

Page 1

DME5000
Entfernungs-Messgerät
Distance Measuring Device
BETRIEBSANLEITUNG/OPERATING INSTRUCTIONS
D
GB
Page 2
Betriebsanleitung
DME5000
Dieses Werk ist urheberrechtlich geschützt. Die dadurch begründeten Rechte bleiben bei der Firma SICK AG. Eine
Vervielfältigung des Werkes oder von Teilen dieses Werkes ist nur in den Grenzen der gesetzlichen Bestimmungen des Urheberrechtsgesetzes zulässig. Eine Abänderung oder Kürzung des Werkes ist ohne ausdrückliche
schriftliche Zustimmung der Firma SICK AG untersagt.
Inhalt/Contents
German Seite 2 – 72
English Page 73– 142
2 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 3

Betriebsanleitung
Inhalt
DME5000
Inhalt
1 Verwendete Symbole und Abkürzungen ........................................................................ 5
1.1 Typenschild ............................................................................................................ 5
2 Bestimmungsgemäße Verwendung .............................................................................. 6
3 Sicherheitshinweise ....................................................................................................... 7
3.1 Laserwarnhinweis ................................................................................................. 7
4 Funktionsweise ............................................................................................................... 8
5 Inbetriebnahme ............................................................................................................... 9
5.1 Montage ................................................................................................................. 9
5.1.1 Vorgehensweise bei der Ausrichtung ...............................................10
5.1.2 Anordnung benachbarter Entfernungs-Messgeräte ........................11
5.1.3 Anordnung Entfernungs-Messgerät mit benachbarter
Datenübertragung .............................................................................11
5.2 Elektrischer Anschluss ........................................................................................12
5.2.1 Verdrahtungshinweise ......................................................................14
5.2.2 PROFIBUS-Terminierung ...................................................................15
6 Bedienung .................................................................................................................... 16
6.1 Aufbau des Bedienfeldes ...................................................................................16
6.2 Bedienung ...........................................................................................................16
6.3 Bedienfeld ...........................................................................................................16
7 Menüstruktur ............................................................................................................... 19
7.1 Flussdiagramm ....................................................................................................19
7.2 Erklärungen zur Menüstruktur ...........................................................................19
8 Beispiel ......................................................................................................................... 29
8.1 Parametereingabe am Beispiel „Code-Eingabe“ ...............................................29
9 Technische Daten ........................................................................................................ 31
9.1 Maßzeichnung .....................................................................................................31
9.2 Zubehör ...............................................................................................................32
9.2.1 Reflektoren ........................................................................................32
9.2.2 Stecker/Leitungen ............................................................................33
9.2.3 Befestigungstechnik .........................................................................39
9.2.4 Wetterschutzgehäuse .......................................................................39
9.2.5 Umlenkspiegel ...................................................................................40
9.2.6 Schnittstellenadapter .......................................................................40
9.2.7 Kühlgehäuse .....................................................................................41
9.3 Technische Daten DME5000-1xx ......................................................................42
9.4 Technische Daten DME5000-2xx ......................................................................43
9.5 Technische Daten DME5000-3xx ......................................................................44
10 Wartung ........................................................................................................................ 45
11 Troubleshooting ........................................................................................................... 46
12 Begriffserklärungen ..................................................................................................... 49
12.1 PROFIBUS® ..........................................................................................................49
12.2 RS 422 .................................................................................................................49
12.3 SSI ........................................................................................................................50
12.4 DeviceNet ............................................................................................................50
12.5 Hiperface .............................................................................................................51
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 3
Page 4
Betriebsanleitung
Inhalt
DME5000
13 Anhang .......................................................................................................................... 52
13.1 Preset .................................................................................................................. 52
13.2 PROFIBUS-Schnittstelle ...................................................................................... 54
13.2.1 Datenformat DME zu Master ........................................................... 54
13.2.2 Datenformat Master zu DME ........................................................... 55
13.2.3 Diagnosedaten (bei aktiviertem Parameter „Extended
Diagnostics“) ..................................................................................... 55
13.3 Inbetriebnahme DME5000 PROFIBUS® (Beispiel Siemens Step 7) ................ 57
13.4 Schnittstellenadapter ......................................................................................... 58
13.5 Sleepmodus ........................................................................................................ 59
13.6 RS-422-Schnittstelle .......................................................................................... 59
13.6.1 Protokoll ............................................................................................ 60
13.6.2 Befehle .............................................................................................. 60
13.6.3 Beispiele für Befehle (Standard-Protokoll) ...................................... 61
13.7 DeviceNet-Schnittstelle ...................................................................................... 62
13.7.1 Allgemeines ....................................................................................... 62
13.7.2 Konfiguration .................................................................................... 62
13.7.3 Datenaustausch ............................................................................... 65
13.7.4 Polled Mode ...................................................................................... 65
13.7.5 Change of State Mode ...................................................................... 66
13.7.6 Parameter Offset und Preset ........................................................... 66
13.7.7 Sleepmodus (Laser aus) .................................................................. 67
13.7.8 Parameter im DME5000 speichern ................................................ 68
13.7.9 Zusätzliche Diagnosedaten .............................................................. 68
13.8 Hiperface-Schnittstelle ....................................................................................... 70
13.8.1 Typenspezifische Einstellung ........................................................... 71
13.8.2 Übersicht der unterstützen Befehle ................................................ 71
13.8.3 Übersicht der Hiperface-Standard-Statusmeldungen .................... 72
13.8.4 Verhalten bei Fehlern und Vorausfallmeldungen ........................... 72
4 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 5

Betriebsanleitung Kapitel 1
Verwendete Symbole und
Abkürzungen
ACHTUNG
Hersteller
Gerätetyp
Nummer
Serien-Nummer
Produktionsjahr/-monat
DME5000
1 Verwendete Symbole und Abkürzungen
Verweist auf die Tasten des Displays in der Maßzeichnung (Abschnitt 9.1
„Maßzeichnung“).
Hinweis
Hinweise erläutern Vorteile bestimmter Einstellungen und helfen Ihnen, den optimalen
Nutzen aus dem DME5000 zu ziehen.
Warnhinweise: Lesen und befolgen Sie diese sorgfältig!
Warnhinweise sollen Sie vor Gefahren schützen oder helfen Ihnen, eine Beschädigung des
Sensors zu vermeiden.
1.1 Typenschild
Anhand des Typenschildes kann der Gerätetyp, die Serien-Nummer des Gerätes und die
Bestell-Nummer festgestellt werden.
Bestell-
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 5
Page 6

Kapitel 2 Betriebsanleitung
Bestimmungsgemäße Verwendung
DME5000
2 Bestimmungsgemäße Verwendung
Das DME5000 ist ein optoelektronischer Sensor, der zum Erfassen von Distanzen zu einer
linear bewegten Reflexionsfolie eingesetzt wird. Er darf nicht in explosionsgefährdeten
Bereichen verwendet werden.
6 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 7
Betriebsanleitung Kapitel 3
Sicherheitshinweise
DME5000
3 Sicherheitshinweise
Lesen Sie die Betriebsanleitung vor der Inbetriebnahme.
Anschluss, Montage und Einstellung nur durch Fachpersonal.
Schützen Sie das DME5000 bei Inbetriebnahme vor Feuchte und Verunreinigung.
Das DME5000 ist kein Sicherheitsmodul gemäß EU-Maschinenrichtlinie.
Beachten Sie die nationalen Sicherheits- und Unfallverhütungsvorschriften.
Reparaturen dürfen nur vom Hersteller durchgeführt werden. Eingriffe und Änderungen
am Gerät sind unzulässig.
Verdrahtungsarbeiten, Öffnen und Schließen von elektrischen Verbindungen nur im
spannungslosen Zustand durchführen.
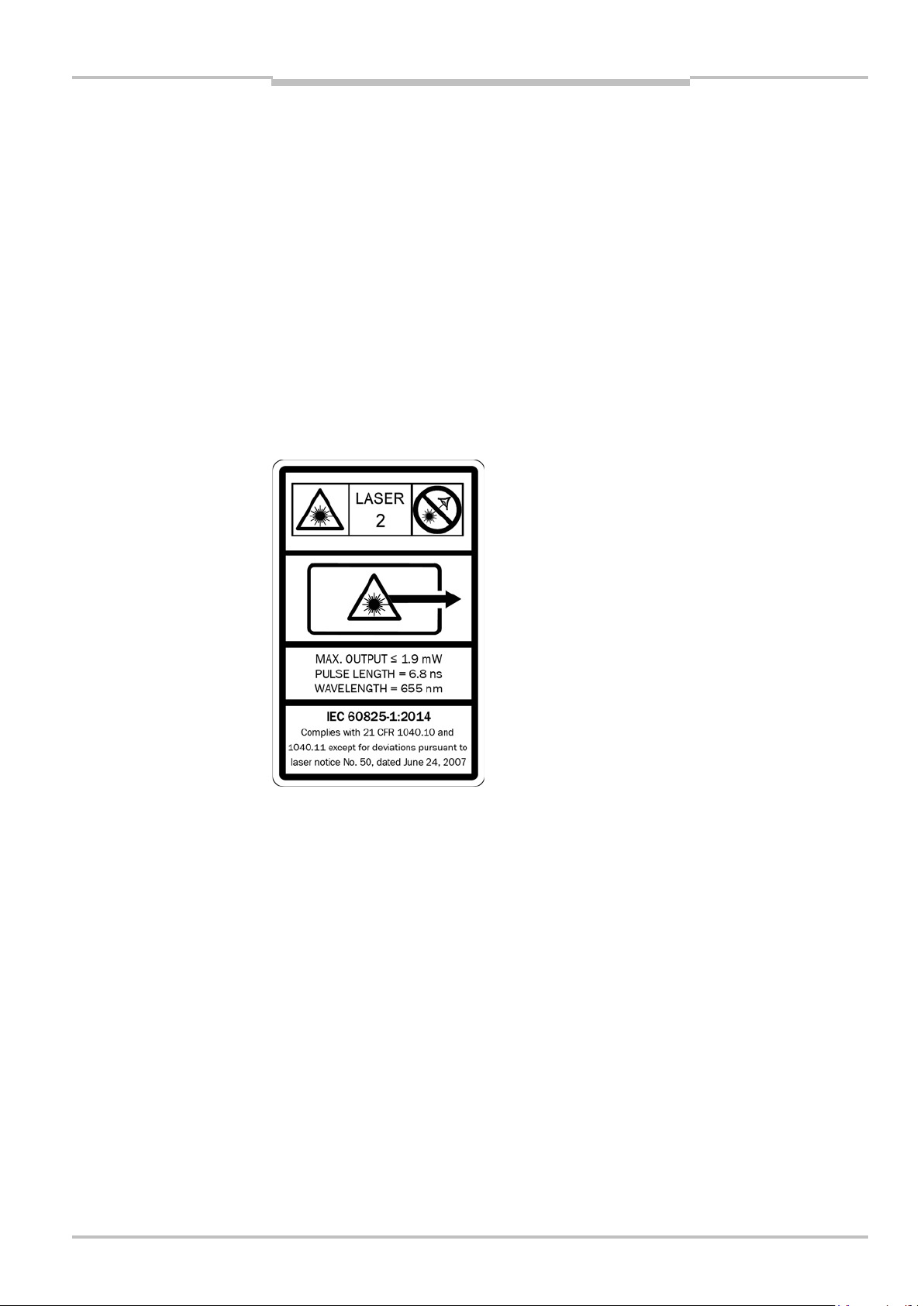
3.1 Laserwarnhinweis
Laserstrahlung - Nicht in den Lichtstrahl blicken Laserklasse 2
Laseraustrittsöffnung
Erfüllt 21 CFR 1040.10 und 1040.11 mit
Ausnahme der aufgeführten Abweichungen im
Dokument Laser Notice No. 50 vom 24. Juni 2007.
Laserklasse 2 (EN/IEC 60825-1:2014)
Identische Laserklasse für Ausgabe EN/IEC 60825-1:2007
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 7
Page 8
Kapitel 4 Betriebsanleitung
Funktionsweise
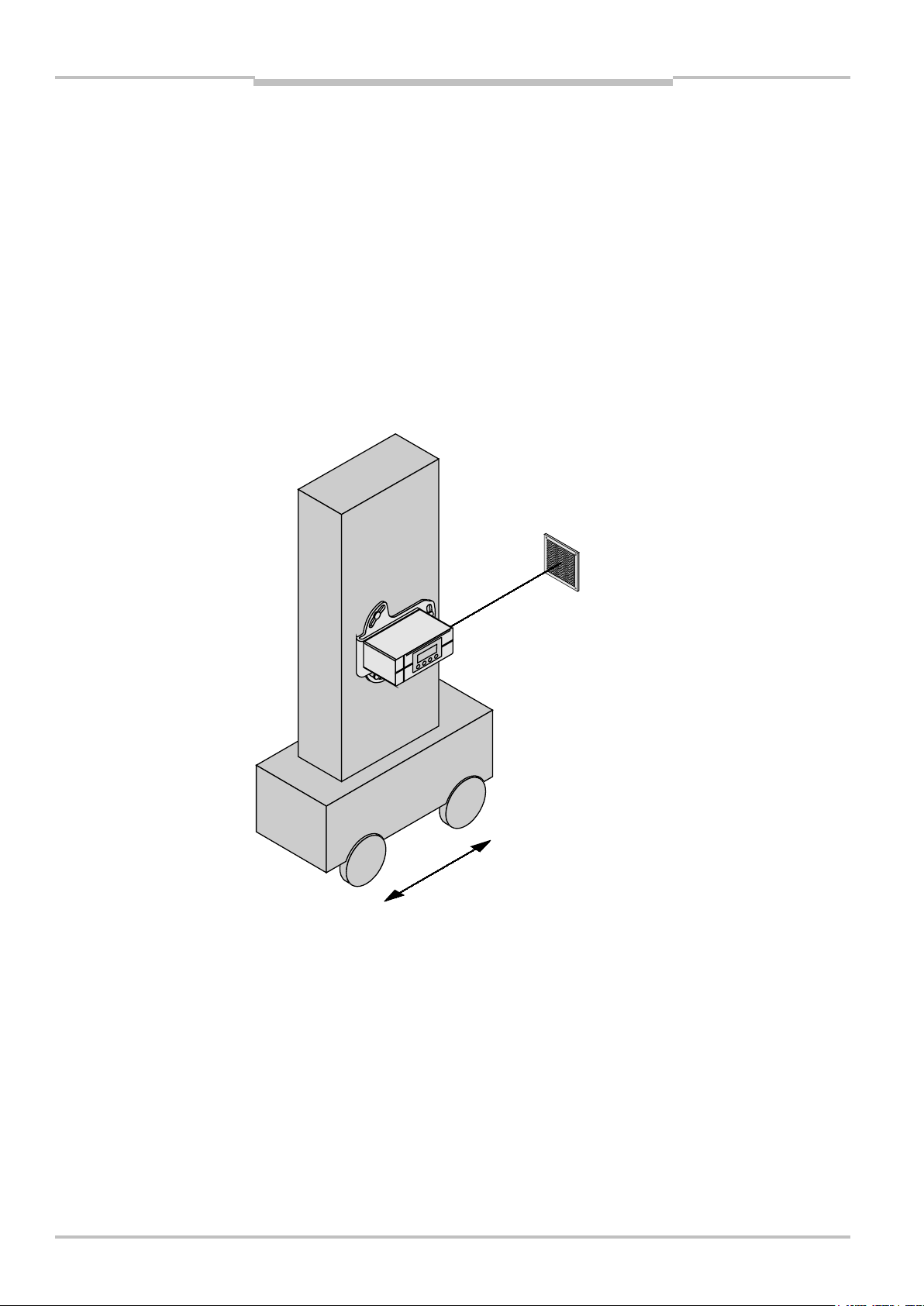
Abb. 1: Funktionsweise
DME5000
DME5000
4 Funktionsweise
Das Entfernungs-Messgerät DME5000 ist ein kompakter optischer Distanzsensor. Das
DME wird so montiert, dass der ausgesendete Laserstrahl auf den Reflektor trifft. Der
Reflektor oder das Gerät bewegen sich entlang des Laserstrahls.
Der Empfänger des DME empfängt das vom Reflektor zurückgespiegelte Licht und ermittelt die Distanz zwischen Sensor und Reflektor mittels Lichtlaufzeitmessung.
Die gemessene Distanz wird, je nach Gerätevariante, über eine SSI-, RS-422-, DeviceNet-,
Hiperface- oder PROFIBUS-Schnittstelle an eine Steuerung oder einen Lageregelkreis
übertragen.
Durch die schnelle Messwertermittlung ist das DME5000 für den direkten Betrieb in
einem geschlossenen Lageregelkreis über die SSI-Schnittstelle z. B. mit einem Frequenzumrichter geeignet.
8 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 9

Betriebsanleitung Kapitel 5
Inbetriebnahme
Abb. 2: Justage DME5000
Abb. 3: Justage DME5000
Umgebung
DME5000
5 Inbetriebnahme
5.1 Montage
Das DME5000 und der Reflektor werden so befestigt, dass der Reflektor immer im Sichtfeld des Sensors ist.
Das DME5000 wird so ausgerichtet, dass sich der (auch in großen Abständen) gut sichtbare Lichtfleck im Zentrum des Reflektors befindet.
Die als Zubehör erhältliche Ausrichthalterung ermöglicht eine einfache Justierung in X- und
Y-Richtung:
bei hochglänzender
Die Reflektorgröße ist so zu wählen, dass der Lichtfleck bei Vibrationen nicht vom
Reflektor abwandert. Ist der Reflektor am bewegten Teil befestigt, ist in der Regel eine
kleinere Reflexionsfolie ausreichend. Bei hochglänzenden Oberflächen (z. B. Regalprofile,
Paletten mit Stretchfolien, Fahrschienen), die den Lichtstrahl oder Streulicht einspiegeln,
Reflektor in den „freien Raum“ ausrichten: mit ca. 1°… 3° Neigung (X- oder Y-Richtung)
montieren. Verschiedene Reflektorgrößen siehe Abschnitt 9.2 „Zubehör“ (ab Seite 32).
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 9
Page 10
Kapitel 5 Betriebsanleitung
Inbetriebnahme
Tab. 1: Dämpfungswerte
DME5000
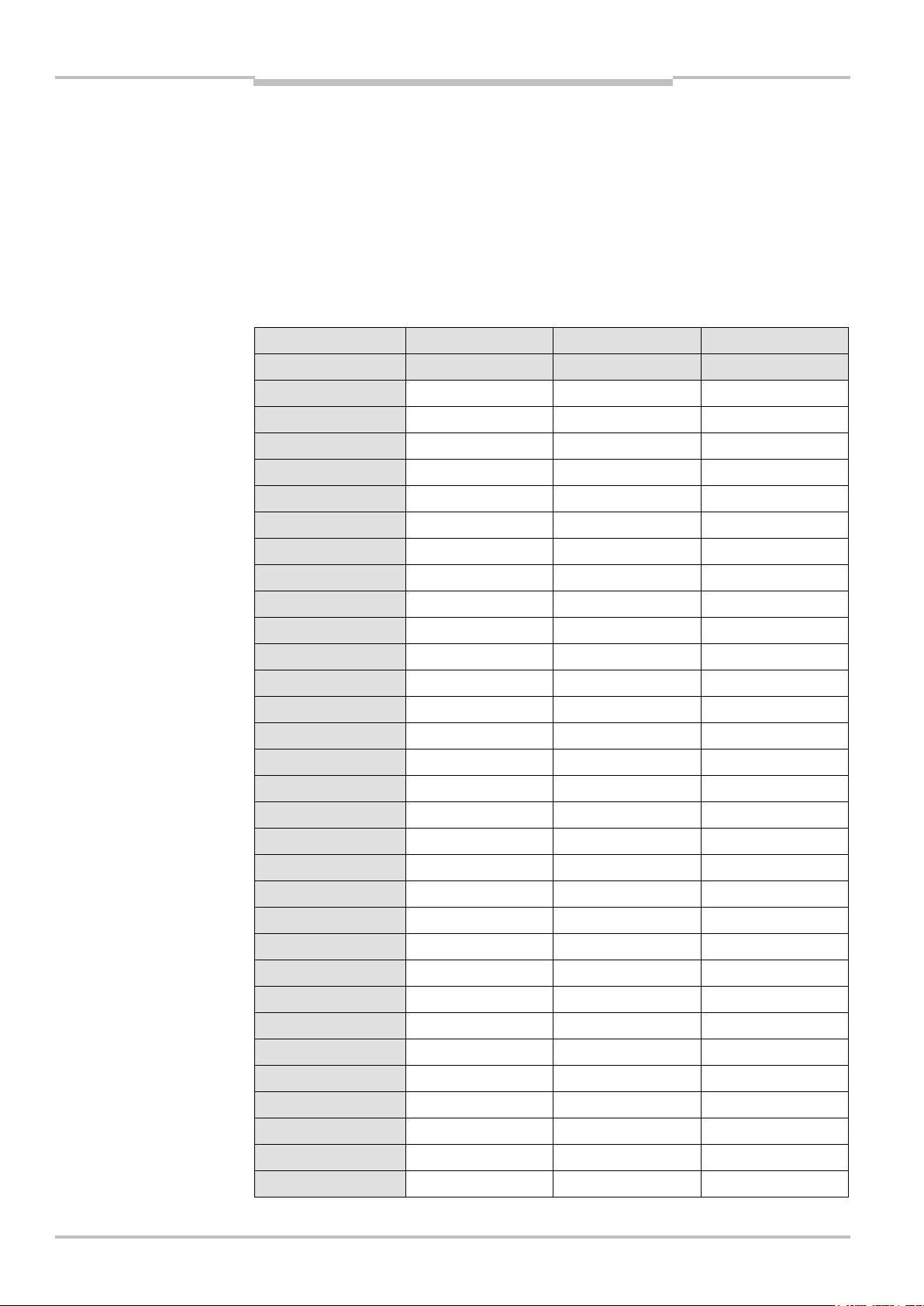
5.1.1 Vorgehensweise bei der Ausrichtung
Bringen Sie Fahrzeug und Reflektor auf kleine Distanz.
Richten Sie das DME5000 so aus, dass der Lichtfleck sich im Zentrum des Reflektors befindet.
Vergrößern Sie die Entfernung von Fahrzeug zu Reflektor und beobachten Sie dabei den
Lichtfleck.
Justieren Sie gegebenenfalls den Lichtfleck in die Mitte des Reflektors nach.
Die im Display-Infofeld 1 angezeigte Signaldämpfung gibt Aufschluss über das aktuelle
Empfangssignal. Bei sauberen Grenzflächen sollten die in der Tabelle aufgeführten
Dämpfungswerte nicht überschritten werden.
DME5000 -1XX -2XX -3XX
Distanz [m] Pegel [dB] Pegel [dB] Pegel [dB]
13 –42 –42 –42
15 –43 –43 –43
20 –50 –47 –46
30 –57 –54 –53
40 –62 –59 –58
50 –66 –63 –62
60 –69 –66 –65
70 –71 –69 –68
80 –71 –70
90 –73 –72
100 –75 –74
110 –77 –76
120 –78 –77
130 –80 –79
140 –81 –80
150 –82 –81
160 –82
170 –83
180 –84
190 –85
200 –86
210 –87
220 –88
10 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
230 –89
240 –89
250 –90
260 –91
270 –91
280 –92
290 –93
300 –93
Page 11
Betriebsanleitung Kapitel 5
Inbetriebnahme
Abb. 4: Anordnung
benachbarter DME5000
Abb. 5: Anordnung benachbarter DME5000 und ISD
Reflektor
Reflektor
Reflektor
DME
DME
DME
DME
Reflektor
Reflektor
ISD
DME
ISD
Parallelmontage
a ≥ 100 mm + 0,01 x s
Antip
a ≥ 100 mm
DME5000
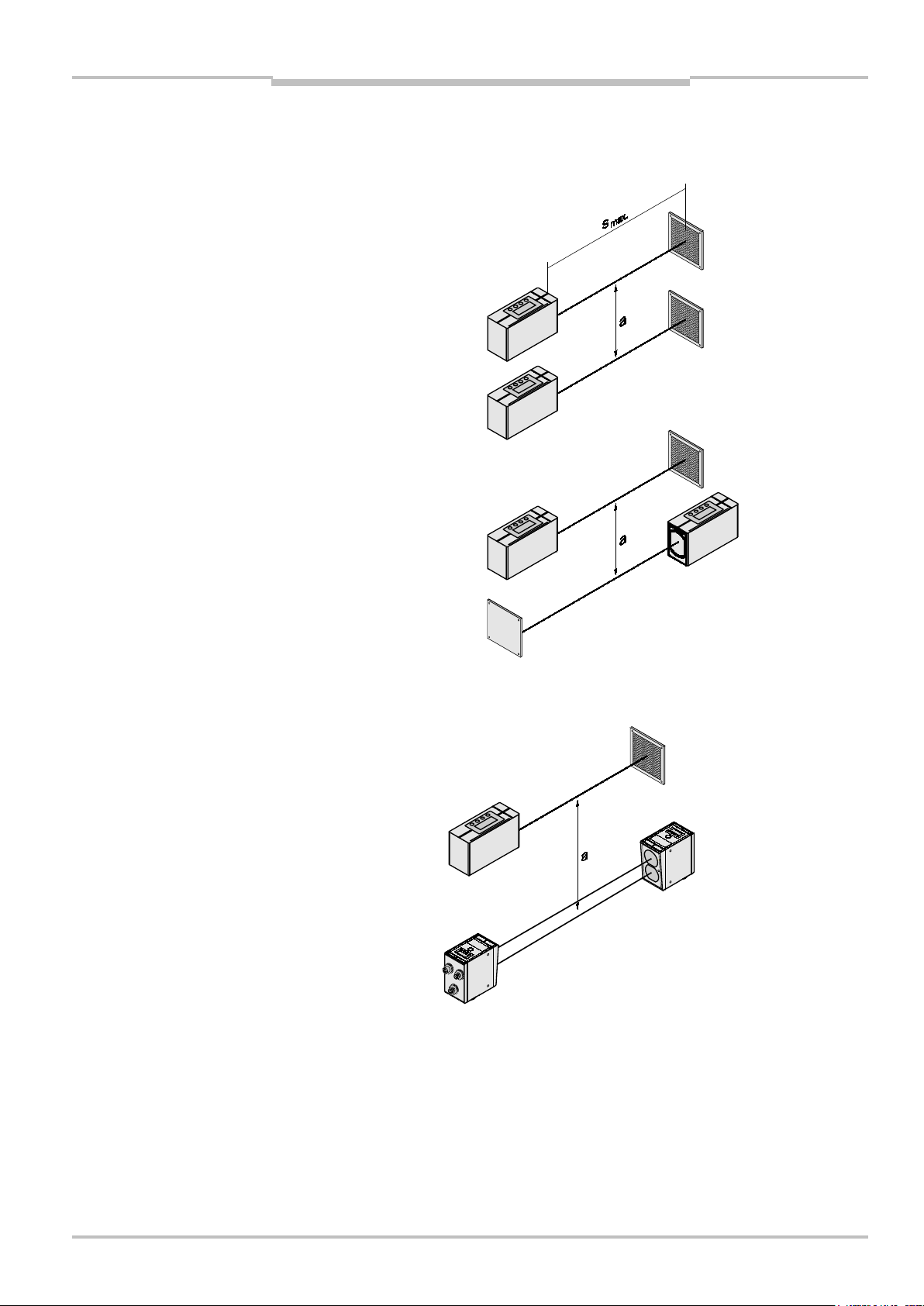
5.1.2 Anordnung benachbarter Entfernungs-Messgeräte
Um gegenseitige Beeinflussung zu vermeiden, sind folgende Mindestabstände a
einzuhalten.
[mm]
max.
arallele Montage
5.1.3 Anordnung Entfernungs-Messgerät mit benachbarter Datenübertragung
Für die Datenübertragungs-Lichtschranken der Baureihe ISD300 / ISD400-1xxx / ISD4006xxx ist unabhängig von der maximalen Reichweite s
ein minimaler Strahlabstand von
max
100 mm einzuhalten.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 11
Page 12

