

1.0 GENERAL DESCRIPTION
STMicroelectronics’ STLC1502 is a high performance VoIP processor specially targeted for the time
effective design of I P-Phones and analog gateway
applications bundled with a comprehensive embedded software solution.
When used in the Enterprise LAN IP Phone space,
this device enables t he augmentation and replacement of traditional telephone systems with network
based communications systems running over local
and wide area IP networks. To design an IP phone,
the only other parts required will be an analog interface, some optional Flash memory for upgradable
software and Fast Ethernet physical layer devices.
The ST complete IP Phone reference design includes standards compliant Application Programming Interfaces (APIs), protocol management
software and software development tools.
STLC1502
VOICE OVER IP PROCESSOR
PQFP208
ORDERING NUM BER: STLC 1502
• 16-bit, fixed point 120 MIPs DSP (D950)
• Two 10/100 Base-T Ethernet MACs
• VLAN support
• Ethernet Bridge
•JTAG
• Smart power management
2.0 REFERENCE SOFTWARE FEATURES
Some of the features of the SW provided are:
The STLC1502 also has all the proper interfaces to
be a cost effective soluti on f or Small Gateway applications. ST also offer a complete SW reference design for Small Gateway applications.
Hence, the STLC1502 enables a superior and cost
effective platform development for IP-phones as well
as voice gateway applications, prov i di ng developers
with a low risk, rapid time to market solutio n .
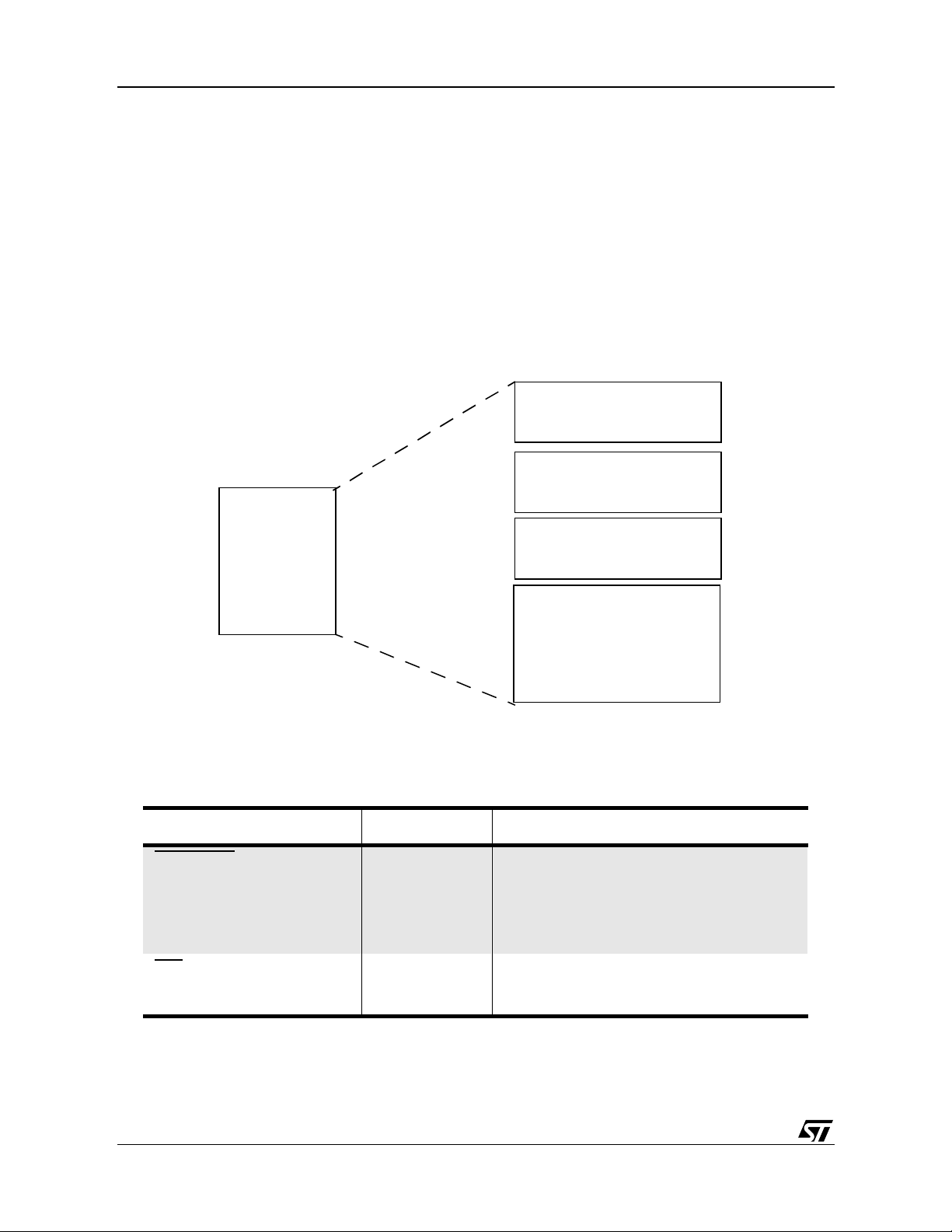
The STLC1502
a ARM7/TDMI MCU and a dual port 10/100 Base-T
switched Ethernet media access control interface
The main characteristics of the STLC1502 IP processor are as follows:
• HCMOS7 technology
• Power supply: Core 2.5 V and I/O: 3.3 V
• Industry standard 32-bit RISC microprocessor
(ARM7/TDMI core)
integrates low power D950 DSP with
.
ARM7/TDMI
• Industry standard Real time OS: VxWorks
• Network Protocol Stack
• TCP/IP, UDP, TFTP, DHCP, HTTP server
• Ethernet/PC communication drivers
• High Level Chip Control
• Stack management
• SNMP (optional)
• Application Specific MIBS
• Signalling Protocol
• MGCP, H.323 (including H.450), SIP
D950 Voice Codec Unit (VCU) features:
• G.711 Packetized PCM
• G.729AB, 8kbps CS-ACELP
• G.726, 16-40 kbps ADPCM
• G.723.1a, 6.3/5.3 kbps MP-MLQ
• Encoding and decoding of PCM sample
frames
• Packing/unpacking of compressed information in Codewords
• Fax Modem : T.38 Fax Relay, V.21, V.17,
V.27ter and V.29 f ax datapump
January 2002
This is preliminary information on a new product now in development. Details are subject to change without notice.
Revision: A04
1/81
STLC1502
• Data Modem: V.34 datapump
• Rate selection
• High performance voice activity detector (VA D)
• Comfort noise generator (CNG)
• G.165 32 ms Line & acoustic echo canceller
• Low latency system implementation
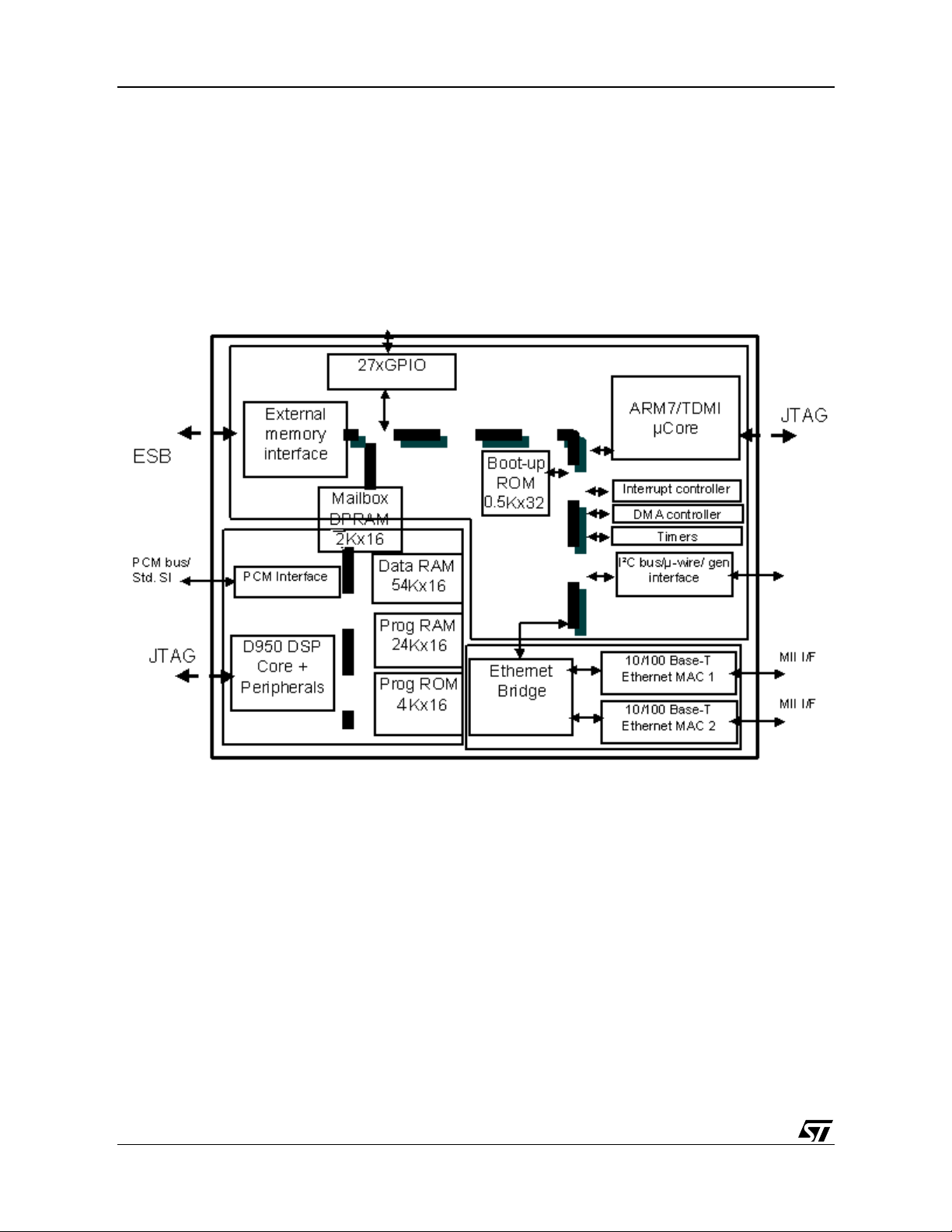
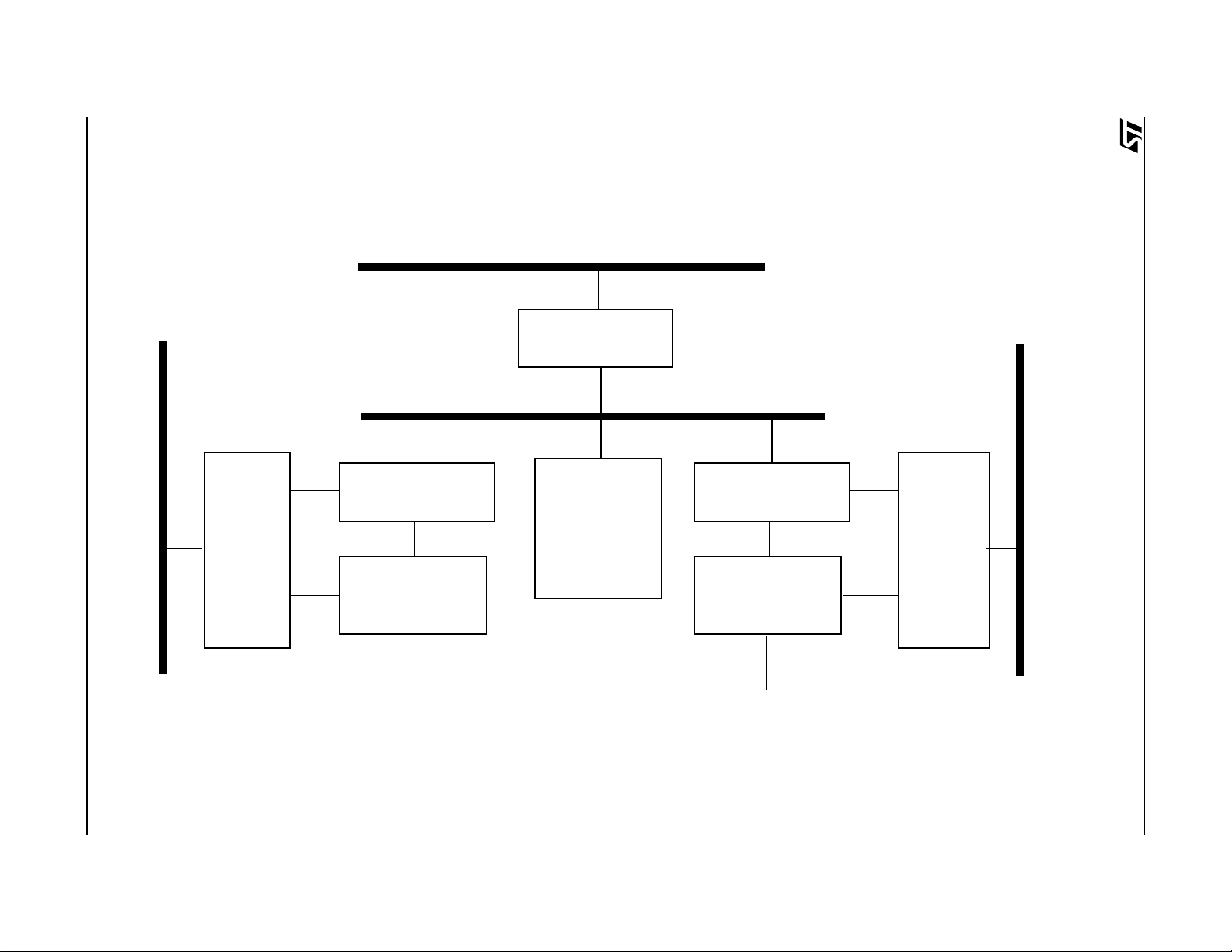
Figure 1: Block diagram
3.0 SYSTEM OVERVIEW
Three main blocks can be identified in the device architecture: ARM domain, the D950 domain and the
Clocks tree domain.
3.1 ARM7 domain
The ARM domain is a multibus microprocessor system based on the ARM7TDMI processor.
• The system bus is based on the Advanced Microcontroller Bus Architecture (AMBA) that includes
two distinct buses:
• The Advanced High performance Bus (AHB) for high performances system modules
• The Advanced Peripheral Bus (APB) for low power peripherals.
• A high speed 32 bit data bus is provided to connect external memories.
• A controller for external static memory (ESM) and a controller for external dynamic memory (EDM)
are provided.
• St atic memories, like FLASH EPROM, SRAM and dynamic memories like EDO, SDRAM, can be
