

Page 1
DME4000
Entfernungs-Messgerät
Distance Measuring Sensor
BETRIEBSANLEITUNG/OPERATING INSTRUCTIONS
DE
EN
Page 2

Betriebsanleitung
DME4000
Dieses Werk ist urheberrechtlich geschützt. Die dadurch begründeten Rechte bleiben bei der Firma SICK AG. Eine Vervielfältigung
des Werkes oder von Teilen dieses Werkes ist nur in den Grenzen der gesetzlichen Bestimmungen des Urheberrechtsgesetzes
zulässig. Eine Abänderung oder Kürzung des Werkes ist ohne ausdrückliche schriftliche Zustimmung der Firma SICK AG untersagt.
Inhalt/Contents
German Seite 2 – 65
English Page 66– 128
2 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 3

Betriebsanleitung
Inhaltsverzeichnis
DME4000
Inhaltsverzeichnis
1 Einleitung.................................................................................................................................................... 5
1.1 Verwendete Symbole und Abkürzungen ...................................................................................... 5
1.1.1 Typenschild ................................................................................................................ 5
1.2 Bestimmungsgemäße Verwendung ............................................................................................. 5
1.3 Sicherheitshinweise ....................................................................................................................... 5
1.3.1 Laserwarnhinweis ...................................................................................................... 6
1.4 Funktionsweise ............................................................................................................................... 6
2 Bedienung .................................................................................................................................................. 7
2.1 Aufbau des Bedienfeldes .............................................................................................................. 7
2.2 Bedienung ........................................................................................................................................ 7
2.3 Bedienfeld ....................................................................................................................................... 8
2.3.1 Statusanzeigen .......................................................................................................... 8
3 Menüstruktur .......................................................................................................................................... 10
3.1 Flussdiagramm ............................................................................................................................ 10
3.2 Erklärungen zur Menüstruktur ................................................................................................... 10
4 Inbetriebnahme ...................................................................................................................................... 18
4.1 Montage ........................................................................................................................................ 18
4.1.1 Vorgehensweise bei der Ausrichtung ...................................................................... 19
4.1.2 Anordnung benachbarter Entfernungs-Messgeräte............................................... 19
4.1.3 Anordnung Entfernungs-Messgerät mit benachbarter Datenübertragung ........... 19
4.2 Elektrischer Anschluss ................................................................................................................ 20
4.2.1 Verdrahtungshinweise ............................................................................................. 21
4.2.2 PROFIBUS-Terminierung .......................................................................................... 23
5 Beispiel .................................................................................................................................................... 24
5.1 Parametereingabe am Beispiel „Code-Eingabe“ ..................................................................... 24
6 Technische Daten .................................................................................................................................. 26
6.1 Maßzeichnung .............................................................................................................................. 26
6.2 Anschlussschema ........................................................................................................................ 27
6.3 Zubehör ......................................................................................................................................... 28
6.3.1 Reflektoren............................................................................................................... 28
6.3.2 Stecker/Leitungen ................................................................................................... 30
6.3.3 Befestigungstechnik ................................................................................................ 35
6.3.4 Wetterschutzgehäuse .............................................................................................. 36
6.3.5 Umlenkspiegel ......................................................................................................... 36
6.4 Technische Daten DME4000-1xx .............................................................................................. 37
6.5 Technische Daten DME4000-2xx .............................................................................................. 38
6.6 Technische Daten DME4000-3xx .............................................................................................. 39
7 Wartung ................................................................................................................................................... 40
8 Troubleshooting und Begriffserklärungen .......................................................................................... 40
8.1 Troubleshooting ........................................................................................................................... 40
8.2 Begriffserklärungen ..................................................................................................................... 41
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 3
8.2.1 PROFIBUS ................................................................................................................. 41
8.2.2 RS 422 ..................................................................................................................... 42
8.2.3 SSI ............................................................................................................................ 42
8.2.4 DeviceNet ................................................................................................................. 43
Page 4

Betriebsanleitung
Inhaltsverzeichnis
DME4000
8.2.5 Hiperface .................................................................................................................. 43
8.2.6 CANopen ................................................................................................................... 43
9 Anhang ..................................................................................................................................................... 45
9.1 Preset ............................................................................................................................................. 45
9.2 PROFIBUS-Schnittstelle ............................................................................................................... 45
9.2.1 Datenformat Slave zu Master ................................................................................. 47
9.2.2 Datenformat Master zu Slave ................................................................................. 47
9.2.3 Diagnosedaten ......................................................................................................... 47
9.2.4 Definitionen/Fehler/Fehlerbehebung zu PROFIBUS-Fehlermeldungen ................ 49
9.3 Inbetriebnahme DME4000 PROFIBUS (Beispiel Siemens Step 7) ....................................... 50
9.4 Sleepmode .................................................................................................................................... 52
9.5 RS-422-Schnittstelle .................................................................................................................... 52
9.5.1 Protokoll ................................................................................................................... 52
9.5.2 Befehle ..................................................................................................................... 52
9.5.3 Beispiele für Befehle (Standard-Protokoll) ............................................................. 53
9.6 DeviceNet ...................................................................................................................................... 54
9.6.1 Allgemeines .............................................................................................................. 54
9.6.2 Konfiguration ............................................................................................................ 54
9.6.3 Datenaustausch ....................................................................................................... 56
9.6.4 Polled Mode ............................................................................................................. 56
9.6.5 Change of State Mode ............................................................................................. 56
9.6.6 Parameter Offset und Preset ................................................................................... 56
9.6.7 Sleepmode (Laser aus) ............................................................................................ 57
9.6.8 Parameter im DME4000 speichern ........................................................................ 58
9.6.9 Zusätzliche Diagnosedaten ..................................................................................... 58
9.7 Hiperface ....................................................................................................................................... 61
9.7.1 Typenspezifische Einstellung .................................................................................. 61
9.7.2 Übersicht der unterstützten Befehle ....................................................................... 61
9.7.3 Übersicht der Hiperfacestandard-Statusmeldungen ............................................. 62
9.8 CANopen ........................................................................................................................................ 63
9.8.1 Datenaustausch ....................................................................................................... 63
9.8.2 Messwertausgabe .................................................................................................... 64
9.8.3 Konfiguration ............................................................................................................ 64
9.8.4 Parameter ................................................................................................................. 64
9.8.5 Speicher-Parameter ................................................................................................. 64
9.8.6 Zusätzliche Diagnosedaten ..................................................................................... 65
4 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 5
Betriebsanleitung Kapitel 1
Einleitung
Hinweis
ACHTUNG
Hersteller
Gerätetyp
Bestell-Nummer
Serien-Nummer
Produktionsjahr/-monat
DME4000
1 Einleitung
1.1 Verwendete Symbole und Abkürzungen
Verweist auf die Tasten des Displays in der Maßzeichnung
(Kapitel 6 „Maßzeichnung“).
Hinweise erläutern Vorteile bestimmter Einstellungen und helfen Ihnen, den optimalen Nutzen aus dem
DME4000 zu ziehen.
Warnhinweise: Lesen und befolgen Sie diese sorgfältig!
Warnhinweise sollen Sie vor Gefahren schützen oder helfen Ihnen, eine Beschädigung des Sensors zu
vermeiden.
1.1.1 Typenschild
Anhand des Typenschildes kann der Gerätetyp, die Serien-Nummer des Gerätes und die BestellNummer festgestellt werden.
1.2 Bestimmungsgemäße Verwendung
Das DME4000 ist ein optoelektronischer Sensor, der zum Erfassen von Distanzen zu einer linear bewegten Reflexionsfolie eingesetzt wird. Er darf nicht in explosionsgefährdeten Bereichen verwendet
werden.
1.3 Sicherheitshinweise
Lesen Sie die Betriebsanleitung vor der Inbetriebnahme.
Anschluss, Montage und Einstellung nur durch Fachpersonal.
Schützen Sie das DME4000 bei Inbetriebnahme vor Feuchte und Verunreinigung.
Das DME4000 ist kein Sicherheitsmodul gemäß EU-Maschinenrichtlinie.
Beachten Sie die nationalen Sicherheits- und Unfallverhütungsvorschriften.
Reparaturen dürfen nur vom Hersteller durchgeführt werden. Eingriffe und Änderungen am Gerät
sind unzulässig.
Verdrahtungsarbeiten, Öffnen und Schließen von elektrischen Verbindungen nur im spannungslosen
Zustand durchführen.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 5
Page 6
Kapitel 1 Betriebsanleitung
Einleitung
Das Entfernungs-Messgerät DME4000 ist ein
Abbildung 1-1 Funktionsweise DME4000
DME4000
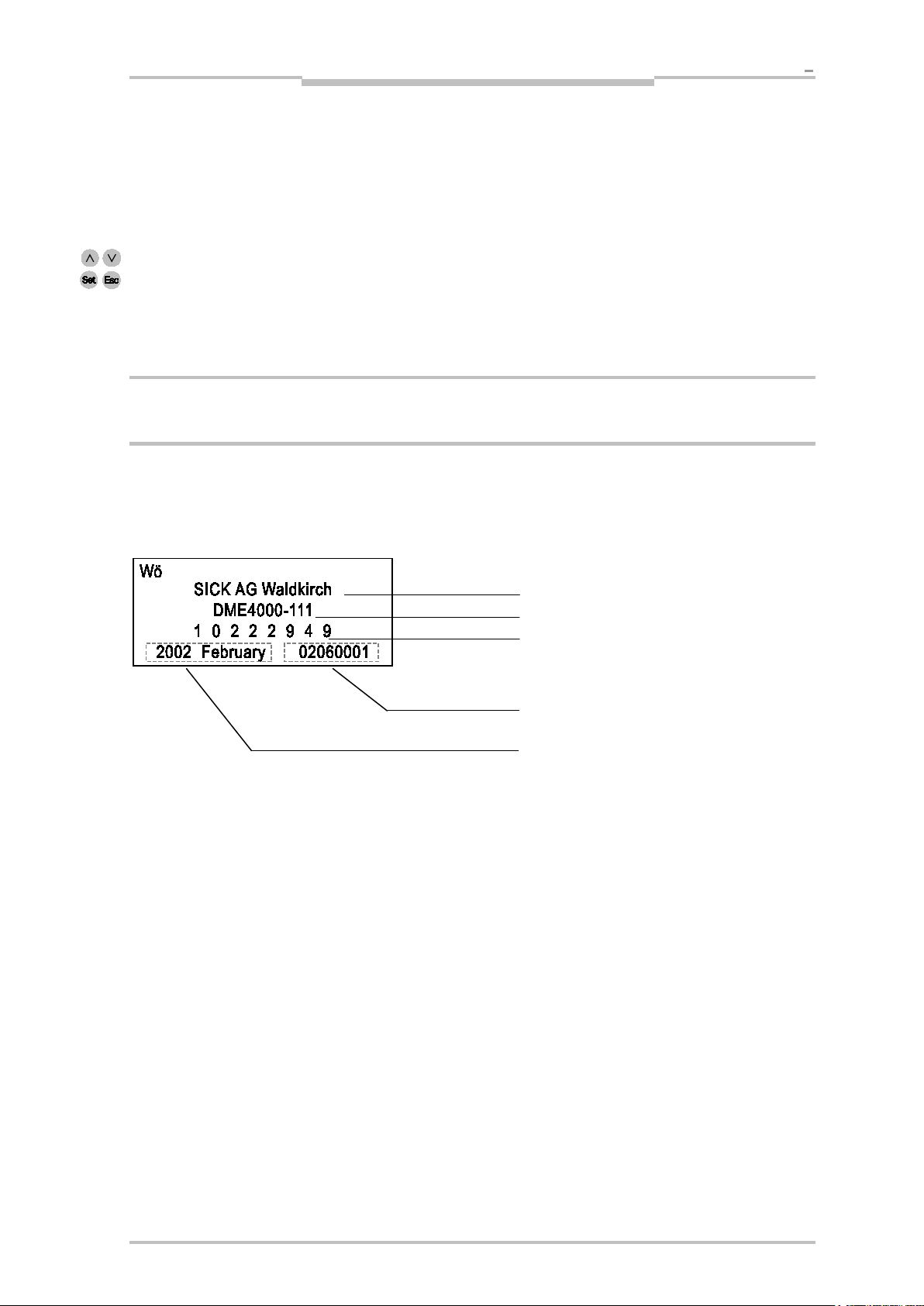
1.3.1 Laserwarnhinweis
Laserstrahlung - Nicht in den Lichtstrahl blicken Laserklasse 2
Laseraustrittsöffnung
Erfüllt 21 CFR 1040.10 und 1040.11 mit
Ausnahme der aufgeführten Abweichungen im
Dokument Laser Notice No. 50 vom 24. Juni 2007.
Laserklasse 2 (EN/IEC 60825-1:2014)
Identische Laserklasse für Ausgabe EN/IEC 60825-1:2007
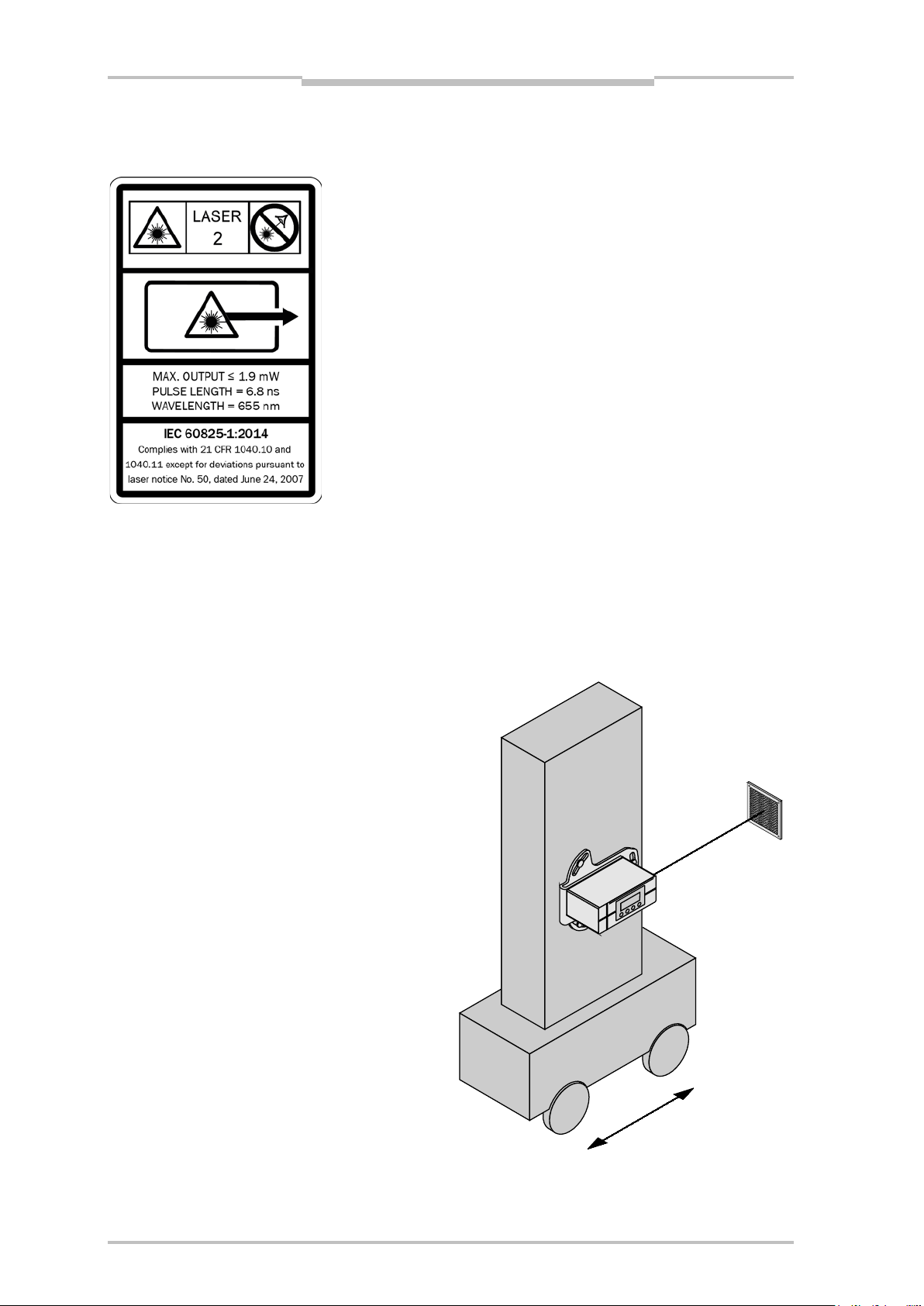
1.4 Funktionsweise
kompakter optischer Distanzsensor. Das DME
wird so montiert, dass der ausgesendete Laserstrahl auf den Reflektor trifft. Der Reflektor oder
das Gerät bewegen sich entlang des Laserstrahls.
Der Empfänger des DME empfängt das vom
Reflektor zurückgespiegelte Licht und ermittelt die
Distanz zwischen Sensor und Reflektor mittels
Lichtlaufzeitmessung.
Die gemessene Distanz wird, je nach Gerätevariante, über eine SSI-, RS-422-, DeviceNet-, Hiperface-, CANopen oder PROFIBUS-Schnittstelle an
eine Steuerung oder einen Lageregelkreis übertragen.
Durch die schnelle Messwertermittlung ist das
DME4000 für den direkten Betrieb in einem
geschlossenen Lageregelkreis über die SSISchnittstelle z. B. mit einem Frequenzumrichter
geeignet.
6 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 7

