

Page 1

TIM310-1030000S01
RANGING AND DETECTING LASER SCANNER
Mounting, electrical installation and license texts
TECHNICAL INFORMATION
Page 2

Technical Information
TiM310-1030000S01 ranging and detecting laser scanner
Described product
TiM3xx
Manufacturer
SICK AG
Erwin-Sick-Str. 1
79183 Waldkirch,
Germany
Copyright
This work is protected by copyright. Any rights derived from the copyright shall be reserved
for SICK AG. Reproduction of this document or parts of this document is only permissible
within the limits of the legal determination of Copyright Law. Any modification, expurgation
or translation of this document is prohibited without the express written permission of SICK
AG.
© SICK AG. All rights reserved.
Original document
This document is an original document of SICK AG.
The TiM is certified to IEC/EN/UL/CSA 61010-1:2007. These operating instructions may
contain passages of text in a foreign language.
2 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 3
Technical Information Chapter 1
NOTICE
WARNING
TiM310-1030000S01
About this document
1 About this document
This document summarizes supplementary information on mounting and electrical instal-
lation, measured value output fomat of the TiM310-1030000S01 as well as license texts.
It is aimed at sufficiently qualified personnel for the purposes of installation, commissioning
and further data processing.
Notes on commissioning, configuration and maintenance can be found in the TiM3101030000S01 operating instructions.
Information on the TiM310-1030000S01 can be found on the Internet on the TiM3xx product page at www.mysick.com/en/tim3xx:
Technical specifications in the online data sheet (PDF)
Dimensional drawing and 3D CAD dimension models in various electronic formats
Range diagram (PDF)
EC Declaration of Conformity (PDF)
Configuration software SOPAS ET
Product information with overview of available accessories (PDF)
TiM3xx operation instructions (PDF) in additional languages where applicable
This technical information (PDF)
Support is also available from your sales partner, see www.sick.com/worldwide.
Important The TiM310-1030000S01 is simply referred as TiM3xx in this technical information.
Symbols used
Certain information in this documentation is emphasized as follows to enable faster access
to the information:
Notice!
A notice indicates potentially damaging hazards or functional impairments to the TiM3xx or
its connected devices.
Warning!
A warning indicates specific or potential dangers to the user's physical integrity. It is intended to protect the user against accidents.
The safety symbol to the left of the warning indicates the type of accident hazard e.g. due
to electricity. Increasing warning levels (CAUTION, WARNING, DANGER) indicate the severity
of the possible hazard.
Always reading warnings carefully and obey them meticulously.
Important This important notice informs you about special aspects.
This symbol refers to supplementary technical documentation.
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 3
Page 4

Chapter 1 Technical Information
About this document
TiM310-1030000S01 ranging and detecting laser scanner
Safety information
Read the notes on mounting and electrical installation before carrying out these tasks.
Read additionally the TiM310-1030000S01 operating instructions to familiarize your-
self with the device and its functions.
The TiM310-1030000S01 complies with laser class 1, for laser warnings see the oper-
ating instructions.
Only use the device in permissible ambient conditions (e.g. temperature, ground poten-
tial). Any applicable legal regulations or regulations of other authorities will have to be
observed during operation.
Opening the screws of the TiM3xx housing will invalidate any warranty claims against
SICK AG.
Repairs may only be performed on the TiM3xx by trained and authorized SICK AG ser-
vice personnel.
The TiM3xx does not constitute personal protection equipment in sense of the respec-
tive applicable safety standards for machines.
4 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 5

