

Page 1

DESCRIPTION
The SM5K3/5K4/5K5 are CMOS 4-bit single-chip
microcomputers incorporating 4-bit parallel processing function, ROM, RAM, 10-bit A/D converter
and timer/counters.
It provides three kinds of interrupts and 4 levels
subroutine stack. Being fabricated through CMOS
process, the chip requires less power and available
in a small package : best suitable for Low power
controlling, compact equipment like a precision
charger.
FEATURES
• ROM capacity : 2 048 x 8 bits
• RAM capacity : 128 x 4 bits
• Instruction sets : 50
• Subroutine nesting : 4 levels
• I/O port :
Input 8
Output 4
Input/output 12 (36QFP/32SOP)
11 (30SDIP)
8 (28SOP)
• Interrupts :
Internal interrupt x 1 (timer)
External interrupt x 2 (2 external interrupt
inputs)
• A/D converter :
Resolution 10 bits
Channels 4
• Timer/counter : 8-bit x 1
• Built-in main clock oscillator for system clock
Ceramic/crystal oscillator (SM5K3/5K5)
CR oscillator (SM5K4)
•
Signal generation for real time clock∗(SM5K3/5K5)
• Built-in 15 stages divider
(
for real time clock∗: SM5K3/5K5)
• Instruction cycle time :
1 µs (MIN.) (2 MHz, at 5 V ± 10%) (SM5K3/5K5)
2 µs (MIN.) (1 MHz, at 2.2 to 5.5 V) (SM5K3/5K5)
1 µs (MIN.) (1.67 MHz ± 20%, at 5 V ± 10%) (SM5K4)
• Large current output pins (LED direct drive) :
15mA (TYP.)
x 4
(sink current)
•
Supply voltages :
2.2 to 5.5 V (SM5K3/5K5)
2.7 to 5.5 V (SM5K4)
•
Packages :
30-pin SDIP (SDIP030-P-0400)
32-pin SOP (SOP032-P-0525)
36-pin QFP (QFP036-P-1010)
28-pin SOP (SOP028-P-0450) (SM5K3/5K5)
24-pin SSOP (SSOP024-P-0275) (SM5K4)
∗
In case of using crystal oscillator
SM5K3/SM5K4/SM5K5
SM5K3/SM5K4
SM5K5
4-Bit Single-Chip Microcomputers
(Controllers With 10-Bit A/D Converter)
- 1 -
In the absence of confirmation by device specification sheets, SHARP takes no responsibility for any defects that may occur in equipment using any SHARP devices shown in catalogs, data books,
etc. Contact SHARP in order to obtain the latest device specification sheets before using any SHARP device.
Page 2
- 2 -
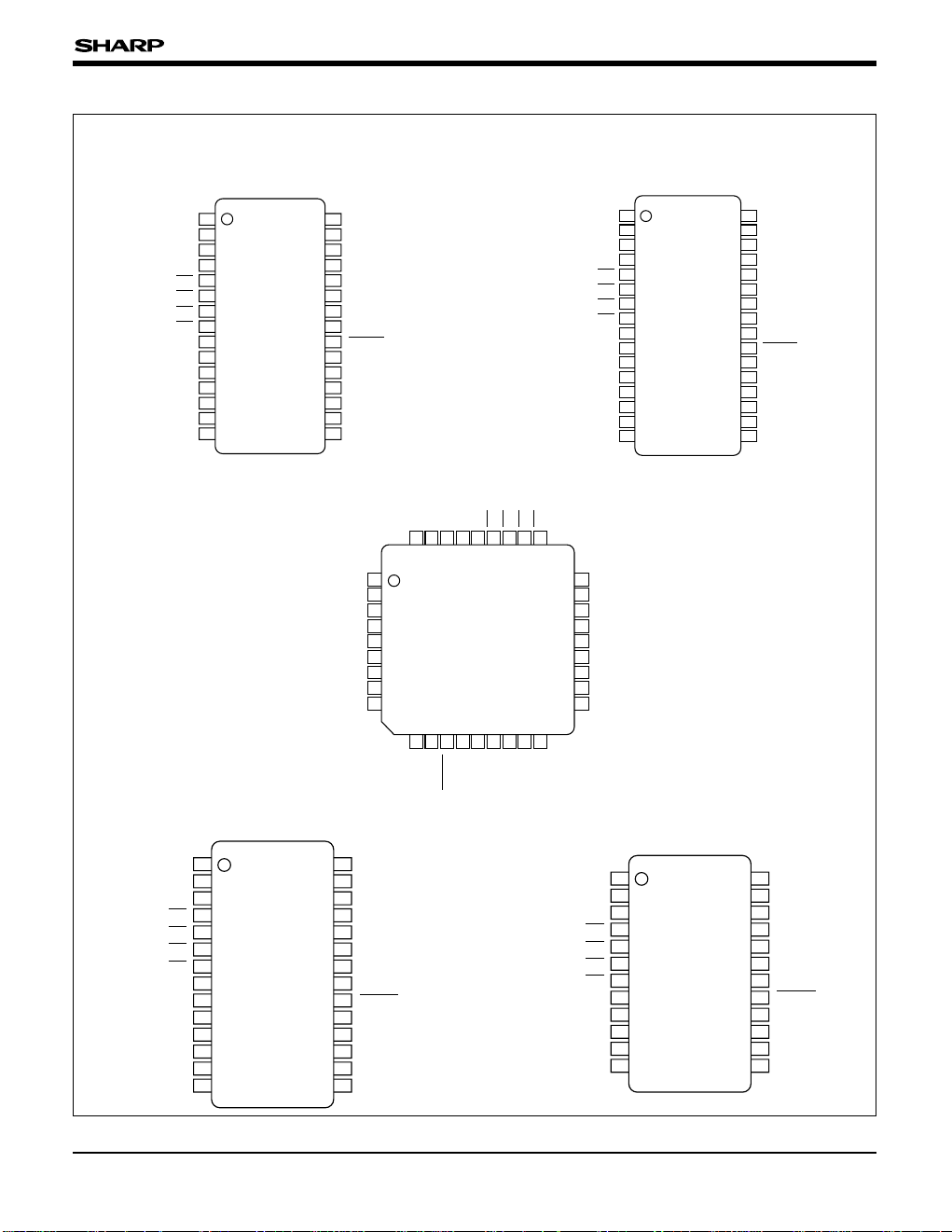
36-PIN QFP
10
11
12
13
14
P4
1
P42
P43
P00
P01
P02
P03
P10
P11
P12
P13
P20
P21
P22
28
27
26
25
24
23
22
21
20
19
18
17
16
15
GND
P4
0
AGND
P3
3
P32
P31
P30
VR
RESET
V
DD
OSCOUT
OSCIN
P23
GND
1
2
3
4
5
6
7
8
9
SM5K3/SM5K4/SM5K5
PIN CONNECTIONS
P53
P41
P42
P43
P00
P01
P02
P03
P10
P11
P12
P13
P20
P21
P22
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
GND
P4
0
AGND
P3
3
P32
P31
P30
VR
RESET
V
DD
OSCOUT
OSCIN
P23
P51
P50
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
10
11
12
13
14
15
16
P5
3
P41
P42
P43
P00
P01
P02
P03
P10
P11
P12
P13
P20
P21
P22
GND
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
GND
P5
2
P40
AGND
P3
3
P32
P31
P30
VR
RESET
V
DD
OSCOUT
OSCIN
P23
P51
P50
1
2
3
4
5
6
7
8
9
30-PIN SDIP 32-PIN SOP
TOP VIEW
28-PIN SOP (SM5K3/5K5)
10
11
12
P4
1
P42
P43
P00
P01
P02
P03
P10
P11
P20
P21
P22
24
23
22
21
20
19
18
17
16
15
14
13
GND
P4
0
AGND
P3
2
P31
P30
VR
RESET
V
DD
OSCOUT
OSCIN
P23
1
2
3
4
5
6
7
8
9
24-PIN SSOP (SM5K4)
P13
P12
P11
P10
(NC)
P03
P02
P01
29 28
P20
P21
P22
(NC)
GND
P50
P51
P23
OSCIN
36 35 34 33 32 31 30
1
2
3
4
5
6
7
8
9
P00
P43
27
P42
26
P41
25
P53
24
GND
23
(NC)
22
P52
21
P40
20
AGND
19
10 1112 13 14 15 16 17 18
VR
P31
P32
P33
RESET
(NC)
P30
VDD
OSCOUT
Page 3
- 3 -
SM5K3/SM5K4/SM5K5
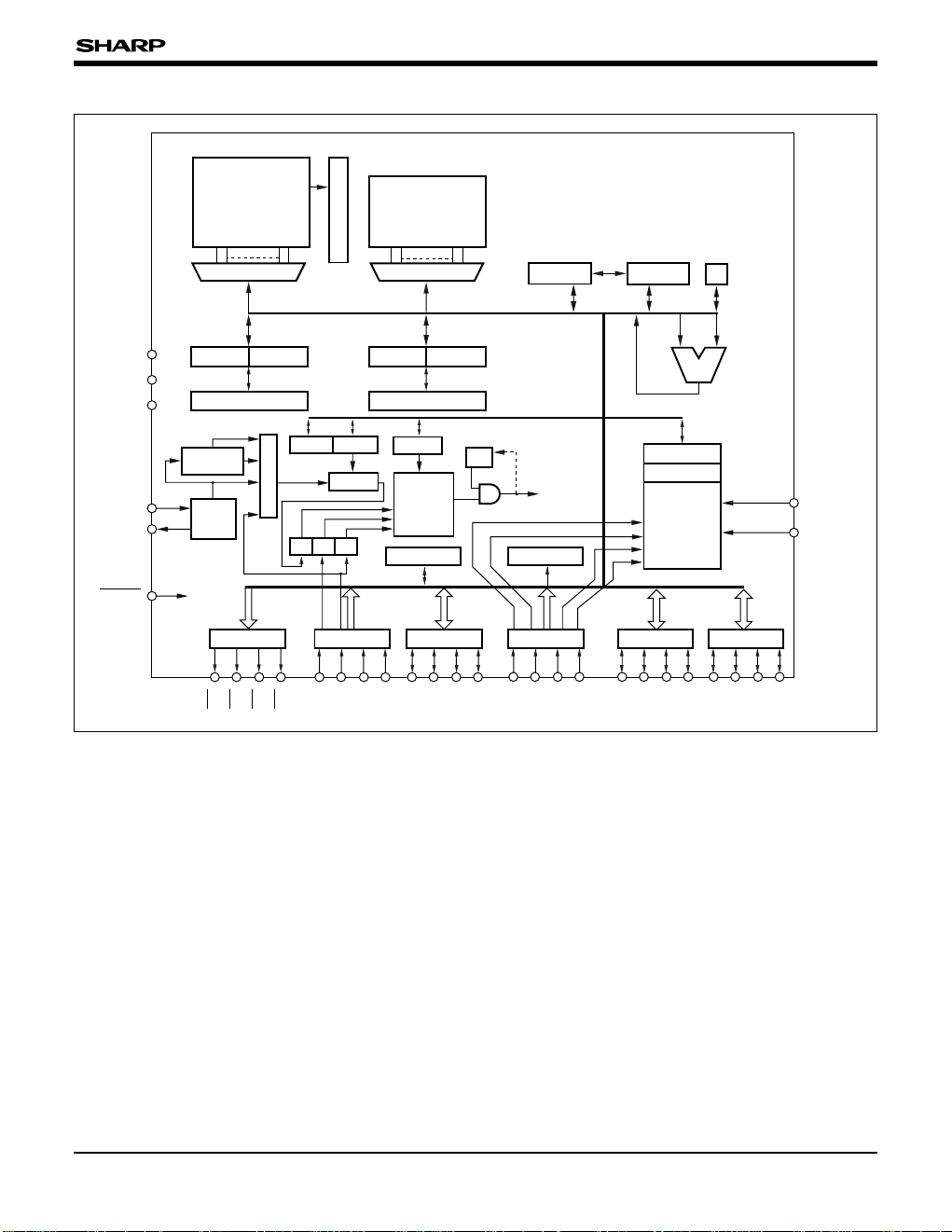
BLOCK DIAGRAM
Nomenclature
A : A register
A/D : A/D converter unit
ALU : Arithmetic logic unit
B
M, BL : RAM address register
C : Carry flag
IFA, IFB, IFT : Interrupt request flag
IME : Interrupt master enable flag
INST. DEC. : Instruction decoder
INT : Interrupt control unit
P0-P5 : Port register
P
U, PL : Program counter
R8, R9, RC, RE, RF
: Mode register
RA : Count register
RB : Modulo register
SB : SB register
SR : Stack register
P00
P01
P02
P03
P10
P11
P12
P13
P20
P21
P22
P23
P30
P31
P32
P33
P40
P41
P42
P43
P50
P51
P52
P53
P2
P0
P1
P3 P4 P5
IFT IFAIFB
FR R3
INT
A/D
VR
AGND
OSC
RC RB
RE
SR x 4
PRESCALER
SR (8)
P
U (5) PL (6)
B
M (4) BL (4)
IME
RA
INTERRUPT
CONTROLLER
DECDEC
X (4)
A (4)
C
ALU
ROM
VDD
GND
OSC
IN
OSCOUT
RESET
2 048-BYTE
128 x 4-BIT
RAM
R8
R9
INST.DEC.
SELECTOR
ALU
Page 4
- 4 -
PARAMETER
SM5K3/SM5K4/SM5K5
PIN DESCRIPTION
ABSOLUTE MAXIMUM RATINGS
SYMBOL I/O FUNCTION
P00-P03
O High current output (sink current 15 mA)
P10-P11 I Input (standby release) (counter input : P11) with pull-up resistor
P12-P13 I Input (standby release) with pull-up resistor
P20-P23 I/O Input (with pull-up resistor) or output (independent)
P30-P33 I Input (also used as analog input) with pull-up resistor
P40-P43, P50-P53 I/O Input (with pull-up resistor) and output
OSCIN, OSCOUT I/O Ceramic/crystal oscillation pin (SM5K3/5K5)/CR oscillation pin (SM5K4)
RESET
I Reset signal input with pull-up resistor
VR, AGND I A/D converter reference supply input port
VDD, GND I Power supply, Ground
SYMBOL CONDITIONS RATING UNIT
Supply voltage VDD – 0.3 to +7.0 V
Input voltage VI – 0.3 to VDD+0.3 V
Output voltage VO – 0.3 to VDD+0.3 V
Maximum output current
IOH High-level output current (all outputs) 4 mA
IOL0 Low-level output current (
P0
0-P03
) 30 mA
IOL1
Low-level output current (all but P00-P03)
4 mA
Total output current
∑IOH High-level output current (all outputs) 20 mA
