

Page 1
DEUTSCH
min. 15
max. 42
min. 15
DEUTSCH DEUTSCH
DEUTSCH DEUTSCH
SICK Encoder
Betriebsanleitung
SICK Encoder sind nach den anerkannten Regeln der Technik
hergestellte Messgeräte.
Der Anbau des Encoders ist von einem Fachmann mit Kenntnis-
▸
sen in Elektrik und Feinmechanik vorzunehmen.
Der Encoder darf nur zu dem seiner Bauart entsprechenden
▸
Zweck verwendet werden.
a Sicherheitshinweise
Beachten Sie die für Ihr Land gültigen berufsgenossenschaftli-
▸
chen Sicherheits- und Unfallverhütungsvorschriften.
Schalten Sie die Spannung bei allen von der Montage betroffe-
▸
nen Geräten/Maschinen und Anlagen ab.
Elektrische Verbindungen zum Encoder nie bei eingeschalteter
▸
Spannung herstellen bzw. lösen, kann sonst zu Gerätedefekt
führen.
Schläge und Stöße auf die Encoderwelle vermeiden, kann zu
▸
Kugellagerdefekt führen.
Für eine einwandfreie Funktion der Encoder ist auf eine EMV-
▸
gerechte Schirmverbindung (beidseitiges Auflegen des Schirms)
zu achten!
Allgemein gültige Hinweise
Je genauer die Zentrierung für den Encoder ist, desto geringer
sind Winkel- und Wellenversatz bei der Montage und um so
weniger werden die Drehmomentstütze und die Lager des Encoders belastet. Um die Drehmomentstütze bei der Montage nicht
zu verspannen, immer erst den Encoder ananschen und dann
den Klemmring der Hohlwellenklemmung befestigen.
Bei Encodern mit Leitungsanschluss ist das Schirmgeecht mit
dem Ge häuse verbunden.
Zur Sicherstellung der Signalqualität und zum Schutz gegen
äußere Störsignale sollte eine abgeschirmte und paarig verdrillte
Leitung eingesetzt werden. Alle Signalleitungen/Schnittstellensignale müssen mit dem jeweiligen komplementären Signal
paarig verdrillt sein. Bitte beachten Sie die Tabelle mit PIN- und
Adernbelegung in dieser Betriebsanleitung.
Es ist unter EMV-Gesichtspunkten zwingend notwendig, dass
das Gehäuse und der Leitungsschirm an Erde bzw. Masse
angeschlossen werden. Dies wird durch den Anschluss des
Leitungsschirmgeechts realisiert.
Wir empfehlen die Verwendung von SICK-Zubehörleitungen, oder
gleichwertigen Leitungen. Die SICK-Zubehörleitungen können den
entsprechenden Datenblättern entnommen werden.
Das Schirmgeecht sollte großächig angeschlossen werden.
Bei der Programmierung von programmierbaren Encodern
(elektrische Schnittstelle „P“ und „M“) mittels Programming Tool
müssen die Betriebsanleitungen der jeweiligen Programming
Tools beachtet werden.
Stellen Sie bei der Verwendung des Programming Tools PGT-08-S
sicher, dass immer die neueste Version der Software SOPAS und
die neueste Version der sdd-Datei verwendet wird.
Betriebsanleitungen, Software und sdd-Datei nden Sie unter
www.sick.com.
Hierzu geben Sie bitte die siebenstellige Artikelnummer des
verwendeten Geräts direkt in das Feld „Suchen“ auf der Startseite
ein. Klicken Sie dann auf das entsprechende Suchergebnis und
Sie werden zu sämtlichen Informationen und Dateien für Ihr Gerät
weitergeleitet.
