

Page 1
MICROMASTER 430
Parameter List Issue 03/02
User Documentation
6SE6400-5AF00-0BP0
Page 2
Getting Started Guide
Is for quick commissioning with SDP and BOP-2.
Operating Instructions
Gives information about features of the
MICROMASTER 430, Installation, Commissioning,
Control modes, System Parameter structure,
Troubleshooting, Specifications and available options
of the MICROMASTER 430
Parameter List
The Parameterlist containes the description of all
Parameters structured in functional order and a
detailed description. The Parameter list also includes
a series of function plans.
Catalogues
In the catalogue you will find all needs to select a
certain inverter, as well as filters chokes, operator
panels or communications options.
Page 3
V
r
Parameter List
1
MICROMASTER 430
Parameter List
User Documentation
Function Diagrams
Alarms and
Warnings
2
3
alid fo
Converter Type
MICROMASTER 430 Software V2.0
Issue 03/02
Issue 03/02
Page 4
Parameters Issue 03/02
y
Warning
!
Please refer to all Definitiones and Warnings contained in the Operating Instructions. You will find the
Operating Instructions on the Docu CD delivered with your inverter. If the CD is lost, it can be ordered
via your local Siemens department under the Order No. 6SE6400-5FA00-1AG00.
Further information can be obtained from Internet website:
http://www.siemens.de/micromaster
Approved Siemens Quality for Software and Training
is to DIN ISO 9001, Reg. No. 2160-01
The reproduction, transmission or use of this document, or its
contents is not permitted unless authorized in writing.
Offenders will be liable for damages. All rights including rights
created by patent grant or registration of a utility model or
design are reserved.
© Siemens AG 2001. All Rights Reserved.
MICROMASTER® is a registered trademark of Siemens
Other functions not described in this document may be
available. However, this fact shall not constitute an obligation
to supply such functions with a new control, or when
servicing.
We have checked that the contents of this document
correspond to the hardware and software described. There
may be discrepancies nevertheless, and no guarantee can be
given that they are completely identical. The information
contained in this document is reviewed regularly and any
necessary changes will be included in the next edition. We
welcome suggestions for improvement.
Siemens handbooks are printed on chlorine-free paper that
has been produced from managed sustainable forests. No
solvents have been used in the printing or binding process.
Document subject to change without prior notice.
Order number: 6SE6400-5AF00-0BP0
Printed in the Federal of German
Siemens-Aktiengesellschaft.
Parameter List MICROMASTER 430
4 6SE6400-5AF00-0BP0
Page 5

Issue 03/02 Parameters
Parameters MICROMASTER 430
This Parameter List must only be used together with the Operating Instructions or the
Reference Manual of the MICROMASTER 430. Please pay special attention to the
Warnings, Cautions, Notices and Notes contained in these manuals.
Table of Contents
1 Parameters.................................................................................................................... 7
1.1 Introduction to MICROMASTER 430 System Parameters ............................................ 7
1.2 Quick commissioning (P0010=1) ................................................................................... 9
1.3 Parameter Description.................................................................................................. 11
2 Function Diagrams................................................................................................... 169
3 Faults and Alarms .................................................................................................... 191
3.1 Fault messages .......................................................................................................... 191
3.2 Alarm messages......................................................................................................... 196
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
5
Page 6

Parameters Issue 03/02
Parameter List MICROMASTER 430
6 6SE6400-5AF00-0BP0
Page 7
Issue 03/02 Parameters
1 Parameters
1.1 Introduction to MICROMASTER 430 System Parameters
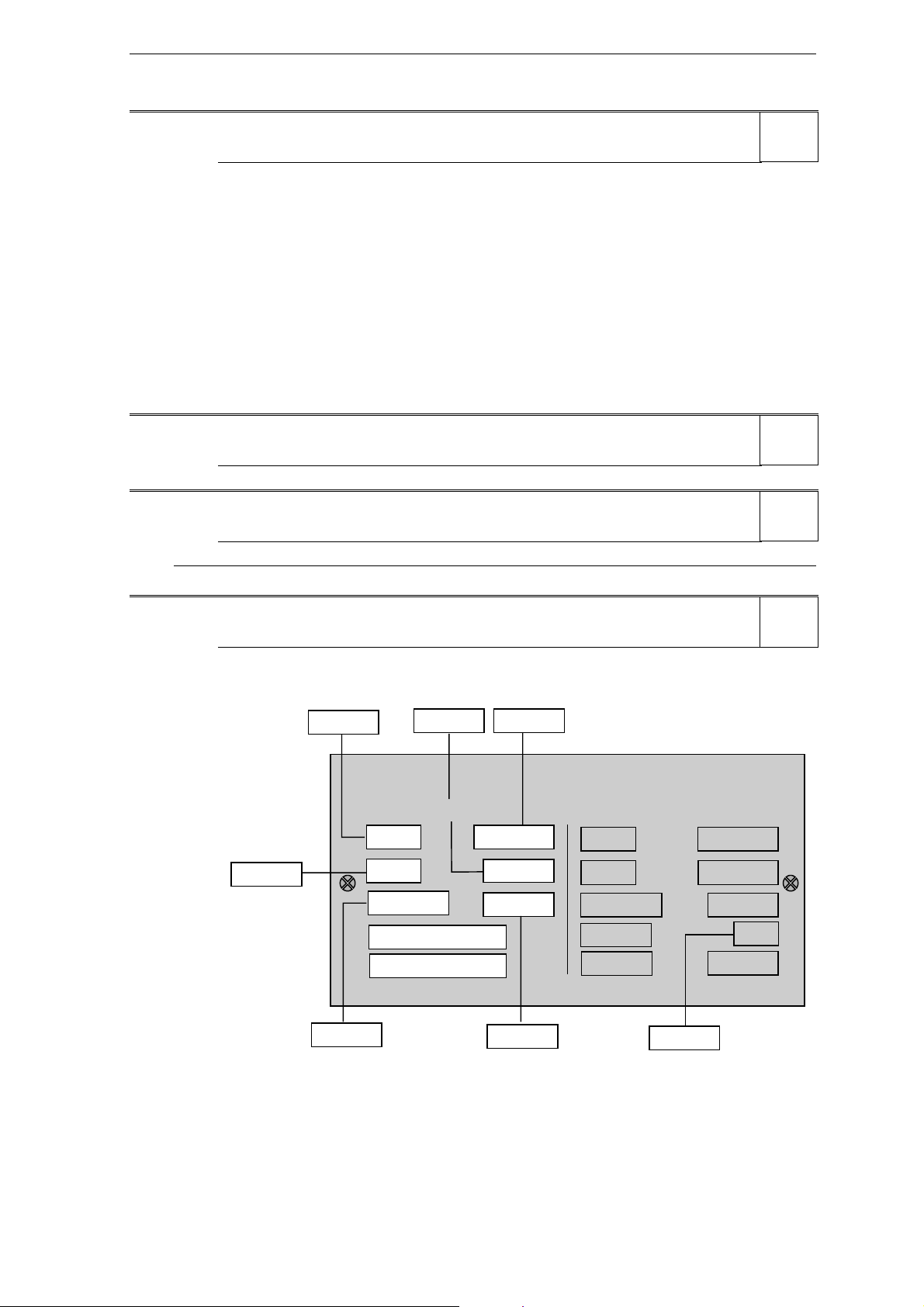
The layout of the parameter description is as follows.
1 Par number 2 Parameter name 9 Min:
[index] 3 CStat: 5 Datatype 7 Unit: 10 Def:
4 P-Group: 6 active: 8 Quick Comm: 11 Max:
13 Description:
1. Parameter number
Indicates the relevant parameter number. The numbers used are 4-digit numbers
in the range 0000 to 9999. Numbers prefixed with an “r” indicate that the
parameter is a “read-only” parameter, which displays a particular value but cannot
be changed directly by specifying a different value via this parameter number (in
such cases, dashes “-“ are entered at the points “Unit”, “Min”, “Def” and “Max” in
the header of the parameter description.
All other parameters are prefixed with a “P”. The values of these parameters can
be changed directly in the range indicated by the “Min” and “Max” settings in the
header.
[index] indicates that the parameter is an indexed parameter and specifies the
number of indices available.
2. Parameter name
Indicates the name of the relevant parameter. Certain parameter names include
the following abbreviated prefixes: BI, BO, CI, and CO followed by a colon.
These abbreviations have the following meanings:
BI = Binector input, i.e. parameter selects the source of a
BO = Binector output, i.e. parameter connects as a binary signal
P9999.C
r9999
(0)
binary signal
12 Level:
2
CI = Connector input, i.e. parameter selects the source of an
CO = Connector output, i.e. parameter connects as an analog
P9999.D
(999:9)
r9999 [99]
analog signal
signal
CO/BO = Connector/Binector output, i.e. parameter connects as an
r9999
r9999
analog signal and/or as a binary signal
To make use of BiCo you will need access to the full parameter list. At this level
many new parameter settings are possible, including BiCo functionality. BiCo
functionality is a different, more flexible way of setting and combining input and
output functions. It can be used in most cases in conjunction with the simple,
level 2 settings.
The BiCo system allows complex functions to be programmed. Boolean and
mathematical relationships can be set up between inputs (digital, analog, serial
etc.) and outputs (inverter current, frequency, analog output, relays, etc.).
3. CStat
Commissioning status of the parameter. Three states are possible:
Commissioning C
Ready to run U
Run T
This indicates when the parameter can be changed. One, two or all three states
may be specified. If all three states are specified, this means that it is possible to
change this parameter setting in all three inverter states
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
7
Page 8