Technical Information
TiM310-1030000S01
Contents
Table of contents
1 About this document..................................................................................................... 3
2 Operating principle of the TiM3xx ............................................................................... 6
2.1 Distance measurement ............................................................................................6
2.2 Direction measurement ............................................................................................6
3 Mounting......................................................................................................................... 8
3.1 Notes on mounting .................................................................................................... 8
3.2 Optional accessories ...............................................................................................10
4 Electrical installation .................................................................................................. 12
4.1 Overview of all interfaces .......................................................................................12
4.2 Pin and wire color assignments .............................................................................13
4.3 Notes on electrical installation ...............................................................................15
4.4 Prerequisites for safe operation of the TiM3xx in a system .................................15
4.5 Installation steps .....................................................................................................19
5 Measured value output...............................................................................................21
5.1 Telegrams ................................................................................................................21
5.2 Request measured values ......................................................................................22
5.3 Measured value output fomat ................................................................................24
6 License texts ................................................................................................................30
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 5
Page 6
Chapter 2 Technical Information
Operating principle of the TiM3xx
TiM310-1030000S01 ranging and detecting laser scanner
2 Operating principle of the TiM3xx
The TiM3xx is an opto-electronic laser scanner that electro-sensitively scans the perimeter
of its surroundings at a single plane with the aid of laser beams. The TiM3xx measures its
surroundings using two-dimensional polar coordinates based on its measurement origin.
This is marked on the hood in the centre using a circular indentation. If a laser beam hits
an object, its position in terms of distance and direction is determined.
Scanning is performed across a 270° sector. The maximum range of the TiM3xx is 4 m
(13.12 ft) on light, natural surfaces with an object reflectivity > 50 % (e. g. a white house
wall).
2.1 Distance measurement
The TiM3xx emits pulsed laser beams using a laser diode. If one of these laser pulses hits
an object or a person, this is reflected at its surface. The reflection is detected in the
TiM3xx's receiver by a photodiode. The TiM3xx uses HDDM technology (High Definition
Distance Measurement), a SICK own-development. Using this measurement method, a
measured value is formed by the average value for several individual pulses. The TiM3xx
calculates the distance to the object from the transit time required by the light from emission of the beam to receipt of the reflection. This principle of "time-of-flight measurement"
is used by radar systems in a similar manner.
2.2 Direction measurement
The emitted laser beams are deflected by the TiM3xx using a rotating mirror and its surroundings scanned in a circular form. The measurements are triggered internally at regular
