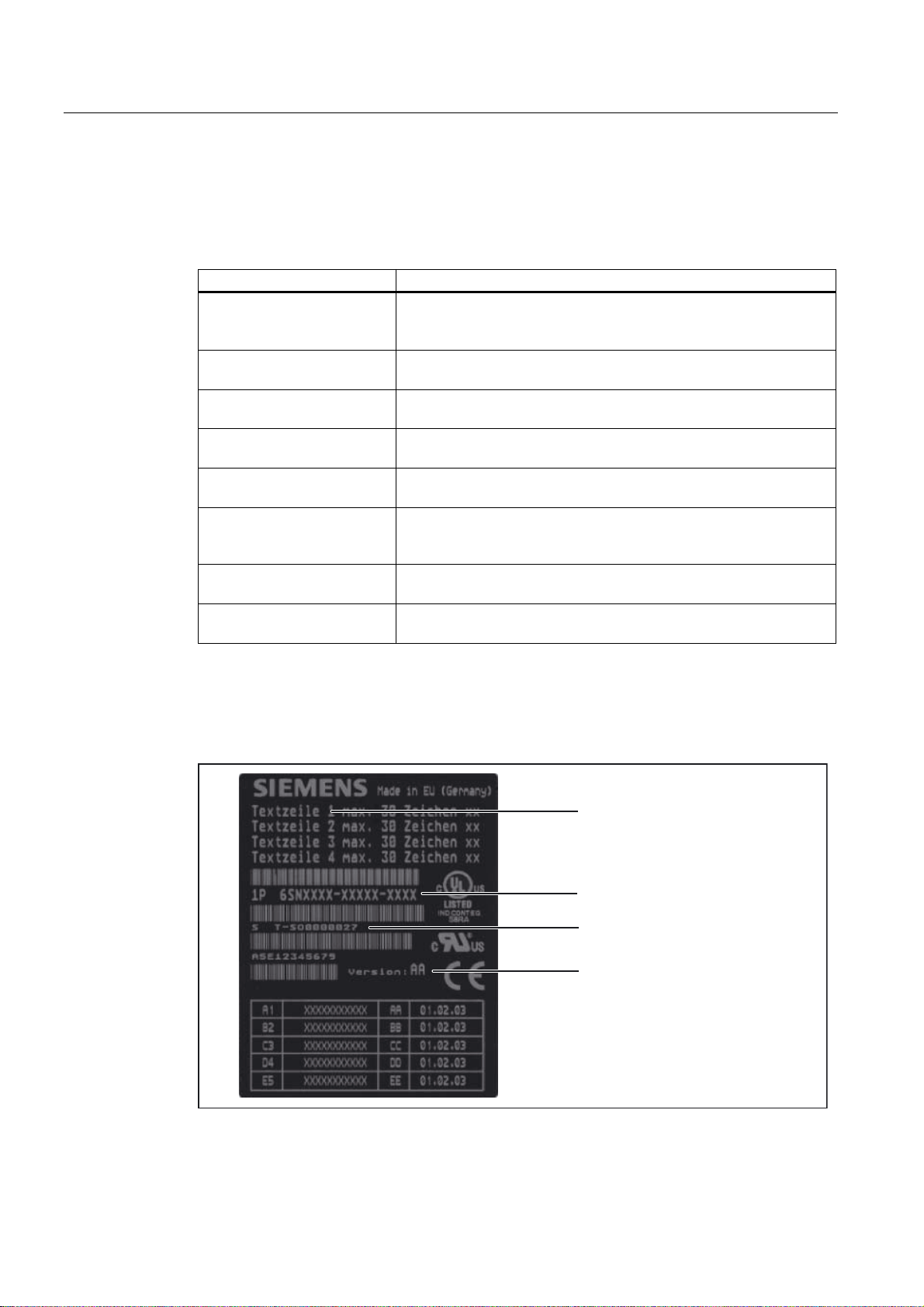
1.3 SIMOTION D410 DP display
The following nameplate includes the SIMOTION D410 DP barcode numbers and is located
on the front side of the module.
%DUFRGH0/)%1R$8$$$$
%DUFRGH8QLTXH1R
%DUFRGH3URGXFW1R$(
3URGXFWQXPEHU
8QLTXHQXPEHU
2UGHUQXPEHU0/)%1R
$UHDIRU&(8/LGHQWLILFDWLRQ
3URGXFWYHUVLRQ
Figure 1-4 SIMOTION D410 DP nameplate (example)
Note
The contents of the individual nameplate fields on the current module may differ from those
described in this Manual (e.g., updated product status, approvals and identifications not yet
issued, etc.).
D410
Manual, 03/2007 Edition
19
Page 20

Description
1.4 SIMOTION D410 PN display
1.4 SIMOTION D410 PN display
View
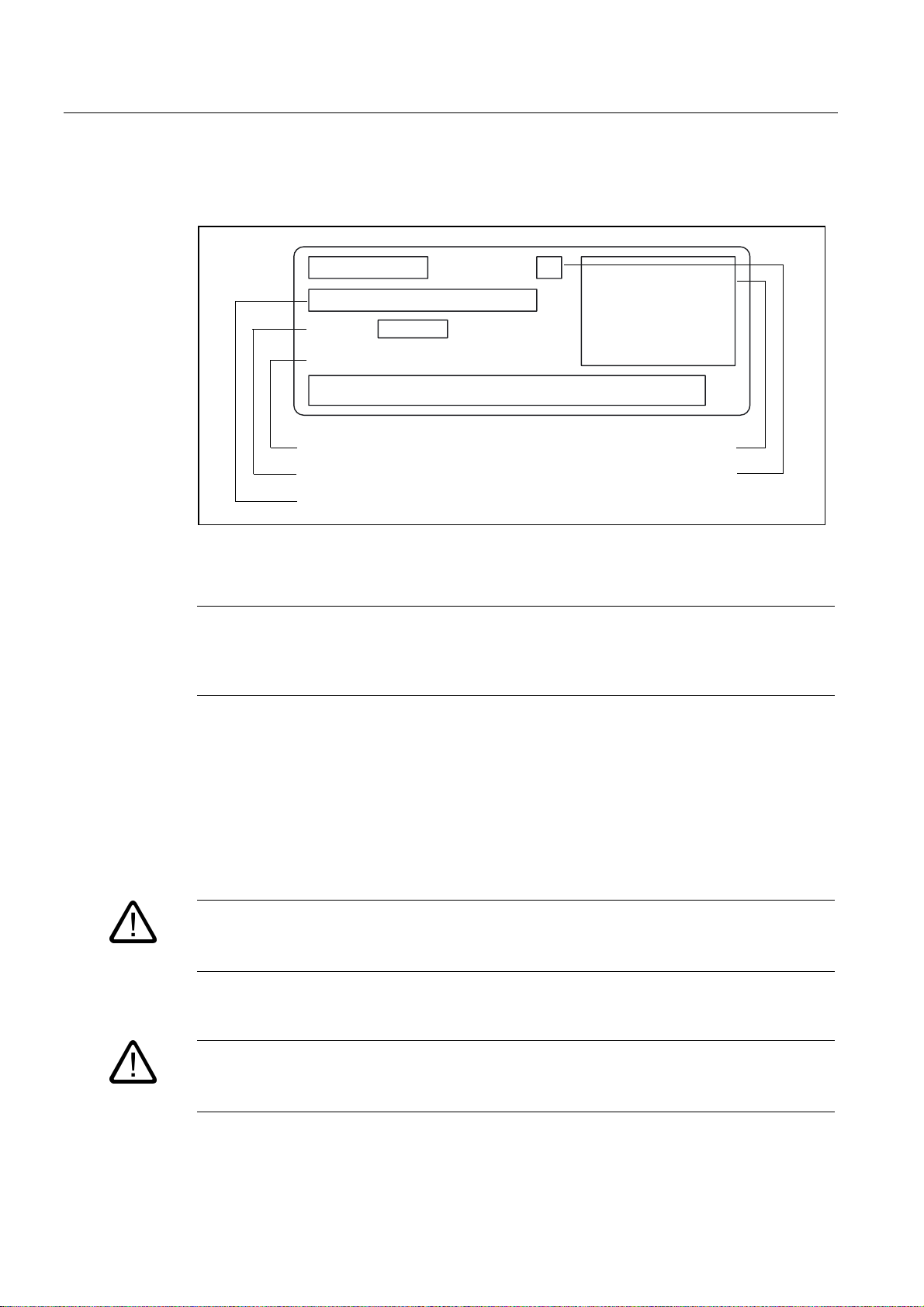
The following figure shows SIMOTION D410 PN with the interfaces and front elements.
3RZHUPRGXOHLQWHUIDFH30,)
6HULDOLQWHUIDFHQR
IXQFWLRQ
;;
352),1(7VRFNHWV
0VFUHZRQVKLHOG
FRQQHFWLRQ
;
(QFRGHULQWHUIDFH+7/77/
;
'5,9(&/L4LQWHUIDFH
;
(OHFWURQLFVSRZHUVXSSO\
&RPSDFW)ODVKb&DUG
;
(3WHUPLQDOVWHPSHUDWXUH
VHQVRUFRQQHFWLRQ
;
'LJLWDOLQSXWVRXWSXWV
Figure 1-5 Location of interfaces and front elements in SIMOTION D410 PN
6LGHQDPHSODWH
7770
0HDVXULQJVRFNHWV
/('GLVSOD\V
1DPHSODWH
5(6(7EXWWRQ
0RGHVHOHFWRUVZLWFK
',/VZLWFK
Note
The lettering "DP ADDRESS" below the DIL switch is of no interest.
D410
20 Manual, 03/2007 Edition
Page 21