Parameters Issue 03/02
4. P-Group
Indicates the functional group of the particular.
Note
Parameter P0004 (parameter filter) acts as a filter and focuses access to
parameters according to the functional group selected.
5. Datatype
The data types available are shown in the table below.
Notation Meaning
U16 16-bit unsigned
U32 32-bit unsigned
I16 16-bit integer
I32 32-bit integer
Float Floating point
6. Active
Indicates whether
♦ Immediately changes to the parameter values take effective immediately
after they have been entered, or
♦ first confirm the “P” button on the operator panel (BOP or AOP) must be
pressed before the changes take effect.
7. Unit
Indicates the unit of measure applicable to the parameter values
8. QuickComm
Indicates whether or not (Yes or No) a parameter can only be changed during
quick commissioning, i.e. when P0010 (parameter groups for commissioning) is
set to 1 (quick commissioning).
9. Min
Indicates the minimum value to which the parameter can be set.
10. Def
Indicates the default value, i.e. the value which applies if the user does not specify
a particular value for the parameter.
11. Max
Indicates the maximum value to which the parameter can be set.
12. Level
Indicates the level of user access. There are four access levels: Standard,
Extended, Expert and Service. The number of parameters that appear in each
functional group depends on the access level set in P0003 (user access level).
13. Description
The parameter description consists of the sections and contents listed below.
Some of these sections and contents are optional and will be omitted on a caseto-case basis if not applicable.
Description: Brief explanation of the parameter function.
Diagram: Where applicable, diagram to illustrate the effects of parameters
on a characteristic curve, for example
Settings: List of applicable settings. These include
Possible settings, Most common settings, Index and Bitfields
Example: Optional example of the effects of a particular parameter setting.
Dependency: Any conditions that must be satisfied in connection with this
parameter. Also any particular effects, which this parameter has
on other parameter(s) or which other parameters have on this
one.
Warning / Caution / Notice / Note:
Important information which must be heeded to prevent personal
injury or damage to equipment / specific information which
should be heeded in order to avoid problems / information which
may be helpful to the user
More details: Any sources of more detailed information concerning the
particular parameter.
Parameter List MICROMASTER 430
8 6SE6400-5AF00-0BP0
Page 9
Issue 03/02 Parameters
1.2 Quick commissioning (P0010=1)
The following parameters are necesarry for quick commissioning (P0010=1).
No Name Access level Cstat
P0100 Europe / North America 1 C
P0205 Inverter application 3 C
P0300 Select motor type 2 C
P0304 Motor voltage rating 1 C
P0305 Motor current rating 1 C
P0307 Motor power rating 1 C
P0308 Motor cosPhi rating 2 C
P0309 Motor efficiency rating 2 C
P0310 Motor frequency rating 1 C
P0311 Motor speed rating 1 C
P0320 Motor magnetizing current 3 CT
P0335 Motor cooling 2 CT
P0640 Motor overload factor [%] 2 CUT
P0700 Selection of command source 1 CT
P1000 Selection of frequency setpoint 1 CT
P1080 Min. speed 1 CUT
P1082 Max. speed 1 CT
P1120 Ramp-up time 1 CUT
P1121 Ramp-down time 1 CUT
P1135 OFF3 ramp-down time 2 CUT
P1300 Control mode 2 CT
P1500 Selection of torque setpoint 2 CT
P1910 Select motor data identification 2 CT
P3900 End of quick commissioning 1 C
When P0010=1 is chosen, P0003 (user access level) can be used to select the
parameters to be accessed. This parameter also allows selection of a user-defined
parameter list for quick commissioning.
At the end of the quick commissioning sequence, set P3900 = 1 to carry out the
necessary motor calculations and clear all other parameters (not included in P0010=1)
to their default settings.
Note
This applies only in Quick Commissioning mode.
Reset to Factory default
To reset all parameters to the factory default settings; the following parameters should
be set as follows:
Set P0010=30.
Set P0970=1.
Note
The reset process takes approximately 10 seconds to complete. Reset to Factory
default
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
9
Page 10
Parameters Issue 03/02
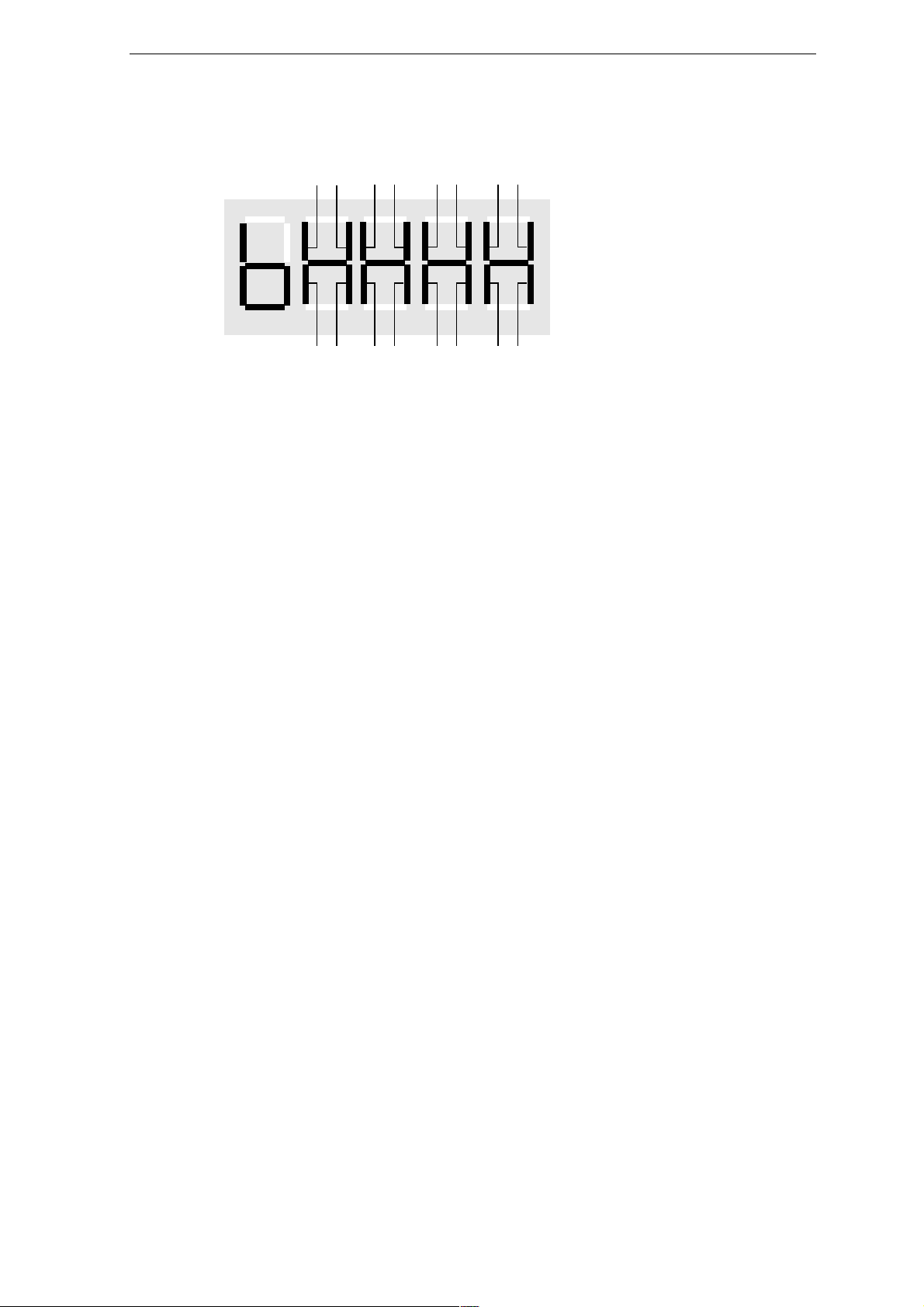
Seven-segment display
The seven-segment display is structured as follows:
9 811 1013 1215 14Segment Bit
Segment Bit
1 03 25 47 6
The significance of the relevant bits in the display is described in the status and
control word parameters.
Parameter List MICROMASTER 430
10 6SE6400-5AF00-0BP0
Page 11
Issue 03/02 Parameters
1.3 Parameter Description
r0000 Drive display Min: -
Datatype: U16 Unit: - Def: -
P-Group: ALWAYS Max: -
Displays the user selected output as defined in P0005.
Note:
Pressing the "Fn" button for 2 seconds allows the user to view the values of DC link voltage, output
frequency, output voltage, output current, and chosen r0000 setting (defined in P0005).
r0002 Drive state Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays actual drive state.
Settings:
0 Commissioning mode (P0010 != 0)
1 Drive ready
2 Drive fault active
3 Drive starting (DC-link precharging)
4 Drive running
5 Stopping (ramping down)
Dependency:
State 3 visible only while precharging DC link, and when externally powered communications board is fitted.
P0003 User access level Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 1
P-Group: ALWAYS Active: first confirm QuickComm. No Max: 4
Defines user access level to parameter sets. The default setting (standard) is sufficient for most simple
applications.
Settings:
0 User defined parameter list - see P0013 for details on use
1 Standard: Allows access into most frequently used parameters.
2 Extended: Allows extended access e.g. to inverter I/O functions.
3 Expert: For expert use only.
4 Service: Only for use by authorized service personal - password protected.
P0004 Parameter filter Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: ALWAYS Active: first confirm QuickComm. No Max: 22
Filters available parameters according to functionality to enable a more focussed approach to
commissioning.
Example:
P0004 = 22 specifies that only PID parameters will be visible.
Settings:
0 All parameters
2 Inverter
3 Motor
4 Speed sensor
5 Technol. application / units
7 Commands, binary I/O
8 ADC and DAC
10 Setpoint channel / RFG
12 Drive features
13 Motor control
20 Communication
21 Alarms / warnings / monitoring
22 Technology controller (e.g. PID)
Dependency:
Parameters marked "Quick Comm: Yes" in the parameter header can only be set when P0010 = 1 (Quick
Commissioning).
Note:
The inverter will start with any setting of P0004.
Level:
1
Level:
3
Level:
1
Level:
1
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
11
Page 12
Parameters Issue 03/02
P0005[3] Display selection Min: 2
CStat: CUT Datatype: U16 Unit: - Def: 21
P-Group: FUNC Active: first confirm QuickComm. No Max: 2890
Selects display for parameter r0000 (drive display).
Settings:
21 Actual frequency
25 Output voltage
26 DC link voltage
27 Output current
Index:
P0005[0] : 1st. Drive data set (DDS)
P0005[1] : 2nd. Drive data set (DDS)
P0005[2] : 3rd. Drive data set (DDS)
Notice:
These settings refer to read only parameter numbers ("rxxxx").
Details:
See relevant "rxxxx" parameter descriptions.
P0006 Display mode Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 2
P-Group: FUNC Active: first confirm QuickComm. No Max: 4
Defines mode of display for r0000 (drive display).
Settings:
0 In Ready state alternate between setpoint and output frequency. In run display output frequency
1 In Ready state display setpoint. In run display output frequency.
2 In Ready state alternate between P0005 value and r0020 value. In run display P0005 value
3 In Ready state alternate between r0002 value and r0020 value. In run display r0002 value
4 In all states just display P0005
Note:
When inverter is not running, the display alternates between the values for "Not Running" and "Running".
Level:
2
Level:
3
Per default, the setpoint and actual frequency values are displayed alternately.
P0007 Backlight delay time Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 2000
Defines time period after which the backlight display turns off if no operator keys have been pressed.
Value:
P0007 = 0:
Backlight always on (default state).
P0007 = 1 - 2000:
Number of seconds after which the backlight will turn off.
Level:
3
Parameter List MICROMASTER 430
12 6SE6400-5AF00-0BP0
Page 13
Issue 03/02 Parameters
P0010 Commissioning parameter
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: ALWAYS Active: first confirm QuickComm. No Max: 30
Filters parameters so that only those related to a particular functional group are selected.
Settings:
0 Ready
1 Quick commissioning
2 Inverter
29 Download
30 Factory setting
Dependency:
Reset to 0 for inverter to run.
P0003 (user access level) also determines access to parameters.
Note:
P0010 = 1
The inverter can be commissioned very quickly and easily by setting P0010 = 1. After that only the important
parameters (e.g.: P0304, P0305, etc.) are visible. The value of these parameters must be entered one after
the other. The end of quick commissioning and the start of internal calculation will be done by setting P3900
= 1 - 3. Afterward parameter P0010 will be reset to zero automatically.
P0010 = 2
For service purposes only.
P0010 = 29
To transfer a parameter file via PC tool (e.g.: DriveMonitor, STARTER) parameter P0010 will be set to 29 by
the PC tool. When download has been finished PC tool resets parameter P0010 to zero.
P0010 = 30
When resetting the parameters of inverter P0010 must be set to 30. Resetting of the parameters will be
started by setting parameter P0970 = 1. The inverter will automatically reset all its parameters to their
default settings. This can prove beneficial if you experience problems during parameter setup and wish to
start again. Duration of factory setting will take about 60 s.
Min: 0
Level:
1
If P3900 is not 0 (0 is the default value), this parameter is automatically reset to 0.
P0011 Lock for user defined parameter Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 65535
Details:
See parameter P0013 (user defined parameter)
P0012 Key for user defined parameter Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 65535
Details:
See parameter P0013 (user defined parameter).
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
13
Page 14
Parameters Issue 03/02
P0013[20] User defined parameter Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 65535
Defines a limited set of parameters to which the end user will have access.
Instructions for use:
Step 1: Set P0003 = 3 (expert user)
Step 2: Go to P0013 indices 0 to 16 (user list)
Step 3: Enter into P0013 index 0 to 16 the parameters required to be visible in the user-defined list.
The following values are fixed and cannot be changed:
- P0013 index 19 = 12 (key for user defined parameter)
- P0013 index 18 = 10 (commissioning parameter filter)
- P0013 index 17 = 3 (user access level)
Step 4: Set P0003 = 0 to activate the user defined parameter.
Index:
P0013[0] : 1st user parameter
P0013[1] : 2nd user parameter
P0013[2] : 3rd user parameter
P0013[3] : 4th user parameter
P0013[4] : 5th user parameter
P0013[5] : 6th user parameter
P0013[6] : 7th user parameter
P0013[7] : 8th user parameter
P0013[8] : 9th user parameter
P0013[9] : 10th user parameter
P0013[10] : 11th user parameter
P0013[11] : 12th user parameter
P0013[12] : 13th user parameter
P0013[13] : 14th user parameter
P0013[14] : 15th user parameter
P0013[15] : 16th user parameter
P0013[16] : 17th user parameter
P0013[17] : 18th user parameter
P0013[18] : 19th user parameter
P0013[19] : 20th user parameter
Dependency:
First, set P0011 ("lock") to a different value than P0012 ("key") to prevent changes to user-defined
parameter. Then, set P0003 to 0 to activate the user-defined list.
Level:
3
When locked and the user-defined parameter is activated, the only way to exit the user-defined parameter
(and view other parameters) is to set P0012 ("key") to the value in P0011 ("lock").
Note:
Alternatively, set P0010 = 30 (commissioning parameter filter = factory setting) and P0970 = 1 (factory
reset) to perform a complete factory reset.
The default values of P0011 ("lock") and P0012 ("key") are the same.
r0018 Firmware version Min: -
Datatype: Float Unit: - Def: -
P-Group: INVERTER Max: -
Displays version number of installed firmware.
Level:
3
Parameter List MICROMASTER 430
14 6SE6400-5AF00-0BP0
Page 15
Issue 03/02 Parameters
r0019 CO/BO: BOP control word
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays status of operator panel commands.
The settings below are used as the "source" codes for keypad control when connecting to BICO input
parameters.
Bitfields:
Bit00 ON/OFF1 0 NO
1 YES
Bit01 OFF2: Electrical stop 0 YES
1NO
Bit08 JOG right 0 NO
1 YES
Bit11 Reverse (setpoint inversion) 0 NO
1 YES
Bit12 Hand Operation 0 NO
1 YES
Bit13 Motor potentiometer MOP up 0 NO
1 YES
Bit14 Motor potentiometer MOP down 0 NO
1 YES
Bit15 Auto Operation 0 NO
1 YES
Note:
When BICO technology is used to allocate functions to panel buttons, this parameter displays the actual
status of the relevant command.
The following functions can be "connected" to individual buttons:
- ON/OFF1,
- OFF2,
- JOG,
- REVERSE,
- INCREASE,
- DECREASE
Min: -
r0020 CO: Act. frequency setpoint Min: -
P-Group: CONTROL Max: -
Displays actual frequency setpoint (output from ramp function generator).
Datatype: Float Unit: Hz Def: -
r0021 CO: Act. frequency Min: -
P-Group: CONTROL Max: -
Displays actual inverter output frequency (r0024) excluding slip compensation, resonance damping and
frequency limitation.
Datatype: Float Unit: Hz Def: -
r0022 Act. rotor speed Min: -
P-Group: CONTROL Max: -
Displays calculated rotor speed based on inverter output frequency [Hz] x 120 / number of poles.
Note:
This calculation makes no allowance for load-dependent slip.
Datatype: Float Unit: 1/min Def: -
r0024 CO: Act. output frequency Min: -
P-Group: CONTROL Max: -
Displays actual output frequency (slip compensation, resonance damping and frequency limitation are
included).
Datatype: Float Unit: Hz Def: -
r0025 CO: Act. output voltage Min: -
P-Group: CONTROL Max: -
Displays [rms] voltage applied to motor.
Datatype: Float Unit: V Def: -
r0026 CO: Act. DC-link voltage Min: -
P-Group: INVERTER Max: -
Displays DC-link voltage.
Datatype: Float Unit: V Def: -
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
15
Page 16
Parameters Issue 03/02
r0027 CO: Act. output current Min: -
Datatype: Float Unit: A Def: -
P-Group: CONTROL Max: -
Displays [rms] value of motor current [A].
r0031 CO: Act. filtered torque Min: -
Datatype: Float Unit: Nm Def: -
P-Group: CONTROL Max: -
Displays motor torque.
r0032 CO: Act. power Min: -
Datatype: Float Unit: - Def: -
P-Group: CONTROL Max: -
Displays motor power.
Dependency:
Value is displayed in [kW] or [hp] depending on setting for P0100 (operation for Europe / North America).
r0035[3] CO: Act. motor temperature Min: -
Datatype: Float Unit: °C Def: -
P-Group: MOTOR Max: -
Displays measured motor temperature.
Index:
r0035[0] : 1st. Drive data set (DDS)
r0035[1] : 2nd. Drive data set (DDS)
r0035[2] : 3rd. Drive data set (DDS)
r0037[2] CO: Inverter temperature [°C] Min: -
Datatype: Float Unit: °C Def: -
P-Group: INVERTER Max: -
Displays measured heatsink temperature and calculated junction temperature of IGBTs based on thermal
model.
Index:
r0037[0] : Measured heat sink temperature
r0037[1] : Chip temperature
r0038 CO: Act. power factor Min: -
Datatype: Float Unit: - Def: -
P-Group: CONTROL Max: -
Displays actual power factor.
Dependency:
Applies when V/f control is selected in P1300 (control mode); otherwise, the display shows the value zero.
r0039 CO: Energy consumpt. meter [kWh] Min: -
Datatype: Float Unit: kWh Def: -
P-Group: INVERTER Max: -
Displays electrical energy used by inverter since display was last reset (see P0040 - reset energy
consumption meter).
Dependency:
Value is reset when
- P0010 = 1, P3900 = 1 -3 quick commissioning,
- P0010 = 30, P0970 = 1 factory reset or
- P0040 = 1 reset energy consumption meter.
P0040 Reset energy consumption meter Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: INVERTER Active: first confirm QuickComm. No Max: 1
Resets value of parameter r0039 (energy consumption meter) to zero.
Settings:
0 No reset
1 Reset r0039 to 0
Dependency:
No reset until "P" is pressed.
r0050 CO: Active command data set Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays currently selected and active command data set (CDS).
Settings:
0 1st. Command data set (CDS)
1 2nd. Command data set (CDS)
2 3rd. Command data set (CDS)
Details:
See parameter P0810.
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
2
Parameter List MICROMASTER 430
16 6SE6400-5AF00-0BP0
Page 17
Issue 03/02 Parameters
r0051[2] CO: Active drive data set (DDS)
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays currently selected and active drive data set (DDS).
Settings:
0 1st. Drive data set (DDS)
1 2nd. Drive data set (DDS)
2 3rd. Drive data set (DDS)
Index:
r0051[0] : Selected drive data set
r0051[1] : Active drive data set
Details:
See parameter P0820.
Min: -
r0052 CO/BO: Act. status word 1 Min: -
P-Group: COMMANDS Max: -
Displays first active status word of inverter (bit format) and can be used to diagnose inverter status. The
display segments for the status word are shown in the "Introduction to MICROMASTER System
Parameters".
Bitfields:
Bit00 Drive ready 0 NO
Bit01 Drive ready to run 0 NO
Bit02 Drive running 0 NO
Bit03 Drive fault active 0 NO
Bit04 OFF2 active 0 YES
Bit05 OFF3 active 0 YES
Bit06 ON inhibit active 0 NO
Bit07 Drive warning active 0 NO
Bit08 Deviation setpoint / act. value 0 YES
Bit09 PZD control 0 NO
Bit10 Maximum frequency reached 0 NO
Bit11 Warning: Motor current limit 0 YES
Bit12 Motor holding brake active 0 NO
Bit13 Motor overload 0 YES
Bit14 Motor runs right 0 NO
Bit15 Inverter overload 0 YES
Note:
Output of Bit3 (Fault) will be inverted on digital output (Low = Fault, High = No Fault).
Datatype: U16 Unit: - Def: -
1 YES
1 YES
1 YES
1 YES
1NO
1NO
1 YES
1 YES
1NO
1 YES
1 YES
1NO
1 YES
1NO
1 YES
1NO
Level:
2
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
17
Page 18
Parameters Issue 03/02
r0053 CO/BO: Act. status word 2 Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays second status word of inverter (in bit format).
Bitfields:
Bit00 DC brake active 0 NO
1 YES
Bit01 Act. freq. r0021 > P2167 (f_off) 0 NO
1 YES
Bit02 Act. freq. r0021 > P1080 (f_min) 0 NO
1 YES
Bit03 Act. current r0027 >= P2170 0 NO
1 YES
Bit04 Act. freq. r0021 >= P2155 (f_1) 0 NO
1 YES
Bit05 Act. freq. r0021 < P2155 (f_1) 0 NO
1 YES
Bit06 Act. freq. r0021 >= setpoint 0 NO
1 YES
Bit07 Act. Vdc r0026 < P2172 0 NO
1 YES
Bit08 Act. Vdc r0026 > P2172 0 NO
1 YES
Bit09 Ramping finished 0 NO
1 YES
Bit10 PID output r2294 == P2292 (PID_min) 0 NO
1 YES
Bit11 PID output r2294 == P2291 (PID_max) 0 NO
1 YES
Bit14 Download data set 0 from AOP 0 NO
1 YES
Bit15 Download data set 1 from AOP 0 NO
1 YES
Details:
See description of seven-segment display given in the "Introduction to MICROMASTER System
Parameters" in this manual.
r0054 CO/BO: Act. control word 1 Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays first control word of inverter and can be used to diagnose which commands are active.
Bitfields:
Bit00 ON/OFF1 0 NO
1 YES
Bit01 OFF2: Electrical stop 0 YES
1NO
Bit02 OFF3: Fast stop 0 YES
1NO
Bit03 Pulse enable 0 NO
1 YES
Bit04 RFG enable 0 NO
1 YES
Bit05 RFG start 0 NO
1 YES
Bit06 Setpoint enable 0 NO
1 YES
Bit07 Fault acknowledge 0 NO
1 YES
Bit08 JOG right 0 NO
1 YES
Bit09 JOG left 0 NO
1 YES
Bit10 Control from PLC 0 NO
1 YES
Bit11 Reverse (setpoint inversion) 0 NO
1 YES
Bit13 Motor potentiometer MOP up 0 NO
1 YES
Bit14 Motor potentiometer MOP down 0 NO
1 YES
Bit15 CDS Bit 0 (Local/Remote) 0 NO
1 YES
Details:
See description of seven-segment display given in the "Introduction to MICROMASTER System
Parameters" in this manual.
Level:
3
Level:
3
Parameter List MICROMASTER 430
18 6SE6400-5AF00-0BP0
Page 19
Issue 03/02 Parameters
r0055 CO/BO: Add. act. control word
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays additional control word of inverter and can be used to diagnose which commands are active.
Bitfields:
Bit00 Fixed frequency Bit 0 0 NO
1 YES
Bit01 Fixed frequency Bit 1 0 NO
1 YES
Bit02 Fixed frequency Bit 2 0 NO
1 YES
Bit03 Fixed frequency Bit 3 0 NO
1 YES
Bit04 Drive data set (DDS) Bit 0 0 NO
1 YES
Bit05 Drive data set (DDS) Bit 1 0 NO
1 YES
Bit08 PID enabled 0 NO
1 YES
Bit09 DC brake enabled 0 NO
1 YES
Bit11 Droop 0 NO
1 YES
Bit12 Torque control 0 NO
1 YES
Bit13 External fault 1 0 YES
1NO
Bit15 Command data set (CDS) Bit 1 0 NO
1 YES
Details:
See description of seven-segment display given in the "Introduction to MICROMASTER System
Parameters" in this handbook.
Min: -
r0056 CO/BO: Status of motor control Min: -
P-Group: CONTROL Max: -
Displays status of motor control (MM420: V/f status), which can be used to diagnose inverter status.
Bitfields:
Bit00 Init. control finished 0 NO
Bit01 Motor demagnetizing finished 0 NO
Bit02 Pulses enabled 0 NO
Bit03 Voltage soft start select 0 NO
Bit04 Motor excitation finished 0 NO
Bit05 Starting boost active 0 NO
Bit06 Acceleration boost active 0 NO
Bit07 Frequency is negative 0 NO
Bit08 Field weakening active 0 NO
Bit09 Volts setpoint limited 0 NO
Bit10 Slip frequency limited 0 NO
Bit11 F_out > F_max Freq. limited 0 NO
Bit12 Phase reversal selected 0 NO
Bit13 I-max controller active 0 NO
Bit14 Vdc-max controller active 0 NO
Bit15 KIB (Vdc-min control) active 0 NO
Details:
See description of seven-segment display given in the introduction.
Datatype: U16 Unit: - Def: -
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
1 YES
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
19
Page 20
Parameters Issue 03/02
r0061 CO: Act. rotor speed Min: -
Datatype: Float Unit: Hz Def: -
P-Group: CONTROL Max: -
Displays current speed detected by encoder.
r0065 CO: Slip frequency Min: -
Datatype: Float Unit: % Def: -
P-Group: CONTROL Max: -
Displays slip frequency of motor in [%] relative to the rated motor frequency (P0310).
Details:
For V/f control, see also P1335 (slip compensation).
r0067 CO: Act. output current limit Min: -
Datatype: Float Unit: A Def: -
P-Group: CONTROL Max: -
Displays valid maximum output current of inverter.
This value is influenced by P0640 (max. output current), the derating characteristics and the thermal motor
and inverter protection.
Dependency:
P0610 (motor I2t temperature reaction) defines reaction when limit is reached.
Note:
Normally, current limit = rated motor current (P0305) x motor current limit (P0640). It is less than or equal to
maximum inverter current r0209.
The current limit may be reduced if the motor thermal model calculation indicates that overheating will
occur.
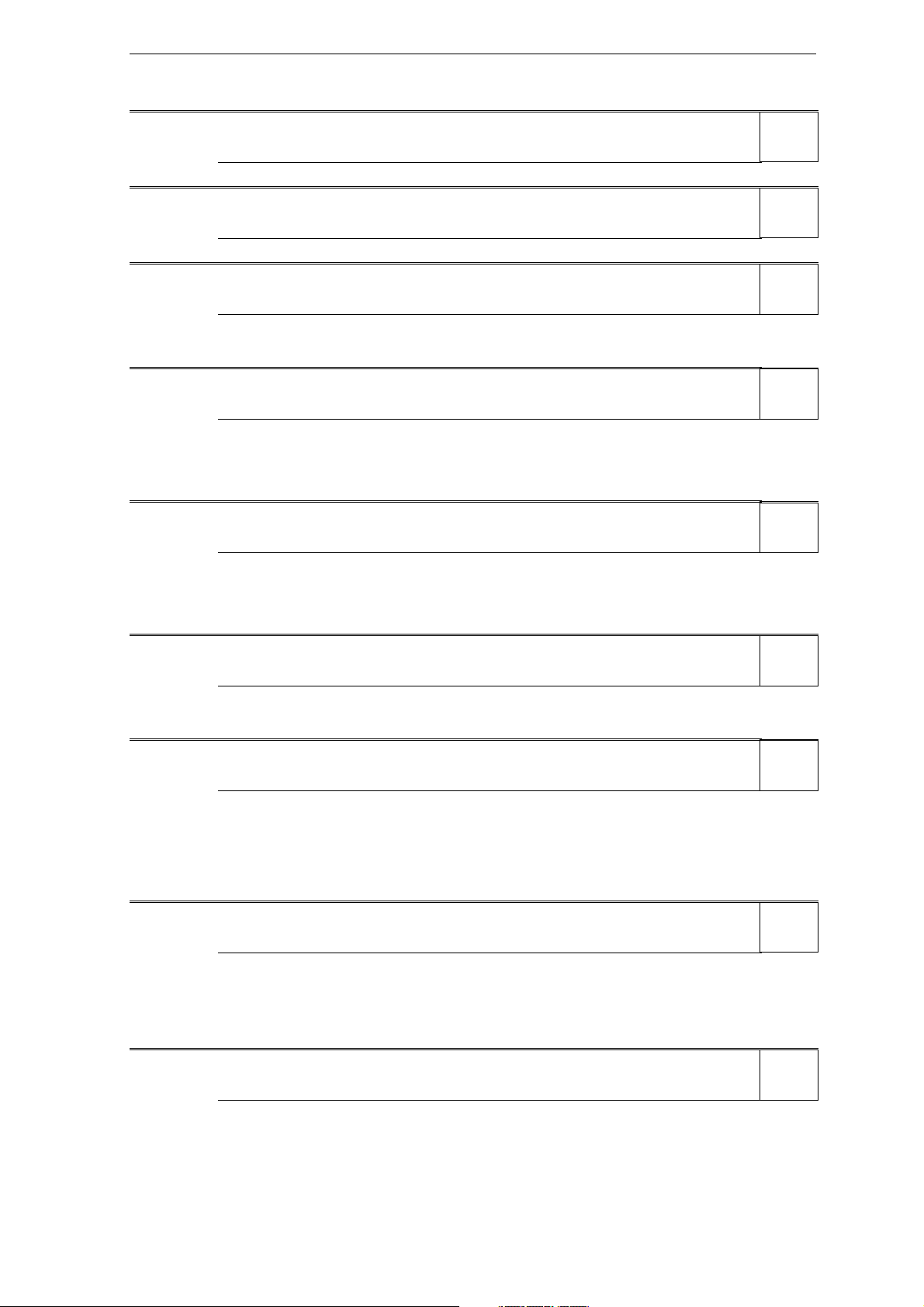
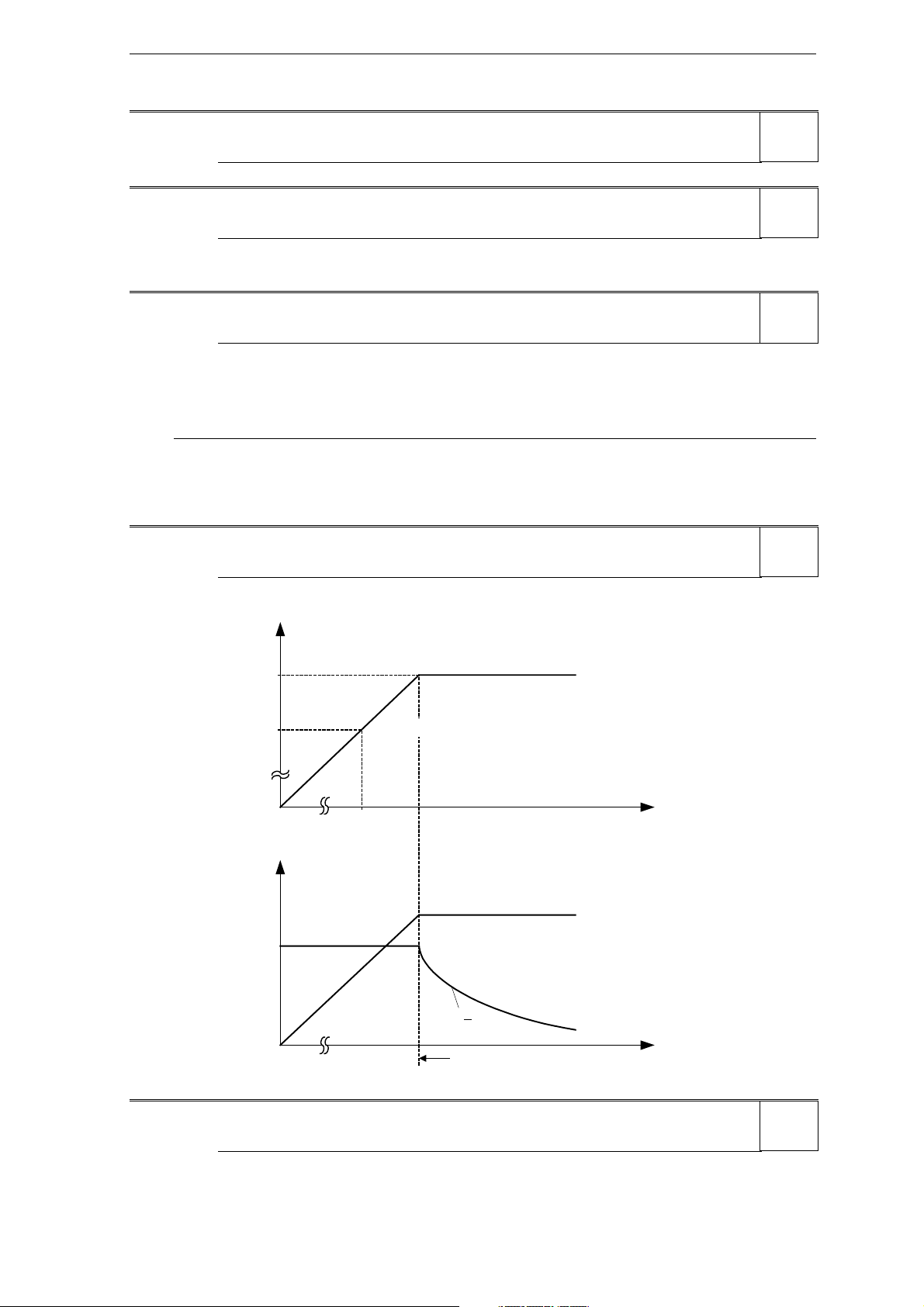
r0071 CO: Max. output voltage Min: -
Datatype: Float Unit: V Def: -
P-Group: CONTROL Max: -
Displays maximum output voltage.
Level:
3
Level:
3
Level:
3
Level:
3
V
r0071
V
(Inverter)
P0304
V
(Motor)
Dependency:
Actual maximum output voltage depends on the actual input supply voltage.
max
P,
V
= f(Vdc,MOD
max
n
P0310
f
(Motor)
ψ
Flux
(Inverter)
n
max
V
)
out
f
Power
1
~
f
Field weakening
f
r0080 CO: Actual torque Min: -
P-Group: CONTROL Max: -
Displays actual torque.
Datatype: Float Unit: Nm Def: -
Level:
3
Parameter List MICROMASTER 430
20 6SE6400-5AF00-0BP0
Page 21
Issue 03/02 Parameters
r0086 CO: Act. active current
Datatype: Float Unit: A Def: -
P-Group: CONTROL Max: -
Displays active (real part) of motor current.
Dependency:
Applies when V/f control is selected in P1300 (control mode); otherwise, the display shows the value zero.
Min: -
P0095[10] CI: Display PZD signals Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: CONTROL Active: first confirm QuickComm. No Max: 4000:0
Selects source of display for PZD signals.
Index:
P0095[0] : 1st PZD signal
P0095[1] : 2nd PZD signal
P0095[2] : 3rd PZD signal
P0095[3] : 4th PZD signal
P0095[4] : 5th PZD signal
P0095[5] : 6th PZD signal
P0095[6] : 7th PZD signal
P0095[7] : 8th PZD signal
P0095[8] : 9th PZD signal
P0095[9] : 10th PZD signal
r0096[10] PZD signals Min: -
P-Group: CONTROL Max: -
Displays PZD signals in [%].
Index:
r0096[0] : 1st PZD signal
r0096[1] : 2nd PZD signal
r0096[2] : 3rd PZD signal
r0096[3] : 4th PZD signal
r0096[4] : 5th PZD signal
r0096[5] : 6th PZD signal
r0096[6] : 7th PZD signal
r0096[7] : 8th PZD signal
r0096[8] : 9th PZD signal
r0096[9] : 10th PZD signal
Note:
r0096 = 100 % corresponds to 4000 hex.
Datatype: Float Unit: % Def: -
P0100 Europe / North America Min: 0
CStat: C Datatype: U16 Unit: - Def: 0
P-Group: QUICK Active: first confirm QuickComm. Yes Max: 2
Determines whether power settings (e.g. nominal rating plate power - P0307) are expressed in [kW] or [hp].
Level:
3
Level:
3
Level:
3
Level:
1
The default settings for the nominal rating plate frequency (P0310) and maximum motor frequency (P1082)
are also set automatically here, in addition to reference frequency (P2000).
Settings:
0 Europe [kW], frequency default 50 Hz
1 North America [hp], frequency default 60 Hz
2 North America [kW], frequency default 60 Hz
Dependency:
The setting of DIP switch 2 under the I/O board determines the validity of settings 0 and 1 for P0100
according to the table below:
DIP2 P0100
setting
OFF 1
ON 0
Stop drive first (i.e. disable all pulses) before you change this parameter.
P0010 = 1 (commissioning mode) enables changes to be made.
Changing P0100 resets all rated motor parameters as well as other parameters that depend on the rated
motor parameters (see P0340 - calculation of motor parameters).
Notice:
P0100 setting 2 (==> [kW], frequency default 60 [Hz]) is not overwritten by the setting of DIP switch 2 (see
table above).
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
Power [kW]
frequency default 50 [Hz]
Power [hp]
frequency default 60 [Hz]
Meaning Meaning
overwrites
overwrites
setting
Power [hp]
frequency default 60 [Hz]
Power [kW]
frequency default 50 [Hz]
21
Page 22
Parameters Issue 03/02
P0199 Equipment system number Min: 0
CStat: UT Datatype: U16 Unit: - Def: 0
P-Group: - Active: first confirm QuickComm. No Max: 255
Equipment system number. This parameter has no operation effect.
r0200 Act. power stack code number Min: -
P-Group: INVERTER Max: -
Identifies hardware variant as shown in table below.
Code-
No.
271 6SE6430-2UD27-5CA0 3AC380-480V +10% -10% 47-63Hz 7,5 no IP20 C
272 6SE6430-2UD31-1CA0 3AC380-480V +10% -10% 47-63Hz 11 no IP20 C
273 6SE6430-2UD31-5CA0 3AC380-480V +10% -10% 47-63Hz 15 no IP20 C
274 6SE6430-2AD27-5CA 0 3A C380-480V +10% -10% 47-63Hz 7,5 Cl. A IP20 C
275 6SE6430-2AD31-1CA0 3A C380-480V +10% -10% 47-63Hz 11 Cl. A IP20 C
276 6SE6430-2AD31-5CA0 3A C380-480V +10% -10% 47-63Hz 15 Cl. A IP20 C
277 6SE6430-2UD31-8DA0 3AC380-480V +10% -10% 47-63Hz 18,5 no IP20 D
278 6SE6430-2UD32-2DA0 3AC380-480V +10% -10% 47-63Hz 22 no IP20 D
279 6SE6430-2UD33-0DA0 3AC380-480V +10% -10% 47-63Hz 30 no IP20 D
280 6SE6430-2AD31-8DA0 3A C380-480V +10% -10% 47-63Hz 18,5 Cl. A IP20 D
281 6SE6430-2AD32-2DA0 3A C380-480V +10% -10% 47-63Hz 22 Cl. A IP20 D
282 6SE6430-2AD33-0DA0 3A C380-480V +10% -10% 47-63Hz 30 Cl. A IP20 D
283 6SE6430-2UD33-7EA 0 3A C380-480V +10% -10% 47-63Hz 37 no IP20 E
284 6SE6430-2UD34-5EA 0 3A C380-480V +10% -10% 47-63Hz 45 no IP20 E
285 6SE6430-2AD33-7EA0 3AC380-480V +10% -10% 47-63Hz 37 Cl. A IP20 E
286 6SE6430-2AD34-5EA0 3AC380-480V +10% -10% 47-63Hz 45 Cl. A IP20 E
287 6SE6430-2UD35-5FA0 3AC380-480V +10% -10% 47-63Hz 55 no IP20 F
288 6SE6430-2UD37-5FA0 3AC380-480V +10% -10% 47-63Hz 75 no IP20 F
289 6SE6430-2UD38-8FA0 3AC380-480V +10% -10% 47-63Hz 90 no IP20 F
290 6SE6430-2AD35-5FA0 3A C380-480V +10% -10% 47- 63Hz 55 Cl. A IP20 F
291 6SE6430-2AD37-5FA0 3A C380-480V +10% -10% 47- 63Hz 75 Cl. A IP20 F
MM430
MLFB
Datatype: U32 Unit: - Def: -
Input Voltage & Frequency
VT Power
kW
Internal
Filter
Protection
Degree
Level:
2
Level:
3
Frame
Size
Notice:
Parameter r0200 = 0 indicates that no power stack has been identified.
P0201 Power stack code number Min: 0
CStat: C Datatype: U16 Unit: - Def: 0
P-Group: INVERTER Active: first confirm QuickComm. No Max: 65535
Confirms actual power stack identified.
r0203 Act. inverter type Min: -
Datatype: U16 Unit: - Def: -
P-Group: INVERTER Max: -
Type number of actual power stack identified.
Settings:
1 MICROMASTER 420
2 MICROMASTER 440
3 MICRO- / COMBIMASTER 411
4 MICROMASTER 410
5 Reserved
6 MICROMASTER 440 PX
7 MICROMASTER 430
r0204 Power stack features Min: -
Datatype: U32 Unit: - Def: -
P-Group: INVERTER Max: -
Displays hardware features of power stack.
Bitfields:
Bit00 DC input voltage 0 NO
1 YES
Bit01 RFI filter 0 NO
1 YES
Note:
Parameter r0204 = 0 indicates that no power stack has been identified.
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
22 6SE6400-5AF00-0BP0
Page 23
Issue 03/02 Parameters
r0206 Rated inverter power [kW] / [hp]
Datatype: Float Unit: - Def: -
P-Group: INVERTER Max: -
Displays nominal rated motor power from inverter.
Dependency:
Value is displayed in [kW] or [hp] depending on setting for P0100 (operation for Europe / North America).
Min: -
r0207 Rated inverter current Min: -
P-Group: INVERTER Max: -
Displays maximum continuous output current of inverter.
Datatype: Float Unit: A Def: -
r0208 Rated inverter voltage Min: -
P-Group: INVERTER Max: -
Displays nominal AC supply voltage of inverter.
Value:
r0208 = 230 : 200 - 240 V +/- 10 %
r0208 = 400 : 380 - 480 V +/- 10 %
r0208 = 575 : 500 - 600 V +/- 10 %
Datatype: U32 Unit: V Def: -
r0209 Maximum inverter current Min: -
P-Group: INVERTER Max: -
Displays maximum output current of inverter.
Datatype: Float Unit: A Def: -
P0210 Supply voltage Min: 0
CStat: CT Datatype: U16 Unit: V Def: 230
P-Group: INVERTER Active: Immediately QuickComm. No Max: 1000
Optimizes Vdc controller, which extends the ramp-down time if regenerative energy from motor would
otherwise cause DC link overvoltage trips.
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Reducing the value enables controller to cut in earlier and reduce the risk of overvoltage.
Dependency:
Set P1254 ("Auto detect Vdc switch-on levels") = 0. Cut-in levels for Vdc-controller and compound braking
are then derived directly from P0210 (supply voltage).
Vdc_max switch-on level
Compound braking switch-on level
Note:
If mains voltage is higher than value entered, automatic deactivation of the Vdc controller may occur to
avoid acceleration of the motor. An alarm will be issued in this case (A0910).
0210P21.15 ⋅⋅=
0210P21.13 ⋅⋅=
r0231[2] Max. cable length Min: -
P-Group: INVERTER Max: -
Indexed parameter to display maximum allowable cable length between inverter and motor.
Index:
r0231[0] : Max. allowed unscreened cable length
r0231[1] : Max. allowed screened cable length
Notice:
For full EMC compliance, the screened cable must not exceed 25 m in length when an EMC filter is fitted.
Datatype: U16 Unit: m Def: -
P0290 Inverter overload reaction Min: 0
CStat: CT Datatype: U16 Unit: - Def: 2
P-Group: INVERTER Active: first confirm QuickComm. No Max: 3
Selects reaction of inverter to an internal over-temperature.
Settings:
0 Reduce output frequency
1 Trip (F0004)
2 Reduce pulse frequency and output frequency
3 Reduce pulse frequency then trip (F0004)
Notice:
P0290 = 0:
Reduction of output frequency is usually only effective if the load is also reduced. This is for example valid
for variable torque applications with a quadratic torque characteristic as pumps or fans.
Level:
3
Level:
3
A trip will always result eventually, if the action taken does not sufficiently reduce internal temperature.
The pulse frequency is normally reduced only if higher than 2 kHz (see P0291 - configuration of inverter
protection).
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
23
Page 24
Parameters Issue 03/02
P0291[3] Inverter protection Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: INVERTER Active: Immediately QuickComm. No Max: 7
Control bit 0 for enabling/disabling automatic pulse frequency reduction at output frequencies below 2 Hz.
Bit 2 shows if phase loss dedection (input phase) of 3 phase inverters is enabled after factory reset. Default
setting of phase loss is disabled for FSA - FSC. FSD and greater it is enabled.
Bitfields:
Bit00 Pulse frequency reduced below 2Hz 0 NO
1 YES
Bit01 Reserved 0 NO
1 YES
Bit02 Phase loss detection enable 0 NO
1 YES
Index:
P0291[0] : 1st. Drive data set (DDS)
P0291[1] : 2nd. Drive data set (DDS)
P0291[2] : 3rd. Drive data set (DDS)
Details:
See P0290 (inverter overload reaction)
P0292 Inverter overload warning Min: 0
CStat: CUT Datatype: U16 Unit: °C Def: 15
P-Group: INVERTER Active: first confirm QuickComm. No Max: 25
Defines temperature difference (in [°C]) between inverter over-temperature trip and warning thresholds.
P0295 Inverter fan off delay time Min: 0
CStat: CUT Datatype: U16 Unit: s Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 3600
Defines inverter fan switch off delay time in seconds after drive has stopped.
Note:
Setting to 0, inverter fan will switch off when the drive stops, that is no delay.
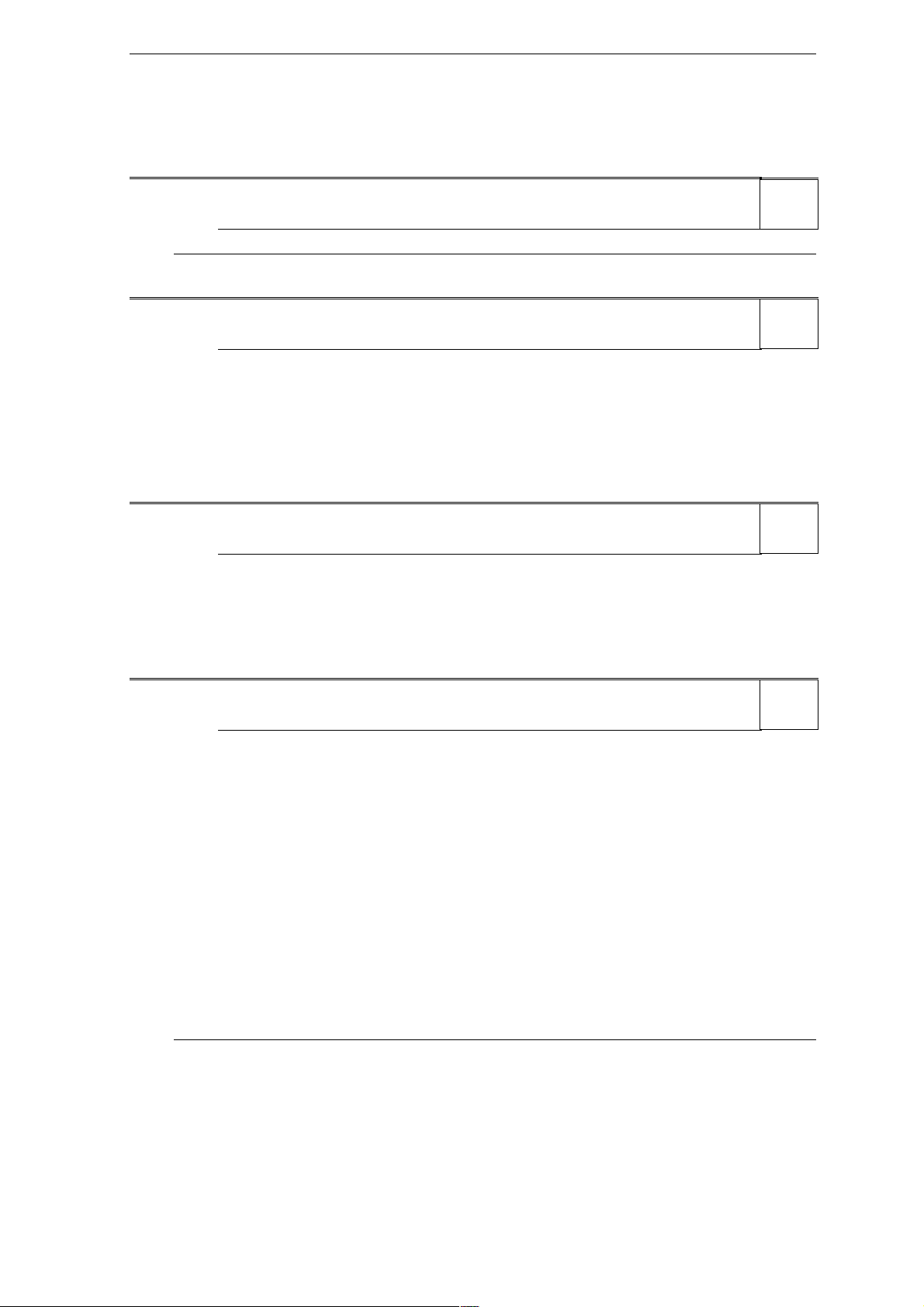
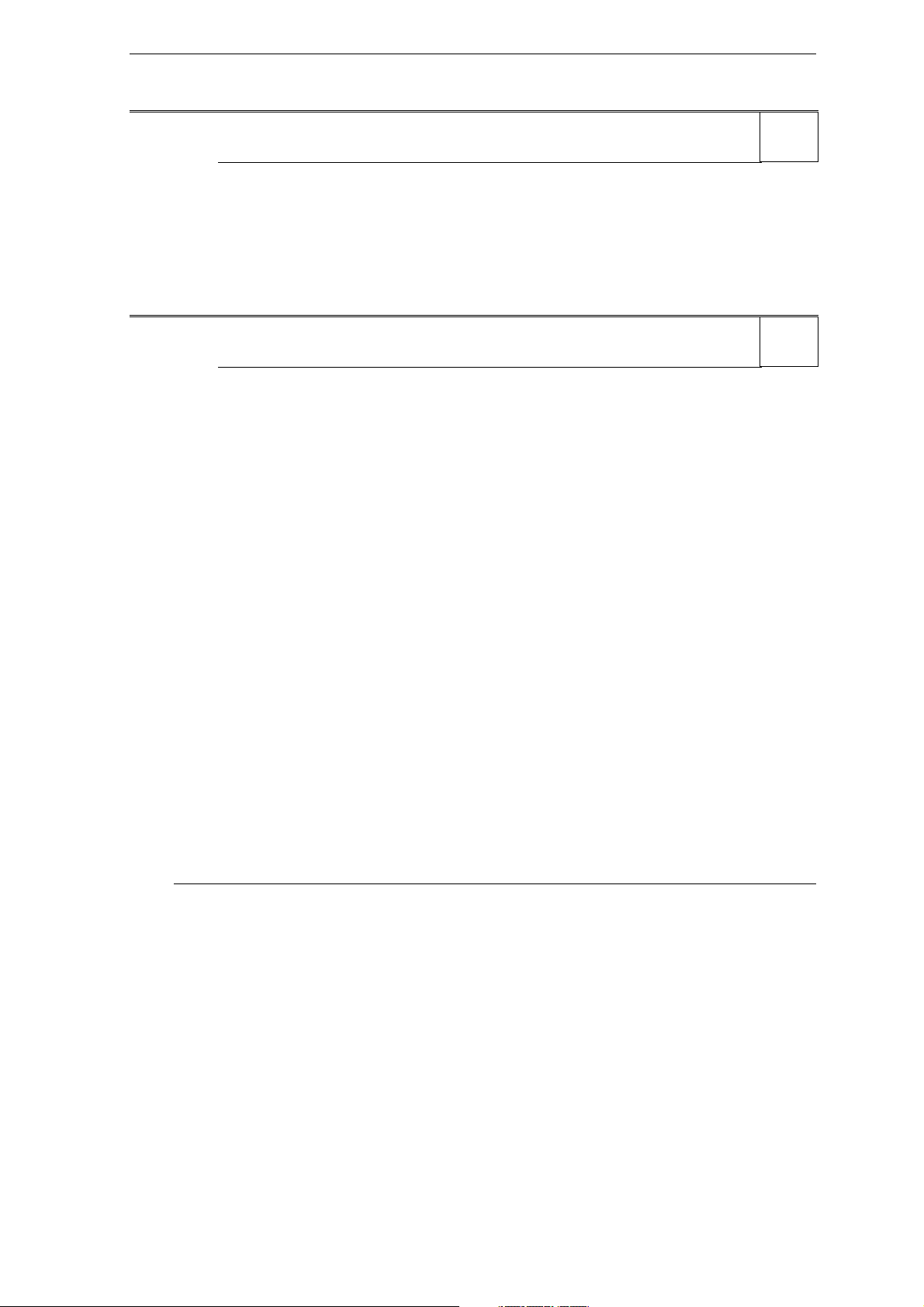
P0304[3] Rated motor voltage Min: 10
CStat: C Datatype: U16 Unit: V Def: 230
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 2000
Nominal motor voltage [V] from rating plate. Following diagram shows a typical rating plate with the
locations of the relevant motor data.
Level:
3
Level:
3
Level:
3
Level:
1
P0310
No UD 0013509-0090-0031 TICI F 1325 IP 55 IM B3
50 Hz
P0307
Index:
P0304[0] : 1st. Drive data set (DDS)
P0304[1] : 2nd. Drive data set (DDS)
P0304[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
5.5kW 19.7/11.A
Cos
ϕϕϕϕ=
=
0.81
==
==
==∆/Υ
∆/Υ=
=
220-240/380-420 V
====
∆/Υ∆/Υ
==
19.7-20.6/11.4-11.9 A
P0308
P0304P0305
230-400 V
1455/min
P0311
3~Mot
1LA7130-4AA10
60 Hz
6.5kW
Cos
ϕϕϕϕ=
=
0.82
==
ΥΥΥΥ=
=
440-480
==
11.1-11.3 A
EN 60034
460 V
10.9 A
1755/min
95.75%
45kg
P0309
Parameter List MICROMASTER 430
24 6SE6400-5AF00-0BP0
Page 25
Issue 03/02 Parameters
P0305[3] Rated motor current
CStat: C Datatype: Float Unit: A Def: 3.25
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 10000.00
Nominal motor current [A] from rating plate - see diagram in P0304.
Index:
P0305[0] : 1st. Drive data set (DDS)
P0305[1] : 2nd. Drive data set (DDS)
P0305[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
Depends also on P0320 (motor magnetization current).
Note:
For asynchronous motors, the maximum value is defined as the maximum inverter current (r0209).
For synchronous motors, the maximum value is defined as twice the maximum inverter current (r0209).
The minimum value is defined as 1/32 times inverter rated current (r0207).
Min: 0.01
P0307[3] Rated motor power Min: 0.01
CStat: C Datatype: Float Unit: - Def: 0.75
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 2000.00
Nominal motor power [kW/hp] from rating plate.
Index:
P0307[0] : 1st. Drive data set (DDS)
P0307[1] : 2nd. Drive data set (DDS)
P0307[2] : 3rd. Drive data set (DDS)
Dependency:
If P0100 = 1 ([kW],frequency default 50 Hz), values will be in [hp] - see diagram P0304 (rating plate).
Changeable only when P0010 = 1 (quick commissioning).
P0308[3] Rated motor cosPhi Min: 0.000
CStat: C Datatype: Float Unit: - Def: 0.000
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 1.000
Nominal motor power factor (cosPhi) from rating plate - see diagram P0304.
Index:
P0308[0] : 1st. Drive data set (DDS)
P0308[1] : 2nd. Drive data set (DDS)
P0308[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
Level:
1
Level:
1
Level:
3
Visible only when P0100 = 0 or 2, (motor power entered in [kW]).
Setting 0 causes internal calculation of value (see r0332).
P0309[3] Rated motor efficiency Min: 0.0
CStat: C Datatype: Float Unit: % Def: 0.0
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 99.9
Nominal motor efficiency in [%] from rating plate.
Index:
P0309[0] : 1st. Drive data set (DDS)
P0309[1] : 2nd. Drive data set (DDS)
P0309[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
Visible only when P0100 = 1, (i.e. motor power entered in [hp]).
Setting 0 causes internal calculation of value (see r0332).
Note:
P0309 = 100 % corresponds to superconducting.
Details:
See diagram in P0304 (rating plate).
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
25
Page 26
Parameters Issue 03/02
P0310[3] Rated motor frequency Min: 12.00
CStat: C Datatype: Float Unit: Hz Def: 50.00
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 650.00
Nominal motor frequency [Hz] from rating plate.
Index:
P0310[0] : 1st. Drive data set (DDS)
P0310[1] : 2nd. Drive data set (DDS)
P0310[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
Pole pair number recalculated automatically if parameter is changed.
Details:
See diagram in P0304 (rating plate)
P0311[3] Rated motor speed Min: 0
CStat: C Datatype: U16 Unit: 1/min Def: 0
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 40000
Nominal motor speed [rpm] from rating plate.
Index:
P0311[0] : 1st. Drive data set (DDS)
P0311[1] : 2nd. Drive data set (DDS)
P0311[2] : 3rd. Drive data set (DDS)
Dependency:
Changeable only when P0010 = 1 (quick commissioning).
Setting 0 causes internal calculation of value.
Required for vector control and V/f control with speed controller.
Slip compensation in V/f control requires rated motor speed for correct operation.
Level:
1
Level:
1
Pole pair number recalculated automatically if parameter is changed.
Details:
See diagram in P0304 (rating plate)
r0313[3] Motor pole pairs Min: -
Datatype: U16 Unit: - Def: -
P-Group: MOTOR Max: -
Displays number of motor pole pairs that the inverter is currently using for internal calculations.
Value:
r0313 = 1 : 2-pole motor
r0313 = 2 : 4-pole motor
etc.
Index:
r0313[0] : 1st. Drive data set (DDS)
r0313[1] : 2nd. Drive data set (DDS)
r0313[2] : 3rd. Drive data set (DDS)
Dependency:
Recalculated automatically when P0310 (rated motor frequency) or P0311 (rated motor speed) is changed.
P0320[3] Motor magnetizing current Min: 0.0
CStat: CT Datatype: Float Unit: % Def: 0.0
P-Group: MOTOR Active: Immediately QuickComm. Yes Max: 99.0
Defines motor magnetization current in [%] relative to P0305 (rated motor current).
Index:
P0320[0] : 1st. Drive data set (DDS)
P0320[1] : 2nd. Drive data set (DDS)
P0320[2] : 3rd. Drive data set (DDS)
Dependency:
Affected by P0366 - P0369 (magnetizing curve imag. 1 - 4): Setting 0 causes calculation by P0340 = 1 (data
entered from rating plate) or by P3900 = 1 - 3 (end of quick commissioning).
Level:
3
Level:
3
Parameter List MICROMASTER 430
26 6SE6400-5AF00-0BP0
Page 27
Issue 03/02 Parameters
r0330[3] Rated motor slip
P-Group: MOTOR Max: -
Displays nominal motor slip in [%] relative to P0310 (rated motor frequency) and P0311 (rated motor
speed).
[%] r0330 ⋅
=
Index:
r0330[0] : 1st. Drive data set (DDS)
r0330[1] : 2nd. Drive data set (DDS)
r0330[2] : 3rd. Drive data set (DDS)
P0311
P0310
60
P0310
Datatype: Float Unit: % Def: -
r0313
⋅−
% 100
Min: -
r0331[3] Rated magnetization current Min: -
P-Group: MOTOR Max: -
Displays calculated magnetizing current of motor in [A].
Index:
r0331[0] : 1st. Drive data set (DDS)
r0331[1] : 2nd. Drive data set (DDS)
r0331[2] : 3rd. Drive data set (DDS)
Datatype: Float Unit: A Def: -
r0332[3] Rated power factor Min: -
P-Group: MOTOR Max: -
Displays power factor for motor
Index:
r0332[0] : 1st. Drive data set (DDS)
r0332[1] : 2nd. Drive data set (DDS)
r0332[2] : 3rd. Drive data set (DDS)
Dependency:
Value is calculated internally if P0308 (rated motor cosPhi) set to 0; otherwise, value entered in P0308 is
displayed.
Datatype: Float Unit: - Def: -
P0335[3] Motor cooling Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: MOTOR Active: first confirm QuickComm. Yes Max: 3
Selects motor cooling system used.
Settings:
0 Self-cooled: Using shaft mounted fan attached to motor
1 Force-cooled: Using separately powered cooling fan
2 Self-cooled and internal fan
3 Force-cooled and internal fan
Index:
P0335[0] : 1st. Drive data set (DDS)
P0335[1] : 2nd. Drive data set (DDS)
P0335[2] : 3rd. Drive data set (DDS)
Notice:
Motors of series 1LA1 and 1LA8 have an internal fan. This internal motor fan must not be confused with the
fan at the end of the motor shaft.
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
27
Page 28
Parameters Issue 03/02
P0340[3] Calculation of motor parameters Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: MOTOR Active: first confirm QuickComm. No Max: 4
Calculates various motor parameters, including:
P0344 Motor weight
P0346 Magnetization time
P0347 Demagnetization time
P0350 Stator resistance
P0611 Motor I2t time constant
P1253 Vdc-controller output limitation
P1316 Boost end frequency
P2000 Reference frequency
P2002 Reference current
Settings:
0 No calculation
1 Complete parameterization
2 Calculation of equivalent circuit data
3 Calculation of V/f data
4 Calculation of controller settings only
Index:
P0340[0] : 1st. Drive data set (DDS)
P0340[1] : 2nd. Drive data set (DDS)
P0340[2] : 3rd. Drive data set (DDS)
Note:
This parameter is required during commissioning to optimize inverter performance.
P0344[3] Motor weight Min: 1.0
CStat: CUT Datatype: Float Unit: kg Def: 9.4
P-Group: MOTOR Active: Immediately QuickComm. No Max: 6500.0
Specifies motor weight [kg].
Index:
P0344[0] : 1st. Drive data set (DDS)
P0344[1] : 2nd. Drive data set (DDS)
P0344[2] : 3rd. Drive data set (DDS)
Note:
This value is used in the motor thermal model.
Level:
3
Level:
3
It is normally calculated automatically from P0340 (motor parameters) but can also be entered manually.
P0346[3] Magnetization time Min: 0.000
CStat: CUT Datatype: Float Unit: s Def: 1.000
P-Group: MOTOR Active: Immediately QuickComm. No Max: 20.000
Sets magnetization time [s], i.e. waiting time between pulse enable and start of ramp-up. Motor
magnetization builds up during this time.
Magnetization time is normally calculated automatically from the motor data and corresponds to the rotor
time constant (r0384).
Index:
P0346[0] : 1st. Drive data set (DDS)
P0346[1] : 2nd. Drive data set (DDS)
P0346[2] : 3rd. Drive data set (DDS)
Note:
If boost settings are higher than 100 %, magnetization may be reduced.
Notice:
An excessive reduction of this time can result in insufficient motor magnetization.
P0347[3] Demagnetization time Min: 0.000
CStat: CUT Datatype: Float Unit: s Def: 1.000
P-Group: MOTOR Active: Immediately QuickComm. No Max: 20.000
Changes time allowed after OFF2 / fault condition, before pulses can be re-enabled.
Index:
P0347[0] : 1st. Drive data set (DDS)
P0347[1] : 2nd. Drive data set (DDS)
P0347[2] : 3rd. Drive data set (DDS)
Note:
The demagnetization time is approximately 2.5 x rotor time constant (r0384) in seconds.
Notice:
Not active following a normally completed ramp-down, e.g. after OFF1, OFF3 or JOG.
Level:
3
Level:
3
Overcurrent trips will occur if the time is decreased excessively.
Parameter List MICROMASTER 430
28 6SE6400-5AF00-0BP0
Page 29
Issue 03/02 Parameters
P0350[3] Stator resistance (line-to-line)
CStat: CUT Datatype: Float Unit: Ohm Def: 4.00000
P-Group: MOTOR Active: Immediately QuickComm. No Max: 2000.00000
Stator resistance value in [Ohms] for connected motor (from line-to-line). The parameter value includes the
cable resistance.
There are three ways to determine the value for this parameter:
1. Calculate using
P0340 = 1 (data entered from rating plate) or
P0010 = 1, P3900 = 1,2 or 3 (end of quick commissioning).
2. Measure using P1910 = 1 (motor data identification - value for stator resistance is overwritten).
3. Measure manually using an Ohmmeter.
Index:
P0350[0] : 1st. Drive data set (DDS)
P0350[1] : 2nd. Drive data set (DDS)
P0350[2] : 3rd. Drive data set (DDS)
Note:
Since measured line-to-line, this value may appear to be higher (up to 2 times higher) than expected.
The value entered in P0350 (stator resistance) is the one obtained by the method last used.
Min: 0.00001
P0352[3] Cable resistance Min: 0.0
CStat: CUT Datatype: Float Unit: Ohm Def: 0.0
P-Group: MOTOR Active: Immediately QuickComm. No Max: 120.0
Describes cable resistance between inverter and motor for one phase.
The value corresponds to the resistance of the cable between the inverter and the motor, relative to the
rated impedance.
Index:
P0352[0] : 1st. Drive data set (DDS)
P0352[1] : 2nd. Drive data set (DDS)
P0352[2] : 3rd. Drive data set (DDS)
r0384[3] Rotor time constant Min: -
P-Group: MOTOR Max: -
Displays calculated rotor time constant [ms].
Index:
r0384[0] : 1st. Drive data set (DDS)
r0384[1] : 2nd. Drive data set (DDS)
r0384[2] : 3rd. Drive data set (DDS)
Datatype: Float Unit: ms Def: -
r0395 CO: Total stator resistance [%] Min: -
P-Group: MOTOR Max: -
Displays stator resistance of motor as [%] of combined stator/cable resistance.
Note:
100 % means :
Z ⋅
ratedmot
Datatype: Float Unit: % Def: -
0304P
0305P
r0396 CO: Act. rotor resistance Min: -
P-Group: MOTOR Max: -
Displays (adapted) rotor resistance of the motor equivalent circuit (phase value) in [%].
Note:
100 % means :
Notice:
Values greater than 25 % tend to produce excessive motor slip. Check rated motor speed [rpm] value
(P0311).
Z ⋅
ratedmot
Datatype: Float Unit: % Def: -
0304P
0305P
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
29
Page 30
Parameters Issue 03/02
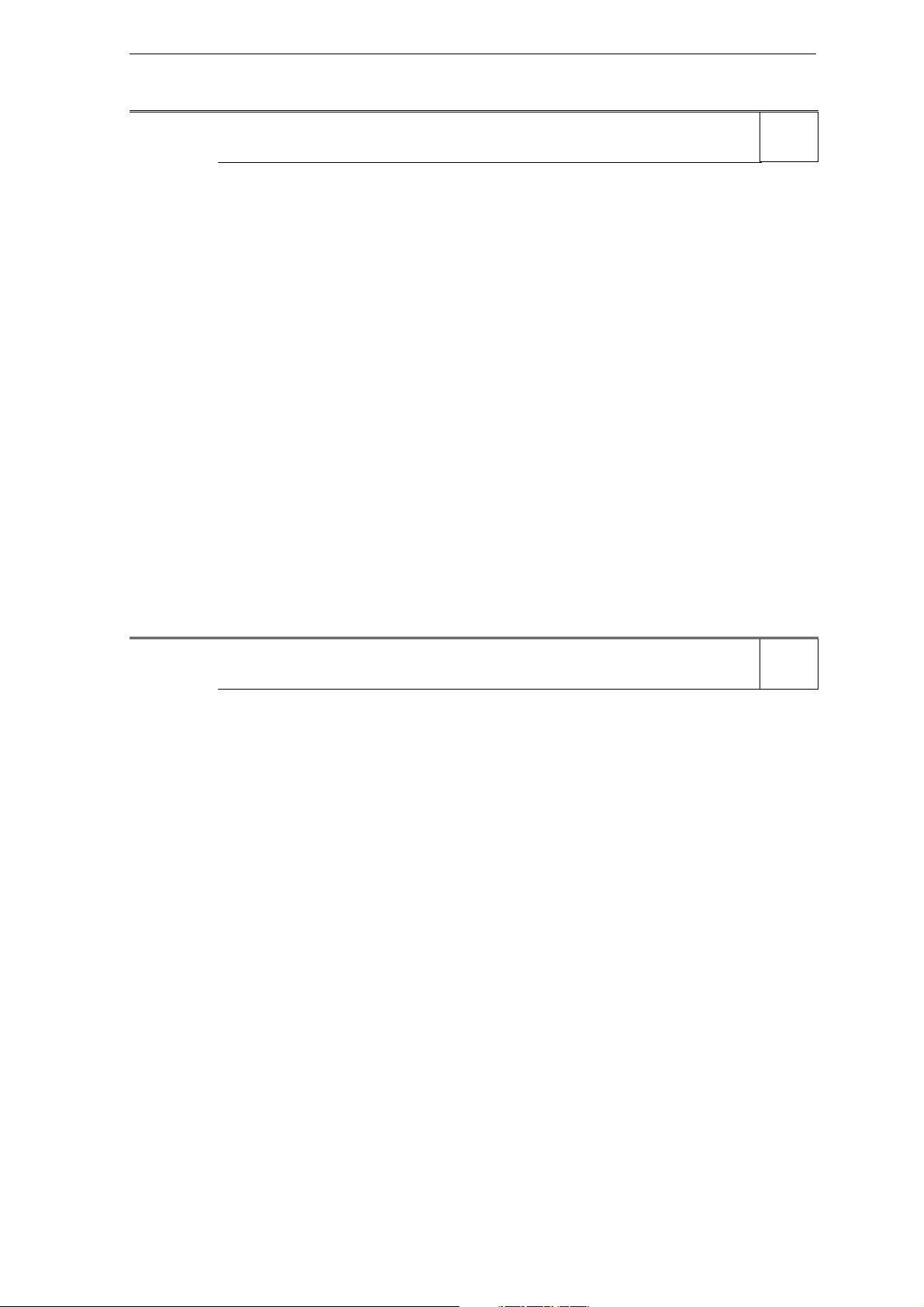
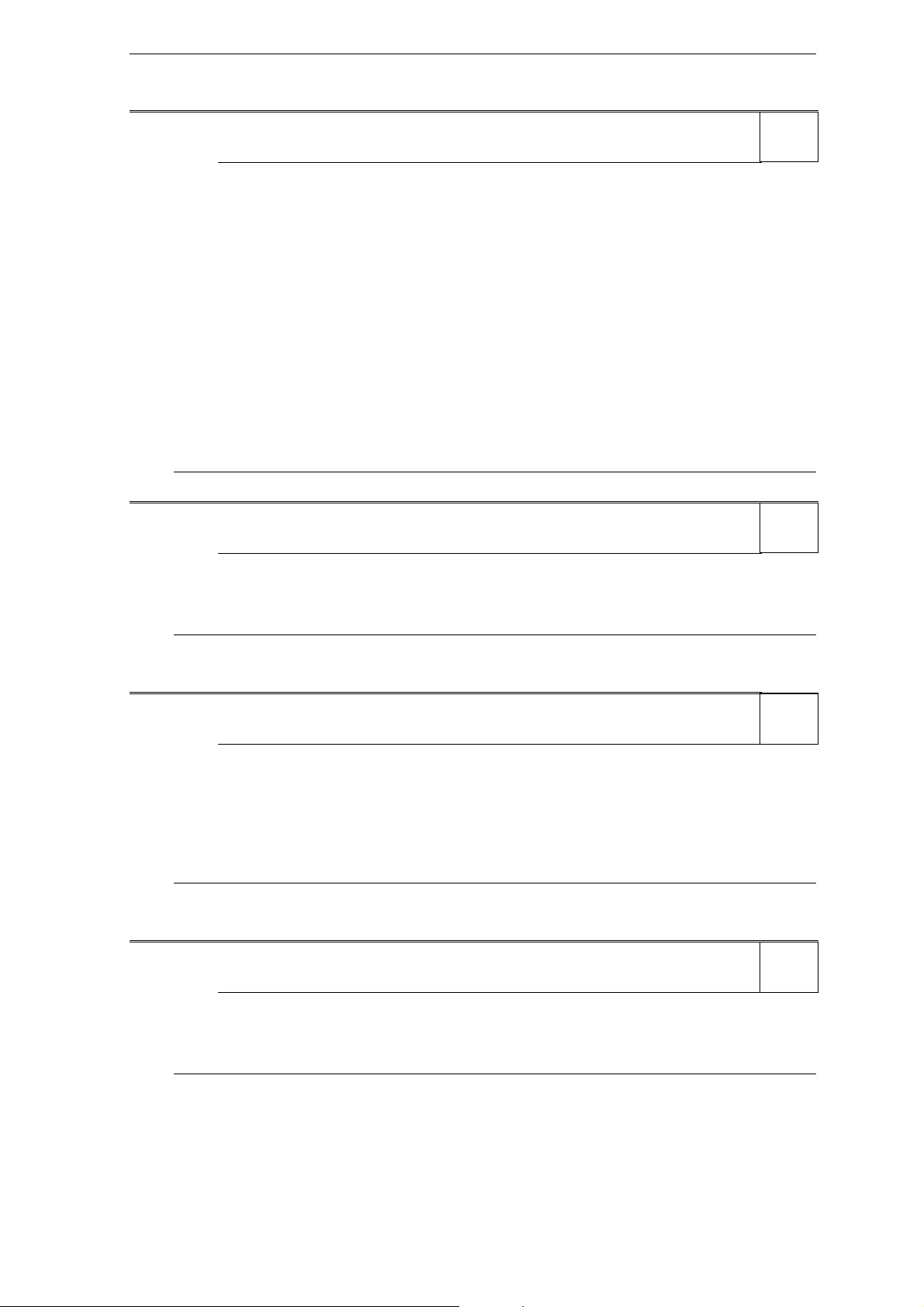
P0400[3] Select encoder type Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: ENCODER Active: Immediately QuickComm. No Max: 2
Selects encoder type.
Parameter Terminal Track Encoder type
P0400 = 1 A
A
AN
P0400 = 2
Settings:
0 Disabled
1 Single channel encoder
2 Quadrature encoder without zero pulse
Index:
P0400[0] : 1st. Drive data set (DDS)
P0400[1] : 2nd. Drive data set (DDS)
P0400[2] : 3rd. Drive data set (DDS)
Note:
Encoders with zero pulse can also be connected, but the zero pulse is not used in MM4.
A
B
A
AN
B
BN
Single ended
Differential
Single ended
Differential
Level:
3
The term "quadrature" in setting 2 refers to two periodic functions separated by a quarter cycle or 90
degrees.
r0403 CO/BO: Encoder status word Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays status word of encoder (in bit format).
Bitfields:
Bit00 Encoder module active 0 NO
1 YES
Bit01 Encoder error 0 NO
1 YES
Bit02 Signal o.k. 0 NO
1 YES
Bit03 Encoder low speed loss 0 NO
1 YES
Bit04 HW timer used 0 NO
1 YES
Details:
See description of seven-segment display given in the "Introduction to MICROMASTER System
Parameters" in this manual.
Level:
3
Parameter List MICROMASTER 430
30 6SE6400-5AF00-0BP0
Page 31

