

Page 1
8016866/12N8/2019-01-31
SICK STEGMANN GmbH
Dürrheimer Str. 36
D-78166 Donaueschingen
www.sick.com
DFS60S Pro
B E T R I E B S A N L E I T U N G d e
Sicherer Encoder
1 Zu diesem Dokument
Dieses Dokument ist ein Originaldokument.
Bitte lesen Sie diese Betriebsanleitung sorgfältig, bevor Sie mit dem sicheren
Encoder DFS60S Pro arbeiten, ihn montieren, in Betrieb nehmen oder warten.
1.1 Funktion dieses Dokuments
Diese Betriebsanleitung leitet das technische Personal des Maschinenherstellers
bzw. Maschinenbetreibers zur sicheren Montage, Elektroinstallation, Inbetrieb‐
nahme sowie zum Betrieb und zur Wartung des DFS60S Pro an.
Darüber hinaus sind für die Planung und den Einsatz von sicheren Encodern wie
dem DFS60S Pro technische Fachkenntnisse notwendig, die nicht in diesem
Dokument vermittelt werden.
Grundsätzlich sind die behördlichen und gesetzlichen Vorschriften beim Betrieb
des DFS60S Pro einzuhalten.
1.2 Symbole und Dokumentkonventionen
WARNUNG
Ein Warnhinweis weist Sie auf konkrete oder potenzielle Gefahren hin. Dies
soll Sie vor Unfällen bewahren.
Lesen und befolgen Sie Warnhinweise sorgfältig!
Handlungsanweisungen sind durch einen Pfeil gekennzeichnet. Lesen und
b
befolgen Sie Handlungsanweisungen sorgfältig.
2 Zu Ihrer Sicherheit
Dieses Kapitel dient Ihrer Sicherheit und der Sicherheit der Anlagenbenutzer.
Bitte lesen Sie dieses Kapitel sorgfältig, bevor Sie mit dem DFS60S Pro an
der Maschine oder Anlage arbeiten, an dem der sichere Encoder eingesetzt
wird.
2.1 Grundlegende Sicherheitshinweise
WARNUNG
Beachten Sie die Sicherheitshinweise und Schutzmaßnahmen!
Beachten Sie die nachfolgenden Punkte, um die bestimmungsgemäße,
sichere Verwendung des DFS60S Pro zu gewährleisten.
Für Einbau und Verwendung des sowie für die Inbetriebnahme und wiederkeh‐
rende technische Überprüfungen gelten die nationalen und internationalen
Rechtsvorschriften, insbesondere:
•
die Maschinenrichtlinie 2006/42/EG
•
die Arbeitsmittelbenutzungsrichtlinie 2009/104/EG
•
die Unfallverhütungsvorschriften und Sicherheitsregeln
•
sonstige relevante Sicherheitsvorschriften
Hersteller und Bediener der Maschine, an der der DFS60S Pro verwendet wird,
müssen alle geltenden Sicherheitsvorschriften und regeln in eigener Verantwor‐
tung mit der für sie zuständigen Behörde abstimmen und einhalten.
Diese Betriebsanleitung ist dem Bediener der Maschine, an der der sichere
Encoder DFS60S Pro verwendet wird, zur Verfügung zu stellen. Der Maschinenbe‐
diener ist durch befähigte Personen einzuweisen und zum Lesen der Betriebsan‐
leitung anzuhalten.
2.2 Bestimmungsgemäße Verwendung
Der DFS60S Pro kann in Sicherheitsanwendungen bis Kategorie 3 gemäß EN ISO
13 849, bis SIL2 gemäß IEC 61 508, bis SILCL2 gemäß EN 62 061 oder bis PL d
gemäß EN ISO 13 849 eingesetzt werden.
Der DFS60S Pro unterstützt Sicherheitsfunktionen, die auf der Geschwindigkeits‐
information und Drehrichtungsinformation basieren.
Der Encoder ist nicht in der Lage, eigenständig einen sicheren Zustand herbeizu‐
führen.
Drehzahl, Drehrichtung und Stillstand sowie Störungen, von denen eine Gefähr‐
dung ausgehen kann, müssen von einem übergeordneten Auswertesystem
erkannt werden. Die Anforderungen an das Auswertesystem sind in Kapitel 4.1
und Kapitel 4.2 beschrieben.
Der DFS60S Pro darf nur innerhalb der Grenzen der vorgeschriebenen und ange‐
gebenen technischen Daten und Betriebsbedingungen verwendet werden. Die in
den technischen Daten genannten Anforderungen und Umgebungsbedingungen,
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 1
müssen beachtet und eingehalten werden, damit der DFS60S Pro seine zugesi‐
cherte Funktion erfüllt.
Bei jeder anderen Verwendung sowie bei Veränderungen am Gerät – auch im
Rahmen von Montage und Installation – verfällt jeglicher Gewährleistungsan‐
spruch gegenüber der SICK STEGMANN GmbH.
2.3 Bestimmungswidrige Verwendung
Der DFS60S Pro unterstützt keine sicherheitsgerichteten Betriebsarten, die im
Zusammenhang mit absoluter Lage oder absoluter Position stehen.
Der DFS60S Pro gibt zur Referenzierung einen Nullimpuls aus. Dieses Signal darf
nicht für sicherheitsgerichtete Betriebsarten verwendet werden.
Der DFS60S Pro ist unter anderem für folgende Verwendungen nicht geeignet:
•
Unter Wasser
•
In explosionsgefährdeten Bereichen
•
In öffentlich zugänglichen Bereichen
2.4 Anforderungen an die Qualifikation des Personals
Der DFS60S Pro darf nur von dazu befähigten Personen projektiert, montiert,
angeschlossen, in Betrieb genommen und instand gehalten werden.
Projektierung
Für die Projektierung gilt eine Person als befähigt, wenn sie Fachwissen und
Erfahrung bei der Auswahl und Anwendung von sicheren Encodern an Maschinen
hat und mit den einschlägigen technischen Regelwerken und staatlichen Arbeits‐
schutzvorschriften vertraut ist.
Mechanische Montage und Inbetriebnahme
Für die mechanische Montage und Inbetriebnahme gilt eine Person als befähigt,
wenn sie Fachwissen und Erfahrung auf dem jeweiligen Gebiet besitzt.
Elektrische Installation
Für die elektrische Installation und Inbetriebnahme gilt eine Person als befähigt,
wenn sie Fachwissen und Erfahrung auf dem jeweiligen Gebiet besitzt.
3 Produktbeschreibung
Der DFS60S Pro ist ein hochauflösender Inkremental-Encoder mit 60 mm Durch‐
messer.
Die Übermittlung der Encodersignale zum Auswertesystem erfolgt durch Analogsi‐
gnale in Form von sinus-/cosinusförmigen Spannungen.
Wenn eine geeignete Auswerteeinheit verwendet wird, dann kann der DFS60S Pro
für sicherheitsgerichtete Betriebsarten, die im Zusammenhang mit Geschwindig‐
keit und Drehrichtung stehen, eingesetzt werden. Dadurch lassen sich Sicher‐
heitsfunktionen gemäß der IEC 61 800-5-2 realisieren.
Die mechanische Schnittstelle wurde gemäß der IEC 61 800-5-2 so dimensio‐
niert, dass ein Fehlerausschluss aufgrund der Überdimensionierung angenom‐
men werden kann.
Der DFS60S Pro unterliegt einer begrenzten Lagerlebensdauer (s. Techn. Daten).
Nach Überschreiten der Lagerlebensdauer können Verschleiß oder Ermüdung der
Lager zum Lagerausfall führen. Um dies zu vermeiden, muss der DFS60S Pro spä‐
testens mit Erreichen der Lagerlebensdauer außer Betrieb genommen werden.
Die Lagerlebensdauer wird zusätzlich applikationsspezifisch beeinflusst, insbe‐
sondere durch Betriebsarten mit kleinen Drehzahlen, Reversierbetrieb, mechani‐
sche Vibrationen. Stromdurchgang durch die Kugellager (z.B. durch eingekoppelte
Ströme) ist zu vermeiden.
Um die Diagnoseabdeckung des sicheren Sensors hinsichtlich eines unerwarte‐
ten Lagerausfalls (z.B. durch erschwerte Betriebsbedingungen, bei grenzwertiger
Belastung, o.ä.) zu erhöhen, kann ebenfalls eine externe Plausibilisierung der
Sensorinformation hilfreich sein.
WARNUNG
Sicherheithinweis
Der DFS60S Pro darf nicht über seine Gebrauchsdauer (s. Techn. Daten) hin‐
aus für Sicherheitsanwendungen verwendet werden. Die Gebrauchsdauer
kann applikationsabhängig von der Lagerlebensdauer begrenzt sein.
Page 2
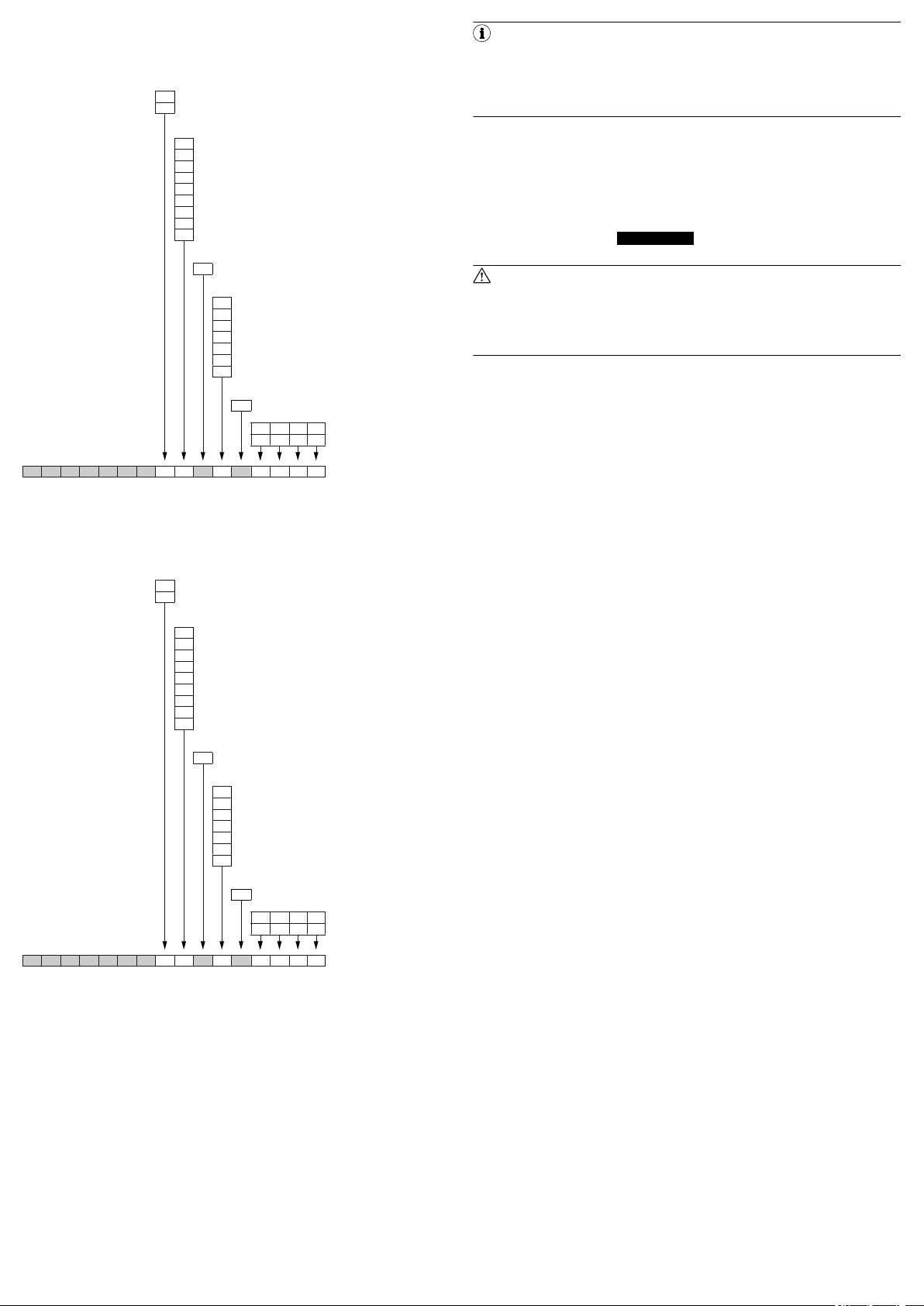
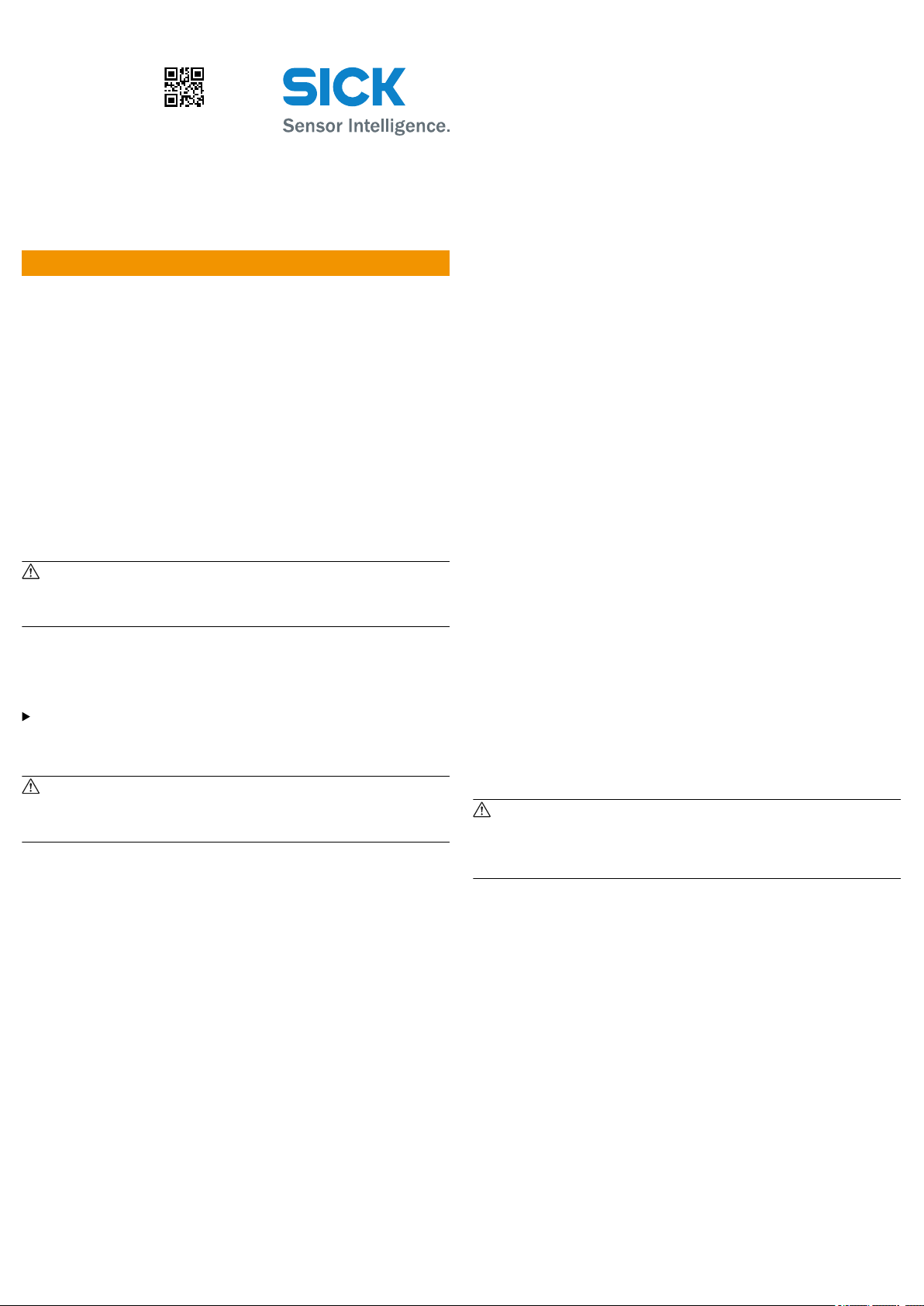
3.1 Typenschlüssel
Hohlwelle
Typ
B Aufsteckhohlwelle
T Durchsteckhohlwelle
Mechanische Ausführung
A Hohlwelle Ø6 mm mit Passfedernut
B Hohlwelle Ø8 mm mit Passfedernut
C Hohlwelle Ø3/8“ mit Passfedernut
D Hohlwelle Ø10 mm mit Passfedernut
E Hohlwelle Ø12 mm mit Passfedernut
F Hohlwelle Ø1/2“ mit Passfedernut
G Hohlwelle Ø14 mm mit Passfedernut
H Hohlwelle Ø15 mm mit Passfedernut
J Hohlwelle Ø5/8“ mit Passfedernut
Elektrische Schnittstelle
O 4.5… 32V, SIN/COS
Anschlussart
Auflösung
A Stecker M23, 12-polig, radial
C Stecker M12, 8-polig, radial
J Leitung 8-adrig, universal 0,5 m 1)
K Leitung 8-adrig, universal 1,5 m
1)
L Leitung 8-adrig, universal 3 m
1)
M Leitung 8-adrig, universal 5 m
1)
N Leitung 8-adrig, universal 10 m
1)
Perioden pro Umdrehung
1 0 2 4
0 S 0 1
Auflösung 1024 Perioden
Drehmomentstütze,
lang (nur mit Typen B, T)
D F S 6 0 S - 000
Hohlwelle
Typ
B Aufsteckhohlwelle
T Durchsteckhohlwelle
Mechanische Ausführung
A Hohlwelle Ø6 mm mit Passfedernut
B Hohlwelle Ø8 mm mit Passfedernut
C Hohlwelle Ø3/8“ mit Passfedernut
D Hohlwelle Ø10 mm mit Passfedernut
E Hohlwelle Ø12 mm mit Passfedernut
F Hohlwelle Ø1/2“ mit Passfedernut
G Hohlwelle Ø14 mm mit Passfedernut
H Hohlwelle Ø15 mm mit Passfedernut
J Hohlwelle Ø5/8“ mit Passfedernut
Elektrische Schnittstelle
O 4.5… 32V, SIN/COS
Anschlussart
Auflösung
A Stecker M23, 12-polig, radial
C Stecker M12, 8-polig, radial
J Leitung 8-adrig, universal 0,5 m 1)
K Leitung 8-adrig, universal 1,5 m
1)
L Leitung 8-adrig, universal 3 m
1)
M Leitung 8-adrig, universal 5 m
1)
N Leitung 8-adrig, universal 10 m
1)
Perioden pro Umdrehung
1 0 2 4
0 S 0 1
Auflösung 1024 Perioden
Drehmomentstütze,
lang (nur mit Typen B, T)
D F S 6 0 S - 000
HINWEIS
Abweichungen können sich ergeben durch:
•
Paarungs-Toleranzen in Schaltschwellen:
± 1 Inkrement
•
Paarungs-Toleranzen von Abtastzeitpunkten: Anzahl Inkremente in Zeit‐
unterschied bei maximaler Geschwindigkeit
Zur Signalauswertung müssen stets die Differenzsignale verwendet werden (siehe
Kapitel 6.2 ).
Aus den Differenzsignalen müssen mit geeigneten Schaltelementen (z.B. Kompa‐
ratoren) Rechtecksignale gebildet werden, die mit geeigneten Verfahren (z.B. Qua‐
dratur-Decoder) für eine Zählung verwendet werden.
Die Schaltschwellen müssen so gewählt werden, dass die untere Grenze der Vek‐
torlängenüberwachung (siehe Kapitel 4.2.1 ) nicht überschritten wird. Entspre‐
chend muss die obere Schaltschwelle inklusive Toleranz bei maximal 150 mV
über der Signalmitte (siehe Abbildung 12 ) liegen und die untere Schaltschwelle
inklusive Toleranz bei maximal 150 mV unter der Signalmitte.
WARNUNG
Bei ungeeigneter Dimensionierung von Schaltschwellen und Hysterese in der
Signalauswertung kann es zur fehlerhaften Erkennung von zusätzlichen Flan‐
ken oder fehlerhaften Nicht-Erkennung von Flanken kommen. Dies kann z.B.
zur falschen Bestimmung von Drehrichtung, Position oder Geschwindigkeit
führen.
Durch die Zähler kann eine Auflösung von 4.096 Schritten pro Umdrehung
erreicht werden (d.h. 4 Schritte pro Signalperiode bzw. 1 Schritt pro Quadrant
jeder Signalperiode).
Der Diagnosedeckungsgrad (DC) zur Fehlererkennung der Encodersignale muss
mindestens 99% betragen. Hierfür müssen die Diagnoseanforderungen aus
Kapitel 4.2 erfüllt werden. Die Diagnose muss innerhalb der Prozess-Sicherheits‐
zeit2 ausgeführt werden.
4.2 Diagnoseanforderungen und Fehlererkennung
1) Der universelle Leitungsabgang ist so positioniert, dass eine knick‐
freie Verlegung in radialer oder axialer Richtung möglich ist. UL-Zulas‐
sung nicht verfügbar.
Das nachgeschaltete Auswertesystem sollte gemäß IEC 61800-5-2 aufgrund der
dort gelisteten Fehlerannahmen zum Einsatz von motion and position feedback
sensors die nachfolgend beschriebenen Diagnoseanforderungen und Fehlerer‐
kennung gewährleisten.
Im Falle der Erkennung eines Fehlers bei einer der unten genannten Diagnosen
muss eine Fehlerreaktion eingeleitet werden, die zu einem sicheren Zustand der
Applikation führt.
Im Fehlerfall muss der sichere Zustand der Anwendung erreicht werden, bevor
eine Gefahr bringende Situation entstehen kann. Entsprechend muss die Summe
aus der maximal benötigten Zeit für die Fehlererkennung und der Zeit für die Feh‐
lerreaktion kleiner sein als die Prozess-Sicherheitszeit2.
Die maximal benötigte Zeit für die Fehlererkennung ist der zeitliche Abstand, mit
dem die unten genannten Diagnosemaßnahmen vollständig wiederholt werden.
4.2.1 Störungen der analogen Encodersignale Sinus/Cosinus
Zur Erkennung aller unzulässigen Pegelveränderungen in der Relation von Sinus
und Cosinus wird die zugrundeliegende mathematische Beziehung der Sinus-/
Cosinussignale herangezogen.
Durch Bildung der Größe k durch folgende mathematische Beziehung
k² = k1² × sin² α + k2² × cos²α
oder anderer geeigneter mathematischer Verfahren ist es möglich, den Gleich‐
spannungspegel, der den Sinus-/Cosinussignalen gemeinsam zugrundeliegt, zu
erfassen. Der Vergleich mit entsprechenden maximalen und minimalen Limitie‐
rungen ermöglicht eine genaue und schnell reagierende Erkennung von unzulässi‐
gen Abweichungen, unabhängig von der momentanen Winkelstellung α .
Mit den vorliegenden Signalen kann k anhand der folgenden Berechnung ermittelt
werden:
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
1) Der universelle Leitungsabgang ist so positioniert, dass eine knick‐
freie Verlegung in radialer oder axialer Richtung möglich ist. UL-Zulas‐
sung nicht verfügbar.
4 Projektierung
4.1 Anforderungen an die Signalauswertung
Für die vorzeichenrichtige Geschwindigkeitsermittlung sowie für die korrekte
inkrementelle Positionsermittlung muss sowohl das Sinussignal als auch das
Cosinussignal ausgewertet werden. Dies muss über eine geeignete Sicherheitsar‐
chitektur realisiert werden. Typischerweise erfolgt die Signalauswertung in zwei
getrennten Kanälen, deren Ergebnisse innerhalb der Prozess-Sicherheitszeit1 mit‐
einander verglichen werden. Die Größe der zulässigen Abweichung muss so
gewählt sein, dass statische Fehler in der Auswertung erkannt werden.
1
Prozess-Sicherheitszeit: Zeitspanne zwischen dem Auftreten eines Gefahr brin‐
genden Ausfalls des Messsystems und dem Zeitpunkt, bei dem die Reaktion
abgeschlossen sein muss, um das Auftreten der Gefahr zu verhindern.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 2
Anschaulich darstellen lässt sich diese Relation der Nutzsignale mittels eines
zweidimensionalen Modells (Lissajous-Figur). Hierbei bilden die Nutzsignale einen
Nutzsignalring.
Für das Signal k wird eine Toleranz von ±50% um die Nominallage erlaubt. Eine
größere Abweichung als diese stellt eine Verletzung der Vektorlängengrenzen dar
und verlangt eine entsprechende Fehlerreaktion des Auswertesystems.
Es wird empfohlen, die Grenzwerte zur Vermeidung von Fehlauslösungen nicht zu
eng zu setzen.
4.2.2 Verlust der mechanischen Kopplung Encodergehäuse oder Versatz der
mechanischen Kopplung während des Stillstands oder des Betriebs
Diese Fehlerannahme kann gemäß IEC 61 800-5-2 unter Berücksichtigung der
korrekten Montage der Drehmomentstütze bzw. des Klemmflansches/Servoflan‐
sches (siehe Kapitel 5) ausgeschlossen werden.
4.2.3 Verlust der mechanischen Kopplung Encoderwelle–Antriebswelle wäh‐
rend des Stillstands oder des Betriebs
Diese Fehlerannahme kann gemäß IEC 61 800-5-2 unter Berücksichtigung der
korrekten Montage des Encoders an der Antriebswelle (siehe Kapitel 5) ausge‐
schlossen werden.
4.2.4 Sinus-/Cosinussignal-Stillstand aufgrund elektrischer Defekte
Diese Fehlerannahme kann ausgeschlossen werden, da Sinus-/Cosinussignale
rein analog erfasst und verarbeitet werden und im Design keine Speicherstruktu‐
ren für analoge Spannungen vorgesehen sind.
2
Prozess-Sicherheitszeit: Zeitspanne zwischen dem Auftreten eines Gefahr brin‐
genden Ausfalls des Messsystems und dem Zeitpunkt, bei dem die Reaktion
abgeschlossen sein muss, um das Auftreten der Gefahr zu verhindern.
Page 3
4.2.5 Beschädigung, Verschmutzung oder Lösung der Maßverkörperung
(Codescheibe)
Eine Beschädigung oder Verschmutzung der Maßverkörperung kann folgende
Situationen herbeiführen:
Durch einen Verlust der Abblendung des Senders kommt es zu einem maximalen
Signalpegel in beiden Kanälen. Dies kann gemäß Kapitel 4.2.1 erkannt werden.
Eine Fehlausrichtung der Codescheibe zum optischen Abtaster oder eine Ver‐
schmutzung erzeugt ebenfalls Signalpegel in den Kanälen Sinus und Cosinus, die
nach Kapitel 4.2.1 diagnostiziert werden können.
Für das Lösen der Maßverkörperung kann ein Fehlerausschluss gemäß EN ISO
13 849-1 und EN ISO 13 849-2 auf Grundlage mechanischer Überdimensionie‐
rung vorgenommen werden.
4.2.6 Oszillationen eines oder mehrerer Ausgänge
Oszillationen an den Signalausgängen können wie folgt detektiert werden:
Führen die Oszillationen zu unzulässigen Signalpegeln in einem oder beiden
Kanälen, lässt sich die Fehlererkennung nach Kapitel 4.2.1 heranziehen.
Im Stillstand wirkt sich die Oszillation eines Eingangssignals bei Einsatz eines
geeigneten Phasendiskriminators für die Erzeugung von Zählimpulsen im Auswer‐
tesystem als Vor- und Rückzählen eines Inkrements aus. Der daraus resultierende
Fehler entspricht dem Winkelbetrag eines Inkrements.
Eine Oszillation beider Signale (Sinus und Cosinus) in Phase oder eines einzelnen
Signals während des Motorlaufs führt zu unzulässigen Signalpegeln, die durch
Maßnahmen gemäß Kapitel 4.2.1 erkannt werden.
4.2.7 Vertauschen der Ausgangssignale Sinus und Cosinus
Dieser Fehler kann ausgeschlossen werden, da Sinus-/Cosinussignale gesondert
erfasst und verarbeitet werden.
Es gibt keine Multiplexer für diese Signale im Encoder.
4.2.8 Überwachung der vom Auswertesystem ausgegebenen Encoder-Versor‐
gungsspannung
Unzulässige Spannungspegel der Encoder-Versorgungsspannung werden durch
Maßnahmen gemäß Störungen der analogen Encodersignale Sinus/Cosinus
erkannt. Insbesondere die dort aufgeführte Untergrenze für die Vektorlänge hilft
auf Unterspannung zu überwachen.
Zur Eingrenzung von Fehlern gemeinsamer Ursache und zur Fehlerfrüherkennung
ist die Versorgungsspannung des Encoders auf Einhaltung der in den technischen
Daten angegebenen Grenzwerte zu überwachen.
4.2.9 Betrieb des Encodersystems außerhalb zulässiger Temperaturbereiche
Wenn nicht sichergestellt werden kann, dass das Encodersystem im zulässigen
Temperaturbereich betrieben wird, muss vom Systembetreiber eine geeignete
Maßnahme ergriffen werden, damit der spezifizierte Temperaturbereich eingehal‐
ten wird.
Fehler, die aus dem Betrieb bei unzulässigen Temperaturen resultieren, werden
durch Maßnahmen gemäß Kapitel 4.2.1 erkannt.
4.3 Anforderungen an die mechanische Wellenverbindung
4.3.1 Hohlwellen-Encoder
Die Verbindung der Antriebseinheit mit dem Hohlwellen-Encoder muss mit einer
kraftschlüssigen oder einer kraft- und formschlüssigen Verbindung hergestellt
werden. Der Einsatz einer Passfeder verhindert ein radiales Verdrehen des
Encoders.
Für die Antriebswellen-Durchmesser 6 mm, 8 mm und 3/8" ist der Einsatz einer
Passfeder zwingend erforderlich. Damit wird die erforderliche Überdimensionie‐
rung für den Fehlerausschluss des Verlustes der Wellenverbindung gewährleistet.
Anforderungen zur Passfedermontage auf der Antriebswelle entnehmen Sie
den Maßzeichnungen am Ende der Betriebsanleitung auf dem sprachneutra‐
len Zusatzblatt.
4.3.2 Klemmflansch-Encoder und Servoflansch-Encoder
Die Wellen-Kupplung ist Teil der sicherheitsgerichteten Funktionskette und muss
vom Anwender entsprechend dimensioniert und validiert werden. Sie ist nicht
Bestandteil der Sicherheitsbetrachtung durch SICK STEGMANN.
Wellenverbindung zwischen Encoder und Antriebssystem mit einer elasti‐
schen Kupplung ausführen.
Geeignete Kupplung in Abhängigkeit der Applikation verwenden. Kupplungen
müssen den Anforderungen der IEC 61 80052:2008 entsprechen (siehe
Kapitel 4.2.3).
Technische Daten und Montageanleitung der eingesetzten Kupplung beach‐
ten.
Folgende mechanische Ausführungen stehen zur formschlüssigen Verbindung zur
Verfügung (siehe Maßzeichnungen am Ende der Betriebsanleitung (auf dem
sprachneutralen Zusatzblatt)):
•
Vollwelle mit Passfeder
•
Vollwelle mit Fläche
•
Für die Drehmomentstütze:
– Je 4 × M3-Zylinderschrauben nach DIN ISO 4762 (oder gleichwertige
Schraubentypen mit ebener Kopfauflage)
– Unterlegscheiben
•
Für die Flanschvarianten F, G, H, J
– 3 × M3-Schrauben
•
Für die Flanschvarianten 1, D, 4, E
– 3 × M4-Schrauben
•
Für den Servoflansch-Anbau
– Zubehörset Servoklammer groß
(Art.-Nr. 2029166)
– 3 × M4-Schrauben
Die Festigkeitsklasse der Schrauben muss mindestens 8.8 sein. Die Schrauben‐
länge wählen Sie entsprechend den Einbauverhältnissen.
5.2 Anbauvorbereitung
Achten Sie darauf, dass Anbauteile frei von Schmierstoffen und Verschmut‐
zungen sind.
Achten Sie auf Beschädigungen!
Bei Varianten mit Drehmomentstütze muss die Wellenverbindung starr erfol‐
gen und darf nicht elastisch sein (wie z.B. über Balgkupplungen)
5.2.1 Allgemein gültige Hinweise
Verbinden Sie den DFS60S Pro verdrehfest mit der kundenseitigen Anflanschung.
Alle angegebenen Maße und Toleranzen der technischen Zeichnungen und der
Montagebeschreibung müssen eingehalten werden.
Je genauer die Zentrierung für den DFS60S Pro ist, desto geringer sind Winkel-
und Wellenversatz bei der Montage und um so weniger werden die Lager des
DFS60S Pro belastet.
Alle Schraubverbindungen sind mit flüssiger Schraubensicherung (beispielsweise
mit LOCTITE 243) gegen Lösen zu sichern.
HINWEIS
Federscheiben und Zahnscheiben sind als Schraubensicherung nicht ausrei‐
chend.
Bei Varianten mit Drehmomentstütze kann u.U. der Drehmomentschlüssel nicht
senkrecht an die Schraube angesetzt werden. In der Toleranz des Anzugsdrehmo‐
ments ist eine Schrägstellung von bis zu 20° mit enthalten. Häufiges Lösen oder
Befestigen der Schraube mit Winkelabweichung kann zur Beschädigung der
Schraube führen (siehe Kapitel 5.2.2 und Kapitel 5.2.3)
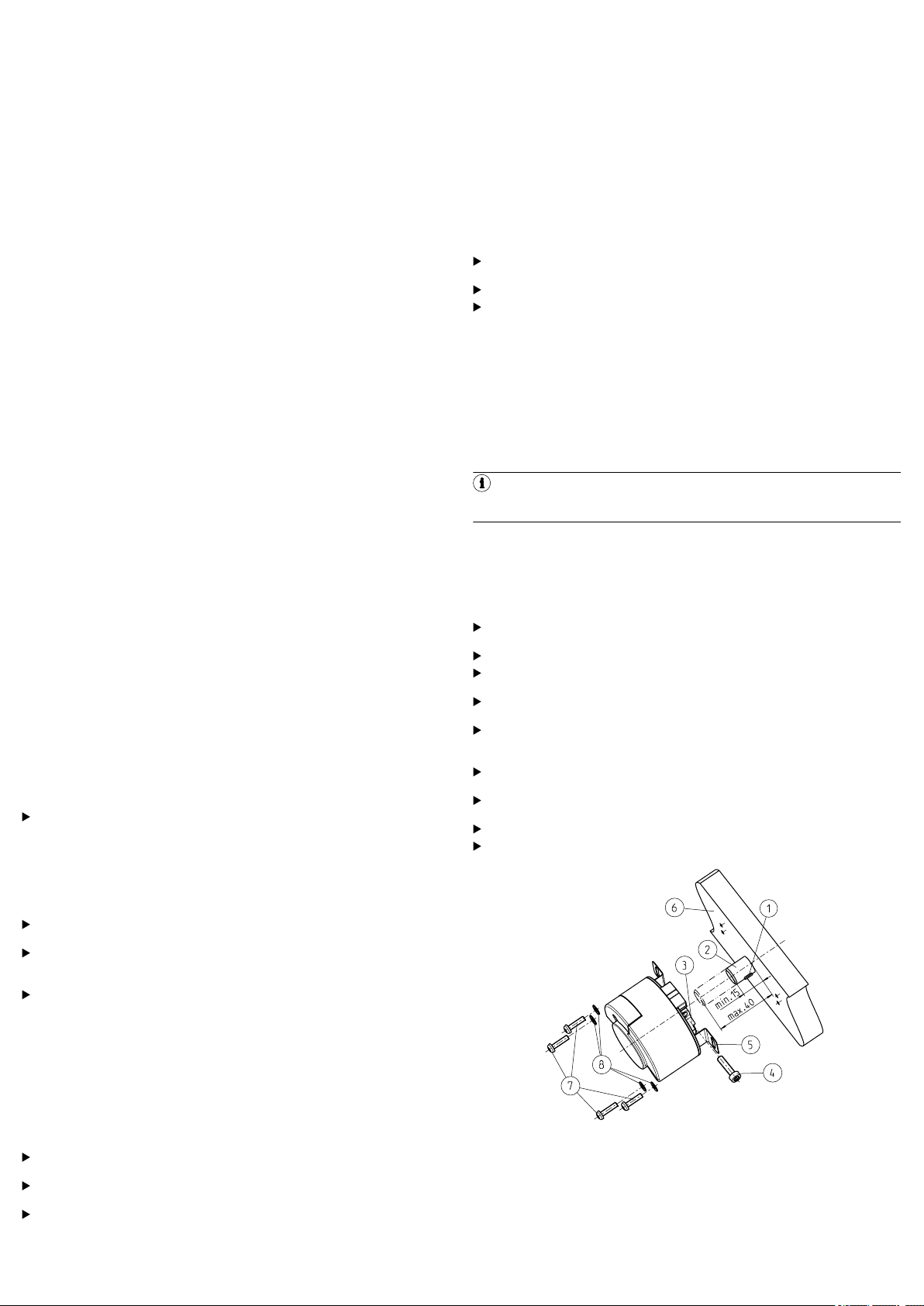
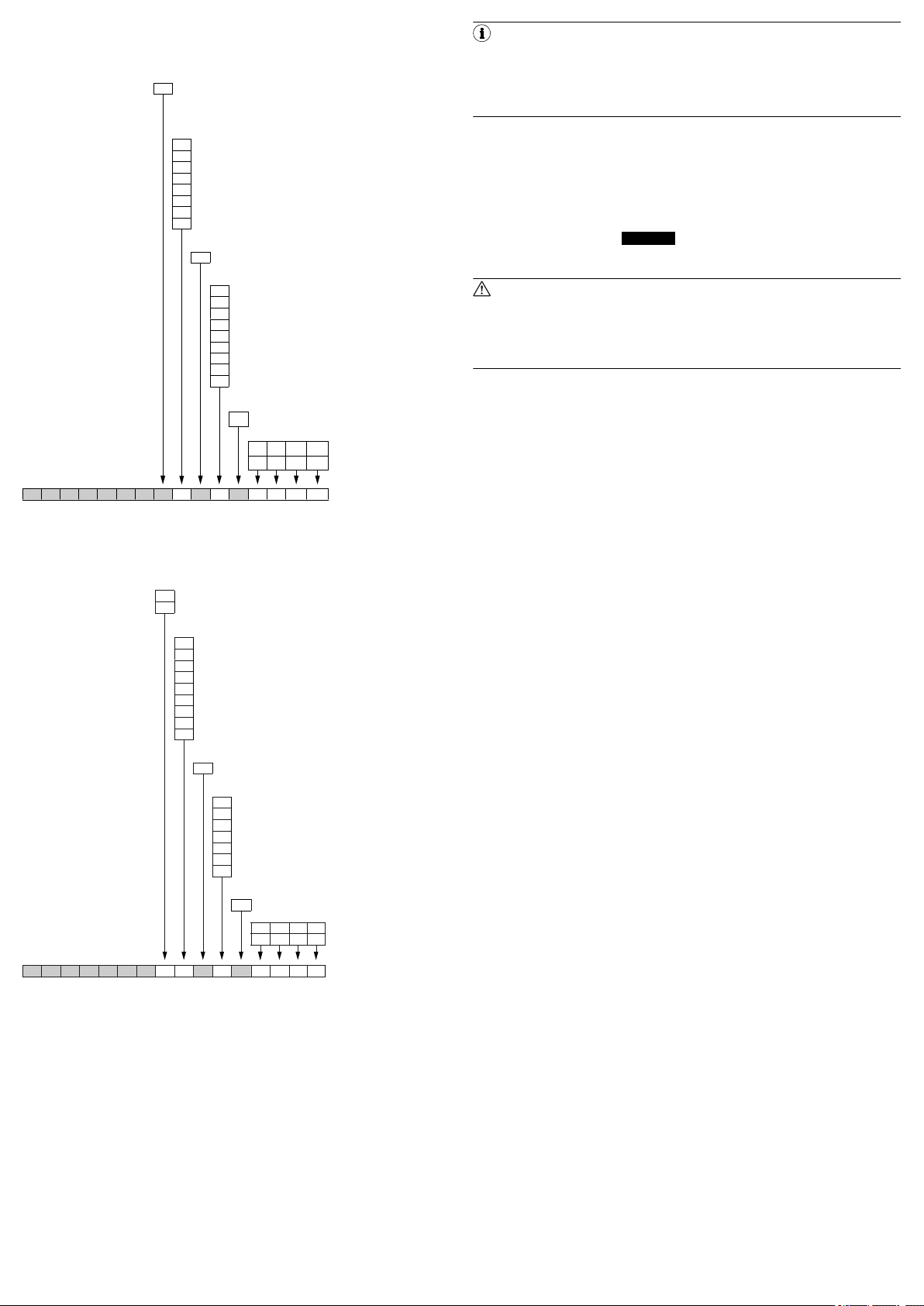
5.2.2 Anbau Hohlwellen-Encoder mit Drehmomentstütze
Falls erforderlich, beigestellte Passfeder (1) auf kundenseitige Antriebswelle
(2) montieren (Kapitel 4.3.1 beachten).
Kundenseitige Antriebswelle (2) blockieren.
Schraubensicherung (Kapitel 5.2.1 beachten) am Gewinde des Klemmrings
(3) oder an beigestellter Torx-Schraube T20 (4) aufbringen.
Torx-Schraube T20 (4) in den Klemmring (3) einführen und vormontieren,
jedoch nicht festziehen.
Encoder auf kundenseitige Antriebswelle (2) nach der Passfeder (1) ausge‐
richtet aufschieben, dabei Abstand Drehmomentstütze (5) zu Montagefläche
(6) in Abhängigkeit der Schraubenlänge (7) berücksichtigen.
Schrauben (7) inklusive Unterlegscheiben (8) vormontieren, dabei Schrau‐
bensicherung (Kapitel 5.2.1 beachten) an jeweiligem Gewinde aufbringen.
Schrauben (7) weiter einschrauben bis Encoder komplett aufgeschoben wer‐
den kann und Drehmomentstütze (5) an Montagefläche (6) anliegt.
Schrauben (7) festziehen, Anzugsdrehmoment: 1,2 ± 0,1 Nm.
Torx-Schraube T20 (4) festziehen, Anzugsdrehmoment: 3,5 ± 0,1 Nm.
5 Montage
Dieses Kapitel beschreibt die Vorbereitung und Durchführung der Montage des
DFS60S Pro.
Schalten Sie die Spannung bei allen von der Montage betroffenen Maschi‐
nen/Anlagen ab.
Vermeiden Sie Schläge und Stöße auf die Welle, dies kann zu Kugellagerde‐
fekten führen.
Ziehen oder drücken Sie niemals am Encoder.
5.1 Befestigungsmaterial
Sie benötigen folgende Schrauben:
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 3
Abbildung 1: Anbau Aufsteckhohlwellen-Encoder
Page 4
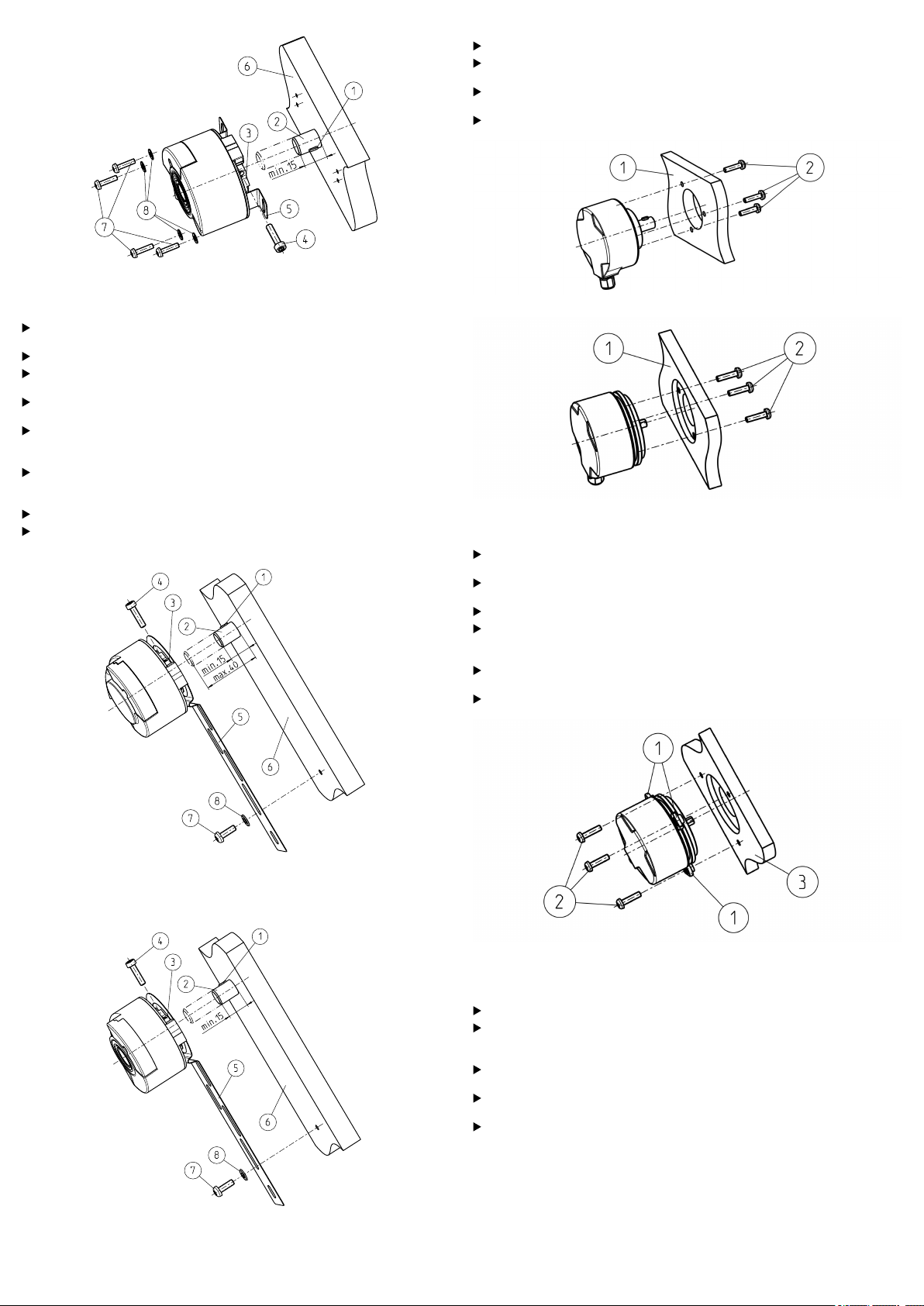
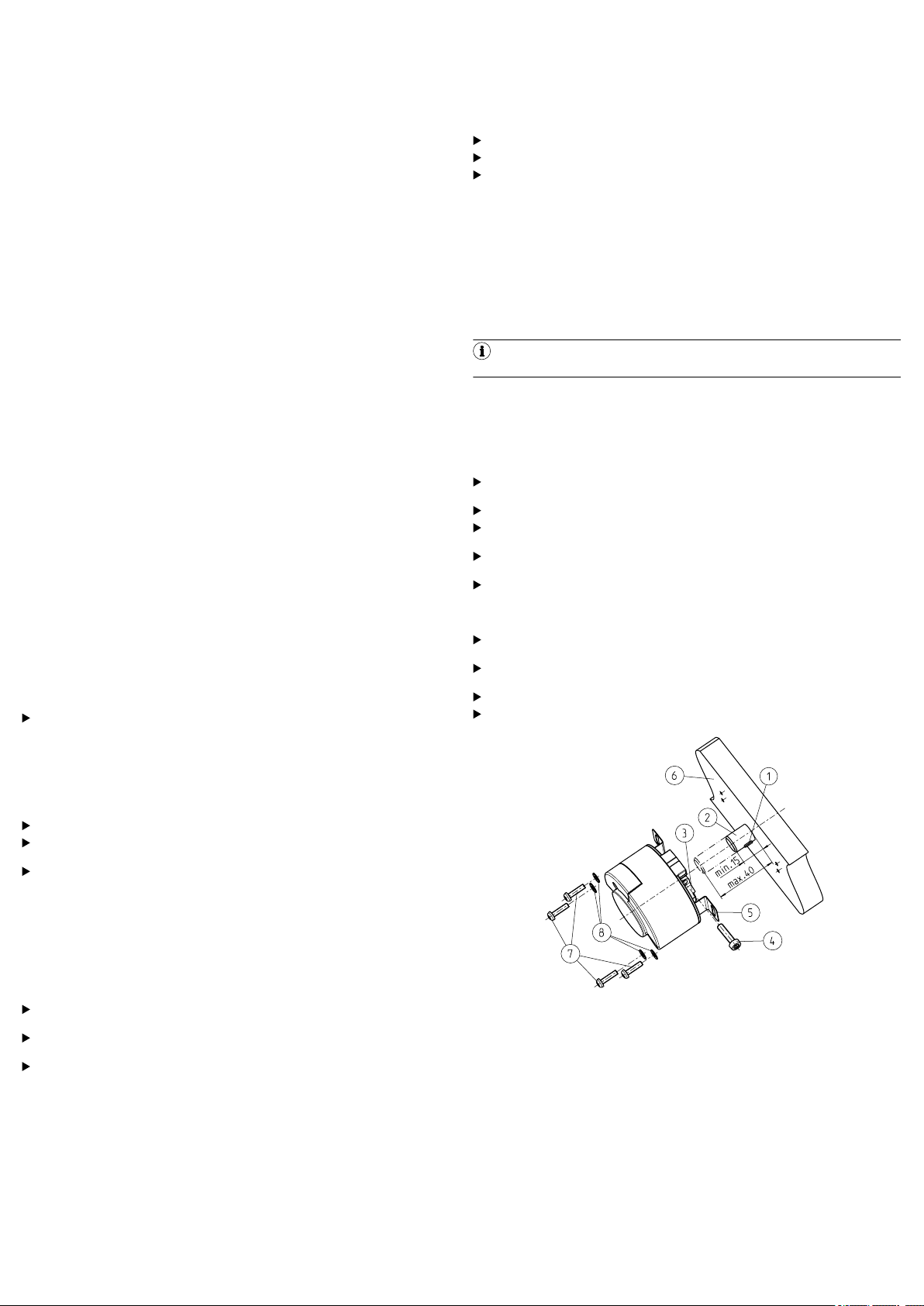
Abbildung 2: Anbau Durchsteckhohlwellen-Encoder
5.2.3 Anbau Hohlwellen-Encoder mit einseitiger Drehmomentstütze, lang
Falls erforderlich, beigestellte Passfeder (1) auf kundenseitige Antriebswelle
(2) montieren (Kapitel 4.3.1 beachten).
Kundenseitige Antriebswelle (2) blockieren.
Schraubensicherung (Kapitel 5.2.1 beachten) am Gewinde des Klemmrings
(3) oder an beigestellter Torx-Schraube T20 (4) aufbringen.
Torx-Schraube T20 (4) in den Klemmring (3) einführen und vormontieren,
jedoch nicht festziehen.
Encoder auf kundenseitige Antriebswelle (2) nach der Passfeder (1) ausge‐
richtet aufschieben, sodass die Drehmomentstütze lang (5) an Montageflä‐
che (6) anliegt.
Drehmomentstütze lang (5) mit mindestens einer Schraube M4 (7) und
Unterlegscheibe (8) befestigen; dabei Schraubensicherung (Kapitel 5.2.1
beachten) an jeweiligem Gewinde aufbringen.
Schraube (7) festziehen, Anzugsdrehmoment: 1,2 ± 0,1 Nm.
Torx-Schraube T20 (4) am Klemmring (3) festziehen, Anzugsdrehmoment:
3,5 ± 0,1 Nm.
5.2.4 Anbau Vollwellen-Encoder über flanschseitige Gewindebohrungen
Encoder in den Zentrier-/Klemmsatz (1) aufschieben.
Schrauben (2) vormontieren, dabei Schraubensicherung (Kapitel 5.2.1
beachten) am jeweiligen Gewinde aufbringen.
Schrauben (2) festziehen, Anzugsdrehmoment:
1,2 ± 0,1 Nm.
Wellenverbindung zwischen Encoder und Antriebswelle durch geeignete elas‐
tische Verbindung herstellen (Kapitel 4.3.2 beachten).
Abbildung 5: Anbau Klemmflansch über flanschseitige Gewindebohrungen
Abbildung 6: Anbau Servoflansch über flanschseitige Gewindebohrungen
5.2.5 Anbau Vollwellen-Encoder mit Servoflansch über Servoklammern
Servoklammern (1) inklusive Schrauben (2) vormontieren, dabei Schrauben‐
sicherung (Kapitel 5.2.1 beachten) am jeweiligen Gewinde aufbringen.
Servoklammern (1) so ausrichten, dass der Encoder in den Zentrier-/Klemm‐
satz (3) aufgeschoben werden kann.
Encoder in den Zentrier-/Klemmsatz (3) aufschieben.
Servoklammern (1) durch Drehen in die Servonut einrücken, hierbei auf
maximale Überdeckung achten und durch Eindrehen der Schrauben (2) fixie‐
ren.
Schrauben (2) festziehen, Anzugsdrehmoment:
1,2 ± 0,1 Nm.
Wellenverbindung zwischen Encoder und Antriebswelle durch geeignete elas‐
tische Verbindung herstellen (Kapitel 4.3.2 beachten).
Abbildung 3: Anbau Aufsteckhohlwellen-Encoder mit einseitiger Drehmoment‐
stütze, lang
Abbildung 7: Anbau Servoflansch mit Servoklammern
5.2.6 Anbau Vollwellen-Encoder mit Servoflansch über Servoklammer-Halb‐
schalen
Encoder in den Zentrier-/Klemmsatz (1) aufschieben.
Servoklammer-Halbschalen (2) inklusive Schrauben (3) vormontieren, dabei
Schraubensicherung (Kapitel 5.2.1 beachten) am jeweiligen Gewinde auf‐
bringen.
Servoklammer-Halbschalen (2) in Servonut ausrichten, hierbei auf maximale
Überdeckung achten, und durch Eindrehen der Schrauben (3) fixieren.
Schrauben (3) festziehen, Anzugsdrehmoment:
1,2 ± 0,1 Nm.
Wellenverbindung zwischen Encoder und Antriebswelle durch geeignete elas‐
tische Verbindung herstellen (Kapitel 4.3.2 beachten).
Abbildung 4: Anbau Durchsteckhohlwellen-Encoder mit einseitiger Drehmoment‐
stütze, lang
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 4
Page 5
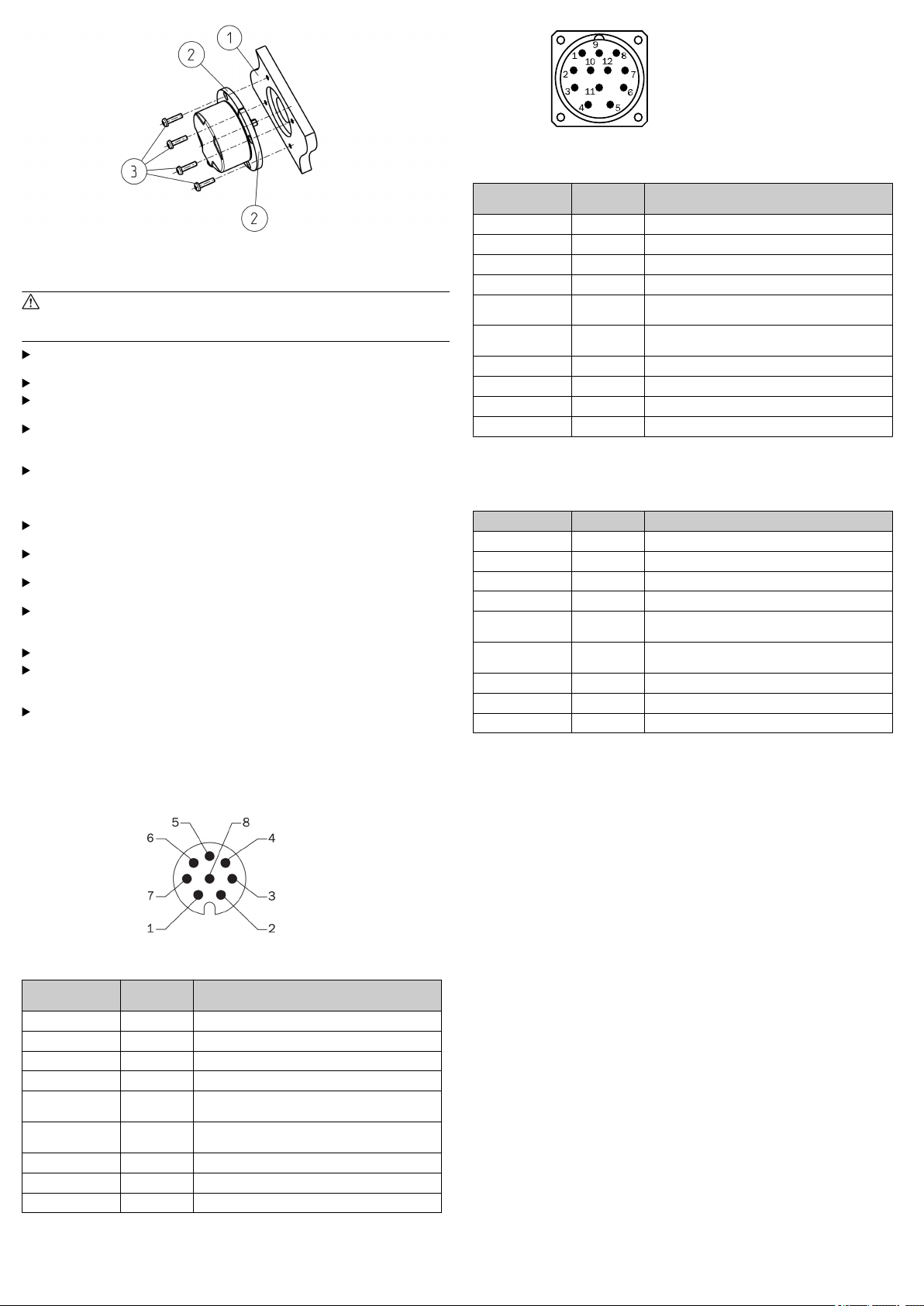
Abbildung 8: Anbau mit Servoklammer-Halbschalen
6 Elektrische Installation
WARNUNG
Schalten Sie die Spannung bei allen von der Installation betroffenen Maschi‐
nen/Anlagen/Fahrzeugen ab.
Beim Anschluss des DFS60S Pro die Betriebsanleitung des übergeordneten
Auswertesystems beachten.
Auf eine sauber aufgelegte Schirmanbindung achten.
Gehäuse bzw. Schirmung an Erde bzw. Masse anschließen. Dazu das Kabel-
Schirmgeflecht großflächig anschließen.
Nur abgeschirmte und paarweise verdrillte Leitungen verwenden. Alle Signal‐
leitungen/Schnittstellensignale müssen mit dem jeweiligen komplementären
Signal paarweise verdrillt sein.
Drehmomentstütze gegenüber jeglicher Belastung durch die Anschlusslei‐
tungen absichern. Den kleinsten zulässigen Biegeradius der Anschlussleitun‐
gen beachten (zulässiger Biegeradius für Encoder mit Leitungsabgang: min.
7,5 × Außendurchmesser Leitung).
Geeignete Leitung in Abhängigkeit der Applikation und Einsatzbedingungen
verwenden.
Wir empfehlen die Verwendung von SICK-Zubehörleitungen (siehe entspre‐
chende Datenblätter).
Den Encoder mit Versorgungsspannung, die aus PELV-Systemen
(EN 50 178) erzeugt wird, versorgen (Verschmutzungsgrad 2).
Der Strom des Netzteils, das den Encoder versorgt, muss extern auf
max. 1 A begrenzt werden – entweder durch das Netzteil selbst oder durch
eine Sicherung.
Encodersignale differenziell auswerten.
Verwendete und nicht verwendete Encodersignale differenziell abschließen,
d.h. zwischen dem Signal und dem Komplementärsignal einen Abschlusswi‐
derstand von ≥ 120 Ω einfügen.
Bei Encodern mit Steckerabgang nicht verwendete Signale nicht weiterfüh‐
ren. Abschließen ist hier nicht erforderlich.
6.1 Anschlussübersicht
Der DFS60S Pro wird mit einem der folgenden Anschlüsse geliefert:
•
M12-Stecker, 8-polig
•
M23-Stecker, 12-polig
•
Offene Leitungsenden
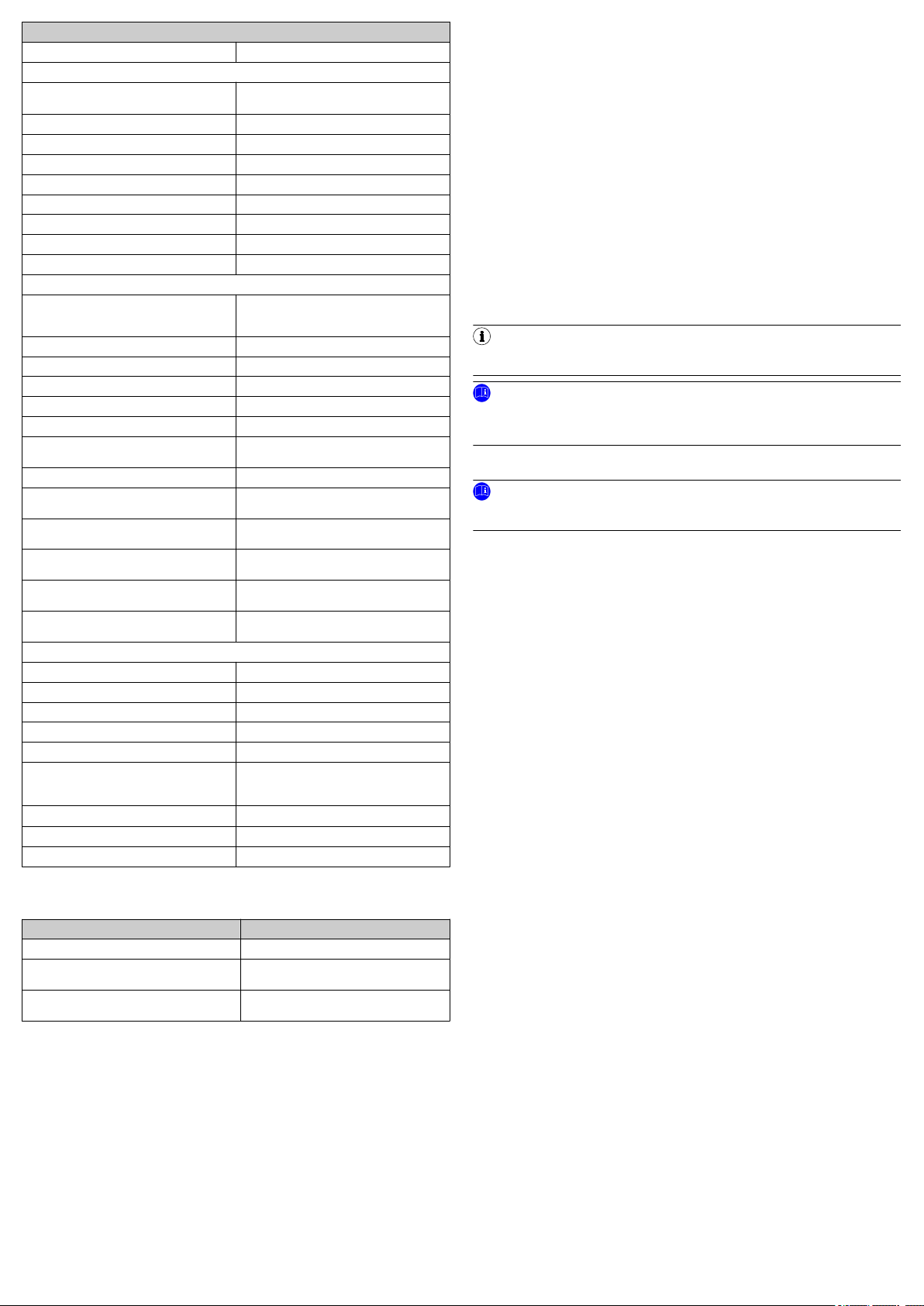
Abbildung 9: Anschluss M12, 8-polig
Pin-Belegung Anschluss M12, 8-polig
Pin
M12, 8polig
1 COS– Signalleitung
2 COS+ Signalleitung
3 SIN– Signalleitung
4 SIN+ Signalleitung
5 Z¯ Signalleitung (nicht für sicherheitsgerichtete
6 Z Signalleitung (nicht für sicherheitsgerichtete
7 GND Masseanschluss
8 +US Versorgungsspannung (Potenzialfrei zum Gehäuse)
Schirm – Mit Encodergehäuse verbunden
Signal Bedeutung
Betriebsarten!)
Betriebsarten!)
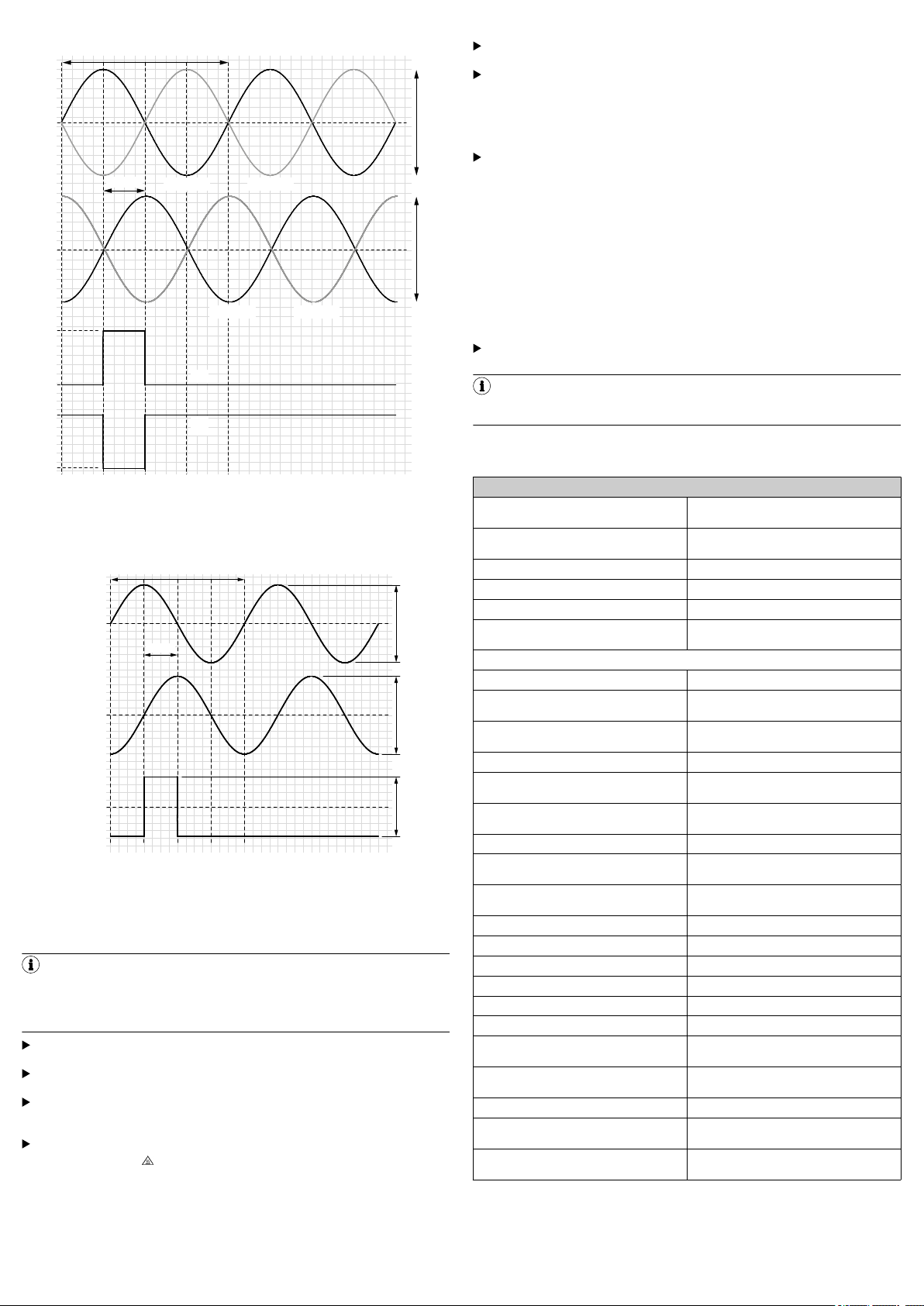
Abbildung 10: Anschluss M23, 12-polig
Pin-Belegung Anschluss M23, 12-polig
Pin
M23, 12polig
6 COS– Signalleitung
5 COS+ Signalleitung
1 SIN– Signalleitung
8 SIN+ Signalleitung
4 Z¯ Signalleitung (nicht für sicherheitsgerichtete
3 Z Signalleitung (nicht für sicherheitsgerichtete
10 GND Masseanschluss
12 +US Versorgungsspannung (potenzialfrei zum Gehäuse)
2, 7, 9, 11 – Nicht belegen
Schirm – Mit Encodergehäuse verbunden
Anschluss mit offenen Leitungsenden
Leiterquerschnitt:
8 × 0,15 mm² + 1,5 mm² Schirm
Leitungsbelegung Anschluss mit offenen Leitungsenden
Leitungsende Signal Bedeutung
Braun COS– Signalleitung
Weiß COS+ Signalleitung
Schwarz SIN– Signalleitung
Rosa SIN+ Signalleitung
Gelb Z¯ Signalleitung (nicht für sicherheitsgerichtete
Violett Z Signalleitung (nicht für sicherheitsgerichtete
Blau GND Masseanschluss
Rot +US Versorgungsspannung (potenzialfrei zum Gehäuse)
Schirm – Mit Encodergehäuse verbunden
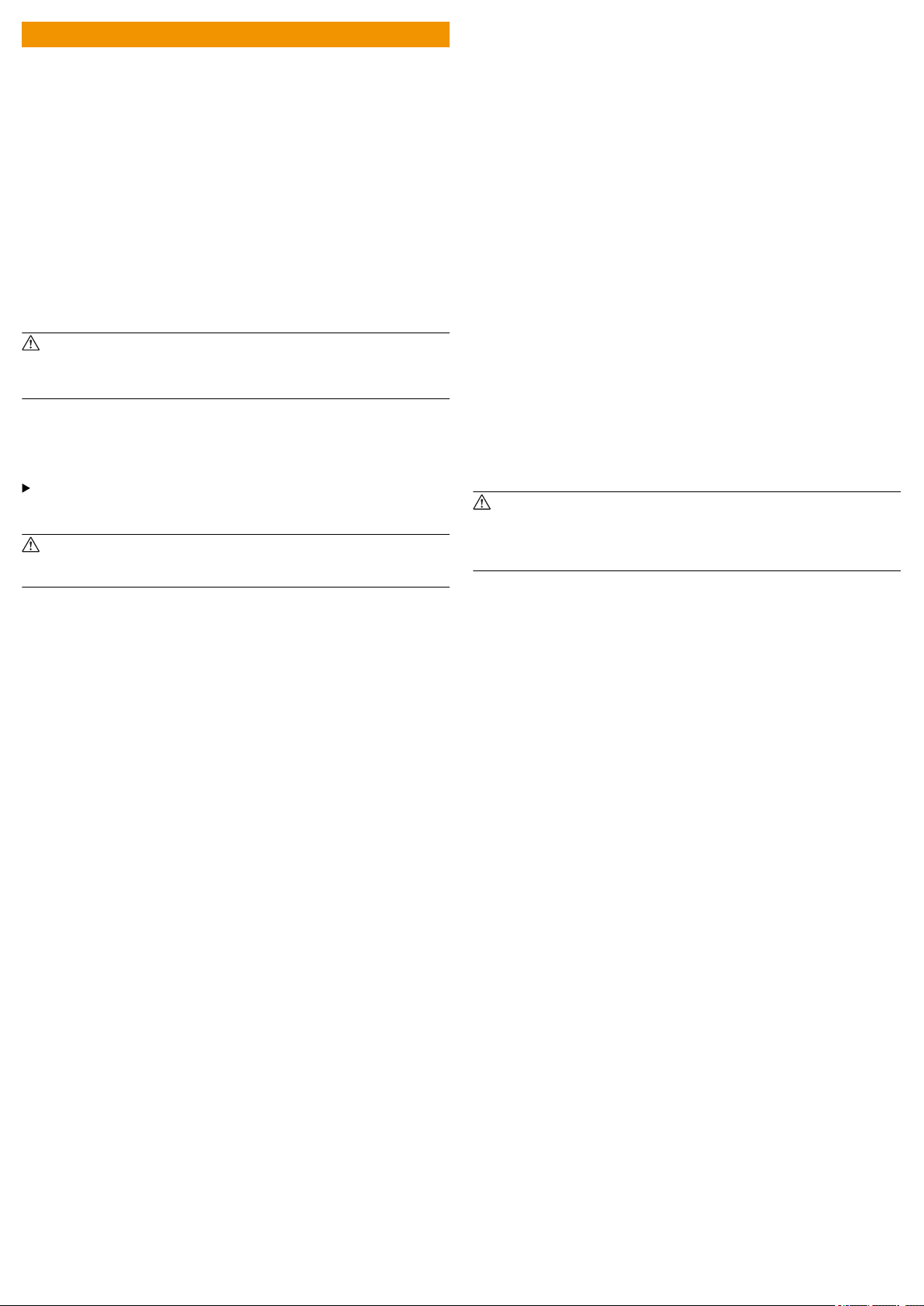
6.2 Signale des Encoders
Der DFS60S Pro verfügt über die folgenden Signale:
•
Versorgungsspannung +US des Encoders: Der Betriebsspannungsbereich
gemessen am Encoder liegt zwischen 4,5 V und 32 V.
•
Masseanschluss GND des Encoders: Galvanisch getrennt vom Gehäuse. Die
auf GND bezogene Spannung ist +US.
•
Prozessdatenkanal SIN+: SIN+ ist ein Sinussignal von 0,5 VPP mit einem sta‐
tischen Offset von 2,5 V.
•
Prozessdatenkanal SIN–: SIN– ist ein Sinussignal von 0,5 VPP mit einem sta‐
tischen Offset von 2,5 V. SIN– ist antivalent zum Signal SIN+.
•
Prozessdatenkanal COS+: COS+ ist ein Cosinussignal von 0,5 VPP mit einem
statischen Offset von 2,5 V. Das Signal COS+ ist um 90° zum Signal SIN+
phasenverschoben.
•
Prozessdatenkanal COS–: COS– ist ein Cosinussignal von 0,5 VPP mit einem
statischen Offset von 2,5 V. COS– ist antivalent zum Signal COS+.
•
Nullimpuls Z: Z gibt die Nullposition des Encoders als differenzielles Digitalsi‐
gnal mit einer Breite von 90° elektrisch (el.) und einem Pegel von 1,75 V
(Low) und 2,9 V (High) aus.
Signal Bedeutung
Betriebsarten!)
Betriebsarten!)
Betriebsarten!)
Betriebsarten!)
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 5
Page 6
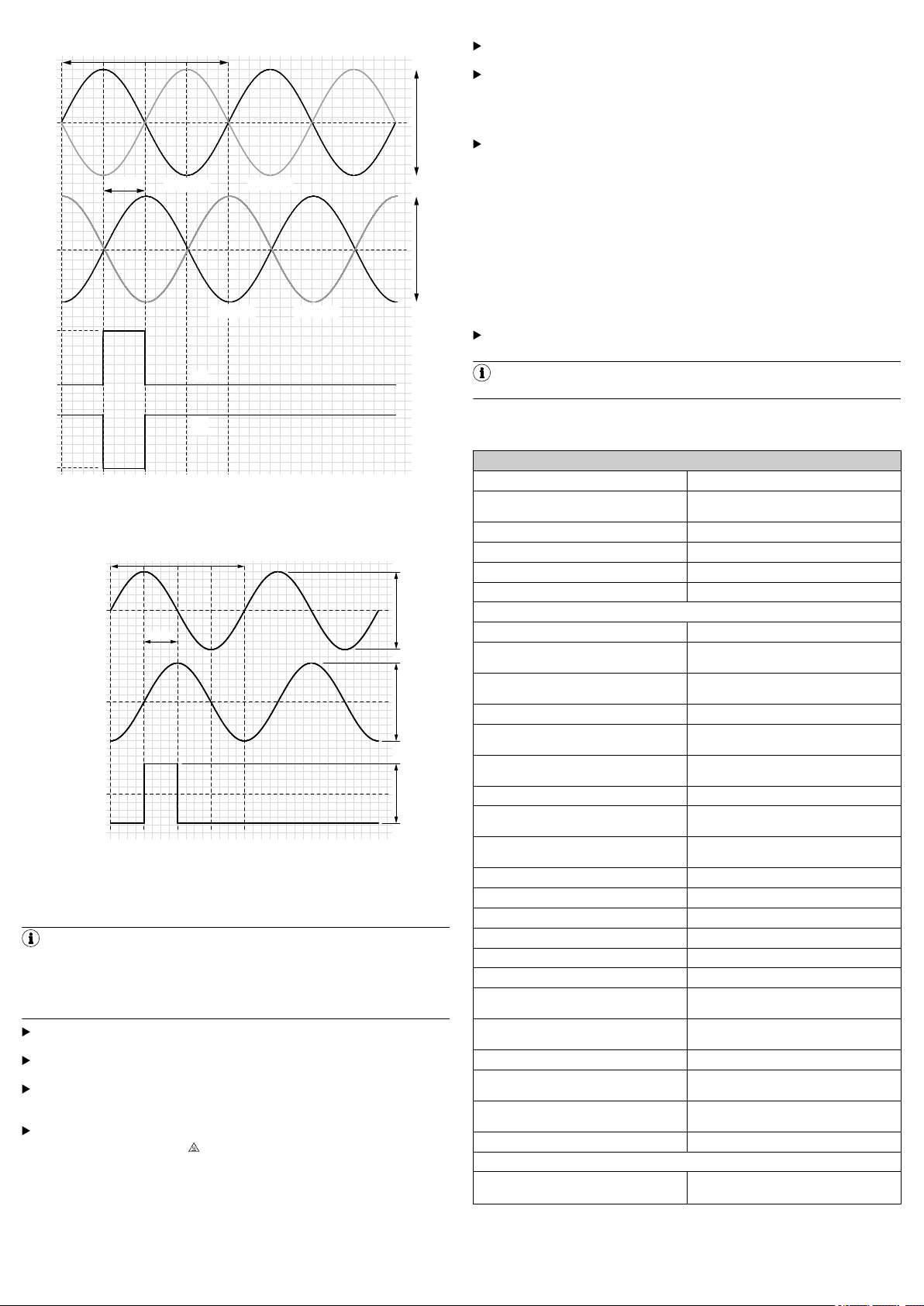
2,5 V
2,5 V
2,9 V
1,75 V
2,9 V
1,75 V
0,5 V
0,5 V
360° el.
90° el.
¯Z
COS+ COS–
SIN+ SIN–
Z
COS+ – COS–
SIN+ – SIN–
Z – ¯Z
0 V
0 V
0 V
1 V
1 V
2,3 V
360° el.
90°el.
8 Instandhaltung
Der DFS60S Pro ist wartungsfrei. Bei Defekt ist keine Reparatur möglich.
Bitte kontaktieren Sie uns bei Reklamationen.
Gebrauchsdauer beachten. Der sichere Encoder DFS60S Pro hat eine maxi‐
male Gebrauchsdauer, nach der er in jedem Fall außer Verkehr gebracht
werden muss. Hierbei ist neben der Gebrauchsdauer TM auch die Lagerle‐
bensdauer zu beachten. Der Parameter der applikationsabhängig zuerst
erreicht wird, bestimmt den Zeitpunkt der erforderlichen Außerbetrieb‐
nahme.
Das Baujahr des Encoders wird auf dem Geräteetikett bzw. Verpackungseti‐
kett kodiert als vierstellige Zahl angegeben (yyww). Die ersten beiden Ziffern
yy bezeichnen das Jahr (ohne Jahrhundert), die letzten beiden Ziffern ww die
Kalenderwoche des Herstellungsprozesses.
9 Außerbetriebnahme
9.1 Umweltgerechtes Verhalten
Der Sicherheits-Encoder ist so konstruiert, dass er die Umwelt so wenig wie mög‐
lich belastet. Er verbraucht nur ein Minimum an Energie und Ressourcen.
Handeln Sie auch am Arbeitsplatz immer mit Rücksicht auf die Umwelt.
b
Beachten Sie deshalb die folgenden Informationen zur Entsorgung.
9.2 Entsorgung
Entsorgen Sie unbrauchbare oder irreparable Geräte immer gemäß den
jeweils gültigen landesspezifischen Abfallbeseitigungsvorschriften.
HINWEIS
Gerne sind wir Ihnen bei der Entsorgung dieser Geräte behilflich. Sprechen
Sie uns an.
10 Technische Daten
Datenblatt DFS60S Pro
Performance
Abbildung 11: Signale des Encoders vor der Differenzbildung bei 120 Ω Last,
Signaldiagramm bei Drehung der Welle im Uhrzeigersinn mit Blick in Richtung
Welle
Anzahl der Sinus-/ Cosinusperioden pro
Umdrehung
Messschrit t (nicht sicherheitsgerichtet) 0,3 Winkelsekunden
Integrale Nichtlinearität Typ. ± 45 Winkelsekunden
Differenzielle Nichtlinearität ± 7 Winkelsekunden
Referenzsignal, Anzahl 1
Referenzsignal, Lage 90°, elektrisch, logisch verknüpf t mit Sinus/
Mechanische Daten
Masse
Klemmflansch
Servoflansch
Durchsteckhohlwelle
Aufsteckhohlwelle
Anlaufdrehmoment bei 20 °C
Klemmflansch
Servoflansch
Durchsteckhohlwelle
Aufsteckhohlwelle
Betriebsdrehmoment bei 20 °C
Abbildung 12: Signale des Encoders nach der Differenzbildung bei 120 Ω Last,
Signaldiagramm bei Drehung der Welle im Uhrzeigersinn mit Blick in Richtung
Welle
7 Inbetriebnahme
HINWEIS
Keine Inbetriebnahme ohne Prüfung durch eine befähigte Person!
Bevor Sie eine Anlage oder eine Maschine, in die der integriert ist, erstmalig
in Betrieb nehmen, muss diese durch eine befähigte Person überprüft und
freigegeben werden. Beachten Sie hierzu die Hinweise im Kapitel 2.
Initialisierungszeit nach dem Einschalten berücksichtigen. Während dieser
Zeit gibt der Encoder keine gültigen Signale aus.
Prüfen, ob alle Sicherheitsfunktionen bei allen relevanten Geschwindigkeiten
wie geplant wirken.
Prüfen, ob die maximale im Betrieb des Encoders entstehende Temperatur
am Arbeitspunkt des Encoders (siehe Maßzeichnungen , „A“) innerhalb des
in den Technischen Daten angegebenen Arbeitstemperaturbereiches liegt.
Wenn die Temperatur am Arbeitspunkt über 70 °C liegt:
– Piktogramm "Achtung! Heiße Oberflächen“ gemäß IEC 60 4175041
gut sichtbar am Encodergehäuse anbringen.
– Die Bedeutung des Piktogramms in der Bedienungsanleitung der
Max. Winkelbeschleunigung ≤ 5 × 105 rad/s²
Zulässige Wellenbelastung (radial/axial) 80 N/40 N
Zulässige Wellenbewegung (Hohlwelle) –
Betriebsdrehzahl max.
Trägheitsmoment des Rotors
Klemmflansch
Servoflansch
Durchsteckhohlwelle
Aufsteckhohlwelle
Statisch (radial/axial) ± 0,3 mm/± 0,5 mm
Dynamisch (radial/axial) ± 0,05 mm/ ± 0,1 mm
4
Klemmflansch
Servoflansch
Durchsteckhohlwelle
Aufsteckhohlwelle
Klemmflansch
Servoflansch
Durchsteckhohlwelle
Aufsteckhohlwelle
Maschine, in die der Encoder eingebaut wird, erläutern.
7.1 Prüfen
Im Betrieb sind keine weiteren prüfenden Maßnahmen erforderlich.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 6
2
Bezogen auf entspannte Drehmomentstüt ze.
3
Bezogen auf Encoder mit Steckerabgang.
4
Die Arbeitstemperatur muss bei Nenndrehzahl gemessen werden und pro 1000 U/min
um 3,0 K gesenkt werden.
1.024
Bei 12 Bit Interpolation
Cosinus
ca. 0,30 kg
ca. 0,25 kg
3
3
≤0,5 Ncm
≤0,8 Ncm
≤0,3 Ncm
≤0,6 Ncm
9.000 min
6.000 min
–1
–1
8 gcm²
56 gcm²
2
–1
Page 7
Performance
Lagerlebensdauer
5
3,6 × 109 Umdrehungen
6
Elektrische Daten
Elektrische Schnittstellen 4,5 V … 32 V, Sin/Cos
1,0 VSS (differenziell)
Ausgabefrequenz ≤153,6 kHz
Initialisierungszeit nach dem Einschalten 50 ms
7
Lastwiderstand ≤ 120 Ω
Leistungsaufnahme ohne Last ≤0,7 W
Schutzklasse gemäß DIN EN 61 140 III
Verschmutzungsgrad 2
Verpolungsschutz Ja
Kurzschlussfestigkeit der Ausgänge Ja
8
Umgebungsdaten
EMV Gemäß
Schutzart gemäß IEC 60 529 IP 65
Zulässige relative Luftfeuchtigkeit
Arbeitstemperaturbereich
10
11
EN 61 000-6-2, EN 61 000-6-3
IEC 61 326-3-1
9
90 %
M12, M23 –30 … +95 °C
Leitungsabgang –30 … +85 °C
Lagerungstemperaturbereich (ohne Verpa‐
ckung)
–30 … +90 °C
Betriebshöhe Max. 2.000 m über N. N. (80 kPa)
Widerstandsfähigkeit gegenüber Schock
gemäß EN 60 068-2-27
Widerstandsfähigkeit gegenüber Vibration
gemäß EN 60 068-26)
12
12
Leitungsabgang 30 g
M12 inkl. Gegenstecker 30 g
M23 inkl. Gegenstecker 10 g
100 g/6 ms
10 … 1.000 Hz
10 … 1.000 Hz
10 … 1.000 Hz
13
Sicherheitstechnische Kenngrößen
Sicherheits-Integritätslevel
14
SIL2 (IEC 61 508), SILCL2 (EN 62 061)
Kategorie 3 (EN ISO 13 849)
Testrate Nicht erforderlich
Maximale Anforderungsrate Kontinuierlich (Analogsignale)
Performance Level
16
PFH
bei 95 °C Arbeitstemperatur) (Wahr‐
D
scheinlichkeit eines Gefahr bringenden Aus‐
falls pro Stunde)
TM (Gebrauchsdauer)
15
5
PL d (EN ISO 13 849)
–8
1,7 × 10
20 Jahre (EN ISO 13 849)
Sicherheitsgerichteter Messschritt 0,09° Quadraturauswertung
Sicherheitsgerichtete Genauigkeit ±0,09°
Die Zubehörteile müssen vom Verwender des Produkts bei der Herstellung der
Gesamtmaschine im Rahmen der Realisierung der entsprechenden Sicherheits‐
funktion(en) betrachtet werden. Gegebenenfalls müssen die erforderlichen Feh‐
lerausschlüsse nachgewiesen werden.
12 Anhang