Description
1.4 SIMOTION D410 PN display
Interfaces
The SIMOTION D410 PN interfaces are described in the following tables.
Table 1-6 SIMOTION D410 interfaces
Interface Description
Digital inputs/outputs
X121
DRIVE-CLiQ interface
X100
PROFINET interface
(ports X200 and X201)
Power Module Interface
(PM-IF)
Encoder interface (HTL/TTL)
X23
EP terminals/temperature
sensor connection
X120
Power supply connection
X124
Measuring sockets
T0, T1, T2 and M
• 4 digital inputs: Socket to connect switches and proximity
sensors
• 4 digital inputs/outputs: 12-pin socket to connect actuators and
sensors
8-pin RJ45plus socket to connect DRIVE-CLiQ nodes
8-pin RJ45plus socket to connect to PROFINET
8-pin direct connector to connect to a blocksize power module
15-pin SUB-D socket to connect HTL and TTL encoders.
8-pin Mini Combicon to connect input terminals ("safe standstill")
or to connect temperature sensing via KTY or PTC
4-pin screw terminal connection to connect the 24 V DC load
power supply
Sockets to output analog signals
Nameplates
The following figure shows you all the information included on the nameplates located on the
side of the unit.
0RGXOHGHVLJQDWLRQ
2UGHUQXPEHU
6HULDOQXPEHU
+:YHUVLRQ
Figure 1-6 SIMOTION D410 nameplate
D410
Manual, 03/2007 Edition
21
Page 22
Description
9HUVLRQ
$(
;;;;;;
$8$%$$
1.5 Safety information
The following nameplate includes the MAC address of the PROFINET interface (ports X200
and X201) and is located on the front side of the module.
%DUFRGH0$&$GGUHVV
0$&DGGUHVV
3URGXFWQXPEHU
2UGHUQXPEHU0/)%1R
Figure 1-7 SIMOTION PN nameplate (example)
Note
The contents of the individual nameplate fields on the current module may differ from those
described in this Manual (e.g., updated product status, approvals and identifications not yet
issued, etc.).
1.5 Safety information
Observe the following safety information when working with SIMOTION D410 and its
components!
$UHDIRU&(8/LGHQWLILFDWLRQ
3URGXFWYHUVLRQ
Caution
The CompactFlash card may only be unplugged and plugged in when SIMOTION D410 is
switched off (zero current)!
Caution
The 50 mm clearances above and below the components must be observed. The ventilation
openings may not be covered by connecting cables.
D410
22 Manual, 03/2007 Edition
Page 23
Operation (hardware)
2.1 Overview of operator controls and indicators
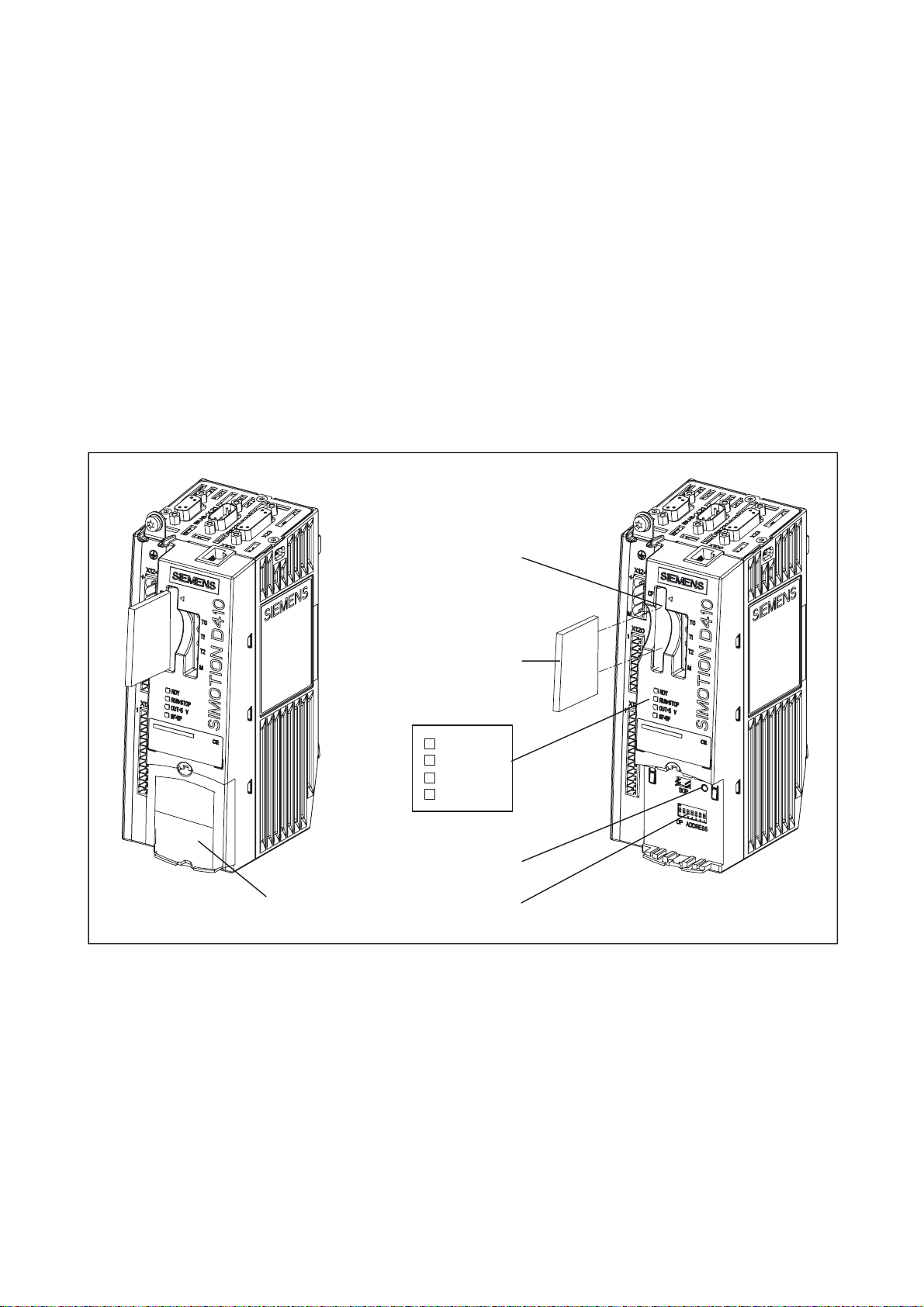
The following figure shows the operator controls and indicators arrangement on the
SIMOTION D410.
&RPSDFW)ODVKFDUG
VORW
&RPSDFW)ODVKb&DUG
/('GLVSOD\V
2
%ODQNLQJSODWH
Figure 2-1 Operator controls and indicators
The operator controls and indicators are described below.
5'<
5816723
287!9
6)%)
5(6(7EXWWRQ
',/VZLWFKHV
D410
Manual, 03/2007 Edition
23
Page 24
Operation (hardware)
2.2 Operator controls
2.2 Operator controls
2.2.1 Mode selector switch
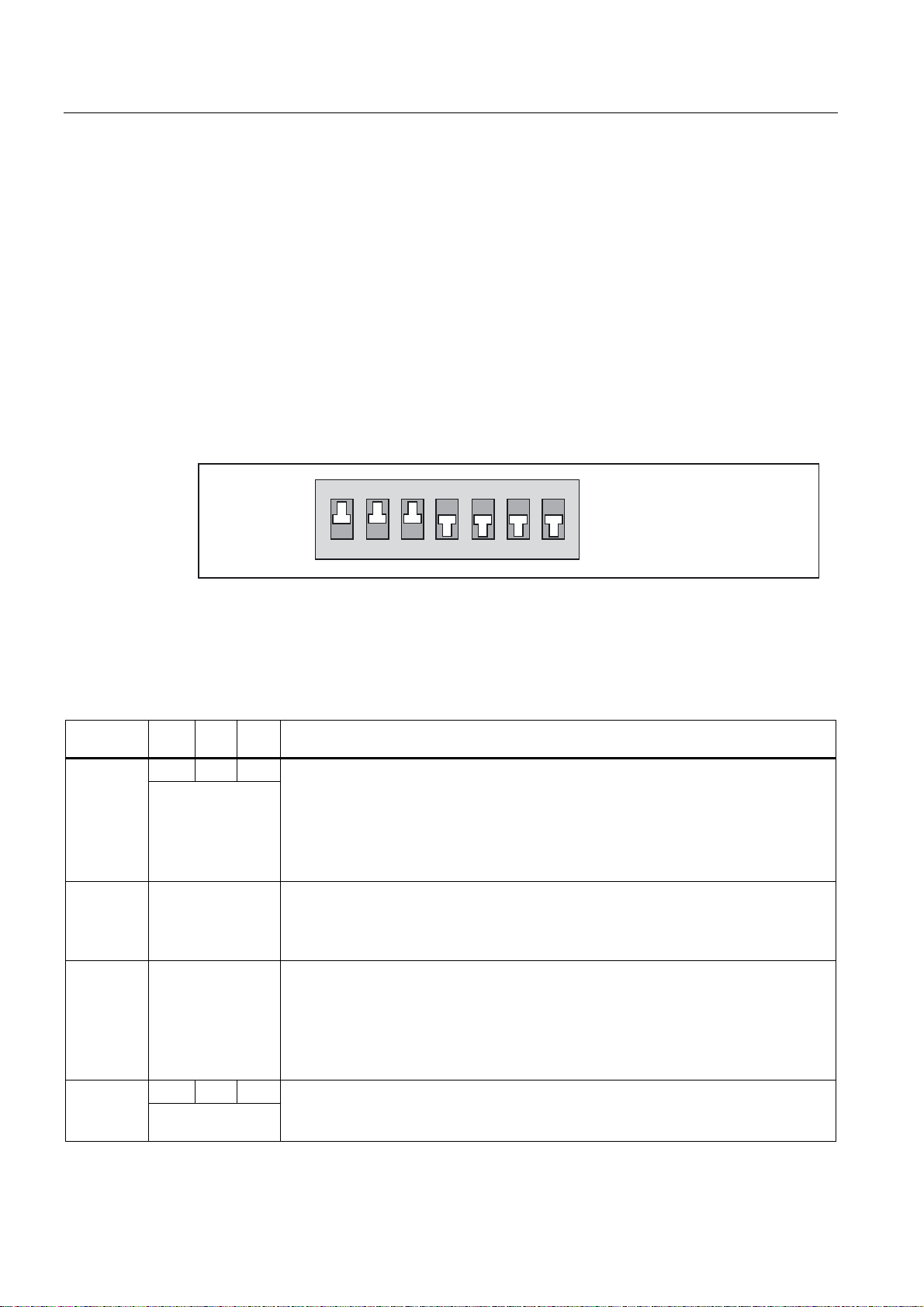
DIL switches
The mode selector switch function is realized in SIMOTION D410 by a DIL switch
(DIL = Dual In Line Package). The DIL switch is located in the lower front area of the
SIMOTION D410 (see "Overview of operator controls and indicators").
To set the SIMOTION operating mode, a binary code is used, which is entered via the DIL
switch (switch S1 - S3).
21
Figure 2-2 DIL switches
The following table contains the operating modes that can be set and the associated code.
Table 2-1 Mode selector switch settings
Operating
mode
STOPU 110 / 101 / 011
STOP 100 / 010 / 001
S1 S2 S3 Description
1 1 1 RUN
(3 switch = ON)
(2 switch = ON)
(1 switch = ON)
0 0 0 MRES
(0 switch = ON)
SIMOTION D410 runs the user program and all connected system performances:
• Read process image of inputs.
• Execution of the user programs assigned to the execution system.
• Write process image of outputs.
The technology packages are active in this state. They can execute commands from the
user program.
SIMOTION D410 does not run a user program.
• The technology packages are active. Test and commissioning functions can be
executed. The user program is not active.
• The I/O modules are in a secure state.
SIMOTION D410 does not run a user program.
• It is possible to load a complete user program.
• All system services (communications, etc.) are active.
• The I/O modules are in a secure state.
• The technology packages are inactive, i.e., all enables are deleted. No axis motions
can be executed.
Overall module reset
You can reset SIMOTION D410 via the MRES switch setting. Observe the operating
sequence in the Commissioning Manual,
SIMOTION D410
6ZLWFKVHWWLQJ 21
6ZLWFKVHWWLQJ 2))
, /1/.
D410
24 Manual, 03/2007 Edition
Page 25
Operation (hardware)
2.2 Operator controls
Note
The factory DIL switch setting (switches S1 to S7) is 1110000. As a rule, it is not necessary
to adjust this switch. Use the SIMOTION SCOUT Engineering System to set the operating
mode (at switch setting 1110000).
Switches S4 - S7 are not used in SIMOTION D410 and must be set to "0" (OFF).
SIMOTION SCOUT mode selector switch
In SIMOTION SCOUT, you can control the SIMOTION D410 operating state using a
software switch.
To set the operating state via SIMOTION SCOUT, see the Configuring Manual,
SCOUT
, /9/.
2.2.2 SIMOTION CompactFlash card
CompactFlash card slot
The CompactFlash card (CF card) is inserted into the plug-in module over the blanking plate
(see "Overview of operator controls and indicators").
SIMOTION
CF card features
The CF card is mandatory to run SIMOTION D410. The CF card must be ordered as a
separate component; it is not included in the SIMOTION D410 scope of delivery.
The SIMOTION firmware is located on the CF card.
CF card functions:
• Backup technology packages and user data
• Update (e.g., SIMOTION firmware update)
Note
The CF card may only be unplugged and plugged in when the system is switched off
(zero current)!
If the CF card is being accessed, the RDY-LED on the SIMOTION D410 flashes green
(see chapter "Error and status indicators").
D410
Manual, 03/2007 Edition
25
Page 26

Operation (hardware)
2.3 Error and status indicators
Further information
For more information on writing and formatting the CF card, see the Commissioning Manual,
SIMOTION D410, /1/
.
See also
System data, connection values, dimensions and weight (Page 62)
2.3 Error and status indicators
Arrangement of LED displays
The LED displays are located under the CF card plug-in module on the SIMOTION D410
(see "Overview of operator controls and indicators").
Further information
For the LED statuses, see the Commissioning Manual,
SIMOTION D410,
/1/.
D410
26 Manual, 03/2007 Edition
Page 27

Interfaces
3.1 Overview of interfaces
This chapter describes the SIMOTION D410 interfaces.
Available interfaces
Table 3-1 Overview of available SIMOTION D410 interfaces
Interface Designation Connector type
Digital inputs X121 12-pin socket
Digital inputs/outputs X121 12-pin socket
DRIVE-CLiQ interface X100 DRIVE-CLiQ connector
PROFIBUS DP interface
(SIMOTION D410 DP only)
PROFINET interface
(SIMOTION D410 PN only)
Power Module Interface PM-IF 8-pin direct connector
Encoder interface (HTL/TTL) X23 15-pin SUB-D socket
EP terminals/temperature sensor connection X120 Mini Combicon, 8-pin
Power supply connection X124 Combicon 4-pin
Measuring sockets T0, T1, T2 and M Sockets
3
X21 9-pin SUB-D socket
X200 and X201 8-pin RJ45 socket
Non-usable interfaces
Table 3-2 Overview of non-usable SIMOTION D410 interfaces
Interface Designation Connector type
RS232 serial interface X22 9-pin SUB-D socket
Interface for BOP20 X142 8-pin multipoint connector
See also
SIMOTION D410 DP display (Page 17)
SIMOTION D410 PN display (Page 20)
D410
Manual, 03/2007 Edition
27
Page 28

Interfaces
3.2 Digital inputs/outputs
3.2 Digital inputs/outputs
Sensors and actuators can be connected to the X121 connector via digital inputs and
outputs. The following types of digital inputs/outputs are available:
• Digital inputs (4 pcs)
• Bidirectional digital inputs/outputs (4 pcs)
Bidirectional digital inputs and outputs can be configured individually as digital inputs or
outputs.
Assignment of the inputs/outputs to functions can be configured as required. Special
functions, such as measuring input and output of the output cam, can be assigned to the
inputs/outputs.
Interface features
Table 3-3 Interface X121
Features Type
Connector type Mini Combicon
Connection possibility Up to 0.5 mm²
Load capacity Max. 4 A
D410
28 Manual, 03/2007 Edition
Page 29

Interfaces
3.2 Digital inputs/outputs
Interface assignments
Table 3-4 Interface assignment X121
1)
View Pin Designation
1 DI0
2 DI1
3 DI2
4 DI3
5 G1 Ground for DI0 - DI3
6 G
7 DI/DO8
8 DI/DO9 fast DI/DO
9 G
10 DI/DO10 fast DI/DO
11 DI/DO11 fast DI/DO
12 G
1)
DI: digital input; DI/DO: bidirectional digital input/output; G: electronic ground;
Description Technical details
• Voltage: -3 to 30 V
• Current input (typical): 10 mA at 24 V DC
• Electrical isolation: reference potential is G1 terminal
• Level (including ripple):
– 0 signal: -3 to 5 V
(functionally-separated
relative to M)
– 1 signal: 15 to 30 V
• Input delay:
– 0 → 1 signal: 50 μs
– 1 → 0 signal: 100 μs
As input:
• Voltage: -3 to 30 V
• Current input (typical): 10 mA at 24 V DC
• Level (including ripple):
– 0 signal: -3 to 5 V
– 1 signal: 15 to 30 V
• Input delay / fast input delay:
– 0 → 1 signal: 50 μs / 5 μs
– 1 → 0 signal: 100 μs / 50 μs
As output:
• Voltage: 24 V DC
• Max. load current per output: 500 mA
• Sustained short-circuit proof
• Output delay:
– 0 → 1 signal: < 400 μs
– 1 → 0 signal: < 100 μs
G1: reference ground
D410
Manual, 03/2007 Edition
Note
An open input is interpreted as "low".
The "fast inputs" can be used for position acquisition with a measuring system.
The G1 terminal must be connected for the digital inputs (DI) 0 to 3 to function. This can be
done as follows:
• Connect the carried digital input reference ground.
• Connect a bridge to G terminal (Important: This will cancel the electrical isolation for
these digital inputs!)
Note
An external 24 V supply is required.
If a momentary interruption in the voltage occurs in the 24 V supply, the digital outputs will be
deactivated until the interruption has been rectified.
29
Page 30

Interfaces
3.2 Digital inputs/outputs
Wiring and block diagram
The following figure shows the wiring and block diagrams of the digital inputs/outputs on the
SIMOTION D410.
([WHUQDOVXSSO\YROWDJH9
'&
0
;
7['
5['
6HULDOLQWHUIDFH
0
;
'5,9(&/L4
;
;
0
0
;
352),%86
9
9
0
0
6,027,21
;
˽
XQDVVLJQHG
XQDVVLJQHG
0
7HPS
7HPS
XQDVVLJQHG
(39
(30
''3
0
(QFRGHULQWHUIDFH
30,)LQWHUIDFH
;
',
',
',
',
0
0
','2
','2
0
','2
','2
0
287
&RPSDFW)ODVKb
&DUG
Figure 3-1 Connection example
D410
30 Manual, 03/2007 Edition
Page 31