SICK Encoder
DFS60
SICK STEGMANN GmbH
Postfach 1560 · D-78156 Donaueschingen
Dürrheimer Straße 36 · D-78166 Donaueschingen
Telefon: +49 (0) 771 80 70 · Telefax +49 (0) 771 80 71 00
Australia
Phone +61 (3) 9457 0600
1800 33 48 02 – tollfree
Austria
Phone +43 (0) 2236 62288-0
Belgium/Luxembourg
Phone +32 (0) 2 466 55 66
Brazil
Phone +55 11 3215-4900
Canada
Phone +1 905.771.1444
Czech Republic
Phone +420 234 719 500
Chile
Phone +56 (2) 2274 7430
China
Phone +86 20 2882 3600
Denmark
Phone +45 45 82 64 00
Finland
Phone +358-9-25 15 800
France
Phone +33 1 64 62 35 00
Germany
Phone +49 (0) 2 11 53 010
Greece
Phone +30 210 6825100
Hong Kong
Phone +852 2153 6300
Hungary
Phone +36 1 371 2680
India
Phone +91-22-6119 8900
Israel
Phone +972 97110 11
Italy
Phone +39 02 27 43 41
Japan
Phone +81 3 5309 2112
Malaysia
Phone +603-8080 7425
Mexico
Phone +52 (472) 748 9451
Detailed addresses and further locations at www.sick.com
UL-Zertizierung nicht für alle Typen gültig. Siehe Typenschild auf
dem Encoder.
For use in NFPA 79 applications only.
Interconnection cables and accessories are available from SICK.
www.sick.com · info@sick.de
Netherlands
Phone +31 (0) 30 229 25 44
New Zealand
Phone +64 9 415 0459
0800 222 278 – tollfree
Norway
Phone +47 67 81 50 00
Poland
Phone +48 22 539 41 00
Romania
Phone +40 356-17 11 20
Russia
Phone +7 495 283 09 90
Singapore
Phone +65 6744 3732
Slovakia
Phone +421 482 901 201
Slovenia
Phone +386 591 78849
South Africa
Phone +27 10 060 0550
South Korea
Phone +82 2 786 6321/4
Spain
Phone +34 93 480 31 00
Sweden
Phone +46 10 110 10 00
Switzerland
Phone +41 41 619 29 39
Taiwan
Phone +886-2-2375-6288
Thailand
Phone +66 2 645 0009
Turke y
Phone +90 (216) 528 50 00
United Arab Emirates
Phone +971 (0) 4 88 65 878
United Kingdom
Phone +44 (0)17278 31121
USA
Phone +1 800.325.7425
Vietnam
Phone +65 6744 3732
Irrtümer und Änderungen vorbehalten.
BZ int49
Anschlussbelegung
Ansicht Gerätestecker M12
8- polig am Encoder
Ansicht Gerätestecker M12
12-polig am Encoder
PIN- und Adernbelegung Incremental-Encoder
1)
DFS60
Achtung! PIN-Belegung nur für Standard-Geber gültig. Bei kunden-
a
spezifischen Encodern bitte entsprechendes Datenblatt beachten.
PIN,
PIN,
8-pol.,
M12Stecker
1 6 7 Braun A– COS– Signalleitung
2 5 6 Weiß A COS+ Signalleitung
3 1 9 Schwarz B– SIN– Signalleitung
4 8 8 Rosa B SIN+ Signalleitung
5 4 4 Gelb Z– ¯Z Signalleitung
6 3 11 Lila Z Z Signalleitung
7 10 12 Blau GND GND
8 12 5 Rot +U
8018427/186H/2019-05-12 · RA_07
– 9 2 – N.C. N.C. Nicht belegt
– 2 3 – N.C. N.C. Nicht belegt
– 11 1 – N.C. N.C. Nicht belegt
– 7
Schirm Schirm Schirm Schirm Schirm Schirm
1)
Um eine gute Signalqualität zu erhalten empfehlen wir grundsätzlich,
die Encodersignale dierentiell auszuwerten.
Nicht verwendete Encoderadern/Signale bitte dierentiell abschlie-
ßen, d. h. zwischen dem Signal und dem Komplementärsignal ist ein
Abschlusswiderstand einzufügen, der so zu dimensionieren ist, dass
ein Strom von 12,5 mA ± 20 % ießt.
Bei Encodern mit Steckeranschluss sollten nicht verwendete Signale
nicht weitergeführt werden.
2)
Nur bei 4,5 … 32 V, TTL/HTL programmierbar. Der SET-Eingang
dient zur Ausführung der Nullimpuls-Teach-Funktion. Wenn der SETEingang länger als 250 ms an U
mindestens 1.000 ms oen oder an GND gelegt war, erhält die aktuelle Wellenstellung das Nullimpuls-Signal „Z“ zugeordnet. Da sich bei
der Nullimpulszuordnung die Position des Nullimpulses sprunghaft
ändert, muss gewährleistet sein, dass die Welle des Encoders während der Nullimpulszuordnung nicht bewegt wird.