Kapitel 5 Betriebsanleitung
Inbetriebnahme
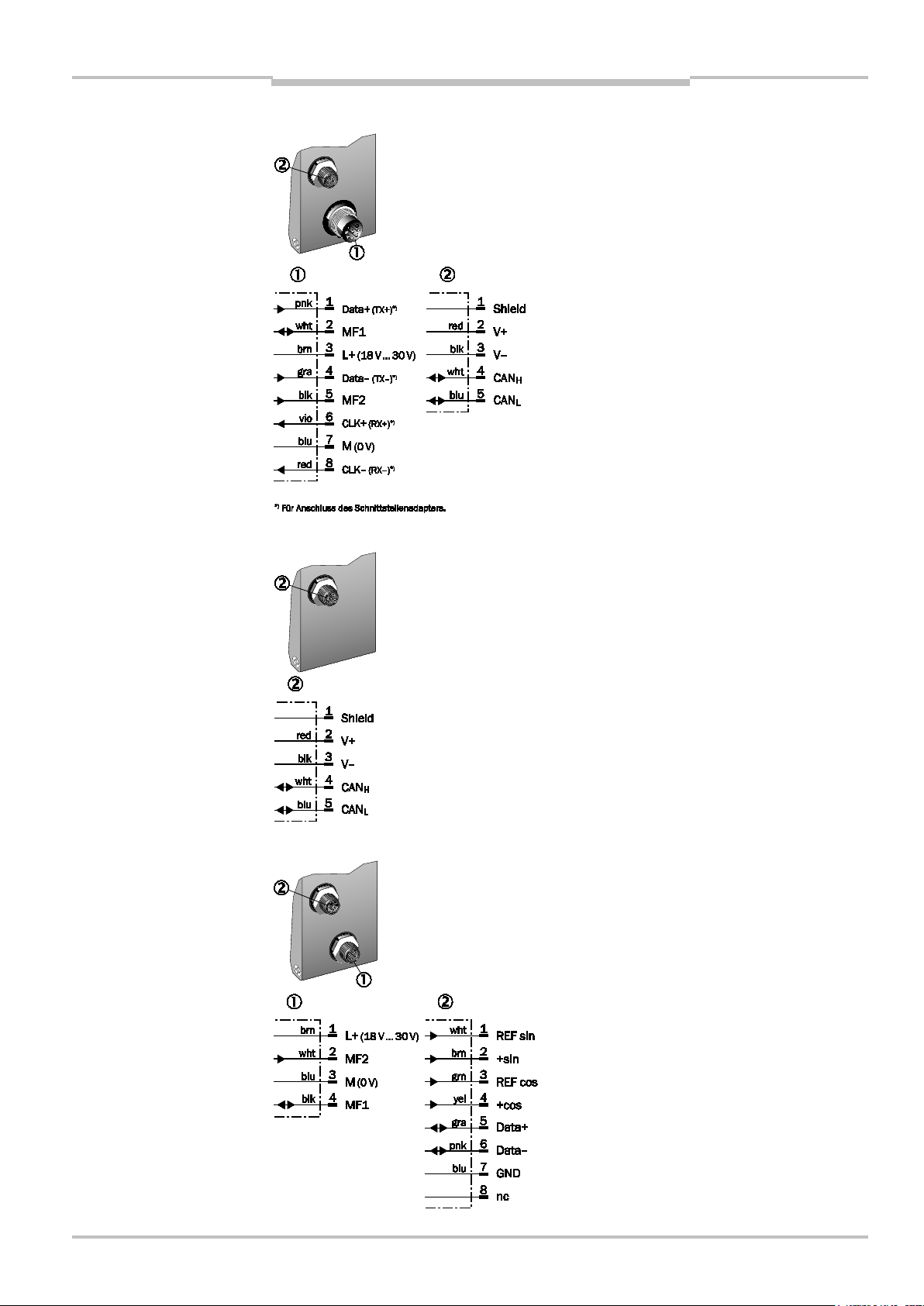
Abb. 6: Anschlussschema
DME5000-xx3 (RS 422)
Abb. 7: Anschlussschema
DME5000-xx2 (PROFIBUS®)
DME5000
5.2 Elektrischer Anschluss
DME5000 nach Anschlussschema anschließen. Verdrahtungshinweise beachten (siehe
Abschnitt 5.2.1), Stecker und Kabel siehe Abschnitt 9.2.2.
DME5000-xx1 (SSI)
12 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 13
Betriebsanleitung Kapitel 5
Inbetriebnahme
Abb. 8: Anschlussschema
DME5000-xx4 (DeviceNet)
Abb. 9: Anschlussschema
DME5000-xx5 (DeviceNet)
Abb. 10: Anschlussschema
DME5000-xx7 (Hiperface)
DME5000
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 13
Page 14
Kapitel 5 Betriebsanleitung
Inbetriebnahme
ACHTUNG
Abb. 11: Leitungen der
rechtwinklig kreuzen
Abb. 12:
verlegen
Abb. 13:
trennen
DME5000
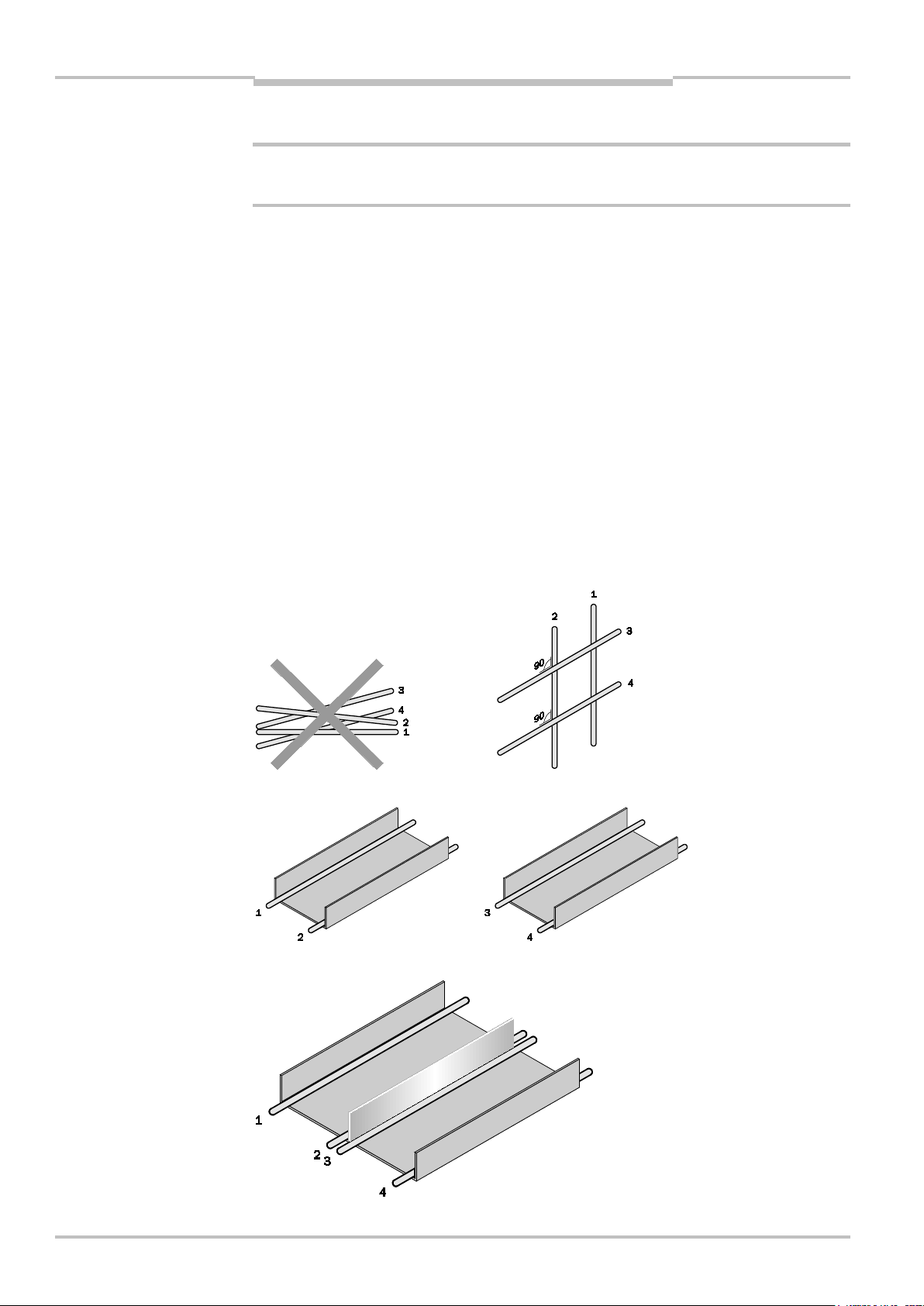
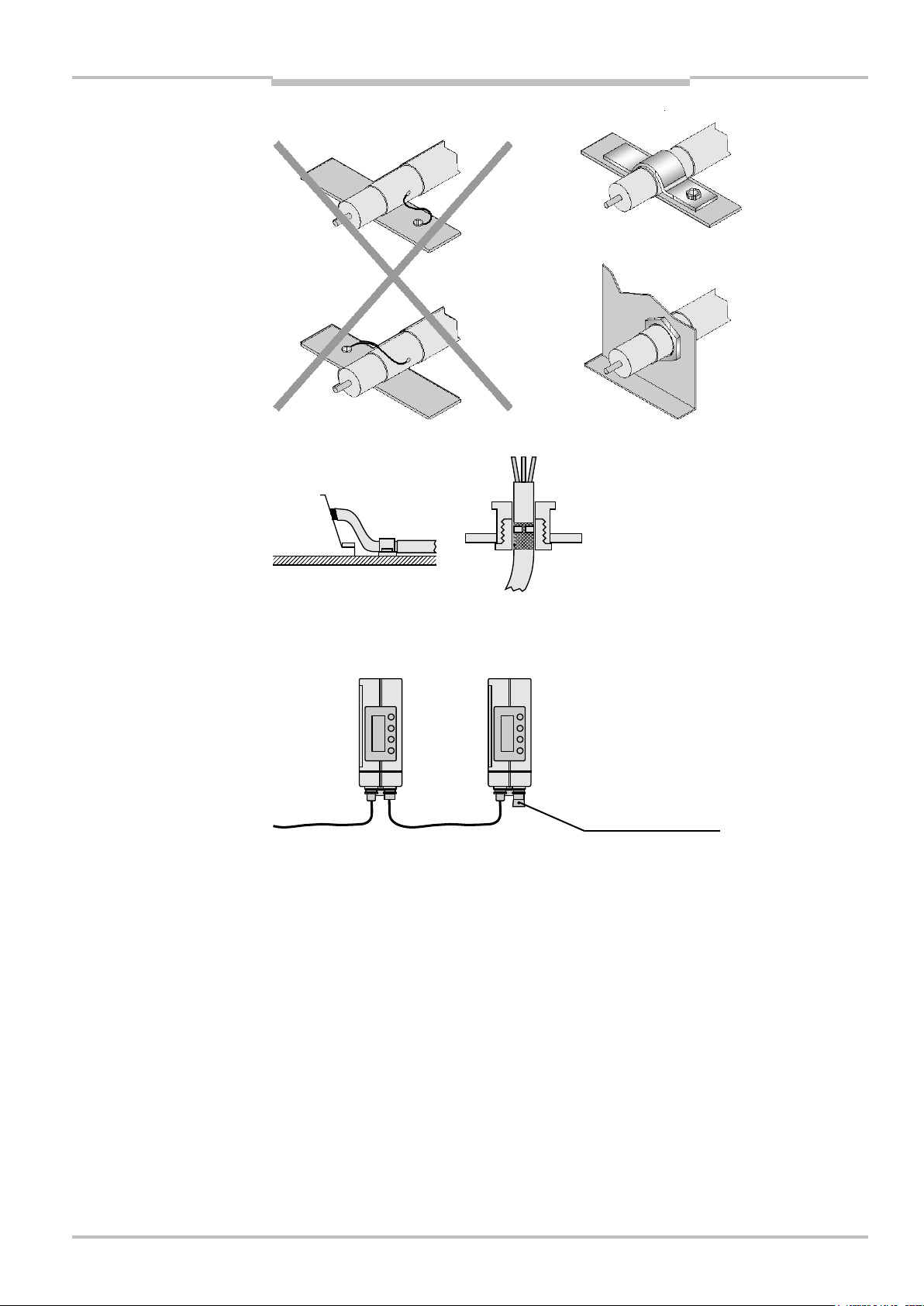
5.2.1 Verdrahtungshinweise
Es werden generell abgeschirmte Leitungen für Versorgung und Schnittstelle
empfohlen (siehe Abschnitt 9.2 „Zubehör“).
Ein einwandfreies und vollständiges Schirmkonzept ist für die störungsfreie Funktion
erforderlich. Speziell muss auf die beidseitige Auflage des Kabelschirmes an
Schaltschrank und DME5000 geachtet werden. Der Kabelschirm der vorkonfektionierten
M16-Kabel ist mit dem Metallstecker und damit mit dem DME5000-Gehäuse verbunden.
Der Kabelschirm am Schaltschrank muss großflächig mit der Betriebserde verbunden
werden. Potenzialausgleichströme über den Kabelschirm sind durch geeignete
Maßnahmen zu vermeiden. Eine störsichere Datenübertragung ist nur bei Verwendung von
abgeschirmten Leitungen mit paarweise verdrillten Adern gegeben.
Die Schirme der PROFIBUS-Leitungen sind über die PROFIBUS-Stecker miteinander
verbunden.
Legende Kabelgruppen Abbildung 11 bis Abbildung 13:
1 = sehr störempfindliche Leitungen (analoge Messleitungen)
2 = störempfindliche Leitungen (Sensorkabel, Kommunikationssignale, Busleitungen)
3 = Störquellen-Leitung (Steuerkabel für induktive Lasten, Motorbremsen)
4 = stark störende Leitungen (Ausgangskabel von Frequenzumrichtern, Versorgung von
Schweißanlagen, Leistungskabel)
Gruppe 1, 2 und 3, 4
Ideal: Leitungen in verschiedenen Kabelkanälen
Alternativ: Leitungen durch
metallischen Trennsteg
14 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 15
Betriebsanleitung Kapitel 5
Inbetriebnahme
Abb. 14: Keine „Schweine-
BEIDE Seiten erden
Abb. 15: Schirmanschluss bei
Kunststoffgehäusen
Abb. 16: PROFIBUS-
Abschnitt 9.2.2)
Terminator
DME5000
schwänzchen“, Schirm kurz
und vollflächig anbinden,
Terminierung (siehe Zubehör
5.2.2 PROFIBUS-Terminierung
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 15
Page 16