Betriebsanleitung Kapitel 2
Bedienung
ACHTUNG
Eingabebereich
LC-Display
DME4000
2 Bedienung
Dieses Kapitel erklärt das Bedienfeld und die grundsätzliche Bedienung des DME4000. Detaillierte
Informationen zur Inbetriebnahme und zum Betrieb des DME4000 finden Sie im Kapitel 4
„Inbetriebnahme“.
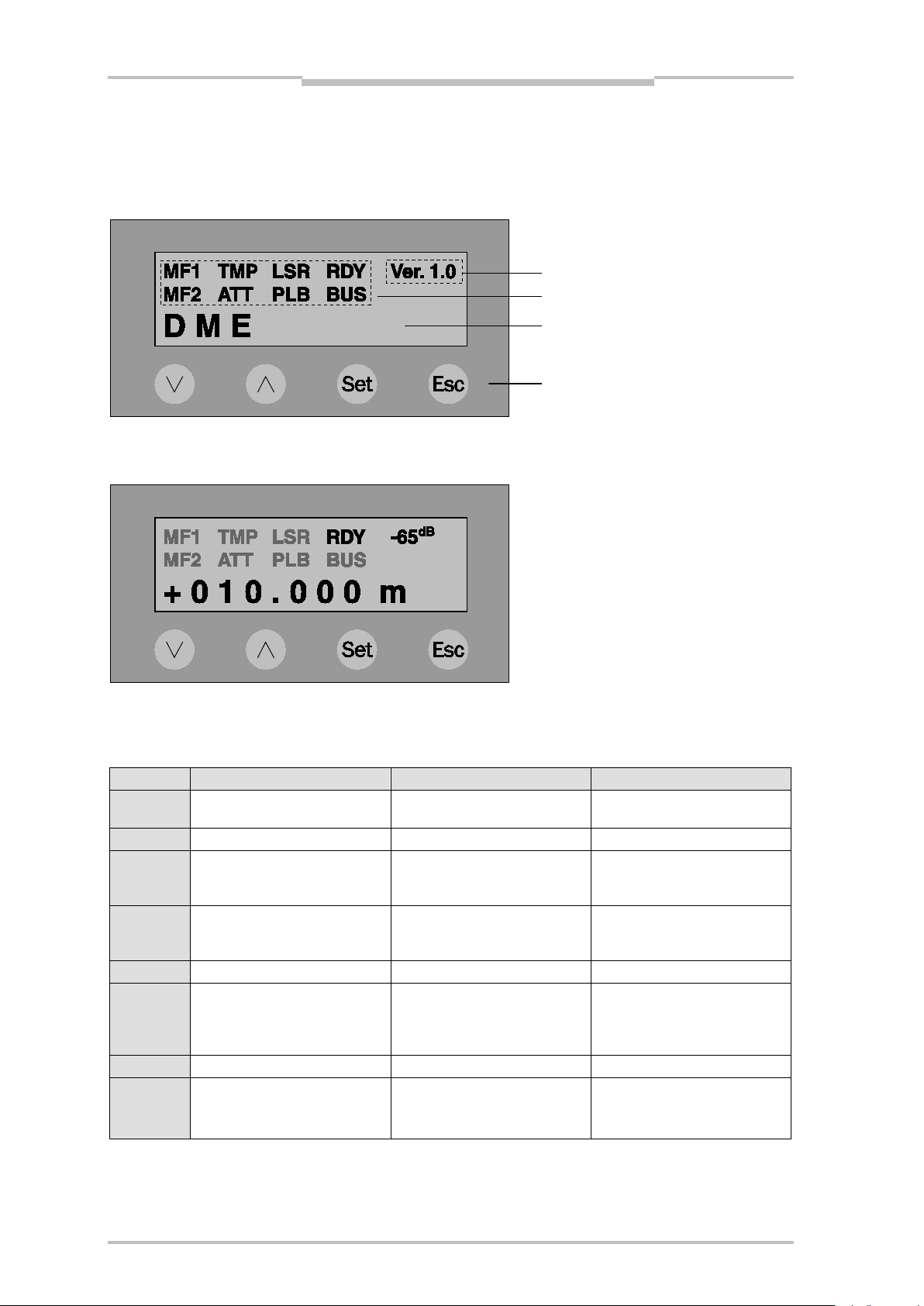
2.1 Aufbau des Bedienfeldes
Abbildung 2-1 – Display
Das Bedienfeld ist in zwei Bereiche unterteilt:
LC-Display: Zeigt das Menü während der Parametrierung
Eingabebereich: Enthält die Funktionstasten zur Eingabe der Parameter bzw. Funktionen
2.2 Bedienung
Das DME4000 ist mit einer Folientastatur ausgestattet.
Bedienen Sie den Eingabebereich nur mit den Fingern oder mit einem geeigneten Zeigegerät!
Benutzen Sie keine spitzen oder harten Gegenstände. Sie können den Eingabebereich beschädigen und
die Bedienung damit erschweren oder unmöglich machen.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 7
Page 8
Kapitel 2 Betriebsanleitung
Bedienung
Anzeige
Bedeutung
Wird angezeigt
Wird nicht angezeigt
Multifunktions-
Ein-/Ausgangspegel aktiv
Ein-/Ausgangspegel nicht aktiv
MF2
Multifunktions-Ausgang
Ausgangspegel aktiv
Ausgangspegel nicht aktiv
Geräteinnentemperatur
Vorausfallmeldung:
Geräteinnentemperatur OK
ATT
Verschmutzung
Vorausfallmeldung:
Empfangspegel OK
Laser
Vorausfallmeldung Messlaser
Laser OK
PLB
Plausibilität
Messfehler
Messwert OK
Betriebsbereit (Ready)
Bei Betriebsbereitschaft
Initialisierung, Hardwaredefekt
BUS
SSI-/PROFIBUS-/DeviceNet-/
SSI: Clocksignal empfangen
SSI: kein Clock
Funktionstasten
Infofeld 2
Statusanzeigen
Infofeld 1
DME4000
2.3 Bedienfeld
Nach Anlegen der Betriebsspannung (oder nach Reset) erscheint folgende Anzeige im Display des
DME4000:
Abbildung 2-2 – Anzeige nach Anlegen der Betriebsspannung
Nach ca. 1 s ist das DME4000 betriebsbereit und zeigt den aktuellen Messwert an:
2.3.1 Statusanzeigen
MF1
Ein-/Ausgang
TMP
Geräteinnentemperatur im
Grenzbereich
Empfangssignalpegel im Grenzbereich
LSR
Ursache: Lichtstrahlunterbrechung, Geschwindigkeit >
10 m/s
RDY
CANopen-Schnittstelle
Abhilfemaßnahmen bei Fehlermeldungen/Vorausfallmeldungen siehe Kapitel 8 „Troubleshooting und
Begriffserklärungen“.
PB/DN: Telegrammverkehr
CANopen: (pre-)operational mode
PB/DN: kein Telegrammverkehr
CANopen: stopped mode
8 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 9
Betriebsanleitung Kapitel 2
Bedienung
– 65 dB
Empfangspegel: Aktuelles Empfangssignal
Ver. 1.0
Software-Version
3.3.3.1
Menüunterpunkt (siehe Menüübersicht), Parameteränderungen nicht möglich
3.3.3.1 !
„!“: Code richtig eingegeben: Parameteränderungen möglich
3.3.3.1 ?
„?“: Eingegebener Parameter ist ungültig, vorher gültiger Parameter bleibt gespeichert.
+ 010.000 m
Aktueller Messwert, wird bei Messbetrieb angezeigt
Menüpunkte und Parameter werden hier angezeigt. „Code“ erscheint
Blinkende Anzeige Service signalisiert einen Hardwaredefekt oder
Führt durch die Menüstruktur, Code, Parametereingabe, Speichern von
Verlassen eines Menüunterpunktes
Auswahl von Menüpunkten, Eingabe von Zahlen
DME4000
Infofeld 1 (Beispiel)
Ursache: z. B. unteres Schaltlimit > oberes Schaltlimit
Abhilfe: Parameter korrigieren.
Infofeld 2 (Beispiel)
Code
durch Drücken von .
Service
Tasten
Über-/Untertemperatur.
Parametern
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 9
Page 10
Kapitel 3 Betriebsanleitung
Menüstruktur
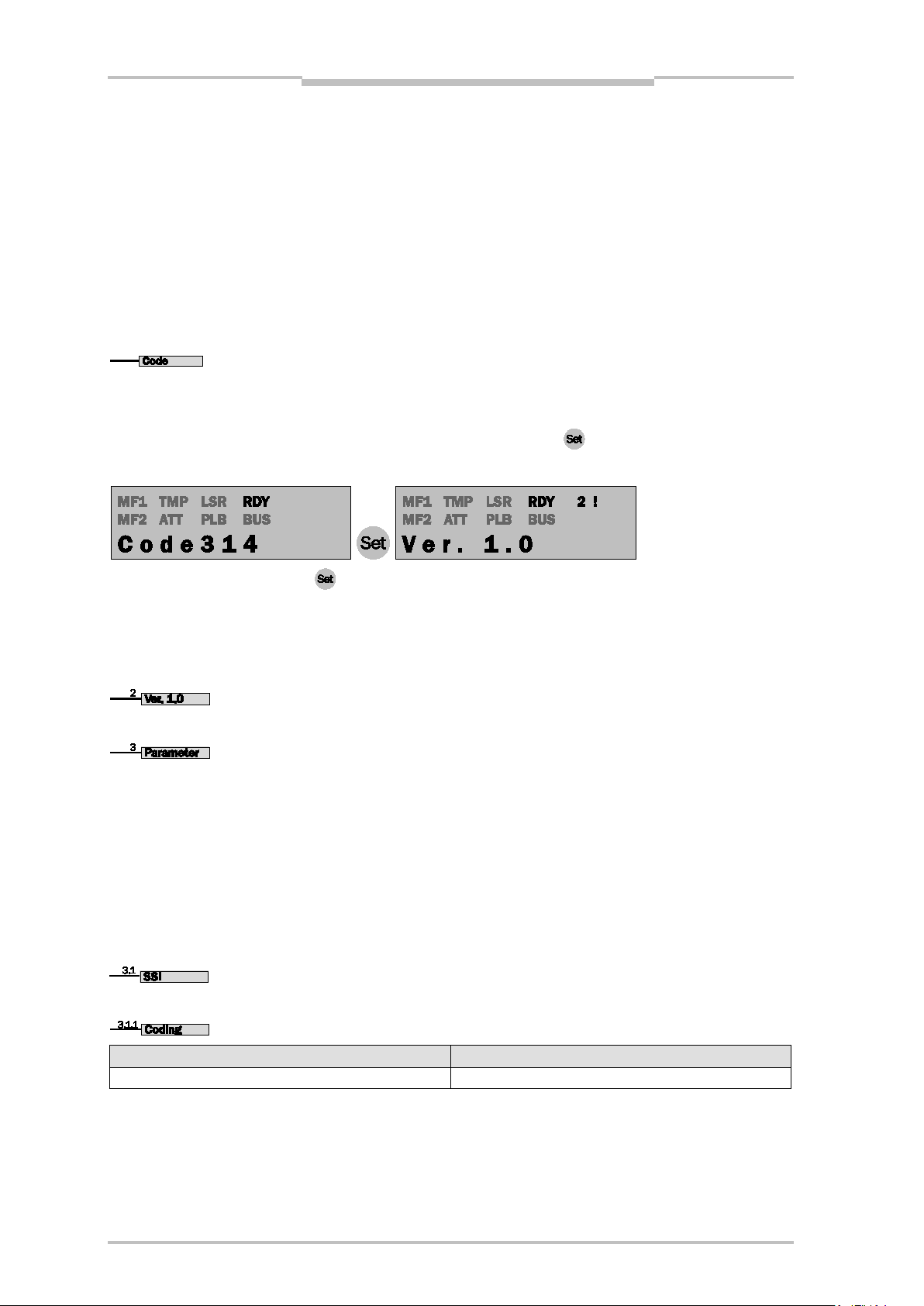
Code
Software-Version
Parameter
Interface
SSI
Coding
Binary
Gray (Default)
Messwertsausgabe im Binärcode
Messwertausgabe im Graycode
Hinweis
Hinweis
DME4000
3 Menüstruktur
3.1 Flussdiagramm
Auf der Innenseite der hinteren Umschlagklappe ist die Menüstruktur des DME4000 in Form eines
Flussdiagramms dargestellt.
3.2 Erklärungen zur Menüstruktur
Schutz vor unbeabsichtigtem Verändern der eingestellten Parameter.
Code: 314
Funktion:
Menüzugang und Verändern der Parameter: Code 314 bestätigen mit
Die erfolgreiche Eingabe des Codes wird im Display mit einem „!“ bestätigt.
.
Parameteränderungen, die mit
Wird die Eingabe des Code übersprungen oder eine andere Zahl (als 314) eingegeben, werden die
gültigen Parameter im Display angezeigt, ein Ändern ist dann nicht möglich.
Die Möglichkeit, alle Parameter ohne Änderungsmöglichkeit einzusehen, erleichtert z.B. die Abfrage
und Übermittlung von Parametern durch ungeschultes Personal.
z.B. Ver. V1.0
Je nach Gerätevariante wird hier die Schnittstelle, der Multifunktions-Ein-/Ausgang MF1, der Ausgang
MF2, die Auflösung und ein Offset eingestellt.
Ein Reset stellt alle Parameter auf Default zurück.
Bei PROFIBUS-Geräten sind alle Parameter über das Display einstellbar. Bei erneutem „Hochfahren“
des PROFIBUS werden alle Parameter vom PROFIBUS-Master mit den in der Steuerung hinterlegten
Parametern überschrieben. Ausnahme: PROFIBUS-Adresse, Offset bei aktivierter Preset-Funktion, Profil
Klasse 1.
Je nach Gerätetyp erscheint im Menü nur die jeweilige Schnittstelle des Gerätetyps.
Funktion SSI-Schnittstelle siehe Kapitel 8.2.3 „SSI“.
bestätigt werden, sind sofort aktiv und nichtflüchtig gespeichert.
10 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 11
Betriebsanleitung Kapitel 3
Menüstruktur
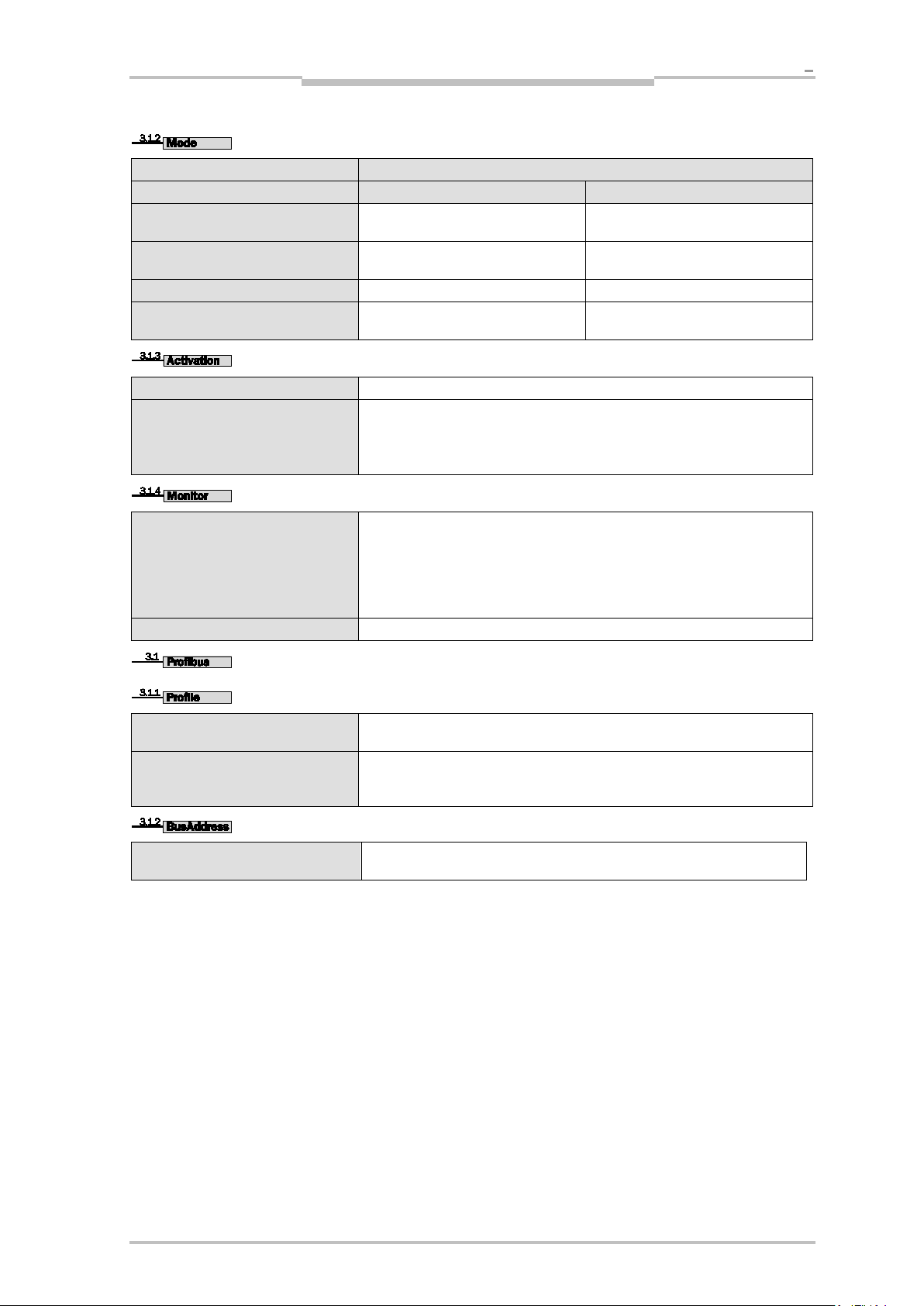
Mode
Datenformat
Binär
Gray
Messwert: Bit 1 ... 24
Messwert inkl. Plausibilitätsbit im
Messwert: Bit 1 ... 24
Messwert: Bit 1 ... 24
24 bit
Messwert: Bit 0 ... 23
Messwert: Bit 0 ... 23
1: Plausibilitätsfehler: Messwertaus-
0: OK
Activation
On (default)
SSI-Schnittstelle in Betrieb, RS-422-Schnittstelle nicht in Betrieb.
RS-422-Schnittstelle in Betrieb, SSI-Schnittstelle nicht in Betrieb. Die RS-422-
Monitor
Serielle Monitorschnittstelle in Verbindung mit dem Schnittstellenadapter
Off (default)
Multifunktionsausgänge MF1 und MF2 in Betrieb wie unter 3.3/3.4 eingestellt.
PROFIBUS
Profile
Dieses Profil entspricht dem Standard-Encoder-Profil, Beschreibung siehe „9.2
Dieses Profil basiert auf dem Standard-Encoder-Profil. Zusätzlich zum Messwert
Bus Address
Hier wird die PROFIBUS-Teilnehmeradresse eingestellt.
Hinweis
DME4000
25 bit (default)
24 bit + err
Plausibilitätsbit:
Off
On
LSB: Plausibilitätsbit
LSB: Plausibilitätsbit
gabe 0
Schnittstelle ermöglicht das Parametrieren des DME mit dem Schnittstellenadapter (1 023 359).
(Baudrate und Protokoll unter > 3.2 Serial < einstellen)
(Bestell-Nr. 1 023 359, siehe Zubehör) über die MF1 und MF2. Die eingeschaltete Monitorschnittstelle wird im Menü 3.3.2 und 3.4.2 MF Function mit
„Monitor“ angezeigt. Die SSI-Schnittstelle ist voll funktionsfähig. Baudrate und
Protokoll wird über 3.2 Serial eingestellt. Genauere Beschreibung siehe „Begriffserklärung – Monitor-Mode“.
Graycode eincodiert
LSB: Plausibilitätsbit (binär)
Encoder
SICK (default)
Addr. 006 (default)
Inbetriebnahme-Beispiel mit Siemens Step 7 siehe Kapitel 9 „Anhang“.
PROFIBUS-Schnittstelle“.
werden Warn-, Zustands- und Fehlerinformationen übertragen.
Beschreibung siehe „9.2 PROFIBUS-Schnittstelle “.
(001-125)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 11
Page 12
Kapitel 3 Betriebsanleitung
Menüstruktur
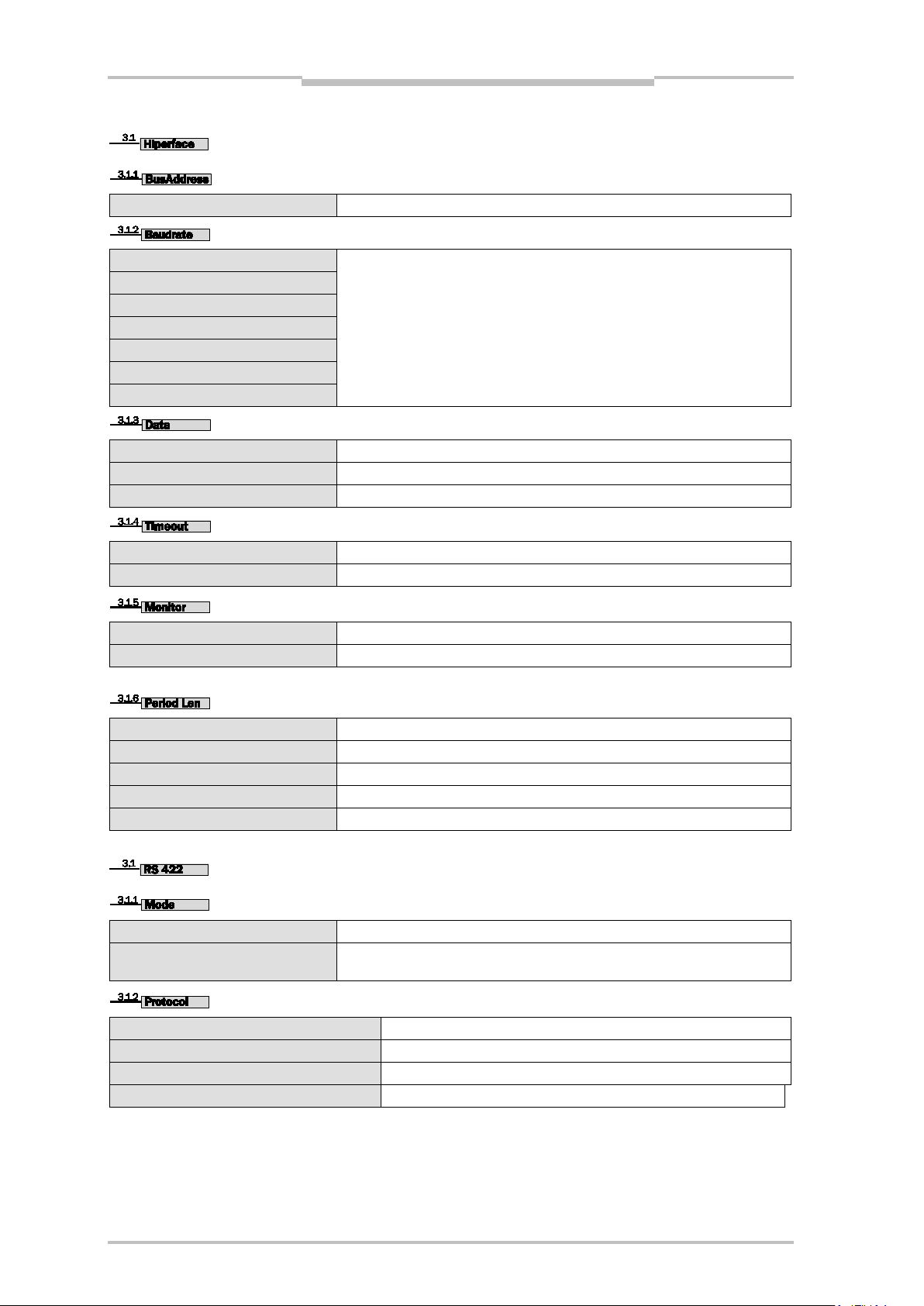
Hiperface
BusAddress
Add 00 (default)
Einstellung der Hiperface-Adresse (Bereich 0 … 31)
Baudrate
0,6 kBd
Einstellung der Baudrate
1,2 kBd
2,4 kBd
4,8 kBd
9,6 kBd (default)
19,2 kBd
38,4 kBd
Data
8, o, 1
8 databits
8, e, 1 (default)
1 stoppbit
8, n, 1
Parity choice
Timeout
X1
1*11 / Baudrate
X4 (default)
4*11 / Baudrate
Monitor
On
Off (default)
Period Len
1 Typecode 90H (default)
Entspr. Auflösung 1 mm
2 Typecode 91H
4 Typecode 92H
8 Typecode 93H
16 Typecode 94H
RS 422
Mode
Request
Datenübertragung nur auf Anforderung
Zyklische Datenübertragung gemäß der eingestellten
Protocol
Standard
<STX><0x81><0x22><sign><7xBCD><ETX>
CRLF
<sign><7xBCD><CR><LF>
CP0
<sign><7xBCD>
CP1
Nicht belegt
Hinweis
DME4000
Continuous
Baudrate
Für eine detaillierte Beschreibung siehe Kapitel 9 „Anhang RS-422-Schnittstelle“.
12 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 13
Betriebsanleitung Kapitel 3
Menüstruktur
DeviceNet
Baudrate
125 (default)
Einstellung der Baudrate (125, 250, 500 kBaud)
Bus Address
Addr. 06 (default)
Einstellung der DeviceNet-Adresse (Bereich 0 ... 63)
CANopen
Baudrate
125 kBd (default)
Einstellung der Baudrate (125, 250, 500 kBaud, 1 MBaud)
Node-ID
ID: 006 (default)
Einstellung Node-ID (Bereich 001 ... 127)
Baudrate
Baudrate für RS-422-Parametrier-Schnittstelle (max. 115,2 kBd)
Data
7,e,1
7 Datenbit, even parity, 1 Stoppbit
8,e,1
8 Datenbit, even parity, 1 Stoppbit
8,n,1 (default)
8 Datenbit, 1 Stoppbit
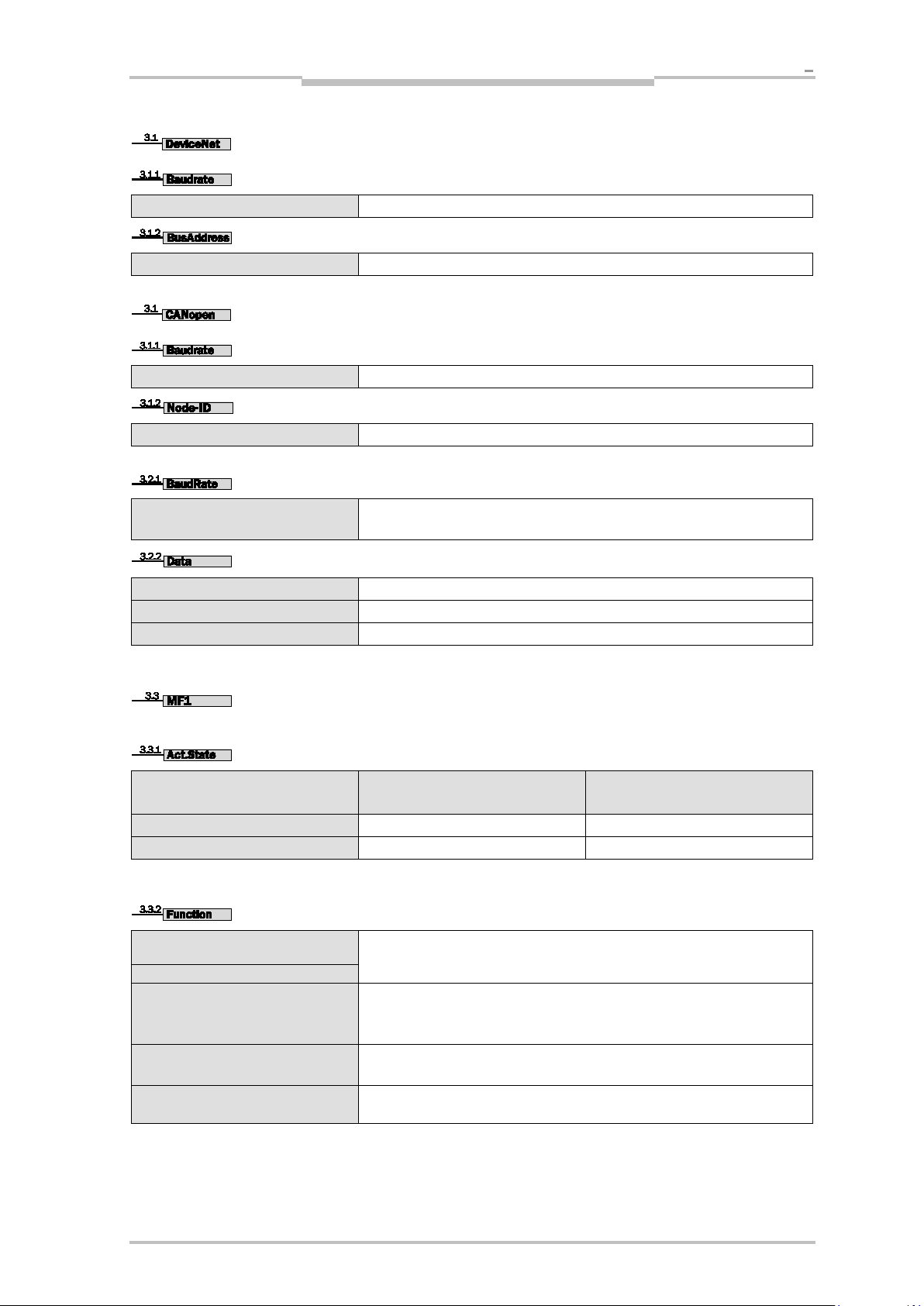
MF1
Act.State
Aktiv 1
LOW (oder unbeschaltet*))
HIGH
Aktiv 0
HIGH
LOW (oder unbeschaltet*))
Function
Distance
(default) siehe 3.3.3
Service siehe 3.3.4
Preset
Überschreiben des Offsetwertes:
Laser aus, Messwert = 0, Quittierung über Ready Status
(Nur SSI-Variante): Wird angezeigt, wenn unter 3.1.4 die Monitorschnittstelle
DME4000
19,2 (default)
Baudrate für SSI-Monitor-Schnittstelle (max. 38,44 kBd)
Detaillierte Beschreibung siehe Kapitel 8.2 „Begriffserklärungen“
Parametrierbarer Aus- oder Eingang.
Funktion Low Active High Active (default)
*)
bei Verwendung als Eingang Funktionsbeschreibung siehe Kapitel 8 „Eingang“
Offset = Presetwert - aktueller Messwert
Funktionsbeschreibung siehe Kapitel 9.1 „Preset“
Sleepmodus
Funktionsbeschreibung siehe Kapitel 9.4 „Sleepmode“
Monitor
ON gesetzt wird
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 13
Page 14
Kapitel 3 Betriebsanleitung
Menüstruktur
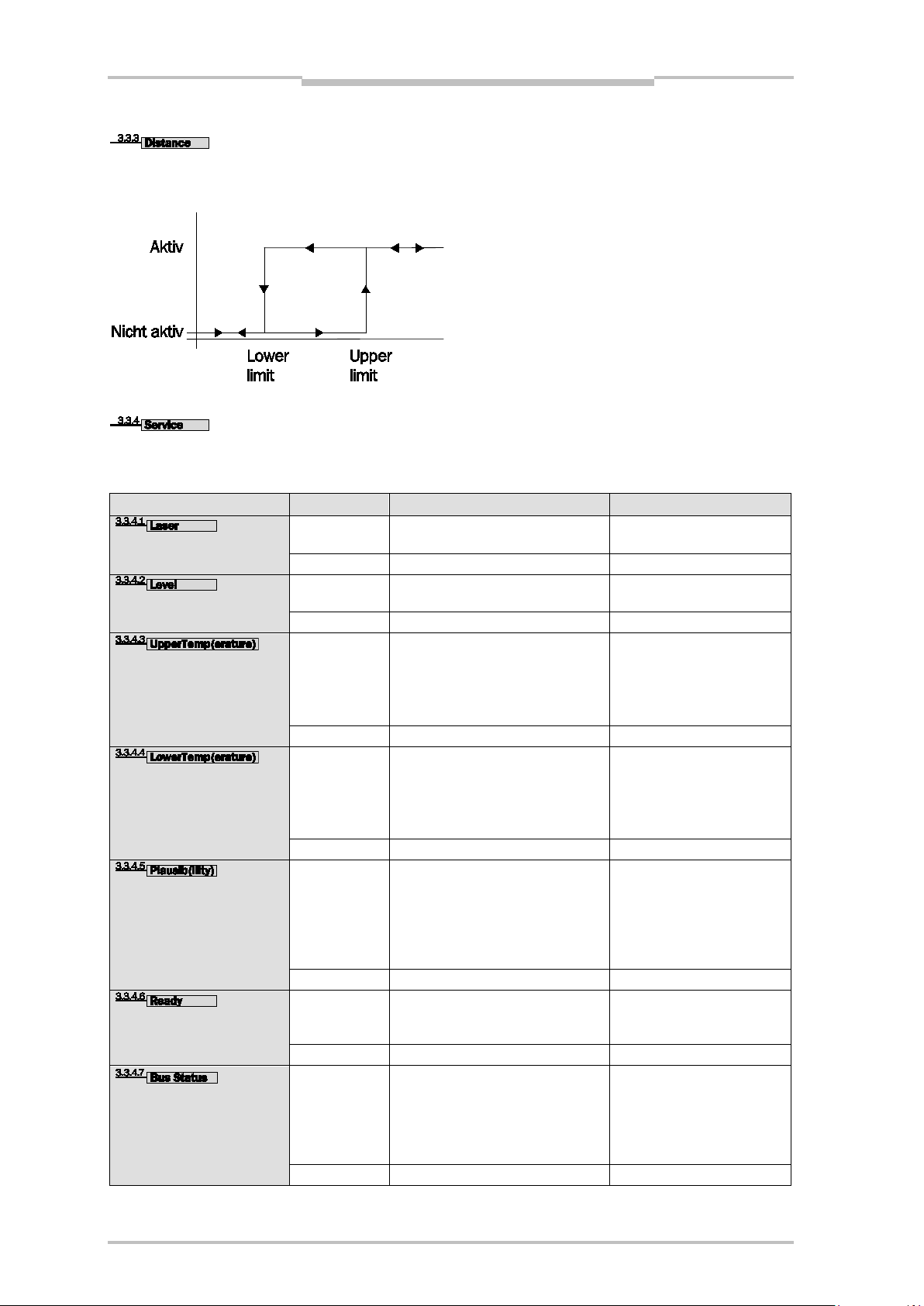
Distance
Service
Aktiv
Nicht Aktiv
On (default)
Vorausfallmeldung
Laser OK
Off
–
On (default)
Vorausfallmeldung
Nicht verschmutzt
Off –
On (default)
Übertemperatur-
Geräteinnentemperatur <
Off –
On (default)
Untertemperatur-
Geräteinnentemperatur >
Off –
On
Fehlerhafter Messwert, Messwert-
Messwert OK
Off –
On (default)
Initialisierung,
Betriebsbereit, Messwert OK
Off –
On
Busfehler
Datenübertragung OK
Off (default)
–
DME4000
MF1 wird als Distanzschaltausgang verwendet.
Funktion:
