

STLC5466
64 CHANNEL-MULTI HDLC WITH
N X 64KB/S SWITCHING MATRIX ASSOCIATED
PRELIMINARY DATA
■
64 TX HDLCs with broadcasting capability and/
or CSMA/CR function with automatic restart in
case of Tx frame abort
■
64 RX HDLCs including Address
Recognition
■
16 Command/Indicate Channels (4 or 6-bit
primitiv e )
■
16 Monitor Channels processed in accordance
with GCI or V*
■
256 x 256 Switching Matrix without blocking
and with Time Slot Sequence Integrity and
loopback per bidirectional connection
■
DMA Controller for 64 Tx Channels and 64 Rx
Channels
■
HDLCs AND DMA CONTROLLER ARE
CAPABLE OF HANDLING A MIX OF
LAPD,LAPB, SS7, CAS AND
PROPRIETARY SIGN AL L IN G S
■
External shared memory access
between DMA Controller and Micro
processor
■
SINGLE MEMORY SHARED BETWEEN
n x MULTI-HDLCs AND SINGLE MICRO
PROCESSOR ALLOWS TO HANDLE n x 64
CHANNELS
■
Bus Arbitration
■
Interface for various 8,16 or 32 bit
Microprocessors with fetch memory
to accelerate the exchanges
between Microprocessor and
SHARED MEMORY
■
SDRAM Controller allows to inter
face up to 16 Megabytes of
Synchronous Dynamic RAM
■
Interrupt Controller to store
automatically events in shared memory
■
Boundary scan for test facility
■
TQFP176 package 24 x 24 x 1.40
#MS-026BGA
■
HCMOS6; 0.35 micron; 3.3volts +/-5%
■
Operating temperature: -40 to +85 °/C
DESCRIPTION
The STLC5466 is a Subscriber line interface card
controller for Central Office, Central Exchange, NT2
and PBX capable of handling:
■
16 U Interfaces or
■
2 Megabits line interface cards or
■
16 SLICs (Plain Old Telephone Service) or
■
Mixed analogue and digital Interfaces
(SLICs or U Interfaces) or
■
16 S Interfaces
■
Switching Network with centralized processing.
TQFP176
(Plastic Quad Flat Pack)
ORDERING NUM BER:
STLC5466
November 1999
This is preliminary information on a new product now in development or undergoing evaluation. Details are subject to change without notice.
1/130

STLC5466
TABLE OF CONTENTS
I PIN INFORMATION................................................................................................................6
I.1 PIN CONNECTIONS....... .......................................................................................................6
I.2 PIN DESCRIPTION................................................................. ..............................................7
I.3 PIN DEFINITION...................................................................... ............................................12
I.3.1 Input Pin Definition................................................................................................................12
I.3.2 Output Pin Definition ............................................................................................................12
I.3.3 Input/Output Pin Definition. ..................................................................................................12
II BLOCK DIAGRAM...............................................................................................................13
III FUNCTIONAL DESCRIPTION................ ...................................... ...................................... .13
III.1 THE SWITCHING MATRIX N X 64 KBITS/S........................................................................13
III.1.1 Function Desc ription.............................................................................................................13
III.1.2 Architecture of the Matrix .....................................................................................................13
III.1.3 Connection Fun ction ............................................................................................................13
III.1.4 Loop Back Functio n ....................................................................................................... ......15
III.1.5 Delay through the Matrix ......................................................................................................15
III.1.5.1 Variable Delay Mode ........................................................................................................15
III.1.5.2 Sequence Integrity Mode..................................................................................................15
III.1.6 Connection Memo ry .............................................................................................................15
III.1.6.1 Description .......................................................................................................................15
III.1.6.2 Access to Connection Memory .........................................................................................15
III.1.6.3 Access to Data Memory....................................................................................................15
III.1.7 Switching at 32 Kbit/s ...........................................................................................................15
III.1.8 Switching at 16 Kbit/s ...........................................................................................................16
III.2 HDLC CONTROLLER.............................................................. ............................................16
III.2.1 Function desc r iption .............................................................................................................16
III.2.1.1 Format of the HDLC Frame..............................................................................................16
III.2.1.2 Composition of an HDLC Frame .......................................................................................16
III.2.1.3 Description and Functions of the HDLC Bytes..................................................................16
III.2.2 CS M A/CR Capability ............................................................................................................17
III.2.3 Time Slot Assigner Memory .................................................................................................17
III.2.4 D ata Storage Structure .........................................................................................................18
III.2.4.1 Reception..........................................................................................................................18
III.2.4.2 Transmission.....................................................................................................................18
III.2.4 .3 Frame Relay ......... .................................................................................................... ........18
III.2.5 Transparent Modes ....................................................................................... .......................18
III.2.6 C om m and of the HDLC Channels ........................................................................................19
III.2.6 .1 Reception Cont ro l.............................................................................................................19
III.2.6.2 Transmission Control........................................................................................................19
III.3 C/I AND MONITOR .................................................................. ............................................19
III.3.1 Function Desc ription ................................................................................................... .........19
III.3.2 GCI and V* Protocol .............................................................................................................19
2/130

STLC5466
III.3.3 Structure of the Treatment ...................................................................................................20
III.3.4 CI and Monitor Channel Configuration.................................................................. .......... .. ....20
III.3.5 CI and Monitor Transmission/Reception Command.............................................................20
III.4 SCRAMBLER AND DESCRAMBLER...................................... ............................................20
III.5 CONNECTION BETWEEN “ISDN CHANNELS” AND GCI CHANNELS..............................20
III.6 MICROPROCESSOR INTERFACE......................................... ............................................21
III.6.1 Description ...........................................................................................................................21
III.6.2 Buffer ...................................................................................................................................21
III.6.2 .1 Write FIFO ........................................................................................................................21
III.6.2.2 Read Fetch Memory .........................................................................................................23
III.6.2.3 Definition of the Interface for the different microprocessors..............................................23
III.7 MEMORY INTERFACE........................................................... ............................................23
III.7.1 Function Desc ription ................................................................................................... .........23
III.7.2 Choice of memory versus microprocessor and capacity required ........................................23
III.7.3 Memory Cycle.......................................................................................................................23
III.7.4 Memories composed of different circuits ..............................................................................23
III.7.4.1 Memory obtained with 1M x16 SDRAM circuit............................... .......... .. ....... .......... ......23
III.7.4.2 Memory obtained with 2M x 8 SDRAM circuit...................................................................23
III.7.4.3 Memory obtained with 8M x 8 SDRAM circuit...................................................................23
III.7.4.4 Memory obtained with 4M x 16 SDRAM circuit.................................................................24
III.8 BUS ARBITRATION................................................................ ............................................24
III.9 CLOCKS.. .................................................................................................................... ........24
III.9.1 C lo ck Distribution Selection and Supervision .......................................................................24
III.9.2 VCXO Frequency Synchronizat ion .......................................................................................24
III.10 INTERRUPT CONTROLLER................................................... ............................................25
III.10.1 Description ........................................................................................................... ................25
III.10.2 Operating Interrupts (INT0 Pin).............................................................................................25
III.10.3 Time Base Interrupts (INT1 Pin)...........................................................................................25
III.10.4 Emergency Interrupts (WDO Pin)......................................................................................... 25
III.10.5 Interrupt Queues ..................................................................................................................25
III.11 WATCHDOG............................................................................ ............................................25
III.12 RESET.................................................................................................................................25
III.13 BOUNDARY SCAN.................................................................. ............................................26
IV DC SPECIFICATIONS..........................................................................................................27
V LIST OF REGISTERS ..........................................................................................................29
VI INTERNAL REGISTERS......................................................................................................31
VI.1 IDENTIFICATION AND DYNAMIC COMMAND REGISTER... IDCR (00)H.........................31
VI.2 GENERAL CONFIGURATION REGISTER 1..........................GCR1 (02)H........................31
VI.3 INPUT MULTIPLEX CONFIGURATION REGISTER 0............IMCR0 (04)H.......................33
3/130

STLC5466
VI.4 INPUT MULTIPLEX CONFIGURATION REGISTER 1 ...........IMCR1 (06)H.......................34
VI.5 OUTPUT MULTIPLEX CONFIGURATION REGISTER 0........ OMCR0 (08)H.....................34
VI.6 OUTPUT MULTIPLEX CONFIGURATION REGISTER 1........ OMCR1 (0A)H ....................34
VI.7 SWITCHING MATRIX CONFIGURATION REGISTER...........SMCR (0C)H.......................35
VI.8 CONNECTION MEMORY DATA REGISTER .........................CMDR (0E)H.......................37
VI.9 CONNECTION MEMORY ADDRESS REGISTER .................CMAR (10)H.......................41
VI.10 SEQUENCE FAULT COUNTER REGISTER .........................SFCR (12)H ........................45
VI.11 TIME SLOT ASSIGNER ADDRESS R EG IST ER 1.. ................TAAR1 (14) H......... .............45
VI.12 TIME SLOT ASSIGNER DATA REGISTER 1.........................TADR1 (16)H......................45
VI.13 HDLC TRANSMIT COMMAND REGISTER 1.........................HTCR1 (18)H......................46
VI.14 HDLC RECEIVE COMMAND REGISTER 1 ............................HRCR1 (1A)H .....................48
VI.15 ADDRESS FIELD RECOGNITION ADDRESS REGISTER 1.AFRAR1 (1C)H ...................50
VI.16 ADDRESS FIELD RECOGNITION DATA REGISTER 1......... AFRDR1 (1E)H...................50
VI.17 FILL CHARACTER REGISTER 1 ............................................FCR1 (20)H........................51
VI.18 GCI CHANNELS DEFINITION REGISTER 0 .........................GCIR0 (22)H.......................51
VI.19 GCI CHANNELS DEFINITION REGISTER 1..........................GCIR1 (24)H.......................51
VI.20 GCI CHANNELS DEFINITION REGISTER 2..........................GCIR2 (26)H.......................52
VI.21 GCI CHANNELS DEFINITION REGISTER 3..........................GCIR3 (28)H.......................52
VI.22 TRANSMIT COMMAND / INDICATE REGISTER ..................TCIR (2A)H.........................52
VI.23 TRANSMIT MONITOR ADDRESS REGISTER.......................TMAR (2C)H.......................53
VI.24 TRANSMIT MONITOR DATA REGISTER ..............................TMDR (2E)H.......................54
VI.25 TRANSMIT MONITOR INTERRUPT REGISTER....................TMIR (30)H .........................55
VI.26 MEMORY INTERFACE CONFIGURATION REGISTER......... MICR (32)H.........................55
VI.27 INITIATE BLOCK ADDRESS REGISTER 1 ...........................IBAR1 (34)H .......................56
VI.28 INTERRUPT QUEUE SIZE REGISTER ................................. IQSR (36)H.........................56
VI.29 INTERRUPT REGISTER ........................................................IR (38)H..............................57
VI.30 INTERRUPT MASK REGISTER ..............................................IMR (3A)H...........................58
VI.31 TIMER REGISTER 1 ...............................................................TIMR1 (3C)H ......................59
VI.32 TEST REGISTER....... .............................................................TR (3E)H.... .........................59
VI.33 GENERAL CONFIGURATION REGISTER 2..........................GCR2 (42)H........................60
VI.34 SPLIT FETCH MEMORY REGISTER.....................................SFMR (4E)H.......................61
VI.35 TIME SLOT ASSIGNER ADDRESS R EG IST ER 2.. ................TAAR2 (54) H......... .............62
VI.36 TIME SLOT ASSIGNER DATA REGISTER 2.........................TADR2 (56)H......................62
VI.37 HDLC TRANSMIT COMMAND REGISTER 2 ........................HTCR2 (58)H......................63
4/130

STLC5466
VI.38 HDLC RECEIVE COMMAND REGISTER 2 ...........................HRCR2 (5A)H.....................65
VI.39 ADDRESS FIELD RECOGNITION ADDRESS REGISTER 2 AFRAR2 (5C)H ...................67
VI.40 ADDRESS FIELD RECOGNITION DATA REGISTER 2......... AFRDR2 (5E)H...................67
VI.41 FILL CHARACTER REGISTER 2 ...........................................FCR2 (60)H........................68
VI.42 SDRAM MODE REGISTER.....................................................SDRAMR (72)H..................68
VI.43 INITIATE BLOCK ADDRESS REGISTER 2 ...........................IBAR2 (74)H .......................69
VI.44 TIMER REGISTER 2 ...............................................................TIMR2 (7C)H ......................70
VII EXTERNAL REGISTERS.....................................................................................................71
VII.1 INITIALIZATION BLOCK IN EXTERNAL MEMORY (IBA1 AND IBA2) 71
VII.2 RECEIVE DESCRIPTOR......................................................... 72
VII.2.1 Bits written by the Microprocessor only ...............................................................................72
VII.2.2 Bits written by the Rx DMAC only ........................................................................................72
VII.2.3 Receive Buff e r ......................................................................................................... ............73
VII.3 TRANSMIT DESCRIPTOR ...................................................... ............................................73
VII.3.1 Bits written by the Microprocessor only ...............................................................................73
VII.3.2 Bits written by the Tx DMAC only ........................................................................................74
VII.3.3 Transmit Buffer ....................................................................................................................74
VII.4 RECEIVE & TRANSMIT HDLC FRAME INTERRUPT ............ ............................................75
VII.5 RECEIVE COMMAND / INDICATE INTERRUPT.................... ............................................76
VII.5.1 Receive Command / Indicate Interrupt when TSV = 0 ... ......................................................76
VII.5.2 Receive Command / Indicate Interrupt when TSV = 1 ... ......................................................77
VII.6 RECEIVE MONITOR INTERRUPT......................................................................................77
VII.6.1 Receive Monitor Interrupt when TSV = 0 .............................................................................77
VII.6.2 Receive Monitor Interrupt when TSV = 1 .............................................................................78
VIII TQFP176 PACKAGE MECHANICAL DATA.......................................................................79
IX FIGURES AND TIMING........................................................................................................80
5/130

