

Siemens SIMOTICS S-1FL6, SINAMICS V90 Compact Operating Instructions

© Siemens AG 2016 - 2017. All rights reserved
A5E37208904-003, 04/2017
1
SINAMICS V90, SIMOTICS S-1FL6
PROFINET (PN) interface
Getting Started
Compact Operating Instructions
Table of contents
1 Fundamental safety instructions .............................................................................................................................. 3
1.1 General safety instructions ...................................................................................................................... 3
1.2 Handling electrostatic sensitive devices (ESD) ....................................................................................... 7
1.3 Industrial security .................................................................................................................................... 7
1.4 Residual risks of power drive systems..................................................................................................... 8
2 General information ................................................................................................................................................ 9
2.1 Deliverables ............................................................................................................................................. 9
2.1.1 Drive components.................................................................................................................................... 9
2.1.2 Motor components ................................................................................................................................. 14
2.2 Device combination ............................................................................................................................... 17
2.3 Accessories ........................................................................................................................................... 20
2.4 Function list ........................................................................................................................................... 22
2.5 Technical data ....................................................................................................................................... 23
2.5.1 Technical data - servo drives ................................................................................................................. 23
2.5.2 Technical data - servo motors ............................................................................................................... 25
2.5.3 Address of CE-authorized manufacturer ............................................................................................... 28
3 Mounting .............................................................................................................................................................. 29
3.1 Mounting the drive ................................................................................................................................. 29
3.2 Mounting the motor................................................................................................................................ 33
4 Connecting ........................................................................................................................................................... 40
4.1 System connection ................................................................................................................................ 40
4.2 Main circuit wiring .................................................................................................................................. 45
4.2.1 Line supply - L1, L2, L3 ......................................................................................................................... 45
4.2.2 Motor power - U, V, W ........................................................................................................................... 46
4.3 Control/Status interface - X8 ................................................................................................................. 48
4.3.1 Interface definition ................................................................................................................................. 48
4.3.2 Standard wiring ..................................................................................................................................... 48
4.4 24 V power supply/STO ......................................................................................................................... 49
4.5 Encoder interface - X9 ........................................................................................................................... 51
4.6 External braking resistor - DCP, R1 ...................................................................................................... 54
4.7 Motor holding brake ............................................................................................................................... 54
4.8 PROFINET interface - X150 .................................................................................................................. 55
5 Commissioning ..................................................................................................................................................... 56
5.1 Introduction to the BOP ......................................................................................................................... 57
5.2 Initial commissioning in JOG mode ....................................................................................................... 62
5.3 Commissioning in basic positioner control mode (EPOS) ..................................................................... 63

Getting Started
2 A5E37208904-003, 04/2017
5.4 Commissioning in speed control mode (S) ............................................................................................ 64
5.5 Commissioning control functions........................................................................................................... 65
5.5.1 Speed limit ............................................................................................................................................ 65
5.5.2 Torque limit ........................................................................................................................................... 66
5.5.3 EJOG .................................................................................................................................................... 67
6 PROFINET communication ....................................................................................................................................68
6.1 Supported telegrams ............................................................................................................................. 68
6.2 I/O data signals ..................................................................................................................................... 70
6.3 Control word definition .......................................................................................................................... 71
6.3.1 STW1 control word (for telegrams 1, 2, 3, 5) ........................................................................................ 71
6.3.2 STW2 control word (for telegrams 2, 3, 5) ............................................................................................ 72
6.3.3 STW1 control word (for telegrams 102, 105) ........................................................................................ 72
6.3.4 STW2 control word (for telegrams 102, 105) ........................................................................................ 73
6.3.5 STW1 control word (for telegrams 7, 9, 110, 111) ................................................................................ 74
6.3.6 STW2 control word (for telegrams 9, 110, 111) .................................................................................... 74
6.3.7 G1_STW encoder 1 control word .......................................................................................................... 75
6.3.8 SATZANW control word ........................................................................................................................ 75
6.3.9 MDI_MOD control word ......................................................................................................................... 76
6.3.10 POS_STW control word ........................................................................................................................ 76
6.3.11 POS_STW1 positioning control word .................................................................................................... 77
6.3.12 POS_STW2 positioning control word .................................................................................................... 77
6.4 Status word definition ............................................................................................................................ 78
6.4.1 ZSW1 status word (for telegrams 1, 2, 3, 5) .......................................................................................... 78
6.4.2 ZSW2 status word (for telegram 2, 3, 5) ............................................................................................... 78
6.4.3 ZSW1 status word (for telegrams 102, 105) .......................................................................................... 79
6.4.4 ZSW2 status word (for telegram 102, 105) ........................................................................................... 79
6.4.5 ZSW1 status word (for telegram 7, 9, 110, 111) ................................................................................... 80
6.4.6 ZSW2 status word (for telegrams 9, 110, 111) ...................................................................................... 80
6.4.7 G1_ZSW encoder 1 status word ........................................................................................................... 81
6.4.8 MELDW status word ............................................................................................................................. 81
6.4.9 POS_ZSW1 positioning status word ..................................................................................................... 82
6.4.10 POS_ZSW2 positioning status word ..................................................................................................... 82
7 Parameters ...........................................................................................................................................................83
7.1 Overview ............................................................................................................................................... 83
7.2 Parameter list ........................................................................................................................................ 84
8 Diagnostics ......................................................................................................................................................... 114
8.1 Overview ............................................................................................................................................. 114
8.2 List of faults and alarms ...................................................................................................................... 116
Getting Started
A5E37208904-003, 04/2017
3
1
Fundamental safety instructions
1.1
General safety instructions
DANGER
Danger to life due to live parts and other energy sources
Death or serious injury can result when live parts are touched.
• Only work on electrical devices when you are qualified for this job.
• Always observe the country-specific safety rules.
Generally, six steps apply when establishing safety:
1. Prepare for shutdown and notify all those who will be affected by the procedure.
2. Disconnect the machine from the supply.
– Switch off the machine.
– Wait until the discharge time specified on the warning labels has elapsed.
– Check that it really is in a no-voltage condition, from phase conductor to phase conductor and phase
conductor to protective conductor.
– Check whether the existing auxiliary supply circuits are de-energized.
– Ensure that the motors cannot move.
3. Identify all other dangerous energy sources, e.g. compressed air, hydraulic systems, or water.
4. Isolate or neutralize all hazardous energy sources by closing switches, grounding or short-circuiting or
closing valves, for example.
5. Secure the energy sources against switching on again.
6. Ensure that the correct machine is completely interlocked.
After you have completed the work, restore the operational readiness in the inverse sequence.
WARNING
Danger to life through a hazardous voltage when connecting an unsuitable power supply
Touching live components can result in death or severe injury.
• Only use power supplies that provide SELV (Safety Extra Low Voltage) or PELV- (Protective Extra Low
Voltage) output voltages for all connections and terminals of the electronics modules.
WARNING
Danger to life when live parts are touched on damaged motors/devices
Improper handling of motors/devices can damage them.
For damaged motors/devices, hazardous voltages can be present at the enclosure or at exposed components.
• Ensure compliance with the limit values specified in the technical data during transport, storage and
operation.
•
Do not use any damaged motors/devices.
WARNING
Danger to life through electric shock due to unconnected cable shields
Hazardous touch voltages can occur through capacitive cross-coupling due to unconnected cable shields.
• As a minimum, connect cable shields and the cores of cables that are not used at one end at the grounded
housing potential.
Getting Started
4 A5E37208904-003, 04/2017
WARNING
Danger to life due to electric shock when not grounded
For missing or incorrectly implemented protective conducto
r connection for devices with protection class I, high
voltages can be present at open, exposed parts, which when touched, can result in death or severe injury.
•
Ground the device in compliance with the applicable regulations.
WARNING
Danger to life due to electric shock when opening plug connections in operation
When opening plug connections in operation, arcs can result in severe injury or death.
• Only open plug connections when the equipment is in a no-
voltage state, unless it has been explicitly stated
that they can be opened in operation.
WARNING
Danger to life through electric shock due to the residual charge of the power component capacitors
Because of the capacitors, a hazardous voltage is present for up to 5 minutes after the power supply has been
switched off. Contact with live parts can result in death or serious injury.
• Wait for 5 minutes before you check that the unit really is in a no-voltage condition and start work.
NOTICE
Material damage due to loose power connections
Insufficient tightening torques or vibrations can result in loose electrical connections. This can result in damage due to fire,
device defects or malfunctions.
• Tighten all power connections with the specified tightening torques, e.g. line supply connection, motor connection, DC
link connections.
•
Check all power connections at regular intervals. This applies in particular after transport.
WARNING
Danger to life due to fire spreading if housing is inadequate
Fire and smoke development can cause severe personal injury or material damage.
• Install devices without a protective housing in a metal control cabinet (or protect the device by another equivalent
measure) in such a way that contact with fire is prevented.
•
Ensure that smoke can only escape via controlled and monitored paths.
WARNING
Danger to life from electromagnetic fields
Electromagnetic fields (EMF) are generated by the operation of electrical power equipment, such as transformers,
converters, or motors.
People with pacemakers or implants are at particular risk in the immediate vicinity of this equipment.
• If you have a heart pacemaker or implant, maintain a minimum distance of 2 m from electrical power equipment.
WARNING
Danger to life from permanent-magnet fields
Even when switched off, electric motors with permanent magnets represent a potential risk for persons with heart
pacemakers or implants if they are close to converters/motors.
• If you have a heart pacemaker or implant, maintain a minimum distance of 2 m.
• When transporting or storing permanent-magnet motors always use the original packing materials with the warning
labels attached.
• Clearly mark the storage locations with the appropriate warning labels.
•
IATA regulations must be observed when transported by air.
Getting Started
A5E37208904-003, 04/2017
5
WARNING
Danger to life through unexpected movement of machines when using mobile wireless devices or mobile phones
Using mobile wireless devices or mobile phones with a transmit power > 1 W closer than approx. 2 m to the components
may cause the devices to malfunction, influence the functional safety of machines therefore putting people at risk or
causing material damage.
• Switch the wireless devices or mobile phones off in the immediate vicinity of the components.
WARNING
Danger to life due to the motor catching fire in the event of insulation overload
There is higher stress on the motor insulation through a ground fault in an IT system. If the insulation fails, it is possible that
death or severe injury can occur as a result of smoke and fire.
• Use a monitoring device that signals an insulation fault.
•
Correct the fault as quickly as possible so the motor insulation is not overloaded.
WARNING
Danger to life due to fire if overheating occurs because of insufficient ventilation clearances
Inadequate ventilation clearances can cause overheating of components with subsequent fire and smoke. This can cause
severe injury or even death. This can also result in increased downtime and reduced service lives for devices/systems.
• Ensure compliance with the specified minimum clearance as ventilation clearance for the respective component.
WARNING
Danger of an accident occurring due to missing or illegible warning labels
Missing or illegible warning labels can result in accidents involving death or serious injury.
• Check that the warning labels are complete based on the documentation.
• Attach any missing warning labels to the components, in the national language if necessary.
•
Replace illegible warning labels.
NOTICE
Device damage caused by incorrect voltage/insulation tests
Incorrect voltage/insulation tests can damage the device.
• Before carrying out a voltage/insulation check of the system/machine, disconnect the devices as all converters and
motors have been subject to a high voltage test by the manufacturer, and therefore it is not necessary to perform an
additional test within the system/machine.
WARNING
Danger to life when safety functions are inactive
Safety functions that are inactive or that have not been adjusted accordingly can cause operational faults on machines that
could lead to serious injury or death.
• Observe the information in the appropriate product documentation before commissioning.
• Carry out a safety inspection for functions relevant to safety on the entire system, including all safety-related
components.
• Ensure that the safety functions used in your drives and automation tasks are adjusted and activated through
appropriate parameterizing.
• Perform a function test.
• Only put your plant into live operation once you have guaranteed that the functions relevant to safety are running
correctly.
Getting Started
6 A5E37208904-003, 04/2017
Note
Important safety notices for Safety Integrated functions
If you want to use Safety Integrated functions, you must observe the safety notices in the Safety Integrated manuals
.
WARNING
Danger to life or malfunctions of the machine as a result of incorrect or changed parameterization
As a result of incorrect or changed parameterization, machines can malfunction, which in turn can lead to injuries or death.
• Protect the parameterization (parameter assignments) against unauthorized access.
•
Respond to possible malfunctions by applying suitable measures (e.g. EMERGENCY STOP or EMERGENCY OFF).
WARNING
Risk of injury caused by moving parts or parts that are flung out
Touching moving motor parts or drive output elements and loose motor parts that are flung out (e.g. feather keys) in
operation can result in severe injury or death.
• Remove any loose parts or secure them so that they cannot be flung out.
• Do not touch any moving parts.
• Safeguard all moving parts using the appropriate safety guards.
WARNING
Danger to life due to fire if overheating occurs because of insufficient cooling
Inadequate cooling can cause overheating resulting in death or severe injury as a result of smoke and fire. This can also
result in increased failures and reduced service lives of motors.
•
Comply with the specified coolant requirements for the motor.
WARNING
Danger to life due to fire as a result of overheating caused by incorrect operation
When incorrectly operated and in the case of a fault, the motor can overheat resulting in fire and smoke. This can result in
severe injury or death. Further, excessively high temperatures destroy motor components and result in increased failures
as well as shorter service lives of motors.
• Operate the motor according to the relevant specifications.
• Only operate the motors in conjunction with effective temperature monitoring.
•
Immediately switch off the motor if excessively high temperatures occur.
CAUTION
Risk of injury due to touching hot surfaces
In operation, the motor can reach high temperatures, which can cause burns if touched.
• Mount the motor so that it is not accessible in operation.
Measures when maintenance is required:
• Allow the motor to cool down before starting any work.
•
Use the appropriate personnel protection equipment, e.g. gloves.
Getting Started
A5E37208904-003, 04/2017
7
1.2
Handling electrostatic sensitive devices (ESD)
Electrostatic sensitive devices (ESD) are individual components, integrated circuits, modules or devices that may be
damaged by either electric fields or electrostatic discharge.
NOTICE
Damage through electric fields or electrostatic discharge
Electric fields or electrostatic discharge can cause malfunctions through damaged individual components,
integrated circuits, modules or devices.
•
Only pack, store, transport and send electronic components, modules or devices in their original packaging
or in other suitable materials, e.g conductive foam rubber of aluminum foil.
• Only touch components, modules and devices when you are grounded by one of the following methods:
– Wearing an ESD wrist strap
– Wearing ESD shoes or ESD grounding straps in ESD areas with conductive flooring
• Only place electronic components, modules or devices on conductive surfaces (table with ESD surface,
conductive ESD foam, ESD packaging, ESD transport container).
1.3
Industrial security
Note
Industrial security
Siemens provides products and solutions with industrial security functions that support the secure operation of plants,
s
ystems, machines and networks.
In order to protect plants, systems, machines and networks against cyber threats, it is necessary to implement
– and
continuously maintain
– a holistic, state-of-the-art industrial security concept. Siemens products and solut
ions only represent
one component of such a concept.
The customer is responsible for preventing unauthorized access to its plants, systems, machines and networks. Systems,
machines and components should only be connected to the enterprise network or the internet if and to the extent necessary
and with appropriate security measures (e.g. use of firewalls and network segmentation) in place.
Additionally, Siemens’ guidance on appropriate security measures should be taken into account. For more information about
industrial security, please visit:
Industrial security (
http://www.siemens.com/industrialsecurity).