Frei einstellbare Statusmeldungen in „ODER“-Verknüpfung, die Aufschluss über den Gerätezustand
geben.
Laser
Level
UpperTemp
LowerTemp
Plausib(ility)
Laserdiode
Verschmutzung
Überwachung
Geräteinnentemperatur
> oberes eingestelltes Temperaturlimit
Überwachung
Geräteinnentemperatur
< unteres eingestelltes Temperaturlimit
ausgabe „0“
Ursache:
–Lichtstrahlunterbrechung
–Verfahrgeschwindigkeit
> 10 m/s
oberes eingestelltes Temperaturlimit
unteres eingestelltes Temperaturlimit
Ready
Bus Status
14 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Hardwarefehler,
Laser ausgeschaltet
SSI: kein Clocksignal
PB/DN: kein Telegrammverkehr
CANopen: stopped mode
SSI: Clocksignal vorhanden
PB/DN: Telegrammverkehr
CANopen: (pre-)operational
mode
Page 15
Betriebsanleitung Kapitel 3
Menüstruktur
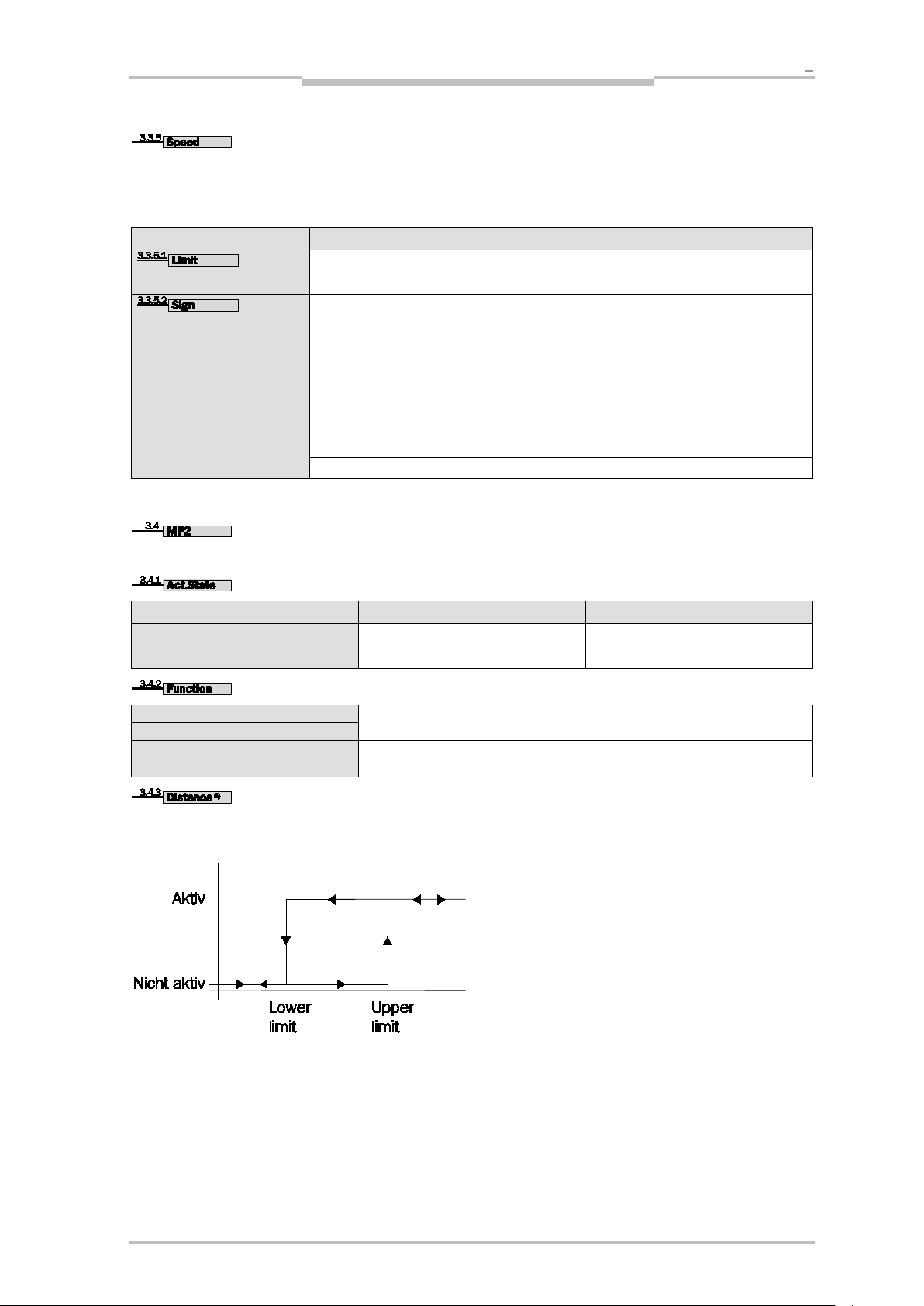
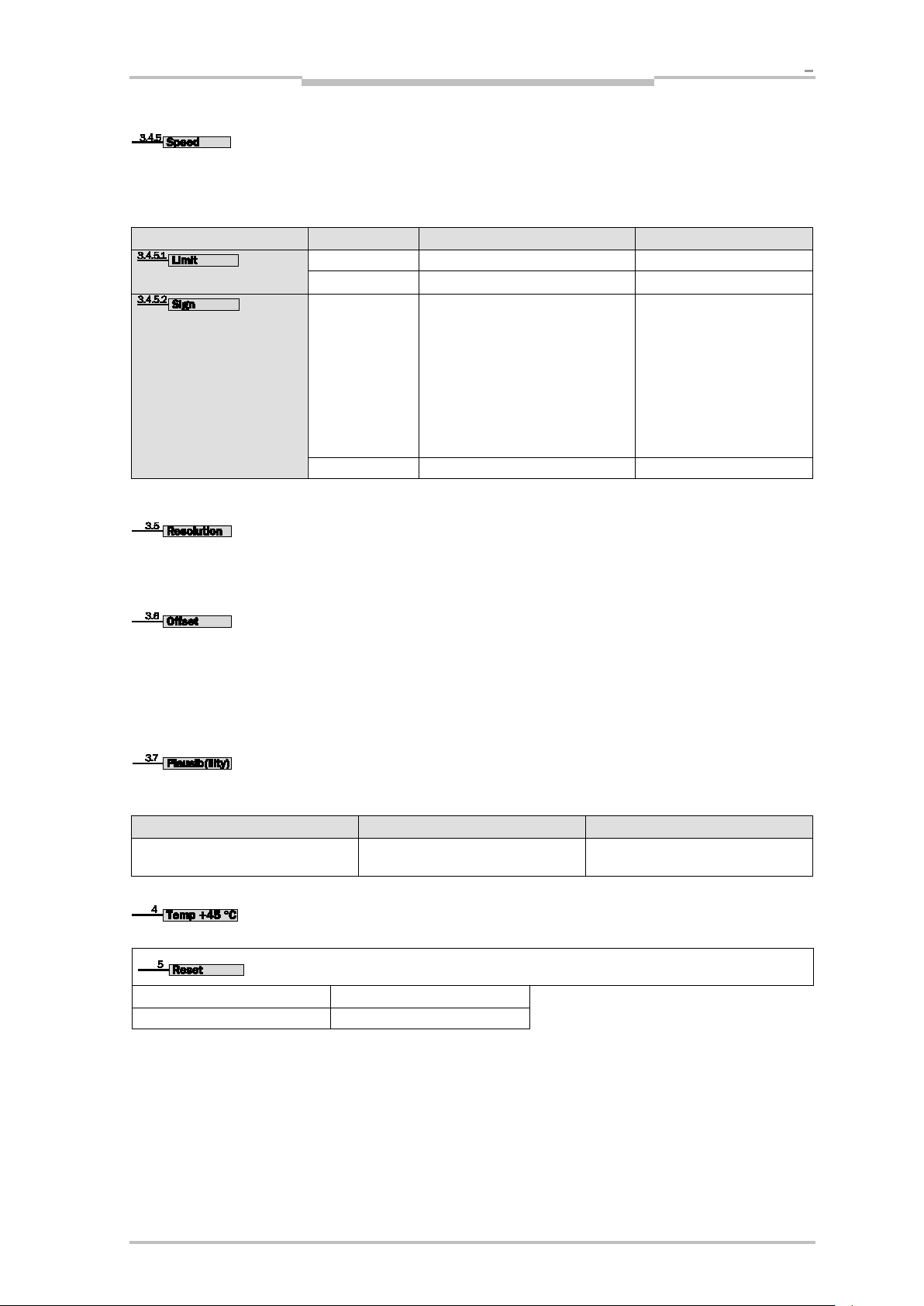
Speed
Aktiv
Nicht aktiv
Limit
On (default)
Range: 0,1 … 9,9 m/s
Range: 0 m/s
Off
–
On (default)
Parametriertes Geschwindigkeitslimit
Parametriertes
Off –
MF2
Active State
Low Active (default)
High Active
Aktiv 1
LOW
HIGH
Aktiv 0
HIGH
LOW
Function
Distance siehe 3.4.3
Service (default) siehe 3.4.4
(nur SSI-Variante): Wird angezeigt, wenn unter 3.1.4 die Monitorschnittstelle
On gesetzt wird
Distance
DME4000
Die Funktion „Speed“ ermöglicht – bei Überschreitung von parametrierten Geschwindigkeitslimits – die
Ausgabe über die beiden Schaltausgänge MF1 und MF2.
Die Schalthysterese ist fix 0,1 m/s.
Sign
Parametrierbarer Ausgang
Monitor
wird überschritten und Verfahrrichtung „+“:
Messwert wird größer;
Verfahrrichtung „-“:
Messwert wird kleiner;
Verfahrrichtung „+/-“: Messwert in
beide
Richtungen
Geschwindigkeitslimit wird
nicht überschritten
MF2 wird als Distanzschaltausgang verwendet.
Funktion:
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 15
Page 16
Kapitel 3 Betriebsanleitung
Menüstruktur
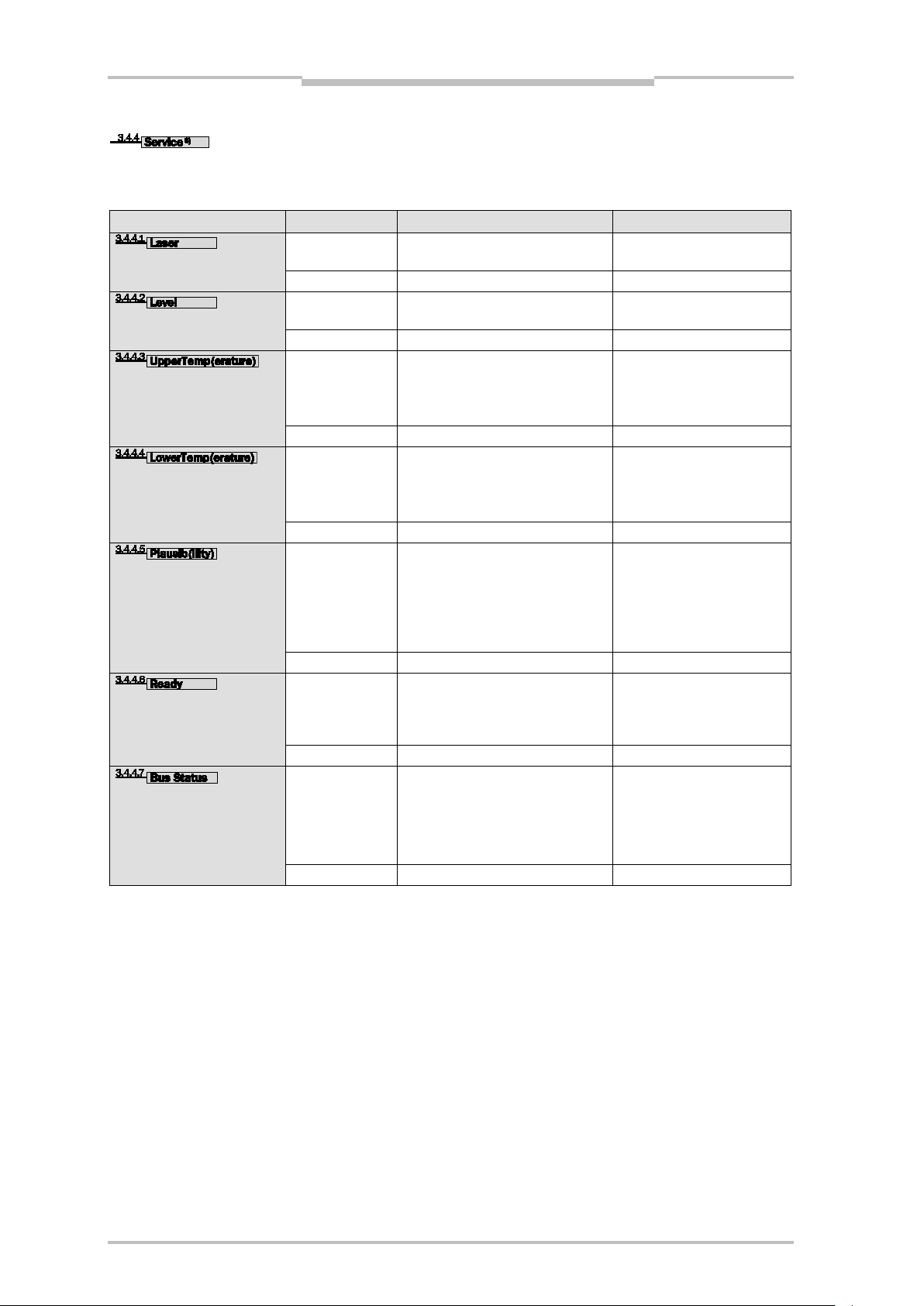
Service
Aktiv
Nicht aktiv
On (default)
Vorausfallmeldung
Laser OK
Off
–
On (default)
Vorausfallmeldung
Nicht verschmutzt
Off –
On (default)
Übertemperatur-Überwachung
Geräteinnentemperatur <
Off –
On (default)
Untertemperatur-Überwachung
Geräteinnentemperatur >
Off –
On
Fehlerhafter Messwert, Messwert-
Messwert OK
Off –
On (default)
Initialisierung
Betriebsbereit,
Off –
On
Busfehler
Datenübertragung OK
Off (default)
–
DME4000
Frei einstellbare Statusmeldungen in „ODER“-Verknüpfung, die Aufschluss über den Gerätezustand
geben.
Laser
Level
UpperTemp
LowerTemp
Plausib(ility)
Ready
(default)
Laserdiode
Verschmutzung
Geräteinnentemperatur
> oberes eingestelltes Temperaturlimit
Geräteinnentemperatur
< unteres eingestelltes Temperaturlimit
ausgabe „0“
Ursache:
–Lichtstrahlunterbrechung
–Verfahrgeschwindigkeit
> 10 m/s
Hardwarefehler,
Messfehler,
Laser ausgeschaltet
oberes eingestelltes Temperaturlimit
unteres eingestelltes Temperaturlimit
Messwert OK
Bus Status
16 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
SSI: kein Clocksignal
PB/DN: kein Telegrammverkehr
CANopen: stopped mode
SSI: Clocksignal vorhanden
PB/DN: Telegrammverkehr
CANopen: (pre-)operational
mode
Page 17
Betriebsanleitung Kapitel 3
Menüstruktur
Speed
Aktiv
Nicht aktiv
Limit
On (default)
Range: 0,1 … 9,9 m/s
Range: 0 m/s
Off
–
On (default)
Parametriertes Geschwindigkeitsli-
Parametriertes
Off –
Resolution
Offset
Plausibilität
Off
Normal
200 ms (Default)
Keine Überprüfung
Überprüfung im Messzyklus
Fehlerunterdrückung
Temperatur
Reset
NO
YES
kein Reset
Rückstellung auf Default-Werte
Hinweis
Hinweis
DME4000
Die Funktion „Speed“ ermöglicht – bei Überschreitung von parametrierten Geschwindigkeitslimits – die
Ausgabe über die beiden Schaltausgänge MF1 und MF2.
Die Schalthysterese ist fix 0,1 m/s.
Sign
Einstellung der Auflösung, wirkt auf alle Schnittstellen.
Einstellbar: 50 ... 5000 µm, default 100 µm
Einstellbar: ± 250 m
Über die SSI-Schnittstelle wird bei negativem Messwert „0“ ausgegeben.
Bei aktivierter Preset-Funktion wird der Offsetwert durch Auslösen des Preset-Eingangs überschrieben,
siehe auch Kapitel 9.1 „Preset“.
mit wird überschritten und Verfahrrichtung „+“:
Messwert wird größer;
Verfahrrichtung „-“:
Messwert wird kleiner;
Verfahrrichtung „+/-“: Messwert in
beide
Richtungen
Geschwindigkeitslimit wird
nicht überschritten
Diese Funktion überwacht Messwerte auf Plausibilität. Spricht an bei Lichtstrahlunterbrechung, Verfahrgeschwindigkeiten > 10 m/s und Verschmutzung. Plausibilitätsfehler führt zu Messwertausgabe 0.
Anzeige der aktuellen Geräteinnentemperatur.
max. 200 ms
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 17
Page 18
Kapitel 4 Betriebsanleitung
Inbetriebnahme
DME4000
4 Inbetriebnahme
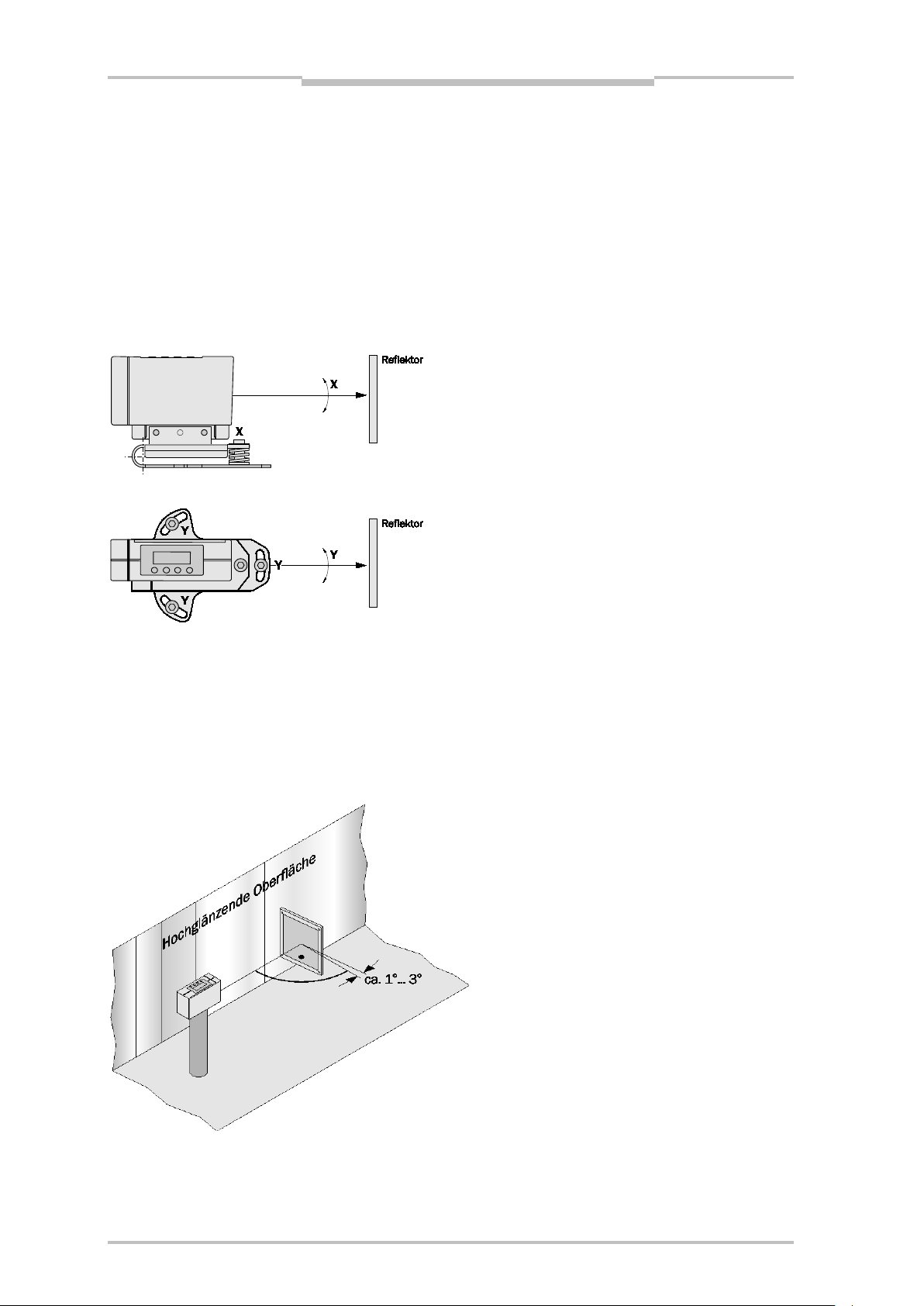
4.1 Montage
Das DME4000 und der Reflektor werden so befestigt, dass der Reflektor immer im Sichtfeld des Sensors ist.
Das DME4000 wird so ausgerichtet, dass sich der (auch in großen Abständen) gut sichtbare Lichtfleck
im Zentrum des Reflektors befindet.
Der als Zubehör erhältliche Haltewinkel ermöglicht eine einfache Justierung in X- und Y-Richtung:
Abbildung 4-1 – Justage DME4000
Die Reflektorgröße ist so zu wählen, dass der Lichtfleck bei Vibrationen nicht vom Reflektor abwandert.
Ist der Reflektor am bewegten Teil befestigt, ist in der Regel eine kleinere Reflexionsfolie ausreichend.
Bei hochglänzenden Oberflächen (z. B. Regale oder Flächen), die den Lichtstrahl oder Streulicht einspiegeln, Reflektor in den „freien Raum“ ausrichten: mit ca. 1° Neigung (X- oder Y-Richtung) montieren.
Verschiedene Reflektorgrößen siehe Zubehör (ab Seite 20 und 28).
Der im Infofeld 1 angezeigte Empfangspegel gibt Aufschluss über das aktuelle Empfangssignal.
Abbildung 4-2 – Justage DME4000 bei hochglänzender Umgebung
18 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 19
Betriebsanleitung Kapitel 4
Inbetriebnahme
DME
DME
DME
Reflektor
Reflektor
Reflektor
Reflektor
DME
DME
ISD
ISD
Reflektor
DME4000
4.1.1 Vorgehensweise bei der Ausrichtung
Bringen Sie Fahrzeug und Reflektor auf kleine Distanz.
Richten Sie das DME4000 so aus, dass der Lichtfleck sich im Zentrum des Reflektors befindet.
Vergrößern Sie die Entfernung von Fahrzeug zu Reflektor und beobachten dabei den Lichtfleck.
Justieren Sie gegebenenfalls den Lichtfleck in die Mitte des Reflektors nach.
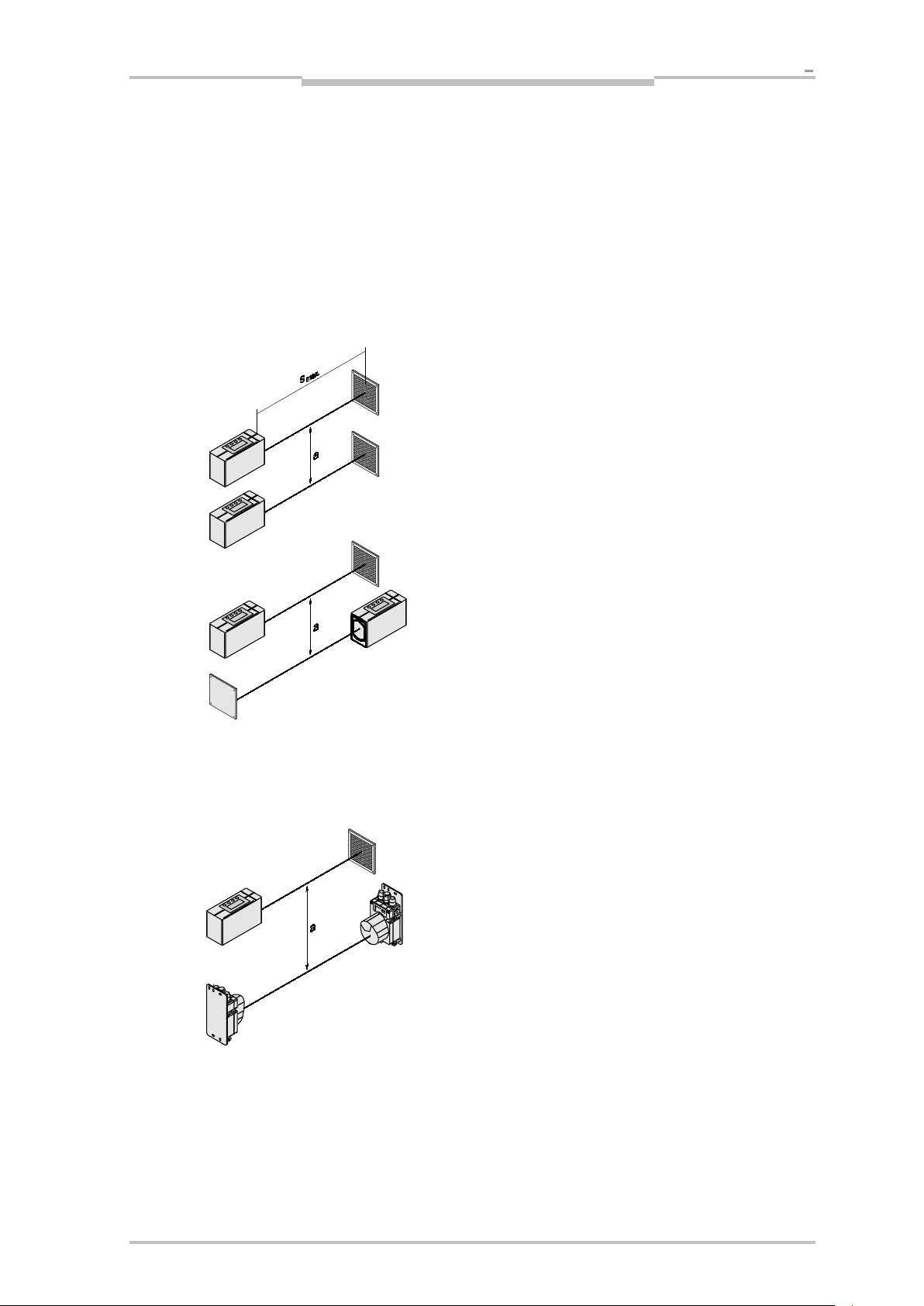
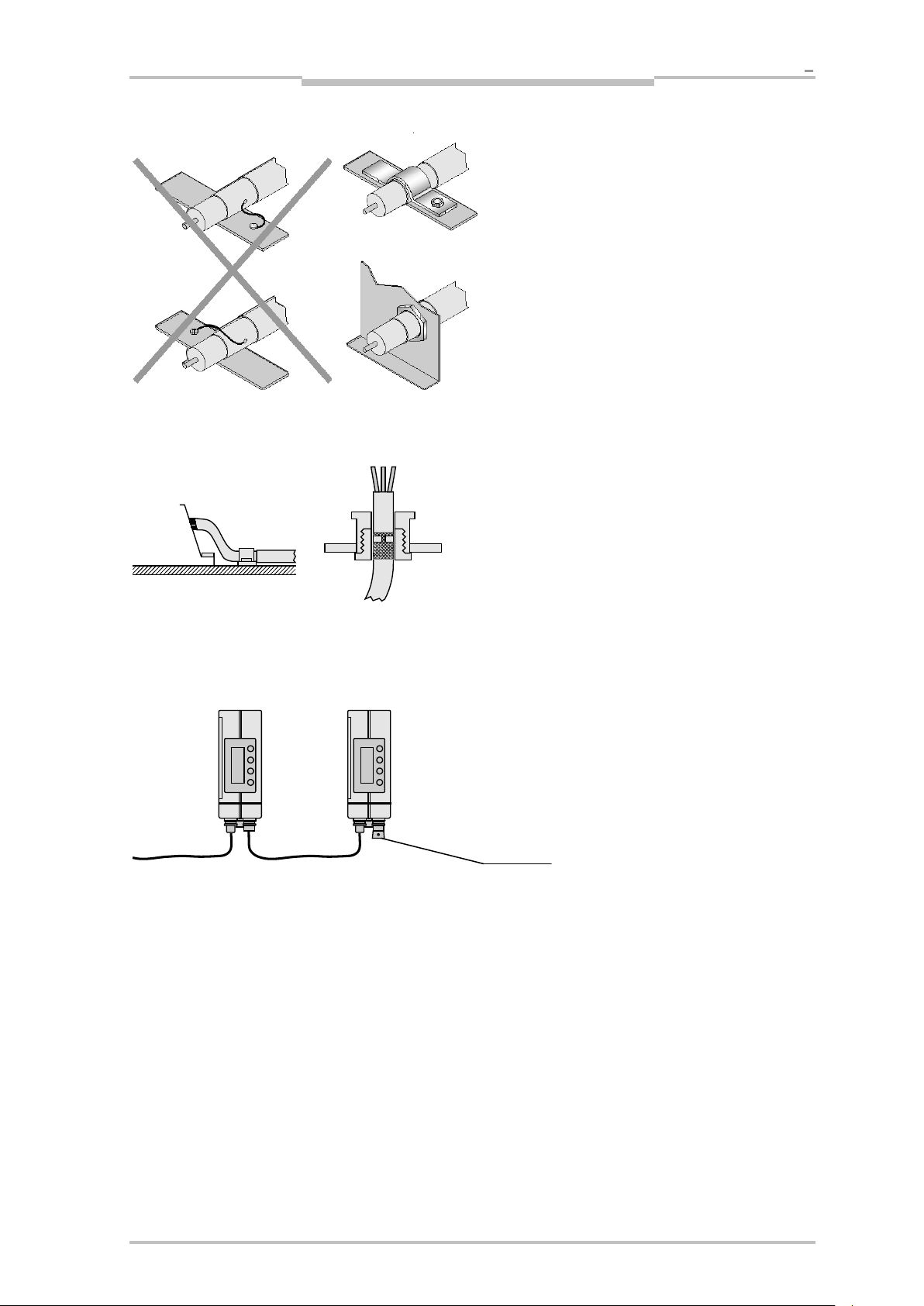
4.1.2 Anordnung benachbarter Entfernungs-Messgeräte
Der Abstand benachbarter Entfernungs-Messgeräte muss mindestens a
min = 100 mm betragen, um
gegenseitige Beeinflussung zu vermeiden. Abhängig von der Reichweite s muss dieser Abstand a = a
+ 0,01 x s
max betragen.
min
Abbildung 4-3 – Anordnung benachbarter DME4000
4.1.3 Anordnung Entfernungs-Messgerät mit benachbarter Datenübertragung
Abbildung 4-4 – Anordnung benachbarter DME4000 und ISD
Für die Datenübertragungslichtschranken der Baureihe ISD300 / ISD400-1xxx / ISD400-6xxx ist unabhängig von der maximalen Reichweite s
max ein minimaler Strahlabstand von 100 mm einzuhalten.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 19
Page 20
Kapitel 4 Betriebsanleitung
Inbetriebnahme
DME4000
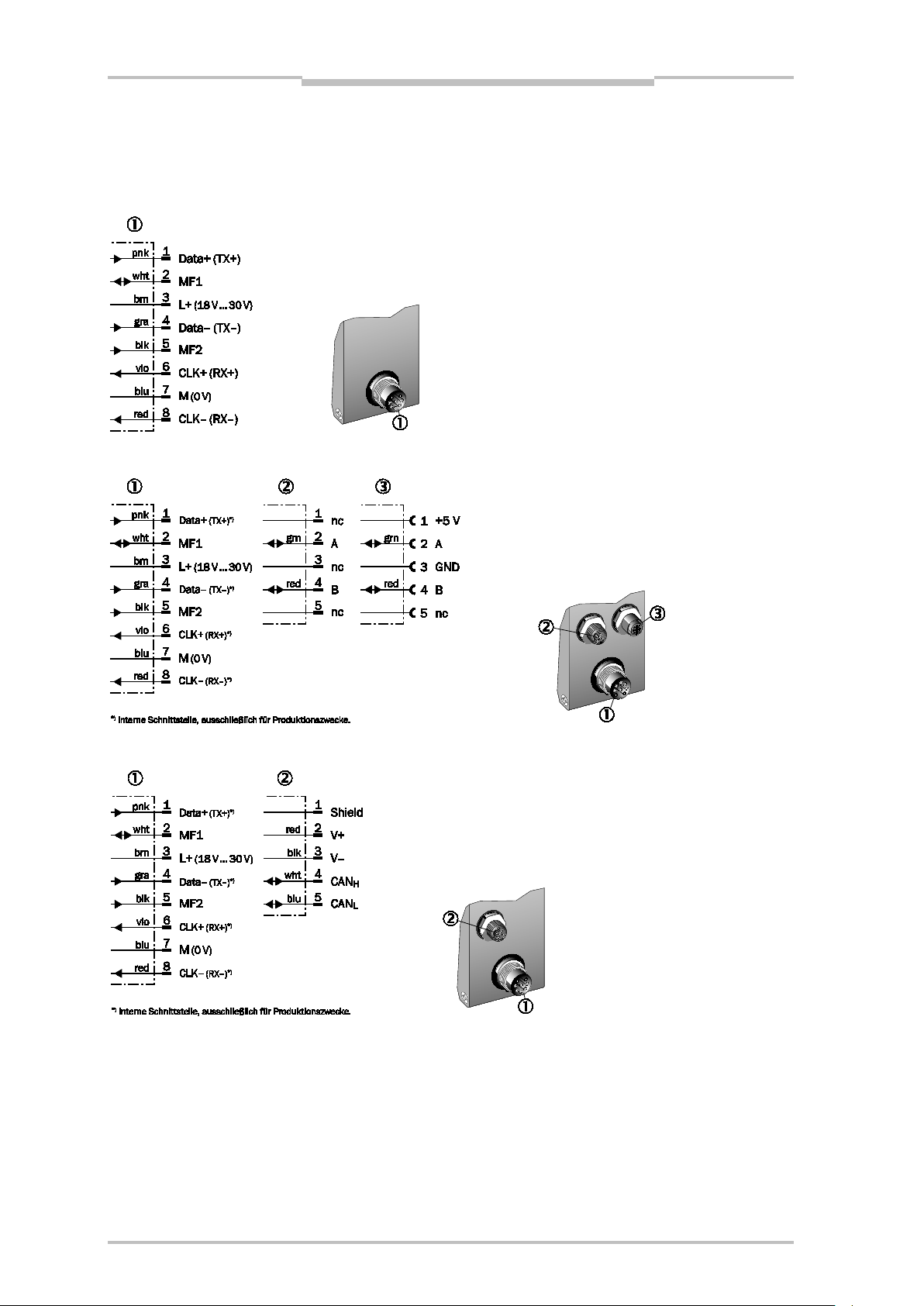
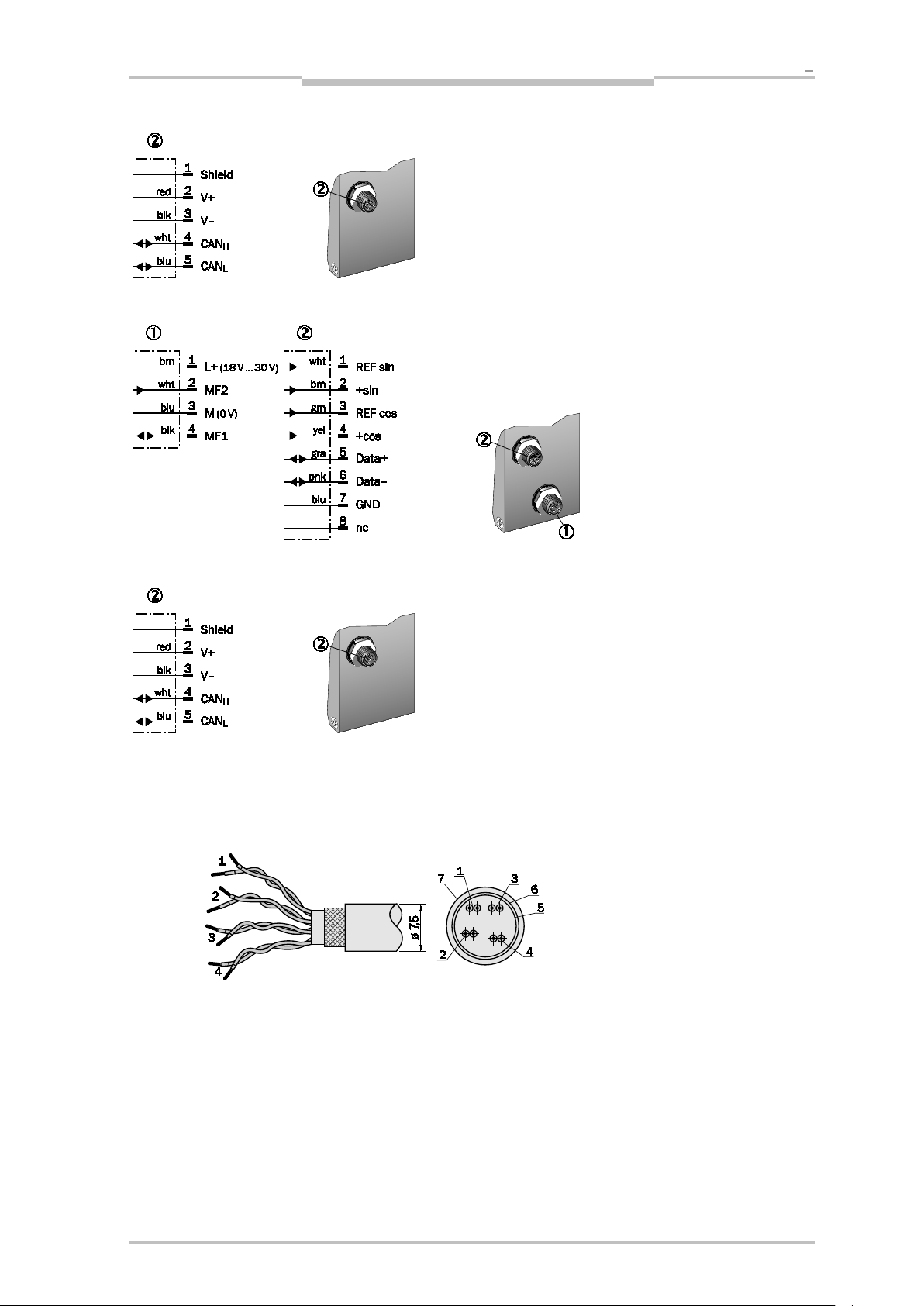
4.2 Elektrischer Anschluss
DME4000 nach Anschlussschema anschließen. Verdrahtungshinweise beachten (siehe Kapitel 4.2.1
„Verdrahtungshinweise“), Stecker und Kabel siehe Kapitel 6.3.2 „Stecker/Leitungen“.
Abbildung 4-5 – Anschlussschema DME4000-xx1/DME4000-xx3 (SSI/RS 422)
Abbildung 4-6 – Anschlussschema DME4000-xx2 (PROFIBUS)
Abbildung 4-7 – Anschlussschema DME4000-xx4 (DeviceNet M16- und M12-Stecker)
20 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 21
Betriebsanleitung Kapitel 4
Inbetriebnahme
zu 4
Paaren
ve
DME4000
Abbildung 4-8 – Anschlussschema DME4000-xx5 (DeviceNet M12-Stecker)
Abbildung 4-9 – Anschlussschema DME4000-xx7 (Hiperface M12-Stecker)
Abbildung 4-10 – Anschlussschema DME4000-xx9 (CANopen M12-Stecker)
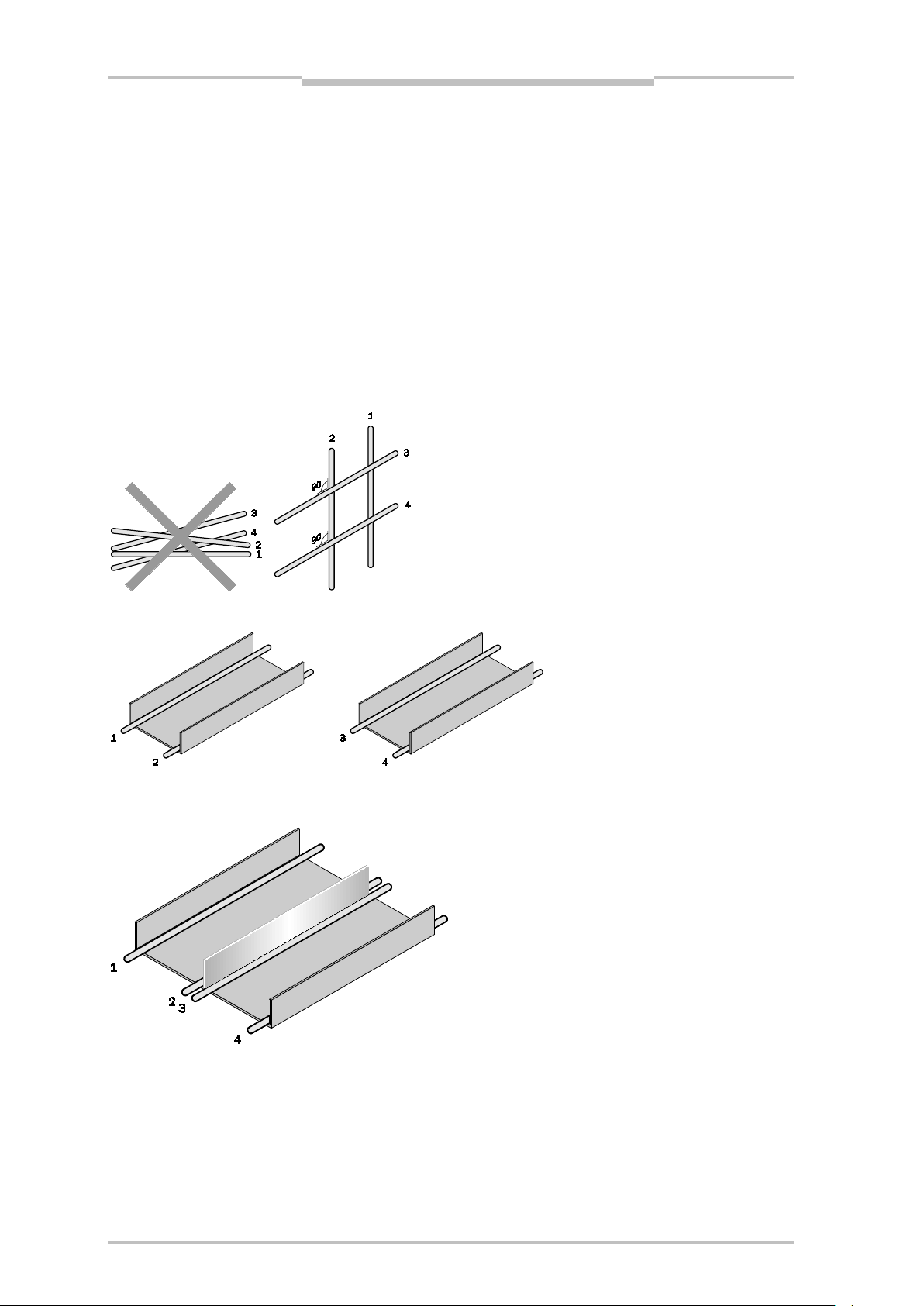
4.2.1 Verdrahtungshinweise
rseilt
Legende:
1 = Adernpaar blk/wht
2 = Adernpaar red/vio
3 = Adernpaar pnk/gra
4 = Adernpaar brn/blu
5 = Isolierfolie
6 = Schirm
7 = PUR-Mantel
Abbildung 4-11 – LTG-2308-MW, Bestell-Nr. 6026292
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 21
Page 22
Kapitel 4 Betriebsanleitung
Inbetriebnahme
DME4000
Eine sichere Datenübertragung ist bei Verwendung von abgeschirmten Leitungen mit zwei paarweise
verdrillten Adern gegeben. Ein einwandfreies und vollständiges Schirmkonzept ist für die störungsfreie
Datenübertragung erforderlich. Speziell muss auf die Erdung des Kabelschirmes an Schaltschrank und
DME4000 geachtet werden. Der Kabelschirm des vorkonfektionierten Kabels ist mit dem Metallstecker
und damit mit dem DME4000-Gehäuse verbunden. Der Kabelschirm am Schaltschrank muss großflächig mit der Betriebserde verbunden werden. Potenzialausgleichströme über den Kabelschirm sind
durch ein geeignetes Massekabel zu vermeiden. Die Schirme der PROFIBUS-Leitungen sind über die
PROFIBUS-Stecker miteinander verbunden.
Legende Kabelgruppen Abbildung 4-12 – Abbildung 4-14:
1 =sehr störempfindliche Leitungen (analoge Messleitungen)
2 =störempfindliche Leitungen (Sensorkabel, Kommunikationssignale, Busleitungen)
3 =Störquellen-Leitung (Steuerkabel für induktive Lasten, Motorbremsen)
4 =stark störende Leitungen (Ausgangskabel von Frequenzumrichtern, Versorgung von
Schweißanlagen, Leistungskabel)
Abbildung 4-12 – Leitungen der Gruppe 1, 2 und 3, 4 rechtwinklig kreuzen
Abbildung 4-13 – Ideal: Leitungen in verschiedenen Kabelkanälen verlegen
Abbildung 4-14 – Alternativ: Leitungen durch metallischen Trennsteg trennen
22 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 23
Betriebsanleitung Kapitel 4
Inbetriebnahme
Terminator
DME4000
Abbildung 4-15 – Keine „Schweineschwänzchen“, Schirm kurz und vollflächig anbinden,
BEIDE Seiten erden
Abbildung 4-16 – Schirmanschluss bei Kunststoffgehäusen
4.2.2 PROFIBUS-Terminierung
Abbildung 4-17 – PROFIBUS-Terminierung (siehe Kapitel 6.3.2 „Stecker/Leitungen“)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 23
Page 24

