

Page 1
LH7A400
Preliminary Data Sheet
FEATURES
• ARM922T™ Core:
– 32-bit ARM9TDMI™ RISC Core
– 16KB Cache: 8KB Instruction Cache and
8KB Data Cache
– MMU (Windows CE Enabled)
• High Performance (200 MHz)
• 80KB On-Chip Memory
• External Bus Interface
– 100 MHz
– Asynchronous SRAM/ROM/Flash
– Synchronous DRAM/Flash
– PCMCIA
– CompactFlash
• Clock and Power Management
– 32.768 kHz and 14.7456 MHz Oscillators
– Programmable PLL
• Low Power Modes
– Run (147 mA), Halt (41 mA), Standby (42 µA)
• Programmable LCD Controller
– Up to 1,024 × 768 Resolution
– Supports STN, Color STN, AD-TFT, HR-TFT, TFT
– Up to 64,000 Colors and 15 Gray Shades
• DMA (10 Channels)
–AC97
–MMC
–USB
• USB Device Interface (USB 1.1)
• Synchronous Serial Port (SSP)
– Motorola SPI™
– Texas Instruments SSI
– National MICROWIRE™
32-Bit System-on-Chip
• Three Programmable Timers
• Three UARTs
– Classic IrDA (115 kbit/s)
• Smart Card Interface (ISO7816)
• DC-to-DC Converters
• MultiMediaCard™ Interface
• AC97 Codec Interface
• Smart Battery Monitor Interface
• Real Time Clock (RTC)
• Up to 60 General Purpose I/Os
• Programmable Interrupt Controller
• Watchdog Timer
• JTAG Debug Interface and Boundary Scan
• Operating Voltage
– 1.8 V Core
– 3.3 V Input/Output (1.8 V I/O Optional
• 5 V Tolerant Inputs (except oscillator pins
• Operating Temperature
– 0°C to +70°C Commercial
– -40°C to +85°C Industrial (With Clock Frequency
Reduction
• 256-Ball PBGA or 256-Ball CABGA Package
1
)
DESCRIPTION
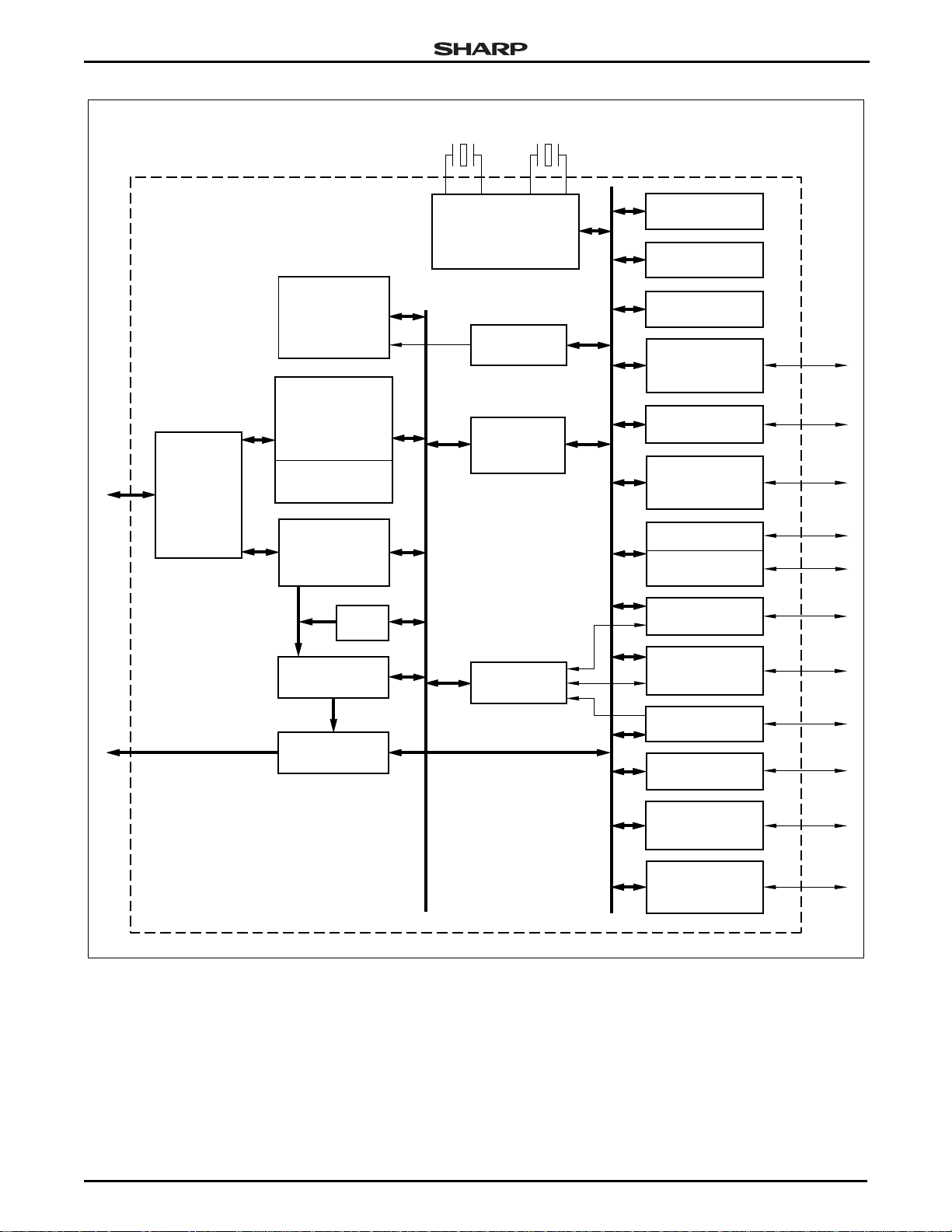
The LH7A400, powered by an ARM922T, is a com-
plete System-on-Chip with a high level of integration to
satisfy a wide range of requirements and expectations.
This high degree of integration lowers overall sys-
tem costs, reduces development cycle time and accelerates product introduction.
1
)
2
)
Motorola SPI is a trademark of Motorola, Inc.
National Semiconductor MICROWIRE is a trademark of
National Semiconductor Corporation.
Windows CE is a trademark of Microsoft Corporation.
Preliminary Data Sheet 12/8/03 1
NOTES:
1. Under development. Results pending further characterization.
2. Oscillator pins R13, T13, P15, and P16 are 1.8 V ±10%
Page 2
LH7A400 32-Bit System-on-Chip
14.7456 MHz 32.768 kHz
EXTERNAL
BUS
INTERFACE
(ASYNCHRONOUS)
CONTROLLER
PCMCIA/CF
CONTROLLER
SYNCHRONOUS
DYNAMIC RAM
CONTROLLER
LCD AHB
BUS
ARM922T
STATIC
MEMORY
(SMC)
(SDMC)
80KB
SRAM
OSCILLATOR,
PLL1 and PLL2, POWER
MANAGEMENT, and
RESET CONTROL
INTERRUPT
CONTROLLER
ADVANCED
PERIPHERAL
BUS BRIDGE
REAL TIME
CLOCK
WATCHDOG
TIMER
TIMER (3)
GENERAL
PURPOSE I/O
(60)
SYNCHRONOUS
SERIAL PORT
BATTERY
MONITOR
INTERFACE
UART (3)
IrDA
INTERFACE
USB DEVICE
INTERFACE
COLOR LCD
CONTROLLER
ADVANCED LCD
INTERFACE
ADVANCED
HIGH-PERFORMANCE
BUS (AHB)
Figure 1. LH7A400 Block Diagram
DMA
CONTROLLER
ADVANCED
PERPHERAL
BUS (APB)
MULTIMEDIACARD
INTERFACE
ADVANCED AUDIO
CODEC (AC97)
AUDIO CODEC
INTERFACE
SMART CARD
INTERFACE
(ISO7816)
DC to DC
INTERFACE
(2)
LH7A400-1
2 12/8/03 Preliminary Data Sheet
Page 3
32-Bit System-on-Chip LH7A400
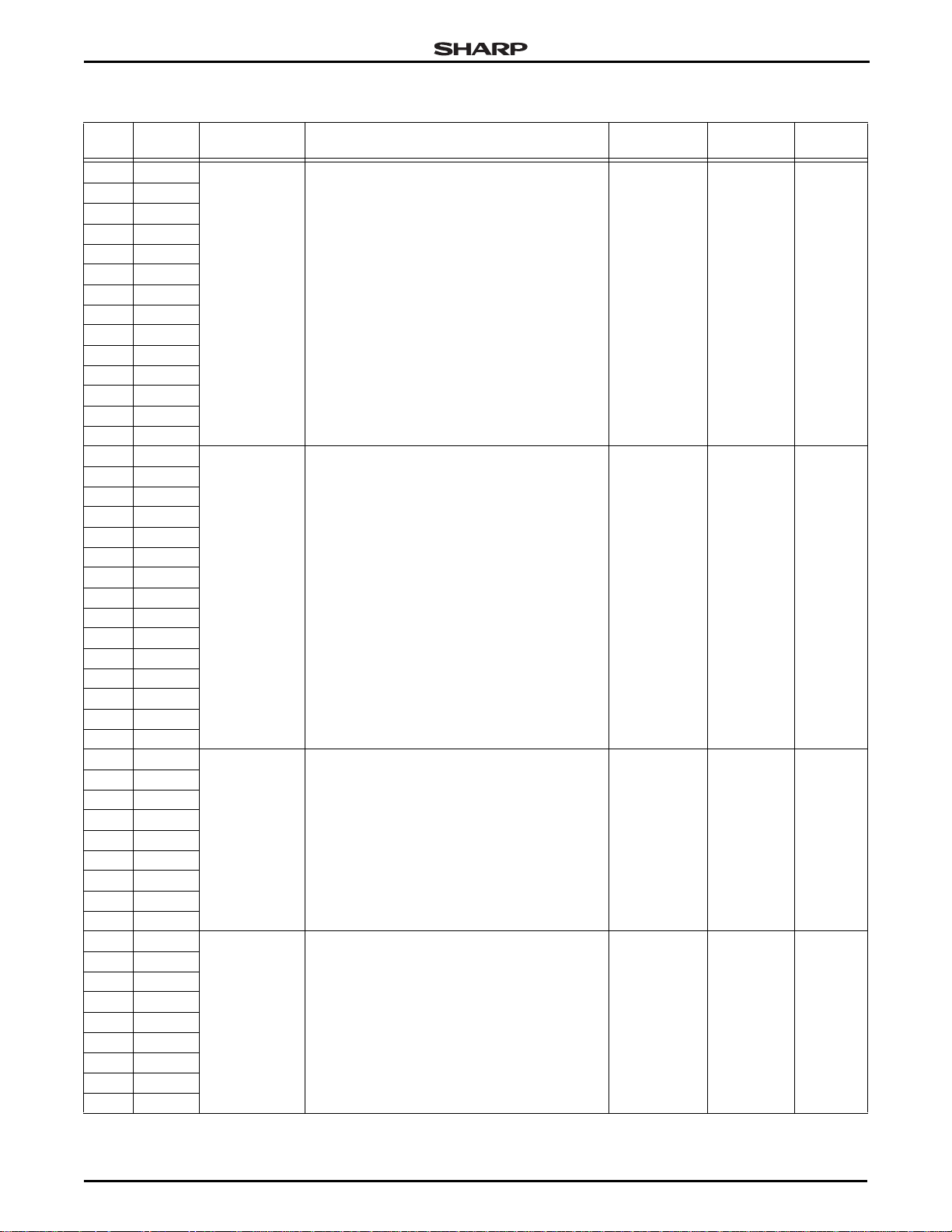
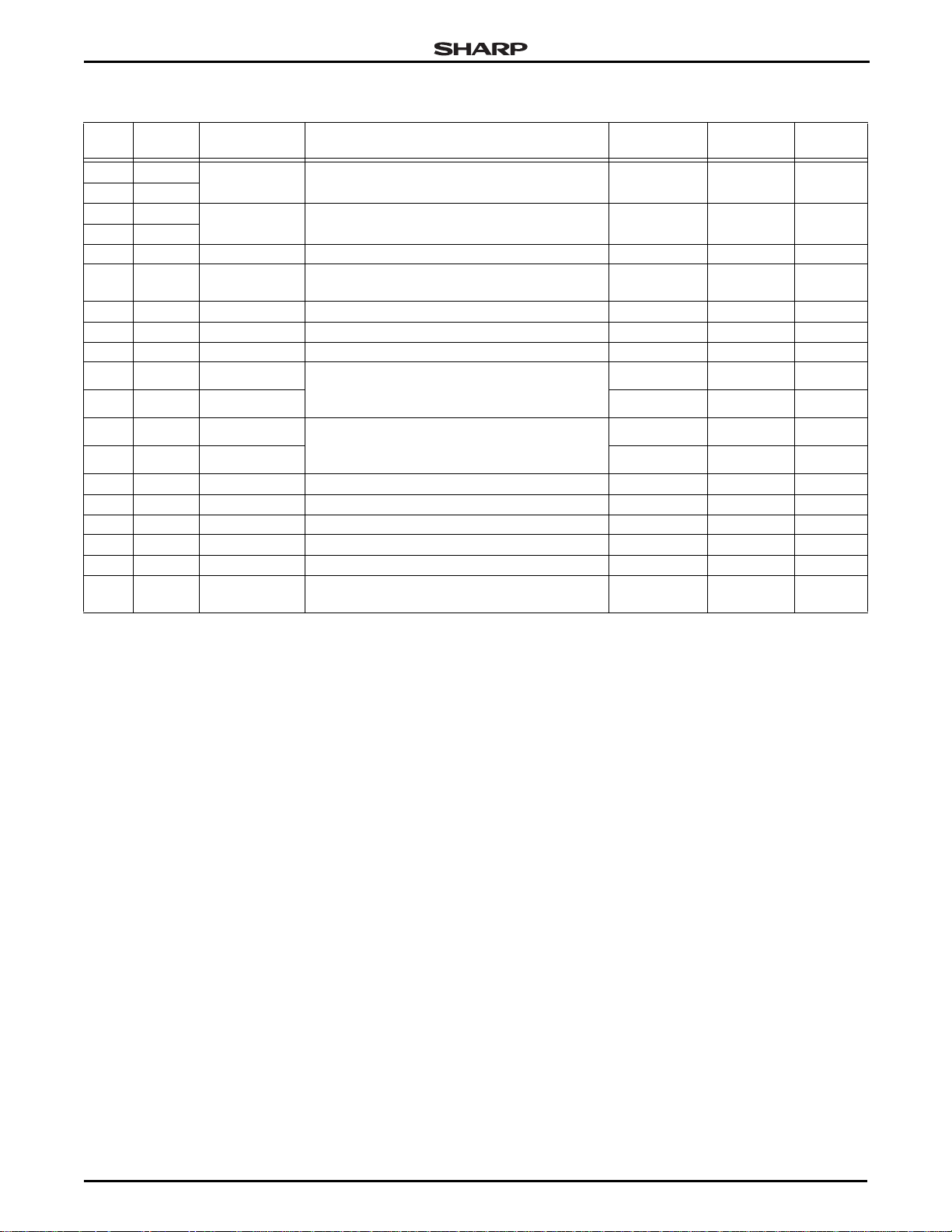
Table 1. Functional Pin List
PBGA
CABGA
PIN
G7 C10
F1 F9
K7 F11
M1 F14
M5 G8
T6 H13
R14 J9
M14 K15
J11 L7
J12 N6
F13 N8
B14 N12
E10 N13
B8 P11
H7 B8
G3 C6
K4 D5
N5 D13
P6 E8
T14 F7
R16 G13
N16 H9
K13 J14
H9 K7
C15 L8
A11 L10
E8 L12
A5 M11
F7 M14
E1 C4
J4 D7
P3 D10
T8 F4
K9 F10
L13 J4
E15 J8
D12 K8
A7 L6
H5 G7
M3 H4
L9 H8
T10 L4
N15 L9
H12 N3
B15 N7
C9 N10
G6 R5
PIN
SIGNAL DESCRIPTION
VDD I/O Ring Power
VSS I/O Ring Ground
VDDC Core Power
VSSC Core Ground
RESET
STATE
STANDBY
STATE
OUTPUT
DRIVE
Preliminary Data Sheet 12/8/03 3
Page 4
LH7A400 32-Bit System-on-Chip
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
R11 P12
N12 M10
P12 R13
T11 N11
D3 E4 nPOR Power On Reset Input Input
H6 D1 nURESET
D4 E2 WAKEUP Wake Up Input (Sch mitt) Input
E4 F2 nPWRFL Power Fail Signal Input (Schmitt) Input
C2 D2 nEXTPWR External Power Input (Schmitt) Input
R13 R14 XTALIN
T13 R15 XTALOUT LOW LOW
P16 N14 XTAL32IN
P15 M13 XTAL32OUT Output Output
P14 M12 CLKEN External Oscillator Clock Enable Output LOW LOW 8 mA
J6 J5 PGMCLK Programmable Clock (14.7456 MHz MAX.) LOW LOW 8 mA
K11 P14 nCS0 Asynchronous Memory Chip Select 0 HIGH HIGH 12 mA
K10 P16 nCS1 Asynchronous Memory Chip Select 1 HIGH HIGH 12 mA
P13 N15 nCS2 Asynchronous Memory Chip Select 2 HIGH HIGH 12 mA
M12 N16
PIN
SIGNAL DESCRIPTION
VDDA Analog Power for PLL
VSSA Analog Ground for PLL
User Reset; should be pulled HIGH for normal or
JTAG operation.
14.7456 MHz Crystal Oscillator pins. An external
clock source can be connected to XTALIN leaving XTALOUT open.
32.768 kHz Real Time Clock Crystal Oscillator
pins. An external clock source can be connected
to XTAL32IN leaving XTAL32OUT open.
nCS3/
nMMSPICS
• Asynchronous Memory Chip Select 3
• MultiMediaCard SPI Mode Chip Select
RESET
STATE
Input (Schmitt) Input
Input Input
Input Input
HIGH: nCS3 HIGH 12 mA
STANDBY
STATE
OUTPUT
DRIVE
4 12/8/03 Preliminary Data Sheet
Page 5
32-Bit System-on-Chip LH7A400
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
L12 L11 D0
M15 L13 D1
N13 L14 D2
L16 K11 D3
L15 L16 D4
L14 K14 D5
H11 J15 D6
K12 J12 D7
J15 J10 D8
J13 H16 D9
J10 H14 D10
H15 H11 D11
H13 G16 D12
G15 G9 D13
G11 G14 D14
G12 G12 D15
F15 F15 D16
F12 E15 D17
E14 D16 D18
D16 F12 D19
H10 E13 D20
D14 D14 D21
F10 E12 D22
A16 B16 D23
A14 D12 D24
B13 A16 D25
C13 B13 D26
E12 B14 D27
G10 C12 D28
B12 A14 D29
B11 B12 D30
D11 A12 D31
M16 M15 A0/nWE1
N14 M16 A1/nWE2
PIN
SIGNAL DESCRIPTION
RESET
STATE
Data Bus LOW LOW 12 mA
• Asynchronous Address Bus
• Asynchronous Memory Write Byte Enable 1
• Asynchronous Address Bus
• Asynchronous Memory Write Byte Enable 2
HIGH: nWE1 HIGH 12 mA
HIGH: nWE2 HIGH 12 mA
STANDBY
STATE
OUTPUT
DRIVE
Preliminary Data Sheet 12/8/03 5
Page 6
LH7A400 32-Bit System-on-Chip
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
M13 L15 A2/SA0
K16 K12 A3/SA1 LOW LOW 12 mA
K15 K13 A4/SA2 LOW LOW 12 mA
K14 K16 A5/SA3 LOW LOW 12 mA
J8 J13 A6/SA4 LOW LOW 12 mA
J16 J11 A7/SA5 LOW LOW 12 mA
J14 J16 A8/SA6 LOW LOW 12 mA
J9 H15 A9/SA7 LOW LOW 12 mA
H16 H10 A10/SA8 LOW LOW 12 mA
H14 H12 A11/SA9 LOW LOW 12 mA
G16 G15 A12/SA10 LOW LOW 12 mA
G14 G10 A13/SA11 LOW LOW 12 mA
G13 G11 A14/SA12 LOW LOW 12 mA
F16 F16 A15/SA13 LOW LOW 12 mA
F14 E16 A16/SB0
E16 F13 A17/SB1
E13 E14 A18
F11 D15 A19
D15 C16 A20
C16 C15 A21
B16 C14 A22
A15 B15 A23
A13 E11 A24
G8 D8 A25/SCIO
F8 B7 A26/SCCLK
A8 A7 A27/SCRST
D8 C8 nOE Asynchronous Memory Output Enable HIGH HIGH 12 mA
C8 F8 nWE0 Asynchronous Memory Write Byte Enable 0 HIGH HIGH 12 mA
D10 D9 nWE3 Asynchronous Memory Write Byte Enable 3 HIGH HIGH 8 mA
B10 E9 CS6/SCKE1_2
C10 A10 CS7/SCKE0
G9 A11 SCKE3 Synchronous Memory Clock Enable 3 LOW LOW 12 mA
A10 B10 SCLK Synchronous Memory Clock LOW LOW
C14 C13 nSCS0 Synchronous Memory Chip Select 0 HIGH HIGH 12 mA
D13 A15 nSCS1 Synchronous Memory Chip Select 1 HIGH HIGH 12 mA
E11 D11 nSCS2 Synchronous Memory Chip Select 2 HIGH HIGH 12 mA
A12 E10 nSCS3 Synchronous Memory Chip Select 3 HIGH HIGH 12 mA
C12 A13 nSWE Synchronous Memory Write Enable HIGH HIGH 12 mA
C11 B11 nCAS
PIN
SIGNAL DESCRIPTION
• Asynchronous Address Bus
• Synchronous Address Bus
• Asynchronous Address Bus
• Synchronous Device Bank Address 0
• Asynchronous Address Bus
• Synchronous Device Bank Address 1
Asynchronous Address Bus LOW LOW 12 mA
• Asynchronous Memory Address Bus
• Smart Card Interface I/O (Data)
• Asynchronous Memory Address Bus
• Smart Card Interface Clock
• Asynchronous Memory Address Bus
• Smart Card Interface Reset
• Asynchronous Memory Chip Select 6
• Synchronous Memory Clock Enable 1 OR 2
• Asynchronous Memory Chip Select 7
• Synchronous Memory Clock Enable 0
Synchronous Memory Column Address
Strobe Signal
RESET
STATE
LOW LOW 12 mA
LOW LOW 12 mA
LOW LOW 12 mA
LOW: A25 LOW 12 mA
LOW: A26 LOW 12 mA
LOW: A27 LOW 12 mA
LOW: CS6 LOW 12 mA
LOW: CS7 LOW 12 mA
HIGH HIGH 12 mA
STANDBY
STATE
OUTPUT
DRIVE
20 mA
(sink)
12 mA
(source)
6 12/8/03 Preliminary Data Sheet
Page 7
32-Bit System-on-Chip LH7A400
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
F9 C11 nRAS Synchronous Memory Row Address Strobe Signal HIGH HIGH 12 mA
A9 C9 DQM0 Synchronous Memory Data Mask 0 HIGH HIGH 12 mA
B9 A9 DQM1 Synchronous Memory Data Mask 1 HIGH HIGH 12 mA
D9 B9 DQM2 Synchronous Memory Data Mask 2 HIGH HIGH 12 mA
E9 A8 DQM3 Synchronous Memory Data Mask 3 HIGH HIGH 12 mA
J5 K1 PA0/LCDVD16
K1 K2 PA1/LCDVD17
K2 K3 PA2
K3 K4 PA3
K5 K6 PA4
L1 K5 PA5
L2 L1 PA6
L3 L2 PA7
L4 L3 PB0/UARTRX1
L5 M1 PB1/UARTTX3
L7 M2 PB2/UARTRX3
M2 M3
M4 L5
N1 N1
N2 N2
N3 M4 PB7/SMBCLK
P1 P1 PC0/UARTTX1
P2 P2 PC1/LCDPS
R1 R1
K6 M5 PC3/LCDREV
L8 P3 PC4/LCDSPS
T1 N4 PC5/LCDCLS
PIN
SIGNAL DESCRIPTION
• GPIO Port A
• LCD Data bit 16. This CLCDC output signal is
always LOW.
• GPIO Port A
• LCD Data bit 17. This CLCDC output signal is
always LOW.
GPIO Port A Input No Change 8 mA
• GPIO Port B
• UART1 Receive Data Input
• GPIO Port B
• UART3 Transmit Data Out
• GPIO Port B
• UART3 Receive Data In
PB3/
UARTCTS3
PB4/
UARTDCD3
PB5/
UARTDSR3
PB6/SWID/
SMBD
PC2/
LCDVDDEN
• GPIO Port B
• UART3 Clear to Send
• GPIO Port B
• UART3 Data Carrier Detect
• GPIO Port B
• UART3 Data Set Ready
• GPIO Port B
• Single Wire Data
• Smart Battery Data
• GPIO Port B
• Smart Battery Clock
• GPIO Port C
• UART1 Transmit Data Output
• GPIO Port C
• HR-TFT Power Save
• GPIO Port C
• HR-TFT Power Sequence Control
• GPIO Port C
• HR-TFT Gray Scale Voltage Reverse
• GPIO Port C
• HR-TFT Reset Row Driver Counter
• GPIO Port C
• HR-TFT Row Driver Clock
RESET
STATE
Input: PA0 No Change 8 mA
Input: PA1 No Change 8 mA
Input: PB0 No Change 8 mA
Input: PB1
Input: PB2 No Change 8 mA
Input: PB3 No Change 8 mA
Input: PB4 No Change 8 mA
Input: PB5 No Change 8 mA
Input: PB6
Input: PB7
LOW: PC0 No Change 12 mA
LOW: PC1 No Change 12 mA
LOW: PC2 No Change 12 mA
LOW: PC3 No Change 12 mA
LOW: PC4 No Change 12 mA
LOW: PC5 No Change 12 mA
STANDBY
STATE
LOW if
UART3 is
Enabled,
otherwise
No Change
Input if SMB
is Enabled,
otherwise
No Change
Input if SMB
is Enabled,
otherwise
No Change
OUTPUT
DRIVE
8 mA
8 mA
8 mA
Preliminary Data Sheet 12/8/03 7
Page 8
LH7A400 32-Bit System-on-Chip
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
T2 R2 PC6/LCDHRLP
R2 N5 PC7/LCDSPL
M11 M9 PD0/LCDVD8
L11 K10 PD1/LCDVD9 LOW: PD1
K8 P10 PD2/LCDVD10 LOW: PD2
N11 T11 PD3/LCDVD11 LOW: PD3
R9 T12 PD4/LCDVD12 LOW: PD4
T9 R11 PD5/LCDVD13 LOW: PD5
P10 R12 PD6/LCDVD14 LOW: PD6
R10 T13 PD7/LCDVD15 LOW: PD7
L10 T9 PE0/LCDVD4
N10 K9 PE1/LCDVD5 Input: PE1
M9 T10 PE2/LCDVD6 Input: PE2
M10 R10 PE3/LCDVD7 Input: PE3
A6 A5 PF0/INT0
B6 B4 PF1/INT1
C6 E7 PF2/INT2
H8 B3 PF3/INT3
B5 C5
D6 D6
E6 A4
C5 A3
R3 M6 PG0/nPCOE
T3 T1 PG1/nPCWE
PIN
SIGNAL DESCRIPTION
• GPIO Port C
• LCD Latch Pulse
• GPIO Port C
• LCD Start Pulse Left
• GPIO Port D
• LCD Video Data Bus
• GPIO Port E
• LCD Video Data Bus
• GPIO Port F
• External FIQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• GPIO Port F
• External IRQ Interrupts. Interrupts can be level
or edge triggered and are internally debounced.
• GPIO Port F
• External IRQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• GPIO Port F
PF4/INT4/
SCVCCEN
PF5/INT5/
SCDETECT
PF6/INT6/
PCRDY1
PF7/INT7/
PCRDY2
• External IRQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• Smart Card Supply Voltage Enable
• GPIO Port F
• External IRQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• Smart Card Detection
• GPIO Port F
• External IRQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• Ready for Card 1 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port F
• External IRQ Interrupt. Interrupts can be level or
edge triggered and are internally debounced.
• Ready for Card 2 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port G
• Output Enable for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port G
• Write Enable for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
RESET
STATE
LOW: PC6 No Change 12 mA
LOW: PC7 No Change 12 mA
LOW: PD0
Input: PE0 LOW if 8-bit
Input: PF0
(Schmitt)
Input: PF1
(Schmitt)
Input: PF2
(Schmitt)
Input: PF3
(Schmitt)
Input: PF4
(Schmitt)
Input: PF5
(Schmitt)
Input: PF6
(Schmitt)
Input: PF7
(Schmitt)
LOW: PG0 No Change 8 mA
LOW: PG1 No Change 8 mA
STANDBY
STATE
LOW if
Dual-Panel
LCD is
Enabled;
otherwise,
No Change
LCD is
Enabled,
otherwise
No Change
No Change 8 mA
No Change 8 mA
No Change 8 mA
No Change 8 mA
LOW if SCI
is Enabled;
otherwise,
No Change
No Change 8 mA
No Change 8 mA
No Change 8 mA
OUTPUT
DRIVE
12 mA
12 mA
8 mA
8 12/8/03 Preliminary Data Sheet
Page 9