Siemens’ products and solutions undergo continuous development to make them more secure. Sie
mens strongly
recommends to apply product updates as soon as available and to always use the latest product versions. Use of product
versions that are no longer supported, and failure to apply latest updates may increase customer’s exposure to cyber
threat
s.
To stay informed about product updates, subscribe to the Siemens Industrial Security RSS Feed at:
Industrial security (
http://www.siemens.com/industrialsecurity).
WARNING
Danger to life as a result of unsafe operating states resulting from software manipulation
Software manipulations (e.g. viruses, trojans, malware or worms) can cause unsafe operating states in your system that
may lead to death, serious injury, and property damage.
• Keep the software up to date.
• Incorporate the automation and drive components into a holistic, state-of-the-art industrial security concept for the
installation or machine.
• Make sure that you include all installed products into the holistic industrial security concept.
• Protect files stored on exchangeable storage media from malicious software by with suitable protection measures, e.g.
virus scanners.

Getting Started
8 A5E37208904-003, 04/2017
1.4
Residual risks of power drive systems
When assessing the machine- or system-related risk in accordance with the respective local regulations (e.g., EC Machinery
Directive), the machine manufacturer or system installer must take into account the following residual risks emanating from
the control and drive components of a drive system:
1. Unintentional movements of driven machine or system components during commissioning, operation, maintenance, and
repairs caused by, for example,
– Hardware and/or software errors in the sensors, control system, actuators, and cables and connections
– Response times of the control system and of the drive
– Operation and/or environmental conditions outside the specification
– Condensation/conductive contamination
– Parameterization, programming, cabling, and installation errors
– Use of wireless devices/mobile phones in the immediate vicinity of electronic components
– External influences/damage
– X-ray, ionizing radiation and cosmic radiation
2. Unusually high temperatures, including open flames, as well as emissions of light, noise, particles, gases, etc., can occur
inside and outside the components under fault conditions caused by, for example:
– Component failure
– Software errors
– Operation and/or environmental conditions outside the specification
– External influences/damage
3. Hazardous shock voltages caused by, for example:
– Component failure
– Influence during electrostatic charging
– Induction of voltages in moving motors
– Operation and/or environmental conditions outside the specification
– Condensation/conductive contamination
– External influences/damage
4. Electrical, magnetic and electromagnetic fields generated in operation that can pose a risk to people with a pacemaker,