2/81

STLC1502
connected on the same external 32 bits high speed bus
• Two MII interfaces can hook directly to two 10/100 Ethernet PHYs
• Internal control hardware manages the switching and MAC processing of frames on the two Ethernet
ports
• Standard serial communication ports are available for easy device connection
• The SPI port is mainly dedicated to the CODEC control. It is compatible with the STM codecs
STLC5046, STLC5048, STW5093. It is a standard SPI port and other peripherals can be connected
to it beside the codec
• I2C port can be use to connect a LCD driver in case of IP-phone application, and a serial EEPROM
for boot coded and configuration data storage
• GPIO block includes as an alternative function a scanning key encoder for direct interface with a 6x6
keypad matrix
• Debouncing function is performed, so no overhead for the ARM controller is introduced
• UART port allows connection to a host terminal. Code downloaded through UART can be performed
during boot
• A Host Processor Interface (HPI) allows direct connection of an external control processor. The interface is directly compatible with the Motorola MPC850 external bus
3.2 D950 domain
The D950 domain is a DSP machine based on the D950 core.
• The D950 core is based on Harvard architecture with separate buses for instruction (I-bus) and data
(X-bus, Y-bus)
• The internal ROM runs basic system management code and standard vocoders
G711,G723.1A,G729AB that are included in the H.323 specification
• Additional vocoders and algorithms are downloaded from the ARM side through the DPRAM
• External CODEC is connected with a standard four wires PCM bus interface
• JT A G and emulation port are available for system software/hardware testing
• DPRAM is used as a communication channel betwee n the ARM and D950
• Control messages and voice packets are exchanged through the DPRAM
• Fax over IP support
3.3 Clock Domain
Three main clock domains are present:
• D950 and peripherals (100 MHz max)
• ARM7 and peripherals (60 MHz max)
• PCM (8.192 MHz max)
The clock base is provided by a fixed external 25MHz crystal/oscillator. A 25MHz clock output can be used
as a master clock for external Ethernet PHY devices, in 10BaseT operation.
NOTE: For 100BaseT operation, this clock may not be sufficiently stable with tight jitter requirements.
Thus the PHY’s may need their own 25 MHz crystal.
Internal PLL’s provide independent clocks to the D950 and ARM7 domain.
The ARM frequency is set by external pin, that selects between 50 MHz and 60 MHz.
The D950 frequency can be set by the ARM via Status register programming.
Four possible values are provided:
100 MHz
180 MHz
190 MHz
3/81

STLC1502
200 MHz
To change the D950 master clock frequency the following procedure must be followed:
1) Disable the D950 clock, by resetting the DCLK bit in the control register of the MISC Control register.
2) Wait 10 ARM cycles
3) Select a new D950 master clock, by writing the MISC Status register.
4) Wait 4 ms
5) Disable the D950 clock, by setting the DCLK bit in the MISC Control register.
An Internal divider provides an internal PCM clock, 2083 KHz, that is not exactly the standard 2048 KHz.
- An external PCM clock frequency can be applied using a dedicated crystal or oscillator, to provide exactly
8KHz synch and sampling clock on the PCM bus. (External pins configuration Testsel[3:0] at [0011]).
The PCM clock rate can be selected via software to achieve the following values:
1536 (24 Ch.) 2048 (32 Ch.) 4096 (64 Ch.) 8192 KHz (128 Ch.).
- The PCM clock and Frame synch signals can be selected as inputs or outputs, by programming the con-
trol register in the miscellaneous block.
