

SICK AHS36 IO-Link Inox,AHM36 IO-Link Inox,AHM36 IO-Link,AHS36 IO-Link Operating Instructions Manual
B E T R I E B S A N L E I T U N G d e
Alle Rechte vorbehalten. Irrtümer und Änderungen vorbehalten.
1 Zu diesem Dokument
Lesen Sie diese Betriebsanleitung sorgfältig durch, bevor Sie den Encoder montie‐
ren, in Betrieb nehmen oder warten.
1.2 Funktion dieses Dokuments
Diese Betriebsanleitung leitet das qualifizierte technische Personal des Maschi‐
nenherstellers bzw. Maschinenbetreibers zur Montage, Elektroinstallation, Inbe‐
triebnahme sowie zum Betrieb und zur Wartung des Encoders an.
2 Zu Ihrer Sicherheit
AHS/AHM36 IO-Link und AHS/AHM IO-Link Inox Absolut-Encoder sind nach den
anerkannten Regeln der Technik hergestellte Messgeräte.
Der Anbau des Encoders ist von Fachpersonal mit Kenntnissen in Elektrik
und Feinmechanik vorzunehmen.
Der Encoder darf nur zu dem seiner Bauart entsprechenden Zweck verwen‐
det werden.
2.2 Grundlegende Sicherheitshinweise
Beachten Sie die für Ihr Land gültigen berufsgenossenschaftlichen Sicher‐
heits- und Unfallverhütungsvorschriften.
Schalten Sie die Spannung bei allen von der Montage betroffenen Geräte,
Maschinen und Anlagen ab.
Elektrische Verbindungen zum Encoder nie bei eingeschalteter Spannung
herstellen oder lösen, dies kann zu einem Gerätedefekt führen.
Schläge auf die Welle und Spannzange vermeiden.
3 Montage
3.1 Encoder mit Servoflansch