32-Bit System-on-Chip LH7A400
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
L6 P4 PG2/nPCIOR
M6 R3 PG3/nPCIOW
N6 T2 PG4/nPCREG
M7 P5 PG5/nPCCE1
M8 R4 PG6/nPCCE2
N4 T3 PG7/PCDIR
P4 P6
R4 T4
T4 M7
N7 T5
P8 R6
P5 R7
PIN
SIGNAL DESCRIPTION
PH0/
PCRESET1
PH1/CFA8/
PCRESET2
PH2/
nPCSLOTE1
PH3/CFA9/
PCMCIAA25/
nPCSLOTE2
PH4/
nPCWAIT1
PH5/CFA10/
PCMCIAA24/
nPCWAIT2
• GPIO Port G
• I/O Read Strobe for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port G
• I/O Write Strobe for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port G
• Register Memory Access for PC Card (PCMCIA
or CompactFlash) in single or dual card mode
• GPIO Port G
• Card Enable 1 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode.
This signal and nPCCE2 are used by the PC
Card for decoding low and high byte accesses.
• GPIO Port G
• Card Enable 2 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode.
This signal and nPCCE1 are used by the PC
Card for decoding low and high byte accesses.
• GPIO Port G
• Direction for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port H
• Reset Card 1 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• GPIO Port H
• Address Bit 8 for PC Card (CompactFlash) in
single card mode
• Reset Card 2 for PC Card (PCMCIA or
CompactFlash) in dual card mode
• GPIO Port H
• Enable Card 1 for PC Card (PCMCIA or
CompactFlash) in single or dual card mode.
This signal is used for gating other control signals to the appropriate PC Card.
• GPIO Port H
• Address Bit 9 for PC Card (CompactFlash) in
single card mode
• Address Bit 25 for PC Card (PCMCIA) in single
card mode
• Enable Card 2 for PC Card (PCMCIA or
CompactFlash) in dual card mode. This signal
is used for gating other control signals to the
appropriate PC Card.
• GPIO Port H
• WAIT Signal for Card 1 for PC Card (PCMCIA
or CompactFlash) in single or dual card mode
• GPIO Port H
• Address Bit 10 for PC Card (CompactFlash) in
single card mode
• Address Bit 24 for PC Card (PCMCIA) in single
card mode
• WAIT Signal f o r Ca r d 2 for PC Card (PCMCIA
or CompactFlash) in dual card mode
RESET
STATE
LOW: PG2 No Change 8 mA
LOW: PG3 No Change 8 mA
LOW: PG4 No Change 8 mA
LOW: PG5 No Change 8 mA
LOW: PG6 No Change 8 mA
LOW: PG7 No Change 8 mA
Input: PH0 No Change 8 mA
Input: PH1 No Change 8 mA
Input: PH2 No Change 8 mA
Input: PH3 No Change 8 mA
Input: PH4 No Change 8 mA
Input: PH5 No Change 8 mA
STANDBY
STATE
OUTPUT
DRIVE
Preliminary Data Sheet 12/8/03 9
Page 10
LH7A400 32-Bit System-on-Chip
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
R5 P7
T5 T6
R6 T7 LCDFP LCD Frame Synchronization pulse LOW LOW 12 mA
R8 R9 LCDLP LCD Line Synchronization pulse LOW LOW 12 mA
P9 P9
N9 N9 LCDDCLK LCD Data Clock LOW LOW 12 mA
P7 M8 LCDVD0
R7 P8 LCDVD1
T7 R8 LCDVD2
N8 T8 LCDVD3
T15 T16 USBDP USB Data Positive (Differential Pair) Input Input
T16 R16 USBDN USB Data Negative (Differential Pair) Input Input
E7 C7 nPWME0
D7 A6 nPWME1
C7 B6 PWM0
B7 B5 PWM1
C4 A2 ACBITCLK
D5 A1 ACOUT
B4 B2 ACSYNC
A4 E6 ACIN
A3 C3
B3 B1
A2 D4
E2 E1 UARTCTS2
E3 F3 UARTDCD2
E5 G4 UARTDSR2 UART2 Data Set Ready Signal Input Input
F2 G5 UARTIRTX1 IrDA Transmit LOW LOW 8 mA
F3 G6 UARTIRRX1
F4 F1 UARTTX2 UART2 Transmit Data Output HIGH HIGH 8 mA
PIN
SIGNAL DESCRIPTION
PH6/
AC97RESET
PH7/nPCSTATRE
LCDENAB/
LCDM
MMCCLK/
MMSPICLK
MMCCMD/
MMSPIDIN
MMCDATA/
MMSPIDOUT
• GPIO Port H
• Audio Codec (AC97) Reset
• GPIO Port H
• Status Read Enable for PC Card (PCMCIA or
CompactFlash) in single or dual card mode
• LCD TFT Data Enable
• LCD STN AC Bias
LCD Video Data Bus LOW LOW 12 mA
DC-DC Converter Pulse Width
Modulator 0 Enable
DC-DC Converter Pulse Width
Modulator 1 Enable
DC-DC Converter Pulse Width
Modulator 0 Output during normal operation and
Polarity Selection input at reset
DC-DC Converter Pulse Width
Modulator 1 Output during normal operation and
Polarity Selection input at reset
• Audio Codec (AC97) Clock
• Audio Codec (ACI) Clock
• Audio Codec (AC97) Output
• Audio Codec (ACI) Output
• Audio Codec (AC97) Synchronization
• Audio Codec (ACI) Synchronization
• Audio Codec (AC97) Input
• Audio Codec (ACI) Input
• MultiMediaCard Clock (20 MHz MAX.)
• MultiMediaCard SPI Mode Clock
• MultiMediaCard Command
• MultiMediaCard SPI Mode Data Input
• MultiMediaCard Data
• MultiMediaCard SPI Mode Data Output
UART2 Clear to Send Signal. This pin is an output for JTAG boundary scan only.
UART2 Data Carrier Detect Signal. This pin is output for JTAG boundary scan only.
IrDA Receive. This pin is an output for JTAG
boundary scan only.
RESET
STATE
Input: PH6 No Change 8 mA
Input: PH7 No Change 8 mA
LOW:
LCDENAB
Input Input
Input Input
Input Input 8 mA
Input Input 8 mA
Input Input
LOW LOW 8 mA
LOW LOW 8 mA
Input Input
LOW:
MMCCLK
Input:
MMCCMD
Input:
MMCDATA
Input Input
Input Input
Input Input
STANDBY
STATE
LOW 12 mA
LOW 8 mA
Input 8 mA
Input 8 mA
OUTPUT
DRIVE
75 mA
(NOM.)
75 mA
(NOM.)
10 12/8/03 Preliminary Data Sheet
Page 11
32-Bit System-on-Chip LH7A400
Table 1. Functional Pin List (Cont’d)
PBGA
CABGA
PIN
J7 G3 UARTRX2
H4 J3 SSPCLK Synchronous Serial Port Clock LOW LOW 8 mA
J1 J6 SSPRX Synchronous Serial Port Receive Input Input
J2 J7 SSPTX Synchronous Serial Port Transmit LOW LOW 8 mA
J3 J2
F6 G2 COL0
F5 G1 COL1
G1 H3 COL2
G2 H5 COL3
G4 H6 COL4
G5 H7 COL5
H1 H2 COL6
H2 H1 COL7
H3 J1 TBUZ Timer Buzzer (254 kHz MAX.) LOW LOW 8 mA
C3 F5 MEDCHG
P11 T14 WIDTH0
R12 T15 WIDTH1
D1 E3 BATOK Battery OK Input (Schmitt) Input
D2 F6 nBATCHG Battery Change Input (Schmitt) Input
A1 E5 TDI
B1 C2 TCK
B2 D3 TDO
C1 C1 TMS
T12 P15 nTEST0
R15 P13 nTEST1
PIN
SIGNAL DESCRIPTION
UART2 Receive Data Input. This pin is an output
for JTAG boundary scan only.
SSPFRM/
nSSPFRM
Synchronous Serial Port Frame Sync
Keyboard Interface HIGH HIGH 8 mA
Boot Device Media Change. Used with the
WIDTH0 and WIDTH1 pins to specify boot memory device.
External Memory Width Pins. Also, used with
MEDCHG to specify the boot memory device size.
JTAG Data In. This signal is internally pulled-up
to VDD.
JTAG Clock. This signal should be externally
pulled-up to VDD.
JTAG Data Out. This signal should be externally
pulled up to VDD with a 33 k
JTAG Test Mode select. This signal is internally
pulled-up to VDD.
Test Pin 0. Internally pulled up to VDD. For Normal
mode, leave open. For JTAG mode, tie to GND.
See Table 2.
Test Pin 1. internally pulled up to VDD. For Normal
and JTAG mode, leave open. See Table 2.
Ω resistor.
RESET
STATE
Input Input
Input:
nSSPFRM
Input (Schmitt) Input
Input (Schmitt) Input
Input with
Pull-up
Input Input
Input No Change 4 mA
Input with
Pull-up
Input with
Pull-up
Input with
Pull-up
STANDBY
STATE
Input 8 mA
Input with
Pull-up
Input with
Pull-up
Input with
Pull-up
Input with
Pull-up
OUTPUT
DRIVE
NOTES: *Signals beginning with ‘n’ are Active LOW.
Table 2. nTest Pin Function
MODE nTEST0 nTEST1 nURESET
JTAG 0 1 1
Normal 1 1 x
Preliminary Data Sheet 12/8/03 11
Page 12
LH7A400 32-Bit System-on-Chip
Table 3. LCD Data Multiplexing
STN
PBGA
CABGA
PIN
K1 K2 LCDVD17 LOW
J5 K1 LCDVD16 LOW
R10 T13 LCDVD15 MLSTN7 CLSTN7 Intensity Intensity
P10 R12 LCDVD14 MLSTN6 CLSTN6 BLUE4 BLUE4
T9 R11 LCDVD13 MLSTN5 CLSTN5 BLUE3 BLUE3
R9 T12 LCDVD12 MLSTN4 CLSTN4 BLUE2 BLUE2
N11 T11 LCDVD11 MLSTN3 CLSTN3 BLUE1 BLUE1
K8 P10 LCDVD10 MLSTN2 CLSTN2 BLUE0 BLUE0
L11 K10 LCDVD9 MLSTN1 CLSTN1 GREEN4 GREEN4
M11 M9 LCDVD8 MLSTN0 CLSTN0 GREEN3 GREEN3
M10 R10 LCDVD7 MLSTN3 MUSTN7 MUSTN7 CUSTN7 CUSTN7 GREEN2 GREEN2
M9 T10 LCDVD6 MLSTN2 MUSTN6 MUSTN6 CUSTN6 CUSTN6 GREEN1 GREEN1
N10 K9 LCDVD5 MLSTN1 MUSTN5 MUSTN5 CUSTN5 CUSTN5 GREEN0 GREEN0
L10 T9 LCDVD4 MLSTN0 MUSTN4 MUSTN4 CUSTN4 CUSTN4 RED4 RED4
N8 T8 LCDVD3 MUSTN3 MUSTN3 MUSTN3 MUSTN3 CUSTN3 CUSTN3 RED3 RED3
T7 R8 LCDVD2 MUSTN2 MUSTN2 MUSTN2 MUSTN2 CUSTN2 CUSTN2 RED2 RED2
R7 P8 LCDVD1 MUSTN1 MUSTN1 MUSTN1 MUSTN1 CUSTN1 CUSTN1 RED1 RED1
P7 M8 LCDVD0 MUSTN0 MUSTN0 MUSTN0 MUSTN0 CUSTN0 CUSTN0 RED0 RED0
PIN
LCD
DATA
SIGNAL
MONO 4-BIT MONO 8-BIT COLOR
SINGLE
PANEL
DUAL
PANEL
SINGLE
PANEL
DUAL
PANEL
SINGLE
PANEL
DUAL
PANEL
TFT
AD-TFT/
HR-TFT
NOTES:
1. The Intensity bit is identically generated for all three colors.
2. MU = Monochrome Upper
3. CU = Color Upper
4. CL = Color Lower
12 12/8/03 Preliminary Data Sheet
Page 13
32-Bit System-on-Chip LH7A400
Table 4. 256-Ball PBGA Package Numerical Pin List
BGA PIN SIGNAL RESET STATE STANDBY STATE
A1 TDI Input with Pull-up Input with Pull-up
A2 MMCDATA/MMSPIDOUT Input: MMSPIDOUT LOW
A3 MMCCLK/MMSPICLK LOW: MMSPICLK LOW
A4 ACIN Input Input
A5 VSS
A6 PF0/INT0 Input: PF0 No Change
A7 VDDC
A8 A27/SCRST LOW: A27 LOW
A9 DQM0 HIGH LOW
A10 SCLK LOW LOW
A11 VSS
A12 nSCS3 HIGH HIGH
A13 A24 LOW LOW
A14 D24 LOW LOW
A15 A23 LOW LOW
A16 D23 LOW LOW
B1 TCK Input Input
B2 TDO Input No Change
B3 MMCCMD/MMSPIDIN Input: MMSPIDIN LOW
B4 ACSYNC LOW LOW
B5 PF4/INT4/SCVCCEN Input: PF4 LOW if SCI is Enabled; otherwise, No Change
B6 PF1/INT1 Input: PF1 No Change
B7 PWM1 Input Input
B8 VDD
B9 DQM1 HIGH LOW
B10 CS6/SCKE1_2 LOW: CS6 LOW
B11 D30 LOW LOW
B12 D29 LOW LOW
B13 D25 LOW LOW
B14 VDD
B15 VSSC
B16 A22 LOW LOW
C1 TMS Input with Pull-up Input with Pull-up
C2 nEXTPWR Input Input
C3 MEDCHG Input Input
C4 ACBITCLK Input Input
C5 PF7/INT7/PCRDY2 Input: PF7 No Change
C6 PF2/INT2 PF2/INT2 No Change
C7 PWM0 Input Input
C8 nWE0 HIGH HIGH
C9 VSSC
C10 CS7/SCKE0 LOW: CS7 LOW
C11 nCAS HIGH HIGH
C12 nSWE HIGH HIGH
C13 D26 LOW LOW
Preliminary Data Sheet 12/8/03 13
Page 14
LH7A400 32-Bit System-on-Chip
Table 4. 256-Ball PBGA Package Numerical Pin List (Cont’d)
BGA PIN SIGNAL RESET STATE STANDBY STATE
C14 nSCS0 HIGH HIGH
C15 VSS
C16 A21 LOW LOW
D1 BATOK Input Input
D2 nBATCHG Input Input
D3 nPOR Input Input
D4 WAKEUP Input Input
D5 ACOUT LOW LOW
D6 PF5/INT5/SCDETECT Input: PF5 No Change
D7 nPWME1 Input Input
D8 nOE HIGH HIGH
D9 DQM2 HIGH LOW
D10 nWE3 HIGH HIGH
D11 D31 LOW LOW
D12 VDDC
D13 nSCS1 HIGH HIGH
D14 D21 LOW LOW
D15 A20 LOW LOW
D16 D19 LOW LOW
E1 VDDC
E2 UARTCTS2 Input Input
E3 UARTDCD2 Input Input
E4 nPWRFL Input Input
E5 UARTDSR2 Input Input
E6 PF6/INT6/PCRDY1 Input: PF6 No Change
E7 nPWME0 Input Input
E8 VSS
E9 DQM3 HIGH LOW
E10 VDD
E11 nSCS2 HIGH HIGH
E12 D27 LOW LOW
E13 A18 LOW LOW
E14 D18 LOW LOW
E15 VDDC
E16 A17/SB1 LOW: SBANK1 LOW
F1 VDD
F2 UARTIRTX1 LOW LOW
F3 UARTIRRX1 Input Input
F4 UARTTX2 HIGH HIGH
F5 COL1 HIGH HIGH
F6 COL0 HIGH HIGH
F7 VSS
F8 A26/SCCLK LOW: A26 LOW
F9 nRAS HIGH HIGH
F10 D22 LOW LOW
14 12/8/03 Preliminary Data Sheet
Page 15
32-Bit System-on-Chip LH7A400
Table 4. 256-Ball PBGA Package Numerical Pin List (Cont’d)
BGA PIN SIGNAL RESET STATE STANDBY STATE
F11 A19 LOW LOW
F12 D17 LOW LOW
F13 VDD
F14 A16/SB0 LOW: SBANK0 LOW
F15 D16 LOW LOW
F16 A15/SA13 LOW: SA13 LOW
G1 COL2 HIGH HIGH
G2 COL3 HIGH HIGH
G3 VSS
G4 COL4 HIGH HIGH
G5 COL5 HIGH HIGH
G6 VSSC
G7 VDD
G8 A25/SCIO LOW: A25 LOW
G9 SCKE3 LOW LOW
G10 D28 LOW LOW
G11 D14 LOW LOW
G12 D15 LOW LOW
G13 A14/SA12 LOW: SA12 LOW
G14 A13/SA11 LOW: SA11 LOW
G15 D13 LOW LOW
G16 A12/SA10 LOW: SA10 LOW
H1 COL6 HIGH HIGH
H2 COL7 HIGH HIGH
H3 TBUZ LOW LOW
H4 SSPCLK LOW LOW
H5 VSSC
H6 nURESET Input Input
H7 VSS
H8 PF3/INT3 Input: PF3 No Change
H9 VSS
H10 D20 LOW LOW
H11 D6 LOW LOW
H12 VSSC
H13 D12 LOW LOW
H14 A11/SA9 LOW: SA9 LOW
H15 D11 LOW LOW
H16 A10/SA8 LOW: SA8 LOW
J1 SSPRX Input Input
J2 SSPTX LOW LOW
J3 SSPFRM/nSSPFRM Input: nSSPFRM Input
J4 VDDC
J5 PA0/LCDVD16 Input: PA0 No Change
J6 PGMCLK LOW LOW
J7 UARTRX2 Input Input
Preliminary Data Sheet 12/8/03 15
Page 16
LH7A400 32-Bit System-on-Chip
Table 4. 256-Ball PBGA Package Numerical Pin List (Cont’d)
BGA PIN SIGNAL RESET STATE STANDBY STATE
J8 A6/SA4 LOW: SA4 LOW
J9 A9/SA7 LOW: SA7 LOW
J10 D10 LOW LOW
J11 VDD
J12 VDD
J13 D9 LOW LOW
J14 A8/SA6 LOW: SA6 LOW
J15 D8 LOW LOW
J16 A7/SA5 LOW: SA5 LOW
K1 PA1/LCDVD17 Input: PA1 No Change
K2 PA2 Input No Change
K3 PA3 Input No Change
K4 VSS
K5 PA4 Input No Change
K6 PC3/LCDREV LOW: PC3 No Change
K7 VDD
K8 PD2/LCDVD10 LOW: PD2
K9 VDDC
K10 nCS1 HIGH HIGH
K11 nCS0 HIGH HIGH
K12 D7 LOW LOW
K13 VSS
K14 A5/SA3 LOW: SA3 LOW
K15 A4/SA2 LOW: SA2 LOW
K16 A3/SA1 LOW: SA1 LOW
L1 PA5 Input No Change
L2 PA6 Input No Change
L3 PA7 Input No Change
L4 PB0/UARTRX1 Input: PB0 No Change
L5 PB1/UARTTX3 Input: PB1 LOW if UART3 is Enabled, otherwise No Change
L6 PG2/nPCIOR LOW: PG2 No Change
L7 PB2/UARTRX3 Input: PB2 No Change
L8 PC4/LCDSPS LOW: PC4 No Change
L9 VSSC
L10 PE0/LCDVD4 Input: PE0 LOW if 8-bit LCD is Enabled, otherwise No Change
L11 PD1/LCDVD9 LOW: PD1
L12 D0 LOW LOW
L13 VDDC
L14 D5 LOW LOW
L15 D4 LOW LOW
L16 D3 LOW LOW
M1 VDD
M2 PB3/UARTCTS3 Input: PB3 No Change
M3 VSSC
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
16 12/8/03 Preliminary Data Sheet
Page 17