6/130
N.C
VSS12
TMS
TDI
TDO
TCK
VDD3
VSS3
NCS0
NCS1
INT0
INT1
SIZE0/NLDS/NLBA
SIZE1/NBHE/NUDS
NDSACK0/NDTACK
NDSACK1/READY
NAS/ALE
R/W / NW R
NDS/NRD/CLKOUT
MOD0
MOD1
MOD2
VDD4
VSS4
A0/AD0
A1/AD1
A2/AD2
A3/AD3
A4/AD4
A5/AD5
A6/AD6
A7/AD7
A8/AD8
A9/AD9
VDD5
VSS5
A10/AD10
A11/AD11
A12/AD12
A13/AD13
A14/AD14
A15/AD15
VDD13
N.C
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
44
N.C
41
42
43
NDIS/NCS2
NTRST
VDD12
NREADY
VSS13
A17
A16
N.C
92
91
90
89
40
DOUT7
A18
93
39
DOUT6
A19
94
38
DOUT5
A20
95
37
DOUT4
A21
96
36
DOUT3
A22
97
35
DOUT2
A23
98
33
34
DOUT0
DOUT1
VDD6
VSS6
100
99
31
32
VDD2
VSS2
D1
D0
102
101
29
30
DIN7
DIN8
D3
D2
104
103
27
28
DIN5
DIN6
D5
D4
106
105
25
26
DIN3
DIN4
D7
D6
108
107
23
24
DIN1
DIN2
D9
D8
110
109
20
21
22
FSCV
PSS
DIN0
STLC54 66
D12
D11
D10
113
112
111
19
FSCG
D13
114
18
FS
D14
115
16
17
VDD1
VSS1
VDD7
D15
117
116
14
15
FRAMEA
FRAMEB
VSS7
TRI
119
118
13
CLOCKB
TRO
120
12
CLOCKA
NWE
121
11
DCLK
NRAS
122
10
7
8
9
CB1
EC1
VCXO IN
VCXO OUT
UDQM
LDQM
NCE1
NCE0
126
125
124
123
4
5
6
MCLK
SFS
WDO
NCE3/ADM13
NCE2/ADM12
CB2
129
128
127
2
3
VSS15
NRESET
VDD14
EC2
131
130
1
N.C
N.C
132
176
175
174
173
172
171
170
169
168
167
166
165
164
163
162
161
160
159
158
157
156
155
154
153
152
151
150
149
148
147
146
145
144
143
142
141
140
139
138
137
136
135
134
133
N.C
VDD15
NTEST
VSS11
VDD11
DM15
DM14
DM13
DM12
DM11
DM10
DM9
DM8
DM7
DM6
DM5
VSS10
VDD10
DM4
DM3
DM2
DM1
DM0
DIN9
SCANM
NCAS
ADM11
ADM10
VSS9
VDD9
ADM9
ADM8
ADM7
ADM6
ADM5
ADM4
ADM3
ADM2
ADM1
ADM0
VSS8
VDD8
VSS14
N.C
I - PIN INFORMATION
I.1 - Pin Connections
STLC5466
STLC5466
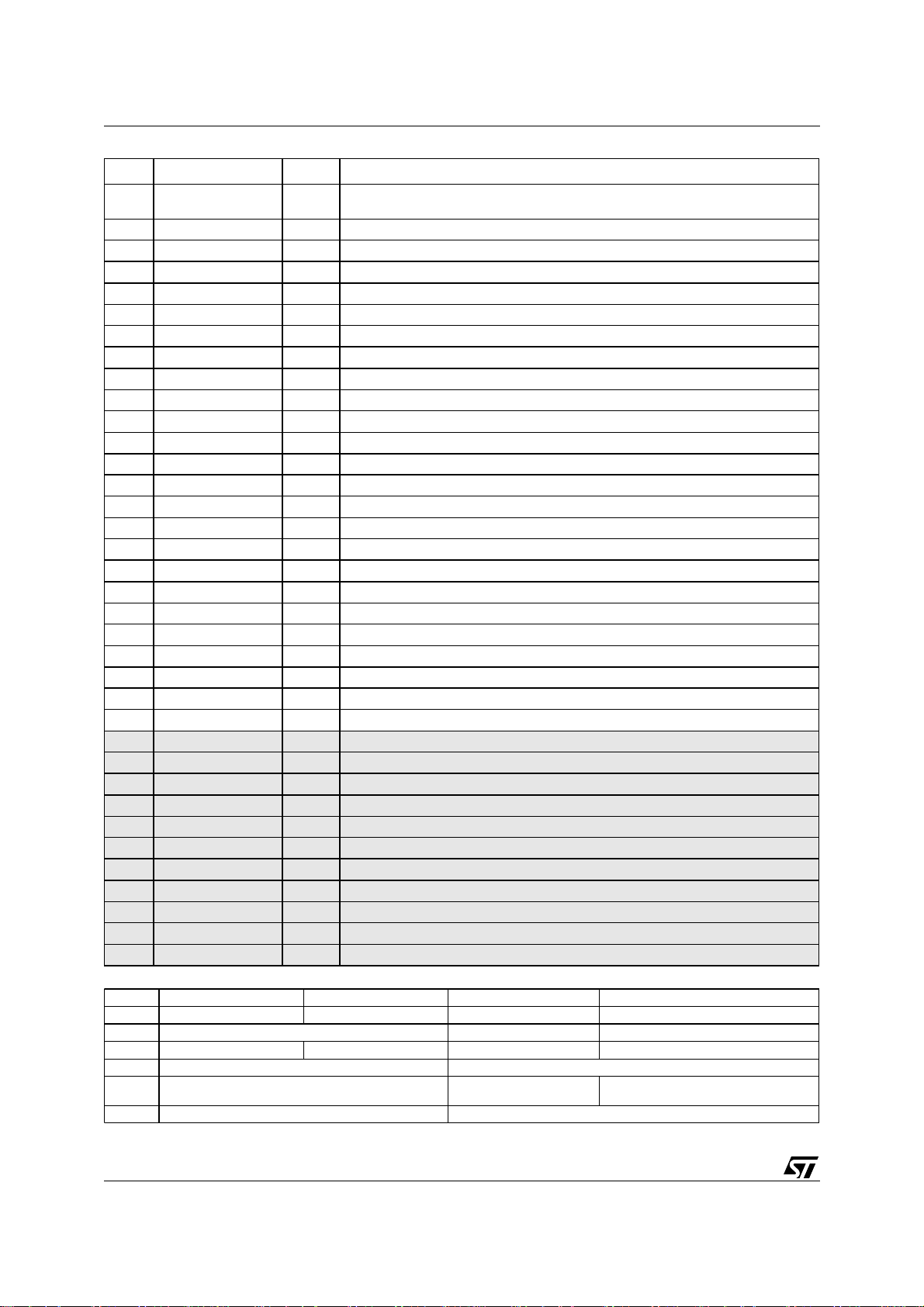
I.2 - Pin Description
Pin N° Symbol Type Function
30 POWER PINS (all the power and ground pins must be connected)
16 V
17 V
31 V
32 V
51 V
52 V
67 V
68 V
79 V
80 V
99 V
100 V
117 V
118 V
135 V
136 V
147 V
148 V
159 V
160 V
172 V
173 V
43 V
46 V
87 V
90 V
131 V
134 V
175 V
2 V
DD1
SS1
DD2
SS2
DD3
SS3
DD4
SS4
DD5
SS5
DD6
SS6
DD7
SS7
DD8
SS8
DD9
SS9
DD10
SS10
DD11
SS11
DD12
SS12
DD13
SS13
DD14
SS14
DD15
SS15
CLOCKS
4 MCLK I3_ft Master clock. This input can receive an external clock at 66, 50 or 33MHz.
5 SFS O3_ft Superframe Synchronisation.
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Power DC supply
Ground DC ground
Programmable signal from 250 microseconds to 15 seconds.
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
ft: five volts tolerant fnt: five volts not tolerant
8mA
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
7/130
STLC5466
Pin N° Symbol Type Function
9 VCXO IN I3_ft VCXO input signal. This signal is compared to clock A(orB)
10 VCXO OUT O3_ft VCXO error signal. This pin delivers the result of the comparison.
12 CLOCKA I3_ft Input Clock A (4096kHz or 8192kHz)
13 CLOCKB I3_ft Input Clock B (4096kHz or 8192kHz)
14 FRAMEA I3_ft Clock A at 8kHz
15 FRAMEB I3_ft Clock B at 8kHz
11 DCLK O6_ft Data Clock issued from Input Clock A (or B). This clock is delivered by the cir-
19 FSCG O6_ft Frame synchronization for GCI at 8kHz.
20 FSCV* O6_ft Frame synchronization for V Star at 8kHz
18 FS I3_ft Frame synchronization.
21 PSS O3_ft Programmable synchronization Signal.
TIME DIVISION MULTIPLEXES (TDM)
22 DIN0 I3_ft TDM0 Data Input 0
23 DIN1 I3_ft TDM1 Data Input 1
24 DIN2 I3_ft TDM2 Data Input 2
25 DIN3 I3_ft TDM3 Data Input 3
26 DIN4 I3_ft TDM4 Data Input 4
27 DIN5 I3_ft TDM5 Data Input 5
28 DIN6 I3_ft TDM6 Data Input 6
29 DIN7 I3_ft TDM7 Data Input 7
30 DIN8 I3_ft TDM8 Data Input 8, Direct access to 1st 32 HDLC Controller
153 DIN9 I3_ft TDM9 Data Input 9, Direct access to 2nd 32 HDLC Controller
33 DOUT0 O6DT_ft TDM0 Data Output 0
34 DOUT1 O6DT_ft TDM1 Data Output 1
35 DOUT2 O6DT_ft TDM2 Data Output 2
36 DOUT3 O6DT_ft TDM3 Data Output 3
37 DOUT4 O6DT_ft TDM4 Data Output 4
38 DOUT5 O6DT_ft TDM5 Data Output5
39 DOUT6 O6DT_ft TDM6 Data Output6
40 DOUT7 O6DT_ft TDM7 Data Output 7
selected inside the
Multi-HDLC
.
cuit at 4096kHz (or 204 8kHz ). DOUT 0/7 are transm itted on th e rising ed ge of
this signal. DIN0/7 are sampled on the falling edge of this signal.
This clock is issued from FRAME A (or B).
This signal synchronizes DIN0/8 and DOUT0/7 and CB.
PSS is programmed by the PS bit of connection memory.
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
ft: five volts tolerant fnt: five volts not tolerant
8mA
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
8/130
STLC5466
Pin N° Symbol Type Function
41 NDIS/NCS2 I 3_ft If 386EX interfa ce is not se lecte d: DO UT 0/ 7 Not Disab le. Wh en th is pin is at
7 CB1 O6D_ft Contention Bus (CSMA/CR) for 1st 32 HDLC Controller
8 EC1 I3_ft Echo for 1st 32 HDLC Controller. Wired at VSS if not used.
128 CB2 O6D_ft Contention Bus (CSMA/CR) for 2nd 32 HDLC Controller
130 EC2 I3_ft Echo for 2nd 32 HDLC Controller. Wired at V
BOUDARY SCAN
42 NTRST I4_ft Reset for boundary scan
47 TMS I2_ft Mode Selection for boundary scan
48 TDI I2_ft Input Data for boundary scan
49 TDO O3T_ft Output Data for boundary scan
50 TCK I4_ft Clock for boundary scan
MICROPROCESSOR INTERFACE
64 MOD0 I1_ft 1 1 0 0 1 1 0 0
65 MOD1 I1_ft 1 1 0 0 0 0 1 1
66 MOD2 I1_ft 01100110
3 NRESET I3_ft Circuit Reset
53 NCS0 I3_ft Chip Select 0: internal registers are selected
54 NCS1 I3_ft Chip Select 1: external memory is selected
55 INT0 O3_ft Interrupt generated by HDLC, RxC/I or RxMON. Active high.
56 I NT1 O3_ft Interrupt1.This pin goes to 5V whe n the selected clock A (or B) has disap-
6 WDO O3_ft Watch Dog Output.This pin goes to 5V during 250µs when the microprocessor
57 SIZE0/NLDS/NLBA I3_ft Transfer Size0 (68020)/Lower Data Stobe/Local Bus Access# when 386EX
58 SIZE1/NBHE/NUDS I3_ft Transfer Size1(68020)/Bus High Enable (Intel) / Upper Data Strobe (68000)
59 NDSACK0/
NDTACK/
NREADY
60 NDSACK1/
READY
61 NAS/
O6T_ft/
O6T_ft/
O6D_ft
O6T_ft
O6T_ft
I3_ft Address Strob e(Mot orola ) /
ALE/NADS
62 R/W / NWR I3_ft Read/Write (Motorola) / Write(Intel)
0V, the Data Output 0/7 are at high impedance. Wired at VDD if not used.
If 386EX interface is selected: NCS2 (Chip Select 2) equivalent to NCS1.
Chip Select 2: external memory is selected
During Chip select (NCS2=0), the output Ready (pin 59) is low impedance and
outside Chip select (NCS2=1), the output Ready is high impedance.
if not used.
SS
80C188 80C186 68000 68020 ST9 ST10 m ST10Nm 386EX
During Chip select (NCS1=0), the output Ready (pin 59) is low impedance and
outside Chip select (NCS1=1), the output Ready is high impedance.
peared; 250µs after reset this pin goes to 5V also if clock A is not present.
has not reset the Watch Dog during the programmable time.
Data Strobe, Acknowledge and Size0 (68020)/
Data Transfer Acknowledge (68000 and ST10)/
READY# (386EX)
Data Strobe, Acknowledge and Size1 (68020)/
Data Transfer Acknowledge (Intel)
Address Latch Enable(Intel) / Address Status 386EX
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
ft: five volts tolerant fnt: five volts not tolerant
8mA
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
9/130
STLC5466
Pin N° Symbol Type Function
63 NDS/
NRD/CLKOUT
69 A0/AD0 I/O6_ft Address bit 0 (Motorola) / Address/Data bit 0 (Intel)
70 A1/AD1 I/O6_ft Address bit 1 (Motorola) / Address/Data bit 1 (Intel)
71 A2/AD2 I/O6_ft Address bit 2 (Motorola) / Address/Data bit 2 (Intel)
72 A3/AD3 I/O6_ft Address bit 3 (Motorola) / Address/Data bit 3 (Intel)
73 A4/AD4 I/O6_ft Address bit 4 (Motorola) / Address/Data bit 4 (Intel)
74 A5/AD5 I/O6_ft Address bit 5 (Motorola) / Address/Data bit 5 (Intel)
75 A6/AD6 I/O6_ft Address bit 6 (Motorola) / Address/Data bit 6 (Intel)
76 A7/AD7 I/O6_ft Address bit 7 (Motorola) / Address/Data bit 7 (Intel)
77 A8/AD8 I/O6_ft Address bit 8 (Motorola) / Address/Data bit 8 (Intel)
78 A9/AD9 I/O6_ft Address bit 9 (Motorola) / Address/Data bit 9 (Intel)
81 A10/AD10 I/O6_ft Address bit 10 (Motorola) / Address/Data bit 10 (Intel)
82 A11/AD11 I/O6_ft Address bit 11 (Motorola) / Address/Data bit 11 (Intel)
83 A12/AD12 I/O6_ft Address bit 12 (Motorola) / Address/Data bit 12 (Intel)
84 A13/AD13 I/O6_ft Address bit 13 (Motorola) / Address/Data bit 13 (Intel)
85 A14 /AD1 4 I/O6_ft Add ress bit14 (Moto rola) / Address/D ata bit 14 (Intel)
86 A15 /AD1 5 I/O6_ft Add ress bit15 (Moto rola) / Address/D ata bit 15 (Intel)
91 A 16 I1_ft Address bit16 from µP
92 A 17 I1_ft Address bit17 from µP
93 A 18 I1_ft Address bit18 from µP
94 A 19 I1_ft Address bit19 from µP
95 A20 I1_ft Address bit 20 from µP
96 A21 I1_ft Address bit 21 from µP
97 A22 I1_ft Address bit 22 from µP
98 A23 I1_ft Address bit 23 from µP
101 DO I/O6_ft Data bit 0 for µP if not multiplexed (see Note 1).
102 D1 I/O6_ft Data bit 1 for µP if not multiplexed
103 D2 I/O6_ft Data bit 2 for µP if not multiplexed
104 D3 I/O6_ft Data bit 3 for µP if not multiplexed
105 D4 I/O6_ft Data bit 4 for µP if not multiplexed
106 D5 I/O6_ft Data bit 5 for µP if not multiplexed
107 D6 I/O6_ft Data bit 6 for µP if not multiplexed
108 D7 I/O6_ft Data bit 7 for µP if not multiplexed
109 D8 I/O6_ft Data bit 8 for µP if not multiplexed
110 D9 I/O6_ft Data bit 9 for µP if not multiplexed
111 D10 I/O6_ft Data bit 10 for µP if not multiplexed
I3_ft Data Strobe (Motorola) External resistor at Vss if 68000/
Read Data (Intel)/CLKOUT if 386EX
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
ft: five volts tolerant fnt: five volts not tolerant
8mA
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
10/130