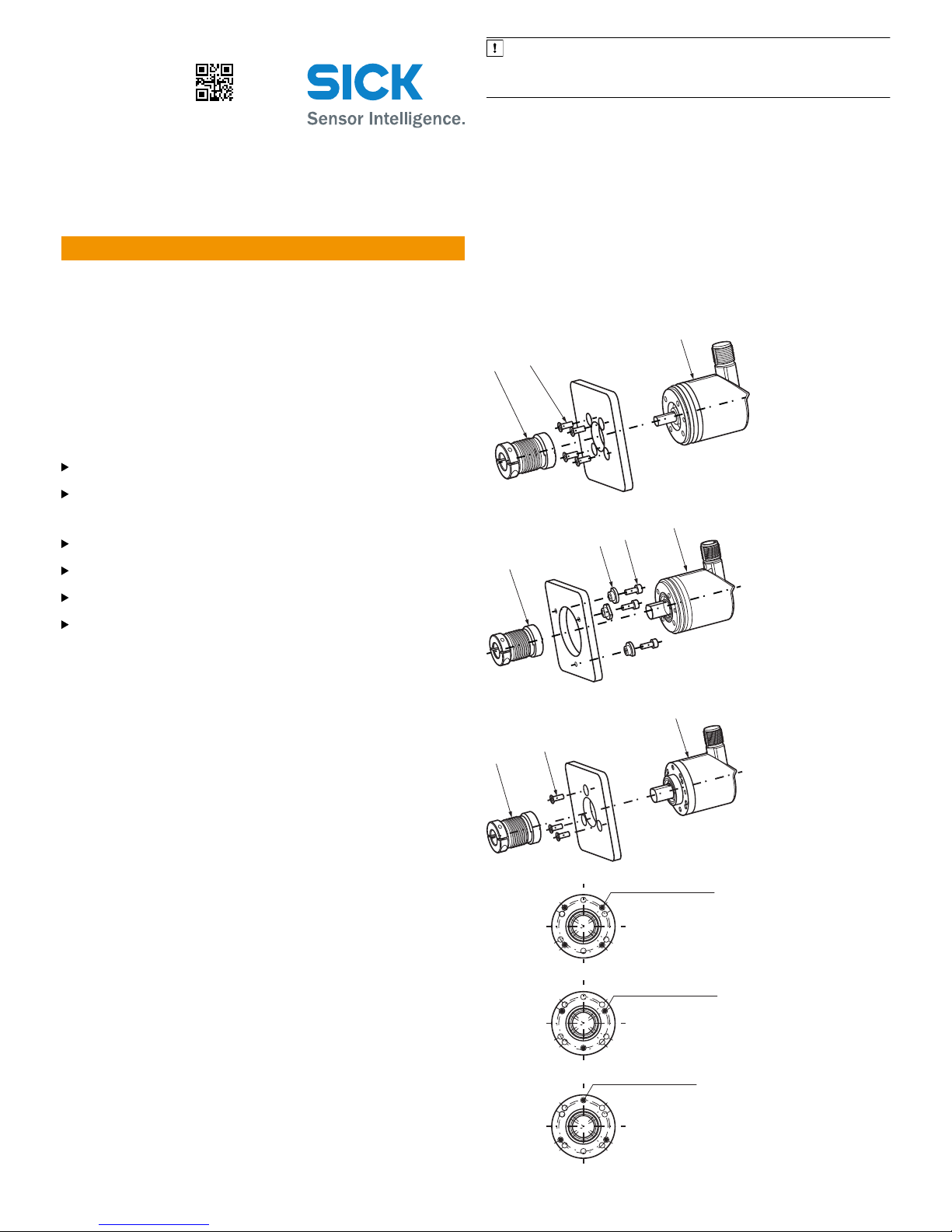
3.1.1 Anbau über flanschseitige Gewindebohrungen (Abb. 1)
Kundenseitige Antriebswelle blockieren. Kupplung (1) am Encoder (2) montieren;
darauf achten, dass diese nicht am Encoder-Flansch streift. Encoder (2) mit mon‐
tierter Kupplung (1) auf Antriebswelle aufschieben. Encoder (2) mit 4 Schrauben
M3 (3) befestigen. Kupplung (1) auf der Antriebswelle befestigen. Darauf achten,
dass die Kupplung keiner axialen Spannung ausgesetzt wird. Elektrische Verbin‐
dung bei abgeschalteter Spannung herstellen. Spannung einschalten und Funk‐
tion des Encoders prüfen.
3.1.2 Anbau mit Servoklammern (Abb. 2)
Kundenseitige Antriebswelle blockieren. Kupplung (1) am Encoder (4) montieren;
darauf achten, dass diese nicht am Encoder-Flansch streift. Servoklammern (2)
mit Schrauben M3 (3) montieren. Schrauben nicht festziehen, Servoklammern so
verdrehen, dass der Encoder-Flansch in die Zentrierung geschoben werden kann.
Encoder (4) mit montierter Kupplung (1) auf Antriebswelle und Zentrierung auf‐
schieben.
Servoklammer (2) durch Drehen in die Nut einrücken und leicht festziehen. Kupp‐
lung (1) auf Antriebswelle befestigen. Darauf achten, dass die Kupplung keiner
axialen Spannung ausgesetzt wird. Alle 3 Schrauben der Servoklammern festzie‐
hen. Elektrische Verbindung bei abgeschalteter Spannung herstellen. Spannung
einschalten und Funktion des Encoders prüfen.