Issue 03/02 Parameters
P0408[3] Encoder pulses per revolution
CStat: CT Datatype: U16 Unit: - Def: 1024
P-Group: ENCODER Active: Immediately QuickComm. No Max: 20000
Specifies the number of encoder pulses per revolution.
Index:
P0408[0] : 1st. Drive data set (DDS)
P0408[1] : 2nd. Drive data set (DDS)
P0408[2] : 3rd. Drive data set (DDS)
Note:
The encoder resolution (pulses per revolution P0408) which may be entered will be limited by the max.
pulse frequency of the encoder option board (f_max = 300 kHz).
The following equation calculates the encoder frequency depending on the encoder resoulution and the
rotational speed (rpm). The encoder frequency has to be less than the max. pulse frequency:
> f =
P0408 x RPM
60
f
max
Min: 2
P0492[3] Allowed speed difference Min: 0.00
CStat: CT Datatype: Float Unit: Hz Def: 10.00
P-Group: ENCODER Active: Immediately QuickComm. No Max: 100.00
Used for high speed encoder loss detection. Selects the allowable difference in calculated speed signals
between samples before it is considered to have lost the speed signal feedback.
Dependency:
This parameter is updated when motor start-up time P0345 is changed or when a speedloop optimisation is
performed (P1960 = 1). There is a fixed delay of 40 ms before acting upon loss of encoder at high speeds.
Caution1:
When allowed speed difference is set to 0, both the high speed and low speed encoder loss detection is
disabled, thus encoder loss will not be detected.
Level:
3
Level:
3
If encoder loss detection is disabled and encoder loss occurs, then operation of the motor may become
unstable.
P0494[3] Delay speed loss reaction Min: 0
CStat: CUT Datatype: U16 Unit: ms Def: 10
P-Group: ENCODER Active: first confirm QuickComm. No Max: 65000
Used for low speed encoder loss detection. If the motor shaft speed is less than the value in P0492 then
encoder loss is detected using a low speed encoder loss detection algorithm. This parameter selects the
delay between loss of encoder at low speed and reaction to the encoder loss.
Index:
P0494[0] : 1st. Drive data set (DDS)
P0494[1] : 2nd. Drive data set (DDS)
P0494[2] : 3rd. Drive data set (DDS)
Dependency:
This parameter is updated when motor start-up time P0345 is changed or when a speedloop optimisation is
performed (P1960 = 1).
Caution1:
When the delay in P0494 is set to 0, then low speed encoder loss detection is disabled and low speed
encoder loss cannot be detected (high speed encoder loss detection will still operate if P0492 > 0).
If low speed encoder loss detection is disabled and encoder should be lost at low speed, then operation of
motor may become unstable.
P0500[3] Technological application Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: TECH_APL Active: first confirm QuickComm. Yes Max: 1
Selects technological application. Sets control mode (P1300).
Settings:
0 Constant torque
1 Pumps and fans
Index:
P0500[0] : 1st. Drive data set (DDS)
P0500[1] : 2nd. Drive data set (DDS)
P0500[2] : 3rd. Drive data set (DDS)
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
31
Page 32