PIN,
12-
12-pol.,
pol.,
M12-
M23-
Ste-
Ste-
cker
cker
2)
10 – 0-SET
Ansicht Gerätestecker M23
12-polig am Encoder
Farbe
Signal
der
TTL,
Adern,
HTL
Leitungsanschluss
S
2)
gelegt wird, nachdem er zuvor für
S
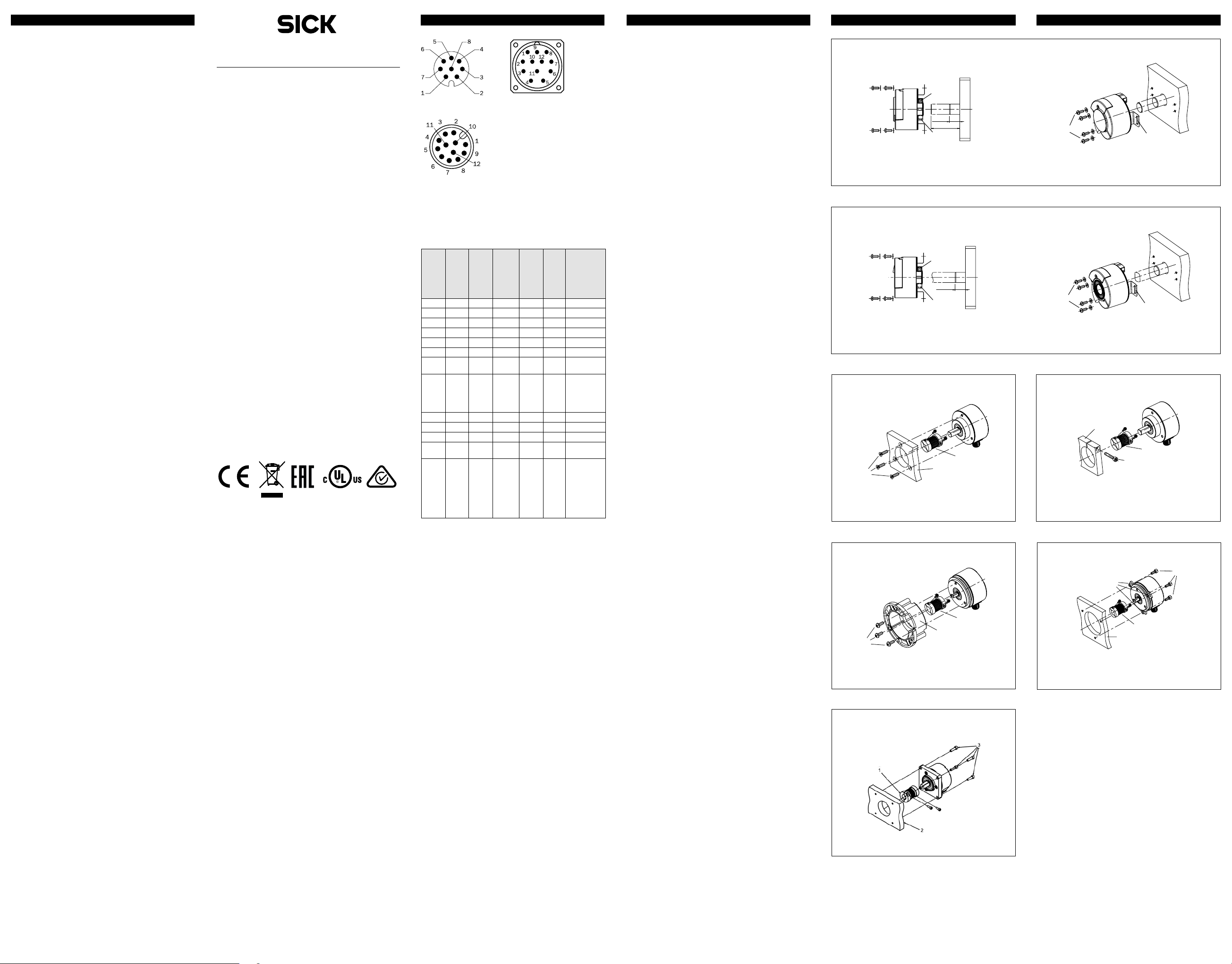
Anbau Aufsteckhohlwellen-Encoder
mit Drehmomentstütze (Bild 1)
Kundenseitige Antriebswelle blockieren.