Interfaces
3.2 Digital inputs/outputs
Digital inputs
4 digital inputs are available on the control unit.
The electrically isolated inputs can be used as user-addressable inputs.
Switches or proximity encoders (2- or 3-wire encoders) can be connected.
The inputs comply with the standard IEC 1131-2/DIN EN 61131-2, characteristic type 2
(24 V P switching).
Bidirectional digital inputs/outputs
4 digital inputs/outputs (DI/DO) are available on the SIMOTION D410.
The following application options are available when configuring the DI/DO as digital inputs:
• DI/DO9, 10 and 11 can be used as "fast inputs" for measuring inputs.
The inputs can be arranged in any way; the special application is activated in the
SIMOTION SCOUT Engineering System when configuring the TO measuring inputs via
the HW address and the bit number.
• All 4 DI/DO can be used as user-addressable inputs or as homing inputs.
The following application options are available when configuring the DI/DO as digital outputs:
• Use as onboard outputs
• Use as "fast output cams"
The outputs comply with the standard IEC 1131-2/DIN EN 61131-2 (24 V P switching).
Additional references
For information on configuring the I/O addresses and on using the "fast inputs" as measuring
inputs, see the Commissioning Manual,
For further information on configuring the digital inputs as measuring inputs and the digital
outputs as fast output cams, see the Function Manual,
Measuring Inputs
, /8/.
SIMOTION D410
SIMOTION Output Cams and
, /1/.
D410
Manual, 03/2007 Edition
31
Page 32
Interfaces
3.3 DRIVE -CLiQ interface
3.3 DRIVE-CLiQ interface
Features
The DRIVE-CLiQ interface has the following features:
• Automatic detection of components
• For the DRIVE-CLiQ interface, 24 V / 450 mA are available to connect encoders and
measuring systems.
Interface features
Table 3-5 Interface X100
Features Type
Connector type: DRIVE-CLiQ connector
max. cable length: 50 m
Data rate: 100 Mbits
blanking plate on DRIVE-CLiQ interface: Molex, Order No.: 85999-3255
Interface assignments
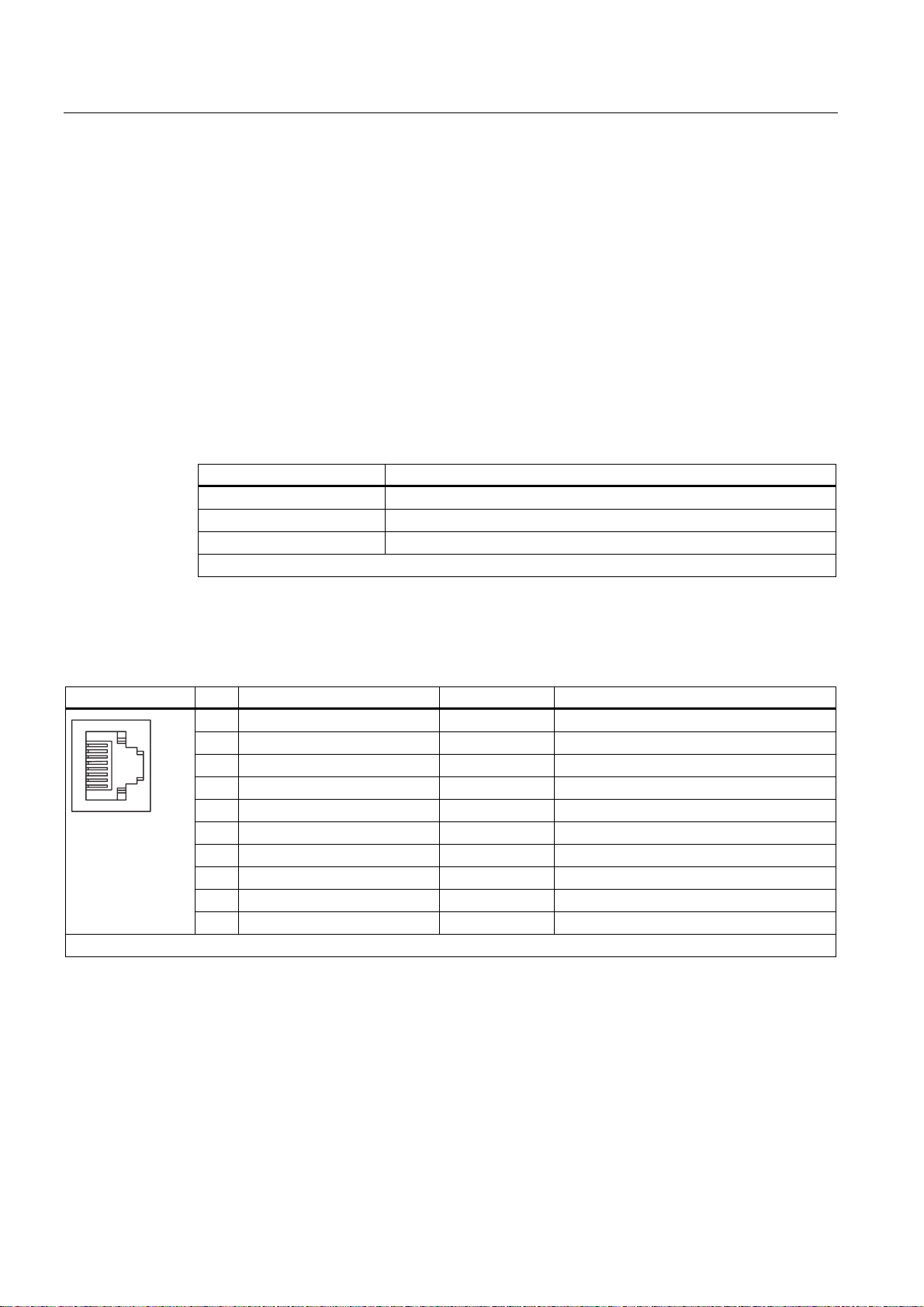
Table 3-6 Interface assignment X100
View Pin Name Signal type Description
%
$
Signal type: I = Input; O = Output; VO = Voltage Output
1 TXP O Transmit data +
2 TXN O Transmit data 3 RXP I Receive data +
4 Reserved, do not use - 5 Reserved, do not use - 6 RXN I Receive data 7 Reserved, do not use - 8 Reserved, do not use - A + (24 V) VO Supply voltage
B M (0 V) VO Electronic ground
D410
32 Manual, 03/2007 Edition
Page 33
Interfaces
3.3 DRIVE -CLiQ interface
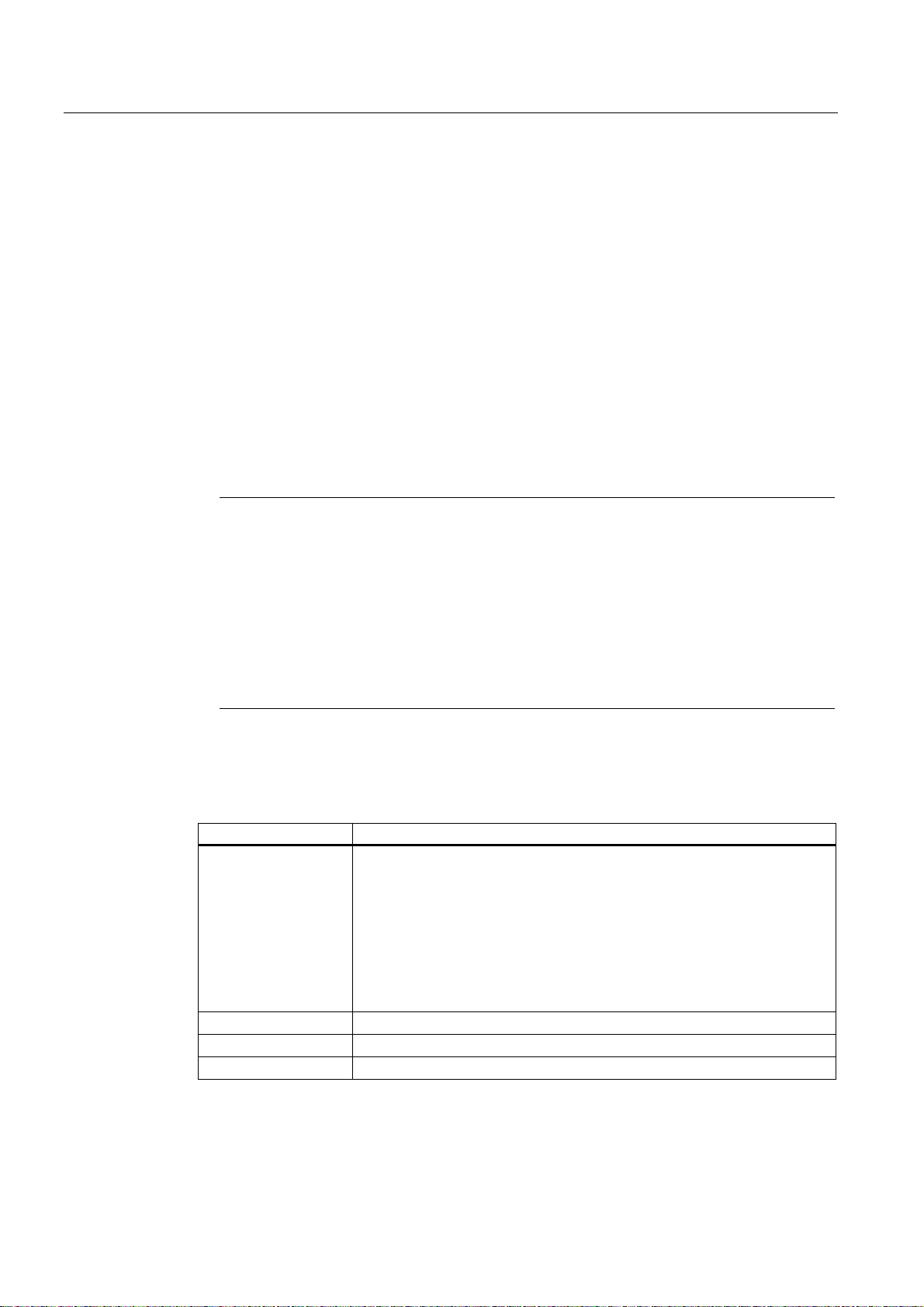
Connectable devices
The following table contains the components that can communicate with SIMOTION D410
via the DRIVE-CLiQ interface. Note the max. number of nodes that can be connected to the
DRIVE-CLiQ!
Table 3-7 DRIVE-CLiQ connection topology
Components Max. number of connectable nodes
Drive Max. 1 drive from the following:
• Blocksize power module (PM340), only possible for operation away from
the power module with CUA31 (see chapter "Installation")
• Power Module Chassis AC/AC
Encoder via Sensor Module Cabinet (SMC)
and Sensor Module Integrated (SMI)
Terminal expansion modules Max. 3 of the following terminal modules:
DRIVE-CLiQ hub module 20 (DMC20) Max. 1 DMC20
Max. 2 of the following encoder modules:
• SMC10
• SMC20
• SMC30
• Encoder connection via motor with DRIVE-CLiQ interface (SMI)
• TM15 terminal module
• High feature terminal module TM17
• TM31 terminal module
• TM41 terminal module
Note: Because an SMC and an SMI only have one DRIVE-CLiQ interface, a
DMC20 must be used for a second encoder on DRIVE-CLiQ. If a CUA31 is
used, then the DMC20 is not required.
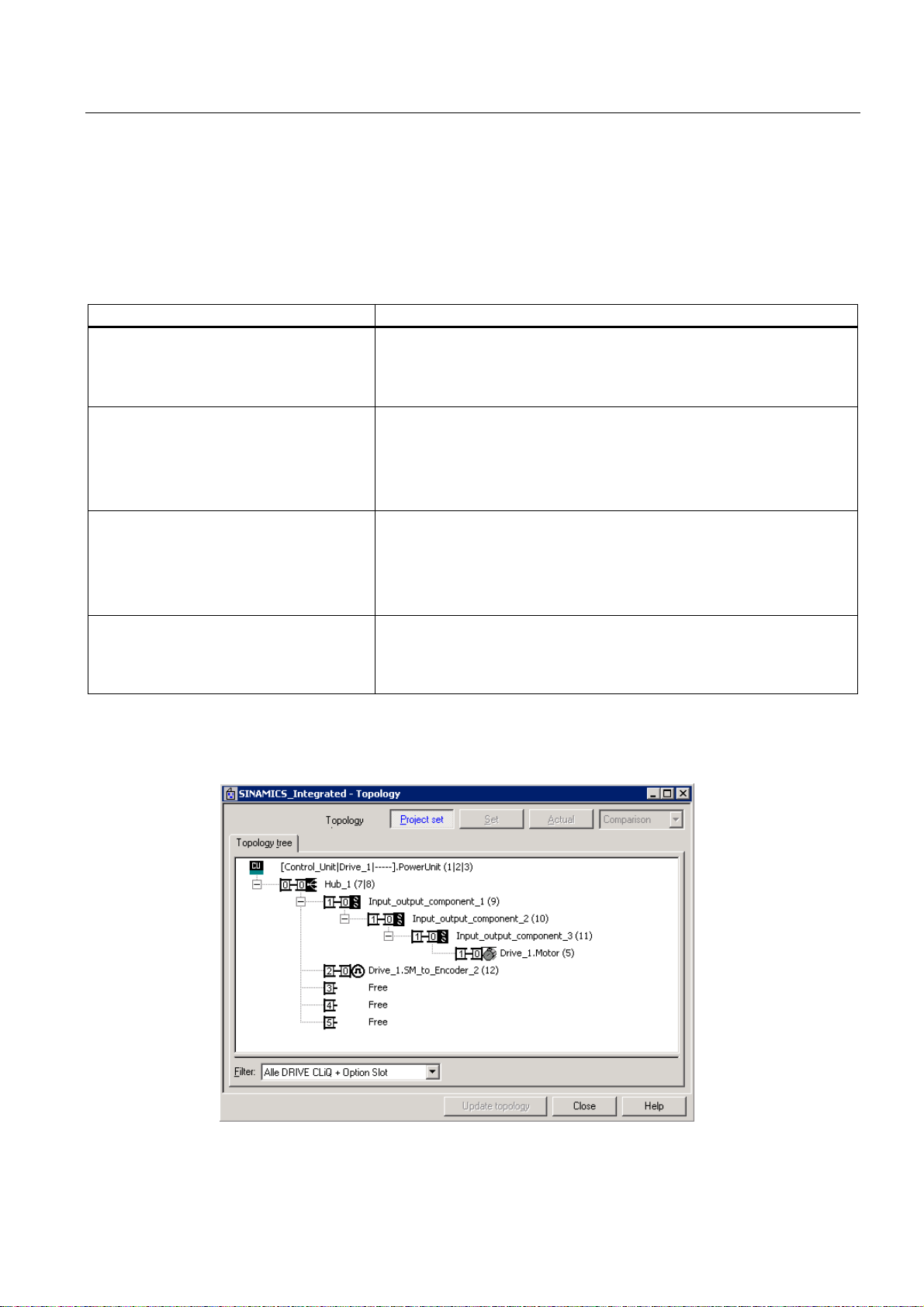
The following figures show 2 example topologies of components that can be connected to
the DRIVE-CLiQ.
Figure 3-2 Example topology: 3 terminal modules, 1 encoder via SMI, 1 encoder via SMC
D410
Manual, 03/2007 Edition
33
Page 34
Interfaces
3.3 DRIVE -CLiQ interface
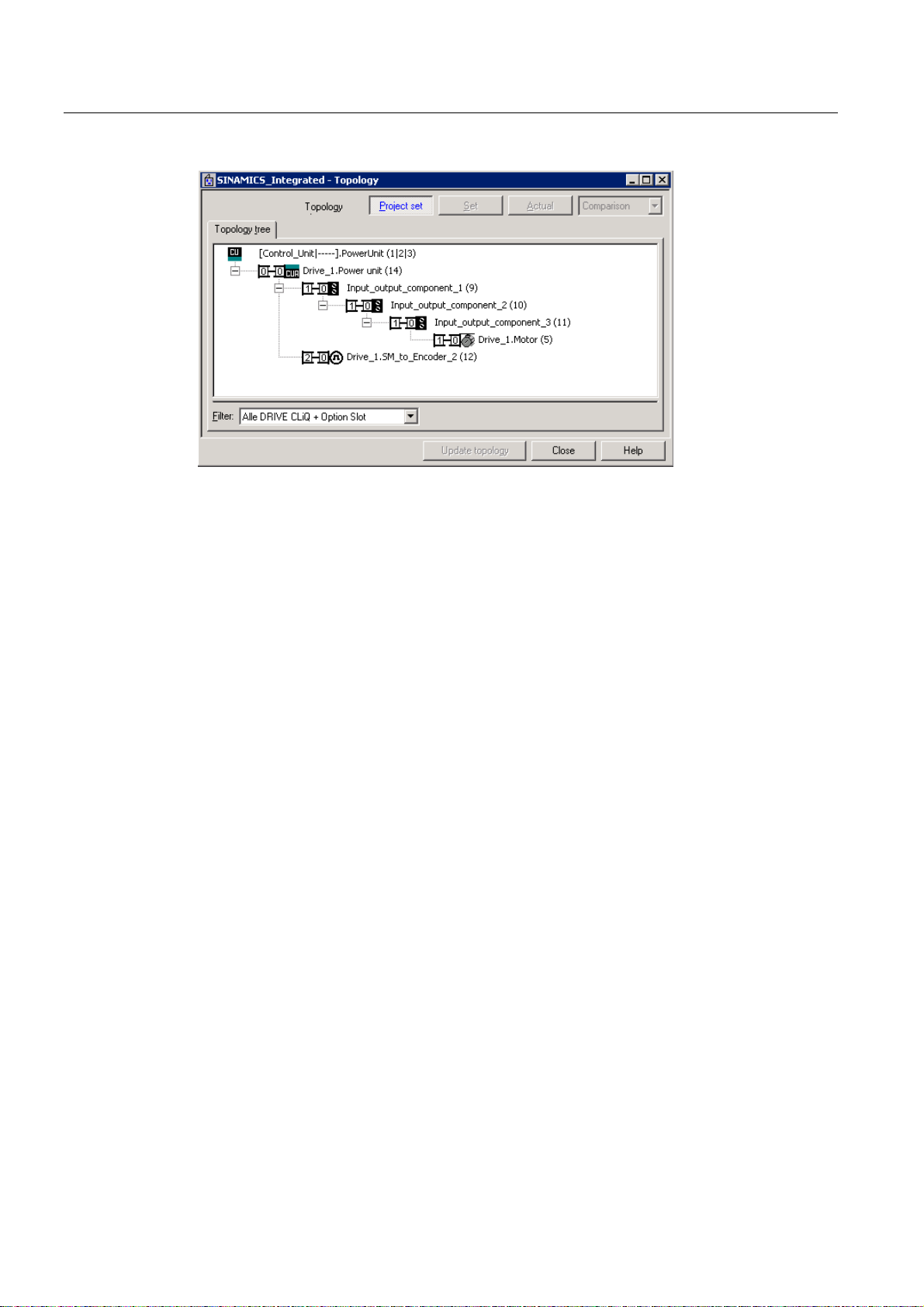
Figure 3-3 Example topology: 3 terminal modules, 1 CUA31, 1 encoder via SMI, 1 encoder via SMC
Further information
For information on the components that can be connected via DRIVE-CLiQ (setup,
connection, configuration, etc.) see
SINAMICS S120 Control Units and Supplementary System Components
•
Manual, /2/
•
SINAMICS S120 AC Drive
•
SINAMICS S120
SINAMICS S120 Booksize Power Modules
•
•
SIMOTION TM15 and TM17 High Feature Terminal Modules
•
Supplementary SINAMICS System Components for SIMOTION
Commissioning Manual, /4/
Equipment Manual, /3/
Equipment Manual, /5/
Commissioning Manual, /6/
Equipment Manual, /7/
Equipment
D410
34 Manual, 03/2007 Edition
Page 35
Interfaces
3.4 PROFIBUS DP interface (SIMOTION D410 DP only)
3.4 PROFIBUS DP interface (SIMOTION D410 DP only)
SIMOTION D410 DP provides one interface to connect to PROFIBUS DP. The interface can
be run asynchronously or isochronously, equidistant.
A baud rate of 12 Mbits/s can be set for the PROFIBUS DP interface.
SIMOTION D410 includes master and I-slave functionality.
Interface features
Table 3-8 Interface X21
Features Type
Connector type: 9-pin D-Sub socket
Cable type: PROFIBUS cable
max. cable length: 100 m for 12 Mbits
max. data rate: 12 Mbits
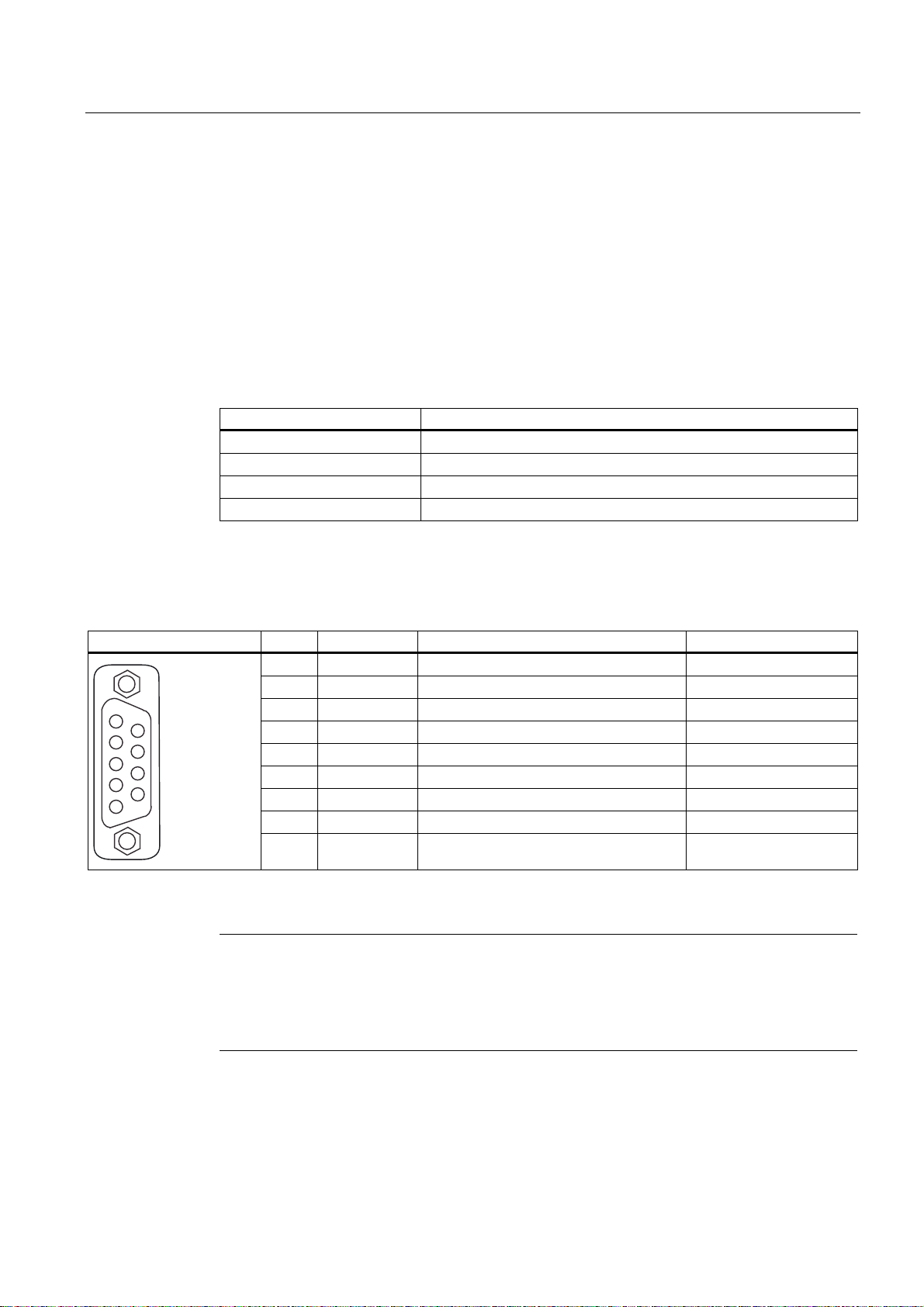
Interface assignments
Table 3-9 Interface assignment X21
View Pin Name Description Area
1 - unassigned
2 M24_SERV Teleservice supply, ground 0 V
3 RxD/TxD-P Receive/transmit data P (B) RS485
4 CNTR-P Control signal TTL
5 DGND PROFIBUS data reference potential
6 VP Supply voltage plus 5 V +/- 10 %
7 P24_SERV Teleservice supply, + (24 V) 24 V (20.4 V - 28.8 V)
8 RxD/TxD-N Receive/transmit data P (N) RS485
9 - unassigned
Note
A teleservice adapter can be connected to the PROFIBUS interface (X21) for remote
diagnosis.
D410
Manual, 03/2007 Edition
The power supply for the teleservice (terminals 2 and 7) can take up to 150 mA and is
sustained short-circuit proof.
35
Page 36
Interfaces
3.4 PROFIBUS DP interface (SIMOTION D410 DP only)
PROFIBUS connector