angle increments using an angular encoder. One complete rotation represents one measuring process (scan).
The TiM3xx works at a scanning frequency of 15 Hz, i.e. it performs 15 measuring processes
per second and makes the measurement results continuously available in real time via the
USB interface.
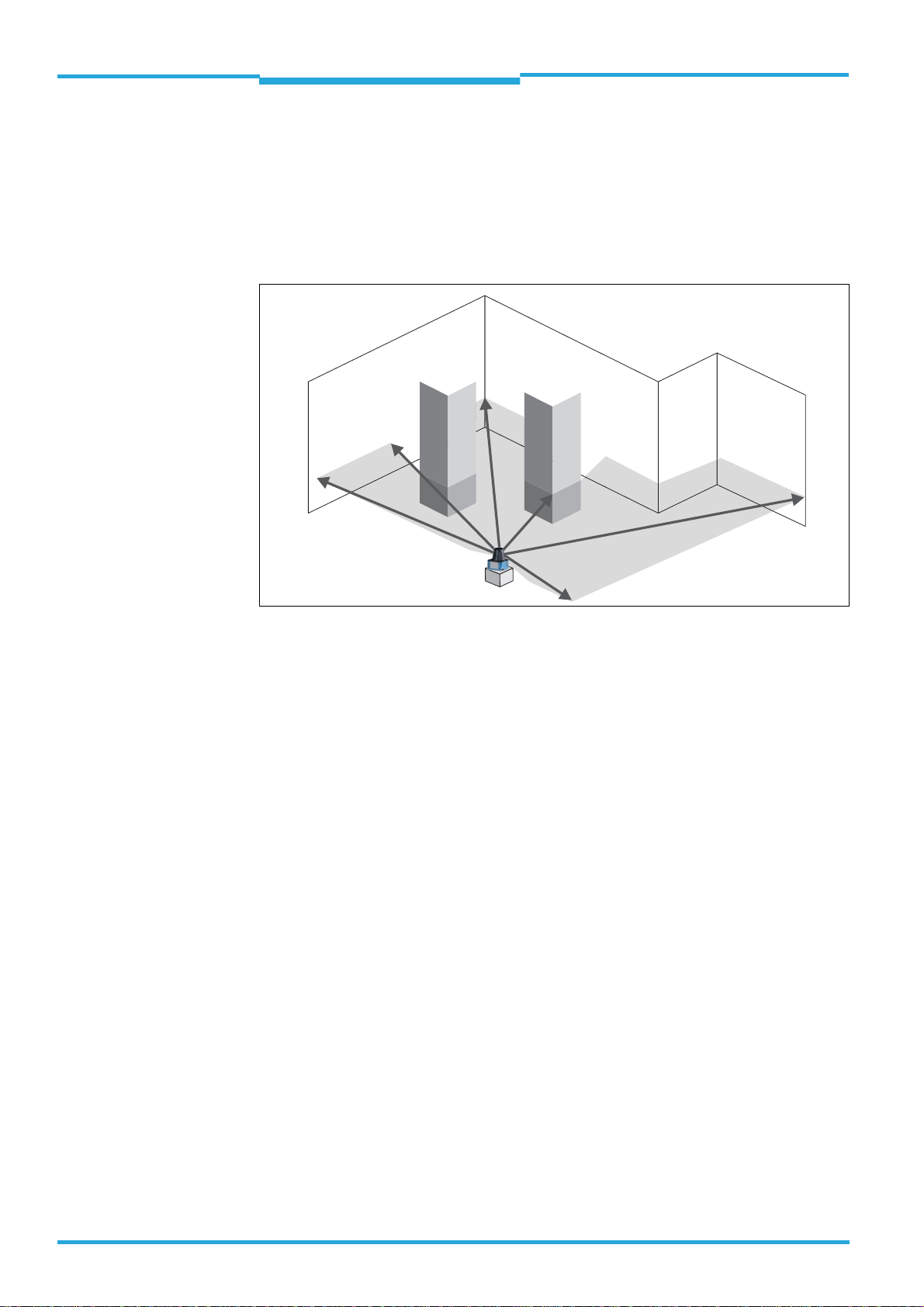
The measurement method forms an average value from several pulses to determine individual measured values. At an angle resolution of 1°, a measuring point is formed from the
average of 84 measurements. The spot geometry of the submeasuring points is virtually circular whereas a measuring point has the form of a narrow rectangle due to overlapping.
6 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 7
Technical Information Chapter 2
Operating principle of the TiM3xx
TiM310-1030000S01
84 submeasuring points
TiM3xx
Spot diameter (mm/in)
120
4.73
100
3.94
80
3.15
60
2.36
40
1.58
20
0.79
0
0 0.5 1 1.5 2.5 3.5234
1.64 3.28 4.92 8.20 11.486.56 9.84 13.12
Range (m/ft)
Spot diameter of a submeasuring point.
Divergence 7 mrad, spot diameter on the front screen 6 mm (0.24 in)
Elongation of the 84 overlayed submeasuring points in direction
of deflection at angle step 1°.
Divergence 22 mrad, spot diameter on the front screen 6.5 mm (0.26 in)
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 7
Page 8
Chapter 3 Technical Information
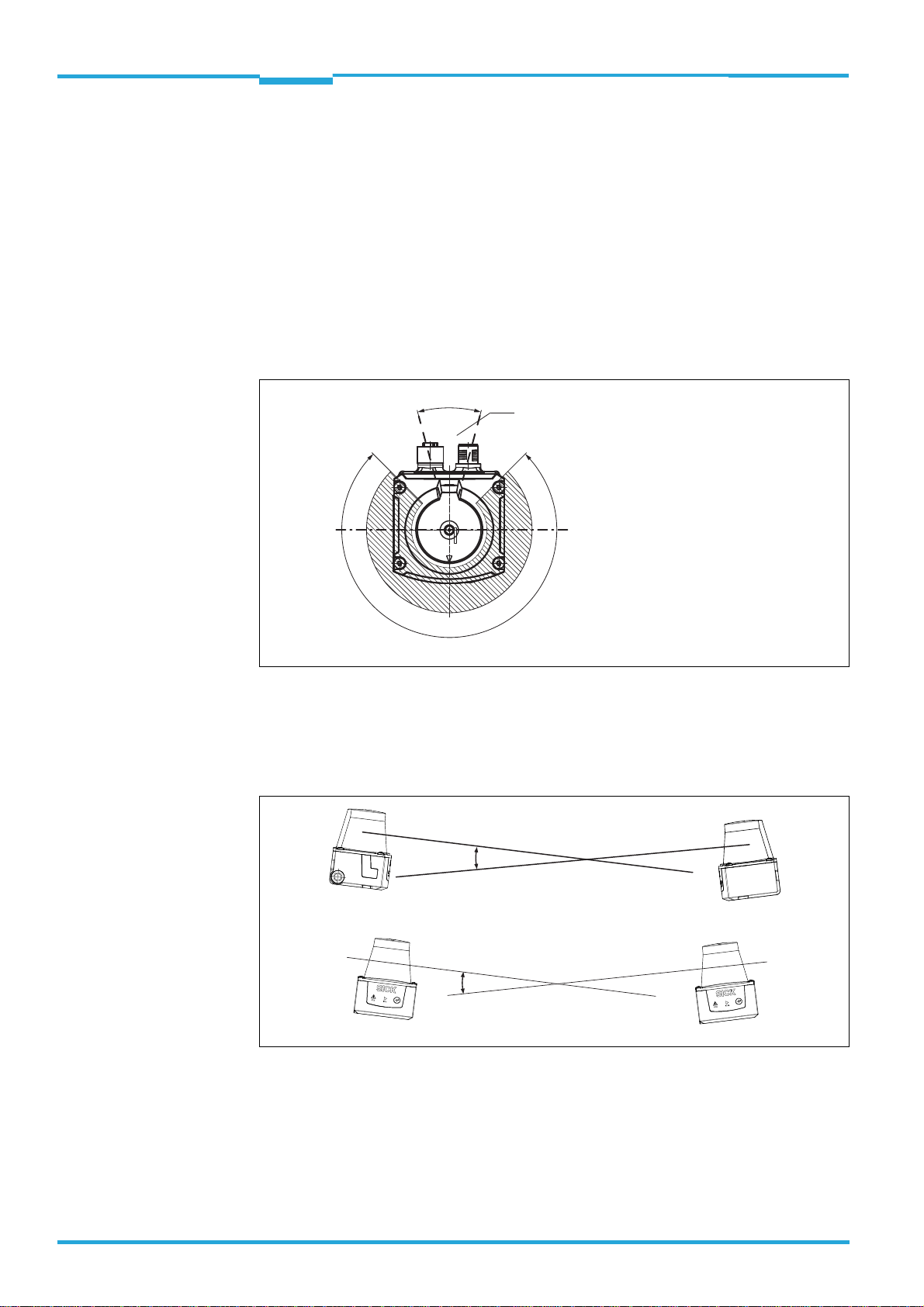
Crosswise placement of two TiM3xx
Placement of two TiM3xx opposed to each other
Mounting
TiM310-1030000S01 ranging and detecting laser scanner
3 Mounting
3.1 Notes on mounting
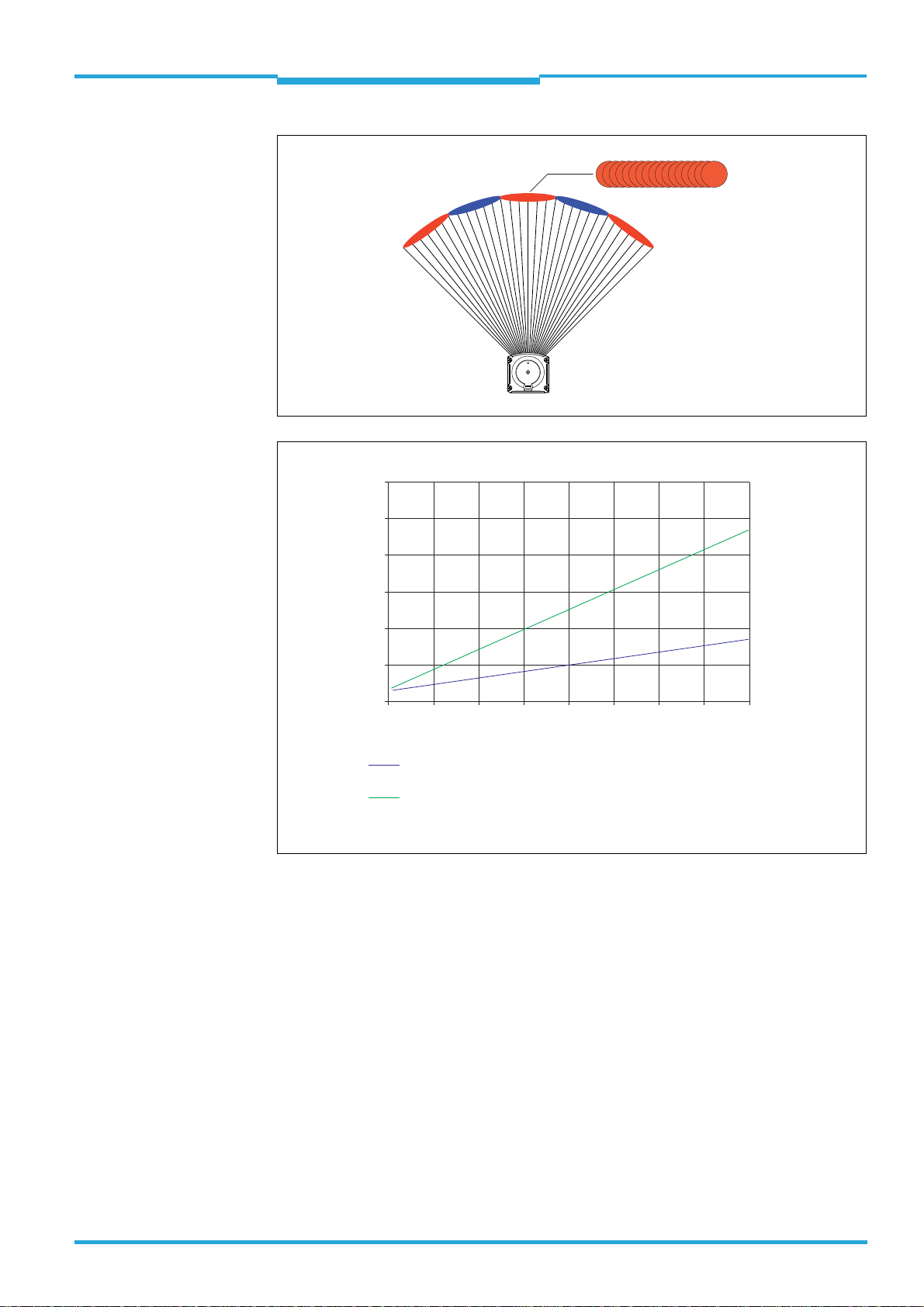
The TiM3xx can, depending on the application purpose, be mounted in any position.
Install the TiM3xx so it as unaffected by shocks and vibrations as possible.
Install the TiM3xx so it is not exposed to any direct sunlight (window, skylight) or any
other heat sources. This prevents impermissible temperature increases inside the
device.
During mounting, make sure there is no reflective surface behind the reference target
(see Figure ).
30°
‒45°
90°
1
225°
180°0°
Using several TiM3xx
The TiM3xx is designed so that mutual interference of the same types of sensors is very unlikely. To preclude even the slightest of influences on the measuring accuracy, we recommend installing the TiM3xx as in the examples below.
8 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 9
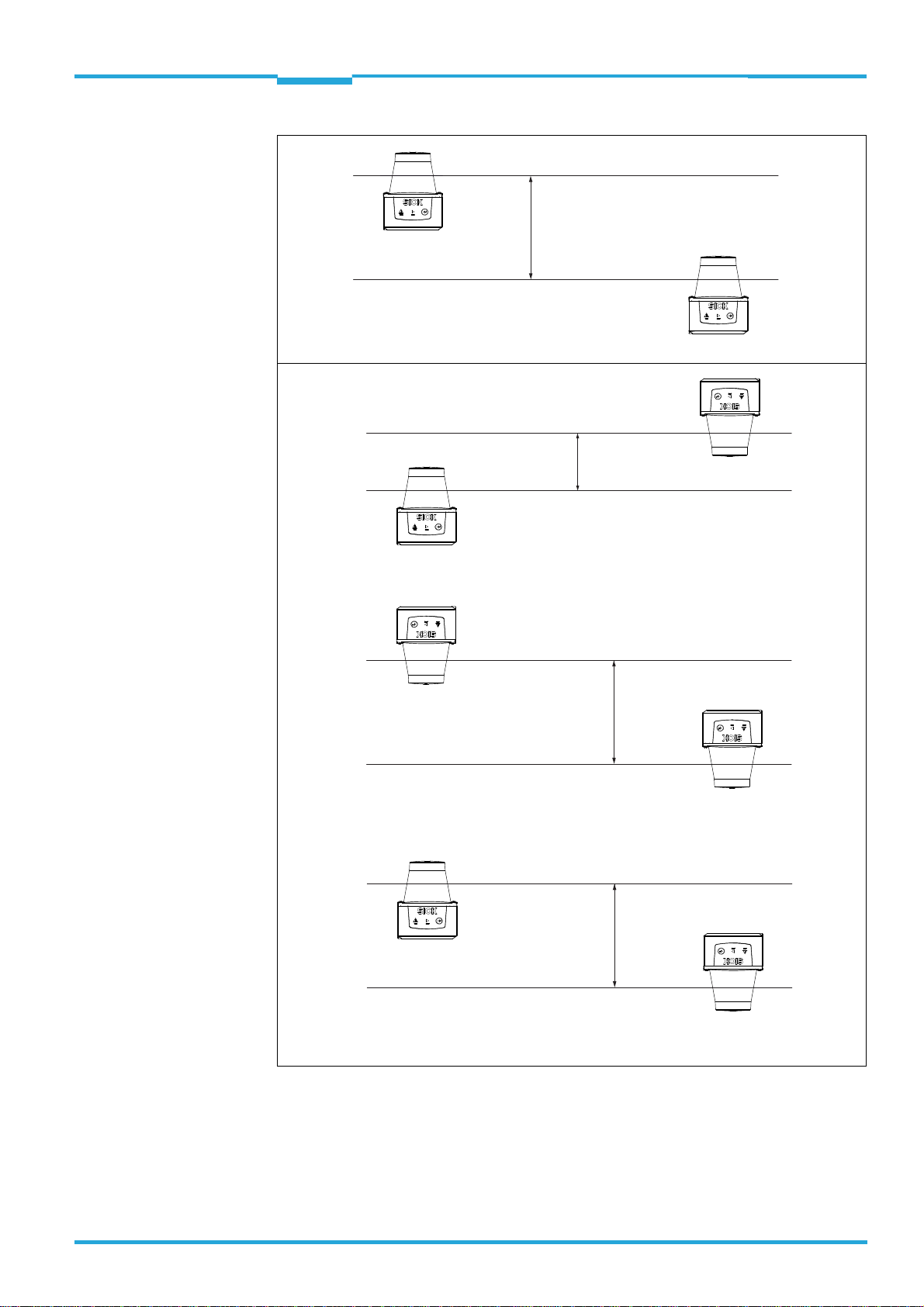
Technical Information Chapter 3
Placement of two TiM3xx with parallel offset
TiM310-1030000S01
Mounting
Placement of two TiM3xx with parallel offset, one of these upside down
Placement of two TiM3xx upside down, parallel offset
Placement of two TiM3xx with parallel offset, one of these upside down
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 9
Page 10
Chapter 3 Technical Information
1
2
7
6
5
3
4
Mounting
TiM310-1030000S01 ranging and detecting laser scanner
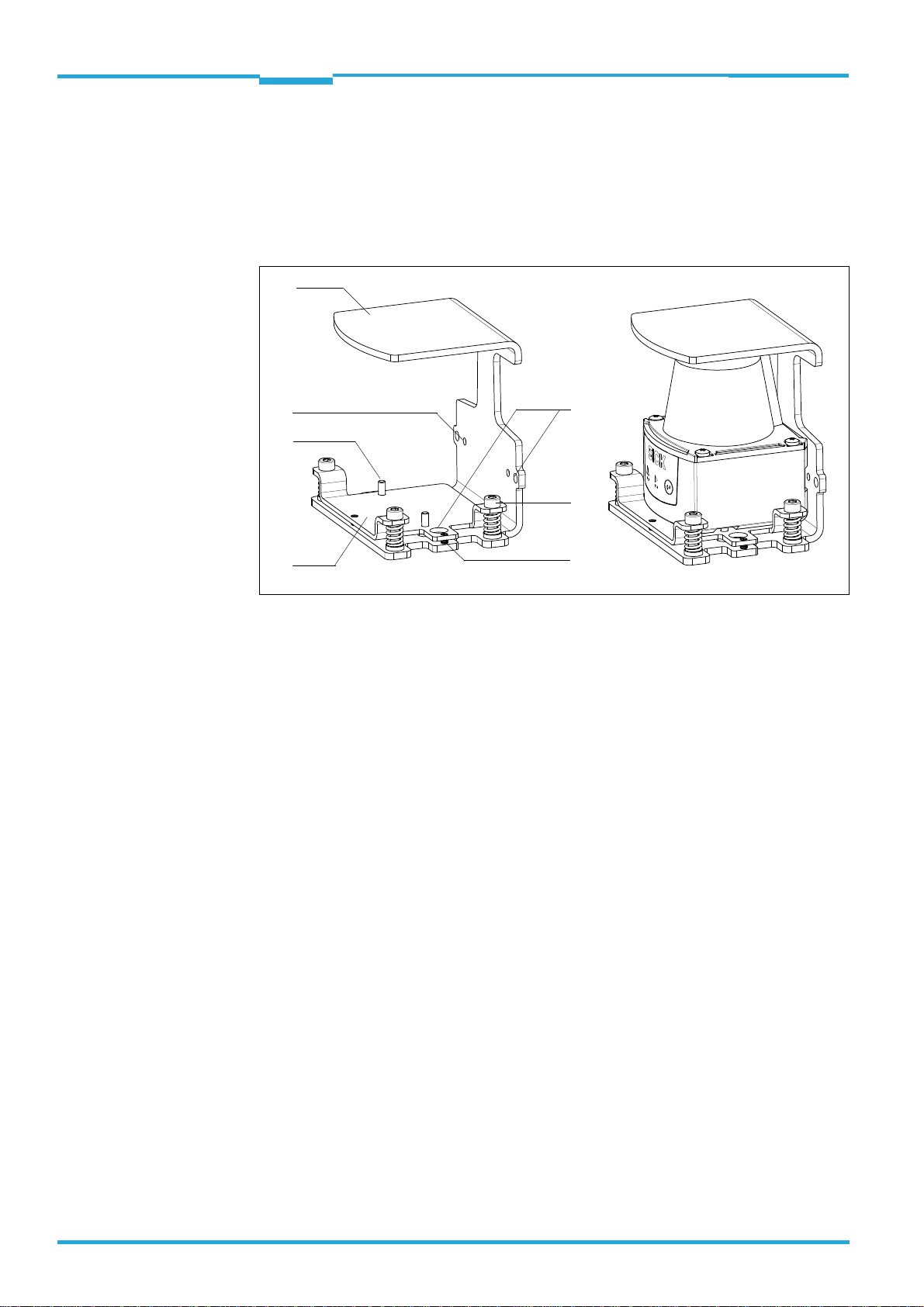
3.2 Optional accessories
3.2.1 Install mounting set 2 (part no. 2061776) on the TiM3xx
The hanger-shaped mounting set 2 is used as skirting protection and as a bracket for making fine adjustments on the scan plane. The TiM3xx can also be fastened directly onto the
bracket without the adapter plate (skirting protection only).
1 Mounting bracket
2 4.3 mm (0.17 in) diameter hole for mounting the mounting bracket horizontally or vertically on a
surface, 2 x 2
3 Cheese-head screw M4 x 16 (hexagon socket) and compression spring for aligning the TiM3xx,
3 x
4 Set screw for locking the adapter plate after alignment, 2 x
5 Adapter plate
6 Cheese-head screw M3 x 8 in a 3.2 mm (0.13 in) diameter hole for mounting the TiM3xx to the
adapter plate, 2 x
7 3.2 mm (0.13 in) diameter hole for mounting the TiM3xx directly on the mounting bracket, 2 x
(alternatively, without option for making adjustments on the scan plane)
10 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 11