12.1 Lieferumfang
•
Encoder DFS60S Pro gemäß Typenschlüssel
•
Passfeder gemäß DIN 6885-A (bei Hohlwellen-Variante)
•
Torx-Schraube T20 für Klemmring (bei Hohlwellen-Variante)
•
Allgemeine Sicherheitshinweise
•
Betriebsanleitung
12.2 Konformitäten
Der sichere Encoder DFS60S Pro wurde gemäß den folgenden Richtlinien herge‐
stellt:
•
Maschinenrichtlinie 2006/42/EG
•
EMV-Richtlinie 2004/108/EG
Die vollständige EU-Konformitätserklärung finden Sie auf der SICK-Homepage im
Internet: www.sick.com
HINWEIS
Das Zertifikat dieses Produktes bezieht sich auf das Produkt selbst sowie auf
das Zubehör.
WICHTIG
Weiterführende und detaillierte Informationen zur Konformitätserklärung fin‐
den Sie am Ende der Betriebsanleitung (im sprachneutralen Zusatzblatt)
sowie auf www.sick.com.
13 Maßzeichnungen
WICHTIG
Die Maßzeichnungen finden Sie am Ende der Betriebsanleitung (im sprach‐
neutralen Zusatzblatt).
11 Zubehör
Artikelnummern Zubehör
Artikel Artikelnr.
BEF-WK-SF Servoklammern, groß (3 Stk.) 2029166
BEF-WK-SF Servoklammern, Halbschalen (2
Stk.)
BEF-DS02DFS/VFS
Drehmomentstütze, lang
Weiteres Zubehör finden Sie in der Produktinformation auf www.sick.com.
5
Die Gebrauchsdauer kann applikationsabhängig auch von der Lagerlebensdauer begrenzt
sein.
6
Gerechnet für max. Drehzahl und Temperatur.
7
Nach dieser Zeit können gültige Signale gelesen werden.
8
Kurzschluss gegenüber einem anderen Kanal oder GND zulässig für max. 30 s. Bei US ≤ 12
V zusätzlich Kurzschluss gegen US zulässig für max. 30 s.
9
Bei Steckerabgang: Gegenstecker muss aufgesteckt sein und mindestens IP 65 erfüllen.
10
Betauung der optischen Abtastung nicht zulässig.
11
Die Arbeitstemperatur muss bei Nenndrehzahl gemessen werden und pro 1000 U/min–1
um 3,0 K gesenkt werden.
12
Geprüft im Betrieb mit Vektorlängenüberwachung.
13
Anzahl der Schocks in jeder Prüfachse, sowohl positiv als auch negativ: 3.
14
Für detaillierte Informationen zur Sicherheitsauslegung Ihrer Maschine/Anlage setzen Sie
sich bitte mit Ihrer zuständigen SICK-Niederlassung in Verbindung.
15
Für detaillierte Informationen zur Sicherheitsauslegung Ihrer Maschine/Anlage setzen Sie
sich bitte mit Ihrer zuständigen SICK-Niederlas sung in Verbindung
16
Die angegebenen Werte beziehen sich auf einen Diagnosedeckungsgrad von 99%, der
durch das externe Antriebssystem erreicht werden muss.
17
Die Drehmomentstütze wird werkseitig montiert ausgeliefert. Ein kundenseitiger Tausch der
Drehmomentstütze ist nicht zulässig.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 7
2029165
Auf Anfrage
17
Page 8
O P E R A T I N G I N S T R U C T I O N S e n
Safe encoder
1 About this document
This document is an original document.
Please read these operating instructions carefully before using the DFS60S Pro
safe encoder or mounting it, putting it into operation, or servicing it.
1.1 Purpose of this document
These operating instructions provide technical personnel of the machine manu‐
facturer or the machine operator with instructions regarding the safe assembly,
electrical installation, commissioning, operation and maintenance of the DFS60S
Pro.
Furthermore, planning and using safe encoders such as the DFS60S Pro also
requires technical skills that are not covered in this document.
The official and legal regulations for operating the DFS60S Pro must always be
complied with.
1.2 Symbols and document conventions
WARNING
A warning indicates a specific or potential hazard. This is intended to protect
you against accidents.
Carefully read and follow the warnings.
Instructions requiring specific action are indicated by an arrow. Carefully
b
read and follow the instructions for action.
2 Safety information
This chapter concerns your own safety and the safety of the system operator.
Please read this chapter carefully before you begin working with the DFS60S
Pro on the machine or system in which the safe encoder is used.
2.1 General safety notes
WARNING
Follow the safety notes and protective measures.
Observe the following to ensure the safe use of the DFS60S Pro as intended.
The national and international legal specifications apply to the installation and
use of the DFS60S Pro, to its commissioning, and to technical inspections
repeated at regular intervals, in particular:
•
The Machinery Directive 2006/42/EC
•
The Work Equipment Directive 2009/104/EC
•
The work safety regulations and safety regulations
•
Any other relevant safety regulations
The manufacturer and operator of the machine on which the DFS60S Pro is used
are responsible for coordinating and complying with all applicable safety specifica‐
tions and regulations, in cooperation with the relevant authorities.
These operating instructions must be made available to the operator of the
machine on which the DFS60S Pro safe encoder is used. The machine operator
must be instructed by qualified safety personnel and read the operating instruc‐
tions.
2.2 Intended use
The DFS60S Pro can be used in safety applications up to category 3 in accor‐
dance with EN ISO 13 849, up to SIL2 in accordance with IEC 61 508, up to
SILCL2 in accordance with EN 62 061, or up to PL d in accordance with
EN ISO 13 849.
The DFS60S Pro supports safety functions based on the speed and direction of
rotation information.
The encoder is not able to create a safe state independently.
The speed, direction of rotation, downtime, and faults that could result in a hazard
must be detected by a higher-level evaluation system. The requirements for the
evaluation system are described in chapter 4.1 and chapter 4.2.
The DFS60S Pro must only be used within the limits of the prescribed and speci‐
fied technical data and operating conditions. The requirements and ambient con‐
ditions defined in the technical data must be observed and maintained to allow
the DFS60S Pro to meet its warranted function.
If used in any other way or if alterations are made to the device – including in the
context of mounting and installation – this will render void any warranty claims
directed to SICK STEGMANN GmbH.
2.3 Improper use
The DFS60S Pro does not support any safety-related operating modes in the con‐
text of an absolute position.
The DFS60S Pro emits a zero pulse as a reference. This signal must not be used
for safety-related operating modes.
The DFS60S Pro is not suitable for the following applications, among others:
•
Underwater
•
In explosion-hazardous areas
•
In areas accessible to the public
2.4 Requirements for the qualification of personnel
The DFS60S Pro must only be configured, installed, connected, commissioned
and serviced by qualified safety personnel.
Project planning
Where project planning is concerned, a person is considered competent when
he/she has expertise and experience in the selection and use of safe encoders
on machines and is familiar with the relevant technical rules and national work
safety regulations.
Mechanical mounting and commissioning
Where mechanical mounting and commissioning are concerned, a person is con‐
sidered competent when he/she has expertise and experience in the field.
Electrical installation
Where electrical installation and commissioning are concerned, a person is con‐
sidered competent when he/she has expertise and experience in the field.
3 Product description
The DFS60S Pro is a high-resolution incremental encoder with a diameter of
60 mm.
Encoder signals are transmitted to the evaluation system using analog signals in
the form of sine/cosine-wave voltages.
If a suitable evaluation unit is used, the DFS60S Pro can then be used for safetyrelated operating modes that are associated with the speed and direction of rota‐
tion. It can then fulfill safety functions in accordance with IEC 61 800-5-2.
In accordance with IEC 61 800-5-2, the mechanical interface has been dimen‐
sioned in such a way that it is possible to assume errors are ruled out based on
its over-dimensioning.
The DFS60S Pro is subject to limited bearing service life (see technical data).
After its bearing service life is exceeded, bearing wear or fatigue could lead to
bearing failure. To prevent this, the DFS60S Pro must be taken out of operation
no later than when the bearing service life has been reached. The bearing service
life is also influenced by the specific application, in particular due to operating
modes with low speeds, reversing operation and mechanical vibrations. Current
should be prevented from passing through the ball bearing (e.g., due to injected
currents).
External plausibilization of the sensor information can be helpful for increasing
diagnostic coverage of the safe sensor regarding unexpected bearing failure (e.g.,
due to difficult operating conditions, borderline load, and the like).
WARNING
Safety note
The DFS60S Pro must not be used for safety applications beyond its mission
time (see technical data). The mission time can be limited by the bearing ser‐
vice life specific to the application.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 8
Page 9
3.1 Type code
Solid shaft
Type
S Solid shaf t
Mechanical design
1 Servo flange, M4 thread, solid shaft Ø6 × 10 mm with face
D Servo flange, M4 thread, solid shaft Ø6 × 10 mm with feather key
F Servo flange, M3 thread, solid shaft Ø6 × 10 mm with face
G Servo flange, M3 thread, solid shaft Ø6 × 10 mm with feather key
4 Face mount flange, M4 thread, solid shaft Ø10 × 19 mm with face
E Face mount flange, M4 thread, solid shaft Ø10 × 19 mm with feather key
H Face mount flange, M3 thread, solid shaft Ø10 × 19 mm with face
J Face mount flange, M3 thread, solid shaft Ø10 × 19 mm with feather key
Electrical interface
O 4.5 … 32 V, SIN/COS
Connection type
Resolution
A M23 male connector, 12-pin, radial
B M23 male connector, 12-pin, axial
C M12 male connector, 8-pin, radial
D M12 male connector, 8-pin, axial
J Cable, 8-wire universal, 0.5 m1)
K Cable, 8-wire universal, 1.5 m
1)
L Cable, 8-wire, universal, 3 m1)
M Cable, 8-wire, universal, 5 m1)
N Cable, 8-wire, universal, 10 m1)
Periods per revolution
1 0 2 4
0 S 0 1 Stator coupling,
long (only with types B, T)
Resolution, 1,024 periods
D F S 6 0 S - S O 0
Hollow shaft
Type
B Blind hollow shaft
T Through hollow shaft
Mechanical design
A Hollow shaft Ø6 mm with feather key groove
B Hollow shaft Ø8 mm with feather key groove
C Hollow shaft Ø3/8” with feather key groove
D Hollow shaft Ø10 mm with feather key groove
E Hollow shaft Ø12 mm with feather key groove
F Hollow shaft Ø1/2” with feather key groove
G Hollow shaft Ø14 mm with feather key groove
H Hollow shaft Ø15 mm with feather key groove
J Hollow shaft Ø5/8” with feather key groove
Electrical interface
O 4.5 … 32 V, SIN/COS
Connection type
Resolution
A M23 male connector, 12-pin, radial
C M12 male connector, 8-pin, radial
J Cable, 8-wire universal, 0.5 m 1)
K Cable, 8-wire universal, 1.5 m
1)
L Cable, 8-wire, universal, 3 m
1)
M Cable, 8-wire, universal, 5 m
1)
N Cable, 8-wire, universal, 10 m
1)
Periods per revolution
1 0 2 4
0 S 0 1
Resolution, 1,024 periods
Stator coupling,
long (only with types B, T)
D F S 6 0 S - 000
NOTE
Deviations can arise as a result of:
•
Pairing tolerances in switching thresholds:
± 1 increment
•
Pairing tolerances of sampling times: Number of increments in time dif‐
ference at maximum speed
The differential signals must always be used to evaluate the signals (see
chapter 6.2).
Square-wave signals must be formed from the differential signals using suitable
switching elements (e.g., comparators). These square-wave signals are used for
counting by means of appropriate methods (e.g., a quadrature decoder).
The switching thresholds must be selected so that the lower limit of the vector
length monitoring (see chapter 4.2.1) is not exceeded. Accordingly, the upper
switching threshold – including tolerance – must be a maximum of 150 mV above
the center of the signal (see figure 12 ) and the lower switching threshold –
including tolerance – must be a maximum of 150 mV below the center of the sig‐
nal.
WARNING
If the switching thresholds are not dimensioned appropriately and hysteresis
occurs during signal evaluation, this can cause additional signal edges to be
detected incorrectly or an incorrect failure to detect signal edges. This can
lead to the direction of rotation, position, or speed being determined incor‐
rectly, for example.
Using the counter, it is possible to achieve a resolution of 4,096 steps per rotation
(i.e., 4 steps per signal period or 1 step per quadrant of each signal period).
The diagnostic degree of coverage (DC) must be at least 99% to enable error
detection in the encoder signals. To achieve this, the diagnostic requirements
from chapter 4.2 must be fulfilled. Diagnosis must be carried out within the
process safety time18.
4.2 Diagnostic requirements and error detection
In accordance with IEC 61800-5-2, the downstream evaluation system should
ensure the following diagnostic requirements are met and error detection is pro‐
1) The universal cable outlet is positioned so that it is possible to lay it
without bends in a radial or axial direction. UL approval not available.
vided; this is based on the error assumptions that the standard lists in relation to
the use of motion and position feedback sensors.
If an error is detected during one of the diagnostic processes listed below, an
error response must be initiated to bring the application into a safe state.
In the event of an error, the application must be brought into a safe state before a
hazardous situation can arise. The sum of the maximum time required for error
detection and the time for responding to errors must therefore be less than the
process safety time18.
The maximum time required for error detection is the interval during which the
diagnostic measures listed below are repeated in full.
4.2.1 Analog sine/cosine signal faults
To detect all impermissible level changes in the relationship between sine and
cosine, the underlying mathematical relationship between sine and cosine signals
is used.
By finding the variable k using the following mathematical formula
k² = k1² × sin² α + k2² × cos²α
or another suitable mathematical process, it is possible to determine the common
DC voltage level of both the sine and cosine signals. Comparing this with the cor‐
responding maximum and minimum limits enables impermissible deviations to be
detected quickly and precisely, regardless of the current angular position α.
The signals available can be used to determine k on the basis of the following cal‐
culation:
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
1) The universal cable outlet is positioned so that it is possible to lay it
without bends in a radial or axial direction. UL approval not available.
4 Project planning
4.1 Requirements for signal evaluation
To determine the speed with the correct sign, as well as the correct incremental
position, both the sine signal and the cosine signal must be evaluated. This must
be carried out using a suitable safety architecture. Typically, the signal is evalu‐
ated on two separate channels, the results of which are compared with one
another during the process safety time18. The extent of the permitted deviation
must be selected to allow static errors to be detected in the evaluation.
18
Process safety time: Period of time between the point at which a failure that
could cause a hazard occurs, and the point by which the reaction must be
complete in order to avoid this hazard.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 9
This relationship between the useful signals can be illustrated clearly using a twodimensional model (Lissajous diagram). In this case, the useful signals form a
useful signal ring.
Where the signal k is concerned, a tolerance of ± 50% is permitted on either side
of the nominal position. A deviation that is greater than this indicates a violation
of the vector length limits. The evaluation system must respond to the error
accordingly.
To avoid false triggering, we recommend that you do not make the limits too
restrictive.
4.2.2 Loss of the encoder housing mechanical coupling or displacement of
the mechanical coupling during downtime or operation
In accordance with IEC 61 800-5-2, this error assumption can be ruled out if the
stator coupling or the face mount flange/servo flange has been mounted correctly
(see chapter 5).
4.2.3 Loss of the encoder shaft/drive shaft mechanical coupling during down‐
time or operation
In accordance with IEC 61 800-5-2, this error assumption can be ruled out if the
encoder has been mounted correctly on the drive shaft (see chapter 5).
4.2.4 Sine/cosine signal downtime due to electrical defects
This error assumption can be ruled out as sine/cosine signals are detected and
processed in a purely analog manner, and the design does not provide for any
memory structures for analog voltages.
4.2.5 Measuring element (code disk) damage, contamination, or dissolving
Damage to or contamination on the measuring element can lead to the following
situations:
18
Process safety time: Period of time between the point at which a failure that
could cause a hazard occurs, and the point by which the reaction must be
complete in order to avoid this hazard.
Page 10
A loss of sender masking will result in the maximum signal level being reached on
both channels. This can be detected in accordance with chapter 4.2.1.
If the code disk is not aligned correctly in relation to the optical scanner or if cont‐
amination is present, this will also result in a signal level on the sine and cosine
channels, which can be diagnosed according to chapter 4.2.1.
In accordance with EN ISO 13 849-1 and EN ISO 13 849-2, errors that occur as a
result of the measuring element dissolving can be ruled out due to the mechani‐
cal over-dimensioning.
4.2.6 Oscillation of one or more outputs
Oscillation at the signal outputs can be detected as follows:
If the oscillation leads to impermissible signal levels in one or both channels, then
error detection as per chapter 4.2.1 can be used.
During downtime, and when using a suitable phase discriminator for generating
counting pulses in the evaluation system, oscillation of an input signal will result
in counting up and down for an increment. The error resulting from this corre‐
sponds to the angular value of one increment.
Oscillation of both signals (sine and cosine) in the phase or of an individual signal
while the motor is running will lead to impermissible signal levels which are
detected using measures in accordance with chapter 4.2.1.
4.2.7 Swapping of the sine and cosine output signals
This error can be ruled out as the sine/cosine signals are detected and processed
separately.
The encoder does not use any multiplexers for these signals.
4.2.8 Monitoring the encoder supply voltage output by the evaluation system
Impermissible encoder supply voltage levels are detected using the measures
described in Analog sine/cosine signal faults. The lower limit for the vector length
specified there is particularly useful for undervoltage monitoring.
To contain errors from common causes and enable early error detection, the sup‐
ply voltage of the encoder must be monitored to ensure that it complies with the
limits specified in the technical data.
4.2.9 Operating the encoder system outside the permissible temperature
ranges
If it is not possible to ensure that the encoder system will be operated within the
permissible temperature range, the system operator must take suitable measures
to ensure that the specified temperature range is complied with.
Errors resulting from operation at impermissible temperatures are detected using
the measures described in chapter 4.2.1.
4.3 Requirements for the mechanical shaft connection
4.3.1 Hollow shaft encoder
The drive unit must be connected to the hollow shaft encoder using a high force
clamp connection or a form-fit and a high force clamp connection. Using a feather
key will prevent the encoder from being twisted radially.
A feather key must be used for drive shafts with a diameter of 6 mm, 8 mm, and
3/8”. This ensures that the over-dimensioning required to rule out errors caused
by the loss of the shaft connection.
To find out the requirements for mounting the feather key on the drive shaft,
refer to the dimensional drawings at the end of the operating instructions on
the language-neutral supplementary sheet.
4.3.2 Face mount flange encoder and servo flange encoder
The shaft coupling is part of the safety-related function chain and must be dimen‐
sioned and validated accordingly by the user. It is not an integral part of the safety
assessment carried out by SICK STEGMANN.
Connect the encoder and the drive system using a flexible coupling.
Use a coupling that is suitable for the application. Couplings must comply
with the requirements specified in IEC 61 800-5-2:2008 (see chapter 4.2.3).
Observe the technical data and mounting instructions of the coupling used.
The following mechanical designs are available for a positive connection (see
dimensional drawings at the end of the operating instructions (on the languageneutral supplementary sheet)):
•
Solid shaft with feather key
•
Solid shaft with face
•
For mounting the servo flange
– Large servo clamp accessory set
(part no. 2029166)
– 3 × M4 screws
The property class of the screws must be at least 8.8. Select the length of the
screws in accordance with the installation conditions.
5.2 Preparation for mounting
Ensure that the mounting parts are free from lubricant and contamination.
Look out for any damage that may be present.
In the case of stator coupling variants, only rigid shaft connections may be
used, they must not be elastic (such as bellows couplings).
5.2.1 Generally applicable notes
Connect the DFS60S Pro to the flanging supplied by the customer in a way that
prevents it from rotating.
All dimensions and tolerances specified in the technical drawings and the mount‐
ing instructions must be complied with.
The more precise the centering for the DFS60S Pro, the lower the angle and shaft
offset during mounting and the lower the load on the bearings of the DFS60S Pro.
All screw connections must be secured against loosening with liquid screw adhe‐
sive (LOCTITE 243, for example).
NOTE
Spring washers and toothed washers are not sufficient for securing screws.
For variants with a stator coupling, it may not be possible to hold the torque
wrench perpendicular to the screw. An angle of inclination of up to 20° is included
in the tightening torque tolerance. Loosening or securing the screw at an angle on
a regular basis can cause damage to the screw (see chapter 5.2.2 and
chapter 5.2.3).
5.2.2 Mounting a hollow shaft encoder with a stator coupling
If necessary, mount the feather key (1) supplied on the drive shaft (2) pro‐
vided by the customer (observe chapter 4.3.1).
Block the customer's drive shaft (2).
Apply screw adhesive (observe chapter 5.2.1) to the thread of the clamping
ring (3) or the Torx T20 screw (4) supplied.
Insert the Torx T20 screw (4) in the clamping ring (3) and secure it loosely;
do not tighten it at this stage.
Push the encoder onto the customer drive shaft (2), aligning it with the
feather key (1). Ensure that you take the distance between the stator cou‐
pling (5) and the mounting surface (6) into account when it comes to the
length of the screws (7).
Secure the screws (7) and the washers (8) loosely and apply screw adhesive
(observe chapter 5.2.1) to each thread at the same time.
Screw in the screws (7) until the encoder can be fully pushed on and the sta‐
tor coupling (5) is resting against the mounting surface (6).
Tighten the screws (7); tightening torque: 1.2 ± 0.1 Nm.
Tighten the Torx T20 screw (4); tightening torque: 3.5 ± 0.1 Nm.
5 Mounting
This chapter describes how to prepare and mount the DFS60S Pro.
Switch off the power of all affected machines/systems during the mounting
process.
Avoid any blows or impact to the shaft to prevent damage to the ball bear‐
ings.
Never pull or push on the encoder.
5.1 Mounting material
You will need the following screws:
•
For the stator coupling:
– 4 × M3 cheese-head screws in accordance with ISO 4762 (or equiva‐
lent screw types with even connecting surface)
– Washers
•
For flange variants F, G, H, J
– 3 × M3 screws
•
For flange variants 1, D, 4, E
– 3 × M4 screws
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 10
Figure 1: Mounting a blind hollow shaft encoder
Page 11
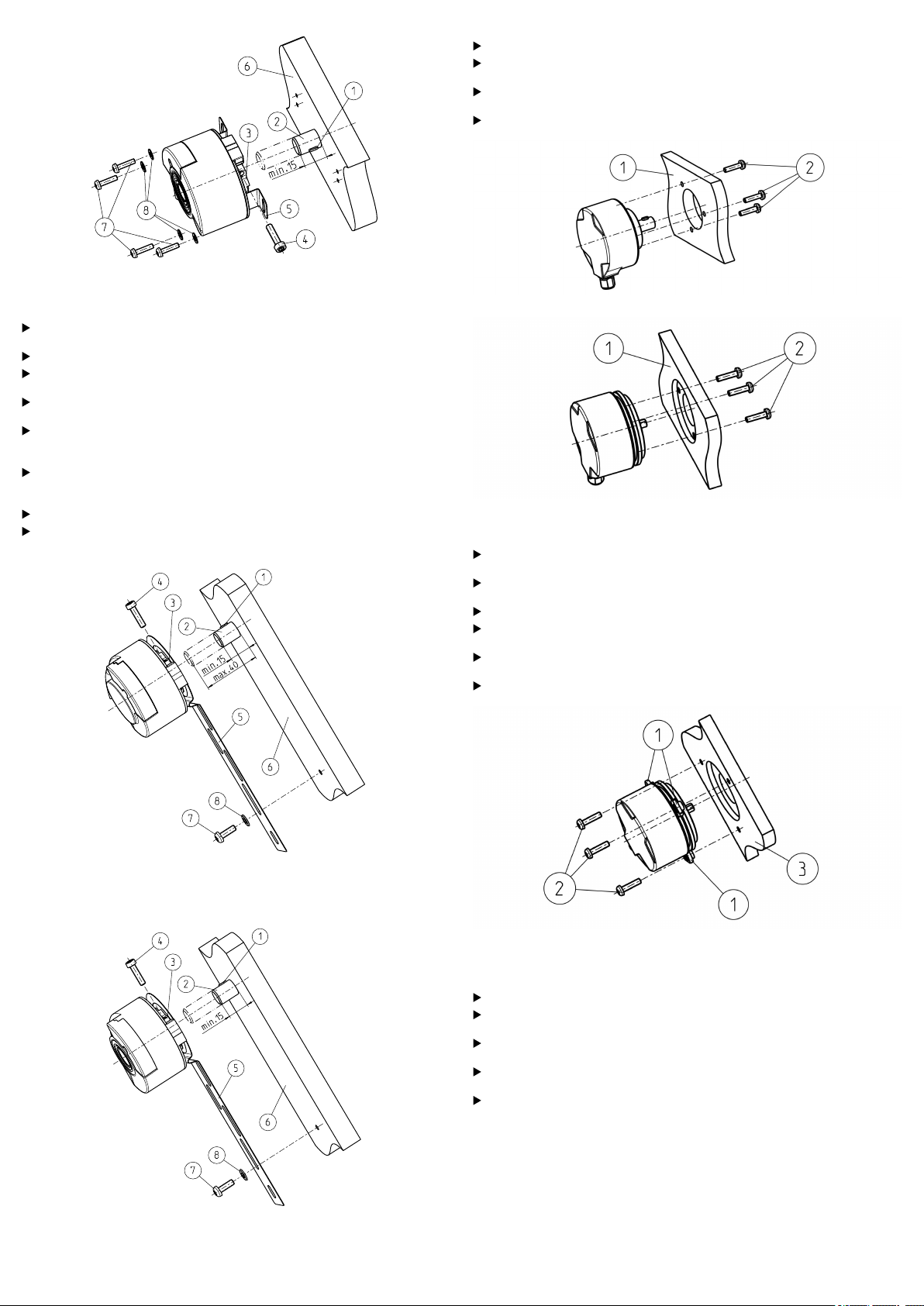
Figure 2: Mounting a through hollow shaft encoder
5.2.3 Mounting a hollow shaft encoder with a long stator coupling on one side
If necessary, mount the feather key (1) supplied on the drive shaft (2) pro‐
vided by the customer (observe chapter 4.3.1).
Block the customer's drive shaft (2).
Apply screw adhesive (observe chapter 5.2.1) to the thread of the clamping
ring (3) or the Torx T20 screw (4) supplied.
Insert the Torx T20 screw (4) in the clamping ring (3) and secure it loosely;
do not tighten it at this stage.
Push the encoder onto the customer drive shaft (2), aligning it with the
feather key (1), so that the long stator coupling (5) is resting against the
mounting surface (6).
Mount the long stator coupling (5) using at least one M4 screw (7) and a
washer (8), and apply screw adhesive (observe chapter 5.2.1) to the thread
at the same time.
Tighten the screw (7); tightening torque: 1.2 ± 0.1 Nm.
Tighten the Torx T20 screw (4) on the clamping ring (3), tightening torque:
3.5 ± 0.1 Nm.
5.2.4 Mounting a solid shaft encoder via the threaded holes on the flange side
Push the encoder into the centering/mounting spigot (1).
Secure the screws (2) loosely and apply screw adhesive (observe
chapter 5.2.1) to each thread at the same time.
Tighten the screws (2); tightening torque:
1.2 ± 0.1 Nm.
Create a shaft connection between the encoder and the drive shaft using a
suitable, flexible connection (observe chapter 4.3.2).
Figure 5: Mounting a face mount flange using threaded holes on the flange side
Figure 6: Mounting a servo flange using threaded holes on the flange side
5.2.5 Mounting a solid shaft encoder with a servo flange using servo clamps
Secure the servo clamps (1) and the screws (2) loosely, and apply screw
adhesive (observe chapter 5.2.1) to each thread at the same time.
Align the servo clamps (1) so that the encoder can be pushed into the cen‐
tering/mounting spigot (3).
Push the encoder into the centering/mounting spigot (3).
Insert the servo clamps (1) into the servo groove by rotating them. Ensure
maximum overlap and secure by screwing in the screws (2).
Tighten the screws (2); tightening torque:
1.2 ± 0.1 Nm.
Create a shaft connection between the encoder and the drive shaft using a
suitable, flexible connection (observe chapter 4.3.2).
Figure 3: Mounting a blind hollow shaft encoder with a long stator coupling on
one side
Figure 7: Mounting a servo flange with servo clamps
5.2.6 Mounting a solid shaft encoder with a servo flange using servo clamp
half-shells
Push the encoder into the centering/mounting spigot (1).
Secure the servo clamp half-shells (2) and the screws (3) loosely, and apply
screw adhesive (observe chapter 5.2.1) to each thread at the same time.
Align the servo clamp half-shells (2) in the servo notch. Ensure maximum
overlap here and secure by screwing in the screws (3).
Tighten the screws (3); tightening torque:
1.2 ± 0.1 Nm.
Create a shaft connection between the encoder and the drive shaft using a
suitable, flexible connection (observe chapter 4.3.2).
Figure 4: Mounting a through hollow shaft encoder with a long stator coupling on
one side
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 11
Page 12
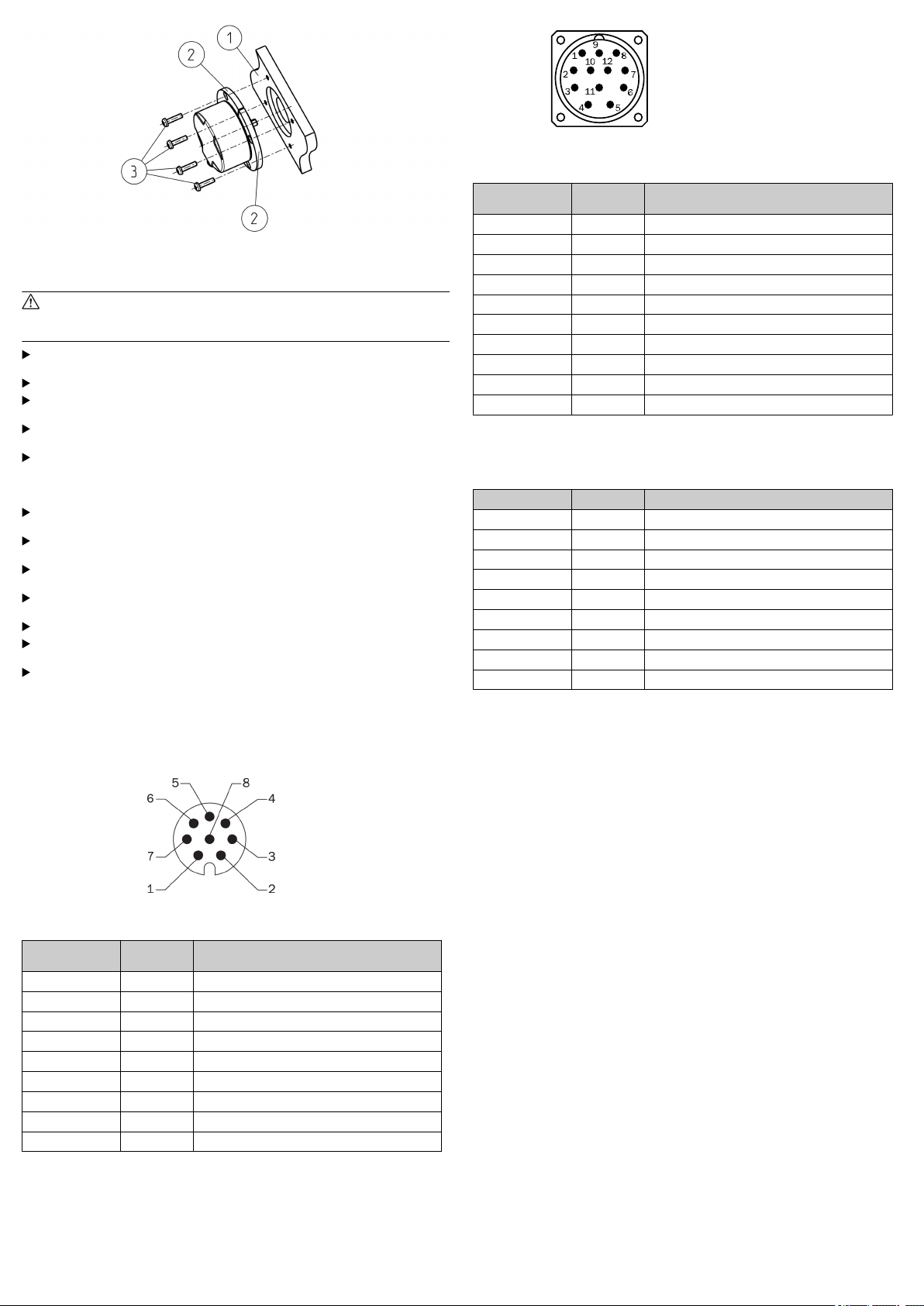
Figure 8: Mounting with servo clamp half-shells
6 Electrical installation
WARNING
Switch off the power of all affected machines/systems/vehicles during the
installation process.
When connecting the DFS60S Pro, observe the operating instructions of the
higher-level evaluation system.
Ensure that the screened connection is applied neatly.
Connect the housing or screen to ground. For this purpose, connect the
cable screening braid over a large area.
Only use screened and twisted-pair cables. All signal cables/interface sig‐
nals must be twisted in pairs with the appropriate complementary signal.
Protect the stator coupling against any strain caused by the connecting
cables. Observe the smallest permitted bend radius of the connecting
cables (permitted bend radius for encoder with cable outlet: min. 7.5 × outer
diameter of the cable).
Use a cable that is suitable for the application and the application condi‐
tions.
We recommend that you use SICK accessory cables (see corresponding data
sheets).
Provide the encoder with supply voltage generated using PELV systems
(EN 50178) (pollution degree 2).
The current for the power supply unit used for the encoder must be limited
externally to max. 1 A – either by the power supply unit itself or using a fuse.
Perform differential evaluation of the encoder signals.
Terminate used and unused encoder signals differentially; i.e., insert a termi‐
nating resistor of ≥ 120 Ω between the signal and the complementary signal.
In encoders with a connector outlet, do not pass on unused signals. Termi‐
nating is not required here.
6.1 Connection overview
The DFS60S Pro is supplied with one of the following connections:
•
M12 male connector, 8-pin
•
M23 male connector, 12-pin
•
Open cable ends
Figure 9: M12 connection, 8-pin
Pin assignment of M12 connection, 8-pin
Pin
M12, 8-pin
1 COS– Signal wire
2 COS+ Signal wire
3 SIN– Signal wire
4 SIN+ Signal wire
5 Z¯ Signal wire (not for safety-related operating modes!)
6 Z Signal wire (not for safety-related operating modes!)
7 GND Ground connection
8 +US Supply voltage (volt-free to housing)
Screen – Connected to encoder housing
Signal Meaning
Figure 10: M23 connection, 12-pin
Pin assignment of M23 connection, 12-pin
Pin
M23, 12-pin
6 COS– Signal wire
5 COS+ Signal wire
1 SIN– Signal wire
8 SIN+ Signal wire
4 Z¯ Signal wire (not for safety-related operating modes!)
3 Z Signal wire (not for safety-related operating modes!)
10 GND Ground connection
12 +US Supply voltage (volt-free to housing)
2, 7, 9, 11 – Do not use
Screen – Connected to encoder housing
Connection with open cable ends
Wire cross-section:
8 × 0.15 mm² + 1.5 mm² screen
Wire assignment of connection with open cable ends
Cable end Signal Meaning
Brown COS– Signal wire
White COS+ Signal wire
Black SIN– Signal wire
Pink SIN+ Signal wire
Yellow Z¯ Signal wire (not for safety-related operating modes!)
Violet Z Signal wire (not for safety-related operating modes!)
Blue GND Ground connection
Red +US Supply voltage (volt-free to housing)
Screen – Connected to encoder housing
6.2 Encoder signals
The DFS60S Pro is equipped with the following signals:
•
Supply voltage +US of the encoder: The supply voltage range measured on
the encoder is between 4.5 V and 32 V.
•
Ground connection GND of the encoder: Galvanically isolated from the hous‐
ing. The voltage relating to GND is +US.
•
Process data channel SIN+: SIN+ is a sine signal of 0.5 VPP with a static off‐
set of 2.5 V.
•
Process data channel SIN–: SIN– is a sine signal of 0.5 VPP with a static off‐
set of 2.5 V. SIN– is complementary to the SIN+ signal.
•
Process data channel COS+: COS+ is a cosine signal of 0.5 VPP with a static
offset of 2.5 V. The COS+ signal is phase-shifted by 90° in relation to the
SIN+ signal.
•
Process data channel COS–: COS– is a cosine signal of 0.5 VPP with a static
offset of 2.5 V. COS– is complementary to the COS+ signal.
•
Zero pulse Z: Z outputs the zero position of the encoder as a differential digi‐
tal signal with a width of 90° electrical (el.) and a level of 1.75 V (low) and
2.9 V (high).
Signal Meaning
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 12
Page 13
2,5 V
2,5 V
2,9 V
1,75 V
2,9 V
1,75 V
0,5 V
0,5 V
360° el.
90° el.
¯Z
COS+ COS–
SIN+ SIN–
Z
COS+ – COS–
SIN+ – SIN–
Z – ¯Z
0 V
0 V
0 V
1 V
1 V
2,3 V
360° el.
90°el.
8 Servicing
The DFS60S Pro is maintenance-free. Repairs cannot be carried out in the
event of a defect. Please contact us if you have any complaints.
Observe the mission time. The DFS60S Pro safe encoder has a maximum
mission time after which it must always be taken out of service. The bearing
service life must be taken into account in addition to the mission time TM.
The parameter which is first reached depending on the application deter‐
mines the time when the system must be taken out of operation.
The encoder’s year of manufacture is specified on the device label or pack‐
aging label as a four-digit code (yyww). The first two digits (yy) represent the
year (without the century), and the last two digits (ww) represent the calen‐
dar week of the manufacturing process.
9 Decommissioning
9.1 Protecting the environment
The safety encoder is designed to minimize its impact on the environment. It uses
a minimum of energy and resources.
Always act in an environmentally responsible manner at work. For this rea‐
b
son, please note the following information on disposal.
9.2 Disposal
Always dispose of unusable or irreparable devices in accordance with the
applicable waste disposal regulations specific to your country.
NOTE
We will be glad to help you dispose of these devices. Please contact us.
10 Technical data
DFS60S Pro data sheet
Performance
Number of sine/cosine periods per revolution 1,024
Figure 11: Encoder signals before subtraction at 120 Ω load, signal diagram dur‐
ing clockwise shaft rotation, as viewed in the direction of the shaft
Measuring increment (not safety-related) 0.3 angular seconds
Integral non-linearity Typ. ± 45 angular seconds
Differential non-linearity ± 7 angular seconds
Reference signal, number 1
Reference signal, position 90°, electric, logically gated with sine/cosine
Mechanical data
Weight
Face mount flange
Servo flange
Through hollow shaft
Blind hollow shaft
Start up torque at 20 °C
Face mount flange
Servo flange
Through hollow shaft
Blind hollow shaft
Operating torque at 20 °C
Face mount flange
Servo flange
Through hollow shaft
Figure 12: Encoder signals after subtraction at 120 Ω load, signal diagram during
clockwise shaft rotation, as viewed in the direction of the shaft
Max. angular acceleration ≤ 5 × 105 rad/s²
Blind hollow shaft
Permissible shaft load (radial/axial) 80 N / 40 N
7 Commissioning
NOTE
Do not commission without a thorough check by qualified safety personnel!
Before you commission a system or a machine into which the DFS60S Pro is
integrated for the first time, the machine or system must be checked and
approved by qualified safety personnel. Observe the notes provided in
chapter 2.
Observe the initialization time after switching on. The encoder does not out‐
put any valid signals during this time.
Check whether all the safety functions work as planned at all the relevant
speeds.
Check whether the maximum temperature that arises at the encoder’s oper‐
ating point while the encoder is being operated (see Dimensional drawings,
“A”) is within the operating temperature range specified in the technical data.
If the temperature at the operating point is above 70 °C:
– Attach the pictogram “Warning! Hot surfaces” in accordance with
IEC 60 4175041 in a visible location on the encoder housing.
– Explain the meaning of the pictogram in the operating instructions of
7.1 Inspection
Further inspection measures are not required during operation.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 13
the machine into which the encoder is being integrated.
Permissible shaft movement (hollow shaf t) –
Static (radial/axial) ± 0.3 mm / ± 0.5 mm
Dynamic (radial/axial) ± 0.05 mm / ± 0.1 mm
Max. operating speed
21
Face mount flange
Servo flange
Through hollow shaft
Blind hollow shaft
Rotor moment of inertia
Face mount flange
Servo flange
Through hollow shaft
Blind hollow shaft
Bearing service life
22
Electrical data
Electrical Interfaces 4.5 V … 32 V, sin/cos
19
Relates to unstressed stator coupling.
20
Relates to encoder with connector outlet.
21
The operating temperature must be measured at the rated speed and must be lowered by
3.0 K for each 1,000 rpm.
22
The mission time can also be limited by the bearing ser vice life specific to the application.
23
Calculated for max. speed and temperature.
At 12-bit interpolation
Approx. 0.30 kg
Approx. 0.25 kg
20
21
≤ 0.5 Ncm
≤ 0.8 Ncm
≤ 0.3 Ncm
≤ 0.6 Ncm
9,000 rpm
6,000 rpm
8 gcm²
56 gcm²
3.6 × 109 revolutions
1.0 VSS (differential)
19
23
Page 14