4.0 Pin Descriptions
The STLC1502 will be delivered in:
• PQFP 208 Pins
4/81
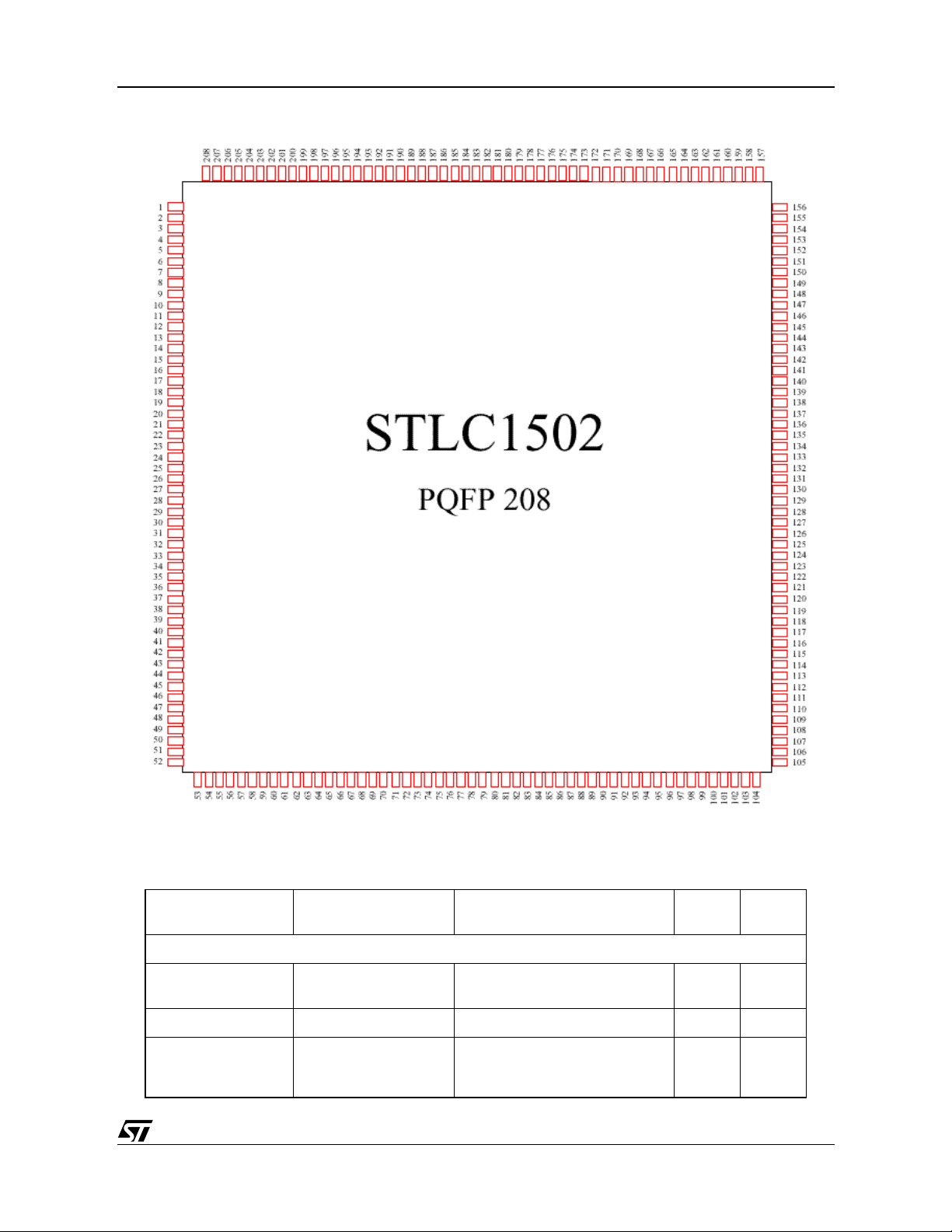
Figure 2: 208-Pin PQFP
STLC1502
4.1 Pin Description Table
Pin Pin Name Pin Description/Note
Clocks, Reset
41 xtalin 25 MHz crystal input Master clock
42 xtalout 25 MHz crystal feedback O
43 pxtalin 8.192 MHz crystal input PCM I/F
or DSP clock in PLL bypass mode
Clock or PCM input clock in PLL
bypass mode
Pin
Drive
Pin
Type
I
I
5/81
STLC1502
Pin Pin Name Pin Description/Note
44 pxtalout 8.192 MHz crystal feedback O
45 edmiclk SDRAM feedback clock (input) 8mA I/O
46 testarmclk ARM clock in bypass mode I
52 selarmfreq Selects ARM PII Vco frequency I
53 rstn Asynchronous Master Reset Input I
188 clkout 25MHz master clock out 4mA O
Miscellaneous
47 bootsel_treqa Boot selection: Select internal [1]
118 hp isel Select between HPI[1] or
Memory I/F (shared signals)
125, 126, 127, 129,
130, 131, 133, 134,
135, 136, 137, 138,
140, 141
add[0..13] Memory address bus.
or external [0] booting ROM. If
proper test configuration has been
selected, then signal assumes Tic
request A functionality
GPIO_KBD IF [0]
For Dynamic RAM, they are the
whole address, whereas for static,
they are the LSBits addresses. At
power up or hardware reset all
address values are 0
Pin
Drive
4mA O
Type
Pin
I
I
62, 63, 64, 65, 66, 69,
70, 71, 72, 73, 74, 75,
77, 78, 79, 81, 82, 84,
85, 86, 88, 89, 91, 92,
93, 95, 96, 98, 99,
100, 102, 103
2, 3, 4, 5 wenbsn[0..3] Write byte enable for external
6 oen Output enable for static/dynamic
ESM (specific controls)
142, 144, 145, 146,
148, 149, 150, 152
data[0..31] Memory data bus, to exchange
data between memory controller
and external memories
static RAM or byte strobe for
dynamic external RAM
external RAM. At power up or
hardware reset, the signal will be
asserted if the external booting
(bootsel = ‘1’) has been selected
add[14..21] Memory address bus’ MSBits.
They complete the ESM
addressability. A total of 4Mbyte
external (FLASH/SRAM) address
space is addressed by the
STLC1502 device. At the first fetch
of instruction after power_up or
hardware reset, all address values
are ‘0’
8mA I/O
8mA O
8mA O
4mA O
6/81
STLC1502
Pin Pin Name Pin Description/Note
153, 154, 155 esmcs[0..2]n Chip select [0..2] for external
memory (FLASH/SR AM). At
power up or hardware reset, if
external boot ROM has been
selected, (bootsel =’1’) the signal
is asserted during the fetch
instruction, else the selection
depends on internal address
mapping
61 ecs0width External FLASH/SRAM Data bus
size: if settled to ‘L’, select a 8 bit
parallelism data.
EDM ( specific controls)
156, 158, 159, 160 edmcsn[0..3] Chip select for SDRAM or RAS for
EDO DRAM
161 edmclken SDRAM clock enable 8mA O
162 edmoclk SDRAM output clock 8mA O
165 edmras SDRAM ras command 8mA O
166 edmcas SDRAM cas command 8mA O
167 edmwe SDRAM we command 8mA O
Pin
Drive
4mA O
8mA O
Type
Pin
I
MII Interface Port # 1
168 mii1_txen Transmit enable 4mA O
169 mii1_txclk Transmit clock reference for txd,
txen, txer
170, 171, 174, 175 mii1_txd[0..3] Transmit data bus 4mA O
176 mii1_rxclk Receive clock reference for rxd,
rxdv, rxer
177 mii1_rxdv Receive data valid I
178 mii1_rxer Receive error signal, indicates an
error condition on receiving data
181, 182, 183, 184 mii1_rxd[0..3] Receive data bus I
185 mii1_col Collision signal I
186 mii1_crs Carrier sense indication I
MII Interface Port # 2
193 mii2_txclk Transmit clock reference for txd,
txen, txer
194 mii2_txen Transmit enable 4mA O
195, 196, 197, 198 mii2_txd[0..3] Transmit data bus 4mA O
I
I
I
I
7/81
STLC1502
Pin Pin Name Pin Description/Note
200 mii2_rxclk Receive clock reference for rxd,
rxdv, rxer
201 mii2_rxdv Receive data valid I
202 mii2_rxer Receive error signal, indicates an
error condition on receiving data
203, 204, 205, 206 mii2_rxd[0..3] Receive data bus I
207 mii2_col Collision signal I
208 mii2_crs Carrier sense indication I
PHY I/F Management
189 mdc MII management clock 4mA O
190 mdio MII management data i/o 4mA I/O
UART I/F
112 sin Serial data input I
113 sout Serial data output 2mA O
I2C I/F
Pin
Drive
Pin
Type
I
I
116 scl I2C clock 2mA I/O
117 sda I2C data 2mA I/O
PCM I/F
104 pdx PCM Downstream data I
105 pdr PCM Upstream data 2mA O
106 pfs PCM Input/Output Frame
107 pdc PCM Input/Output Data clock 4mA I/O
SPI I/F
109 sck SPI interf ace Clock 2mA O
110 smi SPI master data input I
111 smo SPI master data output 2mA O
KBD/GPIO/HPI I/F
9 gpio0_r1_hpidata0 GPIO[0] or keypad matrix row 1 or
10 gpio1_r2_hpidata1 GPIO[1] or keypad matrix row 2 or
synchronization
2mA I/O
4mA I/O
Hpidata[0]
4mA I/O
Hpidata[1]
8/81
1 1 gpio2_r3_hpidata2 GPIO[2] or keypad matrix row 3 or
Hpidata[2]
4mA I/O

STLC1502
Pin Pin Name Pin Description/Note
14 gpio3_r4_hpidata3 GPIO[3] or keypad matrix row 4 or
Hpidata[3]
15 gpio4_r5_hpidata4 GPIO[4] or keypad matrix row 5 or
Hpidata[4]