Kapitel 6 Betriebsanleitung
Bedienung
Abb. 17: Display
ACHTUNG
Abb. 18: Anzeige nach Anlegen der Betriebsspannung
LC
Funktionstasten
Infofeld 1
Statusanzeigen
Infofeld 2
DME5000
6 Bedienung
Dieses Kapitel erklärt das Bedienfeld und die grundsätzliche Bedienung des DME5000.
Detaillierte Informationen zur Inbetriebnahme und zum Betrieb des DME5000 finden Sie
im Kapitel 5 „Inbetriebnahme“.
6.1 Aufbau des Bedienfeldes
-Display
Das Bedienfeld ist in zwei Bereiche unterteilt:
LC-Display: Zeigt das Menü während der Parametrierung
Funktionstasten: Zur Eingabe der Parameter bzw. Funktionen
6.2 Bedienung
Das DME5000 ist mit einer Folientastatur ausgestattet.
Bedienen Sie den Eingabebereich nur mit den Fingern oder mit einem geeigneten
Zeigegerät!
Benutzen Sie keine spitzen oder harten Gegenstände. Sie können die Funktionstasten
beschädigen und die Bedienung damit erschweren oder unmöglich machen.
6.3 Bedienfeld
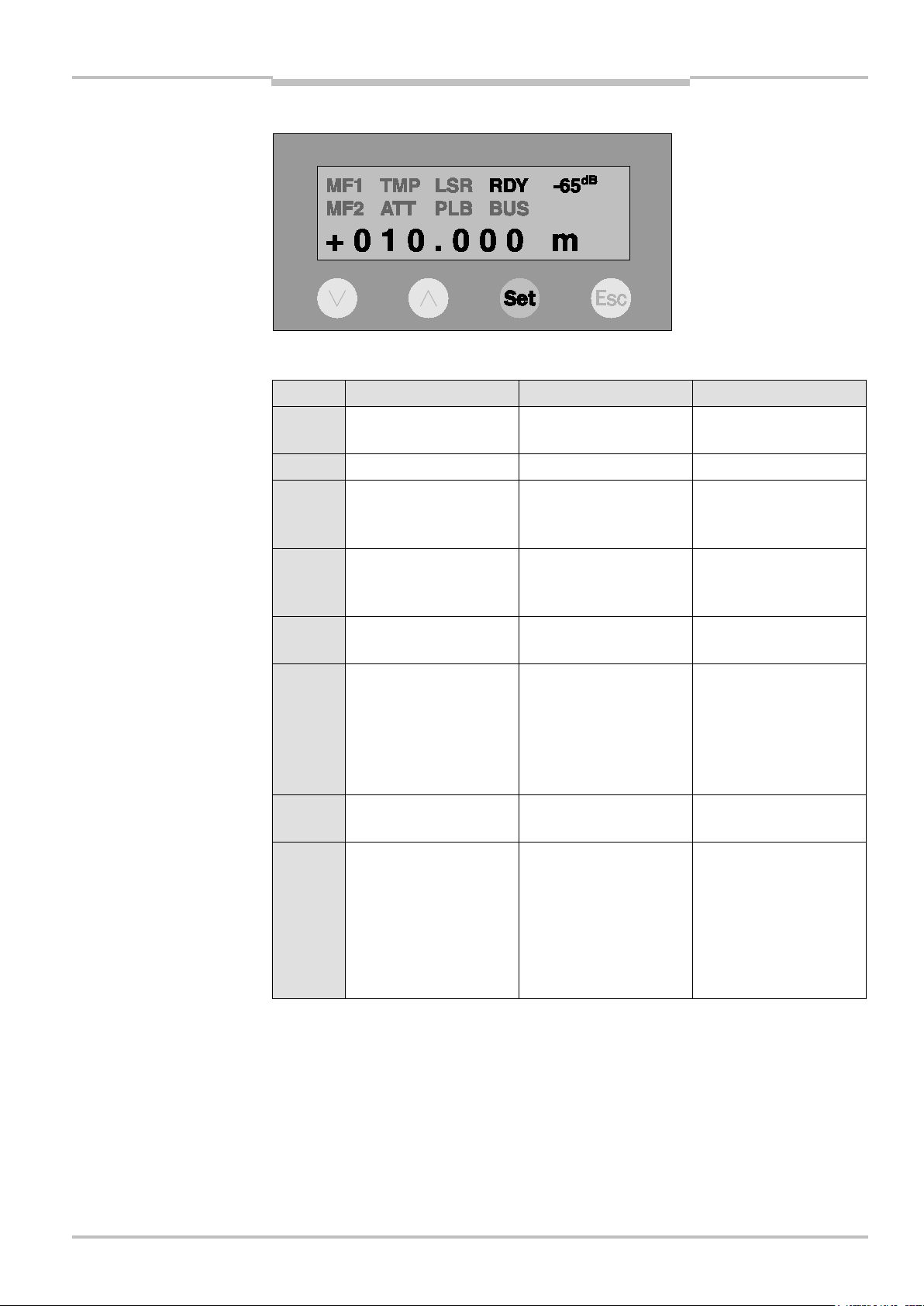
Nach Anlegen der Betriebsspannung (oder nach Reset) erscheint folgende Anzeige im
Display des DME5000:
16 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Funktionstasten
Nach ca. 1 s ist das DME5000 betriebsbereit und zeigt, bei freier Sicht auf den Reflektor,
den aktuellen Messwert an:
Page 17
Betriebsanleitung Kapitel 6
Bedienung
Abb. 19: Messwertanzeige
DME5000
Statusanzeigen
Anzeige Bedeutung Wird angezeigt Wird nicht angezeigt
MF1 Multifunktions-
ein-/ausgang
MF2 Multifunktionsausgang Ausgang aktiv Ausgang nicht aktiv
TMP Geräteinnentemperatur Vorausfallmeldung:
Ein-/Ausgang aktiv Ein-/Ausgang nicht
aktiv
Geräteinnentemperatur
Geräteinnentemperatur
OK
im Grenzbereich
ATT Verschmutzung Vorausfallmeldung:
Empfangspegel OK
Empfangssignalpegel
im Grenzbereich
LSR Laser Vorausfallmeldung
Laser OK
Messlaser
PLB Plausibilität Messfehler
Messwert OK
Ursache: z. B. Lichtstrahlunterbrechung,
Verschmutzung,
Optische/elektrische
Störeinflüsse
RDY Betriebsbereit (Ready) Bei Betriebsbereit-
schaft
BUS Schnittstelle:
SSI
PROFIBUS
®
DeviceNet
RS 422
Hiperface
Clocksignal empfangen
Telegrammverkehr
Telegrammverkehr
Continuous mode
‒
Initialisierung,
Hardwaredefekt
Kein Clock-Signal
Kein Telegrammverkehr
Kein Telegrammverkehr
Request mode
Unabhängig vom
Busstatus
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 17
Abhilfemaßnahmen bei Fehlermeldungen/Vorausfallmeldungen siehe Kapitel 11
„Troubleshooting“.
Page 18
Kapitel 6 Betriebsanleitung
Bedienung
DME5000
Infofeld 1 (Beispiel)
– 65 dB Empfangspegel: Aktuelle Signaldämpfung
Ver. 1.0 Software-Version
3.3.3.1 Menüunterpunkt (siehe Menüübersicht), Parameteränderungen nicht
möglich.
3.3.3.1 ! „!“: Code richtig eingegeben: Parameteränderungen möglich.
3.3.3.1 ? „?“: Eingegebener Parameter ist ungültig, vorher gültiger Parameter
bleibt gespeichert.
Ursache: z. B. unteres Schaltlimit > oberes Schaltlimit.
Abhilfe: Parameter korrigieren.
Infofeld 2 (Beispiel)
+ 010.000 m Aktueller Messwert, wird bei Messbetrieb angezeigt.
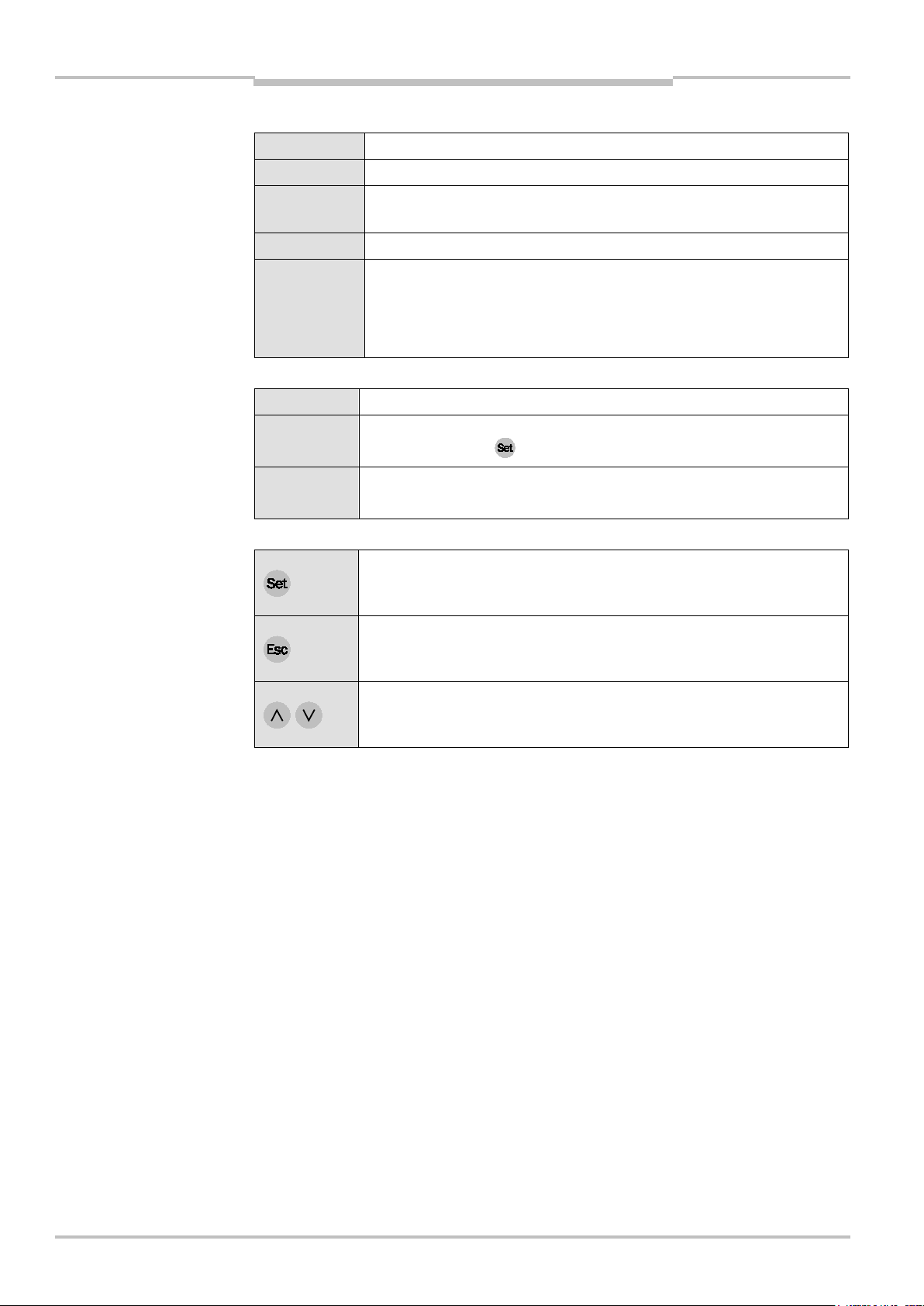
Code Menüpunkte und Parameter werden hier angezeigt. „Code“ erscheint
durch Drücken von
Service Blinkende Anzeige Service signalisiert einen Hardwaredefekt oder
.
Über-/Untertemperatur.
Tasten
Führt durch die Menüstruktur, Code, Parametereingabe, Speichern von
Parametern.
Verlassen eines Menüunterpunktes.
Auswahl von Menüpunkten, Eingabe von Zahlen
18 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 19

Betriebsanleitung Kapitel 7
Menüstruktur
DME5000
7 Menüstruktur
7.1 Flussdiagramm
Auf der Innenseite der hinteren Umschlagklappe ist die Menüstruktur des DME5000 in
Form eines Flussdiagramms dargestellt. Klappen Sie diese Seite aus, um sich während der
folgenden Erklärungen besser in der Menüstruktur zurechtzufinden.
7.2 Erklärungen zur Menüstruktur
Code
Schutz vor unbeabsichtigtem Verändern der eingestellten Parameter.
Code: 314
Funktion:
Menüzugang und Verändern der Parameter: Code 314 bestätigen mit
Die erfolgreiche Eingabe des Codes wird im Display mit einem „!“ bestätigt.
.
Hinweis
Hinweis
Hinweis
Parameteränderungen, die mit
gespeichert.
Während der Parameteränderung muss der Reflektor im Sichtfeld des Sensors sein. Es
darf keine Buskommunikation aktiv sein. Änderungen der Busadresse sind erst nach
einem Geräteneustart aktiv.
Wird die Eingabe des Code übersprungen oder eine andere Zahl (als 314) eingegeben,
werden die gültigen Parameter im Display angezeigt, ein Ändern ist dann nicht möglich.
Die Möglichkeit alle Parameter ohne Änderungsmöglichkeit einzusehen erleichtert z. B. die
Abfrage und Übermittlung von Parametern durch ungeschultes Personal.
Software-Version
z. B. „Ver. 1.0“
Parameter
Je nach Gerätevariante wird hier die Schnittstelle, der Multifunktions-Ein-/Ausgang MF1,
der Ausgang MF2, die Auflösung und ein Offset eingestellt.
Ein Reset stellt alle Parameter auf Default zurück.
Bei PROFIBUS-Geräten sollten bei Verwendung des gsd-Moduls „Class 2“ die Parameter
nicht über das Display eingestellt werden, da diese bei erneutem „Hochfahren“ des
PROFIBUS vom PROFIBUS-Master mit den in der Steuerung hinterlegten Parametern
überschrieben werden.
Ausnahme: PROFIBUS-Adresse und Offset bei aktivierter Preset-Funktion.
bestätigt werden, sind sofort aktiv und nichtflüchtig
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 19
Page 20
Kapitel 7 Betriebsanleitung
Menüstruktur
DME5000
Interface
Je nach Gerätetyp erscheint im Menü nur die jeweilige Schnittstelle des Gerätetyps.
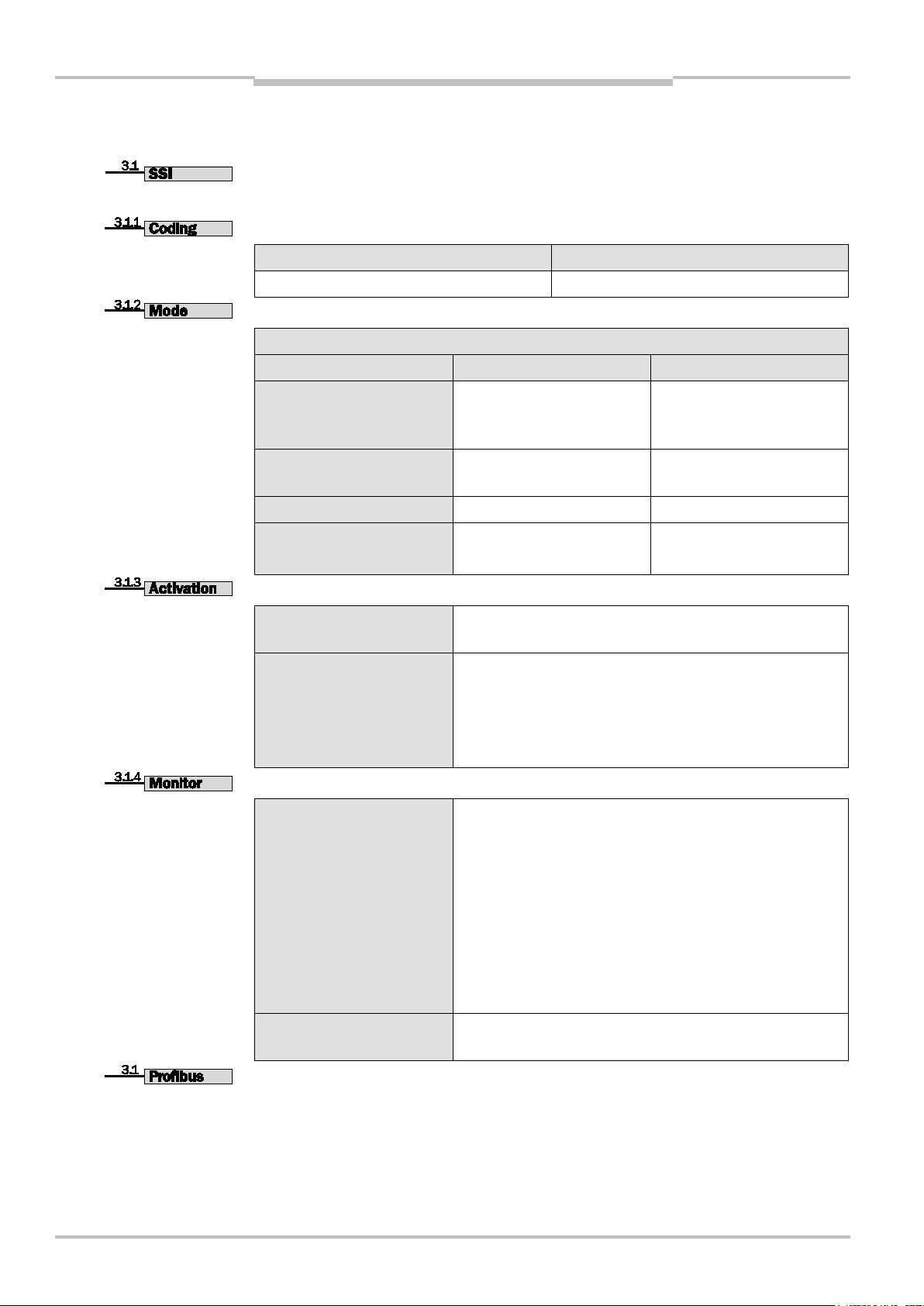
SSI
Funktion SSI-Schnittstelle siehe Kapitel 12 „Begriffserklärungen – SSI“.
Coding
Binary Gray (Default)
Messwertausgabe im Binärcode Messwertausgabe im Gray-Code
Mode
Datenformat
Binär Gray
25 bit (default) Messwert: Bit 1 ... 24
LSB: Plausibilitätsbit
Messwert inkl.
Plausibilitäts-Bit im GrayCode eincodiert
24 bit + err Messwert: Bit 1 ... 24
LSB: Plausibilitätsbit
24 bit Messwert: Bit 0 ... 23 Messwert: Bit 0 ... 23
Plausibilitätsbit: 0: OK
1: Plausibilitätsfehler
Messwert: Bit 1 ... 24
LSB: Plausibilitätsbit
0: OK
1: Plausibilitätsfehler
Activation
On (default) SSI-Schnittstelle in Betrieb, RS-422-Schnittstelle nicht in
Betrieb.
Off RS-422-Schnittstelle in Betrieb, SSI-Schnittstelle nicht in
Betrieb. Die RS-422-Schnittstelle ermöglicht das Parametrieren des DME mit dem Schnittstellenadapter (siehe
Abschnitt 13.4 „Schnittstellenadapter“).
(Baudrate und Protokoll unter > 3.2 Serial < einstellen)
Monitor
On Serielle Monitorschnittstelle in Betrieb, Multifunktions-
ausgänge MF1 und MF2 nicht in Betrieb. Ermöglicht das
Parametrieren des DME5000 mit dem Schnittstellenadapter (siehe Abschnitt 13.4 „Schnittstellenadapter“)
bzw. das Mithören von Messwerten über MF1 und MF2
während des SSI-Betriebs. Die eingeschaltete Monitorschnittstelle wird im Menü 3.3.2 und 3.4.2 MF-Function
mit „Monitor“ angezeigt. Die SSI-Schnittstelle ist voll
funktionsfähig (Baudrate und Protokoll unter > 3.2 Serial
< einstellen).
20 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Off (default) Multifunktionsausgänge MF1 und MF2 in Betrieb, wie
unter Punkt 3.3/3.4 eingestellt.
PROFIBUS
®
Page 21
Betriebsanleitung Kapitel 7
Menüstruktur
DME5000
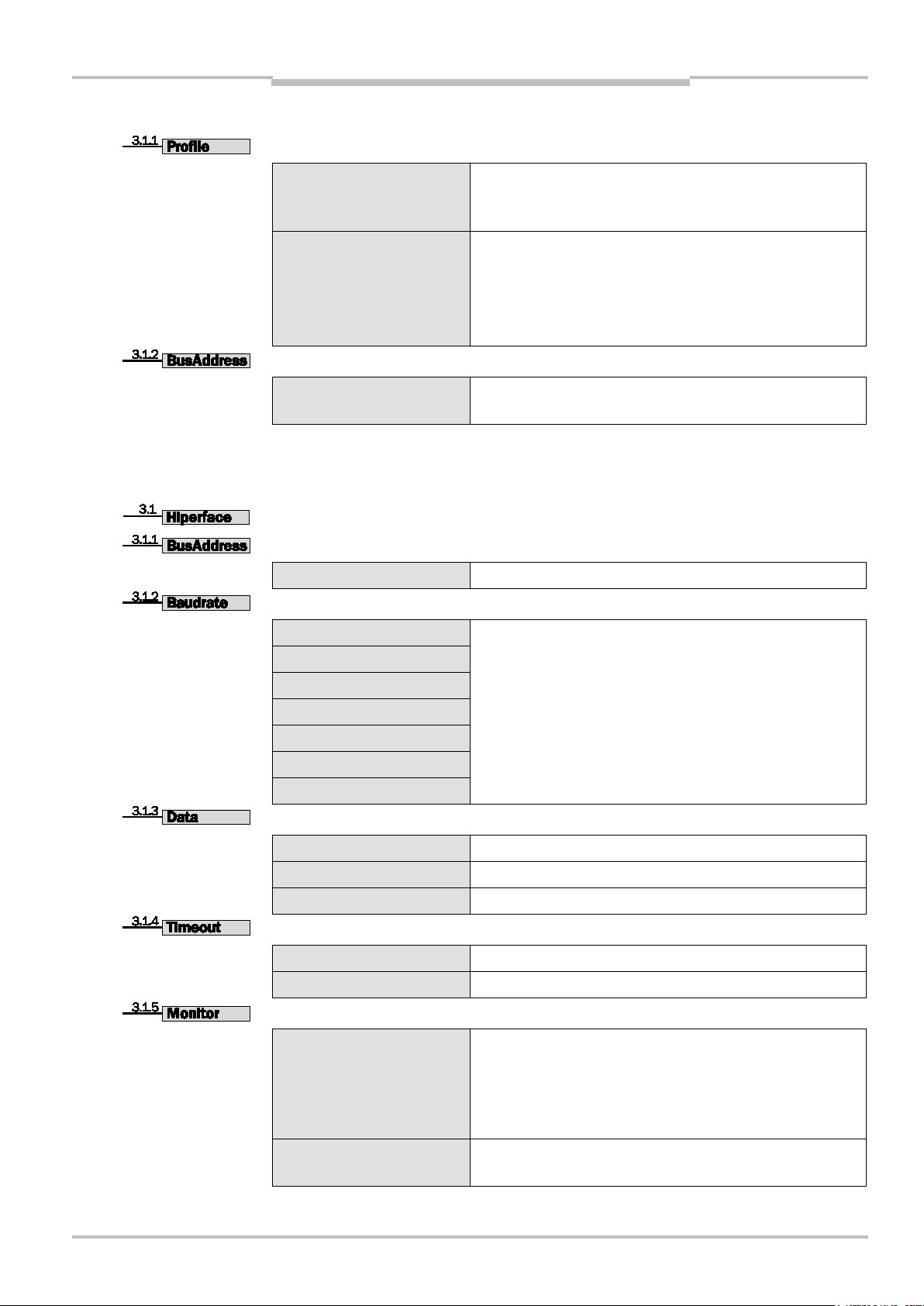
Profile
Encoder Dieses Profil entspricht dem Standard-Encoder-Profil,
Beschreibung siehe Abschnitt 13.2 „PROFIBUSSchnittstelle“.
SICK (default) Dieses Profil basiert auf dem Standard-Encoder-Profil.
Zusätzlich zum Messwert werden Warn-, Zustands- und
Fehlerinformationen übertragen.
Beschreibung siehe Abschnitt 13.2 „PROFIBUSSchnittstelle“.
Bus Address
Addr. 006 (default) Hier wird die PROFIBUS-Teilnehmeradresse eingestellt.
(001 … 125)
Hinweis
Inbetriebnahme-Beispiel mit Siemens Step 7 siehe Kapitel 13 „Anhang“.
Hiperface
BusAddress
Add 00 (default) Einstellung der Hiperface-Adresse (Bereich 0 … 31)
Baudrate
0,6 kBd Einstellung der Baudrate
1,2 kBd
2,4 kBd
4,8 kBd
9,6 kBd (default)
19,2 kBd
38,4 kBd
Data
8, o, 1 8-Datenbit, ungerade Parität, 1 Stopbit
8, e, 1 (default) 8-Datenbit, gerade Parität, 1 Stopbit
8, n, 1 8-Datenbit, keine Parität, 1 Stopbit
Timeout
X1 1*11/Baudrate
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 21
X4 (default) 4*11/Baudrate
Monitor
On Serielle Monitorschnittstelle in Betrieb, Multifunktions-
ausgänge MF1 und MF2 nicht in Betrieb. Ermöglicht das
Parametrieren des DME5000 mit dem Schnittstellenadapter (siehe Abschnitt 13.4 „Schnittstellenadapter“)
bzw. das Mithören von Messwerten über MF1 und MF2.
Off (default) Multifunktionsausgänge MF1 und MF2 in Betrieb, wie
unter Punkt 3.3/3.4 eingestellt.
Page 22

Kapitel 7 Betriebsanleitung
Menüstruktur
DME5000
Period Len
1 Typecode 90H (default) Entspr. Auflösung 1 mm pro Periode
2 Typecode 91H Entspr. Auflösung 2 mm pro Periode
4 Typecode 92H Entspr. Auflösung 4 mm pro Periode
8 Typecode 93H Entspr. Auflösung 8 mm pro Periode
16 Typecode 94H Entspr. Auflösung 16 mm pro Periode
Hinweis
Für eine detaillierte Beschreibung siehe Abschnitt 13.8 „Hiperface-Schnittstelle“.
RS 422
Mode
Request Datenübertragung nur auf Anforderung
Continuous Zyklische Datenübertragung gemäß der eingestellten Baudrate
Protocol
Standard <STX>8122<[sign]><7*[0…9]><ETX>
CRLF <[sign]><7*[0…9]><CR><LF>
Hinweis
Hinweis
CP0 <[sign]><7*[0…9]>
CP1 Nicht belegt
Für eine detaillierte Beschreibung siehe Abschnitt 13.6 „RS-422-Schnittstelle“.
DeviceNet
Baudrate
125 (default) Einstellung der Baudrate (125, 250, 500 kBd)
Bus Address
Addr. 06 (default) Einstellung der DeviceNet-Adresse (Bereich 0 ... 63)
Für eine detaillierte Beschreibung siehe Abschnitt 13.7 „DeviceNet-Schnittstelle“.
Serial
Baudrate
19,2 (default) Baudrate für RS-422-Schnittstelle (max. 115,2 kBd)
Baudrate für Monitor-Schnittstelle über MF1 und MF2
(max. 38,44 kBd), nur bei DME5000 mit SSI- bzw.
Hiperface-Schnittstelle
Genaue Beschreibung siehe Abschnitt 13.4
„Schnittstellenadapter – Monitor-Mode“.
22 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Data
7,e,1 7-Datenbit, gerade Parität, 1 Stopbit
8,e,1 8-Datenbit, gerade Parität, 1 Stopbit
8,n,1 (default) 8-Datenbit, keine Parität, 1 Stopbit
Page 23