implants or metal replacement joints, etc., if they are too close
5. Release of environmental pollutants or emissions as a result of improper operation of the system and/or failure to
dispose of components safely and correctly
6. Influence of network-connected communication systems, e.g. ripple-control transmitters or data communication via the
network
For more information about the residual risks of the drive system components, see the relevant sections in the technical user
documentation.
Getting Started
A5E37208904-003, 04/2017
9
2
General information
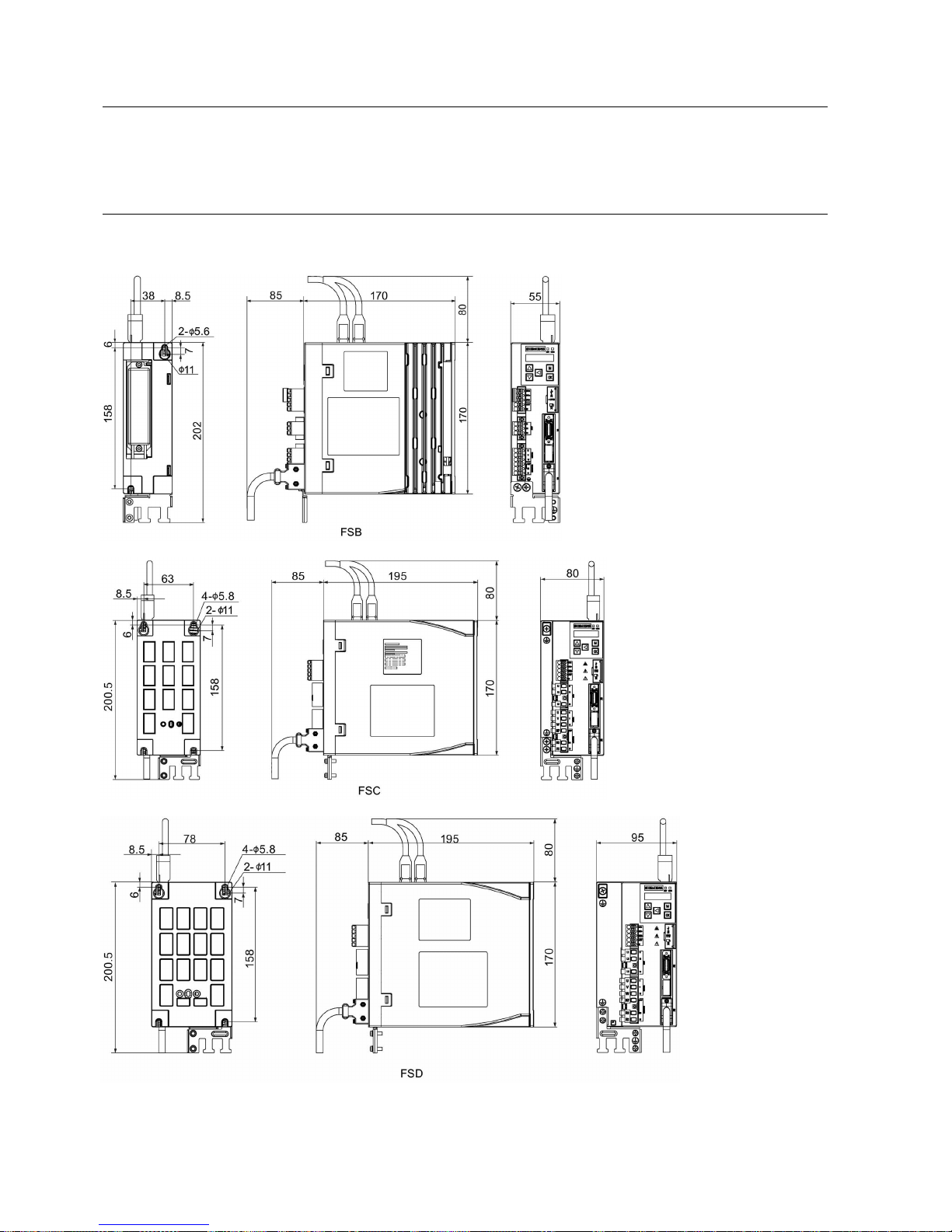
The SINAMICS V90 drives with the PROFINET interface (referred to as SINAMICS V90 PN) are available in two variants,
400 V variant and 200 V variant.
The 200 V variant is available in three frame sizes: FSB, FSC, and FSD. Frame sizes B, and C are used on the single phase
or three phase power network while frame size D is used on the three phase power network only.
The 400 V variant is available in four frame sizes: FSAA, FSA, FSB, and FSC. All the frame sizes are used on three phase
power network only.
2.1
Deliverables
2.1.1
Drive components
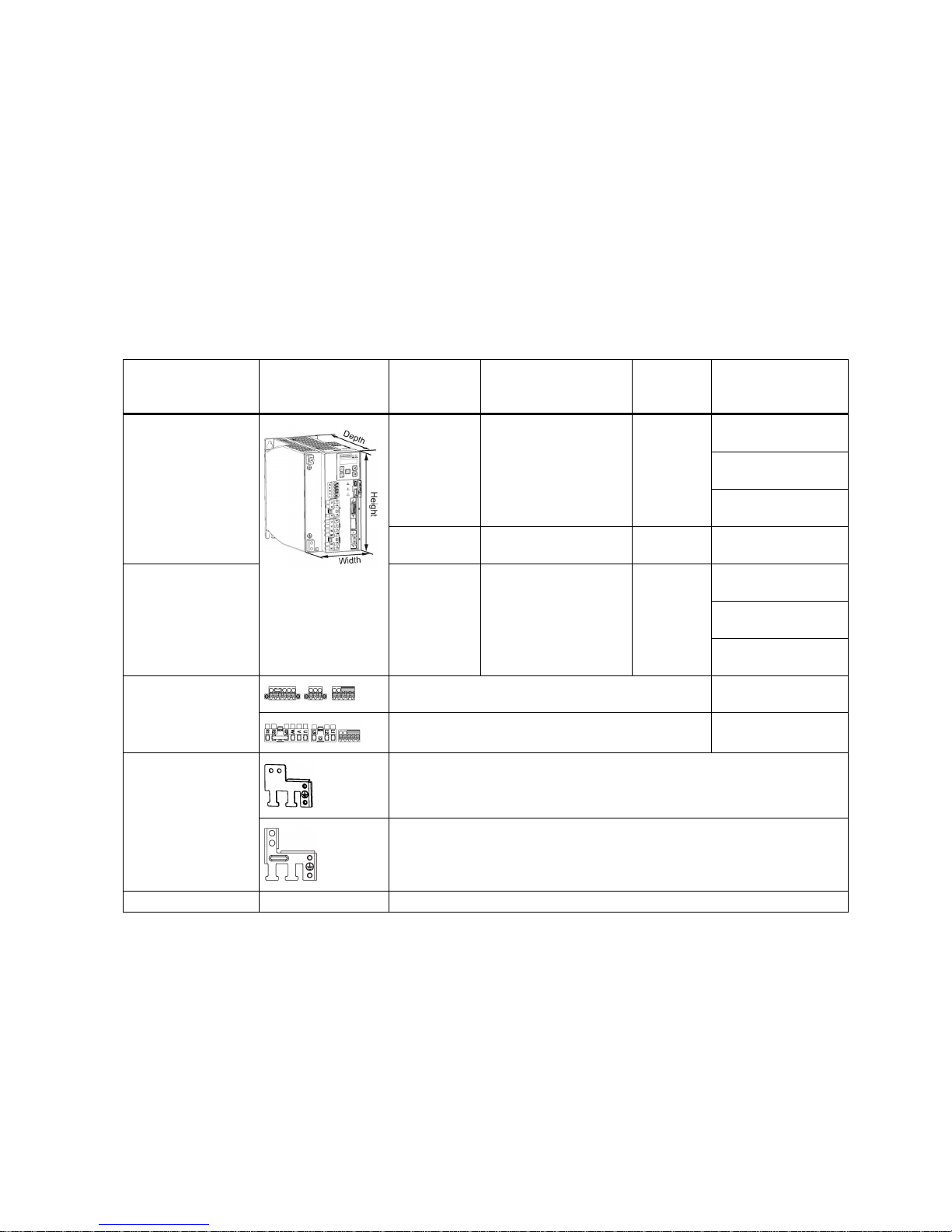
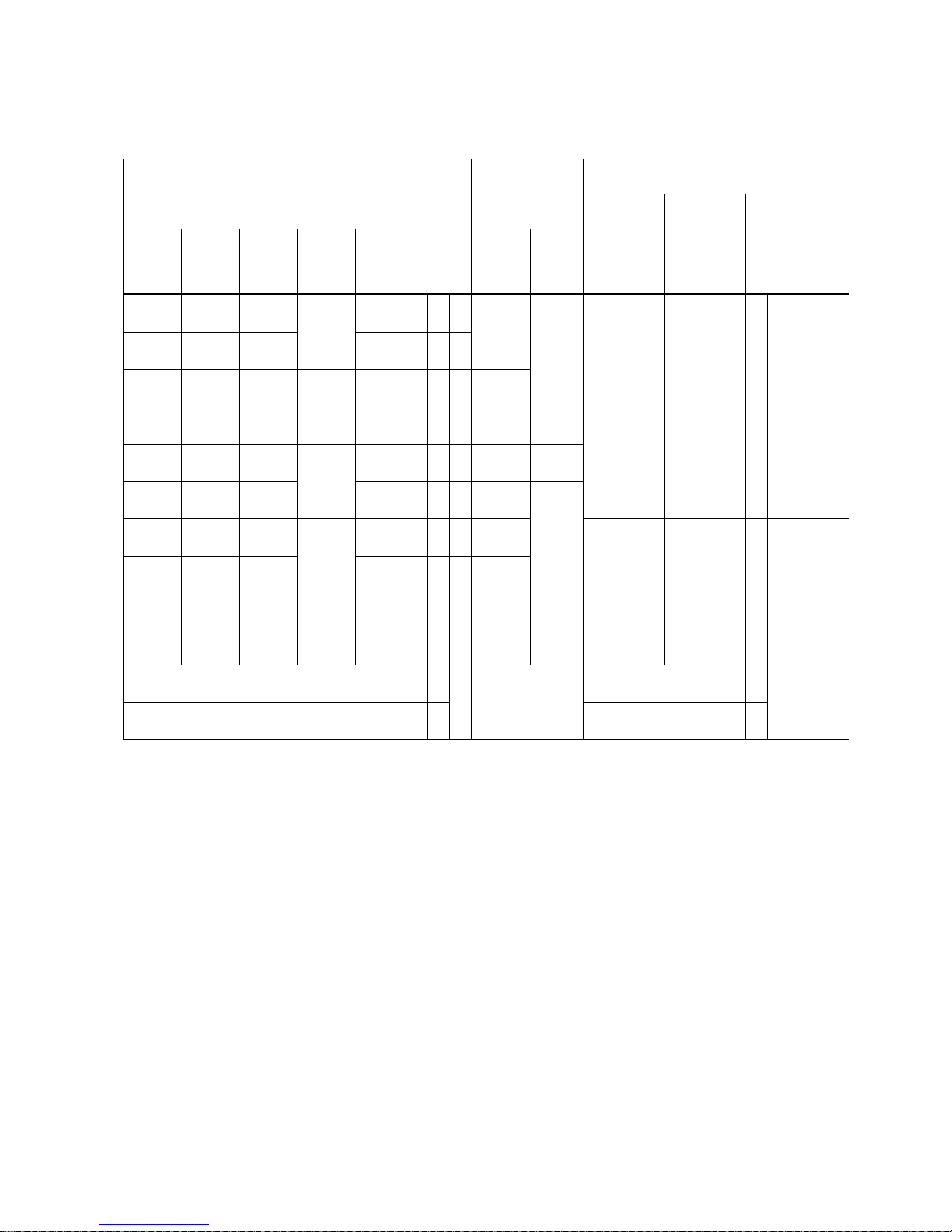
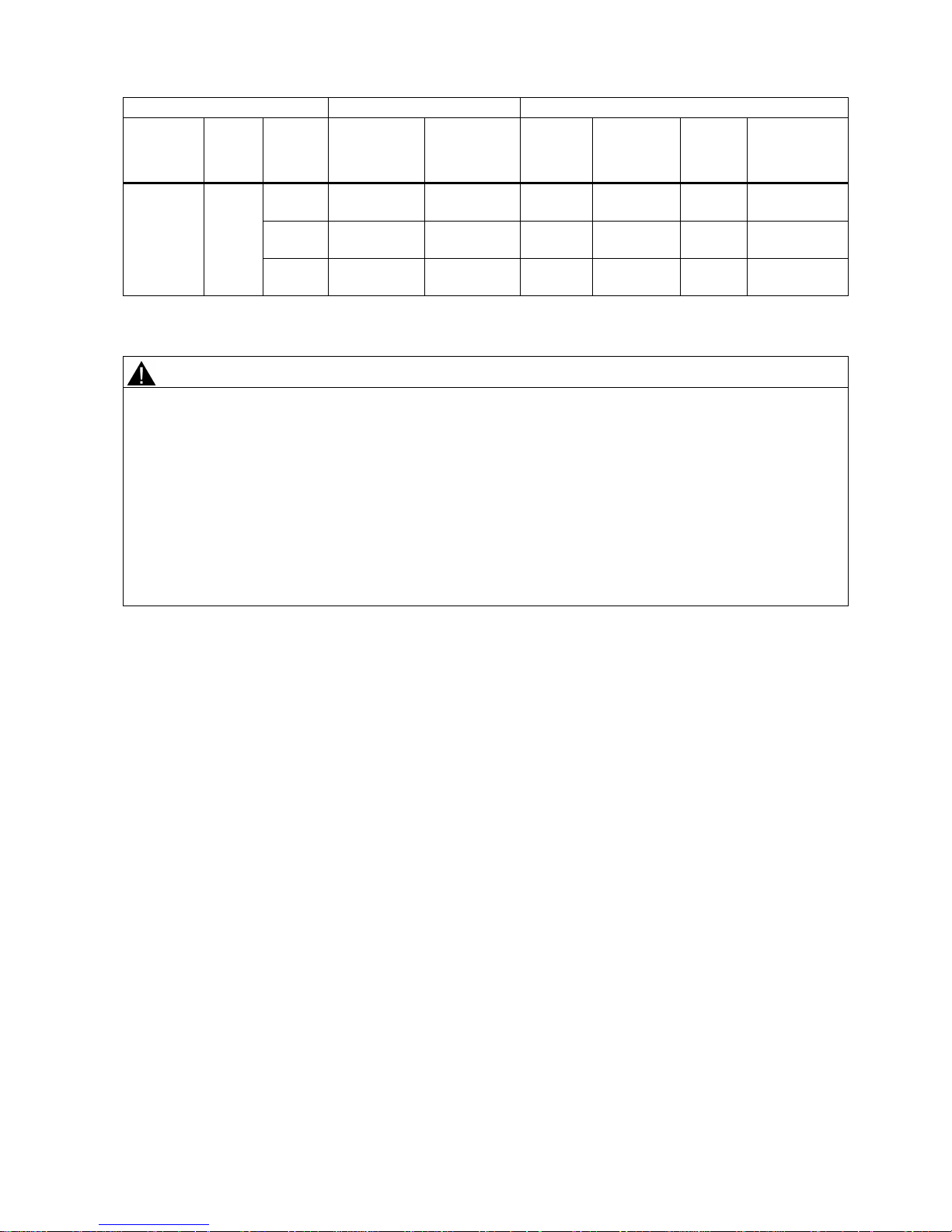
Components in the SINAMICS V90 PN 200 V variant drive package
Component
Illustration
Rated power
(kW)
Outline dimension
(Width x Height x
Depth, mm)
Frame size
Article number
SINAMICS V90 PN,
single/three-phase,
200 V
0.1/0.2/0.4 55 x 170 x 170
FSB 6SL3210-5FB10-
1UF0
6SL3210-5FB10-
2UF0
6SL3210-5FB10-
4UF1
0.75 80 x 170 x 195 FSC 6SL3210-5FB10-
8UF0
SINAMICS V90 PN,
three-phase, 200 V
1.0/1.5/2.0 95 x 170 x 195 FSD 6SL3210-5FB11-
0UF1
6SL3210-5FB11-
5UF0
6SL3210-5FB12-
0UF0
Connectors
For FSB 6SL3200-0WT02-
0AA0
For FSC and FSD 6SL3200-0WT03-
0AA0
Shielding plate
For FSB
For FSC and FSD
User documentation
Information Guide
English-Chinese bilingual version
Getting Started
10 A5E37208904-003, 04/2017
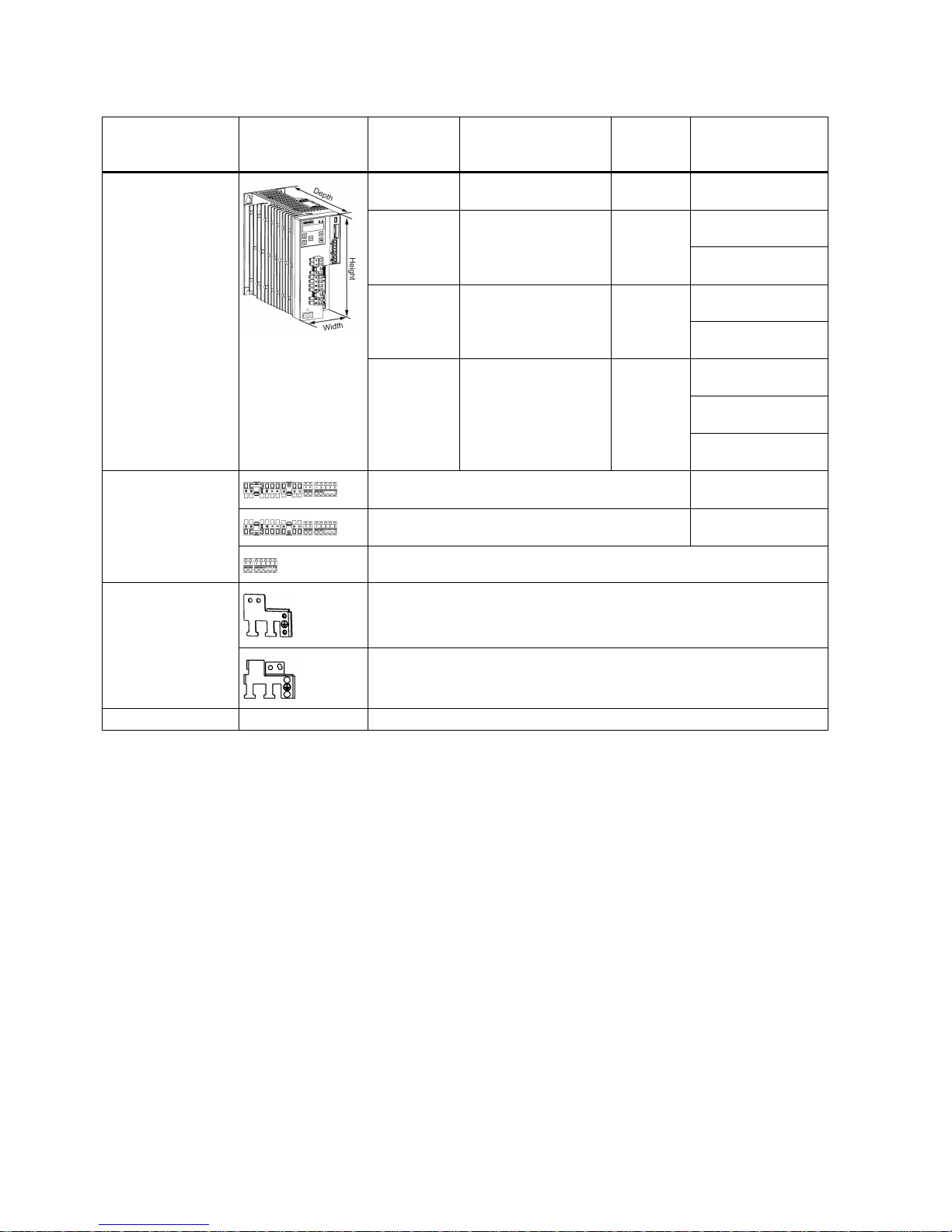
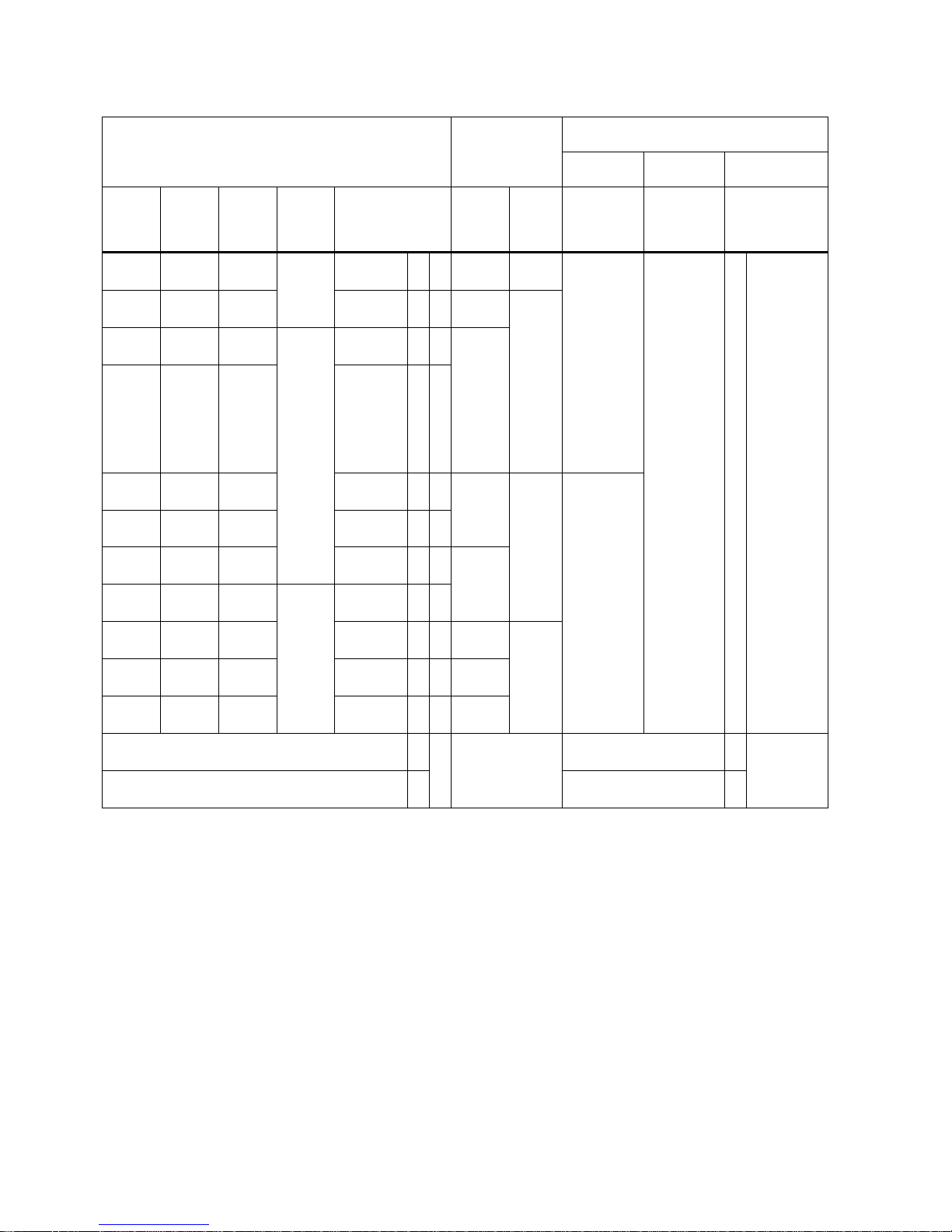
Components in the SINAMICS V90 PN 400 V variant drive package
Component
Illustration
Rated power
(kW)
Outline dimension
(Width x Height x
Depth, mm)
Frame size
Article number
SINAMICS V90 PN,
three-phase, 400 V
0.4 60 x 180 x 200 FSAA 6SL3210-5FE10-
4UF0
0.75/1.0 80 x 180 x 200 FSA 6SL3210-5FE10-
8UF0
6SL3210-5FE11-
0UF0
1.5/2.0 100 x 180 x 220 FSB 6SL3210-5FE11-
5UF0
6SL3210-5FE12-
0UF0
3.5/5.0/7.0 140 x 260 x 240 FSC 6SL3210-5FE13-
5UF0
6SL3210-5FE150UF0
6SL3210-5FE17-
0UF0
Connectors
For FSAA
6SL3200-0WT000AA0
For FSA 6SL3200-0WT01-
0AA0
For FSB and FSC *
Shielding plate
For FSAA and FSA
For FSB and FSC
User documentation Information Guide English-Chinese bilingual version
* You can obtain the connectors for SINAMICS V90 PN 400V servo drives of FSB and FSC from the connector kits for
SINAMICS V90 PN 400V servo drives of FSAA or FSA.