∑IOL Low-level output current (all outputs) 80 mA
TOPR
–20 to +70 (SM5K3/5K5)
–20 to +85 (SM5K4)
°C
Storage temperature
TSTG –55 to +150 °C
Operating temperature
NOTE :
Symbols apply to 32-pin SOP and 36-pin QFP. (
In case of 30-pin SDIP, P52does not exist. In case of 28-pin SOP, P50-P53do not exist.
In case of 24-pin SSOP, P12, P13, P33, P50-P53 pins do not exist.)
Page 5
- 5 -
SM5K3/SM5K4/SM5K5
RECOMMENDED OPERATING CONDITIONS
(SM5K3/5K5)
PARAMETER SYMBOL CONDITIONS RATING UNIT
Supply voltage VDD 2.2 to 5.5 V
Instruction cycle TSYS
VDD = 2.2 to 5.5 V 2 to 61
µs
VDD = 5.0 V ± 10% 1 to 61
Main clock frequency
(OSC
IN-OSCOUT)
fOSC
VDD = 2.2 to 5.5 V 1 M to 32.768 k
Hz
VDD = 5.0 V ± 10% 2 M to 32.768 k
(SM5K4)
NOTES :
• The typical oscillation frequency shall be determined in
consideration of operating condition and fluctuation
frequency.
• Mount Rf, RD, C
1, C2, Oscillator (SM5K3/5K5)/Rf (SM5K4)
as close as possible to the oscillator pins of the LSI, in
order to reduce an influence from floating capacitance.
• Since the value of resistor Rf, RD, C
1, C2, Oscillator
(SM5K3/5K5)/Rf (SM5K4) varies depending on circuit
pattern and others, the final Rf, RD, C
1, C2, Oscillator
(SM5K3/5K5)/Rf (SM5K4) value shall be determined on the
actual unit.
• Don't connect any line to OSC
IN and OSCOUT except
oscillator circuit.
• Don't put any signal line across the oscillator circuit line.
• On the multilayer circuit, do not let the oscillator circuit
wiring cross other circuit.
• Minimize the wiring capacitance of GND and V
DD .
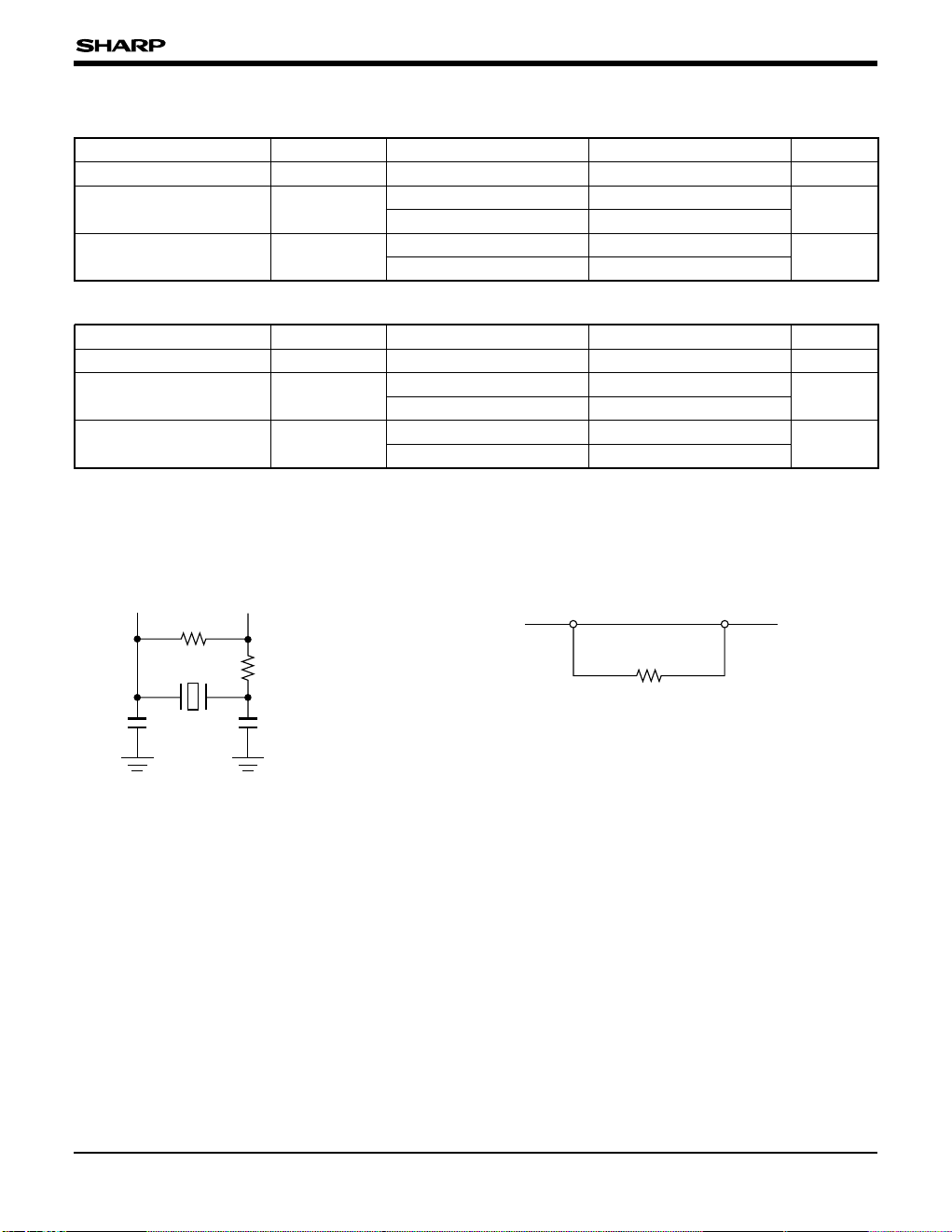
OSCILLATION CIRCUIT
PARAMETER SYMBOL CONDITIONS RATING UNIT
Supply voltage VDD 2.7 to 5.5 V
Instruction cycle TSYS
VDD = 2.7 to 5.5 V 2 to 5
µs
VDD = 5.0 V ± 10% 1 to 5
Main clock frequency ∗
(OSCIN-OSCOUT)
fOSC
VDD = 2.7 to 5.5 V 1 M to 400 k
Hz
VDD = 5.0 V ± 10% 2 M to 400 k
∗
Degree of fluctuation frequency :
± 20%
OSCOUTOSCIN
Rf
Rf = 33 kΩ
(fosc = 1.67 MHz, TYP.)
• SM5K3/5K5
∗
Reference only : Circuit configuration varies according to
oscillator used.
• SM5K4
OSCOUTOSCIN
Rf
RD
Oscillator
C
1 C2
Page 6
- 6 -
NOTES :
1. Applicable pins : P12, P13, P20-P23, P30-P33 (digital input
mode), P4
0-P43 P50-P53
2. Applicable pins : OSCIN, RESET, P10, P11
3. Applicable pins : RESET, P10-P13, P20-P23, P40-P43,
P5
0-P53 (digital input mode)
4. Applicable pins : P3
0-P33 (analog input mode)
5. Applicable pins : P0
0-P03 (high current mode)
6. Applicable
pins :
P20-P23, P40-P43, P50-P53(output mode)
∗
1
7. Applicable pins : P30-P33
∗
2
8. No load (A/D conversion is stop.)
9. A/D conversion in operation (operation enable)
10. A/D conversion in stop (operation disable)
∗
1
In case of 32-pin SOP and 36-pin QFP.
(In case of 30-pin SDIP, P5
2
dose not exist. In case of
28-pin SOP, P5
0
-P53do not exist.)
∗
2
P3 ports are normally used for input ports with pull-up
resistor. These ports can be also used.
SM5K3/SM5K4/SM5K5
VIH1 0.8 x VDD VDD
V1
V
IL1 0 0.2 x VDD
VIH2 0.9 x VDD VDD
V2
V
IL2 0 0.1 x VDD
VDD = 2.2 to 3.3 V 2 25 90
I
IL1 VIN = 0 V
V
DD = 4.5 to 5.5 V 25 70 250 µA 3
I
IH1 VIN = VDD 2
I
IL2 VIN = 0 V 1.0 10
µA 4
I
IH2 VIN = VDD 1.0 10
V
DD = 2.2 to 3.3 V 5 15
I
OL1 VO = 1.0 V
V
DD = 4.5 to 5.5 V 15 25
mA 5
V
DD = 2.2 to 3.3 V 0.3 1.5
I
OH1 VO = VDD – 0.5 V
V
DD = 4.5 to 5.5 V 1.0 2.2
V
DD = 2.2 to 3.3 V 1.2 5.0
I
OL2 VO = 1.5 V
V
DD = 4.5 to 5.5 V 5 9.0
mA 6
V
DD = 2.2 to 3.3 V 0.3 2.0
I
OH2 VO = VDD – 0.5 V
V
DD = 4.5 to 5.5 V 1.0 2.4
V
DD = 2.2 to 3.3 V 0.15
I
OH3 VOH = VDD – 1.0 V mA 7
V
DD = 4.5 to 5.5 V 0.5
f
OSC = 2 MHZ
V
DD = 4.5 to 5.5 V 1 200 2 500
V
DD = 2.2 to 3.3 V 300 800
f
OSC = 1 MHz
I
DD VDD = 4.5 to 5.5 V 600 1 200
f
OSC = 32.768 kHz
V
DD = 2.2 to 3.3 V 20 120
(Crystal OSC mode)
fOSC = 2 MHz
V
DD = 4.5 to 5.5 V 760 1 500
V
DD = 2.2 to 3.3 V 200 600 µA 8
f
OSC = 1 MHz
I
HLT VDD = 4.5 to 5.5 V 400 900
f
OSC = 32.768 kHz
V
DD = 2.2 to 3.3 V 20 75
(Crystal OSC mode)
Ceramic OSC mode
VDD = 2.2 to 3.3 V 2
I
STOP fOSC = 32.768 MHz
V
DD = 2.2 to 3.3 V 15 40
(Crystal OSC mode)
A/D in operation
V
DD = 4.5 to 5.5 V 220 450 µA 9
I
VR
A/D in stop
V
DD = 4.5 to 5.5 V 2 µA 10
Resolution
10 bit
Differential
fOSC = 1 MHz
V
DD = VR = 5.0 V ± 2.5 ± 4.0
linearity error
TOPR = 25°C
Sequential
fOSC = 1 MHz
V
DD = VR = 5.0 V ± 3.2 ± 5.0 LSB
linearity error
TOPR = 25°C
f
OSC = 1 MHz
Total error VDD = VR = 5.0 V ± 4.0 ± 6.0
TOPR = 25°C
A/D
conversion
Input voltage
Input current
Output current
Supply cerrent
DC CHARACTERISTICS
• SM5K3 (TOPR = –20 to +70°C, TYP. value : VDD = 5.0 or 3.0 V, Unless otherwise noted.)
PARAMETER
SYMBOL
CONDITIONS MIN. TYP. MAX.
UNIT
NOTE
Page 7
- 7 -
Resolution 10
Differential
fOSC = 1.0 MHz
VDD = VR = 5.0 V ± 2.5 ± 4.0
linearity error
TOPR = 25°C
Sequential
fOSC = 1 MHz
V
DD = VR = 5.0 V ± 3.2 ± 5.0
linearity error
TOPR = 25°C
f
OSC = 1 MHz
Total error V
DD = VR = 5.0 V ± 4.0 ± 6.0
T
OPR = 25°C
V
IH1 0.8 x VDD VDD
VIL1 0 0.2 x VDD
VIH2 0.9 x VDD VDD
VIL2 0 0.1 x VDD
VDD= 2.7 to 3.3 V
1.0 25 90
I
IL1 VIN = 0 V
VDD= 4.5 to 5.5 V
15 70 250
I
IH1 VIN = VDD 3.0
I
IL2 VIN = 0 V 1.0 10
I
IH2 VIN = VDD 1.0 10
VDD= 2.7 to 3.3 V
315
I
OL1 VO = 1.0 V
VDD= 4.5 to 5.5 V
12 25
VDD= 2.7 to 3.3 V
0.2 1.5
I
OH1 VO = VDD – 0.5 V
VDD= 4.5 to 5.5 V
0.8 2.2
I
OL2 VO = 1.5 V
VDD= 4.5 to 5.5 V
