

Page 1
M4000 Advanced,
M4000 Advanced A/P and
M4000 Area 60/80
Multiple Light Beam Safety Device
OPERATING INSTRUCTIONS
en
Page 2

Operating Instructions
M4000 Adv., Adv. A/P, Area
This document is protected by the law of copyright, whereby all rights established therein remain with the
company SICK AG. Reproduction of this document or parts of this document is only permissible within the limits
of the legal determination of Copyright Law. Alteration or abridgement of the document is not permitted without
the explicit written approval of the company SICK AG.
2 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 3

Operating Instructions
M4000 Adv., Adv. A/P, Area
Contents
Contents
1 About this document.........................................................................................................7
1.1 Function of this document....................................................................................7
1.2 Target group ..........................................................................................................7
1.3 Depth of information............................................................................................. 7
1.4 Scope ..................................................................................................................... 8
1.5 Abbreviations and terms.......................................................................................8
1.6 Symbols used ........................................................................................................9
2 On safety...........................................................................................................................10
2.1 Qualified safety personnel..................................................................................10
2.2 Applications of the device...................................................................................10
2.3 Correct use ..........................................................................................................11
2.4 General safety notes and protective measures ................................................11
2.5 Environmental protection ...................................................................................12
2.5.1 Disposal .............................................................................................12
2.5.2 Separation of materials ....................................................................12
3 Product description.........................................................................................................13
3.1 Special features ..................................................................................................13
3.2 Operating principle of the device .......................................................................14
3.2.1 The principle of the multiple light beam safety device ...................14
3.2.2 Device components ..........................................................................14
3.3 Application examples..........................................................................................16
3.3.1 Access protection..............................................................................16
3.3.2 Access protection on several sides with the aid of deflector
mirrors ...............................................................................................17
3.4 Controls and status indicators ...........................................................................19
3.4.1 End cap with integrated LED (optional, only on receiver) ...............19
3.4.2 Status indicators of the sender........................................................20
3.4.3 Status indicators of the receiver or of the
M4000 Advanced A/P ......................................................................21
4 Muting...............................................................................................................................22
4.1 Muting principle ..................................................................................................23
4.1.1 Muting cycle ......................................................................................23
4.1.2 Muting sensors..................................................................................24
4.1.3 Muting lamp ......................................................................................25
4.2 Placement of muting sensors.............................................................................25
4.2.1 Muting with two sensors (one sensor pair), crossed
placement..........................................................................................26
4.2.2 Muting with two sensors (one sensor pair), crossed
placement, and an additional signal C1..........................................28
4.2.3 Muting using two sensors, serial placement (one sensor pair
in the hazardous area), exit monitoring with End of muting
by ESPE..............................................................................................30
4.2.4 Muting using two sensors, serial placement (one sensor pair
in the hazardous area), with additional signal C1, exit
monitoring with End of muting by ESPE...........................................32
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 3
Subject to change without notice
Page 4

Contents
M4000 Adv., Adv. A/P, Area
4.2.5 Muting with four sensors (two sensor pairs), serial
placement .........................................................................................34
4.2.6 Muting with four sensors (two sensor pairs), parallel
placement .........................................................................................36
5 Configurable functions ................................................................................................... 38
5.1 Restart interlock ................................................................................................. 38
5.2 Beam coding .......................................................................................................40
5.3 Application diagnostic output (ADO).................................................................. 41
5.4 Scanning range................................................................................................... 42
5.4.1 Scanning range of the M4000 Advanced ....................................... 43
5.4.2 Scanning range of the M4000 Advanced Curtain system ............. 43
5.4.3 Scanning range of the M4000 Advanced A/P................................ 44
5.4.4 Scanning range of the M4000 Area 60/80.................................... 45
5.5 External device monitoring (EDM) .....................................................................46
5.6 Sender test.......................................................................................................... 47
6 Configurable muting functions...................................................................................... 48
6.1 Number of muting sensors ................................................................................48
6.2 Sensor test.......................................................................................................... 50
6.2.1 Testable sensors............................................................................... 50
6.2.2 Non-testable sensors ....................................................................... 50
6.3 Time monitoring.................................................................................................. 51
6.3.1 Concurrence monitoring................................................................... 51
6.3.2 Monitoring of the total muting time................................................. 51
6.3.3 Sensor gap monitoring ..................................................................... 52
6.3.4 Belt stop ............................................................................................52
6.3.5 End of muting by ESPE..................................................................... 53
6.3.6 Exit monitoring .................................................................................. 53
6.4 Direction detection .............................................................................................55
6.5 Sequence monitoring ......................................................................................... 55
6.6 Partial blanking................................................................................................... 56
6.7 Partial blanking/muting changeover................................................................. 57
6.8 Override............................................................................................................... 59
6.8.1 Override realised using an external circuit...................................... 59
6.8.2 Override realised with the integrated override function................. 60
6.9 Monitoring the muting lamp...............................................................................62
6.10 Combinable muting functions and facilities for connecting............................. 63
Operating Instructions
7 Mounting.......................................................................................................................... 64
7.1 Determining the minimum distance.................................................................. 64
7.1.1 Minimum distance to the hazardous area...................................... 65
7.1.2 Minimum distance to reflective surfaces........................................ 68
7.2 Steps for mounting the device........................................................................... 69
7.2.1 Mounting with Omega bracket......................................................... 71
7.2.2 Mounting with swivel mount bracket...............................................72
7.2.3 Mounting with side bracket..............................................................74
7.2.4 Mounting with rigid mounting bracket ............................................76
7.2.5 Mounting with pivoting mounting bracket.......................................78
4 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 5

Operating Instructions
M4000 Adv., Adv. A/P, Area
Contents
8 Electrical installation......................................................................................................80
8.1 System connection M26×11 + FE ....................................................................82
8.1.1 M4000 Advanced or M4000 Advanced A/P...................................82
.1.2 M4000 Area 60/80 ..........................................................................83
8
8.2 Extension connection M12× 4 + FE for UE403.................................................84
8.3 Configuration connection M8× 4 (serial interface)...........................................85
8.4 External device monitoring (EDM)......................................................................86
8.5 Reset button........................................................................................................87
8.6 Application diagnostic output (ADO) ..................................................................88
8.7 Test input (sender test).......................................................................................89
8.8 sens:Control applications ...................................................................................89
9 Commissioning ................................................................................................................90
9.1 Display sequence during start-up ......................................................................90
9.2 Alignment of the M4000 ....................................................................................90
9.2.1 Meaning of the 7Esegment display during alignment .....................91
9.2.2 Aligning sender and receiver............................................................93
9.2.3 Special aspects of alignment with deflector mirrors.......................94
9.2.4 Alignment of the M4000 Advanced with integrated laser
alignment aid (optional)....................................................................95
9.3 Test notes ......................................................................................................... 100
9.3.1 Pre-commissioning test notes....................................................... 100
9.3.2 Regular inspection of the protective device by qualified
safety personnel............................................................................. 100
9.3.3 Daily functional checks of the protective device.......................... 101
10 Configuration ................................................................................................................ 103
10.1 Default delivery status..................................................................................... 103
10.2 Preparation of the configuration ..................................................................... 103
11 Care and maintenance ................................................................................................ 104
12 Fault diagnosis ............................................................................................................. 105
12.1 In the event of faults or errors......................................................................... 105
12.2 SICK support..................................................................................................... 105
12.3 Error displays of the LEDs................................................................................ 106
12.4 Error displays of the 7Esegment display.......................................................... 107
12.5 Extended diagnostics....................................................................................... 112
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 5
Subject to change without notice
Page 6

Contents
M4000 Adv., Adv. A/P, Area
13 Technical specifications ..............................................................................................113
13.1 Data sheet.........................................................................................................113
13.2 Table of weights................................................................................................119
3.2.1 M4000 Advanced and M4000 Advanced A/P .............................119
1
13.2.2 M4000 Passive...............................................................................119
13.2.3 M4000 Area 60/80........................................................................119
13.3 Dimensional drawings......................................................................................120
13.3.1 M4000 Advanced, M4000 Advanced A/P....................................120
13.3.2 M4000 Passive...............................................................................122
13.3.3 M4000 Area 60/80........................................................................124
13.3.4 Omega bracket ...............................................................................125
13.3.5 Swivel mount bracket.....................................................................126
13.3.6 Side bracket....................................................................................126
13.3.7 Rigid mounting bracket ..................................................................127
13.3.8 Pivoting mounting bracket .............................................................127
13.3.9 Deflector mirror PNS75E008..........................................................128
13.3.10 Deflector mirror PSK45 ..................................................................129
14 Ordering information ....................................................................................................130
14.1 M4000 Advanced .............................................................................................130
14.1.1 Delivery............................................................................................130
14.1.2 Type code ........................................................................................130
14.1.3 Default delivery status....................................................................132
14.2 M4000 Advanced A/P......................................................................................132
14.2.1 Delivery............................................................................................132
14.2.2 Type code ........................................................................................132
14.2.3 Default delivery status....................................................................133
14.3 M4000 Area 60/80..........................................................................................134
14.3.1 Delivery............................................................................................134
14.3.2 Type code ........................................................................................134
14.3.3 Default delivery status....................................................................135
14.4 Additional front screen (weld spark guard) .....................................................136
14.5 Deflector mirrors and mirror columns.............................................................138
14.6 Device columns ................................................................................................138
14.7 Accessories .......................................................................................................139
Operating Instructions
15 Annex..............................................................................................................................141
15.1 Compliance with EU directives.........................................................................141
15.2 Checklist for the manufacturer........................................................................142
15.3 Alignment templates ........................................................................................143
15.4 Alignment instructions......................................................................................145
15.5 List of tables .....................................................................................................147
15.6 List of illustrations ............................................................................................149
6 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 7

Operating Instructions Chapter 1
M4000 Adv., Adv. A/P, Area
About this document
1 About this document
lease read this chapter carefully before working with this documentation and the M4000
P
multiple light beam safety device.
1.1 Function of this document
These operating instructions are designed to address the technical personnel of the
machine manufacturer or the machine operator in regards to safe mounting, installation,
configuration, electrical installation, commissioning, operation and maintenance of the
M4000 multiple light beam safety device.
These operating instructions do not provide instructions for operating machines on which
the multiple light beam safety device is, or will be, integrated. Information on this is to be
found in the appropriate operating instructions for the machine.
1.2 Target group
These operating instructions are addressed to planning engineers, machine designers and
operators of plants and systems which are to be protected by one or several M4000
multiple light beam safety devices. It also addresses people who integrate the M4000
multiple light beam safety device into a machine, initialise its use, or who are in charge of
servicing and maintaining the device.
Note
1.3 Depth of information
These operating instructions contain the following information on the M4000 multiple light
beam safety device:
mounting
electrical installation
commissioning and configuration
care and maintenance
Planning and using protective devices such as the M4000 multiple light beam safety
device also require specific technical skills which are not detailed in this documentation.
When operating the M4000 multiple light beam safety device, the national, local and
statutory rules and regulations must be observed.
General information on accident prevention using opto-electronic protective devices can
be found in the SICK brochure “Safe Machines with opto-electronic protective devices”.
We also refer you to the SICK homepage on the Internet at www.sick.com.
Here you will find information on:
sample applications
a list of frequently asked questions regarding the M4000
these operating instructions in different languages for viewing and printing
EU declaration of conformity
fault diagnosis and troubleshooting
part numbers
conformity and approval
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 7
Subject to change without notice
Page 8

Chapter 1 Operating Instructions
M4000 Adv., Adv. A/P, Area
About this document
1.4 Scope
hese operating instructions are original operating instructions.
T
hese operating instructions apply to the M4000 Advanced, M4000 Advanced A/P and
Note
Note
T
M4000 Area 60/80 multiple light beam safety devices with one of the following entries on
the type label in the field Operating Instructions:
8010794_WP70
8010794_YT72
This document is part of SICK part number 8010794 (operating instructions
“M4000 Advanced, M4000 Advanced A/P and M4000 Area 60/80 — Multiple light beam
safety device” in all available languages).
For the configuration and diagnostics of these devices you require CDS (Configuration &
Diagnostic Software) version 3.6.4 or higher. To determine the version of your software
version, select the Module-Info... option in the ? menu.
The general requirements for muting are defined in CLC/TS 62046.
1.5 Abbreviations and terms
ADO
Beam separation
CDS
EDM
EFI
ESPE
Muting
OSSD
OWS
PLC
Resolution
SDL
sens:Control
UE403
Application diagnostic output = configurable signal output that indicates a specific status
of the protective device
Distance between two neighbouring beams, measured from the middle of one beam to the
middle of the other.
SICK Configuration & Diagnostic Software = software for the configuration and diagnostics
of your M4000 multiple light beam safety device
External device monitoring
Enhanced function interface = safe SICK device communication
Electro-sensitive protective equipment (e.g. M4000)
A temporary automatic suppression of one or more safety function/s by safety-related
parts of the control system.
Output signal switching device
Output weak signal = contamination signal
Programmable logic controller
Minimum size of a test rod that is reliably detected by the protective device The resolution
is measured from the outside edge of a beam to the opposite outside edge of the
neighbouring beam.
Safety Data Link = SICK safety interface (connection for OSSD and EFI of an ESPE)
The SICK products in the sens:Control series include safety relays, safety controllers and
network solutions. If reference is made in this document to sens:Control devices, safety
controllers and network solutions are meant.
The UE403 safety relay is an accessory for the SICK M4000 Advanced multiple light beam
safety device. It extends the technical application possibilities of the M4000 Advanced.
8 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 9
Operating Instructions Chapter 1
,,
M4000 Adv., Adv. A/P, Area
About this document
1.6 Symbols used
ecommendations are designed to give you some assistance in your decision-making
Recommendation
Note
, ,
Take action …
R
process with respect to a certain function or a technical measure.
Refer to notes for special features of the device.
Display indications show the status of the 7Esegment display on sender or receiver:
Constant display of the letter E
Flashing display of the digit 8
Alternating display of E and 4
The depiction of digits on the 7Esegment display oft the M4000 can be rotated by 180°
with the aid of the CDS. In this document the depiction of the 7Esegment display is
however always in the normal, non-rotated position.
LED symbols describe the status of an LED:
The LED is constantly illuminated.
The LED is flashing.
The LED is off.
Instructions for taking action are shown by an arrow. Read carefully and follow the
instructions for action.
WARNING
,
Warning!
A warning indicates an actual or potential risk or health hazard. They are designed to help
you to prevent accidents.
Read carefully and follow the warning notices!
Software notes show the location in the CDS (Configuration & Diagnostic Software) where
you can make the appropriate settings and adjustments.
Sender and receiver
In drawings and diagrams, the symbol denotes the sender and the symbol denotes
the receiver.
The term “dangerous state”
The dangerous state (standard term) of the machine is always shown in the drawings and
diagrams of this document as a movement of a machine part. In practical operation, there
may be a number of different dangerous states:
machine movements
electrical conductors
visible or invisible radiation
a combination of several risks and hazards
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 9
Subject to change without notice
Page 10
Chapter 2 Operating Instructions
M4000 Adv., Adv. A/P, Area
On safety
2 On safety
his chapter deals with your own safety and the safety of the equipment operators.
T
Please read this chapter carefully before working with the M4000 multiple light beam
safety device or with the machine protected by the M4000 multiple light beam safety
device.
2.1 Qualified safety personnel
The M4000 multiple light beam safety device must only be installed, commissioned and
serviced by qualified safety personnel. Qualified safety personnel are defined as persons
who
have undergone the appropriate technical training
and
who have been instructed by the responsible machine operator in the operation of the
machine and the current valid safety guidelines
and
who have access to these operating instructions.
WARNING
2.2 Applications of the device
The M4000 system is a type 4 electro-sensitive protective equipment (ESPE) as defined by
IEC 61496E1 and IEC 61496E2 and is therefore allowed for use with controls in category 4
according to EN ISO 13849E1. The preconfiguration of the M4000 multiple light beam
safety device is suitable for:
hazardous area protection
access protection
The multiple light beam safety devices must be installed such that the hazardous area can
only be reached by interrupting the light path between sender and receiver. It must not be
possible to start the plant/system as long as personnel are within the hazardous area.
The M4000 system is intended only for use in industrial environments. When used in resi-
dential areas it can cause interference.
Refer to page 16 for an illustration of the protection modes and an example application.
Only use the multiple light beam safety device as an indirect protective measure!
An opto-electronic protective device provides indirect protection, e.g. by switching off the
power at the source of the hazard. It cannot provide protection from parts thrown out, nor
from emitted radiation. Transparent objects are not detected.
Depending on the application, mechanical protective devices may be required in addition
to the M4000 system.
10 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 11
Operating Instructions Chapter 2
M4000 Adv., Adv. A/P, Area
On safety
2.3 Correct use
he M4000 system must be used only as defined in chapter 2.2 “Applications of the
T
device”. It must be used only by qualified personnel and only on the machine where it has
been installed and initialised by qualified safety personnel in accordance with these
operating instructions.
All warranty claims against SICK AG are forfeited in the case of any other use, or altera-
tions being made to the system, even as part of their mounting or installation.
2.4 General safety notes and protective measures
Safety notes
Please observe the following items in order to ensure the correct and safe use of the
WARNING
M4000 multiple light beam safety device.
The national/international rules and regulations apply to the installation, commission-
ing, use and periodic technical inspections of the multiple light beam safety device, in
particular …
– Machinery Directive
– Work Equipment Directive
– the work safety regulations/safety rules
– other relevant safety regulations.
Manufacturers and operators of the machine on which the multiple light beam safety
device is used are responsible for obtaining and observing all applicable safety regula-
tions and rules.
The notices, in particular the test regulations (see “Test notes” on page 100) of these
operating instructions (e.g. on use, mounting, installation or integration into the existing
machine controller) must be observed.
Changes to the configuration of the devices can degrade the protective function. After
every change to the configuration you must therefore check the effectiveness of the
protective device.
The person who makes the change is also responsible for the correct protective function
of the device. When making configuration changes, please always use the password
hierarchy provided by SICK to ensure that only authorised persons make changes to the
configuration. The SICK service team is available to provide assistance if required.
The tests must be carried out by qualified safety personnel or specially qualified and
authorised personnel and must be recorded and documented to ensure that the tests
can be reconstructed and retraced at any time.
The operating instructions must be made available to the operator of the machine
where the M4000 multiple light beam safety device is fitted. The machine operator is to
be instructed in the use of the device by qualified safety personnel and must be instructed to read the operating instructions.
The external voltage supply of the devices must be capable of buffering brief mains
voltage failures of 20 ms as specified in EN 60204E1. Suitable power supplies are
available as accessories from SICK (Siemens type series 6 EP 1).
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 11
Subject to change without notice
Page 12
Chapter 2 Operating Instructions
Tab.1:
Overview on disposal
M4000 Adv., Adv. A/P, Area
On safety
2.5 Environmental protection
he M4000 multiple light beam safety device is constructed in such a way that it adversely
T
affects the environment as little as possible. It uses only a minimum of power and natural
resources.
At work, always act in an environmentally responsible manner.
2.5.1 Disposal
Unusable or irreparable devices should always be disposed as per the applicable national
regulations on waste disposal (e.g. European waste code 16 02 14).
Notes
WARNING
We would be pleased to be of assistance on the disposal of this device. Contact your
local SICK representative.
Information on the individual materials in the M4000 is given in chapter 13 “Technical
specifications” on page 113.
2.5.2 Separation of materials
Only appropriately trained personnel are allowed to separate materials!
Caution is required when dismantling devices. There is a risk of injuries.
by components
Before you send the devices for appropriate recycling, it is necessary to separate the
different materials in the M4000.
Separate the housing from the rest of the parts (in particular the circuit board).
Send the separated parts for recycling as appropriate (see Tab. 1).
Components Disposal
Product
Housing Metal recycling (aluminium)
Circuit boards, cable, connector and
electrical connecting pieces
Packaging
Cardboard, paper Paper/cardboard recycling
Polyethylene packaging Plastic recycling
Electronic recycling
12 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 13

Operating Instructions Chapter 3
M4000 Adv., Adv. A/P, Area
Product description
3 Product description
his chapter provides information on the special features and properties of the M4000
T
multiple light beam safety device. It describes the construction and the operating principle
of the device.
Please read this chapter before mounting, installing and commissioning the device.
3.1 Special features
Properties of all devices described in these operating instructions
protective operation with either internal or external (realised on the machine) restart
interlock
external device monitoring (EDM)
beam coding
configurable application diagnostic output (ADO)
status display with 7Esegment display
SDL interface
M4000 Advanced
muting configurable (only with UE403 or sens:Control)
2, 3 or 4 beams
scanning range up to 70 m
integrated laser alignment aid (optional)
end cap with integrated LED (optional)
M4000 Advanced A/P
less wiring costs: Only one device needs to be connected electrically.
quick and straightforward alignment in conjunction with the M4000 Passive (deflector
unit)
2 beams, scanning range to 7.5 m (M4000 Passive with mirror deflection)
2 or 4 beams, scanning range to 4.5 m (M4000 Passive with fibre-optic deflection)
muting configurable (only with UE403 or sens:Control)
end cap with integrated LED (optional)
M4000 Area 60/80
horizontal area protection
M4000 Area 60:
– 60 mm resolution
– length of the monitored area 300-1800 mm
– scanning range 19 m
M4000 Area 80:
– corresponds: 80 mm resolution
– length of the monitored area 600-1800 mm
– scanning range 70 m
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 13
Subject to change without notice
Page 14