3.2 Encoder mit Klemmflansch
Bei dieser Flanschausführung gibt es 2 Anbaumöglichkeiten:
•
Über flanschseitige Gewindebohrungen
•
Über Klemmung am Klemmansatz
3.2.1 Anbau über flanschseitige Gewindebohrungen (Abb. 3)
Kupplung (1) montieren; darauf achten, dass diese nicht am Encoder-Flansch
streift. Encoder (2) mit montierter Kupplung (1) auf Antriebswelle und Zentrier- /
Klemmsatz aufschieben. Encoder (2) mit 3 Schrauben M3 (3) befestigen, Kupp‐
lung (1) auf der Antriebswelle befestigen. Die Kupplung darf keinen axialen Span‐
nungen ausgesetzt werden. Elektrische Verbindung bei abgeschalteter Spannung
herstellen. Spannung einschalten und Funktion des Encoders prüfen.
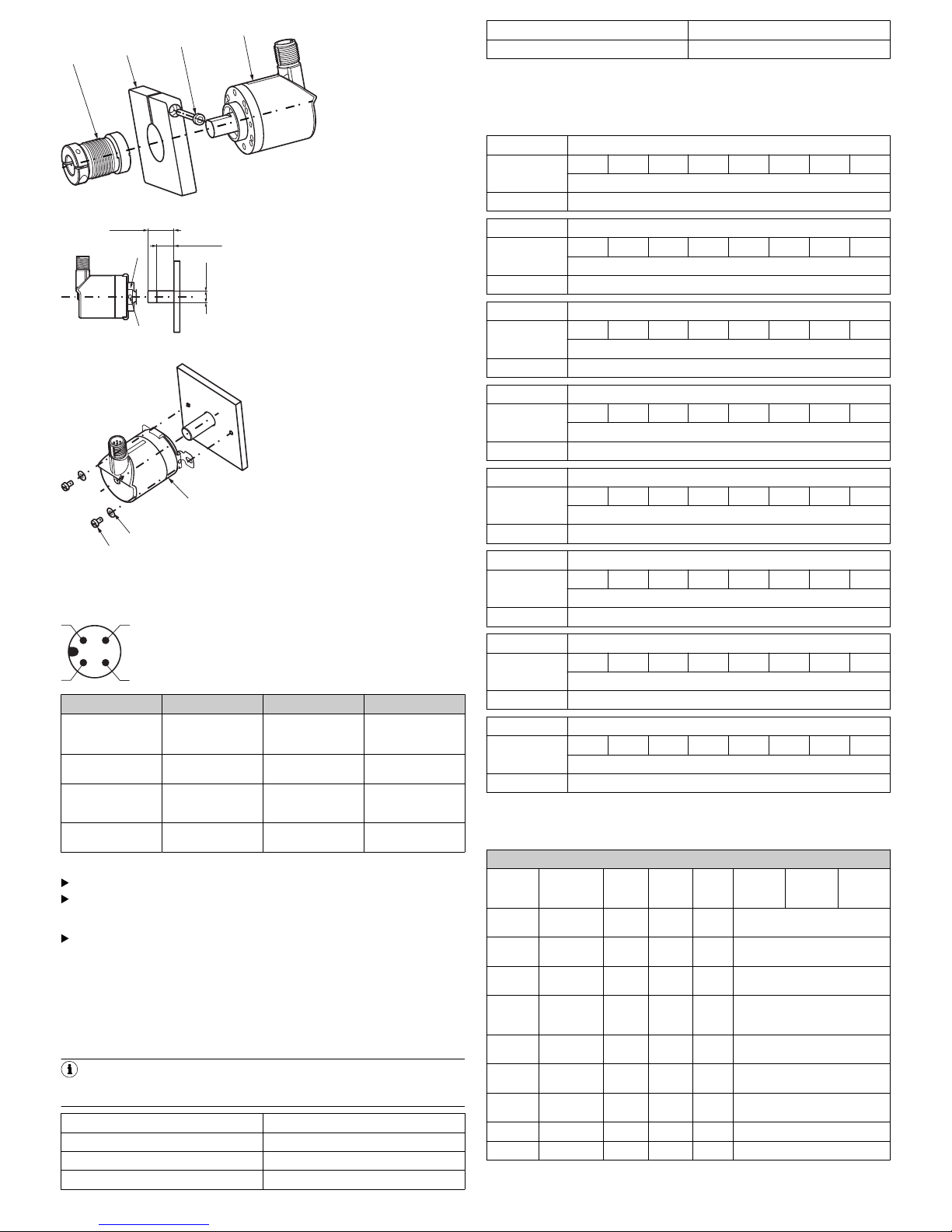
3.2.2 Anbau über den Klemmansatz (Abb. 4)
WICHTIG
Da der Klemmansatz gleichzeitig auch Zentrieransatz ist, muss die Klemm‐
vorrichtung so ausgebildet sein, dass beim Festklemmen kein unzulässiger
Winkel bzw. Wellenversatz entsteht.