Kapitel 5 Betriebsanleitung
Beispiel
Schritt 1
Legen Sie die Betriebsspannung an.
Schritt 2
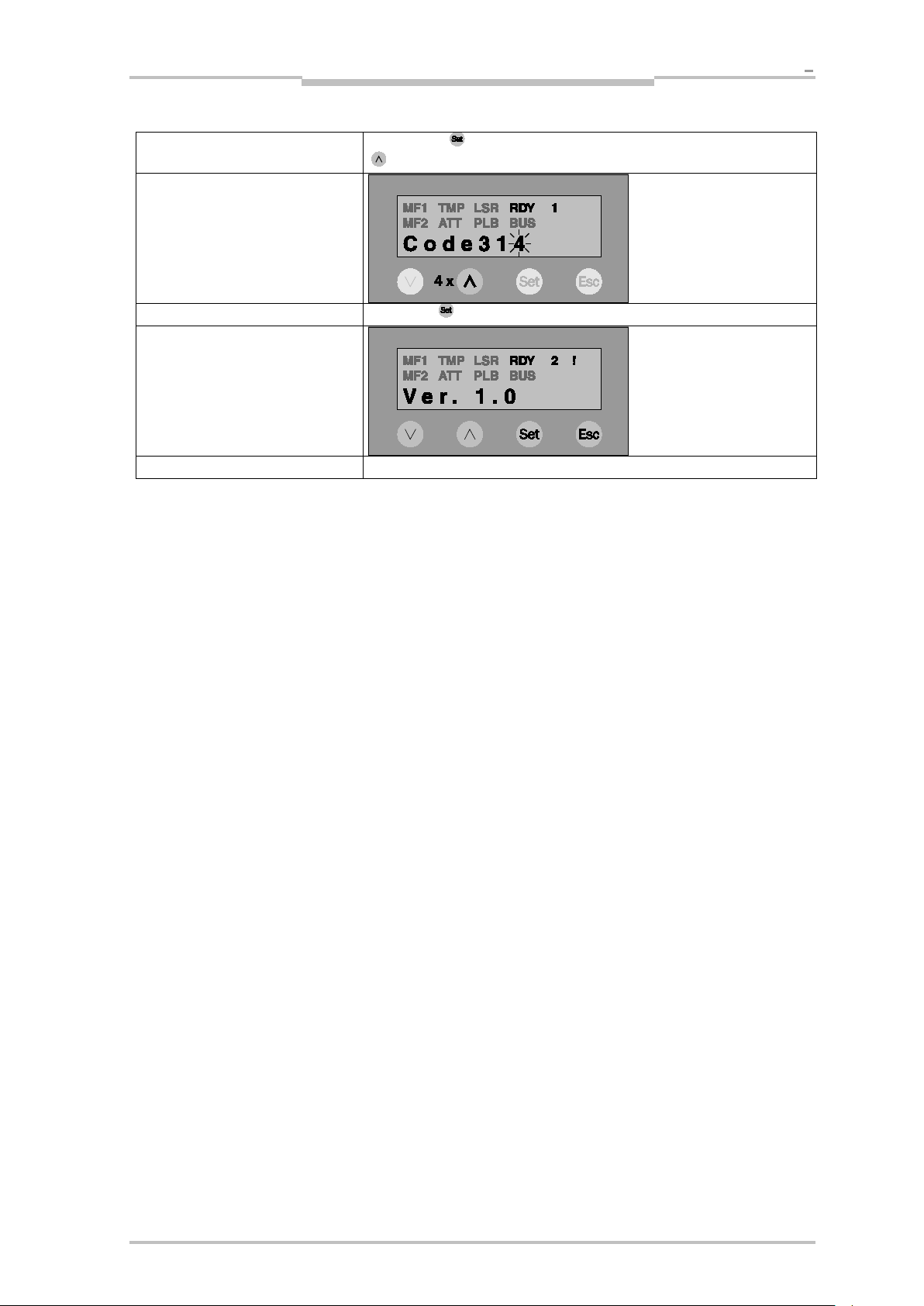
Rufen Sie mit das Menü „CODE“ auf.
Schritt 3
Rufen Sie mit das Eingabefeld „CODE 000“ auf. Die 1. Ziffer blinkt.
Schritt 4
Drücken Sie 3 x für das Passwort „000“ (nur Parameteransicht) oder
Gehen Sie mit eine Stelle weiter und geben Sie mit
Hinweis
DME4000
5 Beispiel
5.1 Parametereingabe am Beispiel „Code-Eingabe“
Alle Parameter lassen sich auf diese Art und Weise einstellen.
Anzeige
Anzeige
Anzeige
Anzeige
Schritt 5
Anzeige
geben Sie mit die gewünschte 1. Ziffer (z.B. „3“) ein.
die gewünschte 2. Ziffer (z.B. „1“) ein.
24 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 25
Betriebsanleitung Kapitel 5
Beispiel
Gehen Sie mit eine Stelle weiter und geben Sie mit
Schritt 7
Drücken Sie um die 3. Ziffer „4“ zu bestätigen.
Hinweis
Das Ausrufezeichen „!“ im Display bestätigt: Parametriermode.
DME4000
Schritt 6
die gewünschte 3. Ziffer (z.B. „4“) ein.
Anzeige
Anzeige
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 25
Page 26
Kapitel 6 Betriebsanleitung
Technische Daten
DME4000-xx1
DME4000-xx2
DME4000-xx4
(Hiperface)
DME4000-xx5
DME4000-xx9
DME4000
6 Technische Daten
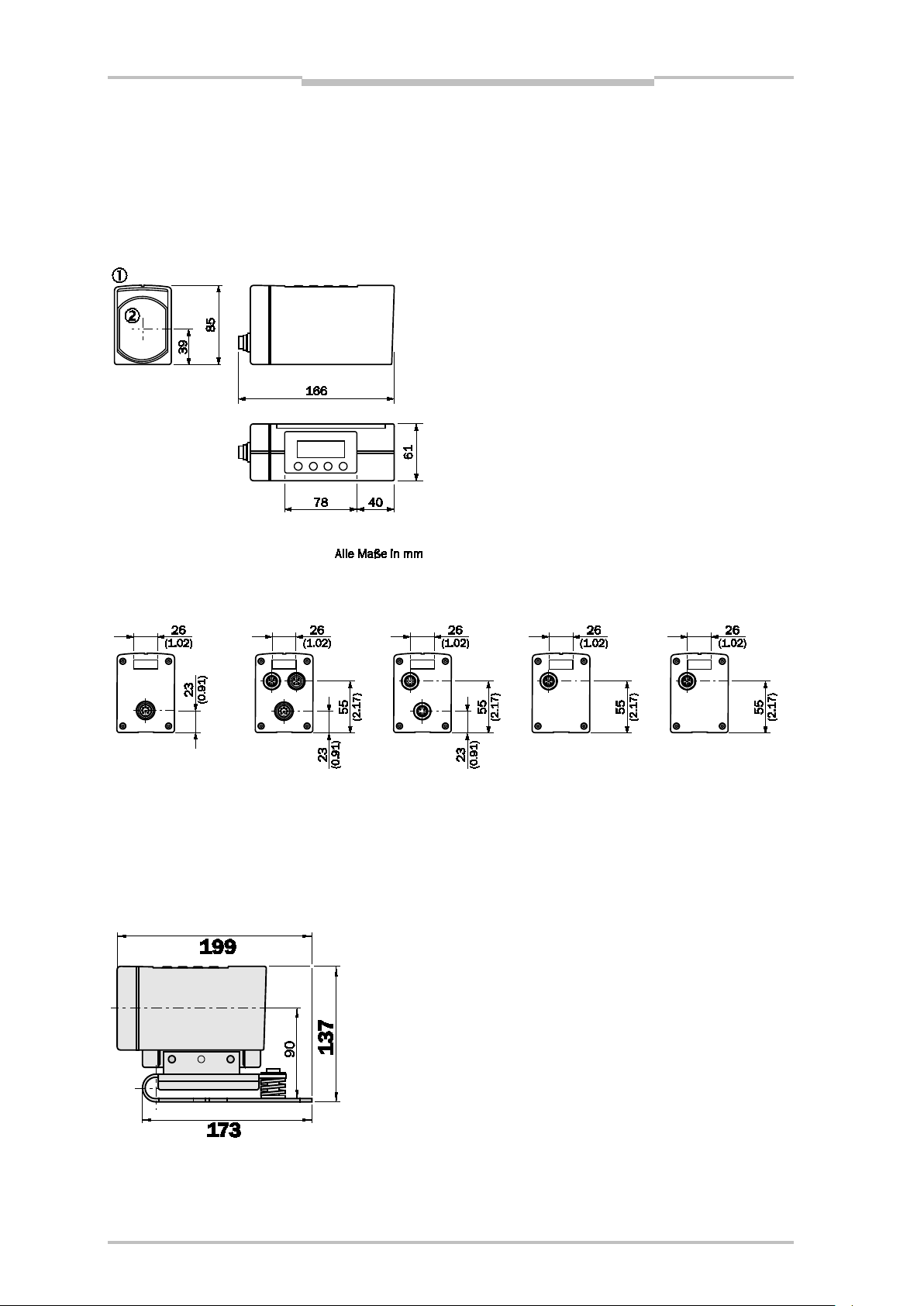
6.1 Maßzeichnung
Abbildung 6-1 –Maßzeichnung DME4000
DME4000-xx3
1 x M16-Stecker
(SSI/RS 422)
Abbildung 6-2 –Maßzeichnungen Rückansicht DME4000
1 x M16-/2 x M12Stecker
(PROFIBUS)
DME4000-xx7
1 x M16-/1 x M12Stecker (DeviceNet)
2 x M12-Stecker
1 x M12-Stecker
(DeviceNet)
1 x M12-Stecker
(CANopen)
Abbildung 6-3 – Maßzeichnung DME4000 am Halter montiert
26 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 27
Betriebsanleitung Kapitel 6
Technische Daten
DME4000
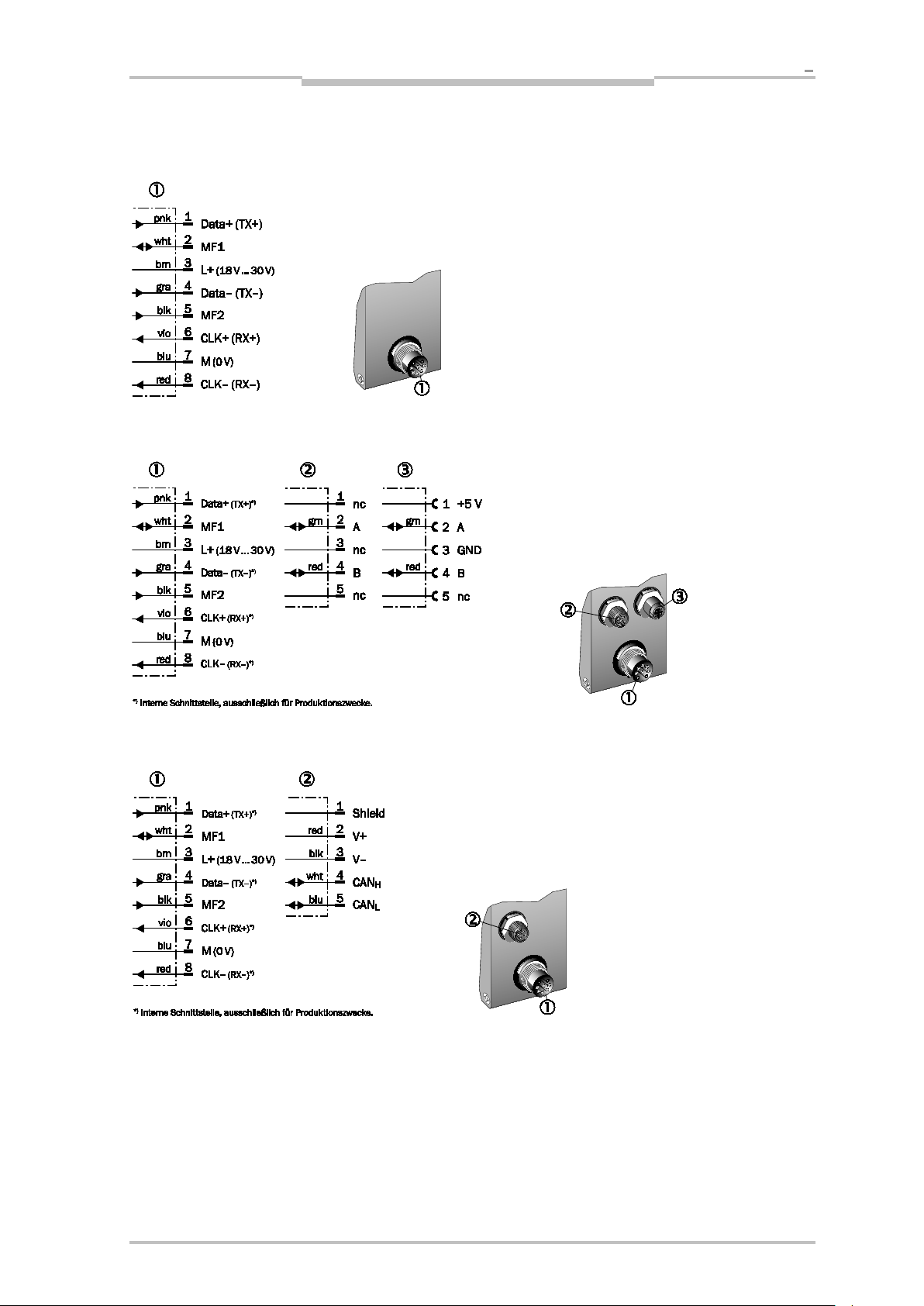
6.2 Anschlussschema
Abbildung 6-4 – Anschlussschema DME4000-xx1/DME4000-xx3 (SSI/RS 422)
Abbildung 6-5 – Anschlussschema DME4000-xx2 (PROFIBUS)
Abbildung 6-6 – Anschlussschema DME4000-xx4 (DeviceNet M16- und M12-Stecker)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 27
Page 28
Kapitel 6 Betriebsanleitung
Technische Daten
Reflektor 0,3 x 0,3 m2 Diamond Grade, montiert
Reflektor 0,6 x 0,6 m2 Diamond Grade, montiert
DME4000
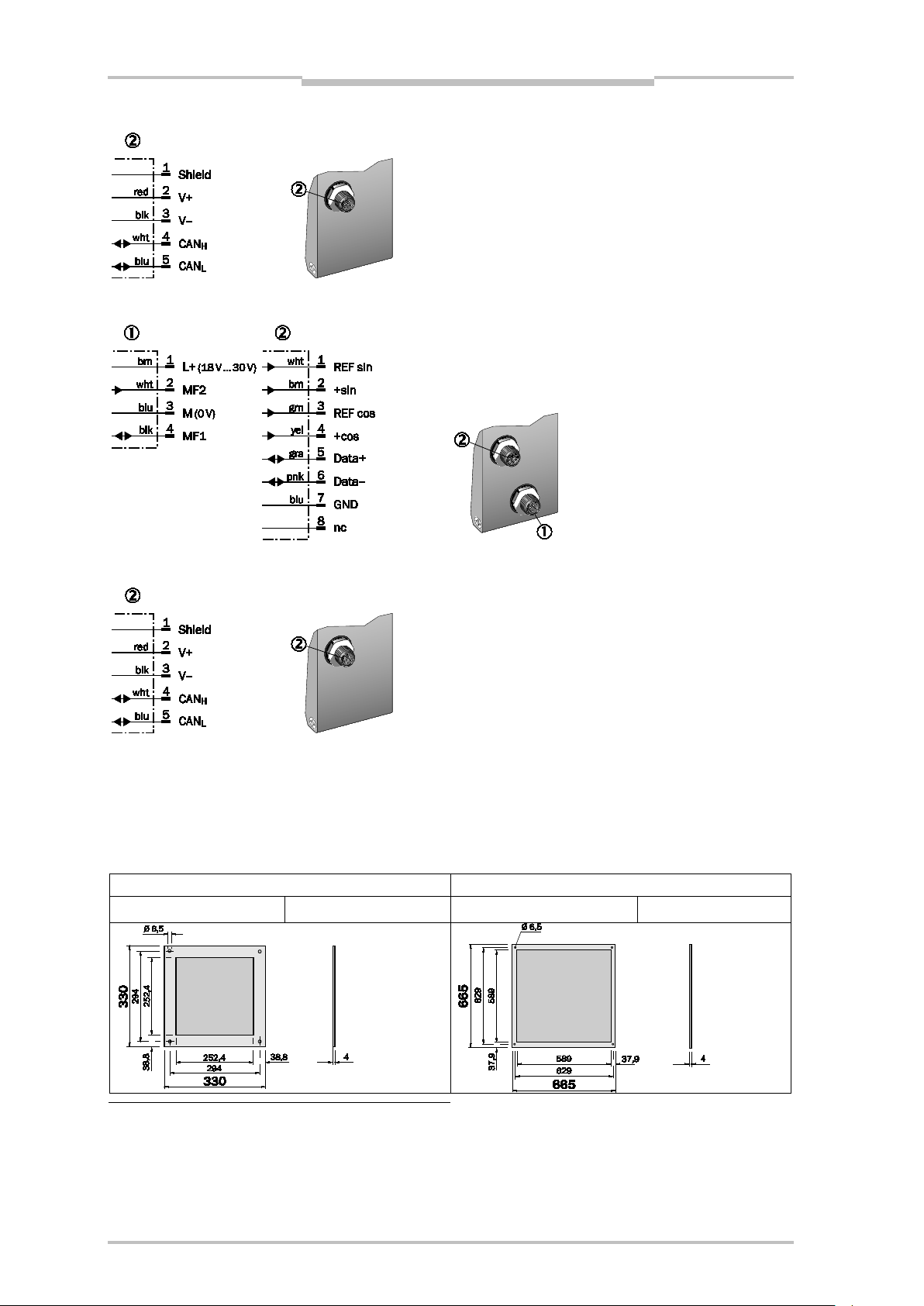
Abbildung 6-7 – Anschlussschema DME4000-xx5 (DeviceNet M12-Stecker)
Abbildung 6-8 – Anschlussschema DME4000-xx7 (Hiperface M12-Stecker)
Abbildung 6-9 – Anschlussschema DME4000-xx9 (CANopen M12-Stecker)
6.3 Zubehör
6.3.1 Reflektoren
Typ: PL 240 DG Bestell-Nr.: 1017910 Typ: PL 560 DG Bestell-Nr.: 1016806
28 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 29
Betriebsanleitung Kapitel 6
Technische Daten
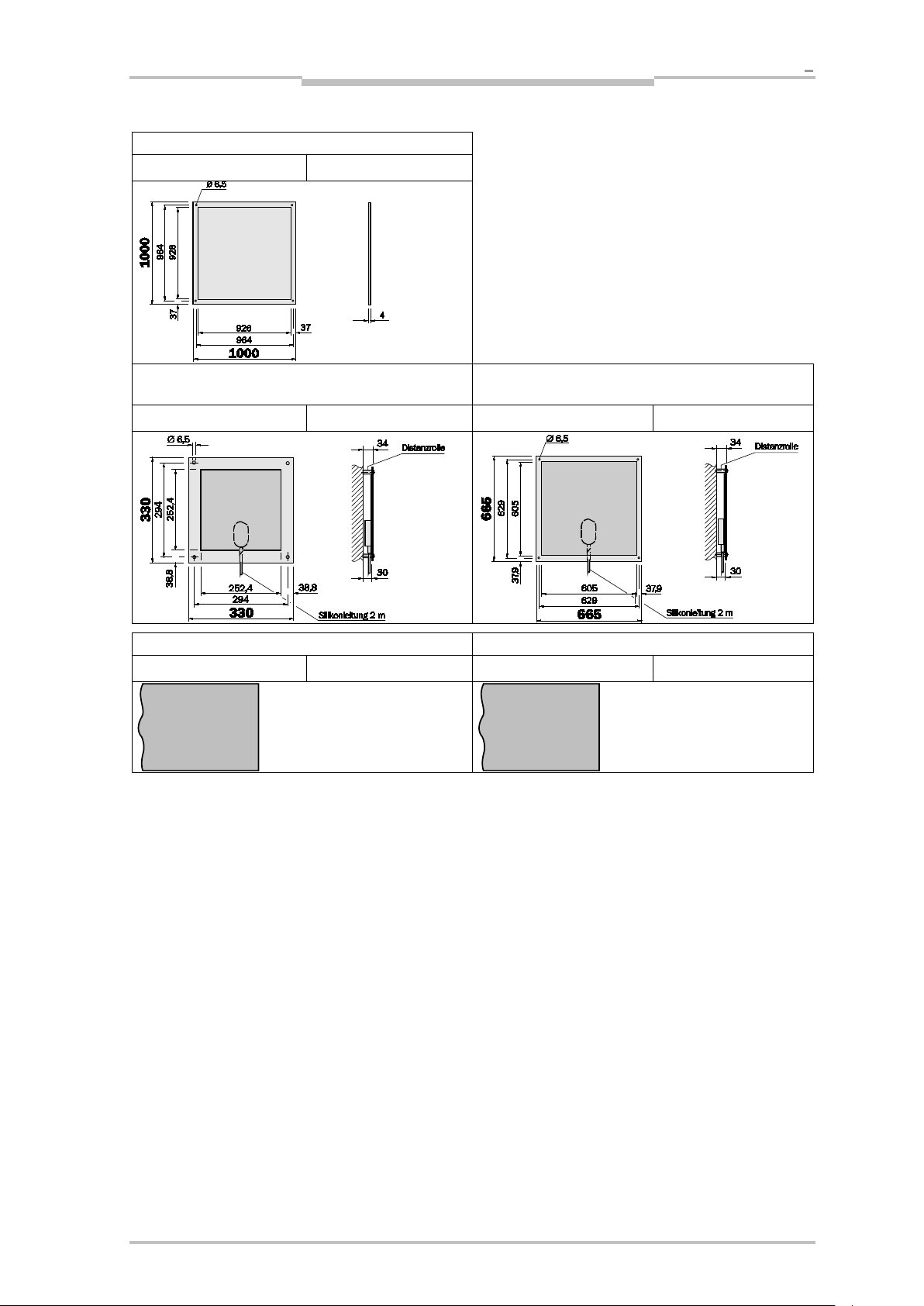
Reflektor 1 x 1 m2 Diamond Grade, montiert
Reflexionsfolie Diamond Grade, Größe konfektionierbar
Reflexionsfolie Diamond Grade, Bogen 749 x 914 mm2
DME4000
Typ: PL 880 DG Bestell-Nr.: 1018975
Reflektor 0,3 x 0,3 m2 Diamond Grade, geregelte Heizung AC
230 V/200 W
Reflektor 0,6 x 0,6 m2 Diamond Grade, geregelte Heizung AC
230 V/900 W
Typ: PL 240 DG-H Bestell-Nr.: 1022926 Typ: PL 560 DG-H Bestell-Nr.: 1023888
Typ: REF-DG-K Bestell-Nr.: 4019634 Typ: REF-DG Bestell-Nr.: 5304334
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 29
Page 30
Kapitel 6 Betriebsanleitung
Technische Daten
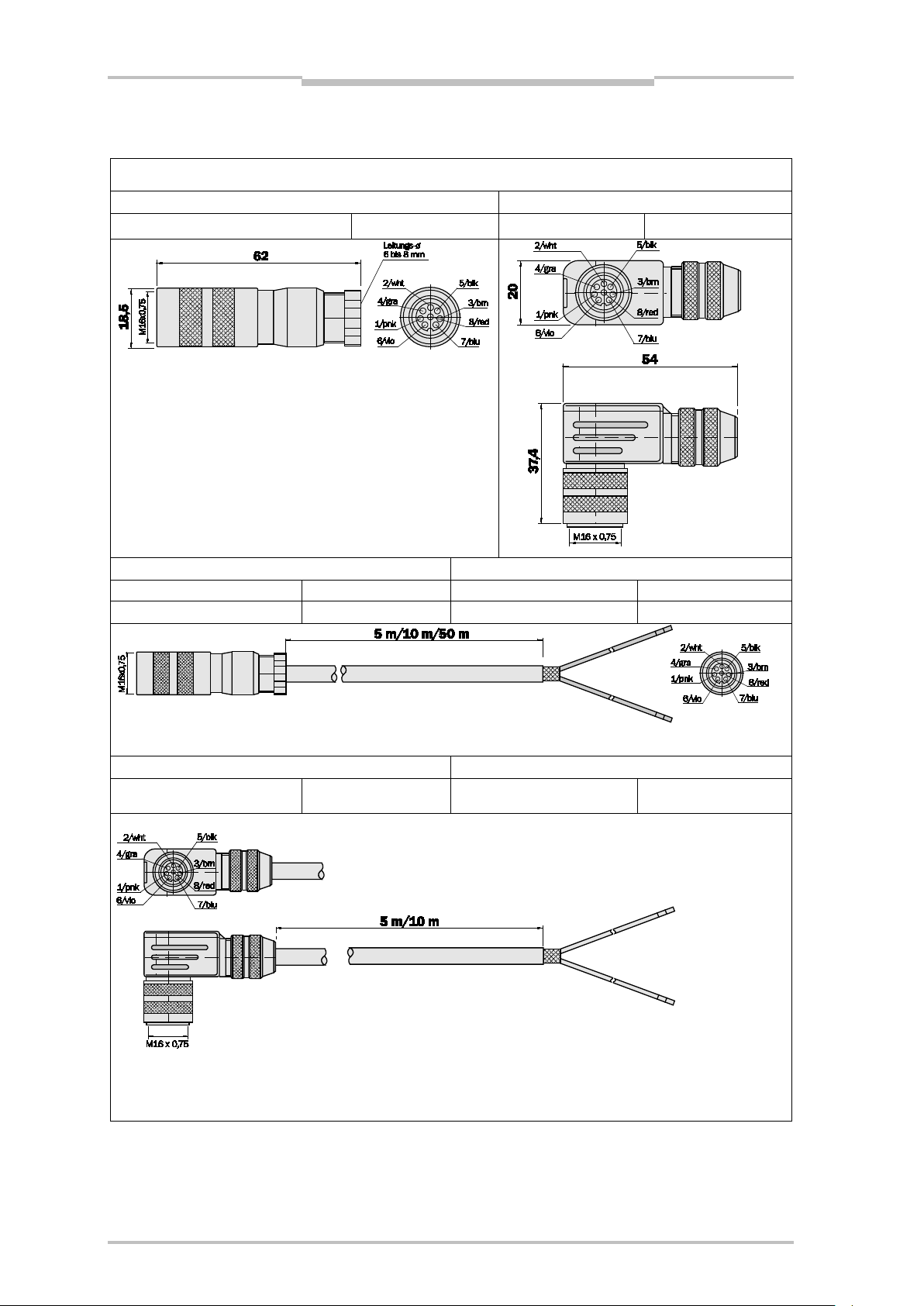
Leitungsdose M16, 8-polig, gerade
Leitungsdose M16, 8-polig, gewinkelt
Typ: DOS-1608-GA
Bestell-Nr.: 6025726
Typ: DOS-1608-WA
Bestell-Nr.: 6025727
Leitungsdose M16, 8-polig, gerade, 5 m/50 m
Leitungsdose M16, 8-polig, gerade, 10 m
Typ: DOL-1608-G05MA
Bestell-Nr.: 2026742
Typ: DOL-1608-G10MA
Bestell-Nr.: 2027193
Typ: DOL-1608-G50MA
Bestell-Nr.: 6032903
Leitungsdose M16, 8-polig, gewinkelt, 5 m
Leitungsdose M16, 8-polig, gewinkelt, 10 m
Typ: DOL-1608-W05MA
Bestell-Nr.: 2026743
Typ: DOL-1608-W10MA
Bestell-Nr.: 2027194
Steckeransicht
Steckeransicht
Steckeransicht
Steckeransicht
DME4000
6.3.2 Stecker/Leitungen
PROFIBUS, SSI und RS 422
30 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 31