32-Bit System-on-Chip LH7A400
Table 4. 256-Ball PBGA Package Numerical Pin List (Cont’d)
BGA PIN SIGNAL RESET STATE STANDBY STATE
M4 PB4/UARTDCD3 Input: PB4 No Change
M5 VDD
M6 PG3/nPCIOW LOW: PG3 No Change
M7 PG5/nPCCE1 LOW: PG5 No Change
M8 PG6/nPCCE2 LOW: PG6 No Change
M9 PE2/LCDVD6 Input: PE2 LOW if 8-bit LCD is Enabled; otherwise No Change
M10 PE3/LCDVD7 Input: PE3 LOW if 8-bit LCD is Enabled; otherwise No Change
M11 PD0/LCDVD8 LOW: PD0
M12 nCS3/nMMSPICS HIGH: nCS3 HIGH
M13 A2/SA0 LOW: SA0 LOW
M14 VDD
M15 D1 LOW LOW
M16 A0/nWE1 HIGH: nWE1 HIGH
N1 PB5/UARTDSR3 Input: PB5 No Change
N2 PB6/SWID/SMBD Input: PB6 Input if SMB is Enabled; otherwise No Change
N3 PB7/SMBCLK Input: PB7 Input if SMB is Enabled; otherwise No Change
N4 PG7/PCDIR LOW: PG7 No Change
N5 VSS
N6 PG4/nPCREG LOW: PG4 No Change
N7 PH3/CFA9/PCMCIAA25/nPCSLOTE2 Input: PH3 No Change
N8 LCDVD3 LOW LOW
N9 LCDDCLK LOW LOW
N10 PE1/LCDVD5 Input: PE1 LOW if 8-bit LCD is Enabled; otherwise No Change
N11 PD3/LCDVD11 LOW: PD3
N12 VDDA
N13 D2 LOW LOW
N14 A1/nWE2 HIGH: nWE2 HIGH
N15 VSSC
N16 VSS
P1 PC0/UARTTX1 LOW: PC0 No Change
P2 PC1/LCDPS LOW: PC1 No Change
P3 VDDC
P4 PH0/PCRESET1 Input: PH0 No Change
P5 PH5/CFA10/PCMCIAA24/nPCWAIT2 Input: PH5 No Change
P6 VSS
P7 LCDVD0 LOW LOW
P8 PH4/nPCWAIT1 Input: PH4 No Change
P9 LCDENAB/LCDM LOW: LCDENAB LOW
P10 PD6/LCDVD14 LOW: PD6
P11 WIDTH0 Input Input
P12 VSSA
P13 nCS2 HIGH HIGH
P14 CLKEN LOW LOW
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
Preliminary Data Sheet 12/8/03 17
Page 18