Betriebsanleitung Kapitel 7
Menüstruktur
DME5000
MF1
Parametrierbarer Aus- oder Eingang
Act.State
Parametrierung der Schaltlogik bei MF1 = Ausgang
Active 1 (default) HIGH-Pegel bei aktivem Ausgang (Schließer/NO)
Active 0 LOW-Pegel bei aktivem Ausgang (Öffner/NC)
Parametrierung der Schaltlogik bei MF1 = Eingang
Active 1 (default) Aktivierung Eingang bei steigender Flanke
Active 0 Aktivierung Eingang bei fallender Flanke
Function
Distance
(default)
Service MF1 wird als Serviceausgang verwendet, siehe 3.3.4.
Sleepmodus MF1 wird als Eingang für die Aktivierung des Sleepmodus
MF1 wird als Distanzschaltausgang verwendet,
siehe 3.3.3.
(Laser aus) verwendet, Quittierung über Ready-Status
Funktionsbeschreibung siehe Abschnitt 13.5
„Sleepmodus“.
Preset MF1 wird als Eingang für die Aktivierung des Preset
(Überschreiben des Offset) verwendet.
Offset = Presetwert - aktueller Messwert
Funktionsbeschreibung siehe Abschnitt 13.1 „Preset“.
SPEED MF1 wird als Geschwindigkeitsschaltausgang verwendet,
siehe 3.3.5.
Monitor (nur bei SSI- bzw. Hiperface-Variante): Wird angezeigt,
wenn unter 3.1.4, bzw. 3.1.5 die Monitorschnittstelle ON
gesetzt wird.
Distance
MF1 wird als Distanzschaltausgang verwendet.
Aktiv bei Überschreitung von „UpperLimit“.
Inaktiv bei Unterschreitung von „LowerLimit“.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 23
Page 24

Kapitel 7 Betriebsanleitung
Menüstruktur
DME5000
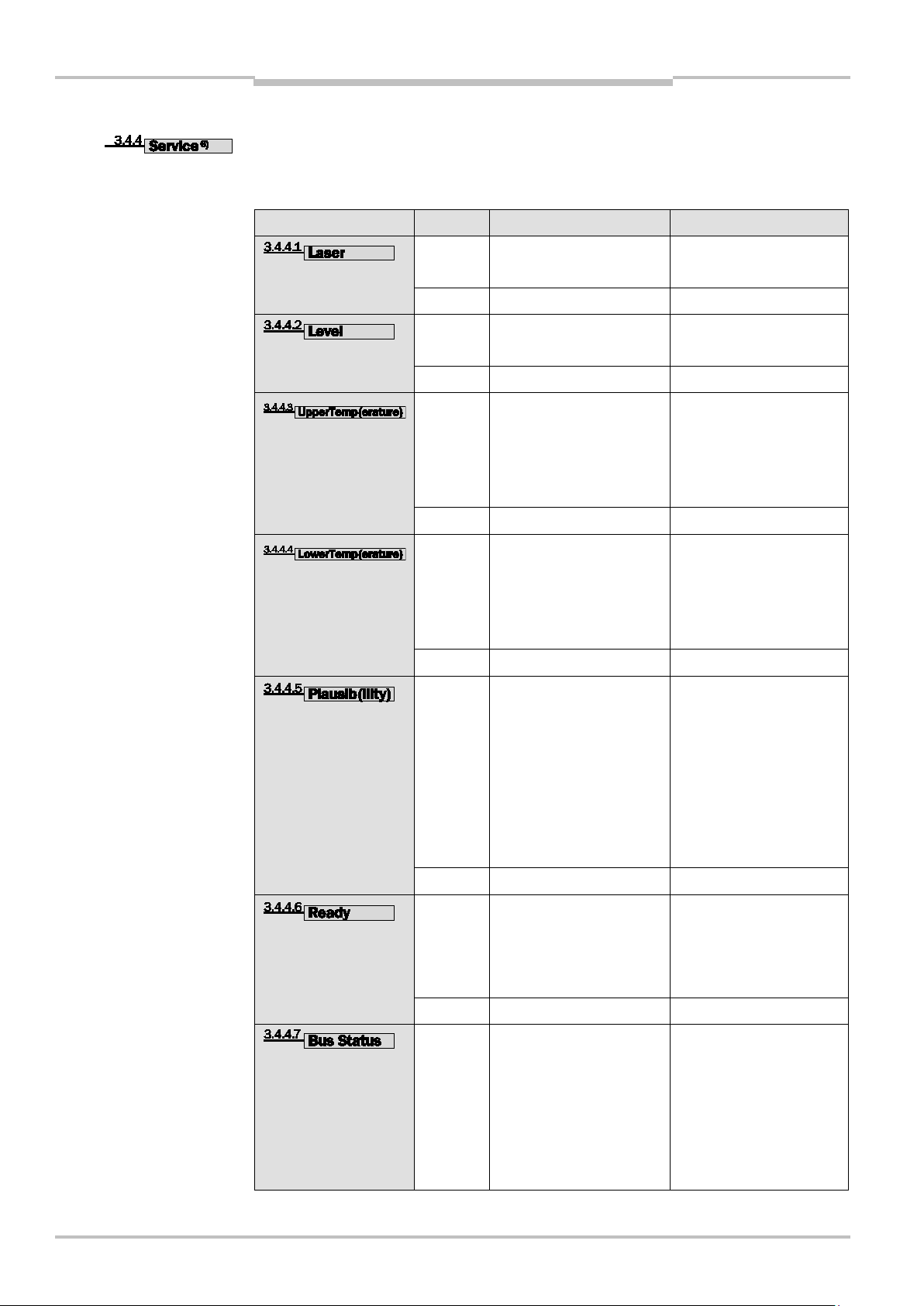
Service
Sammelausgang für frei einstellbare Statusmeldungen in „ODER“-Verknüpfung, die
Aufschluss über den Gerätezustand geben.
Aktiv Nicht Aktiv
Laser
On
(default)
Vorausfallmeldung
Laserdiode
Laser OK
Off –
Level
On
(default)
Vorausfallmeldung
Verschmutzung
Nicht verschmutzt
Off –
UpperTemp
LowerTemp
Plausib(ility)
On
(default)
ÜbertemperaturÜberwachung:
Geräteinnentemperatur
> oberes eingestelltes
Temperaturlimit
Off –
On
(default)
UntertemperaturÜberwachung:
Geräteinnentemperatur
< unteres eingestelltes
Temperaturlimit
Off –
On Fehlerhafter Messwert
Ursache:
– z. B. Lichtstrahlunter-
brechung
– Verschmutzung
– optische/elektrische
Störeinflüsse
Off –
Geräteinnentemperatur
< oberes eingestelltes
Temperaturlimit
Geräteinnentemperatur
> unteres eingestelltes
Temperaturlimit
Messwert OK
24 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Ready
On
(default)
Initialisierung,
Hardwarefehler,
Betriebsbereit,
Messwert OK
Laser ausgeschaltet
Off –
Bus Status
On Busfehler
SSI: kein Clocksignal
PB/DN: kein Tele-
grammverkehr
RS 422/Hiperface: ‒
Datenübertragung OK
RS 422/Hiperface:
unabhängig vom
Busstatus
Off
–
(default)
Page 25

Betriebsanleitung Kapitel 7
Menüstruktur
DME5000
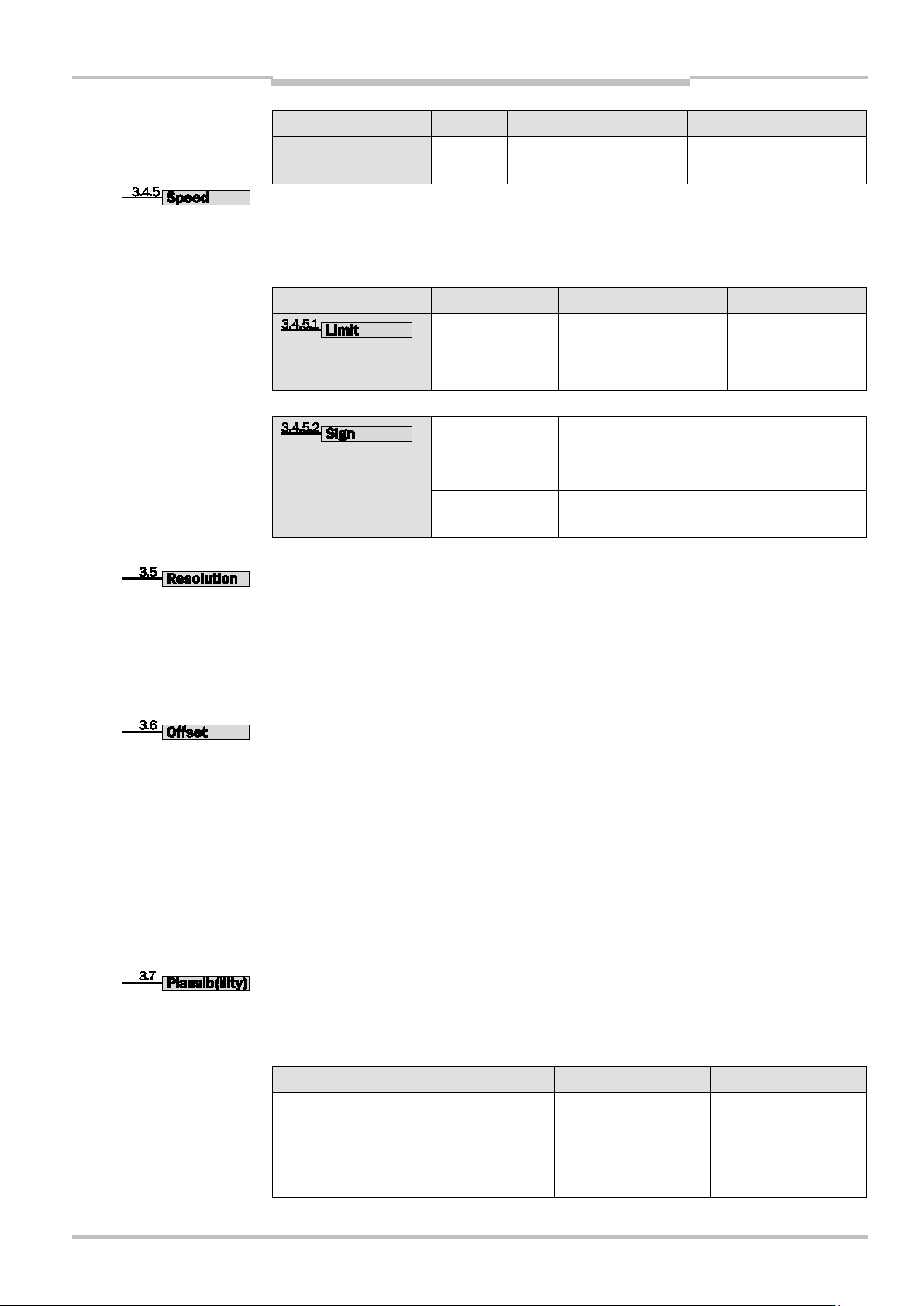
Speed
MF1 wird als Geschwindigkeitsschaltausgang verwendet. Aktiv bei Überschreitung von
„Limit“.
Die Schalthysterese ist fix ± 0,1 m/s.
Aktiv Nicht aktiv
Limit
Range
0,0 … 9,9 m/s
Geschwindigkeit >
Limit
Geschwindigkeit <
Limit
+/– Überwachung in beide Verfahrrichtungen
Sign
+ Überwachung in Verfahrrichtung „+“
(zunehmende Distanz)
– Überwachung in Verfahrrichtung „–“
(abnehmende Distanz)
MF2
Parametrierbarer Ausgang
Active State
Parametrierung der Schaltlogik
Active 1 HIGH-Pegel bei aktivem Ausgang (Schließer/NO)
Active 0 LOW-Pegel bei aktivem Ausgang (Öffner/NC)
Function
Distance siehe 3.4.3 MF2 wird als Distanzschaltausgang verwendet.
Service (default) siehe 3.4.4 MF2 wird als Serviceausgang verwendet.
Speed siehe 3.4.5. MF2 wird als Geschwindigkeitsschaltausgang verwendet.
Monitor (nur bei SSI- bzw. Hiperface-Variante): Wird angezeigt,
wenn unter 3.1.4, bzw. 3.1.5 die Monitorschnittstelle ON
gesetzt wird.
Distance
MF2 wird als Distanzschaltausgang verwendet.
Aktiv bei Überschreitung von „UpperLimit“.
Inaktiv bei Unterschreitung von „LowerLimit“.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 25
Page 26
Kapitel 7 Betriebsanleitung
Menüstruktur
Off –
Off
Off –
Off –
DME5000
Service
Sammelausgang für frei einstellbare Statusmeldungen in „ODER“-Verknüpfung, die
Aufschluss über den Gerätezustand geben.
Aktiv Nicht aktiv
Laser
On
(default)
Vorausfallmeldung
Laserdiode
Vorausfallmeldung
Laserdiode
Level
UpperTemp
LowerTemp
Plausib(ility)
On
(default)
Vorausfallmeldung
Verschmutzung
Off –
On
(default)
ÜbertemperaturÜberwachung:
Geräteinnentemperatur
> oberes eingestelltes
Temperaturlimit
Off
On
(default)
–
UntertemperaturÜberwachung:
Geräteinnentemperatur
< unteres eingestelltes
Temperaturlimit
–
On
(default)
Fehlerhafter Messwert,
Messwertausgabe „0“
Ursache:
– z. B. Lichtstrahlunter-
brechung
– Verschmutzung
– optische/elektrische
Störeinflüsse
Nicht verschmutzt
Geräteinnentemperatur
< oberes eingestelltes
Temperaturlimit
Geräteinnentemperatur
> unteres eingestelltes
Temperaturlimit
Messwert OK
26 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Ready
On
(default)
Initialisierung
Hardwarefehler,
Betriebsbereit,
Messwert OK
Messfehler,
Laser ausgeschaltet
Bus Status
On Busfehler
SSI: kein Clocksignal
PB/DN: kein Tele-
grammverkehr
RS 422/Hiperface: –
Datenübertragung OK
RS 422/Hiperface:
unabhängig vom
Busstatus
Page 27
Betriebsanleitung Kapitel 7
Menüstruktur
Off
Fehler erfolgt
wenn keine Messung
DME5000
Aktiv Nicht aktiv
–
(default)
Speed
MF2 wird als Geschwindigkeitsschaltausgang verwendet. Aktiv bei Überschreitung von
„Limit“.
Die Schalthysterese ist fix ± 0,1 m/s.
Aktiv Nicht aktiv
Limit
Range
0,0 … 9,9 m/s
Geschwindigkeit >
Limit
Geschwindigkeit <
Limit
+/– Überwachung in beide Verfahrrichtungen
Sign
+ Überwachung in Verfahrrichtung „+“
(zunehmende Distanz)
– Überwachung in Verfahrrichtung „–“
(abnehmende Distanz)
Hinweis
Hinweis
Resolution
Einstellung der Auflösung wirkt ausschließlich auf die digitalen Datenschnittstellen.
Bei der Hiperface-Variante darf dieser Parameter nicht geändert werden. Eine
Veränderung der Auflösung erfolgt dort über den Parameter 3.1.6 „Period Length“.
Einstellbar: 50 ... 5000 µm, default 100 µm (bzw. 125 µm bei Hiperface-Variante)
Offset
Der Offsetwert wird zum intern ermittelten DME-Messwert addiert und wirkt auf alle
Ausgänge und das Display.
Einstellbar: ± 250 m
Über die SSI-Schnittstelle wird bei negativem Messwert „0“ ausgegeben.
Bei aktivierter Preset-Funktion wird der Offsetwert durch Auslösen des Preset-Eingangs
überschrieben, siehe auch Abschnitt 13.1 „Preset“.
Plausibilität
Diese Funktion überwacht Messwerte auf Plausibilität. Spricht an bei Lichtstrahlunterbrechung, Verschmutzung oder optischen/elektrischen Störungen. Plausibilitätsfehler führt zu
Messwertausgabe 0.
200 ms (Default) Normal Off
Fehlerunterdrückung durch Messwertextrapolation für max. 200 ms; bei
Fehler > 200 ms Fehlerausgabe
Fehlerunterdrückung
für 1 internen
Messzyklus, bei
länger anliegendem
keine Überprüfung
auf Plausibilität,
Fehlerausgabe
erfolgt nur dann,
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 27
Page 28
Kapitel 7 Betriebsanleitung
Menüstruktur
DME5000
Fehlerausgabe. mehr möglich ist.
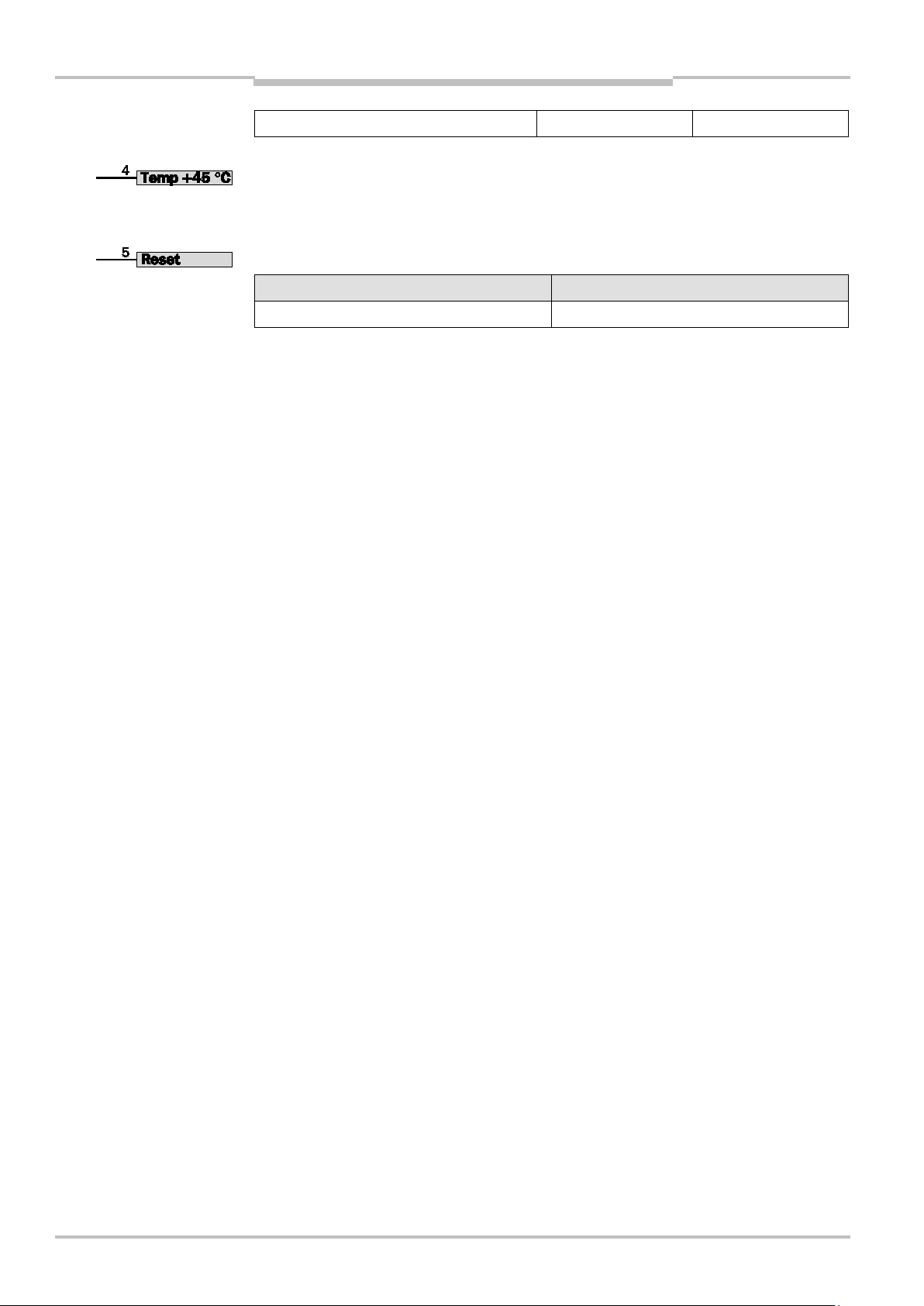
Temperatur
Anzeige der aktuellen Geräteinnentemperatur.
Reset
NO YES
Kein Reset Rückstellung auf Default-Werte
28 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 29
Betriebsanleitung Kapitel 8
Beispiel
DME5000
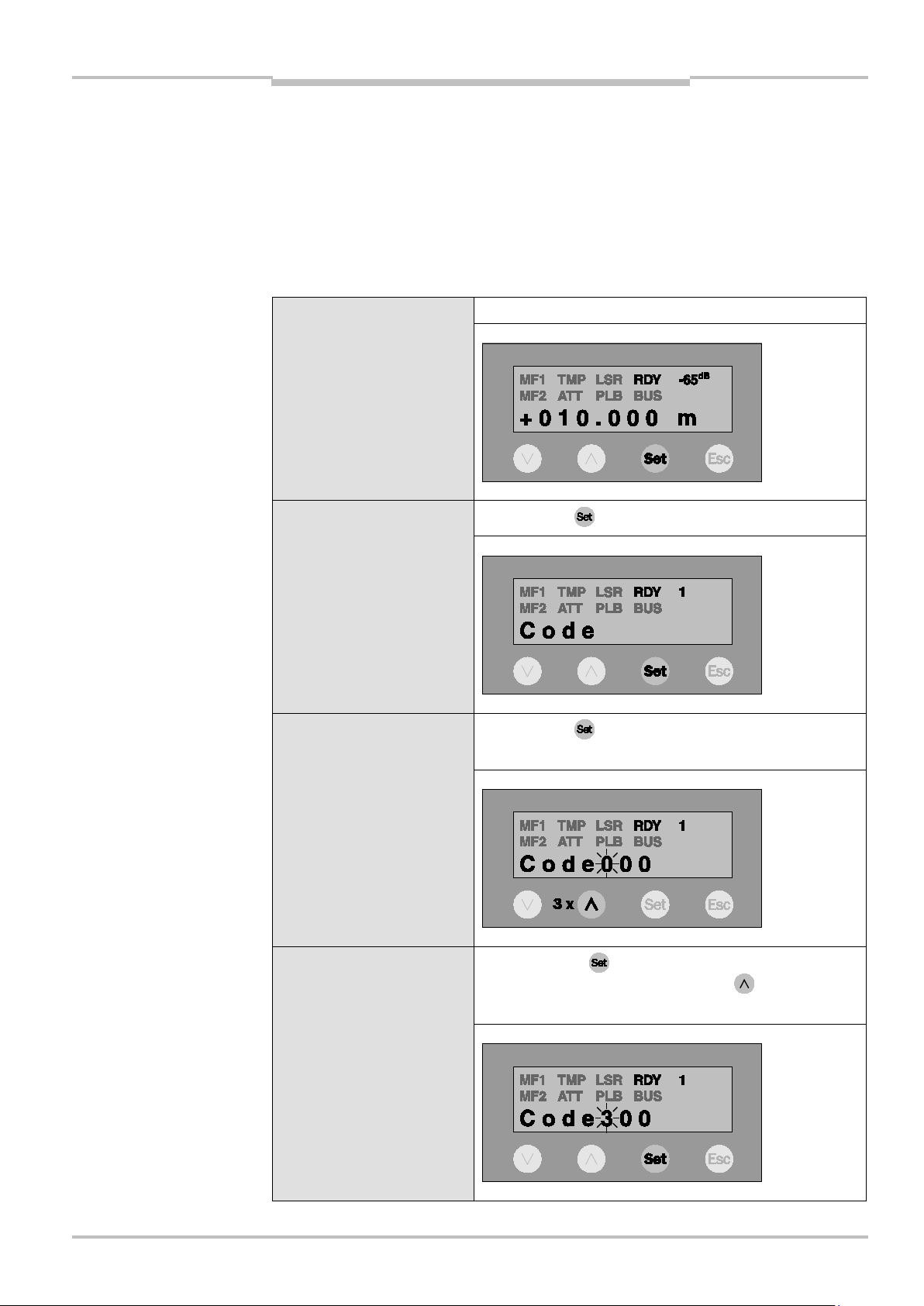
8 Beispiel
8.1 Parametereingabe am Beispiel „Code-Eingabe“
Hinweis
Alle Parameter lassen sich auf diese Art und Weise einstellen.
Während der Parameteränderung muss der Reflektor im Sichtfeld des Sensors sein.
Schritt 1 Legen Sie die Betriebsspannung an.
Anzeige
Schritt 2
Anzeige
Rufen Sie mit das Menü „CODE“ auf.
Schritt 3
Anzeige
Schritt 4
Anzeige
Rufen Sie mit das Eingabefeld „CODE 000“ auf.
Die 1. Ziffer blinkt.
Drücken Sie 3 x für das Passwort „000“ (nur
Parameteransicht) oder geben Sie mit
gewünschte 1. Ziffer (z. B. „3“) ein.
die
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 29
Page 30