▸
Lösen der TORX-Schraube (1) am Klemmring (2) mit einem
▸
TORX-Schraubenschlüssel T10.
Encoder auf die Antriebswelle aufschieben.
▸
Anbauhinweis beachten.
▸
Drehmomentstütze (3) mit 4 Schrauben M3 und U-Scheiben
▸
befestigen (4).
TORX-Schraube (1) am Klemmring (2) festziehen.
▸
Anzugsmoment: 1,1 Nm.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
SIN/
COS
1,0 V
+U
N.C.
SS
S
Erklärung
Masseanschluss
Versorgungsspannung
(Potentialfrei
zum Gehäuse)
Nullimpuls
2)
setzen
Schirm
encoderseitig
mit Gehäuse
verbunden.
Steuerungsseitig mit
Erde verbinden.
Anbau DurchsteckhohlwellenEncoder mit Drehmomentstütze
(Bild 2)
Kundenseitige Antriebswelle blockieren.
▸
Lösen der TORX-Schraube (1) am Klemmring (2) mit einem
▸
TORX-Schraubenschlüssel T10.
Encoder auf die Antriebswelle aufschieben.
▸
Anbauhinweis beachten.
▸
Drehmomentstütze (3) mit 4 Schrauben M3 und U-Scheiben
▸
befestigen (4).
TORX-Schraube (1) am Klemmring (2) festziehen.
▸
Anzugsmoment: 1,1 Nm.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Anbau Klemmansch über anschseitige Gewindebohrungen (Bild 3)
Kundenseitige Antriebswelle blockieren.
▸
Kupplung (1) montieren; darauf achten, dass sie nicht am
▸
Encoder-Flansch streift.
Encoder mit montierter Kupplung (1) auf Antriebswelle und
▸
Zentrier-/Klemmsatz (2) aufschieben.
Encoder mit 3 Schrauben M4 (3) befestigen, Kupplung (1) auf
▸
der Antriebswelle montieren. Die Kupplung darf keinen axialen
Spannungen ausgesetzt werden.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Anbau Klemmansch über den
Klemmansatz (Bild 4)
Da der Klemmansatz gleichzeitig auch Zentrieransatz ist,
a
muss die Klemmvorrichtung so ausgebildet sein, dass beim
Festklemmen kein unzulässiger Winkel bzw. Wellenversatz
entsteht.
Kundenseitige Antriebswelle blockieren.
▸
Kupplung (1) montieren; darauf achten, dass sie nicht am
▸
Encoder-Flansch streift. Encoder mit montierter Kupplung (1)
auf Antriebswelle und Klemmansatz in Klemmvorrichtung (2)
schieben.
Encoder mit Schraube (3) festklemmen.
▸
Kupplung (1) auf der Antriebswelle befestigen. Die Kupplung
▸
darf keinen axialen Spannungen ausgesetzt werden.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Anbau Servoansch über ansch
seitige Gewindebohrungen (Bild 5)
Kundenseitige Antriebswelle blockieren.
▸
Kupplung (1) am Encoder montieren; darauf achten, dass diese
▸
nicht am Encoder-Flansch streift.
Encoder mit montierter Kupplung (1) auf Antriebswelle und
▸
Zentriersatz (2) aufschieben.
Encoder mit 3 Schrauben M4 (3) befestigen.
▸
Kupplung (1) auf der Antriebswelle befestigen. Die Kupplung
▸
darf keinen axialen Spannungen ausgesetzt werden.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Anbau Servoansch mit Servo
klammern (Bild 6)
Kundenseitige Antriebswelle blockieren.
▸
Kupplung (1) am Encoder montieren; darauf achten, dass sie
▸
nicht am Encoder-Flansch streift.
Servoklammern (2) mit Schrauben M4 (4) montieren.
▸
Schrauben nicht festziehen, Servoklammern (2) so verdrehen,
▸
dass der Encoder-Flansch in den Zentriersatz (3) geschoben
werden kann.
Encoder mit montierter Kupplung (1) auf Antriebswelle und
▸
Zentriersatz (3) aufschieben.