Technical Information Chapter 3
All measures of length in mm
68
89.4
70
51
92
68.8
26.4 4238.5
68.8
Ø 4.3 (2 x)
Ø 4.3 (2 x)
mm
4.3
26.4
38.5
42.0
51.0
68.0
68.8
70.0
89.4
92.0
inch
0.17
1.04
1.51
1.65
2.00
2.68
2.71
2.76
3.52
3.62
Mounting
TiM310-1030000S01
Procedure for mounting the TiM3xx
1. Mount the TiM3xx to the adapter plate using the two screws M3 x 8 supplied. For this
purpose, insert the screws from below through the hole in the mounting bracket and
the hole in the adapter plate.
2. Align the scan plane of the TiM3xx using the three cheese-head screws
3. After alignment, lock the adapter plate against the mounting bracket using both set
screws
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 11
4.
3.
Page 12

Chapter 4 Technical Information
SOPASSOPAS
“Power/Out”
“USB 2.0”
Configuration
Diagnosis
TiM3xx
Connection
box
USBUSB
Driver for request of
measurement values
and further data
processing
customer-provided
OUT 4
“Device
Ready”
DC 9 ... 28 V
delayaction
fuse
0,8A/T
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
4 Electrical installation
4.1 Overview of all interfaces
Measuring mode
Field monitoring
customer-provided
Field monitoring
OUT 1 OUT 2
delayaction
fuse
0,8A/T
DC 9 ... 28 V
Connection
box
OUT 4
“Device
Ready”
“Power/Out”
“USB 2.0”
TiM3xx
USBUSB
SOPASSOPAS
Configuration
Diagnosis
Tem porar y
field monitoring
12 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 13