The terminating resistors must be switched on at the first and last terminal in a line to ensure
uninterrupted communication.
The bus terminating resistors are activated in the connector.
The cable shield must be applied over a large area and on both sides.
Connectable devices
The following devices can be connected to the PROFIBUS DP interface:
• PG/OP programming devices
• SIMATIC HMI devices
• SIMATIC S7 controllers with PROFIBUS DP interface
• Distributed I/O
• Teleservice adapter
• Drive units with PROFIBUS DP interface (standard slaves)
Note
For all enabled modules and devices, see SIMOTION Motion Control System
Catalog
Take note of the documentation on the individual modules or devices!
, /11/.
PM 10
D410
36 Manual, 03/2007 Edition
Page 37
Interfaces
3.5 PROFINET interface (SIMOTION D410 PN only)
3.5 PROFINET interface (SIMOTION D410 PN only)
PROFINET is an open component-based industrial communication system using Ethernet
for distributed automation systems.
SIMOTION D410 PN includes a PROFINET interface with 2 ports (X200 and X201).
A SIMOTION D410 PN can be set as IO controller or I device via the PROFINET interface.
Interface features
Table 3-10 Ports X200 and X201
Features Type
Connector type: RJ45plus socket
Cable type: PROFINET
max. cable length: 100 m
min. transmit cycle: 0.5 ms
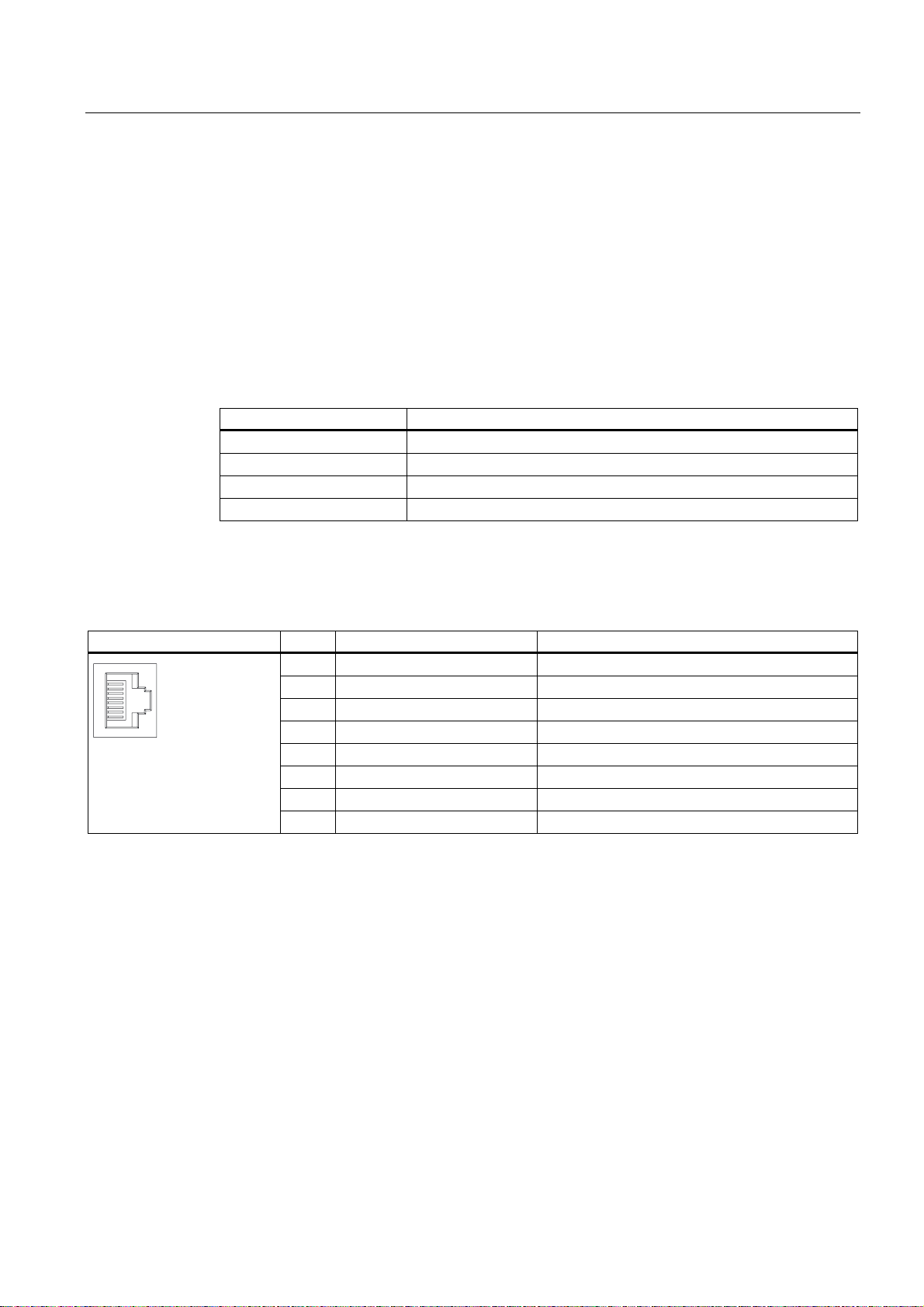
Interface assignments
Table 3-11 Assignment of ports X200 - X201
View Pin Name Description
%
$
1 TXP Transmit data +
2 TXN Transmit data 3 RXP Receive data +
4 Reserved, do not use
5 Reserved, do not use
6 RXN Receive data 7 Reserved, do not use
8 Reserved, do not use
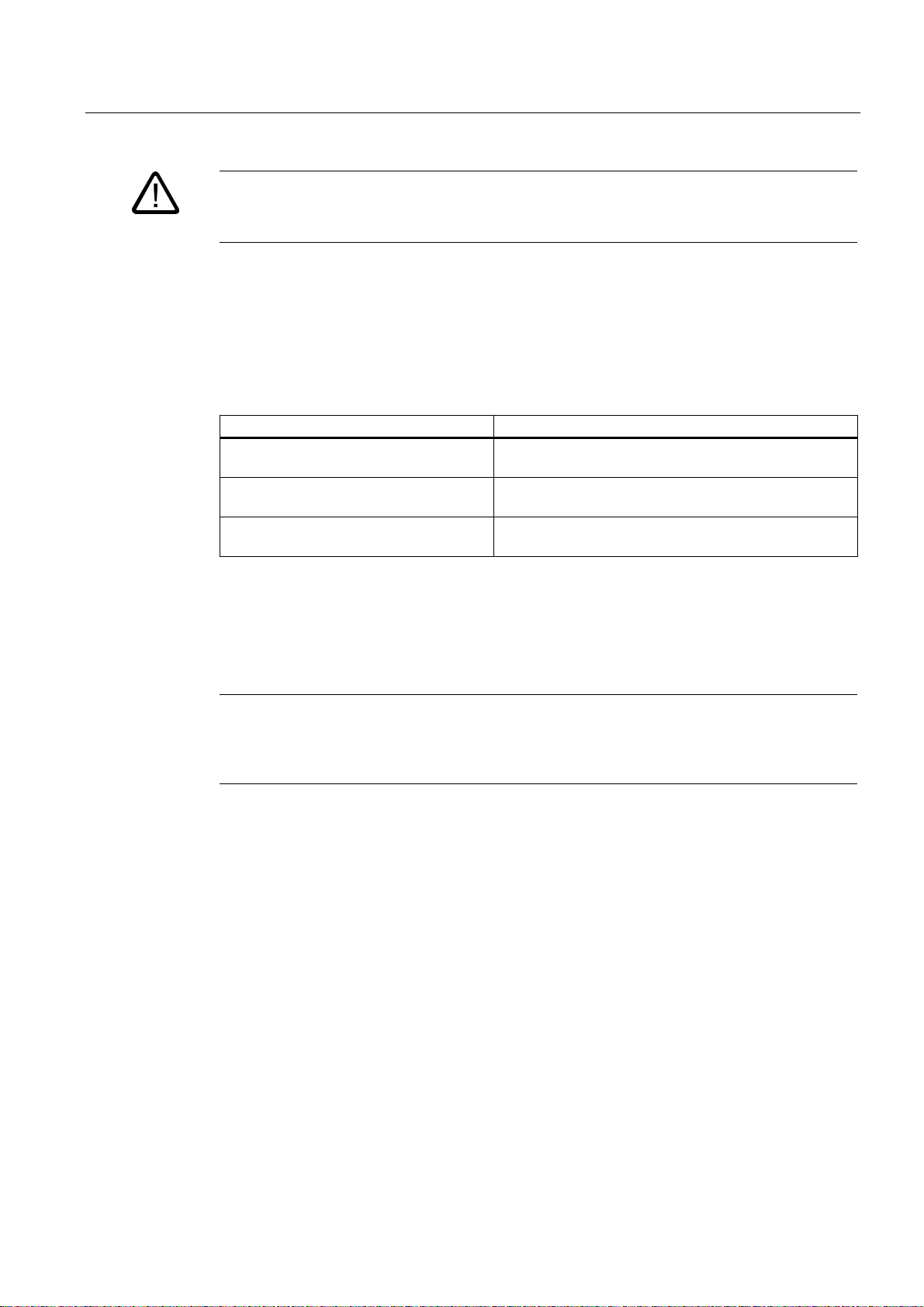
Connectable devices
The following devices can be connected to the PROFINET interface:
• PG/PC programming devices (communication with SIMOTION SCOUT / STEP 7 and
HMI)
• SIMATIC HMI devices
• Distributed I/O
See also
D410
Manual, 03/2007 Edition
• Other SINAMICS drive units (e.g., with CBE20)
Connecting the PROFINET interface (410 PN only) (Page 54)
37
Page 38
Interfaces
3.6 HTL/TTL encoder interface
3.6 HTL/TTL encoder interface
The HTL-/TTL encoder interface is used to connect external encoders (HTL or TTL
encoders).
Interface features
Table 3-12 Interface X23
Features Type
Connector type: 15-pin D-Sub connector
Encoder interface: TTL/HTL incremental encoder
Limiting frequency: 500 kHz
max. cable length:
1)
As of a cable length of 200 m, use a power supply cable with a cable cross-section ≥
0.75 mm²!
• TTL encoder: 100 m (bipolar signals only)
• HTL encoder: 100 m unipolar signals, 300 m bipolar signals
1)
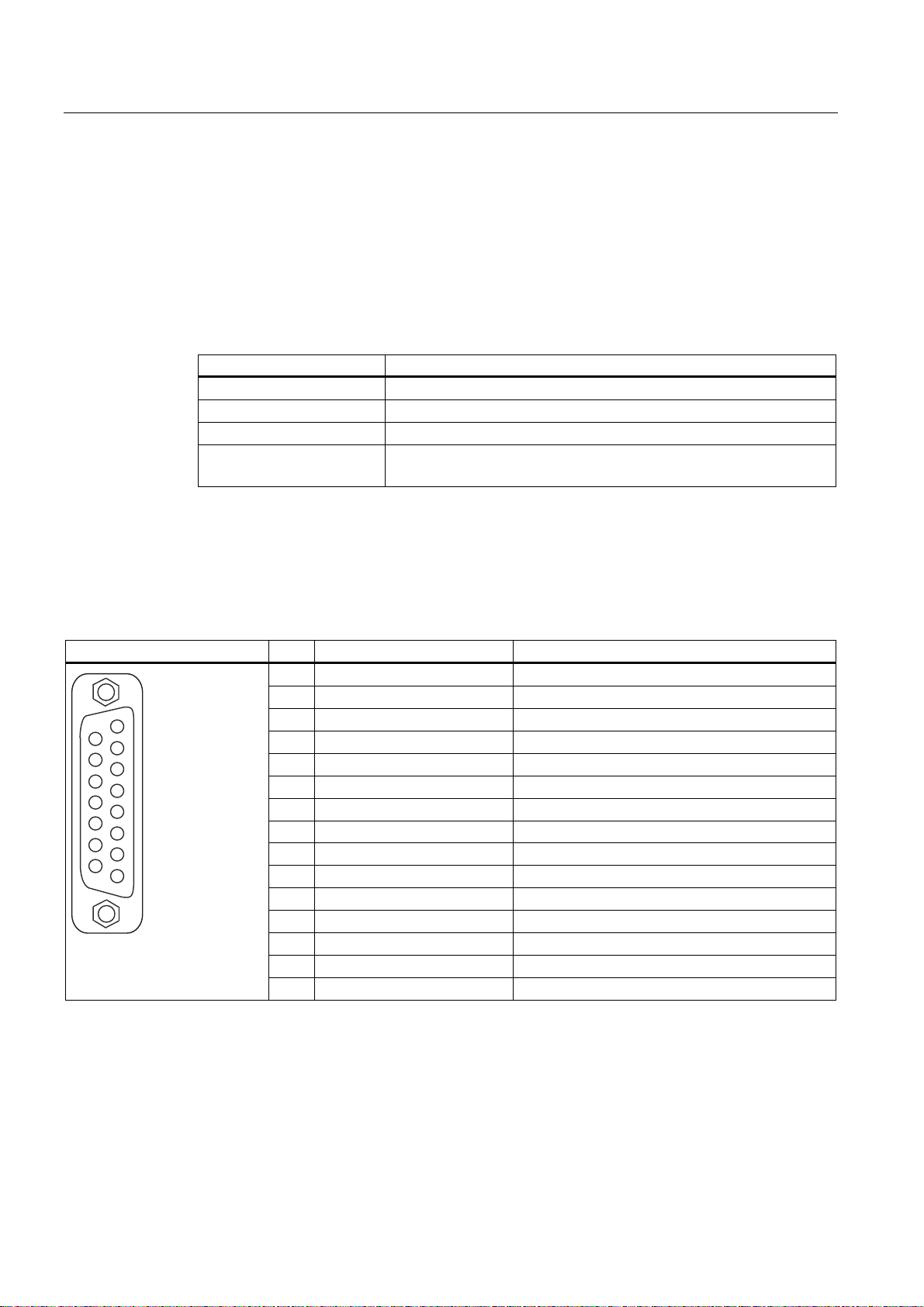
Interface assignments
Table 3-13 Interface assignment X23
View Pin Name Description
1 Reserved, do not use
2 SSI_CLK SSI clock positive
3 SSI_XCLK SSI clock negative
4 PENC Encoder power supply
5 PENC Encoder power supply
6 PSENSE Remote sense encoder power supply (P)
7 G Electronic ground
8 Reserved, do not use
9 MSENSE Remote sense encoder power supply (G)
10 RP R track positive
11 RN R track negative
12 BN B track negative
13 BP B track positive
14 AN_SSI_XDAT A track negative / SSI data negative
15 AP_SSI_DAT A track positive / SSI data positive
D410
38 Manual, 03/2007 Edition
Page 39
Interfaces
3.7 EP terminals/temperature sensor connection
3.7 EP terminals/temperature sensor connection
The EP terminal is the input terminal for the "safe standstill" and is wired to the motor
module. The "safe standstill" is activated, if the EP terminal on the motor module is activated
at the same time as the terminal X121 (DI) on the control unit.
Using the temperature sensor connection, you can connect the temperature sensing via KTY
(special temperature sensor) or PTC (positive temperature coefficient). The temperature
sensing provides thermal motor protection by detecting critical motor conditions.
For more information on "thermal motor protection", see the Commissioning Manual,
SINAMICS S120
Interface features
Table 3-14 Interface X120
Features Type
Connector type: Mini Combicon, 8-pin
Graduation: 2,5 mm
max. connectable cross-section 1.5 mm2
, /4/.
Interface assignments
Table 3-15 Interface assignment X120
View Pin Name Description
1 Reserved, do not use
2 Reserved, do not use
3 G Ground
4 + Temp KTY or PTC input
5 - Temp Ground for KTY or PTC
6 Reserved, do not use
7 EP +24 V Safe standstill input (+)
8 EP M1 Safe standstill input (-)
Notice
The KTY and PTC temperature sensor must be connected with the correct polarity.
D410
Manual, 03/2007 Edition
39
Page 40
Interfaces
3.8 Power supply
3.8 Power supply
The interface X124 is used exclusively to connect the external power supply.
The 24 V DC load power supply is required for the supply
• of digital inputs/outputs (X121)
• SIMOTION D410 can be supplied with power by connecting a power module. Additional
24 V must be connected in the following situations:
– Commissioning/diagnosis with deactivated power module supply voltage
– Running the SIMOTION D410 digital inputs/outputs
– When SIMOTION D410 will not be mounted on a PM340
• of sensor module electronics
• of motor holding brake
Note
A control DC power supply is required to operate a motor with an integrated holding
brake. The supply voltage is realized via the 24 V connection (X124). Take note of the
motor holding brake voltage tolerances and the connecting cable voltage drop.
Interface features
Set the DC power supply to 26 V. This can ensure that the motor holding brake supply
voltage is in the permissible range if the following boundary conditions are fulfilled:
• You are using a Siemens AC motor.
• You are using Siemens Motion-Connect power cables.
• The motor cables are no longer than 100 m.
Features Type
Connector type: Screw terminal 2
• Connectable cable cross-sections:
– Flexible: 0.2 mm² to 2.5 mm²
– with wire-end sleeve without plastic sleeve: 0,25 mm² to 1 mm²
– with wire-end sleeve with plastic sleeve: 0,5 mm² to 1 mm²
• Wire length: 7 mm
• Tool: Screwdriver 0.6 x 3.5 mm
• Torque: 0.5 to 0.6 Nm
Connection possibility: up to 2.5 mm2
Load capacity: 10 A
max. cable length: 10 m
D410
40 Manual, 03/2007 Edition
Page 41