16 gpio5_r6_hpidata5 GPIO[5] or keypad matrix row 6 or
Hpidata[5]
17 gpio6_c1_hpidata6 GPIO[6] or keypad matrix col 1 or
Hpidata[6]
18 gpio7_c2_hpidata7 GPIO[7] or keypad matrix col 2 or
Hpidata[7]
19 gpio8_c3_hpiadr0 GPIO[8] or keypad matrix col 3 or
Hpiadr[0]
20 gpio9_c4_hpiadr1 GPIO[9] or keypad matrix col 4 or
Hpiadr[1]
23 gpio10_c5_hpiadr2 GPIO[10] or keypad matrix col 5 or
Hpiadr[2]
24 gpio11_c6_hpiclk GPIO[11] or keypad matrix col 6 or
Hpiclk input
Pin
Drive
4mA I/O
4mA I/O
4mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
Pin
Type
25 gpio12_dreq GPIO[12] or Dma input request
(software selection)
26 gpio13_dack GPIO[13] or Dma output
acknowledge (software selection)
27 gpio14_hpics_d950idle GPIO[14] or Hpi Chip Select
(active low) or D950 emulator
output idle state
28 gpio15_hpias_d950snap GPIO[15] or Hpi Address Strobe
(active low) or D950 snap output
sate
29 gpio16_hpirw_treqb GPIO[16] or Hpi Read (active
high) Write (active low) strobe or
Tic request B input. The Tic mode
is forced selecting the proper test
configuration through testsel[3..0]
pin
30 gpio17_hpiint_tack GPIO[17] or Hpi Interrupt out or
Tic acknowledge output. The Tic
mode is forced selecting the
proper test configuration through
testsel[3..0] pin
33 gpio18_irq1 GPIO[18] and External interrupt
input 1
2mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
2mA I/O
9/81
STLC1502
Pin Pin Name Pin Description/Note
34 gpio19_irq2 GPIO[19] and External interrupt
input 2
Test Signal
55, 56, 57, 58 testsel[0..3] Test mode selection I
Stradivarius STLC1502 and/or ARM’s JTAG
119 tdi Data input I
120 tdo Data output 2mA O
121 tms Test mode select I
122 tck Clock I
123 trstn Jtag Input Reset I
D950’s JTAG
35 d950tdi Data input I
36 d950tdo Data output 2mA O
37 d950tms TMS command I
38 d950tck Clock I
Pin
Drive
2mA I/O
Pin
Type
39 d950trstn Reset Input I
D950’s EMU signals
54 d950erqn Halt request to enter emulation
Power and Ground pins
1, 12, 21, 31, 67, 76,
83, 90, 97, 124, 132,
139, 147, 164, 180,
192, 199
7, 13, 22, 32, 40, 51,
60, 68, 80, 87, 94,
101, 108, 115, 128,
143, 151, 157, 163,
173, 179, 191
8, 48, 59, 114, 172,
187
49 PLL_VSS PLL digital ground P
50 PLL_VDD PLL analog power supply 2.5V P
vdd3 I/O Power P
gnd Core ground P
vdd Core Power P
5.0 ARM Memory Configuration
I
mode
• The AMBA bus system allows to handle memory blocks and peripherals on distinct buses, in order to
optimize the AHB architecture for maximum speed .
10/81

STLC1502
• The memory blocks are attached to the AHB bus so ARM code can run at maximum speed.
• An internal ROM is used to store boot code that polls serial peripherals (I2C EEPROM, UART) and
HPI for code download in external RAM. After download, the control is given to code in external
RAM.
• An internal RAM is used to store ARM7 interrupt vectors and some data (network frames)
• Four external memory types can be connected.
• Flash
• SRAM
• DRAM (SDRAM or EDO)
• Serial EEPROM
• Flash, SRAM, DRAM share the same 32 bits data bus and 32 bits address bus. Little/Big endian
mode is software programmable for the DRAM memory controller. Serial EEPROM can be connected to the I2C bus.
• The chip provides the option of booting from Flash or from serial EEPROM, by selection from an
external BOOT_SEL pin. So different memory configuration s are possible depending on the application:
1. Flash, DRAM: The boot code including BOO TP and TFT P is stored in Flash. Application can be
stored in flash also, or can be downloaded into DRAM from Ethernet Network or UART.
2. EEPROM, DRAM: The boot is perf ormed from inte r n a l ROM. The ROM code loads th e code stored
in EPROM that includ es BOO TP and TFTP. Applic at ion code w ill be downl oaded int o D RA M from
Ethernet or UART .
3. Flash, DRAM, EEPROM: It is like case 1, but has more flexibility. The EEPROM can be used to store
Network parameter data (MAC address) and other specific board data, so the code to store in flash is
the same for all the platforms, and you do not need to split the flash in a permanent storage area and
in an upgradable storage area. The EEPROM can also be used to allow the programming of the flash
the first time with a code downloaded from Ethernet Network.
4. DRAM: The boot is performed from internal ROM. The application code is downloaded from the host
processor through the HPI interface. To access external memory bus an internal decoder is implemented, that can select different external memory devices. 32 bits data bus is provided with the possibility to select external accesses at 16 and 8 bits for each memory bank. For example the flash can
be at 16 bits and the DRAM at 32 bits. There are 3 chip select available for static memory (4Mbytes
each), 4 chip selects for dynamic memory (8Mbytes each).
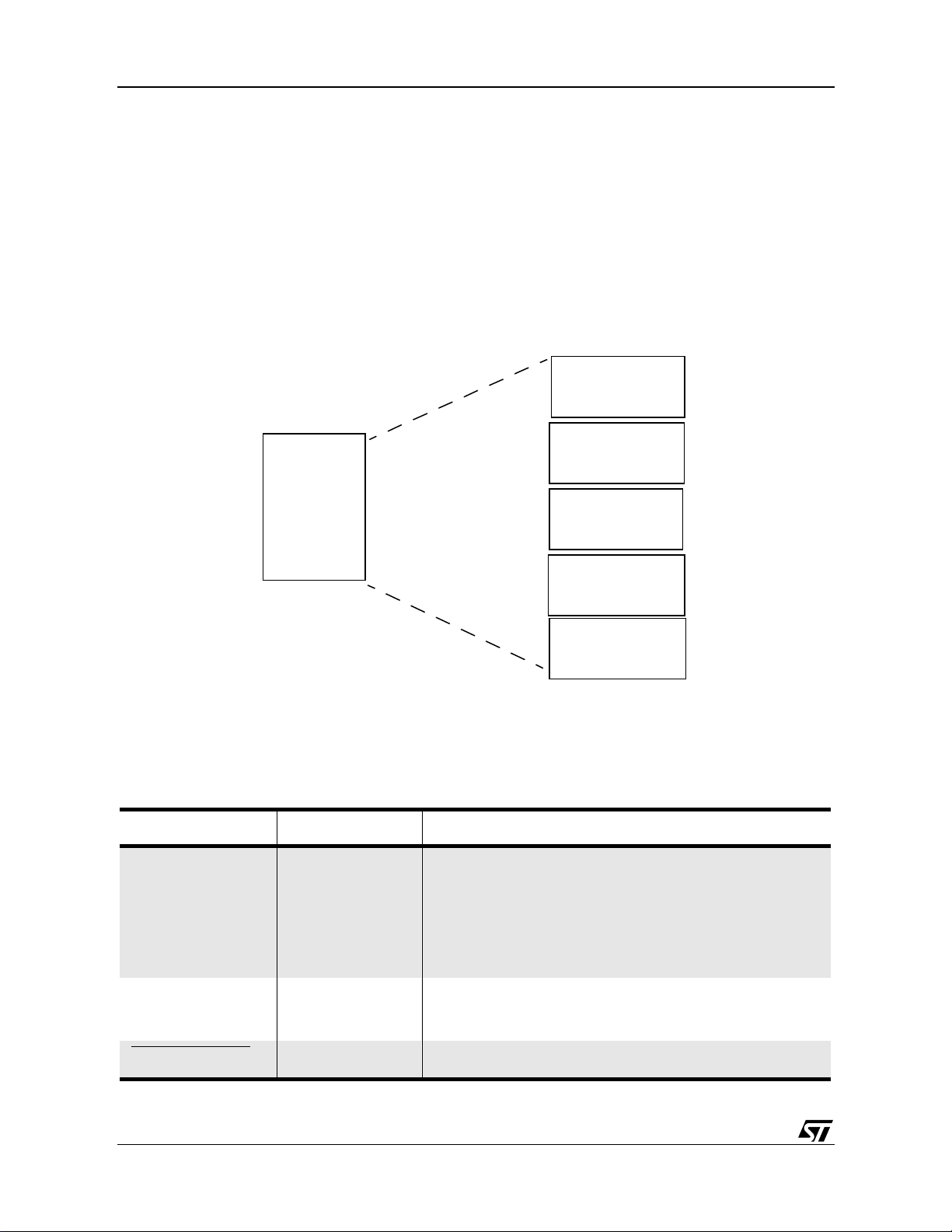
5.1 ARM Memory Map
The ARM microprocessor sees 5 main memory areas.
