

SGS Thomson Microelectronics L9907ND Datasheet
MOTOR BRIDGE FOR HEADLIGHT ADJUSTMENT
FULL BRIDGE OUTPUT CONFIGURATION
WITH LOW SATURATION VOLTAGE LESS
THAN 3.2V AT OUTPUTCURRENT 0.7A
OPERATING SUPPLY VOLTAGE RANGE 7V
TO 18V.SUPPLYOVERVOLTAGEUP TO 50V
HIGH POSITIONING PRECISION AND HIGH
NOISE IMMUNITY DUE TO TRANSFER
CHARACTERISTICS WITH NEUTRAL ZONE
AND STOP RANGE THRESHOLD
FAST STOP THROUGH SHORT-CIRCUITING
THE MOTOR
MOTOR STOP STATUS IN CASE OF OPEN
INPUT CONDITION
SUPPLY OVERVOLTAGE PROTECTION
FUNCTION FOR Vs MORE THAN 18V, UP
TO 50V
INPUT PROTECTION AGAINST TRANSIENTS ON THE BATTERY LINE AND THE
REVERSEBATTERYCONDITION
THERMALOVERLOADPROTECTION
ESDPROTECTEDACCORDINGTO MIL883C
L9907N
SO20L(12+4+4)
ORDERING NUMBER: L9907ND (SO20L)
DESCRIPTION
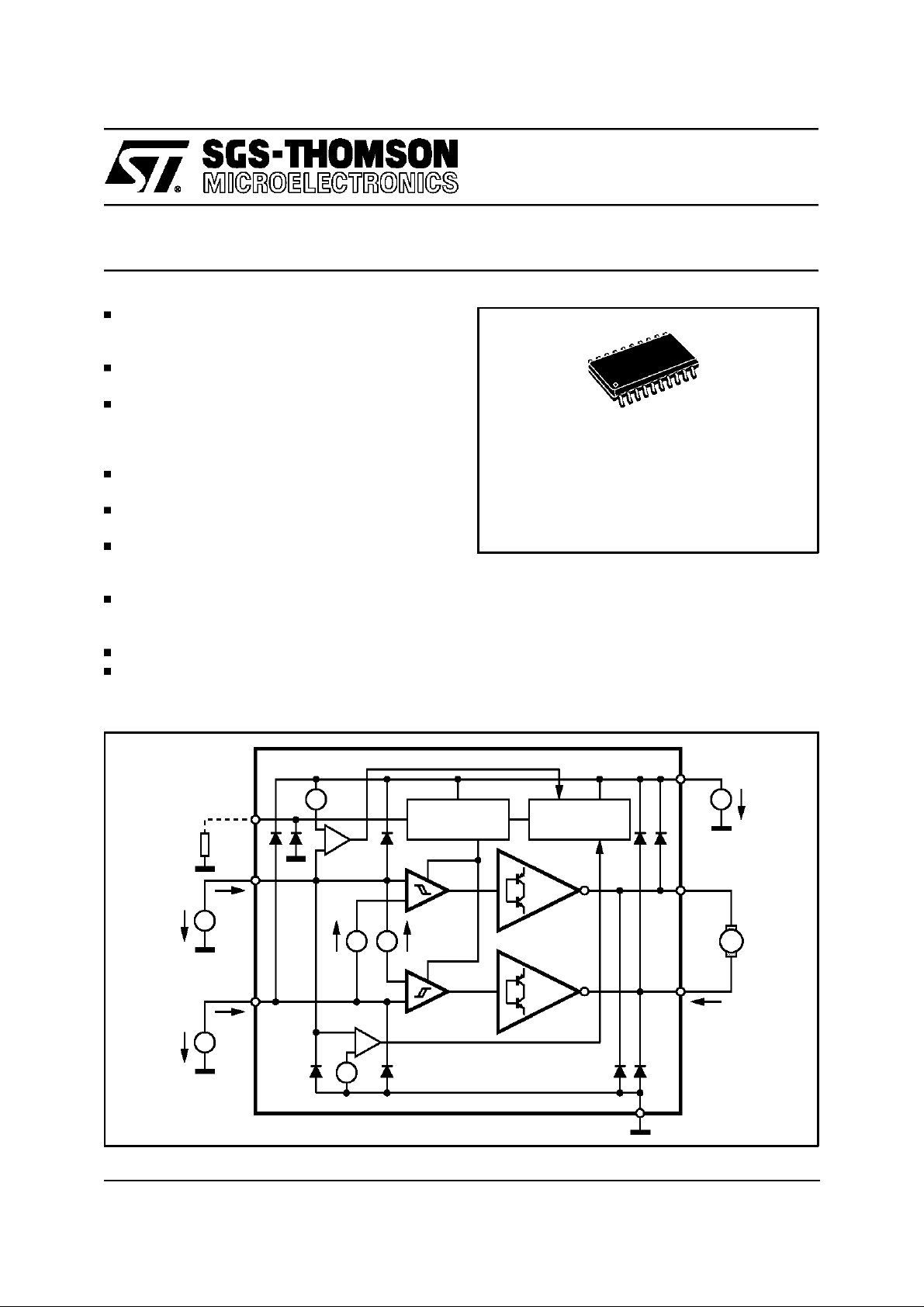
The L9907N is a monolithic integrated power
comparator with full bridge output configuration,
intended for driving DC motors in positioning systems, optimized for headlight adjustment application and respecting the automotiveelectronics environmentalconditions.