Interfaces
3.8 Power supply
Interface assignments
Table 3-16 Interface X124
View Pin Description Technical details
+ Electronic power supply
0
+ Electronic power supply
G Electronic ground
G Electronic ground
Voltage: 24 V DC (20.4 V - 28.8 V)
Current consumption: max. 0.8 A (without DRIVE-CLiQ and
digital outputs)
max. current via the bridges in the connector: 20 A at 55 °C
See also
Note
When using external power supplies, e.g., SITOP, the ground potential must be connected
with the protective ground terminal (PELV).
Connecting the power supply (Page 51)
D410
Manual, 03/2007 Edition
41
Page 42

Interfaces
3.9 Measuring sockets
3.9 Measuring sockets
Interface features
The T0 - T2 measuring sockets are used to output analog signals Any interconnectable
signal can be output to any measuring socket on the control unit.
Interface assignments
Table 3-17 Interface assignments T0, T1 and T2
View Pin Designation Technical details
7
7
7
Note
The measuring sockets are suited for multiple-spring wire connectors with a diameter of
2 mm.
T0 Measuring socket 0
T1 Measuring socket 1
D2 Measuring socket 2
G Ground
• Voltage: 0 V to 5 V
• Resolution: 8-bit
• Load current: max. 3 mA
• sustained short-circuit proof
• Reference potential is G terminal
0
3.10 Power Module Interface
SIMOTION D410 can be connected to a blocksize power module via the power module
interface.
See also
Note
SIMOTION D410 can only be connected to a blocksize power module via the power module
interface. You must connect a chassis power module via the DRIVE-CLiQ interface (see
chapter "Connecting DRIVE-CLiQ Components").
SIMOTION D410 mounted on the power module (Page 43)
D410
42 Manual, 03/2007 Edition
Page 43

Assembling
4.1 General requirements
Mounting options
SIMOTION D410 comes in two designs:
• Mounted on the power module: SIMOTION D410 is mounted on the power module.
• Operation away from the power module: SIMOTION D410 is mounted on a mounting
plate.
Open device
SIMOTION D410 is an open device! This means, you can only install the modules in
housings, cabinets or electrical equipment rooms. These may only be accessible via key or
tool. Housings, cabinets, or electrical equipment rooms may only be accessed by trained or
authorized personnel. An external fire-protection housing is required.
Danger
The system must be without power when you mount the housing.
4
4.2 SIMOTION D410 mounted on the power module
Overview
SIMOTION D410 can be snapped directly on the blocksize power module (e.g., PM340) via
the PM-IF interface.
D410
Manual, 03/2007 Edition
Note
You can connect a blocksize or chassis power module to the DRIVE-CLiQ interface of
SIMOTION D410 using the CUA31 adapter module.
43
Page 44

Assembling
4.2 SIMOTION D410 mounted on the power module
Requirement
As soon as the power module (e.g., PM340) is properly installed, you can mount the
SIMOTION D410 to the power module.
Note
Take note of the associated user documentation when commissioning the power module!
Mounting on the power module
Snapping the SIMOTION D410 onto the power
module (e.g., PM340)
D410
44 Manual, 03/2007 Edition
Power module (e.g., PM340) with
SIMOTION D410
Page 45

Assembling
4.2 SIMOTION D410 mounted on the power module
Disassembling SIMOTION D410
To remove SIMOTION D410 from the power module, the blue release, as shown in the
figure, must be pressed down and SIMOTION D410 tilted forward.
Figure 4-1 Removing the SIMOTION D410 from the power module (e.g., PM340)
D410
Manual, 03/2007 Edition
45
Page 46

Assembling
4.3 Mounting SIMOTION D410 on the mounting plate
4.3 Mounting SIMOTION D410 on the mounting plate
Overview
Using a mounting plate, SIMOTION D410 can be operated on a mounting plate, which
means it is not mounted directly to the power module.
Requirements
You must order the mounting plate for SIMOTION D410 separately. See chapter "Spare
Parts and Accessories" for the order number.
Mounting on mounting plate
1. The mounting plate is mounted to the rear panel of the control cabinet.
2. SIMOTION D410 is snapped onto the mounting plate.
Figure 4-2 Mounting SIMOTION D410 on the mounting plate
D410
46 Manual, 03/2007 Edition
Note
When operating SIMOTION D410 away from the power module, generally the power supply
must be realized via the power supply connection (X124).
Take note of the information on control cabinet installation in the equipment Manual,
SINAMICS S120 AC Drive
, /3/.
Page 47

Connecting
5.1 Overview
This chapter describes the basic guidelines for the electrical setup. You must observes these
guidelines to ensure uninterrupted operation.
Safety regulations
To safely operate your system, take the following measures and adapt them to your specific
conditions:
• An EMERGENCY-OFF concept based on applicable technical specifications
(e.g., European Standards EN 60204, EN 418 and associated standards).
• Additional measures to limit the travel of axes
(e.g., hardware limit switch).
• Equipment and measures to protect motors and power electronics according to the
SINAMICS installation guidelines.
In addition, in order to identify hazards, we recommend that a risk analysis be conducted on
the entire system in accordance with the basic safety requirements set out in Appendix 1 of
EU Machinery Directive 89/392/EEC.
5
Please note the chapter "Guidelines for handling electrostatic sensitive devices (EGB)" in
this Manual.
Additional references
As an additional resource on the topic of EMC guidelines, we recommend the description
EMC installation guidelines, engineering instructions (HW)
Standards and specifications
You must comply with the applicable VDE guidelines when wiring the SIMOTION D410, in
particular VDE 0100 and VDE 0113 for disconnecting devices, short-circuit and overload
protection.
D410
Manual, 03/2007 Edition
, /15/.
47
Page 48