Technical Information Chapter 4
TiM310-1030000S01
Electrical installation
4.2 Pin and wire color assignments
15-pin D-Sub HD plug on the cable
6
1
11
Pin Signal Color of wire Function
1 DC 9 ...28 V red Supply voltage
2n.c. purple –
3n.c. yellow –
4 OUT 4 red + black Switching output 4 (Device ready/index/error)
5GND black Ground
6 n.c. light blue –
7n.c. dark blue –
8 reserved turquoise or light gray –
9 reserved green –
10 reserved gray –
11 reserved pink –
12 OUT 1 brown Switching output 1 (field infringement)
13 OUT 2 orange Switching output 2 (field infringement)
14 reserved white –
15 reserved white + black –
– – metal Shield
Do not connect reserved pins!
5
15
10
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 13
Page 14

Chapter 4 Technical Information
D Sub socket,
front view
110
15611
5
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
Connecting cable no. 2043413 with 15-pin D-Sub-HD socket and open end
(optional accessory)
Pin Signal Color of wire Function
1 DC 9 ...28 V red Supply voltage
2n.c. purple –
3 n.c. yellow –
4 OUT 4 red + black Switching output 4 Device Ready/index/error)
5GND black Ground
6 n.c. light blue –
7n.c. dark blue –
8 reserved turquoise or light gray –
9 reserved green –
10 reserved gray –
11 reserved pink –
12 OUT 1 brown Switching output 1 (field infringement)
13 OUT 2 orange Switching output 2 (field infringement)
14 reserved white –
15 reserved white + black –
– – metal Shield
14 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 15

Technical Information Chapter 4
TiM310-1030000S01
Electrical installation
4.3 Notes on electrical installation
When the cover of the USB socket is open or the USB cable is connected, the TiM3xx
must not come into contact with moisture and dust. In this status, the TiM3xx does not
correspond to any specified IP enclosure rating.
Use the supplied seal for the USB connection to prevent contact with moisture and dirt.
When operating the USB interface, ESD/EMC interferences can lead to an interruption
of the USB connection. To continue with the data transfer, disconnect the USB cable
from the TiM3xx and reattach it to establish contact. To re-establish communication
between TiM3xx and PC, select C
software.
Electrical connections between the TiM3xx and other devices may only be connected
or disconnected when the system is not live, otherwise the devices may be damaged.
All connection cables on the TiM3xx may not exceed a length of 3 m (9.84 ft) in order
to ensure that it conforms with the CE.
Conducting cross sections of the supply cable from the customer's power system
should be selected and perform in accordance with the applicable standards.
Protected the TiM3xx with an external 0.8 A delay-action fuse at the start of the supply
cable from the point of view of the power supply. The connection module already has a
suitable fuse.
All electrical circuits connected to the TiM3xx must be designed as SELV or as PELV
electric circuits (SELV = Safety Extra Low Voltage, PELV = Protective Extra Low Voltage).
When constructing a connection box with 15-pin D-sub HD socket do not use the re-
served pins of the socket (e.g. as solder post)!
Do not switch on the supply voltage for the TiM3xx until the connection work has been
completed and wiring work has been checked carefully.
OMMUNICATION > GO ONLINE in the SOPAS configuration
4.4 Prerequisites for safe operation of the TiM3xx in a system
The TiM3xx is designed and tested for electrical safety according to the standard EN 609501 (2006-04)/A11 (2009-03):
It is connected to peripheral devices (power supply, control, actuators) via shielded cables.
The cable shield e.g. of the supply line is therefore flush with the metal housing of the
TiM3xx. The device can either be grounded via the cable shield or via the two straight plates.
If the peripheral devices also have metal housing and if the cable shields also flush with
their housing, it is assumed that all devices involved in installation have the same ground
potential.
This is achieved by observing the following conditions for instance:
mounting of devices on conducting metal surfaces
professional grounding of devices/metal surfaces in the system
low-impedance and current-conducting equipotential bonding between areas with dif-
ferent ground potentials if necessary.
If these conditions are not met, e.g. on devices in a widely distributed system across several
buildings, equipotential bonding currents may, due to different ground potentials, flow via
the cable shields between the devices, which can lead to dangers.
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 15
Page 16

Chapter 4 Technical Information
DANGER
DANGER
closed current loop
with equalizing currents
via cable shields
grounding point 2
grounding point 1
grounding potential difference
Actuators for
switching outputs
Power
supply unit
I
U
= metal housing
= shielded electrical cable
TiM310-
1030000S01
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
Insufficient ground potential equalization leads to voltage differences arising between
grounding points 1 and 2. The current loop closes via the shielded cables/metal housing.
Risk of injury/risk of damage due to electrical current!
Equipotential bonding currents between the TiM3xx and other grounded devices in the system may have the following effects:
dangerous currents on the metal housing e.g. of the TiM3xx
incorrect functioning or irreparable damage to the devices
Damage/irreparable damage of the cable shield due to heating and cable fires
Where local conditions are unfavorable and thus do not meet conditions for a safe
earthing method (same ground potential at all grounding points), carry out the measures below.
Risque de blessure ou d’endommagement dû au courant électrique !
Des courants d’équipotentialité entre le TiM3xx et les autres appareils mis à la terre de
l’installation peuvent avoir les effets suivants :
tensions dangereuses sur le boîtier métallique du TiM3xx par ex.
comportement défectueux ou destruction des appareils
endommagement ou destruction du blindage des câbles par échauffement et par
combustion des câbles
Prendre des mesures selon les indications suivantes là où les caractéristiques locales
sont défavorables et ne permettent pas un concept de mise à la terre sûr (même
potentiel de terre dans tous les points de mise à la terre).
16 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 17