Chapter 3 Operating Instructions
M4000
Advanced
Beam diameter
Beam separation
Dimension of the light path between
M4000
Advanced
A/P
Beam separation
Dimension of the light path between
M4000
Advanced
A/P
M4000
Passive (deflector
unit)
M4000 Adv., Adv. A/P, Area
Product description
3.2 Operating principle of the device
3.2.1 The principle of the multiple light beam safety device
The M4000 multiple light beam safety device secures the access to a hazardous area and
signals the entry of objects as soon as a light beam is interrupted. The machine or plant
controller that evaluates this message must then bring the dangerous movement to a halt.
You can secure two sides of a hazardous area by using a deflector mirror, with two deflec-
or mirrors you can secure three sides (see chapter 3.3.2 “Access protection on several
t
sides with the aid of deflector mirrors” on page 17ff).
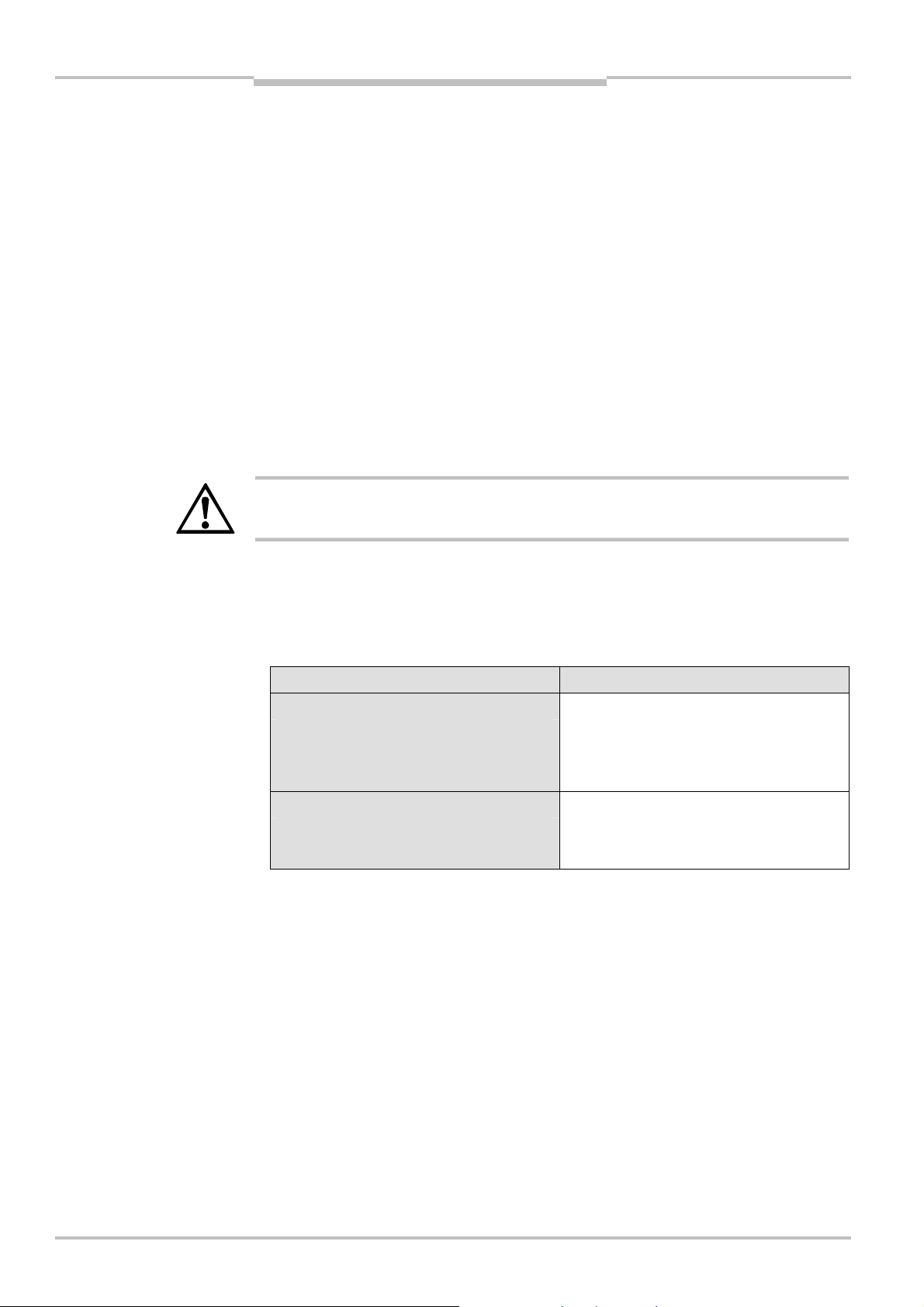
3.2.2 Device components
Fig. 1: Device components of
the M4000 Advanced
(23 mm)
Fig. 2: Device components of
the M4000 Advanced A/P
sender and receiver
M4000 Advanced A/P and M4000 Passive
(deflector unit)
14 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 15
Operating Instructions Chapter 3
M4000
Area 60/80
Length of the
Dimension o
f the light path
M4000 Adv., Adv. A/P, Area
Fig. 3: Components of the
M4000 Area 60/80
Product description
monitored area
between sender and receiver
Principles of operation
The M4000 multiple light beam safety device consists of a sender unit and a receiver unit.
A distinction should be made between active/active systems and active/passive systems:
On the active/active system, sender unit and receiver unit are in separate housings, the
sender and the receiver. The light beam is emitted from the sender and is incident to
the receiver.
On the active/passive system, sender unit and receiver unit are in a common housing
(M4000 Advanced A/P). The light beam is emitted from the sender unit and is deflected
by the deflector unit M4000 Passive (mirror deflection or fibre-optic deflection) by 180°
back to the receiver unit (see Fig. 2). As a passive element, the deflector unit does not
require any electrical connections.
For the exact number and distance of beams, please see chapter 13.3 “Dimensional
drawings” on page 120ff.
The dimension of the light path between sender and receiver (or between the M4000
Advanced A/P and M4000 Passive) must not exceed the maximum permissible scanning
range (see “Technical specifications” on page 113ff.).
On active/active systems, sender unit and receiver unit synchronise automatically by
optical means. An electrical connection between both components is not required.
The M4000 is modular in structure. All optical and electronic components and assemblies
are housed in a slim and torsionally rigid housing.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 15
Subject to change without notice
M4000 Advanced
The M4000 Advanced multiple light beam safety device is available with 2, 3 or 4 beams.
Other configurations with up to 12 beams are possible on request. The maximum scanning
range (dimension of the light path between sender and receiver) is 70 m.
M4000 Advanced A/P
The M4000 Advanced A/P is available with 2 or 4 beams. The maximum scanning range
(dimension of the light path between the M4000 Advanced A/P and the M4000 Passive) is
dependent of the number of beams as well as the utilized M4000 Passive and is 7.5 m
max.
M4000 Area 60/80
The M4000 Area 60/80 multiple light beam safety device is available with a monitored
area length from 300/600 mm to 1800 mm. The beam separation is 50 or 57 mm (resolution of 60 or 80 mm). The maximum scanning range is 19 m (M4000 Area 60) or 70 m
(M4000 Area 80).
Page 16
Chapter 3 Operating Instructions
M4000 Adv., Adv. A/P, Area
Product description
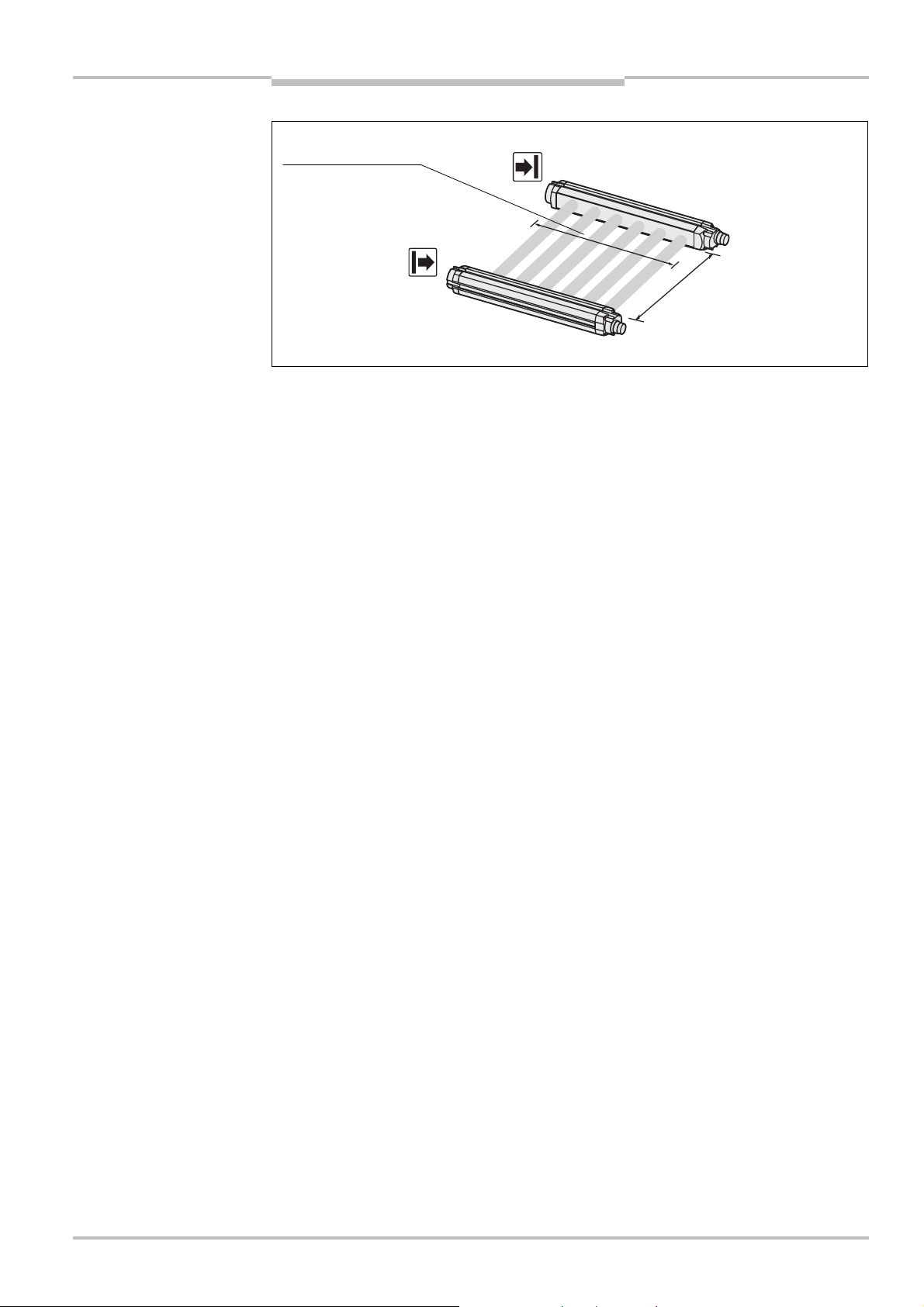
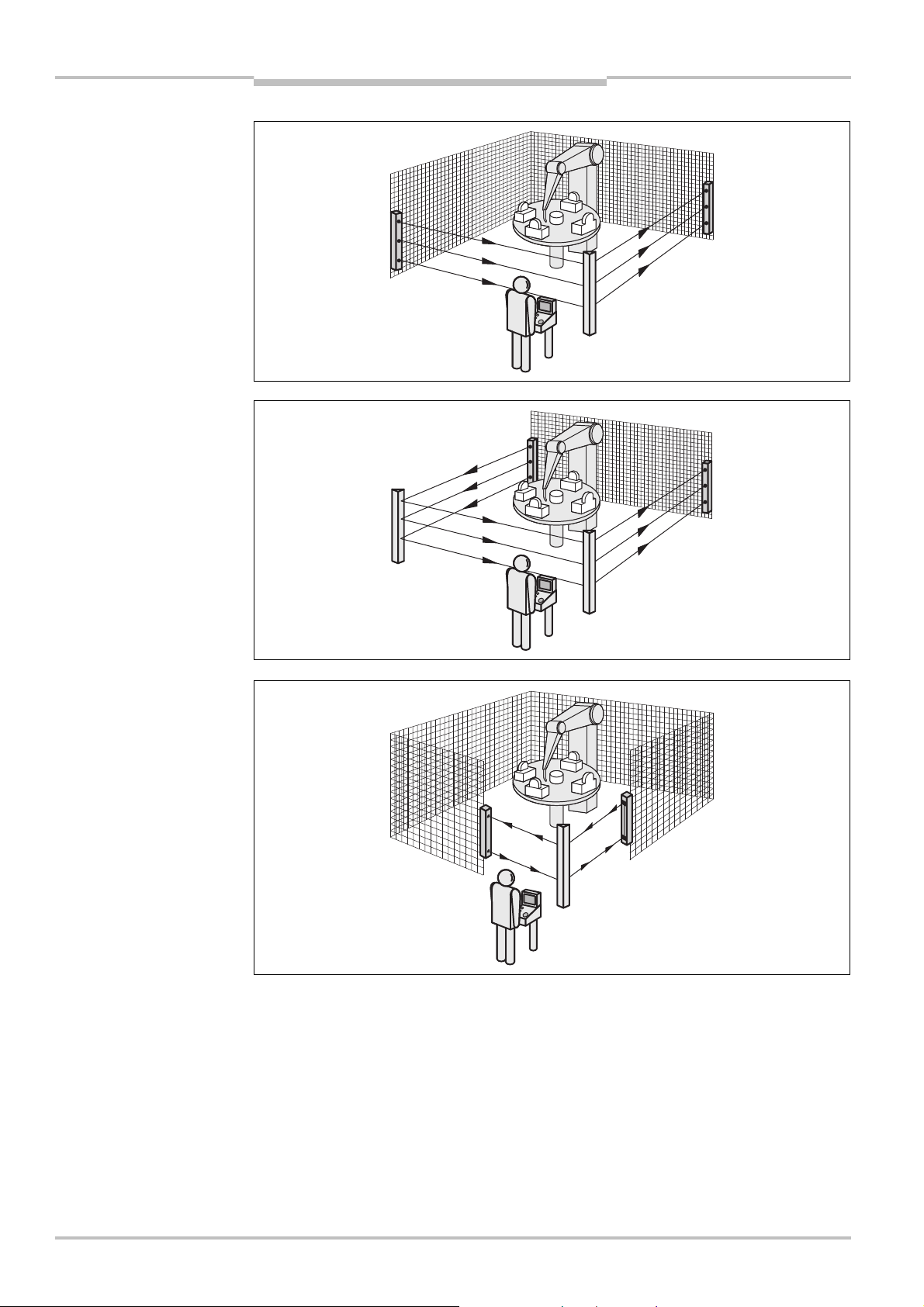
3.3 Application examples
3.3.1 Access protection
Fig. 4: Access protection with
an M4000 Advanced multiple
light beam safety device
Fig. 5: Access protection with
an M4000 Advanced A/P
multiple light beam safety
device
16 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 17
Operating Instructions Chapter 3
M4000 Adv., Adv. A/P, Area
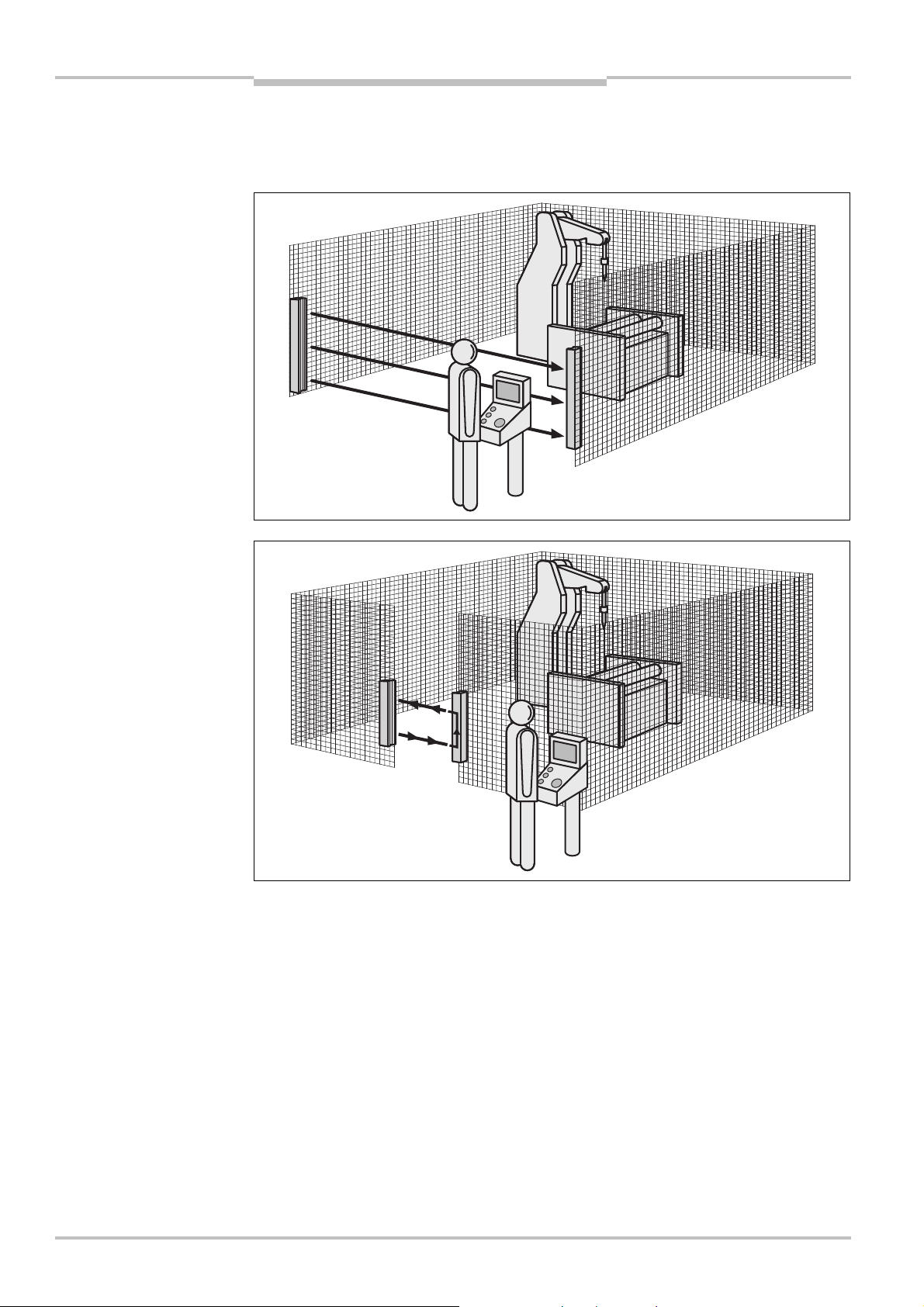
Fig. 6: Access protection with
an M4000 Area 60/80
multiple light beam safety
device
Product description
The M4000 multiple light beam safety device operates correctly as a protective device only
if the following conditions are met:
The control of the machine must be electrical.
It must be possible to achieve a safe state on the machine at any time.
Sender and receiver must be mounted in a way that objects penetrating the hazardous
area are safely identified by the M4000.
The reset button must be fitted outside the hazardous area such that it cannot be ope-
rated by a person working inside the hazardous area. When operating the reset button,
the operator must have full visual command of the hazardous area.
The statutory and local rules and regulations must be observed when installing and
using the device.
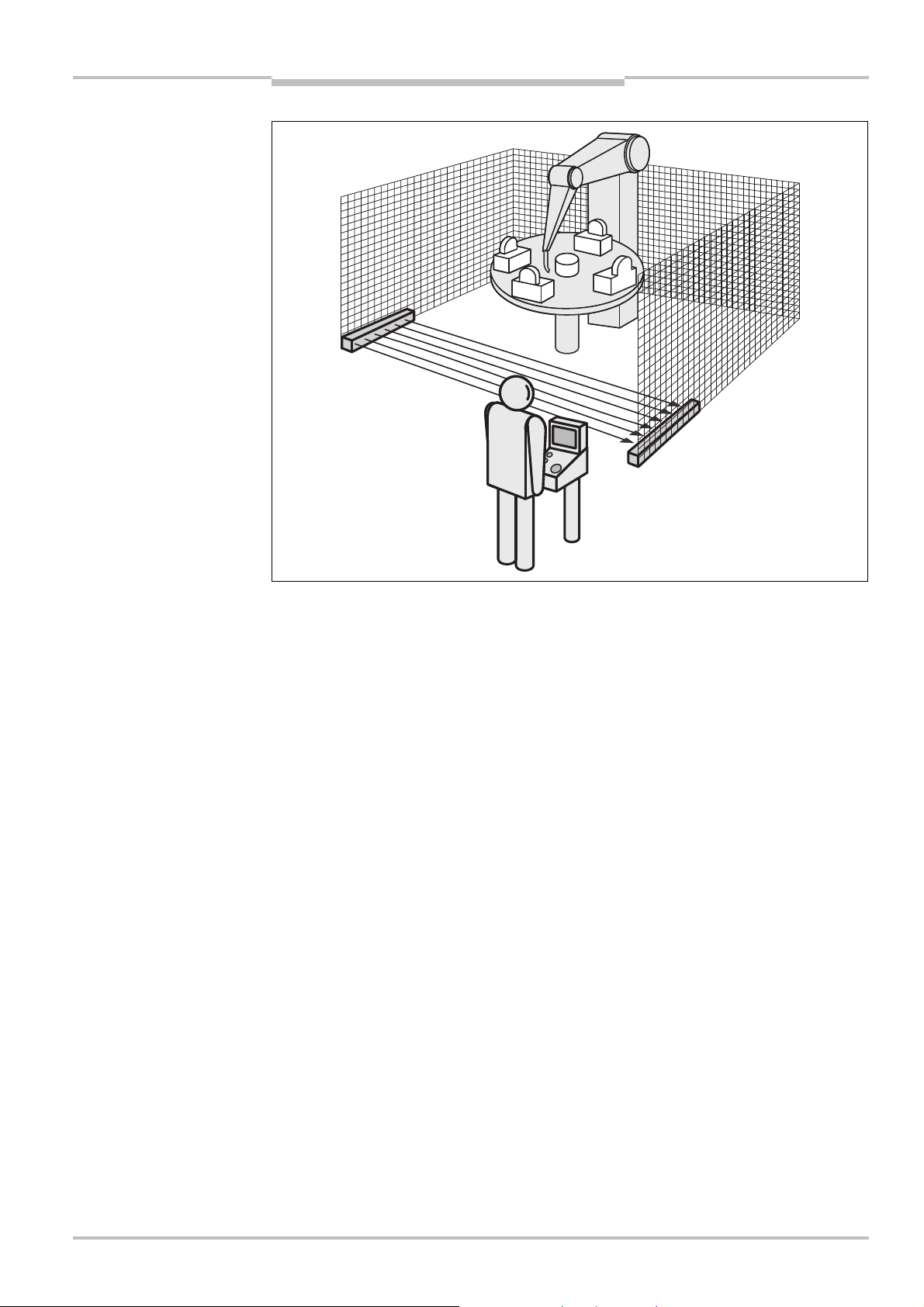
3.3.2 Access protection on several sides with the aid of deflector mirrors
You can secure two sides of a hazardous area by using one deflector mirror (see Fig. 7),
with two deflector mirrors you can secure three sides (see Fig. 8).
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 17
Subject to change without notice
Page 18
Chapter 3 Operating Instructions
M4000 Adv., Adv. A/P, Area
Fig. 7: Access protection with
an M4000 Advanced multiple
light beam safety device and
one deflector mirror
Fig. 8: Access protection with
an M4000 Advanced multiple
light beam safety device and
two deflector mirrors
Product description
Fig. 9: Access protection with
an M4000 Advanced A/P
multiple light beam safety
device and one deflector
mirror
Notes
The formation of droplets of heavy contamination can be detrimental to the reflection
behaviour. Take the necessary organisational measures to avoid the formation of drop-
lets on the deflector mirrors. The deflector mirrors are available as accessories (see
page 128f.).
Deflector mirrors reduce the effective scanning range. The effective scanning range
depends on the number of deflector mirrors in the light path (see chapter 5.4 “Scanning
range” on page 42ff).
You can extend the M4000 Advanced A/P multiple light beam safety device with a maxi-
mum of one deflector mirror.
18 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 19
Operating Instructions Chapter 3
Tab.2:
Significance of the
End cap with integrated
M4000 Adv., Adv. A/P, Area
Product description
3.4 Controls and status indicators
he LEDs and the 7Esegment display of sender and receiver signal the operating status of
T
the M4000.
Note
The depiction of numbers on the 7Esegment display can be rotated by 180° with the aid of
the CDS (Configuration & Diagnostic Software). If you rotate the numbers of the 7Esegment
display, the point in the 7Esegment display goes out:
Point visible: The bottom edge of the numbers on the 7Esegment display is pointing
towards the configuration connection.
Point not visible: The bottom edge of the numbers on the 7Esegment display is pointing
towards the LED display.
Device symbol M4000 Advanced (sender or receiver), M4000 Advanced (A/P) or M4000
Area (sender or receiver), context menu Open device window, parameter node General.
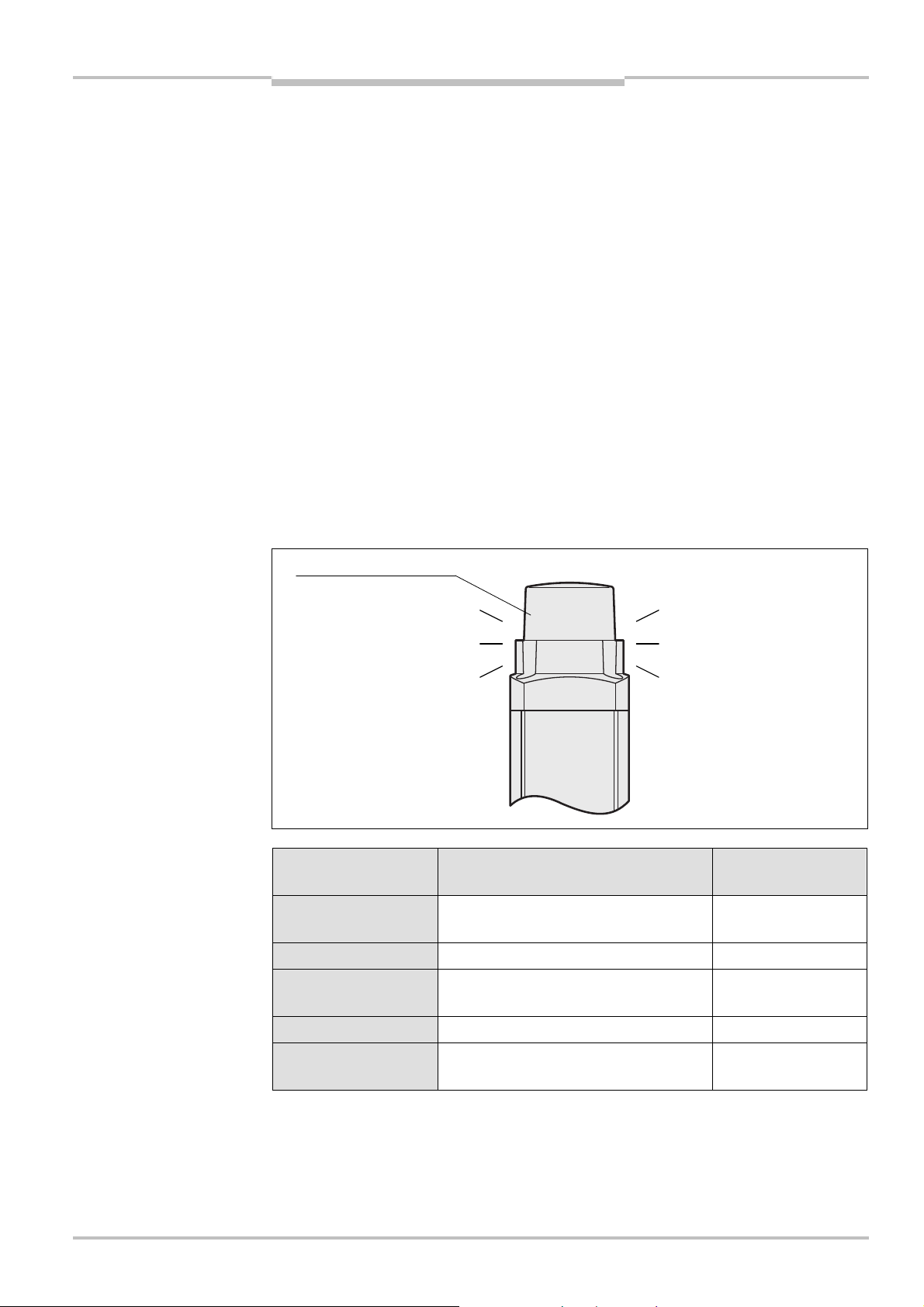
3.4.1 End cap with integrated LED (optional, only on receiver)
Notes
Fig. 10: End cap with
integrated LED
indications on the integrated
LED
The end cap with integrated LED is available only for the receiver of the M4000 Ad-
vanced and the M4000 Advanced A/P.
The integrated LED is not monitored. This means that a failure of the integrated LED has
no effect on the function of the M4000.
LED
Display Meaning Output signal
switching devices
Red System providing signals for shutting
down the machine
Green System clear On
Off
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 19
Subject to change without notice
Yellow Muting
(only with UE403 or sens:Control)
Yellow/red (1 Hz) Reset required Off
Yellow/red (2 Hz) Override required
(only with UE403 or sens:Control)
On
Off
Page 20
Chapter 3 Operating Instructions
Tab.3:
Meaning of the status
Yellow
74segment display
M4000 Adv., Adv. A/P, Area
Product description
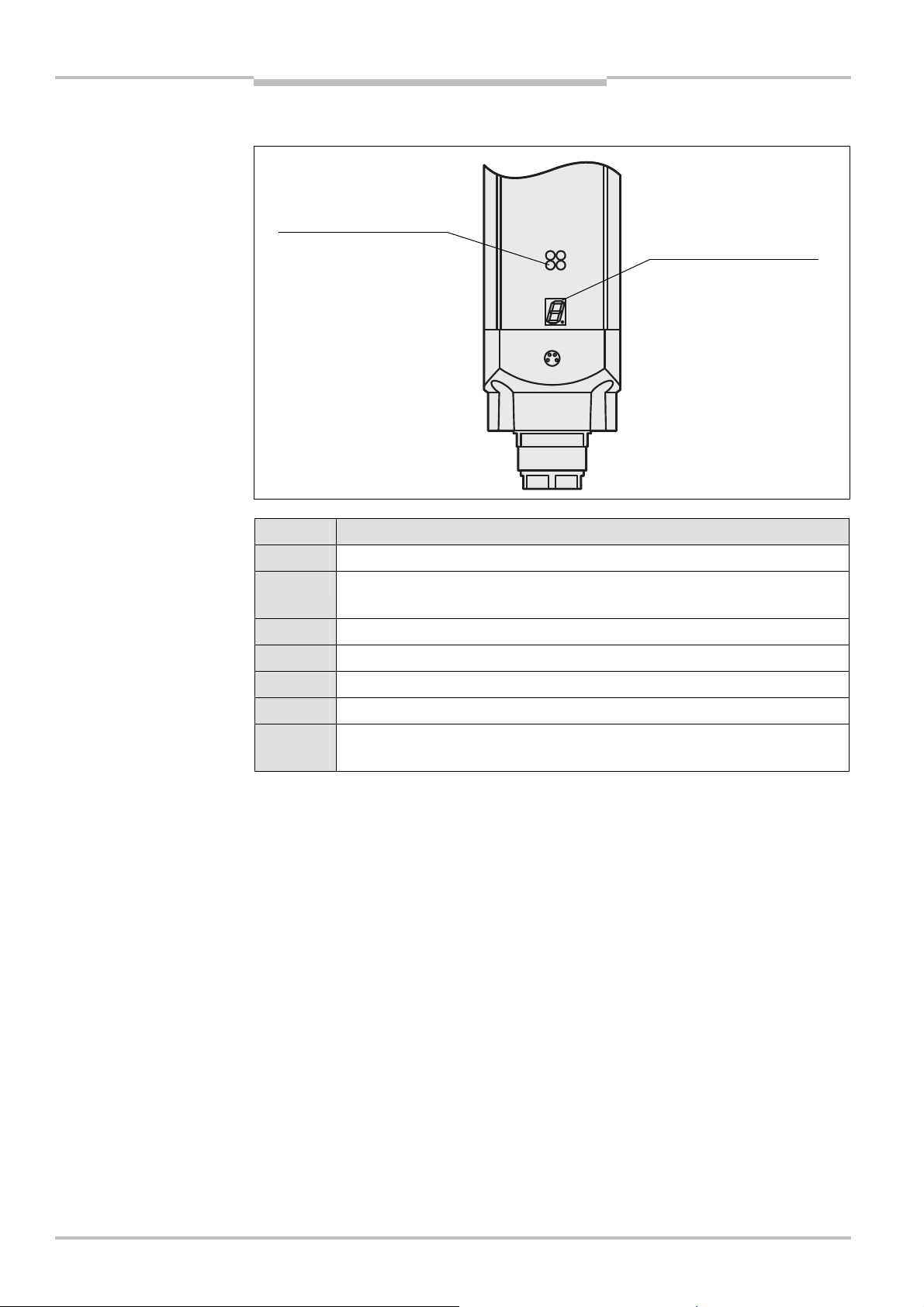
3.4.2 Status indicators of the sender
Fig. 11: Status indicators of
the sender
indicators of the sender
Display Meaning
Yellow Supply voltage o.k.
System error. Disconnect the supply voltage to the M4000 for at least
3 seconds. If the problem persists, replace the unit.
The device is in the test mode.
Non-coded operation (only after switching on)
Operation with code 1 (only after switching on)
Operation with code 2 (only after switching on)
Other
displays
All other displays are error messages. Please refer to chapter 12 “Fault
diagnosis” on page 105.
20 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 21
Operating Instructions Chapter 3
Tab.4:
Meaning of the status
Orange
Red
Yellow
Green
74segment display
M4000 Adv., Adv. A/P, Area
Product description
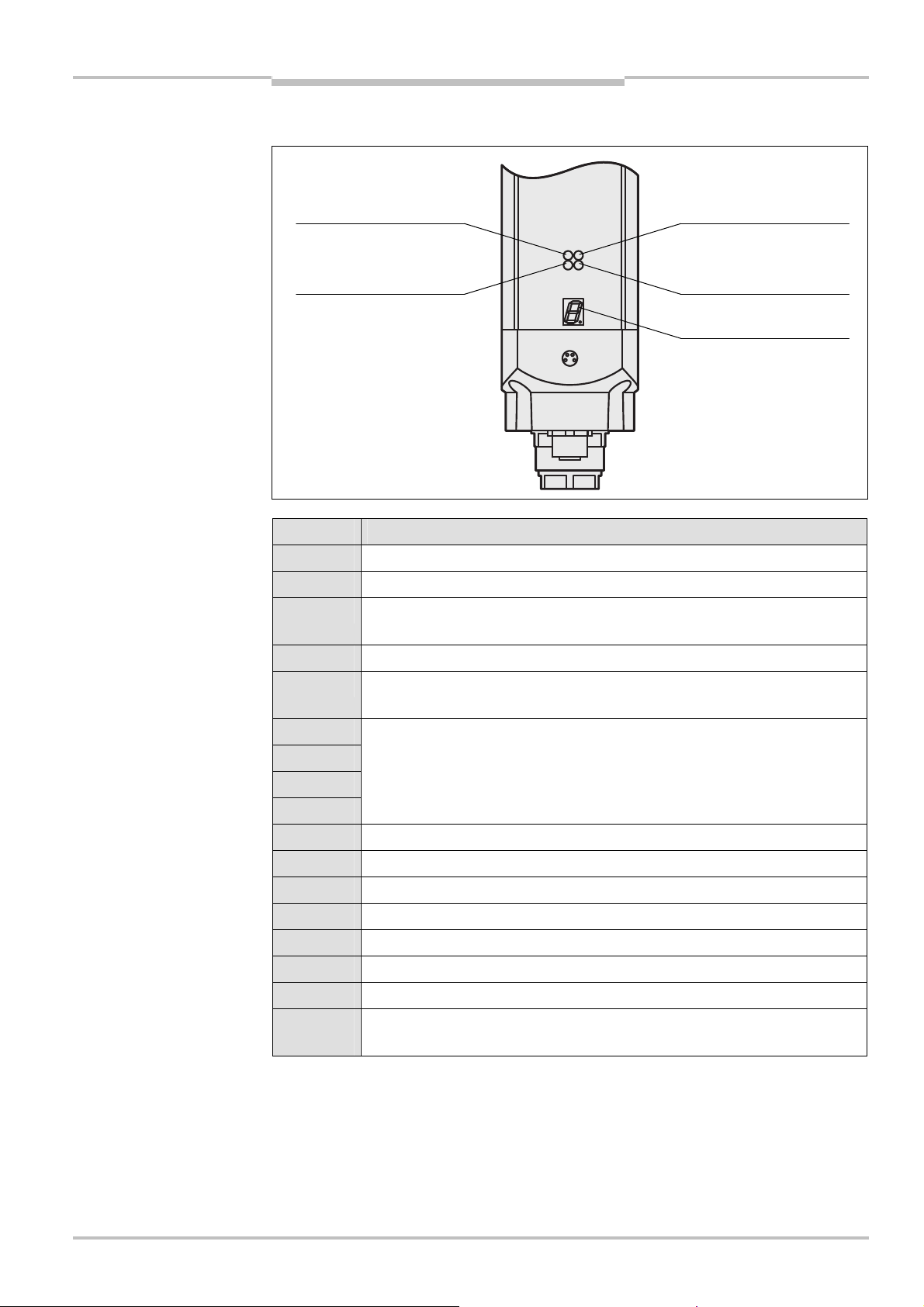
3.4.3 Status indicators of the receiver or of the M4000 Advanced A/P
Fig. 12: Status indicators of
the receiver or of the
M4000 Advanced A/P
indicators of the receiver or
the M4000 Advanced A/P
Display Meaning
Orange Cleaning or realignment required
Yellow Reset required
Red System providing signals for shutting down the machine: output signal
switching devices off
Green System clear: output signal switching devices on
System error. Disconnect the supply voltage to the M4000 for at least
3 seconds. If the problem persists, replace the unit.
Poor alignment to sender.
Please refer to chapter 9.2 “Alignment of the M4000” on page 90.
Note: In normal operation, the display indicates the state “The light path
is interrupted”.
Muting (only with UE403 or sens:Control)
Override (only with UE403 or sens:Control)
Operation with blanking (only with UE403 or sens:Control)
Operation with large scanning range (only after switching on)
Non-coded operation (only after switching on)
Operation with code 1 (only after switching on)
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 21
Subject to change without notice
Operation with code 2 (only after switching on)
Other
displays
All other displays are error messages. Please refer to chapter 12 “Fault
diagnosis” on page 105.
Page 22
Chapter 4 Operating Instructions
Ensure that muting cannot be unintentionally triggered
M4000 Adv., Adv. A/P, Area
Muting
4 Muting
When using the muting functions of the M4000 Advanced please observe the operating
Note
WARNING
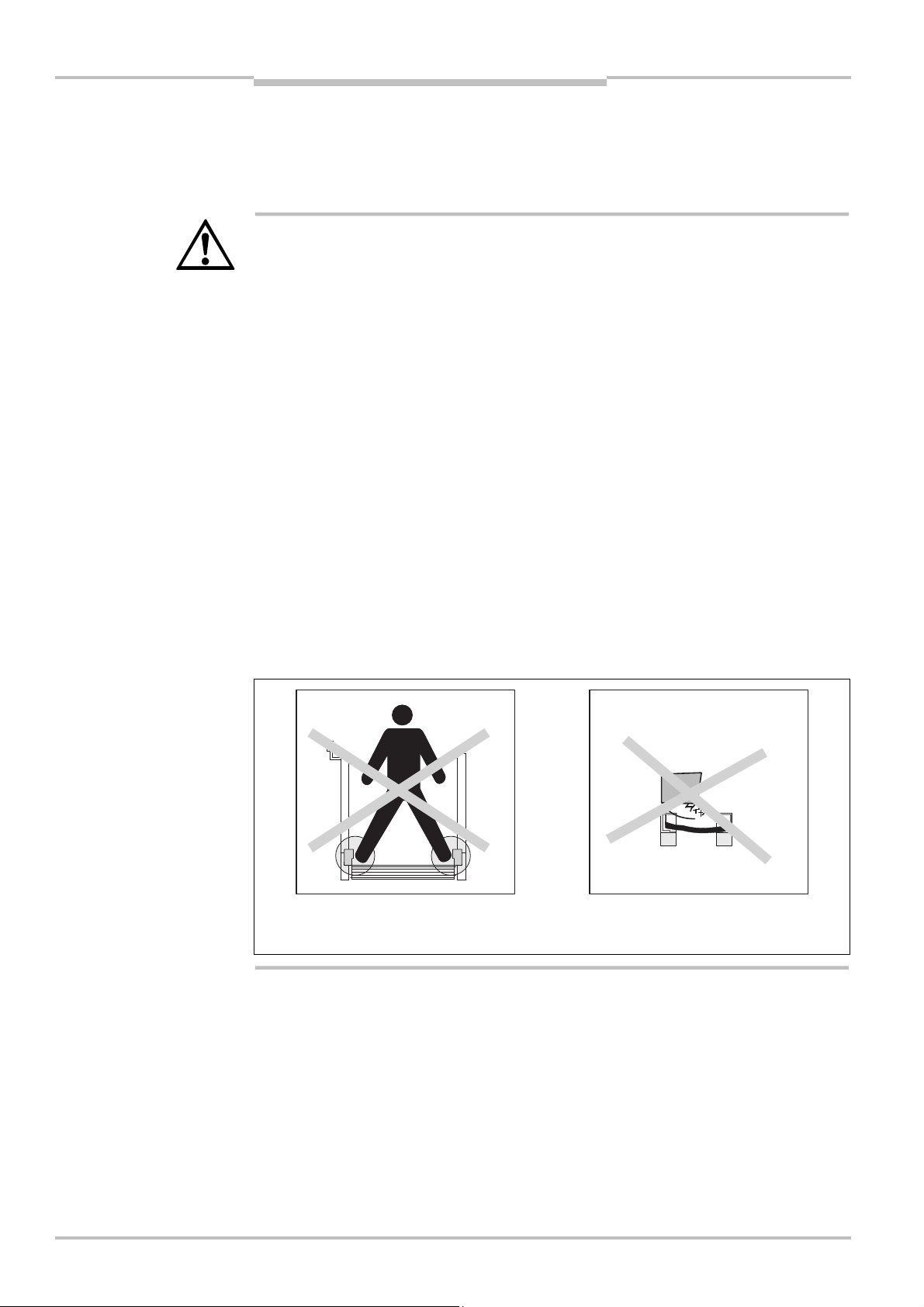
Fig. 13: Safety on mounting
the muting sensors
instructions of the corresponding UE403 or sens:Control device.
Pay attention to the following safety notes!
Muting is only allowed to be activated during the period when the material to be trans-
ported (e.g. on a pallet) blocks the access to the hazardous area.
Muting must be performed automatically, but must not depend on a single electrical
signal.
Muting must be triggered by at least two independently wired signals (e.g. from muting
sensors) and must not depend entirely on software signals (for instance from a PLC).
Muting must be removed immediately as soon as the material to be transported no
longer blocks the access to the dangerous movement so that the protective device is
once more effective.
The material to be transported must be detected over its entire length, i.e. there must
be no interruption in the output signals.
Mount the control switch for reset or override outside the hazardous area such that it
cannot be operated by a person in the hazardous area. When operating the control
switch, the operator must have full visual command of the hazardous area.
Always mount the sensors so that the minimum distance to the protective device is
maintained.
Prevent the unintentional triggering of muting by a person by mounting the sensors
appropriately (see Fig. 13)!
22 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
by a person!
Subject to change without notice
Page 23
Operating Instructions Chapter 4
A1
Hazardous area
A2
ESPE
Material
Means of transport
M4000 Adv., Adv. A/P, Area
Muting
4.1 Muting principle
uting temporarily mutes the protection provided by a safety device. In this way it is possi-
M
ble to move material to or from a machine without the need to interrupt the work process.
During muting a differentiation is made between people and material with the aid of addi-
tional sensor signals. In the event of a valid muting condition the protective device is overridden on the basis of a logical evaluation of these external sensor signals so that the ma-
terial to be transported can pass through the protective device. As soon as anything other
than material enters the hazardous area, the work process is interrupted.
Fig. 14: Schematic
illustration of muting
In the example, the material moves from left to right on a conveyor belt . As soon as the
muting sensors A1 and A2 are activated , the protection provided by the ESPE protective
device is muted and the material can move into the hazardous area. As soon as the
muting sensors are clear again , the protection provided by the protective device is reactivated.
4.1.1 Muting cycle
The muting cycle is the defined sequence of all processes that take place during muting.
The cycle starts when the first muting sensor is activated. The cycle ends when the last
muting sensor returns to its initial state (e.g. clear light path for optical sensors). Only then
is it possible to activate muting again.
Material can be transported several times during a muting cycle, if the muting condition is
maintained continuously, i.e. at least one pair of sensors remains activated continuously.
Exception: With the Exit monitoring function activated (see sections 4.2.3 and 4.2.4 from
page 30), multiple material transport within a muting cycle is not possible.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 23
Subject to change without notice
Page 24
Chapter 4 Operating Instructions
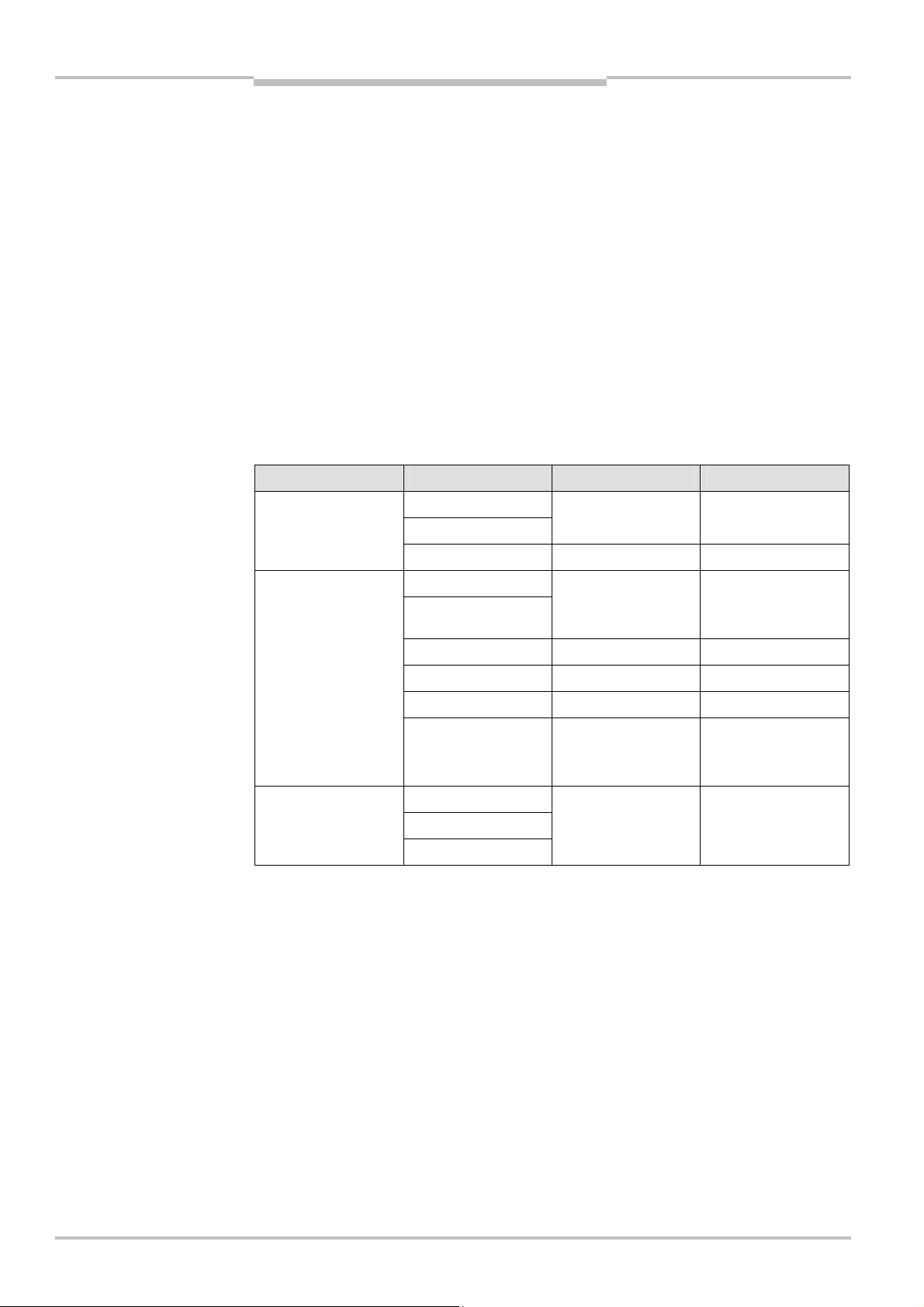
Tab.5:
Sel
ection and set
-
M4000 Adv., Adv. A/P, Area
Muting
4.1.2 Muting sensors
Muting sensors detect material and supply the signals which an evaluation unit requires
for the logic operation.
Sensor signals can be generated by the following external sensors:
optical sensors
inductive sensors
mechanical switches
controller signals
SICK muting sensors
Recommendation
A selection of optical muting sensors is given in the following. Depending on the type (lightswitching or dark-switching), you can use these as testable or non-testable sensors.
Note
You can use testable muting sensors in conjunction with the UE403 safety relay or a
sens:Control device. For this purpose, the sensor test function of the M4000 multiple light
beam safety device must be configured (see section 6.2 “Sensor test” on page 50ff.).
tings for the SICK optical
muting sensors in muting
applications
Note
Sensor Type Testable Non-testable
Photoelectric
proximity switch
WT24
WT27
Dark switching Light switching
WT280 Not possible Light switching
Photoelectric reflex
switch
WL24
WL27
Dark switching,
reflector moving on
Dark switching
the object
WL280 Not possible Dark switching
WL12 Not possible Dark switching
WL14 Not possible Dark switching
WL18 Dark switching,
Dark switching
reflector moving on
the object
Through-beam
photoelectric switch
WS24/WE24
WS27/WE27
Not possible Dark switching
WS280/WE280
For the selection and settings for the SICK optical muting sensors in muting applications,
the following applies:
Outputs must be PNP switching.
Other series are possible.
Pay attention to the output signals in chapter 6.2.
24 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 25
Operating Instructions Chapter 4
Material
Muting sensor
Means of transport
Transport level
v
L
Ha
zardous area
ESPE
M4000 Adv., Adv. A/P, Area
Muting
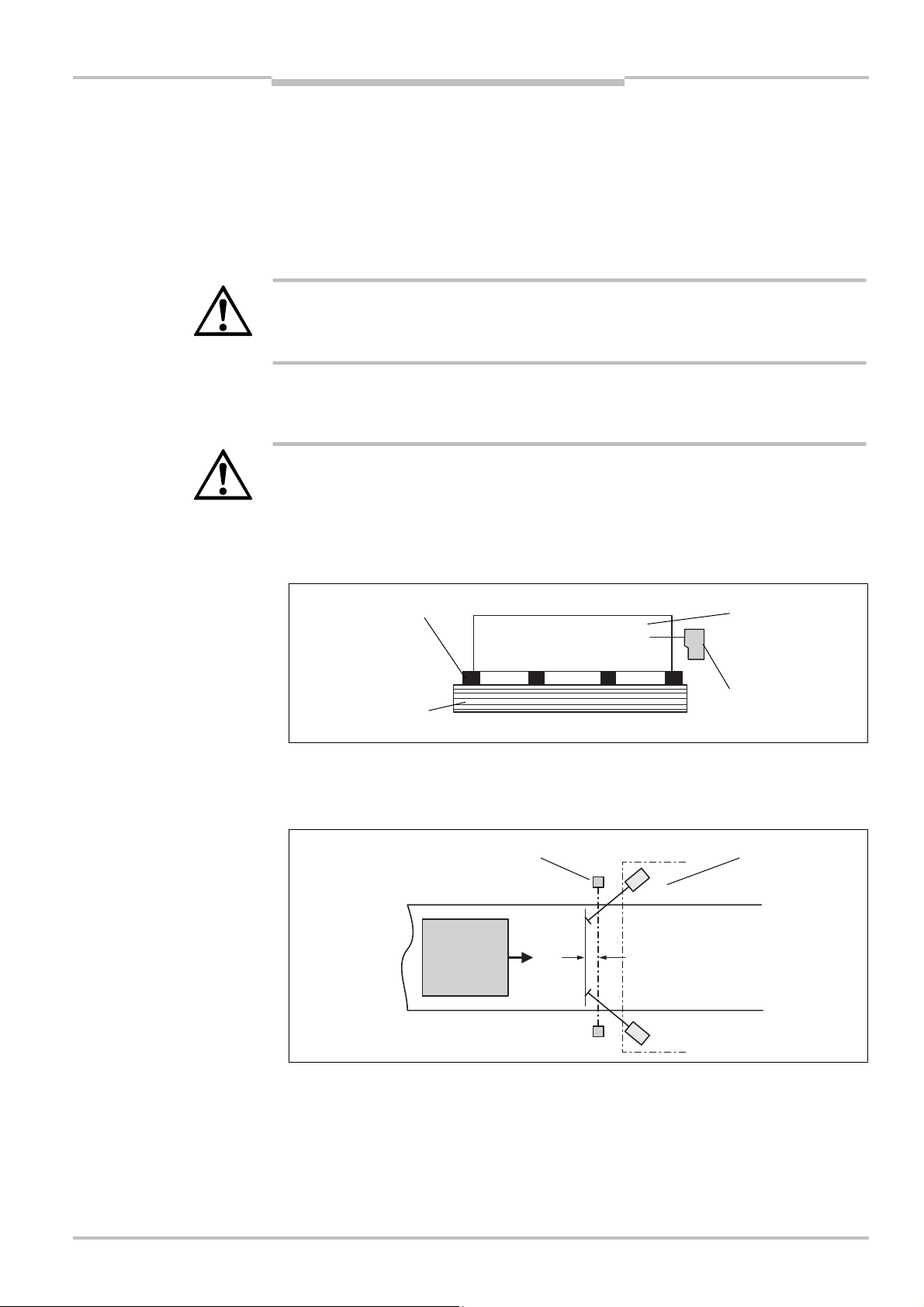
4.1.3 Muting lamp
To signal muting, the use of a muting lamp or a muting status signal is stipulated. The
muting lamp signals the temporary muting. You can use an external lamp (monitored/not
onitored) or the integrated LED on the M4000 Advanced multiple light beam safety
m
device (not monitored).
Depending on the national legal situation, the monitoring of the external muting lamp may
ote
N
be deactivated with the aid of the CDS.
Always mount the muting lamp where it can be clearly seen!
The muting lamp must be clearly visible from all sides of the hazardous area and for the
WARNING
system operator.
4.2 Placement of muting sensors
Pay attention to the following notes on the placement of the muting sensors!
Always position the muting sensors such that only the material is detected and not the
WARNING
Fig. 15: Detection of material
during muting
means of transport (pallet or vehicle).
Always position the muting sensors such that material can pass unhindered, but people
are reliably detected.
Note
Fig. 16: Minimum distance,
material detection to the
ESPE on muting
Always position the muting sensors such that, on the detection of the material , a
minimum distance to the light beams on the ESPE is maintained.
The minimum distance provides the processing time necessary until muting is activated.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 25
Subject to change without notice
Page 26
Chapter 4 Operating Instructions
Tab.6:
Conditions for muting
Detection zone
Background
Sensor
Material is
Material is not
ESPE
A1A2L3L2L
Hazardous area
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the minimum distance:
t
vL
res
t
d
+
+× 0.004
2
Where …
L = Minimum distance [m]
v = Velocity of the material (e.g. of the conveyor belt) [m/s]
t
= Input delay of the UE403 or the sens:Control device [s]
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
Use optical sensors with background suppression. These detect material only up to a
specific distance. Objects that are further away than the material to be detected are not
detected.
Fig. 17: Principle of operation
of sensors with background
suppression
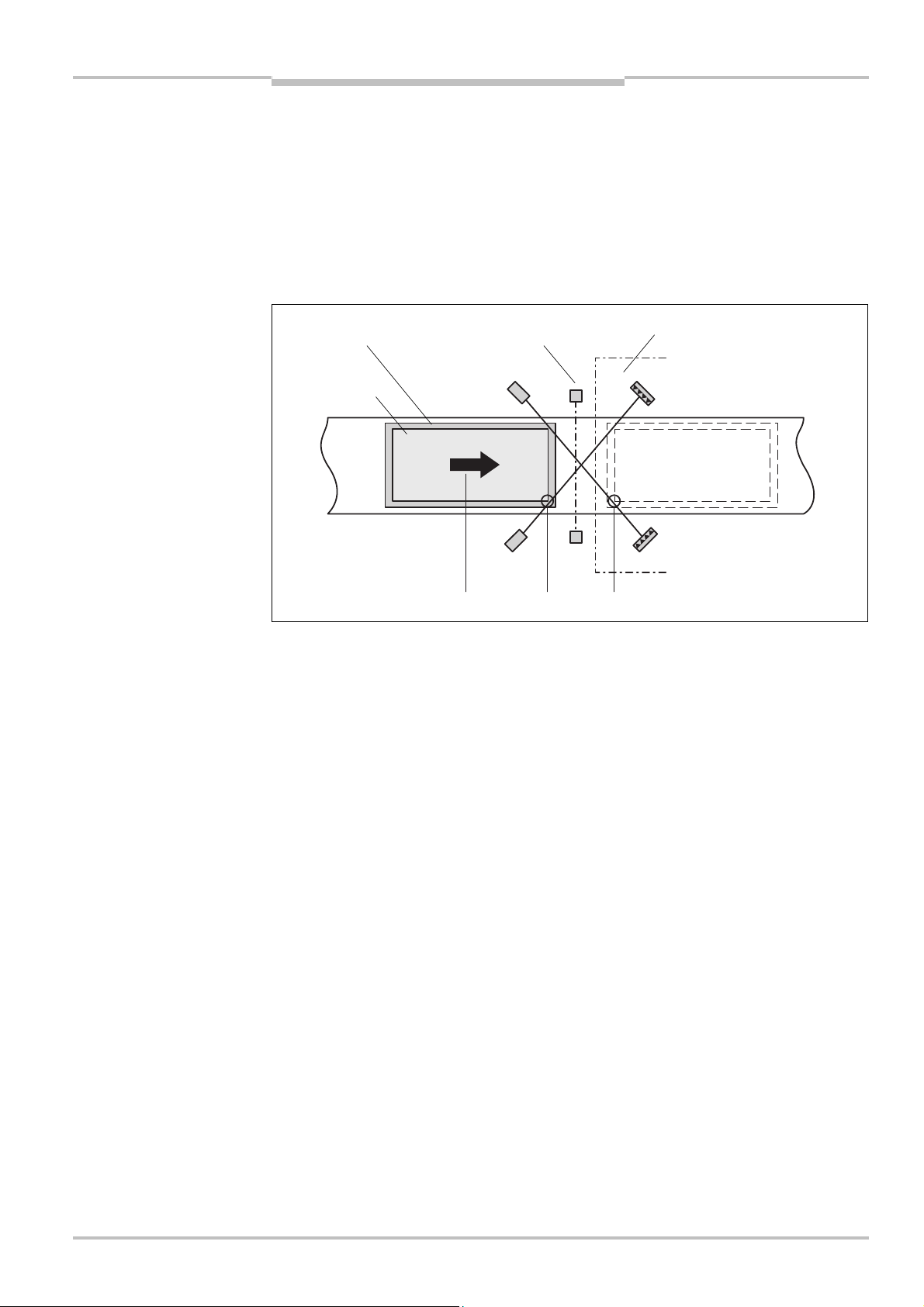
Fig. 18: Muting with two sensors, crossed placement
detected
detected
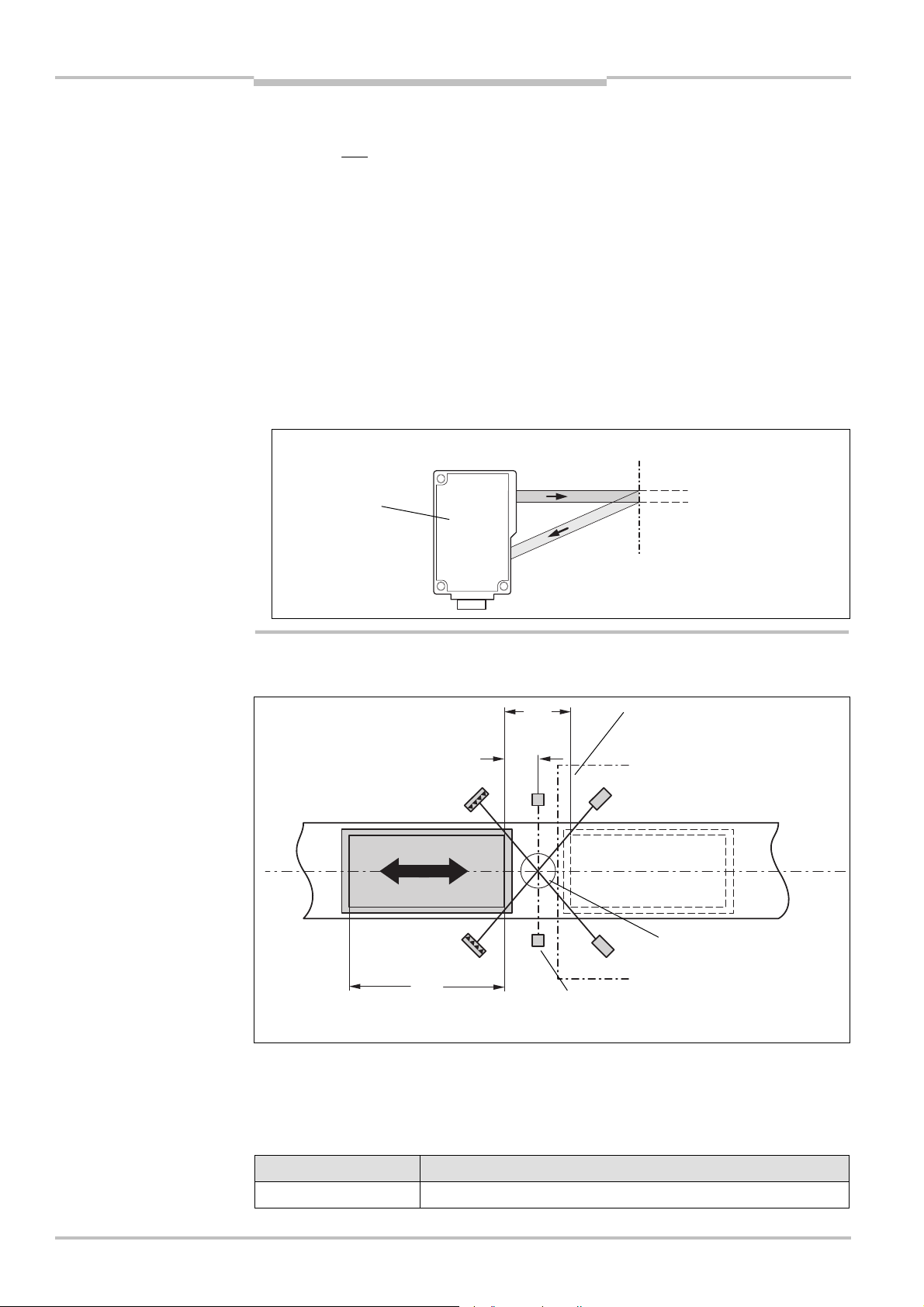
4.2.1 Muting with two sensors (one sensor pair), crossed placement
1
with two sensors, crossed
placement
26 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
In the example, the material moves from left to right or, alternatively, from right to left. As
soon as the muting sensors A1 and A2 are activated, the protection provided by the protective device (ESPE) is muted.
The following requirements must be met:
Condition Description
A1 & A2 Muting applies as long as this condition is met.
Subject to change without notice
Page 27