Connecting
5.2 General rules for operating the SIMOTION D410
5.2 General rules for operating the SIMOTION D410
You must observe these general rules when integrating the SIMOTION D410 into a system.
System startup after certain events
The following table identifies considerations required for startup of a system following certain
events.
Table 5-1 System startup
When ... then ...
Startup after voltage drop or power loss no dangerous states must result. If necessary, force an
EMERGENCY OFF.
Startup after releasing the EMERGENCY
OFF equipment
Supply voltage
The following table identifies the considerations required for the supply voltage.
uncontrolled or undefined startup operations must be
excluded.
Table 5-2 Supply voltage
When ... make sure that ...
Stationary systems or systems
without all-pole power disconnect
switches
Load power supply, power supply
modules
All electric circuits deviation of the line voltage from the rated value must be
24 V DC supply voltage
The following table identifies the considerations required for the 24 V supply voltage.
Table 5-3 24 V DC supply voltage
When ... ensure ...
Buildings External lightning
24 V DC supply voltage cables,
signal cables
24 V supply voltage safe (electrical) isolation of the extra-low voltage
the building installation must be equipped with a power
disconnect switch or a fuse.
the set range of the rated voltage complies with the local
mains voltage.
within the permitted tolerance (refer to "Technical data of the
installed components").
Provide lightning protection (e.g.,
protection
internal lightning
protection
lightning protection devices)
D410
48 Manual, 03/2007 Edition
Page 49
Connecting
5.2 General rules for operating the SIMOTION D410
Danger
The 24 V DC voltage must be designed as functional extra-low voltage with safe isolation
(PELV according to DIN EN 60204-1).
Protection against external electrical interference
The following table identifies the considerations required for electrical interference or failures.
Table 5-4 Protection against external electrical interference
When ... make sure that ...
all installations or systems, in which
SIMOTION is installed
Supply, signal, and bus cables The wiring arrangement and installation complies with
Signal and bus cables A wire or conductor strand break must not cause any
The installation or system is connected to protective
ground to divert electromagnetic interferences.
EMC regulations.
undefined installation or system states.
Rules for current consumption and power loss in an installation
The power loss of all components used in a cabinet must not exceed the maximum amount
that can be dissipated from the cabinet.
Note
When designing the control cabinet, ensure that the temperature inside the cabinet does not
exceed the permitted ambient temperature for the components even at high external
temperatures.
D410
Manual, 03/2007 Edition
49
Page 50
Connecting
5.3 Overview of SIMOTION D410 connections
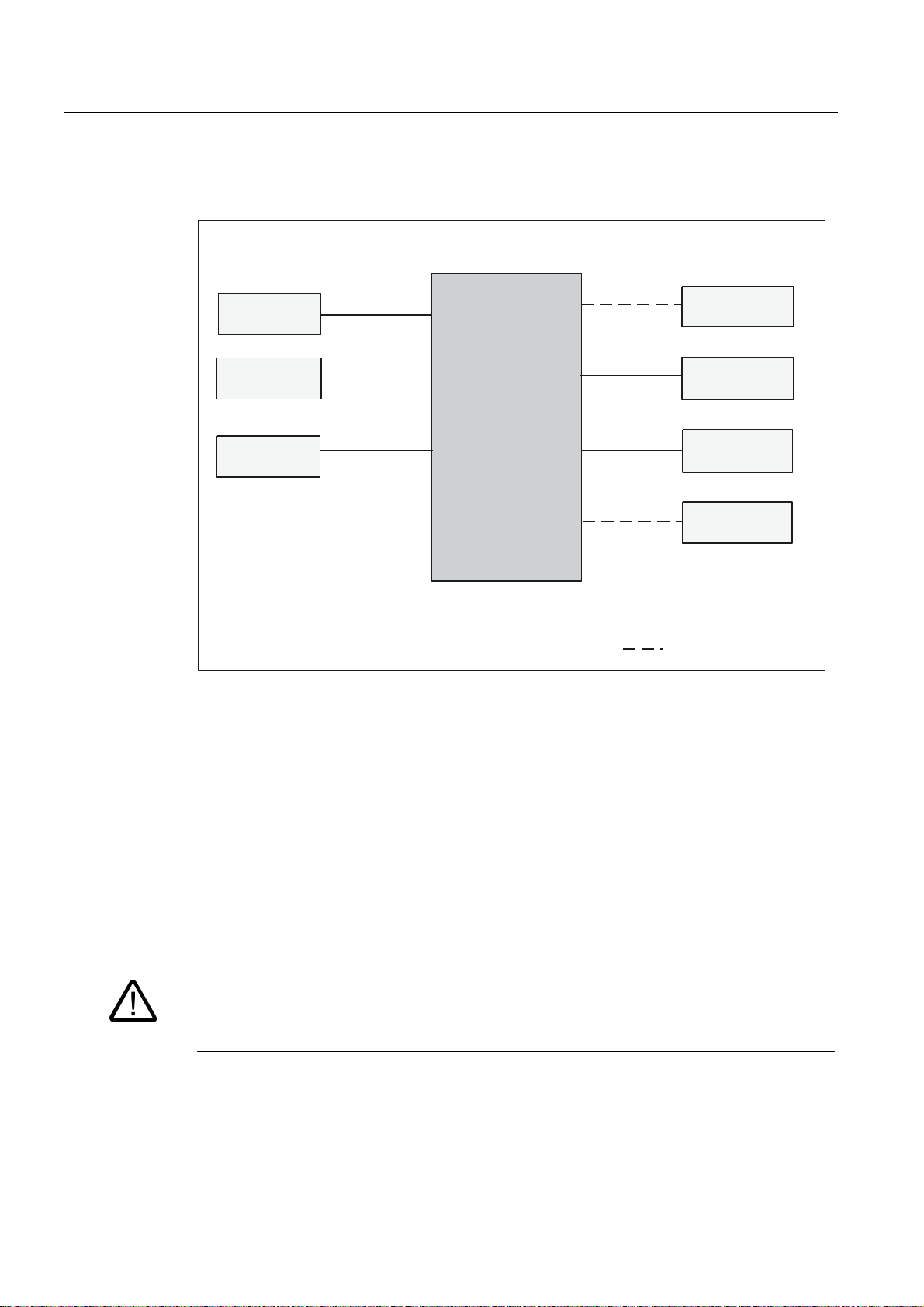
5.3 Overview of SIMOTION D410 connections
6,027,21b'
352),1(7
QRGH
'5,9(&/L4
QRGHV
352),%86
QRGH
RQO\LQ6,027,21b'b31
RQO\LQ6,027,21b'b'3
352),1(7
'5,9(&/L4
352),%86
Figure 5-1 Overview of connections
;
DQG
;
;
;
;
;
;
;
9'&SRZHU
VXSSO\
(3WHUPLQDOV
WHPSHUDWXUHVHQVRU
(QFRGHU
'LJLWDOLQSXWV
RXWSXWV
SUHDVVHPEOHGFDEOH
6LQJOHZLUH
5.4 Connecting the protective ground
Connect SIMOTION D410 to the protective ground. An M4 protective ground screw is
available (see figure "Location of interfaces and front elements in SIMOTION D410" in
Chapter "Description").
The cross-section of the cable running to the protective ground must be at least 10 mm².
1. Remove the M4 protective ground screw.
2. Connect the protective ground and screw the protective ground screw back into the insert
nut (Torx screwdriver, size 25).
Caution
Always ensure the connection to the protective ground is low resistance. If SIMOTION D410
is mounted on a movable frame, you must provide a flexible cable to the protective ground.
D410
50 Manual, 03/2007 Edition
Page 51
Connecting
5.5 Connecting the power supply
5.5 Connecting the power supply
The 24 V DC load power supply required for the supply must be wired to the screw terminal
block (connector X124).
Properties of the load power supply
Note
The interface X124 is provided exclusively to connect the external power supply.
Danger
The 24 V DC voltage must be generated as functional extra-low voltage with safe electrical
isolation (according to IEC 204-1, Chapter 6.4, PELV) and grounded by the user (establish a
connection between PELV signal M and central grounding point of the system).
Table 5-5 Electrical parameters of the required load power supply
Parameters Values Conditions
Voltage range - mean value 20.4...28.8 V DC
Ripple max. 5 % at 24 V DC
Transient overvoltage max. 35 V DC max. 500 ms, 50 s recovery time,
Rated current consumption 0,8 A Without DRIVE-CLiQ and digital outputs
Starting current 3 A Without power module, DRIVE-CLiQ and
Power consumption 20 W
Wiring the screw terminal block
Warning
Ensure that the system is de-energized when you wire the modules!
Use flexible cables with a cross-section of at least 1 mm² when you wire the power supply.
Wire-end sleeves are required if you wire several cables per connection.
max. 10 results / h
digital outputs
D410
Manual, 03/2007 Edition
1. Strip the cable ends.
2. Put on the wire-end sleeve if applicable.
3. Plug the cable end (with wire-end sleeve) into the screw terminal connection.
4. Tighten the mounting screw.
5. Plug the screw terminal with cables into the X124 connection.
51
Page 52
Connecting
5.6 Connecting DRIVE-CLiQ components
Reverse polarity protection
The LED "RDY" lights up green when the power supply is connected correctly and switched
on.
Note
The control does not run if the polarity is reversed. However, integrated reverse polarity
protection protects the electronics from damage.
Fuse
If the control is defective, an internal fuse protects the electronics from consequential
damage (e.g., fire). In this case, the module must be replaced.
5.6 Connecting DRIVE-CLiQ components
DRIVE-CLiQ connects the components in the SINAMICS S120 drive family as well as
SIMOTION D410. DRIVE-CLiQ is a communications system, which enables
SIMOTION D410 to automatically detect connected components. DRIVE-CLiQ provides a
wiring tree, the topology of which can be visualized in SIMOTION SCOUT.
You will find information on the components that can be connected to DRIVE-CLiQ in the
chapter "DRIVE-CLiQ interface".
Rules for wiring DRIVE-CLiQ
The following rules must be followed for wiring DRIVE-CLiQ:
• Ring wiring is not permitted.
• Components must not be double-wired.
• For a motor module, the power cable for the motor and the associated motor encoder
must be connected.
Connecting DRIVE-CLiQ components
Connect the X100 socket on SIMOTION D410 with the corresponding socket on the drive
components via the DRIVE-CLiQ signal cable (motor module, TM and SMC modules).
Note
Note that SIMOTION D410 does not support the CX32 expansion!
See also
DRIVE-CLiQ interface (Page 32)
D410
52 Manual, 03/2007 Edition
Page 53
Connecting
5.7 Connecting the digital inputs/outputs
5.7 Connecting the digital inputs/outputs
Connecting cables for digital inputs/outputs
Use flexible cables with a cross-section of at least 0.25 mm² when you wire the digital
inputs/outputs.
If you wire two cables per connection, use cables with a cross-section of 0.25 mm² each and
a wire-end sleeve. Use wire-end sleeves without insulating collars according to DIN 46228,
Form A long version.
Note
Shielded cables are required when connecting measuring inputs or external zero marks for
optimal noise immunity.
Tools required
3.5-mm screwdriver or power screwdriver
Wiring digital inputs/outputs
1. Strip the cable ends 6 mm.
2. Put on the wire-end sleeve if applicable.
3. Wire the interface digital inputs for the connection of sensors.
4. Wire the interface digital outputs for the connection of actuators.
5. Insert the cable into the corresponding spring-loaded terminal.
D410
Manual, 03/2007 Edition
53
Page 54
Connecting
5.8 Connecting the PROFINET interface (410 PN only)
5.8 Connecting the PROFINET interface (410 PN only)
Information on PROFINET
PROFINET is an open component-based industrial communication system using Ethernet
(IEC 61158) for distributed automation systems.
SIMOTION D410 PN supports the following PROFINET communication methods:
• RT
• IRT top
• IRT flex
Networking
Basic setting
You will find further information in the System Manual,
The network is created via shielded twisted pair cables (TP cables). You will find more
information in the Manual,
/14/.
Note
Note that the connector engages when you connect it.
You will find the factory settings for PROFINET addresses in the Commissioning Manual,
SIMOTION D410
, /1/.
SIMATIC NET, Industrial Twisted Pair and Fiber Optic Networks
SIMOTION Communication
, /10/.
,
D410
54 Manual, 03/2007 Edition
Page 55
Connecting
5.9 Connecting the PROFIBUS DP interface (410 DP only)
5.9 Connecting the PROFIBUS DP interface (410 DP only)
5.9.1 Connection components in PROFIBUS
Connection components
Individual nodes are connected via bus connectors and PROFIBUS cables. Remember to
provide a bus connector with a programming port at the ends of the subnet. This provides
you with the option to expand the subnet if needed, e.g., with a PG or SIMATIC HMI device.
Use RS 485 repeaters for the connection between segments and to extend the cable.
Segments
A segment is a bus cable between two terminating resistors. A segment can contain up to 64
nodes. In addition, a segment is limited by the permissible cable length, which varies
according to the transmission rate.
Terminating resistor
A cable must be terminated with its own surge impedance to prevent line disturbances
caused by reflections. Activate the terminating resistor at the first and last node of a subnet
or segment.
Make sure that the nodes to which the terminating resistor is connected are always supplied
with voltage during power-up and operation.
5.9.2 PROFIBUS cables and connectors
Features of PROFIBUS cables
The PROFIBUS cable is a two-core, twisted and shielded cable with the following features:
Table 5-6 Features of PROFIBUS cables
Features Values
Wave impedance Approx. 135 to 160 Ω (f = 3 to 20 MHz)
Loop resistance ≤ 115 Ω/km
Working capacity 30 nF/km
Attenuation 0.9 dB/100 m (f = 200 kHz)
Permissible core cross-section 0.3 mm2 to 0.5 mm2
Permissible cable diameter 8 mm + 0.5 mm
D410
Manual, 03/2007 Edition
55
Page 56
Connecting
5.9 Connecting the PROFIBUS DP interface (410 DP only)
Connector features
The bus connector is used to connect the PROFIBUS cable to the PROFIBUS DP interface
(X21), which is how you establish the connection to additional nodes.
You will find an overview of the bus connectors available for order in chapter "Spare parts
and accessories".
5.9.3 PROFIBUS cable lengths
Cable lengths and baud rate
The baud rate determines the cable length of a subnet segment.
Table 5-7 Permitted cable length of a subnet segment for specific baud rates
Baud rate Max. cable length of a segment (in m)
19.6 to 187.5 Kbits/s 10001)
500 Kbits/s 400
1.5 Mbits/s 200
3 to 12 Mbit/s 100
1)
With isolated interface
Greater cable lengths
If you must realize greater cable lengths than permitted in one segment, you must use
RS 485 repeaters. The maximum possible cable lengths between two RS 485 repeaters
correspond to the cable length of a segment. Please note that these maximum cable lengths
only apply if there is no further node interconnected between the two RS 485 repeaters. You
can connect up to nine RS 485 repeaters in a series.
Note that an RS 485 repeater must be counted as a subnet node when determining the total
number of nodes to be connected. This is true even if the RS 485 repeater is not assigned its
own PROFIBUS address.
5.9.4 Rules for routing PROFIBUS cables
Routing bus cables
When routing the PROFIBUS cable, you must avoid:
• Twisting
• Stretching
• Squeezing
D410
56 Manual, 03/2007 Edition
Page 57
Connecting
5.9 Connecting the PROFIBUS DP interface (410 DP only)
Boundary conditions
You must pay attention to the following boundary conditions when routing the bus cable for
indoor use (dA = external cable diameter):
Table 5-8 Boundary conditions for routing of PROFIBUS cables
Features Boundary conditions
Bending radius for a single bend 80 mm (10 x dA)
Bending radius for multiple bends 160 mm (20 x dA)
Permissible temperature range for cable routing -5 °C to +50 °C
Shelf and static operating temperature range -30 °C to +65 °C
Additional references
For more information on the pre-assembled cables, refer to:
• Motion Control System SIMOTION
• Automation Systems for Machine Tools
PM10 Catalog
NC60 Catalog
5.9.5 Connecting PROFIBUS DP (interface X21)
Introduction
PROFIBUS cables are connected to the corresponding interface via a bus connector.
Connecting the bus connector
Proceed as follows to connect the bus connector:
1. Plug the bus connector into the module.
2. Screw the bus connector into place.
3. If the bus connector is located at the start or end of a segment, you must switch on the
terminating resistor (switch set to "ON").
7HUPLQDWLQJUHVLVWRU
VZLWFKHGRQ
Figure 5-2 Terminating resistor switched on and off
RQ
RII
, /11/
, /12/
7HUPLQDWLQJUHVLVWRU
QRWVZLWFKHGRQ
RQ
RII
D410
Manual, 03/2007 Edition
Note
Make sure that the nodes at which the terminating resistor is located are always supplied
with voltage during startup and operation.
57
Page 58