Getting Started
A5E37208904-003, 04/2017
11
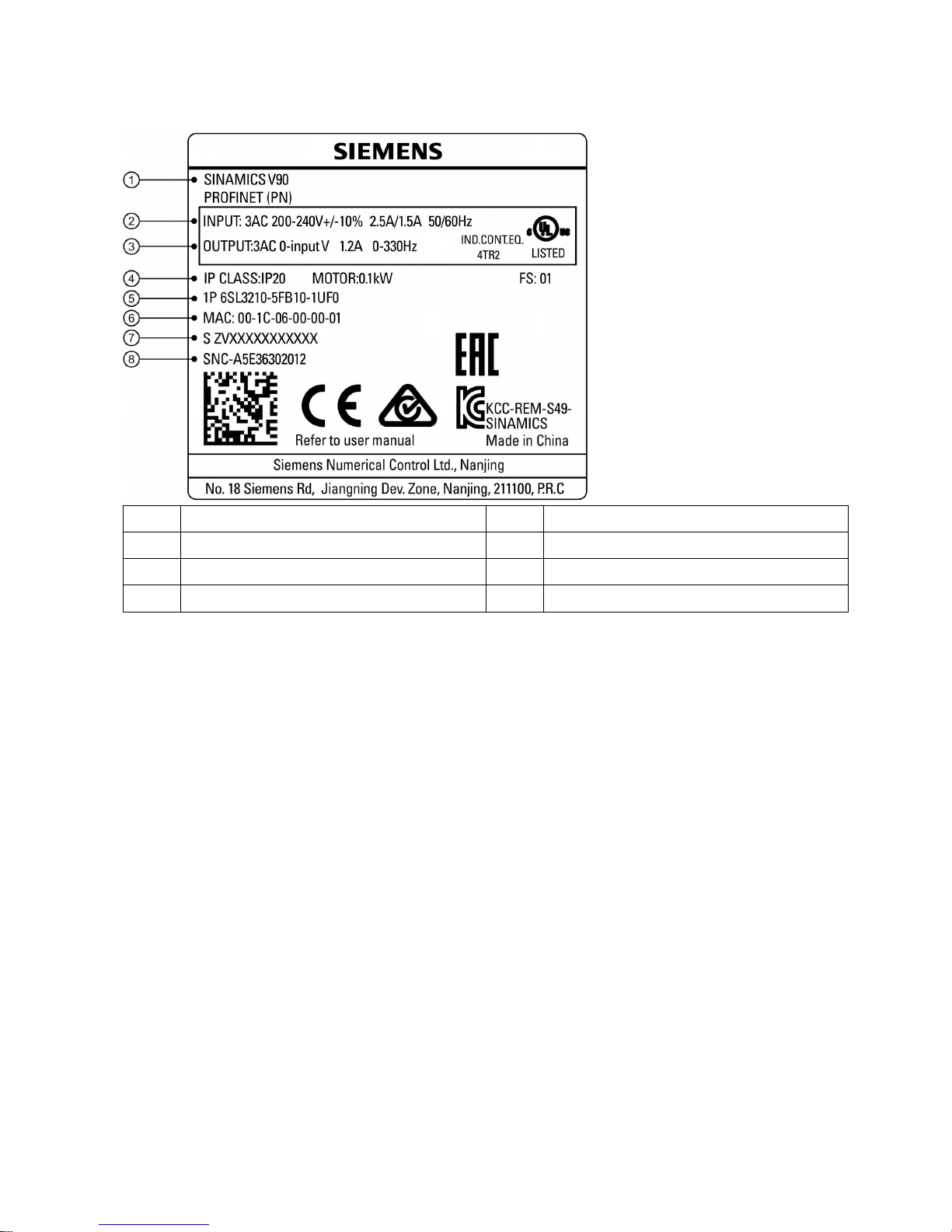
Drive rating plate (example)
①
Drive name
⑤
Article number
②
Power input
⑥
MAC address
③
Power output
⑦
Product serial number
④
Rated motor power
⑧
Part number
Getting Started
12 A5E37208904-003, 04/2017
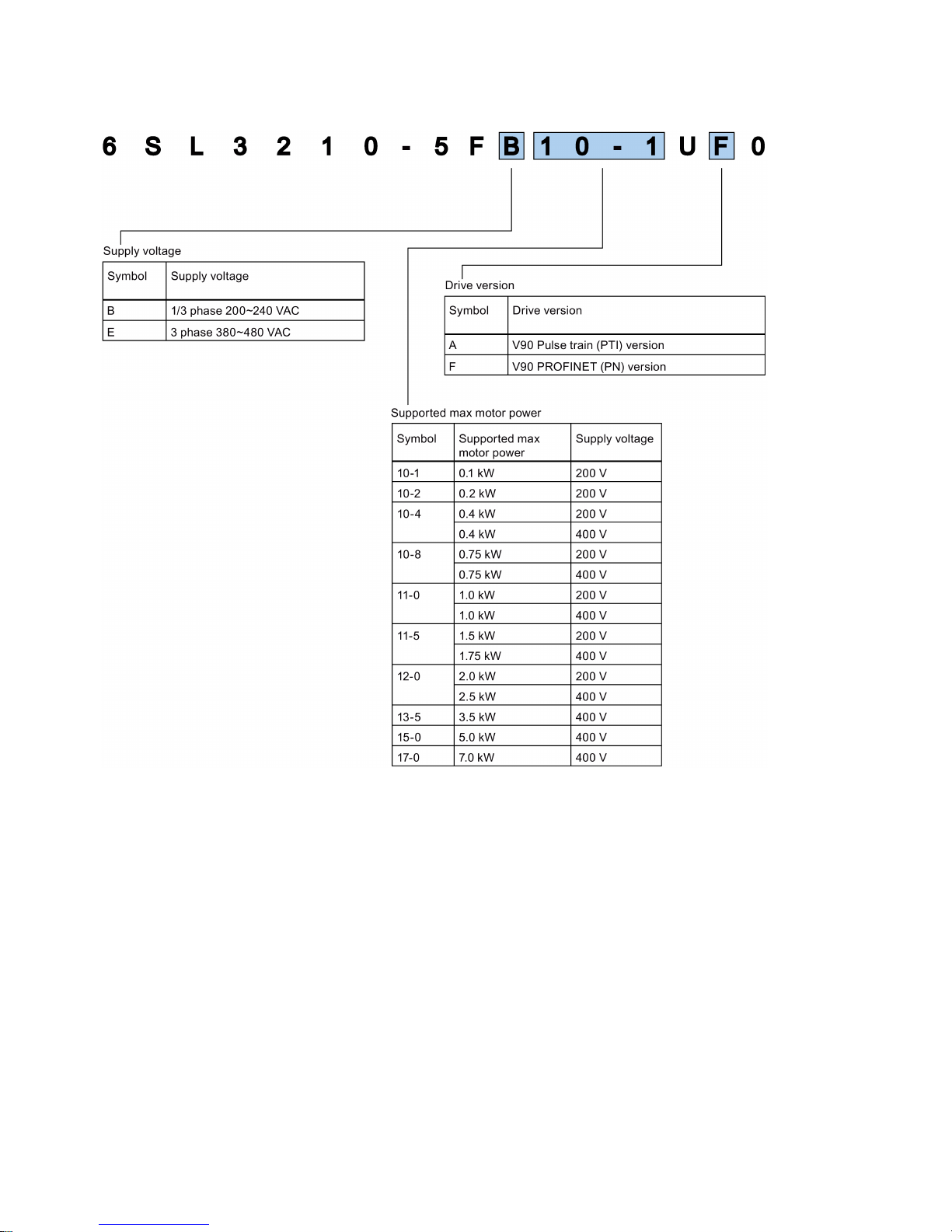
Article number explanation (example)
Getting Started
A5E37208904-003, 04/2017
13
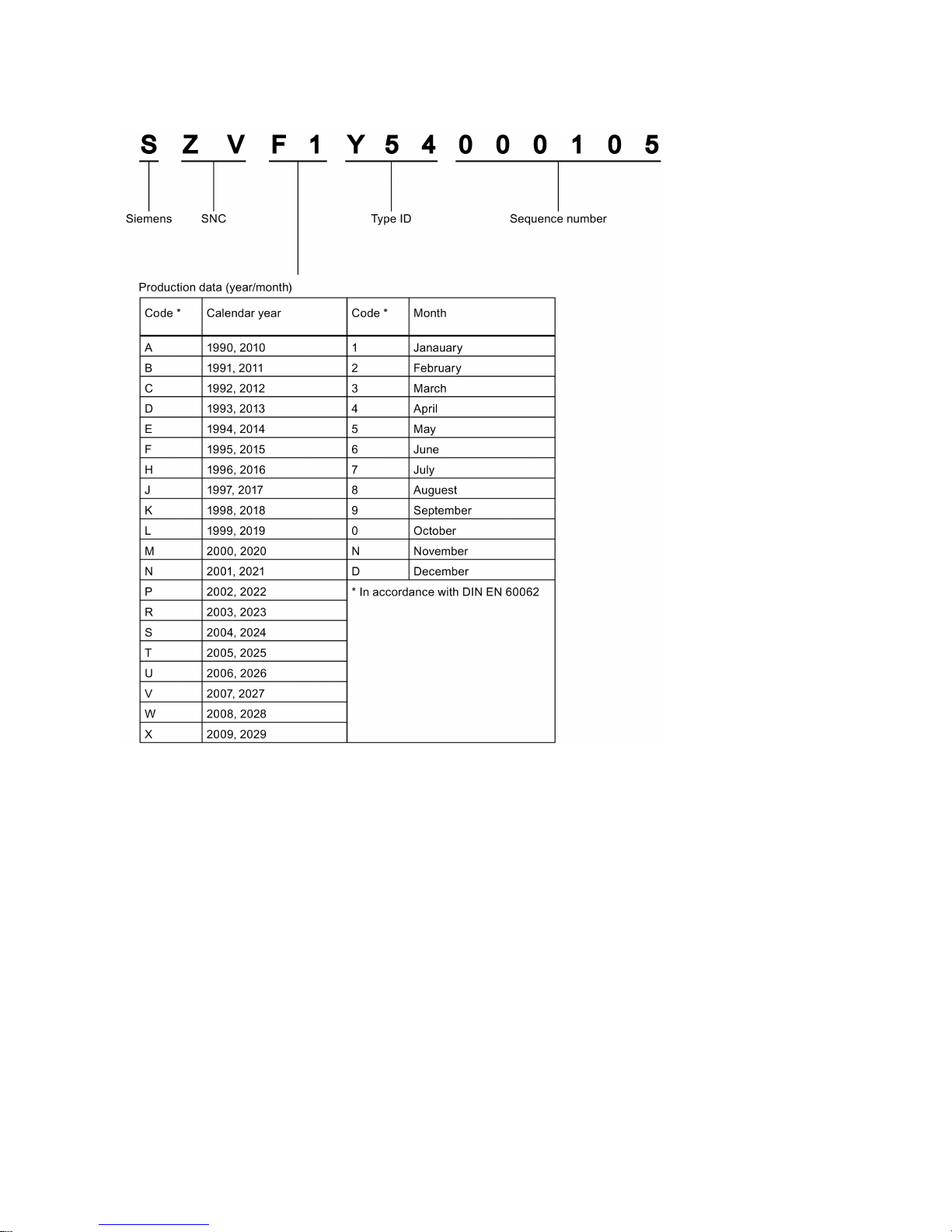
Serial number explanation (example)
Getting Started
14 A5E37208904-003, 04/2017
2.1.2
Motor components
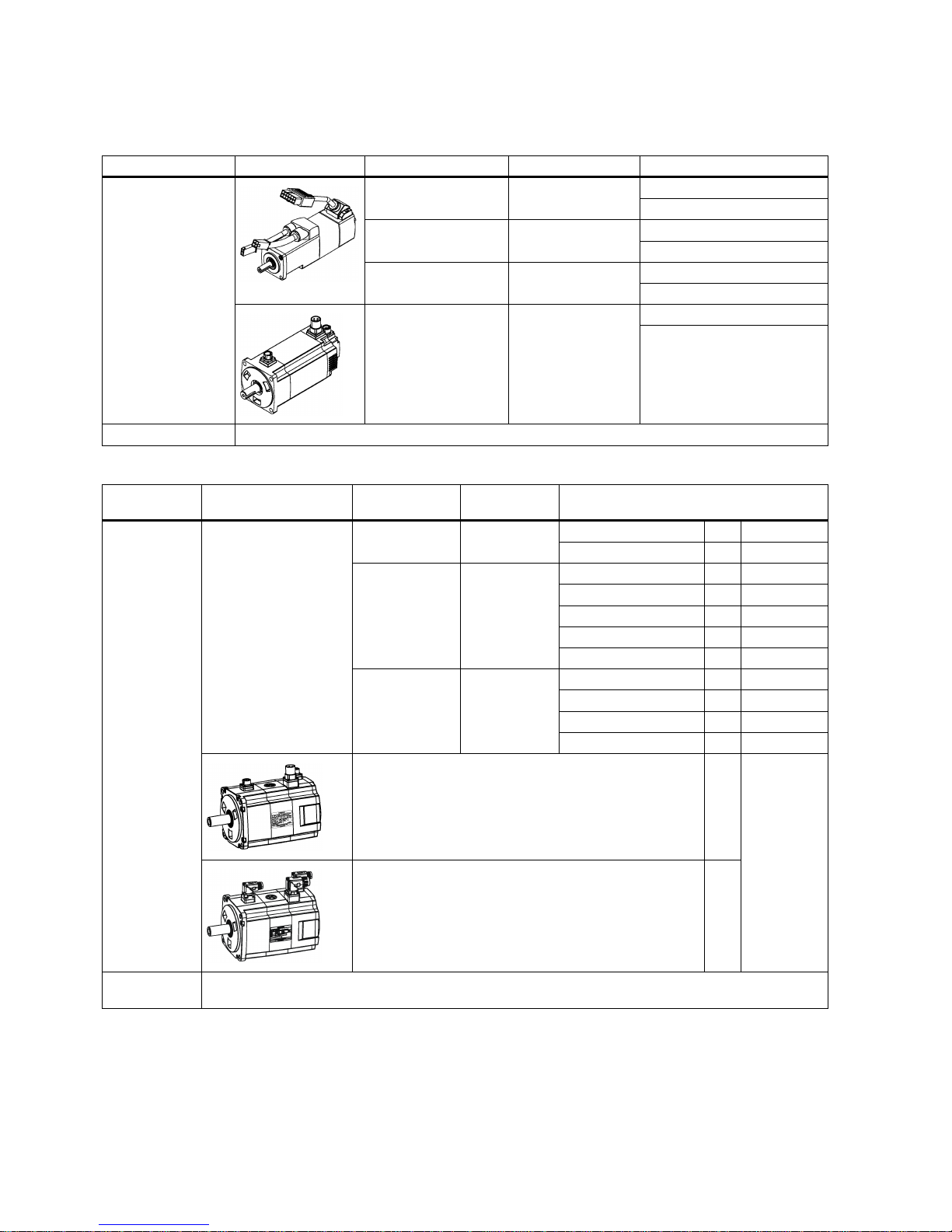
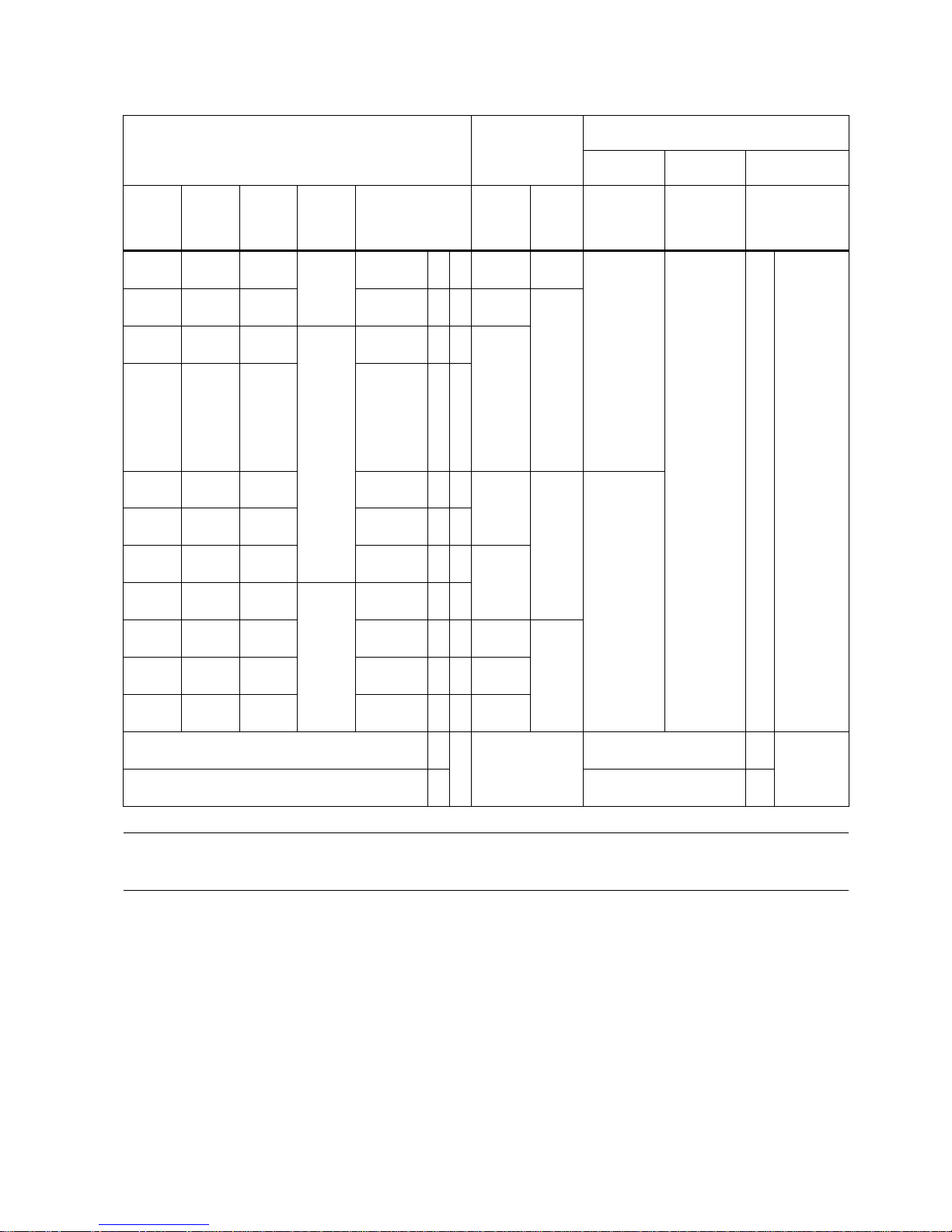
Components in the SIMOTICS S-1FL6 low inertia motor package
Component
Illustration
Rated power (kW)
Shaft height (mm)
Article number
SIMOTICS S-1FL6,
low inertia
0.05/0.1 20
1FL6022-2AF21-1❑❑1
1FL6024-2AF21-1❑❑1
0.2/0.4 30
1FL6032-2AF21-1❑❑1
1FL6034-2AF21-1❑❑1
0.75/1.0 40
1FL6042-2AF21-1❑❑1
1FL6044-2AF21-1❑❑1
1.5/2.0 50
1FL6052-2AF21-0❑❑1
1FL6054-2AF21-0❑❑1
User documentation
SIMOTICS S-1FL6 Servo Motors Installation Guide
Components in the SIMOTICS S-1FL6 high inertia motor package
Component
Illustration
Rated power
(kW)
Shaft height
(mm)
Article number
SIMOTICS S1FL6, high
inertia
0.4/0.75 45
1FL6042-1AF61-
❑
❑❑1
1FL6044-1AF61- ❑ ❑❑1
0.75/1.0/1.5/1.7
5/2.0
65
1FL6061-1AC61-
❑
❑❑1
1FL6062-1AC61-
❑
❑❑1
1FL6064-1AC61-
❑
❑❑1
1FL6066-1AC61-
❑
❑❑1
1FL6067-1AC61-
❑
❑❑1
2.5/3.5/5.0/7.0 90
1FL6090-1AC61-
❑
❑❑1
1FL6092-1AC61-
❑
❑❑1
1FL6094-1AC61-
❑
❑❑1
1FL6096-1AC61-
❑
❑❑1
Straight connectors with a fixed outlet direction 0
Angular connectors with a flexible outlet direction 2
User docu-
mentation
SIMOTICS S-1FL6 Servo Motors Installation Guide

Getting Started
A5E37208904-003, 04/2017
15
Motor rating plate (example)
①
Motor type
⑦
Rated power
⑬
Rated current
②
Article number
⑧
Encoder type and resolution
⑭
Holding brake
③
Serial number
⑨
Thermal class
⑮
Motor ID
④
Rated torque
⑩
Degree of protection
⑯
Weight
⑤
Stall torque
⑪
Motor operating mode
⑰
Maximum speed
⑥
Rated voltage
⑫
Stall current
⑱
Rated speed
Getting Started
16 A5E37208904-003, 04/2017
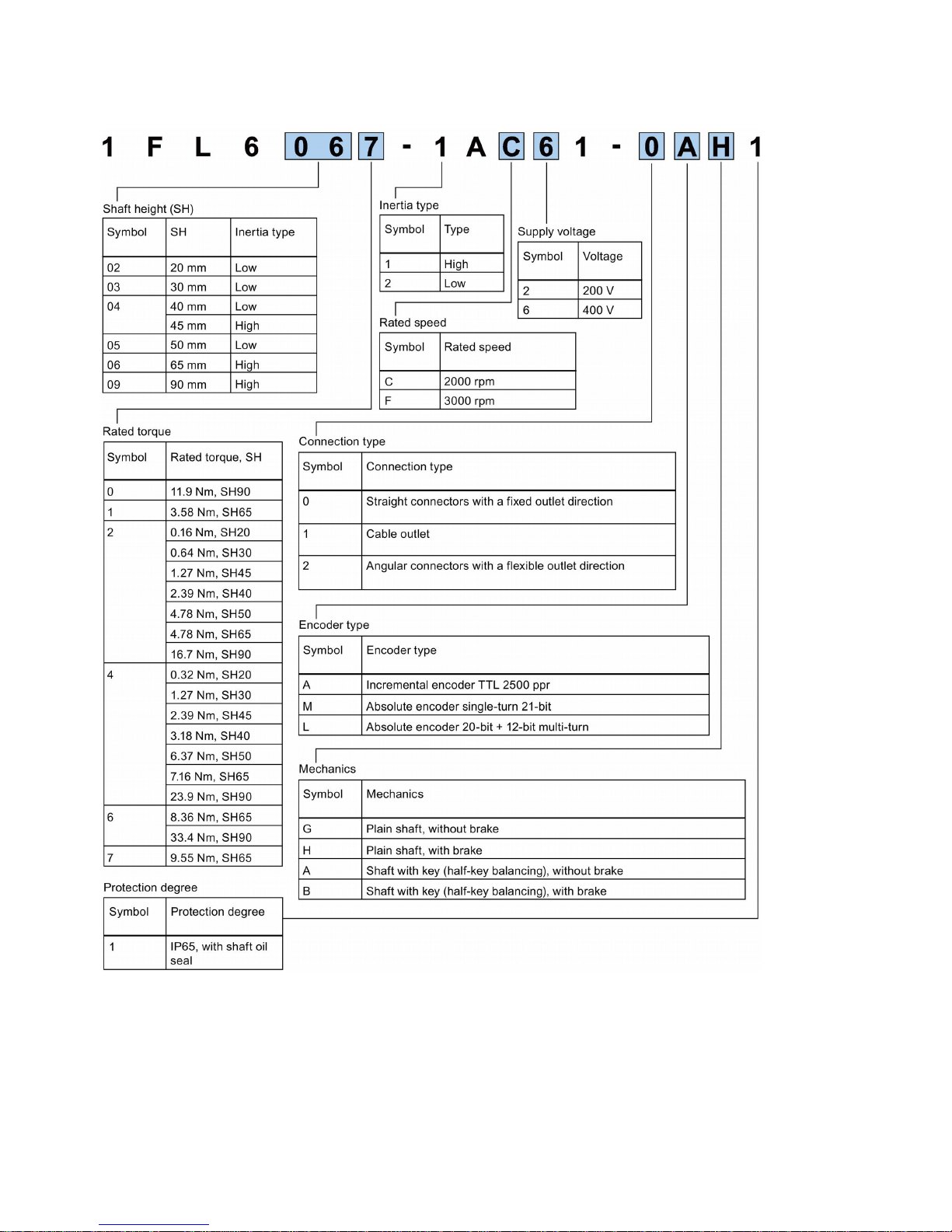
Article number explanation
Getting Started
A5E37208904-003, 04/2017
17
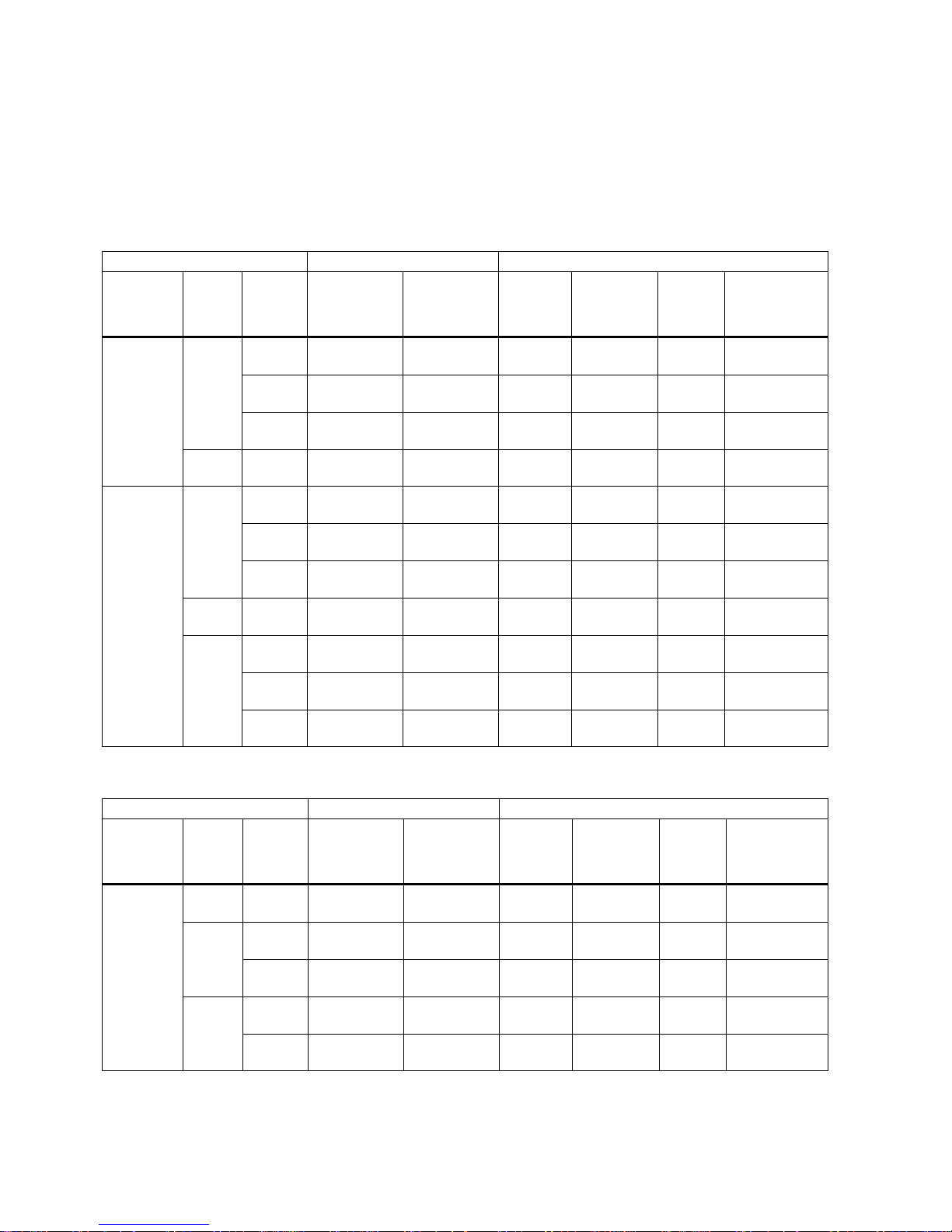
2.2
Device combination
V90 PN 200 V servo system
SIMOTICS S-1FL6 low inertia servo motors
SINAMICS V90
PN 200 V servo
drives
MOTION-CONNECT 300 pre-assembled
cables
Power
cable
Brake cable
Encoder cable
Rated
torque
(Nm)
Rated
power
(kW)
Rated
speed
(rpm)
Shaft
height
(mm)
Article number
1FL60
Article
number
6SL321
0-5
Frame
size
Article
number
6FX3002-5
Article
number
6FX3002-5
Article number
6FX3002-2
0.16 0.05 3000 20 22-2AF21-1 ❑ ❑1 FB101UF0
FSB CK01-1AD0
(3 m)
CK01-1AF0
(5 m)
CK01-1BA0
(10 m)
CK01-1CA0
(20 m)
BK02-1AD0
(3 m)
BK02-1AF0
(5 m)
BK02-1BA0
(10 m)
BK02-1CA0
(20 m)
❑❑ 20-1AD0 (3
m)
20-1AF0 (5
m)
20-1BA0
(10 m)
20-1CA0
(20 m)
0.32 0.1 3000 24-2AF21-1 ❑ ❑
1
0.64 0.2 3000 30 32-2AF21-1 ❑ ❑1 FB10-
2UF0
1.27 0.4 3000 34-2AF21-1 ❑ ❑1 FB10-
4UF1
2.39 0.75 3000 40 42-2AF21-1 ❑ ❑1 FB10-
8UF0
FSC
3.18 1 3000 44-2AF21-1 ❑ ❑1 FB11-
0UF1
FSD
4.78 1.5 3000 50 52-2AF21-0 ❑ ❑1 FB11-
5UF0
CK31-1AD0
(3 m)
CK31-1AF0
(5 m)
CK31-1BA0
(10 m)
CK31-1CA0
(20 m)
BL02-1AD0
(3 m)
BL02-1AF0
(5 m)
BL02-1BA0
(10 m)
BL02-1CA0
(20 m)
❑❑ 10-1AD0 (3
m)
10-1AF0 (5
m)