Pin N° Symbol Type Function
112 D11 I/O6_ft Data bit 11 for µP if not multiplexed
113 D12 I/O6_ft Data bit 12 for µP if not multiplexed
114 D13 I/O6_ft Data bit 13 for µP if not multiplexed
115 D14 I/O6_ft Data bit 14 for µP if not multiplexed
116 D15 I/O6_ft Data bit 15 for µP if not multiplexed
MEMORY INTERFAC E
119 TRI I3_ft Token Ring Input (for use
120 TRO O4_fnt Token Ring Output (for use
Multi-HDLC
Multi-HDLC
s in cascade)
s in cascade)
121 NWE O8T_fnt Write Enable for SDRAM
122 NRAS O8T_fnt Row Address Strobe for SDRAM
123 NCE0 O8T_fnt Chip Select 0 for SDRAM
124 LDQM O8T_fnt Lower Data inputs/outputs mask enable for SDRAM
125 NCE1 O8T_fnt Chip Select 1 for SDRAM
126 UDQM O8T_fnt Upper Data inputs/outputs mask enable for SDRAM
127 NCE2/
ADM12
O8T_fnt Chip Select 2 for SDRAM/
Address bit 12 for 8Mx8 SDRAM circuit
129 NCE3/ADM13 O8T_fnt Chip Select 3 for SDRAM/Address bit 13 for 8Mx8 SDRAM circuit
137 ADM0 O8T_fnt Address bit 0 for SDRAM
138 ADM1 O8T_fnt Address bit 1 for SDRAM
139 ADM2 O8T_fnt Address bit 2 for SDRAM
140 ADM3 O8T_fnt Address bit 3 for SDRAM
141 ADM4 O8T_fnt Address bit 4 for SDRAM
142 ADM5 O8T_fnt Address bit 5 for SDRAM
143 ADM6 O8T_fnt Address bit 6 for SDRAM
144 ADM7 O8T_fnt Address bit 7 for SDRAM
145 ADM8 O8T_fnt Address bit 8 for SDRAM
146 ADM9 O8T_fnt Address bit 9 for SDRAM
149 ADM10 O8T_fnt Address bit 10 for SDRAM
150 ADM11 O8T_fnt Address bit 11 for SDRAM
151 NCAS O8T_fnt Column Address Strobe for SDRAM
152 SCANM I5_ft Scan mode reserved for device test
154 DM0 I/O8_fnt SDRAM Data bit 0
155 DM1 I/O8_fnt SDRAM Data bit 1
156 DM2 I/O8_fnt SDRAM Data bit 2
157 DM3 I/O8_fnt SDRAM Data bit 3
158 DM4 I/O8_fnt SDRAM Data bit 4
161 DM5 I/O8_fnt SDRAM Data bit 5
STLC5466
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
ft: five volts tolerant fnt: five volts not tolerant
8mA
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
11/130

STLC5466
Pin N° Symbol Type Function
162 DM6 I/O8_fnt SDRAM Data bit 6
163 DM7 I/O8_fnt SDRAM Data bit 7
164 DM8 I/O8_fnt SDRAM Data bit 8
165 DM9 I/O8_fnt SDRAM Data bit 9
166 DM10 I/O8_fnt SDRAM Data bit 10
167 DM11 I/O8_fnt SDRAM Data bit 11
168 DM12 I/O8_fnt SDRAM Data bit 12
169 DM13 I/O8_fnt SDRAM Data bit 13
170 DM14 I/O8_fnt SDRAM Data bit 14
171 DM15 I/O8_fnt SDRAM Data bit 15
174 NTEST I2_ft Test Control. When this pin is at 0V each output is high impedance.
Type
TTL I1_ft = Input T T L I2_ft = I1_ft+pull up I3_ft = I1_ft+hysteresis I4_ft = I3_ft+pul l up
TTL I/O6 _ft = Input TTL/ Output T TL 6 m A I5_ft = I3_f t+pull down ;
TTL O3 _ft = Output TTL 3 mA O3T_ft = O3_ft+Tristate O6_ft = Output TTL 6mA
TTL O6D_ft = Output TTL 6mA, Open Drain O6DT_ft = Output TTL 6mA, Open Drain or Tristate
CMOS I/O8_fnt = Input TTL, /Output CMOS 8mA; O8T_fnt = Output CMOS
CMOS O4_fnt = Output CMOS 4mA
Notes : 1.
ft: five volts tolerant fnt: five volts not tolerant
8mA
D0/15 input/output pins must be connected to one single external pull up resistor if not used.
I/O8 _fnt = Inpu t T TL, /Output CMO S
8mA
I.1 - Pin Definition
The pins of the circuit are five volts tolerant except
the pins assigned to SDRAM interface.
I.1.1 - Input Pin Definition
I1_ft Input TTL, five volts tolerant
I2_ft Input 1 TTL + pull up, five volts tolerant
I3_ft Input 2 TTL + hysteresis, five volts tolerant
I4_ft Input 3 TTL + hysteresis +pull up, five volts tolerant.
I5_ft Input 4 TTL + hysteresis +pull down, five volts tolerant
I.1.2 - Output Pin Definition
O3_ft Output TTL 3 mA, five volts tolerant
O3T_ft Output TTL 3 mA, Tristate, five volts tolerant
O6_ft Output TTL 6mA, five volts tolerant
O6D_ft Output TTL 6mA,Open Drain, five volts tolerant
O6DT_ft Output TTL 6mA,Open Drain or Tristate. (Programmable pin), five volts tolerant
O4_fnt Output CMOS 4mA, five volts not tolerant
O8T_fnt Output CMOS 8mA, Tristate, five volts not tolerant
Moreover, each output is high impedance when the NTEST Pin is at 0 volt.
I.1.3 - Input/Output Pin Definition.
I/O6_ft Input TTL/ Ou tput TTL 6 mA five volts tolerant
I/O8_fnt Input TTL/Output CMOS 8mA, five volts not tolerant
12/130

STLC5466
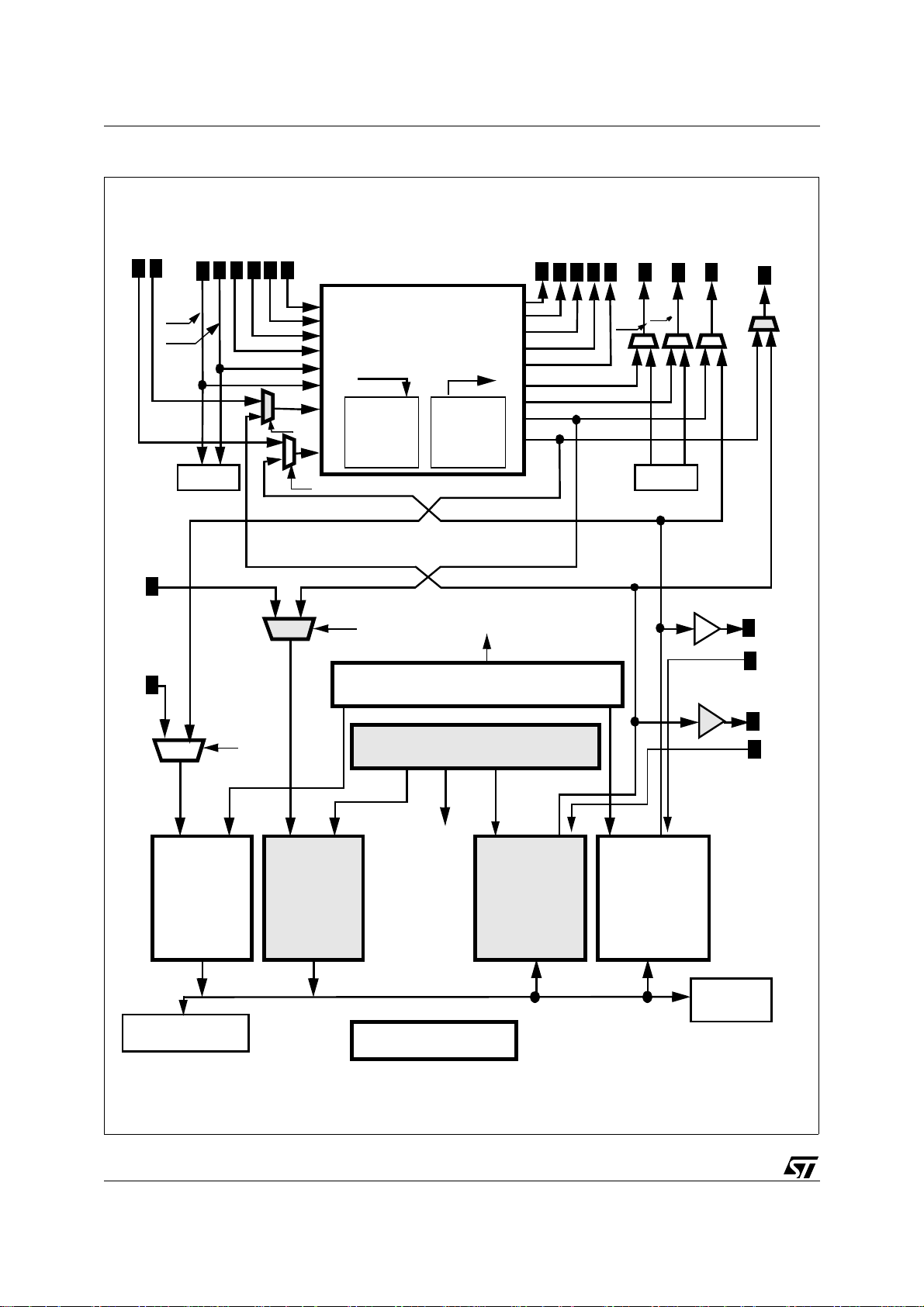
II - BLOCK DIAGRAM
The top level functionalities of
on the general block diagram.
There are:
– The switching ma trix,
– The 2 time slot assigners,
– The 2 x 32 HDLC transmitters with associ ated
DMA controllers,
– The 2 x 32 HDLC receivers with associated
DMA controllers,
– The 16 Command/Indicate and Monitor Channel
transmitters belonging to the two Gene ral Com ponent Interfaces (GCI),
– The 16 Command/Indicate and Monitor Channel
receivers belonging to the two General Component Interfaces (GCI),
– The Synchronous Dyn amic Mem ory interface,
– The microprocessor interface including Write
FIFO and Fetch Memory,
– The bus arbitration,
– The clock selection and time synchronization
function,
– The interrupt controller,
– The watchdog
III - FUNCTIONAL DESCRIPTION
III.1 - The Switching Matrix N x 64 KBits/S
III.1.1 - Function Description
The matrix performs a non-bl ock ing switc h of 256
time slots from 8 Input Time Division Multiplex
(TDM) at 2 Mbit/s to 8 output Time D ivision Mu ltiplex at 2 Mb it/s. A T DM at 2 Mbit/s consist s of 32
Time Slots (TS) at 64 kbit/s. One Time Division
Multiplex at 4 Mbit/s can take place of two Time Division Mu ltiplex at 2 Mbit/s . This TDM at 4 Mbi t/s
is composed of 64 Time Slots (TS) at 64 kbit/s.
The matrix is designed to sw itch a 64 k bit/ s cha nnel (Variable delay mode) or an hyperchannel of
data (Sequence integrity mode). So, it will both
provide minimum throughput switching delay for
voice applications and time slot sequence integrity
for data applications on a per channel basis.
The requirements of the Sequence I ntegrity (n*64
kbit/s) mode are the following:
All the time slots of a given input frame must be put
out during a same output frame.
The time slots of an hyperchannel (concatenation
of TS in the same TDM) are not crossed together
at output in different frames.
In variable delay mode, the time slot is put out as
soon as possible. (The delay is two or three time
slots minimum between input and output).
Multi-HDLC
appear
For test facilities, any time slot of an Output TDM
(OTDM) can be internally looped back into the
same Input TDM number (ITDM) at the same time
slot number.
A Pseudo Random Sequence Generator and a
Pseudo Random Sequence Analyser are implemented in the matrix. They allow the generation of
a sequence on a channel or on a hyperchannel, to
analyse it and verify its integrity after several
switching in the matrix or some passing of the sequence across different boards.
The Frame Signal (FS) synchronises ITDM and
OTDM but a programmable delay or advance can
be introduced separately on each ITDM and
OTDM (a half bit time, a bit time or two bit times).
An additional pin (PSS) permits the generation of
a programmable signa l composed of 256 bits per
frame at a bit rate of 2048 kbit/s. The programmation of this signal is performed thanks to PS bit of
Connection Memory.
An external pin (NDIS) asserts a h igh impedance
on all the TDM out puts of the matrix when active
(during the initialization of the board for example).
III.1.2 - Architecture of the Matrix
The matrix is essentially composed of buffer data
memories and a Connection Memory.
The received serial data is first converted to parallel by a serial to parallel converter and stored consecutively in a 256 position Buf fer Data Memory
(see Figure).
To satisfy the Seque nce Integrity (n*6 4 kbit/s) requirements, the data memory is built with an even
memory, an odd mem ory and an out put mem ory.
Two consecutive frames are stored alternatively in
the odd and even memory. During the time an input frame is stored, the one previously stored is
transferred into the output memory according to
the connection memory switching orders. A frame
later, the output memory is read and data is converted to serial and transferred to the output TDM.
III.1.3 - Connection Fu nct i on
Two types of connections are offered:
– unidirectional connec tion and
– bidirectional connec t ion.
An unidirectional connection makes only the
switch of an input t ime s lo t through an output one
whereas a bidirectional connection establishes the
link in the other direction too. So a double connection can be achieved by a single comm and (see
Figure).
13/130
STLC5466
Figure 1 :
DIN 6
DIN 7
GCI1
DIN 9
DIN 8
BLOCK DIAGRAM
DIN 3
DIN 4
DIN 5
GCI0
RX GCI
DIN 2
DIN 1
DIN 0
D6
SWIT C H ING MA TRIX
0
1
2
3
4
n x 64 kb/s
Scrambler/Descrambler
for 32 channels
5
Pseudo
6
Random
Sequence
7
Analyser
D7
V10b
FIRST TIME SLOT ASSIGNER
Pseudo
Random
Sequence
Generator
0
1
2
3
4
5
6
7
V10a
NDIS
DOUT 0
DOUT 1
DOUT 2
DOUT 3
GCI0
DOUT 4
GCI1
TX GCI
DOUT 6
DOUT 5
V10a
DOUT 7
V10b
CB1
EC1
CB2
FIRST
32 RX HDLC
with Address
Recognition
32 RX DMAC
Microprocessor
interface
14/130
V10a
SECOND
32 RX HDLC
with Address
Recognition
32 RX DMAC
SECOND TIME SLOT ASSIGNER
V10b
SECOND
32 TX HDLC
with C SMA CR
for Contention
Bus
32 TX DMAC
Internal Bus
BUS ARBITRATION
EC2
FIRST
32 TX HDLC
with CSMA CR
for Contention
Bus
32 TX DMAC
SDRAM
Controller
V10a, bit V10 of TADR1
V10b, bit V10 of TADR2
D6, bit of GCR2
D7, bit of GCR1