Betriebsanleitung Kapitel 6
Technische Daten
Leitung 2 x 0,5 mm2, 6 x 0,25 mm2,
Typ: LTG-2308-MW
Bestell-Nr.: 6026292
Temperaturbereich
bewegt –5 ... +70 °C
festverlegt –40 ... +80 °C
Mantel
PUR kieselgrau
Schirm
verzinntes Kupfergeflecht
DME4000
paarweise verdrillt, abgeschirmt
Technische Daten
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 31
Page 32

Kapitel 6 Betriebsanleitung
Technische Daten
PROFIBUS terminal resistor
Bus in, PROFIBUS Leitungsdose, M12, 5-polig
Typ: PR-STE-END
Bestell-Nr.: 6021156
Typ: PR-DOS-1205-G
Bestell-Nr.: 6021353
Bus out, PROFIBUS Leitungsstecker, M12, 5-polig
PROFIBUS Leitung, 2 x 0,34 mm2, Meterware
Typ: PR-STE-1205-G
Bestell-Nr.: 6021354
Typ: LTG-2102-MW
Bestell-Nr.: 6021355
Temperaturbereich
Mantel
PUR violett Ø 8 mm
Schirm
AL-PT-Folie
Typ: DOL-12PR-G05
Bestell-Nr.: 6026006
Typ: DOL-12PR-G10
Bestell-Nr.: 6026008
Bus out, Leitungsstecker mit PROFIBUS-Leitung, 5 m
Bus out, Leitungsstecker mit PROFIBUS-Leitung, 10 m
Typ: STL-12PR-G05
Bestell-Nr.: 6026005
Typ: STL-12PR-G10
Bestell-Nr.: 6026007
DeviceNet-Leitungsdose, M12, 5-polig, gerade,
DeviceNet-Verbindungsleitung 6 m, Dose M12, 5-polig,
DME4000
PROFIBUS
bewegt –5 ... +80 °C
Festgelegt –40 ... +80 °C
Bus in, Leitungsdose mit PROFIBUS-Leitung, 5 m Bus in, Leitungsdose mit PROFIBUS-Leitung, 10 m
DeviceNet
Leitungsdose, M12, 5-polig, gerade, geschirmt,
360°-Schirm auf Rändelmutter, konfektionierbar
Leitungsstecker, M12, 5-polig, gerade, geschirmt,
360-Schirm auf Rändelmutter, konfektionierbar
Typ: DOS-1205-GA Bestell-Nr.: 6027534 Typ: STE-1205-GA Bestell-Nr.: 6027533
Leitung 6 m, Dropcable
gerade, Stecker M12, 5-polig, gerade, Dropcable
Typ: DOL-1205-G06MK Bestell-Nr.: 6028326 Typ: DSL-1205-G06MK Bestell-Nr.: 6028327
32 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 33

Betriebsanleitung Kapitel 6
Technische Daten
DeviceNet-T-Verteiler Dose M12, 5-polig, auf Stecker, Do-
DeviceNet-Abschlusswiderstand, Dose 7/8'',
DeviceNet-Leitungsdose, 7/8'', 5-polig, gerade, PG16,
DeviceNet-Leitungsstecker, 7/8'', 5-polig, gerade, PG16,
Pinbelegung
1 grn shield 4 wht CANH
3 blk M
Leitungsdose, PG9, 8-polig, gerade, konfektionierbar
Leitungsstecker, PG9, 8-polig, gerade, konfektionierbar
Leitungsdose, M12, 8-polig, gerade, angespritzte Leitung mit
Leitung
2 m, DOL-1208-G02MAH1
Bestell-Nr.: 6032448
Typ: LTG-3108-MW
Bestell-Nr.: 6032456
5 m, DOL-1208-G05MAH1
Bestell-Nr.: 6032449
Temperaturbereich
bewegt 10 ... +70 °C
10 m, DOL-1208-G10MAH1
Bestell-Nr.: 6032450
festverlegt 40 ... +70 °C
DME4000
se 7/8'', 5-polig
5-polig, gerade
Typ: SDO-02D78-SF Bestell-Nr.: 6028330 Typ: DOS-7805-GKEND Bestell-Nr.: 6028329
konfektionierbar
konfektionierbar
Typ: DOS-7805-GK Bestell-Nr.: 6028331 Typ: STE-7805-GK Bestell-Nr.: 6028332
2 red L+ 5 blu CANL
Leitung, 4 x 0,34 mm2, Adern paarweise verdrillt und
mit AL-PT-Folie geschirmt
Typ: LTG-2804-MW Bestell-Nr.: 6028328
Temperaturbereich
bewegt 10 ... +70 °C
festverlegt 40 ... +70 °C
Mantel PUR schwarz Ø 6,8 mm
Abschirmung Cu verzinnt
Anschlusstechnik für Hiperface-Schnittstelle
Hiperface
Typ: DOS-1208-G Bestell-Nr.: 6028369 Typ: STE-1208-G Bestell-Nr.: 6028370
Schirm über Rändelmutter
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 33
Page 34

Kapitel 6 Betriebsanleitung
Technische Daten
20 m, DOL-1208-G20MAH1
Bestell-Nr.: 6032451
Mantel
PUR schwarz 6,8 mm
Abschirmung
Cu verzinnt
Leitungsdose, M12, 5-polig, gerade, geschirmt,
Leitungsstecker, M12, 5-polig, gerade, geschirmt,
CANopen-Leitungsdose, M12, 5-polig, gerade,
CANopen-Verbindungsleitung 6 m, Dose M12, 5-polig,
CANopen-T-Verteiler Dose M12, 5-polig, auf Stecker, Do-
CANopen-Abschlusswiderstand, Dose 7/8'',
1 grn shield 4 wht CANH
DME4000
Anschlusstechnik für CANopen-Schnittstelle
CANopen
360°-Schirm auf Rändelmutter, konfektionierbar
360-Schirm auf Rändelmutter, konfektionierbar
Typ: DOS-1205-GA Bestell-Nr.: 6027534 Typ: STE-1205-GA Bestell-Nr.: 6027533
Leitung 6 m, Dropcable
gerade, Stecker M12, 5-polig, gerade, Dropcable
Typ: DOL-1205-G06MK Bestell-Nr.: 6028326 Typ: DSL-1205-G06MK Bestell-Nr.: 6028327
se 7/8'', 5-polig
5-polig, gerade
Typ: SDO-02D78-SF Bestell-Nr.: 6028330 Typ: DOS-7805-GKEND Bestell-Nr.: 6028329
CANopen-Leitungsdose, 7/8'', 5-polig, gerade, PG16, konfektionierbar
Typ: DOS-7805-GK Bestell-Nr.: 6028331 Typ: STE-7805-GK Bestell-Nr.: 6028332
Pinbelegung
34 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
CANopen-Leitungsstecker, 7/8'', 5-polig, gerade, PG16,
konfektionierbar
Page 35

Betriebsanleitung Kapitel 6
Technische Daten
2 red L+ 5 blu CANL
3 blk M
Ausrichthalterung DME4000
Typ: BEF-DME
Bestell-Nr.: 2040695
Ausrichthalterung DME5000
Befestigungs-Kit Sockelplatte DME4000
Typ: BEF-AH-DME5
Bestell-Nr.: 2027721
Typ: BEF-DME4000
Bestell-Nr.: 2040738
DME4000
Leitung, 4 x 0,34 mm2, Adern paarweise verdrillt und
mit AL-PT-Folie geschirmt
Typ: LTG-2804-MW Bestell-Nr.: 6028328
Temperaturbereich
bewegt 10 ... +70 °C
festverlegt 40 ... +70 °C
Mantel PUR schwarz Ø 6,8 mm
Abschirmung Cu verzinnt
6.3.3 Befestigungstechnik
(benötigt für DME4000)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 35
Page 36

Kapitel 6 Betriebsanleitung
Technische Daten
Wetterschutzgehäuse DME4000
Typ: WSG-DME5
Bestell-Nr.: 2027800
Umlenkung Lichtaustritt nach oben
Typ: USP-DME5
Bestell-Nr.: 2027710
DME4000
6.3.4 Wetterschutzgehäuse
6.3.5 Umlenkspiegel
36 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 37

Betriebsanleitung Kapitel 6
Technische Daten
DME4000-
111
112
113
114
115
117
119
Bestell-Nr.
1029789
1029788
1029796
1029800
1029801
1029807
1042838
Messbereich
0,15 … 50 m
Genauigkeit
± 3 mm
Reproduzierbarkeit1)
1 mm
Messwertausgabe
1 ms
2 ms
2 ms
2 ms
2 ms
2 ms
4 ms
Auflösung (einstellbar)
0,05 … 5 mm
Temperaturdrift (typ.)
0,1 mm/K
Temperatureinfluss
1 ppm/K
Luftdruckeinfluss
0,3 ppm/hPa
Initialisierungszeit
500 ms
900 ms
500 ms
Max. Verfahrgeschwindigkeit
10 m/s
Versorgungsspannung U
2)
DC 18 … 30 V
Restwelligkeit3)
5 VSS
Stromaufnahme (ohne Heizung)
< 250 mA bei DC 24 V
Lichtsender
Laserdiode (Rotlicht)
Laserklasse
2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C)
MTTF 50.000 h
Lichtfleckdurchmesser/
max. 100 mm/50 m
Schaltausgänge MF1, MF2
B (push/pull)
Output (MF1/MF2)
HIGH: UV < 3 V; LOW < 2 V
Input (MF1)4)
HIGH: > 12 V; LOW < 3 V
Ausgangsstrom5)
100 mA (kurzschlussfest, überlastfest)
Schnittstellen
SSI
PROFIBUS
RS 422
DeviceNet 500 kBd
Hiperface
CANopen
Betriebsumgebungstemperatur
–10 … +55 °C
Lagertemperatur
–25 … +75 °C
Heizung DME4000
121
122
123
124
Nicht
127
Bestell-Nr.
1029792
1029793
1029797
1029808
1029812
Betriebsumgebungstemperatur
–40 … +55 °C
Stromaufnahme (mit Heizung)
< 1000 mA
Schutzart
IP 65
Elektrische Schutzklasse
VDE Klasse 2 (Bemessungsspannung 32 V)
EMV
EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung
Schock: EN 600 68-2-27/-2-29, Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
Gewicht
ca. 1650 g
DME4000
6.4 Technische Daten DME4000-1xx
V
Entfernung
12 MBd
lieferbar
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 37
Page 38

Kapitel 6 Betriebsanleitung
Technische Daten
DME4000-
211
212
213
214
215
217
219
Bestell-Nr.
1029790
1029791
1029798
1029802
1029803
1029806
1042839
Messbereich
0,15 … 130 m
Genauigkeit
± 5 mm
Reproduzierbarkeit1)
2 mm
Messwertausgabe
1 ms
2 ms
2 ms
2 ms
2 ms
2 ms
4 ms
Auflösung (einstellbar)
0,05 … 5 mm
Temperaturdrift (typ.)
0,1 mm/K
Temperatureinfluss
1 ppm/K
Luftdruckeinfluss
0,3 ppm/hPa
Initialisierungszeit
500 ms
900 ms
500 ms
Max. Verfahrgeschwindigkeit
10 m/s
Versorgungsspannung U
2)
DC 18 … 30 V
Restwelligkeit3)
5 VSS
Stromaufnahme (ohne Heizung)
< 250 mA bei DC 24 V
Lichtsender
Laserdiode (Rotlicht)
Laserklasse
2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C)
MTTF 50.000 h
Lichtfleckdurchmesser/
max. 240 mm/130 m
Schaltausgänge MF1, MF2
B (push/pull)
Output (MF1/MF2)
HIGH: UV < 3 V; LOW < 2 V
Input (MF1)4)
HIGH: > 12 V; LOW < 3 V
Ausgangsstrom5)
100 mA (kurzschlussfest, überlastfest)
Schnittstellen
SSI
PROFIBUS
RS 422
DeviceNet 500 kBd
Hiperface
CANopen
Betriebsumgebungstemperatur
–10 … +55 °C
Lagertemperatur
–25 … +75 °C
Heizung DME4000
221
222
223
224
Nicht
227
Bestell-Nr.
1029794
1029795
1029799
1029805
1029804
Betriebsumgebungstemperatur
–40 … +55 °C
Stromaufnahme (mit Heizung)
< 1000 mA
Schutzart
IP 65
Elektrische Schutzklasse
VDE Klasse 2 (Bemessungsspannung 32 V)
EMV
EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung
Schock: EN 600 68-2-27/-2-29, Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
Gewicht
ca. 1650 g
DME4000
6.5 Technische Daten DME4000-2xx
V
Entfernung
12 MBd
lieferbar
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
38 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 39

Betriebsanleitung Kapitel 6
Technische Daten
DME4000-
311
312
313
314
315
317
319
Bestell-Nr.
1041951
1041950
1041952
1041953
1041954
1041955
1042841
Messbereich
0.15 … 220 mm
Genauigkeit
± 6 mm
Reproduzierbarkeit1)
3 mm
Messwertausgabe
1 ms
2 ms
2 ms
2 ms
2 ms
2 ms
4 ms
Auflösung (einstellbar)
0,05 … 5 mm
Temperaturdrift (typ.)
0,1 mm/K
Temperatureinfluss
1 ppm/K
Luftdruckeinfluss
0,3 ppm/hPa
Initialisierungszeit
500 ms
900 ms
500 ms
Max. Verfahrgeschwindigkeit
10 m/s
Versorgungsspannung U
2)
DC 18 … 30 V
Restwelligkeit3)
5 VSS
Stromaufnahme (ohne Heizung)
< 250 mA bei DC 24 V
Lichtsender
Laserdiode (Rotlicht)
Laserklasse
2 (EN 60825-1/C.D.R.H.)
Lebensdauer (bei 25 °C)
MTTF 50.000 h
Lichtfleckdurchmesser/
max. 400 mm/220 m
Schaltausgänge MF1, MF2
B (push/pull)
Output (MF1/MF2)
HIGH: UV < 3 V; LOW < 2 V
Input (MF1)4)
HIGH: > 12 V; LOW < 3 V
Ausgangsstrom5)
100 mA (kurzschlussfest, überlastfest)
Schnittstellen
SSI
PROFIBUS
RS 422
DeviceNet 500 kBd
Hiperface
CANopen
Betriebsumgebungstemperatur
–10 … +55 °C
Lagertemperatur
–25 … +75 °C
Heizung DME4000
321
322
323
324
Nicht
327
Bestell-Nr.
1041957
1041958
1040959
1041960
1041961
Betriebsumgebungstemperatur
–40 … +55 °C
Stromaufnahme (mit Heizung)
< 1000 mA
Schutzart
IP 65
Elektrische Schutzklasse
VDE Klasse 2 (Bemessungsspannung 32 V)
EMV
EN 61000-6-2, EN 55011: Klasse B
Mechanische Belastung
Schock: EN 600 68-2-27/-2-29
Gewicht
ca. 1650 g
DME4000
6.6 Technische Daten DME4000-3xx
V
Entfernung
12 MBd
lieferbar
Sinus: EN 600 68-2-6, Rauschen: EN 600 68-2-64
1)
Statistischer Fehler 1 σ, Umfeldbedingungen konstant minimale Einschaltzeit: 10 min.
2)
Verpolsicher
3)
Darf UV-Toleranzen nicht über- oder unterschreiten
4)
Nicht verpolgeschützt
5)
Max. 100 nF/20 mH
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 39
Page 40

Kapitel 7 Betriebsanleitung
Wartung
Hiperface
Keine
30H
SSI: kein Taktsignal
SSI: Verdrahtung prüfen, Taktgeber prüfen
Keine RDY-
Nicht betriebsbereit
–
LSR-
31H
Vorausfallmeldung Messlaser
Der Messlaser ist noch betriebsbereit, aber am Ende Lebens-
ATT-
32H
Vorausfallmeldung Ver-
Die Messwerte sind noch OK, optische Grenzflächen reinigen
TMP-
1E
Geräteinnentemperatur im
Umgebungstemperatur prüfen, ggf. für bessere Belüftung
PLB-
34H
Lichtweg zum Reflektor
Lichtfleck auf dem Reflektor beobachten, darf nicht vom
SERVICE
33H
Hardwareproblem
Versorgungspannung kontrollieren, Spannung aus/ein, falls
Geräteinnentemperatur
Gerät zu kalt
Auswirkung: Messwertausga-
DME4000
7 Wartung
Das DME4000 ist wartungsfrei.
Wir empfehlen in regelmäßigen Abständen
die optischen Grenzflächen zu reinigen,
Verschraubungen und Steckverbindungen zu überprüfen.
8 Troubleshooting und Begriffserklärungen
8.1 Troubleshooting
Problem
BUSAnzeige
Anzeige
Anzeige
Anzeige
Anzeige
Anzeige
Fehlercode
Ursache Maßnahme
RS 422: request mode
PROFIBUS/DeviceNet: kein
Datenfluss
CANopen: kein Datenfluss
schmutzung
Grenzbereich
unterbrochen
Bei gleichzeitiger ATT-Anzeige:
Objektiv/Reflektor verschmutzt
c) Bei gleichzeitiger LSRAnzeige: Laser defekt
RS 422: continuous mode
PROFIBUS/DeviceNet: Verdrahtung und Schirmung prüfen
CANopen: (pre-)operational mode bzw. Verdrahtung prüfen
dauer. Ersatzgerät bereithalten
(Reflektor, Objektiv)
sorgen. Gegen Strahlungswärme abschirmen, z.B. Abschatten
bei direkter Sonneneinstrahlung. Bei tiefen Temperaturen
Gerät mit Heizung verwenden.
Reflektor abwandern, ggf. neu ausrichten oder größeren
Reflektor verwenden.
Objektiv/Reflektor
reinigen
c) Laser defekt, Gerät
ersetzten
(blinkende
Anzeige)
außerhalb Spezifikation
40 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
be wird auf Null gesetzt.
nicht selbstreparierend: Service kontaktieren
(Innentemperatur < –15 °C: Aufwärmphase abwarten. Evtl.
Gerät mit Heizung verwenden.
Gerät zu warm
(Innentemperatur > 80 °C:
Gerät abkühlen
Page 41