Performance
Output frequency ≤ 153.6 kHz
Initialization time after switch-on 50 ms
24
Load resistance ≤ 120 Ω
Power consumption without load ≤ 0.7 W
Protection class in accordance with
EN 61 140
III
Pollution degree 2
Reverse polarity protection Yes
Short-circuit resistance of the outputs Yes
25
Ambient data
EMC In accordance with
Enclosure rating in accordance with
IEC 60 529
Permissible relative humidity
Operating temperature range
27
28
EN 61 000-6-2, EN 61 000-6-3
IEC 61 326-3-1
26
IP 65
90 %
M12, M23 –30 … +95 °C
Cable outlet –30 … +85 °C
Storage temperature range (without packag‐
ing)
–30 … +90 °C
Operating altitude Max. 2,000 m above sea level (80 kPa)
Shock resistance in accordance with EN
60068-2-27
Vibration resistance in accordance with EN
60 068-26
29
31
Cable outlet 30 g
M12 incl. mating connector 30 g
M23 incl. mating connector 10 g
100 g/6 ms
10 … 1,000 Hz
10 … 1,000 Hz
10 … 1,000 Hz
30
Safety-related parameters
Safety integrity level
31
SIL2 (IEC 61 508), SILCL2 (EN 62 061)
Category 3 (EN ISO 13 849)
Test rate Not required
Maximum demand rate Continuous (analog signals)
Performance level
32
PFH
at 95 °C operating temperature (prob‐
D
ability of a dangerous failure per hour)
TM (mission time)
32
33
PL d (EN ISO 13 849)
–8
1.7 × 10
20 years (EN ISO 13 849)
Safety-related measuring increment 0.09°, quadrature analysis
Safety-related accuracy ± 0.09°
12 Appendix
12.1 Scope of delivery
•
DFS60S Pro encoder in accordance with type code
•
Feather key in accordance with DIN 6885-A (for hollow shaft variant)
•
Torx T20 screw for clamping ring (for hollow shaft variant)
•
General safety notes
•
Operating instructions
12.2 Conformities
The DFS60S Pro safe encoder was manufactured in accordance with the following
guidelines:
•
Machinery Directive 2006/42/EC
•
EMC Directive 2004/108/EC
The complete EU declaration of conformity is available from the SICK homepage
on the Internet: www.sick.com
NOTE
The certificate for this product covers the product itself and the accessories.
NOTICE
Additional and detailed information on the declaration of conformity is avail‐
able at the end of the operating instructions (on the language-neutral supple‐
mentary sheet) as well as on www.sick.com.
13 Dimensional drawings
NOTICE
The dimensional drawings are available at the end of the operating instruc‐
tions (on the language-neutral supplementary sheet).
11 Accessories
Accessories part numbers
Part Part no.
BEF-WK-SF servo clamps, large (set of 3) 2029166
BEF-WK-SF servo clamps, half-shells (set of 2) 2029165
BEF-DS02DFS/VFS
Stator coupling, long
On request
You can find additional accessories in the product information on www.sick.com.
The user of the product must consider what accessories are required when creat‐
ing a complete machine as part of implementing the relevant safety function(s).
Where necessary, it must be possible to prove that certain errors can be ruled
out.
24
After this period valid signals can be read.
25
Short-circuit to another channel or GND permit ted for max. 30 s. In the case of US ≤ 12 V,
additional short-circuit to US permit ted for max. 30 s.
26
Connector outlet: Mating connector must be attached and must comply with IP 65 as a min‐
imum.
27
Condensation of optical surfaces not permitted.
28
The operating temperature must be measured at the rated speed and must be lowered by
3.0 K for each 1,000 rpm.
29
Checked during operation using vector length monitoring.
30
Number of shocks in each test axis, both positive and negative: 3.
31
For detailed information on the safety configuration of your machine/system, please con‐
sult your SICK subsidiary.
32
The stated values apply to a diagnostic degree of coverage of 99%, which must be achieved
by the external drive system.
33
The mission time can also be limited by the bearing ser vice life specific to the application.
34
The stator coupling is supplied mounted by the factor y. The customer is not permitted to
replace the stator coupling.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 14
34
Page 15