Parameters Issue 03/02
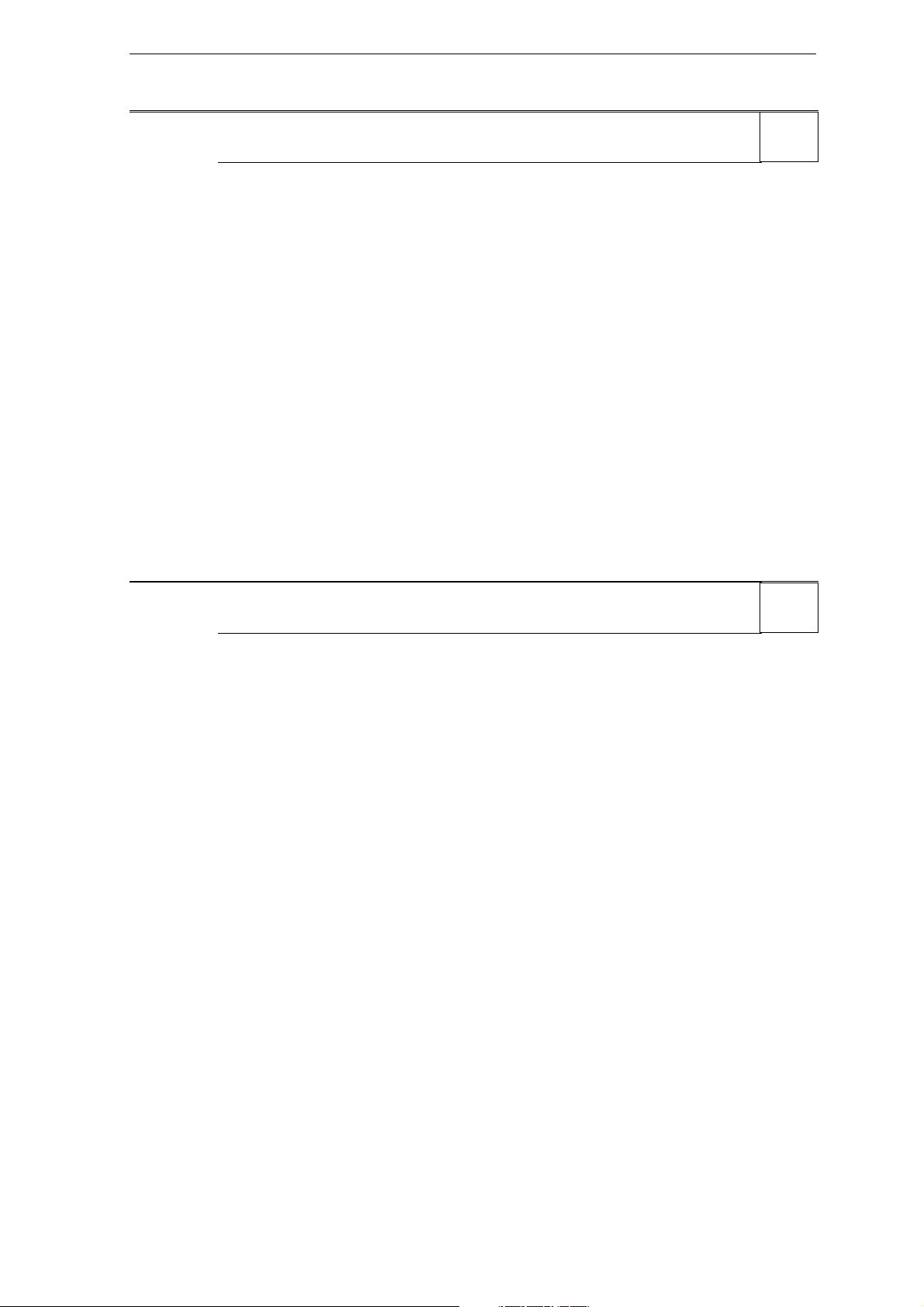
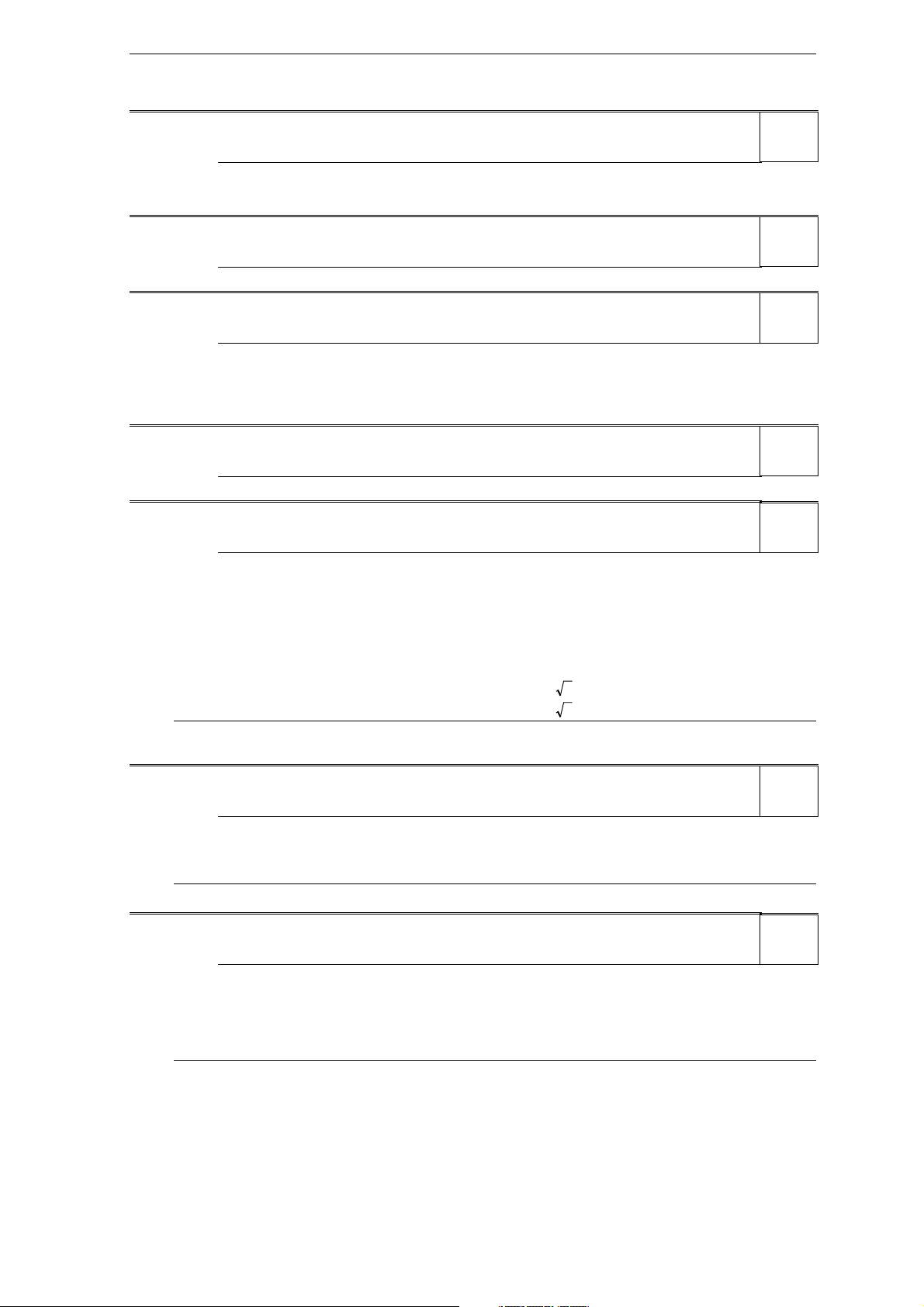
P0601[3] Motor temperature sensor Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: MOTOR Active: first confirm QuickComm. No Max: 2
Selects motor temperature sensor.
Settings:
0 No sensor
1 PTC thermistor
2 KTY84
Index:
P0601[0] : 1st. Drive data set (DDS)
P0601[1] : 2nd. Drive data set (DDS)
P0601[2] : 3rd. Drive data set (DDS)
Dependency:
If "no sensor" is selected, the motor temperature monitoring will be done based on the estimated value of
the thermal motor model.
The temperature of the motor, when a thermal sensor is connected is calculated using the thermal motor
model. When a KTY sensor is fitted, the loss of connection can be detected (Warning A0512). Using the
methods described above the monitoring of the temperature will automatically switch to the thermal model
using values derived from the estimated value. Using a PTC sensor the temperature of the motor is
calculated by the sensor in conjunction with the thermal model. This allows for redundancy of the monitoring
process.
Warning
5 V
ADC
A0512
T
= 4 s
1
Signal
loss
detection
Equivalent
circuit data
Power dissipation
P
V,mot
0
1
2
P0601
P0601 = 2
No sensor
PTC
KTY
ϑ
Thermal
motor
model
&
1
0
r0035
V
r0631
r0632
r0633
1
0
P0604
Level:
3
Motor
2
i
1≥
t
temp.
reaction
P0610
P0604[3] Threshold motor temperature Min: 0.0
CStat: CUT Datatype: Float Unit: °C Def: 130.0
P-Group: MOTOR Active: Immediately QuickComm. No Max: 200.0
Enters warning threshold for motor temperature protection. The trip temperature defined always 10 % higher
than the warning level P0604. When act. motor temperature exeeds trip temperature than inverter trip as
defined in P0610.
Index:
P0604[0] : 1st. Drive data set (DDS)
P0604[1] : 2nd. Drive data set (DDS)
P0604[2] : 3rd. Drive data set (DDS)
Note:
Default value depends on P0300 (select motor type).
P0610[3] Motor I2t temperature reaction Min: 0
CStat: CT Datatype: U16 Unit: - Def: 2
P-Group: MOTOR Active: first confirm QuickComm. No Max: 2
Defines reaction when motor temperature reaches warning threshold.
Settings:
0 No reaction, warning only
1 Warning and Imax reduction (results in reduced output frequency)
2 Warning and trip (F0011)
Index:
P0610[0] : 1st. Drive data set (DDS)
P0610[1] : 2nd. Drive data set (DDS)
P0610[2] : 3rd. Drive data set (DDS)
Dependency:
Trip level = P0604 (motor temperature warning level) * 105 %
Level:
2
Level:
3
Parameter List MICROMASTER 430
32 6SE6400-5AF00-0BP0
Page 33

Issue 03/02 Parameters
P0625[3] Ambient motor temperature
CStat: CUT Datatype: Float Unit: °C Def: 20.0
P-Group: MOTOR Active: Immediately QuickComm. No Max: 80.0
Measures ambient temperature of motor at time of motor data identification.
Index:
P0625[0] : 1st. Drive data set (DDS)
P0625[1] : 2nd. Drive data set (DDS)
P0625[2] : 3rd. Drive data set (DDS)
Min: -40.0
P0640[3] Motor overload factor [%] Min: 10.0
CStat: CUT Datatype: Float Unit: % Def: 110.0
P-Group: MOTOR Active: Immediately QuickComm. Yes Max: 400.0
Defines motor overload current limit in [%] relative to P0305 (rated motor current).
Index:
P0640[0] : 1st. Drive data set (DDS)
P0640[1] : 2nd. Drive data set (DDS)
P0640[2] : 3rd. Drive data set (DDS)
Dependency:
Limited to maximum inverter current or to 400 % of rated motor current (P0305), whichever is the lower.
Details:
See function diagram for current limitation.
P0700[3] Selection of command source Min: 0
CStat: CT Datatype: U16 Unit: - Def: 2
P-Group: COMMANDS Active: first confirm QuickComm. Yes Max: 6
Selects digital command source.
Settings:
0 Factory default setting
1 BOP (keypad)
2 Terminal
4 USS on BOP link
5 USS on COM link
6 CB on COM link
Index:
P0700[0] : 1st. Command data set (CDS)
P0700[1] : 2nd. Command data set (CDS)
P0700[2] : 3rd. Command data set (CDS)
Note:
Changing this parameter resets (to default) all settings on item selected. For example: Changing form 1 to 2
resets all digital inputs to default settings.
Level:
3
Level:
3
Level:
1
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
33
Page 34

Parameters Issue 03/02
P0701[3] Function of digital input 1 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 1.
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0701[0] : 1st. Command data set (CDS)
P0701[1] : 2nd. Command data set (CDS)
P0701[2] : 3rd. Command data set (CDS)
Dependency:
Setting 99 (enable BICO parameterization) requires
- P0700 command source or
- P0010 = 1, P3900 = 1, 2 or 3 quick commissioning or
- P0010 = 30, P0970 = 1 factory reset in order to reset.
Notice:
Setting 99 (BICO) for expert use only.
P0702[3] Function of digital input 2 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 12
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 2.
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0702[0] : 1st. Command data set (CDS)
P0702[1] : 2nd. Command data set (CDS)
P0702[2] : 3rd. Command data set (CDS)
Details:
See P0701 (function of digital input1).
Level:
2
Level:
2
Parameter List MICROMASTER 430
34 6SE6400-5AF00-0BP0
Page 35

Issue 03/02 Parameters
P0703[3] Function of digital input 3
CStat: CT Datatype: U16 Unit: - Def: 9
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 3.
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0703[0] : 1st. Command data set (CDS)
P0703[1] : 2nd. Command data set (CDS)
P0703[2] : 3rd. Command data set (CDS)
Details:
See P0701 (function of digital input 1).
Min: 0
P0704[3] Function of digital input 4 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 15
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 4.
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0704[0] : 1st. Command data set (CDS)
P0704[1] : 2nd. Command data set (CDS)
P0704[2] : 3rd. Command data set (CDS)
Details:
See P0701 (function of digital input 1).
Level:
2
Level:
2
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
35
Page 36

Parameters Issue 03/02
P0705[3] Function of digital input 5 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 15
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 5 (via analog input).
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0705[0] : 1st. Command data set (CDS)
P0705[1] : 2nd. Command data set (CDS)
P0705[2] : 3rd. Command data set (CDS)
Details:
See P0701 (function of digital input 1).
P0706[3] Function of digital input 6 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 15
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 6 ( via analog input)
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase frequency)
14 MOP down (decrease frequency)
15 Fixed setpoint (Direct selection)
16 Fixed setpoint (Direct selection + ON)
17 Fixed setpoint (Binary coded selection + ON)
25 DC brake enable
26 Enable Essential Service
27 Enable PID
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0706[0] : 1st. Command data set (CDS)
P0706[1] : 2nd. Command data set (CDS)
P0706[2] : 3rd. Command data set (CDS)
Details:
See P0701 (function of digital input 1).
Level:
2
Level:
2
Parameter List MICROMASTER 430
36 6SE6400-5AF00-0BP0
Page 37

Issue 03/02 Parameters
P0707[3] Function of digital input 7
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 7 (via analog input).
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase freq.)
14 MOP down (decrease freq.)
25 DC brake enable
26 Enable Essential Service
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0707[0] : 1st. Command data set (CDS)
P0707[1] : 2nd. Command data set (CDS)
P0707[2] : 3rd. Command data set (CDS)
Note:
Signals above 4 V are active, signals below 1,6 V are inactive.
Details:
See P0701 (function of digital input 1).
Min: 0
P0708[3] Function of digital input 8 Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 99
Selects function of digital input 8 (via analog input)
Settings:
0 Digital input disabled
1 ON/OFF1
2 ON reverse /OFF1
3 OFF2 - coast to standstill
4 OFF3 - quick ramp-down
9 Fault acknowledge
10 reserved
11 reserved
12 Reverse
13 MOP up (increase freq.)
14 MOP down (decrease freq.)
25 DC brake enable
26 Enable Essential Service
28 Bypass mode command input
29 External trip
33 Disable additional freq setpoint
99 Enable BICO parameterization
Index:
P0708[0] : 1st. Command data set (CDS)
P0708[1] : 2nd. Command data set (CDS)
P0708[2] : 3rd. Command data set (CDS)
Note:
Signals above 4 V are active, signals below 1,6 V are inactive.
Details:
See P0701 (function of digital input 1).
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
37
Page 38

Parameters Issue 03/02
P0718 CO/BO: Hand / Auto Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: Immediately QuickComm. No Max: 1
From a defaulted drive
0 = Auto operation i.e. the control from the analogue and digital inputs
1 = Hand operation i.e. the control comes from the BOP
Using the Hand / Auto buttons on the BOP will change this parameter.
r0019
1
Bit 12
Hand
0
r0019
1
Bit 15
Auto
0
P0718
}
1
Hand
Auto
0
Default:
P0810 = 718:0
ΤΤ⇔
Hand/Auto
P0718 = 0 : P0700[0] = 2
P0718 = 1 : P0700[1] = 1
CDS1/CDS2
P1000[0] = 2
P1000[1] = 1
(Terminal)
(ADC)
(BOP)
(MOP)
Level:
3
t
t
t
Note:
Changeing CDS values will effect the operation of Hand / Auto
Parameter List MICROMASTER 430
38 6SE6400-5AF00-0BP0
Page 39

Issue 03/02 Parameters
P0719[3] Selection of cmd. & freq. setp.
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 66
Central switch to select control command source for inverter.
Switches command and setpoint source between freely programmable BICO parameters and fixed
command/setpoint profiles. Command and setpoint sources can be changed independently.
The tens digit chooses the command source and the units digit chooses the setpoint source.
Settings:
0 Cmd = BICO parameter Setpoint = BICO parameter
1 Cmd = BICO parameter Setpoint = MOP setpoint
2 Cmd = BICO parameter Setpoint = Analog setpoint
3 Cmd = BICO parameter Setpoint = Fixed frequency
4 Cmd = BICO parameter Setpoint = USS on BOP link
5 Cmd = BICO parameter Setpoint = USS on COM link
6 Cmd = BICO parameter Setpoint = CB on COM link
10 Cmd = BOP Setpoint = BICO parameter
11 Cmd = BOP Setpoint = MOP setpoint
12 Cmd = BOP Setpoint = Analog setpoint
13 Cmd = BOP Setpoint = Fixed frequency
15 Cmd = BOP Setpoint = USS on COM link
16 Cmd = BOP Setpoint = CB on COM link
40 Cmd = USS on BOP link Setpoint = BICO parameter
41 Cmd = USS on BOP link Setpoint = MOP setpoint
42 Cmd = USS on BOP link Setpoint = Analog setpoint
43 Cmd = USS on BOP link Setpoint = Fixed frequency
44 Cmd = USS on BOP link Setpoint = USS on BOP link
45 Cmd = USS on BOP link Setpoint = USS on COM link
46 Cmd = USS on BOP link Setpoint = CB on COM link
50 Cmd = USS on COM link Setpoint = BICO parameter
51 Cmd = USS on COM link Setpoint = MOP setpoint
52 Cmd = USS on COM link Setpoint = Analog setpoint
53 Cmd = USS on COM link Setpoint = Fixed frequency
54 Cmd = USS on COM link Setpoint = USS on BOP link
55 Cmd = USS on COM link Setpoint = USS on COM link
60 Cmd = CB on COM link Setpoint = BICO parameter
61 Cmd = CB on COM link Setpoint = MOP setpoint
62 Cmd = CB on COM link Setpoint = Analog setpoint
63 Cmd = CB on COM link Setpoint = Fixed frequency
64 Cmd = CB on COM link Setpoint = USS on BOP link
66 Cmd = CB on COM link Setpoint = CB on COM link
Index:
P0719[0] : 1st. Command data set (CDS)
P0719[1] : 2nd. Command data set (CDS)
P0719[2] : 3rd. Command data set (CDS)
Note:
If set to a value other than 0 (i.e. BICO parameter is not the setpoint source), P0844 / P0848 (first source of
OFF2 / OFF3) are not effective; instead, P0845 / P0849 (second source of OFF2 / OFF3) apply and the
OFF commands are obtained via the particular source defined.
Min: 0
Level:
3
BICO connections made previously remain unchanged.
r0720 Number of digital inputs Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays number of digital inputs.
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
Level:
3
39
Page 40

Parameters Issue 03/02
r0722 CO/BO: Binary input values Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays status of digital inputs.
Bitfields:
Bit00 Digital input 1 0 OFF
1ON
Bit01 Digital input 2 0 OFF
1ON
Bit02 Digital input 3 0 OFF
1ON
Bit03 Digital input 4 0 OFF
1ON
Bit04 Digital input 5 0 OFF
1ON
Bit05 Digital input 6 0 OFF
1ON
Bit06 Digital input 7 (via ADC 1) 0 OFF
1ON
Bit07 Digital input 8 (via ADC 2) 0 OFF
1ON
Note:
Segment is lit when signal is active.
P0724 Debounce time for digital inputs Min: 0
CStat: CT Datatype: U16 Unit: - Def: 3
P-Group: COMMANDS Active: Immediately QuickComm. No Max: 3
Defines debounce time (filtering time) used for digital inputs.
Settings:
0 No debounce time
1 2.5 ms debounce time
2 8.2 ms debounce time
3 12.3 ms debounce time
P0725 PNP / NPN digital inputs Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: COMMANDS Active: Immediately QuickComm. No Max: 1
Switches between active high (PNP) and active low (NPN). This is valid for all digital inputs simultaneously.
Level:
3
Level:
3
Level:
3
The following is valid by using the internal supply:
Value:
NPN: Terminals 5/6/7/8/16/17 must be connected via terminal 28 ( O V).
PNP: Terminals 5/6/7/8/16/17 must be connected via terminal 9 (24 V).
Settings:
0 NPN mode ==> low active
1 PNP mode ==> high active
r0730 Number of digital outputs Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays number of digital outputs (relays).
Level:
3
Parameter List MICROMASTER 430
40 6SE6400-5AF00-0BP0
Page 41