Betriebsanleitung Kapitel 8
Troubleshooting und
Begriffserklärungen
Gerätefehler
Hardwareproblem
Versorgungspannung kontrollieren, Span-
Geräteinnentemperatur außerhalb Spezifika-
Gerät zu kalt
Auswirkung: Messwertausgabe wird auf Null gesetzt.
Messfehler
Lichtweg wird durch Nebel, Staub o.ä. zu
Für freien Lichtweg sorgen
Objektiv oder Reflektor verschmutzt
Optische Grenzflächen reinigen
Verfahrgeschwindigkeit > 10 m/s
Maximale Verfahrgeschwindigkeit überprüfen
Lichtweg zum Reflektor unterbrochen
Lichtfleck bei Verfahren immer auf dem
Auswirkung: Messwertausgabe wird auf „0“ gesetzt, PLB-Anzeige leuchtet im Display.
Vorausfallkennung
Laserdiode am Ende Lebensdauer
Ersatzgerät für nächsten Wartungszyklus
Lichtweg wird durch Nebel oder Staub
Lichtweg überprüfen
Objektiv oder Reflektor verschmutzt
Optische Grenzflächen beim nächsten
Geräteinnentemperatur im Grenzbereich
Umgebungstemperatur überprüfen
GSD Offset
Wird mit Octet 9, Bit 7 deaktiviert.
Auswirkung: Der per GSD eingestellte Offsetwert wird nicht zum Gerät übertragen.
Anwendung: Bei Verwendung der Presetfunktion bleibt der bei Preset ermittelte Offsetwert
Seriennummer
< 05xxxxxx
> 05xxxxxx
> 05xxxxxx
Initialisierung mit
Fehlermeldung
O.K.
O.K.,
DME4000
Problem Ursache Maßnahme
(PROFIBUS-Diagnose)
(Profibusdiagnose)
(Profibusdiagnose)
tion
stark gedämpft
gedämpft
nung aus/ein, falls nicht selbstreparierend:
Service kontaktieren
(Innentemperatur < –15 °C: Aufwärmphase
abwarten. Evtl. Gerät mit Heizung verwenden.
Gerät zu warm
(Innentemperatur > 80 °C:
Gerät abkühlen
Reflektor zu sehen?
bereithalten
Wartungszyklus reinigen
(Profibusdiagnose)
8.2 Begriffserklärungen
8.2.1 PROFIBUS
Austausch von Geräten die die Funktion „Speed“ nicht unterstützen:
SIV2_069d.gsd
Alle Geräte werden in einer Busstruktur (Linie) angeschlossen. In einem Segment können bis zu 32
Teilnehmer (Master oder Slaves) zusammengeschaltet werden.
Am Anfang und am Ende jedes Segments wird der Bus durch einen aktiven Busabschluss abgeschlossen. Für einen störungsfreien Betrieb muss sichergestellt werden, dass die beiden Busabschlüsse
immer mit Spannung versorgt werden.
Beim DME ist der Busabschluss nicht intern realisiert. Eine Versorgungsspannung für den Busabschluss steht am Bus-Ausgangsstecker zur Verfügung. Diese 5-V-Versorgungsspannung ist von der
Versorgungsspannung des DME galvanisch getrennt. Die 5-V-Versorgungspannung kann mit 100 mA
belastet werden und ggf. für optische Koppelmodule verwendet werden.
Terminator: siehe Zubehör.
Bei mehr als 32 Teilnehmern müssen Repeater (Leistungsverstärker) eingesetzt werden, um die einzelnen Bussegmente zu verbinden.
Die max. Leitungslänge ist abhängig von der Übertragungsgeschwindigkeit, siehe Tabelle 2.
Die angegebene Leitungslänge kann durch den Einsatz von Repeatern vergrößert werden. Es wird
empfohlen, nicht mehr als 3 Repeater in Serie zu schalten. Das DME unterstützt alle in Tabelle 2 genannten Übertragungsgeschwindigkeiten.
gültig.
Funktion Speed nicht
aktivierbar
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 41
Page 42

Kapitel 8 Betriebsanleitung
Troubleshooting und
Begriffserklärungen
< 25
< 500
< 50
< 400
< 100
< 300
< 200
< 200
< 400
< 100
Takt
Daten seriell
Daten parallel
Monoflop P/S
DME4000
Baudrate (Bit/s)
9,6 K 19,2 K 45,45 K 93,75 K 187,5 K
Reichweite/Segment (m)
Baudrate (Bit/s)
Reichweite/Segment (m)
1200 1200 1200 1200 600
500 K 1,5 M 3 M 6 M 12 M
200 200 100 100 100
Tabelle 2 : Reichweite in Abhängigkeit der Übertragungsgeschwindigkeit
8.2.2 RS 422
Der RS-422-Standard erfüllt die Anforderungen an eine schnelle übertragungssichere Datenübertragung.
Vorgesehen ist diese Schnittstelle für die serielle Datenübertragung im Vollduplexverfahren mit einer
Übertragungsrate bis 10 MBaud und 1000 m Leitungslänge (DIN 66259, Teil 3).
Die Schnittstelle wird mit einem Datenkanal senden (T) und einem Datenkanal empfangen (R) betrieben. Die hohe Übertragungssicherheit wird durch die Auswertung der Differenzspannung zwischen
jeweils einem verdrillten Adernpaar erreicht.
8.2.3 SSI
Die Datenübertragung bei Einstellung „SSI“ erfolgt auf Anforderung der Steuerung, wobei Zykluszeit und
Übertragungsgeschwindigkeit in weiten Grenzen einstellbar sind.
Dazu wird von der angeschlossenen Steuerung eine Taktfolge an den Empfangseingang des DME
gelegt. Mit jeder positiven Taktflanke wird ein Datenbit auf die Sendeleitung DME geschoben, begin-
nend mit dem höchstwertigen Bit. Zwischen zwei Taktfolgen liegt eine Taktpause von mindestens 30 µs.
Der Bittakt liegt zwischen 70 kHz und 500 kHz und ist abhängig von der Leitungslänge.
Leitungslänge [m] Übertragungsrate [kBaud]
Impulsdiagramm der Datenübertragung
m = gespeicherte parallele Information
tv = Verzögerungszeit für den 1. Takt, max. 540 ns, für alle weiteren max. 360 ns
Gn = hochwertigstes Bit im Gray-Code
T = Periodendauer des Taktsignals
GO = niederwertigstes Bit im Gray-Code
tm = Monoflop-Zeit 15 µs bis 25 µs
Tp = Taktpause
42 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 43

Betriebsanleitung Kapitel 8
Troubleshooting und
Begriffserklärungen
Übertragungsrate
125 kBd
250 kBd
500 kBd
500 m
250 m
100 m
Stichleitung
6 m
6 m
6 m
156 m
78 m
39 m
DME4000
8.2.4 DeviceNet
DeviceNet ist ein Feldbussystem und basiert auf der CAN-Spezifikation (Controller Area Network).
Die Verbindung erfolgt über Hybridkabel zur Spannungsversorgung und Datenübertragung (nach
RS 485). Es gibt zwei standardisierte Kabeltypen:
Stammleitung (Trunkcable)
Stichleitung (Dropcable) mit kleineren Kabelquerschnitten.
Die Stammleitung wird beidseitig mit Widerständen abgeschlossen, die Stichleitungen benötigen keinen
Busabschluss.
Maximal 64 Teilnehmer inkl. Master können angeschlossen werden.
Die maximale Übertragungsrate ohne Repeater ist abhängig von der Übertragungsrate:
Stammleitung
Stichleitung
kumulierte Länge
8.2.5 Hiperface
Hiperface steht für High Performance Interface und ist die Standard-Schnittstelle für MotorfeedbackSysteme von SICK STEGMANN.
Diese Schnittstelle wurde speziell auf die Anforderungen der digitalen Antriebsregelung entwickelt und
bietet dem Anwender vereinheitlichte und vereinfachte mechanische und elektrische Schnittstellen.
Elektrische Antriebe benötigen im Regelkreis, abhängig von Ausführung und Anwendung, die folgenden
Informationen von entsprechenden Signalgebern:
Positionsinformation inkremental
Positionsinformation über mehrere Umdrehungen absolut
All diese Informationen können über Hiperface übertragen werden.
8.2.6 CANopen
Die integrierte CANopen-Schnittstelle basiert auf der CIA-301 Spezifikation. Das Encoder-Profil CIA-406
wird nicht unterstützt.
CANopen-specific settings
VendorName=SICK AG Advanced Industrial Sensors
VendorNumber=0x02000056
ProductName=DME4000_5000
ProductNumber=1
RevisionNumber=1
Diese Einstellungen sind in der EDS-Datei (Electronic Data Shield) enthalten:
DME_4000_5000_xx9.EDS”. Die EDS-Datei gilt für alle DME4000-XX9-Typen.
Einstellungen über das Display
Über das Display können die Node-ID und die Baudrate eingestellt werden. Der Default-Wert der NodeID ist „006“; er kann zwischen den Werten „001“ und „127“ ausgewählt werden. Der Default-Wert der
Baudrate ist „125kBaud“; sie kann aus folgenden Baudraten ausgewählt werden: 125 kBaud,
250 kBaud, 500 kBaud und 1 MBaud.
Die Einstellungen von Node-ID und Baudrate am Display werden erst nach einem Geräteneustart wirksam.
Verkürzte Menü-Struktur
Das DME4000 kann nur über einen M12-Anschluss mit der Steuerung verbunden werden. Aus diesem
Grund sind nur ausgewählte Einstellungen im Menü enthalten. Die Menüebenen „Serial“, „MF1“ und
„MF2“ sind nicht implementiert. Die Nummerierung der Menü-Ebenen ist identisch mit denen der
Standard-Variante.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 43
Page 44

Kapitel 8 Betriebsanleitung
Troubleshooting und
Begriffserklärungen
Menüebene
Bezeichnung
3.1.
CANOpen
3.5.
Resolution
3.6.
Offset
3.7.
Plausibility
4.
Temperatur
5.
Reset
DME4000
Übersicht der verfügbaren Menü-Ebenen
44 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 45

Betriebsanleitung Kapitel 9
Anhang
Messwert
Vom Messkern ermittelte aktuelle Distanz zum Reflektor
Messwert + Offset
Offset
Parametrierbar, bei negativem Ausgabewert in Verbindung mit SSI: Ausgabewert = 0
Parametrierbar,
Hinweis
DME4000
9 Anhang
9.1 Preset
Die Preset-Funktion erlaubt eine Automatisierung der Initialisierung von Regalbediengeräten und anderen Schienenfahrzeugen bei Wartung, Inbetriebnahme oder Austausch. Bei der Initialisierung wird an
einer definierten Position (Initialisierungsposition) ein gewünschter Ausgabewert eingestellt (Preset). Bei
Gerätevarianten mit Multifunktionseingang MF1 wird dieser hierzu als Preset-Eingang parametriert. Der
Preset kann auch über die Kommunikationsschnittstelle aktiviert werden. Als Preset-Wert wird der Wert
der gewünschten Messwertausgabe an der Initialisierungsposition eingestellt.
Bei SSI-Messwertausgabe beachten, dass keine negativen Messwerte erzeugt werden (negative Werte
führen bei SSI Ausgabe zu Messwert „0“).
Beispiel Vorgehensweise :
MF1 als Preset-Eingang parametrieren und gewünschten Preset-Wert eingeben.
Fahrzeug in der Preset-Position zum Stillstand bringen.
MF1 aktivieren, z.B. über Näherungsinitiator, Lichtschranke oder Schalter.
Der Ausgabewert des DME4000 ist an dieser Position gleich dem eingestellten Preset-Wert.
Hinweis
Der Multifunktionseingang arbeitet flankengesteuert: Aktiv 0:
Definitionen
Ausgabewert
Preset-Wert
Funktionsauslösung: (Messwert@Preset ist dabei konstant, d.h. Fahrzeug steht)
SSI: Preset-Eingang aktiv (Flanke nicht aktiv)
PROFIBUS: Preset-Eingang aktiv oder Profibuskommando
DeviceNet: Preset wird aktiviert
CANopen: Preset wird aktiviert
Funktion: Offset = Preset-Wert – Messwert@Preset
ACHTUNG: Die Preset-Funktion bei PROFIBUS wird mit dem Parameter Preset-Mode aktiviert.
Dadurch wird der per GSD hinterlegte Offsetwert nicht zum DME übertragen, der durch Preset
eingetragene Wert bleibt erhalten.
Steht dieser Parameter auf Offset mode, wird der Parameter Offset zum DME übertragen.
, Aktiv 1:
9.2 PROFIBUS-Schnittstelle
Die PROFIBUS-Anbindung DME4000 erfolgt gemäß ENCODER-Profil. Dabei kann DME4000 wahlweise
als Klasse-1- oder Klasse-2- (empfohlen) Encoder arbeiten. DME4000 ist dabei vom Typ linearer Absolut-Encoder. Angelehnt an das ENCODER-Profil (Klasse 2) ist ein ebenfalls implementiertes SICK-Profil.
Beide Profilarten münden in die gleiche GSD-Datei. Im SICK-Profil ist neben einer von SPS gesteuerten
Laserabschaltung auch die direkte Übertragung von Zustandsinformationsbits im zyklischen Messtelegramm vorgesehen.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 45
Page 46

Kapitel 9 Betriebsanleitung
Anhang
Profil
Klasse
Funktionalität
ENCODER
Class 1
4-Byte-Input-Daten, gerätespezifische Parameter sind nur über die Displaymenü-
Class 2
4-Byte-Input-/4-Byte-Output-Daten, gerätespezifische Parameter sind über GSD
SICK
Class 1
siehe ENCODER Class 1
Class 2
4-Byte-Input-/4-Byte-Output-Daten, gerätespezifische Parameter sind über GSD
DME4000
funktion zugänglich.
zugänglich und überschreiben Parameter, die mit der Displayfunktion eingegeben
wurden, Ausnahme: PROFIBUS-Adresse und Offset bei parametriertem PresetMode.
zugänglich und überschreiben Parameter, die mit der Displayfunktion eingegeben
wurden, Ausnahme: PROFIBUS-Adresse und Offset bei aktivierter Preset-Funktion.
Zusätzlich Statusbits 25 ... 31 Input-Daten und Steuerbits 29 ... 31 Output-Daten.
Empfohlene Einstellung: SICK-Profil Class 2: Dieses Profil bietet folgende Vorteile:
in 4-Byte-Input-Daten sind Messwert und Diagnosebits enthalten,
in 4-Byte-Output-Daten ist Preset-Aktivierung, Laser-ein/aus-Funktion enthalten,
Extended diagnostics disabled: nahezu volle Funktionalität bei nur 4-Byte-I/O-Daten.
46 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 47

Betriebsanleitung Kapitel 9
Anhang
Bit 31 ... 0
Messwert in 2er Komplement, Einheit entsprechend Auflösung
SICK-Profil
Aktiv (1)
Nicht aktiv (0)
Bit 31
Gerätefehler
Gerät OK
Bit 30
Messfehler
Messwert OK
Bit 29
Vorausfallmeldung
Gerät OK
Bit 28
nicht betriebsbereit
betriebsbereit
Bit 27
Laser aus (Stand by)
Laser ein
Bit 26
MF2 aktiv
MF2 nicht aktiv
Bit 25
MF1 aktiv
MF1 nicht aktiv
Bit 24 ... 0
Messwert im 2er Komplement, Einheit entsprechend Auflösung
Encoder-Profil
Bit 31
Preset-Ausführung
Bit 30 ... 0
Preset-Wert im 2er Komplement. Einheit entsprechend Auflösung. Wertebe-
SICK-Profil
Aktiv (1)
Nicht aktiv (0)
Bit 31
Preset-Ausführung
Bit 30
nicht belegt
nicht belegt
Bit 29
Laser aus
Laser ein
Bit 25 ... 28
nicht belegt
nicht belegt
Bit 24 ... 0
Preset-Wert im 2er Komplement. Einheit entsprechend Auflösung.
Encoder-Profil
Diagnose
Class 1
Octet 1 ... 16
Octet 7... 16
Class 2
Octet 1 ... 63
Octet 7... 63
DME4000
9.2.1 Datenformat Slave zu Master
(DDLM_Data_Exchange)
Encoder-Profil
9.2.2 Datenformat Master zu Slave
(DDLM_Data_Exchange)
Aktiv (1) Nicht aktiv (0)
9.2.3 Diagnosedaten
(DDLM_Slave_Diag)
reich +/ 250 m
Wertebereich +/ 250m (siehe auch Parameterdaten Preset-Mode)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 47
Page 48

Kapitel 9 Betriebsanleitung
Anhang
Octet
Aktiv (1)
Nicht aktiv (0)
DP Normdiagnose
Octet 7
Diagnostic Header
Bit 0
Messfehler
Bit 3
Vorausfallmeldung
Bit 4
Gerätefehler
Bit 1, 2, 5, 6, 7
nicht belegt
Bit 1
Class 2
Class 1
Bit 6
Extended Diagnostics
Normal Diagnostics
Bit 7
Preset-Mode: Parameter Offset wird
ignoriert
Parameter Offset wird übernommen
Bit 0, 2, 3, 4, 5
nicht belegt
Encoder Type 7
Octet 11 … 14
Measuring step (linear)
nicht belegt
Octet 17
Bit 0
Gerätefehler
Bit 1
Geräteinnentemperatur zu hoch/zu
niedrig
Bit 2
Plausibilität (siehe Anz. PLB)
Bit 3
Buskommunikation gestört
Bit 4, 5, 6, 7
nicht belegt
Octet 18
Supported alarms in Octet 17
Supported alarms in Octet 8
Octet 20
Bit 0
Laser-Vorausfallmeldung
Bit 1 ... 7
nicht verwendet
Bit 1
Geräteinnentemperatur
Bit 2
Verschmutzung
Bit 0, 3 ... 7
nicht verwendet
Octet 22
Supported warnings in Octet 20
Supported warnings in Octet 21
Octet 24 … 25
Profile version
Software version
Octet 28 … 31
Operating time (Einheit 0.1h)
Offset in Einheiten entsprechend Auflösung
Octet 36 … 47
Nicht verwendet
Seriennummer (2 Leerzeichen + 8 gültige ASCII-Zeichen)
Octet 58 … 59
reserviert
Temperatur (2er Komplement)
Octet 61
Pegel Messkanal (2er Komplement)
MF-Status
Octet 63
Bit 7
Laser ein
Laser aus
Bit 0 ... 6
nicht verwendet
DME4000
Octet 1 … 6
Octet 8
Alarms
Octet 9
Operating Status
Octet 10
Octet 15 … 16
Alarms
Octet 17
Alarms
Octet 19
Warnings
Octet 21
Warnings
Octet 23
Octet 26 … 27
Octet 32 … 35
Octet 48 … 57
Octet 60
Octet 62
48 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 49

Betriebsanleitung Kapitel 9
Anhang
Gerätefehler
Hardwareproblem
Versorgungsspannung
Geräteinnentemperatur
Gerät zu kalt (Innentemperatur
Messfehler
Geräteinnentemperatur zu hoch/zu niedrig:
Umgebungstemperatur prüfen, Küh-
Lichtweg wird durch Nebel, Staub o.ä. zu
Für freien Lichtweg sorgen
Messfehler
Objektiv oder Reflektor verschmutzt
Optische Grenzflächen reinigen
Verfahrgeschwindigkeit > 10 m/s
Maximale Verfahrgeschwindigkeit überprüfen
Lichtweg zum Reflektor unterbrochen
Lichtfleck bei Verfahren immer auf dem
Auswirkung: Messwertausgabe wird auf „0“ gesetzt, PLB-Anzeige leuchtet im Display, bei
Vorausfallkennung
Laserdiode am Ende
Ersatzgerät für nächsten Wartungszyklus
Lichtweg wird durch Nebel oder Staub
Lichtweg überprüfen
Objektiv oder Reflektor verschmutzt
Optische Grenzflächen beim nächsten
Geräteinnentemperatur im Grenzbereich
Umgebungstemperatur
GSD Offset
Wird mit Octet 9, Bit 7 deaktiviert.
DME4000
9.2.4 Definitionen/Fehler/Fehlerbehebung zu PROFIBUS-Fehlermeldungen
Problem Ursache Maßnahme
kontrollieren,
Spannung aus/ein, falls nicht selbstreparie-
rend: Service kontaktieren
außerhalb Spezifikation
Laser aus
stark gedämpft
Temperaturfehler: Laser aus
Lebensdauer
gedämpft
Auswirkung: Der per GSD eingestellte Offsetwert wird nicht zum Gerät übertragen.
Anwendung: bei Verwendung der Preset-Funktion bleibt der bei Preset ermittelte Offsetwert
gültig.
< -15 °C: Aufwärmphase abwarten. Evtl.
Gerät mit Heizung verwenden.
Gerät zu warm (Innentemperatur > 80 °C:
Gerät abkühlen
lung/Heizung verwenden
Reflektor zu sehen?
bereithalten
Wartungszyklus reinigen
überprüfen
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 49
Page 50

Kapitel 9 Betriebsanleitung
Anhang
Schritt
Tätigkeit
Kapitel
1 8-poligen Gerätestecker anschließen und aufstecken
4.2 2
4-poligen PROFIBUS-Stecker „Bus in“ aufstecken
4.2
3 4-poligen PROFIBUS-Stecker „Bus out“ aufstecken/
4.2
4 PROFIBUS-Adresse einstellen (default 006)
3
SICK
5
Profil einstellen SICK(default)/Encoder
3/(Anhang PROFIBUS-
6 GSD Datei SICK069D.gsd in das gsd-Verzeichnis
Siemens
7 Hardware-Katalog aktualisieren
Siemens
8 DME4000 PROFIBUS im Hardware-Katalog:
9 DME4000 auf DP-Mastersystem installieren und
Class 2
10
Auswahl - Universalmodul
11
Ausgangs- und Eingangsadresse vergeben
12
Parametrieren
Siemens
disabled
13
Extended diagnostics
Anhang PROFIBUS-Schnittstelle
14
Preset mode
Anhang Preset
15
Profile selection
Anhang PROFIBUS-Schnittstelle
16
Plausibility
Siehe 3 – Menüstruktur: 3.7
17
Serial Mode: baud rate
Siehe 3 – Menüstruktur: 3.2
18
Serial Mode: parity
19
Measuring resolution (µm)
Siehe 3. Menüstruktur: 3.5
20
Offset (steps entsprechend Auflösung)
Siehe 3 – Menüstruktur: 3.6
21
Service MF1: Plausibility
Siehe 3 –Menüstruktur: 3.3.4
22
Service MF1: Ready
23
Service MF1: Laser
24
Service MF1: Level
26
Service MF1: LowerTemperature
27
Service MF1: UpperTemperature
28
Service MF2: Plausibility
Siehe 3 –Menüstruktur: 3.4.4
29
Service MF2: Ready
30
Service MF2: Laser
31
Service MF2: Level
32
Service MF2: Bus Status
33
Service MF2: LowerTemperature
34
Service MF2: UpperTemperature
DME4000
9.3 Inbetriebnahme DME4000 PROFIBUS (Beispiel Siemens Step 7)
Das Beispiel führt zur im Anhang PROFIBUS-Profile empfohlenen Einstellung. Siehe auch Abbildung auf
Seite 45 (Screenshot).
auswählen
auswählen
auswählen
oder: Abschlusswiderstand aufstecken
(Menüpunkt 3.1.2)
(Menüpunkt 3.1.1)
kopieren (:\siemes\step7\s7data\gsd)
PROFIBUS-DP\weitere Feldgeräte\Encoder\
DME4000 PROFIBUS
PROFIBUS-Adresse vergeben (vgl. Schritt 4)
- Class 1: 4-Byte-Input
- Class 2: 4-Byte-I/O
enabled: gerätespezifische Diagnosedaten senden
disabled: gerätespezifische Diagnosedaten nicht
senden
4.2.2
Schnittstelle)
50 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 51

Betriebsanleitung Kapitel 9
Anhang
Schritt
Tätigkeit
Kapitel
35
MF1 Temp. UpperLimit
Siehe 3 – Menüstruktur: 3.3.4
36
MF1 Temp. LowerLimit
37
MF2 Temp. UpperLimit
Siehe 3 – Menüstruktur: 3.4.4
38
MF2 Temp. LowerLimit
39
MF1 Active
Siehe 3 – Menüstruktur: 3.3
40
MF1 Function
41
MF2 Active
Siehe 3 – Menüstruktur: 3.4
42
MF2 Function
43
MF1 Dist. UpperLimit
Siehe 3 – Menüstruktur: 3.3.3
44
MF1 Dist. LowerLimit
45
MF2 Dist. UpperLimit
Siehe 3 – Menüstruktur: 3.4.3
46
MF2 Dist. LowerLimit
47
Preset
Siehe 3 – Menüstruktur: 3.3.2
DME4000
(Steps: entsprechend Auflösung)
(MF1: Preset)
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 51
Page 52

Kapitel 9 Betriebsanleitung
Anhang
BCD Code:<STX><0x81><0x22><sign><7xBCD><ETX>
CRLF
BCD Code:<sign><7xBCD><CR><LF>
BCD Code:<sign><7xBCD>
Mode Commands
Continuous mode BCD Code
<STX><0x05><0x21><0x01><ETX>
Continuous mode Binär-Code
Request mode
<STX><0x01><0x21><ETX>
Messwert binär
<STX><0x01><0x22><ETX>
Messwert BCD
<STX><0x01><0x23><ETX>
Empfangspegel binär (dB)
<0x25>
Service-Status gemäß Display
1: Icon angezeigt/0: Icon aus
MF2
MF1
TMP
LSR
BUS
ATT
PLB
RDY
<STX><0x01><0x26><ETX>
Innentemperatur, dezimal (°C)
DME4000
9.4 Sleepmode
Mit der Funktion Sleepmode kann der Messlaser des DME4000 über den Eingang MF1 aus- und eingeschaltet werden. Bei ausgeschaltetem Laser ist das DME im Stand-by-Betrieb, die Ready-Anzeige im
Display erlischt.
Um die Funktion zu überwachen, kann MF2 mit „Ready“ die Betriebsbereitschaft bei eingeschaltetem
Laser signalisieren.
Bei der PROFIBUS-Variante kann die gleiche Funktion bei Verwendung des SICK-Profiles Klasse 2 über
4-Byte-Ausgangsdaten Bit 29 erreicht werden.
Bei der RS-422-Variante kann hierzu das ASCII-Kommando (Kap. 9.5.2), bei der CANopen-Variante der
SDO-Dienst (Kap. 9.8.4) benutzt werden.
9.5 RS-422-Schnittstelle
Die serielle Datenübertragung des DME4000 erlaubt es, die Messwerte und andere definierte Betriebsdaten auszulesen. Alle Daten werden als ASCII-Zeichen übertragen, die in STX (ASCII 02) und ETX (ASCII
03) eingeschlossen sind.
Betriebsdaten (wie z. B. die Innentemperatur) werden auf ein Anforderungskommando übertragen.
Messwerte werden in einem kontinuierlichen Datenstrom (continuous mode) oder nur auf Anforderung
(request mode) übertragen.
Die Standardeinstellung des DME4000 ist der request mode.
Befehle werden nur im request mode akzeptiert.
9.5.1 Protokoll
Abhängig vom gewählten Protokoll überträgt der DME4000 Messwerte wie unten dargestellt:
Protokoll
Standard
Binär-Code:<STX><0x81><0x21><sign><7xbinary><ETX>
Binär-Code:<sign><7xbinary><CR><LF>
CP0
Binär-Code:<sign><7xbinary>
9.5.2 Befehle
<STX><0x05><0x22><0x01><ETX>
Auflösung 0,1 mm fix
Auflösung gemäß Einstellung des Parameters „Auflösung“
<STX><0x05><0x22><0x00><ETX>
Request Commands
<STX><0x01>
52 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
<ETX>
Page 53