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
Notes
t
2
here …
= Minimum distance between the light beams on the ESPE and the detection by the
W
L
1
1
res
tvL
d
LLtv
+>×
++×
2
3
0.004
muting sensors [m]
v = Velocity of the material (e.g. of the conveyor belt) [m/s]
= Input delay of the UE403 or the sens:Control device [s]
t
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
es
r
(see section 13.1 “Data sheet” on page 115)
t = Total muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Distance between the two sensor detection lines (sensors activated/sensors clear)
L
2
[m]
= Length of the material on the conveyor [m]
L
3
The material can flow in both directions.
Place the cross-over point for the muting sensors exactly in the path of the ESPE’s
light beams. If this is not possible, place the cross-over point in the direction of the
hazardous area (see Fig. 14).
This placement is suitable for through-beam photoelectric switches and photoelectric
reflex switches.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50 ff.
– Concurrence monitoring, see page 51 ff.
– Monitoring of the total muting time, see page 51 ff.
– End of muting by ESPE, see page 53 ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 27
Subject to change without notice
Page 28
Chapter 4 Operating Instructions
Tab.7:
Conditions for muting
C1
Hazardous
A1A2ESPE
L3L
L
L
M4000 Adv., Adv. A/P, Area
Muting
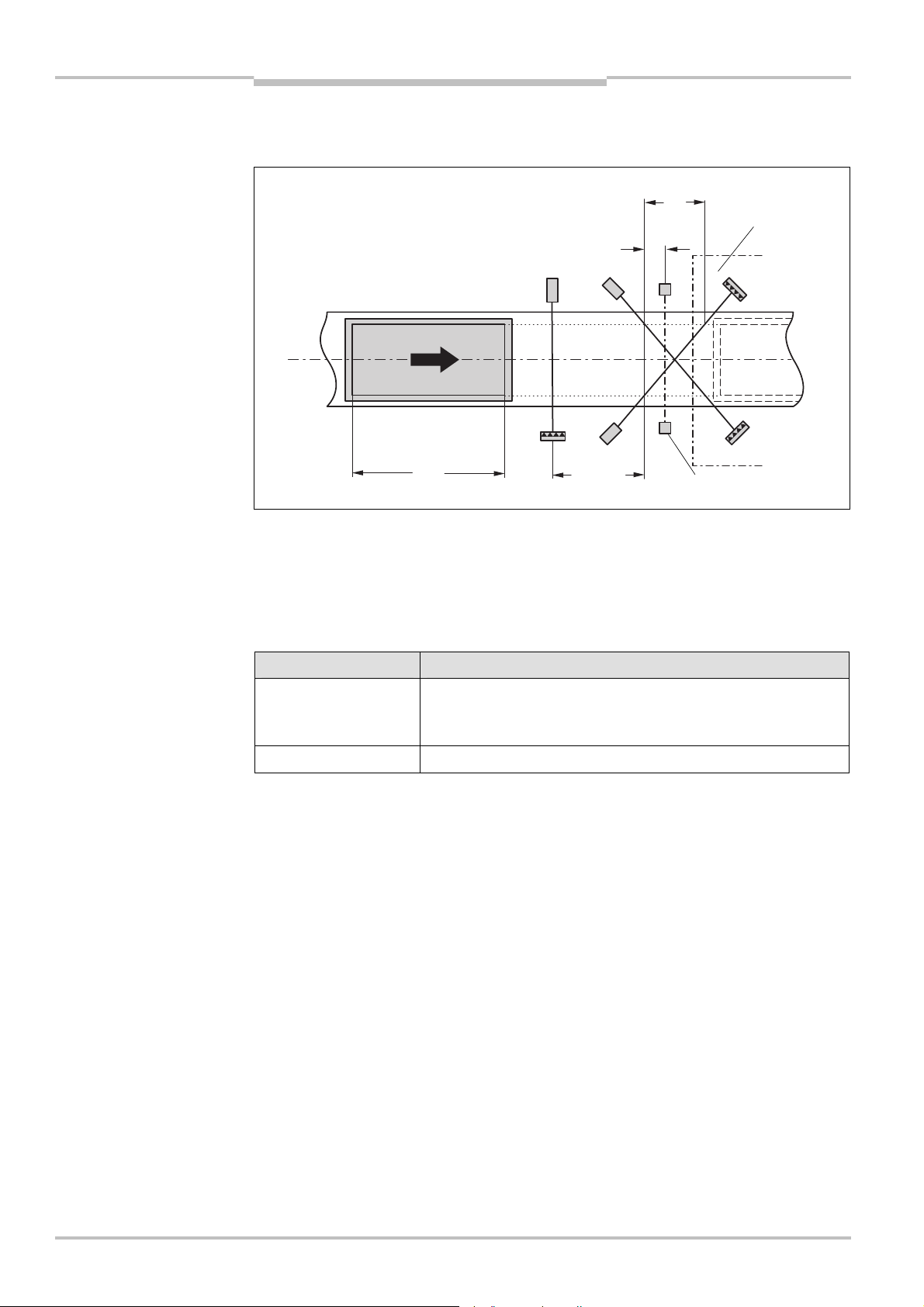
4.2.2 Muting with two sensors (one sensor pair), crossed placement, and an
dditional signal C1
a
Fig. 19: Muting with two sensors, crossed placement, and
an additional signal
4
2
area
1
The protection provided by the protective device is muted when the muting sensors are
activated in a defined sequence. The muting sensor (signal C1) must always be activated,
before both muting sensors in the first sensor pair (e.g. A1 and A2) are active (see section
“Additional signal C1” on page 49).
with two sensors and an additional signal
The following requirements must be met:
Condition Description
C1 & A1 & A2 Brief, to the start of the muting. C1 must always be activated,
before both muting sensors in the first sensor pair (e.g.
A1 and A2) are active.
A1 & A2 Muting applies as long as this condition is met.
28 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 29