I N S T R U C C I O N E S D E U S O e s
Encoder de seguridad
1 Acerca de este documento
Esta es una traducción del documento original.
Lea atentamente estas instrucciones de uso antes de trabajar con el encoder de
seguridad DFS60S Pro, montarlo, ponerlo en funcionamiento o llevar a cabo
tareas de mantenimiento.
1.1 Finalidad de este documento
Estas instrucciones de uso indican al personal técnico del fabricante o de la
empresa explotadora de la máquina cómo llevar a cabo de forma segura el mon‐
taje, la instalación eléctrica, la puesta en servicio, el funcionamiento y el manteni‐
miento del DFS60S Pro.
Además, para la planificación y la utilización de encoders de seguridad, como el
DFS60S Pro, es necesario contar con conocimientos técnicos previos, ya que
estos no se incluyen en las presentes instrucciones.
Deben respetarse las disposiciones legales y oficiales durante el funcionamiento
del DFS60S Pro.
1.2 Símbolos y convenciones utilizados en este documento
ADVERTENCIA
Un aviso de advertencia indica peligros potenciales o concretos. Su objetivo
es prevenir accidentes.
Lea detenidamente y respete las indicaciones de aviso.
Las instrucciones sobre acciones concretas están señaladas con una flecha.
b
Lea detenidamente y cumpla con esmero las instrucciones sobre las accio‐
nes a realizar.
2 Para su seguridad
Este capítulo sirve para su propia seguridad y la de los usuarios de la instalación.
Lea detenidamente este capítulo antes de trabajar con el DFS60S Pro en la
máquina o instalación donde se utilice el encoder de seguridad.
2.1 Indicaciones básicas de seguridad
ADVERTENCIA
Respete las indicaciones de seguridad y las medidas de protección
Tenga en cuenta los siguientes aspectos para garantizar el uso seguro y con‐
forme a lo previsto del DFS60S Pro.
Para el montaje y la utilización del dispositivo, así como para su puesta en servi‐
cio y sucesivas comprobaciones técnicas, se aplican las disposiciones legales
nacionales e internacionales, en especial las siguientes:
•
Directiva de máquinas 2006/42/CE
•
Directiva de uso de medios de trabajo 2009/104/CE
•
Disposiciones para la prevención de riesgos laborales y normas de seguri‐
dad
•
Otras disposiciones de seguridad relevantes
El fabricante y el operador de la máquina en la que se utiliza el DFS60S Pro tie‐
nen la responsabilidad de coordinar con las autoridades competentes y de cum‐
plir todas las disposiciones y normas de seguridad aplicables.
Estas instrucciones de uso deben estar a disposición del operador de la máquina
en la que se utiliza el encoder de seguridad DFS60S Pro. El operador de la
máquina debe ser instruido por personas autorizadas y animado a leer las ins‐
trucciones de uso.
2.2 Uso conforme a lo previsto
El DFS60S Pro puede utilizarse en aplicaciones de seguridad hasta la categoría 3
según EN ISO 13 849, hasta SIL2 según IEC 61 508, hasta SILCL2 según EN
62 061 o hasta PL d según EN ISO 13 849.
El DFS60S Pro es compatible con funciones de seguridad basadas en la infor‐
mación de la velocidad y la información del sentido e giro.
El encoder no puede proporcionar por sí solo un estado seguro.
El número de revoluciones, el sentido de giro, la inactividad y los fallos de los que
se puede derivar un riesgo deben ser identificados por un sistema de evaluación
superior. Los requisitos que debe cumplir el sistema de evaluación se describen
en capitolo 4.1 y capitolo 4.2.
El DFS60S Pro únicamente puede utilizarse dentro de los límites prescritos y esti‐
pulados por los datos técnicos y las condiciones de servicio. Para que el DFS60S
Pro pueda desempeñar la función para la que se ha diseñado, deben tomarse en
consideración y respetarse los requisitos especificados en los datos técnicos y las
condiciones del entorno.
Si el dispositivo se utiliza con otros fines o sufre modificaciones (incluso durante
el montaje y la instalación), la garantía de SICK STEGMANN GmbH perderá su
validez.
2.3 Uso no conforme a lo previsto
El DFS60S Pro no es compatible con modos de funcionamiento para la seguridad
relacionados con la posición o la situación absolutas.
El DFS60S Pro emite un impulso cero como punto de la referencia. Esta señal no
se puede utilizar para modos de funcionamiento de seguridad.
El DFS60S Pro no es apto para los siguientes usos, entre otros:
•
Bajo el agua
•
En atmósferas potencialmente explosivas
•
En zonas de acceso público
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 15
2.4 Requisitos de cualificación del personal
El diseño, montaje, conexión, puesta en funcionamiento y mantenimiento del
DFS60S Pro solo deben realizarlos personas autorizadas.
Planificación del proyecto
Una persona se considera autorizada para la configuración si posee conocimien‐
tos especializados y experiencia en la selección y el uso de encoders de seguri‐
dad en máquinas, y está familiarizada con las reglamentaciones técnicas y la nor‐
mativa nacional de protección laboral aplicables.
Montaje y puesta en servicio del sistema mecánico
Una persona se considera autorizada para el montaje y la puesta en servicio del
sistema mecánico si posee conocimientos especializados y experiencia en el
ámbito correspondiente.
Instalación eléctrica
Una persona se considera autorizada para la instalación y la puesta en servicio
del sistema eléctrico si posee conocimientos especializados y experiencia en el
ámbito correspondiente.
3 Descripción de producto
El DFS60S Pro es un encoder incremental de alta resolución con un diámetro de
60 mm.
La transmisión de las señales del encoder al sistema de evaluación se lleva a
cabo mediante señales analógicas en forma de tensiones senoidales y cosenoi‐
dales.
Si se utiliza una unidad de evaluación, el DFS60S Pro puede utilizarse para
modos de funcionamiento de seguridad relacionados con la velocidad y el sentido
de giro, lo que permite implementar funciones de seguridad según IEC
61 800-5-2.
Las dimensiones de la interfaz mecánica se han realizado de acuerdo con la
norma IEC 61 800-5-2, de modo que se pueda prever una exclusión de fallo por
sobredimensionamiento.
La vida de los rodamientos del DFS60S Pro está limitada (véanse los datos técni‐
cos). Cuando se excede la vida de los rodamientos, el desgaste y la fatiga pueden
causar fallos en los rodamientos. Para evitar que esto suceda, el DFS60S Pro se
debe poner fuera de funcionamiento, como muy tarde, cuando expire la vida de
los rodamientos. La vida de los rodamientos también se ve influenciada por la
aplicación, especialmente por los modos de servicio con números de revolucio‐
nes bajos, inversiones o vibraciones mecánicas. Debe evitarse que circule
corriente eléctrica por los rodamientos de bolas (p. ej. corrientes acopladas).
Para aumentar la cobertura de diagnóstico del sensor seguro con respecto a un
fallo inesperado de los rodamientos (p. ej. por empeoramiento de las condiciones
de servicio, con cargas límite, etc.), puede ser útil una plausibilización externa de
la información del sensor.
ADVERTENCIA
Indicación de seguridad
El DFS60S Pro no puede utilizarse para aplicaciones de seguridad más allá
de su duración de uso (véanse los datos técnicos). Dependiendo de la apli‐
cación, la vida de los rodamientos puede limitar la duración de uso.
Page 16