10-1BA0
(10 m)
10-1CA0
(20 m)
6.37 2 3000 54-2AF21-0 ❑ ❑1 FB120UF0
Incremental encoder TTL 2500 ppr A Incremental encoder TTL
2500 ppr
CT
Absolute encoder single-turn 21-bit M Absolute encoder single-
turn 21-bit
D
B
Getting Started
18 A5E37208904-003, 04/2017
V90 PN 400 V servo system
SIMOTICS S-1FL6 high inertia servo motors with straight
connectors
SINAMICS V90
PN 400 V servo
drives
MOTION-CONNECT 300 pre-assembled
cables
Power
cable
Brake cable
Encoder cable
Rated
torque
(Nm)
Rated
power
(kW)
Rated
speed
(rpm)
Shaft
height
(mm)
Article number
1FL60
Article
number
6SL321
0-5
Frame
size
Article
number
6FX3002-5
Article
number
6FX3002-5
Article number
6FX3002-2
1.27 0.4 3000 45 42-1AF61-0 ❑ ❑1 FE10-
4UF0
FSAA CL01-1AD0
(3 m)
CL01-1AF0
(5 m)
CL01-1AH0
(7 m)
CL01-1BA0
(10 m)
CL01-1BF0
(15 m)
CL01-1CA0
(20 m)
BL02-1AD0
(3 m)
BL02-1AF0
(5 m)
BL02-1AH0
(7 m)
BL02-1BA0
(10 m)
BL02-1BF0
(15 m)
BL02-1CA0
(20 m)
❑❑ 10-1AD0 (3
m)
10-1AF0 (5
m)
10-1AH0 (7
m)
10-1BA0
(10 m)
10-1BF0
(15 m)
10-1CA0
(20 m)
2.39 0.75 3000 44-1AF61-0 ❑ ❑1 FE10-
8UF0
FSA
3.58 0.75 2000 65 61-
1AC61-0
❑ ❑1 FE11-
0UF0
4.78 1.0 2000 621AC61-0
❑ ❑
1
7.16 1.5 2000 64-
1AC61-0
❑ ❑1 FE11-
5UF0
FSB CL11-1AD0
(3 m)
CL11-1AF0
(5 m)
CL11-1AH0
(7 m)
CL11-1BA0
(10 m)
CL11-1BF0
(15 m)
CL11-1CA0
(20 m)
8.36 1.75 2000 66-
1AC61-0
❑ ❑
1
9.55 2.0 2000 67-
1AC61-0
❑ ❑1 FE12-
0UF0
11.9 2.5 2000 90 90-
1AC61-0
❑ ❑
1
16.7 3.5 2000 92-
1AC61-0
❑ ❑1 FE13-
5UF0
FSC
23.9 5.0 2000 94-
1AC61-0
❑ ❑1 FE15-
0UF0
33.4 7.0 2000 96-
1AC61-0
❑ ❑1 FE17-
0UF0
Incremental encoder TTL 2500 ppr A Incremental encoder TTL
2500 ppr
CT
Absolute encoder 20-bit + 12-bit multi-turn L Absolute encoder 20-bit +
12-bit multi-turn
D
B
Getting Started
A5E37208904-003, 04/2017
19
SIMOTICS S-1FL6 high inertia servo motors with angular
connectors
SINAMICS V90
PN 400 V servo
drives
MOTION-CONNECT 300 pre-assembled
cables
Power
cable
Brake cable
Encoder cable
Rated
torque
(Nm)
Rated
power
(kW)
Rated
speed
(rpm)
Shaft
height
(mm)
Article number
1FL60
Article
number
6SL321
0-5
Frame
size
Article
number
6FX3002-5
Article
number
6FX3002-5
Article number
6FX3002-2
1.27 0.4 3000 45 42-1AF61-2 ❑ ❑1 FE10-
4UF0
FSAA CL02-1AD0
(3 m)
CL02-1AF0
(5 m)
CL02-1AH0
(7 m)
CL02-1BA0
(10 m)
CL02-1BF0
(15 m)
CL02-1CA0
(20 m)
BL03-1AD0
(3 m)
BL03-1AF0
(5 m)
BL03-1AH0
(7 m)
BL03-1BA0
(10 m)
BL03-1BF0
(15 m)
BL03-1CA0
(20 m)
❑
❑
❑
❑
-1AD0 (3
m)
-1AF0 (5
m)
-1AH0 (7
m)
-1BA0 (10
m)
-1BF0 (15
m)
-1CA0 (20
m)
2.39 0.75 3000 44-1AF61-2 ❑ ❑1 FE10-
8UF0
FSA
3.58 0.75 2000 65 611AC61-2
❑ ❑1 FE11-
0UF0
4.78 1.0 2000 621AC61-2
❑ ❑
1
7.16 1.5 2000 64-
1AC61-2
❑ ❑1 FE11-
5UF0
FSB CL12-1AD0
(3 m)
CL12-1AF0
(5 m)
CL12-1AH0
(7 m)
CL12-1BA0
(10 m)
CL12-1BF0
(15 m)
CL12-1CA0
(20 m)
8.36 1.75 2000 66-
1AC61-2
❑ ❑
1
9.55 2.0 2000 67-
1AC61-2
❑ ❑1 FE12-
0UF0
11.9 2.5 2000 90 90-
1AC61-2
❑ ❑
1
16.7 3.5 2000 92-
1AC61-2
❑ ❑1 FE13-
5UF0
FSC
23.9 5.0 2000 94-
1AC61-2
❑ ❑1 FE15-
0UF0
33.4 7.0 2000 961AC61-2
❑ ❑1 FE17-
0UF0
Incremental encoder TTL 2500 ppr A Incremental encoder TTL
2500 ppr
CT
12
Absolute encoder 20-bit + 12-bit multi-turn L Absolute encoder 20-bit +
12-bit multi-turn
DB
10
Note
You can select a SINAMICS V90 PN servo drive for all the SIMOTICS S
-1FL6 servo motors whose rated power values are
equal to or smaller than that specified as matching with this servo drive in the table above.