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
t
LL
<
34
res
tvL
d1
LLtv
+>×
++×
2
32
0.004
Where …
= Minimum distance between the light beams on the ESPE and the detection by the
L
1
muting sensors [m]
v = Velocity of the material (e.g. of the conveyor belt) [m/s]
= Input delay of the UE403 or the sens:Control device [s]
t
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
t = Total muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Distance between the two sensor detection lines (sensors activated/sensors
L
2
clear) [m]
= Length of the material on the conveyor [m]
L
3
L
= Maximum distance between C1 and the detection line for A1, A2 [m]
4
Notes
The material can only flow in one direction.
This placement is suitable for through-beam photoelectric switches and photoelectric
reflex switches.
Avoid mutual interference between the sensors.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50 ff.
– Concurrence monitoring, see page 51 ff.
– Monitoring of the total muting time, see page 51 ff.
– End of muting by ESPE, see page 53 ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 29
Subject to change without notice
Page 30
Chapter 4 Operating Instructions
Tab.8:
Conditions for muting
Hazardous area
A2A1ESPE
L1L
M4000 Adv., Adv. A/P, Area
Muting
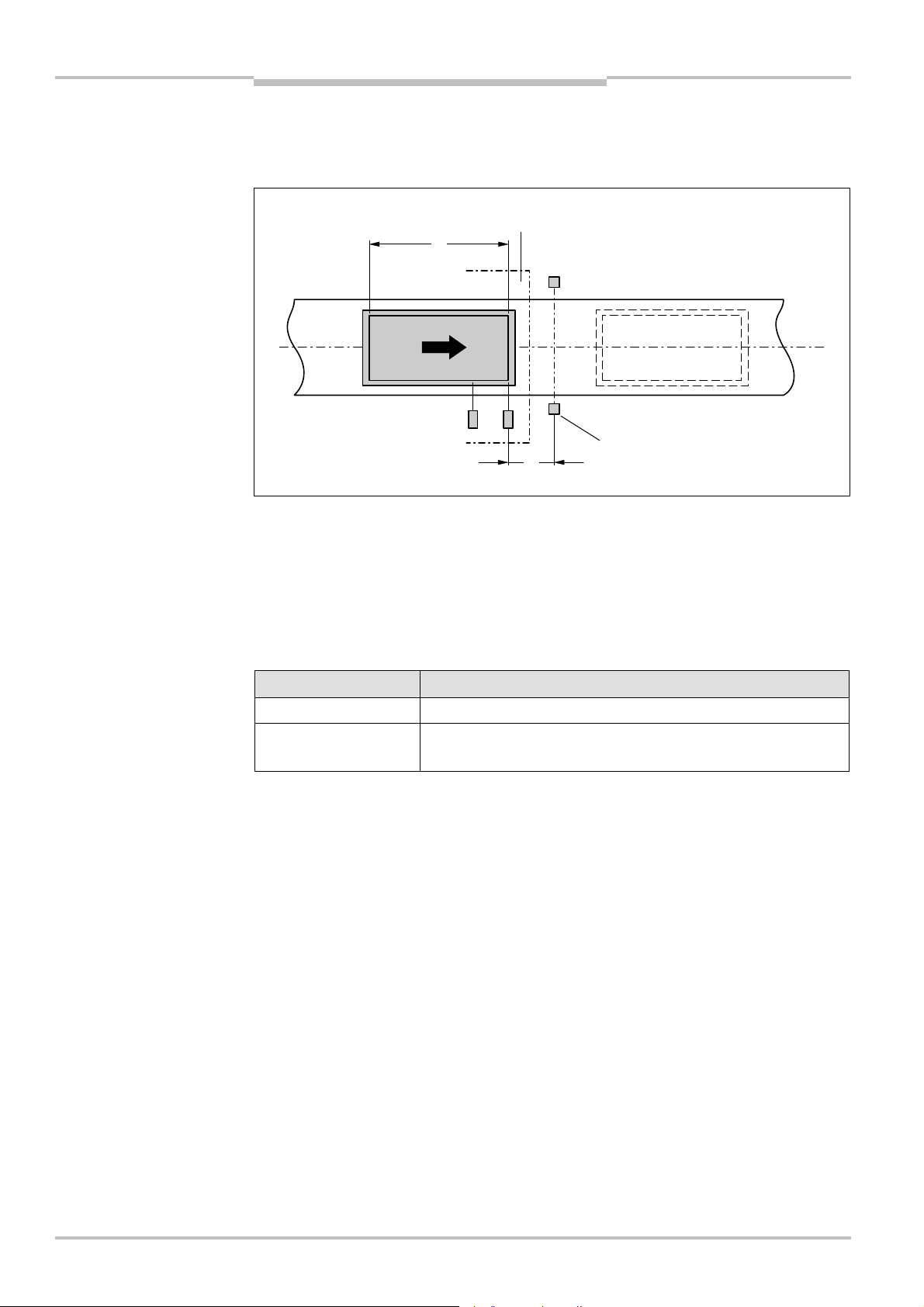
4.2.3 Muting using two sensors, serial placement (one sensor pair in the hazardous
rea), exit monitoring with End of muting by ESPE
a
Fig. 20: Muting with two
sensors, serial placement
Note
The Exit monitoring function is supported by M4000 systems with firmware V1.50.
2
In the case of the Exit monitoring function the muting sensors are at the side of the hazardous area. The material moves out of the hazardous area. As soon as all muting sensors
(A1 and A2) are actuated, the protection provided by the protective device (ESPE) is
bypassed and this situation remains in force until the configured muting hold time
(0.5 s … 4 s) has elapsed or the protective device becomes clear. The muting hold time
starts as soon as one of the muting sensors becomes clear.
with two sensors, serial
placement
The following requirements must be met:
Condition Description
A1 & A2 Muting starts as soon as this condition is met.
A1 & ESPE or
A2 & ESPE or ESPE
Muting applies as long as this condition is met. The muting
hold time counts down.
30 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 31