Issue 03/02 Parameters
P0731[3] BI: Function of digital output 1
CStat: CUT Datatype: U32 Unit: - Def: 52:3
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of digital output 1.
Settings:
52.0 Drive ready 0 Closed
52.1 Drive ready to run 0 Closed
52.2 Drive running 0 Closed
52.3 Drive fault active 0 Closed
52.4 OFF2 active 1 Closed
52.5 OFF3 active 1 Closed
52.6 Switch on inhibit active 0 Closed
52.7 Drive warning active 0 Closed
52.8 Deviation setpoint/actual value 1 Closed
52.9 PZD control (Process Data Control) 0 Closed
52.A Maximum frequency reached 0 Closed
52.B Warning: Motor current limit 1 Closed
52.C Motor holding brake (MHB) active 0 Closed
52.D Motor overload 1 Closed
52.E Motor running direction right 0 Closed
52.F Inverter overload 1 Closed
53.0 DC brake active 0 Closed
53.1 Act. freq. r0021 > P2167 (f_off) 0 Closed
53.2 Act. freq. r0021 > P1080 (f_min) 0 Closed
53.3 Act. current r0027 >= P2170 0 Closed
53.4 Act. freq. r0021 >= P2155 (f_1) 0 Closed
53.5 Act. freq. r0021 < P2155 (f_1) 0 Closed
53.6 Act. freq. r0021 >= setpoint 0 Closed
53.7 Act. Vdc r0026 < P2172 0 Closed
53.8 Act. Vdc r0026 > P2172 0 Closed
53.A PID output r2294 == P2292 (PID_min) 0 Closed
53.B PID output r2294 == P2291 (PID_max) 0 Closed
Index:
P0731[0] : 1st. Command data set (CDS)
P0731[1] : 2nd. Command data set (CDS)
P0731[2] : 3rd. Command data set (CDS)
Min: 0:0
P0732[3] BI: Function of digital output 2 Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 52:7
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of digital output 2.
Settings:
52.0 Drive ready 0 Closed
52.1 Drive ready to run 0 Closed
52.2 Drive running 0 Closed
52.3 Drive fault active 0 Closed
52.4 OFF2 active 1 Closed
52.5 OFF3 active 1 Closed
52.6 Switch on inhibit active 0 Closed
52.7 Drive warning active 0 Closed
52.8 Deviation setpoint/actual value 1 Closed
52.9 PZD control (Process Data Control) 0 Closed
52.A Maximum frequency reached 0 Closed
52.B Warning: Motor current limit 1 Closed
52.C Motor holding brake (MHB) active 0 Closed
52.D Motor overload 1 Closed
52.E Motor running direction right 0 Closed
52.F Inverter overload 1 Closed
53.0 DC brake active 0 Closed
53.1 Act. freq. r0021 > P2167 (f_off) 0 Closed
53.2 Act. freq. r0021 > P1080 (f_min) 0 Closed
53.3 Act. current r0027 >= P2170 0 Closed
53.4 Act. freq. r0021 >= P2155 (f_1) 0 Closed
53.5 Act. freq. r0021 < P2155 (f_1) 0 Closed
53.6 Act. freq. r0021 >= setpoint 0 Closed
53.7 Act. Vdc r0026 < P2172 0 Closed
53.8 Act. Vdc r0026 > P2172 0 Closed
53.A PID output r2294 == P2292 (PID_min) 0 Closed
53.B PID output r2294 == P2291 (PID_max) 0 Closed
Index:
P0732[0] : 1st. Command data set (CDS)
P0732[1] : 2nd. Command data set (CDS)
P0732[2] : 3rd. Command data set (CDS)
Note:
Other settings are possible in "Expert" mode (see P0003 - user access level).
Level:
2
Level:
2
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
41
Page 42

Parameters Issue 03/02
P0733[3] BI: Function of digital output 3 Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of digital output 2.
Settings:
52.0 Drive ready 0 Closed
52.1 Drive ready to run 0 Closed
52.2 Drive running 0 Closed
52.3 Drive fault active 0 Closed
52.4 OFF2 active 1 Closed
52.5 OFF3 active 1 Closed
52.6 Switch on inhibit active 0 Closed
52.7 Drive warning active 0 Closed
52.8 Deviation setpoint/actual value 1 Closed
52.9 PZD control (Process Data Control) 0 Closed
52.A Maximum frequency reached 0 Closed
52.B Warning: Motor current limit 1 Closed
52.C Motor holding brake (MHB) active 0 Closed
52.D Motor overload 1 Closed
52.E Motor running direction right 0 Closed
52.F Inverter overload 1 Closed
53.0 DC brake active 0 Closed
53.1 Act. freq. r0021 > P2167 (f_off) 0 Closed
53.2 Act. freq. r0021 > P1080 (f_min) 0 Closed
53.3 Act. current r0027 >= P2170 0 Closed
53.4 Act. freq. r0021 >= P2155 (f_1) 0 Closed
53.5 Act. freq. r0021 < P2155 (f_1) 0 Closed
53.6 Act. freq. r0021 >= setpoint 0 Closed
53.7 Act. Vdc r0026 < P2172 0 Closed
53.8 Act. Vdc r0026 > P2172 0 Closed
53.A PID output r2294 == P2292 (PID_min) 0 Closed
53.B PID output r2294 == P2291 (PID_max) 0 Closed
Index:
P0733[0] : 1st. Command data set (CDS)
P0733[1] : 2nd. Command data set (CDS)
P0733[2] : 3rd. Command data set (CDS)
Note:
Other settings are possible in "Expert" mode (see P0003 - user access level).
r0747 CO/BO: State of digital outputs Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMMANDS Max: -
Displays status of digital outputs (also includes inversion of digital outputs via P0748).
Bitfields:
Bit00 Digital output 1 energized 0 NO
1 YES
Bit01 Digital output 2 energized 0 NO
1 YES
Bit02 Digital output 3 energized 0 NO
1 YES
Dependency:
Bit 0 = 0 :
Relay de-energized / contacts open
Level:
2
Level:
3
Bit 0 = 1 :
Relay energized / contacts closed
P0748 Invert digital outputs Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 7
Defines high and low states of relay for a given function.
Bitfields:
Bit00 Invert digital output 1 0 NO
1 YES
Bit01 Invert digital output 2 0 NO
1 YES
Bit02 Invert digital output 3 0 NO
1 YES
r0750 Number of ADCs Min: -
Datatype: U16 Unit: - Def: -
P-Group: TERMINAL Max: -
Displays number of analog inputs available.
Parameter List MICROMASTER 430
Level:
3
Level:
3
42 6SE6400-5AF00-0BP0
Page 43

Issue 03/02 Parameters
r0752[2] Act. input of ADC [V] or [mA]
Datatype: Float Unit: - Def: -
P-Group: TERMINAL Max: -
Displays smoothed analog input value in volts before the characteristic block.
Index:
r0752[0] : Analog input 1 (ADC 1)
r0752[1] : Analog input 2 (ADC 2)
Min: -
P0753[2] Smooth time ADC Min: 0
CStat: CUT Datatype: U16 Unit: ms Def: 3
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 10000
Defines filter time (PT1 filter) in [ms] for analog input.
Index:
P0753[0] : Analog input 1 (ADC 1)
P0753[1] : Analog input 2 (ADC 2)
Note:
Increasing this time (smooth) reduces jitter but slows down response to the analog input.
P0753 = 0 : No filtering
r0754[2] Act. ADC value after scaling [%] Min: -
P-Group: TERMINAL Max: -
Shows smoothed value of analog input in [%] after scaling block.
Index:
r0754[0] : Analog input 1 (ADC 1)
r0754[1] : Analog input 2 (ADC 2)
Dependency:
P0757 to P0760 define range (ADC scaling).
Datatype: Float Unit: % Def: -
r0755[2] CO: Act. ADC after scal. [4000h] Min: -
P-Group: TERMINAL Max: -
Displays analog input, scaled using ASPmin and ASPmax.
Datatype: I16 Unit: - Def: -
Level:
2
Level:
3
Level:
2
Level:
3
Analog setpoint (ASP) from the analog scaling block can vary from min. analog setpoint (ASPmin) to a max.
analog setpoint (ASPmax) as shown in P0757 (ADC scaling).
The largest magnitude (value without sign) of ASPmin and ASPmax defines the scaling of 16384.
Example:
ASPmin = 300 %, ASPmax = 100 % then 16384 represents 300 %.
This parameter will vary from 5461 to 16364
ASPmin = -200 %, ASPmax = 100 % then 16384 represents 200 %.
This parameter will vary from -16384 to +8192
Index:
r0755[0] : Analog input 1 (ADC 1)
r0755[1] : Analog input 2 (ADC 2)
Note:
This value is used as an input to analog BICO connectors.
ASPmax represents the highest analog setpoint (this may be at 10 V).
ASPmin represents the lowest analog setpoint (this may be at 0 V).
Details:
See parameters P0757 to P0760 (ADC scaling)
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
43
Page 44

Parameters Issue 03/02
P0756[2] Type of ADC Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 4
Defines type of analog input and also enables analog input monitoring.
To switch over from voltage to current analog input it is not sufficient to merely modify parameter P0756.
Rather, the DIPs on the terminal board must also be set to the correct position. The DIP settings are as
follows:
- OFF = voltage input (10 V)
- ON = current input (20 mA)
Allocation of DIPs to analog inputs is as follows:
- DIP on left (DIP 1) = Analog input 1
- DIP on right (DIP 2) = Analog input 2
Settings:
0 Unipolar voltage input (0 to +10 V)
1 Unipolar voltage input with monitoring (0 to 10 V)
2 Unipolar current input (0 to 20 mA)
3 Unipolar current input with monitoring (0 to 20 mA)
4 Bipolar voltage input (-10 V to +10 V)
Index:
P0756[0] : Analog input 1 (ADC 1)
P0756[1] : Analog input 2 (ADC 2)
Dependency:
Function disabled if analog scaling block programmed to output negative setpoints (see P0757 to P0760).
Notice:
When monitoring is enabled and a deadband defined (P0761), a fault condition will be generated (F0080) if
the analog input voltage falls below 50 % of the deadband voltage.
On account of h/w restirction it is not possible to select the bipolar voltage (see Enum declaration) for
analog input 2 (P0756[1] = 4).
Details:
See P0757 to P0760 (ADC scaling).
Level:
2
Parameter List MICROMASTER 430
44 6SE6400-5AF00-0BP0
Page 45

Issue 03/02 Parameters
P0757[2] Value x1 of ADC scaling [V / mA]
CStat: CUT Datatype: Float Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Parameters P0757 - P0760 configure the input scaling as shown in the diagram:
P0756 = 0 ... 3
P0761 = 0
%
100 %
ASPmax
P0760
P0757
P0759
P0758
ASPmin
Where:
Analog setpoints represent a [%] of the normalized frequency in P2000.
Analog setpoints may be larger than 100 %.
ASPmax represents highest analog setpoint (this may be at 10 V or 20 mA).
ASPmin represents lowest analog setpoint (this may be at 0 V or 20 mA).
10 V
20 mA
Min: -20
Level:
2
x
100%
V
mA
4000H 10 V or 20 mA
Default values provide a scaling of 0 V or 0 mA = 0 %, and 10 V or 20 mA = 100 %.
P0756 = 4
P0761 = 0
ASPmax
P0760
P0757
-10 V
Index:
P0757[0] : Analog input 1 (ADC 1)
P0757[1] : Analog input 2 (ADC 2)
Notice:
The value x2 of ADC scaling P0759 must be greater than the value x1 of ADC scaling P0757.
100 %
%
ASPmin
P0758
P0759
10 V
4000H 10 V
x
V
100%
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
45
Page 46

Parameters Issue 03/02
P0758[2] Value y1 of ADC scaling Min: -99999.9
CStat: CUT Datatype: Float Unit: % Def: 0.0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 99999.9
Sets value of Y1 in [%] as described in P0757 (ADC scaling)
Index:
P0758[0] : Analog input 1 (ADC 1)
P0758[1] : Analog input 2 (ADC 2)
Dependency:
Affects P2000 to P2003 (reference frequency, voltage, current or torque) depending on which setpoint is to
be generated.
P0759[2] Value x2 of ADC scaling [V / mA] Min: -20
CStat: CUT Datatype: Float Unit: - Def: 10
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Sets value of X2 as described in P0757 (ADC scaling).
Index:
P0759[0] : Analog input 1 (ADC 1)
P0759[1] : Analog input 2 (ADC 2)
Notice:
The value x2 of ADC scaling P0759 must be greater than the value x1 of ADC scaling P0757.
P0760[2] Value y2 of ADC scaling Min: -99999.9
CStat: CUT Datatype: Float Unit: % Def: 100.0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 99999.9
Sets value of Y2 in [%] as described in P0757 (ADC scaling).
Index:
P0760[0] : Analog input 1 (ADC 1)
P0760[1] : Analog input 2 (ADC 2)
Dependency:
Affects P2000 to P2003 (reference frequency, voltage, current or torque) depending on which setpoint is to
be generated.
Level:
2
Level:
2
Level:
2
Parameter List MICROMASTER 430
46 6SE6400-5AF00-0BP0
Page 47

Issue 03/02 Parameters
P0761[2] Width of ADC deadband [V / mA]
CStat: UT Datatype: Float Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Defines width of deadband on analog input. The diagrams below explain its use.
Example:
ADC value 2 to 10 V (0 to 50 Hz)
The below example produces a 2 to 10 V analog input (0 to 50 Hz):
P2000 = 50 Hz
P0759 = 8 V P0760 = 75 %
P0757 = 2 V P0758 = 0 %
P0761 = 2 V
P0756 = 0 or 1
P0761 > 0
||
0 < P0758 < P0760
%
100 %
ASPmax
P0760
P0758
0 > P0758 > P0760
P0757
P0761
P0759
10 V
20 mA
Min: 0
Level:
3
P0757 > P0761
x
100%
V
mA
4000H 10 V or 20 mA
P0757 = P0761
ASPmin
ADC value 0 to 10 V (-50 to +50 Hz):
The below example produces a 0 to 10 V analog input (-50 to +50 Hz) with center zero and a "holding point"
0.2 V wide (0.1 V to each side of center).
P2000 = 50 Hz
P0759 = 8 V P0760 = 75 %
P0757 = 2 V P0758 = -75 %
P0761 = 0.1 V
P0756 = 0 or 1
P0761 > 0
P0758 < 0 < P0760
%
100 %
ASPmax
P0760
P0757
P0758
P0761
P0759
4000H 10 V or 20 mA
10 V
20 mA
x
100%
V
mA
P0757 < P0761
ASPmin
ADC value -10 to +10 V (-50 to +50 Hz):
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
47
Page 48

Parameters Issue 03/02
The below example produces a -10 to +10 V analog input (-50 to +50 Hz) with center zero and a "holding
point" 0.2 V wide (0.1 V to each side of center).
P0756 = 4
P0761 > 0
P0758 < 0 < P0760
ASPmax
P0760
P0757
-10 V
100 %
%
P0761
P0758
P0759
10 V
4000H 10 V
x
V
100%
ASPmin
Index:
P0761[0] : Analog input 1 (ADC 1)
P0761[1] : Analog input 2 (ADC 2)
Note:
P0761[x] = 0 : No deadband active.
Notice:
Deadband starts from 0 V to value of P0761, if both values of P0758 and P0760 (y coordinates of ADC
scaling) are positive or negative respectively. However, deadband is active in both directions from point of
intersection (x axis with ADC scaling curve), if sign of P0758 and P0760 are opposite.
Min. frequency P1080 should be zero when using center zero setup. There is no hysteresis at the end of the
deadband.
P0762[2] Delay for loss of signal action Min: 0
CStat: CUT Datatype: U16 Unit: ms Def: 10
P-Group: TERMINAL Active: Immediately QuickComm. No Max: 10000
Defines time delay between loss of analog setpoint and appearance of fault code F0080.
Index:
P0762[0] : Analog input 1 (ADC 1)
P0762[1] : Analog input 2 (ADC 2)
Note:
Expert users can choose the desired reaction to F0080 (default is OFF2).
r0770 Number of DACs Min: -
Datatype: U16 Unit: - Def: -
P-Group: TERMINAL Max: -
Displays number of analog outputs available.
P0771[2] CI: DAC Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 21:0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 4000:0
Defines function of the 0 - 20 mA analog output.
Settings:
21 CO: Act. frequency (scaled to P2000)
24 CO: Act. output frequency (scaled to P2000)
25 CO: Act. output voltage (scaled to P2001)
26 CO: Act. DC-link voltage (scaled to P2001)
27 CO: Act. output current (scaled to P2002)
Index:
P0771[0] : Analog output 1 (DAC 1)
P0771[1] : Analog output 2 (DAC 2)
Level:
3
Level:
3
Level:
2
Parameter List MICROMASTER 430
48 6SE6400-5AF00-0BP0
Page 49

Issue 03/02 Parameters
P0773[2] Smooth time DAC
CStat: CUT Datatype: U16 Unit: ms Def: 2
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 1000
Defines smoothing time [ms] for analog output signal. This parameter enables smoothing for DAC input
using a PT1 filter.
Index:
P0773[0] : Analog output 1 (DAC 1)
P0773[1] : Analog output 2 (DAC 2)
Dependency:
P0773 = 0: Deactivates filter.
Min: 0
r0774[2] Act. DAC value [V] or [mA] Min: -
P-Group: TERMINAL Max: -
Shows value of analog output in [V] or [mA] after filtering and scaling.
Index:
r0774[0] : Analog output 1 (DAC 1)
r0774[1] : Analog output 2 (DAC 2)
Datatype: Float Unit: - Def: -
P0776[2] Type of DAC Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 1
Defines type of analog output.
Settings:
0 Current output
1 Voltage output
Index:
P0776[0] : Analog output 1 (DAC 1)
P0776[1] : Analog output 2 (DAC 2)
Note:
The analog output is designed as a current output with a range of 0...20 mA.
Level:
3
Level:
3
Level:
2
For a voltage output with a range of 0...10 V an external resistor of 500 Ohms has to be connected at the
terminals (12/13 or 26/27).
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
49
Page 50

Parameters Issue 03/02
P0777[2] Value x1 of DAC scaling Min: -99999.0
CStat: CUT Datatype: Float Unit: % Def: 0.0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 99999.0
Defines x1 output characteristic in [%]. Scaling block is responsible for adjustment of output value defined in
P0771 (DAC connector input).
Parameters of DAC scaling block (P0777 ... P0781) work as follows:
Output signal (mA)
20
P0780 Y2
P0778 Y1
0
P0777
X1
Where:
Points P1 (x1, y1) and P2 (x2, y2) can be chosen freely.
Example:
The default values of the scaling block provides a scaling of:
P1: 0.0 % = 0 mA or 0 V and
P2: 100.0 % = 20 mA or 20 V.
Index:
P0777[0] : Analog output 1 (DAC 1)
P0777[1] : Analog output 2 (DAC 2)
Dependency:
Affects P2000 to P2003 (referency frequency, voltage, current or torque) depending on which setpoint is to
be generated.
P0779
X2
20 mA
100%(-100%)
P0778[2] Value y1 of DAC scaling Min: 0
CStat: CUT Datatype: Float Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Defines y1 of output characteristic.
Index:
P0778[0] : Analog output 1 (DAC 1)
P0778[1] : Analog output 2 (DAC 2)
P0779[2] Value x2 of DAC scaling Min: -99999.0
CStat: CUT Datatype: Float Unit: % Def: 100.0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 99999.0
Defines x2 of output characteristic in [%].
Index:
P0779[0] : Analog output 1 (DAC 1)
P0779[1] : Analog output 2 (DAC 2)
Dependency:
Affects P2000 to P2003 (referency frequency, voltage, current or torque) depending on which setpoint is to
be generated.
P0780[2] Value y2 of DAC scaling Min: 0
CStat: CUT Datatype: Float Unit: - Def: 20
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Defines y2 of output characteristic.
Index:
P0780[0] : Analog output 1 (DAC 1)
P0780[1] : Analog output 2 (DAC 2)
Level:
2
Level:
2
Level:
2
Level:
2
Parameter List MICROMASTER 430
50 6SE6400-5AF00-0BP0
Page 51

Issue 03/02 Parameters
P0781[2] Width of DAC deadband
CStat: CUT Datatype: Float Unit: - Def: 0
P-Group: TERMINAL Active: first confirm QuickComm. No Max: 20
Sets width of dead-band in [mA] or [V] for analog output.
Index:
P0781[0] : Analog output 1 (DAC 1)
P0781[1] : Analog output 2 (DAC 2)
Min: 0
P0800[3] BI: Download parameter set 0 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of command to start download of parameter set 0 from attached AOP. The first three digits
describe the parameter number of the command source, the last digit refers to the bit setting for that
parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
Index:
P0800[0] : 1st. Command data set (CDS)
P0800[1] : 2nd. Command data set (CDS)
P0800[2] : 3rd. Command data set (CDS)
Note:
Signal of digital input:
0 = No download
1 = Start download parameter set 0 from AOP.
P0801[3] BI: Download parameter set 1 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines sources of command to start download of parameter set 1 from attached AOP. The first three digits
describe the parameter number of the command source, the last digit refers to the bit setting for that
parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
Index:
P0801[0] : 1st. Command data set (CDS)
P0801[1] : 2nd. Command data set (CDS)
P0801[2] : 3rd. Command data set (CDS)
Note:
Signal of digital input:
0 = No download
1 = Start download parameter set 1 from AOP.
P0809[3] Copy command data set (CDS) Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 2
Calls 'Copy command data set' function.
Index:
P0809[0] : Copy from CDS
P0809[1] : Copy to CDS
P0809[2] : Start copy
Note:
Start value in index 2 is automatically reset to '0' after execution of function.
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
51
Page 52

Parameters Issue 03/02
P0810 BI: CDS bit 0 (Local / Remote) Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 718:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4095:0
Selects command source from which to read Bit 0 for selecting a command data set (CDS).
Selection of CDS
BI: CDS bit 1
P0811
(0:0)
BI: CDS b0 loc/rem
P0810
(0:0)
3
2
1
CO/BO: Add. CtrlWd
CO/BO: Act CtrlWd1
t0
CDS active
r0050
3
Switch-over time
aprox. 4 ms
2
1
t0
The actual active command data set (CDS) is displayed in parameter r0050.
selected
CDS
r0055
Bit15
1. CDS 0 0
2. CDS 0 1
3. CDS 1 0
3. CDS 1 1
r0054
Bit15
active
CDS
r0050
0
1
2
2
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Note:
P0811 is also relevant for command data set (CDS) set selection.
P0811 BI: CDS bit 1 Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4095:0
Selects command source from which to read Bit 1 for selecting a command data set (see P0810).
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Note:
P0810 is also relevant for command data set (CDS) selection.
r0055
r0055
r0054
r0054
Level:
3
.15
.15
.15
.15
Level:
2
Parameter List MICROMASTER 430
52 6SE6400-5AF00-0BP0
Page 53

Issue 03/02 Parameters
P0819[3] Copy drive data set (DDS)
Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 2
Calls 'Copy drive data set' function.
Index:
P0819[0] : Copy from DDS
P0819[1] : Copy to DDS
P0819[2] : Start copy
Note:
Start value in index 2 is automatically reset to '0' after execution of function.
P0820 BI: DDS bit 0 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4095:0
Selects command source from which to read Bit 0 for selecting a drive data set (DDS).
Drive running
Drive ready
Selection of DDS
BI: DDS bit 1
P0821
BI: DDS bit 0
P0820
DDS active
r0051 [1]
(0:0)
(0:0)
3
2
1
Switch-over time
aprox. 50 ms
3
CO/BO: Add. CtrlWd
r0055
r0055
CO/BO: Add. CtrlWd
r0055
r0055
Level:
2
Level:
3
t
.05
.05
.04
.04
t0
2
1
The actual active drive data set (DDS) is displayed in parameter r0051[1].
selected
r0055
Bit05
r0054
Bit04
1. DDS 0 0
2. DDS 0 1
3. DDS 1 0
3. DDS 1 1
DDS
r0051 [0]
0
1
2
2
active
DDS
r0051 [1]
0
1
2
2
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Note:
P0821 is also relevant for drive data set (DDS) selection.
t0
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
53
Page 54

Parameters Issue 03/02
P0821 BI: DDS bit 1 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4095:0
Selects command source from which Bit 1 for selecting a drive data set is to be read in (see parameter
P0820).
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Note:
P0820 is also relevant for drive data set (DDS) selection.
P0840[3] BI: ON/OFF1 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 722:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Allows ON/OFF1 command source to be selected using BICO. The first three digits describe the parameter
number of the command source; the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Level:
3
Level:
3
19.0 = ON/OFF1 via BOP
Index:
P0840[0] : 1st. Command data set (CDS)
P0840[1] : 2nd. Command data set (CDS)
P0840[2] : 3rd. Command data set (CDS)
Dependency:
Active only when P0719 = 0 (remote selection of command/setpoint source).
BICO requires P0700 set to 2 (enable BICO).
The default setting (ON right) is digital input 1 (722.0). Alternative source possible only when function of
digital input 1 is changed (via P0701) before changing value of P0840.
P0842[3] BI: ON reverse/OFF1 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Allows ON/OFF1 reverse command source to be selected using BICO. The first three digits describe the
parameter number of the command source and the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
19.0 = ON/OFF1 via BOP
Index:
P0842[0] : 1st. Command data set (CDS)
P0842[1] : 2nd. Command data set (CDS)
P0842[2] : 3rd. Command data set (CDS)
Dependency:
Active only when P0719 = 0 (remote selection of command/setpoint source).
Level:
3
Parameter List MICROMASTER 430
54 6SE6400-5AF00-0BP0
Page 55

Issue 03/02 Parameters
P0844[3] BI: 1. OFF2
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines first source of OFF2 when P0719 = 0 (BICO). The first three digits describe the parameter number
of the command source and the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
19.0 = ON/OFF1 via BOP
19.1 = OFF2: Electrical stop via BOP
Index:
P0844[0] : 1st. Command data set (CDS)
P0844[1] : 2nd. Command data set (CDS)
P0844[2] : 3rd. Command data set (CDS)
Dependency:
Active only when P0719 = 0 (remote selection of command/setpoint source).
If one of the digital inputs is selected for OFF2, the inverter will not run unless the digital input is active.
Note:
OFF2 means immediate pulse-disabling; the motor is coasting.
OFF2 is low-active, i.e. :
0 = Pulse disabling.
1 = Operating condition.
Min: 0:0
P0845[3] BI: 2. OFF2 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 19:1
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines second source of OFF2. The first three digits describe the parameter number of the command
source and the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Level:
3
Level:
3
19.0 = ON/OFF1 via BOP
Index:
P0845[0] : 1st. Command data set (CDS)
P0845[1] : 2nd. Command data set (CDS)
P0845[2] : 3rd. Command data set (CDS)
Dependency:
In contrast to P0844 (first source of OFF2), this parameter is always active, independent of P0719 (selection
of command and frequency setpoint).
If one of the digital inputs is selected for OFF2, the inverter will not run unless the digital input is active.
Note:
OFF2 means immediate pulse-disabling; the motor is coasting.
OFF2 is low-active, i.e. :
0 = Pulse disabling.
1 = Operating condition.
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
55
Page 56

Parameters Issue 03/02
P0848[3] BI: 1. OFF3 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines first source of OFF3 when P0719 = 0 (BICO). The first three digits describe the parameter number
of the command source and the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
19.0 = ON/OFF1 via BOP
Index:
P0848[0] : 1st. Command data set (CDS)
P0848[1] : 2nd. Command data set (CDS)
P0848[2] : 3rd. Command data set (CDS)
Dependency:
Active only when P0719 = 0 (remote selection of command/setpoint source).
If one of the digital inputs is selected for OFF3, the inverter will not run unless the digital input is active.
Note:
OFF3 means fast ramp-down to 0.
OFF3 is low-active, i.e.
0 = Ramp-down.
1 = Operating condition.
P0849[3] BI: 2. OFF3 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines second source of OFF3. The first three digits describe the parameter number of the command
source and the last digit denotes the bit setting for that parameter.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Level:
3
Level:
3
19.0 = ON/OFF1 via BOP
Index:
P0849[0] : 1st. Command data set (CDS)
P0849[1] : 2nd. Command data set (CDS)
P0849[2] : 3rd. Command data set (CDS)
Dependency:
In contrast to P0848 (first source of OFF3), this parameter is always active, independent of P0719 (selection
of command and frequency setpoint).
If one of the digital inputs is selected for OFF3, the inverter will not run unless the digital input is active.
Note:
OFF3 means fast ramp-down to 0.
OFF3 is low-active, i.e.
0 = Ramp-down.
1 = Operating condition.
Parameter List MICROMASTER 430
56 6SE6400-5AF00-0BP0
Page 57