Kapitel 8 Betriebsanleitung
Beispiel
DME5000
Schritt 5
Anzeige
Schritt 6
Anzeige
Gehen Sie mit eine Stelle weiter und geben Sie mit
die gewünschte 2. Ziffer (z. B. „1“) ein.
Gehen Sie mit eine Stelle weiter und geben Sie mit
die gewünschte 3. Ziffer (z. B. „4“) ein.
Hinweis
Schritt 7
Anzeige
Drücken Sie , um die 3. Ziffer „4“ zu bestätigen.
Das Ausrufezeichen „!“ im Display bestätigt: Parametriermode.
30 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 31

Betriebsanleitung Kapitel 9
Technische Daten
DME5000
DME5000
1 x M16
(SSI/RS 422)
DME5000
1 x M16
Stecker (PROFIBUS
DME5000
DME5000
1 x M16
Stecker (DeviceNet)
2 x M12
(Hiperface)
DME5000
1 x M12
(DeviceNet)
Abb. 20: Maßzeichnung
DME5000
Abb. 21: Maßzeichnungen
Rückansicht DME5000
Abb. 22: Maßzeichnung
montiert
Gerätenullpunkt
DME5000
9 Technische Daten
9.1 Maßzeichnung
DME5000 am Halter
-xx1
-xx3
-Stecker
-xx2
-/2 x M12
-xx4
-xx7
®
)
-/1 x M12-
-Stecker
-xx5
-Stecker
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 31
Page 32

Kapitel 9 Betriebsanleitung
Technische Daten
DME5000
9.2 Zubehör
9.2.1 Reflektoren
Reflektor 0,3 x 0,3 m2 Diamond Grade, montiert 1) Reflektor 0,6 x 0,6 m2 Diamond Grade, montiert 1)
Typ: PL240DG Bestell-Nr.: 1017910 Typ: PL560DG Bestell-Nr.: 1016806
Reflektor 1 x 1 m2 Diamond Grade, montiert
1)
Typ: PL880DG Bestell-Nr.: 1018975
1)
Grundplatte: ALMG3
32 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 33

Betriebsanleitung Kapitel 9
Technische Daten
Steckeransicht
Steckeransicht
DME5000
Reflektor 0,3 x 0,3 m2 Diamond Grade, geregelte Heizung +20 °C
AC 230 V/200 W, IP 64 1)
Reflektor 0,6 x 0,6 m2 Diamond Grade, geregelte Heizung +20 °C
AC 230 V/900 W, IP 64 1)
Typ: PL240DG-H Bestell-Nr.: 1022926 Typ: PL560DG-H Bestell-Nr.: 1023888
Reflexionsfolie Diamond Grade, Größe konfektionierbar Reflexionsfolie Diamond Grade, Bogen 749 x 914 mm2
Typ: REF-DG- Bestell-Nr.: 4019634 Typ: REF-DG Bestell-Nr.: 5320565
9.2.2 Stecker/Leitungen
®
PROFIBUS
Leitungsdose M16, 8-polig, gerade, geschirmt Leitungsdose M16, 8-polig, gewinkelt, geschirmt
, SSI, RS 422 und DeviceNet (nur DME5000-xx4)
Typ: DOS-1608-GA Bestell-Nr.: 6025726 Typ: DOS-1608-WA Bestell-Nr.: 6025727
1)
Grundplatte: ALMG3
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 33
Page 34

Kapitel 9 Betriebsanleitung
Technische Daten
Steckeransicht
Steckeransicht
DME5000
Leitungsdose M16, 8-polig, gerade, 5 m/50 m, geschirmt Leitungsdose M16, 8-polig, gerade, 10 m, geschirmt
Typ: DOL-1608-G05MA Bestell-Nr.: 2026742 Typ: DOL-1608-G10MA Bestell-Nr.: 2027193
Typ: DOL-1608-G50MA Bestell-Nr.: 6032903
Leitungsdose M16, 8-polig, gewinkelt, 5 m, geschirmt Leitungsdose M16, 8-polig, gewinkelt, 10 m, geschirmt
Typ: DOL-1608-W05MA Bestell-Nr.: 2026743 Typ: DOL-1608-W10MA Bestell-Nr.: 2027194
Leitung 2 x 0,5 mm2, 6 x 0,25 mm2,
paarweise verdrillt, abgeschirmt
Technische Daten
Typ: LTG-2308-MW Bestell-Nr.: 6026292 Temperaturbereich bewegt –5 ... +70 °C
festverlegt –40 ... +80 °C
Mantel PUR kieselgrau
Schirm verzinntes Kupfergeflecht
Legende:
1 = Adernpaar blk/wht
2 = Adernpaar red/vio
3 = Adernpaar pnk/gra
4 = Adernpaar brn/blu
5 = Isolierfolie
6 = Schirm
7 = PUR-Mantel
34 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 35

Betriebsanleitung Kapitel 9
Technische Daten
DME5000
PROFIBUS®
PROFIBUS® Abschlusswiderstand, M12, B-cod. Bus in, Leitungsdose, M12, 5-polig, B-cod., geschirmt
Typ: PR-STE-END Bestell-Nr.: 6021156 Typ: PR-DOS-1205-G Bestell-Nr.: 6021353
Bus out, Leitungsstecker, M12, 5-polig, B-cod., geschirmt PROFIBUS-Leitung, 2 x 0,34 mm2, Meterware
Typ: PR-STE-1205-G Bestell-Nr.: 6021354 Typ: LTG-2102-MW Bestell-Nr.: 6021355
Temperaturbereich bewegt –5 ... +80 °C
Festverlegt –40 ... +80 °C
Mantel PUR violett Ø 8 mm
Schirm AL-PT-Folie
Bus in, Leitungsdose mit PROFIBUS-Leitung, 5 m, B-cod. Bus in, Leitungsdose mit PROFIBUS-Leitung, 10 m, B-cod.
Typ: DOL-12PR-G05 Bestell-Nr.: 6026006 Typ: DOL-12PR-G10 Bestell-Nr.: 6026008
Bus out, Leitungsstecker mit PROFIBUS-Leitung, 5 m, B-cod. Bus out, Leitungsstecker mit PROFIBUS-Leitung, 10 m, B-cod.
Typ: STL-12PR-G05 Bestell-Nr.: 6026005 Typ: STL-12PR-G10 Bestell-Nr.: 6026007
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 35
Page 36

Kapitel 9 Betriebsanleitung
Technische Daten
1)
DME5000
DeviceNet
Leitungsdose, M12, 5-polig, gerade, geschirmt,
360°-Schirm auf Rändelmutter, konfektionierbar, A-cod.
Leitungsstecker, M12, 5-polig, gerade, geschirmt,
360°-Schirm auf Rändelmutter, konfektionierbar; A-cod.
Typ: DOS-1205-GA Bestell-Nr.: 6027534 Typ: STE-1205-GA Bestell-Nr.: 6027533
Leitungsdose, M12, 5-polig, gerade,
Leitung 6 m, Dropcable, A-cod.
Verbindungsleitung 6 m, Dose M12, 5-polig, gerade, Stecker
M12, 5-polig, gerade, Dropcable, A-cod., Schirm auf Pin 1
Typ: DOL-1205-G06MK Bestell-Nr.: 6028326 Typ: DSL-1205-G06MK Bestell-Nr.: 6028327
Minimaler Biegeradius bei
- ortsfester Verlegung: > 5 x Leitungsdurchmesser
- flexiblem Einsatz: > 10 x Leitungsdurchmesser
DeviceNet-T-Verteiler Dose M12, 5-polig, auf Stecker, Dose
7/8'', 5-polig
DeviceNet-Abschlusswiderstand, Dose 7/8'',
5-polig, gerade
Typ: SDO-02D78-SF Bestell-Nr.: 6028330 Typ: DOS-7805-GKEND Bestell-Nr.: 6028329
36 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 37

Betriebsanleitung Kapitel 9
Technische Daten
DME5000
DeviceNet-Leitungsdose, 7/8'', 5-polig, gerade, PG16,
konfektionierbar
DeviceNet-Leitungsstecker, 7/8'', 5-polig, gerade, PG16,
konfektionierbar
Typ: DOS-7805-GK Bestell-Nr.: 6028331 Typ: STE-7805-GK Bestell-Nr.: 6028332
Leitung, 2 x 0,34 mm2 (V+, V‒) bzw. 2 x 0,25 mm2 (CANH, CANL),
Adern paarweise verdrillt und mit AL-PT-Folie geschirmt
Pinbelegung
Typ: LTG-2804-MW Bestell-Nr.: 6028328 1 Shield
Temperaturbereich bewegt –10 ... +70 °C
festverlegt –40 ... +70 °C
Mantel PUR schwarz Ø 6,7 mm
2 red V+
3 blk V–
4 wht CAN
5 blu CANL
H
Abschirmung Cu verzinnt
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 37
Page 38

Kapitel 9 Betriebsanleitung
Technische Daten
Steckeransicht
Steckeransicht
Steckeransicht
DME5000
Hiperface
Leitungsdose, M12, 8-polig, gerade, konfektionierbar, A-cod.,
geschirmt
Leitungsstecker, M12, 8-polig, gerade, konfektionierbar,
A-cod., geschirmt
Typ: DOS-1208-GA Bestell-Nr.: 6028369 Typ: STE-1208-GA Bestell-Nr.: 6028370
Leitungsdose, M12, 8-polig, gerade, angespritzte Leitung mit
Schirm über Rändelmutter, A-cod.
Leitungsdose M12, 5-polig, PUR, gerade, Schirm auf
Rändelmutter, A-cod.
2 m – DOL-1208-G02MAH1 Bestell-Nr.: 6032448 5 m – DOL-1205-G05MAC Bestell-Nr.: 6036384
5 m – DOL-1208-G05MAH1 Bestell-Nr.: 6032449 10 m – DOL-1205-G10MAC Bestell-Nr.: 6036385
10 m – DOL-1208-G10MAH1 Bestell-Nr.: 6032450 20 m – DOL-1205-G20MAC Bestell-Nr.: 6036386
20 m – DOL-1208-G20MAH1 Bestell-Nr.: 6032451
Leitung Pinbelegung
Typ: LTG-3108-MW Bestell-Nr.: 6032456 1 wht REFsin
Temperaturbereich Bewegt –10 ... +70 °C
festverlegt –40 ... +70 °C
Mantel PUR schwarz Ø 6,8 mm
Abschirmung Cu verzinnt
2 brn +sin
3 grn REFcos
4 yel +cos
5 gra Data+
6 pnk Data–
7 blu GND
8 red –
38 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 39

Betriebsanleitung Kapitel 9
Technische Daten
1)
DME5000
9.2.3 Befestigungstechnik
Ausrichthalterung DME5000, Edelstahl 1.4571
Typ: BEF-AH-DME5 Bestell-Nr.: 2027721
9.2.4 Wetterschutzgehäuse
Wetterschutzgehäuse DME5000, ALMG3 eloxiert
Typ: WSG-DME5 Bestell-Nr.: 2027800
1)
DME5000 Halterung nicht im Lieferumfang enthalten.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 39
Page 40

Kapitel 9 Betriebsanleitung
Technische Daten
DME5000
9.2.5 Umlenkspiegel
Umlenkung Lichtaustritt nach oben
Typ: USP-DME5 Bestell-Nr.: 2027710
9.2.6 Schnittstellenadapter
Schnittstellenadapter DME5000
Bestell-Nr.: 1023359
40 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 41

Betriebsanleitung Kapitel 9
Technische Daten
1)
DME5000
9.2.7 Kühlgehäuse
Kühlgehäuse für DME5000 Technische Daten
Bestell-Nr.: 6036180 Gehäusematerial Glasfaserverstärkter
Kunststoff (GFK)
Betriebsumgebungs-
temperatur
–20 … +75 °C
(kurzzeitig +80 °C)
Versorgungsspannung DC 24 V ±20 %
Stromaufnahme 15 A (bei DC 24 V)
Technische Details siehe separates Datenblatt Schutzart IP 54
1)
DME5000 Halterung im Kühlgehäuse integriert (im Lieferumfang enthalten).
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 41
Page 42

Kapitel 9 Betriebsanleitung
Technische Daten
1/32 …
®
DME5000
9.3 Technische Daten DME5000-1xx
DME5000- 111 112 113 114 115 117
Bestell-Nr. 1022949 1023668 1025248 1025832 1025833 1028243
Messbereich 0,15 … 70 m
Genauigkeit ± 2 mm
Reproduzierbarkeit 1) 0,5 mm
Messwertausgabe 1 ms 2 ms 2 ms 2 ms 2 ms 2 ms
Auflösung Datenschnittstelle (einstellbar) 0,05 … 5 mm
Auflösung sin/cos (einstellbar) 0,25 … 4 mm
1/2 mm
Temperaturdrift (typ.) 0,1 mm/K
Temperatureinfluss 1 ppm/K
Luftdruckeinfluss 0,3 ppm/hPa
Initialisierungszeit Typ. 1,5 s 900 ms
Max. Verfahrgeschwindigkeit 10 m/s (< 1 m/s bei Neuinitialisierung)
Versorgungsspannung UV 2) DC 18 … 30 V
Restwelligkeit 3) 5 VSS
Stromaufnahme (ohne Heizung) < 250 mA bei DC 24 V
Lichtsender Laserdiode (Rotlicht)
Laserklasse 2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C) MTTF 50.000 h
Lichtfleckdurchmesser/Entfernung max. 130 mm/70 m
Schaltausgänge MF1, MF2 B (push/pull)
Output (MF1/MF2) HIGH: UV ‒ (< 3 V); LOW < 2 V
Input (MF1) 4) HIGH: > 12 V; LOW < 3 V
Ausgangsstrom 5) 100 mA (kurzschlussfest, überlastfest)
Schnittstellen SSI PROFIBUS
RS 422 DeviceNet 500 kBd Hiperface
12 MBd
Betriebsumgebungstemperatur –10 … +55 °C
Lagertemperatur –25 … +75 °C
Heizung DME5000 121 122 123 124 Nicht
Bestell-Nr. 1024083 1024084 1025249 1025836 1028244
lieferbar
127
Betriebsumgebungstemperatur –40 … +55 °C
Stromaufnahme (mit Heizung) < 1000 mA bei DC 24 V
Schutzart IP 65
Elektrische Schutzklasse VDE Klasse 2 (Bemessungsspannung 32 V)
EMV EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung Schock: EN 600 68-2-27/-2-29; Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
Gewicht ca. 1650 g
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
42 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 43

Betriebsanleitung Kapitel 9
Technische Daten
1/32 … 1/2 mm
®
DME5000
9.4 Technische Daten DME5000-2xx
DME5000- 211 212 213 214 215 217
Bestell-Nr. 1024081 1024082 1025250 025834 1025835 1028245
Messbereich 0,15 … 150 m
Genauigkeit ± 3 mm
Reproduzierbarkeit 1) 1 mm
Messwertausgabe 1 ms 2 ms 2 ms 2 ms 2 ms 2 ms
Auflösung Datenschnittstelle (einstellbar) 0,05 … 5 mm
Auflösung sin/cos (einstellbar) 0,25 … 4 mm
Temperaturdrift (typ.) 0,1 mm/K
Temperatureinfluss 1 ppm/K
Luftdruckeinfluss 0,3 ppm/hPa
Initialisierungszeit Typ. 1,5 s 900 ms
Max. Verfahrgeschwindigkeit 10 m/s
Versorgungsspannung UV 2) DC 18 … 30 V
Restwelligkeit 3) 5 VSS
Stromaufnahme (ohne Heizung) < 250 mA bei DC 24 V
Lichtsender Laserdiode (Rotlicht)
Laserklasse 2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C) MTTF 50.000 h
Lichtfleckdurchmesser/Entfernung max. 270 mm/150 m
Schaltausgänge MF1, MF2 B (push/pull)
Output (MF1/MF2) HIGH: UV ‒ (< 3 V); LOW < 2 V
Input (MF1) 4) HIGH: > 12 V; LOW < 3 V
Ausgangsstrom 5) 100 mA (kurzschlussfest, überlastfest)
Schnittstellen SSI PROFIBUS
RS 422 DeviceNet 500 kBd Hiperface
12 MBd
Betriebsumgebungstemperatur –10 … +55 °C
Lagertemperatur –25 … +75 °C
Heizung DME5000 221 222 223 224 Nicht
Bestell-Nr. 1024085 1024086 1025251 1025837 1028246
lieferbar
227
Betriebsumgebungstemperatur –40 … +55 °C
Stromaufnahme (mit Heizung) < 1000 mA bei DC 24 V
Schutzart IP 65
Elektrische Schutzklasse VDE Klasse 2 (Bemessungsspannung 32 V)
EMV EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung Schock: EN 600 68-2-27/-2-29; Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
Gewicht ca. 1650 g
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 43
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
Page 44

Kapitel 9 Betriebsanleitung
Technische Daten
1/32 … 1/2 mm
®
DME5000
9.5 Technische Daten DME5000-3xx
DME5000- 311 312 313 314 315 317
Bestell-Nr. 1025244 1025245 1025252 1026002 1026003 1028247
Messbereich 0,15 … 300 m
Genauigkeit ± 5 mm
Reproduzierbarkeit 1) 2 mm
Messwertausgabe 1 ms 2 ms 2 ms 2 ms 2 ms 2 ms
Auflösung Datenschnittstelle (einstellbar) 0,05 … 5 mm
Auflösung sin/cos (einstellbar) 0,25 … 4 mm
Temperaturdrift (typ.) 0,1 mm/K
Temperatureinfluss 1 ppm/K
Luftdruckeinfluss 0,3 ppm/hPa
Initialisierungszeit Typ. 1,5 s 900 ms
Max. Verfahrgeschwindigkeit 10 m/s
Versorgungsspannung UV 2) DC 18 … 30 V
Restwelligkeit 3) 5 VSS
Stromaufnahme (ohne Heizung) < 250 mA bei DC 24 V
Lichtsender Laserdiode (Rotlicht)
Laserklasse 2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C) MTTF 50.000 h
Lichtfleckdurchmesser/Entfernung max. 550 mm/300 m
Schaltausgänge MF1, MF2 B (push/pull)
Output (MF1/MF2) HIGH: UV ‒ (< 3 V); LOW < 2 V
Input (MF1) 4) HIGH: > 12 V; LOW < 3 V
Ausgangsstrom 5) 100 mA (kurzschlussfest, überlastfest)
Schnittstellen SSI PROFIBUS
RS 422 DeviceNet 500 kBd Hiperface
12 MBd
Betriebsumgebungstemperatur –10 … +55 °C
Lagertemperatur –25 … +75 °C
Heizung DME5000 321 322 323 324 Nicht
Bestell-Nr. 1025246 1025247 1025253 1026004 1028248
lieferbar
327
Betriebsumgebungstemperatur –40 … +55 °C
Stromaufnahme (mit Heizung) < 1000 mA bei DC 24 V
Schutzart IP 65
Elektrische Schutzklasse VDE Klasse 2 (Bemessungsspannung 32 V)
EMV EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung Schock: EN 600 68-2-27/-2-29; Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
Gewicht ca. 1650 g
44 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
Page 45

Betriebsanleitung Kapitel 10
Wartung
DME5000
10 Wartung
Das DME5000 ist wartungsfrei.
Wir empfehlen in regelmäßigen Abständen
Linse und Reflektor zu reinigen,
Verschraubungen und Steckverbindungen zu überprüfen.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 45
Page 46

Kapitel 11 Betriebsanleitung
Troubleshooting
DME5000
11 Troubleshooting
Problem Hiperface
Statuscode
Keine
Busanzeige
Keine RDYAnzeige
LSRAnzeige
ATTAnzeige
TMPAnzeige
SSI: kein Taktsignal
Nicht betriebsbereit
31H Vorausfallmeldung
32H Vorausfallmeldung
1E Geräteinnentemperatur
Ursache Maßnahme
SSI: Verdrahtung prüfen,
RS 422: request mode aktiv
®
PROFIBUS
kein Datenfluss
Hardware defekt
Sleepmodus aktiv
Messlaser
Verschmutzung
im Grenzbereich
/DeviceNet:
Taktgeber prüfen.
RS 422: ‒
PROFIBUS
tung und Schirmung prüfen.
Gerät zur Reparatur einsenden.
Sleepmodus deaktivieren.
Der Messlaser ist noch betriebsbereit, aber am Ende Lebensdauer. Ersatzgerät bereithalten.
Die Messwerte sind noch OK,
optische Grenzflächen reinigen
(Reflektor, Objektiv).
Umgebungstemperatur prüfen,
ggf. für bessere Belüftung sorgen.
Gegen Strahlungswärme abschirmen, z. B. Abschatten bei direkter
Sonneneinstrahlung. Bei tiefen
Temperaturen Gerät mit Heizung
verwenden.
®
/DeviceNet: Verdrah-
PLBAnzeige
34H a) Lichtweg zum Reflek-
tor unterbrochen
b) Optische Störeinflüsse
c) Bei gleichzeitiger ATT-
Anzeige: Objektiv/Reflektor verschmutzt
d) Bei gleichzeitiger LSR-
Anzeige: Laser defekt
Auswirkung: Messwertausgabe wird auf „O“ gesetzt.
a) Lichtfleck auf dem Reflektor
beobachten, darf nicht vom
Reflektor abwandern, ggf. neu
ausrichten oder größeren
Reflektor verwenden.
b) Siehe Abschnitt 5.1 „Montage“
c) Objektiv/Reflektor reinigen.
d) Laser defekt, Gerät ersetzen.
46 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 47

Betriebsanleitung Kapitel 11
Troubleshooting
DME5000
Problem Hiperface
Statuscode
SERVICE
33H Hardwareproblem Versorgungsspannung kontrollieren,
(blinkende
Anzeige)
Ursache Maßnahme
Spannung aus/ein, Verkabelung
gemäß Abschnitt 5.2.1. prüfen; falls
nicht selbstreparierend: Gerät zur
Reparatur einsenden.
Geräteinnentemperatur
außerhalb Spezifikation
Gerät zu kalt (Innentemperatur
<– 15 °C: Aufwärmphase abwarten,
Spannung aus- und wieder einschalten. Evtl. Gerät mit Heizung
verwenden). Gerät zu warm
(Innentemperatur > 80 °C: Gerät
abkühlen).
Auswirkung: Messwertausgabe wird auf „0“ gesetzt.
Problem Ursache Maßnahme
Parameteränderungen über
Bedientasten
werden nicht
dauerhaft
Während der Änderung war:
- Buskommunikation aktiv,
- kein Sichtkontakt zum
Reflektor.
- Buskabel entfernen.
- Lichtweg überprüfen.
gespeichert.
PROFIBUS-Fehlermeldungen
Problem Ursache Maßnahme
Gerätefehler Hardwareproblem Versorgungspannung kontrol-
lieren, Verkabelung gemäß
Abschnitt 5.2.1. prüfen, Spannung aus/ein, falls nicht selbstreparierend: Gerät zur Reparatur einsenden.
Geräteinnentemperatur
außerhalb Spezifikation.
Gerät zu kalt (Innentemperatur
< –15 °C: Aufwärmphase abwarten. Evtl. Gerät mit Heizung
verwenden).
Gerät zu warm (Innentemperatur > 80 °C: Gerät abkühlen).
Auswirkung: Messwertausgabe wird auf „0“ gesetzt.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 47
Page 48