4.0 9.0
VDD= 2.7 to 3.3 V
0.2 2.0
I
OH2 VO = VDD – 0.5 V
VDD= 4.5 to 5.5 V
0.8 2.4
I
OH3 VOH = VDD – 1.0 V
VDD= 4.5 to 5.5 V
0.5
f
OSC = 2.0 MHz
VDD= 4.5 to 5.5 V
1 200 2 800
I
DD
VDD= 2.7 to 3.3 V
300 900
f
OSC = 1.0 MHz
VDD= 4.5 to 5.5 V
600 1 400
f
OSC = 2.0 MHz
VDD= 4.5 to 5.5 V
760 1 700
I
HLT
fOSC = 1.0 MHz
VDD= 4.5 to 5.5 V
400 1 000
I
STOPVDD
= 2.7 to 5.5 V
5
A/D conversion
VDD= 2.7 to 3.3 V
130 350
I
VR in operation
VDD= 4.5 to 5.5 V
220 500
A/D conversion in stop
VDD= 2.7 to 5.5 V
3
• SM5K4 (TOPR = –20 to +85°C, TYP. value : VDD = 5.0 or 3.0 V, Unless otherwise noted.)
SM5K3/SM5K4/SM5K5
PARAMETER SYMBOL
CONDITIONS MIN. TYP. MAX.
UNIT
NOTE
Input voltage
V 1
V 2
Input current
µA 3
µA
4
Output current
mA 5
mA
6
mA
7
Supply current
µA 8
µA
9
µA 10
A/D
conversion
Reference
clock oscillator
frequency
bit
LSB
MHz
NOTES :
1. Applicable pins : P12, P13, P20-P23, P30-P33 (digital input
mode), P4
0-P43, P50-P53
∗
1
2. Applicable pins : OSCIN, RESET, P10, P11
3. Applicable pins : RESET, P10-P13, P20-P23, P40-P43,
P5
0-P53 (digital input mode)
∗
1
4. Applicable pins : P30-P33 (analog input mode)
5. Applicable pins : P0
0-P03 (high current output)
6. Applicable
pins :
P20-P23, P40-P43, P50-P53(output mode)
∗
1
7. Applicable pins : P30-P33
∗
2
8. No load (A/D conversion in stop)
9. A/D conversion in operation (A/D conversion enable)
10. A/D conversion in stop (A/D conversion disable)
∗
1
In case of 32-pin SOP and 36-pin QFP.
(In case of 30-pin SDIP, P5
2
pin dose not exist. In case of
24-pin SSOP, P1
2
, P13, P33, P50-P53pins do not exist.)
∗
2 P3 ports are normally used for input port with pull-up
resistor. These ports can be also used as a suspected
case of output port.
fOSC
VDD= 4.5 to 5.5 V, Rf = 33 kΩ
1.34 1.67 2.0
Page 8
SM5K3/SM5K4/SM5K5
- 8 -
• SM5K5 (TOPR = –20 to +70°C, TYP. value : VDD = 5.0 or 3.0 V, Unless otherwise noted.)
PARAMETER
SYMBOL
CONDITIONS MIN.
UNIT
NOTE
Input voltage
VIH1
0.8 x VDD
0
0.9 x VDD
0
VDD
0.2 x VDD
VDD
0.1 x VDD
VV1
2
Input current
IIL1
VIN = 0 V
2
25
25
70
1
1
90
250
2
10
10
µAµA3
4
Output current
IOL1 VO = 1.0 V
5
15
0.3
1.0
7
20
300
1 000
15
25
1.5
2.2
35
60
2 000
2 400
mA
µA
5
6
Supply current
IDD
fOSC = 2 MHz 1 200
300
600
20
40
760
400
15
20
2
10
130
220
2 500
800
1 200
120
160
1 500
900
60
90
2
10
25
300
450
2
µA
µA
µA
µA
7
7
8
9
A/D
conversion
Resolution 10
± 2.5
± 3.2
± 4.0
± 4.0
± 5.0
± 6.0
bit
LSB
VIH2
VIL1
VIL2
IIL2
IIH1
IIH2
IOL2
IOH1
IOH2
ISTOP
IHLT
IVR
Sequential
linearity error
Differential
linearity error
Total error
VDD = VR = 5.0 V
V
DD = VR = 5.0 V
V
DD = VR = 5.0 V
fOSC = 1 MHz
TOPR = 25°C
fOSC = 1 MHz
T
OPR = 25°C
fOSC = 1 MHz
T
OPR = 25°C
VIN = VDD
VIN = 0 V
VIN = VDD
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VO = VDD–0.5 V
VO = 0.5 V
VO = VDD–0.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 4.5 to 5.5 V
A/D in operation
Ceramic OSC mode
fOSC = 32.768 kHz
(Crystal OSC mode)
fOSC = 1 MHz
fOSC = 32.768 kHz
(Crystal OSC mode)
fOSC = 1 MHz
fOSC = 2 MHz
fOSC = 32.768 kHz
(Crystal OSC mode)
A/D in stop
VDD= 4.5 to 5.5 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 4.5 to 5.5 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 4.5 to 5.5 V
VDD= 2.2 to 3.3 V
VDD= 2.2 to 3.3 V
MAX.TYP.
Page 9
SM5K3/SM5K4/SM5K5
- 9 -
NOTES :
1. Applicable pins : P12, P13, P20-P23, P30-P33 (digital input
mode), P4
0-P43, P50-P53
∗
1
2. Applicable pins : OSCIN, RESET, P10, P11
3. Applicable pins : RESET, P10-P13, P20-P23, P40-P43,
P5
0-P53 (digital input mode)
∗
1
4. Applicable pins : P30-P33 (analog input mode)
5. Applicable pins : P0
0-P03 (high current port)
6. Applicable pins : P2
0-P23, P40-P43, P50-P53 (output mode)
∗
1
7. No load (A/D conversion in stop)
8. A/D conversion in operation (operation enable)
9. A/D conversion in stop (operation disable)
∗
1 In case of 32-pin SOP and 36-pin QFP.
( In case of 30-pin SDIP, P5
2 dose not exist. In case of
28-pin SOP, P5
0-P53 do not exist.)
SYSTEM CONFIGURATION
A Register and X Register
The A register (or accumulator : ACC) is a 4-bit
general purpose register. The register is mainly
used in conjunction with the ALU, C flag and RAM
to transfer numerical value and data to perform
various operations. The A register is also used to
transfer data between input and output pins.
The X register (or auxiliary accumulator) is a 4-bit
register and can be used as a temporary register.
It loads contents of the A register or its content is
transferred to the A register. When the table
reference instruction PAT is used, the X and A
registers load ROM data. A pair of A and X
registers can accommodate 8-bit data.
Arithmetic and Logic Unit (ALU) and
Carry Signal Cy
The ALU performs 4-bit parallel operation
The ALU operates binary addition in conjunction
with RAM, C flag and A register. The carry signal
Cy is generated if a carry occurs during ALU
operation. Some instructions use Cy : ADC
instruction sets/clears the content of the C flag;
ADX instruction causes the program to skip the
next instruction. Note that Cy is the symbol for
carry signal and not for C flag.
3
3
0
0
A register
X register
EXAX instruction
Fig. 1 Data Transfer Example between
A Register and X Register
c
Areg
ALU
Result of operation
4-bit data 4-bit data
Fig. 2 ALU
Page 10