STLC5466
III.1.4 - Loop Back Function
Any time slot of an Output TDM can be internally
looped back on the t ime slot wh ich has the same
TDM number and the same TS number
(OTDMi, TSj) ----> (ITDMi, TSj).
In the case of a bidirect ional connection, onl y the
one specified by the microprocessor is concerned
by the loop back (see Figure).
III.1.5 - Delay through the Matrix
III.1.5.1 - Variable Delay Mode
In the variable delay mode, the delay through the
matrix depends on t he relat ive posi tions of t he i nput and output time slots in the frame.
So, some limits are fixed:
– the maximum del ay is a frame + 2 time slots,
– the minimum delay is programmable.
Three time slots if IMTD = 1, in this case n = 2 in
the formula hereafter or
two time slots if IMTD = 0, in this case n = 1 in
the same formula (see Paragraph “Switching
Matrix Configuration Register SMCR (0C)
”).
H
All the possibilities can be ranked in three cases:
a) If OTSy > ITSx + n then the variable delay is:
OTSy - ITSx Time slots
b) If ITSx
<
OTSy < ITSx+n then the variable delay
is:
OTSy - ITSx + 32 Time slots
c) OTSy < ITSx then the variable delay is:
32 - (ITSx - OTSy) Time slots.
N.B. Rule b) and rule c) are identical.
For n = 1 and n = 2, (see Figure).
III.1.5.2 - Sequence Integrity Mode
In the sequence integrity mode (SI = 1, bit located
in the Connection Memory), the input time slots
are put out 2 frames later (see Figure). In this
case, the delay is defined by a single expression:
Constant Delay = (32 - ITSx) + 32 + OTSy
So, the delay in sequence i ntegrity mode varies
from 33 to 95 time slots.
III.1.6 - Connection Memory
III.1.6.1 - Description
The connection memory is composed of 256 locations addressed by the number of OTDM and T S
(8x32).
Each location permits:
– to connect each input time slot to one output
time slot (If two or more output time slots are
connected to the same input time slot number,
there is broadcasting).
– to select the variable delay mode or the se-
quence integrity mode for any time slot.
– to loop back an output time slot. In this case the
contents of an i nput time slot (ITSx, ITDMp) is
the same as the output time slot (OTSx, OTDMp).
– to output the contents of the corresponding con-
nection memory instead of the data which has
been stored in data memory.
– to output the sequenc e of the pseudo random
sequence generator on an output time slot: a
pseudo random sequence can be inserted in
one or several time slots (hyperchannel) of the
same Output T DM; this insertion must be enabled by the microprocessor in the configuration
register of the matrix.
– to define the source of a sequence by the pseu-
do random sequence analyser: a pseudo random sequence can be extracted from one or
several time slots (hyperchannel) of the same
Input TDM and rout ed to the analyser; this extraction can be en abled by the microprocessor
in the configuration register of the m atrix (SMCR).
– to ass ert a high impedance level on an output
time slot (disconnection).
– to deliver a programmable 256-bit sequence
during 125 microseconds on the Programmable
synchronization Signal pin (PSS).
III.1.6.2 - Access to Connection Memory
Supposing that the Switching Matrix Configuration
Register (SMCR) has been already written by t he
microprocessor, it is possi ble to access to the connection memory from microprocessor with the
help of two registers:
– Connection Memory Data Register (CMDR) and
– Connection Memory Address Register (CMAR).
III.1.6.3 - Access to Data Memory
To extract the contents of the data memory it is
possible to read the data memory from microprocessor with the help of the two registers:
– Connection Memory Data Register (CMDR) and
– Connection Memory Address Register (CMAR).
III.1.7 - Switching at 32 Kbit/s
Four TDMs can be programmed individually to
carry 64 channels at 32 Kbit/s (only if these TDMs
are at 2 Mbit/s).
Two bits (SW0/1) located in SMCR define the type
of channels of two couples of TDMs.
SW0 defines TDM0 and TDM4 (GCI0) and SW1
defines TDM1 and TDM5 (GCI1).
If TDM0 or/and TDM1 carry 64 channels at 32
15/130
STLC5466
Kbit/s then TDM2 or/and TDM3 are not available
externally they are used internally to perform the
function.
See figure: Downstream switching at 32 kb/s.
See figure: Upstream switching at 32 kb/s.
III.1.8 - Switching at 16 Kbit/s
The TDM4 and TDM5 can be GCI multiplexes.
Each GCI multiplex comprises 8 GCI channels.
Each GCI channel comprises one D channel at 16
Kbit/s. See figure: GCI channel definition, GCI
Synchro signal delivered by the Multi-HDLC
It is possible to switch the contents of 16 D channels from the 16 GCI channels to 4 timeslots of the
256 output timeslots.
In the other di rection the cont ents of an sel ected
timeslot is automatically switched to 4 D channels
at 16 Kbit/s.
See Connection Memory Data Register CMDR
(0E)H.
III.2 - HDLC CONTROLLER
III.2.1 - Function description
Two independent HDLC controllers allow to process 64 channels.
Each internal HDLC controller can run up to 32
channels in a conventional HDLC mode or in a
transparent (non-HDLC) mode (configurable per
channel).
Each channel bit rate is programmable from 4kbit/
s to 64kbit/s. All the configurations are also possible from 32 cha nnels (from 4 to 6 4 kbit/s) to one
channel at 2 Mbit/s.
– First HDLC controller
In reception for the first HDL C cont roller, the co ntents of each time slot can directly come from the
input TDM DIN8 (direct H DLC Input) or from a ny
other TDM input after switching t owards the output
7 of the matrix (configurable per time slot).
In transmission, the HDLC frames are sent on the
output DOUT6 and on the output CB1 (with or
without contention mechanism), or are switched
tow ar ds th e ot her TD M out put vi a th e in put 7 of th e
matrix.
– Second HDLC controller
In reception for the second HDLC c ontroller, the
contents of each time slot can directly com e from
the input TDM DIN9 (direct HDLC Input) or from
any other TDM input after switching towards the
output 6 of the matrix (configurable per time slot).
In transmission, the HDLC frames are sent on the
output DOUT7 and on the output CB2 (with or
without contention mechanism), or are switched
towards the other TDM output via the input 6 of the
matrix .
III.2.1.1 - Format of the HDLC Frame
The format of an HDLC frame is the s ame in receive and transmit direction and shown here after.
III.2.1.2 - Composition of an HDLC Frame
Opening Flag
Address Field (first byte)
Address Field (second byte)
Command Field (first byte)
Command Field (second byte)
Data (first byte)
Data (optional)
Data (last byte)
FCS (first byte)
FCS (second byte)
Closing Flag
– Opening Fl ag
– One or two bytes for address recognition (recep-
tion) and insertion (transmission)
– Data bytes with bit stuffing
– Frame Check S equence: CRC with polynomial
G(x) = x
16
+x12+x5+1
– Closing Flag.
III.2.1.3 - Description and Functions of the
HDLC Bytes
–FLAG
The binary sequence 01111110 m arks the be-
ginning and the end of the HDLC Frame.
Note: In reception, three possible flag configura-
tion are allowed and correctly detected:
- two normal consecutive flags:
...01111110 01111110...
- two consecutive flags with a “0” common:
...011111101111110...
- a global common flag:...01111110...
this flag is the closing flag for the current frame
and the opening flag for the next frame
– ABORT
The binary sequence 11111 11 marks an Abort
command.
In reception, seven consecutive 1’s, inside a
message, are detected as an abort command
and generates an interrupt to the host.
In transmit direction, an abort is sent upon com-
mand of the micro-processor. No ending flag is
expected after the abort command.
16/130

STLC5466
– BIT STUFFING AND UNSTUFFING
This operation is done to avoid the c on fusio n of
a data byte with a flag.
In transmission, if five consecutive 1’s appear in
the serial stream being transmitted, a zero is automatically inserted (bit stuffing) after the fifth
“1”.
In reception, if five consecutive “1” followed by a
zero are received, the “0” is assumed to have
been inserted and is automatically deleted (bit
unstuffing).
– FRAME CHECK SEQUENCE
The Frame Check Sequence is calculated according to the recommendation Q921 of the
CCITT.
– ADDRESS RECOGNITION
In the frame, one or two bytes are transmitted to
indicate the destination of the message. Two
types of addresses are possible:
- a specific destination address
- a broadcast address.
In reception, the controller compares the receive
addresses to internal registers, which contain
the address message. 4 bits in the receive command register (HRCR) inform the receiver of
which registers, it has to take into account for the
com parison. The rece iver compar es th e two address bytes of the message to the specific board
address and the broadcast address. Upon an
address match, the address and the data following are written to the data buffers ; upon an address mismatch, the frame is ignored. So, it
authorizes the filtering of the messages. If no
comparison is specified, each frame is received
whatever its address field.
In Transmission, the controller sends t he frame
including the destination or b roadcast addresses.
III.2.2 - CSMA/CR Capability
An HDLC channel can come in and go out by any
TDM input on the matrix.
For time constraints, direct HDLC Access is
achieved by the input TDM (DIN 8 for the first
HDLC controller and DIN9 for the second HDLC
controller) and the output TDM (DOUT6 for the
first and DOUT7 for the second HDLC controller).
In transmission, a time slot of a TDM can be
shared between different s ources in Multi-point to
point configuration (different subscriber’s boards
for example). The arbit ratio n system is the CSMA/
CR (Carrier Sense Multiple access with Contention Resolution).
The contention is resolved by a bus connected to
the CB1 pin (Contention Bus) for t he first HDLC
controller and CB2 pin for the second HDLC con-
troller. These two bus are respe ctively a 2Mbit/s
wire line common to all the potential sources.
If the first HDLC controller (or the second) has obtained the access t o the bu s, the data to transmit
is sent simultaneously on the CB1 line (or the CB2
line) and the output TDM. The result of the contention is read back on the Echo line (EC1o r EC2). If
a collision is detected, the transmission is stopped
immediately. A contention on a bit basis is so
achieved. Each message to be sent with CSMA/
CR has a priority class (PRI = 8, 10) indicated by
the Transmit Descriptor and some rules are implemented to arbitrate the access to the line. The
CSMA/CR Algorithm is given. Whe n a request to
send a message occurs, the transmitter determines if the shared channel is free. The
HDLC
listens to the Echo line. If C or more consecutive “1” are detected (C depending on the message’s priority), the
message. Each bit sent is sampled back and compared with the original value to send. If a bit is different, the transmission is instantaneously
stopped (before the end of this bit time) and will restart as soon as the
channel is free without interrupting the microprocessor.
After a successful transmi ssion of a message, a
programmable pen alty PEN(1 or 2) is applied to
the transmitter. It guarantees that the same transmitter will not take the b us another time b efore a
transmitter which has to send a message of same
priority.
In case of a collision, the frame which has been
aborted is automatically retransmitted by the DMA
controller without warning the microprocessor of
this collision. The frame can be located in several
buffers in external memory. The collision can be
detected from the second bit of the opening frame
to the last but one bit of the closing frame.
III.2.3 - Ti m e Slot Assigner Memory
Each HDLC channel is bidirectional and is defined
by two Time Slot Assigners (TSA).
TSA is a memory of 32 words (one per phys ical
Time Slot) where all of the 32 input and output time
slots of the HDLC controllers can be associated to
logical HDLC channels. Super channels are created by assigning the same logical chann el num ber
to several physical time slot s.
The following features are programmed for each
HDLC time slot:
– Time slot used or not
– One logical channel number
– Its so u r ce:
- DIN 8 or the output 7 of the matrix for the first
Time Slot Assigner
Multi-H DLC
Multi-HDLC
begins to send its
will detect that the
Multi-
17/130