3.1 Clave de tipos
Eje macizo
Tipo
S Eje macizo
Características mecánicas
1 Brida servo, rosca M4, eje macizo Ø 6 x 10 mm con superficie
D Brida servo, rosca M4, eje macizo Ø 6 x 10 mm con muelle de ajuste
F Brida servo, rosca M3, eje macizo Ø 6 x 10 mm con superficie
G Brida servo, rosca M3, eje macizo Ø 6 x 10 mm con muelle de ajuste
4 Brida clamping, rosca M4, eje macizo Ø 10 × 19 mm con superficie
E Brida clamping, rosca M4, eje macizo Ø 10 × 19 mm con muelle de ajuste
H Brida clamping, rosca M3, eje macizo Ø 10 × 19 mm con superficie
J Brida clamping, rosca M3, eje macizo Ø 10 × 19 mm con muelle de ajuste
Interfaces eléctricas
O 4,5… 32 V, SIN/COS
Tipo de conexión
Resolución
A Conector macho M23 de 12 polos radial
B Conector macho M23 de 12 polos axial
C Conector macho M12 de 8 polos, radial
D Conector macho M12 de 8 polos, axial
J Cable de 8 hilos, universal 0,5 m1)
K Cable de 8 hilos, universal 1,5 m
1)
L Cable de 8 hilos, universal 3 m1)
M Cable de 8 hilos, universal 5 m1)
N Cable de 8 hilos, universal 10 m1)
Periodos por revolución
1 0 2 4
0 S 0 1 Par de apoyo,
largo (solo con los tipos B, T)
Resolución 1.024 periodos
D F S 6 0 S - S O 0
Eje hueco
Tipo
B Eje hueco de inserción
T Eje hueco pasante
Características mecánicas
A Eje hueco de Ø 6 mm con ranura para el muelle de ajuste
B Eje hueco de Ø 8 mm con ranura para el muelle de ajuste
C Eje hueco de Ø 3/8" con ranura para el muelle de ajuste
D Eje hueco de Ø 10 mm con ranura para el muelle de ajuste
E Eje hueco de Ø 12 mm con ranura para el muelle de ajuste
F Eje hueco de Ø 1/2" con ranura para el muelle de ajuste
G Eje hueco de Ø 14 mm con ranura para el muelle de ajuste
H Eje hueco de Ø 15 mm con ranura para el muelle de ajuste
J Eje hueco de Ø 5/8" con ranura para el muelle de ajuste
Interfaces eléctricas
O 4,5… 32 V, SIN/COS
Tipo de conexión
Resolución
A Conector macho M23 de 12 polos radial
C Conector macho M12 de 8 polos, radial
J Cable de 8 hilos, universal 0,5 m 1)
K Cable de 8 hilos, universal 1,5 m
1)
L Cable de 8 hilos, universal 3 m
1)
M Cable de 8 hilos, universal 5 m
1)
N Cable de 8 hilos, universal 10 m
1)
Periodos por revolución
1 0 2 4
0 S 0 1
Resolución 1.024 periodos
Par de apoyo,
largo (solo con los tipos B, T)
D F S 6 0 S - 000
INDICACIÓN
Las desviaciones pueden deberse a:
•
Tolerancias de acoplamiento en los umbrales de conmutación:
± 1 incremento
•
Tolerancias de acoplamiento de los momentos de exploración: número
de incrementos en diferencia de tiempo a máxima velocidad
Para evaluar las señales deben utilizarse siempre las señales diferenciales
(véase capitolo 6.2).
De las señales diferenciales deben formarse señales de onda cuadrada con ele‐
mentos de conmutación adecuados (p. ej., comparadores) que se utilizan con el
método adecuado (p. ej., decodificador de cuadratura) para llevar a cabo un
recuento.
Los umbrales de conmutación deben seleccionarse de modo que no se sobre‐
pase el límite inferior de la monitorización de la longitud vectorial (véase
capitolo 4.2.1). Por consiguiente, el umbral de conmutación superior (con toleran‐
cia incluida) debe encontrarse a un máximo de 150 mV por encima del centro de
la señal (véase figura 12 ), y el umbral de conmutación inferior (con tolerancia
incluida) debe encontrarse a un máximo de 150 mV por debajo del centro de la
señal.
ADVERTENCIA
Si las dimensiones de los umbrales de conmutación y de la histéresis son
inapropiadas, al evaluarse las señales pueden producirse detecciones
erróneas de flancos adicionales o no detecciones erróneas de flancos. Esto
puede dar lugar a que se produzcan, p. ej., errores al determinar el sentido
de giro, la posición o la velocidad.
Mediante los contadores puede alcanzarse una resolución de 4.096 pasos por
revolución (es decir, 4 pasos por periodo de señal o 1 paso por cuadrante en
cada periodo de señal).
La cobertura de diagnóstico (CC) para la detección de errores de las señales del
encoder debe ser al menos del 99 %. A este respecto, deben cumplirse los requi‐
1) La salida de cable universal está ubicada de forma que el cable se
puede colocar tanto en sentido radial como axial sin doblarlo. Homo‐
logación UL no disponible.
sitos de diagnóstico que se especifican en capitolo 4.2. El diagnóstico debe reali‐
zarse durante el tiempo de seguridad del proceso
4.2 Requisitos de diagnóstico y detección de errores
El sistema de evaluación postconectado debe garantizar, según IEC 61800-5-2,
basándose en los supuestos de errores para el uso de motion and position feed‐
back sensors allí listados, los requisitos de diagnóstico y detección de errores
36
descritos a continuación.
En caso de que se detecte un error en uno de los diagnósticos abajo menciona‐
dos, debe introducirse una respuesta al error que ponga la aplicación en un
estado seguro.
En caso de error, debe alcanzarse el estado seguro de la aplicación antes de que
pueda surgir una situación peligrosa. Por consiguiente, la suma del tiempo
máximo necesario para detectar el error y el tiempo para la respuesta al error
debe ser menor que el tiempo de seguridad del proceso
36
El tiempo máximo necesario para detectar el error es el intervalo de tiempo con el
que las medidas de diagnóstico abajo mencionadas se repiten por completo.
4.2.1 Fallos de las señales analógicas de encoder de seno y coseno
Para detectar cualquier cambio de nivel no permitido en la relación entre seno y
coseno se utiliza la fórmula matemática de las señales seno y coseno que sirve
de base.
Usando la siguiente fórmula matemática para el valor de k
k² = k1² × sin² α + k2² × cos²α
u otro proceso matemático adecuado que permita registrar el nivel de tensión
continua común de las señales seno/coseno. La comparación con los límites
máximos y mínimos apropiados permite una detección precisa y rápida de las
1) La salida de cable universal está ubicada de forma que el cable se
puede colocar tanto en sentido radial como axial sin doblarlo. Homo‐
logación UL no disponible.
4 Planificación del proyecto
4.1 Requisitos de la evaluación de señales
Para determinar la velocidad con el signo correcto y la posición incremental
correcta, debe evaluarse tanto la señal senoidal como la cosenoidal. Esto debe
realizarse mediante una arquitectura de seguridad adecuada. Normalmente la
evaluación de la señal se realiza en dos canales aislados cuyos resultados se
comparan entre sí durante el tiempo de seguridad del proceso35 La magnitud de
la desviación permitida debe seleccionarse de modo que en el proceso de eva‐
luación puedan detectarse los errores estáticos.
35
Tiempo de seguridad del proceso: lapso de tiempo entre la aparición de un
fallo peligroso del sistema de medición y el momento en el que debe haber
concluido la respuesta para evitar la aparición del peligro.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 16
desviaciones no permitidas, independientemente de la posición angular
momentánea α.
Con las señales existentes, k puede determinarse con la ayuda del cálculo
siguiente:
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
Esta relación de las señales útiles puede representarse con claridad mediante un
modelo bidimensional (diagrama de Lissajous). Las señales útiles forman aquí un
anillo de señal útil.
Para la señal k se permite una tolerancia de ± 50 % en relación a la situación
nominal. Una desviación superior a esta supone la vulneración de los límites de
las longitudes vectoriales y exige una respuesta al error apropiada del sistema de
evaluación.
Se recomienda no ajustar demasiado los valores límite para evitar falsas alar‐
mas.
4.2.2 Pérdida del acoplamiento mecánico de la carcasa del encoder o des‐
viación del acoplamiento mecánico durante la parada o el funciona‐
miento
Este supuesto de error puede excluirse según IEC 61 800-5-2 montando correcta‐
mente el par de apoyo o la brida clamping/servo (véase capitolo 5).
4.2.3 Pérdida del acoplamiento mecánico entre el eje del encoder y el eje del
accionamiento durante la parada o el funcionamiento
Este supuesto de error puede excluirse según IEC 61 800-5-2 montando correcta‐
mente el encoder en el eje del accionamiento (véase capitolo 5).
36
Tiempo de seguridad del proceso: lapso de tiempo entre la aparición de un
fallo peligroso del sistema de medición y el momento en el que debe haber
concluido la respuesta para evitar la aparición del peligro.
Page 17

4.2.4 Parada de la señal seno/coseno por fallos eléctricos
Este supuesto de error puede excluirse, ya que las señales de seno y coseno se
captan y procesan de forma exclusivamente analógica y en el diseño no están
previstas estructuras de almacenamiento para tensiones analógicas.
4.2.5 Daños, suciedad o anulación de las medidas materializadas (disco de
código)
El daño o la suciedad de las medidas materializadas puede conllevar las siguien‐
tes situaciones:
La pérdida de la regulación de intensidad del emisor produce un nivel de señal
máximo en ambos canales que puede identificarse según lo descrito en
capitolo 4.2.1.
La orientación incorrecta del disco de código con respecto al sensor óptico o la
suciedad generan igualmente un nivel de señal en los canales seno y coseno que
puede diagnosticarse según lo especificado en capitolo 4.2.1.
Para la anulación de las medidas materializadas puede llevarse a cabo una
exclusión de errores según EN ISO 13 849-1 y EN ISO 13 849-2 sobre la base de
sobredimensionamiento mecánico.
4.2.6 Oscilaciones de una o varias salidas
Las oscilaciones en las salidas de las señales pueden detectarse del modo
siguiente:
Si las oscilaciones producen niveles de señal inadmisibles en uno o ambos cana‐
les, la detección de errores puede utilizarse según lo especificado en
capitolo 4.2.1.
Cuando se usa un discriminador de fase adecuado para generar impulsos de con‐
teo en el sistema de evaluación, la oscilación de una señal de entrada durante el
tiempo de inactividad dará lugar a recuentos hacia adelante o hacia atrás de un
incremento. El error resultante equivale al valor angular de un incremento.
La oscilación de ambas señales (seno y coseno) en la fase o de una única señal
durante el funcionamiento del motor produce niveles de señal inadmisibles que
se identifican mediante las medidas descritas en capitolo 4.2.1.
4.2.7 Confusión de las señales de salida seno y coseno
Este error se puede excluir, ya que las señales de seno y coseno se captan y se
procesan por separado.
El encoder no usa un multiplexor para estas señales.
4.2.8 Supervisión de la tensión de alimentación del encoder emitida por el
sistema de evaluación
Los niveles inadmisibles de la tensión de alimentación del encoder se identifican
mediante las medidas descritas en Fallos de las señales analógicas de encoder
de seno y coseno. Especialmente el límite inferior para la longitud vectorial allí
mencionado es especialmente útil para controlar la subtensión.
Para limitar los errores de causa común y para la detección temprana de los erro‐
res, es necesario supervisar la tensión de alimentación del encoder con el fin de
que se mantengan los valores límite indicados en los datos técnicos.
4.2.9 Funcionamiento del sistema de encoder fuera de los rangos de tempe‐
ratura admisibles
Si no se puede garantizar que el sistema de encoder funcione en el rango de tem‐
peratura admisible, el operador del sistema deberá adoptar las medidas adecua‐
das para que se mantenga el rango de temperatura especificado.
Los errores que resulten del funcionamiento con temperaturas inadmisibles se
identifican mediante las medidas descritas en capitolo 4.2.1.
4.3 Requisitos de la unión mecánica de ejes
4.3.1 Encoder de eje hueco
La unión de la unidad de accionamiento con el encoder de eje hueco debe esta‐
blecerse con una unión en arrastre de fuerza o en arrastre de fuerza y de forma.
El uso de un muelle de ajuste impedirá la rotación radial del encoder.
Para ejes de accionamiento con diámetros de 6 mm, 8 mm y 3/8", es obligatorio
usar un muelle de ajuste. Esto garantizará el sobredimensionamiento requerido
para excluir el error de pérdida de la unión de los ejes.
Los requisitos para montar el muelle de ajuste en el eje de accionamiento
los puede consultar en los dibujos acotados al final de las instrucciones de
uso en la hoja suplementaria comprensible con independencia del idioma.
4.3.2 Encoder con brida clamping y encoder con brida servo
El acoplamiento del eje es parte de la cadena funcional de seguridad y debe ser
correctamente dimensionado y validado por el usuario. No es parte integrante del
planteamiento de seguridad de SICK-STEGMANN.
Realice la unión de ejes entre el encoder y el sistema de accionamiento con
un acoplamiento elástico.
Utilice el acoplamiento adecuado en función de la aplicación. Los acopla‐
mientos deben cumplir los requisitos de IEC 61 80052:2008 (véase
capitolo 4.2.3).
Respete los datos técnicos y las instrucciones de montaje del acoplamiento
utilizado.
Para la unión con arrastre de forma están disponibles los siguientes diseños
mecánicos (véanse los dibujos acotados al final de la instrucciones de uso (en la
hoja suplementaria comprensible con independencia del idioma)):
•
Eje macizo con muelle de ajuste
•
Eje macizo con brida
Desconecte la tensión de todas las máquinas/instalaciones afectadas por el
montaje.
Evite los golpes y choques con el eje, ya que pueden deteriorar el roda‐
miento de bolas.
Nunca empuje ni tire del encoder.
5.1 Material de fijación
Necesita los siguientes tornillos:
•
Para el par de apoyo:
– En cada caso, 4 tornillos de cabeza cilíndrica M3 según DIN ISO 4762
(u otro tipo de tornillo equivalente con la base de la cabeza plana)
– Arandelas
•
Para las variantes de brida F, G, H, J
– 3 tornillos M3
•
Para las variantes de brida 1, D, 4, E
– 3 tornillos M4
•
Para el montaje de la brida servo
– Juego de accesorios de pinzas servo grandes
(Ref. 2029166)
– 3 tornillos M4
La clase de resistencia de los tornillos debe ser como mínimo 8.8. Seleccione la
longitud de los tornillos de acuerdo a las condiciones de montaje.
5.2 Preparación del montaje
Asegúrese de que las piezas de montaje están libres de lubricantes y sucie‐
dades.
Preste atención a que no estén dañadas.
Para aquellas variantes con par de apoyo, la unión de ejes debe ser rígida y
no elástica (como es el caso, p. ej., de los acoplamientos de fuelle).
5.2.1 Indicaciones generales aplicables
Fije el DFS60S Pro con la brida proporcionada por el cliente de manera que no
pueda girarse.
Deben respetarse todas las medidas y tolerancias indicadas en los dibujos técni‐
cos y en la descripción del montaje.
Cuanto más centrado esté el DFS60S Pro, menor será la asimetría angular y del
eje durante el montaje y menor será la carga del rodamiento del DFS60S Pro.
Todas las uniones atornilladas deben asegurarse con un medio de fijación de tor‐
nillos líquido (por ejemplo, con LOCTITE 243) para que no se suelten.
INDICACIÓN
Las arandelas elásticas y las arandelas dentadas no son suficientes como
medio de fijación de tornillos.
En las variantes con par de apoyo, la llave dinamométrica no se puede colocar en
determinadas circunstancias verticalmente sobre el tornillo. La tolerancia del par
de apriete incluye una inclinación de hasta 20°. Si se aflojan o se aprietan los
tornillos frecuentemente con desviación angular, estos pueden sufrir daños
(véase capitolo 5.2.2 y capitolo 5.2.3)
5.2.2 Montaje de encoder de eje hueco con par de apoyo
Si fuera necesario, monte el muelle de ajuste suministrado (1) en el eje del
accionamiento proporcionado por el cliente (2) (téngase en
cuenta capitolo 4.3.1).
Bloquee el eje del accionamiento (2) proporcionado por el cliente.
Aplique el medio de fijación de tornillos (téngase en cuenta capitolo 5.2.1)
en la rosca del anillo de fijación (3) o en el tornillo Torx T20 suministrado (4).
Introduzca y premonte el tornillo Torx T20 (4) en el anillo de fijación (3), pero
no lo apriete.
Deslice el encoder en el eje del accionamiento proporcionado por el cliente
(2) alineado con el muelle de ajuste (1), teniendo en cuenta la distancia del
par de apoyo (5) en relación a la superficie de montaje (6) en función de la
longitud del tornillo (7).
Premonte los tornillos (7) con sus arandelas (8) y aplique el medio de
fijación de tornillos en la rosca correspondiente (téngase en cuenta
capitolo 5.2.1).
Siga apretando los tornillos (7) hasta que el encoder quede completamente
montado y el par de apoyo (5) toque con la superficie de montaje (6).
Apriete los tornillos (7); par de apriete: 1,2 ± 0,1 Nm.
Apriete el tornillo Torx T20 (4); par de apriete: 3,5 ± 0,1 Nm.
5 Montaje
En este capítulo se explican los preparativos y la realización del montaje del
DFS60S Pro.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 17
Page 18

Figura 1: Montaje de encoder de eje hueco de inserción
Figura 2: Montaje de encoder de eje hueco pasante
5.2.3 Montaje de encoder de eje hueco con par de apoyo unilateral largo
Si fuera necesario, monte el muelle de ajuste suministrado (1) en el eje del
accionamiento proporcionado por el cliente (2) (téngase en cuenta
capitolo 4.3.1).
Bloquee el eje del accionamiento (2) proporcionado por el cliente.
Aplique el medio de fijación de tornillos (téngase en cuenta capitolo 5.2.1)
en la rosca del anillo de fijación (3) o en el tornillo Torx T20 suministrado (4).
Introduzca y premonte el tornillo Torx T20 (4) en el anillo de fijación (3), pero
no lo apriete.
Deslice el encoder en el eje del accionamiento proporcionado por el cliente
(2) alineado con el muelle de ajuste (1), de modo que el par de apoyo largo
(5) toque con la superficie de montaje (6).
Fije el par de apoyo largo (5) con un tornillo M4 (7) y una arandela (8) como
mínimo, y aplique el medio de fijación de tornillos en la rosca correspon‐
diente (téngase en cuenta capitolo 5.2.1).
Apriete el tornillo (7), par de apriete: 1,2 ± 0,1 Nm.
Apriete el tornillo Torx T20 (4) en el anillo de fijación (3); par de apriete:
3,5 ± 0,1 Nm.
Figura 4: Montaje de encoder de eje hueco pasante con par de apoyo unilateral
largo
5.2.4 Montaje de encoder de eje macizo mediante orificios roscados en la
brida
Deslice el encoder en el collar de sujeción y el juego de centrado (1).
Premonte los tornillos (2) y aplique el medio de fijación de tornillos en la
rosca correspondiente (téngase en cuenta capitolo 5.2.1).
Apriete los tornillos (2); par de apriete:
1,2 ± 0,1 Nm.
Realice la unión de eje entre el encoder y el eje del accionamiento mediante
un sistema elástico apropiado (téngase en cuenta capitolo 4.3.2).
Figura 5: Montaje de brida clamping mediante orificios roscados en la brida
Figura 6: Montaje de brida servo mediante orificios roscados en la brida
5.2.5 Montaje de encoder de eje macizo con brida servo mediante pinzas
servo
Premonte las pinzas servo (1), incluidos los tornillos (2), y aplique el medio
de fijación de tornillos en la rosca correspondiente (téngase en cuenta
capitolo 5.2.1).
Alinee las pinzas servo (1) de modo que el encoder pueda deslizarse en el
collar de sujeción y el juego de centrado (3).
Deslice el encoder en el collar de sujeción y el juego de centrado (3).
Enganche las pinzas servo (1) mediante giros en la ranura servo, prestando
la máxima atención a que la superposición sea correcta y fije los tornillos
introduciéndolos y (2) enroscándolos.
Apriete los tornillos (2); par de apriete:
1,2 ± 0,1 Nm.
Realice la unión de eje entre el encoder y el eje del accionamiento mediante
un sistema elástico apropiado (téngase en cuenta capitolo 4.3.2).
Figura 3: Montaje de encoder de eje hueco de inserción con par de apoyo unilate‐
ral largo
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 18
Page 19

Figura 9: Conexión M12 de 8 polos
Asignación de pines de la conexión M12 de 8 polos
Terminal
M12 de 8 polos
1 COS– Cable de señal
Figura 7: Montaje de brida servo con pinzas servo
5.2.6 Montaje de encoder de eje macizo con brida servo mediante semicas‐
quillos con pinza servo
Deslice el encoder en el collar de sujeción y el juego de centrado (1).
Premonte los semicasquillos de las pinzas servo (2), incluidos los tornillos
(3), y aplique el medio de fijación de tornillos en la rosca correspondiente
(téngase en cuenta capitolo 5.2.1).
Alinee los semicasquillos con pinza servo (2) en la ranura servo, prestando
la máxima atención a que la superposición sea correcta y fije los tornillos
introduciéndolos y (3) enroscándolos.
Apriete los tornillos (3); par de apriete:
1,2 ± 0,1 Nm.
Realice la unión de eje entre el encoder y el eje del accionamiento mediante
un sistema elástico apropiado (téngase en cuenta capitolo 4.3.2).
Figura 8: Montaje con semicasquillos de pinzas servo
2 COS+ Cable de señal
3 SIN– Cable de señal
4 SIN+ Cable de señal
5 Z¯ Cable de señal (no idóneo para modos de funciona‐
6 Z Cable de señal (no idóneo para modos de funciona‐
7 GND Conexión a masa
8 +US Tensión de alimentación (sin potencial a la carcasa)
Pantalla – Conectada con la carcasa del encoder
Figura 10: Conexión M23 de 12 polos
Asignación de pines de la conexión M23 de 12 polos
Terminal
M23 de 12 polos
6 COS– Cable de señal
5 COS+ Cable de señal
1 SIN– Cable de señal
8 SIN+ Cable de señal
4 Z¯ Cable de señal (no idóneo para modos de funciona‐
6 Instalación eléctrica
ADVERTENCIA
Desconecte la tensión de todas las máquinas, instalaciones y vehículos afec‐
tados por la instalación.
Al conectar el DFS60S Pro, tenga en cuenta las instrucciones de uso del sis‐
tema de evaluación superior.
Preste atención a que la conexión del apantallamiento se realice correcta‐
mente.
Conecte la carcasa o el apantallamiento a tierra o a masa. Para ello,
conecte la malla de apantallamiento del cable en toda su extensión.
Utilice únicamente cables apantallados y de pares trenzados. Todos los
cables de señal/señales de interfaz deben ser de pares trenzados con la
señal complementaria correspondiente.
Proteja el par de apoyo frente a cualquier carga de los cables de conexión.
Respete el radio de curvatura admisible más pequeño de los cables de
conexión (radio de curvatura para encoders con salida de cable: diámetro
mín. del cable 7,5).
Utilice un cable adecuado en función de la aplicación y de las condiciones
de uso.
Recomendamos usar cables de accesorios SICK (véanse las hojas de datos
correspondientes).
Alimente el encoder con tensión de alimentación que se genere en sistemas
MBTP (EN 50 178) (nivel de suciedad 2).
La intensidad de la fuente de alimentación que alimenta el encoder debe
limitarse externamente a un máx. de 1 A (mediante la fuente de alimen‐
tación misma o mediante un fusible).
Evalúe las señales del encoder de modo diferencial.
Desconecte de modo diferenciado las señales del encoder utilizadas y no
utilizadas, es decir, introduzca una resistencia de terminación ≥ 120 Ω entre
la señal y la señal complementaria.
En encoders con salida enchufable no continúe con las señales utilizadas.
No es necesario desconectar.
6.1 Vista general de las conexiones
El DFS60S Pro se suministra con una de las siguientes conexiones:
•
Conector macho M12 de 8 polos
•
Conector macho M23 de 12 polos
•
Extremos de cable abiertos
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 19
3 Z Cable de señal (no idóneo para modos de funciona‐
10 GND Conexión a masa
12 +US Tensión de alimentación (sin potencial a la carcasa)
2, 7, 9, 11 – Sin ocupar
Pantalla – Conectada con la carcasa del encoder
Conexión con extremos de cable abiertos
Sección del conductor:
8 × 0,15 mm² + 1,5 mm² de pantalla
Asignación de cables de la conexión con extremos de cable abiertos
Extremo de cable Señal Significado
Marrón COS– Cable de señal
Blanco COS+ Cable de señal
Negro SIN– Cable de señal
Rosa SIN+ Cable de señal
Amarillo Z¯ Cable de señal (no idóneo para modos de funciona‐
Violeta Z Cable de señal (no idóneo para modos de funciona‐
Azul GND Conexión a masa
Rojo +US Tensión de alimentación (sin potencial a la carcasa)
Pantalla – Conectada con la carcasa del encoder
6.2 Señales del encoder
El DFS60S Pro dispone de las siguientes señales:
•
Tensión de alimentación +US del encoder: el rango de tensión de alimen‐
tación medido en el encoder está entre 4,5 V y 32 V.
•
Conexión a masa GND del encoder: con aislamiento galvánico de la carcasa.
La tensión correspondiente a GND es + US.
•
Canal de datos de proceso SIN+: SIN+ es una señal senoidal de 0,5 VPP con
una compensación estática de 2,5 V.
Señal Significado
miento de seguridad)
miento de seguridad)
Señal Significado
miento de seguridad)
miento de seguridad)
miento de seguridad)
miento de seguridad)
Page 20

•
2,5 V
2,5 V
2,9 V
1,75 V
2,9 V
1,75 V
0,5 V
0,5 V
360° el.
90° el.
¯Z
COS+ COS–
SIN+ SIN–
Z
COS+ – COS–
SIN+ – SIN–
Z – ¯Z
0 V
0 V
0 V
1 V
1 V
2,3 V
360° el.
90°el.
Canal de datos de proceso SIN–: SIN– es una señal senoidal de 0,5 VPP con
una compensación estática de 2,5 V. SIN– es antivalente con respecto a la
señal SIN+.
•
Canal de datos de proceso COS+: COS+ es una señal cosenoidal de 0,5 V
con una compensación estática de 2,5 V. La señal COS+ está desfasada
90° con respecto a la señal SIN+.
•
Canal de datos de proceso COS–: COS– es una señal cosenoidal de 0,5 V
con una compensación estática de 2,5 V. COS– es antivalente con respecto
a la señal COS+.
•
Impulso cero Z: Z emite la posición cero del encoder como señal digital con
una anchura de 90° eléctricos (el.) y un nivel de 1,75 V (Low) y 2,9 V (High).
Compruebe si la temperatura máxima generada en el punto de trabajo
durante el funcionamiento del encoder (véase Dibujos acotados, “A”) se
encuentra dentro del rango de temperatura de servicio indicado en los datos
PP
técnicos.
Si la temperatura en el punto de trabajo es superior a 70 °C:
– Colocar de forma bien visible en la carcasa del encoder el pictograma
PP
“¡Atención! Superficies calientes” según IEC 60 4175041.
– Explicar el significado del pictograma en el manual de instrucciones de
la máquina en la que el encoder está integrado.
7.1 Comprobación
No se precisan otras medidas de comprobación del funcionamiento.
8 Mantenimiento
El DFS60S Pro no precisa mantenimiento. En caso de fallo, no es posible la
reparación. Póngase en contacto con nosotros en caso de reclamaciones.
Tenga en cuenta la duración de uso del dispositivo. El encoder de seguridad
DFS60S Pro tiene una duración de uso máxima, tras la cual debe ser reti‐
rado de la circulación. Por este motivo, además de la duración de uso TM,
también se debe tener en cuenta la vida de los rodamientos. El parámetro
que se alcance en primer lugar en función de la aplicación determina
cuándo debe realizarse la puesta fuera de servicio.
El año de construcción del encoder se indica codificado en la etiqueta del
dispositivo o en la etiqueta del paquete en forma de un número de cuatro
dígitos (yyww). Las primeras dos cifras indican el año (sin siglo), las últimas
dos cifras ww, la semana del proceso de fabricación.
9 Puesta fuera de servicio
9.1 Comportamiento respetuoso con el medio ambiente
El encoder de seguridad está diseñado para tener el mínimo impacto medioam‐
biental. Consume la menor cantidad posible de energía y recursos.
También en el puesto de trabajo se ha de actuar de modo respetuoso con el
b
medio ambiente. Por ello, debe observarse la siguiente información relativa
a la eliminación de residuos.
9.2 Eliminación
Elimine siempre los dispositivos inservibles o que no se puedan reparar de
acuerdo con las disposiciones aplicables sobre eliminación de residuos de
cada país.
INDICACIÓN
Estaremos encantados de ayudarle a eliminar estos dispositivos. Póngase en
contacto con nosotros.
Figura 11: Señales del encoder antes de la diferenciación con una carga de
120 Ω, diagrama de señales al girar el eje en el sentido de las agujas del reloj
con orientación en dirección al eje
10 Datos técnicos
Hoja de datos de DFS60S Pro
Rendimiento
Número de periodos senoidales/cosenoida‐
les por revolución
Paso de medición (no orientado a la seguri‐
dad)
1.024
0,3 segundos de ángulo
Con 12 bits de interpolación
No linealidad integral Normalmente ± 45 segundos de ángulo
No linealidad diferencial ± 7 segundos de ángulo
Señal de referencia, número 1
Señal de referencia, posición 90°, eléctricos, unión lógica con seno/
Datos mecánicos
coseno
Peso
37
37
Brida clamping
Brida servo
Eje hueco pasante
Eje hueco de inserción
Aprox. 0,30 kg
Aprox. 0,25 kg
Par de arranque a 20 °C
Figura 12: Señales del encoder después de la diferenciación con una carga de
120 Ω, diagrama de señales al girar el eje en el sentido de las agujas del reloj
con orientación en dirección al eje
7 Puesta en servicio
INDICACIÓN
La puesta en ser vicio requiere la supervisión por parte de un persona autorizada
La puesta en servicio por primera vez de una instalación o una máquina en
la que esté integrado el dispositivo requiere la supervisión y habilitación por
parte de una persona autorizada. Observe a este respecto las indicaciones
de capitolo 2.
Tenga en cuenta el tiempo de inicialización tras la conexión. Durante este
tiempo, el encoder no emitirá ninguna señal válida.
Compruebe si todas las funciones de seguridad producen los efectos pla‐
neados con todas las velocidades relevantes.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 20
Brida clamping
Brida servo
Eje hueco pasante
Eje hueco de inserción
≤ 0,5 Ncm
≤ 0,8 Ncm
Par de funcionamiento a 20 °C
Brida clamping
Brida servo
Eje hueco pasante
Eje hueco de inserción
≤ 0,3 Ncm
≤ 0,6 Ncm
Aceleración angular máx. ≤ 5 × 105 rad/s²
Carga del eje admisible (radial/axial) 80 N/40 N
Movimiento admisible del eje (eje hueco) –
Estático (radial/axial) ± 0,3 mm/± 0,5 mm
Dinámico (radial/axial) ± 0,05 mm/ ± 0,1 mm
Número de revoluciones de funcionamiento
36
Referido al par de apoyo destensado.
37
Referido a encoders con salida de conector.
38
36
Page 21