Kapitel 11 Betriebsanleitung
Troubleshooting
DME5000
Problem Ursache Maßnahme
Messfehler Lichtweg wird durch Nebel,
Staub o.ä. zu stark gedämpft.
Für freien Lichtweg sorgen.
Objektiv oder Reflektor
verschmutzt.
Verfahrgeschwindigkeit zu hoch. Maximale Verfahrgeschwindig-
Lichtweg zum Reflektor
unterbrochen.
Auswirkung: Messwertausgabe wird auf „0“ gesetzt, PLB-Anzeige
leuchtet im Display.
Vorausfallkennung Laserdiode am Ende Lebens-
dauer
Lichtweg wird durch Nebel oder
Staub gedämpft.
Objektiv oder Reflektor
verschmutzt.
Geräteinnentemperatur im
Grenzbereich.
Optische Grenzflächen
reinigen.
keit überprüfen.
Lichtfleck bei Verfahren immer
auf dem Reflektor zu sehen?
Ersatzgerät für nächsten
Wartungszyklus bereithalten.
Lichtweg überprüfen.
Optische Grenzflächen beim
nächsten Wartungszyklus
reinigen.
Umgebungstemperatur
überprüfen.
48 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 49

Betriebsanleitung Kapitel 12
Begriffserklärungen
Tab. 2: Reichweite in
Übertragungsgeschwindigkeit
DME5000
12 Begriffserklärungen
12.1 PROFIBUS®
Alle Geräte werden in einer Busstruktur (Linie) angeschlossen. In einem Segment können
bis zu 32 Teilnehmer (Master oder Slaves) zusammengeschaltet werden.
Am Anfang und am Ende jedes Segments wird der Bus durch einen aktiven Busabschluss
abgeschlossen. Für einen störungsfreien Betrieb muss sichergestellt werden, dass die
beiden Busabschlüsse immer mit Spannung versorgt werden.
Beim DME ist der Busabschluss nicht intern realisiert. Eine Versorgungsspannung für den
Busabschluss steht am Bus-Ausgangsstecker zur Verfügung. Diese 5-V-Versorgungs–
spannung ist von der Versorgungsspannung des DME galvanisch getrennt. Die 5-VVersorgungsspannung kann mit 100 mA belastet werden und ggf. für optische Koppelmodule verwendet werden.
Terminator für Busabschluss: siehe Abschnitt 9.2 „Zubehör“.
Bei mehr als 32 Teilnehmern müssen Repeater (Leistungsverstärker) eingesetzt werden,
um die einzelnen Bussegmente zu verbinden.
Die max. Leitungslänge ist abhängig von der Übertragungsgeschwindigkeit, siehe
Tabelle 2.
Die angegebene Leitungslänge kann durch den Einsatz von Repeatern vergrößert werden.
Es wird empfohlen, nicht mehr als 3 Repeater in Serie zu schalten. Das DME unterstützt
alle in Tabelle 2 genannten Übertragungsgeschwindigkeiten und stellt sich beim Auf–
starten automatisch auf die Baudrate des Busmasters ein.
Abhängigkeit der
Baudrate (Bit/s) 9,6 K 19,2 K 45,45 K 93,75 K 187,5 K
Reichweite/Segment (m) 1200 1200 1200 1200 600
Baudrate (Bit/s) 500 K 1,5 M 3 M 6 M 12 M
Reichweite/Segment (m) 200 200 100 100 100
12.2 RS 422
Der RS-422-Standard erfüllt die Anforderungen an eine schnelle übertragungssichere
Datenübertragung.
Vorgesehen ist diese Schnittstelle für die serielle Datenübertragung im Vollduplexverfahren mit einer Übertragungsrate bis 10 MBaud und 1000 m Leitungslänge (DIN 66259,
Teil 3).
Die Schnittstelle wird mit einem Datenkanal Senden (T) und einem Datenkanal Empfangen
(R) betrieben. Die hohe Übertragungssicherheit wird durch die Auswertung der Differenzspannung zwischen jeweils einem verdrillten Adernpaar erreicht
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 49
Page 50

Kapitel 12 Betriebsanleitung
Begriffserklärungen
Takt
Daten seriell
Monoflop P/S
Daten parallel
DME5000
12.3 SSI
Die Datenübertragung bei Einstellung „SSI“ erfolgt auf Anforderung der Steuerung, wobei
Zykluszeit und Übertragungsgeschwindigkeit in weiten Grenzen einstellbar sind.
Dazu wird von der angeschlossenen Steuerung eine Taktfolge an den Empfangseingang
des DME gelegt. Mit jeder positiven Taktflanke wird ein Datenbit auf die Sendeleitung DME
geschoben, beginnend mit dem höchstwertigen Bit. Zwischen zwei Taktfolgen liegt eine
Taktpause von mindestens 30 µs. Der Bittakt liegt zwischen 70 kHz und 500 kHz und ist
abhängig von der Leitungslänge.
Leitungslänge [m] Übertragungsrate [kBaud]
< 25 < 500
< 50 < 400
< 100 < 300
< 200 < 200
< 400 < 100
Impulsdiagramm der Datenübertragung
m = gespeicherte parallele Information
tv = Verzögerungszeit für den 1. Takt, max. 540 ns, für alle Weiteren max. 360 ns
Gn = hochwertigstes Bit im Gray-Code
T = Periodendauer des Taktsignals
GO = niederwertigstes Bit im Gray-Code
tm = Monoflop-Zeit 15 µs bis 25 µs
Tp = Taktpause
12.4 DeviceNet
DeviceNet ist ein Feldbussystem und basiert auf der CAN-Spezifikation (Controller Area
Network).
Die Verbindung erfolgt über Hybridkabel zur Spannungsversorgung und Datenübertragung
(nach RS-485). Es gibt zwei standardisierte Kabeltypen:
Stammleitung (Trunkcable)
Stichleitung (Dropcable) mit kleineren Kabelquerschnitten.
50 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 51

Betriebsanleitung Kapitel 12
Begriffserklärungen
DME5000
Die Stammleitung wird beidseitig mit Widerständen abgeschlossen, die Stichleitungen
benötigen keinen Busabschluss.
Maximal 64 Teilnehmer inkl. Master können angeschlossen werden.
Die maximale Leitungslänge ohne Repeater ist abhängig von der Übertragungsrate:
Übertragungsrate 125 kBd 250 kBd 500 kBd
Stammleitung 500 m 250 m 100 m
Stichleitung 6 m 6 m 6 m
Stichleitung
kumulierte Länge
156 m 78 m 39 m
12.5 Hiperface
Hiperface steht für „High Performance Interface“ und ist die Standard-Schnittstelle für
Motorfeedback-Systeme von SICK STEGMANN.
Diese Schnittstelle wurde speziell auf die Anforderungen der digitalen Antriebsregelung
entwickelt und bietet dem Anwender vereinheitlichte und vereinfachte mechanische und
elektrische Schnittstellen.
Elektrische Antriebe benötigen im Regelkreis, abhängig von Ausführung und Anwendung,
die folgenden Informationen von entsprechenden Signalgebern:
Positionsinformation inkremental
Positionsinformation über mehrere Umdrehungen absolut
Alle diese Informationen können über Hiperface übertragen werden.
Hiperface beinhaltet hierzu eine hybride Schnittstelle aus:
Analogem Prozessdatenkanal (Sinus-/Cosinussignale) und
Bidirektionalem Parameterkanal (RS-485) zur Übertragung der absoluten Position und
unterschiedlicher Parameter.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 51
Page 52

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13 Anhang
13.1 Preset
Die Preset-Funktion erlaubt eine Automatisierung der Initialisierung von Regalbediengeräten und anderen Schienenfahrzeugen bei Wartung, Inbetriebnahme oder Austausch.
Bei der Initialisierung wird an einer definierten Position (Initialisierungsposition) der
gewünschte Ausgabewert eingestellt (Preset-Wert). Es exisitieren, je nach Gerätevariante,
folgende Möglichkeiten zur Durchführung eines Presets:
1) Statischer Preset: Auslösung über Multifunktionseingang MF1 (Varianten DME5000xx1, -xx3, -xx4, -xx7)
Vorgehensweise:
Parameter „MF1/Function“ auf „Preset“ einstellen und gewünschten Preset-Wert
eingeben.
Fahrzeug an Initialisierungsposition fahren und MF1 aktivieren, z. B. über
Näherungsinitiator, Lichtschranke oder Schalter.
Der Ausgabewert des DME5000 entspricht danach an der Initialisierungsposition dem
eingestellten Preset-Wert.
Hinweis
Bei Variante DME5000-xx1 beachten, dass keine negativen Messwerte erzeugt werden
(negative Werte führen bei SSI-Ausgabe zu Messwert „0“).
Bei Variante DME5000-xx3 kann der Preset alternativ hierzu über ein RS-422-Befehl
erfolgen.
2) Statischer Preset: Auslösung über Multifunktionseingang MF1
(Variante DME5000-xx2, bei Verwendung des GSD Moduls „Class 2“, „4 byte in/out“)
Vorgehensweise:
GSD Parameter „Preset mode“ auf „Preset mode“ einstellen.
GSD Parameter „MF1 Function“ auf „Preset“ parametrieren und in GSD Parameter
„Preset (steps) “ gewünschten Preset-Wert eingeben (Einheit des Preset-Wertes
entspricht der Einstellung des Parameters „Auflösung“).
Fahrzeug an Initialisierungsposition fahren und MF1 aktivieren, z. B. über
Näherungsinitiator, Lichtschranke oder Schalter.
Der Ausgabewert des DME5000 entspricht danach an der Initialisierungsposition dem
eingestellten Preset-Wert.
3) Dynamischer, programmgesteuerter Preset: Auslösung über PROFIBUS-Schnittstelle
(Variante DME5000-xx2, bei Verwendung des GSD Moduls „Class 2“, 4 byte in/out)
Vorgehensweise:
GSD Parameter „Preset mode“ auf „Preset mode“ einstellen.
gewünschten Preset-Wert über Bit 0 … 24 der Ausgangsdaten zum DME5000 senden
(Einheit des Preset-Wertes entspricht der Einstellung des Parameters „Auflösung“).
Zur Auslösen des Presets Bit 31 in den Ausgangsdaten aktivieren; dieses Bit kann z. B.
von einem Näherungsinitiator, einer Lichtschranke oder einem Schalter an der
Initialisierungsposition stammen.
52 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 53

Betriebsanleitung Kapitel 13
Anhang
DME5000
Der Ausgabewert des DME5000 entspricht danach an der Initialisierungsposition dem
eingestellten Preset-Wert.
Weitere Infos siehe Abschnitt 13.2, „PROFIBUS-Schnittstelle“.
Hinweis
Der Multifunktionseingang arbeitet flankengesteuert: Aktiv 0:
Aktiv 1:
Definitionen
Interner Messwert Vom Messkern ermittelte aktuelle Distanz zum Reflektor
Ausgabewert Interner Messwert + Offset
Preset-Wert Parametrierbarer, gewünschter Ausgabewert an
Initialisierungsposition
Das Auslösen des Presets kann je nach Gerätevariante
folgendermaßen erfolgen:
- DME5000-xx1, -xx4, -xx7: MF1
- DME5000-xx3: MF1 bzw. RS-422-Kommando
- DME5000-xx2: MF1 bzw. PROFIBUS-Kommando
Funktion:
- Das Auslösen des Presets führt geräteintern zur Berechnung
eines Offset-Wertes, welcher zum internen Messwert addiert wird.
(Offset = Preset-Wert – interner Messwert@Presetposition)
Bei der Variante DME5000-xx2 kann mit dem GSDParameter „Preset-Mode“ festgelegt werden, ob nach
Achtung
einem Neustart des PROFIBUS der über den Preset vorgegebene Ausgabewert an der Initialisierungsposition
erhalten bleibt (Parametrierung auf „Preset-Mode“) oder
ob der per GSD fest hinterlegte Offset-Wert zum DME
übertragen wird (Parametrierung auf „Offset-Mode“).
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 53
Page 54

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.2 PROFIBUS-Schnittstelle
Die DME4000 und DME5000 verwenden die identische GSD-Datei. Die aktuelle GSD-Datei
zum Download sowie Hinweise zur Kompatibilität von Firmware und GSD-Datei finden Sie
im Servicebereich bzw. auf der DME5000-Produktseite unter http://www.sick.com.
Das DME5000 kann wahlweise als Klasse-1- oder Klasse-2- (empfohlen) Encoder arbeiten. DME5000 ist dabei vom Typ linearer Absolut-Encoder. Angelehnt an das ENCODERProfil (Klasse 2) ist ein ebenfalls implementiertes SICK-Profil. Beide Profilarten münden in
die gleiche GSD-Datei. Im SICK-Profil ist neben einer von SPS gesteuerten Laserabschaltung auch die direkte Übertragung von Zustandsinformationsbits im zyklischen Messtelegramm vorgesehen.
Profil Klasse Funktionalität
ENCODER Class 1 4-Byte-Input-Daten, gerätespezifische Parameter sind nur
über die Display-Menüfunktion zugänglich.
Class 2 4-Byte-Input-/4-Byte-Output-Daten, gerätespezifische
Parameter sind über GSD zugänglich und überschreiben
Parameter, die mit der Display-Menüfunktion eingegeben
wurden, Ausnahme: PROFIBUS-Adresse und Offset bei
parametriertem Preset-Mode.
SICK Class 1 siehe ENCODER-Class-1
Class 2 4-Byte-Input-/4-Byte-Output-Daten, gerätespezifische
Parameter sind über GSD zugänglich und überschreiben
Parameter, die mit der Display-Menüfunktion eingegeben
wurden, Ausnahme: PROFIBUS-Adresse und Offset bei
aktivierter Preset-Funktion. Zusätzlich Statusbits 25 ... 31
Input-Daten und Steuerbits 29 ... 31 Output-Daten.
Empfohlene Einstellung: SICK-Profil Class 2: Dieses Profil bietet folgende Vorteile:
In 4-Byte-Input-Daten sind Messwert und Diagnosebits enthalten, (Abschnitt 13.2.1).
In 4-Byte-Output-Daten ist Preset-Aktivierung, Laser-ein/aus-Funktion enthalten,
(Abschnitt 13.2.2).
Extended diagnostics disabled: kürzere SPS-Zykluszeit durch Verzicht auf 16- bzw.
64-Byte-Diagnosedaten (Abschnitt 13.2.3.), nahezu volle Funktionalität bei nur 4Byte-I/O-Daten.
13.2.1 Datenformat DME zu Master
(DDLM_Data_Exchange)
Encoder-Profil Bit 31 ... 0 Messwert, Einheit entsprechend Auflösung, Bit
25 … 31 unbenutzt.
SICK-Profil Aktiv (1) Nicht aktiv (0)
Bit 31 Gerätefehler Gerät OK
54 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Bit 30 Messfehler Messwert OK
Bit 29 Vorausfallmeldung Gerät OK
Bit 28 Nicht betriebsbereit Betriebsbereit
Bit 27 Laser aus (Stand by) Laser ein
Bit 26 MF2 aktiv MF2 nicht aktiv
Bit 25 MF1 aktiv MF1 nicht aktiv
Bit 24 ... 0 Messwert, Einheit entsprechend Auflösung
Page 55

Betriebsanleitung Kapitel 13
Anhang
DME5000
13.2.2 Datenformat Master zu DME
(DDLM_Data_Exchange)
Encoder-Profil Bit 31 Preset-Ausführung
Aktiv (1) Nicht aktiv (0)
Bit 30 ... 0 Preset-Wert. Einheit entsprechend Auflösung.
Wertebereich +/-250 m
SICK-Profil Aktiv (1) Nicht aktiv (0)
Bit 31 Preset-Ausführung
Bit 30 Nicht belegt Nicht belegt
Bit 29 Laser aus Laser ein
Bit 25 ... 28 Nicht belegt Nicht belegt
Bit 24 ... 0 Preset-Wert. Einheit entsprechend Auflösung.
Wertebereich +/-250 m
13.2.3 Diagnosedaten (bei aktiviertem Parameter „Extended Diagnostics“)
(DDLM_Slave_Diag)
Encoder-Profil Diagnose
Class 1 Octet 1 ... 16 Octet 7 ... 16
Class 2 Octet 1 ... 63 Octet 7 ... 63
Octet Aktiv (1) Nicht aktiv (0)
Octet 1 … 6 DP Normdiagnose
Octet 7 Diagnostic Header
Octet 8
Alarms
Bit 0 Messfehler
Bit 3 Vorausfallmeldung
Bit 4 Gerätefehler
Bit 1, 2, 5,
Nicht belegt
6, 7
Octet 9
Operating Status
Bit 1 Class 2 Class 1
Bit 6 Extended Diagnostics Normal Diagnostics
Bit 7 Preset-Mode: Parameter
Offset wird ignoriert
Bit 0, 2, 3,
Nicht belegt
Parameter Offset wird
übernommen
4, 5
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 55
Octet 10 Encoder Type 7
Octet 11 … 14 Measuring step (linear)
Octet 15 … 16 nicht belegt
Page 56

Kapitel 13 Betriebsanleitung
Anhang
DME5000
Octet Aktiv (1) Nicht aktiv (0)
Octet 17
Alarms
Bit 0 Gerätefehler
Bit 1 Geräteinnentemperatur zu
hoch/zu niedrig
Bit 2 Plausibilität (siehe Anz.
PLB)
Bit 3 Buskommunikation
gestört
Bit 4, 5, 6, 7 Nicht belegt
Octet 18 Supported alarms in Octet 17
Octet 19 Supported alarms in Octet 8
Octet 20
Warnings
Octet 21
Warnings
Bit 0 Laser-Vorausfallmeldung
Bit 1 ... 7 Nicht verwendet
Bit 1 Geräteinnentemperatur
Bit 2 Verschmutzung
Bit 0, 3 ... 7 Nicht verwendet
Octet 22 Supported warnings in Octet 20
Octet 23 Supported warnings in Octet 21
Octet 24 … 25 Profile version
Octet 26 … 27 Software version
Octet 28 … 31 Operating time (Einheit 0.1h)
Octet 32 … 35 Offset in Einheiten entsprechend Auflösung
Octet 36 … 47 Nicht verwendet
Octet 48 … 57 Seriennummer (2 Leerzeichen + 8 gültige ASCII-Zeichen)
Octet 58 … 59 Reserviert
Octet 60 Temperatur (2er Komplement)
Octet 61 Pegel Messkanal (2er Komplement)
Octet 62 MF-Status
Octet 63 Bit 7 Laser ein Laser aus
56 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Bit 0 ... 6 Nicht verwendet
Page 57

Betriebsanleitung Kapitel 13
Anhang
GSD Modul Class 2 auswählen
disabled auswählen
DME5000
13.3 Inbetriebnahme DME5000 PROFIBUS® (Beispiel Siemens Step 7)
Das Beispiel führt zur im Anhang PROFIBUS-Profile empfohlenen Einstellung. Siehe auch
Abbildung (Screenshot).
Schritt Tätigkeit Kapitel
1 8-poligen Gerätestecker anschließen und
aufstecken
2 Sichtkontakt zum Reflektor herstellen, PROFIBUS-
Adresse einstellen (default 006) (Menüpunkt 3.1.2.)
3 4-poligen PROFIBUS-Stecker „Bus in“ aufstecken 5.2
4 4-poligen PROFIBUS-Stecker „Bus out“ auf-
stecken/oder: Abschlusswiderstand aufstecken
5 GSD Datei in das gsd-Verzeichnis kopieren
(:\siemes\step7\s7data\gsd)
(Hinweise zur gsd-Datei in Abschnitt 12.1. beachten
6 Hardware-Katalog aktualisieren Siemens
7 DME5000 PROFIBUS® im Hardware-Katalog:
PROFIBUS-DP\weitere Feldgeräte\Encoder\
DME5000 PROFIBUS
8 DME5000 auf DP-Mastersystem installieren und
PROFIBUS-Adresse vergeben (vgl. Schritt 2, s. o.)
9 Auswahl - Class 2: 4-Byte-I/O
10 E/A-Adressen vergeben (Doppelklick auf E/A-
Adresse)
11 Parametrieren (Doppelklick auf E/A-Adresse –
Menüpunkt „Parametrieren)
12 GSD Parameter „Extended diagnostics“
disabled: gerätespezifische Diagnosedaten nicht
senden
®
5.2
7.2
5.2 bzw. 5.2.2
Siemens
Anhang PROFIBUSSchnittstelle
Hinweis
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 57
Bei Verwendung des SICK-Profils kann zur Trennung der 7 Diagnosebits (Bit 25 … 31) vom
Messwert (Bit 0 … 24) das Doppelwort mit der Operation SLD7 nach links und danach mit
der Operation SRD7 nach rechts geschoben werden. Hierdurch werden alle 7 Diagnosebits
durch „0“ ersetzt.
Page 58

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.4 Schnittstellenadapter
Der Schnittstellenadapter (Best.-Nr. 1023359) dient als Servicezubehör zur Ankopplung
eines DME5000 (außer DME5000-XX5) an einen Laptop mit serieller RS-232-Schnittstelle.
Im Lieferumfang des Schnittstellenadapters sind enthalten:
Schnittstellenadapter
Steckernetzteil 24 V
Verbindungskabel Laptop – Schnittstellenadapter (9-polig Sub D)
Verbindungskabel DME5000 – Schnittstellenadapter
Software SOPAS Engineering Tool
Folgende Funktionen sind möglich:
Up-/Download von Parametern
Ändern von Parametern
Klonen kompletter Parametrierungen
Auslesen von Messwerten
Grafische Messwertdarstellung/Datenlogger
58 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 59

Betriebsanleitung Kapitel 13
Anhang
DME5000
SSI-Variante (DME5000-XX1) bzw. Hiperface-Variante (DME5000-XX7):
Mithören von Messwerten während SSI-/Hiperface-Betrieb über die als Monitor
geschalteten Multifunktionsausgänge MF1/MF2. Für Hiperface ist ein zusätzliches
Adapterkabel erforderlich (erhältlich auf Anfrage).
PROFIBUS-Variante (DME5000-XX2) bzw. DeviceNet-Variante (DME5000-XX4):
Mithören von Messwerten während PROFIBUS-/DeviceNet-Betrieb über die RS-422Schnittstelle.
DeviceNet-Variante (DME5000-XX5):
Schnittstellenadapter nicht verwendbar.
Beispiel
Anschluss Mithörbetrieb: Der Frequenzumrichter erhält die Messwerte über die SSISchnittstelle des DME5000, über die Monitorschnittstelle MF1/MF2 werden Messwerte
und Parameter zum Laptop gesendet.
13.5 Sleepmodus
Mit der Funktion Sleepmodus kann der Messlaser des DME5000 über den Eingang MF1
aus- und eingeschaltet werden. Bei ausgeschaltetem Laser ist das DME im StandbyBetrieb, die Ready-Anzeige im Display erlischt, als Messwert wird „0“ ausgegeben.
Um die Funktion zu überwachen, kann MF2 mit „Ready“ die Betriebsbereitschaft bei
eingeschaltetem Laser signalisieren. Bei der PROFIBUS-, DeviceNet- und RS-422-Variante
kann der Sleepmodus auch über die Schnittstelle aktiviert werden.
13.6 RS-422-Schnittstelle
Die serielle Datenübertragung des DME5000-XX3 erlaubt es, die Messwerte und andere
definierte Betriebsdaten auszulesen. Alle Daten werden als ASCII-Zeichen übertragen, die
in <STX> (0x02) und <ETX> (0x03) eingeschlossen sind.
Betriebsdaten (wie z. B. die Innentemperatur) werden auf ein Anforderungskommando
übertragen. Messwerte werden in einem kontinuierlichen Datenstrom (continuous mode)
oder nur auf Anforderung (request mode) übertragen.
Die Standardeinstellung des DME5000 ist der „request mode“. Befehle werden nur im
„request mode“ akzeptiert.
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 59
Page 60