Kundenseitige Antriebswelle blockieren. Kupplung (1) montieren; darauf achten,
dass diese beim Verdrehen der Welle nicht am Encoder-Flansch streift. Encoder
(4) mit montierter Kupplung (1) auf Antriebswelle und Klemmansatz in Klemmvor‐
richtung (2) aufschieben. Encoder (4) mit Schraube (3) festklemmen. Kupplung
(1) auf der Antriebswelle befestigen.
Die Kupplung darf keinen axialen Spannungen ausgesetzt werden. Elektrische
Verbindung bei abgeschalteter Spannung herstellen. Spannung einschalten und
Funktion des Encoders prüfen.
3.3 Encoder mit Flansch für Aufsteckhohlwelle (Abb. 5 und 6)
Kundenseitige Antriebswelle blockieren. Zylinderschraube (2) am Klemmring (1)
lösen. Encoder mit Spannzange auf Antriebswelle aufschieben. Anbauhin‐
weis Abb. 6 beachten! Momentenstütze (3) mit 2 Schrauben M3 (4) und U-Schei‐
ben (5) befestigen. Zylinderschraube (2) an Klemmring (1) festziehen.
Anzugsmoment max. 0,8 Nm.
Elektrische Verbindung bei abgeschalteter Spannung herstellen. Spannung ein‐
schalten und Funktion des Encoders prüfen.
1
3
2
Abbildung 1: Anbau über flanschseitige Gewindebohrungen
4
3
2
1
Abbildung 2: Anbau mit Servoklammern
1
3
2
4 x M3 auf Ø 30 mm
Tiefe 5 mm
3 x M3 auf Ø 28 mm
Tiefe 5 mm
3 x M3 auf Ø 30 mm
Tiefe 5 mm
Abbildung 3: Anbau über flanschseitige Gewindebohrung
8022049/2018-02-14/de, en AHS/AHM36 IO-Link AHS/AHM36 IO-Link Inox | SICK 1
8022049/2018-02-14
www.sick.com
AHS/AHM36 IO-Link
AHS/AHM36 IO-Link Inox
SICK AG
E
rwin-Sick
-Straße 1
D-79183 Waldkirch
1
2
3
4
Abbildung 4: Anbau über Klemmansatz
1
2
22 max.
14,5 min.
Ø xf7
Abbildung 5: Encoder mit Flansch für Aufsteckhohlwelle (Anbauvorschlag)
3
5
4
Abbildung 6: Encoder mit Flansch für Aufsteckhohlwelle
4 Elektrische Installation
2
1 4
3
PIN Adernfarbe Signal Funktion
1 Braun L+ Versorgungsspan‐
nung Encoder 20 - 30
V (+US)
2 Weiß I/Q nicht verbunden -
keine Funktion
3 Blau L- Versorgungsspan‐
nung Encoder 0 V
(GND)
4 Schwarz C/Q IO-Link Kommunika‐
tion
4.2 Gerät elektrisch anschließen
Anschluss direkt über Rundschraubsystem M12 oder Leitungsabgang.
Der drehbare Stecker- / Leitungsabgang ist nur für die Ausrichtung des Ste‐
cker- / Leitungsabgangs während der Montage vorgesehen, nicht für dauer‐
hafte Bewegung.