Rendimiento
Brida clamping
Brida servo
Eje hueco pasante
Eje hueco de inserción
9.000 rpm
6.000 rpm
Par de inercia del rotor
Vida de los rodamientos
Brida clamping
Brida servo
Eje hueco pasante
Eje hueco de inserción
39
8 gcm²
56 gcm²
3,6 × 109 revoluciones
40
Datos eléctricos
Interfaces eléctricas 4,5 V … 32 V, Sin/Cos
1,0 VSS (diferencial)
Frecuencia de salida ≤ 153,6 kHz
Tiempo de inicialización tras la conexión 50 ms
41
Resistencia de carga ≤ 120 Ω
Consumo de potencia sin carga ≤ 0,7 W
Clase de protección según DIN EN 61 140 III
Grado de suciedad 2
Protección contra polarización inversa Sí
Resistencia a cortocircuitos de las salidas Sí
42
Datos del entorno
CEM Conforme a
Tipo de protección según IEC 60 529 IP 65
Humedad relativa del aire permitida
Rango de temperatura de servicio
44
45
EN 61 000-6-2, EN 61 000-6-3
IEC 61 326-3-1
43
90 %
M12, M23 –30 … +95 °C
Salida del cable –30 … +85 °C
Rango de temperatura de almacenamiento
(sin embalaje)
–30 … +90 °C
Altitud de servicio Máx. 2.000 m sobre el nivel del mar (80 kPa)
Resistencia a impactos conforme a EN 60
46
068-2-27
Resistencia a las vibraciones según EN
60 068-2-6)
48
Salida del cable 30 g
M12 incl. contraconector 30 g
M23 incl. contraconector 10 g
100 g/6 ms
10 … 1.000 Hz
10 … 1.000 Hz
10 … 1.000 Hz
47
Características técnicas de seguridad
Nivel de integridad de seguridad
48
SIL2 (IEC 61 508), SILCL2 (EN 62 061)
Categoría 3 (EN ISO 13 849)
Índice de prueba No se requiere
Índice de demanda máximo Continuo (señales analógicas)
Nivel de rendimiento
49
PFH
con una temperatura de servicio de
D
95 °C) (probabilidad de un fallo peligroso por
hora)
TM (duración de uso)
49
50
PL d (EN ISO 13 849)
–8
1,7 × 10
20 años (EN ISO 13 849)
Paso de medición orientado a la seguridad 0,09° de evaluación de cuadratura
Exactitud de medición orientada a la seguri‐
dad
± 0,09°
11 Accesorios
Referencias de los accesorios
Artículo Referencia
BEF-WK-SF Pinzas servo grandes (3 uds.) 2029166
BEF-WK-SF Pinzas servo, semicasquillos (2
uds.)
BEF-DS02DFS/VFS
Par de apoyo, largo
2029165
Bajo pedido
50
Podrá encontrar accesorios adicionales en la información de producto en
www.sick.com.
Los accesorios tienen que ser considerados por el usuario del producto al confec‐
cionar la máquina completa como parte de la implementación de las funciones
de seguridad correspondientes. Si fuera necesario, deberán certificarse las exclu‐
siones de errores requeridas.
12 Anexo
12.1 Volumen de suministro
•
Encoder DFS60S Pro según clave de tipos
•
Muelle de ajuste según DIN 6885-A (con variante de eje hueco)
•
Tornillo Torx T20 para anillo de fijación (con variante de eje hueco)
•
Indicaciones generales de seguridad
•
Instrucciones de uso
12.2 Certificados de conformidad
El encoder de seguridad DFS60S Pro ha sido fabricado de acuerdo con las
siguientes directivas:
•
Directiva de máquinas 2006/42/CE
•
Directiva CEM 2004/108/CE
La declaración de conformidad de la UE completa está a su disposición en la
página web de SICK: www.sick.com
INDICACIÓN
El certificado de este producto se refiere al propio producto y a sus acceso‐
rios.
IMPORTANTE
Puede encontrar información más exhaustiva y detallada al final de las ins‐
trucciones de uso (en la hoja suplementaria comprensible con independen‐
cia del idioma) así como en www.sick.com.
13 Dibujos acotados
IMPORTANTE
Encontrará los dibujos acotados al final de las instrucciones de uso (en la
hoja suplementaria comprensible con independencia del idioma).
38
La temperatura de servicio debe medirse a velocidad nominal y reducirse 3,0 K cada
1.000 rpm.
39
Dependiendo de la aplicación, la vida de los rodamientos también puede limitar la
duración de uso.
40
Calculado para el número de revoluciones y la temperatura máximos.
41
Transcurrido este tiempo pueden leerse las señales válidas.
42
Se permite el cortocircuito con otro canal o GND durante 30 s como máximo. En caso de US
≤ 12 V, se permite cortocircuito adicional con US durante 30 s como máximo.
43
Con salida de conector: el contraconector debe estar enchufado y cumplir al menos con
IP 65.
44
Condensación en la exploración óptica no permitida.
45
La temperatura de servicio debe medirse al número de revoluciones nominal y reducirse
3,0 K cada 1.000 rpm.
46
Comprobada durante el funcionamiento con monitorización de la longitud vectorial.
47
Número de golpes en cada eje sometido a comprobación, tanto positivos como negativos:
3.
48
Para más información sobre el diseño de seguridad de su máquina/instalación, póngase en
contacto con su representante de SICK.
49
Los valores indicados hacen referencia a una cober tura de diagnóstico del 99 %, que debe
alcanzarse mediante el sistema de accionamiento externo.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 21
50
El par de apoyo se suministra montado de fábrica. No se permite el cambio del par de
apoyo por el cliente.
Page 22

N O T I C E D ’ I N S T R U C T I O N f r
Codeur sûr
1 À propos de ce document
Ce document est un document original.
Veuillez lire attentivement cette notice d'instruction avant de travailler avec le
codeur sûr DFS60S Pro, de le monter, de le mettre en service ou de procéder à sa
maintenance.
1.1 Objet de ce document
Cette notice d’instruction, destinée au personnel technique du fabricant de la
machine ou de l’exploitant de la machine, constitue un guide de montage fiable,
d’installation électrique, de mise en service, ainsi que de fonctionnement et de
maintenance du codeur DFS60S Pro.
En outre, la planification et la mise en œuvre de codeurs sûrs, tels que le DFS60S
Pro, requièrent des compétences techniques que ce document ne procure pas.
Il est fondamental de respecter les prescriptions réglementaires et légales lors du
fonctionnement du codeur DFS60S Pro.
1.2 Symboles et conventions documentaires
AVERTISSEMENT
Un avertissement vous indique les dangers concrets ou potentiels. Il doit
prévenir les accidents.
Lisez et respectez impérativement les avertissements !
Les instructions sont signalées par une flèche. Lisez et suivez attentivement
b
les instructions.
2 Pour votre sûreté
Ce chapitre est destiné à votre sécurité et à celle de l’utilisateur de l’installation.
Veuillez lire attentivement ce chapitre avant de travailler avec le
codeur DFS60S Pro sur la machine ou l'installation sur laquelle le codeur sûr
est mis en œuvre.
2.1 Consignes de sécurité générales
AVERTISSEMENT
Observez les consignes et mesures de sécurité !
Les points suivants doivent être pris en compte pour garantir l'utilisation
conforme et sûre du codeur DFS60S Pro.
Pour le montage et l’utilisation du codeur, ainsi que pour sa mise en service et les
contrôles techniques réguliers, il est impératif d’appliquer les prescriptions
légales nationales et internationales, notamment :
•
la directive machines 2006/42/CE,
•
la directive d'utilisation des outils de travail 2009/104/CE,
•
les prescriptions de prévention des accidents et les règlements de sécurité,
•
toutes les prescriptions de sécurité importantes.
Le fabricant et l’opérateur de la machine sur laquelle le codeur DFS60S Pro va
être mis en œuvre sont responsables vis-à-vis des autorités compétentes de
l’application et du respect stricts de l’ensemble des prescriptions et règlements
de sécurité en vigueur.
Cette notice d'instruction doit être mise à disposition de l'opérateur de la machine
sur laquelle le codeur sûr DFS60S Pro va être mis en œuvre. L’opérateur de la
machine doit être formé par le personnel qualifié et avoir impérativement lu cette
notice d’instruction.
2.2 Utilisation conforme
Le codeur DFS60S Pro peut être utilisé dans des applications de sécurité jusqu'à
la catégorie 3 selon la norme EN ISO 13 849, jusqu'à la limite d'exigence SIL2
selon la norme CEI 61 508, jusqu'à SILCL2 selon la norme EN 62 061 ou jusqu'à
PL d selon la norme EN ISO 13 849.
Le codeur DFS60S Pro prend en charge des fonctions de sécurité qui se basent
sur l'information de vitesse et de sens de rotation.
Le codeur n’est pas en mesure d’instaurer un état sûr de manière autonome.
La vitesse, le sens de rotation et l'arrêt, ainsi que les dysfonctionnements pou‐
vant être à l'origine d'un danger, doivent être détectés par un système d'évalua‐
tion supérieur. Les exigences relatives au système d'évaluation sont décrites dans
chapitre 4.1 et chapitre 4.2.
Utiliser le codeur DFS60S Pro uniquement dans les limites des caractéristiques
techniques et des conditions d’exploitation prescrites et indiquées. Observer et
respecter les exigences indiquées dans les caractéristiques techniques et les
conditions ambiantes afin de garantir le fonctionnement sûr du DFS60S Pro.
Pour toute autre utilisation, aussi bien que pour les modifications apportées à
l'appareil, y compris dans le cadre du montage et de l’installation, la société SICK
STEGMANN GmbH décline toute responsabilité.
2.3 Utilisation non conforme
Le DFS60S Pro ne prend pas en charge les modes de fonctionnement de sécurité
liés au positionnement absolu ou à la position absolue.
Le DFS60S Pro fournit pour le référencement un top zéro. Ce signal ne doit pas
être utilisé pour les modes de fonctionnement de sécurité.
Le DFS60S Pro ne convient pas aux usages suivants (entre autres) :
•
Sous l’eau
•
Dans des zones explosibles
•
Dans des zones accessibles au public
2.4 Exigences relatives aux qualifications du personnel
Le codeur DFS60S Pro doit être conçu, monté, raccordé, mis en service et entre‐
tenu uniquement par le personnel qualifié.
Conception
La personne chargée de la conception doit posséder des connaissances et de
l’expérience dans le choix et l’utilisation de codeurs sûrs sur les machines et
connaitre les règlements techniques et la réglementation nationale en vigueur sur
la sécurité au travail.
Montage mécanique et mise en service
La personne chargée du montage mécanique et de la mise en service doit
posséder des connaissances et de l’expérience dans le domaine correspondant.
Installation électrique
La personne chargée de l’installation électrique et de la mise en service doit
posséder suffisamment de connaissances spécialisées et d’expérience dans le
domaine correspondant.
3 Description du produit
Le DFS60S Pro est un codeur incrémental haute résolution de 60 mm de
diamètre.
La transmission des signaux du codeur au système d'évaluation est effectuée par
des signaux analogiques sous forme de tensions sinusoïdales et cosinusoïdales.
En cas d'utilisation d'une unité d'évaluation adaptée, le DFS60S Pro peut être mis
en œuvre pour des modes de fonctionnement de sécurité liés à la vitesse et au
sens de rotation. Des fonctions de sécurité conformes à la norme CEI 61 800-5-2
peuvent ainsi être développées.
L'interface mécanique a été dimensionnée selon la norme CEI 61 800-5-2 de
sorte qu'une exclusion de défaut puisse être admise suite à un surdimensionne‐
ment.
Le DFS60S Pro se caractérise par une durée de vie limitée des paliers (voir
caractéristiques techniques). Lorsque leur durée de vie est dépassée, les paliers
peuvent présenter des traces d’usure ou de fatigue susceptibles d’entraîner leur
défaillance. Afin d’éviter cela, le DFS60S Pro doit être mis hors service au plus
tard lorsque la durée de vie des paliers est atteinte. La durée de vie des paliers
est également influencée par l’application, notamment par les modes de fonc‐
tionnement à faibles vitesses, un fonctionnement réversible et les vibrations
mécaniques. Éviter tout passage de courant à travers les paliers à billes (p. ex.
par des courants injectés).
Pour augmenter la couverture du diagnostic du capteur sûr du point de vue d’une
défaillance inopinée des paliers (p. ex. en raison de conditions d’exploitation diffi‐
ciles, de sollicitation limite ou autre), il peut s’avérer utile de faire appel à une
vérification externe de la plausibilité des informations fournies par le capteur.
AVERTISSEMENT
Consigne de sécurité
Au-delà de sa durée d’utilisation, le DFS60S Pro ne doit pas être utilisé pour
des applications de sécurité (voir caractéristiques techniques). Selon l’appli‐
cation, la durée d’utilisation peut être limitée par la durée de vie des paliers.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 22
Page 23

3.1 Désignation
S
1
D
F
G
4
E
H
J
O
A
B
C
D
J
K
L
M
N
1 0 2 4
0 S 0 1
D F S 6 0 S - S O 0
Axe saillant
Type
Axe saillant
Version mécanique
Bride synchro, filetage M4, axe saillant Ø 6 x 10 mm avec surface
Bride synchro, filetage M4, axe saillant Ø 6 x 10 mm avec clavette
Bride synchro, filetage M4, axe saillant Ø 6 x 10 mm avec clavette
Bride synchro, filetage M3, axe saillant Ø 6 x 10 mm avec clavette
Bride synchro, filetage M3, axe saillant Ø 6 x 10 mm avec clavette
Bride de serrage, filetage M4, axe saillant Ø 10 x 19 mm avec clavette
Bride de serrage, filetage M3, axe saillant Ø 10 x 19 mm avec surface
Bride de serrage, filetage M3, axe saillant Ø 10 x 19 mm avec surface
Interface électrique
4.5… 32V, SIN/COS
Mode de raccordement
Résolution
Connecteur mâle M23, 12 pôles, radial
Connecteur mâle M23, 12 pôles, radial
Connecteur mâle M12, 8 pôles, radial
Connecteur mâle M12, 8 pôles, axial
Câble 8 fils, universel 0,5 m1)
Câble 8 fils, universel 1,5 m1)
Câble 8 fils, universel 3 m1)
Câble 8 fils, universel 5 m1)
Câble 8 fils, universel 10 m1)
Connecteur mâle M12, 8 pôles, axial
Bras de couple,
long (uniquement avec types B, T)
Résolution 1.024 périodes
Arbre creux
Type
B Axe creux non traversant
T Axe creux traversant
Version mécanique
A Arbre creux Ø 6 mm avec rainure de clavette
B Arbre creux Ø 8 mm avec rainure de clavette
C Arbre creux Ø 3/8“ avec rainure de clavette
D Arbre creux Ø 10 mm avec rainure de clavette
E Arbre creux Ø 12 mm avec rainure de clavette
F Arbre creux Ø 1/2“ avec rainure de clavette
G Arbre creux Ø 14 mm avec rainure de clavette
H Arbre creux Ø 15 mm avec rainure de clavette
J Arbre creux Ø 5/8“ avec rainure de clavette
Interface électrique
O 4.5… 32V, SIN/COS
Mode de raccordement
Résolution
A Connecteur mâle M23, 12 pôles, radial
C Connecteur mâle M12, 8 pôles, radial
J Câble 8 fils, universel 0,5 m
1)
K Câble 8 fils, universel 1,5 m1)
L Câble 8 fils, universel 3 m1)
M Câble 8 fils, universel 5 m1)
N Câble 8 fils, universel 10 m1)
Périodes par tour
1 0 2 4
0 S 0 1
Résolution 1.024 périodes
Bras de couple,
long (uniquement avec types B, T)
D F S 6 0 S - 000
REMARQUE
Des écarts peuvent se produire en raison des :
•
tolérances de combinaison dans les seuils de commutation :
± 1 incrément
•
Tolérances de combinaison de moments de balayage : nombre
d'incréments dans la différence temporelle à vitesse maximale
Pour l'évaluation de signal, les signaux différentiels doivent toujours être utilisés
(voir chapitre 6.2).
Les signaux rectangulaires doivent être formés à partir des signaux différentiels,
avec des éléments de commutation appropriés (p. ex. des comparateurs). Ces
signaux rectangulaires sont utilisés pour un compte avec une méthode adaptée
(p. ex. décodeur de quadrature).
Les seuils de commutation doivent être sélectionnés de sorte que la limite
inférieure de la surveillance de la longueur vectorielle (voir chapitre 4.2.1) ne soit
pas dépassée. En conséquence, le seuil de commutation supérieur, tolérance
incluse, doit se situer à 150 mV maximum au-dessus du milieu du signal (voir
illustration 12 ) et le seuil de commutation inférieur, tolérance incluse, à 150 mV
maximum en dessous du milieu du signal.
AVERTISSEMENT
En cas de dimensionnement inapproprié des seuils de commutation et de
l'hystérésis dans l'évaluation de signal, la détection de fronts de signaux
supplémentaires ou la non-détection erronée de fronts de signaux peut se
produire. Cela peut conduire par exemple à une erreur de détermination du
sens de rotation, de la position ou de la vitesse.
Les compteurs permettent d'atteindre une résolution de 4.096 pas par tour (soit
4 pas par période de signal ou 1 pas par quadrant à chaque période de signal).
La couverture du diagnostic (DC) pour l'identification des défauts des signaux de
codeur doit s'élever à au moins 99 %. Pour cela, les exigences de diagnostic de
chapitre 4.2 doivent être remplies. Le diagnostic doit être exécuté dans le délai de
sécurité du processus52.
4.2 Exigences de diagnostic et identification des défauts
Le système d'évaluation en aval doit garantir selon la norme CEI 61800-5-2 les
1) Le départ de câble universel est positionné de sorte qu'une pose
sans pli soit possible dans le sens radial ou axial. Homologation UL
non disponible.
exigences de diagnostic et l'identification des défauts décrites ci-après en raison
des hypothèses d'erreur déjà répertoriées pour l'utilisation de capteurs de feed‐
back de mouvement et de position.
En cas de détection d'erreur au cours de l'un des diagnostics cités ci-après, une
réponse est requise pour amener l'application dans un état sûr.
En cas d'erreur, l'état sûr de l'application doit être atteint avant qu'une situation
dangereuse puisse se produire. Par conséquent, la somme du temps maximal
nécessaire à l'identification des défauts et du temps de réponse doit être
inférieure au délai de sécurité du processus52.
Le temps maximal nécessaire à l'identification des défauts correspond à l'inter‐
valle temporel auquel les mesures de diagnostic mentionnées ci-dessous sont
intégralement répétées.
4.2.1 Défauts des signaux analogiques de codeur Sinus/Cosinus
Pour détecter toute modification non autorisée de niveau dans le rapport Sinus et
Cosinus, la relation mathématique sous-jacente des signaux Sinus/Cosinus est
utilisée.
Grâce à la formation de la grandeur k résultant de la relation mathématique sui‐
vante :
k² = k1² × sin² α + k2² × cos²α
ou de tout autre procédé mathématique approprié, il est possible de capturer le
niveau de tension continue sous-jacent aux signaux Sinus/Cosinus. La comparai‐
son avec les limitations correspondantes maximale et minimale permet de détec‐
ter rapidement et avec précision les écarts non autorisés, indépendamment de la
4 Conception
4.1 Exigences relatives à l'évaluation de signal
Pour déterminer la vitesse en tenant compte du signe ainsi que pour déterminer
la position incrémentale correcte, le signal sinus et le signal cosinus doivent être
évalués. Cela demande une architecture de sécurité adaptée. En général, l'évalua‐
tion de signal s'effectue dans deux canaux distincts, dont les résultats sont com‐
parés dans le délai de sécurité du processus51. L'ampleur de l'écart autorisé doit
être choisie de sorte que les erreurs statiques soient détectées dans l'évaluation.
51
Délai de sécurité du processus : intervalle entre la survenue d'une défaillance
dangereuse du système de mesure et le moment auquel la réaction doit
prendre fin pour empêcher l'apparition du danger.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 23
1) Le départ de câble universel est positionné de sorte qu'une pose
sans pli soit possible dans le sens radial ou axial. Homologation UL
non disponible.
position angulaire actuelle α.
Avec les signaux présents, k peut être déterminé à l'aide du calcul suivant :
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
Ce rapport entre les signaux utiles peut être clairement représenté avec un
modèle en deux dimensions (figure de Lissajous). Les signaux utiles forment alors
un anneau.
Pour le signal k, une tolérance de ± 50 % autour de la position nominale est
admise. Un écart plus important constitue une violation des limites de longueur
vectorielle et exige une réponse adéquate du système d'évaluation à l'erreur.
Il est recommandé de ne pas définir les limites de manière trop étroite pour éviter
des déclenchements erronés.
4.2.2 Perte du couplage mécanique du boîtier du codeur ou déviation du cou‐
plage mécanique pendant l'arrêt ou le fonctionnement
Cette hypothèse d'erreur peut être exclue conformément à la norme
CEI 61 800-5-2 en tenant compte du montage correct du bras de couple ou de la
bride de serrage/bride synchro (voir chapitre 5).
4.2.3 Perte du couplage mécanique arbre du codeur-arbre d'entraînement
pendant l'arrêt ou le fonctionnement
Cette hypothèse d'erreur peut être exclue conformément à la norme
CEI 61 800-5-2 en tenant compte du montage correct du codeur sur l'arbre
d'entraînement (voir chapitre 5).
4.2.4 Signal sinus/cosinus - Arrêt en raison de défauts électriques
Cette hypothèse d'erreur peut être exclue, car les signaux sinus/cosinus sont cap‐
turés et traités uniquement sous forme analogique, et dans la conception, aucune
structure de mémorisation n'est prévue pour les tensions analogiques.
52
Délai de sécurité du processus : intervalle entre la survenue d'une défaillance
dangereuse du système de mesure et le moment auquel la réaction doit
prendre fin pour empêcher l'apparition du danger.
Page 24

4.2.5 Endommagement, encrassement ou résolution de la mesure matéria‐
lisée (disque codeur)
Un endommagement ou un encrassement de la mesure matérialisée peut
conduire aux situations suivantes :
La perte de la protection de l'émetteur entraîne un niveau de signal maximal dans
les deux canaux. Ceci peut être détecté selon chapitre 4.2.1.
Un alignement incorrect du disque codeur par rapport à l'analyseur optique ou un
encrassement génère également des niveaux de signal dans les canaux Sinus et
Cosinus, qui peuvent être diagnostiqués selon chapitre 4.2.1.
Pour la résolution de la mesure matérialisée, une exclusion de défaut peut être
effectuée selon la norme EN ISO 13 849-1 et la norme EN ISO 13 849-2 sur la
base d'un surdimensionnement mécanique.
4.2.6 Oscillations d'une ou de plusieurs sorties
Les oscillations au niveau des sorties de signaux peuvent être détectées comme
suit :
Si les oscillations conduisent à des niveaux de signaux non autorisés dans l'un
des canaux ou les deux, l'identification des défauts a lieu selon chapitre 4.2.1.
À l'arrêt, lors de l'utilisation d'un discriminateur de phase adapté pour produire
des impulsions de comptage dans le système dévaluation, l'oscillation d'un signal
d'entrée agit comme un comptage anticipé ou un comptage rétroactif d'un
incrément. L'erreur qui en résulte correspond à la valeur angulaire d'un incrément.
Une oscillation des deux signaux (sinus et cosinus) pendant la phase ou d'un seul
signal pendant le fonctionnement du moteur entraîne des niveaux de signaux
inadmissibles, qui sont détectés par des mesures conformes à chapitre 4.2.1.
4.2.7 Permutation des signaux de sortie sinus et cosinus
Cette erreur peut être exclue, car les signaux sinus/cosinus sont capturés et
traités séparément.
Il n'existe pas de multiplexeur pour ces signaux du codeur.
4.2.8 Surveillance de la tension d'alimentation du codeur émise par le
système d'évaluation
Les niveaux non autorisés de tension d'alimentation du codeur sont détectés par
des mesures conformes à Défauts des signaux analogiques de codeur Sinus/
Cosinus. La limite inférieure citée ici pour la longueur vectorielle aide notamment
à surveiller la sous-tension.
Pour limiter les erreurs dont la cause est commune et pour détecter relativement
tôt les erreurs, la tension d’alimentation du codeur doit être surveillée afin qu'elle
respecte la limite prescrite dans les caractéristiques techniques.
4.2.9 Fonctionnement du système de codeur en dehors des plages de
températures autorisées
S'il est impossible de garantir le fonctionnement du système de codeur dans la
plage de températures autorisée, l'exploitant du système doit prendre des
mesures appropriées pour respecter la plage de températures spécifiée.
Les erreurs résultant d'un fonctionnement à des températures inadmissibles sont
détectées par des mesures conformes à chapitre 4.2.1.
4.3 Exigences relatives au raccord d'arbre mécanique
4.3.1 Codeur à arbre creux
Le raccordement de l'unité d'entraînement au codeur à arbre creux doit être
établi par le biais d'une liaison par friction ou d'une liaison par friction et clave‐
tage. L'utilisation d'une clavette empêche une torsion radiale du codeur.
Pour les arbres de transmission de diamètre 6 mm, 8 mm et 3/8", l'usage d'une
clavette est obligatoire. Ainsi, le surdimensionnement nécessaire pour exclure
tout défaut de perte de raccord d'arbre est garanti.
Les exigences pour le montage d’une clavette sur l’arbre d’entraînement
figurent sur les plans cotés à la fin de la notice d'instruction sur la feuille
complémentaire indépendante de lalangue.
4.3.2 Codeur à bride de serrage et à bride synchro
Le couplage par arbre fait partie de la chaîne des fonctions de sécurité. Il doit être
dimensionné et validé en conséquence par l'utilisateur. Il ne constitue pas une
composante de la prise en compte de la sécurité réalisée par SICK STEGMANN.
Réaliser un raccord d'arbre entre le codeur et le système d'entraînement
avec un accouplement élastique.
Utiliser un accouplement adapté à l'application. Les accouplements doivent
répondre aux exigences de la norme CEI 61 80052:2008 (voir
chapitre 4.2.3).
Respecter les caractéristiques techniques et la notice de montage de
l’accouplement utilisé.
Les versions mécaniques suivantes sont disponibles pour la liaison par friction et
clavetage (voir les plans cotés à la fin de la notice d'instruction (sur la feuille
complémentaire indépendante de lalangue)) :
•
Axe saillant avec clavette
•
Axe saillant avec surface
•
Pour le bras de couple :
– 4 × vis à tête cylindrique M3 selon la norme DIN ISO 4762 (ou types de
vis équivalents avec tête plate)
– Rondelles
•
Pour les variantes de bride F, G, H, J
– 3 × vis M3
•
Pour les variantes de bride 1, D, 4, E
– 3 × vis M4
•
Pour le montage de la bride synchro
– Kit d'accessoires grande bride synchro
(réf. : 2029166)
– 3 × vis M4
La classe de résistance des vis doit être de 8.8 minimum. Sélectionnez la lon‐
gueur des vis en fonction des conditions de montage.
5.2 Préparation au montage
Assurez-vous que les composants sont exempts de lubrifiants et d'encrasse‐
ments.
Vérifiez l'absence de dommages.
Pour les variantes avec bras de couple, le raccord d’arbre doit être rigide et
non élastique (comme avec des accouplements à soufflet).
5.2.1 Remarques d'ordre général
Reliez le codeur DFS60S Pro à la bride côté client.
Toutes les dimensions et tolérances indiquées sur les dessins techniques et dans
la description de montage doivent être respectées.
Plus le centrage du DFS60S Pro est précis, plus le décalage angulaire et le désali‐
gnement de l'arbre sont moindres lors du montage et moins les paliers du
DFS60S Pro sont sollicités.
Arrêter tous les raccords vissés avec du frein de vis liquide (p. ex. LOCTITE 243)
pour empêcher le desserrage.
REMARQUE
Les rondelles élastiques et les rondelles dentées ne suffisent pas pour
sécuriser les vis.
Pour les variantes avec bras de couple, dans certains cas, la clé dynamométrique
ne peut pas être placée verticalement sur la vis. Inclure dans la tolérance du
couple de serrage une inclinaison de 20° maximum. La fixation ou le desserrage
fréquent de la vis avec une déviation angulaire peut endommager la vis
(voir chapitre 5.2.2 et chapitre 5.2.3)
5.2.2 Montage du codeur à arbre creux avec bras de couple
Si nécessaire, monter la clavette jointe (1) sur l'arbre d'entraînement côté
client (2) (respecter chapitre 4.3.1).
Bloquer l’arbre d’entraînement côté client (2).
Appliquer du frein de vis (respecter chapitre 5.2.1) sur le filetage de la bague
de serrage (3) ou sur la vis Torx T20 (4) fournie.
Introduire la vis Torx T20 (4) dans la bague de serrage (3) et effectuer le
prémontage sans serrer à fond.
Pousser le codeur sur l'arbre d'entraînement côté client (2) aligné sur la cla‐
vette (1). Tenir compte de la distance du bras de couple (5) par rapport à la
surface de montage (6) en fonction de la longueur de la vis (7).
Prémonter les vis (7) avec les rondelles (8), appliquer du frein de vis (respec‐
ter chapitre 5.2.1) sur le filetage correspondant.
Serrer davantage les vis (7) jusqu'à ce que le codeur puisse être
entièrement inséré et le bras de couple (5) en appui sur la surface de mon‐
tage (6).
Serrer les vis (7) à un couple de serrage de 1,2 ± 0,1 Nm.
Serrer la vis Torx T20 (4) à un couple de serrage de 3,5 ± 0,1 Nm.
5 Montage
Ce chapitre décrit la préparation et la réalisation du montage du codeur
DFS60S Pro.
Mettez toutes les machines/installations concernées par le montage hors
tension.
Évitez tout impact et coup sur l'arbre, car ils risquent d'endommager les rou‐
lements à billes.
Ne tirez ou n'appuyez jamais sur le codeur.
5.1 Matériel de fixation
Vous avez besoin des vis suivantes :
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 24
Illustration 1: Montage du codeur à axes creux non traversants
Page 25

Illustration 2: Montage du codeur à axes creux traversants
5.2.3 Montage du codeur à arbres creux avec bras de couple long unilatéral
Si nécessaire, monter la clavette jointe (1) sur l'arbre d'entraînement côté
client (2) (respecter chapitre 4.3.1).
Bloquer l’arbre d’entraînement côté client (2).
Appliquer du frein de vis (respecter chapitre 5.2.1) sur le filetage de la bague
de serrage (3) ou sur la vis Torx T20 (4) fournie.
Introduire la vis Torx T20 (4) dans la bague de serrage (3) et effectuer le
prémontage sans serrer à fond.
Pousser le codeur sur l'arbre d'entraînement côté client (2) aligné sur la cla‐
vette (1) de sorte que le bras de couple long (5) repose sur la surface de
montage (6).
Fixer le bras de couple long (5) avec au moins une vis M4 (7) et une ron‐
delle (8), appliquer du frein de vis (respecter chapitre 5.2.1) sur le filetage
correspondant.
Serrer la vis (7) à un couple de serrage de 1,2 ± 0,1 Nm.
Serrer la vis Torx T20 (4) sur la bague de serrage (3) à un couple de 3,5
± 0,1 Nm.
5.2.4 Montage du codeur à axes saillants via des trous filetés côté bride
Pousser le codeur dans l'ergot de centrage/montage (1).
Prémonter les vis (2), appliquer du frein de vis (respecter chapitre 5.2.1) sur
le filetage correspondant.
Serrer les vis (2) au couple de serrage suivant :
1,2 ± 0,1 Nm.
Réaliser un raccord d'arbre entre le codeur et l'arbre d'entraînement au
moyen d'une liaison élastique adaptée (respecter chapitre 4.3.2).
Illustration 5: Montage de la bride de serrage via des trous filetés côté bride
Illustration 6: Montage de la bride synchro via des trous filetés côté bride
5.2.5 Montage du codeur à axes saillants avec brides synchro
Prémonter les brides synchro (1) avec les vis (2), appliquer du frein de vis
(respecter chapitre 5.2.1) sur le filetage correspondant.
Aligner les brides synchro (1) de sorte que le codeur puisse être poussé
dans l'ergot de centrage/montage (3).
Pousser le codeur dans l'ergot de centrage/montage (3).
Entrer les brides synchro (1) dans la rainure synchro en tournant. Veiller à un
recouvrement maximale et serrer les vis (2).
Serrer les vis (2) au couple de serrage suivant :
1,2 ± 0,1 Nm.
Réaliser un raccord d'arbre entre le codeur et l'arbre d'entraînement au
moyen d'une liaison élastique adaptée (respecter chapitre 4.3.2).
Illustration 3: Montage du codeur à axes creux non traversants avec bras de
couple long unilatéral
Illustration 7: Montage avec des brides synchro
5.2.6 Montage du codeur à axes saillants avec bride synchro via des demicoques de brides synchro
Pousser le codeur dans l'ergot de centrage/montage (1).
Prémonter les demi-coques de brides synchro (2) avec les vis (3), appliquer
du frein de vis (respecter chapitre 5.2.1) sur le filetage correspondant.
Aligner les demi-coques de brides synchro (2) dans la rainure synchro. Veiller
à un recouvrement maximale et fixer en serrant les vis (3).
Serrer les vis (3) au couple de serrage suivant :
1,2 ± 0,1 Nm.
Réaliser un raccord d'arbre entre le codeur et l'arbre d'entraînement au
moyen d'une liaison élastique adaptée (respecter chapitre 4.3.2).
Illustration 4: Montage du codeur à axes creux traversants avec bras de couple
long unilatéral
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 25
Page 26

Illustration 8: Montage avec des demi-coques de bride synchro
6 Installation électrique
AVERTISSEMENT
Mettre toutes les machines/installations/véhicules concernés par l'installa‐
tion hors tension.
Pour le raccordement du DFS60S Pro, respecter la notice d'instruction du
système d'évaluation supérieur.
S’assurer que le raccordement de blindage a été réalisé proprement.
Raccorder le boîtier ou le blindage à la terre ou à la masse. Pour cela, rac‐
corder la tresse de blindage sur une grande surface.
N'utiliser que des câbles blindés et torsadés par paires. Tous les câbles de
signalisation/signaux d'interface doivent être torsadés par paires avec le
signal complémentaire correspondant.
Protéger le bras de couple de toute sollicitation des câbles de raccordement.
Respecter le plus petit rayon de courbure admissible des câbles de raccor‐
dement (rayon de courbure admissible du codeur avec départ de câble :
7,5 min. × diamètre extérieur du câble).
Utiliser un câble adapté à l'application et aux conditions d'utilisation.
Nous recommandons l'utilisation de câbles accessoires de SICK (voir les
fiches techniques correspondantes).
Alimenter le codeur avec une tension produite par des systèmes PELV
(EN 50 178) (niveau d'encrassement 2).
Le courant du bloc d’alimentation secteur, qui alimente le codeur, doit être
limité en externe à 1 A max., soit au niveau du bloc d’alimentation même,
soit par un fusible.
Évaluer les signaux de codeur de manière différentielle.
Terminer de manière différentielle les signaux de codeur utilisés et inutilisés,
à savoir ajouter entre le signal et le signal complémentaire une résistance
de terminaison de ≥ 120 Ω.
Pour les codeurs avec départ de connecteur, ne pas poursuivre les signaux
inutilisés. Une terminaison n'est pas nécessaire dans ce cas.
6.1 Vue d’ensemble du raccordement
Le DFS60S Pro est livré avec l'un des raccordements suivants :
•
Connecteur mâle M12, 8 pôles
•
Connecteur mâle M23, 12 pôles
•
Extrémités de câble ouvertes
Illustration 9: Raccordement M12, 8 pôles
Affectation des broches du raccordement M12, 8 pôles
Broche
M12, 8 pôles
1 COS– Câble de signal
2 COS+ Câble de signal
3 SIN– Câble de signal
4 SIN+ Câble de signal
5 Z¯ Câble de signal (inadapté aux modes de fonctionne‐
6 Z Câble de signal (inadapté aux modes de fonctionne‐
7 GND Raccordement à la masse
8 +US Tension d’alimentation (libre de potentiel vers le
Blindage – Relié au boîtier du codeur
Signal Signification
ment de sécurité !)
ment de sécurité !)
boîtier)
Illustration 10: Raccordement M23, 12 pôles
Affectation des broches du raccordement M23, 12 pôles
Broche
M23, 12 pôles
Signal Signification
6 COS– Câble de signal
5 COS+ Câble de signal
1 SIN– Câble de signal
8 SIN+ Câble de signal
4 Z¯ Câble de signal (inadapté aux modes de fonctionne‐
3 Z Câble de signal (inadapté aux modes de fonctionne‐
ment de sécurité !)
ment de sécurité !)
10 GND Raccordement à la masse
12 +US Tension d’alimentation (libre de potentiel vers le
boîtier)
2, 7, 9, 11 – Ne pas affecter
Blindage – Relié au boîtier du codeur
Raccordement avec extrémités de câble ouvertes
Section du conducteur :
Blindage 8 × 0,15 mm² + 1,5 mm²
Affectation des câbles du raccordement avec extrémités ouvertes
Extrémité de câble Signal Signification
Marron COS– Câble de signal
Blanc COS+ Câble de signal
Noir SIN– Câble de signal
Rose SIN+ Câble de signal
Jaune Z¯ Câble de signal (inadapté aux modes de fonctionne‐
Violet Z Câble de signal (inadapté aux modes de fonctionne‐
ment de sécurité !)
ment de sécurité !)
Bleu GND Raccordement à la masse
Rouge +US Tension d’alimentation (libre de potentiel vers le
boîtier)
Blindage – Relié au boîtier du codeur
6.2 Signaux du codeur
Le DFS60S Pro dispose des signaux suivants :
•
Tension d’alimentation +US du codeur : la plage de tension d’alimentation
mesurée au niveau du codeur se situe entre 4,5 V et 32 V.
•
Connexion à la masse GND du codeur : séparée galvaniquement du boîtier.
La tension relative à GND est +US.
•
Canal des données de processus SIN+ : SIN+ est un signal sinus de 0,5 V
avec un décalage statique de 2,5 V.
•
Canal des données de processus SIN– : SIN– est un signal sinus de 0,5 V
avec un décalage statique de 2,5 V. SIN– est complémentaire au signal SIN
+.
•
Canal des données de processus COS+ : COS+ est un signal cosinus de
0,5 VPP avec un décalage statique de 2,5 V. Le signal COS+ est déphasé de
90° par rapport au signal SIN+.
•
Canal des données de processus COS– : COS– est un signal cosinus de
0,5 VPP avec un décalage statique de 2,5 V. COS– est complémentaire au
signal COS+.
•
Top zéro Z : Z émet la position zéro du codeur en tant que signal numérique
différentiel avec une largeur de 90° électrique (él.) et un niveau de 1,75 V
(Low) et 2,9 V (High).
pp
pp
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 26
Page 27