LH7A400 32-Bit System-on-Chip
Table 4. 256-Ball PBGA Package Numerical Pin List (Cont’d)
BGA PIN SIGNAL RESET STATE STANDBY STATE
P15 XTAL32OUT Output Output
P16 XTAL32IN Input Input
R1 PC2/LCDVDDEN LOW: PC2 No Change
R2 PC7/LCDSPL LOW: PC7 No Change
R3 PG0/nPCOE LOW: PG0 No Change
R4 PH1/CFA8/PCRESET2 Input: PH1 No Change
R5 PH6/nAC97RESET Input: PH6 No Change
R6 LCDFP LOW LOW
R7 LCDVD1 LOW LOW
R8 LCDLP LOW LOW
R9 PD4/LCDVD12 LOW: PD4
R10 PD7/LCDVD15 LOW: PD7
R11 VDDA
R12 WIDTH1 Input Input
R13 XTALIN Input Input
R14 VDD
R15 nTEST1 Input with Pull-up Input with Pull-up
R16 VSS
T1 PC5/LCDCLS LOW: PC5 No Change
T2 PC6/LCDHRLP LOW: PC6 No Change
T3 PG1/nPCWE LOW: PG1 No Change
T4 PH2/nPCSLOTE1 Input: PH2 No Change
T5 PH7/nPCSTATRE Input: PH7 No Change
T6 VDD
T7 LCDVD2 LOW LOW
T8 VDDC
T9 PD5/LCDVD13 LOW: PD5
T10 VSSC
T11 VSSA
T12 nTEST0 Input with Pull-up Input with Pull-up
T13 XTALOUT LOW LOW
T14 VSS
T15 USBDP HIGH HIGH
T16 USBDN LOW LOW
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
NOTE: ‘No Change’ means the pin remains as it was programmed
prior to entering the Standby state.
18 12/8/03 Preliminary Data Sheet
Page 19

32-Bit System-on-Chip LH7A400
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
A1 ACOUT LOW LOW
A2 ACBITCLK Input Input
A3 PF7/INT7/PCRDY2 Input: PF7 (Schmitt) No Change
A4 PF6/INT6/PCRDY1 Input: PF6 (Schmitt) No Change
A5 PF0/INT0 Input: PF0 (Schmitt) No Change
A6 nPWME1 Input Input
A7 A27/SCRST LOW: A27 LOW
A8 DQM3 HIGH HIGH
A9 DQM1 HIGH HIGH
A10 CS7/SCKE0 LOW: CS7 LOW
A11 SCKE3 LOW LOW
A12 D31 LOW LOW
A13 nSWE HIGH HIGH
A14 D29 LOW LOW
A15 nSCS1 HIGH HIGH
A16 D25 LOW LOW
B1 MMCCMD/MMSPIDIN Input: MMCCMD Input
B2 ACSYNC LOW LOW
B3 PF3/INT3 Input: PF3 (Schmitt) No Change
B4 PF1/INT1 Input: PF1 (Schmitt) No Change
B5 PWM1 Input Input
B6 PWM0 Input Input
B7 A26/SCCLK LOW: A26 LOW
B8 VSS
B9 DQM2 HIGH HIGH
B10 SCLK LOW LOW
B11 nCAS HIGH HIGH
B12 D30 LOW LOW
B13 D26 LOW LOW
B14 D27 LOW LOW
B15 A23 LOW LOW
B16 D23 LOW LOW
C1 TMS Input with Pull-up Input with Pull-up
C2 TCK Input Input
C3 MMCCLK/MMSPICLK LOW: MMCCLK LOW
C4 VDDC
C5 PF4/INT4/SCVCCEN Input: PF4 (Schmitt) LOW if SCI is Enabled; otherwise, No Change
C6 VSS
C7 nPWME0 Input Input
C8 nOE HIGH HIGH
C9 DQM0 HIGH HIGH
C10 VDD
C11 nRAS HIGH HIGH
Preliminary Data Sheet 12/8/03 19
Page 20

LH7A400 32-Bit System-on-Chip
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
C12 D28 LOW LOW
C13 nSCS0 HIGH HIGH
C14 A22 LOW LOW
C15 A21 LOW LOW
C16 A20 LOW LOW
D1 nURESET Input (Schmitt) Input
D2 nEXTPWR Input (Schmitt) Input
D3 TDO Input No Change
D4 MMCDATA/MMSPIDOUT Input: MMCDATA Input
D5 VSS
D6 PF5/INT5/SCDETECT Input: PF5 (Schmitt) No Change
D7 VDDC
D8 A25/SCIO LOW: A25 LOW
D9 nWE3 HIGH HIGH
D10 VDDC
D11 nSCS2 HIGH HIGH
D12 D24 LOW LOW
D13 VSS
D14 D21 LOW LOW
D15 A19 LOW LOW
D16 D18 LOW LOW
E1 UARTCTS2 Input Input
E2 WAKEUP Input (Schmitt) Input
E3 BATOK Input (Schmitt) Input
E4 nPOR Input Input
E5 TDI Input with Pull-up Input with Pull-up
E6 ACIN Input Input
E7 PF2/INT2 Input: PF2 (Schmitt) No Change
E8 VSS
E9 CS6/SCKE1_2 LOW: CS6 LOW
E10 nSCS3 HIGH HIGH
E11 A24 LOW LOW
E12 D22 LOW LOW
E13 D20 LOW LOW
E14 A18 LOW LOW
E15 D17 LOW LOW
E16 A16/SB0 LOW LOW
F1 UARTTX2 HIGH HIGH
F2 nPWRFL Input (Schmitt) Input
F3 UARTDCD2 Input Input
F4 VDDC
F5 MEDCHG Input (Schmitt) Input
F6 nBATCHG Input (Schmitt) Input
20 12/8/03 Preliminary Data Sheet
Page 21

32-Bit System-on-Chip LH7A400
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
F7 VSS
F8 nWE0 HIGH HIGH
F9 VDD
F10 VDDC
F11 VDD
F12 D19 LOW LOW
F13 A17/SB1 LOW LOW
F14 VDD
F15 D16 LOW LOW
F16 A15/SA13 LOW LOW
G1 COL1 HIGH HIGH
G2 COL0 HIGH HIGH
G3 UARTRX2 Input Input
E5 UARTDSR2 Input Input
G5 UARTIRTX1 LOW LOW
G6 UARTIRRX1 Input Input
G7 VSSC
G8 VDD
G9 D13 LOW LOW
G10 A13/SA11 LOW LOW
G11 A14/SA12 LOW LOW
G12 D15 LOW LOW
G13 VSS
G14 D14 LOW LOW
G15 A12/SA10 LOW LOW
G16 D12 LOW LOW
H1 COL7 HIGH HIGH
H2 COL6 HIGH HIGH
H3 COL2 HIGH HIGH
H4 VSSC
H5 COL3 HIGH HIGH
H6 COL4 HIGH HIGH
H7 COL5 HIGH HIGH
H8 VSSC
H9 VSS
H10 A10/SA8 LOW LOW
H11 D11 LOW LOW
H12 A11/SA9 LOW LOW
H13 VDD
H14 D10 LOW LOW
H15 A9/SA7 LOW LOW
H16 D9 LOW LOW
J1 TBUZ LOW LOW
Preliminary Data Sheet 12/8/03 21
Page 22

LH7A400 32-Bit System-on-Chip
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
J2 SSPFRM/nSSPFRM Input: nSSPFRM Input
J3 SSPCLK LOW LOW
J4 VDDC
J5 PGMCLK LOW LOW
J6 SSPRX Input Input
J7 SSPTX LOW LOW
J8 VDDC
J9 VDD
J10 D8 LOW LOW
J11 A7/SA5 LOW LOW
J12 D7 LOW LOW
J13 A6/SA4 LOW LOW
J14 VSS
J15 D6 LOW LOW
J16 A8/SA6 LOW LOW
K1 PA0/LCDVD16 Input: PA0 No Change
K2 PA1/LCDVD17 Input: PA1 No Change
K3 PA2 Input No Change
K4 PA3 Input No Change
K5 PA5 Input No Change
K6 PA4 Input No Change
K7 VSS
K8 VDDC
K9 PE1/LCDVD5 Input: PE1
K10 PD1/LCDVD9 LOW: PD1
K11 D3 LOW LOW
K12 A3/SA1 LOW LOW
K13 A4/SA2 LOW LOW
K14 D5 LOW LOW
K15 VDD
K16 A5/SA3 LOW LOW
L1 PA6 Input No Change
L2 PA7 Input No Change
L3 PB0/UARTRX1 Input: PB0 No Change
L4 VSSC
L5 PB4/UARTDCD3 Input: PB4 No Change
L6 VDDC
L7 VDD
L8 VSS
L9 VSSC
L10 VSS
L11 D0 LOW LOW
L12 VSS
22 12/8/03 Preliminary Data Sheet
Page 23

32-Bit System-on-Chip LH7A400
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
L13 D1 LOW LOW
L14 D2 LOW LOW
L15 A2/SA0 LOW LOW
L16 D4 LOW LOW
M1 PB1/UARTTX3 Input: PB1 LOW if UART3 is Enabled, otherwise No Change
M2 PB2/UARTRX3 Input: PB2 No Change
M3 PB3/UARTCTS3 Input: PB3 No Change
M4 PB7/SMBCLK Input: PB7 Input if SMB is Enabled, otherwise No Change
M5 PC3/LCDREV LOW: PC3 No Change
M6 PG0/nPCOE LOW: PG0 No Change
M7 PH2/nPCSLOTE1 Input: PH2 No Change
M8 LCDVD0 LOW LOW
M9 PD0/LCDVD8 LOW: PD0
M10 VDDA
M11 VSS
M12 CLKEN LOW LOW
M13 XTAL32OUT Output Output
M14 VSS
M15 A0/nWE1 HIGH: nWE1 HIGH
M16 A1/nWE2 HIGH: nWE2 HIGH
N1 PB5/UARTDSR3 Input: PB5 No Change
N2 PB6/SWID/SMBD Input: PB6 Input if SMB is Enabled, otherwise No Change
N3 VSSC
N4 PC5/LCDCLS LOW: PC5 No Change
N5 PC7/LCDSPL LOW: PC7 No Change
N6 VDD
N7 VSSC
N8 VDD
N9 LCDDCLK LOW LOW
N10 VSSC
N11 VSSA
N12 VDD
N13 VDD
N14 XTAL32IN Input Input
N15 nCS2 HIGH HIGH
N16 nCS3/nMMSPICS HIGH: nCS3 HIGH
P1 PC0/UARTTX1 LOW: PC0 No Change
P2 PC1/LCDPS LOW: PC1 No Change
P3 PC4/LCDSPS LOW: PC4 No Change
P4 PG2/nPCIOR LOW: PG2 No Change
P5 PG5/nPCCE1 LOW: PG5 No Change
P6 PH0/PCRESET1 Input: PH0 No Change
LOW if Dual-Panel LCD is Enabled; otherwise,
No Change
Preliminary Data Sheet 12/8/03 23
Page 24

LH7A400 32-Bit System-on-Chip
Table 5. 256-Ball CABGA Package Numerical Pin List
CABGA PIN SIGNAL RESET STATE STANDBY STATE
P7 PH6/AC97RESET Input: PH6 No Change
P8 LCDVD1 LOW LOW
P9 LCDENAB/LCDM LOW: LCDENAB LOW
P10 PD2/LCDVD10 LOW: PD2 No Change
P11 VDD No Change
P12 VDDA
P13 nTEST1 Input with Pull-up Input with Pull-up
P14 nCS0 HIGH HIGH
P15 nTEST0 Input with Pull-up Input with Pull-up
P16 nCS1 HIGH HIGH
R1 PC2/LCDVDDEN LOW: PC2 No Change
R2 PC6/LCDHRLP LOW: PC6 No Change
R3 PG3/nPCIOW LOW: PG3 No Change
R4 PG6/nPCCE2 LOW: PG6 No Change
R5 VSSC
R6 PH4/nPCWAIT1 Input: PH4 No Change
R7 PH5/CFA10/PCMCIAA24/nPCWAIT2 Input: PH5 No Change
R8 LCDVD2 LOW LOW
R9 LCDLP LOW LOW
R10 PE3/LCDVD7 Input: PE3 No Change
R11 PD5/LCDVD13 LOW: PD5 No Change
R12 PD6/LCDVD14 LOW: PD6 No Change
R13 VSSA
R14 XTALIN Input Input
R15 XTALOUT LOW LOW
R16 USBDN Input Input
T1 PG1/nPCWE LOW: PG1 No Change
T2 PG4/nPCREG LOW: PG4 No Change
T3 PG7/PCDIR LOW: PG7 No Change
T4 PH1/CFA8/PCRESET2 Input: PH1 No Change
T5 PH3/CFA9/PCMCIAA25/nPCSLOTE2 Input: PH3 No Change
T6 PH7/nPCSTATRE Input: PH7 No Change
T7 LCDFP LOW LOW
T8 LCDVD3 LOW LOW
T9 PE0/LCDVD4 Input: PE0
T10 PE2/LCDVD6 Input: PE2 No Change
T11 PD3/LCDVD11 LOW: PD3 No Change
T12 PD4/LCDVD12 LOW: PD4 No Change
T13 PD7/LCDVD15 LOW: PD7 No Change
T14 WIDTH0 Input (Schmitt) Input
T15 WIDTH1 Input (Schmitt) Input
T16 USBDP Input Input
LOW if 8-bit LCD is Enabled, otherwise
No Change
24 12/8/03 Preliminary Data Sheet
Page 25