Die Schutzart beim Steckerabgang wird nur mit aufgeschraubtem Gegenste‐
cker erreicht.
Anzugsmoment Gegenstecker bei M12-Steckerabgang: 1,0 Nm
4.3 IO-Link spezifische Informationen
Laden Sie das IODD-File des AHS36/AHM36 IO-Link oder AHS/AHM36 IO-Link
Inox von www.sick.com oder aus dem IODD-Finder des IO-Link Konsortiums herun‐
ter. Stellen Sie sicher, dass Sie immer das aktuelle IODD-File verwenden.
4.3.1 Physikalische Schicht
HINWEIS
Maximale Stromaufnahme des IO-Link Devices (inkl. Lastströme) darf maxi‐
malen Ausgangsstrom des Master-Ports nicht überschreiten.
SIO Modus Nein
Min. Zykluszeit 3,2 ms
Baudrate
1
COM3
Prozessdatenlänge 8 Byte
IODD Version V 1.0
Gültig für IO-Link Version 1.1.0
1
COM-Werte spezifizieren die Baudrate (s. IO-Link Spezifikation): COM1 (4,8 kbit/s),
COM2 (38,4 kbit/s), COM3 (230,4 kbit/s)
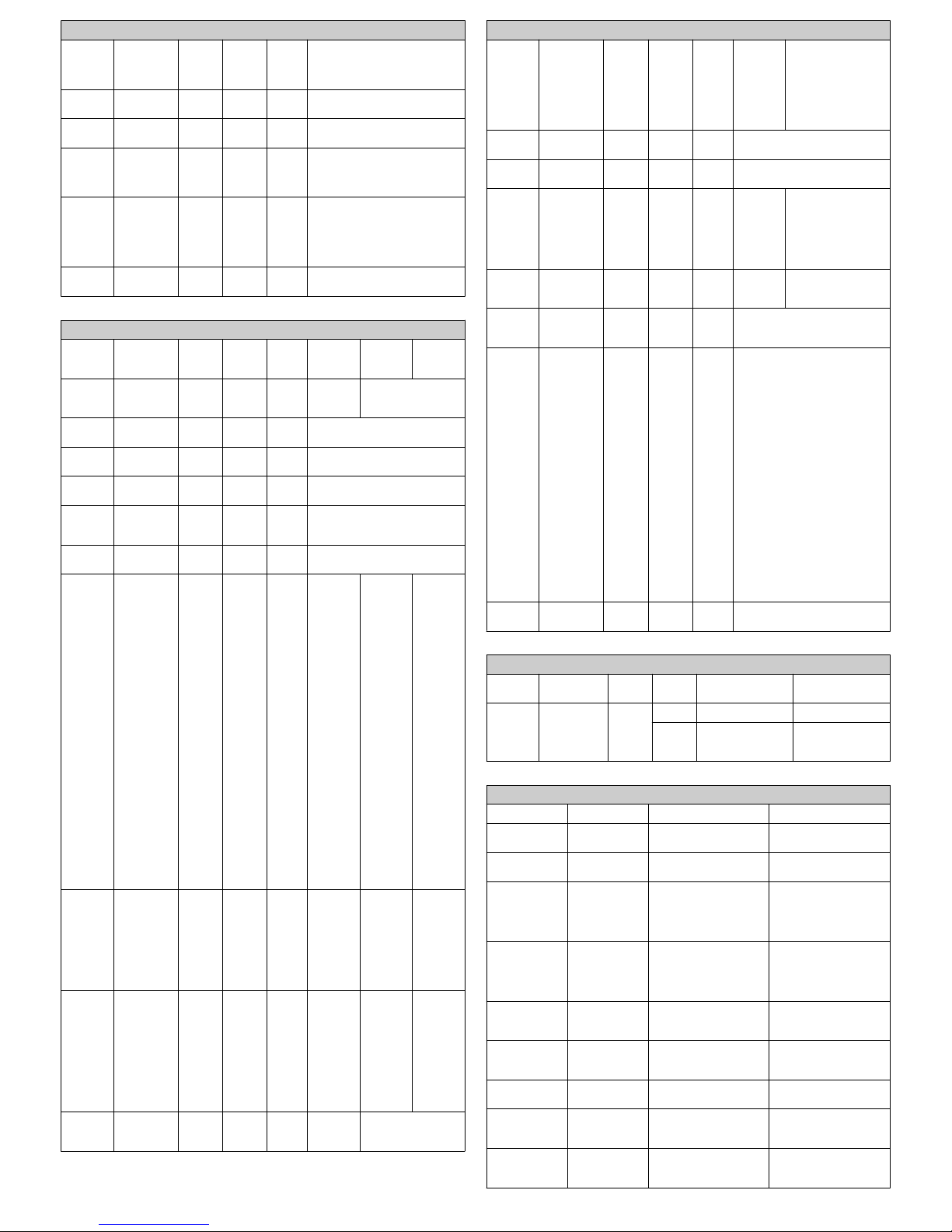
4.3.2 Prozessdaten
Record: 8 Byte
Bitoffset
Byte 0 63 62 61 60 59 58 57 56
Geschwindigkeit
Type/Subindex Integer 32
Bitoffset
Byte 1 55 54 53 52 51 50 49 48
Geschwindigkeit
Type/Subindex Integer 32
Bitoffset
Byte 2 47 46 45 44 43 42 41 40
Geschwindigkeit
Type/Subindex Integer 32
Bitoffset
Byte 3 39 38 37 36 35 34 33 32
Geschwindigkeit
Type/Subindex Integer 32
Bitoffset
Byte 4 31 30 29 28 27 26 25 24
Position
Type/Subindex Unsigned Integer 32
Bitoffset
Byte 5 23 22 21 20 19 18 17 16
Position
Type/Subindex Unsigned Integer 32
Bitoffset
Byte 6 15 14 13 12 11 10 9 8
Position
Type/Subindex Unsigned Integer 32
Bitoffset
Byte 7 7 6 5 4 3 2 1 0
Position
Type/Subindex Unsigned Integer 32
4.3.3 Servicedaten
Die folgenden ISDUs werden nicht über Data-Storage gesichert: Gerätespezifische
Markierung und roher Positionswert.
IO-Link spezifisch
Index dez