STLC5466
- DIN 9 or the output 6 of the matrix for the second Time Slot Assigner.
– Its bit rate and conc erned bit s (4k bit/s to 64kbit /
s). 4kbit/s correspond to one bit transmitted
each two frames. This bit is repeated twice in
transmission. This bit must be present in two
consecutive frames in reception.
– Its destination for the first Time Slot Assigner:
- direct output on DOUT6
- direct output on DOUT6 and on the Contention
Bus (CB1)
- on another OTDM via input 7 of the matrix and
on the Contention Bus (CB1)
– Its destination for the second Time Slot Assig n-
er:
- direct output on DOUT7
- direct output on DOUT7 and on the Contention
Bus (CB2)
- on another OTDM via input 6 of the matrix and
on the Contention Bus (CB2)
III.2.4 - Data Storage Structure
Data associated with each Rx and Tx HDLC channel is stored in external memory; The data transfers between the HDLC controllers and m emory
are ensured by 2*32 DMAC (Direct Memory Access Controller) in reception and 2*32 DMA C in
transmission.
The storage structure chosen i n bot h di rections is
composed of one circular queue of buffers per
channel. In such a queue, each data buffer is
pointed to by a Descriptor located in external
memory too. The main information contained in
the Descriptor is the address of the Data Buf fer, its
length and the address of the next Descriptor; so
the descriptors can be linked together.
This struct ur e allow s to:
– Store receive frames of variable and unknown
length
– Read transmit frames stored in external memory
by the host
– Easily perform the frame relay function.
III.2.4.1 - Reception
At the initialization of the application, the host has
to prepare two Initialization Block registers. Each
Initialization Block located in shared memory contains the first receive buffer descriptor address for
each channel, and the receive circular queues. At
the opening of a receive channel, the DMA controller reads the address of the first buffer descriptor corresponding to this channel in the
initialization Block. Then, the data transfer can occur without intervention of the processor.
A new HDLC frame always begins in a new buffer.
A long frame can be split between several buffers
if the buffer size is not sufficient. All the information
concerning the fram e a nd its l ocatio n in the c ircular queue is included in the Receive Buffer Descriptor:
– The Receive Buffer Address (RBA),
– The size of the receive buffer (SOB),
– The number of bytes written into the buffer
(NBR),
– The Next Receive Descriptor Address (NRDA),
– The status concerning the receive frame,
– The control of the queue.
III.2.4.2 - Transmission
In transmission, the data is manage d by a sim ilar
structure as in reception
By the same way, a frame can be split up between
consecutive transmit buffers.
The main information contained in the Transmit
Desc rip t or ar e:
– transmit buffer address (TBA),
– number of bytes to transmit (NBT) concerning
the buffer,
– next transmit descriptor address (NTDA),
– status of the frame after transmission,
– control bit of the queue,
– CSMA/CR priority (8 or 10).
III.2.4.3 - Frame Relay
The principle of the frame relay is to transmit a
frame which has been received without treatment.
A new heading is just added. This will be easily
achieved, taking into account that the queue structure allows the transmission of a frame s plit between several buffers.
III.2.5 - Transparent Modes
In the transparent mode, the
data in a completely transparent manner without
performing any bit manipulation or Flag insertion.
The transparent mode is per byte function; the
channel used for this mode is n*64 kb/s mandatory.
Two transparent modes are offered:
– First mode: for the receive channels, the
HDLC
continu ously w rites rece ived b ytes (from
the received timeslot) into the external memory
as specified in the current receive descriptor
without taking into account the Fill Character
Register.
– Second mo de: the Fill Character Register spec-
ifies the “fill c ha ra c te r” w hic h m u st be tak en int o
account. In reception, the “fill character” is de-
Multi-HDLC
transmits
Multi-
18/130