32-Bit System-on-Chip LH7A400
TOUCH
SCREEN
CONTR.
ROM
FLASH
SRAM
SDRAM
1 2 3
4 5 6
7 8 9
*
0 #
GPIO
STN/TFT/
AD-TFT
SSP
UART
SCI
SMART
CARD
MMC
MULTIMEDIA
CARD
LH7A400
COMPACT
FLASH
PC
CARD
PCMCIA
UART
USB
Figure 2. Application Diagram
SYSTEM DESCRIPTIONS
ARM922T Processor
The LH7A400 microcontroller features the
ARM922T cached core with an Advanced High Performance Bus (AHB) interface. The processor is a member of the ARM9T family of processors. For more
information, see the ARM document, ‘ARM922T Technical Reference Manual’, available on ARM’s website
at www.arm.com.
Clock and State Controller
The clocking scheme in the LH7A400 is based
around two primary oscillator inputs. These are the
14.7456 MHz input crystal and the 32.768 kHz real time
clock oscillator. See Figure 3. The 14.7456 MHz oscillator is used to generate the main system clock
domains for the LH7A400, where as the 32.768 kHz is
used for controlling the power down operations and
real time clock peripheral. The clock and state controller provides the clock gating and frequency division
necessary, and then supplies the clocks to the processor and to the rest of the system. The amount of clock
gating that actually takes place is dependent on the
current power saving mode selected.
DMA
AC97
IR
BMI
BATTERY
CODEC
DC to DC
VOLT AGE
GENERATION
CIRCUITRY
LH7A400-3
The 32.768 kHz clock provides the source for the
Real Time Clock tree and power-down logic.This clock
is used for the power state control in the design and is
the only clock in the LH7A400 that runs permanently.
The 32.768 kHz clock is divided down to 1 Hz using a
ripple divider to save power. This generated 1 Hz clock
is used in the Real Time Clock counter.
The 14.7456 MHz source is used to generate the
main system clocks for the LH7A400. It is the source
for PLL1 and PLL2, it acts as the primary clo ck to the
peripherals and is the source clock to the Programmable clock (PGM) divider.
PLL1 provides the main clock tree for the chip, it
generates the following clocks: FCLK, HCLK and
PCLK. FCLK is the clock that drives the ARM922T
core. HCLK is the main bus (AHB) clock, as such it
clocks all memory interfaces, bus arbitrators and the
AHB peripherals. HCLK is generated by dividing FCLK
by 1, 2, 3, or 4. HCLK can be gated by the system to
enable low power operation. PCLK is the peripheral
bus (APB) clock. It is generated by dividing HCLK by
either 2, 4, or 8.
PLL2 is used to generate a fixed frequency of
48 MHz for the USB peripheral.
Preliminary Data Sheet 12/8/03 25
Page 26

LH7A400 32-Bit System-on-Chip
14.7456 MHz
MAIN OSC.
32.768 kHz
RTC OSC.
STATE CONTROLLER
DIVIDE REGISTER
HCLK
Figure 3. Clock and State Controller Block Diagram
Power Modes
The LH7A400 has three operational states: Run,
Halt, and Standby. In Run mode, all clocks are hardware-enabled and the processor is clocked. Halt mode
stops the processor clock while waiting for an event
such as a key press, but the dev ice contin ues to fu nction. Finally, Standby equates to the computer being
switched ‘off’, i.e. no display (LCD disabled) and the
main oscillator is shut down. The 32.768 kHz oscillator
operates in all three modes.
Reset Modes
There are three external signals that can generate
resets to the LH7A400; these are nPOR (power on
reset), nPWRFL (power failure) and nURESET (user
reset). If any of these are active, a system reset is generated internally. A nPOR reset performs a full system
reset. The nPWRFL and nURESET resets will perform
a full system reset except for the SDRAM refresh control, SDRAM Global Configuration, SDRAM Device
Configuration and the RTC peripheral r egisters. The
SDRAM controller will issue a self-refresh command to
external SDRAM before the system enters this reset
(the nPWRFL and nURESET resets only, not so for the
nPOR reset). This allows the system to maintain its
Real Time Clock and SDRAM contents. On coming out
of reset, the chip enters Standby mode. Once in Run
mode the PWRSR register can be interrogated to determine the nature of the reset, and the trigger source,
after which software can then take appropriate actions.
FCLK
HCLK
(TO PROCESSOR CORE)
/2, /4, /8 PCLKs
LH7A400-4
Data Paths
The data paths in the LH7A400 are:
• The AMBA AHB bus
• The AMBA APB bus
• The External Bus Interface
• The LCD AHB bus
• The DMA busses.
AMBA AHB BUS
The Advanced Microprocessor Bus Architecture
Advanced High-performance Bus (AMBA AHB) bus is a
high speed 32-bit-wide data bus. The AMBA AHB is for
high-performance, high clock frequency system modules.
Peripherals that have high bandwidth requirements
are connected to the LH7A400 core processor using
the AHB bus. These include the external and internal
memory interfaces, the LCD registers, palette RAM
and the bridge to the Advanced Peripheral Bus (APB)
interface. The APB Bridge transparently converts the
AHB access into the slower speed APB accesses. All
of the control registers for the APB peripheral s are programmed using the AHB - APB bridge interface. The
main AHB data and address lines are configured using
a multiplexed bus. This removes the need for tri-state
buffers and bus holders, and simplifies bus arbitra tio n.
26 12/8/03 Preliminary Data Sheet
Page 27

32-Bit System-on-Chip LH7A400
AMBA APB BUS
The AMBA APB bus is a lower-speed 32-bit-wide
peripheral data bus. The speed of this bus is selectable
to be a divide-by-2, divide-by-4 or divide-by-8 of the
speed of the AHB bus.
EXTERNAL BUS INTERFACE
The External Bus Interface (EBI) provides a 32-bit
wide, high speed gateway to external memory devices.
The memory devices supported include:
• Asynchronous RAM/ROM/Flash
• Synchronous DRAM/Flash
• PCMCIA interfaces
• CompactFlash interfaces.
The EBI can be controlled by either the Asynchronous memory controller or Synchronous memory controller. There is an arbiter on the EBI input, with priority
given to the Synchronous Memory Controller int erface.
LCD AHB BUS
The LCD controller has its own local memory bus
that connects it to the system’s embedded m emory and
external SDRAM. The function of this local data bus is
to allow the LCD controller to perform its video refresh
function without congesting the AHB bus. This leads to
better system performance and lower power consumption. There is an arbiter on both th e embedded memory
and the synchronous memory controller. In b oth cases
the LCD bus is given priority.
DMA BUSES
The LH7A400 has a DMA system that conn ects t he
higher speed/higher data volume APB peripherals
(MMC, USB and AC97) to the AHB bus. This enables
the efficient transfer of data between these peripherals
and external memory without the intervention of the
ARM922T core. The DMA engine d oes not support
memory to memory transfers.
Memory Map
The LH7A400 system has a 32-bit-wide address bus.
This allows it to address up to 4GB of memory. This
memory space is subdivided into a number of memory
banks; see Figure 4. Four of these banks (each of
256MB) are allocated to the Synchronous memory controller. Eight of the banks (again, each 256MB) are allo cated to the Asynchronous memory controller. Two of
these eight banks are designed for PCMCIA systems.
Part of the remaining memory space is allocated to the
embedded SRAM, and to the control registers of the
AHB and APB. The rest is unused.
The LH7A400 can boot from either synchronous or
asynchronous ROM/Flash. The selection is determined
by the value of the MEDCHG pin at Power On Reset as
shown in Table 6. When booting from synchronous
memory, then synchronous bank 4 (nSCS3) is mapped
into memory location zero. When booting from asynchronous memory, asynchronous memory bank 0
(nSCS0) is mapped into memory location zero.
Figure 4 shows the memory map of the LH7A400
system for the two boot modes.
Once the LH7A400 has booted, the boot code can
configure the ARM922T MMU to remap the low memory space to a location in RAM. This allows the user to
set the interrupt vector table.
Table 6. Boot Modes
BOOT MODE
8-bit ROM 0 0 0
16-bit ROM 0 1 0
32-bit ROM 1 0 0
32-bit ROM 1 1 0
16-bit SFlash
(Initializes Mode Register)
16-bit SROM
(Initializes Mode Register)
32-bit SFlash
(Initializes Mode Register)
32-bit SROM
(Initializes Mode Register)
LATCHED
BOOT-
WIDTH1
0 0 1
0 1 1
1 0 1
1 1 1
LATCHED
BOOT-
WIDTH0
LATCHED
MEDCHG
Interrupt Controller
The LH7A400 interrupt controller is designed to control the interrupts from 28 different sources. Four interrupt sources are mapped to the FIQ input of the
ARM922T and 24 are mapped to the IRQ input. FIQs
have a higher priority than the IRQs. If two interrupts
with the same priority become active at the same time,
the priority must be resolved in software.
When an interrupt becomes active, the interrupt controller generates an FIQ or IRQ if the corresponding
mask bit is set. No latching of interrupts takes place in
the controller. After a Power On Reset all mask register
bits are cleared, therefore masking all interrupts.
Hence, enabling of the mask register must be done by
software after a power-on-reset.
Preliminary Data Sheet 12/8/03 27
Page 28

LH7A400 32-Bit System-on-Chip
E000.0000
D000.0000
C000.0000
B001.4000
B000.0000
8000.3800
8000.2000
8000.0000
7000.0000
6000.0000
5000.0000
4000.0000
3000.0000
2000.0000
1000.0000
0000.0000
ASYNCHRONOUS MEMORY (nCS0)F000.0000
SYNCHRONOUS MEMORY (nSCS2)
SYNCHRONOUS MEMORY (nSCS1)
SYNCHRONOUS MEMORY (nSCS0)
RESERVED
EMBEDDED SRAM
RESERVED
AHB INTERNAL REGISTERS
APB INTERNAL REGISTERS
ASYNCHRONOUS MEMORY (CS7)
ASYNCHRONOUS MEMORY (CS6)
PCMCIA/CompactFlash (nPCSLOTE2)
PCMCIA/CompactFlash (nPCSLOTE1)
ASYNCHRONOUS MEMORY (nCS3)
ASYNCHRONOUS MEMORY (nCS2)
ASYNCHRONOUS MEMORY (nCS1)
SYNCHRONOUS ROM (nSCS3)
SYNCHRONOUS MEMORY BOOT
Figure 4. Memory Mapping for Ea ch Boot Mode
SYNCHRONOUS MEMORY (nSCS3)
SYNCHRONOUS MEMORY (nSCS2)
SYNCHRONOUS MEMORY (nSCS1)
SYNCHRONOUS MEMORY (nSCS0)
RESERVED
EMBEDDED SRAM
RESERVED
AHB INTERNAL REGISTERS
APB INTERNAL REGISTERS
ASYNCHRONOUS MEMORY (CS7)
ASYNCHRONOUS MEMORY (CS6)
PCMCIA/CompactFlash (nPCSLOTE2)
PCMCIA/CompactFlash (nPCSLOTE1)
ASYNCHRONOUS MEMORY (nCS3)
ASYNCHRONOUS MEMORY (nCS2)
ASYNCHRONOUS MEMORY (nCS1)
ASYNCHRONOUS ROM (nCS0)
ASYNCHRONOUS MEMORY BOOT
256MB
256MB
256MB
256MB
80KB
256MB
256MB
256MB
256MB
256MB
256MB
256MB
256MB
LH7A400-6
External Bus Interface
The external bus interface allows the ARM922T,
LCD controller and DMA engine access to an external
memory system. The LCD controller has access to an
internal frame buffer in embedded SRAM and an extension buffer in Synchronous Memory for large displays.
The processor and DMA engine share the main system
bus, providing access to all external memory devices
and the embedded SRAM frame buffer.
An arbitration unit ensures that control over the
External Bus Interface (EBI) is only granted when an
existing access has been completed. See Figure 5.
Embedded SRAM
The amount of Embedded SRAM contained in the
LH7A400 is 80KB. This Embedded memory is designed
to be used for storing code, data, or LCD frame data
and to be contiguous with external SDRAM. The 80KB
is large enough to store a QVGA panel (320 × 240) at 8
bits per pixel, equivalent to 70KB of information.
Containing the frame buffer on chip reduces the
overall power consumed in any application that uses
the LH7A400. Normally, the system has to perform
external accesses to acquire this data. T he LCD controller is designed to automatically use an overflo w
frame buffer in SDRAM if a larger screen size is
required. This overflow buffer can be located on any
4KB page boundary in SDRAM, allowing software to
set the MMU (in the LCD controller) page tables such
that the two memory areas appear contiguous. Byte,
Half-Word and Word accesses are permissible.
Asynchronous Memory Controller
The Asynchronous memory controller is incorporated as part of the memory controller to provide an
interface between the AMBA AHB system bus and
external (off-chip) memory devices.
The Asynchronous Memory Controller prov ides support for up to eight independently configura ble memory
banks simultaneously. Each memory bank is capable
of supporting:
•SRAM
•ROM
• Flash EPROM
• Burst ROM memory.
Each memory bank may use devices using either 8-,
16-, or 32-bit external memory dat a paths. The memory
controller can be configured to support either littleendian or big-endian operation.
The memory banks can be configured to support:
• Non-burst read and write accesses only to high-
speed CMOS static RAM.
• Non-burst write accesses, nonburst read accesses
and asynchronous page mode read accesses to
fast-boot block flash memory.
28 12/8/03 Preliminary Data Sheet
Page 29

32-Bit System-on-Chip LH7A400
SDRAM
SDRAM
EXTERNAL TO
THE LH7A400
SRAM
ROM
INTERNAL TO
THE LH7A400
DATA
ADDRESS
and
CONTROL
EXTERNAL
BUS
INTERFACE
(EBI)
LCD
AHB
ASYNCHRONOUS
ARBITER
ARM922T
STATIC
MEMORY
CONTROLLER
(SMC)
PCMCIA/CF
SUPPORT
SYNCHRONOUS
DYNAMIC
MEMORY
CONTROLLER
(SDMC)
80KB
EMBEDDED
SRAM
LCD MEMORY
MANAGEMENT
UNIT (MMU)
ARBITERARBITER
ARBITER
COLOR LCD
CONTROLLER
(CLCDC)
AD-TFT
LCD TIMING
CONTROLLER
ADVANCED
HIGH-PERFORMANCE
BUS (AHB)
Figure 5. External Bus Interface Block Diagram
DMA
CONTROLLER
LH7A400-8
Preliminary Data Sheet 12/8/03 29
Page 30