Connecting
5.9 Connecting the PROFIBUS DP interface (410 DP only)
Removing the bus connector
You can remove the bus connector with a looped-through PROFIBUS cable from the
PROFIBUS DP interface at any time, without interrupting data traffic on the bus.
Warning
Data traffic error might occur on the bus!
A bus segment must always be terminated at both ends with the terminating resistor. This is
not the case, for example, if the last node with a bus connector is de-energized. The bus
connector draws its power from the node, and the terminating resistor is thus disabled.
Make sure that power is always supplied to nodes on which the terminating resistor is active.
5.9.6 Connection rules in the PROFIBUS subnet
Introduction
Connection rules
There are a number of rules for configuring and installing cables for PROFIBUS networks to
ensure seamless communication over PROFIBUS. These rules apply to both configuring and
cabling as well as address assignment for the different network nodes.
• Before you interconnect individual nodes in a subnet, you must assign a unique
PROFIBUS address to each node.
• Narrow down the number of nodes by limiting the PROFIBUS addresses to the highest
address in the network.
Tip: Mark the address on the housing of all nodes in a subnet. You can then always see
which address is assigned to which node in your system.
• Connect all nodes in a subnet "in a series". No spur lines may be routed to the
PROFIBUS DP.
In addition, connect the programming devices and SIMATIC HMI devices to the subnet in
a series for commissioning or maintenance work.
• If you are running more than 32 nodes in one subnet, you must couple the bus segments
via RS 485 repeaters (see also the description of the RS 485 repeater in the reference
Manual,
In a PROFIBUS subnet, all bus segments combined must have at least one DP master
and one DP slave.
SIMATIC Automation Systems S7-300, Module Data,
/13/).
• Use RS 485 repeaters to connect ungrounded bus segments and grounded bus
segments.
• The maximum number of nodes per bus segment decreases with each RS 485 repeater,
which means if a bus segment contains one RS 485 repeater, the bus segment can
contain no more than 31 additional nodes However, the number of RS 485 repeaters
does not affect the maximum number of nodes on the bus.
D410
58 Manual, 03/2007 Edition
Page 59
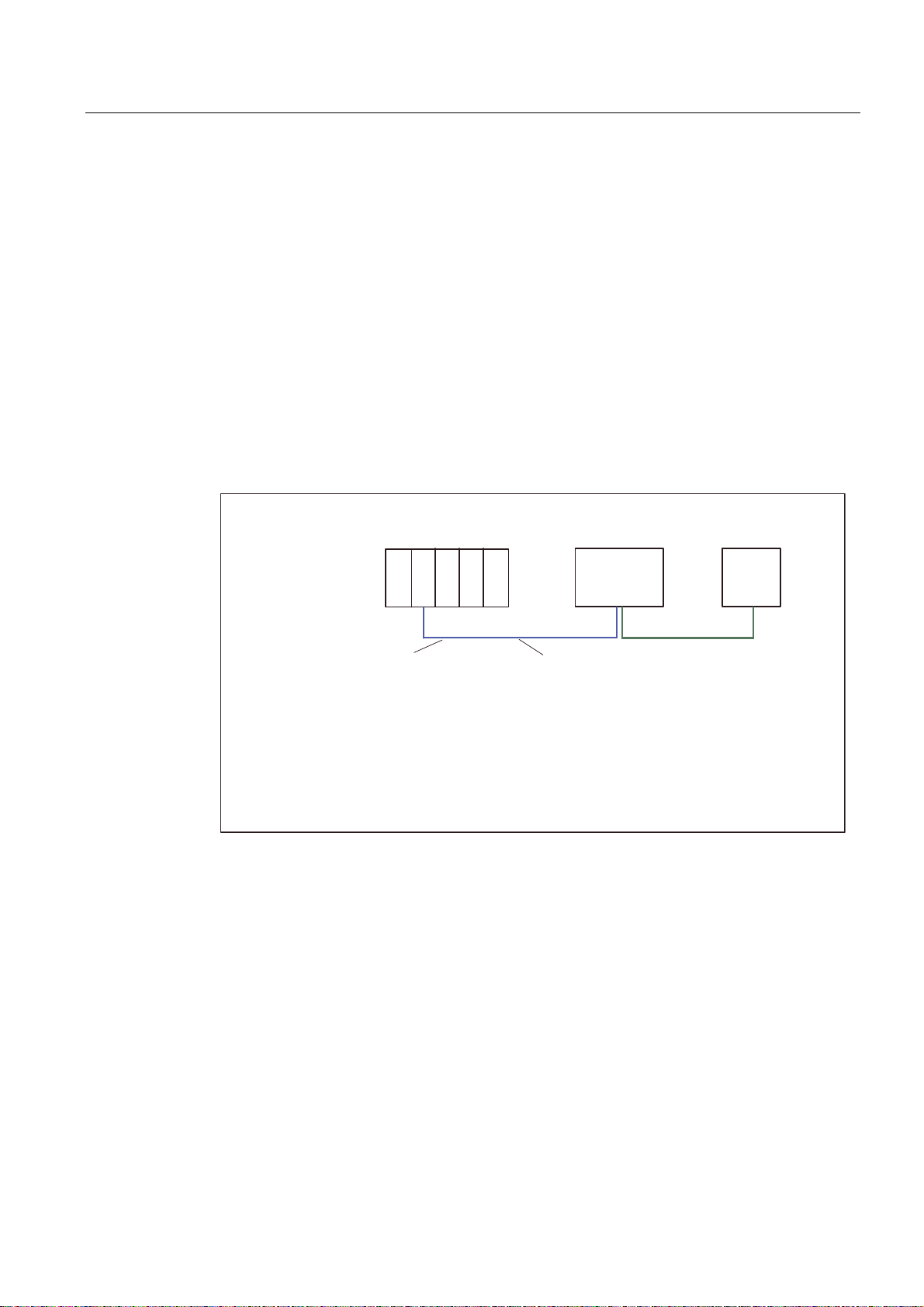
Connecting
5.9 Connecting the PROFIBUS DP interface (410 DP only)
• Up to ten segments can be connected in a series.
• At least one terminal must be supplied with 5 V.
This is done by connecting the PROFIBUS DP connector with inserted terminating
resistor to an energized device.
• Before inserting a new node on the subnet, you must switch off its supply voltage.
The node must first be connected, and then switched on.
When a node is disconnected, the connection must first be deactivated and then the
connector removed.
• The bus cable of a segment must be terminated at both ends. This is achieved by
switching on the terminating resistor in the PROFIBUS DP connector at the first and last
node and switching off the other terminating resistors.
Networking example
The following figure shows an example configuration of a subnet with SIMOTION D410 DP.
(70
,0
36
PD[FDEOHOHQJWKP
IURPWHUPLQDWLQJUHVLVWRUWRWHUPLQDWLQJUHVLVWRU
$b
%
&
[
7HUPLQDWLQJUHVLVWRUVZLWFKHGRQ
'3PDVWHU
'3VODYH
352),%86'3QRGHDGGUHVV
Figure 5-3 Networking example
60 60 60
6,027,21''3
;
%&
0ESV
3*
$
D410
Manual, 03/2007 Edition
59
Page 60

Connecting
5.10 Connecting an external encoder
5.10 Connecting an external encoder
Connecting the connecting cable
Note
Use only shielded cables to connect an external encoder to the encoder interface (X23). The
shielding must be connected with the metallic or metallized connector housing.
The pre-assembled connecting cables offer optimal noise immunity as well as sufficiently
measured cross-sections for the supply voltage of the external encoder.
The connecting cables are available in various lengths, see
Procedure for connecting encoders
To connect an external encoder (HTL or TTL encoder), proceed as follows:
1. Connect the connecting cable to the encoder.
2. Plug the D-Sub connector (15-pin) to the socket X23.
3. Lock the connector using the finger screws.
NC 60
Catalog, /12/.
D410
60 Manual, 03/2007 Edition
Page 61

Technical data
6.1 SIMOTION D410 dimensional diagram
6
Figure 6-1 SIMOTION D410 dimensional diagram
D410
Manual, 03/2007 Edition
61
Page 62

Technical data
6.2 System data, connection values, dimensions and weight
6.2 System data, connection values, dimensions and weight
Memory for system data
Table 6-1 Memory for system data and its memory size
Data Memory size
Diagnostic buffer 200 messages
Connection values
Table 6-2 SIMOTION D410 electrical connection values
Supply voltage 24 V DC (permissible range: 20,4 ... 28.8 V)
Power consumption from 24 V Basic configuration
typically 0.8 A
Power loss 20 W
Starting current, total 3 A
Dimensions and Weight
Table 6-3 SIMOTION D410 dimensions and weight
Dimensions W x H x D 73 x 183.2 x 89.6 mm
SIMOTION D410 weight 990 g
CompactFlash Card
Table 6-4 CF card
Memory capacity 512 MB
Weight 7 g
D410
62 Manual, 03/2007 Edition
Page 63

Technical data
6.3 Digital inputs/outputs
6.3 Digital inputs/outputs
Digital inputs (according to IEC 1131-2/DIN EN 61131-2, characteristic type 2)
Table 6-5 Digital input technical data
Number of inputs 4 DI
4 DI/DO (configured as DI)
Supply voltage 24 V DC
Input voltage
Input current typ. 10 mA at 24 V DC
Input delay (DI0 - DI3)
Input delay (DI8 - DI11) Normal input delay:
• Connection of a 2-wire encoder
• Permissible quiescent current
Electrical isolation between inputs Yes, between blocks 4 DI and 4 DI/DO
Electrical isolation between inputs and logic Yes, at 4 DI
Insulation 500 V
• 0 signal: -3 to 5 V
• 1 signal: 11 to 30 V
• 0 → 1 signal: 50 µs
• 1 → 0 signal: 100 µs
• 0 → 1 signal: typ. 50 µs
• 1 → 0 signal: typ. 100 µs
Fast input delay:
• 0 → 1 signal: typ. 5 µs
• 1 → 0 signal: typ. 50 µs
• Supported
• 2 mA
Digital outputs (according to IEC 1131-2 / DIN EN 61131-2)
Table 6-6 Digital output technical data
Number of outputs 4 DI/DO (configured as DO)
Supply voltage 24 V DC
Output voltage 24 V DC
Max. output current 500 mA
Total current of the outputs Maximum permitted total current at X121 each 1 A
over the total operating temperature range (equals
50 % coincidence)
Extinguishing energy per output 400 mJ
Lamp load 1 A for 50 ms
• Short-circuit protection
• Max. leakage current
Output delay (DO8 - DO11)
Electrical isolation between outputs No
Electrical isolation between outputs and logic No
Insulation 500 V
D410
Manual, 03/2007 Edition
• yes
• 2 mA
• 0 → 1 signal: < 400 µs
• 1 → 0 signal: < 100 µs
63
Page 64

Technical data
6.4 Shipping and storage conditions
6.4 Shipping and storage conditions
The control exceeds the requirements according to DIN EN 60068-2 with regard to shipping
and storage conditions. The following information applies to modules shipped and stored in
the original packaging.
Table 6-7 Shipping and storage conditions
Type of condition Permissible range
Free fall, checked according to
DIN EN60721-3-2, Class 2M2
Temperature
Air pressure from 1060 to 700 hPa (equals a height of 3000 m)
Relative humidity 5% to 95%, without condensation
≤ 1 m
• Shipping: -40 °C to +70 °C
• Storage: -25 °C to +55 °C
6.5 Mechanical and climatic ambient conditions
Conditions of use
SIMOTION D410 is designed for use in stationary, weather-protected locations. The
conditions of use exceed the requirements of the environmental test according to
DIN IEC 60068-2-2.
SIMOTION D410 meets the conditions of use, Class 3C3, according to DIN EN 60721-3-3
(operating locations with high traffic densities and in the immediate vicinity of industrial
equipment with chemical emissions).
Use prohibition
Without additional measures, SIMOTION D410 may not be used in
• Locations with a high percentage of ionizing radiation
• Locations with extreme operating conditions, e.g.,
– Dust accumulation
– corrosive vapors or gases
• In systems, which require special monitoring, e.g.,
– Elevator installations
– Electrical systems in particularly hazardous rooms
An additional measure for using SIMOTION D410 can, for example, be installation in
cabinets.
D410
64 Manual, 03/2007 Edition
Page 65
Technical data
6.5 Mechanical and climatic ambient conditions
Mechanical ambient conditions
SIMOTION D410 meets the following standards for mechanical stress:
• Vibration load: DIN EN 60721-3-3, Class 3M4
• Shock load: DIN EN 60721-3-3, Class 3M4
• Free fall: DIN EN 60721-3-2, Class 2M1 and 2M2
• Toppling: DIN EN 60721-3-2, Class 2M1
The mechanical ambient conditions for SIMOTION D410 are listed in the following table in
the form of sinusoidal vibrations.
Table 6-8 Mechanical ambient conditions
Ambient conditions Operation Transport (in packaging)
Vibration tested in accordance with
DIN EN 60068-2-6
Shock resistance tested in accordance with
DIN EN 60068-2-27
10 to 57 Hz: 0.35 mm
58 to 200 Hz: 50 m/s²
10 g peak value, 6 ms duration
100 shocks in each axis vertical with
respect to each other
5 to 9 Hz: 3.5 mm
9 to 200 Hz: 10 m/s²
10 g peak value, 6 ms duration
100 shocks in each axis vertical with
respect to each other
Vibration reduction
If SIMOTION D410 is subjected to larger shocks or vibrations, you must use suitable
measures to reduce the acceleration or the amplitude.
We recommend installation on shock-absorbing material (e.g., rubber-metal vibration
dampers).
Climatic ambient conditions
SIMOTION D410 may not be used under the following climatic ambient conditions:
Table 6-9 Climatic ambient conditions
Ambient conditions Application range Remarks
Temperature From 0 to 40 °C Oil mist, ice formation, moisture condensation,
dripping water, spraying water, splashing water and
water jets are not permitted (EN 60204, Part 1)
Relative humidity From 5 to 95 % Without condensation, corresponds to a relative
humidity (RH) severity level 2 according to
IEC 1131-2
Air pressure From 1080 to 795 hPa Pollutant concentration
SO
: <0.5 ppm;
2
Relative humidity <60 %, no condensation
H
S: <0.1 ppm;
2
Relative humidity <60 %, no condensation
Test:
10 ppm; 4 days
1 ppm; 4 days
D410
Manual, 03/2007 Edition
65
Page 66