2,5 V
2,5 V
2,9 V
1,75 V
2,9 V
1,75 V
0,5 V
0,5 V
360° el.
90° el.
¯Z
COS+ COS–
SIN+ SIN–
Z
COS+ – COS–
SIN+ – SIN–
Z – ¯Z
0 V
0 V
0 V
1 V
1 V
2,3 V
360° el.
90°el.
7.1 Contrôle
En fonctionnement, aucune autre mesure de contrôle n''est nécessaire.
8 Entretien
Le DFS60S Pro est exempt de maintenance. En cas de défaut, aucune
réparation n’est possible. En cas de réclamations, veuillez nous contacter.
Respectez la durée d'utilisation. Le codeur sûr DFS60S Pro a une durée
d’utilisation maximale après laquelle il doit systématiquement être mis hors
service. Il convient ici de prendre en compte la durée d’utilisation TM et la
durée de vie des paliers. La durée atteinte en premier en fonction de l’appli‐
cation détermine le moment de la mise hors service obligatoire.
L’année de construction du codeur est indiquée sur l’étiquette de l’appareil
ou de l'emballage sous la forme d'un numéro à quatre chiffres (yyww). Les
deux premiers chiffres yy désignent l'année (sans le siècle), les deux der‐
niers chiffres ww indiquent la semaine calendaire du processus de fabrica‐
tion.
9 Mise hors service
9.1 Respect de l’environnement
Le codeur de sécurité est conçu dans le respect de l'environnement. Il consomme
un minimum d'énergie et de ressources.
Travaillez toujours dans le respect de l’environnement. Pour cela, observez
b
les informations suivantes à propos de la mise au rebut.
9.2 Mise au rebut
Mettez toujours les appareils hors d’usage ou irréparables au rebut
conformément aux prescriptions d’élimination des déchets en vigueur dans
le pays concerné.
REMARQUE
Nous vous offrons volontiers notre assistance lors de la mise au rebut de ces
appareils. Contactez-nous.
Illustration 11: Signaux du codeur avant la soustraction à une charge de 120 Ω,
diagramme de signal en cas de rotation de l’arbre dans le sens horaire avec vue
dans la direction de l'arbre
10 Caractéristiques techniques
Fiche technique du codeur DFS60S Pro
Performance
Nombre de périodes sin/cos par tour 1.024
Pas de mesure (non sécurisé) 0,3 seconde d'angle
Avec une interpolation 12 bits
Non-linéarité intégrale Standard ± 45 secondes d'angle
Non-linéarité différentielle ± 7 secondes d'angle
Signal de référence, nombre 1
Signal de référence, position 90°, électrique, liaison logique avec sinus/
cosinus
Caractéristiques mécaniques
Poids
Bride de serrage
Bride synchro
Axe creux traversant
Axe creux non traversant
0,30 kg env.
0,25 kg env.
53
53
Couple de démarrage à 20 °C
Bride de serrage
Illustration 12: Signaux du codeur après la soustraction à une charge de 120 Ω,
diagramme de signal en cas de rotation de l’arbre dans le sens horaire avec vue
Couple de fonctionnement à 20 °C
Axe creux non traversant
dans la direction de l'arbre
7 Mise en service
REMARQUE
Pas de mise en service sans contrôle par le personnel qualifié !
Avant la première mise en service d'une installation ou d'une machine dans
laquelle le codeur est intégré, elle doit être testée et validée par du personnel
qualifié. Pour cela, observez les remarques dans chapitre 2.
Tenez compte de la durée d'initialisation après la mise en route. Pendant ce
temps, le codeur n'émet aucun signal valide.
Vérifiez si toutes les fonctions de sécurité agissent comme prévu à toutes les
vitesses pertinentes.
Accélération angulaire max. ≤ 5 × 105 rad/s²
Charge admissible de l'arbre (radiale/axiale) 80 N/40 N
Mouvement admissible de l’arbre (creux) –
Vitesse de fonctionnement max.
Contrôlez si la température maximale en fonctionnement du codeur au point
de travail du codeur (voir Plans cotés , « A ») se situe au sein de la plage de
température de fonctionnement indiquée dans les caractéristiques tech‐
niques.
Si la température au point de travail est supérieure à 70 °C :
– Apposer le pictogramme « Attention ! Surfaces chaudes » à un
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 27
endroit bien visible sur le boîtier du codeur conformément à la
norme CEI 60 4175041.
– Expliquer la signification du pictogramme dans la notice d'instructions
de la machine dans laquelle le codeur est monté.
Moment d’inertie du rotor
52
Par rapport au bras de couple détendu.
53
Par rapport au codeur avec départ de connecteur.
54
La température de fonctionnement doit être mesurée à la vitesse nominale et être réduite
de 3,0 K tous les 1.000 tr/min–1.
Axe creux non traversant
Dynamique (radial/axial) ± 0,05 mm/± 0,1 mm
Axe creux non traversant
Axe creux non traversant
Bride synchro
Axe creux traversant
Bride de serrage
Bride synchro
Axe creux traversant
Statique (radial/axial) ± 0,3 mm/± 0,5 mm
54
Bride de serrage
Bride synchro
Axe creux traversant
Bride de serrage
Bride synchro
Axe creux traversant
≤ 0,5 Ncm
≤ 0,8 Ncm
≤ 0,3 Ncm
≤ 0,6 Ncm
9.000 min
6.000 min
8 gcm²
56 gcm²
–1
–1
52
Page 28

Performance
Durée de vie des paliers
55
3,6 × 109 tours
56
Caractéristiques électriques
Interfaces électriques 4,5 V … 32 V, Sin/Cos
1,0 VSS (différentiel)
Fréquence de sortie ≤ 153,6 kHz
Durée d'initialisation après la mise en route 50 ms
57
Résistance de charge ≤ 120 Ω
Puissance absorbée sans charge ≤ 0,7 W
Classe de protection conformément à DIN EN
61 140
III
Niveau d’encrassement 2
Protection contre l’inversion de polarité Oui
Immunité aux courts-circuits des sor ties Oui
58
Caractéristiques ambiantes
CEM Selon
Indice de protection selon CEI 60 529 IP 65
Humidité relative admissible
Plage de température de fonctionnement
60
61
EN 61 000-6-2, EN 61 000-6-3
CEI 61 326-3-1
59
90 %
M12, M23 –30 … +95 °C
Départ de câble –30 … +85 °C
Plage de températures de stockage (sans
emballage)
Hauteur de fonctionnement 2.000 m max. au-dessus du niveau de la
Résistance aux chocs selon
EN 60 068-2-27
Résistance aux vibrations selon
EN 60 068-2-6)
62
Départ de câble 30 g
M12, contre-connecteur inclus 30 g
M23, contre-connecteur inclus 10 g
–30 … +90 °C
mer (80 kPa)
100 g/6 ms
10 … 1.000 Hz
10 … 1.000 Hz
10 … 1.000 Hz
63
Caractéristiques de sécurité
Niveau d'intégrité de la sécurité
64
Limite d'exigence SIL2 (CEI 61 508), SILCL2
(EN 62 061)
Catégorie 3 (EN ISO 13 849)
Taux d’essai Pas nécessaire
Taux maximal de demandes Continuel (signaux analogiques)
Niveau de performance
65
PFH
(À une température de fonctionne‐
D
ment de 95 °C) (probabilité de défaillance
dangereuse par heure)
TM (durée d'utilisation)
64
66
PL d (EN ISO 13 849)
–8
1,7 × 10
20 ans (EN ISO 13 849)
Pas de mesure de sécurité Évaluation de la quadrature 0,09°
Exactitude de mesure de sécurité ±0,09°
Article Référence
BEF-DS02DFS/VFS
Bras de couple, long
Sur demande
67
Vous trouverez d'autres accessoires dans les informations produit sur
www.sick.com.
Les accessoires doivent être examinés par l'utilisateur du produit lors de la fabri‐
cation de la machine complète dans le cadre de la réalisation des fonctions de
sécurité correspondantes. Le cas échéant, les exclusions de défaut nécessaires
doivent être démontrées.
12 Annexe
12.1 Étendue de la livraison
•
Codeur DFS60S Pro selon la désignation
•
Clavette selon la norme DIN 6885-A (pour la variante à arbres creux)
•
Vis Torx T20 de la bague de serrage (pour la variante à arbres creux)
•
Consignes générales de sécurité
•
Notice d’instruction
12.2 Conformités
Le codeur sûr DFS60S Pro a été fabriqué selon les directives suivantes :
•
Directive machines 2006/42/CE
•
Directive CEM 2004/108/CE
Vous trouverez la déclaration de conformité UE intégrale sur la page d’accueil
Internet de SICK : www.sick.com
REMARQUE
Le certificat de ce produit se rapporte au produit lui-même ainsi qu'à ses
accessoires.
IMPORTANT
Vous trouverez des informations complémentaires et détaillées sur la décla‐
ration de conformité à la fin de la notice d'instruction (dans la feuille
complémentaire indépendante de la langue) ainsi que sur www.sick.com.
13 Plans cotés
IMPORTANT
Les plans cotés sont disponibles à la fin de la notice d'instruction (dans la
feuille complémentaire indépendante de la langue).
11 Accessoires
Références des accessoires
Article Référence
BEF-WK-SF Brides synchro, grandes (3 unités) 2029166
BEF-WK-SF Brides synchro, demi-coques
(2 unités)
55
Selon l’application, la durée d’utilisation peut également être limitée par la durée de vie des
paliers.
56
Calculé pour la vitesse et la température max.
57
Après ce temps, il est possible de lire les signaux valides.
58
Court-circuit vis-à-vis d'un autre canal ou de la GND admissible pendant 30 s max. Pour
US ≤ 12 V en plus, court-circuit vis-à-vis de US admissible pendant 30 s max.
59
Avec départ de connecteur : le contre-connecteur doit être enfiché et satisfaire à un IP 65
minimum.
60
Condensation du balayage optique inadmissible.
61
La température de fonctionnement doit être mesurée à la vitesse nominale et être réduite
de 3,0 K tous les 1.000 tr/min–1.
62
Vérifiée pendant le fonctionnement avec la surveillance de la longueur vectorielle.
63
Nombre des chocs sur chaque axe d'essai, aussi bien positifs que négatifs : 3.
64
Pour des informations détaillées sur la conception de sécurité de votre machine/installa‐
tion, contactez la succursale SICK la plus proche.
65
Les valeurs indiquées se réfèrent à une couver ture du diagnostic de 99 %, qui doit être
atteinte par le système d’entraînement externe.
66
Selon l'application, la durée d'utilisation peut également être limitée par la durée de vie
des paliers.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 28
2029165
67
Le bras de couple est livré monté en usine. Un échange côté client du bras de couple n'est
pas admissible.
Page 29

I S T R U Z I O N I P E R L ’ U S O i t
Encoder di sicurezza
1 In merito al documento in oggetto
Il presente documento è un documento originale.
Leggere attentamente le presenti istruzioni per l'uso prima di lavorare con l'enco‐
der di sicurezza DFS60S Pro, prima di montarlo, metterlo in servizio o procedere
alla sua manutenzione.
1.1 Funzione di questo documento
Queste istruzioni per l'uso guidano il personale tecnico della ditta costruttrice
della macchina, ovvero del gestore della macchina stessa, nel montaggio,
nell'installazione elettrica e nella messa in servizio all'insegna della sicurezza,
nonché nell'esercizio e nella manutenzione dell'encoder DFS60S Pro.
Inoltre, per la progettazione e l’impiego di encoder di sicurezza, come DFS60S
Pro, sono necessarie conoscenze tecniche specifiche non contenute nel presente
documento.
In linea di principio per l'esercizio dell'encoder DFS60S Pro occorre attenersi alle
disposizioni previste dalle autorità e dalla legge.
1.2 Simboli e convenzioni utilizzati nel documento
AVVERTENZA
Un'indicazione di allarme richiama l'attenzione su pericoli concreti o poten‐
ziali. Queste hanno il compito di proteggere dagli incidenti.
Leggere e seguire attentamente le avvertenze!
Le istruzioni pratiche sono contrassegnate da una freccia. Leggere e osser‐
b
vare attentamente le istruzioni pratiche.
2 Norme di sicurezza
Il presente capitolo serve per la vostra sicurezza e per quella degli utilizzatori
dell’impianto.
Leggere attentamente questo capitolo prima di lavorare con DFS60S Pro
sulla macchina o nell'impianto in cui viene utilizzato l'encoder di sicurezza.
2.1 Avvertenze di sicurezza generali
AVVERTENZA
Osservare le avver tenze di sicurezza e le misure precauzionali!
Attenersi ai punti seguenti per garantire un utilizzo sicuro e conforme alle
disposizioni dell'encoder DFS60S Pro.
Per il montaggio e l'utilizzo, nonché per la messa in servizio e i ricorrenti controlli
tecnici valgono le disposizioni di legge nazionali e internazionali, in particolare:
•
la direttiva sui macchinari 2006/42/CE
•
la direttiva di utilizzo mezzi di lavoro 2009/104/CE
•
le regole antinfortunistiche e di sicurezza
•
altre norme di sicurezza pertinenti
I costruttori e gli operatori della macchina, su cui si utilizza DFS60S Pro, devono
concordare, sotto la loro responsabilità, tutte le disposizioni e le normative di sicu‐
rezza vigenti con le autorità preposte e attenervisi.
Le presenti istruzioni per l'uso devono essere a disposizione dell'operatore della
macchina sulla quale si utilizza l'encoder di sicurezza DFS60S Pro. L'operatore
della macchina va istruito da personale di sicurezza qualificato e va sollecitato
alla lettura delle istruzioni per l'uso.
2.2 Uso conforme alla destinazione
DFS60S Pro può essere utilizzato in applicazioni di sicurezza fino alla categoria 3
secondo EN ISO 13 849, fino a SIL2 secondo IEC 61 508, fino a SILCL2 secondo
EN 62 061 o fino a PL d secondo EN ISO 13 849.
DFS60S Pro supporta funzioni di sicurezza basate su informazioni relative a velo‐
cità e senso di rotazione.
L'encoder non è in grado di passare automaticamente in stato di sicurezza.
Velocità, senso di rotazione e stato di riposo, nonché anomalie che possono gene‐
rare pericoli, devono essere riconosciuti da un sistema di analisi di livello supe‐
riore. I requisiti del sistema di analisi sono descritti in capitolo 4.1 e capitolo 4.2.
L'encoder DFS60S Pro può essere usato in ogni circostanza solo entro i limiti dei
dati tecnici e delle condizioni di funzionamento prescritte e indicate. Si devono
rispettare e osservare i requisiti indicati nella scheda tecnica e le condizioni
ambientali, affinché DFS60S Pro possa garantire un funzionamento sicuro.
In caso di qualsiasi altro utilizzo o qualsiasi modifica del dispositivo - anche in
fase di montaggio e installazione - decade ogni diritto di garanzia nei confronti di
SICK STEGMANN GmbH.
2.3 Uso non conforme alle prescrizioni
L'encoder DFS60S Pro non supporta modalità d'esercizio di sicurezza connesse a
una posizione assoluta.
DFS60S Pro emette un impulso zero per il riferimento. Questo segnale non può
essere utilizzato per modalità d'esercizio di sicurezza.
L'encoder DFS60S Pro non idoneo, fra l'altro, per i seguenti impieghi:
•
sott’acqua
•
in zone con pericolo di esplosione
•
in aree pubbliche accessibili
2.4 Qualifiche richieste al personale
L'encoder DFS60S Pro deve essere progettato, montato, collegato, messo in servi‐
zio e sottoposto a manutenzione esclusivamente da personale di sicurezza speci‐
ficamente qualificato.
Progettazione
Una persona viene considerata competente per la progettazione se dispone di
conoscenze specifiche ed esperienza nella scelta e nell'impiego di encoder di
sicurezza per macchine e se ha competenza nelle norme tecniche e direttive
antinfortunistiche locali.
Montaggio meccanico e messa in servizio
Una persona viene considerata competente per il montaggio meccanico e la
messa in servizio se dispone di conoscenze specifiche ed esperienza nel rispet‐
tivo ambito.
Installazione elettrica
Una persona viene considerata competente per l'installazione elettrica e la messa
in servizio se dispone di conoscenze specifiche ed esperienza nel rispettivo
ambito.
3 Descrizione prodotto
DFS60S Pro è un encoder incrementale ad alta risoluzione con diametro 60 mm.
Il trasferimento dei segnali encoder al sistema di analisi avviene tramite segnali
analogici sotto forma di tensioni sinusoidali / cosinusoidali.
Se viene impiegata un'unità di controllo adatta, è possibile utilizzare DFS60S Pro
per modalità d'esercizio di sicurezza correlate a velocità e senso di rotazione. In
questo modo possono essere realizzate funzioni di sicurezza secondo IEC
61 800-5-2.
L'interfaccia meccanica è stata dimensionata secondo IEC 61 800-5-2 in modo
da potere escludere difetti a causa del sovradimensionamento.
DFS60S Pro ha una durata di conservazione limitata (v. dati tecnici). Una volta
superata la durata di conservazione, l’usura e il logoramento dei cuscinetti pos‐
sono provocare il mancato funzionamento degli stessi. Per evitarlo è necessario
mettere fuori esercizio DFS60S Pro non oltre il raggiungimento della durata di
conservazione. La durata di conservazione varia anche a seconda dell’applica‐
zione specifica, in particolare in caso di funzionamento a bassa velocità, funziona‐
mento reversibile e vibrazioni meccaniche. Evitare il passaggio di corrente attra‐
verso i cuscinetti a sfere (ad es. a causa di correnti iniettate).
Per incrementare la copertura diagnostica del sensore di sicurezza nel caso di un
guasto inatteso dei cuscinetti (ad es. per un peggioramento della condizioni di
esercizio, in caso di carico prossimo al limite e così via), può essere utile anche
un controllo di plausibilità esterno delle informazioni fornite dal sensore.
AVVERTENZA
Avvertenza di sicurezza
DFS60S Pro non deve essere utilizzato per applicazioni di sicurezza oltre la
sua durata di vita (v. dati tecnici). La durata di vita può essere limitata, a
seconda dell’applicazione, dalla durata di conservazione.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 29
Page 30

3.1 Codice modello
S
1
D
F
G
4
E
H
J
O
A
B
C
D
J
K
L
M
N
1 0 2 4
0 S 0 1
D F S 6 0 S - S O 0
Albero maschio
Tipo
Albero maschio
esecuzione meccanica
Servo flangia filetto M4, albero maschio Ø 6 x 10 mm con superficie
Servo flangia M4 filetto, albero maschio Ø 6 x 10 mm con chiavetta
Servo flangia filetto M3, albero maschio Ø 6 x 10 mm con superficie
Servo flangia M3 filetto, albero maschio Ø 6 x 10 mm con chiavetta
Flangia fissa M4 filetto, albero maschio Ø 10 x 19 mm con superficie
Flangia fissa M4 filetto, albero maschio Ø10 x 19 mm con chiavetta
Flangia fissa M3 filetto, albero maschio Ø 10 x 19 mm con superficie
Flangia fissa M3 filetto, albero maschio Ø10 x 19 mm con chiavetta
Interfaccia elettrica
4.5… 32V, SIN/COS
Tipo di collegamento
Risoluzione
Connettore maschio M23, 12 pin, radiale
Connettore maschio M23, 12 pin, assiale
Connettore maschio M12, 8 pin, radiale
Connettore maschio M12, 8 pin, assiale
Cavo 8 fili, universale 0,5 m1)
Cavo 8 fili, universale 1,5 m1)
Cavo 8 fili, universale 3 m1)
Cavo 8 fili, universale 5 m1)
Cavo 8 fili, universale 10 m1)
Periodi per rotazione
Limitatore di coppia,
lungo (solo con tipi B, T)
Risoluzione 1024 periodi
Albero cavo
Tipo
B Foro cieco
T Foro passante
esecuzione meccanica
A Albero cavo Ø 6 mm con cava per chiavetta
B Albero cavo Ø 8 mm con cava per chiavetta
C Albero cavo Ø 3/8“ con cava per chiavetta
D Albero cavo Ø 10 mm con cava per chiavetta
E Albero cavo Ø 12 mm con cava per chiavetta
F Albero cavo Ø 1/2“ con cava per chiavetta
G Albero cavo Ø 14 mm con cava per chiavetta
H Albero cavo Ø 15 mm con cava per chiavetta
J Albero cavo Ø 5/8“ con cava per chiavetta
Interfaccia elettrica
O 4.5… 32V, SIN/COS
Tipo di collegamento
Risoluzione
A Connettore maschio M23, 12 pin, radiale
C Connettore maschio M12, 8 pin, radiale
J Cavo 8 fili, universale 0,5 m1)
K Cavo 8 fili, universale 1,5 m1)
L Cavo 8 fili, universale 3 m1)
M Cavo 8 fili, universale 5 m1)
N Cavo 8 fili, universale 10 m1)
Periodi per rotazione
1 0 2 4
0 S 0 1
Risoluzione 1024 periodi
Limitatore di coppia,
lungo (solo con tipi B, T)
D F S 6 0 S - 000
INDICAZIONE
Possono verificarsi scostamenti per i seguenti motivi:
•
Tolleranze di accoppiamento in soglie di commutazione:
± 1 incremento
•
Tolleranze di accoppiamento di tempi di tastatura: numero di incrementi
in scostamento temporale alla massima velocità
Per l'analisi dei segnali devono essere sempre utilizzati i segnali differenziali
(vedere capitolo 6.2 ).
In base ai segnali differenziali devono essere formati, tramite adeguati elementi di
commutazione (ad es. comparatori), segnali rettangolari, da utilizzare per il con‐
teggio con adeguate procedure (ad es. decoder di quadratura).
Le soglie di commutazione devono essere selezionate in modo da non superare il
limite inferiore del monitoraggio lunghezza (vedere capitolo 4.2.1 ). Analoga‐
mente, la soglia di commutazione superiore, compresa tolleranza, deve attestarsi
a massimo 150 mV sopra il centro del segnale (vedere figura 12 ) e la soglia di
commutazione inferiore, compresa tolleranza, deve attestarsi a massimo 150 mV
sotto il centro del segnale.
AVVERTENZA
In caso di dimensionamento inadeguato delle soglie di commutazione e di
isteresi nell'analisi dei segnali, possono verificarsi riconoscimenti errati di
bordi aggiuntivi o mancati riconoscimenti di bordi. Ciò può comportare ad es.
l'errata determinazione del senso di rotazione, della posizione o della velo‐
cità.
Con il contatore è possibile ottenere una risoluzione di 4.096 passi (ad.es. 4
passi per periodo di segnale o 1 passo per quadrante di ogni periodo di segnale).
Il grado di copertura diagnosi (DC) per il riconoscimento difetti del segnale enco‐
der deve essere di minimo 99%. A tale scopo devono essere soddisfatti i requisiti
di diagnosi indicati nel paragrafo capitolo 4.2. La diagnosi deve essere eseguita
entro il tempo di sicurezza del processo
68
4.2 Requisiti di diagnosi e riconoscimento di difetti
Il sistema di analisi collegato a posteriori deve garantire, secondo IEC 61800-5-2
in base alle ipotesi di difetti ivi elencate per l'impiego di motion and position feed‐
1) L'uscita universale del cavo è posizionata in modo da consentire la
posa senza schiacciamenti in direzione radiale o assiale. certificato
UL non disponibile.
back sensors, i seguenti requisiti di diagnosi e riconoscimento di difetti.
In caso di riconoscimento di un difetto nel corso di una delle diagnosi sotto elen‐
cate, deve essere attivata una reazione all'errore, che comporta uno stato di sicu‐
rezza dell'applicazione.
In caso di difetto è necessario raggiungere uno stato di sicurezza dell'applicazione
prima dell'insorgenza di una situazione pericolosa. Di conseguenza la somma del
massimo tempo necessario per il riconoscimento di difetti e il tempo per la rea‐
zione all'errore è inferiore al tempo di sicurezza del processo68.
Il massimo tempo necessario per il riconoscimento di difetti è la distanza tempo‐
rale con cui vengono ripetute completamente le misure di diagnosi sotto indicate.
4.2.1 Anomalie dei segnali encoder analogici di seno/coseno
Per il riconoscimento di tutte le variazioni di livello non ammesse nella relazione
di seno e coseno si ricorre ai rapporti su cui si basano i segnali di seno/coseno.
Mediante determinazione della grandezza k con il seguente rapporto matematico
k² = k1² × sin² α + k2² × cos²α
o con altre procedure matematiche adeguate è possibile rilevare il livello di ten‐
sione corrente continua alla base dei segnali di seno/coseno. Il confronto con i
relativi limiti massimi e minimi consente il riconoscimento preciso e con imme‐
diata reazione di scostamenti non ammessi, indipendentemente dalla posizione
angolare momentanea α .
In presenza dei segnali è possibile determinare k sulla base dei seguenti calcoli:
k² = (SIN+ – SIN–)² + (COS+ – COS–)²
Questa relazione dei segnali utili può essere rappresentata visivamente con un
4 Progettazione
4.1 Requisiti dell'analisi dei segnali
Per il rilevamento della velocità con il segno giusto e per la corretta determina‐
zione della posizione incrementale occorre analizzare sia il segnale di seno sia il
segnale di coseno. Ciò avviene tramite un'adeguata struttura di sicurezza. Tipica‐
mente l'analisi dei segnali avviene in due canali divisi, i cui risultati sono recipro‐
camente confrontati nel tempo di sicurezza del processo.68 La grandezza dello
scostamento ammesso deve essere scelta in modo da riconoscere difetti statici
nell'analisi.
68
Tempo di sicurezza del processo: periodo tra il verificarsi di un malfunziona‐
mento pericoloso nel sistema di misura e il momento in cui deve essere con‐
clusa la reazione per impedire che subentri il pericolo.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 30
1) L'uscita universale del cavo è posizionata in modo da consentire la
posa senza schiacciamenti in direzione radiale o assiale. certificato
UL non disponibile.
modello bidimensionale (figura di Lissajous), in cui i segnali utili formano un
anello.
Per il segnale k viene ammessa una tolleranza di ± 50% rispetto alla posizione
nominale. Uno scostamento maggiore di tale tolleranza rappresenta un supera‐
mento dei limiti di lunghezza dei vettori e necessita di una relativa reazione
all'errore del sistema di analisi.
Si consiglia di non impostare valori limite eccessivamente ristretti per evitare riso‐
luzioni difettose.
4.2.2 Perdita di accoppiamento meccanico dell'alloggiamento encoder o spo‐
stamento dell'accoppiamento meccanico durante lo stato di riposo o di
esercizio
Questa ipotesi di difetto può essere esclusa secondo IEC 61 800-5-2 facendo
attenzione al corretto montaggio del limitatore di coppia e della flangia fissa /
servo flangia (vedere capitolo 5).
4.2.3 Perdita di accoppiamento meccanico dell'albero encoder–albero motore
durante lo stato di riposo o di esercizio
Questa ipotesi di difetto può essere esclusa secondo IEC 61 800-5-2 facendo
attenzione al corretto montaggio dell'encoder sull'albero motore (vedere
capitolo 5).
4.2.4 Stato di riposo del segnale seno/coseno a causa di difetti elettrici
Questa ipotesi di difetto può essere esclusa perché i segnali seno/coseno pos‐
sono essere rilevati ed elaborati solo in modo analogico e nel design non sono
previste strutture di memoria per tensioni analogiche.
68
Tempo di sicurezza del processo: periodo tra il verificarsi di un malfunziona‐
mento pericoloso nel sistema di misura e il momento in cui deve essere con‐
clusa la reazione per impedire che subentri il pericolo.
Page 31

4.2.5 Danneggiamento, imbrattamento o distacco dell'elemento di misura
(disco per codici)
Il danneggiamento o imbrattamento dell'elemento di misura può generare le
seguenti situazioni:
con la perdita di dissolvenza dell'emettitore il livello del segnale diventa massimo
in entrambi i canali. Ciò può essere riconosciuto conformemente a capitolo 4.2.1.
L'orientamento errato del disco per codici rispetto al tastatore ottico o la presenza
di imbrattamento genera livelli del segnale nei canali seno e coseno che possono
essere diagnosticati secondo capitolo 4.2.1.
Per il distacco dell'elemento di misura è possibile un'esclusione di difetti secondo
EN ISO 13 849-1 e EN ISO 13 849-2 in base al sovradimensionamento mecca‐
nico.
4.2.6 Oscillazioni di una o più uscite
Le oscillazioni nelle uscite dei segnali possono essere rilevate nel modo seguente:
se le oscillazioni generano livelli di segnali non ammessi in uno o entrambi i
canali, è possibile il riconoscimento di difetti secondo capitolo 4.2.1.
In stato di riposo l'oscillazione di un segnale in ingresso, applicando un adeguato
discriminatore di fase per la generazione di impulsi di conteggio nel sistema di
analisi, agisce come contatore crescente e decrescente di un incremento. Il
difetto risultante corrisponde all'angolo di un incremento.
L'oscillazione di entrambi i segnali (seno e coseno) in fase o di un singolo segnale
durante il funzionamento del motore genera livelli di segnali non ammessi, ricono‐
sciuti tramite misure conformemente a capitolo 4.2.1.
4.2.7 Scambio dei segnali in uscita seno e coseno
Questo difetto può essere escluso perché i segnali di seno e coseno sono rilevati
ed elaborati separatamente.
Non esistono multiplexer per questi segnali nell'encoder.
4.2.8 Monitoraggio della tensione di alimentazione encoder emessa dal
sistema di analisi
I livelli di segnali non ammessi della tensione di alimentazione encoder sono rico‐
nosciuti tramite misure conformemente a Anomalie dei segnali encoder analogici
di seno/coseno. In particolare i valori limite inferiori indicati per la lunghezza vet‐
tore concorrono al monitoraggio della sottotensione.
Per la limitazione di difetti con cause comuni e per il riconoscimento anticipato di
difetti, la tensione di alimentazione dell'encoder deve essere monitorata in rela‐
zione al rispetto dei valori limite indicati nei dati tecnici.
4.2.9 Utilizzo del sistema encoder al di fuori degli intervalli di temperatura
ammessi
Se non è possibile garantire l'impiego del sistema encoder nell'intervallo di tem‐
peratura ammesso, l'operatore del sistema deve adottare misure adeguate per il
rispetto dell'intervallo di temperatura specificato.
I difetti risultanti dall'impiego a temperature non ammesse sono riconosciuti con
misure conformemente a capitolo 4.2.1.
4.3 Requisiti del collegamento meccanico dell'albero
4.3.1 Encoder con albero cavo
Il collegamento del motore all'encoder con albero cavo deve essere realizzato con
presa di forza o con presa di forza e trasmissione geometrica di forza. L'impiego di
una chiavetta impedisce la rotazione radiale dell'encoder.
Per alberi motore con diametro 6 mm, 8 mm e 3/8" è tassativamente necessaria
una chiavetta. In questo modo viene garantito il sovradimensionamento necessa‐
rio per escludere il difetto di perdita di collegamento dell'albero.
I requisiti per il montaggio della chiavetta sull’albero di trasmissione sono
indicati nei disegni quotati, alla fine delle istruzioni per l'uso, nel foglio sup‐
plementare linguisticamente neutro.
4.3.2 Encoder con flangia fissa ed encoder con servo flangia
Il giunto dell'albero fa parte delle funzioni di sicurezza e deve essere adeguata‐
mente dimensionato e validato dall'utilizzatore. Non rientra tra le condizioni di
sicurezza di SICK STEGMANN.
Realizzare il collegamento dell'albero tra encoder e sistema motore con un
giunto elastico.
Utilizzare un giunto adatto in funzione dell'applicazione. I giunti devono
essere conformi ai requisiti di IEC 61 80052:2008 (vedere capitolo 4.2.3).
Attenersi ai dati tecnici e alle istruzioni di montaggio del giunto utilizzato.
I seguenti modelli meccanici sono disponibili per il collegamento con trasmissione
geometrica di forza (vedere i disegni quotati alla fine delle istruzioni per l'uso ( nel
foglio supplementare linguisticamente neutro)):
•
Albero maschio con chiavetta
•
Albero maschio con superficie
– 3 viti M3
•
Per le varianti flangia 1, D, 4, E
– 3 viti M4
•
Per il montaggio servo flangia
– Kit accessori servo flangia grande
(Art. n. 2029166)
– 3 viti M4
La classe di resistenza delle viti deve essere minimo 8.8. Scegliere la lunghezza
delle viti conformemente alle condizioni di montaggio.
5.2 Preparazione del montaggio
Fare attenzione affinché i pezzi applicati siano privi di lubrificanti e sporcizia.
Fare attenzione ai danneggiamenti!
Per varianti con limitatore di coppia, il collegamento con l'albero deve essere
rigido e non elastico (come ad es. tramite giunti a soffietto)
5.2.1 Avvertenze generali
Collegare DFS60S Pro con sicurezza antirotazione alla flangia dal lato cliente.
Tutte le dimensioni e le tolleranze indicate nei disegni tecnici e la descrizione di
montaggio devono essere rispettate.
Quanto più è preciso il centraggio di DFS60S Pro, tanto più sono ridotti gli sposta‐
menti angolari e dell'albero durante il montaggio con conseguente minore carico
sui cuscinetti di DFS60S Pro.
Tutti i collegamenti a vite devono essere fissati contro l'allentamento con sigil‐
lante fluido per viti (ad esempio LOCTITE 243).
INDICAZIONE
Le rondelle elastiche e i dischi dentati non sono sufficienti come frenafiletti.
Per varianti con limitatore di coppia, la chiave dinamometrica non può essere
applicata verticalmente sulla vite. Nella tolleranza della coppia di serraggio è
compresa una posizione angolare fino a 20°. Il frequente allentamento o fissag‐
gio della vite con variazione di angolazione può causare il danneggiamento della
vite (vedere capitolo 5.2.2 und capitolo 5.2.3)
5.2.2 Montaggio di encoder con albero cavo con limitatore di coppia
Se necessario, montare le chiavette in dotazione (1) sull'albero motore dal
lato utente (2) (vedere capitolo 4.3.1).
Bloccare l'albero motore (2) dal lato cliente.
Applicare sigillante per viti (vedere capitolo 5.2.1) sul filetto dell'anello di
bloccaggio (3) o sulla vite Torx T20 (4) in dotazione.
Introdurre la vite Torx T20 (4) nell'anello di bloccaggio (3) e premontarla
senza stringerla.
Infilare l'encoder sull'albero motore (2) dal lato cliente orientato secondo la
chiavetta (1), tenendo conto della distanza del limitatore di coppia (5) dalla
superficie di montaggio (6) in funzione della lunghezza della vite (7).
Premontare le viti (7) con le rondelle (8) applicando sigillante per viti sul
rispettivo filetto (vedere capitolo 5.2.1).
Avvitare ulteriormente le viti (7) fino all'inserimento completo dell'encoder e
al posizionamento del limitatore di coppia (5) sulla superficie di montaggio
(6).
Stringere le viti (7), coppia di serraggio: 1,2 ± 0,1 Nm.
Stringere la vite Torx T20 (4), coppia di serraggio: 3,5 ± 0,1 Nm.
Figura 1: Montaggio di encoder con albero cavo cieco
5 Montaggio
Questo capitolo descrive la preparazione e il montaggio di DFS60S Pro.
Togliere la tensione a tutte le macchine/impianti interessati dal montaggio.
Evitare colpi e urti sull'albero che possono causare guasti ai cuscinetti a
sfere.
Non tirare o comprimere mai l'encoder.
5.1 Materiale di fissaggio
Servono le seguenti viti:
•
Per il limitatore di coppia:
– 4 viti cilindriche M3 secondo DIN ISO 4762 (o viti di tipo analogo a
testa piatta)
– Rondelle
•
Per le varianti flangia F, G, H, J
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 31
Page 32