Technical Information Chapter 4
Actuators for
switching outputs
grounding point 1
Electro-
optical
signal
isolators
Electro-
optical
signal
isolators
grounding point 2
= metal housing
= shielded electrical cable
= fiber optic cable
grounding potential difference
U
TiM310-
1030000S01
Electrical installation
TiM310-1030000S01
Remedial measures
The primary solution for avoiding equipotential bonding currents on the cable shields is to
guarantee low-impedance and current-conducting potential equalization. If this is not possible, the following two solution approaches are intended as suggestions.
Important It is not advisable to open up the cable shields. This can cause compliance with EMC limit
values for the devices to be no longer guaranteed.
a) Measures for widely distributed system installations
On widely distributed system installations with correspondingly large potential differences,
we recommend setting up local islands and connecting them using commercially available
electro-optical signal isolators. This will attain maximum resistance to electromagnetic interference, while observing all requirements of EN 60950-1 at the same time.
The ground loop is isolated by using the electro-optical signal isolator between the islands.
Equalization currents are prevented on the cable shields within the islands by conductible
equipotential bonding.
b) Measures for small system installations
For smaller installations with only slight potential differences, insulated installation of the
TiM3xx and of peripheral devices may be a sufficient solution.
Actuators for
switching outputs
grounding point 1
grounding potential difference
U
TiM310-
1030000S01
electrically
insulated
grounding point 2 grounding point 3
= metal housing
= shielded electrical cable
Power
supply unit
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 17
Page 18

Chapter 4 Technical Information
Important The power supply for the TiM3xx and the connected peripheral devices must also guarantee
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
Ground loops are, even in the event of large differences in ground potential, effectively prevented. This prevents any equalization currents flowing via the cable shields or metal housings.
the required level of insulation.
Under certain circumstances, a tangible potential can develop between the insulated metal
housings and the local ground potential.
18 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 19

Technical Information Chapter 4
TiM310-1030000S01
Electrical installation
Special national regulations for Sweden and Norway
Varning och atjarder
Utrustning som ar kopplad till skyddsjord via jordat vagguttag och/eller via annan utrustning
och samtidigt ar kopplad till kabel-TV nat kan i vissa fall medfora risk for brand.
For att undvika detta skall vid anslutning av utrustningen till kabel-TV nat galvanisk iso-
lator finnas mellan utrustningen och kabel-TV natet.
Advarsel og tiltaker
Utstyr som er koplet til beskyttelsesjord via nettplugg og/eller via annet jordtilkoplet utstyr
- og er tilkoplet et kabel - TV nett, kan forarsake brannfare.
For a unnga dette skal det ved tilkopling av utstyret til kabel-TV nettet installeres en gal-
vanisk isolator mellom utstyret og kabel-TV nettet.
Corresponding English translation
Devices which are connected to the electrical system PE of the building via a mains connection or other devices with a connection to the PE, and which are connected to a cable distribution system with coaxial cables, can under certain circumstances cause a risk of fire.
Connections to a cable distribution system must therefore be made such that electrical
insulation is offered below a certain frequency range (galvanic separating link).
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 19
Page 20

Chapter 4 Technical Information
DANGER
DANGER
TiM310-1030000S01xx
V
S
= DC 9 ... 28 V
OUT 1
Structure and wiring principle of output OUT 2 (pin 13)
and OUT 4 (pin 4) same as output OUT 1
12
5
GND
V
out
Quenching circuit:
Install an anti-surge
diode directly at the
load!
For inductive load:
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
4.5 Installation steps
4.5.1 Supply voltage connection
The TiM3xx requires a supply voltage between DC 9 and 28 V (stabilized protective extralow voltage [SELV or PELV] as per the IEC 60364-4-41 standard) .
The electricity source must be able to provide a power of 5 W at minimum.
Risk of injury due to electrical current!
If the supply voltage is generated by extracting and converting current from the alternating
current network using a stabilized power supply unit, insufficient electrical separation between the input and output circuit may lead to an electric shock.
Only use a power supply unit whose output circuit has reliable electrical separation due
to double insulation and a safety transformer as per IEC 742.
Risque de blessure dû au courant électrique !
Une séparation électrique insuffisante entre les circuits d’entrée et de sortie peut provoquer une électrocution si la tension d’alimentation est générée par le prélèvement et la
conversion de courant du réseau alternatif à l’aide d’un bloc d’alimentation stabilisé.
N’utiliser qu’un seul bloc d’alimentation dont le circuit de sortie, à l’opposé du circuit
d’entrée, possède une séparation électrique sécurisée par une double isolation et un
transformateur de sécurité selon CEI 742 (VDE 0551).
4.5.2 Wiring of switching outputs OUT 1, OUT 2 and OUT 4
Switching outputs OUT 1 and OUT 2 signal in combination infringement of the both fields.
Output OUT 4 is used to output the Device Ready signal, an error and a regular index pulse.
20 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Characteristic data of all switching outputs is identical.
Page 21

Technical Information Chapter 4
Electrical installation
TiM310-1030000S01
Switching behavior PNP-switching against supply voltage VS.
OUT 1 and OUT 2:
Idle level: High (no field infringement),
Working level: Low (field infringement)
Response time: 134 ms to 30 s (adjustable via SOPAS)
Duration time: 0 ms to 10 s (adjustable via SOPAS)
OUT 4:
Idle level: High (Device Ready),
Working level: Low (error), low pulse (15 Hz, index, corresponds to
measurement at 90°)
Properties – Short-circuit resistant and temperature-protected
– Not electrically isolated from the supply voltage V
Electrical values 0 V V
Guaranteed: (VS – 1.5 V)V
out
V
S
VS at I
out
100 mA
out
S
Important Longer connecting cables at the switching outputs of the TiM3xx should be avoided due to
the resultant voltage drop. This is calculated as follows:
2 x length x current
D V = -------------------------------------------------------------
Conductance value x cross section
Conductance value for copper: 56 m/W mm
2
.
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 21
Page 22

Chapter 4 Technical Information
Electrical installation
TiM310-1030000S01 ranging and detecting laser scanner
22 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 23

Technical Information Chapter 5
TiM310-1030000S01
Measured value output
5 Measured value output
5.1 Telegrams
Notation
The individual sections in the syntax of the telegrams from the TiM3xx are each separated
by a space (ASCII code 32, 20h) as also neccessary in the request to the TiM3xx.
The TiM3xx sends measured values conditioned as followed:
Values with a leading “+” or “–” as a decimal value (ASCII notation).
Values without a leading “+” or “–” as a hexadecimal value (ASCII notation).
The different notations can be mixed within the telegram.
All following telegram examples refer to the CoLa-A protocol
Variable types
The variable types are the given in the syntax of the measuring data output telegram.
The following variable types are possible:
Variable type Length (byte) Value range Sign
uint_8 1 0 … 255 No
uint_16 2 0 … 65,535 No
uint_32 4 0 … 4,294,967,295 No
int_32 4 –2,147,483, 648 … +2,147,483, 647 Yes
float_32 4
string Context-dependent Important: strings are not terminated by zeroes
–10
–44.85
... +10
38.53
Yes
Important The information in the “Length” column of the table refers to the binary transfer of the
numeric parameters.
The information in the “Value range” column in the table refers to the value range math-
ematically possible for the variable type. The actual value ranges for the parameters
may be different see also Chapter 5.3 Measured value output fomat, Page 26.
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 23
Page 24