Issue 03/02 Parameters
P0852[3] BI: Pulse enable
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of pulse enable/disable signal.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Index:
P0852[0] : 1st. Command data set (CDS)
P0852[1] : 2nd. Command data set (CDS)
P0852[2] : 3rd. Command data set (CDS)
Dependency:
Active only when P0719 = 0 (remote selection of command/setpoint source).
Min: 0:0
P0918 CB address Min: 0
CStat: CT Datatype: U16 Unit: - Def: 3
P-Group: COMM Active: first confirm QuickComm. No Max: 65535
Defines address of CB (communication board) or address of the other option modules.
There are two ways to set the bus address:
1 via DIP switches on the PROFIBUS module
2 via a user-entered value
Note:
Possible PROFIBUS settings:
1 ... 125
0, 126, 127 are not allowed
Level:
3
Level:
2
The following applies when a PROFIBUS module is used:
DIP switch = 0 Address defined in P0918 (CB address) is valid
DIP switch not = 0 DIP switch setting has priority and P0918 indicates DIP switch setting.
P0927 Parameter changeable via Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 15
P-Group: COMM Active: first confirm QuickComm. No Max: 15
Specifies the interfaces which can be used to change parameters.
Example:
"b - - n n" (bits 0, 1, 2 and 3 set) in the default setting means that parameters can be changed via any
interface.
"b - - r n" (bits 0, 1 and 3 set) would specify that parameters can be changed via PROFIBUS/CB, BOP and
USS on COM link (RS485 USS) but not via USS on BOP link (RS232).
Bitfields:
Bit00 PROFIBUS / CB 0 NO
1 YES
Bit01 BOP 0 NO
1 YES
Bit02 USS on BOP link 0 NO
1 YES
Bit03 USS on COM link 0 NO
1 YES
Details:
The seven-segment display is explained in the "Introduction to MICROMASTER System Parameters" in this
handbook.
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
57
Page 58

Parameters Issue 03/02
r0947[8] Last fault code Min: -
P-Group: ALARMS Max: -
Displays fault history according to the diagram below
where:
"F1" is the first active fault (not yet acknowledged).
"F2" is the second active fault (not yet acknowledged).
"F1e" is the occurrence of the fault acknowledgement for F1 & F2.
This moves the value in the 2 indices down to the next pair of indices, where they are stored. Indices 0 & 1
contain the active faults. When faults are acknowledged, indices 0 & 1 are reset to 0.
r0947[0]
r0947[1]
r0947[2]
r0947[3]
r0947[4]
r0947[5]
r0947[6]
r0947[7]
Example:
If the inverter trips on undervoltage and then receives an external trip before the undervoltage is
acknowledged, you will obtain:
r0947[0] = 3 Undervoltage (F0003)
r0947[1] = 85 External trip (F0085)
F1
F1e
F1e
F1e
Datatype: U16 Unit: - Def: -
Active
F2
Fault Codes
F1e
F1e
F1e
Most recent
Fault Codes - 1
Most recent
Fault Codes - 2
Most recent
Fault Codes - 3
Level:
3
Whenever a fault in index 0 is acknowledged (F1e), the fault history shifts as indicated in the diagram
above.
Index:
r0947[0] : Recent fault trip --, fault 1
r0947[1] : Recent fault trip --, fault 2
r0947[2] : Recent fault trip -1, fault 3
r0947[3] : Recent fault trip -1, fault 4
r0947[4] : Recent fault trip -2, fault 5
r0947[5] : Recent fault trip -2, fault 6
r0947[6] : Recent fault trip -3, fault 7
r0947[7] : Recent fault trip -3, fault 8
Dependency:
Index 1 used only if second fault occurs before first fault is acknowledged.
Details:
See "Faults and Warnings"
r0948[12] Fault time Min: -
Datatype: U16 Unit: - Def: -
P-Group: ALARMS Max: -
Time stamp to indicate when the fault has occurred. P2114 (run-time counter) or P2115 (real time clock) are
the possible sources of the time stamp.
Example:
The time is taken from P2115 if this parameter has been updated with the real time. If not, P2114 is used.
Index:
r0948[0] : Recent fault trip --, fault time seconds+minutes
r0948[1] : Recent fault trip --, fault time hours+days
r0948[2] : Recent fault trip --, fault time month+year
r0948[3] : Recent fault trip -1, fault time seconds+minutes
r0948[4] : Recent fault trip -1, fault time hours+days
r0948[5] : Recent fault trip -1, fault time month+year
r0948[6] : Recent fault trip -2, fault time seconds+minutes
r0948[7] : Recent fault trip -2, fault time hours+days
r0948[8] : Recent fault trip -2, fault time month+year
r0948[9] : Recent fault trip -3, fault time seconds+minutes
r0948[10] : Recent fault trip -3, fault time hours+days
r0948[11] : Recent fault trip -3, fault time month+year
Note:
P2115 can be updated via AOP, Starter, DriveMonitor, etc.
Level:
3
Parameter List MICROMASTER 430
58 6SE6400-5AF00-0BP0
Page 59

Issue 03/02 Parameters
r0949[8] Fault value
Datatype: U16 Unit: - Def: -
P-Group: ALARMS Max: -
Displays drive fault values. It is for service purposes and indicate the type of fault reported. The values are
not documented. They are listed in the code where faults are reported.
Index:
r0949[0] : Recent fault trip --, fault value 1
r0949[1] : Recent fault trip --, fault value 2
r0949[2] : Recent fault trip -1, fault value 3
r0949[3] : Recent fault trip -1, fault value 4
r0949[4] : Recent fault trip -2, fault value 5
r0949[5] : Recent fault trip -2, fault value 6
r0949[6] : Recent fault trip -3, fault value 7
r0949[7] : Recent fault trip -3, fault value 8
Min: -
P0952 Total number of faults Min: 0
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: ALARMS Active: first confirm QuickComm. No Max: 8
Displays number of faults stored in P0947 (last fault code).
Dependency:
Setting 0 resets fault history. (changing to 0 also resets parameter r0948 - fault time).
r0964[5] Firmware version data Min: -
P-Group: COMM Max: -
Firmware version data.
Example:
No. Value Meaning
r0964[0] 42 SIEMENS
r0964[1]
r0964[2] 105
r0964[3] 2001
r0964[4] 2710
Index:
r0964[0] : Company (Siemens = 42)
r0964[1] : Product type
r0964[2] : Firmware version
r0964[3] : Firmware date (year)
r0964[4] : Firmware date (day/month)
1001 MICROMASTER 420
1002 MICROMASTER 440
1003 MICRO- / COMBIMASTER 411
1004 MICROMASTER 410
1005
reserved
1006
MICROMASTER 440 PX
1007 MICROMASTER 430
Firmware V1.05
27.10.2001
Datatype: U16 Unit: - Def: -
r0965 Profibus profile Min: -
P-Group: COMM Max: -
Identification for PROFIDrive. Profile number and version.
Datatype: U16 Unit: - Def: -
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
59
Page 60

Parameters Issue 03/02
r0967 Control word 1 Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMM Max: -
Displays control word 1.
Bitfields:
Bit00 ON/OFF1 0 NO
1 YES
Bit01 OFF2: Electrical stop 0 YES
1NO
Bit02 OFF3: Fast stop 0 YES
1NO
Bit03 Pulse enable 0 NO
1 YES
Bit04 RFG enable 0 NO
1 YES
Bit05 RFG start 0 NO
1 YES
Bit06 Setpoint enable 0 NO
1 YES
Bit07 Fault acknowledge 0 NO
1 YES
Bit08 JOG right 0 NO
1 YES
Bit09 JOG left 0 NO
1 YES
Bit10 Control from PLC 0 NO
1 YES
Bit11 Reverse (setpoint inversion) 0 NO
1 YES
Bit13 Motor potentiometer MOP up 0 NO
1 YES
Bit14 Motor potentiometer MOP down 0 NO
1 YES
Bit15 CDS Bit 0 (Local/Remote) 0 NO
1 YES
r0968 Status word 1 Min: -
Datatype: U16 Unit: - Def: -
P-Group: COMM Max: -
Displays active status word of inverter (in binary) and can be used to diagnose which commands are active.
Bitfields:
Bit00 Drive ready 0 NO
1 YES
Bit01 Drive ready to run 0 NO
1 YES
Bit02 Drive running 0 NO
1 YES
Bit03 Drive fault active 0 NO
1 YES
Bit04 OFF2 active 0 YES
1NO
Bit05 OFF3 active 0 YES
1NO
Bit06 ON inhibit active 0 NO
1 YES
Bit07 Drive warning active 0 NO
1 YES
Bit08 Deviation setpoint / act. value 0 YES
1NO
Bit09 PZD control 0 NO
1 YES
Bit10 Maximum frequency reached 0 NO
1 YES
Bit11 Warning: Motor current limit 0 YES
1NO
Bit12 Motor holding brake active 0 NO
1 YES
Bit13 Motor overload 0 YES
1NO
Bit14 Motor runs right 0 NO
1 YES
Bit15 Inverter overload 0 YES
1NO
Level:
3
Level:
3
Parameter List MICROMASTER 430
60 6SE6400-5AF00-0BP0
Page 61

Issue 03/02 Parameters
P0970 Factory reset
CStat: C Datatype: U16 Unit: - Def: 0
P-Group: PAR_RESET Active: first confirm QuickComm. No Max: 1
P0970 = 1 resets all parameters to their default values.
Settings:
0 Disabled
1 Parameter reset
Dependency:
First set P0010 = 30 (factory settings).
Stop drive (i.e. disable all pulses) before you can reset parameters to default values.
Note:
The following parameters retain their values after a factory reset:
P0918 CB address
P2010 USS baud rate
P2011 USS address
Min: 0
P0971 Transfer data from RAM to EEPROM Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: COMM Active: first confirm QuickComm. No Max: 1
Transfers values from RAM to EEPROM when set to 1.
Settings:
0 Disabled
1 Start transfer
Note:
All values in RAM are transferred to EEPROM.
Parameter is automatically reset to 0 (default) after successful transfer.
Level:
1
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
61
Page 62

Parameters Issue 03/02
P1000[3] Selection of frequency setpoint Min: 0
CStat: CT Datatype: U16 Unit: - Def: 2
P-Group: SETPOINT Active: first confirm QuickComm. Yes Max: 77
Selects frequency setpoint source. In the table of possible settings below, the main setpoint is selected from
the least significant digit (i.e., 0 to 7) and any additional setpoint from the most significant digit (i.e., x0
through to x7).
Example:
Setting 12 selects main setpoint (2) derived from analog input with additional setpoint (1) taken from the
motor potentiometer.
Example P1000 = 12 :
P1000 = 12 P1070 = 755
P1000 = 12 P1075 = 1050
MOP
ADC
FF
USS
BOP link
USS
COM link
CB
COM link
P1000 = 12
P1000 = 1
P1070 CI: Main setpoint
r0755 CO: Act. ADC after scal. [4000h]
P1075 CI: Additional setpoint
r1050 CO: Act. Output freq. of the MOP
Additonal
setpoint
Setpoint
channel
2
Main
setpoint
control
Level:
1
Motor
ADC2
Settings:
0 No main setpoint
1 MOP setpoint
2 Analog setpoint
3 Fixed frequency
4 USS on BOP link
5 USS on COM link
6 CB on COM link
7 Analog setpoint 2
10 No main setpoint + MOP setpoint
11 MOP setpoint + MOP setpoint
12 Analog setpoint + MOP setpoint
13 Fixed frequency + MOP setpoint
14 USS on BOP link + MOP setpoint
15 USS on COM link + MOP setpoint
16 CB on COM link + MOP setpoint
17 Analog setpoint 2 + MOP setpoint
20 No main setpoint + Analog setpoint
21 MOP setpoint + Analog setpoint
22 Analog setpoint + Analog setpoint
23 Fixed frequency + Analog setpoint
24 USS on BOP link + Analog setpoint
25 USS on COM link + Analog setpoint
26 CB on COM link + Analog setpoint
27 Analog setpoint 2 + Analog setpoint
30 No main setpoint + Fixed frequency
31 MOP setpoint + Fixed frequency
32 Analog setpoint + Fixed frequency
33 Fixed frequency + Fixed frequency
34 USS on BOP link + Fixed frequency
35 USS on COM link + Fixed frequency
36 CB on COM link + Fixed frequency
37 Analog setpoint 2 + Fixed frequency
40 No main setpoint + USS on BOP link
41 MOP setpoint + USS on BOP link
42 Analog setpoint + USS on BOP link
43 Fixed frequency + USS on BOP link
44 USS on BOP link + USS on BOP link
Parameter List MICROMASTER 430
62 6SE6400-5AF00-0BP0
Page 63

Issue 03/02 Parameters
45 USS on COM link + USS on BOP link
46 CB on COM link + USS on BOP link
47 Analog setpoint 2 + USS on BOP link
50 No main setpoint + USS on COM link
51 MOP setpoint + USS on COM link
52 Analog setpoint + USS on COM link
53 Fixed frequency + USS on COM link
54 USS on BOP link + USS on COM link
55 USS on COM link + USS on COM link
57 Analog setpoint 2 + USS on COM link
60 No main setpoint + CB on COM link
61 MOP setpoint + CB on COM link
62 Analog setpoint + CB on COM link
63 Fixed frequency + CB on COM link
64 USS on BOP link + CB on COM link
66 CB on COM link + CB on COM link
67 Analog setpoint 2 + CB on COM link
70 No main setpoint + Analog setpoint 2
71 MOP setpoint + Analog setpoint 2
72 Analog setpoint + Analog setpoint 2
73 Fixed frequency + Analog setpoint 2
74 USS on BOP link + Analog setpoint 2
75 USS on COM link + Analog setpoint 2
76 CB on COM link + Analog setpoint 2
77 Analog setpoint 2 + Analog setpoint 2
Index:
P1000[0] : 1st. Command data set (CDS)
P1000[1] : 2nd. Command data set (CDS)
P1000[2] : 3rd. Command data set (CDS)
Note:
Single digits denote main setpoints that have no additional setpoint.
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
63
Page 64

Parameters Issue 03/02
P1001[3] Fixed frequency 1 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 1.
There are 3 types of fixed frequencies:
1. Direct selection
2. Direct selection + ON command
3. Binary coded selection + ON command
1. Direct selection (P0701 - P0706 = 15):
In this mode of operation 1 digital input selects 1 fixed frequency.
If several inputs are active together, the selected frequencies are summed.
E.g.: FF1 + FF2 + FF3 + FF4 + FF5 + FF6.
2. Direct selection + ON command (P0701 - P0706 = 16):
The fixed frequency selection combines the fixed frequencies with an ON command.
In this mode of operation 1 digital input selects 1 fixed frequency.
If several inputs are active together, the selected frequencies are summed.
E.g.: FF1 + FF2 + FF3 + FF4 + FF5 + FF6.
3. Binary coded selection + ON command (P0701 - P0706 = 17):
Up to 16 fixed frequencies can be selected using this method.
The fixed frequencies are selected according to the following table:
Example:
DIN4 DIN3 DIN2 DIN1
OFF
P1001 FF1
P1002 FF2
P1003 FF3
P1004 FF4
P1005 FF5
P1006 FF6
P1007 FF7
P1008 FF8
P1009 FF9
P1022 FF10
P1011 FF11
P1012 FF12
P1013 FF13
P1014 FF14
P1015 FF15
Index:
P1001[0] : 1st. Drive data set (DDS)
P1001[1] : 2nd. Drive data set (DDS)
P1001[2] : 3rd. Drive data set (DDS)
Dependency:
Select fixed frequency operation (using P1000).
Inactive
Inactive
Inactive
Inactive
Inactive
Inactive
Inactive
Inactive
Active
Active
Active
Active
Active
Active
Active
Active
Inactive
Inactive
Inactive
Inactive
Active
Active
Active
Active
Inactive
Inactive
Inactive
Inactive
Active
Active
Active
Active
Inactive
Inactive
Active
Active
Inactive
Inactive
Active
Active
Inactive
Inactive
Active
Active
Inactive
Inactive
Active
Active
Inactive
Active
Inactive
Active
Inactive
Active
Inactive
Active
Inactive
Active
Inactive
Active
Inactive
Active
Inactive
Active
Level:
3
Inverter requires ON command to start in the case of direct selection (P0701 - P0706 = 15).
Note:
Fixed frequencies can be selected using the digital inputs, and can also be combined with an ON command.
P1002[3] Fixed frequency 2 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 5.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 2.
Index:
P1002[0] : 1st. Drive data set (DDS)
P1002[1] : 2nd. Drive data set (DDS)
P1002[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
Parameter List MICROMASTER 430
Level:
3
64 6SE6400-5AF00-0BP0
Page 65

Issue 03/02 Parameters
P1003[3] Fixed frequency 3
CStat: CUT Datatype: Float Unit: Hz Def: 10.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 3.
Index:
P1003[0] : 1st. Drive data set (DDS)
P1003[1] : 2nd. Drive data set (DDS)
P1003[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
Min: -650.00
P1004[3] Fixed frequency 4 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 15.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 4.
Index:
P1004[0] : 1st. Drive data set (DDS)
P1004[1] : 2nd. Drive data set (DDS)
P1004[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1005[3] Fixed frequency 5 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 20.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 5.
Index:
P1005[0] : 1st. Drive data set (DDS)
P1005[1] : 2nd. Drive data set (DDS)
P1005[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1006[3] Fixed frequency 6 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 25.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 6.
Index:
P1006[0] : 1st. Drive data set (DDS)
P1006[1] : 2nd. Drive data set (DDS)
P1006[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1007[3] Fixed frequency 7 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 30.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 7.
Index:
P1007[0] : 1st. Drive data set (DDS)
P1007[1] : 2nd. Drive data set (DDS)
P1007[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1008[3] Fixed frequency 8 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 35.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 8.
Index:
P1008[0] : 1st. Drive data set (DDS)
P1008[1] : 2nd. Drive data set (DDS)
P1008[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
65
Page 66

Parameters Issue 03/02
P1009[3] Fixed frequency 9 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 40.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 9.
Index:
P1009[0] : 1st. Drive data set (DDS)
P1009[1] : 2nd. Drive data set (DDS)
P1009[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1010[3] Fixed frequency 10 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 45.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 10.
Index:
P1010[0] : 1st. Drive data set (DDS)
P1010[1] : 2nd. Drive data set (DDS)
P1010[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1011[3] Fixed frequency 11 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 50.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 11.
Index:
P1011[0] : 1st. Drive data set (DDS)
P1011[1] : 2nd. Drive data set (DDS)
P1011[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1012[3] Fixed frequency 12 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 55.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 12.
Index:
P1012[0] : 1st. Drive data set (DDS)
P1012[1] : 2nd. Drive data set (DDS)
P1012[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1013[3] Fixed frequency 13 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 60.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 13.
Index:
P1013[0] : 1st. Drive data set (DDS)
P1013[1] : 2nd. Drive data set (DDS)
P1013[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
P1014[3] Fixed frequency 14 Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 65.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 14.
Index:
P1014[0] : 1st. Drive data set (DDS)
P1014[1] : 2nd. Drive data set (DDS)
P1014[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
66 6SE6400-5AF00-0BP0
Page 67

Issue 03/02 Parameters
P1015[3] Fixed frequency 15
CStat: CUT Datatype: Float Unit: Hz Def: 65.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines fixed frequency setpoint 15.
Index:
P1015[0] : 1st. Drive data set (DDS)
P1015[1] : 2nd. Drive data set (DDS)
P1015[2] : 3rd. Drive data set (DDS)
Details:
See parameter P1001 (fixed frequency 1).
Min: -650.00
P1016 Fixed frequency mode - Bit 0 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 3
Fixed frequencies can be selected in three different modes. Parameter P1016 defines the mode of selection
Bit 0.
Settings:
1 Direct selection
2 Direct selection + ON command
3 Binary coded selection + ON command
Details:
See table in P1001 (fixed frequency 1) for description of how to use fixed frequencies.
P1017 Fixed frequency mode - Bit 1 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 3
Fixed frequencies can be selected in three different modes. Parameter P1017 defines the mode of selection
Bit 1.
Settings:
1 Direct selection
2 Direct selection + ON command
3 Binary coded selection + ON command
Details:
See table in P1001 (fixed frequency 1) for description of how to use fixed frequencies.
P1018 Fixed frequency mode - Bit 2 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 3
Fixed frequencies can be selected in three different modes. Parameter P1018 defines the mode of selection
Bit 2.
Settings:
1 Direct selection
2 Direct selection + ON command
3 Binary coded selection + ON command
Details:
See table in P1001 (fixed frequency 1) for description of how to use fixed frequencies.
P1019 Fixed frequency mode - Bit 3 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 3
Fixed frequencies can be selected in three different modes. Parameter P1019 defines the mode of selection
Bit 3.
Settings:
1 Direct selection
2 Direct selection + ON command
3 Binary coded selection + ON command
Details:
See table in P1001 (fixed frequency 1) for description of how to use fixed frequencies.
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
67
Page 68

Parameters Issue 03/02
P1020[3] BI: Fixed freq. selection Bit 0 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Settings:
P1020 = 722.0 ==> Digital input 1
P1021 = 722.1 ==> Digital input 2
P1022 = 722.2 ==> Digital input 3
P1023 = 722.3 ==> Digital input 4
P1026 = 722.4 ==> Digital input 5
P1028 = 722.5 ==> Digital input 6
Index:
P1020[0] : 1st. Command data set (CDS)
P1020[1] : 2nd. Command data set (CDS)
P1020[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO)
P1021[3] BI: Fixed freq. selection Bit 1 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Index:
P1021[0] : 1st. Command data set (CDS)
P1021[1] : 2nd. Command data set (CDS)
P1021[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO)
Details:
See P1020 (fixed frequency selection Bit 0) for most common settings
P1022[3] BI: Fixed freq. selection Bit 2 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Index:
P1022[0] : 1st. Command data set (CDS)
P1022[1] : 2nd. Command data set (CDS)
P1022[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO)
Details:
See P1020 (fixed frequency selection Bit 0) for most common settings
P1023[3] BI: Fixed freq. selection Bit 3 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 722:3
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Index:
P1023[0] : 1st. Command data set (CDS)
P1023[1] : 2nd. Command data set (CDS)
P1023[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO)
Details:
See P1020 (fixed frequency selection Bit 0) for most common settings
r1024 CO: Act. fixed frequency Min: -
Datatype: Float Unit: Hz Def: -
P-Group: SETPOINT Max: -
Displays sum total of selected fixed frequencies.
P1025 Fixed frequency mode - Bit 4 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 2
Direct selection or direct selection + ON for bit 4
Settings:
1 Direct selection
2 Direct selection + ON command
Details:
See parameter P1001 for description of how to use fixed frequencies.
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
68 6SE6400-5AF00-0BP0
Page 69

Issue 03/02 Parameters
P1026[3] BI: Fixed freq. selection Bit 4
CStat: CT Datatype: U32 Unit: - Def: 722:4
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Index:
P1026[0] : 1st. Command data set (CDS)
P1026[1] : 2nd. Command data set (CDS)
P1026[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO).
Details:
See P1020 (fixed frequency selection Bit 0) for most common settings.
Min: 0:0
P1027 Fixed frequency mode - Bit 5 Min: 1
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 2
direct selection or direct selection + ON for bit 5
Settings:
1 Direct selection
2 Direct selection + ON command
Details:
See parameter P1001 for description of how to use fixed frequencies.
P1028[3] BI: Fixed freq. selection Bit 5 Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 722:5
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines origin of fixed frequency selection.
Index:
P1028[0] : 1st. Command data set (CDS)
P1028[1] : 2nd. Command data set (CDS)
P1028[2] : 3rd. Command data set (CDS)
Dependency:
Accessible only if P0701 - P0706 = 99 (function of digital inputs = BICO).
Details:
See P1020 (fixed frequency selection Bit 0) for most common settings.
P1031[3] Setpoint memory of the MOP Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 1
Saves last motor potentiometer setpoint (MOP) that was active before OFF command or power down.
Settings:
0 MOP setpoint will not be stored
1 MOP setpoint will be stored (P1040 is updated)
Index:
P1031[0] : 1st. Drive data set (DDS)
P1031[1] : 2nd. Drive data set (DDS)
P1031[2] : 3rd. Drive data set (DDS)
Note:
On next ON command, motor potentiometer setpoint will be the saved value in parameter P1040 (setpoint
of the MOP).
P1032 Inhibit reverse direction of MOP Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 1
Inhibits reverse setpoint selection
Settings:
0 Reverse direction is allowed
1 Reverse direction inhibited
Dependency:
Motor potentiometer (P1040) must be chosen as main setpoint or additional setpoint (using P1000).
Note:
It is possible to change motor direction using the motor potentiometer setpoint (increase / decrease
frequency either by using digital inputs or BOP/AOP keypad up / down).
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
69
Page 70

Parameters Issue 03/02
P1035[3] BI: Enable MOP (UP-command) Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 19:13
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source for motor potentiometer setpoint increase frequency.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
19.D = MOP up via BOP
Index:
P1035[0] : 1st. Command data set (CDS)
P1035[1] : 2nd. Command data set (CDS)
P1035[2] : 3rd. Command data set (CDS)
P1036[3] BI: Enable MOP (DOWN-command) Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 19:14
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source for motor potentiometer setpoint decrease frequency.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Level:
3
Level:
3
19.E = MOP down via BOP
Index:
P1036[0] : 1st. Command data set (CDS)
P1036[1] : 2nd. Command data set (CDS)
P1036[2] : 3rd. Command data set (CDS)
P1040[3] Setpoint of the MOP Min: -650.00
CStat: CUT Datatype: Float Unit: Hz Def: 5.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Determines setpoint for motor potentiometer control (P1000 = 1).
Index:
P1040[0] : 1st. Drive data set (DDS)
P1040[1] : 2nd. Drive data set (DDS)
P1040[2] : 3rd. Drive data set (DDS)
Note:
If motor potentiometer setpoint is selected either as main setpoint or additional setpoint, the reverse
direction will be inhibited by default of P1032 (inhibit reverse direction of MOP).
To re-enable reverse direction, set P1032 = 0.
r1050 CO: Act. Output freq. of the MOP Min: -
Datatype: Float Unit: Hz Def: -
P-Group: SETPOINT Max: -
Displays output frequency of motor potentiometer setpoint ([Hz]).
P1070[3] CI: Main setpoint Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 755:0
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 4000:0
Defines source of main setpoint.
Settings:
755 = Analog input 1 setpoint
1024 = Fixed frequency setpoint
1050 = Motor potentiometer (MOP) setpoint
Index:
P1070[0] : 1st. Command data set (CDS)
P1070[1] : 2nd. Command data set (CDS)
P1070[2] : 3rd. Command data set (CDS)
Level:
2
Level:
3
Level:
3
Parameter List MICROMASTER 430
70 6SE6400-5AF00-0BP0
Page 71

Issue 03/02 Parameters
P1071[3] CI: Main setpoint scaling
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 4000:0
Defines source of the main setpoint scaling.
Settings:
755 = Analog input 1 setpoint
1024 = Fixed frequency setpoint
1050 = Motor potentiometer (MOP) setpoint
Index:
P1071[0] : 1st. Command data set (CDS)
P1071[1] : 2nd. Command data set (CDS)
P1071[2] : 3rd. Command data set (CDS)
Min: 0:0
P1074[3] BI: Disable additional setpoint Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Disables additional setpoint
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99))
Index:
P1074[0] : 1st. Command data set (CDS)
P1074[1] : 2nd. Command data set (CDS)
P1074[2] : 3rd. Command data set (CDS)
P1075[3] CI: Additional setpoint Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 4000:0
Defines source of the additional setpoint (to be added to main setpoint).
Settings:
755 = Analog input 1 setpoint
1024 = Fixed frequency setpoint
1050 = Motor potentiometer (MOP) setpoint
Index:
P1075[0] : 1st. Command data set (CDS)
P1075[1] : 2nd. Command data set (CDS)
P1075[2] : 3rd. Command data set (CDS)
P1076[3] CI: Additional setpoint scaling Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 4000:0
Defines source of scaling for additional setpoint (to be added to main setpoint).
Settings:
1 = Scaling of 1.0 (100%)
755 = Analog input 1 Setpoint
1024 = Fixed Frequency Setpoint
1050 = MOP Setpoint
Index:
P1076[0] : 1st. Command data set (CDS)
P1076[1] : 2nd. Command data set (CDS)
P1076[2] : 3rd. Command data set (CDS)
r1078 CO: Total frequency setpoint Min: -
P-Group: SETPOINT Max: -
Displays sum of main and additional setpoints in [Hz].
Datatype: Float Unit: Hz Def: -
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
71
Page 72