Technical data
6.6 Specifications for dielectric tests, safety class and degree of protection
6.6 Specifications for dielectric tests, safety class and degree of protection
Test voltages
Insulation resistance is verified with a routine test with the following test voltage according to
IEC 61131-2:
Table 6-10 Test voltages
Circuits with rated voltage U
ground
0 V < Ue ≤ 50 V 500 V DC
relative to other circuits or
e
Safety class
Safety class I according to VDE 0106 Part 1 (IEC 536), i.e., protective ground terminal
required.
Protection against the ingress of foreign matter and water
Front panel: Safety class IP65 according to IEC 60529
Rear panel: Safety class IP00 according to IEC 60529
Test Voltage
D410
66 Manual, 03/2007 Edition
Page 67
Spare parts/Accessories
7.1 Terminal module TM31
Features of the TM31
The TM31 terminal module allows you to expand the number of available digital
inputs/outputs as well as the number of analog inputs/outputs within a drive system. The
TM31 is connected via DRIVE-CLiQ. It has 2 DRIVE-CLiQ interfaces for this.
The TM31 contains the following terminals:
Table 7-1 Interface overview of the TM31
Interface Quantity
Digital inputs 8
Bidirectional inputs/outputs 4
Relay outputs with changeover contact 2
Analog inputs 2
Analog outputs 2
Temperature sensor input (KTY84-130 or PTC) 1
7
Caution
The 50 mm clearances above and below the components must be observed.
Additional references
You will find more information on the TM31 in the Supplementary
Components for SIMOTION
D410
Manual, 03/2007 Edition
SINAMICS System
Equipment Manual, /7/.
67
Page 68
Spare parts/Accessories
7.2 Terminal module TM41
7.2 Terminal module TM41
Features of the TM41
The TM41 terminal module allows you to expand the number of available digital
inputs/outputs as well as the number of analog inputs within a drive system. In addition, it
enables the use of the TTL output for encoder simulation. The TM41 is connected via
DRIVE-CLiQ.
The TM41 contains the following terminals:
Table 7-2 TM41 interface overview
Type Quantity
Digital inputs 4
Digital inputs/outputs 4
Analog inputs 1
TTL encoder output 1
Caution
The 50 mm clearances above and below the components must be observed!
Additional references
You will find more information on the TM41 terminal module in the
SINAMICS System Components for SIMOTION
Supplementary
Equipment Manual, /7/.
D410
68 Manual, 03/2007 Edition
Page 69
Spare parts/Accessories
7.3 Terminal modules TM15 and TM17 High Feature
7.3 Terminal modules TM15 and TM17 High Feature
Features of TM15 and TM17 High Feature
The TM15 and TM17 High Feature terminal modules are used to implement inputs of
measuring inputs and outputs of output cams for SIMOTION D. In addition, these terminal
modules provide drive-related digital inputs and outputs with short signal delay times. TM15
and TM17 High Feature are connected via DRIVE-CLiQ.
TM15
Each of the 24 electrically isolated DI/DO can be configured on a channel-specific basis as
digital input (DI), digital output (DO), measuring input or output cam output.
TM17 High Feature
Each of the 16 DI/DO can be configured on a channel-specific basis as digital input (DI),
digital output (DO), measuring input or output cam output.
TM17 High Feature has fewer I/O channels than TM15, but more functionality. TM17 High
Feature is distinguished by especially high resolution and accuracy as well as a configurable
input filter and enabling inputs (max. 6 units). Configured enable inputs can enable
measuring inputs or outputs of output cams (gate function). Due to their high accuracy, the
DI/DO channels of the TM17 High Feature are non-isolated.
Note
Caution
The 50 mm clearances above and below the components must be observed.
Additional references
You will find further information on TM15 and TM17 High Feature in the
•
•
Supplementary SINAMICS System Components for SIMOTION
SIMOTION Terminal Modules TM15 and TM17 High Feature
Commissioning Manual, /6/
Equipment Manual, /7/
D410
Manual, 03/2007 Edition
69
Page 70
Spare parts/Accessories
7.4 CUA31 control unit adapter
7.4 CUA31 control unit adapter
Features of the CUA31
The control unit adapter 31 (CUA31), combined with a modular power module, is used to
expand an existing DC/AC group. You can connect a blocksize power module to the DRIVECLiQ interface using the CUA31 adapter module.
The maximum DRIVE-CLiQ cable length is 50 m.
The CUA31 contains the following interfaces:
Table 7-3 Overview of CUA31 interfaces
Interface Quantity
DRIVE-CLiQ interface 3
EP terminals/temperature sensor connection 1
Power Module Interface (PM-IF) 1
24 V electronic power supply 1
Caution
The 50 mm clearances above and below the components must be observed. The ventilation
openings may not be covered by connecting cables.
Additional references
You will find more information on the control unit adapter CUA31 in the
SINAMICS S120 AC Drive
Equipment Manual, /3/.
D410
70 Manual, 03/2007 Edition
Page 71
Spare parts/Accessories
7.5 DMC20 DRIVE-CLiQ hub
7.5 DMC20 DRIVE-CLiQ hub
Features
The DRIVE-CLiQ hub module 20 (DMC20) is used for the star-shaped distribution of a
DRIVE-CLiQ cable.
The module is especially suitable for applications which require DRIVE-CLiQ link nodes to
be removed in groups, without interrupting the DRIVE-CLiQ link cable and therefore the data
exchange.
Caution
The 50 mm clearances above and below the components must be observed!
Additional references
You will find more information on the DMC20 in the
Supplementary System Components
Equipment Manual, /2/.
SINAMICS S120 Control Units and
D410
Manual, 03/2007 Edition
71
Page 72
Spare parts/Accessories
7.6 List of spare parts and accessories
7.6 List of spare parts and accessories
Table 7-4 Spare parts and accessories
Parts for SIMOTION D410 Order number Accessories Spare part
Weidmüller M4 screw-on shield connection - x Weidmüller M4/1.8 Nm protective ground terminal - x Mounting plate for operation away from the power module 6AU1 400-7AA05-0AA0 x Spare fan for SIMOTION D410 6SL3 064-0AC00-0AA0 - x
CompactFlash Card 6AU1 400-2NA00-0AA0 x x
Bus connection up to 12 Mbit/s, 90° cable outlet:
Without PG socket without FastConnect insulation displacement 6ES7 972-0BA12-0XA0 x Without PG socket with FastConnect insulation displacement 6ES7 972-0BA50-0XA0 x With PG socket without FastConnect insulation displacement 6ES7 972-0BB12-0XA0 x With PG socket with FastConnect insulation displacement 6ES7 972-0BB50-0XA0 x Bus connection up to 12 MBit/s, 90° oblique cable outlet:
Without PG socket without FastConnect insulation displacement 6ES7 972-0BA41-0XA0 x Without PG socket with FastConnect insulation displacement 6ES7 972-0BA60-0XA0 x With PG socket without FastConnect insulation displacement 6ES7 972-0BB41-0XA0 x With PG socket with FastConnect insulation displacement 6ES7 972-0BB60-0XA0 x -
D410
72 Manual, 03/2007 Edition
Page 73
Standards and approvals
A.1 General rules
IEC 1131
The SIMOTION programmable controller meets the requirements and criteria of the
Standard IEC 1131, Section 2.
CE marking
Our products meet the general and safety-related requirements of the following EC
guidelines and conform to the uniform standards (EN) for programmable controllers
published in the official gazettes of the European Union:
89/336/EEC "Electromagnetic Compatibility" (EMC guideline)
The EC declaration of conformity is contained in this manual.
EMC Directive
SIMOTION products are designed for industrial use.
A
Table A-1 EMC Directive
Field of application Requirements for
Emitted interference Immunity to noise
Industry EN 50081-2 EN 61000-6-2
UL certification
Recognized component mark for United States and the Canada Underwriters Laboratories
(UL) in accordance with UL 508, File 16 4110.
Declaration of conformity
The current Declaration of Conformity is on the Internet at
http://support.automation.siemens.com/WW/view/de/15257461
D410
Manual, 03/2007 Edition
73
Page 74

Standards and approvals A.2 Safety of electronic controllers
A.2 Safety of electronic controllers
Introduction
The remarks made here relate to fundamental criteria and apply irrespective of the type of
controller and the manufacturer.
Reliability
The reliability of devices and components is maintained at the highest possible level thanks
to comprehensive and cost-effective measures implemented during the development and
manufacturing processes.
These include
• The selection of high-quality components
• Worst-case dimensioning of all circuits
• Systematic and computerized inspection of all supplied components
• Burning in of all LSI circuits (e.g. processors, memories, etc.)
The risk
• Measures to prevent static discharge when handling MOS circuits
• Visual checks during various stages of manufacture
• Continuous heat testing at higher ambient temperatures for several days
• Thorough computerized final inspection
• Statistical analysis of all returned goods so that corrective measures can be initiated
immediately
• Monitoring of the primary controller components using online tests
These measures are considered to be basic measures for safety engineering. They avoid or
control the majority of faults that may occur.
A higher degree of safety standard applies to all applications and situations where there is a
risk of material damage or injury to persons if there is a failure. Special regulations specific to
the system apply to such applications. These must be taken into account for configuration of
the controller (e.g. VDE 0116 for furnaces).
For electronic controllers with safety responsibility, the measures required for preventing or
controlling faults depend on the hazard inherent in the plant. In this respect, the basic
measures listed above are no longer adequate once the hazard exceeds a certain potential.
Additional measures (e.g. double redundancy, tests, checksums, etc.) for the controller must
implemented and certified (DIN VDE 0801).
D410
74 Manual, 03/2007 Edition
Page 75
Standards and approvals
A.3 Electromagnetic Compatibility
Division into safety-critical and non-safety-critical areas
Nearly all systems contain parts that perform safety-related tasks (e.g. emergency stop
switch, protective grating, two-hand controls). To avoid having to apply safety-related criteria
to the entire controller, it is customary to divide the controller into two areas - one that is
critical to safety and one that is not critical to safety. No special demands are made as
regards safety in the area that is not safety-critical as an electronic fault would not have any
effect on the safety of the system. However, in the safety-critical area, only controllers and
circuits that comply with the relevant regulations, may be used.
Important note
Even if an extremely high level of conceptual safety has been achieved in the design of an
electronic controller - e.g. through implementation of a multi-channel design - strict
adherence to all instructions in the operator's guide is mandatory, as incorrect handling could
invalidate measures taken to prevent hazardous faults or create additional potential hazards.
A.3 Electromagnetic Compatibility
Definition
Electromagnetic compatibility (EMC) is the ability of an electrical device to function
sufficiently in its electromagnetic environment without interfering with this environment.
The SIMOTION D410 control meets the requirements of the EU directive on EMC and the
EMC law of the European single market 89/339/EEC.
Relevant standards regarding electromagnetic compatibility
The following EMC standards are met if the EMC installation guideline (order number
6FC5297-☐AD30-0AP☐) is complied with:
Table A-2 EMC standards
Informational topic Standard
Product standard DIN EN 61800-3
Emitted interference DIN EN 61000-6-4
Noise immunity DIN EN 61000-6-2
D410
Manual, 03/2007 Edition
75
Page 76

Page 77

ESD directives
B.1 ESD definition
What does ESD mean?
All electronic modules are equipped with highly integrated modules or components. Because
of the technology used, these electronic components are very sensitive to overvoltages and
thus to discharge of static electricity.
The acronym ESD has become the established designation for such Electrostatic Sensitive
Devices. The ESD designation is used internationally to refer to electrostatic sensitive
devices.
Electrostatic sensitive devices are identified by the following symbol:
Figure B-1 Symbol for identification of electrostatic sensitive devices
B
D410
Manual, 03/2007 Edition
Caution
Electrostatic sensitive devices can be irreparably damaged by voltages that are far lower
than anything a person can perceive. These voltages occur if you touch a component or the
electrical connection of a module without having previously discharged any static from your
body. Any damage that occurs to a module as a result of overvoltage is generally not
recognized immediately and only comes to light after the equipment has been operating for
some time.
77
Page 78

ESD directives B.2 Electrostatic charging of individuals
B.2 Electrostatic charging of individuals
Any person who is not conductively connected to the electrical potential of the environment
can accumulate an electrostatic charge.
This figure indicates the maximum electrostatic charges that can accumulate on an operator
when he comes into contact with the indicated materials. These values comply with the
specifications in IEC 801-2.
9ROWDJHLQN9
N9
Figure B-2 Electrostatic voltage that can accumulate on operating personnel
6\QWKHWLFPDWHULDO
:RRO
$QWLVWDWLFPDWHULDOHJZRRGRUFRQFUHWH
5HODWLYHKXPLGLW\LQ
B.3 Basic measures for protection against discharge of static electricity
Ensure sufficient grounding
When working with electrostatic sensitive devices, make sure that the you, your workstation,
and the packaging are properly grounded. This prevents the accumulation of static
electricity.
Avoid direct contact
You should only touch ESD components if unavoidable (for example, during maintenance
work). When you touch modules, make sure that you do not touch either the pins on the
modules or the printed conductors. If you follow these instructions, electrostatic discharge
cannot reach or damage sensitive components.
If you have to take measurements on a module, make sure that you first discharge any static
that may have accumulated in your body. To do this, touch a grounded metal object. Only
use grounded measuring instruments.
D410
78 Manual, 03/2007 Edition
Page 79

Appendix
C.1 References
The following documents are part of the documentation package, SIMOTION D4xx.
1 SIMOTION D410, Commissioning Manual
This documentation is part of the SIMOTION D4xx documentation
package and is included in the SIMOTION SCOUT scope of
delivery.
2 SINAMICS S120 Control Units and Supplementary System
Components, Equipment Manual
3 SINAMICS S120 AC Drive, Equipment Manual
Order no.: 6SL3 097-2AL00-0AP0
4 SINAMICS S120, Commissioning Manual Edition 03/2007
5 SINAMICS S120 Booksize Power Modules, Equipment Manual Edition 03/2007
The following documents are included in the SIMOTION SCOUT scope of supply as
electronic documentation.
6 SIMOTION Terminal Modules TM15 and TM17 High Feature,
Commissioning Manual
7 Supplementary SINAMICS System Components for SIMOTION,
Equipment Manual
8 SIMOTION Output Cams and Measuring Inputs, Function Manual Edition 03/2007
9 SIMOTION SCOUT, Configuration Manual Edition 03/2007
10 SIMOTION Communication, System Manual Edition 03/2007
C
Edition 03/2007
Edition 03/2007
Edition 03/2007
Edition 03/2007
Edition 03/2007
D410
Manual, 03/2007 Edition
79
Page 80

Appendix
C.1 References
11 Motion Control System SIMOTION, PM10 Catalog, Order
documentation
Order no.: E86060-K4910-A101-A5
12 Automation Systems for Machine Tools, NC60 Catalog, Order
documentation
Order no.: E86060-K4460-A101-B1
13 SIMATIC Automation System S7-300, Module Data, Reference
Manual
This documentation is part of the documentation package with
Order number: 6ES7 398-8FA10-8AA0
Edition 02/2004
14 SIMATIC NET, Industrial Twisted Pair and Fiber Optic Networks,
Manual
Order no.: 6GK1 970-1BA10-0AA0
Edition 05/2001
15 EMC Installation Guide, Engineering Instructions (HW)
Order no.: 6FC5 297-0AD30-0AP2
D410
80 Manual, 03/2007 Edition
Page 81

Appendix
C.2 List of abbreviations
C.2 List of abbreviations
Table C-1 Abbreviations
Abbreviation Description
ASIC Application Specific Integrated Circuit
CF card CompactFlash Card
CUA Control Unit Adapter
DAC Digital-to-analog converter
DESINA Decentralized and standardized installation technology for machine tools and
manufacturing systems
DI Digital Input
DIP Dual In Line Package
DO Digital Output
DP Distributed I/O
DRIVE-CLiQ DRIVE Component Link with IQ
ECOFAST Energy and Communication Field Installation System
ESD Electrostatically Sensitive Devices
EMC Electromagnetic Compatibility
EP Enable Pulses
ES Engineering System
FW Firmware
GSD Device master data (device parameter list for integration in HW config)
HTL High Threshold-Logic
HW Hardware
I/O Input/Output
IRT Isochronous Real Time Ethernet
KTY Special temperature sensor
LED Light Emitting Diode
OLP Optical Link Plug
PB PROFIBUS
PELV Protective Extra Low Voltage
PG/PC Programming Device / Personal Computer
PN PROFINET
PROFIBUS DP Process Field Bus - Decentral Periphery
PS Power supply
PTC Positive Temperature Coefficient
PZD Process status data
RT Real Time Ethernet (non-isochronous PROFINET)
SCOUT SIMOTION Controlling with Optimized Usability Toolbox
(Engineering system in the SIMOTION product family)
SITOP Power supply
SMC Sensor Module Cabinet, encoder connection to DRIVE-CLiQ
SMI Sensor Module Integrated
D410
Manual, 03/2007 Edition
81
Page 82
Appendix
C.2 List of abbreviations
Abbreviation Description
SW Software
TCP/IP Transmission Control Protocol / Internet Protocol
TIA Totally Integrated Automation
TM Terminal Module for DRIVE-CLiQ
TO Technology object
TP Technology package
TTL Transistor Transistor Logic
D410
82 Manual, 03/2007 Edition
Page 83

Index
A
Abbreviations, 82
Accessories, 72
CUA31, 70
DRIVE-CLiQ hub module (DMC20), 71
TM15, 69
TM17 High Feature, 69
TM31, 67
TM41, 68
ambient conditions
Climatic, 65
Mechanical, 65
Applications, 11
DRIVE-CLiQ hub module, 71
DRIVE-CLiQ
Connecting components, 52
Rules for wiring, 52
DRIVE-CLiQ interface, 32
E
EMC guidelines, 73
EP terminals, 39
ESD guideline, 77
G
Guideline
ESD, 77
B
Bus connector, 56
removing, 58
setting the terminating resistor, 57
C
CE
Identifier, 73
Climatic ambient conditions, 65
CompactFlash Card
Slot, 25
Conditions of use, 64
Control Unit Adapter (CUA31), 70
D
Declaration of conformity, 73
Digital inputs, 31
Digital inputs/outputs
Connecting cables, 53
Digital outputs, 31
DIL switches, 24
Dimensional diagram, 61
Disassembly, 45
DMC20
H
HTL/TTL encoder interface, 38
I
IEC 1131, 73
Indicators, 23
Installation
SIMOTION D410 on the mounting plate, 46
SIMOTION D410 on the power module, 44
Interfaces
Digital inputs/outputs, 28
DRIVE-CLiQ (X100), 32
EP terminals, 39
HTL/TTL encoder interface (X23), 38
Power Module Interface, 42
Power supply (X124), 40
PROFIBUS DP, 35
PROFINET, 37
Temperature sensor connection, 39
L
LED displays, 26
D410
Manual, 03/2007 Edition
83
Page 84
Index
M
Mechanical ambient conditions, 65
Mode selector switch, 24
N
Nameplates
SIMOTION D410 DP, 18
SIMOTION D410 PN, 21
O
Operator controls, 23
P
Possible applications, 11
Power Module Interface, 42
Power supply, 40
PROFIBUS cable
Baud rate, 56
Cable length, 56
connecting, 57
Features, 55
Rules for cabling, 56
PROFIBUS DP interface, 35
PROFINET interface, 37
S
Safety of electronic controllers, 74
Shipping conditions, 64
SIMOTION D410
Product variants, 11
Spare parts, 72
Storage conditions, 64
Subnet
Connection components, 55
Connection rules, 58
Segment, 55
Terminating resistor, 55
System integration, 12
T
Technical data
Digital inputs, 63
Digital outputs, 63
Temperature sensor connection, 39
Terminal Module
TM15 and TM17, 69
TM31, 67
TM41, 68
Terminating resistor, 55
U
R
References, 4, 80
UL certification, 73
Use prohibition, 64
D410
84 Manual, 03/2007 Edition
 Loading...
Loading...