Getting Started
20 A5E37208904-003, 04/2017
2.3
Accessories
Fuse/Type-E combination motor controller
A fuse/type-E combination motor controller/circuit breaker can be used to protect the system. Integral solid state short circuit
protection does not provide branch circuit protection. Branch circuit protection must be provided in accordance with the
National Electrical Code and any additional local codes. Refer to the following table for the selection of fuses, type-E
combination motor controllers, and circuit breakers:
SINAMICS V90 PN 200 V variant
SINAMICS V90 PN
Recommended fuse
Type-E combination motor controller 1)
Power
supply
Frame
size
Rated
power
(kW)
CE-compliant
UL/cULcompliant
listed (JDDZ)
fuse
Rated
current
(A)
Rated voltage (VAC)
Rated
power
(hp)
Article number
1-phase,
200 VAC to
240 VAC
FSB 0.1 3NA3 801 (6
A)
6 A 2.8 to 4 230/240 1/3 3RV 2011-
1EA10
0.2 3NA3 801 (6
A)
6 A 2.8 to 4 230/240 1/3 3RV 2011-
1EA10
0.4 3NA3 803 (10
A)
10 A 5.5 to 8 230/240 1 3RV 2011-
1HA10
FSC 0.75 3NA3 805 (16
A)
20 A 9 to 12.5 230/240 2 3RV 2011-
1KA10
3-phase,
200 VAC to
240 VAC
FSB 0.1 3NA3 801 (6
A)
6 A 2.8 to 4 230/240 3/4 3RV 2011-
1EA10
0.2 3NA3 801 (6
A)
6 A 2.8 to 4 230/240 3/4 3RV 2011-
1EA10
0.4 3NA3 803 (10
A)
10 A 2.8 to 4 230/240 3/4 3RV 2011-
1EA10
FSC 0.75 3NA3 805 (16
A)
20 A 5.5 to 8 230/240 2 3RV 2011-
1HA10
FSD 1.0 3NA3 805 (16
A)
20 A 7 to 10 230/240 3 3RV 2011-
1JA10
1.5 3NA3 810 (25
A)
25 A 10 to 16 230/240 5 3RV 2011-
4AA10
2.0 3NA3 810 (25
A)
25 A 10 to 16 230/240 5 3RV 2011-
4AA10
1)
The above types for type-E combination motor controllers are listed in compliance with both CE and UL/cUL standards.
SINAMICS V90 PN 400 V variant
SINAMICS V90 PN
Recommended fuse type
Type-E combination motor controller 1)
Power
supply
Frame
size
Rated
power
(kW)
CE-compliant
UL/cULcompliant
listed (JDDZ)
fuse
Rated
current (A)
Rated voltage (VAC)
Rated
power
(hp)
Article number
3-phase,
380 VAC to
480 VAC
FSAA 0.4 3NA3 801-6
(6 A)
10 A 2.2 to 3.2 380/480 0.5 3RV 2021-
1DA10
FSA 0.75 3NA3 801-6
(6 A)
10 A 2.8 to 4 380/480 1 3RV 2021-
1EA10
1.0 3NA3 803-6
(10 A)
10 A 3.5 to 5 380/480 1.34 3RV 2021-
1FA10
FSB 1.5 3NA3 803-6
(10 A)
15 A 5.5 to 8 380/480 2 3RV 2021-
1HA10
2.0 3NA3 805-6
(16 A)
15 A 11 to 16 380/480 2.68 3RV 2021-
4AA10
Getting Started
A5E37208904-003, 04/2017
21
SINAMICS V90 PN
Recommended fuse type
Type-E combination motor controller 1)
Power
supply
Frame
size
Rated
power
(kW)
CE-compliant
UL/cULcompliant
listed (JDDZ)
fuse
Rated
current (A)
Rated voltage (VAC)
Rated
power
(hp)
Article number
FSC 3.5 3NA3 807-6
(20 A)
25 A 14 to 20 380/480 4.7 3RV 2021-
4BA10
5.0 3NA3 807-6
(20 A)
25 A 14 to 20 380/480 6.7 3RV 2021-
4BA10
7.0 3NA3 810-6
(25 A)
25 A 20 to 25 380/480 9.4 3RV 2021-
4DA10
1)
The above types for Type-E combination motor controllers are listed in compliance with both CE and UL/cUL standards.
For more information about the accessories, refer to SINAMICS V90, SIMOTICS S-1FL6 Operating Instructions.
WARNING
Requirements for United States/Canadian installations (UL/cUL)
Suitable for use on a circuit capable of delivering not more than 65000 rms Symmetrical Amperes, 480 VAC maximum for
400 V variants of drives or 240 VAC maximum for 200 V variant drives, when protected by UL/cUL listed (JDDZ) fuse or
type E combination motor controller. For each frame size AA, A, B, C and D, use 75 °C copper wire only.
This equipment is capable of providing internal motor overload protection according to UL508C.
For Canadian (cUL) installations the drive mains supply must be fitted with any external recommended suppressor with the
following features:
• Surge-protective devices; device shall be a Listed Surge-protective device (Category code VZCA and VZCA7)
• Rated nominal voltage 480/277 VAC, 50/60 Hz, 3-phase
• Clamping voltage VPR = 2000 V, IN = 3kA min, MCOV = 508 VAC, SCCR = 65 kA
• Suitable for Type 2 SPD application
•
Clamping shall be provided between phases and also between phase and ground
Product maintenance
The components are subject to continuous further development within the scope of product maintenance (improvements to
robustness, discontinuations of components, etc).
These further developments are "spare parts-compatible" and do not change the article number.
In the scope of such spare parts-compatible further developments, connector positions are sometimes changed slightly. This
does not cause any problems with proper use of the components. Please take this fact into consideration in special
installation situations (e.g. allow sufficient clearance for the cable length).
Use of third-party products
This document contains recommendations relating to third-party products. Siemens accepts the fundamental suitability of
these third-party products.
You can use equivalent products from other manufacturers.
Siemens does not accept any warranty for the properties of third-party products.
Getting Started
22 A5E37208904-003, 04/2017
2.4
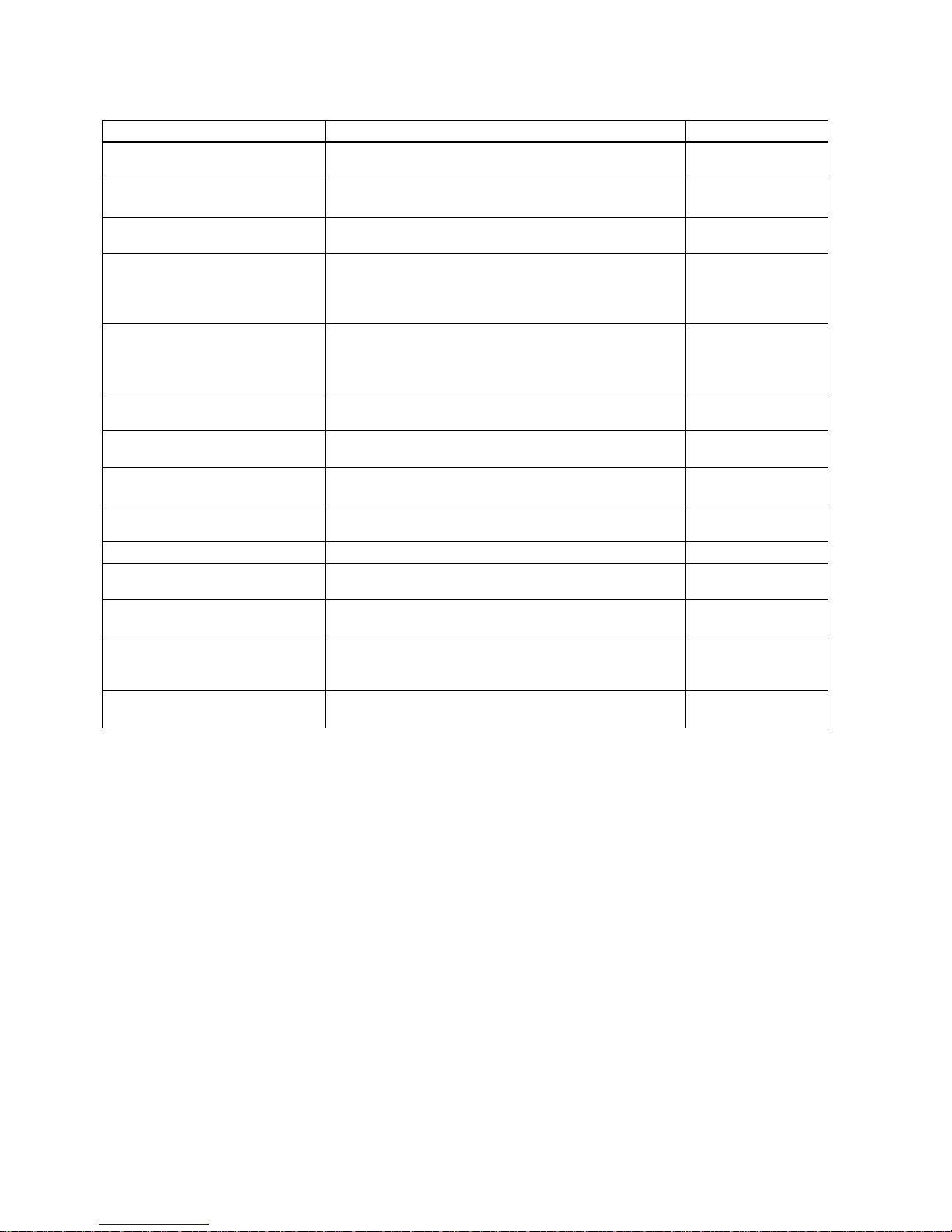
Function list
Function
Description
Control mode
Basic positioner (EPOS) Positions axes in absolute/relative terms with a motor en-
coder
EPOS
Speed control (S) Flexibly controls motor speed and direction through
PROFINET communication port
S
Safe Torque Off (STO) Safely disconnects torque-generating motor power supply
to prevent an unintentional motor restart
EPOS, S
One-button auto tuning Estimates the machine characteristic and sets the closed
loop control parameters (speed loop gain, speed integral
compensation, filter if necessary, etc.) without any user
intervention
EPOS, S
Real-time auto tuning Estimates the machine characteristic and sets the closed
loop control parameters (speed loop gain, speed integral
compensation, filter if necessary, etc.) continuously in real
time without any user intervention
EPOS, S
Resonance suppression Suppresses the mechanical resonance, such as workpiece
vibration and base shake
EPOS, S
Low frequency vibration suppres-
sion
Suppresses the low frequency vibration in the machine
system
EPOS
Speed limit Limits motor speed through internal speed limit commands
(two groups)
EPOS, S
Torque limit Limits motor torque through internal torque limit commands
(two groups)
EPOS, S
Basic operator panel (BOP)
Displays servo status on a 6-digit 7-segment LED display
EPOS, S
External braking resistor - DCP, R1 An external braking resistor can be used when the internal
braking resistor is insufficient for regenerative energy
EPOS, S
Digital inputs/outputs (DIs/Dos) Control signals and status signals can be assigned to four
programmable digital inputs and two digital outputs
EPOS, S
PROFINET communication Supports communication between the SINAMICS V90 PN
servo drive and PLC with PROFINET communication protocol
EPOS, S
SINAMICS V-ASSISTANT You can perform parameter settings, test operation, ad-
justment and other operations with a PC
EPOS, S
Getting Started
A5E37208904-003, 04/2017
23
2.5
Technical data
2.5.1
Technical data - servo drives
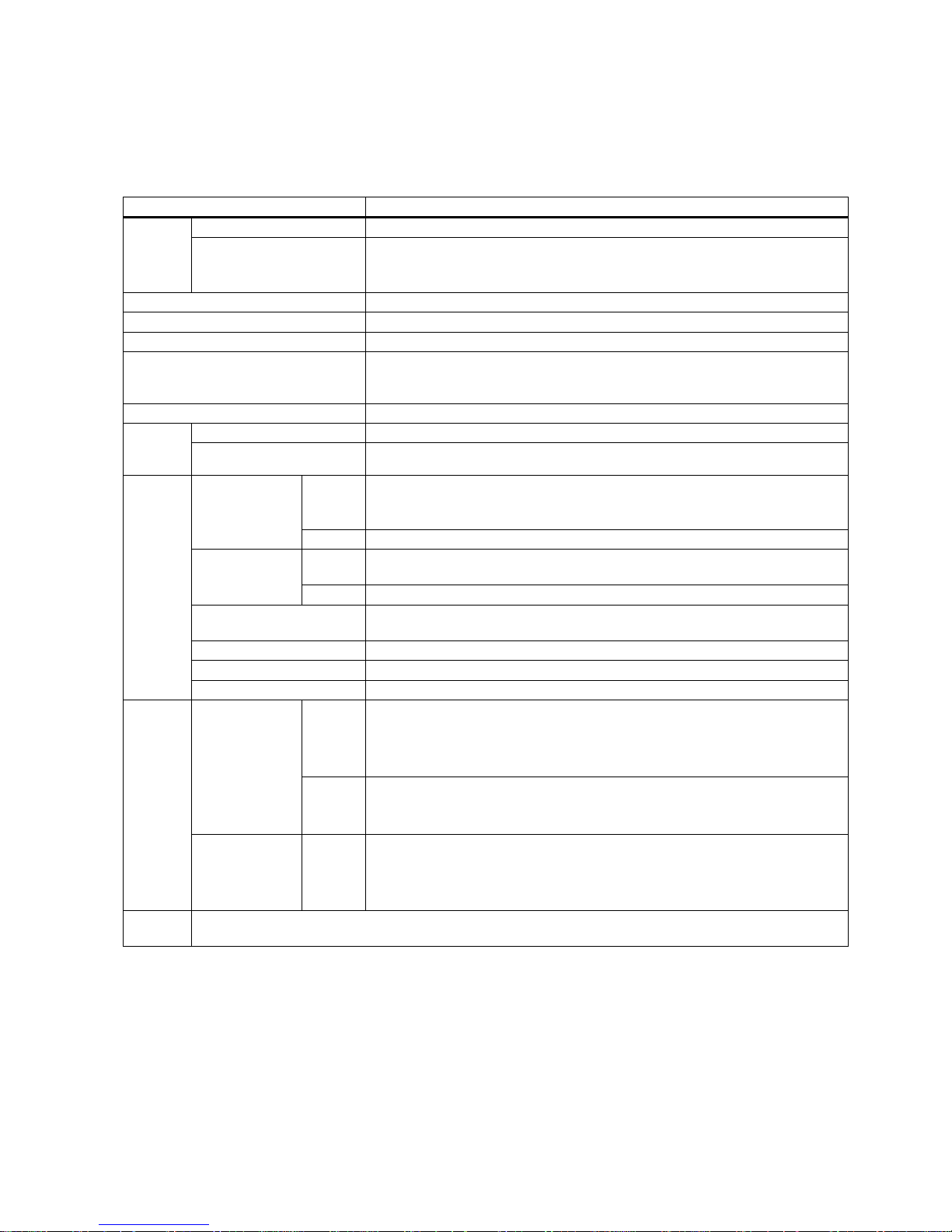
General technical data
Parameter
Description
24 VDC
power
supply
Voltage (V)
24 (-15% to +20%)
1)
Maximum current (A)
When using a motor without a brake: 1.5 A
When using a motor with a brake: 1.5 A + motor holding brake rated current (See
Section "Technical data - servo motors (Page 25)".)