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
Notes
t
res
tvL
d1
LLtv
+>×
++×
2
21
0.004
Where …
L
< 200 mm; Minimum distance between the light beams on the ESPE and the
1
detection by the muting sensors [m]
v = Velocity of the material (e.g. of the conveyor) [m/s]
t
= Input delay of the UE403 or the sens:Control device [s]
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
t = Muting hold time set[s] (with End of muting by ESPE function activated) or total
muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Length of the material on the conveyor [m]
L
2
Only material flow out of the hazardous area is possible.
Position the two muting sensors at the side of the hazardous area.
This placement is suitable for through-beam photoelectric switches and photoelectric
reflex switches.
Avoid mutual interference between the sensors.
If you activate the Exit monitoring function, you must either activate the End of muting
by ESPE function or configure the Total muting time.
The functions Direction detection and Sequence monitoring can not be configured.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50ff.
– Concurrence monitoring, see page 51ff.
– Monitoring of the total muting time, see page 51ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 31
Subject to change without notice
Page 32

Chapter 4 Operating Instructions
Tab.9:
Conditions for muting
Hazardous area
A2A1ESPE
L1L2C1
L
M4000 Adv., Adv. A/P, Area
Muting
4.2.4 Muting using two sensors, serial placement (one sensor pair in the hazardous
rea), with additional signal C1, exit monitoring with End of muting by ESPE
a
Note
Fig. 21: Muting with two
sensors, serial placement,
with additional signal C1
The Exit monitoring function is supported by M4000 systems with firmware V1.50.
3
In the case of the Exit monitoring function the muting sensors are at the side of the haz-
ardous area. The material moves out of the hazardous area. As soon as all muting sensors
(A1 and A2 and C1) are actuated, the protection provided by the protective device (ESPE)
is bypassed and this situation remains in force until the muting hold time configured
(0.5 s … 4 s) has elapsed or the protective device becomes clear. The muting hold time
starts as soon as one of the muting sensors becomes clear. The muting sensor (additional
signal C1) muss always be activated before the muting sensors A1 and A2 (see section
“Additional signal C1” on page 49).
with two sensors, serial
placement, with additional
signal C1
The following requirements must be met:
Condition Description
C1 & A1 & A2 Muting starts as soon as this condition is met. C1 must always
be activated before A1 and A2.
A1 & ESPE or
A2 & ESPE
Muting applies as long as this condition is met. The muting
hold time counts down.
32 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 33

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
Notes
t
1
LL
<
23
res
tvL
d1
LLtv
+>×
++×
2
2
0.004
Where …
< 200 mm; Minimum distance between the light beams on the ESPE and the
L
1
detection by the muting sensors [m]
v = Velocity of the material (e.g. of the conveyor) [m/s]
t
= Input delay of the UE403 or the sens:Control device [s]
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
t = Muting hold time set [s] (with End of muting by ESPE function activated) or total
muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Length of the material on the conveyor [m]
L
2
L
= Maximum distance between C1 and the detection line of the sensor which is closest
3
to the ESPE [m]
Only material flow out of the hazardous area is possible.
Position the two muting sensors at the side of the hazardous area.
This placement is suitable for through-beam photoelectric switches and photoelectric
reflex switches.
Avoid mutual interference between the sensors.
If you activate the Exit monitoring function, you must either activate the End of muting
by ESPE function of configure the Total muting time.
The functions Direction detection and Sequence monitoring can not be configured.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50ff.
– Concurrence monitoring, see page 51ff.
– Monitoring of the total muting time, see page 51ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 33
Subject to change without notice
Page 34

Chapter 4 Operating Instructions
Tab.10:
Conditions for
ESPE
L2L1L3Hazardous area
A1A2B1
B2
M4000 Adv., Adv. A/P, Area
Muting
4.2.5 Muting with four sensors (two sensor pairs), serial placement
Fig. 22: Muting with two
serial sensor pairs
In the example, the material moves from left to right. As soon as the muting sensors
A1 & A2 are activated, the protection provided by the protective device (ESPE) is muted.
The protection remains muted until one of the sensors in the muting sensor pair B1 & B2
is clear again.
The following requirements must be met:
muting with four sensors,
serial placement
Condition Description
A1 & A2
(or B1 & B2)
Brief, to the start of the muting. The first sensor pair is acti-
vated as a function of the direction of transport of the material.
A1 & A2 & B1 & B2 Brief, for accepting the muting condition.
B1 & B2
(or A1 & A2)
Muting applies as long as this condition is met. The second
sensor pair is activated as a function of the direction of transport of the material.
34 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 35

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
t
LLtv
+>×
LL
<
32
res
t2vL
d1
31
++××
2
0.004
Where …
= Distance between the inner sensors (placement symmetrical in relation the ESPE’s
L
1
light beams) [m]
v = Velocity of the material (e.g. of the conveyor belt) [m/s]
= Input delay of the UE403 or the sens:Control device [s]
t
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
t = Total muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Distance between the outer sensors (placement symmetrical in relation the ESPE’s
L
2
light beams) [m]
= Length of the material on the conveyor [m]
L
3
Notes
The material can flow in both directions.
The direction can also be defined as fixed:
– Using the additional signal C1: The signal C1 must always be activated, before both
muting sensors in the first sensor pair (e.g. A1 and A2) are active (see section
“Additional signal C1” on page 49).
– Using the Direction detection function that can be configured in software (page 55ff.).
All types of sensor can be used in this placement.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50 ff.
– Concurrence monitoring, see page 51 ff.
– Monitoring of the total muting time, see page 51 ff.
– End of muting by ESPE, see page 53 ff.
– Sequence monitoring, see page 55 ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 35
Subject to change without notice
Page 36

Chapter 4 Operating Instructions
Tab.11:
Conditions for
A1
ESPEL
L
A2
Hazardous area
B1
B2
M4000 Adv., Adv. A/P, Area
Muting
4.2.6 Muting with four sensors (two sensor pairs), parallel placement
Fig. 23: Muting with two
parallel sensor pairs
muting with four sensors,
parallel placement
1
3
In the example, the material moves from left to right. As soon as the first muting sensor
pair A1 & A2 is activated, the protection provided by the protective device (ESPE) is muted.
The protection remains muted until the muting sensor pair B1 & B2 is clear again.
The following requirements must be met:
Condition Description
A1 & A2
(or B1 & B2)
Brief, to the start of the muting. The first sensor pair is acti-
vated as a function of the direction of transport of the material.
A1 & A2 & B1 & B2 Brief, for accepting the muting condition.
B1 & B2
(or A1 & A2)
Muting applies as long as this condition is met. The second
sensor pair is activated as a function of the direction of transport of the material.
36 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 37

Operating Instructions Chapter 4
M4000 Adv., Adv. A/P, Area
Muting
How to calculate the distance:
t
LLtv
+>×
LL
<
31
res
t2vL
d1
31
++××
2
0.004
Where …
= Distance between the inner sensors (Placement symmetrical to the light path
L
1
between sender and receiver) [m]
v = Velocity of the material (e.g. of the conveyor belt) [m/s]
= Input delay of the UE403 or the sens:Control device [s]
t
d
(see the operating instructions of the UE403 or sens:Control device)
= Response time of the M4000 [s]
t
res
(see section 13.1 “Data sheet” on page 115)
t = Total muting time set [s]
(see section 6.3.2 “Monitoring of the total muting time” on page 51)
= Length of the material on the conveyor [m]
L
3
Notes
The material can flow in both directions.
With the parallel placement, the width of the object allowed is also checked due to the
position of the muting sensors. The objects must always fit in an identical width to suit
the muting sensors.
The direction can also be defined as fixed:
– Using the additional signal C1: The signal C1 must always be activated, before both
muting sensors in the first sensor pair (e.g. A1 and A2) are active (see section
“Additional signal C1” on page 49).
– Using the Direction detection function that can be configured in software (page 55ff.).
In this placement, optical proximity sensors and all types on non-optical sensors can be
used. Use sensors and proximity sensors with background suppression.
Avoid mutual interference between the sensors.
You can usefully increase the protection against manipulation and safety using the
following configurable functions:
– Sensor test, see page 50 ff.
– Concurrence monitoring, see page 51 ff.
– Monitoring of the total muting time, see page 51 ff.
– End of muting by ESPE, see page 53 ff.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 37
Subject to change without notice
Page 38

Chapter 5 Operating Instructions
The person who makes the change is also responsible for the correct protective function of
M4000 Adv., Adv. A/P, Area
Configurable functions
5 Configurable functions
his chapter describes the functions on the M4000 multiple light beam safety device that
T
can be set via software. Some of the functions can be combined.
Test the protective device after any changes!
Changes to the configuration of the devices can degrade the protective function. After
WARNING
every change to the configuration you must therefore check the effectiveness of the
protective device (see section 9.3 on page 100).
the device. When making configuration changes, please always use the password hierar-
chy provided by SICK to ensure that only authorised persons make changes to the configuration. The SICK service team is available to provide assistance if required.
When starting to configure the device, you may save an application name with a maximum
of 22 characters. Use this function as a “memory jog”, e.g. to describe the application of
the current device configuration. Device symbol M4000 Advanced (sender or receiver),
M4000 Advanced (A/P) or M4000 Area (sender or receiver), context menu Open device
window, parameter node General.
Fig. 24: Schematic
illustration of the protective
operation
Note
5.1 Restart interlock
The dangerous state of the machine is interrupted if the light path is broken , and is
not re-enabled until the operator presses the reset button situated outside the hazardous area.
Do not confuse the restart interlock with the start interlock on the machine. The start
interlock prevents the machine starting after switching on. The restart interlock prevents
the machine starting again after an error or an interruption in the light path.
You can prevent the machine restarting in two ways:
With the internal restart interlock of the M4000:
The M4000 controls the restart.
With the restart interlock of the machine (external):
The M4000 has no control over the restart.
38 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 39

Operating Instructions Chapter 5
Tab.12:
Permissible
M4000 Adv., Adv. A/P, Area
Configurable functions
The possible combinations are shown in the following table:
configuration of the restart
interlock
WARNING
Restart interlock of the
M4000
Deactivated Deactivated Only when it is not possible to stand
Deactivated Activated All
Activated Deactivated Only when it is not possible to stand
Activated Activated All. The restart interlock of the M4000
Always configure the application with restart interlock!
Ensure that there is always a restart interlock. The M4000 is unable to verify if the restart
interlock of the machine is operable. If you deactivate both the internal and the external
restart interlock, the users and operators of the machine will be at acute risk of injury.
The electrical connection of the reset button is described in chapter 8.5 “Reset button” on
page 87.
Device symbol M4000 Advanced (receiver), M4000 Advanced (A/P) or M4000 Area
(receiver), context menu Open device window, parameter node General.
Restart interlock of the
machine
Permissible
application
behind the multiple light beam safety
device. Observe EN 60204E1!
behind the multiple light beam safety
device. Observe EN 60204E1!
handles the Reset function
(see “Reset” further below).
Recommendation
Recommendation
You can indicate the status “Reset required” using a signal lamp. The M4000 has a dedicated output for this purpose. The electrical connection of the signal lamp is described in
chapter “Connection of a Reset required signal lamp” on page 87.
Reset
If you want to activate the restart interlock on the M4000 (internal) and also a restart
interlock on the machine (external), then each restart interlock has its own button.
When actuating the reset button (for the internal restart interlock) …
the M4000 activates the output signal switching devices.
the multiple light beam safety device changes to green.
Only the external restart interlock prevents the machine from restarting. After pressing the
reset button for the M4000, the operator must also press the restart button for the machine. If the reset button and the restart button are not pressed in the specified sequence,
the dangerous state remains disrupted.
The reset button prevents the accidental and inadvertent operation of the external restart
button. The operator must first acknowledge the safe state with the reset button.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 39
Subject to change without notice
Page 40

Chapter 5 Operating Instructions
Code 1
Code 2
M4000 Adv., Adv. A/P, Area
Configurable functions
5.2 Beam coding
f several multiple light beam safety devices operate in close proximity to each other, the
I
sender beams of one system may interfere with the receiver of another system. With
code 1 or 2 activated, the receiver can distinguish the beams designated for it from other
beams. The following settings are available: non-coded, code 1 and code 2.
Use different beam codings if the systems are mounted in close proximity!
Systems mounted in close proximity to each other must be operated with different beam
WARNING
Fig. 25: Schematic
illustration of the beam
coding
codings (code 1 or code 2). If this precaution is neglected, the system may be impaired in
its protective function by the beams from the neighbouring system and so change to the
unsafe state. This would mean that the operator is at risk.
Notes
Beam coding increases the availability of the protected machine. Beam coding also
enhances the resistance to optical interference such as weld sparks or similar.
Within a system you must configure the beam coding for every device (sender and
receiver) separately.
After switching on, the 7Esegment display of sender and receiver will briefly display the
coding.
Device symbol M4000 Advanced (sender or receiver), M4000 Advanced (A/P) or M4000
Area (sender or receiver), context menu Open device window, parameter node General.
40 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 41

Operating Instructions Chapter 5
You are only allowed to use the application diagnostic output for signalling. You must never
Tab.13:
Possible
M4000 Adv., Adv. A/P, Area
Configurable functions
5.3 Application diagnostic output (ADO)
he M4000 has an application diagnostic output (ADO) that can be configured. With the
T
aid of the application diagnostic output, the multiple light beam safety device can signal
specific states. You can use this output for a relay or a PLC.
You must not use the application diagnostic output for safety-relevant functions!
ARNING
W
configuration for the
application diagnostic output
Notes
use the application diagnostic output for controlling the application or with safety-relevant
functions.
The connection can signal one of the following states:
Assignment Possible uses
Contamination
Eases diagnostics in case of contaminated front screen
(OWS)
OSSD status Signals the status of the output signal switching devices when the
)
multiple light beam safety device switches to red or green
1
Reset required Signals the status “Reset required”
Muting status Signals the status “Muting”
(only M4000 Advanced and M4000 Advanced A/P in conjunction
with UE403 or sens:Control device)
Override status Signals the status “Override”
(only M4000 Advanced and M4000 Advanced A/P in conjunction
with UE403 or sens:Control device)
The electrical connection of a PLC to the application diagnostic output is described in
chapter 8.6 “Application diagnostic output (ADO)” on page 88.
When you connect the application diagnostic output as an alarm signal for contamina-
tion (OWS) or for the OSSD status, then during the configuration you can choose how
the application diagnostic output is to signal the alarm.
– HIGH active: If there is contamination or if the OSSDs are switched on, 24 V are
present. Otherwise the output is high resistance.
– LOW active: If there is contamination or if the OSSDs are switched on, the output is
1)
high resistance. Otherwise 24 V are present
.
If you use the application diagnostic output as an alarm signal for “Reset required”, it
has a frequency of 1 Hz.
If you connect the application diagnostic output as an alarm signal for muting or over-
ride status, then the application diagnostic output will always signal the alarm with an
active HIGH. With muting or override 24 V are present. Otherwise the output is high
resistance.
Device symbol M4000 Advanced (receiver), M4000 Advanced (A/P) or M4000 Area
(receiver), context menu Open device window, parameter node General.
1)
With external device monitoring activated, the OSSD status function cannot be configured as active LOW.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 41
Subject to change without notice
Page 42

Chapter 5 Operating Instructions
M4000 Adv., Adv. A/P, Area
Configurable functions
5.4 Scanning range
Configure the scanning range to suit the dimension of the light path between sender
and receiver!
ARNING
W
You must adjust the scanning range of every system to the dimension of the light path
between sender and receiver.
If the scanning range is set too low, the multiple light beam safety device may not
switch to green.
If the scanning range is set too large, the multiple light beam safety device may mal-
function due to reflections. This would mean that the operator is at risk.
Notes
Additional front screens (SICK accessories see page 136) reduce the effective scanning
range.
Deflector mirrors (see page 128f.) reduce the effective scanning range. It is dependent
on the number of deflector mirrors in the light path.
A further reduction in the scanning range is possible due to soiling, e.g. of the additional
front screens or deflector mirrors used.
The scanning ranges with deflector mirrors given apply for beam deflections between
80° and 110°.
42 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 43

Operating Instructions Chapter 5
Tab.14:
Scanning range of
M4000 Adv., Adv. A/P, Area
Configurable functions
5.4.1 Scanning range of the M4000 Advanced
You can set the M4000 Advanced multiple light beam safety device to two different scanning ranges. The effective scanning range is dependent here upon the dimension of the
ight path between sender and receiver and the number of deflector mirrors and additional
l
front screens used. You will find the necessary scanning ranges and the resulting setting
in Tab. 14.
The following scanning ranges are available:
low scanning range (0.5-20 m)
high scanning range (9-70 m)
Device symbol M4000 Advanced (receiver), context menu Open device window, para-
meter node General.
the M4000 Advanced as a
function of the number of
deflections per beam and the
additional front screens
Number of
deflections
per beam
None
1
2
3
4
Number of
additional
front screens
Without 0.5-20.0 m 9.0-70.0 m
1 0.5-18.4 m 9.0-64.4 m
2 0.5-16.9 m 9.0-59.2 m
Without 0.5-18.0 m 9.0-63.0 m
1 0.5-16.5 m 9.0-57.9 m
2 0.5-15.1 m 9.0-53.2 m
Without 0.5-16.0 m 9.0-56.0 m
1 0.5-14.7 m 9.0-51.5 m
2 0.5-13.5 m 9.0-47.3 m
Without 0.5-14.3 m 9.0-50.0 m
1 0.5-13.1 m 9.0-46.0 m
2 0.5-12.0 m 9.0-42.3 m
Without 0.5-12.8 m 9.0-45.0 m
1 0.5-11.7 m 9.0-41.4 m
2 0.5-10.7 m 9.0-38.0 m
M4000 Advanced
with short
scanning range
M4000 Advanced
with long
scanning range
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 43
Subject to change without notice
5.4.2 Scanning range of the M4000 Advanced Curtain system
Information on the scanning range of the M4000 Advanced Curtain-system can be found
in the corresponding Addendum Operating Instructions “M4000 Standard Curtain and
M4000 Advanced Curtain” in the “Scanning Range” section.
Page 44

Chapter 5 Operating Instructions
Tab.15:
Scanning range of
Tab.16:
Maximum effective
M4000 Adv., Adv. A/P, Area
Configurable functions
5.4.3 Scanning range of the M4000 Advanced A/P
With the M4000 Advanced A/P multiple light beam safety device you must differentiate
between the scanning range to be configured and the maximum effective scanning
ange.
r
You must configure the scanning range to be configured to suit the deflector unit used
(mirror deflection or fibre-optic deflection) (see Tab. 15).
the M4000 Advanced A/P to
be configured dependent of
the deflector unit used
scanning range of the
M4000 Advanced A/P as a
function of the number of
deflections and the number
of additional front screens
Deflector unit used Scanning range to be configured
Mirror deflection
M4000 Passive with mirror deflection
or
two deflector mirrors PSK45 (see section 13.3.10
“Deflector mirror PSK45” on page 129)
Low scanning range
or
one mirror column (part number: 1041917, see
section 14.5 “Deflector mirrors and mirror
columns” on page 138)
Fibre-optic deflection
High scanning range
M4000 Passive with fibre-optic deflection
Device symbol M4000 Advanced (A/P), context menu Open device window, parameter
node General.
The maximum effective scanning range is dependent here on the number of deflections
between the M4000 Advanced A/P and the M4000 Passive and the number of additional
front screens used (see Tab. 16).
Maximum effective scanning range Number
Mirror
deflection
Fibre-optic
deflection
of
deflections2)
None
Number of
additional
front screens
Without 7.5 m 4.5 m
1 6.3 m 3.8 m
2 5.1 m 3.5 m
Without 6.0 m Not
recommended
1
1 5.1 m Not
recommended
2 4.3 m Not
recommended
2)
Between M4000 Advanced A/P and M4000 Passive.
44 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 45