Chapter 5 Technical Information
Measured value request
Output of one measured value telegram
Measured value output
TiM310-1030000S01 ranging and detecting laser scanner
5.2 Request measured values
After switching on the supply voltage, the TiM3xx initializes and the green LED will light up
to indicate its readiness for operation.
The TiM3xx begins its readiness to measure automatically. It continuously scans the surrounding contour in its field of vision at a frequency of 15 Hz. It continuously saves the values determined in each measuring process (scan) in its measured value memory by
overwriting the previous values.
5.2.1 Single measured value output
If the data from a measuring process are required, the TiM3xx sends the measured values
from the most recent scan.
Example of single measured value output
Request:
<STX>sRN LMDscandata<ETX>
Answer of TiM3xx:
<STX>sRA LMDscandata (contents see Chapter 5.3 Measured value output fomat,
Page 26) <ETX>
Telegram structure: sRN LMDscandata
Telegram part Description Variable type Length (byte) Value range
Type of command Request (SOPAS read by name) string 3 sRN
Command Data request string 11 LMDscandata
24 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 25

Technical Information Chapter 5
Measured value request
Output of the measured value telegrams
Stop the output
TiM310-1030000S01
Measured value output
5.2.2 Continuous measured value output
If the data from ongoing measuring processes are required, the TiM3xx sends measured
values from successive scans until the output of measured values is stopped again using
the same telegram.
Example of continuous measured value output
1. Start measured value output
Request:
<STX>sEN LMDscandata 1<ETX>
Answer of TiM3xx (acknowledgement of request):
<STX>sEA LMDscandata 1<ETX>
Answer of TiM3xx (measured value output):
<STX>sSN LMDscandata (contents see Chapter 5.3 Measured value output fomat,
Page 26) <ETX>
2. Stop measured value output
Request:
<STX>sEN LMDscandata 0<ETX>
Answer of TiM3xx (acknowledgement of request):
<STX>sEA LMDscandata 0<ETX>
Telegram structure: sEN LMDscandata MeasurementStartStop
Telegram part Description Variable type Length (byte) Value range
Type of command Request (SOPAS event by name) string 3 sEN
Command Data request string 11 LMDscandata
MeasurementStartStop Enum8 1 0 Stop measured value output
1 Start measured value output
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 25
Page 26

Chapter 5 Technical Information
Measured value output
TiM310-1030000S01 ranging and detecting laser scanner
5.3 Measured value output fomat
Important Information that is grayed out in the following table is not output by the TiM3xx.
Telegram part Description Variable type Length (byte) Value range
Type of command Request (SOPAS read
answer/SOPAS sent event)
Command Data request string 11 LMDscandata
Version number Firmware version information uint_16 2 0000h ... FFFFh
Device number Device ID as configured in
SOPAS ET
Serial number Factory serial number uint_32 4 00000000h ... FFFFFFFFh
Device status Status of the TiM3xx uint_x 2 x 1 00 00h Device OK
Device information
Telegram counter Counter, starting at the first
measured value telegram
(cyclic data) after confirmation of the measured value
request.
When the upper limit is
reached, the counter starts
again at 0 (= 1st telegram).
Scan counter Counter, starting with the first
scan after confirmation of the
measured value request.
When the upper limit is
reached, the counter starts
again at 0 (= 1. scan).
Time since startup Time since the TiM3xx was
switched on and the end
point of the scan in micro
seconds (μs)
Time of transmission Time since the TiM3xx was
Status information
Input status The least significant byte
Output status The least significant byte
Reserved byte A Reserved uint_16 2 –
switched on and the transfer
of the measured values in
micro seconds (μs)
reflects the state of the digital
switching inputs by bit.
The least significant bit corresponds to input 1.
reflects the state of the digital
switching outputs by bit.
The least significant bit corresponds to output 1.
string 3 sRA/sSN
uint_16 2 0000h ... FFFFh
00 01h Device error
uint_16 2 0000h 0
FFFFFh 65,535
uint_16 2 0000h 0
FFFFFh 65,535
uint_32 4 00000000h 0
FFFFFFFFFh 4,294,967,295
uint_32 4 00000000h 0
FFFFFFFFFh 4,294,967,295
uint_x 2 x 1 00 00h all switching inputs inactive
uint_x 2 x 1 00 00h all switching outputs inactive
00 0Bh all switching outputs active
26 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 27

Technical Information Chapter 5
TiM310-1030000S01
Telegram part Description Variable type Length (byte) Value range
Scanning frequency Information in 1/100 Hz uint_32 4 1500 15 Hz
Measurement
frequency
Measurement parameters
Number of encoders Defines the number of encod-
Encoder position Information in ticks uint_32 4 00000000h ... FFFFFFFFh
Encoder speed Information in mm/s uint_16 2 0000h ... FFFFh
Encoder
Number of 16 bit channels Defines the number of 16-bit
Measured data contents
Scaling factor Multiplier for the values in the
Scaling offset For the TiM3xx always 0 float_32 4 00000000h ... FFFFFFFFh
Starting angle Information 1/10,000 degree Int_32 4 –450,000 ... + 2,250,000
Angular step width Information 1/10,000 degree uint_16 2 10,000 (1 degree)
Number of data Defines the number mea-
Data_1 ... Data_n Output of the measured val-
Output channels 1 ... 4 (16 bit)
Measured value output
Frequency between two separate measurements in 100 Hz
ers from which data are output
output channels on which the
TiM3xx outputs measured
data.
If “0 output channels” are
selected, no data is output.
The telegram part defines the
contents of the output channel.
telegram parts Data_1 to
Data_n
sured values the TiM3xx outputs
ues 1 to n. The contents and
the unit depend on the telegram part “Measured data
contents”. DIST in mm
uint_32 4 00000000h ... FFFFFFFFh
uint_16 2 0 No encoder data
(can not be changed)
uint_16 2 1 The TiM3xx sends the distance
data as 16 bit value via one
channel
string 5 DIST1 Radial distance for the first echo
float_32 4 00000000h ... FFFFFFFFh
uint_16 2 271
uint_16 2 0000h ... FFFFh
(contd.)
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 27
Page 28