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.6.1 Protokoll
Abhängig vom gewählten Protokoll überträgt das DME5000 Messwerte, wie unten
dargestellt:
Protokoll
Standard <STX>8122<[sign]><7*[0...9]><ETX> (Anforderung) bzw.
<STX>0322<[sign]><7*[0...9]><ETX> (kontinuierlich)
CRLF <[sign]><7*[0...9]><CR><LF>
CPO <[sign]><7*[0...9]>
13.6.2 Befehle
Anforderung Messwert/Status/Geschwindigkeit
Messwert (Auflösung 0,1 mm fix) <STX>0122<ETX>
Empfangspegel (dB) in Hex-Format <STX>0123<ETX>
Innentemperatur (°C) in Hex-Format <STX>0126<ETX>
Geschwindigkeit (x 0,1 m/s) in Hex-Format <STX>0135<ETX>
Service-Status gemäß Display Icon
<STX>0125<ETX>
1: Icon aktiv, 0: Icon inaktiv
MF2 MF1 TMP LSR BUS ATT PLB RDY
Kontinuierliche Messwertausgabe
Kontinuierliche Ausgabe ein
<STX>052201<ETX>
(Auflösung 0,1 mm fix)
Kontinuierliche Ausgabe aus <STX>052200<ETX>
Kontinuierliche Geschwindigkeitsausgabe
Kontinuierliche Ausgabe ein
<STX>053501<ETX>
Geschwindigkeit (x 0,1 m/s) in Hex-Format
Kontinuierliche Ausgabe aus <STX>053500<ETX>
Spezielle Funktionen
Laser aus (Sleepmodus ein) <STX>0333<ETX>
Laser ein (Sleepmodus aus) <STX>0332<ETX>
Preset-Aktivierung <STX>0335<ETX>
60 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 61

Betriebsanleitung Kapitel 13
Anhang
DME5000
13.6.3 Beispiele für Befehle (Standard-Protokoll)
Anforderung Messwert
zum DME <STX>0122<ETX>
vom DME <STX>8122<[sign]><7*[0...9]><ETX>
Beispiel: 5378,8 mm <STX>8122+0053788<ETX>
Anforderung Empfangspegel
zum DME <STX>0123<ETX>
1)
vom DME
<STX>8123<2*[0...F]><ETX>
Beispiel: ‒39 dB <STX>8123D9<ETX (0x100-0xD9=0x27=39)
Anforderung Innentemperatur
zum DME <STX>0126<ETX>
1)
vom DME
<STX>8126<2*[0...F]><ETX>
Beispiel: +45 °C <STX>81262D<ETX
Beispiel: ‒10 °C <STX>8126F6<ETX (0x100-0xF6=0x0A=10)
Anforderung Geschwindigkeit
zum DME <STX>0135<ETX>
1)
vom DME
<STX>8135<4*[0...F]><ETX>
Beispiel: +2,8 m/s <STX>8135001C<ETX>
Anforderung Service Status
zum DME <STX>0125<ETX>
vom DME <STX>8125<2*[0...F]><ETX>
Beispiel: MF2 u. PLB sichtbar in Display <STX>812582<ETX> (0x82=10000010)
MF2 MF1 TMP LSR BUS ATT PLB RDY
1 0 0 0 0 0 1 0
Kontinuierliche Messwertausgabe ein
zum DME <STX>052201<ETX>
vom DME <STX>852201<ETX>
danach kontinuierlich vom DME <STX>0322<[sign]><7*[0...9]><ETX>
Beispiel: 5378,8 mm <STX>0322+0053788<ETX>
Kontinuierliche Messwertausgabe aus
zum DME <STX>052200<ETX>
vom DME <STX>852200<ETX>
Kontinuierliche Geschwindigkeitsausgabe ein
zum DME <STX>053501<ETX>
vom DME <STX>853501<ETX>
danach kontinuierlich vom DME <STX>0335<4*[0...F]><ETX>
Beispiel: +2,8 m/s <STX>0335001C<ETX>
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 61
Kontinuierliche Geschwindigkeitsausgabe aus
zum DME <STX>053500<ETX>
vom DME <STX>853500<ETX>
1)
Negative Werte werden als 2-er-Komplement dargestellt.
Page 62

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.7 DeviceNet-Schnittstelle
13.7.1 Allgemeines
Die Vendor-ID des DME5000-xx4 und DME5000-xx5 (DeviceNet) ist 808.
Der DeviceNet-Typ (Generic Type) ist 0.
Der Produktcode ist 3-stellig:
DME5000-xx4 hat den Produktcode 4
DME5000-xx5 hat den Produktcode 5
Grundlage ist die DeviceNet-Spezifikation 2.0, Errata 5.
Der Produktname ist „DME5000“.
13.7.2 Konfiguration
Die Konfiguration und Inbetriebnahme des DME5000 als DeviceNet-Slave wird anhand
der Allen-Bradley-Software „RS Networx for DeviceNet (Revision 4.12)“ gezeigt:
Vorgehensweise:
DME5000-xx4
8-poligen M16-Gerätestecker aufstecken und anschließen.
5-poligen M12-DeviceNet-Stecker aufstecken und anschließen.
DME5000-xx5
5-poligen M12-DeviceNet-Stecker aufstecken und anschließen.
ESD-Datei von der mitgelieferten Diskette importieren.
Tools/EDS-Wizzard anklicken und den Anweisungen des EDS Wizzard folgen.
Im Folder „...\DeviceNet\Vendor\SICKAG\GenericDevice“ erscheint das DME5000.
Mit dem Mauszeiger an den Bus anhängen (siehe Screenshot).
Mit Doppelklick auf die Adresse (hier 06) die Slave-Adresse einstellen (vergleiche
Seite 20 „3.1.2 Bus Address“). Die Baudrate muss ebenfalls übereinstimmen.
62 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 63

Betriebsanleitung Kapitel 13
Anhang
DME5000
Die folgende Tabelle gibt eine Übersicht über die einzustellenden Parameter. Siehe auch
Abbildung (Screenshot).
Parameter
ID Parameter Current Value Kapitel 7 Menü
1 Position Value 7295 counts
2 COS/Delta 0 counts Anhang 13.3
3 Position State Register 0 counts Siehe DeviceNet
Specification
4 Position Low Limit 0 counts Siehe DeviceNet
Specification
5 Position High Limit 0 counts Siehe DeviceNet
Specification
6 Offset Value 0 counts 3.6
7 Resolution 100 µm 3.5
8 Serial Mode Baudrate 19200 3.2.1
9 Serial Mode Data 8n1 3.2.2
10 Plausibility Off 3.7
11 MF1 ActiveState High 3.3.1
12 MF1 Function Distance 3.3.2
13 MF2 ActiveState High 3.4.1
14 MF2 Function Service 3.4.2
15 Service MF1 1101110 3.3.4
16 Service MF2 1101110 3.4.4
17 MF1 Temperature UpperLimit 70 °C 3.3.4.3
18 MF1 Temperature LowerLimit 0 °C 3.3.4.4
19 MF2 Temperature UpperLimit 70 °C 3.4.4.3
20 MF2 Temperature LowerLimit 0 °C 3.4.4.4
21 MF1 Distance UpperLimit 2000 mm 3.3.3.1
22 MF1 Distance LowerLimit 1990 mm 3.3.3.2
23 MF2 Distance UpperLimit 2000 mm 3.4.3.1
24 MF2 Distance LowerLimit 1990 mm 3.4.3.2
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 63
Page 64

Kapitel 13 Betriebsanleitung
Anhang
ACHTUNG
DME5000
Parametrierung von MF1 und MF2
Gerätevarianten DME5000-xx5 sind nur mit einem 5-poligen DeviceNet-Stecker ausgerüstet. Die Multifunktionsein- und -ausgänge MF1 und MF2 sind hardwaremäßig nicht verfügbar.
Die Parametrierung von MF1 und MF2 ist trotzdem möglich und das Ergebnis kann im
Diagnosebyte (siehe Abschnitt 13.7.3 „Datenaustausch“) über den Bus abgefragt werden.
Eine Parametrierung als Eingang ist nicht möglich. Die Funktionen Sleepmodus und Preset
sind über den „Class Instance Editor“ möglich.
64 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 65

Betriebsanleitung Kapitel 13
Anhang
DME5000
13.7.3 Datenaustausch
Die Art des Datenaustausches wird im Fenster „Edit I/O Parameters“ eingestellt:
Es werden 5-Byte-Daten gesendet, in Byte 0 bis 3 wird der Messwert dargestellt, in Byte 4
sind Diagnosedaten:
Byte
0 Position Value (low Byte Attribute 10)
1 Position Value
2 Position Value
3 Position Value (High-Byte-Attribute 10)
4 Laser on:
1
Laser off:
0
MF1
active: 1
MF1 not
active: 0
MF2
active: 1
MF2 not
active: 0
Reserved
by
DeviceNet
Warning: 1
No
warning: 0
Alarm: 1
No Alarm:
0
7 6 5 4, 3, 2 1 0
Warnung:
Hier werden alle Vorausfallmeldungen als Sammelmeldung ausgegeben:
Übertemperatur
Verschmutzung
Laservorausfallmeldung
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 65
Alarm:
Plausibilitätsfehler signalisiert, dass keine Messung möglich ist, parallel wird Messwert „0“
ausgegeben.
13.7.4 Polled Mode
Der Prozessdatenaustausch zwischen DME5000 und DeviceNet-Master erfolgt standardmäßig über eine Polled I/O connection. Dabei werden die Slaves zyklisch vom Master
abgefragt.
Page 66

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.7.5 Change of State Mode
Im Change-of-State-Mode (COS/Delta) werden Daten zyklisch gesendet oder wenn der
Wert des Parameters Delta überschritten wird.
13.7.6 Parameter Offset und Preset
Der Parameter Offset wird bei Auslösen der Presetfunktion überschrieben. Funktionsweise
des Preset siehe Abschnitt 13.1. Ein Preset kann mit dem „Class Instance Editor“
ausgelöst werden:
Description: Set single Attribute
Class: 65
Instance: 1
>Execute<-Meldung: Execution was completed.
66 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 67

Betriebsanleitung Kapitel 13
Anhang
DME5000
13.7.7 Sleepmodus (Laser aus)
Die Funktion Sleepmodus kann mit dem „Class Instance Editor“ aktiviert werden:
Laser aus
Laser ein
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 67
Page 68

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.7.8 Parameter im DME5000 speichern
Mit dem Befehl „Download“ im Fenster „Parameters“ werden die Parameter zum
DME5000 heruntergeladen und sind dort flüchtig gespeichert.
Mit dem „Class Instance Editor“ können die Parameter nichtflüchtig (permanent) im
DME5000 gespeichert werden (Vorgehensweise siehe Screenshot).
Description: Save
Class: 65
Instance: 1
>Execute<-Meldung: Execution was completed.
13.7.9 Zusätzliche Diagnosedaten
Als zusätzliche Diagnosedaten können folgende Parameter ausgelesen werden:
68 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Empfangspegel
Description: Get single Attribute
Class: 64
Instance: 1
Attribute: 11
Receive Data: Beispiel: B0 → 0 x 100 – 0 x B0 = 0 x 47 → –71dB
Page 69

Betriebsanleitung Kapitel 13
Anhang
DME5000
Fehlerstatus
Description: Get single Attribute
Class: 64
Instance: 11
Attribute: 12
Receive Data: Beispiel: 09 x 0 → 0000 1001
MF2 MF1 TMP LSR BUS ATT PLB RDY
0 0 0 0 1 0 0 1
Icob Bus und RDY sind im Display sichtbar.
Temperatur
Description: Get single Attribute
Class: 64
Instance: 1
Attribute: 13
Receive Data: Beispiel: 2B → 0x2B → 43 °C
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 69
Page 70

Kapitel 13 Betriebsanleitung
Anhang
DME5000
Betriebsstunden
Description: Get single Attribute
Class: 64
Instance: 1
Attribute: 32
Receive Data: Zeit: 0 x 0142 = 322 x 6 min = 1932 min = 32,2 h
z. B. 01 02 03 04 = 0 x 04030201 = 67305985 x 6 min =
403835910 min = 6730598,5 h
13.8 Hiperface-Schnittstelle
Beim Einschalten stellt das DME5000 einen absoluten, digitalen Distanzwert zur Verfügung. Dieser wird vom Regler über den RS-485-Parameterkanal abgefragt. Bezug nehmend auf diesen Absolutwert zählt danach der Regler bei Verfahrung inkrementell die
Nulldurchgänge der analogen sin/cos-Signale und bestimmt daraus die aktuelle Position.
Über den RS-485-Parameterkanal kann parallel hierzu jederzeit ein absoluter Distanzwert
abgefragt werden. Dies ermöglicht eine Kontrolle des inkrementell bestimmten Positionswertes.
Bei einem rotativen Motorfeedback-System werden die analogen sin/cos-Signale direkt
durch die Abtastung der im Geber liegenden Codescheibe, die in starrer Verbindung mit
der Motorwelle steht, erzeugt. Aus regelungstechnischer Sicht ergibt sich damit ein hochdynamisches, reines P-Verhalten mit sehr rauscharmen sin/cos- Signalen. Zusätzlich zum
Zählen der sin/cos-Nulldurchgänge kann deshalb durch eine optionale, steuerungsseitig
implementierte Arctan-Interpolation die Auflösung deutlich erhöht werden.
Das DME5000 arbeitet, im Gegensatz zu rotativen Systemen, nach dem Messprinzip der
Lichtlaufzeitmessung. Der Messkern des DME5000 ermittelt dabei immer einen digitalen
Distanzwert, aus welchem die analogen sin/cos-Signale über einen D/A-Wandler erzeugt
werden. Deshalb weisen diese Signale ein erhöhtes Rauschen auf, welches steuerungsseitig keine Arctan-Interpolation zur Erhöhung der Auflösung zulässt, sondern ausschließlich das Zählen der Nulldurchgänge erlaubt.
Die Auflösung des Distanzwertes kann ausschließlich über den Parameter „Period Length“
eingestellt werden. Je nach Einstellung und der damit aktivierten Typ-Kennung ergeben
sich die folgenden Auflösungen für den RS-485-Parameterkanal bzw. die Periodenlängen
und die daraus abgeleitete Auflösung des analogen sin/cos-Prozessdatenkanals
basierend auf der Zählung der Nulldurchgänge.
70 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 71

Betriebsanleitung Kapitel 13
Anhang
DME5000
13.8.1 Typenspezifische Einstellung
Hinweis
Period Length
(mm)
Typecode Auflösung RS-485
(mm)
Auflösung sin/cos bei Zählung der 0Durchgänge (mm)
1 90h 1/32 0,25
2 91h 1/16 0,5
4 92h 1/8 1
8 93h 1/4 2
16 94h 1/2 4
Die Werkseinstellung des Parameters 3.1.6 „Period Length“ (1 mm) ergibt die
bestmögliche Auflösung.
Die Werkseinstellung des Parameters 3.5 „Resolution“ (125 µm) darf nicht verändert
werden.
13.8.2 Übersicht der unterstützen Befehle
Command byte Funktion Code 0 1) Kommentar
42h Position lesen.
43h Position setzen. •
44h Analogwert lesen. Temperatur (°C)
46h Zähler lesen.
47h Zähler erhöhen.
49h Zähler löschen. •
4Ah Daten lesen.
4Bh Daten speichern.
4Ch Status eines Datenfeldes
ermitteln.
4Dh Datenfeld anlegen 2).
4Eh Verfügbaren Speicherbereich
ermitteln.
4Fh Zugriffschlüssel ändern.
50h Geberstatus lesen. Gebertyp=22h
52h Typenschild auslesen.
53h Geberreset.
55h Geberadresse vergeben. •
56h Seriennummer und
Programmversion lesen.
57h Serielle Schnittstelle
konfigurieren.
•
8009813/ZJV1/2017-05 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 71
1)
Die entsprechend gekennzeichneten Befehle beinhalten den Parameter „Code 0“. Code 0 ist ein Byte, das zur
zusätzlichen Absicherung wichtiger Systemparameter gegen versehentliches Überschreiben ins Protokoll
eingefügt ist. Bei Auslieferung ist „Code 0“ = 55h.
2)
Für Datenfelder stehen im EEPROM max. 1792 Byte zur Verfügung.
Page 72

Kapitel 13 Betriebsanleitung
Anhang
DME5000
13.8.3 Übersicht der Hiperface-Standard-Statusmeldungen
Fehlertyp Statuscode Beschreibung
Initialisierung 03H Tabelle über Datenfeld-Partitionierung defekt
Protokoll 07H Geberreset durch Programmüberwachung
Protokoll 09H Parityfehler
Protokoll 0AH Checksumme der übertragenen Daten falsch
Protokoll 0BH Unbekannter Befehlscode
Protokoll 0CH Anzahl der übertragenen Daten falsch
Protokoll 0DH Übertragenes Befehlsargument falsch
Daten 0EH Das selektierte Datenfeld darf nicht
beschrieben werden
Daten 0FH Falscher Zugriffscode
Daten 10H Angegebenes Datenfeld in seiner Größe nicht
veränderbar
Daten 11H Angegebene Wortadresse außerhalb Datenfeld
Daten 12H Zugriff auf nicht existierendes Datenfeld
Hinweis
Vorausfall 1EH Gebertemperatur kritisch
Weitere Statuscodes siehe Kapitel 11 „Troubleshooting“.
13.8.4 Verhalten bei Fehlern und Vorausfallmeldungen
DME5000 spezifische Statuscodes können dem Kapitel 11 „Troubleshooting“ entnommen
werden. Bei Fehlern, der keine Distanzwertberechnung mehr zulassen (z. B. Plausibilitätsfehler infolge Lichtstrahlunterbrechung), werden die analogen sin/cos-Signale auf die
Nulllinie gezogen. Ist der Lichtweg wieder frei, werden die Nulldurchgänge entsprechend
des während der Unterbrechung zurückgelegten Weges mit einer Frequenz von max.
10 kHz nachträglich ausgegeben.
Über den RS-485-Parameterkanal wird im Fehlerfall der Messwert „0“ ausgegeben (bei
Geräten mit Produktionsdatum < 23.10.2009 wurde der letzte gültige Wert über die
RS-485 ausgegeben).
Sowohl Fehler als auch Vorausfallmeldungen können im Kommandobyte erkannt werden.
Im fehlerfreien Zustand beinhaltet die Antwort auf einen über den RS-485-Parameterkanal
zum DME5000 gesendeten Befehl immer das Kommandobyte des Befehls unmittelbar
hinter dem Adressbyte. Im Fehlerfall oder bei anliegender Vorausfallmeldung wird im
Kommandobyte der Antwort das MSB-Bit gesetzt.
Beispiel für Kommandobyte 42h (Position lesen):
Fehlerfreier Zustand: Kommandobyte in Antwort des DME5000: 42h
Fehlerfall/Vorausfall: Kommandobyte in Antwort des DME5000: C2h
Im Fehlerfall (z. B. Lichtstrahlunterbrechung) sollte das Fahrzeug angehalten und nach
Behebung des Fehlers ein neuer Absolutwert über den RS-485-Parameterkanal angefragt
werden.
72 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
Page 73

Operating Instructions
Table of Contents
DME5000
Table of Contents
1 Icons and Abbreviations Used .................................................................................... 75
1.1 Type Label ...........................................................................................................75
2 Intended Use ................................................................................................................ 76
3 Safety Notes ................................................................................................................. 77
3.1 Laser Warning Note ............................................................................................77
3.2 UL .........................................................................................................................77
4 Function ........................................................................................................................ 78
5 Commissioning ............................................................................................................. 79
5.1 Mounting ..............................................................................................................79
5.1.1 How to Align .......................................................................................80
5.1.2 Alignment of Adjacent Distance Measuring Devices ......................81
5.1.3 Alignment of Distance Measuring Device with Adjacent Data
Transmission .....................................................................................81
5.2 Electrical Connection ..........................................................................................82
5.2.1 Wiring Notes ......................................................................................84
5.2.2 PROFIBUS Termination .....................................................................85
6 Operation ...................................................................................................................... 86
6.1 Operating Panel Setup ........................................................................................86
6.2 Operation .............................................................................................................86
6.3 Operating Panel ...................................................................................................86
7 Menu Structure ............................................................................................................ 89
7.1 Flow Chart ............................................................................................................89
7.2 Explanations on the Menu Structure .................................................................89
8 Example ........................................................................................................................ 99
8.1 Parameter Input at the Example "Code Input" ..................................................99
9 Technical Data ........................................................................................................... 101
9.1 Dimensional Drawing ....................................................................................... 101
9.2 Accessories ....................................................................................................... 102
9.2.1 Reflectors ....................................................................................... 102
9.2.2 Cables and Connectors .................................................................. 103
9.2.3 Attachment Method ....................................................................... 109
9.2.4 Weather Protection hood ............................................................... 109
9.2.5 Passive Reflector ............................................................................ 110
9.2.6 Interface Adapter ........................................................................... 110
9.2.7 Cooling Casing ................................................................................ 111
9.3 Technical Data DME5000-1xx ......................................................................... 112
9.4 Technical Data DME5000-2xx ......................................................................... 113
9.5 Technical Data DME5000-3xx ......................................................................... 114
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 73
10 Maintenance .............................................................................................................. 115
11 Troubleshooting ......................................................................................................... 116
12 Terms .......................................................................................................................... 119
12.1 PROFIBUS® ....................................................................................................... 119
12.2 RS-422 .............................................................................................................. 119
12.3 SSI ..................................................................................................................... 120
12.4 DeviceNet ......................................................................................................... 121
Page 74

Operating Instructions
Table of Contents
DME5000
12.5 Hiperface ........................................................................................................... 121
13 Annex .......................................................................................................................... 122
13.1 Preset ................................................................................................................ 122
13.2 PROFIBUS Interface .......................................................................................... 124
13.2.1 Data Format DME to Master .......................................................... 124
13.2.2 Data Format Master to DME .......................................................... 125
13.2.3 Diagnosis Data (for Activated Parameter "Extended
Diagnostics") ................................................................................... 125
13.3 Commissioning DME5000 PROFIBUS® (Example Siemens Step 7) .............. 127
13.4 Interface Adapter .............................................................................................. 128
13.5 Sleep Mode ....................................................................................................... 129
13.6 RS-422 Interface .............................................................................................. 129
13.6.1 Protocol ........................................................................................... 130
13.6.2 Commands ...................................................................................... 130
13.6.3 Examples for Commands (Standard Protocol) .............................. 131
13.7 DeviceNet Interface .......................................................................................... 132
13.7.1 General ............................................................................................ 132
13.7.2 Configuration .................................................................................. 132
13.7.3 Data Exchange ................................................................................ 135
13.7.4 Polled Mode .................................................................................... 135
13.7.5 Change of State Mode .................................................................... 136
13.7.6 Parameter Offset and Preset ......................................................... 136
13.7.7 Sleep Mode (Laser Off) ................................................................... 137
13.7.8 Save Parameter in DME5000 ........................................................ 138
13.7.9 Additional Diagnosis Data .............................................................. 138
13.8 Hiperface Interface ........................................................................................... 140
13.8.1 Type-Specific Settings .................................................................... 141
13.8.2 Overview of the Supported Commands ......................................... 141
13.8.3 Overview of the Hiperface Standard Status Messages ................ 142
13.8.4 Conduct in Case of Errors and Pre-failure Messages ................... 142
74 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 75

Operating Instructions Chapter 1
Icons and Abbreviations Used
ATTENTION
Manufacturer
Device type
Part number
Serial number
Production year/month
DME5000
1 Icons and Abbreviations Used
Refers to the display buttons in the dimensional drawing (section 9.1 "Dimensional
Drawing").
Note
Notes explain benefits of certain settings and support you in making best use of the
DME5000.
Warning notes: Read and observe with care!
Warning notes protect from danger or help in preventing damage to the sensor.
1.1 Type Label
The type label can be used to determine the device type, serial number and part number.
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 75
Page 76