Servoklammern (2) durch Drehen in die Nut einrücken und
▸
leicht festziehen. Kupplung (1) auf Antriebswelle befestigen. Die
Kupplung darf keinen axialen Spannungen ausgesetzt werden.
Alle 3 Schrauben (4) der Servoklammern (2) festziehen.
▸
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Anbau mit Quadratansch (Bild 7)
Kundenseitige Antriebswelle blockieren.
▸
Kupplung (1) montieren; darauf achten, dass sie nicht am
▸
Encoder-Flansch streift. Encoder mit montierter Kupplung (1)
auf Antriebswelle und Klemmansatz in Klemmvorrichtung (2)
schieben.
Encoder mit 4 M5-Schrauben (3) montieren.
▸
Kupplung (1) auf der Antriebswelle befestigen. Die Kupplung
▸
darf keinen axialen Spannungen ausgesetzt werden.
Elektrische Verbindungen bei abgeschalteter Spannung
▸
herstellen. Spannung einschalten und Funktion des Encoders
überprüfen.
Bild 1
min. 15
max. 42
Anbauhinweise Aufsteckhohlwelle beachten
Bild 2
min. 15
Anbauhinweis Durchsteckhohlwelle beachten
Bild 3
Anbau Klemmansch über anschseitige Gewindebohrungen
Bild 5
Anbau Servoansch über anschseitige Gewindebohrungen
Bild 7
Anbau mit Quadratansch
Anbau Aufsteckhohlwellen-Encoder mit Drehmomentstütze
Anbau Durchsteckhohlwellen-Encoder mit Drehmomentstütze
Bild 4
Anbau Klemmansch über den Klemmansatz
Bild 6
Anbau Servoansch mit Servoklammern
Page 2
ENGLISH
min. 15
min. 15
max. 42
ENGLISH ENGLISH
ENGLISH ENGLISH
SICK encoders
Operating instructions
SICK encoders are measuring instruments produced in accordance with recognized industrial regulations.
The installation of the encoder is to be carried out by trained
▸
personal with knowledge of electrical engineering and precision
engineering.
The encoder must be used only for the purpose appropriate to
▸
its design.
a Safety notes
Observe the professional safety and accident prevention regula-
▸
tions applicable to your country.
Switch of the voltage to all the devices/machines and plant
▸
involved in the mounting.
Never electrically connect or disconnect the encoder with the
▸
voltage switched on, otherwise this may lead to damage to the
encoder.
Avoid striking the shaft of the encoder.
▸
For the satisfactory operation of the devices, care must be paid
▸
to good earthing and to a screen connection suitable for EMC
(screen connected at both ends).
Generally applicable notes
The more accurately the centering for the encoder is, the lower
are the angular oset and shaft oset after the installation and
the smaller is the stress applied to the stator coupling and bearing of the encoder. In order not to stress the stator coupling during
the installation, always x the encoder by its stator coupling and
then fasten the clamping ring of the hollow shaft clamping.
In case of the encoders with cable outlet, the screening braid is
connected to the housing.
In order to ensure the signal quality and to protect against
external interference signals, a shielded pair-twisted cable should
be used. All signal lines/interface signals must be twisted in
pairs with the respective complementary signal. Please consult
the relevant table contained in these operating instructions for
information about the PIN and wire allocation.
From the point of view of EMC, it is absolutely necessar y for the
housing and cable screen to be connected to earth or ground.
This can be done by connecting the screening braid of the cable.
We recommend the use of SICK accessory cables, or cables of an
equivalent quality. Information relating to SICK accessory cables
can be found in the corresponding data sheets.
The screening braid should be connected over a large area.
Compliance with the operating instructions for the corresponding
tool is mandatory when programming programmable encoders
with a programming tool (electrical interface “P” and “M”).
When using the PGT-08-S programming tool, make sure that you
are always working with the latest version of the SOPAS software
and the latest version of the SDD le.
Operating instructions, software, and the SDD le can be found
at www.sick.com.
To do this, please enter the seven-digit part number for the device
in question directly in the “Search” eld on the homepage. Click
on the relevant search result, and you will be taken to all the
information and les for your device.