SM5K3/SM5K4/SM5K5
- 10 -
Data Memory (RAM)
The data memory (RAM) is used to store data up
to 4 x 16 x 8 = 512 bits.
Fig. 3 B Register and SB Register
File
(0-7)
B
M
BL
0
1
2
3
4
5
6
7
0123456789ABCDEF
Word (0-F
H)
1 word = 4-bit
Fig. 4 RAM File and Word
B Register and SB Register
• B register (BM, BL)
The B register is an 8-bit register that is used to
specify the RAM address. The upper 4-bit section
is called B
M register and lower 4-bit BL.
• SB register
The SB register is an 8-bit register used as the
save register for the B register. The contents of B
register and SB register can be exchanged through
EX instruction.
7
3
0
003
EX instruction (swap)
SB register
B
M registerB register BL register
Page 11

SM5K3/SM5K4/SM5K5
- 11 -
The program counter PC specifies the ROM
address. The PC consists of 12-bit as shown in
Fig. 5 : The upper 6-bit (P
U) represents a page
while the lower 6-bit (P
L) denotes a step. The PU
section is a register and the PL section, a binary
counter.
Execution of interrupt handling and the table
reference instruction PAT also automatically uses 1
stage of the stack register SR.
Program Memory (ROM)
The ROM is used to store the program. The
capacity of the ROM is 2 048-step (32-page by 64-
step. See Fig. 6). The configuration of the ROM
and program jumps are illustrated in Fig. 7.
PU
Specifies a page (Pages 00H-1FH) Specifies a page (Pages 00H-3FH)
PL
Fig. 6 Page and Step for ROM
Fig. 5 Program Counter PC and Stack Register SR
Program Counter PC and Stack Register SR
Program counter PC
Page Step
PU PL
MSB LSB
Push Pop
SR ( level 1 )
SR ( level 2 )
SR ( level 3 )
SR ( level 4 )
Stack register SR
Page 12

SM5K3/SM5K4/SM5K5
- 12 -
PU (page) PU (page)
Start address upon hardware reset
Front cover of
subroutine TRS
Reference to the table during execution
of PAT instructions
Interrupt
Standby released
00H
01H
02H
03H
04H
05H
06H
07H
08H
09H
0AH
0BH
0CH
0DH
0EH
0FH
10H
11H
12H
13H
14H
15H
16H
17H
18H
19H
1AH
1BH
1CH
1DH
1EH
1FH
Number in a circle is a step number in the program jump.
Last page, last step (1F3F
H)
RTN
TLxy
RTN
TRSx
TRSx
TLxy
TRx
RTN
CALLxy
TRx
2
1
3
2
1
1
1
1
1
2
Fig. 7 ROM Configuration and Program Jump Example
Page 13