Operating Instructions Chapter 5
Tab.17:
Scanning range of
Tab.18:
Scanning range of
M4000 Adv., Adv. A/P, Area
Configurable functions
5.4.4 Scanning range of the M4000 Area 60/80
The scanning range of the M4000 Area 60/80 multiple light beam safety device is dependent on the related resolution and the beam separation.
Note
Additional front screens reduce the scanning range. Pay attention to the related maximum
scanning range dependent of the number of additional front screens in Tab. 17 and
Tab. 18.
M4000 Area 60
You can set the M4000 Area 60 multiple light beam safety device to two different scanning ranges. The effective scanning range is dependent here upon the dimension of the
light path between sender and receiver and the number of additional front screens used.
You will find the necessary scanning ranges and the resulting setting in Tab. 17.
The following scanning ranges are available:
low scanning range (0.5-6 m)
high scanning range (5-19 m)
Device symbol M4000 Area (receiver), context menu Open device window, parameter
node General.
the M4000 Area 60 as a
function of the number of
additional front screens
the M4000 Area 80 as a
function of the number of
additional front screens
Number of additional front
screens
Without 0.5-6.0 m 5.0-19.0 m
1 0.5-5.5 m 5.0-17.4 m
2 0.5-5.0 m 5.0-15.9 m
M4000 Area 60 with short
scanning range
M4000 Area 60 with long
scanning range
M4000 Area 80
You can set the M4000 Area 80 multiple light beam safety device to two different scan-
ning ranges. The effective scanning range is dependent here upon the dimension of the
light path between sender and receiver and the number of additional front screens used.
You will find the necessary scanning ranges and the resulting setting in Tab. 18.
The following scanning ranges are available:
low scanning range (0.5-20 m)
3)
high scanning range (9-70 m)
Device symbol M4000 Area (receiver), context menu Open device window, parameter
node General.
Number of additional front
screens
Without 0.5-20.0 m 9.0-70.0 m
M4000 Area 80 with short
scanning range
M4000 Area 80 with long
scanning range
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 45
Subject to change without notice
1 0.5-18.4 m 9.0-64.4 m
2 0.5-16.9 m 9.0-59.2 m
3)
On the utilisation of this protective field width, it must be expected the orange LED will illuminate (cleaning or
realignment required). The system then only has a reserve of 30%.
Page 46

Chapter 5 Operating Instructions
Tab.19:
Device status after
M4000 Adv., Adv. A/P, Area
Configurable functions
5.5 External device monitoring (EDM)
he external device monitoring (EDM) checks if the contactors actually de-energize when
T
the protective device responds. If you activate external device monitoring, then the M4000
checks the contactors after each interruption to the light path and prior to machine restart.
The EDM can so identify if one of the contacts has fused, for instance. In this case the
external device monitoring places the system in the safe operational status. The OSSDs
are not re-activated in this case.
Note
The indicators and the operational status after the external device monitoring has trig-
gered are dependent on the type of error present and the configuration of the internal
restart interlock in the M4000 (see Tab. 19).
the external device
monitoring has triggered
Internal restart
interlock of
the M4000
Activated
Deactivated
The electrical connection for the external device monitoring is described in chapter 8.4
“External device monitoring (EDM)” on page 86.
Device symbol M4000 Advanced (receiver), M4000 Advanced (A/P) or M4000 Area
(receiver), context menu Open device window, parameter node General.
Signal on
the EDM
input
Permanently 0 V
Perma-
nently 24 V
Perma-
nently 0 V
Perma-
nently 24 V
Display of the
7Gsegment
display
Device status after the external
device monitoring has triggered
Display of the
diagnostics
LED
Red
Red
Yellow
Red
Red
Output signal
switching devices
Output signal
switching devices
off and “Reset
Output signal
switching devices
Operational
status
off
required”
off
LockEout
46 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 47

Operating Instructions Chapter 5
M4000 Adv., Adv. A/P, Area
Configurable functions
5.6 Sender test
he function Sender test is not available with the M4000 Advanced A/P.
Note
T
he M4000 sender has a test input on pin 3 for checking the sender and the related
T
receiver. During the test, the sender no longer emits light beams.
Note
During the test the sender indicates
The test is successful, if the M4000 receiver switches to red, i.e. the output signal
switching devices (OSSDs) are deactivated.
M4000 sender and receiver are self-testing. You only need to configure the function of the
sender test if this is necessary for an older existing application.
To be able to perform a sender test, …
the option Enable sender test must be active.
a means of controlling the test input must be available.
Device symbol M4000 Advanced (sender) or M4000 Area (sender), context menu Open
device window, parameter node General.
The electrical connection at the test input is described in chapter 8.7 “Test input (sender
test)” on page 89.
The pin assignment of the system connection is described in chapter 8.1 “System connection M26× 11 + FE” on page 82.
.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 47
Subject to change without notice
Page 48

Chapter 6 Operating Instructions
operating instructions
kes the change is also responsible for the correct protective function of
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6 Configurable muting functions
his section describes the muting functions of the M4000 Advanced multiple light beam
T
safety device which can be adjusted with the software and can only be used in conjunction
with an UE403 safety relay or a sens:Control device. The functions can be partially com-
ined with the other configurable functions of the multiple light beam safety device.
b
Test the protective device after any changes!
The entire protective device must be tested for correct operation after each change of the
WARNING
configuration (see Operating Instructions for the M4000 Advanced multiple light beam
safety device, section 9.3 “Test notes” from page 100 as well as the
of the corresponding UE403 or sens:Control device).
The person who ma
the device. When making configuration changes, please always use the password hierarchy provided by SICK to ensure that only authorised persons make changes to the configu-
ration. The SICK service team is available to provide assistance if required.
6.1 Number of muting sensors
To realise muting, two to four sensors can be connected. The number of sensors is defined
by the geometry of the object to be detected.
You can use the following sensor combinations:
two sensors (one sensor pair)
two sensors (one sensor pair) and an additional signal C1
for the Exit monitoring function:
– two sensors (one sensor pair) at the side of the hazardous area
– two sensors (one sensor pairs) and one additional signal C1 at the side of the
hazardous area
four sensors (two sensor pairs)
four sensors (two sensor pairs) and an additional signal C1
Electrical connection of muting sensors is described in the chapter “Electrical Installation”
of the operating instructions of the corresponding UE403 or sens:Control device.
You define the number of muting sensors by allocating the muting sensors to the related
connection using drag and drop. Device symbol M4000 Advanced (receiver) or M4000
Advanced (A/P), context menu Open device window, parameter node I/O configuration.
48 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 49

Operating Instructions Chapter 6
Cycle start
Takeover
Cycle end
t
Signal
C1
Sensor pair A
Muting
B1
B2
Sensor pair B
A1
A2
M4000 Adv., Adv. A/P, Area
Configurable muting functions
Additional signal C1
You can also connect an additional signal C1 to the muting sensors. The signal can be a
ontrol signal from a PLC or a further sensor. The additional signal C1 is not allowed to be
c
a static signal. It is checked for dynamic behaviour during the muting cycle. If dynamic signal behaviour is not detected, no further muting can be initiated.
The following dynamic sequence must be present at the input:
Fig. 26: Signal sequence with
integrated C1 input during
the muting cycle
ESPE
Notes
To activate muting, a LOW/HIGH signal change must occur on input C1, before both mu-
ting sensors in the first sensor pair (e.g. A1 and A2) are active. If this is not the case,
then muting is not initiated.
If muting has been initiated, then a HIGH/LOW signal change must then occur on input
C1. If this is not the case, muting cannot be initiated again.
If you activate the additional signal C1, the direction detection function is activated
automatically and cannot be deactivated.
Information on the possible combinations of additional signal C1 and on connection can
be found in section 6.10 “Combinable muting functions and facilities for connecting”
from page 63.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 49
Subject to change without notice
Page 50

Chapter 6 Operating Instructions
Tab.20:
Output signals of
Tab.21:
Output signals of
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.2 Sensor test
Sensor test is only possible with testable optical proximity switches and only in conjunc-
Notes
tion with the UE403 and is only performed when the sensor test function has been
configured.
You can usefully increase safety with testable and non-testable sensors by using the
configurable functions (e.g. time monitors, direction detection, sequence monitoring).
To ensure that a sensor is connected and functioning, the system sends a short test signal
(LOW signal) to the sensor when the muting sensor is activated and waits for its reply
(HIGH signal on the output). The test pulse lasts 30 ms and does not affect the muting
function.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Sensor configuration.
6.2.1 Testable sensors
Testable sensors provide a continuous check on their correct function.
Testable sensors must meet the following technical requirements:
Tests must be possible in the activated state (when material activates the sensor).
In the activated state the LOW output signal must be output.
testable sensors
non-testable sensors
Testable sensors output Status
LOW Activated, material detected
HIGH Deactivated, no material detected
6.2.2 Non-testable sensors
All sensors that do not comply with the technical requirements for testable sensors are
considered non-testable sensors. On non-testable sensors, the HIGH output signal is
always output in the activated state.
Non-testable sensors output Status
HIGH Activated, material detected
LOW Deactivated, no material detected
50 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 51

Operating Instructions Chapter 6
Fig.27:
Concurrence
Hazardous area
ESPE
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.3 Time monitoring
6.3.1 Concurrence monitoring
For protection against manipulation (e.g. covering an optical sensor) of the safety application, you can configure what is known as Concurrence monitoring.
The concurrence monitoring monitors whether both muting sensors in a sensor pair are
actuated within a configurable time (100 ms to 3000 ms).
Note
The configurable time for the concurrence monitoring applies to both sensor pairs.
monitoring
Note
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Sensor configuration.
6.3.2 Monitoring of the total muting time
With active Monitoring of the total muting time, the maximum duration of the muting is
limited:
Exit monitoring function deactivated: Total muting time 10 to 300 seconds
Exit monitoring function activated: Total muting time 10 seconds to 8 hours
The muting is brought to an end at the latest at the end of the total muting time.
Monitoring of the total muting time is also active during partial blanking (see section 6.6
on page 56).
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 51
Subject to change without notice
WARNING
Configure the shortest possible muting hold time!
In combination with the Exit monitoring function the muting hold time remaining after
leaving the monitored area must be Y 1 second. Otherwise people could enter undetected
the hazardous area which has become clear.
Configure the shortest possible muting hold time or adjust the transport velocity to the
requirements.
In combination with the Exit monitoring function use the End of muting by ESPE
function.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
Page 52

Chapter 6 Operating Instructions
Tab.22:
Input signa
ls from
M4000 Adv., Adv. A/P, Area
Notes
Note
Configurable muting functions
6.3.3 Sensor gap monitoring
If a valid muting condition is present for a sensor pair, then a sensor can become clear
(inactive) again for a defined time without lifting the valid muting condition. The defined
ime (10 ms to 1000 ms) can be adjusted by CDS.
t
Only one sensor pair is allowed to be clear (inactive) for a short time.
A valid muting condition must be met at the sensor pair affected.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
pen device window, parameter node Sensor configuration.
O
6.3.4 Belt stop
To ensure a valid muting condition is not reset by time monitoring elapsing during a belt
stop, the following time monitoring functions can be stopped using the Belt stop function
and a belt stop signal:
Monitoring of the total muting time
Concurrence monitoring
Muting hold time
3 seconds after the belt stop the system starts to monitor the active muting sensors.
When the conveyor belt is restarted, muting …
is continued if the muting condition is still valid.
stopped if the muting condition was invalid.
If the belt stop function is configured in the CDS, the conveyor belt signal must be applied
to the belt stop input (see section 6.10 “Combinable muting functions and facilities for
connecting” on page 63).
belt stop
Belt stop input Status
HIGH Conveyor belt is running, muting time
monitoring active
LOW Conveyor belt is stationary:
The muting time monitoring is stopped.
and
The last state of the active muting
sensors and the ESPE is monitored.
Configure belt stop by allocating the signal for belt stop to the related connection using
drag and drop. Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P),
context menu Open device window, parameter node I/O configuration.
52 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 53

Operating Instructions Chapter 6
Hazardous area
ESPE
Material
Means of transport
M4000 Adv., Adv. A/P, Area
Fig. 28: End of muting by
ESPE
Configurable muting functions
6.3.5 End of muting by ESPE
Muting ends if a sensor in the last sensor pair becomes inactive and as a result a valid
muting condition is not met. The End of muting by ESPE function shortens the duration of
uting to the time at which the ESPE light path becomes clear again. In this way you will
m
achieve a shorter muting time and at the same time, a high level of safety.
Notes
Note
Without the End of muting by ESPE function, muting is only brought to an end when a
sensor in the last sensor pair becomes clear again (see in Fig. 28).
With the End of muting by ESPE function, muting is brought to an end when the ESPE
becomes clear again (see in Fig. 28).
Material and means of transport must be detected by the muting sensors or the ESPE
over their entire length. There must not be any detectable gaps as otherwise muting will
be brought to an end prematurely.
If the ESPE does not always accurately detect the end of muting due to irregularities of
the material or means of transport, plant availability can be increased by configuring a
muting end delay of up to 1000 ms in the EDS.
If the ESPE’s light path does not become clear again, muting will be brought to an end
at the latest when the muting condition is no longer met.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
6.3.6 Exit monitoring
The Exit monitoring function is supported by M4000 systems with firmware V1.50.
You can use the Exit monitoring function if material is allowed to move out of the hazardous area while a person is however not allowed enter.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 53
Subject to change without notice
Page 54

Chapter 6 Operating Instructions
A1A2ESPE
interrupted
Muting
unoccupied
tM+tA1A2
ESPE
interrupted
Muting
unoccupied
tM+t
M4000 Adv., Adv. A/P, Area
Fig. 29: Exit monitoring:
Signal sequence of the
configured muting hold time
Configurable muting functions
The muting hold time configured starts as soon as the muting condition is no longer
met.
Muting ends as soon as the muting hold time configured has elapsed or – if End of
muting by ESPE is configured – if the ESPE becomes clear.
Fig. 30: Exit monitoring:
Signal sequence on End of
muting by ESPE
Note
Recommendations
You must place the muting sensors such that the entire length of both the material and
the means of transport is detected by sensors or the ESPE. There must not be any
detectable gaps as otherwise muting will be brought to an end prematurely (reduced
system availability).
The End of muting by ESPE function shortens the duration of muting to the time at
which the ESPE light path becomes clear again. In this way you will achieve a shorter
muting time and at the same time, a higher level of safety.
If the ESPE does not always accurately detect the end of muting due to irregularities of
the material or means of transport, plant availability can be increased by configuring a
muting end delay of up to 1000 ms in the EDS.
If you activate the Exit monitoring function, you must either activate the End of muting
by ESPE function or configure the Total muting time.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
54 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 55

Operating Instructions Chapter 6
Tab.23:
Conditions for
Tab.24:
Conditions for
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.4 Direction detection
f Direction detection is activated, a sensor pair must be triggered and cleared again in a
I
specific sequence. The material can only pass the protective device in one direction. The
order of the sensors within a senor pair is not relevant here. The following table shows the
exact conditions as a function of the number of sensors.
direction detection
Number of muting sensors Conditions to be met
2 (1 sensor pair) Direction detection is not possible
4 (2 sensor pairs) The sensor pairs must be triggered in the following order
as a function of the direction set:
sensor pair A before sensor pair B
or
sensor pair B before sensor pair A
For the muting conditions to be met, the object is only allowed to move through the muting
sensors in the direction and order described.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
6.5 Sequence monitoring
If Sequence monitoring is activated, the sensors must be triggered and cleared again in a
specific sequence. The material must completely pass the protective device to ensure that
a muting error does not occur. The direction can be additionally defined by the configuration of the Direction detection. The table shows the exact conditions as a function of the
number of sensors.
sequence monitoring
Note
Number of muting sensors Conditions to be met
2 (1 sensor pair) Sequence monitoring not possible
4 (2 sensor pairs) A1before A2before B1before B
(defined direction, defined sequence)
or
B
before B1before A2before A
2
(defined direction, defined sequence)
or
A
before A2before B1before B2or B2before B1before
1
before A
A
2
(changing direction, defined sequence)
For the muting conditions to be met, the object is only allowed to move through the muting
sensors in the direction and order described.
If you activate the additional signal C1, the Direction detection function is activated automatically and cannot be deactivated.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
1
2
1
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 55
Subject to change without notice
Page 56

Chapter 6 Operating Instructions
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.6 Partial blanking
uting mutes the ESPE on the presence of a valid muting condition. With the Partial blank-
M
ing function, safety can be increased by only blanking part of the ESPE on the presence of
a valid muting condition. One or more light beams remain permanently active.
Fig. 31: Principle of operation
of the partial blanking
function
The part of the ESPE configured by the partial blanking function is blanked on the presence of a valid muting condition (e.g. for a specific object height). The rest of the light
beams remain active; an interruption to the light beams in the active area always results in
the shutdown of the OSSDs.
The area to be blanked is configured by entering the start of the blanking (see Fig. 32: first
beam adjacent to display or first beam remote from display ) and the number of
blanked beams.
Fig. 32: Start of the blanking
Notes
Even if partial blanking is configured, the active light beams can be muted by an over-
ride.
Monitoring of total muting time is also active during partial blanking (see section 6.3.2
on page 51).
The partial blanking is not signalled by the muting lamp.
Device symbol M4000 Advanced (receiver), context menu Open device window, para-
meter node Muting configuration and parameter node Partial blanking.
56 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 57

Operating Instructions Chapter 6
Tab.25:
Selection of the type
Partial blanking
Changeover
to muting
Bar-code reader
Bar-code information for low material
Bar-code reader
Bar-code information for high
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.7 Partial blanking/muting changeover
f partial blanking is configured, this function makes it possible to switch between partial
I
blanking and muting. To ensure that an incorrect signal does not trigger invalid changeover from the partial blanking function to the muting function, it is checked whether a valid
condition for changeover is present with the aid of the additional signal C1 (dynamic sequence) (see section “Additional signal C1” on page 49).
A changeover is only sensible if, e.g., different material heights are transported at irregular
intervals and some beams cannot remain permanently active without interrupting the ma-
terial flow. The material can be classified, e.g., using a bar-code reader that generates the
signal C1 necessary for the changeover.
Fig. 33: Principle of operation
of the changeover between
the partial blanking and
muting functions using a barcode reader
of muting as a function of the
input signal
(by additional signal C1, generated by a bar-code reader)
material
In the example, the changeover between the partial blanking and muting functions is per-
formed using a bar-code reader. The different material heights are classified and saved
using bar-codes. The bar-code reader classifies the material and generates the change-
over signal C1 over a separate output as required.
If the bar-code reader detects low material , the partial blanking configured remains
active.
If the bar-code reader detects high material , it generates the additional signal C1 and
the configured changeover between partial blanking and muting is performed.
Input C1
Partial blanking/muting
Type of muting
LOW Partial blanking
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 57
Subject to change without notice
HIGH Muting
Page 58

Chapter 6 Operating Instructions
M4000 Adv., Adv. A/P, Area
Configurable muting functions
Notes
To activate muting, a LOW/HIGH signal change must occur on input C1, before both mu-
ting sensors in the first sensor pair (e.g. A1 and A2) are active. If this is not the case, the
partial blanking function is initiated on the activation of the sensors in the first sensor
pair.
If muting has been initiated, then a HIGH/LOW signal change must then occur on input
C1. If this is not the case, muting cannot be initiated again.
You will find information on the connection and on the possible combinations for the
additional signal C1 in section 6.10 “Combinable muting functions and facilities for
connecting” from page 63.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
58 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 59

Operating Instructions Chapter 6
M4000
+24VDC
+24VDC
+24VDCK1K2k1k2
Key-operated sw
itch
EDM (PIN
6)
OSSD1 (PIN
3)
OSSD2 (PIN
4)
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.8 Override
verride is a manual triggering of muting after an error in the muting conditions. By means
O
of the brief simulation of a valid muting condition, you can mute the protective device
(muting) and then move the system clear and establish an error-free state.
Override can be realised using an external circuit or using the integrated override function.
6.8.1 Override realised using an external circuit
An additional key-operated switch connects the relay K1/K2 directly to 24 V. In this way
you overwrite the outputs OSSD1 and OSSD2.
Please pay attention to the following notes on integration!
The key-operated switch must have a positive-action resetting device and two switching
WARNING
contacts for K1 and K2.
Override is only to be effective using a key-operated switch in the manual mode of the
machine or plant controller.
The control switch for override (key-operated switch) and the control switch for the
restart interlock must not be identical.
Always fit the key-operated switch so that the entire hazardous area can be seen.
The key-operated switch and its integration must comply with EN ISO 12100 and
EN 60204E1.
Fig. 34: Connection diagram
for Override
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 59
Subject to change without notice
Page 60

Chapter 6 Operating Instructions
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.8.2 Override realised with the integrated override function
The override function is activated with the aid of the CDS and differentiates between two
states Override required and Override.
Override required
The Override required state means that the output signal switching devices (OSSD) are in
the OFF state and the system is waiting for the activation of the override control switch.
The system signals this state with a flashing muting lamp (2 Hz) and at the same time
ndicates the cause of the error message on the 7Esegment display.
i
The Override required state is only triggered by the system if, during the presence of a
valid muting condition …
an error occurs, i.e. if at least one muting sensor is active and at least one is inactive
and
muting is brought to an end
and
the ESPE is interrupted by an object.
Errors can be triggered by the triggering of the concurrence monitoring, the monitoring of
the total muting time, the direction detection, the sequence monitoring or the sensor gap
monitoring, by the muting sensors or the muting lamp or by a re-start after an emergency
stop/mains voltage failure.
WARNING
Override
Please pay attention to the following safety notes for the Override state!
Install the control switch for override so that the entire hazardous area can be seen
when the switch is operated.
After clearing the system and before actuating the override make sure the plant is in
the correct state. Check in particular whether the following muting indicators are off:
– end cap with integrated LED
– external muting lamp
– display Override required ( Yellow/red 2 Hz)
If it is necessary to press the override button twice in two muting cycles one after the
other, the muting arrangement and the sensors must be checked.
Override (indication ) can only started in the override required state ( Yellow/red
2 Hz) by actuating the control switch for the override. The system continues the muting at
the point at which it was interrupted. The output signal switching devices (OSSD) switch to
the ON state and the system only monitors the override status.
Override can be triggered in two different ways:
with a separate control switch
with a common control switch for reset and override
Electrical connection of the control switch is described in the chapter “Electrical Installa-
tion” of the operating instructions of the corresponding UE403 or sens:Control device.
Configure override by allocating a control switch for reset/override to the related
connection using drag and drop. Device symbol M4000 Advanced (receiver) or M4000
Advanced (A/P), context menu Open device window, parameter node I/O configuration.
60 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 61

Operating Instructions Chapter 6
Tab.26:
Permissible number
M4000 Adv., Adv. A/P, Area
Configurable muting functions
Monitoring the override time
Note
For safety reasons the override duration is limited and is monitored using 2 time monitors.
he first time monitor lasts 30 minutes, the second time monitor lasts 60 minutes.
T
Both time monitors are started the first time the override control switch is actuated. The
following two conditions must be met:
1. The muting cycle initiated must have been brought to an end within 30 minutes, i.e. all
muting sensors and the ESPE must be clear again (objects/material has been moved
out of or removed from the area of the muting sensors/the ESPE).
2. A completely error-free muting cycle must have been completed within 60 minutes
without triggering of the override.
Effects of the conditions:
If both conditions are met, the system continues to operate normally (muting is trig-
gered on the presence of valid muting condition) and both time monitors are reset.
If the first condition is not met (30 minutes have elapsed), the system goes back into
the Override required state. The first time monitor re-starts and a further 30 minutes are
available to meet both conditions.
If the second condition is not met completely (a completely error-free muting cycle has
not been completed within 60 minutes), the system changes to the lockEout status.
of override statuses
Monitoring the number of override statuses
For safety reasons the number of override statuses is limited.
The system automatically calculates the permissible number of override statuses. The
permissible number is dependent on the configuration of the monitoring of the total
muting time function.
Configuration of the function
Monitoring of the total muting time
Permissible number of override
statuses
Deactivated 5×
Activated,
total muting time 300 s
Calculation using the formula:
3600
Total muting time [s]
The result is always rounded.
Example values:
10 s 360×
30 s 120×
120 s 30×
250 s 14× (rounded)
Activated,
5×
total muting time > 300 s
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 61
Subject to change without notice
Notes
The system automatically resets the counter each time the system is powered up as
well as after every error-free muting cycle without override.
If the permissible number of override statuses has been exceeded, the system changes
to the lock4out status and the 7Esegment display indicates the error message
.
Page 62