LH7A400 32-Bit System-on-Chip
The Asynchronous Memory Controller has six main
functions:
• Memory bank select
• Access sequencing
• Wait states generation
• Byte lane write control
• External bus interface
• CompactFlash or PCMCIA interfacing.
Synchronous Memory Controller
The Synchronous memory controller provides a high
speed memory interface to a wide variety of Synchronous memory devices, including SDRAM, Synchronous Flash and Synchronous ROMs.
The key features of the controller are:
• LCD DMA port for high bandwidth
• Up to four Synchronous Memory banks that can be
independently set up
• Special configuration bits for Synchronous ROM
operation
• Ability to program Synchronous Flash devices using
write and erase commands
• On booting from Synchronous ROM, (and optionally
with Synchronous Flash), a configuration sequence is
performed before releasing the processor from reset
• Data is transferred between the controller and the
SDRAM in quad-word bursts. Longer transfers withi n
the same page are concatenated, forming a seamless burst
• Programmable for 16- or 32-bit data bus size
• Two reset domains are provided to enable SDRAM
contents to be preserved over a ‘soft’ reset
• Power saving Synchronous Memory SCKE and
external clock modes provided.
MultiMediaCard (MMC)
The MMC adapter combines all of the requirements
and functions of an MMC host. The adapter supports
the full MMC bus protocol, defined by the MMC Definition Group’s specification v.2.11. The controller can
also implement the SPI interface to the cards.
INTERFACE DESCRIPTION AND MMC OVERVIEW
The MMC controller uses the three-wire serial data
bus (clock, command, and data) to transfer data to and
from the MMC card, and to configure and acquire status
information from the card’s registers.
MMC bus lines can be divided into three groups:
• Power supply: VDD and VSS
• Data Transfer: MMCCMD, MMCDATA
• Clock: MMCLK.
MULTIMEDIACARD ADAPTER
The MultiMediaCard Adapter implements MultiMediaCard specific functions, serves as the bus master for the
MultiMediacard Bus and implements the standard interface to the MultiMediaCard Cards (card initialization,
CRC generation and validation, comma nd/response
transactions, etc.).
Smart Card Interface (SCI)
The SCI (ISO7816) interfaces to an external Smart
Card reader. The SCI can autonomously control data
transfer to and from the smart ca rd. Transmit and
receive data FIFOs are provided to reduce the required
interaction between the CPU core and the peripheral.
SCI FEATURES
• Supports asynchronous T0 and T1 transmission
protocols
• Supports clock rate conversion factor F = 372, with
bit rate adjustment factors D = 1, 2, or 4 supported
• Eight-character-deep buff er ed Tx an d Rx pa th s
• Direct interrupts for Tx and Rx FIFO level monitoring
• Interrupt status register
• Hardware-initiated card deactivation sequence on
detection of card removal
• Software-initiated card deactivation sequence on
transaction complete
• Limited support for synchronous Smart Cards via
registered input/output.
PROGRAMMABLE PARAMETERS
• Smart Card clock frequency
• Communication baud rate
• Protocol convention
• Card activation/deactivation time
• Check for maximum time for first character of
Answer to Reset - ATR reception
• Check for maximum duration of ATR character
stream
• Check for maximum time of receipt of first character
of data stream
• Check for maximum time allowed between characters
• Character guard time
• Block guard time
• Transmit/receive character retry.
30 12/8/03 Preliminary Data Sheet
Page 31

32-Bit System-on-Chip LH7A400
Direct Memory Access Controller (DMA)
The DMA Controller interfaces streams from the fol-
lowing three peripherals to the system memory:
• USB (1 Tx and 1 Rx DMA Channel)
• MMC (1 Tx and 1 Rx DMA Channel)
• AC97 (3 Tx and 3 Rx DMA Channels).
Each has its own bi-directional peripheral DMA bus
capable of transferring data in both directions simultaneously. All memory transfers take place via the main
system AHB bus.
DMA Specific features are:
• Independent DMA channels for Tx and Rx
• Two Buffer Descriptors per channel to avoid poten-
tial data under/over-flows due to software introduced
latency
• No Buffer wrapping
• Buffer size may be equal to, greater than or less than
the packet size. Transfers can automatically switch
between buffers.
• Maskable interrupt generation
• Internal arbitration between DMA Channels and
external bus arbiter.
• For DMA Data transfer sizes, byte, word and quad-
word data transfers are supported.
A set of control and status registers are available to
the system processor for setting up DMA operations
and monitoring their status. A system interrupt is generated when any or all of the DMA channels wish to
inform the processor that a new buffer needs to be allocated. The DMA controller services three peripherals
using ten DMA channels, each with its own peripheral
DMA bus capable of transferring data in both directions
simultaneously.
The MMC and USB peripherals each use two DMA
channels, one for transmit and one for receive. The
AC97 peripheral uses six DMA channels (three transmit and three receive) to allow different sample frequency data queues to be handled with low software
overheads. The DMA Controller does not su pport
memory to memory transfers.
USB Device
The features of the USB are:
• Fully compliant to USB 1.1 specification
• Provides a high level interface that shields the firm-
ware from USB protocol details
• Compatible with both OpenHCI and Intel’s UHCI
standards
• Supports full-speed (12 Mbps) functions
• Supports Suspend and Resume signalling.
Color LCD Controller
The LH7A400’s LCD Controller is programmable to
support up to 1,024 × 768, 16-bit color LCD panels. It
interfaces directly to STN, color STN, TFT, AD-TFT,
and HR-TFT panels. Unlike other LCD controllers, the
LH7A400’s LCD Controller incorporates the timing conversion logic from TFT to HR-TFT, allowing a direct
interface to HR-TFT and minimizing external chip count.
The Color LCD Controller features suppo rt for:
• Up to 1,024 × 768 Resolution
• 16-bit Video Bus
• STN, Color STN, AD-TFT, HR-TFT, TFT panels
• Single and Dual Scan STN panels
• Up to 15 Gray Shades
• Up to 64,000 Colors
AC97 Advanced Audio Codec Interface
The AC97 Advanced Audio Codec controller
includes a 5-pin serial interface to an ex ternal audio
codec. The AC97 LINK is a bi-directional, fixed rate,
serial Pulse Code Modulation (PCM) digital stream,
dividing each audio frame into 12 outgoing and 12
incoming data streams (slots), each with 2 0-bit sa mple
resolution.
The AC97 controller contains logic that controls the
AC97 link to the Audio Codec and an interface to the
AMBA APB.
Its main features include:
• Serial-to-parallel conversion for data received from
the external codec
• Parallel-to-serial conversion for data transmitted to
the external codec
• Reception/Transmission of control and status infor-
mation via the AMBA APB interface
• Supports up to 4 different codec sampling rates at a
time with its 4 transmit and 4 receive channels. The
transmit and receive paths are buffered with internal
FIFO memories, allowing data to be stored independently in both transmit and receive modes. The outgoing data for the FIFOs can be written via either the
APB interface or with DMA channels 1 - 3.
Preliminary Data Sheet 12/8/03 31
Page 32

LH7A400 32-Bit System-on-Chip
Audio Codec Interface (ACI)
The ACI provides:
• A digital serial interface to an off-chip 8-bit CODEC
• All the necessary clocks and timing pulses to perform serialization or de-serialization of the data
stream to or from the CODEC device.
The interface supports full duplex operation and the
transmit and receive paths are buffered with internal
FIFO memories allowing up to 16 bytes to be stored
independently in both transmit and receive modes.
The ACI includes a programmable frequency divider
that generates a common transmit and receive bit clo ck
output from the on-chip ACI clock input (ACICLK).
Transmit data values are output synchronous with the
rising edge of the bit clock output. Receive data values
are sampled on the falling edge of the bit clock output.
The start of a data frame is indicated b y a synchronization output signal that is synchronous with the bit clock.
Synchronous Serial Port (SSP)
The LH7A400 SSP is a master-only interface for
synchronous serial communication with device peripheral devices that has either Motorola SPI, National
Semiconductor MICROWIRE or Texas Instruments
Synchronous Serial Interfaces.
The LH7A400 SSP performs serial-to-parallel conversion on data received from a peripheral device. The
transmit and receive paths are buffered with internal
FIFO memories allowing up to eight 16-bit values to be
stored independently in both transmit and receive
modes. Serial data is transmitted on SSPTXD and
received on SSPRXD.
The LH7A400 SSP includes a programmab le bit rate
clock divider and prescaler to generate the serial output
clock SCLK from the input clock SSPCLK. Bit rates are
supported to 2 MHz and beyond, subject to choice of
frequency for SSPCLK; the maximum bit rate will usually be determined by peripheral devices.
UART/IrDA
The LH7A400 contains three UARTs, UART1,
UART2, and UART3.
The UART performs:
• Serial-to-Parallel conversion on data received from
the peripheral device
• Parallel-to-Serial conversion on data transmitted to
the peripheral device.
The transmit and receive paths are buffered with internal FIFO memories allowing up to 16 bytes to be stored
independently in both transmit and receive modes.
The UART can generate:
• Four individually maskable interrupts from the
receive, transmit and modem status logic blocks
• A single combined interrupt so that the output is
asserted if any of the individual interrupts are
asserted and unmasked.
If a framing, parity or break error occurs durin g
reception, the appropriate error bit is set, and is stored
in the FIFO. If an overrun condition occurs, the overrun
register bit is set immediately and the FIFO data is pr evented from being overwritten. UART1 also supports
IrDA 1.0 (15.2 kbit/s).
The modem status input signals Clear to Send
(CTS), Data Carrier Detect (DCD) and Data Set Ready
(DSR) are supported on UART2 and UART3.
Timers
Two identical timers are integrated in the LH7A400.
Each of these timers has an associated 16-bit read/write
data register and a control register. Each timer is loaded
with the value written to the data register immediately,
this value will then be decremented on the next active
clock edge to arrive after the write. When the timer
underflows, it will immediately assert its appropriate
interrupt. The timers can be read at any time. The clock
source and mode is selectable by writing to various bits
in the system control register. Clock sources are
508 kHz and 2 kHz.
Timer 3 (TC3) has the same basic operation, but is
clocked from a single 7.3728 MHz source. It has the
same register arrangement as Timer 1 and Timer 2, providing a load, value, control and clear register. Once the
timer has been enabled and is written to, unlike the
Timer 1 and Timer 2, will decrement the timer on the
next rising edge of the 7.3728 MHz clock after the data
register has been updated. All the timers can operate in
two modes, free running mode or pre-scale mode.
FREE-RUNNING MODE
In free-running mode, the timer will wrap around to
0xFFFF when it underflows and continue counting down.
PRE-SCALE MODE
In pre-scale (periodic) mode, the value written to
each timer is automatically re-loaded when the timer
underflows. This mode can be used to produce a programmable frequency to drive the bu zzer or generate a
periodic interrupt.
32 12/8/03 Preliminary Data Sheet
Page 33

32-Bit System-on-Chip LH7A400
Real Time Clock (RTC)
The RTC can be used to provide a basic alarm function or long time-base counter. This is achieved by generating an interrupt signal after counting for a
programmed number of cycles of a real-time clock
input. Counting in one second intervals is achieved by
use of a 1 Hz clock input to the RTC.
Battery Monitor Interface (BMI)
The LH7A400 BMI is a serial communication interface specified for two types of Battery Monitors/Gas
Gauges. The first type employs a single wire interface.
The second interface employs a two-wire multi-master
bus, the Smart Battery System Specification. If both
interfaces are enabled at the same time , the Single
Wire Interface will have priority. A brief overview of
these two interface types are given here.
SINGLE WIRE INTERFACE
The Single Wire Interface performs:
• Serial-to-parallel conversion on data received from
the peripheral device
• Parallel-to-serial conversion on data transmitted to
the peripheral device
• Data packet coding/decoding on data transfers
(incorporating Start/Data/Stop data packets)
The Single Wire interface uses a command-based
protocol, in which the host initiates a data transfer by
sending a WriteData/Command word to the Battery
Monitor. This word will always contain the Command
section, which tells the Single Wire Interface device the
location for the current transaction. The most significant bit of the Command deter mines if the trans action
is Read or Write. In the case of a Write transaction,
then the word will also contain a WriteData section with
the data to be written to the peripheral.
SMART BATTERY INTERFACE
The SMBus Interface performs:
• Serial-to-Parallel conversion on data received from
the peripheral device
• Parallel-to-Serial conversion of data transmitted to
the peripheral device.
The Smart Battery Interface uses a two-wire multimaster bus (the SMBus), meaning that more than one
device capable of controlling the bus can be connected
to it. A master device initiates a bus transfer and provides
the clock signals. A slave device can receive data provided by the master or it can provide data to the master.
Since more than one device may attempt to take control
of the bus as a master, SMBus provides an arbitration
mechanism, by relying on the wired-AND connection of
all SMBus interfaces to the SMBus.
DC-to-DC Converter
The features of the DC-DC Converter interface are:
• Dual drive PWM outputs, with independent closed
loop feedback
• Software programmable configuration of one of 8
output frequencies (each being a fixed divide of the
input clock).
• Software programmable configuration of duty cycle
from 0 to 15/16, in intervals of 1/16.
• Output polarity (for positive or negative voltage generation) is hardware-configured during power-o n
reset via the polarity select inputs
• Each PWM output can be dynamically switched to
one of a pair of preprogrammed frequency/duty
cycle combinations via external pins.
Watchdog Timer (WDT)
The Watchdog Timer provides hardware protection
against malfunctions. It is a programmable timer that is
reset by software at regular intervals. Failure to reset
the timer will cause a FIQ interrupt. Failure to service
the FIQ interrupt will then generate a System Reset.
The WDT features are:
• Driven by the system clock
• 16 programmable time-out per iods: 2
clock cycles
• Generates a system reset (resets LH7A400) or a
FIQ Interrupt whenever a time-out period is reached
• Software enable, lockout, and counter-reset mecha-
nisms add security against inadvertent writes
• Protection mechanism guards against
interrupt-service-failure:
– The first WDT time-out triggers FIQ and asserts
nWDFIQ status flag
– If FIQ service routine fails to clear nWDFIQ, then
the next WDT time-out triggers a System Reset.
16
through 2
31
General Purpose I/O (GPIO)
The LH7A400 GPIO has eight ports, each with a
data register and a data direction register. It also has
added registers including Keyboard Scan, PINMUX,
GPIO Interrupt Enable, INTYPE1/2, GPIOFEOI and
PGHCON.
The data direction register determines whether a
port is configured as an input or an output while the
data register is used to read the value of the GPIO pins.
The GPIO Interrupt Enable, INTYPE1/2, and GPIOFEOI registers are used to control edge-triggered
Interrupts on Port F. The PINMUX register controls
what signals are output of Port D and Port E when they
are set as outputs, while the PGHCON controls the
operations of Port G and H.
Preliminary Data Sheet 12/8/03 33
Page 34

LH7A400 32-Bit System-on-Chip
ELECTRICAL SPECIFICATIONS
Absolute Maximum Ratings
PARAMETER MINIMUM MAXIMUM
DC Core Supply Voltage (VDDC) -0.3 V 2.4 V
DC I/O Supply Voltage (VDD)
DC Analog Supply Voltage (VDDA)
-0.3 V
-0.3 V
4.6 V
2.4 V
Storage Temperature -55°C 125°C
NOTE: These ratings are only for transient conditions. Operation at
or beyond absolute maximum rating conditions may affect
reliability and cause permanent damage to the device.
Recommended Operating Conditions
PARAMETER MINIMUM TYPICAL MAXIMUM NOTES
DC Core Supply Voltage (VDDC) 1.62 V 1.8 V 1.98 V 1
DC I/O Supply Voltage (VDD) 3.0 V 3.3 V 3.6 V 2
DC Analog Supply Voltage for PLLs (VDDA) 1.62 V 1.8 V 1.98 V
Clock Frequency (Commercial) 10 MHz 200 MHz 3, 4, 5
Clock Frequency (Industrial) 10 MHz 195 MHz 3, 4, 5
Operating Temperature (Commercial) 0°C 25°C 70°C
Operating Temperature (Industrial) -40°C 25°C +85°C
NOTES:
1. Core Voltage should never exceed I/O Voltage.
2. USB is not functional below 3.0 V.
3. Using 14.756 MHz Main Oscillator Crystal and 32.768 kHz RTC Oscillator Crystal.
4. VDDC = 1.62 V to 1.98 V.
5. VDD = 3.0 V to 3.6 V.
34 12/8/03 Preliminary Data Sheet
Page 35

32-Bit System-on-Chip LH7A400
DC/AC SPECIFICATIONS (COMMERCIAL AND INDUSTRIAL)
Unless otherwise noted, all data provided under
commercial DC/AC specifications are based on -40°C
to +85°C, VDDC = 1.62 V to 1.98 V, VDD = 3.0 V to
3.6 V, VDDA = 1.62 V to 1.98 V.
DC Specifications
SYMBOL PARAMETER MIN. TYP. MAX. UNIT CONDITIONS NOTES
VIH CMOS and Schmitt Trigger Input HIGH Voltage 2.0 V
VIL CMOS and Schmitt Trigger Input LOW Voltage 0.8 V
VHST Schmitt Trigger Hysteresis 0.25 V VIL to VIH
CMOS Output HIGH Voltage, Output Drive 1 2.6 V IOH = -2 mA
VOH
VOL
IIN Inpu t Leakage Current -10 10 µA VIN = VDD or GND
IOZ Output Tri-state Leakage Current -10 10 µA VOUT = VDD or GND
ISTARTUP Startup Current 50 µA2
CIN Input Capacitance 4 pF
COUT Output Capacitance 4 pF
Output Drive 2 2.6 V IOH = -4 mA
Output Drive 3 2.6 V IOH = -8 mA
Output Drive 4 and 5 2.6 V IOH = -12 mA 1
CMOS Output LOW Voltage, Output Drive 1 0.4 V IOL = 2 mA
Output Drive 2 0.4 V IOL = 4 mA
Output Drive 3 0.4 V IOL = 8 mA
Output Drive 4 0.4 V IOL = 12 mA
Output Drive 5 0.4 V IOL = 20 mA 1
NOTES:
1. Output Drive 5 can sink 20 mA of current, but sources 12 mA of current.
2. Current consumption until oscillators are stabilized.
AC Test Conditions
PARAMETER RATING UNIT
DC I/O Supply Voltage (VDD) 3.0 to 3.6 V
DC Core Supply Voltage (VDDC) 1.62 to 1.98 V
Input Pulse Levels VSS to 3 V
Input Rise and Fall Times 2 ns
Input and Output Timing Reference Levels VDD/2 V
Preliminary Data Sheet 12/8/03 35
Page 36