SM5K3/SM5K4/SM5K5
- 13 -
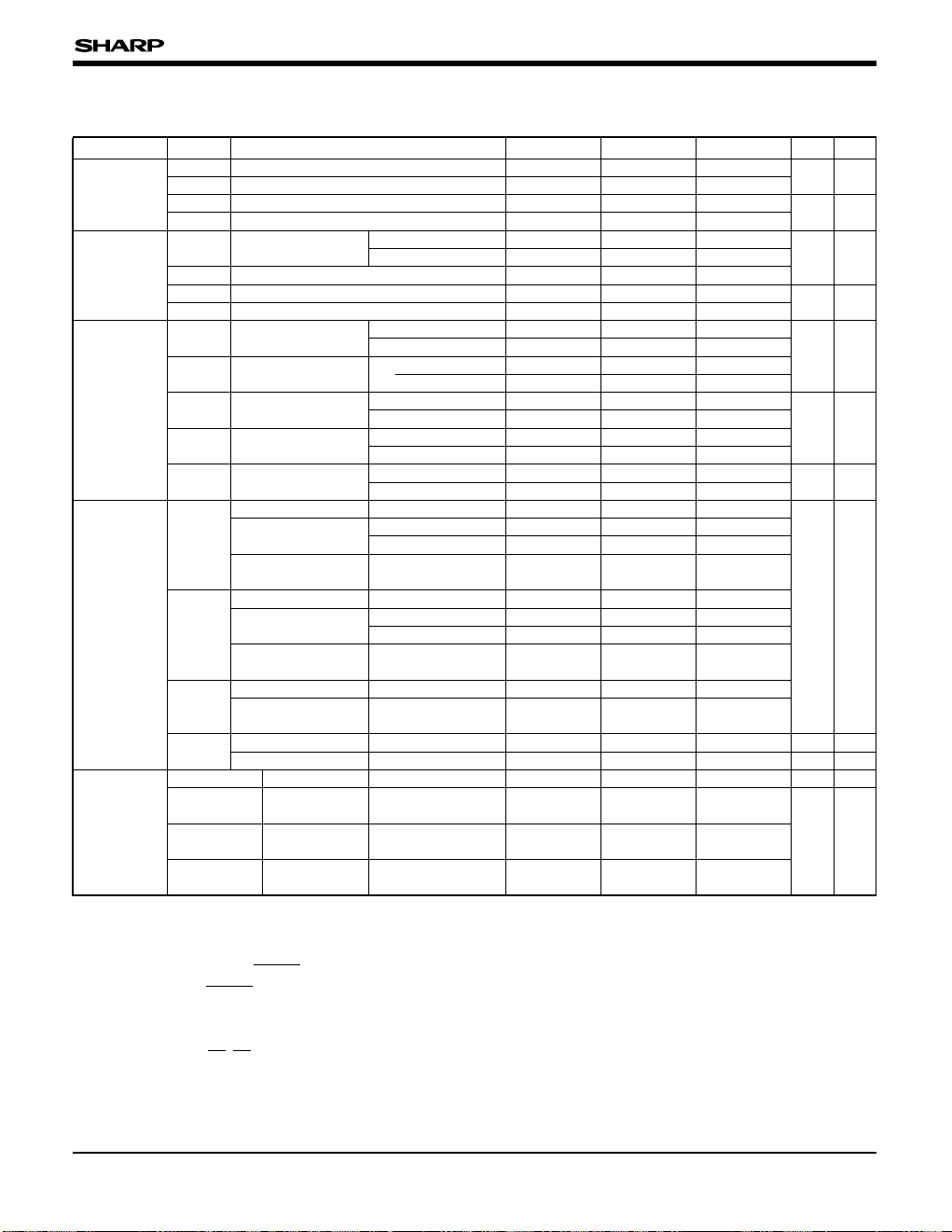
Output Latch Register and Mode Register
The SM5K3/5K4/5K5 contain 6 output-latch
registers and 8 mode-registers which either latch
contents of output ports or control some functions
of the SM5K3/5K4/5K5.
These registers, their functions and available
transfer instructions are shown in Table 1 below.
An output latch register sets the output level of the
pin to which it is connected.
Refer to the section of “MODE REGISTERS”
concerning about the details mode registers.
SYMBOL FUNCTION OUT INL OUT IN/TPB ANP/ORP CONTENT OF BL
P0 Output register
O
– O – O 0
P1 Input register – O – O – 1
P2 I/O register (independent) – – O O O 2
P3 Input register (and analog input) – – – O – 3
R3 Control register – – O – – 3
P4 I/O register – – O O O 4
P5 I/O register – – O O O 5
R8∗
A/D data/control register – – O O – 8
R9∗
A/D data register – – O O – 9
RA∗
Timer/counter register – – O O – A
RB∗
Timer/modulo register – – O O – B
RC Timer control register – – O O – C
RE Interrupt mask register – – O O – E
RF P2 directional register – – O O – F
Table 1 Output Latch Registers and Mode Registers
∗
8-bit register
NOTE :
Bit 4 (R84) in the R8 register is read only.
(Read or write operation of this bit does not affect any other operation.)
Page 14

SM5K3/SM5K4/SM5K5
- 14 -
FUNCTIONAL DESCRIPTION
Hardware Reset Function
Reset function initializes the SM5K3/5K4/5K5
systems. When the input on the RESET pin goes
Low, the system enters reset condition after 2
command cycles. After the RESET pin goes High
level, the reset condition is removed as the input
pulse from OSC
IN pin repeats 2
15
times, forcing the
program counter to start at 0 page and 0 address.
Initialized status of the system immediately after
resetting is shown below.
Reset causes the following changes.
1) I/O pins are set input.
2) All mode registers are reset.
3) Output latch register P0 is reset, causing P0
0 to
P0
3 pins go High level.
4) Interrupt request flags (IFA, IFB, and IFT),
interrupt master enable flag (IME) are reset,
disabling all interrupts.
Standby Feature
The standby function saves power by stopping the
program whenever it is not necessary to run. The
mode in which the microcomputer is executing the
program is called the run mode and the mode in
which it stops the program is called the standby
mode. Standby mode is further divided into two
modes : stop mode and halt mode, one of which is
selected by halt instruction or stop instruction. Upon
removal of standby condition, the SM5K3/5K4/5K5
return from the standby mode to the normal run
mode. To enter the standby mode, select either
stop mode or halt mode whichever is appropriate
(Fig. 8).
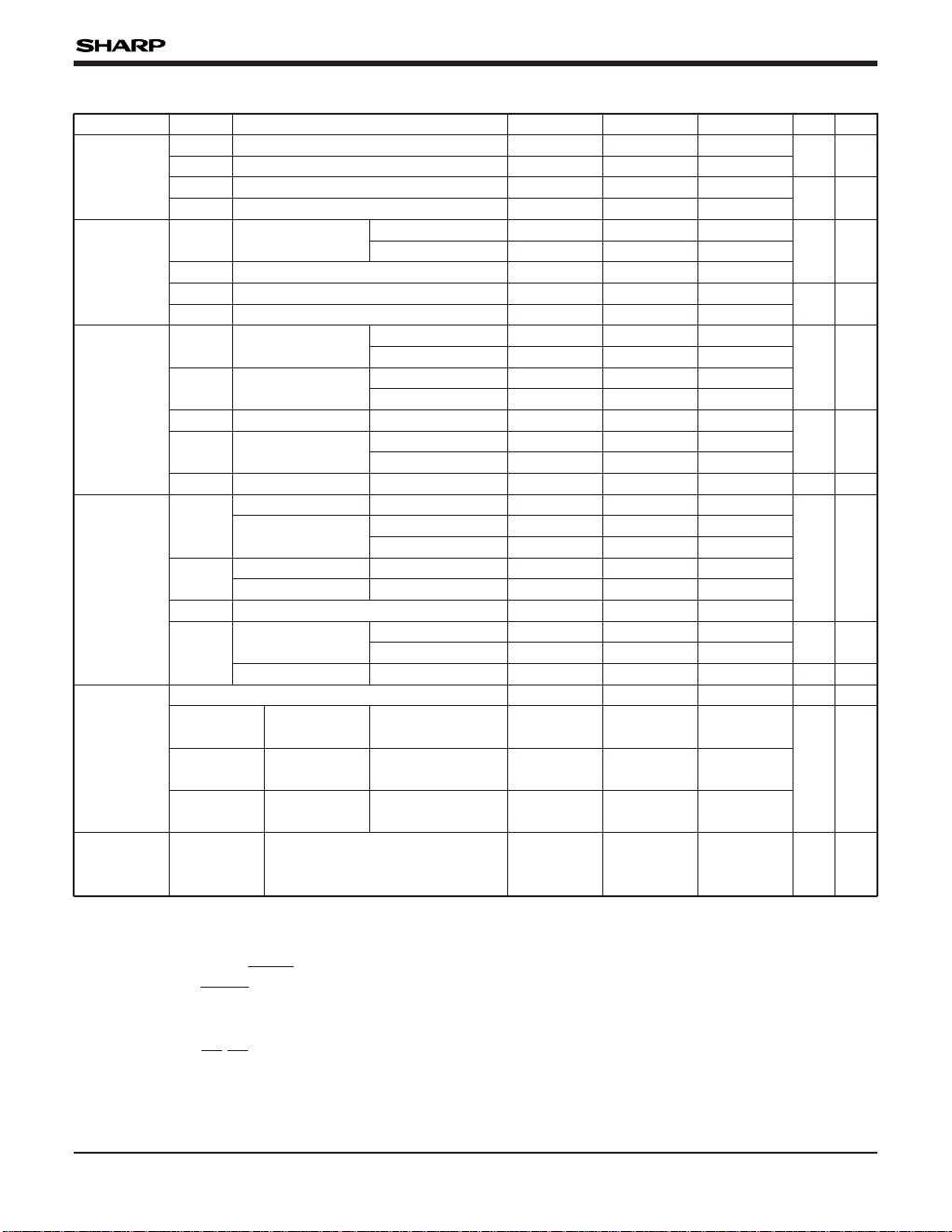
Table 2 Status of Flags and Registers Immediately after Reset
FLAG REGISTER STATUS FLAG REGISTER STATUS
PC 0 IFA flag 0
SP Level 1 IFB flag 0
RAM Undefined IFT flag 0
Register A Undefined IME flag 0
Register X Undefined C flag Undefined
P0, P2, P4, P5 output latch register 0 BM, BL registers, SB register Undefined
Timers (RA, RB), divider 0
R3, R8∗, R9, RC, RE, RF
0
∗
The content of the bit R84 is undefined because it is read only.
Page 15

SM5K3/SM5K4/SM5K5
- 15 -
• Blocks stopped during standby mode
In the halt mode
The system clock generating circuit stops during
the halt mode, deactivating all the blocks driven by
the system clock. The main clock and dividers
remain active. This means that timers can be used
while in the halt mode. Both internal and external
clocks can be used as the count clock.
In the stop mode
The main clock and system clock stop upon
entering the stop mode. Therefore, only timers
using the external clock remain active.
• Counters that the system retains during
standby mode
The contents that will be retained in the halt mode
will also be retained in the stop mode. These items
are shown in Table 3.
Operation mode Standby mode
HALT mode
Run HALT command
HALT mode
release event
Normal
operation
Run STOP command
STOP mode
release event
STOP mode
Fig. 8 Operation Shift of Program
Table 3 System Contents Secured During Standby Mode
FLAG REGISTER OUTPUT LATCH REGISTER/MODE REGISTER OTHER
IFA flag
IFB flag
IFT flag
IME flag
C flag
A register
X register
B
M, BL register
SP
SR
P0, P2, R3, P5
R8, R9, RA, RB
RC, RE, RF
RAM
• Releasing events of standby mode (6-type)
RELEASING EVENT FLAG INT/EXT MASKABLE / NONMASKABLE PRIORITY
Reset input – External Nonmaskable –
Low level input on P10 pin IFA External Maskable 1
Low level input on P11 pin IFB External Maskable 2
Low level input on P12 pin – External Nonmaskable –
Low level input on P13 pin – External Nonmaskable –
Timer overflow IFT Internal Maskable 3
Page 16