Actually the memory map depends on the phase the microprocessor is working on:
• Boot from internal ROM phase (REMAP=0 and BOOT_SEL=0);
• Boot from external Flash phase (REMAP=0 and BOOT_S E L=1);
• Operating phase (REMAP=1).
The first two phases are alternative (only one of them happens at the power on reset, while the third happens
after the boot.
6.0 AHB Bus
AHB Bus is a 32 bits data and 32 bits address bus.
6.1 Internal RAM
An internal Static RAM 2048x 32 is mapped starting at address 0x0 in operational mode and is used for ARM
interrupt vector tables.
11/81
STLC1502
6.2 ESM interface
• The ESM (External Static Memory) interface is used to access static RAMs or Flash devices. It provides 3 chip select signals and gives external access to 21 address bits, so that the memory space
accessible through each chip select is 4 Mbytes.
• The data bus on ESM external interface is 32bits wide, with the additional ability to perform 16 and 8
bits accesses. Little endian byte ordering is used. The data bus and address bus pins are shared with
the DRAM driver, using EBI interface.
• Programmable per chip-select wait-states from 0 to 15 internal clock cycles are available.
• At reset, every CS space has 15 wait states. The actual value is contained in the downloaded code.
• The external memory spaces are mapped by the ESM interface as reported in Figure 4.
• There are 3 addressable memory spaces 0x00400000 byte long each.
04000000
ESM_CS0
043FFFFF
04400000
ESM_CS1
04000000
ESM
External
Memories
ESM_CS2
047FFFFF
04800000
04BFFFFF
04C00000
07FFFFFF
Reserved
07FFFFFF
Figure 4: ESM memory map
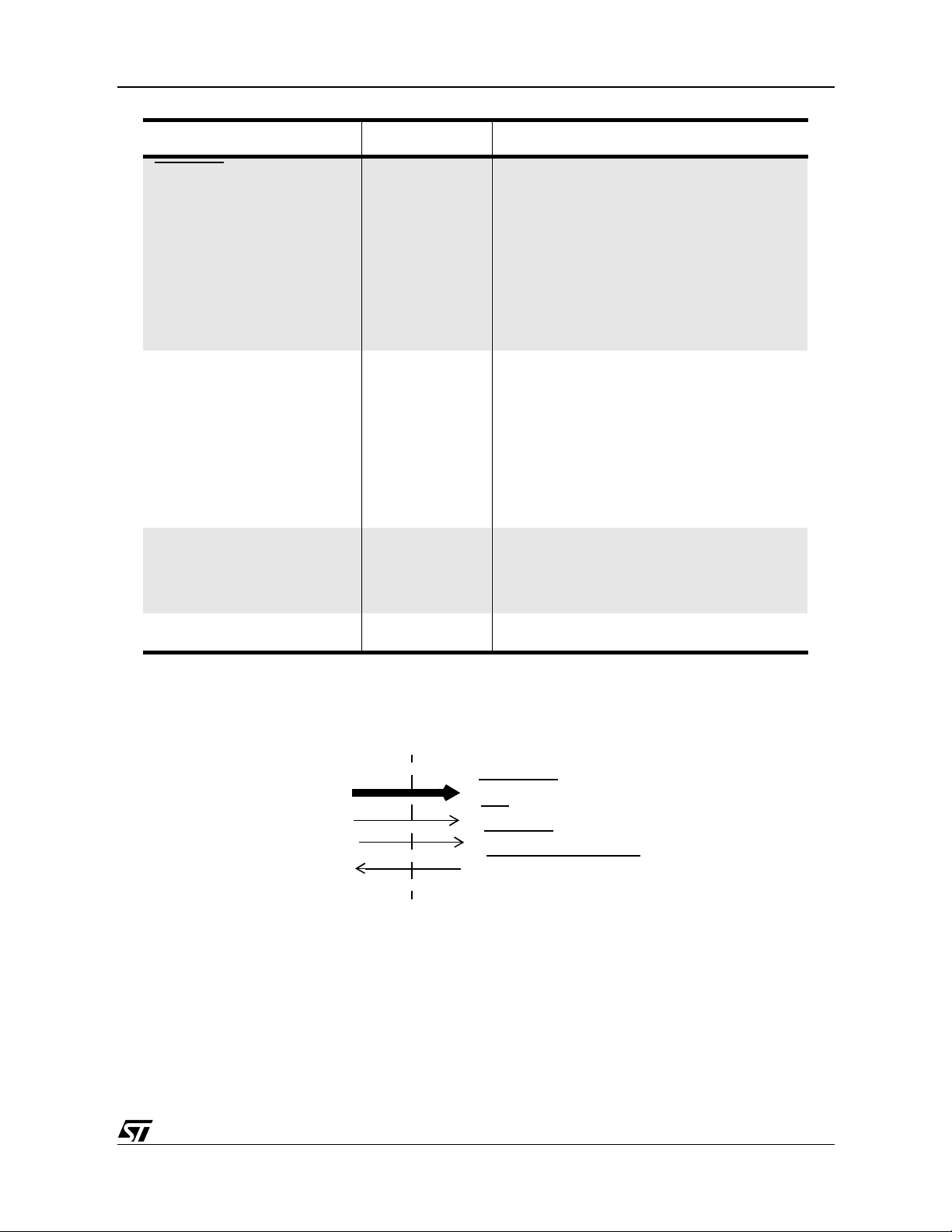
Following is the list of the available external signals that implement SRAM or F LASH read and write cycles. Data
and address buses are not shown as they are shared with the DRAM EBI interface.
NAME Signal type Description
ESM_CS(2:0) OUT Chip Select. Asserted when the
ESM decodes the proper address
space in order to select the right
external device
OE
OUT
Output Enable. Asserted during a
read cycle (shared with EDM)
12/81
NAME Signal type Description
STLC1502
WE[3:0]
OUT
Bytes Write enable. They are
used to select one/two bytes
when a x16/x32 Flash/SRAM is
present (shared with EDM).
0: lower byte
1: 2nd byte
2: 3rd byte
3: higher byte
ESM_CS0WIDTH
IN
This input informs whether a x8
(ESM_CS0WIDTH=0) or x16
(ESM_CS0WIDTH=1) device is
present on the CS0. This information is needed the boot from external memory is selected.
A[21:0] OUT 22 Address lines for up to
4Mbytes address space (shared
with EDM A[13:0])
D[31:0]
A scheme of the ESM control interface is reported in Figure 5.
device side
INOUT Data bus(shared with EDM bus)
external side
ESM_CS(2:0)
OE
WE[3:0]
ESM_CS0WIDTH
Figure 5: ESM control interface
Every CS space can be programmed through internal register (one for each CS) in order to:
• select the number of wait states to perform external access depending on the speed of the external
device mapped on that memory area
• select if the data bus is x8 or x16 (available only for CS1 to CS2). When the x8 memories are used,
their data bus has to be placed on the ESM_D(7:0) signals
The wait states number f or the ext ernal memories (dependi ng on memory access t ime) is obt ained from the
software code during the download phase. During the initialization phase, it is the responsibility of the software
to determine if a SRAM or a FLASH is present or not on a given CS space and the width of CS1-2 memories (if
13/81
STLC1502
present).
It is possible to connect every CSx to a Dual Port SRAM and use that as a communication mailbox betwee n the
device and an external microprocessor. For example, the microprocessor can write a message in the memory
using one port and can send an interrupt to the dev i ce so t hat t he executi on routi ne rel ated wit h that i nterrupt
can read from the other port of the memory connected to the same CSx of the ESM.
Viceversa, the ESM can write a message in the memory and then can send an interrupt to the external microprocessor t hat will r ead the message from the other port of the memory.
The SRAM and the FLASH dev ices that are used as references are standard.
6.2.1 ESM address decoding scheme
The ESM block includes also a decoder in order to generate the proper CS to the external device. In particular
this decoder will wor k on the b it 22,2 3,24 and 25 of the internal ARM address bus.
ESM decoder ESM_A(21:0)
ESM decoding scheme
6.2.2 ESM Register Map [
The base address of the ESM register is 0x0C600000.