Chapter 5 Technical Information
Telegram part Description Variable type Length (byte) Value range
Number of 8 bit channels Defines the number of 8-bit
Measured data contents
Scaling factor Multiplier for the values in the
Scaling offset For the TiM3xx always 0 float_32 4 00000000h ... FFFFFFFFh
Starting angle Information 1/10,000 degree Int_32 4 –450,000 ... + 2,250,000
Angular step width Information 1/10,000 degree uint_16 2 10.000 (1 degree)
Number of data Defines the number mea-
Output channels 1 ... 4 (8 bit)
Data_1 ... Data_n Output of the measured val-
Position Defines the output of position
X position XN coordinate of the sensor in
Y position YN coordinate of the sensor in
Z position ZN coordinate of the sensor in
X rotation XN rotation of the sensor in a
Y rotation YN rotation of the sensor in a
Z rotation ZN rotation of the sensor in a
Position information
Type of rotation Kind of rotation Enum8 1 0 No rotation
Measured value output
output channels on which the
TiM3xx outputs measured
data.
If “0 output channels” are
selected, no data is output.
The telegram part defines the
contents of the output channel.
telegram parts Data_1 to
Data_n
sured values the TiM3xx outputs
ues 1 to n. The contents and
the unit depend on the telegram part “Measured data
contents”. RSSI in digits
data
a coordinate system
a coordinate system
a coordinate system
coordinate system
coordinate system
coordinate system
TiM310-1030000S01 ranging and detecting laser scanner
uint_16 2 1 The TiM3xx sends the RSSI data
as 8 bit value via one channel
string 5 RSSI1 Received power for the first
echo
float_32 4 00000000h ... FFFFFFFFh
uint_16 2 271
uint_8 1 00h ... FFh
uint_16 2 0 No position data
(can not be changed)
Real 4 00000000h ... FFFFFFFFh
Real 4 00000000h ... FFFFFFFFh
Real 4 00000000h ... FFFFFFFFh
Real 4 00000000h ... FFFFFFFFh
Real 4 00000000h ... FFFFFFFFh
Real 4 00000000h ... FFFFFFFFh
1 Pitching
2 Rolling
3 Free rotation
Name Defines whether the TiM3xx
outputs the device name configured with SOPAS ET
Device name Flexible range from 0 to
16 characters (20h … FFh)
Comment Defines whether the TiM3xx
outputs the comment configured with SOPAS ET
Contents of comment Configured comment string 0 ... 128 ..........
RSSI = Received Signal Strength Indicator
(contd.)
uint_16 2 0 No device name
(can not be changed))
string 0 ... 16 ..........
uint_16 2 0 No comment
(can not be changed)
28 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 29

Technical Information Chapter 5
TiM310-1030000S01
Telegram part Description Variable type Length (byte) Value range
Time information Defines whether the TiM3xx
Year Year (4 digits) uint_16 2 0000h ... 270Fh
Month Month from 1 to 12 uint_8 1 00h ... 0Ch
Day Day of the month from 1 to 31uint_8 1 00h ... 1Fh
Hour Hour from 0 to 23 uint_8 1 00h ... 17h
Minute Minute from 0 to 59 uint_8 1 00h ... 3Bh
Second Second from 0 to 59 uint_8 1 00h ... 3Bh
Time information
Micro second Micro seconds from 0 to
Event information Defines whether the TiM3xx
Type of event Fast digital input event string 4 FDIN
Encoder position Encoder position at the time
Event time Time since the TiM3xx was
Angular position Angular position of the
Event information
(contd.)
Measured value output
outputs time information
999,999
outputs event information
of the event.
Information in ticks
switched on up to the time of
the event in micro second
(μs)
TiM3xx at the time of the
event.
Information in 1/10,000
degree
uint_16 2 0 No time information
(can not be changed)
uint_32 4 00000000h ... 000F423Fh
unit_16 2 0 No event information
(can not be changed)
uint_32 4 00000000h ... FFFFFFFFh
uint_32 4 00000000h 0
FFFFFFFFFh 68,719,476,735
int_32 4 –450,000 ... + 2,250,000
8014884/YK97/2015-04-27 © SICK AG · Germany · All rights reserved · Subject to change without notice 29
Page 30

Chapter 6 Technical Information
License texts
TiM310-1030000S01 ranging and detecting laser scanner
6 License texts
SICK uses open source software in its TiM sensors. This software is licensed by the rights
holders using the following licenses among others: the free licenses GNU General Public License (GPL Version2, GPL Version3) and GNU Lesser General Public License (LGPL), the MIT
license, zLib license, and the licenses derived from the BSD license.
This Program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY;
without even the implied warranty for merchantability or fitness for a particular purpose.
See the GNU General Public License for more details.
View the complete license texts here: www.sick.com/licensetexts.
A printed copy of the license texts is also available on request.
30 © SICK AG · Germany · All rights reserved · Subject to change without notice 8014884/YK97/2015-04-27
Page 31

Page 32

8014884/YK97/2015-04-27 ∙ SH_8M/ITL (2015-04) ∙ A4 4c int43
Australia
Phone +61 3 9457 0600
1800 33 48 02 – tollfree
E-Mail sales@sick.com.au
Belgium/Luxembourg
Phone +32 (0)2 466 55 66
E-Mail info@sick.be
Brasil
Phone +55 11 3215-4900
E-Mail marketing@sick.com.br
Canada
Phone +1 905 771 14 44
E-Mail information@sick.com
Česká republika
Phone +420 2 57 91 18 50
E-Mail sick@sick.cz
China
Phone +86 4000 121 000
E-Mail info.china@sick.net.cn
Phone +852-2153 6300
E-Mail ghk@sick.com.hk
Danmark
Phone +45 45 82 64 00
E-Mail sick@sick.dk
Deutschland
Phone +49 211 5301-301
E-Mail info@sick.de
España
Phone +34 93 480 31 00
E-Mail info@sick.es
France
Phone +33 1 64 62 35 00
E-Mail info@sick.fr
Great Britain
Phone +44 (0)1727 831121
E-Mail info@sick.co.uk
India
Phone +91–22–4033 8333
E-Mail info@sick-india.com
Israel
Phone +972-4-6881000
E-Mail info@sick-sensors.com
Italia
Phone +39 02 27 43 41
E-Mail info@sick.it
Japan
Phone +81 (0)3 5309 2112
E-Mail support@sick.jp
Magyarország
Phone +36 1 371 2680
E-Mail office@sick.hu
Nederland
Phone +31 (0)30 229 25 44
E-Mail info@sick.nl
Norge
Phone +47 67 81 50 00
E-Mail sick@sick.no
Österreich
Phone +43 (0)22 36 62 28 8-0
E-Mail office@sick.at
Polska
Phone +48 22 837 40 50
E-Mail info@sick.pl
România
Phone +40 356 171 120
E-Mail office@sick.ro
Russia
Phone +7-495-775-05-30
E-Mail info@sick.ru
Schweiz
Phone +41 41 619 29 39
E-Mail contact@sick.ch
Singapore
Phone +65 6744 3732
E-Mail sales.gsg@sick.com
Slovenija
Phone +386 (0)1-47 69 990
E-Mail office@sick.si
South Africa
Phone +27 11 472 3733
E-Mail info@sickautomation.co.za
South Korea
Phone +82 2 786 6321/4
E-Mail info@sickkorea.net
Suomi
Phone +358-9-25 15 800
E-Mail sick@sick.fi
Sverige
Phone +46 10 110 10 00
E-Mail info@sick.se
Taiwan
Phone +886 2 2375-6288
E-Mail sales@sick.com.tw
Türkiye
Phone +90 (216) 528 50 00
E-Mail info@sick.com.tr
United Arab Emirates
Phone +971 (0) 4 88 65 878
E-Mail info@sick.ae
USA/México
Phone +1(952) 941-6780
1 (800) 325-7425 – tollfree
E-Mail info@sickusa.com
More representatives and agencies
at www.sick.com
SICK AG | Waldkirch | Germany | www.sick.com
 Loading...
Loading...