SICK encoders
DFS60
PO Box 1560 · D-78156 Donaueschingen, Germany
Dürrheimer Straße 36 · D-78166 Donaueschingen, Germany
Phone: +49 771 80 70 · Fax: +49 771 80 71 00
Australia
Phone +61 (3) 9457 0600
1800 33 48 02 – tollfree
Austria
Phone +43 (0) 2236 62288-0
Belgium/Luxembourg
Phone +32 (0) 2 466 55 66
Brazil
Phone +55 11 3215-4900
Canada
Phone +1 905.771.1444
Czech Republic
Phone +420 234 719 500
Chile
Phone +56 (2) 2274 7430
China
Phone +86 20 2882 3600
Denmark
Phone +45 45 82 64 00
Finland
Phone +358-9-25 15 800
France
Phone +33 1 64 62 35 00
Germany
Phone +49 (0) 2 11 53 010
Greece
Phone +30 210 6825100
Hong Kong
Phone +852 2153 6300
Hungary
Phone +36 1 371 2680
India
Phone +91-22-6119 8900
Israel
Phone +972 97110 11
Italy
Phone +39 02 27 43 41
Japan
Phone +81 3 5309 2112
Malaysia
Phone +603-8080 7425
Mexico
Phone +52 (472) 748 9451
Detailed addresses and further locations at www.sick.com
UL certication not valid for all types. See type label on the
encoder.
For use in NFPA 79 applications only.
Interconnection cables and accessories are available from SICK.
SICK STEGMANN GmbH
www.sick.com · info@sick.de
Netherlands
Phone +31 (0) 30 229 25 44
New Zealand
Phone +64 9 415 0459
0800 222 278 – tollfree
Norway
Phone +47 67 81 50 00
Poland
Phone +48 22 539 41 00
Romania
Phone +40 356-17 11 20
Russia
Phone +7 495 283 09 90
Singapore
Phone +65 6744 3732
Slovakia
Phone +421 482 901 201
Slovenia
Phone +386 591 78849
South Africa
Phone +27 10 060 0550
South Korea
Phone +82 2 786 6321/4
Spain
Phone +34 93 480 31 00
Sweden
Phone +46 10 110 10 00
Switzerland
Phone +41 41 619 29 39
Taiwan
Phone +886-2-2375-6288
Thailand
Phone +66 2 645 0009
Turke y
Phone +90 (216) 528 50 00
United Arab Emirates
Phone +971 (0) 4 88 65 878
United Kingdom
Phone +44 (0)17278 31121
USA
Phone +1 800.325.7425
Vietnam
Phone +65 6744 3732
Subject to change without notice.
BZ int49
Allocation
View to the connector M12 8-
pin tted to the encoder body
View to the connector M12 12-
pin tted to the encoder body
PIN and wire allocation incremental encoders
1)
DFS60
Attention! PIN allocation only valid for standard encoders. For
a
customer specific versions please see the relevant data sheet.
PIN,
PIN,
8-pin,
M12
connector
1 6 7 Brown A– COS– Signal line
2 5 6 White A COS+ Signal line
3 1 9 Black B– SIN– Signal line
4 8 8 Pink B SIN+ Signal line
5 4 4 Yellow Z– ¯Z Signal line
6 3 11 Lilac Z Z Signal line
7 10 12 Blue GND GND
8 12 5 Red +U
8018427/186H/2020-05-12 · RA_07
– 9 2 – N.C. N.C. Not connected
– 2 3 – N.C. N.C. Not connected
– 11 1 – N.C. N.C. Not connected
– 7
Shield Shield Shield Shield Shield Shield
1)
In order to achieve a high signal quality, we recommend a dierential
evaluation of the encoder signals.
Unused signal wires shall be connected dierentially, i.e. a resistor
needs to be connected between signal wire and inverted signal wire.
The resulting current should be 12.5 mA ± 20 %.
For encoders with connector, the unused signals must not be connected to the customer cabling.
2)
Only at 4.5 … 32 V, TTL/HTL programmable. The SET input serves to
carry out the zero pulse teach function. If the SET input is applied to
for longer than 250 ms, after it was open for at least 1,000 ms or
U
S
applied to GND, the current shaft position is assigned the zero pulse
signal “Z”. Since the position value alters rapidly during Zero-Pulse
assignment, care must be taken to ensure that the encoder shaft
remains stationary during Zero-Pulse adjustment.