Parameters Issue 03/02
P1080[3] Min. frequency Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. Yes Max: 650.00
Sets minimum motor frequency [Hz] at which motor will run irrespective of frequency setpoint.
Index:
P1080[0] : 1st. Drive data set (DDS)
P1080[1] : 2nd. Drive data set (DDS)
P1080[2] : 3rd. Drive data set (DDS)
Note:
Value set here is valid both for clockwise and for anticlockwise rotation.
Under certain conditions (e.g. ramping, current limiting), motor can run below minimum frequency.
P1082[3] Max. frequency Min: 0.00
CStat: CT Datatype: Float Unit: Hz Def: 50.00
P-Group: SETPOINT Active: first confirm QuickComm. Yes Max: 650.00
Sets maximum motor frequency [Hz] at which motor will run irrespective of the frequency setpoint.
Index:
P1082[0] : 1st. Drive data set (DDS)
P1082[1] : 2nd. Drive data set (DDS)
P1082[2] : 3rd. Drive data set (DDS)
Dependency:
The maximal value of motor frequency P1082 is limited to pulse frequency P1800. P1082 is dependent on
the derating characteristic as followed:
Max. frequency
f
max
P1082
[Hz]
650.0
max
f
P1082 f
pulse
15
1800P
=≤=
15
Level:
1
Level:
1
Allowed
area
133.3
21016
When P1300 < 20 (control mode = VF or FCC modes) then max output frequency is limited to smallest of
650 Hz or ( maximum pulse frequency / 15)
The value is displayed in r0209 (maximum frequency).
Note:
The value set here is valid for both clockwise and anticlockwise rotation.
The maximum output frequency of inverter can be exceeded if one of the following is active:
Slip compensation
or
Flying restart
Notice:
Maximum motor speed is subject to mechanical limitations.
=
=
maxcompslipmax ff +
nomslipma x ff +
f
pulse
[kHz]
Pulse
frequency
P1800
Parameter List MICROMASTER 430
72 6SE6400-5AF00-0BP0
Page 73

Issue 03/02 Parameters
P1091[3] Skip frequency 1
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines skip frequency 1 which avoids effects of mechanical resonance and suppresses frequencies within
+/- P1101 (skip frequency bandwidth).
f out
P1101
Skip frequency
bandwidth
Min: 0.00
Level:
3
P1091
Skip frequency
Index:
P1091[0] : 1st. Drive data set (DDS)
P1091[1] : 2nd. Drive data set (DDS)
P1091[2] : 3rd. Drive data set (DDS)
Notice:
Stationary operation is not possible within the suppressed frequency range; the range is merely passed
through (on the ramp).
For example, if P1091 = 10 Hz and P1101 = 2 Hz, it is not possible to operate continuously between 10 Hz
+/- 2 Hz (i.e. between 8 and 12 Hz).
f in
P1092[3] Skip frequency 2 Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines skip frequency 2 which avoids effects of mechanical resonance and suppresses frequencies within
+/- P1101 (skip frequency bandwidth).
Index:
P1092[0] : 1st. Drive data set (DDS)
P1092[1] : 2nd. Drive data set (DDS)
P1092[2] : 3rd. Drive data set (DDS)
Details:
See P1091 (skip frequency 1).
P1093[3] Skip frequency 3 Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines skip frequency 3 which avoids effects of mechanical resonance and suppresses frequencies within
+/- P1101 (skip frequency bandwidth).
Index:
P1093[0] : 1st. Drive data set (DDS)
P1093[1] : 2nd. Drive data set (DDS)
P1093[2] : 3rd. Drive data set (DDS)
Details:
See P1091 (skip frequency 1).
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
73
Page 74

Parameters Issue 03/02
P1094[3] Skip frequency 4 Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 0.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 650.00
Defines skip frequency 4 which avoids effects of mechanical resonance and suppresses frequencies within
+/- P1101 (skip frequency bandwidth).
Index:
P1094[0] : 1st. Drive data set (DDS)
P1094[1] : 2nd. Drive data set (DDS)
P1094[2] : 3rd. Drive data set (DDS)
Details:
See P1091 (skip frequency 1).
P1101[3] Skip frequency bandwidth Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 2.00
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 10.00
Delivers frequency bandwidth to be applied to skip frequencies (in [Hz]).
Index:
P1101[0] : 1st. Drive data set (DDS)
P1101[1] : 2nd. Drive data set (DDS)
P1101[2] : 3rd. Drive data set (DDS)
Details:
See P1091 (skip frequency 1).
P1110[3] BI: Inhibit neg. freq. setpoint Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Inhibits direction reversal, thus preventing a negative setpoint from causing motor from running in reverse.
Instead, it will run at minimum frequency (P1080) in the normal direction.
Settings:
0 = Disabled
1 = Enabled
Index:
P1110[0] : 1st. Command data set (CDS)
P1110[1] : 2nd. Command data set (CDS)
P1110[2] : 3rd. Command data set (CDS)
Note:
It is possible to disable all reverse commands (i.e. the command is ignored). To do this, set P0719 = 0
(remote selection of command/setpoint source) and define the command sources (P1113) individually.
Notice:
This function does not disable the "reverse" command function; rather, a reverse command causes motor to
run in the normal direction as described above.
P1113[3] BI: Reverse Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 722:1
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines source of reverse command used when P0719 = 0 (remote selection of command/setpoint source).
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
Level:
3
Level:
3
Level:
3
Level:
3
19.B = Reverse via BOP
Index:
P1113[0] : 1st. Command data set (CDS)
P1113[1] : 2nd. Command data set (CDS)
P1113[2] : 3rd. Command data set (CDS)
r1114 CO: Freq. setp. after dir. ctrl. Min: -
Datatype: Float Unit: Hz Def: -
P-Group: SETPOINT Max: -
Displays setpoint frequency after change of direction.
Parameter List MICROMASTER 430
Level:
3
74 6SE6400-5AF00-0BP0
Page 75

Issue 03/02 Parameters
r1119 CO: Freq. setpoint before RFG
Datatype: Float Unit: Hz Def: -
P-Group: SETPOINT Max: -
Displays output frequency after modification by other functions, e.g.:
* P1110 BI: Inhibit neg. freq. setpoint,
* P1091 - P1094 skip frequencies,
* P1080 Min. frequency,
* P1082 Max. frequency,
* limitations,
* etc.
Min: -
P1120[3] Ramp-up time Min: 0.00
CStat: CUT Datatype: Float Unit: s Def: 10.00
P-Group: SETPOINT Active: first confirm QuickComm. Yes Max: 650.00
Time taken for motor to accelerate from standstill up to maximum motor frequency (P1082) when no
rounding is used.
f (Hz)
f max
(P1082)
Level:
3
Level:
1
0
Setting the ramp-up time too short can cause the inverter to trip (overcurrent).
Index:
P1120[0] : 1st. Drive data set (DDS)
P1120[1] : 2nd. Drive data set (DDS)
P1120[2] : 3rd. Drive data set (DDS)
Note:
If an external frequency setpoint with set ramp rates is used (e.g. from a PLC). The best way to achieve
optimum drive performance is to set ramp times in P1120 and P1121 slightly shorter than those of the PLC.
Notice:
Ramp times will be used as follows:
P1060 / P1061 : JOG mode is active
P1120 / P1121 : Normal mode (ON/OFF) is active
P1060 / P1061 : Normal mode (ON/OFF) and P1124 is active
P1120
t (s)
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
75
Page 76

Parameters Issue 03/02
P1121[3] Ramp-down time Min: 0.00
CStat: CUT Datatype: Float Unit: s Def: 30.00
P-Group: SETPOINT Active: first confirm QuickComm. Yes Max: 650.00
Time taken for motor to decelerate from maximum motor frequency (P1082) down to standstill when no
rounding is used.
f (Hz)
f max
(P1082)
0
Index:
P1121[0] : 1st. Drive data set (DDS)
P1121[1] : 2nd. Drive data set (DDS)
P1121[2] : 3rd. Drive data set (DDS)
Notice:
Setting the ramp-down time too short can cause the inverter to trip (overcurrent (F0001) / overvoltage
(F0002)).
P1121
t (s)
Level:
1
Ramp times will be used as follows:
P1060 / P1061 : JOG mode is active
P1120 / P1121 : Normal mode (ON/OFF) is active
P1060 / P1061 : Normal mode (ON/OFF) and P1124 is active
Parameter List MICROMASTER 430
76 6SE6400-5AF00-0BP0
Page 77

Issue 03/02 Parameters
P1130[3] Ramp-up initial rounding time
CStat: CUT Datatype: Float Unit: s Def: 0.00
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 40.00
Defines initial rounding time in seconds as shown on the diagram below.
f
where:
T
up total
T
down total
Index:
P1130[0] : 1st. Drive data set (DDS)
P1130[1] : 2nd. Drive data set (DDS)
P1130[2] : 3rd. Drive data set (DDS)
Note:
Rounding times are recommended, since they prevent an abrupt response, thus avoiding detrimental effects
on the mechanics.
Notice:
Rounding times are not recommended when analog inputs are used, since they would result in
overshoot/undershoot in the inverter response.
1
=
2
1
=
2
X is defined as: X
i.e. X is the ratio between the frequency step and fmax
1120PX1130P
+⋅+
1121PX1130P
+⋅+
= =∆f / fmax
1
2
1
2
P1133P1132P1131P1130
1131P
1133P
t
Min: 0.00
P1131[3] Ramp-up final rounding time Min: 0.00
CStat: CUT Datatype: Float Unit: s Def: 0.00
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 40.00
Defines rounding time at end of ramp-up as shown in P1130 (ramp-up initial rounding time).
Index:
P1131[0] : 1st. Drive data set (DDS)
P1131[1] : 2nd. Drive data set (DDS)
P1131[2] : 3rd. Drive data set (DDS)
Note:
Rounding times are recommended, since they prevent an abrupt response, thus avoiding detrimental effects
on the mechanics.
Notice:
Rounding times are not recommended when analog inputs are used, since they would result in
overshoot/undershoot in the inverter response.
P1132[3] Ramp-down initial rounding time Min: 0.00
CStat: CUT Datatype: Float Unit: s Def: 0.00
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 40.00
Defines rounding time at start of ramp-down as shown in P1130 (ramp-up initial rounding time).
Index:
P1132[0] : 1st. Drive data set (DDS)
P1132[1] : 2nd. Drive data set (DDS)
P1132[2] : 3rd. Drive data set (DDS)
Note:
Rounding times are recommended, since they prevent an abrupt response, thus avoiding detrimental effects
on the mechanics.
Notice:
Rounding times are not recommended when analog inputs are used, since they would result in
overshoot/undershoot in the inverter response.
Level:
2
Level:
2
Level:
2
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
77
Page 78

Parameters Issue 03/02
P1133[3] Ramp-down final rounding time Min: 0.00
CStat: CUT Datatype: Float Unit: s Def: 0.00
P-Group: SETPOINT Active: first confirm QuickComm. No Max: 40.00
Defines rounding time at end of ramp-down as shown in P1130 (ramp-up initial rounding time).
Index:
P1133[0] : 1st. Drive data set (DDS)
P1133[1] : 2nd. Drive data set (DDS)
P1133[2] : 3rd. Drive data set (DDS)
Note:
Rounding times are recommended, since they prevent an abrupt response, thus avoiding detrimental effects
on the mechanics.
Notice:
Rounding times are not recommended when analog inputs are used, since they would result in
overshoot/undershoot in the inverter response.
P1134[3] Rounding type Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: SETPOINT Active: Immediately QuickComm. No Max: 1
Defines smoothing response to OFF1 command or setpoint reduction.
If parameter P1134 = 0 it aviods sudden changes in setpoint frequency. Moreover, it gives smoother torque
(no jerk).
ON
OFF
f
Level:
2
Level:
2
t
P1134 = 0
P1134 = 1
Settings:
0 Continuous smoothing
1 Discontinuous smoothing
Index:
P1134[0] : 1st. Drive data set (DDS)
P1134[1] : 2nd. Drive data set (DDS)
P1134[2] : 3rd. Drive data set (DDS)
Dependency:
No effect until total rounding time (P1130) > 0 s.
Notice:
P1134 = 0:
Rounding acts at all times. At a sudden reduction of the input value, overshoot can occur.
P1134 = 1:
Rounding does not act upon sudden reduction of input value during acceleration process.
Rounding times are not recommended when analog inputs are used. They would result in
overshoot/undershoot in the inverter response.
t
Parameter List MICROMASTER 430
78 6SE6400-5AF00-0BP0
Page 79

Issue 03/02 Parameters
P1135[3] OFF3 ramp-down time
CStat: CUT Datatype: Float Unit: s Def: 5.00
P-Group: SETPOINT Active: first confirm QuickComm. Yes Max: 650.00
Defines ramp-down time from maximum frequency to standstill for OFF3 command.
Index:
P1135[0] : 1st. Drive data set (DDS)
P1135[1] : 2nd. Drive data set (DDS)
P1135[2] : 3rd. Drive data set (DDS)
Note:
This time may be exceeded if the VDC_max. level is reached.
Min: 0.00
P1140[3] BI: RFG enable Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines command source of RFG enable command (RFG: ramp function generator). If binary input is equal
to zero than the RFG output will be set immediately to 0.
Index:
P1140[0] : 1st. Command data set (CDS)
P1140[1] : 2nd. Command data set (CDS)
P1140[2] : 3rd. Command data set (CDS)
P1141[3] BI: RFG start Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines command source of RFG start command (RFG: ramp function generator). If binary input is equal to
zero than the RFG output is held at it present value.
Index:
P1141[0] : 1st. Command data set (CDS)
P1141[1] : 2nd. Command data set (CDS)
P1141[2] : 3rd. Command data set (CDS)
P1142[3] BI: RFG enable setpoint Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 1:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Defines command source of RFG enable setpoint command (RFG: ramp function generator). If binary input
is equal to zero than the RFG input will be set to zero and the RFG output will be ramp-down to zero.
Index:
P1142[0] : 1st. Command data set (CDS)
P1142[1] : 2nd. Command data set (CDS)
P1142[2] : 3rd. Command data set (CDS)
r1170 CO: Frequency setpoint after RFG Min: -
P-Group: SETPOINT Max: -
Displays overall frequency setpoint after ramp generator.
Datatype: Float Unit: Hz Def: -
Level:
2
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
79
Page 80

Parameters Issue 03/02
P1200 Flying start Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 6
Starts inverter onto a spinning motor by rapidly changing the output frequency of the inverter until the actual
motor speed has been found. Then, the motor runs up to setpoint using the normal ramp time.
(f
+ 2f
max
fout
P1202
I out
slip nom
)
'ramps to set point
with normal ramp'
t
Level:
3
I dc
Vn
V out
Settings:
0 Flying start disabled
1 Flying start is always active, start in direction of setpoint
2 Flying start is active if power on, fault, OFF2, start in direction of setpoint
3 Flying start is active if fault, OFF2, start in direction of setpoint
4 Flying start is always active, only in direction of setpoint
5 Flying start is active if power on, fault, OFF2, only in direction of setpoint
6 Flying start is active if fault, OFF2, only in direction of setpoint
Note:
Useful for motors with high inertia loads.
Settings 1 to 3 search in both directions.
Settings 4 to 6 search only in direction of setpoint.
Notice:
Flying start must be used in cases where the motor may still be turning (e.g. after a short mains break) or
can be driven by the load. Otherwise, overcurrent trips will occur.
as per V/f
characteristic
'motor speed found'
Parameter List MICROMASTER 430
80 6SE6400-5AF00-0BP0
Page 81

Issue 03/02 Parameters
P1202[3] Motor-current: Flying start
CStat: CUT Datatype: U16 Unit: % Def: 100
P-Group: FUNC Active: first confirm QuickComm. No Max: 200
Defines search current used for flying start.
Value is in [%] based on rated motor current (P0305).
Index:
P1202[0] : 1st. Drive data set (DDS)
P1202[1] : 2nd. Drive data set (DDS)
P1202[2] : 3rd. Drive data set (DDS)
Note:
Reducing the search current may improve performance for flying start if the inertia of the system is not very
high.
Min: 10
P1203[3] Search rate: Flying start Min: 10
CStat: CUT Datatype: U16 Unit: % Def: 100
P-Group: FUNC Active: first confirm QuickComm. No Max: 200
Sets factor by which the output frequency changes during flying start to synchronize with turning motor. This
value is entered in [%] defines the reciprocal initial gradient in the search sequence (see curve below).
Parameter P1203 influences the time taken to search for the motor frequency.
r0330
P0310
2 P1082 f 2 + f nomslip,max ⋅⋅+=
100
Level:
3
Level:
3
f
1 ms
search
t
r0330
[%] 2
= f [%] 2
[%] P1203
100
0310P
⋅⋅∆⋅⋅
∆
f
f
motor
nomslip,
[ms] t
∆
[%] P1203
=
The search time is the time taken to search through all frequencies between max. frequency P1082 + 2 x
f_slip to 0 Hz.
P1203 = 100 % is defined as giving a rate of 2 % of f_slip,nom / [ms].
P1203 = 200 % would result in a rate of frequency change of 1 % of f_slip,nom / [ms].
Example:
For a motor with 50 Hz, 1350 rpm, 100 % would produce a maximum search time of 600 ms. If the motor is
turning, the motor frequency is found in a shorter time.
Index:
P1203[0] : 1st. Drive data set (DDS)
P1203[1] : 2nd. Drive data set (DDS)
P1203[2] : 3rd. Drive data set (DDS)
Note:
A higher value produces a flatter gradient and thus a longer search time.
A lower value has the opposite effect.
[Hz] f
∆
[Hz] f
[ms] 1
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
81
Page 82

Parameters Issue 03/02
P1210 Automatic restart Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 1
P-Group: FUNC Active: first confirm QuickComm. No Max: 6
Configures automatic restart function
Settings:
0 Disabled
1 Trip reset after power on, P1211 disabled
2 Restart after mains blackout, P1211 disabled
3 Restart after mains brownout or fault, P1211 enabled
4 Restart after mains brownout, P1211 enabled
5 Restart after mains blackout and fault, P1211 disabled
6 Restart after mains brown- /blackout or fault, P1211 disabled
Dependency:
Automatic restart requires constant ON command via a digital input wire link.
Caution1:
P1210 > 2 can cause the motor to restart automatically without toggling the ON command !
Notice:
A "mains brownout" is where the power in interrupted and re-applied before the display on the BOP (if one
is fitted to the inverter) has gone dark (a very short mains break where the DC link has not fully collapsed).
A "mains blackout" is where the display has gone dark (a long mains break where the DC link has fully
collapsed) before the power is re-applied.
P1210 = 0:
Automatic restart is disabled.
P1210 = 1:
The inverter will acknowledge (reset) faults i.e. it will reset a fault when the is re-applied. This means the
inverter must be fully powered down, a brownout is not sufficed. The inverter will not run until the ON
command has been toggled.
Level:
3
P1210 = 2:
The inverter will acknowledge the fault F0003 at power on after blackout and restarts the drive. It is
necessary that the ON command is wired via digital input (DIN).
P1210 = 3:
For these settings it is fundamental that the drive only restarts if it has been in a RUN state at the time of the
faults (F0003, etc.). The inverter will acknowledge the fault and restarts the drive after a blackout or
bronwout. It is necessary that the ON command is wired via digital input (DIN).
P1210 = 4:
For these settings it is fundamental that the drive only restarts if it has been in a RUN state at the time of the
fault (F0003). The inverter will acknowledge the fault and restarts the drive after a blackout or bronwout. It is
necessary that the ON command is wired via digital input (DIN).
P1210 = 5:
The inverter will acknowledge the faults F0003 etc. at power on after blackout and restarts the drive. It is
necessary that the ON command is wired via digital input (DIN).
P1210 = 6:
The inverter will acknowledge the faults (F0003 etc.) at power on after blackout or brownout and restarts the
drive. It is necessary that the ON command is wired via digital input (DIN). Setting 6 causes the motor to
restart immediately.
Following table presents an overview of parameter P1210 and its functionality.
Parameter List MICROMASTER 430
82 6SE6400-5AF00-0BP0
Page 83

Issue 03/02 Parameters
P1210
0
1
2
3
4
5
6
Flying start must be used in cases where the motor may still be turning (e.g. after a short mains break) or
can be driven by the load (P1200).
Blackout
F0003
−− − −
Fault acknowledge Fault acknowledge
Fault acknowledge
Fault acknowledge
Fault acknowledge
Fault acknowledge
Fault acknowledge Fault acknowledge
+
restart
++ +
restart
++
restart
+
restart
++ + +
restart
Brownout
F0003
−−
−−
Fault acknowledge
restart
Fault acknowledge
restart
−−−−
Fault acknowledge
restart
All other faults
without
power cycle
Fault acknowledge
restart
−−−−
−−−−
Fault acknowledge
restart
All other faults
with
power cycle
−
−
−
Fault acknowledge
+
restart
−−−−
Fault acknowledge
+
restart
Fault acknowledge
+
restart
P1211 Number of restart attempts Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 3
P-Group: FUNC Active: first confirm QuickComm. No Max: 10
Specifies number of times inverter will attempt to restart if automatic restart P1210 is activated.
P1212 Time to first restart Min: 0
CStat: CUT Datatype: U16 Unit: s Def: 30
P-Group: FUNC Active: first confirm QuickComm. No Max: 1000
Selects the time before the inverter is restarted for the first time if automatic restart P1210 is activated.
ON command
enabled during
Power OFF
Fault acknowledge
Fault acknowledge
+
restart
−
−
+
restart
restart
Level:
3
Level:
3
f
f*
Acknowledge active
1
0
P1212
Fault active
1
0
Act. restart attempts
P1211
3
2
1
f
Motor
P1212
+
P1213
P1212
+
1213P2 ⋅
30 s
f* = f
t
Motor
t
t
t
P1213 Restart time increment Min: 0
CStat: CUT Datatype: U16 Unit: s Def: 30
P-Group: FUNC Active: first confirm QuickComm. No Max: 1000
Selects the amount the restart time is increment for each restart of the inverter if automatic restart P1210 is
activated.
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
Level:
3
83
Page 84

Parameters Issue 03/02
P1215 Holding brake enable Min: 0
CStat: T Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 1
Enables/disables holding brake function. This function applies the following profile to the inverter:
Relay switching is also possible at point 1 and point 2 (if programmed in P0731 = 52.C) to control a brake.
ON / OFF1/OFF3:
ON
OFF1/OFF3
f
fmin
(P1080)
P1217P1216
r0052.C
1
0t
Point 2Point 1
Level:
2
t
t
ON / OFF2:
OFF2
inactive
active
ON
OFF1/OFF3
f
fmin
(P1080)
P1216
r0052.C
1
0
Settings:
0 Motor holding brake disabled
1 Motor holding brake enabled
Note:
The brake relay opens at point 1, if enabled using P0731 (function of digital output), and closes at point 2.
t
t
t
t
Parameter List MICROMASTER 430
84 6SE6400-5AF00-0BP0
Page 85

Issue 03/02 Parameters
P1216 Holding brake release delay
CStat: T Datatype: Float Unit: s Def: 1.0
P-Group: FUNC Active: first confirm QuickComm. No Max: 20.0
Defines period during which inverter runs at min. frequency P1080 before ramping up at point 1 (as shown
in P1215 - holding brake enable). Inverter starts at min. frequency P1080 on this profile, i.e. it does not use
a ramp.
Note:
A typical value of min. frequency P1080 for this type of application is the slip frequency of the motor.
You can calculate the rated slip frequency by using the following formula:
nn
−
n nsy
n
f
⋅
n
nsy
Notice:
If used to hold the motor at a certain frequency against a mechanical brake (i.e. you are using a relay to
control mechanical brake), it is important that min. frequency P1080 < 5 Hz; otherwise, the current drawn
may be too high and the relay may not open.
Min: 0.0
P1217 Holding time after ramp down Min: 0.0
CStat: T Datatype: Float Unit: s Def: 1.0
P-Group: FUNC Active: first confirm QuickComm. No Max: 20.0
Defines time for which inverter runs at minimum frequency (P1080) after ramping down at point 2.
Details:
See diagram P1215 (holding brake enable).
P1230[3] BI: Enable DC braking Min: 0:0
CStat: CUT Datatype: U32 Unit: - Def: 0:0
P-Group: COMMANDS Active: first confirm QuickComm. No Max: 4000:0
Enables DC braking via a signal applied from an external source. Function remains active while external
input signal is active.
Level:
2
Level:
2
Level:
3
DC braking causes the motor to stop rapidly by applying a DC braking current (current applied also holds
shaft stationary).
When the DC braking signal is applied, the inverter output pulses are blocked and the DC current is not
applied until the motor has been sufficiently demagnetized.
The level of DC braking is set in P1232 (DC braking current - relative to the rated motor current) which is set
to 100 % by default.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Index:
P1230[0] : 1st. Command data set (CDS)
P1230[1] : 2nd. Command data set (CDS)
P1230[2] : 3rd. Command data set (CDS)
Caution2:
Frequent use of long periods of DC braking can cause the motor to overheat.
Notice:
This delay time is set in P0347 (demagnetization time). If this delay is too short, overcurrent trips can occur.
DC braking is not possible when using a synchronous motor (i.e. P0300 = 2).
P1232[3] DC braking current Min: 0
CStat: CUT Datatype: U16 Unit: % Def: 100
P-Group: FUNC Active: Immediately QuickComm. No Max: 250
Defines level of DC current in [%] relative to rated motor current (P0305).
Index:
P1232[0] : 1st. Drive data set (DDS)
P1232[1] : 2nd. Drive data set (DDS)
P1232[2] : 3rd. Drive data set (DDS)
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
85
Page 86

Parameters Issue 03/02
P1233[3] Duration of DC braking Min: 0
CStat: CUT Datatype: U16 Unit: s Def: 0
P-Group: FUNC Active: Immediately QuickComm. No Max: 250
Defines duration for which DC injection braking is to be active following an OFF1 or OFF3 command. When
an OFF1 or OFF3 command is received by the drive, the output frequency starts to ramp to 0 Hz. When the
output frequency reaches the value set in P1234, the drive injects a DC braking current P1232 for the time
duration set in P1233.
1
ON
OFF1/OFF3
f
P1234
DC braking
ON
OFF t
P1233
2
ON
OFF1/OFF3
Level:
3
t
t
t
f
OFF ramp
P1234
DC braking
ON
OFF t
Parameter P1232 still controls the level of DC injection.
Value:
P1233 = 0 :
Not active following OFF1 / OFF3.
P1233 = 1 - 250 :
Active for the specified duration.
Index:
P1233[0] : 1st. Drive data set (DDS)
P1233[1] : 2nd. Drive data set (DDS)
P1233[2] : 3rd. Drive data set (DDS)
Caution2:
Frequent use of long periods of DC braking can cause the motor to overheat.
Notice:
The DC braking function causes the motor to stop rapidly by applying a DC braking current (the current
applied also holds the shaft stationary). When the DC braking signal is applied, the inverter output pulses
are blocked and the DC current not applied until the motor has been sufficiently demagnetized
(demagnetization time is calculated automatically from motor data).
OFF ramp + DC braking
OFF ramp
P1233
t
The inverter will not restart if an ON-command is given during this period.
DC braking is not possible when using a synchronous motor (i.e. P0300 = 2).
Parameter List MICROMASTER 430
86 6SE6400-5AF00-0BP0
Page 87