SM5K3/SM5K4/SM5K5
- 16 -
• Interrupt used with SM5K3/5K4/5K5
Interrupt event occurs on the falling edge of P1
0 or
P1
1 pin input, or the overflow at the timer. These
events set flags IFA, IFB and IFT respectively, that
then serve as interrupt request flag.
Table 4 shows interrupt handling priority level and
jump address.
Table 4 Interrupt Event Summary
INTERRUPT EVENT
(REQUEST FLAG)
JUMP ADDRESS
PRIORITY ORDER INTERRUPT MASK FLAG
Falling edge of input on P10 (IFA) 2 1 RE0
Falling edge of input on P11 (IFB) 2 2 RE1
Timer overflow (IFT) 2 3 RE2
PAGE STEP
0
2
4
• Usage of halt mode and stop mode
The system returns back to the normal operation
mode upon occurring of a standby mode releasing
condition. The halt mode should be used when the
system must enter and exit normal operation
frequently as in the case of key operation.
The halt mode should also be used to keep timers
that are operating from the internal clock, while in
the standby mode.
The stop mode further saves power than the halt
mode but requires slightly longer time to return to
the normal mode. Therefore, the stop mode should
be used when the system will not be required to
return to the normal mode in a short time.
Interrupt Feature
The interrupt block consists of mask flags (bits RE0,
RE1 and RE2), IME flag and interrupt request
handling circuit. Fig. 9 shows the configuration of the
interrupt block.
Mask flag (mode register RE)
RE2
I FA
I FB
I FT
RE1 RE0
Interrupt request flag
IME
Interrupt enable flag
(master enable flag)
Interrupt handling circuit
INT signal
Stack register SR
Program counter PC
Fig. 9 Interrupt Block Diagram
Page 17

SM5K3/SM5K4/SM5K5
- 17 -
• IME flag (master enable flag)
The IME enables or disables all interrupts at the
same time. The IE command, when executed, sets
the IME flag and enables the interrupt specified by
the mask flag setting. The ID command resets the
IME flag, disabling process of any interrupt request.
Setting the IME flag to reset after releasing
hardware reset, all interrupts are inhibited.
• Mode register RE (interrupt mask flag)
The mode register RE (RE0, RE1 and RE2;
interrupt mask flag) individually enables or disables
three type of interrupts.
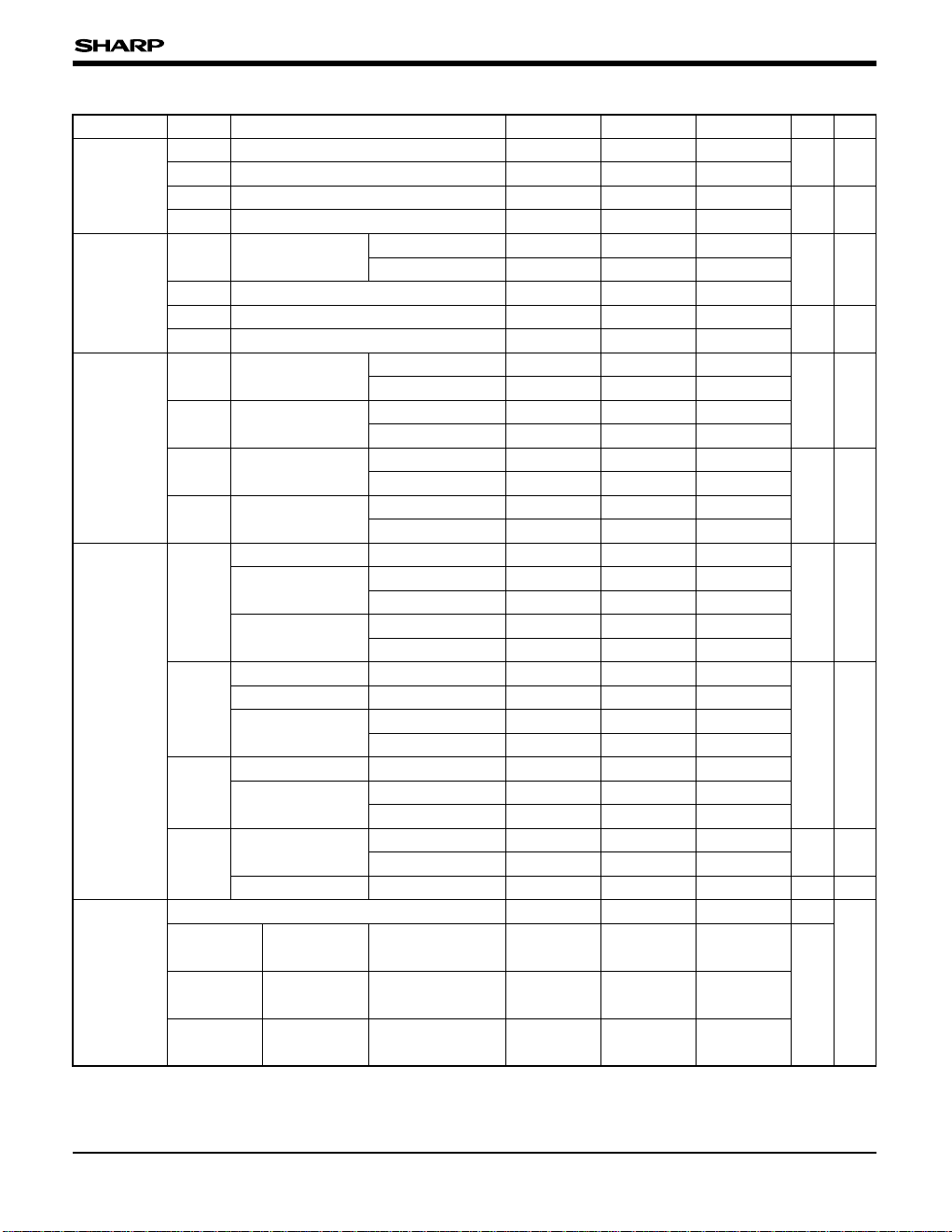
Timer/Counter
The SM5K3/5K4/5K5 have a pair of built-in
timer/counter. The timer/counter are used to handle
periodic interrupts and to count. The overflowing
timer can be used to disable the halt mode. The
timer/counter serve as interval timer.
The timer/counter consists of an 8-bit count register
RA, modulo register RB (for counter initial value
setting), 15-bit divider and 4-bit mode register RC
(for count clock selection). The configuration of the
timer/counter is shown in Fig. 10.
fSYS
System clock
P11 pin
( external event clock )
Divider
Mode register
( RC register )
f
SYS / 2
0
0
3
3
03
0303
47
47
03
15
fSYS / 2
7
AX
AX
I FT
Modulo register
( RB register )
Count register
( RA register )
After setting BL = 0BH
OUT command ( RB←[ X, A ] )
IN command ( [ X, A ]←RB )
After setting B
L = 0AH
OUT command
After setting BL = 0AH
IN command
Interrupt request flag
Count clock selsctor
Fig. 10 Configuration of Timer/Counter
• Selecting count clock
A count clock is selected by the bit settings in the
mode register RC.
LOWER 2-BIT OF RC BITS
SELECTED COUNT CLOCK
0 fSYS (system clock)
0
f
SYS
/2
7
1
f
SYS
/2
15
1
External event clock (P11)
1 0
0
1
0
1
Table 5 Count Clock Selection
Page 18