(hex)
Name Format
(Offset)
Länge Zugriff1Standard‐
wert
Wertebe‐
reich
Bemer‐
kung [Ein‐
heit]
0 (0x00) Direkte Para‐
meter 1
Record 16 Byte rw siehe IO-Link Interface Specifica‐
tion
1 (0x01) Direkte Para‐
meter 2
Record 16 Byte rw siehe IO -Link Interface Specifica‐
tion
12 (0x0C) Gerätezu‐
griffs sperren
Record 2 Byte rw
2
(0x02)
Daten‐
speiche‐
rungssperre
Bit (1) 1 Bit rw
16 (0x10) Hersteller‐
name
String 64 Byte ro SICK AG
17 (0x11) Hersteller‐
text
String 64 Byte ro SICK Sensor Intelligence
18 (0x12) Produkt‐
name
String 64 Byte ro AHx36x-xxxxxxxxxx
19 (0x13) Produkt-ID String 64 Byte ro 1xxxxxx
20 (0x14) Produkttext String 64 Byte ro Absolute Encoder Multiturn
8022049/2018-02-14/de, en AHS/AHM36 IO-Link AHS/AHM36 IO-Link Inox | SICK 2
IO-Link spezifisch
21 (0x15) Seriennum‐
mer
String 16 Byte ro yywwnnnn
y = Jahr
w = W
oche
n = Zähler
22 (0x16) Hardware‐
v
ersion
String 64 Byte ro 1.0
23 (0x17) Firmwarever‐
sion
String 64 Byte ro 1.1.0
24 (0x18) Anwen‐
dun
gsspezi‐
fische Mar‐
kierung
String 32 Byte rw Anwendungsspezifische Markie‐
rung, beschreibbar durch Anwen‐
der
36 (0x24) Gerätestatus UInt 8 Bit ro 0 = Gerät ist OK
1 = W
artung erforderlich
2 = Außerhalb der Spezifikation
3 = Funktionsprüfung
4 = Fehler
5 ... 255 = Reserviert
40 (0x28) Prozessda‐
t
en Eingang
PD In 8 Byte ro Wie im Kapitel Prozessdaten
beschrieben, jedoch azyklisch
1
ro = nur lesen, wo = nur schreiben, rw = lesen/schreiben
SICK spezifisch
Index dez
(
hex)
Name Format
(Offset)
Länge Zugriff1Standard‐
wert
Wertebe‐
reich
Bemer‐
kung
[Einheit]
13 (0x0D) Profile Cha‐
r
acteristic
Array 8 Byte ro Unsigned
Integer16
[2]
siehe IO-Link Interface
Specification
14 (0x0E) PDInputDe‐
scr
iptor
Record 6 Byte ro siehe IO-Link Inter face Specifica‐