Chapter 2 Operating Instructions
Intended Use
DME5000
2 Intended Use
The DME5000 is an opto-electronic sensor used to record distances to a reflective tape
that is moved linearly. It must not be used in potentially explosive areas.
76 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 77

Operating Instructions Chapter 3
Safety Notes
DME5000
3 Safety Notes
Read the operating instructions before commissioning.
Connection, mounting and setting must be performed by qualified personnel.
Protect the DME5000 from humidity and contamination at commissioning.
The DME5000 is not a safety module pursuant to EU machinery directive.
Observe the national safety and accident prevention provisions.
Repairs must only be performed by the manufacturer. Manipulations and modifications
of the device are not permissible.
Perform wiring, open and close electrical connections only when the device is powered
down.
3.1 Laser Warning Note
Laser radiation - Do not look into the laser beam Laser class 2
Laser aperture
Complies with 21CFR1040.10 and 1040.11 except
for deviations pursuant to Laser Notice 50, dated
June 24, 2007.
Laser class 2 (EN/IEC 60825-1:2014)
Identical laser class for issue EN/IEC 60825-1:2007
3.2 UL
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 77
Page 78

Chapter 4 Operating Instructions
Function
Fig. 1: Function DME5000
DME5000
4 Function
The distance measuring device DME5000 is a compact optical distance sensor. The DME
is installed so that the emitted laser beam hits the reflector. The reflector or device move
along the laser beam.
The DME receives the light reflected by the reflector and determines the distance between
sensor and reflector by time of flight measurement.
The measured distance is submitted to a control or position control loop via a SSI-, RS422-, DeviceNet-, Hiperface- or PROFIBUS-interface, depending on device model.
With its quick calculation of measurement values, the DME5000 is suitable for direct
operation in a closed-loop position control via the SSI interface, e.g. with a frequency
converter.
78 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 79

Operating Instructions Chapter 5
Commissioning
Fig. 2: Alignment DME5000
Fig. 3: Alignment DME5000
environment
DME5000
5 Commissioning
5.1 Mounting
The DME5000 and the reflector are attached so that the reflector is always in the sensor's
field of view.
The DME5000 is aligned so that the light spot is well visible (even at large distances) at
the reflector's center.
The alignment bracket, available as an accessory, enables easy alignment in X- and Ydirections:
in a highly reflective
Select the reflector size so that the light spot does not move off of the reflector in case of
vibrations. If the reflector is attached to the moving part, a smaller reflective tape is usually
sufficient. If there are any highly reflective surfaces (e.g. shelf profiles, palettes wrapped
with stretch foil, rails) that reflect the light beam or stray light, the reflector must be
aligned into the "free space": mount with a tilt of approx. 1° … 3° (X- or Y-direction). For
different reflector sizes, see section 9.2 "Accessories" (page 102 and following)
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 79
Page 80

Chapter 5 Operating Instructions
Commissioning
Tab. 1: Damping values
DME5000
5.1.1 How to Align
Move the vehicle and reflector close together.
Align the DME5000 so that the light spot is at the center of the reflector.
Increase the distance between vehicle and reflector and watch the light spot.
If required, adjust the light spot to remain at the reflector center.
The signal damping displayed in display information field 1 indicates the current reception
signal. On clean surfaces, the damping values listed in the table should not be exceeded.
DME5000 -1XX -2XX -3XX
Distance [m] Level [dB] Level [dB] Level [dB]
13 –42 –42 –42
15 –43 –43 –43
20 –50 –47 –46
30 –57 –54 –53
40 –62 –59 –58
50 –66 –63 –62
60 –69 –66 –65
70 –71 –69 –68
80 –71 –70
90 –73 –72
100 –75 –74
110 –77 –76
120 –78 –77
130 –80 –79
140 –81 –80
150 –82 –81
160 –82
170 –83
180 –84
190 –85
200 –86
210 –87
220 –88
230 –89
240 –89
250 –90
260 –91
80 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
270 –91
280 –92
290 –93
300 –93
Page 81

Operating Instructions Chapter 5
Commissioning
Fig. 4: Alignment of adjacent
DME5000
Fig. 5: Alignment of adjacent
DME5000 and ISD
Reflector
Reflector
Reflector
DME
DME
DME
DME
Reflector
DME
ISD
ISD
Reflector
Parallel
a ≥ 100 mm + 0.01 x s
Anti
a ≥ 100 mm
DME5000
5.1.2 Alignment of Adjacent Distance Measuring Devices
To prevent mutual interference, the following minimum distances a must be kept.
mounting
[mm]
max.
-parallel mounting
5.1.3 Alignment of Distance Measuring Device with Adjacent Data Transmission
For ISD300 / ISD400-1xxx / ISD400-6xxx optical data transmission a minimum beam
distance of 100 mm independently of the maximum range s
must be kept.
max
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 81
Page 82

Chapter 5 Operating Instructions
Commissioning
Fig. 6: Connection diagram
DME5000-xx3 (RS-422)
Fig. 7: Connection diagram
DME5000-xx2 (PROFIBUS®)
DME5000
5.2 Electrical Connection
Wire DME5000 according to connection diagram. Observe wiring notes (see section 5.2.1).
For plugs and cables, see section 9.2.2.
DME5000-xx1 (SSI)
82 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 83

Operating Instructions Chapter 5
Commissioning
Fig. 8: Connection diagram
DME5000-xx4 (DeviceNet)
Fig. 9: Connection diagram
DME5000-xx5 (DeviceNet)
Fig. 10: Connection diagram
DME5000-xx7 (Hiperface)
DME5000
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 83
Page 84

Chapter 5 Operating Instructions
Commissioning
ATTENTION
Fig. 11: Cross cables of
at right angles
Fig. 12:
different cable ducts
Fig. 13:
by metallic separation
DME5000
5.2.1 Wiring Notes
groups 1, 2 and 3, 4
Generally, shielded cables are recommended for supply and interface (see section 9.2
"Accessories").
A proper and complete shielding concept is required for interference-free function.
Especially the conncetion of the cable shield on the both sides on the switching cabinet
and DME5000 must be ensured. The cable shield of the ready-made M16 cables is
connected to the metal plug and thus the DME5000 housing. The cable shield at the
switching cabinet must be connected to the operating ground with a large cross-section.
Potential balancing currents through the cable shield must be prevented by suitable
measures. Interference-free data transmission is only given when using shielded cables
with twisted-pair wires
The PROFIBUS cable shields are connected to each other via the PROFIBUS plugs.
Key cable groups figures 11 to 13:
1 = Highly interference-resistant cables (analog measuring cables)
2 = Interference-sensitive cables (sensor cable, communications signals, bus cables)
3 = Cables that are sources of interference (control cables for inductive loads, motor
brakes)
4 = Cables that are strong sources of interference (frequency converter output cables,
supply to welding plants; power cables)
Ideal: Place cables in
Alternatively: Separate cables
84 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 85

Operating Instructions Chapter 5
Commissioning
Fig. 14: No "pigtails", connect
sides
Fig. 15: Shield connection in
plastic casings
Fig. 16: PROFIBUS
section 9.2.2.)
Terminating resistor
DME5000
shield short and over the
entire surface, ground BOTH
termination (see Accessories
5.2.2 PROFIBUS Termination
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 85
Page 86

Chapter 6 Operating Instructions
Operation
Fig. 17: Display
ATTENTION
Fig. 18: Display after
voltage
Function buttons
LC
Status displays
Information field 1
Information field 2
Function buttons
DME5000
6 Operation
This chapter explains the operating panel and the general operation of the DME5000. For
more detailed information on commissioning and operation of the DME5000 see chapter
5 "Commissioning".
6.1 Operating Panel Setup
-Display
The operating panel has two areas:
LC-Display: Indicates the menu during parameterization
Function buttons: To enter the parameters or functions
application of operating
6.2 Operation
The DME5000 is equipped with a membrane keyboard.
Only operate the input area with your fingers or a suitable pointer!
Never use any pointed or hard objects. They may damage the function buttons, which
would make operation difficult or impossible.
6.3 Operating Panel
After application of the operating voltage (or after reset), the following display appears on
the DME5000:
86 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
After approx. 1 s, the DME5000 is operational and shows the current distance value to the
reflector, if in sight.
Page 87

Operating Instructions Chapter 6
Operation
Fig. 19: Measured value
display
DME5000
Status displays
Display Meaning Is displayed Is not displayed
MF1 Multifunctional
In-/output active In-/output not active
in-/output
MF2 Multifunctional output Output active Output not active
TMP Device inside
temperature
Pre-failure message:
Internal device
Internal device
temperature OK
temperature has
reached threshold
range
ATT Contamination Pre-failure message:
Reception level OK
Reception level within
the threshold range
LSR Laser Pre-failure measuring
Laser OK
laser
PLB Plausibility Measuring error
Measured value OK
Cause: e.g. light beam
interruption,
contamination,
optical/electrical
interferences
RDY Ready When ready for
operation
BUS Interface:
SSI
PROFIBUS
DeviceNet
RS-422
Hiperface
®
Clock signal received
Telegram transfer
Telegram transfer
Continuous mode
‒
Initializing, hardware
defect
No clock signal
No telegram transfer
No telegram transfer
Request mode
Independent of bus
status
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 87
For removal measures in error messages/pre-failure messages, see chapter 11
"Troubleshooting".
Page 88

Chapter 6 Operating Instructions
Operation
DME5000
Information field 1 (example)
– 65 dB Reception level: Current signal damping
Ver. 1.0 Software version
3.3.3.1 Submenu item (see Menu overview), parameter changes not possible.
3.3.3.1 ! "!": Code entered correctly: Parameter changes possible.
3.3.3.1 ? "?": Entered parameter is invalid, previous valid parameter remains
saved.
Cause: e.g. lower switching limit > upper switching limit.
Remedy: Correct parameters.
Information field 2 (example)
+ 010.000 m Current distance value, displayed in measuring mode.
Code Menu items and parameters are displayed here. "Code" appears
by pressing of
Service Flashing Service indication signals a hardware defect or
.
over-/undertemperature.
Keys
Guides through the menu structure, code, parameter input, parameter
storage.
Leaving a submenu item.
Selection of menu items, input of figures
88 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 89

Operating Instructions Chapter 7
Menu Structure
DME5000
7 Menu Structure
7.1 Flow Chart
The menu structure of the DME5000 is displayed on the inside of the rear cover flap in the
form of a flow chart. Fold out this page for a better overview of the menu structure during
the following explanations.
7.2 Explanations on the Menu Structure
Code
Protection from unintentional changes to the set parameters.
Code: 314
Function:
Menu access and changing of the parameters: Confirm code 314 with
Successful input of the code is confirmed with a "!" in the display.
.
Note
Note
Note
Parameter changes confirmed with
During parameter change, the reflector must be within the field of view of the sensor. No
bus communication must be active. Bus address changes will only become active after
restarting the device.
If code input is skipped or a different figure is entered (than 314), the valid parameters are
displayed; they cannot be changed.
The option of viewing all parameters without the possibility of changing them makes it
easier, e.g., to have parameters requested and transmitted by untrained staff.
Software version
e.g. "Ver. 1.0"
Parameter
Depending on device version, the interface, multifunctional in/output MF1, output MF2,
resolution and an offset are set.
Resetting sets all parameters back to default.
For PROFIBUS devices, the parameters should not be set via the display when using the
gsd module "Class 2", because they are overwritten with the parameters stored in the
control unit when the PROFIBUS is restarted by the PROFIBUS master.
Exception: PROFIBUS address and offset with the preset function activated.
are stored active and nonvolatile at once.
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 89
Page 90

Chapter 7 Operating Instructions
Menu Structure
DME5000
Interface
Depending on device type, the menu only displays the respective device type interface.
SSI
For SSI interface function, see chapter 12 "Terms – SSI".
Coding
Binary Gray (Default)
Measured value output in binary code Measured value output in gray code
Mode
Data format
Binary Gray
25 bit (default) Measured value: Bit 1 ... 24
LSB: Plausibility bit
Measured value, incl.
plausibility bit encoded in
gray code
24 bit + err Measured value: Bit 1 ... 24
LSB: Plausibility bit
24 bit Measured value: Bit 0 ... 23 Measured value: Bit 0 ... 23
Plausibility bit: 0: OK
1: Plausibility error
Measured value: Bit 1 ... 24
LSB: Plausibility bit
0: OK
1: Plausibility error
Activation
On (default) SSI interface in operation, RS-422-interface not in
operation.
Off RS-422-interface in operation, SSI-interface not in
operation. The RS-422-interface enables
parameterization of the DME with the interface adapter
(see section 13.4 "Interface Adapter").
(Set baud rate and protocol in > 3.2 Serial <)
Monitor
On Serial monitor interfaces in operation, multifunctional
outputs MF1 and MF2 not in operation. Enables
parameterization of the DME5000 with the interface
adapter (see section 13.4 "Interface Adapter") or listening
in on measured values via MF1 and MF2 during SSI
operation. The active monitor interface is displayed in the
menus 3.3.2 and 3.4.2 MF-Function as "Monitor". The SSI
interface is fully functional (set baud rate and protocol in
> 3.2 Serial <).
90 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Off (default) Multifunctional outputs MF1 and MF2 in operation as set
in item 3.3/3.4.
PROFIBUS
®
Page 91

Operating Instructions Chapter 7
Menu Structure
DME5000
Profile
Encoder This profile corresponds to the standard encoder profile,
for description, see section 13.2 "PROFIBUS Interface".
SICK (default) This profile is based on the standard encoder profile. In
addition to the measured value, warning, condition and
error information are transmitted.
For description, see section 13.2 "PROFIBUS Interface".
Bus Address
Addr. 006 (default) Set PROFIBUS address
(001 … 125)
Note
Commissioning example with Siemens Step 7 see chapter 13 "Annex".
Hiperface
BusAddress
Add 00 (default) Setting of the Hiperface address (area 0 … 31)
Baud rate
0.6 kBd Baud rate setting
1.2 kBd
2.4 kBd
4.8 kBd
9.6 kBd (default)
19.2 kBd
38.4 kBd
Data
8, o, 1 8-data bit, odd parity, 1 stop bit
8, e, 1 (default) 8-data bit, even parity, 1 stop bit
8, o, 1 8-data bit, no parity, 1 stop bit
Timeout
X1 1*11/baud rate
X4 (default) 4*11/baud rate
Monitor
On Serial monitor interface in operation, multifunctional
outputs MF1 and MF2 not in operation. Enables
parameterization of the DME5000 with the interface
adapter (see section 13.4 "Interface Adapter") or
monitoring of measured values via MF1 and MF2.
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 91
Off (default) Multifunctional outputs MF1 and MF2 in operation as set
in item 3.3/3.4.
Page 92

Chapter 7 Operating Instructions
Menu Structure
DME5000
Period Len
1 Type code 90H (default) Corresponding resolution 1 mm per period
2 Type code 91H Corresponding resolution 2 mm per period
4 Type code 92H Corresponding resolution 4 mm per period
8 Type code 93H Corresponding resolution 8 mm per period
16 Type code 94H Corresponding resolution 16 mm per period
Note
For detailed description, see section 13.8 "Hiperface Interface".
RS-422
Mode
Request Data transfer on request only
Continuous Cyclic data transmission according to set baud rate
Protocol
Standard <STX>8122<[sign]><7*[0…9]><ETX>
CRLF <[sign]><7*[0…9]><CR><LF>
Note
Note
CP0 <[sign]><7*[0…9]>
CP1 Not assigned
For detailed description, see section 13.6 "RS-422 Interface".
DeviceNet
Baud rate
125 (default) Baud rate setting (125, 250, 500 kBd)
BusAddress
Addr. 06 (default) Setting of the DeviceNetaddress (area 0 … 63)
For detailed description, see section 13.7 "DeviceNet Interface".
Serial
Baud rate
19.2 (default) Baud rate for RS-422-interface (max. 115.2 kBd)
Baud rate for monitor interface via MF1 and MF2 (max.
38.44 kBd), only for DME5000 with SSI- or Hiperface
interface
For more detained description, see section 13.4
"Interface Adapter – Monitor-Mode".
92 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Data
7,e,1 7-data bit, even parity, 1 stop bit
8,e,1 8-data bit, even parity, 1 stop bit
8,n,1 (default) 8-data bit, no parity, 1 stop bit
Page 93

Operating Instructions Chapter 7
Menu Structure
DME5000
MF1
Parameterizable output or input
Act.State
Parameterization of switching logic for MF1 = output
Active 1 (default) HIGH-level at active output (closer/NO)
Active 0 LOW-level at active output (opener/NC)
Parameterization of switching logic for MF1 = input
Active 1 (default) Activation of input with rising flank
Active 0 Activation of input with dropping flank
Function
Distance
(default)
Service MF1 is used as service output, see 3.3.4.
Sleep mode MF1 is used for activation of sleep mode (laser off),
MF1 is used as distance switching output,
see 3.3.3.
confirmation by ready status
Function description see section 13.5 "Sleep Mode".
Preset MF1 is used as input for activation of the preset
(overwriting the offset).
Offset = Preset value - current measured value
For function description, see section 13.1 "Preset".
SPEED MF1 is used as speed switching output, see 3.3.5.
Monitor (for SSI or Hiperface version only): Displayed if monitor
interface is set to ON in 3.1.4 or 3.1.5.
Distance
MF1 is used as distance switching output.
Active when "UpperLimit" is exceeded.
Inactive when below "LowerLimit".
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 93
Page 94

Chapter 7 Operating Instructions
Menu Structure
DME5000
Service
Collective output for freely adjustable status messages in "OR" links that enable
conclusions about the device condition.
Active Inactive
Laser
On
(default)
Pre-failure message
Laser diode
Laser OK
Off –
Level
On
(default)
Pre-failure message
Contamination
Not contaminated
Off –
UpperTemp
LowerTemp
Plausib(ility)
On
(default)
Overtemperature
monitoring:
Internal device
temperature > upper
set temperature limit
Off –
On
(default)
Undertemperature
monitoring:
Internal device
temperature < lower set
temperature limit
Off –
On Defective measured
value; causes:
– Light beam
interruption
– Contamination
– Optical/electrical
interferences
Off –
Internal device
temperature < upper
set temperature limit
Internal device
temperature > lower set
temperature limit
Measured value OK
94 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Ready
On
(default)
Initialization,
Hardware error,
Ready, measured value
OK
Laser off
Off –
Bus Status
On Bus error
SSI: no clock signal
PB/DN: no telegram
transfer
RS-422/Hiperface: ‒
Data transfer OK
RS-422/Hiperface:
independent of bus
status
Off
–
(default)
Page 95

Operating Instructions Chapter 7
Menu Structure
DME5000
Speed
MF1 is used as speed switching output. Active when "Limit" is exceeded.
The switching hysteresis is fixed at ± 0.1 m/s.
Active Inactive
Limit
Range
0.0 … 9.9 m/s
Speed > Limit Speed < Limit
+/– Monitoring in both movement directions
Sign
+ Monitoring in movement direction "+"
(increasing distance)
– Monitoring in movement direction "-"
(decreasing distance)
MF2
Parameterizable output
Active State
Parameterization of the switching logic
Active 1 HIGH-level at active output (closer/NO)
Active 0 LOW-level at active output (opener/NC)
Function
Distance see 3.4.3 MF2 is used as distance switching output.
Service (default) see 3.4.4 MF2 is used as service output.
Speed see 3.4.3 MF2 is used as speed switching output.
Monitor (for SSI or Hiperface version only): Displayed if monitor
interface is set to ON in 3.1.4 or 3.1.5.
Distance
MF2 is used as distance switching output.
Active when "UpperLimit" is exceeded.
Inactive when below "LowerLimit".
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 95
Page 96

Chapter 7 Operating Instructions
Menu Structure
DME5000
Service
Collective output for freely adjustable status messages in "OR" links that enable
conclusions about the device condition.
Active Inactive
Laser
On
(default)
Pre-failure message
Laser diode
Pre-failure message
Laser diode
Off –
Level
On
(default)
Pre-failure message
Contamination
Not contaminated
Off –
UpperTemp
LowerTemp
Plausib(ility)
On
(default)
Overtemperature
monitoring:
Internal device
temperature > upper set
temperature limit
Off –
On
(default)
Undertemperature
monitoring:
Internal device
temperature < lower set
temperature limit
Off –
On
(default)
Defective measured
value, measured value
output "0", causes:
– Light beam interruption
– Contamination
– Optical/electrical
interferences
Off –
Internal device
temperature < upper
set temperature limit
Internal device
temperature > lower
set temperature limit
Measured value OK
96 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Ready
On
(default)
Initialization
Hardware error,
Ready,
Measured value OK
Measuring error,
Laser off
Off –
Bus Status
On Bus error
SSI: no clock signal
PB/DN: no telegram
transfer
RS-422/Hiperface: –
Data transfer OK
RS-422/Hiperface:
independent of bus
status
Off
–
(default)
Page 97

Operating Instructions Chapter 7
Menu Structure
DME5000
Speed
MF2 is used as speed switching output. Active when "Limit" is exceeded.
The switching hysteresis is fixed at ± 0.1 m/s.
Active Inactive
Limit
Range
0.0 … 9.9 m/s
Speed > Limit Speed < Limit
+/– Monitoring in both movement directions
Sign
+ Monitoring in movement direction "+"
(increasing distance)
– Monitoring in movement direction "-"
(decreasing distance)
Resolution
Setting the resolution affects the digital data interfaces only.
This parameter must not be changed in the Hiperface version. Changes to the resolution
are only made by the parameter 3.1.6 "Period Length".
Adjustable: 50 ... 5000 µm, default 100 µm (or 125 µm in the Hiperface version)
Offset
The offset value is added to the internally determined distance value and acts on all
outputs and the display.
Adjustable: ± 250 m
Note
"0" is output via the SSI interface at a negative measured value.
Note
If the preset function is active, the offset value is overwritten when the preset input is
triggered; also see section 13.1 "Preset".
Plausibility
This function verifies measured values for plausibility. Triggers when the light beam is
interrupted, Contamination or optical/electrical interferences. Plausibility error leads to
measured value output 0.
200 ms (Default) Normal Off
Error suppression by measured value
extrapolation for max. 200 ms; errors >
200 ms result in error output.
Error suppression for
1 internal measuring
cycle, error output if
the error is pending
for longer.
No verification of
plausibility, error
output only if
measurement is no
longer possible.
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 97
Temperature
Display of current internal device temperature.
Page 98

Chapter 7 Operating Instructions
Menu Structure
DME5000
Reset
NO YES
No reset Reset to default values
98 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
Page 99

Operating Instructions Chapter 8
Example
DME5000
8 Example
8.1 Parameter Input at the Example "Code Input"
Note
All parameters can be set this way.
During parameter change, the reflector must be within the field of view of the sensor.
Step 1 Apply operating voltage.
Display
Step 2
Display
Access the menu "CODE" with .
Step 3
Display
Step 4
Display
Access the input field "CODE 000" with .
The 1st figure flashes.
Push 3 x for password "000" (parameter view only) or
enter the desired 1st figure with
(e.g. "3").
8009813/ZJV1/2017-05 © SICK AG • Germany • Subject to change without notice 99
Page 100

Chapter 8 Operating Instructions
Example
DME5000
Step 5
Display
Step 6
Display
Move forward a digit with and enter the desired 2nd
figure with
(e.g. "1").
Move forward a digit with and enter the desired 3rd
figure with
(e.g. "4").
Note
Step 7
Display
Push to confirm the 3rd figure "4".
The exclamation mark "!" in the display confirms: Parameterization mode.
100 © SICK AG • Germany • Subject to change without notice 8009813/ZJV1/2017-05
 Loading...
Loading...