0x0C600000
]
Address Register
R/W Notes
Name
ESMBase + 0x00 CS0 R/W CS0 bank control
ESMBase + 0x04 CS1 R/W CS1 bank control
ESMBase + 0x08 CS2 R/W CS2 bank control
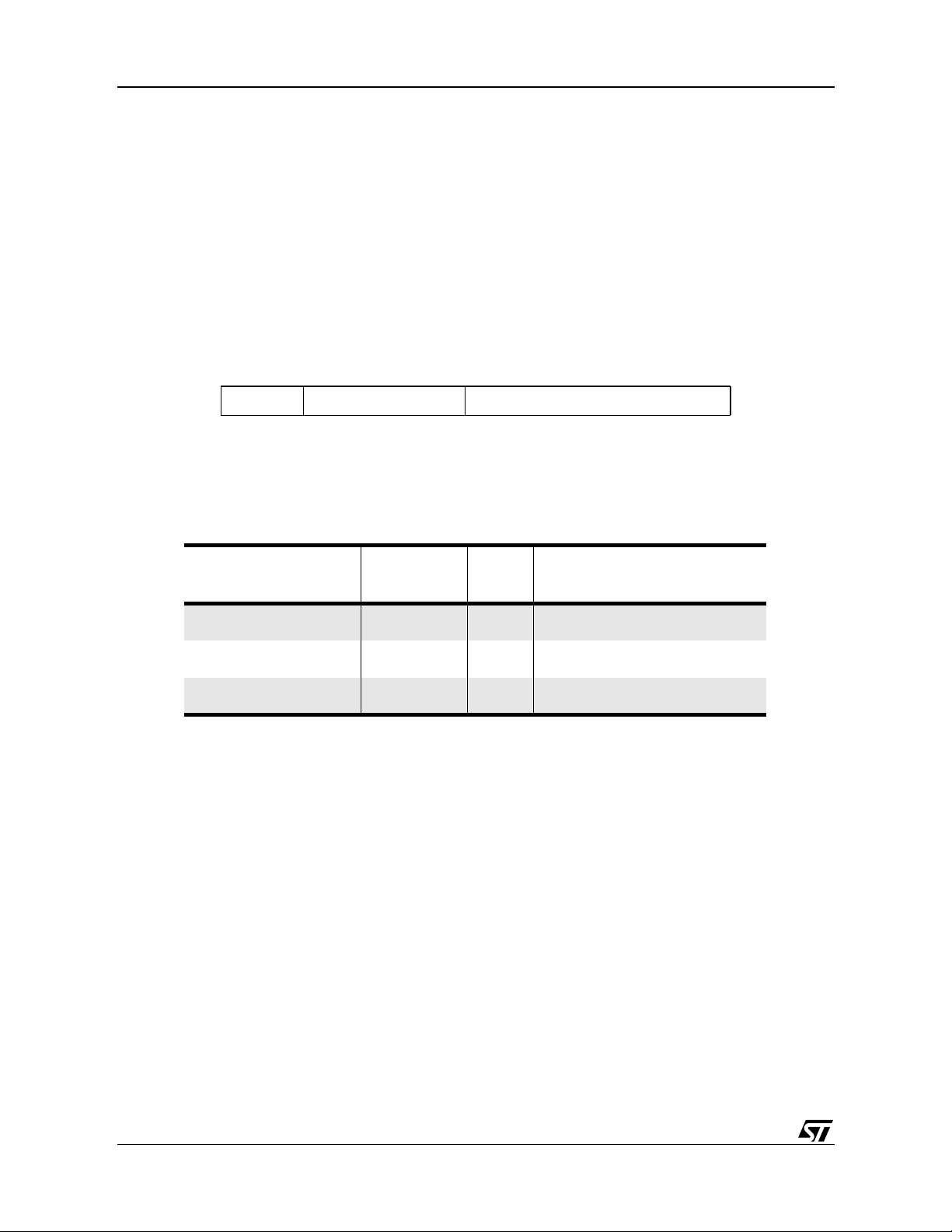
6.3 EDM interface
The EDM interface is used to access external DRAMs. This block supports both EDO and SDRAM interfaces
with enough flexibility to be used with several DRAM chips available in the market. This block has a separate
bus for control (the registers are placed on the APB bus) and for data (data and address are placed on the ASB
bus) and also includes an external bus interface that allows to share address and data bus pins with the static
ESM interface.
Figure 6 shows a block diagram of the EDM block.
14/81
15/81
STLC1502
APB
bus
AHB
bus
Registers
AHB
interface
Refresh
Memory
driver
Data
Mux
Control
Address
External
bus
interface
Data
ESM
External Static
Memory Co ntroller
TIC
STLC1502
Figure 6: EDM block diagram
It is possible to connect up to 4 external chips with x8, x16, and x32 data bus. Each memory bank space is
8Mbytes big so that a standard 64Mbi t DRAM device can be connected. It is not possible to use a single
32Mbytes memory device.
It is the responsibility of the ARM c ode to properly configure the EDM block to initialize the DRAM at startup.
The external memory is mapped by the EDM interface as shown in Fig. 7.
10000000
EDM_CS0
107FFFFF
10000000
13FFFFFF
EDM
External
DRAM
EDM_CS1
EDM_CS2
EDM_CS3
10800000
10FFFFFF
11000000
117FFFFF
11800000
11FFFFFF
12000000
Reserved
13FFFFFF
Figure 7: EDM memory map
In the following table there is the list of the available external signals of the EDM interface.
NAME Signal type Description
EDM_CS(3:0) OUT Chip Select. Asserted when the EDM
decodes the proper address space in order
to select the right external device. To be connected to RAS signal in case of use of EDO
memorie s
EDM_CLK OUT
EDM_CLKEN
16/81
OUT
SDRAM Memory clock (same as ARM
clock). Not used with EDO.
SDRAM clock enable. Not used with EDO.
NAME Signal type Description
STLC1502
EDM_RAS
EDM_CAS
OEN
OUT
OUT
OUT
SDRAM RAS signal. Not used with EDO.
SDRAM CAS signal. Not used with EDO
SRAM Output Enable. Not used with
SDRAM
EDM_WE
OUT
DRAM Write Enable
EDM_BS(3:0) OUT SDRAM byte strobe. CA S w hen EDO memo-
ries are used
EDM_A(21::0) OUT DRAM address lines, only 14 lines are
driven.. Lines.21:14 are driven by static
memory cont ro l le r
EDM_D(31:0) INOUT DRAM data lines, shared with static memory
controller lines.
The EDM block includes a decoder in order to generate proper CS to the external device. In particular this decoder will work on bits 25 and 26 of internal ARM address bus.
EDM
Decoder
EDM decoding scheme
• Every CS space can be programmed through internal register in order to configure the EDM to work
with the proper external device
• The DRAM Controller has nine registers, the configuration register, four bank registers and four
SDRAM configuration registers. The registers are accesses via the APB bus. The register data path
is 16 bits wide.
6.3.1 EDM Register Ma p [0x0C5800 00]
• The base address of the EDM register is 0x0C580000
Address Register
Name
EDMBase +
0x00
EDMBase +
0x04
MB1Config
MB2Config
R/W Notes
R/W
R/W
Memory Bank 1 Configuration Register
Memory Bank 2 Configuration Register
EDM_A(13:0)
17/81
STLC1502
Address Register
Name
EDMBase +
0x08
EDMBase +
0x0C
EDMBase +
0x10
EDMBase +
0x14
EDMBase +
0x18
EDMBase +
0x1C
EDMBase +
0x20
MB3Config
MB4Config
SDRAM1C
onfigLo
SDRAM1C
onfigHi
SDRAM2C
onfigLo
SDRAM2C
onfigHi
SDRAM3C
onfigLo
R/W Notes
R/W
R/W
WO
Memory Bank 3 Configuration Register
Memory Bank 4 Configuration Register
Memory Bank 1 Low SDRAM Configuration Register
WO
Memory Bank 1 High SDRAM Configuration Register
WO
Memory Bank 2 Low SDRAM Configuration Register
WO
Memory Bank 2 High SDRAM Configuration Register
WO
Memory Bank 3 Low SDRAM Configuration Register
EDMBase +
0x24
EDMBase +
0x28
EDMBase +
0x2C
EDMBase +
0x30
6.3.1.1 Memory Bank Configuration registers
Memory bank configuration registers are used to setup memory bank specific parameters:
1514131211109876543210
Reserved DEVWID DATA-
SDRAM3C
onfigHi
SDRAM4C
onfigLo
SDRAM4C
onfigHi
MemConfig
WO
WO
WO
R/W
LAT
Memory Bank 3 High SDRAM Configuration Register
Memory Bank 4Low SDRAM Configuration Register
Memory Bank 4 High SDRAM Configuration Register
Memory Configuration Register
SETUP TIME IDLET IME SDRAM-
COL
DEVWID: Device Width
18/81
STLC1502
• Defines the data width of the external memory device:
• 00 - Byte (8 bit)
• 01 - Half Word (16 bit)
• 10 - Word (32 bit)
DATALAT: Data Latency
• Defines the number of memory clock cycles between the start of a memory read access and the first
valid data.
• The DATALAT value is valid between 0 and 3.
SETUPTIME: Setup Time
• Defines the number of memory clock cycles t he m emory driver spends in the DECODE state before
accessing the external memory.
• The SETUPTIME value is valid between 0 and 7.
IDLETIME: Idle Time
• Defines the minimum time the memory driver must spend in the IDLE state following memory
accesses.
• The value defines the number of Memory Clock cycles.
• The IDLETIME value is valid between 0 and 7.
SDRAMCOL : SD RAM Column Width Definition
• Specifies the width of the SDRAM column address:
• 00 - 8 bits
• 01 - 9 bits
• 10 - 10 bits
• 1 1 - reserved
6.3.1.2 SDRAM Configuration registers
These registers are write only. A write access to the high registers will start the SDRAM configuration cycle,
during which the value written to the register will be asserted on the memory bus for a one clock period.
Low SDRAM Configuration Registers
1514131211109876543210
Reserved MIAB
MIAB: Memory Interface Address Bus
High SDRAM Configuration Registers
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved MIVE MIAA MISA
19/81
STLC1502
MIAB: Memory Interface Address Bus
MIWE: Memory Interface Write Enable
MIAA: M e mory Interface Access A ctive (nCAS)
MISA: M e mory Interface Setup Active (nRAS)
After the power-up the CPU must configure each SDRAM device, i.e. perform precharge-refresh-mode register
set procedure.