Overload capability
300%
Control system
Servo control
Dynamic brake
Built-in
Protective functions Earthing fault protection, output short-circuit protection 2), overvolt-
age/undervoltage protection
3)
, I2t inverter,I2t motor, IGBT overtemperature pro-
tection 4)
Overvoltage criteria
Category III
Speed
control
mode
Speed control range
Internal speed command 1:5000
Torque limit
Set through a parameter
Environ-
mental
conditions
Surrounding air
temperature
Opera-
tion
0 °C to 45 °C: without power derating
45 °C to 55 °C: with power derating
Storage
-40 °C to +70 °C
Ambient humidi-
ty
Opera-
tion
< 90% (non-condensing)
Storage
90% (non-condensing)
Operating environment Indoors (without direct sunlight), free from corrosive gas, combustible gas, oil
gas, or dust
Altitude
≤ 1000 m (without power derating)
Degree of protection
IP 20
Degree of pollution
Class 2
Vibration Operation Shock Operational area II
Peak acceleration: 5 g, 30 ms and 15 g, 11 ms
Quantity of shocks: 3 per direction × 6 directions
Duration of shock: 1 s
Vibration
Operational area II
10 Hz to 58 Hz: 0.075 mm deflection
58 Hz to 200 Hz: 1 g vibration
Product packag-
ing
Vibration
2 Hz to 9 Hz: 3.5 mm deflection
9 Hz to 200 Hz: 1 g vibration
Quantity of cycles: 10 per axis
Sweep seed: 1 octave/min
Certifica-
tion
UL, CE, KC, C-Tick, EAC
1 )
When SINAMICS V90 PN works with a motor with a brake, the voltage tolerance of 24 VDC power supply must be -10%
to +10% to meet the voltage requirement of the brake.
2)
Integral solid state short circuit protection does not provide branch circuit protection. Branch circuit protection must be
provided in accordance with the National Electrical Code and any additional local codes.
3)
The V90 PN 200 V servo drive has an overvoltage threshold of 410 VDC and an undervoltage threshold of 150 VDC;
the V90 PN 400 V servo drive has an overvoltage threshold of 820 VDC and an undervoltage threshold of 320 VDC.
4)
SINAMICS V90 PN does not support motor overtemperature protection. Motor overtemperature is calculated by I2t and
protected by the output current from the drive.
Getting Started
24 A5E37208904-003, 04/2017
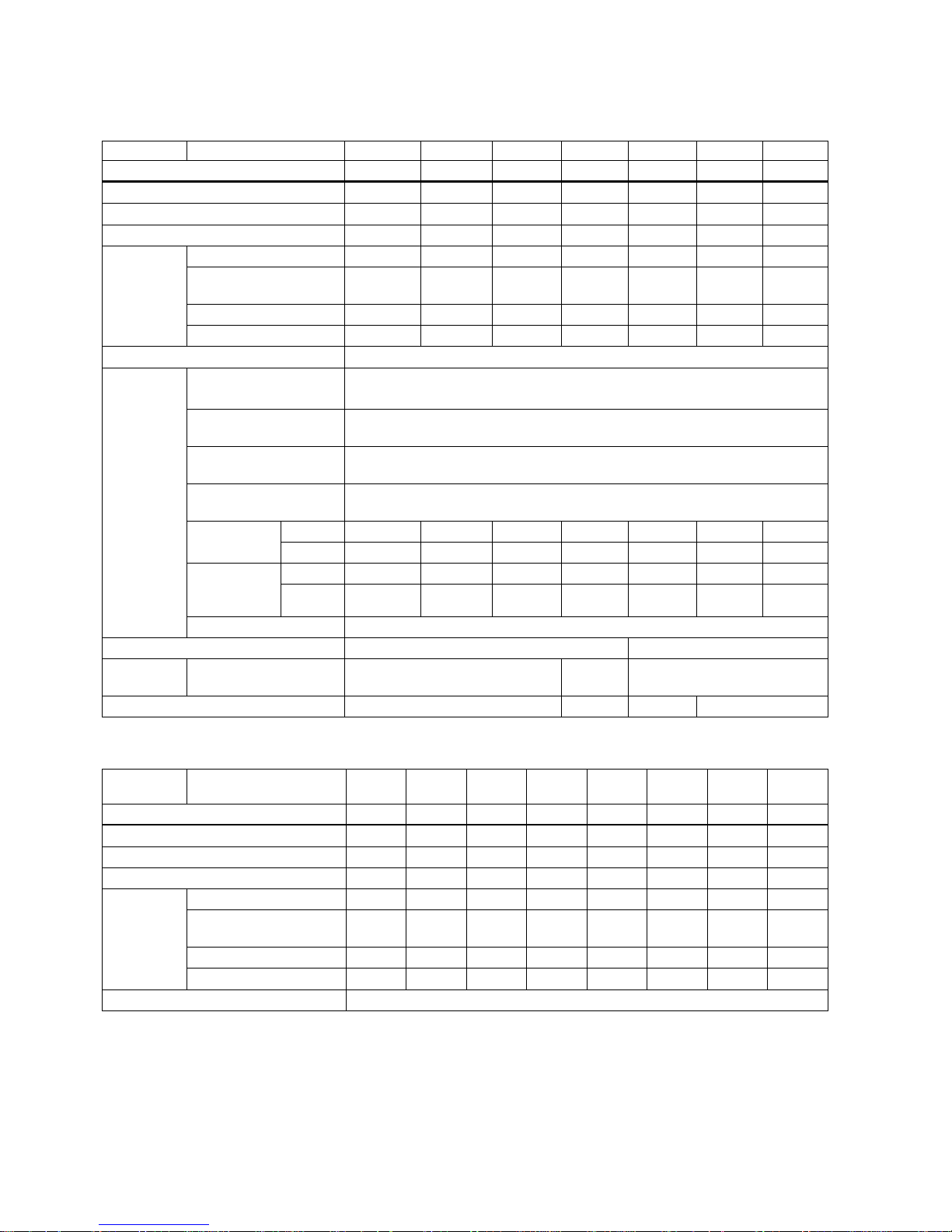
Specific technical data
SINAMICS V90 PN 200V variant
Article No.
6SL3210-5FB...
10-1UF0
10-2UF0
10-4UF1
10-8UF0
11-0UF1
11-5UF0
12-0UF0
Frame size
FSB
FSB
FSB
FSC
FSD
FSD
FSD
Rated output current (A)
1.2
1.4
2.6
4.7
6.3
10.6
11.6
Max. output current (A)
3.6
4.2
7.8
14.1
18.9
31.8
34.8
Max. supported motor power (kW)
0.1
0.2
0.4
0.75
1.0
1.5
2.0
Power loss
1)
Main circuit (W)
8
15
33
48
65
105
113
Regenerative resistor
(W)
5 5 7 9 13 25 25
Control circuit (W)
16
16
16
16
16
18
18
Total (W)
29
36
56
73
94
148
156
Output frequency (Hz)
0 to 330
Power supply
Voltage/frequency FSB and FSC: single phase/three phase 200 VAC to 240 VAC, 50/60 Hz
FSD: three phase 200 VAC to 240 VAC, 50/60 Hz
Permissible voltage
fluctuation
-15% to +10%
Permissible frequency
fluctuation
-10% to +10%
Permissible supply con-
figuration
TN, TT, IT
Rated input
current (A)
1-phase
2.5
3.0
5.0
10.4 - -
-
3-phase 1.5 1.8 3.0 5.0 7.0 11.0 12.0
Power supply
capacity
(kVA)
1-phase
0.5
0.7
1.2
2.0 - -
-
3-phase 0.5 0.7 1.1 1.9 2.7 4.2 4.6
Inrush current (A)
8.0
Cooling method
Self-cooled
Fan-cooled
Mechanical
design
Outline dimensions (W x
H x D, mm)
50 x 170 x 170 80 x 170
x 195
95 x 170 x 195
Weight (kg)
1.25
1.95
2.3
2.4
1)
The values here are calculated at rated load.
SINAMICS V90 PN 400V variant
Article No.
6SL3210-5FE...
104UF0
108UF0
110UF0
115UF0
120UF0
135UF0
150UF0
170UF0
Frame size
FSAA
FSA
FSA
FSB
FSB
FSC
FSC
FSC
Rated output current (A)
1.2
2.1
3.0
5.3
7.8
11.0
12.6
13.2
Max. output current (A)
3.6
6.3
9.0
13.8
23.4
33.0
37.8
39.6
Max. supported motor power (kW)
0.4
0.75
1.0
1.75
2.5
3.5
5.0
7.0
Power loss
1)
Main circuit (W)
12
29
32
84
96
92
115
138
Regenerative resistor
(W)
17 57 57 131 131 339 339 339
Control circuit (W)
32
32
35
35
35
36
36
36
Total (W)
61
118
124
250
262
467
490
513
Output frequency (Hz) 0 to 330

Getting Started
A5E37208904-003, 04/2017
25
Article No.
6SL3210-5FE...
104UF0
108UF0
110UF0
115UF0
120UF0
135UF0
150UF0
170UF0
Frame size
FSAA
FSA
FSA
FSB
FSB
FSC
FSC
FSC
Power supply
Voltage/frequency
Three phase 380 VAC to 480 VAC, 50/60 Hz
Permissible voltage fluc-
tuation
-15% to +10%
Permissible frequency
fluctuation
-10% to +10%
Permissible supply con-
figuration
TN, TT, IT
Rated input current (A)
1.5
2.6
3.8
6.6
9.8
13.8
15.8
16.5
Power supply capacity
(kVA)
1.7 3.0 4.3 7.6 11.1 15.7 18.0 18.9
Inrush current (A)
8.0
8.0
8.0
4.0
4.0
2.5
2.5
2.5
Cooling method
Self-cooled
Fan-cooled
Mechanical
design
Outline dimensions (W x
H x D, mm)
60 x
180 x
200
80 x 180 x 200 100 x 180 x 220 140 x 260 x 240
Weight (kg)
1.5
1.9
1.9
2.5
2.5
5.0
5.5
5.75
1)
The values here are calculated at rated load.
2.5.2
Technical data - servo motors
General technical data
Parameter
Description
Type of motor
Permanent-magnet synchronous motor
Cooling
Self-cooled
Relative humidity [RH]
90% (non-condensing at 30°C )
Installation altitude [m]
≤ 1000 (without power derating)
Thermal class
B
Vibration severity grade
A (according to IEC 60034-14)
Shock resistance [m/s2]
25 (continuous in axial direction); 50 (continuous in radial direction); 250
(in a short time of 6 ms)
Bearing lifetime [h]
> 20000
1)
Paint finish
Black
Protection degree of shaft
IP 65, with shaft oil seal
Type of construction
IM B5, IM V1, and IM V3
Positive rotation
Clockwise (default setting in servo drives)
Certification
CE, EAC
1)
This lifetime is only for refere
nce. When a motor keeps running at rated speed under rated load, replace its bearing after
20,000 to 30,000 hours of service time. Even if the time is not reached, the bearing must be replaced when unusual
noise, vibration, or faults are found.
Getting Started
26 A5E37208904-003, 04/2017
Specific technical data
SIMOTICS S-1FL6, low inertia servo motor
Article No.
1FL60...
22
24
32
34
42
44
52
54
Rated power [kW]
0.05
0.1
0.2
0.4
0.75 1 1.5 2 Rated torque [Nm]
0.16
0.32
0.64
1.27
2.39
3.18
4.78
6.37
Maximum torque [Nm]
0.48
0.96
1.91
3.82
7.2
9.54
14.3
19.1
Rated speed [rpm]
3000
Maximum speed [rpm]
5000
Rated frequency [Hz]
200
Rated current [A] 1.2 1.2 1.4 2.6 4.7 6.3 10.6 11.6
Maximum current [A]
3.6
3.6
4.2
7.8
14.2
18.9
31.8
34.8
Moment of inertia [10-4
kgm2]
0.031 0.052 0.214 0.351 0.897 1.15 2.04 2.62
Moment of inertia (with
brake) [10-4 kgm2]
0.038 0.059 0.245 0.381 1.06 1.31 2.24 2.82
Recommended load to mo-
tor inertia ratio
Max. 30x Max. 20x Max. 15x
Operating temperature [°C] 1FL602❑, 1FL603❑ and 1FL604❑: 0 to 40 (without power derating)
1FL605❑: 0 to 30 (without power derating) 1)
Storage temperature [°C]
-20 to +65
Maximum noise level [dB]
60
Holding
brake
Rated voltage
(V)
24 ± 10%
Rated current
(A)
0.25 0.3 0.35 0.57
Holding brake
torque [Nm]
0.32 1.27 3.18 6.37
Maximum
brake opening
time [ms]
35 75 105 90
Maximum
brake closing
time [ms]
10 10 15 35
Maximum
number of
emergency
stops
2000
2)
Oil seal lifetime [h]
3000 to 5000
Encoder lifetime [h]
> 20000 3)
Protection degree of motor
body
IP 65
Protection degree of cable
end connector
IP20 -
Weight [kg]
With brake
0.70
0.86
1.48
1.92
3.68
4.20
6.76
8.00
Without brake
0.47
0.63
1.02
1.46
2.80
3.39
5.35
6.56
1)
When the surrounding temperature is between 30 °C and 40 °C, the 1FL605 motor will have a power derating of 10%.