BLOCK DIAGRAM
R
PR
V
INC
=
V
INF
=
PR
INC
I
INC
INF
I
INF
V
S
V
S
OUT C
OUT F
I
M
=
M
1.2V
=
REFERENCE
BIAS
-
+
=
=
+
-
=
1.2V
PROTECTION
FUNCTIONS
L9907N
D95AT189
GND
December 1996
1/8
L9907N
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
V
SDC
V
SP
I
OUT_DC
I
OUT_P
I
IN
I
IN
T
s
(*) Recommended maximal T
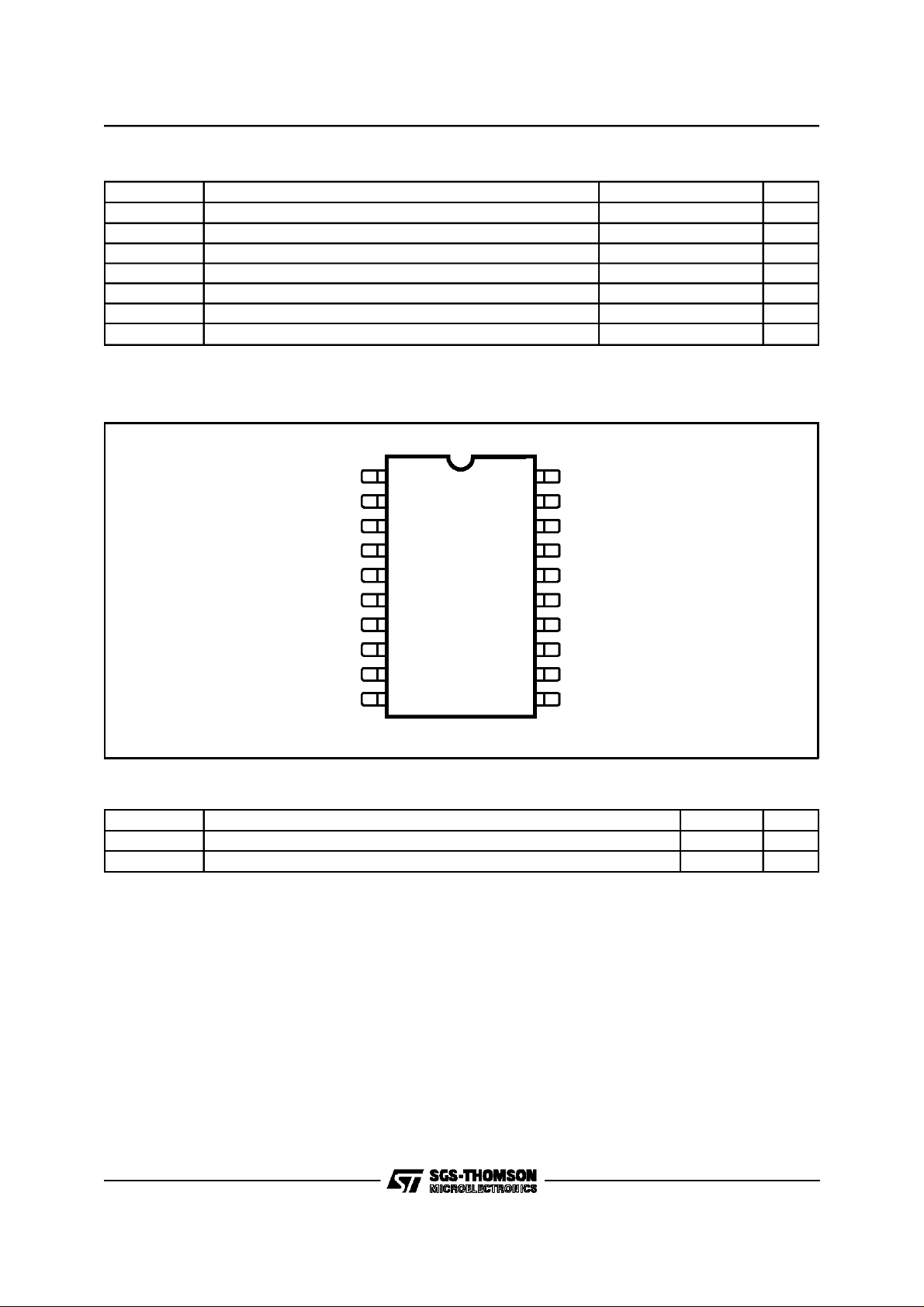
PIN CONNECTION
DC Supply Voltage 26 V
Supply Voltage Pulse (T ≤ 400ms) 50 V
DC Output Current ±0.4 A
Output Current Pulsed (100ms) 0.8 A
DC Input Current ±10 mA
Input Current Pulse (2ms) ±40 mA
Storage Shutdown Junction Temperature Range (*) 150 °C
≤ 105°C
amb
V
S
OUT
C
N.C.