STLC5466
tected in each timeslot and will not be transferred to the external memory. The detection of
“Fill character” marks the end of a message and
generates an interrupt if BINT=1). When the “Fill
character” is not detected a new message is re-
ceiving.
As for the HDLC mode the correspondence between the physical time slot and the logical channel is fully defined in the two Time Slot Assigners
(Time slot used or not used, logical channel
number, source, destination).
III.2.6 - Command of the HDLC Channels
The microprocessor is able to control each HDLC
receive and transmit channel. Some of the com mands are specific to the transmission or t he reception but others are identical.
III.2.6.1 - Reception Control
– The configuration of the controller operating
mode is: HDLC mode or Transparent mode.
– The control of the controller: START, HALT,
CONTINUE, ABORT.
START: On a start comm and, the RxDM A con-
troller reads the address of the first descriptor in
the initialization block memory and is ready to
receive a frame.
HALT: For overloading reasons, the microproc-
essor can decide to halt the reception. The DMA
controller finishes transfer of the current frame
to external memory and stops. The channel can
be restarted on CONTINUE command.
CONTINUE: The reception restarts in the next
descriptor.
ABORT: On an abort command, the reception is
instantaneously stopped. The channel can be
restarted on a START or CONTINUE command.
– Reception of FLAG (01111110) or IDLE
(11111111) between Frames.
– Address recognition. The microprocessor de-
fines the addresses that the Rx controller has to
take into account.
– In transparent mode: “fill character” register is
selected or not.
III.2.6.2 - Transmission Control
– The configuration of the controller operating
mode is: HDLC mode or Transparent mode.
– The control of the controller: START, HALT,
CONTINUE, ABORT.
START: On a start comm and, t he Tx DM A controller reads the address of the first descriptor in
the initialization block memory and tries to transmit the first frame if End Of Queue is not at “1”.
HALT: The transmitter finishes to send the current frame and stops.The channel can be restarted on a CONTINUE command.
CONTINUE: if the CONTINUE command occurs
after HALT command, the HDLC Transmitter restarts by transmitting t he next bu ffer as sociat ed
to the next descriptor.
If the CONTINUE command occurs after an
ABORT command which has occurred during a
frame, the HDLC transmitter restarts by transmitting the frame which has been effectively
aborted by the microprocessor.
ABORT: On an abort comm and, the transmission of the current frame is instantaneously
stopped, an ABORT sequence “1111111” is
sent, followed by IDLE or FLAG bytes. The
channel can be restarted on a START or CONTINUE command.
– Transmission of FLAG (01111110) or IDLE
(111111111) between frames can be selected.
– CRC can be generat ed or no t. If the CRC is not
generated by the HDLC Controller, it must be located in the shared memory.
– In transparent mode: “fill character” register can
be selected or not.
III.3 - C/I and Monitor
III.3.1 - Function Description
The
Multi-HDLC
is able to operate both GCI and
V* links. The TDM DIN/DOUT 4 and 5 are internally connected to the CI and Monitor receivers/transmitters. Since the controllers handle up to 16CI
and 16 Monitor channels simultaneously, the
ti-HDLC
The
can manage up to 16 level 1 circuits.
Multi-H D L C
can be used to support the CI and
Mul-
monitor channels based on the following protocols:
– ISDN V* protocol
– ISDN GCI protocol
– Analog GCI protocol.
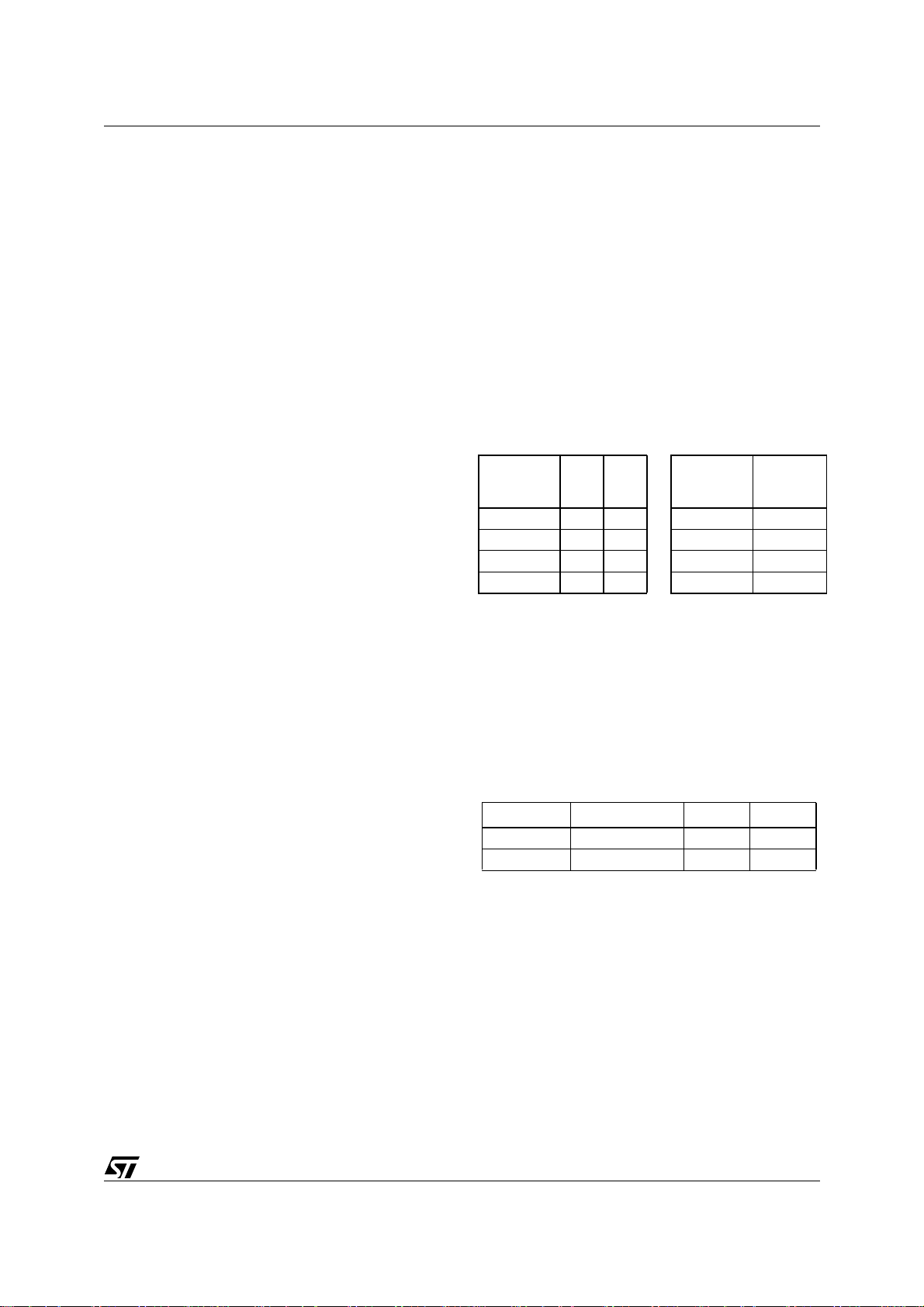
III.3.2 - GCI and V* Protocol
A TDM can carry 8 GCI channels or V* channels.
The monitor and S/C bytes always stand at the
same position in the TDM in both cases.
CGI Channel 0
TS0 TS1 TS2 TS3 TS28 TS29 TS30 TS31
B1 B2 MON S/C B1 B2 MON S/C
CGI Channel 1 to Channel 6
CGI Channel 7
19/130
STLC5466
The GCI or V* channels are composed of 4 bytes
and have both the same general structure.
B1 B2 MON S/C
B1, B2 : B ytes of data. Those bytes are not af-
fected by the monitor and CI protocols.
MON : Monitor channel for operation and
maintenance information.
S/C : Signalling and control information.
Only Monitor hands hakes and S/C bytes are dif-
ferent in the three protocols:
ISDN V* S/C byte
D 2 bits C/I 4 bits T E
ISDN GCI S/C byte
D 2 bits C/I 4 bits A E
Analog GCI S/C byte
C/I 6 bits A E
CI : The Comm and/Indicate channel is used for
activation/deactivation of lines and control
functions.
D : These 2 bits carry the 16 kbit/s ISDN basic
access D channel.
In GCI protocol, A and E are the handshake bits
and are used to control the transfer of information
on monitor channels.The E bit indicates the transfer of each new byte in one direction and the A bit
acknowledges this byte transfer in the reverse direction.
In V* protocol, there isn’t any handshake
mode.The transmitter has only to mark the validity
of the Monitor byte by positioning the E bit (T is not
used and is forced to “1”).
For more information about the GCI and V*, ref er
to the General Interface Circuit Specification
(issue1.0, march 1989) and the France Telecom
Specification about ISDN Basic Access second
generation (November 1990).
III.3.3 - Structure of the Treatment
In reception GCI/V* TDM’s are connected to DIN 4
and DIN 5. The D channel s are switched t hrough
the matrix towards the output 7 and output6 then
towards the HDLC receivers. The Monitor and S/C
bytes are multiplexed and sent to the CI and Monitor receive rs .
In transmission, the S/C and Monitor bytes are recombined by multiplexing the information provided
by the Monitor, C/I and the HDLC Transmitter.
Like in reception, the D channel is switched
through the matrix (input 7 towards DOUT 4 and
DOUT 5).
III.3.4 - CI and Monitor Channel Configuration
Monitor channel data is located in a time slot; the
CI and monitor handshake bits are in the next time
slot.
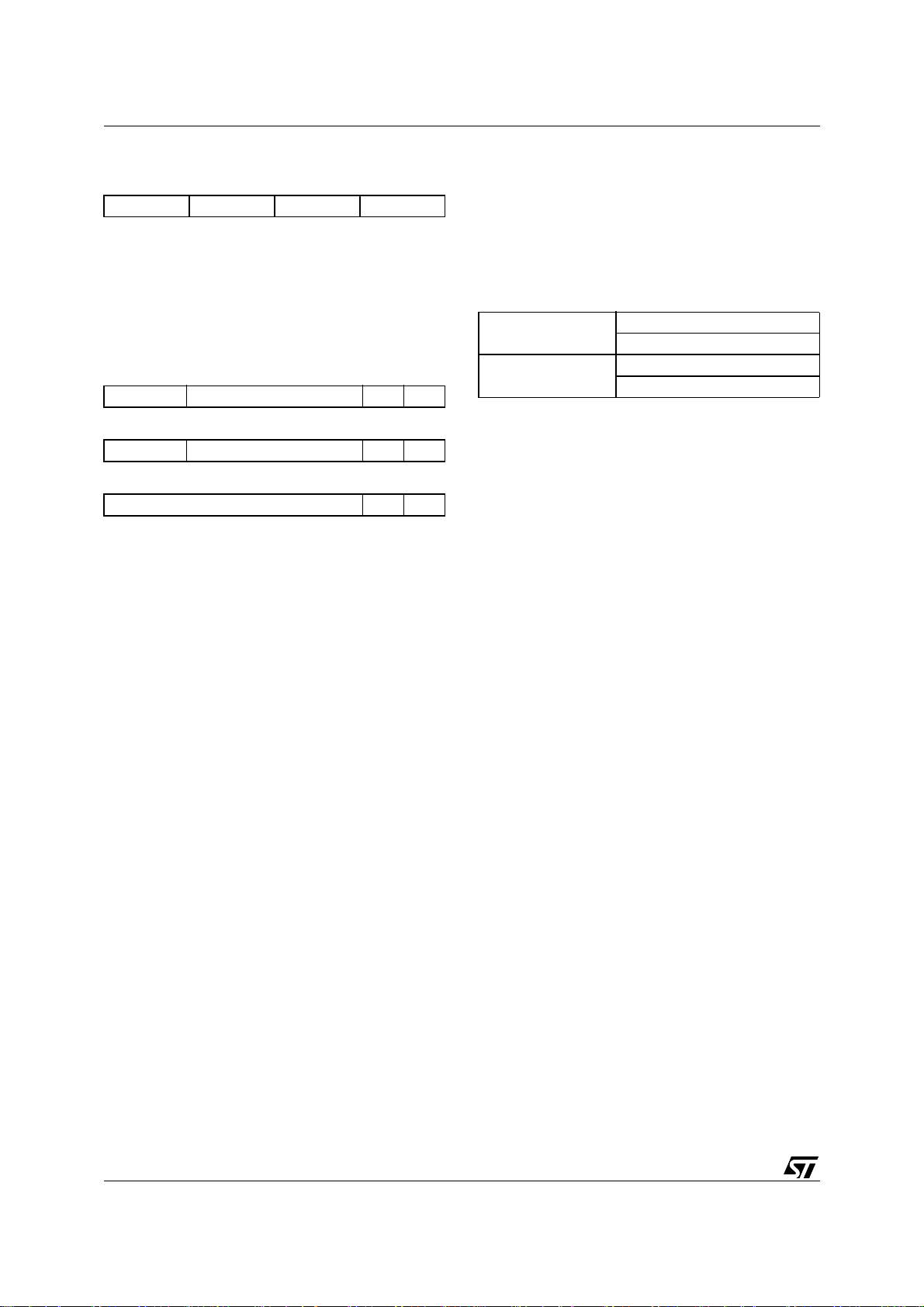
Each channel can be defined independently. A table with all the possible configurations is presented hereafter (Table 13).
Table 13: C/I and MON Channel Configuration
C/I validated
or not
Monitor validated
or not
Note:
A mix of V* and GCI monitoring can be performed for two dis-
tinct chan nels in the sam e applicat io n.
CI For analog subscriber (6 bits)
CI For ISDN subscriber (4 bits)
Monitor V*
Monitor GCI
III.3.5 - CI and Monitor Transmission/Reception
Command
The reception of C/I and Monitor messages are
managed by two interrupt queues.
In transmission, a transmit command register is
implemented for each C/I and monitor channel
(16C/I transmit command registers and 16 Monitor
transmit command regist ers). Those regist ers are
accessible in read and write modes by the microprocessor.
III.4 - Scrambler and Descrambler
The TDM4 and TDM5 can be GCI multipexes.
Each GCI multipex comprises 8 GCI channels.
Each GCI channe l comprises two B chann els at
64 Kbit/s.
In reception it is possible to switch and to scramble
the contents of 32 B channels of GCI channels to
32 timeslots of the 256 output timeslots. In transmission these 32 timeslots are assigned to 32 B
channels.
In the other direction the contents of an selected B
channels is automatically switched an d descrambled to one B channel of 16 GCI channel.
See SCR bit of Connection Memory Data Register
CMDR (0E)H.
III.5 - Connection between “ISDN channels”
and GCI channels.
Three timeslots are assigned to one “ISDN channels”. Each “ISDN channels” comprises three
channels: B1+B2+B* with B*= D1,D2, A, E, S1,
S2, S3, S4 (See figure).
– Upstream. From GCI channels to ISDN chan-
nels.
• in reception: 16 GCI channels (B1+B2+MON+
D+C/I),
20/130
STLC5466
• in transmission: 16 ISDN channels (B1+B2+B*).
It is possible to swit ch t he c ontents of B 1, B2 and
D channels from 16 GCI channels in any 16 “ISDN
channels”, TDM side.
The contents of B1 and/or B2 can be scrambled or
not. If scrambled the number of the 32 timeslots
(TDM side) are different mandatory.
Receiving the contents of M onitor and Command
/ Indicate channels from 16 G CI channels. Pr imitives and messages are stored automatically in
the external shared memory.
Transmitting “six bit word” (A, E, S1, S2, S3, S4)
to any 16 “ISDN channels” TDM side or not. See
SBV bit of General Configuration Register GCR
(02)H.
– Downstream. From ISDN channels to GCI chan-
nels.
• in reception: ISDN channel (B1+B2+B*)
• in transmission: GCI channel (B1+B2+MON+
D+C/I)
It is possible to swit ch t he c ontents of B 1, B2 and
D channels from 16 “ISDN channels”, TDM side in
16 GCI channels.
The contents of B1 and/or B2 can be descrambled
or not. If descrambled the 32 B1/B2 belong to GCI
channels mandatory.
Receiving six bit word (A, E, S1, S2, S3, S4) from
any 16 “ISDN channels”, TDM side. The 16 “six bit
word” are stored automatically in the external
shared memory.
Transmitting the contents of Monitor and Command / Indicate channels to 16 GCI channels. See
SBV bit of General Configuration Register GCR
(02)H.
– Alarm Indication Signal.
This detection concerns 16 hyperchannels. One
hyperchannel comprises 16 bits (B1 and B2 only).
The Alarm Indications for the 16 hyperchannels
are stored automatically in the external shared
memory. See AISD bit of Switchi n g Matrix C onfiguration Register SMCR (0C)H.
III.6 - Microprocessor Interface
III.6.1 - Description
Multi-HDLC
The
circuit can be controlled by several types of microprocess ors (ST9/10, Intel /Motorola 8 or 16 data bits interfaces) such as:
– ST9/10 fa mily
– INTEL 80C188 8 bits
– INTEL 80C186 16 bits
– INTEL 386EX 16 bits
– MOTOROLA 68000 16 bits
– MOTOROLA 68020 32 bits
Table 14 :
MOD2
Pin
During the initialization of the
Microprocessor Interface Selection
MOD1
Pin
0 1 1 80C188
1 1 1 80C186
1 0 0 68000
0 0 0 68020
0 0 1 ST9
1 0 1 ST10 A/D multiplexed
1 1 0 ST10 A/D Not multiplexed
0 1 0 386EX
MOD0
Pin
Microprocessor
Multi-HD LC
circuit,
the microprocessor interface is informed of the
type of microprocessor that is connected by polarisation of three external pins MOD 0/2.
Three chip Select (CS0/2) pins are provided. CS0
will select the internal registers and CS1 the external memory. CS2 can be used to select the external memory in INTEL 386EX application only (see
pin 41 definition).
III.6.2 - Buffer
A Buffer is located in the microprocessor interface.
It is used whatever microprocessor selected
thanks to MOD0/2 pins. It allows to reduce the
shared memory access cycles for the microprocessor.
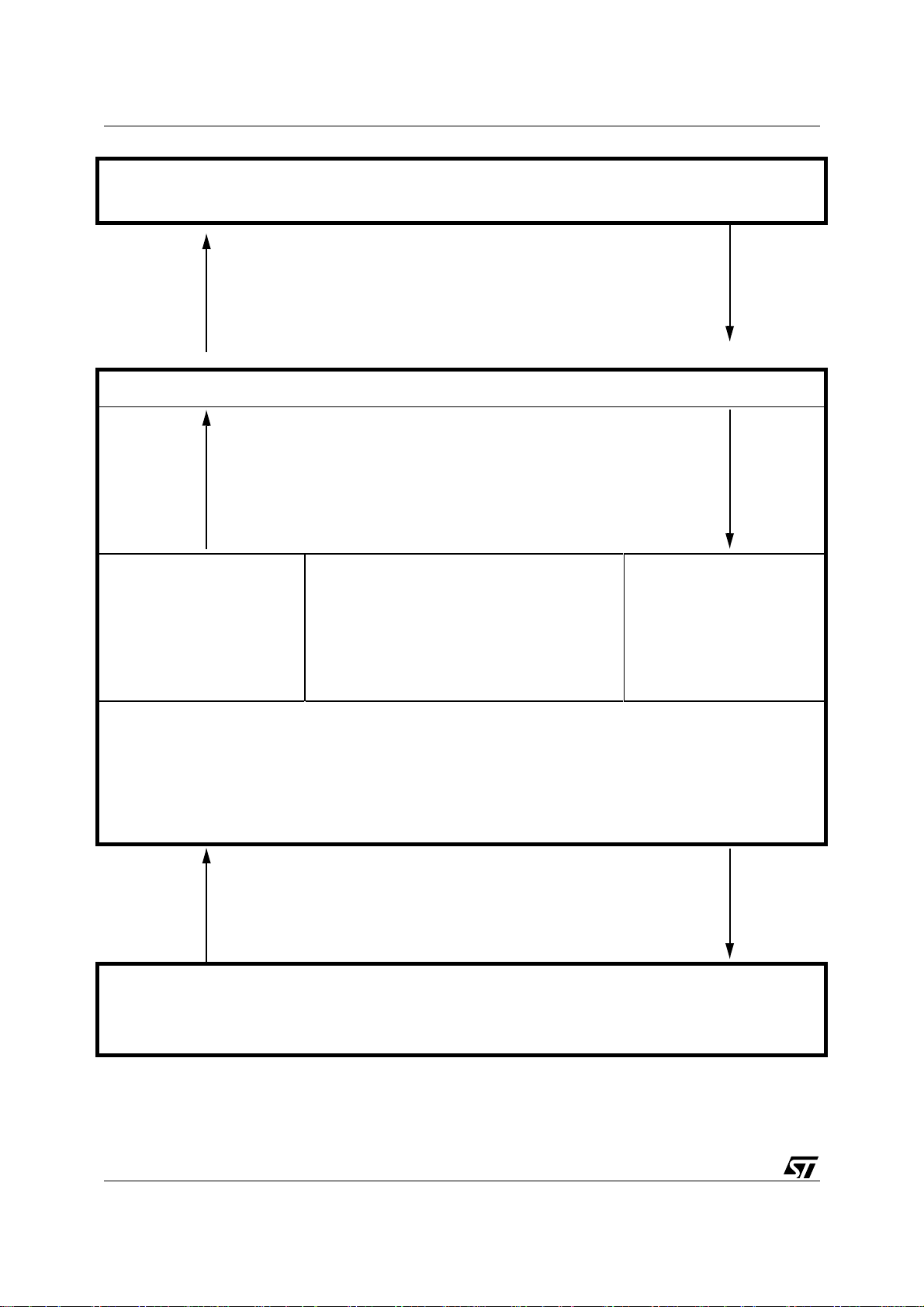
This Buffer consists of o ne Write FIFO and one
Read Fetch Memory (see Figure).
III.6.2.1 - Write FIFO
When the microprocessor delivers the address
word named Ax to write dat a named [Ax] in the
shared memory in fact it writes data [Ax] and address word Ax in the Write FIFO (8 words). If Ax is
in Fetch Memo r y, [Ax ] is re moved i n Fetch Memory.
There is no wait time for the microprocessor if the
Write FIFO is not full entirely.
21/130
STLC5466
Shared memory
SDRAM Bus
To shared memory SDRAM Controller From shared memory
MHDLC Internal Bus
Ax, [Ax] Read Fetch 64 words
Ay, [Ay] Memory
Az, [Az]
At, [At] Write FIF O
Up to eight wo rds
Input register used to
store data in Write
FIFO
from microprocessor
Fetch Memory
An, [An]
MHDLC microprocessor interface To microprocessor
Microprocessor Bus
Microprocessor
Figure 2 :
22/130
Exchange between Microprocessor and Shared memory across MHDLC
STLC5466
III.6.2.2 - Read Fetch Memory
When the microprocessor delivers the address
word named An to read data named [An] out of the
shared memory in fact it reads data [An] from the
Read Fetch Memory (64 words).
The number of wait cycle f or the microp rocessor i s
strongly reduced. If An, address word delivered by
the microprocessor, and data [An] are already in
the Read Fetch Memory and validated then there
is no wait time for the microprocessor.
The source of [An] is truly the shared memory
whatever An.
Data [An] if validated in Fetch Memory and Data
[An] in shared memory are always the same.
III.6.2.3 - Definition of the Interface for the different microprocessor s
The signals connected to the microprocessor interface are presented on the following figures for
the different microprocessor (see Figures).
III.7 - Memory Interface
III.7.1 - Function Description
The memory interface allows the connection of
Synchronous Dynamic RAM. The memory interface will address up to 16 Megabytes. The memory location is always organized in 16 bits.
The memory is shared b etween the
Multi-HDLC
and the microprocessor. The access to the m emory is arbitrated by an internal function of the c ircuit: the bus arbitration.
III.7.2 - Choice of memory versus microprocessor and capacity required
The memory interface depends on the memory
chips which are connected. The memory chips will
be chosen versus their organization.
Example1: if the applicat ion requires 8 or 16 bit
µ
Processor and 1 Megaword Shared memory
size, one capability is offered:
– 1 SDRAM Circuit (1Mx16).
Example2: if the application requires 16 bit µProc-
essor and 4 Megaword Shared memory size,
three capabilities are offered:
– 4 SDRAM Circuits (1Mx16) or
– 4 SDRAM Circuits (4Mx4) or
– 1 SDRAM Circuit (4Mx16).
.Example3: if the application requires 8 Megaword
Shared memory size three capabilities are offered:
– 8 SDRAM Circuits (4Mx4) or
– 2 SDRAM Circuits (4Mx16) or
– 2 SDRAM Circuit (8Mx8).
III.7.3 - Memory Cycle
Some parameters are frozen:
– Burst Read and Singl e Write.
– The Burst Length is 4.
– The burst data is addressed in sequential mode.
The programmable parameters are:
– Latency Mode
– selected c ircuit organisation
– the exchanges between Multi-HDLC and
SDRAM are at the Master Clock frequency
(33MHz, 50MHz, 66MHz)
III.7.4 - Memories composed of different circuits
III.7.4.1 - Memory obtained with 1M x16 SDRAM
circuit
Signals A22 A21 Signals
NCE3 1 1
NCE2 1 0
NCE1 0 1 UDQM 1
NCE0 0 0 LDQM 0
A0
or equiva-
lent
The Address bits delivered by the Multi-HDLC for
1M x 16 SDRAM circuits are:
– ADM 11 for B ank s el ect correspon ding with A20
delivered by the microprocessor
– ADM0/10 for Row address inputs corresponding
with A9/19 delivered by the microprocessor
– ADM0/7 for Column address inputs correspond-
ing with A1/8 delivered by the microprocessor
III.7.4.2 - Memory obtained with 2M x 8 SDRAM
circuit
Signals A0 or equivalent NLDS NUDS
UDQM 1 0 1
LDQM 0 1 0
The Address bits delivered by the Multi-HDLC for
2M x 8 SDRAM circuits are:
– ADM 11 for B ank s el ect correspon ding with A21
delivered by the microprocessor
– ADM0/10 for Row address inputs corresponding
with A10/20 delivered by the microprocessor
– ADM0/8 for Column address inputs correspond-
ing with A1/9 delivered by the microprocessor
23/130
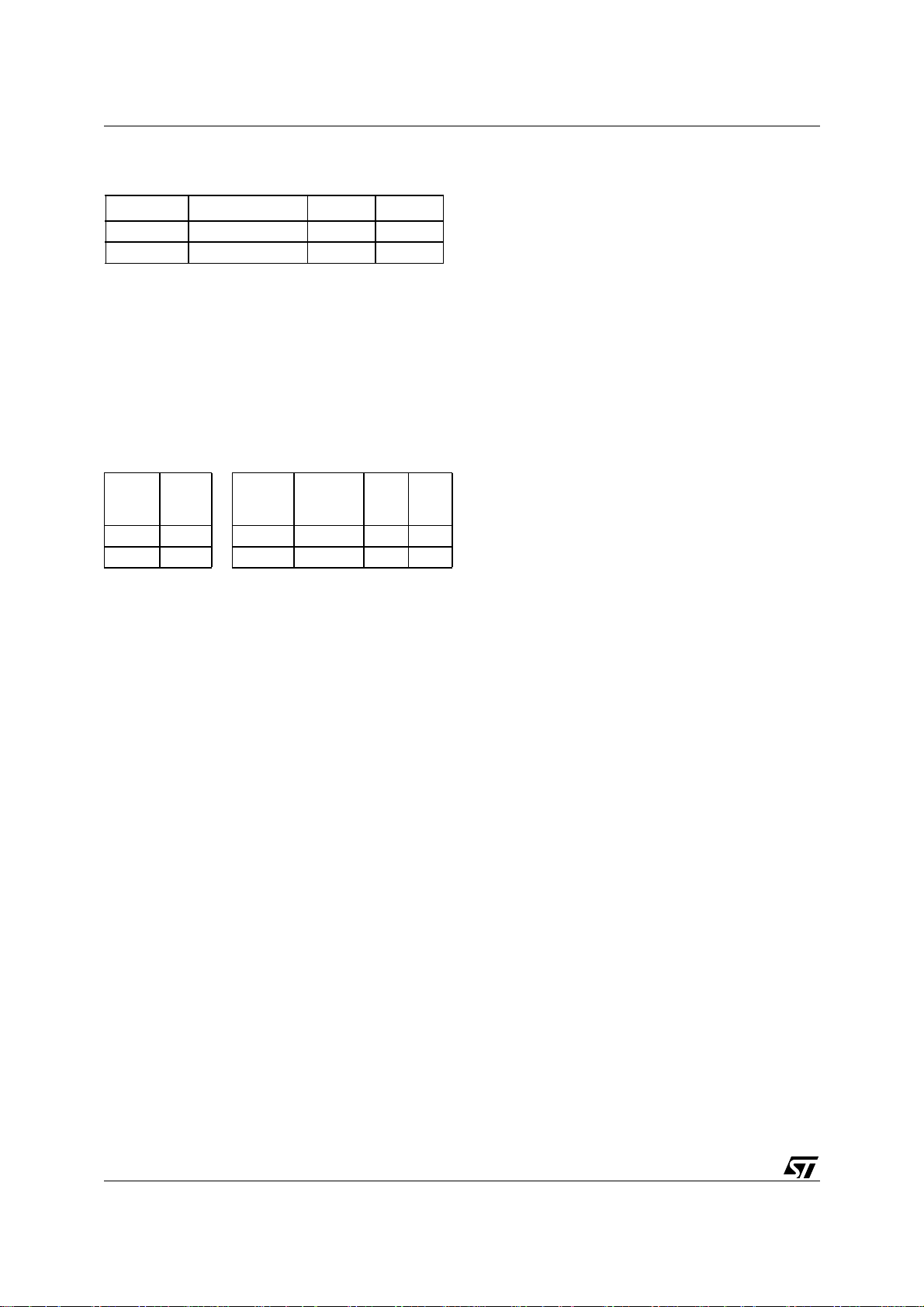
STLC5466
III.7.4.3 - Memory obtained with 8M x 8 SDRAM
circuit
Signals A0 or equivalent NLDS NUDS
UDQM 1 0 1
LDQM 0 1 0
The Address bits delivered by the Multi-HDLC for
8M x 8 SDRAM microprocessor circuits are:
– ADM12/13 for Bank select corresponding with
A22/23 delivered by the microprocessor
– ADM0/11 for Row address inputs corresponding
with A10/21 delivered by the microprocessor
– ADM0/8 for Column address inputs correspond-
ing with A1/9 delivered by the microprocessor
III.7.4.4 - Memory obtained with 4M x 16
SDRA M c i rc uit
Signals A23 Signals
NCE1 1 UDQM 1 0 1
NCE0 0 LDQM 0 1 0
A0 or
equiva-
lent
NLDS NUDS
The Address bits delivered by the Multi-HDLC for
4M x 16 S DRAM circuits are:
– ADM12/13 for Bank select corresponding with
A21/22 delivered by the microprocessor
– ADM0/11 for Row address inputs corresponding
with A9/20 delivered by the microprocessor
– ADM0/7 for Column address inputs correspond-
ing with A1/8 delivered by the microprocessor
III.8 - Bus Arbitration
The Bus arbitration function arbitrates t he access
to the bus b etwe en dif ferent ent ities of the circuit.
Those entities which can cal l for the bus are the
follo wing :
– The receive DMA controller,
– The microproces sor,
– The transmit DMA controller,
– The Interrupt controller,
– The memory interface for refreshing the
SDRAM.
This list gi ves the memory access pri orities per default.
If the treatment of more than 64 HDLC channels is
required by the application, it is possible to chain
seve ra l
Multi-H DLC
components. That is done
with two external pins (TRI, TRO) and a token ring
system.
The TRI, TRO signals are managed by the bus arbitration function too. When a chip has finished its
tasks, it sends a pulse of 30 ns to the next chip.
III.9 - Clocks
III.9.1 - Clock Distribution Selection and Super-
vision
Two clock distributions are available:
Clock at 4.096 MHz or 8.192 MHz and a synchro-
nization signal at 8 KHz.
The component has to select one of these two dis-
tributions and to check its integrity.
Two other clock distributions are allowed: Clock at
3072 MHz or 6144 MHz and a synchronization signal at 8 KHz.
See General Configuration Register GCR (02)
.
H
DCLK, FSC GCI and FSC V* are o utput on three
external pins of the Multi-HDLC. DCLK is the clock
selected between Clock A and Clock B. FSC, GCI
and FSC V* are functions of the selected distribution and respect the GCI and V* f ram e sy nchronization specifications.
The supervision of t he clock distribution consists
of verifying its availability. The detection of the
clock absence is done in a less than 250 microseconds. In case the clock is absent, an interrupt is
generated with a 4 kHz recurrence. Then the clock
distribution is switched automatica lly up to de tection of couple A or couple B. When a couple is detected the change of clock occurs on a falling edge
of the new selected distribution. Moreover the
clock distribution can be con trolled by the microprocessor thanks to SELB, bit of General Configuration Register.
Depending on the applications, three different signals of synchronization (GCI, V* or Sy) can be provided to the comp onent . Th e c lock A/B frequency
can be a 4096 or 8192 kHz clock. The component
is informed of the synchronization and clocks that
are connected by software.
III.9.2 - VCXO Frequency Synchronization
An external VCXO can be used to provide a clock
to the transmission components. This clock is controlled by the main clock distribution (Clock A or
Clock B at 4096kHz). As the c lock of the transmission component is 15360 o r 16384kHz, a c onfigurable function is necessary.
The VCXO frequency is divided by P (30 or 32) to
provide a common sub-multiple (512kHz) of the
reference frequency CLOCKA or CLOCKB
(4096kHz). The com parison of these two si gnals
gives an error signal which commands the VCXO.
Two external pins are needed to perform this function: VCXO-IN and VCXO-OUT.
24/130