2)
Restricted emergency stop operation is permissible. Up to 2000 braking operations for the motors of 0.05 kW to 1 kW,
and 200 braking operations for the motors of 1.5 kW to 2 kW can be executed with 300% rotor moment of inertia as external moment of inertia from a speed of 3000 rpm without the brake being subject to an inadmissible amount of wear.
3)
This lifetime is only for reference. When a motor keeps running at 80% rated value and the surrounding temperature is
30 °C, the encoder lifetime can be ensured.
Getting Started
A5E37208904-003, 04/2017
27
Note
The data of rated torque, rated power, maximum torque in the above table allows a tolerance of 10%.
SIMOTICS S-1FL6, high inertia servo motor
Article No.
1FL60...
42
44
61
62
64
66
67
90
92
94
96
Rated power [kW]
0.40
0.75
0.75
1.00
1.50
1.75
2.00
2.5
3.5
5.0
7.0 1)
Rated torque [Nm]
1.27
2.39
3.58
4.78
7.16
8.36
9.55
11.9
16.7
23.9
33.4
Maximum torque [Nm]
3.8
7.2
10.7
14.3
21.5
25.1
28.7
35.7
50.0
70.0
90.0
Rated speed [rpm]
3000
2000
2000
Maximum speed [rpm]
4000
3000
3000
2500
2000
Rated frequency [Hz]
200
133
133
Rated current [A]
1.2
2.1
2.5
3.0
4.6
5.3
5.9
7.8
11.0
12.6
13.2
Maximum current [A]
3.6
6.3
7.5
9.0
13.8
15.9
17.7
23.4
33.0
36.9
35.6
Moment of inertia [10-4
kgm2]
2.7
5.2
8.0
15.3/1
1.7
2)
15.3
22.6
29.9
47.4
69.1
90.8
134.3
Moment of inertia (with
brake) [10-4 kgm2]
3.2
5.7
9.1
16.4/1
3.5 2)
16.4
23.7
31.0
56.3
77.9
99.7
143.2
Recommended load to
motor inertia ratio
Max. 10x
Max. 5x
Max. 5x
Operating temperature [°C]
0 to 40 (without power derating)
Storage temperature [°C]
-20 to +65
Maximum noise level [dB]
65
70
70
Holding
brake
Rated voltage
(V)
24 ± 10%
Rated current
(A)
0.88 1.44 1.88
Holding brake
torque [Nm]
3.5
12
30
Maximum
brake opening
time [ms]
60 180 220
Maximum
brake closing
time [ms]
45
60
115
Maximum
number of
emergency
stops
2000 3)
Oil seal lifetime [h]
5000
Encoder lifetime [h]
> 20000
4)
Degree of protection
IP65, with shaft oil seal
Weight of
incremental encoder
motor [kg]
With brake 2)
4.6/4.
8
6.4/6.
6
8.6/8.
8
11.3/1
0.1
11.3/1
1.5
14.0/1
4.2
16.6/1
6.8
21.3/2
1.5
25.7/2
5.9
30.3/3
0.5
39.1/3
9.3
Without brake
2)
3.3/3.4 5.1/5.2 5.6/5.7 8.3/7.0 8.3/8.4 11.0/1
1.1
13.6/1
3.7
15.3/1
5.4
19.7/1
9.8
24.3/2
4.4
33.2/3
3.3
Getting Started
28 A5E37208904-003, 04/2017
Article No.
1FL60...
42
44
61
62
64
66
67
90
92
94
96
Weight of
absolute
encoder
motor [kg]
With brake 2) 4.4/4.5 6.2/6.3 8.3/8.4 11.0/9
.7
11.0/1
1.1
13.6/1
3.7
16.3/1
6.4
20.9/2
1.0
25.3/2
5.4
29.9/3
0.0
38.7/3
8.8
Without brake
2)
3.1/3.
2
4.9/5.
0
5.3/5.
4
8.0/6.
7
8.0/8.
1
10.7/1
0.8
13.3/1
3.4
14.8/1
4.9
19.3/1
9.4
23.9/2
4.0
32.7/3
2.8
1)
When the surrounding temperature is higher than 30 °C, the 1FL6096 motors with brake will have a power derating of
10%.
2)
The former value indicates the data for high inertia motors with straight connectors; the latter value indicates the data for
high inertia motors with angular connectors.
3)
Restricted emergency stop operation is permissible. Up to 2000 braking operations can be executed with 300% rotor
moment of inertia as external moment of inertia from a speed of 3000 rpm without the brake being subject to an inadmissible amount of wear.
4)
This lifetime is only for reference. When a motor keeps running at 80% rated value and the surrounding temperature is
30 °C, the encoder lifetime can be ensured.
Note
The data of rated torque, rated power, and maximum torque in th
e above table allows a tolerance of 10%.
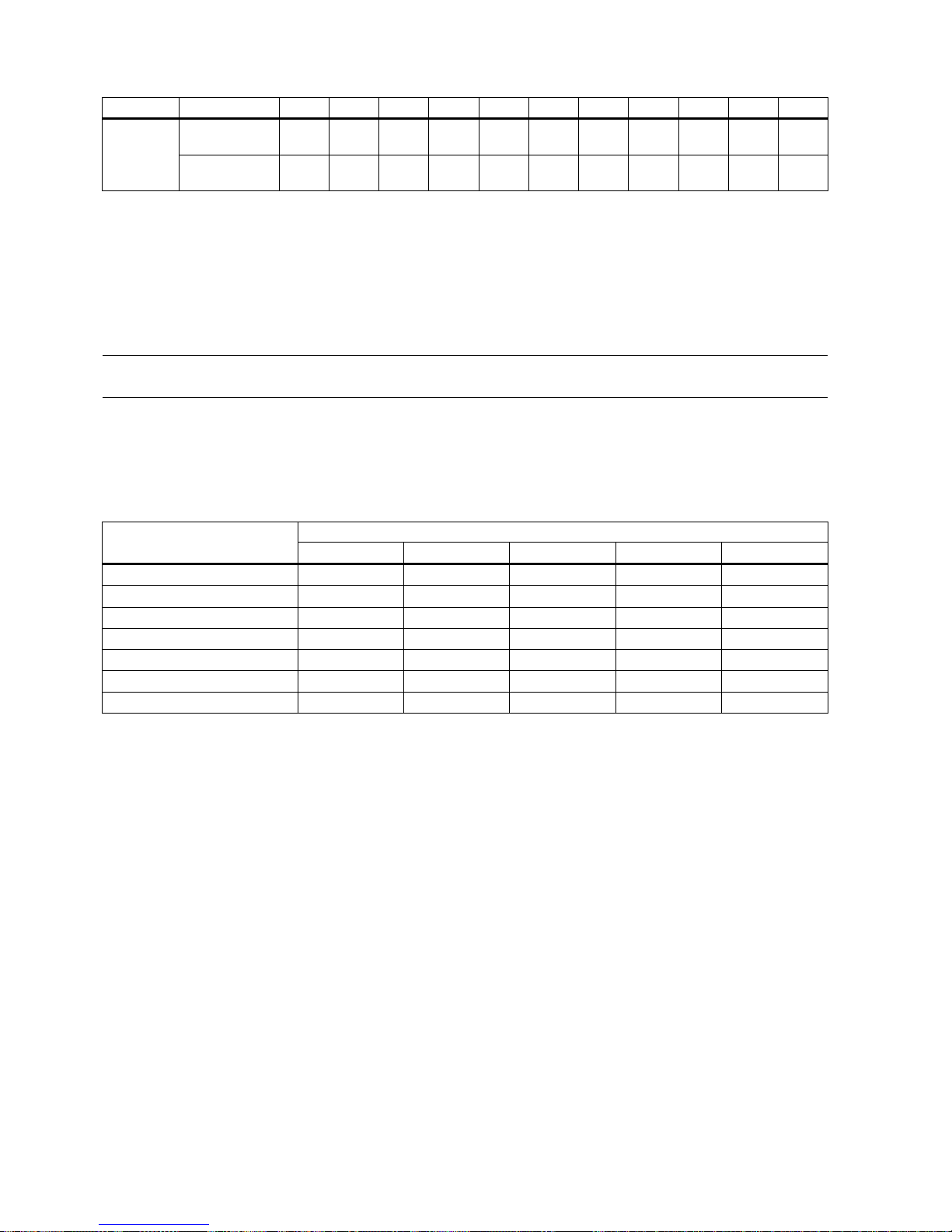
Power derating
For deviating conditions (surrounding temperature > 40 °C or installation altitude > 1000 m above sea level) the permissible
torque/power must be determined from the following table. Surrounding temperatures and installation altitudes are rounded
off to 5 °C and 500 m respectively.
Power derating as a function of the installation altitude and ambient temperature
Installation altitude above sea
level (m)
Surrounding temperature in °C
< 30
30 to 40
45
50
55
1000
1.07
1.00
0.96
0.92
0.87
1500 1.04 0.97 0.93 0.89 0.84
2000
1.00
0.94
0.90
0.86
0.82
2500
0.96
0.90
0.86
0.83
0.78
3000
0.92
0.86
0.82
0.79
0.75
3500
0.88
0.82
0.79
0.75
0.71
4000
0.82
0.77
0.74
0.71
0.67
2.5.3
Address of CE-authorized manufacturer
The address of CE-authorized manufacturer is as follows:
Siemens AG
Digital Factory
Motion Control
Frauenauracher Straße 80
DE-91056 Erlangen
Germany
Getting Started
A5E37208904-003, 04/2017
29
3
Mounting
3.1
Mounting the drive
Protection against the spread of fire
The device may be operated only in closed housings or in control cabinets with protective covers that are closed, and when
all of the protective devices are used. The installation of the device in a metal control cabinet or the protection with another
equivalent measure must prevent the spread of fire and emissions outside the control cabinet.
Protection against condensation or electrically conductive contamination
Protect the device, e.g. by installing it in a control cabinet with degree of protection IP54 according to IEC 60529 or
NEMA 12. Further measures may be necessary for particularly critical operating conditions.
If condensation or conductive pollution can be excluded at the installation site, a lower degree of control cabinet protection
may be permitted.
WARNING
Death or severe personal injury from harsh installation environment
A harsh installation environment will jeopardize personal safety and equipment. Therefore,
• Do not install the drive and the motor in an area subject to inflammables or combustibles, water or corrosion hazards.
• Do not install the drive and the motor in an area where it is likely to be exposed to constant vibrations or physical
shocks.
•
Do not keep the drive exposed to strong electro-magnetic interference.
CAUTION
Hot surface
During operation and for a short time after switching-off the drive, the surfaces of the drive can reach a high temperature.
Avoid coming into direct contact with the drive surface.
For mounting conditions, see Technical data - servo drives (Page 23).
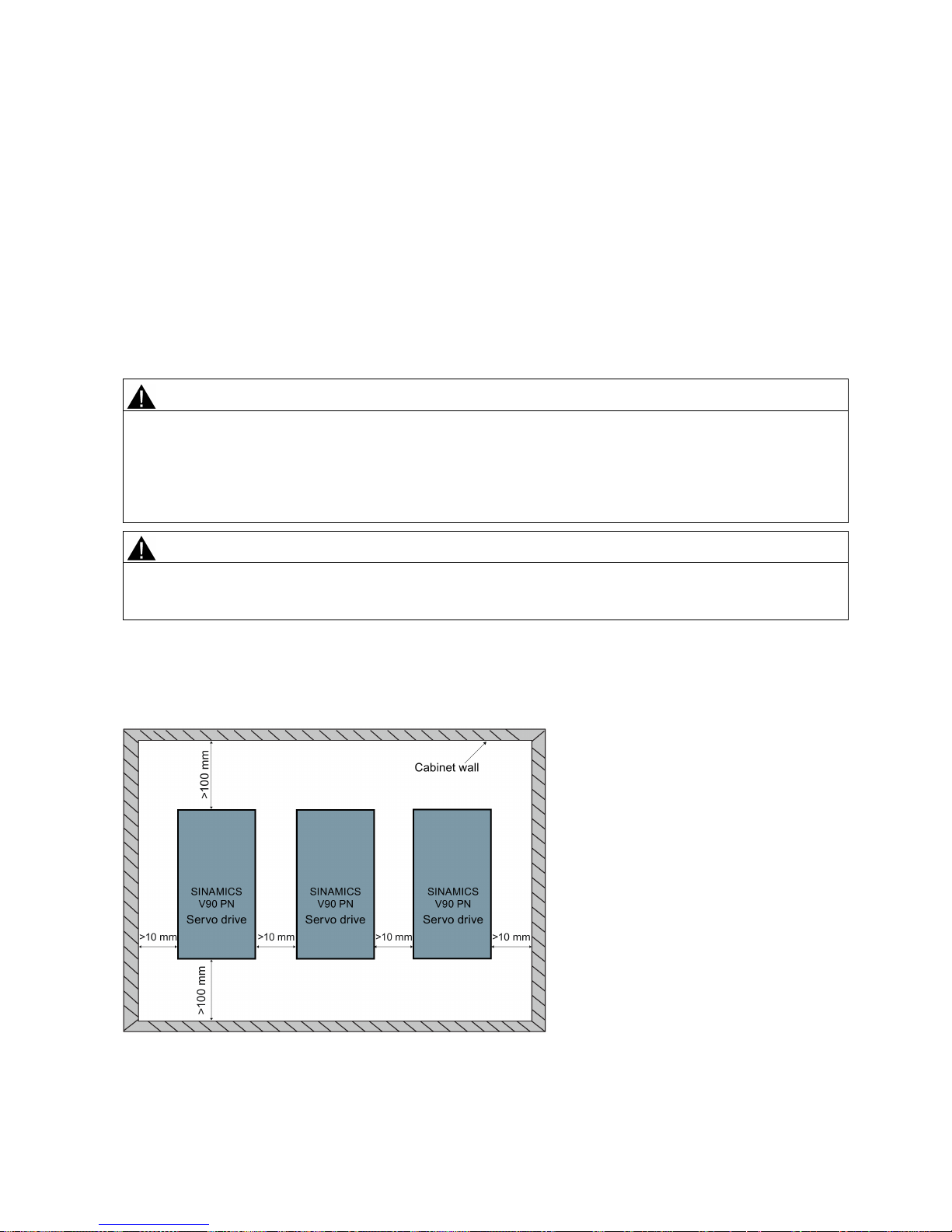
Mounting orientation and clearance
Mount the drive vertically in a shielded cabinet and observe the mounting clearances specified in the illustration below:
Getting Started
30 A5E37208904-003, 04/2017
Note
The drive must be derated to 80% when the following conditions are satisfied:
•
The surrounding temperature is 0 °C to 45 °C, and the mounting clearance is less than 10
mm. In this case, the minimum
mounting clearance should not be less than 5 mm.
•
The surrounding temperature is 45 °C to 55 °C. In this case, the minimum mounting clearance should not be less than
20 mm.
SINAMICS V90 PN 200V variant (unit: mm)
 Loading...
Loading...