GND
GND
GND
GND
N.C.
IN
C
PR N.C.
2
3
4
5
6
7
8
9
10
D95AT181
20
19
18
17
16
15
14
13
12
11
N.C.1
OUT
N.C.
GND
GND
GND
GND
N.C.
IN
F
F
THERMAL DATA
Symbol Parameter SO20L Unit
R
th j-amb
R
th j-pins
(1) with 6cm2on board heat sink area
Thermal Resistance Junction-ambient (1) 50 °C/W
Thermal Resistance Junction-pins 15 °C/W
2/8
L9907N
ELECTRICALCHARACTERISTICS
(7V < V
< 18V, –40°C<Tj< 150°C; unless otherwise specified.)
S
Symbol Parameter Test Condition Min. Typ. Max. Unit
-V
N
-V
ST-,VST+
V
V
INCH
V
CH (3)
I
q
-, V
INCL
Quiescent Current I
Neutral Zone Threshold (2) 1.5 < V
N+
Stop Range Threshold 1.5< VINC < VS-2V;VS=12V
Control Input LOW Disable
Threshold
Control Input HIGH Disable
Threshold (4)
= 0, (Output Open)
OUT
|V
| < 20mV (stop)
din
|V
| < 200mV (L or R)
din
INC<VS
R
= ∞
PR
R
=0
PR
R
= ∞
PR
R
=0
PR
Tj= -40 to +25ºC
T
= >25ºC
j
Outputs = ON
with RINC = 0Ω
with R
with R
INC
INC
=5KΩ
= 10K
-2V; VS= 12V
Ω
3xV
3xV
25
50
0.8
0.6
ST
ST
7
6
9
7
120
2404xVST
4xV
38
76
1.2
1.2
V
V
60
100
1.5
1.5
V
S
S
S
-1.5
-1.4
mA
mA
mV
mV
ST
mV
mV
V
V
-2
V
V
V
Outputs = OFF
with R
with R
with R
I
IN
V
OSI
V
OSO
(2) With a programming resistor RPRbetweenthe PR pin and GND the N+ and N- thresholds can be adjusted from the nominalvalue (RPR= ∞
, pin PR open) up to two times the nominal value (R
The formula defining V
for R
=∞ this formula reduced to:
PR
-V
N+(RPR
in V and RPRin KΩ theseformulas result in mV
for V
s
is the controlinput voltage applied to the pin INCthrough a serial resistor R
(3) V
CH
(4) OUTPUTS = UNDEFINED for: VS-2V < VCH(R
Input Bias Current 1.5 < V
Output Saturation Voltage
Sink Stage
Output Saturation Voltage
Source Stage
PR
typicalvalue as a function of RPRand VSis: –VN−= VN+=(36mV + 0.017⋅ VS) ⋅
N+,VN-
= ∞)=VN+(RPR= ∞) = 18mV + 0.0086 ⋅ VS.
-1.5V< VCH(R
V
S
-1.4V< VCH(R
V
S
INC
INC
INC
V
din
V
din
V
din
V
din
I
OUT
I
OUT
I
OUT
I
OUT
= 0,pin PR shorted to GND).
=0Ω)<VS-0.8V
=5KΩ)<VS-0.6V
= 10KΩ)<VS-0.4V
=0Ω
INC
=5K
= 10KΩ
INC<VS
Ω
-2V; VS= 12V
∞
INC
INC
=0;RPR=
= ± 200mV; RPR= ∞
=0;RPR=0
=±200mV; RPR=0
= 0.7A
= 0.35A
= 0.7A
= 0.35A
INC
V
-0.8
S
V
-0.6
S
V
-0.4
S
R
PR
R
PR
9.5KΩ
2.0
4.0
3.6
6.8
1.4
1.1
2
1.5
.