LH7A400 32-Bit System-on-Chip
CURRENT CONSUMPTION BY OPERATING MODE
Current consumption can depend on a number of
parameters. To make this data more usable, the values
presented in Table 7 were derived under th e conditions
presented here.
Maximum Specified Value
The values specified in the MAXIMUM column were
determined using these operating cha ra ct er istics:
• All IP blocks either operating or enabled at maximum
frequency and size configuration
• Core operating at maximum power configuration
• All voltages at maximum specified values
• Maximum specified ambient temperature.
Typical
The values in the TYPICAL column were determined
using a ‘typical’ application under ‘typical’ environmental
conditions and the following operating characteristics:
• LINUX operating system running from SDRAM
• UART and AC97 peripherals operating; all other
peripherals as needed by the OS
• LCD enabled with 320 × 240 × 16-bit color, 60 Hz
refresh rate, data in SDRAM
• I/O loads at nominal
• Cache enabled
• FCLK = 200 MHz; HCLK = 100 MHz; PCLK = 50 MHz
• All voltages at typical values
• Nominal case temperature.
PERIPHERAL CURRENT CONSUMPTION
In addition to the modal current consumption, Table
8 shows the typical current consumption for each of the
on-board peripheral blocks. The values were determined with the peripheral clock running at maximum
frequency, typical conditions, and no I/O loads. This
current is supplied by the 1.8 V power supply.
Table 8. Peripheral Current Consumption
PERIPHERAL TYPICAL UNITS
AC97 1.3 mA
UART (each) 1.0 mA
RTC 0.005 mA
Timers (each) 0.1 mA
LCD (+I/O) 5.4 (1.0) mA
MMC 0.6 mA
SCI 23 mA
PWM (each) <0.1 mA
BMI-SWI 1.0 mA
BMI-SBus 1.0 mA
SDRAM (+I/O) 1.5 (14.8) mA
USB (+PLL) 5.6 (3.3) mA
ACI 0.8 mA
Table 7. Current Consumption by Mode
SYMBOL PARAMETER TYP. MAX. UNITS
ACTIVE MODE
ICORE Current drawn by core 132 180 mA
IIO Current drawn by I/O 15 58 mA
HALT MODE (ALL PERIPHERALS DISABLED)
ICORE Current drawn by core 40 44 mA
IIO Current drawn by I/O 1 1 mA
STANDBY MODE (TYPICAL CONDITIONS ONLY)
ICORE Current drawn by core 38 µA
IIO Current drawn by I/O 4 µA
36 12/8/03 Preliminary Data Sheet
Page 37

32-Bit System-on-Chip LH7A400
AC Specifications
All signals described in Table 9 relate to transitions after a reference clock signal. The illustration in
Figure 6 represents all cases of these sets of measurement parameters.
The reference clock signals in this design are:
• HCLK, internal System Bus clock (‘C’ in timing data)
• PCLK, Peripheral Bus clock
• SSPCLK, Synchronous Serial Port clock
• UARTCLK, UART Interface clock
• LCDDCLK, LCD Data clock from the
LCD Controller
• ACBITCLK, AC97 clock
• SCLK, Synchronous Memory clock.
All signal transitions are measured from the 50%
point of the clock to the 50% point of the sig nal.
REFERENCE
CLOCK
tOVXXX
For outputs from the LH7A400, tOVXXX (e.g. tOVA)
represents the amount of time for the outpu t to become
valid from a valid address bus, or rising edge of the
peripheral clock. Maximum requirements for tOVXXX
are shown in Table 9.
The signal tOHXXX (e.g. tOHA) represents the
amount of time the output will be held valid from the valid
address bus, or rising edge of the peripheral clock. Minimum requirements for tOHXXX are listed in Table 9.
For Inputs, tISXXX (e.g. tISD) represents the amount
of time the input signal must be valid after a valid
address bus, or rising edge of the peripheral clock. Maximum requirements for tISXXX are shown in Table 9.
The signal tIHXXX (e.g. tIHD) represents the
amount of time the output must be held valid from the
valid address bus, or rising edge of the peripheral
clock. Minimum requirements are shown in Table 9.
tOHXXX
OUTPUT
SIGNAL (O)
INPUT
SIGNAL (I)
tISXXX tIHXXX
7A400-28
Figure 6. LH7A400 Signal Timing
Preliminary Data Sheet 12/8/03 37
Page 38

LH7A400 32-Bit System-on-Chip
Table 9. AC Signal Characteristics
SIGNAL TYPE LOAD SYMBOL MIN. MAX. DESCRIPTION
ASYNCHRONOUS MEMORY INTERFACE SIGNALS (+ wait states × C)
Output 50 pF
D[31:0]
Input
tOVD 1C + 1 ns Data Valid
tOHD 3C – 7 ns Data Hold
tISD 3C – 20 ns Data Setup
tIHD 3C – 3 ns Data Hold
tOVCSR 0 ns Chip Select Valid (Read)
nCS[3:0]/CS[7:6] Output 30 pF
tOVCSW 1C Chip Select Valid (Write)
tOHCS 3C – 10 ns Chip Select Hold
tOVWE 1C Write Enable Valid
nWE[3:0] Output 30 pF
tOHWE 2C – 10 ns Write Enable Hold
tOHWECS 0 1C
nOE Output 30 pF
tOVOE 1C Ouput Enable Valid
tOHOE 3C – 10 ns Ouput Enable Hold
SYNCHRONOUS MEMORY INTERFACE SIGNALS
SA[13:0] Output 50 pF tOVA 7.5 ns Address Valid
SA[17:16]/SB[1:0] Output 50 pF tOVB 7.5 ns Bank Select Valid
Output 50 pF tOVD 2 ns 7.5 ns Data Valid
D[31:0]
Input
nCAS Output 30 pF
nRAS Output 30 pF
nSWE Output 30 pF
tISD 2 ns Data Setup
tIHD
1 ns Data Hold
tOVCA 2 ns 7.5 ns CAS Valid
tOHCA
0.0 ns CAS Hold
tOVRA 2 ns 7.5 ns RAS Valid
tOHRA
0.0 ns RAS Hold
tOVSDW 2 ns 7.5 ns Write Enable Valid
tOHSDW
0.0 ns Write Enable Hold
SCKE[1:0] Output 30 pF tOVC 2 ns 7.5 ns Clock Enable Valid
DQM[3:0] Output 30 pF tOVDQ 2 ns 7.5 ns Data Mask Valid
nSCS[3:0] Output 30 pF
PCMCIA INTERFACE SIGNALS (+ wait states × C)
nPCREG Output 30 pF
Output 50 pF
D[31:0]
Input
nPCCE1 Output 30 pF
nPCCE2 Output 30 pF
nPCOE Output 30 pF
nPCWE Output 30 pF
PCDIR Output 30 pF
tOVSC 2 ns 7.5 ns Synchronous Chip Select Valid
tOHSC
0.0 ns Synchronous Chip Select Hold
1
tOVDREG 1C nREG Valid
tOHDREG 4C – 5 ns nREG Hold
tOVD 1C Data Valid
tOHD 4C – 5 ns Data Hold
tISD 1C Data Setup Time
tIHD 4C – 15 ns Data Hold Time
tOVCE1 1C Chip Enable 1 Valid
tOHCE1 4C – 5 ns Chip Enable 1 Hold
tOVCE2 1C Chip Enable 2 Valid
tOHCE2 4C – 5 ns Chip Enable 2 Hold
tOVOE 1C + 1 ns Output Enable Valid
tOHOE 3C – 5 ns Output Enable Hold
tOVWE 1C + 1 ns Write Enable Valid
tOHWE 3C – 5 ns Write Enable Hold
tOVPCD 1C Card Direction Valid
tOHPCD 4C – 5 ns Card Direction Hold
MMC INTERFACE SIGNALS
MMCCMD Output 100 pF
MMCDATA Output 100 pF
tOVCMD 3 ns MMC Command Valid
tOHCMD 3 ns MMC Command Hold
tOVDAT 3 ns MMC Data Valid
tOHDAT 3 ns MMC Data Hold
1
Deassertion delay between
nWE[3:0] and nCS[3:0]/CS[7:6]
38 12/8/03 Preliminary Data Sheet
Page 39

32-Bit System-on-Chip LH7A400
Table 9. AC Signal Characteristics (Cont’d)
SIGNAL TYPE LOAD SYMBOL MIN. MAX. DESCRIPTION
MMCDATA Input
MMCCMD Input
ACOUT/ACSYNC Output 30 pF
ACIN Input
ACBITCLK Input tACBITCLK 72 ns 90 ns AC97 Clock Period
SSPFRM Input tISSSPFRM 14 ns SSPFRM Input Valid
SSPTX Output 50 pF tOVSSPOUT 14 ns SSP Transmit Valid
SSPRX Input tISSSPIN 14 ns SSP Receive Setup
ACOUT/ACSYNC Output 30 pF
ACIN Input
tISDAT 5 ns MMC Data Setup
tIHDAT 5 ns MMC Data Hold
tISCMD 5 ns MMC Command Setup
tIHCMD 5 ns MMC Command Hold
AC97 INTERFACE SIGNALS
tOVAC97 15 ns AC97 Output Valid/Sync Valid
tOHAC97 10 ns AC97 Output Hold/Sync Hold
tISAC97 10 ns AC97 Input Setup
tIHAC97 2.5 ns AC97 Input Hold
SYNCHRONOUS SERIAL PORT (SSP)
AUDIO CODEC INTERFACE (ACI)
tOS TBD TBD
tOH TBD TBD ACOUT Hold
tIS TBD TBD ACIN Setup
tIH TBD TBD ACIN Hold
ACOUT delay from rising clock
edge
NOTES:
1. ‘nC’ in the MIN./MAX. columns indicates the number of system clock (HCLK) periods after valid address.
2. For Output Drive strength specifications, refer to Table 1.
Preliminary Data Sheet 12/8/03 39
Page 40

LH7A400 32-Bit System-on-Chip
SMC Waveforms
Figure 7 shows the waveform and timing for an
External Asynchronous Memory Write. Note that the
deassertion of nWE can preceed the deassertion of
01234
HCLK
(See Note 2)
A[27:0]
(See Note 1)
D[31:0]
nCSx, CSx
nWE[3:0]
NOTES:
1. A[24:0] when SCI used.
2. HCLK is an internal signal, shown for reference only.
tOVD
DATA
tOHD
tOVCSW
tOHCS
tOVWE
tOHWE
Figure 7. External Asynchronous Memory Write
nCS by a maximum of one HCLK, or at minimum, can
coincide (see Table 9). Figure 8 shows the waveform
and timing for an External Asynchronous Memory
Read, with one Wait State.
ADDRESS
tOHWECS
LH7A400-20
0123
HCLK
(See Note)
A[25:0]
D[31:0]
tOVCSR
nCSx, CSx
NOTE: HCLK is an internal signal, shown for reference only.
nOE
tOVOE
Figure 8. External Asynchronous Memory Read
ADDRESS
tISD
DATA
tIHD
tOHCS
tOHOE
LH7A400-21
40 12/8/03 Preliminary Data Sheet
Page 41

32-Bit System-on-Chip LH7A400
Synchronous Memory Controller Waveforms
Figure 9 shows the waveform and timing for a Synchronous Burst Read (page already open). Figure 10
shows the waveform and timing for Synchronous memory to Activate a Bank and Write.
t
SCLK
SCLK
t
OHXXX
t
OVXXX
tOVA
READ
BANK,
COLUMN
t
OVA
SDRAMcmd
nDQM
SA[13:0],
SB[1:0]
D[31:0]
NOTES:
1. SDRAMcmd is the combination of nRAS, nCAS, nSWE, and nSCSx.
2. tOVXXX represents tOVRA, tOVCA, tOVSVW, or tOVSC.
3. tOHXXX represents tOHRA, tOHCA, tOHSVW, or tOHSC.
4. DQM[3:0] is static LOW.
5. SCKE is static HIGH.
Figure 9. Synchronous Burst Read
tSCLK
SCLK
tOVC
tISD tIHD
DATA n
DATA n + 1
DATA n + 2
DATA n + 3
LH7A400-23
SCKE
tOVXXX
SDRAMcmd
tOHXXX
ACTIVE WRITE
tOVA
SA[13:0],
SB[1:0]
BANK,
ROW
BANK,
COLUMN
tOVA
D[31:0]
DATA
tOVD
NOTES:
tOHD
1. SDRAMcmd is the combination of nRAS, nCAS, nSWE, and nSCSx.
2. tOVXXX represents tOVRA, tOVCA, tOVSVW, or tOVSC. Refer to the AC timing table.
3. tOHXXX represents tOHRA, tOHCA, tOHSVW, or tOHSC.
4. DQM[3:0] is static LOW.
LH7A400-24
Figure 10. Synchronous Bank Activate and Write
Preliminary Data Sheet 12/8/03 41
Page 42

LH7A400 32-Bit System-on-Chip
PC Card (PCMCIA) Waveforms
Figure 11 shows the waveforms and timing for a
PCMCIA Read Transfer, Figure 12 shows the waveforms and timing for a PCMCIA Write Transfer.
HCLK
A[25:0]
nPCREG
nPCCEx
(See Note 2)
PCDIR
D[15:0]
tOVDREG
tOVCEx
tOVPCD
tISD
PRECHARGE
TIME
(See Note 1)
ADDRESS
tOHDREG
tOHCEx
DATA
tIHD
ACCESS
TIME
(See Note 1)
HOLD
TIME
(See Note 1)
nPCOE
NOTES:
1. Precharge time, access time, and hold
time are programmable wait-state times.
2.
nPCCE1
nPCCE2
0
0
1
1
TRANSFER TYPE
0
Common Memory
1
Attribute Memory
0
1
I/O
None
tOVOE
tOHOE
LH7A400-11
Figure 11. PCMCIA Read Transfer
42 12/8/03 Preliminary Data Sheet
Page 43

32-Bit System-on-Chip LH7A400
HCLK
A[25:0]
nPCREG
nPCCEx
(See Note 2)
PCDIR
D[15:0]
tOVDREG
tOVCEx
tOVPCD
tOVD
PRECHARGE
TIME
(See Note 1)
ADDRESS
tOHDREG
tOHCEx
DATA
tOHD
ACCESS
TIME
(See Note 1)
HOLD
TIME
(See Note 1)
nPCWE
NOTES:
1. Precharge time, access time, and hold
time are programmable wait-state times.
2.
nPCCE1
nPCCE2
0
0
1
1
TRANSFER TYPE
0
Common Memory
1
Attribute Memory
0
1
I/O
None
tOVWE
tOHWE
LH7A400-12
Figure 12. PCMCIA Write Transfer
Preliminary Data Sheet 12/8/03 43
Page 44

LH7A400 32-Bit System-on-Chip
MMC Interface Waveforms
Figure 13 shows the waveforms and timing for an
MMC command or data Write, and Figure 14 shows
the waveforms and timing for an MMC command or
data Read.
MMCCLK
MMCCMD
tOVCMD
MMCDAT
tOVDAT tOHDAT
Figure 13. MMC Command/Data Write
MMCCLK
AC97 Interface Waveforms
Figure 15 shows the waveforms and timing for the
AC97 interface Data Setup and Hold.
tOHCMD
LH7A400-14
MMCCMD
MMCDAT
ACBITCLK
ACOUT/ACSYNC
ACIN
tISCMD
tISDAT tIHDAT
tIHCMD
Figure 14. MMC Command/Data Read
tACBITCLK
tOVAC97
tISAC97 tIHAC97
tOHAC97
Figure 15. AC97 Data Setup and Hold
LH7A400-15
LH7A400-16
44 12/8/03 Preliminary Data Sheet
Page 45