PIN,
12-pin,
12-
M23
pin,
con-
M12
nector
connector
2)
10 – 0-SET
View to the connector M23
tted to the encoder body
Color
Signal
TTL,
of
HTL
wires,
cable
outlet
S
2)
SIN/
COS
1.0
V
SS
+U
N.C.
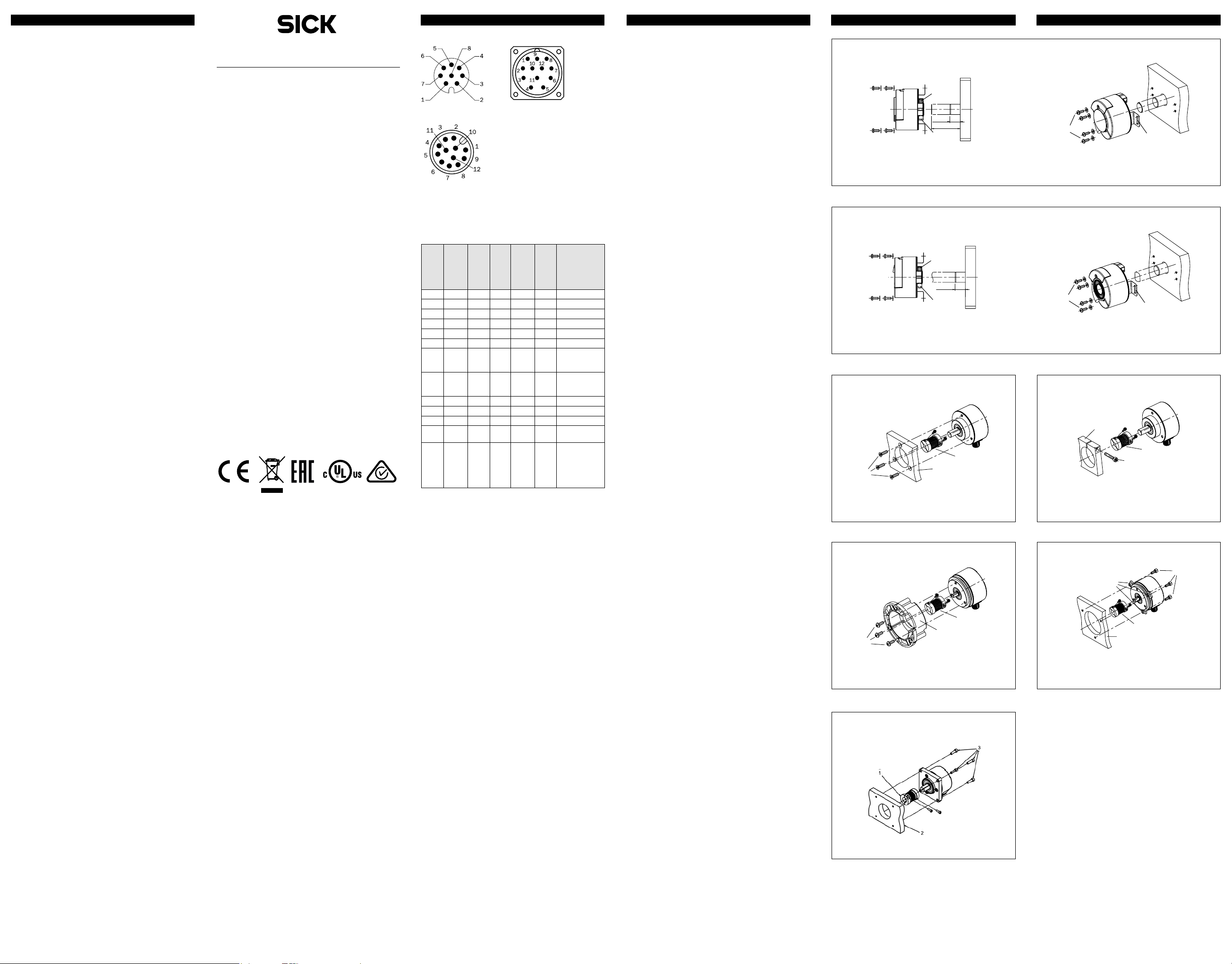
Installation blind hollow shaft
encoder with stator coupling
(Fig. 1)
Lock the drive shaft on the application side.
▸
Loosen the TORX screw (1) on the clamping ring (2) with a TORX
▸
wrench T10.
Push the encoder onto the drive shaft.