tion
1
(0x01)
Position Bit (24) 3 Byte ro
2
(0x02)
Geschwin‐
di
gkeit
Bit (0) 3 Byte ro
64 (0x40) Gerätespezi‐
f
ische Mar‐
kierung
String 16 Byte rw Gerätespezifische Markierung,
beschreibbar durch Anwender
65 (0x41) Geschwin‐
di
gkeit
Int 32 Bit ro
66 (0x42) Geschwin‐
di
gkeitsein‐
heit
UInt 8 Bit rw 3 0 =
Schritte
pro
Sekunde
[cps]
1 =
Schritte
pro 100
Millise‐
kunden
[cp100m
s]
2 =
Schritte
pro 10
Millise‐
kunden
[cp10ms]
3 =
Umdre‐
hungen
pro
Minute
[rpm]
4 =
Umdre‐
hungen
pro
Sekunde
[rps]
Folgende
Geschwin
digkeits‐
einheiten
können
gewählt
werden:
cps
cp100ms
cp10ms
rpm
rps
67 (0x43) Geschwin‐
di
gkeits-
Update-Zeit
UInt 32 Bit rw 2 1 ... 50 =
Bereich
der
Geschwin
digkeitsUpdateZeit
Die
UpdateZeit defi‐
niert die
Zeit zwi‐
schen den
einzelnen
Messun‐
gen [ms]
68 (0x44) Geschwin‐
di
gkeitsIntegrations‐
zeit
UInt 32 Bit rw 200 1 ... 200
= Bereich
der
Geschwin
digkeitsIntegrati‐
onszeit
Die Inte‐
grations‐
zeit defi‐
niert die
Anzahl
Werte aus
denen der
Durch‐
schnitt
berechnet
wird [ms]
81 (0x51) Schrittzahl
pr
o Umdre‐
hung
UInt 32 Bit rw 4096 1 ... 4096 = Wertebe‐
reich für Schritt zahl
pro Umdrehung
SICK spezifisch
82 (0x52)
nur
AHM36
Gesamt‐
messbereich
UInt 32 Bit rw 167772161 ... 16777216 =
Wertebereich für den
gesamten Messbe‐
reich. Der Gesamt‐
messbereich muss
das 2n-fache der Auf‐
lösung pro Umdrehung
sein
83 (0x53) Presetwert UInt 32 Bit wo 0 ... 16777215 = Preset Wertebe‐
reich
84 (0x54) Positions‐
wert
UInt 32 Bit ro
85 (0x55) Zählrichtung UInt 8 Bit rw 0 = im
Uhrzeiger‐
sinn (cw)
1 = gegen
den Uhr‐
zeigersinn
(ccw)
Die Zählrichtung
bestimmt, bei welcher
Drehrichtung sich der
Positionswert erhöht,
ausgehend von einer
Blickrichtung auf die
Welle.