Chapter 6 Operating Instructions
Tab.27:
Significance of the
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.9 Monitoring the muting lamp
he monitoring the muting lamp function is a minimum current monitor. It is checked
T
whether a minimum current flows at the muting lamp output when muting is activated.
muting lamp
Notes
Muting lamp Meaning
Off No muting
Illuminated Muting
Flashing Entry from a control switch is expected:
Override required
The Monitoring of the muting mamp function is only available in conjunction with
UE403 or with a sens:Control device.
Depending on the national legal situation, the monitoring of the external muting lamp
may be deactivated with the aid of the CDS.
The integrated LED on the M4000 multiple light beam safety device can not be checked
using the monitoring the muting lamp function.
Device symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu
Open device window, parameter node Muting configuration.
62 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 63

Operating Instructions Chapter 6
Tab.28:
Combinable muting
M4000 Adv., Adv. A/P, Area
Configurable muting functions
6.10 Combinable muting functions and facilities for
connecting
Up to three different muting functions can be combined for any application. Tab. 28 shows
he possible combinations (A to Q).
t
functions
Possible combinations Function that
can be
configured
A B4)C4)D E4)F G H I4)J K L M4)N4)O P4)Q
Reset
Reset/override
(combined)
Override
Additional
signal C1
Belt stop
There are different connection options for the signals:
The signals for Reset, Reset/Override (combined)
5)
, Additional signal C1 and Belt stop
can be optionally connected to M4000 multiple light beam safety device or to the
UE403 or sens:Control device.
The Override signal can only be connected to the UE403 or sens:Control device.
Each signal must only be connected once.
The used connections and functions are configured with the help of the CDS. Device
symbol M4000 Advanced (receiver) or M4000 Advanced (A/P), context menu Open
device window, parameter node I/O configuration. Invalid combinations are prevented by
the software.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 63
Subject to change without notice
4)
This combination option is not available if an IP 67 Remote-I/O-controller, e.g. UE4455 is used since pins 5
and 11 of M4000 cannot be used in an IP 67 environment.
5)
It is only possible to connect Reset/Override (combined) on the M4000 in conjunction with an UE403 or
sens:Control device.
Page 64

Chapter 7 Operating Instructions
M4000 Adv., Adv. A/P, Area
Mounting
7 Mounting
his chapter describes the preparation and completion of the installation of the M4000
T
multiple light beam safety device. The mounting requires two steps:
determining the necessary minimum distance
mounting with swivel mount or side bracket, rigid or pivoting mounting bracket
he following steps are necessary after mounting and installation:
T
completing the electrical connections (chapter 8)
aligning sender and receiver (chapter 9.2)
testing the installation (chapter 9.3)
7.1 Determining the minimum distance
The M4000 multiple light beam safety device must be mounted with an adequate mini-
mum distance:
to the hazardous area
from reflective surfaces
WARNING
Note
No protective function without sufficient minimum distance!
You must mount the multiple light beam safety device/s with the correct minimum
distance to the hazardous area. Otherwise the safe protection of the M4000 system is
not provided.
Risk of failure to detect!
Persons who are in the hazardous area but not in the light path between sender and
receiver are not detected by the M4000 system. It is therefore to be ensured that the
hazardous area is fully visible and any dangerous state can only be initiated if there are
no personnel in the hazardous area.
The M4000 system is not allowed to be used for hand and finger protection.
Read and follow the relevant safety standards!
The procedure described in the following sections for the calculation of the minimum
distance is no substitute for knowledge of the related safety standards.
Therefore read and follow in particular the standards stated in the following sections.
You will find further information on the application of the standards during the calculation
of the minimum distance in the SICK reference brochure “Guidelines Safe Machinery”
(part no. 8007988).
The applicable legal and official regulations apply to the use and mounting of the protec-
tive device. These regulations vary depending on the application.
64 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 65

Operating Instructions Chapter 7
Minimum distance S
(Ds)
M4000
Hazar
-
Direction of
Height of the beams above the floor
Height of the
M4000 Adv., Adv. A/P, Area
Mounting
7.1.1 Minimum distance to the hazardous area
A minimum distance must be maintained between the multiple light beam safety device
and the hazardous area. This ensures that the hazardous area can only be reached when
he dangerous state of the machine is completely at an end.
t
The minimum distance as defined in EN ISO 13855 and EN ISO 13857 depends on:
stopping/run-down time of the machine or system
(The stopping/run-down time is shown in the machine documentation or must be
etermined by taking a measurement.)
d
response time of the protective device (response times see chapter 13.1 “Data sheet”
on page 113)
reach or approach speed
resolution of the multiple light beam safety device or beam separation
other parameters that are stipulated by the standard depending on the application
Under the authority of OSHA and ANSI the minimum distance as specified by
ANSI B11.19:2003G04, Annex D and Code of Federal Regulations, Volume 29,
Part 1910.217 … (h) (9) (v) depends on:
stopping/run-down time of the machine or system
(The stopping/run-down time is shown in the machine documentation or must be
determined by taking a measurement.)
response time of the protective device (response times see chapter 13.1 “Data sheet”
on page 113)
reach or approach speed
other parameters that are stipulated by the standard depending on the application
Fig. 35: Minimum distance to
the hazardous point for
perpendicular approach
Calculation of the minimum distance for perpendicular approach
hazardous area
dous
point
approach
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 65
Subject to change without notice
Page 66

Chapter 7 Operating Instructions
M4000 Adv., Adv. A/P, Area
Mounting
How to calculate the minimum distance S according to EN ISO 13855 and
EN ISO 13857:
he following calculation shows an example calculation of the minimum distance.
Note
T
Depending on the application and the ambient conditions, a different calculation may be
necessary.
First, calculate S using the following formula:
S = 1600 × T + C [mm]
Where …
T = Stopping/run-down time of the machine
+ Response time of the M4000 system after light path interruption [s]
S = Minimum distance [mm]
C = Supplement [mm], depending on the number of beams (1, 2, 3 or 4)
If it is possible to reach over the vertical protective field of an ESPE, the
supplement C must be determined as per the tables in EN ISO 13855. Here the
following always applies: C
(reaching over) C
O
R
(reaching through)
T
R
Example 1: Access protection with two beams for a hazardous point, where there is no
risk of reaching over:
C = 850 mm
Stopping/run-down time of the machine = 290 ms
Response time of the light path interruption = 30 ms
T = 290 ms + 30 ms = 320 ms = 0.32 s
S = 1600 × 0.32 + 850 = 1362 mm
Example 2: Access protection with three beams for a hazardous point, where there is a
risk of reaching over:
Three-beam standard ESPE (300/400/1100 mm)
Height of the top edge of the protective field: 1100 mm
Height of the hazardous area: 1400 mm
As per EN ISO 13855 a resolution-dependent supplement C of 1100 mm applies (instead
of the previously usual 850 mm).
C = 1100 mm
Stopping/run-down time of the machine = 290 ms
Response time of the light path interruption = 30 ms
T = 290 ms + 30 ms = 320 ms = 0,32 s
S = 1600 × 0,32 + 1100 = 1612 mm
66 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 67

Operating Instructions Chapter 7
Parallel approach
Angular approach
S
S
H
H
M4000
M4000
H
Direction of
M4000 Adv., Adv. A/P, Area
Mounting
How to calculate the minimum distance Dsaccording to ANSI B11.19:2003G04,
Annex D and Code of Federal Regulations, Volume 29, Part 1910.217 … (h) (9) (v):
he following calculation shows an example calculation of the minimum distance.
Note
T
Depending on the application and the ambient conditions, a different calculation may be
necessary.
First, calculate D
= Hs× (Ts+ Tc+ Tr+ Tbm) + Dpf
D
s
using the following formula:
s
Where …
D
= The minimum distance in inches (or millimetres) from the hazardous point to the
s
protective device
= A parameter in inches/second or millimetres/second, derived from data on
H
s
approach speeds of the body or parts of the body.
Often 63 inches/second is used for H
T
= Stopping/run down time of the machine tool measured at the final control
s
.
S
element
= Stopping/run-down time of the control system
T
c
= Response time of the entire protective device after light path interruption
T
r
T
= Additional response time allowed for brake monitor to compensate for wear
bm
Note
Any additional response times must be accounted for in this calculation.
D
= An additional distance added to the overall minimum distance required. This
pf
value is based on a possible intrusion toward the hazardous point prior to actu-
ation of the electro-sensitive protective equipment (ESPE). For applications that
can be reached over, the value D
= 1.2 m. For beam arrangements that permit
f
p
reaching in with the arms or the detectable object size is greater than 63 mm,
the value D
= 0.9 m.
pf
The applicable legal and official regulations apply to the use and mounting of the protective device. These regulations vary depending on the application.
Fig. 36: Minimum distance to
the hazardous point for nonperpendicular approach
Calculation of the minimum distance S for non-perpendicular approach
approach
max
min
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 67
Subject to change without notice
Page 68

Chapter 7 Operating Instructions
The light beams from the sender may be deflected by reflective surfaces. This can result in
Tab.29:
Equations for
Reflective surface
Field of view
Minimum distance a
Distance D s
ender
–
receiver
M4000 Adv., Adv. A/P, Area
Mounting
calculating the minimum
distance S
Approach Calculation Conditions
Parallel S = 1600 × T + (1200 – 0.4 × H)
[mm]
Angular > 30° calculation as for
perpendicular approach
1200 – 0.4 × H > 850 mm
15 × (d – 50) H 1000 mm
d H
H
min
1000 mm
max
< 30° calculation as for
parallel approach
S is applied to the beam that is the
farthest away from the hazardous
point.
Where …
S = Minimum distance [mm]
H = Height of the beams above the floor [mm]
For approach at an angle:
= Height of the uppermost beam [mm]
H
max
= Height of the bottom beam [mm]
H
min
d = Resolution of the multiple light beam safety device [mm]
= Angle between detection plane and the direction of entry
T = Time
/15 + 50
WARNING
Fig. 37: Minimum distance to
reflective surfaces
Note
7.1.2 Minimum distance to reflective surfaces
Maintain the minimum distance from reflective surfaces!
failure to identify an object. This would mean that the operator is at risk.
All reflective surfaces and objects (e.g. material bins) must be a minimum distance a from
the light path between sender and receiver. The minimum distance a depends on the
distance D between sender and receiver.
The field of view of the sender and receiver optics is identical.
68 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 69

Operating Instructions Chapter 7
During mounting, ensure that sender and receiver are aligned correctly. The optical lens
Tab.30:
Formula for the
3
131
M4000 Adv., Adv. A/P, Area
Fig. 38: Graph, minimum
distance from reflective
surfaces
Mounting
How to determine the minimum distance from reflective surfaces:
Determine the distance D [m] sender–receiver.
Read the minimum distance a [mm] in the diagram or calculate it using the related
formula in Tab. 30.
calculation of the minimum
distance to reflective
surfaces
WARNING
Fig. 39: Sender and receiver
must not be rotated 180°
with respect to each other
Distance D [m]
sender–receiver
D 3 m a [mm] = 131
D > 3 m a [mm] = tan(2.5°) × 1000 × D [m] = 43.66 × D [m]
Calculation of the minimum distance a from reflective
surfaces
7.2 Steps for mounting the device
Special features to note during mounting:
Always mount the sender and receiver parallel to one another.
systems of sender and receiver must be located in exact opposition to each other; the
status indicators must be mounted at the same height. The system plugs of both de-
vices must point in the same direction.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 69
Subject to change without notice
Page 70

Chapter 7 Operating Instructions
M4000 Adv., Adv. A/P, Area
Mounting
Observe the minimum distance of the system during mounting. On this subject read
chapter 7.1 “Determining the minimum distance” on page 64.
Mount the multiple light beam safety device such that the risk of failure to detect is ex-
cluded. Ensure that the protective device cannot be bypassed by crawling underneath,
reaching over, climbing between 2 beams, jumping over or moving the multiple light
beam safety device.
Fig. 40: The correct
installation (above) must
eliminate the errors (below)
of reaching through and
crawling beneath
Once the system is mounted, one or several of the enclosed self-adhesive information
labels must be affixed:
– Use only information labels in the language which the users and operators of the
machine understand.
– Affix the information labels such that they are easily visible by the users and opera-
tors during operation. After attaching additional objects and equipment, the informa-
tion labels must not be concealed from view.
– Affix the information label “Important Notices” to the system in close proximity to
sender and receiver.
When mounting a M4000 with integrated laser alignment aid, ensure that the laser
warning labels on the device remain visible. If the laser warning labels are covered, e.g.
on installation of the M4000 in a device column (accessory), you must apply the laser
warning labels supplied with the receiver in the appropriate place on the cover.
Sender and receiver can be mounted in five different ways:
Mounting with Omega bracket
Mounting with swivel mount bracket
Mounting with side bracket
Mounting with rigid mounting bracket
Mounting with pivoting mounting bracket
70 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 71

Operating Instructions Chapter 7
49Part No. 2044846
M4000 Adv., Adv. A/P, Area
Mounting
7.2.1 Mounting with Omega bracket
Fig. 41: Omega bracket (mm)
Note
Fig. 42: Mounting with
Omega bracket
The Omega bracket is made of aluminium. The bracket is designed such that sender and
receiver can also be exactly aligned after the installation and mounting of the bracket.
Attach the screws of the Omega bracket with a torque of between 2 and 2.5 Nm. Higher
torques can damage the bracket; lower torques provide inadequate protection against
vibration.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 71
Subject to change without notice
Note
Engage the Omega fixing bracket in its profile rails. Additional spacers are used to
correctly adjust the bracket in the slot. The safety light curtain can be mounted and also
subsequently adjusted using just one screw.
Page 72

Chapter 7 Operating Instructions
Part No.
2030510
M4000 Adv., Adv. A/P, Area
Mounting
7.2.2 Mounting with swivel mount bracket
The swivel mount bracket is made of high-strength black plastic. The bracket is designed
such that sender and receiver can still be accurately aligned even after the bracket has
een mounted.
b
Note
Attach the screws of the swivel mount bracket with a torque of between 2.5 and 3 Nm.
Higher torques can damage the bracket; lower torques provide inadequate protection
against vibration.
Fig. 43: Composition of the
swivel mount bracket
72 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 73

Operating Instructions Chapter 7
M4000 Adv., Adv. A/P, Area
Fig. 44: Mounting the M4000
with swivel mount bracket
Mounting
Notes
Mount the bolts marked with to on the operator side of the system to ensure that
they remain accessible after mounting. The multiple light beam safety device can then
also be adjusted later.
The mounting screw is not included in the delivery.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 73
Subject to change without notice
Page 74

Chapter 7 Operating Instructions
Part No. 2019506
M4000 Adv., Adv. A/P, Area
Mounting
7.2.3 Mounting with side bracket
The side bracket is made of die cast zinc ZP 0400. It is enamelled in black. The side
bracket will be covered by the device after mounting. It provides adjustment so that the
ertical alignment of sender and receiver can be corrected by ±2.5° after mounting.
v
Fig. 45: Composition of the
side bracket
Notes
Attach the bolts of the side bracket with a torque of between 5 and 6 Nm. Higher
torques can damage the bracket; lower torques provide inadequate protection against
vibration.
74 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 75

Operating Instructions Chapter 7
Sliding nut
Sliding nut
M4000 Adv., Adv. A/P, Area
Fig. 46: Mounting the M4000
with side bracket
Mounting
Notes
When mounting the side bracket ensure that the bolts marked and remain
accessible, allowing you later to adjust and lock the multiple light beam safety device in
position.
When mounting the bracket, note the distance and the position of the sliding nuts as
described in chapter 13.3 “Dimensional drawings” on page 120f.
The mounting screw is not included in the delivery.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 75
Subject to change without notice
Page 76

Chapter 7 Operating Instructions
Part No.
7021352
M4000 Adv., Adv. A/P, Area
Mounting
7.2.4 Mounting with rigid mounting bracket
The rigid mounting bracket is a black, powder-coated bracket without adjustment. It is only
suitable for mounting surfaces on which it is not necessary to compensate for large
echanical tolerances. The alignment of the sender and receiver can be corrected after
m
mounting using only the slots.
Fig. 47: Rigid mounting
bracket
76 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 77

Operating Instructions Chapter 7
Sliding nuts
Sliding nuts
M4000 Adv., Adv. A/P, Area
Fig. 48: Mounting the M4000
with rigid mounting bracket
Mounting
Notes
When mounting the rigid mounting bracket ensure that the four bolts marked and
remain accessible, allowing you later to adjust and lock the multiple light beam safety
device in position.
When mounting the bracket, note the distance and the position of the sliding nuts as
described in chapter 13.3 “Dimensional drawings” on page 120f.
The mounting screw is not included in the delivery.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 77
Subject to change without notice
Page 78

Chapter 7 Operating Instructions
Part No.
2017751
M4000 Adv., Adv. A/P, Area
Mounting
7.2.5 Mounting with pivoting mounting bracket
The pivoting mounting bracket is made of black anodised aluminium. It will be covered by
the device after mounting. The pivoting mounting bracket provides adjustment for correc-
ing the horizontal alignment of sender and receiver by ± 2.0° after mounting.
t
Fig. 49: Assembly of the
pivoting mounting bracket
Note
Tighten the bolts on the pivoting mounting bracket to a torque of between 5 and 6 Nm.
Higher torques can damage the bracket; lower torques provide inadequate protection
against vibration.
78 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 79

Operating Instructions Chapter 7
Sliding nut
Sliding nut
Sliding nut
Sliding nut
M4000 Adv., Adv. A/P, Area
Fig. 50: Mounting the M4000
with pivoting mounting
bracket
Mounting
Notes
When mounting the pivoting mounting bracket ensure that the bolts marked
, , and remain accessible, allowing you later to adjust and lock the multiple
light beam safety device in position.
When mounting the bracket, note the distance and the position of the sliding nuts as
described in chapter 13.3 “Dimensional drawings” on page 120f.
The mounting screw is not included in the delivery.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 79
Subject to change without notice
Page 80

Chapter 8 Operating Instructions
OSSD1
Safety output1OSSD2
Safety output2OSSD1
Safety output1OSSD2
Safety output
M4000 Adv., Adv. A/P, Area
Electrical installation
8 Electrical installation
Switch the power supply off!
The machine/system could inadvertently start up while you are connecting the devices.
WARNING
Ensure that the entire machine/system is disconnected during the electrical installation.
Connect OSSD1 and OSSD2 separately!
You are not allowed to connect OSSD1 and OSSD2 together, otherwise signal safety will
not be ensured.
Connect OSSD1 and OSSD2 separately to the machine controller.
Ensure that the machine controller processes the two signals separately.
Prevent the formation of a potential difference between the load and the protective
device!
If you connect loads that are not reverse-polarity protected to the OSSDs or the safety
outputs, you must connect the 0 V connections of these loads and those of the corresponding protective device individually and directly to the same 0 V terminal strip. This is
the only way to ensure that, in the event of a defect, there can be no potential difference between the 0 V connections of the loads and those of the corresponding pro-
tective device.
2
80 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 81

Operating Instructions Chapter 8
Tab.31:
Connecti
ons of the
M4000 Adv., Adv. A/P, Area
Electrical installation
M4000
Notes
The two outputs are protected against short-circuits to 24 V DC and 0 V. When the light
path is clear, the signal level on the outputs is HIGH DC (at potential), when the light
beams are interrupted or there is a device fault the outputs are LOW DC.
The M4000 multiple light beam safety device meets the interference suppression
requirements (EMC) for industrial use (interference suppression class A). When used in
residential areas it can cause interference.
To ensure full electromagnetic compatibility (EMC), functional earth (FE) must be connected.
The external voltage supply of the devices must be capable of buffering brief mains
voltage failures of 20 ms as specified in EN 60204E1. Suitable power supplies are
available as accessories from SICK (Siemens type series 6 EP 1).
The plug alignment (direction of turn) in the housing may vary from device to device. You
can identify the correct pin assignment by the position of the pins in relation to each
other as shown in the drawings.
Connections of the M4000
Connections M4000 Advanced M4000 Advanced A/P M4000 Area 60/80
System
connection
Extension
connection
(see page 82)
(see page 84)
(see page 82)
(see page 84)
(see page 83)
–
Configuration
connection
(see page 85)
(see page 85)
(see page 85)
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 81
Subject to change without notice
Page 82

Chapter 8 Operating Instructions
Tab.32:
Pin assignment
12934105611
7
8
FE129341056
11
7
8
FE
M4000 Adv., Adv. A/P, Area
Electrical installation
8.1 System connection M26×11 + FE
8.1.1 M4000 Advanced or M4000 Advanced A/P
Fig. 51: Pin assignment
system connection M4000
Advanced or M4000
Advanced A/P M26
× 11 + FE
system connection
M4000 Advanced or
M4000 Advanced A/P
× 11 + FE
M26
Pin Wire colour Sender Receiver or M4000 Advanced A/P
1 Brown Input 24 V DC (voltage
Input 24 V DC (voltage supply)
supply)
2 Blue 0 V DC (voltage supply) 0 V DC (voltage supply)
3 Grey Test input:
0 V: external test active
OSSD1 (output signal switching device
1)
24 V: external test inactive
4 Pink Reserved OSSD2 (output signal switching device
2)
5 Red Reserved Reset/restart
or
Reset/override (combined)
6)
6 Yellow Reserved External device monitoring (EDM)
7 White Reserved Application diagnostic output (ADO)
8 Red/blue Reserved Reset required
9 Black Device communication (EFIA) Device communication (EFIA)
10 Purple Device communication (EFIB) Device communication (EFIB)
11 Grey/pink Reserved Belt stop/C1 (only in conjunction with
UE403 or sens:Control device)
FE Green Functional earth Functional earth
82 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Notes
For the connection of pin 9 and 10 only use cable with twisted cores, e.g. the SICK con-
nection cables available as accessories (see section 14.7 “Accessories” on page 139).
If the UE403 safety relay is used on the extension connection of the M4000, then only
SICK sens:Control devices may be connected to pin 9 and pin 10 (EFI device
communication) of the system connection.
If you do not use either a UE403 or a sens:Control device on the system connection
pin 9 and 10 (EFI device communication), to improve the EMC behaviour we recom-
6)
It is only possible to connect Reset/Override (combined) on the M4000 in conjunction with an UE403 or
sens:Control device.
Subject to change without notice
Page 83