STLC5466
III.10 - Interrupt Controller
III.10.1 - Description
Three external pins are used to manage the interrupts generated by the
Multi-HDLC
. The interrupts
have three main sources:
– The operating interrupts generated by the HDLC
receivers/transmitters, the CI receivers and the
monitor transmitters/receivers. INT0 Pin is reserved for this use.
– The interrupt generated by an abnormal working
of the clock distribution. INT1 Pin is reserved for
this use.
– The non-activity of the microprocessor (Watch-
dog). WDO Pin is reserved for this use.
III.10.2 - Operating Interrupts (INT0 Pin)
There are five main sources of operating interrupts
Multi-H DL C
in the
circuit:
– The HDLC receiver,
– The HDLC transmitter,
– The CI receiver,
– The Monitor receiver,
– The Monitor transmitter.
When an interrupt is generated by one of these
functions, the interrupt controller:
– Collects all the information about the reasons of
this interrupt
– Stores them in external memory.
– Informs the microprocessor by positioning the
INT0 pin in the high level.
Three interrupt queues are built in exte rnal mem-
ory to store the information about the interrupts:
– A single queue for the HDLC receivers and
transmitter
– One for the CI receivers
– One for the monitor receiver
The microprocessor takes the interrupts into account by reading the Interrupt Register (IR) of the
interrupt controller.
This register informs the microprocessor of the interrupt source. The microprocessor will have information about the in terrupt source by reading the
corresponding interrupt queue (see Paragraph “Interrupt Register IR(38)
” on Page 74).
H
On an overflow of the circular interrupt queues and
an overrun or underrun o f the different FIFO, the
INT0Pin is activated and the origin of the interrupt
is stored in the Interrupt Register.
A 16 bits register is associated with the Tx Monitor
interrupt. It informs the microprocessor of which
transmitter has generated the interrupt (see Paragraph “Transmit Monitor Interrupt Register
TMIR(30)
” on Page 71).
H
III.10.3 - Time Base Interrupts (INT1 Pin)
The Time base interrupt is generated when an absence or an abnormal working of clock distribution
is detected. The INT1 Pin is activated.
III.10.4 - Emergency Interrupts (WDO Pin)
The WDO signal is activated by an overflow of the
watchdog register.
III.10.5 - Interrupt Queues
There are three different interrupt queues:
– Tx and Rx HDLC interrupt queue
– Rx C/I interrupt queue
– Rx Monitor interrupt queue.
Their length can be defined by software.
For debugging function, each interrupt word of the
CI interrupt queue and monitor interrupt queue
can be followed by a time stamped word. It is composed of a counter which runs in the range of
250µs. The counter is the same as the watchdog
counter. Consequently, the watchdog function
isn’t available at the same time.
III.11 - Watchdog
This function is used to control the activity of the
application. It is composed of a counter which
counts down from an initial value loaded in the
Timer register by the microprocessor.
If the microprocessor doesn’t reset this counter
before it is totally decremented, the external Pin
WDO is activated; this signal can be used to reset
the microprocessor and all the application.
The initial time value of the counter is programmable from 0 to 15s in increments of 0.25ms.
At the reset of the component, the counter i s automatically initialized by the value corresponding t o
512ms which are indicated in the Timer register.
The microprocessor must put WDR (IDCR Register) to”1” to reset this counter and to confirm that
the application started correctly.
In the reverse case, the WDO signal could be used
to reset the board a second time.
III.12 - Reset
There are two possibilities to reset the circuit:
–by software,
– by hardware.
Each programmable register receives its default
value. After that, the default value of each data
register is stored in the associated memory except
for Time slot Assi gn e r memory.
25/130