6.3.1.3 Memory Configuration register
Memory configuration registers are used to setup parameters that are same for all banks:
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved PWS TYPE B3EN B2EN B1EN B0E N R EFR
PWS: Power save mode
• If PWS bit is set to’1’, the next refresh cycle will set the memory devices in the self-refresh mode.
• The memories will exit the self-refresh mode, when the PWS mode is set to’0’.
TYPE: M e mory type:
• The TYPE bit is used to select a type of the external memory.
•1 - SDRAM
•0 - EDO
B3EN: Bank 3 enable
B2EN: Bank 2 enable
B1EN: Bank 1 enable
B0EN: Bank 0 enable
• The bank enable bits are used to enable each bank separately.
• If an AHB transfer is accessing a disabled bank, the DRAM Controller will return the error response
to the AHB master.
REFR: Refresh period
• The REFR value is used to determine the refresh period. The period can be set in the 1 us steps.
• REFR Refresh Period
• 00000000 Refresh is disabled
• 00000001 Refresh period is 1us
• 00000010 Refresh period is 2us
•.
• 11111111 Refresh period is 255us
6.4 DMA Controller
• The DMA controller is intended to be used with the Ethernet switch block to transfer Ethernet frames
between the Ethernet switch buffers and memory.
• The DMAC needs initialization before starting operation. During operation it does not need interven-
20/81

STLC1502
tion from the ARM controller.
• In receive, when the complete frame is stored in memory, the DMAC asserts the interrupt for the
ARM that can read the frame.
• In transmit the DMAC provides an interrupt when the complete frame is transferred.
6.5 Ethernet Switch
The Ethernet switch block interfaces two MAC cores to implement a 3-port Ethernet Fast switch and MAC layer
for the Embedded VoIP network software.
Main features of the block are:
• Internal FIFOs for easy DMA transfers.
• Full duplex support using separate Tx, Rx FIFOs.
• Fast switching using hardware connections between the two MAC cores. ARM microcontroller is not
involved in the switching function.
• Support for priority mechanism for voice packets, using store-and-forward procedure for incoming
data packets.
• VLAN support
• 10/100 Mb/s data transfer rates
• The MAC cores provide 2 MII interfaces to connect two external PHYs.
The device works normally as a bidirectional switch between the two ports. When the following conditions happen the device triggers additional operations:
• Received frame destination MAC address matches device MAC address. The frame is transferred to
memory using DMA, and is not switched to the other port.
• A frame has to be transmitted by the device. In this case the block waits for the end of the current
frame being switched if any. If the frame is a voice frame, as soon as the line is free the block starts
transfer of the frame. Eventual incoming frames in the same direction are stored and forwarded after
the voice frame has been sent.
The block diagram of the Ethernet switch is shown below:
21/81
AHB bus
APB bus
Config
Control
registers
Internal bus
DMA_MAC
MAC
MII1
Bridge/arbiter
Ethernet
switching
memory
DMA_MAC
MAC
MII2
APB bus
Config
Control
registers
STLC1502
22/81
STLC1502
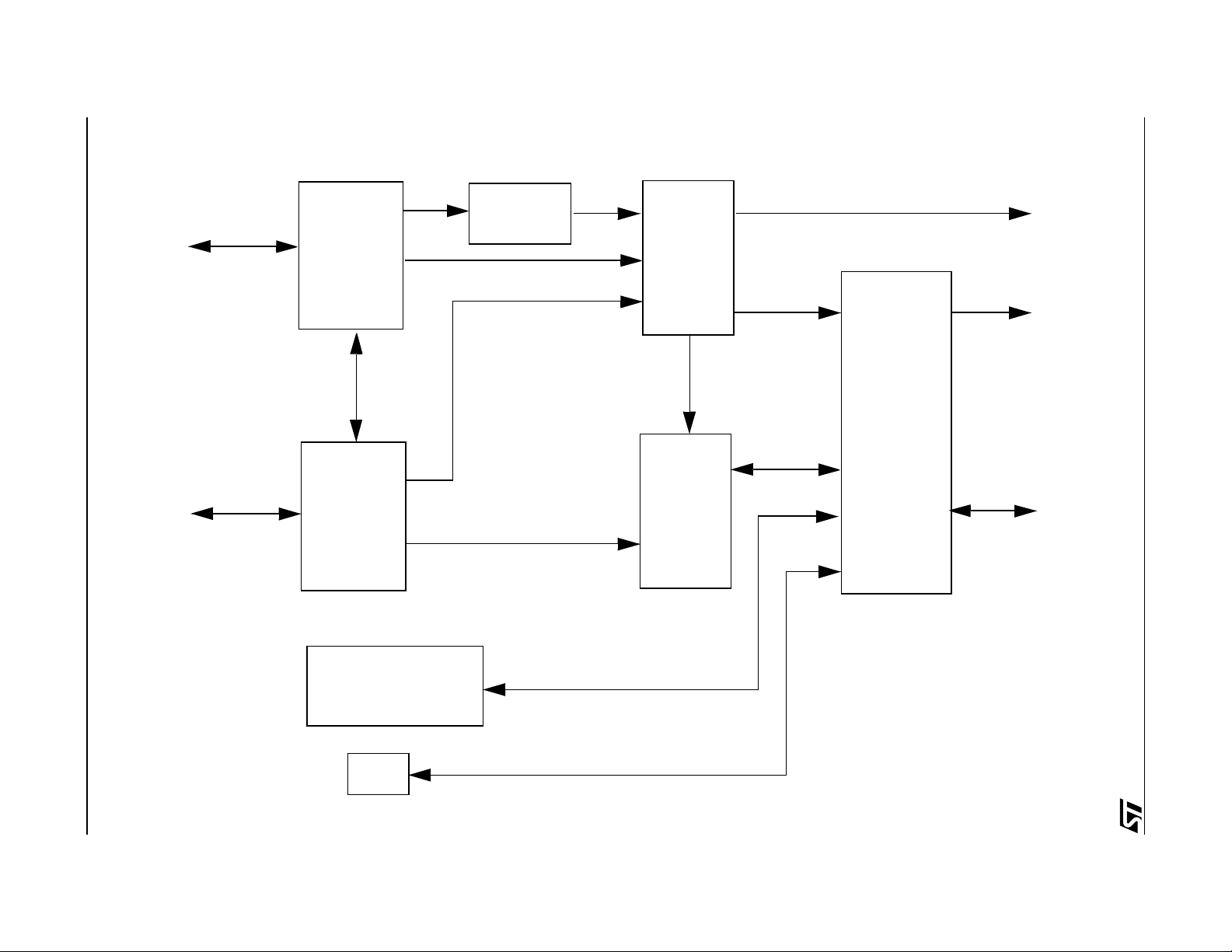
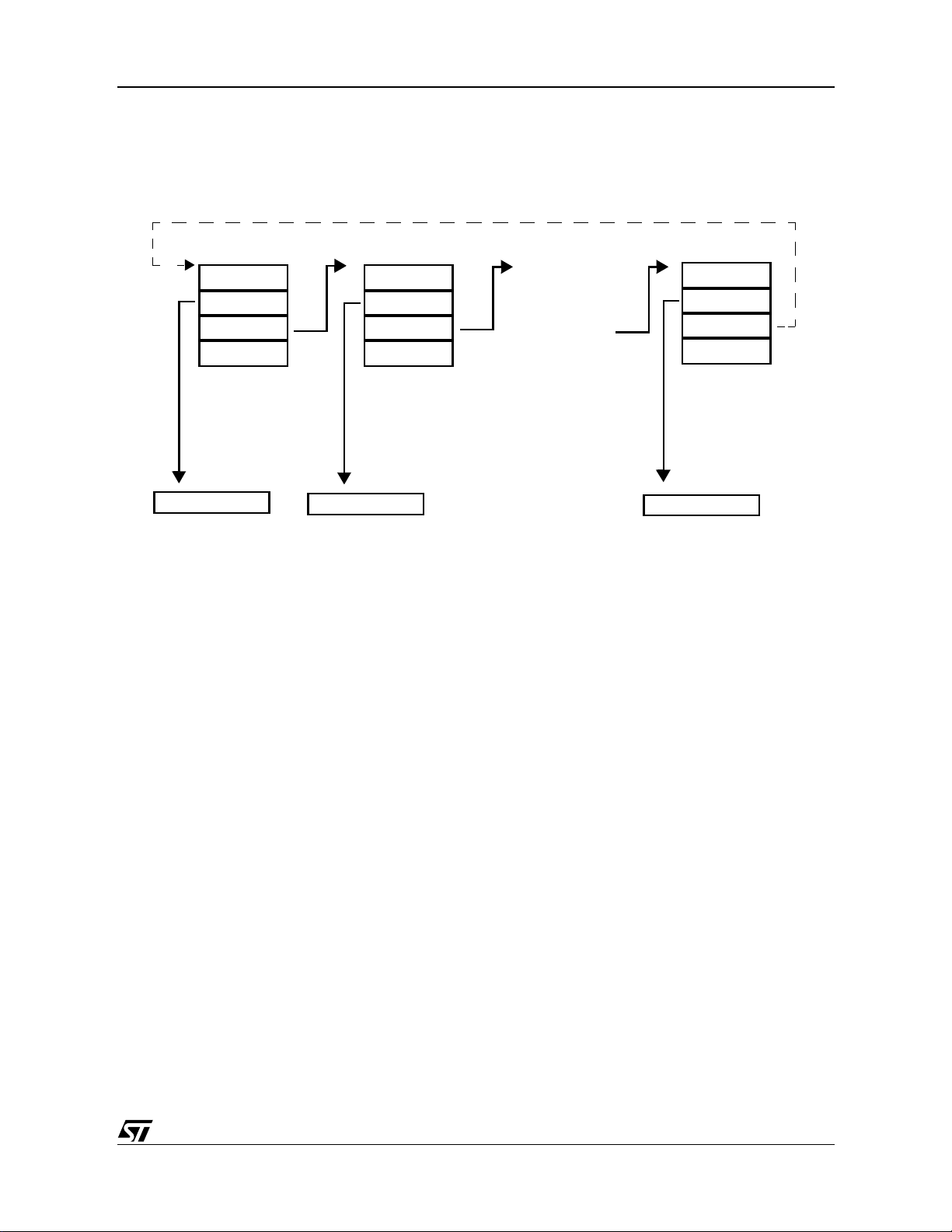
6.5.1 The DMA Descriptors Chain
The Descriptor list is the mean the CPU and the DMA_MAC use to communicate each other in order to
transmit/receive frames on the cable. This list must be properly prepared before initiating any transfer
activity to/from the cable. The Descriptor is produced by the CPU and consumed by the DMA_MAC.