SM5K3/SM5K4/SM5K5
- 18 -
A/D CONVERSION MODE
In the A/D conversion mode, the converter converts
the analog input voltage to the digital value. The
analog input voltage is successively compared with
the internal voltage charged on the weighted
capacitor array until its digital equivalent is
determined. The resultant digital data is stored into
the mode registers R8 and R9.
The conversion requires 152.5 µs (main clock at
400 kHz/system clock at 5 µs) or 1.86 ms (main
clock at 32.768 kHz/system clock at 61 µs).
COMPARISON MODE
In the comparison mode, the analog voltage from
one of P3
0 to P33 pins is compared, in amplitude,
with internally generated voltage whose value is set
by the mode registers R8 and R9. The result data
of the comparison is saved into the bit 4 (bit R84)
position of the mode register R8. The comparison
cycle lasts 62.5 µs (main clock at 400 kHz, system
clock at 5 µs) or 763 µs (main clock at 32.768
kHz/system clock at 61 µs).
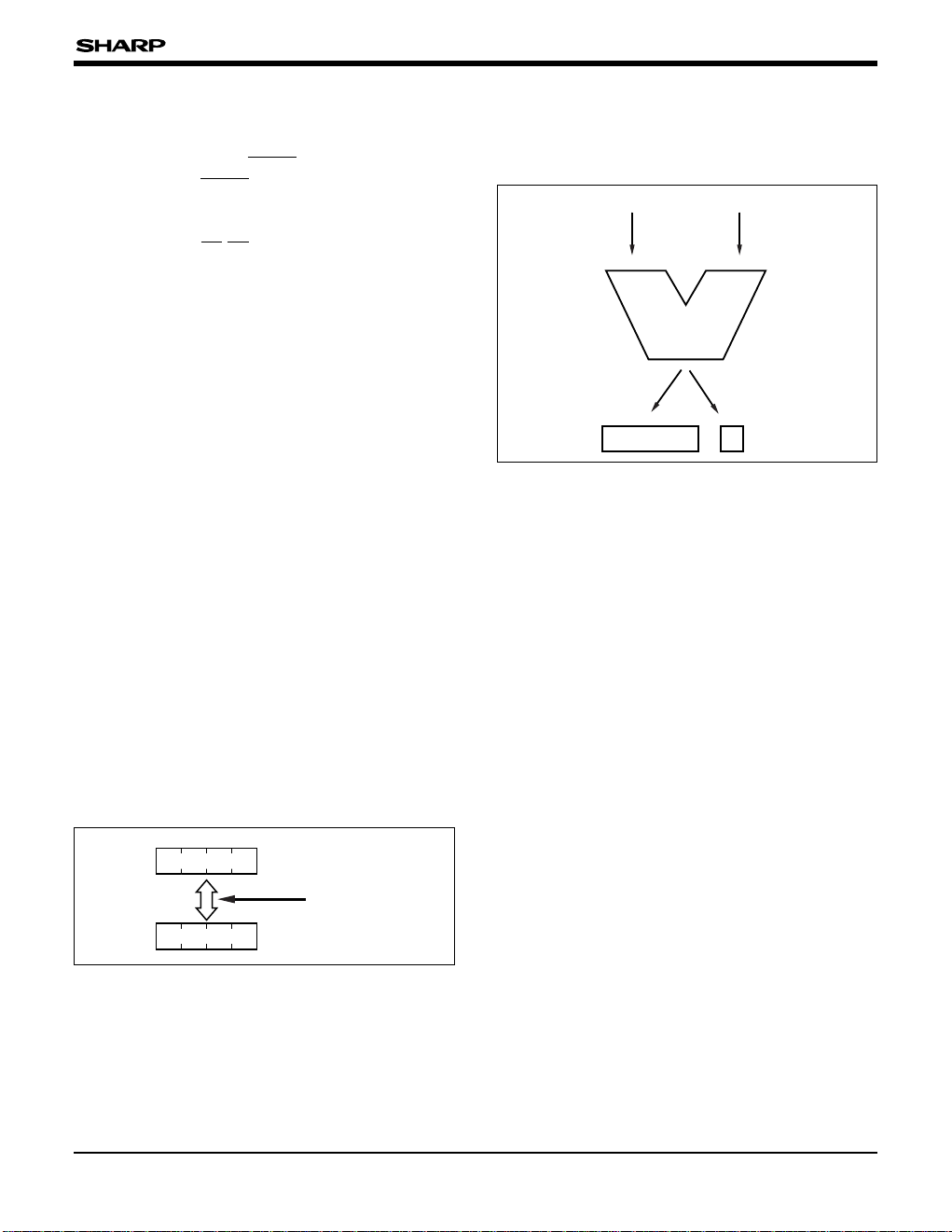
A/D Conversion
The SM5K3/5K4/5K5 are provided with a built-in
10-bit A/D converter having 4-channel multiplexer
analog inputs. The A/D converter operates in A/D
conversion mode and comparison mode. In the
A/D conversion mode, the converter converts the
analog input from the P3 pin to the digital value;
and in the comparison mode, it compares the input
analog amplitude with that of a reference voltage
set inside the SM5K3/5K4/5K5. The P3
0 to P33
pins can be used as analog voltage inputs. One or
more of these 4 inputs can be set to assume A/D
pin by the bit operation of the mode register R3.
One of these A/D pins is further set as analog input
by the bit operation of the mode register R8. The
A/D converter is controlled by the bits set in the
mode register R8. For details of the mode register
R8, refer to " MODE REGISTERS R8 ".
Configuration of the A/D converter is illustrated in
Fig. 11.
CAUTIONS
• Keep the A/D converter reference voltage on the VR pin
equal to or below V
DD.
• Do not apply the voltage to the VR pin before V
DD is
applied.
• Connect AGND to GND.
Fig. 11 A/D Converter Block Diagram
P30
P31
P32
P33
A/D pins
Multiplexer
Normal input pin
Changeover
R3 register
A register
X, A registers
X, A registers
A/D control, data
(mode register R8 )
A/D data
( Mode register R9 )
VR
AGND
10-bit
D/A
Comparator
Control circuit
Page 19

SM5K3/SM5K4/SM5K5
- 19 -
MODE REGISTERS
The registers which control functions of the
SM5K3/5K4/5K5 and which serve as counter/timer are
commonly referred to as “mode registers”. In the
SM5K3/5K4/5K5, R8 to RB are 8-bit mode registers;
and R3, RC, RE and RF are 4-bit mode registers.
To set data into the mode registers, the OUT
command is used; and to check the contents of the
mode registers IN command is used.
R3 (A/D pin selection register)
Any pin on 4-pin port P3 can be set accommodate
analog voltage (hereafter called A/D pin).
Bit 3 0
Bit i (i = 3 to 0)
Sets P3i pin to either general purpose input or
A/D pin
0 | (General purpose) input
1 | A/D input
R8 (A/D conversion control & A/D data
register)
An 8-bit register used to control A/D conversion
and storing part of A/D conversion result. It also
stores the results of comparison.
Bit 7 0
Bits 7 to 6
Storage of A/D conversion result (A/D conversion
mode) and setting of internal voltage (comparison
mode)
• Use as part of a 10-bit data ragister in
combination with mode register R9.
• Bit R86 is the LSB.
• Store lower 2-bit of converted data in A/D
conversion mode.
• Use as lower 2-bit of internal voltage setting
data in comparison mode.
Bit 5
∗ A/D operation enable/disable flag
0 | Disable (A/D power source off)
1 | Enable (A/D power source on)
Bit 4
Storages of comparison result (read only)
0 | P3i pin voltage < internal setting voltage
1 | P3i pin voltage > internal setting voltage
(i = 3 to 0)
Bit 3
∗ S/R flag (start/clear)
0 | End of operation (or stop)
1 | Start of operation (or in operation)
Bit 2
Operation mode selection
0 | A/D conversion
1 | Comparison
Bits 1 to 0
Select one of A/D pins as A/D conversion
00 | P30
01 | P31
10 | P32
11 | P33
R9 (A/D data register)
The register to store the upper 8-bit of 10-bit data
resulting from A/D conversion.
Bit 7 0
Bit i (i = 7 to 0)
Storages of A/D conversion result (A/D conversion
mode) and setting of internal voltage (comparison
mode)
• Uses as part of a 10-bit data register in
combination with mode register R8.
• Bit R97 is the MSB.
• Stores upper 8-bit of A/D conversion result.
• Uses as upper 8-bit of internal voltage setting
data in comparison mode.
∗
When operation is end, these bits are cleared.
∗
Select one pin which is to be selected by mode register R8.
Page 20

SM5K3/SM5K4/SM5K5
- 20 -
RA (Count register)
Bit 7 0
Bit i (i = 7 to 0)
Count clock input register
• Uses as counter part of timer/counter (count
clock input).
• Loads the content of RB to RA when the RA
overflows or when OUT command (B
L = 0AH)
is executed.
RA←RB
• Loads the content of RA to X and A registers
upon execution of IN command (B
L = 0AH).
(X, A)←RA
• Bit 7 = MSB, bit 0 = LSB
RB (Modulo register)
Bit 7 0
Bit i (i = 7 to 0)
Count initial value storage register
• Uses as modulo register of timer/counter
• Loads the content of RB to X and A registers
upon execution of
IN command (B
L = 0BH) : X = upper bits,
A = lower bits.
(X, A)←RB
• Loads the contents of X and A registers to RB
upon execution of
OUT command (B
L = 0BH) : X = upper bits,
A = lower bits.
RB←(X, A)
• Bit 7 : MSB, Bit 0 : LSB
RC (Timer control)
Bit 3 0
Bit 3
Starts up count of the timer.
0 | Stop
1 | Start
Bit 2 (Unused)
Bits 1 to 0
Select the source clock to the timer.
00 | fSYS (system clock)
01 | fSYS/2
7
10 | fSYS/2
15
11 | Falling edge input on P11 pin
RE (Interrupt mask flag)
Bit 3 0
Bit 3 (Unused)
Bit 2
Removes overflow interrupt from timer or standby
condition.
0 | Disable
1 | Enable
Bit 1
Interrupts on the falling edge of input from P11 pin,
or releases of standby mode by the Low input from
P1
1
pin.
0 | Disable
1 | Enable
Bit 0
Interrupts on the falling edge of input on P10pin, or
releases of standby mode by the Low input from
P1
0
pin.
0 | Disable
1 | Enable
RF (P2 port direction register)
Bit 3 0
Bit i (i = 3 to 0)
Selection of input pin/output pin
0 | Set P2i pin to input.
1 | Set P2i pin to output.
Page 21

SM5K3/SM5K4/SM5K5
- 21 -
I/O Ports
The SM5K3/5K4/5K5 have 24 ports : 8-input, 4output and 12-I/O port. To verify the input, use
suitable instruction to transfer the input on the pin
directly to the A register. To select the output latch
register to which the content of the A register is to
be transferred, and to select the input port from
which the signal or data is to be transferred to the
A register, use the B
L register. For details of BL
settings and associated ports, refer to Table 1.
• Port P0
0 to P03 (CMOS inverting output port)
The data transfers in 4-bit string (use OUT or
OUTL instruction) or in unit of 1-bit (use ANP or
ORP instruction).
• Port P10to P13(input port with pull-up resistor)
The data transfers in unit of 4-bit. This port can be
used as standby/external interrupt input or count
pulse input. The P1 port can also be used as a
standby release port without requiring specific
setting on P1
2 and P13 pins. Pins P10 and P11
require settings through the mode resister RE.
When using the P1 port as an external interrupt
input, use pins P1
0 and P11 with suitable settings in
the mode register RE. When using the P1 port as
the count pulse input, use P1
1 pin.
•
Port P20 to P23 (I/O port with pull-up
resistor
)
Each bit can be independently be set its direction
and can be transferred independently or in
combination of other 3-bit. The direction of the bits
is determined by the RF register. After reset, the
P2 port is set input.
• Port P30to P33(input port with pull-up resistor)
The data transfers in unit of 4-bit. The port can also
be used as A/D analog voltage input. To use the P3
port as the A/D port, set the mode register R3.
• Port P40 to P43 (I/O port with pull-up
resistor
)
The data transfers in unit of 4-bit.
When set output, content of each bit can be set.
Executing the input instruction (IN) sets the P4
ports (P4
0 to P43) to input; and executing output
instruction (OUT, ANP or ORP) sets the port to
output. After reset, the P4 port is set input.
• Port P5
0 to P53 (I/O port with pull-up
resistor
)
The data transfers in unit of 4-bit.
When set output, content of each bit can be set.
Executing the input instruction (IN) sets the P5
ports (P5
0 to P53) to input; and executing output
instruction (OUT, ANP or ORP) sets the port to
output. After reset, the P5 port is set input.
Flags
The SM5K3/5K4/5K5 have 4 flags (C flag and
interrupt request flags [IFA, IFB, IFT] ), which are
used to perform setting and judgments.
Page 22