1 +
1 + 2 ⋅
0.45
0.9
0.8
1.5
1.1
0.8
1.2
0.9
9.5KΩ
V
V
V
µ
µA
µA
µ
V
V
V
V
A
A
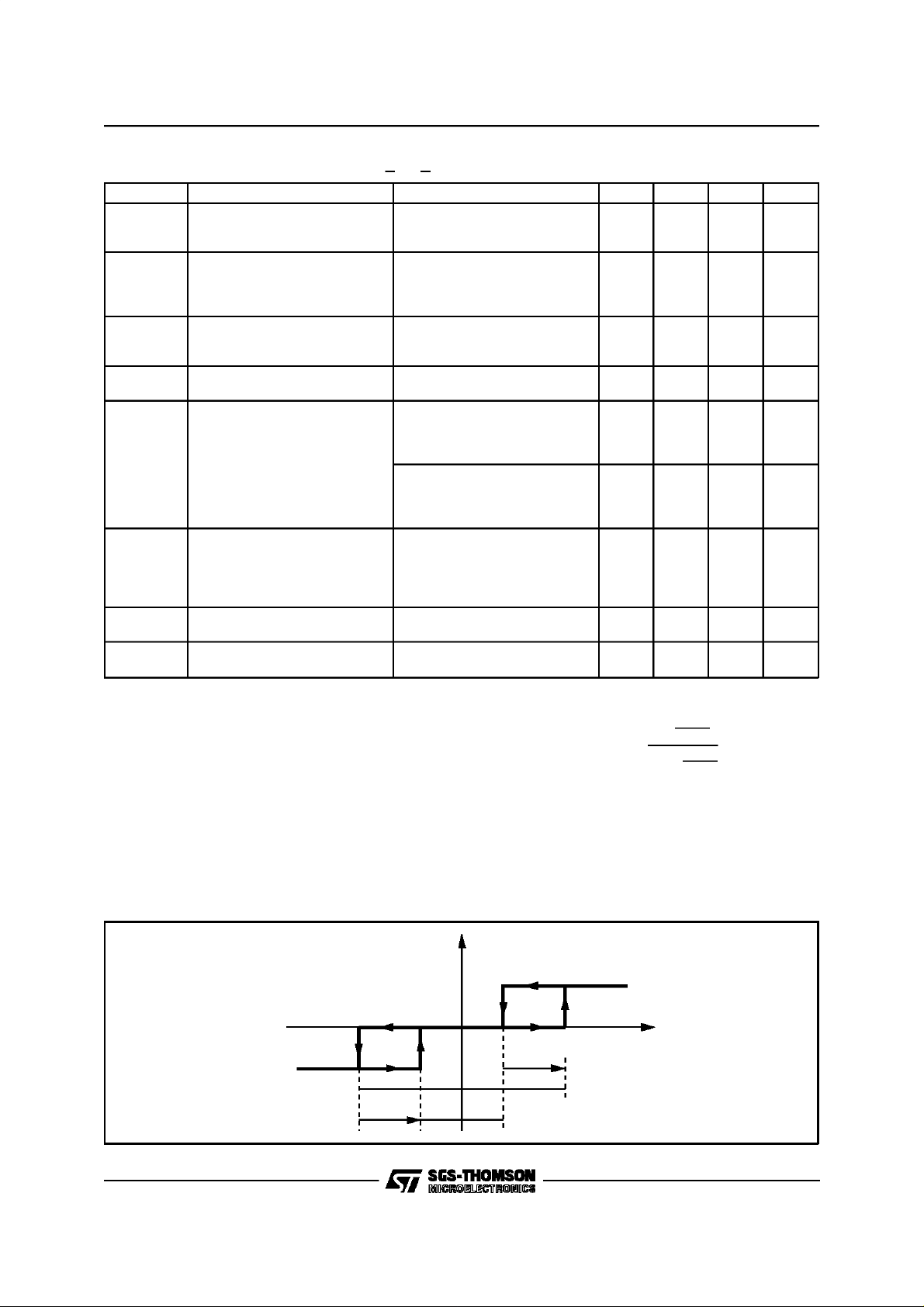
Figure 1: L9907NDifferential Input to OutputTransfer Characteristics
VM=V
OUTC-VOUTF
V
N-
MOTOR
DIRECTION RIGHT
D95AT182
V
H-
V
N+
V
H+
STOP RANGE
MOTOR
DIRECTION LEFT
V
INC-VINF
NEUTRALZONE
3/8
 Loading...
Loading...