DMA_Cntl
DMA_Addr
DMA_Next
Tx/Rx_Status
Descr 1
(4 X 4 Bytes)
Frame 0
DMA_Cntl
DMA_Addr
DMA_Next
Tx/Rx_S tatus
Descr 2
(4 X 4 Bytes) (4 X 4 Bytes)
Frame 1
. . .
DMA_Cntl
DMA_Addr
DMA_Next
Tx/Rx_S t at us
Descr n
Frame n
• A Descriptor is a 16-bytes element which provides the DMA_MAC with information about how to
transmit/receive a single frame and how to report the transfer status back to the CPU.
• A Descriptor can be stored in any main memory location with a 32-bit aligned address.
• The first 3 words stored in a Descriptor are expected to be the values of the 3 DMA_MAC registers
describing a DMA transfer (DMA_Cntl, DMA_Addr and DMA_Next). When the DMA_MAC fetches a
Descriptor it loads this three values into its own corresponding registers.
• The last word is to be used by the DMA_MAC to report the transfer status.
6.5.2 The Descriptor control bits
The Descriptor keeps information about a single frame transfer and how to access t he next Descriptor.
The following discussion is rela ted to 3 bits of the Descriptor: the VALID bit, the NXT_EN bit and the
NPOL_EN bit.
The Descriptor can be accessed simultaneously by the CPU and the DMA_MAC. This concurrent access
is synchronized by the VALID bit in the DM A_Cntl register. When the VALID bit is equal to 0 then the
CPU is the owner of the Des criptor. Otherwise the owner is the DMA _M AC. Since t he Des criptor can be
accessed in write mode by the owner only at any time, race conditions are guaranteed to never happen.
The NXT_EN bit enables the fetch of the Next Descriptor. When the DMA_MAC finds this bit set to 0 then
its activity is considered to be completed as soon a s the current descriptor DMA transfers have been
compl eted .
The NPOL_EN bit enables the DMA_MAC to keep polling for a non-valid Descriptor until its VALID bit is
set to one. When the DMA_MAC finds both the NPOL_EN bit and the VALID bit set to 0 then its activity is
considered to be completed.
23/81

STLC1502
6.5.3 Transfer interrupts
The DMA_MAC can interrupt the CPU with three different levels of information about transfer completion.
The CPU can choose which interrupt needs to be enabled. The y do not exclud e each ot her though; they
can be all three enabled at the same time.
The TX_CURR_DONE (RX_CURR_ DONE) interrupt bit reports the CPU when a single Descriptor (i.e.
one frame) has been completely treated by the DMA_MAC and the CPU is agai n the owner (VALID bit
set to 0).
The TX_NEXT (RX_NEXT) in terrupt bit is set when next descriptor fetch is e nabled (NXT_EN=1 in the
current descriptor) the next Descriptor is not valid (V ALID bit is off).
The TX_DONE (RX_DONE) interrupt bit is set when a whole DMA transfer is complete. This can happen
either when the current is the last Des criptor i n t he chain (NXT_EN is off) or when the next Descriptor is
not valid yet (VALID bit is off) and the polling is disabled (NPOL_EN bit is off).
6.5.4 Frames transmission (TX)
When the CPU wants to t ransm it a set of frames on t he cable, it needs to p rovide t he DMA_M A C wi th a
Descriptor list. The CP U is expec t ed to allocat e a D es cript or for each f rame it wants to s end, to fill i t with
the DMA control information and the pointer to the frame, and to link the Descriptor in the chain. The
frames will be sent on the cable in the same order they are found in the chain.
6.5.6 Open list approach
The simplest way to construct a Descriptor chain is the open list approach. Every Descriptor but the last
one will have the DMA_Next field pointing to the next Descriptor in the chain, the NXT_EN bit and the
VALID bit on, the NPOL_EN bit on /off. The last Descriptor will be set in the same way e xcept for the
NXT_EN bit (off) and the DMA_Next field (NULL).
• The CPU starts the DMA activity loading the physical location of the first Descriptor into the DMA
Next register of the DMA_MAC and set the DMA Start register enable bit to on.
• The DMA_MAC will then keep fetching the Descriptors one by one until it finds the NXT_EN bit of the
last Descriptor set to off. Every time it completes a Descriptor (f rame) it saves the t ransfer stat us i nto
TxRx_Status, it turns the Descriptor VALID bit to off and raises the TX_CURR_DONE interrupt bit.
• When the NXT_EN bit is found to be off, that means the DMA_MAC has fetched the last Descriptor in
the chain. When it completes also this Descriptor (the end of the DMA transfer) it raises both the
TX_CURR_DONE and the TX_DONE interrupt bits.
6.5.7 Closed list approach
The approach above is easy since it doesn’t require the DMA_MAC and the CPU to synchronize their access to the Descriptor chain. The problem is that it requires the CPU to build the list every time it needs a
transfer.
A faster way to operate is building a closed Descriptor list only the first time and using the VALID bit to
mark the end of the transfe r. The polling facility could also be used to s ave the CPU from the activity of
programming the DMA Start register every time it needs to start the DMA transfer. Instead, the DMA Start
register will be activated only once and the DM A_MAC will keep poll ing the invalid descript or, raising
each time the TX_NEXT interrupt bit (if enabled), until the CPU finally sets its VALID bit to on. Since the
DMA transfer practically never ends, note that in this case the TX_DONE interrupt bit is never raised.
24/81
STLC1502
With this approach every Descriptor will have the DMA_Next field pointing to the next Des criptor in the
chain (the last on e w ill po int to the first on e) , the NX T_EN bit, the VALID bit and the N PO L _E N bit on.
The DMA_MAC will keep fetching the Descriptors one by one until it finds one with its VALI D bit set to of f.
Every time the DMA_MAC completes a Descriptor (frame) it saves the transfer status into TxRx_Status,
it turns its VALID bit to off and raises the TX_CURR_DONE interrupt bit.
6.5.8 Frames reception (RX)
The frame reception process is somethin g that needs to be activated at the be ginning and kept always
running. For this reason the closed Descriptor list (see above) is much more useful than the open list
approach.
Again, with this approach every Descriptor will have the DMA_Next field pointing to the next Descriptor in
the chain (the last one will point to the first one), the NXT_EN bit, the VALID bit and the NPOL_EN bit on.
The CPU starts the transfer activity loading the DMA Next register of the DMA_MAC with the physical
location of the first Desc riptor and set the DMA Start register enable bit to o n.The DMA_MAC wi ll start
fetching the Descriptors one by one, driven by the frames reception from the line. Every time the
DMA_MAC completes a Descriptor (frame) it saves the transfer status into TxRx_Status, it turns its
VALID bit to off and raises the TX_CURR_DONE interrupt bit.
Eventually, the DMA_MAC will be faster than the CPU, it will wrap around the Descriptor chain and find a
Descriptor still invalid.
Then the DMA_CNT keeps polling the invalid descriptor, raising each time the TX_NE XT interrupt bit (if
enabled), until some Descriptor gets available (note that in this case some frame could be lost). In the
meantime the CPU should consume the frames received and set the VALID bit to on of all the Descriptor
released.
As soon as the DM A _CNT finds the Descript or v alid agai n, i t w ill be abl e t o co m plete t he t rans fer and t o
fetch the next Descriptor.
6.5.9 Ethernet block Register Map [0x0C680000]
The base address of the Ethernet registers is 0x0C680000
The memory map of the Dual MAC Ethernet block is shown below:
Address Register Name Notes
DMA_MAC1 Eth_base1=0x0C680000
Eth_base1+ 0x0000 DMA_ST&CNTL DMA Status and Control Register
Eth_base1+0004 DMA_INT_EN DMA Interrupt Sources Enable R egister
Eth_base1+0008 DMA_INT_STAT DMA Inter rupt Status Register
Eth_base1+000C Reserved
Eth_base1+ 0x0010 RX_DMA_START RX DMA start Register
25/81
 Loading...
Loading...