Operating Instructions Chapter 8
Tab.33:
Pin assignment
1
2
934105
6
11
7
8
FE
1
2
934105
6
11
7
8
FE
M4000 Adv., Adv. A/P, Area
Electrical installation
mend — especially when using the combination M4000 Advanced or M4000 Ad-
vanced A/P with the UE403 safety relay at the extension connection — the termination
of the connections pin 9 and 10 (EFI device communication) on the system connection
in the control cabinet using a resistor of 182 (SICK part number 2027227). Alternatively we recommend the use of a connecting cable on which pin 9 and 10 are not
used(see section 14.7 “Accessories” on page 139).
8.1.2 M4000 Area 60/80
Fig. 52: Pin assignment
system connection M4000
Area 60/80 M26
× 11 + FE
system connection M4000
Area 60/80 M26
× 11 + FE
Notes
Pin Wire colour Sender Receiver
1 Brown Input 24 V DC (voltage supply) Input 24 V DC (voltage supply)
2 Blue 0 V DC (voltage supply) 0 V DC (voltage supply)
3 Grey Test input:
0 V: external test active
OSSD1 (output signal switching
device 1)
24 V: external test inactive
4 Pink Reserved OSSD2 (output signal switching
device 2)
5 Red Reserved Reset/restart
6 Yellow Reserved External device monitoring (EDM)
7 White Reserved Application diagnostic output
(ADO)
8 Red/blue Reserved Reset required
9 Black Device communication (EFIA) Device communication (EFIA)
10 Purple Device communication (EFIB) Device communication (EFIB)
11 Grey/pink Reserved Reserved
FE Green Functional earth Functional earth
For the connection of pin 9 and 10 only use cable with twisted cores, e.g. the SICK con-
nection cables available as accessories (see section 14.7 “Accessories” on page 139).
If you do not use either a UE403 or a sens:Control device on the system connection
pin 9 and 10 (EFI device communication), to improve the EMC behaviour we recom-
mend the termination of the connections pin 9 and 10 (EFI device communication) on
the system connection in the control cabinet using a resistor of 182 (SICK part num-
ber 2027227). Alternatively we recommend the use of a connecting cable on which
pin 9 and 10 are not used (see section 14.7 “Accessories” on page 139).
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 83
Subject to change without notice
Page 84

Chapter 8 Operating Instructions
Tab.34:
Pin assignment
1FE432
M4000 Adv., Adv. A/P, Area
Electrical installation
8.2 Extension connection M12×4 + FE for UE403
Fig. 53: Pin assignment
extension connection
× 4 + FE
M12
extension connection
× 4 + FE
M12
Pin M4000 Advanced (receiver) or
M4000 Advanced A/P
1 24 V DC output (voltage supply UE403)
2 Device communication (EFIA)
3 0 V DC (voltage supply UE403)
4 Device communication (EFIB)
FE Functional earth
Note
If the UE403 safety relay is used on the extension connection of the M4000, then only
SICK sens:Control devices may be connected to pin 9 and pin 10 (EFI device communication) of the system connection.
84 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 85

Operating Instructions Chapter 8
Tab.35:
Pin assignment
214
3
M4000 Adv., Adv. A/P, Area
Electrical installation
8.3 Configuration connection M8× 4 (serial interface)
Fig. 54: Pin assignment
configuration connection
M8
× 4
configuration connection
× 4
M8
Note
Pin M4000 PC-side RSG232GDGSub
1 Not assigned
2 RxD Pin 3
3 0 V DC (voltage supply) Pin 5
4 TxD Pin 2
The pin assignment of sender, receiver and M4000 Advanced A/P is identical.
After configuration always remove the connecting cable from the configuration connec-
tion!
After the configuration of the device has been completed, locate the attached protec-
tion cap to cover the configuration connection.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 85
Subject to change without notice
Page 86

Chapter 8 Operating Instructions
24VDC0VDCPin3Pin4k2k1Pin6K1
K2
M4000 Adv., Adv. A/P, Area
Electrical installation
8.4 External device monitoring (EDM)
he external device monitoring (EDM) checks if the contactors actually de-energize when
T
the protective device responds. If, after an attempted reset, the EDM does not detect a
response from the switched devices within 300 ms, the EDM will deactivate the output
signal switching devices again.
Fig. 55: Connecting the
contact elements to the EDM
Notes
You must implement the external device monitoring electrically by the positively guided
closing action of both N/C contacts (k1, k2) when the contact elements (K1, K2) reach
their de-energized position after the protective device has responded. 24 V is then applied
at the input of the EDM. If 24 V is not present after the response of the protective device,
then one of the contact elements is faulty and the external device monitoring prevents the
machine starting up again.
If you connect the contact elements to be monitored to the EDM input, then you must
activate the option EDM in the CDS (Configuration & Diagnostic Software). If not, the
device will show the error .
If you later deselect the EDM option, pin 6 of the system plug must not remain connec-
ted to 24 V.
86 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 87

Operating Instructions Chapter 8
function again via the CDS. It is not enough
24VDC
Pin
5
M4000 Adv., Adv. A/P, Area
Electrical installation
8.5 Reset button
n the protective operation mode with internal restart interlock (see page 38) the operator
I
must first press the reset button before restarting.
Select the correct installation site for the reset button!
Install the reset button outside the hazardous area such that it cannot be operated from
WARNING
Fig. 56: Connection of the
reset button
inside the hazardous area. When operating the reset button, the operator must have full
visual command of the hazardous area.
WARNING
Device configuration after replacement!
If you replace a multiple light beam safety device with activated Reset function with a re-
placement device, you must activate the Reset
to only make the electrical connections.
Connection of a Reset required signal lamp
Pin 8 of the system connection can be used as Reset required output (24 V). The output
has a frequency of 1 Hz.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 87
Subject to change without notice
Page 88

Chapter 8 Operating Instructions
0VDC
Pin
7
M4000 Adv., Adv. A/P, Area
Electrical installation
8.6 Application diagnostic output (ADO)
in 7 on the system plug is an application diagnostic output (ADO). You can use this output
P
for a relay or a PLC.
Fig. 57: Connection to the
application diagnostic output
Notes
WARNING
When you connect the application diagnostic output as an alarm signal for contamina-
tion (OWS) or for the OSSD status, then during the configuration you can choose how
the application diagnostic output is to signal the alarm.
– HIGH active: If there is contamination or if the OSSDs are switched on, 24 V are
present. Otherwise the output is high resistance.
– LOW active: If there is contamination or if the OSSDs are switched on, the output is
high resistance. Otherwise 24 V are present.
If you use the application diagnostic output as an alarm signal for “Reset required”, it
has a frequency of 1 Hz.
Only M4000 Advanced and M4000 Advanced A/P in conjunction with a UE403 or
sens:Control device:
If you connect the application diagnostic output as an alarm signal for muting or over-
ride status, then the application diagnostic output will always signal the alarm with an
active HIGH. With muting or override 24 V are present. Otherwise the output is high
resistance.
If you connect the signal output, then you must configure it with the aid of the CDS prior to
commissioning. Details can be found in chapter 5.3 “Application diagnostic output (ADO)”
on page 41.
Device configuration after replacement!
If you replace a multiple light beam safety device on which the application diagnostic out-
put (ADO) is connected and configured, then you must activate the application diagnostic
output (ADO) again via the CDS. It is not enough to only make the electrical connections.
88 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 89

Operating Instructions Chapter 8
24VDC
Pin3Sender test control, e.g. using
button
M4000 Adv., Adv. A/P, Area
Electrical installation
8.7 Test input (sender test)
Fig. 58: Connection of the
sender test button
Note
The function Sender test is not available with the M4000 Advanced A/P.
The sender test is performed when 0 V is present at the test input (pin 3) of the sender.
To be able to use the sender test button, you must also configure the Sender test function
with the aid of the CDS: device symbol M4000 Advanced (sender), context menu Open
device window, parameter node General.
Note
8.8 sens:Control applications
Using sens:Control, the intelligent interface technology for safety systems, SICK provides
you with an entire range of interface products that were specially developed for interfacing
safety products and machines.
For complex applications the M4000 can be integrated into UE100 sens:Control family
safety systems. In this way the functions of the multiple light beam safety device can be
enhanced and corresponding applications realised.
All variants of the M4000 Advanced, M4000 Advanced A/P and M4000 Area 60/80 are
equipped with EFI (safe SICK device communication). All safety-relevant signals are trans-
mitted using this interface. A bus interface to a safe fieldbus is possible using the series
UE1000 sens:Control device family.
You will find connection diagrams in the operating instructions for the series UE100 and
UE1000.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 89
Subject to change without notice
Page 90

Chapter 9 Operating Instructions
multiple light beam safety device for
Tab.36:
Displays shown
M4000 Adv., Adv. A/P, Area
Commissioning
9 Commissioning
Commissioning requires a thorough check by qualified safety personnel!
Before you operate a system protected by the M4000
WARNING
the first time, make sure that the system is first checked and released by qualified safety
personnel. Please read the notes in chapter 2 “On safety” on page 10.
9.1 Display sequence during start-up
After the system is activated, sender and receiver go through a power-up cycle. The 7Esegment display indicates the device status during the power-up cycle.
The indications have the following meaning:
during the power-up cycle
Display Meaning
, , , ,
, , ,
Ca. 0.5 s. Is displayed only at the receiver and only in operation with
, or Ca. 0.5 s. Non-coded operation or operation with code 1 or 2
, , or Receiver only: Sender–receiver alignment is not optimal (see
Other display Device error. See chapter 12 “Fault diagnosis” on page 105.
Testing the 7Esegment display. All segments are activated
sequentially.
large scanning range.
chapter 9.2.1 “Meaning of the 7Esegment display during alignment”
on page 90ff).
9.2 Alignment of the M4000
After the multiple light beam safety device has been mounted and connected, you must
align the sender and receiver precisely in relation to each other.
Alignment is performed by mechanically adjusting the M4000 components. During this
process the M4000 is in the alignment mode. You can then see when the optimal align-
ment is achieved on the 7Esegment display on the receiver.
The alignment mode is automatically activated when the multiple light beam safety device
is switched on if the light beams are not yet aligned or the light path is interrupted.
90 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Alignment aids
You can conveniently and accurately align the devices using a laser alignment aid. An
alignment aid is recommended particularly when a M4000 system is used with deflector
mirrors (each mirror on the mirror columns must be adjusted).
The following alignment aids are available:
integrated laser alignment aid per beam (optional, only for M4000 Advanced)
On this subject read the description in chapter 9.2.4 “Alignment of the M4000 Ad-
vanced with integrated laser alignment aid (optional)” on page 95.
alignment aid AR60 + adapter for M4000 (see section 14.7 “Accessories” on page 139)
On this topic read the description in the operating instructions for the “Alignment aid
AR60”.
Subject to change without notice
Page 91

Operating Instructions Chapter 9
Tab.37:
Indications on the
First light beam
74segment display
Last light beam
M4000
Advanced and
M4000
M4000 Adv., Adv. A/P, Area
Commissioning
9.2.1 Meaning of the 7Gsegment display during alignment
During alignment, the 7Esegment display on the receiver shows you when the optimal
alignment is achieved (see Tab. 37).
Notes
The beam that is closest to the 7Esegment display is termed the first light beam
(see Fig. 59 and Fig. 60).
Only the first and last light beam are evaluated during alignment.
If the optimum alignment (= no display) persists for longer than 2 minutes without the
ultiple light beam safety device being interrupted, the system automatically deacti-
m
vates the alignment mode.
M4000 Advanced and M4000 Area 60/80
Fig. 59: Illustration of the
beam order of the M4000
Advanced and the
M4000 Area 60/80
74segment display during
alignment of the
M4000 Advanced and the
M4000 Area 60/80
Area 60/80
Display Significance during alignment
First and last light beam not aligned.
Only the first light beam is aligned.
Only the last light beam is aligned.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 91
Subject to change without notice
All the light beams hit the receiver, but the alignment is still slightly
No indication and
green LED
illuminated on the
receiver
off.
The alignment is now true; the devices must be locked in this
position.
Page 92

Chapter 9 Operating Instructions
Tab.38:
Indications on the
M4000
M4000
Advanced
First light beam
74segment display
First light beam
74segment display
Last light beam
M4000 Adv., Adv. A/P, Area
Commissioning
M4000 Advanced A/P
Fig. 60: Illustration of the
beam order of the
M4000 Advanced A/P
74segment display during
alignment of the
M4000 Advanced A/P
Advanced A/P
(2 beam)
Meaning during alignment of the M4000 Advanced A/P Display
2 beam 4 beam
The first light beam is not
aligned.
(4 beam)
A/P
None of the light beams is
aligned.
– Only the first light beam is
– Only the last light beam is
The first light beam is aligned,
No indication and
green LED
illuminated.
aligned.
aligned.
All the light beams hit the
but the alignment is still slightly
off.
receiver, but the alignment is
still slightly off.
The alignment is now true; the devices must be locked in this
position.
92 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 93

Operating Instructions Chapter 9
M4000 Adv., Adv. A/P, Area
Commissioning
9.2.2 Aligning sender and receiver
Secure the plant/system. No dangerous state possible!
Ensure that the dangerous state of the machine is (and remains) switched off! During the
WARNING
alignment process, the outputs of the multiple light beam safety device are not allowed to
have any effect on the machine.
How to align sender and receiver in relation to each other:
Check with a spirit level whether the devices and the deflector mirrors, if used, are
mounted vertically.
Check whether the following points are the same distance from the floor:
M4000 Advanced or M4000 Area 60/80
– first beam of the sender
– first beam of the receiver
– when using deflector mirrors: centre of the first mirror surface
M4000 Advanced A/P
– first beam of the M4000 Advanced A/P
– centre of the first mirror surface for the M4000 Passive (with mirror deflection) or
centre of the first beam for the M4000 Passive (with fibre-optic deflection)
Loosen the clamping bolts which hold the multiple light beam safety device in place.
Switch the power supply to the multiple light beam safety device on.
Watch the alignment information on the 7Esegment display of the receiver. Correct the
alignment of the sender and receiver (or of the M4000 Advanced A/P and the M4000
Passive), until the 7Esegment display goes off.
Fix the multiple light beam safety device using the clamping screws.
Switch the power supply off and then back on again and check via the 7Esegment dis-
play whether the alignment is correct after tightening the clamping bolts (see Tab. 37 or
Tab. 38).
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 93
Subject to change without notice
Page 94

Chapter 9 Operating Instructions
Deflector mirror
Deflector mirror
Alignment tolerance
Deflector mirror
Alignment tolerance
M4000 Adv., Adv. A/P, Area
Commissioning
9.2.3 Special aspects of alignment with deflector mirrors
If you use the M4000 multiple light beam safety device with deflector mirrors (mirror
columns), then you must note the following points when aligning the mirrors:
1. On the deflection of several beams using a mirror column, each individual mirror must
be adjusted separately.
2. For deflection using mirrors, the angle of incidence equals the angle of reflection. This
means: A slight rotation of the mirror results in a change that is twice as large
(see Fig. 61).
If the light beam is guided to the receiver using a deflector mirror, only part of the origi-
nal diverging beam is passed on.
The alignment tolerance will become smaller with each further deflection (see Fig. 62).
Recommendation
Fig. 61: Schematic
illustration of the change on
slight rotation of the deflector
mirror
Always use an alignment aid when aligning the M4000 Advanced with deflector mirrors
(see section “Alignment aids” on page 90).
rotated slightly
Fig. 62: Schematic
illustration of the alignment
tolerance without and with
deflector mirror
94 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 95

Operating Instructions Chapter 9
s). There is only a hazard for the eye if the normal blinking reaction to bright light is
M4000 Adv., Adv. A/P, Area
Commissioning
9.2.4 Alignment of the M4000 Advanced with integrated laser alignment aid
optional)
(
The multiple light beam safety device is equipped with an integrated laser alignment aid of
aser class 2.
l
Never look directly into the laser beam!
Do not point the laser at a person’s eye at close range!
WARNING
The laser beam is not dangerous for the eye in case of accidental, brief exposure
(< 0.25
suppressed. If the laser beam falls on your eye, you must consciously close your eyes or
turn away immediately.
Do not use any other controls or adjustments!
Caution! Use of controls, adjustments or performance of procedures other than those
herein specified may result in hazardous radiation exposure.
LASER RADIATION
Do not stare into the beam!
LASER CLASS 2
P 1 mW CW, = 630–680 nm
Complies with IEC 60825E1:2007
and 21 CFR 1040.10 and 1040.11
except for deviations pursuant to
Laser Notice No. 50, June 24, 2007
Notes
The M4000 Advanced multiple light beam safety device is available with an integrated
laser alignment aid as an extra.
The laser alignment aid in conjunction with the indications on the 7Esegment display
enables you to precisely adjust and align the multiple light beam safety device. The aid
comprises a laser per light beam (in the receiver) as well as a laser deflector mirror and a
transparent display screen (in the sender).
The laser alignment aid is activated automatically when the M4000 Advanced is switched
on if the light beams are not yet aligned or if the light path is interrupted.
Always align the beams individually and in the following order: first beam, second
beam …, last beam (starting at the 7 segment display). When aligning the second and
all further beams, it may occur that the laser beams for beams already aligned (e.g. the
first beam) are no longer incident to the target on the alignment template (when this is
fitted again). This situation has no effect on the accuracy of the overall alignment. I.e.
beams already correctly aligned (e.g. first beam) do not need to be re-aligned after the
alignment of the next beam (e.g. second beam), even if the laser beam for the beam
previously aligned deviates from the target on the alignment template.
If the multiple light beam safety device is in the lockEout status when switched on (see
section “The lockE out status” on page 105), the laser alignment aid is not activated.
The laser alignment aid switches off automatically, …
– if the LED Green on the receiver (light path unoccupied and optimal alignment) is
on without interruption for more than 2 minutes.
– independent of the state after 60 minutes.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 95
Subject to change without notice
Page 96

Chapter 9 Operating Instructions
Remove protective film from the
Adhere alignment template to the
M4000 Adv., Adv. A/P, Area
Commissioning
In the delivery with the receiver for the M4000 Advanced with integrated laser align-
ment aid you will find two self-adhesive alignment templates (one template for the
deflector mirror and one for the sender). Keep both alignment templates at hand. You
will find further information on the alignment templates as well as a master for copying
in the annex 15.3.
Secure the plant/system. No dangerous state possible!
Ensure that the dangerous state of the machine is (and remains) switched off! During the
WARNING
alignment process, the outputs of the multiple light beam safety device are not allowed to
have any effect on the machine.
How to align the M4000 Advanced with the aid of the integrated alignment aid:
Check with a spirit level whether the devices and the deflector mirrors, if used, are
mounted vertically.
Check whether the following points are the same distance from the floor:
– first beam of the sender
– first beam of the receiver
– when using deflector mirrors: centre of the first mirror surface
Loosen the clamping bolts which hold the multiple light beam safety device in place.
Adhere the alignment template for mirrors to the individual mirror on the mirror pillar
that is used to deflect the beam to be aligned. If you start the alignment with the first
beam as per these instructions, this is the bottom mirror on the mirror pillar
(see Fig. 64).
Fig. 63: Attaching the
alignment template for
mirrors
self-adhesive strip on the rear
surface of the individual mirror
Activate the laser alignment aid by switching on the power supply to the multiple light
beam safety device.
Note
You can also activate and deactivate the laser alignment aid via the CDS.
Rotate the receiver until the alignment beam is incident in the centre of the hole in the
alignment template (see Fig. 64). If further mirror columns are used, use the alignment
template for all further mirrors on the mirror columns.
Note
If you do not use an alignment template, the alignment beam must be incident approx.
23.5 mm above the centre of the mirror.
96 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 97

Operating Instructions Chapter 9
The laser beam is incident in the
Deflector mirror
Laser deflector mirror
Adhere alignment template to
Top edge of the
M4000 Adv., Adv. A/P, Area
Commissioning
Remove the alignment template from the individual mirror.
Fig. 64: Alignment of the
receiver to the deflector
mirror using the laser
alignment aid
middle of the hole in the alignment
template.
Adhere the alignment template for the sender to the beam on the sender that is closest
to the 7Esegment display.
Note
The alignment template for the sender is correctly positioned on the sender
(see Fig. 65), when …
– the circular opening is exactly over the beam optics
and
– the tabs on the template are exactly positioned on the edges of the sender housing
and point upward from the 7Esegment/LED display.
Fig. 65: Attach the alignment
template to the sender
74segment/LED display
edges of the housing
Align the deflector mirror (depending on the mirror columns, you may need to remove
the cover plate first). With the aid of three adjusting screws, you can finely adjust the
individual mirror (see Fig. 66). The optimal alignment is achieved when the alignment
beam is incident in the middle of the rectangular hole in the alignment template.
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 97
Subject to change without notice
Page 98

Chapter 9 Operating Instructions
Deflector mirror
Fine adjustment is performed with the
The laser beam is incident in
alignment
template.
Transparent
Laser deflector
mirror
Laser beam
The display screen illuminates when
M4000 Adv., Adv. A/P, Area
Fig. 66: Alignment of the
deflector mirror to the sender
using the laser alignment aid
Commissioning
aid of the three adjusting screws.
the middle of the hole in the
Fig. 67: Principle of laser
deflection in the sender
Note
For the alignment of the sender, the laser beam is deflected within the sender onto a
transparent display screen with the aid of the laser deflector mirror. As soon as correct
alignment is achieved, the display screen, which can be seen from the exterior, illumi-
nates (see Fig. 67).
display screen
the laser beam is incident on it.
98 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
Page 99

Operating Instructions Chapter 9
If the alignment is correct the
Deflector mirror
M4000 Adv., Adv. A/P, Area
Commissioning
Rotate the sender until the display screen illuminates.
Fig. 68: Alignment of the
sender using the laser
alignment aid
display screen illuminates.
Remove the alignment template. Watch the alignment information on the 7Esegment
display of the receiver (see Tab. 37). The optimal alignment of the beam near the 7Esegment display is achieved when a appears on the 7Esegment display.
Notes
When the alignment information on the 7Esegment display goes out (no indication), then
all other beams are already aligned.
The sender is only aligned once. This step is not necessary when aligning other beams.
Fix the sender in place.
Align the other beams using the steps described.
Note
When aligning the second and all further beams, it may occur that the laser beams for
beams already aligned (e.g. the first beam) are no longer incident to the target on the
alignment template (when this is fitted again). This situation has no effect on the accuracy of the overall alignment.
Using the clamping bolts, fix the receiver in place.
Switch the power supply off and then back on again and check via the 7Esegment dis-
play whether the alignment is correct after tightening the clamping bolts (see Tab. 37).
Note
All alignment templates used must be removed after the alignment procedure!
8010797/YT72/2016-02-19 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 99
Subject to change without notice
Page 100

Chapter 9 Operating Instructions
M4000 Adv., Adv. A/P, Area
Commissioning
9.3 Test notes
heck the protective device as described below and in accordance with the applicable
C
standards and regulations.
These tests are also used to identify if the protection is affected by external light sources
or other unusual ambient effects.
These tests must therefore always be performed.
9.3.1 Pre-commissioning test notes
Ensure that you do not place anybody at risk during initial commissioning of the
machine!
WARNING
Always expect that the machine, plant or the protective device does not yet behave as you
have planned.
Ensure that there are no persons in the hazardous area during initial commissioning.
Check the effectiveness of the protective device mounted to the machine, using all
selectable operating modes as specified in the checklist in the annex (see 15.2 on
page 142).
Ensure that the operating personnel of the machine protected by the multiple light
beam safety device are correctly instructed by qualified safety personnel before being
allowed to operate the machine. Instructing the operating personnel is the responsibility
of the machine owner.
Annex 15.2 of this document shows a checklist for review by the manufacturer and
OEM. Use this checklist as a reference before commissioning the system for the first
time.
9.3.2 Regular inspection of the protective device by qualified safety personnel
Check the system following the inspection intervals specified in the national rules and
regulations. This procedure ensures that any changes on the machine or manipulations
of the protective device after the first commissioning are detected.
If major changes have been made to the machine or the protective device, or if the
multiple light beam safety device has been modified or repaired, check the plant again
as per the checklist in the annex.
100 © SICK AG • Industrial Safety Systems • Germany • All rights reserved 8010797/YT72/2016-02-19
Subject to change without notice
 Loading...
Loading...