SM5K3/SM5K4/SM5K5
- 22 -
• Divider
The divider consists of 15 divided-by-two dividers,
providing 2 (f
SYS/2
7
, fSYS/215) of 4 count clocks that
are fed to the counter RA from the system clock.
Its configuration is shown below. The divider can
be cleared by using the DR instruction.
• Oscillator mask option
Selection of type of oscillator, ceramic or crystal, is
made by mask option.
System clock
(fSYS)
Main clock
(fOSC)
Fig. 12 Main Clock and System Clock
Fig. 13 System Clock Generator and Divider
System Clock Generator and Dividers
•
System clock generator
The system clock is the divided-by-two main clock
applied through OSC
IN and OSCOUT (See Fig. 12).
The system clock generator is shown in Fig. 13.
One system clock cycle period is equal to one
instruction execution time when the instruction
consists of 1 word. When the ceramic oscillator
runs at 400 kHz, the system clock fsys is 200 kHz.
This means that the instruction execution time is 5
µs/word. Using a 32.768 kHz crystal oscillator
generates 16.384 kHz fsys and the instruction
execution time is 61 µs/word. The system clock
can be used as count input pulse to the timer.
OSCIN
OSCOUT
CG
111111111111111
fSYS
( System clock )
222222222222222
System clock generator (divided-by-two main clock)
Divider (can be cleared by DR instruction)
fSYS/2
fSYS/2
7
15
Page 23

- 23 -
INSTRUCTION SET
Definition of Symbols
M : Content of RAM at the address defined
by the B register.
← : Transfer direction
∪
: Logical OR
∩
: Logical AND
⊕ : Exclusive OR
Ai : An i bit of A register (i = 3 to 0)
Push : Saves the contents of PC to stack
register SR.
Pop : Returns the contents saved in the stack
register back to PC.
Pj : Indicates output latch register or input
register. Pj ( j = 0, 1, 2, 3, 4, 5)
Rj : Mode register. Rj register ( j = 3, A, B,
C, E, F)
ROM ( ) : Content stored in ROM location defined
by the value in ( ).
CY : Carry in ALU (independent of C flag)
The CY(carry) is a signal which is
generated when the ALU has been
carried by the execution of a command.
It is different from the C flag.
X : Used to represent a group of bits in the
content of a register or memory. For
example, the X in the LDAX instruction
denotes the lower 2 digits (I
1 and I0) of A
register.
• A bit in a register is affixed to the register symbol,
e.g. a bit (i = 0, 1, 2, 3....) of X register is
expressed as Xi and P (R) register as P (R) i.
• Increment means binary addition of 1
H and
decrement addition of F
H.
• Skipping an instruction means to ignore that
instruction and to do nothing until starting the next
instruction. In this sense, an instruction to be
skipped is treated as an NOP instruction.
Skipping 1-byte instruction requires 1-cycle, and
2-byte instruction 2-cycle. Skipping 1-byte 2-cycle
instruction requires 1-cycle.
SM5K3/SM5K4/SM5K5
MNEMONIC
MACHINE CODE
OPERATION
ROM Addressing Instructions
TR x 80 to BF
PL←x (I5-I0)
TL xy
E0 to E7,
00 to FF
PU←x (I11-I6)
PL←y (I5-I0)
TRS x C0 to DF
Push, PU←01H,
P
L←x (I4, I3, I2, I1, I0)
CALL xy
F0 to F7
00 to FF
Push, PU←x (I11-I6)
PL←y (I5-I0)
RTN 7D Pop
RTNS 7E
Pop, Skip the next step
RTNI 7F
Pop, IME←1
Data Load Instructions
LAX x 10 to 1F
A←x (I3-I0)
LBMX x 30 to 3F
BM←x (I3-I0)
LBLX x 20 to 2F
BL←x (I3-I0)
LDA x 50 to 53
A←M, BMi←BMi ⊕ x (I1, I0),
(i = 1, 0)
EXC x 54 to 57
M↔A, BMi←BMi ⊕ x (I1, I0),
(i = 1, 0)
EXCI x 58 to 5B
M↔A, BL←BL+1
BMi←BMi ⊕ x (I1, I0), (i = 1, 0)
Skip the next step, if result
of B
L = 0
EXCD x 5C to 5F
M↔A, BL←BL–1
BMi←BMi ⊕ x (I1, I0), (i = 1, 0)
Skip the next step, if result
of B
L is = FH
EXAX 64
A↔X-reg
ATX 65
X-reg←A
EXBM 66
BM↔A
EXBL 67
BL↔A
EX 68
B↔SB
Instruction Summary
Page 24

- 24 -
SM5K3/SM5K4/SM5K5
MNEMONIC
ADX x
ADD 7A
A←A+M
ADC 7B
A←A+M+C, C←CY
Skip the next step, if CY = 1
COMA 79
A←A
–
INCB 78
BL←BL+1, Skip the next
step, if result of BL = 0
DECB 7C
BL←BL–1, Skip the next
step, if result of B
L = FH
Test Instructions
TAM 6F
Skip the next step, if A = M
TC 6E Skip the next step, if C = 1
TM x 48 to 4B
Skip the next step, if Mi = 1,
(i = 3 to 0)
TABL 6B
Skip the next step, if A = B
L
TPB x 4C to 4F
Skip the next step, if P (R)
i = 1, (i = I1, I0)
TA 6C
Skip the next step, if IFA = 1
IFA←0
TB 6D
Skip the next step, if IFB = 1
IFB←0
TT
69
02
Skip the next step, if IFT = 1
IFT←0
Bit Operation Instructions
SM x 44 to 47
Mi←1 (i = 3 to 0)
RM x 40 to 43
Mi←0 (i = 3 to 0)
SC 61
C←1
RC 60
C←0
IE 63
IME←1 (Interrupt enable)
ID 62
IME←0 (Interrupt disable)
A←A+x (I3-I0)
Skip the next step, if CY = 1
00 to 0F
Arithmetic Instructions
OPERATION
MACHINE CODE
MNEMONIC
MACHINE CODE
OPERATION
I/O Instructions
INL 70
A←P1
OUTL 71
P0←A
ANP 72
Pj←Pj ∩A ( j = 0, 2, 4, 5)
ORP 73
Pj←Pj ∪A ( j = 0, 2, 4, 5)
IN 74
A←Pj ( j = 1, 2, 3, 4, 5)
X-reg, A←Rj ( j = 8, 9, A, B)
A←Rj ( j = C, E, F)
OUT 75
Pj←A ( j = 0, 2, 4, 5)
Rj←X-reg, A ( j = 8, 9, B)
RA←RB
Rj←A ( j = 3, C, E, F)
Table Search Instruction
PAT 6A
Push
PU←04H, PL←(X1, X0, A)
X-reg←ROM
H, A←ROML
Pop
Divider Operation Instruction
DR
69
03
Divider (f0-f15) clear
Special Instructions
STOP 76 Standby mode (STOP)
HALT 77 Standby mode (HALT)
NOP 00 No operation
Page 25

SM5K3/SM5K4/SM5K5
- 25 -
SYSTEM CONFIGURATION EXAMPLE
• Charger controller
OSCOUT
OSCIN
P42
SM5K3/5K5
P41
P40
VR
V
DD
P00 P01 P02 P03
RESET
GND AGND
P30
P21
P20
Battery
Switching circuit
To 10-bit A/D converter
DC supply source
+
OSCOUT
OSCIN
P42
SM5K4
P41
P40
P00 P01 P02 P03
RESET
P30
P21
P20
Battery
Switching circuit
To 10-bit A/D converter
DC supply source
VDD
VDD
VDD
+
VR
GND AGND
Page 26

SM5K3/SM5K4/SM5K5
- 26 -
± 0.1
27.2
16
15
1
30
± 0.25
± 0.2
0.25
0.46
± 0.1
TYP.
0.51
MIN.
± 0.2
± 0.2
8.6
4.4
3.85
3.25
TYP.
10.16
1.778
0°-15°
± 0.2
M0.25
30 SDIP (SDIP030-P-0400)
± 0.2
1.275
± 0.1
0.1
2.7
(1.4)
± 0.2
1.270.4
32
1
17
16
20.6
(1.4)
11.3
14.1
0.15
(12.5)
± 0.1
TYP.
± 0.2
± 0.4
± 0.05
0.15
0.1
0.15
M
32 SOP (SOP032-P-0525)
Page 27

SM5K3/SM5K4/SM5K5
- 27 -
0.8
0.38
27
19
13.5
(1.75)
(1.75)
10.0
13.5
10.0
(1.75)
(1.75)
19
10
18
36
28
0.15
(11.5)
0.85
1.45
0.1
TYP.
± 0.1
± 0.2
± 0.4
± 0.2
± 0.4
± 0.05
± 0.2
± 0.2
± 0.1
0.15
0.15
M
Package
base plane
36 QFP (QFP036-P-1010)
1.27
0.4
0.15
(10.6)
12.0
± 0.2
8.6
(1.7)
(1.7)
± 0.1
0.1
± 0.2
2.2
1.025
18.0
14
15
1
28
± 0.1
TYP.
± 0.05
± 0.2
± 0.3
0.15
0.1
0.12 M
28 SOP (SOP028-P-0450)
Page 28

SM5K3/SM5K4/SM5K5
- 28 -
1.05
0.1
0.45
6.0
7.8
0.65
0.27
0.15
12
13
1
24
± 0.2
7.6
± 0.1 TYP.
± 0.2
± 0.4
± 0.1
± 0.05
(6.6)
± 0.1
0.15
0.15
0.15
M
24 SSOP (SSOP024-P-0275)
 Loading...
Loading...