86 (0x56) Roher Positi‐
onswert
UInt 32 Bit ro 0 Roher Positionswer t
ohne Offset oder Ska‐
lierungsfaktor
91 (0x5B)
nur
AHM36
Gesamt‐
messbereich
angepasst
UInt 32 Bit ro
92 (0x5C) Status Flag A UInt 16 Bit ro Zeigt das Encoder Status Flag A -
Bit kodiert
Bit_0 = Positionsfehler - Generell
beim Aufstarten
Bit_1 = Warnung - Temperatur
außerhalb zulässigem Bereich
Bit_2 = Reserviert - Immer Null
Bit_3 = Warning - Sensor-Span‐
nung außerhalb des zulässigen
Bereichs
Bit_4 = Positionsfehler - Amplitude
Multiturn außerhalb des zuläs sigen
Bereichs
Bit_5 = Warnung - Geschwindigkeit
außerhalb des zulässigen Bereichs
Bit_6 = Positionsfehler - Amplitude
des Singleturn außerhalb des
zulässigen Bereichs
Bit_7 = Eepromfehler - Ungültige
Kommunikation zum Gerät
Bit_8 ... 14 = Reserviert - Immer
Null
Bit_15 = Speicher Checksummen‐
fehler
205
(0xCD)
SICK ProfilVersion
String 4 Byte ro 1.00
1
ro = nur lesen, wo = nur schreiben, rw = lesen/schreiben
Standardkommando
Index dez
(
hex)
Zugriff1Wert Name Bemerkung [Einheit]
2 (0x02) Standard‐
k
ommando
wo 128 Gerät zurücksetzen
130 Auslieferungszu‐
s
tand wiederherstel‐
len
Erforder t Reset des
Geräts
1
ro = nur lesen, wo = nur schreiben, rw = lesen/schreiben
Fehlercodes
Code dez (hex) Additional Code Name Bemerkung [Einheit]
128 (0x80) 17 (0x11) Index nicht vorhanden Zugrif f auf einen nicht
e
xistierenden Index
128 (0x80) 18 (0x12) Subindex nicht vorhanden Zugrif f auf einen nicht
e
xistierenden Subindex
128 (0x80) 32 (0x20) Service zur Zeit nicht ver‐
f
ügbar
Auf den Parameter kann
gerade nicht zugegriffen
werden. Das Gerät erlaubt
dies im aktuellen Zustand
nicht
128 (0x80) 34 (0x22) Service zur Zeit nicht ver‐
f
ügbar - Geräte Betriebs‐
modus
Auf den Parameter kann
gerade nicht zugegriffen
werden, da sich das Gerät
zur Zeit in einem Remote
Betriebsmodus befindet
128 (0x80) 35 (0x23) Zugriff ver weigert Schreibzugriff auf einen
schr
eibgeschützten Para‐
meter
128 (0x80) 48 (0x30) Parameterwer t außerhalb
de
s gültigen Bereichs
Geschriebener Parameter‐
wert liegt außerhalb des
zulässigen Wertebereichs
128 (0x80) 51 (0x33) Parameterlänge zu groß Geschriebene Parameter‐
län
ge ist größer als erlaubt
128 (0x80) 52 (0x34) Parameterlänge zu klein Geschriebene Parameter‐
län
ge ist kleiner als
erlaubt
128 (0x80) 53 (0x35) Funktion nicht verfügbar Geschriebenes Kom‐
mando wir
d vom Gerät
nicht unterstützt
8022049/2018-02-14/de, en AHS/AHM36 IO-Link AHS/AHM36 IO-Link Inox | SICK 3
 Loading...
Loading...