32-Bit System-on-Chip LH7A400
Audio Codec Interface Waveforms
Figure 16 and Figure 17 show the timing for the
ACI. Transmit data is clocked on the rising edge of
ACBITCLK (whether transmitted by the LH7A404 ACI
ACBITCLK
ACSYNC/ACOUT
ACIN
Figure 16. ACI Signal Timing
or by the external codec chip); receive data is clocked
on the falling edge. This allows full-speed, full duplex
operation.
tOS
tOH
tIS tIH
LH7A400-169
ACBITCLK
ACSYNC
ACIN/ACOUT
76BIT 5 4 3 2 1 0 7 6
ACIN/ACOUT
SAMPLED ON
FALLING EDGE
LH7A400-181
Figure 17. ACI Datastream
Preliminary Data Sheet 12/8/03 45
Page 46

LH7A400 32-Bit System-on-Chip
Clock and State Controller (CSC) Waveforms
Figure 18 shows the behavior of the LH7A400 when
coming out of Reset or Power On. Figure 19 shows external reset timing, and Table 10 gives the timing parameters. Figure 20 depicts signal timing following a Reset.
Figure 21 shows the recommended components for
the SHARP LH7A400 32.768 kHz external oscillator
circuit. Figure 22 shows the same for the 14.7456 MHz
external oscillator circuit. In both figures, the NAND
gate represents the internal logic of the chip.
Table 10. Reset AC Timing
PARAMETER DESCRIPTION MIN. MAX. UNIT
tOSC32 32 kHz Oscillator Stabilization Time after Power On* 550 ms
tPORH nPOR Hold Time after tOSC32 0 ms
tOSC14 14.7456 MHz Oscillator Stabilization Time after Wake UP 4 ms
tPLLL Phase Locked Loop Lockup Time 250 µs
tURESET/tPWRFL nURESET/nPWRFL Pulse Width (once sampled LOW) 2 System Clock Cycles
NOTE: *VDDC = VDDCmin
VDDCmin
VDDC
XTAL32
XTAL14
nPOR
nURESET
nPWRFL
tOSC32
tPORH
tOSC14
LH7A400-25
Figure 18. Oscillator Start-up
tURESET
tPWRFL
LH7A400-26
Figure 19. External Reset
46 12/8/03 Preliminary Data Sheet
Page 47

32-Bit System-on-Chip LH7A400
WAKEUP
(asynchronous)
≤ 7.8125 ms
CLKEN
7.8125 ms
HCLK
Figure 20. Signal Timing After Reset
INTERNAL TO
THE LH7A400
EXTERNAL TO
THE LH7A400
START UP
ENABLE
XTALIN XTALOUT
Y1
32.768 kHz
R1
18 MΩ
C1
15 pF
GND
STABLE CLOCK
LH7A400-175
C2
18 pF
GND
NOTES:
1. Y1 is a parallel-resonant type crystal. (See table)
2. The nominal values for C1 and C2 shown are for
a crystal specified at 12.5 pF load capacitance (CL).
3. The values for C1 and C2 are dependent upon
the cystal's specified load capacitance and PCB
stray capacitance.
4. R1 must be in the circuit.
5. Ground connections should be short and return
to the ground plane which is connected to the
processor's core ground pins.
6. Tolerance for R1, C1, C2 is ≤ 5%.
RECOMMENDED CRYSTAL SPECIFICATIONS
PARAMETER DESCRIPTION
32.768 kHz Crystal
Tolerance
Aging
Load Capacitance
ESR (MAX.)
Drive Level
Recommended Part
Parallel Mode
±30 ppm
±3 ppm
12.5 pF
50 kΩ
1.0 µW (MAX.)
MTRON SX1555 or equivalent
LH7A400-187
Figure 21. 32.768 kHz External Oscillator Components and Schematic
Preliminary Data Sheet 12/8/03 47
Page 48

LH7A400 32-Bit System-on-Chip
ENABLE
INTERNAL TO
THE LH7A400
EXTERNAL TO
THE LH7A400
NOTES:
1. Y1 is a parallel-resonant type crystal. (See table)
2. The nominal values for C1 and C2 shown are for
a crystal specified at 18 pF load capacitance (CL).
3. The values for C1 and C2 are dependent upon
the cystal's specified load capacitance and PCB
stray capacitance.
4. R1 must be in the circuit.
5. Ground connections should be short and return
to the ground plane which is connected to the
processor's core ground pins.
6. Tolerance for R1, C1, C2 is ≤ 5%.
XTALIN XTALOUT
RECOMMENDED CRYSTAL SPECIFICATIONS
PARAMETER DESCRIPTION
14.7456 MHz Crystal
Tolerance
Stability
Aging
Load Capacitance
ESR (MAX.)
Drive Level
Recommended Part
Y1
14.7456 MHz
R1
1 MΩ
C1
18 pF
GND
C2
22 pF
GND
(AT-Cut) Parallel Mode
±50 ppm
±100 ppm
±5 ppm
18 pF
40 Ω
100 µW (MAX.)
MTRON SX2050 or equivalent
LH7A400-188
Figure 22. 14.7456 MHz External Oscillator Components and Schematic
48 12/8/03 Preliminary Data Sheet
Page 49

32-Bit System-on-Chip LH7A400
Printed Circuit Board Layout Practices
LH7A400 POWER SUPPLY DECOUPLING
The LH7A400 has separate power and ground pins
for different internal circuitry se ctions. The VDD and
VSS pins supply power to I/O buffers, while VDDC and
VSSC supply power to the core logic, and VDDA/VSSA
supply analog power to the PLLs.
Each of the VDD and VDDC pins must be provided
with a low impedance path to the corresponding board
power supply. Likewise, the VSS and VSSC pins must
be provided with a low impedance path to the board
ground.
Each power supply must be decoupled to ground
using at least one 0.1 µF high frequency capacitor
located as close as possible to a VDDx, VSSx pin pair
on each of the four sides of the chip. If room on the circuit board allows, add one 0.01 µF h igh frequency
capacitor near each VDDx, VSSx pair on the chip.
To be effective, the capacitor leads and associated
circuit board traces connecting to the chip VDDx, VSSx
pins must be kept to less than half an inch (12.7 mm)
per capacitor lead. There must be one bulk 10 µF
capacitor for each power supply placed near one side
of the chip.
REQUIRED LH7A400 PLL, VDDA, VSSA FILTER
The VDDA pins supplies power to the chip PLL circuitry. VSSA is the ground return path for the PLL circuit. These pins must have a low-pass filter attached as
shown in Figure 23.
The Schottky diode shown in the schematic must
have a low forward drop specification to allow VDDA to
quickly transition through the entire input voltage range.
The power pin VDDA path must be a single wire
from the IC package pin to the high frequency capacitor, then to the low frequency capacitor, and finally
through the series resistor to the board power supply.
The distance from the IC pin to the high frequency
capacitor must be kept as short as possible.
Similarly, the VSSA path is from the IC pin to the
high frequency capacitor, then to the low frequency
capacitor, keeping the distance from the IC pin to the
high frequency cap as short as possible.
CAUTION
Note that the VSSA pin specifically does not have a connection to the circuit board ground. The LH7A400 PLL circuit has
an internal DC ground connection to VSS (GND), so the external VSSA pin must NOT be connected to the circuit board
ground, but only to the filter components.
VDDC
(SOURCE)
100 Ω
22 µF
+
0.1 µF
VDDC
LH7A400
VDDA
VSSA
LH7A400-189
Figure 23. VDDA, VSSA Filter Circuit
UNUSED INPUT SIGNAL CONDITIONING
Floating input signals can cause excessive power
consumption. Unused inputs without internal pull-up or
pull-down resistors should be pulled up or down externally, to tie the signal to its inactive state.
Some GPIO signals may default to inputs. If the pins
that carry these signals are unused, software can program these signals as outputs, eliminating the need for
pull-ups or pull-downs. Power consumption may be
higher than expected until software completes programming the GPIO. Some LH7A400 inputs have in ternal pull-ups or pull-downs. If unused, these inputs do
not require external conditioning.
OTHER CIRCUIT BOARD LAYOUT PRACTICES
All outputs have fast rise and fall times. Printed circuit trace interconnection length must therefore be
reduced to minimize overshoot, undershoot and reflections caused by transmission line effects of these fast
output switching times. This recommendation particularly applies to the address and data buses.
When considering capacitance, calculations must
consider all device loads and capacitances due to the
circuit board traces. Capacitance due to the traces will
depend upon a number of factors, including the trace
width, dielectric material the circuit board is made from
and proximity to ground and power planes.
Attention to power supply decoupling and printed circuit board layout becomes more critical in systems with
higher capacitive loads. As these capacitive loads
increase, transient currents in the power supply and
ground return paths also increase.
Preliminary Data Sheet 12/8/03 49
Page 50

LH7A400 32-Bit System-on-Chip
PACKAGE SPECIFICATIONS
256-BALL PBGA
TOP VIEW
A1 BALL
PAD
CORNER
2.90
A1 BALL PAD
INDICATOR, 1.0 DIA.
AVAILABLE
MARKING
AREA
˚ CHAMFER
45
4 PLACES
BOTT OM VIEW
(256 solder balls)
17.00
15.00
6.00
2.90
11.64 MAX.
16
14 12 10 8 6 4 2
15 13 11 9 7 5 3
1.00
1.00 REF.
+0.70
-0.05
A1 BALL
PAD CORNER
A
6.00
1.21 TYP.
1
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
1.21 TYP.
(4X)0.20
-0.05
+0.70
11.64 MAX.
15.00
SIDE VIEW
17.00
30˚
TYP.
B
C0.35
C0.25
C0.15
C
+0.10
φ0.50
-0.10
φ0.30 M
φ0.10 M
SEATING PLANE
CACB
1.00 REF.
0.50 R, 3 PLACES
NOTE: Dimensions in mm.
1.00
0.80 ±0.05
1.76 ±0.21
0.40 ±0.10
1.56 ±0.06
256PBGA
Figure 24. 256-Ball PBGA Package Specification
50 12/8/03 Preliminary Data Sheet
Page 51

32-Bit System-on-Chip LH7A400
256-BALL CABGA
(4X)0.10
TOP VIEW
A1 BALL
PAD CORNER
BOTT OM VIEW
(256 solder balls)
1.0
14 12 10 816 6
15 13 11 9 7 5 3
0.80
14.00
A
B
14.00
C0.10
C0.12
2
4
1
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
SIDE VIEW
C
φ0.46 TYP.
φ0.15 M
φ0.08 M
6
SEATING PLANE
C5ACB
1.0
0.80
0.36 ±0.04
0.70 ±0.05
1.70 MAX.
NOTE: Dimensions in mm.
256CABGA
Figure 25. 256-Ball CABGA Package Specification
Preliminary Data Sheet 12/8/03 51
Page 52

LH7A400 32-Bit System-on-Chip
ORDERING INFORMATION
Table 11. Ordering Information
PART NUMBER PACKAGE
LH7A400N0B000 PBGA
LH7A400N0E000 CABGA
LH7A400N0C000* Scribed Die
LH7A400N0W000* Probed Wafer
NOTE: *Requires Factory Approval.
SPEED (MHz)
AT TEMP. (°C)
200 at 0+70
195 at -40+85
200 at 0+70
195 at -40+85
200 at 0+70
195 at -40+85
200 at 0+70
195 at -40+85
CONTENT REVISIONS
This document contains the following changes to
content, causing it to differ from previous versions.
Table 12. Record of Revisions
DATE
8-19-2003
11-15-03
PAGE
NO.
3-11 Table 1
12 Table 3 Signal ordering corrected
12-18 Table 4 Table title added to differentiate between PBGA and CABGA packages
18-24 Table 5 CABGA numerical pin list table added
39 Figure 7 and Figure 8 ‘CSx’ added to figures
41-42 Figures 11 and 12 PCDIR signal corrected in PCMCIA timing diagrams
44
45-47
49 Figure 23 Figure added for CABGA package
34
37-38 Table 9 Minor corrections to type.
39 Table 9 Added ACI timing.
49 Figure 24 PBGA package drawing adde d.
51 Table 11 Added ordering information
PARAGRAPH OR
ILLUSTRATION
1 Features 256-ball CABGA package added
CABGA Pins added; VDDA1/VDDA2 combined to VDDA; VSSA1/VSSA2
combined to VSSA
Table 10 and
Figure 16
Figures 19-21 and
Printed Circuit Board
Layout Practices
1Text
2 Figure 1 Updated to show ALI Interface
‘Recommended
Operating Conditions’
tOSC14 added to both table and figure; XTAL14 added to figure;
tPLLL added to table
Figures and text added
Corrected minor text errors; added separate Commercial and Industrial
temperature specification.
Broke out “Commercial” and “Industrial” speed ranges.
SUMMARY OF CHANGES
52 12/8/03 Preliminary Data Sheet
Page 53

32-Bit System-on-Chip LH7A400
SPECIFICATIONS ARE SUBJECT TO CHANGE WITHOUT NOTICE.
Suggested applications (if any) are for standard use; See Important Restrictions for limitations on special applications. See Limited
Warranty for SHARP’s product warranty. The Limited Warranty is in lieu, and exclusive of, all other warranties, express or implied.
ALL EXPRESS AND IMPLIED WARRANTIES, INCLUDING THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR USE AND
FITNESS FOR A PARTICULAR PURPOSE, ARE SPECIFICALLY EXCLUDED. In no event will SHARP be liable, or in any way responsible,
for any incidental or consequential economic or property damage.
NORTH AMERICA
SHARP Microelectronics of the Americas
5700 NW Pacific Rim Blvd.
Camas, WA 98607, U.S.A.
Phone: (1) 360-834-2500
Fax: (1) 360-834-8903
www.sharpsma.com
TAIWAN
SHARP Electronic Components
(Taiwan) Corporation
8F-A, No. 16, Sec. 4, Nanking E. Rd.
Taipei, Taiwan, Republic of China
Phone: (886) 2-2577-7341
Fax: (886) 2-2577-7326/2-2577-7328
CHINA
SHARP Microelectronics of China
(Shanghai) Co., Ltd.
28 Xin Jin Qiao Road King Tower 16F
Pudong Shanghai, 201206 P.R. China
Phone: (86) 21-5854-7710/21-5834-6056
Fax: (86) 21-5854-4340/21-5834-6057
Head Office:
No. 360, Bashen Road,
Xin Development Bldg. 22
Waigaoqiao Free Trade Zone Shanghai
200131 P.R. China
Email: smc@china.global.sharp.co.jp
EUROPE
SHARP Microelectronics Europe
Division of Sharp Electronics (Europe) GmbH
Sonninstrasse 3
20097 Hamburg, Germany
Phone: (49) 40-2376-2286
Fax: (49) 40-2376-2232
www.sharpsme.com
SINGAPORE
SHARP Electronics (Singapore) PTE., Ltd.
438A, Alexandra Road, #05-01/02
Alexandra Technopark,
Singapore 119967
Phone: (65) 271-3566
Fax: (65) 271-3855
HONG KONG
SHARP-ROXY (Hong Kong) Ltd.
3rd Business Division,
17/F, Admiralty Centre, Tower 1
18 Harcourt Road, Hong Kong
Phone: (852) 28229311
Fax: (852) 28660779
www.sharp.com.hk
Shenzhen Representative Office:
Room 13B1, Tower C,
Electronics Science & Technology Building
Shen Nan Zhong Road
Shenzhen, P.R. China
Phone: (86) 755-3273731
Fax: (86) 755-3273735
JAPAN
SHARP Corporation
Electronic Components & Devices
22-22 Nagaike-cho, Abeno-Ku
Osaka 545-8522, Japan
Phone: (81) 6-6621-1221
Fax: (81) 6117-725300/6117-725301
www.sharp-world.com
KOREA
SHARP Electronic Components
(Korea) Corporation
RM 501 Geosung B/D, 541
Dohwa-dong, Mapo-ku
Seoul 121-701, Korea
Phone: (82) 2-711-5813 ~ 8
Fax: (82) 2-711-5819
©2003 by SHARP Corporation Reference Code SMA01012
 Loading...
Loading...