STLC5466
III.13 - BOUNDARY SCAN
The Multi-HDLC is equipped with an IEEE Standard Test Access Port (IEEE Std 1149.1). The
boundary scan technique involves the inclusion of
a shift register stage adjacent to each component
pin so that signa ls at component boundaries can
be controlled and observed using scan testing
principle. Its intention is to enable the test of on
board interconnections and ASIC production tests.
The external interface of the Boundary Scan is
composed of the signals TDI, TDO, TCK, TMS
and TRST as defined in the IEEE Standard.
26/130
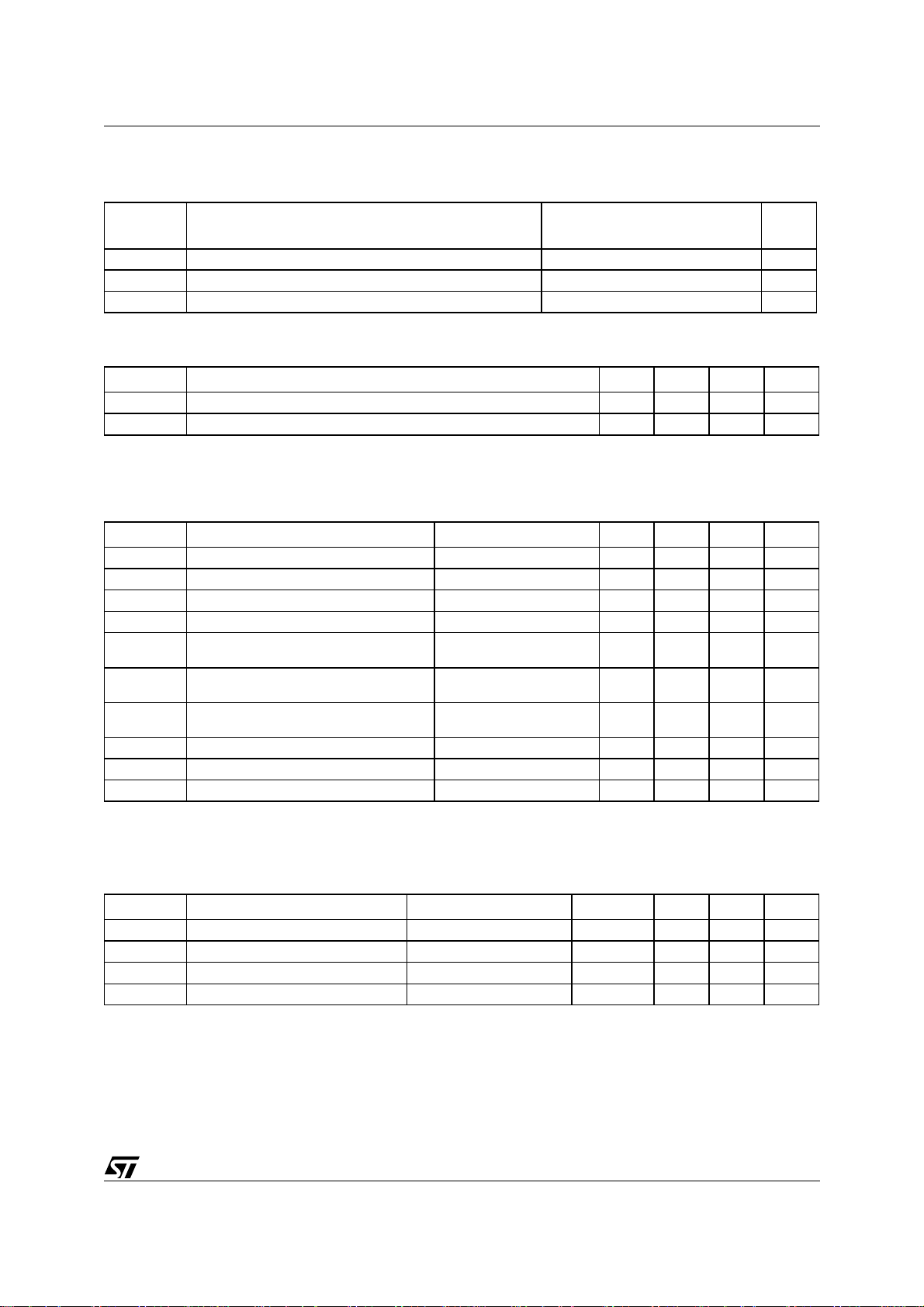
STLC5466
IV - DC SPECIFICATIONS
Absolute Maximum Ratings
Symbol Parameter Value Unit
V
DD
T
stg
Recommended DC Operating Conditions
Symbol Parameter Min. Typ. Max. Unit
V
DD
T
oper
Note 1:
For 5V tolerant inputs and 5V tolerant output buffers in tristate mode
Note 2:
All the following specifications are valid only within these recommended operating conditions
.
TTL Input DC Electrical Characteristics
Symbol Parameter Test Conditions Min. Typ. Max. Unit
V
IL
V
IH
V
OL
V
OH
I
IL
I
IH
I
oz
Vhyst Schmitt Trigger hysteresis 0.4 0.7 V
V
T+
V
T-
3.3V Power Supply Voltage -0.5V to 4V V
Input or Output Voltage -0.5 to V
+ 0.5V V
DD
Input or Output Voltage -0.5 to +5.5V(see Note 1) V
Storage Temperature -55 to 125 °/C °/C
3.3V Power Supply Voltage (see Note2) 3.0 3.3 3.6 V
Operating Temperature - 40 85 °/C
Low Level Input Voltage 0.8 V
High Level Input Voltage 2.0 V
Low Level Output Voltage IOL = X mA (see Note 3) 0.4 V
High Level Output Voltage IOH = -X mA (see Note 3) 2.4 V
Low Level Input Current
VI = 0V 1 µA
Without pull-up device
High Level Input
Without pull-up device
Tristate output leakage current
VI = V
DD
-1 µA
VI = VDD -1 µA
without pullup/down device
Positive Trigger Voltage 0.9 1. 35 V
Negative Trigger Voltage 0.4 0.7 V
Note 3:
X is the source /sink current under worst case conditions in accordance with the drive capability: O3 = 3mA, O4 = 4 mA
CMOS Output DC Electrical Characteristics
valid only within these recommended operating conditions
Symbol Parameter Test Conditions Min. Typ. Max. Unit
V
IL
V
IH
V
OL
V
OH
Note 4: X is the source/sink curr ent under worst case conditions and is reflect ed i n the name of the I/O cell acc ording to the drive capability.
X = 4 or 8mA
Low level input voltage 0.2VDDV
High level input voltage 0.8V
DD
Low Level Output Voltage Iol = XmA (see Note 4) 0.4 V
High Level Output Voltage Ioh = XmA (see Note 4) 0.85V
DD
V
V
27/130
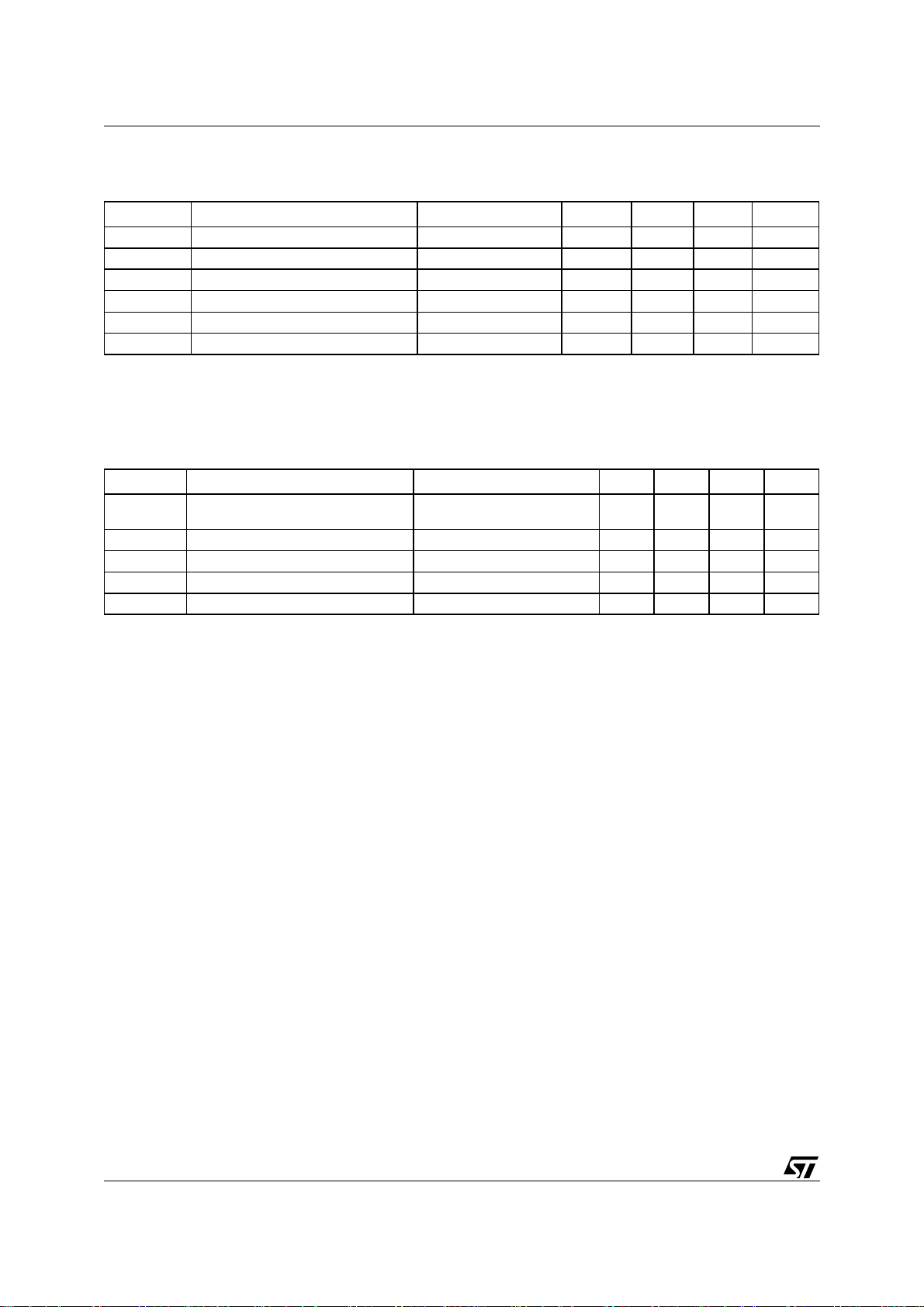
STLC5466
pull-up and pu l l-dow n charact erist ics
Symbol Parameter Test Conditions Min. Typ. Max. Unit
Ipu pull-up current Vi = 0V (Note5) -25 -66 -125 µA
Ipd pull-down current Vi = Vdd (Note5) +25 +66 +125 uA
Ipd pull-down current Vi = 5V (Note5) +25 +66 +125 uA
Rpu Equivalent pull-up resistance Vi = 0V 50 KOhm
Rpd Equivalent pull-down resistance Vi = Vdd 50 KOhm
Rpd Equivalent pull-down resistance Vi = 5V (Note6) 76 KOhm
Note5 Min conditio n: Vdd = 3.0V, 85 degrees C.
Note6 For 5V tolerant buffers
Max condition: Vdd = 3.6V, -40 degrees C.
General interface Electrical Characteristics
Symbol Parameter Test Conditions Min. Typ. Max. Unit
P Power Dissipation VDD=3.3 Volts;
MCLK=66MHz
Cin Input capacitance Freq = 1MHz@0V (Note6) 2 4 pF
Cout Output capacitance (Note
C i/o Bidir I/O capacitance (Note
)4pF
7
)48pF
7
VESD Electrostatic Protection C = 100pF, R = 1.5kΩ 2000 V
Note7 Excluding package (TQ F P176, add 1.9pF)
350 450 mW
28/130

STLC5466
V - List of registers
Internal registers
• Identification and Dynamic Command Register IDCR (00)H
• General Configuration Register 1 GCR1 (02)H
• Input Multiplex Configuration Register 0 IMCR0 (04)H
• Input Multiplex Configuration Register 1 IMCR1 (06)H
• Output Multiplex Configuration Register 0 OMCR0 (08)H
• Output Multiplex Configuration Register 1 OMCR1 (0A)H
• Switching Matrix Configuration Register SMCR (0C)H
• Connection Memory Data Register CMDR (0E)H
• Connection Memory Address Register CMAR (10 )H
• Sequence Fault Counter Register SFCR (12 )H
• Time Slot Assigner Address Register 1 TAAR1 (14)H
• Time Slot Assigner Data Register 1 TADR1 (16)H
• HDLC Transmit Command Register 1 HTCR1 (18)H
• HDLC Receive Command Register 1 HRCR1 (1A)H
• Address Field Recognition Address Register 1 AFRAR1 (1C)H
• Address Field Recognition Data Register 1 AFRDR1 (1E)H
• Fill Character Register 1 FCR1 (20)H
• GCI Channels Definition Register 0 GCIR0 (22)H
• GCI Channels Definition Register 1 GCIR1 (24)H
• GCI Channels Definition Register 2 GCIR2 (26)H
• GCI Channels Definition Register 3 GCIR3 (28)H
• Transmit Command / Indicate Register TCIR (2A)H
• Transmit Monitor Address Register TMAR (2C )H
• Transmit Monitor Data Register TMDR (2E)H
• Transmit Monitor Interrupt Register TMIR (30)H
• M emory Interface Co nfiguration Regis ter MICR (32)H
• Initiate Block Address Register 1 I BAR1 (34)H
• Interrupt Queue Size Register IQSR (36)H
• Interrupt Register IR (38)H
• Interrupt Mask Register IMR (3A)H
• Timer Register 1 TIMR1 (3C )H
• Test Register TR (3E)H
• General Configuration Register 2 GCR2 (42)H
• Split Fetch Memory Register SFMR (4E)H
• Time Slot Assigner Address Register 2 TAAR2 (54)H
• Time Slot Assigner Data Register 2 TADR2 (56)H
• HDLC Transmit Command Register 2 HTCR2 (58)H
• HDLC Receive Command Register 2 HRCR2 (5A)H
• Address Field Recognition Address Register 2 AFRAR2 (5C)H
• Address Field Recognition Data Register 2 AFRDR2 (5E)H
• Fill Character Register 2 FCR2 (60)H
• SDRAM Mode Register SDRAMR (72)H
• Initiate Block Address Register 2 I BAR2 (74)H
• Timer Register 2 TIMR2 (7C)H
29/130

STLC5466
External registers
• Initialization Block in External Memory (IBA1 and IBA2)
• Receive Descriptor
• Transmit De scriptor
• Receive & Transmit HDLC Frame Interrupt
• Receive Command / Indicate Interrupt
• Receive Monitor Interrupt
30/130
 Loading...
Loading...