Betriebsanleitung Kapitel 9
Anhang
Function Commands
Laser ein (Sleepmode)
<STX><0x03><0x33><ETX>
Laser aus (Sleepmode)
Preset-Aktivierung
1 0 0 0 0 0 1
0
DME4000
<STX><0x03><0x32><ETX>
<STX><0x03><0x35><ETX>
9.5.3 Beispiele für Befehle (Standard-Protokoll)
Anforderung Binär-Messwert
zum DME<STX><0x01><0x21><ETX>
vom DME<STX><0x81><0x21><0x..>… <0x..><0x..><0x..><ETX>
Beispiel-Terminal5378,8 mm ⇒ 81210000D21C
(14 bytes: 02 38 31 32 31 30 30 30 30 44 32 31 43 03)
Anforderung BCD-Messwert
zum DME<STX><0x01><0x22><ETX>
vom DME<STX><0x81><0x22><0x..>… <0x..><0x..><0x..><ETX>
Beispiel5378,8 mm ⇒ 8122+0053788
Binär-Messwert kontinuierlich an
zum DME<STX><0x05><0x21><0x01><ETX>
vom DME<STX><0x85><0x21><0x01><ETX>
danach
kontinuierlich
vom DME<STX><0x03><0x21><0x..>… <0x..><0x..><0x..><ETX>
Binär-Messwert kontinuierlich aus
zum DME<STX><0x05><0x21><0x00><ETX>
vom DME<STX><0x85><0x21><0x00><ETX>
BCD-Wert kontinuierlich an
zum DME<STX><0x05><0x22><0x01><ETX>
vom DME<STX><0x85><0x22><0x01><ETX>
danach
kontinuierlich
vom DME<STX><0x03><0x22><0x..>… <0x..><0x..><0x..><ETX>
BCD-Wert kontinuierlich aus
zum DME<STX><0x05><0x22><0x00><ETX>
vom DME<STX><0x85><0x22><0x00><ETX>
Temperatur
zum DME<STX><0x01><0x26><ETX>
vom DME<STX><0x81><0x26><0x..><ETX>
BeispielInnentemperatur +54 °C ⇒ 812636 ⇒ 0x36 = 54
Empfangspegel
zum DME<STX><0x01><0x23><ETX>
vom DME<STX><0x81><0x23><0x..><ETX>
Beispiel-39 dB ⇒ 8123D9 ⇒ 0x100 − 0xD9 = 0x27 =39
Service-Status
zum DME<STX><0x01><0x23><ETX>
vom DME<STX><0x81><0x23><0x..><ETX>
BeispielIcon MF2 und Icon PLB sind sichtbar auf dem Display:
812542 ⇒ 0x42 = 10000010 binär
MF2 MF1 TMP LSR BUS ATT PLB RDY
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 53
Page 54

Kapitel 9 Betriebsanleitung
Anhang
DME4000
9.6 DeviceNet
9.6.1 Allgemeines
Die Vendor ID des DME4000-xx4 und DME4000-xx5 (DeviceNet) ist 808.
Der DeviceNet-Typ (Generic Type) ist 0.
Der Produktcode ist 3-stellig:
DME4000-xx4 hat den Produktcode 4
DME4000-xx5 hat den Produktcode 5
Grundlage ist die DeviceNet-Spezifikation 2.0, Errata 5.
Der Produktname ist „DME4000“.
9.6.2 Konfiguration
Die Konfiguration und Inbetriebnahme des DME4000 als DeviceNet-Slave wird anhand der AlanBradley-Software „RS Networx for DeviceNet (Revision 4.12)“ gezeigt:
Vorgehensweise:
DME4000-xx4
8-poligen M16-Gerätestecker aufstecken und anschließen.
5-poligen M12-DeviceNet-Stecker aufstecken und anschließen.
DME4000-xx5
5-poligen M12-DeviceNet-Stecker aufstecken und anschließen.
ESD-Datei von der mitgelieferten Diskette importieren.
Tools/EDS-Wizzard anklicken und den Anweisungen des EDS Wizzard folgen.
Im Folder „...\DeviceNet\Vendor\SICKAG\GenericDevice“ erscheint das DME4000.
Mit dem Mauszeiger an den Bus anhängen (siehe Screenshot).
Mit Doppelklick auf die Adresse (hier 06) die Slaveadresse einstellen. Die Baudrate muss ebenfalls
übereinstimmen.
54 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 55

Betriebsanleitung Kapitel 9
Anhang
ID
Parameter
Current Value
Kapitel 3 Menü
1
Position Value
7295 counts
2
COS/Delta
0 counts
Anhang 0
3
Position State
0 counts
See DeviceNet
4
Position Low
0 counts
See DeviceNet
5
Position High
0 counts
See DeviceNet
6
Offset Value
0 counts
3.6 7 Resolution
100 µm
3.5
8
Serial Mode
19200
3.2.1
9
Serial Mode Data
8n1
3.2.2
10
Plausibility
Off
3.7
11
MF1 ActiveState
High
3.3.1
12
MF1 Function
Distance
3.3.2
13
MF2 ActiveState
High
3.4.1
14
MF2 Function
Service
3.4.2
15
Service MF1
1101110
3.3.4
16
Service MF2
1101110
3.4.4
17
MF1 Temperature
70 °C
3.3.4.3
18
MF1 Temperature
0 °C
3.3.4.4
19
MF2 Temperature
70 °C
3.4.4.3
20
MF2 Temperature
0 °C
3.4.4.4
21
MF1 Distance
2000 mm
3.3.3.1
22
MF1 Distance
1990 mm
3.3.3.2
23
MF2 Distance
2000 mm
3.4.3.1
24
MF2 Distance
1990 mm
3.4.3.2
ACHTUNG
DME4000
Parameter
Register
Limit
Limit
Baudrate
UpperLimit
LowerLimit
Specification
Specification
Specification
UpperLimit
LowerLimit
UpperLimit
LowerLimit
UpperLimit
LowerLimit
Parametrierung von MF1 und MF2
Gerätevarianten DME4000-xx5 sind nur mit einem 5-poligen DeviceNet-Stecker ausgerüstet. Die Multifunktionsein- und -ausgänge MF1 und MF2 sind hardwaremäßig nicht verfügbar.
Die Parametrierung von MF1 und MF2 ist trotzdem möglich und das Ergebnis kann im Diagnosebyte
(siehe Kapitel 9.6.3 „Datenaustausch“) über den Bus abgefragt werden.
Eine Parametrierung als Eingang ist nicht möglich. Die Funktionen Sleepmode und Preset sind über den
„Class Instance Editor“ möglich.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 55
Page 56

Kapitel 9 Betriebsanleitung
Anhang
0
Position Value (low Byte Attribute 10)
Position Value
2
Position Value
Position Value (high Byte Attribute 10)
4
Laser on: 1
MF1
MF2
Reserved by
Warning: 1
Alarm: 1
7 6 5
4, 3, 2
1
0
DME4000
9.6.3 Datenaustausch
Die Art des Datenaustausches wird im Fenster „Edit I/O Parameters“ eingestellt:
Es werden 5 Byte Daten gesendet, in Byte 0 bis 3 wird der Messwert dargestellt, Byte 4 sind Diagnosedaten:
Byte
1
3
Laser off: 0
active: 1
MF1 not
active: 0
active: 1
MF2 not
active: 0
DeviceNet
No warning: 0
No Alarm: 0
Warnung:
Hier werden alle Vorausfallmeldungen als Sammelmeldung ausgegeben:
Übertemperatur
Verschmutzung
Laservorausfallmeldung
Alarm:
Plausibilitätsfehler signalisiert, da keine Messung möglich ist, parallel wird Messwert 0 ausgegeben.
9.6.4 Polled Mode
Der Prozessdatenaustausch zwischen DME4000 und DeviceNet-Master erfolgt standardmäßig über
eine Polled I/O connection. Dabei werden die Slaves zyklisch vom Master abgefragt.
9.6.5 Change of State Mode
Im Change of State Mode (COS/Delta) werden Daten zyklisch gesendet oder wenn der Wert des Parameters Delta überschritten wird.
9.6.6 Parameter Offset und Preset
Der Parameter Offset wird bei Auslösen der Presetfunktion überschrieben. Funktionsweise des Preset
siehe Kapitel 9.1 „Preset“
56 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 57

Betriebsanleitung Kapitel 9
Anhang
DME4000
Ein Preset kann mit dem „Class Instance Editor“ ausgelöst werden:
DescriptionSet single Attribute
Class65
Instance1
Attribute13
>Execute<-MeldungExecution was completed
9.6.7 Sleepmode (Laser aus)
Die Funktion Sleepmode kann mit dem „Class Instance Editor“ aktiviert werden:
Laser aus
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 57
Page 58

Kapitel 9 Betriebsanleitung
Anhang
DME4000
Laser ein
9.6.8 Parameter im DME4000 speichern
Mit dem Befehl „Download“ im Fenster „Parameters“ werden die Parameter zum DME4000 heruntergeladen und sind dort flüchtig gespeichert.
Mit dem „Class Instance Editor“ können die Parameter nichtflüchtig (permanent) im DME4000 gespeichert werden (Vorgehensweise siehe Screenshot).
DescriptionSave
Class65
Instance1
>Execute<-MeldungExecution was completed
9.6.9 Zusätzliche Diagnosedaten
Als zusätzliche Diagnosedaten können folgende Parameter ausgelesen werden:
58 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 59

Betriebsanleitung Kapitel 9
Anhang
MF2
MF1
TMP
LSR
BUS
ATT
PLB
RDY 0 0 0 0 1 0 0 1
DME4000
Empfangspegel
DescriptionGet single Attribute
Class64
Instance1
Attribute:11
Received InformationBeispiel: B0 0 x 100 – 0 x B0 = 0 x 47 -71dB
Fehlerstatus
DescriptionGet single Attribute
Class64
Instance1
Attribute:12
Received InformationBeispiel: 0 x 09 0000 1001
Icon BUS und RDY sind im Display sichtbar.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 59
Page 60

Kapitel 9 Betriebsanleitung
Anhang
DME4000
Temperatur
DescriptionGet single Attribute
Class64
Instance1
Attribute:13
Received InformationBeispiel: 2B 0x2B 43 °C
Betriebsstunden
DescriptionGet single Attribute
Class64
Instance1
Attribute:32
Received InformationZeit: 0 x 0142 = 322 x 6 min = 1932 min = 32,2 h
z.B. 01 02 03 04 = 0 x 04030201 = 67305985 x 6 min =
403835910 min = 6730598,5 h
60 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 61

Betriebsanleitung Kapitel 9
Anhang
90h
1
1792
55h
91h
2
1792
55h
92h
4
1792
55h
93h
8
1792
55h
94h
16
1792
55h
Commandbyte
42h
Position lesen
43h
Position setzen
44h
Analogwert lesen
Kanalnummer 48 h
Temperatur (°C)
46h
Zähler lesen
47h
Zähler erhöhen
49h
Zähler löschen
4Ah
Daten lesen
4Bh
Daten speichern
4Ch
Status eines Datenfeldes ermitteln
4Dh
Datenfeld anlegen
4Eh
Verfügbaren Speicherbereich ermitteln
4Fh
Zugriffschlüssel ändern
50h
Geberstatus lesen
Gebertyp = 22 h
52h
Typenschild auslesen
53h
Geberreset
55h
Geberadresse vergeben
56h
Seriennummer und Programmversion lesen
57h
Serielle Schnittstelle konfigurieren
DME4000
9.7 Hiperface
9.7.1 Typenspezifische Einstellung
Typ Kennung Periodenlänge (mm) Freies EERPOM (Bytes) Code 0 …3
9.7.2 Übersicht der unterstützten Befehle
Funktion Code 0 1) Kommentar
•
•
•
•
1)
Die entsprechend gekennzeichneten Befehle beinhalten den Parameter „Code 0“.
Code 0 ist ein Byte, das zur zusätzlichen Absicherung wichtiger Systemparameter gegen versehentliches
Überschreiben ins Protokoll eingefügt ist. Bei Auslieferung ist „Code 0“ = 55h.
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 61
Page 62

Kapitel 9 Betriebsanleitung
Anhang
Fehlertyp
Statuscode
Beschreibung
Initialisierung
03H
Tabelle über Datenfeldpartitionierung defekt
Protokoll
07H
Geberreset durch Programmüberwachung
Protokoll
09H
Parityfehler
Protokoll
0AH
Checksumme der übertragenen Daten ist falsch
Protokoll
0BH
Unbekannter Befehlscode
Protokoll
0CH
Anzahl der übertragenen Daten ist falsch
Protokoll
0DH
Übertragenes Befehlsargument fehlerhaft
Daten
0EH
Das selektierte Datenfeld darf nicht beschrieben werden
Daten
0FH
Falscher Zugriffscode
Daten
10H
Angegebenes Datenfeld in seiner Größe nicht veränderbar
Daten
11H
Angegebene Wortadresse außerhalb Datenfeld
Daten
12H
Zugriff auf nicht existierendes Datenfeld
Vorausfall
1EH
Gebertemperatur kritisch
DME4000
9.7.3 Übersicht der Hiperfacestandard-Statusmeldungen
Weitere Fehlercodes siehe Kapitel 8.1 „Troubleshooting“.
62 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 63

Betriebsanleitung Kapitel 9
Anhang
DME4000
9.8 CANopen
9.8.1 Datenaustausch
Das Objektverzeichnis ist unterteilt in Communication Segment“ mit allen CANopen-relevanten Parametern und in „Manufacturer Segment“ mit allen DME-spezifischen Parametern:
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 63
Page 64

Kapitel 9 Betriebsanleitung
Anhang
Byte
Description
0
Position Value (low Byte)
1
Position Value
2
Position Value
3
Position Value (high Byte)
4
Not used
Laser on: 1
Laser off: 0
Warning: 1
No warning: 0
Alarm: 1
No Alarm: 0
7, 6, 5, 4, 3
2 1 0
Index (Hex)
0x2000
Measurement value
0x2001
Diagnostic data
Index (Hex)
Kapitel für weitere Informationen
0x2100
Offset
3.2
0x2101
Resolution
3.2
0x2102
Plausibility
3.2
0x2103
Preset
9.1
0x2104
Sleep Mode (Laser off)
9.4
Index (Hex)
0x1010, sub index 001
Save all Parameter
0x1010, sub index 003
Save Application Parameters
DME4000
9.8.2 Messwertausgabe
Der Messwert wird über zwei TPDO (Transmit Process Data Objects) ausgegeben.
TPDO 1:
Übertragungsmodus: „Asynchronous/timer triggert“
Der TPDO Parameter „COB-ID“ hat den Wert 0x280 + Node-ID
Der „Event“-Timer ist auf 20 ms voreingestellt
TPDO 2:
Übertragungsmodus: „Synchronous/cyclic“
Der TPDO Parameter „COB-ID“ hat den Wert 0x180 + Node-ID
Der TPDO Parameter „Transmission Type“ ist auf „1“ voreingestellt. D.h. der Messwert wird nach
jeder SYNC vom NMT-Master übertragen.
Beide TPDO übertragen die gleichen 5 Byte Daten: In den Bytes 0 bis 3 wird der Messwert übertragen,
im Byte 4 die Diagnose Daten:
Nach der Inbetriebnahme ist das DME im CANopen Status „PRE-OPERATIONAL“. In diesem Status
werden die Messwerte, die Parameter und die Diagnose Daten über den SDO-Dienst übertragen. Die
TPDO für die Messung werden mit dem Übergang in den Status „OPERATIONAL“ gestartet. Diese Vorgang wird über den NMT Service „start remote service“, der vom NMT-Master gesendet wird, ausgelöst
(siehe dazu die CIA-301 Spezifikation).
Index für die Messung und die Diagnose über SDO:
9.8.3 Konfiguration
Die Konfiguration und die Inbetriebnahme des DME4000 als CANopen-Slave wird über den SDO-Dienst
des CANopen gestartet (siehe dazu die CIA-301 Spezifikation). Die Device-spezifischen Informationen
sind in der EDS-Datei enthalten.
9.8.4 Parameter
Folgende Parameter können über den SDO-Service (Service Data Object) ausgewählt werden:
9.8.5 Speicher-Parameter
Parameter, die über den SDO-Dienst verändert werden, werden nicht permanent gespeichert. Bei einer
Aktivierung des CANopen-Objektes „Store Parameter Field“ werden die Parameter im DME4000 permanent gespeichert. Für die Aktivierung muss der dazugehörige Sub-Index mit „1“ beschrieben werden.
Siehe die folgende Tabelle:
64 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8014584/ZN33/2017-07
Page 65

Betriebsanleitung Kapitel 9
Anhang
Index (Hex)
Kapitel für weitere Informationen
0x2200
Measurement Level
-
0x2201, subindex 001
Error status „Temperature“
11
0x2201, Subindex 002
Error status „Laser“
11
0x2201, Subindex 003
Status „telegram traffic“
11
0x2201, subindex 004
Error status „Attenuation“
11
0x2201, Subindex 005
Error status „Plausibility“
11
0x2201, Subindex 006
Status „Ready“
11
0x2202
Temperature
-
0x2203
Operating Hours
-
0x2204
Speed
-
Hinweis
DME4000
Das Objekt „Save Communication Parameters“, Index 0x1010, Sub-Index „002“ wird nicht unterstützt.
Das bedeutet, dass Parameter, die im „Communication Segment“ des Objekt-Verzeichnisses, einschließlich der TPDO-Parameter, nicht permanent gespeichert werden und nach Geräteneustart auf die
Default-Werte zurückgesetzt sind.
9.8.6 Zusätzliche Diagnosedaten
Die folgenden Diagnose-Werte können über den SDO-Dienst ausgelesen werden:
8014584/ZN33/2017-07 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 65
Page 66

Operating Instructions
Table of Contents
DME4000
Table of Contents
1 Introduction .......................................................................................................................................................... 68
1.1 Symbols and Abbreviations Used ..................................................................................................... 68
1.1.1 Type Plate ............................................................................................................................. 68
1.2 Use in Accordance with Regulations ................................................................................................ 68
1.3 Safety Instructions ............................................................................................................................. 68
1.3.1 Laser Warning ...................................................................................................................... 69
1.4 UL ....................................................................................................................................................... 69
1.5 Mode of Operation ............................................................................................................................. 70
2 Operation .............................................................................................................................................................. 71
2.1 Operating Panel Structure ................................................................................................................. 71
2.2 Operation ........................................................................................................................................... 71
2.3 Control Panel ..................................................................................................................................... 72
2.3.1 Status indicators .................................................................................................................. 72
3 Menu Structure .................................................................................................................................................... 74
3.1 Flow Chart .......................................................................................................................................... 74
3.2 Explanations about the Menu Structure........................................................................................... 74
4 Operation Startup ................................................................................................................................................ 82
4.1 Assembly ............................................................................................................................................ 82
4.1.1 Alignment Procedure ........................................................................................................... 82
4.1.2 Arrangement of the Positions of Neighboring Distance Measuring Sensors .................... 83
4.1.3 Arrangement of Distance Measuring Sensors with Neighboring Data Transmission ....... 83
4.2 Electric Connection ............................................................................................................................ 84
4.2.1 Wiring Notes ......................................................................................................................... 85
4.2.2 PROFIBUS Terminator Connection ...................................................................................... 87
5 Example ................................................................................................................................................................ 88
5.1 Parameter Entry using the Example of “Code Entry” ....................................................................... 88
6 Specifications ....................................................................................................................................................... 90
6.1 Dimensional Drawing ........................................................................................................................ 90
6.2 Connection Diagram .......................................................................................................................... 91
6.3 Accessories ........................................................................................................................................ 92
6.3.1 Reflectors ............................................................................................................................. 92
6.3.2 Plugs/Cables ........................................................................................................................ 93
6.3.3 Mounting .............................................................................................................................. 98
6.3.4 Weather-Protecting Hood .................................................................................................... 99
6.3.5 Corner Mirror ........................................................................................................................ 99
6.4 Specifications DME4000-1xx .......................................................................................................... 100
6.5 Specifications DME4000-2xx .......................................................................................................... 101
6.6 Specifications DME4000-3xx .......................................................................................................... 102
7 Maintenance ..................................................................................................................................................... 103
8 Troubleshooting and Explanation of Terms ................................................................................................... 103
8.1 Troubleshooting ............................................................................................................................... 103
8.2 Explanation of Terms ....................................................................................................................... 104
8.2.1 PROFIBUS ........................................................................................................................... 104
8.2.2 RS 422 ............................................................................................................................... 105
8.2.3 SSI ....................................................................................................................................... 105
8014584/ZN33/2017-07 SICK AG • Germany • Subject to change without notice 66
Page 67

Operating Instructions
Table of Contents
DME4000
8.2.4 DeviceNet ........................................................................................................................... 106
8.2.5 Hiperface ............................................................................................................................ 106
8.2.6 CANopen ............................................................................................................................ 106
9 Appendix ............................................................................................................................................................. 108
9.1 Preset ............................................................................................................................................... 108
9.2 PROFIBUS Interface ......................................................................................................................... 108
9.2.1 Data Format Slave to Master ............................................................................................ 110
9.2.2 Data Format Master to Slave ............................................................................................ 110
9.2.3 Diagnosis Data ................................................................................................................... 110
9.2.4 Definitions/Errors/Correct Errors of PROFIBUS Error Messages .................................... 112
9.3 Operation Startup of DME4000 PROFIBUS (Example: Siemens Step 7) ...................................... 113
9.4 Sleep mode ...................................................................................................................................... 115
9.5 RS-422 Interface ............................................................................................................................. 115
9.5.1 Protocol .............................................................................................................................. 115
9.5.2 Commands ......................................................................................................................... 115
9.5.3 Command examples (Standard protocol) ......................................................................... 116
9.6 DeviceNet ........................................................................................................................................ 117
9.6.1 General ............................................................................................................................... 117
9.6.2 Configuration ...................................................................................................................... 117
9.6.3 Data Exchange ................................................................................................................... 119
9.6.4 Polled Mode ....................................................................................................................... 119
9.6.5 Change of State Mode ....................................................................................................... 119
9.6.6 Parameter Offset und Preset ............................................................................................ 120
9.6.7 Sleep mode (Laser off) ...................................................................................................... 120
9.6.8 Save parameter in DME4000 ........................................................................................... 121
9.6.9 Additional diagnostic data ................................................................................................. 122
9.7 Hiperface ......................................................................................................................................... 124
9.7.1 Type-Specific Setting ......................................................................................................... 124
9.7.2 Overview of the support commands ................................................................................. 124
9.7.3 Overview of the Hiperface standard status messages .................................................... 125
9.8 CANopen .......................................................................................................................................... 126
9.8.1 Data transmission.............................................................................................................. 126
9.8.2 Measuring value output .................................................................................................... 127
9.8.3 Configuration ...................................................................................................................... 127
9.8.4 Parameter .......................................................................................................................... 127
9.8.5 Store parameters in DME .................................................................................................. 128
9.8.6 Additional diagnostic values ............................................................................................. 128
SICK AG • Industrial Sensors • Germany • All rights reserved 67
Page 68

Chapter 1 Operating Instructions
Introduction
Note
CAUTION
Manufacturer
Sensor type
Part number
Series number
Production year/month
DME4000
1 Introduction
1.1 Symbols and Abbreviations Used
Refers to keys of the display in the dimensional drawing (Section 6.1 Dimensional Drawing).
Notes explain the advantages of specific settings and help you to use the DME4000 optimally.
Warnings: Read and follow them carefully!
Warnings are intended to protect you from dangers and help you to prevent damage to the sensor.
1.1.1 Type Plate
The type plate shows the equipment type, the serial number of the sensor and the part number.
1.2 Use in Accordance with Regulations
The DME4000 is an opto-electronic sensor, which is used for detecting distances to reflective tape that
is moved linearly. It may not be used in areas subject to the danger of explosions.
1.3 Safety Instructions
Read the operating instructions before operation startup.
Connection, mounting and setting only by skilled technicians.
Protect the DME4000 from humidity and soiling at operation startup.
The DME4000 is not a safety module according to EU machine regulations.
Observe the national safety and accident-prevention regulations.
Only the manufacturer may make repairs. Interfering with and changes to the equipment are not
Only carry out cabling work and open and close electric connections when power is switched off.
68 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
permitted.
Page 69

Operating Instructions Chapter 1
Introduction
DME4000
1.3.1 Laser Warning
Laser radiation - Do not look into the laser beam Laser class 2
Laser aperture
Complies with 21CFR1040.10 and 1040.11 except
for deviations pursuant to Laser Notice 50, dated
June 24, 2007.
Laser class 2 (EN/IEC 60825-1:2014)
Identical laser class for issue EN/IEC 60825-1:2007
1.4 UL
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 69
Page 70

Chapter 1 Operating Instructions
Introduction
The DME4000 distance measuring sensor is a
DME4000
1.5 Mode of Operation
compact optical distance sensor. The DME is
mounted in such a way that the transmitted laser
beam hits a reflector. The reflector of the sensor
moves along the laser beam.
The recipient of the DME receives the light reflected by the reflector and calculates the distance between the sensor and reflector by measuring the time between sending the light and
receiving it back.
The measured distance is transmitted to a control
unit or a position control loop via an SSI, RS 422,
DeviceNet, Hiperface, CANopen or PROFIBUS
interface, depending on the sensor model.
Thanks to the fast calculation of measurement
values, the DME4000 is suitable for direct operation in a closed-loop position control via the SSI
interface, e.g., with a frequency converter.
Illustration 1.1 – DME4000 Mode of Operation
70 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 71

Operating Instructions Chapter 2
Operation
CAUTION
Function keys
LC Display
DME4000
2 Operation
This section explains the control panel and basic operation of the DME4000. You can find detailed
information about the operation startup and operation of the DME4000 in Chapter 4 “Operation
Startup”.
2.1 Operating Panel Structure
Illustration 2.1 – Display
The operating panel is divided into two areas:
LC Display: Displays the menu during parameterization
Function keys: For entering the parameters and functions
2.2 Operation
The DME4000 is equipped with a film keyboard.
Only touch the entry area with your fingers or with a suitable pointer sensor!
Do not use any sharp or hard objects. You could damage the entry area and consequently make operation of the machine difficult or impossible.
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 71
Page 72

Chapter 2 Operating Instructions
Operation
Display
Significance
Is Displayed
Is not Displayed
MF1
Multifunctional
Input/output level active
Input/output level not active
MF2
Multifunctional output
Output level active
Output level not active
TMP
Internal sensor temperature
Pre-failure message:
Internal sensor temperature OK
ATT
Attenuation
Pre-failure message:
Reception level OK
LSR
Laser
Pre-failure message for
Laser OK
PLB
Plausibility
Measurement error
Measurement value OK
RDY
Ready
At ready-to-operate state
Initialization, hardware defect
BUS
SSI/PROFIBUS/RS 422/
SSI: clock signal received
SSI: no clock
Function keys
Information field 2
Status indicators
Information field 1
DME4000
2.3 Control Panel
The following display of the DME4000 appears after you connect operating voltage (or after a reset):
Illustration 2.2 – Display after Connection of Operating Voltage
The DME4000 is ready to operate after approx. 1 s and displays the current measurement value:
2.3.1 Status indicators
input/output
DeviceNet/CANopen interface
Internal sensor temperature at
fringe range
Reception signal level at fringe
range
measurement laser
cause: Light beam interruption,
speed > 10 m/s
PB/DN: telegram traffic
RS 422: continuous mode
CANopen: (pre-)operational mode
PB/DN: no telegram traffic
RS 422: request mode
CANopen: stopped mode
Correction measures when there are error messages/pre-failure messages; see Troubleshooting in the
Appendix.
72 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 73

Operating Instructions Chapter 2
Operation
– 65 dB
Reception level: current reception signal
Ver. 1.0
Software Version
3.3.3.1
Menu subitem (see the menu overview); parameter changes not possible
3.3.3.1 !
“!”: Enter code correctly: Parameter changes possible
3.3.3.1 ?
“?”: Entered parameter is invalid; previously valid parameter remains stored
+ 010.000 m
Current measurement value; is displayed during measurement operation.
Menu items and parameters are displayed here. “Code” appears
Blinking Service display signals a hardware defect or
Prompts through the menu structure, code, parameter entry, storing of
Exit a menu subitem
Selection of menu items and entry of numbers
DME4000
Information field 1 (example)
Cause: for example, lower switching limit > upper switching limit
Correction measure: correct parameters
Information field 2 (example)
Code
when you press .
Service
too high or too low temperature
Keys
parameters
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 73
Page 74

Chapter 3 Operating Instructions
Menu Structure
Code
Code: 314
Software-Version
Parameter
Note
Note
DME4000
3 Menu Structure
3.1 Flow Chart
The menu structure of the DME4000 is displayed in the form of a flow chart on the inside of the back
cover.
3.2 Explanations about the Menu Structure
Protection against unintentional changes to the set parameters.
Function:
Menu access and changing parameters. Confirm code 314 with
Successful entry of a code is confirmed with a “!” in the display.
.
Parameter changes, which are confirmed with
If the code is not entered or a different number (than 314) is entered, the valid parameters are displayed; changing is not possible then.
The possibility of viewing all parameters without a change option simplifies querying and transmitting
parameters by unskilled personnel, for example.
For example, Ver. V1.0
Depending on the sensor model, the interface, the multifunctional input/output MF1, the output MF2,
the resolution and an offset are set here.
A reset resets all parameters to their default values.
All parameters can be set via the display with PROFIBUS sensors. When the PROFIBUS is started up
anew, all parameters are overwritten with the parameters stored in the control unit. Exception:
PROFIBUS address, offset with active preset function, profile class 1.
, are active immediately and stored permanently.
74 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 75