Issue 03/02 Parameters
P1234[3] DC braking start frequency
CStat: CUT Datatype: Float Unit: Hz Def: 650.00
P-Group: FUNC Active: Immediately QuickComm. No Max: 650.00
Sets start frequency for DC braking.
When an OFF1 or OFF3 command is received by the drive, the output frequency starts to ramp to 0 Hz.
When the output frequency reaches the value set in start frequency of DC braking P1234, the drive injects a
DC braking current P1232 for the time duration set in P1233.
Index:
P1234[0] : 1st. Drive data set (DDS)
P1234[1] : 2nd. Drive data set (DDS)
P1234[2] : 3rd. Drive data set (DDS)
Details:
See P1232 (DC braking current) and P1233 (duration of DC braking)
Min: 0.00
P1236[3] Compound braking current Min: 0
CStat: CUT Datatype: U16 Unit: % Def: 0
P-Group: FUNC Active: Immediately QuickComm. No Max: 250
Defines DC level superimposed on AC waveform after OFF1 / OFF3 command. The value is entered in [%]
relative to rated motor current (P0305).
If P1254 = 0 :
Compound braking switch-on level
otherwise :
Compound braking switch-on level
Value:
P1236 = 0 :
Compound braking disabled.
1242r0.98 ⋅=
Level:
3
Level:
3
P0210213.1V21.13 main s ⋅⋅=⋅⋅=
P1236 = 1 - 250 :
Level of DC braking current defined as a [%] of rated motor current (P0305).
Index:
P1236[0] : 1st. Drive data set (DDS)
P1236[1] : 2nd. Drive data set (DDS)
P1236[2] : 3rd. Drive data set (DDS)
Dependency:
Compound braking depends on the DC link voltage only (see threshold above). This will happen on OFF1,
OFF3 and any regenerative condition.
It is disabled, when:
- DC braking is active
- Flying start is active
Notice:
Increasing the value will generally improve braking performance; however, if you set the value too high, an
overcurrent trip may result. If used with dynamic brake enabled as well compound braking will take priority.
If used with the Vdc max controller enabled the drive behaviour whilst braking may be worsened paticularly
with high values of compound braking.
P1240[3] Configuration of Vdc controller Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: FUNC Active: Immediately QuickComm. No Max: 1
Enables / disables Vdc controller.
The Vdc controller dynamically controls the DC link voltage to prevent overvoltage trips on high inertia
systems.
Settings:
0 Vdc controller disabled
1 Vdc-max controller enabled
Index:
P1240[0] : 1st. Drive data set (DDS)
P1240[1] : 2nd. Drive data set (DDS)
P1240[2] : 3rd. Drive data set (DDS)
Note:
Vdc max automatically increases ramp-down times to keep the DC-link voltage (r0026) within limits (P2172).
r1242 CO: Switch-on level of Vdc-max Min: -
Datatype: Float Unit: V Def: -
P-Group: FUNC Max: -
Displays switch-on level of Vdc max controller. The formula is only valid if auto detection is not activated
(P1254=0)
Following equation is only valid, if P1254 = 0 :
0210P215.1V21.15 = r1242 mains ⋅⋅⋅⋅ =
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
87
Page 88

Parameters Issue 03/02
P1243[3] Dynamic factor of Vdc-max Min: 10
CStat: CUT Datatype: U16 Unit: % Def: 100
P-Group: FUNC Active: Immediately QuickComm. No Max: 200
Defines dynamic factor for DC link controller in [%].
Index:
P1243[0] : 1st. Drive data set (DDS)
P1243[1] : 2nd. Drive data set (DDS)
P1243[2] : 3rd. Drive data set (DDS)
Dependency:
P1243 = 100 % means parameters P1250, P1251 and P1252 (gain, integration time and differential time)
are used as set. Otherwise, these are multiplied by P1243 (dynamic factor of Vdc-max).
Note:
Vdc controller adjustment is calculated automatically from motor and inverter data.
P1253[3] Vdc-controller output limitation Min: 0.00
CStat: CUT Datatype: Float Unit: Hz Def: 10.00
P-Group: FUNC Active: Immediately QuickComm. No Max: 600.00
Limits maximum effect of Vdc max controller.
Index:
P1253[0] : 1st. Drive data set (DDS)
P1253[1] : 2nd. Drive data set (DDS)
P1253[2] : 3rd. Drive data set (DDS)
P1254 Auto detect Vdc switch-on levels Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: FUNC Active: Immediately QuickComm. No Max: 1
Enables/disables auto-detection of switch-on levels for Vdc max controller.
Settings:
0 Disabled
1 Enabled
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
88 6SE6400-5AF00-0BP0
Page 89

Issue 03/02 Parameters
P1260[3] Bypass control
CStat: CT Datatype: U16 Unit: - Def: 0
P-Group: FUNC Active: first confirm QuickComm. No Max: 7
Selects the possible sources for contactor changeover control.
Settings:
0 Bypass disabled
1 Controlled by inverter trip
2 Controlled by P1266
3 Controlled by P1266 or inverter trip
4 Controlled by act. frequenz = P1265
5 Controlled by act. frequenz = P1265 or inverter trip
6 Controlled by act. frequenz = P1265 or P1266
7 Controlled by act. frequenz = P1265 or P1266 or inverter trip
Index:
P1260[0] : 1st. Drive data set (DDS)
P1260[1] : 2nd. Drive data set (DDS)
P1260[2] : 3rd. Drive data set (DDS)
Dependency:
Bypass is used to described the condition when a motor is ran alternatively between a mains supply and the
inverter.
For example, the bypass circuit can be used to switch over from the inverter to a mains supply when the
inverter is faulty. This function can also be used to ramp-up a large rotation mass using the inverter and
then, at the correct speed, switching over to the mains supply.
An example of a bypass circuit is given in the following diagram:
Mains
Isolator
Min: 0
Level:
2
Relay outputs
Mechanical
interlock
Contactors
Isolator
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
89
Page 90

Parameters Issue 03/02
BI: Bypass command
P1266.C
f
max
Note:
Flying start P1200 should be enabled in cases where the motor may still be turning after switch-over from
bypass-mode to inverter-mode.
r1261 BO: Bypass status word Min: -
P-Group: FUNC Max: -
Output word from the bypass feature that allows external connections to be made.
Bitfields:
Bit00 Motor supplied by inverter 0 NO
Bit01 Motor supplied by mains 0 NO
P1262[3] Bypass dead time Min: 0
CStat: CUT Datatype: Float Unit: s Def: 1.000
P-Group: FUNC Active: first confirm QuickComm. No Max: 20.000
P1262 is the interlock time between switching one contator OFF, and the other ON. Its minimum value
should not be smaller than the motor demagnetisation time P0347.
Index:
P1262[0] : 1st. Drive data set (DDS)
P1262[1] : 2nd. Drive data set (DDS)
P1262[2] : 3rd. Drive data set (DDS)
P1263[3] De-Bypass time Min: 0
CStat: CUT Datatype: Float Unit: s Def: 1.0
P-Group: FUNC Active: first confirm QuickComm. No Max: 300.0
This delay timer is used as a delay for all sources of switchover from bypass to inverter control.
(0:0)
+ 2f
f
Mains
f*
Inverter
r1261
Bit 0
r1261
Bit 1
Slip
1
0
f
1
0
1
0
P1264
f
Motor
P1262 P1262
Datatype: U16 Unit: - Def: -
P1263
1 YES
1 YES
f
Flying start
t
t
t
t
Level:
2
Level:
2
Level:
2
If the condition for switching from bypass is removed then this timer is reset, and must run through again
before bypass will occur.
Index:
P1263[0] : 1st. Drive data set (DDS)
P1263[1] : 2nd. Drive data set (DDS)
P1263[2] : 3rd. Drive data set (DDS)
P1264[3] Bypass time Min: 0
CStat: CUT Datatype: Float Unit: s Def: 1.0
P-Group: FUNC Active: first confirm QuickComm. No Max: 300.0
This delay timer is used as a delay for all sources of switchover from inverter control to bypass.
If the condition for switching to bypass is removed then this timer is reset, and must run through again
before bypass will occur.
Index:
P1264[0] : 1st. Drive data set (DDS)
P1264[1] : 2nd. Drive data set (DDS)
P1264[2] : 3rd. Drive data set (DDS)
Parameter List MICROMASTER 430
Level:
2
90 6SE6400-5AF00-0BP0
Page 91

Issue 03/02 Parameters
P1265[3] Bypass frequency
CStat: CT Datatype: Float Unit: Hz Def: 50.00
P-Group: FUNC Active: first confirm QuickComm. No Max: 650.00
Bypass frequency.
Index:
P1265[0] : 1st. Drive data set (DDS)
P1265[1] : 2nd. Drive data set (DDS)
P1265[2] : 3rd. Drive data set (DDS)
Min: 12.00
P1266[3] BI: Bypass command Min: 0:0
CStat: CT Datatype: U32 Unit: - Def: 0:0
P-Group: FUNC Active: first confirm QuickComm. No Max: 4000:0
Bypass Control P1260 can be controlled by an external switch which is connected to the inverter. The
P1266 BI: Bypass command selects the interface (e.g. DIN, USS or CB) from which the signal originates.
Settings:
722.0 = Digital input 1 (requires P0701 to be set to 99, BICO)
722.1 = Digital input 2 (requires P0702 to be set to 99, BICO)
722.2 = Digital input 3 (requires P0703 to be set to 99, BICO)
722.3 = Digital input 4 (requires P0704 to be set to 99, BICO)
722.4 = Digital input 5 (requires P0705 to be set to 99, BICO)
722.5 = Digital input 6 (requires P0706 to be set to 99, BICO)
722.6 = Digital input 7 (via analog input 1, requires P0707 to be set to 99)
722.7 = Digital input 8 (via analog input 2, requires P0708 to be set to 99)
Index:
P1266[0] : 1st. Command data set (CDS)
P1266[1] : 2nd. Command data set (CDS)
P1266[2] : 3rd. Command data set (CDS)
Level:
2
Level:
2
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
91
Page 92

Parameters Issue 03/02
P1300[3] Control mode Min: 0
CStat: CT Datatype: U16 Unit: - Def: 1
P-Group: CONTROL Active: first confirm QuickComm. Yes Max: 23
Controls relationship between speed of motor and voltage supplied by inverter as illustrated in the diagram
below.
V
Vn
'0'
'2'
0
Settings:
0 V/f with linear characteristic
1 V/f with FCC
2 V/f with parabolic characteristic
3 V/f with programmable characteristic
4 Reserved
5 V/f for textile applications
6 V/f with FCC for textile applications
19 V/f control with independent voltage setpoint
20 reserved
21 reserved
22 reserved
23 reserved
Index:
P1300[0] : 1st. Drive data set (DDS)
P1300[1] : 2nd. Drive data set (DDS)
P1300[2] : 3rd. Drive data set (DDS)
Note:
V/f mode:
P1300 = 1 : V/f with FCC (flux current control)
* Maintains motor flux current for improved efficiency.
* If FCC is chosen, linear V/f is active at low frequencies.
fn
f
Level:
3
P1300 = 2 : V/f with a quadratic curve
* Suitable for centrifugal fans / pumps
The following table presents an overview of control parameters (V/f) that can be modify in relationship to
P1300 dependencies:
Parameter List MICROMASTER 430
92 6SE6400-5AF00-0BP0
Page 93

Issue 03/02 Parameters
ParNo. ParText Level U/f
P1300 = 0 1 2 3 5 6 19
P1300[3] Control mode 2 x x x x x x x
P1310[3] Continuous boost 2 x x x x x x x
P1311[3] Acceleration boost 2 x x x x x x x
P1312[3] Starting boost 2 x x x x x x x
P1316[3] Boost end frequency 3 x x x x x x x
P1320[3] Programmable V/f freq. coord. 1 3
P1321[3] Programmable V/f volt. coord. 1 3
P1322[3] Programmable V/f freq. coord. 2 3
P1323[3] Programmable V/f volt. coord. 2 3
P1324[3] Programmable V/f freq. coord. 3 3
P1325[3] Programmable V/f volt. coord. 3 3
P1330[3] CI: Voltage setpoint 3
P1333[3] Start frequency for FCC 3
P1335[3] Slip compensation 2 x x x x
P1336[3] Slip limit 2 x x x x
P1338[3] Resonance damping gain V/f 3 x x x x
P1340[3] Imax controller prop. gain 3 x x x x x x x
P1341[3] Imax controller integral time 3 x x x x x x x
P1345[3] Imax controller prop. gain 3 x x x x x x x
P1346[3] Imax controller integral time 3 x x x x x x x
P1350[3] Voltage soft start 3 x x x x x x x
−−−x−−−
−−−x−−−
−−−x−−−
−−−x−−−
−−−x−−−
−−−x−−−
−−−−−−
x
−
−−−x−
x
−−−
−−−
−−−
P1310[3] Continuous boost Min: 0.0
CStat: CUT Datatype: Float Unit: % Def: 50.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 250.0
At low output frequencies the output voltage is low to keep the flux level constant. However, the output
voltage may be too low
- for magnetisation the asynchronous motor
- to hold the load
- to overcome losses in the system. The output voltage can be increased using parameter P1310.
Defines boost level in [%] relative to P0305 (rated motor current) applicable to both linear and quadratic V/f
curves according to the diagram below:
Vmax
(P0304)
V
ContBoost,100
V
Vn
actual V
V
ContBoost,50
Boost
Linear V/f
O
V/
mal
0
0
3
Nor
P1
(
e
g
a
t
l
o
v
t
pu
t
u
f
0)
=
Level:
3
f
0
Boost,end
(P1316)
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
fn
(P0310)
f max
(P1082)
f
93
Page 94

Parameters Issue 03/02
V
Quadratic V/f
Vmax
Vn
(P0304)
V
ContBoost,100
u
O
actual V
V
ContBoost,50
0
f
Boost,end
(P1316)
Boost
q
l
a
m
r
1
o
P
(
N
e
g
a
t
l
o
v
t
u
p
t
c
i
t
a
r
d
)
a
2
u
=
0
0
3
fn
(P0310)
fmax
(P1082)
f
where voltage values are given
V_ConBoost,100 = rated motor current (P0305) * Stator resistance (P0350) * Continous boost (P1310)
V_ConBoost,50 = V_ConBoost,100 / 2
Index:
P1310[0] : 1st. Drive data set (DDS)
P1310[1] : 2nd. Drive data set (DDS)
P1310[2] : 3rd. Drive data set (DDS)
Dependency:
Setting in P0640 (motor overload factor [%]) limits the boost.
Note:
The boost values are combined when continuous boost (P1310) used in conjunction with other boost
parameters (acceleration boost P1311 and starting boost P1312).
However priorities are allocated to these parameters as follows:
P1310 > P1311 > P1312
Notice:
Increasing the boost levels increases motor heating (especially at standstill).
⋅⋅≤ ImotR300Boosts S
Parameter List MICROMASTER 430
94 6SE6400-5AF00-0BP0
Page 95

Issue 03/02 Parameters
P1311[3] Acceleration boost
CStat: CUT Datatype: Float Unit: % Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 250.0
P1311 will only produce boost during ramping, and is therefore useful for additional torque during
acceleration.
Applies boost in [%] relative to P0305 (rated motor current) following a positive setpoint change and drops
back out once the setpoint is reached.
V
Vmax
Vn
(P0304)
V
AccBoost,100
V
AccBoost,50
actual V
Boost
Linear V/f
V
l
a
m
r
0
o
0
N
3
1
P
(
Min: 0.0
Level:
3
e
g
a
t
l
o
v
t
u
p
t
u
O
f
/
)
0
=
f
0
Boost,end
(P1316)
fn
(P0310)
fmax
(P1082)
where voltage values are given
V_AccBoost,100 = rated motor current (P0305) * Stator resistance (P0350) * Acceleration boost (P1311)
V_AccBoost,50 = V_AccBoost,100 / 2
Index:
P1311[0] : 1st. Drive data set (DDS)
P1311[1] : 2nd. Drive data set (DDS)
P1311[2] : 3rd. Drive data set (DDS)
Dependency:
Setting in P0640 (motor overload factor [%]) limits boost.
Note:
Acceleration boost can help to improve response to small positive setpoint changes.
⋅⋅≤ ImotR300Boosts
S
Notice:
Increasing the boost level increases motor heating.
Details:
See note in P1310 for boost priorities.
f
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
95
Page 96

Parameters Issue 03/02
P1312[3] Starting boost Min: 0.0
CStat: CUT Datatype: Float Unit: % Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 250.0
Applies a constant linear offset (in [%] relative to P0305 (rated motor current)) to active V/f curve (either
linear or quadratic) after an ON command and is active until setpoint is reached for the first time. This is
useful for starting loads with high inertia.
Setting the starting boost (P1312) too high will cause the inverter to limit the current, which will in turn
restrict the output frequency to below the setpoint frequency.
Vmax
(P0304)
V
StartBoost,100
V
StartBoost,50
Vn
V
actual V
Boost
Linear V/f
f
/
V
l
a
=
m
r
0
o
0
N
3
1
P
(
e
g
a
t
l
o
v
t
u
p
t
u
O
)
0
Level:
3
f
0
Boost,end
(P1316)
fn
(P0310)
fmax
(P1082)
where voltage values are given
V_StartBoost,100 = rated motor current (P0305) * Stator resistance (P0350) * Starting boost (P1312)
V_StartBoost,50 = V_StartBoost,100 / 2
Index:
P1312[0] : 1st. Drive data set (DDS)
P1312[1] : 2nd. Drive data set (DDS)
P1312[2] : 3rd. Drive data set (DDS)
Dependency:
Setting in P0640 (motor overload factor [%]) limits boost.
Notice:
Increasing the boost levels increases motor heating.
⋅⋅≤ ImotR300Boosts
S
Details:
See note in P1310 for boost priorities.
f
Parameter List MICROMASTER 430
96 6SE6400-5AF00-0BP0
Page 97

Issue 03/02 Parameters
P1316[3] Boost end frequency
CStat: CUT Datatype: Float Unit: % Def: 20.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 100.0
Defines point at which programmed boost reaches 50 % of its value.
This value is expressed in [%] relative to P0310 (rated motor frequency).
The default frequency is defined as follows:
153
( 2 = f
min Boost
Index:
P1316[0] : 1st. Drive data set (DDS)
P1316[1] : 2nd. Drive data set (DDS)
P1316[2] : 3rd. Drive data set (DDS)
Note:
The expert user may change this value to alter the shape of the curve, e.g. to increase torque at a particular
frequency.
Details:
See diagram in P1310 (continuous boost).
P
motor
+⋅
)3
Min: 0.0
P1320[3] Programmable V/f freq. coord. 1 Min: 0.00
CStat: CT Datatype: Float Unit: Hz Def: 0.00
P-Group: CONTROL Active: Immediately QuickComm. No Max: 650.00
Sets V/f coordinates (P1320/1321 to P1324/1325) to define V/f characteristic.
V
V
V
max
r0071
= f(Vdc, M
max
max
)
Level:
3
Level:
3
P0304
P1325
P1323
P1321
P1310
f0
0 Hz
P1310[V] ⋅⋅=
Example:
This parameter can be used to provide correct torque at correct frequency and is useful when used with
synchronous motors.
Index:
P1320[0] : 1st. Drive data set (DDS)
P1320[1] : 2nd. Drive data set (DDS)
P1320[2] : 3rd. Drive data set (DDS)
Dependency:
To set parameter, select P1300 = 3 (V/f with programmable characteristic).
Note:
Linear interpolation will be applied between the individual data points.
f1
P1320
P1310[%]
100[%]
f2
P1322
r0395[%]
100[%]
f3
P1324fnP0310
]P0304[V
fmax
P1082
f
V/f with programmable characteristic (P1300 = 3) has 3 programmable points. The two non-programmable
points are:
- Continuous boost P1310 at zero 0 Hz
- Rated motor voltage P0304 at rated motor frequency P0310
The acceleration boost and starting boost defined in P1311 and P1312 are applied to V/f with
programmable characteristic.
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
97
Page 98

Parameters Issue 03/02
P1321[3] Programmable V/f volt. coord. 1 Min: 0.0
CStat: CUT Datatype: Float Unit: V Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 3000.0
See P1320 (programmable V/f freq. coord. 1).
Index:
P1321[0] : 1st. Drive data set (DDS)
P1321[1] : 2nd. Drive data set (DDS)
P1321[2] : 3rd. Drive data set (DDS)
P1322[3] Programmable V/f freq. coord. 2 Min: 0.00
CStat: CT Datatype: Float Unit: Hz Def: 0.00
P-Group: CONTROL Active: Immediately QuickComm. No Max: 650.00
See P1320 (programmable V/f freq. coord. 1).
Index:
P1322[0] : 1st. Drive data set (DDS)
P1322[1] : 2nd. Drive data set (DDS)
P1322[2] : 3rd. Drive data set (DDS)
P1323[3] Programmable V/f volt. coord. 2 Min: 0.0
CStat: CUT Datatype: Float Unit: V Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 3000.0
See P1320 (programmable V/f freq. coord. 1).
Index:
P1323[0] : 1st. Drive data set (DDS)
P1323[1] : 2nd. Drive data set (DDS)
P1323[2] : 3rd. Drive data set (DDS)
P1324[3] Programmable V/f freq. coord. 3 Min: 0.00
CStat: CT Datatype: Float Unit: Hz Def: 0.00
P-Group: CONTROL Active: Immediately QuickComm. No Max: 650.00
See P1320 (programmable V/f freq. coord. 1).
Index:
P1324[0] : 1st. Drive data set (DDS)
P1324[1] : 2nd. Drive data set (DDS)
P1324[2] : 3rd. Drive data set (DDS)
P1325[3] Programmable V/f volt. coord. 3 Min: 0.0
CStat: CUT Datatype: Float Unit: V Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 3000.0
See P1320 (programmable V/f freq. coord. 1).
Index:
P1325[0] : 1st. Drive data set (DDS)
P1325[1] : 2nd. Drive data set (DDS)
P1325[2] : 3rd. Drive data set (DDS)
P1330[3] CI: Voltage setpoint Min: 0:0
CStat: T Datatype: U32 Unit: - Def: 0:0
P-Group: CONTROL Active: first confirm QuickComm. No Max: 4000:0
BICO parameter for selecting source of voltage setpoint for independent V/f control.
Index:
P1330[0] : 1st. Command data set (CDS)
P1330[1] : 2nd. Command data set (CDS)
P1330[2] : 3rd. Command data set (CDS)
P1333[3] Start frequency for FCC Min: 0.0
CStat: CUT Datatype: Float Unit: % Def: 10.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 100.0
Defines start frequency at which FCC (flux current control) is enabled as [%] of rated motor frequency
(P0310).
Index:
P1333[0] : 1st. Drive data set (DDS)
P1333[1] : 2nd. Drive data set (DDS)
P1333[2] : 3rd. Drive data set (DDS)
Notice:
If this value is too low, the system may become unstable.
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Level:
3
Parameter List MICROMASTER 430
98 6SE6400-5AF00-0BP0
Page 99

Issue 03/02 Parameters
P1335[3] Slip compensation
CStat: CUT Datatype: Float Unit: % Def: 0.0
P-Group: CONTROL Active: Immediately QuickComm. No Max: 600.0
Dynamically adjusts output frequency of inverter so that motor speed is kept constant independent of motor
load.
Increasing the load from md1 to md2 (see diagram) will decrease the motor speed from f1 to f2, due to the
slip. The inverter can compensate for this by increasing the output frequency slightly as the load increases.
The inverter measures the current and increases the output frequency to compensate for the expected slip.
M
M
2
M
1
Value:
P1335 = 0 % :
Slip compensation disabled.
∆
f
2f1
Min: 0.0
Level:
3
f
f
P1335 = 50 % - 70 % :
Full slip compensation at cold motor (partial load).
P1335 = 100 % :
Full slip compensation at warm motor (full load).
Slip compensation uses the motor data and motor model to add the rated slip frequency rated motor speed
and rated motor current.
Index:
P1335[0] : 1st. Drive data set (DDS)
P1335[1] : 2nd. Drive data set (DDS)
P1335[2] : 3rd. Drive data set (DDS)
Note:
Gain adjustment enables fine-tuning of the actual motor speed (see P1460 - gain speed control).
100% = standard setting for warm stator.
P1336[3] Slip limit Min: 0
CStat: CUT Datatype: U16 Unit: % Def: 250
P-Group: CONTROL Active: Immediately QuickComm. No Max: 600
Compensation slip limit in [%] relative to r0330 (rated motor slip), which is added to frequency setpoint.
Index:
P1336[0] : 1st. Drive data set (DDS)
P1336[1] : 2nd. Drive data set (DDS)
P1336[2] : 3rd. Drive data set (DDS)
Dependency:
Slip compensation (P1335) active.
r1337 CO: V/f slip frequency Min: -
Datatype: Float Unit: % Def: -
P-Group: CONTROL Max: -
Displays actual compensated motor slip as [%]
Dependency:
Slip compensation (P1335) active.
Level:
3
Level:
3
Parameter List MICROMASTER 430
6SE6400-5AF00-0BP0
99
Page 100

Parameters Issue 03/02
P1338[3] Resonance damping gain V/f Min: 0.00
CStat: CUT Datatype: Float Unit: - Def: 0.00
P-Group: CONTROL Active: Immediately QuickComm. No Max: 10.00
Defines resonance damping gain for V/f. Here, di/dt of the acitve current will be scaled by P1338 (see
diagram below). If di/dt increases the resonance damping circuit decreases the inverter output frequency.
P1338
i
active
1338P
-
Index:
P1338[0] : 1st. Drive data set (DDS)
P1338[1] : 2nd. Drive data set (DDS)
P1338[2] : 3rd. Drive data set (DDS)
Note:
The resonance circuit damps oscillations of the active current which frequently occur during no-load
operation.
In V/f modes (see P1300), the resonance damping circuit is active in a range from approx. 6 % to 80 % of
rated motor frequency (P0310).
If the value of P1338 is too high, this will cause instability (forward control effect).
f
res damping
T
P1340[3] Imax controller prop. gain Min: 0.000
CStat: CUT Datatype: Float Unit: - Def: 0.000
P-Group: CONTROL Active: Immediately QuickComm. No Max: 0.499
Proportional gain of the I_max frequency controller.
Level:
3
Level:
3
The Imax controller reduces inverter current if the output current exceeds the maximum motor current
(r0067).
In linear V/f, parabolic V/f, FCC, and programmable V/f modes the I_max controller uses both a frequency
controller (see parameters P1340 and P1341) and a voltage controller (see parameters P1344 and P1345).
The frequency controller seeks to reduce current by limiting the inverter output frequency (to a minimum of
the two times nominal slip frequency). If this action does not successfully remove the overcurrent condition,
the inverter output voltage is reduced using the I_max voltage controller. When the overcurrent condition
has been removed successfully, frequency limiting is removed using the ramp-up time set in P1120.
In linear V/f for textiles, FCC for textiles, or external V/f modes only the I_max voltage controller is used to
reduce current (See parameters P1345 and P1346).
Index:
P1340[0] : 1st. Drive data set (DDS)
P1340[1] : 2nd. Drive data set (DDS)
P1340[2] : 3rd. Drive data set (DDS)
Note:
The I_max controller can be disabled by setting the frequency controller integral time P1341 to zero. This
disables both the frequency and voltage controllers. Note that when disabled, the I_max controller will take
no action to reduce current but overcurrent warnings will still be generated, and the Drive will trip in
excessive overcurrent or overload conditions.
P1341[3] Imax controller integral time Min: 0.000
CStat: CUT Datatype: Float Unit: s Def: 0.300
P-Group: CONTROL Active: Immediately QuickComm. No Max: 50.000
Integral time constant of the I_max frequency controller.
P1341 = 0 : I_max frequency and voltage controllers disabled
P1340 = 0 and P1341 > 0 : frequency controller enhanced integral
P1340 > 0 and P1341 > 0 : frequency controller normal PI control
See description in parameter P1340 for further information.
Index:
P1341[0] : 1st. Drive data set (DDS)
P1341[1] : 2nd. Drive data set (DDS)
P1341[2] : 3rd. Drive data set (DDS)
Level:
3
Parameter List MICROMASTER 430
100 6SE6400-5AF00-0BP0
 Loading...
Loading...