Figura 2: Montaggio di encoder con albero cavo passante
5.2.3 Montaggio di encoder con albero cavo con limitatore di coppia unilate‐
rale, lungo
Se necessario, montare le chiavette in dotazione (1) sull'albero motore dal
lato utente (2) (vedere capitolo 4.3.1).
Bloccare l'albero motore (2) dal lato cliente.
Applicare sigillante per viti (vedere capitolo 5.2.1) sul filetto dell'anello di
bloccaggio (3) o sulla vite Torx T20 (4) in dotazione.
Introdurre la vite Torx T20 (4) nell'anello di bloccaggio (3) e premontarla
senza stringerla.
Infilare l'encoder sull'albero motore (2) dal lato cliente orientato secondo la
chiavetta (1) in modo che il limitatore di coppia lungo (5) sia posizionato
sulla superficie di montaggio (6).
Fissare il limitatore di coppia lungo (5) con almeno una vite M4 (7) e una
rondella (8), applicando sigillante per viti sul rispettivo filetto (vedere
capitolo 5.2.1).
Stringere la vite (7), coppia di serraggio: 1,2 ± 0,1 Nm.
Stringere la vite Torx T20 (4) sull'anello di bloccaggio (3), coppia di serraggio:
3,5 ± 0,1 Nm.
Figura 4: Montaggio di encoder con albero cavo passante con limitatore di coppia
unilaterale, lungo
5.2.4 Montaggio di encoder con albero maschio tramite fori filettati lato flan‐
gia
Infilare l'encoder nell'inserto a centraggio/morsetto (1).
Premontare le viti (2) applicando sigillante per viti sui rispettivi filettati
(vedere capitolo 5.2.1).
Stringere le viti (2), coppia di serraggio:
1,2 ± 0,1 Nm.
Realizzare il collegamento dell'albero tra encoder e albero motore con un
collegamento elastico (vedere capitolo 4.3.2).
Figura 5: Montaggio di flangia fissa tramite fori filettati lato flangia
Figura 3: Montaggio di encoder con albero cavo cieco con limitatore di coppia
unilaterale, lungo
Figura 6: Montaggio di servo flangia tramite fori filettati lato flangia
5.2.5 Montaggio di encoder con albero maschio con servo flangia tramite ser‐
vomorsetti
Premontare i servomorsetti (1) con le viti (2) applicando sigillante per viti sul
rispettivo filetto (vederecapitolo 5.2.1).
Orientare i servomorsetti (1) in modo che l'encoder possa essere infilato
nell'inserto a centraggio/morsetto (3).
Infilare l'encoder nell'inserto a morsetto/centraggio (3).
Inserire i servomorsetti (1) ruotando la servofessura, facendo attenzione alla
massima copertura e fissarli stringendo le viti (2).
Stringere le viti (2), coppia di serraggio:
1,2 ± 0,1 Nm.
Realizzare il collegamento dell'albero tra encoder e albero motore con un
collegamento elastico (vedere capitolo 4.3.2).
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 32
Page 33

Figura 7: Montaggio di servo flangia con servomorsetti
5.2.6 Montaggio di encoder con albero maschio con servo flangia tramite ser‐
vomorsetti a semiguscio
Infilare l'encoder nell'inserto a centraggio/morsetto (1).
Premontare i servomorsetti a semiguscio (2) con le viti (3) applicando sigil‐
lante per viti sul rispettivo filetto (vedere capitolo 5.2.1).
Inserire i servomorsetti a semiguscio (2) ruotando la servocava, facendo
attenzione alla massima copertura e fissarli stringendo le viti (3).
Stringere le viti (3), coppia di serraggio:
1,2 ± 0,1 Nm.
Realizzare il collegamento dell'albero tra encoder e albero motore con un
collegamento elastico (vedere capitolo 4.3.2).
Figura 8: Montaggio con servomorsetti a semiguscio
6 Installazione elettrica
AVVERTENZA
Togliere la tensione a tutte le macchine/impianti/veicoli interessati dall'instal‐
lazione.
Per il collegamento dell'encoder DFS60S Pro attenersi alle istruzioni per
l'uso del sistema di analisi di livello superiore.
Fare attenzione a una corretta connessione con schermatura.
Collegare la custodia o lo schermo a terra o a massa. A tale scopo applicare
abbondante tessuto schermante per cavo.
Utilizzare solo cavi con fili schermati e attorcigliati a coppie. Tutti i fili di cavi
dei segnali/segnali di interfaccia devono essere attorcigliati a coppie con i
rispettivi segnali complementari.
Mettere in sicurezza il limitatore di coppia contro qualsiasi eventuale carico
dei cavi di collegamento. Fare attenzione ai minimi raggi di curvatura possi‐
bili nei cavi di collegamento (raggio di curvatura ammesso per encoder con
uscita cavo: min. 7,5 × diametro esterno cavo).
Utilizzare un cavo adatto in relazione all'applicazione e alle condizioni di
impiego.
Suggeriamo l'utilizzo di cavi accessori SICK (vedere la relativa scheda tec‐
nica).
Alimentare l'encoder con la tensione di alimentazione generata dai sistemi
PELV (EN 50 178) (grado di impurità 2).
La corrente dell'alimentatore che alimenta l'encoder deve essere limitata
esternamente a max. 1 A, sia attraverso l'alimentatore sia tramite un fusi‐
bile.
Analisi differenziale dei segnali dell'encoder.
Chiudere in modo differenziale i segnali encoder utilizzati e non utilizzati,
ovvero inserire tra il segnale e il segnale complementare una resistenza di
terminazione ≥ 120 Ω.
Con encoder con uscita connettore non inoltrare i segnali non utilizzati. In
questo caso non è necessaria la chiusura dei segnali.
6.1 Panoramica dei collegamenti
DFS60S Pro viene fornito con i seguenti collegamenti:
•
connettore maschio M12, 8 pin
•
connettore maschio M23, 12 pin
•
estremità cavo aperte
Figura 9: collegamento M12, 8 pin
Occupazione pin collegamento M12, 8 pin
Pin
M12, 8 pin
1 COS– Cavo di segnalazione
2 COS+ Cavo di segnalazione
3 SIN– Cavo di segnalazione
4 SIN+ Cavo di segnalazione
5 Z¯ Cavo del segnale (non per modalità d'esercizio di
6 Z Cavo del segnale (non per modalità d'esercizio di
7 GND collegamento a massa
8 +US Tensione di alimentazione (senza potenziale verso
Schermo – Collegato con alloggiamento encoder
Figura 10: Collegamento M23, 12 pin
Occupazione pin collegamento M23, 12 pin
Pin
M23, 12 pin
6 COS– Cavo di segnalazione
5 COS+ Cavo di segnalazione
1 SIN– Cavo di segnalazione
8 SIN+ Cavo di segnalazione
4 Z¯ Cavo del segnale (non per modalità d'esercizio di
3 Z Cavo del segnale (non per modalità d'esercizio di
10 GND collegamento a massa
12 +US Tensione di alimentazione (senza potenziale verso
2, 7, 9, 11 – Non assegnato
Schermo – Collegato con alloggiamento encoder
Collegamento con estremità cavo aperte
Sezione conduttore:
8 × 0,15 mm² + 1,5 mm² schermo
Occupazione cavo collegamento con estremità cavo aperte
Estremità cavo Segnale Significato
Marrone COS– Cavo di segnalazione
Bianco COS+ Cavo di segnalazione
Nero SIN– Cavo di segnalazione
Rosa SIN+ Cavo di segnalazione
Giallo Z¯ Cavo del segnale (non per modalità d'esercizio di
Viola Z Cavo del segnale (non per modalità d'esercizio di
Blu GND collegamento a massa
Rosso +US Tensione di alimentazione (senza potenziale verso
Schermo – Collegato con alloggiamento encoder
6.2 Segnali dell'encoder
DFS60S Pro è dotato dei seguenti segnali:
•
Tensione di alimentazione +US dell'encoder: l'intervallo della tensione di
esercizio misurata nell'encoder è compreso tra 4,5 V e 32 V.
•
Collegamento a massa GND dell'encoder: separazione galvanica dalla custo‐
dia. La tensione riferita a GND è +US.
Segnale Significato
sicurezza!)
sicurezza!)
custodia)
Segnale Significato
sicurezza!)
sicurezza!)
custodia)
sicurezza!)
sicurezza!)
custodia)
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 33
Page 34

•
2,5 V
2,5 V
2,9 V
1,75 V
2,9 V
1,75 V
0,5 V
0,5 V
360° el.
90° el.
¯Z
COS+ COS–
SIN+ SIN–
Z
COS+ – COS–
SIN+ – SIN–
Z – ¯Z
0 V
0 V
0 V
1 V
1 V
2,3 V
360° el.
90°el.
Canale dei dati di processo SIN+: SIN+ è un segnale seno di 0,5 VPP con un
offset statico di 2,5 V.
•
Canale dei dati di processo SIN–: SIN– è un segnale seno di 0,5 VPP con un
offset statico di 2,5 V. SIN– è complementare del segnale SIN+.
•
Canale dei dati di processo COS+: COS+ è un segnale coseno di 0,5 VPP con
un offset statico di 2,5 V. Il segnale COS+ è spostato di fase di 90° rispetto
al SIN+.
•
Canale dei dati di processo COS–: COS– è un segnale coseno di 0,5 VPP con
un offset statico di 2,5 V. SIN– è complementare del segnale COS+.
•
Impulso zero Z: Z indica la posizione zero dell'encoder come segnale digitale
differenziale con una larghezza elettrica di 90° (el.) e un livello di 1,75 V
(Low) e 2,9 V (High).
Tenere conto del tempo di inizializzazione dopo l'accensione. Durante questo
periodo l'encoder non emette segnali validi.
Controllare se tutte le funzioni di sicurezza sono efficaci a tutte le velocità
rilevanti come pianificato.
Controllare se la massima temperatura che si genera nel punto di lavoro
dell'encoder durante il suo funzionamento (vedere Disegni quotati , "A") si
trova nell'intervallo delle temperature d'esercizio indicate nei dati tecnici.
Se la temperatura nel punto di lavoro è superiore a 70 °C:
– applicare il pittogramma "Attenzione! Superfici calde" secondo IEC
60 4175041 ben visibile sull'alloggiamento dell'encoder.
– Il significato del pittogramma deve essere spiegato nelle istruzioni per
l'uso della macchina in cui è montato l'encoder.
7.1 Verifiche
Per il funzionamento non sono richiesti ulteriori misure di collaudo.
8 Manutenzione
DFS60S Pro è esente da manutenzione. In caso di difetti non sono possibili
riparazioni. In caso di reclami, contattateci.
Fare attenzione al TM. L'encoder di sicurezza DFS60S Pro ha un TM mas‐
simo, dopo il quale deve essere assolutamente messo fuori uso. Bisogna
quindi osservare, oltre alla durata di vita TM, anche la durata di conserva‐
zione. Il limite che viene raggiunto per primo, a seconda dell’applicazione,
determina il momento in cui è necessario eseguire la messa fuori servizio.
L'anno di costruzione dell'encoder è indicato sull'etichetta del dispositivo o
dell'imballaggio come codice a quattro numeri (aass). Le prime due cifre aa
indicano l'anno (senza migliaia e centinaia), le ultime due ss si riferiscono
alla settimana del processo di produzione.
9 Messa fuori servizio
9.1 Tutela dell’ambiente
L'encoder di sicurezza è concepito in modo da ridurre il più possibile l'impatto
ambientale. Esso consuma soltanto un minimo di energia e di risorse.
Rispettare l’ambiente anche sul posto di lavoro. Osservare pertanto le
b
seguenti informazioni sullo smaltimento.
9.2 Smaltimento
Smaltire sempre i dispositivi inutilizzati o non riparabili secondo le disposi‐
zioni di smaltimento in vigore, specifiche per ogni paese.
INDICAZIONE
Siamo a vostra disposizione per lo smaltimento del dispositivo. Contattateci.
10 Dati tecnici
Scheda tecnica DFS60S Pro
Figura 11: Segnale dell'encoder prima della formazione differenza con carico
120 Ω, diagramma di segnale con rotazione dell'albero in senso orario rivolto in
direzione dell'albero
Figura 12: Segnale dell'encoder dopo la formazione differenza con carico 120 Ω,
diagramma di segnale con rotazione dell'albero in senso orario rivolto in direzione
dell'albero
7 Messa in servizio
INDICAZIONE
Messa in servizio non consentita senza il controllo da parte di personale di sicurezza qua‐
lificato!
Prima di mettere in funzione per la prima volta una macchina o un impianto,
in cui è integrato l'encoder, devono essere controllati e ritenuti idonei da per‐
sonale di sicurezza qualificato. Osservare le indicazioni sull'argomento in
capitolo 2.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 34
Prestazione
Numero dei periodi seno/coseno per rota‐
zione
Passo di misurazione (non di sicurezza) 0,3 secondi angolari
1.024
Con interpolazione 12 bit
Non linearità integrale Tip. ± 45 secondi angolari
Non linearità differenziale ± 7 secondi angolari
Segnale di riferimento, numero 1
Segnale di riferimento, posizione 90°, elettrico, logicamente connesso con
seno/coseno
Dati meccanici
Peso
Flangia fissa
Servo flangia
Foro passante
Foro cieco
ca. 0,30 kg
ca. 0,25 kg
70
70
Coppia di avviamento a 20 °C
Flangia fissa
Servo flangia
Foro passante
Foro cieco
≤ 0,5 Ncm
≤ 0,8 Ncm
Coppia di esercizio a 20 °C
Flangia fissa
Servo flangia
Foro passante
Foro cieco
≤ 0,3 Ncm
≤ 0,6 Ncm
Accelerazione angolare max. ≤ 5 × 105 rad/s²
Carico ammesso per l'albero (radiale/
assiale)
Movimento ondulatorio ammesso (albero
cavo)
80 N/40 N
–
Statico (radiale/assiale) ± 0,3 mm/± 0,5 mm
Dinamico (radiale/assiale) ± 0,05 mm/ ± 0,1 mm
69
Riferiti a limitatore di coppia allentato.
70
Riferiti all'encoder con uscita connettore.
69
Page 35

Prestazione
Velocità di esercizio max.
71
Flangia fissa
Servo flangia
Foro passante
Foro cieco
9.000 min
6.000 min
–1
–1
Momento d’inerzia del rotore
Durata di conservazione
72
Flangia fissa
Servo flangia
Foro passante
Foro cieco
8 gcm²
56 gcm²
3,6 × 109 rotazioni
73
Dati elettrici
Interfacce elettriche 4,5 V … 32 V, sin/cos
1,0 VSS (differenziale)
Frequenza di aggiornamento dell’uscita ≤ 153,6 kHz
Tempo di inizializzazione dopo accensione 50 ms
74
Resistenza al carico ≤ 120 Ω
Consumo energetico senza carico ≤ 0,7 W
Classe di protezione secondo DIN EN 61 140 III
Grado di imbrattamento 2
Protezione all’inversione della polarità Sì
Resistenza al corto circuito delle uscite Sì
75
Dati ambientali
EMC Secondo
Grado di protezione secondo IEC 60 529 IP 65
Umidità relativa dell'aria ammessa
Intervallo temperatura d'esercizio
77
71
EN 61 000-6-2, EN 61 000-6-3
IEC 61 326-3-1
76
90 %
M12, M23 –30 … +95 °C
Uscita del cavo –30 … +85 °C
Range della temperatura di stoccaggio (senza
imballo)
–30 … +90 °C
Altezza di esercizio Max. 2.000 m s.l.m. N. N. (80 kPa)
Resistenza agli urti secondo EN 60
78
068-2-27
Resistenza alle vibrazioni secondo EN
60 068-26)
78
Uscita del cavo 30 g
M12 incl. controconnettore 30 g
M23 incl. controconnettore 10 g
100 g/6 ms
10 … 1.000 Hz
10 … 1.000 Hz
10 … 1.000 Hz
79
Parametri di sicurezza
80
SIL
SIL2 (IEC 61 508), SILCL2 (EN 62 061)
Categoria 3 (EN ISO 13 849)
Velocità di test non richiesta
Velocità di richiesta massima Costante (segnali analogici)
81
PL
82
PFH
a temperatura d'esercizio 95 °C) (Pro‐
D
babilità media di un malfunzionamento peri‐
coloso all’ora)
TM (Durata di vita)
72
PL d (EN ISO 13 849)
–8
1,7 × 10
20 anni (EN ISO 13 849)
Passo di misurazione di sicurezza 0,09° analisi quadratura
Precisione orientata alla sicurezza ± 0,09°
11 Accessori
codici articolo degli accessori
Articolo Cod. art.
BEF-WK-SF servomorset ti, grandi (3 pz.) 2029166
BEF-WK-SF servomorset ti, semigusci (2 pz.) 2029165
BEF-DS02DFS/VFS
Limitatore di coppia, lungo
Su richiesta
83
Ulteriori accessori sono riportati nell'informazione di prodotto in www.sick.com.
Gli accessori devono essere presi in considerazione dall'utilizzatore del prodotto
per la costruzione dell'intera macchina nell'ambito della realizzazione delle rela‐
tive funzioni di sicurezza. All'occorrenza devono essere attestate le esclusioni di
difetti necessarie.
12 Appendice
12.1 Dotazione di fornitura
•
Encoder DFS60S Pro secondo codice modello
•
Chiavetta secondo DIN 6885-A (per variante con albero cavo)
•
Vite Torx T20 per anello di bloccaggio (per variante con albero cavo)
•
Indicazioni di sicurezza generali
•
Istruzioni per l’uso
12.2 Conformità
L'encoder di sicurezza DFS60S Pro è stato prodotto conformemente alle seguenti
direttive:
•
Direttiva Macchine 2006/42/EG
•
Direttiva EMC 2004/108/CE
La versione integrale della dichiarazione di conformità UE è disponibile in Internet
alla homepage di SICK: www.sick.com
INDICAZIONE
Il certificato relativo a questo prodotto si riferisce sia al prodotto stesso sia ai
relativi accessori.
IMPORTANTE
Ulteriori e maggiori informazioni sulla dichiarazione di conformità si trovano
alla fine delle istruzioni per l'uso (nel foglio supplementare linguisticamente
neutro) e in www.sick.com.
13 Disegni quotati
IMPORTANTE
I disegni quotati si trovano alla fine delle istruzioni per l'uso (nel foglio supple‐
mentare linguisticamente neutro).
71
La temperatura d'esercizio deve essere misurata al numero di giri nominale per 1000
giri/min e ridotta di 3,0 K.
72
La durata di vita può essere limitata, a seconda dell’applicazione, anche dalla durata di
conservazione.
73
Calcolate per max. velocità e temperatura.
74
Trascorso questo tempo possono essere letti segnali validi.
75
Corto circuito verso un altro canale o GND ammesso per max. 30 s. Per US cortocircuito
12 V supplementare verso US ammesso per max. 30 s.
76
Con uscita connettore: il controconnettore deve essere inserito e avere un grado di prote‐
zione minimo IP 65.
77
Condensa del campionamento ottico non ammes sa.
78
Controllata in esercizio con monitoraggio lunghezza vettori.
79
Numero di urti in ogni asse di prova, sia positivo sia negativo: 3.
80
Per informazioni dettagliate sulla progettazione in sicurezza della propria macchina /
dell’impianto contattare la filiale SICK di competenza.
81
Per informazioni dettagliate sulla progettazione in sicurezza della propria macchina /
dell’impianto contattare la filiale SICK di competenza
82
I valori indicati si riferiscono a un grado di copertura diagnostica del 99%, raggiungibile con
il sistema di azionamento esterno.
8016866/12N8/2019-01-31/de, en, es, fr, it DFS60S Pro | SICK 35
83
Il limitatore di coppia viene fornito montato di fabbrica. Non è consentita la sostituzione del
limitatore di coppia da parte dell'utente.
Page 36

1 Dimensional drawings
A
B
A
B
A
B
A
B
A
B
NOTE
General tolerances as per DIN ISO 2768-mk
NOTE
Cable diameter = 5.6 ± 0.2 mm; bend radius R = min. 7.5 x diameter cable
Meßpunkt Arbeitstemperatur (frei wählbar, jeweils umlaufend an der Gehäuse-Man‐
telfläche, ca. 3 mm vom Flansch entfernt)
Meßpunkt Vibration (jeweils an der Gehäuse-Stirnfläche, ca. 3 mm von Gehäuse-Kante
entfernen)
Measuring point working temperature (freely selectable, respectively circumferential at
the cover shell, aprro. 3 mm (0.12) away from the flange)
Measuring point vibration (respectively at the housing face, approx. 3 mm (0.12) away
from the cover)
Punto de medición de la temperatura de trabajo (cualquier punto a elegir de toda la
superficie lateral de la carcasa. Aprox. a 3 mm de la brida)
Punto de medición de las vibraciones (en la superficie frontal de la carcasa. Aprox. a 3
mm del borde de la carcasa)
Point de mesure température de service (Librement sélectionnable, sur le pourtour de la
surface du boîtier. À env. 3 mm de la bride)
Point de mesure vibration (Sur la face frontale du boîtier. À env. 3 mm du bord du boîtier)
Punto di misura temperatura d'esercizio (liberamente selezionabile, perimetralmente sulla
superficie esterna dell'alloggiamento, a ca. 3 mm di distanza dalla flangia)
Punto di misura vibrazione (sulla superficie frontale dell'alloggiamento, a ca. 3 mm dal
bordo dell'alloggiamento)
Table 1: Shaft diameter
XF7 shaft diameter xj7 shaft diameter
10 mm
12 mm
14 mm
15 mm
6 mm
8 mm
3/8"
Provided by customer
1/2"
5/8"
2 DFS60S Pro | SICK 8016866/12N8/2019-01-31/en
Page 37

Dimensional drawings (dimensions in mm)
9 (0.35)
40.1
(1.58)
10
(0.39)
Ø 0.05
19 ±0.3
(0.75)
19 ±0.3
(0.75)
Ø 10 f7 (0.39)
Ø 10 f7 (0.39)
Ø 36 f8 (1.42)
3 h9
(0.12)
1.2
(0.05)
3.5
(0.14)
X
2:1
X
Shaft with flat
Ø 60
(2.36)
Ø 48 ±0.05
(1.89)
120° (3x)
M3 / M4 (3x)
(6-deep)
B
0.03
A
0.1
A
C
B
A
14.5
(0.57)
26.1
(1.03)
13
(0.51)
7.75
(0.31)
25°±2°
18
(0.71)
Key
DIN 6885-A 3x3x6
A
M12x1
M23x1
Ø 0.1 C
A
B
0.1
A
0.03
A
Ø 0.05
B
57
(2.24)
10
(0.39)
12
(0.47)
X
19 ±0.3
(0.75)
3.5
(0.14)
1.2 (0.05)
Ø 10 f7 (0.39)
Ø 36 f8
(1.42)
M12x1
C
B
A
Shaft with flat
19 ±0.3
(0.75)
18
(0.71)
Ø 10 f7 (0.39)
9 (0.35)
A
A
B
X
5:1
Connector orientation
Connector orientation
Y
3:1
21.1
(0.83)
M23x1
Y
Ø 0.1
C
Key
DIN 6885-A 3x3x6
3 h9
(0.12)
Ø 48 ±0.05
(1.89)
Ø 60 (2.36)
M3 / M4 (3x)
(6-deep)
120° (3x)
25°±2°
Figure 1: Solid shaft, face mount flange, male connector connection, radial
Figure 2: Solid shaft, face mount flange, male connector connection, axial
8016866/12N8/2019-01-31/en
DFS60S Pro | SICK 3
Page 38

43.1
(1.70)
10
(0.39)
Ø 0.05
19 ±0.3
(0.75)
18
(0.71)
Ø 10 f7 (0.39)
Ø 36 f8
(1.42)
3 h9
(0.12)
1.2
(0.05)
3.5
(0.14)
9 (0.35)
X
2:1
X
Shaft with flat
Ø 60
(2.36)
Ø 48 ±0.05
(1.89)
Key
DIN 6885-A 3x3x6
120° (3x)
M3 / M4 (3x)
(6-deep )
B
Ø 0.1
C
0.03
A
0.1
A
C
B
A
19 ±0.3
(0.75)
Ø 10 f7 (0.39)
A
B
A
Figure 3: Solid shaft, face mount flange, cable connection
0.03
A
0.1
A
0.1
A
Ø 0.05
B
A
B
C
4
+0.1
(0.16)
3 (0.12)
10 ±0.3
(0.39)
X
M12x1
14.5
(0.57)
7.75
(0.31)
Ø 58 ±0.1 (2.28)
Ø 51.5
-0.2
(2.03)
Ø 50 f8 (1.97)
Ø 6 f7 (0.24)
10
+0.1
(0.39)
43.1
(1.70)
Shaft with flat
10 ±0.3
(0.39)
9.5
(0.37)
Ø 6 f7 (0.24)
5.7
(0.22)
A
A
B
M23x1
26.1 (1.03)
13
(0.51)
X
5:1
0.8 (0.03)
2
(0.08)
Ø 0.1
C
25°±2°
120° (3x)
Key
DIN 6885-A 2x2x6
2 h9 (0.08)
Y
10:1
M3 / M4 (3x)
(6-deep)
Ø 42 ±0.05 (1.65)
Ø 60 (2.36)
Y
Figure 4: Solid shaft, servo flange, male connector connection, radial
4
DFS60S Pro | SICK 8016866/12N8/2019-01-31/en
Page 39

Ø 0.05
B
4
+0.1
(0.16)
3
(0.12)
10
+0.1
(0.39)
57
(2.24)
0.1
A
0.1
A
A
B
C
0.03
A
Y
12
(0.47)
Z
M12x1
10 ±0.3 (0.39)
Ø 58 ±0.1 (2.28)
Ø 51.5
-0.2
(2.03)
Ø 50 f8 (1.97)
Ø 6 f7
(0.24)
A
A
B
Ø 60 (2.36)
Ø 0.1
C
Z
5:1
Connector orientation
21.1
(0.83)
W
W
3:1
Connector orientation
Y
3:1
M3 / M4 (3x)
(6-deep)
Ø 42 ±0.05 (1.65)
25°±2°
X
120° (3x)
Key
DIN 6885-A 2x2x6
2 h9
(0.08)
X
10:1
Shaft with flat
10 ±0.3
(0.39)
9.5
(0.37)
Ø 6 f7 (0.24)
5.7 (0.22)
0.8
(0.03)
2
(0.08)
M23 x 1
Figure 5: Solid shaft, servo flange, male connector connection, axial
Ø 0.05
B
0.1
A
0.1
A
A
B
C
Shaft with flat
4
+0.1
(0.16)
3
(0.12)
X
Ø 58 ±0.1 (2.28)
Ø 51.5
-0.2
(2.03)
Ø 50 f8 (1.97)
Ø 6 f7 (0.24)
10±0.3
(0.39)
10
+0.1
(0.39)
43.1
(1.70)
Ø 60 (2.36)
10 ±0.3
(0.39)
9.5
(0.37)
Ø 6 f7 (0.24)
5.7 (0.22)
0.03
A
A
A
B
Ø 0.1
C
M3 / M4 (3x)
(6-deep)
Ø 42 ±0.05 (1.65)
Y
120° (3x)
Key
DIN 6885-A 2x2x6
0.8 (0.03)
2
(0.08)
X
5:1
2 h9
(0.08)
Y
10:1
Figure 6: Solid shaft, servo flange, cable connection
8016866/12N8/2019-01-31/en
DFS60S Pro | SICK 5
Page 40

Ø 60 (2.36)
Ø 32.6
(1.28)
Ø 63 ±0.2 (2.48)
Ø 72 ±0.3 (2.83)
Ø X F7
47 (1.85)
3.2
+0.1
(0.12)
20
(0.79)
20°
X
5:1
Ø X j7
Key
DIN 6885-A 2x2x6
C - C
2:1
C
C
min. 15 (0.59)
max. 40 (1.57)
45.5 (1.79)
9.4 (0.37)
3.4
(0.13)
2.5 (0.10)
Key seat
M12x1
M23x1
7.75
(0.31)
14.5
(0.57)
26.1
(1.03)
0.8 (0.03)
max. 0.4 at Ø 5 / 8" (0.02)
2 h9 (0.08)
max. 8.5 (0.33)
min. 7.5 (0.30)
6
(0.24)
A
A
B
Mounting suggestion
X
Figure 7: Blind hollow shaft, male connector connection
Ø 60 (2.36)
Ø 35 (1.38)
Ø 63 ±0.2 (2.48)
Ø 72 ±0.3 (2.83)
Ø X F7
47 (1.85)
3.2
+0.1
(0.12)
20
(0.79)
20°
X
5:1
Ø X j7
0.8 (0.03)
max. 0.4 at Ø 5 / 8" (0.02)
2 h9 (0.08)
Key
DIN 6885-A 2x2x6
C - C
2:1
C
C
max. 8.5 (0.33)
min. 7.5 (0.30)
6
(0.24)
min. 15 (0.59)
max. 40 (1.57)
45.5 (1.79)
9.4 (0.37)
3.4
(0.13)
2.5
(0.10)
Key seat
A
B
Mounting suggestion
X
A
Figure 8: Blind hollow shaft, cable connection
6
DFS60S Pro | SICK 8016866/12N8/2019-01-31/en
Page 41

43 (1.69)
9.4 (0.37)
Ø 60 (2.36)
Ø X F7
3.4
(0.13)
M12x1
7.75
(0.31)
14.5
(0.57)
M23x1
26.1 (1.03)
13
(0.51)
Ø 63 ±0.2 (2.48)
Ø 72 ±0.3 (2.83)
47 (1.85)
3.2
+0.1
(0.12)
20
(0.79)
20°
X
5:1
Key seat
0.8 (0.03)
max. 0.4 at Ø 5 / 8" (0.02)
2 h9 (0.08)
Key
DIN 6885-A 2x2x6
C - C
2:1
Ø X j7
C
C
max. 8.5 (0.33)
min. 7.5 (0.30)
6
(0.24)
min. 15 (0.59)
A
A
B
Mounting suggestion
X
Figure 9: Through hollow shaft, male connector connection
Ø 60 (2.36)
Ø X F7
43 (1.69)
9.4 (0.37)
3.4
(0.13)
20
(0.79)
20°
Ø 63 ±0.2 (2.48)
Ø 72 ±0.3 (2.83)
47 (1.85)
3.2
+0.1
(0.12)
X
5:1
Key seat
Ø X j7
C
C
max. 8.5 (0.33)
min. 7.5 (0.30)
6
0.8 (0.03)
max. 0.4 at Ø 5 / 8" (0.02)
2 h9 (0.08)
Key
DIN 6885-A 2x2x6
C - C
2:1
min. 15 (0.59)
A
A
B
Mounting suggestion
X
Figure 10: Through hollow shaft, cable connection
8016866/12N8/2019-01-31/en
DFS60S Pro | SICK 7
Page 42

2 Compliance
The complete EU Declaration of Conformity is available from the SICK homepage on the
Internet: www.sick.com
Note: The certificate for this product covers the product itself and the accessories.
8 DFS60S Pro | SICK 8016866/12N8/2019-01-31/en
 Loading...
Loading...