Operating Instructions Chapter 3
Menu Structure
Interface
SSI
Coding
Binary
Gray (Default)
Measurement value output in binary code
Measurement value output in gray code
Mode
Data Format
Binär
Gray
Measurement value:
Measurement value incl. plausibility bit
Measurement value:
Measurement value:
Measurement value:
Measurement value:
1: Plausibility error:
0: OK
Activation
On (default)
SSI interface in operation, RS 422 interface not in operation.
RS 422 interface in operation, SSI interface not in operation. The RS 422 interface
Monitor
Serial monitor interface in connection with the interface adapter (part no.
Off (default)
Multifunctional outputs MF1 and MF2 in operation as set under 3.3/3.4.
PROFIBUS
Profile
This profile corresponds to the standard encoder profile; refer to “9.2 PROFIBUS
This profile is based on the standard encoder profile. In addition to the
Bus Address
The Profile bus subscriber address is set here.
Note
DME4000
Depending on the sensor type, only the respective interface of the sensor type appears in the menu.
For the function of the SSI interface, refer to Chapter 8.2.3 “SSI“.
25 bit (default)
24 bit + err
24 bit
Plausibility bit:
Off
On
Bit 1 ... 24
LSB: Plausibility bit
Bit 1 ... 24
LSB: Plausibility bit
Bit 0 ... 23
measurement value output 0
enables parameterizing the DME with the interface adapter
(1 023 359).
(Set baud rate and protocol under > 3.2 Serial <)
1 023 359, refer to accessories) via the MF1 and MF2. The switched on monitor
interface is displayed with “Monitor” in the menu 3.3.2 and 3.4.2 MF function. The
SSI interface is capable of performing all functions. Baud rate and protocol are set
via 3.2 Serial.
coded in gray code
Bit 1 ... 24
LSB: Plausibility bit (binary)
Bit 0 ... 23
Encoder
Interface”.
SICK (default)
measurement value, warning, state and error information are transmitted.
For a more precise description, see “9.2 PROFIBUS Interface”.
Addr. 006 (default)
(001-125)
For an operation startup example with Siemens Step 7 (see Chapter 9.5 “RS-422 Interface”).
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 75
Page 76

Chapter 3 Operating Instructions
Menu Structure
Hiperface
BusAddress
Add 00 (default)
Setting the Hiperface address (range 0 … 31)
Baudrate
0,6 kBd
Setting the baud rate
1,2 kBd
2,4 kBd
4,8 kBd
9,6 kBd (default)
19,2 kBd
38,4 kBd
Data
8, o, 1
8 data bits
8, e, 1 (default)
1 stopp bit
8, n, 1
Parity choice
Timeout
X1
1*11 / Baud rate
X4 (default)
4*11 / Baud rate
Monitor
On
Off (default)
Period Len
1 Typecode 90H (default)
Corresponding resolution 1 mm
2 Typecode 91H
4 Typecode 92H
8 Typecode 93H
16 Typecode 94H
RS 422
Mode
Request
Data transfer on request only
Continuous
Cyclical data transfer in accordance with the defined baud rate setting
Protocol
Standard
<STX><0x81><0x22><sign><7xBCD><ETX>
CRLF
<sign><7xBCD><CR><LF>
CP0
<sign><7xBCD>
CP1
unused
Note
DME4000
For a detailed description, see Chapter 9.5 RS-422 Interface.
76 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 77

Operating Instructions Chapter 3
Menu Structure
DeviceNet
Baud rate
125 (default)
Setting the baud rate (125, 250, 500 kBaud)
Bus Address
Addr. 06 (default)
Setting the DeviceNet address (range 0 ... 63)
CANopen
Baud rate
125 kBd (default)
Setting the baud rate (125, 250, 500 kBaud, 1 MBaud)
Node-ID
ID: 006 (default)
Setting the Node-ID (range 001 ... 127)
Serial
Baud rate
Baud rate for RS 422 parameter interface (max. 115.2 kBd)
Data
7,e,1
7 data bits, even parity, 1 stop bit
8,e,1
8 data bits, even parity, 1 stop bit
8,n,1 (default)
8 data bits, 1 stop bit
MF1
Act.State
Operation
Low Active
High Active (default)
Aktiv 1
LOW (or not switched*))
HIGH
Aktiv 0
HIGH
LOW (or not switched*))
Function
Distance
(default) see 3.3.3
Service see 3.3.4
Preset
Overwriting of the offset value
Laser off, measured value = 0, acknowledgment via Ready status
Monitor
(Only SSI variant): Is displayed when the monitor interface is set to ON under 3.1.4.
DME4000
19.2 (default)
Baud rate for SSI monitor interface (max. 38.44 kBd)
For a detailed description, see Chapter 8.2.2 “RS 422”.
Parameterizable input or output.
*) When using as input, see Chapter 9 “Appendix”.
Offset = Preset value – current measured value
For a function description, see “Explanation of Terms – Preset”.
Sleep Mode
For a function description, see “Explanation of Terms – Sleep Mode”.
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 77
Page 78

Chapter 3 Operating Instructions
Menu Structure
Distance
Service
Active
Not active
On (default)
Pre-failure message
Laser OK
Off
–
On (default)
Pre-failure message
Not soiled
Off –
On (default)
Excess temperature
Sensor temperature < upper
Off –
On (default)
Subnormal temperature
Sensor temperature > lower
Off –
On
Faulty measured valued, measured
Measurement value OK
Off –
On (default)
Initialization,
Ready-to-operate, measured
Off –
On
Bus error
Data transmission OK
Off (default)
–
DME4000
MF1 is used as distance switching output.
Function:
Freely settable status messages in “OR” link, which provide information about the sensor state.
Laser
laser diode
Level
UpperTemp
LowerTemp
Plausib(ility)
Ready
attenuation
monitoring
Sensor temperature
> upper temperature limit set
temperature limit set
monitoring
Sensor temperature
< lower temperature limit set
temperature limit set
value output “0”
Cause:
–Light beam interruption
Vehicle speed
> 10 m/s
hardware defect,
laser switched off
value OK
Bus Status
78 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
SSI: no clock signal
PB/DN: no telegram traffic
CANopen: stopped mode
SSI: clock signal
PB/DN: telegram traffic
CANopen: (pre-)operational
mode
Page 79

Operating Instructions Chapter 3
Menu Structure
Speed
Aktiv
Nicht aktiv
On
Range: 0,1 … 9,9 m/s
Range: 0 m/s
Off
–
On
Parameterized speed limit is exceeded and movement
Parameterized speed limit is not
Off –
MF2
Active State
Low Active (default)
High Active
Aktiv 1
LOW
HIGH
Aktiv 0
HIGH
LOW
Function
Distance siehe 3.4.3
Service (default) siehe 3.4.4
Monitor
(Only SSI variant): Is displayed when the monitor interface is set to On under 3.1.4.
Distance
Service
Active
Not active
On (default)
Pre-failure message
Laser OK
Off
–
DME4000
The “Speed” function makes output via both switching outputs MF1 and MF 2 possible when the parameterized speed limit is exceeded.
The switching hysteresis is fixed ± 0,1 m/s.
Limit
(default)
Sign
(default)
Parameterizable output
direction “+”.
Measured value becomes bigger;
Movement direction “-“: Measured value becomes
smaller;
Movement direction “+/-“: Measured value in both
directions
exceeded.
MF2 is used as distance switching output.
Function:
Freely settable status messages in “OR” link, which provide information about the sensor state.
Laser
laser diode
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 79
Page 80

Chapter 3 Operating Instructions
Menu Structure
Active
Not active
On (default)
Pre-failure message
Not soiled
Off –
On (default)
Excess temperature monitoring
Sensor temperature < upper
Off –
On (default)
Subnormal temperature monitoring
Sensor temperature > upper
Off –
On
Faulty measured valued, measured
Measurement value OK
Off –
On (default)
Initialization,
Ready-to-operate,
Off –
On
Bus error
Data transmission OK
Off (default)
–
Speed
Active
Not active
Limit
On (default)
Range: 0,1 … 9,9 m/s
Range: 0 m/s
Off
–
On (default)
Parameterized speed limit is exceeded
Parameterized speed limit is
Off –
Resolution
DME4000
Level
UpperTemp
LowerTemp
Plausib(ility)
Ready
attenuation
Sensor temperature
> upper temperature limit set
temperature limit set
Sensor temperature
< lower temperature limit set
temperature limit set
(default)
value output “0”
Cause:
–Light beam interruption
–Vehicle speed
> 10 m/s
hardware defect,
measurement error,
laser switched off
measured value OK
Bus Status
SSI: no clock signal
PB/DN: no telegram traffic
CANopen: stopped mode
SSI: clock signal
PB/DN: telegram traffic
CANopen: (pre-)operational
mode
The “Speed” function makes output via both switching outputs MF1 and MF 2 possible when the parameterized speed limit is exceeded.
The switching hysteresis is fixed ± 0,1 m/s.
Sign
and movement direction “+”.
Measured value becomes bigger;
Movement direction “-“: Measured
value becomes smaller;
Movement direction “+/-“: Measured
value in both directions
not exceeded.
The resolution setting affects all interfaces.
Possible settings: 50 ... 5000 µm, default 100 µm
80 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 81

Operating Instructions Chapter 3
Menu Structure
Offset
Plausibility
Off
Normal
200 ms (Default)
No check
Check in measurement cycle
Error suppression
Temperature
Reset
NO
YES
No reset
Reset to default values
Note
Note
DME4000
Possible settings: ± 250 m
If there is a negative measured value, “0” is output via the SSI interface.
When the preset function is activated, the offset value is overwritten if the present input is triggered;
also refer to Chapter 9.1 “Preset”.
This function monitors measured values for plausibility. Responds at light beam interruption, vehicle
speed > 10 m/s and soiling. Plausibility error results in measurement value output 0.
max. 200 ms.
Display of the current sensor temperature.
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 81
Page 82

Chapter 4 Operating Instructions
Operation Startup
DME4000
4 Operation Startup
4.1 Assembly
The DME4000 and the reflector are mounted in such a way that the reflector is always in the detection
field of the sensor.
The DME4000 is aligned in such a way that there is a clearly visible light spot in the middle of the
reflector (even at greater distances).
The mounting bracket available as an accessory enables simple alignment in the X and Y directions:
Illustration 4.1 – DME4000 Alignment
The reflector size should be selected so that the light spot does not move from the reflector due to
vibrations. If the reflector is attached to the moved part, smaller reflective tape normally suffices. To
avoid highly reflective surfaces (e. g. shelves or other surfaces) to mirror in light beams or scattered
light, align the reflector in the “free space”: mount with approx. 1° slant (X or Y direction). For different
reflector sizes, refer to the accessories (starting on page 84 and 92).
The reception level displayed in the information field 1 provides information about the current reception
signal.
Illustration 4.2 – DME4000 Alignment in Highly Reflective Surfaces
4.1.1 Alignment Procedure
Move the vehicle and reflector a small distance from each other.
Align the DME4000 so that the light spot is in the middle of the reflector.
Increase the distance of the vehicle to the reflector and observe the light spot when you do this.
82 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 83

Operating Instructions Chapter 4
Operation Startup
DME
DME
DME
Reflector
Reflector
Reflector
Reflector
DME
DME
ISD
ISD
Reflector
DME4000
Align the light spot in the middle of the reflector if necessary.
4.1.2 Arrangement of the Positions of Neighboring Distance Measuring Sensors
The distance of neighboring distance measuring sensors must be at least a
mutual interference. Depending on the range s, this distance a must equal a
Illustration 4.3 – Arrangement of Neighboring DME4000s
min = 100 mm to prevent
min + 0.01 x smax.
4.1.3 Arrangement of Distance Measuring Sensors with Neighboring Data Transmission
Illustration 4.4 – Arrangement of Neighboring DME4000 and ISD
A minimum beam distance of 100 mm should be maintained for the data transmission photoelectric
switches of the ISD300 / ISD400-1xxx / ISD400-6xxx series, independent of the maximum range s
max.
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 83
Page 84

Chapter 4 Operating Instructions
Operation Startup
DME4000
4.2 Electric Connection
Connect the DME4000 according to the connection diagram. Note the wiring notes (see Chapter 4.2.1);
refer to Chapter 6.3.2 “Plugs/Cables” for information about the plugs and cables.
Illustration 4.5 – DME4000-xx1/DME4000-xx3 Connection Diagram (SSI/RS 422)
Illustration 4.6 – DME4000-xx2 Connection Diagram (PROFIBUS)
Illustration 4.7 – DME4000-xx4 Connection Diagram (DeviceNet M16 and M12 plug)
84 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 85

Operating Instructions Chapter 4
Operation Startup
Stranded to
4 pairs
DME4000
Illustration 4.8 – DME4000-xx5 Connection Diagram (DeviceNet M12 plug)
Illustration 4.9 – DME4000-xx7 Connection Diagram (Hiperface M12 plug)
Illustration 4.10 – DME4000-xx9 Connection Diagram (CANopen M12 plug)
4.2.1 Wiring Notes
Key:
1 = Wire pair blk/wht
2 = Wire pair red/vio
3 = Wire pair pnk/gra
4 = Wire pair brn/blu
5 = Insulating film
6 = Shield
7 = PUR sheathing
Illustration 4.11 – LTG-2308-MW, Part no. 6026292
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 85
Page 86

Chapter 4 Operating Instructions
Operation Startup
DME4000
Reliable data transmission is provided with shielded lines with wires stranded in pairs. A comprehensive
shield concept that functions flawlessly is required for interference-free data transmission. Special
attention must be paid to grounding of the cable shield to the switching cabinet and the DME4000. The
cable shield of the prefabricated cable is connected with the metal plug and consequently with the
DME4000 housing. The cable shield on the switching cabinet must be connected with the system
ground over a large area. Potential compensating current via the cable shield is prevented by a suitable
ground cable. The shields of the PROFIBUS lines are connected to each other via the PROFIBUS plug.
Key for cable groups Illustration 4.12 – Illustration 4.14:
1 =Line very sensitive to interference (analog measurement lines)
2 =Interference-sensitive lines (sensor cables, communication signals, bus lines)
3 =Interference-source lines (control cable for inductive loads, engine brakes)
4 =Lines causing strong interference (outlet cable of frequency convertor, power supply to welding
systems, electric power cable)
Illustration 4.12 – Cross the lines of groups 1 and 2 with 3 and 4 at right angles
Illustration 4.13 – Ideally: lay lines in different cable ducts
Illustration 4.14 – Alternatively: separate lines by metal rib
86 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 87

Operating Instructions Chapter 4
Operation Startup
Terminator
DME4000
Illustration 4.15 –No “pigtails”; connect the shield at a short distance and over the
complete area; ground BOTH sides
Illustration 4.16 – Shield connection for plastic housing
4.2.2 PROFIBUS Terminator Connection
Illustration 4.17 –PROFIBUS Terminator Connection (refer to the accessories in
Chapter 6.3.2 “Plugs/Cables“)
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 87
Page 88

Chapter 5 Operating Instructions
Example
Step 1
Connect the operating voltage.
Step 2
Call the “Code” menu with .
Step 3
Call the “CODE 000” entry field with . The 1st digit blinks
Press 3x for the password “000” (only parameter view), enter the desired 1st digit
Step 5
Advance one place with and enter the desired 2nd digit (e.g., “1”) with .
Note
DME4000
5 Example
5.1 Parameter Entry using the Example of “Code Entry”
All parameters can be set in this way.
Anzeige
Display
Display
Step 4
Display
Display
(e.g., “3”) with .
88 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 89

Operating Instructions Chapter 5
Example
Step 6
Advance one place with and enter the desired 3rd digit (e.g., “4”) with .
Step 7
Press to confirm the desired 3rd digit (e.g., “4”).
Note
The exclamation mark “!” in the display confirms: parameterizing mode
DME4000
Display
Display
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 89
Page 90

Chapter 6 Operating Instructions
Specifications
DME4000-xx1
DME4000-xx2
DME4000-xx4
DME4000-xx5
DME4000-xx9
DME4000
6 Specifications
6.1 Dimensional Drawing
Illustration 6.1 – DME4000 Dimensional Drawing
DME4000-xx3
1 x M16 plug
(SSI/RS 422)
Illustration 6.2 – DME4000 Dimensional Drawings
1 x M16-/2 x M12
plug (PROFIBUS)
DME4000-xx7
1 x M16-/1 x M12
plug (DeviceNet)
2 x M12 plug
(Hiperface)
Rear View
1 x M12 plug
(DeviceNet)
1 x M12 plug
(CANopen)
Illustration 6.3 – Dimensional Drawing of DME4000 Mounted on Bracket
90 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 91

Operating Instructions Chapter 6
Specifications
DME4000
6.2 Connection Diagram
Illustration 6.4 – DME4000-xx1/DME4000-xx3 Connection Diagram (SSI/RS 422)
Illustration 6.5 – DME4000-xx2 Connection Diagram (PROFIBUS)
Illustration 6.6 – DME4000-xx4 Connection Diagram (DeviceNet M16 and M12 plug)
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 91
Page 92

Chapter 6 Operating Instructions
Specifications
Reflector 0,3 x 0,3 m2 Diamond Grade, mounted
Reflector 0,6 x 0,6 m2 Diamond Grade, mounted
DME4000
Illustration 6.7 – DME4000-xx5 Connection Diagram (DeviceNet M12 plug)
Illustration 6.8 – DME4000-xx7 Connection Diagram (Hiperface M12 plug)
Illustration 6.9 – DME4000-xx9 Connection Diagram (CANopen M12 plug)
6.3 Accessories
6.3.1 Reflectors
Typ: PL 240 DG Part no.: 1017910 Typ: PL 560 DG Part no.: 1016806
92 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 93

Operating Instructions Chapter 6
Specifications
Reflector 1 x 1 m2 Diamond Grade, mounted
Reflector 0.3 x 0.3 m² Diamond Grade, regulated heating AC
Reflector 0.6 x 0.6 m² Diamond Grade, regulated heating AC
Diamond Grade reflective tape, size made-to-order
Diamond Grade reflective tape, sheet 749 x 914 mm2
M16 cable receptacle, 8-pin, straight
M16 cable receptacle, 8-pin, angled
Typ: DOS-1608-GA
Part no.: 6025726
Typ: DOS-1608-WA
Part no.: 6025727
Connector view
Connector view
DME4000
Typ: PL 880 DG Part no.: 1018975
230 V/200 W
Typ: PL 240 DG-H Part no.: 1022926 Typ: PL 560 DG-H Part no.: 1023888
Typ: REF-DG-K Part no.: 4019634 Typ: REF-DG Part no.: 5304334
230 V/900 W
6.3.2 Plugs/Cables
PROFIBUS, SSI and RS 422
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 93
Page 94

Chapter 6 Operating Instructions
Specifications
M16 cable receptacle, 8-pin, straight, 5 m/50 m
M16 cable receptacle, 8-pin, straight, 10 m
Typ: DOL-1608-G05MA
Part no.: 2026742
Typ: DOL-1608-G10MA
Part no.: 2027193
Typ: DOL-1608-G50MA
Part no.: 6032903
Typ: DOL-1608-W05MA
Part no.: 2026743
Typ: DOL-1608-W10MA
Part no.: 2027194
Wire 2 x 0.5 mm², 6 x 0.25 mm²,
Typ: LTG-2308-MW
Part no.: 6026292
Temperature range
Variable –5 ... +70 °C
Not variable –40 ... +80 °C
Sheathing
PUR grey
Shield
Tined cupper net
Connector view
Connector view
DME4000
M16 cable receptacle, 8-pin, angled, 5 m M16 cable receptacle, 8-pin, angled, 10 m
stranded in pairs, shielded
Specifications
94 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 95

Operating Instructions Chapter 6
Specifications
PROFIBUS terminal resistor
Bus in, PROFIBUS cable socket, M12, 5-pin
Typ: PR-STE-END
Part no.: 6021156
Typ: PR-DOS-1205-G
Part no.: 6021353
Bus out, PROFIBUS cable plug, M12, 5-pin
PROFIBUS cable, 2 x 0,34 mm2, sold by meter
Typ: PR-STE-1205-G
Part no.: 6021354
Typ: LTG-2102-MW
Part no.: 6021355
Temperature range
Variable –5 ... +80 °C
Not variable –40 ... +80 °C
Sheathing
PUR violet Ø 8 mm
Shield
AL-PT tape
Bus in, cable receptacle with PROFIBUS cable, 5 m
Bus in, cable receptacle with PROFIBUS cable, 10 m
Typ: DOL-12PR-G05
Part no.: 6026006
Typ: DOL-12PR-G10
Part no.: 6026008
Typ: STL-12PR-G05
Part no.: 6026005
Typ: STL-12PR-G10
Part no.: 6026007
Female connector, M12, 5-pin, straight, shielded,
Male connector, M12, 5-pin, straight, shielded,
DeviceNet female connector, M12, 5-pin, straight,
DeviceNet connection cable 6 m, M12 receptacle, 5-pin,
DME4000
PROFIBUS
Bus out, cable plug with PROFIBUS cable, 5 m Bus out, cable plug with PROFIBUS cable, 10 m
DeviceNet
360 screen can be assembled onto a knurled nut
Typ: DOS-1205-GA Part no.: 6027534 Typ: STE-1205-GA Part no.: 6027533
cable 6 m, Dropcable
Typ: DOL-1205-G06MK Part no.: 6028326 Typ: DSL-1205-G06MK Part no.: 6028327
360 screen can be assembled onto a knurled nut
straight, M12 plug, 5-pin, straight, Dropcable
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 95
Page 96

Chapter 6 Operating Instructions
Specifications
DeviceNet T junction box M12, 5-pin, on plug,
DeviceNet terminating resistor, 7/8'' receptacle,
1grn shield 4 wht CANH
Female connector, PG9, 8-pin, straight, sizeable
Male connector, PG9, 8-pin, straight, sizeable
2 m, DOL-1208-G01MAH1
Part no.: 6032448
Type: LTG-3108-MW
Part no.: 6032456
5 m, DOL-1208-G05MAH1
Part no.: 6032449
Temperature range
variable 10 ... +70 °C
DME4000
7/8'' receptacle, 5-pin
Typ: SDO-02D78-SF Part no.: 6028330 Typ: DOS-7805-GKEND Part no.: 6028329
DeviceNet female connector, 7/8'', 5-pin, straight, PG16,
sizeable
Typ: DOS-7805-GK Part no.: 6028331 Typ: STE-7805-GK Part no.: 6028332
5-pin, straight
DeviceNet male connecotr, 7/8'', 5-pin, straight, PG16,
sizeable
Pin assignment
2red L+ 5 blu CANL
3blk M
Cable, 4 x 0.34 mm2, cores, twisted pair and screened
with AL-PT foil (for DME4000, DeviceNet)
Type: LTG-2804-MW Part no.: 6028328
Temperature range variable 10 ... +70 °C
not variable 40 ... +70 °C
Sheathing PUR black Ø 6.8 mm
Shield Cu tin-coated
Mounting systems for Hiperface interface
Hiperface
Part no.: 6028369 Type: STE-1208-G Part no.: 6028369 Type: STE-1208-G
Female connector, M12, 8-pin, straight, cable with screen
can be assembled onto a knurled nut
96 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Wire
Page 97

Operating Instructions Chapter 6
Specifications
10 m, G10MAH1
Part no.: 6032450
not variable 40 ... +70 °C
20 m, G20MAH1
Part no.: 6032451
Sheathing
PUR black 6.8 mm
Shield
Cu tin-coated
Female connector, M12, 5-pin, straight, shielded,
Male connector, M12, 5-pin, straight, shielded,
CANopen T junction box M12, 5-pin, on plug,
CANopen terminating resistor, 7/8'' receptacle,
CANopen female connector, 7/8'', 5-pin, straight, PG16,
CANopen male connecotr, 7/8'', 5-pin, straight, PG16,
DME4000
Mounting systems for CANopen interface
CANopen
360 screen can be assembled onto a knurled nut
Typ: DOS-1205-GA Part no.: 6027534 Typ: STE-1205-GA Part no.: 6027533
CANopen female connector, M12, 5-pin, straight,
cable 6 m, Dropcable
Typ: DOL-1205-G06MK Part no.: 6028326 Typ: DSL-1205-G06MK Part no.: 6028327
360 screen can be assembled onto a knurled nut
CANopen connection cable 6 m, M12 receptacle, 5-pin,
straight, M12 plug, 5-pin, straight, Dropcable
7/8'' receptacle, 5-pin
Typ: SDO-02D78-SF Part no.: 6028330 Typ: DOS-7805-GKEND Part no.: 6028329
5-pin, straight
sizeable
Typ: DOS-7805-GK Part no.: 6028331 Typ: STE-7805-GK Part no.: 6028332
Pin assignment
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 97
sizeable
Page 98

Chapter 6 Operating Instructions
Specifications
1grn shield 4 wht CANH
DME4000 alignment bracket
Type: BEF-DME
Part no.: 2040695
DME4000 alignment bracket
Mounting kit for baseplate
Typ: BEF-AH-DME5
Part no.: 2027721
Typ: BEF-DME4000
Part no.: 2040738
DME4000
2red L+ 5 blu CANL
3blk M
Cable, 4 x 0.34 mm2, cores, twisted pair and screened
with AL-PT foil (for DME4000, CANopen)
Type: LTG-2804-MW Part no.: 6028328
Temperature range variable 10 ... +70 °C
not variable 40 ... +70 °C
Sheathing PUR black Ø 6.8 mm
Shield Cu tin-coated
6.3.3 Mounting
(needed for DME4000)
98 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
Page 99

Operating Instructions Chapter 6
Specifications
DME4000 weather-protecting hood
Type: WSG-DME5
Part no.: 2027800
Deflection of light emission upward
Typ: USP-DME5
Part no.: 2027710
DME4000
6.3.4 Weather-Protecting Hood
6.3.5 Corner Mirror
8014584/ZN33/2017-07 © SICK AG • Germany • Subject to change without notice 99
Page 100

Chapter 6 Operating Instructions
Specifications
DME4000-
111
112
113
114
115
117
119
Part no.
1029789
1029788
1029796
1029800
1029801
1029807
1042838
Measurement range
0.15 … 50 mm
Accuracy
± 3 mm
Reproducibility1)
1 mm
Measurement value output
1 ms
2 ms
2 ms
2 ms
2 ms
2 ms
4 ms
Resolution (adjustable)
0.05 … 5 mm
Temperature drift (type)
0.1 mm/K
Temperature influence
1 ppm/K
Air pressure influence
0.3 ppm/hPa
Initialization time
500 ms
900 ms
500 ms
Max. movement speed
10 m/s
Supply voltage V
2)
18 … 30 V DC
Residual ripple3)
5 VPP
Current consumption (without
< 250 mA at 24 V DC
Optical transmitter
Laser diode (red light)
Laser class
2 (EN 60825-1/C.D.R.H.)
Operating life (at 25 °C)
MTTF 50,000 h
Light spot diameter/distance
max. 100 mm/50 m
Switching outputs MF1, MF2
B (push/pull)
Output (MF1/MF2)
HIGH: VS < 3 V; LOW < 2 V
Input (MF1)4)
HIGH: > 12 V; LOW < 3 V
Output current5)
100 mA (short-circuit protected, overload-protected)
Interfaces
SSI
PROFIBUS
RS 422
DeviceNet 500 kBd
Hiperface
CANopen
Ambient operating temperature
–10 … +55 °C
Storage temperature
–25 … +75 °C
DME4000 heating
121
122
123
124
Not
127
Part no.
1029792
1029793
1029797
1029808
1029812
Ambient operating temperature
–40 … +55 °C
Current consumption
< 1000 mA
IP 65
Electric protection class
VDE class 2 (rated voltage 32 V)
EMC
EN 61000-6-2, EN 55011: class B
Mechanical load
Shock: EN 600 68-2-27/-2-29, Sinus: EN 600 68-2-6, noise: EN 600 68-2-64
Weight
Approx. 1650 g
DME4000
6.4 Specifications DME4000-1xx
S
heating)
12 MBd
available
(with heating)
Enclosure rating
1)
Statistical error, constant ambient conditions, minimum switch-on time 10 min
2)
Reverse-polarity protected
3)
May not exceed or fall short of VS tolerances
4)
Not reverse-polarity protected
5)
Max. 100 nF/20 mH
100 © SICK AG • Germany • Subject to change without notice 8014584/ZN33/2017-07
 Loading...
Loading...