▸
Take note of the installation.
▸
Fix the stator coupling (3) with 4 M3 screws and washers (4).
▸
Firmly tighten the TORX screw (1) on the clamping ring (2).
▸
Tightening torque: 1.1 Nm.
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Explanation
Ground connection of the
encoder
Supply voltage
(potential free to
S
housing)
Zeropulse
teach
Shield connected
to housing on
side of encoder.
Connected to
ground on side
of control.
Installation through hollow shaft
encoder with stator coupling
Fig. 1
(Fig. 2)
Lock the drive shaft on the application side.
▸
Loosen the TORX screw (1) on the clamping ring (2) with a TORX
▸
wrench T10.
Push the encoder onto the drive shaft.
▸
Take note of the installation.
▸
Fix the stator coupling (3) with 4 M3 screws and washers (4).
▸
Firmly tighten the TORX screw (1) on the clamping ring (2).
▸
Tightening torque: 1.1 Nm.
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Installation face mount ange via
threaded holes on the ange side
Installation for blind hollow shaft
min. 15
max. 42
Installation blind hollow shaft encoder with stator coupling
(Fig.3)
Lock the drive shaft on the application side.
▸
Mount the coupling (1) on the encoder, take care that it does
▸
not touch the encoder ange.
Push the encoder, with mounted coupling (1) onto the drive
▸
shaft and centring recess (2).
Fix the encoder with 3 M4 screws (3) and x the coupling (1) to
▸
the drive shaft. The coupling must not be subjected to any axial
stresses.
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Installation face mount ange via
Fig. 2
min. 15
mounting spigot (Fig. 4)
Since the mounting spigot is also the means of centring,
a
the clamping device must be constructed in such a way that
when it is clamped firmly, no impermissible angular or shaft
offset results.
Lock the drive shaft on the application side.
▸
Mount the coupling (1); take care that it does not touch the
▸
encoder ange. Fit the encoder, with mounted coupling (1),
onto the drive shaft, and the mounting spigot into the clamping
device (2).
Clamp the encoder rmly with the screw (3).
▸
Fix the coupling (1) on the drive shaft. The coupling must not be
▸
subjected to any axial stresses.
Make the electrical connections with the voltage switched off.
2)
▸
Switch on the voltage and check the functioning of the encoder.
Installation for hollow shaft
Fig. 3
Installation through hollow shaft encoder with stator coupling
Fig. 4
Installation face mounting ange via mounting spigot
Fig. 6
Installation servo ange via servo clamps
Installation servo ange via threaded holes on the ange side (Fig. 5)
Lock the drive shaft on the application side.
▸
Mount the coupling (1) on the encoder, take care that this does
▸
not touch the encoder ange.
Push the encoder, with mounted coupling (1), onto the drive
▸
shaft and mounting spigot into the centring recess. (2)
Fix the encoder with 3 M4 screws (3) and x the coupling (1) to
▸
the drive shaft. The coupling must not be subjected to any axial
stresses.
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Installation servo ange via servo
clamps (Fig. 6)
Lock the drive shaft on the application side.
▸
Mount the coupling (1) on the encoder, take care that it does
▸
not touch the encoder ange.
Mount the servo clamps (2) with M4 screws (4). Do not tighten
▸
screws, rotate the servo clamps (2) so that the encoder ange can
be pushed into the centring recess (3). Push the encoder, with
mounted coupling (1), onto drive shaft and centring recess (3).
Push the servo clamps (2) into the groove by rotating them and
▸
tighten slightly.
Fix the coupling (1) to the drive shaft. The coupling must not be
▸
subjected to any axial stresses.
Tighten all 3 screws (4) on the servo clamps (2).
▸
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Installation using square ange
Installation face mounting ange via threaded holes on the
ange side
Fig. 5
Installation servo ange via threaded holes on the ange side
Fig. 7
(Fig. 7)
Lock the drive shaft on the application side.
▸
Push the encoder, with mounted coupling (1), onto the drive
▸
shaft and centering device (2).Clamp the encoder firmly with 4
M5 screws (3).
Fix the coupling (1) to the drive shaft. The coupling must not be
▸
subject to any axial stresses.
Make the electrical connections with the voltage switched off.
▸
Switch on the voltage and check the functioning of the encoder.
Installation using square ange
 Loading...
Loading...